Meccanica di un sistema puntiforme Cinematica in due ...personalpages.to.infn.it/~gbosia/ Scienze...
13
Lezione 2 Lezione 2 Meccanica di un sistema puntiforme Cinematica in due dimensioni
Transcript of Meccanica di un sistema puntiforme Cinematica in due ...personalpages.to.infn.it/~gbosia/ Scienze...
Lezione 2Lezione 2
Meccanica di un sistema puntiformeCinematica in due dimensioni
Moto in un pianoMoto in un piano
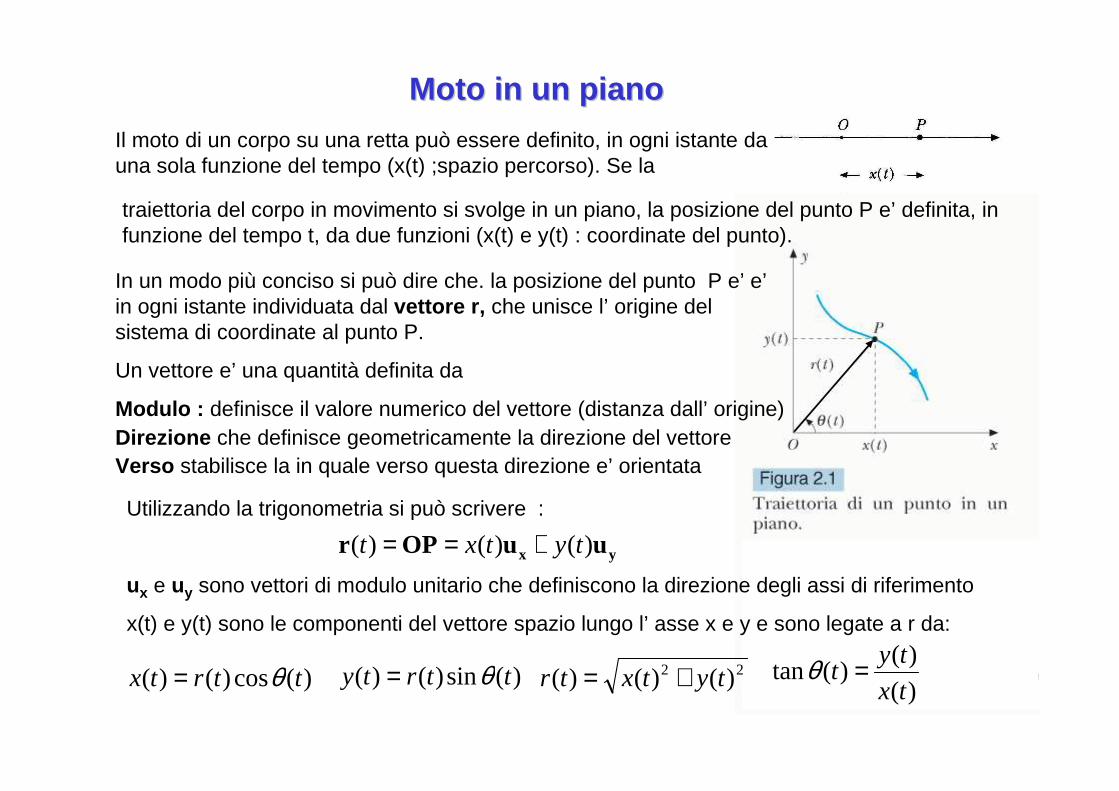
Il moto di un corpo su una retta può essere definito, in ogni istante da una sola funzione del tempo (x(t) ;spazio percorso). Se la
In un modo più conciso si può dire che. la posizione del punto P e’ e’ in ogni istante individuata dal vettore r, che unisce l’ origine del sistema di coordinate al punto P.
Un vettore e’ una quantità definita da
Modulo : definisce il valore numerico del vettore (distanza dall’ origine) Direzione che definisce geometricamente la direzione del vettore Verso stabilisce la in quale verso questa direzione e’ orientata
Utilizzando la trigonometria si può scrivere :
ux e uy sono vettori di modulo unitario che definiscono la direzione degli assi di riferimento
x(t) e y(t) sono le componenti del vettore spazio lungo l’ asse x e y e sono legate a r da:
yx uuOPr )()()( tytxt +==
traiettoria del corpo in movimento si svolge in un piano, la posizione del punto P e’ definita, in funzione del tempo t, da due funzioni (x(t) e y(t) : coordinate del punto).
