Elaborazione del linguaggio naturale automi & morfologia Maria Teresa PAZIENZA a.a. 2007-08.

di Hiroaki Kitano e Minoru Asada
o
mb:e4
.11111'
aur «k-t
Tre immagini del sorprendente Honda Humanoid Robot, co-struito dalla casa giapponese per la partecipazione alle edizionifuture della RoboCup. Questi esemplari sono alti un metro e60 centimetri per 130 chilogrammi di peso, e saranno pronti aentrare in gara dall'edizione del 2002. In alto a destra, una fo-tografia d'insieme della RoboCup 98 «a quattro zampe».
RoboCup: e ora in campo gli automiT
el 1997, dopo la vittoria diDeep Blue, il computerdell'IBM che gioca a scac-
chi, contro Garry Kasparov, campionedel mondo in carica, l'attenzione dei ri-cercatori nel campo dell'intelligenzaartificiale si è rivolta a una nuova sfi-da: lo sviluppo di robot che possano,un giorno, battere la squadra campio-ne del mondo di calcio. Proprio perrealizzare questo progetto, che allo sta-to dell'arte ha i contorni di un sogno,ha avuto inizio uno sforzo di ricerca alivello internazionale. La Robot WorldCup Initiative (RoboCup) è un tentati-vo di promuovere l'intelligenza artifi-ciale, la robotica e altri campi di ricer-ca correlati ponendosi un obiettivoambizioso: entro il 2050, una squadradi robot umanoidi completamente au-tomatici sarà in grado di vincere un in-contro di calcio contro la squadracampione del mondo, secondo le rego-le approvate dalla FIFA (l'organismoche governa il calcio mondiale).
Ciò implica che una squadra di ro-bot bipedi che camminano, corrono ecalciano un pallone sia in grado di per-cepire le situazioni di gioco, e che ognisingolo robot prenda decisioni sul mo-vimento da compiere e sulla strategiadi gioco. Inoltre gli automi devono es-sere robusti a sufficienza da poter gio-care la partita, e allo stesso tempo noncostituire un pericolo per gli avversari.
La tecnologia attuale è lontanissimada questo obiettivo; la maggior partedei robot si muove su ruote anziché sugambe, e ha spesso seri problemi solo ascorgere la palla e gli altri robot. Non-dimeno, siamo convinti che mezzo se-colo sarà sufficiente a ottenere unospettacolare successo. In fondo, dalprimo volo dei fratelli Wright alla mis-sione Apollo 11 che ha portato l'uomosulla Luna sono passati appena 60 an-ni. Dall'invenzione del computer allacostruzione di una macchina capace dibattere il campione del mondo di scac-chi ne sono trascorsi solo 40.
Abbiamo scelto di sviluppare robotche giocano a calcio da un lato perché èlo sport più popolare al mondo, e dal-l'altro perché conseguire un simile ri-sultato implica una serie di innovazioniche potrebbe costituire la base della tec-nologia industriale futura. Perché unrobot - sia un robot materiale sia unagente software - possa giocare un in-
contro di calcio in maniera apprezzabi-le, è necessario integrare un gran nume-ro di tecnologie, e si deve compiereun'enorme quantità di passi avanti. Letecnologie coinvolte in questa sfida ab-bracciano tutta una gamma che va dal-la ricerca sui robot intelligenti, allascienza dei materiali, all'elettronica.
L'idea della RoboCup è nata nel1993 da un gruppo di ricercatori giap-ponesi, tra i quali gli autori. Se l'obiet-tivo ultimo - ci siamo detti - è quello dicostruire robot in grado di giocarecontro una squadra di atleti umani,può essere di grande aiuto incomincia-
Dopo il successodi Deep Blue
su Garry Kasparov,un campionato
di calcio per robot.Con un obiettivo:
sfidare, nel 2050, lasquadra campione
del mondo
re con robot che giochino tra loro. Per-ciò abbiamo deciso di organizzare unacompetizione in concomitanza conuna conferenza accademica su questoargomento. L'annuncio della primaRobot World Cup - organizzata per il1997 - fu dato nel 1995, lasciando airicercatori intenzionati a parteciparedue anni per lo sviluppo degli automi.
La competizione veniva organizzataper facilitare lo scambio di conoscenzetecniche e la valutazione dei progressiscientifici. La prima Robot World CupSoccer Games and Conferences (Robo-Cup 97) si tenne a Nagoya, in Giappo-
32
LE SCIENZE 372/ agosto 1999 LE SCIENZE 372/ agosto 1999
33

ne, durante l'International Joint Con-ference on Artificial Intelligence e videla partecipazione di 35 squadre prove-nienti da 12 paesi. Fu un successo, co-me testimoniano le 7000 presenze dipubblico e i 70 media accreditati. Laseconda RoboCup si tenne a Parigi nelluglio dello scorso anno, durante iMondiali di calcio. Questa volta parte-ciparono 60 squadre di 20 paesi, glispettatori furono 20 000 e l'evento fucoperto da 120 mezzi d'informazione.Quest'anno la RoboCup si è svolta aStoccolma proprio nelle scorse setti-mane, e ha visto la partecipazione di120 squadre di 35 paesi.
Un punto di riferimentoLa RoboCup non è semplicemente
una competizione tra robot. È unosforzo di collaborazione internazionaleper promuovere la scienza, la tecnolo-gia e l'educazione attraverso un tema dirichiamo come il calcio dei robot. Lacompetizione annuale serve per scam-biare tecnologie, per fare esperimentifuori dai laboratori, e come festival peri ricercatori. È per stimolare la tecnolo-gia che abbiamo lanciato la grande sfi-da del 2050: battere la squadra cam-pione del mondo. Ovviamente, rag-giungere questo obiettivo è tutt'altroche semplice. Con le tecnologie attualinon è nemmeno immaginabile; tuttaviaè possibile che lanciare ufficialmente lasfida faccia da stimolo per lo sviluppodi nuove tecnologie, in modo che si ar-rivi davvero alla meta.
D'altra parte, uno dei modi più effi-caci di promuovere la ricerca in campoingegneristico è proporre un obiettivoa lungo termine. Il più celebre esempiodi questo genere è il programma spa-ziale Apollo. In quel caso, l'Ammini-strazione degli Stati Uniti affidò allaNASA l'obiettivo di «far scendere unuomo sulla superficie della Luna e ri-portarlo sulla Terra sano e salvo». Ilcompimento di questo obiettivo fu unapietra miliare nella storia dell'umanità.Sebbene l'impatto economico imme-diato del progetto sia stato negativo, letecniche messe a punto per conseguirlohanno contribuito in misura decisiva aifondamenti tecnologici dell'attuale in-dustria americana.
