Maurizio Barbarella, Fabio Radicioni, Fernando Sansò · Ludovico Biagi (Cap. 1 – Datum e rete...
225
Transcript of Maurizio Barbarella, Fabio Radicioni, Fernando Sansò · Ludovico Biagi (Cap. 1 – Datum e rete...
Maurizio Barbarella, Fabio Radicioni, Fernando Sansò editori
Lo sviluppo delle tecnologie per le reti geodetiche Coordinatori della ricerca Maurizio Barbarella, Fabio Radicioni, Fernando Sansò Responsabili delle linee tematiche Ludovico Biagi (Cap. 1 – Datum e rete ordine zero) Mattia Crespi (Cap. 2 – Applicazioni catastali) Ambrogio Maria Manzino (Cap. 3 – Infomobilità) Stefano Gandolfi (Cap. 4 – Sorveglianza territorio) Partecipanti alla ricerca Stefano Caldera, Alberto Cina, Donatella Dominici, Guido Fastellini, Lucia Luzietti, Augusto Mazzoni, Livio Pinto, Marco Roggero, Aurelio Stoppini, Vincenza Tornatore Referenti per il CISIS Roberto Gavaruzzi, Domenico Longhi
Maurizio Barbarella Università degli Studi di Bologna, DISTART, viale Risorgimento 2, 40136 Bologna [email protected] Fabio Radicioni Università degli Studi di Perugia, DICA, via G. Duranti 93, 06125 Perugia [email protected] Fernando Sansò Politecnico di Milano, DIIAR c/o Polo Regionale di Como, via Valleggio 11, 22100 Como [email protected] Lo sviluppo delle tecnologie per le reti geodetiche Pubblicazione a cura del CISIS, 2009 ISBN .............................. Stampato nel 2009 da: Grafiche Bovini Srl, Perugia Immagini in copertina (da sinistra in alto, in senso antiorario): Satellite GPS (Courtesy NASA/JPL-Caltech) Stazione permanente GNSS di Orvieto (foto G. Centi) Success rate e numero satelliti per Galileo a 3 frequenze (dal cap. 3) Lista PF catastali (dal cap. 2) Rete di test preliminare all'istituzione di una rete dinamica nazionale (dal cap. 1)
ERRATA CORRIGE A pagina 1 riga 5 dopo le parole “L’utilizzazione delle specifiche tecniche” si deve integrare con “prodotte dalla Commissione Geodetica Italiana ed edite nel 1973 dall’IGM” A pagina 1 riga 22 al posto di “0,04 millimetri” si deve sostituire con “0,2 millimetri” alla scala di rappresentazione ; alla riga 23 al posto di “quattro metri” si deve sostituire con “due metri” per le CTR 1:10000; al posto di “due metri” si deve sostituire con “un metro” per le CTR !:5000 e al posto di “ottanta centimetri” si deve sostituire con “quaranta centimetri” per le CTR 1:2000.
INDICE Premessa 1
Introduzione 3 CAPITOLO 1: Il sistema di riferimento e la rete di ordine zero (responsabile: Ludovico Biagi)
Riassunto 9
1.1. Introduzione 10
1.2. La situazione attuale in Italia 11
1.3. La necessità di una rete di stazioni permanenti di ordine zero in Italia 14
1.4. Linee guida tecniche per le stazioni di una rete di ordine zero 15
1.5. La rete test 17
1.6. L’inquadramento della rete test 18
1.7. Considerazioni sull’esperimento della rete test 31
1.8. Interpretazione delle serie temporali di una rete permanente 31
1.9. La Rete Dinamica Nazionale di IGM e relative considerazioni 34
1.10. Bibliografia 36
Allegati:
1.1 - Repertorio delle stazioni permanenti in Italia, al 31.01.2008 37
1.2 - Le stazioni permanenti utilizzate per la rete test 55
1.3 - Coordinate all’epoca media e velocità per la stima reiezione 61
1.4 - Serie di residui per la stima reiezione 67
1.5 - Scheda per censimento preliminare SP 87
1.6 - Glossario relativo alla scheda censimento stazioni 88
CAPITOLO 2: Applicazioni catastali delle reti geodetiche GNSS (responsabile: Mattia Crespi)
2.1. Introduzione 93
2.2. Definizione di una metodologia per la rideterminazione delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89 94
2.3. Definizione di una metodologia per la trasformazione del DB cartografico catastale nel sistema cartografico UTM-WGS84-ETRS89 101
2.4. Definizione di una metodologia per la (ri)determinazione delle coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89 105
2.5. Studio di fattibilità di un ulteriore raffittimento della rete GPS ai fini della
rideterminazione ex-novo delle coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89 106
2.6. Bibliografia 108
Allegati:
2.1 - Trasformazioni globali per punti doppi (M. Crespi, A. Mazzoni) 112
2.2 - Trasformazioni globali per Coordinate dell'Origine Catastale (A. Cina) 119
2.3 - Ricerca automatica di punti omologhi tra le carte e trasformazione mediante funzioni spline multirisoluzione (M. A. Brovelli, G. Zamboni) 130
2.4 - Ricomposizione procustiana della rete fiduciale e della cartografia catastale numerica (A. Beinat, F. Crosilla, E. Sossai) 145
CAPITOLO 3: Impiego delle reti GNSS per la Infomobilità (responsabile: Ambrogio Maria Manzino)
3.1. Introduzione 157
3.2. Le applicazioni di infomobilità di reti GNSS e le loro esigenze 157
3.3. Valutazione delle possibilità tecniche e delle modalità di riuso delle reti regionali per applicazioni di infomobilità, in termini di analisi costi/benefici 165
3.4. Bibliografia ragionata 171
Allegato:
Rapporto su sperimentazioni eseguite in diverse modalità 175
CAPITOLO 4: Impiego delle reti GNSS per la sorveglianza del territorio (responsabile: Stefano Gandolfi)
4.1. Introduzione 197
4.2. Definizione dei fenomeni da sottoporre a sorveglianza 197
4.3. Stato dell’arte sui metodi attualmente impiegati per la sorveglianza 201
4.4. Analisi di un possibile riuso delle reti di stazioni permanenti per scopi di sorveglianza e monitoraggio del territorio 202
4.5. Conclusioni 209
4.6. Bibliografia 210
Considerazioni conclusive 215


Lo sviluppo delle tecnologie per le reti geodetiche
1
PREMESSA
Fin dalla loro istituzione, avvenuta negli anni settanta, le Regioni italiane hanno finanziato la realizzazione e l’aggiornamento di carte topografiche a grande scala (a seconda delle zone 1:10.000, 1:5.000, 1:2.000) denominate CTR (Carte Tecniche Regionali) e le hanno messe a disposizione dei Comuni e degli altri Enti Locali quale sfondo nella georeferenziazione dei piani urbanistici e dei piani territoriali. L’utilizzazione delle specifiche tecniche promosse dalla SIFET (Società Italiana di Topografia e Fotogrammetria) ha consentito ad ogni Regione di procedere alla realizzazione delle CTR in maniera autonoma e di garantirne la standardizzazione, il riuso e l’interoperabilità. Le CTR vengono utilizzate per molteplici attività. Ad esempio quando un cittadino chiede ad un Comune che cosa è possibile costruire su uno specifico appezzamento di terreno, vengono confrontate le zonizzazioni dei piani urbanistici (il piano regolatore ed i suoi derivati moderni piano strutturale e piano operativo) con la definizione dell’appezzamento individuato da un insieme di particelle nella rappresentazione cartografica catastale. Ovvero oggi con strumenti GIS viene elaborata localmente una intersezione tra la georeferenziazione della rappresentazione del piano urbanistico disegnato sulla CTR e la georeferenziazione della cartografia catastale. Negli anni settanta le modalità operative di gestione delle CTR erano caratterizzate da un ambiente operativo analogico di alta qualità dato da modalità di copia dei disegni cartografici originali realizzate solo per contatto in bromografo e di riproduzione con variazione di scala realizzate solo con strumenti fotomeccanici di alta precisione. Queste accurate e costose tecniche consentivano di garantire la conformità delle riproduzioni gestionali degli archivi cartografici, ovvero di garantire la proprietà fondamentale della rappresentazione topografica rilevata a grande scala: una rappresentazione cartografica inquadrata nel sistema di riferimento nazionale limitata planimetricamente dal solo errore di graficismo (0,04 millimetri alla scala di rappresentazione); ovvero quattro metri per le CTR 1:10.000; due metri per le CTR 1:5.000; ottanta centimetri per le CTR 1:2.000. Negli anni novanta lo sviluppo tecnologico ha consentito di passare dalle modalità operative analogiche di gestione delle CTR a modalità digitali. In genere le Regioni fecero digitalizzare le CTR preesistenti con tecniche di elevata qualità finalizzate a mantenerne integra l’accuratezza di georeferenziazione. Alcune Regioni, in occasione di aggiornamenti generali da foto aeree, passarono alla gestione cartografica digitale facendo rifare il rilevamento fotogrammetrico con gli allora recenti strumenti di restituzione digitale. Nello stesso periodo entrò in uso il GPS per applicazioni geodetiche: con esso l’Istituto Geografico Militare realizzò una nuova rete geodetica denominata “IGM95” materializzata con centrini ad interdistanza media di quindici chilometri. Nell’ambito delle collaborazioni nazionali “IntesaGIS”, le Regioni ne hanno fatto realizzare un raffittimento con materializzazioni ad interdistanza media di sette chilometri denominato “GPS7”. Negli anni duemila lo sviluppo tecnologico ha consentito di applicare le tecniche di organizzazione e gestione dei Sistemi Informativi anche all’ambiente dei dati georeferenziati mettendo a disposizione strumenti software GIS (sistemi informativi geografici). Nell’ambito italiano le Regioni, in collaborazione con gli Enti Locali, hanno avviato e stanno consolidando una riorganizzazione ad oggetti del contenuto informativo delle CTR definendo anche dei formati di
M. Barbarella, F. Radicioni, F. Sansò editori
2
scambio standard. Il nuovo prodotto è stato denominato DB Topografico e in esso sono state inserite ed integrate alcune altre informazioni tra le quali particolarmente significativi i reticoli stradali e la numerazione civica. Nello stesso periodo diverse Regioni hanno finanziato e fatto realizzare reti locali di stazioni permanenti GPS/GNSS quali infrastrutture tecnologiche finalizzate a ridurre i costi degli operatori nel settore “rilevamento sul terreno georiferito in modo accurato”; quindi investimenti finalizzati a ridurre i costi di aggiornamento dei dati topografici rilevati. A livello di coordinamento interregionale si è sentita l’esigenza di coordinare le varie iniziative regionali GPS/GNSS sia per condividere e riusare i ricevitori delle stazioni permanenti poste in prossimità dei confini regionali, sia per standardizzarne le modalità di gestione e di sviluppo anche nella prospettiva di una loro estensione agli altri ambiti regionali. Per questo motivo nel 2007 il CPSG (Comitato Permanente sui Sistemi Geografici) del CISIS (Centro Interregionale per i Sistemi informatici, geografici e statistici), organismo tecnico delle Regioni, ha promosso e finanziato alcune ricerche applicate tra cui anche quella sulla moderna geodesia i cui risultati sono descritti in questo volume. Valuto molto positivo il fatto che sia stato possibile affidare la ricerca al team dei docenti universitari che avevano condotto gli studi in materia di geodesia nell’ambito dei PRIN (Progetti di Rilevante Interesse Nazionale) cofinanziati dal MIUR (Ministero dell’Università e della Ricerca). Ho potuto conoscere questo team di docenti non solo per la competenza ma anche per l’entusiasmo e la passione con cui hanno condotto la nostra ricerca: una importante attività che ha poi consentito alle Regioni di dialogare in modo costruttivo con gli Enti Nazionali sul tema operativo geodetico. In particolare ha consentito di collaborare con l’Istituto Geografico Militare e con l’Agenzia del Territorio nel calcolo della RDN (Rete Dinamica Nazionale) e nella preparazione del DPCM (Decreto Presidente Consiglio dei Ministri) 2009 sul nuovo sistema geodetico nazionale. Condivido gli esiti di questa ricerca anche nella parte delle conclusioni in cui si propongono ulteriori step di studio quali la standardizzazione e la certificazione operativa dei processi di rilevamento in tempo reale per l’aggiornamento dei dati topografici a grande scala e dei dati cartografici catastali. Il CISIS sta già ricercando soluzioni di collaborazione delle Regioni con altri soggetti della pubblica amministrazione per promuoverne il finanziamento.
CISIS IL VICEPRESIDENTE
Domenico Longhi
Lo sviluppo delle tecnologie per le reti geodetiche
3
INTRODUZIONE
Le informazioni territoriali sono strumento fondamentale di programmazione e di gestione del territorio e di realizzazione di opere da parte di soggetti pubblici e privati. Ciascuna Pubblica Amministrazione, Ente Locale o organizzazione privata lavora in ambiti territoriali ben definiti e organizza l’acquisizione e le modalità di gestione dei dati secondo le proprie esigenze e ai propri fini istituzionali. Queste attività si sviluppano su tutto il territorio nazionale ed è necessario che i dati siano coerenti per ambiti territoriali limitrofi. Con tutta evidenza, attualmente il problema della integrazione e interoperabilità dei dati geografici si pone non solo a livello nazionale ma almeno a quello europeo. Se dati acquisiti in tempi diversi, da parte di soggetti diversi e per finalità anche diverse debbono avere una completa coerenza e interagire senza conflitti, non è solo necessario procedere alla definizione di standard formali condivisi, ma è anche indispensabile che la collocazione geografica delle informazioni sia riferita ad una infrastruttura geodetica unica su tutto il territorio nazionale (almeno): deve cioè essere possibile riferire le coordinate associate alle informazioni ad un unico sistema di riferimento. Questo problema non è ovviamente nuovo, ma la risposta ad esso è figlia dei tempi e del livello tecnologico raggiunto. Una struttura geodetica si concretizza dal punto di vista pratico in una Rete di vertici materializzati in modo stabile, distribuiti uniformemente sul territorio nazionale, di coordinate note in un Sistema Geodetico e pienamente accessibili alla misura, in modo che qualsiasi rilievo che venga effettuato appoggiandosi a quei vertici viene ad essere inquadrato anch’esso nel Sistema. All’indomani dell’unità d’Italia si trattò di unificare le strutture geodetiche e le cartografie degli Stati pre-unitari per realizzare una unica infrastruttura alla quale appoggiare la sia la cartografia di base, che quella catastale, che altre cartografie ‘tematiche’, oltre evidentemente ad inquadrare tutti i rilievi necessari alla società civile. Alla fine della prima guerra mondiale questa infrastruttura, la Rete Trigonometrica Italiana, era stata creata e calcolata, con un lavoro durato mezzo secolo; i Vertici Trigonometrici di posizione nota che essa forniva all’utenza per riattaccare i propri rilievi erano scelti in modo da facilitare le misure, che all’epoca erano quasi esclusivamente di tipo angolare. Chiunque operava in campagna organizzava i rilievi dei nuovi punti collegandoli ai Vertici esistenti nell’area e ne calcolava le coordinate a partire da quelle – note – dei Vertici Trigonometrici; tanto bastava ad inserire il nuovo rilievo nel Sistema di riferimento nazionale. Alla fine della seconda guerra mondiale la Rete di Vertici Trigonometrici viene ricostruita e le sue coordinate permettono di accedere al nuovo Sistema Geodetico Nazionale Roma 40 e al Sistema Cartografico Gauss Boaga. La introduzione a partire dagli anni settanta dei distanziometri ad onda che permettono finalmente di effettuare agevolmente le misure di distanza e delle nuove capacità di elaborazione consentite dai computer, non spostano il senso e la struttura della Rete Trigonometrica, ma ne migliorano solo la affidabilità e la precisione. L’introduzione delle tecniche di rilievo satellitare invece segna una svolta decisiva: a partire dalla metà degli anni ’80 infatti i ricevitori GPS diventano lo strumento di misura più efficace per il rilievo, soprattutto per il collegamento di punti a grande distanza. Non si richiede più la intervisibilità reciproca dei punti che si intende collegare con misure, ma piuttosto la completa
M. Barbarella, F. Radicioni, F. Sansò editori
4
visibilità del cielo dai punti di stazione. La Rete Trigonometrica, basata su punti ben visibili a distanza ma non sempre facilmente occupabili (assi di campanili, ad esempio) non risponde alle esigenze del rilievo satellitare. A metà degli anni ’90 viene realizzata una nuova infrastruttura, nei limiti del possibile coincidente con quella esistente, ma orientata specificatamente all’uso di tecniche di rilievo satellitare, con punti facilmente raggiungibili, non intervisibili tra di loro, ma con completa visibilità del cielo. Tale infrastruttura è nota come “Rete IGM95” e costituisce la Rete Geodetica fondamentale italiana atta al rilievo col GPS e comunque collegata e derivata dalla precedente Rete Trigonometrica. La tecnica che fa uso di ricevitori satellitari consente di effettuare misure che raggiungono ampiamente la precisione e la affidabilità richieste dai rilievi topografici tecnici e catastali e dalla realizzazione di cartografia tecnica a scala regionale e comunale anche a grandissima scala. Questo avviene mediante il rilievo di “basi GPS”: due ricevitori fanno contemporaneamente stazione su punti comunque distanti e generalmente non intervisibili per un sufficiente lasso di tempo, poi i dati raccolti vengono scaricati su un computer e un apposito programma calcola la differenza di posizione tra i punti sui quali si è fatta stazione. Tale “base GPS”, ovvero la posizione relativa tra i punti di stazione è definita in un Sistema di Riferimento condiviso e unico per tutti gli utenti, il “WGS84” : tale Sistema, visto che deve essere lo stesso in tutto il mondo, è ovviamente diverso da quello italiano, ma è ad esso riconducibile con opportune procedure di misura e di calcolo. Più recentemente ci si è posti il problema di realizzare una tecnologia che consentisse di semplificare ulteriormente, rendendolo più rapido e più produttivo – e quindi più economico – il rilievo con ricevitori GPS: per esempio abbreviando la durata dello stazionamento che permette di generare la base, o magari utilizzando un solo ricevitore, o evitando di dover fare i calcoli al rientro in ufficio. Tale ottimizzazione, nella sua forma più evoluta e completa, è in effetti ora tecnicamente possibile ma passa sostanzialmente attraverso la realizzazione di un’ulteriore infrastruttura: quella costituita da una serie di Stazioni Permanenti munite di un ricevitore satellitare funzionante in continuazione e distribuite sul territorio. Lo sviluppo delle comunicazioni tramite telefonia cellulare rende inoltre possibile il trasferimento di dati in tempo reale tramite normali cellulari: i dati delle Stazioni Permanenti possono raggiungere l’operatore in campagna con un ritardo estremamente contenuto. Inizialmente le Stazioni Permanenti GPS sono state realizzate per scopi scientifici quali il controllo dei sistemi di riferimento mondiali e lo studio della dinamica della crosta terrestre, ma presto si è incominciato ad istituire delle stazioni fisse GPS allo scopo di semplificare rilievi effettuati per scopi tecnici. Le Ditte produttrici e distributrici di ricevitori per il rilievo satellitare (oggi per GPS e GLONASS, presto auspicabilmente anche per Galileo) operanti in Italia hanno seguito la politica di facilitare la diffusione di Stazioni Permanenti allo scopo di incrementare l’impiego dei ricevitori e quindi aumentarne la vendita. Gli operatori professionisti da parte loro hanno intravisto la possibilità di nuovi sviluppi nelle modalità operative con le quali esplicano il proprio lavoro e le Università e strutture di ricerca hanno avuto la possibilità di sperimentare nuove strumentazioni e software altrimenti non accessibili con i fondi disponibili. La diffusione delle Stazioni Permanenti è avvenuta inizialmente in modo del tutto volontaristico e quindi senza coordinamento e priva di logica unificante: professionisti, scuole secondarie, università, le stesse Ditte hanno seguito le modalità di istallazione e di funzionamento ritenute più opportune. Un tentativo riuscito di istituire una infrastruttura unitaria di stazioni permanenti che costituisse una rete fondamentale – di ordine zero – dalla quale derivare ogni altro punto rilevato in Italia , è stato effettuato dall’IGM che ha pensato di riutilizzare le materializzazioni esistenti di un sottoinsieme appositamente scelto di Stazioni Permanenti per effettuare il calcolo in blocco delle posizioni definendo così un frame, una realizzazione che costituisce una rete Fondamentale, attualmente nota come Rete Dinamica Nazionale. A questa operazione hanno contribuito con calcoli separati e
Lo sviluppo delle tecnologie per le reti geodetiche
5
indipendenti alcune Università e il CISIS ha offerto un contributo per consentirne la realizzazione pratica. Parallelamente a queste attività di individuazione di un frame unico italiano, sono state realizzate Reti di Stazioni Permanenti interagenti tra loro in tempo reale in grado di fornire su un territorio sostanzialmente ricompreso tra le stazioni stesse, un servizio real time all’utenza: tale servizio consente all’operatore di ricevere via telefono opportuni dati (derivati da quelli acquisiti dalle stazioni di Riferimento che interloquiscono con un Centro di Calcolo) e di determinare tramite essi la posizione della propria antenna in un sistema di coordinate unico per la struttura, in tempo praticamente reale e quindi senza esigenza di post processamento: tutto questo con precisione di alcuni centimetri. Queste strutture, denominate NRTK (Network Real Time Kinematic) o CORS (Continuously Operating Reference Stations) sono state per lo più sviluppate a livello territoriale di una Regione a cura di Enti o di organizzazioni professionali, con contributo totale o parziale delle Regioni nel cui ambito la struttura è realizzata. Oramai gli uffici “Cartografici” Regionali si sono trasformati in uffici “Sistemi Informativi Geografici” ovvero in strutture che realizzano e gestiscono informazioni strutturate georeferenziate organizzate per la comunicazione e fruizione da parte di vasti settori di utenza in ambito regionale, e non più la sola Cartografia: la necessità di georeferenziazione precisa e univoca diviene ancora più impellente ai fini istituzionali. La constatazione da parte dei coordinatori degli Uffici SIT regionali della disomogeneità delle iniziative in atto relative alle Stazioni Permanenti GNSS, della necessità di evitare incongruenze e delle opportunità che queste iniziative possono portare, ha spinto il CISIS a emanare un Bando rivolto specificamente a Università e Enti di ricerca, per uno studio sullo “Sviluppo delle tecnologie per le reti geodetiche”. Al Bando emanato ha risposto un pool di Università che ha affrontato i problemi posti e il cui lavoro è riportato in questo volume. Uno dei primi impegni è consistito nell’inventario delle centinaia di Stazioni Permanenti operanti in Italia: la fotografia scattata, assai accurata al momento della realizzazione, sarà probabilmente superata al momento della pubblicazione. Ciascun gestore è infatti libero di attivare o dismettere una Stazione GPS senza doverne rendere conto o informare chicchesia. Tale lavoro è stato comunque assai importante anche per aiutare la scelta del sottoinsieme che poi ha costituito la Rete Dinamica Nazionale. Un tema primario posto ai ricercatori riguardava infatti lo studio delle problematiche inerenti il “coordinamento operativo nazionale delle varie infrastrutture a scala regionale al fine di concorrere, anche in collaborazione con strutture nazionali interessate al problema, alla definizione di un datum geodetico nazionale di ordine zero e del suo costante aggiornamento temporale”. Questo è stato effettivamente realizzato in buon accordo con L’IGM, tanto che, come detto, alcune Università hanno successivamente concorso al calcolo della rete RDN su progetti autonomi. Un punto assai importante tante per la comunità dei Topografi quanto per la società civile riguarda le attività svolte in relazione al Catasto: la ottimizzazione delle procedure produce semplificazione delle stesse e risparmio per la committenza e una migliore integrabilità con la cartografia a grande scala. Un intero capitolo del presente volume è dedicato a studi finalizzati alla redazione di specifiche per il raffittimento geodetico GPS ai fini della rideterminazione di Punti Fiduciali Catastali. Si è ritenuto di interesse per il lettore riportare integralmente alcuni studi già sviluppati e parzialmente pubblicati in canali strettamente scientifici; gli Autori sono vivamente ringraziati per la disponibilità mostrata. A fianco dei basilari aspetti sopra descritti, non si può non prendere atto dell’esistenza di reti NRTK, sia pure in ambito “locale”, istituite primariamente per agevolare le attività professionali. E’ peraltro assai plausibile prevedere nel breve-medio periodo lo sviluppo di infrastrutture regionali analoghe a quelle esistenti, su tutto il territorio nazionale. Tali strutture possono allargare il proprio campo di applicazione verso tematiche di grande interesse generale, e in un contesto territoriale gradualmente più vasto. Un esempio è costituito dalla
M. Barbarella, F. Radicioni, F. Sansò editori
6
infomobilità, che in alcuni suoi aspetti può trarre grande vantaggio dai livelli di precisione consentiti dalle reti NRTK: il terzo capitolo è rivolto ad una valutazione tecnica, in termini di analisi costi/benefici, per il riuso delle infrastrutture regionali finalizzato a quel tema. Analogamente nel quarto capitolo si è discussa la possibilità di un riuso delle Reti NRTK per per la sorveglianza del territorio e la prevenzione dei rischi: la possibilità offerta di monitoraggio in tempo reale permette di allargare il campo di applicazioni possibile.
I COORDINATORI DELLA RICERCA
Maurizio Barbarella, Fabio Radicioni e Fernando Sansò

Lo sviluppo delle tecnologie per le reti geodetiche
7

M. Barbarella, F. Radicioni, F. Sansò editori
8

Lo sviluppo delle tecnologie per le reti geodetiche
9
CAPITOLO 1
Il sistema di riferimento e la rete di ordine zero
Responsabile: Ludovico Biagi(1) Stefano Caldera (1), Mattia Crespi (2), Donatella Dominici (3), Guido Fastellini (4), Ambrogio
Maria Manzino (5), Augusto Mazzoni (2), Livio Pinto (6), Fabio Radicioni (4), Marco Roggero (7), Fernando Sansò (1)
(1) DIIAR – Politecnico di Milano, c/o Polo Regionale di Como, via Valleggio 11 – 22100 Como
(2) DITS – Sapienza Università di Roma, via Eudossiana 18 – 00184 Roma (3) DAU – Università degli Studi dell’Aquila, loc. Monteluco di Roio – 67100 L'Aquila
(4) DICA – Università degli Studi di Perugia, via Duranti 93 – 06125 Perugia (5) DITAG – Politecnico di Torino, corso Duca degli Abruzzi 24 – 10129 Torino (6) DIIAR – Politecnico di Milano, piazza Leonardo da Vinci 32 – 20133 Milano
(7) DINSE – Politecnico di Torino, viale Mattioli 39 – 10125 Torino
Riassunto In questi anni, le reti di stazioni permanenti finalizzate a servizi di posizionamento in tempo reale e postprocessati sono in rapida espansione in Italia. Per ragioni amministrative i servizi di posizionamento vengono progettati, implementati e gestiti alla scala spaziale delle Regioni. Si ricorda che una rete di stazioni permanenti (RSP) materializza e distribuisce alla propria utenza un sistema di riferimento (SR); per garantire che RSP locali distribuiscano il medesimo SR è necessario che esse condivano un’infrastruttura comune, ovvero che siano inquadrate e monitorate in una comune RSP di ordine zero, inoltre seguendo un protocollo comune di elaborazione dei dati. Da un punto di vista teorico, la RSP globale di IGS e le linee guida IGS per la compensazione di sottoreti locali costituiscono l’infrastruttura comune; da un punto di vista pratico, le stazioni IGS da sole non possono costituire la rete di ordine zero perchè sono troppo rade e non omogeneamente distribuite sul territorio nazionale. Inoltre IGS non si pone lo scopo di monitorare sottoreti locali, mentre l’istituzione di una rete di ordine zero dovrebbe essere naturalmente accompagnata da una sorta di organo di governo e controllo. Evidentemente, la scelta naturale è quella di istituire una RSP di ordine zero a livello nazionale, in modo da soddisfare le priorità nazionali; tale RSP dovrebbe essere inquadrata e monitorata in IGS, in modo da fornire il collegamento fra la rete globale e i servizi locali di posizionamento; inoltre la RSP di ordine zero può costituire lo strumento di controllo della consistenza fra servizi locali contigui. Per garantire tali scopi, la RSP di ordine zero dovrà soddisfare numerosi requisiti di ordine scientifico e tecnico, che vanno dal disegno della rete alle scelte di inquadramento. Il presente documento si focalizza su tali argomenti: la situazione Italiana viene analizzata e un primo test numerico viene descritto. Una rete test di circa 60 SP è stata selezionata in accordo a criteri di buon disegno; i loro dati relativi a 3 mesi sono stati analizzati, al fine di valutare le difficoltà intrinseche nelle operazioni di inquadramento. Inoltre, nell’ambito di una collaborazione con l’Istituto Geografico Militare, è stato effettuato l’inquadramento della Rete Dinamica Nazionale. Questo capitolo illustra: 1. la situazione Italiana, 2. i criteri di selezione per le stazioni permanenti da includere nella RSP di ordine zero, 3. la scelta delle stazioni per la rete test,
M. Barbarella, F. Radicioni, F. Sansò editori
10
4. la definizione delle procedure di processamento giornaliero della rete, 5. i risultati ottenuti dall’elaborazione dei tre mesi della rete test, 6. i suggerimenti relativi all’interpretazione delle serie temporali, 7. la rete dinamica nazionale di IGM.
1.1. INTRODUZIONE Negli anni 80 e 90, reti fondamentali di vertici GPS vennero monumentate in tutta Europa: esse erano progettate per distribuire il SR con un’accuratezza di alcuni cm, per applicazioni cartografiche. Sufficientemente dense, tali reti vennero tipicamente rilevate all’epoca della loro monumentazione e quindi inquadrate nel SR europeo, ETRS89 (Adam et al, 1999), vincolando un insieme di punti fondamentali alle loro coordinate ETRS89 già stimate e ufficialmente pubblicate. Nel caso una rete non sia mai stata rilevata nuovamente, né spostamenti nel tempo, né velocità possono essere stimate per i suoi vertici: per tali ragioni la rete può essere definita statica, e materializza staticamente il SR. A quell’epoca, le tipiche tecniche di rilievo erano quelle statiche (o statico rapide) postprocessate. Negli anni, gli algoritmi di processamento dei dati GPS si sono grandemente evoluti. Senza entrare nel dettaglio storico, al presente la tecnica Real Time (RT) rappresenta il metodo più rapido per ottenere accuratezze compatibili con le applicazioni cartografiche e catastali; tipicamente, il postprocessamento è dedicato ad applicazioni altamente specializzate, come ad esempio la ricostruzione di traiettorie cinematiche per la fotogrammetria aerea oppure il monitoraggio di alta precisione di deformazioni. Per utilizzare al meglio le nuove tecniche GPS (a breve GNSS), segnatamente quelle in RT, in molte nazioni europee sono state attivate reti di stazioni permanenti (RSP) che forniscono servizi di posizionamento alla propria utenza: queste, oltre a distribuire i file RINEX e le coordinate delle stazioni, tipicamente forniscono dati e prodotti per il posizionamento in RT (si veda ad esempio, Wübbena et al., 2001, Xiaoming et al., 2003). Diversi servizi di posizionamento sono già operativi in Europa; essi sono generalmente coordinati, o perlomeno certificati, a livello nazionale da una autorità cartografica; da un punto di vista tecnico, le reti più piccole, come ad esempio quella svizzera AGNES (www.swisstopo.admin.ch) sono gestite in un unico cluster; viceversa quelle più grandi, come ad esempio la tedesca SAPOS (www.sapos.de), sono ripartite in più sottoreti, che vengono gestite e monitorate separatamente. Per garantire la massima affidabilità e accuratezza, un servizio di posizionamento dovrebbe monitorare le coordinate delle proprie stazioni mediante un inquadramento continuo nella rete globale IGS, vincolando le coordinate delle stazioni IGS, adottando nell’elaborazione i prodotti finali IGS e applicando nell’elaborazione dei dati GPS le linee guida internazionali per la compensazione di RSP. In questo modo, alla sua scala spaziale, un servizio di posizionamento materializza e distribuisce la realizzazione IGS del SR globale ITRS. (Kouba et al., 1998, Beutler et al., 1999, Mc Carthy et al., 2003, Ferland et al., 2004, Ray et al., 2004): in particolare, al presente, IGS05. Tuttavia, la maggior parte degli utenti richiede la connessione al SR nazionale cartografico, che in quasi tutte le nazioni Europee è una qualche realizzazione di ETRS89. Per tale ragione, al fine di essere veramente fruibile, un servizio di posizionamento deve anche stimare e distribuire la trasformazione fra IGS05 e il SR nazionale cartografico: tutti i dettagli rilevanti sono discussi in Benciolini et al., (2008), Biagi et al., (2008). Mediante l’inquadramento continuo, un servizio di posizionamento monitora con continuità le coordinate delle proprie stazioni e materializza dinamicamente il SR, con riferimento non solo ai movimenti lenti e lisci, quali tipicamente quelli dovuti alla tettonica a placche, ma anche alle brusche discontinuità, come quelle dovute ad esempio a eventuali cedimenti locali o strutturali. Ciò non è possibile per le reti statiche, i cui vertici non vengono rilevati neppure periodicamente: perciò, le RSP e i relativi servizi di posizionamento rappresentano effettivamente la prima possibilità storica di controllo continuo delle coordinate distribuite. Ciò evidentemente è importante alla scala
Lo sviluppo delle tecnologie per le reti geodetiche
11
dei millimetri per le applicazioni di alta precisione ma lo è anche, alla scala di alcuni centimetri, per le applicazioni cartografiche e catastali: per tale motivo le reti fondamentali dei paesi sviluppati stanno migrando dalle realizzazioni statiche a quelle dinamiche. Da ultimo, si noti che da un punto di vista tecnico, l’automazione delle operazioni di inquadramento di una RSP richiede uno sforzo iniziale significativo; poi, a regime, la manutenzione del software risulta minima e l’analisi scientifica dei risultati rappresenta lo sforzo maggiore e più stimolante. Nel seguito, viene discussa la situazione italiana e la necessità di una RSP di ordine zero a livello nazionale come rete di inquadramento per i servizi di posizionamento regionali; quindi, vengono dettagliate le linee guida per l’istituzione di tale rete; alla fine, per dimostrare la facile realizzabilità di una RSP di ordine zero, vengono illustrati e discussi i risultati del primo esperimento numerico su una rete test.
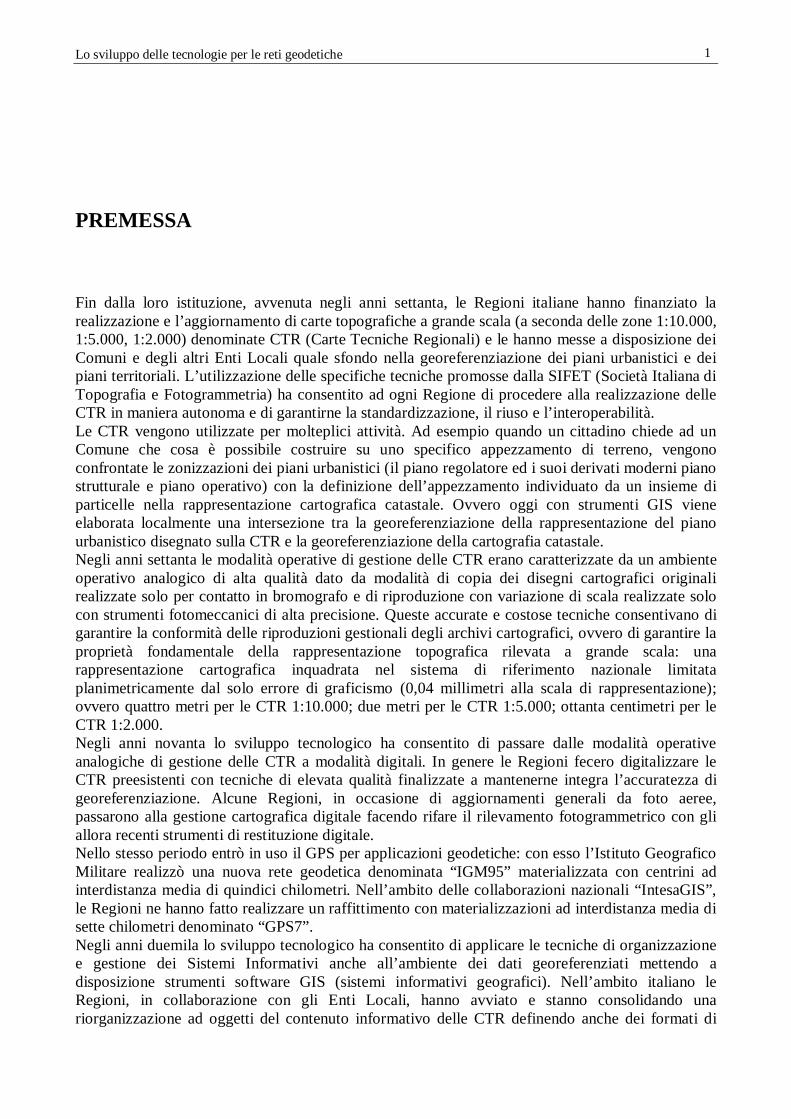
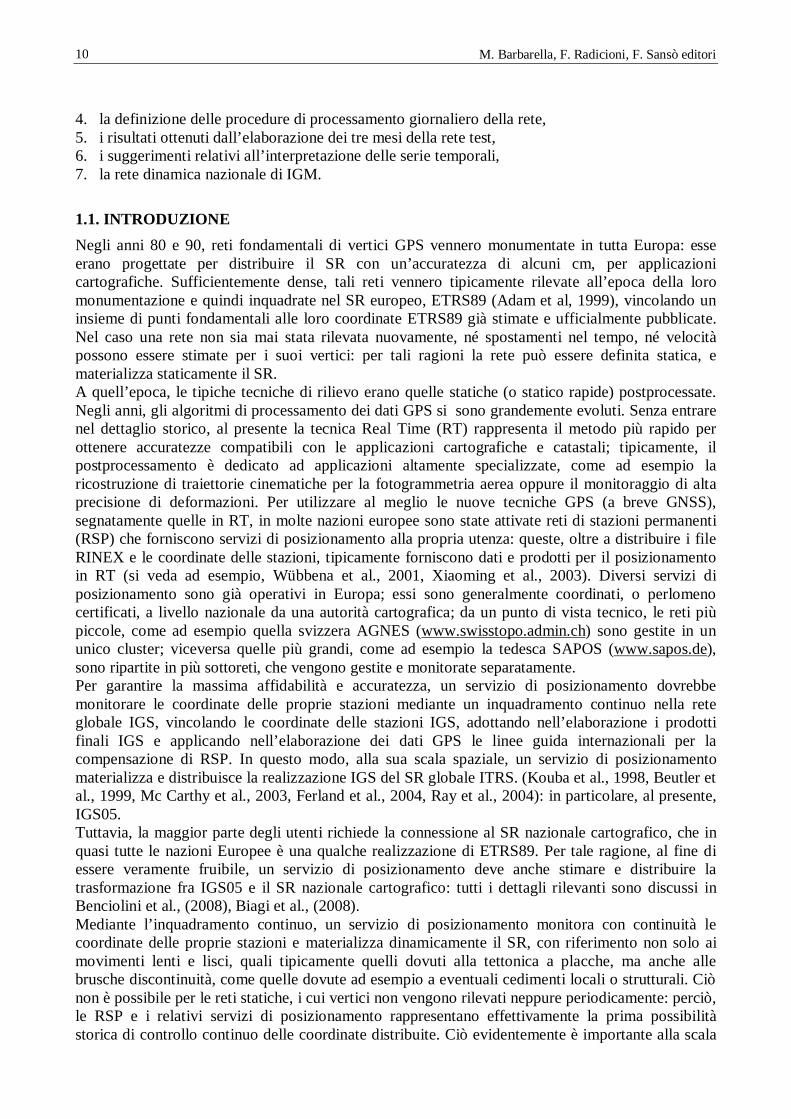
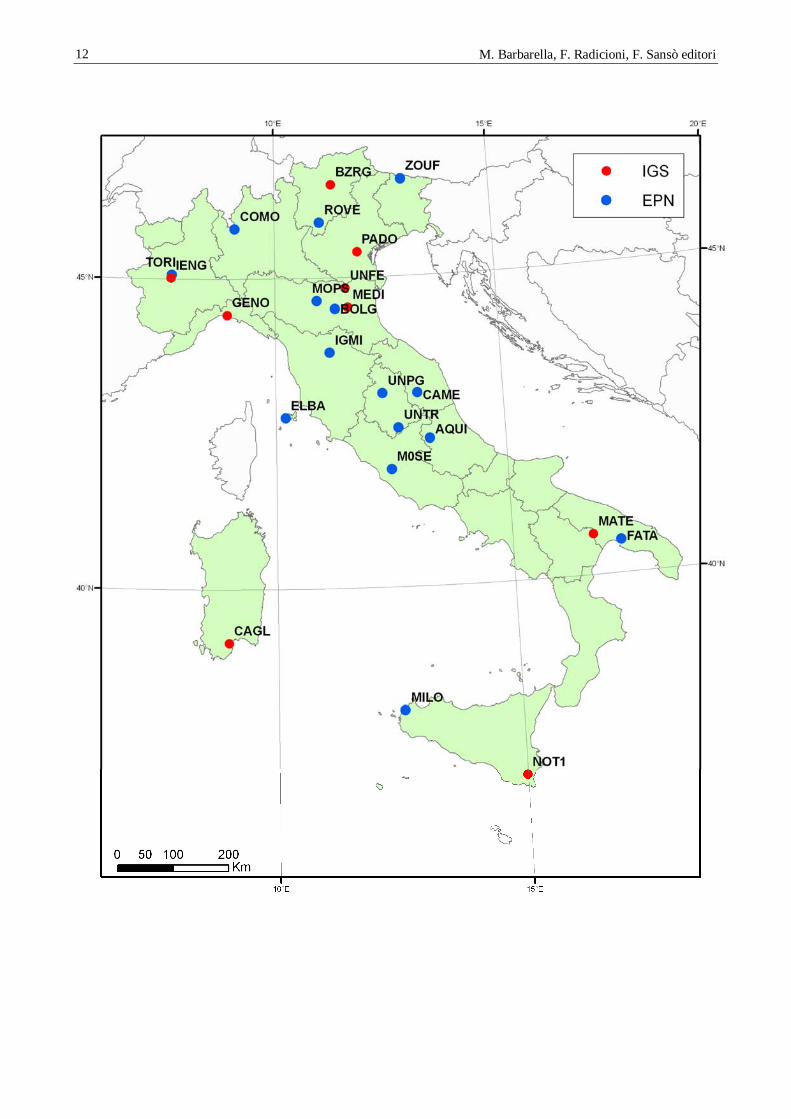
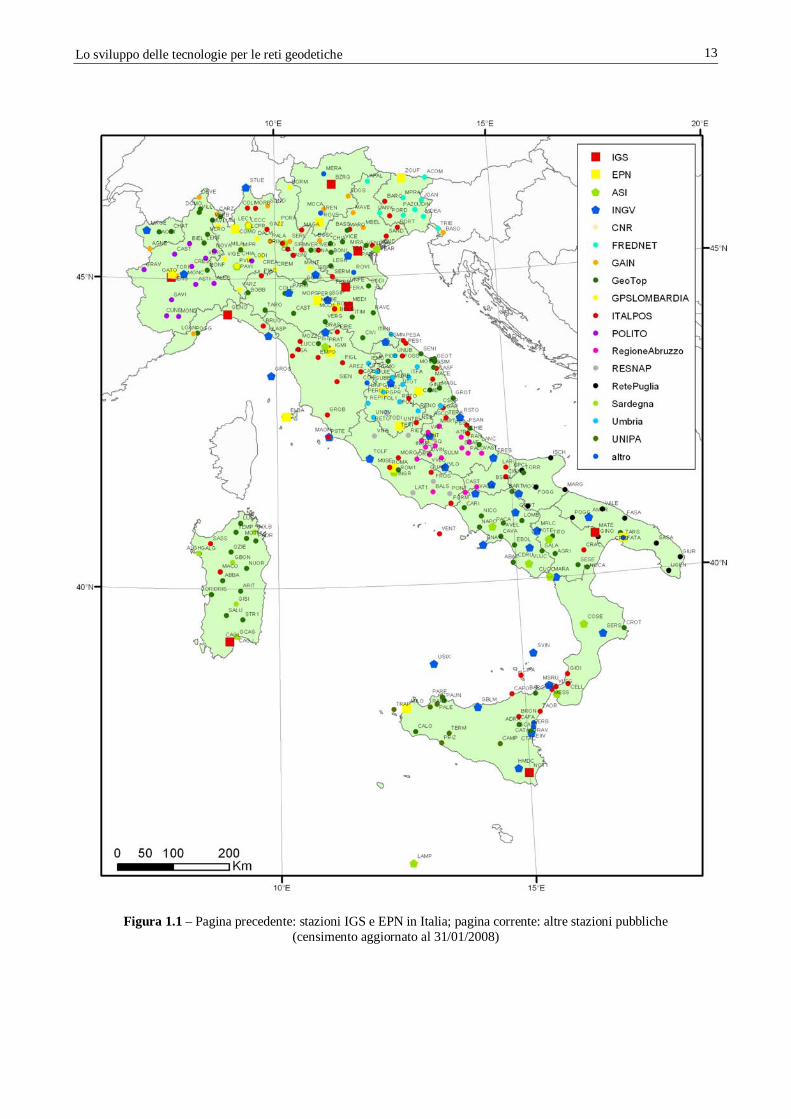
1.2. LA SITUAZIONE ATTUALE IN ITALIA Il SR geodetico ufficiale è ETRF89-IGM95, realizzato mediante una rete statica, inizialmente composta da circa 1250 vertici rilevati negli anni 1992-1994 dall’ Istituto Geografico Militare Italiano (IGM, http://www.igmi.org/, Surace, 1997). Nella compensazione della rete, 9 vertici appartenenti alla rete europea EUREF vennero vincolati alle loro coordinate ETRF89 (epoca t = 1989.0): ETRF89-IGM95 (nel seguito, semplicemente IGM95) è distribuito mediante le monografie dei vertici. Il 34% di essi sono stati rilevati anche mediante livellazione di alta precisione, il 52% coincide o è collegato alla rete storica trigonometrica di primo ordine; ciò permise lo studio del geoide locale e la stima della trasformazione da IGM95 ai vecchi SR nazionali (Roma40 and IGM83). In anni più recenti, nuovi vertici e reti di raffittimento regionali sono state rilevate e ufficialmente inserite in IGM95, che ora si compone di circa 2000 vertici. In ogni caso, ogni aggiornamento di IGM95 è stato fatto mantenendo i vincoli originali e le baseline del primo rilievo: né spostamenti nel tempo, né velocità sono stati stimati o ufficialmente pubblicati per i vertici di IGM95. A causa della differente geodinamica delle regioni italiane, IGM95 è deformato alla scala nazionale: i movimenti differenziali fra Nord e Sud negli anni dal 1989 dovrebbe essere di alcuni centimetri, ma questo non rappresenta il problema principale per applicazioni cartografiche. IGM95 è anche caratterizzato da deformazioni localmente correlate e errori incorrelati sparsi: la deviazione standard è di circa 3 cm in planimetria e di 5 cm in quota; sono però riportati anche errori localizzati maggiori di 10 cm; questi sono dovuti alle tecniche di rilievo e compensazione degli anni ’90, come anche ai movimenti relativi dei vertici negli ultimi 20 anni. Negli ultimi anni, i servizi di posizionamento GNSS si sono sviluppati in Italia, per applicazioni sia in RT sia in post-processamento (Biagi et al., 2006); per motivi amministrativi, sui quali non si discute nel presente documento, e in mancanza di alcun coordinamento nazionale, essi si sono sviluppati alla scala spaziale delle regioni. Ad ora, circa 10 servizi regionali di posizionamento sono ufficialmente operativi e distribuiscono dati e prodotti, ma altri sono in fase di pieno sviluppo. Per quanto a conoscenza degli autori, secondo il censimento condotto a febbraio 2008 in Italia erano operative almeno 350 stazioni permanenti GNSS (Fig. 1, All.1.1); di queste almeno 200 pubblicano liberamente i loro dati; 9 sono inserite nella rete globale IGS e 15 nella rete europea EPN. Alla scala nazionale, le principali RSP finalizzate a riferimento geodetico e monitoraggio geofisico sono Geodaf, gestita dall’Agenzia Spaziale Italiana (ASI, geodaf.mt.asi.it), RING, gestita dall’Istituto Nazionale di Geofisica e Vulcanologia (INGV, ring.gm.ingv.it) e GAIN, gestita dall’Università di Trieste (http://www.alps-gps.units.it/gain-network.php); tre ditte private (Leica Italia, www.italpos.it, Geotop, www.geotop.it, Assogeo, www.assogeo.net) gestiscono altrettante reti, tipicamente per la distribuzione di dati in RT e postprocessamento ai propri clienti. A parte i già citati servizi regionali di posizionamento, le altre stazioni sono gestite in modo indipendente, da enti privati o amministrazioni pubbliche. Nel panorama nazionale, il 57% delle stazioni è monumentato su edificio, il restante 43% direttamente al suolo o su roccia.
M. Barbarella, F. Radicioni, F. Sansò editori
12
Lo sviluppo delle tecnologie per le reti geodetiche
13
Figura 1.1 – Pagina precedente: stazioni IGS e EPN in Italia; pagina corrente: altre stazioni pubbliche (censimento aggiornato al 31/01/2008)
M. Barbarella, F. Radicioni, F. Sansò editori
14
1.3. LA NECESSITÀ DI UNA RETE DI STAZIONI PERMANENTI DI ORDINE ZERO IN ITALIA L’organizzazione su scala regionale dei servizi di posizionamento può sembrare un punto di debolezza ma rappresenta anche un elemento di forza: in principio permette una facile gestione di ogni RSP, una veloce risoluzione di eventuali problemi, una forte interazione di ogni servizio con la sua utenza. Inoltre, servizi contigui possono scambiare dati delle stazioni di confine, in modo da rafforzare la ridondanza di sistema ai bordi. In ogni caso, servizi di posizionamento su scala regionale confinanti tra loro devono garantire la distribuzione di un sistema di riferimento coerente, cosa possibile solo in presenza di un coordinamento a livello nazionale. Ad un primo livello, quindi, questi devono essere compensati e monitorati in una RSP comune di ordine zero a livello nazionale, seguendo un protocollo di elaborazione comune, esattamente come avviene per i centri di analisi di IGS o EPN. Inoltre, una RSP di ordine zero può soddisfare molti altri scopi. Il primo, e il più importante, è supportare la transizione dal vecchio e statico sistema di riferimento nazionale IGM95 ad un nuovo SR, monitorato in modo continuo nel SR globale IRTF, che può fornire serie di coordinate in teoria della massima accuratezza oggi possibile. L’applicazione delle formule di trasformazione internazionali (Boucher, Altamimi, 2007) alle coordinate ITRF permette di ricavare le corrispondenti ETRF, seguendo il medesimo approccio applicato per le SP EPN (www.epncb.oma.be); in più, la disponibilità di serie temporali lunghe può permettere la stima delle velocità ITRF, e quindi della loro trasformazione in velocità ETRF. In questo modo è possibile realizzare una materializzazione cartografica nazionale di ETRS89 con un’accuratezza confrontabile con quella delle RSP europee, eliminando le deformazioni e gli errori di IGM95. Infine, la disponibilità di coordinate e velocità ITRF ed ETRF di una RSP di ordine zero può consentire una stima nazionale della trasformazione tra i due SR, per qualunque epoca: la distribuzione all’utenza di una trasformazione nazionale unica e ufficiale permette di evitare scelte indipendenti a livello locale che tipicamente portano a risultati inconsistenti: a questo proposito recentemente è stata effettuata una verifica in Lombardia e Piemonte (Biagi et al., 2008); l’applicazione dei parametri di trasformazione tra IRTF-IGb00 e IGM95, stimati in modo indipendente per le due regioni, produce discrepanze inaccettabili al confine tra le due regioni, caratterizzate da sistematismi di circa 5 cm in planimetria e 15 cm in altimetria. L’utilizzo delle sole SP IGS per la realizzazione di una RSP zero è impraticabile: al momento le SP IGS (Fig. 1.1) sono molto rade e non omogeneamente distribuite su tutto il territorio nazionale, in modo particolare sulle regioni meridionali. Un raffittimento della rete IGS in Italia sembra possibile ma allo stato attuale non pare previsto: in ogni caso, ovviamente, qualora realizzato sarebbe pianificato per conseguire scopi geodinamici e non per supportare esigenze nazionali. EPN presenta, allo stato attuale, una migliore distribuzione in Italia, ma anche il suo futuro sviluppo sarà basato su altre priorità. In ogni caso, e questo è il problema principale, IGS e EPN non hanno lo scopo di monitorare sottoreti locali. Al contrario, una RSP nazionale di ordine zero può essere progettata seguendo esigenze e priorità a livello nazionale; la sua istituzione deve essere seguita da un gestore che sia in grado di garantire il coordinamento tecnico tra RSP locali e il controllo di coerenza tra le coordinate distribuite. Nel seguito, vengono delineate le regole tecniche e scientifiche che dovrebbero portare alla definizione di una RSP di ordine zero; quindi, come previsto nell’offerta, un primo esperimento numerico di elaborazione di una RSP di test viene descritto. Tale esperimento non ha lo scopo di individuare definitivamente la RSP di ordine zero: la situazione in Italia evolve rapidamente e tal obiettivo avrà senso solo al momento di reale ufficializzazione della RSP di ordine zero; il test serve unicamente a dimostrare che la creazione di una RSP di ordine zero in Italia è già possibile e non richiede quasi alcun costo di monumentazione; gli unici costi sono collegati all’implementazione e al mantenimento del sistema di monitoraggio continuo della rete stessa.
Lo sviluppo delle tecnologie per le reti geodetiche
15
1.4. LINEE GUIDA TECNICHE PER LE STAZIONI PERMANENTI DELLA RETE DI ORDINE ZERO Da un punto di vista generale la rete nazionale di ordine zero dovrebbe: 1. essere composta di stazioni omogeneamente distribuite sul territorio nazionale, con ragionevole
densità; 2. includere le principali stazioni EPN e IGS; 3. includere le stazioni delle principali reti nazionali (ASI, INGV and GAIN); 4. includere alcune (almeno 2) stazioni per ogni servizio di posizionamento regionale; 5. essere composta solo di stazioni i cui dati siano liberamente distribuiti via ftp e/o http; 6. essere composta solo di stazioni le cui agenzie responsabili sottoscrivano linee guida sulla
qualità e consistenza dei dati quali quelle adottate da IGS e EPN. In particolare le SP (Stazioni Permanenti) appartenenti alla rete di ordine zero italiana devono possedere requisiti tecnici adeguati allo standard IGS-EUREF; occorre siano costantemente manutenute da personale in grado di agire tempestivamente in caso di malfunzionamenti hardware e/o software. Le seguenti linee guida si basano largamente sulle specifiche definite da EUREF per accogliere e mantenere una SP nella rete EUREF-EPN. 1.4.1 Ente gestore della SP La SP deve essere gestita da un ente che abbia dimostrato la propria stabilità nel tempo, che possieda le conoscenze tecniche necessarie alla gestione e di avere personale permanente adeguato; in particolare si suggerisce di richiedere una lettera di intenzioni per almeno 5 anni. Ove possibile, si suggerisce di includere SP coordinate in reti permanenti piuttosto che singolarmente gestite. 1.4.2 Referenti della SP E’ necessario che siano specificati due referenti stabili, raggiungibili tramite telefono e mail, che garantiscano la manutenzione della SP e, in caso di variazioni della configurazione della stazione, provvedano a comunicarle al gestore e a modificare il sitelog relativo alla SP. Ogni cambiamento delle persone e/o dei loro riferimenti deve essere comunicato tempestivamente al gestore della rete di ordine zero pena esclusione della SP dalla rete stessa. 1.4.3 Specifiche tecniche relative alle SP Ricevitore:
acquisizione dei segnali GPS di codice e fase sulle frequenze trasmesse; campionamento dei dati ad almeno 1 Hz; capacità di trasferimento simultaneo delle osservazioni a uno o più centri di raccolta ed
elaborazione dati di file RINEX (nel formato Hatanaka e ulteriormente compressi con programmi di compressione UNIX e/o DOS) orari e giornalieri con campionamenti a 30 secondi (il trasferimento dati può essere eseguito in alternativa dal server di controllo della SP) ;
registrazione delle osservabili con cutoff di almeno 5°; massimo errore del segnale temporale del ricevitore: 10-3 secondi; di tipo catalogato in EPN/IGS; capacità di memorizzazione dati per almeno 3 giornate di osservazione;
caratteristiche (auspicabili) opzionali del ricevitore: registrazione delle osservabili anche con cutoff di 0°; acquisizione dei segnali GLONASS di codice e fase sulle frequenze trasmesse; possibilità di tracciare qualsiasi satellite visibile GNSS e eventuali nuove frequenze;
M. Barbarella, F. Radicioni, F. Sansò editori
16
Antenna:
di tipo catalogato in EPN/IGS, con calibrazione assoluta o perlomeno relativa; sia nota la variazione del centro di fase dell’antenna nel file EPN: epn_05.atx; sia in posizione orizzontale e orientata a Nord; eventuali eccentricità devono essere riportate nel site log (calcolate rispetto all’Antenna
Reference Point); preferibile l’impiego di antenna Choke Ring; l’eventuale uso di Radome è accettato se esiste la relativa calibrazione assoluta (antenna +
radome). Altro Hardware presso la SP:
obbligatoriamente gruppo di continuità connesso a tutta la stazione, tale da garantire 3 giornate di autonomia;
opzionalmente orologio atomico esterno connesso al ricevitore; opzionalmente stazione meteo (pressione, temperatura e umidità) con caratteristiche
riportate nel site log e interfacciata al ricevitore in modo che possa registrare le osservazioni e trasferirle ai centri di raccolta (direttamente il ricevitore oppure attraverso il server) Rinex meteo;
opzionalmente altri strumenti per acquisire segnali geofisici: SLR, VLBI. Caratteristiche della monumentazione:
l’antenna deve essere rigidamente connessa alla monumentazione, così da avere movimenti inferiori a 0.1 mm;
la monumentazione deve essere stabile, in accordo agli standard internazionali di stabilità e durabilità a lungo termine;
non devono essere presenti ostruzioni particolarmente importanti sopra i 15° di elevazione, sarebbe auspicabile che non vi fossero al di sotto di questa soglia;
al marker deve essere associato un IERS DOMES NUMBER (http://itrf.ensg.ign.fr/domes_request.php ).
1.4.4 Distribuzione dei dati Si suppone che esista un server (o un gruppo di server), con il compito di scaricare i dati della SP e ridistribuirli. Il server può essere localmente presso la SP: è questo il tipico caso delle SP gestite a livello singolo; in alternativa il server può essere connesso in remoto, tramite porta Ethernet, alla SP: è questo il caso tipico delle reti regionali, che dispongono di un gruppo di server centralizzati presso il centro di controllo per la gestione dell’intera rete. Il server, o il gruppo di server deputati allo scaricamento e alla distribuzione dei dati, devono comunque soddisfare le seguenti caratteristiche:
gestione globale della SP, in particolare del ricevitore; scaricamento dei dati acquisiti dal ricevitore:
periodico, effettuato a posteriori e non in tempo reale, con capacità di recupero di eventuali dati memorizzati ma non ancora scaricati;
backup dei dati, distribuzione dei dati al centro di raccolta della rete di ordine zero, mediante procedure
standard e automatizzabili (ad esempio ftp), in fase iniziale distribuzione dei dati ad ogni mezzanotte, per sessioni di 24 ore decimate a
30 secondi, in seguito possibilità di aggiungere anche una distribuzione oraria, i dati distribuiti devono essere formattati in formato RINEX, compattati nel formato
Hatanaka e ulteriormente compressi con programmi di compressione UNIX e/o DOS),
Lo sviluppo delle tecnologie per le reti geodetiche
17
gli header dei file RINEX devono riportare correttamente i metadati relativi alla SP: a tale riguardo fanno riferimento gli standard IGS e EPN.
Si noti l’importanza di una delle specifiche tecniche sopra elencate: la RSP di ordine zero dovrebbe essere composta solo da stazioni i cui dati RINEX siano scaricati a posteriori dalla memoria dei ricevitori e/o memorizzati nei server e non ricostruiti in tempo reale dagli stream RTCM, in modo da evitare buchi di dati dovuti a problemi di trasmissione. I dati delle SP appartenenti alla rete nazionale di ordine zero dovranno essere pubblici, possibilmente distribuiti tramite un portale web e un server ftp, perlomeno alla decimazione di 30 secondi, come è il caso delle reti internazionali e di quelle nazionali di ASI e INGV; la pubblicazione dei dati naturalmente sarà a cura e a carico dell’autorità che gestirà la rete di ordine zero: gli enti responsabili delle singole SP afferenti alla rete di ordine zero dovranno comunque accettare la libera pubblicazione dei dati. Prima dell’accettazione della SP nella rete di ordine zero, questa sarà testata per un periodo nella sua piena operatività per verificare la qualità dei dati trasferiti, la latenza degli stessi e eventuali altri problemi che intervengano. I referenti saranno avvisati in caso di inconsistenza nei dati o inattività della SP. Nell’eventualità che la SP rimanga inattiva per oltre due mesi senza giustificati e importanti motivi o nel caso in cui si verifichino problemi particolarmente importanti nei dati, quali ad esempio elevati livelli di multipath non eliminabili, la SP verrà esclusa temporaneamente dalla rete per ulteriori tre mesi e poi definitivamente rimossa.
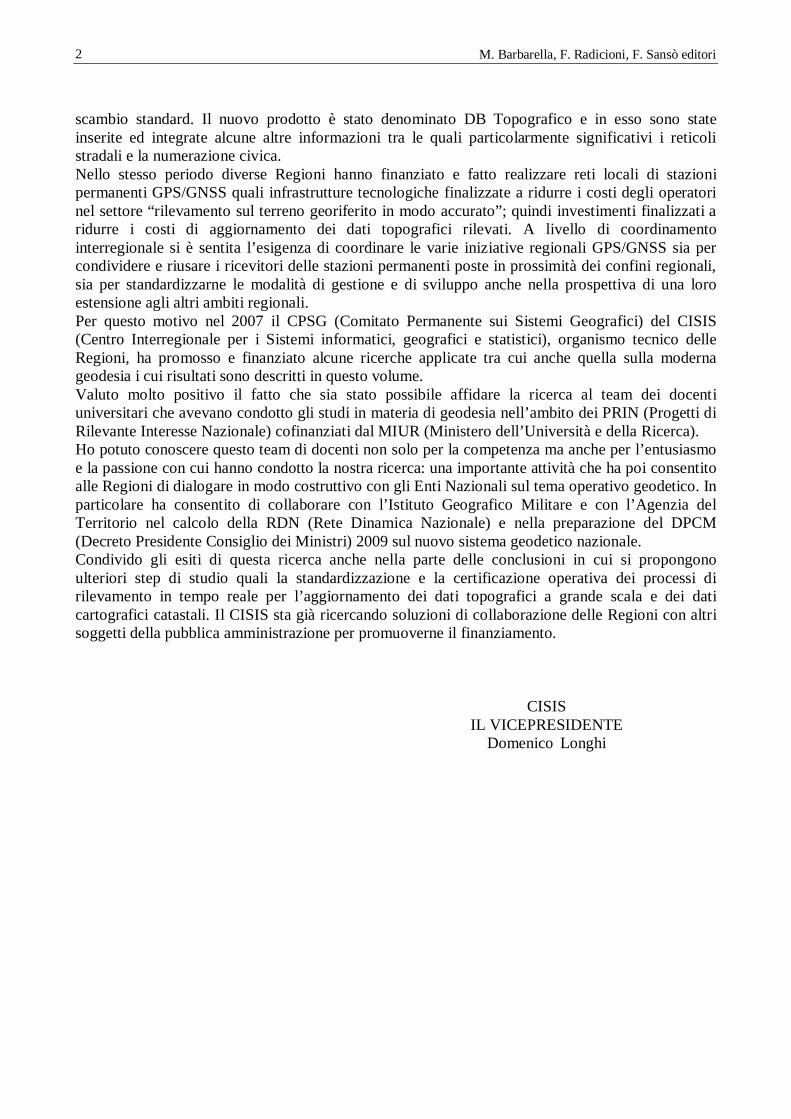
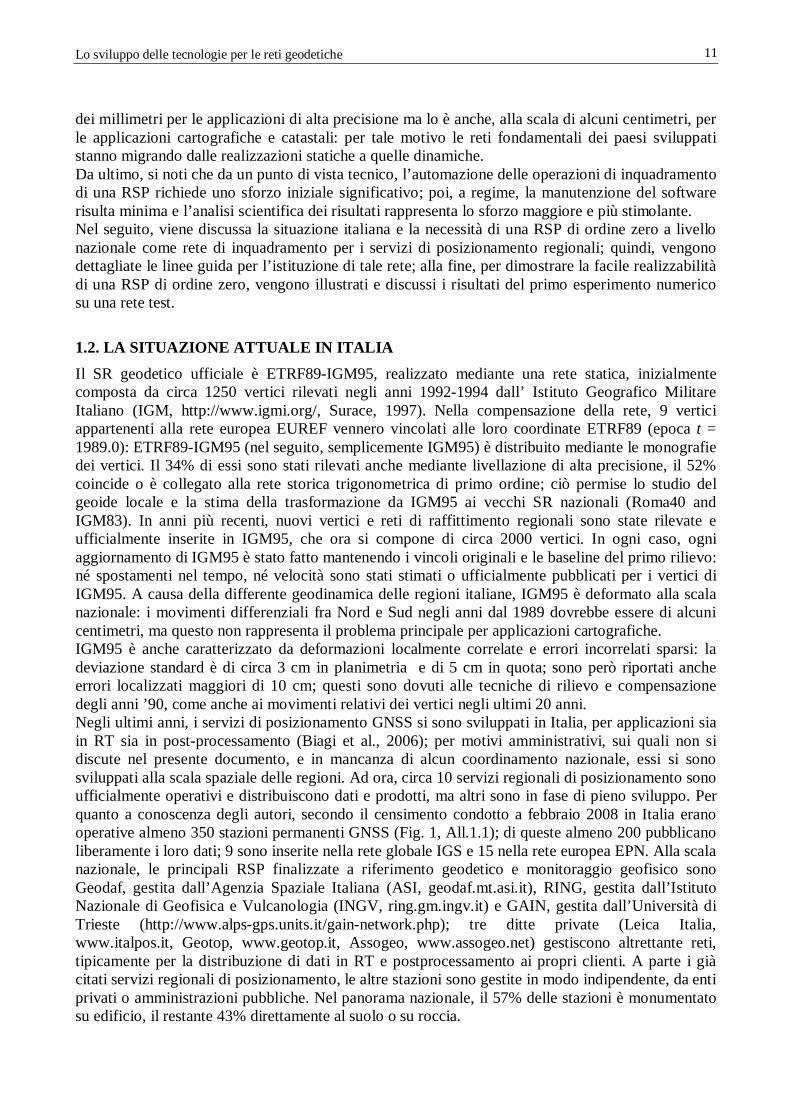
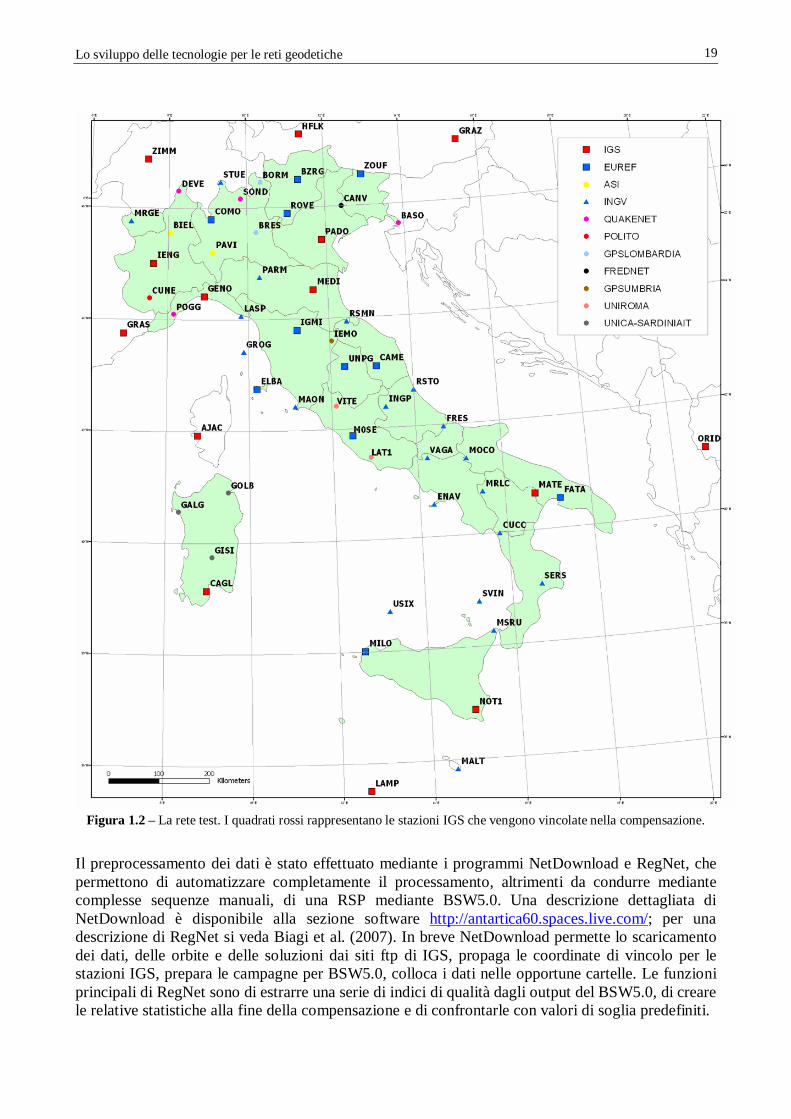
1.5. LA RETE TEST Come accennato, una RSP di ordine zero può essere realizzata in Italia praticamente senza alcuna nuova installazione; per verificare tale aspetto, una rete test, sottoinsieme dell’attuale panorama italiano, è stata selezionata e elaborata. La rete test si compone di 61 stazioni che risultavano già operative all’inizio del 2007, scelte in modo da minimizzare i compromessi con le sopra menzionate linee guida, con una distanza media di circa 100 km (Fig. 2, All.1.2). Di tali stazioni sono stati analizzati i dati dal 1 gennaio 2007 al 31 marzo 2007. Le stazioni IGS e EPN sono state scelte in modo da utilizzare la maggior parte di quelle presenti nel territorio nazionale e quelle principali al di fuori di esso, in accordo a un criterio di distribuzione omogenea; ovviamente, in caso di stazioni gemelle (per esempio CAGL e CAGZ, poste a meno di 3 metri) fra esse è stata selezionata la principale. Nella definizione della rete test sono stati accettati alcuni compromessi rispetto alle linee guida sopra menzionate: in particolare sono state incluse stazioni i cui dati non sono attualmente disponibili via ftp e stazioni i cui file RINEX vengono attualmente ricostruiti dagli stream RTCM. In ogni caso si rammenta che gli entri responsabili di tali stazioni sono pienamente disponibili ad adeguarne le caratteristiche in caso di inclusione in una RSP di ordine zero ufficiale a livello nazionale. La distribuzione spaziale è pienamente soddisfacente al Nord, mentre nelle aree centrale e meridionale della nazione vi sono zone piuttosto deficitarie, dovute all’assenza di stazioni operative all’epoca dell’esperimento: tuttavia, (Fig. 1, All.1.1), la situazione attuale è già differente e un disegno migliore sarebbe ora già possibile, a pochi mesi dal primo test: in ogni caso si ricorda che la rete test selezionata non vuole avere carattere definitivo, ma solo dimostrare che una RSP ragionevolmente ben configurata in Italia era già disponibile a inizio 2007. Allo stato attuale, non appare utile dare un’ipotesi definitiva di rete, poiché la distribuzione di stazioni permanenti è ancora in continua evoluzione sul territorio nazionale; tale ipotesi potrà essere effettuata con rapidità al momento della effettiva istituzione della RSP di ordine zero, seguendo le linee guida indicate nel presente documento.
M. Barbarella, F. Radicioni, F. Sansò editori
18
1.6. L’INQUADRAMENTO DELLA RETE TEST L’analisi routinaria di una RSP nazionale dovrebbe essere condotta in accordo alle seguenti linee guida: 1. inquadramento della RSP nella rete globale IGS e in quella europea EPN; 2. inquadramenti giornalieri indipendenti, condotti con la latenza dei prodotti finali IGS; 3. vincolo stocastico delle stazioni IGS alle loro coordinate pubblicate, con attribuzione di
covarianze realistiche ai vincoli; 4. adozione, senza ulteriore stima, dei prodotti finali IGS: EOP, EPH e PCV; 5. utilizzo di SW scientifico, con adozione delle linee guida IGS e EPN nell’inquadramento; 6. accurata analisi di consistenza e qualità dei dati e dei risultati. Per effettuare l’inquadramento della rete test, sono stati analizzati 3 mesi di dati, dalla settimana GPS 1408 (31 Dicembre 2006) alla settimana GPS 1420 (31 Marzo 2007), in accordo alle suddette strategie, utilizzando il programma Bernese 5.0 (BSW5.0, Dach et al., 2007). Nella presente analisi non si ha ridondanza di risultati, poiché è stata stimata solo una serie temporale; un approccio ottimale viceversa presupporrebbe la stima di più soluzioni in più centri indipendenti, possibilmente con differenti programmi: in tal modo sarebbero possibili il controllo e la validazione reciproca dei relativi risultati. Si noti che la scelta del programma di inquadramento per la rete test non vuole avere carattere prescrittivo: è stato utilizzato il BSW5.0 perchè questo è il programma scientifico adottato dalla grande maggioranza dei centri di analisi europei e usualmente utilizzato presso l’unità che ha fisicamente condotto l’esempio di elaborazione dei dati. Altri programmi scientifici, altrettanto qualificati a livello internazionale (GAMIT, GIPSY, ecc.), sono disponibili: importanti rimangono le linee guida per l’inquadramento e il processamento dei dati, che possono variare da programma a programma ma che, per ogni programma, sono sostanzialmente dettate dalla letteratura scientifica internazionale. In particolare, nel caso del BSW5.0, viene identificata come ottimale la seguente procedura di processamento:
1. acquisizione di EOP, EPH, PCV finali da IGS, 2. interpolazione delle orbite, 3. processamento di codice in singola stazione, per la stima degli orologi, 4. definizione del grafo della rete, mediante costruzione delle singolo differenze, 5. identificazione e stima dei cycle slip di singola differenza, 6. prima stima delle basi mediante soluzione float ionospheric free, 7. fissaggio delle ambiguità mediante metodo QIF, 8. stima finale multibase della rete, mediante soluzione fixed ionospheric free, 9. estrazione di indici di qualità dagli output di BSW5.0, 10. reiezione degli outlier e riprocessamento dei dati accettati.
Lo sviluppo delle tecnologie per le reti geodetiche
19
Figura 1.2 – La rete test. I quadrati rossi rappresentano le stazioni IGS che vengono vincolate nella compensazione.
Il preprocessamento dei dati è stato effettuato mediante i programmi NetDownload e RegNet, che permettono di automatizzare completamente il processamento, altrimenti da condurre mediante complesse sequenze manuali, di una RSP mediante BSW5.0. Una descrizione dettagliata di NetDownload è disponibile alla sezione software http://antartica60.spaces.live.com/; per una descrizione di RegNet si veda Biagi et al. (2007). In breve NetDownload permette lo scaricamento dei dati, delle orbite e delle soluzioni dai siti ftp di IGS, propaga le coordinate di vincolo per le stazioni IGS, prepara le campagne per BSW5.0, colloca i dati nelle opportune cartelle. Le funzioni principali di RegNet sono di estrarre una serie di indici di qualità dagli output del BSW5.0, di creare le relative statistiche alla fine della compensazione e di confrontarle con valori di soglia predefiniti.
M. Barbarella, F. Radicioni, F. Sansò editori
20
Fra gli altri, gli indici e le statistiche che verranno illustrati nel seguito sono: 1. per ogni stazione, il numero di dati presenti e gli eventuali buchi (output della routine
RXOBV3); 2. per ogni stazione, gli RMS dell’elaborazione di codice ionospheric free (CODSPP); 3. per ogni base, il numero di ambiguità iniziali e l’RMS della prima soluzione float (GPSEST, 1o
output); 4. per ogni base, la percentuale di ambiguità fissate e l’RMS di fissaggio (GPSEST, 2o output); 5. per la soluzione finale multibase, l’RMS della soluzione fixed ionospheric free (GPSEST, 3o
output); 6. infine, per ogni stazione, un confronto fra soluzione diurna e regressione lineare su tutte le
soluzioni diurne disponibili. Differenti scelte di elaborazione sono state provate, principalmente collegate al controllo di qualità; ciò ha permesso una prima stima di sensibilità dei parametri stimati rispetto ai suddetti parametri. In particolare, vengono qui discussi i seguenti risultati preliminari: 1. Un primo inquadramento, denominato No Reiezione: come il nome può suggerire, i risultati sono quelli ottenuti dall’inquadramento di tutti i dati scaricati, senza applicare alcun criterio di reiezione di eventuali outlier: questo approccio è stato utilizzato per identificare gli indici di qualità significativi e i possibili livelli di soglia; 2. Nel secondo approccio, denominato Reiezione, un primo criterio di reiezione viene applicato e valutato, in base a confronti con i risultati del primo processo.
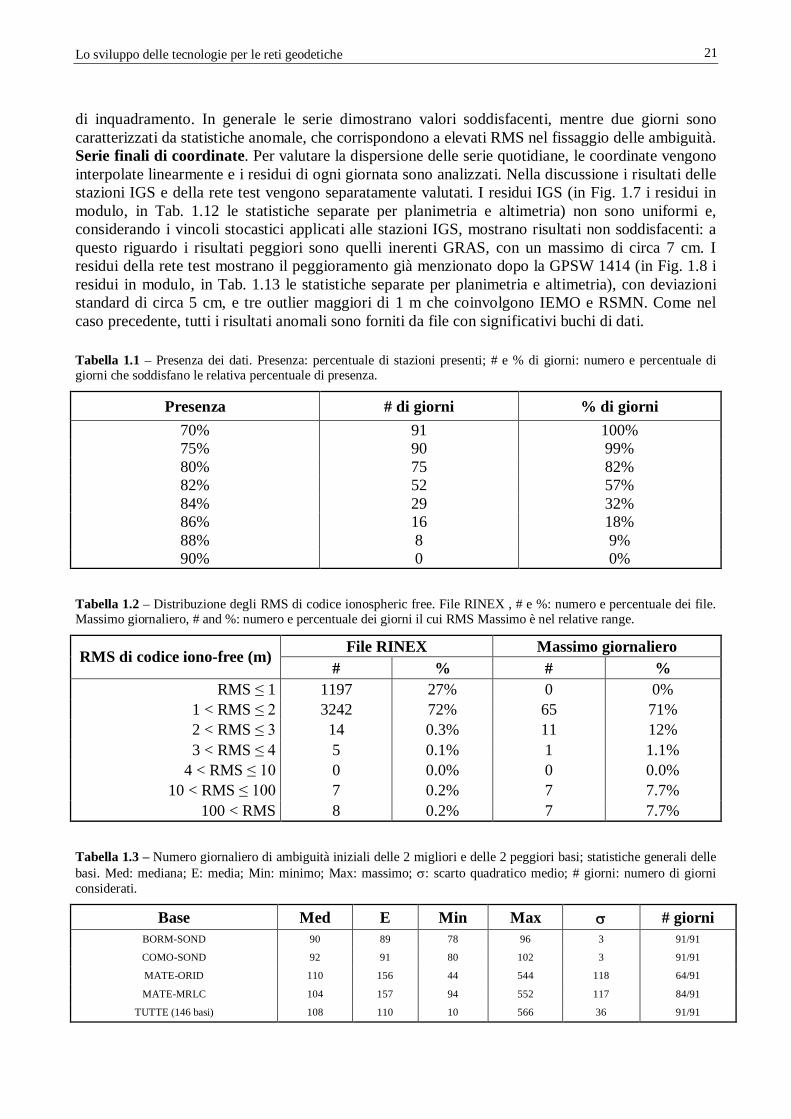
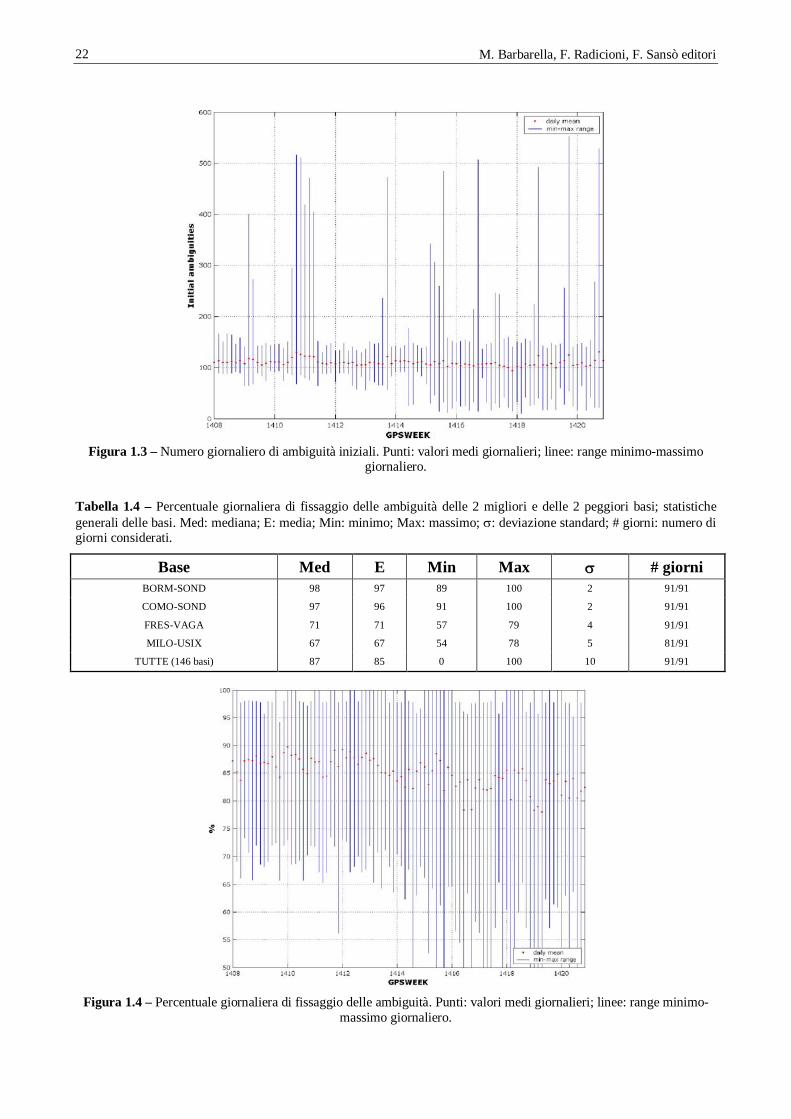
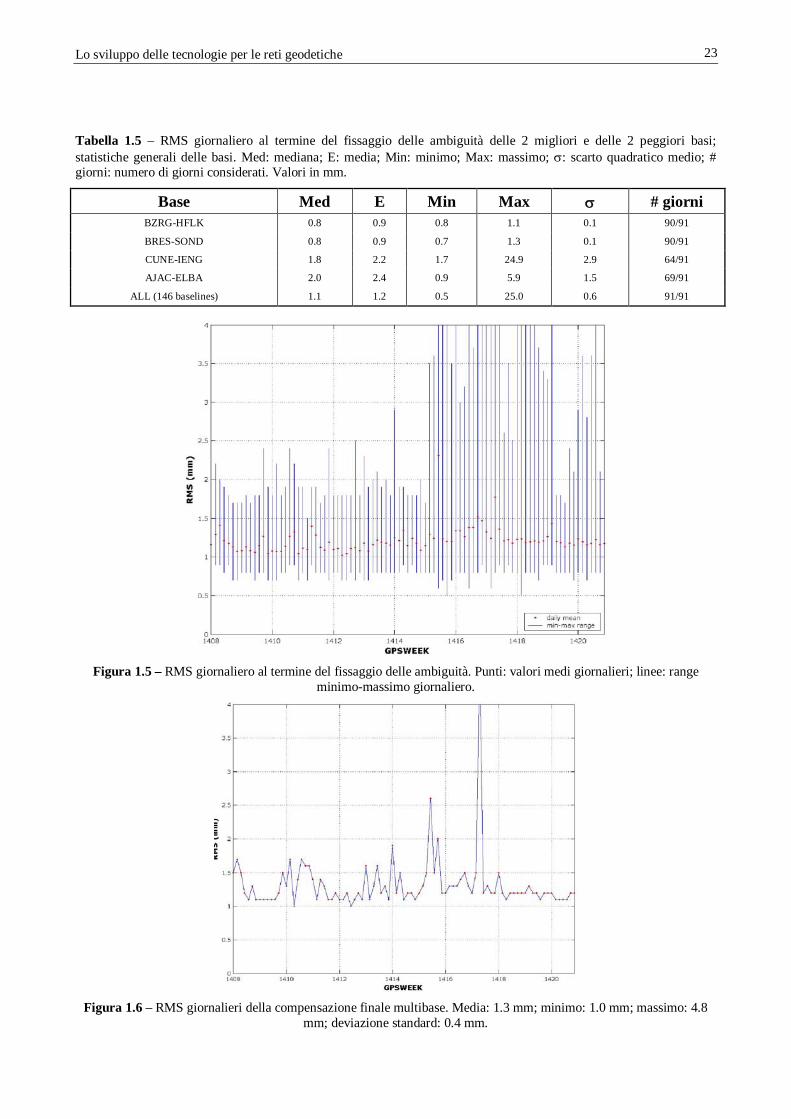
1.6.1. Approccio No reiezione Presenza di dati. La disponibilità di dati (Tab.1.1) è stato il primo indicatore analizzato. Quattro stazioni inizialmente candidate all’inclusione perché ufficialmente esistenti, non hanno reso disponibili i dati per alcuna giornata del periodo considerato: ciò è evidentemente stato causato da un periodo di malfunzionamento delle stazioni o dei relativi server di dati. 80% dei giorni è caratterizzato dalla presenza di almeno 80% delle stazioni; tuttavia, e ciò non è soddisfacente, non vi sono giorni con almeno il 90% delle stazioni. Le assenze di dati sono tipicamente dovute a prolungati problemi di trasmissione e verranno discusse nella sezione 6.2. CODSPP. Per ricevitori moderni, si attendono tipicamente RMS di codice ionospheric free dell’ordine del metro, con piccole variazioni; in genere lavori peggiori sono dovuti a problemi con qualche satellite, effetti locali come il multipath. Solo 15 di circa 4500 file giornalieri RINEX presentano valori realmente anomali, dell’ordine di alcune decine di metri (Tab.1.2): questi problemi vengono discussi nel Cap. 6.2, mentre tutti gli altri valori risultano nella norma. GPSEST, 1o. Il successo nel fissaggio dei cycle slip può essere valutato direttamente dal numero di ambiguità iniziali (Tab.1.3, Fig.1.3); valori elevati possono indicare seri problemi nei dati: per le basi di una rete come questa, un ragionevole livello di soglia pari a 200 può essere scelto. A tale riguardo, nel nostro caso le peggiori basi sono quelli che coinvolgono la stazione MATE: ciò è probabilmente dovuto a qualche problema della stazione nel periodo considerato. I piccoli valori nel periodo successivo alla GPSW 1414 sono dovuti a file incompleti, tipicamente relativi alla stazione IEMO. GPSEST, 2o. la percentuale di successo del processo di fissaggio delle ambiguità (QIF) viene mostrato in Tab. 1.4 e Fig. 1.4. La percentuale media è del 85%, con un significativo peggioramento dopo la GPSW 1414; diversi giorni presentano lo 0% di successo: tipicamente questi sono conseguenza di sessioni incomplete. Anche le serie di RMS di fissaggio (Tab.1.5, Fig.1.5) presentano due periodi chiaramente differenti: il primo è abbastanza buono, anche per le peggiori basi; nella seconda metà, i massimi raggiungono valori veramente mediocri, denotando alcuni problemi di fissaggio, in particolare per la base AJAC-GOLB. GPSEST, 3o. Gli RMS finali (Fig.1.6) forniscono un’idea generale sulla qualità del processo diurno
Lo sviluppo delle tecnologie per le reti geodetiche
21
di inquadramento. In generale le serie dimostrano valori soddisfacenti, mentre due giorni sono caratterizzati da statistiche anomale, che corrispondono a elevati RMS nel fissaggio delle ambiguità. Serie finali di coordinate. Per valutare la dispersione delle serie quotidiane, le coordinate vengono interpolate linearmente e i residui di ogni giornata sono analizzati. Nella discussione i risultati delle stazioni IGS e della rete test vengono separatamente valutati. I residui IGS (in Fig. 1.7 i residui in modulo, in Tab. 1.12 le statistiche separate per planimetria e altimetria) non sono uniformi e, considerando i vincoli stocastici applicati alle stazioni IGS, mostrano risultati non soddisfacenti: a questo riguardo i risultati peggiori sono quelli inerenti GRAS, con un massimo di circa 7 cm. I residui della rete test mostrano il peggioramento già menzionato dopo la GPSW 1414 (in Fig. 1.8 i residui in modulo, in Tab. 1.13 le statistiche separate per planimetria e altimetria), con deviazioni standard di circa 5 cm, e tre outlier maggiori di 1 m che coinvolgono IEMO e RSMN. Come nel caso precedente, tutti i risultati anomali sono forniti da file con significativi buchi di dati. Tabella 1.1 – Presenza dei dati. Presenza: percentuale di stazioni presenti; # e % di giorni: numero e percentuale di giorni che soddisfano le relativa percentuale di presenza.
Presenza # di giorni % di giorni 70% 91 100% 75% 90 99% 80% 75 82% 82% 52 57% 84% 29 32% 86% 16 18% 88% 8 9% 90% 0 0%
Tabella 1.2 – Distribuzione degli RMS di codice ionospheric free. File RINEX , # e %: numero e percentuale dei file. Massimo giornaliero, # and %: numero e percentuale dei giorni il cui RMS Massimo è nel relative range.
File RINEX Massimo giornaliero RMS di codice iono-free (m) # % # %
RMS ≤ 1 1197 27% 0 0% 1 < RMS ≤ 2 3242 72% 65 71% 2 < RMS ≤ 3 14 0.3% 11 12% 3 < RMS ≤ 4 5 0.1% 1 1.1%
4 < RMS ≤ 10 0 0.0% 0 0.0% 10 < RMS ≤ 100 7 0.2% 7 7.7%
100 < RMS 8 0.2% 7 7.7%
Tabella 1.3 – Numero giornaliero di ambiguità iniziali delle 2 migliori e delle 2 peggiori basi; statistiche generali delle basi. Med: mediana; E: media; Min: minimo; Max: massimo; : scarto quadratico medio; # giorni: numero di giorni considerati.
Base Med E Min Max # giorni BORM-SOND 90 89 78 96 3 91/91
COMO-SOND 92 91 80 102 3 91/91
MATE-ORID 110 156 44 544 118 64/91
MATE-MRLC 104 157 94 552 117 84/91
TUTTE (146 basi) 108 110 10 566 36 91/91
M. Barbarella, F. Radicioni, F. Sansò editori
22
Figura 1.3 – Numero giornaliero di ambiguità iniziali. Punti: valori medi giornalieri; linee: range minimo-massimo
giornaliero.
Tabella 1.4 – Percentuale giornaliera di fissaggio delle ambiguità delle 2 migliori e delle 2 peggiori basi; statistiche generali delle basi. Med: mediana; E: media; Min: minimo; Max: massimo; : deviazione standard; # giorni: numero di giorni considerati.
Base Med E Min Max # giorni BORM-SOND 98 97 89 100 2 91/91
COMO-SOND 97 96 91 100 2 91/91
FRES-VAGA 71 71 57 79 4 91/91
MILO-USIX 67 67 54 78 5 81/91
TUTTE (146 basi) 87 85 0 100 10 91/91
Figura 1.4 – Percentuale giornaliera di fissaggio delle ambiguità. Punti: valori medi giornalieri; linee: range minimo-
massimo giornaliero.
Lo sviluppo delle tecnologie per le reti geodetiche
23
Tabella 1.5 – RMS giornaliero al termine del fissaggio delle ambiguità delle 2 migliori e delle 2 peggiori basi; statistiche generali delle basi. Med: mediana; E: media; Min: minimo; Max: massimo; : scarto quadratico medio; # giorni: numero di giorni considerati. Valori in mm.
Base Med E Min Max # giorni BZRG-HFLK 0.8 0.9 0.8 1.1 0.1 90/91
BRES-SOND 0.8 0.9 0.7 1.3 0.1 90/91
CUNE-IENG 1.8 2.2 1.7 24.9 2.9 64/91
AJAC-ELBA 2.0 2.4 0.9 5.9 1.5 69/91
ALL (146 baselines) 1.1 1.2 0.5 25.0 0.6 91/91
Figura 1.5 – RMS giornaliero al termine del fissaggio delle ambiguità. Punti: valori medi giornalieri; linee: range
minimo-massimo giornaliero.
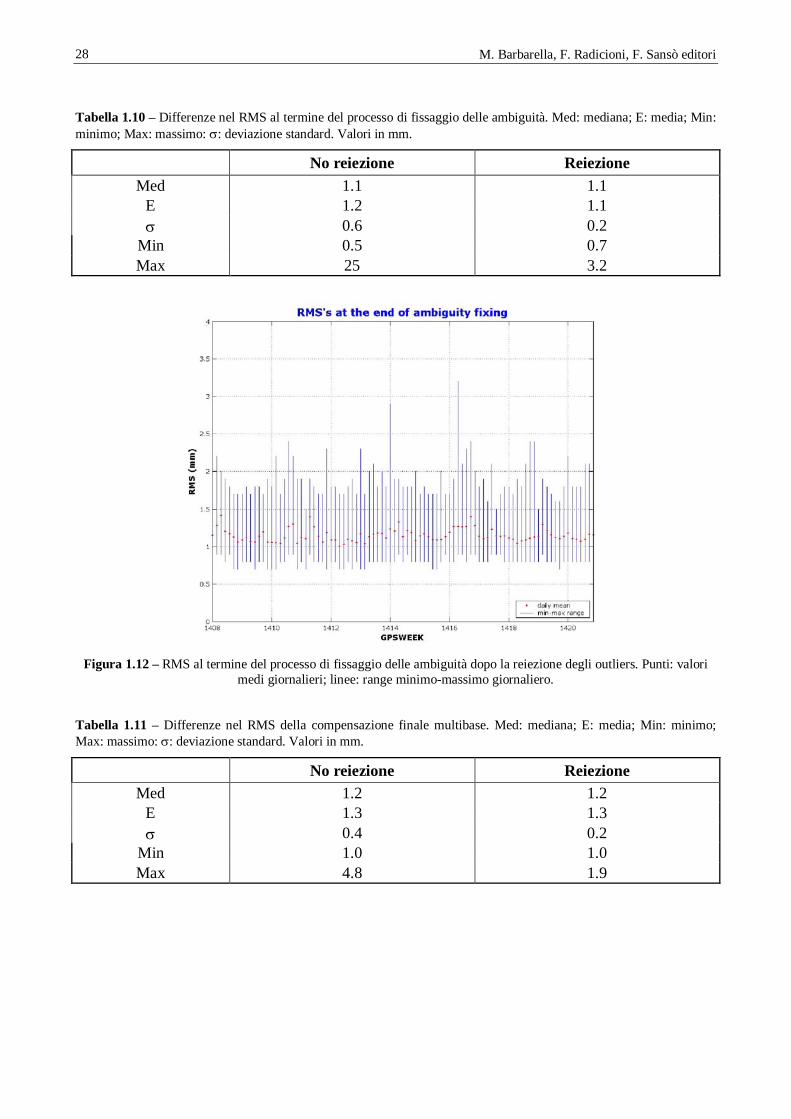
Figura 1.6 – RMS giornalieri della compensazione finale multibase. Media: 1.3 mm; minimo: 1.0 mm; massimo: 4.8
mm; deviazione standard: 0.4 mm.
M. Barbarella, F. Radicioni, F. Sansò editori
24
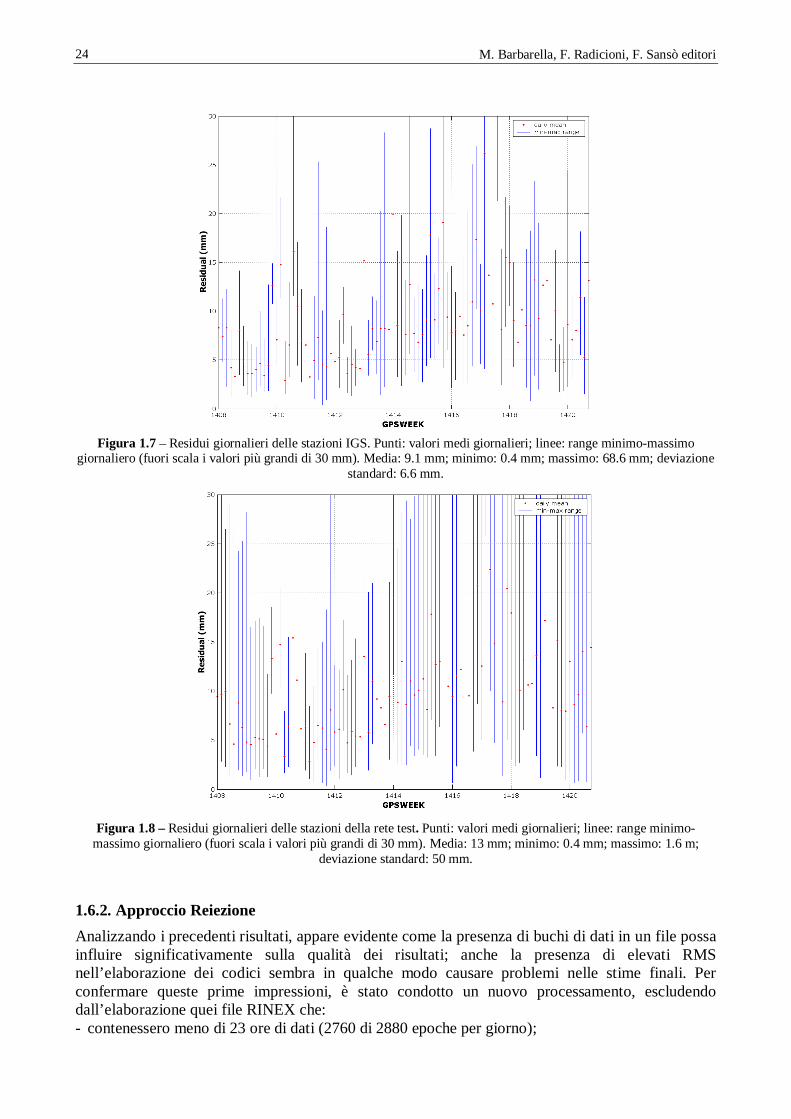
Figura 1.7 – Residui giornalieri delle stazioni IGS. Punti: valori medi giornalieri; linee: range minimo-massimo
giornaliero (fuori scala i valori più grandi di 30 mm). Media: 9.1 mm; minimo: 0.4 mm; massimo: 68.6 mm; deviazione standard: 6.6 mm.
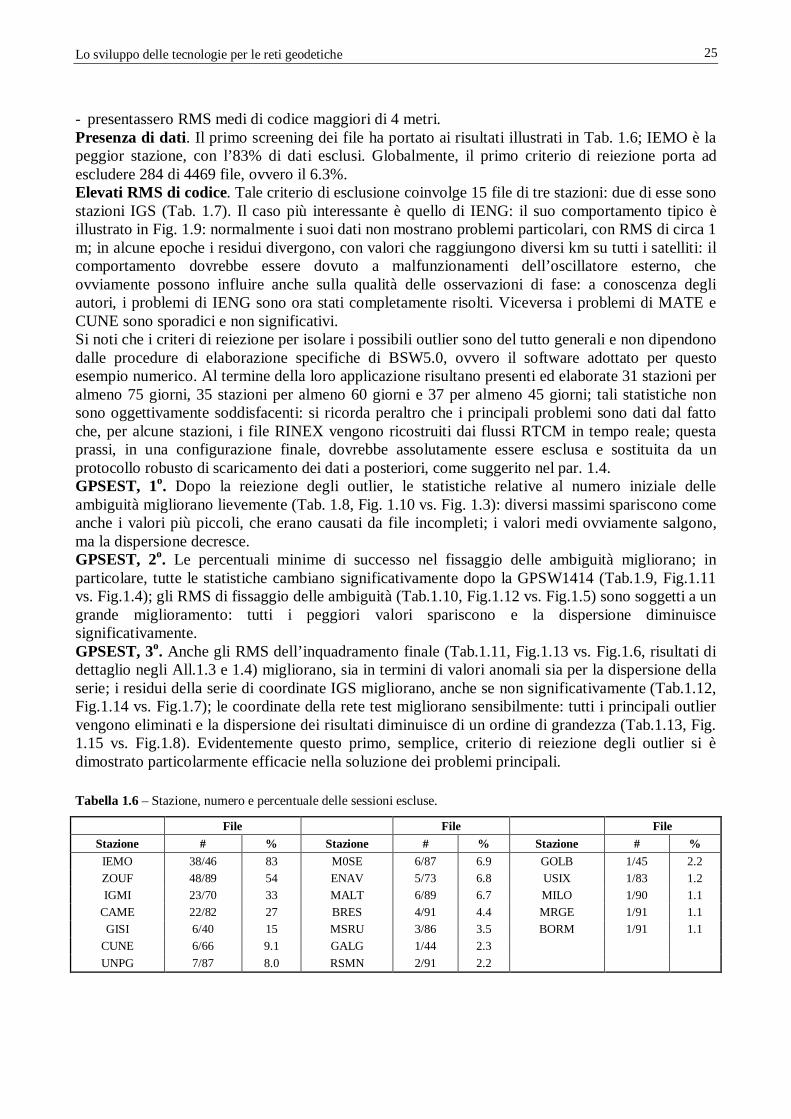
Figura 1.8 – Residui giornalieri delle stazioni della rete test. Punti: valori medi giornalieri; linee: range minimo-
massimo giornaliero (fuori scala i valori più grandi di 30 mm). Media: 13 mm; minimo: 0.4 mm; massimo: 1.6 m; deviazione standard: 50 mm.
1.6.2. Approccio Reiezione Analizzando i precedenti risultati, appare evidente come la presenza di buchi di dati in un file possa influire significativamente sulla qualità dei risultati; anche la presenza di elevati RMS nell’elaborazione dei codici sembra in qualche modo causare problemi nelle stime finali. Per confermare queste prime impressioni, è stato condotto un nuovo processamento, escludendo dall’elaborazione quei file RINEX che: - contenessero meno di 23 ore di dati (2760 di 2880 epoche per giorno);
Lo sviluppo delle tecnologie per le reti geodetiche
25
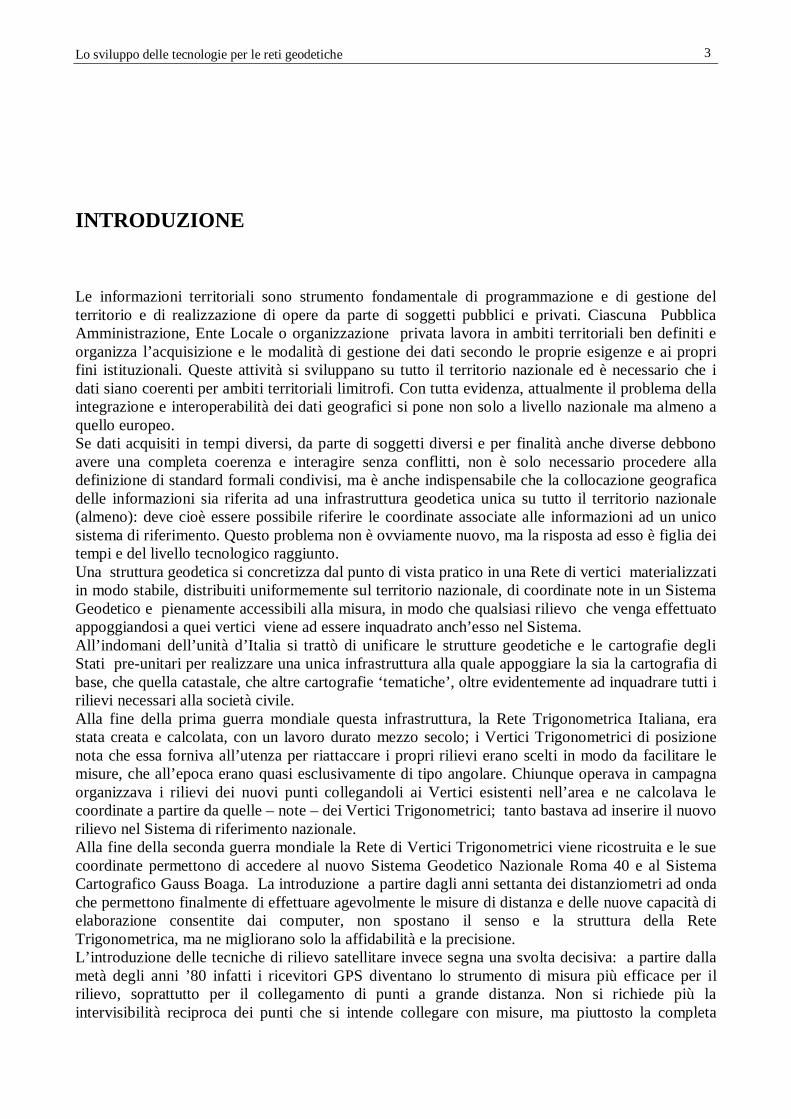
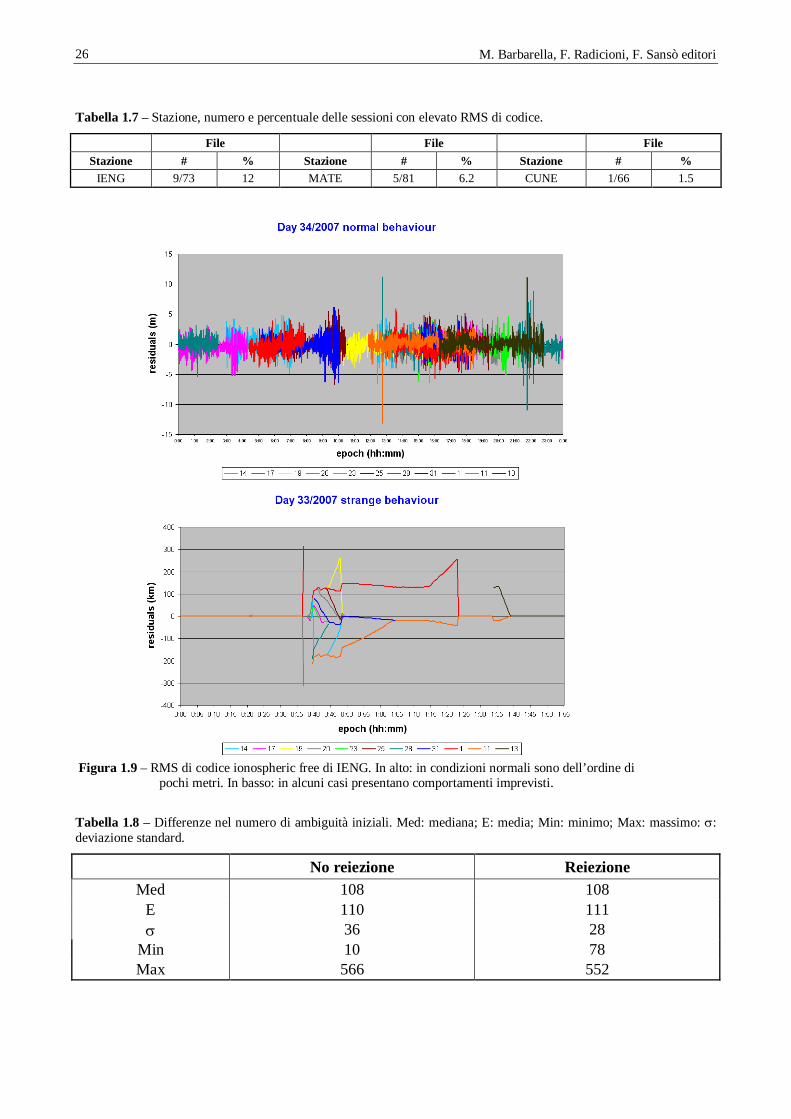
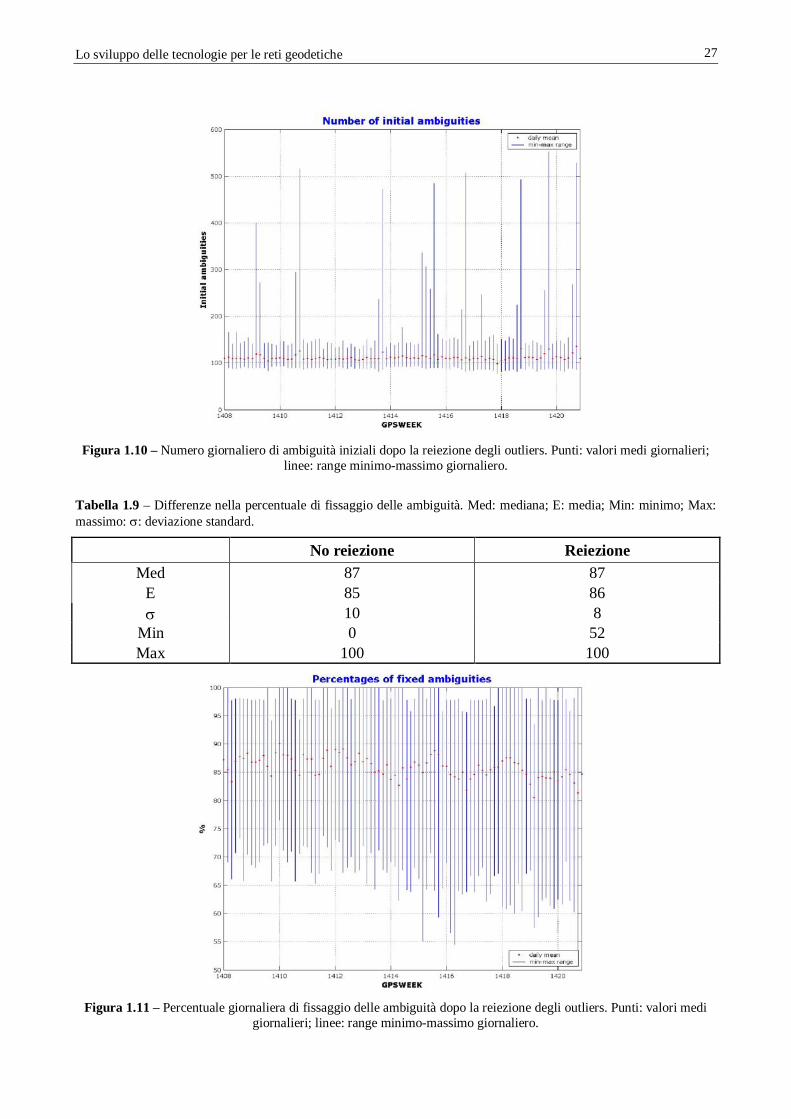
- presentassero RMS medi di codice maggiori di 4 metri. Presenza di dati. Il primo screening dei file ha portato ai risultati illustrati in Tab. 1.6; IEMO è la peggior stazione, con l’83% di dati esclusi. Globalmente, il primo criterio di reiezione porta ad escludere 284 di 4469 file, ovvero il 6.3%. Elevati RMS di codice. Tale criterio di esclusione coinvolge 15 file di tre stazioni: due di esse sono stazioni IGS (Tab. 1.7). Il caso più interessante è quello di IENG: il suo comportamento tipico è illustrato in Fig. 1.9: normalmente i suoi dati non mostrano problemi particolari, con RMS di circa 1 m; in alcune epoche i residui divergono, con valori che raggiungono diversi km su tutti i satelliti: il comportamento dovrebbe essere dovuto a malfunzionamenti dell’oscillatore esterno, che ovviamente possono influire anche sulla qualità delle osservazioni di fase: a conoscenza degli autori, i problemi di IENG sono ora stati completamente risolti. Viceversa i problemi di MATE e CUNE sono sporadici e non significativi. Si noti che i criteri di reiezione per isolare i possibili outlier sono del tutto generali e non dipendono dalle procedure di elaborazione specifiche di BSW5.0, ovvero il software adottato per questo esempio numerico. Al termine della loro applicazione risultano presenti ed elaborate 31 stazioni per almeno 75 giorni, 35 stazioni per almeno 60 giorni e 37 per almeno 45 giorni; tali statistiche non sono oggettivamente soddisfacenti: si ricorda peraltro che i principali problemi sono dati dal fatto che, per alcune stazioni, i file RINEX vengono ricostruiti dai flussi RTCM in tempo reale; questa prassi, in una configurazione finale, dovrebbe assolutamente essere esclusa e sostituita da un protocollo robusto di scaricamento dei dati a posteriori, come suggerito nel par. 1.4. GPSEST, 1o. Dopo la reiezione degli outlier, le statistiche relative al numero iniziale delle ambiguità migliorano lievemente (Tab. 1.8, Fig. 1.10 vs. Fig. 1.3): diversi massimi spariscono come anche i valori più piccoli, che erano causati da file incompleti; i valori medi ovviamente salgono, ma la dispersione decresce. GPSEST, 2o. Le percentuali minime di successo nel fissaggio delle ambiguità migliorano; in particolare, tutte le statistiche cambiano significativamente dopo la GPSW1414 (Tab.1.9, Fig.1.11 vs. Fig.1.4); gli RMS di fissaggio delle ambiguità (Tab.1.10, Fig.1.12 vs. Fig.1.5) sono soggetti a un grande miglioramento: tutti i peggiori valori spariscono e la dispersione diminuisce significativamente. GPSEST, 3o. Anche gli RMS dell’inquadramento finale (Tab.1.11, Fig.1.13 vs. Fig.1.6, risultati di dettaglio negli All.1.3 e 1.4) migliorano, sia in termini di valori anomali sia per la dispersione della serie; i residui della serie di coordinate IGS migliorano, anche se non significativamente (Tab.1.12, Fig.1.14 vs. Fig.1.7); le coordinate della rete test migliorano sensibilmente: tutti i principali outlier vengono eliminati e la dispersione dei risultati diminuisce di un ordine di grandezza (Tab.1.13, Fig. 1.15 vs. Fig.1.8). Evidentemente questo primo, semplice, criterio di reiezione degli outlier si è dimostrato particolarmente efficacie nella soluzione dei problemi principali. Tabella 1.6 – Stazione, numero e percentuale delle sessioni escluse.
File File File Stazione # % Stazione # % Stazione # %
IEMO 38/46 83 M0SE 6/87 6.9 GOLB 1/45 2.2 ZOUF 48/89 54 ENAV 5/73 6.8 USIX 1/83 1.2 IGMI 23/70 33 MALT 6/89 6.7 MILO 1/90 1.1
CAME 22/82 27 BRES 4/91 4.4 MRGE 1/91 1.1 GISI 6/40 15 MSRU 3/86 3.5 BORM 1/91 1.1
CUNE 6/66 9.1 GALG 1/44 2.3 UNPG 7/87 8.0 RSMN 2/91 2.2
M. Barbarella, F. Radicioni, F. Sansò editori
26
Tabella 1.7 – Stazione, numero e percentuale delle sessioni con elevato RMS di codice.
File File File Stazione # % Stazione # % Stazione # %
IENG 9/73 12 MATE 5/81 6.2 CUNE 1/66 1.5
Figura 1.9 – RMS di codice ionospheric free di IENG. In alto: in condizioni normali sono dell’ordine di
pochi metri. In basso: in alcuni casi presentano comportamenti imprevisti. Tabella 1.8 – Differenze nel numero di ambiguità iniziali. Med: mediana; E: media; Min: minimo; Max: massimo: : deviazione standard.
No reiezione Reiezione Med 108 108
E 110 111 36 28
Min 10 78 Max 566 552
Lo sviluppo delle tecnologie per le reti geodetiche
27
Figura 1.10 – Numero giornaliero di ambiguità iniziali dopo la reiezione degli outliers. Punti: valori medi giornalieri;
linee: range minimo-massimo giornaliero.
Tabella 1.9 – Differenze nella percentuale di fissaggio delle ambiguità. Med: mediana; E: media; Min: minimo; Max: massimo: : deviazione standard.
No reiezione Reiezione Med 87 87
E 85 86 10 8
Min 0 52 Max 100 100
Figura 1.11 – Percentuale giornaliera di fissaggio delle ambiguità dopo la reiezione degli outliers. Punti: valori medi
giornalieri; linee: range minimo-massimo giornaliero.
M. Barbarella, F. Radicioni, F. Sansò editori
28
Tabella 1.10 – Differenze nel RMS al termine del processo di fissaggio delle ambiguità. Med: mediana; E: media; Min: minimo; Max: massimo: : deviazione standard. Valori in mm.
No reiezione Reiezione Med 1.1 1.1
E 1.2 1.1 0.6 0.2
Min 0.5 0.7 Max 25 3.2
Figura 1.12 – RMS al termine del processo di fissaggio delle ambiguità dopo la reiezione degli outliers. Punti: valori
medi giornalieri; linee: range minimo-massimo giornaliero.
Tabella 1.11 – Differenze nel RMS della compensazione finale multibase. Med: mediana; E: media; Min: minimo; Max: massimo: : deviazione standard. Valori in mm.
No reiezione Reiezione Med 1.2 1.2
E 1.3 1.3 0.4 0.2
Min 1.0 1.0 Max 4.8 1.9
Lo sviluppo delle tecnologie per le reti geodetiche
29
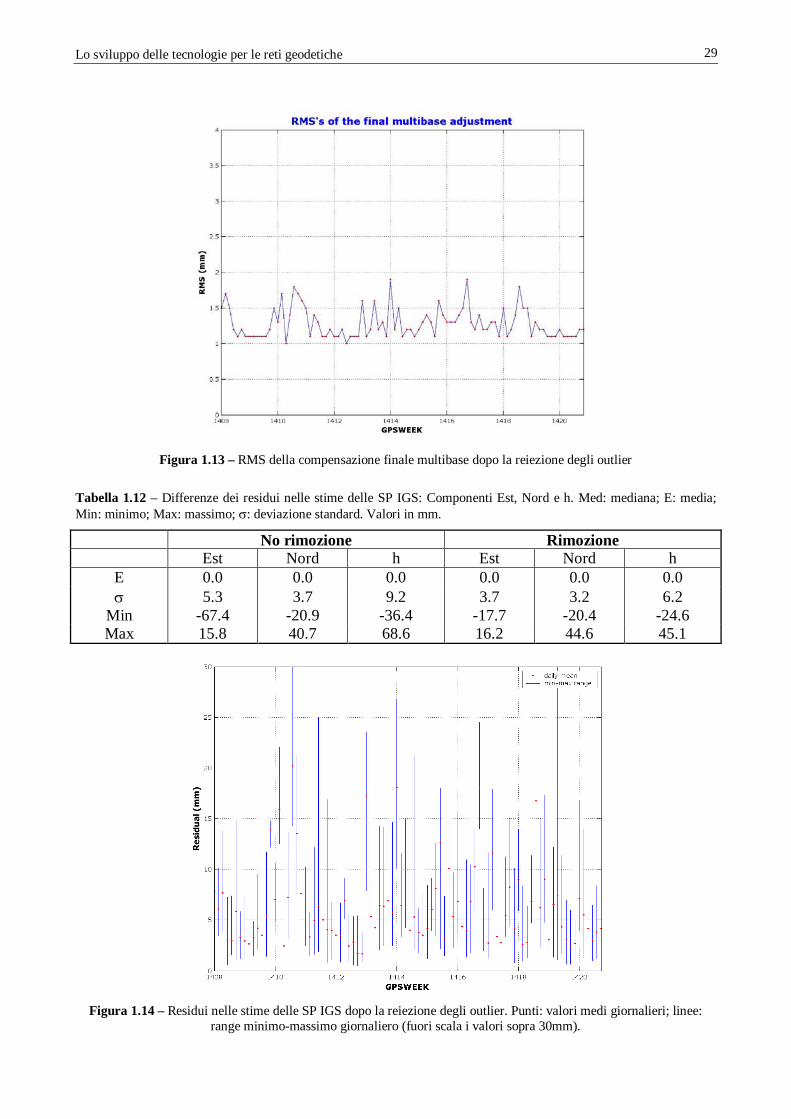
Figura 1.13 – RMS della compensazione finale multibase dopo la reiezione degli outlier
Tabella 1.12 – Differenze dei residui nelle stime delle SP IGS: Componenti Est, Nord e h. Med: mediana; E: media; Min: minimo; Max: massimo; : deviazione standard. Valori in mm.
No rimozione Rimozione Est Nord h Est Nord h
E 0.0 0.0 0.0 0.0 0.0 0.0 5.3 3.7 9.2 3.7 3.2 6.2
Min -67.4 -20.9 -36.4 -17.7 -20.4 -24.6 Max 15.8 40.7 68.6 16.2 44.6 45.1
Figura 1.14 – Residui nelle stime delle SP IGS dopo la reiezione degli outlier. Punti: valori medi giornalieri; linee:
range minimo-massimo giornaliero (fuori scala i valori sopra 30mm).
M. Barbarella, F. Radicioni, F. Sansò editori
30
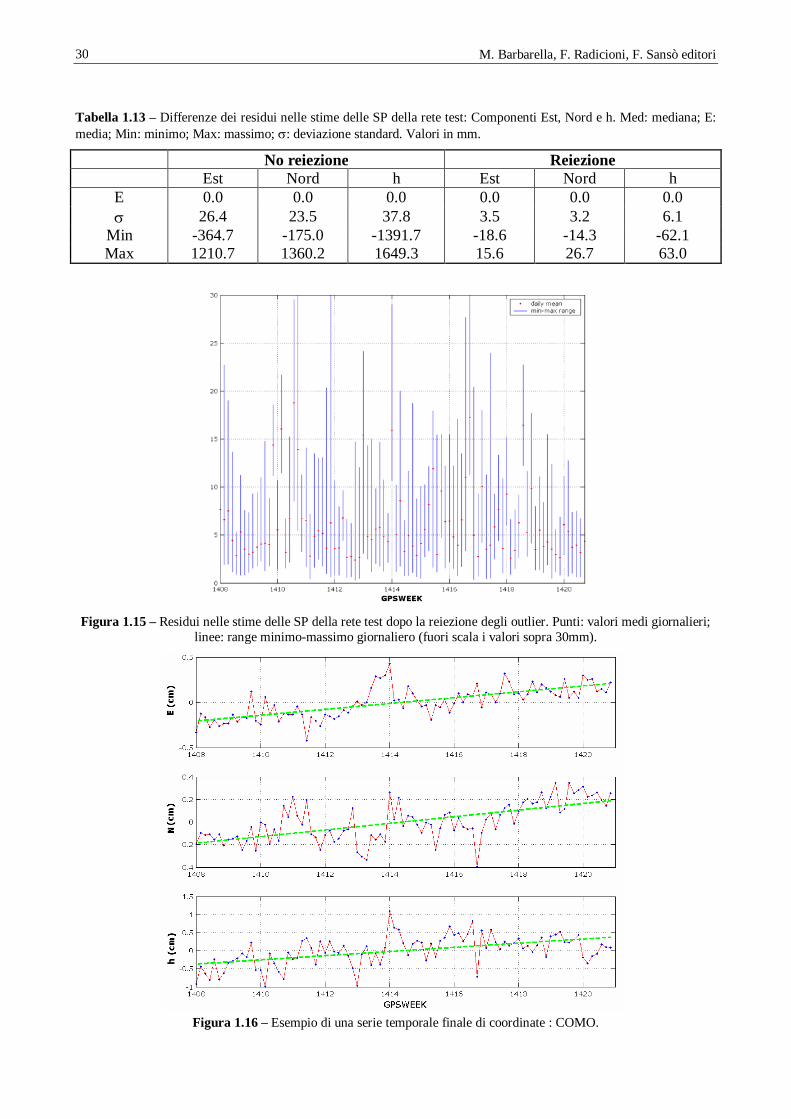
Tabella 1.13 – Differenze dei residui nelle stime delle SP della rete test: Componenti Est, Nord e h. Med: mediana; E: media; Min: minimo; Max: massimo; : deviazione standard. Valori in mm.
No reiezione Reiezione Est Nord h Est Nord h
E 0.0 0.0 0.0 0.0 0.0 0.0 26.4 23.5 37.8 3.5 3.2 6.1
Min -364.7 -175.0 -1391.7 -18.6 -14.3 -62.1 Max 1210.7 1360.2 1649.3 15.6 26.7 63.0
Figura 1.15 – Residui nelle stime delle SP della rete test dopo la reiezione degli outlier. Punti: valori medi giornalieri;
linee: range minimo-massimo giornaliero (fuori scala i valori sopra 30mm).
Figura 1.16 – Esempio di una serie temporale finale di coordinate : COMO.
Lo sviluppo delle tecnologie per le reti geodetiche
31
1.7. CONSIDERAZIONI SULL’ESPERIMENTO DELLA RETE TEST Nel contesto italiano, l’istituzione di una RSP di ordine zero è necessaria per permettere un inquadramento comune di tutti i servizi di posizionamento che stanno nascendo alla scala spaziale delle Regioni; la RSP di ordine zero permetterebbe inoltre la realizzazione di un sistema di riferimento dinamico per il monitoraggio geodetico in Italia e la transizione del sistema di riferimento cartografico dalla realizzazione statica IGM95 a quella EPN corrente. La realizzazione di una RSP di ordine zero implicherebbe costi minimi, giacché si potrebbero pienamente utilizzare le stazioni già esistenti in Italia, pur adottando alcuni adeguamenti tecnici per alcune di esse. Per dare una verifica operativa di questo fatto, si è effettuato un test numerico, selezionando e processando per i primi tre mesi del 2007 una rete test. Si noti che la rete test selezionata voleva solo dimostrare che una RSP ragionevolmente ben configurata in Italia era già disponibile a inizio 2007 e che il suo inquadramento era un’operazione fattibile con ragionevoli sforzi: oggi, con gli ulteriori sviluppi, si può definire un disegno ancora migliore per quanto riguarda le regioni centrali e meridionali. Anche la scelta del programma di inquadramento per la rete test non aveva carattere ultimativo: è stato utilizzato il BSW5.0 perchè questo è il programma scientifico adottato dalla grande maggioranza dei centri di analisi europei e disponibile presso l’unità di ricerca che ha fisicamente condotto l’elaborazione dei dati. Altri programmi scientifici, altrettanto qualificati a livello internazionale, sono disponibili: importanti rimangono le linee guida per l’inquadramento e il processamento dei dati, dettate sostanzialmente dalla letteratura scientifica internazionale. Si sono evidenziati alcuni problemi nel controllo di qualità dei dati; in particolare, sono presenti significative assenze di file o buchi nei dati dei file presenti. Quasi tutti questi problemi discendono dalla consuetudine di ricostruire i file RINEX dai flussi RTCM in tempo reale: ovviamente tale pratica dovrebbe costituire criterio di esclusione nella configurazione finale della RPS: d’altro canto questo problema costituisce l’unico requisito maggiore di upgrade per le stazioni che vogliano entrare nella rete. Un primo esempio di automazione del processamento dei dati, comprensivo di un semplice criterio di reiezione degli outlier, è stato discusso: nella sua semplicità tale approccio, ha effettivamente permesso significativi miglioramenti dei risultati. Nei prossimi mesi verranno condotti ulteriori test per l’identificazione di problemi di minore entità. Il test numerico ha chiaramente dimostrato la realizzabilità di una RSP di ordine zero con costi contenuti. Tali costi sono sostanzialmente legati alla chiara necessità di istituire un centro per l’acquisizione dei dati e il monitoraggio continuo della rete, ove lavorino tecnici preparati a tale scopo.
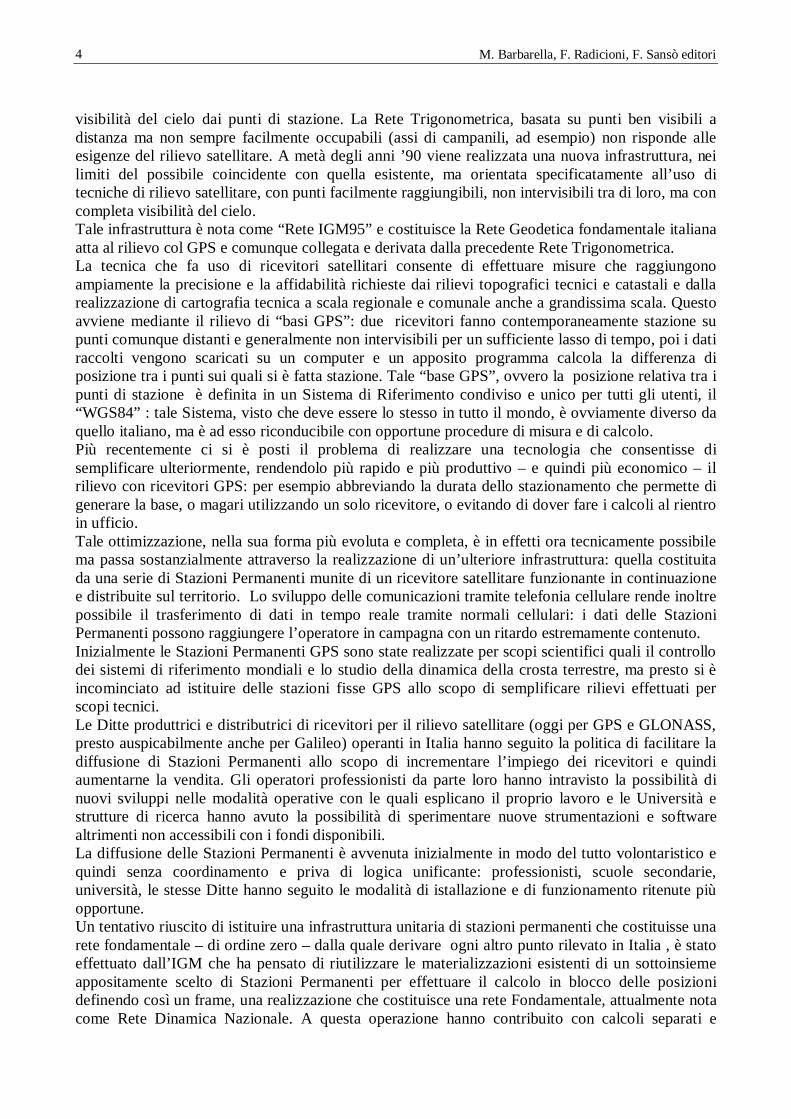
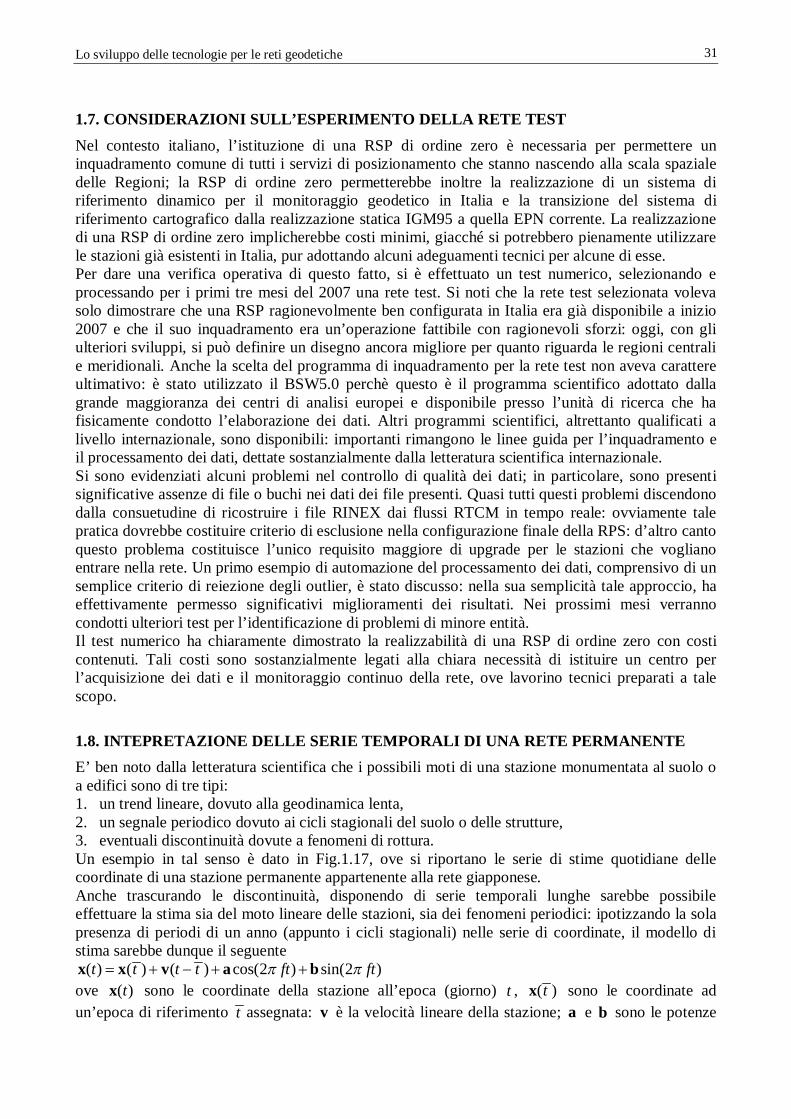
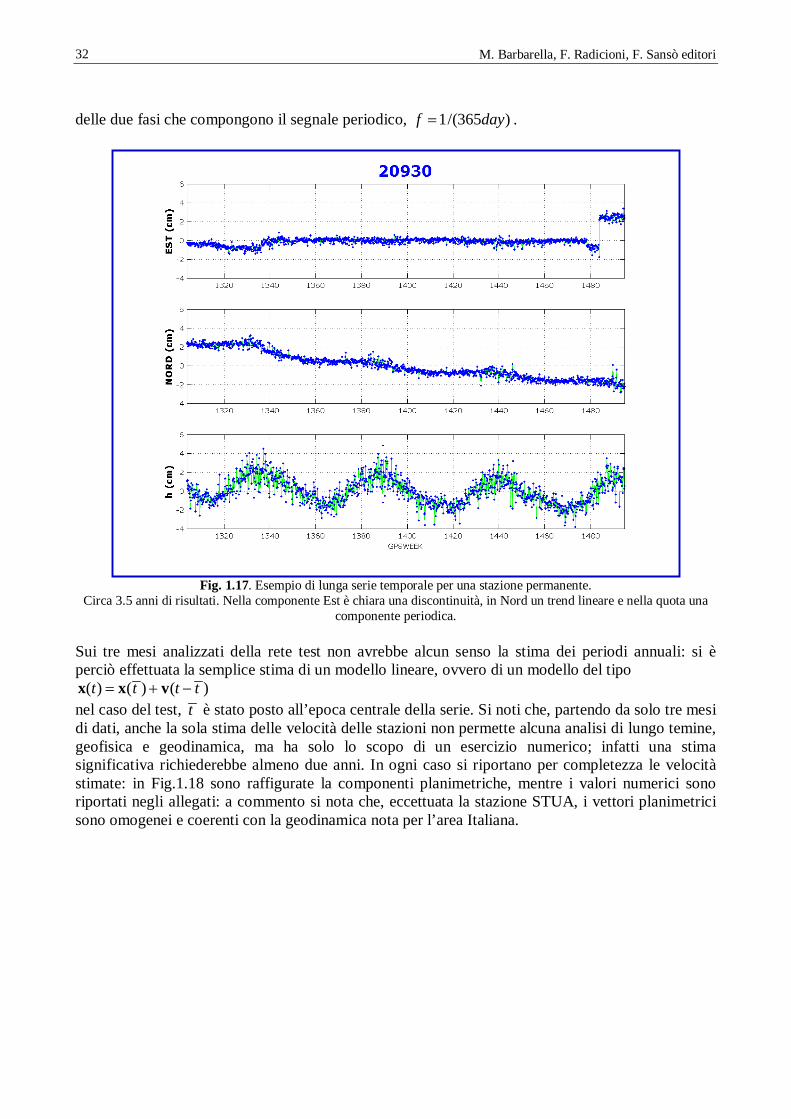
1.8. INTEPRETAZIONE DELLE SERIE TEMPORALI DI UNA RETE PERMANENTE E’ ben noto dalla letteratura scientifica che i possibili moti di una stazione monumentata al suolo o a edifici sono di tre tipi: 1. un trend lineare, dovuto alla geodinamica lenta, 2. un segnale periodico dovuto ai cicli stagionali del suolo o delle strutture, 3. eventuali discontinuità dovute a fenomeni di rottura. Un esempio in tal senso è dato in Fig.1.17, ove si riportano le serie di stime quotidiane delle coordinate di una stazione permanente appartenente alla rete giapponese. Anche trascurando le discontinuità, disponendo di serie temporali lunghe sarebbe possibile effettuare la stima sia del moto lineare delle stazioni, sia dei fenomeni periodici: ipotizzando la sola presenza di periodi di un anno (appunto i cicli stagionali) nelle serie di coordinate, il modello di stima sarebbe dunque il seguente
( ) ( ) ( ) cos(2 ) sin(2 )t t t t ft ft x x v a b ove ( )tx sono le coordinate della stazione all’epoca (giorno) t , ( )tx sono le coordinate ad un’epoca di riferimento t assegnata: v è la velocità lineare della stazione; a e b sono le potenze
M. Barbarella, F. Radicioni, F. Sansò editori
32
delle due fasi che compongono il segnale periodico, 1/(365 )f day .
Fig. 1.17. Esempio di lunga serie temporale per una stazione permanente.
Circa 3.5 anni di risultati. Nella componente Est è chiara una discontinuità, in Nord un trend lineare e nella quota una componente periodica.
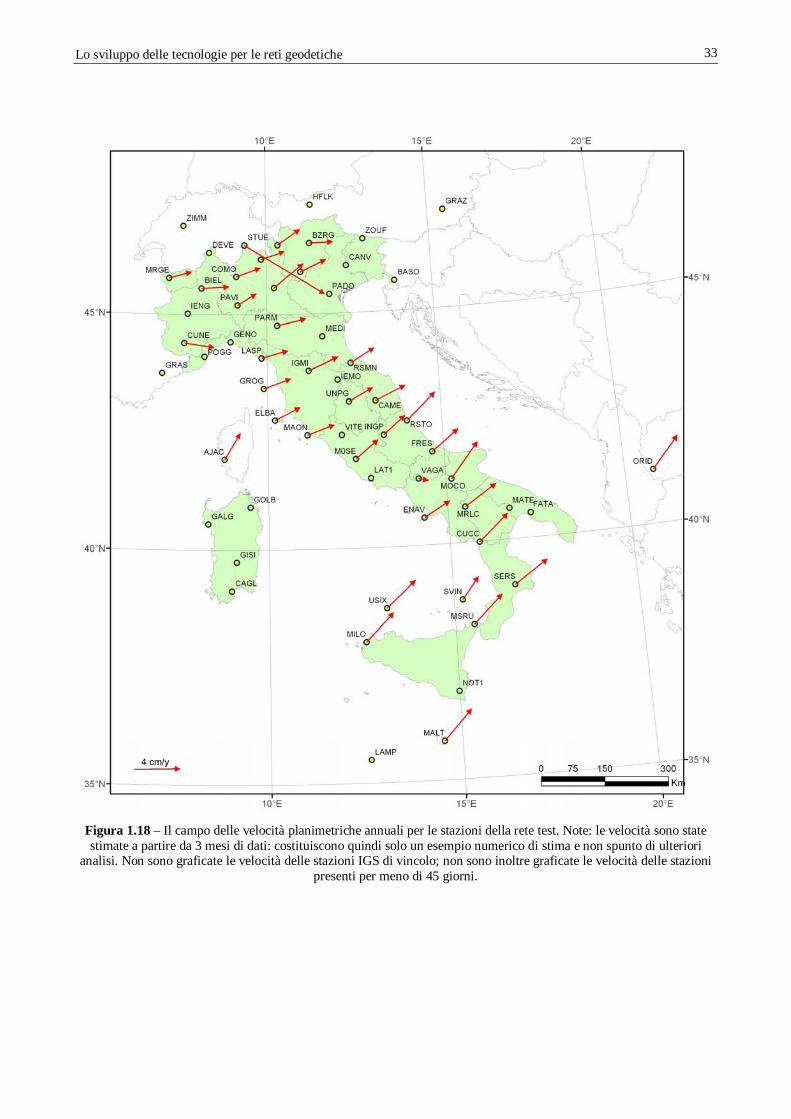
Sui tre mesi analizzati della rete test non avrebbe alcun senso la stima dei periodi annuali: si è perciò effettuata la semplice stima di un modello lineare, ovvero di un modello del tipo
( ) ( ) ( )t t t t x x v nel caso del test, t è stato posto all’epoca centrale della serie. Si noti che, partendo da solo tre mesi di dati, anche la sola stima delle velocità delle stazioni non permette alcuna analisi di lungo temine, geofisica e geodinamica, ma ha solo lo scopo di un esercizio numerico; infatti una stima significativa richiederebbe almeno due anni. In ogni caso si riportano per completezza le velocità stimate: in Fig.1.18 sono raffigurate la componenti planimetriche, mentre i valori numerici sono riportati negli allegati: a commento si nota che, eccettuata la stazione STUA, i vettori planimetrici sono omogenei e coerenti con la geodinamica nota per l’area Italiana.
Lo sviluppo delle tecnologie per le reti geodetiche
33
Figura 1.18 – Il campo delle velocità planimetriche annuali per le stazioni della rete test. Note: le velocità sono state stimate a partire da 3 mesi di dati: costituiscono quindi solo un esempio numerico di stima e non spunto di ulteriori
analisi. Non sono graficate le velocità delle stazioni IGS di vincolo; non sono inoltre graficate le velocità delle stazioni presenti per meno di 45 giorni.
M. Barbarella, F. Radicioni, F. Sansò editori
34
1.9. LA RETE DINAMICA NAZIONALE DI IGM E RELATIVE CONSIDERAZIONI L’Istituto Geografico Militare ha definito una rete di ordine zero che costituirà il futuro riferimento geodetico nazionale: tale rete prende nome di Rete Dinamica Nazionale (RDN). RDN (Fig. 1.19) si compone di 96 SP, scelte sostanzialmente in base ai criteri descritti nel paragrafo precedente; la sua distribuzione geografica è buona e presenta notevole omogeneità spaziale sulla nazione, anche nelle regioni meridionali ove la nostra prima rete test era più carente. E’ da precisarsi che RDN allo stato attuale non è una rete permanente: le stazioni che la compongono sono permanentemente monumentate ma non sono permanentemente monitorate e, in alcuni casi, anche lo scaricamento dei loro dati avviene solo su richiesta; in particolare, allo stato attuale sono disponibili presso IGM quattro settimane di dati, corrispondenti al periodo dal 23.12.2007 (settimana GPS 1459) al 19.01.2008 (settimana GPS 1462). I gruppi di ricerca coinvolti nel presente progetto hanno elaborato in modo indipendente tali dati allo scopo di cross validare i risultati ottenuti presso IGM: nella stessa settimana in cui è stata redatta la relazione diretta al CISIS, è stata anche consegnata a IGM la relazione relativa all’inquadramento di RDN, e la presentazione pubblica del lavoro è stata eseguita in una sessione dedicata della Conferenza Nazionale ASITA, il 23 ottobre 2008. Tutte le elaborazioni sono state svolte applicando esattamente gli stessi criteri adottati nell’elaborazione della rete test e i processi di reiezione degli outlier hanno confermato una buona qualità generale dei dati. Al termine della compensazione delle quattro settimane, per ogni stazione si è stimata la posizione all’epoca centrale nel sistema di riferimento IGS05; vista la limitatezza delle serie non si è ritenuto opportuno stimare anche delle velocità. Le deviazioni standard dei residui giornalieri sono dell’ordine di 1.5 mm in planimetria e di 3 mm in quota: in tal senso, i risultati sono decisamente buoni. Si ricorda infine che, allo stato attuale, RDN non è una rete permanente: infatti è disponibile solo un mese di dati. Avendo fatto un così importante lavoro di definizione e istituzionalizzazione di una rete ufficiale nazionale, sarebbe ora necessario avviare tutte le procedure che permettano il suo monitoraggio, la pubblicazione dei suoi dati e delle sue coordinate su base continua. L’attuazione di tali procedure non è naturalmente banale, perché innanzitutto richiede di stipulare gli accordi formali con tutti i gestori delle stazioni incluse nella rete e probabilmente, in prospettiva, l’aggiornamento di alcune stazioni affinché rispettino gli standard discussi precedentemente; è inoltre necessaria l’istituzione di un centro di calcolo qualificato per la compensazione continua e la distribuzione dei dati e delle coordinate. Tali azioni pongono però solo problematiche tecniche ed economiche, ma nulla di difficile carattere metodologico; in cambio se ne avrebbe un notevole ritorno di sviluppo tecnico, scientifico e di controllo geodetico alla scala nazionale.
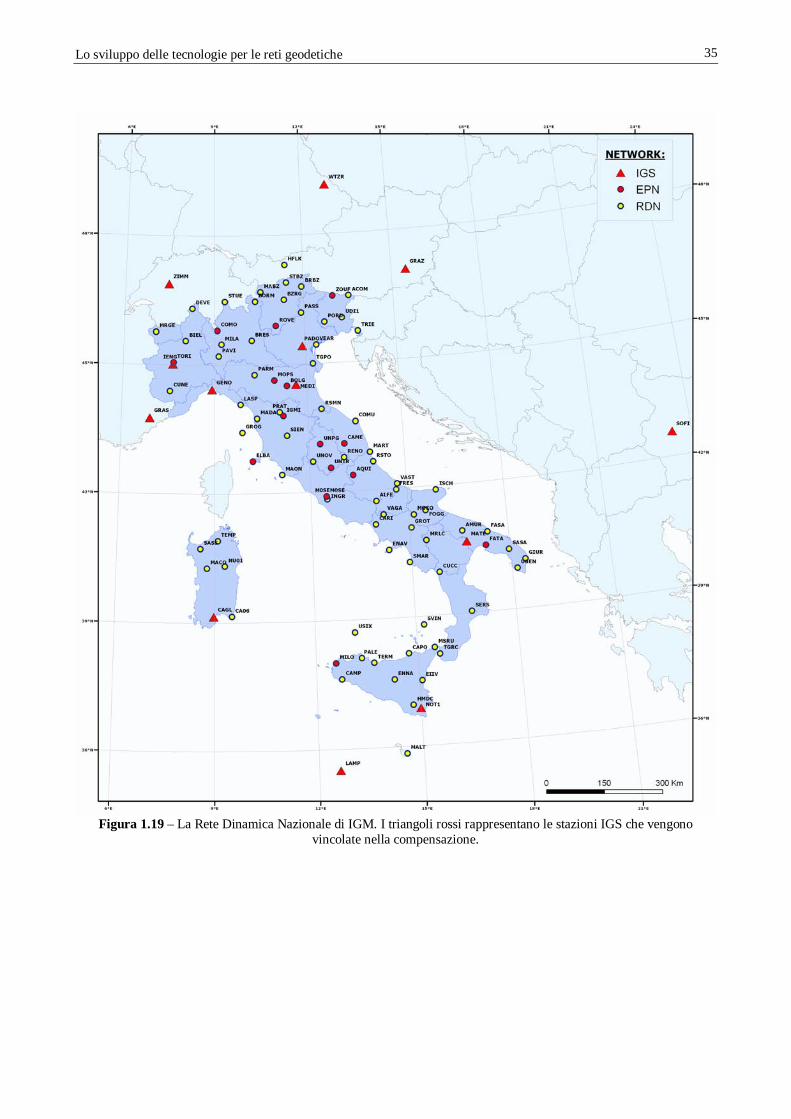
Lo sviluppo delle tecnologie per le reti geodetiche
35
Figura 1.19 – La Rete Dinamica Nazionale di IGM. I triangoli rossi rappresentano le stazioni IGS che vengono vincolate nella compensazione.
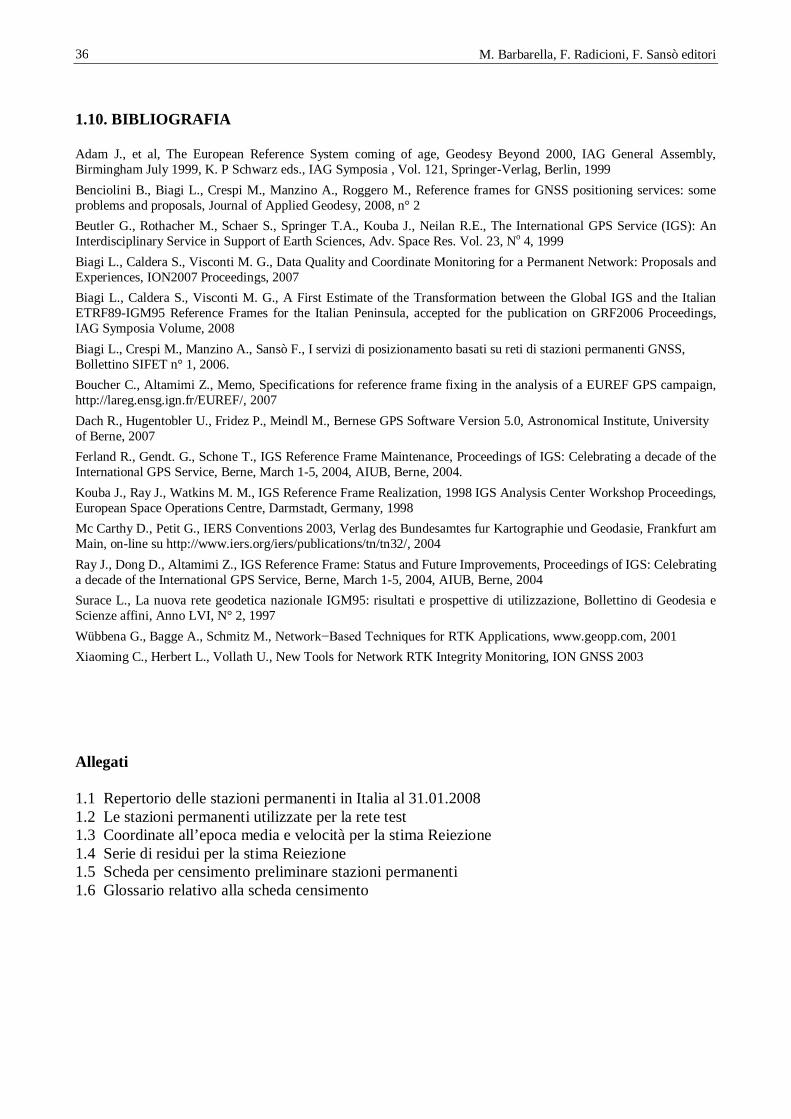
M. Barbarella, F. Radicioni, F. Sansò editori
36
1.10. BIBLIOGRAFIA Adam J., et al, The European Reference System coming of age, Geodesy Beyond 2000, IAG General Assembly, Birmingham July 1999, K. P Schwarz eds., IAG Symposia , Vol. 121, Springer-Verlag, Berlin, 1999 Benciolini B., Biagi L., Crespi M., Manzino A., Roggero M., Reference frames for GNSS positioning services: some problems and proposals, Journal of Applied Geodesy, 2008, n° 2 Beutler G., Rothacher M., Schaer S., Springer T.A., Kouba J., Neilan R.E., The International GPS Service (IGS): An Interdisciplinary Service in Support of Earth Sciences, Adv. Space Res. Vol. 23, No 4, 1999 Biagi L., Caldera S., Visconti M. G., Data Quality and Coordinate Monitoring for a Permanent Network: Proposals and Experiences, ION2007 Proceedings, 2007 Biagi L., Caldera S., Visconti M. G., A First Estimate of the Transformation between the Global IGS and the Italian ETRF89-IGM95 Reference Frames for the Italian Peninsula, accepted for the publication on GRF2006 Proceedings, IAG Symposia Volume, 2008 Biagi L., Crespi M., Manzino A., Sansò F., I servizi di posizionamento basati su reti di stazioni permanenti GNSS, Bollettino SIFET n° 1, 2006. Boucher C., Altamimi Z., Memo, Specifications for reference frame fixing in the analysis of a EUREF GPS campaign, http://lareg.ensg.ign.fr/EUREF/, 2007 Dach R., Hugentobler U., Fridez P., Meindl M., Bernese GPS Software Version 5.0, Astronomical Institute, University of Berne, 2007 Ferland R., Gendt. G., Schone T., IGS Reference Frame Maintenance, Proceedings of IGS: Celebrating a decade of the International GPS Service, Berne, March 1-5, 2004, AIUB, Berne, 2004. Kouba J., Ray J., Watkins M. M., IGS Reference Frame Realization, 1998 IGS Analysis Center Workshop Proceedings, European Space Operations Centre, Darmstadt, Germany, 1998 Mc Carthy D., Petit G., IERS Conventions 2003, Verlag des Bundesamtes fur Kartographie und Geodasie, Frankfurt am Main, on-line su http://www.iers.org/iers/publications/tn/tn32/, 2004 Ray J., Dong D., Altamimi Z., IGS Reference Frame: Status and Future Improvements, Proceedings of IGS: Celebrating a decade of the International GPS Service, Berne, March 1-5, 2004, AIUB, Berne, 2004 Surace L., La nuova rete geodetica nazionale IGM95: risultati e prospettive di utilizzazione, Bollettino di Geodesia e Scienze affini, Anno LVI, N° 2, 1997 Wübbena G., Bagge A., Schmitz M., Network−Based Techniques for RTK Applications, www.geopp.com, 2001 Xiaoming C., Herbert L., Vollath U., New Tools for Network RTK Integrity Monitoring, ION GNSS 2003
Allegati 1.1 Repertorio delle stazioni permanenti in Italia al 31.01.2008 1.2 Le stazioni permanenti utilizzate per la rete test 1.3 Coordinate all’epoca media e velocità per la stima Reiezione 1.4 Serie di residui per la stima Reiezione 1.5 Scheda per censimento preliminare stazioni permanenti 1.6 Glossario relativo alla scheda censimento
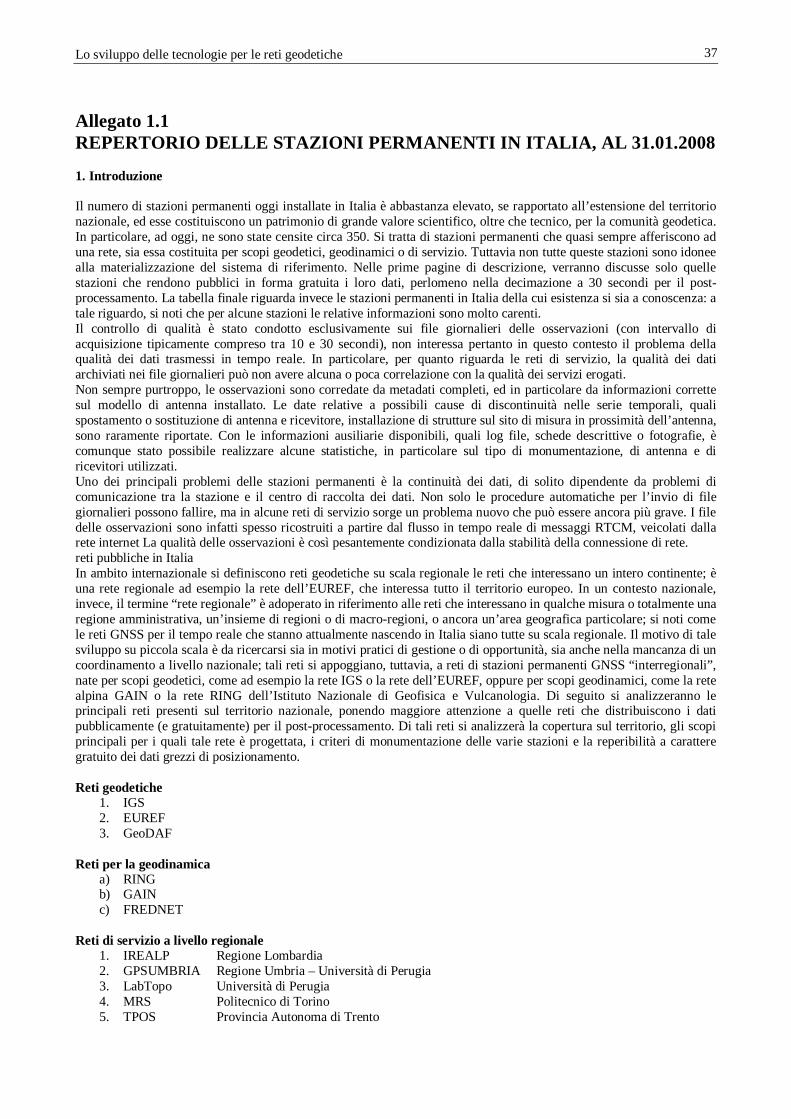
Lo sviluppo delle tecnologie per le reti geodetiche
37
Allegato 1.1 REPERTORIO DELLE STAZIONI PERMANENTI IN ITALIA, AL 31.01.2008 1. Introduzione Il numero di stazioni permanenti oggi installate in Italia è abbastanza elevato, se rapportato all’estensione del territorio nazionale, ed esse costituiscono un patrimonio di grande valore scientifico, oltre che tecnico, per la comunità geodetica. In particolare, ad oggi, ne sono state censite circa 350. Si tratta di stazioni permanenti che quasi sempre afferiscono ad una rete, sia essa costituita per scopi geodetici, geodinamici o di servizio. Tuttavia non tutte queste stazioni sono idonee alla materializzazione del sistema di riferimento. Nelle prime pagine di descrizione, verranno discusse solo quelle stazioni che rendono pubblici in forma gratuita i loro dati, perlomeno nella decimazione a 30 secondi per il post-processamento. La tabella finale riguarda invece le stazioni permanenti in Italia della cui esistenza si sia a conoscenza: a tale riguardo, si noti che per alcune stazioni le relative informazioni sono molto carenti. Il controllo di qualità è stato condotto esclusivamente sui file giornalieri delle osservazioni (con intervallo di acquisizione tipicamente compreso tra 10 e 30 secondi), non interessa pertanto in questo contesto il problema della qualità dei dati trasmessi in tempo reale. In particolare, per quanto riguarda le reti di servizio, la qualità dei dati archiviati nei file giornalieri può non avere alcuna o poca correlazione con la qualità dei servizi erogati. Non sempre purtroppo, le osservazioni sono corredate da metadati completi, ed in particolare da informazioni corrette sul modello di antenna installato. Le date relative a possibili cause di discontinuità nelle serie temporali, quali spostamento o sostituzione di antenna e ricevitore, installazione di strutture sul sito di misura in prossimità dell’antenna, sono raramente riportate. Con le informazioni ausiliarie disponibili, quali log file, schede descrittive o fotografie, è comunque stato possibile realizzare alcune statistiche, in particolare sul tipo di monumentazione, di antenna e di ricevitori utilizzati. Uno dei principali problemi delle stazioni permanenti è la continuità dei dati, di solito dipendente da problemi di comunicazione tra la stazione e il centro di raccolta dei dati. Non solo le procedure automatiche per l’invio di file giornalieri possono fallire, ma in alcune reti di servizio sorge un problema nuovo che può essere ancora più grave. I file delle osservazioni sono infatti spesso ricostruiti a partire dal flusso in tempo reale di messaggi RTCM, veicolati dalla rete internet La qualità delle osservazioni è così pesantemente condizionata dalla stabilità della connessione di rete. reti pubbliche in Italia In ambito internazionale si definiscono reti geodetiche su scala regionale le reti che interessano un intero continente; è una rete regionale ad esempio la rete dell’EUREF, che interessa tutto il territorio europeo. In un contesto nazionale, invece, il termine “rete regionale” è adoperato in riferimento alle reti che interessano in qualche misura o totalmente una regione amministrativa, un’insieme di regioni o di macro-regioni, o ancora un’area geografica particolare; si noti come le reti GNSS per il tempo reale che stanno attualmente nascendo in Italia siano tutte su scala regionale. Il motivo di tale sviluppo su piccola scala è da ricercarsi sia in motivi pratici di gestione o di opportunità, sia anche nella mancanza di un coordinamento a livello nazionale; tali reti si appoggiano, tuttavia, a reti di stazioni permanenti GNSS “interregionali”, nate per scopi geodetici, come ad esempio la rete IGS o la rete dell’EUREF, oppure per scopi geodinamici, come la rete alpina GAIN o la rete RING dell’Istituto Nazionale di Geofisica e Vulcanologia. Di seguito si analizzeranno le principali reti presenti sul territorio nazionale, ponendo maggiore attenzione a quelle reti che distribuiscono i dati pubblicamente (e gratuitamente) per il post-processamento. Di tali reti si analizzerà la copertura sul territorio, gli scopi principali per i quali tale rete è progettata, i criteri di monumentazione delle varie stazioni e la reperibilità a carattere gratuito dei dati grezzi di posizionamento. Reti geodetiche
1. IGS 2. EUREF 3. GeoDAF
Reti per la geodinamica
a) RING b) GAIN c) FREDNET
Reti di servizio a livello regionale
1. IREALP Regione Lombardia 2. GPSUMBRIA Regione Umbria – Università di Perugia 3. LabTopo Università di Perugia 4. MRS Politecnico di Torino 5. TPOS Provincia Autonoma di Trento
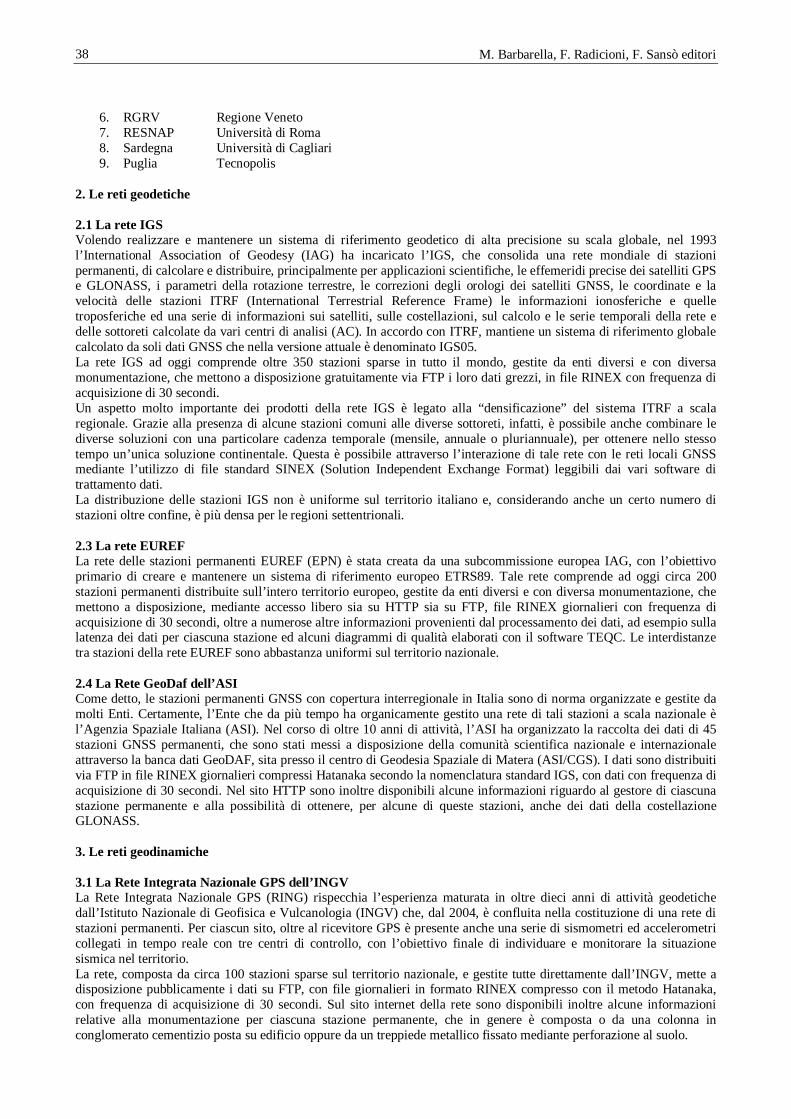
M. Barbarella, F. Radicioni, F. Sansò editori
38
6. RGRV Regione Veneto 7. RESNAP Università di Roma 8. Sardegna Università di Cagliari 9. Puglia Tecnopolis
2. Le reti geodetiche 2.1 La rete IGS Volendo realizzare e mantenere un sistema di riferimento geodetico di alta precisione su scala globale, nel 1993 l’International Association of Geodesy (IAG) ha incaricato l’IGS, che consolida una rete mondiale di stazioni permanenti, di calcolare e distribuire, principalmente per applicazioni scientifiche, le effemeridi precise dei satelliti GPS e GLONASS, i parametri della rotazione terrestre, le correzioni degli orologi dei satelliti GNSS, le coordinate e la velocità delle stazioni ITRF (International Terrestrial Reference Frame) le informazioni ionosferiche e quelle troposferiche ed una serie di informazioni sui satelliti, sulle costellazioni, sul calcolo e le serie temporali della rete e delle sottoreti calcolate da vari centri di analisi (AC). In accordo con ITRF, mantiene un sistema di riferimento globale calcolato da soli dati GNSS che nella versione attuale è denominato IGS05. La rete IGS ad oggi comprende oltre 350 stazioni sparse in tutto il mondo, gestite da enti diversi e con diversa monumentazione, che mettono a disposizione gratuitamente via FTP i loro dati grezzi, in file RINEX con frequenza di acquisizione di 30 secondi. Un aspetto molto importante dei prodotti della rete IGS è legato alla “densificazione” del sistema ITRF a scala regionale. Grazie alla presenza di alcune stazioni comuni alle diverse sottoreti, infatti, è possibile anche combinare le diverse soluzioni con una particolare cadenza temporale (mensile, annuale o pluriannuale), per ottenere nello stesso tempo un’unica soluzione continentale. Questa è possibile attraverso l’interazione di tale rete con le reti locali GNSS mediante l’utilizzo di file standard SINEX (Solution Independent Exchange Format) leggibili dai vari software di trattamento dati. La distribuzione delle stazioni IGS non è uniforme sul territorio italiano e, considerando anche un certo numero di stazioni oltre confine, è più densa per le regioni settentrionali. 2.3 La rete EUREF La rete delle stazioni permanenti EUREF (EPN) è stata creata da una subcommissione europea IAG, con l’obiettivo primario di creare e mantenere un sistema di riferimento europeo ETRS89. Tale rete comprende ad oggi circa 200 stazioni permanenti distribuite sull’intero territorio europeo, gestite da enti diversi e con diversa monumentazione, che mettono a disposizione, mediante accesso libero sia su HTTP sia su FTP, file RINEX giornalieri con frequenza di acquisizione di 30 secondi, oltre a numerose altre informazioni provenienti dal processamento dei dati, ad esempio sulla latenza dei dati per ciascuna stazione ed alcuni diagrammi di qualità elaborati con il software TEQC. Le interdistanze tra stazioni della rete EUREF sono abbastanza uniformi sul territorio nazionale. 2.4 La Rete GeoDaf dell’ASI Come detto, le stazioni permanenti GNSS con copertura interregionale in Italia sono di norma organizzate e gestite da molti Enti. Certamente, l’Ente che da più tempo ha organicamente gestito una rete di tali stazioni a scala nazionale è l’Agenzia Spaziale Italiana (ASI). Nel corso di oltre 10 anni di attività, l’ASI ha organizzato la raccolta dei dati di 45 stazioni GNSS permanenti, che sono stati messi a disposizione della comunità scientifica nazionale e internazionale attraverso la banca dati GeoDAF, sita presso il centro di Geodesia Spaziale di Matera (ASI/CGS). I dati sono distribuiti via FTP in file RINEX giornalieri compressi Hatanaka secondo la nomenclatura standard IGS, con dati con frequenza di acquisizione di 30 secondi. Nel sito HTTP sono inoltre disponibili alcune informazioni riguardo al gestore di ciascuna stazione permanente e alla possibilità di ottenere, per alcune di queste stazioni, anche dei dati della costellazione GLONASS. 3. Le reti geodinamiche 3.1 La Rete Integrata Nazionale GPS dell’INGV La Rete Integrata Nazionale GPS (RING) rispecchia l’esperienza maturata in oltre dieci anni di attività geodetiche dall’Istituto Nazionale di Geofisica e Vulcanologia (INGV) che, dal 2004, è confluita nella costituzione di una rete di stazioni permanenti. Per ciascun sito, oltre al ricevitore GPS è presente anche una serie di sismometri ed accelerometri collegati in tempo reale con tre centri di controllo, con l’obiettivo finale di individuare e monitorare la situazione sismica nel territorio. La rete, composta da circa 100 stazioni sparse sul territorio nazionale, e gestite tutte direttamente dall’INGV, mette a disposizione pubblicamente i dati su FTP, con file giornalieri in formato RINEX compresso con il metodo Hatanaka, con frequenza di acquisizione di 30 secondi. Sul sito internet della rete sono disponibili inoltre alcune informazioni relative alla monumentazione per ciascuna stazione permanente, che in genere è composta o da una colonna in conglomerato cementizio posta su edificio oppure da un treppiede metallico fissato mediante perforazione al suolo.
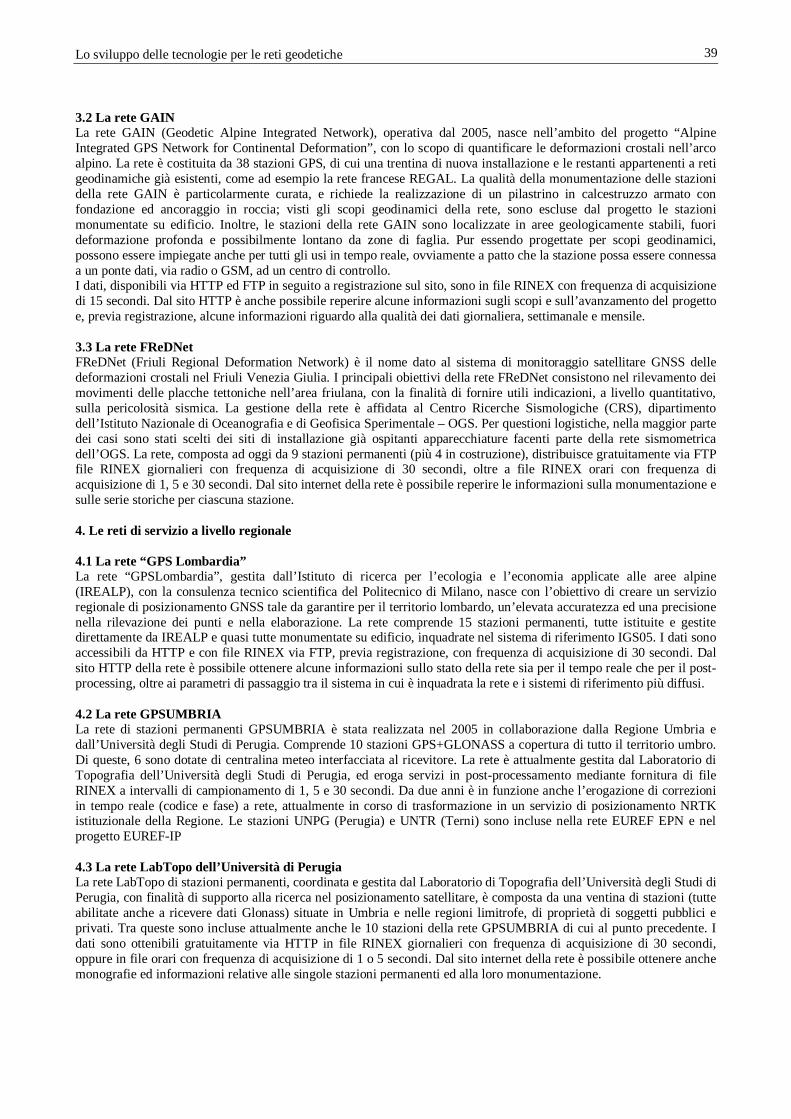
Lo sviluppo delle tecnologie per le reti geodetiche
39
3.2 La rete GAIN La rete GAIN (Geodetic Alpine Integrated Network), operativa dal 2005, nasce nell’ambito del progetto “Alpine Integrated GPS Network for Continental Deformation”, con lo scopo di quantificare le deformazioni crostali nell’arco alpino. La rete è costituita da 38 stazioni GPS, di cui una trentina di nuova installazione e le restanti appartenenti a reti geodinamiche già esistenti, come ad esempio la rete francese REGAL. La qualità della monumentazione delle stazioni della rete GAIN è particolarmente curata, e richiede la realizzazione di un pilastrino in calcestruzzo armato con fondazione ed ancoraggio in roccia; visti gli scopi geodinamici della rete, sono escluse dal progetto le stazioni monumentate su edificio. Inoltre, le stazioni della rete GAIN sono localizzate in aree geologicamente stabili, fuori deformazione profonda e possibilmente lontano da zone di faglia. Pur essendo progettate per scopi geodinamici, possono essere impiegate anche per tutti gli usi in tempo reale, ovviamente a patto che la stazione possa essere connessa a un ponte dati, via radio o GSM, ad un centro di controllo. I dati, disponibili via HTTP ed FTP in seguito a registrazione sul sito, sono in file RINEX con frequenza di acquisizione di 15 secondi. Dal sito HTTP è anche possibile reperire alcune informazioni sugli scopi e sull’avanzamento del progetto e, previa registrazione, alcune informazioni riguardo alla qualità dei dati giornaliera, settimanale e mensile. 3.3 La rete FReDNet FReDNet (Friuli Regional Deformation Network) è il nome dato al sistema di monitoraggio satellitare GNSS delle deformazioni crostali nel Friuli Venezia Giulia. I principali obiettivi della rete FReDNet consistono nel rilevamento dei movimenti delle placche tettoniche nell’area friulana, con la finalità di fornire utili indicazioni, a livello quantitativo, sulla pericolosità sismica. La gestione della rete è affidata al Centro Ricerche Sismologiche (CRS), dipartimento dell’Istituto Nazionale di Oceanografia e di Geofisica Sperimentale – OGS. Per questioni logistiche, nella maggior parte dei casi sono stati scelti dei siti di installazione già ospitanti apparecchiature facenti parte della rete sismometrica dell’OGS. La rete, composta ad oggi da 9 stazioni permanenti (più 4 in costruzione), distribuisce gratuitamente via FTP file RINEX giornalieri con frequenza di acquisizione di 30 secondi, oltre a file RINEX orari con frequenza di acquisizione di 1, 5 e 30 secondi. Dal sito internet della rete è possibile reperire le informazioni sulla monumentazione e sulle serie storiche per ciascuna stazione. 4. Le reti di servizio a livello regionale 4.1 La rete “GPS Lombardia” La rete “GPSLombardia”, gestita dall’Istituto di ricerca per l’ecologia e l’economia applicate alle aree alpine (IREALP), con la consulenza tecnico scientifica del Politecnico di Milano, nasce con l’obiettivo di creare un servizio regionale di posizionamento GNSS tale da garantire per il territorio lombardo, un’elevata accuratezza ed una precisione nella rilevazione dei punti e nella elaborazione. La rete comprende 15 stazioni permanenti, tutte istituite e gestite direttamente da IREALP e quasi tutte monumentate su edificio, inquadrate nel sistema di riferimento IGS05. I dati sono accessibili da HTTP e con file RINEX via FTP, previa registrazione, con frequenza di acquisizione di 30 secondi. Dal sito HTTP della rete è possibile ottenere alcune informazioni sullo stato della rete sia per il tempo reale che per il post-processing, oltre ai parametri di passaggio tra il sistema in cui è inquadrata la rete e i sistemi di riferimento più diffusi. 4.2 La rete GPSUMBRIA La rete di stazioni permanenti GPSUMBRIA è stata realizzata nel 2005 in collaborazione dalla Regione Umbria e dall’Università degli Studi di Perugia. Comprende 10 stazioni GPS+GLONASS a copertura di tutto il territorio umbro. Di queste, 6 sono dotate di centralina meteo interfacciata al ricevitore. La rete è attualmente gestita dal Laboratorio di Topografia dell’Università degli Studi di Perugia, ed eroga servizi in post-processamento mediante fornitura di file RINEX a intervalli di campionamento di 1, 5 e 30 secondi. Da due anni è in funzione anche l’erogazione di correzioni in tempo reale (codice e fase) a rete, attualmente in corso di trasformazione in un servizio di posizionamento NRTK istituzionale della Regione. Le stazioni UNPG (Perugia) e UNTR (Terni) sono incluse nella rete EUREF EPN e nel progetto EUREF-IP 4.3 La rete LabTopo dell’Università di Perugia La rete LabTopo di stazioni permanenti, coordinata e gestita dal Laboratorio di Topografia dell’Università degli Studi di Perugia, con finalità di supporto alla ricerca nel posizionamento satellitare, è composta da una ventina di stazioni (tutte abilitate anche a ricevere dati Glonass) situate in Umbria e nelle regioni limitrofe, di proprietà di soggetti pubblici e privati. Tra queste sono incluse attualmente anche le 10 stazioni della rete GPSUMBRIA di cui al punto precedente. I dati sono ottenibili gratuitamente via HTTP in file RINEX giornalieri con frequenza di acquisizione di 30 secondi, oppure in file orari con frequenza di acquisizione di 1 o 5 secondi. Dal sito internet della rete è possibile ottenere anche monografie ed informazioni relative alle singole stazioni permanenti ed alla loro monumentazione.
M. Barbarella, F. Radicioni, F. Sansò editori
40
4.4 La rete MRS del Politecnico di Torino La rete test per il posizionamento Multi Reference Station (MRS) gestita dal Politecnico di Torino in collaborazione con Leica Geosystem, comprende ad oggi 15 stazioni GNSS permanenti esistenti in Piemonte e Lombardia, inquadrate nel sistema IGS05. Le stazioni, tutte monumentate su edificio, non sono state specificatamente installate per la rete, ma hanno origini e storie diverse, sono di proprietà di enti diversi (università, istituti tecnici, pubbliche amministrazioni) e da questi sono mantenute. I dati delle stazioni della rete sono disponibili liberamente via FTP con frequenza di acquisizione di 1, 5 e 30 secondi, in file RINEX compressi Hatanaka e memorizzati dopo una compressione “unix” secondo gli standard IGS. Dal sito internet della rete sono inoltre disponibili i parametri di passaggio della rete da IGS05 a IGM95, ETRF2000 ed IGb00, oltre alla descrizione completa dei prodotti disponibili via GSM per il tempo reale. 4.5 La rete TPOS La rete TPOS è una rete di stazioni permanenti GNSS realizzata e gestita dal Servizio Catasto della Provincia Autonoma di Trento, e nasce con l’obiettivo di porsi come l’infrastruttura geometrica fondamentale per il posizionamento di precisione sul territorio provinciale. L’utilizzo della rete TPOS sostituisce l’uso di stazioni-base collocate su punti fiduciali con grande vantaggio di praticità, economia e accuratezza. La rete, costituita da 8 stazioni permanenti di nuova installazione e con diversa monumentazione, mette a disposizione gratuitamente, previa registrazione, file RINEX con frequenza di acquisizione di 1, 5, 15 e 30 secondi, scaricabili via HTTP in maniera, purtroppo, non automatizzabile. 4.6 La rete geodetica veneta La rete geodetica regionale veneta nasce dalla collaborazione tra la Regione Veneto e l’Università di Padova. Essa consiste in un network di stazioni permanenti GNSS (rete statica e real time) disseminate nel territorio regionale e fornisce un’infrastruttura di supporto per le attività e per gli enti di ricerca scientifica che impiegano la tecnologia GPS. La rete veneta è costituita al momento attuale da 11 stazioni, i cui dati sono disponibili via HTTP in maniera non automatizzabile. 4.7 La rete RESNAP La REte Sperimentale regionale di stazioni GNSS per il Posizionamento e la NAvigazione (RESNAP-GPS), attiva in una parte del territorio della regione Lazio dal 1 settembre 2005, è stata realizzata per sperimentare i potenziali servizi ottenibili su base regionale con una rete di stazioni permanenti nell’ambito del posizionamento in tempo reale e della navigazione. Attualmente, comprende 10 ricevitori GNSS, con dati reperibili gratuitamente via FTP, previa registrazione, in formato RINEX con frequenza di aggiornamento di 30 secondi, in file giornalieri. Dal sito HTTP è possibile ottenere alcune informazioni sui gestori delle singole stazioni permanenti, e sulla strumentazione presente per ciascuna stazione. 4.8 La rete di SP della Regione Puglia La rete è gestita da Tecnopolis, ed è stata progettata con la collaborazione dell’Università di Modena. La rete, che è stata di recente ultimata e collaudata, allo stato attuale si compone di 13 stazioni permanenti; a breve è previsto il suo completamento con un’ultima SP ubicata a Taranto. Le coordinate delle SP sono state stimate nel SR IGS05, sinora con elaborazioni periodiche condotte su periodi di almeno 2 settimane mediante programma scientifico BERNESE 5.0; con l’ultimazione della rete è prevista l’automazione delle procedure di compensazione. In corrispondenza della stima delle coordinate IGS05 delle SP, viene aggiornata la stima della trasformazione da IGS05 a ETRF89, mediante adattamento della Boucher Altamimi. I dati della rete sono disponibili gratuitamente, semplicemente mediante iscrizione al servizio. Maggiori informazioni sono sul sito della rete, ovvero http://gps.sit.puglia.it/frmIndex.aspx. 4.8 La rete della Sardegna La rete di Stazioni Permanenti GNSS della Sardegna è nata con scopi istituzionali e scientifici per la Topografia e Cartografia e per il controllo e gestione del territorio. L’implementazione della rete riguarda il perfezionamento delle componenti della rete stessa e l’ottimizzazione delle procedure operative nei rilievi topografici insieme con l’utilizzazione di differenti tipologie di stazioni GNSS rover. La rete di stazioni permanenti comprende ad oggi 10 siti (più 7 di prossima attivazione) con la possibilità di accedere sia via FTP sia via HTTP ai dati, raccolti in file RINEX giornalieri con frequenza di acquisizione di 30 secondi. 4.9 Altre reti commerciali ItalPos1 La struttura di Leica ItalPoS è costituita da numerose stazioni di riferimento GNSS sia pubbliche che private, alcune delle quali fanno parte della rete RING dell’Istituto Nazionale di Geofisica e Vulcanologia. La qualità dei dati distribuiti
1 http://www.italpos.it/
Lo sviluppo delle tecnologie per le reti geodetiche
41
della rete Leica ItalPoS è controllata da G3 “Gruppo di Geodesia e Geomatica”, Associazione Scientifica fra Politecnico di Milano, Politecnico di Torino e Università La Sapienza di Roma che esegue il monitoraggio e la certificazione del dato tramite proprie e comprovate procedure. La rete consta di circa 100 stazioni GPS e GLONASS distribuite sulle aree del territorio nazionale attualmente non coperto da servizi regionali. I dati campionati a 30s sono scaricabili gratuitamente dal sito web previa registrazione, mentre l’accesso FTP non è pubblico. GeoTop2 Circa un centinaio di stazioni permanenti, installate dalla ditta GeoTop per conto di privati o enti pubblici, sono censite sulla pagina web della stessa ditta. GeoTop tuttavia non ridistribuisce i dati, per cui è necessario contattare direttamente i gestori che nella maggior parte dei casi sono privati. Pur non costituendo una rete vera e propria, riteniamo di dover citare nel repertorio anche queste stazioni, che costituiscono un patrimonio di rilevante interesse in particolare per quelle zone d’Italia dove le stazioni pubbliche sono rare o del tutto assenti. 5. Standardizzazione delle stazioni permanenti Le stazioni permanenti in Italia sono nate per svariati scopi: reti regionali, singole stazioni di enti pubblici, istituti di ricerca, istituti didattici ecc.. Al momento dell’installazione questi scopi, i vincoli legati al sito, quelli legati all’istituzione sono stati determinanti. Nonostante ciò, per l’utilizzo dei dati in post-processamento è importante che si rispettino certi standard qualitativi; attualmente, lo standard più diffuso ed internazionalmente conosciuto è quello dell’IGS, e ogni stazione GNSS permanente, in seguito alla propria installazione, dovrebbe essere ufficializzata in conformità a tali standard. Purtroppo nel caso di stazioni appartenenti a reti regionali, o peggio ancora private, questa semplice procedura è quasi sempre ignorata. Per rendere internazionalmente ufficiale una stazione GNSS è necessario eseguire due operazioni: richiedere l’attribuzione di un dome number e compilare il log file. Il dome number identifica univocamente la stazione nel catalogo IERS/ITRF e può essere richiesto verificandone la disponibilità del nome ed inviando la richiesta all’URL http://itrf.ensg.ing.fr, previa compilazione del documento “DOMES INFORMATION FORM (DIF)”. Il log file deve essere compilato in accordo agli standard IGS seguendo le istruzioni disponibili all’URL ftp://igscb.jpl.nasa.gov/pub/station/general/sitelog_instr.txt, e mantenuto aggiornato. Il log file (anche noto come site log) riporta l’intera storia della stazione e tutti gli eventi che la riguardano, le caratteristiche del sito e della monumentazione, le sostituzioni di ricevitore ed antenna e le relative date. Le stazioni permanenti prese in considerazione rispettano in gran parte tali istruzioni, e mettono a disposizione i dati grezzi in file RINEX nominati, secondo la convenzione suggerita internazionalmente, come “CCCCDDDF.YYO”, dove “CCCC” è il dome number a quattro caratteri della stazione, “DDD” e “YY” sono il giorno giuliano e le ultime due cifre dell’anno della prima epoca di osservazione contenuta nel file, “F” è un numero progressivo di identificazione del file, utile per separare file prodotti nello stesso giorno (ad esempio A-X per file RINEX orari, oppure 0 per file giornalieri) e la lettera “O” è l’etichetta che identifica i file di osservazione, ovvero quei files che contengono le posizioni misurate dal ricevitore della stazione permanente. I file RINEX di osservazione sono sempre accompagnati dai file RINEX di navigazione, contenenti i messaggi broadcast per ciascun satellite osservato durante l’epoca di acquisizione. Anche in questo caso, i nomi di tali file seguono di norma la convenzione internazionale del tipo “CCCCDDDF.YYN” per i satelliti della costellazione GPS e “CCCCDDDF.YYG” per i satelliti della costellazione GLONASS. 6. Monumentazione La disponibilità di metadati, in particolare dei log file, per un buon numero di stazioni ha reso possibile indagare le caratteristiche dei siti e dei tipi di monumentazione più diffusi. Purtroppo le descrizioni non sono sempre chiare, a volte sono incomplete, ma spesso è possibile reperire informazioni ausiliarie e anche fotografie che sono pubblicate direttamente dagli enti gestori delle stazioni permanenti. Nel condurre questa ricerca è stato necessario schematizzare per categorie il tipo di monumentazione; è ovvio che la schematizzazione e anche l’assegnazione di una stazione a una certa categoria possono risentire in qualche caso di una certa soggettività. Inoltre alcuni tipi di monumentazione sono così particolari da essere difficilmente inquadrabili. Parlando di monumentazione non faremo alcun riferimento alla stabilità, che non è in alcun modo direttamente correlata. La stabilità infatti può essere verificata solo con l’analisi di anni di dati e anche per mezzo di misure effettuate su reti locali di controllo. Possono essere considerati stabili anche monumentazioni su edificio, come l’esperienza dimostra per numerose stazioni delle reti IGS ed EUREF. Ci è sembrato comunque importante in prima istanza capire quante stazioni sono monumentate su edifici e quante direttamente sul terreno. Le stazioni su edificio sono ancora la maggioranza (57%) ma, soprattutto grazie alla recente installazione di numerose stazioni per la geodinamica particolarmente nell’ambito delle reti RING, GAIN, FREDNET e
2 http://www.geotop.it/gps_GNSS_stazione_fissa.htm
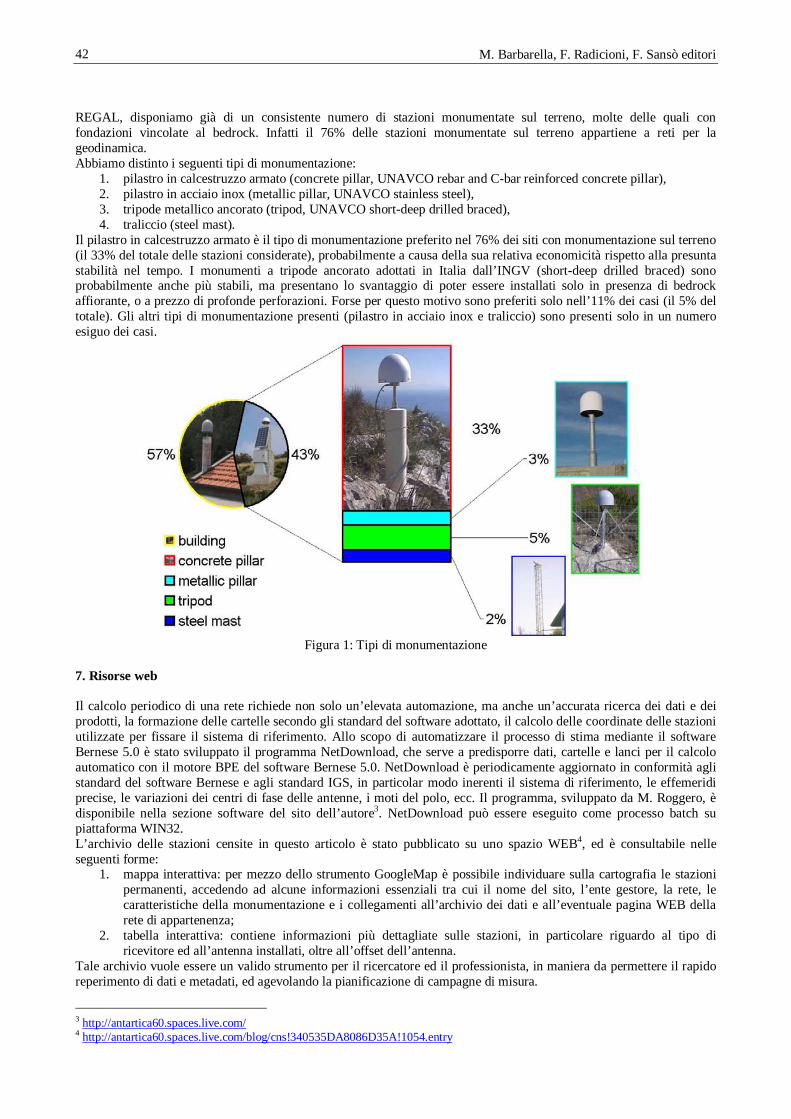
M. Barbarella, F. Radicioni, F. Sansò editori
42
REGAL, disponiamo già di un consistente numero di stazioni monumentate sul terreno, molte delle quali con fondazioni vincolate al bedrock. Infatti il 76% delle stazioni monumentate sul terreno appartiene a reti per la geodinamica. Abbiamo distinto i seguenti tipi di monumentazione:
1. pilastro in calcestruzzo armato (concrete pillar, UNAVCO rebar and C-bar reinforced concrete pillar), 2. pilastro in acciaio inox (metallic pillar, UNAVCO stainless steel), 3. tripode metallico ancorato (tripod, UNAVCO short-deep drilled braced), 4. traliccio (steel mast).
Il pilastro in calcestruzzo armato è il tipo di monumentazione preferito nel 76% dei siti con monumentazione sul terreno (il 33% del totale delle stazioni considerate), probabilmente a causa della sua relativa economicità rispetto alla presunta stabilità nel tempo. I monumenti a tripode ancorato adottati in Italia dall’INGV (short-deep drilled braced) sono probabilmente anche più stabili, ma presentano lo svantaggio di poter essere installati solo in presenza di bedrock affiorante, o a prezzo di profonde perforazioni. Forse per questo motivo sono preferiti solo nell’11% dei casi (il 5% del totale). Gli altri tipi di monumentazione presenti (pilastro in acciaio inox e traliccio) sono presenti solo in un numero esiguo dei casi.
Figura 1: Tipi di monumentazione
7. Risorse web Il calcolo periodico di una rete richiede non solo un’elevata automazione, ma anche un’accurata ricerca dei dati e dei prodotti, la formazione delle cartelle secondo gli standard del software adottato, il calcolo delle coordinate delle stazioni utilizzate per fissare il sistema di riferimento. Allo scopo di automatizzare il processo di stima mediante il software Bernese 5.0 è stato sviluppato il programma NetDownload, che serve a predisporre dati, cartelle e lanci per il calcolo automatico con il motore BPE del software Bernese 5.0. NetDownload è periodicamente aggiornato in conformità agli standard del software Bernese e agli standard IGS, in particolar modo inerenti il sistema di riferimento, le effemeridi precise, le variazioni dei centri di fase delle antenne, i moti del polo, ecc. Il programma, sviluppato da M. Roggero, è disponibile nella sezione software del sito dell’autore3. NetDownload può essere eseguito come processo batch su piattaforma WIN32. L’archivio delle stazioni censite in questo articolo è stato pubblicato su uno spazio WEB4, ed è consultabile nelle seguenti forme:
1. mappa interattiva: per mezzo dello strumento GoogleMap è possibile individuare sulla cartografia le stazioni permanenti, accedendo ad alcune informazioni essenziali tra cui il nome del sito, l’ente gestore, la rete, le caratteristiche della monumentazione e i collegamenti all’archivio dei dati e all’eventuale pagina WEB della rete di appartenenza;
2. tabella interattiva: contiene informazioni più dettagliate sulle stazioni, in particolare riguardo al tipo di ricevitore ed all’antenna installati, oltre all’offset dell’antenna.
Tale archivio vuole essere un valido strumento per il ricercatore ed il professionista, in maniera da permettere il rapido reperimento di dati e metadati, ed agevolando la pianificazione di campagne di misura.
3 http://antartica60.spaces.live.com/ 4 http://antartica60.spaces.live.com/blog/cns!340535DA8086D35A!1054.entry
Lo sviluppo delle tecnologie per le reti geodetiche
43
Conclusioni Un paziente lavoro di ricerca ha permesso di costruire un repertorio di stazioni permanenti che possano fornire pubblicamente dati per il post processing. Questo repertorio non è tuttavia da considerarsi “statico” in quanto l’evolversi della situazione nazionale nel settore è rapido e non ben prevedibile. Bibliografia AA.VV., 2006. La rete delle stazioni permanenti regionali. In: CartoGraphica, suppl. a MondoGIS n.° 54.
Serpelloni E., Casula G., Galvani A., Anzidei M., Baldi P., 2006. Data analysis of permanent GPS network in Italy and surrounding regions: application of a distributed processing approach. In: Annals of Geophysics, Roma, Vol. 49 (4/5), pp. 897-928.
Biagi L., Crespi M., Manzino A., Sansò F., Roggero M., 2005. Guidelines to an optimal adjustment of local service permanent networks within a dynamic world: a first proposal. http ://geomatica.como.polimi.it/prin/doc.php
Euler H.-J.: 2005 – IAG-WG5.4.1 “Reference station network information distribution”. www.network-rtk.info
De Agostino M., Manzini A.M., Roggero M., 2007. Repertorio delle stazioni GNSS in Italia, controllo di qualità e monitoraggio dei dati. Atti del Convegno Nazionale SIFET, Arezzo 2007.
Siti WEB delle reti di stazioni permanenti IGS: http://igscb.jpl.nasa.gov/ EUREF EPN: http://www.epncb.oma.be/ GEODAF: http://geodaf.mt.asi.it/html_old/index.html RING: http://ring.gm.ingv.it/ GAIN: http://www.alps-gps.units.it/ Piemonte: http://www.vercelli.polito.it/civili/topo0103.htm GPSLombardia: http://www.gpslombardia.it/ FREDNET : http ://www.crs.inogs.it/frednet/ItalianSite/XFReDNetHome.htm TPOS : http ://www.catasto.provincia.tn.it/TPOS%20-%20Trentino%20POsitioning%20Service/ Veneto : http ://cisas.unipd.it/project/gps/index.html RESNAP : http://w3.uniroma1.it/resnap-gps/index.asp Labtopo Umbria: http://www.gpsumbria.it/ Sardegna: http://topografia.unica.it/index.php?option=com_wrapper&Itemid=82 Altri siti utili IERS : http ://www.iers.org EUREF: http://www.euref-iag.net/ QC2SKY: http://www.vercelli.polito.it/civili/topo0105.htm TEQC: http://www.unavco.org/facility/software/teqc/teqc.html UNAVCO: http://www.unavco.org/ http://facility.unavco.org/project_support/permanent/monumentation/monumentation.html Repertorio stazioni permanenti http://antartica60.spaces.live.com/blog/cns!340535DA8086D35A!1054.entry
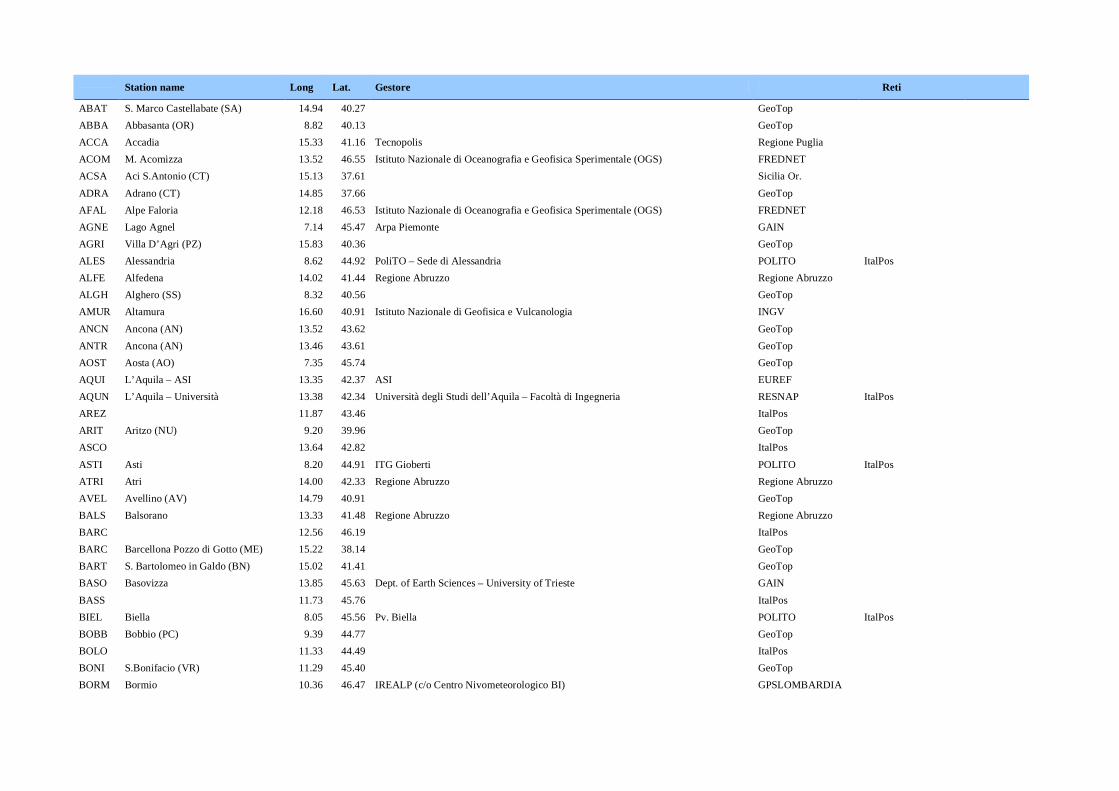
Station name Long Lat. Gestore Reti
ABAT S. Marco Castellabate (SA) 14.94 40.27 GeoTop ABBA Abbasanta (OR) 8.82 40.13 GeoTop ACCA Accadia 15.33 41.16 Tecnopolis Regione Puglia ACOM M. Acomizza 13.52 46.55 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET ACSA Aci S.Antonio (CT) 15.13 37.61 Sicilia Or. ADRA Adrano (CT) 14.85 37.66 GeoTop AFAL Alpe Faloria 12.18 46.53 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET AGNE Lago Agnel 7.14 45.47 Arpa Piemonte GAIN AGRI Villa D’Agri (PZ) 15.83 40.36 GeoTop ALES Alessandria 8.62 44.92 PoliTO – Sede di Alessandria POLITO ItalPos ALFE Alfedena 14.02 41.44 Regione Abruzzo Regione Abruzzo ALGH Alghero (SS) 8.32 40.56 GeoTop AMUR Altamura 16.60 40.91 Istituto Nazionale di Geofisica e Vulcanologia INGV ANCN Ancona (AN) 13.52 43.62 GeoTop ANTR Ancona (AN) 13.46 43.61 GeoTop AOST Aosta (AO) 7.35 45.74 GeoTop AQUI L’Aquila – ASI 13.35 42.37 ASI EUREF AQUN L’Aquila – Università 13.38 42.34 Università degli Studi dell’Aquila – Facoltà di Ingegneria RESNAP ItalPos AREZ 11.87 43.46 ItalPos ARIT Aritzo (NU) 9.20 39.96 GeoTop ASCO 13.64 42.82 ItalPos ASTI Asti 8.20 44.91 ITG Gioberti POLITO ItalPos ATRI Atri 14.00 42.33 Regione Abruzzo Regione Abruzzo AVEL Avellino (AV) 14.79 40.91 GeoTop BALS Balsorano 13.33 41.48 Regione Abruzzo Regione Abruzzo BARC 12.56 46.19 ItalPos BARC Barcellona Pozzo di Gotto (ME) 15.22 38.14 GeoTop BART S. Bartolomeo in Galdo (BN) 15.02 41.41 GeoTop BASO Basovizza 13.85 45.63 Dept. of Earth Sciences – University of Trieste GAIN BASS 11.73 45.76 ItalPos BIEL Biella 8.05 45.56 Pv. Biella POLITO ItalPos BOBB Bobbio (PC) 9.39 44.77 GeoTop BOLO 11.33 44.49 ItalPos BONI S.Bonifacio (VR) 11.29 45.40 GeoTop BORM Bormio 10.36 46.47 IREALP (c/o Centro Nivometeorologico BI) GPSLOMBARDIA

