SISTEMI DI MONITORAGGIO METEOROLOGICO PER L’ANALISI … · SISTEMI DI MONITORAGGIO METEOROLOGICO...
24
© 2018 EdiBios 1 SISTEMI DI MONITORAGGIO METEOROLOGICO PER L’ANALISI DEL CAMPO DI PRECIPITAZIONE IN AREE URBANE FINALIZZATI AL PREANNUNCIO PRECOCE DI DISSESTI IDROGEOLOGICI A. Francipane, G. La Loggia, L.V. Noto Università di Palermo – Dipartimento di Ingegneria Civile ed Applicazioni Ambientali SOMMARIO. Lo sviluppo dei sistemi informativi territoriali, insieme con quello di avanzate tecniche di monitoraggio ambientale, potrebbe risultare molto utile nell’ambito del preavviso e/o della mitigazione del rischio idrogeologico. Questo lavoro presenta un sistema integrato per il preannuncio del rischio idrogeologico il cui punto di forza risiede in un sistema di monito‐ raggio climatico e idrologico/geotecnico costituito da diversi sensori wireless che registrano una serie di informazioni relative a grandezze di tipo meteorologico, idrologico e geotecnico. I dati registrati e inviati ad una piattaforma web sono utilizzati per alimentare una rete neurale artifi‐ ciale, opportunamente creata e addestrata, che esegue il controllo in tempo reale della stabilità di una data area di studio. I risultati restituiti dalla rete neurale artificiale permettono di preve‐ dere se e quando una frana si potrebbe attivare a seguito di precipitazioni intense e di lanciare automaticamente un messaggio di potenziale pericolo. Il sistema è organizzato secondo tre li‐ velli che interagiscono tra di loro e, in particolare: un primo livello costituito dall’acquisizione dei dati dai sensori, un secondo livello di processamento dei dati e, infine, un livello di lancio del warning. Il sistema sviluppato è stato testato in un sito pilota nei pressi dell’area urbana di Palermo. I primi risultati ottenuti hanno permesso di verificare il perfetto funzionamento del si‐ stema nelle sue singole componenti ma anche nel suo insieme. 1. Introduzione I movimenti di massa includono tutti quei processi, dall’erosione alle frane, che possono modi‐ ficare rapidamente la morfologia di un’area spesso con conseguenze più o meno gravi per le infra‐ strutture, le attività umane e, a volte, la vita stessa. Come è ormai ampiamente noto, le condizioni climatiche giocano un ruolo fondamentale nell’attivazione di questi processi. Con riferimento alle sole frane, ad esempio, è stato dimostrato che le precipitazioni intense e/o particolarmente prolun‐ gate nel tempo sono la causa principale dell’attivazione di una frana (Crosta and Frattini, 2008). In molti casi, i movimenti di massa sono dovuti ad un aumento delle pressioni interstiziali, con una conseguente diminuzione della resistenza al taglio dei suoli; in altri casi, invece, le cause possono essere ricercate nella modifica della geometria dei pendii, dovuta all’erosione, alla saturazione dei suoli, all’estrazione di acqua dal suolo, all’intervento antropico, ecc. (Popescu, 1994). In generale, le frane attivate da precipitazione, siano esse profonde o superficiali, sono spesso indicate con l’acronimo RTL (Rainfall‐Triggered Landslides). L’impatto delle condizioni climatiche sull’attivazione di una frana è già stato ampiamente discusso nel passato (Crozier, 1986; Garland e Olivier, 1993, Rahardjo et al., 1995). Tali studi sembrano concordare sul fatto che piogge brevi e intense siano alla base del verificarsi di frane superficiali (Cannon e Ellen, 1985; Michiue, 1985), al contrario delle fra‐ ne profonde che sembrerebbero essere attivate, nella maggior parte dei casi, da piogge poco intense ma prolungate nel tempo (Bonnard e Noverraz, 2001). Un altro ruolo importante, nell’attivazione di una frana, è giocato anche dalle condizioni del suolo antecedenti al verificarsi della frana stessa (Kim et al., 1992). Polemio e Petrucci (2000) hanno rivisto e confrontato diversi approcci metodologici allo studio delle RTL. Queste analisi, che hanno riguardato 234 paesi del mondo, hanno dimostrato che molte aree dell’Italia sono particolarmente predisposte all’attivazione di frane da precipitazione. Inoltre,
Transcript of SISTEMI DI MONITORAGGIO METEOROLOGICO PER L’ANALISI … · SISTEMI DI MONITORAGGIO METEOROLOGICO...

© 2018 EdiBios 1
SISTEMI DI MONITORAGGIO METEOROLOGICO PER L’ANALISI DEL CAMPO DI PRECIPITAZIONE IN AREE URBANE FINALIZZATI AL PREANNUNCIO
PRECOCE DI DISSESTI IDROGEOLOGICI
A. Francipane, G. La Loggia, L.V. Noto
Università di Palermo – Dipartimento di Ingegneria Civile ed Applicazioni Ambientali
SOMMARIO. Lo sviluppo dei sistemi informativi territoriali, insieme con quello di avanzate tecniche di monitoraggio ambientale, potrebbe risultare molto utile nell’ambito del preavviso e/o della mitigazione del rischio idrogeologico. Questo lavoro presenta un sistema integrato per il preannuncio del rischio idrogeologico il cui punto di forza risiede in un sistema di monito‐raggio climatico e idrologico/geotecnico costituito da diversi sensori wireless che registrano una serie di informazioni relative a grandezze di tipo meteorologico, idrologico e geotecnico. I dati registrati e inviati ad una piattaforma web sono utilizzati per alimentare una rete neurale artifi‐ciale, opportunamente creata e addestrata, che esegue il controllo in tempo reale della stabilità di una data area di studio. I risultati restituiti dalla rete neurale artificiale permettono di preve‐dere se e quando una frana si potrebbe attivare a seguito di precipitazioni intense e di lanciare automaticamente un messaggio di potenziale pericolo. Il sistema è organizzato secondo tre li‐velli che interagiscono tra di loro e, in particolare: un primo livello costituito dall’acquisizione dei dati dai sensori, un secondo livello di processamento dei dati e, infine, un livello di lancio del warning. Il sistema sviluppato è stato testato in un sito pilota nei pressi dell’area urbana di Palermo. I primi risultati ottenuti hanno permesso di verificare il perfetto funzionamento del si‐stema nelle sue singole componenti ma anche nel suo insieme.
1. Introduzione
I movimenti di massa includono tutti quei processi, dall’erosione alle frane, che possono modi‐ficare rapidamente la morfologia di un’area spesso con conseguenze più o meno gravi per le infra‐strutture, le attività umane e, a volte, la vita stessa. Come è ormai ampiamente noto, le condizioni climatiche giocano un ruolo fondamentale nell’attivazione di questi processi. Con riferimento alle sole frane, ad esempio, è stato dimostrato che le precipitazioni intense e/o particolarmente prolun‐gate nel tempo sono la causa principale dell’attivazione di una frana (Crosta and Frattini, 2008). In molti casi, i movimenti di massa sono dovuti ad un aumento delle pressioni interstiziali, con una conseguente diminuzione della resistenza al taglio dei suoli; in altri casi, invece, le cause possono essere ricercate nella modifica della geometria dei pendii, dovuta all’erosione, alla saturazione dei suoli, all’estrazione di acqua dal suolo, all’intervento antropico, ecc. (Popescu, 1994). In generale, le frane attivate da precipitazione, siano esse profonde o superficiali, sono spesso indicate con l’acronimo RTL (Rainfall‐Triggered Landslides). L’impatto delle condizioni climatiche sull’attivazione di una frana è già stato ampiamente discusso nel passato (Crozier, 1986; Garland e Olivier, 1993, Rahardjo et al., 1995). Tali studi sembrano concordare sul fatto che piogge brevi e intense siano alla base del verificarsi di frane superficiali (Cannon e Ellen, 1985; Michiue, 1985), al contrario delle fra‐ne profonde che sembrerebbero essere attivate, nella maggior parte dei casi, da piogge poco intense ma prolungate nel tempo (Bonnard e Noverraz, 2001). Un altro ruolo importante, nell’attivazione di una frana, è giocato anche dalle condizioni del suolo antecedenti al verificarsi della frana stessa (Kim et al., 1992).
Polemio e Petrucci (2000) hanno rivisto e confrontato diversi approcci metodologici allo studio delle RTL. Queste analisi, che hanno riguardato 234 paesi del mondo, hanno dimostrato che molte aree dell’Italia sono particolarmente predisposte all’attivazione di frane da precipitazione. Inoltre,

