Sensori propriocettivi (PC) - ladispe.polito.it · rispetto a un riferimento fisso Guide a...
18
Basilio Bona – DAUIN – Politecnico di Torino AA 2006/07 Sensori 001/1 ROBOTICA – 01CFIDV 02CFICY Sensori per la Robotica • Sensori propriocettivi (PC) – Misurano grandezze “proprie” cioè relative allo stato interno del robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione, assetto, ecc. • Sensori eterocettivi (EC) – Misurano grandezze esterne al robot, cioè proprie dell’ambiente in cui il robot opera: ed. distanze da muri, campo magnetico, posizione di oggetti, ecc. • Sensori passivi (SP) – Per effettuare le misurazioni utilizzano l’energia fornita dall’ambiente (non confondere con l’energia necessaria per essere alimentati) • Sensori attivi (SA) – Utilizzano la propria energia, ma in questo modo possono modificare l’ambiente
Transcript of Sensori propriocettivi (PC) - ladispe.polito.it · rispetto a un riferimento fisso Guide a...

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/1
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Sensori per la Robotica
• Sensori propriocettivi (PC)– Misurano grandezze “proprie” cioè relative allo stato interno del
robot: es. velocità delle ruote, coppie motrici, carica delle batterie, accelerazione, assetto, ecc.
• Sensori eterocettivi (EC)– Misurano grandezze esterne al robot, cioè proprie dell’ambiente
in cui il robot opera: ed. distanze da muri, campo magnetico, posizione di oggetti, ecc.
• Sensori passivi (SP)– Per effettuare le misurazioni utilizzano l’energia fornita
dall’ambiente (non confondere con l’energia necessaria per essere alimentati)
• Sensori attivi (SA)– Utilizzano la propria energia, ma in questo modo possono
modificare l’ambiente

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/2
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Sensori per la Robotica
• Sensori analogici• Sensori digitali• Sensori continui• Sensori binari ON/OFF
• Sensori analogici ON/OFF, sensori digitali continui, sensori analogici continui, sensori digitali ON/OFF
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/3
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
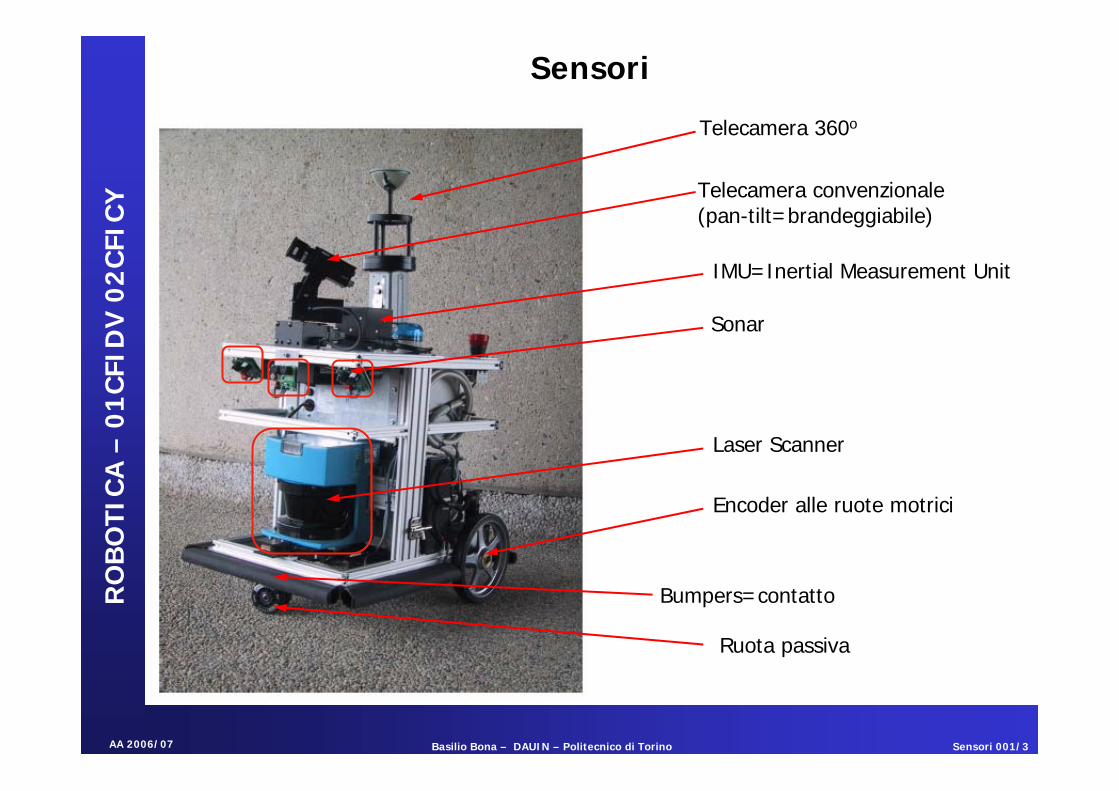
Sensori
Telecamera 360o
Telecamera convenzionale (pan-tilt=brandeggiabile)
Sonar
Laser Scanner
IMU=Inertial Measurement Unit
Encoder alle ruote motrici
Bumpers=contatto
Ruota passiva

