Presentazione di...
112
MATLAB
-
Upload
phungquynh -
Category
Documents
-
view
214 -
download
0
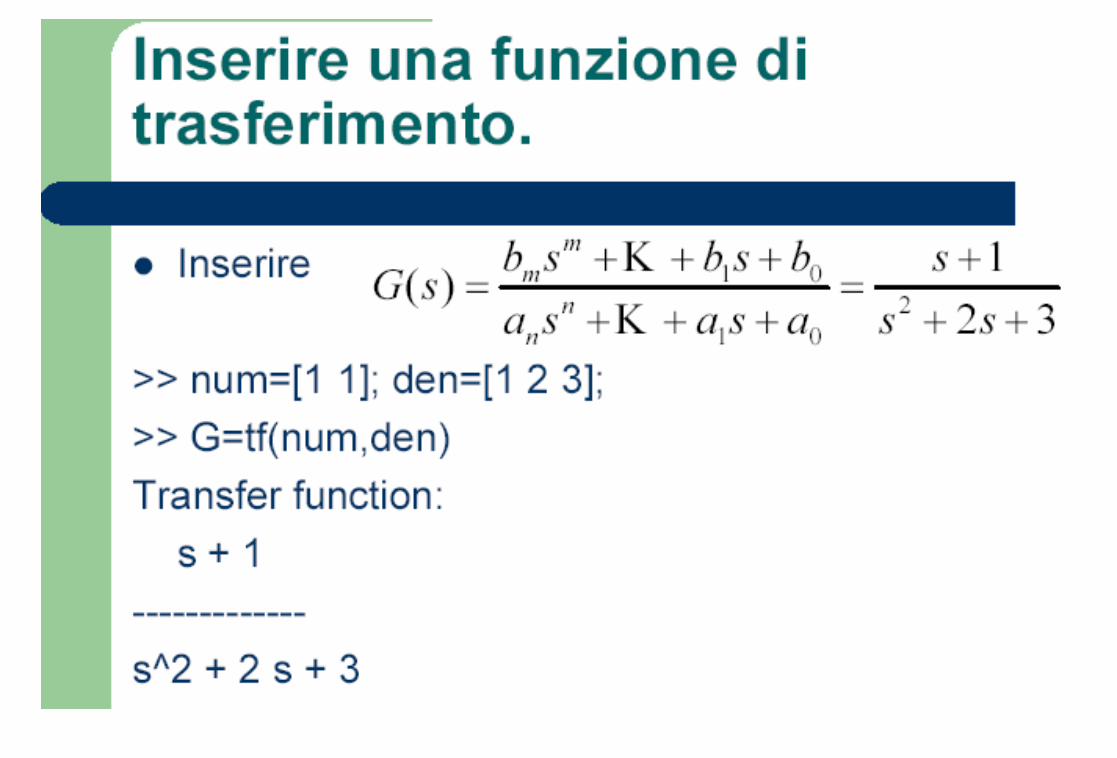
Transcript of Presentazione di...

MATLAB

• MATLAB (MATrix LABoratory) è un linguaggio di
programmazione per applicazioni scientifiche (elaborazione
numerica dei segnali, progetto di simulatori, sintesi di
sistemi di controllo, ecc.)
• MATLAB è un interprete di comandi. I comandi possono
essere forniti interattivamente o contenuti in files su disco
(M-files)
• Comprende un vasto set di funzioni predefinite e numerose
librerie (toolbox) per svariate applicazioni
• Le potenzialità di MATLAB possono essere facilmente
estese (è semplice creare nuovi toolbox)
• E' possibile convertire un programma MATLAB in codice C
e C++ in modo automatico
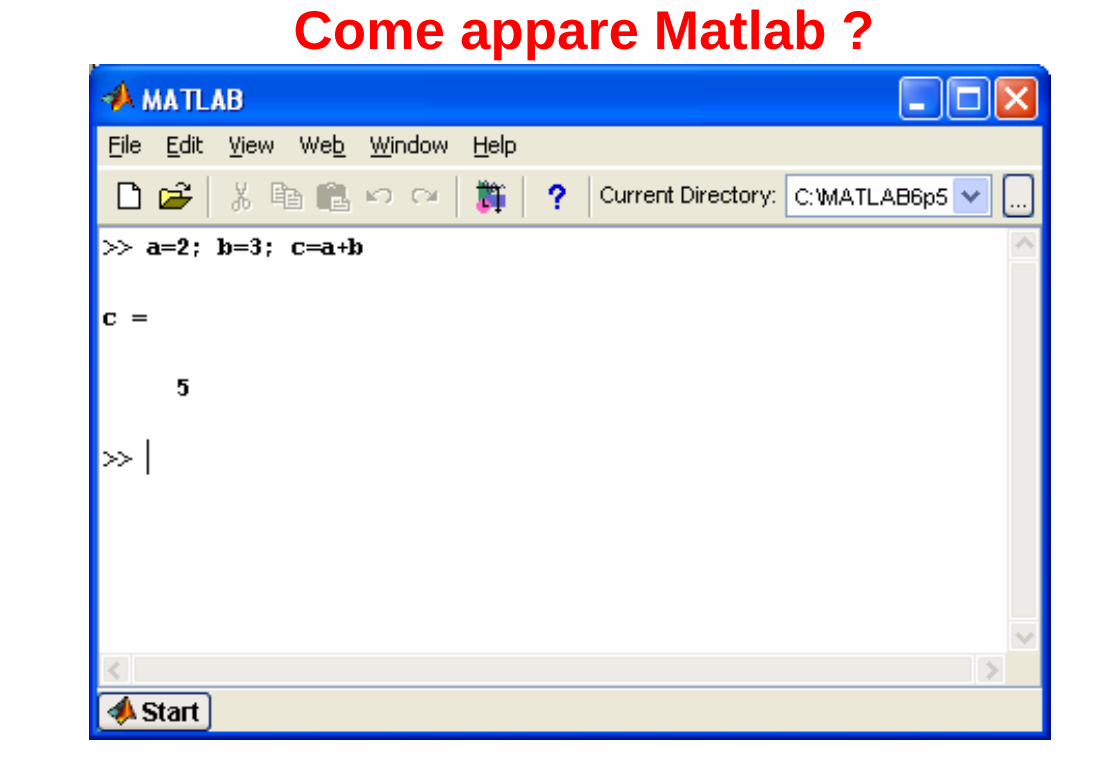
Come appare Matlab ?
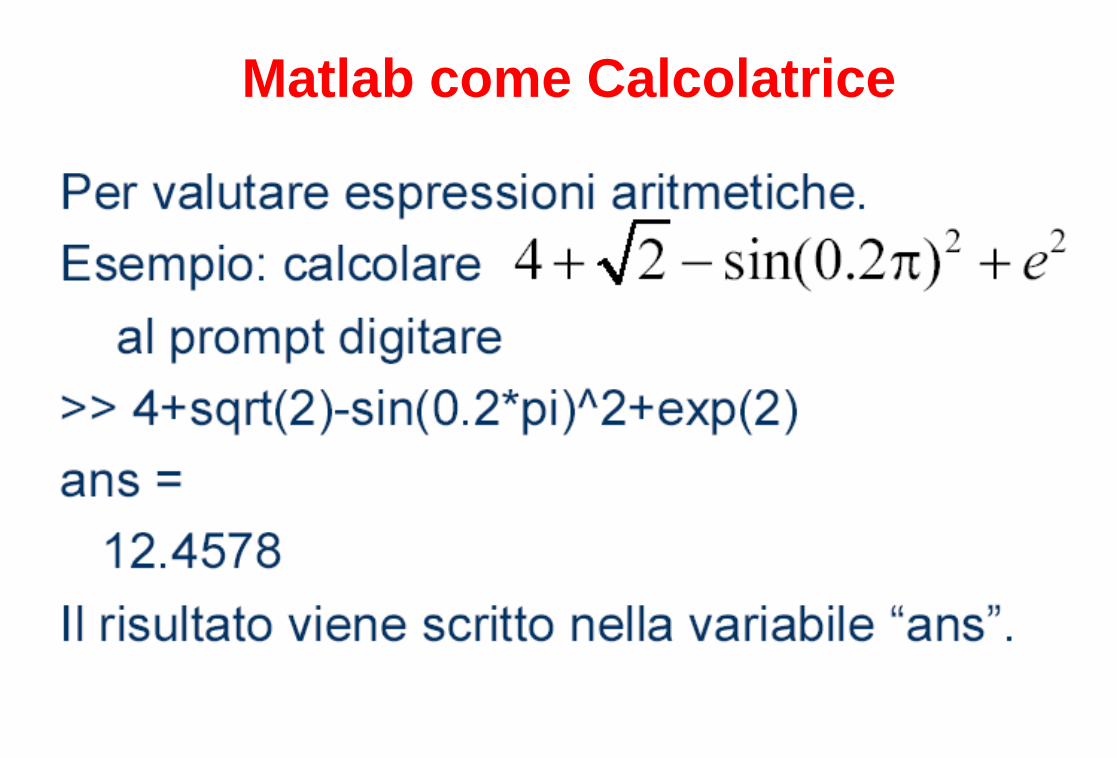
Matlab come Calcolatrice
Definizione Variabili

Workspace • Tutte le variabile definite o calcolate vengono tenute
automaticamente in memoria e posso essere richiamate
successivamente.
Lettura e scrittura dati su FILE
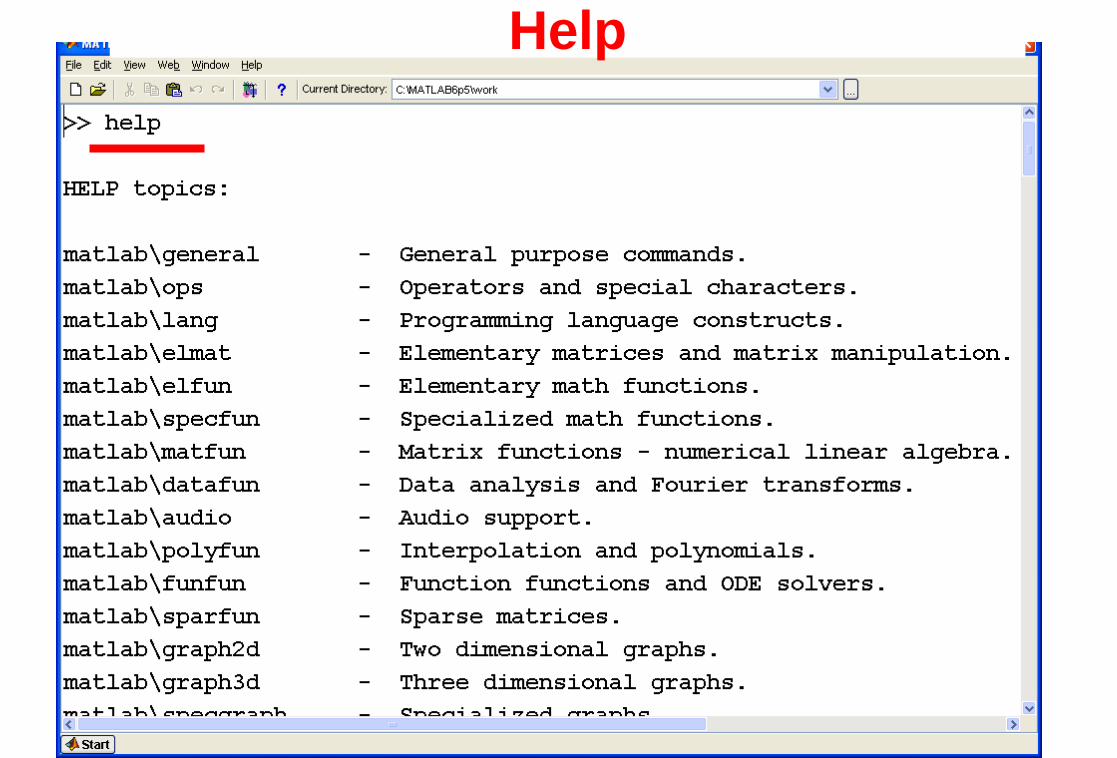
Help
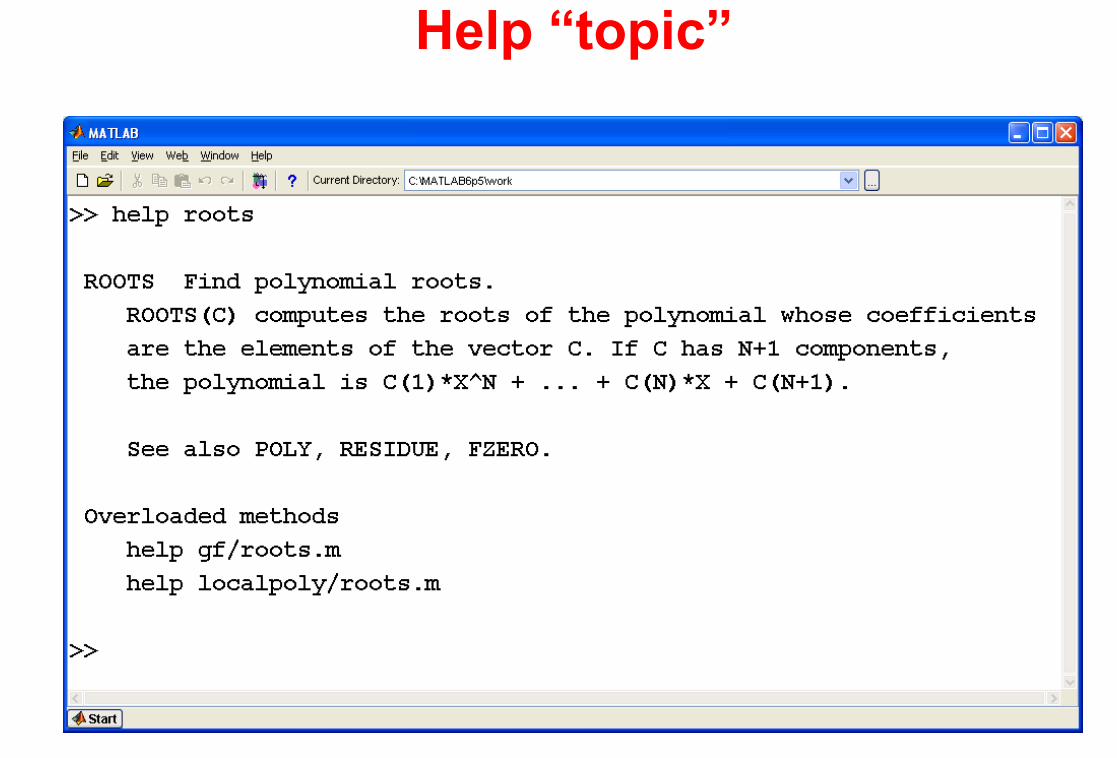
Help “topic”
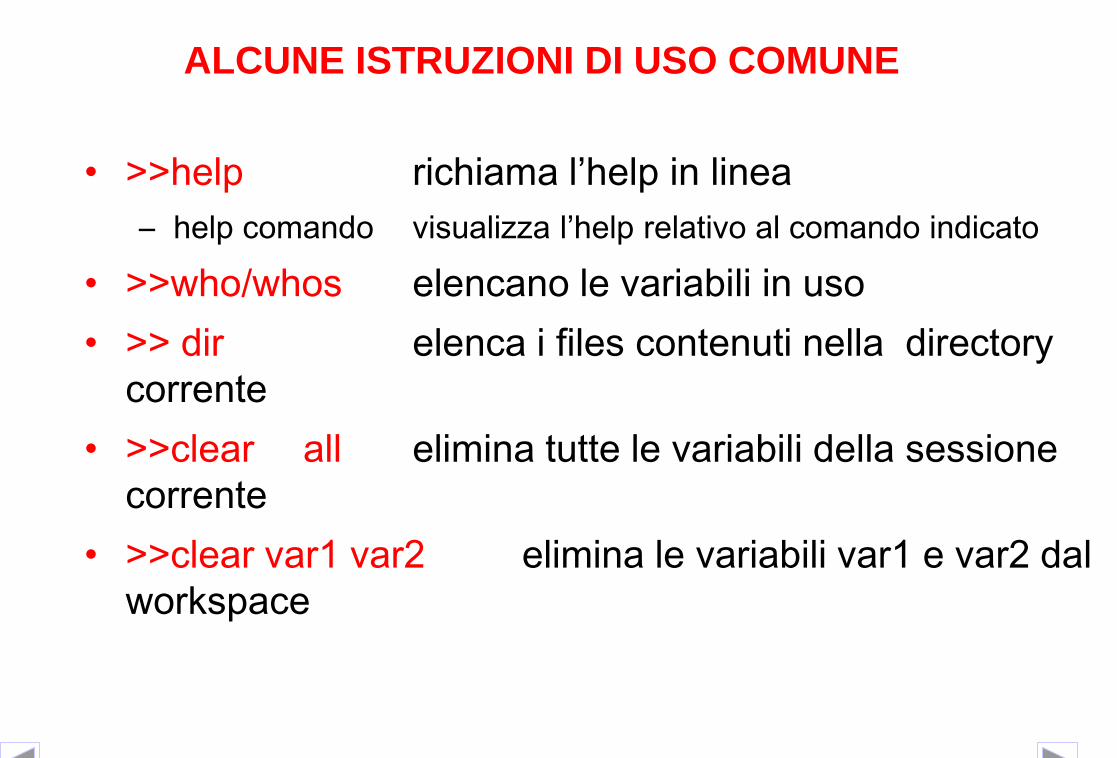
ALCUNE ISTRUZIONI DI USO COMUNE
• >>help richiama l’help in linea
– help comando visualizza l’help relativo al comando indicato
• >>who/whos elencano le variabili in uso
• >> dir elenca i files contenuti nella directory
corrente
• >>clear all elimina tutte le variabili della sessione
corrente
• >>clear var1 var2 elimina le variabili var1 e var2 dal
workspace
VETTORI
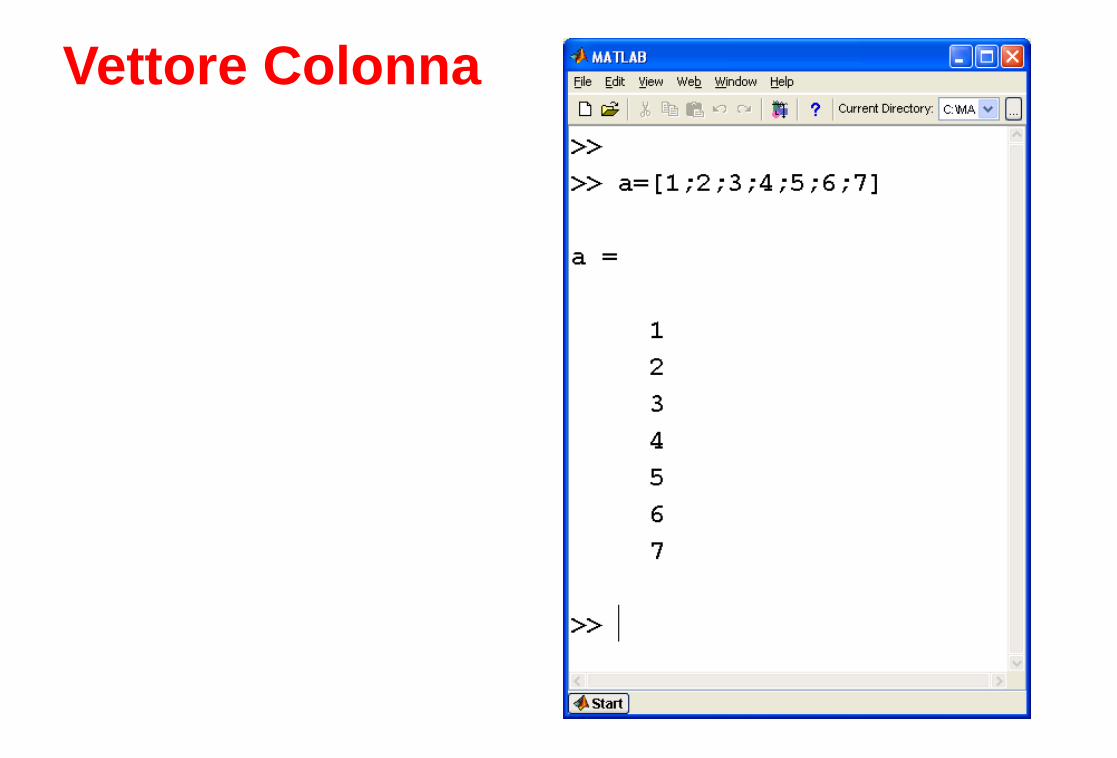
Vettore Colonna

