
Moti nel piano - UniFI
205
Moti nel piano
Transcript of Moti nel piano - UniFI
Moti nel piano

La traiettoria è un insieme di punti del piano o dello spazio corrispondenti alle
posizioni del baricentro di un corpo in moto in istanti di tempo successivi.
Traiettoria

Legge oraria
La legge oraria è una relazione matematica che lega tra loro il tempo t e la
posizione s occupata dal corpo in quell'istante di tempo.
Se il moto avviene in una sola dimensione, ad esempio lungo una retta, il
grafico della legge oraria è una linea in un piano cartesiano avente lo spazio s in
ordinata e il tempo t in ascissa.
Alla stessa traiettoria possono corrispondere leggi orarie diverse, a conferma
del fatto che traiettoria e legge oraria sono due concetti totalmente indipendenti.
os0

Moto uniforme: è il moto di un corpo che compie spostamenti uguali
in intervalli di tempo uguali.
Moto rettilineo: è il moto di un corpo la cui traiettoria è una linea
retta.
Moto rettilineo uniforme: è il moto di un corpo che risulta
simultaneamente rettilineo ed uniforme.
Moto rettilineo uniforme
s (m) t (s) s totale (m) t totale (s) v = s/t (m/s)0,2 0,8 0,2 0,8 0,25
0,2 0,8 0,4 1,6 0,25
0,2 0,8 0,6 2,4 0,25
0,2 0,8 0,8 3,2 0,25
0,2 0,8 1 4 0,25
TABELLA DEI VALORI
00,20,40,60,8
11,2
0 1 2 3 4 5
sp
az
io (m
)
tempo (s)

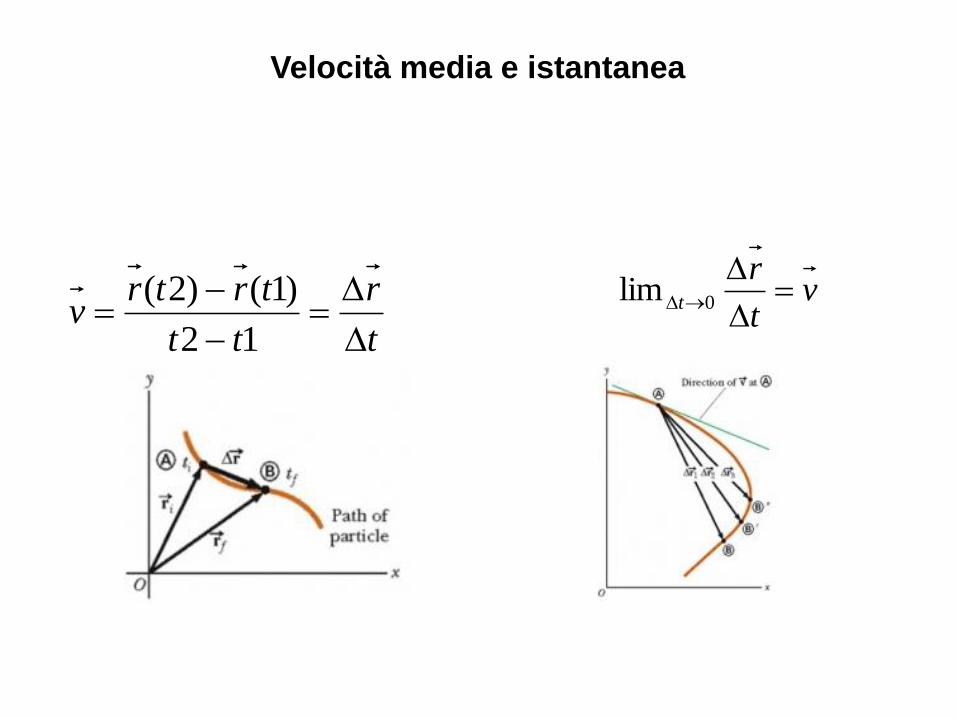
La velocità media è una grandezza vettoriale definita come
rapporto tra spazio percorso e tempo impiegato a
percorrerlo
Velocità media e istantanea
t
r
tt
trtrv
12
)1()2(
Nel S.I. l’unita di misura della velocità è m/s
vt
rt
0lim

Moto rettilineo vario
L’unità di misura è il m/s2
Ricorda che: spostamento, velocità ed accelerazione hanno nel moto rettilineo la stessa direzione
v Varia nel tempo
t
v
tt
tvtva
12
)1()2(
Accelerazione: grandezza vettoriale definita come variazione di velocità in un certo intervallo di tempo
at
vt
0lim
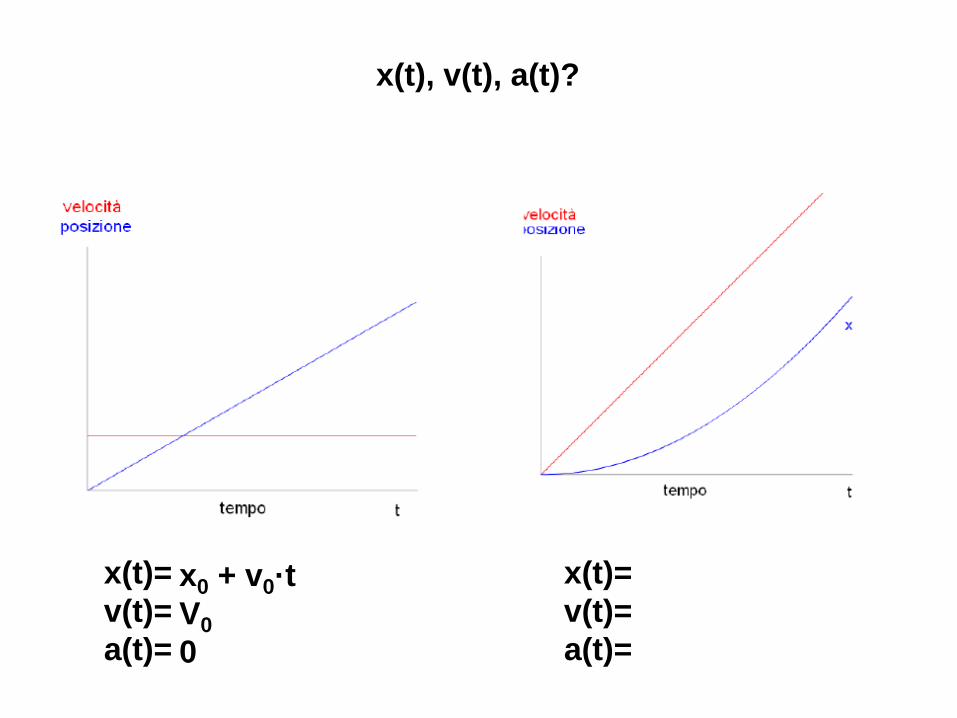
x(t), v(t), a(t)?
x(t)=
v(t)=
a(t)=
x(t)=
v(t)=
a(t)=
x0 + v0·t
V0
0

v
t
Moto uniformemente accelerato
atdt
dx
Esempio: caduta di un grave
v (t)= gt
S (t)= ½ g t2
dtatdx )(
dtatdx )(
atv
oxattx 2
2
1)(

Moto uniformemente accelerato
x(t)=
v(t)=
a(t)=
x0 + v0·t+1/2 at2
v0+ at
a
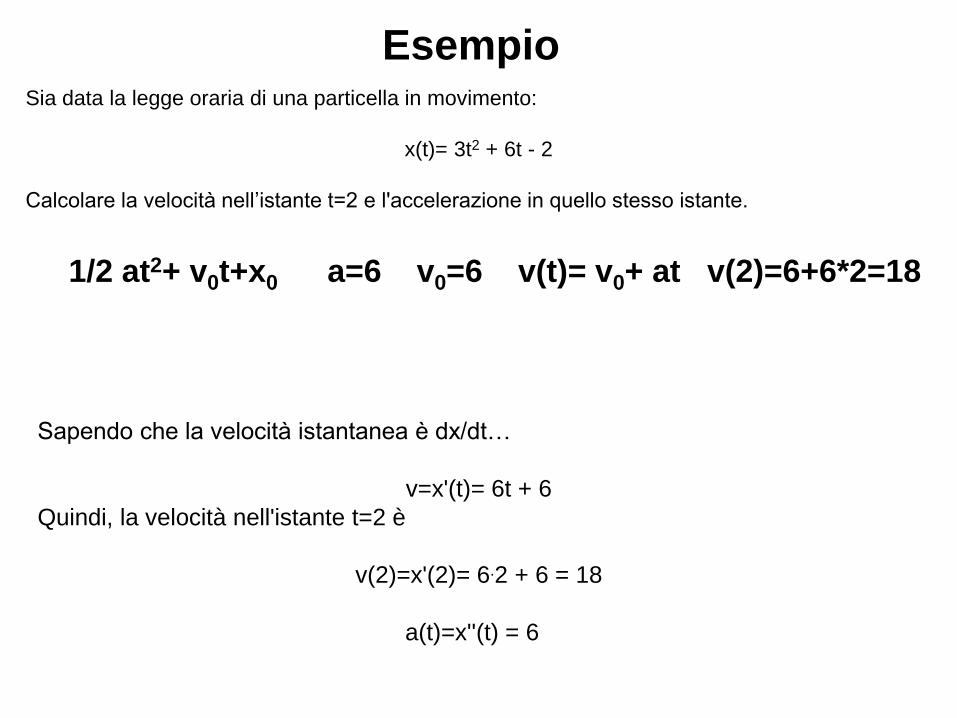
Esempio Sia data la legge oraria di una particella in movimento:
x(t)= 3t2 + 6t - 2
Calcolare la velocità nell’istante t=2 e l'accelerazione in quello stesso istante.
Sapendo che la velocità istantanea è dx/dt…
v=x'(t)= 6t + 6
Quindi, la velocità nell'istante t=2 è
v(2)=x'(2)= 6.2 + 6 = 18
a(t)=x''(t) = 6
1/2 at2+ v0t+x0 a=6 v0=6 v(t)= v0+ at v(2)=6+6*2=18

Domande Che tipo di traiettoria segue il proiettile? Dopo quanto tempo toccherà il suolo? Con che velocità toccherà il suolo? A queste domande rispose Galileo Galilei nel 1638
4. Moti nel piano: moto parabolico

Principio di composizione dei movimenti: è possibile studiare
separatamente il moto del proiettile lungo la direzione x e la direzione y
perché i due movimenti sono indipendenti.
Lungo l’asse x:
Lungo l’asse y:
Si trascurano gli attriti
4. Moti nel piano: moto parabolico
moto rettilineo uniforme
moto uniformemente accelerato
(accelerazione di gravità)

