Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
34
www.democraziadigitale.eu Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford ANNO ACCADEMICO 2014/2015 Francesco Ciclosi Camerino, febbraio 2015
-
Upload
francesco-ciclosi -
Category
Presentations & Public Speaking
-
view
205 -
download
0
Transcript of Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford

www.democraziadigitale.eu
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
ANNO ACCADEMICO 2014/2015
Francesco Ciclosi
Camerino, febbraio 2015

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Il problema dei cammini minimi
un problema di cammino minimo prevede
l’individuazione della via più breve per andare da un
punto di partenza (p), a un punto di arrivo (a)
Nella teoria dei grafi, il cammino minimo indica il
percorso che collega due vertici dati, minimizzando
la somma dei costi associati all’attraversamento di
ogni arco

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Un problema molte varianti
cammini minimi a sorgente singola, per la
determinazione dei cammini minimi a partire da un
nodo prefissato;
cammini minimi tra tutte le coppie, per la
determinazione dei cammini minimi tra ogni nodo.
La maggior parte dei problemi è riconducibile al 1°

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Archi con cicli di pesi negativi
Dati due vertici s e v, v è raggiungibile da s se
esiste almeno un cammino da s a v
La raggiungibilità
non è sufficiente a
garantire l’esistenza
di un cammino
minimo tra due
nodi

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Il sottografo dei predecessori
Sia 𝐺 = (𝑉, 𝐸) un grafo orientato e pesato senza
cicli di peso negativo raggiungibili da 𝑠 ∈ 𝑉;
Il sottografo dei predecessori 𝐺𝜋 = 𝑉𝜋, 𝐸𝜋 è:
• 𝑉𝜋 = 𝑣 ∈ 𝑉: 𝜋 𝑣 ≠ 𝑁𝐼𝐿 ∪ 𝑠 , ovvero l’insieme
dei vertici 𝑉𝜋 è l’insieme composto dai vertici di 𝐺
aventi predecessore diverso da NIL, più la sorgente 𝑠
• 𝐸𝜋 = 𝜋 𝑣 , 𝑣 ∈ 𝐸: 𝑣 ∈ 𝑉𝜋 − 𝑠 , ovvero l’insieme
degli archi orientati 𝐸𝜋 è l’insieme di archi indotto dai
valori di 𝜋 per i vertici in 𝑉𝜋.
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
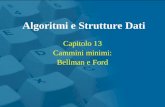
La tecnica del rilassamento
per ogni nodo 𝑢 del grafo, si memorizza un
attributo 𝑑 𝑢 (stima del cammino minimo)
𝑑 𝑢 è un limite superiore al peso di un cammino
minimo dalla sorgente 𝑠 a un nodo 𝑣 ∈ 𝑉
rilassare un arco (𝑢, 𝑣) vuol dire
• verificare se passando per 𝑢, si può migliorare il
cammino minimo per 𝑣 attualmente noto
• aggiornare conseguentemente i valori di 𝑑[𝑣] e 𝜋[𝑣]
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
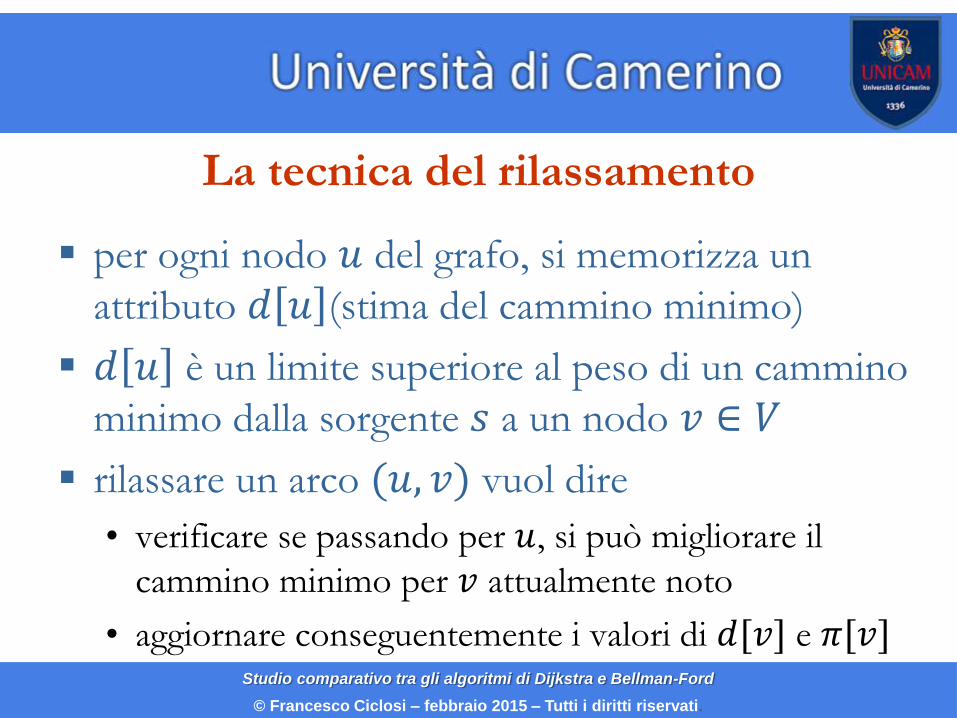
Rappresentazione dell’output
L’output del problema dei cammini minimi a
sorgente singola è l’albero dei cammini minimi
La rappresentazione utilizza un array 𝜋, di
dimensione pari al numero dei nodi e tale che 𝜋 𝑢
contenga:
• il nodo padre di u
• -1 se u è la radice dell’albero (ovvero il nodo sorgente)

