Modello di un sistema dinamico - La funzione di ... · Considerando le notevoli quantità delle...
124
Modello di un sistema dinamico - La funzione di trasferimento - Le variabili I/O - Feed- Forward e Feed- Backward
Transcript of Modello di un sistema dinamico - La funzione di ... · Considerando le notevoli quantità delle...

Modello di un sistema dinamico - La funzione di
trasferimento - Le variabili I/O - Feed- Forward e Feed-
Backward

Argomenti
- Modello di un sistema dinamico
- La funzione di trasferimento
- Le variabili I/O
- Feed- Forward e Feed- Backward

Modello di un sistema dinamico
Si è definito, nella lezione precedente, un modello
matematico come una descrizione matematica del
comportamento del sistema reale, o meglio dei
legami funzionali che sussistono tra le grandezze
d'interesse.

Modello di un sistema dinamico
Si ricorda anche la definizione di ingresso al sistema
come la variabile di controllo u(t), dell’uscita come la
variabile y(t) e dello stato del sistema come la
variabile x(t).

Modello di un sistema dinamico
Esistono più rappresentazioni del sistema dinamico
nel tempo continuo:
- rappresentazione ISO (Ingresso/Stato/Uscita);
- rappresentazione IO (Ingresso/Uscita).
La rappresentazione ISO viene detta anche
rappresentazione in equazioni di stato.

Modello di un sistema dinamico
A sua volta, una rappresentazione ISO può essere
suddiviso in:
- rappresentazione globale;
- rappresentazione locale.

Modello di un sistema dinamico
Nella rappresentazione globale, la descrizione della
dinamica (x(t)) viene modellata nella forma:

Modello di un sistema dinamico
In cui la relazione è in forma esplicita e si
conoscono tutti gli ingressi dall’i-esimo istante ti
all’istante t.
In realtà, questo modello è poco applicabile perché
raramente le leggi che regolano i fenomeni fisici
sono in questa forma.

Modello di un sistema dinamico
Si sfrutta perciò il modello ISO locale, in cui le leggi
di interesse sono espresse dal modello:

Modello di un sistema dinamico
In cui abbiamo le equazioni dello stato del sistema
ẋ(t) (dove ẋ(t) è la derivata dello stato in t) e
dell’uscita y(t), che sono funzioni del tempo, dello
stato nell’istante t e dell’ingresso nell’istante t, e
l’equazione dello stato nell’istante ti nota.

Modello di un sistema dinamico
Considerando le notevoli quantità delle grandezze in
gioco, il sistema di equazioni sopra descritto può
essere riportato esplicitamente nella forma
matriciale:

Modello di un sistema dinamico
Dove u, y, x rappresentano rispettivamente i vettori
delle variabili reali d’ingresso, d’uscita e di stato.
A(t), B(t), C(t), D(t) sono matrici dipendenti dalla
variabile temporale e dalle caratteristiche
parametriche del sistema in oggetto.
La forma matriciale è la più largamente usata per la
descrizione dei sistemi lineari tempo varianti (LTV).

Modello di un sistema dinamico
Un sistema tempo continuo, lineare tempo
invariante (LTI) è modellabile attraverso la
rappresentazione ingresso/stato/uscita:

Modello di un sistema dinamico

Modello di un sistema dinamico
Prima di introdurre il modello del sistema dinamico
nel dettaglio, è necessario richiamare la definizione
di trasformata di Laplace ed alcune trasformate
fondamentali, che verranno largamente utilizzate nel
dominio della frequenza.

Modello di un sistema dinamico
Si ricorda che la trasformata di Laplace è definita
come:
E si riportano alcune delle trasformate fondamentali
in tabella.

Modello di un sistema dinamico

Modello di un sistema dinamico
Inoltre, è importante introdurre alcune operazioni nel
dominio di Laplace che occorreranno per la
comprensione dei modelli nel dominio della
frequenza. Si tratta di:
- Derivata nel dominio di Laplace;
- Integrale nel dominio di Laplace;
- Ritardo temporale nel dominio di Laplace;
- Convoluzione.

