
REALIZZAZIONE HARDWARE E SOFTWARE DI UN ROBOT MOBILE DI SERVIZIO
14
REALIZZAZIONE HARDWARE E SOFTWARE DI UN ROBOT MOBILE DI SERVIZIO Tesi di Laurea in SISTEMI OPERATIVI Laureando: Basilio Marco Matessi Relatore: Chiar.mo Prof. Enzo Mumolo Anno Accademico 2009-2010
-
Upload
basix86 -
Category
Technology
-
view
66 -
download
1
Transcript of REALIZZAZIONE HARDWARE E SOFTWARE DI UN ROBOT MOBILE DI SERVIZIO

REALIZZAZIONE HARDWARE E SOFTWARE DI UN ROBOT MOBILE DI
SERVIZIOTesi di Laurea in
SISTEMI OPERATIVI
Laureando:Basilio Marco Matessi
Relatore:Chiar.mo Prof. Enzo Mumolo
Anno Accademico 2009-2010

IntroduzioneScopo di un robot mobile di servizio: sviluppare un sistema autonomo che realizzi un servizio utile all'uomo.
In questa tesi è stato sviluppato un robot prototipale.
Obbiettivo: realizzare una flotta di robot mobili per provare algoritmi di coordinazione.
Software realizzato: movimento casuale del robot, schivando gli ostacoli.
Architettura cognitiva a priorità.
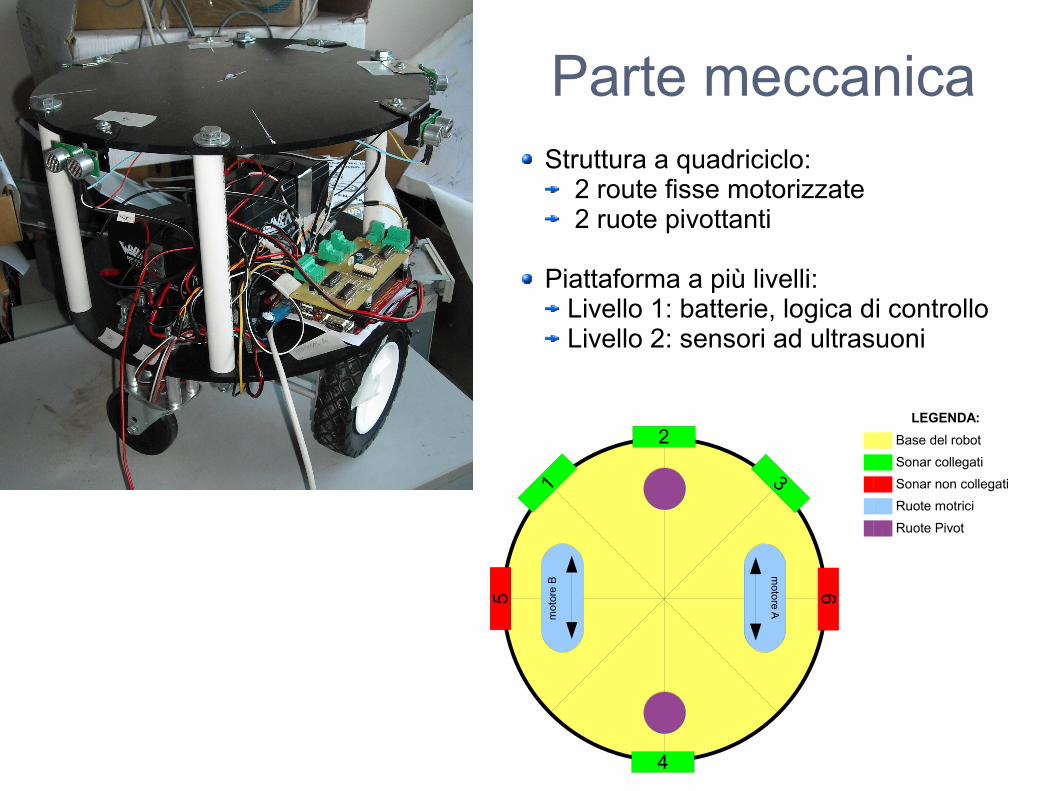
Parte meccanica
2
