
S critto d i m ecca n ica ra zio n a le 2 d el 1 0 .0 2 .2 ...siboni/proveMR2no/2_feb2010.pdf · S...
21
Scritto di meccanica razionale 2 del 10.02.2010 Esercizio 1 Un sistema rigido pesante ` e appoggiato ad un piano orizzontale senza attrito e debolmente cedevole, identificabile con il piano Oxy di una terna Oxyz = Oˆ e 1 ˆ e 2 ˆ e 3 che ha l’asse verticale Oz diretto verso l’alto. Il corpo ha baricentro G(1, 1/2, 2) e punti di appoggio: P 1 (0, 0, 0) P 2 (2, 0, 0) P 3 (5/2, 2, 0) P 4 (0, 1, 0) . Determinare: (a) il poligono d’appoggio e l’area di completo appoggio; (b) le reazioni vincolari nello stato di quiete, verificato che la configurazione del sistema ` e di equilibrio; (c) se la configurazione sarebbe di equilibrio qualora il baricentro del corpo fosse il punto G (1/2, 1/4, 2) e, in tal caso, i punti di effettivo appoggio. Esercizio 2 Dato il sistema di equazioni differenziali nel piano: ˙ x = x 2 - y 2 +1 ˙ y =2x + y - 1 (x, y) ∈ R 2 , determinare: (a) i relativi punti fissi; (b) le propriet` a di stabilit` a degli stessi punti fissi. 1
Transcript of S critto d i m ecca n ica ra zio n a le 2 d el 1 0 .0 2 .2 ...siboni/proveMR2no/2_feb2010.pdf · S...

Scritto di meccanica razionale 2 del 10.02.2010
Esercizio 1Un sistema rigido pesante e appoggiato ad un piano orizzontale senza attrito e debolmentecedevole, identificabile con il piano Oxy di una terna Oxyz = Oe1e2e3 che ha l’asse verticaleOz diretto verso l’alto. Il corpo ha baricentro G(1, 1/2, 2) e punti di appoggio:
P1(0, 0, 0) P2(2, 0, 0) P3(5/2, 2, 0) P4(0, 1, 0) .
Determinare:
(a) il poligono d’appoggio e l’area di completo appoggio;(b) le reazioni vincolari nello stato di quiete, verificato che la configurazione del sistema
e di equilibrio;(c) se la configurazione sarebbe di equilibrio qualora il baricentro del corpo fosse il punto
G!(1/2, 1/4, 2) e, in tal caso, i punti di e!ettivo appoggio.
Esercizio 2Dato il sistema di equazioni di!erenziali nel piano:
!"
#x = x2 ! y2 + 1
y = 2x + y ! 1(x, y) " R2 ,
determinare:
(a) i relativi punti fissi;(b) le proprieta di stabilita degli stessi punti fissi.
1

Esercizio 3Nel piano Oxy di una terna inerziale Oxyz = Oe1e2e3 un’asta rettilinea omogenea OA,di massa m e lunghezza 2a, ruota liberamente attorno al proprio estremo fisso O. LungoOA e vincolato a scorrere un punto materiale P , di massa m. Come parametri lagrangianisi usano le coordinate s " (0, 2) e ! " R indicate in figura. Su P agiscono una resistenzaviscosa con costante di frizione ", una forza elastica !k(P ! O) e una forza costante!ka e2. Sull’asta e invece applicato un sistema S di forze con risultante #R = (2ka cos!!mg)/2 e2 ! "A e momento in A:
#MA = ka2s cos! e1 +12mga sin! e3 .
Supposti i vincoli ideali, si determinino:
(a) le componenti generalizzate delle sollecitazioni attive applicate;(b) gli equilibri del sistema;(c) la proprieta di stabilita dei predetti equilibri.
Esercizio 4Un sistema scleronomo posizionale conservativo a vincoli ideali e descritto dalle coordinategeneralizzate (x, y) " R2 e dalla lagrangiana:
L = ma2$3
2x2+xx2+xy!1
2y2xy+
12xyxy+
12y2+
32yy2
%+ka2
$2xy!x2!3
2y2!2x2y+xy2
%
nella quale m, a e k sono rispettivamente una massa, una lunghezza e una costante elasticacaratteristiche. Determinare, nell’intorno dell’equilibrio stabile (x, y) = (0, 0):
(a) le equazioni delle piccole oscillazioni;(b) le frequenze normali delle piccole oscillazioni;(c) le espressioni dei modi normali delle piccole oscillazioni.
2