2
alcuni eventi di dissesto verificatisi recentemente hanno dimostrato che in Italia esiste una reale e concreta necessità di implementare e migliorare le misure di mitigazione degli effetti delle frane migliorando, al contempo, anche i sistemi di Early Warning (EWS), ovvero di preannuncio precoce delle frane.
Un EWS è una misura non strutturale di mitigazione del rischio che può essere pensata come una catena di sistemi che lavorano insieme per il rilevamento, l’analisi e la mitigazione di potenziali eventi calamitosi. L’uso di questi sistemi nel campo delle frane (Nadim e Intrieri, 2011; Thiebes, 2012) è in continua crescita anche grazie ai costi contenuti, soprattutto se confrontati con quelli de‐gli interventi di tipo strutturale. Una nuova e promettente frontiera nell’EWS per RTL è rappresen‐tata dalla combinazione di modelli idrologici e modelli per lo studio della stabilità dei pendii (e.g., Montgomery e Dietrich, 1994; Simoni et al., 2008; Capparelli e Tiranti, 2010; Arnone et al., 2011; Le‐pore et al., 2013). Un modello idrologico che sia in grado di fare anche delle valutazioni sulla stabi‐lità dei pendii e di studiare come varino alcuni fattori di innesco delle frane (ad esempio, pioggia, umidità del suolo, ecc.) è essenziale per fronteggiare e ridurre il rischio da frane in un EWS moder‐no e funzionale. A quanto sin qui detto, si aggiunga che i recenti avanzamenti tecnologici nella co‐struzione di sensori e strumenti per la misura di determinate variabili ambientali, insieme con lo sviluppo di nuovi metodi e protocolli di trasmissione dati e il diffondersi di strumenti di calcolo sempre più potenti per la gestione e l’analisi dei dati rilevati, ha in qualche modo tracciato la strada per lo sviluppo dei moderni EWS.
In questo lavoro si presenta una piattaforma capace di integrare servizi di monitoraggio e di‐versi processi di gestione e analisi dei dati meteoclimatici e idrologici al fine di fornire un supporto alla decisione nel campo dell’EWS per RTL.
L’intero sistema è stato sviluppato all’interno del progetto SESAMO (Integrated Information Sy‐stem for the acquisition, management and sharing of environmental data aimed to decision making) specifi‐catamente per frane innescate da precipitazione e si connota per alcune innovazioni apportate ri‐spetto ad altri sistemi di EWS già esistenti. Alcune delle principali innovazioni introdotte sono rias‐sunte qui di seguito: uso di un sistema di monitoraggio avanzato, realizzato con l’utilizzo di diversi sensori, dotato di
flessibilità per adattarsi alle condizioni attuali del sito in studio. Una delle peculiarità del sistema è, ad esempio, quella di far variare in maniera automatica il tempo di acquisizione dei dati, in‐crementandolo in presenza di una previsione di precipitazioni e riducendolo nei periodi in cui non sono previste piogge; oltre che ridurre la mole di dati da trasmettere e gestire, tale caratteri‐stica consente di risparmiare il consumo di energia del sistema durante i periodi di calma.
Utilizzo di tecnologie web‐based per la trasmissione e la gestione dei dati, sia in ingresso al si‐stema che in uscita da esso. Tutte le tecnologie utilizzate sono di tipo open source. Tutti i senso‐ri comunicano in modalità wireless con un collettore che raccoglie i dati, ne omogenizza i formati e li trasmette ad una piattaforma web dove questi sono immagazzinati, processati, mostrati e messi a disposizione dell’utente finale.
Utilizzo di una Rete Neurale Artificiale (ANN) per il processamento dei dati e l’identificazione di un potenziale evento franoso all’interno dell’area osservata. Data la loro capacità nel gestire grandi quantità di dati e apprendere, sulla base di quanto avvenuto in passato, le complesse relazioni che esistono tra i dati di input e quelli di output (Giustolisi e Savic, 2006), l’utilizzo di una ANN per lo studio del rischio da frane è molto comune in lette‐ratura (Mayoraz et al., 1996; Ermini et al., 2005; Doglioni et al., 2012; Arnone et al., 2014). Un aspetto innovativo della ANN qui utilizzata sta nel fare uso di un modello fisicamente basato e spazialmente distribuito, il tRIBS‐VEGGIE‐Landslide (Lepore et al., 2013), per lo studio della risposta idrologica e, al contempo, della stabilità di un pendio per il suo addestramento.
Per quanto riguarda l’organizzazione del presente lavoro, dopo una breve introduzione sul progetto SESAMO (Sezione 2), l’intero sistema sarà discusso in maniera approfondita con particola‐re riferimento al sistema di monitoraggio meteoclimatico (Sezione 3) e al sistema web‐based (Sezione 4). Nella Sezione 5 particolare attenzione sarà dedicate alla descrizione di alcuni moduli e algoritmi utilizzati per il processamento dei dati, come gli algoritmi di correzione a terra delle misure da ra‐dar o l’utilizzo della ANN per l’identificazione di un potenziale evento di dissesto idrogeologico. Nella Sezione 6 sarà presentata un’applicazione ad un caso studio e nelle ultime due sezioni (Se‐zione 7 e 8) saranno commentati alcuni degli aspetti più importanti della piattaforma SESAMO.

3
2. Il Sistema di Early Warning di SESAMO
Il progetto SESAMO coinvolge differenti partner scientifici e industriali con l’obiettivo comune di creare un sistema informativo integrato per l’acquisizione, la gestione e la condivisione di dati ambientali e per fornire alcuni servizi nell’ambito di diverse applicazioni. Una di queste applica‐zioni riguarda lo sviluppo di un moderno ed efficiente EWS per RTL.
Il sistema, la cui rappresentazione schematica è riportata in figura 1, è costituito da due compo‐nenti principali tra di loro collegate: il sistema di monitoraggio e la piattaforma web.
Fig. 1 – Rappresentazione schematica del sistema di Early Warning di SESAMO per frane attivate da precipitazione La piattaforma integra al suo interno diversi sottosistemi designati a gestire diverse funzioni:
acquisizione, controllo, processamento, immagazzinamento e visualizzazione dei dati sul web; comunicazione in entrambi i sensi tra il sistema di monitoraggio e la piattaforma per
l’acquisizione dei dati e il controllo e la gestione dei sensori; generazione e trasmissione di eventuali allarmi.
La piattaforma web, che può essere interrogata dall’utente in qualsiasi momento, è in grado di fornire e mostrare i dati acquisiti fino a quel momento, oltre che una serie di informazioni che po‐trebbero essere di grande importanza per ricercatori, agenzie locali e regionali e utenti che, in gene‐rale, si occupano dello studio e la gestione del rischio idrogeologico.
3. Sistema di Monitoraggio di SESAMO
L’EWS proposto è supportato da un avanzato sistema di monitoraggio che può essere suddiviso in due sottosistemi: il sistema di monitoraggio meteoclimatico, per l’osservazione dei campi di pre‐cipitazioni, e il sistema di monitoraggio idrologico/geotecnico che misura le principali variabili idrologiche di un’area posta sotto osservazione ed eventuali spostamenti di suolo al suo interno.
All’interno del sistema di monitoraggio sono possibili due condizioni operative, ognuna delle quali è associata ad un diverso tempo di acquisizione dei dati: la condizione di allerta, in cui i dati vengono acquisiti con una frequenza pari a 4 h‐1, e la condizione di non allerta, in cui la frequenza di acquisizione è pari a 1 h‐1. Tutti i sensori sono in grado di variare in maniera sincrona il tempo di acquisizione, passando da una condizione all’altra, in base ad un segnale identificativo della condi‐zione in essere (allerta o non allerta), automaticamente inviato dalla piattaforma.

4
3.1 Sistema di Monitoraggio Meteoclimatico
Data l’importanza della precipitazione quale causa principale di dissesto idrogeologico, SESA‐MO è stato dotato di un avanzato sistema di monitoraggio meteoclimatico. Il sistema consiste di diverse componenti per la misura/previsione delle precipitazioni che servono da input per un mo‐dello idrologico e di stabilità dei pendii. I dati misurati dal sistema costituiscono, già di per sé, un primo output messo a disposizione dell’utente sulla piattaforma web di SESAMO.
Oltre che le osservazioni fornite dal sistema di monitoraggio, SESAMO ha la possibilità di uti‐lizzare le previsioni di un’eventuale precipitazione fornite da un modello ad area limitata (LAM ‐ Limited Area Model) gestito dall’ente regionale del SIAS (Servizio Informativo Agrometeorologico Siciliano). Il LAM è un modello numerico per la previsione meteorologica capace di fare previsioni a scala oraria e con una risoluzione spaziale di 7,5 Km. Gli output del modello sono usati per de‐terminare la condizione di allerta/non allerta; in particolare, se la pioggia cumulata prevista nelle 24 ore successive alla previsione è superiore ad una data soglia (prudentemente assunta uguale a 10 mm) il sistema si trova in una situazione di allerta e, di conseguenza, tutti i sensori aumentano la loro frequenza di acquisizione. Al contrario, se la precipitazione prevista nelle 24 ore successive alla previsione è inferiore alla soglia considerata, allora il sistema si trova in una condizione di non‐allerta e la frequenza di acquisizione viene diminuita.
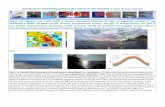
Il sistema di monitoraggio climatico è stato sviluppato dal Dipartimento di Ingegneria Civile, Ambientale, Aerospaziale, dei Materiali (DICAM) dell’Università degli Studi di Palermo e copre un’area di osservazione di circa 700 km2 (Fig. 2). Esso è costituito da un mini‐radar meteorologico in banda X, una rete di stazioni pluviometriche, un pluviometro a pesata, un disdrometro e una stazione meteorologica.
3.1.1 Radar in banda X
Il radar utilizzato nel sistema di monitoraggio climatico (Fig. 3a) è un mini‐radar in banda X a polarizzazione singola prodotto dalla EnviSens Technologies e che opera alla frequenza di 9.41±0.03GHz con un picco di potenza di 10 kW e un raggio d’azione massimo di 30 km. Lo stru‐ment
Fig. 2 – Localizzazione dei diversi strumenti del sistema di monitoraggio climatico che coprono l’area urbana della città di Palermo

5
Fig. 3 ‐ Sensori del sistema di osservazione meteorologica: mini‐radar in banda X (a); pluviometro a pesata (b); disdrometro (c); stazione meteo (d) mento è stato installato sulle montagne a est di Palermo (38°02’N‐13°27’E) ed ha un campo di os‐servazione che ricopre per intero l’area urbana della città di Palermo. La casa produttrice del radar mette a disposizione dei suoi clienti anche una procedura per la correzione dei valori di ground clut‐ter. I dettagli di questo filtro non sono forniti agli utenti, probabilmente perché il dispositivo è stato progettato come un sistema semplificato e a basso costo che consente il monitoraggio delle dinami‐che delle precipitazioni senza richiedere competenze specifiche da parte dell utente. Pertanto, se si vogliono utilizzare delle impostazioni anti‐clutter personalizzate, ad esempio per scopi di ricerca scientifica, è necessario disattivare il filtro fornito dalla casa produttrice ed utilizzarne uno proprio. Il radar è in grado di produrre una mappa al minuto con una risoluzione “virtuale” di 60 m. Le mappe così prodotte sono trasmesse, via GPRS (General Packet Radio Service), alla piattaforma SE‐SAMO dove sono opportunamente processate. In tabella 1 si riportano le caratteristiche dettagliate del radar del sistema di monitoraggio meteoclimatico di SESAMO.
Tab. 1 – Caratteristiche del mini‐radar in banda X
3.1.2 Rete pluviometrica
Le misure di precipitazione a terra sono eseguite per mezzo di una rete di stazioni pluviometri‐che antecedente al progetto SESAMO e opportunamente ampliata durante lo sviluppo di questo. La rete originaria, gestita dal DICAM, era costituita da nove pluviometri a bascula della serie ISCO 674, accoppiati ad altrettanti data logger per la registrazione dei dati misurati. La pioggia, misurata con una risoluzione di 0.1 mm, è prima trasferita via GSM (Global System for Mobile Communications) ad un database del software proprietario ISCO Flowlink® (v. 4.7) e, quindi, trasferito via FTP (File Transfer Protocollo) alla piattaforma SESAMO. In occasione del progetto SESAMO, la rete è stata ampliata con ulteriori nove pluviometri a bascula della serie TECNO PENTA M1 PLUV 1000 (con risoluzione anche questi di 0.1 mm) che trasmettono i dati via GPRS direttamente alla piattaforma SESAMO.
3.1.3 Disdrometro, Pluviometro a pesata e Stazione Meteorologica
Oltre alla rete di pluviometri a bascula, altri due strumenti permettono la misura a terra delle