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
L’algoritmo di Dijkstra
Risolve il problema di cammini minimi con
sorgente singola
• su di un grafo orientato e pesato 𝐺 = (𝑉, 𝐸)
• nel caso in cui tutti gli archi hanno peso non negativo,
quindi 𝑤(𝑢, 𝑣) ≥ 0 per ogni arco (𝑢, 𝑣) ∈ 𝐸
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
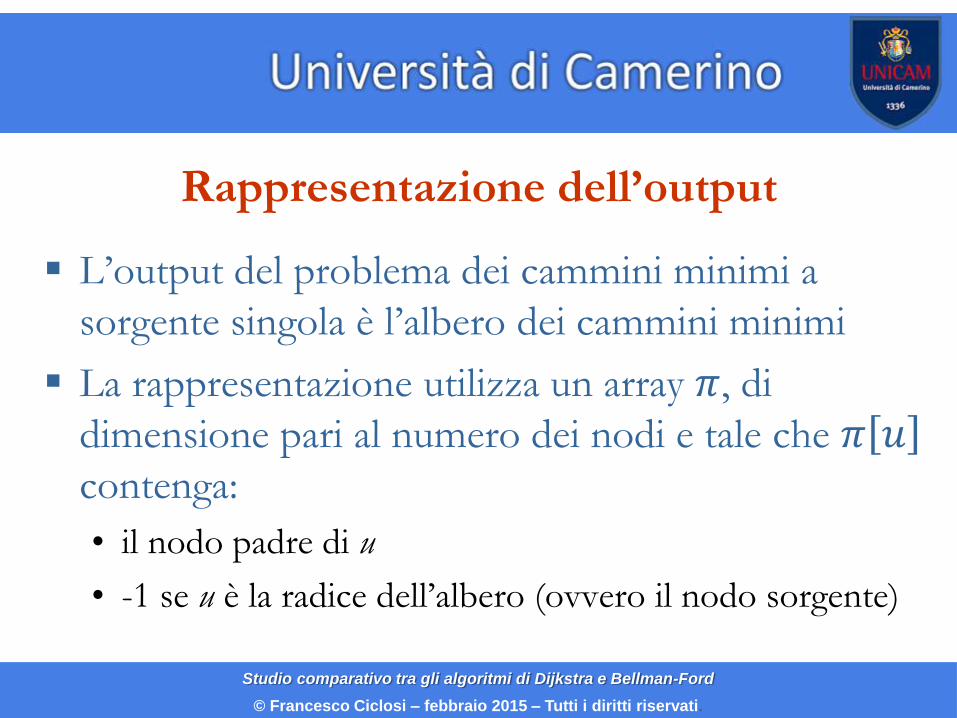
Funzionamento – elementi utilizzati
• un insieme 𝑆 con i vertici aventi il peso di cammino
minimo dalla sorgente 𝑠 già determinato;
• una coda a priorità 𝑄 con i vertici aventi il peso di
cammino minimo dalla sorgente 𝑠 non già determinato;
• un array 𝑑 per memorizzare di volta in volta il peso del
cammino migliore temporaneo per ciascun nodo;
• un array 𝜋 in cui viene memorizzato l’albero dei
cammini