4
5 6
mot
ore
B
motore A
LEGENDA:███ Base del robot███ Sonar collegati███ Sonar non collegati███ Ruote motrici███ Ruote Pivot
Struttura a quadriciclo: 2 route fisse motorizzate 2 ruote pivottanti
Piattaforma a più livelli:Livello 1: batterie, logica di controlloLivello 2: sensori ad ultrasuoni
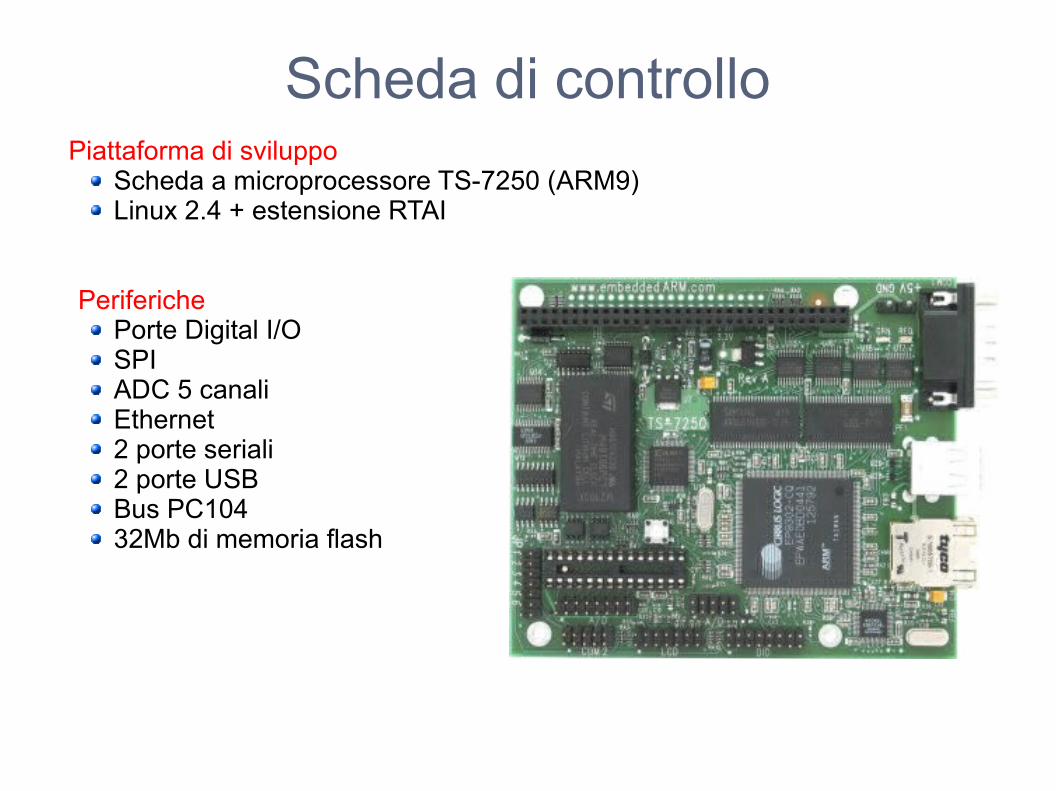
Scheda di controlloPiattaforma di sviluppo
Scheda a microprocessore TS-7250 (ARM9)Linux 2.4 + estensione RTAI
PeriferichePorte Digital I/OSPIADC 5 canaliEthernet2 porte seriali2 porte USBBus PC10432Mb di memoria flash
