PLC - Altervistamagistri.altervista.org/SISTEMI/quarta/PLC1.pdf · La norma IEC 1131-1 recepita...
16
PLC Lo sviluppo dell’elettronica, in particolare dei microprocessori digitali, ha portato a sviluppare sistemi e software per applicazioni industriali. Col termine calcolatore industriale, in genere, ci si riferisce ad un prodotto destinato a programmatori esperti e con prestazioni elevate. Il PLC, invece, (Programmable Logic Controller) è un dispositivo che è stato introdotto per sostituire i circuiti sequenziali a relè dei dispositivi di controllo e come tale ha storicamente occupato la fascia più bassa del mercato con linguaggi semplificati per l’utilizzo anche da programmatori non specializzati. Oggi il mercato è talmente diversificato che, per la fascia dei PLC modulari ad alte prestazioni, il confine tra PLC e calcolatori industriali è molto sottile. La norma IEC 1131-1 recepita dalla CEI 65-23 definisce il PLC come un: “sistema elettronico a funzionamento digitale, destinato all’uso in ambito industriale, che utilizza una memoria programmabile per l’archiviazione interna di istruzioni orientate all’utilizzatore per l’implementazione di funzioni specifiche, come quelle logiche, di sequenziamento, di temporizzazione,…,per controllare, mediante ingressi ed uscite, sia digitali che analogiche, vari tipi di macchine e di processi.” A livello di funzionamento il PLC opera leggendo i suoi ingressi e, in base al loro stato, attiva e disattiva le uscite. L’utilizzatore introduce un programma tramite opportuno software, che fornisce il risultato desiderato. I PLC sono usati in molte applicazioni industriali: assemblaggio, imballo, manipolazione di materiali. Quasi tutte le applicazioni industriali che necessitano di un controllo elettrico possono utilizzare un PLC. I primi PLC furono introdotti sul mercato verso la fine degli anni 60. La ragione fondamentale del loro sviluppo era di cercare di eliminare gli alti costi dei controlli basati su logiche a relè. La Bedford Associates (Bedford, MA) propose un sistema chiamato Modular Digital Controller (MODICON) alla maggiore casa automobilistica americana. Altre compagnie proposero, contemporaneamente, degli schemi basati su computer, uno dei quali era basato sul PDP-8. Il MODICON 084 fu il primo PLC ad entrare in produzione. Questi nuovi controllori, a differenza dei relè, potevano essere facilmente programmati, inoltre richiedevano scarsa manutenzione consentendo modifiche in modo semplice e poco costoso. La durata dei componenti era superiore ai relè e la modalità di programmazione consentiva dei cambiamenti delle funzioni in modo molto semplice e rapido. Per aumentarne la diffusione, lo sforzo dei progettisti fu mirato a creare dei linguaggi di programmazione che fossero accessibili e familiari ai vecchi utenti dei relè (linguaggi a contatti). Nella metà degli anni 70 la tecnologia dominante per la realizzazione di PLC erano: automi sequenziali a stati finiti e CPU dedicate. Successivamente la diffusione e lo sviluppo di microprocessori convenzionali a prezzi bassi e dalle prestazioni sempre crescenti, portò allo
Transcript of PLC - Altervistamagistri.altervista.org/SISTEMI/quarta/PLC1.pdf · La norma IEC 1131-1 recepita...