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
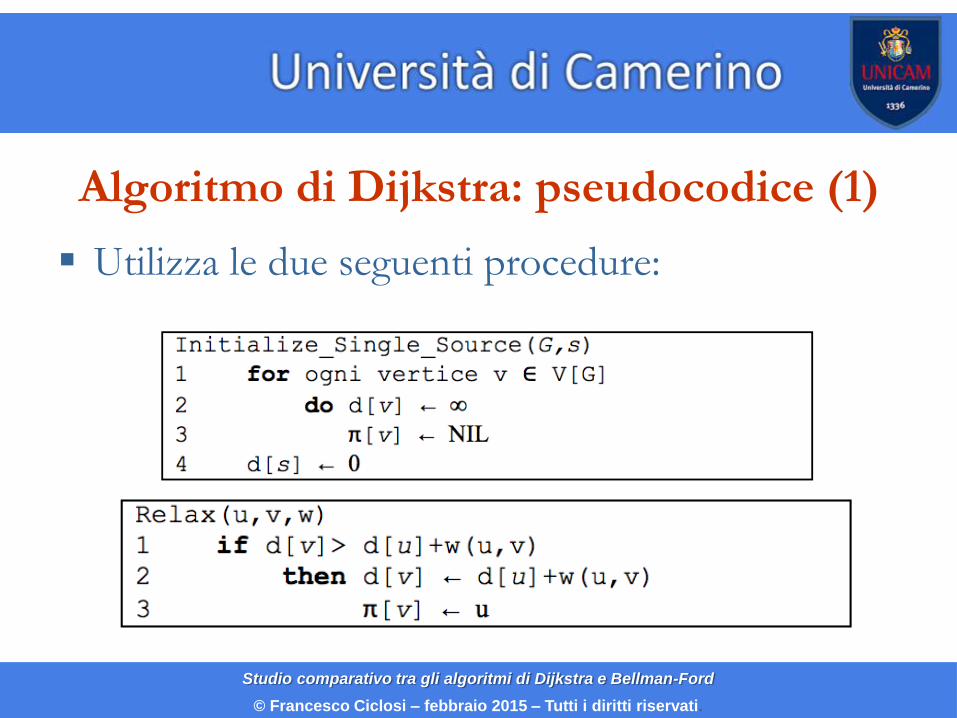
Algoritmo di Dijkstra: pseudocodice (1)
Utilizza le due seguenti procedure:
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
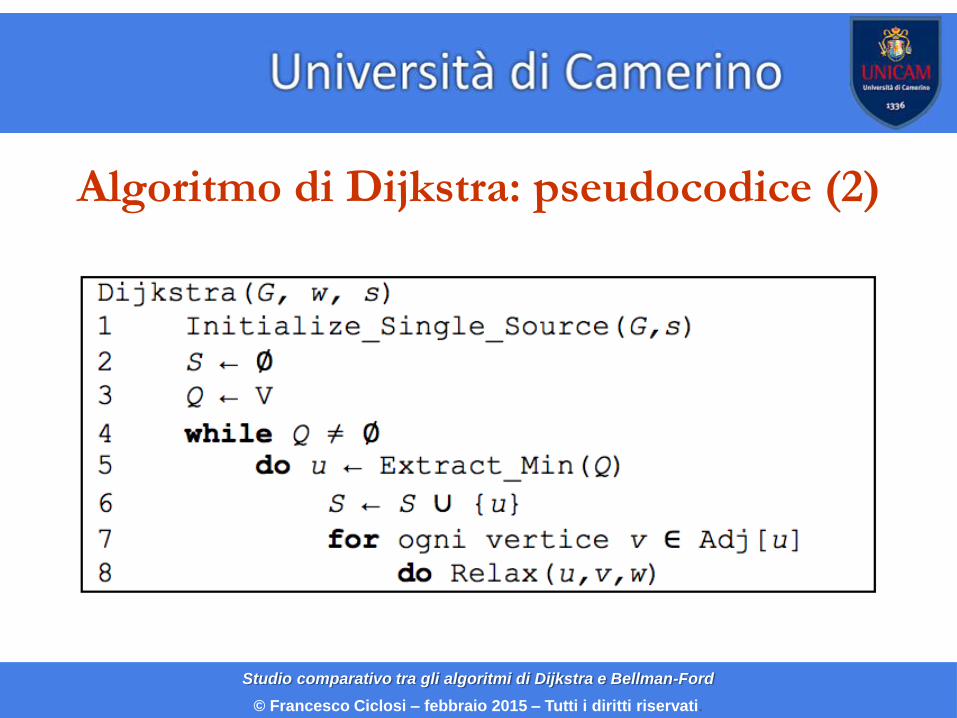
Algoritmo di Dijkstra: pseudocodice (2)
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
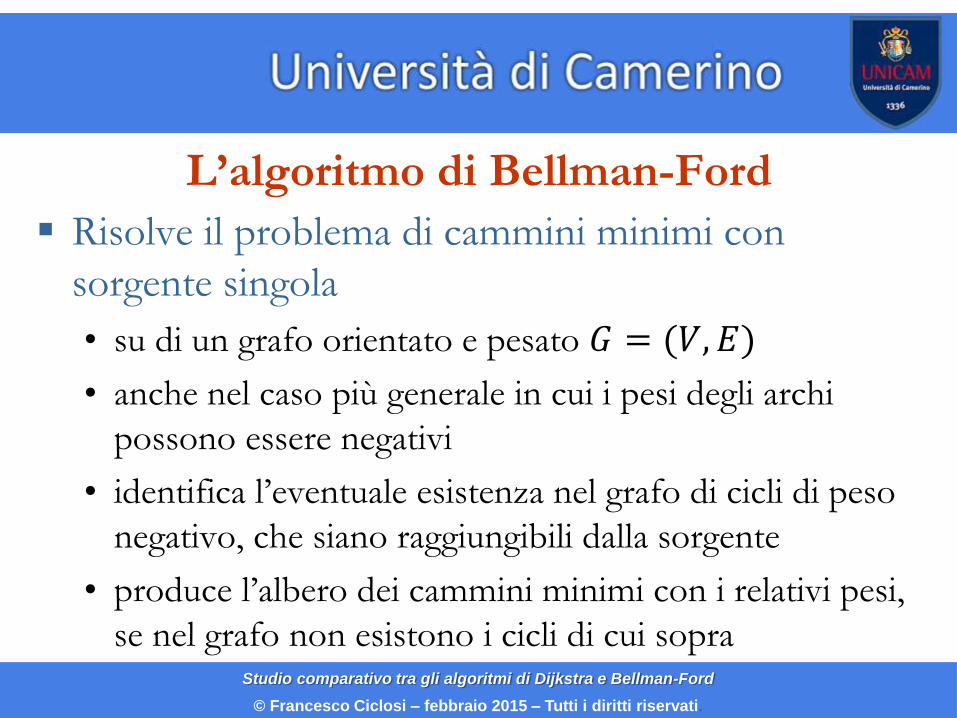
L’algoritmo di Bellman-Ford
Risolve il problema di cammini minimi con
sorgente singola
• su di un grafo orientato e pesato 𝐺 = (𝑉, 𝐸)
• anche nel caso più generale in cui i pesi degli archi
possono essere negativi
• identifica l’eventuale esistenza nel grafo di cicli di peso
negativo, che siano raggiungibili dalla sorgente
• produce l’albero dei cammini minimi con i relativi pesi,
se nel grafo non esistono i cicli di cui sopra