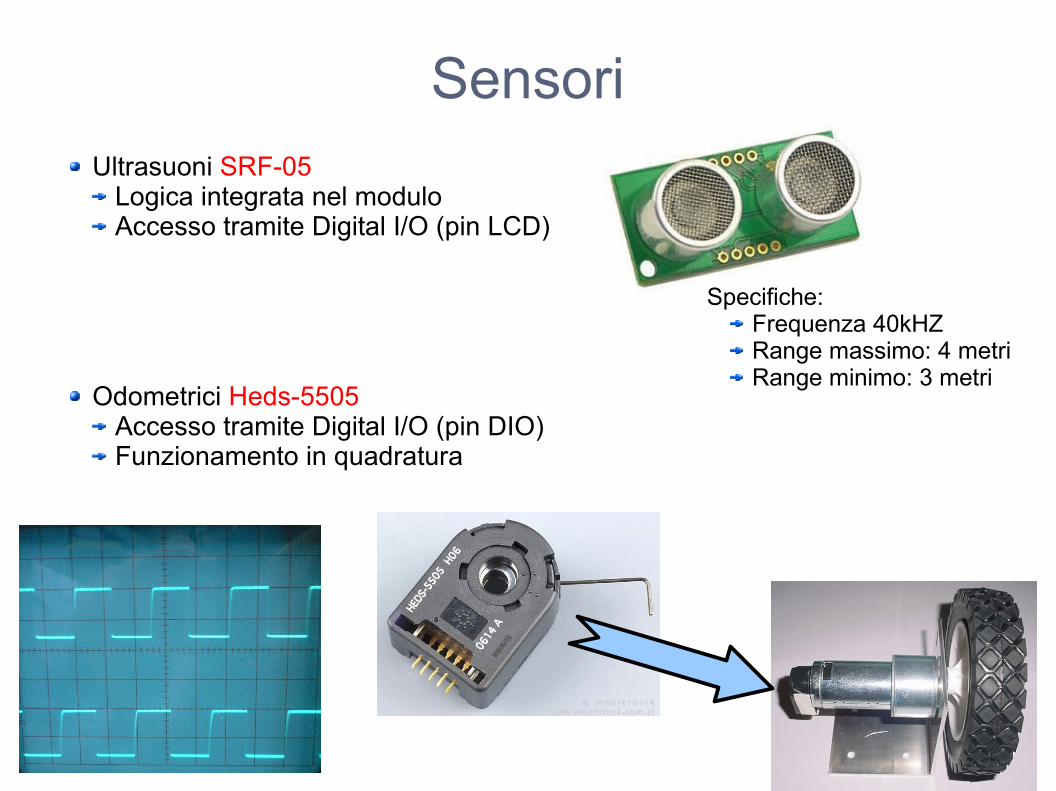
SensoriUltrasuoni SRF-05
Logica integrata nel moduloAccesso tramite Digital I/O (pin LCD)
Odometrici Heds-5505Accesso tramite Digital I/O (pin DIO)Funzionamento in quadratura
Specifiche:Frequenza 40kHZRange massimo: 4 metriRange minimo: 3 metri
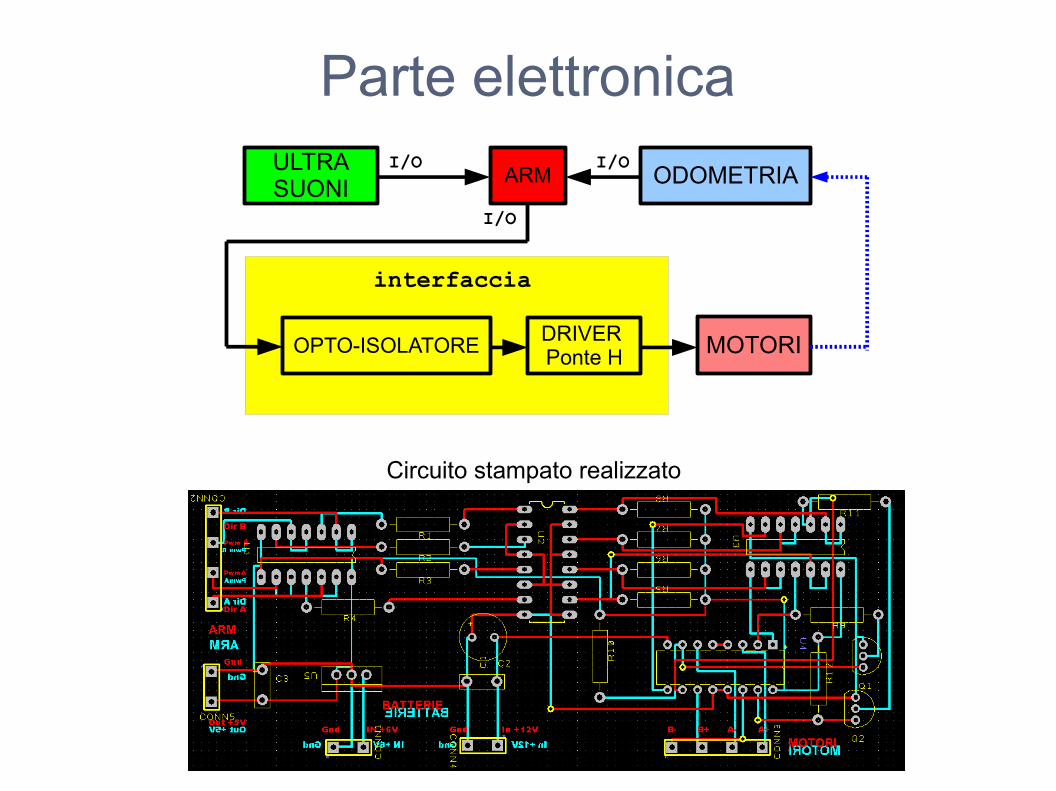
Circuito stampato realizzato
Parte elettronicaARM
OPTO-ISOLATORE DRIVER Ponte H MOTORI
interfaccia
I/OULTRASUONI ODOMETRIA
I/O
I/O
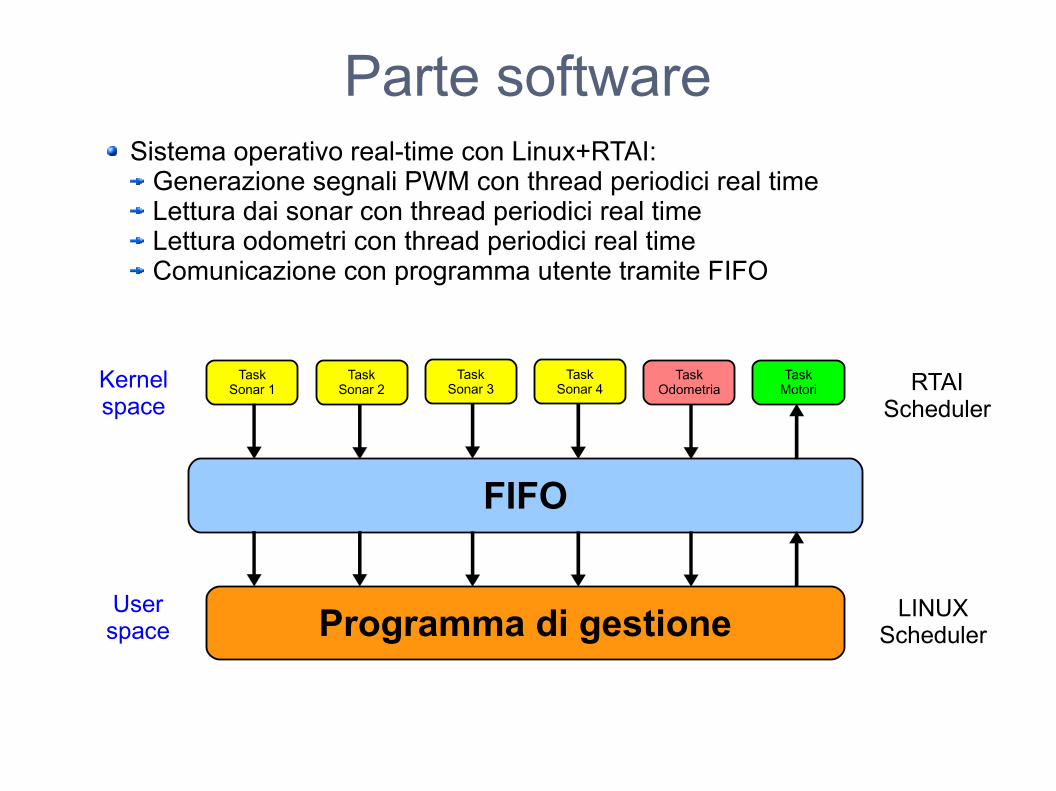
