Sensori per la Robotica - robocys.com Robotica Como/FondamentiSensoriComo.pdf · di ritorno...
22
1 1 Sensori per la Robotica Sensori per la Robotica PhD PhD . Ing. . Ing. Michele Folgheraiter Michele Folgheraiter Corso di Robotica Corso di Robotica Prof. Vincenzo Prof. Vincenzo Caglioti Caglioti 2005/2006 2005/2006 Como Como 2 Possiamo classificare i sensori del Robot in 2 grosse categorie: •Sensori di stato interno : posizione,velocità, momenti,forze nei giunti.. •Sensori di stato esterno: localizzazione del robot, configurazione dell’ambiente esterno,tatto… •L'uso di sensori per la percezione esterna permette al robot di interagire con il suo ambiente in modo versatile. •Un robot che può "vedere" e "percepire" è più semplice da istruire per l’esecuzione di compiti complessi . Funzionalità dei sensori nella Robotica
-
Upload
phungthien -
Category
Documents
-
view
222 -
download
0
Transcript of Sensori per la Robotica - robocys.com Robotica Como/FondamentiSensoriComo.pdf · di ritorno...

1
1
Sensori per la RoboticaSensori per la Robotica
PhDPhD. Ing. . Ing. Michele FolgheraiterMichele Folgheraiter
Corso di Robotica Corso di Robotica Prof. Vincenzo Prof. Vincenzo CagliotiCaglioti
2005/20062005/2006
ComoComo
2
Possiamo classificare i sensori del Robot in 2 grosse categorie:
•Sensori di stato interno : posizione,velocità, momenti,forze nei giunti..
•Sensori di stato esterno: localizzazione del robot, configurazione dell’ambiente esterno,tatto…
•L'uso di sensori per la percezione esterna permette al robot di interagire con il suo ambiente in modo versatile.
•Un robot che può "vedere" e "percepire" è più semplice da istruire per l’esecuzione di compiti complessi .
Funzionalità dei sensori nella Robotica

2
3
Sistema Sensoriale
Sistema di Attuazione
Organi Meccanici
Fisici
Sistema di Controllo
AMBIENTE
Sensori stato Esterno
Sensori stato Interno
Interazione Meccanica
4
Classificazione delle Percezioni nei Robot
1. Percezione della distanza da un oggetto esterno
2. Percezione della prossimità rispetto un ostacolo o un oggetto
3. Percezione del tatto: contatto con un oggetto manipolato o ostacolo.
4. Percezione della forza e del momento nei giunti o nei links
5. Percezione della posizione e della velocità dei giunti o del robot rispetto il sdr. esterno
6. Percezione visiva

3
5
Schema di una catena di misura
TrasduttoreSensore
Elaborazione del segnale
Utilizzo
dell’informazione nella strategia di
controllo del ROBOT
Grandezza fisica
6
Cos’ è un “SENSORE”
“E’ un dispositivo che riceve un’ informazione attraversoun segnale di ingresso, generato da una determinatagrandezza fisica, e restituisce in uscita un segnale elettrico che rappresenta questa informazione”La rappresentazione dell’informazione attraverso una grandezza elettrica facilita le sucessive elaborazioni (per esempio mediante un circuito elettronico o un elaboratore)
SensoreGrandezza
FisicaGrandezza
Elettrica

4
7
Differenza Sensore/Trasduttore
SENSORE: la grandezza di ingresso è di qualsiasi natura, mentre l’ uscita è una grandezza elettrica
TRASDUTTORE: converte una grandezza fisica in un’altra grandezza fisica (non necessariamente elettrica) Es: lo sfregamento di un materiale ne altera la temperatura).
OSS1: In generale lo stesso sensore potrà essere utilizzato con differenti trasduttori
OSS2: Comunemente si denomina come sensore quel dispositivo che incorpora sia il trasduttore che il sensore vero e proprio.
8
Le interazioni nei sensori
Il sensore è influenzato da:
• Sistema misurato
• Sistema utilizzatore (es: assorbimento di energia)
•Ambiente (es: variazioni di temperatura)
Sistema ambiente
Sistema misurato
TrasduttoreSensore
Sistema utilizzatore
x(t) y(t)

5
9
Modello del sensore
La funzione di conversione
y(t) = g[x(t)]
Es) Estensimetro. La variazione di lunghezza si traduce in una variazione di resistenza elettrica.
costante)()(
)()(;
)()(
00
00
==⇒=
==
SgL
tLS
RtR
RtR
tyL
tLtx
LL ∆+0
F
Legame lineare
10
Campo di misura e di normale funzionamento
• Campo di misura: definisce i limiti entro i quali deve variare la grandezza fisica misurata affinchéil sensore funzioni secondo le specifiche fornite dal costruttore.
• Campo di normale funzionamento: Campo di valori assunti dall’ uscita del sensore in corrispondenza di valori della grandezza fisica appartenenti al campo di misura.
OSS: Il modello scelto per rappresentare il comportamento del sensore può essere diverso a seconda di dove sta operando all’interno del campo di misura.