Modello di un sistema dinamico
Derivata nel dominio di Laplace

Modello di un sistema dinamico
Integrale nel dominio di Laplace

Modello di un sistema dinamico
Ritardo temporale nel dominio di Laplace
Partendo dalla funzione elementare:
Posso introdurre un generico ritardo in una funzione:

Modello di un sistema dinamico
Ritardo temporale nel dominio di Laplace
Andando a trasformare ottengo:

Modello di un sistema dinamico
Convoluzione
A partire dalla funzione in t:
Trasformando si ottiene:

Modello di un sistema dinamico
A partire dal sistema di equazioni:
E’ possibile passare dal dominio del tempo al
dominio della frequenza adoperando la Laplace -
trasformata.

Modello di un sistema dinamico
Applicando la trasformata di Laplace al sistema
iniziale, si ha:

Funzione di trasferimento
Esplicitando il sistema di equazioni rispetto ad X(s)
e Y(s) si ottiene:
Dove con l’esponente -1 sono indicate le matrici
inverse.

Funzione di trasferimento
E’ possibile dare un’interpretazione delle equazioni
sopra scritte in funzione delle evoluzioni dello stato
e dell’uscita.
Infatti i primi membri delle due equazioni, dipendenti
dallo stato iniziale del sistema, sono riconducibili
all’evoluzione della risposta libera, mentre i secondi
membri, dipendenti dagli ingressi del sistema, sono
riconducibili all’evoluzione della risposta forzata.

Funzione di trasferimento
Sfruttando il principio di sovrapposizione degli effetti
si ha:
Dove con l’indice ‘l’ si intende l’evoluzione libera e
con l’indice ‘f’ l’evoluzione forzata.

Modello di un sistema dinamico
A questo punto è possibile introdurre la relazione tra
le variabili di ingresso (U(s)) e di uscita ((s)) nel
dominio della variabile s o più comunemente nel
dominio della frequenza. Come si vedrà, la funzione
di trasferimento permette di studiare le
caratteristiche del sistema in frequenza.

Funzione di trasferimento
La matrice G(s) che mette in relazione gli ingressi e
le uscite del sistema viene chiamata Funzione di
Trasferimento (FdT) del sistema dinamico:

Funzione di trasferimento
Funzione di trasferimento
G(s), funzione di trasferimento, è anche definibile
come la trasformata di Laplace della risposta
all’impulso del sistema, visto che la trasformata di
U(s) è pari ad 1 se l’ingresso è un impulso.

Funzione di trasferimento
La F.d.T. G(s) può essere rappresentata in varie
forme:
1. Forma razionale fratta:
2. Forma poli-zeri:

Funzione di trasferimento
3. Forma a costanti di tempo (o di Bode):

Funzione di trasferimento
Forma razionale fratta
La F.d.T., che si ricorda essere espressa in funzione
di s, quindi nel dominio dei numeri complessi, è
posta nella forma
dove il denominatore D(s) ha grado n, mentre il
numeratore N(s) deve necessariamente avere grado
m≤ n.

Funzione di trasferimento
Forma razionale fratta
Esplicitando in funzione dei vari termini, si ha:
Dove b0,…, bn sono i coefficienti del polinomio N(s)
e a0,…, an sono i coefficienti del polinomio D(s).

Funzione di trasferimento
Forma poli - zeri
Un polinomio di grado n a coefficienti reali ammette
nel piano complesso n radici, reali o a coppie
complesse e complesse coniugate (a parte
immaginaria negativa).
Nel piano complesso si avrà una rappresentazione
come di seguito riportato.

Funzione di trasferimento
Forma poli - zeri

Funzione di trasferimento
Forma poli - zeri
Facendo sempre riferimento iniziale alla forma
Si possono scomporre i polinomi nella forma poli –
zeri.