Parte softwareSistema operativo real-time con Linux+RTAI:
Generazione segnali PWM con thread periodici real timeLettura dai sonar con thread periodici real timeLettura odometri con thread periodici real timeComunicazione con programma utente tramite FIFO
TaskSonar 1
TaskSonar 2
TaskMotori
FIFO
Programma di gestione
TaskSonar 3
TaskSonar 4 RTAI
SchedulerTask
Odometria
LINUXScheduler
Kernel space
Userspace
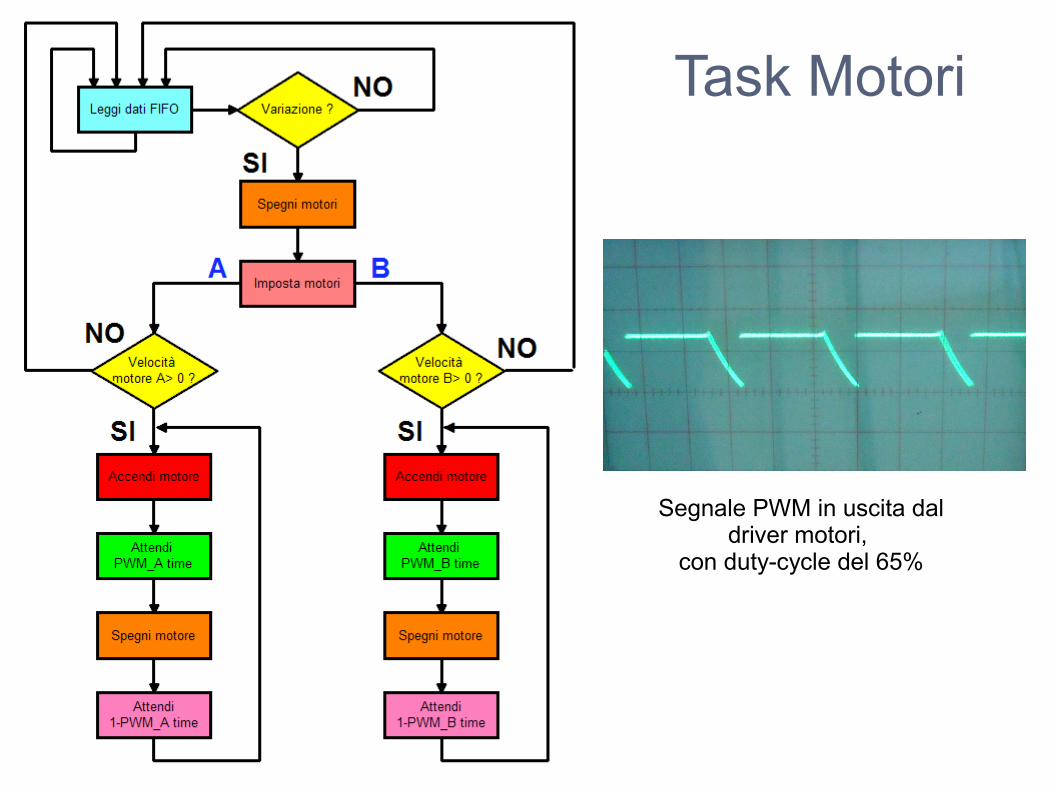
Task Motori
Segnale PWM in uscita dal driver motori,