Soluzione dell’esercizio 1(a) Poligono d’appoggio e area di completo appoggioIl poligono d’appoggio del sistema e per definizione l’inviluppo convesso della base d’appog-gio " = {P1, P2, P3, P4}. Poiche il poligono P1P2P3P4 chiuso risulta chiaramente convesso,esso deve identificarsi con il poligono d’appoggio. E questo infatti l’intersezione dei quattrosemipiani chiusi che contengono " e la cui frontiera passa per una coppia di punti adiacentidello stesso ". L’espressione formale del risultato e data dal calcolo seguente, nel quale siconviene di indicare con (xi, yi) le coordinate del generico punto d’appoggio Pi, i = 1, 2, 3, 4.
Semipiano delimitato dalla retta P1P2 e contenente "La retta P1P2, che costituisce la frontiera del semipiano, coincide ovviamente con l’asseOx. Il semipiano da considerare e dunque y # 0.
Semipiano delimitato dalla retta P2P3 e contenente "La retta P2P3 ha equazione
x ! x2
x3 ! x2=
y ! y2
y3 ! y2
ossia, sostituendo le coordinate dei punti P2(2, 0) e P3(5/2, 2),
x ! 252! 2
=y ! 02 ! 0
$% x ! 2 =y
4
e quindi 4x ! y ! 8 = 0. Dal momento che il semipiano richiesto deve contenere l’origineP1, la disequazione che lo individua deve essere
!4x + y + 8 # 0 .
Semipiano delimitato dalla retta P3P4 e contenente "La retta P3P4 e individuata dall’equazione cartesiana
x ! x3
x4 ! x3=
y ! y3
y4 ! y3
vale a dire, ricordando le coordinate di P3(5/2, 2) e P4(0, 1),
x ! 52
0! 52
=y ! 21! 2
$% x ! 52
= !52(2 ! y)
e pertanto 2x ! 5y + 5 = 0. Il semipiano richiesto e allora l’insieme delle soluzioni delladisequazione
2x ! 5y + 5 # 0 ,
dovendo contenere l’origine P1 della terna di riferimento.
3

Semipiano delimitato dalla retta P4P1 e contenente "La retta che delimita il semipiano e ovviamente l’asse Oy. Il semipiano deve inoltre con-tenere i punti P2 e P3. La disequazione che lo caratterizza e percio x # 0.
Definizione formale del poligono d’appoggioIl poligono d’appoggio e il luogo del punti P (x, y) del piano d’appoggio Oxy per i qualirisulta soddisfatto il seguente sistema di disequazioni algebriche lineari non omogenee:
!&&"
&&#
y # 0!4x + y + 8 # 02x ! 5y + 5 # 0x # 0 .
Area di completo appoggioPoiche il piano d’appoggio si assume debolmente cedevole, le reazioni vincolari esterneagenti sul corpo rigido nei punti di appoggio sono determinate completamente dagli ap-propriati coe#cienti di struttura a, b, c. Detti coe#cienti si esprimono per mezzo dellarelazione matriciale '
(abc
)
* = S!1
'
(x
Gy
G1
)
*mg
nella quale xG
e yG
indicano le coordinate del centro di pressione e la matrice S assumela forma
S =
'
(Sxx Sxy Sx
Sxy Syy Sy
Sx Sy #"
)
* =
'
+(41/4 5 9/2
5 5 39/2 3 4
)
,*
avendo gli elementi:
Sxx =4-
i=1
x2i = 02 + 22 +
$52
%2+ 02 = 4 +
254
=414
Syy =4-
i=1
y2i = 02 + 02 + 22 + 12 = 5
Sxy =4-
i=1
xiyi = 0 · 0 + 2 · 0 +52· 2 + 0 · 1 = 5
Sx =4-
i=1
xi = 0 + 2 +52
+ 0 =92
Sy =4-
i=1
yi = 0 + 0 + 2 + 1 = 3
#" =4-
i=1
1 = 4 .
4

