PRESENTAZIONE DELLE FASI FINALI DELLA … · COSTRUZIONE E DELLA MESSA IN VOLO DEL VELIVOLO SENZA...
11
XIX CONGRESSO NAZIONALE AIDAA 17-21 settembre 2007 FORLI’ PRESENTAZIONE DELLE FASI FINALI DELLA PROGETTAZIONE E COSTRUZIONE E DELLA MESSA IN VOLO DEL VELIVOLO SENZA PILOTA A BORDO DIANA A. F. ACCARDO 1 , F. RICCI 1 , D. ACCARDO 1 , D. LUCARIELLO 1 , D. CHINNICI 2 1 Dipartimento di Ingegneria Aerospaziale, Università di Napoli “Federico II”, Napoli 2 LMC SpA, Mariglianella (NA) SOMMARIO Al precedente Congresso AIDAA, quello tenuto a Volterra nel 2005, è stato presentato il “planning Università/Industria per la progettazione e la costruzione di un mini-UAV”. In effetti con dizione più appropriata occorreva dire che si parlava di un APR AV-Light, trattandosi di un velivolo militare senza uomo a bordo. Questa dizione è stata definita solo dalla legge 14 luglio 2004 n. 178. La sigla APR significa aeromobile a pilotaggio remoto. Si ricorda che a fine 2004 la LMC SpA ha concluso l’iter amministrativo tecnico con ARMAEREO per la costruzione di un prototipo di un mini-UAV .Il progetto era stato approvato da SEGREDIFESA, che aveva passato la pratica ad ARMAEREO per la definizione del contratto. Sin dall’inizio, come già detto nella precedente presentazione appena citata, era stato determinante ai fini della realizzazione del progetto l’intervento di alcuni elementi del DPA e del DISIS della Università Federico II. Ora questi dipartimenti sono confluiti nell’unico DIPARTIMENTO DI INGEGNERIA AEROSPAZIALE (DIAS) Dopo il Congresso di Volterra si è continuato nel lavoro di progettazione e di costruzione , che ha richiesto diverse fasi di calcolo, analisi e sperimentazione e che si è concluso con la messa in volo. In questa memoria si intende presentare principalmente alcuni risultati salienti del lavoro sperimentale sviluppatosi secondo le seguenti fasi: - prove di galleria, - prove preliminari strutturali,. - prove statiche, - prove di rumore , - prove di vibrazioni al suolo per le analisi aeroelastiche, - prove in volo per la verifica della specifica Al momento della presentazione di questo sommario risultavano imminenti le prove ufficiali di volo, che sono state eseguite a Perdasdefogu nel poligono militare. Saranno presentate anche fasi di calcolo e di sviluppo analitico insieme con i relativi risultati anche a conforto delle sperimentazioni. Sempre relativamente all’attività sperimentale saranno messe in luce le seguenti evenienze. Le prove di galleria sono state eseguite presso il DPA. Sono state effettuate prove di forza e di visualizzazione sia sul velivolo parziale che sul velivolo completo. In base ad alcune prove di galleria sono stati decisi alcuni dettagli importanti della configurazione. Si ricordano le prove eseguite con varie derive e pinne ventrali. Sempre in base alle prove di galleria ed in modo specifico di quelle di visualizzazione è stato deciso di non operare raccordi tra ala e fusoliera. Alcune prove preliminari strutturali sono state eseguite per caratterizzare i materiali impiegati per la costruzione. Le prove statiche sono state eseguite in base alle indicazioni fornite dalla JAR VLA non esistendo una normativa specifica a proposito degli APR. Sono state effettuate prove sull’ala più gravose a torsione per la condizione di contingenza, più gravose a flessione per la condizione di contingenza e più gravose a flessione per la condizione di robustezza. La più gravosa a flessione è risultata la più gravosa in generale e per questo è stata eseguita anche a robustezza. Per quanto attiene alla fusoliera sono state eseguite prove di flessione verso il basso per la parte 75/07 Aerotecnica Missili e Spazio Vol. 86 4/2007 161
Transcript of PRESENTAZIONE DELLE FASI FINALI DELLA … · COSTRUZIONE E DELLA MESSA IN VOLO DEL VELIVOLO SENZA...