PLC
Lo sviluppo dell’elettronica, in particolare dei microprocessori digitali, ha portato a sviluppare sistemi e software per applicazioni industriali.
Col termine calcolatore industriale, in genere, ci si riferisce ad un prodotto destinato a programmatori esperti e con prestazioni elevate. Il PLC, invece, (Programmable Logic Controller) è un dispositivo che è stato introdotto per sostituire i circuiti sequenziali a relè dei dispositivi di controllo e come tale ha storicamente occupato la fascia più bassa del mercato con linguaggi semplificati per l’utilizzo anche da programmatori non specializzati. Oggi il mercato è talmente diversificato che, per la fascia dei PLC modulari ad alte prestazioni, il confine tra PLC e calcolatori industriali è molto sottile.
La norma IEC 1131-1 recepita dalla CEI 65-23 definisce il PLC come un:
“sistema elettronico a funzionamento digitale, destinato all’uso in ambito industriale, che utilizza una memoria programmabile per l’archiviazione interna di istruzioni orientate all’utilizzatore per l’implementazione di funzioni specifiche, come quelle logiche, di sequenziamento, di temporizzazione,…,per controllare, mediante ingressi ed uscite, sia digitali che analogiche, vari tipi di macchine e di processi.”
A livello di funzionamento il PLC opera leggendo i suoi ingressi e, in base al loro stato, attiva e disattiva le uscite. L’utilizzatore introduce un programma tramite opportuno software, che fornisce il risultato desiderato.
I PLC sono usati in molte applicazioni industriali: assemblaggio, imballo, manipolazione di materiali. Quasi tutte le applicazioni industriali che necessitano di un controllo elettrico possono utilizzare un PLC. I primi PLC furono introdotti sul mercato verso la fine degli anni 60. La ragione fondamentale del loro sviluppo era di cercare di eliminare gli alti costi dei controlli basati su logiche a relè. La Bedford Associates (Bedford, MA) propose un sistema chiamato Modular Digital Controller (MODICON) alla maggiore casa automobilistica americana. Altre compagnie proposero, contemporaneamente, degli schemi basati su computer, uno dei quali era basato sul PDP-8. Il MODICON 084 fu il primo PLC ad entrare in produzione. Questi nuovi controllori, a differenza dei relè, potevano essere facilmente programmati, inoltre richiedevano scarsa manutenzione consentendo modifiche in modo semplice e poco costoso. La durata dei componenti era superiore ai relè e la modalità di programmazione consentiva dei cambiamenti delle funzioni in modo molto semplice e rapido. Per aumentarne la diffusione, lo sforzo dei progettisti fu mirato a creare dei linguaggi di programmazione che fossero accessibili e familiari ai vecchi utenti dei relè (linguaggi a contatti). Nella metà degli anni 70 la tecnologia dominante per la realizzazione di PLC erano: automi sequenziali a stati finiti e CPU dedicate. Successivamente la diffusione e lo sviluppo di microprocessori convenzionali a prezzi bassi e dalle prestazioni sempre crescenti, portò allo

sviluppo di PLC con tali micro. Il crescere delle prestazioni di questi portò allo sviluppo di PLC sempre più potenti, flessibili, in grado di comunicare e dalle dimensioni sempre più contenute. Le capacità di comunicazione comparvero verso il 1973. Il PLC poteva dialogare con altri PLC e potevano essere disposti lontano dalle macchine che dovevano controllare. Inoltre, furono dotati di dispositivi di conversione delle grandezze analogiche (ADC). Inizialmente la standardizzazione in questi settori non fu elevata, almeno fino agli anni 80 quando la General Motor produsse il manufacturing automation protocol (MAP). Si svilupparono dei software in grado di programmare i PLC tramite personal computer, invece di terminali dedicati per la programmazione o tastierini di programmazione palmari. Si è incrementata la miniaturizzazione tanto che il più piccolo PLC ha le dimensioni di un relè. Negli anni 90 non sono stati introdotti nuovi protocolli ma sono stati aggiornati quelli creati negli anni 80. Gli ultimi standard hanno cercato di unificare i differenti linguaggi di programmazione per PLC, attualmente è possibile utilizzare per la programmazione: liste istruzioni, linguaggi a contatti, funzionali e linguaggi come il C. Negli ultimi anni, la diffusione del PC ha portato in alcuni prodotti alla sostituzione del PLC con il PC che, tramite un programma, può gestire delle periferiche di I/O. Affidabilità dei PLC La logica cablata a relè presenta non pochi problemi rispetto a quella programmata: maggiori costi di realizzazione maggiore ingombro una logistica e una manutenzione più accurata difficoltà di modifiche e di debug. tempi realizzativi elevati impossibilità di controllare processi veloci. Un altro aspetto che in parte rachhiude i precedenti e una minore afffidabilità.
L'affidabilità è l'attitudine di un dispositivo a compiere una funzione richiesta secondo le condizioni di utilizzazione e per un periodo determinato Esistono delle funzioni che rappresentano l’affidabilità: R(t) Funzione affidabilità Avendo N dispositivi identici, funzionanti nelle stesse condizioni, la curva R(t) rappresenta la frazione di dispositivi in vita al tempo t (probabilità di sopravvivenza al tempo t) MTBF = Mean Time Between Failure F(t) Probabilità di guasto al termine del tempo t. È il completamento a 1 della funzione di affidabilità R(t)
f(t) Densità di probabilità di guasto al tempo t. È la probabilità di guasto per unità di tempo all’istante t. Risulta la derivata di F(t) all’istante
(t) Tasso di guasto al tempo t È la probabilità di guasto dei dispositivi rimasti in buono stato al tempo t (t) = f(t)/R(t) L'inverso 1/(t) rappresenta l'MTBF nel caso (t) rimanga costante nel tempo