)(cos)()( ttrtx θ= )(sin)()( ttrty θ= 22 )()()( tytxtr += )(
)()(tan
tx
tyt =θ
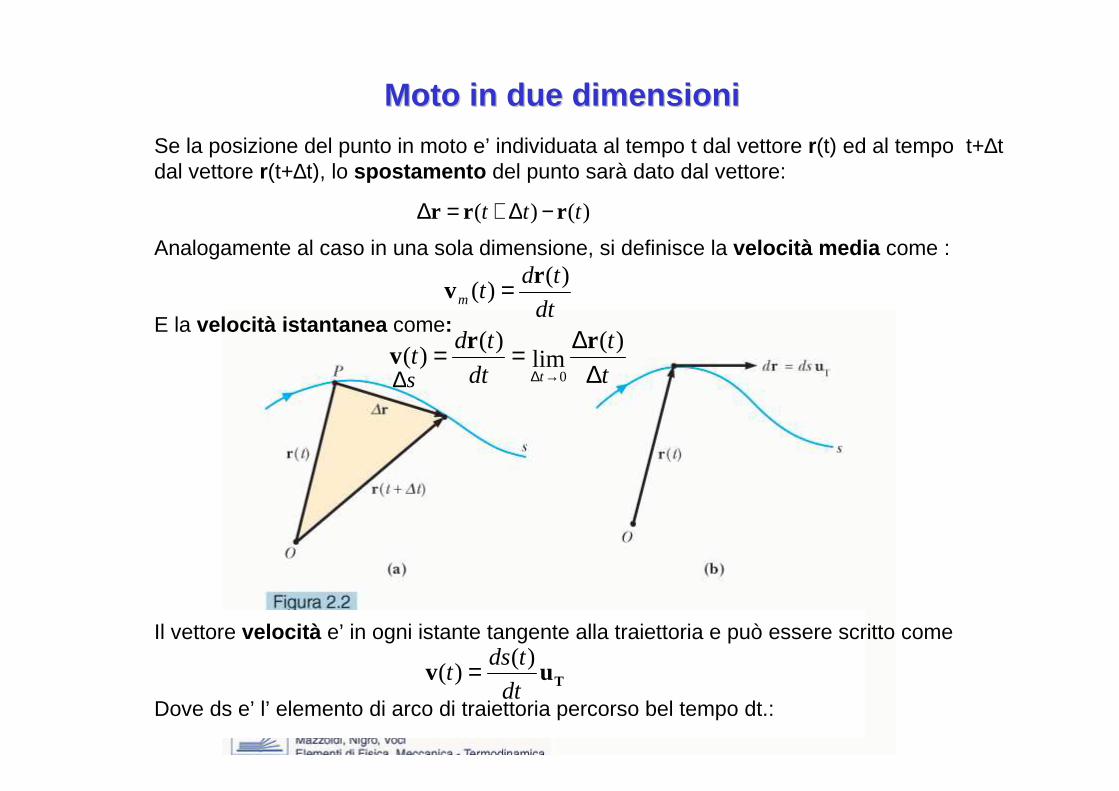
Moto in due dimensioniMoto in due dimensioniSe la posizione del punto in moto e’ individuata al tempo t dal vettore r(t) ed al tempo t+∆tdal vettore r(t+∆t), lo spostamento del punto sarà dato dal vettore:
Analogamente al caso in una sola dimensione, si definisce la velocità media come :
E la velocità istantanea come:
Il vettore velocità e’ in ogni istante tangente alla traiettoria e può essere scritto come
Dove ds e’ l’ elemento di arco di traiettoria percorso bel tempo dt.:
)()( ttt rrr −∆+=∆
t
t
dt
tdt
t ∆∆==
→∆
)(lim
)()(
0
rrv
dt
tdtm
)()(
rv =
Tuvdt
tdst
)()( =
s∆
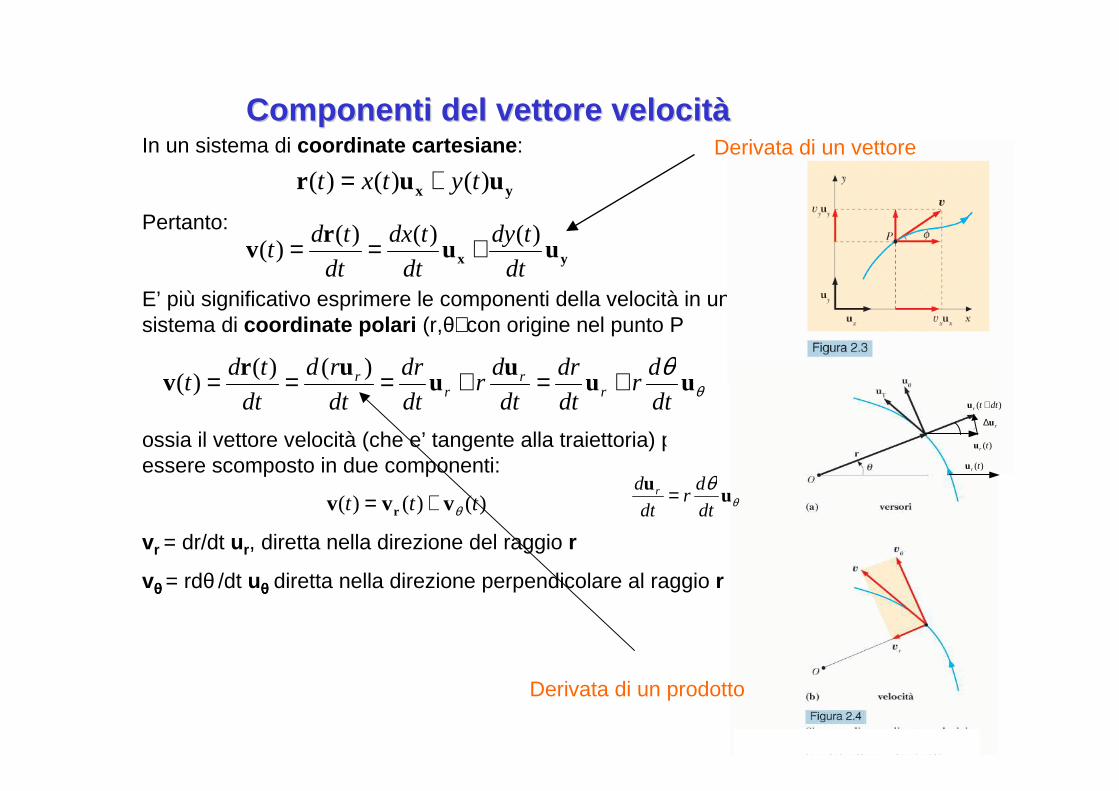
In un sistema di coordinate cartesiane :
Pertanto:
E’ più significativo esprimere le componenti della velocità in un sistema di coordinate polari (r,θ) con origine nel punto P
ossia il vettore velocità (che e’ tangente alla traiettoria) puòessere scomposto in due componenti:
vr = dr/dt ur, diretta nella direzione del raggio r
vθθθθ = rdθ /dt uθθθθ diretta nella direzione perpendicolare al raggio r
Componenti del vettore velocitàComponenti del vettore velocità
yx uur )()()( tytxt +=
yx uur
vdt
tdy
dt
tdx
dt
tdt
)()()()( +==
θθ
uuu
uur
vdt
dr
dt
dr
dt
dr
dt
dr
dt
rd
dt
tdt r
rr
r +=+=== )()()(
)()()( ttt θvvv r +=
)(tru
)( dttr +u
ru∆
)(tru
θθ
uu
dt
dr
dt
d r =
Derivata di un vettore
Derivata di un prodotto
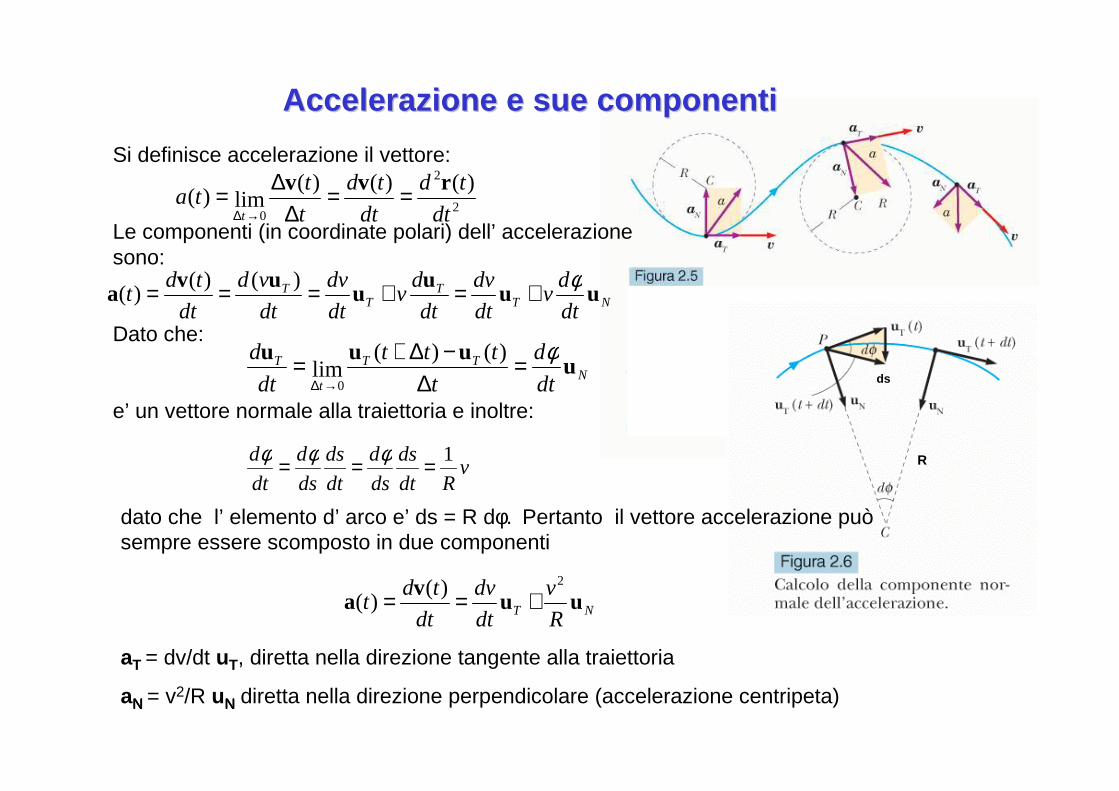
Si definisce accelerazione il vettore:
Le componenti (in coordinate polari) dell’ accelerazione sono:
Dato che:
e’ un vettore normale alla traiettoria e inoltre:
2
2
0
)()()(lim)(
dt
td
dt
td
t
tta
t
rvv ==∆
∆=→∆
NTT
TT
dt
dv
dt
dv
dt
dv
dt
dv
dt
vd
dt
tdt uu
uu
uva
φ+=+=== )()()(
NTT
t
T
dt
d
t
ttt
dt
du
uuu φ=∆
−∆+=→∆
)()(lim
0
vRdt
ds
ds
d
dt
ds
ds
d
dt
d 1=== φφφ
Accelerazione e sue componentiAccelerazione e sue componenti
NT R
v
dt
dv
dt
tdt uu
va
2)()( +==
dato che l’ elemento d’ arco e’ ds = R dφ. Pertanto il vettore accelerazione può sempre essere scomposto in due componenti