6
precipitazioni: un pluviometro a pesata (OTT ‐ Pluvio2 200) ed un disdrometro ottico (OTT ‐ Parsi‐vel2) mostrati in figura 3b e figura 3c, rispettivamente. I due strumenti sono stati installati sul tetto dell’Edificio 8 del campus universitario (38° 6 18.48 N, 13°20 52.80 E), e utilizzati per il benchmar‐king della rete pluviometrica e per la calibrazione delle stime di precipitazione fatte dal radar.
In particolare, il pluviometro a pesata consente di eseguire misure in continuo e ad alta preci‐sione delle precipitazioni ed è utilizzato all’interno del sistema per controllare la consistenza delle misure a terra provenienti dai pluviometri a bascula. Lo strumento, che ha un’area di raccolta della pioggia di 200 cm2, una risoluzione di 0,1 mm ed è concepito per misurare precipitazioni con un’intensità compresa tra 0,05 e 3000 mm/h, trasferisce i dati via GPRS direttamente alla piattafor‐ma di SESAMO.
Il disdrometro misura la velocità della precipitazione e fornisce anche la distribuzione dei dia‐metri delle gocce di pioggia (DSD ‐ drop size distribution) che è direttamente collegata ai parametri utilizzati per trasformare la riflettività misurata dal radar in stime di precipitazione. Lo strumento in questione utilizza un fascio laser orizzontale per calcolare il tipo, la quantità e l’intensità di pre‐cipitazione, l’energia cinetica della pioggia e l’equivalente riflettività radar. Quest’ultima grandezza è fondamentale per il confronto delle stime da radar con le misure a terra in un punto specifico. In tabella 2 sono riportate le caratteristiche tecniche principali del disdrometro utilizzato nella rete di monitoraggio climatico di SESAMO.
Infine, una stazione meteorologica (Fig. 3d), che include diversi sensori, è utilizzata per eseguire misure di temperatura dell’aria, umidità relativa, pressione atmosferica, radiazione solare, direzio‐ne e velocità del vento. Tali grandezze sono fondamentali per il corretto utilizzo del modello idro‐logico e di stabilità del pendio.
Tab. 2 – Caratteristiche del disdrometro 3.2 Sistema di monitoraggio idrologico/geotecnico
Poiché il contenuto idrico del suolo gioca un ruolo chiave nell’attivazione delle frane, il monito‐raggio in continuo dell’umidità del suolo a differenti profondità e posizioni di un pendio è di fon‐damentale importanza per lo studio della sua stabilità. Le misure di umidità del suolo sono utiliz‐zate durante la calibrazione del modulo idrologico del tRIBS‐VEGGIE‐Landslide e durante la suc‐cessiva fase di simulazione con la ANN. Il sistema prevede che i profili e i valori del contenuto vo‐lumetrico di acqua nel suolo siano misurati con delle sonde FDR (Frequency Domain Reflectometry) e delle sonde TDR (Time Domain Reflectometry) e, quindi, trasmessi via GPRS alla piattaforma SESA‐MO. I valori registrati sono messi a disposizione degli utenti della piattaforma stessa.
Più specificatamente, ogni sonda FDR (Campbell EnviroSCAN) include quattro sensori che misu‐rano il contenuto d’acqua a diverse profondità (30, 60, 90 e 120 cm sotto il piano campagna). Attor‐no ad ogni sensore, la sonda, che penetra attraverso un tubo di accesso all’interno del suolo, crea un campo elettrico ad alta frequenza. Il contenuto idrico del suolo è così determinato, per inversione, dalla misura della capacità elettrica misurata dalla sonda. Ogni sonda TDR (Campbell CS650), inve‐ce, è formata da una barra di acciaio inossidabile lunga 30 cm connessa ad un circuito stampato. Questo strumento misura la propagazione e l’attenuazione del segnale nel tempo, mentre il conte‐nuto volumetrico d’acqua e la conducibilità idraulica sono derivate per inversione dai valori grezzi misurati dalla sonda.

7
L’osservazione in tempo reale dei movimenti di un pendio è estremamente utile per emettere allarmi relativi all’accadimento di una frana ma anche per verificare l’esattezza o meno di eventuali previsioni di attivazione della frana, minimizzando in questo modo i falsi allarmi. Una nuova fron‐tiera nel monitoraggio delle frane è costituita dall’uso della tecnologia MEMS (Micro Electro‐Mechanical Sensors) nella costruzione di sensori quali accelerometri, inclinometri e sensori di rota‐zione (Fernandez‐Steeger et al., 2009). Questa tecnologia, realizzata dall’integrazione di diversi di‐spositivi e circuiti dalle dimensioni molto piccole, è oggigiorno caratterizzata da costi di produzio‐ne e installazione molto bassi. In questo modo, è possibile realizzare reti di monitoraggio molto fitte e con sensori posti anche nelle aree più inaccessibili. Inoltre, un’eventuale perdita dello strumento dovuta all’attivazione di una frana comporterebbe una perdita economica molto piccola.
Con particolare riferimento al progetto SESAMO, essendo il sistema di monitoraggio specifico per RTL poco profonde, è possibile ipotizzare che gli eventi franosi interessino solo gli strati super‐ficiali del terreno e che la cinematica dei loro movimenti sia relativamente veloce. Sotto tali ipotesi, un elemento rigido (ad esempio, un palo) direttamente radicato nel terreno fino alla superficie di scorrimento, quando colpito da una frana, sarebbe soggetto a un movimento roto‐traslatorio. In questa configurazione dinamica, il monitoraggio dell angolo di inclinazione e lo spostamento della testa dal palo diventano significativi e rappresentativi per lo stato cinematico della porzione di ter‐reno monitorata. Il sistema è progettato come una rete di diverse unità funzionali slave (SFU) distri‐buite all interno di un’area di monitoraggio selezionata; ogni SFU è costituita da un sensore incli‐nometrico triassiale basato sulla tecnologia MEMS, fissato sulla testa di un palo lungo 1 m, che deve essere completamente immerso nel terreno. L unità è dotata di un modulo per la trasmissione di dati wireless, integrato nel sensore MEMS ed è autoalimentato da una batteria con pannello solare. Le SFU sono state sviluppate e realizzate da una delle società coinvolte nel progetto SESAMO, no‐nostante siano disponibili in commercio sensori simili. Il sistema è dotato di un unità master che comunica con la piattaforma remota SESAMO tramite TCP/IP. L unità master e le SFU sono inter‐connesse tramite moduli di conversione dei dati da seriale a Ethernet per la comunicazione locale, formando un nodo di una WSN (Wireless Sensor Network) efficiente in termini di costi e al contempo affidabile. Il master integra al suo interno diverse unità (unità di alimentazione, unità di elaborazio‐ne dati, unità di memoria e unità di ricezione della trasmissione a lungo raggio) ed è controllato a distanza dalla piattaforma SESAMO. I tempi di acquisizione vengono comunicati dalla piattaforma al master e quindi trasmessi da questo alle SFU. Attraverso il master, gli angoli di inclinazione in un preciso istante vengono acquisiti dalle diverse SFU e trasmessi alla piattaforma web. I dati vengono infine elaborati all interno della piattaforma SESAMO, confrontando ciascun valore con l acquisi‐zione immediatamente precedente per stimare la variazione nel tempo dell angolo di inclinazione del polo rispetto all asse verticale e la sua traslazione lineare; tali misure vengono confrontate con opportuni valori di soglia, il cui superamento genera un allarme di frana in corso.
4. Piattaforma web
L obiettivo principale della piattaforma SESAMO è connettere e controllare reti di sensori etero‐genei, dispositivi (ad esempio, telefoni cellulari) e altre fonti di dati esterne (ad esempio, FTP, file locali, ecc.) per raccogliere e distribuire i dati provenienti da sensori e da mappe. Tali dati vengono anche utilizzati per alimentare un insieme di moduli di elaborazione software espandibili e confi‐gurabili che forniscono prodotti diversi, come mappe e informazioni di supporto al processo deci‐sionale. SESAMO consente, quindi, di integrare diversi tipi di sensori e di distribuire i loro dati at‐traverso un unico protocollo standard, noto anche come SOS (Sensor Observation Service). Alcune delle principali attività della piattaforma comprendono il recupero e l elaborazione dei dati, il con‐trollo dei tempi di acquisizione/trasmissione per i vari sensori in caso di condizioni di allarme, la visualizzazione e la condivisione di dati e informazioni. Per questi motivi la piattaforma deve esse‐re flessibile e in grado di supportare diversi formati derivanti dai diversi dispositivi ad essa con‐nessi e trasmessi attraverso protocolli diversi.
La piattaforma SESAMO si basa su un’interfaccia di interoperabilità standard e utilizza le codi‐fiche di metadati stabilite dalla OGC (Open Geospatial Consortium) Sensor Web Enablement Specifica‐tions, tra cui:

8
‐ Sensor Model Language ‐ SensorML: descrizione dei sistemi di sensori e dei processi as‐sociati alle osservazioni dei sensori;
‐ Observation & Measurements – O&M: descrizione di un modello di dati e dello schema per la decodifica delle osservazioni provenienti dai sensori;
‐ Sensor Observation Service – SOS: fornitura di un servizio standard per l accesso alle os‐servazioni dei sensori;
‐ Sensor Planning Service – SPS: fornitura di un servizio standard per la richiesta di attivi‐tà guidate dall utente ai sistemi di sensori.
Altri standard OGC utilizzati per lo sviluppo della piattaforma SESAMO sono: ‐ Web Map Service (WMS) che produce immagini di mappe geografiche registrate da uno
o più database geospaziali distribuiti che possono essere visualizzate in un applicazio‐ne browser;
‐ Web Feature Service (WFS) che consente la creazione, la modifica e il trasporto di infor‐mazioni geografiche in formato vettoriale attraverso un protocollo HTTP e l utilizzo del linguaggio Geography Markup Language (GML) basato su XML;
‐ Web Coverage Service (WCS) che fornisce l accesso e l elaborazione di dati geospaziali; ‐ Web Processing Service (WPS) che definisce regole standard per i servizi di elaborazione
di input e output geospaziali; ‐ Catalogue Service for the Web (CSW) che fornisce un interfaccia di ricerca, di navigazione
e di query basata su metadati di risorse, in particolare quelli basati su altri servizi web. La figura 4 mostra una rappresentazione schematica dell architettura di SESAMO, evidenziando
i diversi moduli che costituiscono la piattaforma e i principali componenti web che saranno singo‐larmente descritti in seguito.
Fig. 4 – Rappresentazione schematica dei moduli costituenti la piattaforma SESAMO: ISI= In Situ Inspection; SOS= Sensor Observation Service; SPS= Sensor Planning Service; DPM= Data Processing Module; DSS= Decision Support System
4.1 Rete di sensori wireless, in situ inspections e sorgenti esterne di dati
La rete di sensori wireless (WSN ‐ Wireless Sensor Network) è finalizzata alla realizzazione di un infrastruttura efficiente per la raccolta e il trasferimento dei dati da sensori remoti a un server centrale. Il WSN utilizza protocolli sia commerciali che proprietari per trasferire i dati del sensore, in base alle specifiche del sensore stesso. Al livello più basso del suo stack di comunicazioni, il WSN fa affidamento sulle infrastrutture 4G e satellitari per la trasmissione dei dati. Attraverso questo sottosistema, i dati raccolti dal sistema di monitoraggio vengono inviati a un server gateway centra‐le, che esegue l applicazione software Data Import Tool (descritta nella Sezione 4.2.1), al fine di ar‐chiviare e mettere a disposizione degli utenti i dati sulla piattaforma. Il server centrale può inviare