L’inversa di S si calcola senza alcuna di#colta e risulta
S!1 =1
186
'
(44 !26 !30!26 83 !33!30 !33 105
)
*
grazie all’espressione del determinante:
detS =414
....5 33 4
.... ! 5....
5 39/2 4
.... +92
....5 5
9/2 3
.... =
=414
(20 ! 9) ! 5$20 ! 27
2
%+
92
$15 ! 45
2
%=
414
· 11 ! 5 · 132
+92
$!15
2
%=
=4514
! 652
! 1354
=451 ! 130 ! 135
4=
1864
=932
,
in modo che:
(S!1)11 =293
....5 33 4
.... =293
(20 ! 9) =2293
(S!1)22 =293
....41/4 9/29/2 4
.... =293
$41 ! 81
4
%=
293
164! 814
=83186
(S!1)33 =293
....41/4 5
5 5
.... =293
$2054
! 25%
=105186
(S!1)12 = (S!1)21 = ! 293
....5 3
9/2 4
.... = ! 293
$20 ! 27
2
%= !13
93
(S!1)13 = (S!1)31 =293
....5 5
9/2 3
.... =293
$15! 45
2
%=
293
$!15
2
%= !15
93
(S!1)23 = (S!1)32 = ! 293
....41/4 59/2 3
.... =293
$!41
4· 3 +
452
%= ! 33
186.
La componente verticale della reazione vincolare esterna in un generico punto d’appoggioPi(xi, yi) e data dall’espressione
$i = (xi yi 1)
'
(abc
)
* = (xi yi 1)S!1
'
(x
Gy
G1
)
*mg .
L’area di completo appoggio A e il luogo dei centri di pressione (xG
, yG
) per i quali tuttele reazioni vincolari esterne nei punti di appoggio risultano strettamente positive. Omessoper brevita il pedice G, l’area di completo appoggio e quindi specificata dal sistema didisequazioni
(xi yi 1)S!1
'
(xy1
)
*mg > 0 i = 1, 2, 3, 4,
5
ossia
(xi yi 1)1
186
'
(44 !26 !30!26 83 !33!30 !33 105
)
*
'
(xy1
)
*mg > 0 i = 1, 2, 3, 4,
e dunque
(xi yi 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
*
'
(xy1
)
* > 0 i = 1, 2, 3, 4 .
Si ha d’altra parte:
(x1 y1 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* = (0 0 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* = (!30 ! 33 105)
(x2 y2 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* = (2 0 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* =
= (88 ! 30 ! 52 ! 33 ! 60 + 105) = (58 ! 85 45)
(x3 y3 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* = (5/2 2 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* =
= (110 ! 52 ! 30 ! 65 + 166! 33 ! 75 ! 66 + 105) = (28 68 ! 36)
(x4 y4 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* = (0 1 1)
'
(44 !26 !30!26 83 !33!30 !33 105
)
* =
= (!26 ! 30 83! 33 ! 33 + 105) = (!56 50 72)
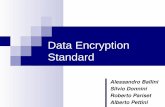
per cui i punti dell’area di completo appoggio A sono tutte e sole le soluzioni (x, y) delsistema di disequazioni lineari:
!&&&&&&"
&&&&&&#
!30x ! 33y + 105 > 0
58x ! 85y + 45 > 0
28x + 68y ! 36 > 0
!56x + 50y + 72 > 0
(0.1)
6
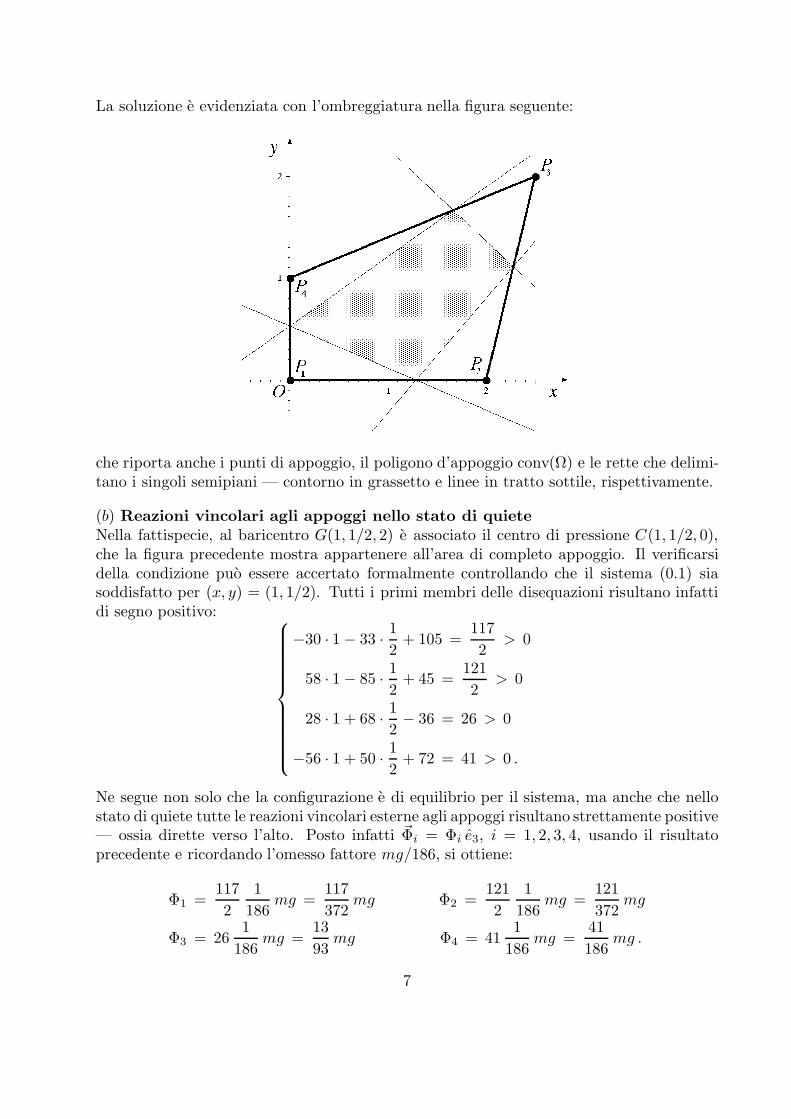
La soluzione e evidenziata con l’ombreggiatura nella figura seguente:
che riporta anche i punti di appoggio, il poligono d’appoggio conv(") e le rette che delimi-tano i singoli semipiani — contorno in grassetto e linee in tratto sottile, rispettivamente.
(b) Reazioni vincolari agli appoggi nello stato di quieteNella fattispecie, al baricentro G(1, 1/2, 2) e associato il centro di pressione C(1, 1/2, 0),che la figura precedente mostra appartenere all’area di completo appoggio. Il verificarsidella condizione puo essere accertato formalmente controllando che il sistema (0.1) siasoddisfatto per (x, y) = (1, 1/2). Tutti i primi membri delle disequazioni risultano infattidi segno positivo: !
&&&&&&&&&&"
&&&&&&&&&&#
!30 · 1 ! 33 · 12
+ 105 =1172
> 0
58 · 1 ! 85 · 12
+ 45 =1212
> 0
28 · 1 + 68 · 12! 36 = 26 > 0
!56 · 1 + 50 · 12
+ 72 = 41 > 0 .
Ne segue non solo che la configurazione e di equilibrio per il sistema, ma anche che nellostato di quiete tutte le reazioni vincolari esterne agli appoggi risultano strettamente positive— ossia dirette verso l’alto. Posto infatti #$i = $i e3, i = 1, 2, 3, 4, usando il risultatoprecedente e ricordando l’omesso fattore mg/186, si ottiene:
$1 =1172
1186
mg =117372
mg $2 =1212
1186
mg =121372
mg
$3 = 261
186mg =
1393
mg $4 = 411
186mg =
41186
mg .
7