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Algoritmo di Bellman-Ford: pseudocodice
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Analisi comparativa
Analisi dell’algoritmo di Dijkstra
• descrizione, analisi asintotica, analisi della struttura
dati implementata per la coda di priorità
Analisi dell’algoritmo di Bellman-Ford
• descrizione, analisi asintotica
Comparazione riassuntiva tra i due algoritmi
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Dijkstra: analisi (1)
L’efficienza dell’algoritmo dipende dalla struttura
dati usata per implementare la coda di priorità Q
La scelta dell’implementazione di Q non cambia
il comportamento dell’algoritmo
La scelta dell’implementazione di Q cambia la
complessità e l’efficienza dell’algoritmo
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Dijkstra: analisi (2)
L’algoritmo si basa su tre operazioni principali
che sono la base per l’analisi della complessità
asintotica
• Inserimento (istruzione Q ← V)
• Estrazione del minimo (funzione Extract_Min())
• Decremento di una chiave (implicito nella funzione
Relax(u,v,w))

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Coda di priorità su lista non ordinata
È la più semplice implementazione della coda
È realizzabile con un vettore di puntatori
Il tempo totale di esecuzione dell’algoritmo è
quindi Ο 𝐸 + 𝑉2 = Ο(𝑉2)
× |V| operazioni
× |E| operazioni
