11_Esempi Di Determinazione Delle Reazioni Vincolari Con Le Equazioni Cardinali Della Statica

Passaggio sistema riferimento locale-globale
Elemento asta nel piano
L’elemento ha, come detto 2 gdl, nel sistema globale x-y contribuirà con una matrice 4x4
x
y
Rif. globale
Nel riferimento locale, l’equilibrio
dell’elemento si scrive come:
2
1
2221
1211
2
1
f
f
KK
KK
F
F
Chiamando con l, m i coseni direttori
dell’asse locale su quelli globali
y2x22
y1x11
f mf lf
f mf lf
y2
x2
y1
x1
2
1
f
f
f
f
ml00
00ml
f
f
Nel riferimento globale l’elemento ha 4 gdl ! -Il passaggio inverso:
2y2
2x2
1y1
1x1
f mf
f lf
f mf
f lf
; f Tf
2
1
y2
x2
y1
x1
f
f
m0
l0
0m
0l
f
f
f
f
; f TfT

I passaggi svolti per gli spostamenti generalizzati si possono rifare per le forze generalizzate
F T F F T F T
f K F
(Premoltiplicando per TT)
f KT F TTT
f TKT F T
T KTKT
Per l’elemento asta nel piano, la matrice T del coseni direttori è
sencos00
00sencosT
Dove è la rotazione che deve compiere l’asse x globale per sovrapporsi all’x locale
x
x
Elemento asta nello spazio
Nel sistema globale x-y-z ora l’elemento contribuirà con una matrice 6x6
Chiamando con l, m, n i coseni direttori dell’asse locale su quelli globali
z2y2x22
z1y1x11
f nf mf lf
f nf mf lf
nml000
000nmlT

Ricordando che i coseni direttori sono le proiezioni dei versori locali sugli assi globali:
212
2
12
2
12 zzyyxxd
121212
121212
zzyyxx000
000zzyyxx
d
1T
Vale quindi, con la nuova T, il medesimo passaggio Klocale , Kglobale
T KTKT
Elemento trave completa nel piano
La trave completa che qui si considera possiede sia la rigidezza assiale, che quella flessionale
Ci sono quindi 3 gdl per nodo, per complessivi 6 gdl nel riferimento locale
Lo stesso numero di gdl è utilizzato nel riferimento globale e quindi nei due sistemi di
riferimento l’ordine della matrice K sarà il medesimo
Per chiarezza, si rinumerano i gdl in
modo da utilizzarne solo 6
4
3x 5
2
y,
6
1

K
<1> <2> <3> <4>
<1>
<2>
<3>
<4>
<5> <6>
<5>
<6>
Assiale
Flessionale4
3x 5
2
y,
6
1
Per poter scrivere agevolmente la matrice T per il passaggio di riferimento, conviene permutare la
precedente numerazione, facendo in modo di avvicinare i gdl che si riferiscono allo stesso nodo
1 1
2 4
3 2
4 3
5 5
6 6
K compatta T compatta
Pertanto, la matrice di rigidezza della trave nel piano che
si considera è la seguente:
L4L6-L2L6
L6-12L6-12-
L2L6-L4L6
L612-L612
-
22
22
K
<1> <2> <3> <4>
<1>
<2>
<3>
<4>
<5> <6>
<5>
<6>
dove
L
EA
3L
EJ

Facendo, da ora in poi, riferimento a quest’ultima definizione della matrice
di rigidezza della trave nel piano, si può rappresentare la matrice T
x
y
lx
mx
my
ly
Nella figura sono rappresentati i coseni
direttori, secondo la loro definizione
coslx senmx
senly cosmy
100000
0ml000
0ml000
000100
0000ml
0000ml
yy
xx
yy
xx
T
x2x11 m fl ff
y2y12 m fl ff
33 ff
x5x44 m fl ff
y5y45 m fl ff
66 ff
Si riporta di seguito il risultato di TT K T per lo svolgimento esercizi

22
2222
2222
22
2222
2222
L 4c L 6-s L 6L 2c L 6s L 6-
c L 6-c 12s sc 12sc c L 6-c 12s sc 12sc
s L 6sc 12sc s 12c s L 6sc 12sc s 12c -
L 2c L 6-s L 6L 4c L 6s L 6-
c L 6c 12s sc 12sc c L 6c 12s sc 12sc
s L 6-sc 12sc s 12c -s L 6-sc 12sc s 12c
<1> <2> <3> <4> <5> <6>
Dove si sono indicati con
L
EA
3L
EJ cosc sens