Le reazioni vincolari esterne agli appoggi, per lo stato di quiete, sono pertanto:
#$1 =117372
mg e3#$2 =
121372
mg e3#$3 =
1393
mg e3#$4 =
41186
mg e3 .
Da notare che la somma delle componenti $i coincide con il peso totale del corpo:
4-
i=1
$i =117372
mg +121372
mg +1393
mg +41186
mg = mg ,
a conferma del risultato ottenuto.
(c) Equilibrio e punti di appoggio qualora il baricentro fosse G!
In tal caso il centro di pressione sarebbe C!(1/2, 1/4, 0) e apparterrebbe al poligono d’ap-poggio conv("). La configurazione sarebbe dunque di equilibrio per il sistema. Si osservituttavia che il centro di pressione non e compreso entro l’area di completo appoggio, dalmomento che le disequazioni (0.1) non sono tutte soddisfatte:
!&&&&&&&&&&"
&&&&&&&&&&#
!30 · 12! 33 · 1
4+ 105 =
3274
> 0
58 · 12! 85 · 1
4+ 45 =
2114
> 0
28 · 12
+ 68 · 14! 36 = !5 < 0 (non soddisfatta)
!56 · 12
+ 50 · 14
+ 72 =1132
> 0 ,
per cui la reazione vincolare in P3 risulterebbe negativa. P3 va dunque riguardato comepunto di distacco e la base di e!ettivo appoggio del corpo si riduce ai tre soli puntiP1, P2, P4.
Soluzione dell’esercizio 2(a) Punti fissiI punti fissi sono definiti come le soluzioni costanti del sistema di equazioni di!erenziali.Essi sono dunque caratterizzati dal sistema di equazioni algebriche ottenuto annullando lederivate prime: /
0 = x2 ! y2 + 10 = 2x + y ! 1 .
La seconda equazione e lineare e consente di ottenere la relazione
y = 1 ! 2x
che sostituita nella prima conduce all’equazione pura in x:
x2 ! (1 ! 2x)2 + 1 = 0
8

ossia!3x2 + 4x = 0 .
Ne derivano le radici:x = 0 x = 4/3
alle quali corrispondono i valori di y rispettivi:
y = 1 ! 2 · 0 = 1 y = 1 ! 2 · 43
= !53
.
I punti fissi del sistema sono pertanto:
(x, y) = (0, 1) (x.y) =$4
3,!5
3
%.
(b) Stabilita dei punti fissiSi ponga per brevita f(x, y) = x2 ! y2 + 1 e g(x, y) = 2x + y ! 1, in modo che il sistemadi equazioni di!erenziali si possa rappresentare nella forma
/x = f(x, y)y = g(x, y) .
(0.2)
Si hanno allora le derivate parziali prime:
$f
$x(x, y) = 2x
$f
$y(x, y) = !2y
$g
$x(x, y) = 2
$g
$y(x, y) = 1
per cui la matrice jacobiana dei secondi membri in (0.2) diventa
J(x, y) =0
2x !2y2 1
1.
Questa matrice permette di accertare le proprieta di stabilita dei punti fissi facendo ricorsoal teorema di analisi lineare.
Punto fisso (x, y) = (0, 1)In questo caso la matrice jacobiana si riduce a
J(0, 1) =0
0 !22 1
1
ed ha equazione caratteristica:
det[J(0, 1) ! %I] = det0!% !22 1 ! %
1= %2 ! % + 4 = 0
9

alla quale corrispondono le radici complesse coniugate:
% =1 ±
&1 ! 4 · 42
=1 ± i
&15
2.
Entrambi gli autovalori hanno percio parte reale positiva, e questa circostanza basta aconcludere che il punto fisso e instabile per il teorema di analisi lineare della stabilita.
Punto fisso (x, y) = (4/3,!5/3)Nella fattispecie la matrice jacobiana diventa
J(4/3,!5/3) =0
8/3 10/32 1
1
con equazione caratteristica
det2J$4
3,!5
3
%!%I
3= det
'
(83! %
103
2 1 ! %
)
* =$8
3!%
%(1!%)! 20
3= %2! 11
3%!4 = 0
che deve necessariamente ammettere un’unica radice positiva per la regola dei segni diCartesio (i coe#cienti dell’equazione algebrica presentano una variazione e una permanenzadi segno). In e!etti, il calcolo esplicito degli autovalori porge:
% =12
$113
±4
1219
! 4 · (!4)%
=12
$113
±4
2659
%= '
(
11 +&
2656
> 0
11 !&
2656
< 0
e l’instabilita dell’equilibrio segue ancora dal teorema di analisi lineare.
Soluzione dell’esercizio 3(a) Componenti generalizzate delle sollecitazioni attiveLe forze attive che agiscono sul sistema sono date dalla resistenza viscosa, la forza elasticae la forza costante, agenti sul punto P , oltre che dal sistema S applicato all’asta OA.Per ciascuna sollecitazione si devono calcolare le relative componenti generalizzate, la cuisomma definira le componenti generalizzate delle sollecitazioni applicate al sistema.
Forza elasticaAlla molla ideale, di costante elastica k, che congiunge O con P e associato il potenziale
Uel = !k
2(P !O)2 = !k
2(as sin! e1 ! as cos! e2)2 = !k
2a2s2
al quale corrispondono le componenti generalizzate:
Qel,s =$Uel
$s= !ka2s Qel," =
$Uel
$!= 0 .
10