Andamento del tasso di guasto (t): la Curva sembra risultare dalla sovrapposizione di due curve: – una (a) di eliminazione dei difetti di giovinezza dopo la messa in servizio – l’altra (b) di comparsa del fenomeno di usura e di degrado
Per i componenti elettromeccanici superata la fase iniziale di morte giovanile, si nota che l’usura influenza notevolmente il tasso di guasto aumentando notevolmente durante la fase di vecchiaia del componente; nei componenti elettronici rimane invece pressocchè costante.
Per determinare la politica di manutenzione più appropriata: – se il tasso di guasto (t) a regime è costante non conviene effettuare la sostituzione in quanto non si migliora l'affidabilità (guasti di gioventù) – se invece il tasso di guasto (t) cresce (usura) conviene effettuare la sostituzione una volta raggiunto un determinato
livello Da ciò si deduce che anche la manutenzione nei PLC ha un peso inferiore. La manutenzione assume maggiore importanza al crescere dell’automazione delle imprese; in alcune aziende, altamente automatizzate, si rileva che circa il 40% dei dipendenti è dedicato alla manutenzione – tale fatto rappresenta il costo diretto della manutenzione, mentre i costi indiretti associati non riescono a essere contabilizzati correttamente. I costi indiretti sono determinati • incidenza finanziaria delle perdite di produzione per guasti, indisponibilità o degrado delle funzioni, dei costi di non qualità che potrebbero eventualmente risultare • eventuali penalità per ritardi nella consegna; • dei costi di provvedimenti presi eventualmente per mascherare guasti delle attrezzature produttive: ore supplementari, richieste all’esterno; • in certi casi i guasti possono causare la distruzione completa del sistema complessivo RIDONDANZA Un modo per aumentare l’affidabilità del sistema è quella di far funzionare in parallelo più dispositivi che svolgano la stessa funzione: ridondanza attiva (o calda): tutte le unita’ sono soggette fin dall’inizio allo stesso carico ridondanza tiepida: le unita’ in riserva sono soggette ad un carico inferiore rispetto alle unita’ in
funzione fino a quando non si verifica il primo guasto ridondanza stand-by (o fredda): le unita’ in riserva non sono soggette ad alcun carico, fino a quando non si verifica il primo guasto
Elettromeccanici
elettronici

dentro il PLC. Il PLC è costituito, principalmente da una CPU, da una memoria, e dai circuiti per ricevere i dati d’ingresso-uscita, esemplificando un PLC può essere considerato come un dispositivo contenente centinaia o migliaia di relè, contatori, timer e locazioni di memoria. Differentemente dalla logica cablata questi dispositivi non esistono “fisicamente” ma sono simulati dal software attraverso dei bit nei registri interni del PLC. C.P.U. La C.P.U. è il cuore dell’elaboratore • è caratterizzata dalla velocità, dal numero di bit, dai registri, dall’architettura. Comunica con memorie e il mondo esterno attraverso i bus indirizzi, controlli, dati. – Interpretare l’istruzione, allo scopo di capire (decidere) che cosa deve fare; – Eseguire l’operazione richiesta dall’istruzione (agire). • Inoltre, il microprocessore deve anche: – Controllare il trasferimento dei dati con i circuiti di memoria e di I/O.
– Rispondere alle richieste di servizio provenienti dalle periferiche.
La memoria
Non esistono sotanziali differenze con quelle di un PC, la memoria di massa è quella del PC con cui si programma quindi: CD-rom, hardisk, floppy. La memoria veloce è costituita dalla RAM e dalla ROM.
La RAM Random access memory ossia memoria ad accesso casuale, “casuale” nel senso che si può selezionare una qualsiasi cella a differenza delle memorie sequenziali in cui si può accedere unicamente nell’ordine consequenziale delle celle di
memoria.
•La memoria é organizzata secondo una struttura a matrice suddivisa in righe e colonne, in cui ogni cella é in grado di immagazzinare un bit.
• ROM (Read Only Memory): i punti di contatto sono realizzati su ordinazione nella fase finale di costruzione del chip (metal mask), si realizzano su larga scala. • PROM (Programmable ROM): i contatti sono all’inizio tutti stabiliti, il cliente puo’ eliminarli su apposite macchine bruciando i fusibili posti in serie al drain. Le PROM possono essere programmate una sola volta con programmatori molto economici e sono usate principalmente nella fase di prototipizzazione
Circuitid’ingresso
Circuitid’uscita
CPU
MemoriaRelè d’uscita
Relèd’ingresso Timer
Contatori
Relèinterni
Memoria dati