9
richieste ai sensori, fornendo così una piattaforma bidirezionale per la raccolta dei dati dai sensori e la gestione di questi. L obiettivo del sottosistema ISI (In Situ Inspection) è quello di trasmettere sulla piattaforma, attraverso dispositivi mobili come smartphone o tablet, un insieme specifico di informa‐zioni raccolte in loco, come informazioni multimediali e di testo che descrivono lo stato dei sensori o quello dell ambiente Queste informazioni, raccolte periodicamente o eccezionalmente da operato‐ri esperti sul campo, possono essere di supporto per l analisi dei risultati degli altri sottosistemi del‐la piattaforma ed essere utili nel processo decisionale per affrontare azioni specifiche.
Infine, all’interno dell infrastruttura informatica di SESAMO, è stata considerata anche la possi‐bilità di utilizzare fonti esterne di dati. In particolare, tale componente è stata utilizzata per intro‐durre dati dal modello di previsione delle precipitazioni, fornito dall agenzia meteorologica locale SIAS, utilizzando un modulo del Data Import Tool per l assimilazione di questi dati all interno di SESAMO.
4.2 Infrastruttura informatica
4.2.1 Sensor Observation Service, Sensor Planning Service e Data Import Tool L interfaccia web standard SOS consente di memorizzare, recuperare e accedere alle misurazio‐
ni eseguite dal sensore. L’interfaccia SOS viene utilizzata dai sensori (tramite il gateway centrale) per inviare i dati al database della piattaforma e da altri moduli di SESAMO per filtrare e recupera‐re i dati per le elaborazioni successive.
L interfaccia web standard per il rilevamento del sensore è l SPS, che viene qui utilizzato princi‐palmente allo scopo di modificare la frequenza di acquisizione di un sottoinsieme di sensori remoti. Entrambe le implementazioni SOS e SPS sono fornite da 52°North Initiative for Geospatial Open Sour‐ce Software GmbH (http://52north.org/).
Poiché la maggior parte dei sensori non è in grado di interfacciarsi direttamente con SOS e SPS, un gateway, ovvero uno strumento di importazione dei dati, è stato sviluppato come plug‐in per la comunicazione con socket o protocolli software specifici, dati accessibili tramite archivi FTP, databa‐se esterni. Il Data Import Tool ha anche il compito di consentire la comunicazione bidirezionale tra la piattaforma e i sensori, consentendo così il tasking del sensore. A tale scopo, è stato sviluppato un plug‐in aggiuntivo per caricare le richieste di tasking gestite tramite SPS e inviarle ai sensori tramite un protocollo proprietario.
4.2.2 Catalogue, Map Services, Data Processing Module e Decision Support System
Il Catalogue consente la gestione dei metadati utilizzando i servizi CSW (Catalogue Service for the Web). È stato implementato tramite il software GeoNetwork (http://geonetwork‐opensource.org/) ba‐sato sui metadati geografici ISO 19115 e ISO 23950. Il modulo consente sia il caricamento che la ri‐cerca di informazioni dai dati memorizzati nell infrastruttura informatica di SESAMO.
La componente Map Services consente la gestione e la visualizzazione di informazioni geografi‐che distribuite tramite i servizi standard WMS, WFS e WCS, implementati dal software open source Geoserver (http://geoserver.org/).
Il modulo di Data Processing (DPM), basato sul servizio WPS OGC, contiene diversi processi, come quelli che forniscono funzionalità geospaziali e di geo‐elaborazione. Gli algoritmi del DPM, come quello per la correzione dei ground clutter delle mappe radar e l’addestramento della ANN, saranno descritti in dettaglio in una sezione specificatamente ad essi dedicata (Sezione 5). Tutti gli algoritmi possono essere richiamati utilizzando il WPS. Il DPM può recuperare i dati da SOS, WMS, WFS e dal database per fornire dati alla piattaforma per le elaborazioni. Anche l implementazione WPS è fornita da 52° North Initiative per Geospatial Open Source Software GmbH.
Il Decision Support System (DSS) utilizza moduli e algoritmi del sottosistema DPM, fornendo suggerimenti testuali o grafici a utenti esperti che supportano il processo decisionale per sviluppare azioni opportune. Pertanto, dal DSS è possibile analizzare e recuperare un interpretazione dei risul‐tati degli algoritmi.
4.2.3 Portale
Il portale rappresenta l’interfaccia tra la piattaforma, i suoi servizi e gli utenti del sistema. Due

10
tipologie di utenti possono accedere al portale di SESAMO: utenti semplici e utenti amministratori del servizio. Per ognuno di essi l’interfaccia grafica del portale sarà diversa. Gli utenti amministra‐tori possono configurare diversi aspetti della piattaforma; ad esempio, possono creare, modificare e cancellare un account utente o indirizzarlo a un dominio specifico. Gli utenti del servizio, una volta registrati, possono accedere a diversi strumenti della piattaforma per visualizzare mappe, fare il download di dati e utilizzare i modelli implementati nella piattaforma. L applicazione si basa sull integrazione di diversi software open source come Geonode, 52° North Sensor WebClient e altri moduli proprietari come WebGIS (http://www.webgis.com/). In particolare, Geonode consente di ca‐ricare dati spaziali, come mappe raster e vettoriali, al fine di distribuirli attraverso WMS/WFS in base ai permessi accordati ad un utente. Inoltre, Geonode aggiorna i metadati e configura i servizi per la gestione dei dati utilizzando i servizi di Catalog Service for the Web (CSW). Il sensore WebClient offre accesso alle misure recuperate dall’interfaccia SOS. Esso fornisce, altresì, una mappa da cui l utente può selezionare una stazione di sensori e visualizzare per il periodo di tempo di interesse un diagramma dei dati. Dal modulo WebGIS è inoltre possibile modificare le frequenze di acquisi‐zione del sensore mediante SPS.
5. Algoritmi per il modulo di Data Processing
Il modulo di Data Processing (DPM) comprende diversi sottomoduli, ciascuno contenente oppor‐tuni algoritmi, che sono direttamente o indirettamente necessari per la generazione dei diversi pro‐dotti da parte del sistema. In particolare, il DPM si basa essenzialmente su tre sottomoduli: il primo sottomodulo è finalizzato alla calibrazione delle equazioni del radar (Sezione 5.1); il secondo sot‐tomodulo esegue la correzione delle mappe radar sulla base delle misure di precipitazione fatte a terra (Sezione 5.2), tenendo conto di tutte le misure puntuali derivanti dalla rete di pluviometri; in‐fine, il terzo sottomodulo (Sezione 5.3) serve ad addestrare la ANN utilizzata per studiare la stabili‐tà del pendio.
5.1 Calibrazione delle equazioni del Radar
Al fine di costruire un sistema affidabile e accurato per il monitoraggio dei campi di precipita‐zioni, i dati provenienti dai diversi sensori meteorologici devono essere analizzati e gestiti median‐te diversi moduli operativi e algoritmi che formano uno specifico sottosistema del DPM finalizzato alla calibrazione delle equazioni fondamentali del radar e alla correzione delle mappe di precipita‐zione provenienti da questo.
I problemi degli errori nelle stime da radar meteorologico dipendono, soprattutto, dalla fisica delle idrometeore e da aspetti specificatamente strumentali e/o riguardanti il sito di installazione. Con riferimento ai radar in banda X, molti dei problemi specifici sono stati affrontati e risolti in let‐teratura mediante algoritmi che si riferiscono a sensori a doppia polarizzazione, mentre lo strumen‐to utilizzato nel sistema proposto è, come già evidenziato, un dispositivo a polarizzazione singola. Se da un lato questo non permette di utilizzare molte delle metodologie già sviluppate, dall’altro, la disponibilità di dati diversi da quelli radar (ad esempio, disdrometro e rete pluviometrica), permet‐te di sviluppare tecniche alternative per migliorare le stime provenienti dai radar (Lo Conti et al., 2015). La disponibilità di diversi sensori per la misura della precipitazione, infatti, consente la com‐binazione di dati eterogenei al fine di ottenere un dataset di alta qualità che combina i punti di forza di ciascun sensore. Così, ad esempio, l alta risoluzione temporale e spaziale dei dati forniti dal ra‐dar meteorologico può essere migliorata calibrando l equazione del radar e la relazione Z‐R a parti‐re dalle misure del disdrometro, mentre le stime del radar meteorologico possono essere ulterior‐mente elaborate e collegate alle misure a terra mediante una procedura di correzione basata sui dati provenienti dalla rete pluviometrica.
La struttura generale considerata per questo sistema è fornita nella figura 5, in cui le misure dei dati di input ottenuti dai diversi sensori, i moduli dell applicazione e le loro uscite sono rappresen‐tati e collegati in uno schema funzionale.

11
Fig. 5 – Rappresentazione schematica del sistema di misura delle precipitazioni e della correzione delle mappe radar con i dati misurati a terra
5.1.1 Calibrazione dell’equazione fondamentale del Radar L’equazione fondamentale del radar collega le misure grezze provenienti dal radar a una gran‐
dezza fisica, la riflettività Z, che è correlata alla precipitazione, R. Essa mette in relazione l eco, cioè l energia elettromagnetica ricevuta dal radar dopo che il segnale emesso è stato riflesso dalla preci‐pitazione, e Z secondo un’equazione che tiene conto delle caratteristiche del radar ed alcuni para‐metri fisici tipici dello strumento adottato. L’espressione fornita dal produttore del radar è espressa in forma logaritmica come: 𝑃 𝑍 20 ∗ 𝑙𝑜𝑔 𝑟 𝑐𝑜𝑛𝑠𝑡. (1) dove 𝑃 è la potenza ricevuta dal radar, Z è il fattore di riflettività del radar, r è il range di fun‐zionamento del radar e const. è una costante che riassume al suo interno tutte le perdite dovute agli aspetti fisici del processo e alle caratteristiche dello strumento.
Prima ancora di calibrare il valore di const., i dati radar vengono preliminarmente corretti per l intercettazione del ground clutter con un algoritmo basato su condizioni di cielo sereno sviluppato da EnviSens Technologies e distribuito con il dispositivo (Allegretti et al., 2012). Successivamente, il valore di const. è calcolato considerando le caratteristiche specifiche del radar (ad esempio, larghez‐za del fascio, lunghezza d onda, durata e lunghezza dell impulso, guadagno dell antenna, perdite interne del dispositivo relative alla trasmissione e ricezione del segnale) e le proprietà dielettriche delle particelle. Le condizioni atmosferiche, che possono introdurre fluttuazioni nei valori reali del‐la costante, di solito vengono trascurate nel calcolo dell’equazione (1). Pertanto, la calibrazione di tale equazione è correlata alla sola conoscenza delle grandezze di cui sopra e che possono essere modellate come costanti conosciute. Il valore di const. è solitamente fornito dal produttore di radar (ad esempio, il valore di const. relativo al radar del sistema di monitoraggio considerato in questo studio è uguale a 91,4 dBZ). Tuttavia, tale valore può essere soggetto a variazioni nel tempo dovu‐te, principalmente, all’usura dei componenti principali del radar e agli effetti termici.
Tra i diversi approcci disponibili per la calibrazione dell’equazione fondamentale del radar, uno