XIX CONGRESSO NAZIONALE AIDAA
17-21 settembre 2007 FORLI’
PRESENTAZIONE DELLE FASI FINALI DELLA PROGETTAZIONE E COSTRUZIONE E DELLA MESSA IN VOLO DEL VELIVOLO SENZA
PILOTA A BORDO DIANA
A. F. ACCARDO1, F. RICCI1 , D. ACCARDO1, D. LUCARIELLO1, D. CHINNICI2
1Dipartimento di Ingegneria Aerospaziale, Università di Napoli “Federico II”, Napoli
2LMC SpA, Mariglianella (NA)
SOMMARIO
Al precedente Congresso AIDAA, quello tenuto a Volterra nel 2005, è stato presentato il “planning Università/Industria per la progettazione e la costruzione di un mini-UAV”. In effetti con dizione più appropriata occorreva dire che si parlava di un APR AV-Light, trattandosi di un velivolo militare senza uomo a bordo. Questa dizione è stata definita solo dalla legge 14 luglio 2004 n. 178. La sigla APR significa aeromobile a pilotaggio remoto. Si ricorda che a fine 2004 la LMC SpA ha concluso l’iter amministrativo tecnico con ARMAEREO per la costruzione di un prototipo di un mini-UAV .Il progetto era stato approvato da SEGREDIFESA, che aveva passato la pratica ad ARMAEREO per la definizione del contratto. Sin dall’inizio, come già detto nella precedente presentazione appena citata, era stato determinante ai fini della realizzazione del progetto l’intervento di alcuni elementi del DPA e del DISIS della Università Federico II. Ora questi dipartimenti sono confluiti nell’unico DIPARTIMENTO DI INGEGNERIA AEROSPAZIALE (DIAS) Dopo il Congresso di Volterra si è continuato nel lavoro di progettazione e di costruzione , che ha richiesto diverse fasi di calcolo, analisi e sperimentazione e che si è concluso con la messa in volo. In questa memoria si intende presentare principalmente alcuni risultati salienti del lavoro sperimentale sviluppatosi secondo le seguenti fasi:
- prove di galleria, - prove preliminari strutturali,. - prove statiche, - prove di rumore , - prove di vibrazioni al suolo per le analisi aeroelastiche, - prove in volo per la verifica della specifica
Al momento della presentazione di questo sommario risultavano imminenti le prove ufficiali di volo, che sono state eseguite a Perdasdefogu nel poligono militare. Saranno presentate anche fasi di calcolo e di sviluppo analitico insieme con i relativi risultati anche a conforto delle sperimentazioni. Sempre relativamente all’attività sperimentale saranno messe in luce le seguenti evenienze. Le prove di galleria sono state eseguite presso il DPA. Sono state effettuate prove di forza e di visualizzazione sia sul velivolo parziale che sul velivolo completo. In base ad alcune prove di galleria sono stati decisi alcuni dettagli importanti della configurazione. Si ricordano le prove eseguite con varie derive e pinne ventrali. Sempre in base alle prove di galleria ed in modo specifico di quelle di visualizzazione è stato deciso di non operare raccordi tra ala e fusoliera. Alcune prove preliminari strutturali sono state eseguite per caratterizzare i materiali impiegati per la costruzione. Le prove statiche sono state eseguite in base alle indicazioni fornite dalla JAR VLA non esistendo una normativa specifica a proposito degli APR. Sono state effettuate prove sull’ala più gravose a torsione per la condizione di contingenza, più gravose a flessione per la condizione di contingenza e più gravose a flessione per la condizione di robustezza. La più gravosa a flessione è risultata la più gravosa in generale e per questo è stata eseguita anche a robustezza. Per quanto attiene alla fusoliera sono state eseguite prove di flessione verso il basso per la parte
75/07
Aerotecnica Missili e Spazio Vol. 86 4/2007 161
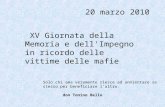
posteriore, prove di flessione laterale e flessione per la parte posteriore e prove di flessione verso il basso per la parte anteriore. Sono state eseguite prove per verificare il livello di rumore anche a conforto di alcune indagini analitiche. Sono state effettuate indagini per verificare la RADAR CROSS SECTION. Sono state eseguite prove di vibrazioni al suolo a supporto delle determinazioni aeroelastiche. Esse saranno più diffusamente presentate in un’altra memoria. Sono state organizzate ed eseguite prove di volo per verificare la specifica ed le previsioni dei calcoli. . 1. INTRODUZIONE Il velivolo, di cui si tratta in questa memoria, è un APR AV-Light secondo la definizione militare italiana. In effetti esso è un UAV con apertura alare di 3,15 metri e lunghezza 3 metri, capace di avere un carico pagante di 7 daN ed un’autonomia superiore a un’ora. Il capitolato, inserito nell’ambito contrattuale tra LMC SpA e ARMAEREO, prevedeva la esecuzione delle seguenti attività, come già indicato anche nella memoria [1]:
- studio e definizione delle specifiche tecniche; - prove in galleria del vento; - progettazione del dettaglio cellula, carrello di atterraggio; - scelta ed integrazione del gruppo motopropulsore; - effettuazione del Critical Design Review (CDR) - studio e verifica del rumore esterno e della trasparenza radar ed esecuzione delle prove; - esecuzione delle prove statiche, aeroelastiche e di vibrazione; - realizzazione del dimostratore tecnologico completo e della cellula di back-up per la realizzazione delle prove di
volo; - esecuzione delle prove in volo con report finale Nella memoria [1], appena citata, è stata fatta una presentazione delle prime quattro attività. Nel frattempo le operazioni si sono completamente definite fino alla esauriente esecuzione delle prove in volo. In questa memoria si intende concludere la presentazione delle attività, compreso un sintetico riepilogo delle prime quattro attività. Per una loro più ampia considerazione si rimanda alla memoria [1].
Figura 1: L’UAV Diana pronto per il volo a Perdasdefogu.
Nella Figura 1 si vede l’UAV pronto ad eseguire le prove di volo a Perdasdefogu. Le esatte dimensioni geometriche più dettagliate sono state presentate nella memoria [1].
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
162 Aerotecnica Missili e Spazio Vol. 86 4/2007

Figura 2: Il modello di galleria durante la costruzione, finito e durante le prove di visualizzazione.