• EPROM (Erasable Programmable ROM): i transistori utilizzati sono particolari (gate isolato e gate di accesso) Un’opportuna apparecchiatura di programmazione consente di aprire i contatti non desiderati; la situazione iniziale è ripristinabile sottoponendo il dispositivo a radiazioni ultraviolette tramite apposite lampade. • E2PROM (Electrical Erasable Programmable ROM): simili alla precedenti ma programmabili e cancellabili con soli impulsi elettrici con il vantaggio di non dover rimuovere il componente e di non richiedere apparecchiature esterne per la cancellazione. • FLASH: evoluzione delle E2PROM, consentono fino a 105 cicli di R/W, con tempi di prog. di pochi ms, e cancellazione in secondi.
Relè d’INPUT – Sono connessi al mondo esterno e ricevono i segnali da interruttori, fotocellule, sensori, in genere non sono realizzati con relè ma con transistor. Relè interni- A differenza dei primi, non ricevono segnali esterni e non esistono fisicamente, essi sono dei relè simulati e consentono di eliminare la maggior parte dei relè dei circuiti di comando. Ne esistono alcuni tipi dalle caratteristiche particolari che realizzano degli scopi specifici. Per esempio stato logico “1”, stato logico “0”, o altri che si attivano solo all’accensione e consentono d'inizializzare un processo CONTATORI- Anche questi dispositivi non esistono fisicamente ma sono dei componenti software programmati per contare impulsi. In genere, questi contatori possono contare sù, giù o in entrambi i modi. Qualche limitazione è presente nella velocità di conteggio dovuto alla realizzazione sw; alcuni costruttori inseriscono dei contatori a conteggio veloce che sono realizzati con dei componenti hardware. TIMERS - Sono dei componenti virtuali e sono stati implementati in una certa varietà di versioni, il più diffuso è quello che simula il componente reale ritardato alla diseccitazione. Altri modelli di PLC possiedono differenti tipologie di Timer che si possono adattare alle diverse esigenze del programmatore. I tempi programmabili sono incrementabili in modo flessibile e vario da 1ms a 1s. OUTPUT RELE’-(bobine) Sono dei dispositivi connessi al mondo esterno e sono in grado di mandare impulsi a relè, teleruttori, luci, motori. Possono essere realizzati con transistor, relè, o triac in base al modello scelto. MEMORIA DATI- Tipicamente sono dei registri destinati a memorizzare dei dati temporaneamente; possono essere adoperati per salvare i dati quando è tolta l’alimentazione al PLC, in modo che quando è ripristinata l’energia, i dati sono ripristinati.
ROM CMOS

Scansione degli ingressi e delle uscite Un PLC lavora facendo una scansione continua durante l’esecuzione del programma. Semplificando possiamo pensare che la scansione sia effettuata in tre importanti passi. Nella semplificazione si sono trascurati gli altri che consentono di aggiornare i timer e i contatori. Step 1- LETTURA DELLO STATO DEGLI INPUT – inizialmente il PLC controlla ciascun ingresso per determinare se è attivo o interdetto. Controlla ad uno ad uno i dispositivi connessi agli ingressi memorizzando questi dati nella memoria per poterli adoperare al successivo passo Step 2- ESECUZIONE DEL PROGRAMMA – Successivamente il PLC esegue il programma istruzione per istruzione. Nel programma sono scritte informazioni del tipo: se il primo ingresso è on, l’uscita due deve essere attivata. Gli stati di ciascun ingresso sono stati memorizzati nel passo precedente, perciò il PLC sa quali ingressi sono on o off, pertanto è in grado di stabilire quali uscite deve attivare, e memorizza tali risultati per il passo successivo. Step 3-AGGIORNAMENTO STATO DELLE USCITE-Finalmente il PLC aggiorna lo stato delle uscite sulla base dei risultati dell’elaborazione del passo 2. Per l’esempio riportato in precedenza, in cui l’ingresso uno è attivo, sarà in questa fase che sarà aggiornata l’uscita due. Invece, le variazioni degli ingressi avvenute successivamente al passo uno, non produrranno alcuna modifica dello stato delle uscite. Dopo il terzo passo il PLC torna ad eseguire il passo uno e sarà solo in questa fase che saranno rilevate le eventuali variazioni degli ingressi. Ciclicamente saranno ripetuti i tre passi descritti in precedenza: il tempo necessario ad eseguirli è detto tempo di scansione. Esso influenza il tempo di risposta. Il tempo di risposta totale del PLC è un elemento di scelta importante. Per tempo di risposta intendiamo il tempo di reazione del dispositivo a dei cambi per esempio degli ingressi. Per determinate applicazioni questo tempo non riveste una particolare importanza mentre potrebbe esserlo per altre. Il PLC può vedere la variazione di un ingresso solo durante lo step di analisi degli ingressi. In altre parole, vede i suoi ingressi solo durante il controllo dello stato degli ingressi durante la scansione.