Nell'area della scienza dei calcolato-ri, i computer capaci di giocare a scac-chi hanno segnato una pietra miliare.La macchina in grado di battere ilcampione di scacchi umano fu imma-ginata subito dopo l'invenzione delcomputer, ed è stata perseguita comegrande sfida dell'intelligenza artificiale.Per lavorare in questo campo, sonostati inventati e valutati innumerevoli
algoritmi di ricerca. Con la recente vit-toria di Deep Blue, la sfida degli scac-chi si è conclusa con successo. Ritenia-mo che la RoboCup possa essere unasfida adeguata ai nuovi obiettivi del-l'intelligenza artificiale.
La RoboCup è pensata per poter af-frontare complessità pratiche del mon-do reale - sebbene in un ambiente limi-tato - mantenendo le dimensioni delproblema e i costi della ricerca a livelliaccettabili. E offre un obiettivo di ri-cerca integrata che copre ampie areedella robotica intelligente, tra cui: larealizzazione di sensori capaci di reagi-re in tempo reale, il comportamentoreattivo, l'acquisizione di una strategia,l'apprendimento, la pianificazione intempo reale, sistemi multi-agente, la ri-cognizione di un contesto, la visione, lacapacità di prendere decisioni strategi-che, il controllo dei motori, il controllodi robot intelligenti, e altro ancora.
Le categoriedella RoboCup
Attualmente la RoboCup prevedediversi tipi di competizioni ed esibizio-
A sinistra, un mo-mento dell'esibi-zione dei robot-ca-ne della Sony allaRoboCup 98. Quisopra e a destra,due immagini del-le partite per pic-coli robot, giocatesu comuni tavolida ping pong darobot che si muo-vono su ruote.
ni: innanzitutto vi sono sia tornei perrobot reali, sia una gara per simulatori,che sfrutta la simulazione software dirobot virtuali. Le gare per robot realisono a loro volta suddivise in diversicampionati.
• La categoria «simulatori»In questa categoria, i partecipanti de-
vono realizzare 11 agenti software ingrado di giocare in un campo virtua-le senza l'intervento umano. La Robo-Cup mette a disposizione il simulatoreufficiale - ideato da Itsuki Noda dell'E-lectrotechnical Laboratory, in Giappo-ne - che gestisce l'incontro. Ciascungiocatore può vedere, dalla sua posizio-ne, solo una parte del campo. La perce-zione visiva è limitata a 90 gradi, e nonpuò essere distinta la natura di oggettimolto distanti. I giocatori virtuali pos-sono correre alla massima velocità soloper una distanza limitata, e la resisten-za cala rapidamente. È importante ave-re una buona gestione dell'energia du-rante il gioco. Dal 1998 è stata adotta-ta la regola del fuorigioco, e ciò ha con-tribuito a perfezionare la collaborazio-ne tra molti agenti, poiché è possibileadottare la tattica del fuorigioco facen-
do avanzare simultaneamente i difenso-ri. L'attuale versione della simulazionesfrutta una fisica semplificata, cosicchéi partecipanti a questo campionato pos-sono concentrarsi sugli aspetti coopera-tivi: apprendimento, pianificazione intempo reale, preparazione al lavoro digruppo e altri obiettivi dell'intelligenzaartificiale. La prossima generazione disimulatori comprenderà elementi di fi-sica più sofisticati e realistici.
• La categoria «piccoli robot»A questo torneo partecipano squa-
dre composte da cinque robot, ciascu-
no dei quali non può eccedere i 15 cen-timetri di diametro (180 centimetri cu-bi di volume). Il campo è grande comeun tavolo da ping pong, e il pallone ècostituito da una pallina da golf. Nonsi possono installare sensori nell'am-biente circostante poiché potrebberointralciare lo spiegamento della squa-dra avversaria. Di solito si usa una te-lecamera disposta sul soffitto per guar-dare il campo dall'alto, il che permetteal controllo software di gestire la posi-zione dei robot. È permesso anche l'u-so di telecamere multiple e di altri tipidi sensori. Questa categoria sarà il ter-reno di prova per la ricerca nel campodei sistemi autonomi e semiautonomiin ambienti dove sono dislocati senso-ri. Un'applicazione futura potrebbe es-sere un sistema intelligente'per la circo-lazione, in cui veicoli semiautonomi si
muovano in un am-biente urbano dissemi-nato di sensori in gra-do di monitorare iltraffico e di controllar-lo in modo efficiente.
• La categoria «robotdi media taglia»
Anche in questo ca-so sono in gioco cin-que robot per squa-dra, ciascuno dei qualiha un diametro infe-riore ai 50 centimetri.Il campo è grande co-me nove tavoli da pingpong e il pallone è o-mologato dalla FIFA,anche se di dimensioniinferiori a quelle rego-lamentari. Tutti i sen-sori devono trovarsi abordo dei robot. Que-sta regola è stata for-mulata per incentivarela ricerca su sistemiautonomi in grado diriconoscere gli oggettie agire in modo indi-pendente. Ciò potreb-
be contribuire alla ricerca sui robot di-slocati in luoghi che gli operatori nonpossono controllare a distanza.
Per ora, nelle ultime due categorie sierigono barriere per impedire che ilpallone esca dal terreno di gioco. Nelprossimo futuro, tuttavia, le pareti ver-ranno rimosse in modo che i robotdebbano muoversi rapidamente per te-nere il pallone in campo.
• La categoria «robot con gambe»Dopo le partite di esibizione della
RoboCup 1998 a Parigi, la categoriadei robot dotati di gambe è oggi rico-
nosciuta come ufficiale, ed è piena-mente sostenuta dalla Sony, che harealizzato i robot a quattro zampe - so-miglianti a cani - utilizzati in questotorneo. I robot hanno 15 gradi di li-bertà e tutti i sistemi di rilevamento edi calcolo sono a bordo. Secondo il re-golamento della RoboCup 99, ciascu-na squadra è composta da tre robot.
