N. Alberto Borghese - homes.di.unimi.it · 3 A.A. 2004-2005 5/39 borghese/ Controllo di rigidità...
17
1 http://homes.dsi.unimi.it/~borghese/ 1/39 A.A. 2004-2005 Animazione biologica N. Alberto Borghese N.B.: Il diritto di scaricare questo file è riservato solamente agli studenti regolarmente iscritti al corso di Animazione Digitale. http://homes.dsi.unimi.it/~borghese/ 2/39 A.A. 2004-2005 Sommario Il movimento biologico I movimenti del braccio e della mano Il cammino
Transcript of N. Alberto Borghese - homes.di.unimi.it · 3 A.A. 2004-2005 5/39 borghese/ Controllo di rigidità...

1
http://homes.dsi.unimi.it/~borghese/1/39A.A. 2004-2005
Animazione biologicaN. Alberto Borghese
N.B.: Il diritto di scaricare questo file è riservato solamenteagli studenti regolarmente iscritti al corso di Animazione
Digitale.
http://homes.dsi.unimi.it/~borghese/2/39A.A. 2004-2005
Sommario
Il movimento biologicoI movimenti del braccio e della manoIl cammino
2
http://homes.dsi.unimi.it/~borghese/3/39A.A. 2004-2005
Il movimento biologico
Variabilità intra-individuale ed inter-individuale.
Complessità computazionale.
Vocabolario motorio (unione di chunk motori)
Firma spazio-temporale (e.g. esperimenti di Johanson, Stucchi e Viviani….)
http://homes.dsi.unimi.it/~borghese/4/39A.A. 2004-2005
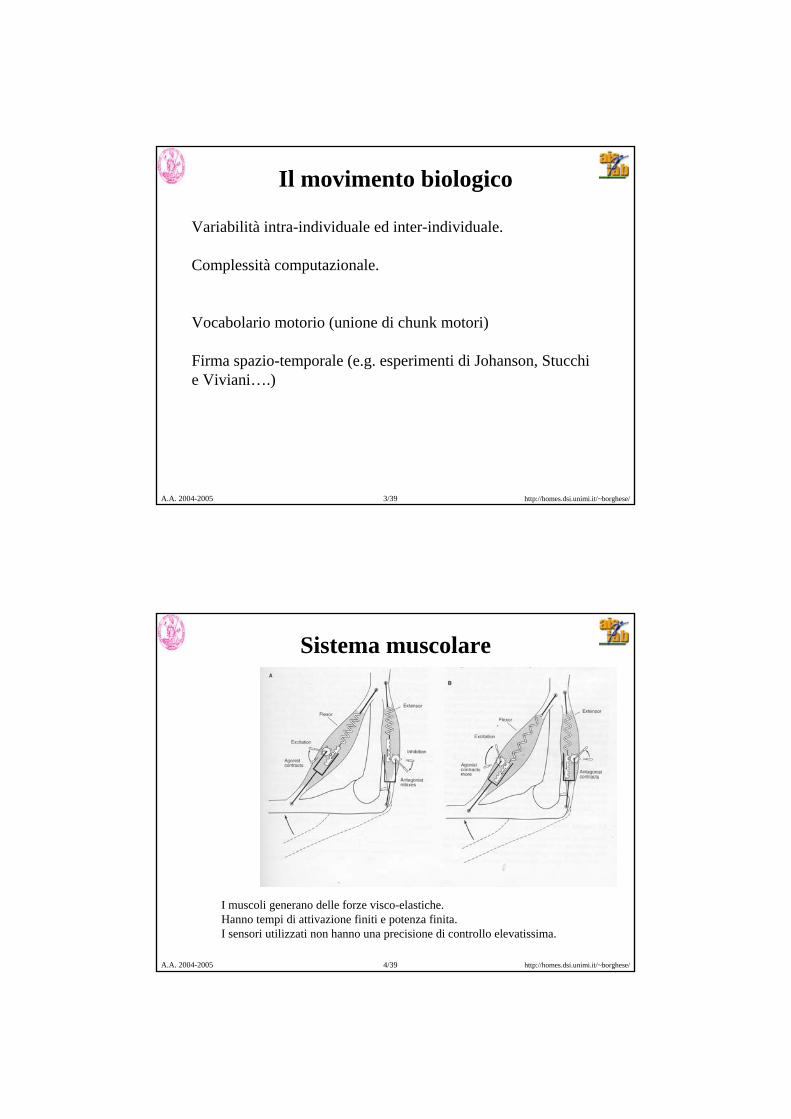
Sistema muscolare
I muscoli generano delle forze visco-elastiche.Hanno tempi di attivazione finiti e potenza finita.I sensori utilizzati non hanno una precisione di controllo elevatissima.