Nel diagramma, la variazione dell’ingresso 1 non è vista fino alla scansione 2, questo perché quando l’input 1 va on, la scansione 1 ha già finito l’analisi degli ingressi. L’input 2 non è visto fino alla scansione 3, infatti quando l’input commuta la scansione 2 ha finito l’analisi degli ingressi . L’Input 3 non è mai visto essendo le sue variazioni comprese durante il tempo di esecuzione del programma e non interessano il tempo di lettura degli ingressi né della scansione 3 né della scansione 4.
Per evitare questi problemi, un ingresso dovrebbe durare per almeno 1 tempo di scansione + 1 di lettura degli ingressi.
Se l’ingresso non dura per tutto questo tempo, ci sono due strategie per superare il problema.
Funzione di allungamento dell’impulso. Questa funzione estende la lunghezza del segnale d’ingresso fino alla lettura degli ingressi durante la successiva scansione.( in figura allunga la durata dell’impulso.)
IMPULSOALLUNGATO
Funzione Interrupt . Questa funzione interrompe il processo di scansione per eseguire una routine speciale. Appena l’ingresso commuta, il PLC interrompe ciò che sta facendo per eseguire un sottoprogramma di interrupt. Dopo che ha eseguito tale sottoprogramma, torna indietro a completare le operazioni che aveva momentaneamente sospeso per poi continuare il normale processo di scansione . Ingressi in DC Abbiamo visto come un PLC lavora, cerchiamo ora di capire come devono essere cablati gli ingressi e le uscite anche perché un errato montaggio può comportare dei seri problemi alle apparecchiature e al processo da controllare. Tipicamente i moduli d’ingresso in corrente continua sono disponibili con tensioni che funzionano a 5, 12, 24, and 48 volt. E’ possibile scegliere la tensione più adatta ai nostri scopi.
I moduli DC consentono di adoperare sia dei sensori a transistor pnp che npn. La differenza tra i due tipi è che l’NPN commuta il carico a massa mentre il PNP a una tensione positiva.

I fotoaccoppiatori sono usati per isolare i circuiti interni dei PLC dagli ingressi, ciò consente di eliminare la possibilità che dei disturbi elettrici possano entrare direttamente nei circuiti elettrici interni del PLC. Il loro funzionamento si basa su una coppia led-fototransistor; il led converte i segnali elettrici in segnali luminosi e il fototransistor al contrario i segnali ottici in elettrici.
Comune
Rappresentazione dei fotoaccoppiatori interni al PLC
Ingressi in alternata
Tipicamente i moduli d’ingresso per corrente alternata lavorano a 24, 48, 110, and 220 volt.
I moduli AC sono meno comuni di quelli in DC anche perché molti sensori richiedono un’alimentazione continua e i transistor delle loro uscite non lavorano con tensioni alternate.
Co
mun
e
In1
In2
In3
P L C
Gli ingressi sono connessi al modulo come nella figura: la fase è connessa all’interruttore d’ingresso mentre il neutro è connesso al comune del plc. Il terminale di terra quando è presente, deve essere connesso alla massa del plc.
Uscite a relè
Uno dei più comuni tipi di uscite disponibili sono quelli a relè, questo perché il relè può essere adoperato sia in corrente continua che in corrente alternata. I più comuni tipi di carichi da controllare sono bobine di altri relè o di elettrovalvole, lampade, motori. Poiché questi carichi possono assorbire correnti differenti è necessario leggere attentamente il manuale del plc per ricavare la massima corrente sopportabile dai contatti d’uscita ed evitare, con errata connessione di danneggiarli. Un particolare riguardo deve essere posto per i carichi induttivi che hanno la caratteristica di produrre una sovracorrente nell’istante dell’accensione. Tale sovracorrente può assumere anche trenta volte il valore nominale e si capisce che possa arrivare a danneggiare i relè d’uscita del plc. Come circuiti di protezione sono adoperati dei diodi o dei varistori.