aT = dv/dt uT, diretta nella direzione tangente alla traiettoria
aΝΝΝΝ = v2/R uΝΝΝΝ diretta nella direzione perpendicolare (accelerazione centripeta)
ds
R
Equazioni del moto piano Equazioni del moto piano
Se l’ accelerazione e’ costante in entrambe le direzioni ax = ax0 ay = ay0 le equazioni del moto sono:
∫+=t
t
dttt0
)()( 0 vrr∫+=t
t
dttt0
)()( 0 avv
che corrispondono a due coppie di equazioni scalari per le componenti:
Il moto del punto nel piano può pertanto essere scomposto in due moti (scalari) lungo gli assi di riferimento
∫+=t
t
xxx dtatvtv0
)()( 0
∫+=t
t
yyy dtatvtv0
)()( 0
∫+=t
t
xdtvtxtx0
)()( 0
∫+=t
t
ydtvtyty0
)()( 0
)()()( 000 ttatvtv xxx −+=
)()()( 000 ttatvtv yyy −+=
200000 )(
2
1)()( ttattvxtx xx −+−+=
200000 )(
2
1)()( ttattvyty yy −+−+=
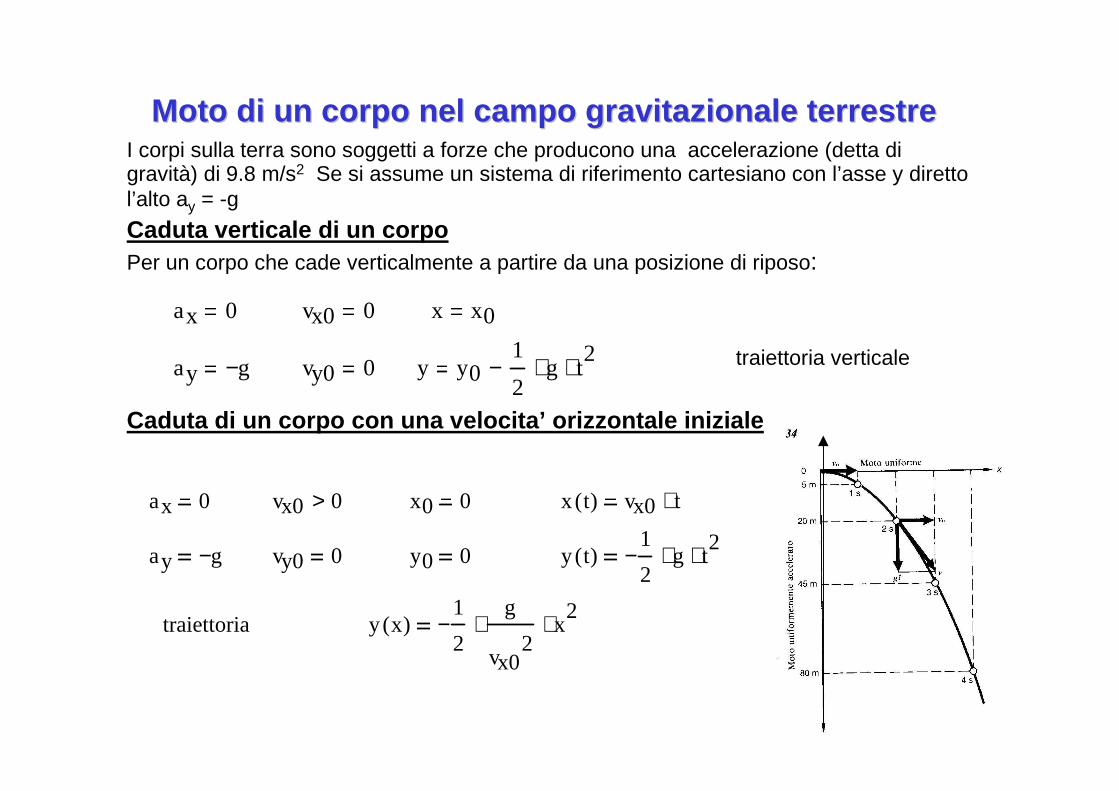
Moto di un corpo nel campo gravitazionale terrestre Moto di un corpo nel campo gravitazionale terrestre I corpi sulla terra sono soggetti a forze che producono una accelerazione (detta di gravità) di 9.8 m/s2 Se si assume un sistema di riferimento cartesiano con l’asse y diretto l’alto ay = -g