12
dei più importanti e semplici è quello del confronto con i dati provenienti da un disdrometro. La calibrazione del termine const. è basata sul confronto tra i valori di riflettività ricavati dal disdrome‐tro e i valori di riflettività del radar ricavati con l’utilizzo dell’equazione (1) valutata in corrispon‐denza della posizione del disdrometro. La riflettività ricavata dal disdrometro è ottenuta secondo la seguente relazione funzionale con il DSD: 𝑍 𝑁 𝐷 𝐷 dD (2)
dove N(D) è il numero di gocce di pioggia con diametro appartenente alla classe D per un volume unitario di riferimento [mm‐1 m‐3] e D è il diametro della goccia sferica equivalente. Eventuali errori dovuti alla cattiva corrispondenza tra l’effettiva posizione del disdrometro e la corrispondente cella del radar e/o alla presenza di vento sono considerati ininfluenti ai fini del calcolo.
La calibrazione viene eseguita minimizzando l’RMSE (Root Mean Square Error) tra la riflettività del disdrometro, ottenuta mediante l’equazione (2), e quella del radar, ottenuta mediante l’equazione (1) e con valori di const. compresi tra 90 e 100 dBZ (un intervallo in cui è previsto il va‐lore della costante per il dispositivo specifico). Con riferimento agli eventi osservati tra febbraio e marzo 2014, questa procedura ha portato ad un incremento del valore predefinito fornito dagli svi‐luppatori per la costante (91,4 dBZ) di circa il 5% (96,4 dBZ). In figura 6 viene mostrato l’andamento dell’RMSE in funzione del valore di const. che ha portato alla scelta del valore ottimale di quest’ultimo.
Fig. 6 – Selezione del valore ottimale per la variabile const.
5.1.2 Calibrazione della relazione Z‐R del Radar L equazione Z‐R rappresenta la relazione funzionale tra la riflettività del radar, Z, e l intensità di
pioggia, R. Dato che sia Z che R sono fisicamente legate al DSD di un evento, è possibile trovare una relazione diretta tra queste grandezze. In particolare, il valore teorico di Z ed il valore di R pos‐sono essere ottenuti mediante l equazione (1) e la seguente equazione (3), rispettivamente: 𝑅 𝑁 𝐷 𝑣 𝐷 𝐷 dD (2)
dove v(D) è la velocità della goccia di pioggia [ms‐1]. La relazione Z‐R è di solito modellata con una funzione sintetica detta anche equazione Z‐R. Una forma semplice ed efficiente di questa equazione è quella di Marshal e Palmer (Marshall e Palmer, 1948, Marshall et al.,1955) espressa da: 𝑍 a ∙ 𝑅 (3) dove i parametri a e b sono spesso derivati dalla letteratura sulla base della tipologia dell’evento meteorologico (Joss e Waldvogel, 1969; 1970). Poiché il disdrometro fornisce misure dirette di Z e R basate sul DSD, è possibile progettare un modulo di calibrazione appropriato per la calibrazione dei parametri dell’equazione (3). In particolare, dall analisi delle prestazioni associate a diverse coppie di parametri a e b, in termini di RMSE tra i valori di R provenienti dal disdrometro e i valori di R stimati a partire dai valori di Z, è possibile stimare una coppia ottimale di parametri, minimiz‐zando il valore di RMSE. Tale procedura viene riepilogata, per un evento di riferimento avvenuto il 2 marzo 2014, nella figura 7, in cui vengono visualizzati tutti i valori di RMSE ottenuti per diversi

13
mmm
Fig. 7 ‐ Calibrazione dei parametri a e b dell’equazione (3)
intervalli continui di a e b e vengono evidenziati anche i valori ottimali (a = 204, b = 1,75). Questa analisi è stata ripetuta per gli eventi registrati dal disdrometro nel periodo di un anno (dal 1 set‐tembre 2013 al 1 settembre 2014) al fine di caratterizzare la variabilità temporale dei parametri Z‐R per l area osservata dal radar. Il set di dati è stato suddiviso in eventi di precipitazione consideran‐do un periodo asciutto minimo tra un evento e un altro pari ad almeno 1 ora. L’applicazione di questo criterio ha permesso di identificare 330 eventi di precipitazione aventi caratteristiche diverse (per intensità e durata). Al fine di ottenere delle stime affidabili dei parametri, per l’applicazione della procedura di calibrazione sono stati considerati solo gli eventi con una durata minima di 30 minuti; in totale, sono stati identificati 170 eventi. I risultati ottenuti, in termini di valori calibrati per i parametri a e b, sono mostrati in figura 8. Entrambi i parametri sono stati caratterizzati utiliz‐zando un opportuna distribuzione di probabilità teorica che approssimasse bene l’andamento reale delle loro distribuzioni empiriche (Fig. 9). In particolare, le distribuzioni log‐normale e normale so‐no risultate essere le più adatte a descrivere i campioni del parametro a e b, rispettivamente. I valori mediani dei parametri (a = 279,5, b = 1,71), che possono essere assunti per la caratterizzazione dell’area osservata, sono risultati essere leggermente diversi dai valori di letteratura spesso adottati (a = 200, b = 1,6) e riportati da Marshall e Palmer (1948) e Marshall et al. (1955). 5.2 Correzione delle mappe radar
Le misure effettuate dai pluviometri sono generalmente considerate come i valori di riferimento per la precipitazione e, di conseguenza, risulta necessario che le stime effettuate dal radar siano congruenti con esse. In genere, la correzione è volta a ridurre le differenze tra le due fonti di dati mediante la modifica delle mappe restituite dal radar. Nonostante tali applicazioni, in genere, non cerchino di indagare esplicitamente le fonti di errore tra le stime del radar e le misure dei pluvio‐metri, è stato osservato che la natura degli errori può essere spesso collegata alla presenza di errori sistematici dovuti, ad esempio, alla errata calibrazione dell equazione fondamentale del radar e/o della relazione Z‐R. Wang et al. (2013) classificano i metodi di correzione delle stime da radar in due gruppi: metodi per la riduzione del bias e metodi per la minimizzazione della la varianza dell errore. Tra i metodi inclusi nella seconda classe, le procedure geostatistiche hanno ricevuto par‐ticolare attenzione in quanto, rispetto ai metodi deterministici, offrono diversi vantaggi come la possibilità di recuperare la precisione della stima, e considerare un framework probabilistico in cui sia possibile tenere conto delle diverse fonti di incertezza. Nonostante alcuni di questi approcci ab‐biano ricevuto oggi il consenso di gran parte del mondo scientifico, la tendenza è quella di selezio‐nare il metodo più adatto alla correzione delle stime radar di volta in volta sulla base delle caratte‐

14
rist
Fig. 8 ‐ Valori dei parametri a e b della relazione Z‐R calibrati per gli eventi identificati nel periodo 1 settembre 2013 ‐ 1 settembre 2014. Gli eventi n. 7, 90, 121 e 131 (quadrati verdi) sono stati utilizzati per la validazione
Fig. 9 – Confronto tra le CDF empiriche eteoriche per la determinazione dei parametri a eb con la procedura di calibrazione della relazioneZ‐R

15
La figura 10 mostra un esempio della procedura di correzione sopra descritta applicata ad un evento di riferimento osservato il 2 marzo 2014 e considerando una mappa di precipitazione cumu‐lata di 15 minuti. Dall osservazione delle mappe radar originali e corrette, si può osservare come la procedura riesca ad applicare una correzione distribuita sull intera mappa e a modificare alcune caratteristiche spaziali in base ai valori dei pluviometri. La generazione di mappe accurate delle precipitazioni è uno dei prodotti attesi della piattaforma SESAMO e, a tal fine, è possibile, per un utente interessato, scaricare mappe radar corrette derivanti da questo sottomodulo (come quello rappresentato in figura 10b) per qualsiasi evento di pioggia.
Più in generale, il confronto tra alcune misure derivanti dai pluviometri e le corrispondenti sti‐me radar negli stessi punti, considerando una precipitazione cumulata di 15 minuti, ha mostrato un buon livello di accordo in termini di valori medi e di correlazione tra le due misure. Alcune incon‐gruenze possono essere correlate a diversi fattori come la diversa natura delle variabili fisiche mi‐surate, le diverse quote dei siti nei quali viene eseguita la correzione (il cui effetto potrebbe essere esacerbato dalla presenza di vento), problemi relativi alla non perfetta coincidenza tra il posizio‐namento del pluviometro e il pixel corrispondente del radar, ecc.
Fig. 10 ‐ (a) Mappa radar originale e (b) mappa radar corretta sulla base delle misure effettuate a terra dalla rete di pluviometri
5.3 La Rete Neurale Artificiale
La valutazione delle condizioni di stabilità di un pendio, sia in tempo reale che in modalità pre‐visione, viene effettuata utilizzando una ANN, specificatamente progettata e addestrata per preve‐dere le condizioni di stabilità del pendio in funzione delle variabili meteorologiche. Le condizioni di stabilità sono fornite dalla ANN in termini di Stability Index (SI), ovvero un indice dicotomico che può assumere i valori 0 (pendio stabile) e 1 (pendio instabile).
La rete in questione, schematicamente illustrata in figura 11, è una rete del tipo Multi Layer Per‐ceptron (MLP) feed‐forward, che è una delle ANN maggiormente utilizzate per lo studio di suscettibi‐lità alle frane (ad esempio, Lee et al, 2004; Caniani et al., 2008; Melchiorre et al., 2008; Pradhan e Lee, 2009). La progettazione e l’addestramento della rete sono eseguite secondo la metodologia de‐scritta in Arnone et al. (2014).
L ANN è costruita considerando le seguenti variabili: 1) durata dell evento, 2) altezza di pioggia cumulata, 3) intensità massima di precipitazione, 4) umidità iniziale del suolo e, infine, 5) la corri‐spondente condizione di stabilità del pendio in termini di SI. Il livello di input è costituito da quat‐tro neuroni corrispondenti alle prime quattro variabili di input citate; il layer di output consiste di 1 solo neurone che fornisce due possibili condizioni di stabilità, pendio instabile (1) o pendio stabile (0); nel livello nascosto, sono presenti 8 neuroni (Fig.11). Il calcolo numerico può essere effettuato utilizzando l’apposito neural network toolbox del software Matlab della MathWorks.