Nella Figura 2 si vede il modello durante varie fasi. In effetti esso è stato provato nella galleria aerodinamica dell’allora Dipartimento di Progettazione Aeronautica (ora confluito nel Dipartimento di Ingegneria Aerospaziale – DIAS) sia per l’esecuzioni di prove di forza che per l’esecuzione di visualizzazioni. Relativamente ai punti terzo e quarto va detto che un’ampia presentazione è stata effettuata nella memoria [1]. All’atto della presentazione di tale memoria non erano stati ancora definiti i carrelli, che ora si vedono nella illustrazione di Figura 1. Per la loro realizzazione è stato condotto un attento studio. Il carrello principale è costituito da una struttura sandwich realizzata con due balestre in carboresina, che costituiscono le face del sandwich, ed un core in gomma. Il carrello anteriore è costituito da un elemento in lega di alluminio di diametro esterno di 20 mm, nella parte superiore avente la funzione di perno, fissato per mezzo di due dadi ad un elemento laminare curvo nella parte inferiore, in fibra di carbonio, avente la funzione di elemento elastico e di congiunzione con la ruota. Le ruote del carrello principale sono dotate di dispositivo frenante. Per quanto attiene il gruppo motopropulsore è stato confermato il modello previsto, cioè ZDZ 120B2RV con potenza dichiarata dal costruttore di 10,5 bhp. Durante le prove di volo sono state utilizzate varie eliche bipala, secondo le indicazioni del costruttore del motore. Durante effettuazione del Critical Design Review si sono definiti alcuni aspetti relativamente al progetto e disegno strutturale: - costruzione dei carrelli secondo le indicazioni precedentemente indicate, - realizzazione dei serbatoi alari in plastica, - realizzazione dell’ordinata parafiamma in composito avanzato. Questi dettagli , non secondari comunque, non erano stati definiti nel capitolato. Si fa presente che nella costruzione di un precedente velivolo più piccolo di Diana, chiamato Federica, sempre nell’ambito della collaborazione tra LMC SpA e il gruppo di ricerca dell’Università Federico II, i primi due elementi sopra riportati erano metallici. Si è ritenuto per Diana di evitare per quanto possibile elementi metallici per aumentare la trasparenza radar. Va qui sottolineato che una delle caratteristiche fondamentali dell’UAV Diana è l’utilizzazione nella sua costruzione del composito avanzato. Tale caratteristica lo distingue dalla quasi totalità dei velivoli simili, già costruiti, in campo internazionale. Il vantaggio di tale tipo di costruzione è quello di accoppiare ad una buona trasparenza radar un’ottima possibilità di lavorazione in serie. Nei paragrafi che seguono saranno illustrati i risultati delle ultime quattro attività descritte nell’elenco riportato all’inizio di questo paragrafo. Saranno inoltre presentate le conclusioni di uno studio condotto per valutare i possibili impieghi futuri di Diana. 2. FASI SPERIMENTALI A TERRA E STUDIO DELLA TRASPARENZA RADAR Si intende qui presentare in maniera sintetica le attività di studio e verifica del rumore esterno e della trasparenza radar e di realizzazione delle relative prove, di esecuzione delle prove statiche e di vibrazione, di realizzazione del dimostratore tecnologico completo e della cellula di backup per la realizzazione delle prove di volo. Tali ultime attività hanno richiesto un lavoro ampio e puntuale sia del gruppo dell’Università Federico II che della ditta LMC SpA. E’ stato necessario in effetti creare un sistema di trasferimento dei dati del disegno, principalmente eseguito dagli elementi legati all’Università, alla realizzazione dei prototipi, effettuata dagli elementi della LMC SpA. Nella Figura 3 vengono mostrati alcuni attrezzi ed alcuni scali utilizzati per la lavorazione di Diana. Per quanto attiene ai calcoli di aeroelasticità si rimanda al lavoro presentato in questo stesso congresso [2]. Si fa presente solamente che il velivolo è risultato completamente esente da problemi connessi con tali fenomeni e che le
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
Aerotecnica Missili e Spazio Vol. 86 4/2007 163

difficoltà incontrate nell’espletare tali determinazioni sono dovute anche al quasi nullo riscontro bibliografico sia per le ridotte dimensioni del velivolo, che per il materiale impiegato nella sua costruzione.
Figura 3: Immagine degli attrezzi e degli scali utilizzati dalla LMC SpA per la preparazione delle parti prima e durante
le operazioni in autoclave..
Figura 4: Immagine del prototipo durante le prove di vibrazioni a terre.
Il prof: Sergio De Rosa con il suo gruppo ha condotto le prove presso la LMC SpA. Nella Figura 4 sono mostrate alcune immagini scattate durante le prove di vibrazione al suolo. Sono stati condotti calcoli ed effettuate analisi sperimentali per determinare il livello di rumore emesso dal velivolo. Per quanto attiene alla fase sperimentale le prove hanno riguardato sia la misura del motore al banco che la misura del rumore provocato dall’intero velivolo con il motore in funzione al suolo. A tale scopo è stato costruito un prototipo. Non sono state effettuate prove di rumore con il velivolo in volo, perché è stato ritenuto più opportuno sfruttare le finestre temporali di prove in volo nel poligono di Perdasdefogu per prove riguardanti prestazioni del velivolo relativamente alla meccanica del volo.