Station name Long Lat. Gestore Reti
BOSC Boscochiesanuova 11.03 45.60 Arpa Veneto GAIN BRAS Brasimone 11.11 44.12 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos BRES Brescia 10.23 45.56 IREALP (c/o Università degli Studi di Brescia) GPSLOMBARDIA BRIX Brescia 10.23 45.55 Provincia di Brescia ASI BRON 14.85 37.79 ItalPos BRUG 9.72 44.24 ItalPos BSSO Busso 14.59 41.55 Istituto Nazionale di Geofisica e Vulcanologia INGV BZRG Bolzano 11.34 46.49 Ufficio per il rilevamento geodetico – Provincia autonoma di Bolzano IGS CAFA Santa Venerina (CT) 15.14 37.68 Sicilia Or. CAGI Caltagirone (CT) GeoTop CAGJ Cagliari 9.11 39.23 Sardegna UNICA CAGL Cagliari 8.97 39.13 ASI IGS ASI CAGZ Cagliari Universita’ di Cagliari – DIST ASI CAIE Città di Castello 12.25 43.47 Italeco – Università degli Studi di Perugia LABTOPO CALA 11.16 43.87 ItalPos CALO Campobello di Mazara (TP) 12.75 37.63 GeoTop CAME Camerino 13.12 43.10 ASI EUREF ASI CAMP Campobello di Mazara 37.37 14.44 Uni. Palermo UNIPA CANV Caneva 12.43 46.00 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET CAPO 14.74 38.16 ItalPos CARI Carinola (CE) 13.98 41.20 GeoTop CARP 10.43 45.37 ItalPos CARZ Monte Carza 8.68 46.04 Arpa Piemonte GAIN CASD Castel del Monte 13.43 42.22 Regione Abruzzo Regione Abruzzo CASF 13.54 43.46 ItalPos CASN 10.30 45.47 ItalPos CAST Castellamonte 7.71 45.39 Ferrari Ing. Emanuele POLITO ItalPos CAST Castiglione Messer Marino 14.27 41.52 Regione Abruzzo Regione Abruzzo CAST Castelnuovo (RE) 10.41 44.43 GeoTop CATA 15.08 37.51 ItalPos CAVA Cava dei Tirreni (SA) 14.72 40.70 GeoTop CDRU Ottati 15.30 40.49 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) INGV CEL1 10.18 45.57 ItalPos CELL 15.89 38.26 ItalPos CESI 12.90 43.00 ItalPos
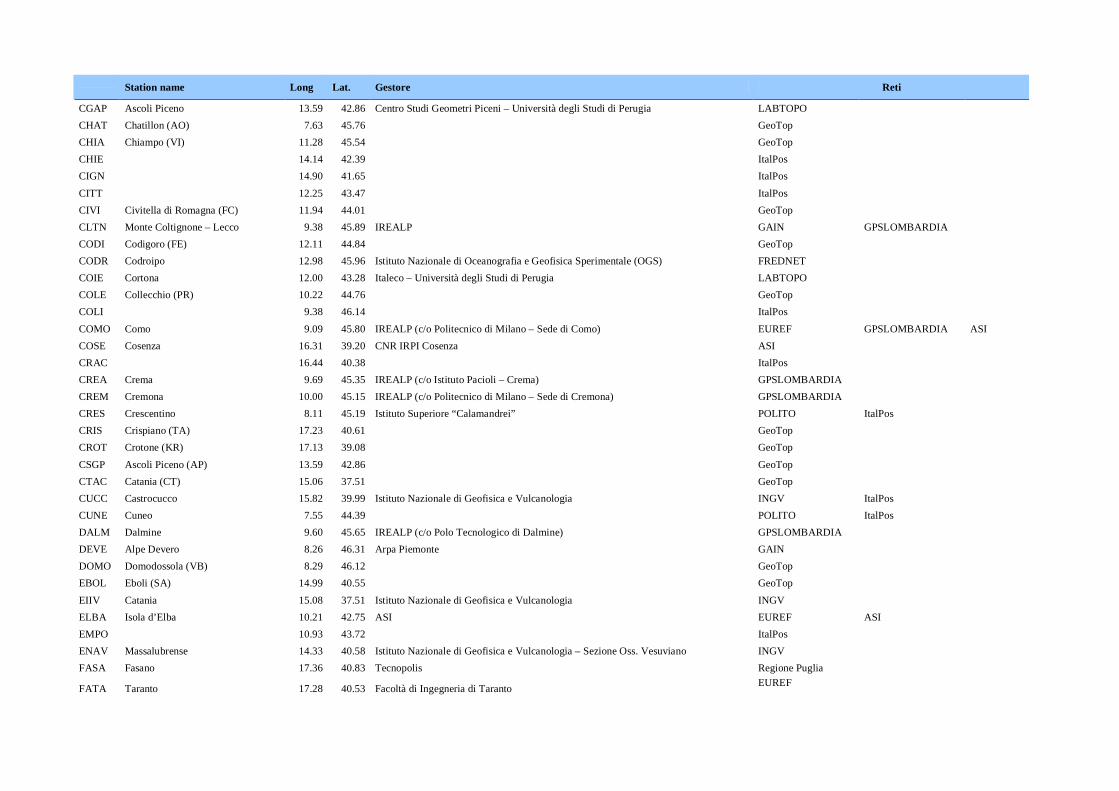
Station name Long Lat. Gestore Reti
CGAP Ascoli Piceno 13.59 42.86 Centro Studi Geometri Piceni – Università degli Studi di Perugia LABTOPO CHAT Chatillon (AO) 7.63 45.76 GeoTop CHIA Chiampo (VI) 11.28 45.54 GeoTop CHIE 14.14 42.39 ItalPos CIGN 14.90 41.65 ItalPos CITT 12.25 43.47 ItalPos CIVI Civitella di Romagna (FC) 11.94 44.01 GeoTop CLTN Monte Coltignone – Lecco 9.38 45.89 IREALP GAIN GPSLOMBARDIA CODI Codigoro (FE) 12.11 44.84 GeoTop CODR Codroipo 12.98 45.96 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET COIE Cortona 12.00 43.28 Italeco – Università degli Studi di Perugia LABTOPO COLE Collecchio (PR) 10.22 44.76 GeoTop COLI 9.38 46.14 ItalPos COMO Como 9.09 45.80 IREALP (c/o Politecnico di Milano – Sede di Como) EUREF GPSLOMBARDIA ASI COSE Cosenza 16.31 39.20 CNR IRPI Cosenza ASI CRAC 16.44 40.38 ItalPos CREA Crema 9.69 45.35 IREALP (c/o Istituto Pacioli – Crema) GPSLOMBARDIA CREM Cremona 10.00 45.15 IREALP (c/o Politecnico di Milano – Sede di Cremona) GPSLOMBARDIA CRES Crescentino 8.11 45.19 Istituto Superiore “Calamandrei” POLITO ItalPos CRIS Crispiano (TA) 17.23 40.61 GeoTop CROT Crotone (KR) 17.13 39.08 GeoTop CSGP Ascoli Piceno (AP) 13.59 42.86 GeoTop CTAC Catania (CT) 15.06 37.51 GeoTop CUCC Castrocucco 15.82 39.99 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos CUNE Cuneo 7.55 44.39 POLITO ItalPos DALM Dalmine 9.60 45.65 IREALP (c/o Polo Tecnologico di Dalmine) GPSLOMBARDIA DEVE Alpe Devero 8.26 46.31 Arpa Piemonte GAIN DOMO Domodossola (VB) 8.29 46.12 GeoTop EBOL Eboli (SA) 14.99 40.55 GeoTop EIIV Catania 15.08 37.51 Istituto Nazionale di Geofisica e Vulcanologia INGV ELBA Isola d’Elba 10.21 42.75 ASI EUREF ASI EMPO 10.93 43.72 ItalPos ENAV Massalubrense 14.33 40.58 Istituto Nazionale di Geofisica e Vulcanologia – Sezione Oss. Vesuviano INGV FASA Fasano 17.36 40.83 Tecnopolis Regione Puglia
FATA Taranto 17.28 40.53 Facoltà di Ingegneria di Taranto EUREF
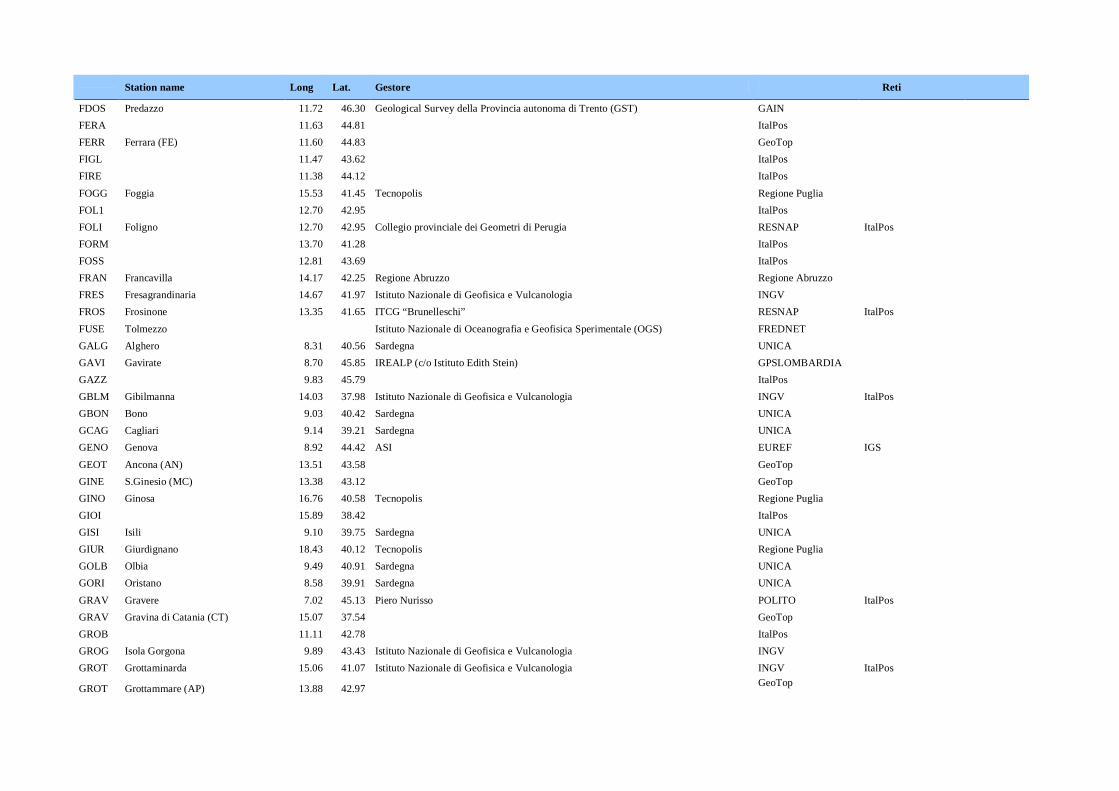
Station name Long Lat. Gestore Reti
FDOS Predazzo 11.72 46.30 Geological Survey della Provincia autonoma di Trento (GST) GAIN FERA 11.63 44.81 ItalPos FERR Ferrara (FE) 11.60 44.83 GeoTop FIGL 11.47 43.62 ItalPos FIRE 11.38 44.12 ItalPos FOGG Foggia 15.53 41.45 Tecnopolis Regione Puglia FOL1 12.70 42.95 ItalPos FOLI Foligno 12.70 42.95 Collegio provinciale dei Geometri di Perugia RESNAP ItalPos FORM 13.70 41.28 ItalPos FOSS 12.81 43.69 ItalPos FRAN Francavilla 14.17 42.25 Regione Abruzzo Regione Abruzzo FRES Fresagrandinaria 14.67 41.97 Istituto Nazionale di Geofisica e Vulcanologia INGV FROS Frosinone 13.35 41.65 ITCG “Brunelleschi” RESNAP ItalPos FUSE Tolmezzo Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET GALG Alghero 8.31 40.56 Sardegna UNICA GAVI Gavirate 8.70 45.85 IREALP (c/o Istituto Edith Stein) GPSLOMBARDIA GAZZ 9.83 45.79 ItalPos GBLM Gibilmanna 14.03 37.98 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos GBON Bono 9.03 40.42 Sardegna UNICA GCAG Cagliari 9.14 39.21 Sardegna UNICA GENO Genova 8.92 44.42 ASI EUREF IGS GEOT Ancona (AN) 13.51 43.58 GeoTop GINE S.Ginesio (MC) 13.38 43.12 GeoTop GINO Ginosa 16.76 40.58 Tecnopolis Regione Puglia GIOI 15.89 38.42 ItalPos GISI Isili 9.10 39.75 Sardegna UNICA GIUR Giurdignano 18.43 40.12 Tecnopolis Regione Puglia GOLB Olbia 9.49 40.91 Sardegna UNICA GORI Oristano 8.58 39.91 Sardegna UNICA GRAV Gravere 7.02 45.13 Piero Nurisso POLITO ItalPos GRAV Gravina di Catania (CT) 15.07 37.54 GeoTop GROB 11.11 42.78 ItalPos GROG Isola Gorgona 9.89 43.43 Istituto Nazionale di Geofisica e Vulcanologia INGV GROT Grottaminarda 15.06 41.07 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos
GROT Grottammare (AP) 13.88 42.97 GeoTop
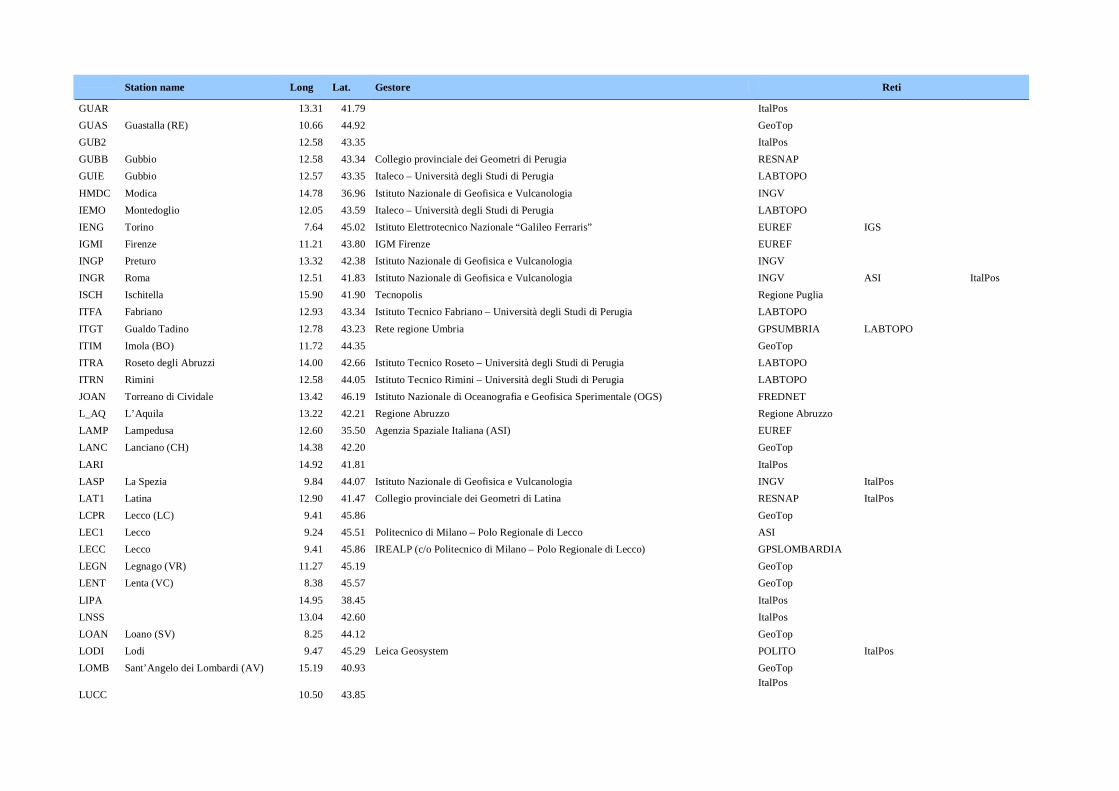
Station name Long Lat. Gestore Reti
GUAR 13.31 41.79 ItalPos GUAS Guastalla (RE) 10.66 44.92 GeoTop GUB2 12.58 43.35 ItalPos GUBB Gubbio 12.58 43.34 Collegio provinciale dei Geometri di Perugia RESNAP GUIE Gubbio 12.57 43.35 Italeco – Università degli Studi di Perugia LABTOPO HMDC Modica 14.78 36.96 Istituto Nazionale di Geofisica e Vulcanologia INGV IEMO Montedoglio 12.05 43.59 Italeco – Università degli Studi di Perugia LABTOPO IENG Torino 7.64 45.02 Istituto Elettrotecnico Nazionale “Galileo Ferraris” EUREF IGS IGMI Firenze 11.21 43.80 IGM Firenze EUREF INGP Preturo 13.32 42.38 Istituto Nazionale di Geofisica e Vulcanologia INGV INGR Roma 12.51 41.83 Istituto Nazionale di Geofisica e Vulcanologia INGV ASI ItalPos ISCH Ischitella 15.90 41.90 Tecnopolis Regione Puglia ITFA Fabriano 12.93 43.34 Istituto Tecnico Fabriano – Università degli Studi di Perugia LABTOPO ITGT Gualdo Tadino 12.78 43.23 Rete regione Umbria GPSUMBRIA LABTOPO ITIM Imola (BO) 11.72 44.35 GeoTop ITRA Roseto degli Abruzzi 14.00 42.66 Istituto Tecnico Roseto – Università degli Studi di Perugia LABTOPO ITRN Rimini 12.58 44.05 Istituto Tecnico Rimini – Università degli Studi di Perugia LABTOPO JOAN Torreano di Cividale 13.42 46.19 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET L_AQ L’Aquila 13.22 42.21 Regione Abruzzo Regione Abruzzo LAMP Lampedusa 12.60 35.50 Agenzia Spaziale Italiana (ASI) EUREF LANC Lanciano (CH) 14.38 42.20 GeoTop LARI 14.92 41.81 ItalPos LASP La Spezia 9.84 44.07 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos LAT1 Latina 12.90 41.47 Collegio provinciale dei Geometri di Latina RESNAP ItalPos LCPR Lecco (LC) 9.41 45.86 GeoTop LEC1 Lecco 9.24 45.51 Politecnico di Milano – Polo Regionale di Lecco ASI LECC Lecco 9.41 45.86 IREALP (c/o Politecnico di Milano – Polo Regionale di Lecco) GPSLOMBARDIA LEGN Legnago (VR) 11.27 45.19 GeoTop LENT Lenta (VC) 8.38 45.57 GeoTop LIPA 14.95 38.45 ItalPos LNSS 13.04 42.60 ItalPos LOAN Loano (SV) 8.25 44.12 GeoTop LODI Lodi 9.47 45.29 Leica Geosystem POLITO ItalPos LOMB Sant’Angelo dei Lombardi (AV) 15.19 40.93 GeoTop
LUCC 10.50 43.85 ItalPos
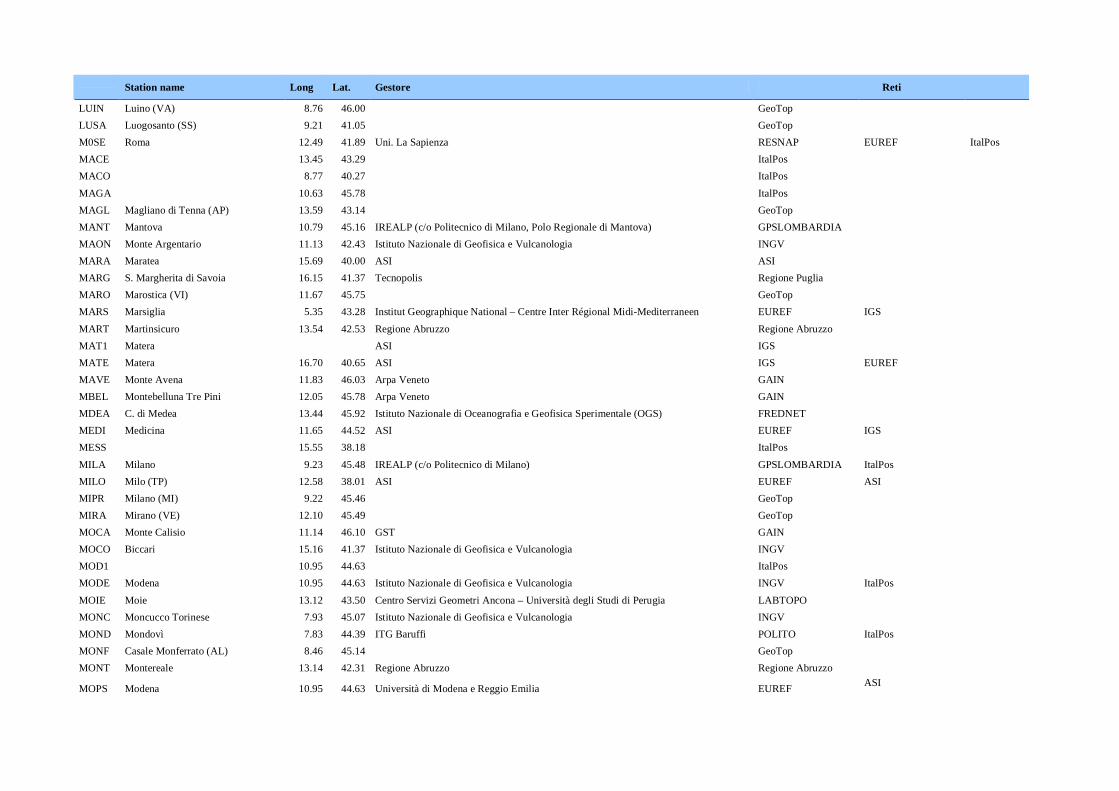
Station name Long Lat. Gestore Reti
LUIN Luino (VA) 8.76 46.00 GeoTop LUSA Luogosanto (SS) 9.21 41.05 GeoTop M0SE Roma 12.49 41.89 Uni. La Sapienza RESNAP EUREF ItalPos MACE 13.45 43.29 ItalPos MACO 8.77 40.27 ItalPos MAGA 10.63 45.78 ItalPos MAGL Magliano di Tenna (AP) 13.59 43.14 GeoTop MANT Mantova 10.79 45.16 IREALP (c/o Politecnico di Milano, Polo Regionale di Mantova) GPSLOMBARDIA MAON Monte Argentario 11.13 42.43 Istituto Nazionale di Geofisica e Vulcanologia INGV MARA Maratea 15.69 40.00 ASI ASI MARG S. Margherita di Savoia 16.15 41.37 Tecnopolis Regione Puglia MARO Marostica (VI) 11.67 45.75 GeoTop MARS Marsiglia 5.35 43.28 Institut Geographique National – Centre Inter Régional Midi-Mediterraneen EUREF IGS MART Martinsicuro 13.54 42.53 Regione Abruzzo Regione Abruzzo MAT1 Matera ASI IGS MATE Matera 16.70 40.65 ASI IGS EUREF MAVE Monte Avena 11.83 46.03 Arpa Veneto GAIN MBEL Montebelluna Tre Pini 12.05 45.78 Arpa Veneto GAIN MDEA C. di Medea 13.44 45.92 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET MEDI Medicina 11.65 44.52 ASI EUREF IGS MESS 15.55 38.18 ItalPos MILA Milano 9.23 45.48 IREALP (c/o Politecnico di Milano) GPSLOMBARDIA ItalPos MILO Milo (TP) 12.58 38.01 ASI EUREF ASI MIPR Milano (MI) 9.22 45.46 GeoTop MIRA Mirano (VE) 12.10 45.49 GeoTop MOCA Monte Calisio 11.14 46.10 GST GAIN MOCO Biccari 15.16 41.37 Istituto Nazionale di Geofisica e Vulcanologia INGV MOD1 10.95 44.63 ItalPos MODE Modena 10.95 44.63 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos MOIE Moie 13.12 43.50 Centro Servizi Geometri Ancona – Università degli Studi di Perugia LABTOPO MONC Moncucco Torinese 7.93 45.07 Istituto Nazionale di Geofisica e Vulcanologia INGV MOND Mondovì 7.83 44.39 ITG Baruffi POLITO ItalPos MONF Casale Monferrato (AL) 8.46 45.14 GeoTop MONT Montereale 13.14 42.31 Regione Abruzzo Regione Abruzzo
MOPS Modena 10.95 44.63 Università di Modena e Reggio Emilia EUREF ASI
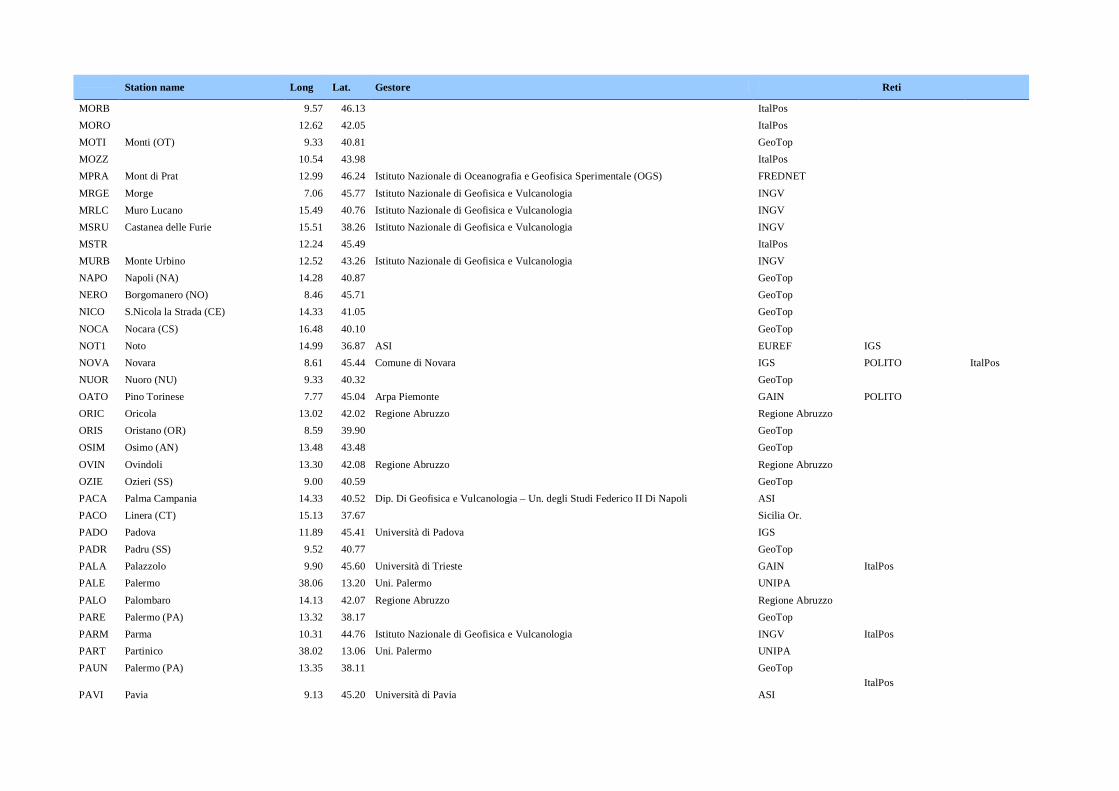
Station name Long Lat. Gestore Reti
MORB 9.57 46.13 ItalPos MORO 12.62 42.05 ItalPos MOTI Monti (OT) 9.33 40.81 GeoTop MOZZ 10.54 43.98 ItalPos MPRA Mont di Prat 12.99 46.24 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET MRGE Morge 7.06 45.77 Istituto Nazionale di Geofisica e Vulcanologia INGV MRLC Muro Lucano 15.49 40.76 Istituto Nazionale di Geofisica e Vulcanologia INGV MSRU Castanea delle Furie 15.51 38.26 Istituto Nazionale di Geofisica e Vulcanologia INGV MSTR 12.24 45.49 ItalPos MURB Monte Urbino 12.52 43.26 Istituto Nazionale di Geofisica e Vulcanologia INGV NAPO Napoli (NA) 14.28 40.87 GeoTop NERO Borgomanero (NO) 8.46 45.71 GeoTop NICO S.Nicola la Strada (CE) 14.33 41.05 GeoTop NOCA Nocara (CS) 16.48 40.10 GeoTop NOT1 Noto 14.99 36.87 ASI EUREF IGS NOVA Novara 8.61 45.44 Comune di Novara IGS POLITO ItalPos NUOR Nuoro (NU) 9.33 40.32 GeoTop OATO Pino Torinese 7.77 45.04 Arpa Piemonte GAIN POLITO ORIC Oricola 13.02 42.02 Regione Abruzzo Regione Abruzzo ORIS Oristano (OR) 8.59 39.90 GeoTop OSIM Osimo (AN) 13.48 43.48 GeoTop OVIN Ovindoli 13.30 42.08 Regione Abruzzo Regione Abruzzo OZIE Ozieri (SS) 9.00 40.59 GeoTop PACA Palma Campania 14.33 40.52 Dip. Di Geofisica e Vulcanologia – Un. degli Studi Federico II Di Napoli ASI PACO Linera (CT) 15.13 37.67 Sicilia Or. PADO Padova 11.89 45.41 Università di Padova IGS PADR Padru (SS) 9.52 40.77 GeoTop PALA Palazzolo 9.90 45.60 Università di Trieste GAIN ItalPos PALE Palermo 38.06 13.20 Uni. Palermo UNIPA PALO Palombaro 14.13 42.07 Regione Abruzzo Regione Abruzzo PARE Palermo (PA) 13.32 38.17 GeoTop PARM Parma 10.31 44.76 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos PART Partinico 38.02 13.06 Uni. Palermo UNIPA PAUN Palermo (PA) 13.35 38.11 GeoTop
PAVI Pavia 9.13 45.20 Università di Pavia ASI ItalPos
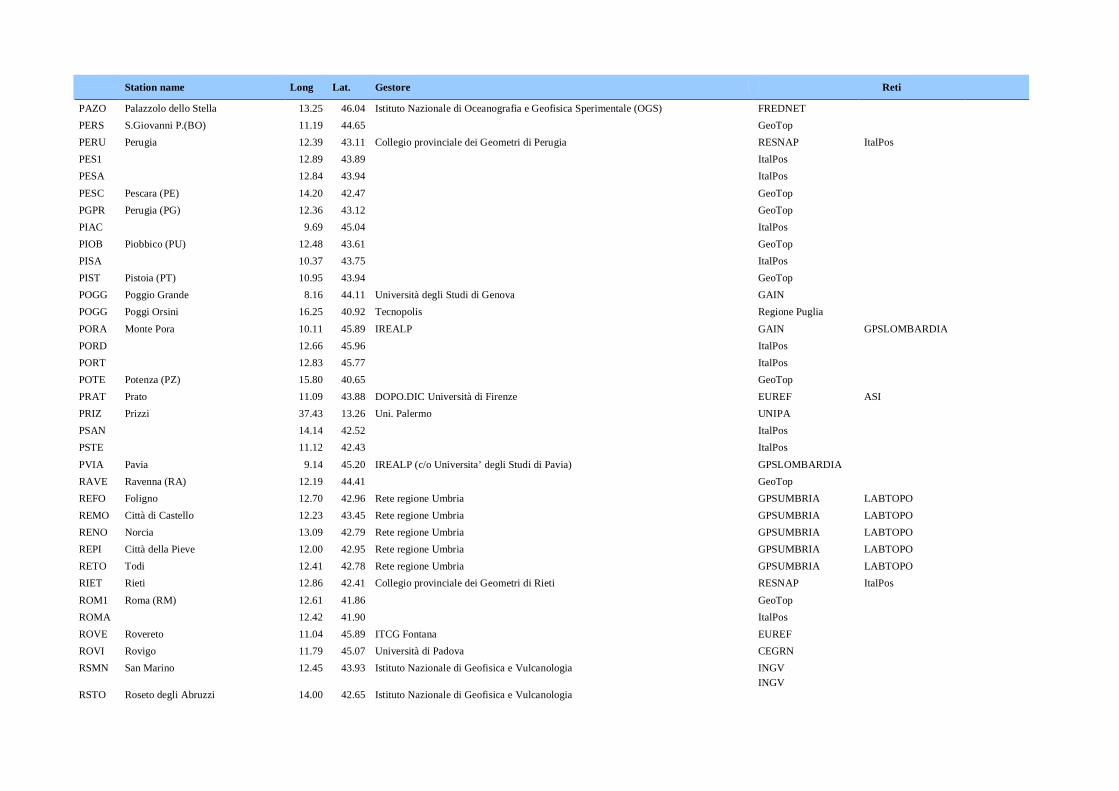
Station name Long Lat. Gestore Reti
PAZO Palazzolo dello Stella 13.25 46.04 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET PERS S.Giovanni P.(BO) 11.19 44.65 GeoTop PERU Perugia 12.39 43.11 Collegio provinciale dei Geometri di Perugia RESNAP ItalPos PES1 12.89 43.89 ItalPos PESA 12.84 43.94 ItalPos PESC Pescara (PE) 14.20 42.47 GeoTop PGPR Perugia (PG) 12.36 43.12 GeoTop PIAC 9.69 45.04 ItalPos PIOB Piobbico (PU) 12.48 43.61 GeoTop PISA 10.37 43.75 ItalPos PIST Pistoia (PT) 10.95 43.94 GeoTop POGG Poggio Grande 8.16 44.11 Università degli Studi di Genova GAIN POGG Poggi Orsini 16.25 40.92 Tecnopolis Regione Puglia PORA Monte Pora 10.11 45.89 IREALP GAIN GPSLOMBARDIA PORD 12.66 45.96 ItalPos PORT 12.83 45.77 ItalPos POTE Potenza (PZ) 15.80 40.65 GeoTop PRAT Prato 11.09 43.88 DOPO.DIC Università di Firenze EUREF ASI PRIZ Prizzi 37.43 13.26 Uni. Palermo UNIPA PSAN 14.14 42.52 ItalPos PSTE 11.12 42.43 ItalPos PVIA Pavia 9.14 45.20 IREALP (c/o Universita’ degli Studi di Pavia) GPSLOMBARDIA RAVE Ravenna (RA) 12.19 44.41 GeoTop REFO Foligno 12.70 42.96 Rete regione Umbria GPSUMBRIA LABTOPO REMO Città di Castello 12.23 43.45 Rete regione Umbria GPSUMBRIA LABTOPO RENO Norcia 13.09 42.79 Rete regione Umbria GPSUMBRIA LABTOPO REPI Città della Pieve 12.00 42.95 Rete regione Umbria GPSUMBRIA LABTOPO RETO Todi 12.41 42.78 Rete regione Umbria GPSUMBRIA LABTOPO RIET Rieti 12.86 42.41 Collegio provinciale dei Geometri di Rieti RESNAP ItalPos ROM1 Roma (RM) 12.61 41.86 GeoTop ROMA 12.42 41.90 ItalPos ROVE Rovereto 11.04 45.89 ITCG Fontana EUREF ROVI Rovigo 11.79 45.07 Università di Padova CEGRN RSMN San Marino 12.45 43.93 Istituto Nazionale di Geofisica e Vulcanologia INGV
RSTO Roseto degli Abruzzi 14.00 42.65 Istituto Nazionale di Geofisica e Vulcanologia INGV
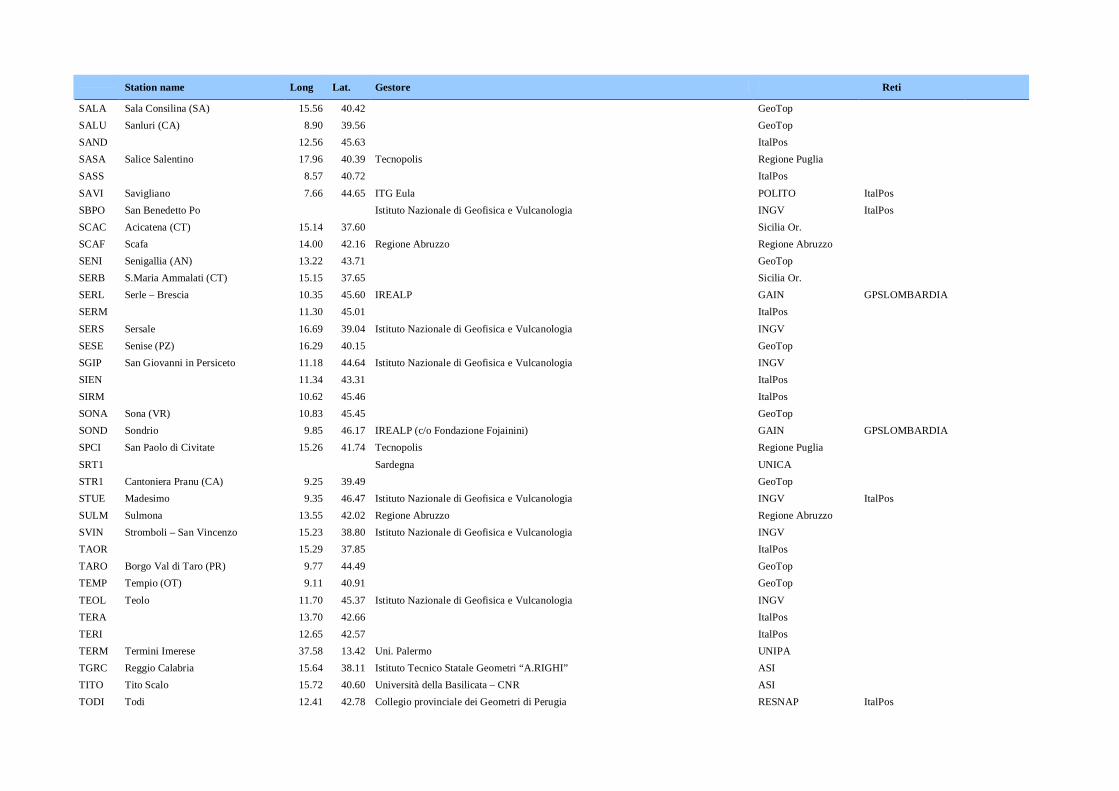
Station name Long Lat. Gestore Reti
SALA Sala Consilina (SA) 15.56 40.42 GeoTop SALU Sanluri (CA) 8.90 39.56 GeoTop SAND 12.56 45.63 ItalPos SASA Salice Salentino 17.96 40.39 Tecnopolis Regione Puglia SASS 8.57 40.72 ItalPos SAVI Savigliano 7.66 44.65 ITG Eula POLITO ItalPos SBPO San Benedetto Po Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos SCAC Acicatena (CT) 15.14 37.60 Sicilia Or. SCAF Scafa 14.00 42.16 Regione Abruzzo Regione Abruzzo SENI Senigallia (AN) 13.22 43.71 GeoTop SERB S.Maria Ammalati (CT) 15.15 37.65 Sicilia Or. SERL Serle – Brescia 10.35 45.60 IREALP GAIN GPSLOMBARDIA SERM 11.30 45.01 ItalPos SERS Sersale 16.69 39.04 Istituto Nazionale di Geofisica e Vulcanologia INGV SESE Senise (PZ) 16.29 40.15 GeoTop SGIP San Giovanni in Persiceto 11.18 44.64 Istituto Nazionale di Geofisica e Vulcanologia INGV SIEN 11.34 43.31 ItalPos SIRM 10.62 45.46 ItalPos SONA Sona (VR) 10.83 45.45 GeoTop SOND Sondrio 9.85 46.17 IREALP (c/o Fondazione Fojainini) GAIN GPSLOMBARDIA SPCI San Paolo di Civitate 15.26 41.74 Tecnopolis Regione Puglia SRT1 Sardegna UNICA STR1 Cantoniera Pranu (CA) 9.25 39.49 GeoTop STUE Madesimo 9.35 46.47 Istituto Nazionale di Geofisica e Vulcanologia INGV ItalPos SULM Sulmona 13.55 42.02 Regione Abruzzo Regione Abruzzo SVIN Stromboli – San Vincenzo 15.23 38.80 Istituto Nazionale di Geofisica e Vulcanologia INGV TAOR 15.29 37.85 ItalPos TARO Borgo Val di Taro (PR) 9.77 44.49 GeoTop TEMP Tempio (OT) 9.11 40.91 GeoTop TEOL Teolo 11.70 45.37 Istituto Nazionale di Geofisica e Vulcanologia INGV TERA 13.70 42.66 ItalPos TERI 12.65 42.57 ItalPos TERM Termini Imerese 37.58 13.42 Uni. Palermo UNIPA TGRC Reggio Calabria 15.64 38.11 Istituto Tecnico Statale Geometri “A.RIGHI” ASI TITO Tito Scalo 15.72 40.60 Università della Basilicata – CNR ASI TODI Todi 12.41 42.78 Collegio provinciale dei Geometri di Perugia RESNAP ItalPos
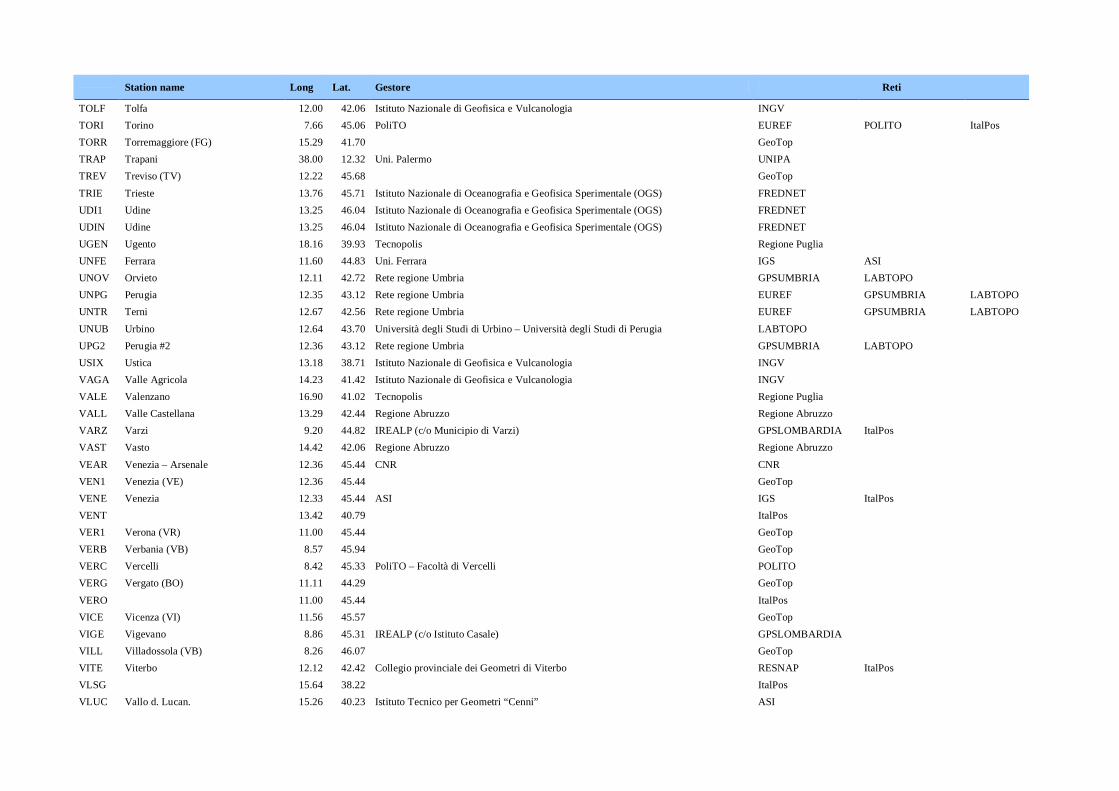
Station name Long Lat. Gestore Reti
TOLF Tolfa 12.00 42.06 Istituto Nazionale di Geofisica e Vulcanologia INGV TORI Torino 7.66 45.06 PoliTO EUREF POLITO ItalPos TORR Torremaggiore (FG) 15.29 41.70 GeoTop TRAP Trapani 38.00 12.32 Uni. Palermo UNIPA TREV Treviso (TV) 12.22 45.68 GeoTop TRIE Trieste 13.76 45.71 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET UDI1 Udine 13.25 46.04 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET UDIN Udine 13.25 46.04 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET UGEN Ugento 18.16 39.93 Tecnopolis Regione Puglia UNFE Ferrara 11.60 44.83 Uni. Ferrara IGS ASI UNOV Orvieto 12.11 42.72 Rete regione Umbria GPSUMBRIA LABTOPO UNPG Perugia 12.35 43.12 Rete regione Umbria EUREF GPSUMBRIA LABTOPO UNTR Terni 12.67 42.56 Rete regione Umbria EUREF GPSUMBRIA LABTOPO UNUB Urbino 12.64 43.70 Università degli Studi di Urbino – Università degli Studi di Perugia LABTOPO UPG2 Perugia #2 12.36 43.12 Rete regione Umbria GPSUMBRIA LABTOPO USIX Ustica 13.18 38.71 Istituto Nazionale di Geofisica e Vulcanologia INGV VAGA Valle Agricola 14.23 41.42 Istituto Nazionale di Geofisica e Vulcanologia INGV VALE Valenzano 16.90 41.02 Tecnopolis Regione Puglia VALL Valle Castellana 13.29 42.44 Regione Abruzzo Regione Abruzzo VARZ Varzi 9.20 44.82 IREALP (c/o Municipio di Varzi) GPSLOMBARDIA ItalPos VAST Vasto 14.42 42.06 Regione Abruzzo Regione Abruzzo VEAR Venezia – Arsenale 12.36 45.44 CNR CNR VEN1 Venezia (VE) 12.36 45.44 GeoTop VENE Venezia 12.33 45.44 ASI IGS ItalPos VENT 13.42 40.79 ItalPos VER1 Verona (VR) 11.00 45.44 GeoTop VERB Verbania (VB) 8.57 45.94 GeoTop VERC Vercelli 8.42 45.33 PoliTO – Facoltà di Vercelli POLITO VERG Vergato (BO) 11.11 44.29 GeoTop VERO 11.00 45.44 ItalPos VICE Vicenza (VI) 11.56 45.57 GeoTop VIGE Vigevano 8.86 45.31 IREALP (c/o Istituto Casale) GPSLOMBARDIA VILL Villadossola (VB) 8.26 46.07 GeoTop VITE Viterbo 12.12 42.42 Collegio provinciale dei Geometri di Viterbo RESNAP ItalPos VLSG 15.64 38.22 ItalPos VLUC Vallo d. Lucan. 15.26 40.23 Istituto Tecnico per Geometri “Cenni” ASI
Station name Long Lat. Gestore Reti
VVLO 13.62 41.87 ItalPos VVLO Villa Val Longa 13.62 41.87 Istituto Nazionale di Geofisica e Vulcanologia INGV ZOUF Zouf Plan 12.58 46.33 Istituto Nazionale di Oceanografia e Geofisica Sperimentale (OGS) FREDNET
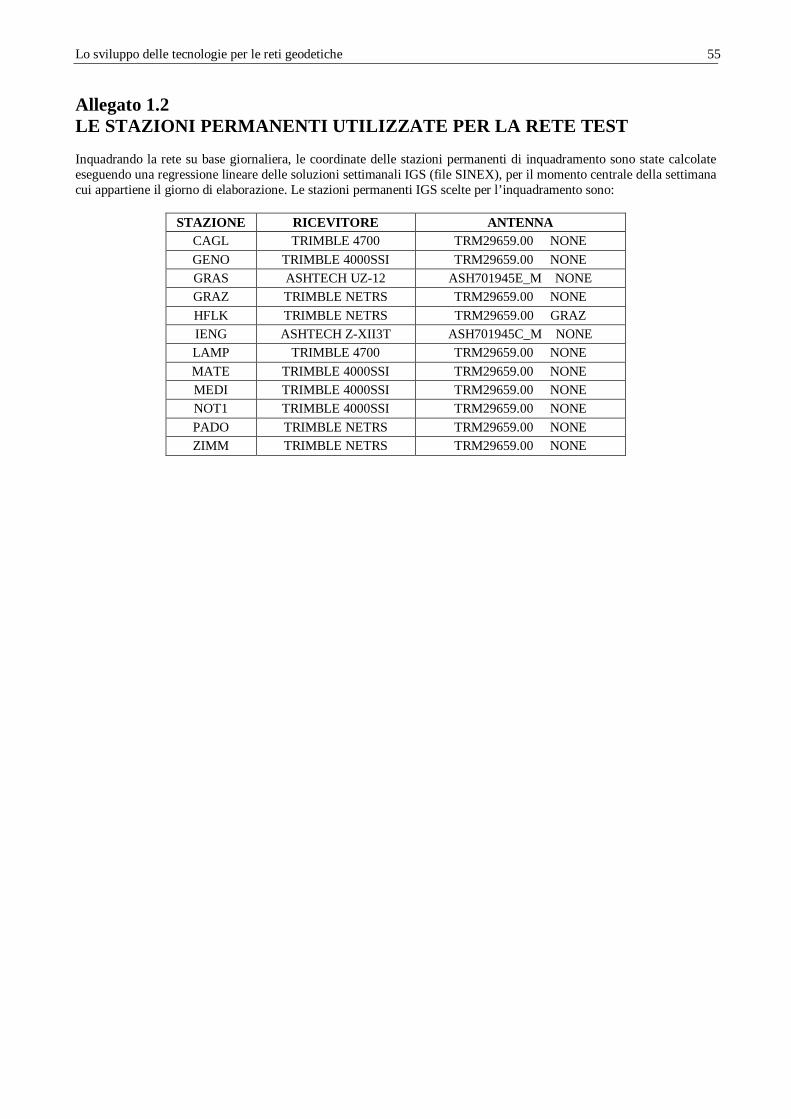
Lo sviluppo delle tecnologie per le reti geodetiche
55
Allegato 1.2 LE STAZIONI PERMANENTI UTILIZZATE PER LA RETE TEST Inquadrando la rete su base giornaliera, le coordinate delle stazioni permanenti di inquadramento sono state calcolate eseguendo una regressione lineare delle soluzioni settimanali IGS (file SINEX), per il momento centrale della settimana cui appartiene il giorno di elaborazione. Le stazioni permanenti IGS scelte per l’inquadramento sono:
STAZIONE RICEVITORE ANTENNA CAGL TRIMBLE 4700 TRM29659.00 NONE GENO TRIMBLE 4000SSI TRM29659.00 NONE GRAS ASHTECH UZ-12 ASH701945E_M NONE GRAZ TRIMBLE NETRS TRM29659.00 NONE HFLK TRIMBLE NETRS TRM29659.00 GRAZ IENG ASHTECH Z-XII3T ASH701945C_M NONE LAMP TRIMBLE 4700 TRM29659.00 NONE MATE TRIMBLE 4000SSI TRM29659.00 NONE MEDI TRIMBLE 4000SSI TRM29659.00 NONE NOT1 TRIMBLE 4000SSI TRM29659.00 NONE PADO TRIMBLE NETRS TRM29659.00 NONE ZIMM TRIMBLE NETRS TRM29659.00 NONE

