SPOSTAMENTO DI UN IMPIANTO DI PIEGATURA … · Magazzino utensili manuale ... 511658 LAMIERA ......
14
15/04/2013 Pagina 1 di 14 Project Work_Merlo Tecnico per la conduzione e Anno Scolastico 2012/2013 la manutenzione di impianti automatizzati PROJECT WORK DI ANDREA BERTOLOTTI SPOSTAMENTO DI UN IMPIANTO DI PIEGATURA ROBOTIZZATO SHIFTING OF A ROBOTIZED PLEATING SYSTEM
-
Upload
phungkhanh -
Category
Documents
-
view
221 -
download
0
Transcript of SPOSTAMENTO DI UN IMPIANTO DI PIEGATURA … · Magazzino utensili manuale ... 511658 LAMIERA ......

15/04/2013 Pagina 1 di 14 Project Work_Merlo
Tecnico per la conduzione e Anno Scolastico 2012/2013 la manutenzione di impianti automatizzati
PROJECT WORK DI
ANDREA BERTOLOTTI
SPOSTAMENTO DI UN IMPIANTO DI PIEGATURA ROBOTIZZATO SHIFTING OF A ROBOTIZED PLEATING SYSTEM

15/04/2013 Pagina 2 di 14 Project Work_Merlo
INDICE:
1. DESCRIZIONE GENERALE DELL’IMPIANTO P. 3
2. LAYOUT DEGLI SPOSTAMENTI P. 4
3. DESCRIZIONE DI QUANTO FATTO P. 5
3.1 FONDAZIONI
3.2 RICHIESTA CONTROLLO CALIBRAZIONE
3.3 CREAZIONE STOCK
3.4 SMANTELLAMENTO
4. ISTALLAZIONE P. 7
5. TRASPORTO PIEGATRICE P. 7
6. ALLINEAMENTO PIEGATRICE P. 7
7. FOTO CON DESCRIZIONE P. 9
8. FUNZIONAMENTO P. 13

15/04/2013 Pagina 3 di 14 Project Work_Merlo
1. DESCRIZIONE GENERALE DELL’IMPIANTO:
Questo impianto è composto da:
Piegatrice LVD-4000x400 ton, con sistema EASY-FORM
Robot FANUC R2000iA/165F
Piastra basamento robot
Catenaria pallets di carico
Catenaria pallets di scarico
Magazzino utensili manuale
Caricatore lamiere
Centratore lamiere
Ribaltatore lamiere
Controllo spessore
Barriera ottica Muting
Protezioni isola
Quadri elettrici (robot, isola, piegatrice)
LVD-4000-400 ton
A
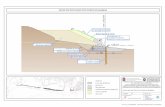
SCALA 1:50SEZIONE A-A
A
1
2345