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
164 Aerotecnica Missili e Spazio Vol. 86 4/2007

Il gruppo dell’Università che ha condotto le prove di rumore presso la LMC SpA è stato guidato dal Prof. Francesco Marulo. Nella Figura 5 è mostrato il prototipo prima menzionato durante le sperimentazioni relative al rumore.
Figura 5: Immagine del prototipo durante le prove di rumore.
Figura 6: Immagini delle prove statiche e della strumentazione per i relativi rilievi estensimetrici.
Nella Figura 6 si vedono alcune immagini delle prove statiche condotte presso gli stabilimenti della LMC SpA su di un prototipo di Diana. Le prove sono state preparate dal gruppo dell’Università, con la collaborazione anche dell’ing Nicola Montefusco, attualmente dottorando, allestite dal personale della LMC SpA ed eseguite da entrambi. Un voluminoso dossier è stato preparato per preventivare e consuntivare i risultati delle prove. Il preventivo è stato preparato in base ai dettami delle JAR-VLA ( vedere [3]) in assenza di un regolamento specifico per gli UAV. Le JAR-VLA sono state evidentemente opportunamente modificate. Le prove principali eseguite sono relative alla flessione dell’ala, alla torsione dell’ala, alla flessione della parte anteriore della fusoliera, alla flessione della parte posteriore della fusoliera ed alla torsione della parte posteriore della fusoliera. Tutte le prove menzionate sono state eseguite a contingenza. La prova di flessione a robustezza ha concluso le operazioni relative alle prove statiche. Il carico è sempre stato posto gradualmente con incrementi tarati in funzione della prova.
-14
-12
-10
-8
-6
-4
-2
0
2
0 200 400 600 800 1000 1200 1400 1600
ascissa lungo l'apertura a partire dalla mezzeria dell'ala ( mm )
abbassamenti (mm )
step 1
step 2
step 4
D iagram m a es tensime tri
-1000-900-800-700-600-500-400-300-200-100
0100200300400500600700800900
1000
15,4 kg 23,4 kg 37,1 kg 55 ,5 kg 73 ,9 kg 92,3 kg 110,7 kg
C arico (kg)
S tra in(mic rostrain)
E stens im e tro 1E stens im e tro 2E stens im e tro 3E stens im e tro 4E stens im e tro 5E stens im e tro 6
Figura 7: Diagrammi degli abbassamenti lungo l’apertura e delle letture estensimetriche al variare del carico rilevati
durante le prove di flessione a robustezza dell’ala.
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
Aerotecnica Missili e Spazio Vol. 86 4/2007 165

In fondo alla pagina precedente nella Figura 7 sono riportati i diagrammi degli abbassamenti lungo l’apertura e delle letture estensimetriche al variare del carico rilevati durante le prove di flessione a robustezza dell’ala. In effetti durante tutte le prove sono stati letti opportuni spostamenti e per alcune di esse sono state lette anche le risposte di estensimetri opportunamente disposti. Come era nelle attese la struttura del velivolo è risultata estremamente robusta per poter sopportare anche possibili carichi conseguenti al pilotaggio remoto. Va anche detto che per tener conto dei carichi severi conseguenti a manovre brusche durante il pilotaggio remoto si era anche notevolmente modificato in maniera gravosa il diagramma di manovra rispetto a quello indicato nella JAR-VLA (vedere Figura 8) e si era usato il metodo di Schrenk, estremamente gravoso, per calcolare la distribuzione di portanza lungo l’apertura alare.
DIAGRAMMA DI MANOVRA DEL VELIVOLO DIANA
-4
-3
-2
-1
0
1
2
3
4
5
6
0 50 100 150 200 250
VELOCITA' (EAS ) km/h
n
A B
EG
D
E'
Figura 8: Diagramma di manovra utilizzato Prima di chiudere questo paragrafo è d’uopo presentare un’indagine importante condotta solo con analisi. Si tratta della determinazione della RADAR CROSS SECTION. Una verifica sperimentale poteva essere opportuna. Essa si sarebbe dovuta effettuare durante le prove di volo a Perdasdefogu. Le finestre temporali limitate e le difficoltà incontrate nel predisporre un radar presso la pista del poligono hanno sconsigliato anche per ragioni economiche tale eventualità. D’altro canto l’indagine analitica condotta da elementi dell’Università ha permesso di essere sufficientemente convinti dei risultati ottenuti. Viene definita RADAR CROSS SECTION (RCS) il rapporto tra la potenza per unità di angolo solido riflessa da un corpo materiale nella direzione di un’antenna ricevente rispetto alla densità di potenza per unità di area di un’onda piana incidente proveniente da un’antenna trasmittente . Per il calcolo della RCS, nei regimi tipici della regione ottica, esistono una serie di metodologie numeriche derivate dall’ottica geometrica (ray-tracing). Esse permettono di realizzare una stima adeguata dell’ordine di grandezza della RCS di un velivolo ed a valutare i contributi dei singoli componenti della sua struttura. In particolare si distinguono due metodi:
1. Il metodo di riduzione a componenti semplici [4]; 2. Il metodo di riduzione a poligoni piani (facets) [5].
Si evince dalla letteratura che, per le tipiche geometrie di velivoli, il primo metodo permette di ottenere risultati dello stesso livello di accuratezza del secondo con un onere computazionale notevolmente ridotto. Pertanto, è stato prescelto tale metodo nell’applicazione presentata in questa sede.