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/4
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Sensori
EC – SP/AInclinometri
EC – SAGuide (Beacons) ottiche o RF
EC – SAGPS (solo per outdoor)
Sensori di posizione cartesiana rispetto a un riferimento fisso EC – SAGuide a ultrasuoni
EC – SAGuide a riflessione
Sensori di orientamento rispetto a un riferimento fisso
Sensori alle ruote motrici
Sensori tattili o di “vicinanza”
Categoria
PC - SPGiroscopi
EC - SPBussole e girobussole
PC - SAEncoder ottici, magnetici, effetto Hall, induttivi, capacitivi, syncro e resolver
PC - SPEncoder potenziometrici
EC - SASensori di distanza (induttivi/capacitivi)
EC - SASensori di prossimità(induttivi/capacitivi)
EC - SPSensori di contatto (on/off)
TipoSensore

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/5
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Sensori
EC - SALuce strutturata (2D)
EC - SATriangolazione ottica (1D)
EC - SASoluzioni integrate (package) per object tracking
Sensori di visione: distanza, analisi features, segmentazione, object recognition
Sensori di velocità relativa a oggetti fissi o mobili
Sensori attivi di distanza (active ranging)
Categoria
EC - SASoluzioni integrate (package) per visual ranging
EC - SA(Tele)-camere CCD o CMOS
EC - SASuono doppler
EC - SARadar doppler
EC - SALaser range finders (Laser scanners)
EC - SASensori a ultrasuoni
EC - SASensori a riflessione
TipoSensore

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/6
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Caratteristiche di un sensore
Trasduttore = Sensore (per semplificare le definizioni)• Risoluzione• Ripetibilità• Precisione/Accuratezza• Isteresi• Coefficiente di temperatura• Linearità
– Funzione di Trasferimento– Range dinamico– Ampiezza di banda
• Rumore e disturbi: rapporto segnale/rumore
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/7
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Caratteristiche di un sensore
• Problematiche legate al rumore/errore/disturbo: modellazione con segnali stocastici

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/8
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Rumore
• Shot noise• Rumore termico• Flicker noise• Burst noise• Avalanche noise
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/9
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Shot noise
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/10
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Rumore termico
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/11
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Flicker noise

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/12
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Flicker noise
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/13
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Burst e Avalanche noise

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/14
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Colore dei rumori

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/15
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Noise Floor – Rumore di fondo
Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/16
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Le sfide della robotica mobile
• Obbiettivo: percepire, analizzare e interpretare lo stato dell’ambiente intorno al robot
• Le misure cambiano (sono relative a oggetti che hanno una loro dinamica) e sono fortemente affette da errore/rumore
• Esempi:– Variabilità dell’illuminazione– Riflessioni– Superfici diversamente assorbenti/riflettenti suono e luce– Sensitività della misura alla posa e all’ambiente

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/17
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Le sfide della robotica mobile
• Comportamento dei segnali dei sensori modellato da una distribuzione statistica– Si conosce poco o nulla delle cause degli errori random– Si usa spesso una distribuzione gaussiana o simmetrica, ma ciò
può essere molto sbagliato
• Esempio:– I sensori a ultrasuoni (sonar) possono sovrastimare la distanza
e quindi non hanno una distribuzione simmetrica dell’errore– Bisogna considerare diverse situazioni: quando il segnale
ritorna direttamente o quando ritorna dopo riflessioni multiple– La visione stereo può correlare due immagini in modo scorretto
e generare risultati senza senso

Basilio Bona – DAUIN – Politecnico di TorinoAA 2006/07 Sensori 001/18
RO
BO
TIC
A –
01
CFI
DV
02
CFI
CY
Questi punti vanno correlati: come cercarli nelle due immagini?
Correlazione immagini stereo