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Coda di priorità su heap binario (1)
Realizza Q organizzando gli elementi in un
albero binario secondo la struttura min-heap
Mantiene 3 proprietà:
• Ogni elemento della coda corrisponde a un nodo
dell’albero binario
• Ogni nodo dell’albero binario diverso dalla radice ha
priorità ≥ a quella del nodo padre
• L’albero è completo fino al penultimo livello (h-1)
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Coda di priorità su heap binario (2)
Dato un albero di n nodi, dalle tre proprietà
derivano le seguenti:
1. L’heap conterrà esattamente n nodi
2. Tutti i nodi dell’albero avranno priorità ≥ a
quella della radice
3. L’altezza è proporzionale a 𝑙𝑜𝑔2𝑛 che diviene un
limite superiore per ogni operazione sull’albero
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
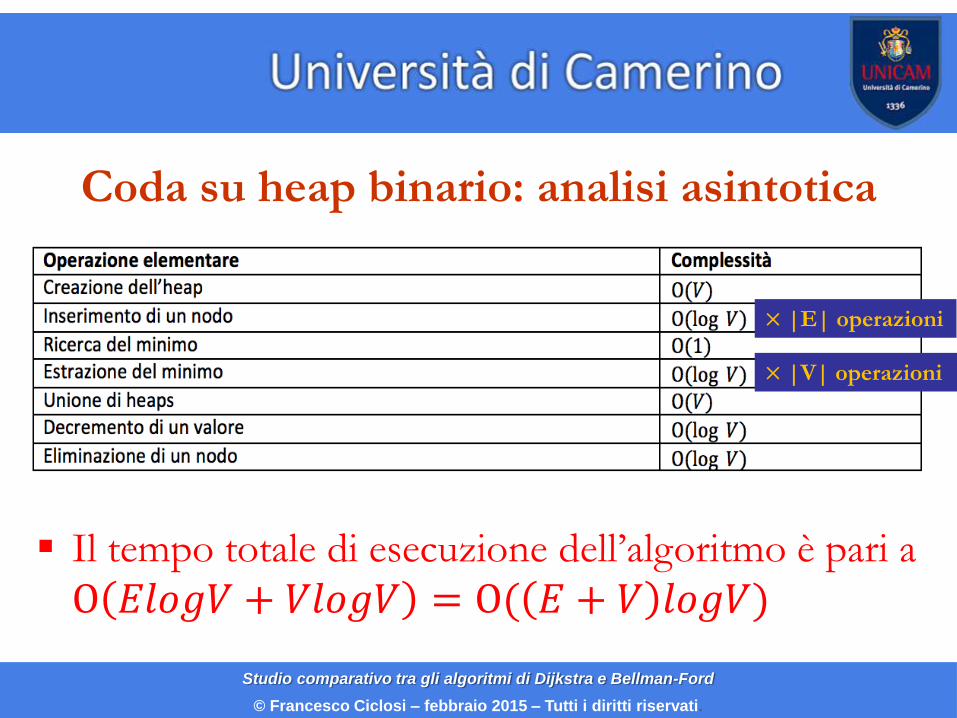
Coda su heap binario: analisi asintotica
Il tempo totale di esecuzione dell’algoritmo è pari a
Ο 𝐸𝑙𝑜𝑔𝑉 + 𝑉𝑙𝑜𝑔𝑉 = Ο( 𝐸 + 𝑉 𝑙𝑜𝑔𝑉)
× |V| operazioni
× |E| operazioni
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
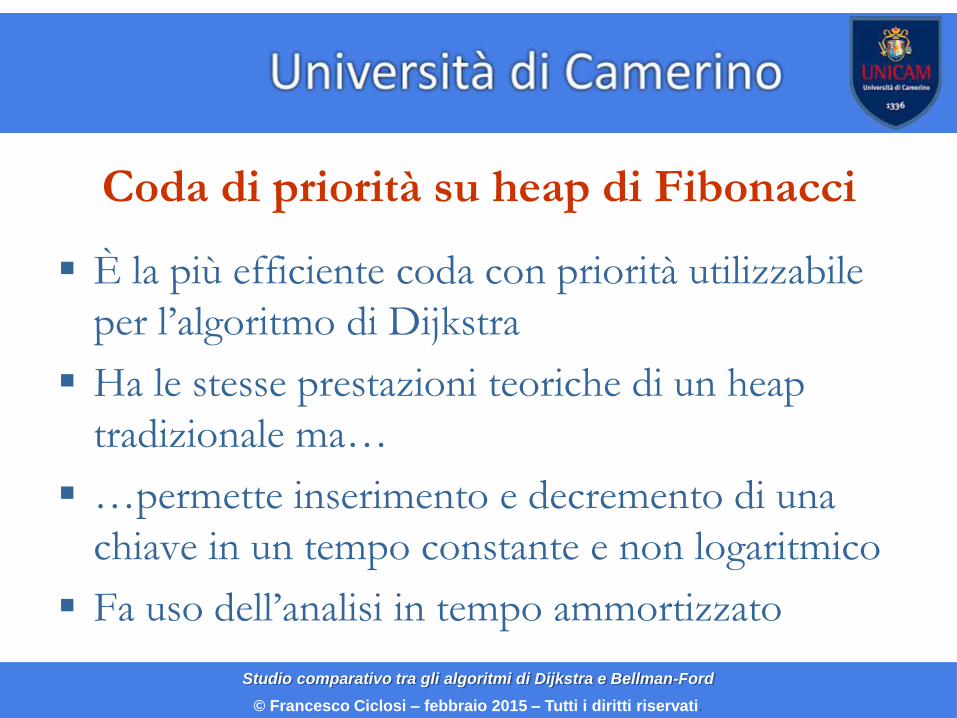
Coda di priorità su heap di Fibonacci
È la più efficiente coda con priorità utilizzabile
per l’algoritmo di Dijkstra
Ha le stesse prestazioni teoriche di un heap
tradizionale ma…
…permette inserimento e decremento di una
chiave in un tempo constante e non logaritmico
Fa uso dell’analisi in tempo ammortizzato