6
11
X(t)
Y(t)
Campo di Normale Funzionamento
Campo di Misura
Tratto Lineare
Tratto Non Lineare
12
Classificazione dei sensori
• Sulla base della tecnologia e del principio fisico utilizzato (ottico, piezoelettrico, ...)
• Grandezza misurata (forza, velocità,..)
• In base al comportamento energetico:
F SENSORI ATTIVI : convertono direttamente l’energia dell’ ingresso in energia di uscita, senza l’ausilio di sorgenti esterne (cella fotovoltaica trasforma l’energia luminosa in energia elettrica ).
F SENSORI PASSIVI : richiedono energia dall’esterno per la conversione (Potenziometro, sensore angolare).

7
13
Un sensore attivo può sempre essere sempre rappresentato dagli schemi equivalenti, duali, riportati in figura , dove:
V= f(X ) I= f (X)
e X rappresenta la grandezza da misurare.
Raramente il legame fra V (o la duale I ) ed X è lineare; sempre però saràverificata la condizione
Questo perchè la relazione funzionale deriva da interazioni di tipo energetico.
Sensori Attivi
14
Sensori Passivi
...)(!2
)()(
!1)(
)()( 0''
20
0'0
0 +−
+−
+= xfxx
xfxx
xfxf

8
15
Tipi di sensori passivi
Classi ed esempi Natura del sensore Misurando e applicazioni
Resistore a filo Resistenza variabile in un potenziometro Dimensioni, spostamento
Strain-gauge Resistenza variabile con lo sforzo Sforzi, coppie, forze, pressioni
Termometri a resistenza Spira o termistore con variazioni di resistenza
Temperatura, effetti termici, calore irradiato
Cellule fotoconduttive Resistenze variabili con radiazioni incidenti
Sensibili alla luce o a radiazioni infrarosse
Sensore a effetto Hall Interazioni tra campo magnetico corrente Prossimità, velocità
Microfono a condensatore Variazioni capacità per pressione del suono Voce
16
Tipi di sensori attivi
Classi ed esempi Natura del sensore Misurando e applicazioni
Termocoppie Metalli diversi a diverse temperature
Temperature, radiazioni, flussi di calore
Sensori piezoelettrici Compressione del quarzo o altro cristallo
Vibrazioni, accelerazioni, suoni, pressioni
Cellule fotovoltaiche Generazione in
semiconduttori di tensione dalla luce solare
Esposizione, luce

9
17
Regime stazionario e regime dinamico
• Un sensore opera in regime stazionario quando il segnale di ingresso “varia molto lentamente”, quindi la funzione di trasferimento (FDT) del sensore si riduce ad un semplice guadagno.
• Regime dinamico: quando si verifica il contrario
Occorre una caratterizzazione del sensore nelle due situazioni
18
Sensibilità•Rapporto tra la variazione del segnale in uscita al trasduttore e la corrispondente variazione della grandezza in ingresso (es: per la termocoppia rame-costantana circa 45 V/°C ).
Risoluzione•La risoluzione corrisponde con la più piccola quantità che può essere misurata; ovvero con la minima variazione dell'ingresso che provoca un'apprezzabile variazione in uscita.
Taratura (Calibrazione)•L'operazione di taratura di un trasduttore corrisponde con la misurazione della grandezza di uscita per valori noti della grandezza di ingresso al trasduttore stesso.
Per ciclo di taratura si intende una prova che copra tutto il campo di misura del trasduttore; la prova viene suddivisa in due parti, una pervalori crescenti della grandezza e l'altra per valori decrescenti
µ
Parametri fondamentali del sensore