M. Barbarella, F. Radicioni, F. Sansò editori
56
Elenco e mappa delle stazioni permanenti IGS di inquadramento:
le loro coordinate interpolate, per ogni settimana, sono riportate nelle tabelle seguenti:
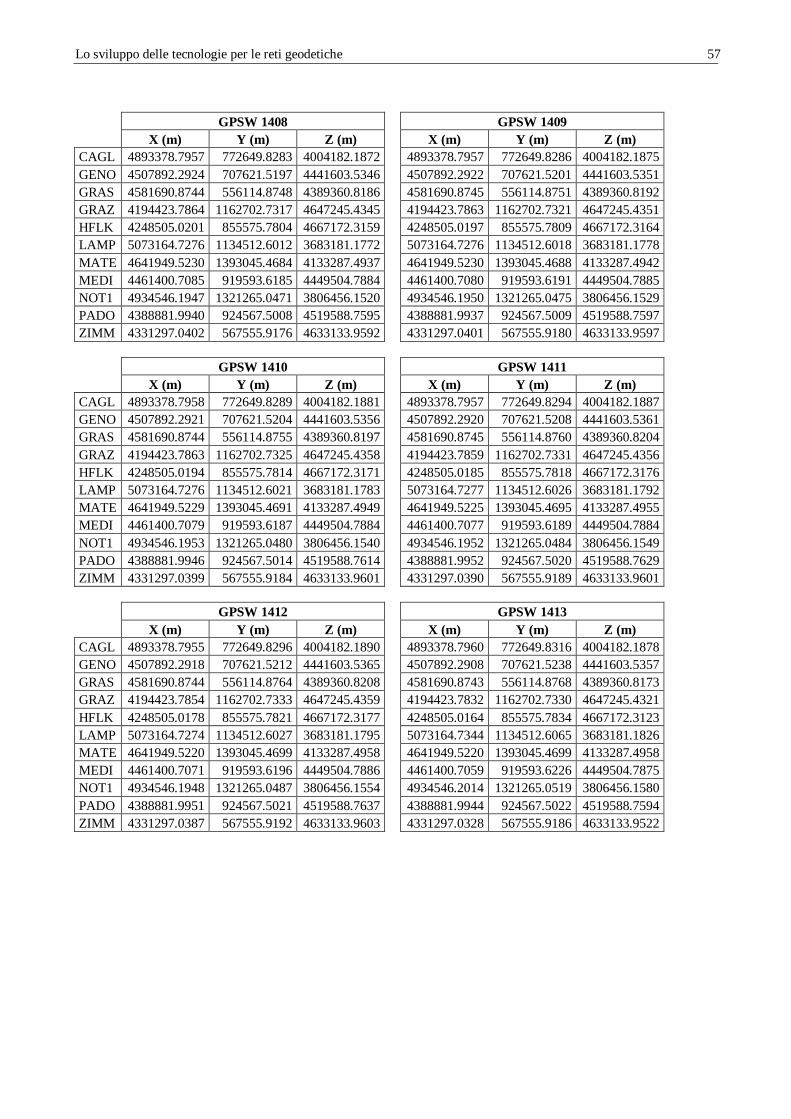
Lo sviluppo delle tecnologie per le reti geodetiche
57
GPSW 1408 GPSW 1409 X (m) Y (m) Z (m) X (m) Y (m) Z (m) CAGL 4893378.7957 772649.8283 4004182.1872 4893378.7957 772649.8286 4004182.1875 GENO 4507892.2924 707621.5197 4441603.5346 4507892.2922 707621.5201 4441603.5351 GRAS 4581690.8744 556114.8748 4389360.8186 4581690.8745 556114.8751 4389360.8192 GRAZ 4194423.7864 1162702.7317 4647245.4345 4194423.7863 1162702.7321 4647245.4351 HFLK 4248505.0201 855575.7804 4667172.3159 4248505.0197 855575.7809 4667172.3164 LAMP 5073164.7276 1134512.6012 3683181.1772 5073164.7276 1134512.6018 3683181.1778 MATE 4641949.5230 1393045.4684 4133287.4937 4641949.5230 1393045.4688 4133287.4942 MEDI 4461400.7085 919593.6185 4449504.7884 4461400.7080 919593.6191 4449504.7885 NOT1 4934546.1947 1321265.0471 3806456.1520 4934546.1950 1321265.0475 3806456.1529 PADO 4388881.9940 924567.5008 4519588.7595 4388881.9937 924567.5009 4519588.7597 ZIMM 4331297.0402 567555.9176 4633133.9592 4331297.0401 567555.9180 4633133.9597
GPSW 1410 GPSW 1411 X (m) Y (m) Z (m) X (m) Y (m) Z (m) CAGL 4893378.7958 772649.8289 4004182.1881 4893378.7957 772649.8294 4004182.1887 GENO 4507892.2921 707621.5204 4441603.5356 4507892.2920 707621.5208 4441603.5361 GRAS 4581690.8744 556114.8755 4389360.8197 4581690.8745 556114.8760 4389360.8204 GRAZ 4194423.7863 1162702.7325 4647245.4358 4194423.7859 1162702.7331 4647245.4356 HFLK 4248505.0194 855575.7814 4667172.3171 4248505.0185 855575.7818 4667172.3176 LAMP 5073164.7276 1134512.6021 3683181.1783 5073164.7277 1134512.6026 3683181.1792 MATE 4641949.5229 1393045.4691 4133287.4949 4641949.5225 1393045.4695 4133287.4955 MEDI 4461400.7079 919593.6187 4449504.7884 4461400.7077 919593.6189 4449504.7884 NOT1 4934546.1953 1321265.0480 3806456.1540 4934546.1952 1321265.0484 3806456.1549 PADO 4388881.9946 924567.5014 4519588.7614 4388881.9952 924567.5020 4519588.7629 ZIMM 4331297.0399 567555.9184 4633133.9601 4331297.0390 567555.9189 4633133.9601
GPSW 1412 GPSW 1413 X (m) Y (m) Z (m) X (m) Y (m) Z (m) CAGL 4893378.7955 772649.8296 4004182.1890 4893378.7960 772649.8316 4004182.1878 GENO 4507892.2918 707621.5212 4441603.5365 4507892.2908 707621.5238 4441603.5357 GRAS 4581690.8744 556114.8764 4389360.8208 4581690.8743 556114.8768 4389360.8173 GRAZ 4194423.7854 1162702.7333 4647245.4359 4194423.7832 1162702.7330 4647245.4321 HFLK 4248505.0178 855575.7821 4667172.3177 4248505.0164 855575.7834 4667172.3123 LAMP 5073164.7274 1134512.6027 3683181.1795 5073164.7344 1134512.6065 3683181.1826 MATE 4641949.5220 1393045.4699 4133287.4958 4641949.5220 1393045.4699 4133287.4958 MEDI 4461400.7071 919593.6196 4449504.7886 4461400.7059 919593.6226 4449504.7875 NOT1 4934546.1948 1321265.0487 3806456.1554 4934546.2014 1321265.0519 3806456.1580 PADO 4388881.9951 924567.5021 4519588.7637 4388881.9944 924567.5022 4519588.7594 ZIMM 4331297.0387 567555.9192 4633133.9603 4331297.0328 567555.9186 4633133.9522
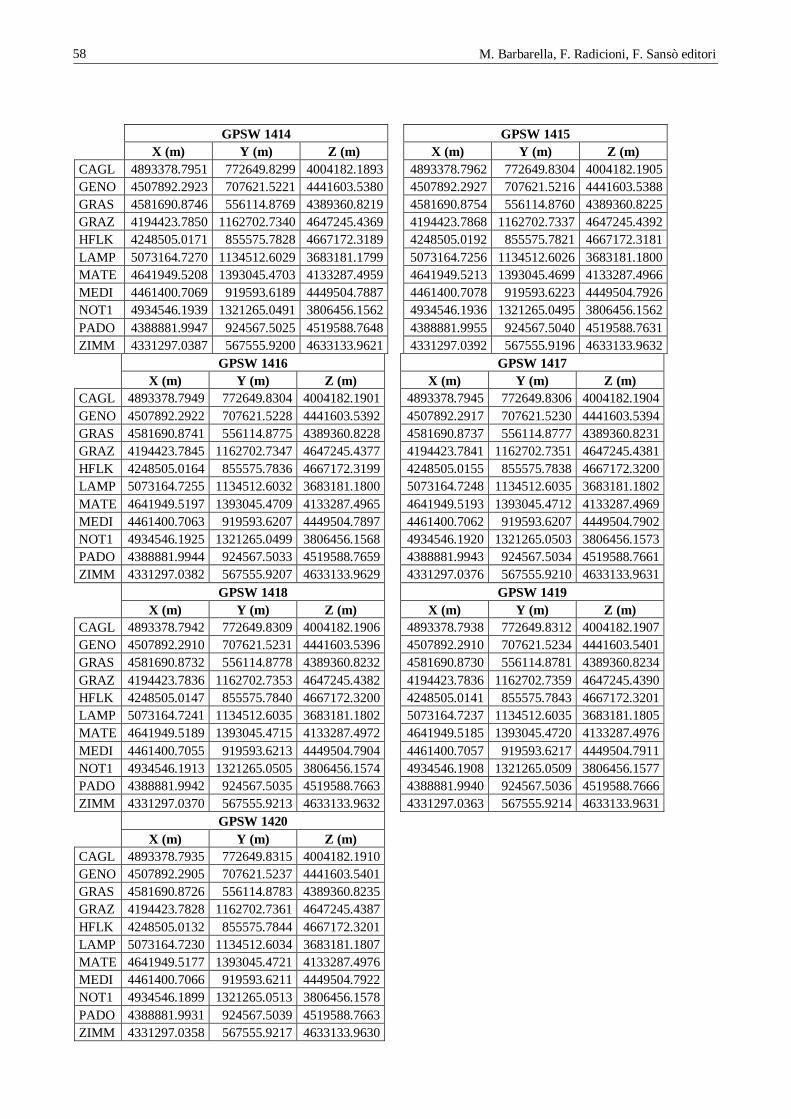
M. Barbarella, F. Radicioni, F. Sansò editori
58
GPSW 1414 GPSW 1415 X (m) Y (m) Z (m) X (m) Y (m) Z (m) CAGL 4893378.7951 772649.8299 4004182.1893 4893378.7962 772649.8304 4004182.1905 GENO 4507892.2923 707621.5221 4441603.5380 4507892.2927 707621.5216 4441603.5388 GRAS 4581690.8746 556114.8769 4389360.8219 4581690.8754 556114.8760 4389360.8225 GRAZ 4194423.7850 1162702.7340 4647245.4369 4194423.7868 1162702.7337 4647245.4392 HFLK 4248505.0171 855575.7828 4667172.3189 4248505.0192 855575.7821 4667172.3181 LAMP 5073164.7270 1134512.6029 3683181.1799 5073164.7256 1134512.6026 3683181.1800 MATE 4641949.5208 1393045.4703 4133287.4959 4641949.5213 1393045.4699 4133287.4966 MEDI 4461400.7069 919593.6189 4449504.7887 4461400.7078 919593.6223 4449504.7926 NOT1 4934546.1939 1321265.0491 3806456.1562 4934546.1936 1321265.0495 3806456.1562 PADO 4388881.9947 924567.5025 4519588.7648 4388881.9955 924567.5040 4519588.7631 ZIMM 4331297.0387 567555.9200 4633133.9621 4331297.0392 567555.9196 4633133.9632 GPSW 1416 GPSW 1417 X (m) Y (m) Z (m) X (m) Y (m) Z (m) CAGL 4893378.7949 772649.8304 4004182.1901 4893378.7945 772649.8306 4004182.1904 GENO 4507892.2922 707621.5228 4441603.5392 4507892.2917 707621.5230 4441603.5394 GRAS 4581690.8741 556114.8775 4389360.8228 4581690.8737 556114.8777 4389360.8231 GRAZ 4194423.7845 1162702.7347 4647245.4377 4194423.7841 1162702.7351 4647245.4381 HFLK 4248505.0164 855575.7836 4667172.3199 4248505.0155 855575.7838 4667172.3200 LAMP 5073164.7255 1134512.6032 3683181.1800 5073164.7248 1134512.6035 3683181.1802 MATE 4641949.5197 1393045.4709 4133287.4965 4641949.5193 1393045.4712 4133287.4969 MEDI 4461400.7063 919593.6207 4449504.7897 4461400.7062 919593.6207 4449504.7902 NOT1 4934546.1925 1321265.0499 3806456.1568 4934546.1920 1321265.0503 3806456.1573 PADO 4388881.9944 924567.5033 4519588.7659 4388881.9943 924567.5034 4519588.7661 ZIMM 4331297.0382 567555.9207 4633133.9629 4331297.0376 567555.9210 4633133.9631 GPSW 1418 GPSW 1419 X (m) Y (m) Z (m) X (m) Y (m) Z (m) CAGL 4893378.7942 772649.8309 4004182.1906 4893378.7938 772649.8312 4004182.1907 GENO 4507892.2910 707621.5231 4441603.5396 4507892.2910 707621.5234 4441603.5401 GRAS 4581690.8732 556114.8778 4389360.8232 4581690.8730 556114.8781 4389360.8234 GRAZ 4194423.7836 1162702.7353 4647245.4382 4194423.7836 1162702.7359 4647245.4390 HFLK 4248505.0147 855575.7840 4667172.3200 4248505.0141 855575.7843 4667172.3201 LAMP 5073164.7241 1134512.6035 3683181.1802 5073164.7237 1134512.6035 3683181.1805 MATE 4641949.5189 1393045.4715 4133287.4972 4641949.5185 1393045.4720 4133287.4976 MEDI 4461400.7055 919593.6213 4449504.7904 4461400.7057 919593.6217 4449504.7911 NOT1 4934546.1913 1321265.0505 3806456.1574 4934546.1908 1321265.0509 3806456.1577 PADO 4388881.9942 924567.5035 4519588.7663 4388881.9940 924567.5036 4519588.7666 ZIMM 4331297.0370 567555.9213 4633133.9632 4331297.0363 567555.9214 4633133.9631 GPSW 1420 X (m) Y (m) Z (m) CAGL 4893378.7935 772649.8315 4004182.1910 GENO 4507892.2905 707621.5237 4441603.5401 GRAS 4581690.8726 556114.8783 4389360.8235 GRAZ 4194423.7828 1162702.7361 4647245.4387 HFLK 4248505.0132 855575.7844 4667172.3201 LAMP 5073164.7230 1134512.6034 3683181.1807 MATE 4641949.5177 1393045.4721 4133287.4976 MEDI 4461400.7066 919593.6211 4449504.7922 NOT1 4934546.1899 1321265.0513 3806456.1578 PADO 4388881.9931 924567.5039 4519588.7663 ZIMM 4331297.0358 567555.9217 4633133.9630
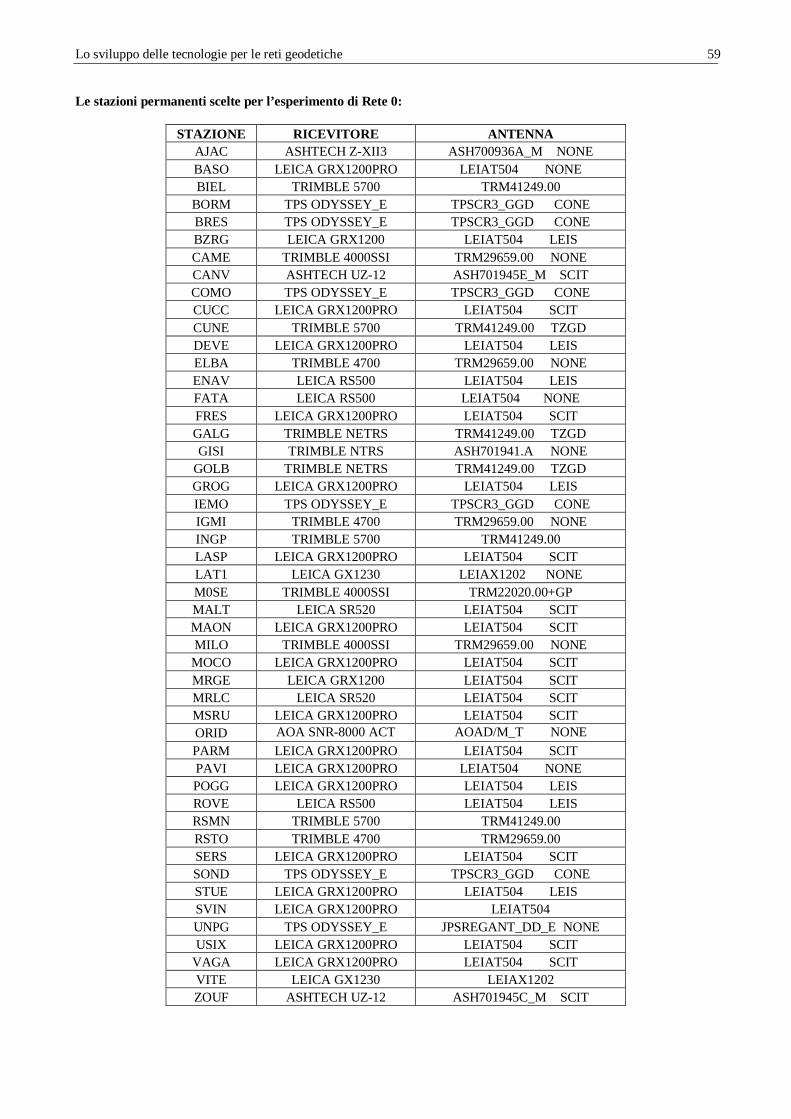
Lo sviluppo delle tecnologie per le reti geodetiche
59
Le stazioni permanenti scelte per l’esperimento di Rete 0:
STAZIONE RICEVITORE ANTENNA AJAC ASHTECH Z-XII3 ASH700936A_M NONE BASO LEICA GRX1200PRO LEIAT504 NONE BIEL TRIMBLE 5700 TRM41249.00
BORM TPS ODYSSEY_E TPSCR3_GGD CONE BRES TPS ODYSSEY_E TPSCR3_GGD CONE BZRG LEICA GRX1200 LEIAT504 LEIS CAME TRIMBLE 4000SSI TRM29659.00 NONE CANV ASHTECH UZ-12 ASH701945E_M SCIT COMO TPS ODYSSEY_E TPSCR3_GGD CONE CUCC LEICA GRX1200PRO LEIAT504 SCIT CUNE TRIMBLE 5700 TRM41249.00 TZGD DEVE LEICA GRX1200PRO LEIAT504 LEIS ELBA TRIMBLE 4700 TRM29659.00 NONE ENAV LEICA RS500 LEIAT504 LEIS FATA LEICA RS500 LEIAT504 NONE FRES LEICA GRX1200PRO LEIAT504 SCIT GALG TRIMBLE NETRS TRM41249.00 TZGD GISI TRIMBLE NTRS ASH701941.A NONE
GOLB TRIMBLE NETRS TRM41249.00 TZGD GROG LEICA GRX1200PRO LEIAT504 LEIS IEMO TPS ODYSSEY_E TPSCR3_GGD CONE IGMI TRIMBLE 4700 TRM29659.00 NONE INGP TRIMBLE 5700 TRM41249.00 LASP LEICA GRX1200PRO LEIAT504 SCIT LAT1 LEICA GX1230 LEIAX1202 NONE M0SE TRIMBLE 4000SSI TRM22020.00+GP MALT LEICA SR520 LEIAT504 SCIT MAON LEICA GRX1200PRO LEIAT504 SCIT MILO TRIMBLE 4000SSI TRM29659.00 NONE MOCO LEICA GRX1200PRO LEIAT504 SCIT MRGE LEICA GRX1200 LEIAT504 SCIT MRLC LEICA SR520 LEIAT504 SCIT MSRU LEICA GRX1200PRO LEIAT504 SCIT ORID AOA SNR-8000 ACT AOAD/M_T NONE PARM LEICA GRX1200PRO LEIAT504 SCIT PAVI LEICA GRX1200PRO LEIAT504 NONE POGG LEICA GRX1200PRO LEIAT504 LEIS ROVE LEICA RS500 LEIAT504 LEIS RSMN TRIMBLE 5700 TRM41249.00 RSTO TRIMBLE 4700 TRM29659.00 SERS LEICA GRX1200PRO LEIAT504 SCIT SOND TPS ODYSSEY_E TPSCR3_GGD CONE STUE LEICA GRX1200PRO LEIAT504 LEIS SVIN LEICA GRX1200PRO LEIAT504 UNPG TPS ODYSSEY_E JPSREGANT_DD_E NONE USIX LEICA GRX1200PRO LEIAT504 SCIT
VAGA LEICA GRX1200PRO LEIAT504 SCIT VITE LEICA GX1230 LEIAX1202 ZOUF ASHTECH UZ-12 ASH701945C_M SCIT
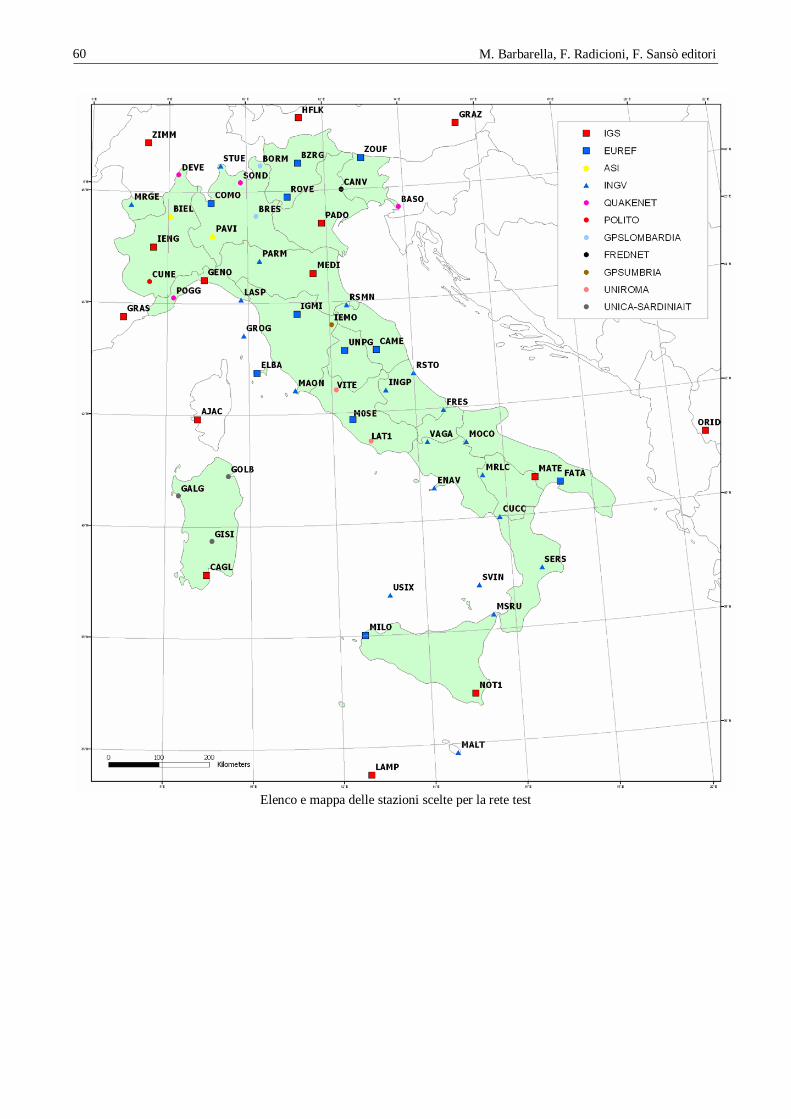
M. Barbarella, F. Radicioni, F. Sansò editori
60
Elenco e mappa delle stazioni scelte per la rete test
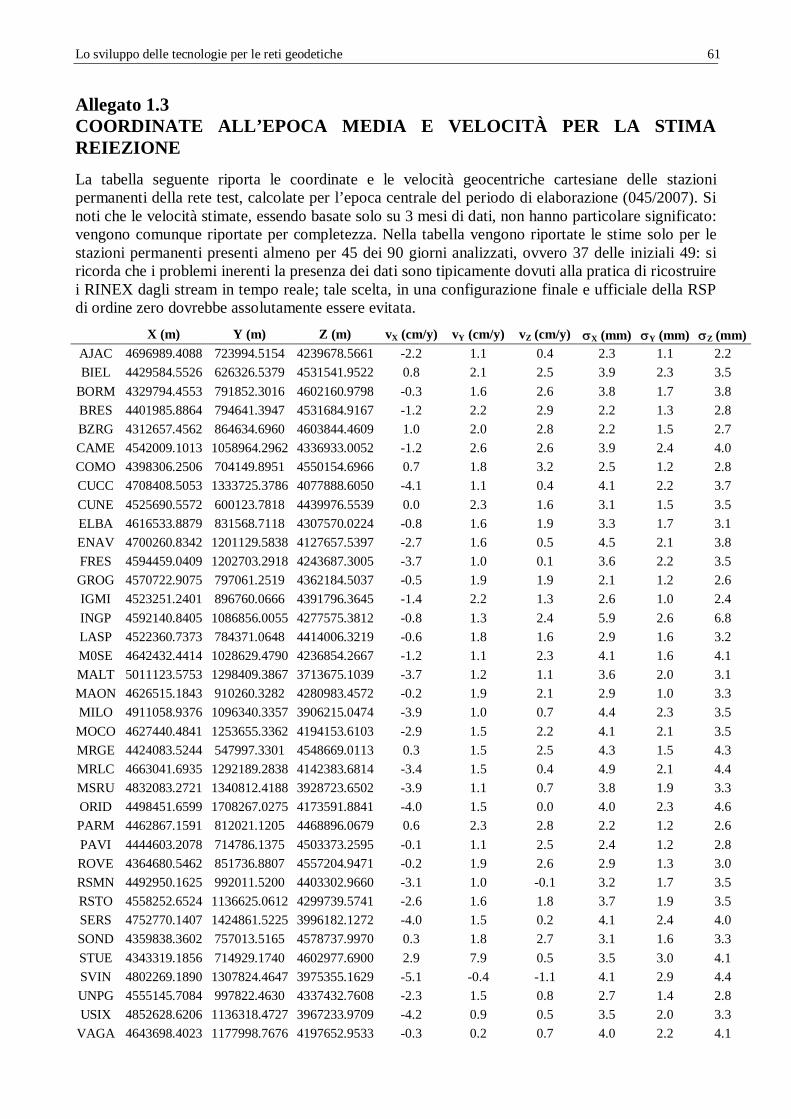
Lo sviluppo delle tecnologie per le reti geodetiche
61
Allegato 1.3 COORDINATE ALL’EPOCA MEDIA E VELOCITÀ PER LA STIMA REIEZIONE La tabella seguente riporta le coordinate e le velocità geocentriche cartesiane delle stazioni permanenti della rete test, calcolate per l’epoca centrale del periodo di elaborazione (045/2007). Si noti che le velocità stimate, essendo basate solo su 3 mesi di dati, non hanno particolare significato: vengono comunque riportate per completezza. Nella tabella vengono riportate le stime solo per le stazioni permanenti presenti almeno per 45 dei 90 giorni analizzati, ovvero 37 delle iniziali 49: si ricorda che i problemi inerenti la presenza dei dati sono tipicamente dovuti alla pratica di ricostruire i RINEX dagli stream in tempo reale; tale scelta, in una configurazione finale e ufficiale della RSP di ordine zero dovrebbe assolutamente essere evitata.
X (m) Y (m) Z (m) vX (cm/y) vY (cm/y) vZ (cm/y) X (mm) Y (mm) Z (mm)AJAC 4696989.4088 723994.5154 4239678.5661 -2.2 1.1 0.4 2.3 1.1 2.2 BIEL 4429584.5526 626326.5379 4531541.9522 0.8 2.1 2.5 3.9 2.3 3.5
BORM 4329794.4553 791852.3016 4602160.9798 -0.3 1.6 2.6 3.8 1.7 3.8 BRES 4401985.8864 794641.3947 4531684.9167 -1.2 2.2 2.9 2.2 1.3 2.8 BZRG 4312657.4562 864634.6960 4603844.4609 1.0 2.0 2.8 2.2 1.5 2.7 CAME 4542009.1013 1058964.2962 4336933.0052 -1.2 2.6 2.6 3.9 2.4 4.0 COMO 4398306.2506 704149.8951 4550154.6966 0.7 1.8 3.2 2.5 1.2 2.8 CUCC 4708408.5053 1333725.3786 4077888.6050 -4.1 1.1 0.4 4.1 2.2 3.7 CUNE 4525690.5572 600123.7818 4439976.5539 0.0 2.3 1.6 3.1 1.5 3.5 ELBA 4616533.8879 831568.7118 4307570.0224 -0.8 1.6 1.9 3.3 1.7 3.1 ENAV 4700260.8342 1201129.5838 4127657.5397 -2.7 1.6 0.5 4.5 2.1 3.8 FRES 4594459.0409 1202703.2918 4243687.3005 -3.7 1.0 0.1 3.6 2.2 3.5 GROG 4570722.9075 797061.2519 4362184.5037 -0.5 1.9 1.9 2.1 1.2 2.6 IGMI 4523251.2401 896760.0666 4391796.3645 -1.4 2.2 1.3 2.6 1.0 2.4 INGP 4592140.8405 1086856.0055 4277575.3812 -0.8 1.3 2.4 5.9 2.6 6.8 LASP 4522360.7373 784371.0648 4414006.3219 -0.6 1.8 1.6 2.9 1.6 3.2 M0SE 4642432.4414 1028629.4790 4236854.2667 -1.2 1.1 2.3 4.1 1.6 4.1 MALT 5011123.5753 1298409.3867 3713675.1039 -3.7 1.2 1.1 3.6 2.0 3.1 MAON 4626515.1843 910260.3282 4280983.4572 -0.2 1.9 2.1 2.9 1.0 3.3 MILO 4911058.9376 1096340.3357 3906215.0474 -3.9 1.0 0.7 4.4 2.3 3.5 MOCO 4627440.4841 1253655.3362 4194153.6103 -2.9 1.5 2.2 4.1 2.1 3.5 MRGE 4424083.5244 547997.3301 4548669.0113 0.3 1.5 2.5 4.3 1.5 4.3 MRLC 4663041.6935 1292189.2838 4142383.6814 -3.4 1.5 0.4 4.9 2.1 4.4 MSRU 4832083.2721 1340812.4188 3928723.6502 -3.9 1.1 0.7 3.8 1.9 3.3 ORID 4498451.6599 1708267.0275 4173591.8841 -4.0 1.5 0.0 4.0 2.3 4.6 PARM 4462867.1591 812021.1205 4468896.0679 0.6 2.3 2.8 2.2 1.2 2.6 PAVI 4444603.2078 714786.1375 4503373.2595 -0.1 1.1 2.5 2.4 1.2 2.8 ROVE 4364680.5462 851736.8807 4557204.9471 -0.2 1.9 2.6 2.9 1.3 3.0 RSMN 4492950.1625 992011.5200 4403302.9660 -3.1 1.0 -0.1 3.2 1.7 3.5 RSTO 4558252.6524 1136625.0612 4299739.5741 -2.6 1.6 1.8 3.7 1.9 3.5 SERS 4752770.1407 1424861.5225 3996182.1272 -4.0 1.5 0.2 4.1 2.4 4.0 SOND 4359838.3602 757013.5165 4578737.9970 0.3 1.8 2.7 3.1 1.6 3.3 STUE 4343319.1856 714929.1740 4602977.6900 2.9 7.9 0.5 3.5 3.0 4.1 SVIN 4802269.1890 1307824.4647 3975355.1629 -5.1 -0.4 -1.1 4.1 2.9 4.4 UNPG 4555145.7084 997822.4630 4337432.7608 -2.3 1.5 0.8 2.7 1.4 2.8 USIX 4852628.6206 1136318.4727 3967233.9709 -4.2 0.9 0.5 3.5 2.0 3.3
VAGA 4643698.4023 1177998.7676 4197652.9533 -0.3 0.2 0.7 4.0 2.2 4.1
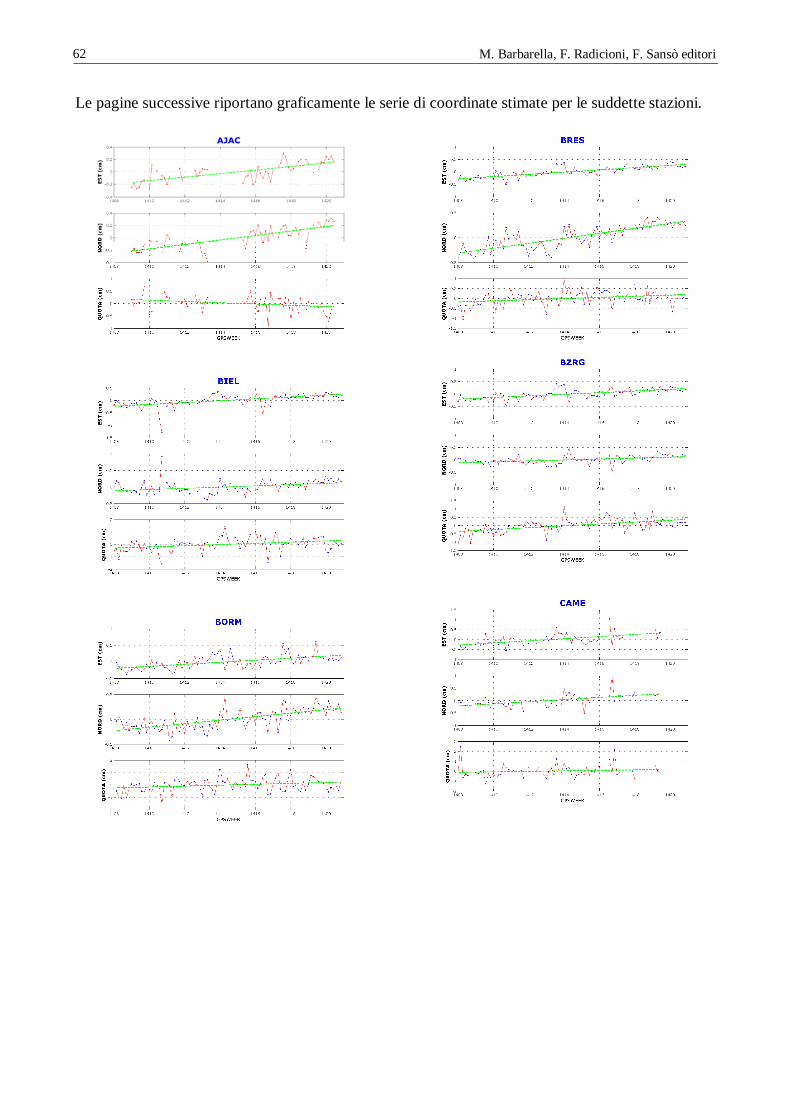
M. Barbarella, F. Radicioni, F. Sansò editori
62
Le pagine successive riportano graficamente le serie di coordinate stimate per le suddette stazioni.
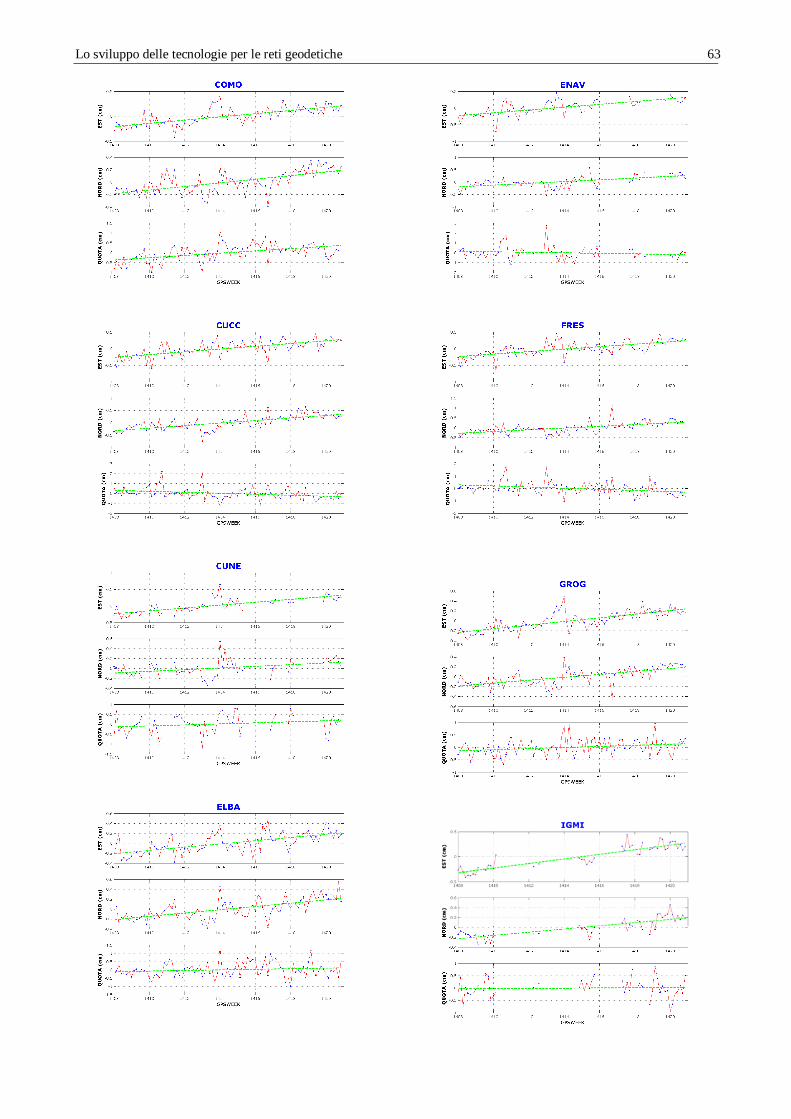
Lo sviluppo delle tecnologie per le reti geodetiche
63
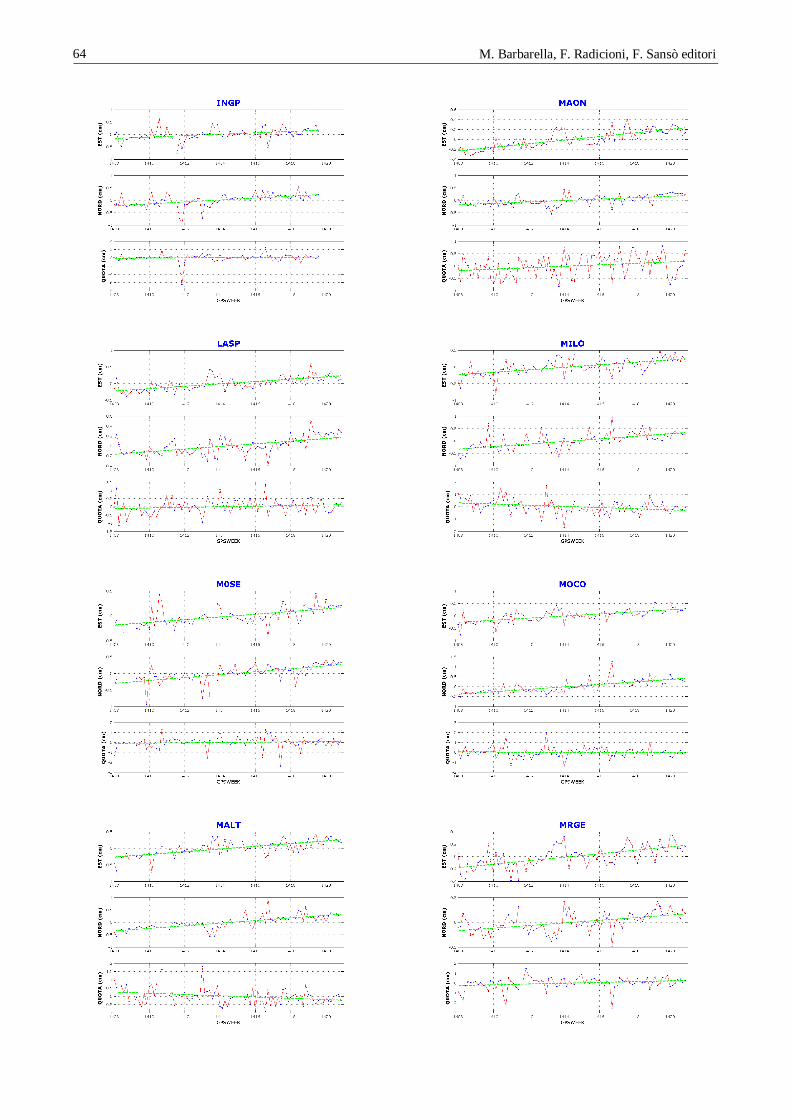
M. Barbarella, F. Radicioni, F. Sansò editori
64
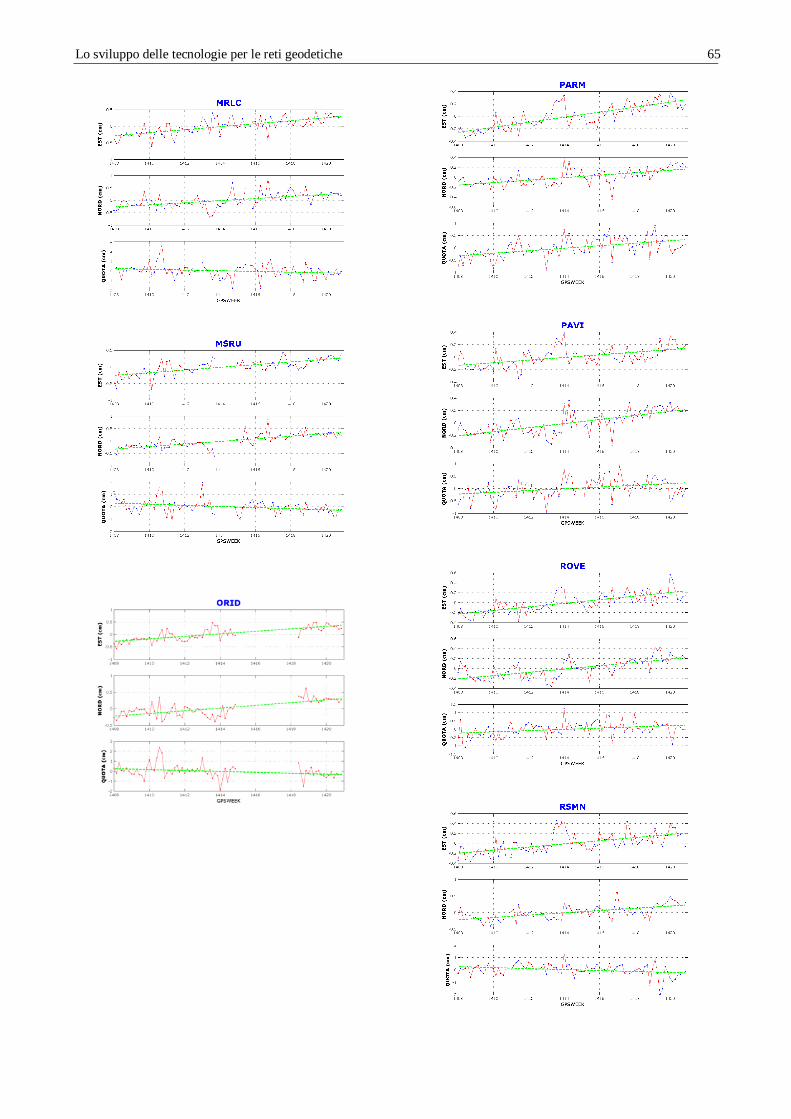
Lo sviluppo delle tecnologie per le reti geodetiche
65
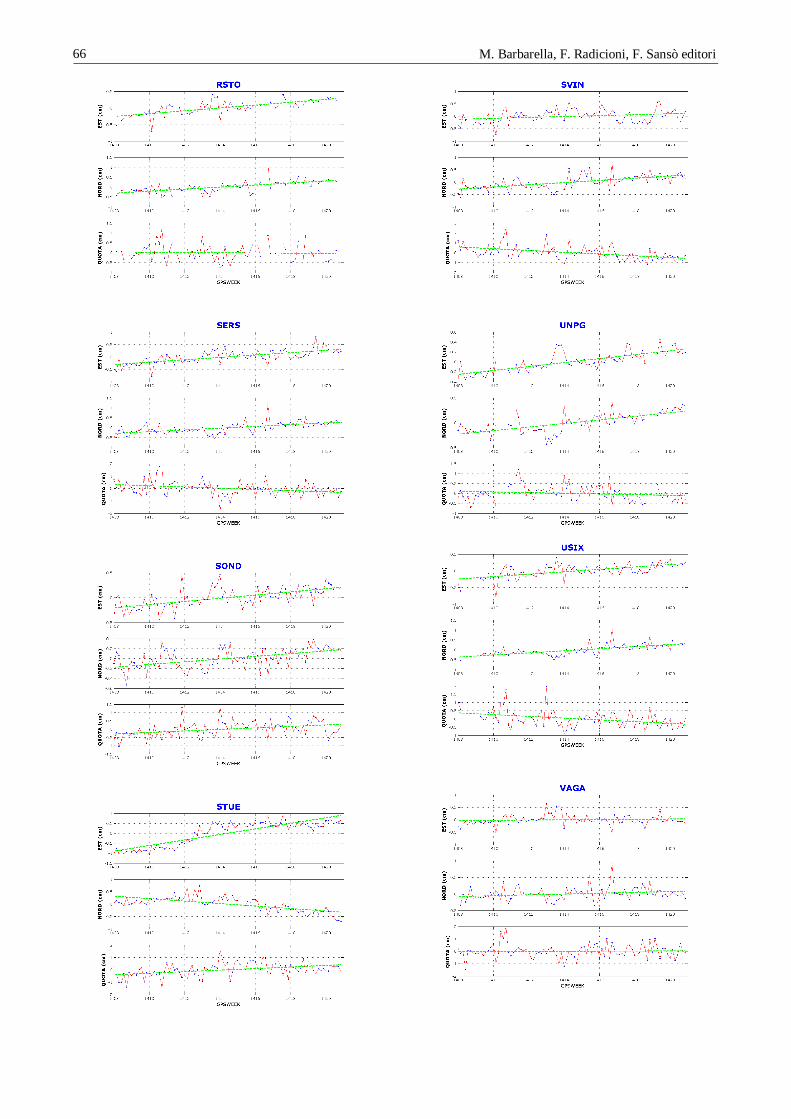
M. Barbarella, F. Radicioni, F. Sansò editori
66
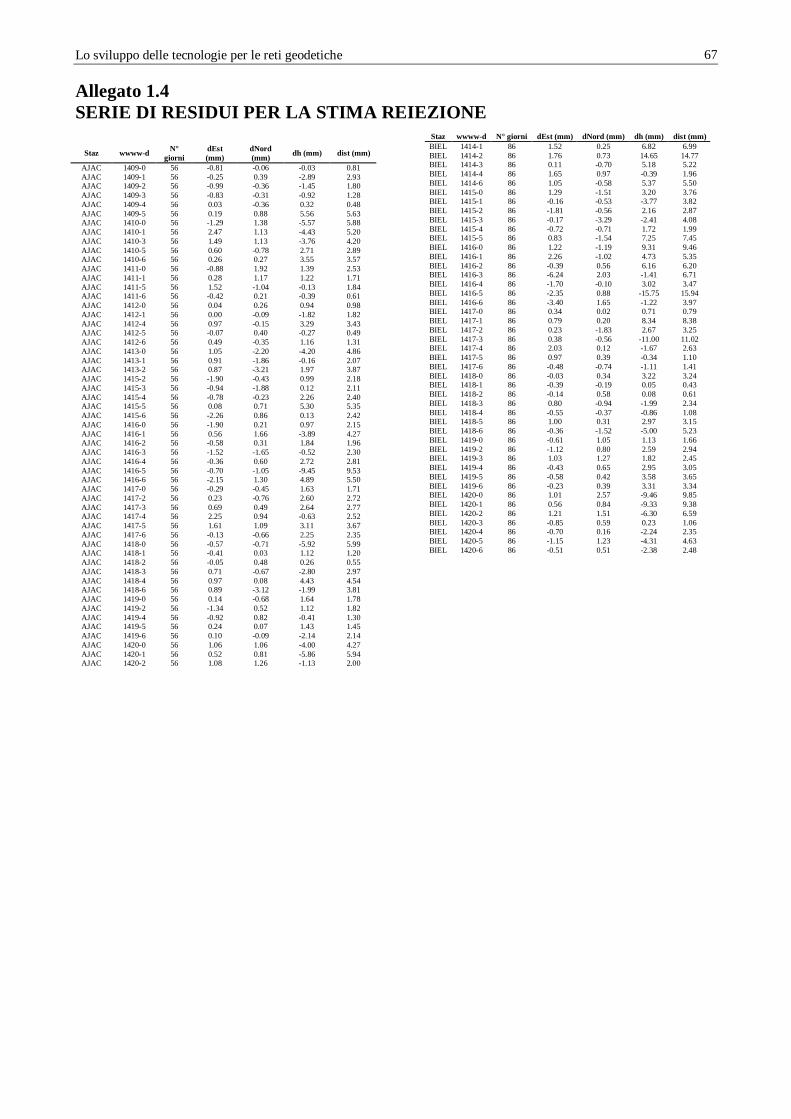
Lo sviluppo delle tecnologie per le reti geodetiche
67
Allegato 1.4 SERIE DI RESIDUI PER LA STIMA REIEZIONE
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
AJAC 1409-0 56 -0.81 -0.06 -0.03 0.81 AJAC 1409-1 56 -0.25 0.39 -2.89 2.93 AJAC 1409-2 56 -0.99 -0.36 -1.45 1.80 AJAC 1409-3 56 -0.83 -0.31 -0.92 1.28 AJAC 1409-4 56 0.03 -0.36 0.32 0.48 AJAC 1409-5 56 0.19 0.88 5.56 5.63 AJAC 1410-0 56 -1.29 1.38 -5.57 5.88 AJAC 1410-1 56 2.47 1.13 -4.43 5.20 AJAC 1410-3 56 1.49 1.13 -3.76 4.20 AJAC 1410-5 56 0.60 -0.78 2.71 2.89 AJAC 1410-6 56 0.26 0.27 3.55 3.57 AJAC 1411-0 56 -0.88 1.92 1.39 2.53 AJAC 1411-1 56 0.28 1.17 1.22 1.71 AJAC 1411-5 56 1.52 -1.04 -0.13 1.84 AJAC 1411-6 56 -0.42 0.21 -0.39 0.61 AJAC 1412-0 56 0.04 0.26 0.94 0.98 AJAC 1412-1 56 0.00 -0.09 -1.82 1.82 AJAC 1412-4 56 0.97 -0.15 3.29 3.43 AJAC 1412-5 56 -0.07 0.40 -0.27 0.49 AJAC 1412-6 56 0.49 -0.35 1.16 1.31 AJAC 1413-0 56 1.05 -2.20 -4.20 4.86 AJAC 1413-1 56 0.91 -1.86 -0.16 2.07 AJAC 1413-2 56 0.87 -3.21 1.97 3.87 AJAC 1415-2 56 -1.90 -0.43 0.99 2.18 AJAC 1415-3 56 -0.94 -1.88 0.12 2.11 AJAC 1415-4 56 -0.78 -0.23 2.26 2.40 AJAC 1415-5 56 0.08 0.71 5.30 5.35 AJAC 1415-6 56 -2.26 0.86 0.13 2.42 AJAC 1416-0 56 -1.90 0.21 0.97 2.15 AJAC 1416-1 56 0.56 1.66 -3.89 4.27 AJAC 1416-2 56 -0.58 0.31 1.84 1.96 AJAC 1416-3 56 -1.52 -1.65 -0.52 2.30 AJAC 1416-4 56 -0.36 0.60 2.72 2.81 AJAC 1416-5 56 -0.70 -1.05 -9.45 9.53 AJAC 1416-6 56 -2.15 1.30 4.89 5.50 AJAC 1417-0 56 -0.29 -0.45 1.63 1.71 AJAC 1417-2 56 0.23 -0.76 2.60 2.72 AJAC 1417-3 56 0.69 0.49 2.64 2.77 AJAC 1417-4 56 2.25 0.94 -0.63 2.52 AJAC 1417-5 56 1.61 1.09 3.11 3.67 AJAC 1417-6 56 -0.13 -0.66 2.25 2.35 AJAC 1418-0 56 -0.57 -0.71 -5.92 5.99 AJAC 1418-1 56 -0.41 0.03 1.12 1.20 AJAC 1418-2 56 -0.05 0.48 0.26 0.55 AJAC 1418-3 56 0.71 -0.67 -2.80 2.97 AJAC 1418-4 56 0.97 0.08 4.43 4.54 AJAC 1418-6 56 0.89 -3.12 -1.99 3.81 AJAC 1419-0 56 0.14 -0.68 1.64 1.78 AJAC 1419-2 56 -1.34 0.52 1.12 1.82 AJAC 1419-4 56 -0.92 0.82 -0.41 1.30 AJAC 1419-5 56 0.24 0.07 1.43 1.45 AJAC 1419-6 56 0.10 -0.09 -2.14 2.14 AJAC 1420-0 56 1.06 1.06 -4.00 4.27 AJAC 1420-1 56 0.52 0.81 -5.86 5.94 AJAC 1420-2 56 1.08 1.26 -1.13 2.00
Staz wwww-d N° giorni dEst (mm) dNord (mm) dh (mm) dist (mm) BIEL 1414-1 86 1.52 0.25 6.82 6.99 BIEL 1414-2 86 1.76 0.73 14.65 14.77 BIEL 1414-3 86 0.11 -0.70 5.18 5.22 BIEL 1414-4 86 1.65 0.97 -0.39 1.96 BIEL 1414-6 86 1.05 -0.58 5.37 5.50 BIEL 1415-0 86 1.29 -1.51 3.20 3.76 BIEL 1415-1 86 -0.16 -0.53 -3.77 3.82 BIEL 1415-2 86 -1.81 -0.56 2.16 2.87 BIEL 1415-3 86 -0.17 -3.29 -2.41 4.08 BIEL 1415-4 86 -0.72 -0.71 1.72 1.99 BIEL 1415-5 86 0.83 -1.54 7.25 7.45 BIEL 1416-0 86 1.22 -1.19 9.31 9.46 BIEL 1416-1 86 2.26 -1.02 4.73 5.35 BIEL 1416-2 86 -0.39 0.56 6.16 6.20 BIEL 1416-3 86 -6.24 2.03 -1.41 6.71 BIEL 1416-4 86 -1.70 -0.10 3.02 3.47 BIEL 1416-5 86 -2.35 0.88 -15.75 15.94 BIEL 1416-6 86 -3.40 1.65 -1.22 3.97 BIEL 1417-0 86 0.34 0.02 0.71 0.79 BIEL 1417-1 86 0.79 0.20 8.34 8.38 BIEL 1417-2 86 0.23 -1.83 2.67 3.25 BIEL 1417-3 86 0.38 -0.56 -11.00 11.02 BIEL 1417-4 86 2.03 0.12 -1.67 2.63 BIEL 1417-5 86 0.97 0.39 -0.34 1.10 BIEL 1417-6 86 -0.48 -0.74 -1.11 1.41 BIEL 1418-0 86 -0.03 0.34 3.22 3.24 BIEL 1418-1 86 -0.39 -0.19 0.05 0.43 BIEL 1418-2 86 -0.14 0.58 0.08 0.61 BIEL 1418-3 86 0.80 -0.94 -1.99 2.34 BIEL 1418-4 86 -0.55 -0.37 -0.86 1.08 BIEL 1418-5 86 1.00 0.31 2.97 3.15 BIEL 1418-6 86 -0.36 -1.52 -5.00 5.23 BIEL 1419-0 86 -0.61 1.05 1.13 1.66 BIEL 1419-2 86 -1.12 0.80 2.59 2.94 BIEL 1419-3 86 1.03 1.27 1.82 2.45 BIEL 1419-4 86 -0.43 0.65 2.95 3.05 BIEL 1419-5 86 -0.58 0.42 3.58 3.65 BIEL 1419-6 86 -0.23 0.39 3.31 3.34 BIEL 1420-0 86 1.01 2.57 -9.46 9.85 BIEL 1420-1 86 0.56 0.84 -9.33 9.38 BIEL 1420-2 86 1.21 1.51 -6.30 6.59 BIEL 1420-3 86 -0.85 0.59 0.23 1.06 BIEL 1420-4 86 -0.70 0.16 -2.24 2.35 BIEL 1420-5 86 -1.15 1.23 -4.31 4.63 BIEL 1420-6 86 -0.51 0.51 -2.38 2.48
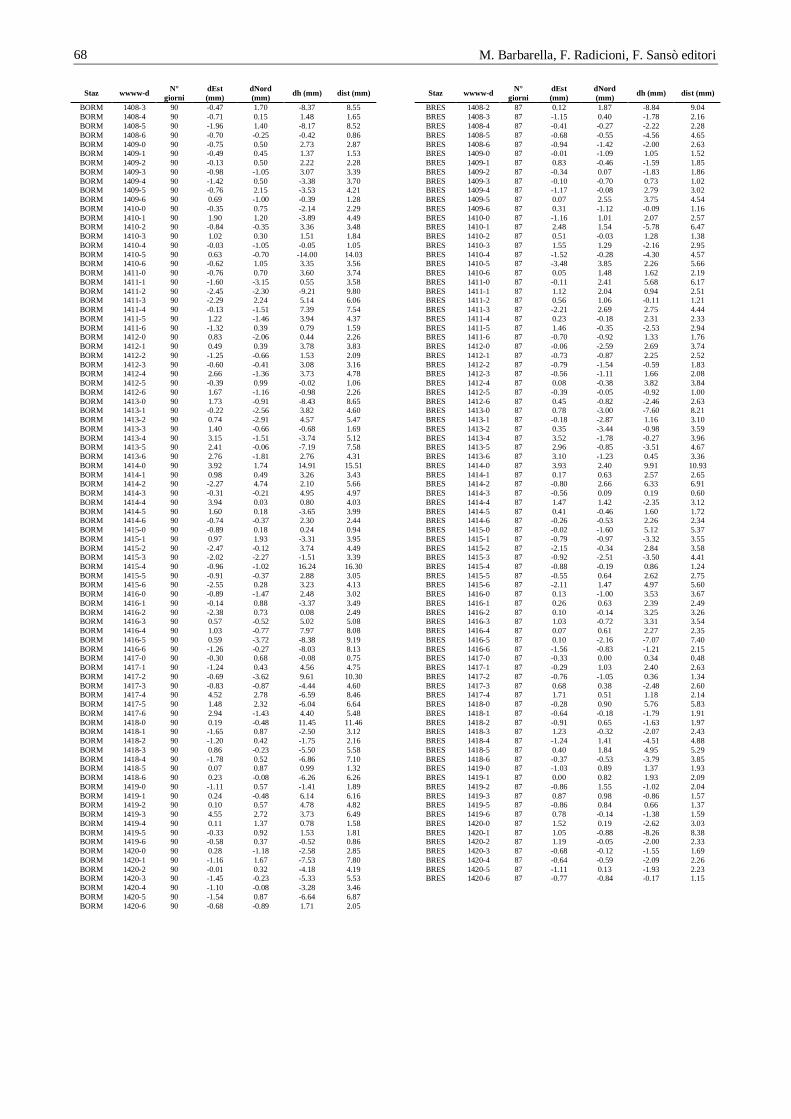
M. Barbarella, F. Radicioni, F. Sansò editori
68
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
BORM 1408-3 90 -0.47 1.70 -8.37 8.55 BORM 1408-4 90 -0.71 0.15 1.48 1.65 BORM 1408-5 90 -1.96 1.40 -8.17 8.52 BORM 1408-6 90 -0.70 -0.25 -0.42 0.86 BORM 1409-0 90 -0.75 0.50 2.73 2.87 BORM 1409-1 90 -0.49 0.45 1.37 1.53 BORM 1409-2 90 -0.13 0.50 2.22 2.28 BORM 1409-3 90 -0.98 -1.05 3.07 3.39 BORM 1409-4 90 -1.42 0.50 -3.38 3.70 BORM 1409-5 90 -0.76 2.15 -3.53 4.21 BORM 1409-6 90 0.69 -1.00 -0.39 1.28 BORM 1410-0 90 -0.35 0.75 -2.14 2.29 BORM 1410-1 90 1.90 1.20 -3.89 4.49 BORM 1410-2 90 -0.84 -0.35 3.36 3.48 BORM 1410-3 90 1.02 0.30 1.51 1.84 BORM 1410-4 90 -0.03 -1.05 -0.05 1.05 BORM 1410-5 90 0.63 -0.70 -14.00 14.03 BORM 1410-6 90 -0.62 1.05 3.35 3.56 BORM 1411-0 90 -0.76 0.70 3.60 3.74 BORM 1411-1 90 -1.60 -3.15 0.55 3.58 BORM 1411-2 90 -2.45 -2.30 -9.21 9.80 BORM 1411-3 90 -2.29 2.24 5.14 6.06 BORM 1411-4 90 -0.13 -1.51 7.39 7.54 BORM 1411-5 90 1.22 -1.46 3.94 4.37 BORM 1411-6 90 -1.32 0.39 0.79 1.59 BORM 1412-0 90 0.83 -2.06 0.44 2.26 BORM 1412-1 90 0.49 0.39 3.78 3.83 BORM 1412-2 90 -1.25 -0.66 1.53 2.09 BORM 1412-3 90 -0.60 -0.41 3.08 3.16 BORM 1412-4 90 2.66 -1.36 3.73 4.78 BORM 1412-5 90 -0.39 0.99 -0.02 1.06 BORM 1412-6 90 1.67 -1.16 -0.98 2.26 BORM 1413-0 90 1.73 -0.91 -8.43 8.65 BORM 1413-1 90 -0.22 -2.56 3.82 4.60 BORM 1413-2 90 0.74 -2.91 4.57 5.47 BORM 1413-3 90 1.40 -0.66 -0.68 1.69 BORM 1413-4 90 3.15 -1.51 -3.74 5.12 BORM 1413-5 90 2.41 -0.06 -7.19 7.58 BORM 1413-6 90 2.76 -1.81 2.76 4.31 BORM 1414-0 90 3.92 1.74 14.91 15.51 BORM 1414-1 90 0.98 0.49 3.26 3.43 BORM 1414-2 90 -2.27 4.74 2.10 5.66 BORM 1414-3 90 -0.31 -0.21 4.95 4.97 BORM 1414-4 90 3.94 0.03 0.80 4.03 BORM 1414-5 90 1.60 0.18 -3.65 3.99 BORM 1414-6 90 -0.74 -0.37 2.30 2.44 BORM 1415-0 90 -0.89 0.18 0.24 0.94 BORM 1415-1 90 0.97 1.93 -3.31 3.95 BORM 1415-2 90 -2.47 -0.12 3.74 4.49 BORM 1415-3 90 -2.02 -2.27 -1.51 3.39 BORM 1415-4 90 -0.96 -1.02 16.24 16.30 BORM 1415-5 90 -0.91 -0.37 2.88 3.05 BORM 1415-6 90 -2.55 0.28 3.23 4.13 BORM 1416-0 90 -0.89 -1.47 2.48 3.02 BORM 1416-1 90 -0.14 0.88 -3.37 3.49 BORM 1416-2 90 -2.38 0.73 0.08 2.49 BORM 1416-3 90 0.57 -0.52 5.02 5.08 BORM 1416-4 90 1.03 -0.77 7.97 8.08 BORM 1416-5 90 0.59 -3.72 -8.38 9.19 BORM 1416-6 90 -1.26 -0.27 -8.03 8.13 BORM 1417-0 90 -0.30 0.68 -0.08 0.75 BORM 1417-1 90 -1.24 0.43 4.56 4.75 BORM 1417-2 90 -0.69 -3.62 9.61 10.30 BORM 1417-3 90 -0.83 -0.87 -4.44 4.60 BORM 1417-4 90 4.52 2.78 -6.59 8.46 BORM 1417-5 90 1.48 2.32 -6.04 6.64 BORM 1417-6 90 2.94 -1.43 4.40 5.48 BORM 1418-0 90 0.19 -0.48 11.45 11.46 BORM 1418-1 90 -1.65 0.87 -2.50 3.12 BORM 1418-2 90 -1.20 0.42 -1.75 2.16 BORM 1418-3 90 0.86 -0.23 -5.50 5.58 BORM 1418-4 90 -1.78 0.52 -6.86 7.10 BORM 1418-5 90 0.07 0.87 0.99 1.32 BORM 1418-6 90 0.23 -0.08 -6.26 6.26 BORM 1419-0 90 -1.11 0.57 -1.41 1.89 BORM 1419-1 90 0.24 -0.48 6.14 6.16 BORM 1419-2 90 0.10 0.57 4.78 4.82 BORM 1419-3 90 4.55 2.72 3.73 6.49 BORM 1419-4 90 0.11 1.37 0.78 1.58 BORM 1419-5 90 -0.33 0.92 1.53 1.81 BORM 1419-6 90 -0.58 0.37 -0.52 0.86 BORM 1420-0 90 0.28 -1.18 -2.58 2.85 BORM 1420-1 90 -1.16 1.67 -7.53 7.80 BORM 1420-2 90 -0.01 0.32 -4.18 4.19 BORM 1420-3 90 -1.45 -0.23 -5.33 5.53 BORM 1420-4 90 -1.10 -0.08 -3.28 3.46 BORM 1420-5 90 -1.54 0.87 -6.64 6.87 BORM 1420-6 90 -0.68 -0.89 1.71 2.05
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
BRES 1408-2 87 0.12 1.87 -8.84 9.04 BRES 1408-3 87 -1.15 0.40 -1.78 2.16 BRES 1408-4 87 -0.41 -0.27 -2.22 2.28 BRES 1408-5 87 -0.68 -0.55 -4.56 4.65 BRES 1408-6 87 -0.94 -1.42 -2.00 2.63 BRES 1409-0 87 -0.01 -1.09 1.05 1.52 BRES 1409-1 87 0.83 -0.46 -1.59 1.85 BRES 1409-2 87 -0.34 0.07 -1.83 1.86 BRES 1409-3 87 -0.10 -0.70 0.73 1.02 BRES 1409-4 87 -1.17 -0.08 2.79 3.02 BRES 1409-5 87 0.07 2.55 3.75 4.54 BRES 1409-6 87 0.31 -1.12 -0.09 1.16 BRES 1410-0 87 -1.16 1.01 2.07 2.57 BRES 1410-1 87 2.48 1.54 -5.78 6.47 BRES 1410-2 87 0.51 -0.03 1.28 1.38 BRES 1410-3 87 1.55 1.29 -2.16 2.95 BRES 1410-4 87 -1.52 -0.28 -4.30 4.57 BRES 1410-5 87 -3.48 3.85 2.26 5.66 BRES 1410-6 87 0.05 1.48 1.62 2.19 BRES 1411-0 87 -0.11 2.41 5.68 6.17 BRES 1411-1 87 1.12 2.04 0.94 2.51 BRES 1411-2 87 0.56 1.06 -0.11 1.21 BRES 1411-3 87 -2.21 2.69 2.75 4.44 BRES 1411-4 87 0.23 -0.18 2.31 2.33 BRES 1411-5 87 1.46 -0.35 -2.53 2.94 BRES 1411-6 87 -0.70 -0.92 1.33 1.76 BRES 1412-0 87 -0.06 -2.59 2.69 3.74 BRES 1412-1 87 -0.73 -0.87 2.25 2.52 BRES 1412-2 87 -0.79 -1.54 -0.59 1.83 BRES 1412-3 87 -0.56 -1.11 1.66 2.08 BRES 1412-4 87 0.08 -0.38 3.82 3.84 BRES 1412-5 87 -0.39 -0.05 -0.92 1.00 BRES 1412-6 87 0.45 -0.82 -2.46 2.63 BRES 1413-0 87 0.78 -3.00 -7.60 8.21 BRES 1413-1 87 -0.18 -2.87 1.16 3.10 BRES 1413-2 87 0.35 -3.44 -0.98 3.59 BRES 1413-4 87 3.52 -1.78 -0.27 3.96 BRES 1413-5 87 2.96 -0.85 -3.51 4.67 BRES 1413-6 87 3.10 -1.23 0.45 3.36 BRES 1414-0 87 3.93 2.40 9.91 10.93 BRES 1414-1 87 0.17 0.63 2.57 2.65 BRES 1414-2 87 -0.80 2.66 6.33 6.91 BRES 1414-3 87 -0.56 0.09 0.19 0.60 BRES 1414-4 87 1.47 1.42 -2.35 3.12 BRES 1414-5 87 0.41 -0.46 1.60 1.72 BRES 1414-6 87 -0.26 -0.53 2.26 2.34 BRES 1415-0 87 -0.02 -1.60 5.12 5.37 BRES 1415-1 87 -0.79 -0.97 -3.32 3.55 BRES 1415-2 87 -2.15 -0.34 2.84 3.58 BRES 1415-3 87 -0.92 -2.51 -3.50 4.41 BRES 1415-4 87 -0.88 -0.19 0.86 1.24 BRES 1415-5 87 -0.55 0.64 2.62 2.75 BRES 1415-6 87 -2.11 1.47 4.97 5.60 BRES 1416-0 87 0.13 -1.00 3.53 3.67 BRES 1416-1 87 0.26 0.63 2.39 2.49 BRES 1416-2 87 0.10 -0.14 3.25 3.26 BRES 1416-3 87 1.03 -0.72 3.31 3.54 BRES 1416-4 87 0.07 0.61 2.27 2.35 BRES 1416-5 87 0.10 -2.16 -7.07 7.40 BRES 1416-6 87 -1.56 -0.83 -1.21 2.15 BRES 1417-0 87 -0.33 0.00 0.34 0.48 BRES 1417-1 87 -0.29 1.03 2.40 2.63 BRES 1417-2 87 -0.76 -1.05 0.36 1.34 BRES 1417-3 87 0.68 0.38 -2.48 2.60 BRES 1417-4 87 1.71 0.51 1.18 2.14 BRES 1418-0 87 -0.28 0.90 5.76 5.83 BRES 1418-1 87 -0.64 -0.18 -1.79 1.91 BRES 1418-2 87 -0.91 0.65 -1.63 1.97 BRES 1418-3 87 1.23 -0.32 -2.07 2.43 BRES 1418-4 87 -1.24 1.41 -4.51 4.88 BRES 1418-5 87 0.40 1.84 4.95 5.29 BRES 1418-6 87 -0.37 -0.53 -3.79 3.85 BRES 1419-0 87 -1.03 0.89 1.37 1.93 BRES 1419-1 87 0.00 0.82 1.93 2.09 BRES 1419-2 87 -0.86 1.55 -1.02 2.04 BRES 1419-3 87 0.87 0.98 -0.86 1.57 BRES 1419-5 87 -0.86 0.84 0.66 1.37 BRES 1419-6 87 0.78 -0.14 -1.38 1.59 BRES 1420-0 87 1.52 0.19 -2.62 3.03 BRES 1420-1 87 1.05 -0.88 -8.26 8.38 BRES 1420-2 87 1.19 -0.05 -2.00 2.33 BRES 1420-3 87 -0.68 -0.12 -1.55 1.69 BRES 1420-4 87 -0.64 -0.59 -2.09 2.26 BRES 1420-5 87 -1.11 0.13 -1.93 2.23 BRES 1420-6 87 -0.77 -0.84 -0.17 1.15
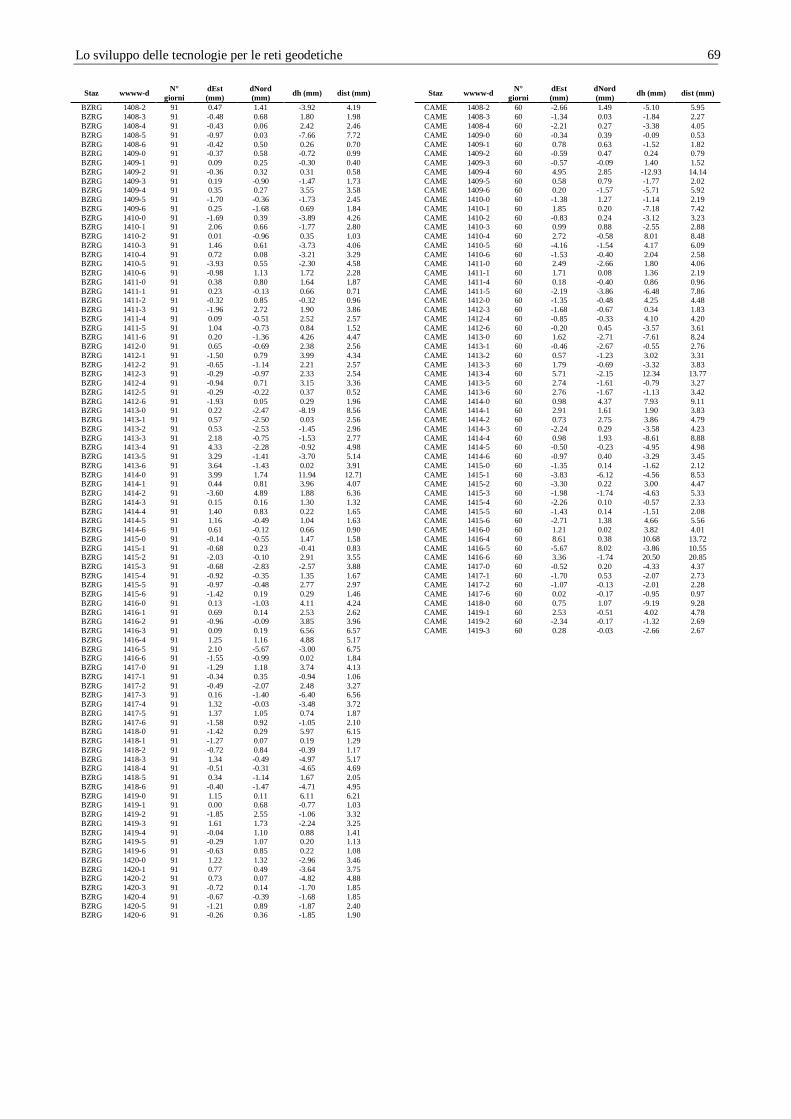
Lo sviluppo delle tecnologie per le reti geodetiche
69
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
BZRG 1408-2 91 0.47 1.41 -3.92 4.19 BZRG 1408-3 91 -0.48 0.68 1.80 1.98 BZRG 1408-4 91 -0.43 0.06 2.42 2.46 BZRG 1408-5 91 -0.97 0.03 -7.66 7.72 BZRG 1408-6 91 -0.42 0.50 0.26 0.70 BZRG 1409-0 91 -0.37 0.58 -0.72 0.99 BZRG 1409-1 91 0.09 0.25 -0.30 0.40 BZRG 1409-2 91 -0.36 0.32 0.31 0.58 BZRG 1409-3 91 0.19 -0.90 -1.47 1.73 BZRG 1409-4 91 0.35 0.27 3.55 3.58 BZRG 1409-5 91 -1.70 -0.36 -1.73 2.45 BZRG 1409-6 91 0.25 -1.68 0.69 1.84 BZRG 1410-0 91 -1.69 0.39 -3.89 4.26 BZRG 1410-1 91 2.06 0.66 -1.77 2.80 BZRG 1410-2 91 0.01 -0.96 0.35 1.03 BZRG 1410-3 91 1.46 0.61 -3.73 4.06 BZRG 1410-4 91 0.72 0.08 -3.21 3.29 BZRG 1410-5 91 -3.93 0.55 -2.30 4.58 BZRG 1410-6 91 -0.98 1.13 1.72 2.28 BZRG 1411-0 91 0.38 0.80 1.64 1.87 BZRG 1411-1 91 0.23 -0.13 0.66 0.71 BZRG 1411-2 91 -0.32 0.85 -0.32 0.96 BZRG 1411-3 91 -1.96 2.72 1.90 3.86 BZRG 1411-4 91 0.09 -0.51 2.52 2.57 BZRG 1411-5 91 1.04 -0.73 0.84 1.52 BZRG 1411-6 91 0.20 -1.36 4.26 4.47 BZRG 1412-0 91 0.65 -0.69 2.38 2.56 BZRG 1412-1 91 -1.50 0.79 3.99 4.34 BZRG 1412-2 91 -0.65 -1.14 2.21 2.57 BZRG 1412-3 91 -0.29 -0.97 2.33 2.54 BZRG 1412-4 91 -0.94 0.71 3.15 3.36 BZRG 1412-5 91 -0.29 -0.22 0.37 0.52 BZRG 1412-6 91 -1.93 0.05 0.29 1.96 BZRG 1413-0 91 0.22 -2.47 -8.19 8.56 BZRG 1413-1 91 0.57 -2.50 0.03 2.56 BZRG 1413-2 91 0.53 -2.53 -1.45 2.96 BZRG 1413-3 91 2.18 -0.75 -1.53 2.77 BZRG 1413-4 91 4.33 -2.28 -0.92 4.98 BZRG 1413-5 91 3.29 -1.41 -3.70 5.14 BZRG 1413-6 91 3.64 -1.43 0.02 3.91 BZRG 1414-0 91 3.99 1.74 11.94 12.71 BZRG 1414-1 91 0.44 0.81 3.96 4.07 BZRG 1414-2 91 -3.60 4.89 1.88 6.36 BZRG 1414-3 91 0.15 0.16 1.30 1.32 BZRG 1414-4 91 1.40 0.83 0.22 1.65 BZRG 1414-5 91 1.16 -0.49 1.04 1.63 BZRG 1414-6 91 0.61 -0.12 0.66 0.90 BZRG 1415-0 91 -0.14 -0.55 1.47 1.58 BZRG 1415-1 91 -0.68 0.23 -0.41 0.83 BZRG 1415-2 91 -2.03 -0.10 2.91 3.55 BZRG 1415-3 91 -0.68 -2.83 -2.57 3.88 BZRG 1415-4 91 -0.92 -0.35 1.35 1.67 BZRG 1415-5 91 -0.97 -0.48 2.77 2.97 BZRG 1415-6 91 -1.42 0.19 0.29 1.46 BZRG 1416-0 91 0.13 -1.03 4.11 4.24 BZRG 1416-1 91 0.69 0.14 2.53 2.62 BZRG 1416-2 91 -0.96 -0.09 3.85 3.96 BZRG 1416-3 91 0.09 0.19 6.56 6.57 BZRG 1416-4 91 1.25 1.16 4.88 5.17 BZRG 1416-5 91 2.10 -5.67 -3.00 6.75 BZRG 1416-6 91 -1.55 -0.99 0.02 1.84 BZRG 1417-0 91 -1.29 1.18 3.74 4.13 BZRG 1417-1 91 -0.34 0.35 -0.94 1.06 BZRG 1417-2 91 -0.49 -2.07 2.48 3.27 BZRG 1417-3 91 0.16 -1.40 -6.40 6.56 BZRG 1417-4 91 1.32 -0.03 -3.48 3.72 BZRG 1417-5 91 1.37 1.05 0.74 1.87 BZRG 1417-6 91 -1.58 0.92 -1.05 2.10 BZRG 1418-0 91 -1.42 0.29 5.97 6.15 BZRG 1418-1 91 -1.27 0.07 0.19 1.29 BZRG 1418-2 91 -0.72 0.84 -0.39 1.17 BZRG 1418-3 91 1.34 -0.49 -4.97 5.17 BZRG 1418-4 91 -0.51 -0.31 -4.65 4.69 BZRG 1418-5 91 0.34 -1.14 1.67 2.05 BZRG 1418-6 91 -0.40 -1.47 -4.71 4.95 BZRG 1419-0 91 1.15 0.11 6.11 6.21 BZRG 1419-1 91 0.00 0.68 -0.77 1.03 BZRG 1419-2 91 -1.85 2.55 -1.06 3.32 BZRG 1419-3 91 1.61 1.73 -2.24 3.25 BZRG 1419-4 91 -0.04 1.10 0.88 1.41 BZRG 1419-5 91 -0.29 1.07 0.20 1.13 BZRG 1419-6 91 -0.63 0.85 0.22 1.08 BZRG 1420-0 91 1.22 1.32 -2.96 3.46 BZRG 1420-1 91 0.77 0.49 -3.64 3.75 BZRG 1420-2 91 0.73 0.07 -4.82 4.88 BZRG 1420-3 91 -0.72 0.14 -1.70 1.85 BZRG 1420-4 91 -0.67 -0.39 -1.68 1.85 BZRG 1420-5 91 -1.21 0.89 -1.87 2.40 BZRG 1420-6 91 -0.26 0.36 -1.85 1.90
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
CAME 1408-2 60 -2.66 1.49 -5.10 5.95 CAME 1408-3 60 -1.34 0.03 -1.84 2.27 CAME 1408-4 60 -2.21 0.27 -3.38 4.05 CAME 1409-0 60 -0.34 0.39 -0.09 0.53 CAME 1409-1 60 0.78 0.63 -1.52 1.82 CAME 1409-2 60 -0.59 0.47 0.24 0.79 CAME 1409-3 60 -0.57 -0.09 1.40 1.52 CAME 1409-4 60 4.95 2.85 -12.93 14.14 CAME 1409-5 60 0.58 0.79 -1.77 2.02 CAME 1409-6 60 0.20 -1.57 -5.71 5.92 CAME 1410-0 60 -1.38 1.27 -1.14 2.19 CAME 1410-1 60 1.85 0.20 -7.18 7.42 CAME 1410-2 60 -0.83 0.24 -3.12 3.23 CAME 1410-3 60 0.99 0.88 -2.55 2.88 CAME 1410-4 60 2.72 -0.58 8.01 8.48 CAME 1410-5 60 -4.16 -1.54 4.17 6.09 CAME 1410-6 60 -1.53 -0.40 2.04 2.58 CAME 1411-0 60 2.49 -2.66 1.80 4.06 CAME 1411-1 60 1.71 0.08 1.36 2.19 CAME 1411-4 60 0.18 -0.40 0.86 0.96 CAME 1411-5 60 -2.19 -3.86 -6.48 7.86 CAME 1412-0 60 -1.35 -0.48 4.25 4.48 CAME 1412-3 60 -1.68 -0.67 0.34 1.83 CAME 1412-4 60 -0.85 -0.33 4.10 4.20 CAME 1412-6 60 -0.20 0.45 -3.57 3.61 CAME 1413-0 60 1.62 -2.71 -7.61 8.24 CAME 1413-1 60 -0.46 -2.67 -0.55 2.76 CAME 1413-2 60 0.57 -1.23 3.02 3.31 CAME 1413-3 60 1.79 -0.69 -3.32 3.83 CAME 1413-4 60 5.71 -2.15 12.34 13.77 CAME 1413-5 60 2.74 -1.61 -0.79 3.27 CAME 1413-6 60 2.76 -1.67 -1.13 3.42 CAME 1414-0 60 0.98 4.37 7.93 9.11 CAME 1414-1 60 2.91 1.61 1.90 3.83 CAME 1414-2 60 0.73 2.75 3.86 4.79 CAME 1414-3 60 -2.24 0.29 -3.58 4.23 CAME 1414-4 60 0.98 1.93 -8.61 8.88 CAME 1414-5 60 -0.50 -0.23 -4.95 4.98 CAME 1414-6 60 -0.97 0.40 -3.29 3.45 CAME 1415-0 60 -1.35 0.14 -1.62 2.12 CAME 1415-1 60 -3.83 -6.12 -4.56 8.53 CAME 1415-2 60 -3.30 0.22 3.00 4.47 CAME 1415-3 60 -1.98 -1.74 -4.63 5.33 CAME 1415-4 60 -2.26 0.10 -0.57 2.33 CAME 1415-5 60 -1.43 0.14 -1.51 2.08 CAME 1415-6 60 -2.71 1.38 4.66 5.56 CAME 1416-0 60 1.21 0.02 3.82 4.01 CAME 1416-4 60 8.61 0.38 10.68 13.72 CAME 1416-5 60 -5.67 8.02 -3.86 10.55 CAME 1416-6 60 3.36 -1.74 20.50 20.85 CAME 1417-0 60 -0.52 0.20 -4.33 4.37 CAME 1417-1 60 -1.70 0.53 -2.07 2.73 CAME 1417-2 60 -1.07 -0.13 -2.01 2.28 CAME 1417-6 60 0.02 -0.17 -0.95 0.97 CAME 1418-0 60 0.75 1.07 -9.19 9.28 CAME 1419-1 60 2.53 -0.51 4.02 4.78 CAME 1419-2 60 -2.34 -0.17 -1.32 2.69 CAME 1419-3 60 0.28 -0.03 -2.66 2.67
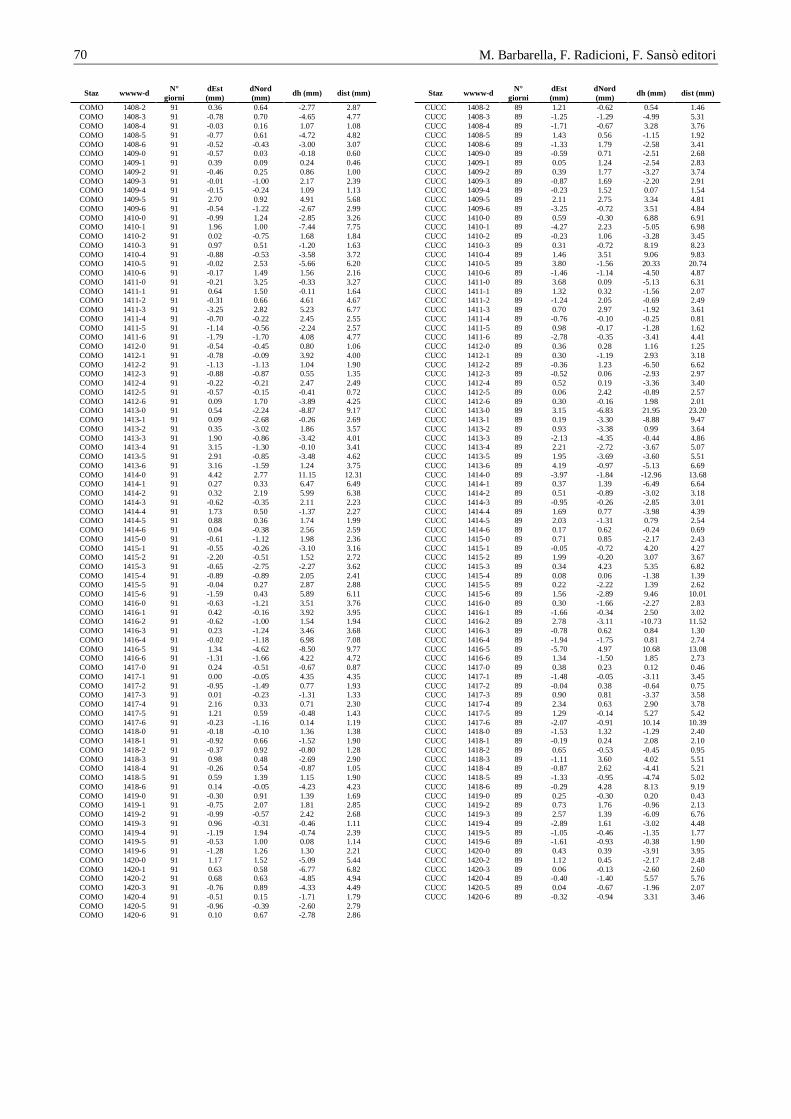
M. Barbarella, F. Radicioni, F. Sansò editori
70
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
COMO 1408-2 91 0.36 0.64 -2.77 2.87 COMO 1408-3 91 -0.78 0.70 -4.65 4.77 COMO 1408-4 91 -0.03 0.16 1.07 1.08 COMO 1408-5 91 -0.77 0.61 -4.72 4.82 COMO 1408-6 91 -0.52 -0.43 -3.00 3.07 COMO 1409-0 91 -0.57 0.03 -0.18 0.60 COMO 1409-1 91 0.39 0.09 0.24 0.46 COMO 1409-2 91 -0.46 0.25 0.86 1.00 COMO 1409-3 91 -0.01 -1.00 2.17 2.39 COMO 1409-4 91 -0.15 -0.24 1.09 1.13 COMO 1409-5 91 2.70 0.92 4.91 5.68 COMO 1409-6 91 -0.54 -1.22 -2.67 2.99 COMO 1410-0 91 -0.99 1.24 -2.85 3.26 COMO 1410-1 91 1.96 1.00 -7.44 7.75 COMO 1410-2 91 0.02 -0.75 1.68 1.84 COMO 1410-3 91 0.97 0.51 -1.20 1.63 COMO 1410-4 91 -0.88 -0.53 -3.58 3.72 COMO 1410-5 91 -0.02 2.53 -5.66 6.20 COMO 1410-6 91 -0.17 1.49 1.56 2.16 COMO 1411-0 91 -0.21 3.25 -0.33 3.27 COMO 1411-1 91 0.64 1.50 -0.11 1.64 COMO 1411-2 91 -0.31 0.66 4.61 4.67 COMO 1411-3 91 -3.25 2.82 5.23 6.77 COMO 1411-4 91 -0.70 -0.22 2.45 2.55 COMO 1411-5 91 -1.14 -0.56 -2.24 2.57 COMO 1411-6 91 -1.79 -1.70 4.08 4.77 COMO 1412-0 91 -0.54 -0.45 0.80 1.06 COMO 1412-1 91 -0.78 -0.09 3.92 4.00 COMO 1412-2 91 -1.13 -1.13 1.04 1.90 COMO 1412-3 91 -0.88 -0.87 0.55 1.35 COMO 1412-4 91 -0.22 -0.21 2.47 2.49 COMO 1412-5 91 -0.57 -0.15 -0.41 0.72 COMO 1412-6 91 0.09 1.70 -3.89 4.25 COMO 1413-0 91 0.54 -2.24 -8.87 9.17 COMO 1413-1 91 0.09 -2.68 -0.26 2.69 COMO 1413-2 91 0.35 -3.02 1.86 3.57 COMO 1413-3 91 1.90 -0.86 -3.42 4.01 COMO 1413-4 91 3.15 -1.30 -0.10 3.41 COMO 1413-5 91 2.91 -0.85 -3.48 4.62 COMO 1413-6 91 3.16 -1.59 1.24 3.75 COMO 1414-0 91 4.42 2.77 11.15 12.31 COMO 1414-1 91 0.27 0.33 6.47 6.49 COMO 1414-2 91 0.32 2.19 5.99 6.38 COMO 1414-3 91 -0.62 -0.35 2.11 2.23 COMO 1414-4 91 1.73 0.50 -1.37 2.27 COMO 1414-5 91 0.88 0.36 1.74 1.99 COMO 1414-6 91 0.04 -0.38 2.56 2.59 COMO 1415-0 91 -0.61 -1.12 1.98 2.36 COMO 1415-1 91 -0.55 -0.26 -3.10 3.16 COMO 1415-2 91 -2.20 -0.51 1.52 2.72 COMO 1415-3 91 -0.65 -2.75 -2.27 3.62 COMO 1415-4 91 -0.89 -0.89 2.05 2.41 COMO 1415-5 91 -0.04 0.27 2.87 2.88 COMO 1415-6 91 -1.59 0.43 5.89 6.11 COMO 1416-0 91 -0.63 -1.21 3.51 3.76 COMO 1416-1 91 0.42 -0.16 3.92 3.95 COMO 1416-2 91 -0.62 -1.00 1.54 1.94 COMO 1416-3 91 0.23 -1.24 3.46 3.68 COMO 1416-4 91 -0.02 -1.18 6.98 7.08 COMO 1416-5 91 1.34 -4.62 -8.50 9.77 COMO 1416-6 91 -1.31 -1.66 4.22 4.72 COMO 1417-0 91 0.24 -0.51 -0.67 0.87 COMO 1417-1 91 0.00 -0.05 4.35 4.35 COMO 1417-2 91 -0.95 -1.49 0.77 1.93 COMO 1417-3 91 0.01 -0.23 -1.31 1.33 COMO 1417-4 91 2.16 0.33 0.71 2.30 COMO 1417-5 91 1.21 0.59 -0.48 1.43 COMO 1417-6 91 -0.23 -1.16 0.14 1.19 COMO 1418-0 91 -0.18 -0.10 1.36 1.38 COMO 1418-1 91 -0.92 0.66 -1.52 1.90 COMO 1418-2 91 -0.37 0.92 -0.80 1.28 COMO 1418-3 91 0.98 0.48 -2.69 2.90 COMO 1418-4 91 -0.26 0.54 -0.87 1.05 COMO 1418-5 91 0.59 1.39 1.15 1.90 COMO 1418-6 91 0.14 -0.05 -4.23 4.23 COMO 1419-0 91 -0.30 0.91 1.39 1.69 COMO 1419-1 91 -0.75 2.07 1.81 2.85 COMO 1419-2 91 -0.99 -0.57 2.42 2.68 COMO 1419-3 91 0.96 -0.31 -0.46 1.11 COMO 1419-4 91 -1.19 1.94 -0.74 2.39 COMO 1419-5 91 -0.53 1.00 0.08 1.14 COMO 1419-6 91 -1.28 1.26 1.30 2.21 COMO 1420-0 91 1.17 1.52 -5.09 5.44 COMO 1420-1 91 0.63 0.58 -6.77 6.82 COMO 1420-2 91 0.68 0.63 -4.85 4.94 COMO 1420-3 91 -0.76 0.89 -4.33 4.49 COMO 1420-4 91 -0.51 0.15 -1.71 1.79 COMO 1420-5 91 -0.96 -0.39 -2.60 2.79 COMO 1420-6 91 0.10 0.67 -2.78 2.86
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
CUCC 1408-2 89 1.21 -0.62 0.54 1.46 CUCC 1408-3 89 -1.25 -1.29 -4.99 5.31 CUCC 1408-4 89 -1.71 -0.67 3.28 3.76 CUCC 1408-5 89 1.43 0.56 -1.15 1.92 CUCC 1408-6 89 -1.33 1.79 -2.58 3.41 CUCC 1409-0 89 -0.59 0.71 -2.51 2.68 CUCC 1409-1 89 0.05 1.24 -2.54 2.83 CUCC 1409-2 89 0.39 1.77 -3.27 3.74 CUCC 1409-3 89 -0.87 1.69 -2.20 2.91 CUCC 1409-4 89 -0.23 1.52 0.07 1.54 CUCC 1409-5 89 2.11 2.75 3.34 4.81 CUCC 1409-6 89 -3.25 -0.72 3.51 4.84 CUCC 1410-0 89 0.59 -0.30 6.88 6.91 CUCC 1410-1 89 -4.27 2.23 -5.05 6.98 CUCC 1410-2 89 -0.23 1.06 -3.28 3.45 CUCC 1410-3 89 0.31 -0.72 8.19 8.23 CUCC 1410-4 89 1.46 3.51 9.06 9.83 CUCC 1410-5 89 3.80 -1.56 20.33 20.74 CUCC 1410-6 89 -1.46 -1.14 -4.50 4.87 CUCC 1411-0 89 3.68 0.09 -5.13 6.31 CUCC 1411-1 89 1.32 0.32 -1.56 2.07 CUCC 1411-2 89 -1.24 2.05 -0.69 2.49 CUCC 1411-3 89 0.70 2.97 -1.92 3.61 CUCC 1411-4 89 -0.76 -0.10 -0.25 0.81 CUCC 1411-5 89 0.98 -0.17 -1.28 1.62 CUCC 1411-6 89 -2.78 -0.35 -3.41 4.41 CUCC 1412-0 89 0.36 0.28 1.16 1.25 CUCC 1412-1 89 0.30 -1.19 2.93 3.18 CUCC 1412-2 89 -0.36 1.23 -6.50 6.62 CUCC 1412-3 89 -0.52 0.06 -2.93 2.97 CUCC 1412-4 89 0.52 0.19 -3.36 3.40 CUCC 1412-5 89 0.06 2.42 -0.89 2.57 CUCC 1412-6 89 0.30 -0.16 1.98 2.01 CUCC 1413-0 89 3.15 -6.83 21.95 23.20 CUCC 1413-1 89 0.19 -3.30 -8.88 9.47 CUCC 1413-2 89 0.93 -3.38 0.99 3.64 CUCC 1413-3 89 -2.13 -4.35 -0.44 4.86 CUCC 1413-4 89 2.21 -2.72 -3.67 5.07 CUCC 1413-5 89 1.95 -3.69 -3.60 5.51 CUCC 1413-6 89 4.19 -0.97 -5.13 6.69 CUCC 1414-0 89 -3.97 -1.84 -12.96 13.68 CUCC 1414-1 89 0.37 1.39 -6.49 6.64 CUCC 1414-2 89 0.51 -0.89 -3.02 3.18 CUCC 1414-3 89 -0.95 -0.26 -2.85 3.01 CUCC 1414-4 89 1.69 0.77 -3.98 4.39 CUCC 1414-5 89 2.03 -1.31 0.79 2.54 CUCC 1414-6 89 0.17 0.62 -0.24 0.69 CUCC 1415-0 89 0.71 0.85 -2.17 2.43 CUCC 1415-1 89 -0.05 -0.72 4.20 4.27 CUCC 1415-2 89 1.99 -0.20 3.07 3.67 CUCC 1415-3 89 0.34 4.23 5.35 6.82 CUCC 1415-4 89 0.08 0.06 -1.38 1.39 CUCC 1415-5 89 0.22 -2.22 1.39 2.62 CUCC 1415-6 89 1.56 -2.89 9.46 10.01 CUCC 1416-0 89 0.30 -1.66 -2.27 2.83 CUCC 1416-1 89 -1.66 -0.34 2.50 3.02 CUCC 1416-2 89 2.78 -3.11 -10.73 11.52 CUCC 1416-3 89 -0.78 0.62 0.84 1.30 CUCC 1416-4 89 -1.94 -1.75 0.81 2.74 CUCC 1416-5 89 -5.70 4.97 10.68 13.08 CUCC 1416-6 89 1.34 -1.50 1.85 2.73 CUCC 1417-0 89 0.38 0.23 0.12 0.46 CUCC 1417-1 89 -1.48 -0.05 -3.11 3.45 CUCC 1417-2 89 -0.04 0.38 -0.64 0.75 CUCC 1417-3 89 0.90 0.81 -3.37 3.58 CUCC 1417-4 89 2.34 0.63 2.90 3.78 CUCC 1417-5 89 1.29 -0.14 5.27 5.42 CUCC 1417-6 89 -2.07 -0.91 10.14 10.39 CUCC 1418-0 89 -1.53 1.32 -1.29 2.40 CUCC 1418-1 89 -0.19 0.24 2.08 2.10 CUCC 1418-2 89 0.65 -0.53 -0.45 0.95 CUCC 1418-3 89 -1.11 3.60 4.02 5.51 CUCC 1418-4 89 -0.87 2.62 -4.41 5.21 CUCC 1418-5 89 -1.33 -0.95 -4.74 5.02 CUCC 1418-6 89 -0.29 4.28 8.13 9.19 CUCC 1419-0 89 0.25 -0.30 0.20 0.43 CUCC 1419-2 89 0.73 1.76 -0.96 2.13 CUCC 1419-3 89 2.57 1.39 -6.09 6.76 CUCC 1419-4 89 -2.89 1.61 -3.02 4.48 CUCC 1419-5 89 -1.05 -0.46 -1.35 1.77 CUCC 1419-6 89 -1.61 -0.93 -0.38 1.90 CUCC 1420-0 89 0.43 0.39 -3.91 3.95 CUCC 1420-2 89 1.12 0.45 -2.17 2.48 CUCC 1420-3 89 0.06 -0.13 -2.60 2.60 CUCC 1420-4 89 -0.40 -1.40 5.57 5.76 CUCC 1420-5 89 0.04 -0.67 -1.96 2.07 CUCC 1420-6 89 -0.32 -0.94 3.31 3.46
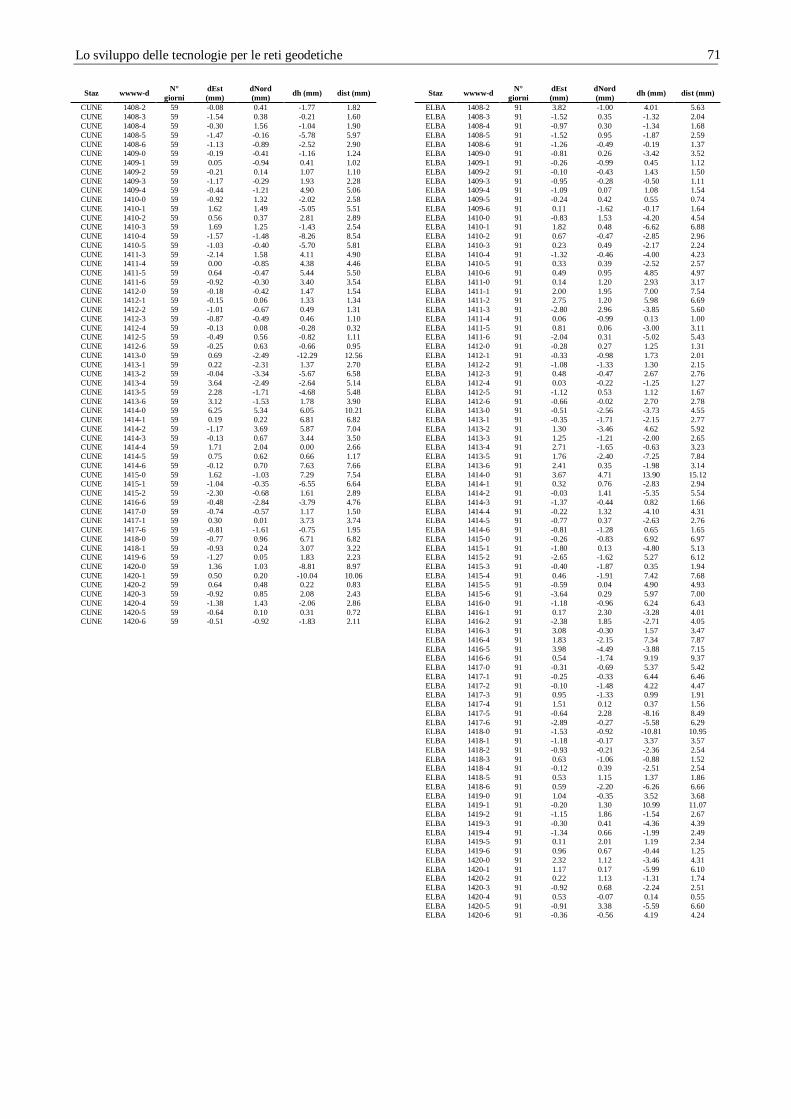
Lo sviluppo delle tecnologie per le reti geodetiche
71
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
CUNE 1408-2 59 -0.08 0.41 -1.77 1.82 CUNE 1408-3 59 -1.54 0.38 -0.21 1.60 CUNE 1408-4 59 -0.30 1.56 -1.04 1.90 CUNE 1408-5 59 -1.47 -0.16 -5.78 5.97 CUNE 1408-6 59 -1.13 -0.89 -2.52 2.90 CUNE 1409-0 59 -0.19 -0.41 -1.16 1.24 CUNE 1409-1 59 0.05 -0.94 0.41 1.02 CUNE 1409-2 59 -0.21 0.14 1.07 1.10 CUNE 1409-3 59 -1.17 -0.29 1.93 2.28 CUNE 1409-4 59 -0.44 -1.21 4.90 5.06 CUNE 1410-0 59 -0.92 1.32 -2.02 2.58 CUNE 1410-1 59 1.62 1.49 -5.05 5.51 CUNE 1410-2 59 0.56 0.37 2.81 2.89 CUNE 1410-3 59 1.69 1.25 -1.43 2.54 CUNE 1410-4 59 -1.57 -1.48 -8.26 8.54 CUNE 1410-5 59 -1.03 -0.40 -5.70 5.81 CUNE 1411-3 59 -2.14 1.58 4.11 4.90 CUNE 1411-4 59 0.00 -0.85 4.38 4.46 CUNE 1411-5 59 0.64 -0.47 5.44 5.50 CUNE 1411-6 59 -0.92 -0.30 3.40 3.54 CUNE 1412-0 59 -0.18 -0.42 1.47 1.54 CUNE 1412-1 59 -0.15 0.06 1.33 1.34 CUNE 1412-2 59 -1.01 -0.67 0.49 1.31 CUNE 1412-3 59 -0.87 -0.49 0.46 1.10 CUNE 1412-4 59 -0.13 0.08 -0.28 0.32 CUNE 1412-5 59 -0.49 0.56 -0.82 1.11 CUNE 1412-6 59 -0.25 0.63 -0.66 0.95 CUNE 1413-0 59 0.69 -2.49 -12.29 12.56 CUNE 1413-1 59 0.22 -2.31 1.37 2.70 CUNE 1413-2 59 -0.04 -3.34 -5.67 6.58 CUNE 1413-4 59 3.64 -2.49 -2.64 5.14 CUNE 1413-5 59 2.28 -1.71 -4.68 5.48 CUNE 1413-6 59 3.12 -1.53 1.78 3.90 CUNE 1414-0 59 6.25 5.34 6.05 10.21 CUNE 1414-1 59 0.19 0.22 6.81 6.82 CUNE 1414-2 59 -1.17 3.69 5.87 7.04 CUNE 1414-3 59 -0.13 0.67 3.44 3.50 CUNE 1414-4 59 1.71 2.04 0.00 2.66 CUNE 1414-5 59 0.75 0.62 0.66 1.17 CUNE 1414-6 59 -0.12 0.70 7.63 7.66 CUNE 1415-0 59 1.62 -1.03 7.29 7.54 CUNE 1415-1 59 -1.04 -0.35 -6.55 6.64 CUNE 1415-2 59 -2.30 -0.68 1.61 2.89 CUNE 1416-6 59 -0.48 -2.84 -3.79 4.76 CUNE 1417-0 59 -0.74 -0.57 1.17 1.50 CUNE 1417-1 59 0.30 0.01 3.73 3.74 CUNE 1417-6 59 -0.81 -1.61 -0.75 1.95 CUNE 1418-0 59 -0.77 0.96 6.71 6.82 CUNE 1418-1 59 -0.93 0.24 3.07 3.22 CUNE 1419-6 59 -1.27 0.05 1.83 2.23 CUNE 1420-0 59 1.36 1.03 -8.81 8.97 CUNE 1420-1 59 0.50 0.20 -10.04 10.06 CUNE 1420-2 59 0.64 0.48 0.22 0.83 CUNE 1420-3 59 -0.92 0.85 2.08 2.43 CUNE 1420-4 59 -1.38 1.43 -2.06 2.86 CUNE 1420-5 59 -0.64 0.10 0.31 0.72 CUNE 1420-6 59 -0.51 -0.92 -1.83 2.11
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
ELBA 1408-2 91 3.82 -1.00 4.01 5.63 ELBA 1408-3 91 -1.52 0.35 -1.32 2.04 ELBA 1408-4 91 -0.97 0.30 -1.34 1.68 ELBA 1408-5 91 -1.52 0.95 -1.87 2.59 ELBA 1408-6 91 -1.26 -0.49 -0.19 1.37 ELBA 1409-0 91 -0.81 0.26 -3.42 3.52 ELBA 1409-1 91 -0.26 -0.99 0.45 1.12 ELBA 1409-2 91 -0.10 -0.43 1.43 1.50 ELBA 1409-3 91 -0.95 -0.28 -0.50 1.11 ELBA 1409-4 91 -1.09 0.07 1.08 1.54 ELBA 1409-5 91 -0.24 0.42 0.55 0.74 ELBA 1409-6 91 0.11 -1.62 -0.17 1.64 ELBA 1410-0 91 -0.83 1.53 -4.20 4.54 ELBA 1410-1 91 1.82 0.48 -6.62 6.88 ELBA 1410-2 91 0.67 -0.47 -2.85 2.96 ELBA 1410-3 91 0.23 0.49 -2.17 2.24 ELBA 1410-4 91 -1.32 -0.46 -4.00 4.23 ELBA 1410-5 91 0.33 0.39 -2.52 2.57 ELBA 1410-6 91 0.49 0.95 4.85 4.97 ELBA 1411-0 91 0.14 1.20 2.93 3.17 ELBA 1411-1 91 2.00 1.95 7.00 7.54 ELBA 1411-2 91 2.75 1.20 5.98 6.69 ELBA 1411-3 91 -2.80 2.96 -3.85 5.60 ELBA 1411-4 91 0.06 -0.99 0.13 1.00 ELBA 1411-5 91 0.81 0.06 -3.00 3.11 ELBA 1411-6 91 -2.04 0.31 -5.02 5.43 ELBA 1412-0 91 -0.28 0.27 1.25 1.31 ELBA 1412-1 91 -0.33 -0.98 1.73 2.01 ELBA 1412-2 91 -1.08 -1.33 1.30 2.15 ELBA 1412-3 91 0.48 -0.47 2.67 2.76 ELBA 1412-4 91 0.03 -0.22 -1.25 1.27 ELBA 1412-5 91 -1.12 0.53 1.12 1.67 ELBA 1412-6 91 -0.66 -0.02 2.70 2.78 ELBA 1413-0 91 -0.51 -2.56 -3.73 4.55 ELBA 1413-1 91 -0.35 -1.71 -2.15 2.77 ELBA 1413-2 91 1.30 -3.46 4.62 5.92 ELBA 1413-3 91 1.25 -1.21 -2.00 2.65 ELBA 1413-4 91 2.71 -1.65 -0.63 3.23 ELBA 1413-5 91 1.76 -2.40 -7.25 7.84 ELBA 1413-6 91 2.41 0.35 -1.98 3.14 ELBA 1414-0 91 3.67 4.71 13.90 15.12 ELBA 1414-1 91 0.32 0.76 -2.83 2.94 ELBA 1414-2 91 -0.03 1.41 -5.35 5.54 ELBA 1414-3 91 -1.37 -0.44 0.82 1.66 ELBA 1414-4 91 -0.22 1.32 -4.10 4.31 ELBA 1414-5 91 -0.77 0.37 -2.63 2.76 ELBA 1414-6 91 -0.81 -1.28 0.65 1.65 ELBA 1415-0 91 -0.26 -0.83 6.92 6.97 ELBA 1415-1 91 -1.80 0.13 -4.80 5.13 ELBA 1415-2 91 -2.65 -1.62 5.27 6.12 ELBA 1415-3 91 -0.40 -1.87 0.35 1.94 ELBA 1415-4 91 0.46 -1.91 7.42 7.68 ELBA 1415-5 91 -0.59 0.04 4.90 4.93 ELBA 1415-6 91 -3.64 0.29 5.97 7.00 ELBA 1416-0 91 -1.18 -0.96 6.24 6.43 ELBA 1416-1 91 0.17 2.30 -3.28 4.01 ELBA 1416-2 91 -2.38 1.85 -2.71 4.05 ELBA 1416-3 91 3.08 -0.30 1.57 3.47 ELBA 1416-4 91 1.83 -2.15 7.34 7.87 ELBA 1416-5 91 3.98 -4.49 -3.88 7.15 ELBA 1416-6 91 0.54 -1.74 9.19 9.37 ELBA 1417-0 91 -0.31 -0.69 5.37 5.42 ELBA 1417-1 91 -0.25 -0.33 6.44 6.46 ELBA 1417-2 91 -0.10 -1.48 4.22 4.47 ELBA 1417-3 91 0.95 -1.33 0.99 1.91 ELBA 1417-4 91 1.51 0.12 0.37 1.56 ELBA 1417-5 91 -0.64 2.28 -8.16 8.49 ELBA 1417-6 91 -2.89 -0.27 -5.58 6.29 ELBA 1418-0 91 -1.53 -0.92 -10.81 10.95 ELBA 1418-1 91 -1.18 -0.17 3.37 3.57 ELBA 1418-2 91 -0.93 -0.21 -2.36 2.54 ELBA 1418-3 91 0.63 -1.06 -0.88 1.52 ELBA 1418-4 91 -0.12 0.39 -2.51 2.54 ELBA 1418-5 91 0.53 1.15 1.37 1.86 ELBA 1418-6 91 0.59 -2.20 -6.26 6.66 ELBA 1419-0 91 1.04 -0.35 3.52 3.68 ELBA 1419-1 91 -0.20 1.30 10.99 11.07 ELBA 1419-2 91 -1.15 1.86 -1.54 2.67 ELBA 1419-3 91 -0.30 0.41 -4.36 4.39 ELBA 1419-4 91 -1.34 0.66 -1.99 2.49 ELBA 1419-5 91 0.11 2.01 1.19 2.34 ELBA 1419-6 91 0.96 0.67 -0.44 1.25 ELBA 1420-0 91 2.32 1.12 -3.46 4.31 ELBA 1420-1 91 1.17 0.17 -5.99 6.10 ELBA 1420-2 91 0.22 1.13 -1.31 1.74 ELBA 1420-3 91 -0.92 0.68 -2.24 2.51 ELBA 1420-4 91 0.53 -0.07 0.14 0.55 ELBA 1420-5 91 -0.91 3.38 -5.59 6.60 ELBA 1420-6 91 -0.36 -0.56 4.19 4.24
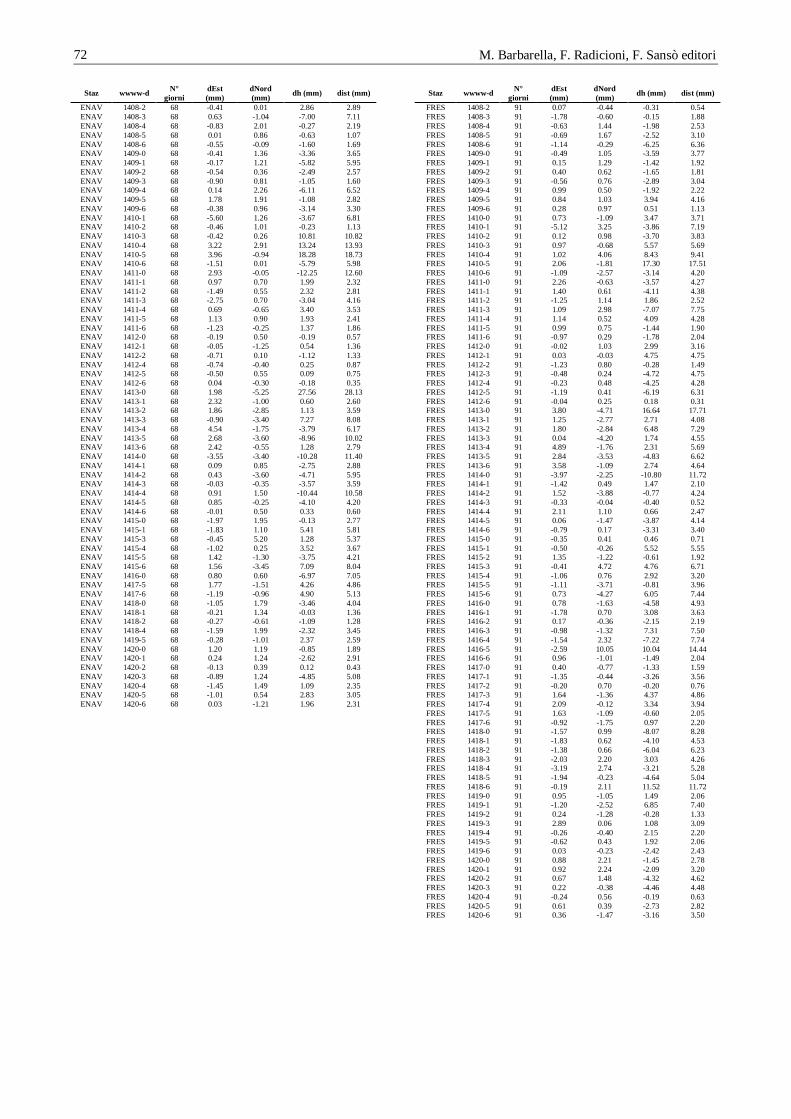
M. Barbarella, F. Radicioni, F. Sansò editori
72
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
ENAV 1408-2 68 -0.41 0.01 2.86 2.89 ENAV 1408-3 68 0.63 -1.04 -7.00 7.11 ENAV 1408-4 68 -0.83 2.01 -0.27 2.19 ENAV 1408-5 68 0.01 0.86 -0.63 1.07 ENAV 1408-6 68 -0.55 -0.09 -1.60 1.69 ENAV 1409-0 68 -0.41 1.36 -3.36 3.65 ENAV 1409-1 68 -0.17 1.21 -5.82 5.95 ENAV 1409-2 68 -0.54 0.36 -2.49 2.57 ENAV 1409-3 68 -0.90 0.81 -1.05 1.60 ENAV 1409-4 68 0.14 2.26 -6.11 6.52 ENAV 1409-5 68 1.78 1.91 -1.08 2.82 ENAV 1409-6 68 -0.38 0.96 -3.14 3.30 ENAV 1410-1 68 -5.60 1.26 -3.67 6.81 ENAV 1410-2 68 -0.46 1.01 -0.23 1.13 ENAV 1410-3 68 -0.42 0.26 10.81 10.82 ENAV 1410-4 68 3.22 2.91 13.24 13.93 ENAV 1410-5 68 3.96 -0.94 18.28 18.73 ENAV 1410-6 68 -1.51 0.01 -5.79 5.98 ENAV 1411-0 68 2.93 -0.05 -12.25 12.60 ENAV 1411-1 68 0.97 0.70 1.99 2.32 ENAV 1411-2 68 -1.49 0.55 2.32 2.81 ENAV 1411-3 68 -2.75 0.70 -3.04 4.16 ENAV 1411-4 68 0.69 -0.65 3.40 3.53 ENAV 1411-5 68 1.13 0.90 1.93 2.41 ENAV 1411-6 68 -1.23 -0.25 1.37 1.86 ENAV 1412-0 68 -0.19 0.50 -0.19 0.57 ENAV 1412-1 68 -0.05 -1.25 0.54 1.36 ENAV 1412-2 68 -0.71 0.10 -1.12 1.33 ENAV 1412-4 68 -0.74 -0.40 0.25 0.87 ENAV 1412-5 68 -0.50 0.55 0.09 0.75 ENAV 1412-6 68 0.04 -0.30 -0.18 0.35 ENAV 1413-0 68 1.98 -5.25 27.56 28.13 ENAV 1413-1 68 2.32 -1.00 0.60 2.60 ENAV 1413-2 68 1.86 -2.85 1.13 3.59 ENAV 1413-3 68 -0.90 -3.40 7.27 8.08 ENAV 1413-4 68 4.54 -1.75 -3.79 6.17 ENAV 1413-5 68 2.68 -3.60 -8.96 10.02 ENAV 1413-6 68 2.42 -0.55 1.28 2.79 ENAV 1414-0 68 -3.55 -3.40 -10.28 11.40 ENAV 1414-1 68 0.09 0.85 -2.75 2.88 ENAV 1414-2 68 0.43 -3.60 -4.71 5.95 ENAV 1414-3 68 -0.03 -0.35 -3.57 3.59 ENAV 1414-4 68 0.91 1.50 -10.44 10.58 ENAV 1414-5 68 0.85 -0.25 -4.10 4.20 ENAV 1414-6 68 -0.01 0.50 0.33 0.60 ENAV 1415-0 68 -1.97 1.95 -0.13 2.77 ENAV 1415-1 68 -1.83 1.10 5.41 5.81 ENAV 1415-3 68 -0.45 5.20 1.28 5.37 ENAV 1415-4 68 -1.02 0.25 3.52 3.67 ENAV 1415-5 68 1.42 -1.30 -3.75 4.21 ENAV 1415-6 68 1.56 -3.45 7.09 8.04 ENAV 1416-0 68 0.80 0.60 -6.97 7.05 ENAV 1417-5 68 1.77 -1.51 4.26 4.86 ENAV 1417-6 68 -1.19 -0.96 4.90 5.13 ENAV 1418-0 68 -1.05 1.79 -3.46 4.04 ENAV 1418-1 68 -0.21 1.34 -0.03 1.36 ENAV 1418-2 68 -0.27 -0.61 -1.09 1.28 ENAV 1418-4 68 -1.59 1.99 -2.32 3.45 ENAV 1419-5 68 -0.28 -1.01 2.37 2.59 ENAV 1420-0 68 1.20 1.19 -0.85 1.89 ENAV 1420-1 68 0.24 1.24 -2.62 2.91 ENAV 1420-2 68 -0.13 0.39 0.12 0.43 ENAV 1420-3 68 -0.89 1.24 -4.85 5.08 ENAV 1420-4 68 -1.45 1.49 1.09 2.35 ENAV 1420-5 68 -1.01 0.54 2.83 3.05 ENAV 1420-6 68 0.03 -1.21 1.96 2.31
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
FRES 1408-2 91 0.07 -0.44 -0.31 0.54 FRES 1408-3 91 -1.78 -0.60 -0.15 1.88 FRES 1408-4 91 -0.63 1.44 -1.98 2.53 FRES 1408-5 91 -0.69 1.67 -2.52 3.10 FRES 1408-6 91 -1.14 -0.29 -6.25 6.36 FRES 1409-0 91 -0.49 1.05 -3.59 3.77 FRES 1409-1 91 0.15 1.29 -1.42 1.92 FRES 1409-2 91 0.40 0.62 -1.65 1.81 FRES 1409-3 91 -0.56 0.76 -2.89 3.04 FRES 1409-4 91 0.99 0.50 -1.92 2.22 FRES 1409-5 91 0.84 1.03 3.94 4.16 FRES 1409-6 91 0.28 0.97 0.51 1.13 FRES 1410-0 91 0.73 -1.09 3.47 3.71 FRES 1410-1 91 -5.12 3.25 -3.86 7.19 FRES 1410-2 91 0.12 0.98 -3.70 3.83 FRES 1410-3 91 0.97 -0.68 5.57 5.69 FRES 1410-4 91 1.02 4.06 8.43 9.41 FRES 1410-5 91 2.06 -1.81 17.30 17.51 FRES 1410-6 91 -1.09 -2.57 -3.14 4.20 FRES 1411-0 91 2.26 -0.63 -3.57 4.27 FRES 1411-1 91 1.40 0.61 -4.11 4.38 FRES 1411-2 91 -1.25 1.14 1.86 2.52 FRES 1411-3 91 1.09 2.98 -7.07 7.75 FRES 1411-4 91 1.14 0.52 4.09 4.28 FRES 1411-5 91 0.99 0.75 -1.44 1.90 FRES 1411-6 91 -0.97 0.29 -1.78 2.04 FRES 1412-0 91 -0.02 1.03 2.99 3.16 FRES 1412-1 91 0.03 -0.03 4.75 4.75 FRES 1412-2 91 -1.23 0.80 -0.28 1.49 FRES 1412-3 91 -0.48 0.24 -4.72 4.75 FRES 1412-4 91 -0.23 0.48 -4.25 4.28 FRES 1412-5 91 -1.19 0.41 -6.19 6.31 FRES 1412-6 91 -0.04 0.25 0.18 0.31 FRES 1413-0 91 3.80 -4.71 16.64 17.71 FRES 1413-1 91 1.25 -2.77 2.71 4.08 FRES 1413-2 91 1.80 -2.84 6.48 7.29 FRES 1413-3 91 0.04 -4.20 1.74 4.55 FRES 1413-4 91 4.89 -1.76 2.31 5.69 FRES 1413-5 91 2.84 -3.53 -4.83 6.62 FRES 1413-6 91 3.58 -1.09 2.74 4.64 FRES 1414-0 91 -3.97 -2.25 -10.80 11.72 FRES 1414-1 91 -1.42 0.49 1.47 2.10 FRES 1414-2 91 1.52 -3.88 -0.77 4.24 FRES 1414-3 91 -0.33 -0.04 -0.40 0.52 FRES 1414-4 91 2.11 1.10 0.66 2.47 FRES 1414-5 91 0.06 -1.47 -3.87 4.14 FRES 1414-6 91 -0.79 0.17 -3.31 3.40 FRES 1415-0 91 -0.35 0.41 0.46 0.71 FRES 1415-1 91 -0.50 -0.26 5.52 5.55 FRES 1415-2 91 1.35 -1.22 -0.61 1.92 FRES 1415-3 91 -0.41 4.72 4.76 6.71 FRES 1415-4 91 -1.06 0.76 2.92 3.20 FRES 1415-5 91 -1.11 -3.71 -0.81 3.96 FRES 1415-6 91 0.73 -4.27 6.05 7.44 FRES 1416-0 91 0.78 -1.63 -4.58 4.93 FRES 1416-1 91 -1.78 0.70 3.08 3.63 FRES 1416-2 91 0.17 -0.36 -2.15 2.19 FRES 1416-3 91 -0.98 -1.32 7.31 7.50 FRES 1416-4 91 -1.54 2.32 -7.22 7.74 FRES 1416-5 91 -2.59 10.05 10.04 14.44 FRES 1416-6 91 0.96 -1.01 -1.49 2.04 FRES 1417-0 91 0.40 -0.77 -1.33 1.59 FRES 1417-1 91 -1.35 -0.44 -3.26 3.56 FRES 1417-2 91 -0.20 0.70 -0.20 0.76 FRES 1417-3 91 1.64 -1.36 4.37 4.86 FRES 1417-4 91 2.09 -0.12 3.34 3.94 FRES 1417-5 91 1.63 -1.09 -0.60 2.05 FRES 1417-6 91 -0.92 -1.75 0.97 2.20 FRES 1418-0 91 -1.57 0.99 -8.07 8.28 FRES 1418-1 91 -1.83 0.62 -4.10 4.53 FRES 1418-2 91 -1.38 0.66 -6.04 6.23 FRES 1418-3 91 -2.03 2.20 3.03 4.26 FRES 1418-4 91 -3.19 2.74 -3.21 5.28 FRES 1418-5 91 -1.94 -0.23 -4.64 5.04 FRES 1418-6 91 -0.19 2.11 11.52 11.72 FRES 1419-0 91 0.95 -1.05 1.49 2.06 FRES 1419-1 91 -1.20 -2.52 6.85 7.40 FRES 1419-2 91 0.24 -1.28 -0.28 1.33 FRES 1419-3 91 2.89 0.06 1.08 3.09 FRES 1419-4 91 -0.26 -0.40 2.15 2.20 FRES 1419-5 91 -0.62 0.43 1.92 2.06 FRES 1419-6 91 0.03 -0.23 -2.42 2.43 FRES 1420-0 91 0.88 2.21 -1.45 2.78 FRES 1420-1 91 0.92 2.24 -2.09 3.20 FRES 1420-2 91 0.67 1.48 -4.32 4.62 FRES 1420-3 91 0.22 -0.38 -4.46 4.48 FRES 1420-4 91 -0.24 0.56 -0.19 0.63 FRES 1420-5 91 0.61 0.39 -2.73 2.82 FRES 1420-6 91 0.36 -1.47 -3.16 3.50
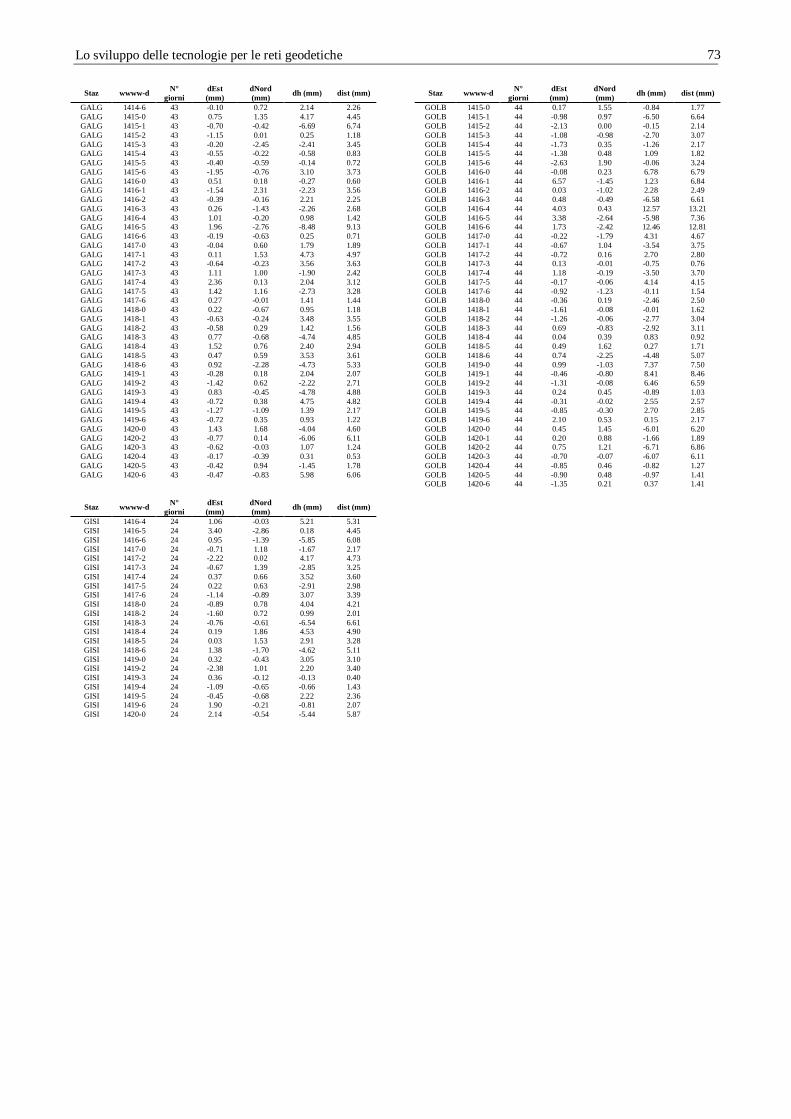
Lo sviluppo delle tecnologie per le reti geodetiche
73
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
GALG 1414-6 43 -0.10 0.72 2.14 2.26 GALG 1415-0 43 0.75 1.35 4.17 4.45 GALG 1415-1 43 -0.70 -0.42 -6.69 6.74 GALG 1415-2 43 -1.15 0.01 0.25 1.18 GALG 1415-3 43 -0.20 -2.45 -2.41 3.45 GALG 1415-4 43 -0.55 -0.22 -0.58 0.83 GALG 1415-5 43 -0.40 -0.59 -0.14 0.72 GALG 1415-6 43 -1.95 -0.76 3.10 3.73 GALG 1416-0 43 0.51 0.18 -0.27 0.60 GALG 1416-1 43 -1.54 2.31 -2.23 3.56 GALG 1416-2 43 -0.39 -0.16 2.21 2.25 GALG 1416-3 43 0.26 -1.43 -2.26 2.68 GALG 1416-4 43 1.01 -0.20 0.98 1.42 GALG 1416-5 43 1.96 -2.76 -8.48 9.13 GALG 1416-6 43 -0.19 -0.63 0.25 0.71 GALG 1417-0 43 -0.04 0.60 1.79 1.89 GALG 1417-1 43 0.11 1.53 4.73 4.97 GALG 1417-2 43 -0.64 -0.23 3.56 3.63 GALG 1417-3 43 1.11 1.00 -1.90 2.42 GALG 1417-4 43 2.36 0.13 2.04 3.12 GALG 1417-5 43 1.42 1.16 -2.73 3.28 GALG 1417-6 43 0.27 -0.01 1.41 1.44 GALG 1418-0 43 0.22 -0.67 0.95 1.18 GALG 1418-1 43 -0.63 -0.24 3.48 3.55 GALG 1418-2 43 -0.58 0.29 1.42 1.56 GALG 1418-3 43 0.77 -0.68 -4.74 4.85 GALG 1418-4 43 1.52 0.76 2.40 2.94 GALG 1418-5 43 0.47 0.59 3.53 3.61 GALG 1418-6 43 0.92 -2.28 -4.73 5.33 GALG 1419-1 43 -0.28 0.18 2.04 2.07 GALG 1419-2 43 -1.42 0.62 -2.22 2.71 GALG 1419-3 43 0.83 -0.45 -4.78 4.88 GALG 1419-4 43 -0.72 0.38 4.75 4.82 GALG 1419-5 43 -1.27 -1.09 1.39 2.17 GALG 1419-6 43 -0.72 0.35 0.93 1.22 GALG 1420-0 43 1.43 1.68 -4.04 4.60 GALG 1420-2 43 -0.77 0.14 -6.06 6.11 GALG 1420-3 43 -0.62 -0.03 1.07 1.24 GALG 1420-4 43 -0.17 -0.39 0.31 0.53 GALG 1420-5 43 -0.42 0.94 -1.45 1.78 GALG 1420-6 43 -0.47 -0.83 5.98 6.06
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
GISI 1416-4 24 1.06 -0.03 5.21 5.31 GISI 1416-5 24 3.40 -2.86 0.18 4.45 GISI 1416-6 24 0.95 -1.39 -5.85 6.08 GISI 1417-0 24 -0.71 1.18 -1.67 2.17 GISI 1417-2 24 -2.22 0.02 4.17 4.73 GISI 1417-3 24 -0.67 1.39 -2.85 3.25 GISI 1417-4 24 0.37 0.66 3.52 3.60 GISI 1417-5 24 0.22 0.63 -2.91 2.98 GISI 1417-6 24 -1.14 -0.89 3.07 3.39 GISI 1418-0 24 -0.89 0.78 4.04 4.21 GISI 1418-2 24 -1.60 0.72 0.99 2.01 GISI 1418-3 24 -0.76 -0.61 -6.54 6.61 GISI 1418-4 24 0.19 1.86 4.53 4.90 GISI 1418-5 24 0.03 1.53 2.91 3.28 GISI 1418-6 24 1.38 -1.70 -4.62 5.11 GISI 1419-0 24 0.32 -0.43 3.05 3.10 GISI 1419-2 24 -2.38 1.01 2.20 3.40 GISI 1419-3 24 0.36 -0.12 -0.13 0.40 GISI 1419-4 24 -1.09 -0.65 -0.66 1.43 GISI 1419-5 24 -0.45 -0.68 2.22 2.36 GISI 1419-6 24 1.90 -0.21 -0.81 2.07 GISI 1420-0 24 2.14 -0.54 -5.44 5.87
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
GOLB 1415-0 44 0.17 1.55 -0.84 1.77 GOLB 1415-1 44 -0.98 0.97 -6.50 6.64 GOLB 1415-2 44 -2.13 0.00 -0.15 2.14 GOLB 1415-3 44 -1.08 -0.98 -2.70 3.07 GOLB 1415-4 44 -1.73 0.35 -1.26 2.17 GOLB 1415-5 44 -1.38 0.48 1.09 1.82 GOLB 1415-6 44 -2.63 1.90 -0.06 3.24 GOLB 1416-0 44 -0.08 0.23 6.78 6.79 GOLB 1416-1 44 6.57 -1.45 1.23 6.84 GOLB 1416-2 44 0.03 -1.02 2.28 2.49 GOLB 1416-3 44 0.48 -0.49 -6.58 6.61 GOLB 1416-4 44 4.03 0.43 12.57 13.21 GOLB 1416-5 44 3.38 -2.64 -5.98 7.36 GOLB 1416-6 44 1.73 -2.42 12.46 12.81 GOLB 1417-0 44 -0.22 -1.79 4.31 4.67 GOLB 1417-1 44 -0.67 1.04 -3.54 3.75 GOLB 1417-2 44 -0.72 0.16 2.70 2.80 GOLB 1417-3 44 0.13 -0.01 -0.75 0.76 GOLB 1417-4 44 1.18 -0.19 -3.50 3.70 GOLB 1417-5 44 -0.17 -0.06 4.14 4.15 GOLB 1417-6 44 -0.92 -1.23 -0.11 1.54 GOLB 1418-0 44 -0.36 0.19 -2.46 2.50 GOLB 1418-1 44 -1.61 -0.08 -0.01 1.62 GOLB 1418-2 44 -1.26 -0.06 -2.77 3.04 GOLB 1418-3 44 0.69 -0.83 -2.92 3.11 GOLB 1418-4 44 0.04 0.39 0.83 0.92 GOLB 1418-5 44 0.49 1.62 0.27 1.71 GOLB 1418-6 44 0.74 -2.25 -4.48 5.07 GOLB 1419-0 44 0.99 -1.03 7.37 7.50 GOLB 1419-1 44 -0.46 -0.80 8.41 8.46 GOLB 1419-2 44 -1.31 -0.08 6.46 6.59 GOLB 1419-3 44 0.24 0.45 -0.89 1.03 GOLB 1419-4 44 -0.31 -0.02 2.55 2.57 GOLB 1419-5 44 -0.85 -0.30 2.70 2.85 GOLB 1419-6 44 2.10 0.53 0.15 2.17 GOLB 1420-0 44 0.45 1.45 -6.01 6.20 GOLB 1420-1 44 0.20 0.88 -1.66 1.89 GOLB 1420-2 44 0.75 1.21 -6.71 6.86 GOLB 1420-3 44 -0.70 -0.07 -6.07 6.11 GOLB 1420-4 44 -0.85 0.46 -0.82 1.27 GOLB 1420-5 44 -0.90 0.48 -0.97 1.41 GOLB 1420-6 44 -1.35 0.21 0.37 1.41
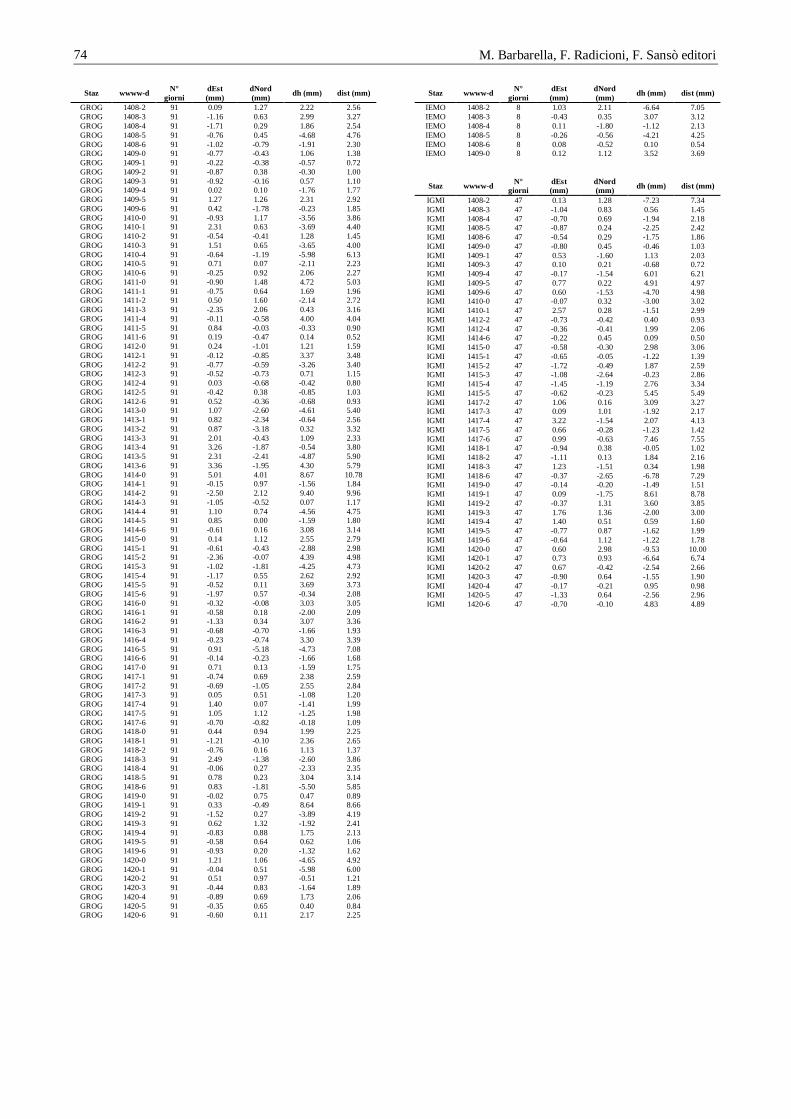
M. Barbarella, F. Radicioni, F. Sansò editori
74
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
GROG 1408-2 91 0.09 1.27 2.22 2.56 GROG 1408-3 91 -1.16 0.63 2.99 3.27 GROG 1408-4 91 -1.71 0.29 1.86 2.54 GROG 1408-5 91 -0.76 0.45 -4.68 4.76 GROG 1408-6 91 -1.02 -0.79 -1.91 2.30 GROG 1409-0 91 -0.77 -0.43 1.06 1.38 GROG 1409-1 91 -0.22 -0.38 -0.57 0.72 GROG 1409-2 91 -0.87 0.38 -0.30 1.00 GROG 1409-3 91 -0.92 -0.16 0.57 1.10 GROG 1409-4 91 0.02 0.10 -1.76 1.77 GROG 1409-5 91 1.27 1.26 2.31 2.92 GROG 1409-6 91 0.42 -1.78 -0.23 1.85 GROG 1410-0 91 -0.93 1.17 -3.56 3.86 GROG 1410-1 91 2.31 0.63 -3.69 4.40 GROG 1410-2 91 -0.54 -0.41 1.28 1.45 GROG 1410-3 91 1.51 0.65 -3.65 4.00 GROG 1410-4 91 -0.64 -1.19 -5.98 6.13 GROG 1410-5 91 0.71 0.07 -2.11 2.23 GROG 1410-6 91 -0.25 0.92 2.06 2.27 GROG 1411-0 91 -0.90 1.48 4.72 5.03 GROG 1411-1 91 -0.75 0.64 1.69 1.96 GROG 1411-2 91 0.50 1.60 -2.14 2.72 GROG 1411-3 91 -2.35 2.06 0.43 3.16 GROG 1411-4 91 -0.11 -0.58 4.00 4.04 GROG 1411-5 91 0.84 -0.03 -0.33 0.90 GROG 1411-6 91 0.19 -0.47 0.14 0.52 GROG 1412-0 91 0.24 -1.01 1.21 1.59 GROG 1412-1 91 -0.12 -0.85 3.37 3.48 GROG 1412-2 91 -0.77 -0.59 -3.26 3.40 GROG 1412-3 91 -0.52 -0.73 0.71 1.15 GROG 1412-4 91 0.03 -0.68 -0.42 0.80 GROG 1412-5 91 -0.42 0.38 -0.85 1.03 GROG 1412-6 91 0.52 -0.36 -0.68 0.93 GROG 1413-0 91 1.07 -2.60 -4.61 5.40 GROG 1413-1 91 0.82 -2.34 -0.64 2.56 GROG 1413-2 91 0.87 -3.18 0.32 3.32 GROG 1413-3 91 2.01 -0.43 1.09 2.33 GROG 1413-4 91 3.26 -1.87 -0.54 3.80 GROG 1413-5 91 2.31 -2.41 -4.87 5.90 GROG 1413-6 91 3.36 -1.95 4.30 5.79 GROG 1414-0 91 5.01 4.01 8.67 10.78 GROG 1414-1 91 -0.15 0.97 -1.56 1.84 GROG 1414-2 91 -2.50 2.12 9.40 9.96 GROG 1414-3 91 -1.05 -0.52 0.07 1.17 GROG 1414-4 91 1.10 0.74 -4.56 4.75 GROG 1414-5 91 0.85 0.00 -1.59 1.80 GROG 1414-6 91 -0.61 0.16 3.08 3.14 GROG 1415-0 91 0.14 1.12 2.55 2.79 GROG 1415-1 91 -0.61 -0.43 -2.88 2.98 GROG 1415-2 91 -2.36 -0.07 4.39 4.98 GROG 1415-3 91 -1.02 -1.81 -4.25 4.73 GROG 1415-4 91 -1.17 0.55 2.62 2.92 GROG 1415-5 91 -0.52 0.11 3.69 3.73 GROG 1415-6 91 -1.97 0.57 -0.34 2.08 GROG 1416-0 91 -0.32 -0.08 3.03 3.05 GROG 1416-1 91 -0.58 0.18 -2.00 2.09 GROG 1416-2 91 -1.33 0.34 3.07 3.36 GROG 1416-3 91 -0.68 -0.70 -1.66 1.93 GROG 1416-4 91 -0.23 -0.74 3.30 3.39 GROG 1416-5 91 0.91 -5.18 -4.73 7.08 GROG 1416-6 91 -0.14 -0.23 -1.66 1.68 GROG 1417-0 91 0.71 0.13 -1.59 1.75 GROG 1417-1 91 -0.74 0.69 2.38 2.59 GROG 1417-2 91 -0.69 -1.05 2.55 2.84 GROG 1417-3 91 0.05 0.51 -1.08 1.20 GROG 1417-4 91 1.40 0.07 -1.41 1.99 GROG 1417-5 91 1.05 1.12 -1.25 1.98 GROG 1417-6 91 -0.70 -0.82 -0.18 1.09 GROG 1418-0 91 0.44 0.94 1.99 2.25 GROG 1418-1 91 -1.21 -0.10 2.36 2.65 GROG 1418-2 91 -0.76 0.16 1.13 1.37 GROG 1418-3 91 2.49 -1.38 -2.60 3.86 GROG 1418-4 91 -0.06 0.27 -2.33 2.35 GROG 1418-5 91 0.78 0.23 3.04 3.14 GROG 1418-6 91 0.83 -1.81 -5.50 5.85 GROG 1419-0 91 -0.02 0.75 0.47 0.89 GROG 1419-1 91 0.33 -0.49 8.64 8.66 GROG 1419-2 91 -1.52 0.27 -3.89 4.19 GROG 1419-3 91 0.62 1.32 -1.92 2.41 GROG 1419-4 91 -0.83 0.88 1.75 2.13 GROG 1419-5 91 -0.58 0.64 0.62 1.06 GROG 1419-6 91 -0.93 0.20 -1.32 1.62 GROG 1420-0 91 1.21 1.06 -4.65 4.92 GROG 1420-1 91 -0.04 0.51 -5.98 6.00 GROG 1420-2 91 0.51 0.97 -0.51 1.21 GROG 1420-3 91 -0.44 0.83 -1.64 1.89 GROG 1420-4 91 -0.89 0.69 1.73 2.06 GROG 1420-5 91 -0.35 0.65 0.40 0.84 GROG 1420-6 91 -0.60 0.11 2.17 2.25
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
IEMO 1408-2 8 1.03 2.11 -6.64 7.05 IEMO 1408-3 8 -0.43 0.35 3.07 3.12 IEMO 1408-4 8 0.11 -1.80 -1.12 2.13 IEMO 1408-5 8 -0.26 -0.56 -4.21 4.25 IEMO 1408-6 8 0.08 -0.52 0.10 0.54 IEMO 1409-0 8 0.12 1.12 3.52 3.69
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
IGMI 1408-2 47 0.13 1.28 -7.23 7.34 IGMI 1408-3 47 -1.04 0.83 0.56 1.45 IGMI 1408-4 47 -0.70 0.69 -1.94 2.18 IGMI 1408-5 47 -0.87 0.24 -2.25 2.42 IGMI 1408-6 47 -0.54 0.29 -1.75 1.86 IGMI 1409-0 47 -0.80 0.45 -0.46 1.03 IGMI 1409-1 47 0.53 -1.60 1.13 2.03 IGMI 1409-3 47 0.10 0.21 -0.68 0.72 IGMI 1409-4 47 -0.17 -1.54 6.01 6.21 IGMI 1409-5 47 0.77 0.22 4.91 4.97 IGMI 1409-6 47 0.60 -1.53 -4.70 4.98 IGMI 1410-0 47 -0.07 0.32 -3.00 3.02 IGMI 1410-1 47 2.57 0.28 -1.51 2.99 IGMI 1412-2 47 -0.73 -0.42 0.40 0.93 IGMI 1412-4 47 -0.36 -0.41 1.99 2.06 IGMI 1414-6 47 -0.22 0.45 0.09 0.50 IGMI 1415-0 47 -0.58 -0.30 2.98 3.06 IGMI 1415-1 47 -0.65 -0.05 -1.22 1.39 IGMI 1415-2 47 -1.72 -0.49 1.87 2.59 IGMI 1415-3 47 -1.08 -2.64 -0.23 2.86 IGMI 1415-4 47 -1.45 -1.19 2.76 3.34 IGMI 1415-5 47 -0.62 -0.23 5.45 5.49 IGMI 1417-2 47 1.06 0.16 3.09 3.27 IGMI 1417-3 47 0.09 1.01 -1.92 2.17 IGMI 1417-4 47 3.22 -1.54 2.07 4.13 IGMI 1417-5 47 0.66 -0.28 -1.23 1.42 IGMI 1417-6 47 0.99 -0.63 7.46 7.55 IGMI 1418-1 47 -0.94 0.38 -0.05 1.02 IGMI 1418-2 47 -1.11 0.13 1.84 2.16 IGMI 1418-3 47 1.23 -1.51 0.34 1.98 IGMI 1418-6 47 -0.37 -2.65 -6.78 7.29 IGMI 1419-0 47 -0.14 -0.20 -1.49 1.51 IGMI 1419-1 47 0.09 -1.75 8.61 8.78 IGMI 1419-2 47 -0.37 1.31 3.60 3.85 IGMI 1419-3 47 1.76 1.36 -2.00 3.00 IGMI 1419-4 47 1.40 0.51 0.59 1.60 IGMI 1419-5 47 -0.77 0.87 -1.62 1.99 IGMI 1419-6 47 -0.64 1.12 -1.22 1.78 IGMI 1420-0 47 0.60 2.98 -9.53 10.00 IGMI 1420-1 47 0.73 0.93 -6.64 6.74 IGMI 1420-2 47 0.67 -0.42 -2.54 2.66 IGMI 1420-3 47 -0.90 0.64 -1.55 1.90 IGMI 1420-4 47 -0.17 -0.21 0.95 0.98 IGMI 1420-5 47 -1.33 0.64 -2.56 2.96 IGMI 1420-6 47 -0.70 -0.10 4.83 4.89
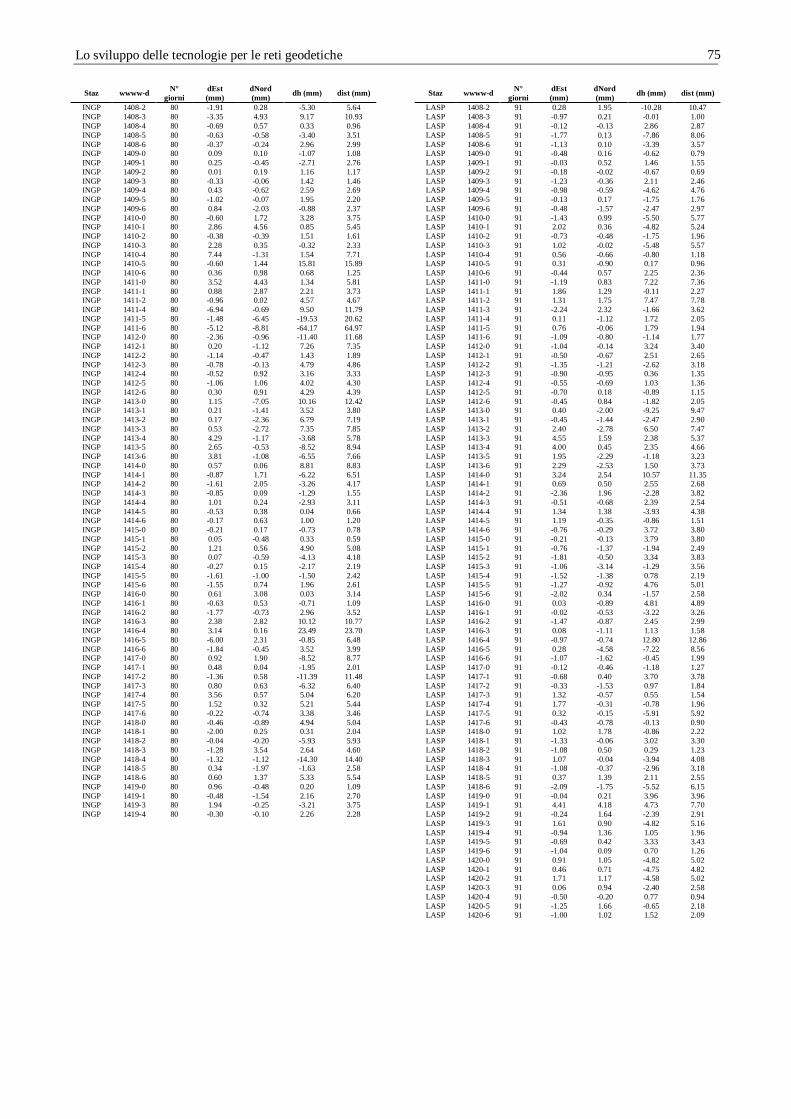
Lo sviluppo delle tecnologie per le reti geodetiche
75
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
INGP 1408-2 80 -1.91 0.28 -5.30 5.64 INGP 1408-3 80 -3.35 4.93 9.17 10.93 INGP 1408-4 80 -0.69 0.57 0.33 0.96 INGP 1408-5 80 -0.63 -0.58 -3.40 3.51 INGP 1408-6 80 -0.37 -0.24 2.96 2.99 INGP 1409-0 80 0.09 0.10 -1.07 1.08 INGP 1409-1 80 0.25 -0.45 -2.71 2.76 INGP 1409-2 80 0.01 0.19 1.16 1.17 INGP 1409-3 80 -0.33 -0.06 1.42 1.46 INGP 1409-4 80 0.43 -0.62 2.59 2.69 INGP 1409-5 80 -1.02 -0.07 1.95 2.20 INGP 1409-6 80 0.84 -2.03 -0.88 2.37 INGP 1410-0 80 -0.60 1.72 3.28 3.75 INGP 1410-1 80 2.86 4.56 0.85 5.45 INGP 1410-2 80 -0.38 -0.39 1.51 1.61 INGP 1410-3 80 2.28 0.35 -0.32 2.33 INGP 1410-4 80 7.44 -1.31 1.54 7.71 INGP 1410-5 80 -0.60 1.44 15.81 15.89 INGP 1410-6 80 0.36 0.98 0.68 1.25 INGP 1411-0 80 3.52 4.43 1.34 5.81 INGP 1411-1 80 0.88 2.87 2.21 3.73 INGP 1411-2 80 -0.96 0.02 4.57 4.67 INGP 1411-4 80 -6.94 -0.69 9.50 11.79 INGP 1411-5 80 -1.48 -6.45 -19.53 20.62 INGP 1411-6 80 -5.12 -8.81 -64.17 64.97 INGP 1412-0 80 -2.36 -0.96 -11.40 11.68 INGP 1412-1 80 0.20 -1.12 7.26 7.35 INGP 1412-2 80 -1.14 -0.47 1.43 1.89 INGP 1412-3 80 -0.78 -0.13 4.79 4.86 INGP 1412-4 80 -0.52 0.92 3.16 3.33 INGP 1412-5 80 -1.06 1.06 4.02 4.30 INGP 1412-6 80 0.30 0.91 4.29 4.39 INGP 1413-0 80 1.15 -7.05 10.16 12.42 INGP 1413-1 80 0.21 -1.41 3.52 3.80 INGP 1413-2 80 0.17 -2.36 6.79 7.19 INGP 1413-3 80 0.53 -2.72 7.35 7.85 INGP 1413-4 80 4.29 -1.17 -3.68 5.78 INGP 1413-5 80 2.65 -0.53 -8.52 8.94 INGP 1413-6 80 3.81 -1.08 -6.55 7.66 INGP 1414-0 80 0.57 0.06 8.81 8.83 INGP 1414-1 80 -0.87 1.71 -6.22 6.51 INGP 1414-2 80 -1.61 2.05 -3.26 4.17 INGP 1414-3 80 -0.85 0.09 -1.29 1.55 INGP 1414-4 80 1.01 0.24 -2.93 3.11 INGP 1414-5 80 -0.53 0.38 0.04 0.66 INGP 1414-6 80 -0.17 0.63 1.00 1.20 INGP 1415-0 80 -0.21 0.17 -0.73 0.78 INGP 1415-1 80 0.05 -0.48 0.33 0.59 INGP 1415-2 80 1.21 0.56 4.90 5.08 INGP 1415-3 80 0.07 -0.59 -4.13 4.18 INGP 1415-4 80 -0.27 0.15 -2.17 2.19 INGP 1415-5 80 -1.61 -1.00 -1.50 2.42 INGP 1415-6 80 -1.55 0.74 1.96 2.61 INGP 1416-0 80 0.61 3.08 0.03 3.14 INGP 1416-1 80 -0.63 0.53 -0.71 1.09 INGP 1416-2 80 -1.77 -0.73 2.96 3.52 INGP 1416-3 80 2.38 2.82 10.12 10.77 INGP 1416-4 80 3.14 0.16 23.49 23.70 INGP 1416-5 80 -6.00 2.31 -0.85 6.48 INGP 1416-6 80 -1.84 -0.45 3.52 3.99 INGP 1417-0 80 0.92 1.90 -8.52 8.77 INGP 1417-1 80 0.48 0.04 -1.95 2.01 INGP 1417-2 80 -1.36 0.58 -11.39 11.48 INGP 1417-3 80 0.80 0.63 -6.32 6.40 INGP 1417-4 80 3.56 0.57 5.04 6.20 INGP 1417-5 80 1.52 0.32 5.21 5.44 INGP 1417-6 80 -0.22 -0.74 3.38 3.46 INGP 1418-0 80 -0.46 -0.89 4.94 5.04 INGP 1418-1 80 -2.00 0.25 0.31 2.04 INGP 1418-2 80 -0.04 -0.20 -5.93 5.93 INGP 1418-3 80 -1.28 3.54 2.64 4.60 INGP 1418-4 80 -1.32 -1.12 -14.30 14.40 INGP 1418-5 80 0.34 -1.97 -1.63 2.58 INGP 1418-6 80 0.60 1.37 5.33 5.54 INGP 1419-0 80 0.96 -0.48 0.20 1.09 INGP 1419-1 80 -0.48 -1.54 2.16 2.70 INGP 1419-3 80 1.94 -0.25 -3.21 3.75 INGP 1419-4 80 -0.30 -0.10 2.26 2.28
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
LASP 1408-2 91 0.28 1.95 -10.28 10.47 LASP 1408-3 91 -0.97 0.21 -0.01 1.00 LASP 1408-4 91 -0.12 -0.13 2.86 2.87 LASP 1408-5 91 -1.77 0.13 -7.86 8.06 LASP 1408-6 91 -1.13 0.10 -3.39 3.57 LASP 1409-0 91 -0.48 0.16 -0.62 0.79 LASP 1409-1 91 -0.03 0.52 1.46 1.55 LASP 1409-2 91 -0.18 -0.02 -0.67 0.69 LASP 1409-3 91 -1.23 -0.36 2.11 2.46 LASP 1409-4 91 -0.98 -0.59 -4.62 4.76 LASP 1409-5 91 -0.13 0.17 -1.75 1.76 LASP 1409-6 91 -0.48 -1.57 -2.47 2.97 LASP 1410-0 91 -1.43 0.99 -5.50 5.77 LASP 1410-1 91 2.02 0.36 -4.82 5.24 LASP 1410-2 91 -0.73 -0.48 -1.75 1.96 LASP 1410-3 91 1.02 -0.02 -5.48 5.57 LASP 1410-4 91 0.56 -0.66 -0.80 1.18 LASP 1410-5 91 0.31 -0.90 0.17 0.96 LASP 1410-6 91 -0.44 0.57 2.25 2.36 LASP 1411-0 91 -1.19 0.83 7.22 7.36 LASP 1411-1 91 1.86 1.29 -0.11 2.27 LASP 1411-2 91 1.31 1.75 7.47 7.78 LASP 1411-3 91 -2.24 2.32 -1.66 3.62 LASP 1411-4 91 0.11 -1.12 1.72 2.05 LASP 1411-5 91 0.76 -0.06 1.79 1.94 LASP 1411-6 91 -1.09 -0.80 -1.14 1.77 LASP 1412-0 91 -1.04 -0.14 3.24 3.40 LASP 1412-1 91 -0.50 -0.67 2.51 2.65 LASP 1412-2 91 -1.35 -1.21 -2.62 3.18 LASP 1412-3 91 -0.90 -0.95 0.36 1.35 LASP 1412-4 91 -0.55 -0.69 1.03 1.36 LASP 1412-5 91 -0.70 0.18 -0.89 1.15 LASP 1412-6 91 -0.45 0.84 -1.82 2.05 LASP 1413-0 91 0.40 -2.00 -9.25 9.47 LASP 1413-1 91 -0.45 -1.44 -2.47 2.90 LASP 1413-2 91 2.40 -2.78 6.50 7.47 LASP 1413-3 91 4.55 1.59 2.38 5.37 LASP 1413-4 91 4.00 0.45 2.35 4.66 LASP 1413-5 91 1.95 -2.29 -1.18 3.23 LASP 1413-6 91 2.29 -2.53 1.50 3.73 LASP 1414-0 91 3.24 2.54 10.57 11.35 LASP 1414-1 91 0.69 0.50 2.55 2.68 LASP 1414-2 91 -2.36 1.96 -2.28 3.82 LASP 1414-3 91 -0.51 -0.68 2.39 2.54 LASP 1414-4 91 1.34 1.38 -3.93 4.38 LASP 1414-5 91 1.19 -0.35 -0.86 1.51 LASP 1414-6 91 -0.76 -0.29 3.72 3.80 LASP 1415-0 91 -0.21 -0.13 3.79 3.80 LASP 1415-1 91 -0.76 -1.37 -1.94 2.49 LASP 1415-2 91 -1.81 -0.50 3.34 3.83 LASP 1415-3 91 -1.06 -3.14 -1.29 3.56 LASP 1415-4 91 -1.52 -1.38 0.78 2.19 LASP 1415-5 91 -1.27 -0.92 4.76 5.01 LASP 1415-6 91 -2.02 0.34 -1.57 2.58 LASP 1416-0 91 0.03 -0.89 4.81 4.89 LASP 1416-1 91 -0.02 -0.53 -3.22 3.26 LASP 1416-2 91 -1.47 -0.87 2.45 2.99 LASP 1416-3 91 0.08 -1.11 1.13 1.58 LASP 1416-4 91 -0.97 -0.74 12.80 12.86 LASP 1416-5 91 0.28 -4.58 -7.22 8.56 LASP 1416-6 91 -1.07 -1.62 -0.45 1.99 LASP 1417-0 91 -0.12 -0.46 -1.18 1.27 LASP 1417-1 91 -0.68 0.40 3.70 3.78 LASP 1417-2 91 -0.33 -1.53 0.97 1.84 LASP 1417-3 91 1.32 -0.57 0.55 1.54 LASP 1417-4 91 1.77 -0.31 -0.78 1.96 LASP 1417-5 91 0.32 -0.15 -5.91 5.92 LASP 1417-6 91 -0.43 -0.78 -0.13 0.90 LASP 1418-0 91 1.02 1.78 -0.86 2.22 LASP 1418-1 91 -1.33 -0.06 3.02 3.30 LASP 1418-2 91 -1.08 0.50 0.29 1.23 LASP 1418-3 91 1.07 -0.04 -3.94 4.08 LASP 1418-4 91 -1.08 -0.37 -2.96 3.18 LASP 1418-5 91 0.37 1.39 2.11 2.55 LASP 1418-6 91 -2.09 -1.75 -5.52 6.15 LASP 1419-0 91 -0.04 0.21 3.96 3.96 LASP 1419-1 91 4.41 4.18 4.73 7.70 LASP 1419-2 91 -0.24 1.64 -2.39 2.91 LASP 1419-3 91 1.61 0.90 -4.82 5.16 LASP 1419-4 91 -0.94 1.36 1.05 1.96 LASP 1419-5 91 -0.69 0.42 3.33 3.43 LASP 1419-6 91 -1.04 0.09 0.70 1.26 LASP 1420-0 91 0.91 1.05 -4.82 5.02 LASP 1420-1 91 0.46 0.71 -4.75 4.82 LASP 1420-2 91 1.71 1.17 -4.58 5.02 LASP 1420-3 91 0.06 0.94 -2.40 2.58 LASP 1420-4 91 -0.50 -0.20 0.77 0.94 LASP 1420-5 91 -1.25 1.66 -0.65 2.18 LASP 1420-6 91 -1.00 1.02 1.52 2.09
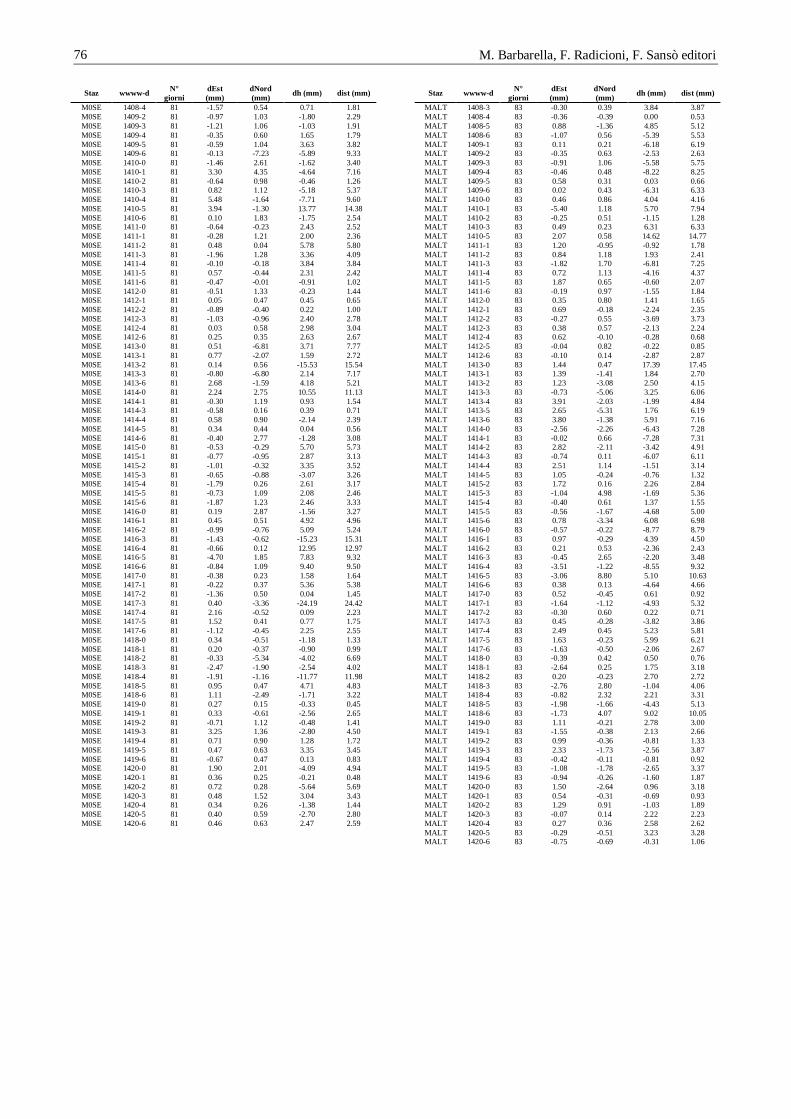
M. Barbarella, F. Radicioni, F. Sansò editori
76
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
M0SE 1408-4 81 -1.57 0.54 0.71 1.81 M0SE 1409-2 81 -0.97 1.03 -1.80 2.29 M0SE 1409-3 81 -1.21 1.06 -1.03 1.91 M0SE 1409-4 81 -0.35 0.60 1.65 1.79 M0SE 1409-5 81 -0.59 1.04 3.63 3.82 M0SE 1409-6 81 -0.13 -7.23 -5.89 9.33 M0SE 1410-0 81 -1.46 2.61 -1.62 3.40 M0SE 1410-1 81 3.30 4.35 -4.64 7.16 M0SE 1410-2 81 -0.64 0.98 -0.46 1.26 M0SE 1410-3 81 0.82 1.12 -5.18 5.37 M0SE 1410-4 81 5.48 -1.64 -7.71 9.60 M0SE 1410-5 81 3.94 -1.30 13.77 14.38 M0SE 1410-6 81 0.10 1.83 -1.75 2.54 M0SE 1411-0 81 -0.64 -0.23 2.43 2.52 M0SE 1411-1 81 -0.28 1.21 2.00 2.36 M0SE 1411-2 81 0.48 0.04 5.78 5.80 M0SE 1411-3 81 -1.96 1.28 3.36 4.09 M0SE 1411-4 81 -0.10 -0.18 3.84 3.84 M0SE 1411-5 81 0.57 -0.44 2.31 2.42 M0SE 1411-6 81 -0.47 -0.01 -0.91 1.02 M0SE 1412-0 81 -0.51 1.33 -0.23 1.44 M0SE 1412-1 81 0.05 0.47 0.45 0.65 M0SE 1412-2 81 -0.89 -0.40 0.22 1.00 M0SE 1412-3 81 -1.03 -0.96 2.40 2.78 M0SE 1412-4 81 0.03 0.58 2.98 3.04 M0SE 1412-6 81 0.25 0.35 2.63 2.67 M0SE 1413-0 81 0.51 -6.81 3.71 7.77 M0SE 1413-1 81 0.77 -2.07 1.59 2.72 M0SE 1413-2 81 0.14 0.56 -15.53 15.54 M0SE 1413-3 81 -0.80 -6.80 2.14 7.17 M0SE 1413-6 81 2.68 -1.59 4.18 5.21 M0SE 1414-0 81 2.24 2.75 10.55 11.13 M0SE 1414-1 81 -0.30 1.19 0.93 1.54 M0SE 1414-3 81 -0.58 0.16 0.39 0.71 M0SE 1414-4 81 0.58 0.90 -2.14 2.39 M0SE 1414-5 81 0.34 0.44 0.04 0.56 M0SE 1414-6 81 -0.40 2.77 -1.28 3.08 M0SE 1415-0 81 -0.53 -0.29 5.70 5.73 M0SE 1415-1 81 -0.77 -0.95 2.87 3.13 M0SE 1415-2 81 -1.01 -0.32 3.35 3.52 M0SE 1415-3 81 -0.65 -0.88 -3.07 3.26 M0SE 1415-4 81 -1.79 0.26 2.61 3.17 M0SE 1415-5 81 -0.73 1.09 2.08 2.46 M0SE 1415-6 81 -1.87 1.23 2.46 3.33 M0SE 1416-0 81 0.19 2.87 -1.56 3.27 M0SE 1416-1 81 0.45 0.51 4.92 4.96 M0SE 1416-2 81 -0.99 -0.76 5.09 5.24 M0SE 1416-3 81 -1.43 -0.62 -15.23 15.31 M0SE 1416-4 81 -0.66 0.12 12.95 12.97 M0SE 1416-5 81 -4.70 1.85 7.83 9.32 M0SE 1416-6 81 -0.84 1.09 9.40 9.50 M0SE 1417-0 81 -0.38 0.23 1.58 1.64 M0SE 1417-1 81 -0.22 0.37 5.36 5.38 M0SE 1417-2 81 -1.36 0.50 0.04 1.45 M0SE 1417-3 81 0.40 -3.36 -24.19 24.42 M0SE 1417-4 81 2.16 -0.52 0.09 2.23 M0SE 1417-5 81 1.52 0.41 0.77 1.75 M0SE 1417-6 81 -1.12 -0.45 2.25 2.55 M0SE 1418-0 81 0.34 -0.51 -1.18 1.33 M0SE 1418-1 81 0.20 -0.37 -0.90 0.99 M0SE 1418-2 81 -0.33 -5.34 -4.02 6.69 M0SE 1418-3 81 -2.47 -1.90 -2.54 4.02 M0SE 1418-4 81 -1.91 -1.16 -11.77 11.98 M0SE 1418-5 81 0.95 0.47 4.71 4.83 M0SE 1418-6 81 1.11 -2.49 -1.71 3.22 M0SE 1419-0 81 0.27 0.15 -0.33 0.45 M0SE 1419-1 81 0.33 -0.61 -2.56 2.65 M0SE 1419-2 81 -0.71 1.12 -0.48 1.41 M0SE 1419-3 81 3.25 1.36 -2.80 4.50 M0SE 1419-4 81 0.71 0.90 1.28 1.72 M0SE 1419-5 81 0.47 0.63 3.35 3.45 M0SE 1419-6 81 -0.67 0.47 0.13 0.83 M0SE 1420-0 81 1.90 2.01 -4.09 4.94 M0SE 1420-1 81 0.36 0.25 -0.21 0.48 M0SE 1420-2 81 0.72 0.28 -5.64 5.69 M0SE 1420-3 81 0.48 1.52 3.04 3.43 M0SE 1420-4 81 0.34 0.26 -1.38 1.44 M0SE 1420-5 81 0.40 0.59 -2.70 2.80 M0SE 1420-6 81 0.46 0.63 2.47 2.59
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MALT 1408-3 83 -0.30 0.39 3.84 3.87 MALT 1408-4 83 -0.36 -0.39 0.00 0.53 MALT 1408-5 83 0.88 -1.36 4.85 5.12 MALT 1408-6 83 -1.07 0.56 -5.39 5.53 MALT 1409-1 83 0.11 0.21 -6.18 6.19 MALT 1409-2 83 -0.35 0.63 -2.53 2.63 MALT 1409-3 83 -0.91 1.06 -5.58 5.75 MALT 1409-4 83 -0.46 0.48 -8.22 8.25 MALT 1409-5 83 0.58 0.31 0.03 0.66 MALT 1409-6 83 0.02 0.43 -6.31 6.33 MALT 1410-0 83 0.46 0.86 4.04 4.16 MALT 1410-1 83 -5.40 1.18 5.70 7.94 MALT 1410-2 83 -0.25 0.51 -1.15 1.28 MALT 1410-3 83 0.49 0.23 6.31 6.33 MALT 1410-5 83 2.07 0.58 14.62 14.77 MALT 1411-1 83 1.20 -0.95 -0.92 1.78 MALT 1411-2 83 0.84 1.18 1.93 2.41 MALT 1411-3 83 -1.82 1.70 -6.81 7.25 MALT 1411-4 83 0.72 1.13 -4.16 4.37 MALT 1411-5 83 1.87 0.65 -0.60 2.07 MALT 1411-6 83 -0.19 0.97 -1.55 1.84 MALT 1412-0 83 0.35 0.80 1.41 1.65 MALT 1412-1 83 0.69 -0.18 -2.24 2.35 MALT 1412-2 83 -0.27 0.55 -3.69 3.73 MALT 1412-3 83 0.38 0.57 -2.13 2.24 MALT 1412-4 83 0.62 -0.10 -0.28 0.68 MALT 1412-5 83 -0.04 0.82 -0.22 0.85 MALT 1412-6 83 -0.10 0.14 -2.87 2.87 MALT 1413-0 83 1.44 0.47 17.39 17.45 MALT 1413-1 83 1.39 -1.41 1.84 2.70 MALT 1413-2 83 1.23 -3.08 2.50 4.15 MALT 1413-3 83 -0.73 -5.06 3.25 6.06 MALT 1413-4 83 3.91 -2.03 -1.99 4.84 MALT 1413-5 83 2.65 -5.31 1.76 6.19 MALT 1413-6 83 3.80 -1.38 5.91 7.16 MALT 1414-0 83 -2.56 -2.26 -6.43 7.28 MALT 1414-1 83 -0.02 0.66 -7.28 7.31 MALT 1414-2 83 2.82 -2.11 -3.42 4.91 MALT 1414-3 83 -0.74 0.11 -6.07 6.11 MALT 1414-4 83 2.51 1.14 -1.51 3.14 MALT 1414-5 83 1.05 -0.24 -0.76 1.32 MALT 1415-2 83 1.72 0.16 2.26 2.84 MALT 1415-3 83 -1.04 4.98 -1.69 5.36 MALT 1415-4 83 -0.40 0.61 1.37 1.55 MALT 1415-5 83 -0.56 -1.67 -4.68 5.00 MALT 1415-6 83 0.78 -3.34 6.08 6.98 MALT 1416-0 83 -0.57 -0.22 -8.77 8.79 MALT 1416-1 83 0.97 -0.29 4.39 4.50 MALT 1416-2 83 0.21 0.53 -2.36 2.43 MALT 1416-3 83 -0.45 2.65 -2.20 3.48 MALT 1416-4 83 -3.51 -1.22 -8.55 9.32 MALT 1416-5 83 -3.06 8.80 5.10 10.63 MALT 1416-6 83 0.38 0.13 -4.64 4.66 MALT 1417-0 83 0.52 -0.45 0.61 0.92 MALT 1417-1 83 -1.64 -1.12 -4.93 5.32 MALT 1417-2 83 -0.30 0.60 0.22 0.71 MALT 1417-3 83 0.45 -0.28 -3.82 3.86 MALT 1417-4 83 2.49 0.45 5.23 5.81 MALT 1417-5 83 1.63 -0.23 5.99 6.21 MALT 1417-6 83 -1.63 -0.50 -2.06 2.67 MALT 1418-0 83 -0.39 0.42 0.50 0.76 MALT 1418-1 83 -2.64 0.25 1.75 3.18 MALT 1418-2 83 0.20 -0.23 2.70 2.72 MALT 1418-3 83 -2.76 2.80 -1.04 4.06 MALT 1418-4 83 -0.82 2.32 2.21 3.31 MALT 1418-5 83 -1.98 -1.66 -4.43 5.13 MALT 1418-6 83 -1.73 4.07 9.02 10.05 MALT 1419-0 83 1.11 -0.21 2.78 3.00 MALT 1419-1 83 -1.55 -0.38 2.13 2.66 MALT 1419-2 83 0.99 -0.36 -0.81 1.33 MALT 1419-3 83 2.33 -1.73 -2.56 3.87 MALT 1419-4 83 -0.42 -0.11 -0.81 0.92 MALT 1419-5 83 -1.08 -1.78 -2.65 3.37 MALT 1419-6 83 -0.94 -0.26 -1.60 1.87 MALT 1420-0 83 1.50 -2.64 0.96 3.18 MALT 1420-1 83 0.54 -0.31 -0.69 0.93 MALT 1420-2 83 1.29 0.91 -1.03 1.89 MALT 1420-3 83 -0.07 0.14 2.22 2.23 MALT 1420-4 83 0.27 0.36 2.58 2.62 MALT 1420-5 83 -0.29 -0.51 3.23 3.28 MALT 1420-6 83 -0.75 -0.69 -0.31 1.06
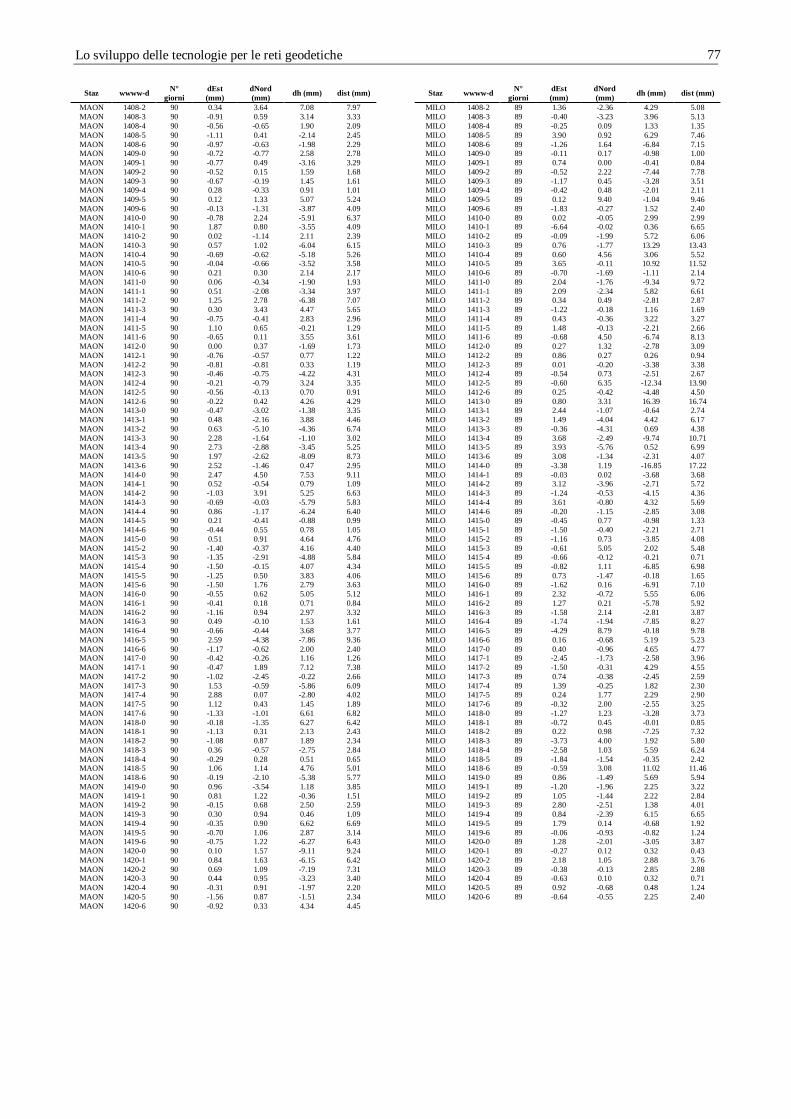
Lo sviluppo delle tecnologie per le reti geodetiche
77
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MAON 1408-2 90 0.34 3.64 7.08 7.97 MAON 1408-3 90 -0.91 0.59 3.14 3.33 MAON 1408-4 90 -0.56 -0.65 1.90 2.09 MAON 1408-5 90 -1.11 0.41 -2.14 2.45 MAON 1408-6 90 -0.97 -0.63 -1.98 2.29 MAON 1409-0 90 -0.72 -0.77 2.58 2.78 MAON 1409-1 90 -0.77 0.49 -3.16 3.29 MAON 1409-2 90 -0.52 0.15 1.59 1.68 MAON 1409-3 90 -0.67 -0.19 1.45 1.61 MAON 1409-4 90 0.28 -0.33 0.91 1.01 MAON 1409-5 90 0.12 1.33 5.07 5.24 MAON 1409-6 90 -0.13 -1.31 -3.87 4.09 MAON 1410-0 90 -0.78 2.24 -5.91 6.37 MAON 1410-1 90 1.87 0.80 -3.55 4.09 MAON 1410-2 90 0.02 -1.14 2.11 2.39 MAON 1410-3 90 0.57 1.02 -6.04 6.15 MAON 1410-4 90 -0.69 -0.62 -5.18 5.26 MAON 1410-5 90 -0.04 -0.66 -3.52 3.58 MAON 1410-6 90 0.21 0.30 2.14 2.17 MAON 1411-0 90 0.06 -0.34 -1.90 1.93 MAON 1411-1 90 0.51 -2.08 -3.34 3.97 MAON 1411-2 90 1.25 2.78 -6.38 7.07 MAON 1411-3 90 0.30 3.43 4.47 5.65 MAON 1411-4 90 -0.75 -0.41 2.83 2.96 MAON 1411-5 90 1.10 0.65 -0.21 1.29 MAON 1411-6 90 -0.65 0.11 3.55 3.61 MAON 1412-0 90 0.00 0.37 -1.69 1.73 MAON 1412-1 90 -0.76 -0.57 0.77 1.22 MAON 1412-2 90 -0.81 -0.81 0.33 1.19 MAON 1412-3 90 -0.46 -0.75 -4.22 4.31 MAON 1412-4 90 -0.21 -0.79 3.24 3.35 MAON 1412-5 90 -0.56 -0.13 0.70 0.91 MAON 1412-6 90 -0.22 0.42 4.26 4.29 MAON 1413-0 90 -0.47 -3.02 -1.38 3.35 MAON 1413-1 90 0.48 -2.16 3.88 4.46 MAON 1413-2 90 0.63 -5.10 -4.36 6.74 MAON 1413-3 90 2.28 -1.64 -1.10 3.02 MAON 1413-4 90 2.73 -2.88 -3.45 5.25 MAON 1413-5 90 1.97 -2.62 -8.09 8.73 MAON 1413-6 90 2.52 -1.46 0.47 2.95 MAON 1414-0 90 2.47 4.50 7.53 9.11 MAON 1414-1 90 0.52 -0.54 0.79 1.09 MAON 1414-2 90 -1.03 3.91 5.25 6.63 MAON 1414-3 90 -0.69 -0.03 -5.79 5.83 MAON 1414-4 90 0.86 -1.17 -6.24 6.40 MAON 1414-5 90 0.21 -0.41 -0.88 0.99 MAON 1414-6 90 -0.44 0.55 0.78 1.05 MAON 1415-0 90 0.51 0.91 4.64 4.76 MAON 1415-2 90 -1.40 -0.37 4.16 4.40 MAON 1415-3 90 -1.35 -2.91 -4.88 5.84 MAON 1415-4 90 -1.50 -0.15 4.07 4.34 MAON 1415-5 90 -1.25 0.50 3.83 4.06 MAON 1415-6 90 -1.50 1.76 2.79 3.63 MAON 1416-0 90 -0.55 0.62 5.05 5.12 MAON 1416-1 90 -0.41 0.18 0.71 0.84 MAON 1416-2 90 -1.16 0.94 2.97 3.32 MAON 1416-3 90 0.49 -0.10 1.53 1.61 MAON 1416-4 90 -0.66 -0.44 3.68 3.77 MAON 1416-5 90 2.59 -4.38 -7.86 9.36 MAON 1416-6 90 -1.17 -0.62 2.00 2.40 MAON 1417-0 90 -0.42 -0.26 1.16 1.26 MAON 1417-1 90 -0.47 1.89 7.12 7.38 MAON 1417-2 90 -1.02 -2.45 -0.22 2.66 MAON 1417-3 90 1.53 -0.59 -5.86 6.09 MAON 1417-4 90 2.88 0.07 -2.80 4.02 MAON 1417-5 90 1.12 0.43 1.45 1.89 MAON 1417-6 90 -1.33 -1.01 6.61 6.82 MAON 1418-0 90 -0.18 -1.35 6.27 6.42 MAON 1418-1 90 -1.13 0.31 2.13 2.43 MAON 1418-2 90 -1.08 0.87 1.89 2.34 MAON 1418-3 90 0.36 -0.57 -2.75 2.84 MAON 1418-4 90 -0.29 0.28 0.51 0.65 MAON 1418-5 90 1.06 1.14 4.76 5.01 MAON 1418-6 90 -0.19 -2.10 -5.38 5.77 MAON 1419-0 90 0.96 -3.54 1.18 3.85 MAON 1419-1 90 0.81 1.22 -0.36 1.51 MAON 1419-2 90 -0.15 0.68 2.50 2.59 MAON 1419-3 90 0.30 0.94 0.46 1.09 MAON 1419-4 90 -0.35 0.90 6.62 6.69 MAON 1419-5 90 -0.70 1.06 2.87 3.14 MAON 1419-6 90 -0.75 1.22 -6.27 6.43 MAON 1420-0 90 0.10 1.57 -9.11 9.24 MAON 1420-1 90 0.84 1.63 -6.15 6.42 MAON 1420-2 90 0.69 1.09 -7.19 7.31 MAON 1420-3 90 0.44 0.95 -3.23 3.40 MAON 1420-4 90 -0.31 0.91 -1.97 2.20 MAON 1420-5 90 -1.56 0.87 -1.51 2.34 MAON 1420-6 90 -0.92 0.33 4.34 4.45
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MILO 1408-2 89 1.36 -2.36 4.29 5.08 MILO 1408-3 89 -0.40 -3.23 3.96 5.13 MILO 1408-4 89 -0.25 0.09 1.33 1.35 MILO 1408-5 89 3.90 0.92 6.29 7.46 MILO 1408-6 89 -1.26 1.64 -6.84 7.15 MILO 1409-0 89 -0.11 0.17 -0.98 1.00 MILO 1409-1 89 0.74 0.00 -0.41 0.84 MILO 1409-2 89 -0.52 2.22 -7.44 7.78 MILO 1409-3 89 -1.17 0.45 -3.28 3.51 MILO 1409-4 89 -0.42 0.48 -2.01 2.11 MILO 1409-5 89 0.12 9.40 -1.04 9.46 MILO 1409-6 89 -1.83 -0.27 1.52 2.40 MILO 1410-0 89 0.02 -0.05 2.99 2.99 MILO 1410-1 89 -6.64 -0.02 0.36 6.65 MILO 1410-2 89 -0.09 -1.99 5.72 6.06 MILO 1410-3 89 0.76 -1.77 13.29 13.43 MILO 1410-4 89 0.60 4.56 3.06 5.52 MILO 1410-5 89 3.65 -0.11 10.92 11.52 MILO 1410-6 89 -0.70 -1.69 -1.11 2.14 MILO 1411-0 89 2.04 -1.76 -9.34 9.72 MILO 1411-1 89 2.09 -2.34 5.82 6.61 MILO 1411-2 89 0.34 0.49 -2.81 2.87 MILO 1411-3 89 -1.22 -0.18 1.16 1.69 MILO 1411-4 89 0.43 -0.36 3.22 3.27 MILO 1411-5 89 1.48 -0.13 -2.21 2.66 MILO 1411-6 89 -0.68 4.50 -6.74 8.13 MILO 1412-0 89 0.27 1.32 -2.78 3.09 MILO 1412-2 89 0.86 0.27 0.26 0.94 MILO 1412-3 89 0.01 -0.20 -3.38 3.38 MILO 1412-4 89 -0.54 0.73 -2.51 2.67 MILO 1412-5 89 -0.60 6.35 -12.34 13.90 MILO 1412-6 89 0.25 -0.42 -4.48 4.50 MILO 1413-0 89 0.80 3.31 16.39 16.74 MILO 1413-1 89 2.44 -1.07 -0.64 2.74 MILO 1413-2 89 1.49 -4.04 4.42 6.17 MILO 1413-3 89 -0.36 -4.31 0.69 4.38 MILO 1413-4 89 3.68 -2.49 -9.74 10.71 MILO 1413-5 89 3.93 -5.76 0.52 6.99 MILO 1413-6 89 3.08 -1.34 -2.31 4.07 MILO 1414-0 89 -3.38 1.19 -16.85 17.22 MILO 1414-1 89 -0.03 0.02 -3.68 3.68 MILO 1414-2 89 3.12 -3.96 -2.71 5.72 MILO 1414-3 89 -1.24 -0.53 -4.15 4.36 MILO 1414-4 89 3.61 -0.80 4.32 5.69 MILO 1414-6 89 -0.20 -1.15 -2.85 3.08 MILO 1415-0 89 -0.45 0.77 -0.98 1.33 MILO 1415-1 89 -1.50 -0.40 -2.21 2.71 MILO 1415-2 89 -1.16 0.73 -3.85 4.08 MILO 1415-3 89 -0.61 5.05 2.02 5.48 MILO 1415-4 89 -0.66 -0.12 -0.21 0.71 MILO 1415-5 89 -0.82 1.11 -6.85 6.98 MILO 1415-6 89 0.73 -1.47 -0.18 1.65 MILO 1416-0 89 -1.62 0.16 -6.91 7.10 MILO 1416-1 89 2.32 -0.72 5.55 6.06 MILO 1416-2 89 1.27 0.21 -5.78 5.92 MILO 1416-3 89 -1.58 2.14 -2.81 3.87 MILO 1416-4 89 -1.74 -1.94 -7.85 8.27 MILO 1416-5 89 -4.29 8.79 -0.18 9.78 MILO 1416-6 89 0.16 -0.68 5.19 5.23 MILO 1417-0 89 0.40 -0.96 4.65 4.77 MILO 1417-1 89 -2.45 -1.73 -2.58 3.96 MILO 1417-2 89 -1.50 -0.31 4.29 4.55 MILO 1417-3 89 0.74 -0.38 -2.45 2.59 MILO 1417-4 89 1.39 -0.25 1.82 2.30 MILO 1417-5 89 0.24 1.77 2.29 2.90 MILO 1417-6 89 -0.32 2.00 -2.55 3.25 MILO 1418-0 89 -1.27 1.23 -3.28 3.73 MILO 1418-1 89 -0.72 0.45 -0.01 0.85 MILO 1418-2 89 0.22 0.98 -7.25 7.32 MILO 1418-3 89 -3.73 4.00 1.92 5.80 MILO 1418-4 89 -2.58 1.03 5.59 6.24 MILO 1418-5 89 -1.84 -1.54 -0.35 2.42 MILO 1418-6 89 -0.59 3.08 11.02 11.46 MILO 1419-0 89 0.86 -1.49 5.69 5.94 MILO 1419-1 89 -1.20 -1.96 2.25 3.22 MILO 1419-2 89 1.05 -1.44 2.22 2.84 MILO 1419-3 89 2.80 -2.51 1.38 4.01 MILO 1419-4 89 0.84 -2.39 6.15 6.65 MILO 1419-5 89 1.79 0.14 -0.68 1.92 MILO 1419-6 89 -0.06 -0.93 -0.82 1.24 MILO 1420-0 89 1.28 -2.01 -3.05 3.87 MILO 1420-1 89 -0.27 0.12 0.32 0.43 MILO 1420-2 89 2.18 1.05 2.88 3.76 MILO 1420-3 89 -0.38 -0.13 2.85 2.88 MILO 1420-4 89 -0.63 0.10 0.32 0.71 MILO 1420-5 89 0.92 -0.68 0.48 1.24 MILO 1420-6 89 -0.64 -0.55 2.25 2.40
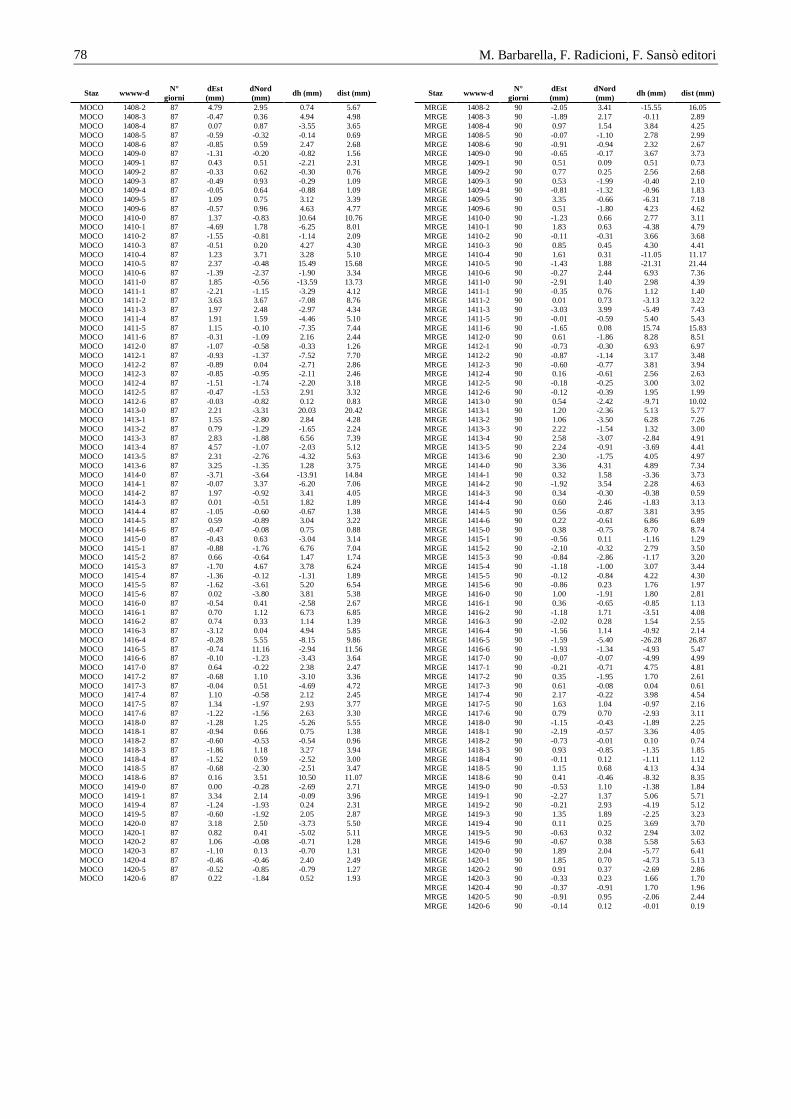
M. Barbarella, F. Radicioni, F. Sansò editori
78
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MOCO 1408-2 87 4.79 2.95 0.74 5.67 MOCO 1408-3 87 -0.47 0.36 4.94 4.98 MOCO 1408-4 87 0.07 0.87 -3.55 3.65 MOCO 1408-5 87 -0.59 -0.32 -0.14 0.69 MOCO 1408-6 87 -0.85 0.59 2.47 2.68 MOCO 1409-0 87 -1.31 -0.20 -0.82 1.56 MOCO 1409-1 87 0.43 0.51 -2.21 2.31 MOCO 1409-2 87 -0.33 0.62 -0.30 0.76 MOCO 1409-3 87 -0.49 0.93 -0.29 1.09 MOCO 1409-4 87 -0.05 0.64 -0.88 1.09 MOCO 1409-5 87 1.09 0.75 3.12 3.39 MOCO 1409-6 87 -0.57 0.96 4.63 4.77 MOCO 1410-0 87 1.37 -0.83 10.64 10.76 MOCO 1410-1 87 -4.69 1.78 -6.25 8.01 MOCO 1410-2 87 -1.55 -0.81 -1.14 2.09 MOCO 1410-3 87 -0.51 0.20 4.27 4.30 MOCO 1410-4 87 1.23 3.71 3.28 5.10 MOCO 1410-5 87 2.37 -0.48 15.49 15.68 MOCO 1410-6 87 -1.39 -2.37 -1.90 3.34 MOCO 1411-0 87 1.85 -0.56 -13.59 13.73 MOCO 1411-1 87 -2.21 -1.15 -3.29 4.12 MOCO 1411-2 87 3.63 3.67 -7.08 8.76 MOCO 1411-3 87 1.97 2.48 -2.97 4.34 MOCO 1411-4 87 1.91 1.59 -4.46 5.10 MOCO 1411-5 87 1.15 -0.10 -7.35 7.44 MOCO 1411-6 87 -0.31 -1.09 2.16 2.44 MOCO 1412-0 87 -1.07 -0.58 -0.33 1.26 MOCO 1412-1 87 -0.93 -1.37 -7.52 7.70 MOCO 1412-2 87 -0.89 0.04 -2.71 2.86 MOCO 1412-3 87 -0.85 -0.95 -2.11 2.46 MOCO 1412-4 87 -1.51 -1.74 -2.20 3.18 MOCO 1412-5 87 -0.47 -1.53 2.91 3.32 MOCO 1412-6 87 -0.03 -0.82 0.12 0.83 MOCO 1413-0 87 2.21 -3.31 20.03 20.42 MOCO 1413-1 87 1.55 -2.80 2.84 4.28 MOCO 1413-2 87 0.79 -1.29 -1.65 2.24 MOCO 1413-3 87 2.83 -1.88 6.56 7.39 MOCO 1413-4 87 4.57 -1.07 -2.03 5.12 MOCO 1413-5 87 2.31 -2.76 -4.32 5.63 MOCO 1413-6 87 3.25 -1.35 1.28 3.75 MOCO 1414-0 87 -3.71 -3.64 -13.91 14.84 MOCO 1414-1 87 -0.07 3.37 -6.20 7.06 MOCO 1414-2 87 1.97 -0.92 3.41 4.05 MOCO 1414-3 87 0.01 -0.51 1.82 1.89 MOCO 1414-4 87 -1.05 -0.60 -0.67 1.38 MOCO 1414-5 87 0.59 -0.89 3.04 3.22 MOCO 1414-6 87 -0.47 -0.08 0.75 0.88 MOCO 1415-0 87 -0.43 0.63 -3.04 3.14 MOCO 1415-1 87 -0.88 -1.76 6.76 7.04 MOCO 1415-2 87 0.66 -0.64 1.47 1.74 MOCO 1415-3 87 -1.70 4.67 3.78 6.24 MOCO 1415-4 87 -1.36 -0.12 -1.31 1.89 MOCO 1415-5 87 -1.62 -3.61 5.20 6.54 MOCO 1415-6 87 0.02 -3.80 3.81 5.38 MOCO 1416-0 87 -0.54 0.41 -2.58 2.67 MOCO 1416-1 87 0.70 1.12 6.73 6.85 MOCO 1416-2 87 0.74 0.33 1.14 1.39 MOCO 1416-3 87 -3.12 0.04 4.94 5.85 MOCO 1416-4 87 -0.28 5.55 -8.15 9.86 MOCO 1416-5 87 -0.74 11.16 -2.94 11.56 MOCO 1416-6 87 -0.10 -1.23 -3.43 3.64 MOCO 1417-0 87 0.64 -0.22 2.38 2.47 MOCO 1417-2 87 -0.68 1.10 -3.10 3.36 MOCO 1417-3 87 -0.04 0.51 -4.69 4.72 MOCO 1417-4 87 1.10 -0.58 2.12 2.45 MOCO 1417-5 87 1.34 -1.97 2.93 3.77 MOCO 1417-6 87 -1.22 -1.56 2.63 3.30 MOCO 1418-0 87 -1.28 1.25 -5.26 5.55 MOCO 1418-1 87 -0.94 0.66 0.75 1.38 MOCO 1418-2 87 -0.60 -0.53 -0.54 0.96 MOCO 1418-3 87 -1.86 1.18 3.27 3.94 MOCO 1418-4 87 -1.52 0.59 -2.52 3.00 MOCO 1418-5 87 -0.68 -2.30 -2.51 3.47 MOCO 1418-6 87 0.16 3.51 10.50 11.07 MOCO 1419-0 87 0.00 -0.28 -2.69 2.71 MOCO 1419-1 87 3.34 2.14 -0.09 3.96 MOCO 1419-4 87 -1.24 -1.93 0.24 2.31 MOCO 1419-5 87 -0.60 -1.92 2.05 2.87 MOCO 1420-0 87 3.18 2.50 -3.73 5.50 MOCO 1420-1 87 0.82 0.41 -5.02 5.11 MOCO 1420-2 87 1.06 -0.08 -0.71 1.28 MOCO 1420-3 87 -1.10 0.13 -0.70 1.31 MOCO 1420-4 87 -0.46 -0.46 2.40 2.49 MOCO 1420-5 87 -0.52 -0.85 -0.79 1.27 MOCO 1420-6 87 0.22 -1.84 0.52 1.93
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MRGE 1408-2 90 -2.05 3.41 -15.55 16.05 MRGE 1408-3 90 -1.89 2.17 -0.11 2.89 MRGE 1408-4 90 0.97 1.54 3.84 4.25 MRGE 1408-5 90 -0.07 -1.10 2.78 2.99 MRGE 1408-6 90 -0.91 -0.94 2.32 2.67 MRGE 1409-0 90 -0.65 -0.17 3.67 3.73 MRGE 1409-1 90 0.51 0.09 0.51 0.73 MRGE 1409-2 90 0.77 0.25 2.56 2.68 MRGE 1409-3 90 0.53 -1.99 -0.40 2.10 MRGE 1409-4 90 -0.81 -1.32 -0.96 1.83 MRGE 1409-5 90 3.35 -0.66 -6.31 7.18 MRGE 1409-6 90 0.51 -1.80 4.23 4.62 MRGE 1410-0 90 -1.23 0.66 2.77 3.11 MRGE 1410-1 90 1.83 0.63 -4.38 4.79 MRGE 1410-2 90 -0.11 -0.31 3.66 3.68 MRGE 1410-3 90 0.85 0.45 4.30 4.41 MRGE 1410-4 90 1.61 0.31 -11.05 11.17 MRGE 1410-5 90 -1.43 1.88 -21.31 21.44 MRGE 1410-6 90 -0.27 2.44 6.93 7.36 MRGE 1411-0 90 -2.91 1.40 2.98 4.39 MRGE 1411-1 90 -0.35 0.76 1.12 1.40 MRGE 1411-2 90 0.01 0.73 -3.13 3.22 MRGE 1411-3 90 -3.03 3.99 -5.49 7.43 MRGE 1411-5 90 -0.01 -0.59 5.40 5.43 MRGE 1411-6 90 -1.65 0.08 15.74 15.83 MRGE 1412-0 90 0.61 -1.86 8.28 8.51 MRGE 1412-1 90 -0.73 -0.30 6.93 6.97 MRGE 1412-2 90 -0.87 -1.14 3.17 3.48 MRGE 1412-3 90 -0.60 -0.77 3.81 3.94 MRGE 1412-4 90 0.16 -0.61 2.56 2.63 MRGE 1412-5 90 -0.18 -0.25 3.00 3.02 MRGE 1412-6 90 -0.12 -0.39 1.95 1.99 MRGE 1413-0 90 0.54 -2.42 -9.71 10.02 MRGE 1413-1 90 1.20 -2.36 5.13 5.77 MRGE 1413-2 90 1.06 -3.50 6.28 7.26 MRGE 1413-3 90 2.22 -1.54 1.32 3.00 MRGE 1413-4 90 2.58 -3.07 -2.84 4.91 MRGE 1413-5 90 2.24 -0.91 -3.69 4.41 MRGE 1413-6 90 2.30 -1.75 4.05 4.97 MRGE 1414-0 90 3.36 4.31 4.89 7.34 MRGE 1414-1 90 0.32 1.58 -3.36 3.73 MRGE 1414-2 90 -1.92 3.54 2.28 4.63 MRGE 1414-3 90 0.34 -0.30 -0.38 0.59 MRGE 1414-4 90 0.60 2.46 -1.83 3.13 MRGE 1414-5 90 0.56 -0.87 3.81 3.95 MRGE 1414-6 90 0.22 -0.61 6.86 6.89 MRGE 1415-0 90 0.38 -0.75 8.70 8.74 MRGE 1415-1 90 -0.56 0.11 -1.16 1.29 MRGE 1415-2 90 -2.10 -0.32 2.79 3.50 MRGE 1415-3 90 -0.84 -2.86 -1.17 3.20 MRGE 1415-4 90 -1.18 -1.00 3.07 3.44 MRGE 1415-5 90 -0.12 -0.84 4.22 4.30 MRGE 1415-6 90 -0.86 0.23 1.76 1.97 MRGE 1416-0 90 1.00 -1.91 1.80 2.81 MRGE 1416-1 90 0.36 -0.65 -0.85 1.13 MRGE 1416-2 90 -1.18 1.71 -3.51 4.08 MRGE 1416-3 90 -2.02 0.28 1.54 2.55 MRGE 1416-4 90 -1.56 1.14 -0.92 2.14 MRGE 1416-5 90 -1.59 -5.40 -26.28 26.87 MRGE 1416-6 90 -1.93 -1.34 -4.93 5.47 MRGE 1417-0 90 -0.07 -0.07 -4.99 4.99 MRGE 1417-1 90 -0.21 -0.71 4.75 4.81 MRGE 1417-2 90 0.35 -1.95 1.70 2.61 MRGE 1417-3 90 0.61 -0.08 0.04 0.61 MRGE 1417-4 90 2.17 -0.22 3.98 4.54 MRGE 1417-5 90 1.63 1.04 -0.97 2.16 MRGE 1417-6 90 0.79 0.70 -2.93 3.11 MRGE 1418-0 90 -1.15 -0.43 -1.89 2.25 MRGE 1418-1 90 -2.19 -0.57 3.36 4.05 MRGE 1418-2 90 -0.73 -0.01 0.10 0.74 MRGE 1418-3 90 0.93 -0.85 -1.35 1.85 MRGE 1418-4 90 -0.11 0.12 -1.11 1.12 MRGE 1418-5 90 1.15 0.68 4.13 4.34 MRGE 1418-6 90 0.41 -0.46 -8.32 8.35 MRGE 1419-0 90 -0.53 1.10 -1.38 1.84 MRGE 1419-1 90 -2.27 1.37 5.06 5.71 MRGE 1419-2 90 -0.21 2.93 -4.19 5.12 MRGE 1419-3 90 1.35 1.89 -2.25 3.23 MRGE 1419-4 90 0.11 0.25 3.69 3.70 MRGE 1419-5 90 -0.63 0.32 2.94 3.02 MRGE 1419-6 90 -0.67 0.38 5.58 5.63 MRGE 1420-0 90 1.89 2.04 -5.77 6.41 MRGE 1420-1 90 1.85 0.70 -4.73 5.13 MRGE 1420-2 90 0.91 0.37 -2.69 2.86 MRGE 1420-3 90 -0.33 0.23 1.66 1.70 MRGE 1420-4 90 -0.37 -0.91 1.70 1.96 MRGE 1420-5 90 -0.91 0.95 -2.06 2.44 MRGE 1420-6 90 -0.14 0.12 -0.01 0.19
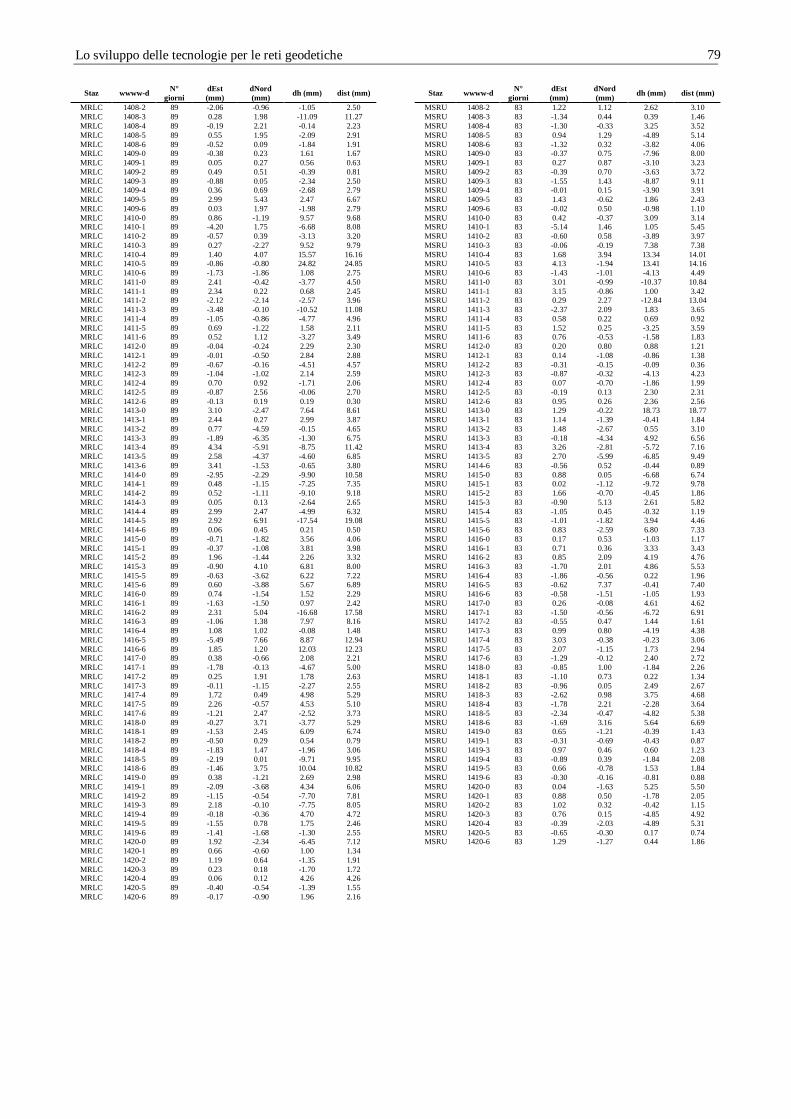
Lo sviluppo delle tecnologie per le reti geodetiche
79
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MRLC 1408-2 89 -2.06 -0.96 -1.05 2.50 MRLC 1408-3 89 0.28 1.98 -11.09 11.27 MRLC 1408-4 89 -0.19 2.21 -0.14 2.23 MRLC 1408-5 89 0.55 1.95 -2.09 2.91 MRLC 1408-6 89 -0.52 0.09 -1.84 1.91 MRLC 1409-0 89 -0.38 0.23 1.61 1.67 MRLC 1409-1 89 0.05 0.27 0.56 0.63 MRLC 1409-2 89 0.49 0.51 -0.39 0.81 MRLC 1409-3 89 -0.88 0.05 -2.34 2.50 MRLC 1409-4 89 0.36 0.69 -2.68 2.79 MRLC 1409-5 89 2.99 5.43 2.47 6.67 MRLC 1409-6 89 0.03 1.97 -1.98 2.79 MRLC 1410-0 89 0.86 -1.19 9.57 9.68 MRLC 1410-1 89 -4.20 1.75 -6.68 8.08 MRLC 1410-2 89 -0.57 0.39 -3.13 3.20 MRLC 1410-3 89 0.27 -2.27 9.52 9.79 MRLC 1410-4 89 1.40 4.07 15.57 16.16 MRLC 1410-5 89 -0.86 -0.80 24.82 24.85 MRLC 1410-6 89 -1.73 -1.86 1.08 2.75 MRLC 1411-0 89 2.41 -0.42 -3.77 4.50 MRLC 1411-1 89 2.34 0.22 0.68 2.45 MRLC 1411-2 89 -2.12 -2.14 -2.57 3.96 MRLC 1411-3 89 -3.48 -0.10 -10.52 11.08 MRLC 1411-4 89 -1.05 -0.86 -4.77 4.96 MRLC 1411-5 89 0.69 -1.22 1.58 2.11 MRLC 1411-6 89 0.52 1.12 -3.27 3.49 MRLC 1412-0 89 -0.04 -0.24 2.29 2.30 MRLC 1412-1 89 -0.01 -0.50 2.84 2.88 MRLC 1412-2 89 -0.67 -0.16 -4.51 4.57 MRLC 1412-3 89 -1.04 -1.02 2.14 2.59 MRLC 1412-4 89 0.70 0.92 -1.71 2.06 MRLC 1412-5 89 -0.87 2.56 -0.06 2.70 MRLC 1412-6 89 -0.13 0.19 0.19 0.30 MRLC 1413-0 89 3.10 -2.47 7.64 8.61 MRLC 1413-1 89 2.44 0.27 2.99 3.87 MRLC 1413-2 89 0.77 -4.59 -0.15 4.65 MRLC 1413-3 89 -1.89 -6.35 -1.30 6.75 MRLC 1413-4 89 4.34 -5.91 -8.75 11.42 MRLC 1413-5 89 2.58 -4.37 -4.60 6.85 MRLC 1413-6 89 3.41 -1.53 -0.65 3.80 MRLC 1414-0 89 -2.95 -2.29 -9.90 10.58 MRLC 1414-1 89 0.48 -1.15 -7.25 7.35 MRLC 1414-2 89 0.52 -1.11 -9.10 9.18 MRLC 1414-3 89 0.05 0.13 -2.64 2.65 MRLC 1414-4 89 2.99 2.47 -4.99 6.32 MRLC 1414-5 89 2.92 6.91 -17.54 19.08 MRLC 1414-6 89 0.06 0.45 0.21 0.50 MRLC 1415-0 89 -0.71 -1.82 3.56 4.06 MRLC 1415-1 89 -0.37 -1.08 3.81 3.98 MRLC 1415-2 89 1.96 -1.44 2.26 3.32 MRLC 1415-3 89 -0.90 4.10 6.81 8.00 MRLC 1415-5 89 -0.63 -3.62 6.22 7.22 MRLC 1415-6 89 0.60 -3.88 5.67 6.89 MRLC 1416-0 89 0.74 -1.54 1.52 2.29 MRLC 1416-1 89 -1.63 -1.50 0.97 2.42 MRLC 1416-2 89 2.31 5.04 -16.68 17.58 MRLC 1416-3 89 -1.06 1.38 7.97 8.16 MRLC 1416-4 89 1.08 1.02 -0.08 1.48 MRLC 1416-5 89 -5.49 7.66 8.87 12.94 MRLC 1416-6 89 1.85 1.20 12.03 12.23 MRLC 1417-0 89 0.38 -0.66 2.08 2.21 MRLC 1417-1 89 -1.78 -0.13 -4.67 5.00 MRLC 1417-2 89 0.25 1.91 1.78 2.63 MRLC 1417-3 89 -0.11 -1.15 -2.27 2.55 MRLC 1417-4 89 1.72 0.49 4.98 5.29 MRLC 1417-5 89 2.26 -0.57 4.53 5.10 MRLC 1417-6 89 -1.21 2.47 -2.52 3.73 MRLC 1418-0 89 -0.27 3.71 -3.77 5.29 MRLC 1418-1 89 -1.53 2.45 6.09 6.74 MRLC 1418-2 89 -0.50 0.29 0.54 0.79 MRLC 1418-4 89 -1.83 1.47 -1.96 3.06 MRLC 1418-5 89 -2.19 0.01 -9.71 9.95 MRLC 1418-6 89 -1.46 3.75 10.04 10.82 MRLC 1419-0 89 0.38 -1.21 2.69 2.98 MRLC 1419-1 89 -2.09 -3.68 4.34 6.06 MRLC 1419-2 89 -1.15 -0.54 -7.70 7.81 MRLC 1419-3 89 2.18 -0.10 -7.75 8.05 MRLC 1419-4 89 -0.18 -0.36 4.70 4.72 MRLC 1419-5 89 -1.55 0.78 1.75 2.46 MRLC 1419-6 89 -1.41 -1.68 -1.30 2.55 MRLC 1420-0 89 1.92 -2.34 -6.45 7.12 MRLC 1420-1 89 0.66 -0.60 1.00 1.34 MRLC 1420-2 89 1.19 0.64 -1.35 1.91 MRLC 1420-3 89 0.23 0.18 -1.70 1.72 MRLC 1420-4 89 0.06 0.12 4.26 4.26 MRLC 1420-5 89 -0.40 -0.54 -1.39 1.55 MRLC 1420-6 89 -0.17 -0.90 1.96 2.16
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
MSRU 1408-2 83 1.22 1.12 2.62 3.10 MSRU 1408-3 83 -1.34 0.44 0.39 1.46 MSRU 1408-4 83 -1.30 -0.33 3.25 3.52 MSRU 1408-5 83 0.94 1.29 -4.89 5.14 MSRU 1408-6 83 -1.32 0.32 -3.82 4.06 MSRU 1409-0 83 -0.37 0.75 -7.96 8.00 MSRU 1409-1 83 0.27 0.87 -3.10 3.23 MSRU 1409-2 83 -0.39 0.70 -3.63 3.72 MSRU 1409-3 83 -1.55 1.43 -8.87 9.11 MSRU 1409-4 83 -0.01 0.15 -3.90 3.91 MSRU 1409-5 83 1.43 -0.62 1.86 2.43 MSRU 1409-6 83 -0.02 0.50 -0.98 1.10 MSRU 1410-0 83 0.42 -0.37 3.09 3.14 MSRU 1410-1 83 -5.14 1.46 1.05 5.45 MSRU 1410-2 83 -0.60 0.58 -3.89 3.97 MSRU 1410-3 83 -0.06 -0.19 7.38 7.38 MSRU 1410-4 83 1.68 3.94 13.34 14.01 MSRU 1410-5 83 4.13 -1.94 13.41 14.16 MSRU 1410-6 83 -1.43 -1.01 -4.13 4.49 MSRU 1411-0 83 3.01 -0.99 -10.37 10.84 MSRU 1411-1 83 3.15 -0.86 1.00 3.42 MSRU 1411-2 83 0.29 2.27 -12.84 13.04 MSRU 1411-3 83 -2.37 2.09 1.83 3.65 MSRU 1411-4 83 0.58 0.22 0.69 0.92 MSRU 1411-5 83 1.52 0.25 -3.25 3.59 MSRU 1411-6 83 0.76 -0.53 -1.58 1.83 MSRU 1412-0 83 0.20 0.80 0.88 1.21 MSRU 1412-1 83 0.14 -1.08 -0.86 1.38 MSRU 1412-2 83 -0.31 -0.15 -0.09 0.36 MSRU 1412-3 83 -0.87 -0.32 -4.13 4.23 MSRU 1412-4 83 0.07 -0.70 -1.86 1.99 MSRU 1412-5 83 -0.19 0.13 2.30 2.31 MSRU 1412-6 83 0.95 0.26 2.36 2.56 MSRU 1413-0 83 1.29 -0.22 18.73 18.77 MSRU 1413-1 83 1.14 -1.39 -0.41 1.84 MSRU 1413-2 83 1.48 -2.67 0.55 3.10 MSRU 1413-3 83 -0.18 -4.34 4.92 6.56 MSRU 1413-4 83 3.26 -2.81 -5.72 7.16 MSRU 1413-5 83 2.70 -5.99 -6.85 9.49 MSRU 1414-6 83 -0.56 0.52 -0.44 0.89 MSRU 1415-0 83 0.88 0.05 -6.68 6.74 MSRU 1415-1 83 0.02 -1.12 -9.72 9.78 MSRU 1415-2 83 1.66 -0.70 -0.45 1.86 MSRU 1415-3 83 -0.90 5.13 2.61 5.82 MSRU 1415-4 83 -1.05 0.45 -0.32 1.19 MSRU 1415-5 83 -1.01 -1.82 3.94 4.46 MSRU 1415-6 83 0.83 -2.59 6.80 7.33 MSRU 1416-0 83 0.17 0.53 -1.03 1.17 MSRU 1416-1 83 0.71 0.36 3.33 3.43 MSRU 1416-2 83 0.85 2.09 4.19 4.76 MSRU 1416-3 83 -1.70 2.01 4.86 5.53 MSRU 1416-4 83 -1.86 -0.56 0.22 1.96 MSRU 1416-5 83 -0.62 7.37 -0.41 7.40 MSRU 1416-6 83 -0.58 -1.51 -1.05 1.93 MSRU 1417-0 83 0.26 -0.08 4.61 4.62 MSRU 1417-1 83 -1.50 -0.56 -6.72 6.91 MSRU 1417-2 83 -0.55 0.47 1.44 1.61 MSRU 1417-3 83 0.99 0.80 -4.19 4.38 MSRU 1417-4 83 3.03 -0.38 -0.23 3.06 MSRU 1417-5 83 2.07 -1.15 1.73 2.94 MSRU 1417-6 83 -1.29 -0.12 2.40 2.72 MSRU 1418-0 83 -0.85 1.00 -1.84 2.26 MSRU 1418-1 83 -1.10 0.73 0.22 1.34 MSRU 1418-2 83 -0.96 0.05 2.49 2.67 MSRU 1418-3 83 -2.62 0.98 3.75 4.68 MSRU 1418-4 83 -1.78 2.21 -2.28 3.64 MSRU 1418-5 83 -2.34 -0.47 -4.82 5.38 MSRU 1418-6 83 -1.69 3.16 5.64 6.69 MSRU 1419-0 83 0.65 -1.21 -0.39 1.43 MSRU 1419-1 83 -0.31 -0.69 -0.43 0.87 MSRU 1419-3 83 0.97 0.46 0.60 1.23 MSRU 1419-4 83 -0.89 0.39 -1.84 2.08 MSRU 1419-5 83 0.66 -0.78 1.53 1.84 MSRU 1419-6 83 -0.30 -0.16 -0.81 0.88 MSRU 1420-0 83 0.04 -1.63 5.25 5.50 MSRU 1420-1 83 0.88 0.50 -1.78 2.05 MSRU 1420-2 83 1.02 0.32 -0.42 1.15 MSRU 1420-3 83 0.76 0.15 -4.85 4.92 MSRU 1420-4 83 -0.39 -2.03 -4.89 5.31 MSRU 1420-5 83 -0.65 -0.30 0.17 0.74 MSRU 1420-6 83 1.29 -1.27 0.44 1.86
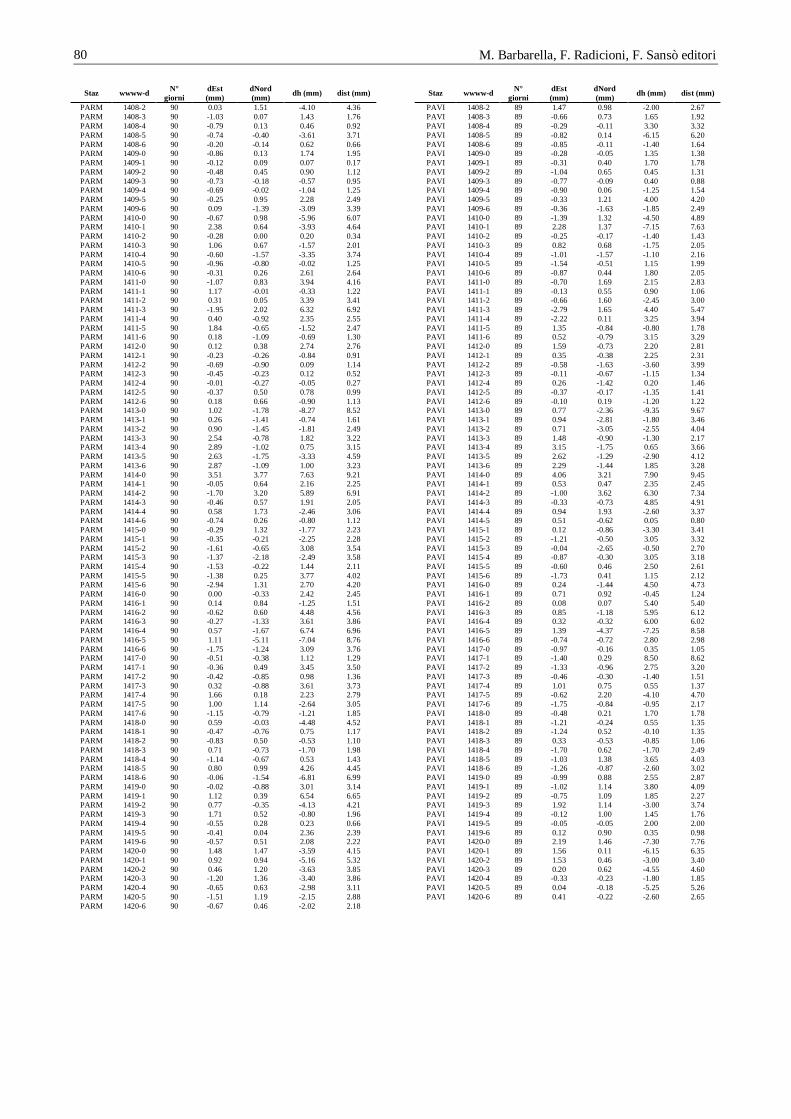
M. Barbarella, F. Radicioni, F. Sansò editori
80
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
PARM 1408-2 90 0.03 1.51 -4.10 4.36 PARM 1408-3 90 -1.03 0.07 1.43 1.76 PARM 1408-4 90 -0.79 0.13 0.46 0.92 PARM 1408-5 90 -0.74 -0.40 -3.61 3.71 PARM 1408-6 90 -0.20 -0.14 0.62 0.66 PARM 1409-0 90 -0.86 0.13 1.74 1.95 PARM 1409-1 90 -0.12 0.09 0.07 0.17 PARM 1409-2 90 -0.48 0.45 0.90 1.12 PARM 1409-3 90 -0.73 -0.18 -0.57 0.95 PARM 1409-4 90 -0.69 -0.02 -1.04 1.25 PARM 1409-5 90 -0.25 0.95 2.28 2.49 PARM 1409-6 90 0.09 -1.39 -3.09 3.39 PARM 1410-0 90 -0.67 0.98 -5.96 6.07 PARM 1410-1 90 2.38 0.64 -3.93 4.64 PARM 1410-2 90 -0.28 0.00 0.20 0.34 PARM 1410-3 90 1.06 0.67 -1.57 2.01 PARM 1410-4 90 -0.60 -1.57 -3.35 3.74 PARM 1410-5 90 -0.96 -0.80 -0.02 1.25 PARM 1410-6 90 -0.31 0.26 2.61 2.64 PARM 1411-0 90 -1.07 0.83 3.94 4.16 PARM 1411-1 90 1.17 -0.01 -0.33 1.22 PARM 1411-2 90 0.31 0.05 3.39 3.41 PARM 1411-3 90 -1.95 2.02 6.32 6.92 PARM 1411-4 90 0.40 -0.92 2.35 2.55 PARM 1411-5 90 1.84 -0.65 -1.52 2.47 PARM 1411-6 90 0.18 -1.09 -0.69 1.30 PARM 1412-0 90 0.12 0.38 2.74 2.76 PARM 1412-1 90 -0.23 -0.26 -0.84 0.91 PARM 1412-2 90 -0.69 -0.90 0.09 1.14 PARM 1412-3 90 -0.45 -0.23 0.12 0.52 PARM 1412-4 90 -0.01 -0.27 -0.05 0.27 PARM 1412-5 90 -0.37 0.50 0.78 0.99 PARM 1412-6 90 0.18 0.66 -0.90 1.13 PARM 1413-0 90 1.02 -1.78 -8.27 8.52 PARM 1413-1 90 0.26 -1.41 -0.74 1.61 PARM 1413-2 90 0.90 -1.45 -1.81 2.49 PARM 1413-3 90 2.54 -0.78 1.82 3.22 PARM 1413-4 90 2.89 -1.02 0.75 3.15 PARM 1413-5 90 2.63 -1.75 -3.33 4.59 PARM 1413-6 90 2.87 -1.09 1.00 3.23 PARM 1414-0 90 3.51 3.77 7.63 9.21 PARM 1414-1 90 -0.05 0.64 2.16 2.25 PARM 1414-2 90 -1.70 3.20 5.89 6.91 PARM 1414-3 90 -0.46 0.57 1.91 2.05 PARM 1414-4 90 0.58 1.73 -2.46 3.06 PARM 1414-6 90 -0.74 0.26 -0.80 1.12 PARM 1415-0 90 -0.29 1.32 -1.77 2.23 PARM 1415-1 90 -0.35 -0.21 -2.25 2.28 PARM 1415-2 90 -1.61 -0.65 3.08 3.54 PARM 1415-3 90 -1.37 -2.18 -2.49 3.58 PARM 1415-4 90 -1.53 -0.22 1.44 2.11 PARM 1415-5 90 -1.38 0.25 3.77 4.02 PARM 1415-6 90 -2.94 1.31 2.70 4.20 PARM 1416-0 90 0.00 -0.33 2.42 2.45 PARM 1416-1 90 0.14 0.84 -1.25 1.51 PARM 1416-2 90 -0.62 0.60 4.48 4.56 PARM 1416-3 90 -0.27 -1.33 3.61 3.86 PARM 1416-4 90 0.57 -1.67 6.74 6.96 PARM 1416-5 90 1.11 -5.11 -7.04 8.76 PARM 1416-6 90 -1.75 -1.24 3.09 3.76 PARM 1417-0 90 -0.51 -0.38 1.12 1.29 PARM 1417-1 90 -0.36 0.49 3.45 3.50 PARM 1417-2 90 -0.42 -0.85 0.98 1.36 PARM 1417-3 90 0.32 -0.88 3.61 3.73 PARM 1417-4 90 1.66 0.18 2.23 2.79 PARM 1417-5 90 1.00 1.14 -2.64 3.05 PARM 1417-6 90 -1.15 -0.79 -1.21 1.85 PARM 1418-0 90 0.59 -0.03 -4.48 4.52 PARM 1418-1 90 -0.47 -0.76 0.75 1.17 PARM 1418-2 90 -0.83 0.50 -0.53 1.10 PARM 1418-3 90 0.71 -0.73 -1.70 1.98 PARM 1418-4 90 -1.14 -0.67 0.53 1.43 PARM 1418-5 90 0.80 0.99 4.26 4.45 PARM 1418-6 90 -0.06 -1.54 -6.81 6.99 PARM 1419-0 90 -0.02 -0.88 3.01 3.14 PARM 1419-1 90 1.12 0.39 6.54 6.65 PARM 1419-2 90 0.77 -0.35 -4.13 4.21 PARM 1419-3 90 1.71 0.52 -0.80 1.96 PARM 1419-4 90 -0.55 0.28 0.23 0.66 PARM 1419-5 90 -0.41 0.04 2.36 2.39 PARM 1419-6 90 -0.57 0.51 2.08 2.22 PARM 1420-0 90 1.48 1.47 -3.59 4.15 PARM 1420-1 90 0.92 0.94 -5.16 5.32 PARM 1420-2 90 0.46 1.20 -3.63 3.85 PARM 1420-3 90 -1.20 1.36 -3.40 3.86 PARM 1420-4 90 -0.65 0.63 -2.98 3.11 PARM 1420-5 90 -1.51 1.19 -2.15 2.88 PARM 1420-6 90 -0.67 0.46 -2.02 2.18
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
PAVI 1408-2 89 1.47 0.98 -2.00 2.67 PAVI 1408-3 89 -0.66 0.73 1.65 1.92 PAVI 1408-4 89 -0.29 -0.11 3.30 3.32 PAVI 1408-5 89 -0.82 0.14 -6.15 6.20 PAVI 1408-6 89 -0.85 -0.11 -1.40 1.64 PAVI 1409-0 89 -0.28 -0.05 1.35 1.38 PAVI 1409-1 89 -0.31 0.40 1.70 1.78 PAVI 1409-2 89 -1.04 0.65 0.45 1.31 PAVI 1409-3 89 -0.77 -0.09 0.40 0.88 PAVI 1409-4 89 -0.90 0.06 -1.25 1.54 PAVI 1409-5 89 -0.33 1.21 4.00 4.20 PAVI 1409-6 89 -0.36 -1.63 -1.85 2.49 PAVI 1410-0 89 -1.39 1.32 -4.50 4.89 PAVI 1410-1 89 2.28 1.37 -7.15 7.63 PAVI 1410-2 89 -0.25 -0.17 -1.40 1.43 PAVI 1410-3 89 0.82 0.68 -1.75 2.05 PAVI 1410-4 89 -1.01 -1.57 -1.10 2.16 PAVI 1410-5 89 -1.54 -0.51 1.15 1.99 PAVI 1410-6 89 -0.87 0.44 1.80 2.05 PAVI 1411-0 89 -0.70 1.69 2.15 2.83 PAVI 1411-1 89 -0.13 0.55 0.90 1.06 PAVI 1411-2 89 -0.66 1.60 -2.45 3.00 PAVI 1411-3 89 -2.79 1.65 4.40 5.47 PAVI 1411-4 89 -2.22 0.11 3.25 3.94 PAVI 1411-5 89 1.35 -0.84 -0.80 1.78 PAVI 1411-6 89 0.52 -0.79 3.15 3.29 PAVI 1412-0 89 1.59 -0.73 2.20 2.81 PAVI 1412-1 89 0.35 -0.38 2.25 2.31 PAVI 1412-2 89 -0.58 -1.63 -3.60 3.99 PAVI 1412-3 89 -0.11 -0.67 -1.15 1.34 PAVI 1412-4 89 0.26 -1.42 0.20 1.46 PAVI 1412-5 89 -0.37 -0.17 -1.35 1.41 PAVI 1412-6 89 -0.10 0.19 -1.20 1.22 PAVI 1413-0 89 0.77 -2.36 -9.35 9.67 PAVI 1413-1 89 0.94 -2.81 -1.80 3.46 PAVI 1413-2 89 0.71 -3.05 -2.55 4.04 PAVI 1413-3 89 1.48 -0.90 -1.30 2.17 PAVI 1413-4 89 3.15 -1.75 0.65 3.66 PAVI 1413-5 89 2.62 -1.29 -2.90 4.12 PAVI 1413-6 89 2.29 -1.44 1.85 3.28 PAVI 1414-0 89 4.06 3.21 7.90 9.45 PAVI 1414-1 89 0.53 0.47 2.35 2.45 PAVI 1414-2 89 -1.00 3.62 6.30 7.34 PAVI 1414-3 89 -0.33 -0.73 4.85 4.91 PAVI 1414-4 89 0.94 1.93 -2.60 3.37 PAVI 1414-5 89 0.51 -0.62 0.05 0.80 PAVI 1415-1 89 0.12 -0.86 -3.30 3.41 PAVI 1415-2 89 -1.21 -0.50 3.05 3.32 PAVI 1415-3 89 -0.04 -2.65 -0.50 2.70 PAVI 1415-4 89 -0.87 -0.30 3.05 3.18 PAVI 1415-5 89 -0.60 0.46 2.50 2.61 PAVI 1415-6 89 -1.73 0.41 1.15 2.12 PAVI 1416-0 89 0.24 -1.44 4.50 4.73 PAVI 1416-1 89 0.71 0.92 -0.45 1.24 PAVI 1416-2 89 0.08 0.07 5.40 5.40 PAVI 1416-3 89 0.85 -1.18 5.95 6.12 PAVI 1416-4 89 0.32 -0.32 6.00 6.02 PAVI 1416-5 89 1.39 -4.37 -7.25 8.58 PAVI 1416-6 89 -0.74 -0.72 2.80 2.98 PAVI 1417-0 89 -0.97 -0.16 0.35 1.05 PAVI 1417-1 89 -1.40 0.29 8.50 8.62 PAVI 1417-2 89 -1.33 -0.96 2.75 3.20 PAVI 1417-3 89 -0.46 -0.30 -1.40 1.51 PAVI 1417-4 89 1.01 0.75 0.55 1.37 PAVI 1417-5 89 -0.62 2.20 -4.10 4.70 PAVI 1417-6 89 -1.75 -0.84 -0.95 2.17 PAVI 1418-0 89 -0.48 0.21 1.70 1.78 PAVI 1418-1 89 -1.21 -0.24 0.55 1.35 PAVI 1418-2 89 -1.24 0.52 -0.10 1.35 PAVI 1418-3 89 0.33 -0.53 -0.85 1.06 PAVI 1418-4 89 -1.70 0.62 -1.70 2.49 PAVI 1418-5 89 -1.03 1.38 3.65 4.03 PAVI 1418-6 89 -1.26 -0.87 -2.60 3.02 PAVI 1419-0 89 -0.99 0.88 2.55 2.87 PAVI 1419-1 89 -1.02 1.14 3.80 4.09 PAVI 1419-2 89 -0.75 1.09 1.85 2.27 PAVI 1419-3 89 1.92 1.14 -3.00 3.74 PAVI 1419-4 89 -0.12 1.00 1.45 1.76 PAVI 1419-5 89 -0.05 -0.05 2.00 2.00 PAVI 1419-6 89 0.12 0.90 0.35 0.98 PAVI 1420-0 89 2.19 1.46 -7.30 7.76 PAVI 1420-1 89 1.56 0.11 -6.15 6.35 PAVI 1420-2 89 1.53 0.46 -3.00 3.40 PAVI 1420-3 89 0.20 0.62 -4.55 4.60 PAVI 1420-4 89 -0.33 -0.23 -1.80 1.85 PAVI 1420-5 89 0.04 -0.18 -5.25 5.26 PAVI 1420-6 89 0.41 -0.22 -2.60 2.65
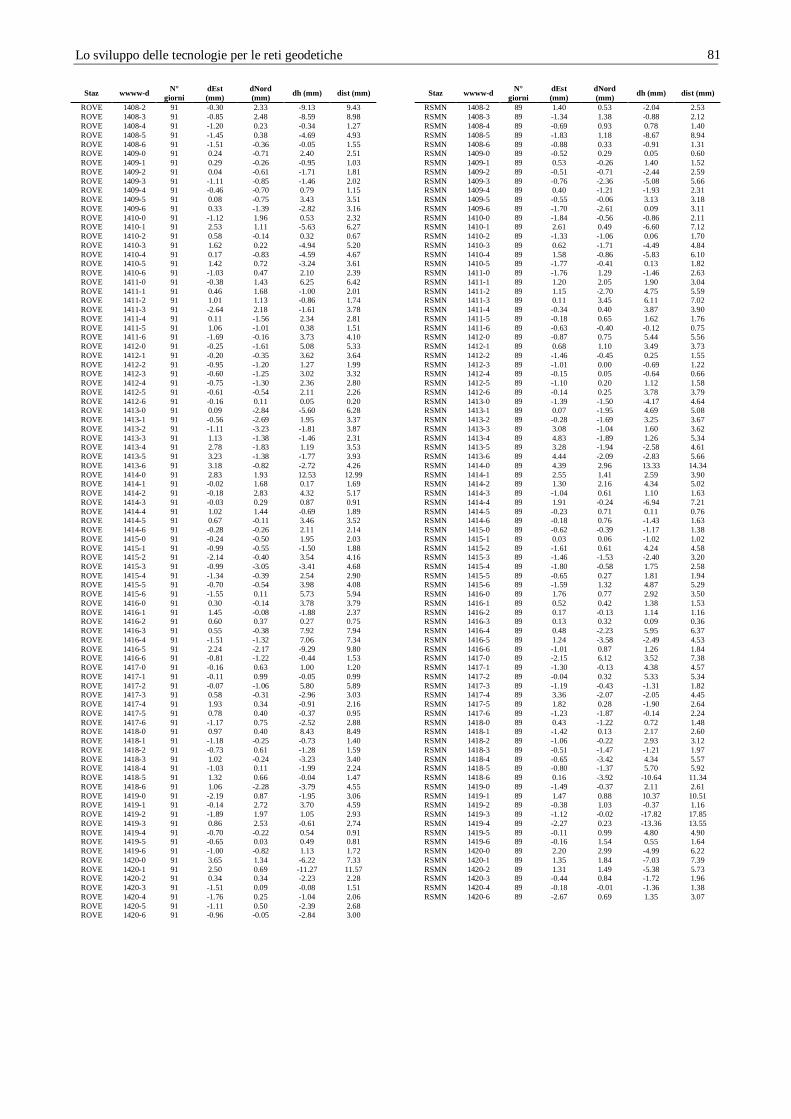
Lo sviluppo delle tecnologie per le reti geodetiche
81
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
ROVE 1408-2 91 -0.30 2.33 -9.13 9.43 ROVE 1408-3 91 -0.85 2.48 -8.59 8.98 ROVE 1408-4 91 -1.20 0.23 -0.34 1.27 ROVE 1408-5 91 -1.45 0.38 -4.69 4.93 ROVE 1408-6 91 -1.51 -0.36 -0.05 1.55 ROVE 1409-0 91 0.24 -0.71 2.40 2.51 ROVE 1409-1 91 0.29 -0.26 -0.95 1.03 ROVE 1409-2 91 0.04 -0.61 -1.71 1.81 ROVE 1409-3 91 -1.11 -0.85 -1.46 2.02 ROVE 1409-4 91 -0.46 -0.70 0.79 1.15 ROVE 1409-5 91 0.08 -0.75 3.43 3.51 ROVE 1409-6 91 0.33 -1.39 -2.82 3.16 ROVE 1410-0 91 -1.12 1.96 0.53 2.32 ROVE 1410-1 91 2.53 1.11 -5.63 6.27 ROVE 1410-2 91 0.58 -0.14 0.32 0.67 ROVE 1410-3 91 1.62 0.22 -4.94 5.20 ROVE 1410-4 91 0.17 -0.83 -4.59 4.67 ROVE 1410-5 91 1.42 0.72 -3.24 3.61 ROVE 1410-6 91 -1.03 0.47 2.10 2.39 ROVE 1411-0 91 -0.38 1.43 6.25 6.42 ROVE 1411-1 91 0.46 1.68 -1.00 2.01 ROVE 1411-2 91 1.01 1.13 -0.86 1.74 ROVE 1411-3 91 -2.64 2.18 -1.61 3.78 ROVE 1411-4 91 0.11 -1.56 2.34 2.81 ROVE 1411-5 91 1.06 -1.01 0.38 1.51 ROVE 1411-6 91 -1.69 -0.16 3.73 4.10 ROVE 1412-0 91 -0.25 -1.61 5.08 5.33 ROVE 1412-1 91 -0.20 -0.35 3.62 3.64 ROVE 1412-2 91 -0.95 -1.20 1.27 1.99 ROVE 1412-3 91 -0.60 -1.25 3.02 3.32 ROVE 1412-4 91 -0.75 -1.30 2.36 2.80 ROVE 1412-5 91 -0.61 -0.54 2.11 2.26 ROVE 1412-6 91 -0.16 0.11 0.05 0.20 ROVE 1413-0 91 0.09 -2.84 -5.60 6.28 ROVE 1413-1 91 -0.56 -2.69 1.95 3.37 ROVE 1413-2 91 -1.11 -3.23 -1.81 3.87 ROVE 1413-3 91 1.13 -1.38 -1.46 2.31 ROVE 1413-4 91 2.78 -1.83 1.19 3.53 ROVE 1413-5 91 3.23 -1.38 -1.77 3.93 ROVE 1413-6 91 3.18 -0.82 -2.72 4.26 ROVE 1414-0 91 2.83 1.93 12.53 12.99 ROVE 1414-1 91 -0.02 1.68 0.17 1.69 ROVE 1414-2 91 -0.18 2.83 4.32 5.17 ROVE 1414-3 91 -0.03 0.29 0.87 0.91 ROVE 1414-4 91 1.02 1.44 -0.69 1.89 ROVE 1414-5 91 0.67 -0.11 3.46 3.52 ROVE 1414-6 91 -0.28 -0.26 2.11 2.14 ROVE 1415-0 91 -0.24 -0.50 1.95 2.03 ROVE 1415-1 91 -0.99 -0.55 -1.50 1.88 ROVE 1415-2 91 -2.14 -0.40 3.54 4.16 ROVE 1415-3 91 -0.99 -3.05 -3.41 4.68 ROVE 1415-4 91 -1.34 -0.39 2.54 2.90 ROVE 1415-5 91 -0.70 -0.54 3.98 4.08 ROVE 1415-6 91 -1.55 0.11 5.73 5.94 ROVE 1416-0 91 0.30 -0.14 3.78 3.79 ROVE 1416-1 91 1.45 -0.08 -1.88 2.37 ROVE 1416-2 91 0.60 0.37 0.27 0.75 ROVE 1416-3 91 0.55 -0.38 7.92 7.94 ROVE 1416-4 91 -1.51 -1.32 7.06 7.34 ROVE 1416-5 91 2.24 -2.17 -9.29 9.80 ROVE 1416-6 91 -0.81 -1.22 -0.44 1.53 ROVE 1417-0 91 -0.16 0.63 1.00 1.20 ROVE 1417-1 91 -0.11 0.99 -0.05 0.99 ROVE 1417-2 91 -0.07 -1.06 5.80 5.89 ROVE 1417-3 91 0.58 -0.31 -2.96 3.03 ROVE 1417-4 91 1.93 0.34 -0.91 2.16 ROVE 1417-5 91 0.78 0.40 -0.37 0.95 ROVE 1417-6 91 -1.17 0.75 -2.52 2.88 ROVE 1418-0 91 0.97 0.40 8.43 8.49 ROVE 1418-1 91 -1.18 -0.25 -0.73 1.40 ROVE 1418-2 91 -0.73 0.61 -1.28 1.59 ROVE 1418-3 91 1.02 -0.24 -3.23 3.40 ROVE 1418-4 91 -1.03 0.11 -1.99 2.24 ROVE 1418-5 91 1.32 0.66 -0.04 1.47 ROVE 1418-6 91 1.06 -2.28 -3.79 4.55 ROVE 1419-0 91 -2.19 0.87 -1.95 3.06 ROVE 1419-1 91 -0.14 2.72 3.70 4.59 ROVE 1419-2 91 -1.89 1.97 1.05 2.93 ROVE 1419-3 91 0.86 2.53 -0.61 2.74 ROVE 1419-4 91 -0.70 -0.22 0.54 0.91 ROVE 1419-5 91 -0.65 0.03 0.49 0.81 ROVE 1419-6 91 -1.00 -0.82 1.13 1.72 ROVE 1420-0 91 3.65 1.34 -6.22 7.33 ROVE 1420-1 91 2.50 0.69 -11.27 11.57 ROVE 1420-2 91 0.34 0.34 -2.23 2.28 ROVE 1420-3 91 -1.51 0.09 -0.08 1.51 ROVE 1420-4 91 -1.76 0.25 -1.04 2.06 ROVE 1420-5 91 -1.11 0.50 -2.39 2.68 ROVE 1420-6 91 -0.96 -0.05 -2.84 3.00
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
RSMN 1408-2 89 1.40 0.53 -2.04 2.53 RSMN 1408-3 89 -1.34 1.38 -0.88 2.12 RSMN 1408-4 89 -0.69 0.93 0.78 1.40 RSMN 1408-5 89 -1.83 1.18 -8.67 8.94 RSMN 1408-6 89 -0.88 0.33 -0.91 1.31 RSMN 1409-0 89 -0.52 0.29 0.05 0.60 RSMN 1409-1 89 0.53 -0.26 1.40 1.52 RSMN 1409-2 89 -0.51 -0.71 -2.44 2.59 RSMN 1409-3 89 -0.76 -2.36 -5.08 5.66 RSMN 1409-4 89 0.40 -1.21 -1.93 2.31 RSMN 1409-5 89 -0.55 -0.06 3.13 3.18 RSMN 1409-6 89 -1.70 -2.61 0.09 3.11 RSMN 1410-0 89 -1.84 -0.56 -0.86 2.11 RSMN 1410-1 89 2.61 0.49 -6.60 7.12 RSMN 1410-2 89 -1.33 -1.06 0.06 1.70 RSMN 1410-3 89 0.62 -1.71 -4.49 4.84 RSMN 1410-4 89 1.58 -0.86 -5.83 6.10 RSMN 1410-5 89 -1.77 -0.41 0.13 1.82 RSMN 1411-0 89 -1.76 1.29 -1.46 2.63 RSMN 1411-1 89 1.20 2.05 1.90 3.04 RSMN 1411-2 89 1.15 -2.70 4.75 5.59 RSMN 1411-3 89 0.11 3.45 6.11 7.02 RSMN 1411-4 89 -0.34 0.40 3.87 3.90 RSMN 1411-5 89 -0.18 0.65 1.62 1.76 RSMN 1411-6 89 -0.63 -0.40 -0.12 0.75 RSMN 1412-0 89 -0.87 0.75 5.44 5.56 RSMN 1412-1 89 0.68 1.10 3.49 3.73 RSMN 1412-2 89 -1.46 -0.45 0.25 1.55 RSMN 1412-3 89 -1.01 0.00 -0.69 1.22 RSMN 1412-4 89 -0.15 0.05 -0.64 0.66 RSMN 1412-5 89 -1.10 0.20 1.12 1.58 RSMN 1412-6 89 -0.14 0.25 3.78 3.79 RSMN 1413-0 89 -1.39 -1.50 -4.17 4.64 RSMN 1413-1 89 0.07 -1.95 4.69 5.08 RSMN 1413-2 89 -0.28 -1.69 3.25 3.67 RSMN 1413-3 89 3.08 -1.04 1.60 3.62 RSMN 1413-4 89 4.83 -1.89 1.26 5.34 RSMN 1413-5 89 3.28 -1.94 -2.58 4.61 RSMN 1413-6 89 4.44 -2.09 -2.83 5.66 RSMN 1414-0 89 4.39 2.96 13.33 14.34 RSMN 1414-1 89 2.55 1.41 2.59 3.90 RSMN 1414-2 89 1.30 2.16 4.34 5.02 RSMN 1414-3 89 -1.04 0.61 1.10 1.63 RSMN 1414-4 89 1.91 -0.24 -6.94 7.21 RSMN 1414-5 89 -0.23 0.71 0.11 0.76 RSMN 1414-6 89 -0.18 0.76 -1.43 1.63 RSMN 1415-0 89 -0.62 -0.39 -1.17 1.38 RSMN 1415-1 89 0.03 0.06 -1.02 1.02 RSMN 1415-2 89 -1.61 0.61 4.24 4.58 RSMN 1415-3 89 -1.46 -1.53 -2.40 3.20 RSMN 1415-4 89 -1.80 -0.58 1.75 2.58 RSMN 1415-5 89 -0.65 0.27 1.81 1.94 RSMN 1415-6 89 -1.59 1.32 4.87 5.29 RSMN 1416-0 89 1.76 0.77 2.92 3.50 RSMN 1416-1 89 0.52 0.42 1.38 1.53 RSMN 1416-2 89 0.17 -0.13 1.14 1.16 RSMN 1416-3 89 0.13 0.32 0.09 0.36 RSMN 1416-4 89 0.48 -2.23 5.95 6.37 RSMN 1416-5 89 1.24 -3.58 -2.49 4.53 RSMN 1416-6 89 -1.01 0.87 1.26 1.84 RSMN 1417-0 89 -2.15 6.12 3.52 7.38 RSMN 1417-1 89 -1.30 -0.13 4.38 4.57 RSMN 1417-2 89 -0.04 0.32 5.33 5.34 RSMN 1417-3 89 -1.19 -0.43 -1.31 1.82 RSMN 1417-4 89 3.36 -2.07 -2.05 4.45 RSMN 1417-5 89 1.82 0.28 -1.90 2.64 RSMN 1417-6 89 -1.23 -1.87 -0.14 2.24 RSMN 1418-0 89 0.43 -1.22 0.72 1.48 RSMN 1418-1 89 -1.42 0.13 2.17 2.60 RSMN 1418-2 89 -1.06 -0.22 2.93 3.12 RSMN 1418-3 89 -0.51 -1.47 -1.21 1.97 RSMN 1418-4 89 -0.65 -3.42 4.34 5.57 RSMN 1418-5 89 -0.80 -1.37 5.70 5.92 RSMN 1418-6 89 0.16 -3.92 -10.64 11.34 RSMN 1419-0 89 -1.49 -0.37 2.11 2.61 RSMN 1419-1 89 1.47 0.88 10.37 10.51 RSMN 1419-2 89 -0.38 1.03 -0.37 1.16 RSMN 1419-3 89 -1.12 -0.02 -17.82 17.85 RSMN 1419-4 89 -2.27 0.23 -13.36 13.55 RSMN 1419-5 89 -0.11 0.99 4.80 4.90 RSMN 1419-6 89 -0.16 1.54 0.55 1.64 RSMN 1420-0 89 2.20 2.99 -4.99 6.22 RSMN 1420-1 89 1.35 1.84 -7.03 7.39 RSMN 1420-2 89 1.31 1.49 -5.38 5.73 RSMN 1420-3 89 -0.44 0.84 -1.72 1.96 RSMN 1420-4 89 -0.18 -0.01 -1.36 1.38 RSMN 1420-6 89 -2.67 0.69 1.35 3.07
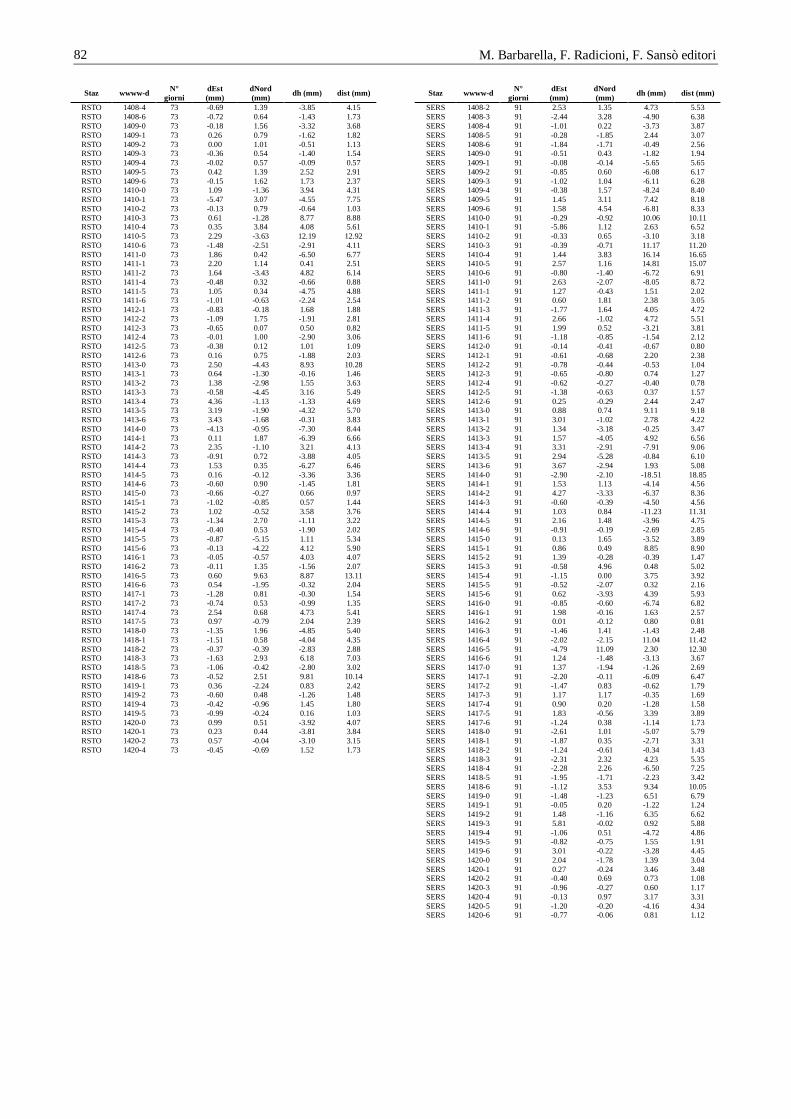
M. Barbarella, F. Radicioni, F. Sansò editori
82
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
RSTO 1408-4 73 -0.69 1.39 -3.85 4.15 RSTO 1408-6 73 -0.72 0.64 -1.43 1.73 RSTO 1409-0 73 -0.18 1.56 -3.32 3.68 RSTO 1409-1 73 0.26 0.79 -1.62 1.82 RSTO 1409-2 73 0.00 1.01 -0.51 1.13 RSTO 1409-3 73 -0.36 0.54 -1.40 1.54 RSTO 1409-4 73 -0.02 0.57 -0.09 0.57 RSTO 1409-5 73 0.42 1.39 2.52 2.91 RSTO 1409-6 73 -0.15 1.62 1.73 2.37 RSTO 1410-0 73 1.09 -1.36 3.94 4.31 RSTO 1410-1 73 -5.47 3.07 -4.55 7.75 RSTO 1410-2 73 -0.13 0.79 -0.64 1.03 RSTO 1410-3 73 0.61 -1.28 8.77 8.88 RSTO 1410-4 73 0.35 3.84 4.08 5.61 RSTO 1410-5 73 2.29 -3.63 12.19 12.92 RSTO 1410-6 73 -1.48 -2.51 -2.91 4.11 RSTO 1411-0 73 1.86 0.42 -6.50 6.77 RSTO 1411-1 73 2.20 1.14 0.41 2.51 RSTO 1411-2 73 1.64 -3.43 4.82 6.14 RSTO 1411-4 73 -0.48 0.32 -0.66 0.88 RSTO 1411-5 73 1.05 0.34 -4.75 4.88 RSTO 1411-6 73 -1.01 -0.63 -2.24 2.54 RSTO 1412-1 73 -0.83 -0.18 1.68 1.88 RSTO 1412-2 73 -1.09 1.75 -1.91 2.81 RSTO 1412-3 73 -0.65 0.07 0.50 0.82 RSTO 1412-4 73 -0.01 1.00 -2.90 3.06 RSTO 1412-5 73 -0.38 0.12 1.01 1.09 RSTO 1412-6 73 0.16 0.75 -1.88 2.03 RSTO 1413-0 73 2.50 -4.43 8.93 10.28 RSTO 1413-1 73 0.64 -1.30 -0.16 1.46 RSTO 1413-2 73 1.38 -2.98 1.55 3.63 RSTO 1413-3 73 -0.58 -4.45 3.16 5.49 RSTO 1413-4 73 4.36 -1.13 -1.33 4.69 RSTO 1413-5 73 3.19 -1.90 -4.32 5.70 RSTO 1413-6 73 3.43 -1.68 -0.31 3.83 RSTO 1414-0 73 -4.13 -0.95 -7.30 8.44 RSTO 1414-1 73 0.11 1.87 -6.39 6.66 RSTO 1414-2 73 2.35 -1.10 3.21 4.13 RSTO 1414-3 73 -0.91 0.72 -3.88 4.05 RSTO 1414-4 73 1.53 0.35 -6.27 6.46 RSTO 1414-5 73 0.16 -0.12 -3.36 3.36 RSTO 1414-6 73 -0.60 0.90 -1.45 1.81 RSTO 1415-0 73 -0.66 -0.27 0.66 0.97 RSTO 1415-1 73 -1.02 -0.85 0.57 1.44 RSTO 1415-2 73 1.02 -0.52 3.58 3.76 RSTO 1415-3 73 -1.34 2.70 -1.11 3.22 RSTO 1415-4 73 -0.40 0.53 -1.90 2.02 RSTO 1415-5 73 -0.87 -5.15 1.11 5.34 RSTO 1415-6 73 -0.13 -4.22 4.12 5.90 RSTO 1416-1 73 -0.05 -0.57 4.03 4.07 RSTO 1416-2 73 -0.11 1.35 -1.56 2.07 RSTO 1416-5 73 0.60 9.63 8.87 13.11 RSTO 1416-6 73 0.54 -1.95 -0.32 2.04 RSTO 1417-1 73 -1.28 0.81 -0.30 1.54 RSTO 1417-2 73 -0.74 0.53 -0.99 1.35 RSTO 1417-4 73 2.54 0.68 4.73 5.41 RSTO 1417-5 73 0.97 -0.79 2.04 2.39 RSTO 1418-0 73 -1.35 1.96 -4.85 5.40 RSTO 1418-1 73 -1.51 0.58 -4.04 4.35 RSTO 1418-2 73 -0.37 -0.39 -2.83 2.88 RSTO 1418-3 73 -1.63 2.93 6.18 7.03 RSTO 1418-5 73 -1.06 -0.42 -2.80 3.02 RSTO 1418-6 73 -0.52 2.51 9.81 10.14 RSTO 1419-1 73 0.36 -2.24 0.83 2.42 RSTO 1419-2 73 -0.60 0.48 -1.26 1.48 RSTO 1419-4 73 -0.42 -0.96 1.45 1.80 RSTO 1419-5 73 -0.99 -0.24 0.16 1.03 RSTO 1420-0 73 0.99 0.51 -3.92 4.07 RSTO 1420-1 73 0.23 0.44 -3.81 3.84 RSTO 1420-2 73 0.57 -0.04 -3.10 3.15 RSTO 1420-4 73 -0.45 -0.69 1.52 1.73
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
SERS 1408-2 91 2.53 1.35 4.73 5.53 SERS 1408-3 91 -2.44 3.28 -4.90 6.38 SERS 1408-4 91 -1.01 0.22 -3.73 3.87 SERS 1408-5 91 -0.28 -1.85 2.44 3.07 SERS 1408-6 91 -1.84 -1.71 -0.49 2.56 SERS 1409-0 91 -0.51 0.43 -1.82 1.94 SERS 1409-1 91 -0.08 -0.14 -5.65 5.65 SERS 1409-2 91 -0.85 0.60 -6.08 6.17 SERS 1409-3 91 -1.02 1.04 -6.11 6.28 SERS 1409-4 91 -0.38 1.57 -8.24 8.40 SERS 1409-5 91 1.45 3.11 7.42 8.18 SERS 1409-6 91 1.58 4.54 -6.81 8.33 SERS 1410-0 91 -0.29 -0.92 10.06 10.11 SERS 1410-1 91 -5.86 1.12 2.63 6.52 SERS 1410-2 91 -0.33 0.65 -3.10 3.18 SERS 1410-3 91 -0.39 -0.71 11.17 11.20 SERS 1410-4 91 1.44 3.83 16.14 16.65 SERS 1410-5 91 2.57 1.16 14.81 15.07 SERS 1410-6 91 -0.80 -1.40 -6.72 6.91 SERS 1411-0 91 2.63 -2.07 -8.05 8.72 SERS 1411-1 91 1.27 -0.43 1.51 2.02 SERS 1411-2 91 0.60 1.81 2.38 3.05 SERS 1411-3 91 -1.77 1.64 4.05 4.72 SERS 1411-4 91 2.66 -1.02 4.72 5.51 SERS 1411-5 91 1.99 0.52 -3.21 3.81 SERS 1411-6 91 -1.18 -0.85 -1.54 2.12 SERS 1412-0 91 -0.14 -0.41 -0.67 0.80 SERS 1412-1 91 -0.61 -0.68 2.20 2.38 SERS 1412-2 91 -0.78 -0.44 -0.53 1.04 SERS 1412-3 91 -0.65 -0.80 0.74 1.27 SERS 1412-4 91 -0.62 -0.27 -0.40 0.78 SERS 1412-5 91 -1.38 -0.63 0.37 1.57 SERS 1412-6 91 0.25 -0.29 2.44 2.47 SERS 1413-0 91 0.88 0.74 9.11 9.18 SERS 1413-1 91 3.01 -1.02 2.78 4.22 SERS 1413-2 91 1.34 -3.18 -0.25 3.47 SERS 1413-3 91 1.57 -4.05 4.92 6.56 SERS 1413-4 91 3.31 -2.91 -7.91 9.06 SERS 1413-5 91 2.94 -5.28 -0.84 6.10 SERS 1413-6 91 3.67 -2.94 1.93 5.08 SERS 1414-0 91 -2.90 -2.10 -18.51 18.85 SERS 1414-1 91 1.53 1.13 -4.14 4.56 SERS 1414-2 91 4.27 -3.33 -6.37 8.36 SERS 1414-3 91 -0.60 -0.39 -4.50 4.56 SERS 1414-4 91 1.03 0.84 -11.23 11.31 SERS 1414-5 91 2.16 1.48 -3.96 4.75 SERS 1414-6 91 -0.91 -0.19 -2.69 2.85 SERS 1415-0 91 0.13 1.65 -3.52 3.89 SERS 1415-1 91 0.86 0.49 8.85 8.90 SERS 1415-2 91 1.39 -0.28 -0.39 1.47 SERS 1415-3 91 -0.58 4.96 0.48 5.02 SERS 1415-4 91 -1.15 0.00 3.75 3.92 SERS 1415-5 91 -0.52 -2.07 0.32 2.16 SERS 1415-6 91 0.62 -3.93 4.39 5.93 SERS 1416-0 91 -0.85 -0.60 -6.74 6.82 SERS 1416-1 91 1.98 -0.16 1.63 2.57 SERS 1416-2 91 0.01 -0.12 0.80 0.81 SERS 1416-3 91 -1.46 1.41 -1.43 2.48 SERS 1416-4 91 -2.02 -2.15 11.04 11.42 SERS 1416-5 91 -4.79 11.09 2.30 12.30 SERS 1416-6 91 1.24 -1.48 -3.13 3.67 SERS 1417-0 91 1.37 -1.94 -1.26 2.69 SERS 1417-1 91 -2.20 -0.11 -6.09 6.47 SERS 1417-2 91 -1.47 0.83 -0.62 1.79 SERS 1417-3 91 1.17 1.17 -0.35 1.69 SERS 1417-4 91 0.90 0.20 -1.28 1.58 SERS 1417-5 91 1.83 -0.56 3.39 3.89 SERS 1417-6 91 -1.24 0.38 -1.14 1.73 SERS 1418-0 91 -2.61 1.01 -5.07 5.79 SERS 1418-1 91 -1.87 0.35 -2.71 3.31 SERS 1418-2 91 -1.24 -0.61 -0.34 1.43 SERS 1418-3 91 -2.31 2.32 4.23 5.35 SERS 1418-4 91 -2.28 2.26 -6.50 7.25 SERS 1418-5 91 -1.95 -1.71 -2.23 3.42 SERS 1418-6 91 -1.12 3.53 9.34 10.05 SERS 1419-0 91 -1.48 -1.23 6.51 6.79 SERS 1419-1 91 -0.05 0.20 -1.22 1.24 SERS 1419-2 91 1.48 -1.16 6.35 6.62 SERS 1419-3 91 5.81 -0.02 0.92 5.88 SERS 1419-4 91 -1.06 0.51 -4.72 4.86 SERS 1419-5 91 -0.82 -0.75 1.55 1.91 SERS 1419-6 91 3.01 -0.22 -3.28 4.45 SERS 1420-0 91 2.04 -1.78 1.39 3.04 SERS 1420-1 91 0.27 -0.24 3.46 3.48 SERS 1420-2 91 -0.40 0.69 0.73 1.08 SERS 1420-3 91 -0.96 -0.27 0.60 1.17 SERS 1420-4 91 -0.13 0.97 3.17 3.31 SERS 1420-5 91 -1.20 -0.20 -4.16 4.34 SERS 1420-6 91 -0.77 -0.06 0.81 1.12
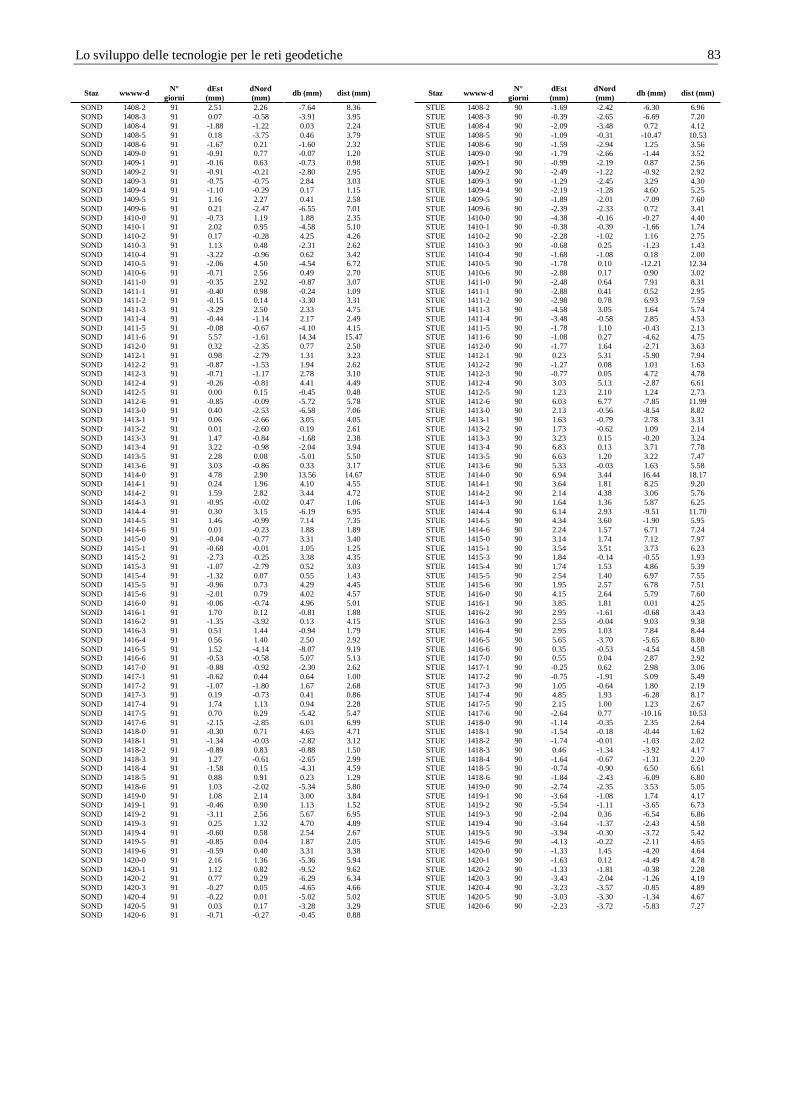
Lo sviluppo delle tecnologie per le reti geodetiche
83
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
SOND 1408-2 91 2.51 2.26 -7.64 8.36 SOND 1408-3 91 0.07 -0.58 -3.91 3.95 SOND 1408-4 91 -1.88 -1.22 0.03 2.24 SOND 1408-5 91 0.18 -3.75 0.46 3.79 SOND 1408-6 91 -1.67 0.21 -1.60 2.32 SOND 1409-0 91 -0.91 0.77 -0.07 1.20 SOND 1409-1 91 -0.16 0.63 -0.73 0.98 SOND 1409-2 91 -0.91 -0.21 -2.80 2.95 SOND 1409-3 91 -0.75 -0.75 2.84 3.03 SOND 1409-4 91 -1.10 -0.29 0.17 1.15 SOND 1409-5 91 1.16 2.27 0.41 2.58 SOND 1409-6 91 0.21 -2.47 -6.55 7.01 SOND 1410-0 91 -0.73 1.19 1.88 2.35 SOND 1410-1 91 2.02 0.95 -4.58 5.10 SOND 1410-2 91 0.17 -0.28 4.25 4.26 SOND 1410-3 91 1.13 0.48 -2.31 2.62 SOND 1410-4 91 -3.22 -0.96 0.62 3.42 SOND 1410-5 91 -2.06 4.50 -4.54 6.72 SOND 1410-6 91 -0.71 2.56 0.49 2.70 SOND 1411-0 91 -0.35 2.92 -0.87 3.07 SOND 1411-1 91 -0.40 0.98 -0.24 1.09 SOND 1411-2 91 -0.15 0.14 -3.30 3.31 SOND 1411-3 91 -3.29 2.50 2.33 4.75 SOND 1411-4 91 -0.44 -1.14 2.17 2.49 SOND 1411-5 91 -0.08 -0.67 -4.10 4.15 SOND 1411-6 91 5.57 -1.61 14.34 15.47 SOND 1412-0 91 0.32 -2.35 0.77 2.50 SOND 1412-1 91 0.98 -2.79 1.31 3.23 SOND 1412-2 91 -0.87 -1.53 1.94 2.62 SOND 1412-3 91 -0.71 -1.17 2.78 3.10 SOND 1412-4 91 -0.26 -0.81 4.41 4.49 SOND 1412-5 91 0.00 0.15 -0.45 0.48 SOND 1412-6 91 -0.85 -0.09 -5.72 5.78 SOND 1413-0 91 0.40 -2.53 -6.58 7.06 SOND 1413-1 91 0.06 -2.66 3.05 4.05 SOND 1413-2 91 0.01 -2.60 0.19 2.61 SOND 1413-3 91 1.47 -0.84 -1.68 2.38 SOND 1413-4 91 3.22 -0.98 -2.04 3.94 SOND 1413-5 91 2.28 0.08 -5.01 5.50 SOND 1413-6 91 3.03 -0.86 0.33 3.17 SOND 1414-0 91 4.78 2.90 13.56 14.67 SOND 1414-1 91 0.24 1.96 4.10 4.55 SOND 1414-2 91 1.59 2.82 3.44 4.72 SOND 1414-3 91 -0.95 -0.02 0.47 1.06 SOND 1414-4 91 0.30 3.15 -6.19 6.95 SOND 1414-5 91 1.46 -0.99 7.14 7.35 SOND 1414-6 91 0.01 -0.23 1.88 1.89 SOND 1415-0 91 -0.04 -0.77 3.31 3.40 SOND 1415-1 91 -0.68 -0.01 1.05 1.25 SOND 1415-2 91 -2.73 -0.25 3.38 4.35 SOND 1415-3 91 -1.07 -2.79 0.52 3.03 SOND 1415-4 91 -1.32 0.07 0.55 1.43 SOND 1415-5 91 -0.96 0.73 4.29 4.45 SOND 1415-6 91 -2.01 0.79 4.02 4.57 SOND 1416-0 91 -0.06 -0.74 4.96 5.01 SOND 1416-1 91 1.70 0.12 -0.81 1.88 SOND 1416-2 91 -1.35 -3.92 0.13 4.15 SOND 1416-3 91 0.51 1.44 -0.94 1.79 SOND 1416-4 91 0.56 1.40 2.50 2.92 SOND 1416-5 91 1.52 -4.14 -8.07 9.19 SOND 1416-6 91 -0.53 -0.58 5.07 5.13 SOND 1417-0 91 -0.88 -0.92 -2.30 2.62 SOND 1417-1 91 -0.62 0.44 0.64 1.00 SOND 1417-2 91 -1.07 -1.80 1.67 2.68 SOND 1417-3 91 0.19 -0.73 0.41 0.86 SOND 1417-4 91 1.74 1.13 0.94 2.28 SOND 1417-5 91 0.70 0.29 -5.42 5.47 SOND 1417-6 91 -2.15 -2.85 6.01 6.99 SOND 1418-0 91 -0.30 0.71 4.65 4.71 SOND 1418-1 91 -1.34 -0.03 -2.82 3.12 SOND 1418-2 91 -0.89 0.83 -0.88 1.50 SOND 1418-3 91 1.27 -0.61 -2.65 2.99 SOND 1418-4 91 -1.58 0.15 -4.31 4.59 SOND 1418-5 91 0.88 0.91 0.23 1.29 SOND 1418-6 91 1.03 -2.02 -5.34 5.80 SOND 1419-0 91 1.08 2.14 3.00 3.84 SOND 1419-1 91 -0.46 0.90 1.13 1.52 SOND 1419-2 91 -3.11 2.56 5.67 6.95 SOND 1419-3 91 0.25 1.32 4.70 4.89 SOND 1419-4 91 -0.60 0.58 2.54 2.67 SOND 1419-5 91 -0.85 0.04 1.87 2.05 SOND 1419-6 91 -0.59 0.40 3.31 3.38 SOND 1420-0 91 2.16 1.36 -5.36 5.94 SOND 1420-1 91 1.12 0.82 -9.52 9.62 SOND 1420-2 91 0.77 0.29 -6.29 6.34 SOND 1420-3 91 -0.27 0.05 -4.65 4.66 SOND 1420-4 91 -0.22 0.01 -5.02 5.02 SOND 1420-5 91 0.03 0.17 -3.28 3.29 SOND 1420-6 91 -0.71 -0.27 -0.45 0.88
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
STUE 1408-2 90 -1.69 -2.42 -6.30 6.96 STUE 1408-3 90 -0.39 -2.65 -6.69 7.20 STUE 1408-4 90 -2.09 -3.48 0.72 4.12 STUE 1408-5 90 -1.09 -0.31 -10.47 10.53 STUE 1408-6 90 -1.59 -2.94 1.25 3.56 STUE 1409-0 90 -1.79 -2.66 -1.44 3.52 STUE 1409-1 90 -0.99 -2.19 0.87 2.56 STUE 1409-2 90 -2.49 -1.22 -0.92 2.92 STUE 1409-3 90 -1.29 -2.45 3.29 4.30 STUE 1409-4 90 -2.19 -1.28 4.60 5.25 STUE 1409-5 90 -1.89 -2.01 -7.09 7.60 STUE 1409-6 90 -2.39 -2.33 0.72 3.41 STUE 1410-0 90 -4.38 -0.16 -0.27 4.40 STUE 1410-1 90 -0.38 -0.39 -1.66 1.74 STUE 1410-2 90 -2.28 -1.02 1.16 2.75 STUE 1410-3 90 -0.68 0.25 -1.23 1.43 STUE 1410-4 90 -1.68 -1.08 0.18 2.00 STUE 1410-5 90 -1.78 0.10 -12.21 12.34 STUE 1410-6 90 -2.88 0.17 0.90 3.02 STUE 1411-0 90 -2.48 0.64 7.91 8.31 STUE 1411-1 90 -2.88 0.41 0.52 2.95 STUE 1411-2 90 -2.98 0.78 6.93 7.59 STUE 1411-3 90 -4.58 3.05 1.64 5.74 STUE 1411-4 90 -3.48 -0.58 2.85 4.53 STUE 1411-5 90 -1.78 1.10 -0.43 2.13 STUE 1411-6 90 -1.08 0.27 -4.62 4.75 STUE 1412-0 90 -1.77 1.64 -2.71 3.63 STUE 1412-1 90 0.23 5.31 -5.90 7.94 STUE 1412-2 90 -1.27 0.08 1.01 1.63 STUE 1412-3 90 -0.77 0.05 4.72 4.78 STUE 1412-4 90 3.03 5.13 -2.87 6.61 STUE 1412-5 90 1.23 2.10 1.24 2.73 STUE 1412-6 90 6.03 6.77 -7.85 11.99 STUE 1413-0 90 2.13 -0.56 -8.54 8.82 STUE 1413-1 90 1.63 -0.79 2.78 3.31 STUE 1413-2 90 1.73 -0.62 1.09 2.14 STUE 1413-3 90 3.23 0.15 -0.20 3.24 STUE 1413-4 90 6.83 0.13 3.71 7.78 STUE 1413-5 90 6.63 1.20 3.22 7.47 STUE 1413-6 90 5.33 -0.03 1.63 5.58 STUE 1414-0 90 6.94 3.44 16.44 18.17 STUE 1414-1 90 3.64 1.81 8.25 9.20 STUE 1414-2 90 2.14 4.38 3.06 5.76 STUE 1414-3 90 1.64 1.36 5.87 6.25 STUE 1414-4 90 6.14 2.93 -9.51 11.70 STUE 1414-5 90 4.34 3.60 -1.90 5.95 STUE 1414-6 90 2.24 1.57 6.71 7.24 STUE 1415-0 90 3.14 1.74 7.12 7.97 STUE 1415-1 90 3.54 3.51 3.73 6.23 STUE 1415-3 90 1.84 -0.14 -0.55 1.93 STUE 1415-4 90 1.74 1.53 4.86 5.39 STUE 1415-5 90 2.54 1.40 6.97 7.55 STUE 1415-6 90 1.95 2.57 6.78 7.51 STUE 1416-0 90 4.15 2.64 5.79 7.60 STUE 1416-1 90 3.85 1.81 0.01 4.25 STUE 1416-2 90 2.95 -1.61 -0.68 3.43 STUE 1416-3 90 2.55 -0.04 9.03 9.38 STUE 1416-4 90 2.95 1.03 7.84 8.44 STUE 1416-5 90 5.65 -3.70 -5.65 8.80 STUE 1416-6 90 0.35 -0.53 -4.54 4.58 STUE 1417-0 90 0.55 0.04 2.87 2.92 STUE 1417-1 90 -0.25 0.62 2.98 3.06 STUE 1417-2 90 -0.75 -1.91 5.09 5.49 STUE 1417-3 90 1.05 -0.64 1.80 2.19 STUE 1417-4 90 4.85 1.93 -6.28 8.17 STUE 1417-5 90 2.15 1.00 1.23 2.67 STUE 1417-6 90 -2.64 0.77 -10.16 10.53 STUE 1418-0 90 -1.14 -0.35 2.35 2.64 STUE 1418-1 90 -1.54 -0.18 -0.44 1.62 STUE 1418-2 90 -1.74 -0.01 -1.03 2.02 STUE 1418-3 90 0.46 -1.34 -3.92 4.17 STUE 1418-4 90 -1.64 -0.67 -1.31 2.20 STUE 1418-5 90 -0.74 -0.90 6.50 6.61 STUE 1418-6 90 -1.84 -2.43 -6.09 6.80 STUE 1419-0 90 -2.74 -2.35 3.53 5.05 STUE 1419-1 90 -3.64 -1.08 1.74 4.17 STUE 1419-2 90 -5.54 -1.11 -3.65 6.73 STUE 1419-3 90 -2.04 0.36 -6.54 6.86 STUE 1419-4 90 -3.64 -1.37 -2.43 4.58 STUE 1419-5 90 -3.94 -0.30 -3.72 5.42 STUE 1419-6 90 -4.13 -0.22 -2.11 4.65 STUE 1420-0 90 -1.33 1.45 -4.20 4.64 STUE 1420-1 90 -1.63 0.12 -4.49 4.78 STUE 1420-2 90 -1.33 -1.81 -0.38 2.28 STUE 1420-3 90 -3.43 -2.04 -1.26 4.19 STUE 1420-4 90 -3.23 -3.57 -0.85 4.89 STUE 1420-5 90 -3.03 -3.30 -1.34 4.67 STUE 1420-6 90 -2.23 -3.72 -5.83 7.27
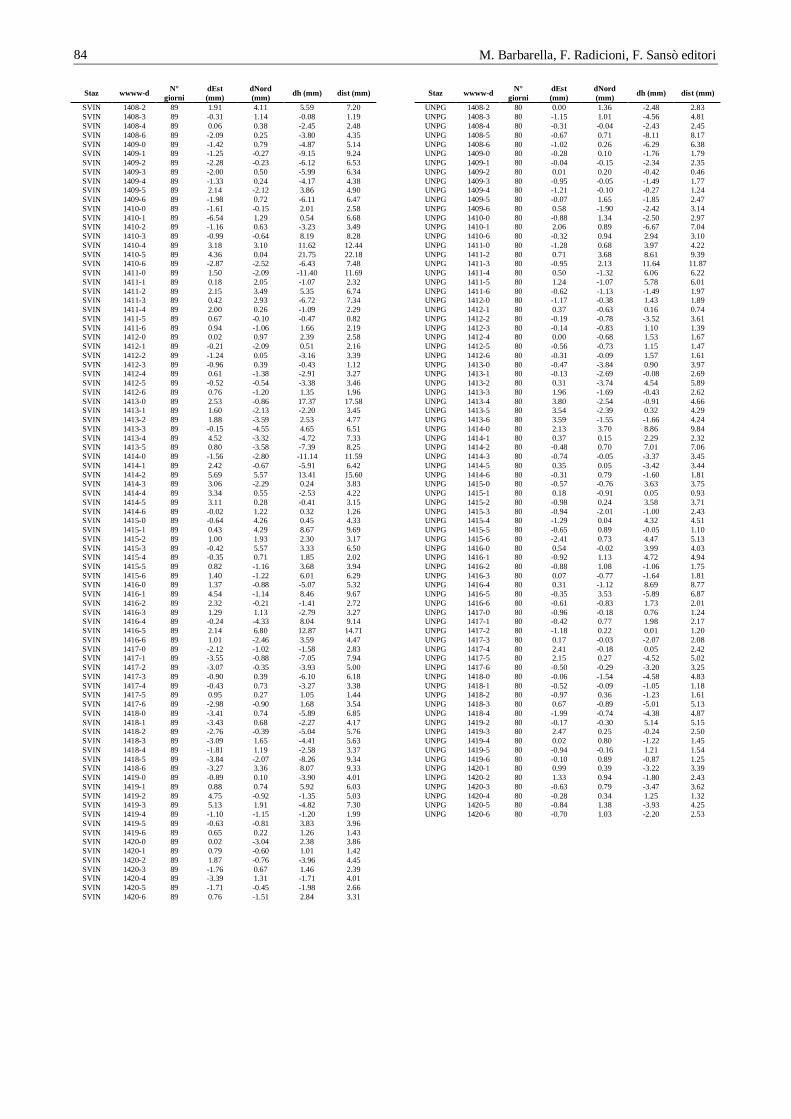
M. Barbarella, F. Radicioni, F. Sansò editori
84
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
SVIN 1408-2 89 1.91 4.11 5.59 7.20 SVIN 1408-3 89 -0.31 1.14 -0.08 1.19 SVIN 1408-4 89 0.06 0.38 -2.45 2.48 SVIN 1408-6 89 -2.09 0.25 -3.80 4.35 SVIN 1409-0 89 -1.42 0.79 -4.87 5.14 SVIN 1409-1 89 -1.25 -0.27 -9.15 9.24 SVIN 1409-2 89 -2.28 -0.23 -6.12 6.53 SVIN 1409-3 89 -2.00 0.50 -5.99 6.34 SVIN 1409-4 89 -1.33 0.24 -4.17 4.38 SVIN 1409-5 89 2.14 -2.12 3.86 4.90 SVIN 1409-6 89 -1.98 0.72 -6.11 6.47 SVIN 1410-0 89 -1.61 -0.15 2.01 2.58 SVIN 1410-1 89 -6.54 1.29 0.54 6.68 SVIN 1410-2 89 -1.16 0.63 -3.23 3.49 SVIN 1410-3 89 -0.99 -0.64 8.19 8.28 SVIN 1410-4 89 3.18 3.10 11.62 12.44 SVIN 1410-5 89 4.36 0.04 21.75 22.18 SVIN 1410-6 89 -2.87 -2.52 -6.43 7.48 SVIN 1411-0 89 1.50 -2.09 -11.40 11.69 SVIN 1411-1 89 0.18 2.05 -1.07 2.32 SVIN 1411-2 89 2.15 3.49 5.35 6.74 SVIN 1411-3 89 0.42 2.93 -6.72 7.34 SVIN 1411-4 89 2.00 0.26 -1.09 2.29 SVIN 1411-5 89 0.67 -0.10 -0.47 0.82 SVIN 1411-6 89 0.94 -1.06 1.66 2.19 SVIN 1412-0 89 0.02 0.97 2.39 2.58 SVIN 1412-1 89 -0.21 -2.09 0.51 2.16 SVIN 1412-2 89 -1.24 0.05 -3.16 3.39 SVIN 1412-3 89 -0.96 0.39 -0.43 1.12 SVIN 1412-4 89 0.61 -1.38 -2.91 3.27 SVIN 1412-5 89 -0.52 -0.54 -3.38 3.46 SVIN 1412-6 89 0.76 -1.20 1.35 1.96 SVIN 1413-0 89 2.53 -0.86 17.37 17.58 SVIN 1413-1 89 1.60 -2.13 -2.20 3.45 SVIN 1413-2 89 1.88 -3.59 2.53 4.77 SVIN 1413-3 89 -0.15 -4.55 4.65 6.51 SVIN 1413-4 89 4.52 -3.32 -4.72 7.33 SVIN 1413-5 89 0.80 -3.58 -7.39 8.25 SVIN 1414-0 89 -1.56 -2.80 -11.14 11.59 SVIN 1414-1 89 2.42 -0.67 -5.91 6.42 SVIN 1414-2 89 5.69 5.57 13.41 15.60 SVIN 1414-3 89 3.06 -2.29 0.24 3.83 SVIN 1414-4 89 3.34 0.55 -2.53 4.22 SVIN 1414-5 89 3.11 0.28 -0.41 3.15 SVIN 1414-6 89 -0.02 1.22 0.32 1.26 SVIN 1415-0 89 -0.64 4.26 0.45 4.33 SVIN 1415-1 89 0.43 4.29 8.67 9.69 SVIN 1415-2 89 1.00 1.93 2.30 3.17 SVIN 1415-3 89 -0.42 5.57 3.33 6.50 SVIN 1415-4 89 -0.35 0.71 1.85 2.02 SVIN 1415-5 89 0.82 -1.16 3.68 3.94 SVIN 1415-6 89 1.40 -1.22 6.01 6.29 SVIN 1416-0 89 1.37 -0.88 -5.07 5.32 SVIN 1416-1 89 4.54 -1.14 8.46 9.67 SVIN 1416-2 89 2.32 -0.21 -1.41 2.72 SVIN 1416-3 89 1.29 1.13 -2.79 3.27 SVIN 1416-4 89 -0.24 -4.33 8.04 9.14 SVIN 1416-5 89 2.14 6.80 12.87 14.71 SVIN 1416-6 89 1.01 -2.46 3.59 4.47 SVIN 1417-0 89 -2.12 -1.02 -1.58 2.83 SVIN 1417-1 89 -3.55 -0.88 -7.05 7.94 SVIN 1417-2 89 -3.07 -0.35 -3.93 5.00 SVIN 1417-3 89 -0.90 0.39 -6.10 6.18 SVIN 1417-4 89 -0.43 0.73 -3.27 3.38 SVIN 1417-5 89 0.95 0.27 1.05 1.44 SVIN 1417-6 89 -2.98 -0.90 1.68 3.54 SVIN 1418-0 89 -3.41 0.74 -5.89 6.85 SVIN 1418-1 89 -3.43 0.68 -2.27 4.17 SVIN 1418-2 89 -2.76 -0.39 -5.04 5.76 SVIN 1418-3 89 -3.09 1.65 -4.41 5.63 SVIN 1418-4 89 -1.81 1.19 -2.58 3.37 SVIN 1418-5 89 -3.84 -2.07 -8.26 9.34 SVIN 1418-6 89 -3.27 3.36 8.07 9.33 SVIN 1419-0 89 -0.89 0.10 -3.90 4.01 SVIN 1419-1 89 0.88 0.74 5.92 6.03 SVIN 1419-2 89 4.75 -0.92 -1.35 5.03 SVIN 1419-3 89 5.13 1.91 -4.82 7.30 SVIN 1419-4 89 -1.10 -1.15 -1.20 1.99 SVIN 1419-5 89 -0.63 -0.81 3.83 3.96 SVIN 1419-6 89 0.65 0.22 1.26 1.43 SVIN 1420-0 89 0.02 -3.04 2.38 3.86 SVIN 1420-1 89 0.79 -0.60 1.01 1.42 SVIN 1420-2 89 1.87 -0.76 -3.96 4.45 SVIN 1420-3 89 -1.76 0.67 1.46 2.39 SVIN 1420-4 89 -3.39 1.31 -1.71 4.01 SVIN 1420-5 89 -1.71 -0.45 -1.98 2.66 SVIN 1420-6 89 0.76 -1.51 2.84 3.31
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
UNPG 1408-2 80 0.00 1.36 -2.48 2.83 UNPG 1408-3 80 -1.15 1.01 -4.56 4.81 UNPG 1408-4 80 -0.31 -0.04 -2.43 2.45 UNPG 1408-5 80 -0.67 0.71 -8.11 8.17 UNPG 1408-6 80 -1.02 0.26 -6.29 6.38 UNPG 1409-0 80 -0.28 0.10 -1.76 1.79 UNPG 1409-1 80 -0.04 -0.15 -2.34 2.35 UNPG 1409-2 80 0.01 0.20 -0.42 0.46 UNPG 1409-3 80 -0.95 -0.05 -1.49 1.77 UNPG 1409-4 80 -1.21 -0.10 -0.27 1.24 UNPG 1409-5 80 -0.07 1.65 -1.85 2.47 UNPG 1409-6 80 0.58 -1.90 -2.42 3.14 UNPG 1410-0 80 -0.88 1.34 -2.50 2.97 UNPG 1410-1 80 2.06 0.89 -6.67 7.04 UNPG 1410-6 80 -0.32 0.94 2.94 3.10 UNPG 1411-0 80 -1.28 0.68 3.97 4.22 UNPG 1411-2 80 0.71 3.68 8.61 9.39 UNPG 1411-3 80 -0.95 2.13 11.64 11.87 UNPG 1411-4 80 0.50 -1.32 6.06 6.22 UNPG 1411-5 80 1.24 -1.07 5.78 6.01 UNPG 1411-6 80 -0.62 -1.13 -1.49 1.97 UNPG 1412-0 80 -1.17 -0.38 1.43 1.89 UNPG 1412-1 80 0.37 -0.63 0.16 0.74 UNPG 1412-2 80 -0.19 -0.78 -3.52 3.61 UNPG 1412-3 80 -0.14 -0.83 1.10 1.39 UNPG 1412-4 80 0.00 -0.68 1.53 1.67 UNPG 1412-5 80 -0.56 -0.73 1.15 1.47 UNPG 1412-6 80 -0.31 -0.09 1.57 1.61 UNPG 1413-0 80 -0.47 -3.84 0.90 3.97 UNPG 1413-1 80 -0.13 -2.69 -0.08 2.69 UNPG 1413-2 80 0.31 -3.74 4.54 5.89 UNPG 1413-3 80 1.96 -1.69 -0.43 2.62 UNPG 1413-4 80 3.80 -2.54 -0.91 4.66 UNPG 1413-5 80 3.54 -2.39 0.32 4.29 UNPG 1413-6 80 3.59 -1.55 -1.66 4.24 UNPG 1414-0 80 2.13 3.70 8.86 9.84 UNPG 1414-1 80 0.37 0.15 2.29 2.32 UNPG 1414-2 80 -0.48 0.70 7.01 7.06 UNPG 1414-3 80 -0.74 -0.05 -3.37 3.45 UNPG 1414-5 80 0.35 0.05 -3.42 3.44 UNPG 1414-6 80 -0.31 0.79 -1.60 1.81 UNPG 1415-0 80 -0.57 -0.76 3.63 3.75 UNPG 1415-1 80 0.18 -0.91 0.05 0.93 UNPG 1415-2 80 -0.98 0.24 3.58 3.71 UNPG 1415-3 80 -0.94 -2.01 -1.00 2.43 UNPG 1415-4 80 -1.29 0.04 4.32 4.51 UNPG 1415-5 80 -0.65 0.89 -0.05 1.10 UNPG 1415-6 80 -2.41 0.73 4.47 5.13 UNPG 1416-0 80 0.54 -0.02 3.99 4.03 UNPG 1416-1 80 -0.92 1.13 4.72 4.94 UNPG 1416-2 80 -0.88 1.08 -1.06 1.75 UNPG 1416-3 80 0.07 -0.77 -1.64 1.81 UNPG 1416-4 80 0.31 -1.12 8.69 8.77 UNPG 1416-5 80 -0.35 3.53 -5.89 6.87 UNPG 1416-6 80 -0.61 -0.83 1.73 2.01 UNPG 1417-0 80 -0.96 -0.18 0.76 1.24 UNPG 1417-1 80 -0.42 0.77 1.98 2.17 UNPG 1417-2 80 -1.18 0.22 0.01 1.20 UNPG 1417-3 80 0.17 -0.03 -2.07 2.08 UNPG 1417-4 80 2.41 -0.18 0.05 2.42 UNPG 1417-5 80 2.15 0.27 -4.52 5.02 UNPG 1417-6 80 -0.50 -0.29 -3.20 3.25 UNPG 1418-0 80 -0.06 -1.54 -4.58 4.83 UNPG 1418-1 80 -0.52 -0.09 -1.05 1.18 UNPG 1418-2 80 -0.97 0.36 -1.23 1.61 UNPG 1418-3 80 0.67 -0.89 -5.01 5.13 UNPG 1418-4 80 -1.99 -0.74 -4.38 4.87 UNPG 1419-2 80 -0.17 -0.30 5.14 5.15 UNPG 1419-3 80 2.47 0.25 -0.24 2.50 UNPG 1419-4 80 0.02 0.80 -1.22 1.45 UNPG 1419-5 80 -0.94 -0.16 1.21 1.54 UNPG 1419-6 80 -0.10 0.89 -0.87 1.25 UNPG 1420-1 80 0.99 0.39 -3.22 3.39 UNPG 1420-2 80 1.33 0.94 -1.80 2.43 UNPG 1420-3 80 -0.63 0.79 -3.47 3.62 UNPG 1420-4 80 -0.28 0.34 1.25 1.32 UNPG 1420-5 80 -0.84 1.38 -3.93 4.25 UNPG 1420-6 80 -0.70 1.03 -2.20 2.53
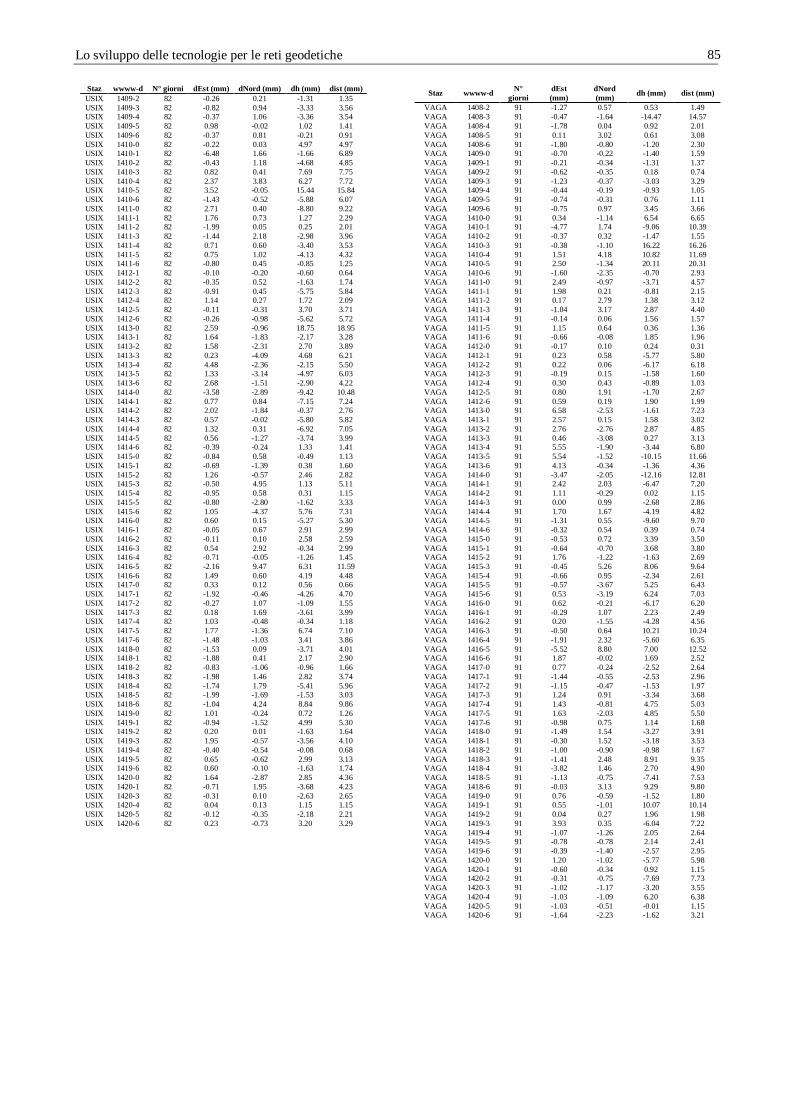
Lo sviluppo delle tecnologie per le reti geodetiche
85
Staz wwww-d N° giorni dEst (mm) dNord (mm) dh (mm) dist (mm) USIX 1409-2 82 -0.26 0.21 -1.31 1.35 USIX 1409-3 82 -0.82 0.94 -3.33 3.56 USIX 1409-4 82 -0.37 1.06 -3.36 3.54 USIX 1409-5 82 0.98 -0.02 1.02 1.41 USIX 1409-6 82 -0.37 0.81 -0.21 0.91 USIX 1410-0 82 -0.22 0.03 4.97 4.97 USIX 1410-1 82 -6.48 1.66 -1.66 6.89 USIX 1410-2 82 -0.43 1.18 -4.68 4.85 USIX 1410-3 82 0.82 0.41 7.69 7.75 USIX 1410-4 82 2.37 3.83 6.27 7.72 USIX 1410-5 82 3.52 -0.05 15.44 15.84 USIX 1410-6 82 -1.43 -0.52 -5.88 6.07 USIX 1411-0 82 2.71 0.40 -8.80 9.22 USIX 1411-1 82 1.76 0.73 1.27 2.29 USIX 1411-2 82 -1.99 0.05 0.25 2.01 USIX 1411-3 82 -1.44 2.18 -2.98 3.96 USIX 1411-4 82 0.71 0.60 -3.40 3.53 USIX 1411-5 82 0.75 1.02 -4.13 4.32 USIX 1411-6 82 -0.80 0.45 -0.85 1.25 USIX 1412-1 82 -0.10 -0.20 -0.60 0.64 USIX 1412-2 82 -0.35 0.52 -1.63 1.74 USIX 1412-3 82 -0.91 0.45 -5.75 5.84 USIX 1412-4 82 1.14 0.27 1.72 2.09 USIX 1412-5 82 -0.11 -0.31 3.70 3.71 USIX 1412-6 82 -0.26 -0.98 -5.62 5.72 USIX 1413-0 82 2.59 -0.96 18.75 18.95 USIX 1413-1 82 1.64 -1.83 -2.17 3.28 USIX 1413-2 82 1.58 -2.31 2.70 3.89 USIX 1413-3 82 0.23 -4.09 4.68 6.21 USIX 1413-4 82 4.48 -2.36 -2.15 5.50 USIX 1413-5 82 1.33 -3.14 -4.97 6.03 USIX 1413-6 82 2.68 -1.51 -2.90 4.22 USIX 1414-0 82 -3.58 -2.89 -9.42 10.48 USIX 1414-1 82 0.77 0.84 -7.15 7.24 USIX 1414-2 82 2.02 -1.84 -0.37 2.76 USIX 1414-3 82 0.57 -0.02 -5.80 5.82 USIX 1414-4 82 1.32 0.31 -6.92 7.05 USIX 1414-5 82 0.56 -1.27 -3.74 3.99 USIX 1414-6 82 -0.39 -0.24 1.33 1.41 USIX 1415-0 82 -0.84 0.58 -0.49 1.13 USIX 1415-1 82 -0.69 -1.39 0.38 1.60 USIX 1415-2 82 1.26 -0.57 2.46 2.82 USIX 1415-3 82 -0.50 4.95 1.13 5.11 USIX 1415-4 82 -0.95 0.58 0.31 1.15 USIX 1415-5 82 -0.80 -2.80 -1.62 3.33 USIX 1415-6 82 1.05 -4.37 5.76 7.31 USIX 1416-0 82 0.60 0.15 -5.27 5.30 USIX 1416-1 82 -0.05 0.67 2.91 2.99 USIX 1416-2 82 -0.11 0.10 2.58 2.59 USIX 1416-3 82 0.54 2.92 -0.34 2.99 USIX 1416-4 82 -0.71 -0.05 -1.26 1.45 USIX 1416-5 82 -2.16 9.47 6.31 11.59 USIX 1416-6 82 1.49 0.60 4.19 4.48 USIX 1417-0 82 0.33 0.12 0.56 0.66 USIX 1417-1 82 -1.92 -0.46 -4.26 4.70 USIX 1417-2 82 -0.27 1.07 -1.09 1.55 USIX 1417-3 82 0.18 1.69 -3.61 3.99 USIX 1417-4 82 1.03 -0.48 -0.34 1.18 USIX 1417-5 82 1.77 -1.36 6.74 7.10 USIX 1417-6 82 -1.48 -1.03 3.41 3.86 USIX 1418-0 82 -1.53 0.09 -3.71 4.01 USIX 1418-1 82 -1.88 0.41 2.17 2.90 USIX 1418-2 82 -0.83 -1.06 -0.96 1.66 USIX 1418-3 82 -1.98 1.46 2.82 3.74 USIX 1418-4 82 -1.74 1.79 -5.41 5.96 USIX 1418-5 82 -1.99 -1.69 -1.53 3.03 USIX 1418-6 82 -1.04 4.24 8.84 9.86 USIX 1419-0 82 1.01 -0.24 0.72 1.26 USIX 1419-1 82 -0.94 -1.52 4.99 5.30 USIX 1419-2 82 0.20 0.01 -1.63 1.64 USIX 1419-3 82 1.95 -0.57 -3.56 4.10 USIX 1419-4 82 -0.40 -0.54 -0.08 0.68 USIX 1419-5 82 0.65 -0.62 2.99 3.13 USIX 1419-6 82 0.60 -0.10 -1.63 1.74 USIX 1420-0 82 1.64 -2.87 2.85 4.36 USIX 1420-1 82 -0.71 1.95 -3.68 4.23 USIX 1420-3 82 -0.31 0.10 -2.63 2.65 USIX 1420-4 82 0.04 0.13 1.15 1.15 USIX 1420-5 82 -0.12 -0.35 -2.18 2.21 USIX 1420-6 82 0.23 -0.73 3.20 3.29
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
VAGA 1408-2 91 -1.27 0.57 0.53 1.49 VAGA 1408-3 91 -0.47 -1.64 -14.47 14.57 VAGA 1408-4 91 -1.78 0.04 0.92 2.01 VAGA 1408-5 91 0.11 3.02 0.61 3.08 VAGA 1408-6 91 -1.80 -0.80 -1.20 2.30 VAGA 1409-0 91 -0.70 -0.22 -1.40 1.59 VAGA 1409-1 91 -0.21 -0.34 -1.31 1.37 VAGA 1409-2 91 -0.62 -0.35 0.18 0.74 VAGA 1409-3 91 -1.23 -0.37 -3.03 3.29 VAGA 1409-4 91 -0.44 -0.19 -0.93 1.05 VAGA 1409-5 91 -0.74 -0.31 0.76 1.11 VAGA 1409-6 91 -0.75 0.97 3.45 3.66 VAGA 1410-0 91 0.34 -1.14 6.54 6.65 VAGA 1410-1 91 -4.77 1.74 -9.06 10.39 VAGA 1410-2 91 -0.37 0.32 -1.47 1.55 VAGA 1410-3 91 -0.38 -1.10 16.22 16.26 VAGA 1410-4 91 1.51 4.18 10.82 11.69 VAGA 1410-5 91 2.50 -1.34 20.11 20.31 VAGA 1410-6 91 -1.60 -2.35 -0.70 2.93 VAGA 1411-0 91 2.49 -0.97 -3.71 4.57 VAGA 1411-1 91 1.98 0.21 -0.81 2.15 VAGA 1411-2 91 0.17 2.79 1.38 3.12 VAGA 1411-3 91 -1.04 3.17 2.87 4.40 VAGA 1411-4 91 -0.14 0.06 1.56 1.57 VAGA 1411-5 91 1.15 0.64 0.36 1.36 VAGA 1411-6 91 -0.66 -0.08 1.85 1.96 VAGA 1412-0 91 -0.17 0.10 0.24 0.31 VAGA 1412-1 91 0.23 0.58 -5.77 5.80 VAGA 1412-2 91 0.22 0.06 -6.17 6.18 VAGA 1412-3 91 -0.19 0.15 -1.58 1.60 VAGA 1412-4 91 0.30 0.43 -0.89 1.03 VAGA 1412-5 91 0.80 1.91 -1.70 2.67 VAGA 1412-6 91 0.59 0.19 1.90 1.99 VAGA 1413-0 91 6.58 -2.53 -1.61 7.23 VAGA 1413-1 91 2.57 0.15 1.58 3.02 VAGA 1413-2 91 2.76 -2.76 2.87 4.85 VAGA 1413-3 91 0.46 -3.08 0.27 3.13 VAGA 1413-4 91 5.55 -1.90 -3.44 6.80 VAGA 1413-5 91 5.54 -1.52 -10.15 11.66 VAGA 1413-6 91 4.13 -0.34 -1.36 4.36 VAGA 1414-0 91 -3.47 -2.05 -12.16 12.81 VAGA 1414-1 91 2.42 2.03 -6.47 7.20 VAGA 1414-2 91 1.11 -0.29 0.02 1.15 VAGA 1414-3 91 0.00 0.99 -2.68 2.86 VAGA 1414-4 91 1.70 1.67 -4.19 4.82 VAGA 1414-5 91 -1.31 0.55 -9.60 9.70 VAGA 1414-6 91 -0.32 0.54 0.39 0.74 VAGA 1415-0 91 -0.53 0.72 3.39 3.50 VAGA 1415-1 91 -0.64 -0.70 3.68 3.80 VAGA 1415-2 91 1.76 -1.22 -1.63 2.69 VAGA 1415-3 91 -0.45 5.26 8.06 9.64 VAGA 1415-4 91 -0.66 0.95 -2.34 2.61 VAGA 1415-5 91 -0.57 -3.67 5.25 6.43 VAGA 1415-6 91 0.53 -3.19 6.24 7.03 VAGA 1416-0 91 0.62 -0.21 -6.17 6.20 VAGA 1416-1 91 -0.29 1.07 2.23 2.49 VAGA 1416-2 91 0.20 -1.55 -4.28 4.56 VAGA 1416-3 91 -0.50 0.64 10.21 10.24 VAGA 1416-4 91 -1.91 2.32 -5.60 6.35 VAGA 1416-5 91 -5.52 8.80 7.00 12.52 VAGA 1416-6 91 1.87 -0.02 1.69 2.52 VAGA 1417-0 91 0.77 -0.24 -2.52 2.64 VAGA 1417-1 91 -1.44 -0.55 -2.53 2.96 VAGA 1417-2 91 -1.15 -0.47 -1.53 1.97 VAGA 1417-3 91 1.24 0.91 -3.34 3.68 VAGA 1417-4 91 1.43 -0.81 4.75 5.03 VAGA 1417-5 91 1.63 -2.03 4.85 5.50 VAGA 1417-6 91 -0.98 0.75 1.14 1.68 VAGA 1418-0 91 -1.49 1.54 -3.27 3.91 VAGA 1418-1 91 -0.30 1.52 -3.18 3.53 VAGA 1418-2 91 -1.00 -0.90 -0.98 1.67 VAGA 1418-3 91 -1.41 2.48 8.91 9.35 VAGA 1418-4 91 -3.82 1.46 2.70 4.90 VAGA 1418-5 91 -1.13 -0.75 -7.41 7.53 VAGA 1418-6 91 -0.03 3.13 9.29 9.80 VAGA 1419-0 91 0.76 -0.59 -1.52 1.80 VAGA 1419-1 91 0.55 -1.01 10.07 10.14 VAGA 1419-2 91 0.04 0.27 1.96 1.98 VAGA 1419-3 91 3.93 0.35 -6.04 7.22 VAGA 1419-4 91 -1.07 -1.26 2.05 2.64 VAGA 1419-5 91 -0.78 -0.78 2.14 2.41 VAGA 1419-6 91 -0.39 -1.40 -2.57 2.95 VAGA 1420-0 91 1.20 -1.02 -5.77 5.98 VAGA 1420-1 91 -0.60 -0.34 0.92 1.15 VAGA 1420-2 91 -0.31 -0.75 -7.69 7.73 VAGA 1420-3 91 -1.02 -1.17 -3.20 3.55 VAGA 1420-4 91 -1.03 -1.09 6.20 6.38 VAGA 1420-5 91 -1.03 -0.51 -0.01 1.15 VAGA 1420-6 91 -1.64 -2.23 -1.62 3.21
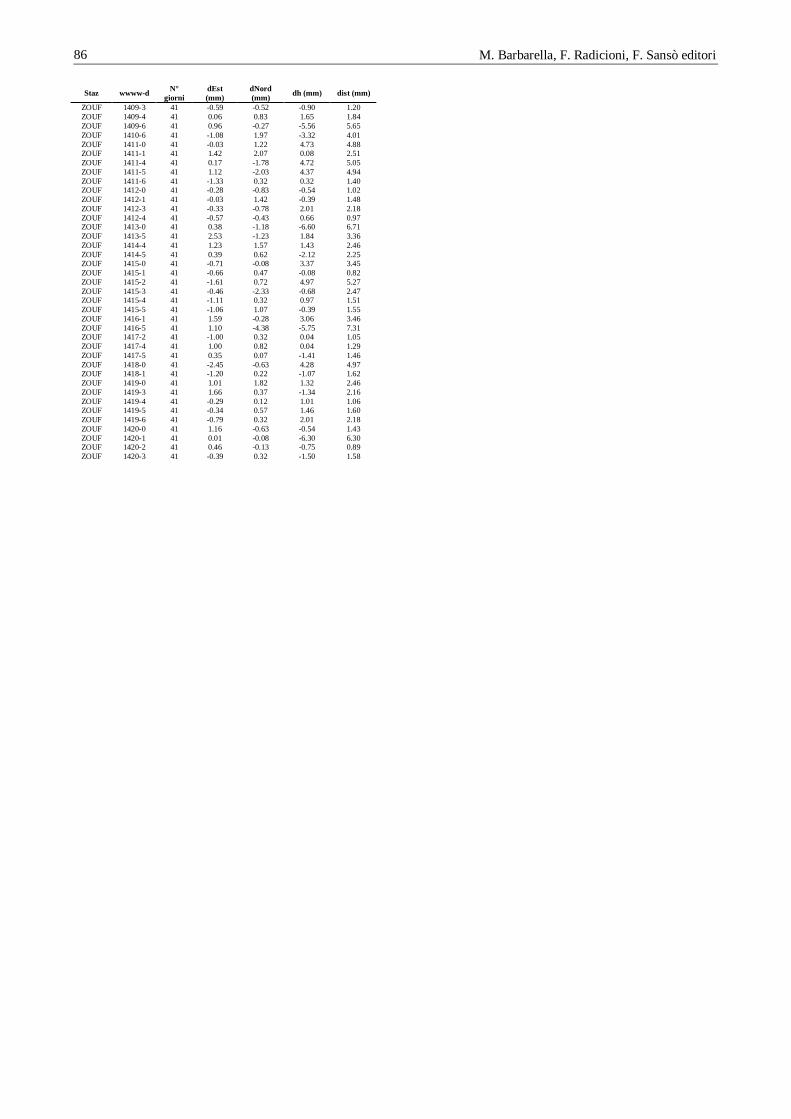
M. Barbarella, F. Radicioni, F. Sansò editori
86
Staz wwww-d N° giorni
dEst (mm)
dNord (mm) dh (mm) dist (mm)
ZOUF 1409-3 41 -0.59 -0.52 -0.90 1.20 ZOUF 1409-4 41 0.06 0.83 1.65 1.84 ZOUF 1409-6 41 0.96 -0.27 -5.56 5.65 ZOUF 1410-6 41 -1.08 1.97 -3.32 4.01 ZOUF 1411-0 41 -0.03 1.22 4.73 4.88 ZOUF 1411-1 41 1.42 2.07 0.08 2.51 ZOUF 1411-4 41 0.17 -1.78 4.72 5.05 ZOUF 1411-5 41 1.12 -2.03 4.37 4.94 ZOUF 1411-6 41 -1.33 0.32 0.32 1.40 ZOUF 1412-0 41 -0.28 -0.83 -0.54 1.02 ZOUF 1412-1 41 -0.03 1.42 -0.39 1.48 ZOUF 1412-3 41 -0.33 -0.78 2.01 2.18 ZOUF 1412-4 41 -0.57 -0.43 0.66 0.97 ZOUF 1413-0 41 0.38 -1.18 -6.60 6.71 ZOUF 1413-5 41 2.53 -1.23 1.84 3.36 ZOUF 1414-4 41 1.23 1.57 1.43 2.46 ZOUF 1414-5 41 0.39 0.62 -2.12 2.25 ZOUF 1415-0 41 -0.71 -0.08 3.37 3.45 ZOUF 1415-1 41 -0.66 0.47 -0.08 0.82 ZOUF 1415-2 41 -1.61 0.72 4.97 5.27 ZOUF 1415-3 41 -0.46 -2.33 -0.68 2.47 ZOUF 1415-4 41 -1.11 0.32 0.97 1.51 ZOUF 1415-5 41 -1.06 1.07 -0.39 1.55 ZOUF 1416-1 41 1.59 -0.28 3.06 3.46 ZOUF 1416-5 41 1.10 -4.38 -5.75 7.31 ZOUF 1417-2 41 -1.00 0.32 0.04 1.05 ZOUF 1417-4 41 1.00 0.82 0.04 1.29 ZOUF 1417-5 41 0.35 0.07 -1.41 1.46 ZOUF 1418-0 41 -2.45 -0.63 4.28 4.97 ZOUF 1418-1 41 -1.20 0.22 -1.07 1.62 ZOUF 1419-0 41 1.01 1.82 1.32 2.46 ZOUF 1419-3 41 1.66 0.37 -1.34 2.16 ZOUF 1419-4 41 -0.29 0.12 1.01 1.06 ZOUF 1419-5 41 -0.34 0.57 1.46 1.60 ZOUF 1419-6 41 -0.79 0.32 2.01 2.18 ZOUF 1420-0 41 1.16 -0.63 -0.54 1.43 ZOUF 1420-1 41 0.01 -0.08 -6.30 6.30 ZOUF 1420-2 41 0.46 -0.13 -0.75 0.89 ZOUF 1420-3 41 -0.39 0.32 -1.50 1.58
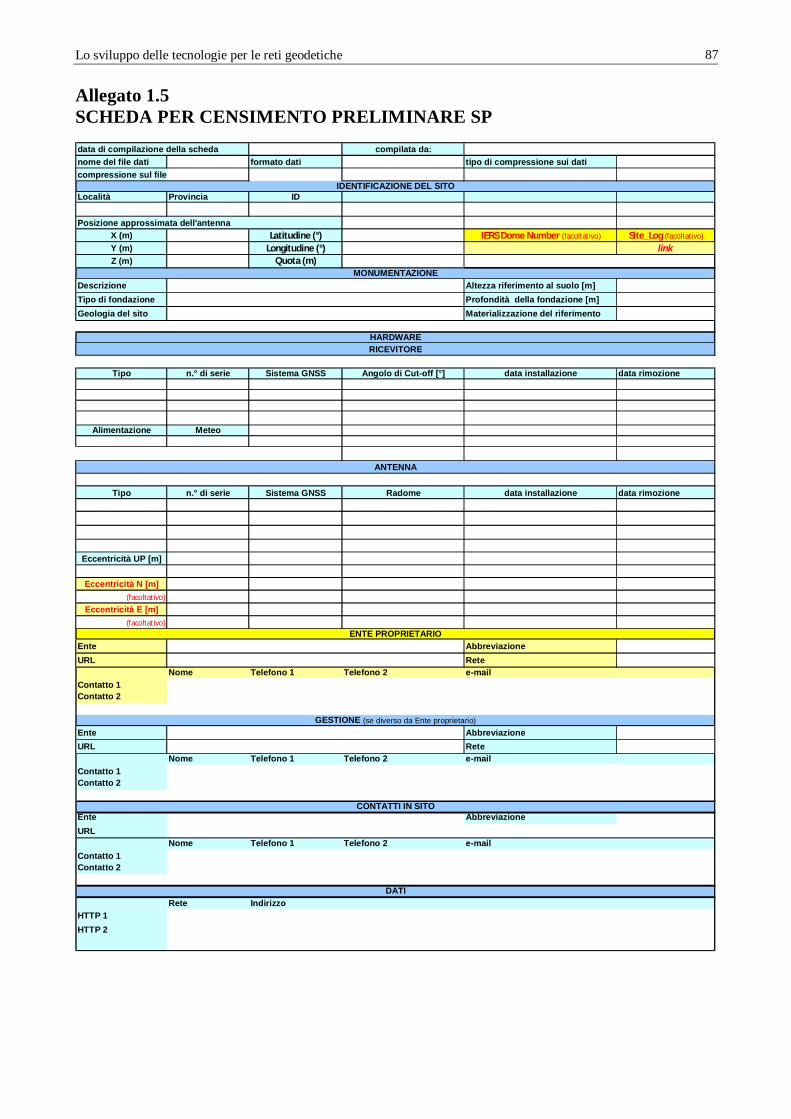
Lo sviluppo delle tecnologie per le reti geodetiche
87
Allegato 1.5 SCHEDA PER CENSIMENTO PRELIMINARE SP
compilata da:nome del file dati formato dati tipo di compressione sui daticompressione sul file
Località Provincia ID
X (m) Latitudine (°) IERS Dome Number (facoltativo) Site_Log (facoltativo)
Y (m) Longitudine (°) linkZ (m) Quota (m)
Descrizione Altezza riferimento al suolo [m]Tipo di fondazione Profondità della fondazione [m]Geologia del sito Materializzazione del riferimento
Tipo n.° di serie Sistema GNSS Angolo di Cut-off [°] data installazione data rimozione
Alimentazione Meteo
Tipo n.° di serie Sistema GNSS Radome data installazione data rimozione
Eccentricità UP [m]
Eccentricità N [m](facoltativo)
Eccentricità E [m](facoltativo)
Ente AbbreviazioneURL Rete
Nome Telefono 1 Telefono 2 e-mailContatto 1Contatto 2
Ente AbbreviazioneURL Rete
Nome Telefono 1 Telefono 2 e-mailContatto 1Contatto 2
Ente AbbreviazioneURL
Nome Telefono 1 Telefono 2 e-mailContatto 1Contatto 2
ReteHTTP 1HTTP 2
ENTE PROPRIETARIO
data di compilazione della scheda
Posizione approssimata dell'antenna
IDENTIFICAZIONE DEL SITO
MONUMENTAZIONE
IndirizzoDATI
CONTATTI IN SITO
GESTIONE (se diverso da Ente proprietario)
HARDWARERICEVITORE
ANTENNA
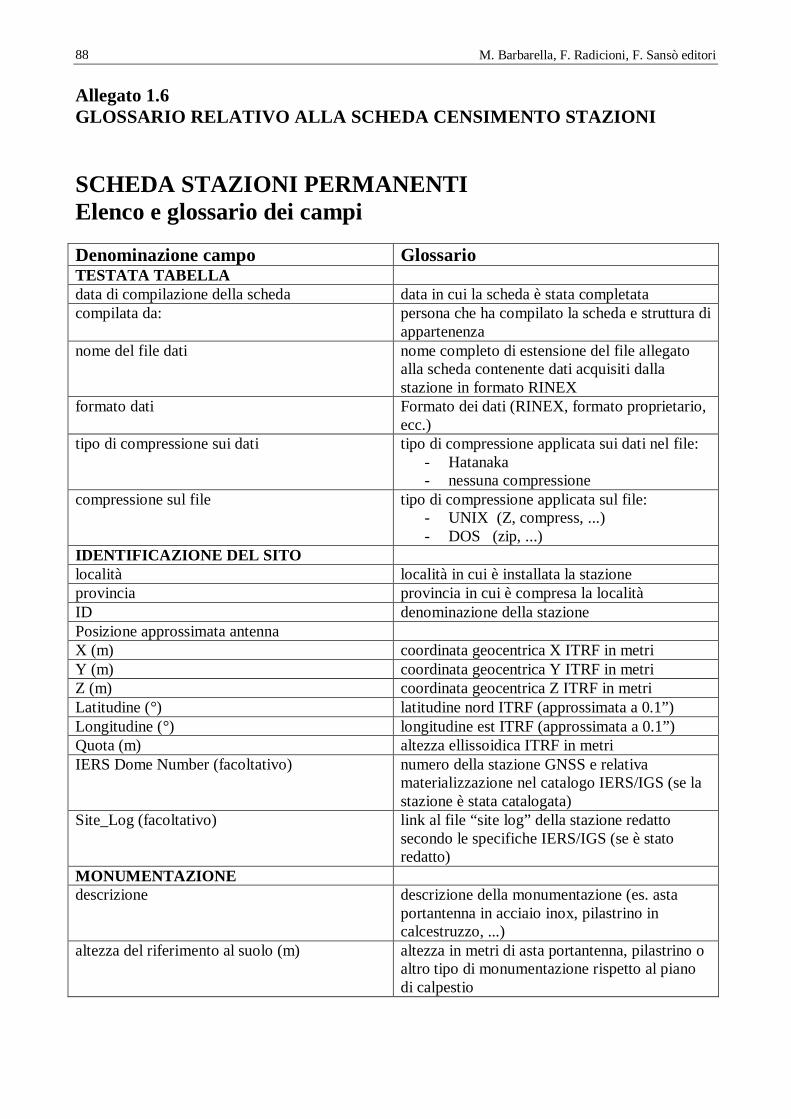
M. Barbarella, F. Radicioni, F. Sansò editori
88
Allegato 1.6 GLOSSARIO RELATIVO ALLA SCHEDA CENSIMENTO STAZIONI
SCHEDA STAZIONI PERMANENTI Elenco e glossario dei campi Denominazione campo Glossario TESTATA TABELLA data di compilazione della scheda data in cui la scheda è stata completata compilata da: persona che ha compilato la scheda e struttura di
appartenenza nome del file dati nome completo di estensione del file allegato
alla scheda contenente dati acquisiti dalla stazione in formato RINEX
formato dati Formato dei dati (RINEX, formato proprietario, ecc.)
tipo di compressione sui dati tipo di compressione applicata sui dati nel file: - Hatanaka - nessuna compressione
compressione sul file tipo di compressione applicata sul file: - UNIX (Z, compress, ...) - DOS (zip, ...)
IDENTIFICAZIONE DEL SITO località località in cui è installata la stazione provincia provincia in cui è compresa la località ID denominazione della stazione Posizione approssimata antenna X (m) coordinata geocentrica X ITRF in metri Y (m) coordinata geocentrica Y ITRF in metri Z (m) coordinata geocentrica Z ITRF in metri Latitudine (°) latitudine nord ITRF (approssimata a 0.1”) Longitudine (°) longitudine est ITRF (approssimata a 0.1”) Quota (m) altezza ellissoidica ITRF in metri IERS Dome Number (facoltativo) numero della stazione GNSS e relativa
materializzazione nel catalogo IERS/IGS (se la stazione è stata catalogata)
Site_Log (facoltativo) link al file “site log” della stazione redatto secondo le specifiche IERS/IGS (se è stato redatto)
MONUMENTAZIONE descrizione descrizione della monumentazione (es. asta
portantenna in acciaio inox, pilastrino in calcestruzzo, ...)
altezza del riferimento al suolo (m) altezza in metri di asta portantenna, pilastrino o altro tipo di monumentazione rispetto al piano di calpestio
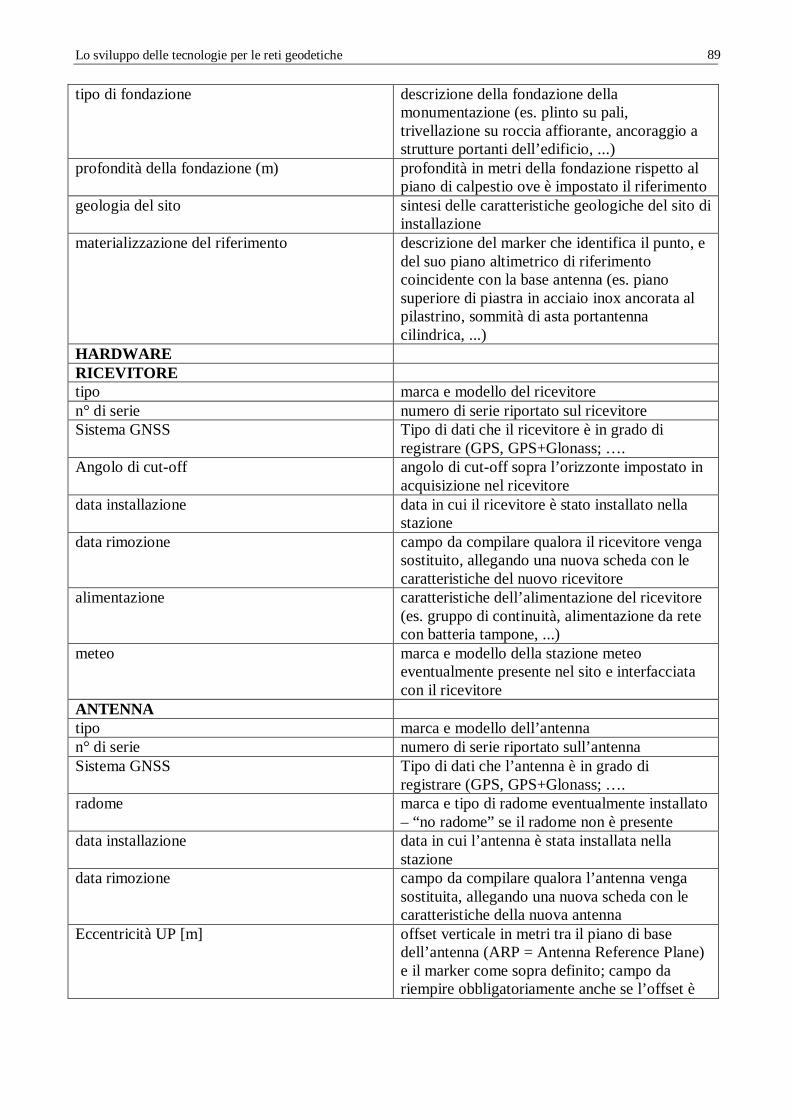
Lo sviluppo delle tecnologie per le reti geodetiche
89
tipo di fondazione descrizione della fondazione della monumentazione (es. plinto su pali, trivellazione su roccia affiorante, ancoraggio a strutture portanti dell’edificio, ...)
profondità della fondazione (m) profondità in metri della fondazione rispetto al piano di calpestio ove è impostato il riferimento
geologia del sito sintesi delle caratteristiche geologiche del sito di installazione
materializzazione del riferimento descrizione del marker che identifica il punto, e del suo piano altimetrico di riferimento coincidente con la base antenna (es. piano superiore di piastra in acciaio inox ancorata al pilastrino, sommità di asta portantenna cilindrica, ...)
HARDWARE RICEVITORE tipo marca e modello del ricevitore n° di serie numero di serie riportato sul ricevitore Sistema GNSS Tipo di dati che il ricevitore è in grado di
registrare (GPS, GPS+Glonass; …. Angolo di cut-off angolo di cut-off sopra l’orizzonte impostato in
acquisizione nel ricevitore data installazione data in cui il ricevitore è stato installato nella
stazione data rimozione campo da compilare qualora il ricevitore venga
sostituito, allegando una nuova scheda con le caratteristiche del nuovo ricevitore
alimentazione caratteristiche dell’alimentazione del ricevitore (es. gruppo di continuità, alimentazione da rete con batteria tampone, ...)
meteo marca e modello della stazione meteo eventualmente presente nel sito e interfacciata con il ricevitore
ANTENNA tipo marca e modello dell’antenna n° di serie numero di serie riportato sull’antenna Sistema GNSS Tipo di dati che l’antenna è in grado di
registrare (GPS, GPS+Glonass; …. radome marca e tipo di radome eventualmente installato
– “no radome” se il radome non è presente data installazione data in cui l’antenna è stata installata nella
stazione data rimozione campo da compilare qualora l’antenna venga
sostituita, allegando una nuova scheda con le caratteristiche della nuova antenna
Eccentricità UP [m] offset verticale in metri tra il piano di base dell’antenna (ARP = Antenna Reference Plane) e il marker come sopra definito; campo da riempire obbligatoriamente anche se l’offset è
M. Barbarella, F. Radicioni, F. Sansò editori
90
zero Eccentricità N [m] (facoltativo) eventuale offset orizzontale tra l’asse
dell’antenna e quello del marker, componente nord in metri
Eccentricità E [m] (facoltativo) eventuale offset orizzontale tra l’asse dell’antenna e quello del marker, componente est in metri
ENTE PROPRIETARIO ente ente proprietario dell’hardware della stazione abbreviazione eventuale sigla dell’ente di cui sopra URL link al sito web dell’ente di cui sopra rete rete GNSS di cui la stazione fa parte contatto 1, contatto 2 dati di reperibilità del personale dell’ente
proprietario della stazione GESTIONE (se diverso da ente proprietario)
ente ente che gestisce la stazione (se diverso dall’ente proprietario di cui sopra)
abbreviazione eventuale sigla dell’ente gestore URL link al sito web dell’ente gestore rete rete GNSS di cui la stazione fa parte contatto 1, contatto 2 dati di reperibilità del personale dell’ente
gestore CONTATTI IN SITO ente ente proprietario dell’immobile dove è installata
la stazione abbreviazione eventuale sigla dell’ente proprietario
dell’immobile URL link al sito web dell’ente proprietario
dell’immobile contatto 1, contatto 2 dati di reperibilità del personale dell’ente
proprietario dell’immobile che è in grado di accedere ai locali in cui la strumentazione è installata per controllare lo stato di funzionamento della stazione
DATI HTTP 1 sito primario di scaricamento dati in protocollo
http rete rete a cui la stazione è connessa (internet,
intranet, ...) indirizzo link al sito da cui si scaricano i dati della
stazione HTTP 2 altro sito di scaricamento dati in protocollo http
(se presente) rete rete a cui la stazione è connessa (internet,
intranet, ...) indirizzo link al sito da cui si scaricano i dati della
stazione
Lo sviluppo delle tecnologie per le reti geodetiche
91
DETTAGLI HTTP percorso percorso della directory di archiviazione dei dati formato dati formato dei dati (RINEX, binario, ...) compressione compressione dei dati e dei files data rate (s) intervallo di campionamento dei dati nei files
distribuiti (eventualmente più intervalli) FTP 1 sito primario di scaricamento dati in protocollo
ftp rete rete a cui la stazione è connessa (internet,
intranet, ...) indirizzo indirizzo ftp del sito di distribuzione dati porta numero porta ftp di connessione utente ID utente per la connessione ftp password password per la connessione ftp DETTAGLI FTP percorso percorso della directory di archiviazione dei dati formato dati formato dei dati (RINEX, binario, ...) compressione compressione dei dati e dei files data rate (s) intervallo di campionamento dei dati nei files
distribuiti (eventualmente più intervalli) Ciascun Gestore può allegare informazioni aggiuntive di tipo facoltativo quali: immagini della Stazione Permanente, Monografia di accesso, Planimetria, Grafico dislivelli verticali dell’antenna (PP, ARP, …..) ecc.