Elemento trave completa nello spazio
In questo caso ci sono sia nel riferimento
locale che nel globale 6 gdl per nodo, per
complessivi 12 gdl dell’elemento 8
2
641
x7
y
z
10
11
95
3
12Per avere una T in forma compatta conviene
rinumerare i gdl dell’elemento nel modo
seguente
zzz
yyy
xxx
nml
nml
nml
zzz
yyy
xxx
nml
nml
nml
zzz
yyy
xxx
nml
nml
nml
zzz
yyy
xxx
nml
nml
nml
T=

Discretizzazione e assemblaggio di una struttura
Discretizzare una struttura vuol dire suddividerla in un certo numero di elementi di proprietà
opportune, variamente connessi
Ciascun elemento è caratterizzato da una matrice di rigidezza che viene calcolata nel proprio
sistema di riferimento
Scelto un sistema di riferimento globale, si rielaborano tutte le matrici di rigidezza nel nuovo
sistema, mediante la solita
ii
loc
ii
g T KTKT
elementi n.1i
Si introduce anche un sistema di numerazione globale dei gdl e si dispongono tutte le matrici
degli elementi in tale nuovo sistema (valgono le considerazioni fatte in precedenza circa la
numerazione più opportuna per minimizzare la banda)
i
gK
elementi n.1i
glob Num
i
gK
Ora si può assemblare l’intera matrice, in quanto tutti gli elementi sono uniti solo per i nodi, e
ciascuno aggiunge ai nodi di competenza il suo contributo di rigidezza
La rigidezza globale è la somma di tutte le matrici degli
elementi
n.elementi
1iglob Num
i
gK K
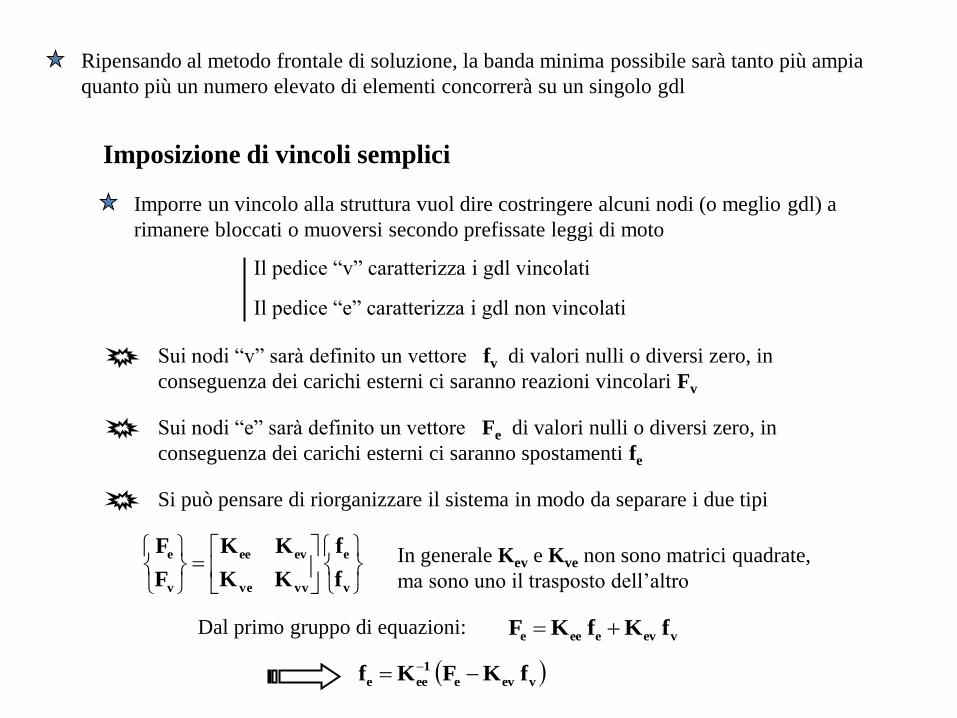
Ripensando al metodo frontale di soluzione, la banda minima possibile sarà tanto più ampia
quanto più un numero elevato di elementi concorrerà su un singolo gdl
Imposizione di vincoli semplici
Imporre un vincolo alla struttura vuol dire costringere alcuni nodi (o meglio gdl) a
rimanere bloccati o muoversi secondo prefissate leggi di moto
Il pedice “v” caratterizza i gdl vincolati
Il pedice “e” caratterizza i gdl non vincolati
Sui nodi “v” sarà definito un vettore fv di valori nulli o diversi zero, in
conseguenza dei carichi esterni ci saranno reazioni vincolari Fv
Sui nodi “e” sarà definito un vettore Fe di valori nulli o diversi zero, in
conseguenza dei carichi esterni ci saranno spostamenti fe
Si può pensare di riorganizzare il sistema in modo da separare i due tipi
v
e
vvve
evee
v
e
f
f
KK
KK
F
F In generale Kev e Kve non sono matrici quadrate,
ma sono uno il trasposto dell’altro
Dal primo gruppo di equazioni:veveeee fKfKF
veve
1
eee f KF Kf