con duty-cycle del 65%
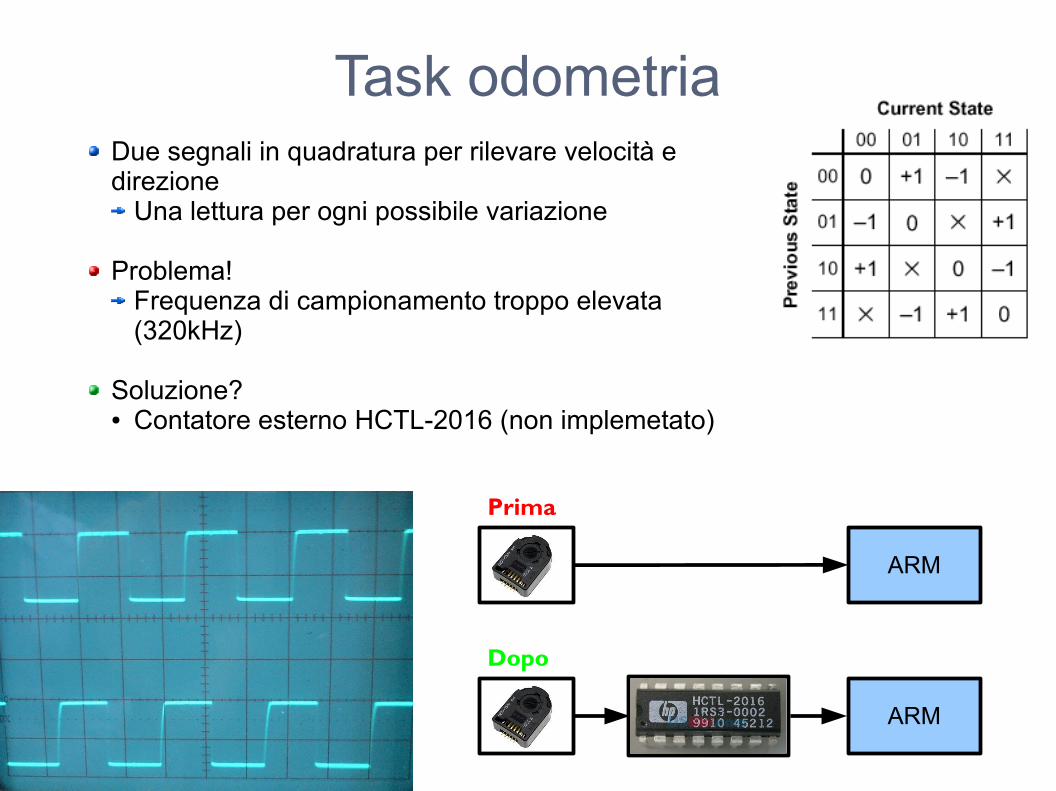
Due segnali in quadratura per rilevare velocità e direzione
Una lettura per ogni possibile variazione
Problema!Frequenza di campionamento troppo elevata (320kHz)
Soluzione?● Contatore esterno HCTL-2016 (non implemetato)
Task odometria
ARM
ARM
Prima
Dopo
Debug dei taskDebug dei sonar:
Task che periodicamente: Legge il valore dei sensoriStampa su terminale le distanze
Debug motore:Invio manuale di comandi alla FIFO dei motori
Da terminale:
Debug odometria:Task che periodicamente:
Legge lo stato dei sensoriVerifica se ci sono state variazioniConta la distanza percorsaStampa su terminale dei valori
echo -n "comando" > /dev/rtf/"fifo_motori"
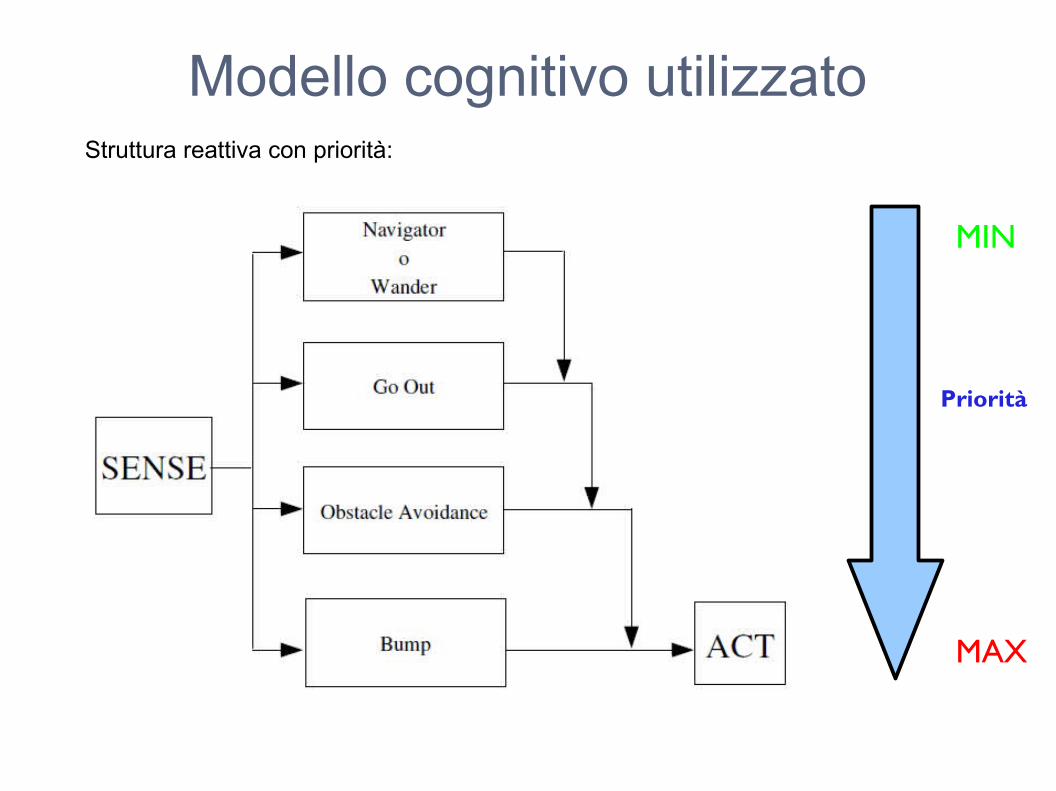
Modello cognitivo utilizzatoStruttura reattiva con priorità:
Priorità
MAX
MIN
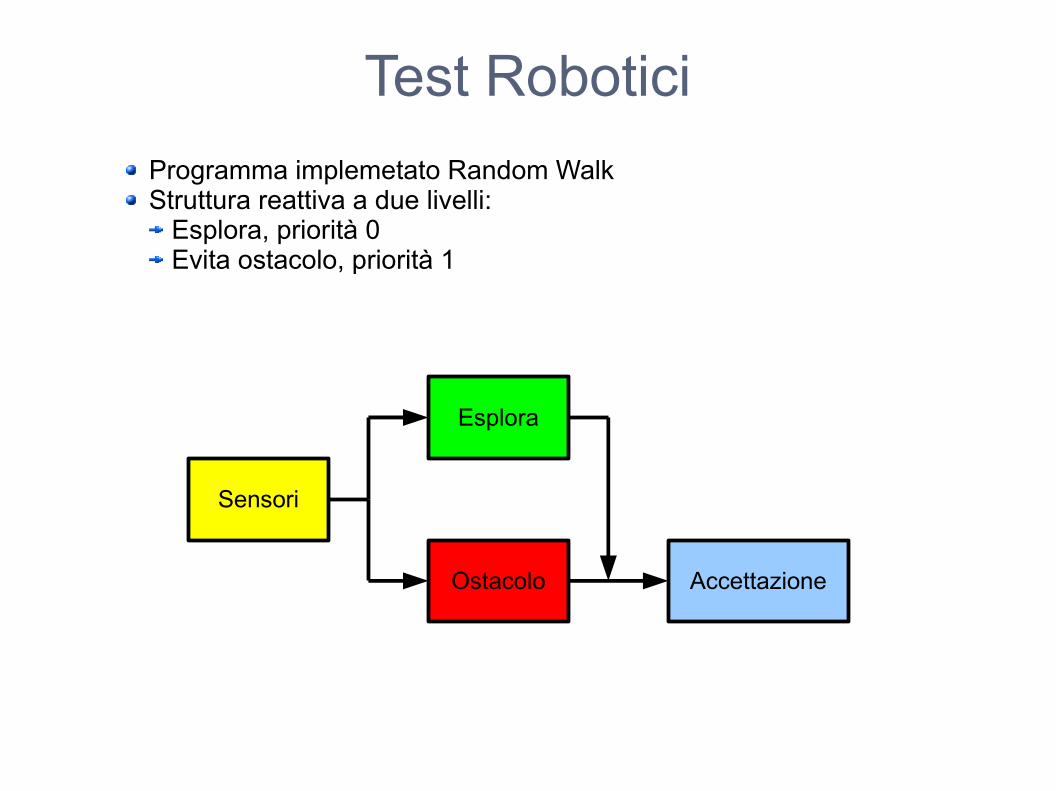
Test RoboticiProgramma implemetato Random WalkStruttura reattiva a due livelli:
Esplora, priorità 0Evita ostacolo, priorità 1
Sensori
Esplora
Ostacolo Accettazione