• La categoria «robot umanoidi»I programmi prevedono l'introdu-
zione di un torneo per robot umanoidia partire dal 2002. Questi robot do-vranno muoversi su due gambe. È lasfida più importante della RoboCup,quella destinata a condurre all'obietti-vo finale dell'iniziativa. Fin dalla riu-scita esibizione di robot umanoidi daparte della Honda, avvenuta nel 1997,diversi istituti di ricerca si sono seria-mente impegnati nello sviluppo di u-manoidi di varie dimensioni. La Hon-da ha dichiarato che metterà a puntosquadre di robot umanoidi in grado digiocare primitive partite di calcio per il2002, e che considera la partecipazio-ne alla RoboCup alla stessa stregua diquella al campionato di Formula 1, incui lo spirito delle corse spinge a pro-gressi tecnologici. Le gare del 2002non saranno altro che una dimostra-zione di robot umanoidi che tentano diavvicinare e calciare un pallone; ma nelgiro di qualche anno essi imparerannoa giocare una vera partita di calcio. Infuturo questo sarà il torneo principaledella RoboCup, e contribuirà in mododecisivo allo sviluppo della robotica.
Gli obiettivi di ricercaIl raggiungimento dell'obiettivo fina-
le richiede una serie di innovazioni. Inquesta sezione discuteremo i progressitecnici necessari per lo sviluppo di ro-bot reali e di agenti software per la Ro-boCup. Una delle ragioni principali percui la RoboCup attrae tanti ricercatoriè che richiede l'integrazione di un am-pio spettro di tecnologie in una squa-dra di agenti completi. Un elenco dellearee di ricerca coperte dalla RoboCupcomprende: le architetture di agenti, ilconnubio di approcci reattivi e approc-ci di pianificazione, il riconoscimentoin tempo reale, la pianificazione e il ra-gionamento, il ragionamento e l'azionein un ambiente dinamico, la fusione disensori, sistemi a molti agenti, l'appren-dimento del comportamento per com-piti complessi, l'acquisizione di strate-gie e la modellizzazione cognitiva.
Oltre a queste tecnologie, un serverper il calcio basato su una rete con gra-fica tridimensionale ad alta qualità ri-chiede un progresso nelle tecnologie
34
LE SCIENZE 372/ agosto 1999
LE SCIENZE 372/ agosto 1999
35

PP i 285
9[73!--
Ree. t:A,: ,41.4h 1> 4.10«. ;44..00Craioire4Cref4r4. •14,0n>
Pecv <2_8: <dr* -30>Ree. t2_9: <6.411 14>
8.41.1n• >1cla_in_r>404.44
Vbe, L1_3: <W, -3>Ibew 11_5: Oah:5. 103 O>
<Merita > n M_off_1)tryderoe vi<u_on>•
Pocv 12_10: (6441, 14>P.e., 12_11: <d4sh
<rdiree 4041_11ck_r>(n4ferte pl4y_on)e
1i4c., 11_6: ftle,Ree, 14_7: <lurn -24.bcy t1.8: <1.rn -15>
soccennenotorsoccenmeoor
Rocv 12,6: <dar 100>ftecv t2.7: <cla.h IO»R. ,2_9, idaoh ICO)▪ 12_10: <0~ 100>Oecv 12,1/: (04041 100)
frefer. fr.4_,ek_r>(( r4fer44 <11=o:h
freforee 1,10k_off_1>~dr. play_en>
R. L/_10: (tu •n 1>Recv 12_1: Cturn 25>Pacv 12-3: <1.4.0 -11)Rec. 12_4: <ho. 1>Ree. 12_11: ftarn -1>
trefero. trop_tal I >0,4w. 01.sy_ce>
ir 9041_,2>1Ick_off_I>.148-440
>_sLa.oel
Ctig
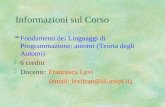
La squadra di agenti software proposta da Sean Luke, dell'Università del Maryland, haimparato a giocare per gradi. All'inizio i giocatori se ne stavano in campo senza reagire(a). Dopo i primi calci, hanno cominciato a rincorrere il pallone tutti insieme, come ra-gazzini (b). Solo dopo qualche centinaio di simulazioni i giocatori hanno cominciato adistribuirsi sul campo (c) e alla fine alcuni elementi si sono spontaneamente disposti aprotezione della porta (d), senza che fosse stata programmata la nozione di portiere.
per l'animazione in tempo reale di gio-catori simulati, e lo sviluppo di un am-biente di rete interattivo a molti utenti.
• Visione ed elaborazione sensorialeLa visione è la più ricca fonte di
informazioni per percepire non solo ilmondo esterno, ma gli effetti stessi del-le azioni del robot. La Computer Vi-sion ha cercato di mettere a puntoun'accurata geometria tridimensionalericostruita a partire da un'informazio-ne visiva bidimensionale, nella certezzache la geometria 3-D sia la più potentee generale rappresentazione da usare inapplicazioni come la navigazione di ro-bot. La ricostruzione 3-D, però - di-spendiosa in termini di tempo di elabo-razione - potrebbe non essere necessa-ria né ottimale per i compiti assegnatia un giocatore della RoboCup.
Per fronteggiare avversari in rapidomovimento e soprattutto il pallone, i si-stemi di visione - che, trovandosi a bor-do, sono a loro volta in movimento -devono elaborare l'immagine in temporeale. Per reagire rapidamente alle si-tuazioni, il giocatore necessita di infor-mazioni essenziali per la selezione delcomportamento. Ciò non significa do-ver costruire un sistema di visione adhoc: esso deve far parte di un sistemacomplesso, che interagisca in modi spe-cifici con il mondo, integrato nel corpodel robot e nei compiti affidatigli.
La sfida non si limita al software, macoinvolge anche l'hardware. Le usualivideocamere a CCD possono essere a-datte per scattare foto o per le riprese diun film, ma non necessariamente per lapercezione dei robot. Il sistema otticoinstallato su molte videocamere a CCDha un angolo di vista di 35 gradi, trop-po piccolo per robot mobili: l'angolo divista deve essere più ampio. Le squadre
partecipanti alla RoboCup 97 incon-trarono diversi problemi con un siste-ma ottico a CCD montato sulla parteanteriore dei robot. Nel 1998 la mag-gior parte delle squadre fece uso di lentigrandangolari o di camere mobili, inmodo che i robot potessero percepirel'ambiente senza dover muovere il cor-po. Un altro diffuso sistema di visualiz-zazione è la visione onnidirezionale,che sfrutta uno specchio iperbolicomontato sulla sommità di una videoca-mera allineata verticalmente. Questo si-stema permette ai robot di vedere a 360gradi, al prezzo di una risoluzione infe-riore in una specifica area. Inadatto peralcuni ruoli, questo sistema è usato in-vece da molte squadre per il portiere.