La complessità del calcolo dipende dalla inversione, per cui dal numero di gdl
effettivamente liberi
Se la struttura è labile, la struttura ha la possibilità di avere moti rigidi e la
precedente espressione non è calcolabile (fe tende all’infinito)
Se tutti i vincoli imposti sono nulli, la precedente si semplifica nella
e
1
eee F Kf
Il che identifica una procedura molto veloce per considerare i vincoli: l’eliminazione
dalla K di tutti i gdl vincolati
Il secondo gruppo di equazioni risolve invece il problema
diretto della determinazione delle forze vincolari evevvvv f Kf KF
Imposizione di vincoli di dipendenza
Non sempre un vincolo è esplicabile con un valore assegnato al gdl nel sistema di
riferimento globale, si possono infatti avere:
a) Vincoli inclinati rispetto sistema riferimento globale
b) Vincoli tra gdl esprimibili mediante equazioni lineari
c) Rilascio di gdl tra elementi con nodi comuni (ad esempio due travi connesse con
una cerniera)
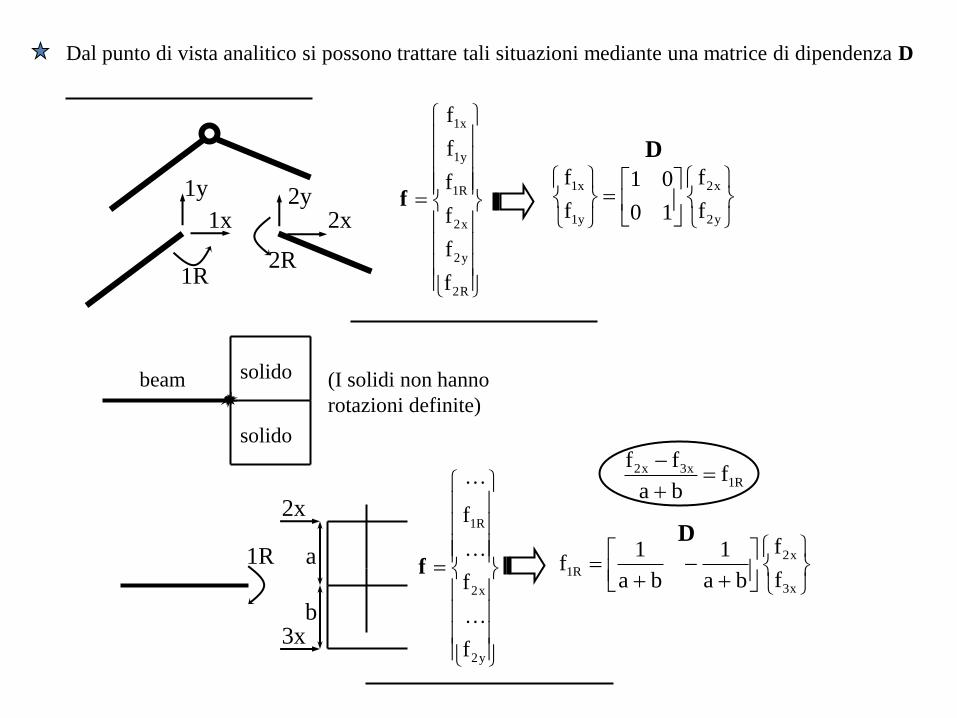
Dal punto di vista analitico si possono trattare tali situazioni mediante una matrice di dipendenza D
1y
2x
1R
2y
2R
1x
R2
y2
x2
R1
y1
x1
f
f
f
f
f
f
f
y2
x2
y1
x1
f
f
10
01
f
f
D
solido
solido
beam
1R
2x
3x
(I solidi non hanno
rotazioni definite)
y2
x2
R1
f
f
f
f
x3
x2
R1f
f
ba
1
ba
1f
Da
b
R1x3x2 f
ba
ff