Funzione di trasferimento
Forma poli - zeri
Gli zeri della funzione di trasferimento sono le radici
del numeratore N(s) (numero minore o uguale a n).
I poli della funzione di trasferimento sono le radici
del denominatore D(s) (numero uguale a n).

Funzione di trasferimento
Forma poli - zeri
La F.d.T. fratta può essere rappresentata con le
produttorie in cui compaiono gli zeri e i poli della
funzione.
dove ρ è la costante di trasferimento, zi sono gli zeri
della funzione, pi sono i poli.

Funzione di trasferimento
Forma poli - zeri
Si può a tal proposito riportare un esempio. Si
consideri la FdT:
La funzione presenta:
• poli in: s = 0 , s = −1 , s = −2
• zeri in: s = 4

Funzione di trasferimento
Forma poli - zeri
La funzione può essere scomposta, mediante il
criterio di Routh per la ricerca dei poli e degli zeri,
nella forma:
Che rappresenta la forma poli – zeri cercata.

Funzione di trasferimento
Forma poli - zeri
Inoltre, i poli e gli zeri sono collocati nel piano
complesso graficamente con una crocetta e un
pallino.
Presa una funzione
Che presenta due zeri, in s = −j e s = j, e tre poli, in
s = 0, s = −1 e s = −2, essi possono essere
rappresentati come di seguito.

Funzione di trasferimento
Forma poli - zeri

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Una possibile rappresentazione della funzione di
trasferimento è detta forma di Bode, particolarmente
utile poiché mette in evidenza i soli parametri
caratteristici reali della risposta del sistema.
Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Per ottenere la rappresentazione con soli numeri
reali bisogna accorpare i termini complessi e
complessi coniugati in polinomi di secondo grado a
radici complesse.

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Questi polinomi, a loro volta sono espressi per
mezzo di due parametri particolarmente significativi,
indicati con ζ e ωn.
ωn infatti, rappresenta la pulsazione naturale dei
poli complessi coniugati, mentre ζ rappresenta il loro
smorzamento .

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Raggruppando le radici complesse e complesse
coniugate in un polinomio:
Le radici del polinomio risultano essere

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Il significato grafico dei parametri ζ e ωn è di seguito
illustrato.

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Nel piano complesso, ωn è il modulo delle due
radici, ossia la loro distanza dall’origine, mentre lo
smorzamento ζ è il coseno dell’angolo α formato
dalla congiungente l’origine con le radici, rispetto al
semiasse reale negativo.

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Poiché la parte reale dei poli vale −ζωn e ωn è un
numero positivo, si ha:
• ζ>0: due radici nel semipiano sinistro;
• ζ=0: due radici sull’asse immaginario;
• ζ<0: due radici nel semipiano destro.

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Possiamo a questo punto esprimere la funzione di
trasferimento per mezzo di soli parametri reali nella
seguente forma:

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
L’espressione realmente utilizzata, fa comparire
quello che prende il nome di guadagno statico della
funzione di trasferimento.
Questo si ottiene ponendo s=0 nella FdT e
corrisponde al rapporto tra ingresso e uscita
all’equilibrio .

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
La rappresentazione di G(s) in forma di Bode sarà:

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
I termini sono:
• sg indica il numero di poli o zeri nell’origine (s=0).
Se g (tipo) è positivo, corrisponde al numero di
poli in s=0, se è negativo, al numero di zeri in s=0.
• αni, ωni pulsazioni naturali, relative a ciascuna
coppia di zeri o poli complessi coniugati;
• τi, Ti costanti di tempo che determinano la rapidità
con il quale vengono assorbite le evoluzioni
transitorie;

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
• K guadagno del sistema;
• ζi smorzamenti delle coppie di zeri complessi
coniugati;
• ξi smorzamenti delle coppie di poli complessi
coniugati;

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Per rendere più chiara la formalizzazione adottata,
facciamo un esempio numerico.
Si porti nella forma di Bode la seguente FdT e se ne
indichi tipo, guadagno, costanti di tempo degli zeri e
dei poli.