Inoltre possono essere necessari altrisensori, come sonar e sistemi di tatto,di forza e di torsione, per discriminarele situazioni che non possono essereanalizzate con la sola informazione vi-siva. Un tipico punto morto nella Ro-boCup si ha quando due robot si scon-trano in modo che le videocamere abordo non individuino l'altro robot. Inquesta situazione, un robot che di-sponga della sola informazione visivanon può accorgersi che qualcosa gliimpedisce i movimenti, poiché non ve-de alcun ostacolo. È perciò importanteche i robot siano equipaggiati con di-versi sensori, in modo da comprenderela situazione in cui sono coinvolti. Infi-ne, i dati raccolti devono essere elabo-rati e integrati in tempo reale.
• L'apprendimentoUno dei problemi emergenti della ri-
cerca può essere illustrato consideran-do i diversi aspetti dell'apprendimento.Per avere successo nella RoboCup, o-gni giocatore deve apprendere gli aspet-ti tecnici, il gruppo deve imparare ilgioco di squadra e un allenatore (unprogramma di addestramento) può do-ver imparare l'attitudine al comando.
Le capacità dei singoli comprendo-no tecniche di base, come il tiro e ilpassaggio, ma anche la «visione di gio-co», ovvero la capacità di deciderequale azione compiere secondo la si-tuazione. Il gioco di squadra è catego-rizzato in due tipi: il gioco locale - co-me far correre il pallone tra i giocatori- e il gioco globale, che è la strategiagenerale della disposizione in campo.Attualmente le categorie per robot rea-li sono focalizzate principalmente sullecapacità del singolo giocatore, mentrequella software si dedica ai problemidel gioco di squadra.
Il problema di come bilanciare l'ap-prendimento individuale e quello disquadra è un nuovo campo di ricerca.L'apprendimento deve avvenire prima,durante e dopo l'incontro. Prima dellagara, per l'addestramento i giocatoripossono sfruttare tutto il tempo che sivuole, ma se una squadra deve ade-guarsi alla strategia avversaria i gioca-tori devono poter apprendere durantela partita, in tempi dell'ordine di 5-10minuti. Le novità apprese durante un
incontro devono poi essere applicabilial successivo, sia che si incontri lo stes-so avversario sia che se ne incontri unonuovo. Inoltre la strategia deve esserecambiata anche nel caso in cui un gio-catore (o un avversario) subisca un in-cidente e non sia più in grado di ripren-dere il gioco; perciò il sistema deve sa-per riconoscere eventuali anomalie eadottare una nuova strategia.
È chiaro perciò che - quando si cercadi costruire un sistema integrato percompiti complessi - l'apprendimentopresenta molteplici aspetti. Se la Robo-Cup è limitata al calcio, presenta peròproblemi cui le attuali teorie dell'ap-prendimento non possono far fronte.Un approfondito studio di tutti gliaspetti del problema costituirebbe giàun primo passo verso la costruzione diagenti veramente autonomi.
Anche considerando uno solo diquesti aspetti, vi sono molti interessantiproblemi di ricerca. Minoru Asada,dell'Università di Osaka, sta cercandodi insegnare a un robot come compor-tarsi davanti alla porta. Egli adotta unatecnica di apprendimento «rafforzati-vo» per istruire il robot senza program-marne esplicitamente il comportamen-to durante la partita. Una scoperta inte-ressante è che un robot non può impa-rare in modo adeguato quando incon-tra fin dall'inizio portieri molto abili. Ilrobot ha appreso meglio davanti a unaporta vuota, poi davanti a una portacon il portiere fermo, quindi con unportiere in grado di muoversi lenta-mente e infine con un portiere rapido.E fondamentale per chi apprende che ladifficoltà dei compiti cresca, anzichédover affrontare il problema complessofin dall'inizio. Quando il portiere è cosìbravo che l'attaccante non può segnareun gol, ogni tentativo porta a un falli-
mento. E ciò pone il robot in condizio-ni di non apprendere nulla. Partendoinvece dal compito più facile, il robotpuò gradualmente arrivare a raggiun-gere obiettivi più difficili e complessi.
• Squadre di calcio che evolvonoSi può far evolvere una squadra di
giocatori software a tal punto che fac-cia bene anche contro squadre pro-grammate dall'uomo? Secondo SeanLuke, dell'Università del Maryland, larisposta è sì. Luke ha sviluppato unasquadra per la categoria simulatori fa-cendo lavorare per alcuni mesi un su-percomputer dell'Advanced Compu-ting Systems dell'Università del Mary-land, ed è riuscito a far evolvere unasquadra software che ha battuto squa-dre programmate dall'uomo, superan-do i primi turni della RoboCup 97.
Il Genetic Program (GP) è uno deicosiddetti metodi evolutivi, usati oggiin un ampio spettro di applicazioni.L'approccio evolutivo sta conquistan-do via via l'attenzione per la sua capa-cità di dedurre soluzioni ragionevol-mente buone senza che sia fornita al si-stema una conoscenza approfonditadel problema. Nondimeno, è usatoperlopiù per l'ottimizzazione di para-metri, e nessuno aveva cercato di ap-plicarlo seriamente al dominio dinami-co che caratterizza la RoboCup.
Quando Luke ha iniziato il suo pro-getto, molti erano scettici all'idea che ilsuo metodo potesse far evolvere unprogramma fino a farlo diventare com-petitivo: il successo di Luke ha quindirappresentato una relativa sorpresa. Al-l'inizio il suo programma creava codicirandom per il controllo dei giocatori.Nelle prime generazioni del program-ma non accadde nulla di buono: i gio-catori non sapevano nemmeno distin-
guere il pallone, sicché se ne stavanofermi o si muovevano senza senso. Percaso, alcuni giocatori iniziarono amuoversi verso il pallone calciandoloverso la porta e - con un po' di fortuna- segnarono un gol. Dopo poche centi-naia di generazioni, la popolazione eracostituita da programmi in cui i gioca-tori inseguivano il pallone un po' comenelle partite tra bambini, dove tutti cor-rono verso la palla cercando di calciar-la. In seguito, accidentalmente, qualcheprogramma ha imparato che sarebbeuna buona idea mettere qualcuno da-vanti alla porta per difenderla. Ciò ènotevole, perché non è stata introdottaalcuna nozione di «portiere», e i difen-sori emergono attraverso l'evoluzione.Poi insorgono altre strategie, più sofisti-cate. In particolare, mentre il compor-tamento dei giocatori a contatto colpallone è emerso e si è stabilizzato rapi-damente, la parte più consistente deltempo veniva utilizzata per istruire igiocatori lontani dalla palla. Ciò è par-ticolarmente interessante, perché il gio-co senza palla è l'aspetto più difficileanche per i calciatori umani.