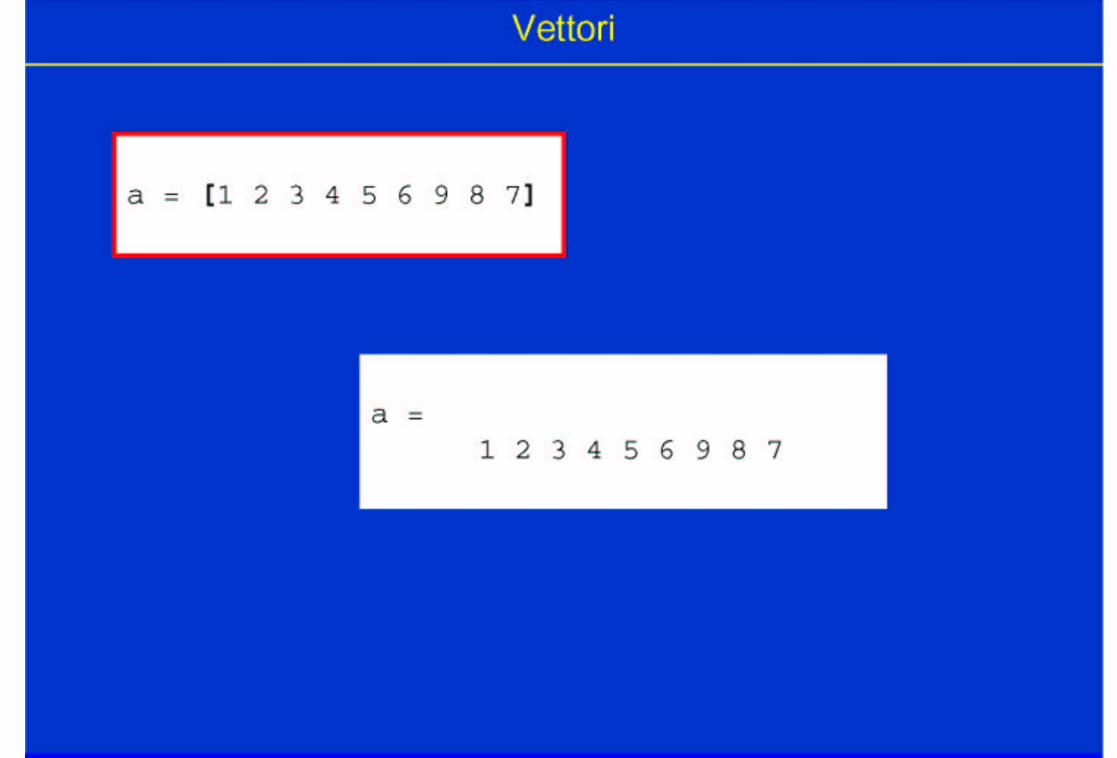
Vettori
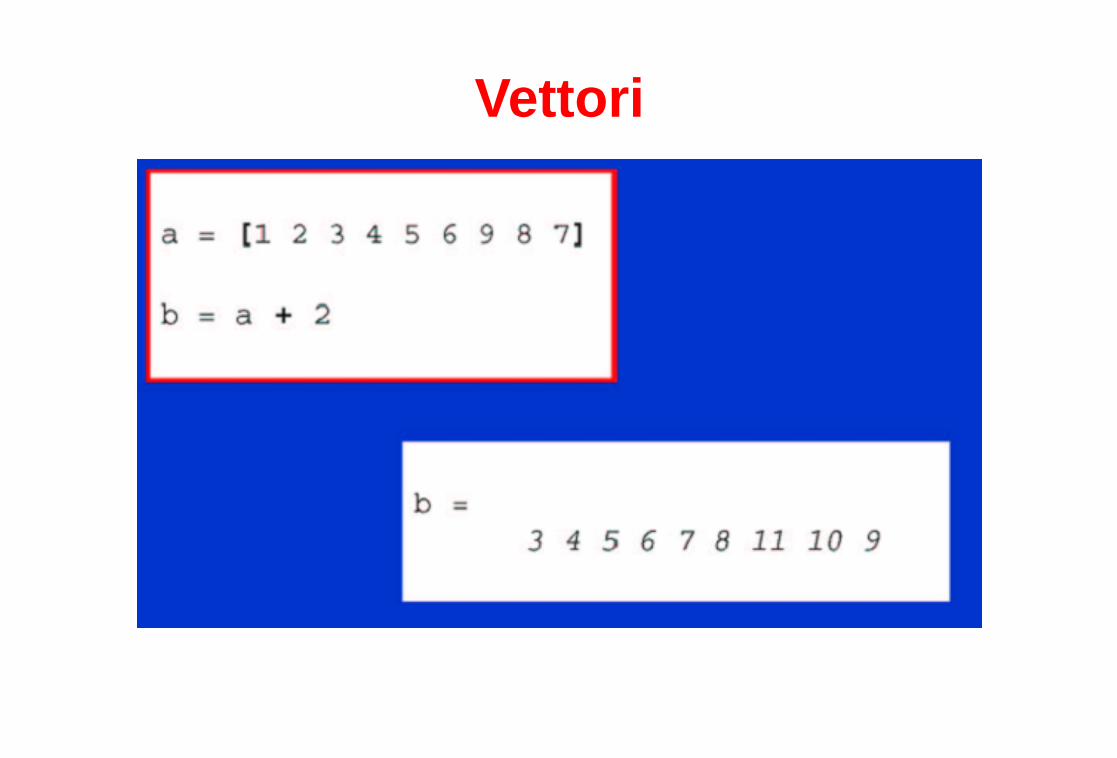
Vettori

Vettori

Funzioni Standard e costanti
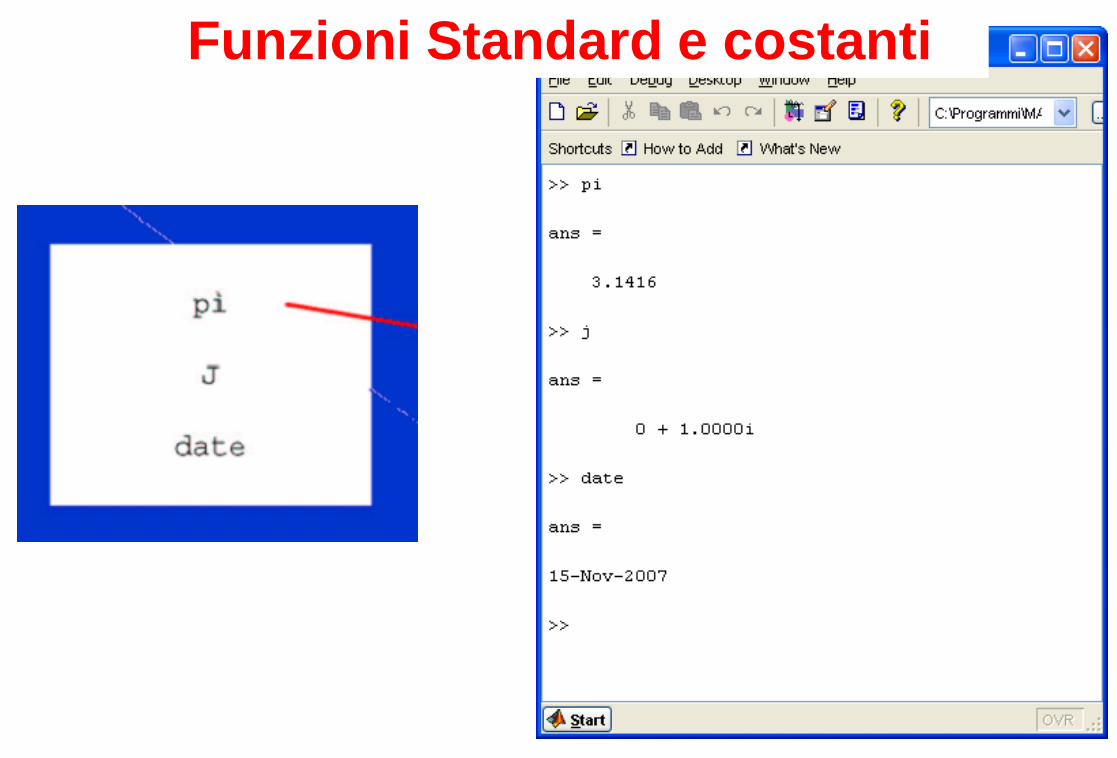
Funzioni Standard e costanti

Funzioni con argomenti Vettoriali
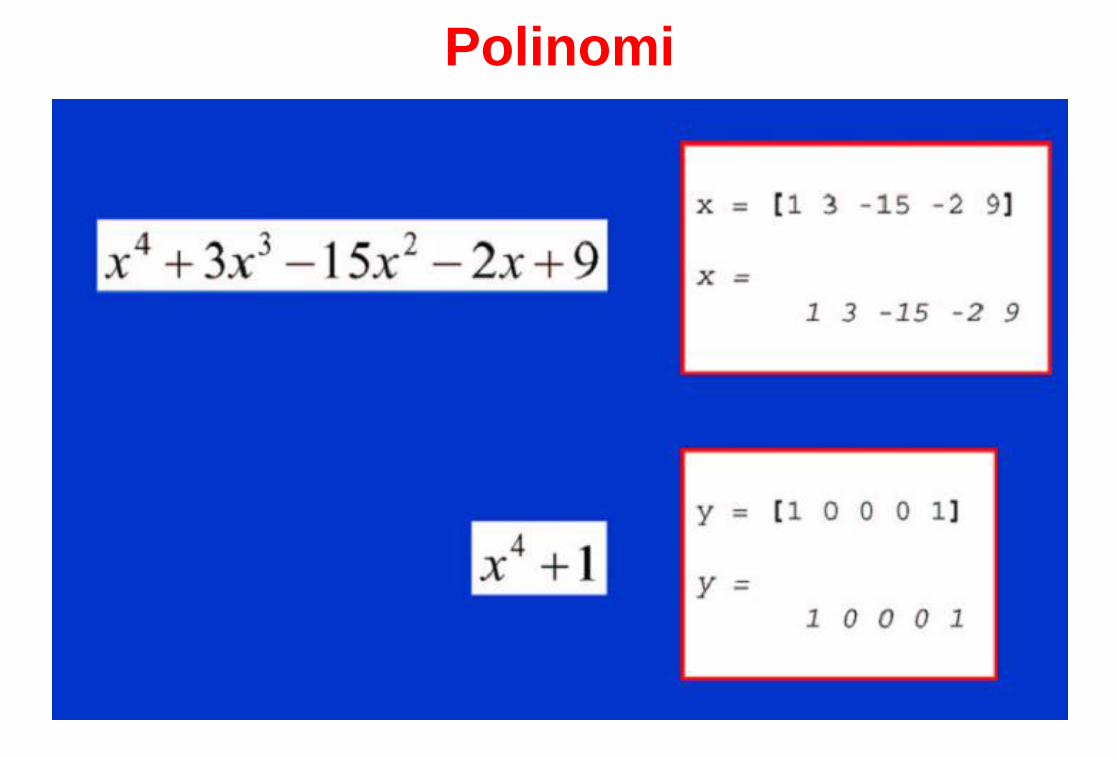
Polinomi

Polinomi
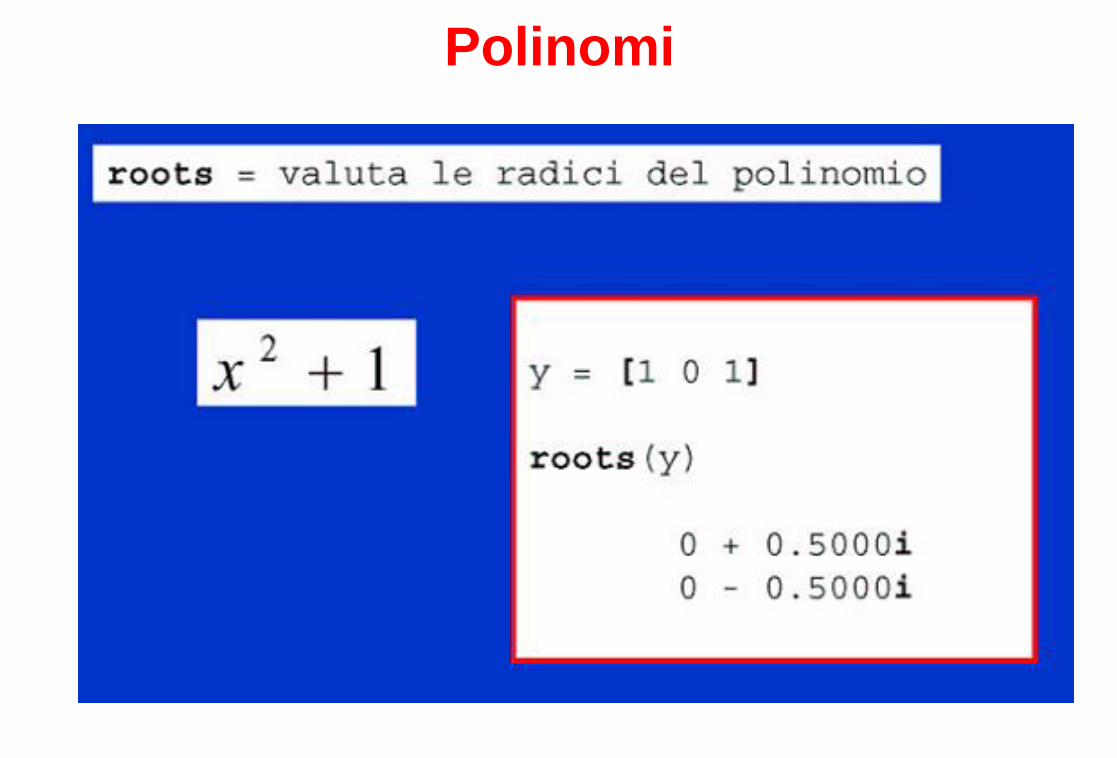
Polinomi


Prodotto tra Polinomi

M-FILE
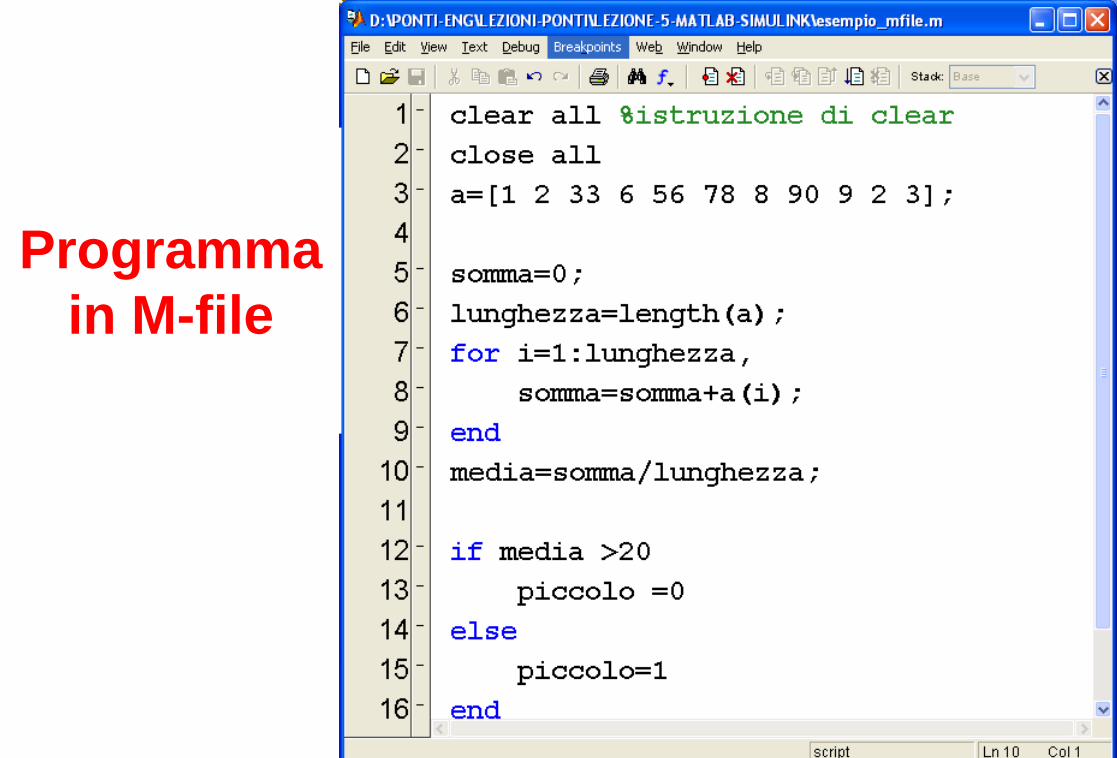
Programma
in M-file
Programmazione in MATLAB

Funzioni
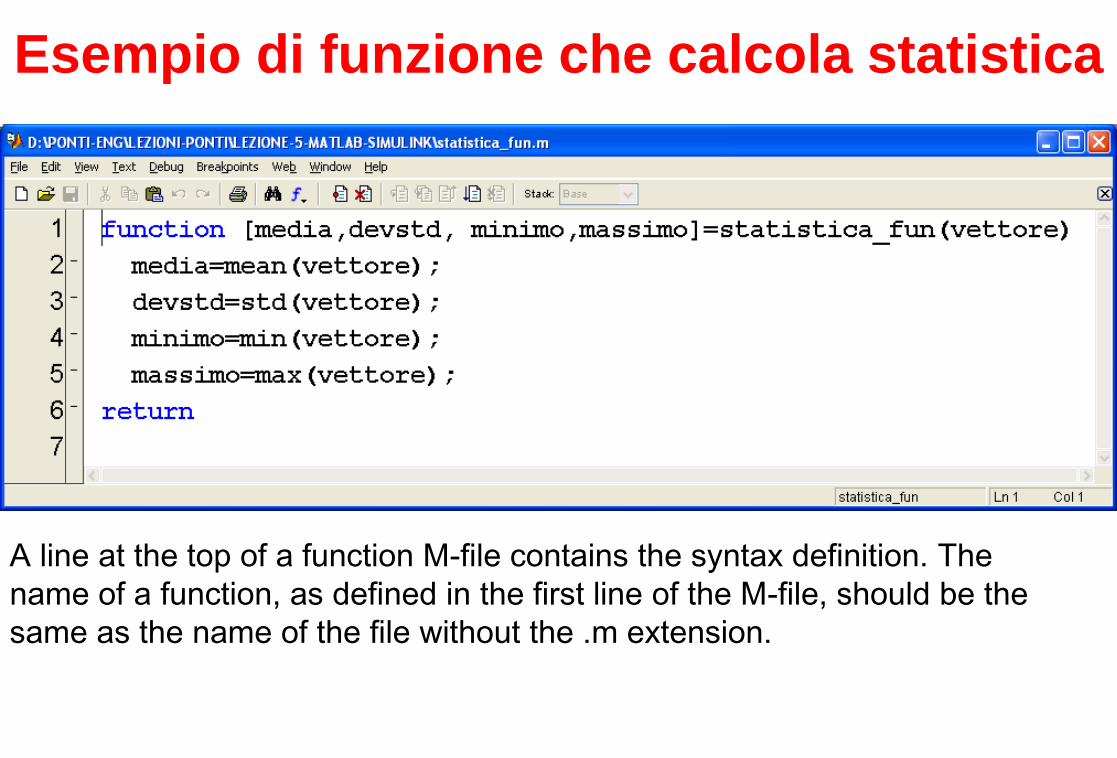
Esempio di funzione che calcola statistica
A line at the top of a function M-file contains the syntax definition. The
name of a function, as defined in the first line of the M-file, should be the
same as the name of the file without the .m extension.
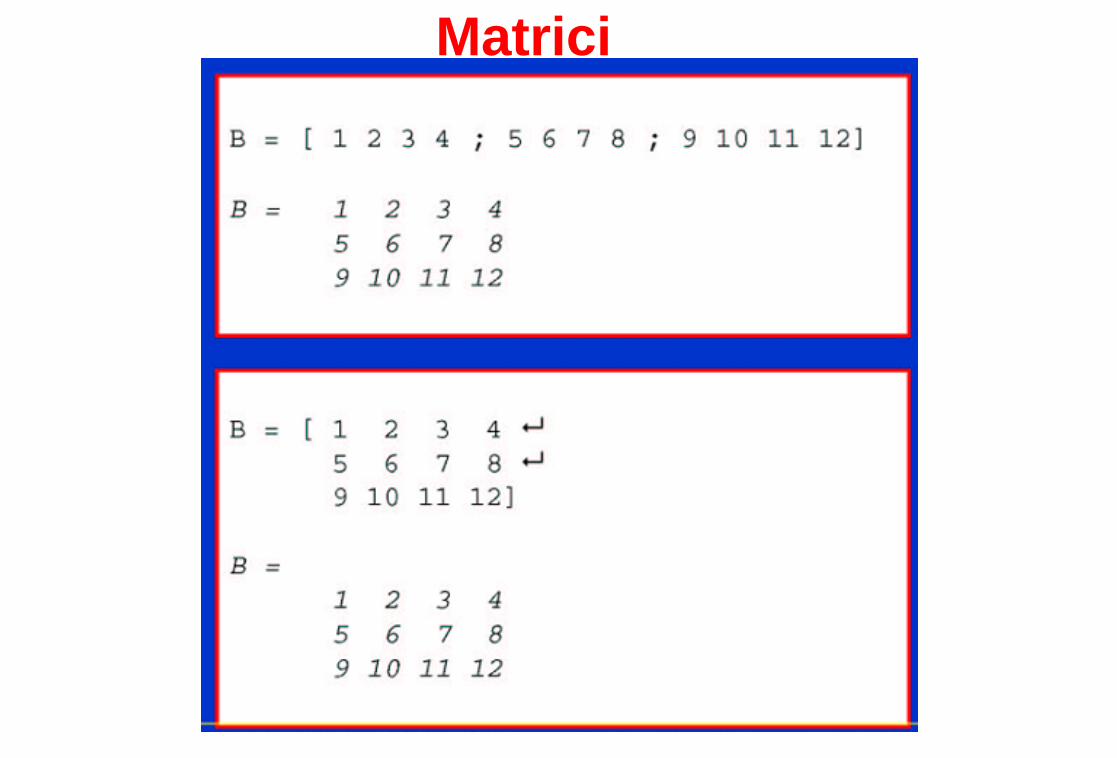
Matrici