16
La fase di addestramento della rete, vale a dire il processo di apprendimento della relazione causa‐effetto tra le variabili di input e di output, richiede un set di dati di addestramento costituito da un insieme di variabili di input, che rappresentano condizioni ed eventi diversi, per i quali le condizioni di stabilità (output) sono conosciuti. Per creare un dataset di addestramento affidabile e poiché la ANN, per potere essere addestrata in maniera opportuna, richiede spesso un dataset di grandi dimensioni, si utilizza il modello fisicamente basato e spazialmente distribuito tRIBS‐VEGGIE‐Landslide per simulare i processi idrologici e di stabilità del pendio in esame e stimare le variazioni delle condizioni di stabilità del pendio nel tempo e nello spazio in funzione delle precipi‐tazioni e dell umidità del suolo. I risultati ottenuti dal tRIBS‐VEGGIE‐Landslide sono utilizzati per generare il dataset per l’addestramento e la validazione della ANN. L algoritmo utilizzato per l’addestramento è il GDM (Gradient Descend with Momentum), ovvero uno degli algoritmi di back‐propagation più adatti a gestire grandi quantità di dati.
Fig. 11 – Rappresentazione schematic della Rete Neurale Artificiale. TIN = Triangulated Irregular Network; SI = Stability Index; LAM = Limited Area Model
Il tRIBS‐VEGGIE‐Landslide appartiene alla categoria ampiamente utilizzata di modelli idrologi‐
ci e di stabilità dei pendii in grado di stimare le condizioni di stabilità a scala distribuita in termini di fattore di sicurezza (FS), definito come il rapporto tra le forze destabilizzanti e quelle stabilizzan‐ti che agiscono su una presunta superficie di rottura; l’FS può risultare maggiore (condizione di stabilità) o minore (condizione di instabilità) di uno. Tali tipi di modelli sono basati su approcci numerici e richiedono vari tipi di informazioni, sia distribuite che non, come: topografia (ad esem‐pio, DEM), uso del suolo, tipo di suolo, parametri del suolo e del terreno, parametri climatici.
La dinamica dell umidità del suolo viene simulata mediante un modulo ecoidrologico che prende in considerazione i principali processi idrologici a livello di bacino idrografico (evaporazio‐ne, infiltrazione, intercettazione, ecc.), nonché i processi biochimici e biofisici delle piante che inte‐ragiscono con il suolo e l atmosfera. In particolare, per una data cella, il modello fornisce il profilo temporale dell umidità del suolo per mezzo della risoluzione dell equazione di Richards (in forma 1D), tenendo conto anche degli effetti dell assorbimento delle radici delle piante. I profili temporali di FS sono calcolati usando l equazione del pendio indefinito, sia per i terreni saturi che insaturi (Lepore et al., 2013), mediante l’equazione (4):
𝐹𝑆 ∙ ∙ (4)
dove c’ e φ sono i parametri geotecnici del terreno (angolo di coesione e di attrito, rispettivamente), γs e γw sono i pesi specifici del suolo e dell acqua, rispettivamente, zn è lo spessore del terreno misu‐rato lungo la normale alla direzione della pendenza, α è l angolo del piano di scorrimento, ψb, λ, θr, e θs sono parametri idrologici della curva di ritenzione del suolo (in particolare, altezza di risalita

17
capillare, indice della distribuzione delle dimensioni dei pori del suolo, umidità del suolo residua e a saturazione, rispettivamente), e θ rappresenta il contenuto di acqua nel momento in cui viene cal‐colato l’FS. Il modello non richiede ipotesi sulla profondità del piano di scorrimento (e quindi sullo spessore del terreno coinvolto nella frana); l’FS viene calcolato a diverse profondità del suolo e la superficie di scorrimento viene posizionata alla profondità in cui viene raggiunto il valore minimo di FS.
La complessità del modello utilizzato e l elevato onere computazionale associato ad essa giusti‐ficano la scelta di utilizzare una ANN per simulare il modello numerico durante le fasi operative, in quanto questa consente una notevole riduzione dei tempi di calcolo e mantiene, al contempo, un’elevata efficienza nella valutazione delle condizioni di stabilità di un pendio.
5.3.1 Procedure di addestramento e validazione dell’ANN
La ANN è associata ad un dato pendio, che deve essere precedentemente caratterizzato dal punto di vista geometrico, idrologico e geotecnico. La procedura adottata per addestrare la ANN comprende tre diverse fasi procedurali: calibrazione del modello tRIBS‐VEGGIE‐Landslide per il sito scelto; generazione di una serie di eventi di pioggia sintetica sufficientemente lunga; valutazio‐ne delle condizioni di stabilità, pendio instabile (1) o pendio stabile (0), in funzione delle diverse forzanti esterne (precipitazioni e umidità del suolo).
Il modello tRIBS‐VEGGIE‐Landslide dapprima calibrato nella sua componente idrologica pres‐so il sito scelto, viene utilizzato per produrre un set di dati di addestramento per la ANN rappre‐sentativo di diversi possibili scenari. In particolare, la forzante climatica da utilizzare per le simula‐zioni in tRIBS‐VEGIE‐Landslide può essere generata sinteticamente utilizzando il generatore clima‐tico stocastico AWE‐GEN (Fatichi et al., 2011). Il modello così forzato restituisce, come risultato, le serie temporali corrispondenti di FS.
A partire dalle serie delle forzanti climatiche così generate è possibile estrarre gli eventi piovosi e caratterizzarli in termini di durata, intensità e precipitazioni totali. Per ciascuno di questi eventi è possibile, altresì, ricavare i corrispondenti valori di umidità iniziale del suolo e il valore minimo di FS. Il set finale di dati, costituito a partire dai dati di input e di output del tRIBS‐VEGGIE‐Landslide, è formato da 5 vettori (durata dell evento, altezza della pioggia, intensità massima, umi‐dità iniziale del suolo, condizione di stabilità) ed è utilizzato per addestrare la ANN.
La ANN così addestrata è specifica per il sito scelto e di conseguenza, per qualsiasi area diversa da quella considerata, per geometria, proprietà idrologiche e meccaniche, la ANN deve essere nuo‐vamente addestrata.
5.3.2 Utilizzo della ANN in fase operativa
Una volta definite tutte le fasi di progettazione, addestramento e validazione della MLP, la ANN è in grado di fornire, in modo efficiente all interno di SESAMO, le condizioni di stabilità in termini di SI (0 ≤ SI ≤ 1) indotte dalle condizioni climatiche rilevate in modalità near real‐time (attra‐verso le acquisizioni dei sensori del sistema di monitoraggio climatico di SESAMO) o in modalità previsione (attraverso le previsioni fornite dal LAM). La ANN è implementata in DPM come un eseguibile gestito sia dal sistema che dagli utenti tramite un WPS interfacciato.
Gli output della ANN portano all emissione di segnali di allarme da parte di SESAMO in caso di instabilità del pendio, cioè quando il valore di SI supera un valore limite che può essere definito dall’utente. Al fine di minimizzare la generazione di falsi allarmi, che è un problema comune in molti EWS tradizionali, la valutazione della stabilità del pendio, in modalità di previsione, viene eseguita utilizzando le prime 24 ore delle proiezioni LAM. Infatti, come è ormai ampiamente rico‐nosciuto dalla comunità scientifica, la previsione delle precipitazioni è meno affidabile man mano che l orizzonte temporale di queste aumenta.
6. Applicazione ad un caso studio
Al fine di testare quanto finora descritto è stata eseguita una prima sperimentazione del sistema SESAMO su un pendio sito nell’area metropolitana di Palermo – Italia ‐ 38°05N ‐ 13°23 E – Fig. 2), dove è stata osservata l’attivazione di una frana nel recente passato. La scelta del sito è stata fatta a partire dal Piano di Assetto Idrogeologico (PAI) della Regione Sicilia (http://www.sitr.regione. sici‐

18
lia.it/pai), che fornisce le mappe di pericolosità e rischio idraulico e morfologico della Sicilia. Il sito pilota, con una quota che varia da 450 a 500 m s.l.m., è mostrato in un’ortofoto del 2008 in figura 12 in cui è mostrata anche l’area interessata da una precedente frana localizzata per mezzo del PAI. Il contenuto idrico del suolo e i movimenti del pendio sono monitorati in continuo per mezzo di sen‐sori sviluppati ad hoc.
Per quanto detto nella Sezione 3.2, sull’importanza del contenuto idrico del suolo sull’attivazione delle frane, il monitoraggio in continuo dell’umidità del suolo a differenti profondi‐tà e posizioni del pendio è stato eseguito mediante tre sonde FDR e quattro sonde TDR; i valori mi‐surati sono trasmessi via GPRS alla piattaforma SESAMO.
L’osservazione in tempo reale dei movimenti del pendio è stata eseguita mediante una rete di cinque SFU distribuite all interno dell area di monitoraggio selezionata; ogni SFU è costituita da un sensore inclinometrico triassiale basato sulla tecnologia MEMS installate vicino alla frana preceden‐temente attivata, in base alla configurazione mostrata in figura 12. Il sistema prevede un unità ma‐ster che comunica con la piattaforma remota SESAMO tramite TCP/IP. Attraverso il master, gli an‐goli di inclinazione in un preciso istante vengono acquisiti dalle diverse SFU e trasmessi alla piatta‐forma web. Il valore di soglia della variazione nel tempo dell angolo di inclinazione per la genera‐zione dell’allarme di frana in corso (vedi Sezione 3.2) è stato prudentemente impostata su un valore leggermente superiore al rumore di fondo massimo del sensore misurato durante una fase di cali‐brazione preliminare e ad oggi non sono mai state superate.
La componente idrologica del tRIBS‐VEGGIE‐Landslide è stata calibrata per il sito pilota per il periodo gennaio 2014 ‐ giugno 2014. I dati di pioggia necessari per calibrare il modello sono stati raccolti da un pluviometro della rete di SESAMO installato all interno del sito di studio; la pioggia è stata assunta come uniformemente distribuita su tutto il pendio. I parametri geotecnici del suolo sono stati valutati attraverso una campagna di indagine appropriata; in particolare, data la piccola estensione dell’area in studio, sono stati prelevati solo due campioni di terreno, rappresentativi ri‐spettivamente delle parti superiore e inferiore del pendio. Entrambi i campioni hanno mostrato che il tipo di suolo dominante è un terreno argilloso con una percentuale di limo (42%) maggiore nella parte superiore del versante rispetto a quella inferiore (28%) e basse percentuali di frammenti di sabbia e roccia nello strato superficiale (Tab. 1).
In base ai risultati, la caratterizzazione del pendio è stata fatta dividendo questo in due parti omogenee (superiore e inferiore); per ognuna di queste si sono assunte caratteristiche spaziali e di uso del suolo uniformi. I valori dei parametri idraulici inziali del terreno sono stati stimati a partire dalla tessitura del suolo mediante le funzioni di pedotrasferimento (PTF) e utilizzando il software cc
Fig. 12 ‐ Sito pilota (Palermo ‐ 38° 05ʹN ‐13° 23ʹE). Localizzazione di: sensori diumidità del suolo (FDR e TDR);inclinometri MEMS (Micro Electro‐Mechanical Systems) (SFUs); centraleWSN (Wireless Sensor Network);pluviometro a bascula. In arancione èindicata anche l’area del pendio interessatada una precedente frana