M. Barbarella, F. Radicioni, F. Sansò editori
92
Lo sviluppo delle tecnologie per le reti geodetiche
93
CAPITOLO 2
Applicazioni catastali delle reti geodetiche GNSS
Responsabile: Mattia Crespi(1)
Alberto Cina (2), Lucia Luzietti (1), Augusto Mazzoni (1), Livio Pinto(3), Aurelio Stoppini (4)
(1) DITS – Sapienza Università di Roma, via Eudossiana 18 – 00184 Roma (2) DITAG – Politecnico di Torino, corso Duca degli Abruzzi 24 – 10129 Torino (3) DIIAR – Politecnico di Milano, piazza Leonardo da Vinci 32 – 20133 Milano
(4) DICA – Università degli Studi di Perugia, via Duranti 93 – 06125 Perugia 2.1. INTRODUZIONE La proposta, che ha come punto di partenza la specifica IntesaGIS sul Raffittimento primario GPS a 7 km dei vertici geodetici IGM95, intende analizzare le attuali possibilità di rideterminazione dei Punti Fiduciali Catastali (PF) in un sistema di riferimento unico a livello nazionale (in tal senso si pone come revisione/estensione della specifica IntesaGIS) e le principali ricadute di tale rideterminazione dal punto di vista dell’integrazione tra il DB cartografico catastale e i DBT regionali, sia esistenti sia in corso/progetto di realizzazione. Tale proposta si articola complessivamente in quattro punti (definizione di una metodologia per la rideterminazione delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89; definizione di una metodologia per la trasformazione del DB cartografico catastale nel sistema cartografico UTM-WGS84-ETRS89 per la sua integrazione con i DBT locali; definizione di una metodologia per la (ri)determinazione delle coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89; studio di fattibilità di un ulteriore raffittimento della rete GPS ai fini della rideterminazione ex-novo delle coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89) che riguardano tematiche accomunate dall’esigenza di rendere fruibili in un unico sistema di riferimento, e quindi più facilmente condivisibili, informazioni territoriali già in larghissima parte disponibili quali quelle catastali. In questo rapporto si esaminano approfonditamente i primi due punti, fornendo (come Allegati dei quali si indicano i rispettivi Autori) anche alcuni esempi di applicazioni relativamente al secondo punto, che, in assenza di un nuovo DB cartografico catastale vivamente auspicato, si ritiene di particolare importanza nell'ambito della pianificazione territoriale e urbanistica e, più in generale, della gestione del territorio: 1. definizione di una metodologia per la rideterminazione delle coordinate 2D dei PF nel sistema
cartografico (coordinate Est, Nord) UTM-WGS84-ETRS89 sulla base delle informazioni attualmente disponibili presso l’Agenzia del Territorio e della eventuale disponibilità di reti di stazioni permanenti GNSS
2. definizione di una metodologia per la trasformazione del DB cartografico catastale nel sistema cartografico (coordinate Est, Nord) UTM-WGS84-ETRS89 per la sua integrazione con i DBT locali (regionali, provinciali, comunali), sia esistenti sia in corso/progetto di realizzazione
Si delineano, inoltre, alcune idee generali relative agli altri due punti: 3. definizione di una metodologia per la (ri)determinazione delle coordinate 3D dei PF nel sistema
M. Barbarella, F. Radicioni, F. Sansò editori 94
di riferimento WGS84-ETRS89 4. studio di fattibilità di un ulteriore raffittimento della rete GPS ai fini della rideterminazione ex-
novo delle coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89 E’ indispensabile sottolineare subito che le prime due tematiche, 1. e 2., devono essere affrontate congiuntamente, in quanto intimamente connesse. Infatti, come maggiormente dettagliato nel seguito, se – in primo luogo – è opportuno utilizzare solo punti presenti sulle mappe di impianto, rappresentanti particolari attualmente ancora presenti sul territorio, per stimare i parametri delle trasformazioni “globali” (valide per un’intera origine catastale o per un solo foglio, nel caso di fogli non inquadrati in un sistema di riferimento) necessarie per portare il DB cartografico catastale nel sistema cartografico UTM-WGS84-ETRS89, la disponibilità delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89 diventa essenziale – in secondo luogo – per stimare trasformazioni “locali” delle geometrie catastali, in modo da renderle coerenti con quelle di altri DB (ad esempio quelli comunali o regionali) assunti come riferimento dal punto di vista geometrico. Analogamente, anche le rimanenti due tematiche, 3. e 4., devono essere considerate congiuntamente, in quanto entrambe strettamente connesse sia all'attuale disponibilità di stazioni permanenti GNSS sul territorio nazionale sia al rapido sviluppo delle reti permanenti GNSS destinate ai servizi di posizionamento (in tempo reale e/o in modalità post-processing) a livello regionale e sovra-regionale, alle quali si fa cenno nel precedente capitolo 1. E’ bene sottolineare, infine, che tutte le tematiche prendono in considerazione il sistema di riferimento WGS84-ETRS89 e il suo corrispondente cartografico UTM-WGS84-ETRS89. Attualmente, in ambito nazionale, tale sistema è ufficialmente materializzato dalla rete IGM95 relativa alla realizzazione ETRF89. Pertanto, allo stato attuale, le rideterminazioni e le trasformazioni citate nelle quattro tematiche sopra descritte devono essere riferite alla realizzazione ufficiale ETRF89-IGM95, anche se, preferibilmente, dovrebbero esserlo alla più recente realizzazione ETRF2000, che prevedibilmente sarà adottata a partire da gennaio 2009 (documento, ancora riportato come “in fase di aggiornamento”, pubblicato sul sito IGM alla pagina web inerente la Rete Dinamica Nazionale http://87.30.244.175/rdn.php). Dal punto di vista metodologico il passaggio alla nuova realizzazione non comporta comunque modifiche alle procedure di seguito presentate. 2.2. DEFINIZIONE DI UNA METODOLOGIA PER LA RIDETERMINAZIONE DELLE COORDINATE 2D DEI PF NEL SISTEMA CARTOGRAFICO UTM-WGS84-ETRS89 2.2.1. Premessa Attualmente i PF, istituiti sulla base di quanto previsto dalla circolare n. 2/1987 dell’Agenzia del Territorio, sono circa 1.7 milioni e sono presenti con un’elevata densità (distanza relativa media 250÷300 m) in tutte le zone del territorio nazionale interessate da interventi territoriali. Si tratta di punti che, progettati ed istituiti per l’aggiornamento della cartografia catastale, devono essere rappresentativi di particolari di manufatti: presenti sul territorio, per garantire la ricostruibilità dell’oggetto del rilievo rappresentati nella mappa catastale, per consentire l’introduzione dell’oggetto del rilievo nella
mappa catastale secondo una procedura di “miglior adattamento” Tali punti, che devono risultare facilmente accessibili e stabilmente materializzati in modo che sia definita la loro posizione 2D, in generale, non sono stazionabili con sensori tradizionali (stazioni totali) o satellitari, ma sono ovviamente collimabili; per ognuno di essi, in generale è stata prodotta una scheda monografica, di cui l’Agenzia del Territorio conserva la storia delle variazioni,
Lo sviluppo delle tecnologie per le reti geodetiche
95
contenente le coordinate cartografiche (informazione 2D) “lette” direttamente dalle mappe catastali e non determinate attraverso operazioni topografiche di collegamento alla rete geodetica catastale. Per i PF si dispone inoltre delle distanze 2D (cosiddette “mutue distanze”) calcolate a partire dalle misure assunte nelle operazioni di rilievo necessarie per la redazione di atti di aggiornamento catastali. Si deve sottolineare che un siffatto patrimonio di informazioni, conservate e gestite dall’Agenzia, è stato di fatto prodotto a partire dal 1989 da diverse migliaia di tecnici abilitati alla redazione degli atti di aggiornamento suddetti, come attività propedeutica agli stessi. Oggi le distanze relative dei PF, note e conservate per tutti i PF utilizzati nei rilievi catastali, sono circa 17 milioni; esse sono state calcolate, con la procedura PREGEO (stima a minimi quadrati), sul piano della rappresentazione cartografica della mappa catastale da aggiornare (Cassini-Soldner, Gauss-Boaga, Sanson-Flamsteed). Per quanto concerne i PF, l’Agenzia del Territorio rende disponibili gratuitamente dal 2003, attraverso il proprio sito Internet (http://www.agenziaterritorio.gov.it/index.htm), i seguenti documenti: elenco delle monografie testuali dei PF – si tratta di un file ASCII (.taf) contenente i punti di una
stessa provincia; viene aggiornato e pubblicato mensilmente schede monografiche dei PF – si tratta di un file immagine (.pdf) contenente la monografia di un
PF; viene pubblicato il giorno successivo alla sua immissione nella banca-dati catastale (Fig. 2.1) elenco delle distanze misurate dei PF – si tratta di un file ASCII (.dis) contenente le distanze
misurate relative ai punti di una stessa provincia; viene aggiornato e pubblicato bimestralmente Si intuisce che se i PF fossero noti in un unico sistema cartografico UTM-WGS84-ETRS89 potrebbero rappresentare un rilevante patrimonio di dati disponibili per svariate applicazioni geomatiche, oltre che catastali, in quanto realizzerebbero una materializzazione diffusa del sistema cartografico stesso. Una di tali applicazioni, ampiamente analizzata nel paragrafo successivo, riguarda la trasformazione delle geometrie dei DB catastali al fine di renderle coerenti con quelle di altri DB (ad esempio quelli comunali o regionali) assunti come riferimento dal punto di vista geometrico. E' importante in questo contesto richiamare l’attenzione su uno degli obiettivi che l’Agenzia del Territorio si prefiggeva di raggiungere con i PF, ovverosia “ottenere, con un limitato numero di aggiornamenti (rilievi), elementi metrici sufficienti per una corretta ricomposizione della maglia dei PF e dei rilievi ad essi connessi” (circolare n. 2/1988). L’utilizzabilità dei dati, prevalentemente disponibili per i PF ricadenti nelle aree soggette a variazioni territoriali, risulta naturalmente subordinata alla disponibilità di procedure di gestione ed elaborazione dati, oltre a tecniche di rilievo veloci ed efficienti per la determinazione delle coordinate cartografiche UTM-WGS84-ETRS89 dei “punti fiduciali di inquadramento” (PFI), ovverosia di quei pochi PF ritenuti idonei, dal punto di vista geodetico (posizione nella rete) e logistico (facilità di rilievo), al collegamento della maglia dei PF al sistema cartografico nazionale. E’ importante ribadire che la presenza dei PF rilevati nelle sole aree soggette a variazioni territoriali non configura una rete connessa sull’intero territorio comunale (Fig. 2.2); rete che risulta addirittura assente nelle zone montane non urbanizzate. Questa condizione non pregiudica il lavoro proposto: sarà sempre possibile collegare alla rete inquadrata nel sistema UTM-WGS84-ETRF89 i PF rilevati in futuro, connettendoli ad essa, eventualmente, prevedendo il rilievo di nuovi PFI.
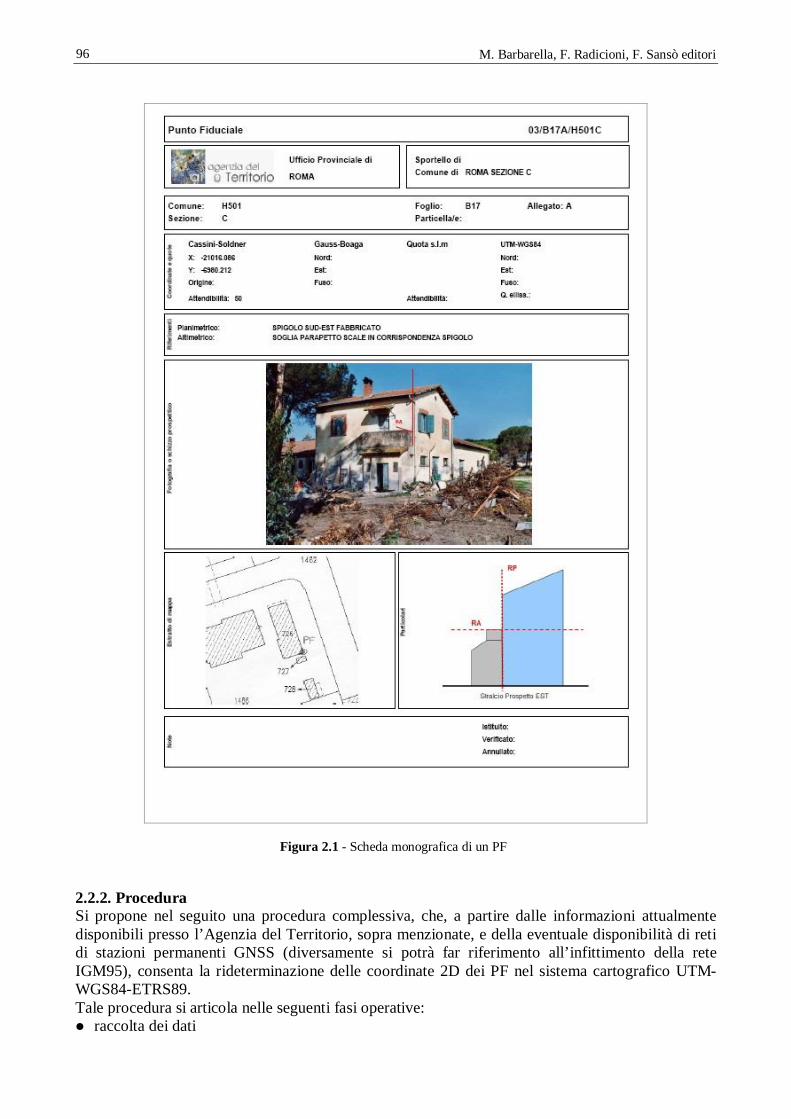
M. Barbarella, F. Radicioni, F. Sansò editori 96
Figura 2.1 - Scheda monografica di un PF
2.2.2. Procedura Si propone nel seguito una procedura complessiva, che, a partire dalle informazioni attualmente disponibili presso l’Agenzia del Territorio, sopra menzionate, e della eventuale disponibilità di reti di stazioni permanenti GNSS (diversamente si potrà far riferimento all’infittimento della rete IGM95), consenta la rideterminazione delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89. Tale procedura si articola nelle seguenti fasi operative: raccolta dei dati
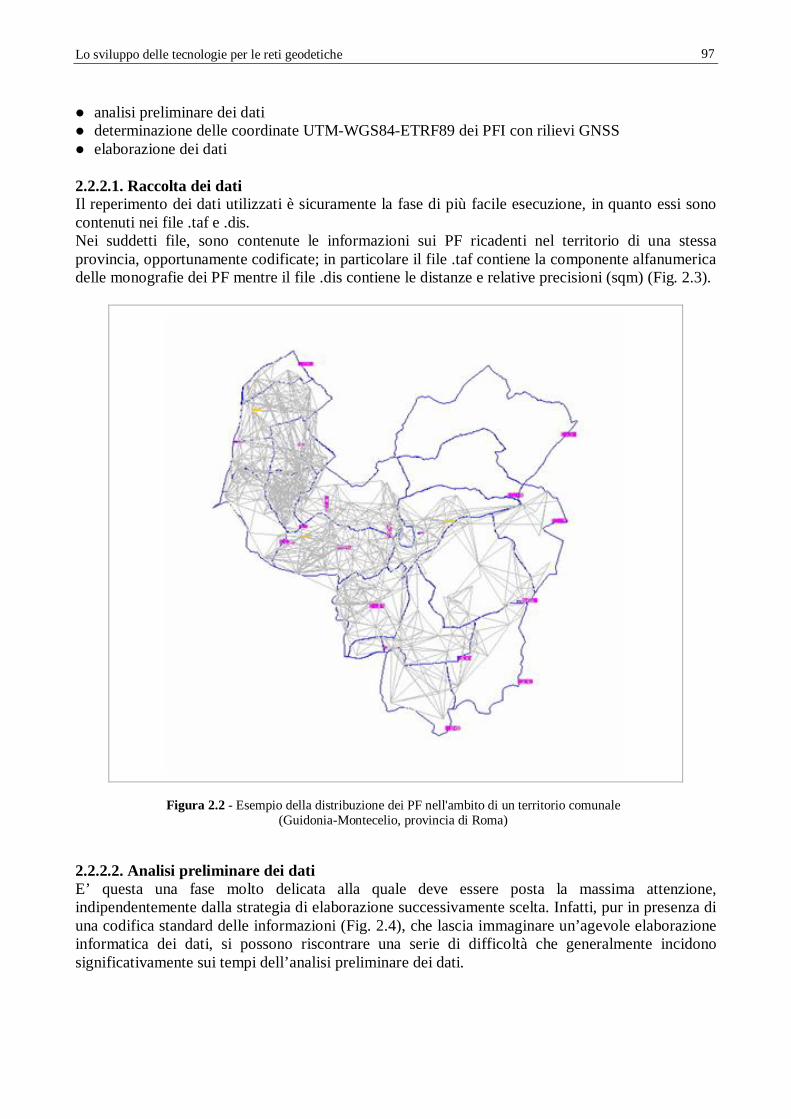
Lo sviluppo delle tecnologie per le reti geodetiche
97
analisi preliminare dei dati determinazione delle coordinate UTM-WGS84-ETRF89 dei PFI con rilievi GNSS elaborazione dei dati 2.2.2.1. Raccolta dei dati Il reperimento dei dati utilizzati è sicuramente la fase di più facile esecuzione, in quanto essi sono contenuti nei file .taf e .dis. Nei suddetti file, sono contenute le informazioni sui PF ricadenti nel territorio di una stessa provincia, opportunamente codificate; in particolare il file .taf contiene la componente alfanumerica delle monografie dei PF mentre il file .dis contiene le distanze e relative precisioni (sqm) (Fig. 2.3).
Figura 2.2 - Esempio della distribuzione dei PF nell'ambito di un territorio comunale (Guidonia-Montecelio, provincia di Roma)
2.2.2.2. Analisi preliminare dei dati E’ questa una fase molto delicata alla quale deve essere posta la massima attenzione, indipendentemente dalla strategia di elaborazione successivamente scelta. Infatti, pur in presenza di una codifica standard delle informazioni (Fig. 2.4), che lascia immaginare un’agevole elaborazione informatica dei dati, si possono riscontrare una serie di difficoltà che generalmente incidono significativamente sui tempi dell’analisi preliminare dei dati.
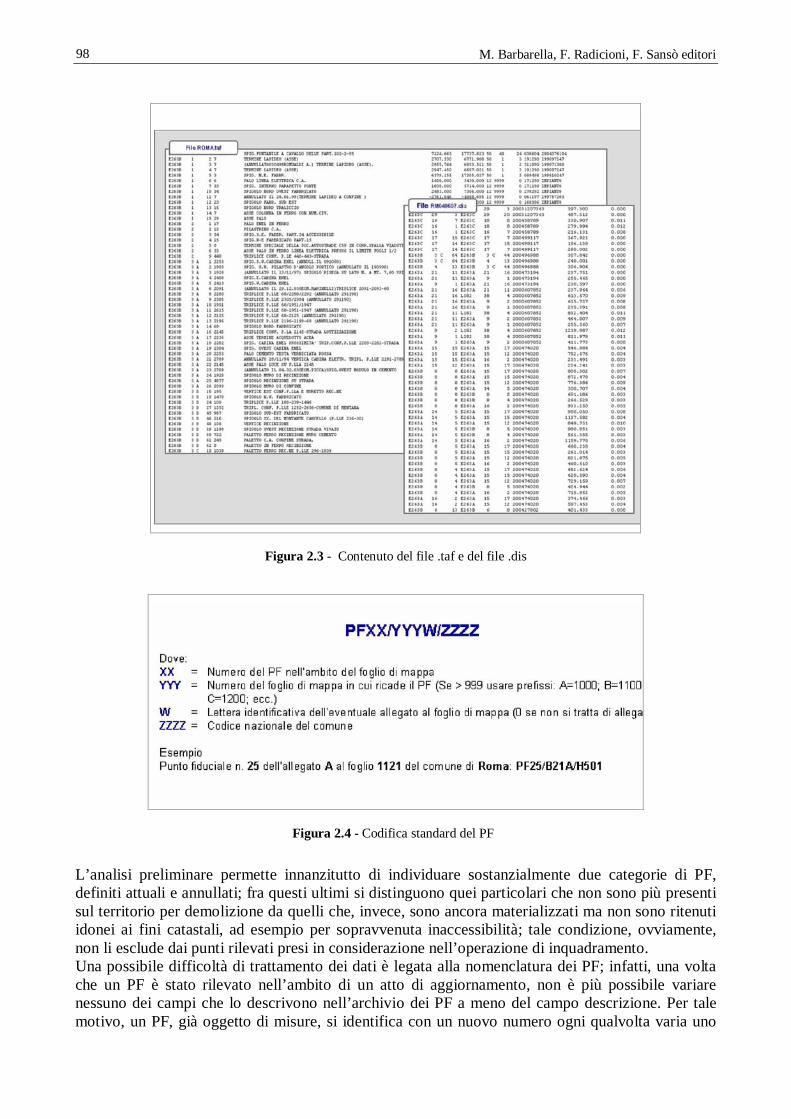
M. Barbarella, F. Radicioni, F. Sansò editori 98
Figura 2.3 - Contenuto del file .taf e del file .dis
Figura 2.4 - Codifica standard del PF
L’analisi preliminare permette innanzitutto di individuare sostanzialmente due categorie di PF, definiti attuali e annullati; fra questi ultimi si distinguono quei particolari che non sono più presenti sul territorio per demolizione da quelli che, invece, sono ancora materializzati ma non sono ritenuti idonei ai fini catastali, ad esempio per sopravvenuta inaccessibilità; tale condizione, ovviamente, non li esclude dai punti rilevati presi in considerazione nell’operazione di inquadramento. Una possibile difficoltà di trattamento dei dati è legata alla nomenclatura dei PF; infatti, una volta che un PF è stato rilevato nell’ambito di un atto di aggiornamento, non è più possibile variare nessuno dei campi che lo descrivono nell’archivio dei PF a meno del campo descrizione. Per tale motivo, un PF, già oggetto di misure, si identifica con un nuovo numero ogni qualvolta varia uno
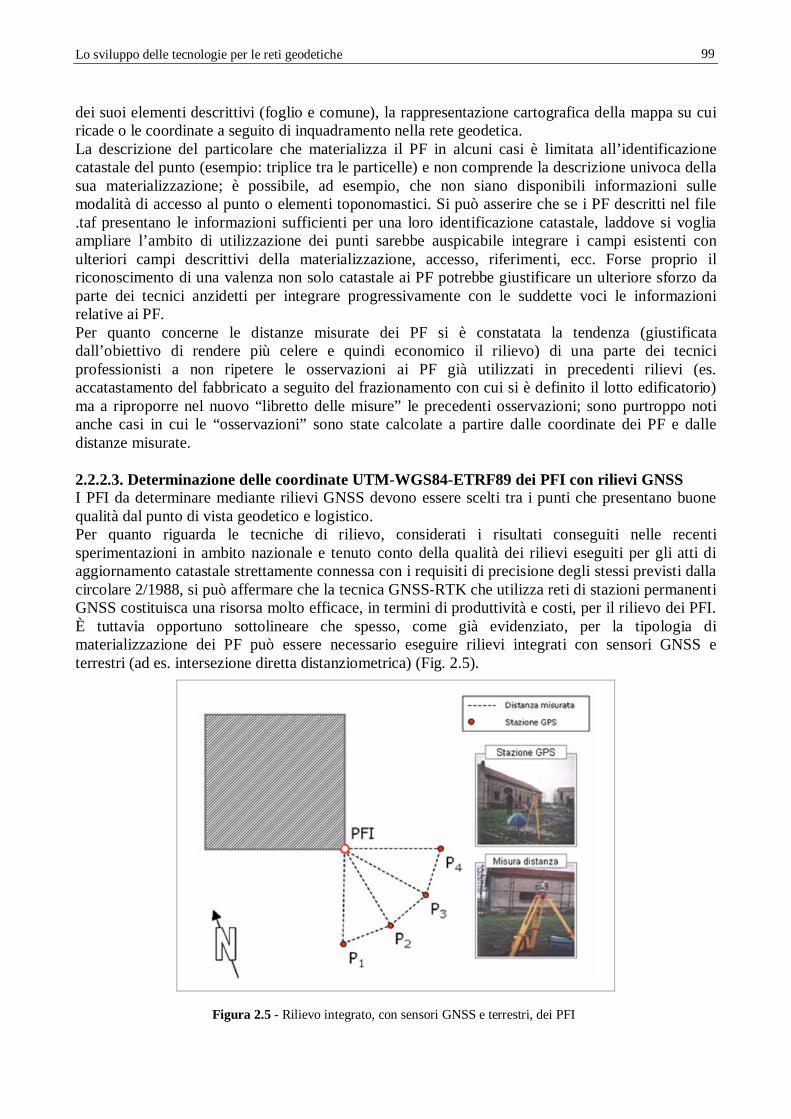
Lo sviluppo delle tecnologie per le reti geodetiche
99
dei suoi elementi descrittivi (foglio e comune), la rappresentazione cartografica della mappa su cui ricade o le coordinate a seguito di inquadramento nella rete geodetica. La descrizione del particolare che materializza il PF in alcuni casi è limitata all’identificazione catastale del punto (esempio: triplice tra le particelle) e non comprende la descrizione univoca della sua materializzazione; è possibile, ad esempio, che non siano disponibili informazioni sulle modalità di accesso al punto o elementi toponomastici. Si può asserire che se i PF descritti nel file .taf presentano le informazioni sufficienti per una loro identificazione catastale, laddove si voglia ampliare l’ambito di utilizzazione dei punti sarebbe auspicabile integrare i campi esistenti con ulteriori campi descrittivi della materializzazione, accesso, riferimenti, ecc. Forse proprio il riconoscimento di una valenza non solo catastale ai PF potrebbe giustificare un ulteriore sforzo da parte dei tecnici anzidetti per integrare progressivamente con le suddette voci le informazioni relative ai PF. Per quanto concerne le distanze misurate dei PF si è constatata la tendenza (giustificata dall’obiettivo di rendere più celere e quindi economico il rilievo) di una parte dei tecnici professionisti a non ripetere le osservazioni ai PF già utilizzati in precedenti rilievi (es. accatastamento del fabbricato a seguito del frazionamento con cui si è definito il lotto edificatorio) ma a riproporre nel nuovo “libretto delle misure” le precedenti osservazioni; sono purtroppo noti anche casi in cui le “osservazioni” sono state calcolate a partire dalle coordinate dei PF e dalle distanze misurate. 2.2.2.3. Determinazione delle coordinate UTM-WGS84-ETRF89 dei PFI con rilievi GNSS I PFI da determinare mediante rilievi GNSS devono essere scelti tra i punti che presentano buone qualità dal punto di vista geodetico e logistico. Per quanto riguarda le tecniche di rilievo, considerati i risultati conseguiti nelle recenti sperimentazioni in ambito nazionale e tenuto conto della qualità dei rilievi eseguiti per gli atti di aggiornamento catastale strettamente connessa con i requisiti di precisione degli stessi previsti dalla circolare 2/1988, si può affermare che la tecnica GNSS-RTK che utilizza reti di stazioni permanenti GNSS costituisca una risorsa molto efficace, in termini di produttività e costi, per il rilievo dei PFI. È tuttavia opportuno sottolineare che spesso, come già evidenziato, per la tipologia di materializzazione dei PF può essere necessario eseguire rilievi integrati con sensori GNSS e terrestri (ad es. intersezione diretta distanziometrica) (Fig. 2.5).
Figura 2.5 - Rilievo integrato, con sensori GNSS e terrestri, dei PFI
M. Barbarella, F. Radicioni, F. Sansò editori 100
2.2.2.4. Elaborazione dei dati Sono state proposte due metodologie: la prima basata sulla compensazione delle distanze tra i PF (Conia et al.; Crespi e Reina) la seconda basata sulla “compensazione” dei triangoli fiduciali nella loro interezza, considerati
come entità geometriche non disaggregabili, con vertici interconnessi tra di loro da legami rigidi (Beinat, Crosilla, Sossai)
Compensazione delle distanze tra i PF L’elaborazione dei dati deve prevedere inizialmente un’analisi topologica della rete di distanze per evidenziare singolarità interne. Infatti, la rete dei PF non è interamente connessa a livello nazionale in quanto i punti sono presenti e rilevati solo nelle zone interessate da interventi territoriali. Inoltre si possono manifestare ovvie singolarità angolari, essendo la rete dei PF rilevati costituita da sole distanze sul piano cartografico. Successivamente è opportuno eseguire compensazioni a minimi vincoli anche parziali per sottoreti (es. singole origini catastali), in modo da valutare e, se necessario, raffinare la qualità delle distanze (identificazione ed eliminazione degli outlier residui) e delle coordinate approssimate cartografiche (disponibili sulle schede monografiche e relative alle singole origini catastali). Tale calcolo preliminare è altresì utile per affinare la scelta dei Punti Fiduciali di Inquadramento (PFI), da rilevare tramite tecniche GNSS-RTK, rispetto ai quali la rete dei triangoli fiduciali deve essere inquadrata. La scelta dei PFI deve prendere in considerazione necessariamente anche la ridondanza locale della rete, talora scarsa a causa dell’assenza di osservazioni angolari. Infine, si deve procedere al calcolo delle coordinate approssimate dei PF nel sistema cartografico UTM-WGS84-ETRF89, mediante la trasformazione delle coordinate approssimate relative alle singole origini; a tal fine si possono usare le soluzioni analitiche proposte da diversi autori (Di Filippo, 2003; Cina, 2008). A questo punto sono disponibili le coordinate approssimate di tutti i PF coinvolti nel sistema cartografico UTM-WGS84-ETRF89 e le singole sottoreti risultano intrinsecamente compensate ed analizzate. Dovendo eseguire il calcolo finale nel sistema cartografico UTM-WGS84-ETRF89 è quindi necessario ridurre in tale sistema tutte le distanze tra i PF, comprese quelle che legano reciprocamente le sottoreti; tale questione è particolarmente evidente nelle aree rappresentate catastalmente da cartografia riferita a “piccole origini”. “Compensazione”dei triangoli fiduciali Tale metodo richiede inizialmente l’esame dei triangoli fiduciali, in quanto possono essere presi in considerazione solo i triangoli completi e, come per la metodologia precedente, devono essere evidenziate singolarità interne dovute a mancanza di connessione della rete e a singolarità angolari. Esso è basato sulle tecniche dell’analisi procustiana generalizzata e si prefigge di effettuare il miglior adattamento conforme ai minimi quadrati dei vari poligoni fiduciali. L’idea è utilizzare per la compensazione della rete non già le singole distanze tra PF, valutate in maniera disgiunta l’una dall’altra, bensì ogni singolo rilievo nella propria interezza, considerato come entità geometrica non disaggregabile. Tale metodo permette di individuare, stimare e risolvere gli eventuali sistematismi presenti nei dati di partenza; inoltre, preservando la forma dei poligoni fiduciali compensati, evita l’insorgenza di deformazioni anisotrope nel tessuto cartografico e mantiene inalterate le mutue relazioni tra i PF e i rilievi di aggiornamento ad essi appoggiati. La ricomposizione viene direttamente inquadrata sui Punti Fiduciali di Inquadramento (PFI), attribuendo alla trasformazione procustiana il compito di compensare le differenze di deformazione tra i sistemi cartografici catastale e UTM-WGS84-ETRF89.
Lo sviluppo delle tecnologie per le reti geodetiche
101
2.2.3. Sperimentazioni Per verificare l’applicabilità delle procedure proposte sono state condotte da numerosi Autori diverse sperimentazioni (Beinat et al., 2005; Cina, 2008; Crespi e Reina, 2004; Pinto, 2008), che hanno mostrato essere possibile una georeferenziazione dei PF nel sistema cartografico nazionale UTM-WGS84-ETRF89 con precisioni dell’ordine di 10÷20 cm. Peraltro, se da un lato tale precisione è notevolmente dipendente, come è evidente, dalla qualità delle misure disponibili e dalla struttura della rete dei PF, dall’altro l’elevato numero di PF disponibili permette di selezionare solo i “migliori” ai fini del calcolo della rete e del suo inquadramento nel sistema cartografico nazionale UTM-WGS84-ETRF89. 2.3. DEFINIZIONE DI UNA METODOLOGIA PER LA TRASFORMAZIONE DEL DB CARTOGRAFICO CATASTALE NEL SISTEMA CARTOGRAFICO UTM-WGS84-ETRS89 2.3.1. Premessa La cartografia catastale costituisce l’unica cartografia a grande scala (1:2000 per l’80%) estesa a tutto il territorio nazionale ed è, per il tematismo rappresentato (possesso), lo strumento da cui non si può prescindere, unitamente al DB catastale ad esso collegato, per la gestione del territorio anche al di fuori dello scopo fiscale che ne ha dettato la formazione; rappresenta quindi un patrimonio unico di informazioni territoriali. Essa è caratterizzata dall’essere georeferenziata, per motivi storici durante la sua realizzazione (circa 70 anni: dal 1886 al 1956), in diverse centinaia di sistemi di riferimento, che ne rendono attualmente molto complessa l’interazione con altri DBT (in particolare quelli locali); in particolare, si individuano 818 sistemi di piccola estensione (“piccole origini”), alle quali corrisponde circa il 35% delle mappe, e 32 sistemi di grande estensione (“grandi origini”), alle quali corrisponde il rimanente 65%. Attualmente, come già ricordato, per facilitare l’integrazione del DB catastale con altri DBT (ad esempio quelli regionali, provinciali o comunali), operazione di particolare rilevanza per la pianificazione territoriale e urbanistica e la gestione complessiva del territorio, si ritiene importante poter trasformare (dal punto di vista della georeferenziazione) il DB catastale nel sistema cartografico UTM-WGS84-ETRS89. Diventa pertanto necessario individuare una procedura efficiente per georeferenziare la cartografia catastale in un unico sistema cartografico; tale procedura è particolarmente importante (se non sostanzialmente necessaria) per le piccole origini, che costituiscono, vista la loro elevata numerosità, il problema principale per raggiungere il suddetto risultato. A tal proposito si deve tenere presente che, se da un lato sono stati proposti e possono ritenersi consolidati diversi algoritmi di trasformazione tra i diversi sistemi cartografici catastali ed il sistema UTM-WGS84-ETRS89, dall’altro la loro applicazione richiede la disponibilità delle coordinate delle origini catastali nel sistema UTM-WGS84-ETRS89 (Cina, 2008) oppure di “punti doppi”, ovvero punti di coordinate note nel generico sistema cartografico catastale e nel sistema UTM-WGS84-ETRS89 (Di Filippo, 2003; Di Filippo, 2004). Il problema del cambio di sistema di riferimento è comunque complicato oltre che dalla incoerenza delle origini locali, dalla storia del sistema di riferimento nazionale a cui il catasto si appoggiò: la rete IGM ai tempi di inizio della formazione della mappa non era ancora ultimata e la conclusione dei lavori relativi alla rete geodetica avrebbe comportato notevoli ritardi nella formazione della mappa stessa. Il catasto si appoggiò dunque a coordinate IGM provvisorie frutto di calcoli parziali appoggiati a ellissoidi variamente orientati che rendono l’incoerenza dei sistemi di riferimento nella varie zone italiane ancora più marcata, complicando ulteriormente la trasformazione.
M. Barbarella, F. Radicioni, F. Sansò editori 102
E’ di primaria importanza, in quest’ambito, sottolineare che l’inserimento della cartografia catastale nel sistema cartografico nazionale UTM-WGS84-ETRF89 condotto “globalmente” (per un’intera origine catastale o per un solo foglio, nel caso di fogli non inquadrati in un sistema di riferimento) ha valenza esclusivamente cartografica e non topografica, ovverosia in termini di informazione tematica territoriale e non per i futuri aggiornamenti a scopo catastale. Infatti, le attuali mappe catastali sono il risultato di molteplici, disomogenei e diacronici rilievi di aggiornamento ciascuno dei quali è stato singolarmente inserito in mappa secondo il principio del miglior adattamento grafico (quindi introducendo deformazioni variabili localmente), a differenza delle mappe di impianto che rappresentano effettivamente il prodotto del rilievo eseguito originariamente in modo omogeneo. Conseguentemente, se ci si limita a trasformazioni “globali”, è illusorio ritenere che le mappe catastali, una volta inserite nel sistema cartografico UTM-WGS84-ETRF89, rappresentino oggetti correttamente georeferenziati in tale sistema (quindi rilevabili direttamente con sensori GNSS), anche tenendo conto dell’errore di graficismo alla scala della mappa; pertanto, anche se riferite nel sistema cartografico UTM-WGS84-ETRF89, le mappe catastali non potranno comunque essere aggiornate con tale tipologia di sensori in modo “diretto”, superando l’esigenza che ha portato all’introduzione dei punti fiduciali. Possono però risultare notevolmente utili come carte tematiche se associate ad altre informazioni territoriali disponibili a scale (nominali) inferiori a quelle proprie delle mappe catastali, quali le carte tecniche regionali (generalmente alle scale di 1:5000 e 1:10000). Diversamente, la possibilità di rendere la cartografia catastale direttamente aggiornabile con rilievi eseguiti parzialmente o totalmente, ove possibile, con sensori GNSS, richiede che tutte le sue geometrie siano rese coerenti con quelle di altri DB (ad esempio quelli comunali o regionali) assunti come riferimento dal punto di vista geometrico. Questo risultato, molto più oneroso del precedente, può essere conseguito solo stimando trasformazioni “locali” delle geometrie catastali, sulla base della disponibilità di punti riconosciuti come corrispondenti sulla cartografia catastale e sul DB di riferimento; il riconoscimento di questa corrispondenza può essere notevolmente aiutato dalla conoscenza delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89, tematica affrontata nel precedente paragrafo. Peraltro è necessario sottolineare che le trasformazioni “locali” inducono non solo variazioni di forma ma anche variazioni di area, con gli ovvi risvolti circa i diritti reali (in particolare la proprietà) costituiti su esse; tali variazioni devono essere compatibili con il limite di tolleranza del 5% (definito sulla base dei criteri stabiliti dall’art. 1538 del Codice Civile, dalla Circolare 30.10.1989, n. 5 della Direzione Generale del Catasto e dei Servizi Tecnici Erariali). A tale proposito è ulteriormente opportuno sottolineare che, al di là della valenza di disporre delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89 per possibili finalità non-catastali, dal punto di vista catastale, una volta eseguita la stima delle trasformazioni “locali”, ovvero una volta che la cartografia catastale sia stata geometricamente resa coerente con un altro DB assunto come riferimento, dal punto di vista teorico non sussiste più lo scopo per cui i PF sono stati istituiti. Infatti, disponendo di una cartografia geometricamente corretta non solo in ambito locale (come è attualmente la cartografia catastale proprio grazie ai PF), l’aggiornamento di tale cartografia può essere condotto sia rispetto a riferimenti locali utilizzando strumentazione terrestre (come oggi avviene utilizzando i PF) sia con riferimenti globali, ovvero utilizzando direttamente sensori GNSS. Si possono quindi, complessivamente, distinguere due diversi processi: stima di trasformazioni “globali” per portare il DB cartografico catastale nel sistema cartografico
UTM-WGS84-ETRS89, comunque necessarie per “attivare” la stima delle trasformazioni “locali”
stima di trasformazioni “locali” delle geometrie catastali, in modo da renderle coerenti con quelle di altri DB assunti come riferimento dal punto di vista geometrico
Lo sviluppo delle tecnologie per le reti geodetiche
103
2.3.2. Stima di trasformazioni “globali” Sono state proposte due metodologie: la prima basata sulla conoscenza di “punti doppi” (Di Filippo) la seconda basata sulla conoscenza delle coordinate delle origini catastali nel sistema UTM-
WGS84-ETRS89 (Cina) 2.3.2.1. Trasformazioni “globali” per punti doppi La metodologia, partendo dalle informazioni attualmente disponibili presso l’Agenzia del Territorio (in particolare le mappe di impianto, alle quali si ritiene necessario riferirsi per l’individuazione dei “punti doppi”) e dalla eventuale disponibilità di reti di stazioni permanenti GNSS (diversamente si potrà far riferimento all’infittimento della rete IGM95), consente la stima delle trasformazioni “globali” idonee a georeferenziare il DB catastale nel sistema cartografico UTM-WGS84-ETRS89. In generale si ipotizza la coerenza dei fogli di mappa di impianto nell’ambito della medesima origine, cosicché la ricerca dei punti doppi può essere effettuata per origine e non per foglio di mappa. Se da un lato sono consolidati gli algoritmi di trasformazione tra i diversi sistemi cartografici catastali ed il sistema UTM-WGS84-ETRF89 (Di Filippo, 2003; Di Filippo, 2004), dall’altro la loro applicazione richiede la disponibilità di “punti doppi”, ovvero punti di coordinate note nel generico sistema cartografico catastale e nel sistema UTM-WGS84-ETRF89. La determinazione delle coordinate dei “punti doppi” si articola essenzialmente in tre fasi: scelta dei punti, che necessariamente deve essere eseguita sulle mappe di impianto, in quanto
costituiscono la base cartografica catastale più precisa e, soprattutto, intrinsecamente coerente (non deformata) dal punto di vista geodetico-cartografico
misura delle coordinate cartografiche catastali dei punti prescelti rilievo delle loro posizioni sul territorio con sensori GNSS e stima delle loro coordinate
cartografiche UTM-WGS84-ETRF89. E’ proprio in quest’ultima fase che la disponibilità dei servizi di posizionamento di una rete di stazioni permanenti GNSS può essere conveniente per velocizzare le operazioni. Si sottolinea che la scelta dei punti è probabilmente l’operazione più delicata, in quanto deve essere eseguita garantendo una sufficiente affidabilità della successiva trasformazione (sono necessari almeno 4 punti) e, nel contempo, individuando punti che siano ancora effettivamente presenti e rilevabili sul territorio, operazione non sempre semplice – soprattutto nelle zone che hanno subito notevoli trasformazioni urbanistiche – se si considera che le mappe di impianto possono risalire anche a diverse decine di anni fa (comunque prima del 1956). 2.3.2.2. Trasformazioni “globali” per origini La metodologia si basa su considerazioni geodetico-cartografiche che mostrano come sia possibile riproiettare i punti dal sistema cartografico catastale al sistema UTM-WGS84-ETRF89 passando tramite le superficie dei due ellissoidi corrispondenti purché sia nota l’origine del sistema catastale nel sistema UTM-WGS84-ETRF89. Se l’origine non è nota può essere ricavata a partire dalle sue coordinate approssimate mediante una procedura iterativa rapidamente convergente; tali coordinate approssimate, a loro volta, possono essere ricavate dalle coordinate di almeno due punti doppi. Conseguentemente, anche in questo caso, la disponibilità dei servizi di posizionamento di una rete di stazioni permanenti GNSS può essere conveniente per velocizzare le operazioni. 2.3.2.3. Sperimentazioni (vedi Allegati 1 e 2) Per verificare l’applicabilità delle procedure proposte sono state condotte da alcuni Autori diverse sperimentazioni sia su “piccole” che su “grandi” origini catastali (Crespi e Reina, 2004; Crespi et Al., 2006, Cina, 2008). Tali sperimentazioni hanno mostrato che sono possibili trasformazioni “globali” con precisioni dell’ordine di alcune decine di cm, generalmente migliori delle tolleranze geometriche delle attuali carte tecniche regionali alla scala 1:5000.
M. Barbarella, F. Radicioni, F. Sansò editori 104
2.3.3. Stima di trasformazioni “locali” Sono state proposte due metodologie: la prima basata sulla preliminare trasformazione di PF nel sistema UTM-WGS84-ETRF89
(Beinat, Crosilla, Sossai) la seconda basata sulla disponibilità di un DB di riferimento per le geometrie (Brovelli e
Zamboni) E’ importante sottolineare da subito che le trasformazioni “locali” possono essere utili per realizzare la giunzione tra cartografie catastali riferite a origini diverse, problema particolarmente sentito nel caso di “piccole” origini. 2.3.3.1. Trasformazioni “locali” per PF La metodologia si basa su tecniche di morfometria procustiana, analogamente a quella relativa alla “compensazione” dei triangoli fiduciali. L’idea di base è quella di considerare la mappa catastale come un mosaico, ossia una partizione geometrica, i cui elementi sono assimilabili alle singole particelle. La procedura proposta individua la mosaicatura ottimale, mediante adattamento conforme ai minimi quadrati, tra le preesistenti entità geometriche presenti in mappa ed i nuovi rilievi di aggiornamento. L’aggiornamento della carta avviene introducendovi progressivamente i nuovi rilievi in sostituzione di quelli preesistenti, e procedendo quindi a un riadattamento conforme a minimi quadrati di tutti gli elementi nuovi e di quelli vecchi rimanenti. L’adattamento opera in maniera da rispettare la forma di tutte le particelle, permettendo solo traslazioni, rotazioni e residue variazioni di scala, distribuendo però le eventuali deformazioni prevalentemente tra gli elementi originali della carta. La metodologia si basa su tre passi principali: compensazione della rete dei triangoli fiduciali secondo il metodo procustiano come già discusso in precedenza; l’inserimento dei rilievi di aggiornamento all’interno della maglia fiduciale ricomposta; adattamento degli elementi geometrici, per compensare le eventuali discrepanze tra elementi adiacenti e realizzare l’adattamento conforme tra geometrie nuove e vecchie. 2.3.3.2. Trasformazioni “locali” per punti omologhi su due basi cartografiche La metodologia si basa sulla disponibilità di una base cartografica che viene assunta come riferimento geometrico e su una procedura di ricerca automatica di punti omologhi. Tale procedura si basa sulla stima di una trasformazione affine iniziale, che consente una sovrapposizione approssima della cartografia catastale con la base cartografica di riferimento, e si articola in tre passi: l’analisi delle coordinate dei punti che geometricamente descrivono gli oggetti, l’analisi della compatibilità delle “direzioni” dei segmenti uscenti dai punti stessi e infine l’analisi della compatibilità dell’informazione descritta dalla geometria (analisi semantica). Un ulteriore raffinamento della procedura prevede l’impiego di un approccio multirisoluzione che permette di ottenere una definizione più accurata nelle zone con alta densità di punti (generalmente zone urbanizzate in cui è auspicabile una maggior precisione nel processo di sovrapposizione) garantendo comunque una copertura totale dell’area da interpolare derivata dall’utilizzo di spline a bassa risoluzione nelle restanti zone. 2.3.3.3. Sperimentazioni (vedi Allegato 3) Entrambi gli approcci sono già stati applicati dai rispettivi Autori su zone di estensione significativa (trasformazione per PF: comune di Udine Nord; trasformazione per punti omologhi: comune di Modena) con buoni risultati.
Lo sviluppo delle tecnologie per le reti geodetiche
105
2.4. DEFINIZIONE DI UNA METODOLOGIA PER LA (RI)DETERMINAZIONE DELLE COORDINATE 3D DEI PF NEL SISTEMA DI RIFERIMENTO WGS84-ETRS89 L'analisi di questo problema deve innanzitutto considerare che, allo stato attuale, i PF sono in generale materializzati in modo da individuarne univocamente la posizione 2D mentre non è in generale definito un cosiddetto “piano di paragone” al quale riferire la quota del PF. E' altresì vero che l'attuale versione della procedura PREGEO prescrive che i rilievi topografici relativi agli atti di aggiornamento siano 3D (anche se, stante la situazione attuale della cartografia catastale, non è indispensabile la considerazione della quota per l'esecuzione degli atti di aggiornamento) e quindi, in un prossimo futuro, un numero sempre maggiore di PF sarà inserito in rilievi che, potenzialmente, potranno consentire di determinarne la posizione 3D, sempre che venga definito univocamente e inserito nelle schede monografiche il “piano di paragone” suddetto. Tuttavia lo sviluppo di tali rilievi 3D potrebbe essere disomogeneo, sia dal punto di vista delle zone interessate sia da quello delle loro accuratezze e probabilmente richiede l'emanazione di normative di rilievo più dettagliate da parte dell'Agenzia del Territorio. Si tratta quindi di analizzare la questione da un punto di vista più generale, chiedendosi per quali scopi (e a quale livello di accuratezza) potrebbe essere utile determinare la posizione 3D dei PF nel sistema di riferimento WGS84-ETRF89, non sussistendo attualmente una effettiva necessità della loro determinazione 3D dal punto di vista dell'esecuzione degli atti di aggiornamento catastale. Tenendo presente le già menzionate accuratezze ragionevolmente conseguibili nella determinazione della loro posizione 2D (10 - 20 cm), certamente raggiungibili anche dal punto di vista altimetrico, si tratta quindi di considerare per quali scopi potrebbe essere utile una materializzazione diffusa (ma non omogenea, ovvero presente solo nelle zone interessate da interventi territoriali) del sistema di riferimento nazionale al livello di accuratezza di qualche decimetro, a fronte di una ingente mole di lavoro (e, conseguentemente, di tempo) necessaria per conseguirla. Allo stato attuale si ritiene che tale materializzazione potrebbe essere eventualmente impiegata in ambito fotogrammetrico, sia da aereo/elicottero che da satellite, limitatamente ovviamente ai PF effettivamente visibili, sia dal punto di vista dell'appoggio che da quello della validazione geometrica dei prodotti. D'altra parte, per la razionale gestione delle risorse disponibili e la valorizzazione degli investimenti già sostenuti da alcuni Enti, Regioni, Province Autonome e anche società private, è assolutamente, necessario considerare l'attuale rapida diffusione delle stazioni permanenti GNSS e lo sviluppo delle reti di stazioni permanenti GNSS destinate all'erogazione di servizi di posizionamento, che prevedibilmente, in un futuro prossimo, su tutto il territorio nazionale permetteranno di conseguire accuratezze di posizionamento di qualche centimetro in modalità post-processing e di pochi centimetri in tempo reale, in grado di soddisfare la pressoché totalità delle applicazioni tecniche, incluse quelle sopra menzionate. Conseguentemente, la valutazione congiunta di tutti gli elementi sopra menzionati (onerosità complessiva dell'operazione, inutilità per le attuali esigenze catastali, mediocrità delle accuratezze conseguibili e conseguente limitatezza delle possibili applicazioni, attuale sviluppo delle infrastrutture per il posizionamento GNSS e necessità di valorizzazione degli investimenti già effettuati in tal senso) porta a concludere che non è conveniente determinare le posizioni 3D dei PF nel sistema di riferimento WGS84-ETRF89.
M. Barbarella, F. Radicioni, F. Sansò editori 106
2.5. STUDIO DI FATTIBILITÀ DI UN ULTERIORE RAFFITTIMENTO DELLA RETE GPS AI FINI DELLA RIDETERMINAZIONE EX-NOVO DELLE COORDINATE 3D DEI PF NEL SISTEMA DI RIFERIMENTO WGS84-ETRS89 L'analisi di questo problema è contigua, anche se non identica, a quella sviluppata nel precedente paragrafo e, sempre per la razionale gestione delle risorse disponibili e la valorizzazione degli investimenti già sostenuti da alcuni Enti, Regioni, Province Autonome e anche società private, deve innanzitutto considerare lo stato attuale della rete fondamentale nazionale IGM95 e dei suoi ormai numerosi raffittimenti (sia a 7 km che a 3 km) regionali realizzati secondo le specifiche dell'Intesa Stato-Regioni-Enti Locali (tra i quali si possono citare: Lombardia, Province Autonome di Trento e Bolzano, Emilia Romagna, Umbria, Lazio, Abruzzo, Calabria, alcuni lotti della cosiddetta “maglia primaria” dei PF) e, come nel caso precedente, l'attuale rapida diffusione delle stazioni permanenti GNSS e lo sviluppo delle reti di stazioni permanenti GNSS destinate all'erogazione di servizi di posizionamento. Il problema va analizzato, a nostro parere, più che in termini di fattibilità (il raffittimento è un’operazione topografica di routine dal punto di vista tecnico, ed è ulteriormente semplificata dalla presenza sul territorio di reti di stazioni permanenti) e di utilità, in termini di convenienza. In questo contesto si tratta quindi di valutare se, per supportare le future operazioni di rilievo per scopi tecnici, sia conveniente procedere al completamento del raffittimento (almeno a 7 km) della rete IGM95 su tutto il territorio nazionale, oppure se le risorse debbano essere prioritariamente indirizzate alla diffusione su tutto il territorio nazionale delle reti di stazioni permanenti GNSS destinate all'erogazione di servizi di posizionamento sia in tempo reale che in post-processing. Per operare tale valutazione, è opportuno tenere conto, da un lato, delle già menzionate potenzialità delle infrastrutture per il posizionamento GNSS e della necessità di valorizzare gli investimenti già effettuati in tal senso da numerose Amministrazioni e, dall'altro, dei prevedibilmente ingenti investimenti necessari (sia in termini di risorse che di tempo) per il completamento del raffittimento, che in ogni caso porterebbe ad un prodotto (la materializzazione di punti sul territorio) meno duraturo di un'infrastruttura permanente ben realizzata e ben gestita e comunque più oneroso da utilizzare da parte dei potenziali utenti (certamente per la necessità di almeno due ricevitori GNSS e, se non si opera in modalità RTK, per la non disponibilità di servizi di posizionamento in tempo reale). Inoltre, se è fuor di dubbio che la disponibilità di una rete materializzata a terra può essere comoda in molte situazioni e applicazioni (ad esempio: necessità di realizzare rilievi RTK in zone con scarsa copertura della telefonia cellulare; affinamento del modello locale del geoide e migliore distribuzione agli utenti del datum verticale, se associata a un raffittimento della livellazione e dei collegamenti GPS/LEV), tuttavia, è anche necessario sottolineare che tale comodità risulta tanto maggiore quanto più tale rete è adeguata alle esigenze specifiche delle applicazioni medesime. A tal fine, la rete materializzata a terra può sempre essere convenientemente realizzata "ad hoc", cioè proprio quando, dove e come serve, una volta che sia attivo un servizio di posizionamento, utilizzandolo generalmente in post-processing. In questo senso, la rete di infittimento materializzata a terra “in caso d'uso” rappresenta una sottostruttura del servizio di posizionamento realizzata per un'esigenza specifica ottenuta tramite un razionale “riuso” del servizio medesimo. Si noti altresì che la prevista Rete Dinamica Nazionale non appare di per sé sufficiente per la realizzazione di reti di infittimento materializzate a terra, a causa dell'interdistanza media delle sue stazioni permanenti, che comporterebbe la necessità di lunghe sessioni di misura e l'impiego di software scientifici per il trattamento dei dati, entrambe condizioni praticamente insostenibili. Conseguentemente, la valutazione congiunta di tutti gli elementi sopra menzionati porta a concludere che non è economicamente conveniente, in presenza di risorse economiche limitate,
Lo sviluppo delle tecnologie per le reti geodetiche
107
procedere al completamento del raffittimento (almeno a 7 km) della rete IGM95 su tutto il territorio nazionale. Appare infatti più opportuno dedicare prioritariamente le risorse disponibili al completamento, alla manutenzione e alla gestione continua delle reti “attive” di stazioni permanenti. In ogni caso, per non disperdere il patrimonio di informazioni già attualmente disponibili, si ritiene comunque indispensabile procedere a una nuovo calcolo di compensazione della rete IGM95 e dei suoi attuali raffittimenti nel nuovo sistema di riferimento nazionale (ETRF2000) che, prevedibilmente, sarà materializzato dalla Rete Dinamica Nazionale.
M. Barbarella, F. Radicioni, F. Sansò editori 108
2.6. BIBLIOGRAFIA La bibliografia raccoglie i riferimenti relativi a: generalità sulla cartografia catastale lavori inerenti alla rideterminazione delle coordinate 2D dei PF nel sistema cartografico UTM-
WGS84-ETRS89 lavori inerenti alla trasformazione del DB cartografico catastale nel sistema cartografico UTM-
WGS84-ETRS89 per la sua integrazione con i DBT locali (regionali, provinciali, comunali) altri lavori inerenti la cartografia catastale e le trasformazioni di coordinate che coinvolgono i
sistemi cartografici catastali Cartografia catastale G. Boaga (1941) Sulla Rappresentazione conforme di Gauss. Istituto Geografico Militare, Firenze, 1941. G. Boaga (1953). Principi fondamentali della moderna cartografia. Rivista del Catasto e dei Servizi Tecnici Erariali, n. 2, 1953. G. Boaga (1953). Sulla rappresentazione cilindrica congruente di Soldner e sui problemi geo-cartografici dell’ingegneria, Rivista del Catasto e dei Servizi Tecnici Erariali, n. 5, 1953. B. Bonifacino (1968). La rappresentazione di Gauss nella formazione delle nuove mappe catastali, Rivista del Catasto e dei Servizi Tecnici Erariali, n. 5-6, 1968. A. Cina (2008). La carta catastale in un sistema globale. Rivista dell’Agenzia del Territorio. n. 1, 2008. S. Di Filippo (1995). Sulla trasformazione delle coordinate plano-cartografiche dalla rappresentazione di Cassini-Soldner alla rappresentazione di Gauss-Boaga e viceversa (parte prima), Rivista del Dipartimento del Territorio, n. 3, 1995. S. Di Filippo (1996). Sulla trasformazione delle coordinate plano-cartografiche dalla rappresentazione di Cassini-Soldner alla rappresentazione di Gauss-Boaga e viceversa (parte seconda), Rivista del Dipartimento del Territorio, n. 1, 1996. S. Di Filippo (1997). Sulla trasformazione delle coordinate plano-cartografiche dalla rappresentazione di Sanson-Flamsteed alla rappresentazione di Gauss-Boaga e viceversa nell’ambito dei sistemi di assi catastali, Rivista del Dipartimento del Territorio, n. 3, 1997. S. Di Filippo (2003). Sul passaggio delle coordinate plano-cartografiche catastali al sistema WGS84 e viceversa. Rivista dell’Agenzia del Territorio S. Di Filippo (2004). Situazione attuale e prospettive della cartografia catastale nell’ottica della riunificazione dei sistemi di riferimento. Rivista dell’Agenzia del Territorio. S. Di Filippo, F. Ferrante, P. R. Gnesivo (2005). Le attività di frontiera per un nuovo futuro della cartografia catastale. Rivista dell’Agenzia del Territorio. A. Guiducci (1953). Trasformazione delle coordinate Cassini-Soldner di piccoli sviluppi catastali in coordinate Gauss-Boaga. Rivista del Catasto e dei Servizi Tecnici Erariali, n. 2, 1953. Ministero delle Finanze (1988). Circolare n. 2/1988: Istruzione per il rilievo catastale di aggiornamento, 1988. A. Paroli (1943). Il problema della trasformazione delle coordinate nella rappresentazione conforme di Gauss e l’unificazione delle reti trigonometriche del nuovo stato, Rivista del Catasto e dei Servizi Tecnici Erariali, n. 3, 1943. A. Paroli (1948). Triangolazioni topografiche e del Catasto, Milano, Hoepli, 1948. A. Paroli (1958). Metodi e strumenti di rilevamento nei 70 anni di formazione del Catasto terreni. Rivista del Catasto e dei Servizi Tecnici Erariali. F. Radicioni, A. Stoppini (1999). Utilizzo di metodologie geodetiche per il coordinamento della cartografia catastale con le carte tecniche regionali. Bollettino SIFET, n.4, 1999. A. Stoppini (1992). Procedimento per la trasformazione diretta e inversa delle coordinate piane dal sistema catastale al sistema nazionale. Rivista del Catasto e dei Servizi Tecnici Erariali, n. 1, 1992. G. Targa, A. Vettore (1994). Nota tecnica sulle trasformazioni di coordinate plano-cartografiche dal sistema catastale Cassini-Soldner al sistema nazionale Gauss-Boaga, Rivista del Dipartimento del Territorio, n. 3, 1994
Lo sviluppo delle tecnologie per le reti geodetiche
109
Lavori inerenti alla rideterminazione delle coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89 A. Beinat, F. Crosilla, M. Furlan, E. Sossai (2004). Ricomposizione procustiana della rete fiduciale catastale mediante dati dell'archivio Pregeo: l'esperienza di Gorizia. Atti dell’ 8a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Roma, dicembre 2004. A. Beinat, F. Crosilla, E. Sossai (2005). Ricomposizione particellare conforme della cartografia catastale numerica, 50° Convegno Nazionale della Società Italiana di Fotogrammetria e Topografia, Mondello (Palermo), giugno 2005. L. Biagi, F. Sansò (Eds.) (2007). I servizi di posizionamento satellitare per l'e-government. Geomatics Workbooks n. 7 . G. Conia, R. Del Frate, N. Mencancini, D. Tufillaro (1992). Procedura automatica per il controllo della congruenza dei tipi di aggiornamento sulla base di un quadro d'unione della rete dei punti fiduciali e della misure GPS di alcuni lati significativi. Bollettino SIFET, n. 4, 1992. M. Crespi, G. Reina (2004). Applicazioni non catastali dei punti fiduciali: proposta di una metodologia per l’inquadramento della maglia dei punti fiduciali nel sistema cartografico UTM-WGS84-ETRF89, Bollettino SIFET, n. 3, 2004. F. Crosilla, A. Beinat (2005). Matching Configurations by Robust Procrustes Methods, CLADAG SIS 2005, Parma, giugno 2005. L. Pinto (2008). Esperienze di inquadramento della maglia dei PF nel sistema cartografico UTM-WGS84-ETRF89 nelle province di Brescia e Piacenza (Comunicazione personale). G. Reina (2006). La materializzazione del sistema di riferimento tramite reti di stazioni permanenti GNSS in ambito globale e locale: metodologie di elaborazione dei dati e aspetti applicativi. Tesi di Dottorato di Ricerca in Infrastrutture e Trasporti - XIX Ciclo - Tutore: M. Crespi. E. Sossai (2005). La ricomposizione di una rete fiduciale catastale di ampie dimensioni: l'esempio di Tarcento (UD). Atti della 9a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Catania, novembre 2005.
Lavori inerenti alla trasformazione del DB cartografico catastale nel sistema cartografico UTM-WGS84-ETRS89 per la sua integrazione con i DBT locali (regionali, provinciali, comunali) A. Beinat, F. Crosilla, E. Sossai (2003). Riconoscimento automatico di entità geometriche non strutturate di una cartografia catastale, Bollettino della Società Italiana di Fotogrammetria e Topografia, n. 4,2003. A. Beinat, F. Crosilla, E. Sossai (2003). Ricerca automatica di corrispondenze fra entità geometriche di una cartografia catastale. Atti della 7a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Verona, ottobre 2003. A. Beinat, F. Crosilla (2003). Generalised procustes algorithms for the conformal updating of a cadastral map, Zeitschrift für Geodäsie ZfV, 128 n. 5/2003, pp. 341-349. A. Beinat, F. Crosilla (2003). A new proposal for the general and optimal conformal updating of a cadastral digital map: the Italian case, International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXIV-6/W11, 15-18 ottobre 2003, Zagreb, Croatia. A. Beinat, F. Crosilla, E. Sossai (2004). Automatic Point matching of GIS geometric figures, International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXV, B3, 12-23 luglio 2004, Istanbul, Turkey. A. Beinat, F. Crosilla, E. Sossai (2004). An automatic analytical procedure for searching corresponding feature points in a cadastral map, FIG Working Week 2004, "The Olympic Spirit in Surveying", 22-27 maggio 2004“ Athens, Greece. A. Beinat, F. Crosilla, E. Sossai (2005). Un metodo particellare per l'aggiornamento progressivo della cartografia catastale. Atti della 9a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Catania, novembre 2005. L. Biagi, F. Sansò (Eds.) (2007). I servizi di posizionamento satellitare per l'e-government. Geomatics Workbooks n. 7 . M. A. Brovelli, G. Zamboni (2003). Integrazione di basi cartografiche su grandi aree. Bollettino SIFET, n. 4, 2003. M. A. Brovelli, G. Zamboni (2003). Procedure automatiche per l’integrazione di differenti basi cartografiche. Atti della 7a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Verona, ottobre 2003. M. A. Brovelli, G. Zamboni (2003). Automatic detection of homologous points in heterogeneous maps, International Workshop on Next Generation Geospatial Information, October 19-21, 2003, Cambridge (Boston), Massachusetts, USA.
M. Barbarella, F. Radicioni, F. Sansò editori 110
M. Crespi, G. Reina (2004). Inquadramento di mappe catastali nel sistema cartografico UTM-WGS84-ETRF89 mediante rilievi GPS-RTK rispetto a stazioni permanenti. Atti della 8a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Roma, dicembre 2004. F. Crosilla, A. Beinat (2007). Ricerca automatica di variazioni locali tra configurazioni spaziali puntuali mediante Analisi Procustiana Robusta. Atti della 11a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Torino, novembre 2007. F. Di Sanza (2006). Inquadramento della cartografia catastale nel sistema di riferimento WGS84-ETRF89: organizzazione ed esecuzione dei rilievi GPS su punti di impianto nella Regione Lazio. Tesi di Laurea in Ingegneria per l'Ambiente ed il Territorio - Relatore: M. Crespi, Correlatori: G. Reina, A. Mazzoni. G. Reina (2006). La materializzazione del sistema di riferimento tramite reti di stazioni permanenti GNSS in ambito globale e locale: metodologie di elaborazione dei dati e aspetti applicativi. Tesi di Dottorato di Ricerca in Infrastrutture e Trasporti - XIX Ciclo - Tutore: M. Crespi. E. Sossai (2003). Ricerca automatica di corrispondenze fra entità geometriche di una cartografia catastale. Tesi di laurea in Ingegneria (Relatore: F. Crosilla). E. Sossai (2006). Ricomposizione cartografica mediante integrazione di rilievi PREGEO e di cartografia numerica esistente. Atti della 11a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Bolzano, novembre 2006.
Altri lavori A Cina, A. Manzino, G. Manzino (2007). I ricevitori palmari in applicazioni catastali. Atti della 11a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Torino. novembre 2007. M. Crespi (2003). Rilevamenti GPS-RTK e reti di stazioni permanenti: stato dell’arte, sperimentazioni e possibili applicazioni. Geocentro XXVI. M. Crespi, G. M. Malena, G. Reina (2003). Rilevamenti GPS-RTK e reti di stazioni permanenti: situazione attuale e possibili applicazioni. Atti della 7a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Verona, ottobre 2003. M. Crespi, G. Reina (2005). Reti di stazioni permanenti GNSS a supporto dell'aggiornamento di un DB cartografico: il caso della cartografia catastale. Atti della 9a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Catania, novembre 2005. G. Fastellini, F. Radicioni, A. Stoppini (2008). L’impiego delle tecniche GNSS in tempo reale a rete per applicazioni catastali nel quadro attuale della cartografia e della normativa. Atti del Congresso Nazionale SIFET, Sorrento, giugno 2008. G. Paggi, A. Stoppini, L. Surace (1994). Trasformazioni di coordinate nei rilievi GPS. Bollettino di Geodesia e SS.AA., IGM, n. 3, 1994. G. Paggi, A. Stoppini, L. Surace (1994). Tecniche per l'inserimento di rilievi GPS nella cartografia esistente. Bollettino ASIT, n. 25/26, 1994. F. Radicioni, A. Stoppini (1996). Trasformazioni di coordinate e di datum geodetico nella cartografia italiana. Relazione presentata al XXXII Convegno Nazionale della Associazione Italiana di Cartografia, Piacenza, maggio 1996. Bollettino A.I.C., n. 96-97, 1996. F. Radicioni, A. Stoppini (1997). Georeferenziazione delle informazioni territoriali ed evoluzione delle reti geodetiche. Atti della 1a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Parma, settembre-ottobre 1997. F. Radicioni, A. Stoppini (2004). Esecuzione di rilievi catastali di aggiornamento con la tecnica GPS. Atti della 8a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Roma, dicembre 2004. A. Stoppini, L. Surace (1991). L'integrazione tra sistemi cartografici locali e sistema cartografico nazionale per la geo-referenziazione delle informazioni territoriali. Relazione presentata al XXVII Convegno Nazionale della Associazione Italiana di Cartografia, Todi, maggio 1991. Bollettino A.I.C., 1991.