• Per semplicità noi studieremo un caso particolare: quello in cui il proiettile, considerato puntiforme ed in assenza di aria, viene sparato orizzontalmente da un altezza h con velocità orizzontale v0
Lungo l’asse x il moto è rettilineo uniforme e dunque la legge oraria è: s=s0+vt x = v0 t
y = ½ g t2
4. Moti nel piano: moto parabolico
Lungo l’asse y il moto è uniformemente accelerato con accelerazione g. La legge oraria è: s=s0+ v0 t + ½ at2
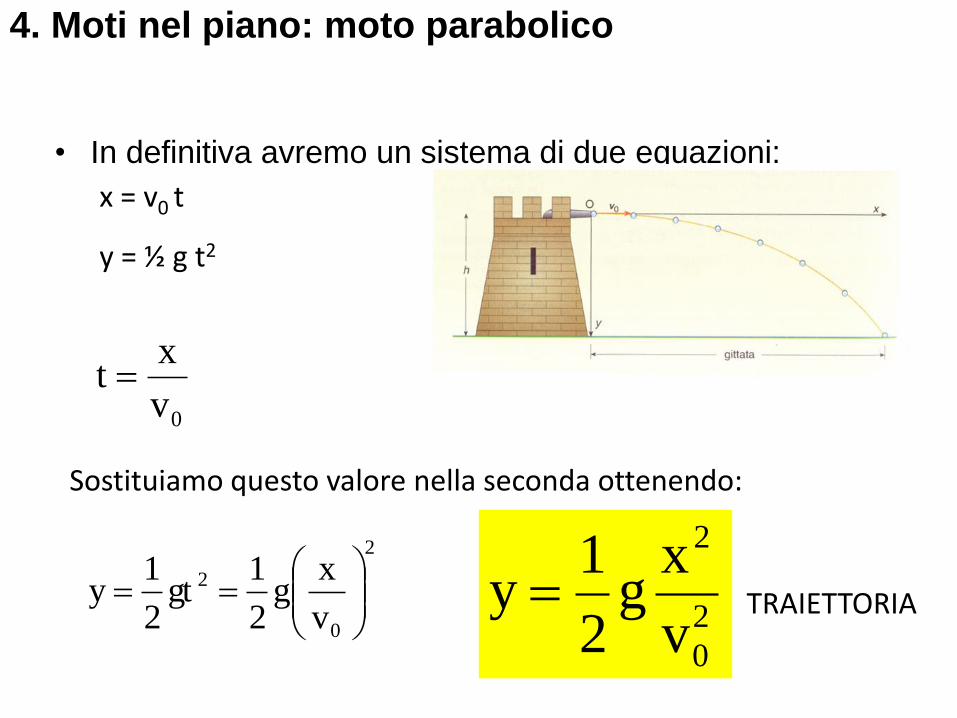
• In definitiva avremo un sistema di due equazioni:
Sostituiamo questo valore nella seconda ottenendo:
y = ½ g t2
x = v0 t
0v
xt
2
0
2
v
xg
2
1gt
2
1y
2
0
2
v
xg
2
1y
4. Moti nel piano: moto parabolico
TRAIETTORIA

• Il tempo di volo del proiettile non dipende dalla velocità di lancio ma solo dalla quota h e dal valore dell’accelerazione di gravità.
• Se il proiettile viene sparato dalla quota h, sostituendo y=h nella seconda equazione si ottiene:
• E con la formula inversa si ricava
• Ciò significa che il tempo di caduta di un proiettile è lo stesso di un corpo lasciato libero di cadere verticalmente.
22 tg2
1h tg
2
1y
g
h 2t
4. Moti nel piano: moto parabolico

• Nella prima equazione sostituiamo al posto di t il tempo
di volo:
• Otteniamo così la gittata, cioè la massima distanza
orizzontale percorsa
• A parità di altezza, la gittata è direttamente proporzionale
alla velocità iniziale (velocità di lancio).
g
2h vt vx 00
g
2h vx 0g
4. Moti nel piano: moto parabolico
Velocità media e istantanea
t
r
tt
trtrv
12
)1()2( vt
rt
0lim

• Mentre il proiettile cade al suolo la sua velocità aumenta.
• Ad ogni istante la velocità è rappresentata da un vettore tangente alla traiettoria parabolica che può essere scomposto lungo le due direzioni x e y
• Poiché la componente orizzontale è costante e pari a v0 mentre la componente verticale aumenta seguendo la legge del moto uniformemente accelerato in ogni istante la velocità totale è pari a :
2
y
2
0 vvv
4. Moti nel piano: moto parabolico

• Un proiettile viene sparato dall’alto di una torre di 25 m
con la velocità di 200 m/s in direzione orizzontale.
Calcolare la gittata e la velocità con cui tocca il suolo.
• Svolgimento
• h = 25 m v0= 200 m/s g= 9.81 m/s2
• Xg= ? v= ?
ssm
m26,2
/81.9
252
g
h 2t
2
m 452 s 2,26200m/stvg
2h vx 00g
smsmsm /22,201)/17,22()/200(vvv 222
y
2
0
4. Moti nel piano: moto parabolico
17.2226.2/81.9v 2
y ssmgt

v0
v0x
v0y v0x
v0y
gtvv
vv
yy
xx
0
0
2
0
0
2
1gttvyy
xtvx
yo
ox
2
2
00
0
2x
v
gx
v
vy
xx
y
4. Moti nel piano: moto parabolico
Supponiamo che l’origine sia il punto nel quale il proiettile inizia a muoversi con velocità v0 e
con un angolo di inclinazione θ

L’equazione della traiettoria si ottiene eliminando il tempo t. Si ha
così :
che ha la forma: y =ax-bx2, ed è l'equazione di una parabola passante per l'origine e
con concavità rivolta verso il basso; e questo prova che la TRAIETTORIA di un
proiettile è una parabola.
Nel caso in cui un proiettile venga lanciato da un'altezza h, y ha anche un termine
noto, che significa chela parabola descritta non passa per (0, 0).
4. Moti nel piano: moto parabolico
2
2
00
0
2x
v
gx
v
vy
xx
y
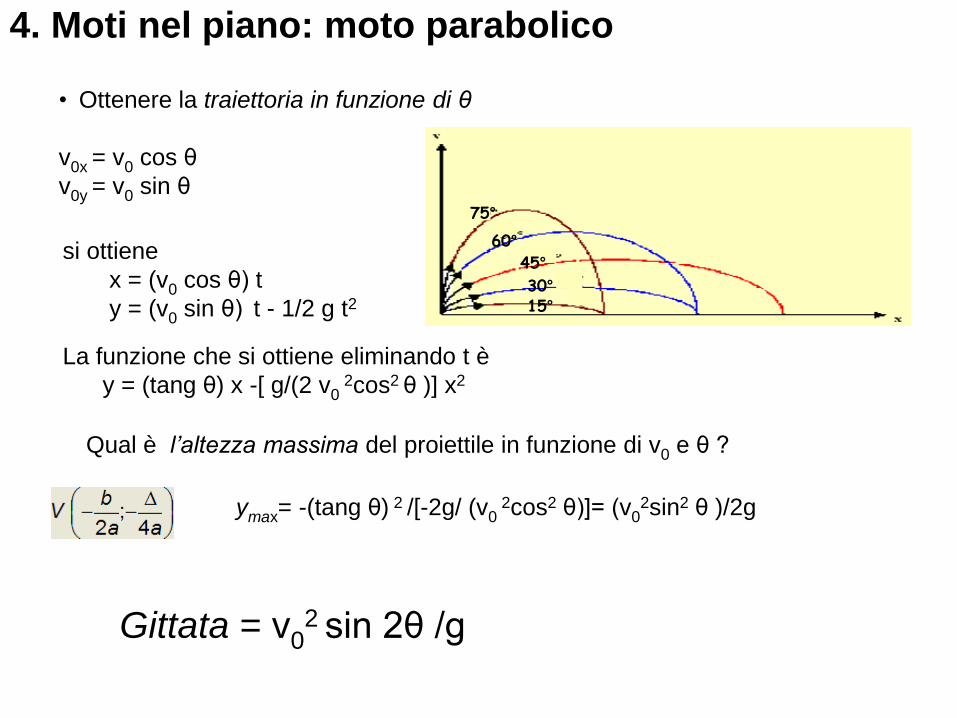
• Ottenere la traiettoria in funzione di θ
v0x = v0 cos θ
v0y = v0 sin θ
Gittata = v02 sin 2θ /g
Qual è l’altezza massima del proiettile in funzione di v0 e θ ?
4. Moti nel piano: moto parabolico
ymax= -(tang θ) 2 /[-2g/ (v0 2cos2 θ)]= (v0
2sin2 θ )/2g
si ottiene
x = (v0 cos θ) t
y = (v0 sin θ) t - 1/2 g t2
La funzione che si ottiene eliminando t è
y = (tang θ) x -[ g/(2 v0 2cos2 θ )] x2
30° 15°
45°
60°
75°

Esercizio • Un’auto viaggia con velocità costante di 70 km/h, valore
oltre il limite di velocità. Dietro un cartellone pubblicitario
c’è appostata una moto dei vigili urbani, che, dopo un
secondo dal passaggio dell’auto, parte all’inseguimento.
La moto ha un’accelerazione di 3 m/s2.
• Quando la moto raggiunge l’auto?