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Volendo portare la FdT nella forma
Si risolvono le equazioni omogenee al numeratore e
al denominatore

Funzione di trasferimento
Forma di Bode (a costanti di tempo)
Così facendo si ottiene
Dove:
Tipo g = −1;
Guadagno μ = 1/4;
Costante di tempo dello zero Tz1 = −0.5;
Costanti di tempo dei poli: Tp1 = 1, Tp2 = 0.25, Tp3
= 0.5.

Le variabili I/O
Finora ci si è concentrati sulla funzione di
trasferimento del sistema dinamico.
Vediamo ora come ricavare, in prima battuta, l’uscita
di un sistema dinamico LTI Y(s) sollecitato da un
ingresso di forzamento U(s).

Le variabili I/O
Per far ciò bisogna:
1. Ricavare, se non è già data, la funzione di
trasferimento G(s) del sistema;
2. Ricavare la trasformata U(s) dell’ingresso;
3. Calcolare la trasformata dell’uscita Y(s) =
G(s)U(s).

Le variabili I/O
Una volta ricavata la risposta nel dominio della
frequenza, si può anti trasformare ottenendo
l’andamento della risposta del sistema nel dominio
del tempo.

Le variabili I/O

Le variabili I/O
Ora che si hanno a disposizione gli strumenti adatti,
facciamo un esempio di sistema modellabile con le
funzioni di trasferimento.

Le variabili I/O
Supponiamo di avere un circuito RLC del tipo:

Le variabili I/O
Considerando la schematizzazione a blocchi,
possiamo scrivere l’equazione nella forma:

Le variabili I/O
Trasformando nel dominio di Laplace:
Ovvero:

Le variabili I/O
Quindi possiamo trovare il legame ingresso – uscita
come:
E definire la FdT, G(s), per il circuito RLC come:

Le variabili I/O
Si è capaci di trovare i parametri caratteristici come
in seguito:
Poli:
Zeri: nessuno
Tipo: g = 0
Guadagno: μ = 1

Le variabili I/O
Stabilità
Una volta ricavato il legame ingresso uscita e la
funzione di trasferimento di un sistema dinamico, è
possibile valutarne alcune caratteristiche
fondamentali, come la stabilità.

Le variabili I/O
Stabilità
Si supponga di avere un sistema dinamico LTI a cui
si applichi in ingresso, all’istante t=0, un impulso,
ovvero una perturbazione di ampiezza molto elevata
e di durata brevissima.

Le variabili I/O
Stabilità
La risposta del sistema alla sollecitazione applicata
può essere di tre tipi:
• l’uscita converge al valore iniziale;
• l’uscita non converge al valore iniziale, ma non
diverge;
• l’uscita diverge.

Le variabili I/O
Stabilità

Le variabili I/O
Stabilità

Le variabili I/O
Stabilità
La risposta al gradino del sistema in oggetto può
essere quindi:
• Semplicemente stabile: La stabilità semplice
coincide con la limitatezza della risposta libera per
una qualunque condizione iniziale;

Le variabili I/O
Stabilità
• Asintoticamente stabile: La stabilità asintotica
coincide con la limitatezza e convergenza al valore
iniziale per t→∞ della risposta libera per una
qualunque condizione iniziale;
• Instabile: L’instabilità coincide con l’illimitatezza
della risposta libera per almeno un valore della
condizione iniziale.

Le variabili I/O
Stabilità
La stabilità può essere classificata in:
• Stabilità interna: associata a perturbazioni delle
condizioni iniziali;
• Stabilità esterna: associata a perturbazioni negli
ingressi.

Le variabili I/O
Stabilità
La stabilità esterna analizza l’effetto che hanno le
perturbazioni in ingresso sull’uscita del sistema.
Un sistema si definisce BIBO (Bounded Input
Bounded Output) stabile se, ad ogni ingresso limitato
corrisponde un’uscita limitata.