In generale, possiamo suddividere i gdl in tre differenti gruppi e riorganizzare l’intero
sistema secondo tale suddivisione
d gdl dipendenti da altri od anche slave
i gdl indipendenti che forniscono condizioni agli slave, detti master
r Tutti i rimanenti gdl non coinvolti da relazioni di dipendenza
Nella ragionevole ipotesi che nessuno slave sia coinvolto da più di una relazione di
dipendenza lineare, tutte le dipendenze o vincoli si raccolgono
vid ff Df
d
i
r
f
f
f
KKK
KKK
KKK
F
F
F
dddidr
idiiir
rdrirr
d
i
r
Dal primo gruppo di equazioni: ffDKfKfKF virdrirrr ir
irdrirrrvrdrr f DK Kf K f KF F
Dal secondo gruppo di equazioni: ff DKf Kf KF viidiiiriri
iidiirirvidii f DK Kf K f KF F
Dal terzo gruppo di equazioni: ff DKf Kf KF viddidirdrd
idddirdrvdddd f DK Kf K f KF F
N.B. hanno le medesime dimensioni
1
, i vD f f
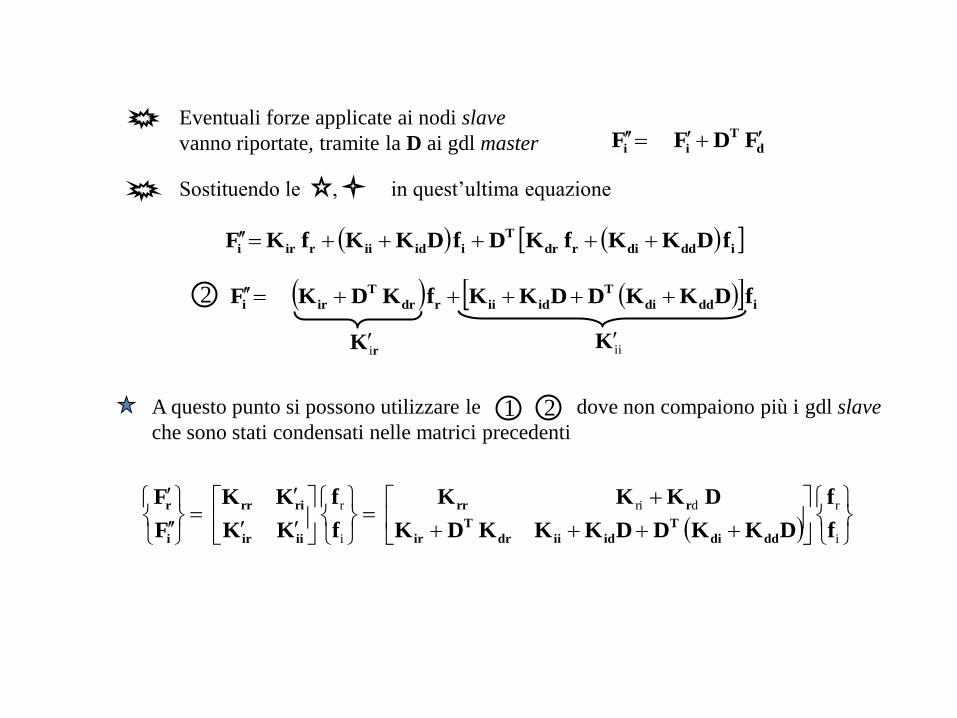
Eventuali forze applicate ai nodi slave
vanno riportate, tramite la D ai gdl master d
T
ii F DF F
Sostituendo le , in quest’ultima equazione
idddirdr
T
iidiiriri f DK Kf K Df DK Kf KF
idddi
T
idiirdr
T
iri f DK K DDK Kf K DK F
rK i iiK
2
1 2A questo punto si possono utilizzare le dove non compaiono più i gdl slave
che sono stati condensati nelle matrici precedenti
i
rdri
i
r
f
f
DK K DDK KK DK
D KKK
f
f
KK
KK
F
F
dddi
T
idiidr
T
ir
rrr
iiir
rirr
i
r