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Struttura dati heap di Fibonacci (1)
Sono composti da una lista di alberi che soddisfano
l’ordinamento parziale min-heap (≤)
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
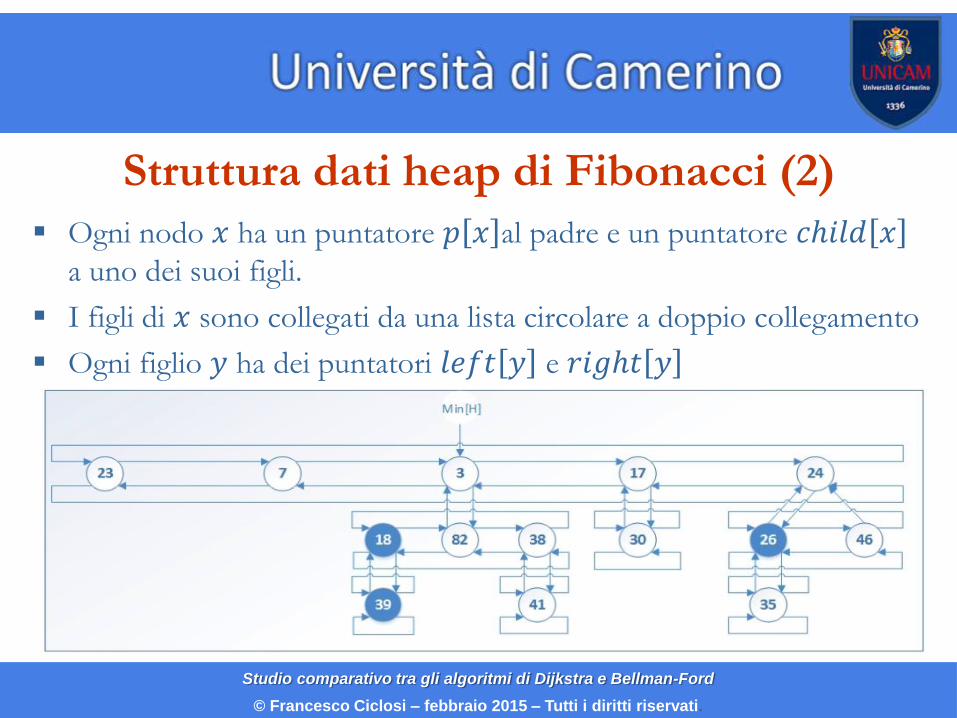
Struttura dati heap di Fibonacci (2)
Ogni nodo 𝑥 ha un puntatore 𝑝 𝑥 al padre e un puntatore 𝑐ℎ𝑖𝑙𝑑 𝑥
a uno dei suoi figli.
I figli di 𝑥 sono collegati da una lista circolare a doppio collegamento
Ogni figlio 𝑦 ha dei puntatori 𝑙𝑒𝑓𝑡 𝑦 e 𝑟𝑖𝑔ℎ𝑡 𝑦