Lo sviluppo delle tecnologie per le reti geodetiche
111
Allegati Si allegano al presente capitolo, a scopo di documentazione e approfondimento, alcuni contributi di ricerca redatti da ricercatori italiani, alcuni dei quali pur non facendo parte del gruppo incaricato dal CISIS hanno cortesemente acconsentito a includere i propri lavori nel presente volume: 2.1 - Trasformazioni globali per Punti Doppi Mattia Crespi, Augusto Mazzoni DITS – Area di Geodesia e Geomatica - Sapienza Università di Roma 2.2 - Trasformazioni globali per Coordinate dell'Origine Catastale Alberto Cina Politecnico di Torino – DITAG 2.3 - Ricerca automatica di punti omologhi tra le carte e trasformazione mediante funzioni spline multirisoluzione Maria Antonia Brovelli e Giorgio Zamboni DIIAR – Politecnico di Milano 2.4 - Ricomposizione Procustiana della Rete Fiduciale e della Cartografia Catastale Numerica Alberto Beinat, Fabio Crosilla, Emiliano Sossai Università di Udine, Laboratorio di Geomatica Computazionale - [email protected]
M. Barbarella, F. Radicioni, F. Sansò editori 112
Allegato 2.1 Trasformazioni globali per Punti Doppi Mattia Crespi, Augusto Mazzoni DITS – Area di Geodesia e Geomatica - Sapienza Università di Roma Introduzione La metodologia si basa sulle informazioni attualmente disponibili presso l’Agenzia del Territorio (in particolare le mappe di impianto, alle quali si ritiene necessario riferirsi per l’individuazione dei “punti doppi”, ovvero punti di coordinate note nel generico sistema cartografico catastale e nel sistema UTM-WGS84-ETRF89) e sugli ormai consolidati algoritmi di trasformazione tra i diversi sistemi cartografici catastali ed il sistema UTM-WGS84-ETRF89 (cfr. in Bibliografia Di Filippo, 2003; Di Filippo, 2004). Si ipotizza, inoltre, la coerenza dei fogli di mappa di impianto nell’ambito della medesima origine, cosicché la ricerca dei punti doppi può essere effettuata per origine e non per foglio di mappa. Tale metodologia può evidentemente trarre notevole vantaggio dalla eventuale disponibilità di reti di stazioni permanenti GNSS, che consentono la rapida determinazione delle coordinate dei punti doppi nel sistema UTM-WGS84-ETRF89 con accuratezze sempre ampiamente accettabili per questa applicazione; diversamente, anche in assenza di tali infrastrutture, è comunque sempre applicabile utilizzando la rete IGM95 o suoi eventuali infittimenti. Operazione cruciale per la proficua applicazione della metodologia è quindi l'identificazione dei punti doppi e la determinazione delle loro coordinate nel generico sistema cartografico catastale e nel sistema UTM-WGS84-ETRF89 Infatti, la rete geodetica catastale, formata nei primi decenni del secolo scorso, non è sostanzialmente più disponibile, in quanto buona parte dei vertici sono andati dispersi. E’ ragionevole desumere, dunque, le coordinate cartografiche catastali dei punti doppi dal primo prodotto cartografico ottenuto a partire dalla suddetta rete, ovverosia dalla “cartografia catastale d’impianto”, prodotto cartografico intrinsecamente coerente dal punto di vista della georeferenziazione e dell'accuratezza media (ovviamente in dipendenza della scala adottata), a differenza della cartografia catastale attuale, risultato di successivi diacronici aggiornamenti, condotti secondo metodologie che sono variate nel tempo e che, conseguentemente, non garantiscono la coerenza sopra menzionata. E' proprio per questo fondamentale motivo che i punti doppi sui quali si basa la metodologia proposta devono essere scelti tra quelli già presenti sulla cartografia catastale di impianto, ovvero devono essere “punti di impianto”. Ne deriva la delicatezza da porre nell'operazione di scelta dei punti di impianto, la cui qualità condiziona quella della trasformazione e che devono essere ancora effettivamente presenti e rilevabili sul territorio (se possibile, direttamente con sensori GNSS, per massimizzare l'efficienza della metodologia), condizione non banale - soprattutto nelle zone che hanno subito notevoli trasformazioni urbanistiche - se si considera che le mappe di impianto possono risalire anche a diverse decine di anni fa (comunque prima del 1956). Un'efficiente strategia per l'individuazione di punti di impianto, comoda soprattutto per l'applicazione della metodologia alle “grandi” origini catastali stante la grande numerosità dei possibili candidati, si basa sul selezionare dalla TAF (Tabella Attuale dei punti Fiduciali (TAF) i PF aventi alla data di istituzione un’attendibilità1 pari a 10, ovverosia quei punti le cui coordinate sono 1 Il codice di attendibilità che si associa alle coordinate dei punti rilevati (PF e vertici particellari), definito dalla Circolare n. 2/1988 è costituito da un numero di 2 cifre compreso nell’intervallo 20÷68 (nel 2004 la disposizione che ha introdotto l’utilizzo dei sensori GNSS nel rilievo catastale ha ampliato l’intervallo a 20÷88); esso sintetizza le informazioni qualitative sulle coordinate di un punto rilevato in funzione delle variabili esterne (rete di appoggio) e di quelle interne (metodologia e strumenti di rilievo) all’attività del tecnico.
Lo sviluppo delle tecnologie per le reti geodetiche
113
state “lette” dalla mappa di impianto. E' opportuno considerare, inoltre, che le coordinate dei punti doppi nei sistemi cartografici catastali vengono lette direttamente sulla carta e la loro accuratezza media è comunque condizionata dall'errore di graficismo (circa 0.2 mm); non ha quindi particolare significato utilizzare trasformazioni complesse: in generale è sufficiente una rototraslazione piana con variazione di scala e, eventualmente, possono essere provate e confrontate, valutandone la significatività statistica dei parametri, le trasformazioni affine particolare a 5 parametri e affine generale a 6 parametri. Si illustra nel seguito l'applicazione di tale metodologia alla “grande” origine catastale di Roma-Monte Mario (cartografia nel sistema Cassini-Soldner), estesa su quasi tutto il territorio della regione Lazio e su porzioni di regioni limitrofe (Umbria, Abruzzo, Campania). Le fasi operative, di validità generale e pertanto applicabili a qualsiasi altra origine catastale, sono riassumibili nei seguenti punti:
Individuazione dei punti doppi - Sono stati individuati circa 7000 PF per i quali le coordinate di impianto della TAF sono state “lette” dalle mappe di impianto (attendibilità pari a 10), nelle province di Pescara, L’Aquila, Viterbo, Rieti, Roma, Frosinone, Latina, Caserta
Selezione dei punti doppi – Sono stati selezionati tra quelli di cui al punto 1. secondo diversi criteri così riassumibili: distribuzione omogenea all’interno della Regione Lazio assenza di variazioni dall’epoca del loro impianto (verifica della descrizione con l'immagine presente sulla monografia) materializzazione che consente il rilievo diretto con sensori GNSS
Rilievo dei punti selezionati - Sono stati rilevati i PF selezionati con sensori GNSS operando in modalità RTK e utilizzando i prodotti per il posizionamento in tempo reale forniti dalla rete permanente RESNAP-GPS (w3.uniroma1.it/resnap-gps)
Stima dei parametri di trasformazione - Sono stati stimati i parametri della trasformazione globale applicando i menzionati algoritmi di Di Filippo, estesi in modo da poter confrontare diverse trasformazioni globali (rototraslazione piana con variazione di scala, affine generale)
Individuazione e selezione dei punti doppi Per l’acquisizione dei dati è individuato inizialmente un set di 3412 PF aventi attendibilità 10 e appartenenti all'origine di Roma Monte Mario (stralcio nelle Tabelle 1 e 2). Questo approccio metodologico ha permesso di disporre di un cospicuo numero di “punti doppi” (ovvero rappresentati nella mappa d’impianto e ancora presenti sul territorio) in modo veloce non dovendo subordinare al sopralluogo sul territorio la verifica sull’esistenza del particolare rappresentato nella mappa d’impianto. Prima di applicare i citati criteri di selezione, per comodità di visualizzazione si sono trasformate le coordinate cartografiche dei PF considerati nel sistema UTM-WGS84-ETRF89 con un software commerciale (CartLab 2) che garantisce in questo caso accuratezze di ordine metrico, più che La 1a cifra (da 2 a 6) caratterizza le metodologia di rilievo: allineamento e squadri (2), celerimensura tradizionale (3 e 4), celerimensura elettro-ottica (5 e 6). La 2a cifra (da 0 a 8) caratterizza i PF utilizzati per l’appoggio del rilievo: PF di aggiornamento (0), PF di impianto (2), rete mista (4), rete catastale (6), rete geodetica (8). Il codice di attendibilità attribuito alle coordinate dei PF in fase di istituzione, definito dalla Circolare n. 2/1987, è costituito da un numero di 2 cifre compreso nell’intervallo 1÷12 (successivamente tale intervallo è stato ampliato a 1÷19). L’attendibilità da 1 a 9 caratterizza i PF le cui coordinate sono analitiche: vertici della rete IGM (1÷5) della rete catastale (6÷8) e punti stabili di riferimento (9). L’attendibilità da 10 a 12 caratterizza i PF le cui coordinate sono state desunte dal supporto cartografico e con non sono stati rilevati con atti di aggiornamento.
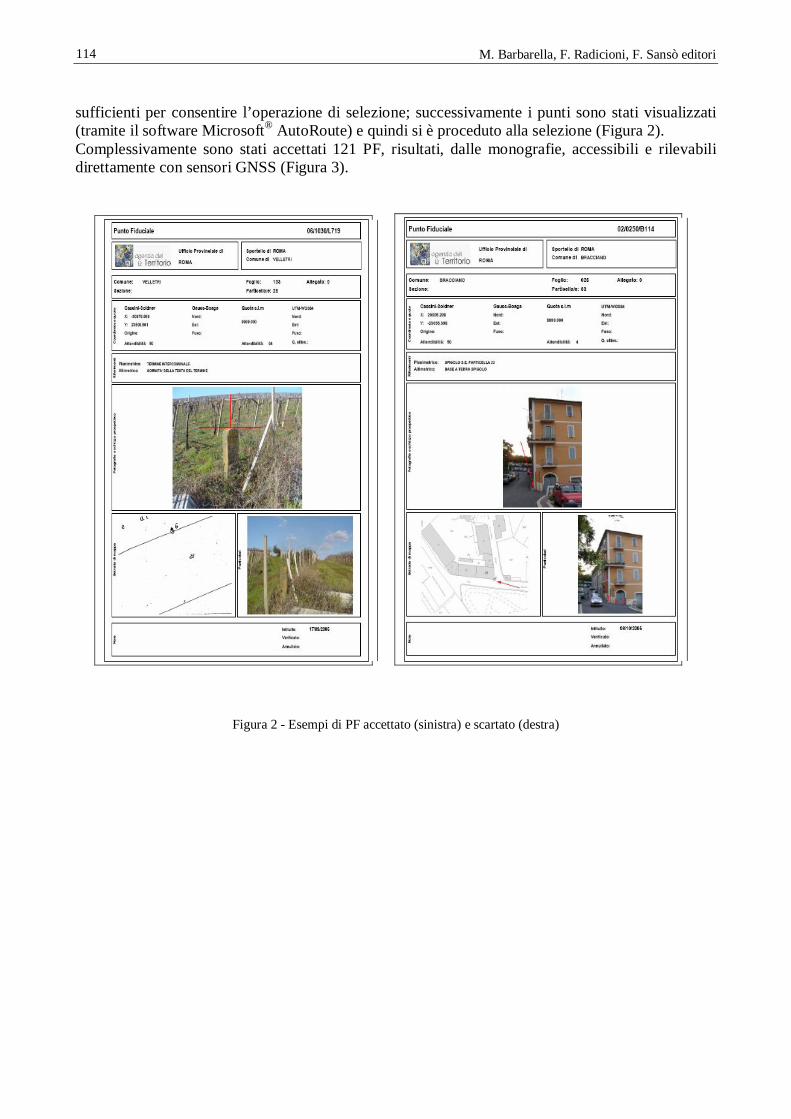
M. Barbarella, F. Radicioni, F. Sansò editori 114
sufficienti per consentire l’operazione di selezione; successivamente i punti sono stati visualizzati (tramite il software Microsoft® AutoRoute) e quindi si è proceduto alla selezione (Figura 2). Complessivamente sono stati accettati 121 PF, risultati, dalle monografie, accessibili e rilevabili direttamente con sensori GNSS (Figura 3).
Figura 2 - Esempi di PF accettato (sinistra) e scartato (destra)
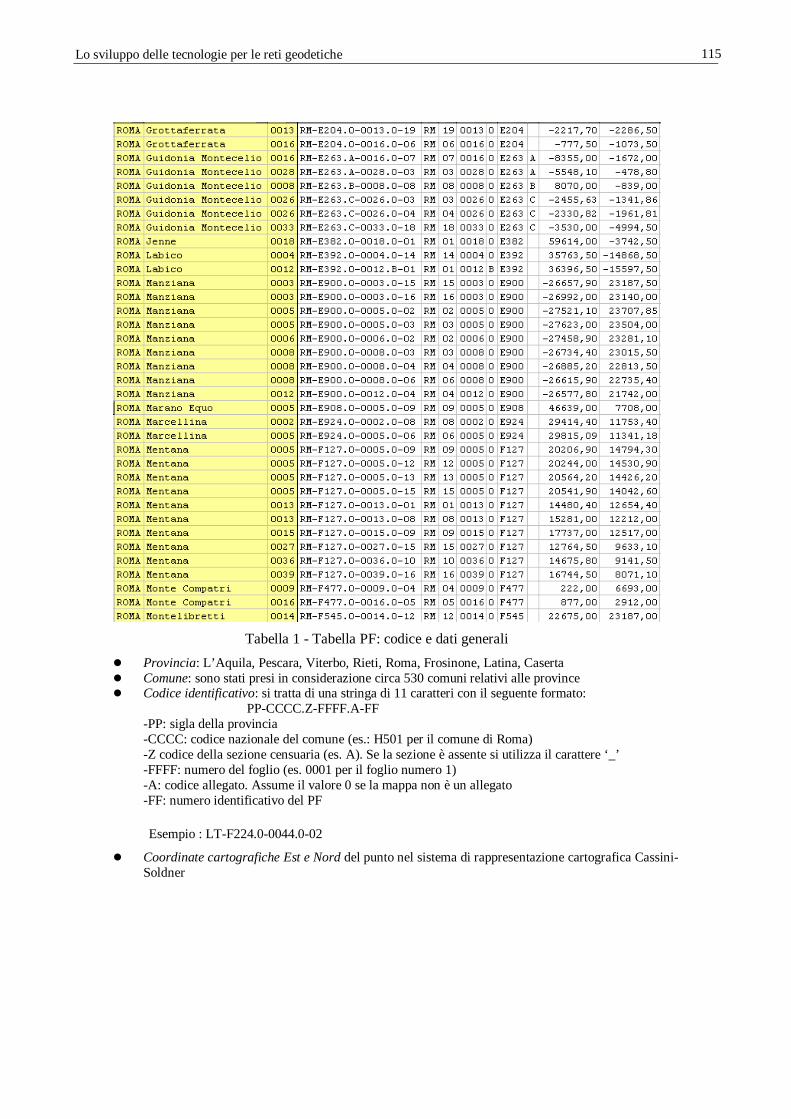
Lo sviluppo delle tecnologie per le reti geodetiche
115
Tabella 1 - Tabella PF: codice e dati generali
Provincia: L’Aquila, Pescara, Viterbo, Rieti, Roma, Frosinone, Latina, Caserta Comune: sono stati presi in considerazione circa 530 comuni relativi alle province Codice identificativo: si tratta di una stringa di 11 caratteri con il seguente formato:
PP-CCCC.Z-FFFF.A-FF -PP: sigla della provincia -CCCC: codice nazionale del comune (es.: H501 per il comune di Roma) -Z codice della sezione censuaria (es. A). Se la sezione è assente si utilizza il carattere ‘_’ -FFFF: numero del foglio (es. 0001 per il foglio numero 1) -A: codice allegato. Assume il valore 0 se la mappa non è un allegato -FF: numero identificativo del PF
Esempio : LT-F224.0-0044.0-02
Coordinate cartografiche Est e Nord del punto nel sistema di rappresentazione cartografica Cassini-Soldner
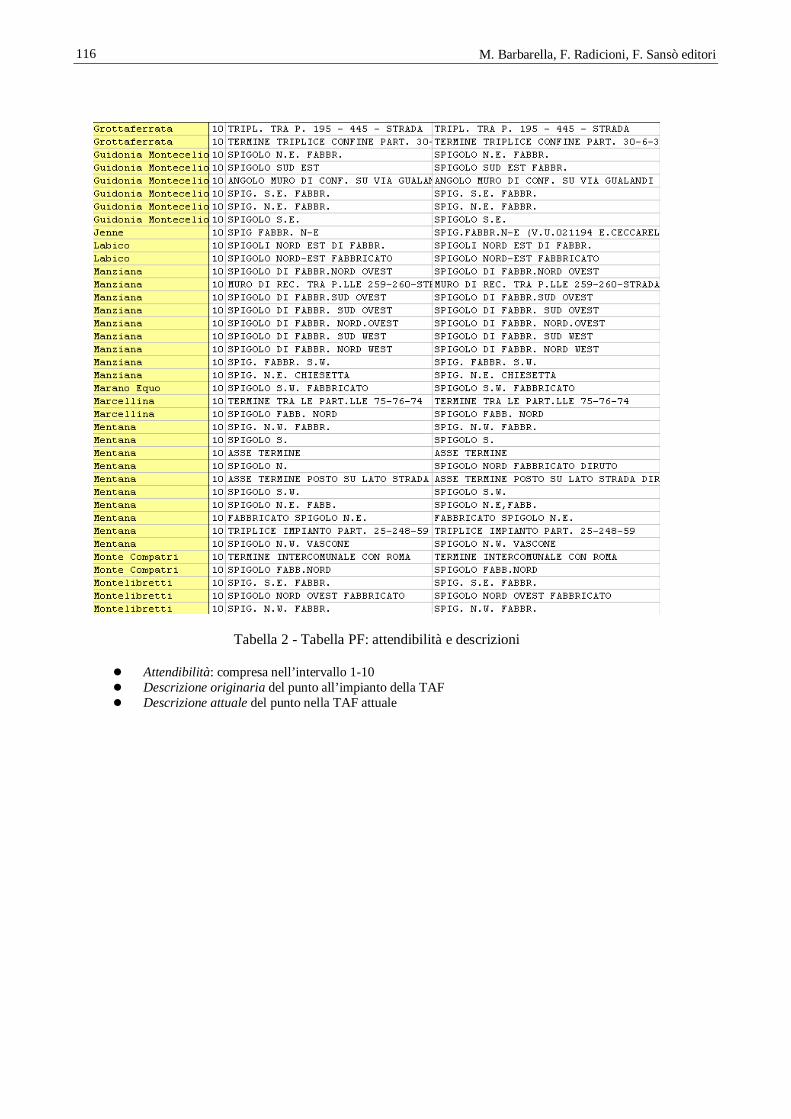
M. Barbarella, F. Radicioni, F. Sansò editori 116
Tabella 2 - Tabella PF: attendibilità e descrizioni
Attendibilità: compresa nell’intervallo 1-10 Descrizione originaria del punto all’impianto della TAF Descrizione attuale del punto nella TAF attuale
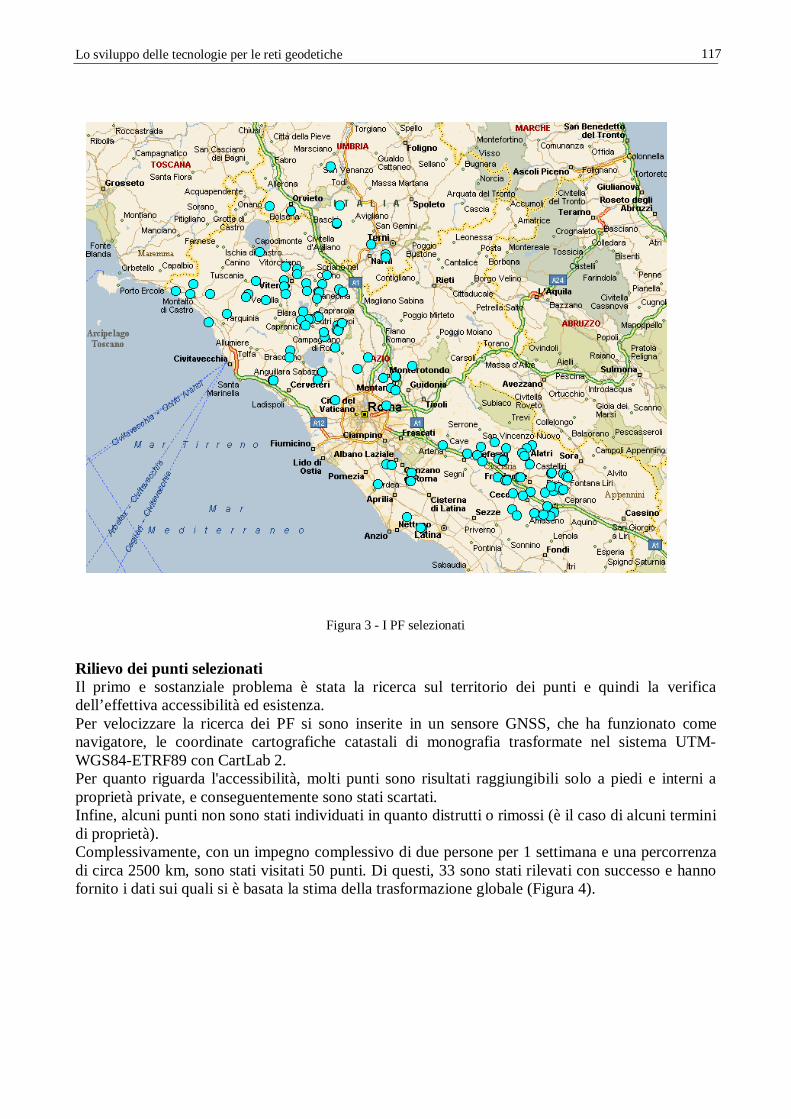
Lo sviluppo delle tecnologie per le reti geodetiche
117
Figura 3 - I PF selezionati
Rilievo dei punti selezionati Il primo e sostanziale problema è stata la ricerca sul territorio dei punti e quindi la verifica dell’effettiva accessibilità ed esistenza. Per velocizzare la ricerca dei PF si sono inserite in un sensore GNSS, che ha funzionato come navigatore, le coordinate cartografiche catastali di monografia trasformate nel sistema UTM- WGS84-ETRF89 con CartLab 2. Per quanto riguarda l'accessibilità, molti punti sono risultati raggiungibili solo a piedi e interni a proprietà private, e conseguentemente sono stati scartati. Infine, alcuni punti non sono stati individuati in quanto distrutti o rimossi (è il caso di alcuni termini di proprietà). Complessivamente, con un impegno complessivo di due persone per 1 settimana e una percorrenza di circa 2500 km, sono stati visitati 50 punti. Di questi, 33 sono stati rilevati con successo e hanno fornito i dati sui quali si è basata la stima della trasformazione globale (Figura 4).
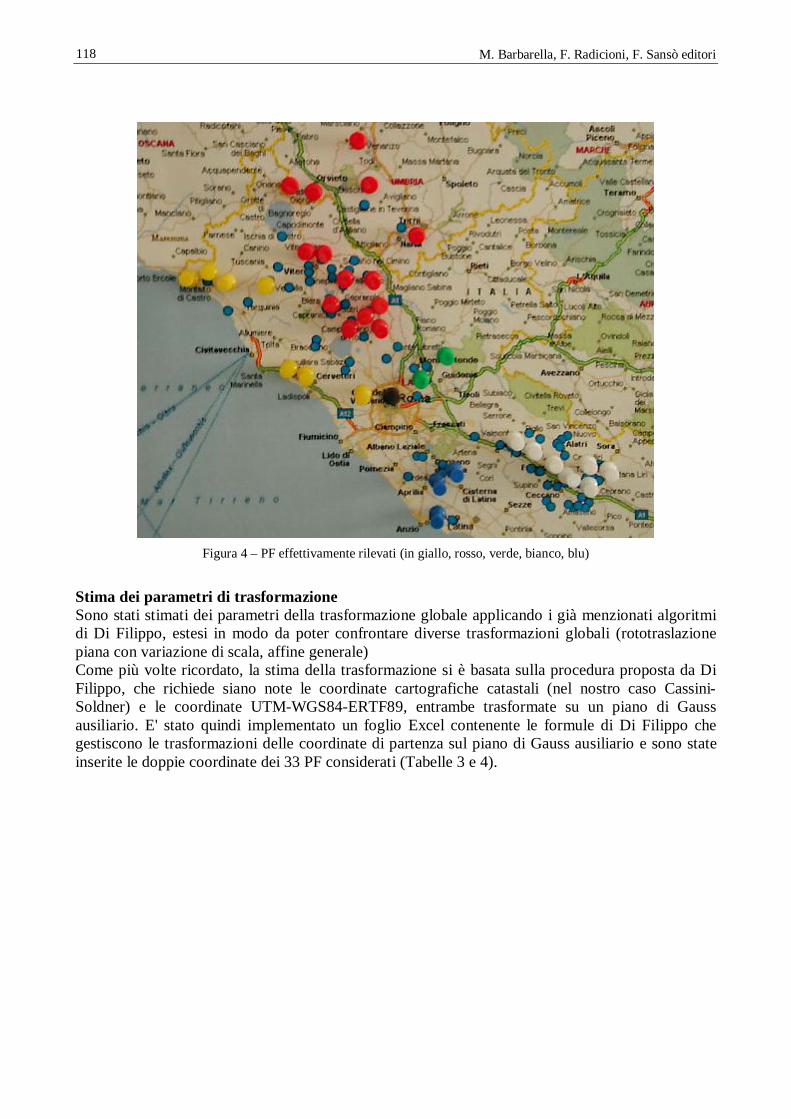
M. Barbarella, F. Radicioni, F. Sansò editori 118
Figura 4 – PF effettivamente rilevati (in giallo, rosso, verde, bianco, blu)
Stima dei parametri di trasformazione Sono stati stimati dei parametri della trasformazione globale applicando i già menzionati algoritmi di Di Filippo, estesi in modo da poter confrontare diverse trasformazioni globali (rototraslazione piana con variazione di scala, affine generale) Come più volte ricordato, la stima della trasformazione si è basata sulla procedura proposta da Di Filippo, che richiede siano note le coordinate cartografiche catastali (nel nostro caso Cassini-Soldner) e le coordinate UTM-WGS84-ERTF89, entrambe trasformate su un piano di Gauss ausiliario. E' stato quindi implementato un foglio Excel contenente le formule di Di Filippo che gestiscono le trasformazioni delle coordinate di partenza sul piano di Gauss ausiliario e sono state inserite le doppie coordinate dei 33 PF considerati (Tabelle 3 e 4).
Lo sviluppo delle tecnologie per le reti geodetiche
119
Allegato 2.2 Trasformazioni globali per Coordinate dell'Origine Catastale Alberto Cina Politecnico di Torino – DITAG Introduzione La carta catastale Italiana si basa su sistemi di riferimento locali: le origini sono più di 800 e sono valide su estensioni di territorio variabili da pochi a oltre 100 km. L’incoerenza delle coordinate che ne derivano, pone problemi pratici in tutte quelle applicazioni nelle quali sia necessario lavorare in un unico sistema di riferimento, ad esempio nella “sovrapposizione” tra la carta catastale e quella tecnica regionale o in previsione di utilizzare coordinate RTK da reti di stazioni permanenti GNSS. È allora di pratica utilità la trasformazione da coordinate catastali Cassini-Soldner a coordinate di Gauss nelle realizzazioni Gauss-Boaga – Roma 1940 o UTM - WGS84. Un approccio basato sull’ignorare il diverso sistema di riferimento ed utilizzare una trasformazione piana di tipo conforme spesso non risulta consigliabile se non per zone limitate, a causa delle diverse deformazioni lineari e angolari che caratterizzano le due rappresentazioni cartografiche. Sebbene il problema sia stato dibattuto dagli anni ’40 ad oggi in eccellenti articoli, si ritiene utile portare un contributo ulteriore per un metodo geodetico di trasformazione che consenta di “riproiettare” i punti da un piano cartografico all’altro, passando prima alla superficie dei due ellissoidi, con errori trascurabili. Il metodo viene proposto con alcuni esempi pratici che consentono di valutare la bontà della trasformazione su punti catastali d’impianto rispetto alle coordinate IGM. La procedura è estensibile anche a carte vettoriali e raster con un software realizzato allo scopo dallo scrivente. Metodo geodetico di trasformazione da coordinate catastali a coordinate di Gauss Si propone una trasformazione basata su considerazioni geodetiche, a partire dalla conoscenza delle sole origini catastali. Di quest’approccio ho cercato di dare una realizzazione pratica con lo sviluppo di un software che possa eseguire agevolmente la trasformazione. Affronterò il problema in due fasi: 1) trasformazione dalle coordinate Cassini-Soldner alle coordinate di Gauss, nel DATUM originario della carta catastale; 2) trasformazione dal DATUM originario Cassini-Soldner ad altro DATUM (Roma40 - ED50 - WGS84) 1) La trasformazione delle coordinate: dalle coordinate Cassini-Soldner alle coordinate di Gauss È possibile eseguire il trasporto delle coordinate geografiche sull’ellissoide da O (0, 0) verso un punto P (P, P) noti sviluppo e azimut della geodetica OP (Inghilleri, 1974). È anche possibile eseguire questo trasporto a partire dalle coordinate cartografiche sul piano di Gauss, utilizzando sviluppo e azimut delle trasformate di geodetiche:
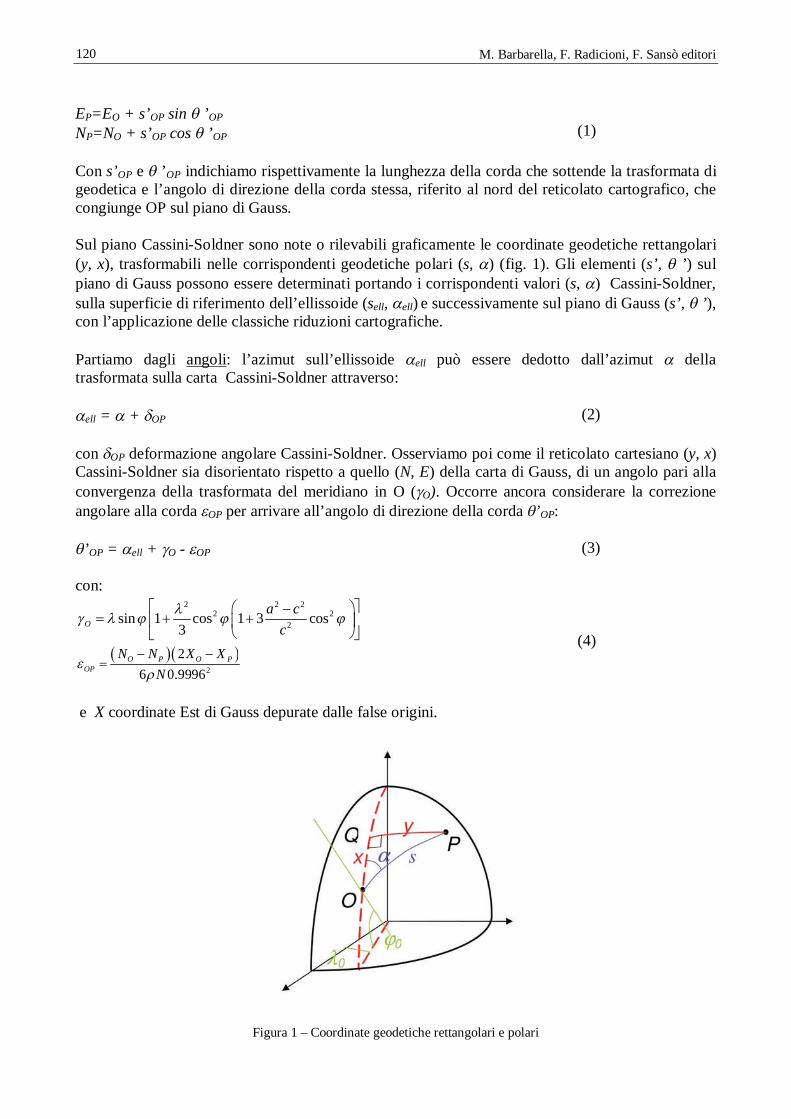
M. Barbarella, F. Radicioni, F. Sansò editori 120
EP=EO + s’OP sin ’OP
NP=NO + s’OP cos ’OP
(1)
Con s’OP e ’OP indichiamo rispettivamente la lunghezza della corda che sottende la trasformata di geodetica e l’angolo di direzione della corda stessa, riferito al nord del reticolato cartografico, che congiunge OP sul piano di Gauss. Sul piano Cassini-Soldner sono note o rilevabili graficamente le coordinate geodetiche rettangolari (y, x), trasformabili nelle corrispondenti geodetiche polari (s, ) (fig. 1). Gli elementi (s’, ’) sul piano di Gauss possono essere determinati portando i corrispondenti valori (s, ) Cassini-Soldner, sulla superficie di riferimento dell’ellissoide (sell, ell) e successivamente sul piano di Gauss (s’, ’), con l’applicazione delle classiche riduzioni cartografiche. Partiamo dagli angoli: l’azimut sull’ellissoide ell può essere dedotto dall’azimut della trasformata sulla carta Cassini-Soldner attraverso: ell = + OP (2) con OP deformazione angolare Cassini-Soldner. Osserviamo poi come il reticolato cartesiano (y, x) Cassini-Soldner sia disorientato rispetto a quello (N, E) della carta di Gauss, di un angolo pari alla convergenza della trasformata del meridiano in O (O). Occorre ancora considerare la correzione angolare alla corda OP per arrivare all’angolo di direzione della corda ’OP: ’OP = ell + O - OP (3) con:
2 2 22 2
2sin 1 cos 1 3 cos3O
a cc
2
26 0.9996
O P O POP
N N X XN
(4)
e X coordinate Est di Gauss depurate dalle false origini.
Figura 1 – Coordinate geodetiche rettangolari e polari
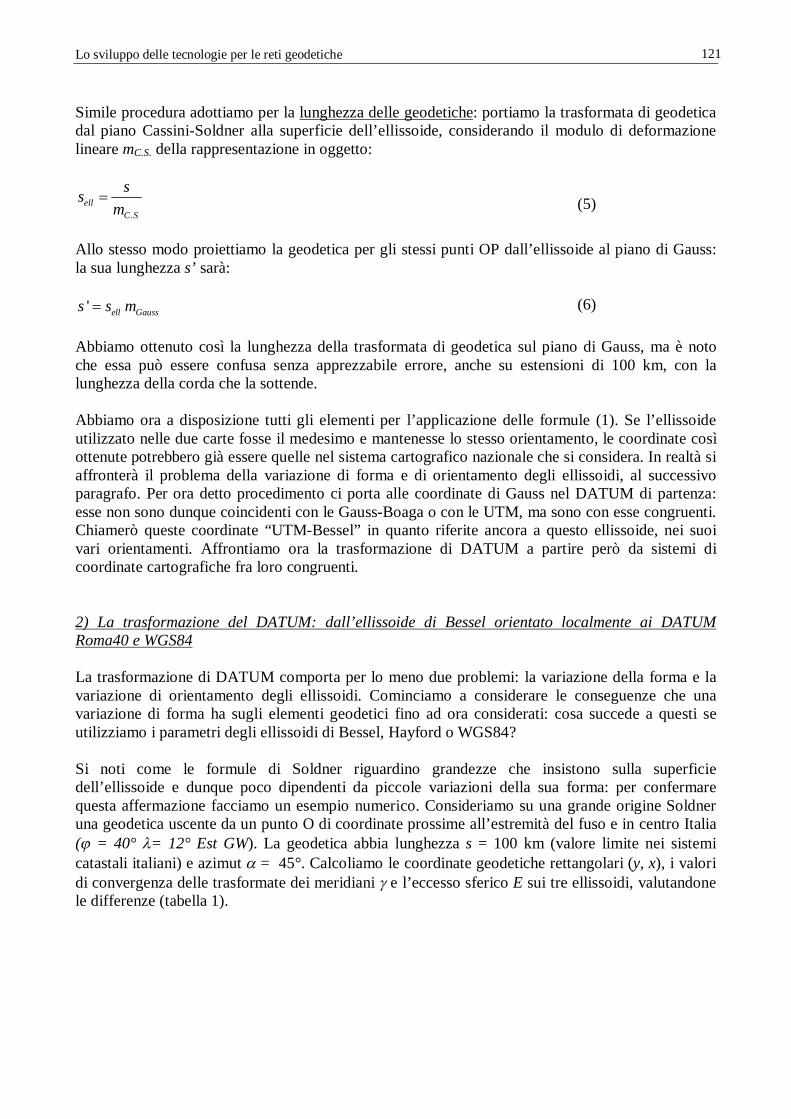
Lo sviluppo delle tecnologie per le reti geodetiche
121
Simile procedura adottiamo per la lunghezza delle geodetiche: portiamo la trasformata di geodetica dal piano Cassini-Soldner alla superficie dell’ellissoide, considerando il modulo di deformazione lineare mC.S. della rappresentazione in oggetto:
.ell
C S
ssm
(5)
Allo stesso modo proiettiamo la geodetica per gli stessi punti OP dall’ellissoide al piano di Gauss: la sua lunghezza s’ sarà:
' ell Gausss s m (6) Abbiamo ottenuto così la lunghezza della trasformata di geodetica sul piano di Gauss, ma è noto che essa può essere confusa senza apprezzabile errore, anche su estensioni di 100 km, con la lunghezza della corda che la sottende. Abbiamo ora a disposizione tutti gli elementi per l’applicazione delle formule (1). Se l’ellissoide utilizzato nelle due carte fosse il medesimo e mantenesse lo stesso orientamento, le coordinate così ottenute potrebbero già essere quelle nel sistema cartografico nazionale che si considera. In realtà si affronterà il problema della variazione di forma e di orientamento degli ellissoidi, al successivo paragrafo. Per ora detto procedimento ci porta alle coordinate di Gauss nel DATUM di partenza: esse non sono dunque coincidenti con le Gauss-Boaga o con le UTM, ma sono con esse congruenti. Chiamerò queste coordinate “UTM-Bessel” in quanto riferite ancora a questo ellissoide, nei suoi vari orientamenti. Affrontiamo ora la trasformazione di DATUM a partire però da sistemi di coordinate cartografiche fra loro congruenti. 2) La trasformazione del DATUM: dall’ellissoide di Bessel orientato localmente ai DATUM Roma40 e WGS84 La trasformazione di DATUM comporta per lo meno due problemi: la variazione della forma e la variazione di orientamento degli ellissoidi. Cominciamo a considerare le conseguenze che una variazione di forma ha sugli elementi geodetici fino ad ora considerati: cosa succede a questi se utilizziamo i parametri degli ellissoidi di Bessel, Hayford o WGS84? Si noti come le formule di Soldner riguardino grandezze che insistono sulla superficie dell’ellissoide e dunque poco dipendenti da piccole variazioni della sua forma: per confermare questa affermazione facciamo un esempio numerico. Consideriamo su una grande origine Soldner una geodetica uscente da un punto O di coordinate prossime all’estremità del fuso e in centro Italia ( = 40° = 12° Est GW). La geodetica abbia lunghezza s = 100 km (valore limite nei sistemi catastali italiani) e azimut = 45°. Calcoliamo le coordinate geodetiche rettangolari (y, x), i valori di convergenza delle trasformate dei meridiani e l’eccesso sferico E sui tre ellissoidi, valutandone le differenze (tabella 1).