Forza costanteLa forza costante !ka e2 costituisce un campo di sollecitazioni posizionali conservative dipotenziale
Ucost = !ka e2 · (P ! O) = !ka e2 · (as sin! e1 ! as cos! e2) = ka2s cos!
e componenti generalizzate:
Qcost,s =$Ucost
$s= ka2 cos! Qcost," =
$Ucost
$!= !ka2s sin! .
Forza di resistenza viscosaDerivando rispetto al tempo il vettore posizione
P ! O = as sin! e1 ! as cos! e2
si ottiene la velocita istantanea del punto materiale:
P = a(s sin! + s cos! !)e1 + a(!s cos! + s sin! !)e2
mentre le derivate parziali rispetto ai parametri lagrangiani risultano:
$P
$s= a(sin! e1 ! cos! e2)
$P
$!= as(cos! e1 + sin! e2) .
Per le componenti generalizzate della resistenza viscosa si hanno cosı le relazioni:
Qrv,s = !"P · $P
$s=
= !"5a(s sin! + s cos! !)e1 + a(!s cos! + s sin! !)e2
6· a(sin! e1 ! cos! e2) =
= !"a25(s sin! + s cos! !) sin!! (!s cos! + s sin! !) cos!
6=
= !"a25s sin2! + s sin! cos! ! + s cos2!! s sin! cos! !
6= !"a2s
Qrv," = !"P · $P
$!=
= !"5a(s sin! + s cos! !)e1 + a(!s cos! + s sin! !)e2
6· as(cos! e1 + sin! e2)
= !"a2s5(s sin! + s cos! !) cos! + (!s cos! + s sin! !) sin!
6= !"a2s2! .
Sistema di forze S agenti sull’astaPoiche l’asta si muove di moto piano con piano fisso Oxy e la sua orientazione rispetto agliassi Ox, Oy puo essere specificata per mezzo dell’angolo !, e osservato che A e un puntodell’asta, le componenti generalizzate del sistema S sono date dalle formule:
QS,s =$A
$s· #R+
$!
$se3 · #MA =
$A
$s· #R QS," =
$A
$!· #R+
$!
$!e3 · #MA =
$A
$!· #R+ e3 · #MA
11

dove:A ! O = 2a(sin! e1 ! cos! e2)
e quindi:$A
$s= 0
$A
$!= 2a(cos! e1 + sin! e2)
mentre:
#R =12(2ka cos!! mg)e2 ! "A #MA = ka2s cos! e1 +
12mga sin! e3
in modo che risultaQS,s = 0 · #R = 0
e
QS," = 2a(cos!e1 + sin!e2)·22ka cos!! mg
2e2 ! 2"a(cos! e1 + sin! e2)!
3+
mga
2sin!
= a sin!(2ka cos!! mg)! 4"a2! +12mga sin! =
= a sin!$2ka cos!! 1
2mg
%! 4"a2! .
In definitiva, le componenti generalizzate delle forze attive sono le seguenti:
Qs = Qel,s + Qcost,s + Qrv,s + QS,s =
= !ka2s + ka2 cos!! "a2s + 0 =
= ka2(cos!! s) ! "a2s
Q" = Qel," + Qcost," + Qrv," + QS," =
= 0 ! ka2s sin!! "a2s2! + a sin!$2ka cos!! 1
2mg
%! 4"a2! =
= !ka2s sin! + 2ka2 sin! cos!! 12mga sin!! "a2(s2 + 4)! .
(0.3)
(b) EquilibriNelle componenti generalizzate (0.3) delle sollecitazioni attive distinguiamo un contributoposizionale:
Qposs (s,!) = ka2(cos!!s) Qpos
" (s,!) = !ka2s sin!+2ka2 sin! cos!! 12mga sin!
e uno non posizionale:
Ds(s,! s, !) = !"a2s D"(s,! s, !) = !"a2(s2 + 4)! .
Il primo risulta conservativo, per via della condizione di chiusura — o “irrotazionalita” —
$Qposs
$!(s,!) !
$Qpos"
$s(s,!) = !ka2 sin!! (!ka2 sin!) = 0
12