3
http://homes.dsi.unimi.it/~borghese/5/39A.A. 2004-2005
Controllo di rigidità
Controllo della rigidità della mano. Come?
Grado di co-contrazione.
http://homes.dsi.unimi.it/~borghese/6/39A.A. 2004-2005
Movimenti complessiRappresentazione ad alto livello è simbolica e discreta.
Ciascun segmento viene tradotto in un programma motorio adeguato.
Il programma èimplementato da sinergie motorie.
Le sinergie vengono sintonizzate sui parametri particolari del movimento.
L’interazione con i parametri dinamici degli attuatori (muscoli) fa sì che il movimento assuma il caratteristico profilo a campana rovesciata della velocità per i movimenti punto a punto e la relazione curvatura / velocità potenza 2/3.

4
http://homes.dsi.unimi.it/~borghese/7/39A.A. 2004-2005
I movimenti del braccio
http://homes.dsi.unimi.it/~borghese/8/33A.A. 2004-2005
Organizzazione del movimento su 2 canalidi controllo: movimenti liberi
Controllo semplificato: Yaw + elevazione e distanza. Modello a 2 canali.
•La cinematica degli angoli è oscillatoria.•La somma della fase tra i due angoli di yaw è legata linearmente all’azimuth del piano in cui la figura viene disegnata (NB la fase dà la posizione iniziale!). •La somma della fase tra i due angoli di elevazione è legata all’inclinazione della figura che vado a disegnare. •La differenza di fase tra gli angoli di elevazione non dipende dal luogo in cui viene disegnata la figura.

5
http://homes.dsi.unimi.it/~borghese/9/39A.A. 2004-2005
1 DOF (elbow)
Vincoli anatomici sui movimenti liberiAvambraccio: articolazione “particolare”.
Limiti anatomici, sono funzione anche della configurazione (pose). Funzione “comfort” a forma di U.
Il braccio è uno strumento di trasporto e di supporto per la mano. Esegue una traiettoria necessaria per posizionare la mano (cinematica inversa).
http://homes.dsi.unimi.it/~borghese/10/33A.A. 2004-2005
La firma temporale nei movimenti liberi
La cinematica dipende dalla curvatura locale, c, e dalla lunghezza della traiettoria, L: k = k(L). Legge potenza 2/3: vt = k c2/3 .
Perché? Deriva dalle proprietà visco-elastiche dell’apparato muscolo-scheletrico.

6
http://homes.dsi.unimi.it/~borghese/11/33A.A. 2004-2005
Il cammino
http://homes.dsi.unimi.it/~borghese/12/33A.A. 2004-2005
Reaching di oggetti•Velocità a forma di campana rovesciata per l’end-point, robusta per variazioni della velocità, dei carichi e del soggetto.
Ottimizzazione del jerk
dt)t(pd3

7
http://homes.dsi.unimi.it/~borghese/13/33A.A. 2004-2005
Reaching & grasping
•Relazione di fase angolare per movimenti liberi.
•Cinematica inversa quando l’end-effector si muove lungo una traiettoria dell’end-point. Profilo di velocità bell-shaped.
• Modifica della cinematica del braccio quando si deve affrontare la presa. Frase di trasporto. Apertura della mano e chiusura.
• Il movimento del braccio si adatta al tipo di presa.
• Planning (ostacoli sul percorso) = Via points nel planning o esecuzione.
http://homes.dsi.unimi.it/~borghese/14/33A.A. 2004-2005
Sommario
Il movimento biologicoI movimenti del braccio e della manoIl cammino

8
http://homes.dsi.unimi.it/~borghese/15/39A.A. 2004-2005
La mano, anatomia
Problema: palmo, flessibilità + rigidità.
http://homes.dsi.unimi.it/~borghese/16/39A.A. 2004-2005
Grasping (modalità)
Identificazione delle affinità tra possibilità di presa e forma / struttura / peso dell’oggetto.
Cinetica. Forze che devono essere esercitate sull’oggetto.
Cinematica / geometria: definizione della posa.
Input sensoriale: rugosità, temperatura, grado di lucentezza.Organizzazione dei gradi di libertà tramite libreria di primitive
(vocabolario motorio del grasping).

9
http://homes.dsi.unimi.it/~borghese/17/39A.A. 2004-2005
Superfici della mano
http://homes.dsi.unimi.it/~borghese/18/33A.A. 2004-2005
Precision vs Power grasp
Napier 1956. Ruolo peculiare del pollice nella presa di precisione.

10
http://homes.dsi.unimi.it/~borghese/19/33A.A. 2004-2005
Gli spazi di opposizione
La ricchezza del repertorio avviene combinando i diversi tipi di presa
Pad opposition// asse longitudinale
Palm opposition⊥ asse longitudinale
Side opposition// asse longitudinaleDirezione trasversale
http://homes.dsi.unimi.it/~borghese/20/33A.A. 2004-2005
Virtual fingers
Opposing forces, no torques