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
166 Aerotecnica Missili e Spazio Vol. 86 4/2007

Nella simulazione è stato considerato un riferimento velivolo con origine nel centro del tratto a sezione costante della fusoliera, asse x diretto verso l’elica, asse y diretto verso l’ala destra e asse z diretto verso il basso. Per quanto attiene il modello completo del velivolo, esso è stato generato a partire dai 74 componenti elementari. Chiaramente, per ognuno dei componenti elementari sono state definite le coordinate del centro di riferimento, la matrice di rotazione del riferimento locale rispetto a quello velivolo, gli opportuni piani limitanti e, nel caso degli spigoli, le superfici di secondo tipo (generalmente dei cilindri a base parabolica). Il motore del velivolo, pur essendo contenuto all’interno della carenatura, è considerato, conservativamente, come investito dal fascio diretto del radar, trascurando la minima attenuazione dovuta alla carenatura stessa. Riguardo all’elica, essa è stata considerata un corpo trasparente essendo composta di legno, come consigliato in letteratura. Nel caso di elica composta di materiale parzialmente o totalmente riflettente, lo studio della RCS sarebbe dovuto condursi tenendo in conto l’effetto di modulazione del suo moto rotatorio. Si noti che questo tipo di osservazione determina anche la tipologia di distribuzione casuale del valore della RCS attorno al suo valore medio ed è, quindi, essenziale per la determinazione della soglia di rilevazione. In base alla classificazione operata da Swerling, infatti, il velivolo può essere identificato, riguardo la distribuzione statistica delle fluttuazioni temporali della RCS, come rientrante nel caso 1. A tale insieme appartengono i sistemi costituiti da diversi elementi riflettenti senza parti di dimensioni rilevanti in movimento. I risultati dello studio indicano che la RCS del velivolo, con struttura interamente in materiale composito resina/carbonio, è sostanzialmente coincidente con quella del motore. Tale RCS risulta variare (nell’ambito dei radar con lunghezza d’onda inferiore a 0,3 m) tra 0,4 m2 e 0,05 m2. Tale valore ridotto, unitamente alla quota operativa bassa del velivolo, possono determinare distanze di rilevazione inferiori ai 1000 m utilizzando stazioni radar di terra trasportabili. Una più ampia presentazione del problema è riportata nella [6]. 3. FASI SPERIMENTALI IN VOLO L’esecuzione delle prove di volo ha concluso il lavoro relativamente alle attività previste dal capitolato tecnico concordato con i militari. Esse sono servite a verificare essenzialmente i calcoli di meccanica del volo. Hanno comunque permesso di accertare la buonissima manovrabilità del velivolo da terra. Anche in questo caso sono stati stilati documenti di preventivo e di consuntivo. Date le ridotte finestre temporali possibili per le attività di volo presso la pista del poligono militare PISQ di Perdasdefogu , sono state realizzate 16 missioni di volo del velivolo. Le attività si sono concluse il 12 aprile 2007. Per missione si intende l’attività condotta dall’inizio della corsa di decollo fino al termine della corsa di atterraggio del velivolo. Il sistema di misura utilizzato per le prove è costituito dai seguenti componenti: - CPU IEI WAFER-LX con Processore AMD Geode 833 MHz, 512 MB RAM e disco Flash da 128Mb Sandisk; - Ricevitore GPS Trimble Lassen SKII installato in starter kit azionabile; - Antenna GPS patched a base magnetica; - Batteria JTRONIK Litio-Polimeri con capacità 3300Ah e tensione nominale di 7,4V. Il ricevitore GPS ha reso possibile l’acquisizione dei seguenti parametri alla frequenza di aggiornamento di 1Hz: - Tempo UTC; - Posizione geodetica del velivolo (latitudine geodetica, longitudine e quota rispetto al geoide WGS-84); - Velocità del velivolo nelle sue componenti orizzontale e verticale; - Angolo di heading del velivolo riferito al nord (solo con velivolo in movimento); - Numero ed identificativi dei satelliti della costellazione GPS i cui segnali erano ricevuti dal ricevitore in un determinato istante; - Parametro Issue of Data Ephemeris (IODE) che indica la validità delle informazioni sulle condizioni orbitali dei satelliti al fine di effettuare la misura di posizione. Nell’analisi di seguito riportata, i principali parametri sono stati stimati nella seguente modalità: - Le fasi di volo orizzontali sono state distinte da quelle in virata sulla base dell’analisi dell’angolo di heading e della traiettoria in pianta. In particolare, le virate sono state individuate da variazioni di heading superiori a 3°/s; - La corsa di decollo è stata calcolata a partire dall’istante precedente a quello in cui la velocità orizzontale risultava essere inferiore a 0,1 m/s fino a quello in cui la quota superava per più di 1m quella misurata con il velivolo sulla pista. Per ottimizzare la stima dell’istante di distacco, è stata effettuata un’interpolazione parabolica sui tre punti nell’intorno della condizione di superamento della quota di 1m. La stima così ottenuta è quella migliore ricavabile con il GPS e risulta essere conservativa rispetto al valore ricavato. Infatti, in questo modo, il GPS misura distanze mai inferiori a quelle reali;
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
Aerotecnica Missili e Spazio Vol. 86 4/2007 167

- La corsa di atterraggio è stata misurata a partire dal punto precedente a quello in cui la quota del velivolo si manteneva entro 1m dalla quota nell’istante di arresto fino al punto in cui la velocità orizzontale risultava essere inferiore a 0,1 m/s. Anche in questo caso vale l’osservazione sulla conservatività della misura realizzata. Si osserva che la misura delle distanze e quella delle velocità, essendo riferite a grandezze non georeferenziabili, presenta un’accuratezza di 1m (rms) per le corse e di 0,1 m/s (rms) per le velocità. Si consideri che le geometrie di osservazioni dei satelliti GPS durante tutta la fase delle prove sono state particolarmente favorevoli, garantendo una Geometric Diluition of Precision (GDOP) media pari a 1,2 (molto favorevole) ed un numero di satelliti pari al massimo ricevibile (8) tranne che in piccoli tratti, solitamente coincidenti con le fasi di virata. La GDOP è un parametro che stima l’effetto della distribuzione geometrica dei satelliti GPS con i quali l’utente misura l’accuratezza della misura stessa. I valori di latitudine, longitudine e quota riportati sono riferiti al geoide WGS84. Nelle statistiche, la quota rispetto alla pista è determinata ritenendo nulla la quota della pista stimata nella fase di velivolo fermo prima del volo.