soddisfatta sul dominio convesso (s,!) " (0, 2) ) R. In e!etti, e immediato verificare perintegrazione diretta che alle sollecitazioni posizionali va associato il potenziale
U(s,!) = ka2s cos! + ka2sin2! +12mga cos!! ka2
2s2 (s,!) " (0, 2) ) R .
Le sollecitazioni non posizionali hanno invece natura completamente dissipativa, visto ilvalore non positivo della potenza:
& = Dss + D"! = !"a2s s ! "a2(s2 + 4)! ! = !"a2s2 ! "a2(s2 + 4)!2 * 0
che si annulla unicamente per velocita generalizzate tutte nulle:
& = 0 $% !"a2s2 ! "a2(s2 + 4)!2 = 0 $% (s, !) = (0, 0) .
Annullandosi a velocita generalizzate nulle, le sollecitazioni dissipative non hanno influenzaalcuna sulle configurazioni di equilibrio, che quindi devono identificarsi con tutti e soli ipunti critici del potenziale U . Le derivate parziali prime di U si scrivono:
$U
$s= Qpos
s (s,!) = ka2(cos!! s)
$U
$!= Qpos
" (s,!) = !ka2s sin! + 2ka2 sin! cos!! 12mga sin!
e porgono il sistema di equazioni di equilibrio:
!"
#ka2(cos!! s) = 0
!ka2s sin! + 2ka2 sin! cos!! 12mga sin! = 0
(0.4)
la prima delle quali fornisce s in funzione dell’angolo !:
s = cos! . (0.5)
Sostituendo questa relazione della seconda delle equazioni (0.4) si perviene all’equazionepura in !:
ka2 sin! cos!! 12mga sin! = 0
ossiaka2 sin!
$cos!! mg
2ka
%= 0 ,
dalla quale si traggono radici per sin! = 0 e per cos!! (mg/2ka) = 0.Nel primo caso si hanno le soluzioni ! = 0 e ! = &, che in virtu della (0.5) conducono agliequilibri
(s,!) = (1, 0) (s,!) = (!1,&) ,
13

dei quali tuttavia soltanto il primo e definito, peraltro incondizionatamente. Nel secondocaso risulta invece
! = arccos$ mg
2ka
%= !! ! = !!!
con i corrispondenti equilibri
(s,!) = (cos!!,!!) =$ mg
2ka,!!
%(s,!) =
$ mg
2ka,!!!
%,
definiti e distinti dai precedenti a condizione che si abbia
% :=mg
2ka< 1 ,
non qual caso e anche !! = arccos% " (0,&/2).
(c) Stabilita degli equilibriLa presenza di sollecitazioni posizionali conservative e di sollecitazioni completamente dis-sipative, unitamente alla circostanza che gli equilibri del sistema sono in numero finitoe dunque necessariamente isolati, consente di risolvere il problema della stabilita degliequilibri ricorrendo alla forma forte del teorema di Lagrange-Dirichlet, basata sui criteridi Barbasin e Krasovskii. Si ha stabilita asintotica di tutti i massimi relativi propri delpotenziale e instabilita in ogni altro caso. Le derivate parziali seconde del potenziale siscrivono:
$2U
$s2(s,!) = !ka2
$2U
$!$s(s,!) =
$2U
$s$!(s,!) = !ka2 sin!
$2U
$!2(s,!) = !ka2s cos! + 2ka2(cos2!! sin2!) ! 1
2mga cos!
e definiscono la matrice hessiana:
HU (s,!) = ka2
7!1 ! sin!
! sin! !s cos! + 2 cos2!! 2 sin2!! % cos!
8
che va calcolata in ciascuna configurazione di equilibrio.
Equilibrio (s,!) = (1, 0)Nella fattispecie la matrice hessiana del potenziale si riduce alla forma diagonale
HU (1, 0) = ka2
7!1 00 !1 + 2 ! %
8= ka2
7!1 00 1 ! %
8
14

dalla quale e immediato riconoscere che:
(i) se % > 1 la matrice e definita negativa, e la configurazione costituisce percio unmassimo relativo proprio del potenziale, asintoticamente stabile;
(ii) per % < 1 l’hessiana risulta indefinita. L’equilibrio e un punto di sella. L’assenza delmassimo basta a concludere che l’equilibrio e instabile;
(iii) qualora si abbia infine % = 1 la matrice HU (1, 0) appare semidefinita non definitanegativa — gli autovalori sono uno negativo ed uno nullo, essendo negativa la tracciae nullo il determinante. L’analisi dell’hessiana non basta ne a provare ne ad escluderel’esistenza di un massimo. Ricorre dunque un caso critico di stabilita. In realta, lanatura del punto stazionario si puo stabilire per via diretta, ricorrendo ad una piccolamanipolazione algebrica. Per % = 1 si ha infatti:
U(s,!) = ka2$!s2
2+ s cos! + sin2! + % cos!
%=
= ka2$!s2
2+ s cos! + sin2! + cos!
%
e posto
U(s,!) =1
ka2U(s,!) e (s,!) = (1 + 's, '!) ,
si ottiene
U(1 + 's, '!) = !12(1 + 's)2 + (1 + 's) cos '! + sin2'! + cos '! =
= !12! 's ! 1
2's2 + 's cos '! + 2 cos '! + sin2'! .
Usando poi le identita trigonometriche
cos '! = 1 ! 2 sin2 '!
2e sin '! = 2 sin
'!
2cos
'!
2
la relazione precedente diventa
U(1 + 's, '!) = !12! 1
2's2 ! 2's sin2 '!
2+ 2 ! 4 sin2 '!
2+ 4 sin2 '!
2cos2
'!
2=
=32! 1
2's2 ! 2's sin2 '!
2! 4 sin4 '!
2=
=32! 1
2
$'s2 + 4's sin2 '!
2+ 4 sin4 '!
2
%! 2 sin4 '!
2=
=32! 1
2
$'s + 2 sin2 '!
2
%2! 2 sin4 '!
2
espressione da cui appare evidente che (s,!) = (1, 0) costituisce anche nel caso criticoun massimo relativo proprio del potenziale. La stabilita asintotica segue ancora daicriteri di Barbasin e Krasovskii.
15