0 10 200
200
400
s(m)
t(s)
0 10 200
200
400
a,0a vv
tva,0 2
mm,0m,0m ta2
1tvss
Auto
Moto rettilineo uniforme
= 70 km/h
tvss a,00a
Moto
Moto uniformemente accelerato
tavv mm,0m )t(tavv 0mm,0m
2
0m0m,0m,0m )t(ta2
1)t(tvss
2
0mm )t(ta2
1s
2
m )1(t32
1s
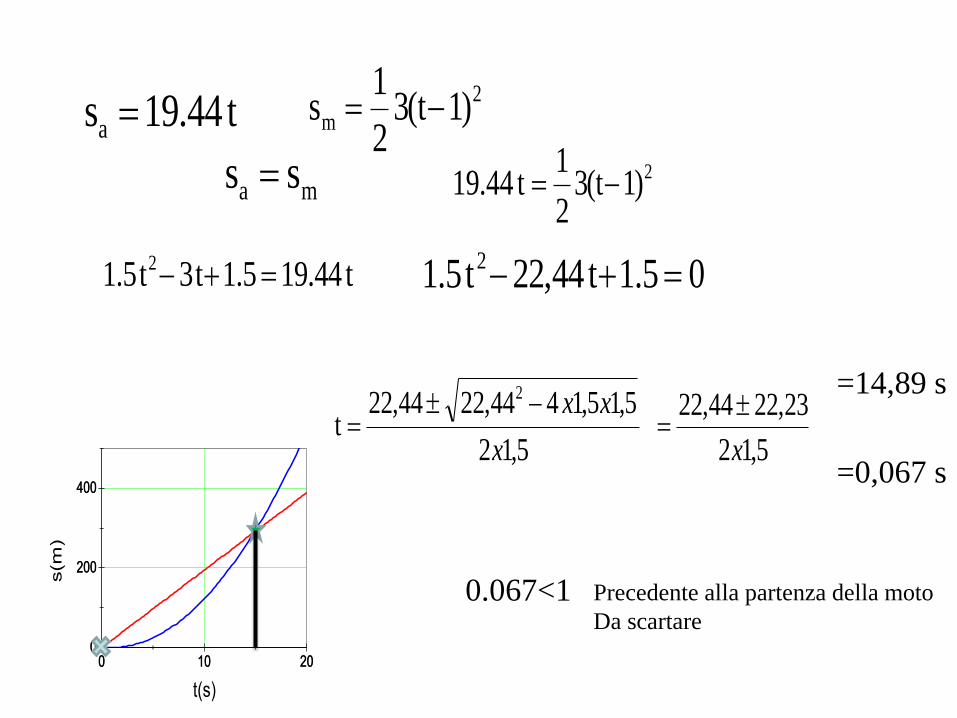
t44.19sa
= 70*1000/3600 m/s = 19.44 m/s
Definiamo come t=0 l’istante in cui la macchina passa davanti al cartellone
0 10 200
200
400
s(m)
t(s)
0 10 200
200
400
t44.19sa 2
m )1(t32
1s
ma ss 2)1(t32
1t44.19
t44.191.5t3t5.1 2 01.5t44,22t5.1 2
5,12
5,15,1444,2244,22t
2
x
xx
5,12
23,2244,22
x
=0,067 s
=14,89 s
0.067<1 Precedente alla partenza della moto
Da scartare

Sicurezza stradale e cinematica
Tempo di reazione e distanze di sicurezza- Il tempo di reazione è l’intervallo di
tempo che passa tra il momento in cui si percepisce un pericolo e il momento in cui si
inizia ad agire per evitarlo. In condizioni normali il tempo di reazione è circa 0.75-1 s .
Se il conducente è sotto l’effetto di alcol, il tempo di reazione aumenta
esponenzialmente col tasso alcolico.
Per esempio, in stato di euforia debole (alcolemia=0.4 g/l), il tempo di reazione è 1.5 s.
0 50 100 150 2000
20
40
60
s(m)
v(km/h)
Da quando vede un ostacolo, il conducente di un veicolo impiega circa 1 s prima di
iniziare a frenare e percorre uno spazio di reazione Δsr = v (1 s) che dipende dalla
velocità v a cui procede. Se l’ostacolo dista meno di Δsr metri dall’auto,
l’automobilista non ha neppure il tempo per iniziare a frenare e urta contro l’ostacolo
con la velocità v.

Lo spazio di frenata è la distanza che un veicolo percorre fra l’inizio della decelerazione e
l’arresto.
v (km/h) Δsf (m)
25 4
50 16
90 52
130 110
|a|
v
2
1
a
)v(v
2
1s
2
0
2
0
2
f
a=-6 m/s2
Sicurezza stradale e cinematica
Gli spazi di frenata aumentano in modo considerevole in caso di pioggia o ghiaccio e quando
le gomme sono sgonfie o comsumate.
Lo spazio di frenata dipende dalle condizioni del veicolo e dal fondo stradale, che determinano
il valore della decelerazione. Lo spazio di frenata cresce con il quadrato della velocità.
Per un’automobile in buone condizioni, su una strada con aderenza media, gli spazi di frenata
sono molto vicini a:
Nell’ipotesi che la decelerazione prodotta dai freni sia costante, il moto del veicolo è
uniformemente decelerato.
La velocità iniziale v0 , lo spazio di frenata , quella finale v = 0 m/s, l’accelerazione (<0) e lo
Δsf sono legati dalla relazione :

La distanza di sicurezza è la distanza che un veicolo deve mantenere da
quello che lo precede per potersi arrestare senza urtarlo.
La distanza di sicurezza Δss è la somma dello spazio di reazione e dello
spazio di frenata:
Δss = Δsr + Δsf
0 20 40 60 80 100 120 1400
20
40
60
80
100
120
sf(m)
v(km/h)
Δsr
Δss A 50 km/h, ss= 35 m
A 100 km/h, ss= 110 m
Sicurezza stradale e cinematica

Esercizio Una persona, su un grattacielo alto 100
m, lancia una palla verso l’alto con una
velocità di 20 m/s. Denominando i punti
del moto come in figura, calcolare: A
B
C
D
E
1. Tempo di arrivo e posizione in B
2. Tempo d’arrivo e velocità in C
3. Se passa da D dopo 6 secondi,
posizione e velocità in D
4. Tempo di arrivo e velocità in E
5. Velocità media del moto.
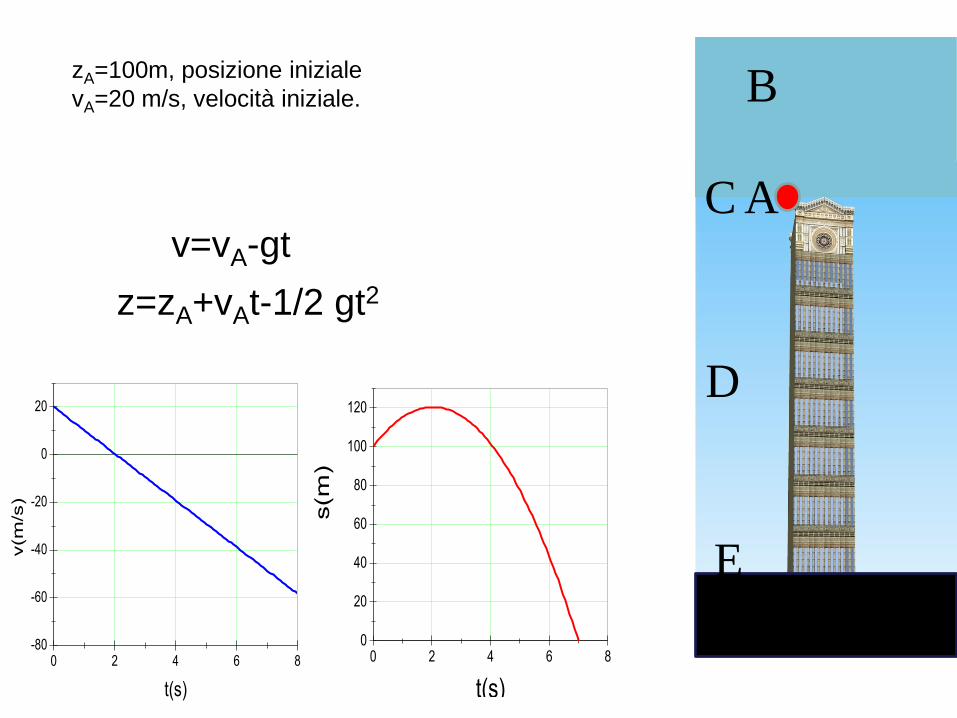
zA=100m, posizione iniziale
vA=20 m/s, velocità iniziale.
A
B
C
D
E
v=vA-gt
z=zA+vAt-1/2 gt2
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
0 2 4 6 80
20
40
60
80
100
120
s(m)
t(s)
zA=100m, posizione iniziale
vA=20 m/s, velocità iniziale.
Chiamo tB il tempo di arrivo in B.
A
B
C
D
E
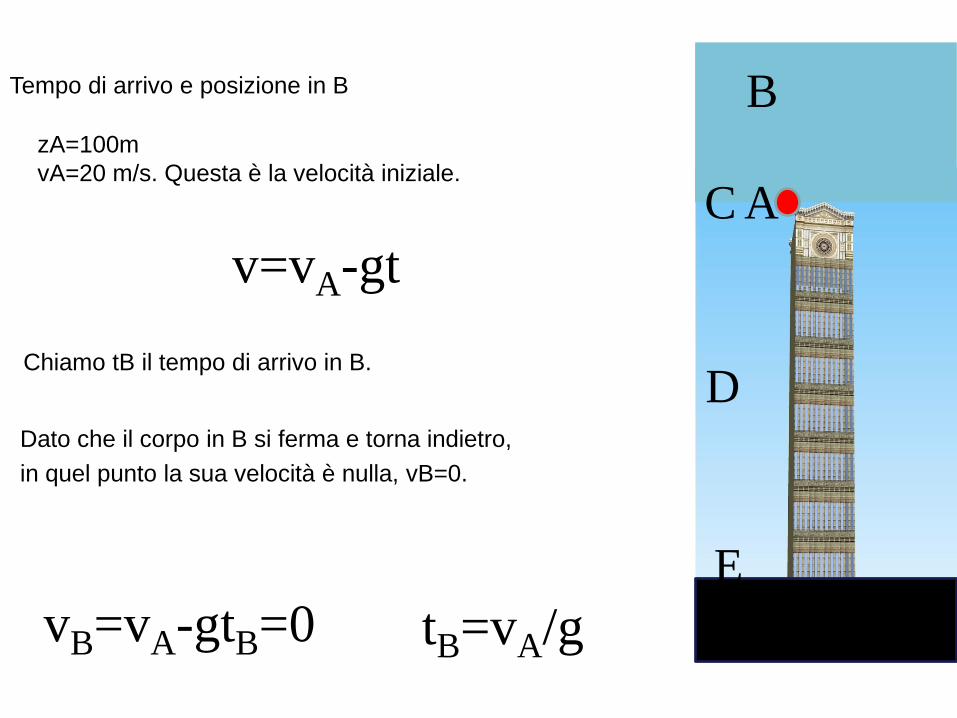
Tempo di arrivo e posizione in B
Dato che il corpo in B si ferma e torna indietro,
in quel punto la sua velocità è nulla, vB=0.
v=vA-gt
vB=vA-gtB=0 tB=vA/g
zA=100m
vA=20 m/s. Questa è la velocità iniziale.