• Lavoro di squadraIl lavoro di squadra ha un ruolo im-
portante nel calcio. Negli ultimi anni laricerca per progettare agenti autonomiche abbiano un comportamento coope-rativo sta suscitando sempre più atten-zione. Tuttavia non esiste ancora unmetodo standard, e i ricercatori stannosperimentando diversi approcci nellaRoboCup. La Carnegie-Mellon Univer-sity - che ha vinto nella categoria picco-li robot nella RoboCup 97 e 98 e nellacategoria simulatori nel 1998 - usa unapproccio in cui a ciascun giocatore èassegnato un ruolo dall'inizio. Durantel'incontro, però, le posizioni si scam-
36
LE SCIENZE 372/ agosto 1999
LE SCIENZE 372/ agosto 1999
37

o
r
o
L'Italia va alla RoboCup
I
n relazione all'attività promossa dalla Federazione Interna-zionale RoboCup, anche in Italia è stata avviata una ricercae sperimentazione nel settore, sin dalla prima competizione
internazionale di Nagoya, nel 1997.Già in quell'anno, infatti, è stato costituito il Comitato scienti-
fico nazionale italiano aderente alla Federazione internazionale,e una squadra dell'Università di Padova, il PaSo-Team (The Uni-versity of Padua Simulated Soccer Robot Team), ha partecipatocon onore alla competizione internazionale di Nagoya nella ca-tegoria per simulatori. Nell'anno successivo, è stato poi costitui-to - presso il Consorzio Padova Ricerche - il Progetto nazionaleRoboCup-Italia, al fine di promuovere lo sviluppo delle meto-dologie e tecnologie che permettano la partecipazione di squa-dre italiane di robot, sia reali che virtuali, alle competizioni ita-liane, europee e mondiali di calcio fra robot, sponsorizzati dallaFederazione internazionale.
È stata così costituita ART (Azzurra Robot Team), la primasquadra italiana di robot calciatori, attraverso una collaborazio-ne fra le Università di Brescia, Genova, Padova, Palermo, Parma eRoma e il Politecnico di Milano. ART ha partecipato alla Robo-Cup 98, svoltasi a Parigi, e alla RoboCup 99 di Stoccolma. Il PaSo-Team ha partecipato sempre con buoni risultati alle gare di Pari-gi, e ha vinto il primo Campionato italiano RoboCup per simula-tori che si è tenuto a Padova nell'autunno 1998. Altre Universitàitaliane stanno entrando nelle competizioni internazionali in si-mulazione, cosicché si può auspicare che nel giro di alcuni annil'iniziativa RoboCup sarà riuscita a stimolare la ricerca scientificain robotica mobile e a promuovere il coinvolgimento di indu-strie italiane qualificate nel settore della robotica di servizio.
RoboCup infatti ha due importanti effetti positivi: il primoè sensibilizzare l'attenzione verso le problematiche di ricerca nelsettore della robotica di servizio; il secondo è coinvolgere inquesta attività i giovani. Infatti, per sviluppare il complesso insie-me di strumenti hardware e software necessari per far compor-tare in modo intelligente i robot, non solo sono necessarie lecompetenze scientifiche e tecniche relative, ma è indispensabilel'entusiamo di giovani che dedichino molte ore di lavoro allo svi-luppo sia dei robot autonomi sia dei sistemi simulati.
La costituzione di ART e la sperimentazione dei sistemi simu-lati hanno stimolato la ricerca in varie aree strategiche. In parti-colare, l'obiettivo di ART è quello di costruire un team di robot,sfruttando le diverse esperienze deipartecipanti al progetto, che abbianodifferenti caratteristiche hardware esoftware, ma siano capaci di coordina-re le loro diverse abilità all'interno delteam. Perciò ART è composta da diver-se tipologie di giocatori, costruiti prin-cipalmente attorno a due strutturemeccaniche, una acquistata sul merca-to (la base mobile Pioneer), e una pro-gettata originariamente al Politecnicodi Milano (la piattaforma MoRo). Sopraqueste basi sono stati assemblati gio-catori con diverse caratteristiche fun-zionali, ma che sfruttino tutti materialeelettronico convenzionale, e possibil-mente di basso costo, cercando di ot-tenere un buon compromesso fra pe-so e autonomia, affinché ogni giocato-re abbia la possibilità di restare in gio-co per tutto il tempo necessario.
A sinistra, il leggendario portiere Saracinescu, progettato daRiccardo Cassinis dell'Università di Brescia. Qui sopra, il lo-go della ART, la sfida italiana alla RoboCup.
Inoltre riesce a mantenere con precisione la posizione di difesagrazie a un efficiente e collaudato sistema di autolocalizzazionerispetto alla propria porta. L'altro portiere, progettato dall'Uni-versità di Parma sempre su base Pioneer, è dotato di due tele-camere che sovrappongono parzialmente il loro campo visivo.
Gli attaccanti/difensori sono stati sviluppati seguendo tre di-versi approcci. Presso l'Università di Roma si è scelto di costruire,su piattaforma Pioneer, un software per il ragionamento auto-matico e la pianificazione, utilizzando l'ambiente di programma-zione SAPHIRA. Il robot è inoltre stato arricchito con alcuni stru-menti di autolocalizzazione. Il Politecnico di Milano ha progetta-to invece da zero sia la parte hardware che il software del pro-prio robot, seguendo un approccio basato su logica fuzzy sia peril controllo di basso livello che per le strategie di pianificazione.Ogni robot è dotato di un visore onnidirezionale. Il robot gioca-tore sviluppato su base mobile Pioneer in cooperazione fra l'Uni-versità di Genova e l'Università di Padova utilizza invece unastruttura di controllo basata su un nucleo di sistema operativo intempo reale costruito in ambiente Linux.