Equilibrio (s,!) = (%,!!)In questo caso la matrice hessiana del potenziale diventa
HU (%,!!) = ka2
7!1 ! sin!!
! sin!! !% cos!! + 2 cos2!! ! 2 sin2!! ! % cos!!
8
ed essendo % = cos!!, con % < 1 e !! " (0,&/2), si riduce alla forma
HU (%,!!) = ka2
7!1 ! sin!!
! sin!! !2 sin2!!
8.
La matrice ha determinante positivo
detHU (%,!!) = k2a4sin2!! > 0
e traccia negativa
trHU (%,!!) = !ka2(1 + 2 sin2!!) < ka2 < 0
per cui risulta definita negativa. L’equilibrio e dunque un massimo relativo proprio delpotenziale, di cui i criteri di Barbasin-Krasovskii assicurano la stabilita asintotica.
Equilibrio (s,!) = (%,!!)La matrice hessiana del potenziale in questa configurazione e identica a quella calcolataper l’equilibrio precedente:
HU (%,!!!) = ka2
7!1 ! sin!!
! sin!! !2 sin2!!
8.
Anche questo equilibrio risulta stabile asintoticamente per la forma forte del teorema diLagrange-Dirichlet.
Soluzione dell’esercizio 4(a) Equazioni delle piccole oscillazioniLa lagrangiana del sistema scleronomo si scrive:
L = ma2
2$32+x
%x2+
$12+
32y%y2+
$1!1
2y2+
12xy
%xy
3+ka2
$2xy!x2!3
2y2!2x2y+xy2
%.
La parte quadratica nelle velocita generalizzate x, y va identificata con l’energia cineticadel sistema:
T = ma2
2$32
+ x%x2 +
$12
+32y%y2 +
$1 ! 1
2y2 +
12xy
%xy
3=
=12ma2
2(3 + 2x)x2 + (1 + 3y)y2 + (2 ! y2 + xy)xy
3=
12(x y)A(x, y)
0xy
1
16

con la matrice di rappresentazione:
A(x, y) = ma2
'
+(3 + 2x 1 +
xy ! y2
2
1 +xy ! y2
21 + 3y
)
,*
che per l’equilibrio (x, y) = (0, 0) diventa
A(0, 0) = ma2
03 11 1
1
ed e chiaramente definita positiva — positivi sono infatti traccia e determinante. L’espres-sione residua della lagrangiana, funzione delle sole coordinate generalizzate x e y, costitu-isce il potenziale del sistema:
U(x, y) = L ! T = ka2$2xy ! x2 ! 3
2y2 ! 2x2y + xy2
%
ed ammette le derivate parziali prime:
$U
$x(x, y) = ka2(2y ! 2x ! 4xy + y2)
$U
$y(x, y) = ka2(2x ! 3y ! 2x2 + 2xy)
che si annullano per (x, y) = (0, 0):
$U
$x(0, 0) = 0
$U
$y(0, 0) = 0 .
Rimane cosı verificato che la configurazione (x, y) = (0, 0) e un equilibrio del sistema. Lederivate parziali seconde del potenziale valgono invece
$2U
$x2(x, y) = ka2(!2 ! 4y)
$2U
$y$x(x, y) = ka2(2 ! 4x + 2y)
$2U
$y$x(x, y) = ka2(2 ! 4x + 2y)
$2U
$y2(x, y) = ka2(!3 + 2x)
e porgono la matrice hessiana
HU (x, y) = ka2
0!2! 4y 2 ! 4x + 2y
2 ! 4x + 2y !3 + 2x
1
che in (x, y) = (0, 0) si riduce alla forma definita negativa
HU (0, 0) = ka2
0!2 22 !3
1,
17

provando in tal modo che non solo l’equilibrio e stabile ma che attorno ad esso e altresıapplicabile la teoria canonica delle piccole oscillazioni. Posto (x, y) = ('x, 'y), con 'x, 'y +0, le equazioni delle piccole oscillazioni sono date dalla relazione matriciale:
A(0, 0)0'x'y
1! HU (0, 0)
0'x'y
1= 0
ossia dama2
03 11 1
10'x'y
1! ka2
0!2 22 !3
1 0'x'y
1= 0
che eseguiti e prodotti e distinte le componenti si riduce al sistema di equazioni di!erenzialilineari: !
"
#ma2(3'x + 'y) ! ka2(!2'x + 2'y) = 0
ma2('x + 'y) ! ka2(2'x ! 3'y) = 0 .(0.6)
(b) Frequenze normali delle piccole oscillazioniLe pulsazioni normali delle piccole oscillazioni attorno a (x, y) = (0, 0) si ottengono impo-nendo al sistema (0.6) soluzioni non banali della forma:
'x = a cos((t + !) 'y = b cos((t + !) , t " R .
La condizione necessaria e su#ciente per l’esistenza di soluzioni cosi!atte e data dall’equa-zione caratteristica in (:
det5(2A(0, 0) + HU (0, 0)
6= 0
vale a diredet
2ma2(2
03 11 1
1+ ka2
0!2 22 !3
13= 0
e quindi, dividendo membro a membro per (ka2)2,
det2m(2
k
03 11 1
1+
0!2 22 !3
13= 0.
Posto per brevita m(2/k = µ, l’equazione diventa0
3µ ! 2 µ + 2µ + 2 µ ! 3
1= 0
e calcolato il determinante a primo membro si riduce a
2µ2 ! 15µ + 2 = 0 .
E immediato calcolare le radici — positive —
µ =15 ±
&225 ! 4 · 2 · 22 · 2 =
15±&
2094
= '(
15 !&
2094
= µ1
15 +&
2094
= µ2 .
18