M. Barbarella, F. Radicioni, F. Sansò editori 122
differenze tra: x [mm]
y [mm]
E [ “ ] [ “ ]
Hayford - Bessel -0.9 0.4 -0.0013 0.0003
WGS84 - Bessel -0.7 0.3 -0.0010 0.0001
Tabella 1 – differenza tra gli elementi geodetici su tre ellissoidi
Nel passaggio ai tre ellissoidi le variazioni delle coordinate Cassini-Soldner si mantengono inferiori a 1 mm e le variazioni degli elementi angolari E e dell’ordine di grandezza rispettivamente di millesimi e decimillesimi di secondo sessagesimale. Possiamo dunque affermare che elementi geodetici “superficiali” si mantengono praticamente inalterati nel cambio di ellissoide, a meno di errori inferiori a 1 mm / 100 km (10-8), trascurabili anche per applicazioni di precisione. Un triangolo sull’ellissoide di Bessel rimane allora praticamente invariato sugli altri ellissoidi e possiamo quindi applicare la sequenza di calcolo esposta, avendo cura solo di calcolare i raggi di curvatura, le deformazioni cartografiche e tutti gli elementi geodetici con riferimento all’ellissoide al quale le grandezze sono effettivamente riferite. Più sensibile è il problema dell’orientamento. Abbiamo già detto come questo non sia stato il medesimo in tutte le parti d’Italia, prima dei riordini delle reti IGM. Nel caso catastale in esame è sufficiente determinare la rotazione tra DATUM nella sola componente che insiste sul piano cartografico. Il problema è di tipo geodetico e va affrontato stimando i parametri a partire da punti di “doppie coordinate” relativi ai due sistemi di riferimento. I parametri da stimare possono essere:
sola rotazione sul piano cartografico ed eventualmente un fattore di scala ; rototraslazione con eventuale fattore di scala (Tx, Ty, , ) nel caso in cui si vogliano
rideterminare o verificare le coordinate dell’origine in base ai valori delle traslazioni T. In tutti i casi i punti nei due sistemi di riferimento devono avere coordinate congruenti: non è corretto confrontare coordinate di Gauss con coordinate Cassini-Soldner a causa delle diverse deformazioni delle due rappresentazioni che vanno ad incidere sulla stima dei parametri. Nel seguito verranno confrontate coordinate nei due sistemi cartografici di Gauss sull’ellissoide di Bessel (chiamate precedentemente UTM-Bessel) con le Gauss-Boaga o UTM-WGS84. In questo caso ci si aspetta che i parametri stimati abbiano anche significato geometrico: le traslazioni Tx, Ty tendano a zero o possano portare al corretto valore dell’origine se questa è di posizione incognita, la rotazione sia effettivamente quella tra i due ellissoidi nella componente sul piano cartografico e la scala prossima a 1. Il fattore di scala può tenere conto delle differenze di altezze ellissoidiche riferite ai vari ellissoidi, se l’effetto non è già computato a priori. Ricordiamo infatti che la lunghezza s0 sulla superficie fisica viene ridotta alla superficie dell’ellissoide sell per il valore dell’altezza ellissoidica h in base alla:
0 1ellhs sR
(7)
In ellissoidi localmente orientati (Hayford, Bessel) è plausibile avere ondulazioni del geoide N=h-H di pochi metri e dunque la quota ellissoidica può essere confusa con quella ortometrica H ai soli fini di questa riduzione. Ciò provoca un errore pari a 1 N
R : per N = 6.3 m esso è pari a 1 mm/km. Nell’ellissoide geocentrico WGS84 l’ondulazione del geoide in alcune zone del nord Italia può
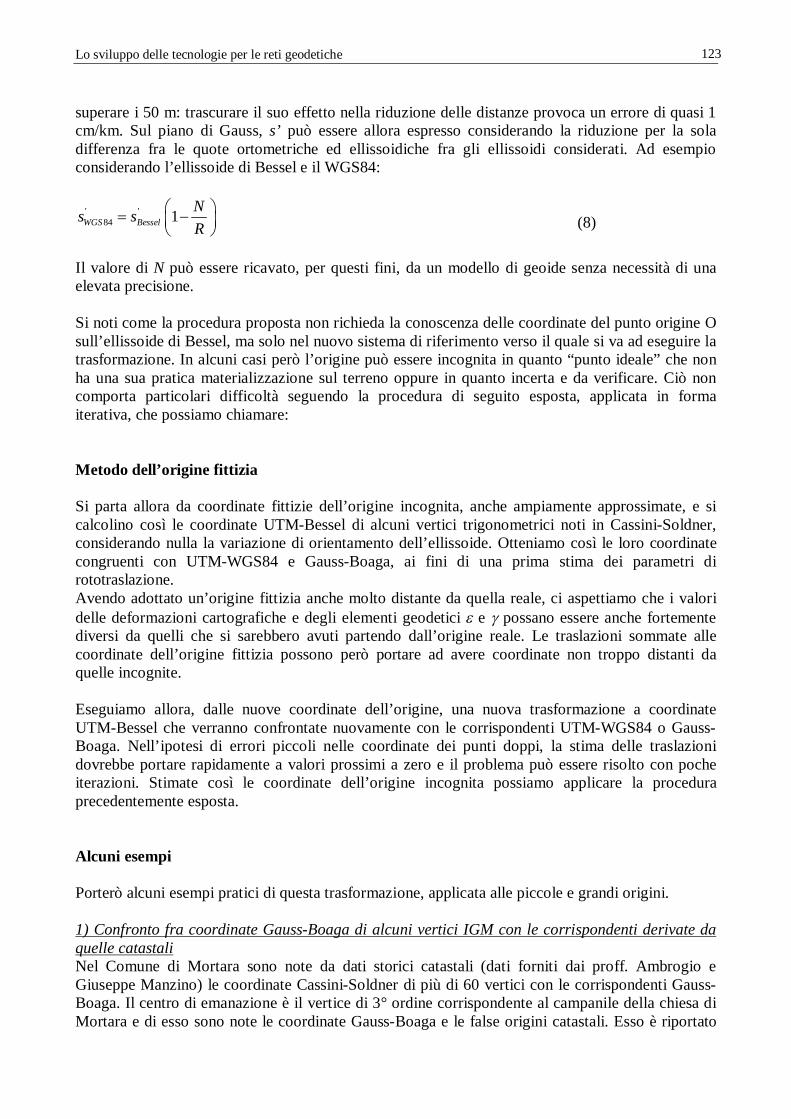
Lo sviluppo delle tecnologie per le reti geodetiche
123
superare i 50 m: trascurare il suo effetto nella riduzione delle distanze provoca un errore di quasi 1 cm/km. Sul piano di Gauss, s’ può essere allora espresso considerando la riduzione per la sola differenza fra le quote ortometriche ed ellissoidiche fra gli ellissoidi considerati. Ad esempio considerando l’ellissoide di Bessel e il WGS84:
' '84 1WGS Bessel
Ns sR
(8)
Il valore di N può essere ricavato, per questi fini, da un modello di geoide senza necessità di una elevata precisione. Si noti come la procedura proposta non richieda la conoscenza delle coordinate del punto origine O sull’ellissoide di Bessel, ma solo nel nuovo sistema di riferimento verso il quale si va ad eseguire la trasformazione. In alcuni casi però l’origine può essere incognita in quanto “punto ideale” che non ha una sua pratica materializzazione sul terreno oppure in quanto incerta e da verificare. Ciò non comporta particolari difficoltà seguendo la procedura di seguito esposta, applicata in forma iterativa, che possiamo chiamare: Metodo dell’origine fittizia Si parta allora da coordinate fittizie dell’origine incognita, anche ampiamente approssimate, e si calcolino così le coordinate UTM-Bessel di alcuni vertici trigonometrici noti in Cassini-Soldner, considerando nulla la variazione di orientamento dell’ellissoide. Otteniamo così le loro coordinate congruenti con UTM-WGS84 e Gauss-Boaga, ai fini di una prima stima dei parametri di rototraslazione. Avendo adottato un’origine fittizia anche molto distante da quella reale, ci aspettiamo che i valori delle deformazioni cartografiche e degli elementi geodetici e possano essere anche fortemente diversi da quelli che si sarebbero avuti partendo dall’origine reale. Le traslazioni sommate alle coordinate dell’origine fittizia possono però portare ad avere coordinate non troppo distanti da quelle incognite. Eseguiamo allora, dalle nuove coordinate dell’origine, una nuova trasformazione a coordinate UTM-Bessel che verranno confrontate nuovamente con le corrispondenti UTM-WGS84 o Gauss-Boaga. Nell’ipotesi di errori piccoli nelle coordinate dei punti doppi, la stima delle traslazioni dovrebbe portare rapidamente a valori prossimi a zero e il problema può essere risolto con poche iterazioni. Stimate così le coordinate dell’origine incognita possiamo applicare la procedura precedentemente esposta. Alcuni esempi Porterò alcuni esempi pratici di questa trasformazione, applicata alle piccole e grandi origini. 1) Confronto fra coordinate Gauss-Boaga di alcuni vertici IGM con le corrispondenti derivate da quelle catastali Nel Comune di Mortara sono note da dati storici catastali (dati forniti dai proff. Ambrogio e Giuseppe Manzino) le coordinate Cassini-Soldner di più di 60 vertici con le corrispondenti Gauss-Boaga. Il centro di emanazione è il vertice di 3° ordine corrispondente al campanile della chiesa di Mortara e di esso sono note le coordinate Gauss-Boaga e le false origini catastali. Esso è riportato
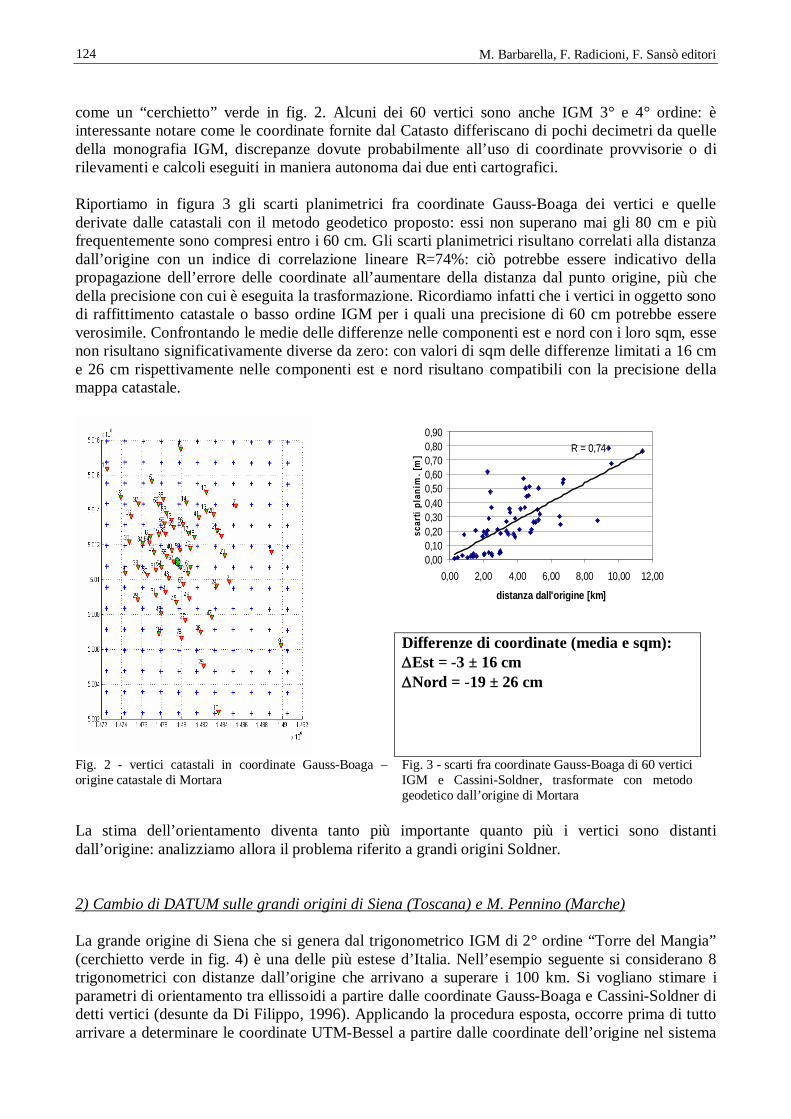
M. Barbarella, F. Radicioni, F. Sansò editori 124
come un “cerchietto” verde in fig. 2. Alcuni dei 60 vertici sono anche IGM 3° e 4° ordine: è interessante notare come le coordinate fornite dal Catasto differiscano di pochi decimetri da quelle della monografia IGM, discrepanze dovute probabilmente all’uso di coordinate provvisorie o di rilevamenti e calcoli eseguiti in maniera autonoma dai due enti cartografici. Riportiamo in figura 3 gli scarti planimetrici fra coordinate Gauss-Boaga dei vertici e quelle derivate dalle catastali con il metodo geodetico proposto: essi non superano mai gli 80 cm e più frequentemente sono compresi entro i 60 cm. Gli scarti planimetrici risultano correlati alla distanza dall’origine con un indice di correlazione lineare R=74%: ciò potrebbe essere indicativo della propagazione dell’errore delle coordinate all’aumentare della distanza dal punto origine, più che della precisione con cui è eseguita la trasformazione. Ricordiamo infatti che i vertici in oggetto sono di raffittimento catastale o basso ordine IGM per i quali una precisione di 60 cm potrebbe essere verosimile. Confrontando le medie delle differenze nelle componenti est e nord con i loro sqm, esse non risultano significativamente diverse da zero: con valori di sqm delle differenze limitati a 16 cm e 26 cm rispettivamente nelle componenti est e nord risultano compatibili con la precisione della mappa catastale.
R = 0,74
0,000,100,200,300,400,500,600,700,800,90
0,00 2,00 4,00 6,00 8,00 10,00 12,00
distanza dall'origine [km]
scar
ti pl
anim
. [m
]
Differenze di coordinate (media e sqm): Est = -3 ± 16 cm Nord = -19 ± 26 cm
Fig. 2 - vertici catastali in coordinate Gauss-Boaga – origine catastale di Mortara
Fig. 3 - scarti fra coordinate Gauss-Boaga di 60 vertici IGM e Cassini-Soldner, trasformate con metodo geodetico dall’origine di Mortara
La stima dell’orientamento diventa tanto più importante quanto più i vertici sono distanti dall’origine: analizziamo allora il problema riferito a grandi origini Soldner. 2) Cambio di DATUM sulle grandi origini di Siena (Toscana) e M. Pennino (Marche) La grande origine di Siena che si genera dal trigonometrico IGM di 2° ordine “Torre del Mangia” (cerchietto verde in fig. 4) è una delle più estese d’Italia. Nell’esempio seguente si considerano 8 trigonometrici con distanze dall’origine che arrivano a superare i 100 km. Si vogliano stimare i parametri di orientamento tra ellissoidi a partire dalle coordinate Gauss-Boaga e Cassini-Soldner di detti vertici (desunte da Di Filippo, 1996). Applicando la procedura esposta, occorre prima di tutto arrivare a determinare le coordinate UTM-Bessel a partire dalle coordinate dell’origine nel sistema
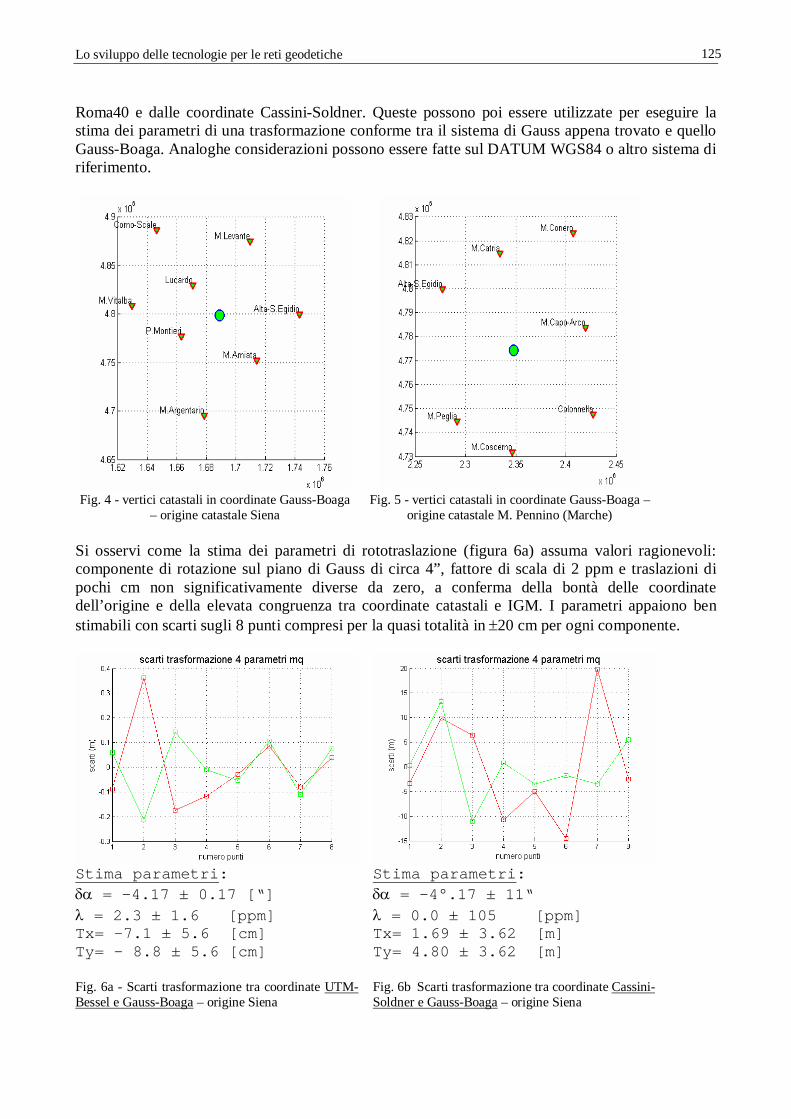
Lo sviluppo delle tecnologie per le reti geodetiche
125
Roma40 e dalle coordinate Cassini-Soldner. Queste possono poi essere utilizzate per eseguire la stima dei parametri di una trasformazione conforme tra il sistema di Gauss appena trovato e quello Gauss-Boaga. Analoghe considerazioni possono essere fatte sul DATUM WGS84 o altro sistema di riferimento.
Fig. 4 - vertici catastali in coordinate Gauss-Boaga
– origine catastale Siena Fig. 5 - vertici catastali in coordinate Gauss-Boaga –
origine catastale M. Pennino (Marche)
Si osservi come la stima dei parametri di rototraslazione (figura 6a) assuma valori ragionevoli: componente di rotazione sul piano di Gauss di circa 4”, fattore di scala di 2 ppm e traslazioni di pochi cm non significativamente diverse da zero, a conferma della bontà delle coordinate dell’origine e della elevata congruenza tra coordinate catastali e IGM. I parametri appaiono ben stimabili con scarti sugli 8 punti compresi per la quasi totalità in 20 cm per ogni componente.
Stima parametri: = -4.17 ± 0.17 [“] = 2.3 ± 1.6 [ppm] Tx= -7.1 ± 5.6 [cm] Ty= - 8.8 ± 5.6 [cm]
Stima parametri: = -4°.17 ± 11“ = 0.0 ± 105 [ppm] Tx= 1.69 ± 3.62 [m] Ty= 4.80 ± 3.62 [m]
Fig. 6a - Scarti trasformazione tra coordinate UTM-Bessel e Gauss-Boaga – origine Siena
Fig. 6b Scarti trasformazione tra coordinate Cassini-Soldner e Gauss-Boaga – origine Siena

M. Barbarella, F. Radicioni, F. Sansò editori 126
Ma cosa succede stimando i parametri di una semplice rototraslazione conforme a partire dalle coordinate Cassini-Soldner e Gauss-Boaga? Ciò è ben rilevabile in figura 6b: i parametri assumono valori che non hanno più significato geometrico, includendo al loro interno deformazioni cartografiche non coerenti. Gli scarti sulle coordinate dei punti usati per la trasformazione possono arrivare anche a 20 m non certo imputabili alla qualità delle coordinate dedotte da Catasto e IGM, ma alle diverse caratteristiche delle rappresentazioni cartografiche. A conferma di ciò affrontiamo l’esempio delle Marche, con origine catastale sul trigonometrico di Monte Pennino (cerchietto verde in fig. 5). Consideriamo 7 vertici trigonometrici di coordinate note nei sistemi Gauss-Boaga e Cassini-Soldner, con una distanza dall’origine fino a 78 km. Le considerazioni esposte nel caso precedente possono essere estese completamente anche a questo caso. Passando a coordinate UTM-Bessel e stimando i parametri di una trasformazione conforme otteniamo parametri ben stimabili con scarti sulle coordinate dei punti contenuti entro 10 cm nella quasi totalità (fig. 7a). Essi diventano però anche di 10 m se si confrontano direttamente le coordinate Cassini-Soldner con le Gauss-Boaga (fig. 7b).
Parametri: = -4.59 ± 0.11 [“] = 2.6 ± 1.1 [ppm] Tx= -4.2 ± 3.7 [cm] Ty= 23.3 ± 3.4 [cm]
Parametri: = -4°.01 ± 9“ = 0.0 ± 85 [ppm] Tx= 2.35 ± 2.83 [m] Ty= 4.77 ± 2.83 [m]
Fig. 7a - Scarti trasformazione coordinate UTM-Bessel e Gauss-Boaga – origine M.Pennino
Fig. 7b - Scarti trasformazione coordinate Cassini-Soldner e Gauss-Boaga – origine M.Pennino
3) Stima dei parametri su grandi estensioni e tipologie di stimatori L’elevata congruenza tra le coordinate catastali e quelle di IGM di Gauss porta a indagare la possibilità di stimare la rotazione o la rototraslazione tra ellissoidi per zone ancora più estese. A partire dai dati usati nelle due precedenti regioni valutiamo la possibilità di stimare un unico set di parametri comuni. Il problema della diversità dei fusi cartografici può essere facilmente risolto considerando le coordinate geografiche in figura 8 proiettate su di un fuso ampliato.
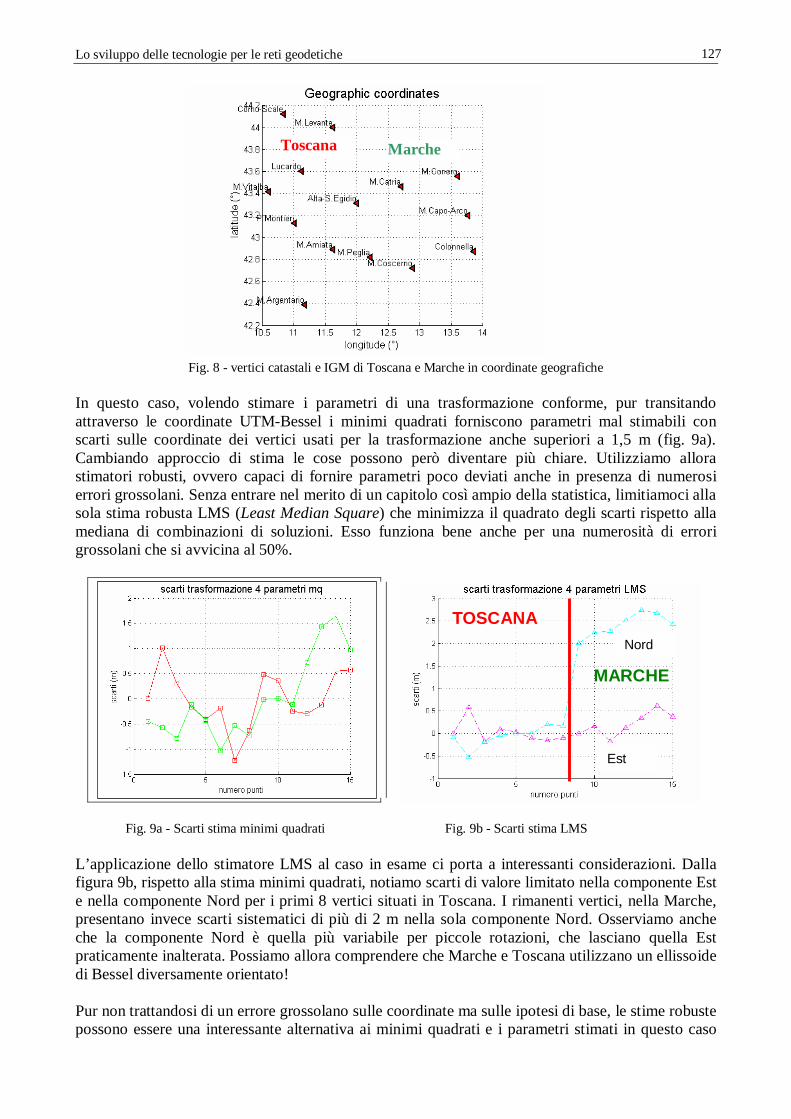
Lo sviluppo delle tecnologie per le reti geodetiche
127
Fig. 8 - vertici catastali e IGM di Toscana e Marche in coordinate geografiche In questo caso, volendo stimare i parametri di una trasformazione conforme, pur transitando attraverso le coordinate UTM-Bessel i minimi quadrati forniscono parametri mal stimabili con scarti sulle coordinate dei vertici usati per la trasformazione anche superiori a 1,5 m (fig. 9a). Cambiando approccio di stima le cose possono però diventare più chiare. Utilizziamo allora stimatori robusti, ovvero capaci di fornire parametri poco deviati anche in presenza di numerosi errori grossolani. Senza entrare nel merito di un capitolo così ampio della statistica, limitiamoci alla sola stima robusta LMS (Least Median Square) che minimizza il quadrato degli scarti rispetto alla mediana di combinazioni di soluzioni. Esso funziona bene anche per una numerosità di errori grossolani che si avvicina al 50%.
Fig. 9a - Scarti stima minimi quadrati Fig. 9b - Scarti stima LMS L’applicazione dello stimatore LMS al caso in esame ci porta a interessanti considerazioni. Dalla figura 9b, rispetto alla stima minimi quadrati, notiamo scarti di valore limitato nella componente Est e nella componente Nord per i primi 8 vertici situati in Toscana. I rimanenti vertici, nella Marche, presentano invece scarti sistematici di più di 2 m nella sola componente Nord. Osserviamo anche che la componente Nord è quella più variabile per piccole rotazioni, che lasciano quella Est praticamente inalterata. Possiamo allora comprendere che Marche e Toscana utilizzano un ellissoide di Bessel diversamente orientato! Pur non trattandosi di un errore grossolano sulle coordinate ma sulle ipotesi di base, le stime robuste possono essere una interessante alternativa ai minimi quadrati e i parametri stimati in questo caso
TOSCANA Nord
MARCHE
Est
Toscana
Marche
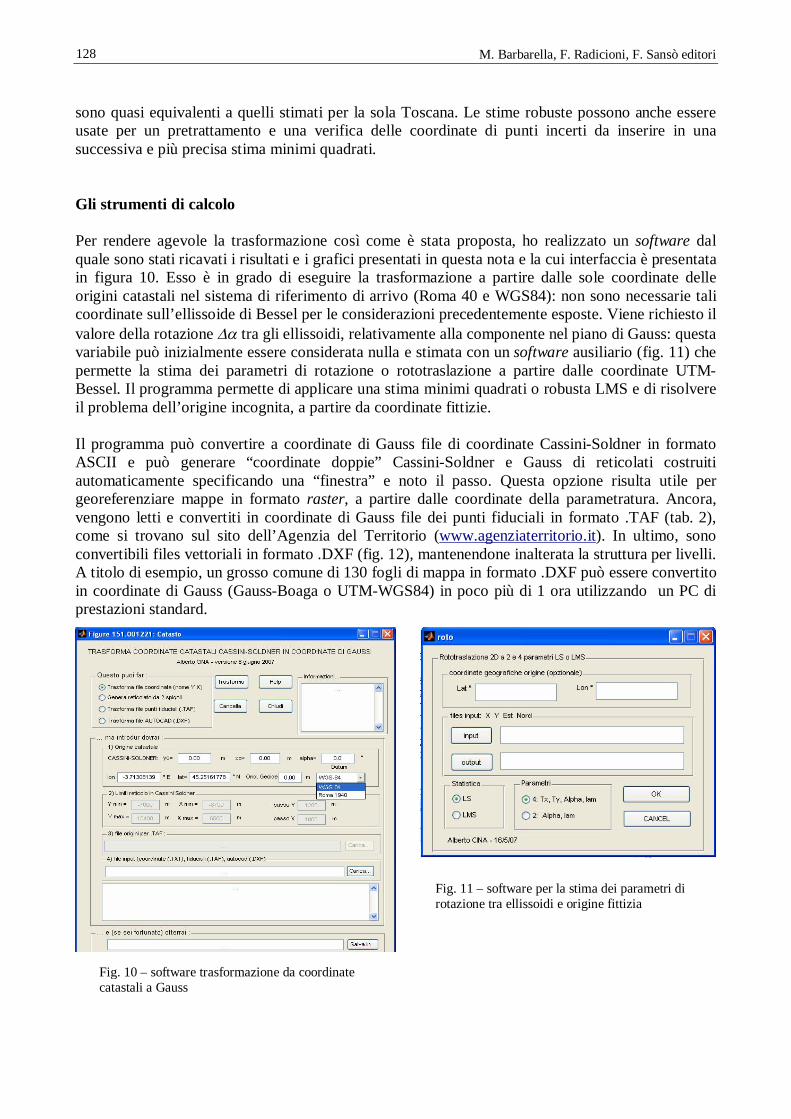
M. Barbarella, F. Radicioni, F. Sansò editori 128
sono quasi equivalenti a quelli stimati per la sola Toscana. Le stime robuste possono anche essere usate per un pretrattamento e una verifica delle coordinate di punti incerti da inserire in una successiva e più precisa stima minimi quadrati. Gli strumenti di calcolo Per rendere agevole la trasformazione così come è stata proposta, ho realizzato un software dal quale sono stati ricavati i risultati e i grafici presentati in questa nota e la cui interfaccia è presentata in figura 10. Esso è in grado di eseguire la trasformazione a partire dalle sole coordinate delle origini catastali nel sistema di riferimento di arrivo (Roma 40 e WGS84): non sono necessarie tali coordinate sull’ellissoide di Bessel per le considerazioni precedentemente esposte. Viene richiesto il valore della rotazione tra gli ellissoidi, relativamente alla componente nel piano di Gauss: questa variabile può inizialmente essere considerata nulla e stimata con un software ausiliario (fig. 11) che permette la stima dei parametri di rotazione o rototraslazione a partire dalle coordinate UTM-Bessel. Il programma permette di applicare una stima minimi quadrati o robusta LMS e di risolvere il problema dell’origine incognita, a partire da coordinate fittizie. Il programma può convertire a coordinate di Gauss file di coordinate Cassini-Soldner in formato ASCII e può generare “coordinate doppie” Cassini-Soldner e Gauss di reticolati costruiti automaticamente specificando una “finestra” e noto il passo. Questa opzione risulta utile per georeferenziare mappe in formato raster, a partire dalle coordinate della parametratura. Ancora, vengono letti e convertiti in coordinate di Gauss file dei punti fiduciali in formato .TAF (tab. 2), come si trovano sul sito dell’Agenzia del Territorio (www.agenziaterritorio.it). In ultimo, sono convertibili files vettoriali in formato .DXF (fig. 12), mantenendone inalterata la struttura per livelli. A titolo di esempio, un grosso comune di 130 fogli di mappa in formato .DXF può essere convertito in coordinate di Gauss (Gauss-Boaga o UTM-WGS84) in poco più di 1 ora utilizzando un PC di prestazioni standard.
Fig. 10 – software trasformazione da coordinate catastali a Gauss
Fig. 11 – software per la stima dei parametri di rotazione tra ellissoidi e origine fittizia
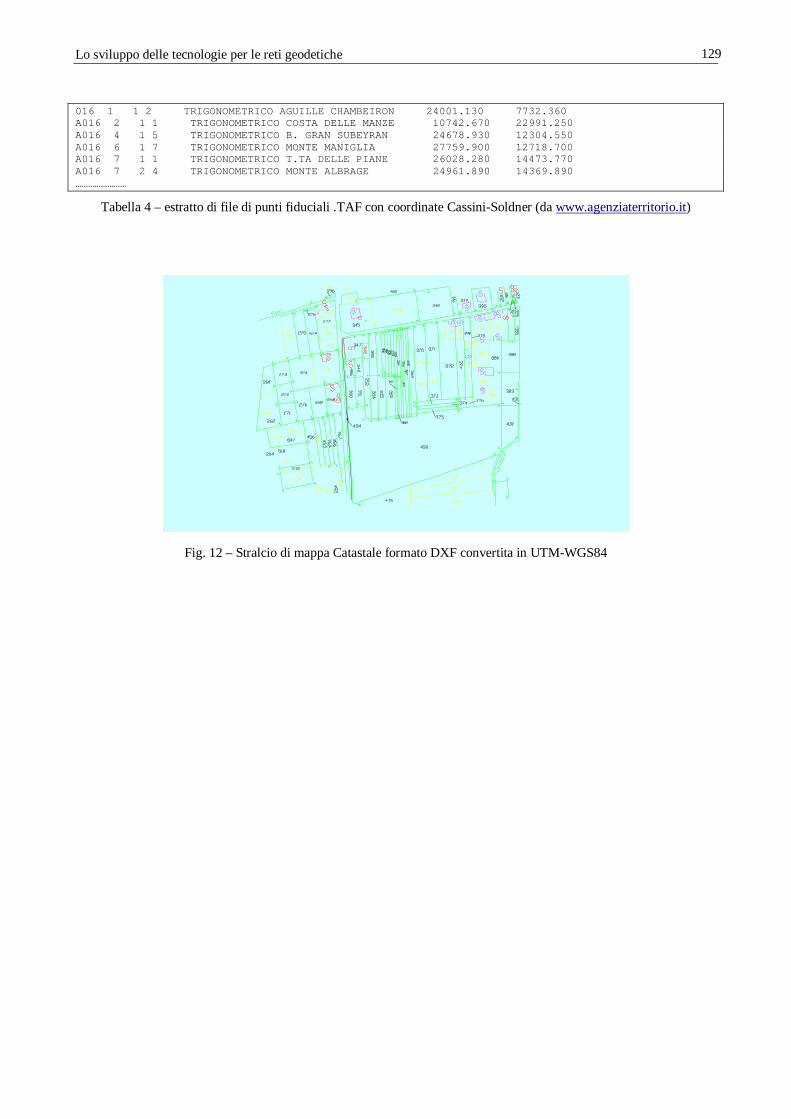
Lo sviluppo delle tecnologie per le reti geodetiche
129
016 1 1 2 TRIGONOMETRICO AGUILLE CHAMBEIRON 24001.130 7732.360 A016 2 1 1 TRIGONOMETRICO COSTA DELLE MANZE 10742.670 22991.250 A016 4 1 5 TRIGONOMETRICO B. GRAN SUBEYRAN 24678.930 12304.550 A016 6 1 7 TRIGONOMETRICO MONTE MANIGLIA 27759.900 12718.700 A016 7 1 1 TRIGONOMETRICO T.TA DELLE PIANE 26028.280 14473.770 A016 7 2 4 TRIGONOMETRICO MONTE ALBRAGE 24961.890 14369.890 ……………………
Tabella 4 – estratto di file di punti fiduciali .TAF con coordinate Cassini-Soldner (da www.agenziaterritorio.it)
Fig. 12 – Stralcio di mappa Catastale formato DXF convertita in UTM-WGS84
M. Barbarella, F. Radicioni, F. Sansò editori 130
Allegato 2.3 Ricerca automatica di punti omologhi tra le carte e trasformazione mediante funzioni spline multirisoluzione Maria A. Brovelli e G. Zamboni DIIAR, Politecnico di Milano L’individuazione delle corrispondenze sulle carte Il processo di integrazione cartografica è basato sull’utilizzo di corrispondenze tra il dato originale che si vuole trasformare e un dato assunto come riferimento. E' intuitivamente comprensibile che migliore è l'informazione che definisce il legame tra i due set di dati (definita in termini di quantità e precisione), migliore sarà la trasformazione finale ottenuta. Il primo passo è quindi quello di definire adeguatamente il legame tra due set di dati cartografici e progettare un metodo che permetta di rendere automatica l’individuazione delle corrispondenze. Indicando con c1 la carta che si desidera sovrapporre alla carta di riferimento c2, il primo passo per l’integrazione consiste nell’effettuare un pre-allineamento applicando una semplice trasformazione affine (rototraslazione con variazione anisotropa di scala e sbandamento) su c1: spesso infatti le carte hanno differente scala di rappresentazione ed orientamento. Per poter stimare ai minimi quadrati i 6 parametri della trasformazione affine generale sono sufficienti almeno quattro coppie di “punti omologhi”. Un punto P1 della carta c1 viene definito omologo di un punto P2 della carta c2 se la realtà geografica rappresentata graficamente dal punto P1 sulla carta c1 corrisponde alla realtà geografica rappresentata graficamente dal punto P2 sulla carta c2. Per definire la “realtà” descritta da un oggetto cartografico implicitamente svolgiamo una attività di riconoscimento della rappresentazione che si basa su un’analisi geometrica e su un’interpretazione semantica della geometria stessa. Risulta comunque evidente come la qualità della stima del vettore dei parametri dipenda, oltre che dalla precisione nella scelta dei punti, anche dal numero di associazioni definite sulle due carte. Per bassi valori del numero di punti, ad una variazione della loro scelta, possono corrispondere brusche oscillazioni dei valori dei parametri stimati, a dimostrazione del fatto che minore è la ridondanza dei dati disponibili, minore è il filtraggio del “noise” nel procedimento di stima ai minimi quadrati. Tali oscillazioni evidenziano anche come l'utilizzo di un numero limitato di punti omologhi renda molto sensibile la stima alla precisione con cui vengono scelti i punti (il singolo contributo è in grado di influenzare notevolmente la stima). Al crescere del numero di punti, i parametri stimati si stabilizzano a dei valori costanti con una progressiva diminuzione delle oscillazioni, indice di una minor sensibilità della stima al singolo contributo i-esimo e quindi all'ipotetica imprecisione nella sua scelta. Il dover inserire manualmente un elevato numero di punti omologhi ha come contropartita, oltre ai costi in termini di tempo, anche la dipendenza dell’individuazione dalla soggettività della scelta umana, sia in termini di numero e posizione dei punti selezionati che di in termini di precisione e correttezza delle associazioni. Per tali motivi è stato progettato un processo di ricerca dei punti omologhi tale da garantire sia un elevato numero di associazioni (al fine di ridurre l’instabilità della trasformazione) che la selezione automatica delle stesse (al fine di riduzione la soggettività della trasformazione).
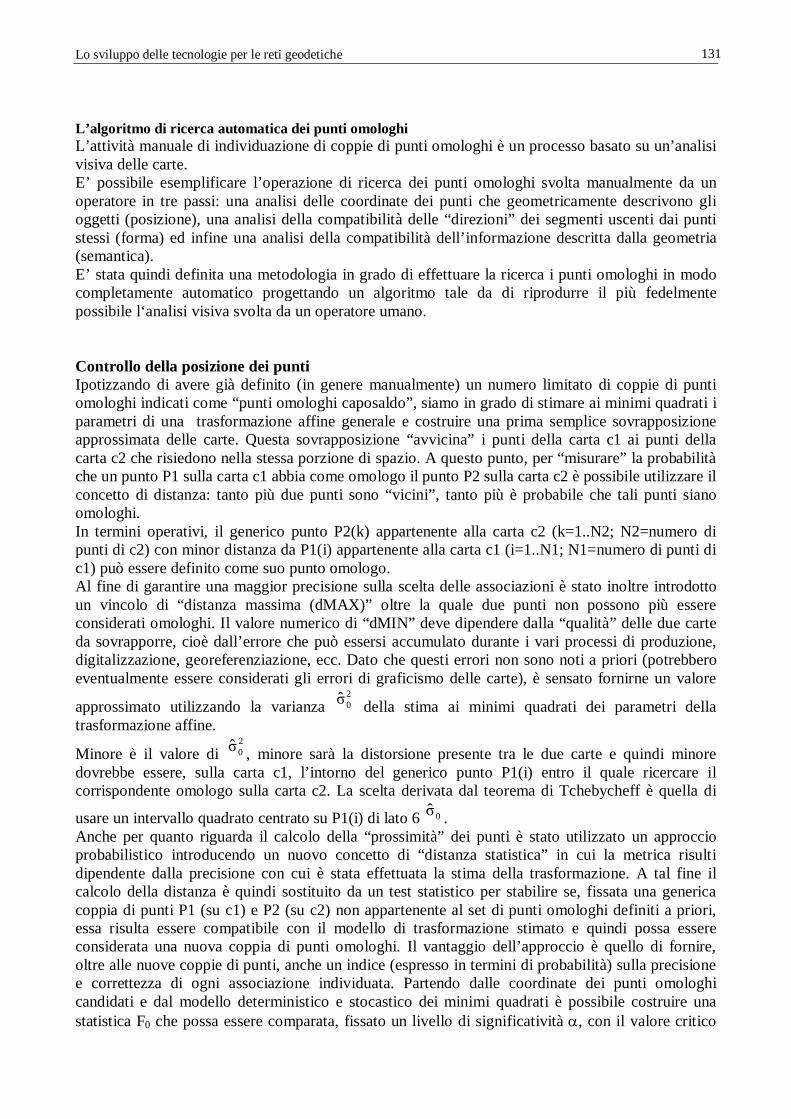
Lo sviluppo delle tecnologie per le reti geodetiche
131
L’algoritmo di ricerca automatica dei punti omologhi L’attività manuale di individuazione di coppie di punti omologhi è un processo basato su un’analisi visiva delle carte. E’ possibile esemplificare l’operazione di ricerca dei punti omologhi svolta manualmente da un operatore in tre passi: una analisi delle coordinate dei punti che geometricamente descrivono gli oggetti (posizione), una analisi della compatibilità delle “direzioni” dei segmenti uscenti dai punti stessi (forma) ed infine una analisi della compatibilità dell’informazione descritta dalla geometria (semantica). E’ stata quindi definita una metodologia in grado di effettuare la ricerca i punti omologhi in modo completamente automatico progettando un algoritmo tale da di riprodurre il più fedelmente possibile l‘analisi visiva svolta da un operatore umano. Controllo della posizione dei punti Ipotizzando di avere già definito (in genere manualmente) un numero limitato di coppie di punti omologhi indicati come “punti omologhi caposaldo”, siamo in grado di stimare ai minimi quadrati i parametri di una trasformazione affine generale e costruire una prima semplice sovrapposizione approssimata delle carte. Questa sovrapposizione “avvicina” i punti della carta c1 ai punti della carta c2 che risiedono nella stessa porzione di spazio. A questo punto, per “misurare” la probabilità che un punto P1 sulla carta c1 abbia come omologo il punto P2 sulla carta c2 è possibile utilizzare il concetto di distanza: tanto più due punti sono “vicini”, tanto più è probabile che tali punti siano omologhi. In termini operativi, il generico punto P2(k) appartenente alla carta c2 (k=1..N2; N2=numero di punti di c2) con minor distanza da P1(i) appartenente alla carta c1 (i=1..N1; N1=numero di punti di c1) può essere definito come suo punto omologo. Al fine di garantire una maggior precisione sulla scelta delle associazioni è stato inoltre introdotto un vincolo di “distanza massima (dMAX)” oltre la quale due punti non possono più essere considerati omologhi. Il valore numerico di “dMIN” deve dipendere dalla “qualità” delle due carte da sovrapporre, cioè dall’errore che può essersi accumulato durante i vari processi di produzione, digitalizzazione, georeferenziazione, ecc. Dato che questi errori non sono noti a priori (potrebbero eventualmente essere considerati gli errori di graficismo delle carte), è sensato fornirne un valore
approssimato utilizzando la varianza 20σ̂ della stima ai minimi quadrati dei parametri della
trasformazione affine.
Minore è il valore di 20σ̂ , minore sarà la distorsione presente tra le due carte e quindi minore
dovrebbe essere, sulla carta c1, l’intorno del generico punto P1(i) entro il quale ricercare il corrispondente omologo sulla carta c2. La scelta derivata dal teorema di Tchebycheff è quella di
usare un intervallo quadrato centrato su P1(i) di lato 6 0σ̂ . Anche per quanto riguarda il calcolo della “prossimità” dei punti è stato utilizzato un approccio probabilistico introducendo un nuovo concetto di “distanza statistica” in cui la metrica risulti dipendente dalla precisione con cui è stata effettuata la stima della trasformazione. A tal fine il calcolo della distanza è quindi sostituito da un test statistico per stabilire se, fissata una generica coppia di punti P1 (su c1) e P2 (su c2) non appartenente al set di punti omologhi definiti a priori, essa risulta essere compatibile con il modello di trasformazione stimato e quindi possa essere considerata una nuova coppia di punti omologhi. Il vantaggio dell’approccio è quello di fornire, oltre alle nuove coppie di punti, anche un indice (espresso in termini di probabilità) sulla precisione e correttezza di ogni associazione individuata. Partendo dalle coordinate dei punti omologhi candidati e dal modello deterministico e stocastico dei minimi quadrati è possibile costruire una statistica F0 che possa essere comparata, fissato un livello di significatività , con il valore critico
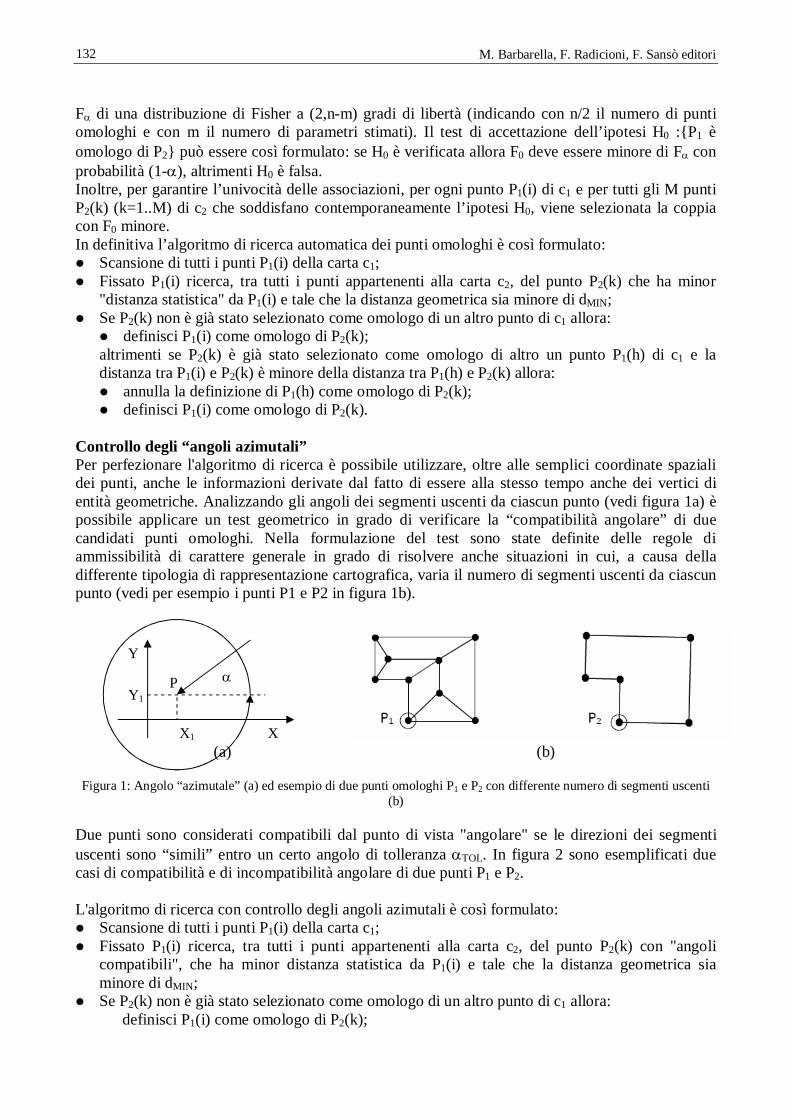
M. Barbarella, F. Radicioni, F. Sansò editori 132
F di una distribuzione di Fisher a (2,n-m) gradi di libertà (indicando con n/2 il numero di punti omologhi e con m il numero di parametri stimati). Il test di accettazione dell’ipotesi H0 :{P1 è omologo di P2} può essere così formulato: se H0 è verificata allora F0 deve essere minore di F con probabilità (1-), altrimenti H0 è falsa. Inoltre, per garantire l’univocità delle associazioni, per ogni punto P1(i) di c1 e per tutti gli M punti P2(k) (k=1..M) di c2 che soddisfano contemporaneamente l’ipotesi H0, viene selezionata la coppia con F0 minore. In definitiva l’algoritmo di ricerca automatica dei punti omologhi è così formulato: Scansione di tutti i punti P1(i) della carta c1; Fissato P1(i) ricerca, tra tutti i punti appartenenti alla carta c2, del punto P2(k) che ha minor
"distanza statistica" da P1(i) e tale che la distanza geometrica sia minore di dMIN; Se P2(k) non è già stato selezionato come omologo di un altro punto di c1 allora:
definisci P1(i) come omologo di P2(k); altrimenti se P2(k) è già stato selezionato come omologo di altro un punto P1(h) di c1 e la distanza tra P1(i) e P2(k) è minore della distanza tra P1(h) e P2(k) allora: annulla la definizione di P1(h) come omologo di P2(k); definisci P1(i) come omologo di P2(k).
Controllo degli “angoli azimutali” Per perfezionare l'algoritmo di ricerca è possibile utilizzare, oltre alle semplici coordinate spaziali dei punti, anche le informazioni derivate dal fatto di essere alla stesso tempo anche dei vertici di entità geometriche. Analizzando gli angoli dei segmenti uscenti da ciascun punto (vedi figura 1a) è possibile applicare un test geometrico in grado di verificare la “compatibilità angolare” di due candidati punti omologhi. Nella formulazione del test sono state definite delle regole di ammissibilità di carattere generale in grado di risolvere anche situazioni in cui, a causa della differente tipologia di rappresentazione cartografica, varia il numero di segmenti uscenti da ciascun punto (vedi per esempio i punti P1 e P2 in figura 1b).
Figura 1: Angolo “azimutale” (a) ed esempio di due punti omologhi P1 e P2 con differente numero di segmenti uscenti (b)
Due punti sono considerati compatibili dal punto di vista "angolare" se le direzioni dei segmenti uscenti sono “simili” entro un certo angolo di tolleranza TOL. In figura 2 sono esemplificati due casi di compatibilità e di incompatibilità angolare di due punti P1 e P2. L'algoritmo di ricerca con controllo degli angoli azimutali è così formulato: Scansione di tutti i punti P1(i) della carta c1; Fissato P1(i) ricerca, tra tutti i punti appartenenti alla carta c2, del punto P2(k) con "angoli
compatibili", che ha minor distanza statistica da P1(i) e tale che la distanza geometrica sia minore di dMIN;
Se P2(k) non è già stato selezionato come omologo di un altro punto di c1 allora: definisci P1(i) come omologo di P2(k);
Y
X X1
Y1
P
(a) (b)
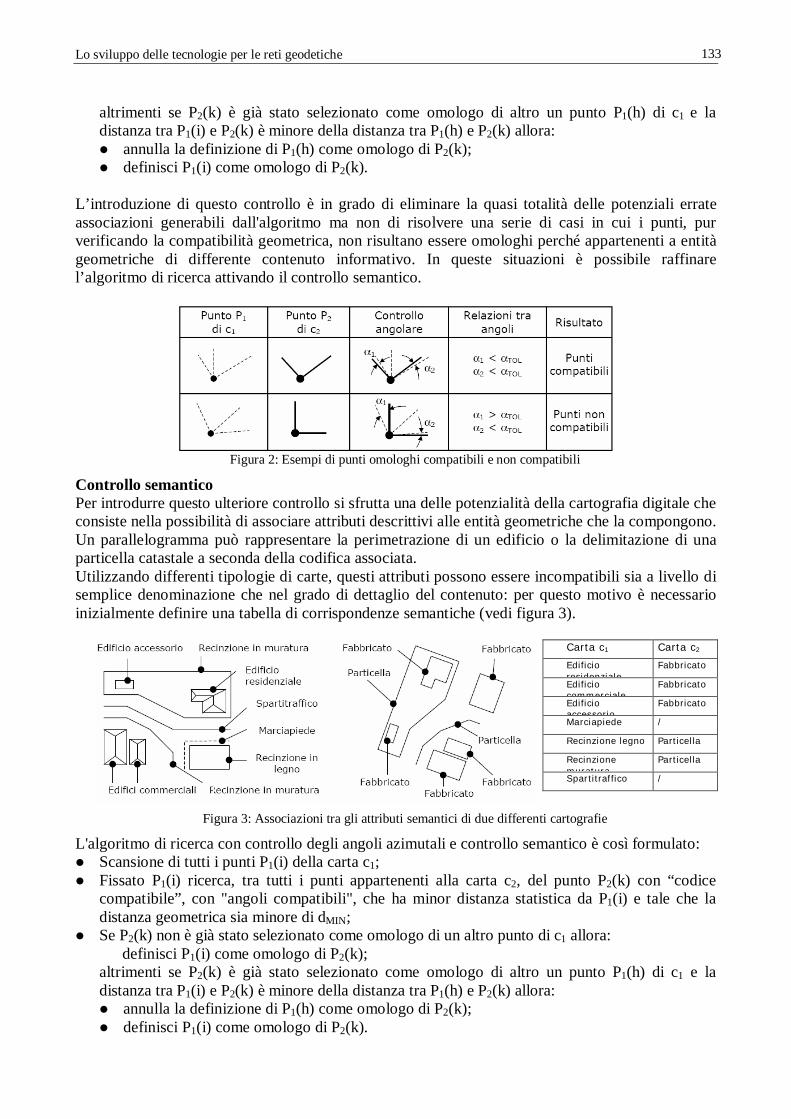
Lo sviluppo delle tecnologie per le reti geodetiche
133
altrimenti se P2(k) è già stato selezionato come omologo di altro un punto P1(h) di c1 e la distanza tra P1(i) e P2(k) è minore della distanza tra P1(h) e P2(k) allora: annulla la definizione di P1(h) come omologo di P2(k); definisci P1(i) come omologo di P2(k).
L’introduzione di questo controllo è in grado di eliminare la quasi totalità delle potenziali errate associazioni generabili dall'algoritmo ma non di risolvere una serie di casi in cui i punti, pur verificando la compatibilità geometrica, non risultano essere omologhi perché appartenenti a entità geometriche di differente contenuto informativo. In queste situazioni è possibile raffinare l’algoritmo di ricerca attivando il controllo semantico.
Figura 2: Esempi di punti omologhi compatibili e non compatibili
Controllo semantico Per introdurre questo ulteriore controllo si sfrutta una delle potenzialità della cartografia digitale che consiste nella possibilità di associare attributi descrittivi alle entità geometriche che la compongono. Un parallelogramma può rappresentare la perimetrazione di un edificio o la delimitazione di una particella catastale a seconda della codifica associata. Utilizzando differenti tipologie di carte, questi attributi possono essere incompatibili sia a livello di semplice denominazione che nel grado di dettaglio del contenuto: per questo motivo è necessario inizialmente definire una tabella di corrispondenze semantiche (vedi figura 3).
Figura 3: Associazioni tra gli attributi semantici di due differenti cartografie
L'algoritmo di ricerca con controllo degli angoli azimutali e controllo semantico è così formulato: Scansione di tutti i punti P1(i) della carta c1; Fissato P1(i) ricerca, tra tutti i punti appartenenti alla carta c2, del punto P2(k) con “codice
compatibile”, con "angoli compatibili", che ha minor distanza statistica da P1(i) e tale che la distanza geometrica sia minore di dMIN;
Se P2(k) non è già stato selezionato come omologo di un altro punto di c1 allora: definisci P1(i) come omologo di P2(k);
altrimenti se P2(k) è già stato selezionato come omologo di altro un punto P1(h) di c1 e la distanza tra P1(i) e P2(k) è minore della distanza tra P1(h) e P2(k) allora: annulla la definizione di P1(h) come omologo di P2(k); definisci P1(i) come omologo di P2(k).
Carta c1 Carta c2
Edificio residenziale
Fabbricato
Edificio commerciale
Fabbricato
Edificio accessorio
Fabbricato
Marciapiede /
Recinzione legno Particella
Recinzione muratura
Particella
Spartitraffico /
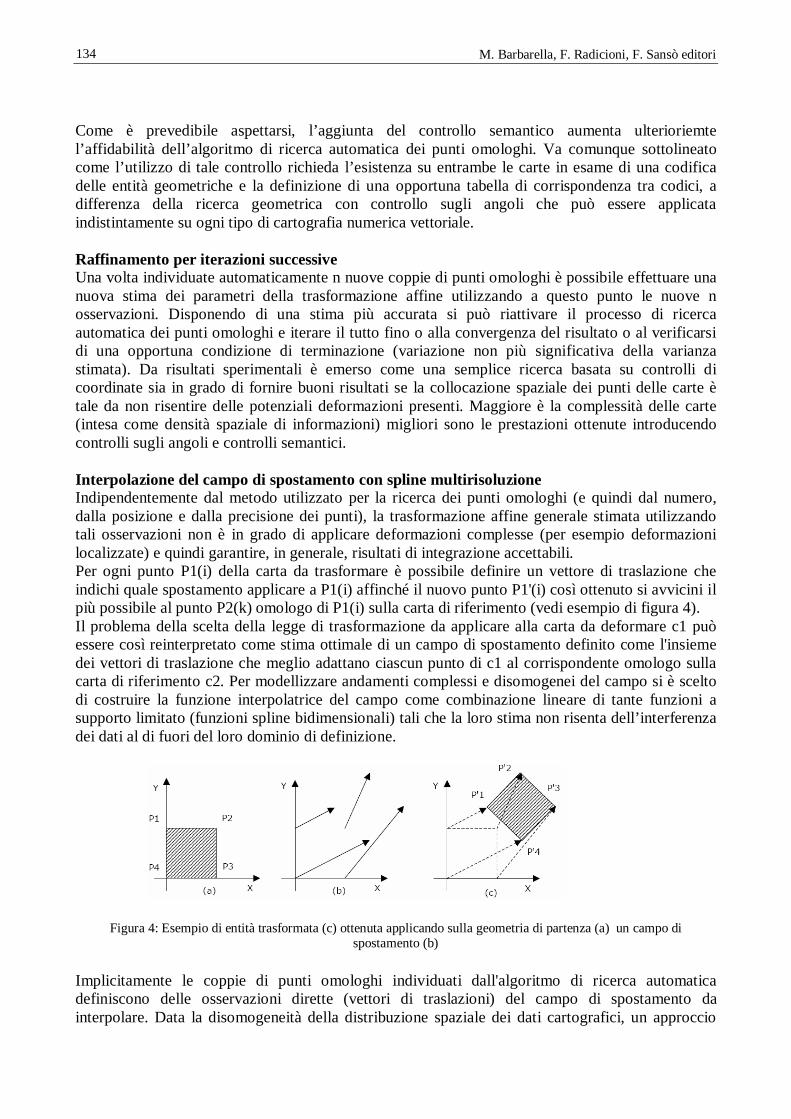
M. Barbarella, F. Radicioni, F. Sansò editori 134
Come è prevedibile aspettarsi, l’aggiunta del controllo semantico aumenta ulterioriemte l’affidabilità dell’algoritmo di ricerca automatica dei punti omologhi. Va comunque sottolineato come l’utilizzo di tale controllo richieda l’esistenza su entrambe le carte in esame di una codifica delle entità geometriche e la definizione di una opportuna tabella di corrispondenza tra codici, a differenza della ricerca geometrica con controllo sugli angoli che può essere applicata indistintamente su ogni tipo di cartografia numerica vettoriale. Raffinamento per iterazioni successive Una volta individuate automaticamente n nuove coppie di punti omologhi è possibile effettuare una nuova stima dei parametri della trasformazione affine utilizzando a questo punto le nuove n osservazioni. Disponendo di una stima più accurata si può riattivare il processo di ricerca automatica dei punti omologhi e iterare il tutto fino o alla convergenza del risultato o al verificarsi di una opportuna condizione di terminazione (variazione non più significativa della varianza stimata). Da risultati sperimentali è emerso come una semplice ricerca basata su controlli di coordinate sia in grado di fornire buoni risultati se la collocazione spaziale dei punti delle carte è tale da non risentire delle potenziali deformazioni presenti. Maggiore è la complessità delle carte (intesa come densità spaziale di informazioni) migliori sono le prestazioni ottenute introducendo controlli sugli angoli e controlli semantici. Interpolazione del campo di spostamento con spline multirisoluzione Indipendentemente dal metodo utilizzato per la ricerca dei punti omologhi (e quindi dal numero, dalla posizione e dalla precisione dei punti), la trasformazione affine generale stimata utilizzando tali osservazioni non è in grado di applicare deformazioni complesse (per esempio deformazioni localizzate) e quindi garantire, in generale, risultati di integrazione accettabili. Per ogni punto P1(i) della carta da trasformare è possibile definire un vettore di traslazione che indichi quale spostamento applicare a P1(i) affinché il nuovo punto P1'(i) così ottenuto si avvicini il più possibile al punto P2(k) omologo di P1(i) sulla carta di riferimento (vedi esempio di figura 4). Il problema della scelta della legge di trasformazione da applicare alla carta da deformare c1 può essere così reinterpretato come stima ottimale di un campo di spostamento definito come l'insieme dei vettori di traslazione che meglio adattano ciascun punto di c1 al corrispondente omologo sulla carta di riferimento c2. Per modellizzare andamenti complessi e disomogenei del campo si è scelto di costruire la funzione interpolatrice del campo come combinazione lineare di tante funzioni a supporto limitato (funzioni spline bidimensionali) tali che la loro stima non risenta dell’interferenza dei dati al di fuori del loro dominio di definizione.
Figura 4: Esempio di entità trasformata (c) ottenuta applicando sulla geometria di partenza (a) un campo di spostamento (b)
Implicitamente le coppie di punti omologhi individuati dall'algoritmo di ricerca automatica definiscono delle osservazioni dirette (vettori di traslazioni) del campo di spostamento da interpolare. Data la disomogeneità della distribuzione spaziale dei dati cartografici, un approccio
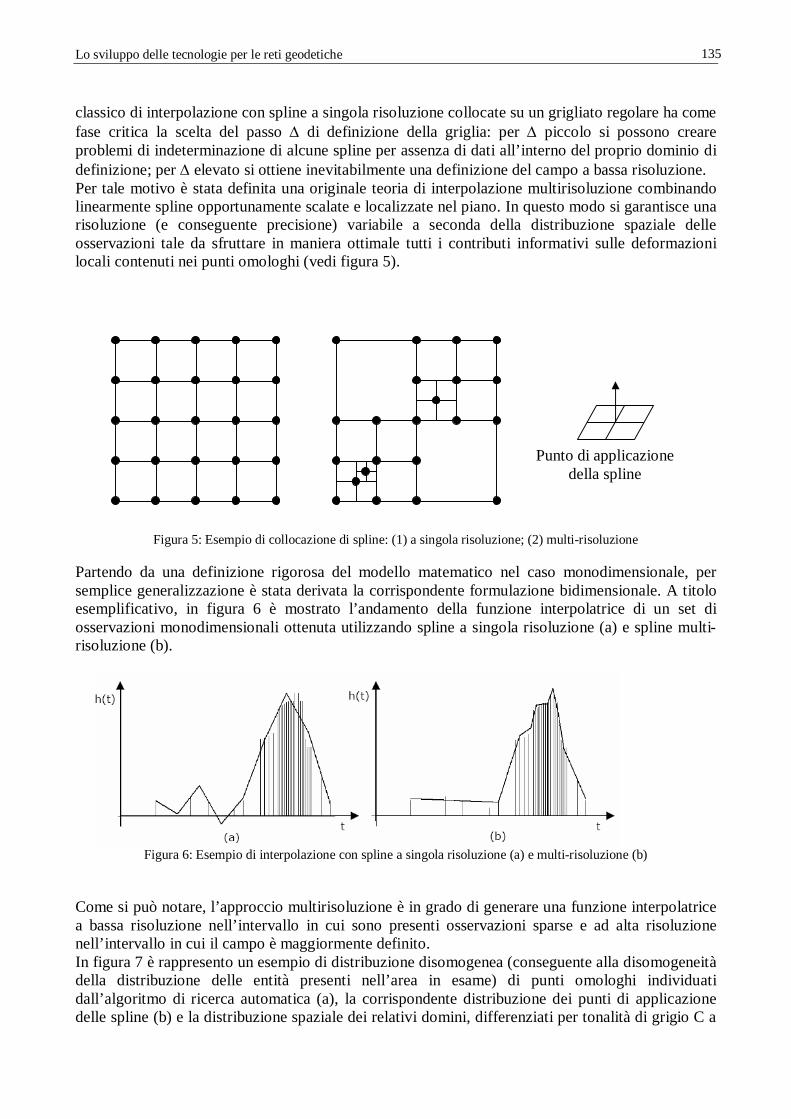
Lo sviluppo delle tecnologie per le reti geodetiche
135
classico di interpolazione con spline a singola risoluzione collocate su un grigliato regolare ha come fase critica la scelta del passo di definizione della griglia: per piccolo si possono creare problemi di indeterminazione di alcune spline per assenza di dati all’interno del proprio dominio di definizione; per elevato si ottiene inevitabilmente una definizione del campo a bassa risoluzione. Per tale motivo è stata definita una originale teoria di interpolazione multirisoluzione combinando linearmente spline opportunamente scalate e localizzate nel piano. In questo modo si garantisce una risoluzione (e conseguente precisione) variabile a seconda della distribuzione spaziale delle osservazioni tale da sfruttare in maniera ottimale tutti i contributi informativi sulle deformazioni locali contenuti nei punti omologhi (vedi figura 5).
Figura 5: Esempio di collocazione di spline: (1) a singola risoluzione; (2) multi-risoluzione
Partendo da una definizione rigorosa del modello matematico nel caso monodimensionale, per semplice generalizzazione è stata derivata la corrispondente formulazione bidimensionale. A titolo esemplificativo, in figura 6 è mostrato l’andamento della funzione interpolatrice di un set di osservazioni monodimensionali ottenuta utilizzando spline a singola risoluzione (a) e spline multi-risoluzione (b).
Figura 6: Esempio di interpolazione con spline a singola risoluzione (a) e multi-risoluzione (b)
Come si può notare, l’approccio multirisoluzione è in grado di generare una funzione interpolatrice a bassa risoluzione nell’intervallo in cui sono presenti osservazioni sparse e ad alta risoluzione nell’intervallo in cui il campo è maggiormente definito. In figura 7 è rappresento un esempio di distribuzione disomogenea (conseguente alla disomogeneità della distribuzione delle entità presenti nell’area in esame) di punti omologhi individuati dall’algoritmo di ricerca automatica (a), la corrispondente distribuzione dei punti di applicazione delle spline (b) e la distribuzione spaziale dei relativi domini, differenziati per tonalità di grigio C a
Punto di applicazione della spline
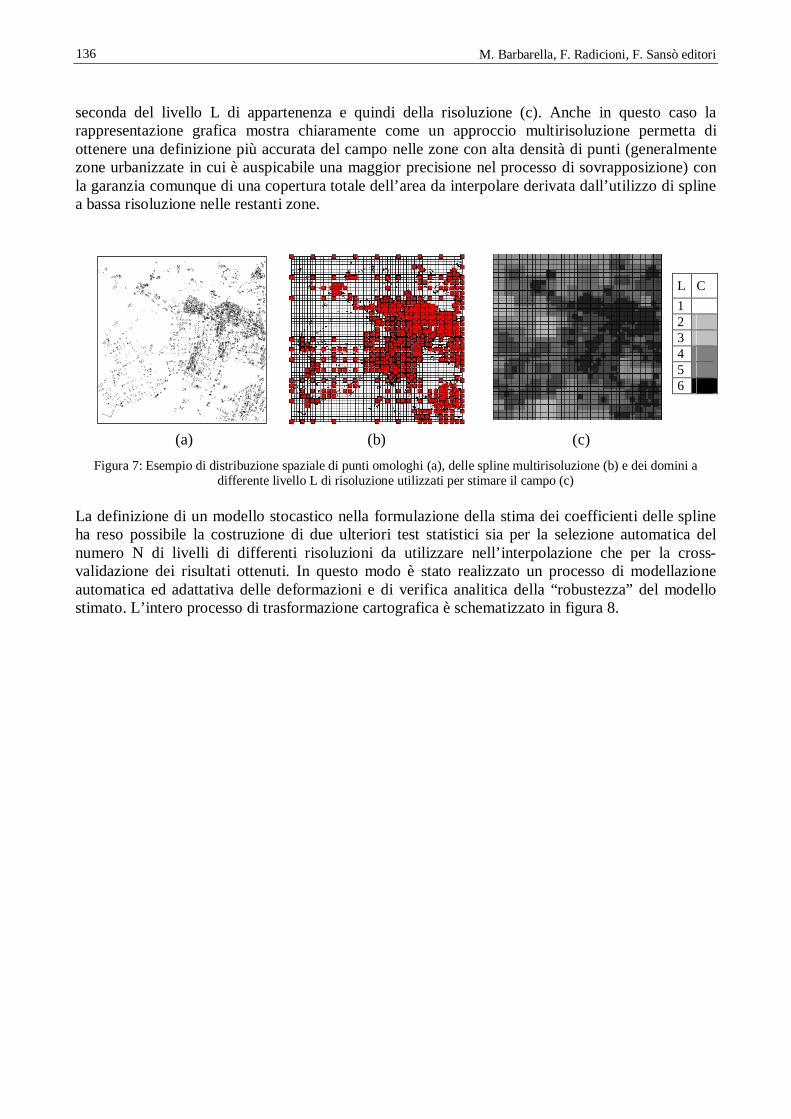
M. Barbarella, F. Radicioni, F. Sansò editori 136
seconda del livello L di appartenenza e quindi della risoluzione (c). Anche in questo caso la rappresentazione grafica mostra chiaramente come un approccio multirisoluzione permetta di ottenere una definizione più accurata del campo nelle zone con alta densità di punti (generalmente zone urbanizzate in cui è auspicabile una maggior precisione nel processo di sovrapposizione) con la garanzia comunque di una copertura totale dell’area da interpolare derivata dall’utilizzo di spline a bassa risoluzione nelle restanti zone.
Figura 7: Esempio di distribuzione spaziale di punti omologhi (a), delle spline multirisoluzione (b) e dei domini a differente livello L di risoluzione utilizzati per stimare il campo (c)
La definizione di un modello stocastico nella formulazione della stima dei coefficienti delle spline ha reso possibile la costruzione di due ulteriori test statistici sia per la selezione automatica del numero N di livelli di differenti risoluzioni da utilizzare nell’interpolazione che per la cross-validazione dei risultati ottenuti. In questo modo è stato realizzato un processo di modellazione automatica ed adattativa delle deformazioni e di verifica analitica della “robustezza” del modello stimato. L’intero processo di trasformazione cartografica è schematizzato in figura 8.
L C 1 2 3 4 5 6
(a) (b) (c)
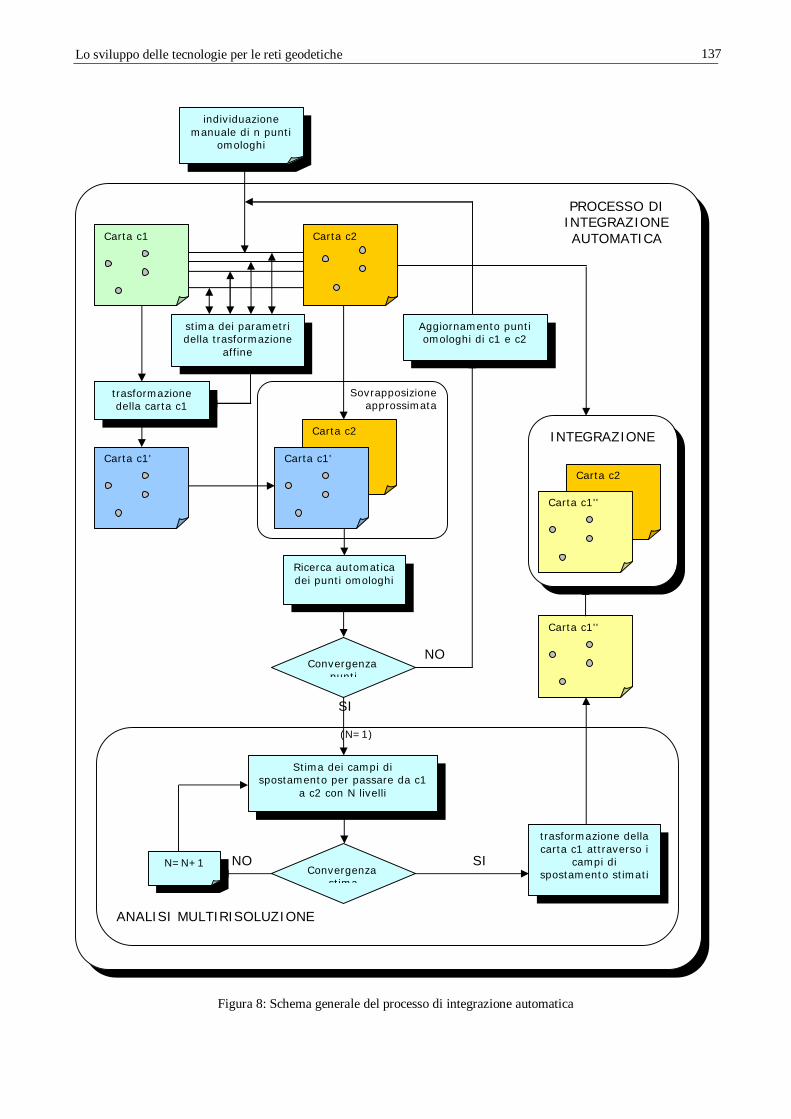
Lo sviluppo delle tecnologie per le reti geodetiche
137
Figura 8: Schema generale del processo di integrazione automatica
PROCESSO DI INTEGRAZIONE AUTOMATICA
Carta c2 INTEGRAZIONE
Carta c2
individuazione manuale di n punti
omologhi
stima dei parametri della trasformazione
affine
trasformazione della carta c1
Carta c1
Ricerca automatica dei punti omologhi
Aggiornamento punti omologhi di c1 e c2
N=N+1
Convergenza punti
Stima dei campi di spostamento per passare da c1
a c2 con N livelli
trasformazione della carta c1 attraverso i
campi di spostamento stimati Convergenza
stima
Carta c1' Carta c1'
Carta c2
Carta c1''
Carta c1''
SI
NO
SI NO
(N=1)
ANALISI MULTIRISOLUZIONE
Sovrapposizione approssimata
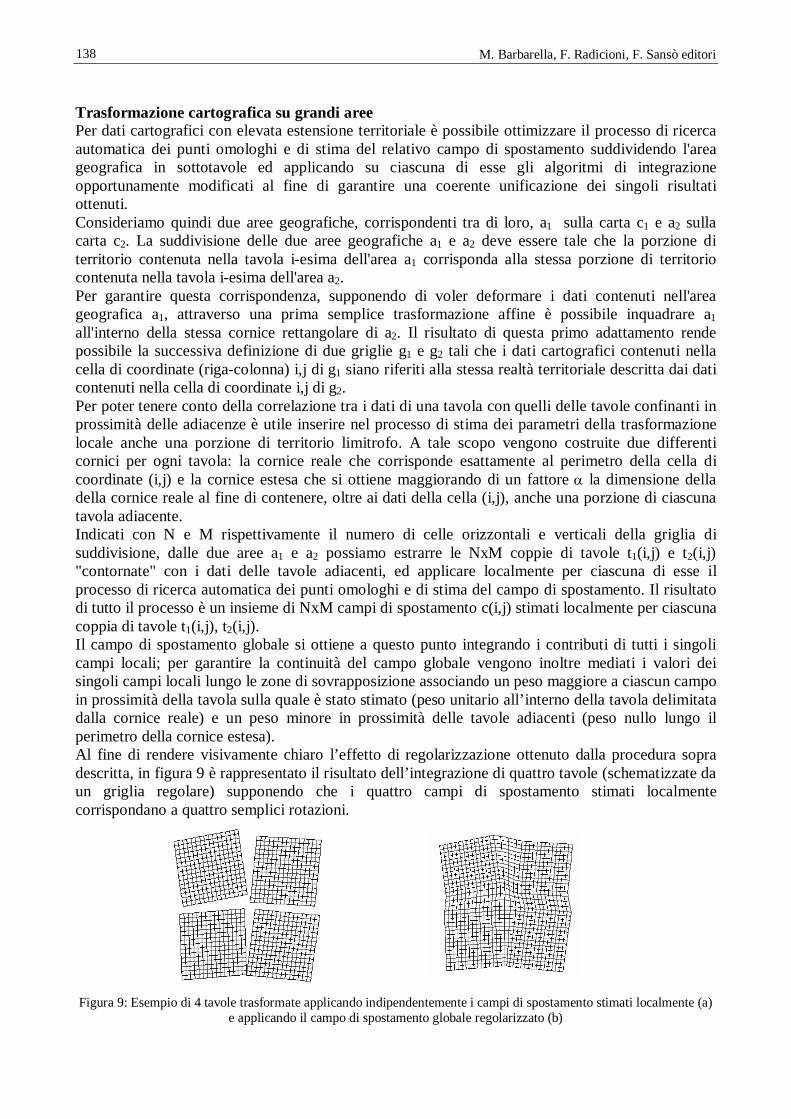
M. Barbarella, F. Radicioni, F. Sansò editori 138
Trasformazione cartografica su grandi aree Per dati cartografici con elevata estensione territoriale è possibile ottimizzare il processo di ricerca automatica dei punti omologhi e di stima del relativo campo di spostamento suddividendo l'area geografica in sottotavole ed applicando su ciascuna di esse gli algoritmi di integrazione opportunamente modificati al fine di garantire una coerente unificazione dei singoli risultati ottenuti. Consideriamo quindi due aree geografiche, corrispondenti tra di loro, a1 sulla carta c1 e a2 sulla carta c2. La suddivisione delle due aree geografiche a1 e a2 deve essere tale che la porzione di territorio contenuta nella tavola i-esima dell'area a1 corrisponda alla stessa porzione di territorio contenuta nella tavola i-esima dell'area a2. Per garantire questa corrispondenza, supponendo di voler deformare i dati contenuti nell'area geografica a1, attraverso una prima semplice trasformazione affine è possibile inquadrare a1 all'interno della stessa cornice rettangolare di a2. Il risultato di questa primo adattamento rende possibile la successiva definizione di due griglie g1 e g2 tali che i dati cartografici contenuti nella cella di coordinate (riga-colonna) i,j di g1 siano riferiti alla stessa realtà territoriale descritta dai dati contenuti nella cella di coordinate i,j di g2. Per poter tenere conto della correlazione tra i dati di una tavola con quelli delle tavole confinanti in prossimità delle adiacenze è utile inserire nel processo di stima dei parametri della trasformazione locale anche una porzione di territorio limitrofo. A tale scopo vengono costruite due differenti cornici per ogni tavola: la cornice reale che corrisponde esattamente al perimetro della cella di coordinate (i,j) e la cornice estesa che si ottiene maggiorando di un fattore la dimensione della della cornice reale al fine di contenere, oltre ai dati della cella (i,j), anche una porzione di ciascuna tavola adiacente. Indicati con N e M rispettivamente il numero di celle orizzontali e verticali della griglia di suddivisione, dalle due aree a1 e a2 possiamo estrarre le NxM coppie di tavole t1(i,j) e t2(i,j) "contornate" con i dati delle tavole adiacenti, ed applicare localmente per ciascuna di esse il processo di ricerca automatica dei punti omologhi e di stima del campo di spostamento. Il risultato di tutto il processo è un insieme di NxM campi di spostamento c(i,j) stimati localmente per ciascuna coppia di tavole t1(i,j), t2(i,j). Il campo di spostamento globale si ottiene a questo punto integrando i contributi di tutti i singoli campi locali; per garantire la continuità del campo globale vengono inoltre mediati i valori dei singoli campi locali lungo le zone di sovrapposizione associando un peso maggiore a ciascun campo in prossimità della tavola sulla quale è stato stimato (peso unitario all’interno della tavola delimitata dalla cornice reale) e un peso minore in prossimità delle tavole adiacenti (peso nullo lungo il perimetro della cornice estesa). Al fine di rendere visivamente chiaro l’effetto di regolarizzazione ottenuto dalla procedura sopra descritta, in figura 9 è rappresentato il risultato dell’integrazione di quattro tavole (schematizzate da un griglia regolare) supponendo che i quattro campi di spostamento stimati localmente corrispondano a quattro semplici rotazioni. Figura 9: Esempio di 4 tavole trasformate applicando indipendentemente i campi di spostamento stimati localmente (a)
e applicando il campo di spostamento globale regolarizzato (b)
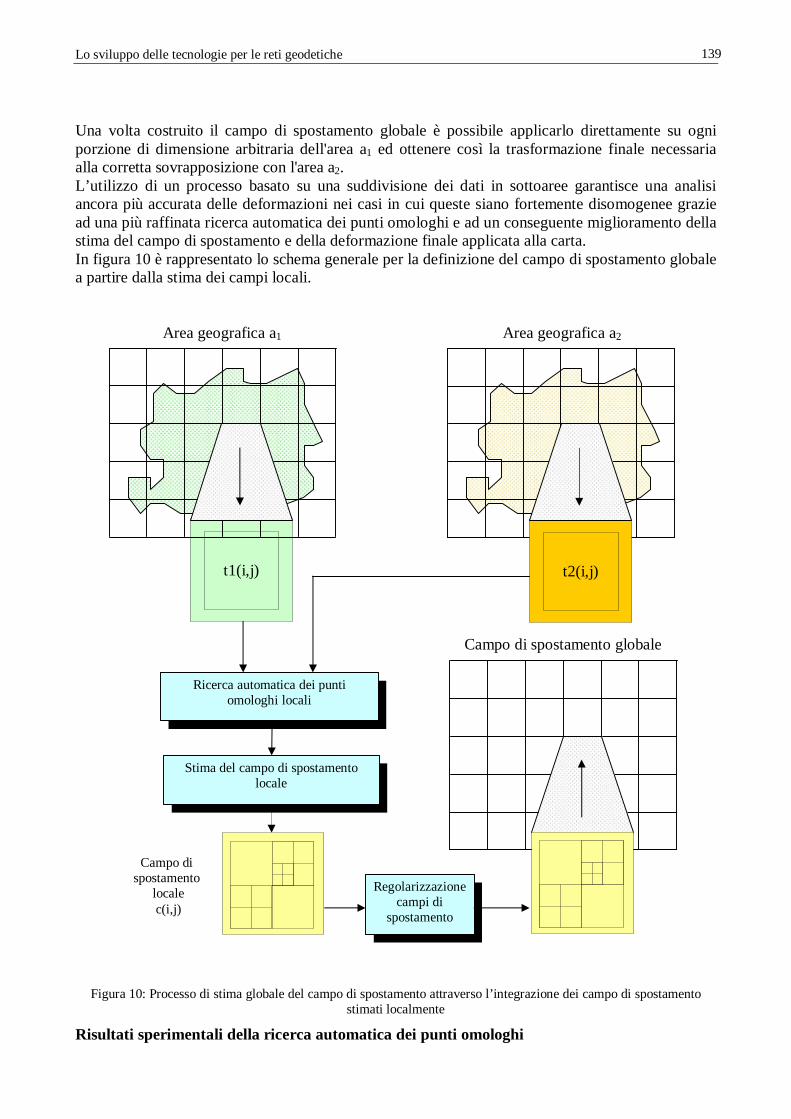
Lo sviluppo delle tecnologie per le reti geodetiche
139
t1(i,j)
t2(i,j)
Una volta costruito il campo di spostamento globale è possibile applicarlo direttamente su ogni porzione di dimensione arbitraria dell'area a1 ed ottenere così la trasformazione finale necessaria alla corretta sovrapposizione con l'area a2. L’utilizzo di un processo basato su una suddivisione dei dati in sottoaree garantisce una analisi ancora più accurata delle deformazioni nei casi in cui queste siano fortemente disomogenee grazie ad una più raffinata ricerca automatica dei punti omologhi e ad un conseguente miglioramento della stima del campo di spostamento e della deformazione finale applicata alla carta. In figura 10 è rappresentato lo schema generale per la definizione del campo di spostamento globale a partire dalla stima dei campi locali.
Figura 10: Processo di stima globale del campo di spostamento attraverso l’integrazione dei campo di spostamento stimati localmente
Risultati sperimentali della ricerca automatica dei punti omologhi
Stima del campo di spostamento locale
Ricerca automatica dei punti omologhi locali
Area geografica a1 Area geografica a2
Regolarizzazione campi di
spostamento
Campo di spostamento
locale c(i,j)
Campo di spostamento globale
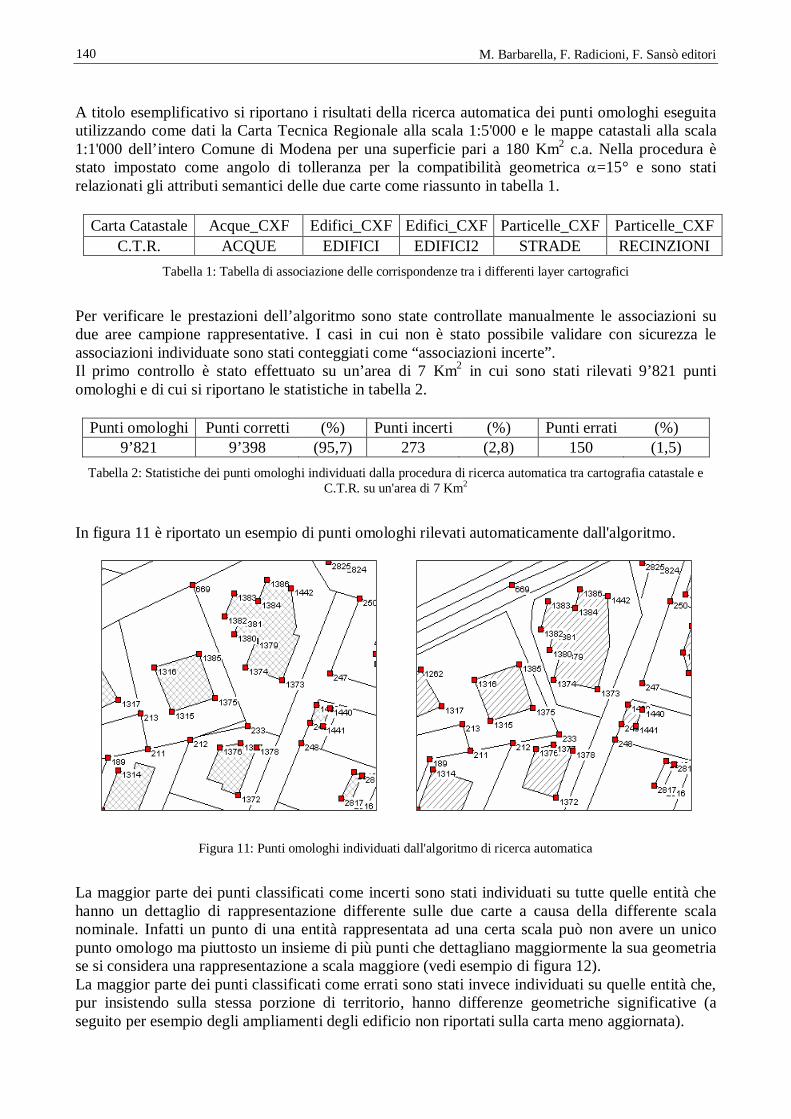
M. Barbarella, F. Radicioni, F. Sansò editori 140
A titolo esemplificativo si riportano i risultati della ricerca automatica dei punti omologhi eseguita utilizzando come dati la Carta Tecnica Regionale alla scala 1:5'000 e le mappe catastali alla scala 1:1'000 dell’intero Comune di Modena per una superficie pari a 180 Km2 c.a. Nella procedura è stato impostato come angolo di tolleranza per la compatibilità geometrica =15° e sono stati relazionati gli attributi semantici delle due carte come riassunto in tabella 1.
Carta Catastale Acque_CXF Edifici_CXF Edifici_CXF Particelle_CXF Particelle_CXF C.T.R. ACQUE EDIFICI EDIFICI2 STRADE RECINZIONI
Tabella 1: Tabella di associazione delle corrispondenze tra i differenti layer cartografici
Per verificare le prestazioni dell’algoritmo sono state controllate manualmente le associazioni su due aree campione rappresentative. I casi in cui non è stato possibile validare con sicurezza le associazioni individuate sono stati conteggiati come “associazioni incerte”. Il primo controllo è stato effettuato su un’area di 7 Km2 in cui sono stati rilevati 9’821 punti omologhi e di cui si riportano le statistiche in tabella 2.
Punti omologhi Punti corretti (%) Punti incerti (%) Punti errati (%) 9’821 9’398 (95,7) 273 (2,8) 150 (1,5)
Tabella 2: Statistiche dei punti omologhi individuati dalla procedura di ricerca automatica tra cartografia catastale e C.T.R. su un'area di 7 Km2
In figura 11 è riportato un esempio di punti omologhi rilevati automaticamente dall'algoritmo.
Figura 11: Punti omologhi individuati dall'algoritmo di ricerca automatica
La maggior parte dei punti classificati come incerti sono stati individuati su tutte quelle entità che hanno un dettaglio di rappresentazione differente sulle due carte a causa della differente scala nominale. Infatti un punto di una entità rappresentata ad una certa scala può non avere un unico punto omologo ma piuttosto un insieme di più punti che dettagliano maggiormente la sua geometria se si considera una rappresentazione a scala maggiore (vedi esempio di figura 12). La maggior parte dei punti classificati come errati sono stati invece individuati su quelle entità che, pur insistendo sulla stessa porzione di territorio, hanno differenze geometriche significative (a seguito per esempio degli ampliamenti degli edificio non riportati sulla carta meno aggiornata).
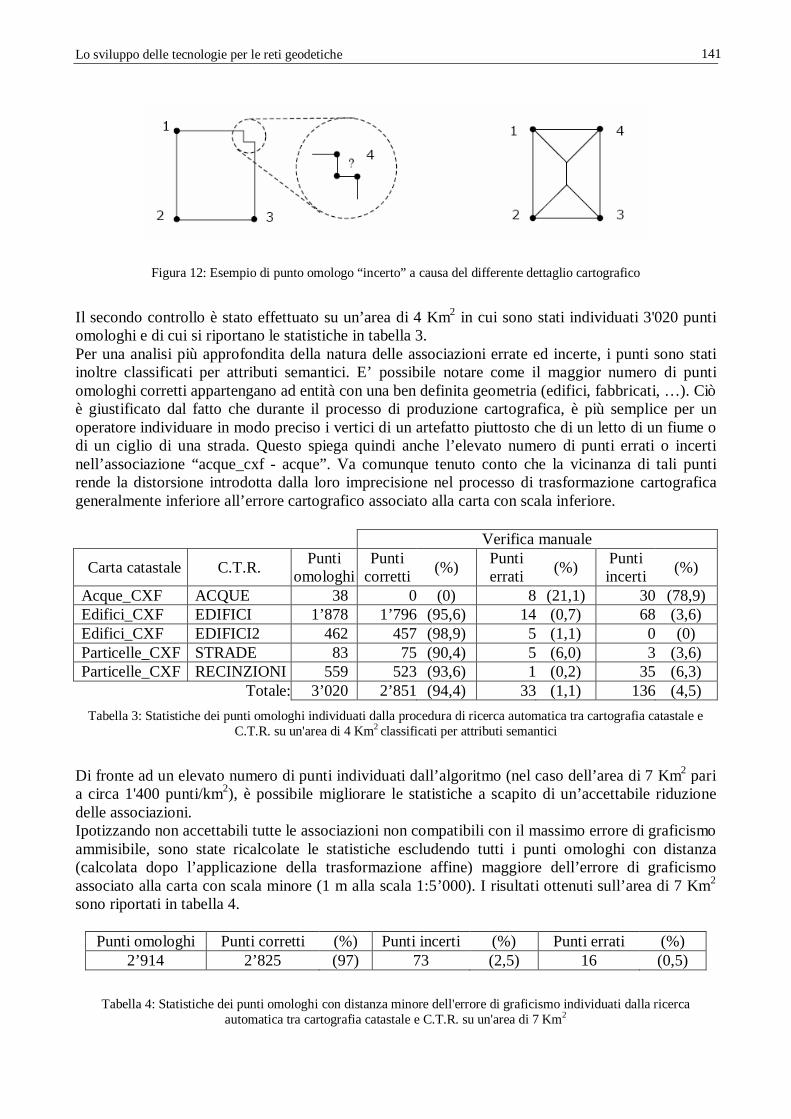
Lo sviluppo delle tecnologie per le reti geodetiche
141
Figura 12: Esempio di punto omologo “incerto” a causa del differente dettaglio cartografico
Il secondo controllo è stato effettuato su un’area di 4 Km2 in cui sono stati individuati 3'020 punti omologhi e di cui si riportano le statistiche in tabella 3. Per una analisi più approfondita della natura delle associazioni errate ed incerte, i punti sono stati inoltre classificati per attributi semantici. E’ possibile notare come il maggior numero di punti omologhi corretti appartengano ad entità con una ben definita geometria (edifici, fabbricati, …). Ciò è giustificato dal fatto che durante il processo di produzione cartografica, è più semplice per un operatore individuare in modo preciso i vertici di un artefatto piuttosto che di un letto di un fiume o di un ciglio di una strada. Questo spiega quindi anche l’elevato numero di punti errati o incerti nell’associazione “acque_cxf - acque”. Va comunque tenuto conto che la vicinanza di tali punti rende la distorsione introdotta dalla loro imprecisione nel processo di trasformazione cartografica generalmente inferiore all’errore cartografico associato alla carta con scala inferiore.
Verifica manuale
Carta catastale C.T.R. Punti omologhi
Punti corretti (%) Punti
errati (%) Punti incerti (%)
Acque_CXF ACQUE 38 0 (0) 8 (21,1) 30 (78,9) Edifici_CXF EDIFICI 1’878 1’796 (95,6) 14 (0,7) 68 (3,6) Edifici_CXF EDIFICI2 462 457 (98,9) 5 (1,1) 0 (0) Particelle_CXF STRADE 83 75 (90,4) 5 (6,0) 3 (3,6) Particelle_CXF RECINZIONI 559 523 (93,6) 1 (0,2) 35 (6,3)
Totale: 3’020 2’851 (94,4) 33 (1,1) 136 (4,5) Tabella 3: Statistiche dei punti omologhi individuati dalla procedura di ricerca automatica tra cartografia catastale e
C.T.R. su un'area di 4 Km2 classificati per attributi semantici
Di fronte ad un elevato numero di punti individuati dall’algoritmo (nel caso dell’area di 7 Km2 pari a circa 1'400 punti/km2), è possibile migliorare le statistiche a scapito di un’accettabile riduzione delle associazioni. Ipotizzando non accettabili tutte le associazioni non compatibili con il massimo errore di graficismo ammisibile, sono state ricalcolate le statistiche escludendo tutti i punti omologhi con distanza (calcolata dopo l’applicazione della trasformazione affine) maggiore dell’errore di graficismo associato alla carta con scala minore (1 m alla scala 1:5’000). I risultati ottenuti sull’area di 7 Km2 sono riportati in tabella 4.
Punti omologhi Punti corretti (%) Punti incerti (%) Punti errati (%) 2’914 2’825 (97) 73 (2,5) 16 (0,5)
Tabella 4: Statistiche dei punti omologhi con distanza minore dell'errore di graficismo individuati dalla ricerca
automatica tra cartografia catastale e C.T.R. su un'area di 7 Km2
M. Barbarella, F. Radicioni, F. Sansò editori 142
Si può notare come la scelta di una soglia sulle distanze tra punti produca una riduzione del 67% del numero di punti errati (dall’1,5% allo 0,5%) e solo una lieve riduzione del numero di punti incerti (dal 2,8% al 2,5%). Dall’analisi dei risultati ottenuti si può sostenere che l’affidabilità dell’algoritmo di ricerca automatica dei punti omologhi è più che soddisfacente, dal momento che percentuali di errori dell’ordine dell’1,5% (o addirittura dello 0,5%), con un numero così elevato di punti sono difficilmente raggiungibili anche da un operatore esperto che operi in condizioni standard di produzione. Sappiamo che all’aumentare del numero di punti omologhi aumenta l’accuratezza della deformazione e quindi la carta da trasformare meglio si adatta a quella di riferimento. D’altro canto l’introduzione di punti omologhi errati introduce deformazioni errate. Per contenere questo effetto e al tempo stesso conservare un numero sufficientemente elevato di punti omologhi, può essere applicato con successo, come dimostrato dai test eseguiti, un filtro sui punti omologhi individuati che tenga conto dell’errore di graficismo e quindi, letto in altro modo, della scala delle carte da deformare. Prestazioni dell’algoritmo di stima del campo di spostamento Per valutare le prestazioni dell’algoritmo di interpolazione del campo di spostamento è stata effettuata una cross-validazione dei risultati ottenuti sia sul campione di 7 Km2 che sull’interno territorio di Modena. In entrambi i casi la totalità dei punti omologhi individuati è stata suddivisa in due sottoinsiemi: l’insieme dei punti utilizzati per stimare il campo di spostamento (80% circa) e l’insieme dei punti utilizzati per validare il risultato (20% restante) attraverso un confronto diretto della distanza di questi ultimi prima e dopo l’applicazione del campo di spostamento. Per quanto riguarda l’area campione di 7 Km2 sono stati utilizzati i 2’914 punti omologhi individuati, come visto in precedenza, limitando la distanza massima all’errore di graficismo. In particolare 2’325 punti sono stati utilizzati per stimare il campo di spostamento e i 589 restanti (punti di controllo) per cross-validare i risultati. Per confermare la migliore attendibilità di tali punti rispetto ai 9’821 totali è stato inoltre ristimato il campo utilizzando questi ultimi (sempre con l’esclusione dei 589 punti di test) e sono stati confrontati i due differenti risultati. In tabella 5 si riportano la media e lo scarto quadratico medio della distanza dei punti omologhi di controllo prima e dopo l’applicazione dei due campi di spostamento.
Distanza dei punti omologhi
Osservazioni per la stima Media (m) S.q.m. (m)
Prima della trasformazione / 0,789 0,467 Dopo la trasformazione 9’232 0,663 0,402 Dopo la trasformazione 2’325 0,490 0,281 Tabella 5: Prestazioni dell’algoritmo di interpolazione su un’area campione di 7 Km2 (statistiche calcolate sui punti di
controllo)
Si riportano di seguito due esempi del risultato della trasformazione della carta catastale sovrapposta alla Carta Tecnica Regionale utilizzando le spline multirisoluzione al fine di verificare le differenze rispetto a quanto ottenuto utilizzando una semplice trasformazione affine generale (vedi figura 13).
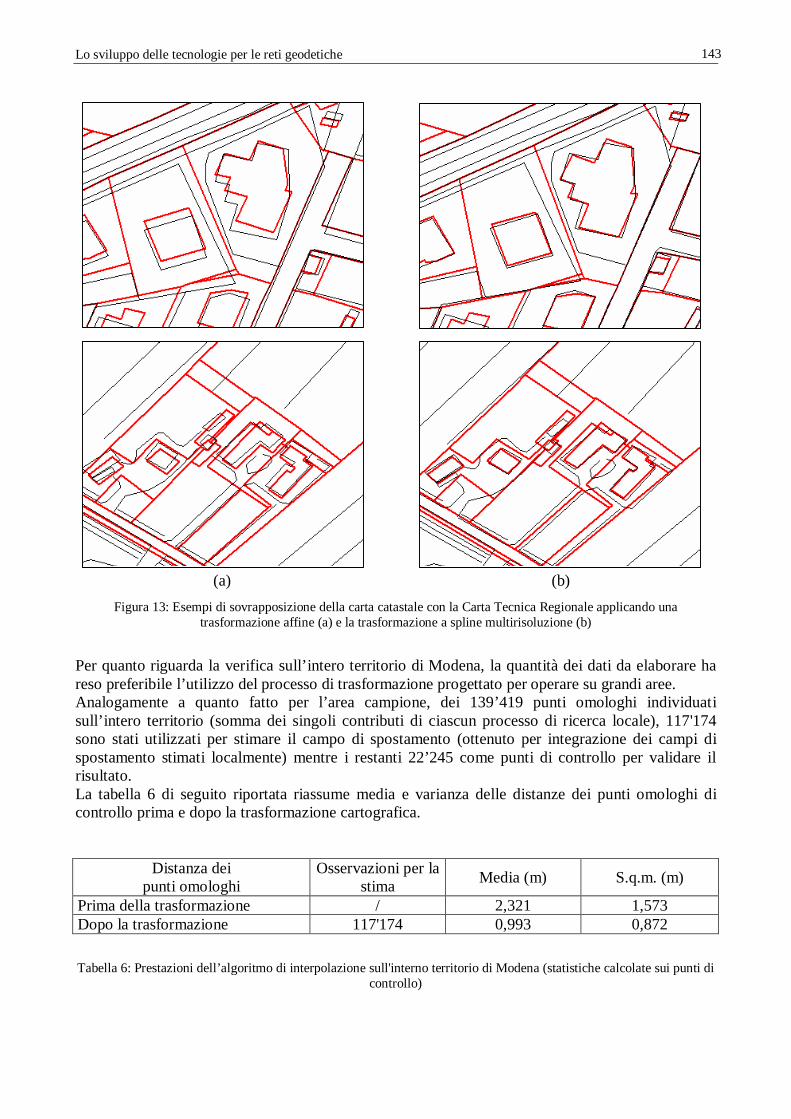
Lo sviluppo delle tecnologie per le reti geodetiche
143
Figura 13: Esempi di sovrapposizione della carta catastale con la Carta Tecnica Regionale applicando una trasformazione affine (a) e la trasformazione a spline multirisoluzione (b)
Per quanto riguarda la verifica sull’intero territorio di Modena, la quantità dei dati da elaborare ha reso preferibile l’utilizzo del processo di trasformazione progettato per operare su grandi aree. Analogamente a quanto fatto per l’area campione, dei 139’419 punti omologhi individuati sull’intero territorio (somma dei singoli contributi di ciascun processo di ricerca locale), 117'174 sono stati utilizzati per stimare il campo di spostamento (ottenuto per integrazione dei campi di spostamento stimati localmente) mentre i restanti 22’245 come punti di controllo per validare il risultato. La tabella 6 di seguito riportata riassume media e varianza delle distanze dei punti omologhi di controllo prima e dopo la trasformazione cartografica.
Distanza dei punti omologhi
Osservazioni per la stima Media (m) S.q.m. (m)
Prima della trasformazione / 2,321 1,573 Dopo la trasformazione 117'174 0,993 0,872 Tabella 6: Prestazioni dell’algoritmo di interpolazione sull'interno territorio di Modena (statistiche calcolate sui punti di
controllo)
(b) (a)
M. Barbarella, F. Radicioni, F. Sansò editori 144
Si può notare come la media della distanza dei punti omologhi diminuisca del 57% mentre lo scarto quadratico medio del 45%. Da rilevare inoltre come la distanza media dei punti dopo la trasformazione diventi inferiore all’errore di graficismo ammissibile per la carta meno dettagliata. Conclusioni sulle verifiche sperimentali Le verifiche sperimentali sono state condotte su dati cartografici reali (base catastale e Carta Tecnica Regionale del Comune di Modena) di estensione territoriale e complessità strutturale tali da essere considerati un campione rappresentativo delle più diffuse carte numeriche (dalla scala 1:500 alla scala 1:5000). Per quanto riguarda le prestazioni dell’algoritmo di interpolazione con spline multirisoluzione si può concludere che i risultati sono pienamente soddisfacenti tenuto conto che, anche nel peggiore dei casi, cioè considerando indistintamente tutti gli omologhi individuati dall'algoritmo di ricerca automatica, la distanza media dei punti al termine della trasformazione risulta inferiore o uguale all’errore di graficismo della carta a scala minore.

Lo sviluppo delle tecnologie per le reti geodetiche
145
Allegato 2.4 Ricomposizione Procustiana della Rete Fiduciale e della Cartografia Catastale Numerica Alberto Beinat, Fabio Crosilla, Emiliano Sossai Università di Udine, Laboratorio di Geomatica Computazionale - [email protected]
KEY WORDS: Cartografia catastale, ricomposizione, punti fiduciali, PREGEO
RIASSUNTO In questi ultimi anni, il gruppo di ricerca2 dell’Università di Udine ha sviluppato una procedura originale e innovativa per la ricomposizione globale della rete dei Punti Fiduciali del catasto. Tale metodo, basato sulle tecniche dell’analisi procustiana generalizzata, si prefigge di effettuare il miglior adattamento conforme ai minimi quadrati dei vari poligoni fiduciali ricostruiti sulla base degli elaborati tecnici inseriti in PREGEO. L’idea distintiva è utilizzare per la compensazione della rete non già le singole distanze tra PF, valutate in maniera disgiunta l’una dall’altra, bensì ogni singolo rilievo nella propria interezza, considerato come entità geometrica non disaggregabile, con vertici interconnessi tra di loro da legami rigidi. La soluzione proposta ha due importanti conseguenze: innanzi tutto, permette di individuare, stimare e risolvere gli eventuali sistematismi presenti nei dati di partenza; inoltre, preservando la forma dei poligoni fiduciali compensati, evita l’insorgenza di deformazioni anisotrope nel tessuto cartografico e mantiene inalterate le mutue relazioni tra i PF e i rilievi di aggiornamento ad essi appoggiati. Tali considerazioni hanno trovato pieno riscontro nella sperimentazione svolta. Dopo una fase iniziale eseguita in ambiente simulato, le prove hanno riguardato due reti reali situate nei comuni di Udine (zona Udine Nord: 68 PF e 3.8 Km2 di estensione), Gorizia (zone censuarie A e G: 59 PF e 2.6 Km2) e Tarcento (UD) (205 PF e 20 Km2). Il confronto tra i risultati ottenuti dalla ricomposizione conforme e i dati relativi a reti di Punti Fiduciali di controllo appositamente istituite, ha permesso di constatare l’ottimo rispetto delle tolleranze vigenti già a partire da una compensazione vincolata a un numero di PF fissi pari al 10-15% del totale. Altre verifiche hanno evidenziato inoltre come il metodo procustiano riesca, a differenza del metodo di compensazione classico, a ridurre gli effetti di componenti sistematiche d’errore eventualmente presenti nelle misure. Gli esiti della sperimentazione hanno permesso di consolidare il metodo in funzione della fase successiva, ovvero la ricomposizione cartografica numerica delle particelle. Nel presente lavoro sono illustrati i primi risultati in questa direzione, ossia l’inserimento, mediante trasformazione conforme ai minimi quadrati, dei rilievi PREGEO all’interno delle reti fiduciali compensate . Per testare la bontà dell’operazione, è stata eseguita una doppia serie di indagini: nella prima si sono valutate le effettive discrepanze, in termini di coordinate, tra punti omologhi di rilievi adiacenti; successivamente, mediante sovrapposizione, si sono confrontati i contenuti della mappa catastale parziale così ricostruita con quelli della carta tecnica numerica del Friuli Venezia Giulia. Nel primo caso, le differenze riscontrate sono risultate estremamente contenute; nel secondo, è stata confermata e messa in risalto la notevole congruenza ottenibile tra i due prodotti cartografici a seguito della ricomposizione dei rilievi catastali. Ulteriori miglioramenti sono stati permessi dall’attuazione di una procedura di ricomposizione che considera simultaneamente i poligoni fiduciali ed i punti omologhi appartenenti a rilievi catastali adiacenti tra loro. 1. INTRODUZIONE La questione relativa alla ricomposizione della cartografia catastale trae le premesse da due atti normativi specifici, la Circolare Ministeriale n. 2 del 15/01/87 e la Circolare Ministeriale n. 2 del 26/02/88, strettamente collegate, con le quali viene dato avvio a un sistema informatizzato per l’archiviazione delle misure topografiche catastali (PREGEO), e si prescrive che, per l’esecuzione dei rilievi di aggiornamento in campagna, il tecnico incaricato debba appoggiarsi ad almeno tre punti di una rete di punti fiduciali appositamente costituita (triangolo o poligono fiduciale). Con lungimiranza, queste norme hanno dato avvio a un processo di aggiornamento e di possibile rinnovamento della cartografia catastale, basato sul lavoro qualificato dei professionisti. Grazie alle procedure introdotte, ogni atto di aggiornamento depositato nel sistema informativo Pregeo, relativo a un rilievo diretto in campagna, può essere considerato come una tessera del mosaico cartografico catastale generale. Ognuna di queste “tessere” detiene un importante valore metrico e giuridico, dato che convalida o aggiorna le geometrie reali delle proprietà, secondo quanto certificato da un professionista. In questi anni, l’Agenzia del Territorio ha accumulato un ingente patrimonio di dati di notevole valenza topo-cartografica. Già nel 2005, a livello nazionale, l’archivio annoverava oltre 650 mila punti fiduciali toccati direttamente da almeno un rilievo, collegati tra loro da oltre 16 milioni di misure di distanza. La distribuzione geografica delle misure è ancora in parte disomogenea e la massima densità si riscontra, comprensibilmente, in corrispondenza delle aree urbanizzate. Un’indagine svolta dagli autori (Beinat, Crosilla e La presente memoria è una integrazione dell’articolo “Ricomposizione particellare conforme della cartografia catastale numerica”, presentato al Convegno Nazionale SIFET di Mondello (Palermo), 29/06/2005-01/07/2005. 2 La ricerca è stata condotta principalemente nell'ambito delle attività previste dal progetto INTERREG IIIA Phare/CBC Italia-Slovenia "Ricomposizione della cartografia catastale e integrazione della cartografia tecnica regionale numerica per i sistemi informativi territoriali degli enti locali mediante sperimentazione di nuove tecnologie di rilevamento" svolto dall'Università di Udine in collaborazione con il Geodetski Inštitut Slovenije di Lubiana
M. Barbarella, F. Radicioni, F. Sansò editori 146
Sossai, 2004), sulla situazione in Friuli Venezia Giulia, rileva che in 9 comuni su 10, il numero dei punti fiduciali interessati da rilievi supera o eguaglia il 70 per cento del totale. Vi sono quindi le premesse, sebbene riferite ad ambiti territoriali definiti, per impiegare vantaggiosamente le informazioni geometriche memorizzate in PREGEO, per impostare ed avviare il rinnovamento della cartografia catastale a livello locale o regionale. La ricomposizione generale della cartografia catastale costituisce infatti la possibile soluzione di problemi aperti. Si va dalla scarsa accuratezza e affidabilità delle coordinate attuali dei Punti Fiduciali, ridefinite nel corso del tempo dalle nuove misure dei professionisti; alla difficile integrazione delle nuove entità catastali, notevolmente precise grazie alla moderna strumentazione topografica, nella cartografia d’impianto digitalizzata, dalla necessità per molti amministrazioni comunali di disporre del “continuum” cartografico catastale, alla realizzazione di una carta catastale congruente con altri prodotti, come le Carte Tecniche Regionali. Per l’aggiornamento della cartografia numerica catastale il gruppo di ricerca dell’Università di Udine ha proposto e sperimentato un metodo analitico di compensazione della rete dei punti fiduciali basato su tecniche di Analisi Procustiana (Beinat e Crosilla, 2003; Beinat, Clerici e Crosilla, 2002), algoritmi matematici già impiegati nella statistica, nella psicometria e nell’analisi delle forme (Dryden e Mardia, 1998). L’obiettivo della procedura è quello di definire coordinate accurate e stabili per l’insieme dei punti fiduciali, e di fornire un datum preciso per le successive necessità cartografiche, mediante una metodologia rigorosa ed appropriata, che utilizzi dati già disponibili, limitando al massimo il ricorso alla misura diretta ex-novo di tutti i P.F., come a volte proposto. Considerando che i P.F. a livello nazionale sono quasi 1600000, i vantaggi per l’economia e la riduzione dei tempi di realizzazione sono evidenti. Il presente lavoro è suddiviso in tre parti. La prima riassume, molto brevemente, le caratteristiche del metodo procustiano di ricomposizione delle reti di Punti Fiduciali e i risultati ottenuti dalle sperimentazioni sin qui svolte. Nella seconda si va a descrivere, nel dettaglio, la fase successiva, nella quale avviene l’inserimento dei rilievi PREGEO all’interno della rete di P.F. ricomposta e iniziano a delinearsi le prime parti della cartografia catastale ricomposta. La terza mostra come sia possibile utilizzare la carta catastale parziale così prodotta per georeferenziare nel sistema UTM/ETRS89 le mappe attuali e porre le basi per la realizzazione del continuum cartografico catastale. Nella quarta si propone di realizzare una Carta Tecnica Catastale, come strumento in grado di fornire il collegamento funzionale, nei SIT degli Enti Locali, tra le Carte Tecniche e la Carta Catastale, ovviando al problema della diversa precisione, dei vincoli “probatori” e del diverso tematismo.
2. PARTE PRIMA: LA RICOMPOSIZIONE DELLA RETE FIDUCIALE CON METODOLOGIA PROCUSTIANA
La procedura procustiana per la ricomposizione delle reti di Punti Fiduciali può essere riassunta nelle seguenti quattro fasi: Acquisizione delle informazioni relative ai punti fiduciali e delle mutue distanze; Costruzione della rete fiduciale approssimata; Compensazione procustiana; Analisi e validazione dei risultati ottenuti. Per quanto riguarda il primo punto, le informazioni necessarie alla procedura sono essenzialmente l’insieme dei poligoni fiduciali afferenti alla rete da compensare: essi sono ricostruiti in maniera automatica a partire dai file .TAF e .DIS messi a disposizione in rete dall’Agenzia del Territorio. All’elenco dei dati di partenza si aggiungono le posizioni di alcuni vertici della rete, destinati a vincolare la compensazione (punti fissi) e a fornire termini di confronto per la validazione dei risultati (punti di controllo). Le coordinate di questi punti sono determinate direttamente mediante una apposita campagna di misure svolta preferibilmente con l’impiego di tecniche satellitari. Nello stadio successivo, i vari poligoni fiduciali ricostruiti vengono ricondotti in maniera automatica ad un unico sistema di riferimento iniziale. Questo può avvenire secondo due metodi: o mediante concatenamento successivo dei vari poligoni tra di loro, o con georeferenziazione diretta tramite le coordinate locali (Cassini-Soldner) presenti nella TAF. Questa fase si conclude con il successivo inquadramento dei poligoni fiduciali, già ricondotti ad un datum unico, nel sistema di riferimento dei punti fissi attraverso l’applicazione di una trasformazione di similitudine ai minimi quadrati. La fase di compensazione si realizza adattando, in ambito topografico, quel metodo noto in letteratura col nome di “Analisi Procustiana Generalizzata a dati mancanti” (Commandeur, 1991; Beinat e Crosilla, 2002). Esso consiste nella determinazione della forma più probabile di una configurazione di punti (la rete complessiva dei Punti Fiduciali) attraverso un ciclo di successive trasformazioni di similitudine ai minimi quadrati, applicate a tutte le sotto-configurazioni disponibili (i vari poligoni fiduciali); tale ciclo viene iterato fino a quando il mutuo adattamento di queste non soddisfa una predefinita condizione di minimo. La procedura in questione, dal punto di vista analitico, è equivalente a una Triangolazione Aerea a Modelli Indipendenti, nella quale al posto dei modelli fotogrammetrici si considerano i vari poligoni fiduciali 2D o 3D (Crosilla e Beinat, 2002). La verifica conclusiva si compie con il confronto delle coordinate ottenute dal processo di compensazione e le omologhe presenti nella rete dei punti di controllo. Il risultato finale è una rete di Punti Fiduciali inquadrata direttamente nel datum definito dall’insieme dei PF fissi, preferibilmente UTM/ETRS89. Il metodo qui brevemente descritto ha trovato applicazione, prima nella risoluzione di casi simulati, successivamente è stato impiegato nella ricomposizione di tre reti reali, situate nei comuni di Udine (Beinat e Crosilla, 2002; Beinat, Clerici e Crosilla ; 2003) Gorizia (Beinat, Crosilla, Furlan e Sossai, 2004), e Tarcento (UD) (Sossai, 2005) composte da 56, 59, 205 Punti Fiduciali distribuiti su un’estensione di 2.8, 2.6 e 20 km2 rispettivamente. La ricomposizione procustiana di una rete simulata, variamente deformata, ha consentito di verificare la capacità del processo di recuperare sia gli errori di tipo accidentale che sistematico. Il confronto con i risultati ottenuti sulla stessa rete dalla compensazione classica ai minimi quadrati, ha evidenziato una sostanziale equivalenza tra i due metodi qualora la natura dell’errore sia solo di tipo casuale, e una superiorità dell’algoritmo procustiano proporzionale al prevalere della componente sistematica di errore rispetto a quella accidentale. Tali risultati hanno trovato conferma nell’esperienza di Udine (rete “Udine Nord”). Realizzata sovrapponendo 205 poligoni fiduciali, vincolata con 9 punti fissi e analizzata su 9 punti di controllo, la compensazione procustiana si è rilevata migliore della tecnica
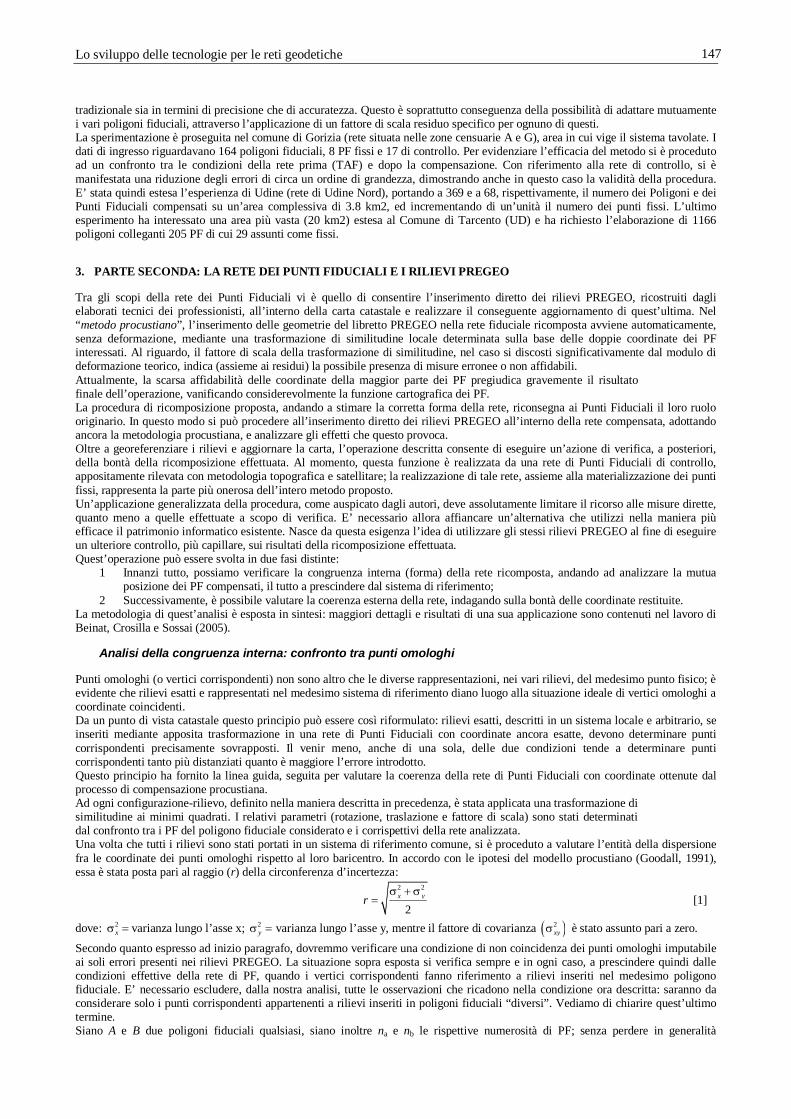
Lo sviluppo delle tecnologie per le reti geodetiche
147
tradizionale sia in termini di precisione che di accuratezza. Questo è soprattutto conseguenza della possibilità di adattare mutuamente i vari poligoni fiduciali, attraverso l’applicazione di un fattore di scala residuo specifico per ognuno di questi. La sperimentazione è proseguita nel comune di Gorizia (rete situata nelle zone censuarie A e G), area in cui vige il sistema tavolate. I dati di ingresso riguardavano 164 poligoni fiduciali, 8 PF fissi e 17 di controllo. Per evidenziare l’efficacia del metodo si è proceduto ad un confronto tra le condizioni della rete prima (TAF) e dopo la compensazione. Con riferimento alla rete di controllo, si è manifestata una riduzione degli errori di circa un ordine di grandezza, dimostrando anche in questo caso la validità della procedura. E’ stata quindi estesa l’esperienza di Udine (rete di Udine Nord), portando a 369 e a 68, rispettivamente, il numero dei Poligoni e dei Punti Fiduciali compensati su un’area complessiva di 3.8 km2, ed incrementando di un’unità il numero dei punti fissi. L’ultimo esperimento ha interessato una area più vasta (20 km2) estesa al Comune di Tarcento (UD) e ha richiesto l’elaborazione di 1166 poligoni colleganti 205 PF di cui 29 assunti come fissi.
3. PARTE SECONDA: LA RETE DEI PUNTI FIDUCIALI E I RILIEVI PREGEO
Tra gli scopi della rete dei Punti Fiduciali vi è quello di consentire l’inserimento diretto dei rilievi PREGEO, ricostruiti dagli elaborati tecnici dei professionisti, all’interno della carta catastale e realizzare il conseguente aggiornamento di quest’ultima. Nel “metodo procustiano”, l’inserimento delle geometrie del libretto PREGEO nella rete fiduciale ricomposta avviene automaticamente, senza deformazione, mediante una trasformazione di similitudine locale determinata sulla base delle doppie coordinate dei PF interessati. Al riguardo, il fattore di scala della trasformazione di similitudine, nel caso si discosti significativamente dal modulo di deformazione teorico, indica (assieme ai residui) la possibile presenza di misure erronee o non affidabili. Attualmente, la scarsa affidabilità delle coordinate della maggior parte dei PF pregiudica gravemente il risultato finale dell’operazione, vanificando considerevolmente la funzione cartografica dei PF. La procedura di ricomposizione proposta, andando a stimare la corretta forma della rete, riconsegna ai Punti Fiduciali il loro ruolo originario. In questo modo si può procedere all’inserimento diretto dei rilievi PREGEO all’interno della rete compensata, adottando ancora la metodologia procustiana, e analizzare gli effetti che questo provoca. Oltre a georeferenziare i rilievi e aggiornare la carta, l’operazione descritta consente di eseguire un’azione di verifica, a posteriori, della bontà della ricomposizione effettuata. Al momento, questa funzione è realizzata da una rete di Punti Fiduciali di controllo, appositamente rilevata con metodologia topografica e satellitare; la realizzazione di tale rete, assieme alla materializzazione dei punti fissi, rappresenta la parte più onerosa dell’intero metodo proposto. Un’applicazione generalizzata della procedura, come auspicato dagli autori, deve assolutamente limitare il ricorso alle misure dirette, quanto meno a quelle effettuate a scopo di verifica. E’ necessario allora affiancare un’alternativa che utilizzi nella maniera più efficace il patrimonio informatico esistente. Nasce da questa esigenza l’idea di utilizzare gli stessi rilievi PREGEO al fine di eseguire un ulteriore controllo, più capillare, sui risultati della ricomposizione effettuata. Quest’operazione può essere svolta in due fasi distinte:
1 Innanzi tutto, possiamo verificare la congruenza interna (forma) della rete ricomposta, andando ad analizzare la mutua posizione dei PF compensati, il tutto a prescindere dal sistema di riferimento;
2 Successivamente, è possibile valutare la coerenza esterna della rete, indagando sulla bontà delle coordinate restituite. La metodologia di quest’analisi è esposta in sintesi: maggiori dettagli e risultati di una sua applicazione sono contenuti nel lavoro di Beinat, Crosilla e Sossai (2005).
Analisi della congruenza interna: confronto tra punti omologhi
Punti omologhi (o vertici corrispondenti) non sono altro che le diverse rappresentazioni, nei vari rilievi, del medesimo punto fisico; è evidente che rilievi esatti e rappresentati nel medesimo sistema di riferimento diano luogo alla situazione ideale di vertici omologhi a coordinate coincidenti. Da un punto di vista catastale questo principio può essere così riformulato: rilievi esatti, descritti in un sistema locale e arbitrario, se inseriti mediante apposita trasformazione in una rete di Punti Fiduciali con coordinate ancora esatte, devono determinare punti corrispondenti precisamente sovrapposti. Il venir meno, anche di una sola, delle due condizioni tende a determinare punti corrispondenti tanto più distanziati quanto è maggiore l’errore introdotto. Questo principio ha fornito la linea guida, seguita per valutare la coerenza della rete di Punti Fiduciali con coordinate ottenute dal processo di compensazione procustiana. Ad ogni configurazione-rilievo, definito nella maniera descritta in precedenza, è stata applicata una trasformazione di similitudine ai minimi quadrati. I relativi parametri (rotazione, traslazione e fattore di scala) sono stati determinati dal confronto tra i PF del poligono fiduciale considerato e i corrispettivi della rete analizzata. Una volta che tutti i rilievi sono stati portati in un sistema di riferimento comune, si è proceduto a valutare l’entità della dispersione fra le coordinate dei punti omologhi rispetto al loro baricentro. In accordo con le ipotesi del modello procustiano (Goodall, 1991), essa è stata posta pari al raggio (r) della circonferenza d’incertezza:
2 2
2
x yr [1]
dove: 2 x varianza lungo l’asse x; 2 y varianza lungo l’asse y, mentre il fattore di covarianza 2xy è stato assunto pari a zero.
Secondo quanto espresso ad inizio paragrafo, dovremmo verificare una condizione di non coincidenza dei punti omologhi imputabile ai soli errori presenti nei rilievi PREGEO. La situazione sopra esposta si verifica sempre e in ogni caso, a prescindere quindi dalle condizioni effettive della rete di PF, quando i vertici corrispondenti fanno riferimento a rilievi inseriti nel medesimo poligono fiduciale. E’ necessario escludere, dalla nostra analisi, tutte le osservazioni che ricadono nella condizione ora descritta: saranno da considerare solo i punti corrispondenti appartenenti a rilievi inseriti in poligoni fiduciali “diversi”. Vediamo di chiarire quest’ultimo termine. Siano A e B due poligoni fiduciali qualsiasi, siano inoltre na e nb le rispettive numerosità di PF; senza perdere in generalità
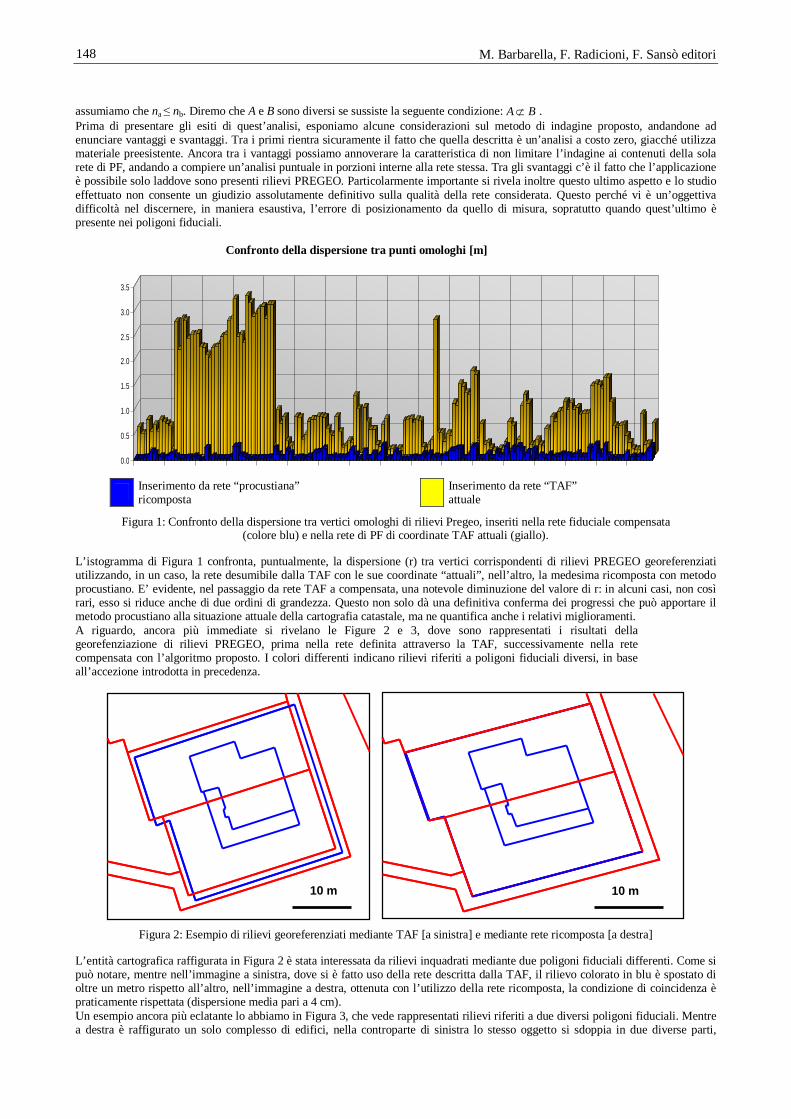
M. Barbarella, F. Radicioni, F. Sansò editori 148
assumiamo che na ≤ nb. Diremo che A e B sono diversi se sussiste la seguente condizione: A B . Prima di presentare gli esiti di quest’analisi, esponiamo alcune considerazioni sul metodo di indagine proposto, andandone ad enunciare vantaggi e svantaggi. Tra i primi rientra sicuramente il fatto che quella descritta è un’analisi a costo zero, giacché utilizza materiale preesistente. Ancora tra i vantaggi possiamo annoverare la caratteristica di non limitare l’indagine ai contenuti della sola rete di PF, andando a compiere un’analisi puntuale in porzioni interne alla rete stessa. Tra gli svantaggi c’è il fatto che l’applicazione è possibile solo laddove sono presenti rilievi PREGEO. Particolarmente importante si rivela inoltre questo ultimo aspetto e lo studio effettuato non consente un giudizio assolutamente definitivo sulla qualità della rete considerata. Questo perché vi è un’oggettiva difficoltà nel discernere, in maniera esaustiva, l’errore di posizionamento da quello di misura, sopratutto quando quest’ultimo è presente nei poligoni fiduciali.
Confronto della dispersione tra punti omologhi [m]
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
Inserimento da rete “procustiana” ricomposta Inserimento da rete “TAF”
attuale
Figura 1: Confronto della dispersione tra vertici omologhi di rilievi Pregeo, inseriti nella rete fiduciale compensata (colore blu) e nella rete di PF di coordinate TAF attuali (giallo).
L’istogramma di Figura 1 confronta, puntualmente, la dispersione (r) tra vertici corrispondenti di rilievi PREGEO georeferenziati utilizzando, in un caso, la rete desumibile dalla TAF con le sue coordinate “attuali”, nell’altro, la medesima ricomposta con metodo procustiano. E’ evidente, nel passaggio da rete TAF a compensata, una notevole diminuzione del valore di r: in alcuni casi, non così rari, esso si riduce anche di due ordini di grandezza. Questo non solo dà una definitiva conferma dei progressi che può apportare il metodo procustiano alla situazione attuale della cartografia catastale, ma ne quantifica anche i relativi miglioramenti. A riguardo, ancora più immediate si rivelano le Figure 2 e 3, dove sono rappresentati i risultati della georefenziazione di rilievi PREGEO, prima nella rete definita attraverso la TAF, successivamente nella rete compensata con l’algoritmo proposto. I colori differenti indicano rilievi riferiti a poligoni fiduciali diversi, in base all’accezione introdotta in precedenza.
Figura 2: Esempio di rilievi georeferenziati mediante TAF [a sinistra] e mediante rete ricomposta [a destra]
L’entità cartografica raffigurata in Figura 2 è stata interessata da rilievi inquadrati mediante due poligoni fiduciali differenti. Come si può notare, mentre nell’immagine a sinistra, dove si è fatto uso della rete descritta dalla TAF, il rilievo colorato in blu è spostato di oltre un metro rispetto all’altro, nell’immagine a destra, ottenuta con l’utilizzo della rete ricomposta, la condizione di coincidenza è praticamente rispettata (dispersione media pari a 4 cm). Un esempio ancora più eclatante lo abbiamo in Figura 3, che vede rappresentati rilievi riferiti a due diversi poligoni fiduciali. Mentre a destra è raffigurato un solo complesso di edifici, nella controparte di sinistra lo stesso oggetto si sdoppia in due diverse parti,
10 m 10 m
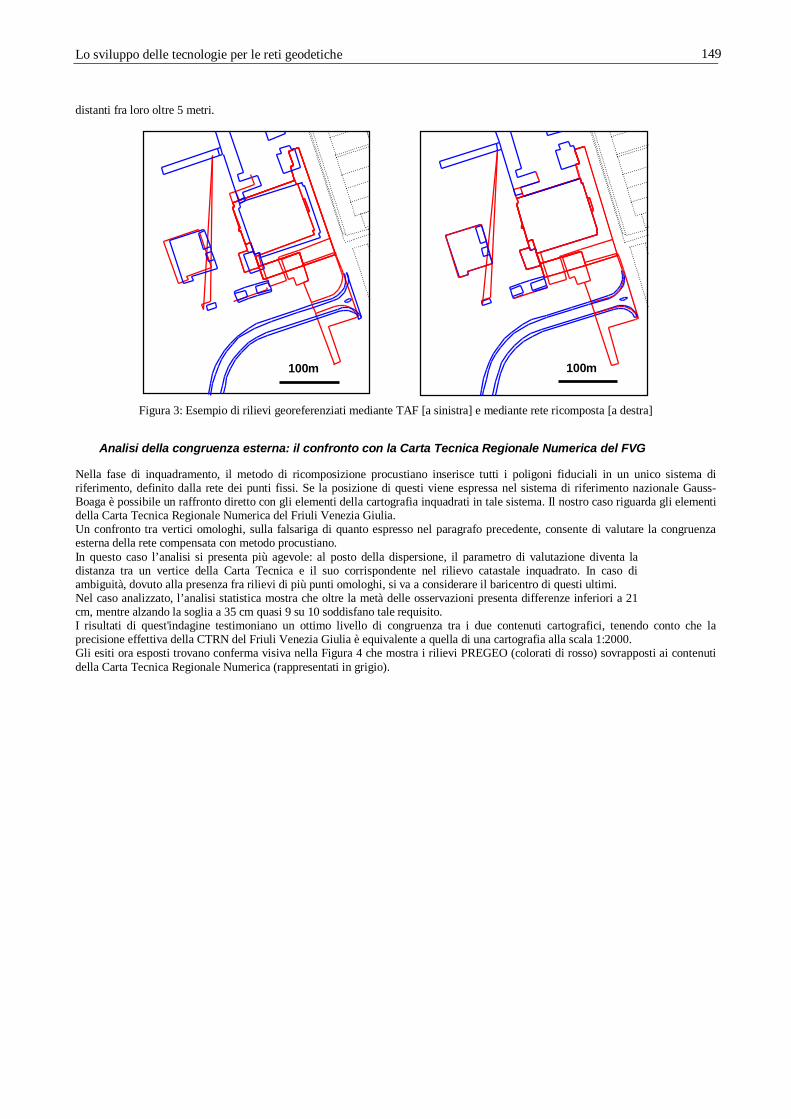
Lo sviluppo delle tecnologie per le reti geodetiche
149
distanti fra loro oltre 5 metri.
Figura 3: Esempio di rilievi georeferenziati mediante TAF [a sinistra] e mediante rete ricomposta [a destra]
Analisi della congruenza esterna: il confronto con la Carta Tecnica Regionale Numerica del FVG
Nella fase di inquadramento, il metodo di ricomposizione procustiano inserisce tutti i poligoni fiduciali in un unico sistema di riferimento, definito dalla rete dei punti fissi. Se la posizione di questi viene espressa nel sistema di riferimento nazionale Gauss-Boaga è possibile un raffronto diretto con gli elementi della cartografia inquadrati in tale sistema. Il nostro caso riguarda gli elementi della Carta Tecnica Regionale Numerica del Friuli Venezia Giulia. Un confronto tra vertici omologhi, sulla falsariga di quanto espresso nel paragrafo precedente, consente di valutare la congruenza esterna della rete compensata con metodo procustiano. In questo caso l’analisi si presenta più agevole: al posto della dispersione, il parametro di valutazione diventa la distanza tra un vertice della Carta Tecnica e il suo corrispondente nel rilievo catastale inquadrato. In caso di ambiguità, dovuto alla presenza fra rilievi di più punti omologhi, si va a considerare il baricentro di questi ultimi. Nel caso analizzato, l’analisi statistica mostra che oltre la metà delle osservazioni presenta differenze inferiori a 21 cm, mentre alzando la soglia a 35 cm quasi 9 su 10 soddisfano tale requisito. I risultati di quest'indagine testimoniano un ottimo livello di congruenza tra i due contenuti cartografici, tenendo conto che la precisione effettiva della CTRN del Friuli Venezia Giulia è equivalente a quella di una cartografia alla scala 1:2000. Gli esiti ora esposti trovano conferma visiva nella Figura 4 che mostra i rilievi PREGEO (colorati di rosso) sovrapposti ai contenuti della Carta Tecnica Regionale Numerica (rappresentati in grigio).
100m 100m
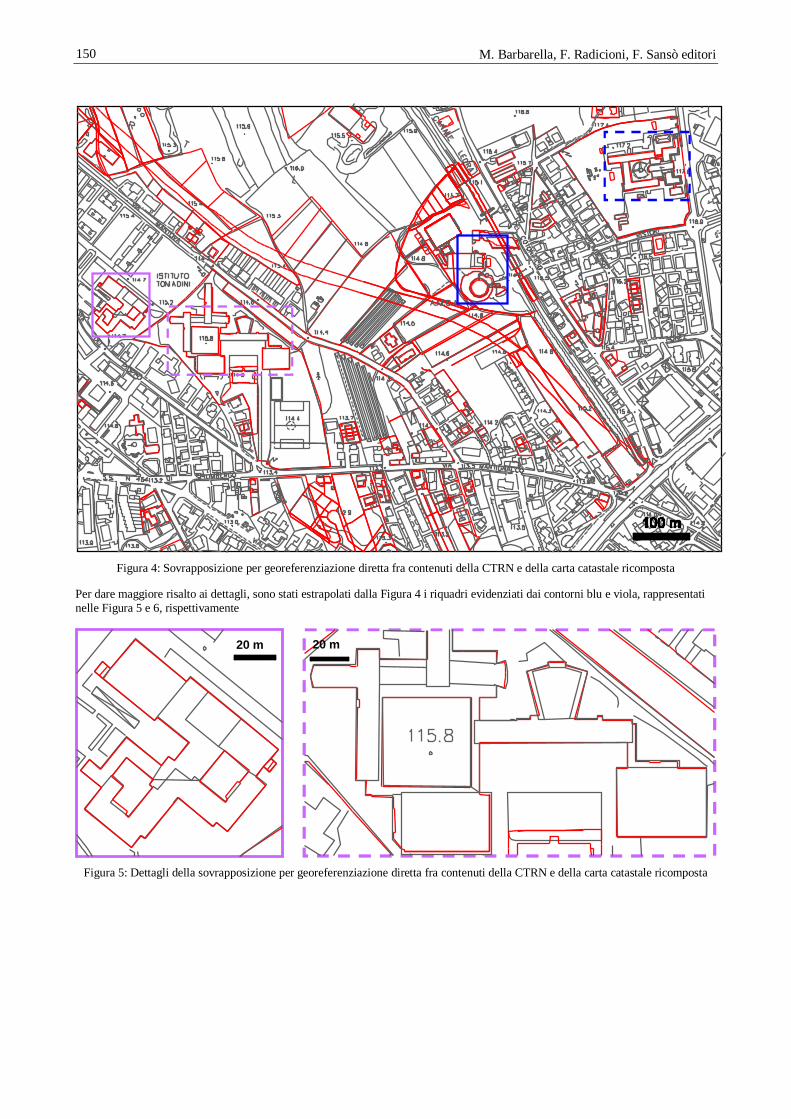
M. Barbarella, F. Radicioni, F. Sansò editori 150
Figura 4: Sovrapposizione per georeferenziazione diretta fra contenuti della CTRN e della carta catastale ricomposta
Per dare maggiore risalto ai dettagli, sono stati estrapolati dalla Figura 4 i riquadri evidenziati dai contorni blu e viola, rappresentati nelle Figura 5 e 6, rispettivamente
Figura 5: Dettagli della sovrapposizione per georeferenziazione diretta fra contenuti della CTRN e della carta catastale ricomposta
20 m 20 m
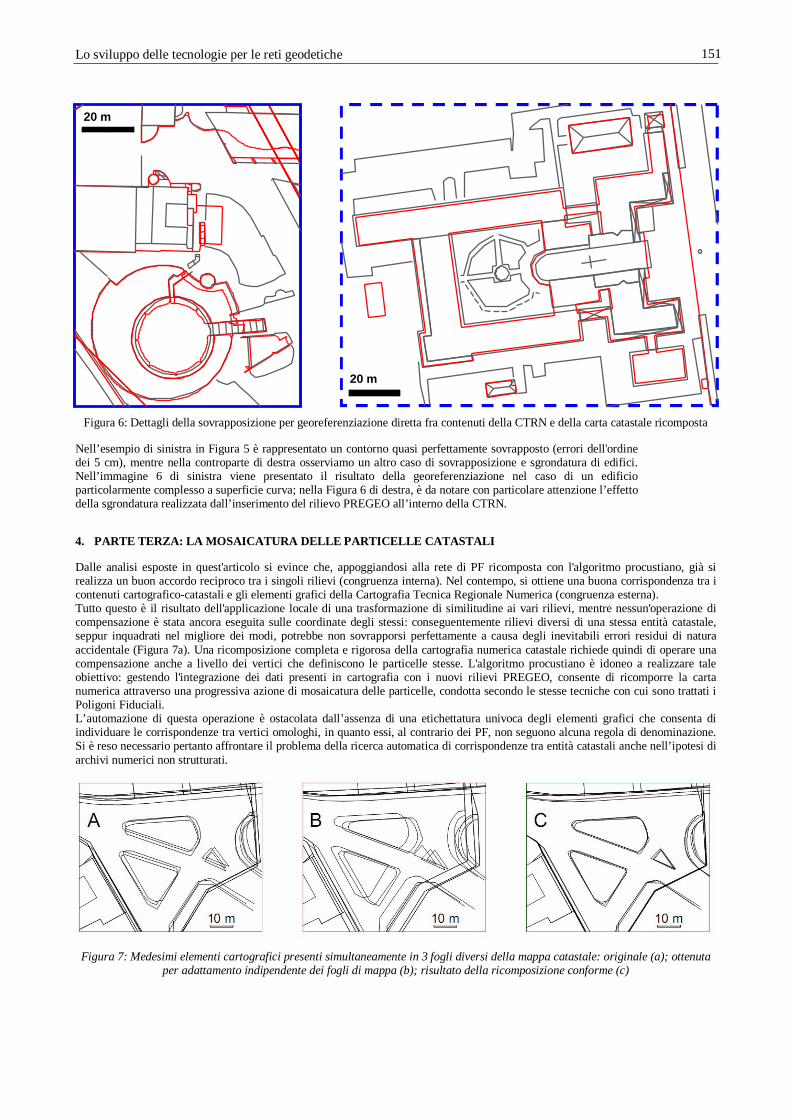
Lo sviluppo delle tecnologie per le reti geodetiche
151
Figura 6: Dettagli della sovrapposizione per georeferenziazione diretta fra contenuti della CTRN e della carta catastale ricomposta
Nell’esempio di sinistra in Figura 5 è rappresentato un contorno quasi perfettamente sovrapposto (errori dell'ordine dei 5 cm), mentre nella controparte di destra osserviamo un altro caso di sovrapposizione e sgrondatura di edifici. Nell’immagine 6 di sinistra viene presentato il risultato della georeferenziazione nel caso di un edificio particolarmente complesso a superficie curva; nella Figura 6 di destra, è da notare con particolare attenzione l’effetto della sgrondatura realizzata dall’inserimento del rilievo PREGEO all’interno della CTRN.
4. PARTE TERZA: LA MOSAICATURA DELLE PARTICELLE CATASTALI
Dalle analisi esposte in quest'articolo si evince che, appoggiandosi alla rete di PF ricomposta con l'algoritmo procustiano, già si realizza un buon accordo reciproco tra i singoli rilievi (congruenza interna). Nel contempo, si ottiene una buona corrispondenza tra i contenuti cartografico-catastali e gli elementi grafici della Cartografia Tecnica Regionale Numerica (congruenza esterna). Tutto questo è il risultato dell'applicazione locale di una trasformazione di similitudine ai vari rilievi, mentre nessun'operazione di compensazione è stata ancora eseguita sulle coordinate degli stessi: conseguentemente rilievi diversi di una stessa entità catastale, seppur inquadrati nel migliore dei modi, potrebbe non sovrapporsi perfettamente a causa degli inevitabili errori residui di natura accidentale (Figura 7a). Una ricomposizione completa e rigorosa della cartografia numerica catastale richiede quindi di operare una compensazione anche a livello dei vertici che definiscono le particelle stesse. L'algoritmo procustiano è idoneo a realizzare tale obiettivo: gestendo l'integrazione dei dati presenti in cartografia con i nuovi rilievi PREGEO, consente di ricomporre la carta numerica attraverso una progressiva azione di mosaicatura delle particelle, condotta secondo le stesse tecniche con cui sono trattati i Poligoni Fiduciali. L’automazione di questa operazione è ostacolata dall’assenza di una etichettatura univoca degli elementi grafici che consenta di individuare le corrispondenze tra vertici omologhi, in quanto essi, al contrario dei PF, non seguono alcuna regola di denominazione. Si è reso necessario pertanto affrontare il problema della ricerca automatica di corrispondenze tra entità catastali anche nell’ipotesi di archivi numerici non strutturati.
Figura 7: Medesimi elementi cartografici presenti simultaneamente in 3 fogli diversi della mappa catastale: originale (a); ottenuta per adattamento indipendente dei fogli di mappa (b); risultato della ricomposizione conforme (c)
20 m
20 m
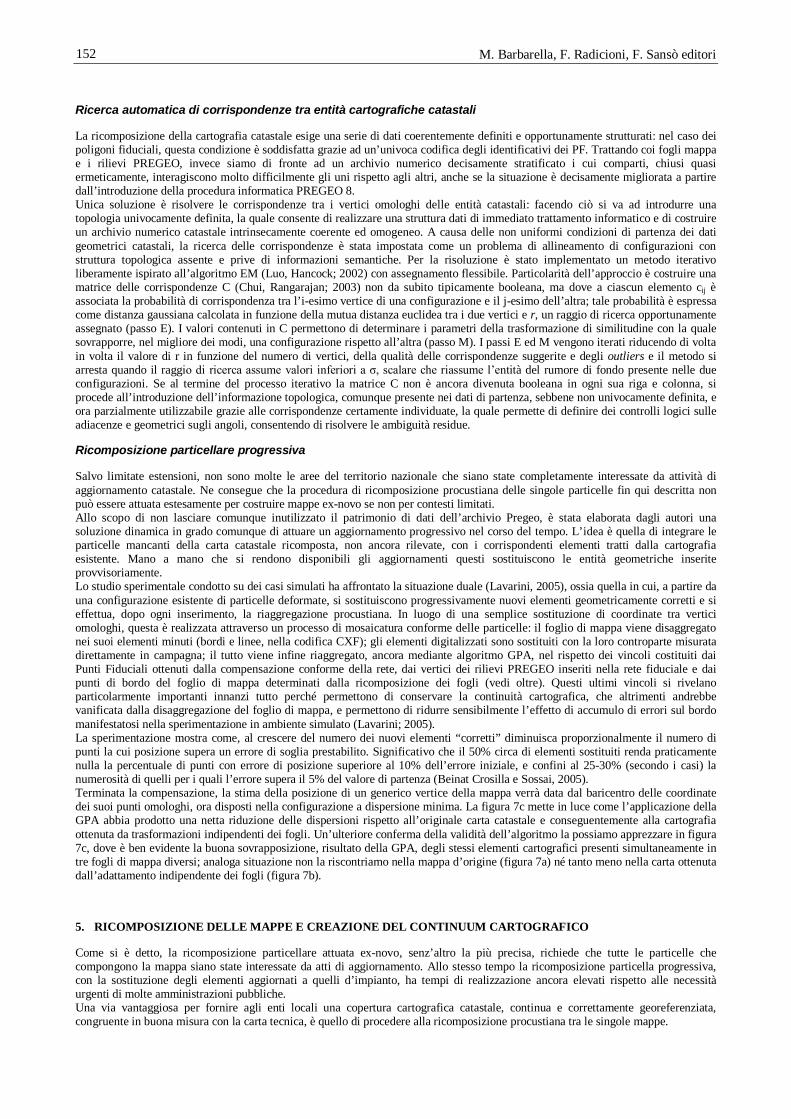
M. Barbarella, F. Radicioni, F. Sansò editori 152
Ricerca automatica di corrispondenze tra entità cartografiche catastali
La ricomposizione della cartografia catastale esige una serie di dati coerentemente definiti e opportunamente strutturati: nel caso dei poligoni fiduciali, questa condizione è soddisfatta grazie ad un’univoca codifica degli identificativi dei PF. Trattando coi fogli mappa e i rilievi PREGEO, invece siamo di fronte ad un archivio numerico decisamente stratificato i cui comparti, chiusi quasi ermeticamente, interagiscono molto difficilmente gli uni rispetto agli altri, anche se la situazione è decisamente migliorata a partire dall’introduzione della procedura informatica PREGEO 8. Unica soluzione è risolvere le corrispondenze tra i vertici omologhi delle entità catastali: facendo ciò si va ad introdurre una topologia univocamente definita, la quale consente di realizzare una struttura dati di immediato trattamento informatico e di costruire un archivio numerico catastale intrinsecamente coerente ed omogeneo. A causa delle non uniformi condizioni di partenza dei dati geometrici catastali, la ricerca delle corrispondenze è stata impostata come un problema di allineamento di configurazioni con struttura topologica assente e prive di informazioni semantiche. Per la risoluzione è stato implementato un metodo iterativo liberamente ispirato all’algoritmo EM (Luo, Hancock; 2002) con assegnamento flessibile. Particolarità dell’approccio è costruire una matrice delle corrispondenze C (Chui, Rangarajan; 2003) non da subito tipicamente booleana, ma dove a ciascun elemento cij è associata la probabilità di corrispondenza tra l’i-esimo vertice di una configurazione e il j-esimo dell’altra; tale probabilità è espressa come distanza gaussiana calcolata in funzione della mutua distanza euclidea tra i due vertici e r, un raggio di ricerca opportunamente assegnato (passo E). I valori contenuti in C permettono di determinare i parametri della trasformazione di similitudine con la quale sovrapporre, nel migliore dei modi, una configurazione rispetto all’altra (passo M). I passi E ed M vengono iterati riducendo di volta in volta il valore di r in funzione del numero di vertici, della qualità delle corrispondenze suggerite e degli outliers e il metodo si arresta quando il raggio di ricerca assume valori inferiori a σ, scalare che riassume l’entità del rumore di fondo presente nelle due configurazioni. Se al termine del processo iterativo la matrice C non è ancora divenuta booleana in ogni sua riga e colonna, si procede all’introduzione dell’informazione topologica, comunque presente nei dati di partenza, sebbene non univocamente definita, e ora parzialmente utilizzabile grazie alle corrispondenze certamente individuate, la quale permette di definire dei controlli logici sulle adiacenze e geometrici sugli angoli, consentendo di risolvere le ambiguità residue.
Ricomposizione particellare progressiva
Salvo limitate estensioni, non sono molte le aree del territorio nazionale che siano state completamente interessate da attività di aggiornamento catastale. Ne consegue che la procedura di ricomposizione procustiana delle singole particelle fin qui descritta non può essere attuata estesamente per costruire mappe ex-novo se non per contesti limitati. Allo scopo di non lasciare comunque inutilizzato il patrimonio di dati dell’archivio Pregeo, è stata elaborata dagli autori una soluzione dinamica in grado comunque di attuare un aggiornamento progressivo nel corso del tempo. L’idea è quella di integrare le particelle mancanti della carta catastale ricomposta, non ancora rilevate, con i corrispondenti elementi tratti dalla cartografia esistente. Mano a mano che si rendono disponibili gli aggiornamenti questi sostituiscono le entità geometriche inserite provvisoriamente. Lo studio sperimentale condotto su dei casi simulati ha affrontato la situazione duale (Lavarini, 2005), ossia quella in cui, a partire da una configurazione esistente di particelle deformate, si sostituiscono progressivamente nuovi elementi geometricamente corretti e si effettua, dopo ogni inserimento, la riaggregazione procustiana. In luogo di una semplice sostituzione di coordinate tra vertici omologhi, questa è realizzata attraverso un processo di mosaicatura conforme delle particelle: il foglio di mappa viene disaggregato nei suoi elementi minuti (bordi e linee, nella codifica CXF); gli elementi digitalizzati sono sostituiti con la loro controparte misurata direttamente in campagna; il tutto viene infine riaggregato, ancora mediante algoritmo GPA, nel rispetto dei vincoli costituiti dai Punti Fiduciali ottenuti dalla compensazione conforme della rete, dai vertici dei rilievi PREGEO inseriti nella rete fiduciale e dai punti di bordo del foglio di mappa determinati dalla ricomposizione dei fogli (vedi oltre). Questi ultimi vincoli si rivelano particolarmente importanti innanzi tutto perché permettono di conservare la continuità cartografica, che altrimenti andrebbe vanificata dalla disaggregazione del foglio di mappa, e permettono di ridurre sensibilmente l’effetto di accumulo di errori sul bordo manifestatosi nella sperimentazione in ambiente simulato (Lavarini; 2005). La sperimentazione mostra come, al crescere del numero dei nuovi elementi “corretti” diminuisca proporzionalmente il numero di punti la cui posizione supera un errore di soglia prestabilito. Significativo che il 50% circa di elementi sostituiti renda praticamente nulla la percentuale di punti con errore di posizione superiore al 10% dell’errore iniziale, e confini al 25-30% (secondo i casi) la numerosità di quelli per i quali l’errore supera il 5% del valore di partenza (Beinat Crosilla e Sossai, 2005). Terminata la compensazione, la stima della posizione di un generico vertice della mappa verrà data dal baricentro delle coordinate dei suoi punti omologhi, ora disposti nella configurazione a dispersione minima. La figura 7c mette in luce come l’applicazione della GPA abbia prodotto una netta riduzione delle dispersioni rispetto all’originale carta catastale e conseguentemente alla cartografia ottenuta da trasformazioni indipendenti dei fogli. Un’ulteriore conferma della validità dell’algoritmo la possiamo apprezzare in figura 7c, dove è ben evidente la buona sovrapposizione, risultato della GPA, degli stessi elementi cartografici presenti simultaneamente in tre fogli di mappa diversi; analoga situazione non la riscontriamo nella mappa d’origine (figura 7a) né tanto meno nella carta ottenuta dall’adattamento indipendente dei fogli (figura 7b).
5. RICOMPOSIZIONE DELLE MAPPE E CREAZIONE DEL CONTINUUM CARTOGRAFICO
Come si è detto, la ricomposizione particellare attuata ex-novo, senz’altro la più precisa, richiede che tutte le particelle che compongono la mappa siano state interessate da atti di aggiornamento. Allo stesso tempo la ricomposizione particella progressiva, con la sostituzione degli elementi aggiornati a quelli d’impianto, ha tempi di realizzazione ancora elevati rispetto alle necessità urgenti di molte amministrazioni pubbliche. Una via vantaggiosa per fornire agli enti locali una copertura cartografica catastale, continua e correttamente georeferenziata, congruente in buona misura con la carta tecnica, è quello di procedere alla ricomposizione procustiana tra le singole mappe.
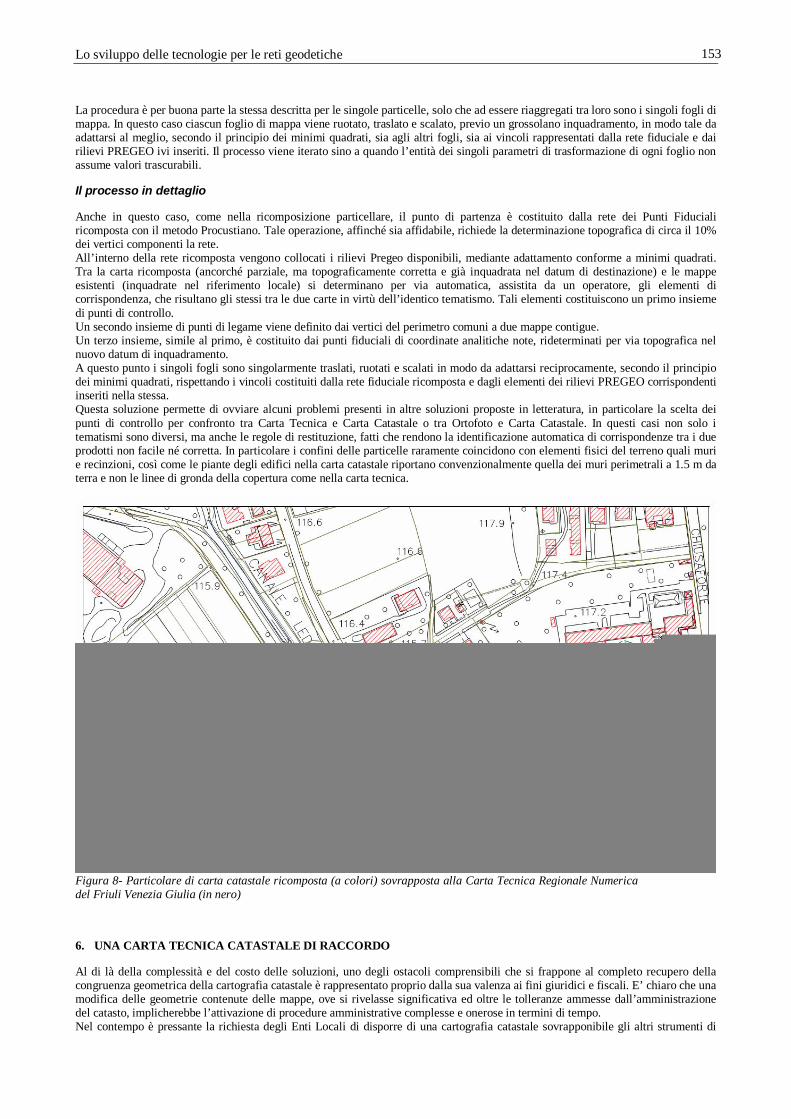
Lo sviluppo delle tecnologie per le reti geodetiche
153
La procedura è per buona parte la stessa descritta per le singole particelle, solo che ad essere riaggregati tra loro sono i singoli fogli di mappa. In questo caso ciascun foglio di mappa viene ruotato, traslato e scalato, previo un grossolano inquadramento, in modo tale da adattarsi al meglio, secondo il principio dei minimi quadrati, sia agli altri fogli, sia ai vincoli rappresentati dalla rete fiduciale e dai rilievi PREGEO ivi inseriti. Il processo viene iterato sino a quando l’entità dei singoli parametri di trasformazione di ogni foglio non assume valori trascurabili.
Il processo in dettaglio
Anche in questo caso, come nella ricomposizione particellare, il punto di partenza è costituito dalla rete dei Punti Fiduciali ricomposta con il metodo Procustiano. Tale operazione, affinché sia affidabile, richiede la determinazione topografica di circa il 10% dei vertici componenti la rete. All’interno della rete ricomposta vengono collocati i rilievi Pregeo disponibili, mediante adattamento conforme a minimi quadrati. Tra la carta ricomposta (ancorché parziale, ma topograficamente corretta e già inquadrata nel datum di destinazione) e le mappe esistenti (inquadrate nel riferimento locale) si determinano per via automatica, assistita da un operatore, gli elementi di corrispondenza, che risultano gli stessi tra le due carte in virtù dell’identico tematismo. Tali elementi costituiscono un primo insieme di punti di controllo. Un secondo insieme di punti di legame viene definito dai vertici del perimetro comuni a due mappe contigue. Un terzo insieme, simile al primo, è costituito dai punti fiduciali di coordinate analitiche note, rideterminati per via topografica nel nuovo datum di inquadramento. A questo punto i singoli fogli sono singolarmente traslati, ruotati e scalati in modo da adattarsi reciprocamente, secondo il principio dei minimi quadrati, rispettando i vincoli costituiti dalla rete fiduciale ricomposta e dagli elementi dei rilievi PREGEO corrispondenti inseriti nella stessa. Questa soluzione permette di ovviare alcuni problemi presenti in altre soluzioni proposte in letteratura, in particolare la scelta dei punti di controllo per confronto tra Carta Tecnica e Carta Catastale o tra Ortofoto e Carta Catastale. In questi casi non solo i tematismi sono diversi, ma anche le regole di restituzione, fatti che rendono la identificazione automatica di corrispondenze tra i due prodotti non facile né corretta. In particolare i confini delle particelle raramente coincidono con elementi fisici del terreno quali muri e recinzioni, così come le piante degli edifici nella carta catastale riportano convenzionalmente quella dei muri perimetrali a 1.5 m da terra e non le linee di gronda della copertura come nella carta tecnica.
Figura 8- Particolare di carta catastale ricomposta (a colori) sovrapposta alla Carta Tecnica Regionale Numerica del Friuli Venezia Giulia (in nero)
6. UNA CARTA TECNICA CATASTALE DI RACCORDO
Al di là della complessità e del costo delle soluzioni, uno degli ostacoli comprensibili che si frappone al completo recupero della congruenza geometrica della cartografia catastale è rappresentato proprio dalla sua valenza ai fini giuridici e fiscali. E’ chiaro che una modifica delle geometrie contenute delle mappe, ove si rivelasse significativa ed oltre le tolleranze ammesse dall’amministrazione del catasto, implicherebbe l’attivazione di procedure amministrative complesse e onerose in termini di tempo. Nel contempo è pressante la richiesta degli Enti Locali di disporre di una cartografia catastale sovrapponibile gli altri strumenti di
M. Barbarella, F. Radicioni, F. Sansò editori 154
cartografici in uso per la gestione del territorio. Queste incongruenze sono molto dispendiose per la collettività e ingenerano spesso problemi amministrativi in operazioni di esproprio, definizione di vincoli urbanistici, rilascio di concessioni edilizie, etc. La nostra proposta è quindi quella di lavorare fuori campo alla creazione di una Carta Tecnica Catastale (CTC), geometricamente corretta, avente la funzione di raccordare la Carta Catastale ufficiale alle altre cartografie. Con questa soluzione il collegamento tra la CTC e la Carta Catastale avverrebbe per congruenza topologica degli stessi elementi rappresentati, mentre quello tra CTC e altre carte topografiche avverrebbe sul piano del datum cartografico comune. A regime la CTC potrebbe quindi sostituire la CT sulla base di uno specifico atto amministrativo o legislativo. BIBLIOGRAFIA Beinat, A., Crosilla, F. 2002 Una procedura per la ricomposizione conforme della cartografia catastale digitale, Bollettino SIFET, 1,
pp 17-34. Beinat, A., Crosilla, F., Clerici, A. 2002 Prime sperimentazioni di una proposta innovativa per la ricomposizione cartografica del
catasto”, In: Atti VI Conferenza Nazionale ASITA, Perugia 5-8 novembre, pp. 355-360. Beinat, A., Crosilla, F. 2003 Generalised Procrustes Algorithms for the Conformal Updating of a Cadastral Map, ZfV-Zeitschrift für
Geodäsie, Geoinformation und Landmanagement, 5, pp. 341-349. Beinat, A., Crosilla, F., Sossai, E. 2004 Analisi della copertura e prime sperimentazioni di concatenamento a scala regionale dei
poligoni fiduciali in Friuli Venezia Giulia, In: Atti VIII Conferenza Nazionale ASITA, Roma 14-17 Dicembre, pp. 339-344 Beinat, A., Crosilla, F., Furlan, M., Sossai, E. 2004 Ricomposizione procustiana della rete fiduciale catastale mediante dati
dell’archivio PREGEO, In: Atti VIII Conferenza Nazionale ASITA, Roma 14-17 Dicembre, pp. 333-338.
Beinat, A., Crosilla, F., Sossai, E. 2005 Ricomposizione particellare conforme della cartografia catastale numerica, Atti del Convegno Nazionale SIFET, Mondello (Palermo), 29/06/2005-01/07/2005.
Crespi, M., Reina, T. 2004 Applicazioni non catastali dei punti fiduciali: proposta di una metodologia per l’inquadramento della maglia dei punti fiduciali nel sistema cartografico UTM-WGS84-ETRF89, Bollettino SIFET, 3, pp. 13-22.
Crosilla, F., Beinat, A. 2002 Use of generalised Procrustes analysis for the photogrammetric block adjustment by independent models, ISPRS Journal of Photogrammetry and Remote Sensing, Vol 56, Issue 3, April 2002, pp. 195-209
Commandeur, J.J.F. 1991 Matching Configurations, DSWO Press, Leiden University, III, M&T series, 19, pp. 13-61. Conia, G., Del Frate, R., Mencancini, N., Tufillaro, D. 1992 Procedura automatica per il controllo della congruenza dei tipi di
aggiornamento sulla base di un quadro d’unione della rete dei punti fiduciali e della misura G.P.S. di alcuni lati significativi, Bollettino SIFET, 4, pp 87-97.
Dryden, I., Mardia, K. 1998 Statistical shape analysis, John Wiley & Sons, Chichester, England, pp. 83-107. Goodall, C. 1991 Procrustes methods in the statistical analysis of shape, Journal Royal Stat. Soc., Series B-Methodological 53 (2),
pp. 285-339. Lavarini, L. 2005 Un metodo evolutivo per l’aggiornamento della cartografia catastale numerica, Tesi di laurea, Università di
Udine, A.A. 2004-2005. Luo, B., Hancock, E. R. 2002 Iterative Procrustes alignment with the EM algorithm, Image and Vision Computing, 20, pp. 377-396. Sossai, E. 2005 La ricomposizione di una rete fiduciale catastale di ampie dimensioni: l'esempio di Tarcento (UD), Atti 9a
Conferenza nazionale ASITA, Catania 15-18 novembre 2005. Sossai, E. 2006 Ricomposizione cartografica mediante integrazione di rilievi PREGEO e di cartografia numerica esistente, Atti 10a
Conferenza nazionale ASITA, Bolzano 14-17 novembre 2006. Tong, X. H., Shi, W. Z., Liu, D. J. 2005 A Least Squares-Based Method for Adjusting the Boundaries of Area Objects,
Photogrammetric Engineering & Remote Sensing, 71 (2), pp. 189-195.