15/04/2013 Pagina 4 di 14 Project Work_Merlo
2. LAYOUT DEGLI SPOSTAMENTI:
E’ stato deciso di spostare tutta l’isola di piegatura per posizionarla vicina alla gemella, per ottimizzare così i
tempi degli operatori e delle movimentazioni del materiale piegato e da piegare.
Situazione a dicembre 2012, prima di iniziare i lavori.
Situazione finale ad aprile 2013, al termine degli spostamenti.
quadro elettrico
bystronic 2
PASSAGGIO LIBEROPASSAGGIO LIBERO
Banco
PEDANAPEDANA
PEDANA
PEDANA
INF
ER
IOR
E
PIA
ST
RA
A
02
26
54
SA
LD
AR
E
LA
MIE
RA
51
16
58
LA
MIE
RA
51
89
07
SU
CO
MP
.
RIN
FO
RZ
O
51
89
92
MA
RT
.SO
LL
.
AT
TA
CC
O
LA
MIE
RA
02
93
87
BO
CC
OL
A
LA
TE
RA
LE
RIN
FO
RZ
O
51
44
29
BO
CC
OL
A
RIN
FO
RZ
O
SC
AT
OL
. C
OL
LE
TT
O
03
38
10
AN
TE
RIO
RE
SN
OD
O
BO
CC
OL
A
02
93
83
P6
0.1
0
P7
2.1
0
INF
ER
IOR
E
RIN
FO
RZ
O
51
83
00
P6
0.1
0
LA
TE
RA
LE
LA
MIE
RA
04
61
70
CO
MP
EN
S.
MA
RT
.
AT
TA
CC
O
04
61
69
P7
2.1
0
LA
TE
RA
LE
LA
MIE
RA
04
39
13
P72.10
RINF.BOCC.
LAM.POST.
518302
P60.10
RINF.BOCC.
LAM.POST.
519367
CO
MP
EN
S
AT
TA
CC
O
LA
MIE
RA
SX
04
39
11
AIU
OL
AA
IUO
LA
ZA
TT
ER
A0
69
88
0G
ZA
TT
ER
A0
80
66
4G
ZA
TT
ER
A0
78
49
6G
03
72
39
GZ
AT
TE
RA
WC
AS
SE
MB
LA
TE
AS
SE
MB
LA
TE
3M506937
PANTOGRAFATO
ATTACCO MART.1200 lt - 1500 lt
3M506922
PANTOGRAFATO
ATTACCO MART.700 lt-900 lt-1000 lt
3M506877
RINFORZODENTI PALA
550 lt
SALD
ATR
ICE
CE
NT
RA
LIN
A
IDR
AU
LIC
A
3M
504042
RIN
FO
RZ
O F
ON
DO
PA
LA
MU
LT
IUS
O
PA
LE
1500 lt
CE
NT
RA
LE
PA
NT
OG
RA
FA
TO
3M
506938
3M506888
RINFORZO
CENTRALE
SOTTO PALA1200 lt
3M506887
RINFORZO
LATERALESOTTO PALA
1200 lt
3M506884
RINFORZO
POSTERIOREDX-SX
1200 lt
3M506883
RINFORZOPOSTERIORE
CENTRALE
1200 lt
CE
NT
RA
LIN
A
IDR
AU
LIC
A
DEPOSITO CARRELLO BRACCI
CAR62
MATERIALE
DEPOSITO
DE
PO
SIT
O B
ILA
NC
INO
CAR06
UF
F C
A
UP
P S
IDE
RU
RG
ICO
UF
F C
R
sola
io in
c.a
. pie
no
da r
ealiz
zare
037750Perno mart.035086Condotta.m063412 Martinetto
052159Micro Area052165 Gruppoprese041280Fermapattini
03
77
50
Pe
rno
ma
rt.
03
50
86
Co
nd
otta
.m
06
34
12
Ma
rtin
etto
05
21
59
Mic
ro A
rea
05
21
65
Gru
pp
op
rese
04
12
80
Fe
rma
pa
ttin
i
037750Perno mart.035086Condotta.m063412 Martinetto
052159Micro Area052165 Gruppoprese041280Fermapattini
037750Perno mart.035086Condotta.m063412 Martinetto
AREADEPOSITO CASSONIVUOTI
Micro Area052165 Gruppoprese041280Fermapattini
NU
OV
A P
IEG
AT
RIC
E
052159