19
Rosetta (Schaap et al., 2001). Le misure fornite dalle sonde FDR e dalle sonde TDR sono state suc‐cessivamente utilizzate per calibrare alcuni di questi parametri sulla base dei profili di umidità del suolo.
Nella seconda fase della procedura di addestramento della ANN è stata generata una serie di precipitazioni orarie di 100 anni utilizzando il generatore climatico stocastico AWE‐GEN (Fatichi et al., 2011). A partire dalle serie delle forzanti climatiche così generate è stato possibile estrarre circa 15.000 eventi piovosi e caratterizzarli in termini di durata, intensità e precipitazioni totali. Per cia‐scuno di questi eventi sono stati ricavati i corrispondenti valori di umidità iniziale del suolo e il va‐lore minimo di FS simulato in tRIBS‐VEGGIE‐Landslide.
La figura 13 mostra uno zoom delle serie temporali generate per la calibrazione della ANN. Ogni evento è caratterizzato da una durata (Fig. 13a), un’altezza (Fig. 13b) e un’intensità massima della pioggia (Fig. 13c). A partire dalla forzante climatica, il tRIBS‐VEGGIE‐Landslide fornisce l u‐midità iniziale del suolo prima di ogni evento e calcola l’FS risultante. In particolare, la figura 13d mostra il valore medio lungo l’altezza del profilo di umidità del suolo iniziale. I valori di FS sono stati quindi riclassificati in termini di indice di stabilità (SI) al fine di assumere il valore 0 (per FS> 1) o 1 (per FS≤1) (Fig. 13e).
La figura evidenzia l importanza di considerare la condizione di umidità del suolo prima di ogni evento, in quanto il suo effetto può essere anche più importante di quello giocato dall intensità massima o dall’altezza totale delle precipitazioni. In effetti, a ben osservare la figura 13, la maggior parte dei casi di frana si verificano quando l’umidità media iniziale del terreno è molto alta. Tra tut‐ti gli eventi piovosi analizzati, 136 sono risultati associati a un evento di frana in tRIBS‐VEGGIE‐Landslide, corrispondente a circa l 1% del numero totale degli eventi piovosi.
Una componente essenziale nella valutazione dell affidabilità dei modelli geomorfologici è la validazione dei risultati sulla base dei dati osservati. Data l assenza di un database storico di eventi franosi osservati nell’area di studio, al fine di convalidare la ANN, è stato eseguito un confronto tra i due modelli utilizzati (tRIBS‐VEGGIE‐Landslide vs. ANN) applicati ad un nuovo scenario climati‐co generato in AWE‐ GEN. Questo nuovo scenario è rappresentato da una serie temporale di 25 anni di pioggia sintetica e contiene circa 3.500 eventi piovosi.
Fig. 13 – Particolare del dataset di addestramento della ANN. I dati mostrati sono relativi agli ultimi 2000 eventi dei 15000 simulati. La durata, profondità e massima intensità della precipitazione usate per forzare il modello tRIBS‐VEGGIE‐Landslide sono mostrate nei pannelli a, b, c, rispettivamente. Il valore dell’umidità iniziale del suolo (mediato lungo la profondità del suolo) ed il corrispondente valore di stabilità sono riportati nei pannelli d ed e, rispettivamente

20
Seguendo la stessa procedura utilizzata per la fase di addestramento, le serie temporali sono state utilizzate per forzare il modello tRIBS‐VEGGIE‐Landslide calibrato e ottenere così il set di dati per validare la ANN. Sulla base di questa nuova simulazione, il tRIBS‐VEGGIE‐Landslide ha resti‐tuito 27 eventi di frane. Gli output della ANN si sono dimostrati coerenti con quelli ottenuti dal modello tRIBS‐VEGGIE‐Landslide per il periodo di test, dal momento che la ANN è stata in grado di prevedere correttamente circa il 93% degli eventi senza frana e circa il 95% degli eventi con frana .
7. Discussione
L EWS proposto è da considerare ancora nella forma prototipale, anche se la maggior parte de‐gli elementi chiave sono stati pienamente sviluppati e testati e sono già operativi, come il sistema di monitoraggio e i moduli della piattaforma per l acquisizione e l elaborazione dei dati e per la ge‐stione dei processi di visualizzazione/condivisione/download dei diversi prodotti della piattaforma (tabelle dati, grafici, mappe di precipitazione radar, ecc.).
La piattaforma è in grado di generare mappe di precipitazione, producendo così uno dei pro‐dotti previsti per l’utilizzo da parte degli utenti finali. Le procedure per la calibrazione delle equa‐zioni del radar e per la correzione a terra delle mappe di precipitazione, si riferiscono a un insieme di applicazioni sviluppate per l uso congiunto di solo alcuni dei diversi sensori disponibili. Al fine di ottenere parametri più robusti che tengano conto degli effetti delle caratteristiche degli eventi di pioggia sull equazione Z‐R, sarà necessaria anche l applicazione a un insieme selezionato di eventi.
Il sistema di monitoraggio registra correttamente le condizioni meteorologiche, l umidità del suolo e i dati di spostamento del suolo. Il sistema di trasferimento dei dati è stato controllato da un punto di vista informatico e non sono stati rilevati problemi. Ogni singolo sotto‐componente della piattaforma web è stato testato, verificando che i dati fossero correttamente memorizzati e/o elabo‐rati (correzione e consegna di mappe radar) e utilizzati per determinare la stabilità del pendio con la ANN. La piattaforma riceve correttamente i dati meteorologici esterni, in particolare quelli forniti dal LAM dell agenzia regionale SIAS, e si dimostra in grado di cambiare i tempi di acquisizio‐ne/trasmissione dei dati (configurazione di allerta o non allarme) in base alle previsioni di pioggia cumulata di 24 ore. La piattaforma ha anche dimostrato di essere in grado di trasmettere segnali di allarme agli utenti finali esterni.
Durante il periodo di monitoraggio, anche se il sistema è passato dalla configurazione di non al‐lerta alla configurazione di allerta per quasi 30 volte, la ANN non ha mai emesso avvisi e, coeren‐temente, nessun movimento di pendenza è stato rilevato dalla rete di sensori di inclinazione nel sito pilota. La mancata emissione di falsi allarmi può essere considerata una prova positiva del fun‐zionamento del sistema nel suo insieme; sfortunatamente la mancanza di frane storiche rilevate preclude la possibilità di una rigorosa e completa validazione del sistema da aggiungere alla vali‐dazione del modello.
Un esempio di visualizzazione dei dati sulla piattaforma SESAMO è mostrato nella figura 14. Più specificatamente, la schermata principale per la ricerca dei sensori è mostrata nella figura 14a, mentre la schermata per la visualizzazione delle serie temporali è mostrata nella figura 14b. Ogni sensore può essere selezionato all interno di una sezione grafica dedicata e la sua posizione viene visualizzata nella mappa di figura 14a.
Una o più serie temporali possono essere selezionate per la visualizzazione (pannello a sinistra di figura 14b) e i relativi grafici sono visualizzati su un pannello dedicato a destra (pannello a de‐stra di figura 14b). Nell esempio mostrato nella figura 14b, relativo a un periodo di 12 giorni (dal 20 al 31 gennaio 2014), il grafico in alto a destra mostra le precipitazioni previste dal LAM; in partico‐lare, le barre blu si riferiscono a un’altezza di pioggia di 1 ora (mm/h), la linea continua rossa si rife‐risce alle precipitazioni cumulate di 24 ore (mm/giorno), mentre la linea tratteggiata rossa indica la soglia di pioggia (cioè 10 mm/giorno) fissata per passare dal sistema di configurazione di non aller‐ta a quello di allerta e viceversa. Il plot centrale mostra l intensità di pioggia (mm/h) derivante dalle mappe di precipitazione radar corrette a terra (pixel che ricoprono il sito pilota), mentre il plot infe‐riore si riferisce all umidità relativa del suolo.
Le previsioni fornite dal SIAS per il periodo mostrato sono risultate consistenti con le precipita‐zioni misurate durante lo stesso periodo dagli strumenti di SESAMO.

21
Nella figura 14b si possono notare tre sotto‐periodi al di sopra della soglia. Durante tali periodi il sistema ha operato in conformità con la modalità ad alta frequenza (4 h‐1) e ciò è evidenziato dal fatto che in corrispondenza di questi le curve della pioggia misurata e dell umidità del suolo risul‐tano essere più dense di punti. Anche il profilo di umidità del suolo è risultato essere coerente con le misure delle precipitazioni per il periodo selezionato. Serie temporali simili per altri tipi di dati e per periodi diversi potrebbero essere selezionate e visualizzate, come i dati dei sensori di inclina‐zione o il SI calcolato dalla ANN.
Fig. 14 ‐ Esempio di visualizzazione dei dati da parte della piattaforma SESAMO. (a) Vista principale per l’interrogazione dei sensori; (b) sono state selezionate tre serie temporali diverse per lo stesso periodo di 12 giorni (dal 20 gennaio al 31 gennaio 2014) (a sinistra) e visualizzate (a destra). Il pannello in alto a destra fa riferimento alle precipitazioni di 1 ora (barre blu, mm/h) e alle precipitazioni cumulate di 24 ore (linea rossa, mm/giorno) previste (dal LAM dellʹagenzia regionale SIAS) per il sito pilota. Il riquadro centrale sulla destra si riferisce alle precipitazioni misurate per il sito pilota (dati dal radar dopo l’elaborazione dei dati). Il riquadro in basso a destra mostra lʹumidità relativa media del suolo misurata allʹinterno del sito pilota