Le variabili I/O
Stabilità
Lo studio della stabilità di un sistema lineare
stazionario si riconduce sempre allo studio della
posizione delle radici di un polinomio rispetto all’asse
immaginario.

Le variabili I/O
Stabilità
Condizione necessaria e sufficiente perché un
sistema SISO lineare stazionario sia asintoticamente
stabile è che la sua funzione di trasferimento
presenti poli tutti a parte reale negativa.

Le variabili I/O
Stabilità

Le variabili I/O
Stabilità
Condizione necessaria e sufficiente perché un
sistema SISO lineare stazionario sia semplicemente
stabile è che la sua funzione di trasferimento
presenti uno o più poli semplici sull’asse immaginario
e che tutti gli altri poli siano a parte reale negativa.

Le variabili I/O
Stabilità

Le variabili I/O
Stabilità
Condizione necessaria e sufficiente perché un
sistema SISO lineare stazionario sia instabile è che
la sua funzione di trasferimento presenti uno o più
poli multipli sull’asse immaginario oppure uno o più
poli a parte reale positiva.

Le variabili I/O
Stabilità

Feed forward e feed backward
La retroazione (feedback in inglese) è una
configurazione dei sistemi dinamici che permette al
sistema di ‘inseguire’ un valore desiderato dell’uscita
confrontandolo istante per istante con l’uscita
effettiva.

Feed forward e feed backward
In un controllo in retroazione il valore della variabile
in uscita dal sistema viene letto dal controllore che
agisce modificando l’ingresso del sistema. Questa
caratteristica differenzia i sistemi retroazionati (ad
anello chiuso) dai sistemi non retroazionati (ad
anello aperto).

Feed forward e feed backward
Nei sistemi di controllo ad anello aperto (feed
forward) il valore della variabile manipolabile viene
determinato a priori sfruttando dei modelli
matematici; tali sistemi vengono chiamati predittivi
perché non viene effettuata nessuna verifica sul
valore.

Feed forward e feed backward
Un sistema feed forward è del tipo:

Feed forward e feed backward
Nei sistemi di controllo retroazionati, invece, il valore
viene determinato e corretto in base alla misura della
variabile controllata e al confronto con la variabile di
set point, quindi il valore di set-point viene ‘inseguito’
in base all’errore che lo separa dall’uscita effettiva.

Feed forward e feed backward
Un sistema feed backward è del tipo:

Feed forward e feed backward
Si parla di retroazione positiva quando l’uscita del
sistema va ad amplificare il funzionamento del
sistema stesso, sommandosi al valore di ingresso.
I sistemi con retroazione positiva sono facilmente
instabili e tipicamente portano il sistema a divergere.

Feed forward e feed backward
Un esempio di retroazione positiva è rappresentato
dal suono amplificato in uscita da un altoparlante che
ritorna al microfono che lo ha generato, si avverte un
acuto sibilo o una vibrazione grave continua.
Questo è dovuto al fatto che il suono che entra nel
microfono viene amplificato e mandato agli
altoparlanti; se questo ritorna al microfono, si forma
una retroazione positiva che lo amplifica all’infinito.

Feed forward e feed backward
C Pu
d
r e
+
+

Feed forward e feed backward
Si parla di retroazione negativa quando l’uscita del
sistema viene sottratta al valore di set – point.
I sistemi con retroazione negativa sono in genere
stabili e tipicamente portano il sistema a convergere.

Feed forward e feed backward

Feed forward e feed backward
Il tempo che trascorre tra il momento in cui l’azione
di controllo viene messa in atto e il momento in cui
l’effetto perviene all’uscita del sistema viene definito
ritardo nell’anello di retroazione.
Quando questo ritardo è elevato si possono avere
problemi di stabilità anche nei sistemi con
retroazione negativa spesso dando vita a fenomeni
oscillatori.