15/04/2013 Pagina 5 di 14 Project Work_Merlo
3. DESCRIZIONE DI QUANTO FATTO:
Al fine di ottimizzare gli spostamenti si doveva preparare tutta la nuova area con la nuove fondazioni in
anticipo rispetto allo spostamento e per permettere anche la stagionatura del cemento armato.
3.1. FONDAZIONI
La prima attività è stata quella di rilevare tutte le misure e preparare un layout dettagliato.
Successivamente sono stati fatti gli scavi e il getto di cemento armato per la nuova isola di piegatura di
fronte alla gemella. L’attività di scavo è stata eseguita nei fine settimana ed orari notturni durante il mese di
gennaio.
3.2. RICHIESTA CONTROLLO CALIBRAZIONE
In precedenza era stato richiesto un intervento diretto dei tecnici Fanuc per accertarsi che il robot fosse in
perfetta calibrazione in modo tale da poter eventualmente rifare la calibrazione in caso di perdita dati dopo lo
spostamento.
3.3. CREAZIONE STOCK
Al fine di permettere lo spostamento della macchina si sono dovuti piegare i particolari necessari per coprire
tutto il periodo della durata dello spostamento senza creare difficoltà alla produzione.
3.4. SMANTELLAMENTO
La prima attività di smantellamento è stata quella delle recinzioni e dei relativi collegamenti per consentire
un facile accesso a tutti i macchinari da spostare.
Le attività sono state supervisionate dai tecnici dei costruttori dei macchinari pertanto sono state smantellate
le recinzioni, i quadri elettrici e tutte le macchine presenti nell’isola precedente con i tecnici Lvd e Starmatik.
In particolare il tecnico Lvd si è occupato di smontare la piegatrice mentre i tecnici della Starmatik si son
dedicati al robot.
La prima attività dei tecnici Starmatik è stata quella di effettuare un backup di tutto il software sia plc che
robot per sicurezza; l’intera isola è rimasta scollegata senza tensione per 2 settimane circa e quindi potevano
esserci problemi di perdita di memoria.
Durante le fasi di smontaggio e rimontaggio sono stati puliti e sgrassati a tutti i componenti dell’isola in
particolare quelli della piegatrice; usando il grasso e l’olio per lubrificarla durante tutto il periodo di
funzionamento si sono create morchie di sporcizia causate dalla polvere che si è amalgamata con i prodotti
lubrificanti. Terminata la pulizia è stato quindi possibile ingrassare nuovamente i coltelli e le rotaie su cui
scorrono i cuscinetti dell’Easy-Form e dei riscontri posteriori; infine sono stati lubrificati anche i pistoni del
coltello prestando attenzione ad eventuali perdite.
A mano a mano che si smontava ogni pezzo, veniva spostato nella nuova isola e rimontato secondo le nuove
misure e posizioni.
L’isola ha circa 170 programmi residenti e funzionanti pertanto lo spostamento dei macchinari richiedeva la
completa riprogrammazione in quanto non sarebbero stati posizionati in modo identico a quello iniziale.
I 170 programmi già esistenti, se si dovessero rifare servirebbe circa 1 giorno per ognuno per rivederli, il che
vorrebbe dire 170 giorni circa, ossia 8 mesi circa di lavoro!

15/04/2013 Pagina 6 di 14 Project Work_Merlo
La precisione delle attività che esegue l’isola è tale da richiedere il controllo dei decimi di grado e di
millimetro pertanto è stato ideato un sistema che doveva permettere il riposizionamento dell’isola nelle
medesime condizioni precedenti.
Siccome la piegatrice pesa oltre 450 quintali ed era impensabile posizionare la macchina con precisione, si è
deciso che, una volta posizionata la piegatrice, tutto doveva essere riposizionato in modo identico alla
vecchia isola facendo riferimento alla piegatrice stessa.
Per fare questo e non perdere tutti i programmi che sono stati fatti in precedenza, sono state create 4 apposite
piastre che son state così posizionate:
- una sulla parte bassa della piegatrice (saldata)
- la piastra comune è stata posizionata sulla flangia del robot (spinata ed imbullonata),
- una è stata posizionata nell’angolo inferiore del centratore lamiere dove si appoggiano i
pezzi da piegare (appoggiata)
- una sulla catenaria dei pallets di scarico (saldata)
Per il ribaltatore è stata presa la misura relativa tra il ribaltatore lamiere e la piastra del braccio del robot.
Una volta posizionate tutte le piastre, si è movimentato il robot in manuale fino a far coincidere la piastra del
robot su tutte le altre. L’attività veniva confermata con l’introduzione di un perno calibrato che veniva
inserito in modo passante tra le due piastre.
L’avvicinamento era facilitato da quattro punte agli angoli di ciascuna piastra. Per ciascuna piastra è stato
salvato il punto sul programma del robot così che per tutte le piastre fossero memorizzate le relative
posizioni.
Al termine è stato rieseguito il programma e verificato che in tutte le posizioni il perno entrasse
perfettamente.
Tutto questo è stato fatto con l’obiettivo di riposizionare tutto come era prima.