Informazioni generalisu RoboCup si trovano al sito:
h ttp://www.ro bocup.orq
Informazioni specifiche sulla Confe-renza IJCAI'99 di Stoccolma, ospite diRoboCup 99, si trovano al sito:http://www.dsv.su.se/ijcai-99/
Sul sito del Gruppo di lavoro in roboti-ca dell'AMA (GLR-AMA) vengonomantenuti sia la documentazione uf-ficiale sulle attività RoboCup in Italiasia i puntatori alle varie sedi, all'indi-rizzo:http://www.unipa.it:80/—glrobot/
Uno dei problemi più importanti che devono essere affrontatie risolti è quello del coordinamento fra i robot. Un meccanismoconsistente di arbitrato sta alla base di ogni capacità di esprimerecomportamenti collettivi coordinati da parte di gruppi di robot. Iproblemi sono resi complicati dal fatto che le possibili interferen-ze fra robot costituiscono un potenziale limite inibitorio alla li-bertà di comportamento di ciascun membro della squadra perevitare che ci sia una competizione dannosa sulle risorse. Un rea-le coordinamento fra i robot può avvenire solo se i singoli robotsviluppano azioni complementari utilizzando una qualche formadi predizione del comportamento dei compagni.
In prima istanza, ciò può essere realizzato tramite un sistemadi comunicazione esplicita delle intenzioni di ciascun compo-nente della squadra verso un robot referente, capace di interpre-tare le informazioni e rivederle opportunamente. Esiste però lapossibilità alternativa di passare le informazioni in modo non in-tenzionale, utilizzando una forma di comunicazione implicita:vale a dire, il coordinamento fra i robot è realizzato attraversol'osservazione da parte di ciascun robot della «situazione am-bientale» per l'estrazione di parametri caratteristici che permet-tano di interpretare le configurazioni del mondo che lo circondae agire in conseguenza. La cooperazione avviene quindi in modo«stigmergico», cioè attraverso l'osservazione del lavoro altrui.Questo metodo di cooperazione è molto promettente per i ro-bot veri, ed è stato usato con successo dal PaSo-Team nelle garein simulazione.
In conclusione, la ricerca può trarre notevoli benefici dallo svi-luppo dell'attività in ambito RoboCup. Di questo importante fat-to si sono resi conto sia la AMA (Associazione Italiana per l'Intel-ligenza Artificiale) sia la SIRI (Associazione Italiana di Robotica),che hanno patrocinato la costituzione del Progetto RoboCup-Italia. L'auspicio migliore è che anche aziende italiane significati-ve nel settore dell'automazione industriale e dei servizi voglianoentrare come finanziatori delle attività di ricerca e di sviluppotecnologico, per permettere al nostro paese di restare al passocon i paesi più avanzati, come Germania, Giappone e Stati Uniti.
ENRICO PAGELLO
ENRICO PAGELLO svolge la sua attività scientifica alla Facoltà diingegneria dell'Università di Padova, dove è professore associato difondamenti di informatica, e presso l'Istituto LADSEB del CNR nell'A-rea di ricerca di Padova. È inoltre il responsabile italiano di un Proget-to bilaterale, finanziato dal CNR per svolgere ricerche sui sistemi mul-tirobot in cooperazione con Tamio Arai dell'Università di Tokyo.
boCup-Italia sono mantenute dalConsorzio Padova Ricerche all'indiriz-zo:http://www.i pe rv. it/RO BOCU P ITA LI A/
Fra i siti stranieri di descrizione delleattività di ricerca in Robocup, si se-gnalano particolarmente:
http://www.er.ams.eng.osaka-u.ac.jp./robocup/trackies/http://www.informatik.uni freiburg.de/—ki/forschung/robocup.htmlit http://www.cs.cmu.edu/— robosoc-cer/http://www.ki.informati k.h u -berl i n.de/RoboCup
Ogni giocatore ha a bordo un sistema di radiotrasmissione(per permettere la comunicazione con gli altri componenti del-la squadra), un sistema di visione composto da un frame grab-ber e un modulo ottico di acquisizione dell'immagine a colori(scelto fra tre diversi tipi: una videocamera a CCD singola, un vi-sore onnidirezionale, o due videocamere a CCD il cui campo vi-sivo si sovrappone parzialmente), e un PC convenzionale cheelabora tutte le informazioni sensoriali e gestisce i vari compor-tamenti individuali e collettivi (implementati su un kernelsoftware di due diversi tipi: un sistema di regole basate sulla lo-gica fuzzy o un sistema operativo multitasking in tempo reale).
In ART ci sono attualmente due robot portieri. Uno - Saraci-nescu, nome di dubbia origine sarda - allestito dall'Università diBrescia su piattaforma Pioneer, ha già giocato a Parigi lo scorsoanno riscuotendo grande successo, e risultando forse il migliorportiere del campionato. Questo robot è dotato di un sistemadi visione onnidirezionale, e basa le sue capacità difensive su uncomportamento squisitamente reattivo. Il robot è capace di in-terpretare la posizione degli avversari e di anticiparne le mosse.
La RoboCup in Italia in sintesi• Università italiane partecipanti alle gare in simulazione
Bologna, Padova, Pisa e Udine.
• Università italiane partecipanti alla Squadra nazionale ART di robot nellacategoria medie dimensioni
Brescia, Genova, Padova, Palermo, Parma e Roma e Milano-Politecnico.
• Associazioni patrocinanti il Progetto di ricerca nazionale RoboCup-ItaliaAI*IA (Associazione Italiana per l'Intelligenza Artificiale) e SIRI (Asso-ciazione Italiana di Robotica)
• Sede del Progetto RoboCup-ItaliaConsorzio Padova Ricerche
• Spesa complessiva per la ricerca nel settore effettuata dalle varie sedi nel 1998250 milioni di lire circa.
Una dettagliata illustrazione sull'ar-chitettura hardware e software deigiocatori e sull'attività di ART è man-tenuta al sito:http://www.d is.0 n i roma 1.it/—nardi/ART.html tramite il quale si accede anche ai sitidei singoli membri di ART.