10
19
Isteresi• Corrisponde con la massima differenza tra i due cammini di andata e
di ritorno dell'uscita di un trasduttore durante il ciclo di calibrazione. E' espressa in percentuale del fondo scala (% f.s.).
Linearità• Corrisponde con il massimo scostamento, espresso in % di f.s., tra
curva di calibrazione e una linea retta di riferimento.
Tempo di risposta• Quando in ingresso al trasduttore applichiamo una sollecitazione a
gradino (cioè un gradino della grandezza da misurare) l'uscita (risposta) varierà fino a raggiungere, dopo un certo tempo, un nuovo valore.
SensoreT° V
s s
20
Vita utile del sensore• E' l’intervallo di tempo all’interno del quale il trasduttore opera senza
modificare le sue prestazioni.Ripetibilità
• Attitudine del trasduttore a fornire valori della grandezza in uscita uguali, a parità di segnale di ingresso (stesse condizioni di lavoro e in tempi diversi).
Es)
Parametro Termocoppia Termo-resistenza• Sensibilità 10÷50 µV/°C 0.1÷1 kΩ/°C • Range temp. -200÷1600 °C -200÷600 °C

11
21
Accuratezza
• Esprime la maggiore deviazione tra il valore presentato in uscita dal sensore (grandezza fisica misurata) ed il “valore effettivo” della grandezza fisica.
Esempio: sensore lineare di spostamento:
• d=spostamento, V=tensione di uscita• Idealmente genera 1 mV per 1 mm• sensibilità s = 1mV/mm• Con d=10mm si rileva in uscita V=10.5 mV• riconvertendo senza errore V all’ ingresso, si ottiene
d=V/s = 10.5 mm• in un range di 10mm l’ accuratezza assoluta è 0.5mm
22
Tipi di sensori
Usano diversi effetti fisici: piezoelettrico, piezoresistivo, effetto Hall, fotoconduttivo,
termoelettrico….
12
23
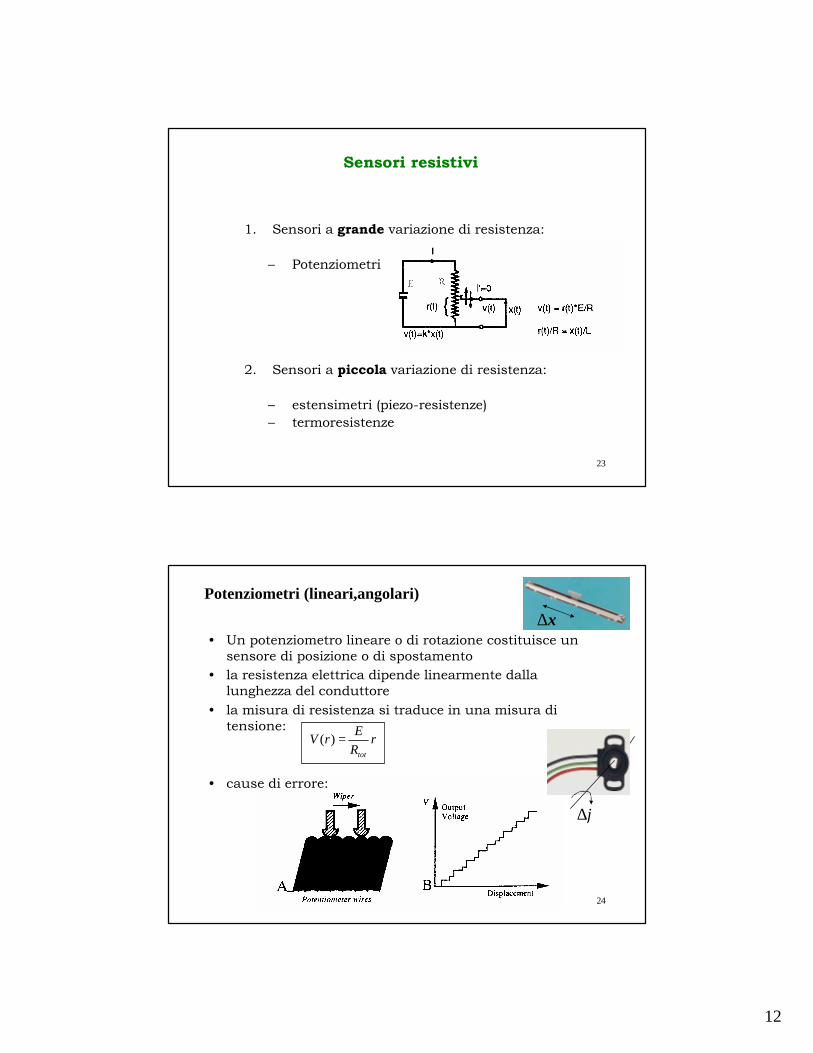
Sensori resistivi
1. Sensori a grande variazione di resistenza:
– Potenziometri
2. Sensori a piccola variazione di resistenza:
– estensimetri (piezo-resistenze)– termoresistenze
24
Potenziometri (lineari,angolari)
x∆
ϕ∆
rRE
rVtot
=)(
• Un potenziometro lineare o di rotazione costituisce un sensore di posizione o di spostamento
• la resistenza elettrica dipende linearmente dalla lunghezza del conduttore
• la misura di resistenza si traduce in una misura di tensione:
• cause di errore:

13
25
ϕ∆x∆
26
Sensori Capacitivi (posizione,velocità, prossimità)
dA
C 0εε=
Sensori Induttivi(posizione,velocità, prossimità)
lA
nL 20µµ=
bobina lunghezzal spire, di numero nHenry/m)( tàpermeabili
(pF/m) adielettric costante
====
µµε
d

14
27
Sensori piezoelettrici (Curie1880)(Forza)
• Fenomeno presente in cristalli naturali (quarzo) • Consiste nella generazione di carica elettrica da parte di
un materiale cristallino sottoposto ad una sollecitazione meccanica
• E’ un effetto reversibile:
? energia meccanica ? energia elettrica
applicataForzaF
BeAmorsettiai.m.e.fe
kFe
u
u
=
=
=
28
Sensori piezoresistivi (Strain-gauge)(Forza)
• Sforzo:
• E = modulo di Young del materiale• F = forza applicata• a = sezione interessata• S=gauge Factor
E’ l’effetto di variazione della resistività di un opportuno materiale quando è soggetto ad una deformazione dovuta ad uno sforzo ad esso applicato (ridotto nei materiali metallici, piùconsistente nei semiconduttori).
0Ld
EaF l
==σ
00 LL
SRR ∂
=∂
RRSEa
F ∂⋅⋅
=0
Materiale di Supporto
Materiale
Resistivo

15
29
• Il conduttore cilindrico che subisce una elongazione (supponendo che il volume V rimanga costante) possiede una resistenza pari a:
2
VR l
ρ=
da cui si ricava la sensibilità:
lV
2dldR ρ
=
che è tanto migliore quanto più lungo e stretto è il cilindro e quanto maggiore è la resistività del materiale.
S = Sensibilità (gauge factor) [2-6 per metalli, 40-200 per semiconduttori]
ld
30
• Il resistore è saldato su un substrato portante elastico, che viene fissato sull’ oggetto che si deforma
• il resistore è in tal modo isolato elettricamente dall’oggetto
• il coefficiente di espansione termica del substrato deve essere coincidente con quello del materiale di cui è fatto il resistore
• Per avere una buona sensibilità il sensore deve avere segmenti longitudinali lunghi e segmenti trasversali corti , così la sensibilità trasversale è solo di pochi percento di quella longitudinale

16
31
Esempio di sensore di Forza/Momento per Manipolatore
Viene montato tra la fine del braccio e il polso, tra un link e l'altro.
Vi sono solitamente 8 strain gaugedisposti sulle 4 lamine deformabili.
32z
y
x
z
y
x
z
y
x
z
z
y
y
x
MMMRRR
M
wwwwwwww
⋅=
4
4
3
3
2
2
1
1
A noi interessa passare dalle 8 misurazioni, effettuate con i sensori di forza, ai 3 momenti e le 3 forze secondo i tre assi cartesiani. Quindi è necessario determinare la matrice RF .
Attraverso una fase di calibrazione si forniscono delle forze e dei momenti noti, si misurano i valori degli sforzi, quindi si calcolano i parametri della matrice M (che devono soddisfare la seguente equazione).
1−= MRF

17
33
Sensori effetto fotoconduttivo
(Sensori passivi) (Intensità Luminosa)
• Variazione di resistività in materiali investiti da radiazioni di varia lunghezza d’onda.
• Dovuto alla variazione della conduttività di materiali isolanti e semiconduttori.
• La radiazione incidente consente il passaggio di elettroni da uno stato di legame ad uno libero, questi non hanno energia sufficiente per uscire dal materiale (fotoemissione) ma contribuiscono alla conduzione facendo diminuire la resistività.
• E’ necessario collegare il sensore ad un generatore di tensione per avere un flusso di corrente elettrica variabile con la radiazione incidente.
34
Sensori Effetto fotovoltaico(Sensori attivi)
(Intensità Luminosa)
• Conversione dell’energia radiante in energia elettrica (celle solari).
• Si presenta nelle giunzioni p-n dei semiconduttori, sottoposte a radiazioni che danno luogo alla comparsa di una f.e.m.
• Illuminando la giunzione si producono coppie elettroni-lacune.• Materiali tipici sono selenio-ferro e rame-(ossido di rame)• Fotodiodi o fototransitor sono elementi fotovoltaici usati come
interruttori nei quali piccole quantità di luce sono in grado di produrre la commutazione del circuito dalla condizione di minima corrente a quella di corrente elevata
p n