Vediamo ora come si comportano le uscite del plc .
Sopra è mostrato una connessione classica di due carichi ad un PLC. L’alimentazione AC potrebbe essere sostituita da una in DC perché il relè non è un componente che richieda una polarizzazione. Il comune del PLC è connesso ad un capo dell’alimentazione, mentre l’altro va ai carichi. L’altro estremo dei carichi deve essere connesso all’uscita che abbiamo definito nel programma.
Il relè è interno al PLC con una configurazione tipica che è quella mostrata in figura. Il programma, quando deve eccitare un relè d’uscita, tramite i circuiti interni applica una tensione alla bobina del particolare relè. Ciò permette ai contatti del relè di attivarsi e di alimentare i carichi esterni. Quando il programma deve diseccitare il relè è sufficiente che i circuiti interni tolgano alimentazione alla bobina.
Uscite a Transistor L’altro tipo di uscite disponibile è quello a transistor. E’ importante sottolineare che un transistor può funzionare solo in corrente continua e quindi non è possibile comandare direttamente dei carichi in alternata Il transistor si comporta come un interruttore elettronico: una piccola corrente di controllo posta sulla base (ingresso) lo porta a condurre delle correnti elevate come avviene in un contatto chiuso. La corrente alla base è applicata dai circuiti interni del plc in base al programma scritto in memoria. Generalmente un PLC ha sia uscite a transistor npn sia pnp. I costruttori adoperano diversi tipi di transistor e il tipo bipolare (BJT- Bipolar Junction Transistor) è solo uno dei possibili. Un altro tipo molto diffuso è il MOSFET (Metal Oxide Semiconductor- Field Effect Transistor) che conduce più corrente del BJT. Qualunque sia il tipo adoperato non bisogna mai superare la corrente fissata dal costruttore.

La struttura di una scheda di uscita a transistor npn è mostrata in figura.
MODULI INPUT/OUTPUT ANALOGICI Accanto ai dispositivi più diffusi esistono dei moduli che consentono di acquisire ingressi analogici e altri di fornire uscite variabili. I primi consentono al plc la lettura di dati provenienti da sensori la cui uscita varia con continuità (temperatura, pressione, umidità..) e di realizzare processi di controllo in cui siano presenti tali variabili. Alla base del funzionamento di tali schede vi è uno o più ADC (Analogic Digital Converter). Un ADC è un dispositivo che ha in ingresso una tensione variabile in un certo range ( es. 0-5 V) e che fornisce in uscita dei bit 8-12-16 secondo il tipo. Il funzionamento di un ADC si basa su una fase di campionamento ad una frequenza almeno doppia della frequenza massima del segnale (per evitare una cattiva ricostruzione dovuti ai pochi campioni), e su una di quantizzazione.
Il campionamento consiste nel misurare a intervalli sufficientemente vicini la tensione del segnale. Una volta che il segnale è campionato è necessario la quantizzazione ossia la conversione dei campioni ancora analogici in digitali.
USC
ITE D
IGITA
LI
ING
RESS
O A
NAL
OG
ICO
ADC
b7
b0b1......