Matrici

Matrici

Matrici
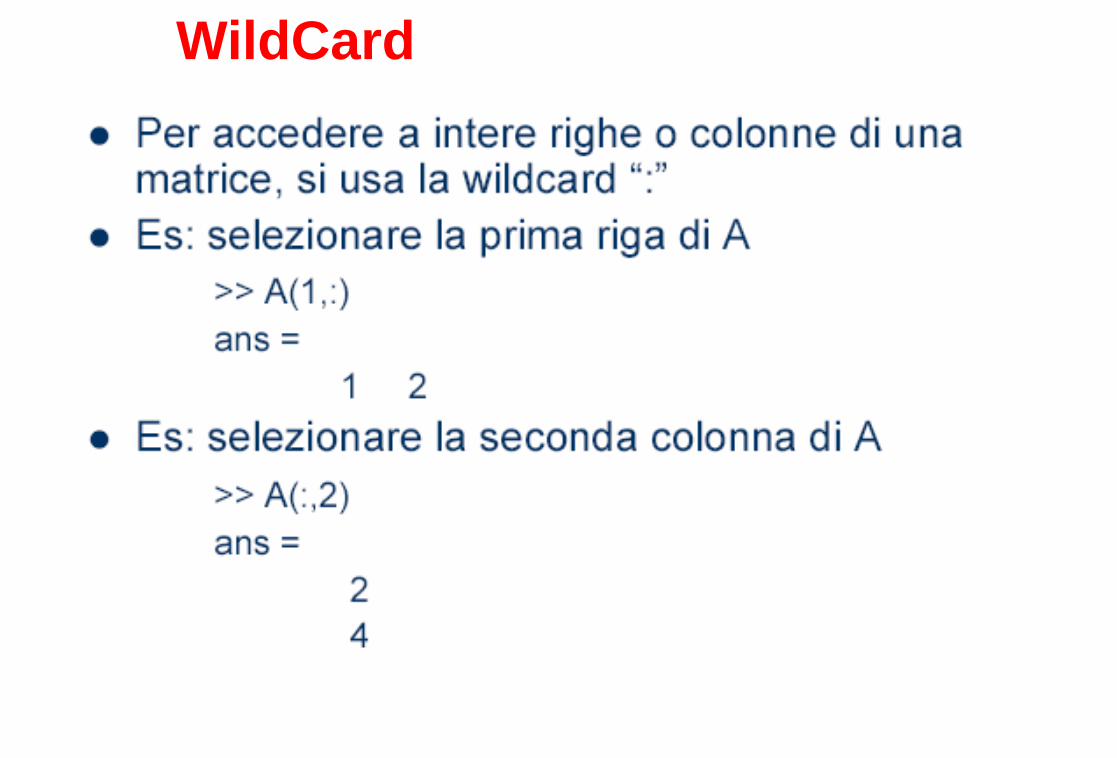
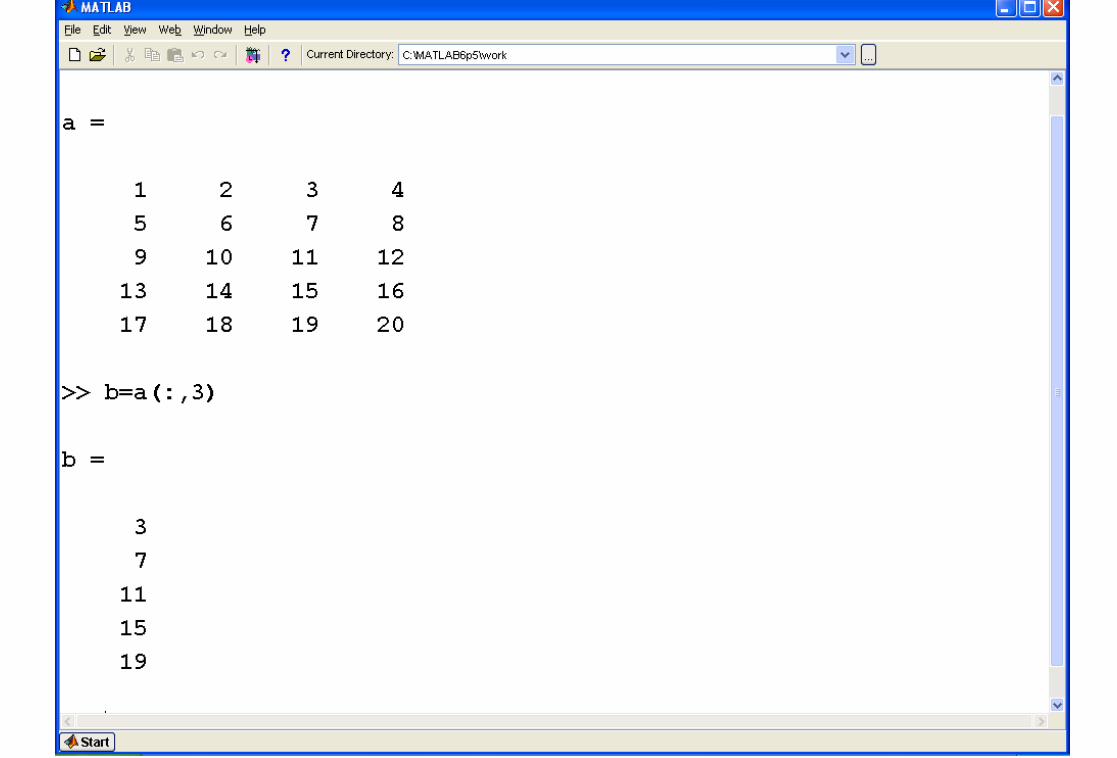
WildCard

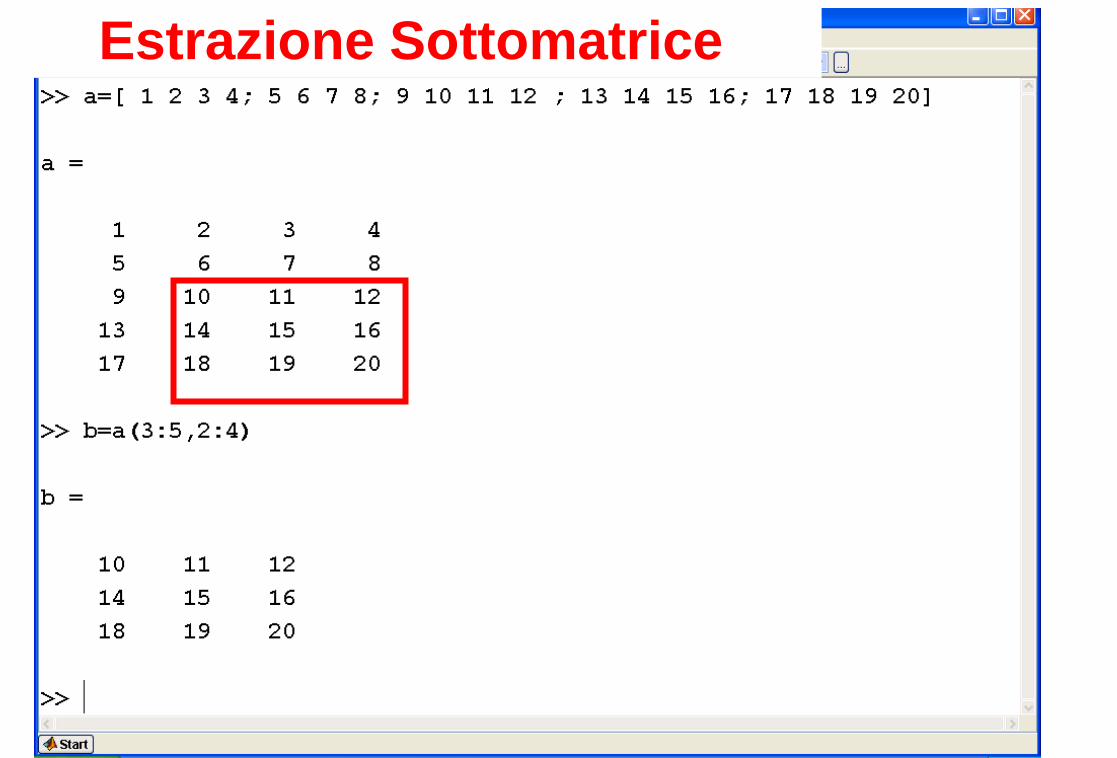
Estrazione Sottomatrice
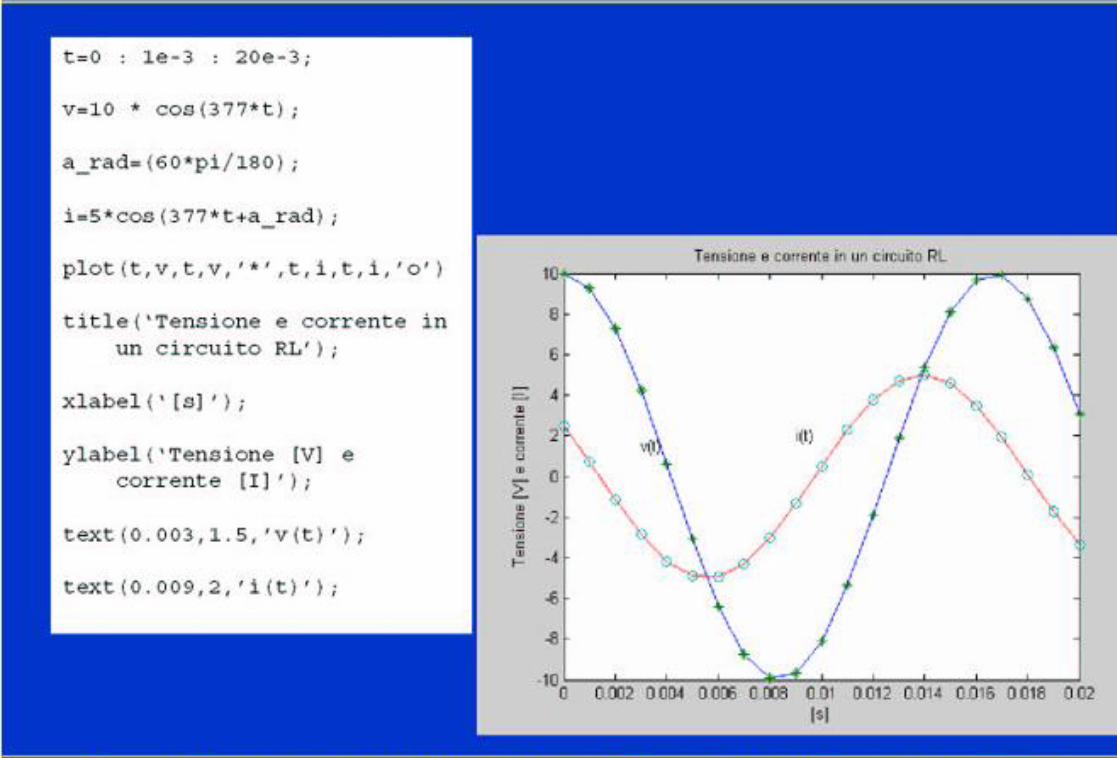
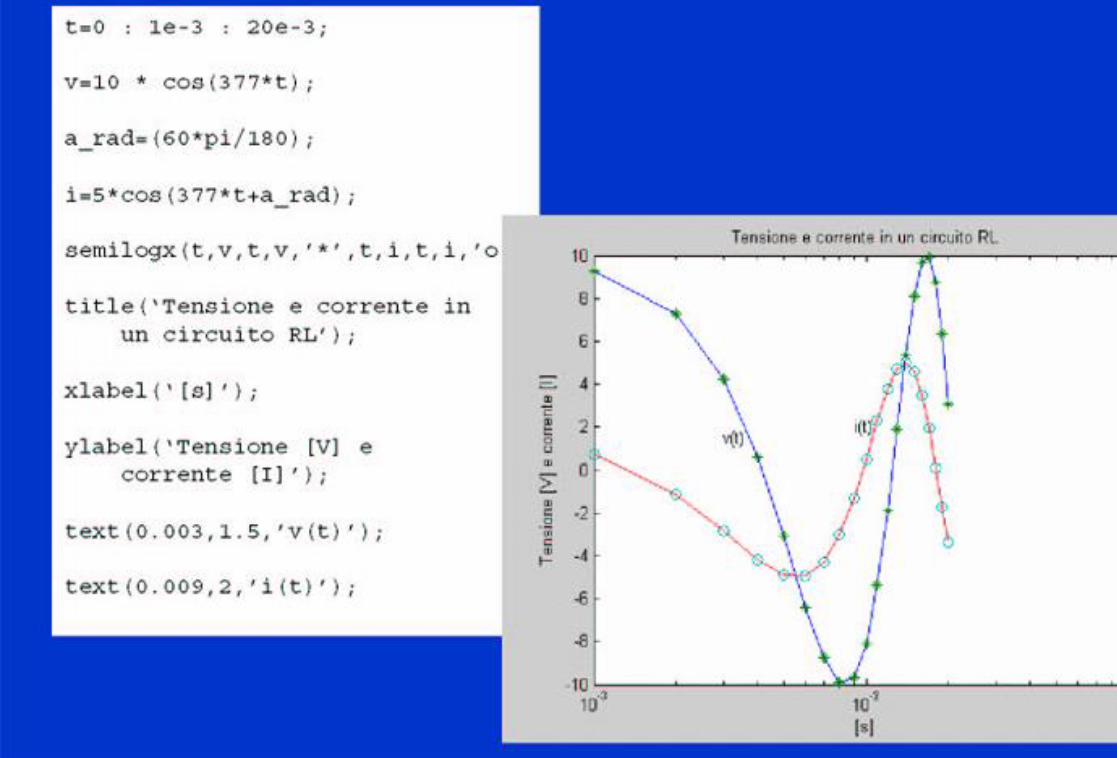
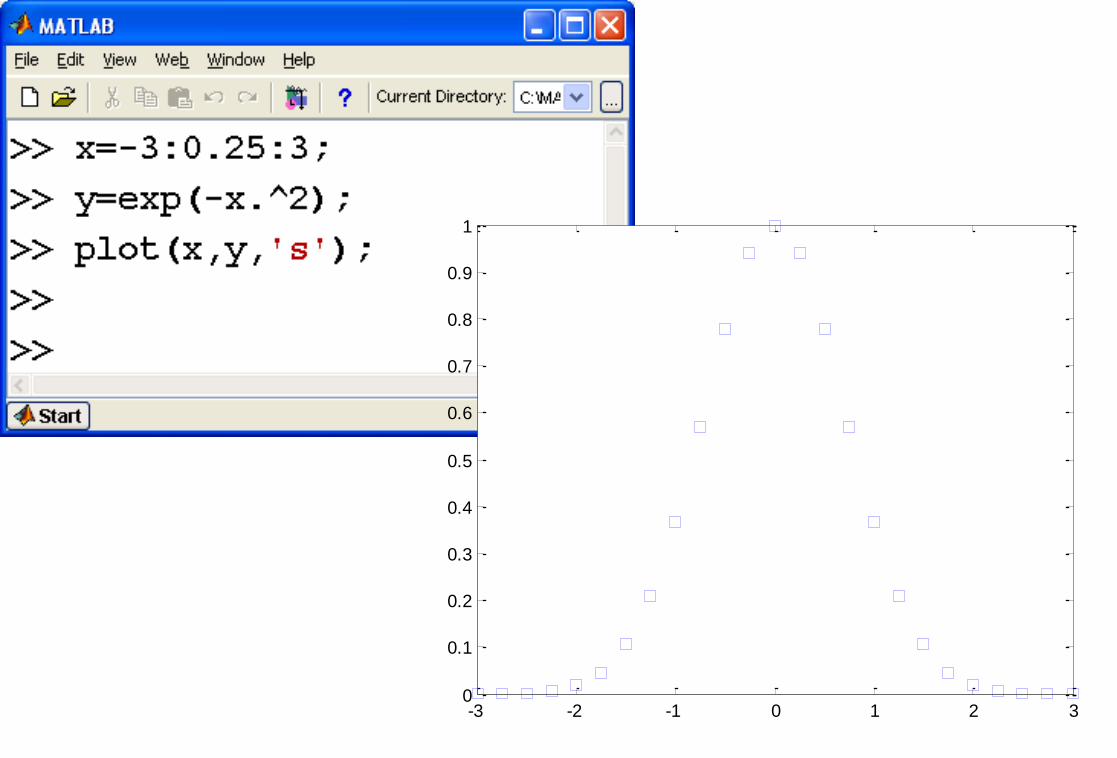
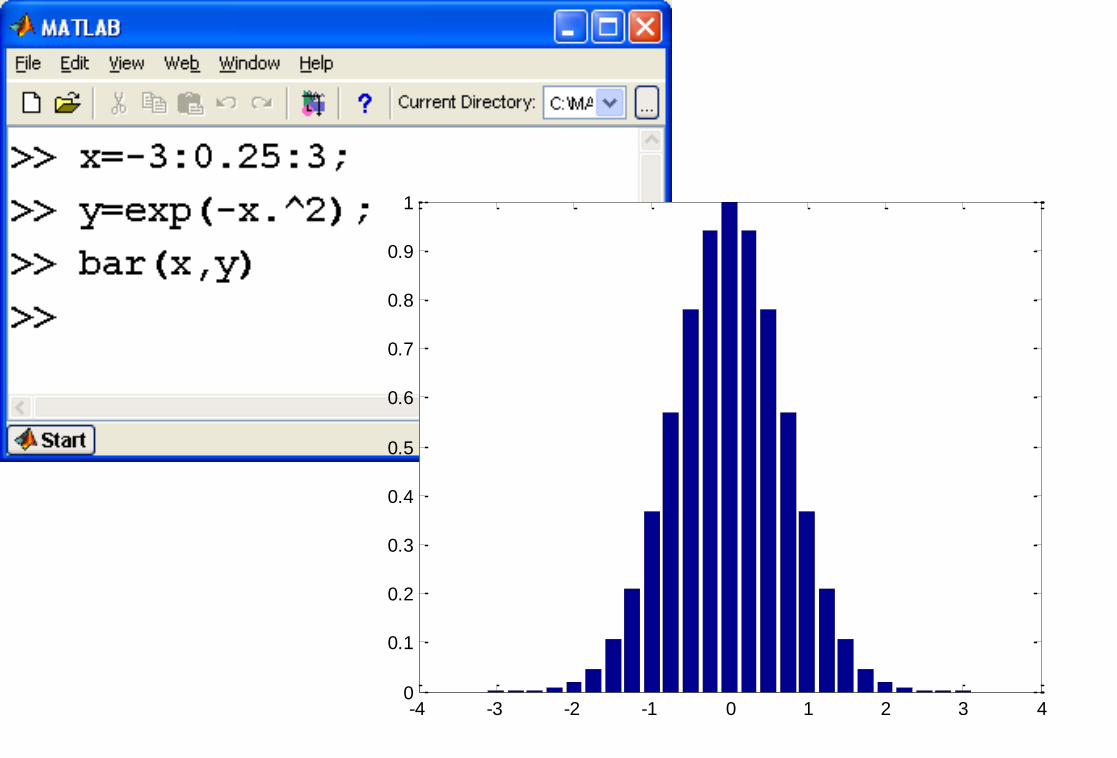
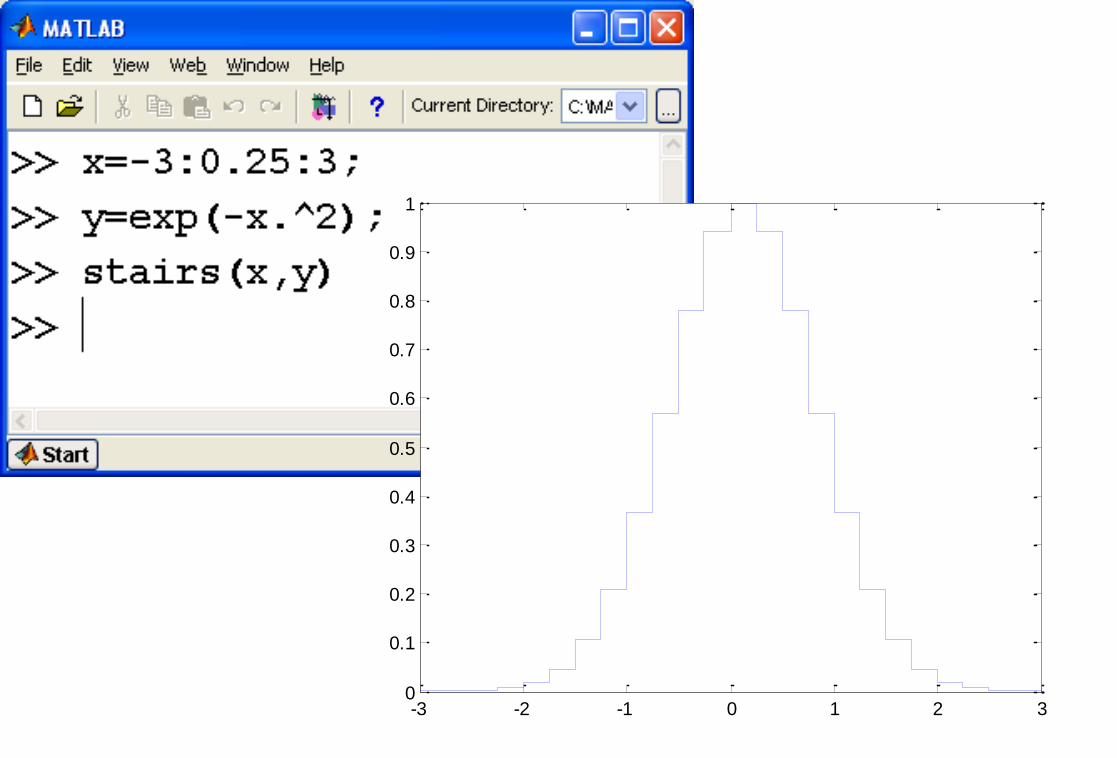
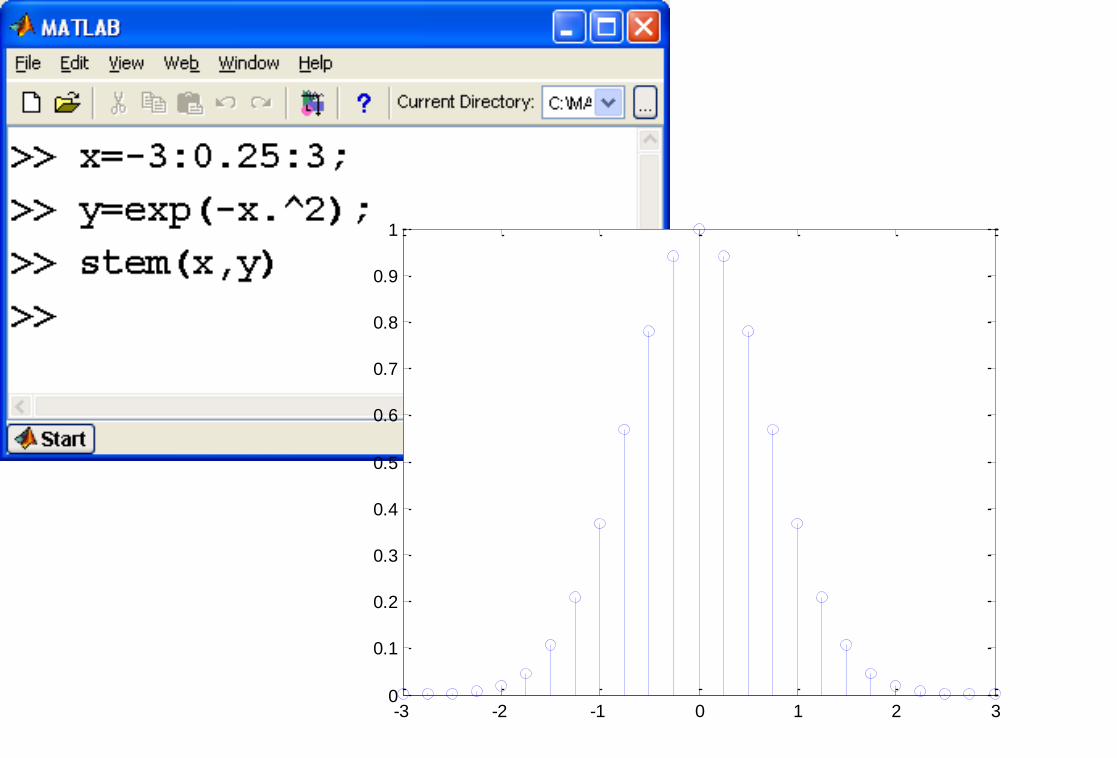
La Grafica Matlab
Alcuni parametri dei Grafici