Valore Misurato Tipo di statistica
Dichiarato nella specifica
Variazione %
Durata (s) 2112,0 Somma
Corsa di decollo (m) 49,3 Media 50 -1,4%
Corsa di atterraggio (m) 62,7 Media 90 -31,11 Distanza totale percorsa (m) 45972,5 Somma Dislivello di quota (m) 166,1 Massimo Minima velocità in discesa (m/s) 13,9 Minimo N. tratti volo orizzontale livellato 25 Somma
Velocità tipica su tratti orizz (m/s) 38,7 Media 37,5 +0,03
Velocità min su tratti orizz (m/s) 27,0 Minimo
Velocità max su tratti orizz (m/s) 50,5 Massimo 55,5 +9,00
N. rampe di salita 12 Somma
Velocità tipica rampa salita (m/s) 4,6 Media
Velocità min. rampa salita (m/s) 0,0 Minimo
Velocità max. rampa salita (m/s) 11,9 Massimo
Rateo tipico di salita % 10,9 Media
Rateo minimo di salita % 7,6 Minimo
Rateo massimo di salita % 14,4 Massimo
N. rampe di discesa 12 Somma
Velocità tipica rampa discesa (m/s) 4,2 Media
Velocità min. rampa discesa (m/s) 0,0 Minimo
Velocità max. rampa discesa (m/s) 15,1 Massimo
Rateo tipico di discesa % 11,0 Media
Rateo minimo di discesa % 5,7 Minimo
Rateo massimo di discesa % 33,7 Massimo
N. virate livellate 21 Somma
Velocità tipica di virata livellata (m/s) 35,1 Media
Velocità minima di virata livellata (m/s) 15,7 Minimo
Velocità max di virata livellata (m/s) 48,2 Massimo
N. virate in salita 24 Somma
Velocità tipica di virata in salita (m/s) 3,5 Media
Velocità minima di virata in salita (m/s) 0,0 Minimo
Velocità max di virata in salita (m/s) 13,5 Massimo
N. virate in discesa 18 Somma
Velocità tipica di virata in discesa (m/s) 3,3 Media
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
168 Aerotecnica Missili e Spazio Vol. 86 4/2007

Velocità minima di virata in discesa (m/s) 0,1 Minimo
Velocità max di virata in discesa (m/s) 11,0 Massimo
Tabella 1 Parametri stimati con il sistema GPS confrontati con quelli di specifica
Delle 16 missione effettuate 8 erano assistite dal sistema GPS. La Tabella 1 riporta la stima dei parametri misurati confrontati con quelli di specifica, quando questi ultimi esistono. Per quanto attiene alla velocità massima si fa presente
Figura 9: Foto scattate durante le prove di volo.