Ciascun campione è convertito in un numero binario che è legato all’ampiezza del campione stesso. In figura il campione dell’istante t2 che è quello di ampiezza max, ha un valore più grande rispetto gli altri. Un criterio di scelta dei ADC è la risoluzione che è la più piccola variazione di tensione rappresentabile dal dispositivo. Essa è legata al numero di bit del DAC, tipicamente vanno da 8 a
12 bit. Se a fondo scala il segnale d’ingresso è 10V allora la risoluzione per un ADC 3-bit ADC corresponde a 10/2^3=1.25V. Che non è molto, mentre per ADC a 12 bit sarà 10/2^12=10/4096=2.44mV Le schede di uscite analogiche ricorrono a un DAC (Digital Analogic Converter) che trasforma in una
tensione i valori binari presenti nella memoria del plc, ciò consente una nterfacciabilità con alcuni azionamenti di motori ed altre apparecchiature che richiedano un ingresso analogico. Come per gli ADC anche per gli DAC i limiti derivano dal numero di campioni e di bit. In figura è reppresentato una sinusoide ricostruita da un DAC a tre bit.
Le possibilità di comunicazione dei plc
HARDWARE RS-232 L’interfaccia seriale RS-232 è il più diffuso dispositivo di comunicazione tra plc e mondo esterno. L’RS-232 è un dispositivo che consente comunicazioni asincrone cioè non è possibile mantenere il ricevitore e il trasmittente in sincronia per tempi elevati a differenza della trasmissione sincrona in cui anche per lunghe sequenze di bit è possibile mantenere operativa la comunicazione senza perdita di aggancio. Per tramettere i dati si adopera un sistema binario costituito da 1 e 0 per trasmettere i dati in codice ASCII (American Standard Code for Information Interchange- si pronuncia ASS-KEY).

Il primo dato ad essere inviato dall’ RS-232 è il bit di start che è un bit di sincronizzazione aggiunto prima di ogni carattere da inviare. Il livello di tale bit corrisponde ad uno zero logico cioè uno SPACE (a livello elettrico essendo la logica della RS232 negata, sarà +15 V) Il bit di stop è invece, l’ultimo ad essere inviato, e individua la fine della trasmissione del carattere, il livello logico è un 1 perciò è un MARK. Il bit di parità è un bit aggiunto al codice ASCII a 7-bit. Quest’ottavo bit serve per effettuare un controllo sulla correttezza della trasmissione, ed è aggiunto in tre modalità:
mantenendo la quantità complessiva di 1 pari (even parity); mantenendo la quantità complessiva di 1 dispari (odd parity); aggiungendo sempre e comunque uno 0 (parity of none).
Consideriamo per esempio la trasmissione della lettera "E"(45h or 1000101b(inary)): se la parità è None, il parity bit è sempre 0, così trasmetteremo 10001010. Se la parità è pari, dovendo avere nel carattere trasmesso un numero pari di 1, essendo tre gli 1 presenti (1000101), dovremo aggiungere un bit di parità uguale a 1 (10001011). Nella parità dispari, infine, è necessario avere un numero dispari di 1 perciò il parity bit sarà 0 (10001010).
Comunicazione industriale La necessità di estendere la capacità di comunicazione a distanza con reti nasce da esigenze diverse: la possibilità dialogare tra sensori e attuatori intelligenti, di integrare la progettazione e la produzione. di ottimizzare lo stoccaggio delle materie prime e dei prodotti lavorati, di migliorare il controllo della qualità, dall’esigenza di una massima flessibilità di produzione.
Standard 4-20 mA Nasce dalla: necessita' di trasportare segnali analogici da sensori verso PLC e da PLC verso attuatori diversita' dei segnali analogici generati dai sensori e da inviare agli attuatori (valori in tensione
o in corrente, e diversita' di intervalli di valore) necessita' di una standardizzazione dei segnali Caratteristiche dello Standard 4-20 mA: si basa su codifica basata su corrente, perche' un segnale analogico rappresentato da corrente
elettrica e' meno sensibile ai rumori rispetto un segnale rappresentato da tensione un segnale analogico e' rappresentato da una corrente che puo' assumere valori compresi tra 4
e 20 mA. Esempio: un sensore di pressione fornisce valori di pressione tra 0 e 10 bar. Una pressione di 8
bar viene rappresentata dalla corrente di valore pari a: (20-4)*8/10+4=12.8+4=16.8 mA