11
http://homes.dsi.unimi.it/~borghese/21/39A.A. 2004-2005
Gli attori del grasping
http://homes.dsi.unimi.it/~borghese/22/39A.A. 2004-2005
Tassonomia
12
http://homes.dsi.unimi.it/~borghese/23/39A.A. 2004-2005
Sommario
Il movimento biologicoI movimenti del braccio e della manoIl cammino
http://homes.dsi.unimi.it/~borghese/24/39A.A. 2004-2005
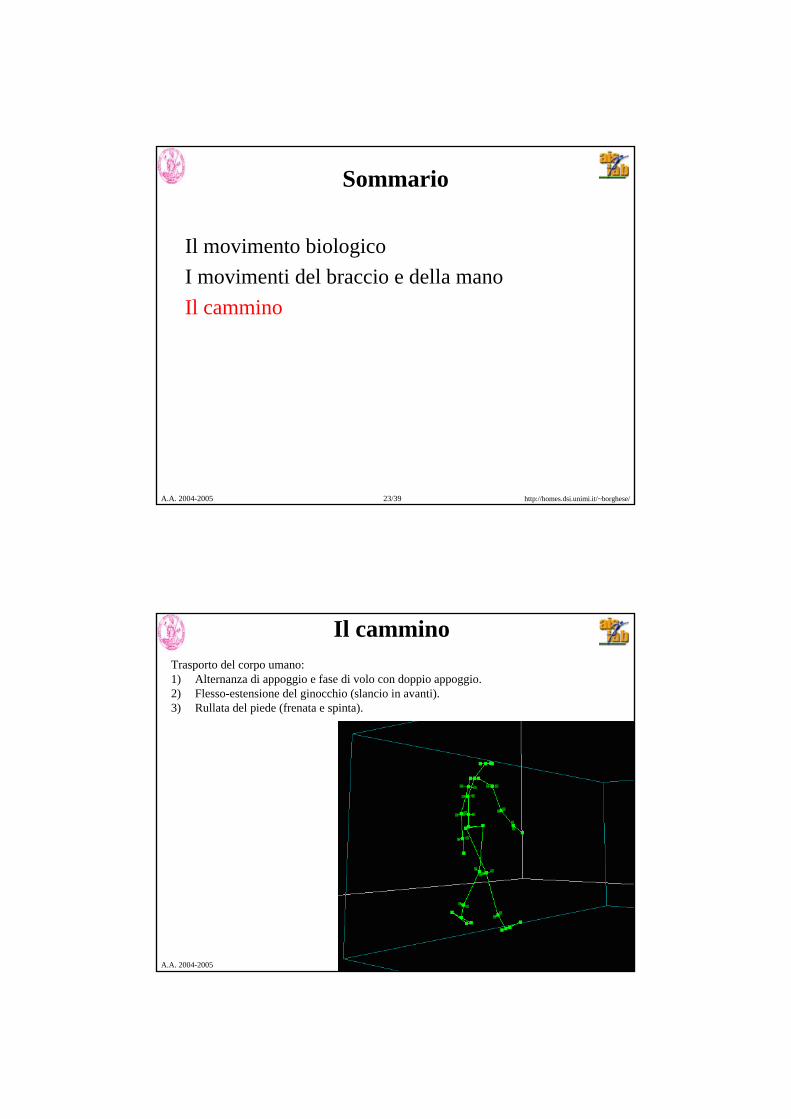
Il camminoTrasporto del corpo umano:1) Alternanza di appoggio e fase di volo con doppio appoggio.2) Flesso-estensione del ginocchio (slancio in avanti).3) Rullata del piede (frenata e spinta).

13
http://homes.dsi.unimi.it/~borghese/25/39A.A. 2004-2005
Cammino plantigrado
Non c’è slancio in avanti del ginocchio.Non c’è rullata del piede (tacco-piatto-punta).
http://homes.dsi.unimi.it/~borghese/26/39A.A. 2004-2005
Le fasi del cammino
Heel-strikeFoot flatToe-off

14
http://homes.dsi.unimi.it/~borghese/27/39A.A. 2004-2005
Il cammino – parametri globali
Pelvic List (oscillazioni nel piano frontale)
Vertical Elevation (oscillazioni nel piano sagittale)
http://homes.dsi.unimi.it/~borghese/28/39A.A. 2004-2005
I l c
amm
ino
–pr
ofil o
di v
e loc
i tà

15
http://homes.dsi.unimi.it/~borghese/29/39A.A. 2004-2005
Il cammino – i segmenti
Variabilità a livello di caviglia
http://homes.dsi.unimi.it/~borghese/30/39A.A. 2004-2005
Il cammino – il piede
Modello a due gradi di libertà
Maximal Inter-subjectvariability

16
http://homes.dsi.unimi.it/~borghese/31/39A.A. 2004-2005
Invarianze cinematiche
http://homes.dsi.unimi.it/~borghese/32/39A.A. 2004-2005
Sintesi del cammino
1) Antropometria.2) Definizione della velocità.3) Impostazione della curva di velocità globale. 4) Impostazione delle covariazioni angolari o della cinematica degli angoli relativi.

17
http://homes.dsi.unimi.it/~borghese/33/33A.A. 2004-2005
Sommario
Il movimento biologicoI movimenti del braccio e della manoIl cammino