che data la corsa ridotta, che è possibile effettuare con il volo a vista il dato rilevato non è significativo. Tutti gli altri parametri registrati dimostrano le ottime prestazioni del velivolo Tenendo presenti i tempi registrati per tutte le prove, comprese quelle senza copertura GPS, si è potuta valutare una autonomia superiore alle 3 ore, molto superiore di quella dichiarata nella specifica (3/4 di ora). Nella Figura 9 sono riportate alcune immagini riprese durante le prove di volo: la prima è stata scattata appena prima di un decollo, la seconda con il velivolo in volo, la terza durante lo scarico dal programma del GPS. 4. POSSIBILI UTILIZZAZIONI DI DIANA Un ampio spazio è dato nella memoria [6] al problema qui posto. L’analisi fatta in quella sede è suffragata da un’abbondante bibliografia, riportata anche in fondo a questa memoria con i numeri che vanno da [7] a [16]. Essa si riferisce all’impiego civile degli UAV. Non si è discusso dell’impiego militare, visto che l’interesse militare è stato già dimostrato, grazie al cofinanziamento del progetto Diana elargito dal Ministero della Difesa. Per interesse civile si intende principalmente quello verso impieghi di pubblica utilità. Alcuni programmi statunitensi, sponsorizzati dalla NASA si interessano di sorveglianza degli incendi nelle foreste, altri sempre con l’interessamento della NASA sono relativi a misure nell’atmosfera. Con un piccolo UAV i giapponesi propongono il trasporto di piccoli carichi. Una proposta polacca, sviluppatasi nell’ambito di ricerche europee, è relativa alla sorveglianza dei confini. Molte altre proposte sono possibili una volta che si sono accettate le considerazioni della FAA sulla certificazione dei mini-UAV ed esse si sono estese anche in Europa. Si pensi alla sorveglianza dei parchi nazionali, alla guardia costiera, a vari altri servizi di polizia, come la sorveglianza delle autostrade. Perché sia possibile effettuare tali missioni occorre che si possa ottenere, come è avvenuto negli USA, una certificazione del velivolo. Mentre in Europa non esiste una possibilità pratica di procedere alla certificazione, in altri paesi questo processo si è gia avviato. Il 13 febbraio del 2005 la FAA ha pubblicato uno statement che stabilisce il cambio di politica relativamente agli UAS ( si usa la lettera S per indicare che la certificazione interessa l’intero sistema e non solo la piattaforma volante). Praticamente in base a tale nuova politica gli UAS possono volare nel cosiddetto NAS (NATIONAL AEROSPACE) Non si vuol qui approfondire tutta la situazione nuova creatasi in tal modo, ma si vuol sottolineare che in base a tale nuova politica è stato possibile portare avanti il processo di certificazione del Cobra, un UAS che ha le caratteristiche della piattaforma volante molto prossime a quelle di Diana. 5. CONSIDERAZIONI CONCLUSIVE In questa memoria si è voluto con lo spazio permesso dai limiti delle presentazioni a questo congresso dare una visione esaustiva del lavoro affrontato dalla LMC SpA con l’assistenza progettuale degli elementi della Università di Napoli FEDERICO II per progettare, costruire e far volare un APR AV-Light, utilizzabile anche come miniUAV o UAS, dopo averlo dotato di un opportuno sistema.
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
Aerotecnica Missili e Spazio Vol. 86 4/2007 169

Tale lavoro ha richiesto lo svolgimento nell’arco di soli due anni di una completa operazione di pre-progettazione, di progettazione, di messa in opera e di verifica sperimentale. I tempi sono stati rispettati ed il velivolo ha effettuato i voli per le prove di verifica. Per una più ampia informazione sui riferimenti relativi alle documentazioni fornite dal gruppo, che ha partecipato a questo lavoro o dal gruppo recepite si rimanda alle memorie da [16] a [37]. BIBLIOGRAFIA [1] A. F. Accardo , L. Marinucci . “Planning Università/Industria per la Progettazione e la Costruzione di un Mini-UAV”. XVIII Congresso Nazionale AIDAA 19-22 Set. 2005. [2] D. Lucariello, A. F. Accardo, R. Pecora, M. Viscardi, S. De Rosa, “Verifiche Aeroelastiche di un APR AV-Light in Composito Avanzato”, AIDAA 2007, Forlì, 17/21 September 2007. [3] Joint Aviation Requirement Jar VLA-Very Light Aeroplanes Joint Aviation Authorities [4] Bhattacharyya, A.K. e Sengupta, D.L., “Radar Cross Section Analysis and Control”, Artech House, Norwood MS, USA, 1991. [5] Shriman, Y.D., “Computer Simulation Of Aerial Target Radar Scattering, Recognition, Detection, And Tracking”, Artech House, Norwood Ms, Usa, 2002. [6] A. F: Accardo, D. Accardo, F. Ricci, D. Lucariello, N. Montefusco, D. Chinnici “Messa in volo del velivolo APR AV-Light Diana in composito avanzato”, IV° Simposio Segredifesa, Roma 2007. [7] FAA Certification Process For A Small Unmanned Aicraft System: One Success Story By Mark D. Ballinger And David E. Bossert, Aiaa Infotech@Aerospace 2007 Conference And Exibit 7-10 2007,Rohnert Park,California, Usa) [8] UAV Platforms Designed In Wut For Border Surveillance By Zdobyslaw Goraj AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007,Rohnert Park, California, Usa) [9] Bygoffrey Bland, Ted Miles, Michael Logan, Mark Motter, Joseph Bretthauer, “Mini UAVs for Atmospheric Measurements”, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, Usa) [10] Brian