Standard 4-20 mA
Schema comune di collegamento tra il trasmettitore ed il ricevitore (Two-Wire 4-20 mA Transmitter)
l'alimentazione DC (24-30 V) non e' quasi mai disponibile nel trasmettitore (sensore ad
esempio). Generalmente l'alimentazione e' locale al ricevitore (PLC ad esempio) la corrente viene convertita in tensione (tramite opportuna resistenza) localmente al ricevitore da tale schema si evince il vantaggio della codifica del minimo valore di corrente (4 mA). Nel
caso di guasto (trasmettitore guasto o interruzione di linea) il valore di 0 mA viene convertito in 0V, permettendo l'individuazione del guasto.
Standard Seriale di Comunicazione RS 422, RS 485 Caratteristiche comuni: Standard per trasmissioni binarie (maggiore immunita' ai disturbi) Codifica del segnale digitale in valori di tensione
Standard Seriale di Comunicazione RS 422
La trasmissione ha il vantaggio di essere piu' immune ai disturbi, ciò permette di raggiungere distanze di 4000 ft 1.2 km e di avere bit/rate di 10 Mb/s. Il numero di Trasmettitori è pari ad uno mentre si possono avere fino a dieci Ricevitori .
Standard Seriale di Comunicazione RS 485 Utilizza una tipologia di trasmissione con distanze di 4000 ft e bit/rate di 10 Mb/s. Il numero di Trasmettitori (max) = 32 mentre il numero di Ricevitori (max)= 32.
Trasmettitore
Ricevitore
DC
+
-
4-20 mA

Reti Orientate all'Automazione Industriale
Reti di Comunicazione Orientate all'Automazione Industriale
Le diverse esigenze presenti a livello di campo (Area Sensori/Attuatori, Field Area, Cell Area), ha di fatto determinato la nascita di tre tipologie di reti di comunicazione orientate all'Automazione Industriale:
Reti di Comunicazione Orientate all'Automazione Industriale Bus di Sensori. Caratteristiche principali:
1. Collega dispositivi gia' esistenti (non intelligenti) 2. L'unico scopo e' la semplificazione del cablaggio 3. Lunghezza tipica dei messaggi e' inferiore al byte 4. Area Sensori/Attuatori
Bus di Dispositivi. Caratteristiche principali: 1. Collega dispositivi gia' esistenti (non intelligenti) o dispositivi con
funzioni "intelligenti" di diagnostica 2. Esempio di dispositivo: sensore di temperatura con funzionalita' di
diagnostica interna 3. Lunghezza tipica dei messaggi e' inferiore a 16-32 byte 4. Field Area
Bus di Campo Caratteristiche principali: 1. Collega dispositivi "intelligenti" capaci di realizzare algoritmi di
regolazione 2. Esempio di dispositivi: valvola dotata di regolatore di portata, con
autodiagnistica 3. Permette di creare un data base distribuito accessibile in real-time e da
tutti i dispositivi afferenti 4. Lunghezza tipica dei messaggi e' di centinaia di bytes. 5. FieldArea/Cell Area

Tipologie di Reti di Comunicazione per l'Automazione Industriale
REGOLATORI PID I regolatori PID ( o STANDARD ) sono certamente i più usati in ambito industriale , sia per la loro capacità di far fronte alla maggior parte dei problemi di controllo, sia per il limitato numero di parametri che li caratterizzano e la disponibilità di regole semplici e rapidamente applicabili per la loro taratura . PROGRAMMAZIONE DEI PLC I PLC possono essere programmati con differenti linguaggi:
1. ladder o linguaggio a contatti è un linguaggio specifico che ha mantenuto molto dei circuiti di comando utilizzati nelle logiche cablate, di fatto è uno schema funzionale ruotato di 90 gradi;
BatiBus, InterBus S, CAN (DeviceNet), LONWorks InterBus S, CAN (DeviceNet), LONWorks, Profibus DP-PA-FMS,
Profibus PA-FMS, WorldFIP, FieldBus Fondation, FieldBus IEC 61158 Ethernet, Token Bus
Senso
micro-PLC, dispositiv
PLC
Controllo,
bi bytes
messaggi file
8 3 256 Bus di
Bus di Dispositivi
Bus di Campo
bit

21 22
23
23
2. lista istruzioni utilizza le regole semantiche dell’algebra booleana per la descrizione delle funzioni di ciascuna riga d’istruzione che assume la struttura caratteristica di una lista d’istruzioni;
LO 21 OO23 AO 22
=O 23 3. linguaggi funzionali sono molto simili agli schemi circuitali propri dell’elettronica digitale,
le differenti funzioni sono descritte in forma grafica;
&1I1
I2
I3
O1
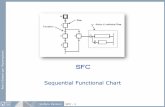
4. linguaggio Grafcet (graphe de commande etape-transition) è un linguaggio grafico in cui sono rappresentati come RETTANGOLI le azioni da eseguire a ciascun passo e con dei tratti gli eventi che determinano i passaggi da un passo ad un altro.
001
002
001
002
003
5. linguaggi general purpose: è possibile adoperare per la programmazione dei plc anche
linguaggi evoluti come il “c” o il “pascal”.