Salvataggio figura su file
-3 -2 -1 0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-4 -3 -2 -1 0 1 2 3 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-3 -2 -1 0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-3 -2 -1 0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
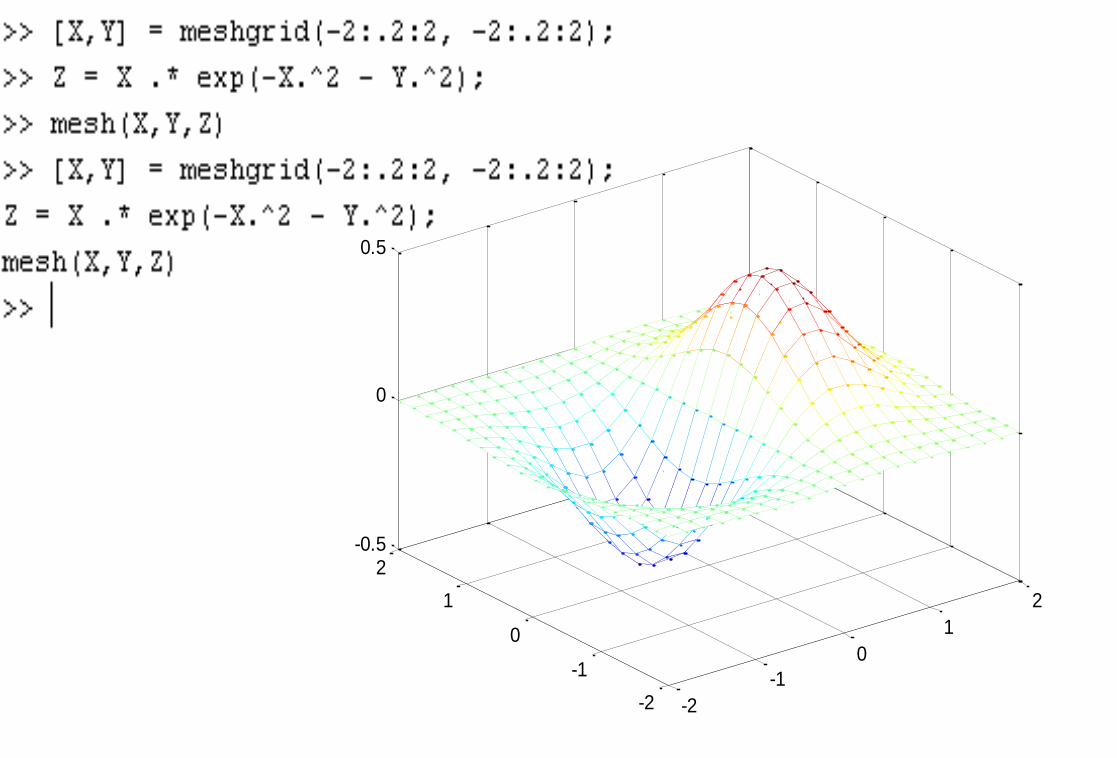
-2
-1
0
1
2
-2
-1
0
1
2-0.5
0
0.5
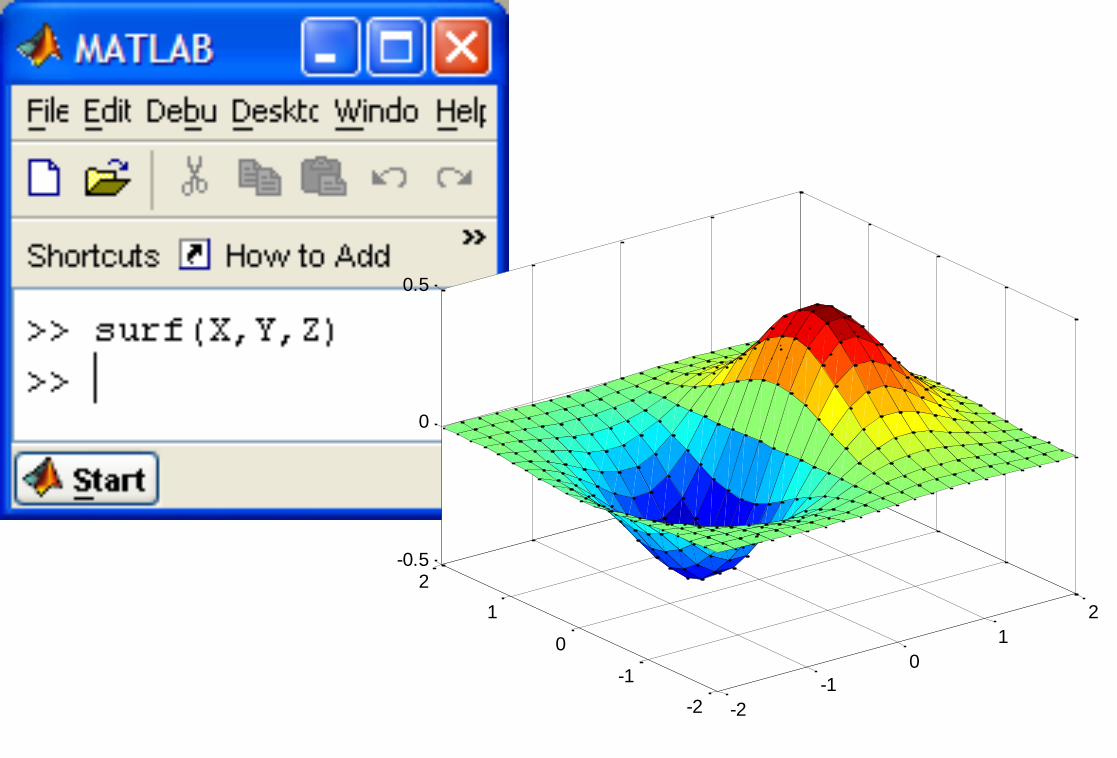
-2
-1
0
1
2
-2
-1
0
1
2-0.5
0
0.5

Control System Toolbox

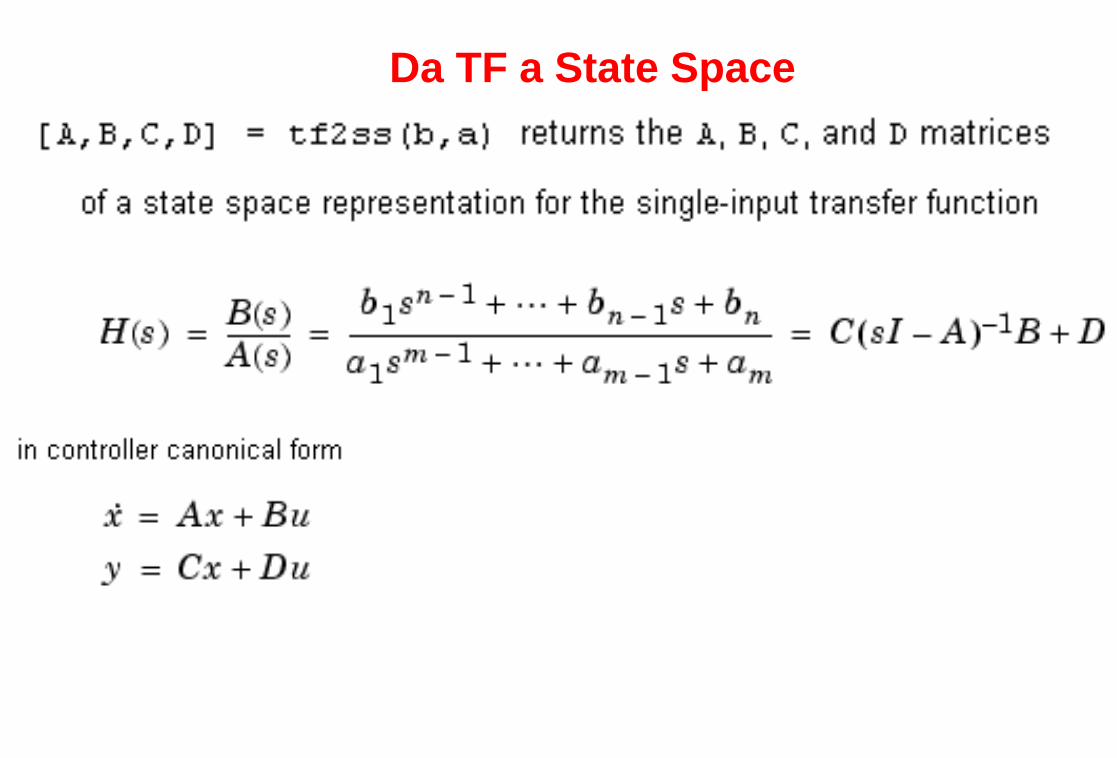
Da TF a State Space
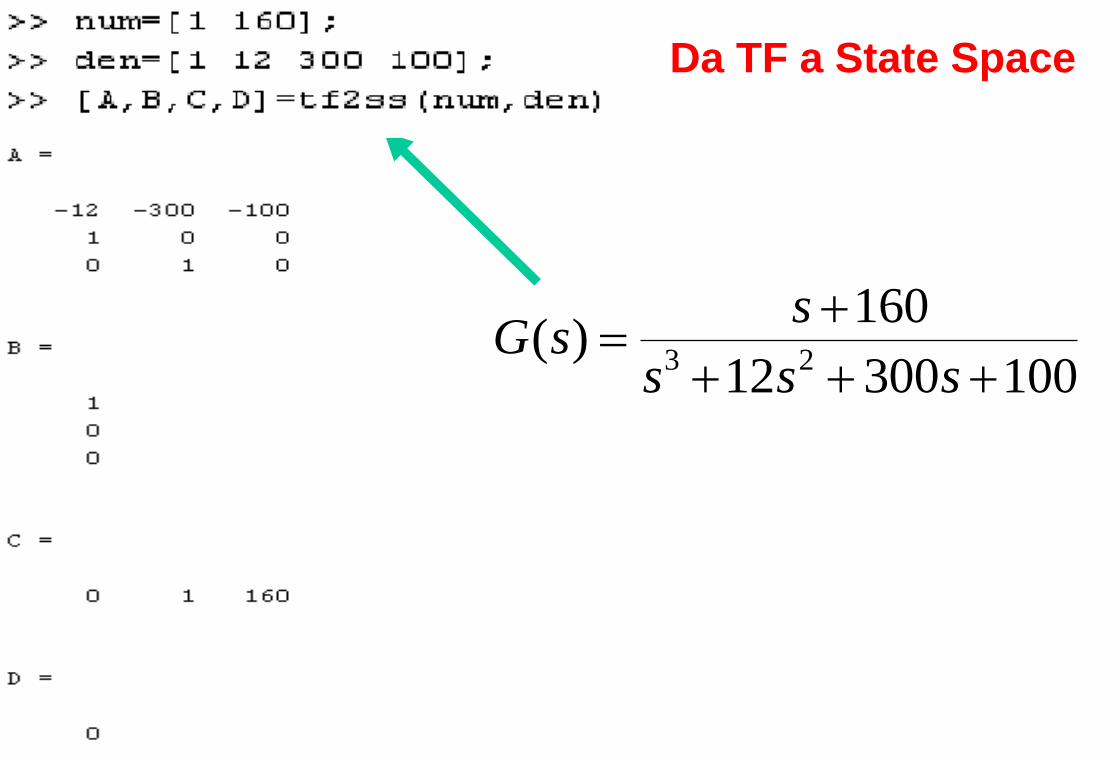
Da TF a State Space
3 2
160( )
12 300 100
sG s
s s s
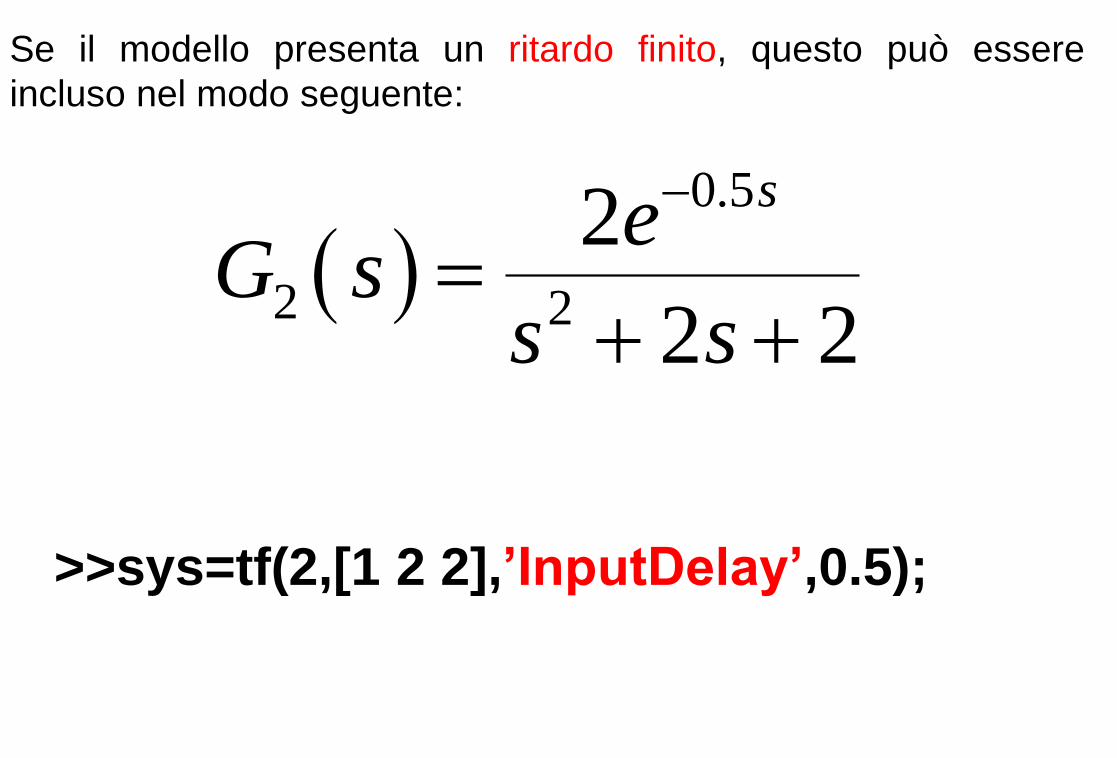
>>sys=tf(2,[1 2 2],’InputDelay’,0.5);
0.5
2 2
2
2 2
seG s
s s
Se il modello presenta un ritardo finito, questo può essere
incluso nel modo seguente:

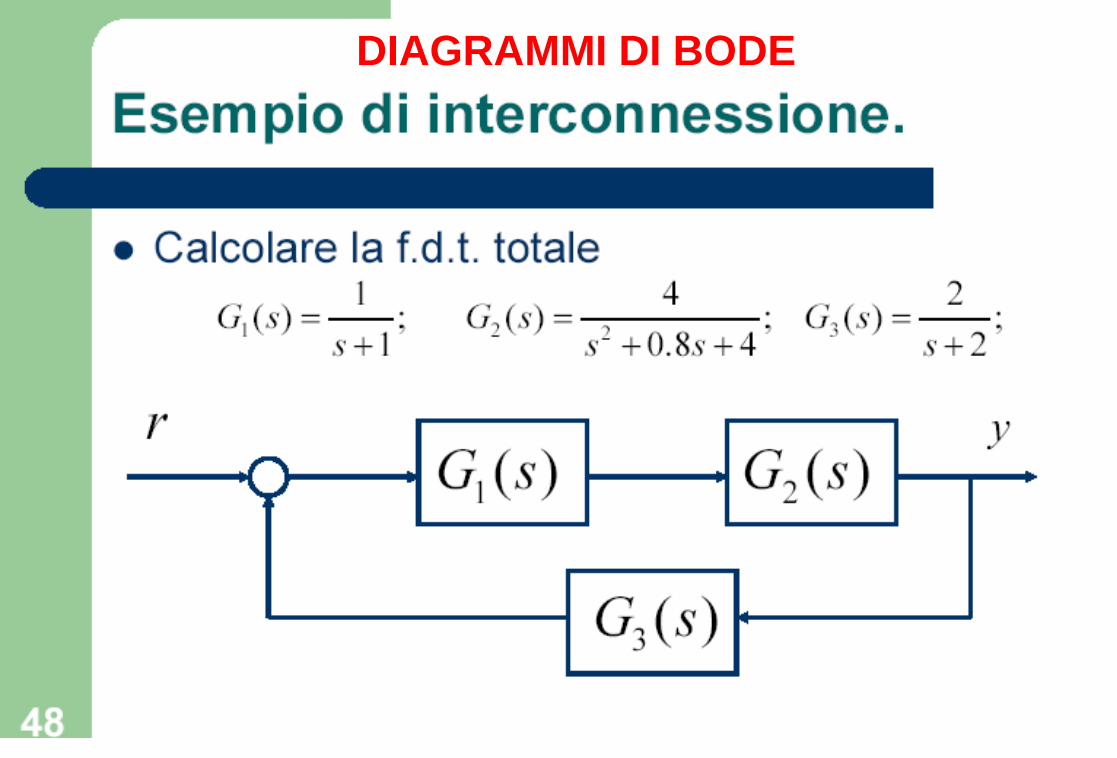
DIAGRAMMI DI BODE


Altra Modalità
1 2
1 2 3
( )* ( )
1 ( )* ( )* ( )
G s G sW s
G s G s G s
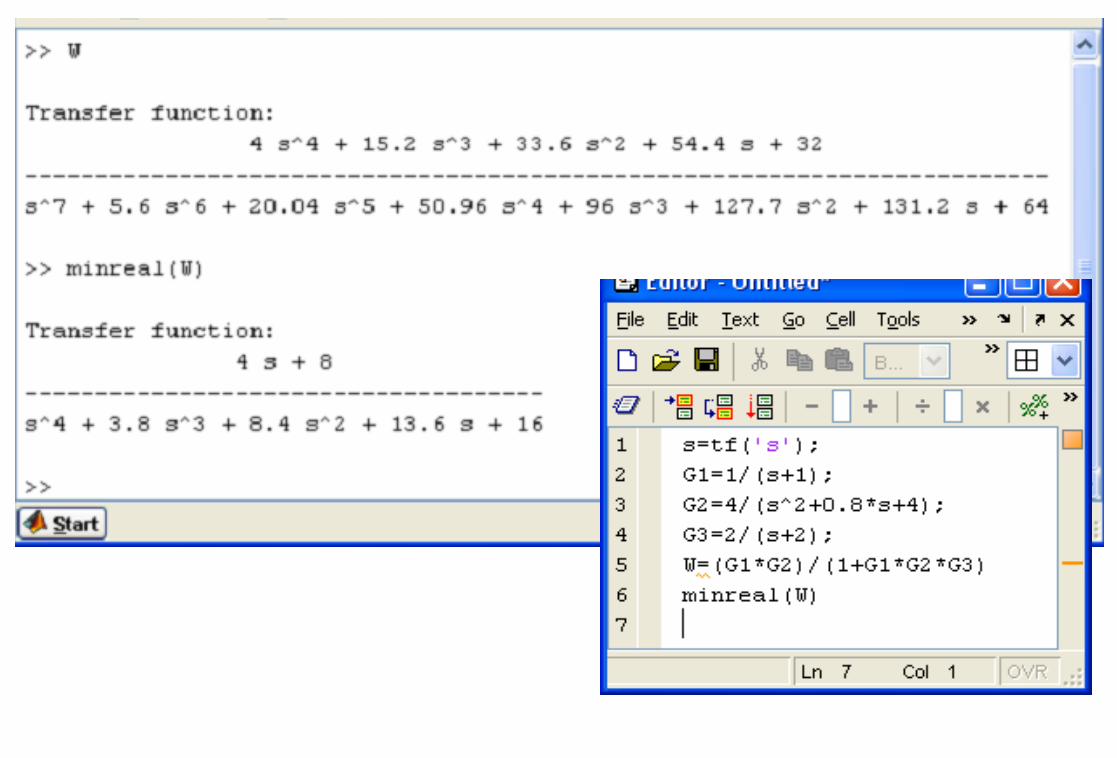
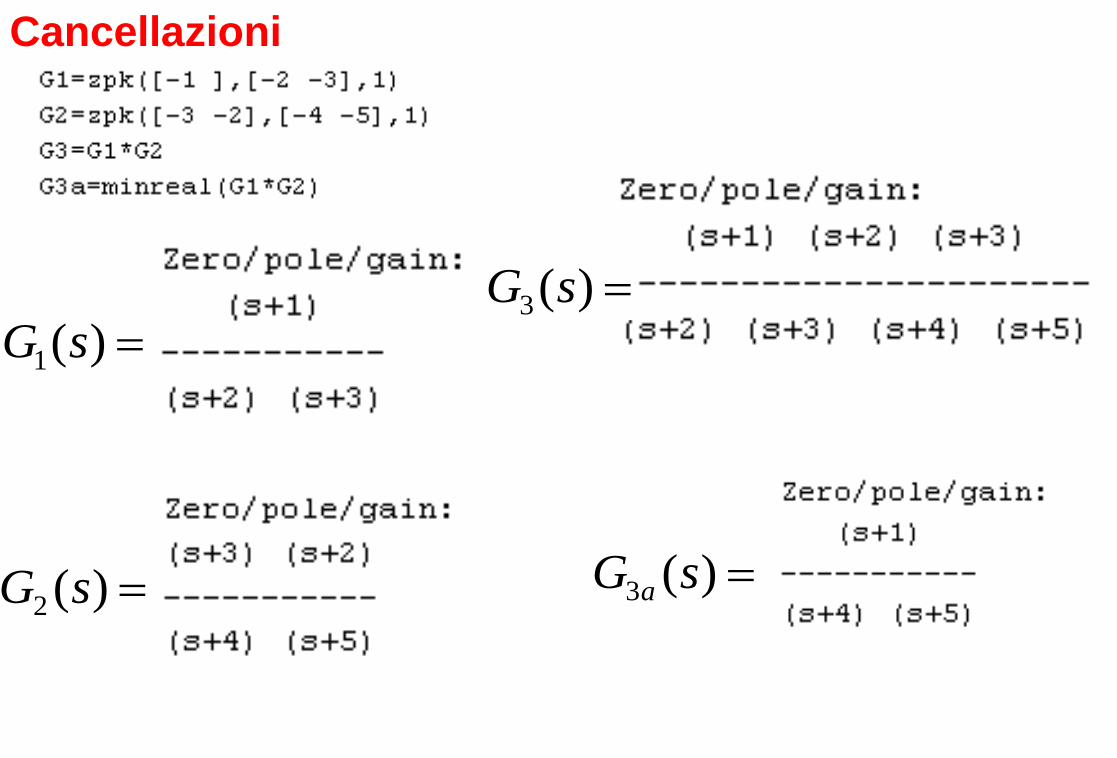
Cancellazioni
1( )G s
2 ( )G s
3( )G s
3 ( )aG s
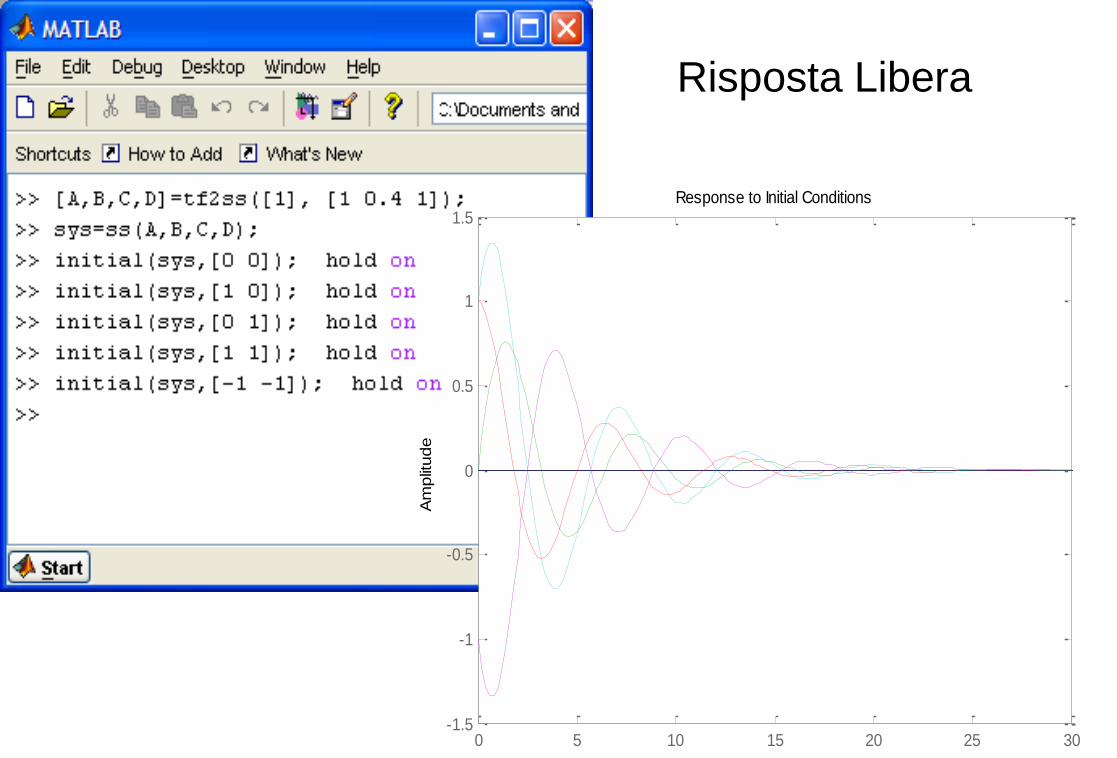
0 5 10 15 20 25 30-1.5
-1
-0.5
0
0.5
1
1.5
Response to Initial Conditions
Time (sec)
Am
plit
ude
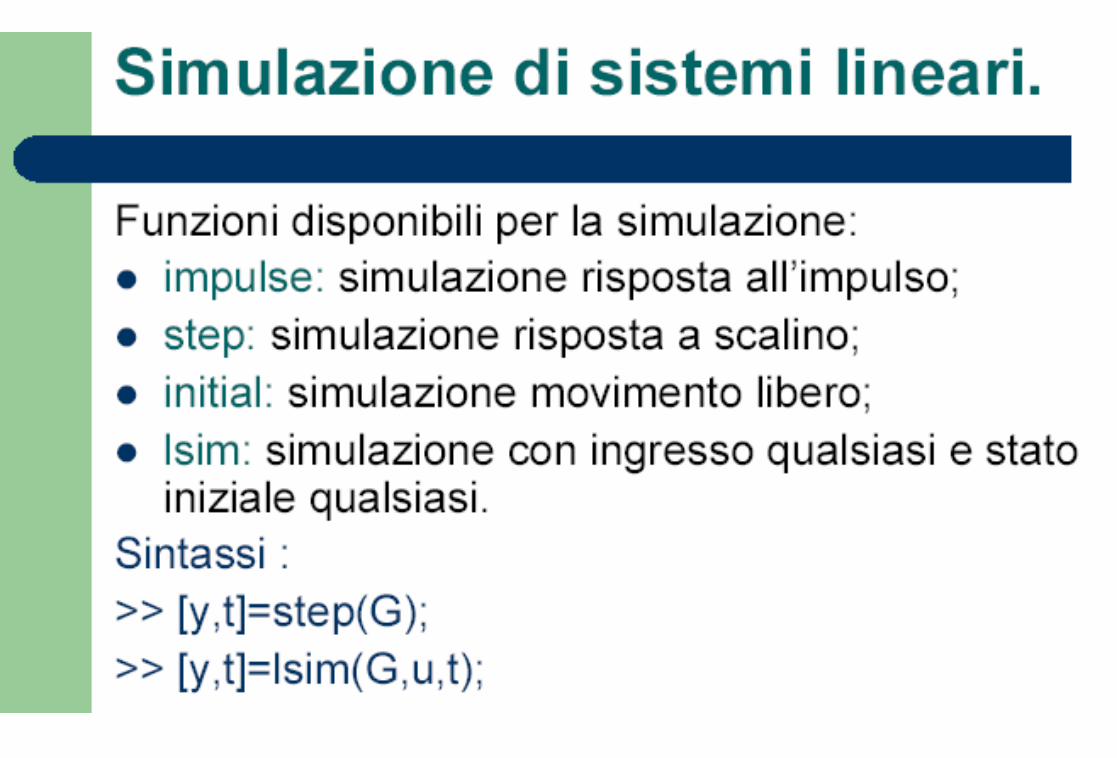
Risposta Libera

Risposta Forzata
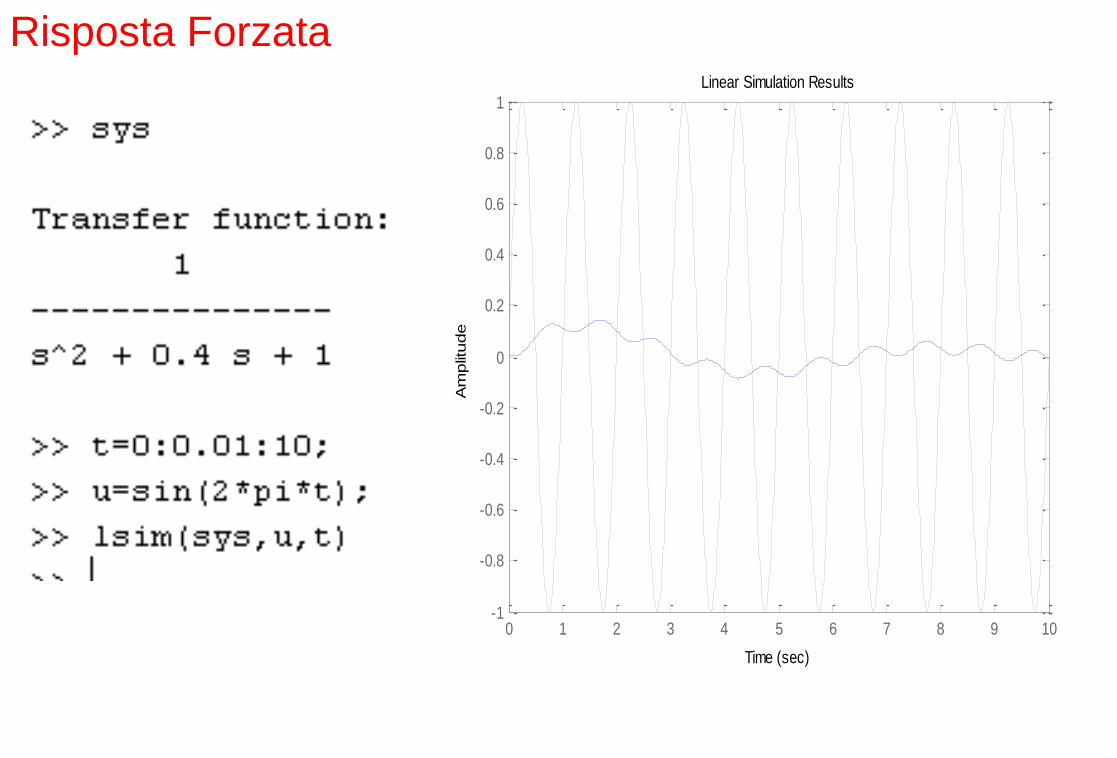
Risposta Forzata
0 1 2 3 4 5 6 7 8 9 10-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Linear Simulation Results
Time (sec)
Am
plit
ude

Risposta Completa
0 5 10 15-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Linear Simulation Results
Time (sec)
Am
plit
ude

Nel caso in cui si voglia valutare la risposa al GRADINO
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
Step Response
Time (sec)
Am
plit
ude
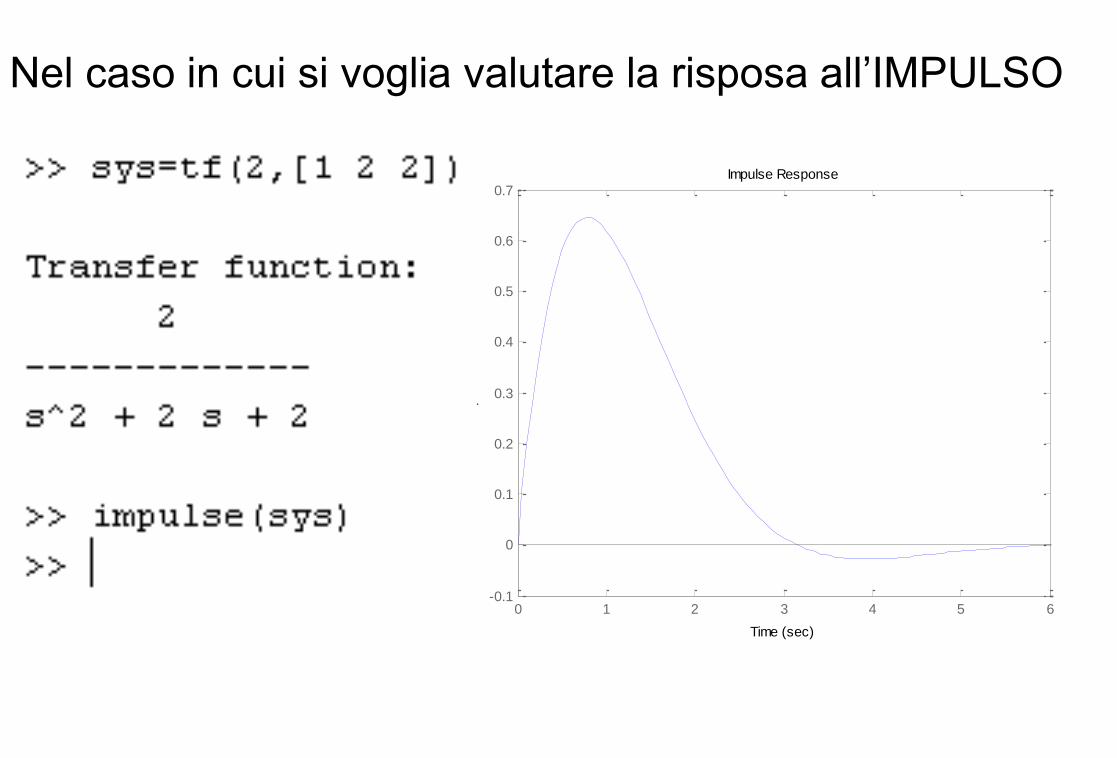
2
2
2 2G s
s s
Step Response
Time (sec)
Am
plit
ude
0 1 2 3 4 5 6 7 8 9 100
0.2
0.4
0.6
0.8
1
1.2
1.4
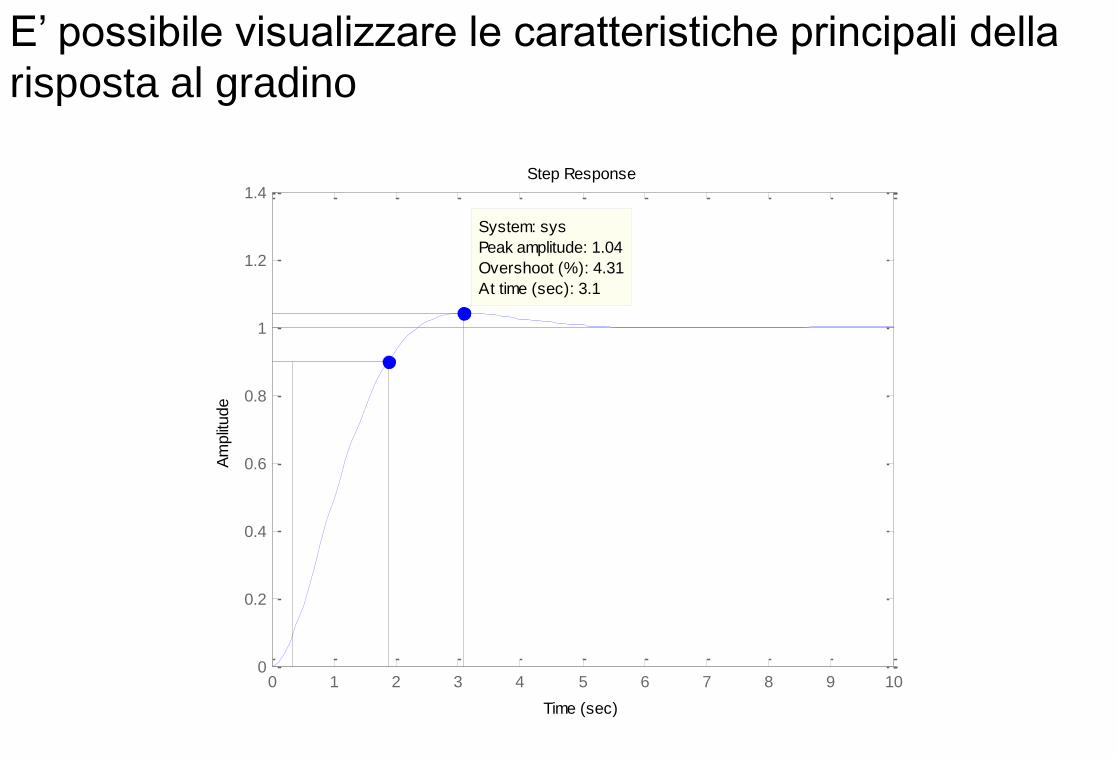
System: sys
Peak amplitude: 1.04
Overshoot (%): 4.31
At time (sec): 3.1
E’ possibile visualizzare le caratteristiche principali della
risposta al gradino
0 1 2 3 4 5 6-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Impulse Response
Time (sec)
Am
plit
ude
Nel caso in cui si voglia valutare la risposa all’IMPULSO
Il sistema Lineare può essere assegnato in uno delle 2
forme possibili:
•sys=tf(num,den);
•sys=zpk([zeri],[poli]);
DIAGRAMMI DI BODE
Si stabilisce decide l’intervallo di frequenze per il quale si vuole disegnare
il diagramma di Bode o Nyquist (wmin<w<wmax).
Si definisce un vettore w contenete l’insieme ordinato delle frequenze che
si vogliono graficare con il comando logspace:
ex: 300 punti nell’intevallo :
2 310 10w
w=logspace(-2,3,300)