L'attività di ricerca in RoboCup relati-va sia alla partecipazione in ART sia al-lo sviluppo del PaSo-Team, primasquadra italiana che ha giocato in si-mulazione, si trova al sito:http://www.dei.0 n ipd.it/—robocup/
Informazioni generali sul Progetto Ro-
38
LE SCIENZE 372/ agosto 1999
LE SCIENZE 372/ agosto 1999
39

Qui a fianco, il «tutto esaurito» agli incontri per robot di medie dimensioni durante la RoboCup 98, dispu-tata a Parigi. Sopra, una fase di gioco della categoria piccoli robot. La capacità di muoversi effettuando ra-pidi cambiamenti di direzione è un problema ancora irrisolto.
biano, a causa della natura dinamicadel gioco, e un centrocampista può tro-varsi nel ruolo di difensore o di ala.Con questo metodo, ogni giocatore è ingrado di giocare in qualsiasi ruolo, maquando le situazioni di gioco si risolvo-no ognuno torna al suo posto.
Una squadra dell'Information Scien-ce Institute della University of Sou-thern California sfrutta l'architetturadi pianificazione SOAR per l'esecuzio-ne di un «operatore di squadra». Anzi-ché assegnare uno specifico piano diesecuzione a ogni giocatore, la squadradell'ISI/USC sfrutta un operatore che siapplica a due o tre giocatori che for-mano un gruppo, come gli attaccanti oi centrocampisti. Gli operatori, come«attacco dalla destra», vengono inviatia un gruppo di giocatori, e ciascun gio-catore, in base alla sua posizione, in-terpreterà ed eseguirà gli ordini checompetono al suo ruolo.
Se questi sono aspetti della ricerca dibase, ci sono altri problemi relativi allavoro di squadra. Quando un gioca-tore subisce un infortunio, qualcunodeve riempire il vuoto lasciato dal gio-catore danneggiato, oppure bisognamodificare l'intera strategia di squadrain modo che l'assenza non produca di-sastrosi sbilanciamenti. Ciò richiedeche ciascun giocatore riconosca le ano-malie negli altri giocatori, valuti la si-tuazione, ripianifichi la strategia inmodo dinamico e generi un nuovo pia-no di lavoro di squadra. Ogni progres-so in questo campo sarà senza dubbiodi aiuto per l'intelligenza artificiale eper la robotica mobile collettiva.
• Il progetto meccanicoGià per i robot su ruote ci sono mol-
ti problemi di progettazione meccani-ca, in particolare di manovrabilità. Ungruppo dell'Istituto giapponese di ri-cerca chimica e fisica ha sviluppato unsofisticato meccanismo a ruote checonsente al robot di muoversi rapida-mente in qualsiasi direzione. Nei tradi-zionali robot su ruote, per cambiare di-rezione si usa un volante o si sfrutta ladifferente rotazione di una coppia diruote. Il meccanismo a ruote onnidire-zionale consiste di quattro ruote chepossono essere sollevate in modo indi-pendente, sicché la combinazione delleruote a terra può imprimere impulso alrobot nella direzione desiderata.
Nella RoboCup 1997 il Royal Mel-bourne Institute of Technology ha mes-so in campo una squadra di robot on-nidirezionali che si muovevano su duesfere guidate da una coppia di alberi di-sposti ortogonalmente. Secondo la dif-ferenza di rotazione degli alberi, le sferepossono ruotare in qualsiasi direzione
senza far ruotare su se stesso il robot.Per la categoria piccoli robot, due in-
gegneri giapponesi hanno sviluppatorobot molto sofisticati e compatti, do-tati di un sistema di guida onnidirezio-nale a quattro ruote motrici asincrone,in grado di cambiare direzione in modoindipendente. Recano anche a bordodue videocamere e un sistema di elabo-razione della visione: il tutto su robotdi 5 centimetri per 10, che se la sonocavata assai bene nella RoboCup 1998.
• Architetture di agentiL'architettura di agenti, che è un
quadro per organizzare la selezione dipercezione e azione di ciascun giocato-re, è il fondamento dell'intero sistema.In passato gran parte dei sistemi di in-telligenza artificiale era progettata perun singolo compito. I giocatori dellaRoboCup devono essere in grado dieseguire molti compiti secondari, cometirare, dribblare, passare, colpire di te-sta, compiti che spesso implicano uncomportamento collettivo, per evitarel'intervento degli avversari.
Ci sono due modi di costruire ungiocatore per la RoboCup. Progettareciascun componente specializzato perun singolo comportamento e assembla-re poi le pani; oppure progettare uno odue componenti in grado di svolgerecompiti secondari multipli. La proget-tazione di agenti con compiti multipli èuno dei problemi aperti della ricerca.
Inoltre c'è il problema del combina-re l'approccio reattivo e l'approcciodeliberativo. Per reagire rapidamenterispetto al pallone e muoversi lungo ilcampo, un qualsiasi approccio reattivopuò essere efficace. Però i giocatori de-vono avere una strategia globale digioco, oltre a una tattica locale. E que-sta non può essere realizzata dai soli si-stemi reattivi. D'altra parte un approc-cio deliberativo - basato su pianifica-zione e ragionamento - può esseretroppo lento per far fronte a un am-biente che cambia in modo dinamico.L'architettura di agenti per i giocatoridella RoboCup deve risolvere il pro-blema di combinare questi approcci.
• Muscoli artificialiSebbene i robot attuali si muovano
mediante motori e ingranaggi, questometodo è fragile e inefficiente. È, un si-stema di trasmissione seriale in cui ilmalfunzionamento di un componentecompromette l'operatività del robot.Inoltre motori sufficientemente potentitendono a essere troppo grandi e trop-po pesanti. D'altra parte, quello mu-scolare è un bel sistema, di alta poten-za ed efficienza, nonché di notevole ro-bustezza. È anche leggero e compatto.
I robot che giocano a calcio devonoessere capaci di correre e saltare. È im-possibile che gli attuali sistemi a moto-re mettano un robot in condizione dieseguire queste azioni. Deve essere svi-
luppato un sistema di movimento dra-sticamente differente, che potremmochiamare «muscolatura artificiale». Unsimile sistema potrebbe essere costitui-to da fasce capaci di contrarsi e rila-sciarsi senza consumare molta energia,e che occupino relativamente pocospazio. Una volta sviluppati, i muscoliartificiali avrebbero un impatto indu-striale in grado di cambiare la proget-tazione di ogni classe di prodotti.