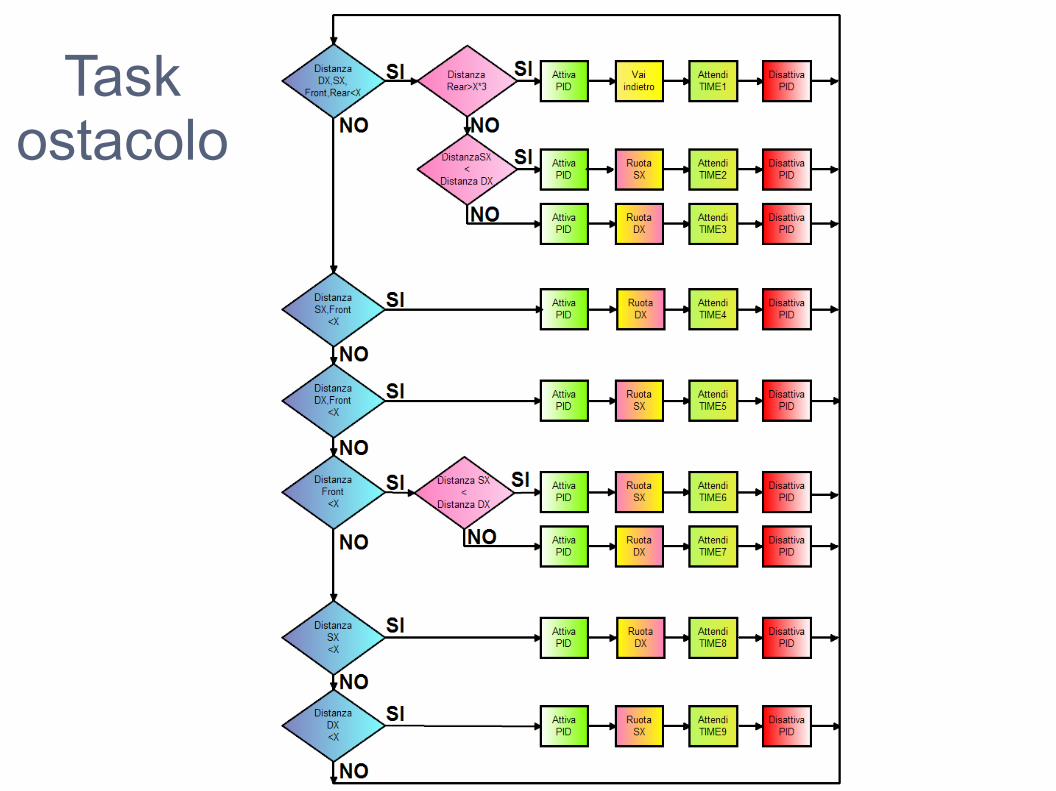
Taskostacolo
Conclusioni
E' stato realizzato un prototipo che usa i sensori ad ultrasuoni per evitare ostacoli.
Il controllo dei motori è stato realizzato dalla scheda ARM utilizzata.
E' stato usato Linux con un patch Real Time.
La lettura degli odometri e' stata progettata ma non realizzata in questa tesi.
E' stato realizzato un programma di movimento casuale nell'ambiente.
Il prototipo funziona correttamente ed è pronto per essere duplicato in diversi esemplari.


