15/04/2013 Pagina 7 di 14 Project Work_Merlo
4. INSTALLAZIONE
La piegatrice è stata posizionata ed allineata per prima (per problemi di peso) e successivamente è stato
posizionato il robot in modo che coincidessero le piastre come era nell’isola vecchia perché; così facendo, i
programmi del robot verso la piegatrice potevano essere gli stessi senza dover fare troppe modifiche.
Questa base mobile ha permesso di muovere il robot in tutte le direzioni e consentirne il posizionamento
corretto.
A questo punto la piegatrice era in bolla e fissata a terra, il robot era stato posizionato in modo corretto
relativamente alla piegatrice e non si poteva più muoverli per non perdere le posizioni.
L’elemento successivo da posizionare era il centratore. Per fare ciò si è spostato il robot (tramite
programma) nella posizione memorizzata nella vecchia isola e si è agito sulle regolazioni della struttura per
spostare il centratore lamiere fino a far coincidere la piastra robot con la piastra del centratore. Le medesime
operazioni sono state eseguite sulla catenaria di pallets di scarico.
Il ribaltatore di lamiere è stato invece posizionato tramite le misure prese precedentemente in quanto non
necessita di precisione perché avviene solo uno scambio.
5. TRASPORTO PIEGATRICE
Per spostare la piegatrice è stata chiamata una ditta che ha messo a disposizione 2 Ormig in grado di
sollevare 25 tonnellate ciascuno, perché il corpo macchina aveva un peso complessivo di 36 tonnellate.
Precedentemente sono stati staccati sia il coltello che la tavola ed appoggiati a terra.
A questo punto è stata legata in alto negli appositi fori, e poi con molta cautela è stata sollevata di circa 20
centimetri per consentire di sfilarla dai tiranti che la vincolavano a terra; fatto questo le gru Ormig hanno
iniziato a fare manovre e con cautela dirigersi verso la nuova postazione.
Superata la via di corso del carroponte, con tante piccole manovre sono riusciti a posizionarla sopra le
apposite piastre di sostegno (precedentemente preparate nella nuova fondazione) dove una volta posata sono
stati inseriti i tiranti ai quattro angoli per poterla vincolare a terra.
Tramite l’ausilio delle gru Ormig sono stati trasportati il coltello e la tavola nei pressi della piegatrice; il
montaggio è stato invece effettuato con il carroponte.
6. ALLINEAMENTO PIEGATRICE
Terminato il trasferimento della macchina, io ed il tecnico della LVD abbiamo iniziato il lavoro di ripristino
della macchina.
Per prima cosa abbiamo tirato i cavi al quadro precedentemente scollegati per il trasporto.
Successivamente abbiamo controllato che la macchina fosse ben in bolla per poi poterla avviare.
Dopo averla avviata abbiamo potuto:
Effettuare l’allineamento degli encoder dei coltelli,
Allineare la guida della tavola dove vengono posizionate le matrici,
Rimontare sugli appositi cuscinetti l’ Easy-Form.
Ricollegamento dell’Easy form
L’Easy Form è un sistema di monitoraggio che calcola, attraverso un raggio laser, l’angolo della lamiera che
viene piegata.
Dopo aver ricollegato l’Easy Form abbiamo iniziato le prove constatando che non andava perché veniva
infastidito dalla luce. Con una semplice pulizia interna dei sensori e delle componenti interne questo
problema è sparito.