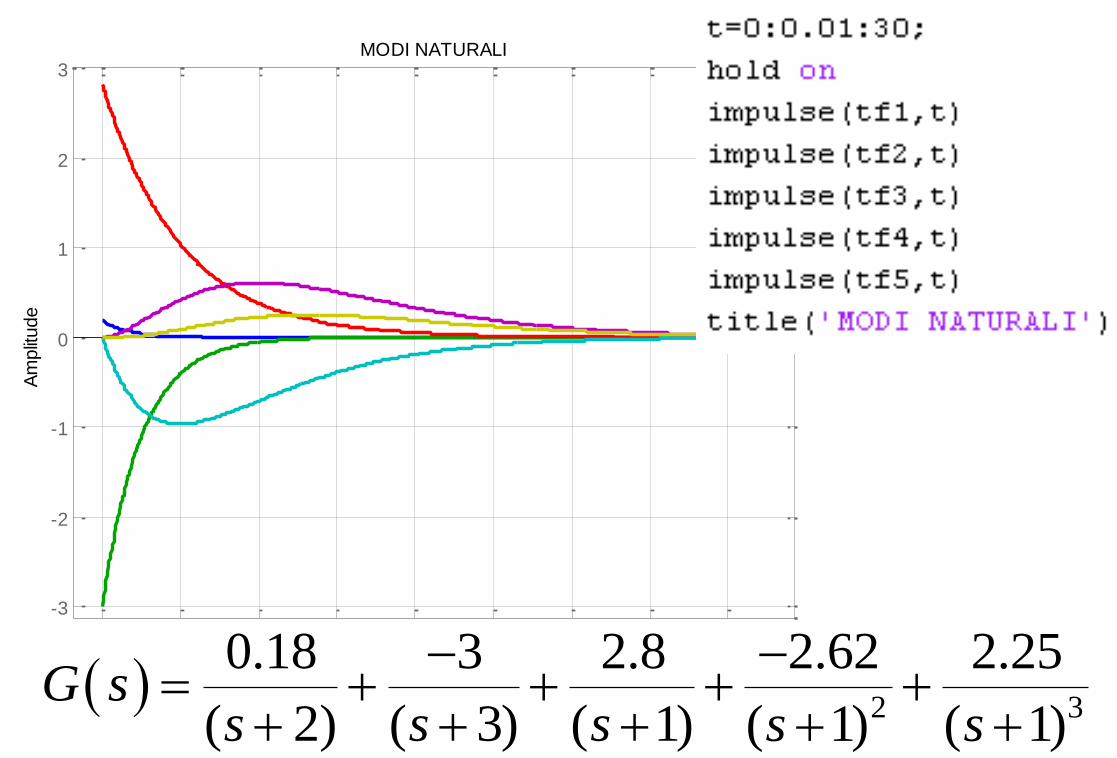
Calcolo dei residui

3
1.5( 4)
( 2)( 3)( 1)
sG s
s s s
3 51 2 4
2 3( 2) ( 3) ( 1) ( 1) ( 1)
R RR R RG s
s s s s s
Calcolo dei residui
0 1 2 3 4 5 6 7 8
-3
-2
-1
0
1
2
3MODI NATURALI
Time (sec)
Am
plit
ude
2 3
0.18 3 2.8 2.62 2.25
( 2) ( 3) ( 1) ( 1) ( 1)G s
s s s s s
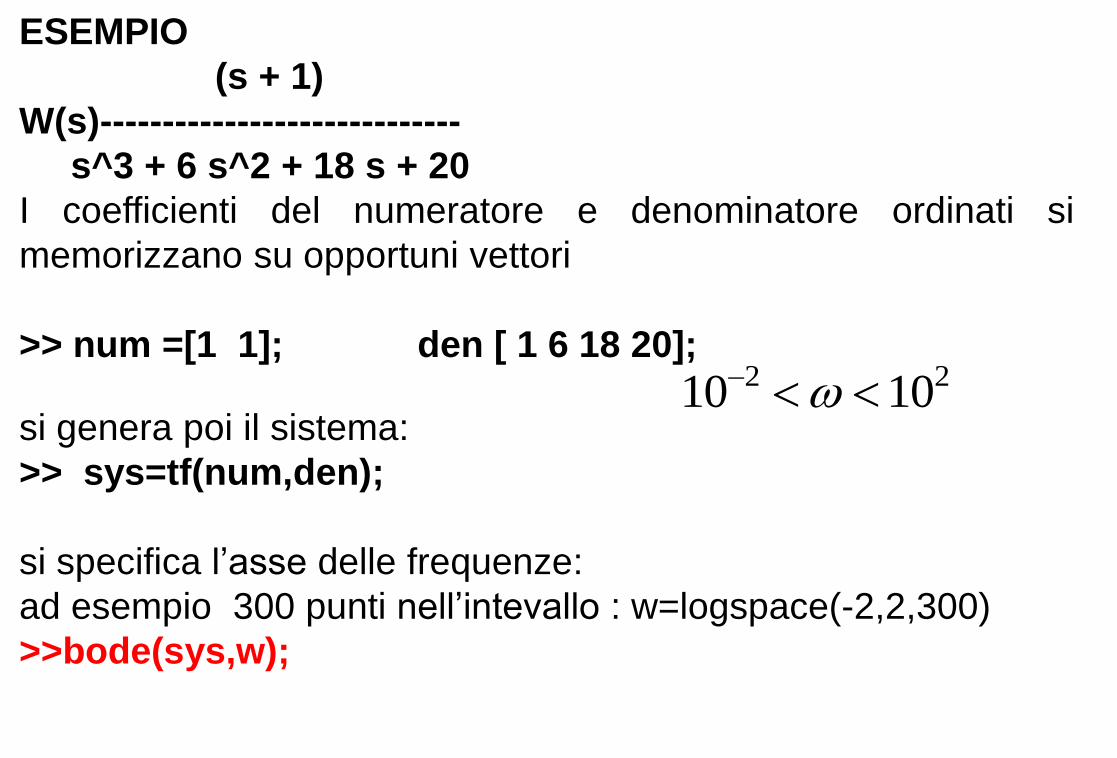
ESEMPIO
(s + 1)
W(s)-----------------------------
s^3 + 6 s^2 + 18 s + 20
I coefficienti del numeratore e denominatore ordinati si
memorizzano su opportuni vettori
>> num =[1 1]; den [ 1 6 18 20];
si genera poi il sistema:
>> sys=tf(num,den);
si specifica l’asse delle frequenze:
ad esempio 300 punti nell’intevallo : w=logspace(-2,2,300)
>>bode(sys,w);
2 210 10w
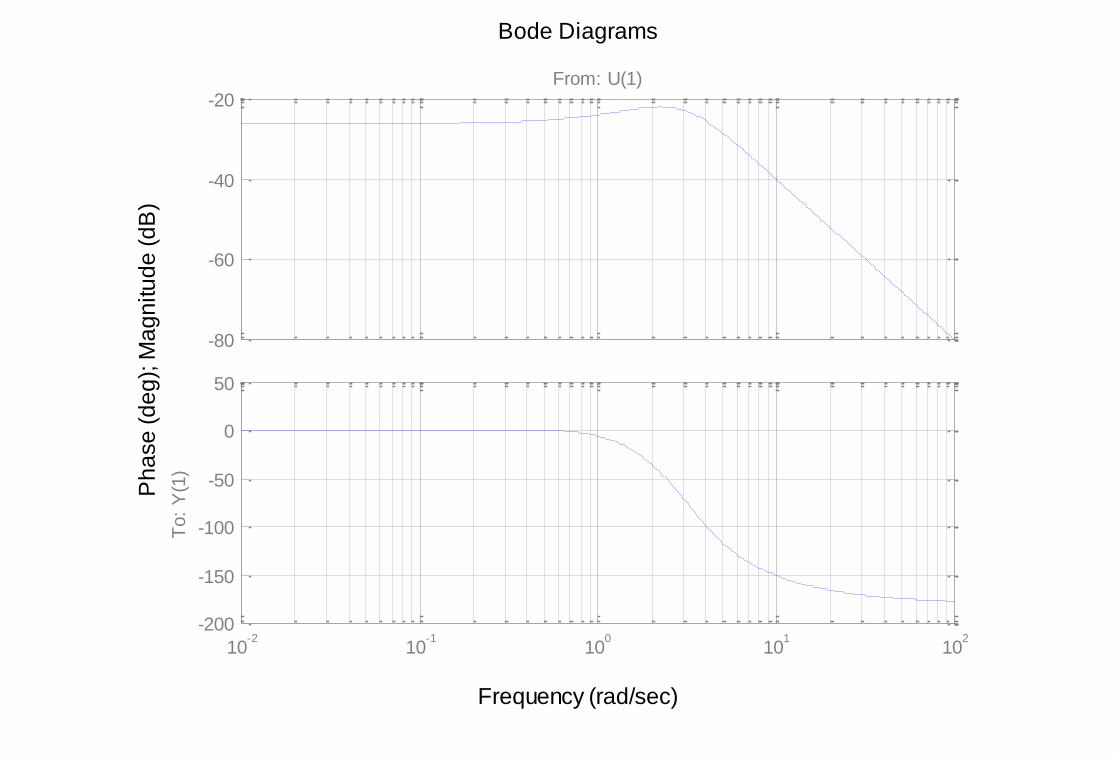
Frequency (rad/sec)
Ph
ase
(d
eg
); M
ag
nitu
de
(d
B)
Bode Diagrams
-80
-60
-40
-20From: U(1)
10-2
10-1
100
101
102
-200
-150
-100
-50
0
50
To:
Y(1
)
10-2
10-1
100
101
102
-180
-135
-90
-45
0
45
Phase (
deg)
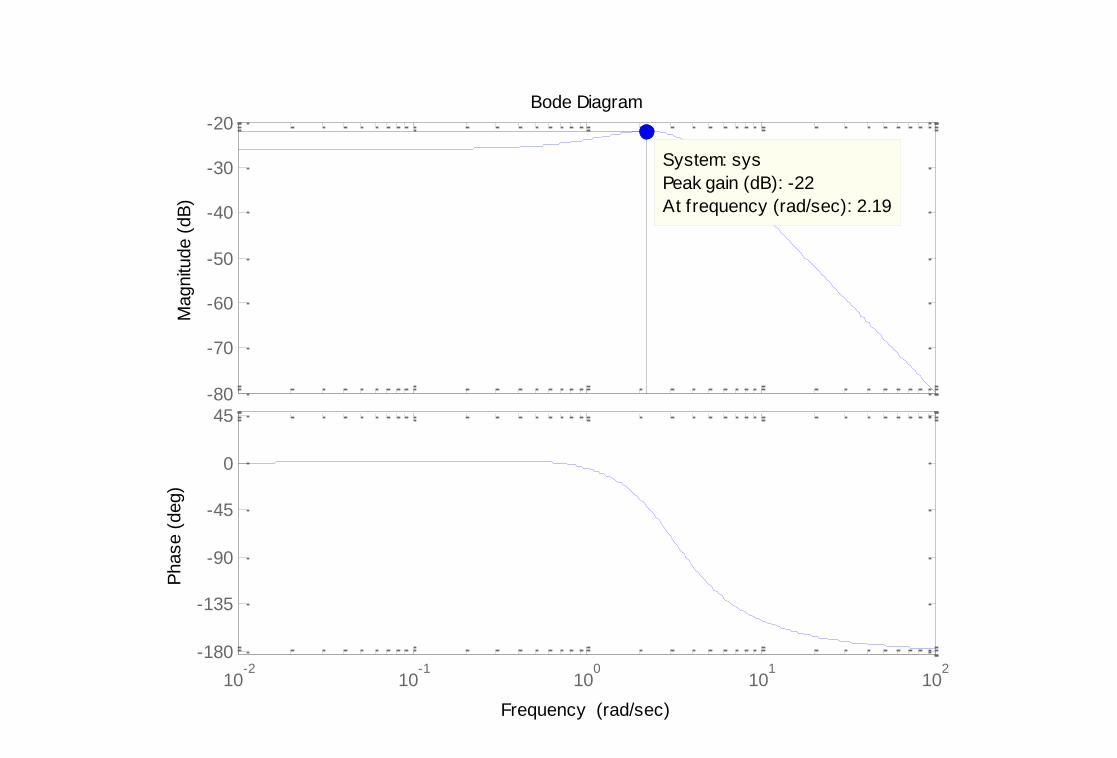
Bode Diagram
Frequency (rad/sec)
-80
-70
-60
-50
-40
-30
-20
System: sys
Peak gain (dB): -22
At frequency (rad/sec): 2.19
Magnitu
de (
dB
)
-60
-40
-20
0
20
40
Magnitu
de (
dB
)
10-1
100
101
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
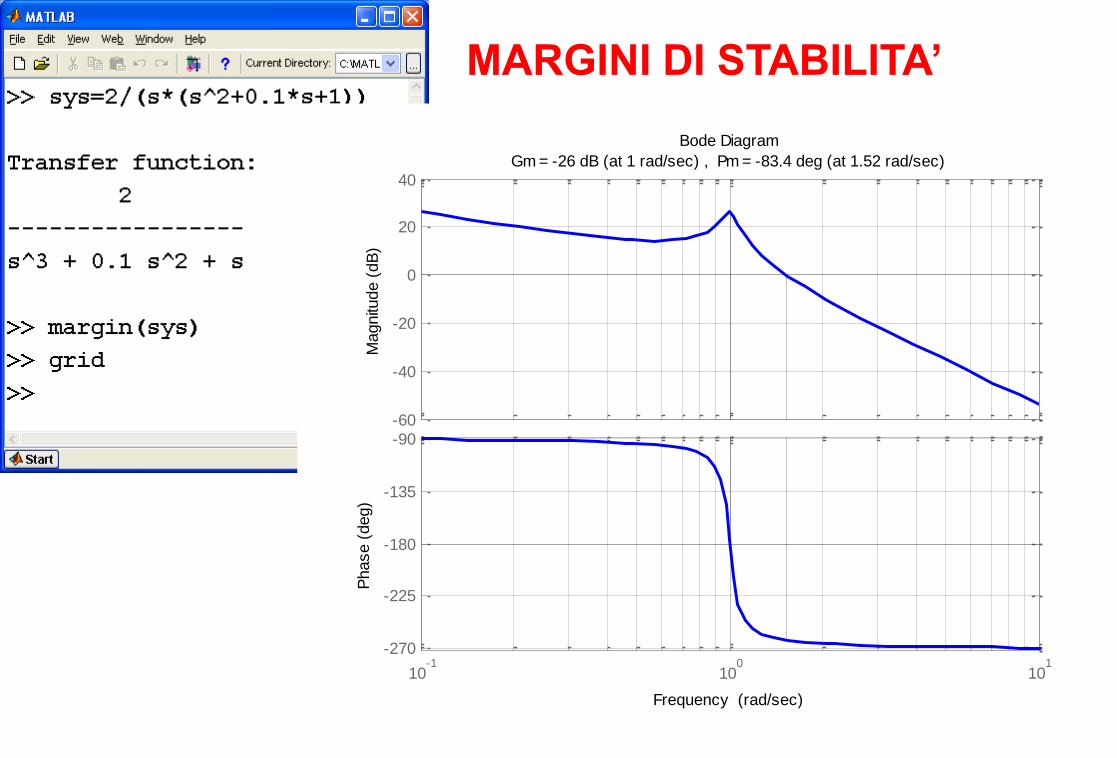
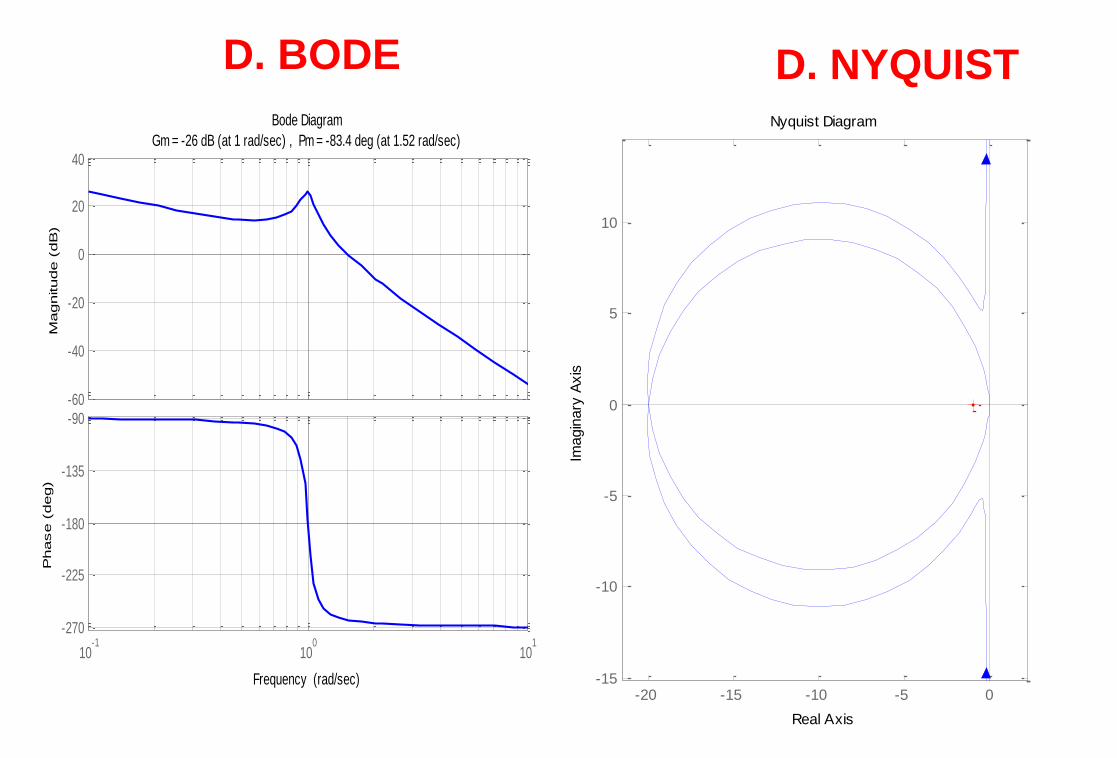
Gm = -26 dB (at 1 rad/sec) , Pm = -83.4 deg (at 1.52 rad/sec)
Frequency (rad/sec)
MARGINI DI STABILITA’
-60
-40
-20
0
20
40
Magnitude (
dB
)
10-1
100
101
-270
-225
-180
-135
-90
Phase (
deg)
Bode Diagram
Gm = -26 dB (at 1 rad/sec) , Pm = -83.4 deg (at 1.52 rad/sec)
Frequency (rad/sec)
D. BODE D. NYQUIST
-20 -15 -10 -5 0-15
-10
-5
0
5
10
Nyquist Diagram
Real Axis
Imagin
ary
Axis

•Se si dispone dei diagrammi di Bode di G(jw) è conveniente utilizzare questi come ausilio
per il tracciamento del diagramma di Nyquist. A tal fine si sceglie sul diagramma di Bode
un insieme di pulsazioni campione, e, facendo riferimento alla forma polare di G(jw), si
riportano sul piano complesso i valori del modulo e della fase letti dai diagrammi d Bode
•Dal diagramma di Bode al diagramma di NyquisT
0.02( )
(1 /10)(1 / 20)(1 /100)w
w w w
G j
j j j• Esempio
-0.01
-0.005
0 0.005
0.01
0.015
0.02
0.025
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
2 x 10
-3
( )G jw
( )G w
Si fissano alcuni
valori sul
diagramma di
bode e si
riportano nel
piano complesso
in modulo e fase Diagramma di Nyquist Diagramma di
Bode
10 -2
10 -1
10 0
10 1
10 2
-100
-50
0
10 -2
10 -1
10 0
10 1
10 2
-270
-180
-90
0
Mo
du
lo d
B
Fase

-1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-4 dB0 dB -2 dB
20 dB -20 dB
10 dB
6 dB
-10 dB
4 dB2 dB
-6 dB
Nyquist Diagram
Real Axis
Imag
inary
Axi
s
( )( 1)( 2)
Ksys s
s s s
•Il diagramma di Nyquist può essere tracciato utilizzando il comando: nyquist ( ):
lim
10.1667
K
• Nel caso in cui sia stato disegnato un diagramma di Nyquist Il
comanda grid traccia i luoghi a modulo costante a ciclo chiuso M
( )
1 ( )
F jM
F j
w
w
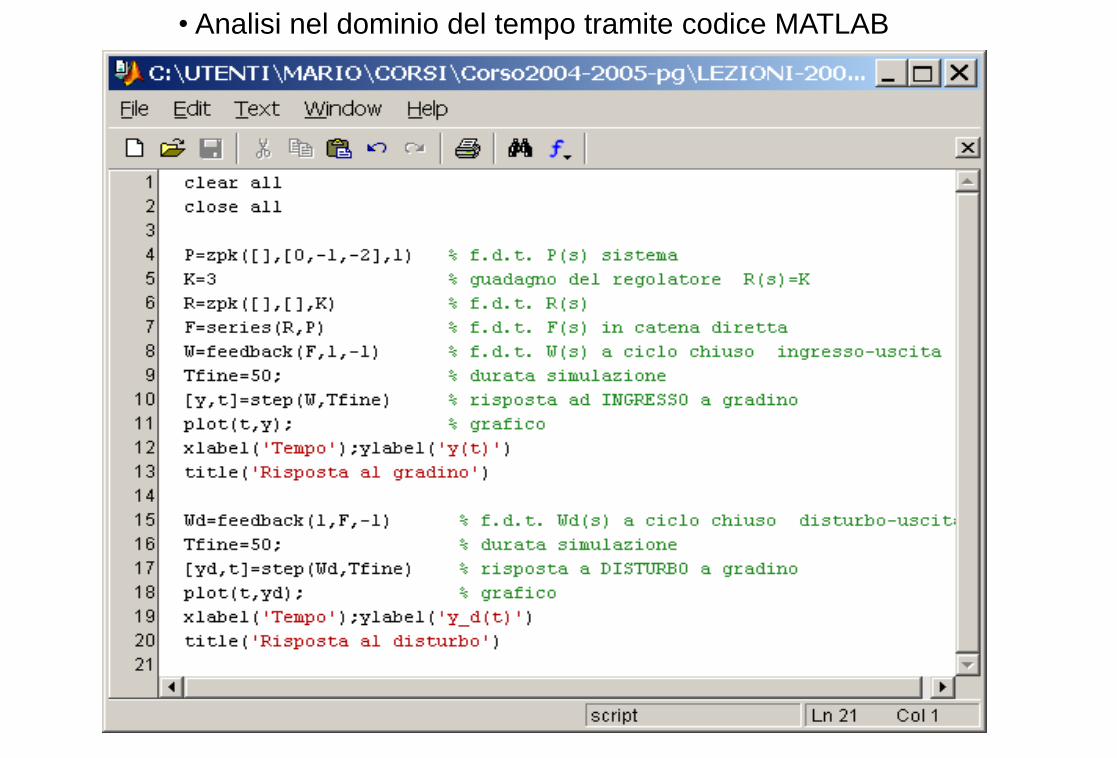
• Analisi nel dominio del tempo tramite codice MATLAB