A
B
C
D
E
1) Tempo di arrivo e posizione in B
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
0 2 4 6 80
20
40
60
80
100
120s(m)
t(s)
tB=vA/g tB=20/9.8 s = 2.04s
B B
z=zA+vAt-1/2 gt2 zB=zA+vAtB-1/2 gtB2
zB=100+vAtB-1/2 gtB2
zB=100+20tB-1/2 9.8tB2 zB=100+20x2.04-1/2 9.8x2.042 zB=120.4 m

A
B
C
D
E
2) Tempo di arrivo e velocità in C
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
0 2 4 6 80
20
40
60
80
100
120
s(m)
t(s)
C
z=zA+vAt-1/2 gt2
0=20tC-1/2 9.8tC2
zC=zA+vAtC-1/2 gtC2
In C si ha che zC=zA
C
tC(20-1/2 9.8tC)=0

A
B
C
D
E
2) Tempo di arrivo e velocità in C
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
0 2 4 6 80
20
40
60
80
100
120s(m)
t(s)
C
0=20tC-1/2 9.8tC2
C
tC(20-1/2 9.8tC)=0
tC=0
(20-1/2 9.8tC)=0
1/2 9.8tC=20 tC=20x2/9.8 =4.08 s

A
B
C
D
E
2) Tempo di arrivo e velocità in C
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
0 2 4 6 80
20
40
60
80
100
120s(m)
t(s)
C C
tC=4.08 s
vC=vA-gtC =20-9.8x4.08
v=vA-gt
=20-40 =-20 m/s

0 2 4 6 80
20
40
60
80
100
120s(m)
t(s)
A
B
C
D
E
3) Posizione e velocità in D
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
D D
tD=6 s
vD=vA-gtD =20-9.8x6
v=vA-gt
=20-58.8 =-38.8 m/s
z=zA+vAt-1/2 gt2 zD=zA+vAtD-1/2 gtD2
zD=100+20x6-1/2 9.8x62 =100+120-176.4 =43.6m

0 2 4 6 80
20
40
60
80
100
120s(m)
t(s)
A
B
C
D
E
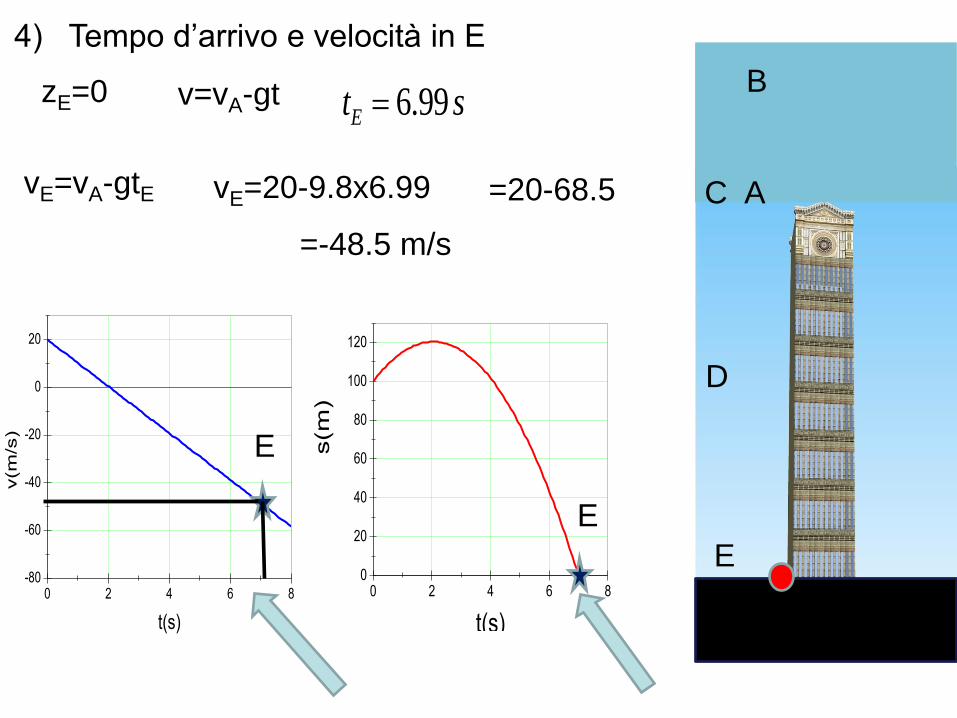
4) Tempo d’arrivo e velocità in E
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
E
E
zE=0 v=vA-gt z=zA+vAt-1/2 gt2
zE=zA+vAtE-1/2 gtE2 0=100+20tE-1/2 9.8xtE
2
4.9xtE2-20tE-100=0
8.9
9.4*100*440020 Et
8.9
58.4820 s99.6
8.9
58.4820
0 2 4 6 80
20
40
60
80
100
120s(m)
t(s)
A
B
C
D
E
4) Tempo d’arrivo e velocità in E
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
E
E
zE=0 v=vA-gt stE 99.6
vE=vA-gtE vE=20-9.8x6.99 =20-68.5
=-48.5 m/s

A
B
C
D
E
5) Velocità media
0 2 4 6 8-80
-60
-40
-20
0
20
v(m/s)
t(s)
E
vE=-48.5 m/s
vmedia=(vE+vA)/2 =(-48.5+20)/2 =-28.5/2
=-14.25 = -100/7
vscalare media=140.8/7
=20.11
vA=20 m/s

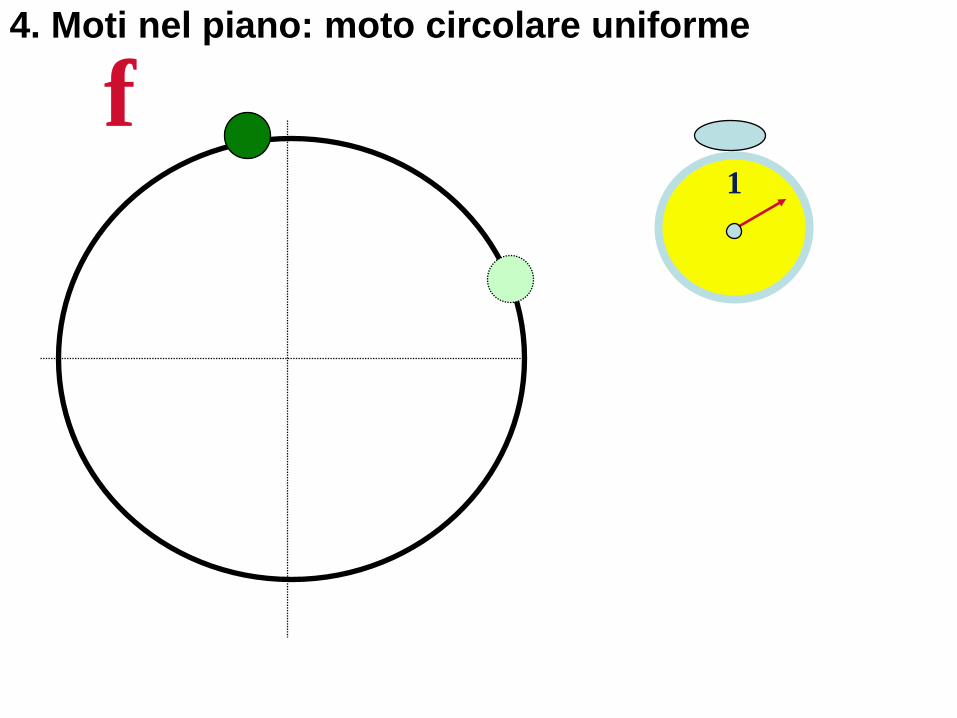
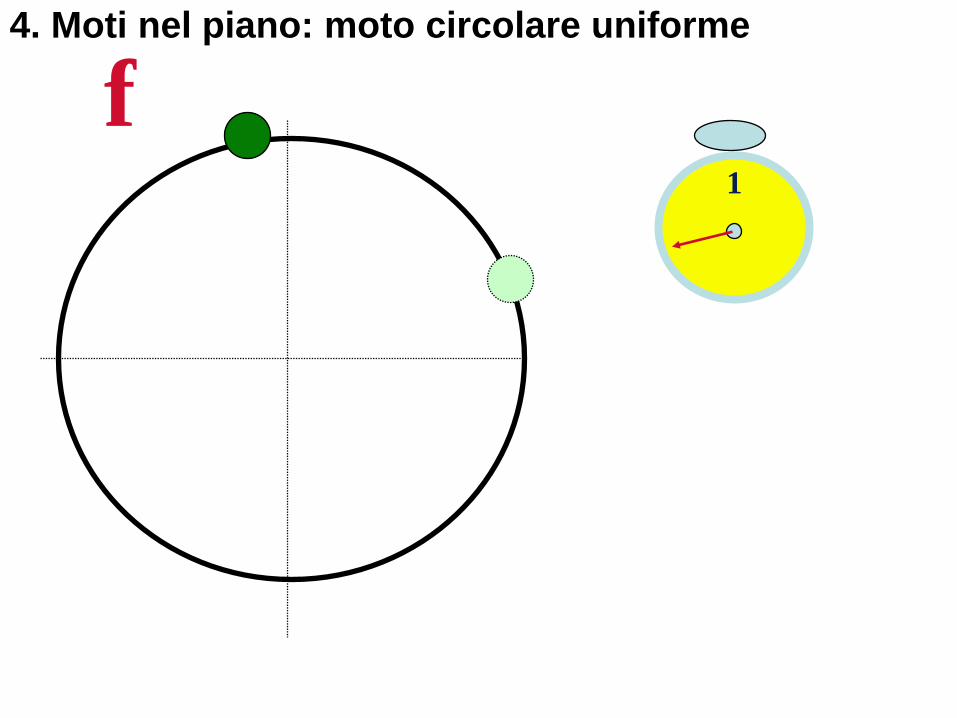
Un oggetto si muove di moto circolare uniforme quando:
La sua traiettoria è una circonferenza
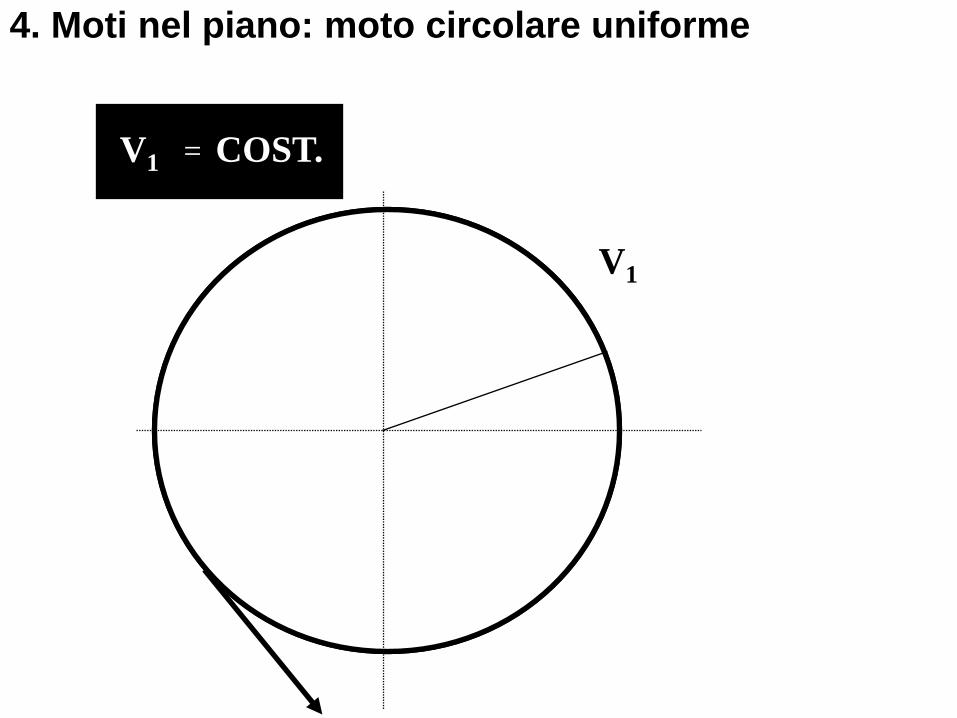
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
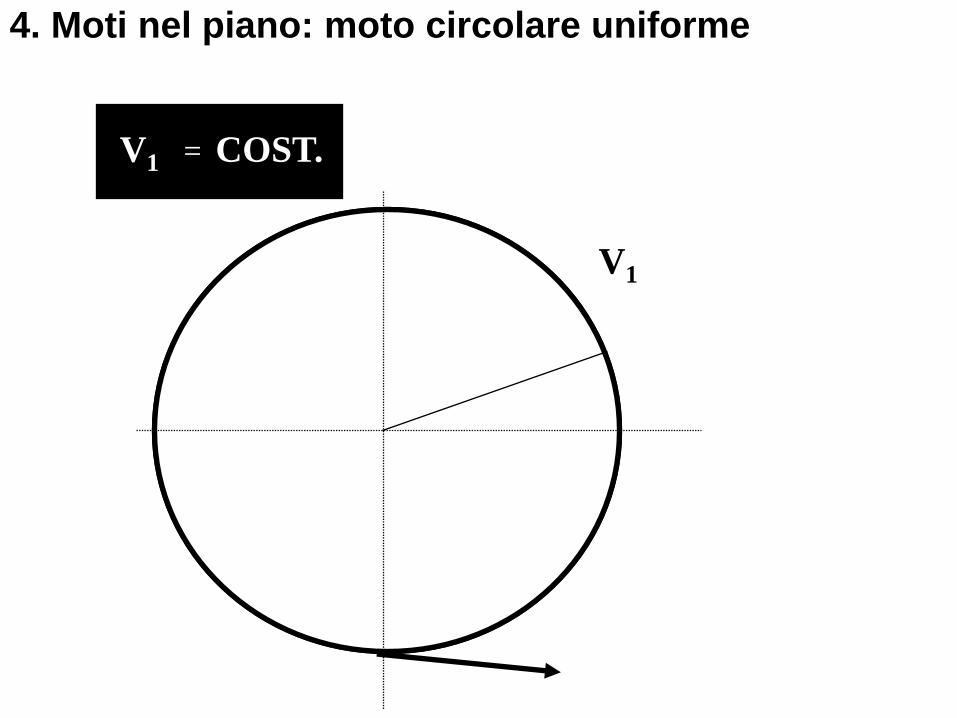
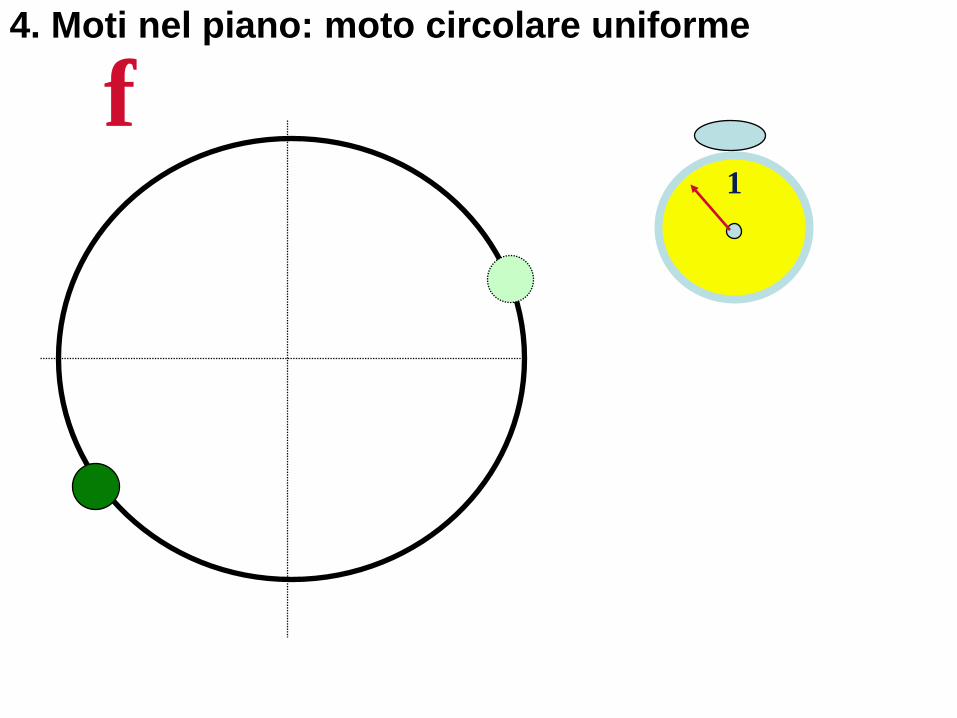
4. Moti nel piano: moto circolare uniforme
Il modulo della velocità
tangenziale è costante