Lo sviluppo delle tecnologie per le reti geodetiche
155

M. Barbarella, F. Radicioni, F. Sansò editori 156
Lo sviluppo delle tecnologie per le reti geodetiche
157
CAPITOLO 3
Impiego delle reti GNSS per la Infomobilità Responsabile: Ambrogio Maria Manzino (1)
Alberto Cina (1), Marco Roggero (2), Vincenza Tornatore (3)
(1) DITAG – Politecnico di Torino, corso Duca degli Abruzzi 24 – 10129 Torino (2) DINSE – Politecnico di Torino, viale Mattioli 39 – 10125 Torino
(3) DIIAR – Politecnico di Milano, piazza Leonardo da Vinci 32 – 20133 Milano
3.1. INTRODUZIONE Lo sviluppo della ricerca su questo tema è avvenuto in tre fasi sequenziali che possono essere sintetizzate come segue:
1. Una accurata ricerca sullo stato dell’arte delle applicazioni di infomobilità supportate da una rete GNSS permanente, e nella definizione delle esigenze relative ai diversi tipi di applicazioni.
2. Una valutazione tecnica delle modalità di riuso delle reti regionali per questo tipo di applicazioni, in termini di analisi costi/benefici.
3. Un lavoro di sintesi finale che produrrà un rapporto definitivo. In questo capitolo cercheremo di rispondere nel paragrafo 3.2 alle esigenze dei diversi tipi di applicazioni. Nel paragrafo 3.4 una bibliografia ragionata servirà a fare il punto sullo stato dell’arte delle applicazioni di rete all’infomobilità. Nel paragrafo 3.3 si cercherà di proporre una modalità di riuso delle reti di stazioni permanenti per questo tipo di applicazioni. L’analisi dei costi e dei benefici tuttavia è solo qualitativa, in quanto dipende sensibilmente sia dall’applicazione che dal grado di automazione che si desidera fornire all’applicazione stessa. 3.2. LE APPLICAZIONI DI INFOMOBILITÀ DI RETI GNSS E LE LORO ESIGENZE Agli scopi della ricerca, relativi alla definizione delle esigenze dei diversi tipi di applicazione ed allo stato dell’arte delle applicazioni stesse cerchiamo dapprima di rispondere a queste domande:
- Qual è lo stato dell’arte delle applicazioni che possono trarre beneficio dalle reti per il tempo reale? Quali sono le loro esigenze?
- Qual è lo stato dell’arte dei ricevitori a costo relativamente basso, che usualmente sono utilizzati in tali applicazioni e che traggono beneficio dalle reti?
- Quali precisioni possono essere richieste nei vari ambiti di infomobilità? 3.2.1. Stato dell’arte delle applicazioni ed esigenze relative Vi sono applicazioni di posizionamento legate all’infomobilità che potrebbero richiedere un incremento di precisione, prestazioni ed affidabilità rispetto al posizionamento stand-alone. Senza la pretesa di esaurire tutte le applicazioni che la fantasia e le nuove esigenze creano, possiamo distinguere gli usi diretti ed indiretti legati all’infomobilità. Infine elenchiamo possibilità non
M. Barbarella, F. Radicioni, F. Sansò editori
158
ancora appieno sfruttate ma di possibile futuro sviluppo. Applicazioni dirette legate all’infomobilità: Il tracciamento di flotte di automezzi di merci pericolose e di veicoli per soccorso stradale. Può
essere utile una affidabilità più spinta delle coordinate in casi di pericolo come deviazioni di corsie e incidenti. Può servire su mezzi di soccorso: ambulanze, VVFF, forze di Polizia, Soccorso Stradale. In questi casi vi possono essere esigenze in tempo reale (forze dell’ordine, polizia, ambulanze ecc.) sia in post processing giornaliero (il tracciamento di flotte non sempre necessita del tempo reale, in alcuni casi è sufficiente il calcolo dei tragitti al termine di una giornata lavorativa). Per questi copi sono sufficienti ricevitori GPS di bassissimo costo, (50€, detti anche mass market), purché dotati della possibilità di applicare le correzioni DGPS in tempo reale e/o di registrare su una periferica, abitualmente sulla memoria di un telefono, o su palmare i dati grezzi. Questa possibilità esiste ad esempio con ricevitori GPS della Ditta Sirf, o della Ditta u-Blox. Vi sono anche prototipi in grado di assemblare tutta la tecnologia necessaria a fare funzionare questi sensori sia con le correzioni differenziali in real time, che in post processing. Non vi sono però ancora strumenti di larga diffusione che abbiano entrambe le capacità elencate.
Per la movimentazione all’interno di un interporto di container in funzione della loro localizzazione. Una precisione elevata consente un buon posizionamento delle gru di sollevamento. Le esigenze sono l’elevata precisione e la buona affidabilità. Ciò è ottenuto applicando le correzioni differenziali a ricevitori di basso o medio costo. Applicazioni diffuse di questo tipo si hanno nei porti e negli interporti del nord Europa con ricevitori mono frequenza della Ditta Septentrio.
In ambiente marino, lacustre o fluviale per la batimetria di precisione, legata ad esempio ai nuovi sensori-scanner subacquei. Le esigenze sono la media od alta precisione in tempo reale. Nel primo caso non è sufficiente un posizionamento stand-alone, ma si richiede almeno un posizionamento differenziale, i costi tuttavia sono limitati a poche centinaia di €. Nel secondo caso si richiede il fissaggio delle ambiguità di fase, con un ricevitore di fascia media di costo. In entrambi i casi è necessario un inquadramento in un sistema di riferimento standard ed è ciò che abitualmente viene assicurato e prodotto con le correzioni di rete.
Nel soccorso alpino. In condizioni di pericolo: nebbia, ghiaccio, condizioni meteo avverse in genere; nella guida assistita da elicotteri del Servizio Civile o dei VVFF per l’avvicinamento in condizioni critiche. Esigenze: usualmente non servono precisioni migliori di uno o due metri. Tali precisioni possono essere raggiunte con ricevitori di bassissimo costo purché abilitati alla ricezione del segnale differenziale. In questi casi il vincolo più stringente non è il ricevitore GPS ma il mezzo di comunicazione con la base. Non è sempre possibile in certi siti la comunicazione GSM o GPRS. Le correzioni di rete, sia pure a basso livello di precisione, potrebbero essere allora radiodiffuse o trasmesse con sistemi satellitari, wireless od altro ancora.
Quando serva una certificazione “PVT” (Posizione, Velocità e Tempo) legata al pagamento di parcheggi, al tempo di sosta od ai km percorsi in autostrada. Le esigenze non richiedono elevata precisione, una precisione di uno o due metri è sufficiente e raggiungibile con ricevitori mass market, purché abbiano accesso alle correzioni di rete. A proposito ricordiamo che le reti memorizzano in un file di log non solo il nome dell’utente e i tempi di utilizzo della rete, ma anche le posizioni e le precisioni raggiunte nel posizionamento.
Posizionamento di precisione di piattaforme o cavi poco fuori costa. Le esigenze sono identiche a quelle esaminate nelle applicazioni batimetriche.
Controllo in tempo reale dell’interdistanza tra veicoli. Vi sono degli studi in proposito sia della General Motors che della Fiat. In questi casi tuttavia l’esigenza principale non è l’applicazione ma la sua certificazione in termini di affidabilità.
Lo sviluppo delle tecnologie per le reti geodetiche
159
Posizionamento indoor. Le esigenze sono precisioni di tipo metrico. È oggi possibile in alcune favorevoli circostanze grazie alla maggior sensibilità dei ricevitori. Uno dei problemi cruciali è il multipath. La costellazione Galileo promette segnali ancora meglio ricevibili in condizione indoor ed una minore sensibilità al multipath.
Agricoltura di precisione. L’esigenza di precisione è di tipo metrico. Anche in questo caso sono sufficienti ricevitori di basso costo, purché abilitati al posizionamento DGPS. La correzione di rete fornisce sia la certificazione che l’inquadramento in un sistema di riferimento noto.
Applicazioni indirettamente utili all’infomobilità Aggiornamento speditivo di database topografici, inserimento e reperimento di elementi di
infrastrutture viarie e di servizi, sottoservizi ed impianti, sentieristica. Per la costruzione di questi sistemi informativi, la precisione usualmente richiesta è sub metrica. Usualmente è possibile ottenerla con correzioni differenziali applicate a ricevitori di medio costo.
Posa automatica di strutture ed infrastrutture legate alla mobilità stradale e ferroviaria o di tubazioni, cavi ed elettrodotti. In particolare in ambito ferroviario la posa delle traversine sulla massicciata con macchine automatiche; in ambito stradale il monitoraggio di macchine fresatrici della massicciata affinché non danneggino giunti di dilatazione o condutture inserite nella massicciata e precedentemente rilevate; sempre in ambito stradale, la gestione degli scavi per la posa o la riparazione di tubazioni e condutture. Esigenze: in tutti questi casi è necessaria sia la precisione che il tempo reale. La richiesta inderogabile è che sia noto ed unico il sistema di riferimento utilizzato. Tale esigenza è certamente tipica di una rete regionale o nazionale certificata.
La costruzione del Catasto stradale e ferroviario. In questo caso non sempre è necessario il tempo reale, può essere sufficiente ed è spesso più produttivo il posizionamento in post processing. Non per questo non sono utili le reti di stazioni permanenti. La notevole interdistanza tra stazione e luogo del rilievo non assicura il fissaggio delle ambiguità ed il relativo posizionamento di precisione. La possibilità della Rete di costruire, anche a posteriori, un archivio di dati di una stazione virtuale prossima al rilievo, consentirebbe di raggiungere gli scopi prefissi.
Applicazioni tecnicamente possibili ma non diffuse Molti potenziali utenti che usano il GPS per scopi di navigazione stradale posseggono
strumentazione mass market che usualmente non si presta a scopi di posizionamento di rete. Per due motivi: il ricevitore non è in grado di applicare le correzioni differenziali o, se anche lo fosse, il carico trasmissivo risulterebbe elevato rispetto al mezzo trasmissivo e all’esigenza di un posizionamento di più spinta precisione saltuaria. In questi casi il centro di controllo potrebbe ricevere, solo quando serve, i dati grezzi del ricevitore. Con tali dati e i prodotti di rete è possibile correggere il posizionamento stand alone del ricevitore ed infine trasmettere e certificare la posizione all’utente connesso. In tal modo i mezzi trasmissivi possono avere bande molto ridotte. Sono avvenute già sperimentazioni di questa procedura utilizzando particolari ricetrasmettitori VHF in dotazione alla Protezione Civile del Piemonte. Tali ricetrasmettitori hanno la capacità di eseguire contemporaneamente la trasmissione della voce e dei dati con una modesta larghezza di banda (9600 baud).
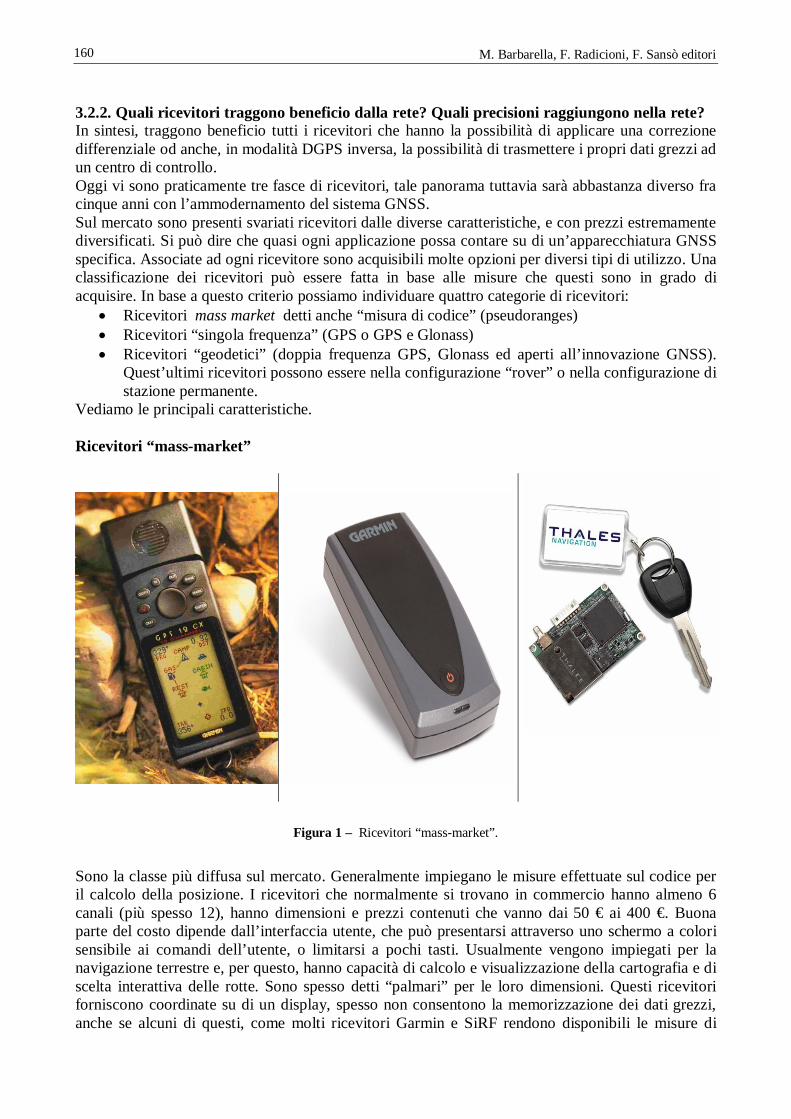
M. Barbarella, F. Radicioni, F. Sansò editori
160
3.2.2. Quali ricevitori traggono beneficio dalla rete? Quali precisioni raggiungono nella rete? In sintesi, traggono beneficio tutti i ricevitori che hanno la possibilità di applicare una correzione differenziale od anche, in modalità DGPS inversa, la possibilità di trasmettere i propri dati grezzi ad un centro di controllo. Oggi vi sono praticamente tre fasce di ricevitori, tale panorama tuttavia sarà abbastanza diverso fra cinque anni con l’ammodernamento del sistema GNSS. Sul mercato sono presenti svariati ricevitori dalle diverse caratteristiche, e con prezzi estremamente diversificati. Si può dire che quasi ogni applicazione possa contare su di un’apparecchiatura GNSS specifica. Associate ad ogni ricevitore sono acquisibili molte opzioni per diversi tipi di utilizzo. Una classificazione dei ricevitori può essere fatta in base alle misure che questi sono in grado di acquisire. In base a questo criterio possiamo individuare quattro categorie di ricevitori:
Ricevitori mass market detti anche “misura di codice” (pseudoranges) Ricevitori “singola frequenza” (GPS o GPS e Glonass) Ricevitori “geodetici” (doppia frequenza GPS, Glonass ed aperti all’innovazione GNSS).
Quest’ultimi ricevitori possono essere nella configurazione “rover” o nella configurazione di stazione permanente.
Vediamo le principali caratteristiche. Ricevitori “mass-market”
Figura 1 – Ricevitori “mass-market”.
Sono la classe più diffusa sul mercato. Generalmente impiegano le misure effettuate sul codice per il calcolo della posizione. I ricevitori che normalmente si trovano in commercio hanno almeno 6 canali (più spesso 12), hanno dimensioni e prezzi contenuti che vanno dai 50 € ai 400 €. Buona parte del costo dipende dall’interfaccia utente, che può presentarsi attraverso uno schermo a colori sensibile ai comandi dell’utente, o limitarsi a pochi tasti. Usualmente vengono impiegati per la navigazione terrestre e, per questo, hanno capacità di calcolo e visualizzazione della cartografia e di scelta interattiva delle rotte. Sono spesso detti “palmari” per le loro dimensioni. Questi ricevitori forniscono coordinate su di un display, spesso non consentono la memorizzazione dei dati grezzi, anche se alcuni di questi, come molti ricevitori Garmin e SiRF rendono disponibili le misure di
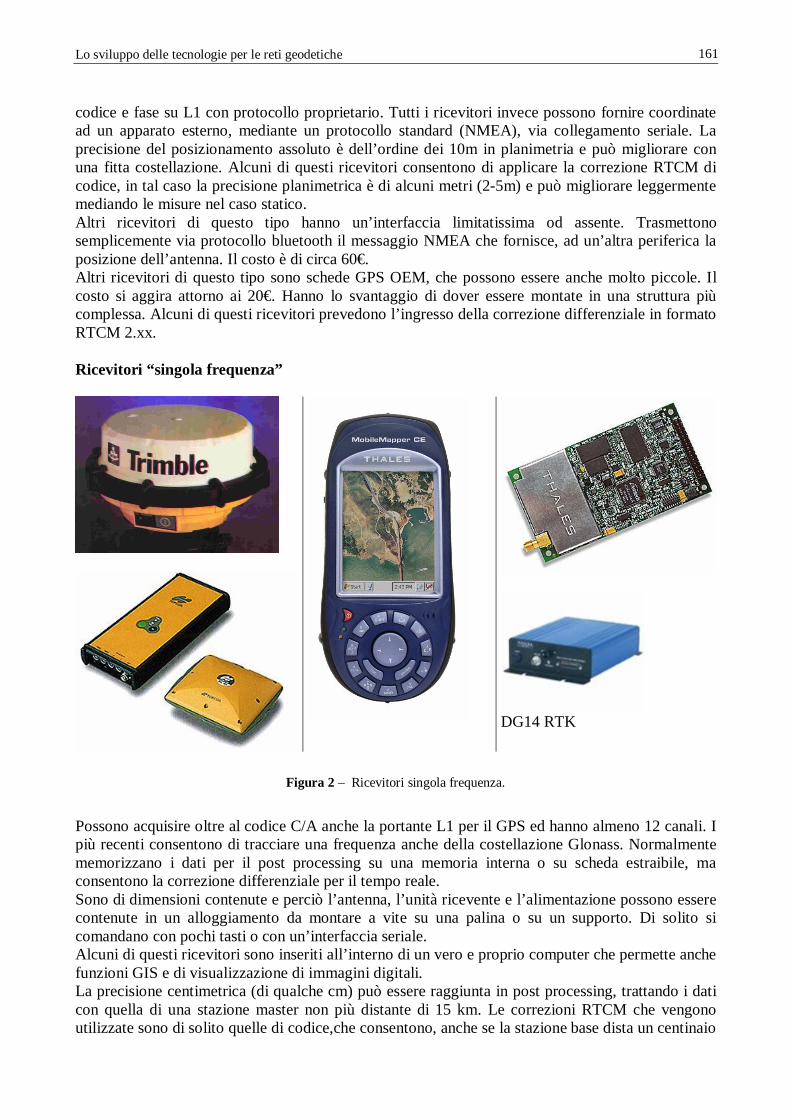
Lo sviluppo delle tecnologie per le reti geodetiche
161
codice e fase su L1 con protocollo proprietario. Tutti i ricevitori invece possono fornire coordinate ad un apparato esterno, mediante un protocollo standard (NMEA), via collegamento seriale. La precisione del posizionamento assoluto è dell’ordine dei 10m in planimetria e può migliorare con una fitta costellazione. Alcuni di questi ricevitori consentono di applicare la correzione RTCM di codice, in tal caso la precisione planimetrica è di alcuni metri (2-5m) e può migliorare leggermente mediando le misure nel caso statico. Altri ricevitori di questo tipo hanno un’interfaccia limitatissima od assente. Trasmettono semplicemente via protocollo bluetooth il messaggio NMEA che fornisce, ad un’altra periferica la posizione dell’antenna. Il costo è di circa 60€. Altri ricevitori di questo tipo sono schede GPS OEM, che possono essere anche molto piccole. Il costo si aggira attorno ai 20€. Hanno lo svantaggio di dover essere montate in una struttura più complessa. Alcuni di questi ricevitori prevedono l’ingresso della correzione differenziale in formato RTCM 2.xx. Ricevitori “singola frequenza”
DG14 RTK
Figura 2 – Ricevitori singola frequenza.
Possono acquisire oltre al codice C/A anche la portante L1 per il GPS ed hanno almeno 12 canali. I più recenti consentono di tracciare una frequenza anche della costellazione Glonass. Normalmente memorizzano i dati per il post processing su una memoria interna o su scheda estraibile, ma consentono la correzione differenziale per il tempo reale. Sono di dimensioni contenute e perciò l’antenna, l’unità ricevente e l’alimentazione possono essere contenute in un alloggiamento da montare a vite su una palina o su un supporto. Di solito si comandano con pochi tasti o con un’interfaccia seriale. Alcuni di questi ricevitori sono inseriti all’interno di un vero e proprio computer che permette anche funzioni GIS e di visualizzazione di immagini digitali. La precisione centimetrica (di qualche cm) può essere raggiunta in post processing, trattando i dati con quella di una stazione master non più distante di 15 km. Le correzioni RTCM che vengono utilizzate sono di solito quelle di codice,che consentono, anche se la stazione base dista un centinaio

M. Barbarella, F. Radicioni, F. Sansò editori
162
di km, un posizionamento con precisione metrica (80 cm – 1m) in planimetria. Normalmente nessuno di questi ricevitori è in grado di usare, in tempo reale, le correzioni di fase. Per meglio dire, nessuno ha la capacità di trattare codice e fase e giungere ad un posizionamento RTK di tipo centimetrico. Attualmente ci risulta possibile solo con due ricevitori della Casa Magellan®. In particolare il modello DG14 RTK che vediamo sia nella versione OEM che nella versione inscatolata nella parte destra della figura è maggiormente indicato per applicazioni di infomobilità. Il costo varia da 800€ nelle versioni OEM, a 5000€ nelle versioni GIS e con ricezione Glonass. Al termine del paragrafo è riportata una tabella dello stato dell’arte di questi ricevitori di fascia media. Tale tabella fornisce anche un costo indicativo e le modalità di utilizzo dei sensori. Ricevitori geodetici e multi costellazione Questi ricevitori possono essere acquistati nella versione “rover”, nella versione “base” e nella versione “stazione permanente”, nonché in versioni OEM.
Figura 3 – Ricevitori geodetici.
Questi tipi di ricevitori sono i più completi e possono acquisire tutte le parti del segnale GPS (L1, L2, C/A, P), nonché tutte le parti del segnale Glonass. Alcuni di essi sono già abilitati a ricevere la terza frequenza delle nuove costellazioni, nonché la costellazione Galileo. Tali ricevitori sono i più indicati per costituire una stazione permanente. A detti ricevitori va in tal caso associata un’adeguata antenna, opportunamente monumentata. Hanno la possibilità di memorizzare internamente una grande quantità di dati, nonché la possibilità di trasmettere, via porta seriale, una o più correzioni differenziali per mezzo di alcuni accessori (radiomodem, gsm-modem, internet) I ricevitori geodetici possono essere usati anche nelle versioni “base” e “rover”. Spesso questa definizione riguarda solo il modo con cui lo stesso ricevitore è utilizzato, ma entrambi hanno caratteristiche identiche. In alcuni casi il ricevitore “rover” è più leggero e compatto. Il ricevitore
Lo sviluppo delle tecnologie per le reti geodetiche
163
base deve calcolare e trasmettere la correzione differenziale. Il ricevitore rover deve essere in grado di riceverla ed applicarla ai propri dati grezzi. L’applicazione più importante è il posizionamento RTK, che si attua quando il ricevitore, utilizzando codici e fasi, è in grado di fissare,con sufficiente affidabilità, l’ambiguità intera di fase. In tal caso si raggiunge, in tempo reale,la precisione centimetrica. Alcuni ricevitori necessitano il posizionamento statico, in attesa di questi calcoli necessari al fissaggio. Dopo il fissaggio e sino ad un’eventuale perdita delle ambiguità, il ricevitore può muoversi e mantenere la precisione centimetrica. Altri ricevitori riescono a raggiungere il calcolo del fissaggio anche se si trovano in moto, utilizzando a tal fine una delle numerose tecniche definite On The Fly (OTF). I tempi necessari al fissaggio, sia in posizione statica, sia in modalità OTF, variano da pochi secondi sino a tre minuti. Tale fissaggio in genere non avviene o, peggio ancora, avviene in modalità errata (falso fissaggio) quando il ricevitore base dista svariati km dal rover (10 o 15 km è un limite ragionevole). A questo proposito gli esperimenti eseguiti sulla rete di stazioni permanenti del Politecnico di Torino hanno mostrato che il posizionamento di rete permette tempi di fissaggio praticamente indipendenti dalla distanza dalla più vicina stazione permanente. Tali tempi sono inoltre limitati nel 95% dei casi a non oltre un minuto. Si sono verificati casi (rari ma presenti) di falsi fissaggi anche a minor distanza. L’uso di più di una costellazione è di buon aiuto all’interno di valli o di canyon urbani. Non risolve tuttavia tutti i problemi in quanto, per il buon posizionamento è anche necessario che gli indici Diluition Of Precision (DOP) siano alquanto bassi, ciò non avviene normalmente nei canyon urbani. I ricevitori geodetici sono normalmente molto flessibili, consentendo la connessione con svariati sensori. I più utilizzati sono ad esempio gli orologi atomici, tipica periferica di una stazione permanente, oppure camere fotogrammetriche, o batimetri, nel caso di ricevitori rover. È molto attuale l’associazione tra ricevitori e sensori inerziali (INS). Tale associazione permette sinergicamente il posizionamento di precisione anche durante la perdita del segnale GNSS dovuta ad ostacoli e in genere ad interruzioni. Se queste sono limitate a pochi secondi è possibile recuperare quasi istantaneamente le ambiguità di fase. Dati in uscita Il ricevitore GPS può generalmente fornire dati in uscita e in particolare dati grezzi (codici e fasi per una loro successiva elaborazione) o coordinate in tempo reale. In tal caso il formato più conosciuto con il quale vengono fornite è secondo uno standard denominato National Marine Electronics Association (NMEA). Questo è organizzato secondo parecchi tipi di formati di “record”, riconoscibili da un identificativo iniziale: all’interno, oltre la posizione, possono essere contenuti vari dati. Dati di codice e fase (per post processamento). Alcuni ricevitori (solitamente quelli singola e doppia frequenza) possono memorizzare le acquisizioni dei dati di codice o di fase. Il formato con cui vengono scaricati i dati dalla memoria del ricevitore è normalmente quello proprietario della ditta costruttrice (normalmente un file binario). Questo può essere poi convertito in un formato standard, riconosciuto internazionalmente, e leggibile da tutti i programmi di elaborazione GPS. Il formato si chiama Receiver INdipendent Exchange (RINEX) l’ultima versione è la 3.0, che prevede la possibilità di inserire i dati delle future costellazioni. L’ultima versione in uso è la 2.30. Esiste anche una versione “compressa” (RINEX formato Hatanaka) già precedentemente menzionata. Il formato RINEX si compone di un file di osservazioni contenente le osservazioni di codici e fasi di ogni costellazione ed altri files, di navigazione, uno per ogni costellazione, contenente i parametri per il calcolo delle orbite dei satelliti. Nel caso di presenza di una stazione meteorologica è prevista anche la possibilità di fornire dati meteo in un opportuno file.
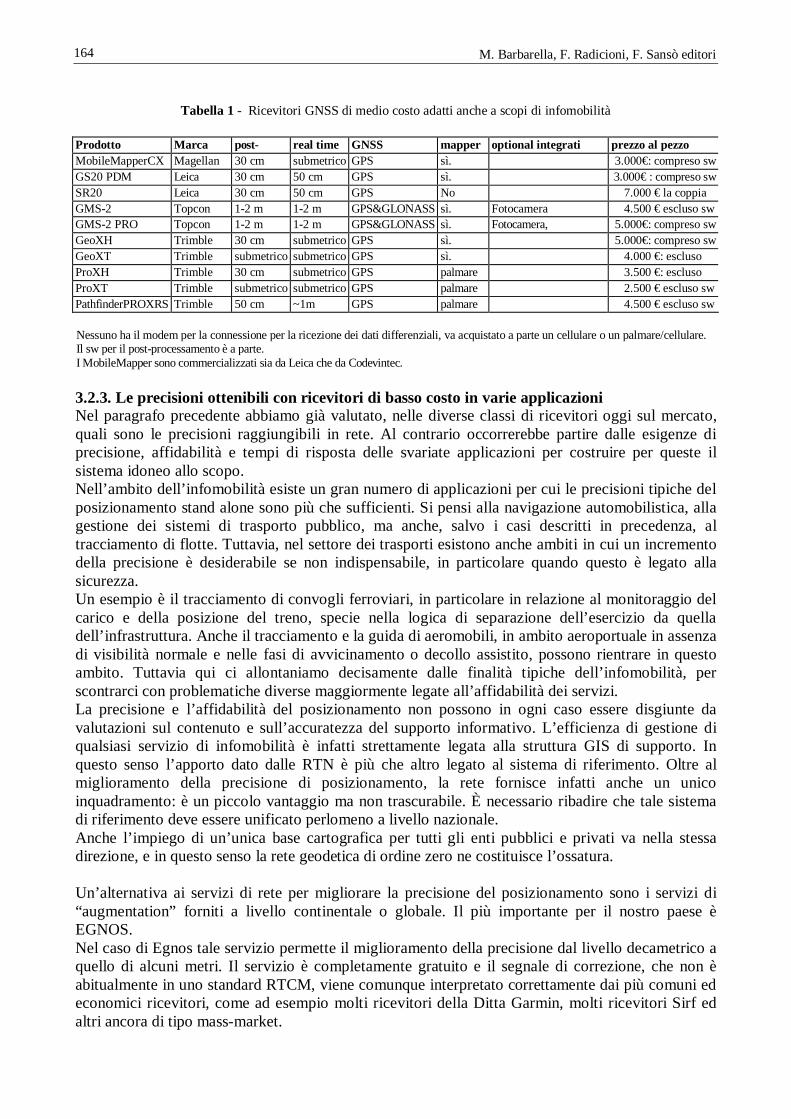
M. Barbarella, F. Radicioni, F. Sansò editori
164
Tabella 1 - Ricevitori GNSS di medio costo adatti anche a scopi di infomobilità Prodotto Marca post-
processato real time GNSS mapper optional integrati prezzo al pezzo
(IVA esclusa) MobileMapperCX Magellan 30 cm submetrico GPS sì. Windows
3.000€: compreso sw nel ricev. GS20 PDM Leica
Geosystems 30 cm 50 cm GPS sì.
Windows 3.000€ : compreso sw
nel ricev. SR20 Leica Geosystems
30 cm 50 cm GPS No 7.000 € la coppia GMS-2 Topcon 1-2 m 1-2 m GPS&GLONASS sì.
Windows Fotocamera 4.500 € escluso sw
GMS-2 PRO Topcon 1-2 m 1-2 m GPS&GLONASS sì. Windows
Fotocamera, distanziometro, bussola
5.000€: compreso sw nel ricev. GeoXH Trimble 30 cm submetrico GPS sì.
Windows 5.000€: compreso sw
nel ricev. GeoXT Trimble submetrico submetrico GPS sì. Windows
4.000 €: escluso sw ProXH Trimble 30 cm submetrico GPS palmare
esterno 3.500 €: escluso sw ProXT Trimble submetrico submetrico GPS palmare
esterno 2.500 € escluso sw PathfìnderPROXRS Trimble 50 cm ~1m GPS palmare
esterno 4.500 € escluso sw
Nessuno ha il modem per la connessione per la ricezione dei dati differenziali, va acquistato a parte un cellulare o un palmare/cellulare. Il sw per il post-processamento è a parte. I MobileMapper sono commercializzati sia da Leica che da Codevintec. 3.2.3. Le precisioni ottenibili con ricevitori di basso costo in varie applicazioni Nel paragrafo precedente abbiamo già valutato, nelle diverse classi di ricevitori oggi sul mercato, quali sono le precisioni raggiungibili in rete. Al contrario occorrerebbe partire dalle esigenze di precisione, affidabilità e tempi di risposta delle svariate applicazioni per costruire per queste il sistema idoneo allo scopo. Nell’ambito dell’infomobilità esiste un gran numero di applicazioni per cui le precisioni tipiche del posizionamento stand alone sono più che sufficienti. Si pensi alla navigazione automobilistica, alla gestione dei sistemi di trasporto pubblico, ma anche, salvo i casi descritti in precedenza, al tracciamento di flotte. Tuttavia, nel settore dei trasporti esistono anche ambiti in cui un incremento della precisione è desiderabile se non indispensabile, in particolare quando questo è legato alla sicurezza. Un esempio è il tracciamento di convogli ferroviari, in particolare in relazione al monitoraggio del carico e della posizione del treno, specie nella logica di separazione dell’esercizio da quella dell’infrastruttura. Anche il tracciamento e la guida di aeromobili, in ambito aeroportuale in assenza di visibilità normale e nelle fasi di avvicinamento o decollo assistito, possono rientrare in questo ambito. Tuttavia qui ci allontaniamo decisamente dalle finalità tipiche dell’infomobilità, per scontrarci con problematiche diverse maggiormente legate all’affidabilità dei servizi. La precisione e l’affidabilità del posizionamento non possono in ogni caso essere disgiunte da valutazioni sul contenuto e sull’accuratezza del supporto informativo. L’efficienza di gestione di qualsiasi servizio di infomobilità è infatti strettamente legata alla struttura GIS di supporto. In questo senso l’apporto dato dalle RTN è più che altro legato al sistema di riferimento. Oltre al miglioramento della precisione di posizionamento, la rete fornisce infatti anche un unico inquadramento: è un piccolo vantaggio ma non trascurabile. È necessario ribadire che tale sistema di riferimento deve essere unificato perlomeno a livello nazionale. Anche l’impiego di un’unica base cartografica per tutti gli enti pubblici e privati va nella stessa direzione, e in questo senso la rete geodetica di ordine zero ne costituisce l’ossatura. Un’alternativa ai servizi di rete per migliorare la precisione del posizionamento sono i servizi di “augmentation” forniti a livello continentale o globale. Il più importante per il nostro paese è EGNOS. Nel caso di Egnos tale servizio permette il miglioramento della precisione dal livello decametrico a quello di alcuni metri. Il servizio è completamente gratuito e il segnale di correzione, che non è abitualmente in uno standard RTCM, viene comunque interpretato correttamente dai più comuni ed economici ricevitori, come ad esempio molti ricevitori della Ditta Garmin, molti ricevitori Sirf ed altri ancora di tipo mass-market.
Lo sviluppo delle tecnologie per le reti geodetiche
165
Il segnale di correzione è trasmesso per mezzo di satelliti geostazionari situati allo zenith a latitudine equatoriale. Il problema dell’utilizzo di tali segnali non è solamente nella bassa precisione fornita, a causa del numero stazioni permanenti che forniscono i dati ancora limitato, ma è la scarsa visibilità dei satelliti, specialmente in ambito urbano. Un recente esperimento per valutare le precisioni e le applicabilità, condotto al Politecnico di Torino, ha riscontrato la possibilità di utilizzate tali correzioni in meno del 10% di un percorso urbano, a causa della scarsa visibilità dei satelliti. Tali satelliti infatti si trovano a circa 40°-45° di elevazione alle nostre latitudini. Per tali motivi, da tempo, il consorzio EGNOS ha previsto di diffondere tali correzioni, gratuitamente, per mezzo di internet. Sperimentazioni in tal senso debbono ancora essere condotte. Va ricordato tuttavia che il miglioramento del posizionamento non è elevato e, con tali premesse,potrebbe essere percorribile la scelta di utilizzare una delle qualsiasi stazioni permanenti europee che forniscono il dato di correzione RTCM che fanno parte del progetto EUREF-IP. A livello globale esiste un servizio di “augmentation” privato della Ditta Fugro, denominato “OmniSTAR”. Il servizio è ovviamente a pagamento (http://www.omnistar.com/pricing.html) e prevede una quota di 1500 US$ per ricevitore e per anno nella modalità a precisione standard (VBS). La copertura globale è fornita da 70 stazioni permanenti. E due centri di controllo calcolano le correzioni. Per l’uso di tali correzioni, diffuse via satellite, servono tuttavia particolari ricevitori che decodificano il segnale,oppure ricevitori tradizionali,purché dotati di scheda di ricezione del segnale Omnistar. In ogni caso si parla di ricevitori di non meno di 5k€ di costo. Il servizio prevede tre livelli di precisione differenziale, denominati VBS, HP, and XP. OmniSTAR VBS dichiara una precisione sub metrica. In 24 ore di acquisizione la precisione tipica 2-sigma (95%) è minore di un metro in planimetria. Il servizio OmniSTAR HP prevede un errore planimetrico 2-sigma (95%) di 6 centimetri, con gli stessi tempi. La Fugro indica l’agricoltura come il settore tipico di impiego Il servizio OmniSTAR XP fornisce una accuracy di circa 5 cm a breve termine ed una ripetibilità a lungo termine migliore di 10 cm, 95%CEP.
3.3. VALUTAZIONE DELLE POSSIBILITÀ TECNICHE E DELLE MODALITÀ DI RIUSO DELLE RETI REGIONALI PER APPLICAZIONI DI INFOMOBILITÀ, IN TERMINI DI ANALISI COSTI/BENEFICI
In tutte le applicazioni legate all’infomobilità salvo casi particolarissimi, vi sono due caratteristiche comuni da considerare: 1) non serve quasi mai una precisione centimetrica, ma è utile spesso un miglioramento (augmentation) della precisione stand-alone che oggi è attorno ai 5m al 95%. Questa caratteristica di precisione è legata tuttavia in parte ai ricevitori oggi a disposizione ed alle loro fasce di costo, in parte potrà cambiare nei prossimi anni a causa del futuro ammodernamento del sistema GNSS. Per tale motivo in questo capitolo si introdurrà un paragrafo che, in qualche modo esprime qual è la tendenza costruttiva dei futuri ricevitori GNSS in questi ambiti applicativi. 2) è indispensabile quasi sempre che, da Regione a Regione, si possa seguire l’oggetto in movimento in un unico sistema di riferimento. Ciò attualmente non avviene: quasi ogni Regione adotta un “Datum” proprio. Quest’ultimo problema dovrebbe essere sanato a breve termine, con l’adozione di un unico e più preciso sistema di riferimento Nazionale, grazie anche all’avvio del calcolo di un nuovo sistema di riferimento Nazionale e Dinamico eseguito in questi giorni dall’IGM. In ogni caso il problema è di carattere più generale, specie se si vuole un coordinamento continentale su certi “corridoi” di comunicazione strategici a livello Europeo.
M. Barbarella, F. Radicioni, F. Sansò editori
166
La soluzione che si propone è appunto un riutilizzo anche per il tempo reale e per scopi di media precisione di alcune stazioni delle reti delle Regioni. Già attualmente le reti delle Regioni forniscono gratuitamente dati con decimazione a 30 secondi che vengono utilizzati in post processing. Questi dati sono parzialmente utilizzati da Enti pubblici, alcune stazioni sono già inserite nella rete Euref, altre stazioni sono utilizzate per il calcolo in post processing della nuova Rete Dinamica Nazionale dell’Istituto Geografico Militare. Per scopi di inquadramento Nazionale è infatti sufficiente disporre dei dati di una o due stazioni regionali, purché ben distribuite e ben monumentate. Ciò permette il riutilizzo per la costruzione e l’unificazione dei sistemi di riferimento in un unico sistema di riferimento nazionale. Ciò che si propone è fare altrettanto per gli scopi legati all’infomobilità. In tal caso il numero di stazioni necessarie potrebbe essere identico al caso precedente, ma ciò che si richiede è il flusso di dati ad un secondo. Tale flusso non sempre è disponibile gratuitamente, ma potrebbe esserlo per una sola stazione della rete regionale, agli scopi previsti legati ad un servizio pubblico nazionale. È chiaro che in tal caso è necessario costruire non solo una rete per il tempo reale a livello nazionale, ma un vero e proprio servizio nazionale dotato di attrezzatura, personale e competenze. Dal punto di vista tecnico è improbabile (perlomeno nella situazione della sola costellazione GPS del 2008) che si arrivi con sole 20 stazioni su tutta Italia, al fissaggio delle ambiguità di fase su tutta la rete nazionale. Tale risultato non è ciò che si richiede e neppure ciò che si desidera, anche per non entrare in concorrenza con i vari servizi nazionali. Ciò che invece è molto probabile è, anche senza fissaggio, un miglioramento della precisione del posizionamento in tempo reale dell’utenza. Tale miglioramento, pur non portando al calcolo centimetrico della posizione riteniamo possa essere idoneo nella maggior parte dei casi utili all’infomobilità. Come conseguenza importante si avrebbe l’unificazione automatica dei vari sistemi di riferimento anche per gli scopi previsti dal posizionamento in tempo reale. Il Politecnico di Torino sta sperimentando le precisioni ottenibili per questi scopi con una rete di stazioni permanenti molto rada, costituita da sole cinque stazioni ad elevata interdistanza. La sperimentazione è eseguita con due software di rete commerciali ed i risultati sono ancora in fase di controllo. 3.3.1. Cosa potrebbe fare una rete nazionale e cosa le reti regionali ancora non fanno completamente Come si evince dalla bibliografia ragionata, vi sono ancora delle zone d’ombra in cui le reti regionali non sono ancora in grado di intervenire. D’altra parte alcune delle proposte che seguiranno hanno senso solo a livello nazionale e per scopi di infomobilità. Una caratteristica critica agli scopi di infomobilità è l’affidabilità del posizionamento. Ciò è descritto in tutta la bibliografia che tenta di affrontare il “real time monitoring” del segnale GNSS. Se si vuole controllare un solo ricevitore usualmente si affianca a tale ricevitore un secondo sensore e si confrontano, ad esempio con un posizionamento in tempo reale, i dati provenienti da entrambi. Il problema è più serio e più complesso se si vuole controllare un’intera rete. Ciò che serve all’utente, non è solo capire se la rete sta funzionando correttamente, ma se le coordinate che il suo ricevitore calcola sono più o meno affidabili. Premesso che il risultato finale dipende ovviamente da come il ricevitore rover calcola l posizione, e su ciò non si può intervenire in nessun modo, ciò che può garantire la rete è che la correzione che l’utenza sta ricevendo è idonea a calcolare una posizione in tempo reale con un certo livello di accuratezza. Inoltre è possibile certificare che i dati inviati dalla rete sono completamente integri. Il servizio SBAS di EGNOS prevede ad esempio un controllo di integrità. Un’altra opzione prevedibile è la modalità di diffusione di correzioni nazionali. Se rimane ancora sensata l’opzione di internet, può avere senso in alcuni casi la diffusione delle correzioni sia in sottoportanti radio, sia per via satellitare. In entrambi i casi occorre studiare la modalità di trasmissione di rete della correzione. Il mezzo
Lo sviluppo delle tecnologie per le reti geodetiche
167
trasmissivo infatti è tipicamente “ad una via” e ciò non è percorribile con gli standard più diffusi di correzione a livello regionale. Ciò è possibile, in parte, con l’uso della correzione con formato FKP. L’alternativa è l’utilizzo di un formato SBAS compatibile con EGNOS. Tali correzioni sono già attualmente leggibili dalla maggior parte dei ricevitori mass-market. Il problema è che i software di rete per il tempo reale non sono ancora in grado, dopo il calcolo dei vari bias, di convertirli e trasmetterli con tale formato. Con ciò si raggiungerebbe probabilmente un livello di precisione dell’ordine di cinque volte migliore di quello attualmente raggiunto da EGNOS. Se fossero disponibili gli errori sistematici calcolati dalla rete in tempo reale, sarebbe teoricamente possibile e percorribile ciò che viene denominato “PPP” (Precise Point Positioning) anche in modalità cinematica, con l’utilizzo delle correzioni di rete. Un’altra possibilità non offerta dalle reti è il posizionamento DGPS inverso. Tale possibilità non è inserita sia per la bassa precisione (ma utile in ogni caso per l’infomobilità) sia per l’esigua richiesta che avrebbe. Tale poco rilevante richiesta, in termini di mercato, può invece essere rilevante in termini di utenza privilegiata. Tale posizionamento è in genere discontinuo e su richiesta, ma fatto in condizioni di emergenza. L’uso di tale posizionamento può essere utile, come accennato, per il soccorso alpino, per emergenze stradali, in zone dove non si disponga di un collegamento internet ma di semplici collegamenti radio VHF. Più in generale conviene fare ciò in tre casi: quando il carico trasmissivo della correzione differenziale è troppo elevato per il mezzo, che può essere così un semplice modem duale: voce/dati. Quando non occorre un posizionamento ogni secondo, ma ci si accontenta di un rate minore, ed infine quando il ricevitore rover non ha capacità di applicazione delle correzioni di rete (è il caso ad esempio di GPS integrati in telefonini). Quale che sia la tipologia di applicazione, anche di bassa precisione, è sempre opportuno che il gestore del servizio o anche l’utente disponga di informazioni sull’integrità del dato. In questo caso è l’utente che invia i dati grezzi (basta un’epoca) al centro di calcolo. A sua volta il centro di calcolo esegue il posizionamento, corregge la posizione in funzione dei bias calcolati dalla rete ed infine ritrasmette la posizione all’utenza fornendo anche un livello di affidabilità. 3.3.2 Con l’ammodernamento del sistema i nuovi ricevitori non avranno più bisogno delle reti (regionali o nazionali)? Come già detto, purtroppo ancor oggi la rete EGNOS è poco sfruttata, sia per lo scarso contributo in precisione, dovuto alla grande interdistanza tra le stazioni permanenti a terra, sia per i satelliti geostazionari che usa, poco visibili alle nostre latitudini. Con una rete nazionale, molto più fitta delle stazioni europee e già predisposta alla diffusione dei dati, entrambi i problemi sarebbero superati. Ciò assumerebbe maggiore importanza nell’ottica dell’ammodernamento delle costellazioni GPS e Glonass e delle nuove costellazioni Galileo e Compass. Sino ad oggi infatti aveva poco senso applicare correzioni di rete a ricevitori di solo codice a causa del grande rumore dei dati di codice. Tale rumore supera, o meglio, è quasi dello stesso ordine di grandezza dell’“augmentation” che può fornire una rete continentale. Il futuro però è ben diverso: con i nuovi satelliti sono previsti codici molto più precisi e molto meno rumorosi. A sua volta le case costruttrici prevedono la costruzione di ricevitori di basso costo che utilizzino detti codici (si veda ad esempio fra tutte la Ditta U-blox: http://www.u-blox.com/products.html). Mentre sinora le fasce di precisione erano grossomodo (a seconda dei ricevitori) tre: 5m per il posizionamento stand alone, 1-2m per il posizionamento DGPS e 5cm per il posizionamento RTK, in futuro avrà senso una precisione submetrica nel caso si utilizzino questi nuovi codici e congiuntamente un posizionamento di rete. Anche se i nuovi ricevitori promettono il tracciamento di più costellazioni (3.3.3) e delle precisioni sui codici decimetriche, rimane sempre il problema della modellazione dei bias, troposferico e ionosferico su una vasta area. Tali bias sono di ordine metrico o decametrico e non è possibile raggiungere precisioni decimetriche se prima non sono stati adeguatamente stimati ed applicati. Inoltre, per garantire la piena inter-operabilità dei sistemi di navigazione occorre che gli stessi
M. Barbarella, F. Radicioni, F. Sansò editori
168
utilizzino un comune sistema di riferimento. Tale sistema è implicitamente trasmesso dalle effemeridi. Purtroppo così attualmente non avviene, non solo per le tre dimensioni di posizione, ma anche per la variabile tempo. Per il trattamento dei dati in post processing il problema non si pone in quanto è risolto attraverso una trasformazione tra i sistemi di riferimento. Il problema principale rimane l’inter-operabilità in tempo reale: anche se gli USA, la Russia e l’UE sono interessati a rendere le effemeridi trasmesse sempre più coerenti con il sistema ITRF, rimangono delle discordanze. Per quanto riguarda la scala dei tempi è previsto nel messaggio navigazionale delle tre costellazioni di inserire un valore di ritardo che permetta il collegamento almeno con la scala GPS. In ogni caso la differenza temporale tra costellazioni sarà dell’ordine del nanosecondo (10-9s=30 cm) e si recupera al costo di una osservazione ad un satellite nel point positioning. Queste differenze non sono tali da interessare le numerosissime applicazioni di bassa precisione. Un ruolo fondamentale per questi calcoli è giocato dalle reti di stazioni permanenti. Queste stazioni infatti, se tracciano più di una costellazione, possono rappresentare il modo di unificare i vari sistemi di riferimento. I benefici apportati da reti di stazioni permanenti di questo tipo non si limitano alla sola unificazione del sistema di riferimento, ma sono numerosi e importanti. Citiamo ad esempio la possibilità di monitorare, quasi in tempo reale, la quantità di vapore precipitabile che, grazie ai numerosi satelliti tracciabili contemporaneamente fra le tre costellazioni, permetterà una conoscenza della troposfera molto più accurata. Queste ricadute tuttavia non fanno parte degli scopi del presente lavoro, ma sono citate in quanto è stata proposta l’istituzione di una rete a carattere nazionale. 3.3.3. I futuri ricevitori Già attualmente sul mercato sono disponibili ricevitori che promettono di tracciare le future frequenze Galileo, GPS e Glonass. Ad esempio Topcon® dispone del ricevitore NETG3 a 72 canali “universali” in grado di tracciare le tre costellazioni, Javad® ha annunciato un ricevitore equivalente di nome GeNiuSS; NovAtel® ha annunciato un ricevitore in grado di tracciare due frequenze GPS e due Galileo, Septentrio® il ricevitore AsteRx1 in grado di tracciare anch’esso queste due costellazioni. Parlare dei futuri ricevitori può apparire allora come parlare delle previsioni del tempo della settimana appena trascorsa. Così non è non solo perché le costellazioni non sono ancora ammodernate od in orbita, ma anche perché il mercato proporrà una vasta fascia di ricevitori per diversi tipi di applicazioni. In ogni caso è utile capire come si muoverà l’industria in questa direzione. Occorre a tal fine fare utilizzare almeno quattro grandi categorie: i ricevitori geodetici di alta precisione, tipicamente usabili per stazioni permanenti, i ricevitori geodetici per applicazioni RTK, i ricevitori per applicazioni GIS ed infine i ricevitori da includersi in ricevitori telefonici o usabili sulle autovetture. È chiaro che i ricevitori più costosi e più precisi saranno in grado di tracciare le tre frequenze GPS, Glonass e le tre frequenze Compass o Galileo aperte a tutti. Sono già tecnicamente disponibili sul mercato a costi, tuttavia, tre volte superiori a quelli di un ricevitore GPS geodetico. L’applicazione ideale è proprio per stazioni permanenti, l’ideale accessorio è un orologio al rubidio e il beneficio che potrà dare alla comunità intera è l’unificazione dei tre sistemi di riferimento spazio temporali GNSS. Ovviamente saranno utilizzati ancora all’interno di reti di stazioni permanenti per il posizionamento in tempo reale. I ricevitori per scopi RTK, secondo alcuni studiosi e secondo Septentrio® potrebbero essere più semplici ed economici. Per giustificare questa affermazione vediamo prima di tutto le premesse. I ricevitori potranno essere solo GPS + Galileo. Le tecniche di acquisizione di questi ricevitori a duplice costellazione (CDMA) sono molto simili e più semplici rispetto ai ricevitori Glonass (FDMA) e i ricevitori sono molto più economici.
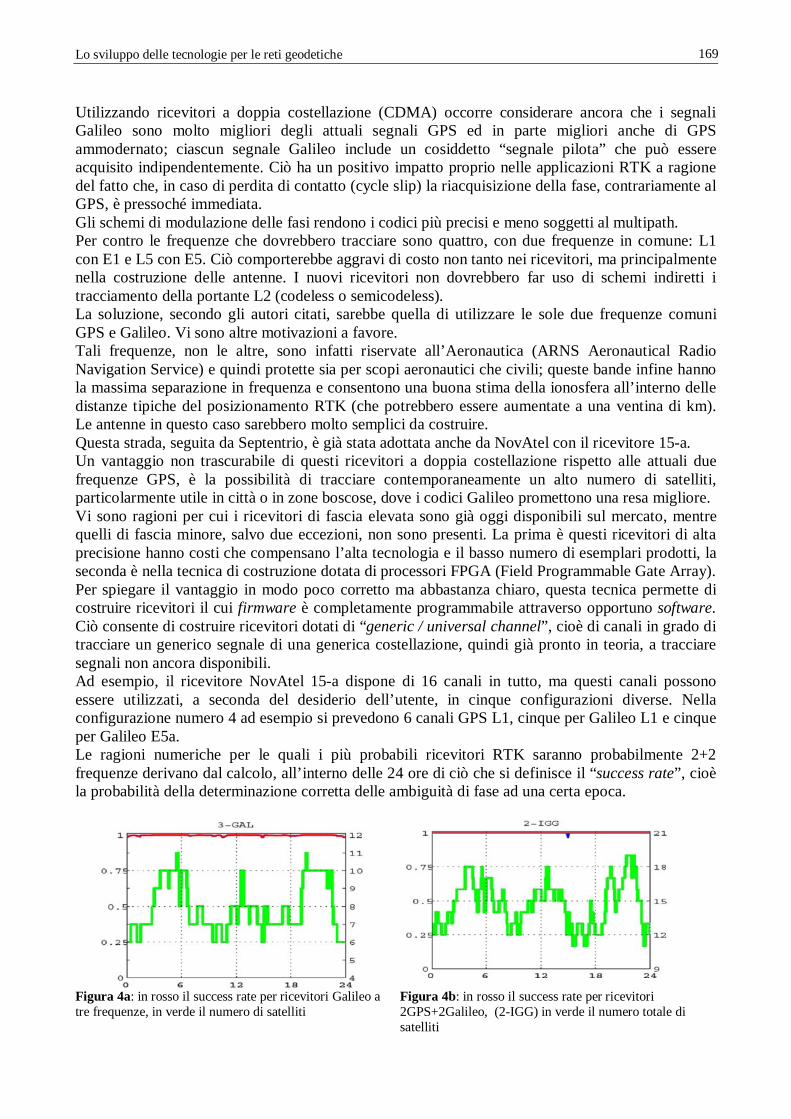
Lo sviluppo delle tecnologie per le reti geodetiche
169
Utilizzando ricevitori a doppia costellazione (CDMA) occorre considerare ancora che i segnali Galileo sono molto migliori degli attuali segnali GPS ed in parte migliori anche di GPS ammodernato; ciascun segnale Galileo include un cosiddetto “segnale pilota” che può essere acquisito indipendentemente. Ciò ha un positivo impatto proprio nelle applicazioni RTK a ragione del fatto che, in caso di perdita di contatto (cycle slip) la riacquisizione della fase, contrariamente al GPS, è pressoché immediata. Gli schemi di modulazione delle fasi rendono i codici più precisi e meno soggetti al multipath. Per contro le frequenze che dovrebbero tracciare sono quattro, con due frequenze in comune: L1 con E1 e L5 con E5. Ciò comporterebbe aggravi di costo non tanto nei ricevitori, ma principalmente nella costruzione delle antenne. I nuovi ricevitori non dovrebbero far uso di schemi indiretti i tracciamento della portante L2 (codeless o semicodeless). La soluzione, secondo gli autori citati, sarebbe quella di utilizzare le sole due frequenze comuni GPS e Galileo. Vi sono altre motivazioni a favore. Tali frequenze, non le altre, sono infatti riservate all’Aeronautica (ARNS Aeronautical Radio Navigation Service) e quindi protette sia per scopi aeronautici che civili; queste bande infine hanno la massima separazione in frequenza e consentono una buona stima della ionosfera all’interno delle distanze tipiche del posizionamento RTK (che potrebbero essere aumentate a una ventina di km). Le antenne in questo caso sarebbero molto semplici da costruire. Questa strada, seguita da Septentrio, è già stata adottata anche da NovAtel con il ricevitore 15-a. Un vantaggio non trascurabile di questi ricevitori a doppia costellazione rispetto alle attuali due frequenze GPS, è la possibilità di tracciare contemporaneamente un alto numero di satelliti, particolarmente utile in città o in zone boscose, dove i codici Galileo promettono una resa migliore. Vi sono ragioni per cui i ricevitori di fascia elevata sono già oggi disponibili sul mercato, mentre quelli di fascia minore, salvo due eccezioni, non sono presenti. La prima è questi ricevitori di alta precisione hanno costi che compensano l’alta tecnologia e il basso numero di esemplari prodotti, la seconda è nella tecnica di costruzione dotata di processori FPGA (Field Programmable Gate Array). Per spiegare il vantaggio in modo poco corretto ma abbastanza chiaro, questa tecnica permette di costruire ricevitori il cui firmware è completamente programmabile attraverso opportuno software. Ciò consente di costruire ricevitori dotati di “generic / universal channel”, cioè di canali in grado di tracciare un generico segnale di una generica costellazione, quindi già pronto in teoria, a tracciare segnali non ancora disponibili. Ad esempio, il ricevitore NovAtel 15-a dispone di 16 canali in tutto, ma questi canali possono essere utilizzati, a seconda del desiderio dell’utente, in cinque configurazioni diverse. Nella configurazione numero 4 ad esempio si prevedono 6 canali GPS L1, cinque per Galileo L1 e cinque per Galileo E5a. Le ragioni numeriche per le quali i più probabili ricevitori RTK saranno probabilmente 2+2 frequenze derivano dal calcolo, all’interno delle 24 ore di ciò che si definisce il “success rate”, cioè la probabilità della determinazione corretta delle ambiguità di fase ad una certa epoca.
Figura 4a: in rosso il success rate per ricevitori Galileo a tre frequenze, in verde il numero di satelliti
Figura 4b: in rosso il success rate per ricevitori 2GPS+2Galileo, (2-IGG) in verde il numero totale di satelliti
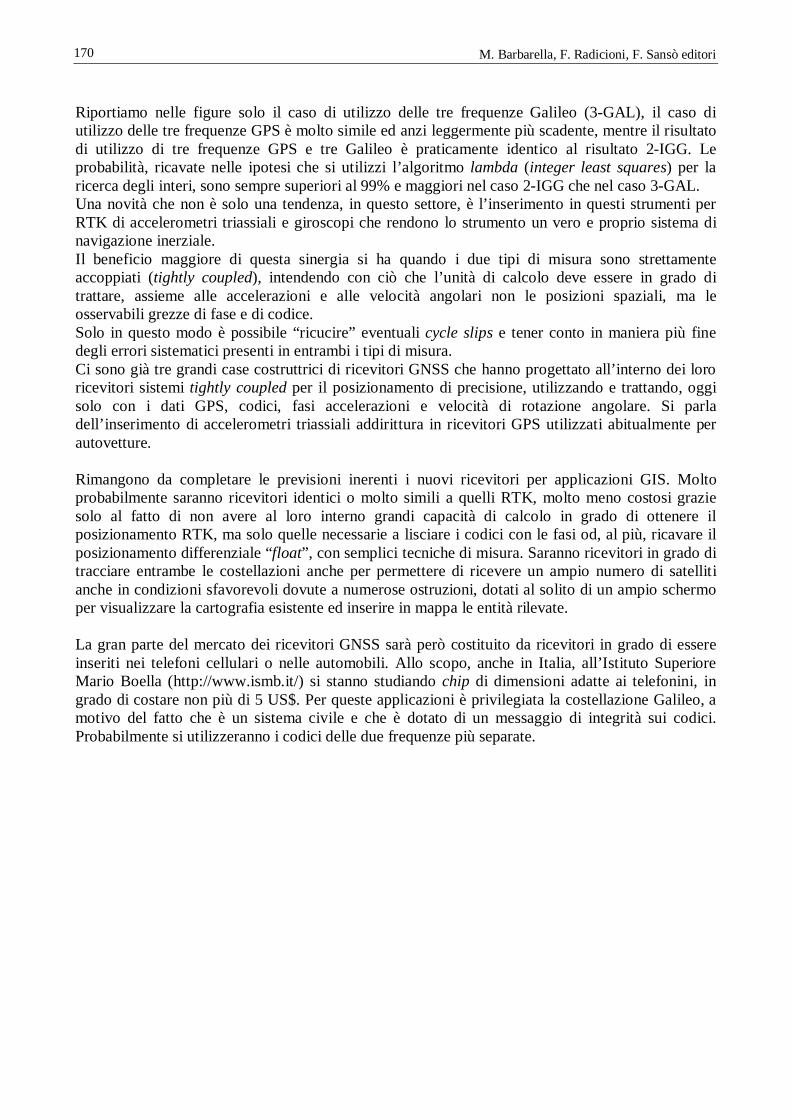
M. Barbarella, F. Radicioni, F. Sansò editori
170
Riportiamo nelle figure solo il caso di utilizzo delle tre frequenze Galileo (3-GAL), il caso di utilizzo delle tre frequenze GPS è molto simile ed anzi leggermente più scadente, mentre il risultato di utilizzo di tre frequenze GPS e tre Galileo è praticamente identico al risultato 2-IGG. Le probabilità, ricavate nelle ipotesi che si utilizzi l’algoritmo lambda (integer least squares) per la ricerca degli interi, sono sempre superiori al 99% e maggiori nel caso 2-IGG che nel caso 3-GAL. Una novità che non è solo una tendenza, in questo settore, è l’inserimento in questi strumenti per RTK di accelerometri triassiali e giroscopi che rendono lo strumento un vero e proprio sistema di navigazione inerziale. Il beneficio maggiore di questa sinergia si ha quando i due tipi di misura sono strettamente accoppiati (tightly coupled), intendendo con ciò che l’unità di calcolo deve essere in grado di trattare, assieme alle accelerazioni e alle velocità angolari non le posizioni spaziali, ma le osservabili grezze di fase e di codice. Solo in questo modo è possibile “ricucire” eventuali cycle slips e tener conto in maniera più fine degli errori sistematici presenti in entrambi i tipi di misura. Ci sono già tre grandi case costruttrici di ricevitori GNSS che hanno progettato all’interno dei loro ricevitori sistemi tightly coupled per il posizionamento di precisione, utilizzando e trattando, oggi solo con i dati GPS, codici, fasi accelerazioni e velocità di rotazione angolare. Si parla dell’inserimento di accelerometri triassiali addirittura in ricevitori GPS utilizzati abitualmente per autovetture. Rimangono da completare le previsioni inerenti i nuovi ricevitori per applicazioni GIS. Molto probabilmente saranno ricevitori identici o molto simili a quelli RTK, molto meno costosi grazie solo al fatto di non avere al loro interno grandi capacità di calcolo in grado di ottenere il posizionamento RTK, ma solo quelle necessarie a lisciare i codici con le fasi od, al più, ricavare il posizionamento differenziale “float”, con semplici tecniche di misura. Saranno ricevitori in grado di tracciare entrambe le costellazioni anche per permettere di ricevere un ampio numero di satelliti anche in condizioni sfavorevoli dovute a numerose ostruzioni, dotati al solito di un ampio schermo per visualizzare la cartografia esistente ed inserire in mappa le entità rilevate. La gran parte del mercato dei ricevitori GNSS sarà però costituito da ricevitori in grado di essere inseriti nei telefoni cellulari o nelle automobili. Allo scopo, anche in Italia, all’Istituto Superiore Mario Boella (http://www.ismb.it/) si stanno studiando chip di dimensioni adatte ai telefonini, in grado di costare non più di 5 US$. Per queste applicazioni è privilegiata la costellazione Galileo, a motivo del fatto che è un sistema civile e che è dotato di un messaggio di integrità sui codici. Probabilmente si utilizzeranno i codici delle due frequenze più separate.
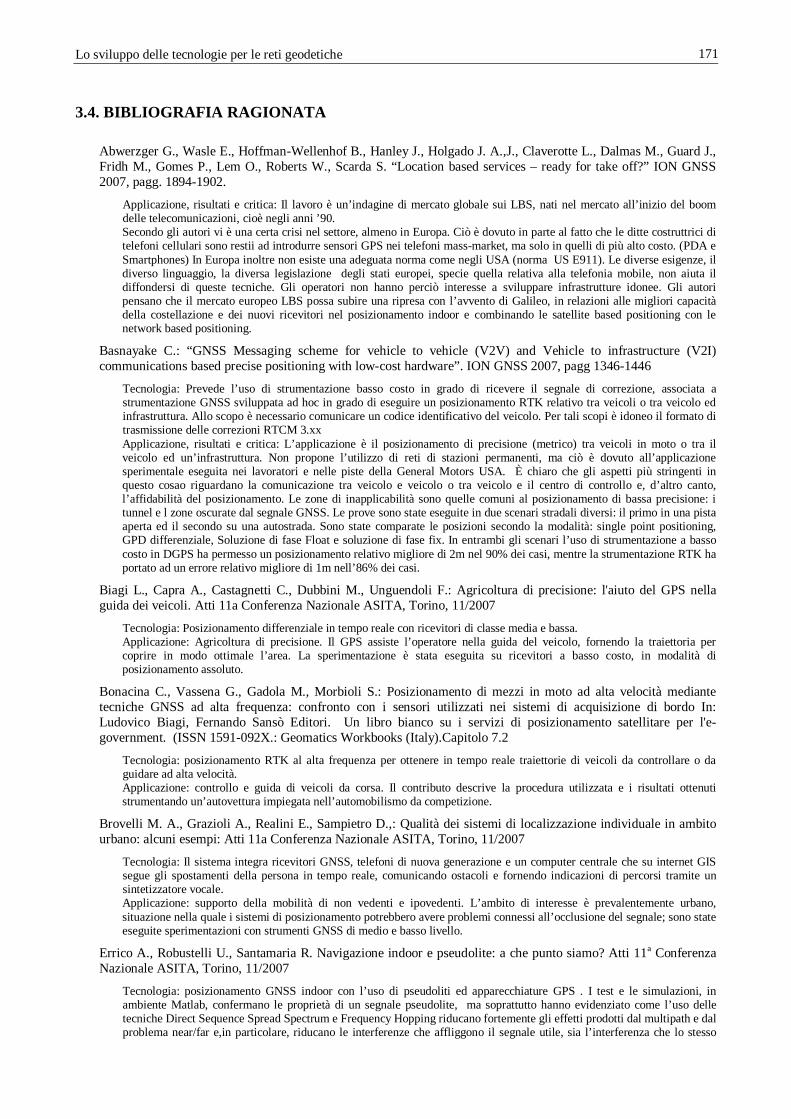
Lo sviluppo delle tecnologie per le reti geodetiche
171
3.4. BIBLIOGRAFIA RAGIONATA
Abwerzger G., Wasle E., Hoffman-Wellenhof B., Hanley J., Holgado J. A.,J., Claverotte L., Dalmas M., Guard J., Fridh M., Gomes P., Lem O., Roberts W., Scarda S. “Location based services – ready for take off?” ION GNSS 2007, pagg. 1894-1902.
Applicazione, risultati e critica: Il lavoro è un’indagine di mercato globale sui LBS, nati nel mercato all’inizio del boom delle telecomunicazioni, cioè negli anni ’90. Secondo gli autori vi è una certa crisi nel settore, almeno in Europa. Ciò è dovuto in parte al fatto che le ditte costruttrici di telefoni cellulari sono restii ad introdurre sensori GPS nei telefoni mass-market, ma solo in quelli di più alto costo. (PDA e Smartphones) In Europa inoltre non esiste una adeguata norma come negli USA (norma US E911). Le diverse esigenze, il diverso linguaggio, la diversa legislazione degli stati europei, specie quella relativa alla telefonia mobile, non aiuta il diffondersi di queste tecniche. Gli operatori non hanno perciò interesse a sviluppare infrastrutture idonee. Gli autori pensano che il mercato europeo LBS possa subire una ripresa con l’avvento di Galileo, in relazioni alle migliori capacità della costellazione e dei nuovi ricevitori nel posizionamento indoor e combinando le satellite based positioning con le network based positioning.
Basnayake C.: “GNSS Messaging scheme for vehicle to vehicle (V2V) and Vehicle to infrastructure (V2I) communications based precise positioning with low-cost hardware”. ION GNSS 2007, pagg 1346-1446
Tecnologia: Prevede l’uso di strumentazione basso costo in grado di ricevere il segnale di correzione, associata a strumentazione GNSS sviluppata ad hoc in grado di eseguire un posizionamento RTK relativo tra veicoli o tra veicolo ed infrastruttura. Allo scopo è necessario comunicare un codice identificativo del veicolo. Per tali scopi è idoneo il formato di trasmissione delle correzioni RTCM 3.xx Applicazione, risultati e critica: L’applicazione è il posizionamento di precisione (metrico) tra veicoli in moto o tra il veicolo ed un’infrastruttura. Non propone l’utilizzo di reti di stazioni permanenti, ma ciò è dovuto all’applicazione sperimentale eseguita nei lavoratori e nelle piste della General Motors USA. È chiaro che gli aspetti più stringenti in questo cosao riguardano la comunicazione tra veicolo e veicolo o tra veicolo e il centro di controllo e, d’altro canto, l’affidabilità del posizionamento. Le zone di inapplicabilità sono quelle comuni al posizionamento di bassa precisione: i tunnel e l zone oscurate dal segnale GNSS. Le prove sono state eseguite in due scenari stradali diversi: il primo in una pista aperta ed il secondo su una autostrada. Sono state comparate le posizioni secondo la modalità: single point positioning, GPD differenziale, Soluzione di fase Float e soluzione di fase fix. In entrambi gli scenari l’uso di strumentazione a basso costo in DGPS ha permesso un posizionamento relativo migliore di 2m nel 90% dei casi, mentre la strumentazione RTK ha portato ad un errore relativo migliore di 1m nell’86% dei casi.
Biagi L., Capra A., Castagnetti C., Dubbini M., Unguendoli F.: Agricoltura di precisione: l'aiuto del GPS nella guida dei veicoli. Atti 11a Conferenza Nazionale ASITA, Torino, 11/2007
Tecnologia: Posizionamento differenziale in tempo reale con ricevitori di classe media e bassa. Applicazione: Agricoltura di precisione. Il GPS assiste l’operatore nella guida del veicolo, fornendo la traiettoria per coprire in modo ottimale l’area. La sperimentazione è stata eseguita su ricevitori a basso costo, in modalità di posizionamento assoluto.
Bonacina C., Vassena G., Gadola M., Morbioli S.: Posizionamento di mezzi in moto ad alta velocità mediante tecniche GNSS ad alta frequenza: confronto con i sensori utilizzati nei sistemi di acquisizione di bordo In: Ludovico Biagi, Fernando Sansò Editori. Un libro bianco su i servizi di posizionamento satellitare per l'e-government. (ISSN 1591-092X.: Geomatics Workbooks (Italy).Capitolo 7.2
Tecnologia: posizionamento RTK al alta frequenza per ottenere in tempo reale traiettorie di veicoli da controllare o da guidare ad alta velocità. Applicazione: controllo e guida di veicoli da corsa. Il contributo descrive la procedura utilizzata e i risultati ottenuti strumentando un’autovettura impiegata nell’automobilismo da competizione.
Brovelli M. A., Grazioli A., Realini E., Sampietro D.,: Qualità dei sistemi di localizzazione individuale in ambito urbano: alcuni esempi: Atti 11a Conferenza Nazionale ASITA, Torino, 11/2007
Tecnologia: Il sistema integra ricevitori GNSS, telefoni di nuova generazione e un computer centrale che su internet GIS segue gli spostamenti della persona in tempo reale, comunicando ostacoli e fornendo indicazioni di percorsi tramite un sintetizzatore vocale. Applicazione: supporto della mobilità di non vedenti e ipovedenti. L’ambito di interesse è prevalentemente urbano, situazione nella quale i sistemi di posizionamento potrebbero avere problemi connessi all’occlusione del segnale; sono state eseguite sperimentazioni con strumenti GNSS di medio e basso livello.
Errico A., Robustelli U., Santamaria R. Navigazione indoor e pseudolite: a che punto siamo? Atti 11a Conferenza Nazionale ASITA, Torino, 11/2007
Tecnologia: posizionamento GNSS indoor con l’uso di pseudoliti ed apparecchiature GPS . I test e le simulazioni, in ambiente Matlab, confermano le proprietà di un segnale pseudolite, ma soprattutto hanno evidenziato come l’uso delle tecniche Direct Sequence Spread Spectrum e Frequency Hopping riducano fortemente gli effetti prodotti dal multipath e dal problema near/far e,in particolare, riducano le interferenze che affliggono il segnale utile, sia l’interferenza che lo stesso
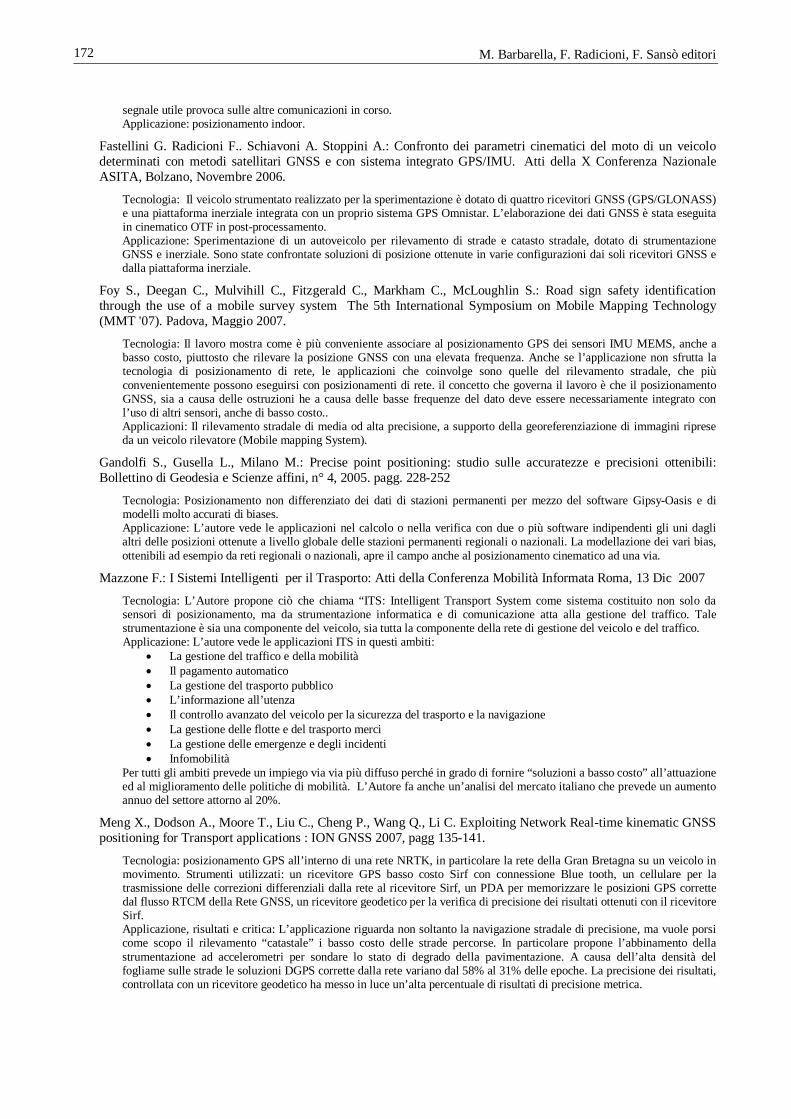
M. Barbarella, F. Radicioni, F. Sansò editori
172
segnale utile provoca sulle altre comunicazioni in corso. Applicazione: posizionamento indoor.
Fastellini G. Radicioni F.. Schiavoni A. Stoppini A.: Confronto dei parametri cinematici del moto di un veicolo determinati con metodi satellitari GNSS e con sistema integrato GPS/IMU. Atti della X Conferenza Nazionale ASITA, Bolzano, Novembre 2006.
Tecnologia: Il veicolo strumentato realizzato per la sperimentazione è dotato di quattro ricevitori GNSS (GPS/GLONASS) e una piattaforma inerziale integrata con un proprio sistema GPS Omnistar. L’elaborazione dei dati GNSS è stata eseguita in cinematico OTF in post-processamento. Applicazione: Sperimentazione di un autoveicolo per rilevamento di strade e catasto stradale, dotato di strumentazione GNSS e inerziale. Sono state confrontate soluzioni di posizione ottenute in varie configurazioni dai soli ricevitori GNSS e dalla piattaforma inerziale.
Foy S., Deegan C., Mulvihill C., Fitzgerald C., Markham C., McLoughlin S.: Road sign safety identification through the use of a mobile survey system The 5th International Symposium on Mobile Mapping Technology (MMT '07). Padova, Maggio 2007.
Tecnologia: Il lavoro mostra come è più conveniente associare al posizionamento GPS dei sensori IMU MEMS, anche a basso costo, piuttosto che rilevare la posizione GNSS con una elevata frequenza. Anche se l’applicazione non sfrutta la tecnologia di posizionamento di rete, le applicazioni che coinvolge sono quelle del rilevamento stradale, che più convenientemente possono eseguirsi con posizionamenti di rete. il concetto che governa il lavoro è che il posizionamento GNSS, sia a causa delle ostruzioni he a causa delle basse frequenze del dato deve essere necessariamente integrato con l’uso di altri sensori, anche di basso costo.. Applicazioni: Il rilevamento stradale di media od alta precisione, a supporto della georeferenziazione di immagini riprese da un veicolo rilevatore (Mobile mapping System).
Gandolfi S., Gusella L., Milano M.: Precise point positioning: studio sulle accuratezze e precisioni ottenibili: Bollettino di Geodesia e Scienze affini, n° 4, 2005. pagg. 228-252
Tecnologia: Posizionamento non differenziato dei dati di stazioni permanenti per mezzo del software Gipsy-Oasis e di modelli molto accurati di biases. Applicazione: L’autore vede le applicazioni nel calcolo o nella verifica con due o più software indipendenti gli uni dagli altri delle posizioni ottenute a livello globale delle stazioni permanenti regionali o nazionali. La modellazione dei vari bias, ottenibili ad esempio da reti regionali o nazionali, apre il campo anche al posizionamento cinematico ad una via.
Mazzone F.: I Sistemi Intelligenti per il Trasporto: Atti della Conferenza Mobilità Informata Roma, 13 Dic 2007
Tecnologia: L’Autore propone ciò che chiama “ITS: Intelligent Transport System come sistema costituito non solo da sensori di posizionamento, ma da strumentazione informatica e di comunicazione atta alla gestione del traffico. Tale strumentazione è sia una componente del veicolo, sia tutta la componente della rete di gestione del veicolo e del traffico. Applicazione: L’autore vede le applicazioni ITS in questi ambiti:
La gestione del traffico e della mobilità Il pagamento automatico La gestione del trasporto pubblico L’informazione all’utenza Il controllo avanzato del veicolo per la sicurezza del trasporto e la navigazione La gestione delle flotte e del trasporto merci La gestione delle emergenze e degli incidenti Infomobilità
Per tutti gli ambiti prevede un impiego via via più diffuso perché in grado di fornire “soluzioni a basso costo” all’attuazione ed al miglioramento delle politiche di mobilità. L’Autore fa anche un’analisi del mercato italiano che prevede un aumento annuo del settore attorno al 20%.
Meng X., Dodson A., Moore T., Liu C., Cheng P., Wang Q., Li C. Exploiting Network Real-time kinematic GNSS positioning for Transport applications : ION GNSS 2007, pagg 135-141.
Tecnologia: posizionamento GPS all’interno di una rete NRTK, in particolare la rete della Gran Bretagna su un veicolo in movimento. Strumenti utilizzati: un ricevitore GPS basso costo Sirf con connessione Blue tooth, un cellulare per la trasmissione delle correzioni differenziali dalla rete al ricevitore Sirf, un PDA per memorizzare le posizioni GPS corrette dal flusso RTCM della Rete GNSS, un ricevitore geodetico per la verifica di precisione dei risultati ottenuti con il ricevitore Sirf. Applicazione, risultati e critica: L’applicazione riguarda non soltanto la navigazione stradale di precisione, ma vuole porsi come scopo il rilevamento “catastale” i basso costo delle strade percorse. In particolare propone l’abbinamento della strumentazione ad accelerometri per sondare lo stato di degrado della pavimentazione. A causa dell’alta densità del fogliame sulle strade le soluzioni DGPS corrette dalla rete variano dal 58% al 31% delle epoche. La precisione dei risultati, controllata con un ricevitore geodetico ha messo in luce un’alta percentuale di risultati di precisione metrica.
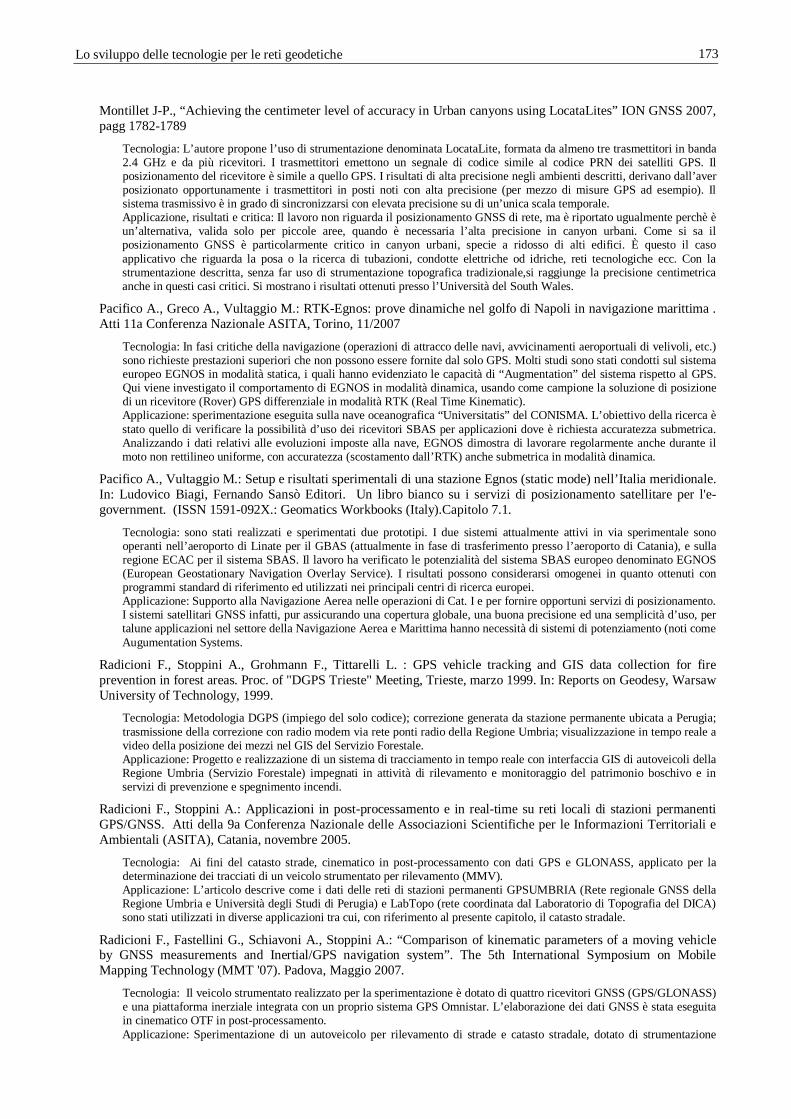
Lo sviluppo delle tecnologie per le reti geodetiche
173
Montillet J-P., “Achieving the centimeter level of accuracy in Urban canyons using LocataLites” ION GNSS 2007, pagg 1782-1789
Tecnologia: L’autore propone l’uso di strumentazione denominata LocataLite, formata da almeno tre trasmettitori in banda 2.4 GHz e da più ricevitori. I trasmettitori emettono un segnale di codice simile al codice PRN dei satelliti GPS. Il posizionamento del ricevitore è simile a quello GPS. I risultati di alta precisione negli ambienti descritti, derivano dall’aver posizionato opportunamente i trasmettitori in posti noti con alta precisione (per mezzo di misure GPS ad esempio). Il sistema trasmissivo è in grado di sincronizzarsi con elevata precisione su di un’unica scala temporale. Applicazione, risultati e critica: Il lavoro non riguarda il posizionamento GNSS di rete, ma è riportato ugualmente perchè è un’alternativa, valida solo per piccole aree, quando è necessaria l’alta precisione in canyon urbani. Come si sa il posizionamento GNSS è particolarmente critico in canyon urbani, specie a ridosso di alti edifici. È questo il caso applicativo che riguarda la posa o la ricerca di tubazioni, condotte elettriche od idriche, reti tecnologiche ecc. Con la strumentazione descritta, senza far uso di strumentazione topografica tradizionale,si raggiunge la precisione centimetrica anche in questi casi critici. Si mostrano i risultati ottenuti presso l’Università del South Wales.
Pacifico A., Greco A., Vultaggio M.: RTK-Egnos: prove dinamiche nel golfo di Napoli in navigazione marittima . Atti 11a Conferenza Nazionale ASITA, Torino, 11/2007
Tecnologia: In fasi critiche della navigazione (operazioni di attracco delle navi, avvicinamenti aeroportuali di velivoli, etc.) sono richieste prestazioni superiori che non possono essere fornite dal solo GPS. Molti studi sono stati condotti sul sistema europeo EGNOS in modalità statica, i quali hanno evidenziato le capacità di “Augmentation” del sistema rispetto al GPS. Qui viene investigato il comportamento di EGNOS in modalità dinamica, usando come campione la soluzione di posizione di un ricevitore (Rover) GPS differenziale in modalità RTK (Real Time Kinematic). Applicazione: sperimentazione eseguita sulla nave oceanografica “Universitatis” del CONISMA. L’obiettivo della ricerca è stato quello di verificare la possibilità d’uso dei ricevitori SBAS per applicazioni dove è richiesta accuratezza submetrica. Analizzando i dati relativi alle evoluzioni imposte alla nave, EGNOS dimostra di lavorare regolarmente anche durante il moto non rettilineo uniforme, con accuratezza (scostamento dall’RTK) anche submetrica in modalità dinamica.
Pacifico A., Vultaggio M.: Setup e risultati sperimentali di una stazione Egnos (static mode) nell’Italia meridionale. In: Ludovico Biagi, Fernando Sansò Editori. Un libro bianco su i servizi di posizionamento satellitare per l'e-government. (ISSN 1591-092X.: Geomatics Workbooks (Italy).Capitolo 7.1.
Tecnologia: sono stati realizzati e sperimentati due prototipi. I due sistemi attualmente attivi in via sperimentale sono operanti nell’aeroporto di Linate per il GBAS (attualmente in fase di trasferimento presso l’aeroporto di Catania), e sulla regione ECAC per il sistema SBAS. Il lavoro ha verificato le potenzialità del sistema SBAS europeo denominato EGNOS (European Geostationary Navigation Overlay Service). I risultati possono considerarsi omogenei in quanto ottenuti con programmi standard di riferimento ed utilizzati nei principali centri di ricerca europei. Applicazione: Supporto alla Navigazione Aerea nelle operazioni di Cat. I e per fornire opportuni servizi di posizionamento. I sistemi satellitari GNSS infatti, pur assicurando una copertura globale, una buona precisione ed una semplicità d’uso, per talune applicazioni nel settore della Navigazione Aerea e Marittima hanno necessità di sistemi di potenziamento (noti come Augumentation Systems.
Radicioni F., Stoppini A., Grohmann F., Tittarelli L. : GPS vehicle tracking and GIS data collection for fire prevention in forest areas. Proc. of "DGPS Trieste" Meeting, Trieste, marzo 1999. In: Reports on Geodesy, Warsaw University of Technology, 1999.
Tecnologia: Metodologia DGPS (impiego del solo codice); correzione generata da stazione permanente ubicata a Perugia; trasmissione della correzione con radio modem via rete ponti radio della Regione Umbria; visualizzazione in tempo reale a video della posizione dei mezzi nel GIS del Servizio Forestale. Applicazione: Progetto e realizzazione di un sistema di tracciamento in tempo reale con interfaccia GIS di autoveicoli della Regione Umbria (Servizio Forestale) impegnati in attività di rilevamento e monitoraggio del patrimonio boschivo e in servizi di prevenzione e spegnimento incendi.
Radicioni F., Stoppini A.: Applicazioni in post-processamento e in real-time su reti locali di stazioni permanenti GPS/GNSS. Atti della 9a Conferenza Nazionale delle Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Catania, novembre 2005.
Tecnologia: Ai fini del catasto strade, cinematico in post-processamento con dati GPS e GLONASS, applicato per la determinazione dei tracciati di un veicolo strumentato per rilevamento (MMV). Applicazione: L’articolo descrive come i dati delle reti di stazioni permanenti GPSUMBRIA (Rete regionale GNSS della Regione Umbria e Università degli Studi di Perugia) e LabTopo (rete coordinata dal Laboratorio di Topografia del DICA) sono stati utilizzati in diverse applicazioni tra cui, con riferimento al presente capitolo, il catasto stradale.
Radicioni F., Fastellini G., Schiavoni A., Stoppini A.: “Comparison of kinematic parameters of a moving vehicle by GNSS measurements and Inertial/GPS navigation system”. The 5th International Symposium on Mobile Mapping Technology (MMT '07). Padova, Maggio 2007.
Tecnologia: Il veicolo strumentato realizzato per la sperimentazione è dotato di quattro ricevitori GNSS (GPS/GLONASS) e una piattaforma inerziale integrata con un proprio sistema GPS Omnistar. L’elaborazione dei dati GNSS è stata eseguita in cinematico OTF in post-processamento. Applicazione: Sperimentazione di un autoveicolo per rilevamento di strade e catasto stradale, dotato di strumentazione