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
L’analisi ammortizzata
Il tempo di esecuzione di una sequenza di
operazioni di una struttura dati è la media dei
tempi di esecuzione della sequenza
Sia n la dimensione di una struttura dati e k una
catena di operazioni su di essa
=> La complessità in tempo è la somma dei
tempi di caso pessimo divisa per k
=> Ottengo l’efficienza media nel caso pessimo
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
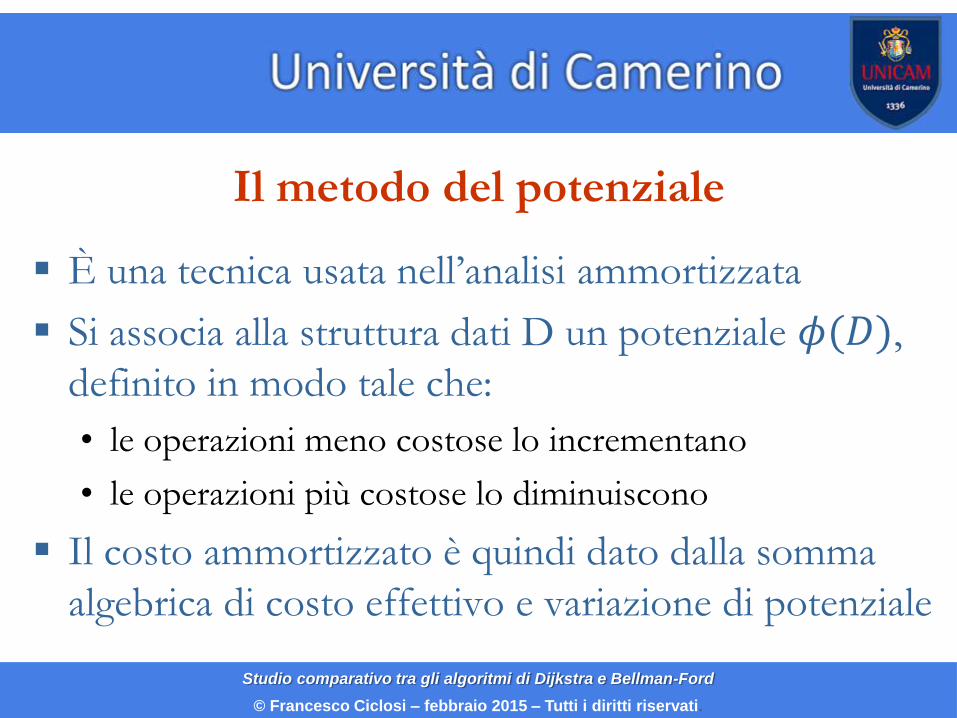
Il metodo del potenziale
È una tecnica usata nell’analisi ammortizzata
Si associa alla struttura dati D un potenziale 𝜙(𝐷),
definito in modo tale che:
• le operazioni meno costose lo incrementano
• le operazioni più costose lo diminuiscono
Il costo ammortizzato è quindi dato dalla somma
algebrica di costo effettivo e variazione di potenziale
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
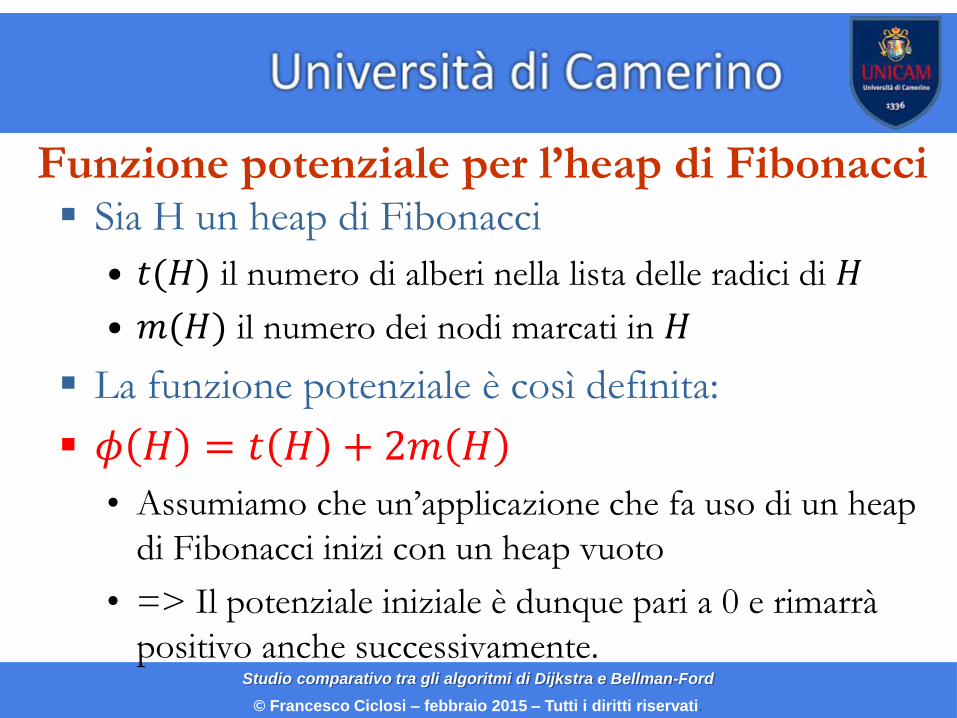
Funzione potenziale per l’heap di Fibonacci Sia H un heap di Fibonacci
• 𝑡(𝐻) il numero di alberi nella lista delle radici di 𝐻
• 𝑚(𝐻) il numero dei nodi marcati in 𝐻
La funzione potenziale è così definita:
𝜙 𝐻 = 𝑡 𝐻 + 2𝑚 𝐻
• Assumiamo che un’applicazione che fa uso di un heap
di Fibonacci inizi con un heap vuoto
• => Il potenziale iniziale è dunque pari a 0 e rimarrà
positivo anche successivamente.