0 10 20 30 40 500
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Tempo
y(t)
Risposta al gradino
0 10 20 30 40 50-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Tempo
y d(t
)
Risposta al disturbo
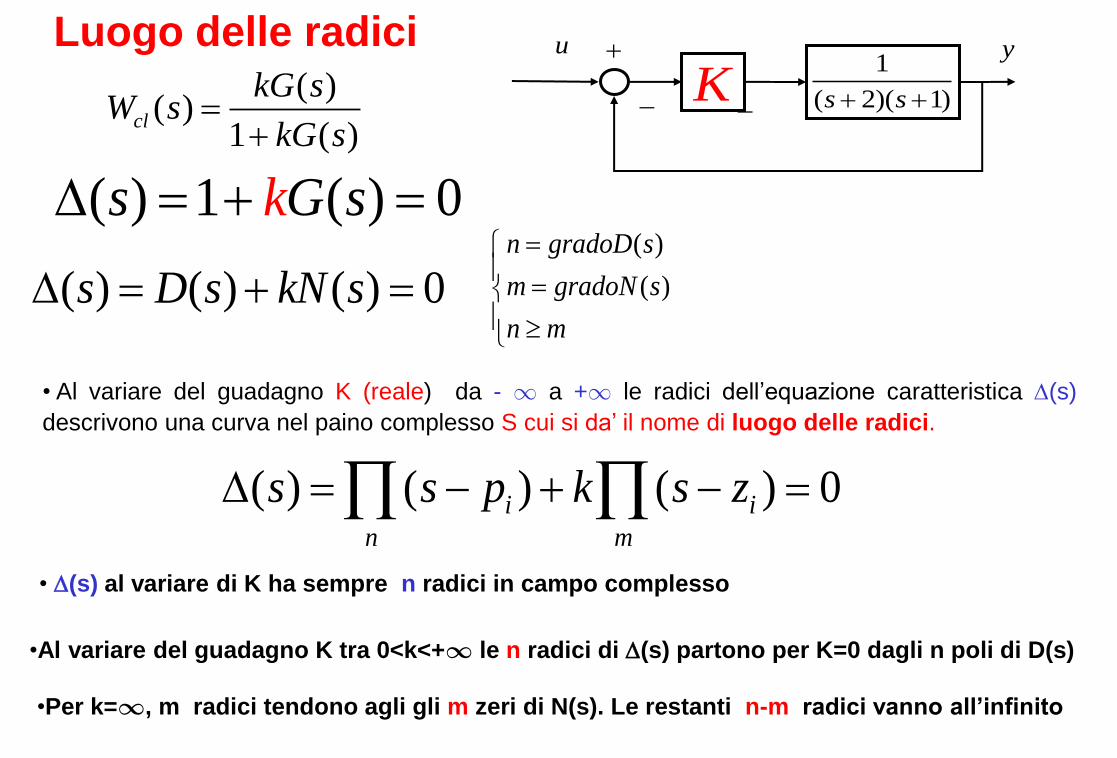
Luogo delle radici 1
( 2)( 1)s s
yu
K
( ) 1 ( ) 0ks G s
( )( )
1 ( )cl
kG sW s
kG s
( ) ( ) ( ) 0s D s kN s ( )
( )
n gradoD s
m gradoN s
n m
• (s) al variare di K ha sempre n radici in campo complesso
•Al variare del guadagno K tra 0<k<+ le n radici di (s) partono per K=0 dagli n poli di D(s)
•Per k=, m radici tendono agli gli m zeri di N(s). Le restanti n-m radici vanno all’infinito
• Al variare del guadagno K (reale) da - a + le radici dell’equazione caratteristica (s)
descrivono una curva nel paino complesso S cui si da’ il nome di luogo delle radici.
( ) ( ) ( ) 0i i
n m
s s p k s z
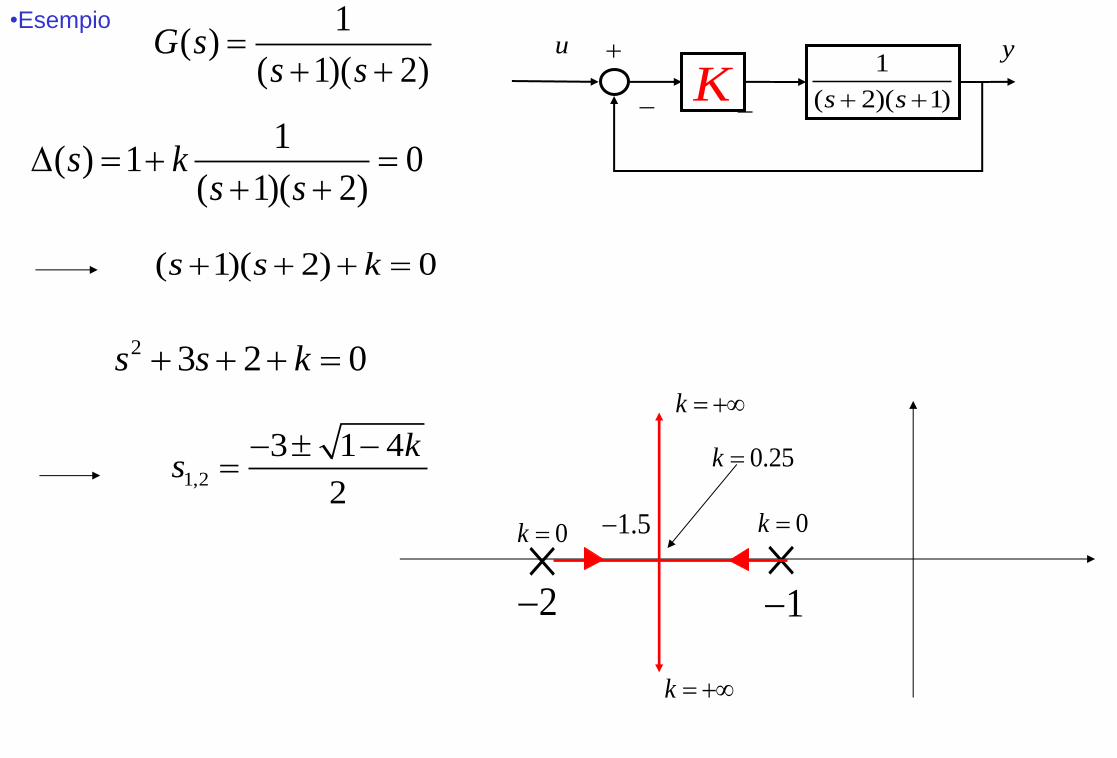
1( ) 1 0
( 1)( 2)s k
s s
2 3 2 0s s k
( 1)( 2) 0s s k
•Esempio 1( )
( 1)( 2)G s
s s
1,2
3 1 4
2
ks
1
( 2)( 1)s s
yu
K
2 1
0.25k
0k 0k
k
k
1.5

( 3)( 2)( 1) 0s s s k
-8 -6 -4 -2 0 2 4-6
-4
-2
0
2
4
6
Root Locus
Real Axis
Imagin
ary
Axis
>>sys=zpk([],[-1 -2 -3],1)
>>rlocus(sys)
1
( 3)( 2)( 1)s s s
yu
K
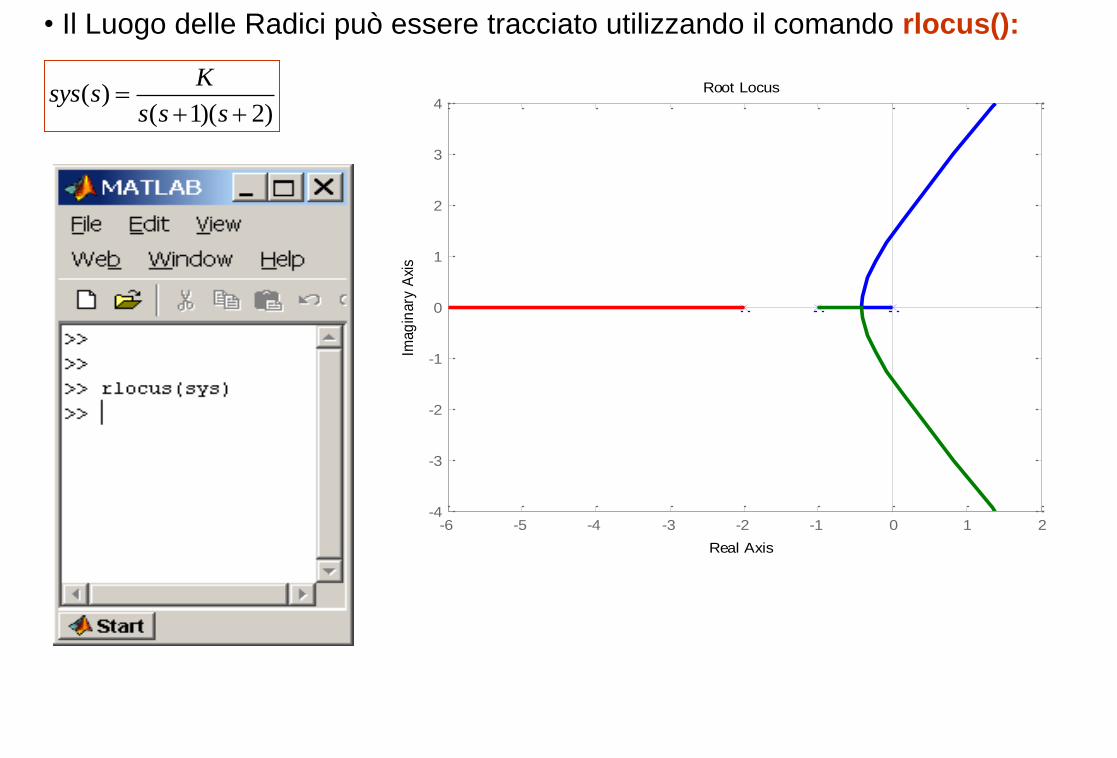
( )( 1)( 2)
Ksys s
s s s
• Il Luogo delle Radici può essere tracciato utilizzando il comando rlocus():
-6 -5 -4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
4Root Locus
Real Axis
Imag
inary
Axi
s
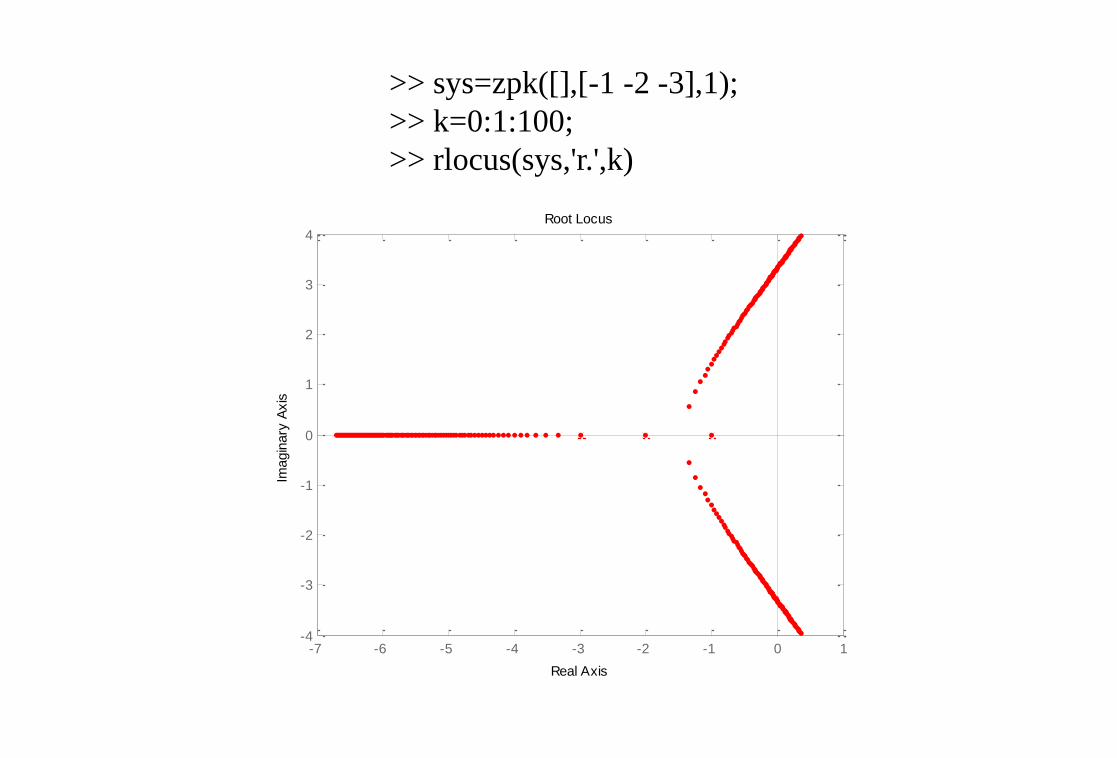
>> sys=zpk([],[-1 -2 -3],1);
>> k=0:1:100;
>> rlocus(sys,'r.',k)
-7 -6 -5 -4 -3 -2 -1 0 1-4
-3
-2
-1
0
1
2
3
4
Root Locus
Real Axis
Imagin
ary
Axis
-4 -3 -2 -1 0 1 2 3 4-5
-4
-3
-2
-1
0
1
2
3
4
5Root Locus
Real Axis
Imag
inary
Axi
s
( )( 1)( 2)
Ksys s
s s s
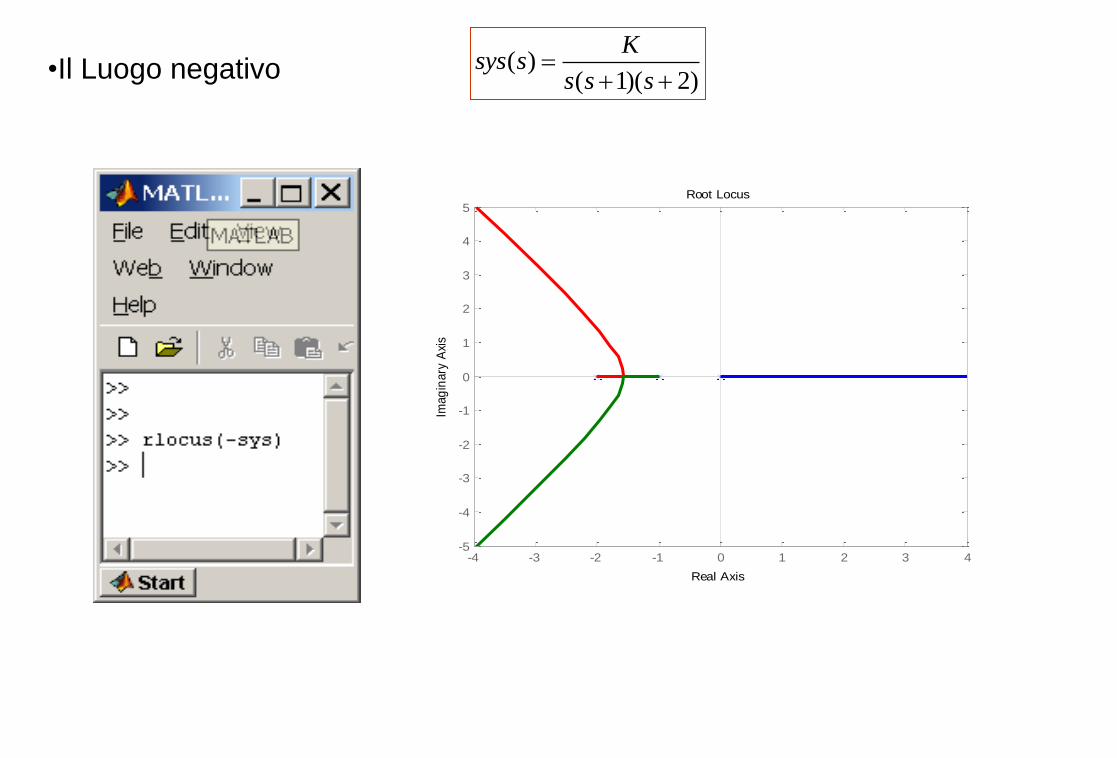
•Il Luogo negativo
( )( 1)( 2)
Ksys s
s s s
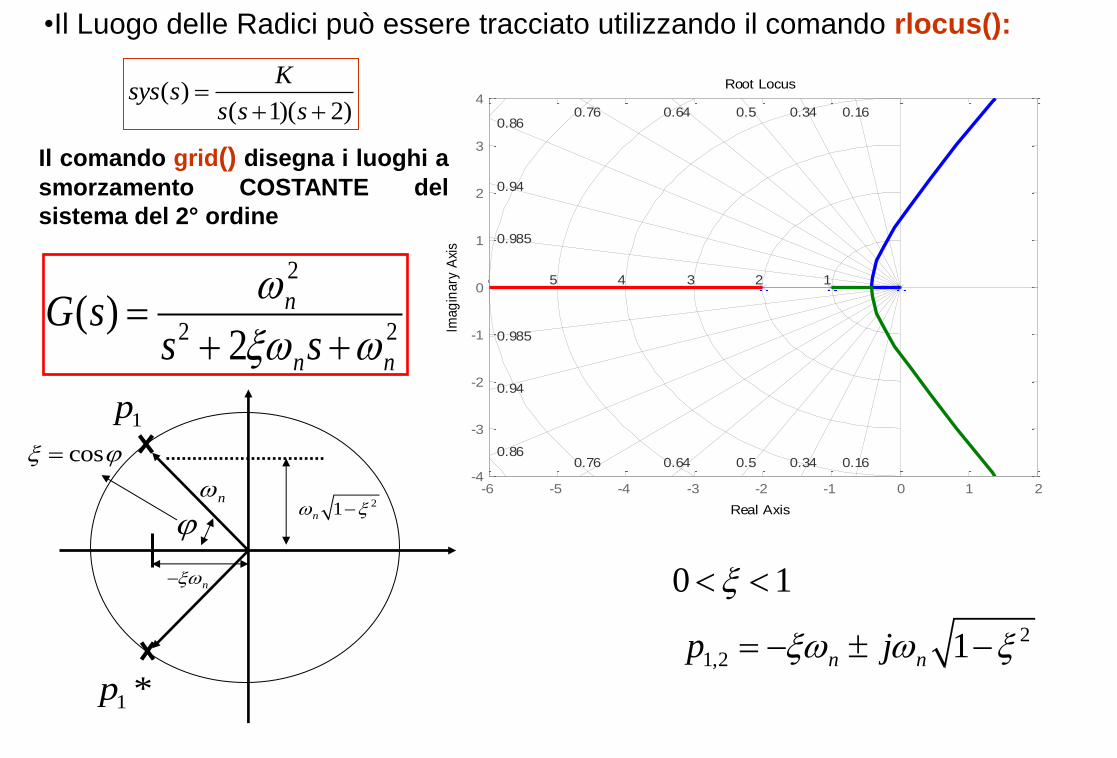
•Il Luogo delle Radici può essere tracciato utilizzando il comando rlocus():
Il comando grid() disegna i luoghi a
smorzamento COSTANTE del
sistema del 2° ordine
2
2 2( )
2
n
n n
G ss s
w
w w
1p
1 *p
wn 21nw
w n
cos
2
1,2
0 1
1n np j
w w
-6 -5 -4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
4
5 4
0.985
0.64
0.985
0.86
0.34
3
0.86
2
0.76
16
0.160.5
0.16
0.76
0.34
0.94
0.50.64
0.94
Root Locus
Real Axis
Imag
inary
Axi
s

• Con il comando rlocfind(), posizionandosi con il mouse sul plot del luogo delle
radici, è possibile determinare il valore del guadagno K in quel punto del luogo ed il
valore delle radici a ciclo chiuso.
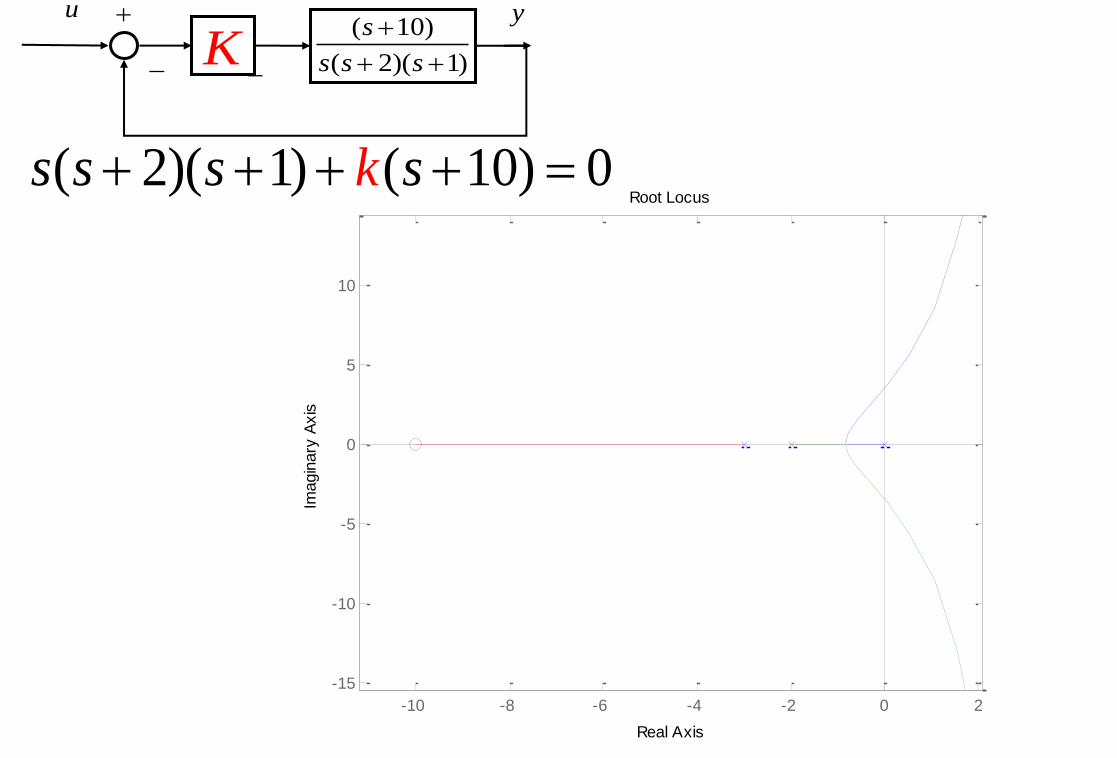
( 10)
( 2)( 1)
s
s s s
yu
K
-10 -8 -6 -4 -2 0 2
-15
-10
-5
0
5
10
Root Locus
Real Axis
Imagin
ary
Axis
( 2)( 1) ( 10) 0s s s sk

-8 -7 -6 -5 -4 -3 -2 -1 0 1 2-4
-3
-2
-1
0
1
2
3
4
Root Locus
Real Axis
Imagin
ary
Axis
( 3)
( 2)
s
s s
yu
K
( 2) ( 3) 0ks s s

1
( 2)( 1)s s s
yu
K
>> sys=zpk([],[0 -2 -3],6)
Zero/pole/gain:
6
-------------
s (s+2) (s+3)
>> sisotool
>>
>>sisotool
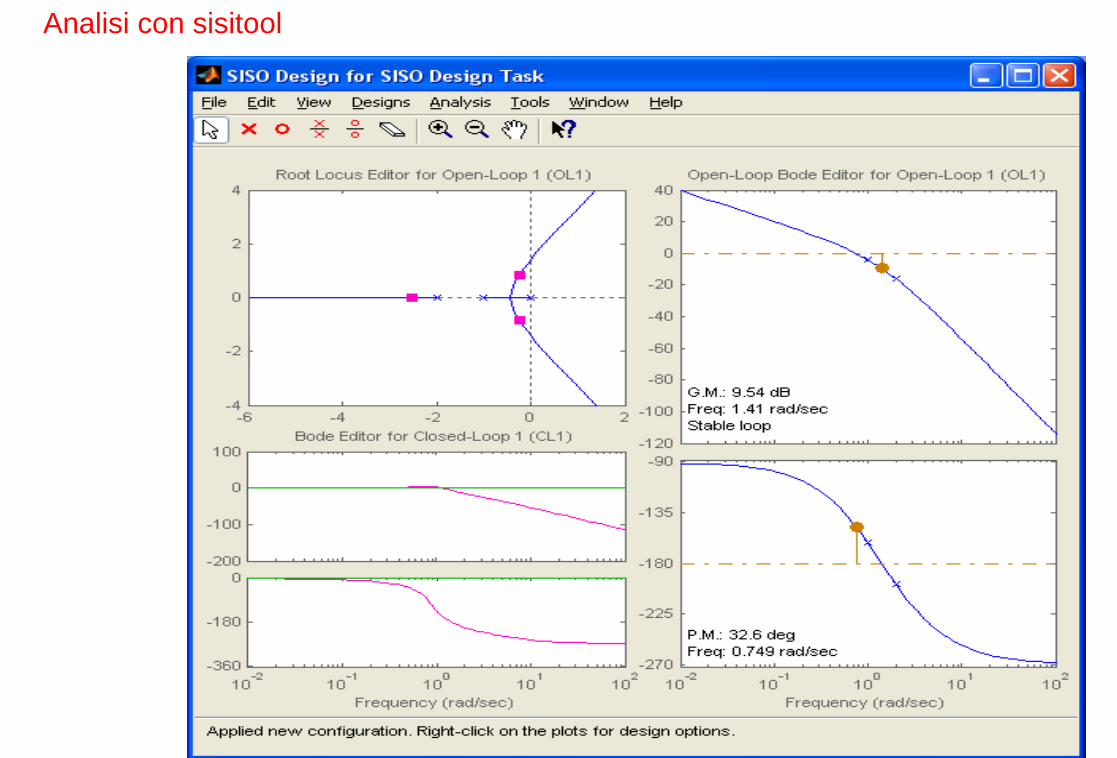
Analisi con sisitool