In taluni casi non si è <interessati allo stato tensionale dell’intera struttura, ma solo di
una sua parte, si può ridurre allora il numero complessivo di gdl condensando i gdl della
parte priva di interesse strutturale
Condensazione statica
Zona da condensareNaturalmente non si potranno
condensare i gdl vincolati o quelli su
cui agiscono carichi esterni
La procedura è del tutto simile a quella esposta in precedenza
c
m
cccm
mcm
f
f
KK
KK
0
F mmSi chiamano master i soli gdl che
rimangono dopo l'avvenuta condensazione
Dal secondo gruppo di equazioni: mcm
1
ccc f K Kf
Sostituita nel I gruppo semplifica il sistema
mcm
1
cccmmm f K KKKF m
condK
Una volta risolto nelle incognite fm si può anche espandere la soluzione ai gdl condensati
La procedura di condensazione statica non comporta perdita precisione
perché, anche se condensati, tutti i gdl influiscono sulla Kcond
Il “costo numerico” dipende dal numero di gdl da condensare (inversione)

Contrariamente alla precedente non fornisce una soluzione esatta, ma solo approssimata (si può
scrivere esatta solo per una frequenza alla volta)
Condensazione dinamica o della matrice di massa
Per tale motivo se ne consiglia l’uso solo per le analisi modali o vibrazionali, ma se ne sconsiglia
l’uso per analisi tensionali dinamiche
Sono state proposte diverse soluzioni, la più comune è quella di Guyan:
cm
1
cccc
1
ccmccm
1
ccmccm
1
ccmcmmcond K K M K KK K MM K KMM
Che può essere utilizzata anche per la matrice di smorzamento
cm
1
cccc
1
ccmccm
1
ccmccm
1
ccmcmmcond K K C K KK K CC K KCC
Sottostrutturazione
Sottostrutturare vuol dire in pratica
condensare una parte o parti della struttura per
maneggiare matrici di calcolo più agevoli
È ad esempio utile quando compaiono più
zone identiche che vengono sostituite dalla
matrice condensata Superelement
È altresì utile quando si vuole risolvere l’intera
struttura a meno di piccole variazioni

La sottomodellazione è l’analisi successiva condotta sulla zona prima condensata, è interessante
notare che in quest’ultima si impongono gli spostamenti al contorno del superelement che però
può anche comportarsi in modo non lineare (si fa l’ipotesi che la non linearità non influisca sul
comportamento globale ma solo localmente)
La sottomodellazione consente di determinare il
comportamento strutturale nel raggio di raccordo
Sottomodellazione

Metodi alternativi per l’imposizione di vincoli
Penalty Functions.
Secondo questa formulazione si inseriscono delle forze tra gradi di libertà da vincolare, il cui
effetto è quello di annullare gli spostamenti
Il vincolo proposto comporta la
condizione u2=u6
Si può immaginare di pensare il vincolo come fornito da un elemento “robusto” aggiuntivo, di
caratteristica W posto tra i punti 2 e 6
7 7 7W u f
7
2 2
76 6
1 1
1 1
u fw
u f
Forze interne aggiuntive
dovute elemento penalty
11 12 1 1
12 22 23 2 2
23 33 34 3 3
34 44 45 4 4
45 55 56 5 5
56 66 67 6 6
67 77 7 7
. . . . .
. . .
. . . .
. . . .
. . . .
. . .
. . . . .
K K u f
K K K u f
K K K u f
K K K u f
K K K u f
K K K u fw w
K u f
w w
K
Il sistema si è modificato, ma quale valore
occorre dare a w ?
Esisterà un errore, funzione di w, e(7)= u2-
u6 0 ; w e(7) 1/w

Il penalty va scelto opportunamente (1056 volte la max kij) per non avere: (i) violazioni significative
del vincolo / (ii) matrice K mal condizionata
Altra indicazione generale: max *10
number of digits
ijw k
Come trattare un vincolo più complesso, come ad esempio:2 3 65 2 2u u u
2
3
6
5 1 2 2
u
u
u
Premoltiplicando per
trasposta vettore riga
dei coefficienti
2
3
6
25 -5 -10 10
-5 1 2 2
-10 2 45 4
u
u
u
Il sistema complessivo si modifica nel seguente:
11 12 1 1
12 22 23 2 2
23 33 34 3 3
34 44 45 4 4
45 55 56 5 5
56 66 67 6 6
67 77 7 7
. . . . .
. . .
. . .
. . . .
. . . .
. .
.
25 5 10 10
5 2 2
1
. . .
0 2 4
.
5 4
K K u f
K K K u f
K K K u
w w w w
w w w w
w
f
K K K u f
K K K u f
K K Kw w u f
K K u f
w
Se ne può dare un’interpretazione anche secondo la formulazione variazionale
Forma quadratica = Energia Potenziale totale + Energia Penalty
Set di equazioni vincolari 1...w p m p pa u b