Feed forward e feed backward
La funzione di trasferimento di un sistema feed
backward è del tipo:
Dove H(s) è la FdT del blocco di retroazione.

Feed forward e feed backward
Si definisce sensibilità di G(s) rispetto ad α (uno
qualsiasi dei parametri caratteristici del sistema) il
rapporto tra la variazione di G e la variazione
percentuale di α , definizione sintetizzata nella
formula:

Feed forward e feed backward
Si possono definire, inoltre, la funzione sensibilità
diretta, che tende a 0 per guadagni di anello elevati,
come:

Feed forward e feed backward
Mentre la funzione sensibilità inversa, che tende ad
1 per guadagni di anello elevati, è definita come:
Naturalmente:

Feed forward e feed backward
Si consideri ora il problema della stabilità per sistemi
retroazionati.
Uno dei criteri più diffusi nello studio dei sistemi
dinamici è rappresentato dal criterio di stabilità di
Bode per sistemi retroazionati.

Feed forward e feed backward
Preso un generico sistema in retroazione unitaria,
del tipo:

Feed forward e feed backward
Una volta tracciati i diagrammi di Bode (in modulo e
fase, come definito nella lezione precedente), si
calcolano il margine di guadagno (mG) ed il margine di fase (mφ) definiti come:
• il margine di fase di un generico impianto G(s) in
retroazione unitaria è dato da:

Feed forward e feed backward
Dove G(jω)|dB=0 è la fase della funzione calcolata
per la frequenza ω, detta pulsazione di taglio (o di
crossover) in cui la curva del modulo interseca l’asse
delle ascisse.
• il margine di guadagno di un generico impianto
G(s) in retroazione unitaria è dato da:

Feed forward e feed backward
Dove |G(jω)| ω−180° è il modulo calcolato nel punto
in cui la fase della funzione è pari a−180°.
Per il criterio di Bode un sistema in retroazione è
stabile se il margine di guadagno ed il margine di
fase sono positivi.

Feed forward e feed backward

Feed forward e feed backward

Feed forward e feed backward
Si riportano ora le operazioni fondamentali da
applicare con gli schemi a blocchi, che serviranno
per calcolare l’uscita Y(s), o qualsiasi altra
grandezza del sistema, nel caso di più blocchi in
serie o parallelo e nel caso della presenza di nodi
sommatori.

Feed forward e feed backward
Il blocco non è altro che un simbolo indicante la
presenza di un sistema dinamico, avente la funzione
di trasferimento riportata nel simbolo del blocco, e
l’ingresso e l’uscita riportati rispettivamente sulla
freccia entrante e sulla freccia uscente dal blocco.

Feed forward e feed backward
Il nodo sommatore, è un nodo la cui uscita è data
dalla somma algebrica dei segnali che entrano in
esso, ciascuno preso con il proprio segno.

Feed forward e feed backward
Il punto di diramazione è caratterizzato dall’avere
tutti i segnali uscenti uguali al segnale entrante nel
punto.

Feed forward e feed backward
Due sistemi si dicono in cascata (o in serie) se
l’uscita dell’uno è l’ingresso dell’altro.

Feed forward e feed backward
La funzione di trasferimento dell’uscita, tenendo
conto di tutti i blocchi in cascata, vale:

Feed forward e feed backward
Quindi:
La FdT del sistema costituito dalla cascata di due
sottosistemi è data dal prodotto delle due funzioni di
trasferimento parziali.
Feed forward e feed backward
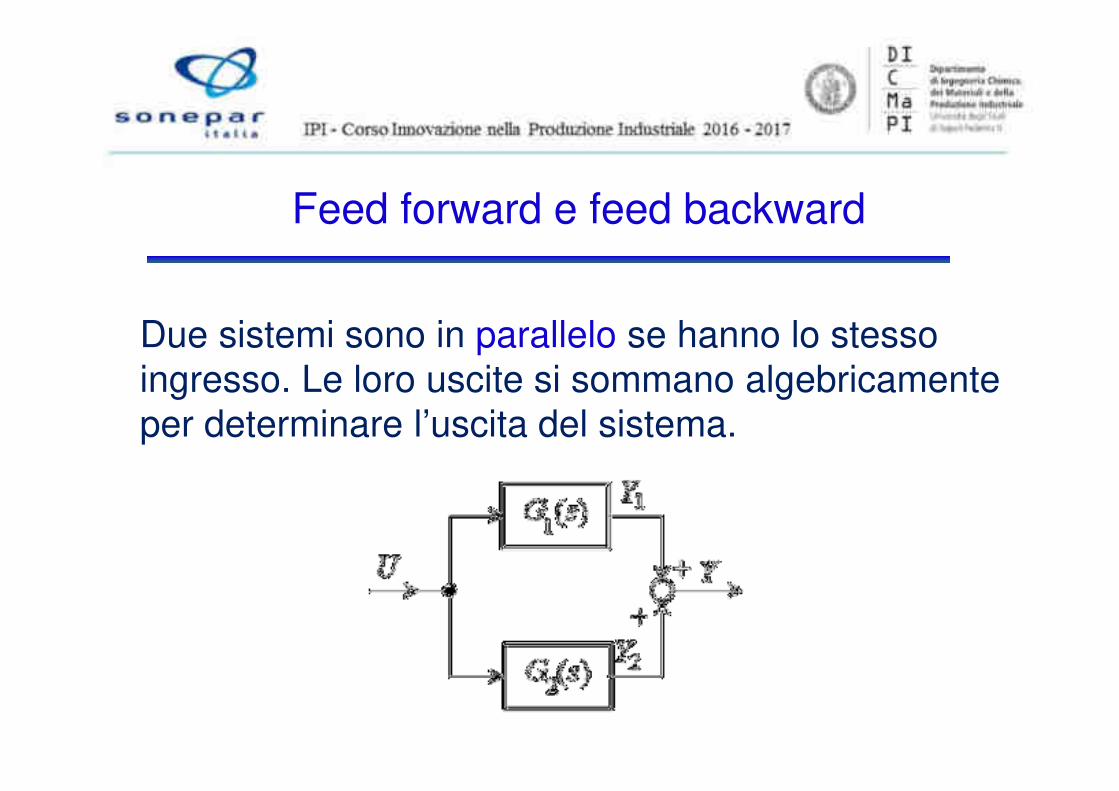
Due sistemi sono in parallelo se hanno lo stesso
ingresso. Le loro uscite si sommano algebricamente
per determinare l’uscita del sistema.

Feed forward e feed backward
La funzione di trasferimento dell’uscita, tenendo
conto di tutti i blocchi in parallelo, vale:

Feed forward e feed backward
Quindi:
La FdT del sistema costituito dal parallelo di due
sottosistemi è data dalla somma algebrica delle due
funzioni di trasferimento parziali.

Feed forward e feed backward
Due sistemi si dicono connessi in retroazione
quando l’uscita del primo blocco è l’ingresso del
secondo, mentre l’uscita del secondo blocco si
somma o si sottrae all’ingresso del primo.

Feed forward e feed backward

Feed forward e feed backward
Se la retroazione è positiva, la funzione di
trasferimento dell’uscita vale:
Quindi:

Feed forward e feed backward

Feed forward e feed backward
Se la retroazione è negativa, la funzione di
trasferimento dell’uscita vale:
Quindi:












![maggio 95 algebra: prodotti notevoli - Claudio Cereda · maggio 95 algebra: prodotti notevoli 1] (1 3 xy − 1 6 x−1)3 ... (quadrati e doppi prodotti con il segno indotto dai prodotti](https://static.fdocumenti.com/doc/165x107/5c6a0c1709d3f25e418bdde9/maggio-95-algebra-prodotti-notevoli-claudio-maggio-95-algebra-prodotti-notevoli.jpg)