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme
V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme
V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme
V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme
V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme
V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V1 COST. =
4. Moti nel piano: moto circolare uniforme

V1
V2
R
V1 V2 =
4. Moti nel piano: moto circolare uniforme
La direzione del vettore velocità varia nel tempo – esiste un’accelerazione.

V1
V2
R
V1 V2 =
V2
-V1
4. Moti nel piano: moto circolare uniforme
Calcoliamo
a = v/t

V1
V2
R
V1
V2
-V1
S
V V
S R =
V
4. Moti nel piano: moto circolare uniforme
V1
V V S
R =
t t
V1 V2 =
a = V2
R Accelerazione centripeta

Alcune grandezze utili:
4. Moti nel piano: moto circolare uniforme
PERIODO: tempo T impiegato dal corpo a percorrere
un’intera circonferenza

4. Moti nel piano: moto circolare uniforme
T

T 4. Moti nel piano: moto circolare uniforme

T 4. Moti nel piano: moto circolare uniforme
T 4. Moti nel piano: moto circolare uniforme

T 4. Moti nel piano: moto circolare uniforme

T 4. Moti nel piano: moto circolare uniforme

T 4. Moti nel piano: moto circolare uniforme

T 4. Moti nel piano: moto circolare uniforme

4. Moti nel piano: moto circolare uniforme
T = 35 s
T

Alcune grandezze utili:
4. Moti nel piano: moto circolare uniforme
PERIODO: tempo T impiegato dal corpo a percorrere
un’intera circonferenza
FREQUENZA: numero di giri f fatti dal corpo nell’unità
di tempo (di solito 1 sec)

f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme
f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme
f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme
f 1
4. Moti nel piano: moto circolare uniforme

f 1
4. Moti nel piano: moto circolare uniforme

f
1 SEC
1
4. Moti nel piano: moto circolare uniforme
il corpo ha percorso
più di un giro
(per es. 1,85 giri)
f = 1,85 Hz
T
1=f

Alcune grandezze utili:
4. Moti nel piano: moto circolare uniforme
PERIODO: tempo T impiegato dal corpo a percorrere
un’intera circonferenza
FREQUENZA: numero di giri f fatti dal corpo nell’unità
di tempo(di solito 1 sec)
VELOCITA’ ANGOLARE: w rapporto tra l’angolo
«spazzato» in un dato intervallo di tempo e l’intervallo
stesso

2T
w
4. Moti nel piano: moto circolare uniforme
w R
t
w
R a
a
2
c
2
c
w
R
v
R r2
v w
T