Argrow And Adam Houston, “UAS for in situ Sensing of an Atmospheric Airmass Boundary”, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [11] Michael Trancitella, Stephen Fujikawa, Tzer Leei Ng, Philipe Roi, Christophe Mazel,Stanley Herwitz, Everett Hinkley, “Using Tactical Unmanned Aerial System to Monitor and Map Wildfires, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [12] Everett Hinkley, Vince Ambrosia, Susan Schoenung ,“Small UAS Demonstration for Wildfire Surveillance By, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [13] Stephen E. Dunagan, James A. Eilers, Bradley M. Lobitz, Thomas Zajkowski , “UAS Enabled Communications for Tactical Firefighting”, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [14] Kakuya Iwata, Masahiko Onda, Masaaki Sano, Kiyshi Komoriya, “UAV for Small Cargo Trasportation”, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [15] Rui Hirokawa, Daisuke Kubo, Shinji Suzuki, Jun-Ichi Meguro, Taro Suzuki, “A Small UAV for Immediate Hazard Map Generation”, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [16] Basil Papadales And Marilyn Downing, “Cost Analysis of Commercial UAV Flight Services”, AIAA Infotech@Aerospace 2007 Conference And Exibit 7-10 2007, Rohnert Park, California, USA. [17] Aerospace America Dicembre 2005 Pag. 72 [18] Norma per l’Applicazione e la Tenuta del Registro degli Aeromobili di Stato (R. A. S.) Aer-P 7 Edizione Base 1 Agosto 2005 Emendamento Del 26 Ottobre 2005 [19] A. F. Accardo, F. Ricci, P. Basso , L. Allini “Design and Development of an Advanced Composite Unmanned Aircraft for Surveillance and Reconaissance Missions” XV Congresso Nazionale AIDAA Torino 15/19 Novembre 1999 [20] A. F. Accardo, F. Ricci, P. Basso “Design and Development of a Low Altitude Unmanned Aerial Vehicle” 22nd International Congress of Aeronautical Sciences ICAS 2000, 27 August-1 September, Harrogate , Uk [21] A. F. Accardo F. Ricci, P. Basso “Design, Realisation and Testing of an Advanced Composite Unmanned Aicraft” 13th International Conference on Composite Materials , Beijing, China, June 25/29, 2001 [22] A. F. Accardo F. Ricci, P. Basso “Design, Realisation and Testing of a Composite UAV for Civil Operation” XVI Congresso Nazionale AIDAA Palermo 24-28 Settembre 2001 [23] A.F. Accardo, F. Ricci, P. Basso, M. Lega, “Design of Low Altitude Unmanned Aircraft”, 17th Bristol International UAV System Conference, Bristol - Uk, 8-10 April 2002 [24] A.F. Accardo, F. Ricci, P. Basso, “Application of Advanced Composite Materials for Unmanned Aerial Vehicles”, 10th European Conference on Composite Materials, Brugge - Belgium, 3-7 June 2002 [25] A.F. Accardo, F. Ricci, P. Basso, M. Lega, “Development Approach and Testing of an Unmanned Aerial Vehicle”, 23rd International Council Of Aeronautical Sciences, Toronto - Canada, 8-13 September 2002 [26] M. Lega, A.F. Accardo, “Flight Tests of a Small Advanced Composite Unmanned Aircraft”, AUVSI 2003, Baltimore – Usa, 14-17 July 2003
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
170 Aerotecnica Missili e Spazio Vol. 86 4/2007

[27] A.F. Accardo, P.Basso, “Application of Composite Materials to General Aviation”- ICCE 2003 New Orleans [28] A. F. Accardo, “Problematiche Inerenti l’ Utilizzazione di UAV per Scopi Civili e Militari”- Congresso Nazionale AIDAA, Roma 2003. [29] D. Lucariello: “Analisi dei Fattori di Rischio Connessi con l’Utilizzo di UAV in Ambito Civile”, Congresso AIDAA 15-19 Settembre 2003 Università Degli Studi La Sapienza, Roma. [30] M. Lega, A.F: Accardo, “Index of Risk and Safety Objetives for Civil UAVS”, 2nd AIAA “Unmanne Unlimited” Systems, Technologies and Operations-Aerospace, 15-18 September 2003, San Diego, California [31] A. F. Accardo, M. Lega, F. Ricci, D. Lucariello -Main Objectives and Additional Criteria in the Design of a New Low Altitude UAV, AIAA 2004 3rd “Unmanned Unlimited” Technical Conference, Chicago, Settembre 2004 [32] A. F. Accardo., F. .Ricci , M. Lega. “A New UAV after Federica”. 24th Congress Of The International Council of the Aeronautical Sciences (ICAS).Yokohama, Agosto 2004 [33] A. F. Accardo, F. Ricci, D. Lucariello P. Polese, “An Overview of Experimental Activities on Composite Structures for Aerospace Applications”, ICCE 12 August 1-6 2005 Tenerife, Spain. [34] A. F. Accardo, F. Ricci, D. Lucariello, “Structural Design Criteria for Advanced Composite Mini UAVS” ICCE 12 August 1-6 2005 Tenerife, Spain. [35] A.F. Accardo, F. Ricci, M. Lega, A. Torone, “A New Full Composite Mini-UAV developed by University of Naples”, Advancing with Composites, International Meeting on Composite Materials, Naples, October 11-14, 2005-11-20 [36] A. F. Accardo, F. Ricci, M. Lega, D. Lucariello: “Design and Tests of Aeronautical Composite Structures”, ICCM 15, Durbans, 27 June/01 July 2005. [36] A. F: Accardo, F. Ricci, D. Accardo, A. Torone, D. Lucariello, L. Marinucci “L’Universita’ di Napoli affianca una PMI per lo Sviluippo di un Prototipo di APR AV-Light in Composito Avanzato e di Altri Programmi, III° Simposio Segredifesa, Roma 2006. [37] UAVWORLD Newsletter Issue 5 – August/September 2003
A.F. Accardo, F. Ricci, D. Accardo, D. Lucariello, D. Chinnici
Aerotecnica Missili e Spazio Vol. 86 4/2007 171