1 1min
2 2w w
T T T T T
p p p pu K u u f u a a u a b
T T
p p p pK a Wa u f Wa b (W = matrice diagonale di w)
Implementazione semplice e formulazione (cautela numerica) valida anche nel
caso di sistemi non lineari
Eventuali ripetizioni di vincoli (rispetto alla formulazione che diminuisce il
numero di gdl attivi) non rendono mal condizionato il sistema
Il sistema rimane definito positivo, per cui la stazionarietà corrisponde al minimo
potenziale
Associato a metodi iterativi (come ad esempio calcolo autovalori) può provocare
instabilità numerica nelle iterazioni successive

Lagrange Multipliers.
In questo caso si considera di sostituire
il vincolo con forze ±λ capaci di
bloccare gli spostamenti reciproci
11 12 1 1
12 22 23 2 2
23 33 34 3 3
34 44 45 4 4
45 55 56 5 5
56 66 67 6 6
67 77 7 7
. . . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . . .
K K u f
K K K u f
K K K u f
K K K u f
K K K u f
K K K u f
K K u f
1
11 12 1
2
12 22 23 2
3
23 33 34 3
4
34 44 45 4
5
45 55 56 5
6
56 66 67
7
67 77
. . . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . . .
+1
- 1
uK K f
uK K K f
uK K K f
uK K K f
uK K K f
uK K K
uK K
.
.
.
.
. 6
7
f
f
Sistema con 8 incognite e 7 equazioni
Si aggiunge la equazione trasposta, la quale impone la condizione vincolare u2=u6 e rende il sistema
completo e invertibile
11 12
12 22 23
23 33 34
34 44 45
45 55 56
56 66 67
67 77
. . . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . . . .
. . .
+
.
1
-1
+1 - 1
K K
K K K
K K K
K K K
K K K
K K K
K K
.
.
.
.
1 1
2 2
3 3
4 4
5 5
6 6
7 7
. . 0
u f
u f
u f
u f
u f
u f
u f

Per ogni vincolo aggiuntivo si aggiunge in pratica una incognita. Un’equazione di vincolo più complessa da:
2 3 65 2 8u u u
11 12
12 22 23
23 33 34
34 44 45
45 55 56
56 66 67
67 77
+5
. . . . .
. . . .
. . . .
. . . .
. . . .
. . . .
. . . . . .
.
-3
-2
+5 - 3 -2 . .
K K
K K K
K K K
K K K
K K K
K K K
K K
.
.
.
1 1
2 2
3 3
4 4
5 5
6 6
7 7
. . 8
u f
u f
u f
u f
u f
u f
u f
In pratica si aggiunge un moltiplicatore di Lagrange per ciascuna delle equazioni di vincolo considerate
In senso più generale si può dare un’interpretazione esatta ai moltiplicatori di Lagrange
T u fK D
λ bD 0
Si voglia imporre un sistema di vincoli lineari del tipo: D u b
Assemblando come descritto si ha
I vincoli agiscono per mezzo di reazioni vincolari che sono definite dalle
Ossia si possono rimuovere i vincoli se si aggiunge il precedente sistema di forze sostitutivo
T
vincF D λ

Uno svantaggio è che la risoluzione è necessariamente di tipo implicito
Ha il vantaggio di fornire direttamente le reazioni vincolari, ossia le forze necessarie al
rispetto delle condizioni vincolari
Se un vincolo o un insieme di vincoli fornisce condizioni ridondanti il sistema diviene
non invertibile e quindi non risolubile
Si incrementano i gdl complessivi della struttura, uno per ogni vincolo imposto






![ITI "G. Omar" Novara VOL. 1... · 2018. 11. 12. · buono Faiso F also F also Faiso Faiso F also F also Vero . 8.v=n C]NVN 8+v=n HON . gov = n HON - xa gov = n HO - xa . BON - xa](https://static.fdocumenti.com/doc/165x107/60abf1238012de2cf37c1588/iti-g-omar-novara-vol-1-2018-11-12-buono-faiso-f-also-f.jpg)