22
Nonostante l applicabilità del sistema proposto in modo operativo sia incoraggiata dalle analisi preliminari ottenute, l effettiva funzionalità delle capacità del sistema per fornire avvisi affidabili relativi alle frane innescate da precipitazioni dovrebbe essere verificata in un periodo di applica‐zione più lungo.
8. Conclusioni
Le piogge sono la più comune causa scatenante di fenomeni di dissesto idrogeologico e, di con‐seguenza, il monitoraggio di alcune variabili climatiche chiave è essenziale per prevedere il com‐portamento delle frane innescate da pioggia (RTL). Data l urgente necessità di sistemi efficaci per la mitigazione degli effetti dovuti alle RTL, è stato qui descritto un moderno e accurato sistema di Ear‐ly Warning (EWS) supportato da un sistema di monitoraggio meteorologico estremamente avanzato e da una rete di sensori a basso costo.
L intero sistema, denominato SESAMO, è stato sviluppato all interno di un framework basato interamente su servizi web e sugli standard di Open Geospatial Consortium (OGC). Il sistema SESA‐MO è un sistema integrato in tempo reale la cui efficacia è sostanzialmente basata sulla disponibili‐tà di dati diversi.
I recenti miglioramenti e le nuove tecnologie applicate agli strumenti di monitoraggio delle pre‐cipitazioni e degli spostamenti dei pendii possono fornire informazioni importanti per identificare non solo l evento ma anche le posizioni specifiche di potenziali smottamenti durante eventi di pioggia intensi o prolungati. Per questo motivo, in questo studio è stata data particolare enfasi alla descrizione del complesso sistema di monitoraggio delle precipitazioni sviluppato per l area me‐tropolitana di Palermo (Italia). La conoscenza accurata e tempestiva delle precipitazioni è un aspet‐to chiave per i sistemi di allarme. I metodi tradizionali di misurazione e previsione delle precipita‐zioni sono spesso basati su pluviometri locali, che hanno una rappresentatività spaziale molto limi‐tata. L inclusione di un radar meteorologico fornisce stime delle precipitazioni che sono più rappre‐sentative su ampie aree e possono essere utilizzate per prevedere meglio la distribuzione delle fra‐ne all interno di una determinata area.
Un’altra sostanziale novità rispetto agli altri sistemi di EWS per RTL è rappresentata dall uso di una ANN per l analisi della suscettibilità da frana. La rete di SESAMO è sviluppata utilizzando i risultati di un modello idrologico, a base fisica e spazialmente distribuito, noto come tRIBS‐VEGGIE‐Landslide. Il modello è in grado di prevedere il fattore di sicurezza del sito monitorato, utilizzando come dati di input i dati provenienti dal sistema di monitoraggio o le previsioni meteo‐rologiche fornite da un LAM.
L infrastruttura informatica SESAMO è stata progettata come un sistema che garantisce l acces‐sibilità di diverse fonti di informazione che eseguono operazioni di interpretazione e omogeneizza‐zione adeguate. Seguendo gli standard OGC, sono stati adottati diversi servizi web (ad esempio, WMS, WFS, WCS e WPS) per la distribuzione e la rappresentazione di informazioni cartografiche, dati raster e dati vettoriali. I linguaggi di modellazione per la comunicazione dei dati dei sensori e delle informazioni geografiche sono forniti dai linguaggi XML, SensorML (Sensor Markup Language) e dal GML (Geography Markup Language).
Sebbene un EWS efficiente debba essere progettato in relazione alle peculiarità dell area da mo‐nitorare, questa ricerca fornisce un quadro generale e il primo input per la progettazione di un mo‐derno sistema di EWS. Infatti, il sistema proposto traccia un nuovo e interessante percorso nel campo della gestione del rischio da frane, ponendo le basi per un approccio multidisciplinare e fu‐turi progressi intersettoriali che potrebbero migliorare ulteriormente le prestazioni generali dei fu‐turi EWS. Bibliografia
1. Allegretti M., Bertoldo S., Prato A., Lucianaz C., Rorato O., Notarpietro R., Gabella M. 2012X‐Band Mini Ra‐dar for Observing and Monitoring Rainfall Events. Atmospheric and Climate Sciences, 2, 290‐297.
2. Arnone,E., Noto, L.V., Lepore, C. and Bras, R. L. 2011Physically‐based and distributed approach to analyze rainfall‐triggered landslides at watershed scale. Geomorphology, 133, 121–131.
3. Arnone E., Francipane A., Noto L.V., Scarbaci A., La Loggia G., 2014 Strategies investigation in using artifi‐cial neural network for landslide susceptibility mapping: application to a Sicilian catchment, Journal of Hy‐droinformatics, 16 (2), 502‐515.

23
4. Bonnard, C.H., Noverraz, F. 2001Influence of climate change on large landslides: assessment of long term movements and trends. In: Proceedings of the International Conference on Landslides causes impact and countermeasures, Gluckauf, Essen, Davos, pp 121–138.
5. Caniani, D., Pascale, S., Sdao, F. and Sole, A. 2008 Neural networks and landslide susceptibility: a case study of the urban area of Potenza. Nat. Hazards 45, 55–72.
6. Capparelli, G. and Tiranti, D. 2010 Application of the MoniFLaIR early warning system for rainfall‐induced landslides in Piedmont region (Italy), Landslides, 7, 401‐410.
7. Cannon, S. H. and Ellen, S.D. 1985 Rainfall conditions for abundant debris avalanches. California Geology, San Francisco Bay Region, pp 38.
8. Crosta, G.B., Frattini, P. 2008 Rainfall induced landslides and debris flows. Hydrological Processes, 22, 473‐477.
9. Crozier, M.J. 1986 Climatic triggering of landslides episodes. Landslides: cause, consequences and environ‐ment. Croom Helm, 196‐192.
10. Doglioni, A., Fiorillo, F., Guadagno, F. & Simeone, V. 2012 Evolutionary polynomial regression to alert rain‐fall‐triggered landslide reactivation. Landslides 9, 53–62.
11. Ermini, L., Catani, F., and Casagli, N. 2005 Artificial neural networks applied to landslide susceptibility as‐sessment, Geomorphology, 66, 327‐343.
12. Fatichi, S., Ivanov, V.Y., and Caporali, E. 2011 Simulation of future climate scenarios with a weather genera‐tor. Adv. Water Resources, 34 (4), 448‐467.
13. Fernandez‐Steeger, T.M., Arnhardt, C., Walter, K., Haß, S., Niemeyer, F., Nakaten, B., Homfeld, S.D., Asch, K., Azzam, R., Bill, R., Ritter, H. 2009 SLEWS ‐ A Prototype System for Flexible Real Time Monitoring of Landslides Using an Open Spatial Data Infrastructure and Wireless Sensor Networks. GEOTECHNOLO‐GIEN Science Report 13. Early Warning Systems in Earth Management, 3‐15.
14. Garland, G. G. and Olivier, M. J.: Predicting landslides from rainfall in a humid sub‐tropical region, Geo‐morphology, 8 (2/3), 165‐174, 1993.
15. Giustolisi, O. & Savic, D. A. 2006 A symbolic data‐driven technique based on evolutionary polynomial re‐gression. Journal of Hydroinformatics, 8, 207–222.
16. Joss, J., and Waldvogel A. 1969 Raindrop size distribution and sampling size errors. J. Atmos. Sci., 26, 566–569.
17. Joss, J., and Waldvogel A. 1970 A method to improve the accuracy of radar measured precipitation amounts of precipitation. Preprints, 14th Radar Meteor. Conf., Tucson, AMS, 237‐238.
18. Kim, S. K., Hong, W. P. and Kim, Y. M. 1992 Prediction of rainfall‐triggered landslides in Korea, in Bell, D. H. (Ed.), Landslides, Proceedings of the Sixth International Symposium on Landslides, Christchurch, 10‐14 February 1992, Vol. 2, Balkema, Rotterdam, 989‐994.
19. Koistinen, J., Puhakka, T. 1981 An improved spatial gauge‐radar adjustment technique. Proc. 20th Confe‐rence on Radar Meteorology, AMS, 179‐186.
20. Lepore, C., Arnone, E., Noto, L.V., Sivandran, G., Bras, R.L. 2013 Physically based modeling of rainfall‐triggered landslides: a case study in the Luquillo forest, Puerto Rico. Hydrol. Earth Syst. Sci. 17:3371‐3387.
21. Lee, S., Ryu, J. H., Won, J. S. and Park, H. J. 2004 Determination and application of the weights for landslide susceptibility mapping using an artificial neural network. Eng. Geol. 71,289–302.
22. Lo Conti F., Francipane A., Pumo D., Noto L.V. 2015. Exploring single polarization X‐band weather radar potentials for local meteorological and hydrological applications. JHydrol.2015. http://dx.doi.org/10.1016/j.jhydrol.2015.10.071
23. Mayoraz, F., Cornu, T., Vuillet, L. 1996 Using Neural networks to predict slope movements. Proc. VII Int. Symp. on Landslides, Trondheim, June 1966, 1. Balkema, Rotterdam, pp. 295‐300.
24. Marshall, J.S., Hitschfeld, W., Gunn, K., 1955 Advances in radar weather. In: Landsberg HE (ed) Advances in geophysics, vol 2. Academic Press Inc.,New York.
25. Marshall, J.S., and Palmer, W.M. 1948 The distribution of raindrops with size, Journal of Meteorology, 5, pp. 165‐166.
26. Melchiorre, C., Matteucci, M., Azzoni, A. and Zanchi, A. 2008 Artificial neural networks and cluster analysis in landslide susceptibility zonation. Geomorphology 94, 379–400.
27. Michiue, M. 1985 A method for predicting slope failures on cliff and mountain due to heavy rain. J Nat Di‐saster Sci 7(1): 1–12.
28. Montgomery, D. R. and Dietrich, W. E. 1994 A physically based model for the topographic control on shal‐low landsliding, Water Resour. Res., 30, 1153–1171.
29. Nadim, F., and Intrieri, E. 2011 Early warning systems for landslides: challenges and new monitoring tech‐nologies. 5th Canadian Conference on Geotechnique and Natural Hazards. Kelowna, BC, Canada. 15th ‐ 17th May, 2011
30. Polemio, M., and Petrucci, O. 2000 Rainfall as a landslide triggering factor: an overview of recent interna‐tional research. Landslides, Edited by: E Bromhead, N Dixon, ML Ibsen. 1219‐1226 Thomas Telford Ltd. isbn: 978‐0727734631.

24
31. Popescu, M.E. 1994 A suggested method for reporting landslide causes. Bulletin of the International Associ‐ation of Engineering Geology ‐ Bulletin de l Association Internationale de Géologie de l Ingénieur. Oct. 1994, 50 (1), pp 71‐74.
32. Pradhan, B. and Lee, S. 2009 Landslide risk analysis using artificial neural network model focusing on dif‐ferent training sites. Int. J. Phys. Sci. 4, 01–015
33. Rahardjo, H., Lim, T.T., Chang, M.F., Fredlund, D.G. 1995 Shear‐strength characteristics of a residual soil. Canadian Geotechnical Journal, 32 (1): 60 – 77.
34. Schapp, M.G., Leij, F.J., and van Genuchten, M.Th. 2001 Rosetta: A computer program for estimating soil hydraulic parameters with hierarchical pedotransfer functions. Journal of Hydrology 251 (3): 163–176.
35. Simoni, S., Zanotti, F., Bertoldi, G., and Rigon, R. 2008 Modelling the probability of occurrence of shallow landslides and channelized debris flows using GEOtop‐FS, Hydrol. Process. 22, 532–545.
36. Thiebes, B. 2012 Landslide Analysis and Early Warning Systems – Local and Regional Case Study in the Swabian Alb, Germany. Springer Theses Series. (online: http://link.springer.com/book/10.1007/978‐3‐642‐27526‐5/page/1). 260 p.
37. Wang, L., Ochoa‐Rodríguez, S., Simões, N., Onof, C., Maksimovic´, Cˇ, et al., 2013. Radar‐raingauge data combination techniques: a revision and analysis of their suitability for urban hydrology. Water Sci. Technol. 68 (4), 737–747.