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Coda su heap di Fibonacci: analisi asintotica
Il tempo totale di esecuzione dell’algoritmo è pari a
Ο(𝑉𝑙𝑜𝑔𝑉 + 𝐸)
× |V| operazioni
× |E| operazioni

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Altre possibili implementazioni di Dijkstra

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Bellman-Ford: analisi
L’algoritmo si basa su tre operazioni principali
basilari per l’analisi della complessità asintotica:
• Inizializzazione (funzione Initialize_Single_Source()) –
riga 1
• Rilassamento (funzione Relax(u,v,w))) – ciclo for delle
righe 2-4
• Diminuzione della stima del peso di cammino minimo
– ciclo for delle righe 5-7

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Coda su heap di Fibonacci: analisi asintotica
Il tempo totale di esecuzione dell’algoritmo è Ο(𝑉𝐸)
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
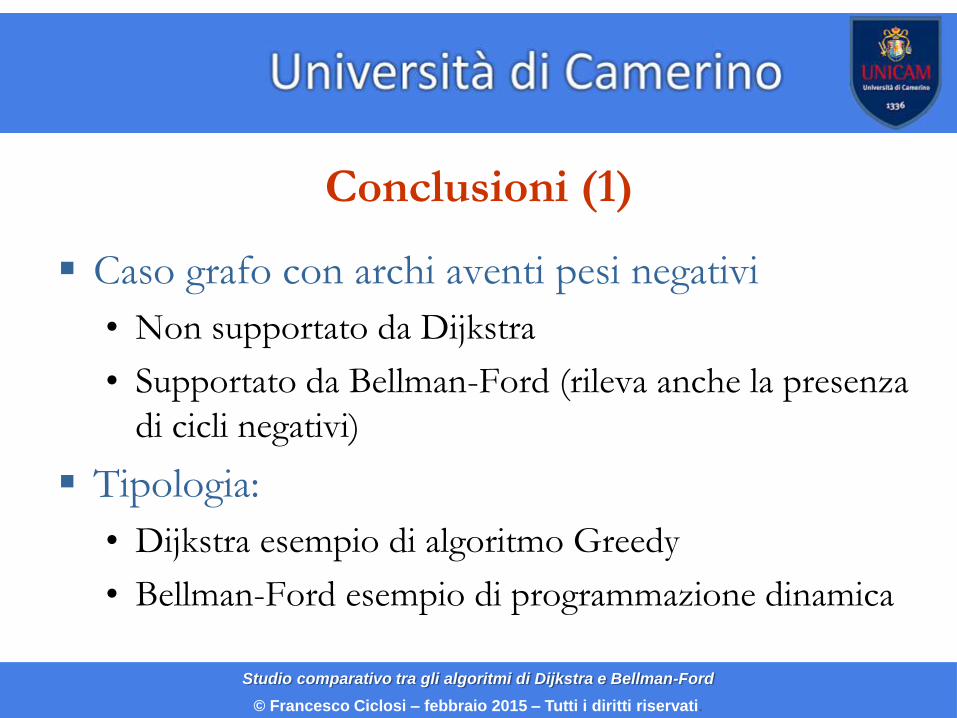
Conclusioni (1)
Caso grafo con archi aventi pesi negativi
• Non supportato da Dijkstra
• Supportato da Bellman-Ford (rileva anche la presenza
di cicli negativi)
Tipologia:
• Dijkstra esempio di algoritmo Greedy
• Bellman-Ford esempio di programmazione dinamica
Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
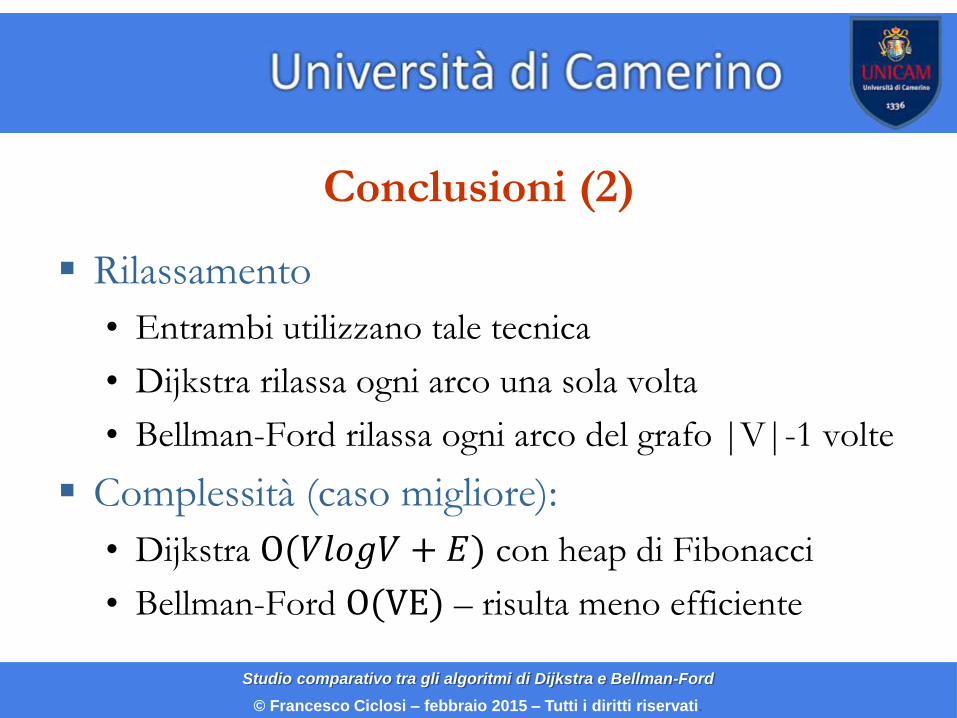
Conclusioni (2)
Rilassamento
• Entrambi utilizzano tale tecnica
• Dijkstra rilassa ogni arco una sola volta
• Bellman-Ford rilassa ogni arco del grafo |V|-1 volte
Complessità (caso migliore):
• Dijkstra Ο(𝑉𝑙𝑜𝑔𝑉 + 𝐸) con heap di Fibonacci
• Bellman-Ford Ο(VE) – risulta meno efficiente

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
Conclusioni (3)
La complessità di Dijkstra è strettamente connessa
alla complessità della sua coda di priorità
Θ(𝑉 + 𝑉 × 𝑇𝐸𝑥𝑡𝑟𝑎𝑐𝑡_𝑀𝑖𝑛() + 𝐸 × 𝑇𝑅𝑒𝑙𝑎𝑥 𝑢,𝑣,𝑤 )

Studio comparativo tra gli algoritmi di Dijkstra e Bellman-Ford
© Francesco Ciclosi – febbraio 2015 – Tutti i diritti riservati.
www.democraziadigitale.eu
I miei contatti linkedin
http://it.linkedin.com/pub/francesco-ciclosi/62/680/a06/
https://www.facebook.com/francesco.ciclosi
@francyciclosi
www
http://www.francescociclosi.it