Le pulsazioni normali delle piccole oscillazioni diventano pertanto:
(1 =&
µ1
4k
m(2 =
&µ2
4k
m
e da esse si deducono le frequenze normali richieste:
f1 =(1
2&=
14&
915 !
&209
4k
mf2 =
(2
2&=
14&
915 +
&209
4k
m.
Si osservi che per mezzo dell’identita
9a ±
&b =
:a +
&a2 ! b
2±
:a !
&a2 ! b
2, a, b > 0 , a2 > b ,
si puo anche scrivere
915 ±
&209 =
415 + 4
2±
415 ! 4
2=
4192
±4
112
=&
19 ±&
11&2
,
per cui le pulsazioni normali possono anche esprimersi nella forma equivalente:
f1 =14&
&19 !
&11&
2
4k
mf2 =
14&
&19 +
&11&
2
4k
m.
(c) Modi normali delle piccole oscillazioniSi devono distinguere un modo “basso”, associato alla pulsazione minore (1, e un modo“alto” di pulsazione (2 > (1.
Modo bassoIl modo normale ha la forma
0'x'y
1=
0a1
b1
1cos((1t + !1) , t " R ,
con vettore delle ampiezze (a1 b1) non nullo. Detto vettore viene individuato dall’equazione
5(2
1A(0, 0) + HU (0, 0)6 0
a1
b1
1= 0 (a1 b1) -= (0 0)
ossia da 03µ1 ! 2 µ1 + 2µ1 + 2 µ1 ! 3
1 0a1
b1
1= 0
19

dove i coe#cienti della matrice quadrata risultano:
3µ1 ! 2 = 3 · 15 !&
2094
! 2 =45 ! 3
&209 ! 8
4=
37 ! 3&
2094
µ1 + 2 =15 !
&209
4+ 2 =
23 !&
2094
µ1 ! 3 =15 !
&209
4! 3 =
3 !&
2094
,
in modo che, omessi i comuni denominatori, l’equazione delle ampiezze diventa
'
(37 ! 3
&209 23 !
&209
23!&
209 3 !&
209
)
*0
a1
b1
1= 0
ovvero !"
#(37 ! 3
&209)a1 + (23 !
&209)b1 = 0
(23 !&
209)a1 + (3 !&
209)b1 = 0 .
Dalla prima equazione si deduce che il rapporto delle ampiezze deve assumere un valorefissato:
b1
a1=
3&
209 ! 3723 !
&209
=(3&
209 ! 37)(23 +&
209)529 ! 209
=32
&209 ! 224320
=&
209! 710
,
lo stesso peraltro desumibile dalla seconda equazione, che e linearmente dipendente dallaprima:
b1
a1=
23 !&
209&209 ! 3
=(23 !
&209)(
&209 + 3)
200=
20&
209 ! 140200
=&
209 ! 710
.
Si puo allora porre a1 = 10 e b1 =&
209 ! 7 e scrivere il modo normale come
0'x'y
1= A1
710
&209 ! 7
8cos
0&19 !
&11
2&
2
4k
mt + !1
1, t " R ,
per A1 -= 0 e !1 " R assegnati a piacere.
Modo altoIl modo alto e espresso da
0'x'y
1=
0a2
b2
1cos((2t + !1) , t " R ,
20

con ampiezze a2, b2 non entrambe nulle e fase !2 arbitraria. L’equazione che definisce leampiezze e in questo caso
5(2
2A(0, 0) + HU (0, 0)6 0
a2
b2
1= 0 (a2 b2) -= (0 0)
ovvero 03µ2 ! 2 µ2 + 2µ2 + 2 µ2 ! 3
1 0a2
b2
1= 0 ,
dove µ2 di!erisce da µ1 per la sola sostituzione&
209 . !&
209. Un calcolo analogo aquello precedente porge pertanto:
a2 = 10 b2 = !&
209! 7
e l’espressione del modo normale diventa
0'x'y
1= A2
710
!&
209 ! 7
8cos
0&19 +
&11
2&
2
4k
mt + !2
1, t " R ,
con A2 -= 0 e !2 costanti reali arbitrarie.
21












![0)#)(0&)('# 0 '$$1/ -%( %+ )#$)( &/ ),-)*#0 ')#, · !"#$%&%&'()"#*%+'#,-./+'(-%#0)#)(0"&)('# 0 '$$1"/ -%( %+ )"#$)( &/ ),-)*"#0 ')#,%.0 )#)( #)-"$)"( %2##" < ol u !' q u j 7 ] od!-](https://static.fdocumenti.com/doc/165x107/5f77c0780e8ed7674554cebd/00-0-1-0-00.jpg)