MOTO CIRCOLARE UNIFORME
Velocità Tangenziale
Velocità Angolare
Accelerazione Centripeta
;;22
rvfrT
rv
w
;;22
r
vf
T w
w
Tf 1
;;44 222
2
22
rafrT
r
r
va w
4. Moti nel piano: moto circolare uniforme
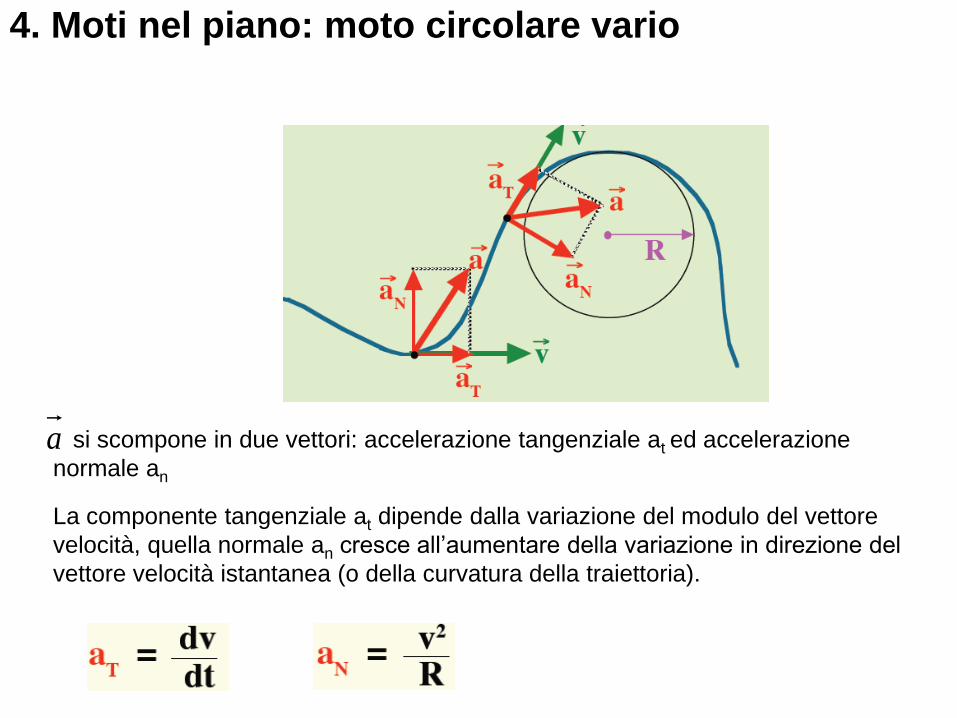
si scompone in due vettori: accelerazione tangenziale at ed accelerazione
normale an
La componente tangenziale at dipende dalla variazione del modulo del vettore
velocità, quella normale an cresce all’aumentare della variazione in direzione del
vettore velocità istantanea (o della curvatura della traiettoria).
a
4. Moti nel piano: moto circolare vario
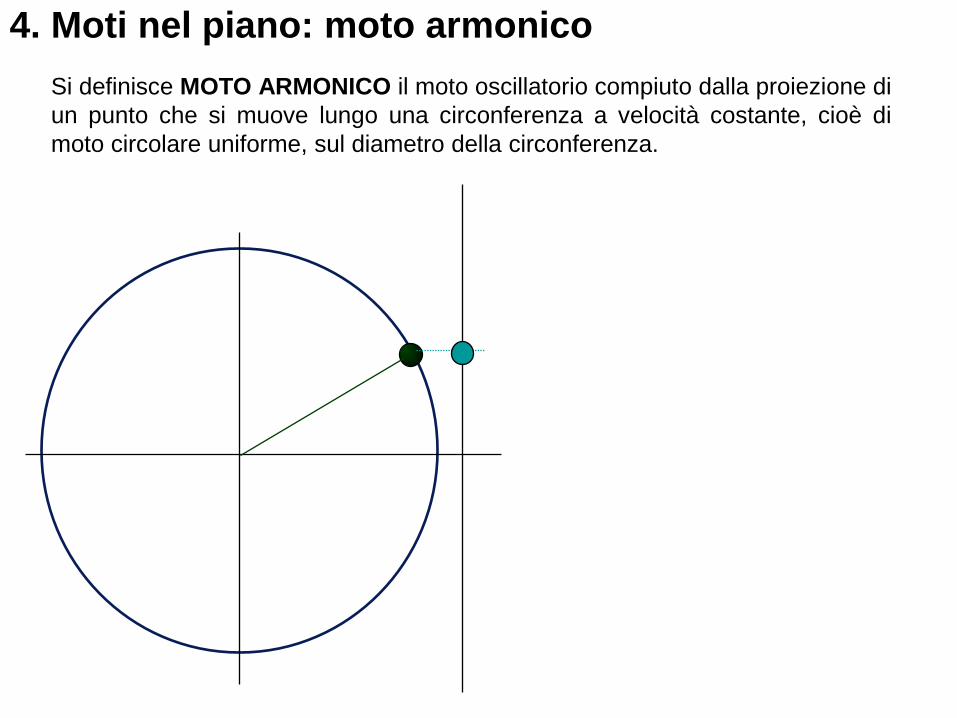
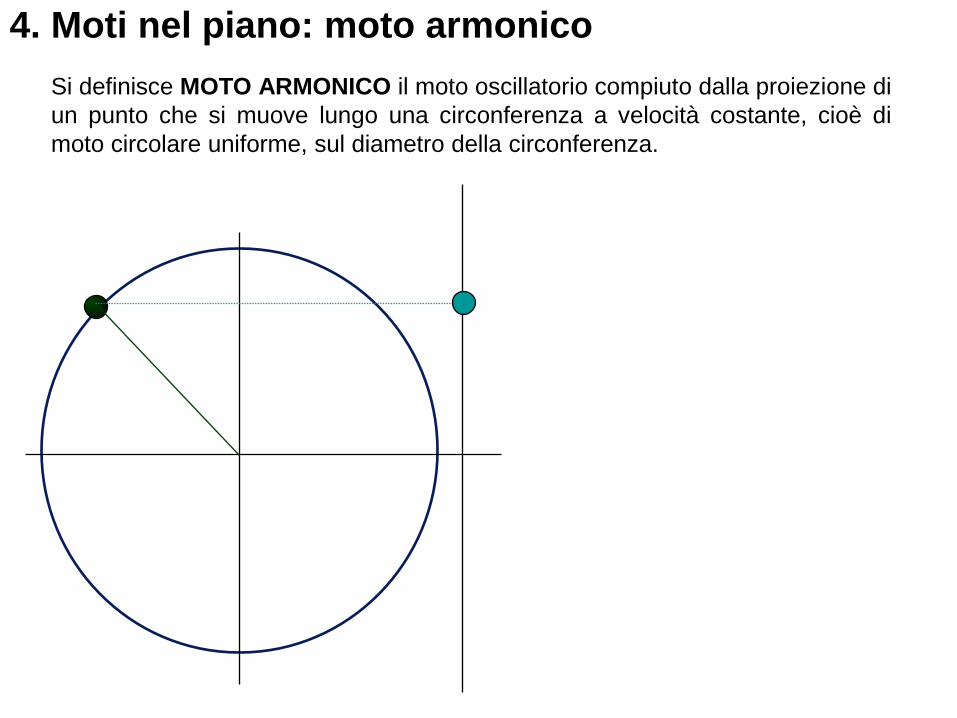
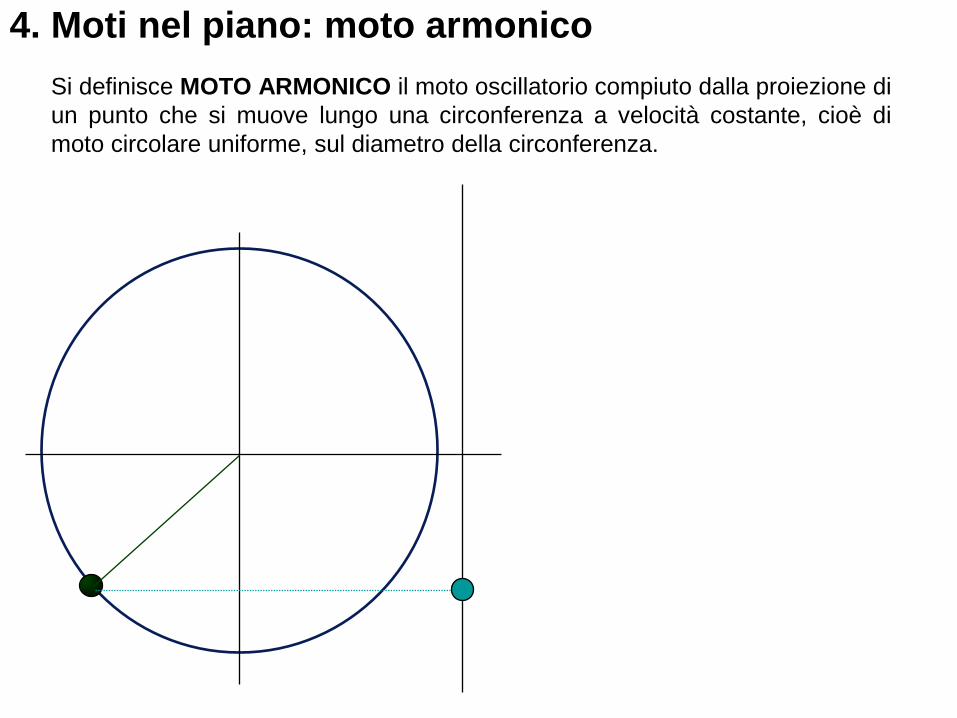
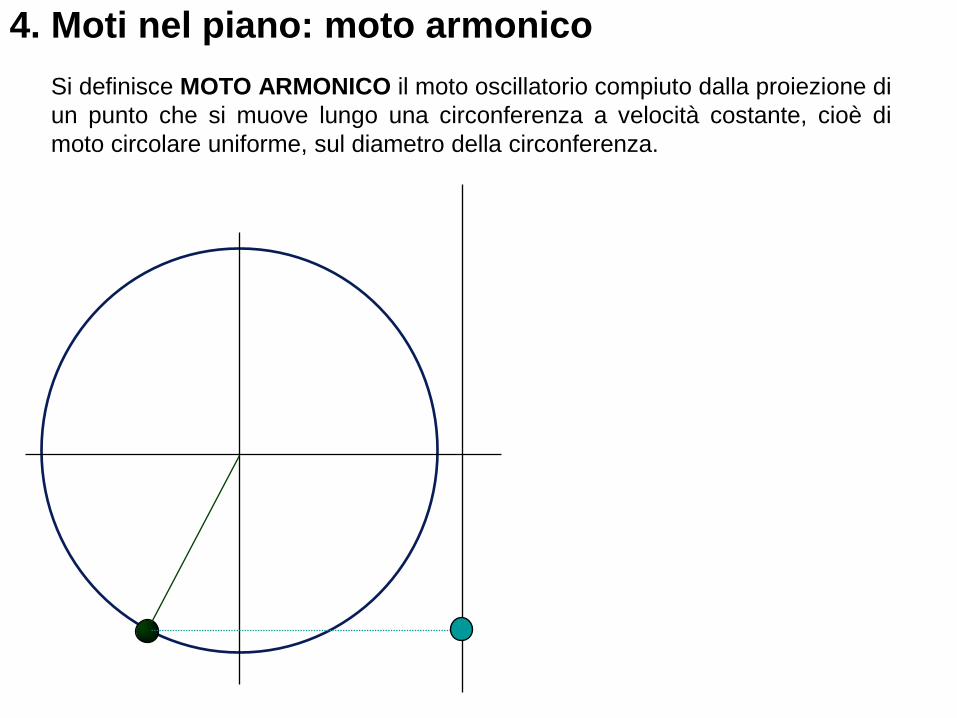
4. Moti nel piano: moto armonico
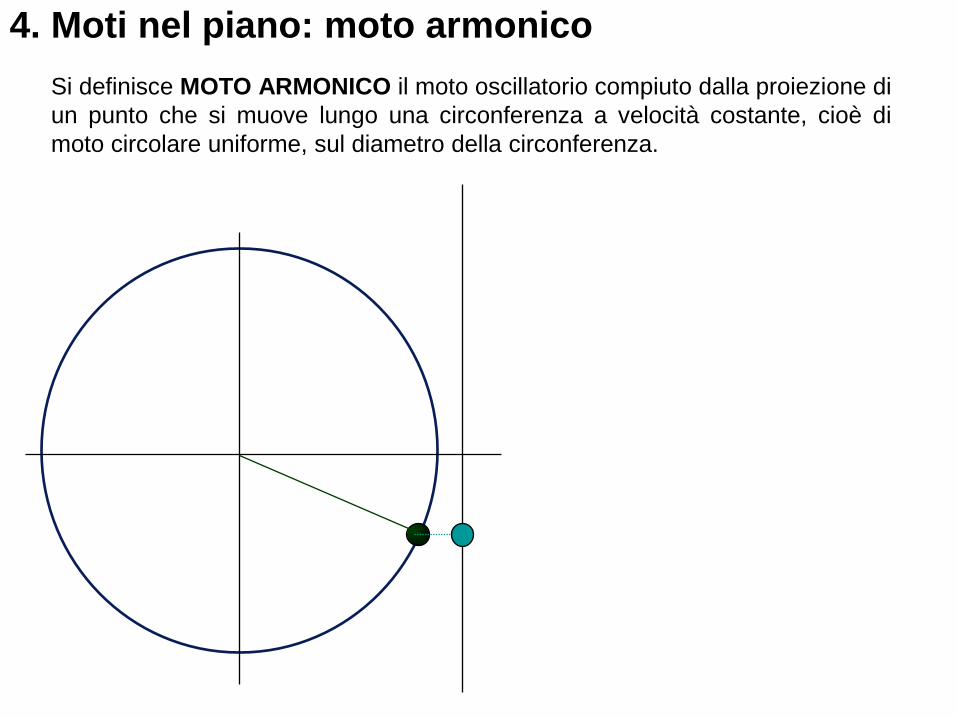
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.
4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.
4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.
4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.
4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

4. Moti nel piano: moto armonico
Si definisce MOTO ARMONICO il moto oscillatorio compiuto dalla proiezione di
un punto che si muove lungo una circonferenza a velocità costante, cioè di
moto circolare uniforme, sul diametro della circonferenza.