18
35
Encoder OtticiPermettono di misurare la posizione del giunto:
Encoder Assoluto
In questo caso la posizione èdeterminata in modo assoluto, sono formati da un disco di materiale trasparente su cui sono applicate delle zone oscurate .
Encoder commerciali hanno 12 tracce, le quali consentono una risoluzione pari a :
°=
08,03604096
1
Encoder a 16 settori e 4 tracce
36
Encoder Incrementale
In questo caso la posizione è determinata in modo relativo; sul disco sono presenti due tracce in cui i settori (trasparenti/opachi) sono in quadratura tra di loro. Molte volte è presente una terza traccia con un unico settore oscurato che permette di definire il riferimento iniziale.
Rispetto gli encoder assoluti, dove la posizione ècodificata direttamente sul disco, questo tipo di encoder necessita di un circuito elettronico in grado di ricostruire la posizione dal tipo di impulsi generati durante la rotazione.
Sono più economici rispetto agli encoder assoluti perché di più facile realizzazione, quindi sono i piùutilizzati.

19
37
Sensori di Tatto
( Mani Robotiche) (Pressioni di contatto)
La capacità umana di manipolare oggetti dipende fortemente dal senso del tatto.
Mediante il tatto, il nostro cervello è in grado di raccogliere fondamentali informazioni dell’oggetto manipolato:
•Temperatura
•Rugosità
•Forma
•Consistenza
Questo soprattutto grazie alla presenza, nella cute, di una miriade di recettori (sensori) in grado di convertire gli stimoli fisici in un segnale elettrico (impulsivo), che grazie al sistema nervoso periferico viene trasmesso fino al cervello.
38
Array di elementi Resistivi
Permettono di rilevare una mappa 2D delle forze di contatto tra l’EndEffector e l’oggetto manipolato.
La matrice sensitiva si forma grazie alla disposizione ortogonale di due serie di elettrodi filiformi, separate da uno strato di materiale piezoresistivo (trasduttore da forza).
Es) (16*16) conduttori per una matrice di 256 elementi.

20
39
Caratteristiche richieste al materiale trasduttore:
•Un’ alta variazione di resistenza rispetto la variazione di pressione (alta sensibilità), questo per arrivare ad una elevata risoluzione.
•Valore di resistenza a vuoto dell’ordine dei 100 ohm, in modo da poter lavorare con segnali di almeno 1Volt (I=10 mA) e quindi meno sensibili al rumore.
•Flessibile, per adattarsi all’oggetto ispezionato.
•Alta capacità di carico 0-600.000Pa su singolo elemento ( 0,6 N)
•Buona ripetibilità
•Bassa isteresi
21mm Nmm 6010 2 →
N
40
Possibile scelta per il materiale del trasduttore:
Gomma caricata Carbonio: Il materiale viene preparato da una miscela di gomma-siliconica e polvere di carbonio.
•Basso costo di realizzazione +•Alto Stress a fatica del materiale, che viene danneggiato dalle micro-particelle -
•Elevata isteresi -• Difficoltà ad ottenere un materiale omogeneo (resistivitànon costante spazialmente) -Tuttavia per particolari applicazioni le caratteristiche meccaniche ed elettriche possono essere alterate secondo le esigenze.

21
41
Pabar 51011 ⋅≡
Es: Costruzione del sensore
Su di una piastrina di materiale plastico vengono depositate le piste composte di una gomma siliconicacaricata con argento (conduttori).
Vengono così create due strisce di conduttori che vengono poi disposti ortogonalmente sulle due facce opposte del materiale piezo-resitivo.
42
Per poter estrarre informazioni da ogni singolo elemento dell’array è necessario esaminare un elemento per volta.
Questo viene realizzato mediante un multiplexeranalogico di interruttori che mettono ad alta impedenza le linee che non sono utilizzate.
E’ possibile leggere il valore trasdotto di ogni elemento sensibile con una frequenza di 1MHz.

22
43
44