Caduta verticale di un corpoPer un corpo che cade verticalmente a partire da una posizione di riposo:
traiettoria verticale
Caduta di un corpo con una velocita’ orizzontale ini ziale
ax 0 vx0 0 x x0
ay g− vy0 0 y y01
2g⋅ t
2⋅−
ax 0 vx0 0> x0 0 x t( ) vx0 t⋅
ay g− vy0 0 y0 0 y t( )1
2− g⋅ t
2⋅
traiettoria y x( )1
2−
g
vx02
⋅ x2⋅
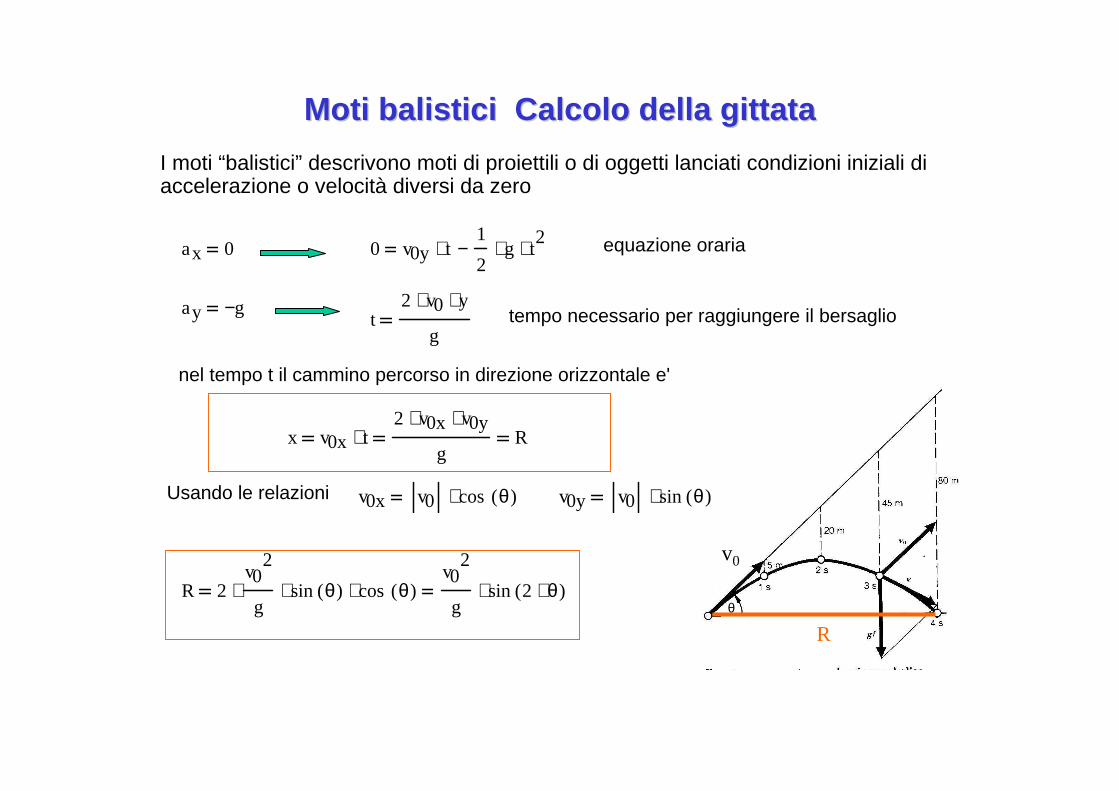
Moti balistici Calcolo della gittataMoti balistici Calcolo della gittata
ax 0 v0x 0 v0y t⋅1
2g⋅ t
2⋅− equazione oraria
ay g− v0y t2 v0⋅ y⋅
gtempo necessario per raggiungere il bersaglio
nel tempo t il cammino percorso in direzione orizzontale e'
x v0x t⋅2 v0x⋅ v0y⋅
gR
Usando le relazioni v0x v0 cos θ( )⋅ v0y v0 sin θ( )⋅
R 2v0
2
g⋅ sin θ( )⋅ cos θ( )⋅
v02
gsin 2 θ⋅( )⋅
v0
θ
I moti “balistici” descrivono moti di proiettili o di oggetti lanciati condizioni iniziali di accelerazione o velocità diversi da zero