VELOCITA’
4. Moti nel piano: moto armonico
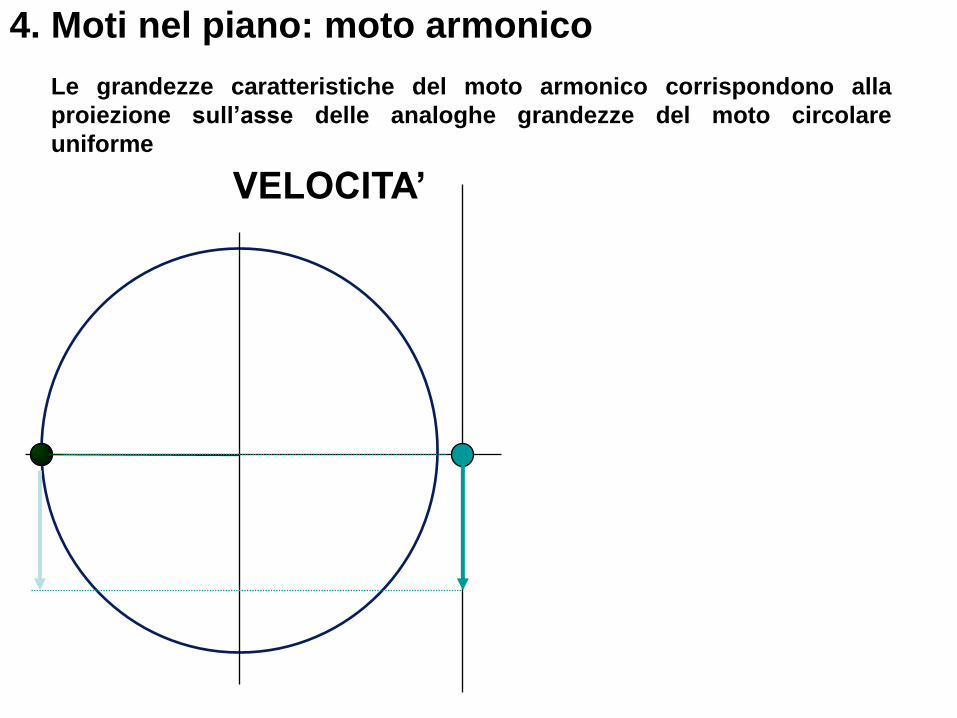
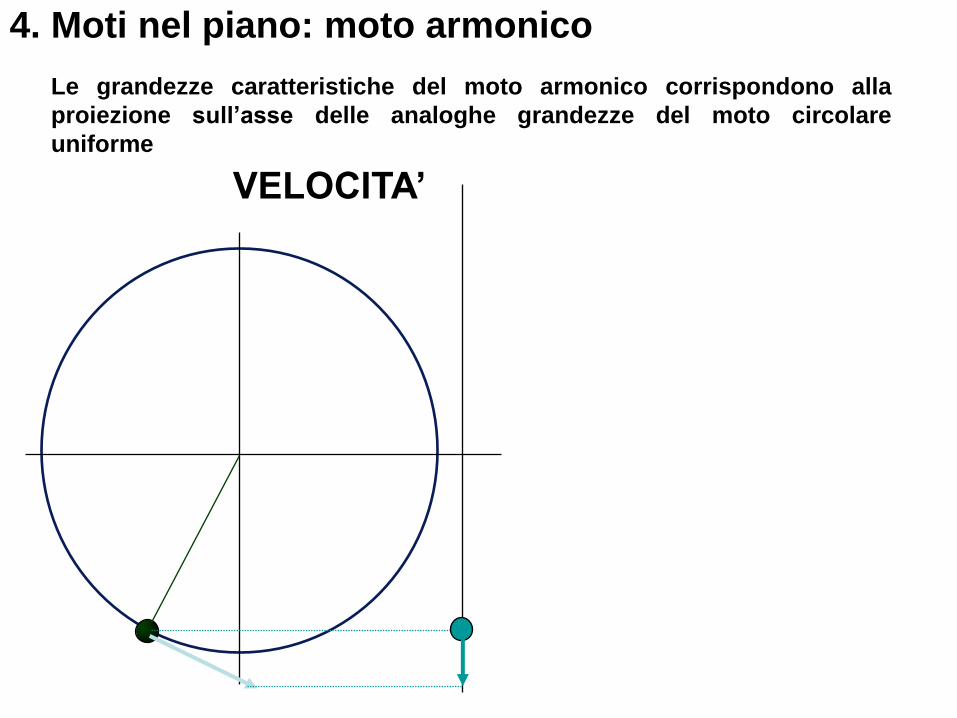
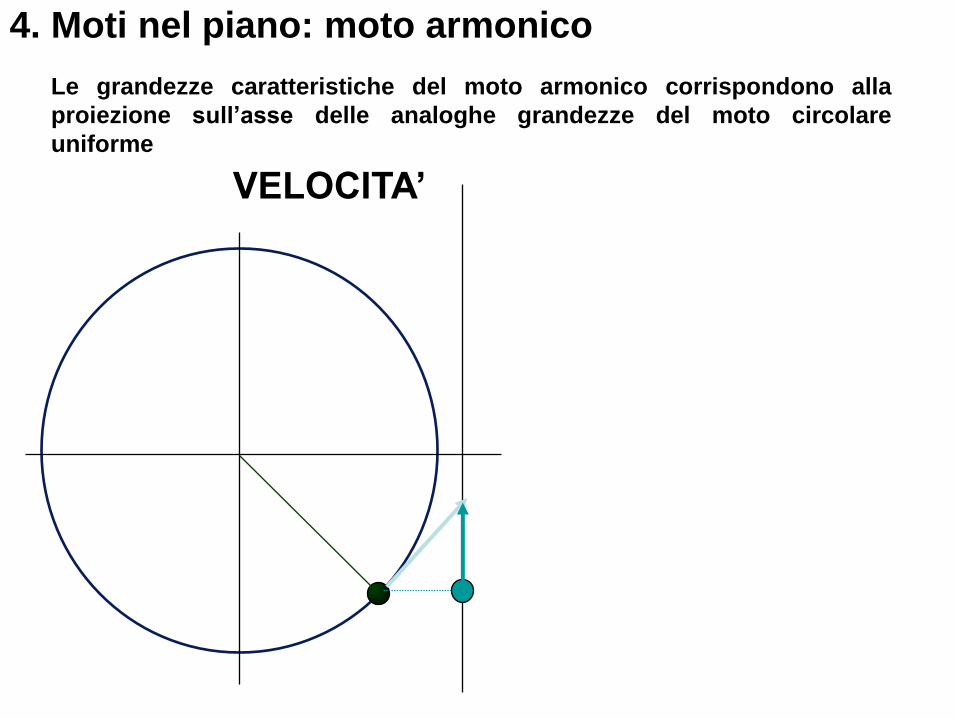
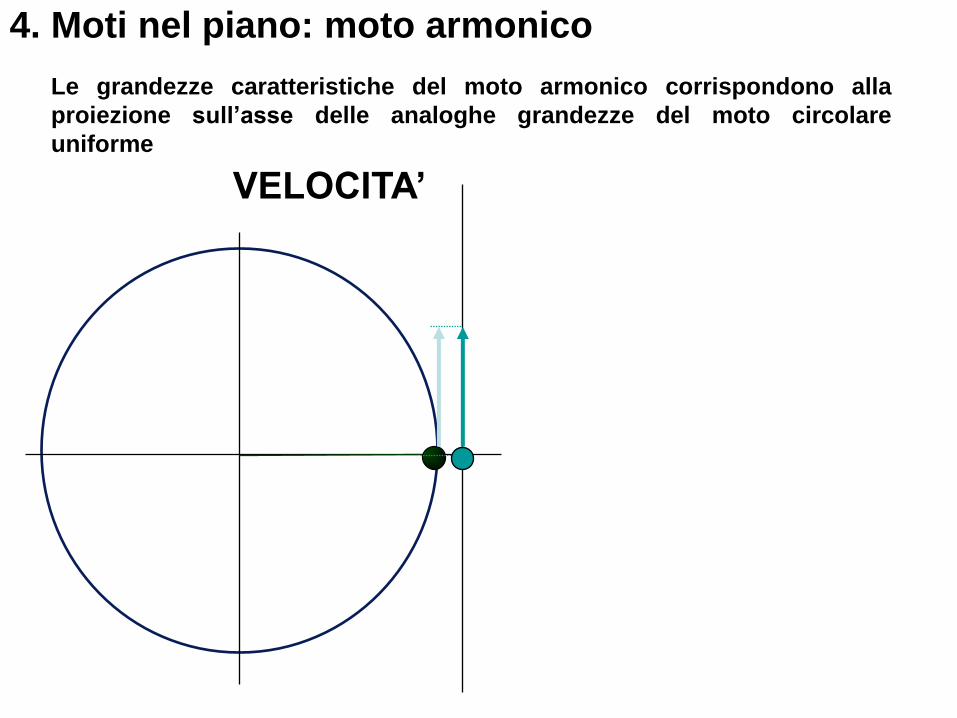
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
VELOCITA’
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
4. Moti nel piano: moto armonico