La RoboCup-RescueL'ampiezza delle tecnologie coinvol-
te e le caratteristiche di un obiettivocomplesso come il gioco del calcio pos-sono far prevedere diverse applicazionifuture socialmente ed economicamentesignificative, come sistemi intelligentiper la gestione del traffico, robot dasoccorso, robot da casa e da ufficio,per l'assistenza ai disabili, per missionipericolose. Per facilitare il trasferimen-to della tecnologia dal campo di calcioalle applicazioni reali, così come permettere a punto caratteristiche com-plementari che il calcio non prevede,stiamo facendo partire un dominio se-condario della RoboCup: abbiamoscelto la ricerca e il soccorso in disastridi grandi proporzioni.
Immaginiamo che un forte terremo-to colpisca città come Los Angeles oTokyo. Le lezioni apprese da Kobe e daaltri disastri di questo tipo indicano
che, se devono essere dispiegati robotautonomi, occorre sviluppare automirobusti e di elevata intelligenza. Le ca-ratteristiche di una missione di salva-taggio coincidono per molti aspetti conquelle di una partita di calcio, ma han-no anche peculiarità che nel calcio sonoassenti. In un disastro di gran-di proporzioni sono disponibili soloinformazioni parziali, per di più in granparte false. Via via che la situazione sichiarisce, saranno disponibili più infor-mazioni, ma ancora molte di esse nonsaranno corrette. Il campo è ostile e di-namico. Devono essere rapidamentedeterminate strategie di dispiegamentoglobali, che vanno modificate al muta-re delle informazioni. La logistica è laquestione dominante in questo con-testo, a differenza del gioco del calcio.
Dopo aver dispiegato sul camposquadre di robot, è molto probabileche alcuni di essi si danneggino, equindi occorrerà rivedere la strategiadi tutto il gruppo in tempo reale. I ro-bot, inoltre, devono lavorare in squa-dra per individuare e salvare i supersti-ti. Sensori multipli - come videocamerea CCD e all'infrarosso, sonar e mi-crofoni - saranno usati da diversi tipidi robot e da esseri umani sul sito perscoprire il più rapidamente possibile levittime del disastro e salvare i supersti-ti. Dopo aver trovato una persona an-cora in vita, i robot devono collabora-re per liberarla dalle macerie. Per e-
sempio, un robot può sollevare unaparete caduta, mentre altri estraggo-no le persone dall'interno dell'edificio.Ulteriori robot possono poi trarre insalvo le persone ancora in vita. Ciò ri-chiede alti livelli di lavoro di squadra.Poi c'è il problema di trasferire i feritiin ospedale, il che richiede il blocco dialcune strade per poterle usare solo perla logistica e il trasporto delle vittime.
La RoboCup-Rescue, perciò, saràsuddivisa in due aree: la simulazionedi strategie di soccorso per disastri sugrande scala e lo studio di robot chesappiano lavorare in squadra con altrirobot e con esseri umani per la ricercae il salvataggio delle vittime sotto lemacerie in un luogo specifico. L'areaper simulatori emulerà missioni disalvataggio in caso di catastrofi natu-rali, valuterà come un gruppo di a-genti possa svolgere compiti di salva-taggio e come due gruppi di agenti,incontrandosi, possano stabilire unacollaborazione.
La RoboCup-Rescue per robot realisarà inizialmente focalizzata sulla ri-cerca di superstiti. Supponendo chequesti si trovino sotto le macerie, unasquadra di robot dovrà trovare la vitti-ma nel minor tempo possibile. Le ma-cerie possono essere instabili e difficil-mente penetrabili. Robot speciali equi-paggiati con diversi sensori dovrannocoprire l'area e trovare tutte le personedisperse con rapidità ed efficienza.
40
LE SCIENZE 372/ agosto 1999 LE SCIENZE 372/ agosto 1999
41
613irco p ti lea6,ortitio 1. t Mr-o ple
niiini:iierolte/ogi 9eier,ile C'ef riirc> r(di
!ENTEL'obiettivo educativo
La natura onnicomprensiva dellaRoboCup la rende il terreno ideale percorsi di robotica e intelligenza artificia-le orientati al progetto. Si stanno giàprogettando corsi universitari e post-universitari basati sulla RoboCup. Sista inoltre mettendo a punto un'infra-struttura educativa che prende il nomedi RoboCup Jr., che riflette le esigenzedelle istituzioni deputate all'istruzione.La RoboCup Jr. userà robot meno co-stosi, e saranno stabiliti obiettivi piùsemplici di quelli di alto livello impostiper la RoboCup vera e propria.
La RoboCup offre terreno fertile perl'intelligenza artificiale, la robotica e icampi di ricerca a esse correlati. L'o-biettivo finale è così ambizioso che nonsi può immaginare di raggiungerlo abreve termine. Tuttavia, avendo benchiaro lo scopo e i tempi proposti perottenerlo, possiamo immaginare unpreciso cammino per raggiungerlo, eogni passo avanti genererà un insiemedi tecnologie che avrà un importanteimpatto industriale. La RoboCup è unsogno e una sfida. In questo periodo, èuna delle aree di ricerca in robotica checrescono più rapidamente: la comunitàsi sta espandendo e sta condividendoesperienze, conoscenze e risorse in dire-zione di questo sogno comune.
HIROAKI KITANO, specializzatosiin scienza dei calcolatori all'Universitàdi Kyoto, è ricercatore ai Sony Compu-ter Science Laboratories. Nel 1993 havinto il Computers and Thought A-ward dell'International Joint Conferen-ces on Artificial Intelligence. I suoicampi di ricerca comprendono la Ro-boCup, la biologia molecolare compu-tazionale e i sistemi evolutivi.
MINORU ASADA si è specializzatoin robotica nel 1982 all'Università diOsaka, dove è rimasto come ricercato-re fino al 1988. Dall'aprile 1997 è pro-fessore presso il dipartimento di sistemiadattativi del medesimo ateneo. Findall'inizio è coinvolto nelle attività del-la RoboCup e una sua squadra ha vin-to un torneo nell'edizione del 1997.
ASADA M. e KITANO H. (a cura), Robo-Cup-98: Robot Soccer World Cup II,Springer-Verlag, 1999.
KITANO H. (a cura), RoboCup-97:Robot Soccer World Cup I, Springer--Verlag, 1998.
KrrANo H. e altri, RoboCup: Chal-lenge AI Problem, «AI Magazine»,AAAI, marzo 1997.