R
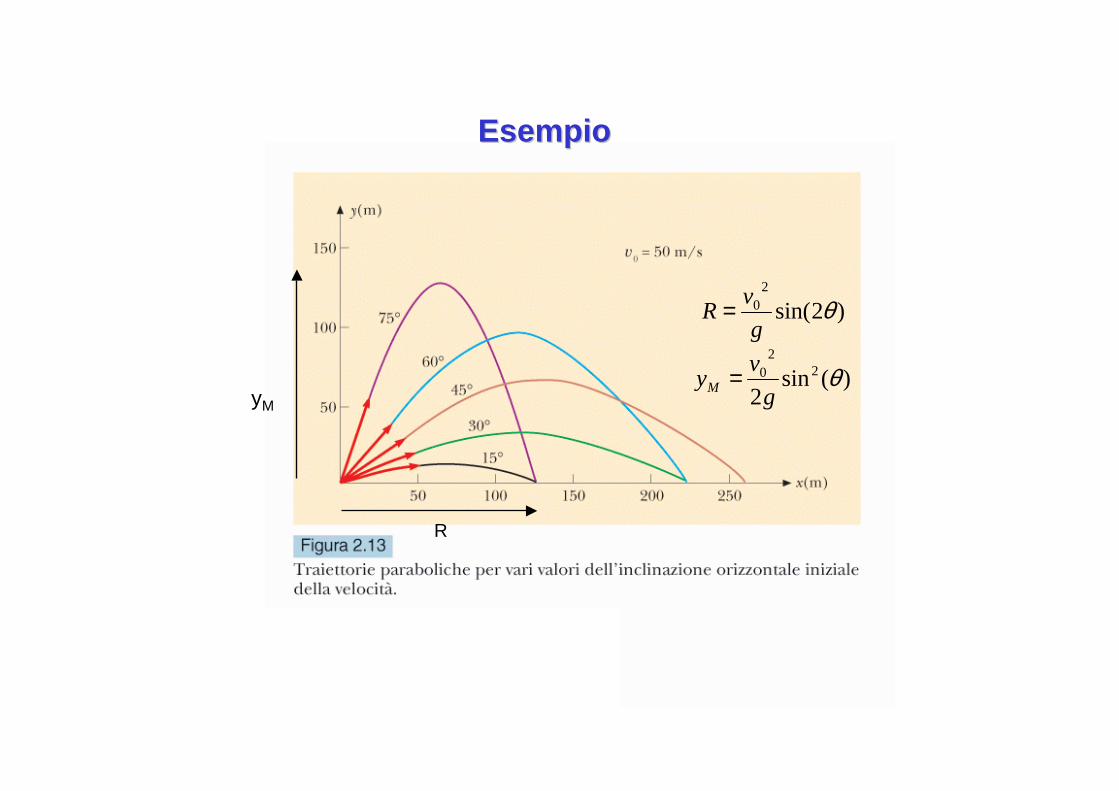
EsempioEsempio
)2sin(2
0 θg
vR =
R
yM
)(sin2
22
0 θg
vyM =
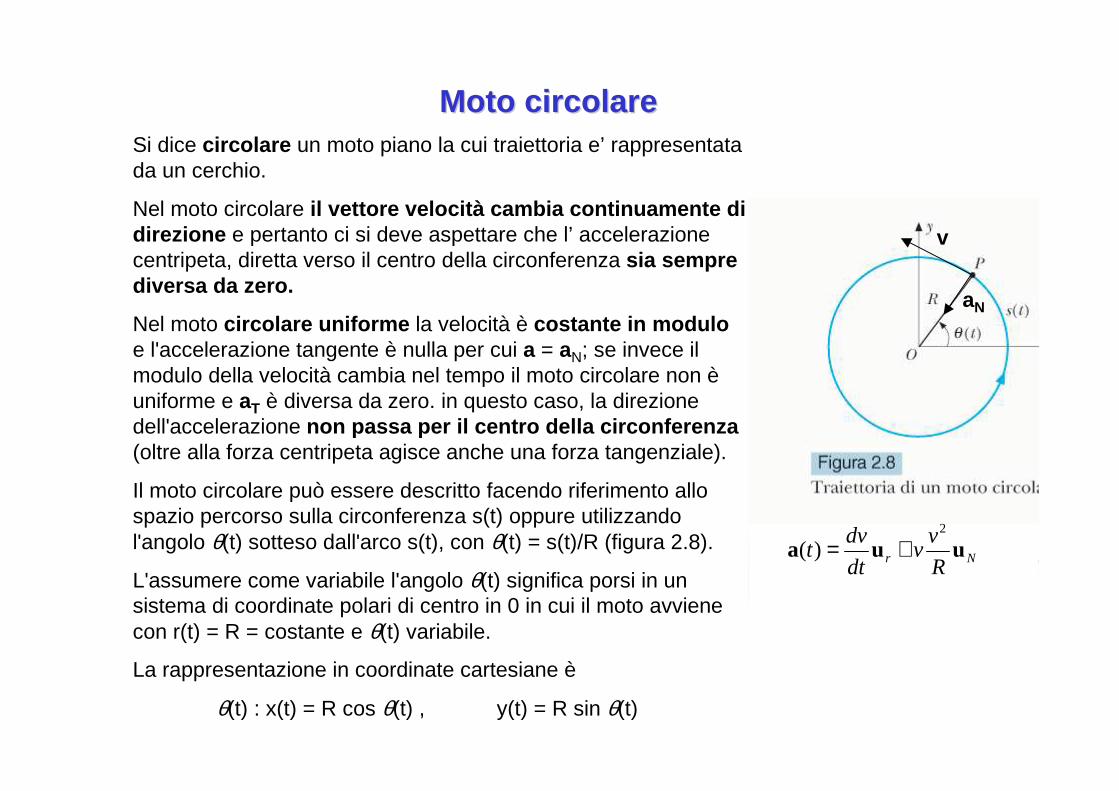
Moto circolareMoto circolareSi dice circolare un moto piano la cui traiettoria e’ rappresentata da un cerchio.
Nel moto circolare il vettore velocità cambia continuamente di direzione e pertanto ci si deve aspettare che l’ accelerazione centripeta, diretta verso il centro della circonferenza sia sempre diversa da zero.
Nel moto circolare uniforme la velocità è costante in moduloe l'accelerazione tangente è nulla per cui a = aN; se invece il modulo della velocità cambia nel tempo il moto circolare non è uniforme e aT è diversa da zero. in questo caso, la direzione dell'accelerazione non passa per il centro della circonferenza(oltre alla forza centripeta agisce anche una forza tangenziale).
Il moto circolare può essere descritto facendo riferimento allo spazio percorso sulla circonferenza s(t) oppure utilizzando l'angolo θ(t) sotteso dall'arco s(t), con θ(t) = s(t)/R (figura 2.8).
L'assumere come variabile l'angolo θ(t) significa porsi in un sistema di coordinate polari di centro in 0 in cui il moto avviene con r(t) = R = costante e θ(t) variabile.
La rappresentazione in coordinate cartesiane è
θ(t) : x(t) = R cos θ(t) , y(t) = R sin θ(t)
v
aN
Nr R
vv
dt
dvt uua
2
)( +=

Moto circolareMoto circolare
s(t)
Se il punto all'instante t occupa la posizione angolare θ1 e all'istante t + ∆t la posizione angolare θ 2 nell'intervallo ∆t ha subito lo spostamento angolare, (figura 2.9), definito dalla:
Si definisce velocità angolare media il rapporto tra ∆θ e ∆t :
La velocità angolare istantanea è definita come limite per ∆t →0 di ωm:
(2.9)
la velocità angolare istantanea è la derivata rispe tto al tempo dell'angolo θ (θ (θ (θ (t) che descrive la posizione angolare del punto.
Se si tiene conto della relazione s(t) = Rθ (t) dalla (2.9) otteniamo:
=
(2.10)
la velocità angolare è proporzionale alla velocità con cui è descritta la circonferenza; se v è variabile lo è anche ω.