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

MAX
0
0
V VELOCITA’
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
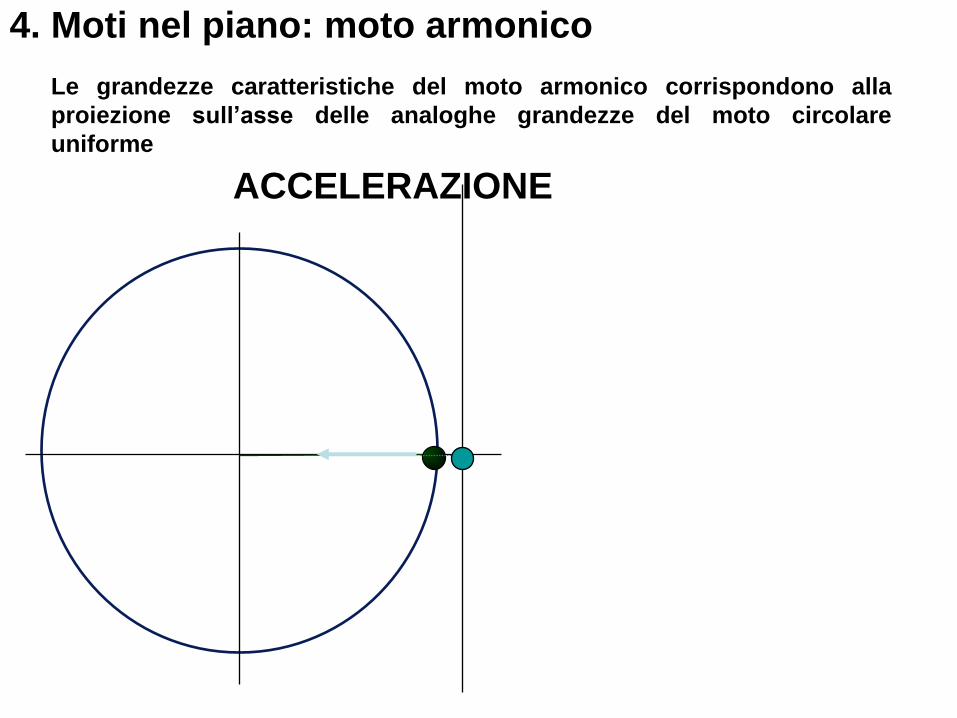
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

MAX
0
0
V a MAX
MAX
0
ACCELERAZIONE
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
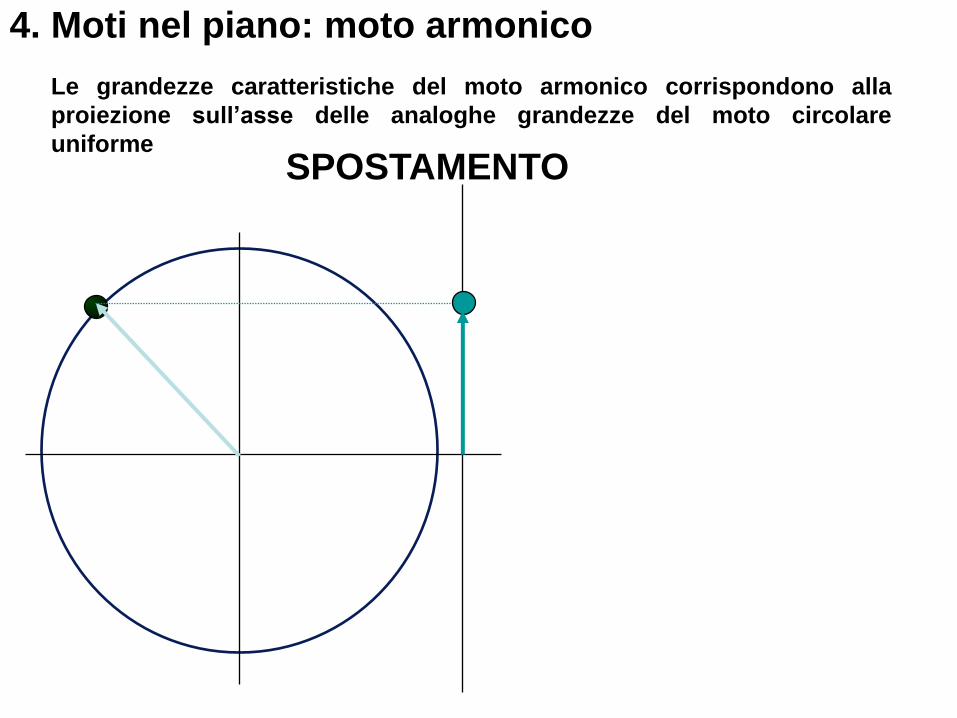
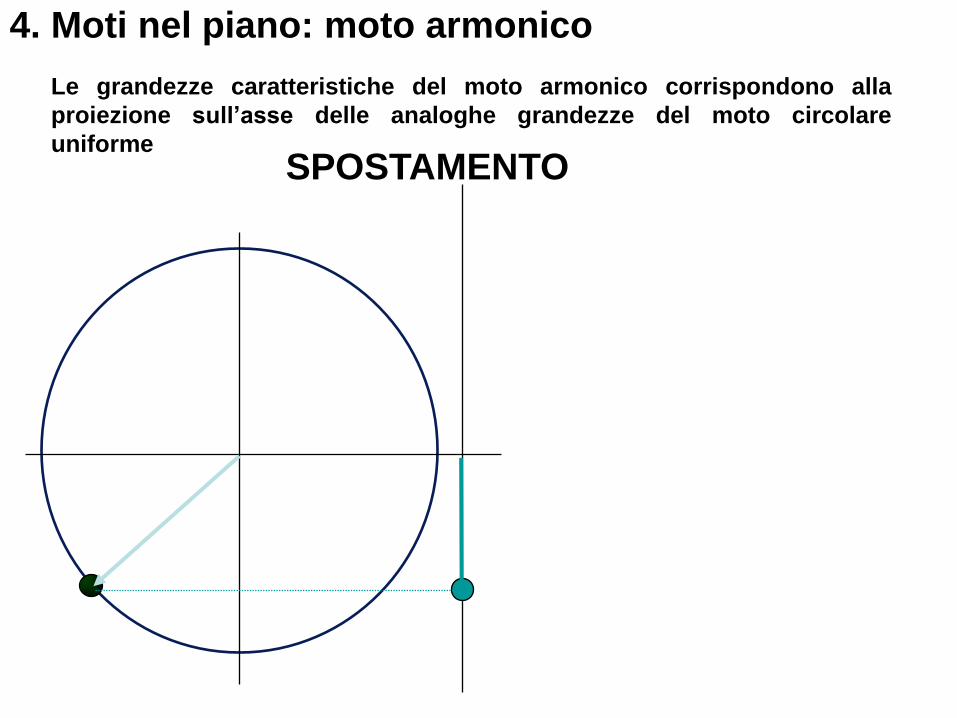
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme
SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

MAX
0
0
V a MAX
MAX
0
x MAX
MAX
0
SPOSTAMENTO
4. Moti nel piano: moto armonico
Le grandezze caratteristiche del moto armonico corrispondono alla
proiezione sull’asse delle analoghe grandezze del moto circolare
uniforme

MAX
0
0
V a MAX
MAX
0
x MAX
MAX
0
a = - K x
4. Moti nel piano: moto armonico

Si definisce PERIODO (T) del moto armonico la durata di
un'oscillazione completa. Tale durata è uguale al periodo T
del moto circolare uniforme.
Si definisce FREQUENZA (f) del moto armonico il numero di
oscillazioni complete compiute nell’unità di tempo.
Si definisce PULSAZIONE (w) del moto armonico la velocità
angolare del moto circolare uniforme.
4. Moti nel piano: moto armonico
w
2T
Tf
1
T
w
2

;cos
;sin
;cos
22 stra
trv
trs
www
ww
wr
r cos wt
L'accelerazione è direttamente proporzionale al quadrato della
pulsazione, ed è sempre diretta in verso opposto allo spostamento s
dalla posizione centrale (se lo spostamento è positivo l'accelerazione è
negativa e viceversa).
L'accelerazione è massima quando lo spostamento s è massimo, e quindi
agli estremi; è nulla quando il corpo si trova al centro.
4. Moti nel piano: moto armonico
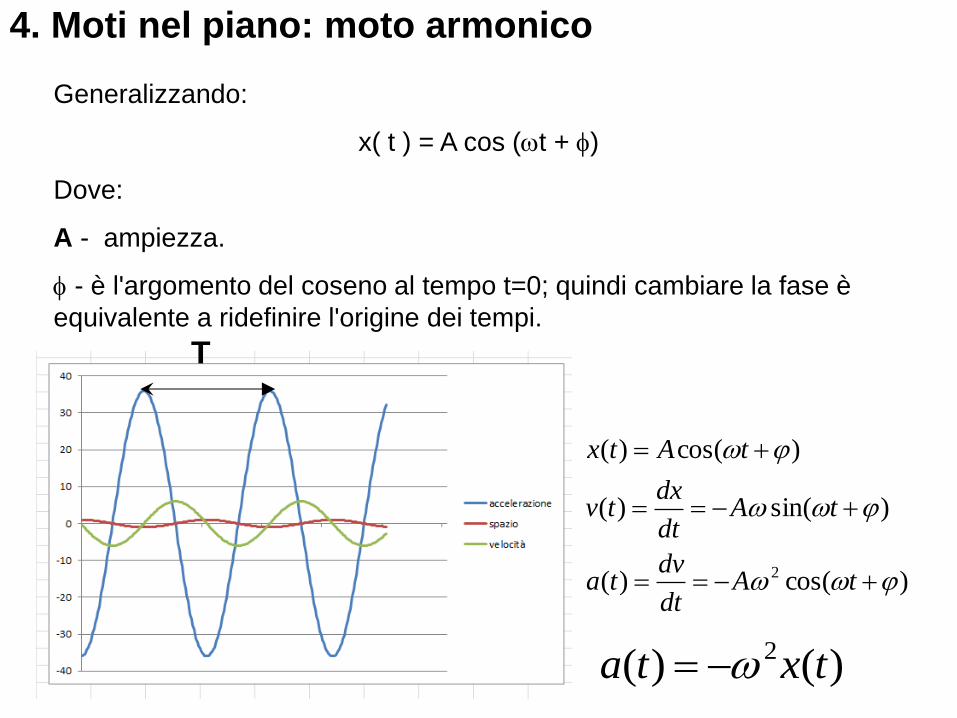
Generalizzando:
x( t ) = A cos (wt + f)
Dove:
A - ampiezza.
f - è l'argomento del coseno al tempo t=0; quindi cambiare la fase è
equivalente a ridefinire l'origine dei tempi.
4. Moti nel piano: moto armonico
T
)cos()(
)sin()(
)cos()(
2 ww
ww
w
tAdt
dvta
tAdt
dxtv
tAtx
)()( 2 txta w

In natura ci sono molti esempi di moti oscillatori armonici: ad esempio il
moto di un corpo appeso a una molla, il moto di un'altalena e quello di un
pendolo.
4. Moti nel piano: moto armonico


