15/04/2013 Pagina 8 di 14 Project Work_Merlo
Quindi abbiamo montato un paio di matrici, di coltelli e abbiamo prelevato della lamiera di scarto per
provare se le prime modifiche erano a posto.
Abbiamo riscontrato un problema di allineamento e non piegava come ci aspettavamo quindi abbiamo
dovuto cambiare alcuni dati della macchina fino a quando i pistoni sono stati allineati perfettamente e
spingevano il coltello in modo uniforme.
Fatto questo il tecnico ha ancora controllato le valvole che son posizionate sopra i pistoni e ha cambiato le
guarnizioni che erano usurate.
La macchina a questo punto era a posto. Abbiamo ancora ingrassato i coltelli e le relative guide prima di
considerare terminato il lavoro.

15/04/2013 Pagina 9 di 14 Project Work_Merlo
7. FOTO CON DESCRIZIONE:
Scavi delle fondamenta della nuova isola di fronte alla gemella (dicembre 2012- gennaio 2013).
Isola nella posizione precedente, prima dello spostamento (2 aprile 2013).

15/04/2013 Pagina 10 di 14 Project Work_Merlo
Inizio smontaggio macchinari.
Posa del robot nella fossa sull’apposita base mobile.

15/04/2013 Pagina 11 di 14 Project Work_Merlo
Sollevamento, spostamento e posa con 2 Ormig della piegatrice da 36 tonnellate.

15/04/2013 Pagina 12 di 14 Project Work_Merlo
Nuova isola di piegatura robotizzata, nella sua nuova posizione e pronta a funzionare (18 aprile
2013)

15/04/2013 Pagina 13 di 14 Project Work_Merlo
8. FUNZIONAMENTO
Lo scopo di questa macchina è quello di programmare dei cicli di piegatura che siano in grado di eseguire le
varie fasi senza interruzioni.
Le fasi sinteticamente sono:
L’operatore deve caricare il pallet con i pezzi da piegare sulla rulliera
L’automazione fa scorrere il pallet fino in posizione di carico
Un portale esegue la sfogliatura delle lamiere con degli elettromagneti
Una spazzola rotante esegue la pulizia delle impurità maggiori.
Attraverso due cuscinetti viene calcolato il suo spessore.
Il portale deposita la lamiera sul centratore dove, per inerzia e grazie a delle sfere, scivolerà fino
all’angolo più basso.
Prelievo del robot
Per ciascun particolare ci sarà un programma dedicato di robot e di piegatrice.
Il robot dialogando con la piegatrice tramite rete profibus comunica le fasi di lavoro e consente alla
piegatrice di posizionare i riscontri posteriori e di effettuare il piego.
A questo punto il robot attraverso delle ventose o degli elettromagneti prenderà la lamiera da piegare e la
posizionerà all’interno della piegatrice dove verrà a contatto dei riscontri interni (precedentemente
posizionati).
Trovando il pezzo nella posizione esatta i riscontri si sposteranno ed il coltello potrà scendere fino a quando
pizzicherà la lamiera per fermarla. Una volta che Easy Form si sarà posizionata sotto si essa (è un sistema
dotato di motorizzazione), la piegatrice potrà scendere per dare la piega necessaria al pezzo.
Questo procedimento sarà uguale per ogni piega che dovrà essere fatta alla lamiera interessata.
Nel caso in cui si renda necessario modificare il lato di presa si dovrà utilizzare il ribaltatore per fare in
modo che il robot possa cambiare lato e continuare nelle pieghe.
Fatte tutte le operazioni il pezzo verrà poi depositato dal robot sul pallet pre-impostato dal programmatore
secondo diversi criteri. Queste attività verranno ripetute fino al termine del lotto reimpostato.

15/04/2013 Pagina 14 di 14 Project Work_Merlo
Ecco una fase di piegatura della lamiera.
E qui una fase della palletizzazione.






![[DEFORMAZIONE PLASTICA]_dispensa piegatura lamiera.pdf](https://static.fdocumenti.com/doc/165x107/55721428497959fc0b93e696/deformazione-plasticadispensa-piegatura-lamierapdf.jpg)