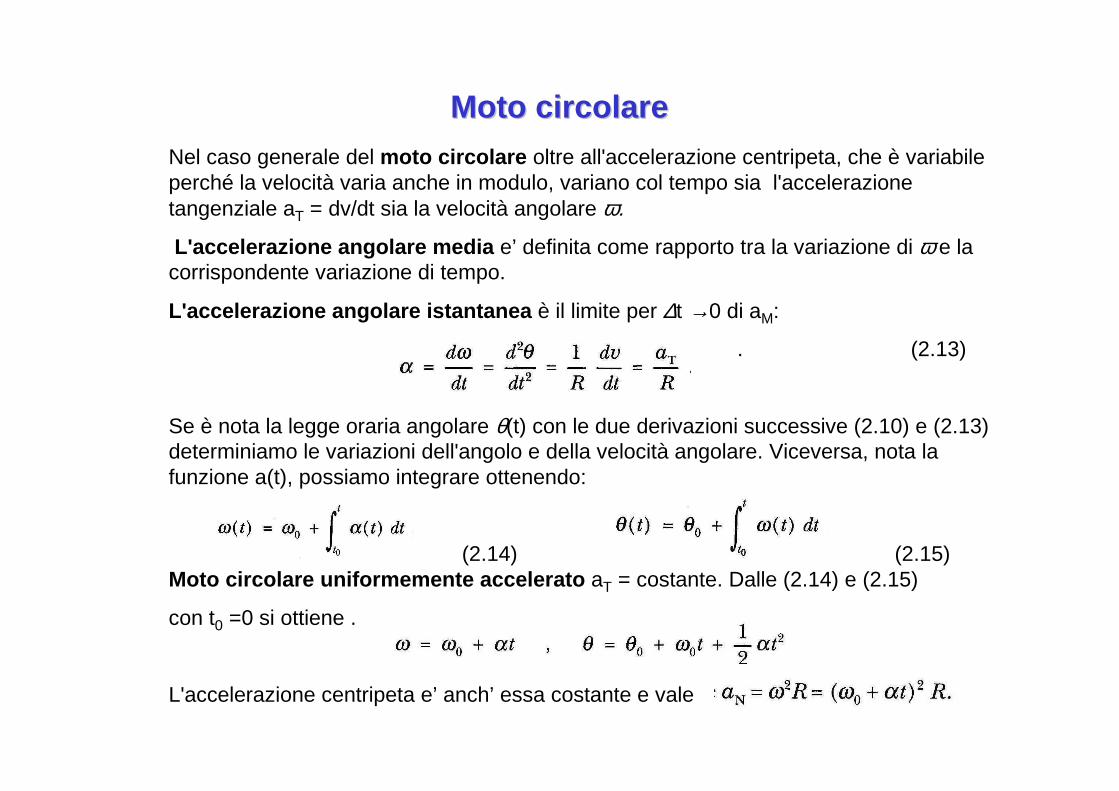
Moto circolareMoto circolareNel caso generale del moto circolare oltre all'accelerazione centripeta, che è variabile perché la velocità varia anche in modulo, variano col tempo sia l'accelerazione tangenziale aT = dv/dt sia la velocità angolare ω.
L'accelerazione angolare media e’ definita come rapporto tra la variazione di ω e la corrispondente variazione di tempo.
L'accelerazione angolare istantanea è il limite per ∆t →0 di aM:
. (2.13)
Se è nota la legge oraria angolare θ(t) con le due derivazioni successive (2.10) e (2.13) determiniamo le variazioni dell'angolo e della velocità angolare. Viceversa, nota la funzione a(t), possiamo integrare ottenendo:
(2.14) (2.15)Moto circolare uniformemente accelerato aT = costante. Dalle (2.14) e (2.15)
con t0 =0 si ottiene .
L'accelerazione centripeta e’ anch’ essa costante e vale

Nota Il termine uniforme significa esclusivamente costanza del modulo della velocità;
il moto circolare uniforme è un moto accelerato con accelerazione costante, ortogonale alla traiettoria ,
• E’ un moto periodico perché ad ogni intervallo T=2πR/v= 2π/ω riprende la posizione e velocità iniziale
Le proiezioni del punto P sull’ asse delle x e delle y in moto circolare uniforme si muovono di moto armonico:
Moto circolare uniformeMoto circolare uniforme
Nel moto circolare la velocità radiale è identicamente nulla perché il raggio vettore è costante in modulo e la velocità trasversale coincide con la velocità: da vθ = R dθ /dt = Rω
• Il moto circolare più semplice è quello uniforme: v e ω sono costanti e le leggi orarie, con riferimento alle due variabili utilizzate, si scrivono
v
aN
M(t)
N(t)