( 1)( 2)
K
s s s
yu
•Analizzare al variare del guadagno K il comportamento del sistema:
-150
-100
-50
0
50
Mag
nitud
e (
dB
)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Pha
se
(d
eg
)
Bode Diagram
Frequency (rad/sec)
( )( 1)( 2)
Ksys s
s s s
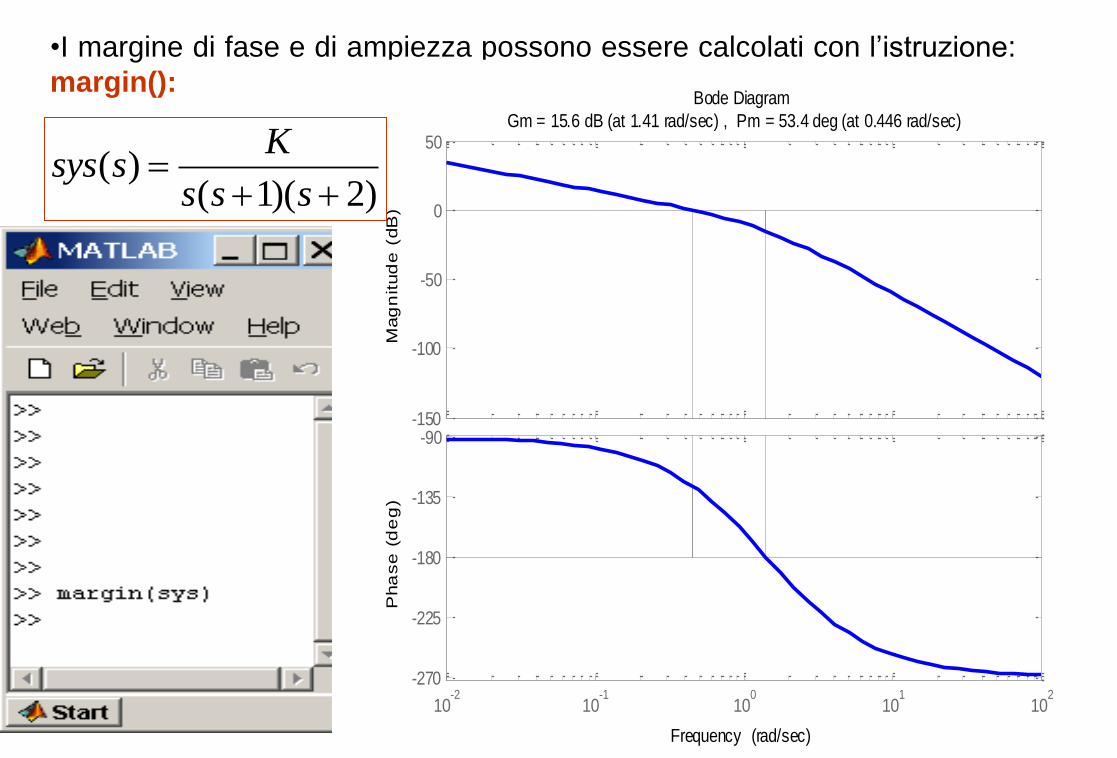
•I margine di fase e di ampiezza possono essere calcolati con l’istruzione:
margin():
-150
-100
-50
0
50
Mag
nitud
e (
dB
)
10-2
10-1
100
101
102
-270
-225
-180
-135
-90
Pha
se
(d
eg
)
Bode Diagram
Gm = 15.6 dB (at 1.41 rad/sec) , Pm = 53.4 deg (at 0.446 rad/sec)
Frequency (rad/sec)
( )( 1)( 2)
Ksys s
s s s
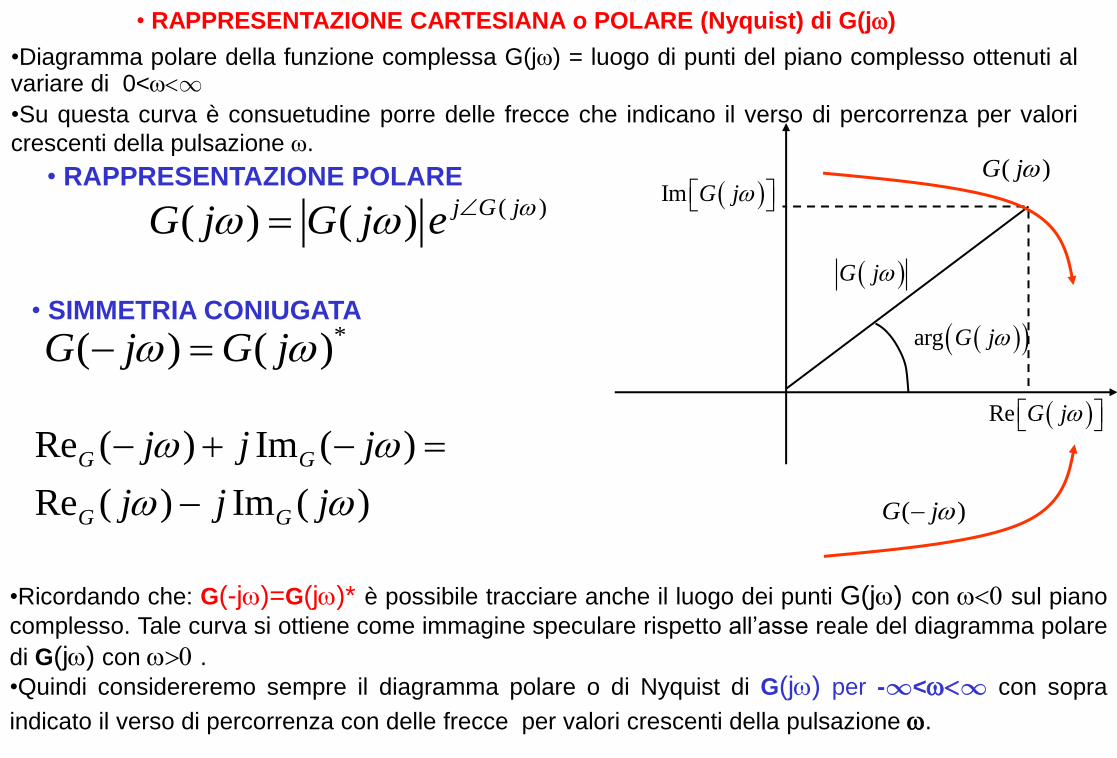
• RAPPRESENTAZIONE CARTESIANA o POLARE (Nyquist) di G(jw)
•Diagramma polare della funzione complessa G(jw) = luogo di punti del piano complesso ottenuti al variare di 0<w
•Su questa curva è consuetudine porre delle frecce che indicano il verso di percorrenza per valori
crescenti della pulsazione w.
( )( ) ( ) j G jG j G j e ww w
• RAPPRESENTAZIONE POLARE
•Ricordando che: G(-jw)=G(jw)* è possibile tracciare anche il luogo dei punti G(jw) con w0 sul piano
complesso. Tale curva si ottiene come immagine speculare rispetto all’asse reale del diagramma polare
di G(jw) con w>0 .
•Quindi considereremo sempre il diagramma polare o di Nyquist di G(jw) per -<w con sopra
indicato il verso di percorrenza con delle frecce per valori crescenti della pulsazione w.
( )G jw
Re ( ) Im ( )
Re ( ) Im ( )
G G
G G
j j j
j j j
w w
w w
• SIMMETRIA CONIUGATA *( ) ( )G j G jw w
Im G jw
Re G jw
G jw
arg G jw
( )G jw
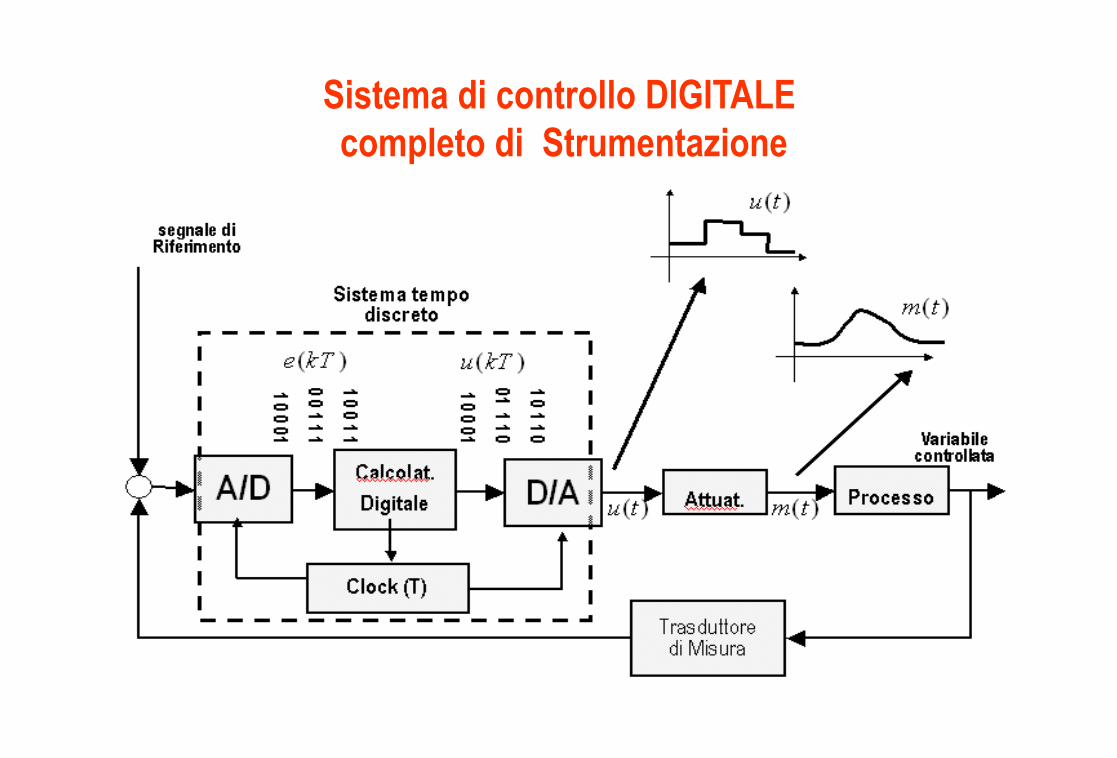
Sistema di controllo DIGITALE
completo di Strumentazione
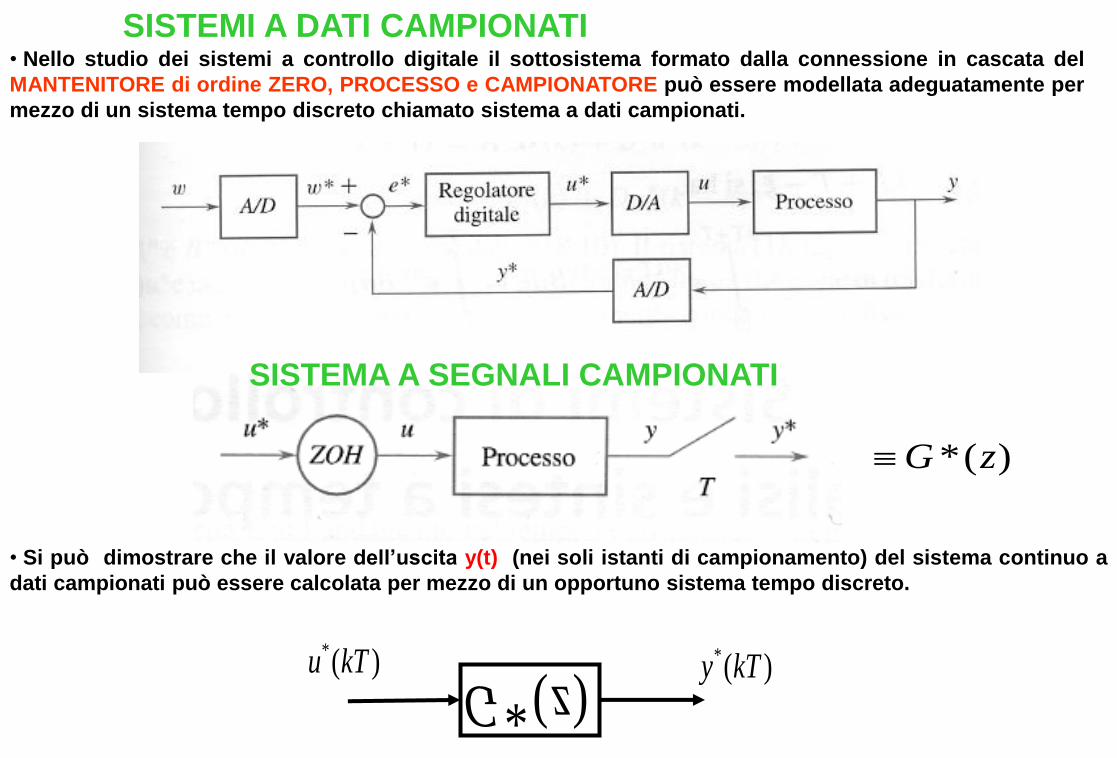
SISTEMI A DATI CAMPIONATI • Nello studio dei sistemi a controllo digitale il sottosistema formato dalla connessione in cascata del
MANTENITORE di ordine ZERO, PROCESSO e CAMPIONATORE può essere modellata adeguatamente per
mezzo di un sistema tempo discreto chiamato sistema a dati campionati.
SISTEMA A SEGNALI CAMPIONATI
*( )G z
• Si può dimostrare che il valore dell’uscita y(t) (nei soli istanti di campionamento) del sistema continuo a
dati campionati può essere calcolata per mezzo di un opportuno sistema tempo discreto.
*( )G z *( )y kT*( )u kT
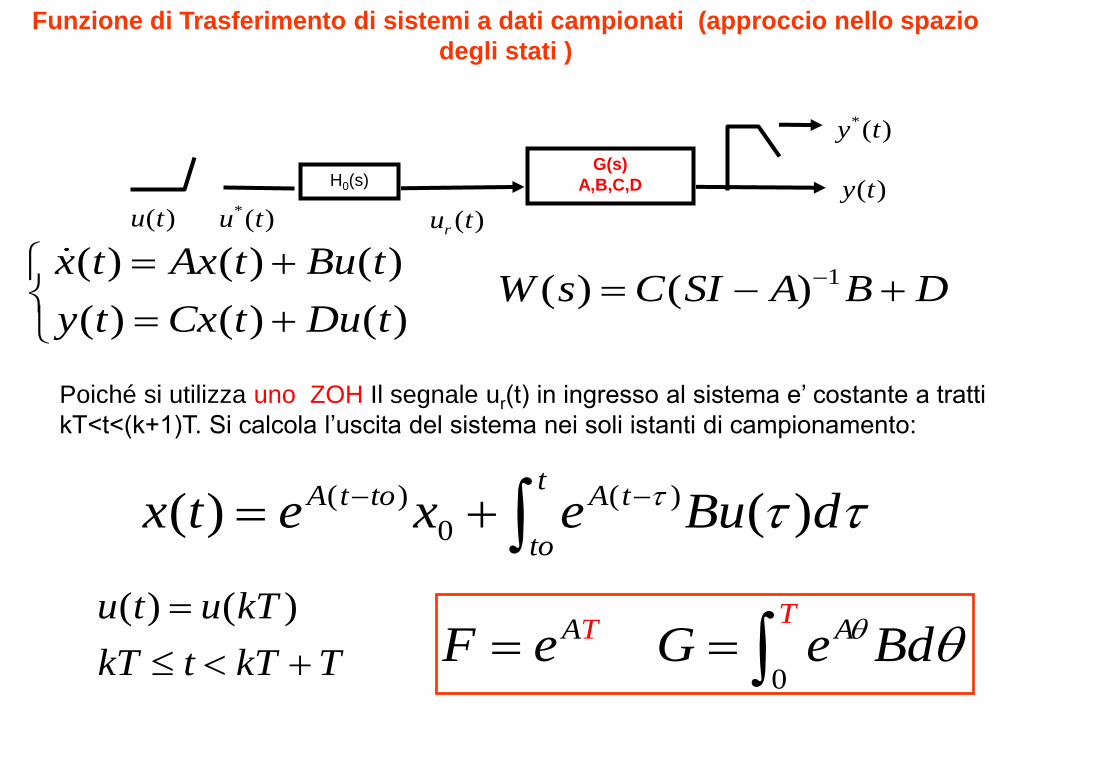
Funzione di Trasferimento di sistemi a dati campionati (approccio nello spazio
degli stati )
H0(s) G(s)
A,B,C,D
( )u t *( )u t
( )y t
*( )y t
( )ru t
( ) ( ) ( )
( ) ( ) ( )
x t Ax t Bu t
y t Cx t Du t
1( ) ( ) W s C SI A B D
( ) ( )
0( ) ( )t
A t to A t
tox t e x e Bu d
( ) ( )
u t u kT
kT t kT T
Poiché si utilizza uno ZOH Il segnale ur(t) in ingresso al sistema e’ costante a tratti
kT<t<(k+1)T. Si calcola l’uscita del sistema nei soli istanti di campionamento:
0
A AT
TF e G e Bd

Si dimostra che negli istanti di campionamento l’uscita del sistema
TEMPO CONTINUO è identica a quella di un opportuno SISTEMA
TEMPO DISCRETO, caratterizzato dalle seguenti matrici: F, G:
( 1) ( ) ( )
( ) ( ) ( )
x k Fx k Gu k
y k Cx k Du k
0
A AT
TF e G e Bd
Quindi ad ogni sistema continuo (A,B,C,D) è associata una intera
famiglia di sistema a dati campionati. Le matrici F e G sono infatti
funzione del periodo di campionamento T

0 5 10 15 20
0
0.5
1
1.5
Step Response
Time (sec)
Am
plit
ude
Risposta al Gradino di un sistema tempo continuo e del corrispondente
sistema a dati campionati

Zero-Order
Hold1
Zero-Order
Hold
1
5s+1
Transfer Fcn2
1
s +0.4s+12
Transfer Fcn1
1
s +0.4s+12
Transfer Fcn
Step
Floating
Scope1
Floating
Scope
0.4050z+0.3529]
1.0000z -0.9124z+0.6703]2
Discrete
Transfer Fcn
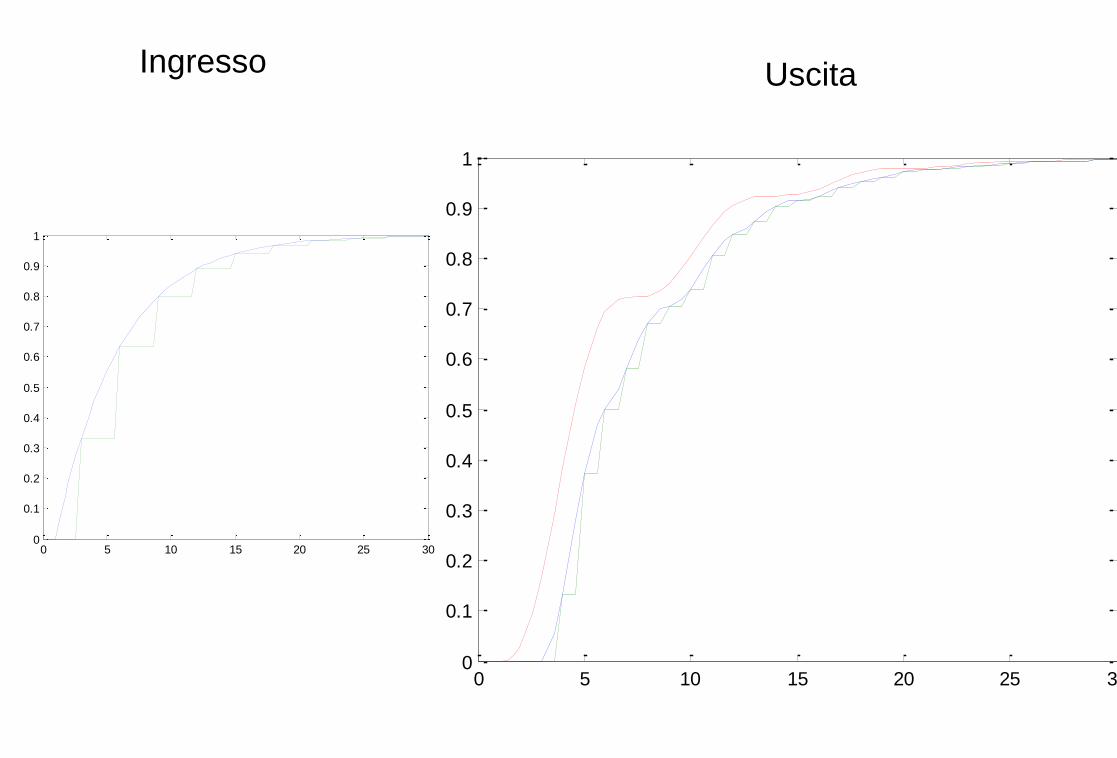
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Ingresso Uscita

0 0.5 1 1.5 2 2.5 3 3.5 4 0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Sistema discreto Sistema continuo
Possibili problemi di intersampling…………………