M. Barbarella, F. Radicioni, F. Sansò editori
174
GNSS e inerziale. Sono state confrontate soluzioni di posizione ottenute in varie configurazioni dai soli ricevitori GNSS e dalla piattaforma inerziale. L’orientamento del veicolo è stato ottenuto dai dati GNSS delle diverse antenne presenti.
Realini E., Reguzzoni M., Tornatore V., Visconti M. G.: Utilizzo di stazioni permanenti per il miglioramento dell'accuratezza di dispositivi GNSS a basso costo: Atti 11a Conferenza Nazionale ASITA, Torino, 11/2007
Tecnologia: posizionamento differenziale in tempo reale con ricevitori di classe media e bassa. Valutazione dell’incremento in termini di accuratezza del posizionamento mediante l’applicazione delle correzioni differenziali (DGPS) distribuite da singole stazioni permanenti (non sono correzioni di rete). Applicazione: esperimenti di posizionamento cinematico su percorsi noti a priori utilizzando ricevitori GNSS di diversa classe. Il primo esperimento è stato effettuato disponendo i ricevitori su un carrello che ha percorso il perimetro rettangolare di un campo da basket di cui erano note le coordinate dei vertici con elevata precisione. Il secondo esperimento è stato realizzato su un veicolo delle Ferrovie Nord Milano Esercizio.
Zhu Z., Gunawardena S., Uijt M., Van Grass F., “Advanced GPS Performance monitor”, ION GNSS 2007 pagg. 415 423.
Tecnologia: l’Autore propone un sistema, denominato GAEM: GPS anomalous Event Monitor, progettato per sistemi di augmentation GBAS e SBAS che usa ricevitori GPS per monitorare eventi anomali, sia nel segmento spaziale, sia nella ionosfera e nella troposfera, sia nei sistemi trasmissivi, producendo rapporti immediatamente comunicati all’utenza. La ricerca è stata condotta in cooperazione con l’Aviazione Federale USA. Applicazione, risultati e critica: Il posizionamento di precisione di mezzi in moto, specie di quelli utilizzati nel campo delle costruzioni, nel movimento terra, in aviazione per decollo ed atterraggio. In tali applicazioni più che l’alta precisione è necessaria un’elevata affidabilità del risultato. Anche se l’articolo non è completamente centrato sull’utilizzo delle reti di stazioni permanenti, mette in luce gli aspetti critici di affidabilità legati al posizionamento GNSS per tali applicazioni che riguardano il trasporto aereo o il machine control.
Lo sviluppo delle tecnologie per le reti geodetiche
175
Allegato RAPPORTO SU SPERIMENTAZIONI ESEGUITE IN DIVERSE MODALITA’
1 ESPERIMENTI ESEGUITI SUL RICEVITORE MAGELLAN DG14 RTK
Per valutare l’effettiva applicabilità delle correzioni di rete anche in ricevitori a basso costo per automotive sono state condotte alcune prove, statiche e cinematiche con il ricevitore Magellan DG14 RTK (in seguito DG14). Tale ricevitore singola frequenza ha la peculiarità di avere un costo contenuto nella versione OEM (circa 800€), nonostante ciò è in grado di raggiungere la condizione di ambiguità fissata (fix) o, alternativamente, una buona precisione delle coordinate in condizioni di ambiguità reale (float). Ci risulta che attualmente siano pochissimi (solo due) i ricevitori a singola frequenza che abbiano entrambe queste peculiarità. Il ricevitore permette anche l’invio alla rete di una stringa NMEA e la possibilità di utilizzare le correzioni differenziali nei formati 2.xx e 3.0, prerogativa che permette l’utilizzo all’interno di una rete di stazioni permanenti per il tempo reale. Per questo si è pensato fosse idoneo per scopi automotive in una fascia di precisione superiore ai ricevitori mass market, tipicamente usati per navigazione, senza per altro richiedere l’uso di più costosi ricevitori a doppia frequenza. È chiaro che gli esperimenti eseguiti su questo ricevitore non esauriscono la totalità delle prove che si possono effettuare con ricevitori di costo anche inferiore, ma forniscono ugualmente indicazioni su cui riflettere.
2 PROVE STATICHE: CONFRONTO TRA POSIZIONAMENTO DALLA STAZIONE PIÙ VICINA E DALLA RETE.
Fra i numerosi esperimenti eseguiti a proposito, riportiamo prima le prove eseguite a ricevitore fermo su un punto di coordinate note (prossimo al laboratorio di Geomatica della II Facoltà del Politecnico di Torino). In tal modo le prove sono avvenute in continuo per diverse ore. L’antenna connessa al ricevitore è stata fissata sulla scala antincendio della sede (in figura 1).
Figura 1 Sono interessanti i risultati ottenuti con:
Correzione proveniente da una singola stazione vicina (quindi non dalla rete), nello specifico è stata scelta Novara, ubicata a circa 20 km di distanza da Vercelli.
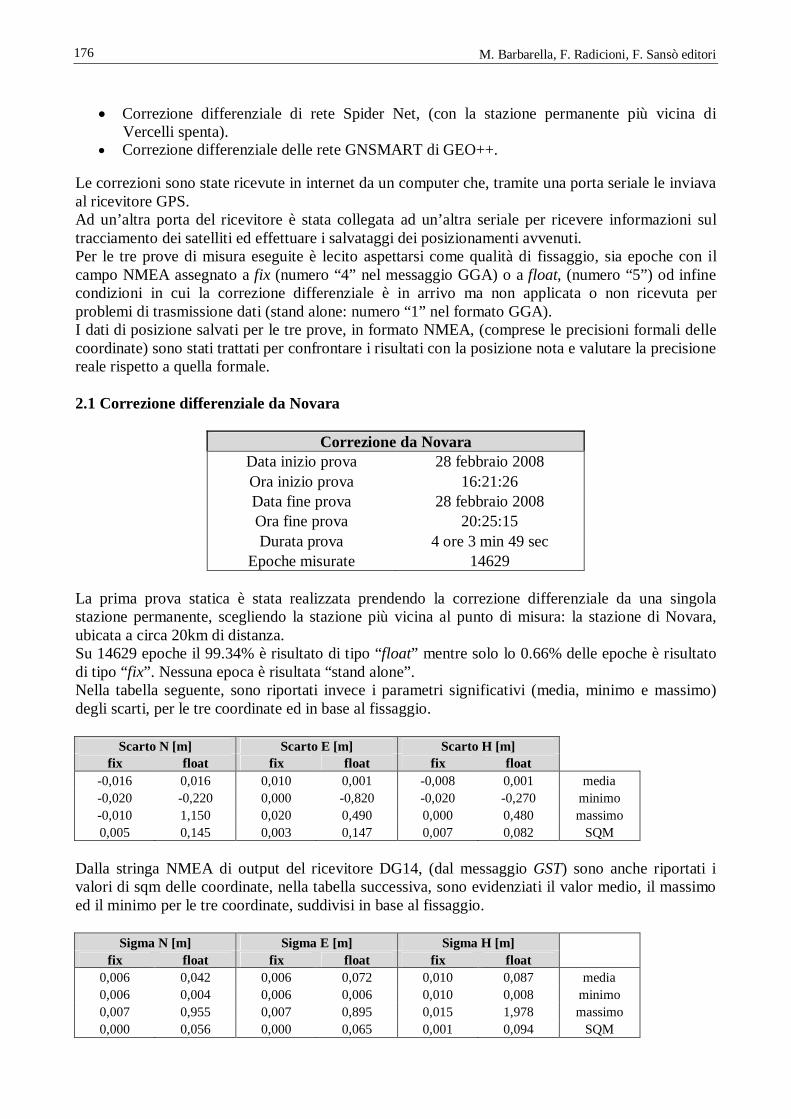
M. Barbarella, F. Radicioni, F. Sansò editori
176
Correzione differenziale di rete Spider Net, (con la stazione permanente più vicina di Vercelli spenta).
Correzione differenziale delle rete GNSMART di GEO++.
Le correzioni sono state ricevute in internet da un computer che, tramite una porta seriale le inviava al ricevitore GPS. Ad un’altra porta del ricevitore è stata collegata ad un’altra seriale per ricevere informazioni sul tracciamento dei satelliti ed effettuare i salvataggi dei posizionamenti avvenuti. Per le tre prove di misura eseguite è lecito aspettarsi come qualità di fissaggio, sia epoche con il campo NMEA assegnato a fix (numero “4” nel messaggio GGA) o a float, (numero “5”) od infine condizioni in cui la correzione differenziale è in arrivo ma non applicata o non ricevuta per problemi di trasmissione dati (stand alone: numero “1” nel formato GGA). I dati di posizione salvati per le tre prove, in formato NMEA, (comprese le precisioni formali delle coordinate) sono stati trattati per confrontare i risultati con la posizione nota e valutare la precisione reale rispetto a quella formale. 2.1 Correzione differenziale da Novara
Correzione da Novara Data inizio prova 28 febbraio 2008 Ora inizio prova 16:21:26 Data fine prova 28 febbraio 2008 Ora fine prova 20:25:15 Durata prova 4 ore 3 min 49 sec
Epoche misurate 14629 La prima prova statica è stata realizzata prendendo la correzione differenziale da una singola stazione permanente, scegliendo la stazione più vicina al punto di misura: la stazione di Novara, ubicata a circa 20km di distanza. Su 14629 epoche il 99.34% è risultato di tipo “float” mentre solo lo 0.66% delle epoche è risultato di tipo “fix”. Nessuna epoca è risultata “stand alone”. Nella tabella seguente, sono riportati invece i parametri significativi (media, minimo e massimo) degli scarti, per le tre coordinate ed in base al fissaggio.
Scarto N [m] Scarto E [m] Scarto H [m] fix float fix float fix float
-0,016 0,016 0,010 0,001 -0,008 0,001 media -0,020 -0,220 0,000 -0,820 -0,020 -0,270 minimo -0,010 1,150 0,020 0,490 0,000 0,480 massimo 0,005 0,145 0,003 0,147 0,007 0,082 SQM
Dalla stringa NMEA di output del ricevitore DG14, (dal messaggio GST) sono anche riportati i valori di sqm delle coordinate, nella tabella successiva, sono evidenziati il valor medio, il massimo ed il minimo per le tre coordinate, suddivisi in base al fissaggio.
Sigma N [m] Sigma E [m] Sigma H [m] fix float fix float fix float
0,006 0,042 0,006 0,072 0,010 0,087 media 0,006 0,004 0,006 0,006 0,010 0,008 minimo 0,007 0,955 0,007 0,895 0,015 1,978 massimo 0,000 0,056 0,000 0,065 0,001 0,094 SQM
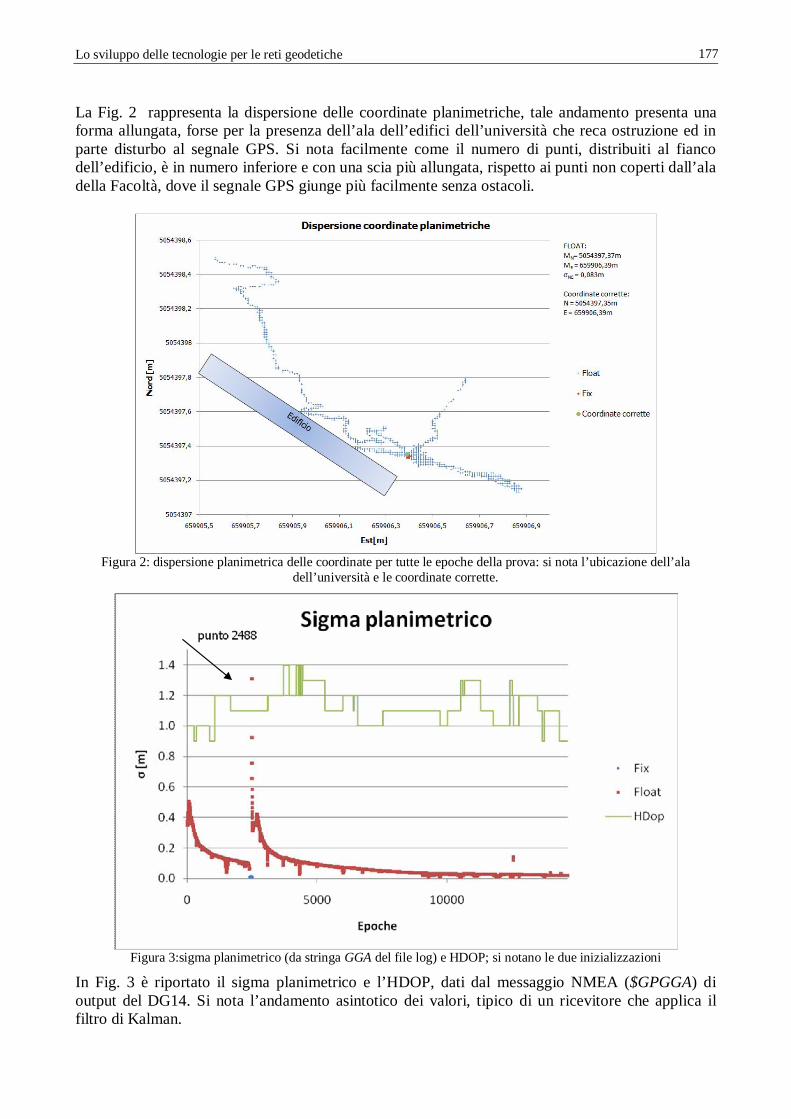
Lo sviluppo delle tecnologie per le reti geodetiche
177
La Fig. 2 rappresenta la dispersione delle coordinate planimetriche, tale andamento presenta una forma allungata, forse per la presenza dell’ala dell’edifici dell’università che reca ostruzione ed in parte disturbo al segnale GPS. Si nota facilmente come il numero di punti, distribuiti al fianco dell’edificio, è in numero inferiore e con una scia più allungata, rispetto ai punti non coperti dall’ala della Facoltà, dove il segnale GPS giunge più facilmente senza ostacoli.
Figura 2: dispersione planimetrica delle coordinate per tutte le epoche della prova: si nota l’ubicazione dell’ala
dell’università e le coordinate corrette.
Figura 3:sigma planimetrico (da stringa GGA del file log) e HDOP; si notano le due inizializzazioni
In Fig. 3 è riportato il sigma planimetrico e l’HDOP, dati dal messaggio NMEA ($GPGGA) di output del DG14. Si nota l’andamento asintotico dei valori, tipico di un ricevitore che applica il filtro di Kalman.
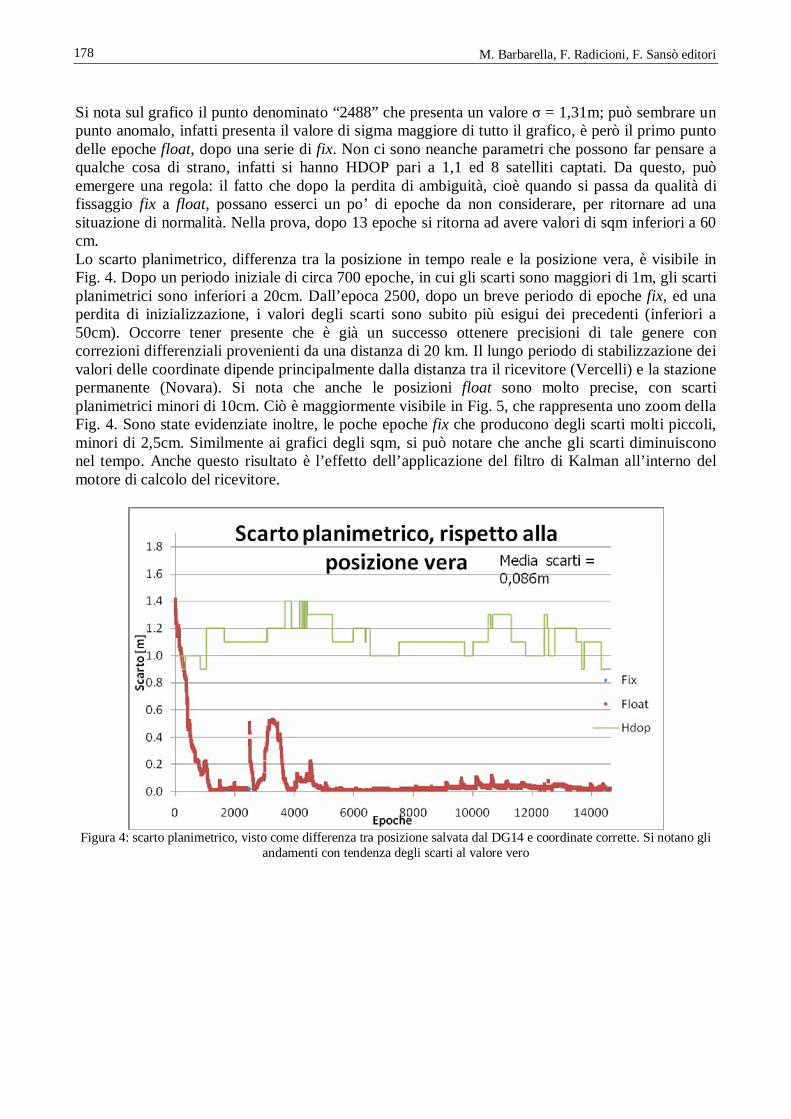
M. Barbarella, F. Radicioni, F. Sansò editori
178
Si nota sul grafico il punto denominato “2488” che presenta un valore σ = 1,31m; può sembrare un punto anomalo, infatti presenta il valore di sigma maggiore di tutto il grafico, è però il primo punto delle epoche float, dopo una serie di fix. Non ci sono neanche parametri che possono far pensare a qualche cosa di strano, infatti si hanno HDOP pari a 1,1 ed 8 satelliti captati. Da questo, può emergere una regola: il fatto che dopo la perdita di ambiguità, cioè quando si passa da qualità di fissaggio fix a float, possano esserci un po’ di epoche da non considerare, per ritornare ad una situazione di normalità. Nella prova, dopo 13 epoche si ritorna ad avere valori di sqm inferiori a 60 cm. Lo scarto planimetrico, differenza tra la posizione in tempo reale e la posizione vera, è visibile in Fig. 4. Dopo un periodo iniziale di circa 700 epoche, in cui gli scarti sono maggiori di 1m, gli scarti planimetrici sono inferiori a 20cm. Dall’epoca 2500, dopo un breve periodo di epoche fix, ed una perdita di inizializzazione, i valori degli scarti sono subito più esigui dei precedenti (inferiori a 50cm). Occorre tener presente che è già un successo ottenere precisioni di tale genere con correzioni differenziali provenienti da una distanza di 20 km. Il lungo periodo di stabilizzazione dei valori delle coordinate dipende principalmente dalla distanza tra il ricevitore (Vercelli) e la stazione permanente (Novara). Si nota che anche le posizioni float sono molto precise, con scarti planimetrici minori di 10cm. Ciò è maggiormente visibile in Fig. 5, che rappresenta uno zoom della Fig. 4. Sono state evidenziate inoltre, le poche epoche fix che producono degli scarti molti piccoli, minori di 2,5cm. Similmente ai grafici degli sqm, si può notare che anche gli scarti diminuiscono nel tempo. Anche questo risultato è l’effetto dell’applicazione del filtro di Kalman all’interno del motore di calcolo del ricevitore.
Figura 4: scarto planimetrico, visto come differenza tra posizione salvata dal DG14 e coordinate corrette. Si notano gli
andamenti con tendenza degli scarti al valore vero
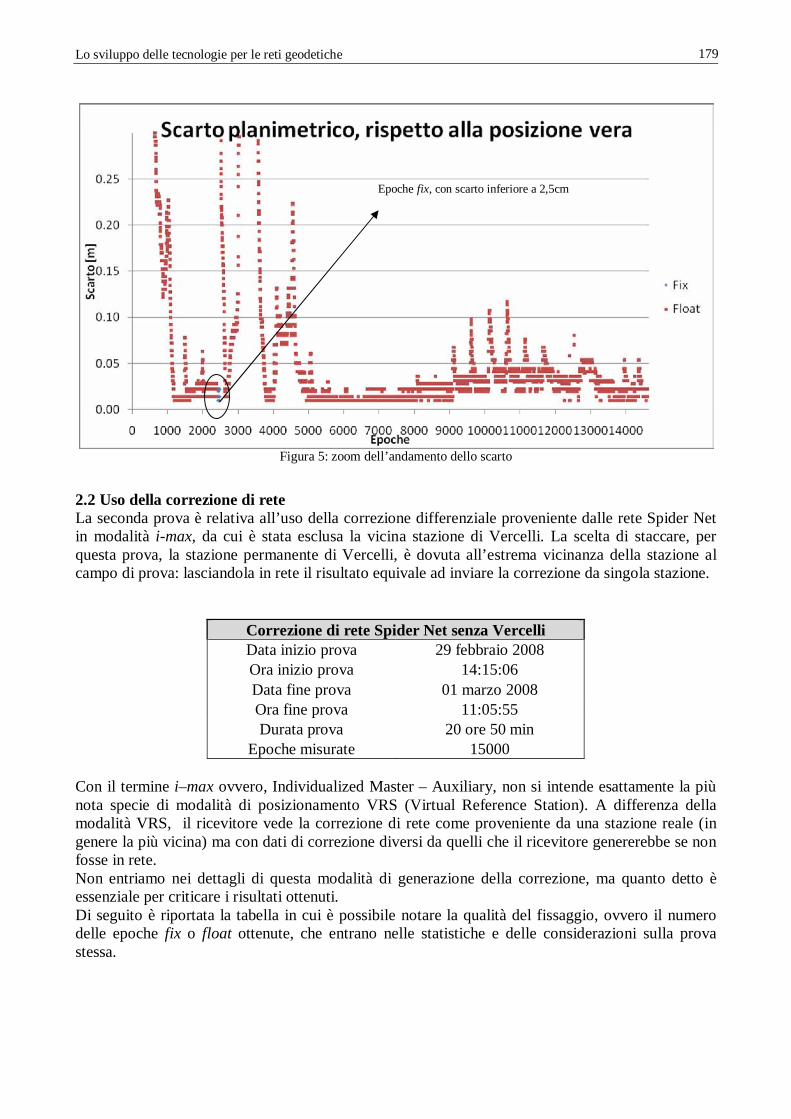
Lo sviluppo delle tecnologie per le reti geodetiche
179
Figura 5: zoom dell’andamento dello scarto
2.2 Uso della correzione di rete La seconda prova è relativa all’uso della correzione differenziale proveniente dalle rete Spider Net in modalità i-max, da cui è stata esclusa la vicina stazione di Vercelli. La scelta di staccare, per questa prova, la stazione permanente di Vercelli, è dovuta all’estrema vicinanza della stazione al campo di prova: lasciandola in rete il risultato equivale ad inviare la correzione da singola stazione.
Correzione di rete Spider Net senza Vercelli Data inizio prova 29 febbraio 2008 Ora inizio prova 14:15:06 Data fine prova 01 marzo 2008 Ora fine prova 11:05:55 Durata prova 20 ore 50 min
Epoche misurate 15000 Con il termine i–max ovvero, Individualized Master – Auxiliary, non si intende esattamente la più nota specie di modalità di posizionamento VRS (Virtual Reference Station). A differenza della modalità VRS, il ricevitore vede la correzione di rete come proveniente da una stazione reale (in genere la più vicina) ma con dati di correzione diversi da quelli che il ricevitore genererebbe se non fosse in rete. Non entriamo nei dettagli di questa modalità di generazione della correzione, ma quanto detto è essenziale per criticare i risultati ottenuti. Di seguito è riportata la tabella in cui è possibile notare la qualità del fissaggio, ovvero il numero delle epoche fix o float ottenute, che entrano nelle statistiche e delle considerazioni sulla prova stessa.
Epoche fix, con scarto inferiore a 2,5cm
M. Barbarella, F. Radicioni, F. Sansò editori
180
Qualità fissaggio float: 14646 97,64% fix: 135 0,90% Stand Alone: 218 1,45% Di tipo “6” 1 0,01% Tot epoche: 15000 100,00%
Riportiamo infine i parametri significativi (media, minimo e massimo) degli scarti in base al tipo di fissaggio, gli scarti sono visti come differenza tra il valore di posizione dell’epoca ed il valore noto del punto di misura.
scarto N [m] Scarto E [m] Scarto H [m] fix float fix float fix float
0,010 0,015 -0,002 0,075 -0,043 -0,046 media 0,000 -2,280 -0,010 -1,120 -0,060 -5,310 minimo 0,030 7,760 0,010 1,970 -0,020 11,320 massimo 0,006 0,217 0,004 0,245 0,008 0,572
Si sono considerate tutte le epoche della prova (fix + float), con HDOP inferiore a 7 e numero di satelliti maggiore o uguale a 4. Dal messaggio NMEA di output del DG14 sono anche riportati i valori di sqm (), espressi nella tabella successiva: si sono evidenziati il valor medio, il massimo ed il minimo per le tre coordinate, in base al fissaggio.
N [m] E [m] H [m] fix float fix float fix float
0,014 0,086 0,006 0,104 0,021 0,174 media 0,006 0,005 0,005 0,003 0,007 0,008 minimo 0,020 2,304 0,007 2,147 0,030 4,287 massimo 0,004 0,112 0,001 0,108 0,006 0,270
La Fig. 6 riporta la dispersione delle coordinate planimetriche, suddivise in base al colore dai periodi float e fix; è riportata inoltre la posizione nota dell’antenna. Si nota che i pochi punti fix, sono tutti molto prossimi alla posizione nota dell’antenna. La cosa evidente è che, in media, le dispersioni delle posizioni sono più scadenti di quelle ricavata dalla stazione permanete più vicina, tuttavia le soluzioni float mantengono sempre una discreta precisione e non vi sono falsi fissaggi. La precisione dei punti planimetrici fix è visibile anche in Fig. 7, relativa al sigma planimetrico. Si notano dal grafico una serie di periodi in cui si hanno valori di elevati che, dopo un certo numero di epoche, diventano prossimi allo zero. È la stessa tendenza che si nota anche in Fig. 8, che riporta invece gli scarti rispetto alla posizione nota. Anche per gli scarti, si ha un andamento a “onde”, con una serie di periodi che partono da valori di differenze elevate (superiori al metro), per poi tendere a scarti esigui. La concorde tendenza di questi grafici porta a presumere che gli sqm forniti dal ricevitore siano indicativi della reale precisione delle coordinate. Si possono riassumere infine i seguenti risultati per quanto riguarda gli scarti:
Tutte le epoche fix della prova, hanno scarti inferiori ai 5cm, Il 61% delle epoche float ha scarti inferiori a 10cm, Il 75% delle epoche float ha scarti inferiori a 20cm.
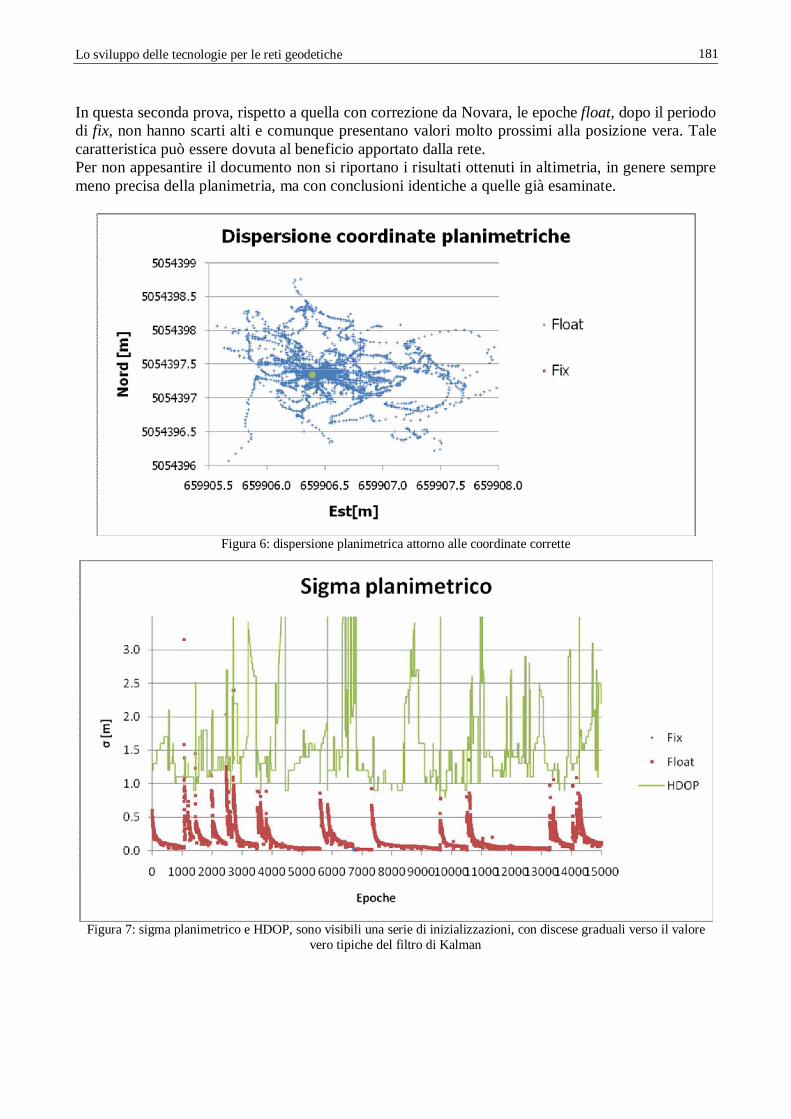
Lo sviluppo delle tecnologie per le reti geodetiche
181
In questa seconda prova, rispetto a quella con correzione da Novara, le epoche float, dopo il periodo di fix, non hanno scarti alti e comunque presentano valori molto prossimi alla posizione vera. Tale caratteristica può essere dovuta al beneficio apportato dalla rete. Per non appesantire il documento non si riportano i risultati ottenuti in altimetria, in genere sempre meno precisa della planimetria, ma con conclusioni identiche a quelle già esaminate.
Figura 6: dispersione planimetrica attorno alle coordinate corrette
Figura 7: sigma planimetrico e HDOP, sono visibili una serie di inizializzazioni, con discese graduali verso il valore
vero tipiche del filtro di Kalman
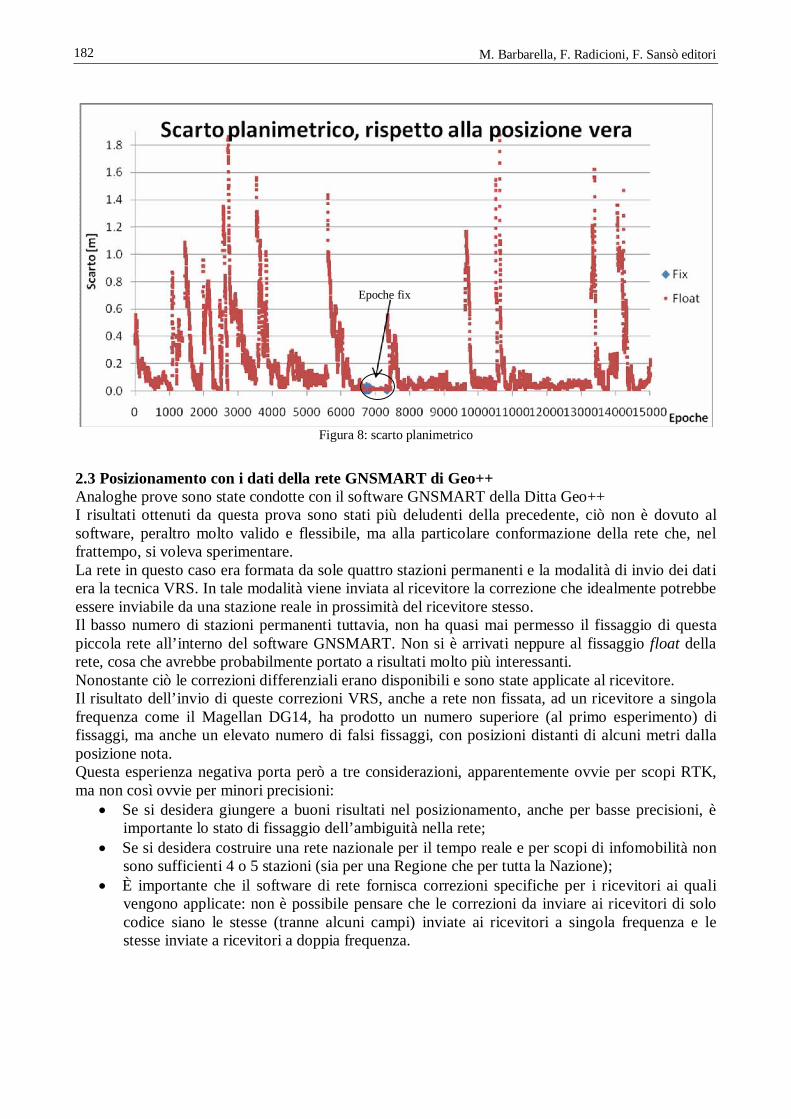
M. Barbarella, F. Radicioni, F. Sansò editori
182
Figura 8: scarto planimetrico
2.3 Posizionamento con i dati della rete GNSMART di Geo++ Analoghe prove sono state condotte con il software GNSMART della Ditta Geo++ I risultati ottenuti da questa prova sono stati più deludenti della precedente, ciò non è dovuto al software, peraltro molto valido e flessibile, ma alla particolare conformazione della rete che, nel frattempo, si voleva sperimentare. La rete in questo caso era formata da sole quattro stazioni permanenti e la modalità di invio dei dati era la tecnica VRS. In tale modalità viene inviata al ricevitore la correzione che idealmente potrebbe essere inviabile da una stazione reale in prossimità del ricevitore stesso. Il basso numero di stazioni permanenti tuttavia, non ha quasi mai permesso il fissaggio di questa piccola rete all’interno del software GNSMART. Non si è arrivati neppure al fissaggio float della rete, cosa che avrebbe probabilmente portato a risultati molto più interessanti. Nonostante ciò le correzioni differenziali erano disponibili e sono state applicate al ricevitore. Il risultato dell’invio di queste correzioni VRS, anche a rete non fissata, ad un ricevitore a singola frequenza come il Magellan DG14, ha prodotto un numero superiore (al primo esperimento) di fissaggi, ma anche un elevato numero di falsi fissaggi, con posizioni distanti di alcuni metri dalla posizione nota. Questa esperienza negativa porta però a tre considerazioni, apparentemente ovvie per scopi RTK, ma non così ovvie per minori precisioni:
Se si desidera giungere a buoni risultati nel posizionamento, anche per basse precisioni, è importante lo stato di fissaggio dell’ambiguità nella rete;
Se si desidera costruire una rete nazionale per il tempo reale e per scopi di infomobilità non sono sufficienti 4 o 5 stazioni (sia per una Regione che per tutta la Nazione);
È importante che il software di rete fornisca correzioni specifiche per i ricevitori ai quali vengono applicate: non è possibile pensare che le correzioni da inviare ai ricevitori di solo codice siano le stesse (tranne alcuni campi) inviate ai ricevitori a singola frequenza e le stesse inviate a ricevitori a doppia frequenza.
Epoche fix
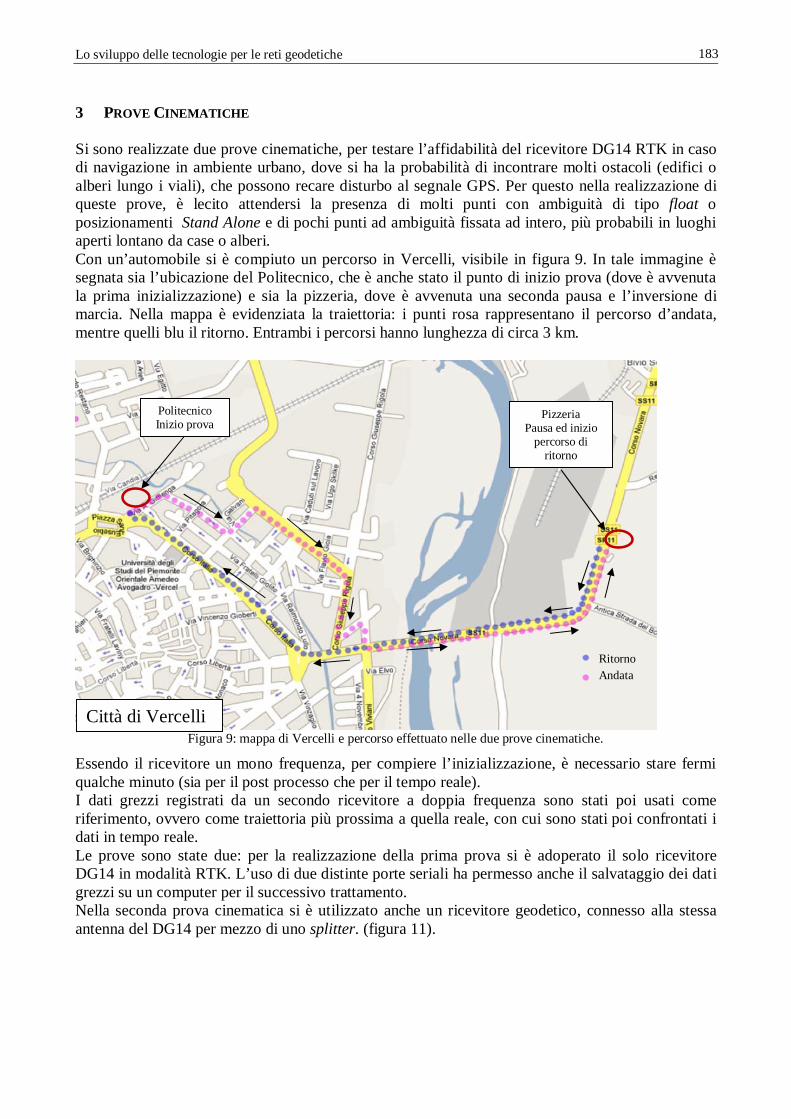
Lo sviluppo delle tecnologie per le reti geodetiche
183
3 PROVE CINEMATICHE Si sono realizzate due prove cinematiche, per testare l’affidabilità del ricevitore DG14 RTK in caso di navigazione in ambiente urbano, dove si ha la probabilità di incontrare molti ostacoli (edifici o alberi lungo i viali), che possono recare disturbo al segnale GPS. Per questo nella realizzazione di queste prove, è lecito attendersi la presenza di molti punti con ambiguità di tipo float o posizionamenti Stand Alone e di pochi punti ad ambiguità fissata ad intero, più probabili in luoghi aperti lontano da case o alberi. Con un’automobile si è compiuto un percorso in Vercelli, visibile in figura 9. In tale immagine è segnata sia l’ubicazione del Politecnico, che è anche stato il punto di inizio prova (dove è avvenuta la prima inizializzazione) e sia la pizzeria, dove è avvenuta una seconda pausa e l’inversione di marcia. Nella mappa è evidenziata la traiettoria: i punti rosa rappresentano il percorso d’andata, mentre quelli blu il ritorno. Entrambi i percorsi hanno lunghezza di circa 3 km.
Figura 9: mappa di Vercelli e percorso effettuato nelle due prove cinematiche.
Essendo il ricevitore un mono frequenza, per compiere l’inizializzazione, è necessario stare fermi qualche minuto (sia per il post processo che per il tempo reale). I dati grezzi registrati da un secondo ricevitore a doppia frequenza sono stati poi usati come riferimento, ovvero come traiettoria più prossima a quella reale, con cui sono stati poi confrontati i dati in tempo reale. Le prove sono state due: per la realizzazione della prima prova si è adoperato il solo ricevitore DG14 in modalità RTK. L’uso di due distinte porte seriali ha permesso anche il salvataggio dei dati grezzi su un computer per il successivo trattamento. Nella seconda prova cinematica si è utilizzato anche un ricevitore geodetico, connesso alla stessa antenna del DG14 per mezzo di uno splitter. (figura 11).
Politecnico Inizio prova
Pizzeria Pausa ed inizio
percorso di ritorno
Ritorno Andata
Città di Vercelli
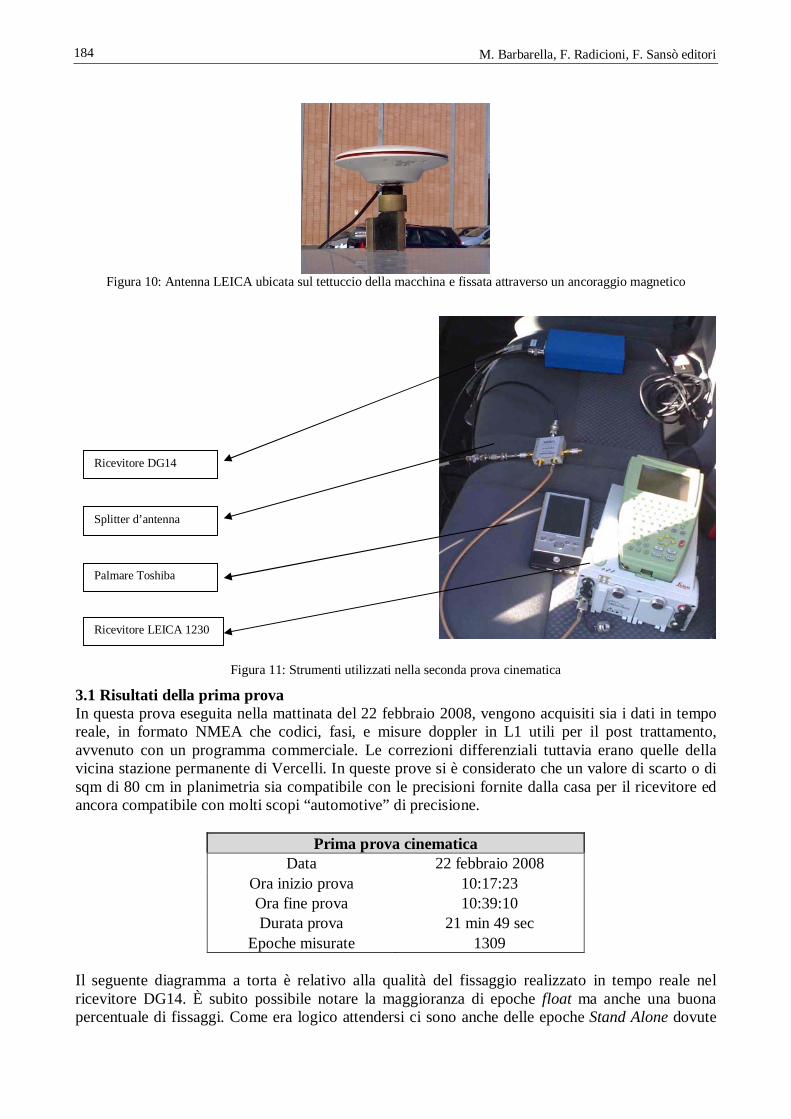
M. Barbarella, F. Radicioni, F. Sansò editori
184
Figura 10: Antenna LEICA ubicata sul tettuccio della macchina e fissata attraverso un ancoraggio magnetico
Figura 11: Strumenti utilizzati nella seconda prova cinematica
3.1 Risultati della prima prova In questa prova eseguita nella mattinata del 22 febbraio 2008, vengono acquisiti sia i dati in tempo reale, in formato NMEA che codici, fasi, e misure doppler in L1 utili per il post trattamento, avvenuto con un programma commerciale. Le correzioni differenziali tuttavia erano quelle della vicina stazione permanente di Vercelli. In queste prove si è considerato che un valore di scarto o di sqm di 80 cm in planimetria sia compatibile con le precisioni fornite dalla casa per il ricevitore ed ancora compatibile con molti scopi “automotive” di precisione.
Prima prova cinematica Data 22 febbraio 2008
Ora inizio prova 10:17:23 Ora fine prova 10:39:10 Durata prova 21 min 49 sec
Epoche misurate 1309 Il seguente diagramma a torta è relativo alla qualità del fissaggio realizzato in tempo reale nel ricevitore DG14. È subito possibile notare la maggioranza di epoche float ma anche una buona percentuale di fissaggi. Come era logico attendersi ci sono anche delle epoche Stand Alone dovute
Splitter d’antenna
Palmare Toshiba
Ricevitore DG14
Ricevitore LEICA 1230
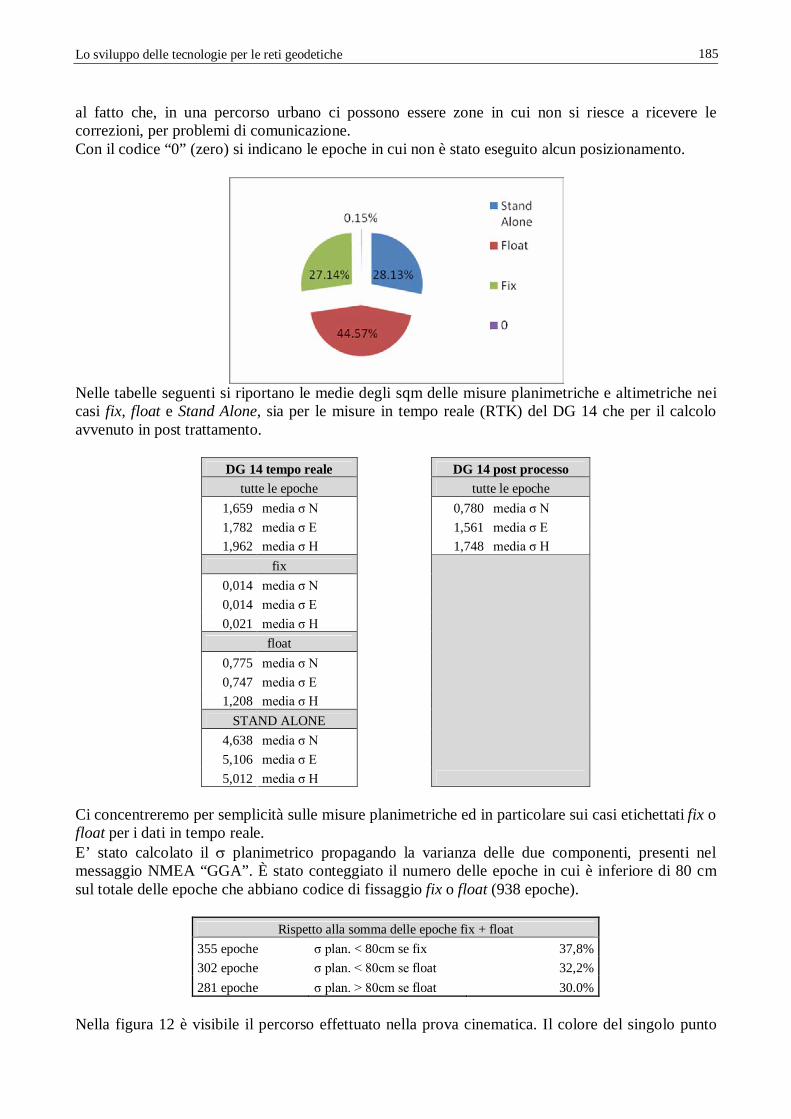
Lo sviluppo delle tecnologie per le reti geodetiche
185
al fatto che, in una percorso urbano ci possono essere zone in cui non si riesce a ricevere le correzioni, per problemi di comunicazione. Con il codice “0” (zero) si indicano le epoche in cui non è stato eseguito alcun posizionamento.
Nelle tabelle seguenti si riportano le medie degli sqm delle misure planimetriche e altimetriche nei casi fix, float e Stand Alone, sia per le misure in tempo reale (RTK) del DG 14 che per il calcolo avvenuto in post trattamento.
DG 14 tempo reale DG 14 post processo tutte le epoche tutte le epoche
1,659 media σ N 0,780 media σ N 1,782 media σ E 1,561 media σ E 1,962 media σ H 1,748 media σ H
fix 0,014 media σ N 0,014 media σ E 0,021 media σ H
float 0,775 media σ N 0,747 media σ E 1,208 media σ H
STAND ALONE 4,638 media σ N 5,106 media σ E 5,012 media σ H
Ci concentreremo per semplicità sulle misure planimetriche ed in particolare sui casi etichettati fix o float per i dati in tempo reale. E’ stato calcolato il planimetrico propagando la varianza delle due componenti, presenti nel messaggio NMEA “GGA”. È stato conteggiato il numero delle epoche in cui è inferiore di 80 cm sul totale delle epoche che abbiano codice di fissaggio fix o float (938 epoche).
Rispetto alla somma delle epoche fix + float 355 epoche σ plan. < 80cm se fix 37,8% 302 epoche σ plan. < 80cm se float 32,2% 281 epoche σ plan. > 80cm se float 30.0%
Nella figura 12 è visibile il percorso effettuato nella prova cinematica. Il colore del singolo punto
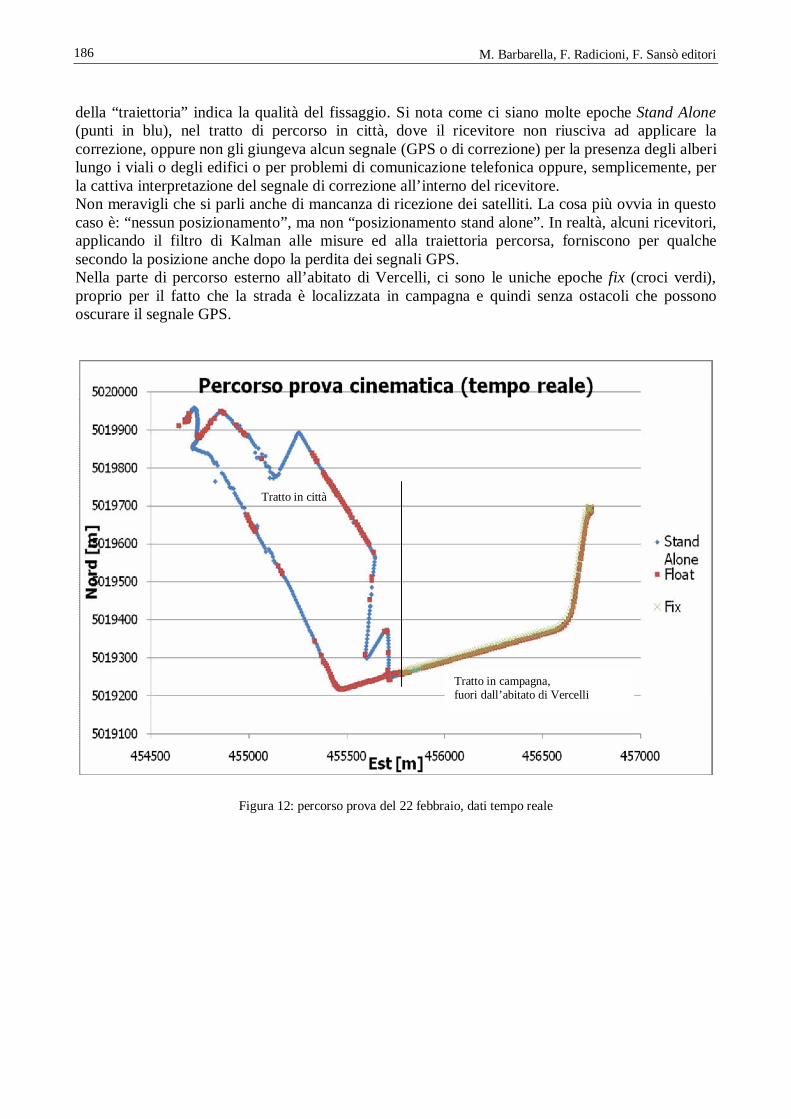
M. Barbarella, F. Radicioni, F. Sansò editori
186
della “traiettoria” indica la qualità del fissaggio. Si nota come ci siano molte epoche Stand Alone (punti in blu), nel tratto di percorso in città, dove il ricevitore non riusciva ad applicare la correzione, oppure non gli giungeva alcun segnale (GPS o di correzione) per la presenza degli alberi lungo i viali o degli edifici o per problemi di comunicazione telefonica oppure, semplicemente, per la cattiva interpretazione del segnale di correzione all’interno del ricevitore. Non meravigli che si parli anche di mancanza di ricezione dei satelliti. La cosa più ovvia in questo caso è: “nessun posizionamento”, ma non “posizionamento stand alone”. In realtà, alcuni ricevitori, applicando il filtro di Kalman alle misure ed alla traiettoria percorsa, forniscono per qualche secondo la posizione anche dopo la perdita dei segnali GPS. Nella parte di percorso esterno all’abitato di Vercelli, ci sono le uniche epoche fix (croci verdi), proprio per il fatto che la strada è localizzata in campagna e quindi senza ostacoli che possono oscurare il segnale GPS.
Figura 12: percorso prova del 22 febbraio, dati tempo reale
Tratto in città
Tratto in campagna, fuori dall’abitato di Vercelli
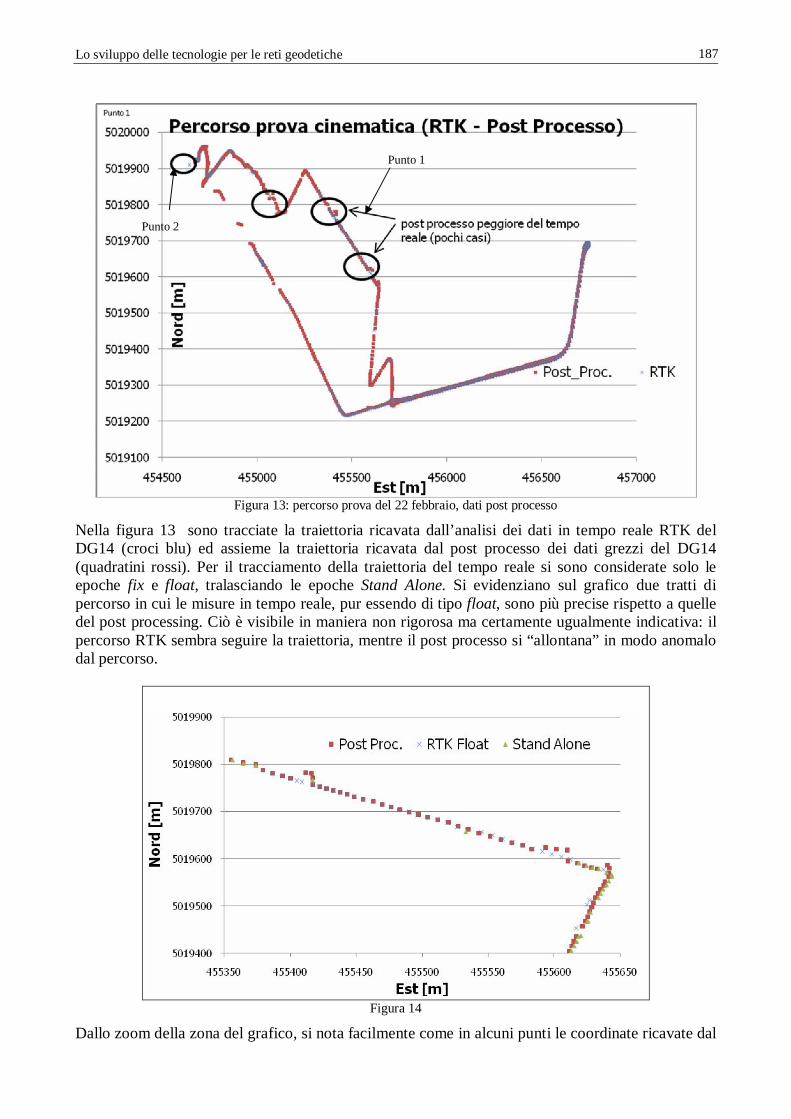
Lo sviluppo delle tecnologie per le reti geodetiche
187
Figura 13: percorso prova del 22 febbraio, dati post processo
Nella figura 13 sono tracciate la traiettoria ricavata dall’analisi dei dati in tempo reale RTK del DG14 (croci blu) ed assieme la traiettoria ricavata dal post processo dei dati grezzi del DG14 (quadratini rossi). Per il tracciamento della traiettoria del tempo reale si sono considerate solo le epoche fix e float, tralasciando le epoche Stand Alone. Si evidenziano sul grafico due tratti di percorso in cui le misure in tempo reale, pur essendo di tipo float, sono più precise rispetto a quelle del post processing. Ciò è visibile in maniera non rigorosa ma certamente ugualmente indicativa: il percorso RTK sembra seguire la traiettoria, mentre il post processo si “allontana” in modo anomalo dal percorso.
Figura 14
Dallo zoom della zona del grafico, si nota facilmente come in alcuni punti le coordinate ricavate dal
Punto 1
Punto 2
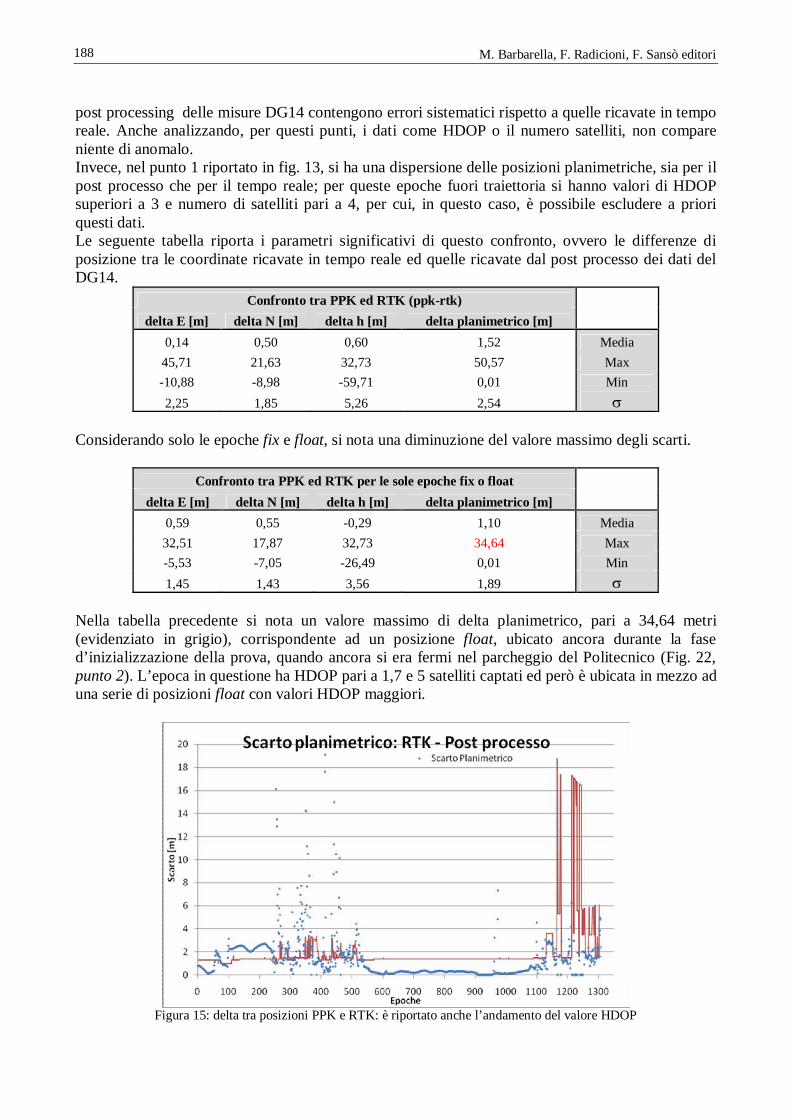
M. Barbarella, F. Radicioni, F. Sansò editori
188
post processing delle misure DG14 contengono errori sistematici rispetto a quelle ricavate in tempo reale. Anche analizzando, per questi punti, i dati come HDOP o il numero satelliti, non compare niente di anomalo. Invece, nel punto 1 riportato in fig. 13, si ha una dispersione delle posizioni planimetriche, sia per il post processo che per il tempo reale; per queste epoche fuori traiettoria si hanno valori di HDOP superiori a 3 e numero di satelliti pari a 4, per cui, in questo caso, è possibile escludere a priori questi dati. Le seguente tabella riporta i parametri significativi di questo confronto, ovvero le differenze di posizione tra le coordinate ricavate in tempo reale ed quelle ricavate dal post processo dei dati del DG14.
Confronto tra PPK ed RTK (ppk-rtk) delta E [m] delta N [m] delta h [m] delta planimetrico [m]
0,14 0,50 0,60 1,52 Media 45,71 21,63 32,73 50,57 Max -10,88 -8,98 -59,71 0,01 Min 2,25 1,85 5,26 2,54
Considerando solo le epoche fix e float, si nota una diminuzione del valore massimo degli scarti.
Confronto tra PPK ed RTK per le sole epoche fix o float delta E [m] delta N [m] delta h [m] delta planimetrico [m]
0,59 0,55 -0,29 1,10 Media 32,51 17,87 32,73 34,64 Max -5,53 -7,05 -26,49 0,01 Min 1,45 1,43 3,56 1,89
Nella tabella precedente si nota un valore massimo di delta planimetrico, pari a 34,64 metri (evidenziato in grigio), corrispondente ad un posizione float, ubicato ancora durante la fase d’inizializzazione della prova, quando ancora si era fermi nel parcheggio del Politecnico (Fig. 22, punto 2). L’epoca in questione ha HDOP pari a 1,7 e 5 satelliti captati ed però è ubicata in mezzo ad una serie di posizioni float con valori HDOP maggiori.
Figura 15: delta tra posizioni PPK e RTK: è riportato anche l’andamento del valore HDOP
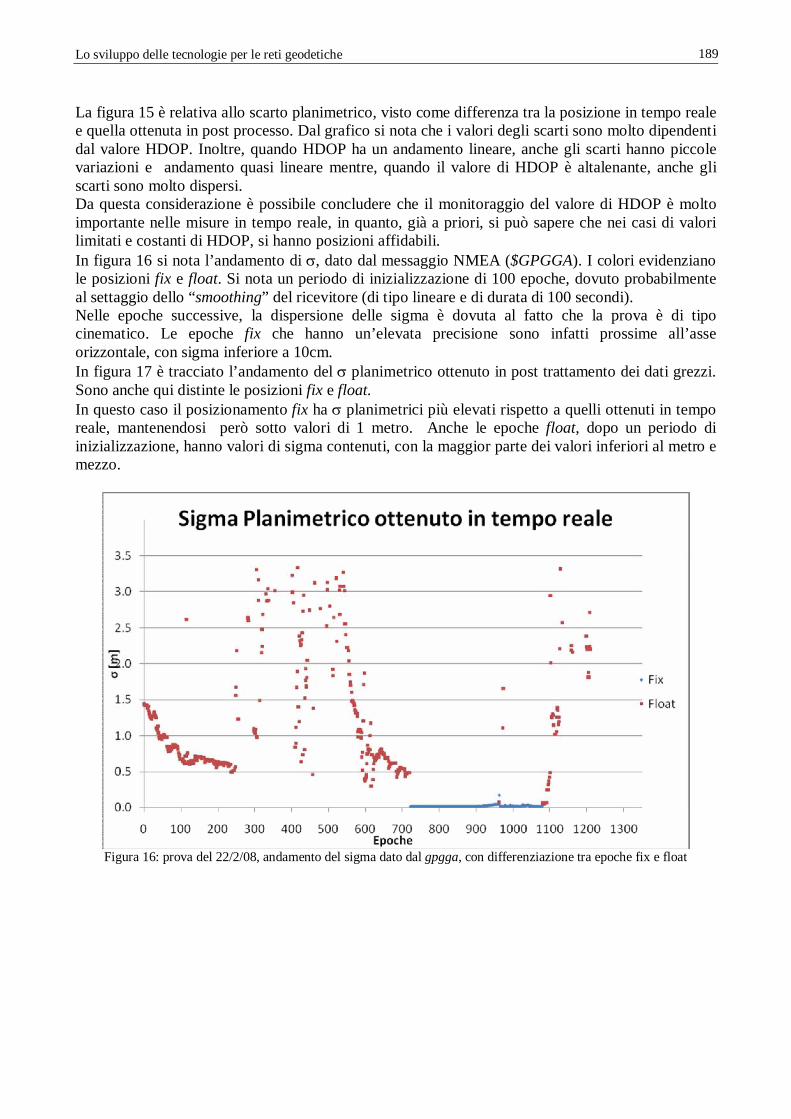
Lo sviluppo delle tecnologie per le reti geodetiche
189
La figura 15 è relativa allo scarto planimetrico, visto come differenza tra la posizione in tempo reale e quella ottenuta in post processo. Dal grafico si nota che i valori degli scarti sono molto dipendenti dal valore HDOP. Inoltre, quando HDOP ha un andamento lineare, anche gli scarti hanno piccole variazioni e andamento quasi lineare mentre, quando il valore di HDOP è altalenante, anche gli scarti sono molto dispersi. Da questa considerazione è possibile concludere che il monitoraggio del valore di HDOP è molto importante nelle misure in tempo reale, in quanto, già a priori, si può sapere che nei casi di valori limitati e costanti di HDOP, si hanno posizioni affidabili. In figura 16 si nota l’andamento di , dato dal messaggio NMEA ($GPGGA). I colori evidenziano le posizioni fix e float. Si nota un periodo di inizializzazione di 100 epoche, dovuto probabilmente al settaggio dello “smoothing” del ricevitore (di tipo lineare e di durata di 100 secondi). Nelle epoche successive, la dispersione delle sigma è dovuta al fatto che la prova è di tipo cinematico. Le epoche fix che hanno un’elevata precisione sono infatti prossime all’asse orizzontale, con sigma inferiore a 10cm. In figura 17 è tracciato l’andamento del planimetrico ottenuto in post trattamento dei dati grezzi. Sono anche qui distinte le posizioni fix e float. In questo caso il posizionamento fix ha planimetrici più elevati rispetto a quelli ottenuti in tempo reale, mantenendosi però sotto valori di 1 metro. Anche le epoche float, dopo un periodo di inizializzazione, hanno valori di sigma contenuti, con la maggior parte dei valori inferiori al metro e mezzo.
Figura 16: prova del 22/2/08, andamento del sigma dato dal gpgga, con differenziazione tra epoche fix e float
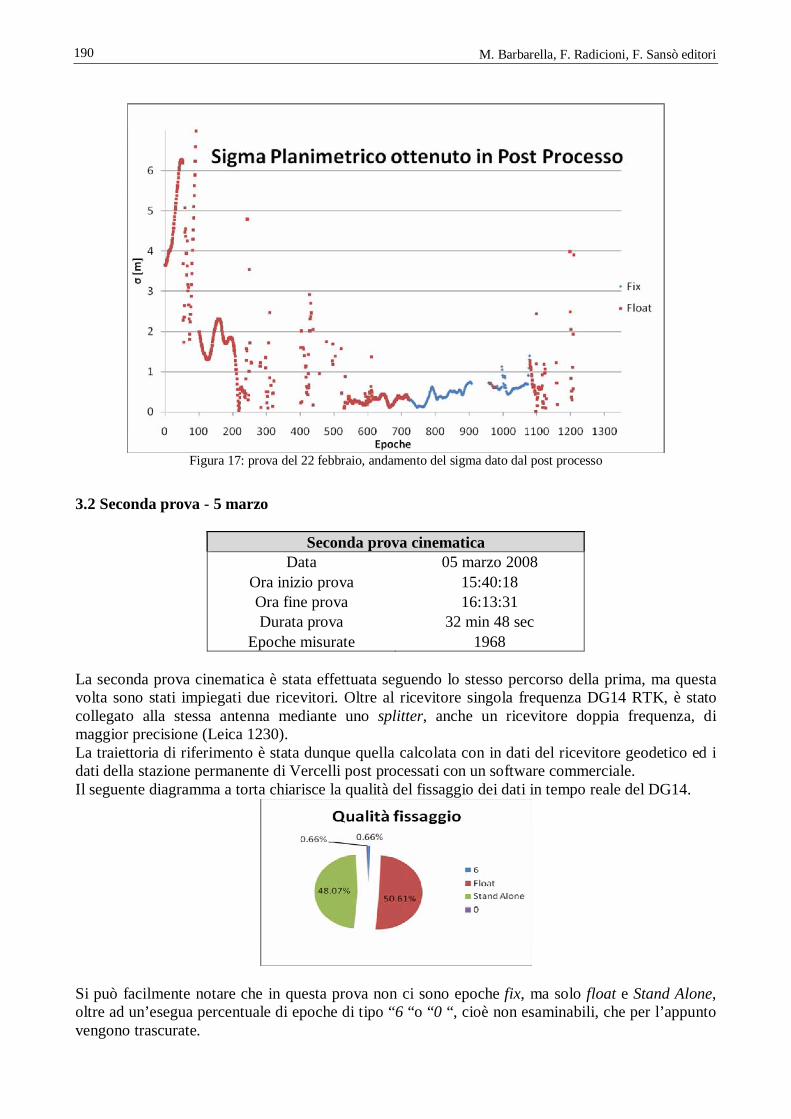
M. Barbarella, F. Radicioni, F. Sansò editori
190
Figura 17: prova del 22 febbraio, andamento del sigma dato dal post processo
3.2 Seconda prova - 5 marzo
Seconda prova cinematica Data 05 marzo 2008
Ora inizio prova 15:40:18 Ora fine prova 16:13:31 Durata prova 32 min 48 sec
Epoche misurate 1968 La seconda prova cinematica è stata effettuata seguendo lo stesso percorso della prima, ma questa volta sono stati impiegati due ricevitori. Oltre al ricevitore singola frequenza DG14 RTK, è stato collegato alla stessa antenna mediante uno splitter, anche un ricevitore doppia frequenza, di maggior precisione (Leica 1230). La traiettoria di riferimento è stata dunque quella calcolata con in dati del ricevitore geodetico ed i dati della stazione permanente di Vercelli post processati con un software commerciale. Il seguente diagramma a torta chiarisce la qualità del fissaggio dei dati in tempo reale del DG14.
Si può facilmente notare che in questa prova non ci sono epoche fix, ma solo float e Stand Alone, oltre ad un’esegua percentuale di epoche di tipo “6 “o “0 “, cioè non esaminabili, che per l’appunto vengono trascurate.
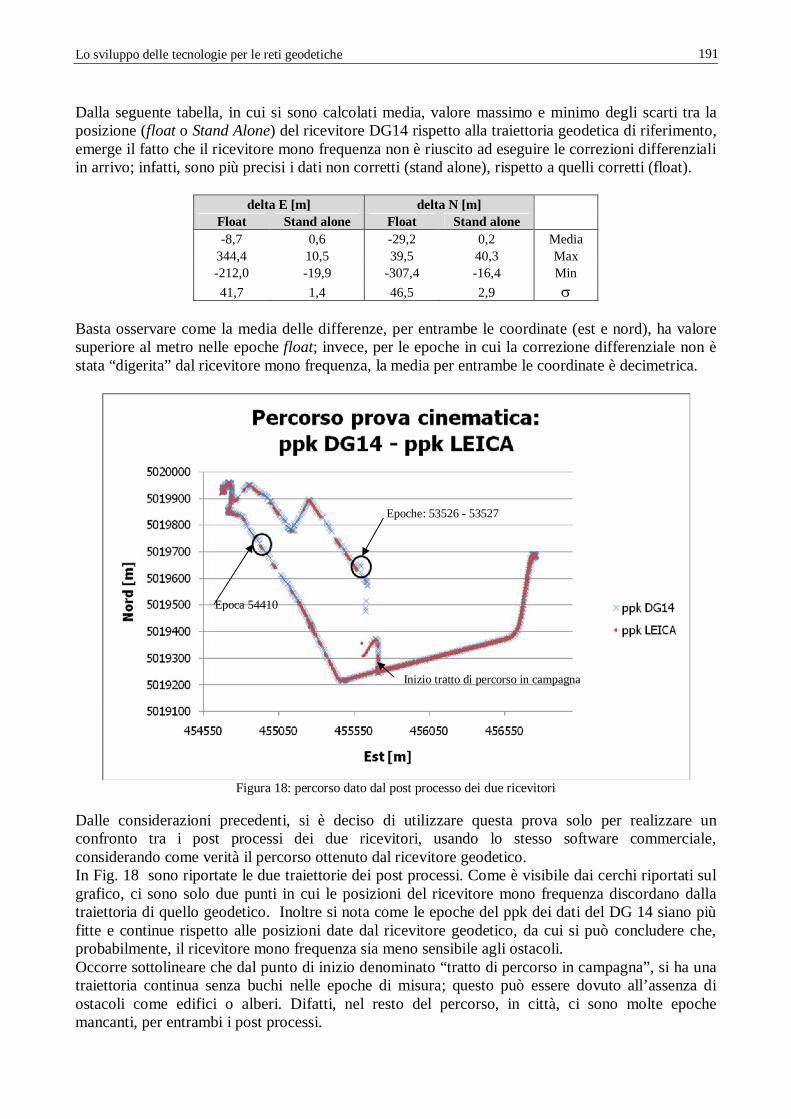
Lo sviluppo delle tecnologie per le reti geodetiche
191
Dalla seguente tabella, in cui si sono calcolati media, valore massimo e minimo degli scarti tra la posizione (float o Stand Alone) del ricevitore DG14 rispetto alla traiettoria geodetica di riferimento, emerge il fatto che il ricevitore mono frequenza non è riuscito ad eseguire le correzioni differenziali in arrivo; infatti, sono più precisi i dati non corretti (stand alone), rispetto a quelli corretti (float).
delta E [m] delta N [m] Float Stand alone Float Stand alone -8,7 0,6 -29,2 0,2 Media
344,4 10,5 39,5 40,3 Max -212,0 -19,9 -307,4 -16,4 Min 41,7 1,4 46,5 2,9
Basta osservare come la media delle differenze, per entrambe le coordinate (est e nord), ha valore superiore al metro nelle epoche float; invece, per le epoche in cui la correzione differenziale non è stata “digerita” dal ricevitore mono frequenza, la media per entrambe le coordinate è decimetrica.
Figura 18: percorso dato dal post processo dei due ricevitori
Dalle considerazioni precedenti, si è deciso di utilizzare questa prova solo per realizzare un confronto tra i post processi dei due ricevitori, usando lo stesso software commerciale, considerando come verità il percorso ottenuto dal ricevitore geodetico. In Fig. 18 sono riportate le due traiettorie dei post processi. Come è visibile dai cerchi riportati sul grafico, ci sono solo due punti in cui le posizioni del ricevitore mono frequenza discordano dalla traiettoria di quello geodetico. Inoltre si nota come le epoche del ppk dei dati del DG 14 siano più fitte e continue rispetto alle posizioni date dal ricevitore geodetico, da cui si può concludere che, probabilmente, il ricevitore mono frequenza sia meno sensibile agli ostacoli. Occorre sottolineare che dal punto di inizio denominato “tratto di percorso in campagna”, si ha una traiettoria continua senza buchi nelle epoche di misura; questo può essere dovuto all’assenza di ostacoli come edifici o alberi. Difatti, nel resto del percorso, in città, ci sono molte epoche mancanti, per entrambi i post processi.
Inizio tratto di percorso in campagna
Epoche: 53526 - 53527
Epoca 54410
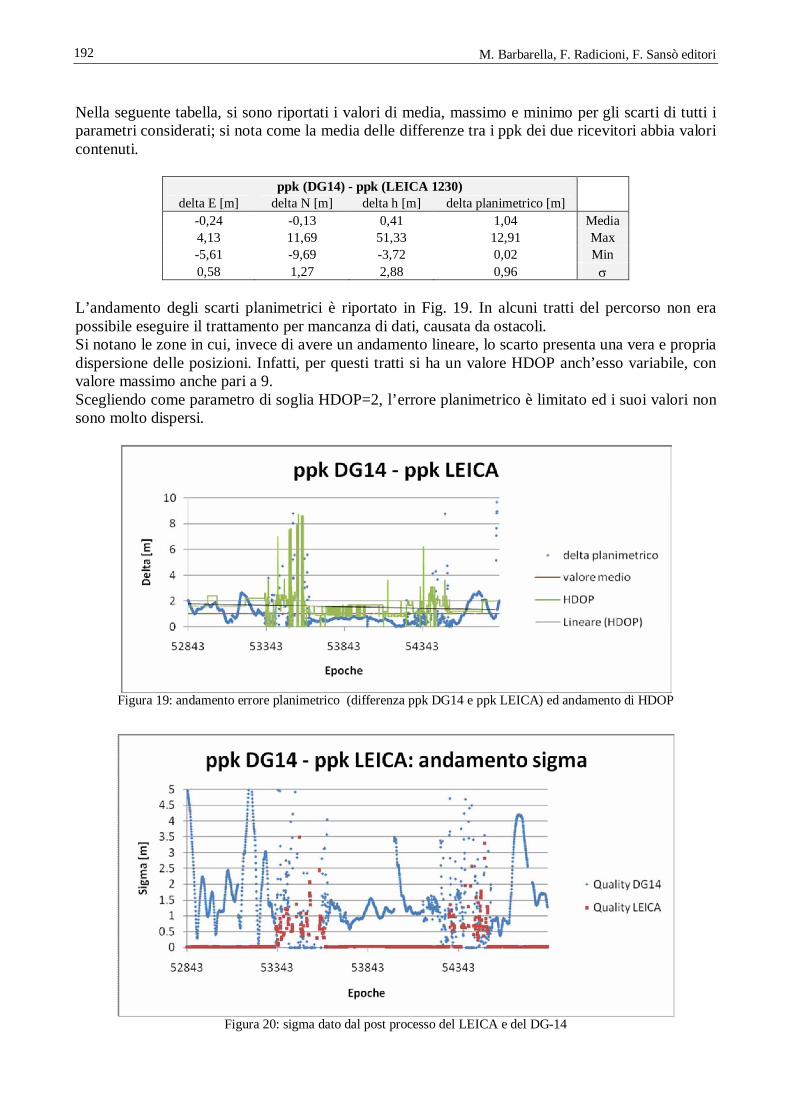
M. Barbarella, F. Radicioni, F. Sansò editori
192
Nella seguente tabella, si sono riportati i valori di media, massimo e minimo per gli scarti di tutti i parametri considerati; si nota come la media delle differenze tra i ppk dei due ricevitori abbia valori contenuti.
ppk (DG14) - ppk (LEICA 1230) delta E [m] delta N [m] delta h [m] delta planimetrico [m]
-0,24 -0,13 0,41 1,04 Media 4,13 11,69 51,33 12,91 Max -5,61 -9,69 -3,72 0,02 Min 0,58 1,27 2,88 0,96
L’andamento degli scarti planimetrici è riportato in Fig. 19. In alcuni tratti del percorso non era possibile eseguire il trattamento per mancanza di dati, causata da ostacoli. Si notano le zone in cui, invece di avere un andamento lineare, lo scarto presenta una vera e propria dispersione delle posizioni. Infatti, per questi tratti si ha un valore HDOP anch’esso variabile, con valore massimo anche pari a 9. Scegliendo come parametro di soglia HDOP=2, l’errore planimetrico è limitato ed i suoi valori non sono molto dispersi.
Figura 19: andamento errore planimetrico (differenza ppk DG14 e ppk LEICA) ed andamento di HDOP
Figura 20: sigma dato dal post processo del LEICA e del DG-14
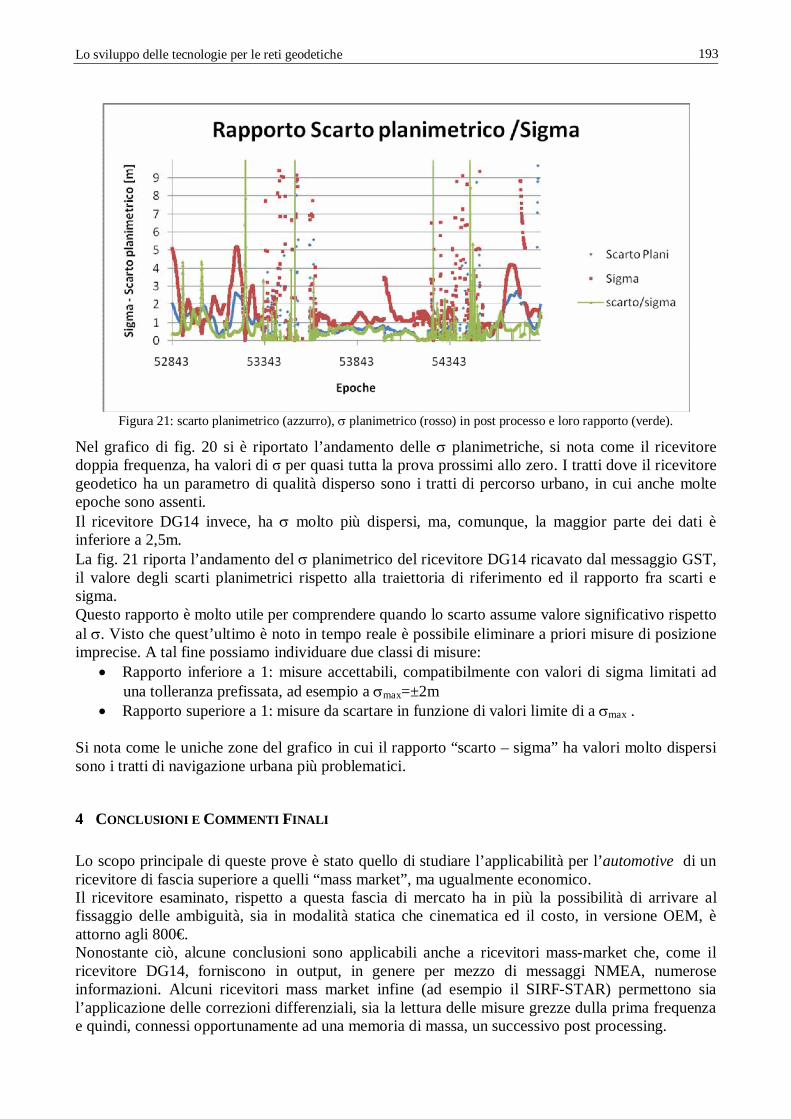
Lo sviluppo delle tecnologie per le reti geodetiche
193
Figura 21: scarto planimetrico (azzurro), planimetrico (rosso) in post processo e loro rapporto (verde).
Nel grafico di fig. 20 si è riportato l’andamento delle planimetriche, si nota come il ricevitore doppia frequenza, ha valori di σ per quasi tutta la prova prossimi allo zero. I tratti dove il ricevitore geodetico ha un parametro di qualità disperso sono i tratti di percorso urbano, in cui anche molte epoche sono assenti. Il ricevitore DG14 invece, ha molto più dispersi, ma, comunque, la maggior parte dei dati è inferiore a 2,5m. La fig. 21 riporta l’andamento del planimetrico del ricevitore DG14 ricavato dal messaggio GST, il valore degli scarti planimetrici rispetto alla traiettoria di riferimento ed il rapporto fra scarti e sigma. Questo rapporto è molto utile per comprendere quando lo scarto assume valore significativo rispetto al . Visto che quest’ultimo è noto in tempo reale è possibile eliminare a priori misure di posizione imprecise. A tal fine possiamo individuare due classi di misure:
Rapporto inferiore a 1: misure accettabili, compatibilmente con valori di sigma limitati ad una tolleranza prefissata, ad esempio a max=±2m
Rapporto superiore a 1: misure da scartare in funzione di valori limite di a max . Si nota come le uniche zone del grafico in cui il rapporto “scarto – sigma” ha valori molto dispersi sono i tratti di navigazione urbana più problematici.
4 CONCLUSIONI E COMMENTI FINALI
Lo scopo principale di queste prove è stato quello di studiare l’applicabilità per l’automotive di un ricevitore di fascia superiore a quelli “mass market”, ma ugualmente economico. Il ricevitore esaminato, rispetto a questa fascia di mercato ha in più la possibilità di arrivare al fissaggio delle ambiguità, sia in modalità statica che cinematica ed il costo, in versione OEM, è attorno agli 800€. Nonostante ciò, alcune conclusioni sono applicabili anche a ricevitori mass-market che, come il ricevitore DG14, forniscono in output, in genere per mezzo di messaggi NMEA, numerose informazioni. Alcuni ricevitori mass market infine (ad esempio il SIRF-STAR) permettono sia l’applicazione delle correzioni differenziali, sia la lettura delle misure grezze dulla prima frequenza e quindi, connessi opportunamente ad una memoria di massa, un successivo post processing.
M. Barbarella, F. Radicioni, F. Sansò editori
194
Per il ricevitore DG14: Nel passaggio tra stati di fissaggio fix a float occorre non prendere in considerazione la prima epoca successiva al cambiamento (meglio le prime n epoche) perché possono avere errori grossolani. Gli errori grossolani diminuiscono sensibilmente filtrando i risultati per mezzo di due parametri: il numero di satelliti (ad esempio almeno 5) e il valore HDOP (ad esempio inferiore a 2 o 3) È importante anche la variazione di HDOP: non è consigliabile accettare un dato se tra due epoche vi è una forte variazione di HDOP. E’ importante richiedere (dal messaggio NMEA) anche gli sqm formali delle coordinate. Si suggerisce di non accettare posizioni con valori superiori a 2m. Ove è possibile (se è utile il post processing) è meglio memorizzare i dati grezzi Conclusioni generali: 1. Se si desidera giungere a buone precisioni nel posizionamento è importante la conformazione e lo stato di fissaggio della rete, anche per scopi di bassa precisione; 2. Se si desidera costruire una rete nazionale per il tempo reale e per scopi di infomobilità non sono sufficienti 4 o 5 stazioni per tutta la Nazione. 3. E’ altrettanto importante il mezzo di trasmissione del dato di rete. Se è possibile occorre preferire una connessione diretta o seriale rispetto ad una connessione bluetooth. 4. È importante che il software di rete fornisca correzioni specifiche per i ricevitori ai quali vengono applicate: non è possibile pensare che le correzioni da inviare ai ricevitori di solo codice siano le stesse (tranne alcuni campi) inviate ai ricevitori a singola frequenza e le stesse inviate a ricevitori a doppia frequenza. 5. Sia per i ricevitori mass market che per quelli di fascia più elevata è necessario che il software tenga sotto controllo contemporaneo una serie di parametri, come ad esempio il numero minimo di satelliti (in vista e corretti), il valore di HDOP, la sua variazione nel tempo e lo sqm formale delle coordinate 6. Ove è utile il post processing è necessario usare ricevitori (anche mass market) in grado di fornire i dati grezzi di codice, di fase e doppler. Tali dati potranno essere trattati con i dati rinex di rete generati in una posizione virtuale opportuna (rinex virtuali). 7. Non bisogna pensare che il sistema GPS, od il GNSS con le future quattro costellazioni sia la panacea del posizionamento. Rimarranno sempre problemi di ricezione satellitare in certe zone densamente urbanizzate. Neppure l’abbinamento con i sistemi INS assicura a priori la soluzione completa del problema, non per motivi teorici, ma per problemi economici. I sistemi GNSS-INS per questi scopi dovranno necessariamente essere economici, ciò significa dotati di strumentazione con alti errori sistematici. Tali errori sono mitigabili solo se, in intervalli relativamente brevi di tempo, si dispone della posizione nota dell’automezzo. In sintesi non è ancora possibile rimanere “all’oscuro” dal posizionamento GNSS per diversi minuti, se si dispone di strumentazione di basso costo.
Lo sviluppo delle tecnologie per le reti geodetiche
195

M. Barbarella, F. Radicioni, F. Sansò editori
196
Lo sviluppo delle tecnologie per le reti geodetiche
197
CAPITOLO 4
Impiego delle reti GNSS per la sorveglianza del territorio
Responsabile: Stefano Gandolfi (1)
Maurizio Barbarella (1), Marco Roggero (2)
(1) DISTART – Università di Bologna, viale Risorgimento 2 – 40136 Bologna (2) DINSE – Politecnico di Torino, viale Mattioli 39 – 10125 Torino
4.1. INTRODUZIONE Lo sviluppo della presente linea tematica si sviluppa in due fasi sequenziali che possono essere così sintetizzate:
a) Definizione del problema e stato dell’arte, ossia la ricerca dei possibili “soggetti” presenti nel territorio da sorvegliare in tempo reale anche nell’ottica di prevenzione dei rischi, e ricerca di quali siano attualmente gli strumenti utilizzati per gli scopi di cui sopra.
b) Valutazione tecnica ed analisi in termini di costi/benefici di un possibile riuso di stazioni permanenti per la sorveglianza del territorio in tempo reale e prevenzione dei rischi.
La prima parte della ricerca si pone dunque il problema di individuare quali siano attualmente i “soggetti” di maggiore interesse che possono essere sorvegliati e comprendere quali siano attualmente le metodologie adottate per la loro sorveglianza. Tale punto di partenza risulta essere importante per la seconda fase del lavoro che si occupa di comprendere quale ruolo potranno giocare le reti di stazioni permanenti GNSS (per il posizionamento in tempo reale) che da qualche anno stanno diffondendosi sul territorio italiano. Si è preferito separare i “soggetti” da sorvegliare dai metodi utilizzati per la loro sorveglianza (che in alcuni casi possono essere comuni a più “soggetti”). Inoltre la sorveglianza del territorio è stata interpretata nella sua forma più estesa come sorveglianza di porzioni più o meno vaste di territorio, di grandi opere civili o di edifici, ma anche come sorveglianza dell’atmosfera, visto l’enorme impatto che la meteorologia ha sulla vita quotidiana e nella capacità di prevenzione di rischi.
4.2. DEFINIZIONE DEI FENOMENI DA SOTTOPORRE A SORVEGLIANZA Nel paragrafo in oggetto verranno elencati i soggetti che potenzialmente possono essere importanti da sorvegliare. 4.2.1. Opere civili ed edili 4.2.1.1. Strutture Con tale termine ci si riferisce alle strutture proprie dell’ingegneria civile e dunque a grandi opere
M. Barbarella, F. Radicioni, F. Sansò editori
198
legate alla realizzazione di infrastrutture di tipo idraulico, viario, etc…. In particolare tra le strutture più di rilievo vi sono:
a) Ponti, b) Viadotti, c) Dighe d) Muri di sostegno
Tali strutture sono da considerarsi parte del territorio e parti vitali per la società. L’impatto che eventuali problemi a tali strutture possono provocare sulla popolazione possono variare da semplici disagi a catastrofi. In tale ottica la sorveglianza, soprattutto se avviene in tempo reale, è un aspetto fondamentale anche nell’ottica della prevenzione verso il problema attuale della cosiddetta SOL (Safety of Life). Al momento attuale, ad eccezione delle dighe dove esistono, soprattutto per quelle più importanti, apparati di sorveglianza e monitoraggio molto sofisticati e complessi (fili a piombo rovesci, reti topografiche misurate con metodologie classiche con total station automatizzate, o livellazioni sulla sommità della diga ecc..), le altre strutture a meno di casi particolari non prevedono sistemi automatici di monitoraggio e la loro sorveglianza avviene solo a seguito di evidenti comportamenti anomali della struttura. Spesso, proprio in quei casi vengono eseguite ispezioni e qualora si presentino evidenze potenzialmente pericolose si può procedere con controlli (utilizzando estensimetri, comparatori e metodi topografici tradizionali) e successivi interventi di consolidamento. 4.2.1.2. Edifici a rischio Non solo le grandi strutture di cui al paragrafo precedente presentano l’esigenza di essere monitorate nel tempo. Molteplici fenomeni naturali (e non) possono rendere importante la sorveglianza di edifici privati e pubblici che normalmente non vengono monitorati. La utilità di monitoraggio di singoli edifici si scontra non tanto con difficoltà tecniche o tecnologiche, quanto con i costi soprattutto di gestione dei sistemi di monitoraggio tradizionali basati su inclinometri e/o vibrometri. 4.2.2. Territorio La sorveglianza del territorio può essere focalizzata o verso porzioni di territorio molto localizzate (ad esempio frane), o interessare aree più vaste (fenomeni di subsidenza), o addirittura investire problematiche di natura globale (studio della geodinamica). In tale contesto si è ritenuto di limitare la ricerca solo al monitoraggio locale e regionale limitandosi dunque a considerare centrali lo studio delle frane e della subsidenza. Per quanto attiene la sorveglianza delle frane si devono considerare diversi aspetti, ossia la sorveglianza della dinamica della frana deve essere intesa nella sua complessità:
a) lo studio dei movimenti, b) la ricerca di sistemi di allarme in caso di rischio, c) le problematiche legate alla perimetrazione delle frane d) la sorveglianza di edifici posti in frana che però rientra nel paragrafo 4.2.1.2.
La sorveglianza in continuo della dinamica delle frane è avvenuta fino ad ora con l’utilizzo di inclinometri che forniscono risultati molto importanti anche per quanto attiene la profondità della zona di scorrimento della frana stessa. Tali strumenti presentano costi relativamente contenuti ma

Lo sviluppo delle tecnologie per le reti geodetiche
199
richiedono sopralluoghi frequenti per l’acquisizione dei dati registrati. Il dato che ne deriva non è dunque un dato istantaneo ma un dato cumulativo indicante il movimento della frana nell’intervallo di tempo compreso tra un sopralluogo ed un altro. Tale aspetto risulta essere non molto oneroso all’atto dell’installazione degli strumenti ma oneroso come costi di gestione. Inoltre tali sistemi non prevedono la possibilità di innescare meccanismi di allarme per la popolazione. Sistemi GPS stanno affacciandosi a tale problema ma le esperienze sono ancora di tipo sperimentale e i sistemi prevedono l’istituzione di stazioni su zone supposte stabili e su frana in modo poter calcolare movimenti relativi dei punti su frana. Per quanto attiene la perimetrazione delle frane, importante ai fini dell’individuazione delle zone stabili da quelle interessate dal fenomeno franoso, al momento tali rilievi vengono eseguiti da geologi che collocano il perimetro all’interno della carta basandosi su metodi spesso approssimativi. 4.2.3. Protezione del territorio o azioni di prevenzione Quando si considera la sorveglianza del territorio spesso si trascurano problematiche legate al transito di materiali potenzialmente pericolosi sul territorio, o ad azioni condotte da terzi al fine di provocare danni al territorio (incendi di natura dolosa). In questo paragrafo si intende invece includere tali problematiche nella sorveglianza del territorio. A tal fine si riportano tre esempi dei molteplici che potrebbero esserci. 4.2.3.1. Movimentazione carichi pericolosi La movimentazione di carichi pericolosi costituisce un aspetto potenzialmente critico. In tale ambito si ritiene dunque che una sorveglianza in tempo reale della posizione del mezzo possa contribuire alla prevenzione di eventuali rischi garantendo in caso di problemi interventi rapidi e mirati. 4.2.3.2. Perimetrazione delle aree incendiate Nel passato è accaduto spesso che al fine di modificare la destinazione d’uso di un area classificata come parco naturale (e dunque non edificabile) ad edificabile si ricorresse all’uso dell’incendio di natura dolosa. Infatti, a seguito dell’incendio tali porzioni di territorio, non presentando più le caratteristiche di parco naturale, potevano essere ridestiate ad usi di tipo diverso. Al fine di arginare tale pratica recentemente è entrata in vigore una legge che blocca per un lungo periodo di tempo ogni attività su aree incendiate. Ovviamente è importante censire e monitorare la dimensione di tali incendi anche al fine di quantificare i danni arrecati e eseguire una qualsiasi opera di riqualificazione. Attualmente non esistono procedure consolidate per ottenere una perimetratura delle aree incendiate anche se tali risultati sono ottenibili, a seconda della precisione richiesta o da telerilevamento o da sistemi di posizionamento satellitare. 4.2.3.3. Perimetrazioni di aree alluvionate o di aree terremotate Analogamente al punto precedente per scopi di natura legale e per una corretta pianificazione delle azioni di intervento risulta importante la perimetrazione di aree alluvionate o terremotate. Attualmente non esistono procedure consolidate per ottenere una perimetratura delle aree alluvionate o terremotate anche se tali risultati sono ottenibili, a seconda della precisione richiesta o da telerilevamento o da sistemi di posizionamento satellitare. Il problema della perimetratura in realtà ricopre numerose applicazioni che possono comprendere anche la sorveglianza della movimentazione della fauna etc.. 4.2.3.4. Cantieri Per quanto attiene i Cantieri, si deve sottolineare che anche in questo caso all’interno di tale ambito
M. Barbarella, F. Radicioni, F. Sansò editori
200
si possono attuare differenti applicazioni alla sorveglianza: a) Monitoraggio strutture limitrofe a grandi cantieri (per esempio durante la realizzazione di
grandi infrastrutture come le metropolitane) b) Monitoraggio di movimentazione mezzi e operatori con delimitazione aree rischiose c) Monitoraggio delle operazioni di scavo e movimentazione terra Per quanto attiene al punto a) in occasione di grandi cantieri, edifici collocati in prossimità del cantiere possono subire danneggiamenti di differente entità. Qualora si eseguano infatti perforazioni, tali interventi potrebbero danneggiare la stabilità degli edifici che potrebbe essere utile monitorare. In tale senso in alcuni casi vengono eseguiti monitoraggi degli edifici o utilizzando sistemi topografici tradizionali o eseguendo ispezioni accurate (basate anche su acquisizione di documentazione fotografica) sullo stato di fatto degli edifici prima dell’intervento da utilizzarsi poi sempre come base di partenza per una valutazione dei danni derivati dal cantiere. Non sono dunque attualmente previsti sistemi di sorveglianza in tempo reale. Lo stesso problema si presenta nel caso di perforazioni per l’individuazione di riserve di idrocarburi. Leggi regionali impongono il controllo degli edifici in un’intorno ben definito del pozzo di perforazione. Per quanto attiene il punto b) la sorveglianza del cantiere deve essere intesa come possibilità di individuare zone a rischio delimitate da poligoni entro le quale chi opera possa operare seguendo opportune procedure di sicurezza. In particolare ci le zone a rischio possono essere le aree circostanti ad alcuni macchinari (gru, scavatori etc..) o anche invasi e pozzi, che potenzialmente generano situazioni a forte rischio per chi opera all’interno del cantiere. Attualmente non è noto nessun sistema di sorveglianza consolidato in tale applicazione Per quanto attiene il punto c), la sorveglianza del cantiere può essere intesa a fini legali per un controllo sull’avanzamento dei lavori e per un computo dell’attività svolta, in caso di controversie. Attualmente non è noto nessun sistema di sorveglianza consolidato in tale applicazione 4.2.4. Meteorologia Per concludere l’elenco delle problematiche legate alla sorveglianza del territorio vi è l’atmosfera. Le proprietà fisiche dell’atmosfera, nelle sue evoluzioni temporali, vengono descritte dalla meteorologia per le evoluzioni ad alta frequenza e dalla climatologia per quella a bassa frequenza. Le previsioni meteorologiche costituiscono un settore di grande interesse che possono giocare ruoli di primo piano nella prevenzione dei problemi legati a rischi di natura idrogeologica e nella protezione civile, sono frequenti infatti gli appelli in ambito nazionale da parte della protezione civile che, a seguito di previsioni meteorologiche avverse, invita la popolazione ad adottare misure precauzionali di varia natura. Tale scienza, per la sua importanza, deve caratterizzare in modo corretto le caratteristiche fisiche dell’atmosfera e le sue evoluzioni spazio temporali. In particolare è la bassa atmosfera quella responsabile delle perturbazioni meteorologiche, e la presenza di perturbazioni nuvolosa risulta essere caratterizzata da una densità di molecole d’acqua molto elevata. Attualmente per gli studi di questa natura si utilizzano informazioni da satelliti (Meteo-sat etc..), radiosonde e palloni sonda. In passato erano utilizzate le radiosonde (Radio Observation Ballon, RAOB), ma più recentemente sono utilizzati anche radiometri a terra (Water Vapor Radiometer, WVR). Tuttavia queste tecniche non possono essere impiegate in modo diffuso sul territorio, né con una troppo elevata frequenza temporale. Tali strumenti infatti hanno notevoli limiti e costi elevati (qualche centinaio di Euro ogni RAOB, qualche centinaia di migliaia un WVR). La loro accuratezza degrada in presenza di pioggia e sono quindi di scarsa utilità per la previsione in corso di evento. Inoltre la loro risoluzione spaziale e temporale è scarsa; ad esempio in Italia i RAOB vengono lanciati in genere ogni 6 ore da
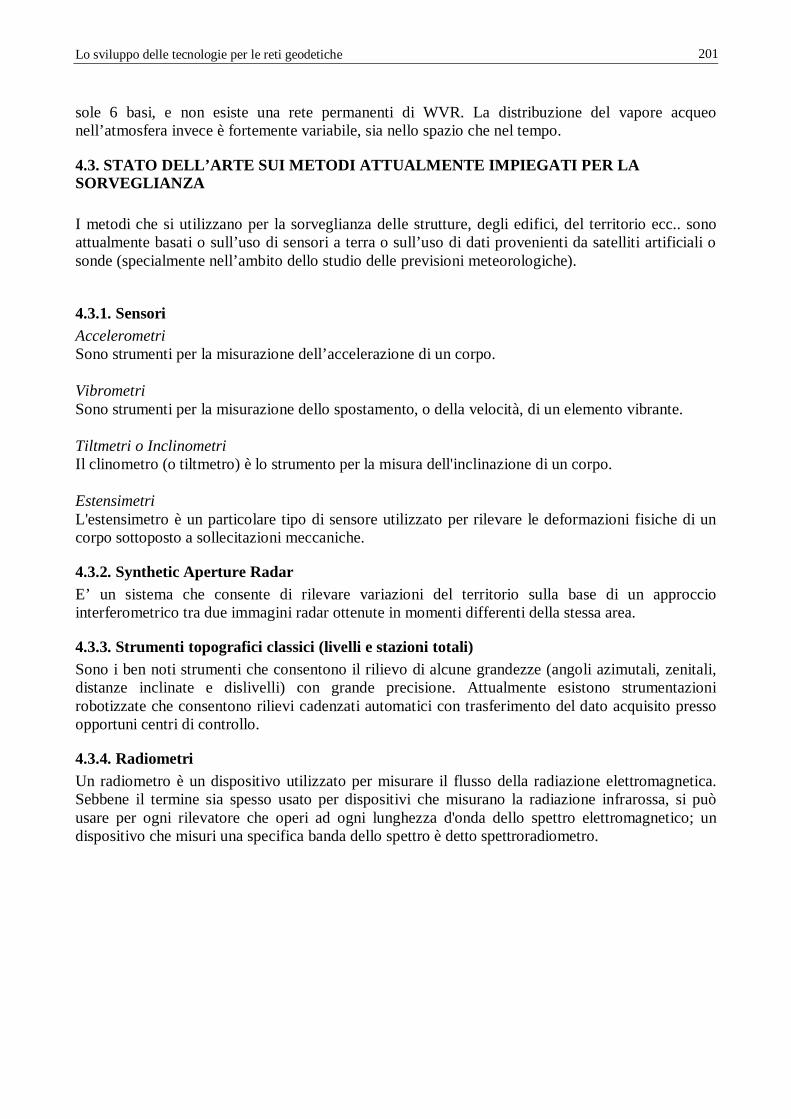
Lo sviluppo delle tecnologie per le reti geodetiche
201
sole 6 basi, e non esiste una rete permanenti di WVR. La distribuzione del vapore acqueo nell’atmosfera invece è fortemente variabile, sia nello spazio che nel tempo.
4.3. STATO DELL’ARTE SUI METODI ATTUALMENTE IMPIEGATI PER LA SORVEGLIANZA I metodi che si utilizzano per la sorveglianza delle strutture, degli edifici, del territorio ecc.. sono attualmente basati o sull’uso di sensori a terra o sull’uso di dati provenienti da satelliti artificiali o sonde (specialmente nell’ambito dello studio delle previsioni meteorologiche).
4.3.1. Sensori Accelerometri Sono strumenti per la misurazione dell’accelerazione di un corpo. Vibrometri Sono strumenti per la misurazione dello spostamento, o della velocità, di un elemento vibrante. Tiltmetri o Inclinometri Il clinometro (o tiltmetro) è lo strumento per la misura dell'inclinazione di un corpo. Estensimetri L'estensimetro è un particolare tipo di sensore utilizzato per rilevare le deformazioni fisiche di un corpo sottoposto a sollecitazioni meccaniche.
4.3.2. Synthetic Aperture Radar E’ un sistema che consente di rilevare variazioni del territorio sulla base di un approccio interferometrico tra due immagini radar ottenute in momenti differenti della stessa area.
4.3.3. Strumenti topografici classici (livelli e stazioni totali) Sono i ben noti strumenti che consentono il rilievo di alcune grandezze (angoli azimutali, zenitali, distanze inclinate e dislivelli) con grande precisione. Attualmente esistono strumentazioni robotizzate che consentono rilievi cadenzati automatici con trasferimento del dato acquisito presso opportuni centri di controllo.
4.3.4. Radiometri Un radiometro è un dispositivo utilizzato per misurare il flusso della radiazione elettromagnetica. Sebbene il termine sia spesso usato per dispositivi che misurano la radiazione infrarossa, si può usare per ogni rilevatore che operi ad ogni lunghezza d'onda dello spettro elettromagnetico; un dispositivo che misuri una specifica banda dello spettro è detto spettroradiometro.
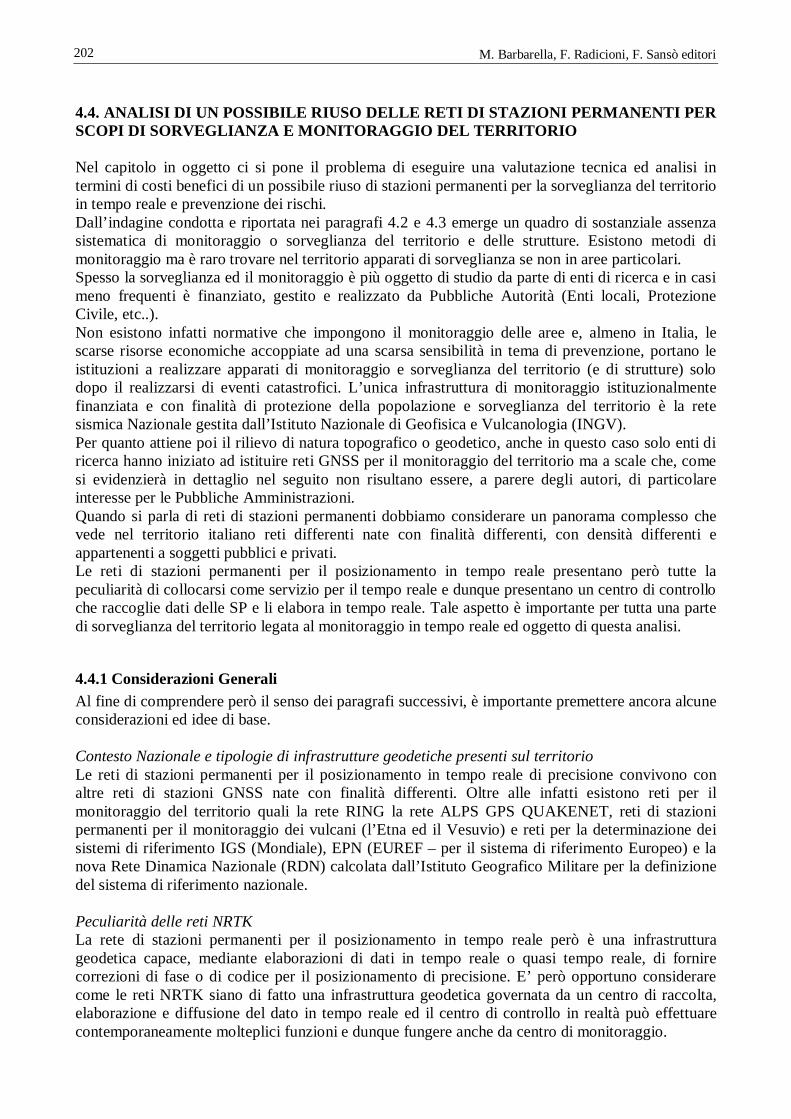
M. Barbarella, F. Radicioni, F. Sansò editori
202
4.4. ANALISI DI UN POSSIBILE RIUSO DELLE RETI DI STAZIONI PERMANENTI PER SCOPI DI SORVEGLIANZA E MONITORAGGIO DEL TERRITORIO Nel capitolo in oggetto ci si pone il problema di eseguire una valutazione tecnica ed analisi in termini di costi benefici di un possibile riuso di stazioni permanenti per la sorveglianza del territorio in tempo reale e prevenzione dei rischi. Dall’indagine condotta e riportata nei paragrafi 4.2 e 4.3 emerge un quadro di sostanziale assenza sistematica di monitoraggio o sorveglianza del territorio e delle strutture. Esistono metodi di monitoraggio ma è raro trovare nel territorio apparati di sorveglianza se non in aree particolari. Spesso la sorveglianza ed il monitoraggio è più oggetto di studio da parte di enti di ricerca e in casi meno frequenti è finanziato, gestito e realizzato da Pubbliche Autorità (Enti locali, Protezione Civile, etc..). Non esistono infatti normative che impongono il monitoraggio delle aree e, almeno in Italia, le scarse risorse economiche accoppiate ad una scarsa sensibilità in tema di prevenzione, portano le istituzioni a realizzare apparati di monitoraggio e sorveglianza del territorio (e di strutture) solo dopo il realizzarsi di eventi catastrofici. L’unica infrastruttura di monitoraggio istituzionalmente finanziata e con finalità di protezione della popolazione e sorveglianza del territorio è la rete sismica Nazionale gestita dall’Istituto Nazionale di Geofisica e Vulcanologia (INGV). Per quanto attiene poi il rilievo di natura topografico o geodetico, anche in questo caso solo enti di ricerca hanno iniziato ad istituire reti GNSS per il monitoraggio del territorio ma a scale che, come si evidenzierà in dettaglio nel seguito non risultano essere, a parere degli autori, di particolare interesse per le Pubbliche Amministrazioni. Quando si parla di reti di stazioni permanenti dobbiamo considerare un panorama complesso che vede nel territorio italiano reti differenti nate con finalità differenti, con densità differenti e appartenenti a soggetti pubblici e privati. Le reti di stazioni permanenti per il posizionamento in tempo reale presentano però tutte la peculiarità di collocarsi come servizio per il tempo reale e dunque presentano un centro di controllo che raccoglie dati delle SP e li elabora in tempo reale. Tale aspetto è importante per tutta una parte di sorveglianza del territorio legata al monitoraggio in tempo reale ed oggetto di questa analisi.
4.4.1 Considerazioni Generali Al fine di comprendere però il senso dei paragrafi successivi, è importante premettere ancora alcune considerazioni ed idee di base. Contesto Nazionale e tipologie di infrastrutture geodetiche presenti sul territorio Le reti di stazioni permanenti per il posizionamento in tempo reale di precisione convivono con altre reti di stazioni GNSS nate con finalità differenti. Oltre alle infatti esistono reti per il monitoraggio del territorio quali la rete RING la rete ALPS GPS QUAKENET, reti di stazioni permanenti per il monitoraggio dei vulcani (l’Etna ed il Vesuvio) e reti per la determinazione dei sistemi di riferimento IGS (Mondiale), EPN (EUREF – per il sistema di riferimento Europeo) e la nova Rete Dinamica Nazionale (RDN) calcolata dall’Istituto Geografico Militare per la definizione del sistema di riferimento nazionale. Peculiarità delle reti NRTK La rete di stazioni permanenti per il posizionamento in tempo reale però è una infrastruttura geodetica capace, mediante elaborazioni di dati in tempo reale o quasi tempo reale, di fornire correzioni di fase o di codice per il posizionamento di precisione. E’ però opportuno considerare come le reti NRTK siano di fatto una infrastruttura geodetica governata da un centro di raccolta, elaborazione e diffusione del dato in tempo reale ed il centro di controllo in realtà può effettuare contemporaneamente molteplici funzioni e dunque fungere anche da centro di monitoraggio.
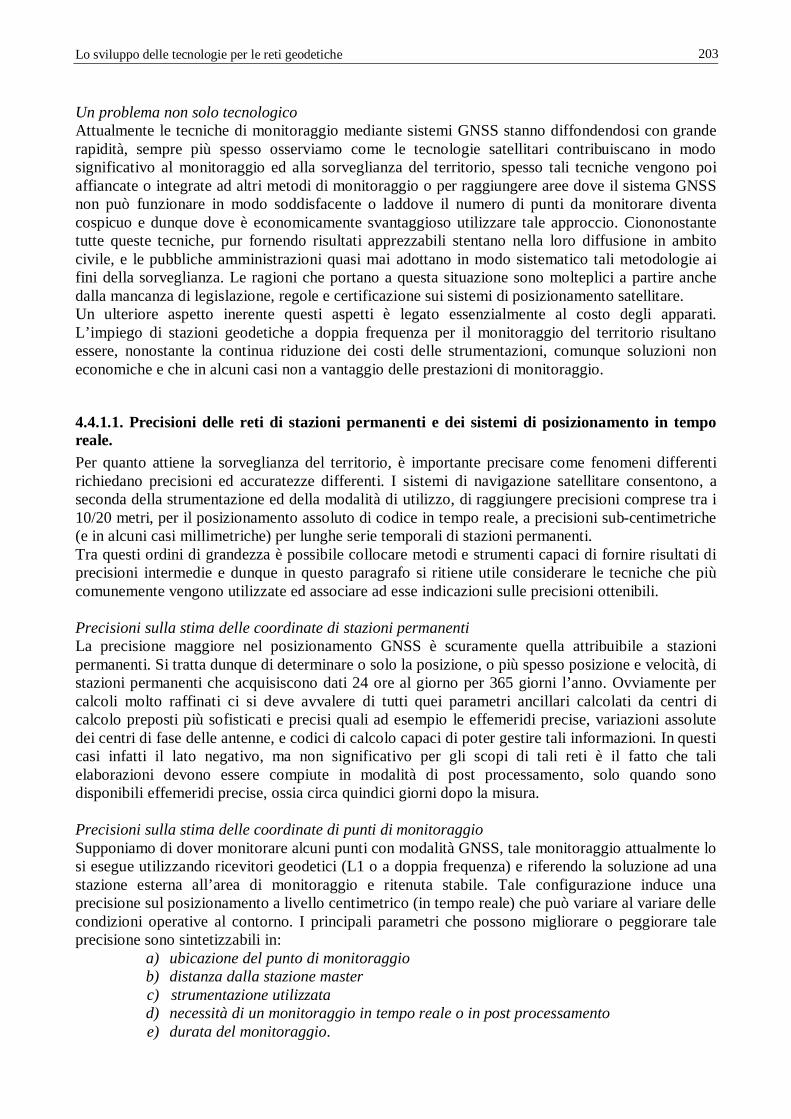
Lo sviluppo delle tecnologie per le reti geodetiche
203
Un problema non solo tecnologico Attualmente le tecniche di monitoraggio mediante sistemi GNSS stanno diffondendosi con grande rapidità, sempre più spesso osserviamo come le tecnologie satellitari contribuiscano in modo significativo al monitoraggio ed alla sorveglianza del territorio, spesso tali tecniche vengono poi affiancate o integrate ad altri metodi di monitoraggio o per raggiungere aree dove il sistema GNSS non può funzionare in modo soddisfacente o laddove il numero di punti da monitorare diventa cospicuo e dunque dove è economicamente svantaggioso utilizzare tale approccio. Ciononostante tutte queste tecniche, pur fornendo risultati apprezzabili stentano nella loro diffusione in ambito civile, e le pubbliche amministrazioni quasi mai adottano in modo sistematico tali metodologie ai fini della sorveglianza. Le ragioni che portano a questa situazione sono molteplici a partire anche dalla mancanza di legislazione, regole e certificazione sui sistemi di posizionamento satellitare. Un ulteriore aspetto inerente questi aspetti è legato essenzialmente al costo degli apparati. L’impiego di stazioni geodetiche a doppia frequenza per il monitoraggio del territorio risultano essere, nonostante la continua riduzione dei costi delle strumentazioni, comunque soluzioni non economiche e che in alcuni casi non a vantaggio delle prestazioni di monitoraggio.
4.4.1.1. Precisioni delle reti di stazioni permanenti e dei sistemi di posizionamento in tempo reale. Per quanto attiene la sorveglianza del territorio, è importante precisare come fenomeni differenti richiedano precisioni ed accuratezze differenti. I sistemi di navigazione satellitare consentono, a seconda della strumentazione ed della modalità di utilizzo, di raggiungere precisioni comprese tra i 10/20 metri, per il posizionamento assoluto di codice in tempo reale, a precisioni sub-centimetriche (e in alcuni casi millimetriche) per lunghe serie temporali di stazioni permanenti. Tra questi ordini di grandezza è possibile collocare metodi e strumenti capaci di fornire risultati di precisioni intermedie e dunque in questo paragrafo si ritiene utile considerare le tecniche che più comunemente vengono utilizzate ed associare ad esse indicazioni sulle precisioni ottenibili. Precisioni sulla stima delle coordinate di stazioni permanenti La precisione maggiore nel posizionamento GNSS è scuramente quella attribuibile a stazioni permanenti. Si tratta dunque di determinare o solo la posizione, o più spesso posizione e velocità, di stazioni permanenti che acquisiscono dati 24 ore al giorno per 365 giorni l’anno. Ovviamente per calcoli molto raffinati ci si deve avvalere di tutti quei parametri ancillari calcolati da centri di calcolo preposti più sofisticati e precisi quali ad esempio le effemeridi precise, variazioni assolute dei centri di fase delle antenne, e codici di calcolo capaci di poter gestire tali informazioni. In questi casi infatti il lato negativo, ma non significativo per gli scopi di tali reti è il fatto che tali elaborazioni devono essere compiute in modalità di post processamento, solo quando sono disponibili effemeridi precise, ossia circa quindici giorni dopo la misura. Precisioni sulla stima delle coordinate di punti di monitoraggio Supponiamo di dover monitorare alcuni punti con modalità GNSS, tale monitoraggio attualmente lo si esegue utilizzando ricevitori geodetici (L1 o a doppia frequenza) e riferendo la soluzione ad una stazione esterna all’area di monitoraggio e ritenuta stabile. Tale configurazione induce una precisione sul posizionamento a livello centimetrico (in tempo reale) che può variare al variare delle condizioni operative al contorno. I principali parametri che possono migliorare o peggiorare tale precisione sono sintetizzabili in:
a) ubicazione del punto di monitoraggio b) distanza dalla stazione master c) strumentazione utilizzata d) necessità di un monitoraggio in tempo reale o in post processamento e) durata del monitoraggio.
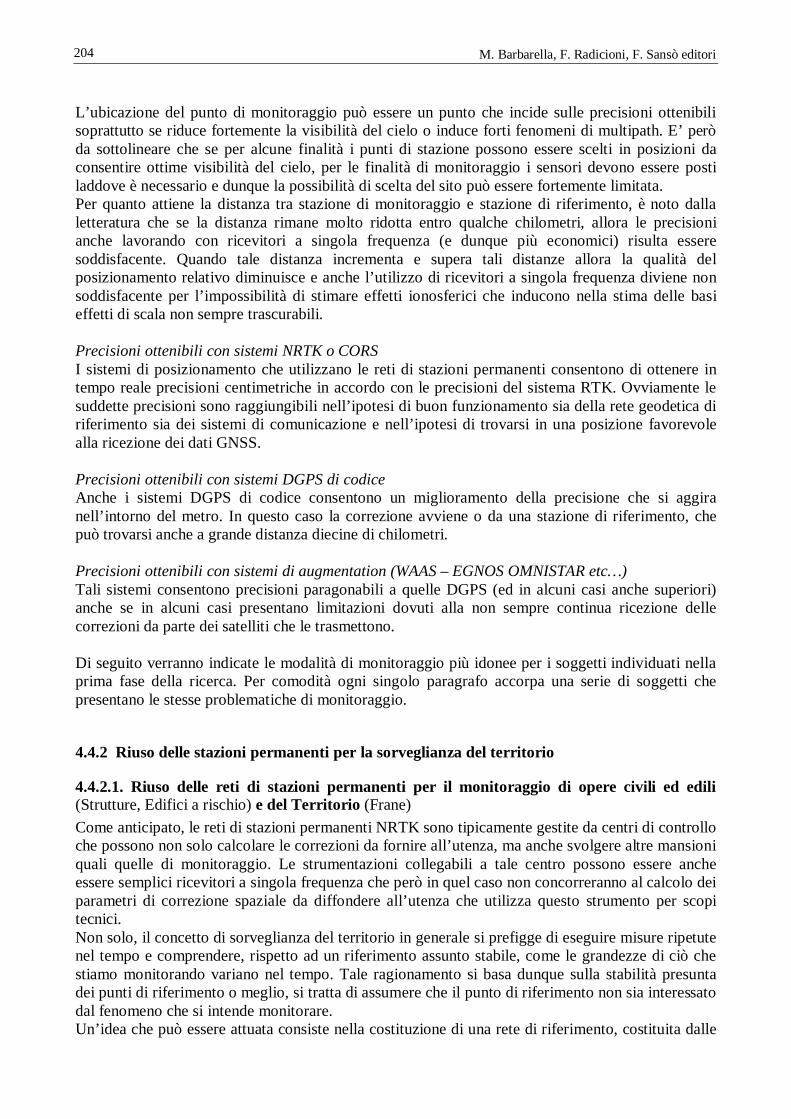
M. Barbarella, F. Radicioni, F. Sansò editori
204
L’ubicazione del punto di monitoraggio può essere un punto che incide sulle precisioni ottenibili soprattutto se riduce fortemente la visibilità del cielo o induce forti fenomeni di multipath. E’ però da sottolineare che se per alcune finalità i punti di stazione possono essere scelti in posizioni da consentire ottime visibilità del cielo, per le finalità di monitoraggio i sensori devono essere posti laddove è necessario e dunque la possibilità di scelta del sito può essere fortemente limitata. Per quanto attiene la distanza tra stazione di monitoraggio e stazione di riferimento, è noto dalla letteratura che se la distanza rimane molto ridotta entro qualche chilometri, allora le precisioni anche lavorando con ricevitori a singola frequenza (e dunque più economici) risulta essere soddisfacente. Quando tale distanza incrementa e supera tali distanze allora la qualità del posizionamento relativo diminuisce e anche l’utilizzo di ricevitori a singola frequenza diviene non soddisfacente per l’impossibilità di stimare effetti ionosferici che inducono nella stima delle basi effetti di scala non sempre trascurabili. Precisioni ottenibili con sistemi NRTK o CORS I sistemi di posizionamento che utilizzano le reti di stazioni permanenti consentono di ottenere in tempo reale precisioni centimetriche in accordo con le precisioni del sistema RTK. Ovviamente le suddette precisioni sono raggiungibili nell’ipotesi di buon funzionamento sia della rete geodetica di riferimento sia dei sistemi di comunicazione e nell’ipotesi di trovarsi in una posizione favorevole alla ricezione dei dati GNSS. Precisioni ottenibili con sistemi DGPS di codice Anche i sistemi DGPS di codice consentono un miglioramento della precisione che si aggira nell’intorno del metro. In questo caso la correzione avviene o da una stazione di riferimento, che può trovarsi anche a grande distanza diecine di chilometri. Precisioni ottenibili con sistemi di augmentation (WAAS – EGNOS OMNISTAR etc…) Tali sistemi consentono precisioni paragonabili a quelle DGPS (ed in alcuni casi anche superiori) anche se in alcuni casi presentano limitazioni dovuti alla non sempre continua ricezione delle correzioni da parte dei satelliti che le trasmettono. Di seguito verranno indicate le modalità di monitoraggio più idonee per i soggetti individuati nella prima fase della ricerca. Per comodità ogni singolo paragrafo accorpa una serie di soggetti che presentano le stesse problematiche di monitoraggio.
4.4.2 Riuso delle stazioni permanenti per la sorveglianza del territorio
4.4.2.1. Riuso delle reti di stazioni permanenti per il monitoraggio di opere civili ed edili (Strutture, Edifici a rischio) e del Territorio (Frane) Come anticipato, le reti di stazioni permanenti NRTK sono tipicamente gestite da centri di controllo che possono non solo calcolare le correzioni da fornire all’utenza, ma anche svolgere altre mansioni quali quelle di monitoraggio. Le strumentazioni collegabili a tale centro possono essere anche essere semplici ricevitori a singola frequenza che però in quel caso non concorreranno al calcolo dei parametri di correzione spaziale da diffondere all’utenza che utilizza questo strumento per scopi tecnici. Non solo, il concetto di sorveglianza del territorio in generale si prefigge di eseguire misure ripetute nel tempo e comprendere, rispetto ad un riferimento assunto stabile, come le grandezze di ciò che stiamo monitorando variano nel tempo. Tale ragionamento si basa dunque sulla stabilità presunta dei punti di riferimento o meglio, si tratta di assumere che il punto di riferimento non sia interessato dal fenomeno che si intende monitorare. Un’idea che può essere attuata consiste nella costituzione di una rete di riferimento, costituita dalle
Lo sviluppo delle tecnologie per le reti geodetiche
205
reti NRTK collocate in posizioni strategiche, e da sistemi a basso costo, anch’essi collegati al centro di controllo. La posizione dei ricevitori a basso costo verrebbe calcolata dal centro di controllo riferendosi alla stazione di riferimento più vicina (se la distanza lo consente) o realizzando una stazione “virtuale” in prossimità della zona di rilievo. In tale modo si realizza un monitoraggio del territorio a piccola scala utilizzando il calcolo continuo della rete di riferimento NRTK e sorveglianze del territorio a grande scala utilizzando i ricevitori a basso costo. È anche da sottolineare che in tale ottica, un unico centro di controllo potrebbe gestire e sorvegliare molteplici soggetti, riducendo i costi di gestione delle infrastrutture. E’ importante sottolineare che in tale ottica il monitoraggio ambientale (anche per la meteorologia) potrebbe essere stimato utilizzando solo i ricevitori della rete di riferimento perché i ricevitori singola frequenza non consentono la modellizzazione dei parametri atmosferici. A partire da tal premessa si riporta di seguito un elenco di possibili applicazioni di monitoraggio e sorveglianza del territorio e delle strutture nonché dell’ambiente che potrebbero utilizzare il suddetto approccio. Attualmente, almeno in Italia, solo le dighe presentano già in fase di progettazione e realizzazione apparati anche molto sofisticati di monitoraggio. D’altro canto la letteratura recente è ricca di esperimenti, condotti anche in Italia, che dimostrano l’utilizzabilità di tali apparati ai fini della sorveglianza delle strutture. Evidentemente la sorveglianza di tali soggetti è da considerarsi se le precisioni richieste sono dell’ordine centimetrico, dunque, qualora alcune strutture possano risultare compromesse già con deformazioni inferiori al centimetro, allora tali apparati potrebbero non essere idonei al monitoraggio. Se poi si considerano i costi della strumentazione da utilizzarsi, rispetto ai costi di progettazione e realizzazione di tali opere allora quanto emerge è che tali sistemi potrebbero essere impiegati in modo sistematico almeno per quelle strutture di particolare rilevanza. Il problema sostanziale nascerebbe se per ogni struttura si dovesse realizzare ad hoc un centro localizzato di elaborazione del dato e personale che controlli con continuità i dati acquisiti. Nell’ottica però di ragionare come in premessa, allora non si realizzerebbe uno scenario di n centri di controllo per n strutture ma di un centro di controllo comune sia per la rete NRTK che per gli n siti di monitoraggio con un abbattimento drammatico dei costi di realizzazione gestione ed esercizio.
Analisi costi/benefici Nell’ipotesi di dover realizzare un sistema di monitoraggio ad esempio di una struttura, il costo della realizzazione del sistema può essere stimato considerando le seguenti azioni. Studio della struttura costituita dall’analisi dei movimenti attesi, individuazione dei siti da dover monitorare. Acquisto di un numero di sensori pari a quelli necessari e loro installazione previa realizzazione di supporti tali da poter garantire un idoneo ancoraggio alla struttura e una buona stabilità del sensore. La tipologia di sensore può essere a singola frequenza o a doppia frequenza a seconda della disponibilità di una stazione di riferimento in prossimità dell’area (da poter considerare nel progetto se il numero di punti di osservazione dovesse essere considerevole). Individuazione di locali dove installare il centro di controllo e monitoraggio. Acquisto del software di trattamento delle osservazioni e monitoraggio in tempo reale Costi di mantenimento e di sorveglianza. Costi di trasmissione dei dati in località remota. Come è facilmente intuibile la possibilità di raccogliere in un'unica struttura il monitoraggio di più soggetti consente di abbattere fortemente alcune voci quali il numero di stazioni di riferimento, il personale e i locali adibiti al monitoraggio.
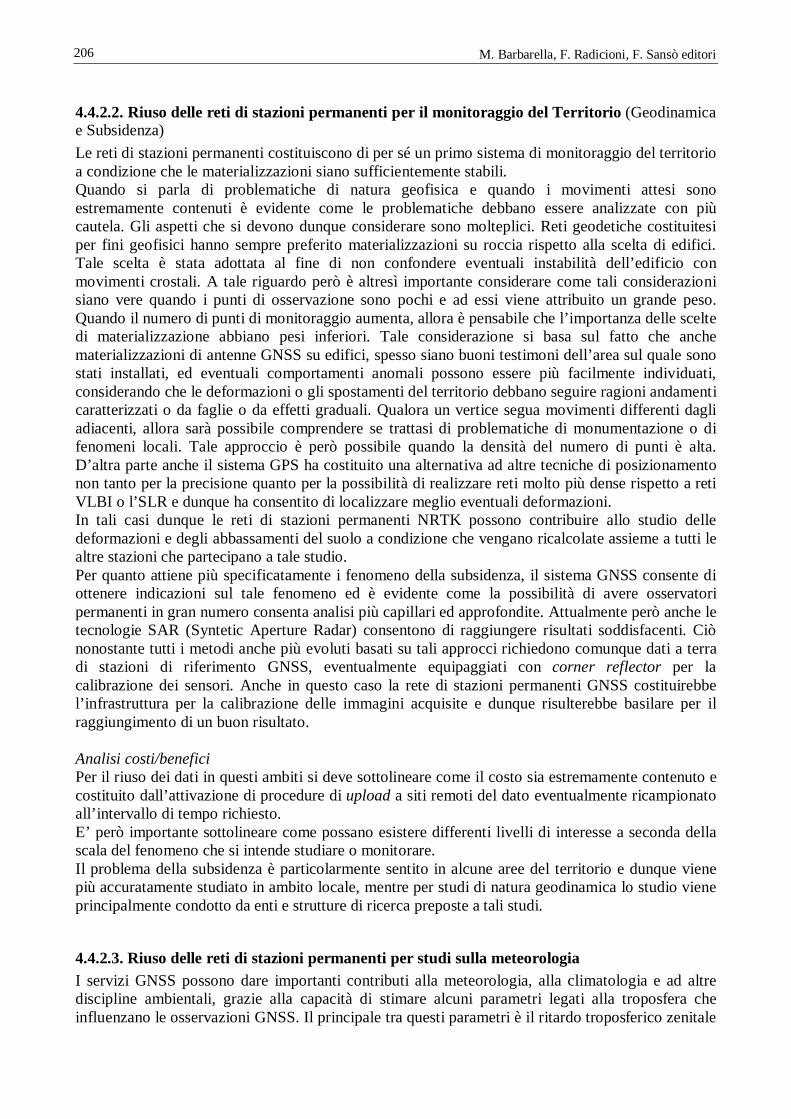
M. Barbarella, F. Radicioni, F. Sansò editori
206
4.4.2.2. Riuso delle reti di stazioni permanenti per il monitoraggio del Territorio (Geodinamica e Subsidenza) Le reti di stazioni permanenti costituiscono di per sé un primo sistema di monitoraggio del territorio a condizione che le materializzazioni siano sufficientemente stabili. Quando si parla di problematiche di natura geofisica e quando i movimenti attesi sono estremamente contenuti è evidente come le problematiche debbano essere analizzate con più cautela. Gli aspetti che si devono dunque considerare sono molteplici. Reti geodetiche costituitesi per fini geofisici hanno sempre preferito materializzazioni su roccia rispetto alla scelta di edifici. Tale scelta è stata adottata al fine di non confondere eventuali instabilità dell’edificio con movimenti crostali. A tale riguardo però è altresì importante considerare come tali considerazioni siano vere quando i punti di osservazione sono pochi e ad essi viene attribuito un grande peso. Quando il numero di punti di monitoraggio aumenta, allora è pensabile che l’importanza delle scelte di materializzazione abbiano pesi inferiori. Tale considerazione si basa sul fatto che anche materializzazioni di antenne GNSS su edifici, spesso siano buoni testimoni dell’area sul quale sono stati installati, ed eventuali comportamenti anomali possono essere più facilmente individuati, considerando che le deformazioni o gli spostamenti del territorio debbano seguire ragioni andamenti caratterizzati o da faglie o da effetti graduali. Qualora un vertice segua movimenti differenti dagli adiacenti, allora sarà possibile comprendere se trattasi di problematiche di monumentazione o di fenomeni locali. Tale approccio è però possibile quando la densità del numero di punti è alta. D’altra parte anche il sistema GPS ha costituito una alternativa ad altre tecniche di posizionamento non tanto per la precisione quanto per la possibilità di realizzare reti molto più dense rispetto a reti VLBI o l’SLR e dunque ha consentito di localizzare meglio eventuali deformazioni. In tali casi dunque le reti di stazioni permanenti NRTK possono contribuire allo studio delle deformazioni e degli abbassamenti del suolo a condizione che vengano ricalcolate assieme a tutti le altre stazioni che partecipano a tale studio. Per quanto attiene più specificatamente i fenomeno della subsidenza, il sistema GNSS consente di ottenere indicazioni sul tale fenomeno ed è evidente come la possibilità di avere osservatori permanenti in gran numero consenta analisi più capillari ed approfondite. Attualmente però anche le tecnologie SAR (Syntetic Aperture Radar) consentono di raggiungere risultati soddisfacenti. Ciò nonostante tutti i metodi anche più evoluti basati su tali approcci richiedono comunque dati a terra di stazioni di riferimento GNSS, eventualmente equipaggiati con corner reflector per la calibrazione dei sensori. Anche in questo caso la rete di stazioni permanenti GNSS costituirebbe l’infrastruttura per la calibrazione delle immagini acquisite e dunque risulterebbe basilare per il raggiungimento di un buon risultato. Analisi costi/benefici Per il riuso dei dati in questi ambiti si deve sottolineare come il costo sia estremamente contenuto e costituito dall’attivazione di procedure di upload a siti remoti del dato eventualmente ricampionato all’intervallo di tempo richiesto. E’ però importante sottolineare come possano esistere differenti livelli di interesse a seconda della scala del fenomeno che si intende studiare o monitorare. Il problema della subsidenza è particolarmente sentito in alcune aree del territorio e dunque viene più accuratamente studiato in ambito locale, mentre per studi di natura geodinamica lo studio viene principalmente condotto da enti e strutture di ricerca preposte a tali studi.
4.4.2.3. Riuso delle reti di stazioni permanenti per studi sulla meteorologia I servizi GNSS possono dare importanti contributi alla meteorologia, alla climatologia e ad altre discipline ambientali, grazie alla capacità di stimare alcuni parametri legati alla troposfera che influenzano le osservazioni GNSS. Il principale tra questi parametri è il ritardo troposferico zenitale
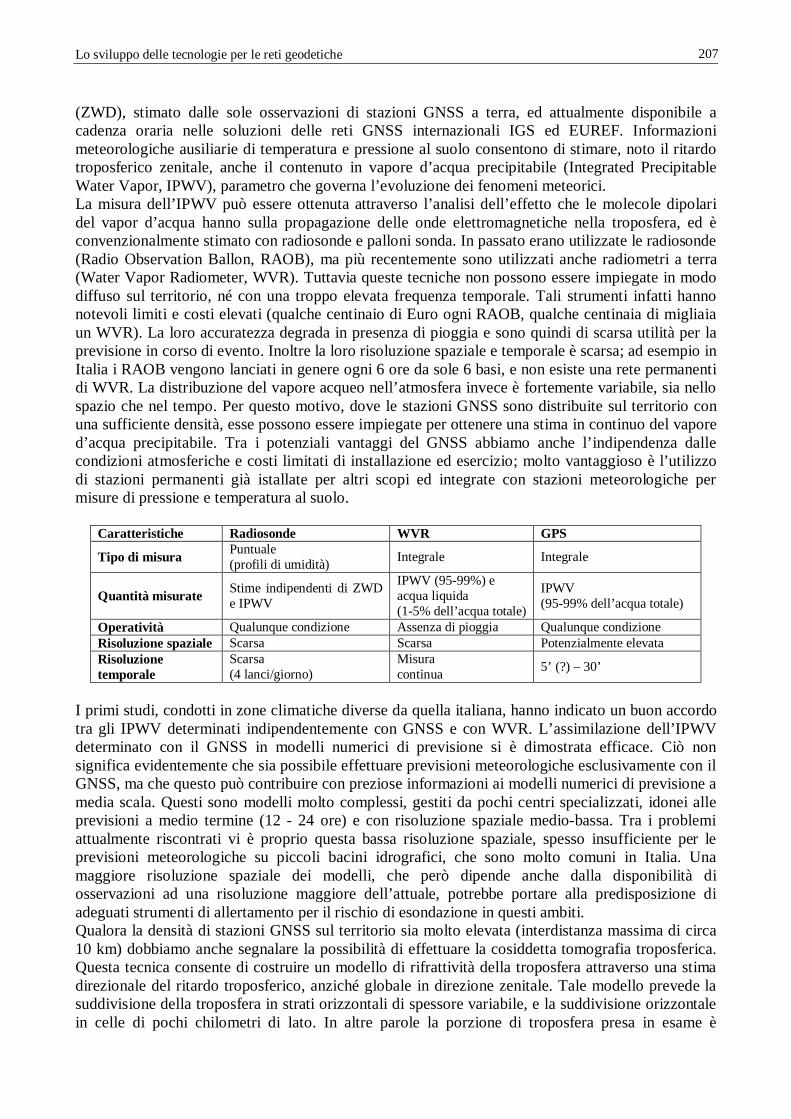
Lo sviluppo delle tecnologie per le reti geodetiche
207
(ZWD), stimato dalle sole osservazioni di stazioni GNSS a terra, ed attualmente disponibile a cadenza oraria nelle soluzioni delle reti GNSS internazionali IGS ed EUREF. Informazioni meteorologiche ausiliarie di temperatura e pressione al suolo consentono di stimare, noto il ritardo troposferico zenitale, anche il contenuto in vapore d’acqua precipitabile (Integrated Precipitable Water Vapor, IPWV), parametro che governa l’evoluzione dei fenomeni meteorici. La misura dell’IPWV può essere ottenuta attraverso l’analisi dell’effetto che le molecole dipolari del vapor d’acqua hanno sulla propagazione delle onde elettromagnetiche nella troposfera, ed è convenzionalmente stimato con radiosonde e palloni sonda. In passato erano utilizzate le radiosonde (Radio Observation Ballon, RAOB), ma più recentemente sono utilizzati anche radiometri a terra (Water Vapor Radiometer, WVR). Tuttavia queste tecniche non possono essere impiegate in modo diffuso sul territorio, né con una troppo elevata frequenza temporale. Tali strumenti infatti hanno notevoli limiti e costi elevati (qualche centinaio di Euro ogni RAOB, qualche centinaia di migliaia un WVR). La loro accuratezza degrada in presenza di pioggia e sono quindi di scarsa utilità per la previsione in corso di evento. Inoltre la loro risoluzione spaziale e temporale è scarsa; ad esempio in Italia i RAOB vengono lanciati in genere ogni 6 ore da sole 6 basi, e non esiste una rete permanenti di WVR. La distribuzione del vapore acqueo nell’atmosfera invece è fortemente variabile, sia nello spazio che nel tempo. Per questo motivo, dove le stazioni GNSS sono distribuite sul territorio con una sufficiente densità, esse possono essere impiegate per ottenere una stima in continuo del vapore d’acqua precipitabile. Tra i potenziali vantaggi del GNSS abbiamo anche l’indipendenza dalle condizioni atmosferiche e costi limitati di installazione ed esercizio; molto vantaggioso è l’utilizzo di stazioni permanenti già istallate per altri scopi ed integrate con stazioni meteorologiche per misure di pressione e temperatura al suolo.
Caratteristiche Radiosonde WVR GPS
Tipo di misura Puntuale (profili di umidità) Integrale Integrale
Quantità misurate Stime indipendenti di ZWD e IPWV
IPWV (95-99%) e acqua liquida (1-5% dell’acqua totale)
IPWV (95-99% dell’acqua totale)
Operatività Qualunque condizione Assenza di pioggia Qualunque condizione Risoluzione spaziale Scarsa Scarsa Potenzialmente elevata Risoluzione temporale
Scarsa (4 lanci/giorno)
Misura continua 5’ (?) – 30’
I primi studi, condotti in zone climatiche diverse da quella italiana, hanno indicato un buon accordo tra gli IPWV determinati indipendentemente con GNSS e con WVR. L’assimilazione dell’IPWV determinato con il GNSS in modelli numerici di previsione si è dimostrata efficace. Ciò non significa evidentemente che sia possibile effettuare previsioni meteorologiche esclusivamente con il GNSS, ma che questo può contribuire con preziose informazioni ai modelli numerici di previsione a media scala. Questi sono modelli molto complessi, gestiti da pochi centri specializzati, idonei alle previsioni a medio termine (12 - 24 ore) e con risoluzione spaziale medio-bassa. Tra i problemi attualmente riscontrati vi è proprio questa bassa risoluzione spaziale, spesso insufficiente per le previsioni meteorologiche su piccoli bacini idrografici, che sono molto comuni in Italia. Una maggiore risoluzione spaziale dei modelli, che però dipende anche dalla disponibilità di osservazioni ad una risoluzione maggiore dell’attuale, potrebbe portare alla predisposizione di adeguati strumenti di allertamento per il rischio di esondazione in questi ambiti. Qualora la densità di stazioni GNSS sul territorio sia molto elevata (interdistanza massima di circa 10 km) dobbiamo anche segnalare la possibilità di effettuare la cosiddetta tomografia troposferica. Questa tecnica consente di costruire un modello di rifrattività della troposfera attraverso una stima direzionale del ritardo troposferico, anziché globale in direzione zenitale. Tale modello prevede la suddivisione della troposfera in strati orizzontali di spessore variabile, e la suddivisione orizzontale in celle di pochi chilometri di lato. In altre parole la porzione di troposfera presa in esame è
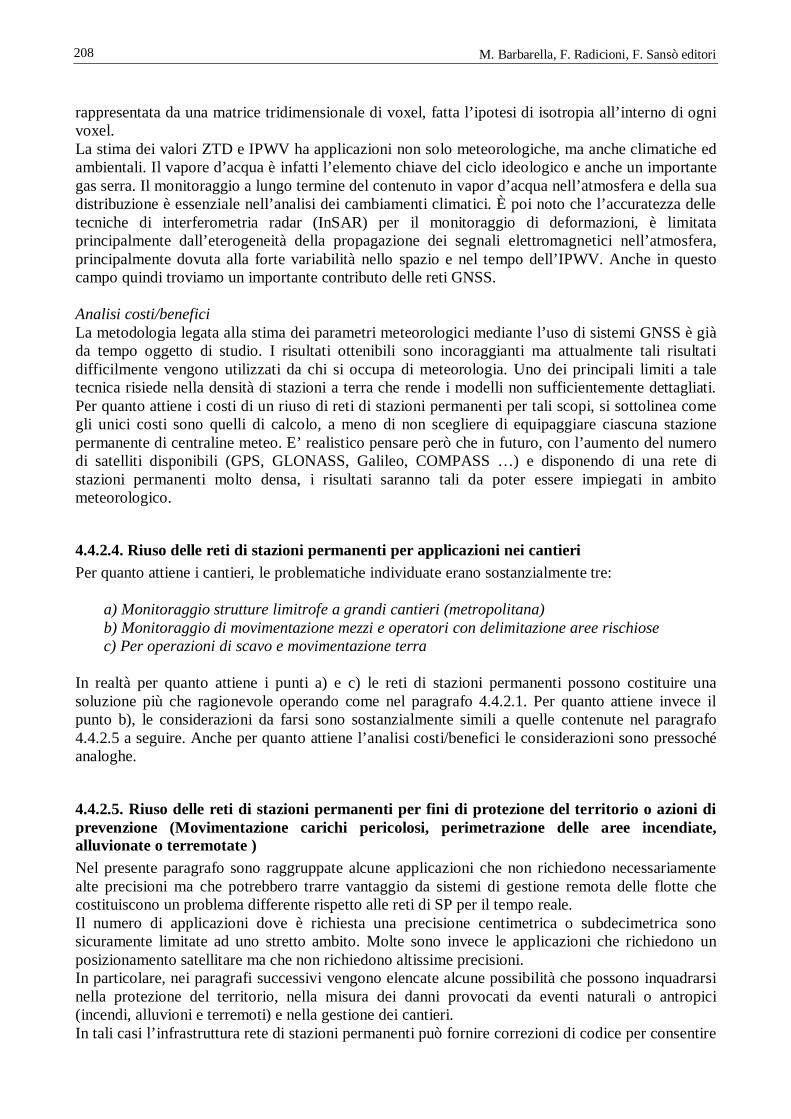
M. Barbarella, F. Radicioni, F. Sansò editori
208
rappresentata da una matrice tridimensionale di voxel, fatta l’ipotesi di isotropia all’interno di ogni voxel. La stima dei valori ZTD e IPWV ha applicazioni non solo meteorologiche, ma anche climatiche ed ambientali. Il vapore d’acqua è infatti l’elemento chiave del ciclo ideologico e anche un importante gas serra. Il monitoraggio a lungo termine del contenuto in vapor d’acqua nell’atmosfera e della sua distribuzione è essenziale nell’analisi dei cambiamenti climatici. È poi noto che l’accuratezza delle tecniche di interferometria radar (InSAR) per il monitoraggio di deformazioni, è limitata principalmente dall’eterogeneità della propagazione dei segnali elettromagnetici nell’atmosfera, principalmente dovuta alla forte variabilità nello spazio e nel tempo dell’IPWV. Anche in questo campo quindi troviamo un importante contributo delle reti GNSS. Analisi costi/benefici La metodologia legata alla stima dei parametri meteorologici mediante l’uso di sistemi GNSS è già da tempo oggetto di studio. I risultati ottenibili sono incoraggianti ma attualmente tali risultati difficilmente vengono utilizzati da chi si occupa di meteorologia. Uno dei principali limiti a tale tecnica risiede nella densità di stazioni a terra che rende i modelli non sufficientemente dettagliati. Per quanto attiene i costi di un riuso di reti di stazioni permanenti per tali scopi, si sottolinea come gli unici costi sono quelli di calcolo, a meno di non scegliere di equipaggiare ciascuna stazione permanente di centraline meteo. E’ realistico pensare però che in futuro, con l’aumento del numero di satelliti disponibili (GPS, GLONASS, Galileo, COMPASS …) e disponendo di una rete di stazioni permanenti molto densa, i risultati saranno tali da poter essere impiegati in ambito meteorologico.
4.4.2.4. Riuso delle reti di stazioni permanenti per applicazioni nei cantieri Per quanto attiene i cantieri, le problematiche individuate erano sostanzialmente tre:
a) Monitoraggio strutture limitrofe a grandi cantieri (metropolitana) b) Monitoraggio di movimentazione mezzi e operatori con delimitazione aree rischiose c) Per operazioni di scavo e movimentazione terra
In realtà per quanto attiene i punti a) e c) le reti di stazioni permanenti possono costituire una soluzione più che ragionevole operando come nel paragrafo 4.4.2.1. Per quanto attiene invece il punto b), le considerazioni da farsi sono sostanzialmente simili a quelle contenute nel paragrafo 4.4.2.5 a seguire. Anche per quanto attiene l’analisi costi/benefici le considerazioni sono pressoché analoghe.
4.4.2.5. Riuso delle reti di stazioni permanenti per fini di protezione del territorio o azioni di prevenzione (Movimentazione carichi pericolosi, perimetrazione delle aree incendiate, alluvionate o terremotate ) Nel presente paragrafo sono raggruppate alcune applicazioni che non richiedono necessariamente alte precisioni ma che potrebbero trarre vantaggio da sistemi di gestione remota delle flotte che costituiscono un problema differente rispetto alle reti di SP per il tempo reale. Il numero di applicazioni dove è richiesta una precisione centimetrica o subdecimetrica sono sicuramente limitate ad uno stretto ambito. Molte sono invece le applicazioni che richiedono un posizionamento satellitare ma che non richiedono altissime precisioni. In particolare, nei paragrafi successivi vengono elencate alcune possibilità che possono inquadrarsi nella protezione del territorio, nella misura dei danni provocati da eventi naturali o antropici (incendi, alluvioni e terremoti) e nella gestione dei cantieri. In tali casi l’infrastruttura rete di stazioni permanenti può fornire correzioni di codice per consentire
Lo sviluppo delle tecnologie per le reti geodetiche
209
all’utenza una navigazione o un rilievo con accuratezza metrica, più che sufficiente per la applicazioni elencate. In realtà la considerazione precedente deve anche tenere in considerazione come lo scenario attuale vede il diffondersi di sistemi di augmentation globali o comunque a copertura continentale che consentono il posizionamento con l’ausilio di satelliti geostazionari che inviano correzioni. Tali sistemi costituiscono una alternativa in alcune circostanze più semplice in quanto i ricevitori abilitati acquisiscono direttamente dal “cielo” sia i dati GNSS sia le correzioni senza l’ausilio di modem GPRS o UMTS che non sempre offrono copertura adeguata specialmente in zone montuose e lontano da centri abitati.
4.5. CONCLUSIONI Dalle indagini svolte sono emerse molteplici applicazioni dove le reti di stazioni permanenti possono contribuire alla sorveglianza del territorio. Nella ricerca in oggetto, a partire da una panoramica generale relativa ai soggetti che possono essere posti sotto sorveglianza (tramite sistemi di monitoraggio in tempo reale) ed elencati nei precedenti paragrafi, è stato condotto uno studio per poter valutare, considerando anche analisi costi/benefici, quali soggetti possano essere sorvegliati con l’uso di reti di stazioni permanenti o meglio come possano essere riutilizzate le reti di stazioni permanenti per altre applicazioni di sorveglianza. Da quanto emerge le reti di stazioni permanenti per il posizionamento in tempo reale possono essere impiegate senza particolari oneri aggiuntivi solo per scopi geodinamici, per lo studio della subsidenza ed in campo meteorologico. E’ però da sottolineare come in particolare per il primo aspetto si deve considerare come esistano, nel panorama nazionale, reti nate per tali scopi e dunque le reti di stazioni permanenti per posizionamento in tempo reale possono costituire un ulteriore raffittimento capace di migliorare le conoscenze dei fenomeni suddetti. Non solo, reti geodetiche per studi di geodinamica vengono realizzate considerando anche l’ubicazione di eventuali faglie mentre le reti per il posizionamento di precisione in tempo reale nascendo per soddisfare altre esigenze si presentano più omogeneamente distribuite nel territorio. Esiste tuttavia un numero notevole di possibili strutture, edifici a rischio, frane ed applicazioni in cantiere dove le reti di stazioni permanenti possono giocare un ruolo di infrastruttura già esistente per scopi di posizionamento di precisione ma riutilizzabile anche come centro di monitoraggio. Per tali scopi è però necessario integrare con ricevitori aggiuntivi (anche a basso costo) le reti in oggetto, collocando tali sensori aggiuntivi sui siti da monitorare. Dunque le stazioni permanenti verrebbero utilizzate come stazioni di riferimento per i siti di sorveglianza. In questo scenario il valore aggiunto è duplice: da un lato le stazioni permanenti, sottoposte a calcoli continui, vengono monitorate e possono fornire indicazioni sulla reale stabilità dell’antenna utilizzata come riferimento rispetto al sito di monitoraggio e dall’altro, il centro di controllo delle reti di stazioni permanenti può fungere anche da centro di monitoraggio, riducendo dunque gli oneri di gestione principalmente attribuibili al personale preposto alla sorveglianza e alla manutenzione. Infine, esistono altre applicazioni individuate nel contesto della sorveglianza del territorio, che per via delle precisioni richieste, non richiedono strettamente l’uso di reti di stazioni permanenti, soprattutto alla luce di sistemi di augmentation capaci di fornire precisioni metriche in tutto il territorio.
M. Barbarella, F. Radicioni, F. Sansò editori
210
4.6. BIBLIOGRAFIA Monitoraggio di strutture Barnes J., Rizos C., Wang J., Meng X., Cosser E., Dodson A. H., Roberts G. W. (2003): “The monitoring of bridge movements using GPS and pseudolites”, 11th International Symposium on deformation measurements, Santorini Greece, 25-28 May, 563-570.
Brownjohn J., Rizos C., Tan G.H., Pan T.C. (2004): “Real-time long-term monitoring of static and dynamic displacement of an office tower, combining RTK GPS and accelerometer data”, Session 1-Surveying in construction, 1st
FIG International Symposium on engineering surveys for construction works and structural engineering, Nottingham United Kingdom 28 June-1 July.
Cazzaniga N. , L. Pinto, F. Bettinali, A. Frigerio, 2006, Structural Monitoring with GPS and Accelerometers: The Chimney of the Power Plant in Piacenza, Italy.
Farina A., 2006, Valutazione dei livelli di vibrazioni in edifici residenziali.
Li X., Peng G.-D., Rizos C., Tamura Y., Yoshida A., (2004): “Seismic response of a tower as measured by an integrated RTK-GPS system”, Session 2-Seismic response of structure, 1st FIG International Symposium on engineering surveys for construction works and structural engineering, Nottingham United Kingdom 28 June-1 July.
Materazzi A. L., 2006, Effetti delle vibrazioni di origine ambientale sulle costruzioni civili.
Meng X., Roberts G., Dodson A., Andreotti M., Cosser E., Meo M. (2004): “Development of a prototype remote structural health monitoring system”, Session 4-Structural health monitoring of bridges, 1st FIG International Symposium on engineering surveys for construction works and structural engineering, Nottingham United Kingdom 28 June-1 July.
Ogaja C., Rizos C., Wang J., Brownjohn J. (2001): “A dynamic GPS system for on-line structural monitoring”, International Symposium on kinematic system in geodesy, geomatic and navigations, Baulf Canada, 5-8 June, 290-297.
Tamura Y., A. Yoshida, R. Ishibashi, M. Matsui, L. C. Pagnini, 2002, Measurement of Wind Induced Response of Buildings Using RTK-GPS and Integrity Monitoring.
Xiaojing L., 2004, The Advantage of an Integrated RTK-GPS System in Monitoring Structural Deforming.
Xiaojing L., C. Rizos, L. Ge, E. Ambikairajah, 2005, 3D Analysis of Structural Response Monitored Using Integrated GPS and Accelerometer System.
Yoshida A., Tamura Y., Masahiro M., Ishibashi S., Pagnini L.C. (2002): “Measurement of wind-induced response of building using RTK-GPS and integrity monitoring” 2nd International Symposium on advances in wind & structures, 497-504.
Monitoraggio del territorio Bitelli G., Bonsignore F., Unguendoli M.: "Levelling and GPS networks for ground subsidence monitoring in the Southern Po Valley". Journal of Geodynamics, 30, pp. 355-369, 2000.
Bitelli G., Vittuari L.: Integrated methodologies for monitoring of subsidence effects on urban areas and buildings. Proceedings Int. Conference Heritage Protection: construction aspects, ISBN 953-95428-1-2, 147-155, SECON HDGK, Dubrovnik, 2006 Strozzi T., Wegmüller U., Tosi L., Bitelli G. E Spreckels V.: Land Subsidence Monitoring with Differential SAR Interferometry. Photogrammetric Engineering and Remote Sensing, vol. 67, 2, 1261-1270, 2001
Monitoraggio della troposfera Bar-Sever, Y., P. M. Kroger, and J. A. Borjesson [1998], Estimating Horizontal Gradients of Tropospheric Path Delay with a Single GPS Receiver, Journal of Geophysical Research, Vol. 103, No. B3, pp. 5019-5035, March 10, 1998
Bevis, B.G., S. Bussinger, T.A. Herring, C. Rocken, R.A. Anthes, R.H. Ware, 1992. GPS Meteorology: Remote Sensing of Atmospheric Water Vapour Using the Global Positioning System, J. Geophys. Res., 97, 15787-15801.
Beutler, G., I. Bauersima, S. Botton, W. Gurtner, M. Rothacher, and T. Bevis, M., St. Businger, Th. A. Herring et al [1992], GPS Meteorology: Remote Sensing of Atmospheric Water Vapour Using the Global Positioning System,
Lo sviluppo delle tecnologie per le reti geodetiche
211
Journal of Geophysical Research, Volume 97, pp. 15,787-15,801
Bevis, M., St. Businger, St. Chriswell et al. [1994], GPS Meteorology: Mapping Zenith Wet Delays onto Precipitable Water, Journal of Applied Meteorology, Vol. 33, pp. 379-386, March 1994
Black, H. D. [1978], An Easily Implemented Algorithm for the Tropospheric Range Correction, Journal of Geophysical Research, Vol. 83, No. B4, pp. 1825-1823, 1978
Chao, C. C. [1972], A Model for Tropospheric Calibration from Daily Surface and Radiosonde Balloon Measurements, Technical Memorandum 391-350, Jet Propulsion Laboratory, Pasadena, California, USA, 1972.
Chen, G. and T. A. Herring [1997], Effects of Atmospheric Azimuthal Asymmetry on the Analysis of Space Geodetic Data, J. of Geophys. Res., Vol 102, No B9, pp. 20,489-20,502, 1997-09-10
Davis, J. L., T. A. Herring, I. I. Shapiro, A. E. E. Rogers, and G. Elgered [1985], Geodesy by Radio Interferometry: Effects of Atmospheric Modeling Errors on Estimates of Baseline Length, Radio Science, Vol. 20, No. 6, pp. 1593-1607, Nov.-Dec. 1985
Davis J. L., G. Elgered, A. E. Niell, And C. E. Kuehn [1993], Ground-Based Measurement of Gradients in the "Wet" Radio Refractivity of Air, Radio Science, Vol. 28, No. 6, pp. 1003-1018, Nov.-Dec. 1993
Duan, J., M. Bevis, P. Fang, Y. Bock, St. Chiswell, St. Businger et al. [1996], GPS Meteorology: Direct Estimation of the Absolute Value of Precipitable Water, Journal of Applied Meteorology, Volume 35, pp. 830-838, June 1996
Elgered, G., J. L. Davis, T. A. Herring, and I. I. Shapiro [1991], Geodesy by Radio Interferometry: Water Vapour Radiometry for Estimation of Wet Delay, Journal of Geophysical Re-search, Vol. 96, No. B4, pp. 6541-6555, April 10, 1991
Elgered, G. [1993], Tropospheric Radio-Path Delay From Ground-Based Microwave Radiometry, in: A. JANSSEN (ed.) [1993], Atmospheric Remote Sensing by Microwave Radiometry, Wiley-Interscience, pp. 215-258
Elliott, W. P., And D. J. Gaffen [1991], On the Utility of Radiosonde Humidity Archives for Climate Studies, Bull. Am. Meteorol. Soc., 72, 1507, 1991 9. References 325
Emardson, T. R. [1998], Studies of Atmospheric Water Vapour Using the Global Positioning System, Chalmers University of Technology, Sweden, Technical Report No. 339
England M. N., R. A. Ferrare, S. H. Melfi, D. N. Whiteman, and T. A. Clark [1992], Atmospheric Water Vapour Measurements: Comparison of Microwave Radiometry and Lidar, Journal of Geophysical Research, Vol. 97, pp. 899-916, Jan. 20, 1992
Gabor, M. [1997], Remote Sensing of Water Vapour From GPS Receivers, ASE 389P - Remote Sensing from Space, University of Texas at Austin, Spring 1997 mid-term project; http://www.ae.utexas.edu/courses/ase389/midterm/gabor/gabor.html
Gendt, G. [1997], SINEX_TRO - Solution (Software/technique) INdependent EXchange Format for combination of Tropospheric estimates Version 0.01 (March 01, 1997), ftp://cddisa.gsfc.nasa.gov/pub/formats/zpd_sinex.format
Herring, Th. A., J. L. Davis, and I. I. Shapiro [1990], Geodesy by Radio Interferometry: The Application of Kalman Filtering to the Analysis of Very Long Baseline Interferometry Data, Journal of Geophysical Research, Vol. 95, No. B8, pp. 12,561-12,581, August 10, 1990
Herring, T. A. [1992], Modeling Atmospheric Delays in the Analysis of Space Geodetic Data, in: DE MUNCK, J. C and Spoelstra, T. A. TH (eds.), Refraction of Transatmospheric Signals in Geodesy, Proceedings of the Symposium, Netherlands Geodetic Commission, Publications on Geodesy, New Series, Number 36, The Hague, The Netherlands, May 19-22, 1992
Ifadis, I. [1986], The Atmospheric Delay of Radio Waves: Modeling the Elevation Dependence on a Global Scale, Technical Report no. 38L, School of Electrical and Computer Engineering, Chalmers University of Technology, Göteborg, Sweden, 1986
Kanamitsu, M., J. C. Alpert, K. A. Campana, P. M. Caplan, D. G. Deaven, M. Iredell, B. Katz, H.-L. Pan, J. Sela, and G. H. White [1991], Recent Changes Implemented into the Global Forecast System at NMC, Weather and Forecasting, Vol. 6, pp. 425-435, 1991
Kuo, Y.-H., Y.-R. Guo and E. R. Westwater [1993], Assimilation of Precipitable Water Measurements into a Mesoscale Numerical Model, Monthly Weather Review, pp. 1215-1238
Linlin Ge, Shaowei Han, Chris Rizos, The double interpolation and double prediction (DIDP) approach for InSAR and GPS integration, IAPRS, Vol. XXXIII, Amsterdam, 2000.
M. Barbarella, F. Radicioni, F. Sansò editori
212
Marini, J. W. [1972], Correction of Satellite Tracking Data for an Arbitrary Tropospheric Profile, Radio Science, Volume 7, Number 2, pp. 223-231, February 1972
Marini, J. W., And C. W. Murray [1973], Correction of Laser Range Tracking Data for Atmospheric Refraction at Elevations above 10 Degrees, NASA report X-591-73-351, Goddard Space Flight Center, 1973
Melbourne, W. G. ET AL [1994], The Application of Spaceborne GPS to Atmospheric Limb Sounding and Global Change Monitoring, JPL Publication 94-18, NASA/JPL, Pasadena, CA, April 1994
Mendes, V. B. and R. B. Langley [1998a], Optimization of Tropospheric Delay Mapping Function Performance for High-Precision Geodetic Applications, Proceedings of DORIS Days, 27-29 April 1998, Toulouse, France
Mendes, V. B. And R. B. Langley [1998b], Tropospheric Zenith Delay Prediction Accuracy for Airborne GPS High-Precision Positioning, Proceedings of The Institute of Navigation 54th Annual Meeting, Denver, CO, U.S.A., 1-3 June; pp. 337-347
Mendes, V. B., G. Prates, L. Santos, And R. B. Langley [2000], An Evaluation of the Accuracy of Models of the Determination of the Weighted Mean Temperature of the Atmosphere, Proceedings of ION, 2000 National Technical Meeting, January 26-28, 2000, Pacific Hotel Disney-land, Anaheim, CA
Mockler, S. B. [1995], Water Vapour in the Climate System, Special Report, American Geo-physical Union (AGU), 2000 Florida Ave., N.W., Washington, DC 20009, ISBN 0-87590-865-9, December 1995; WWW: http://www.agu.org/sci_soc/mockler.html
Oltmans, S. J., and D. J. Hofmann [1995], Increase in Lower-Stratospheric Water Vapour at a Mid-Latitude Northern Hemisphere Site from 1981 to 1994, Nature, 374, 146, 1995
Owens, J. C. [1967], Optical Refractive Index of Air: Dependence on Pressure, Temperature and Composition, Applied Optics, 6, 51-58, 1967
Rind, D., E.-W. Chiou, W. Chu, S. Oltmans, J. Lerner, J. Larsen, M. P. Mccor-Mick, and L. Mcmaster [1993], Overview of the Stratospheric Aerosol and Gas Experiment II Water Vapour Observations: Method, Validation, and Data Characteristics, J. Geophys. Res., 98, 4835, 1993
Rocken C., F. S. Solheim, R. H. Ware, M. Exner, D. Martin, and M. Rothacher [1997], Application of IGS Data to GPS Sensing of the Atmosphere for Weather and Climate Re-search, found in WWW under http://www.unavco.ucar.edu/docs/science/pos_pap/ (apparently re-moved/not found on 03 Oct 2000)
Saastamoinen, J. [1972], Atmospheric Correction for the Troposphere and Stratosphere in Radio Ranging of Satellites, in: Henriksen, The Use of Artificial Satellites for Geodesy, Geo-phys. Monogr. Ser., vol. 15, pp. 247-251, AGU, Washington, D.C., 1972
Schueler T., On Ground-Based GPS Tropospheric Delay Estimation, Dissertation.
Schueler, T. [1998], Preliminary Analysis of Stochastic Properties of Tropospheric Zenith Path Delay Time Series, Technical Report IFEN-TropAC-TN-004-02, Institute of Geodesy and Navigation, University FAF Munich, Germany, November 1998, available via http://ifen.bauv.unibw-muenchen.de/Forschung/TropAC/docs/TN004.PDF
Schueler, T., G. W. Hein, and B. Eissfeller [1999], GNSS Zenith Wet Delay Estimation Considering Their Stochastic Properties, Proceedings of GNSS '99, 3rd European Symposium, Genua, Italy, Oct. 5-8, 1999, http://ifen.bauv.unibwmuenchen.de/Forschung/TropAC/docs/gnss99/index.html
Schueler, T., G. W. Hein, and B. Eissfeller [2000a], On the Use of Numerical Weather Fields for Troposphere Delay Estimation in Wide Area Augmentation Systems, Proceedings of GNSS 2000, Royal Institute of Navigation, Edinburgh, Scotland, May 1-4, 2000, http://ifen.bauv.unibw-muenchen.de/Forschung/TropAC/docs/GNSS2000.PDF
Schueler, T., G. W. Hein, and B. Eissfeller [2000b], Towards an Optimal Strategy for GPS Wet Delay Kalman Filtering, Proceedings of IAIN 2000/ION Annual Meeting, San Diego, Catamaran Hotel, 26-28 June 2000
Schueler, T., G. W. Hein, and B. Eissfeller [2000c], Improved Tropospheric Delay Modeling Using an Integrated Approach of Numerical Weather Models and GPS, Proceedings of ION GPS 2000, The Institute of Navigation, Salt Lake City, Utah, USA, 19-22 September 2000
Spilker, J. J. [1996], Tropospheric Effects on GPS, in: SPILKER and PARKINSON (eds.), GPS Theory and Applications; Vol. I, Progress in Astronautics and Aeronautics, Vol. 163, pp. 517-546, 1996
Starr, D. O., and S. H. Melfi (eds.) [1991], The Role of Water Vapour in Climate: A Strategic Research Plan for the Proposed GEWEX Water Vapour Project (GVaP), NASA Conf. Publ., CP-3120, 50 pp., 1991
Thayer, G. D. [1974], An Improved Equation for the Radio Refractive Index of Air, Radio Science, Vol. 9, pp. 803-807, 1974

Lo sviluppo delle tecnologie per le reti geodetiche
213

M. Barbarella, F. Radicioni, F. Sansò editori
214
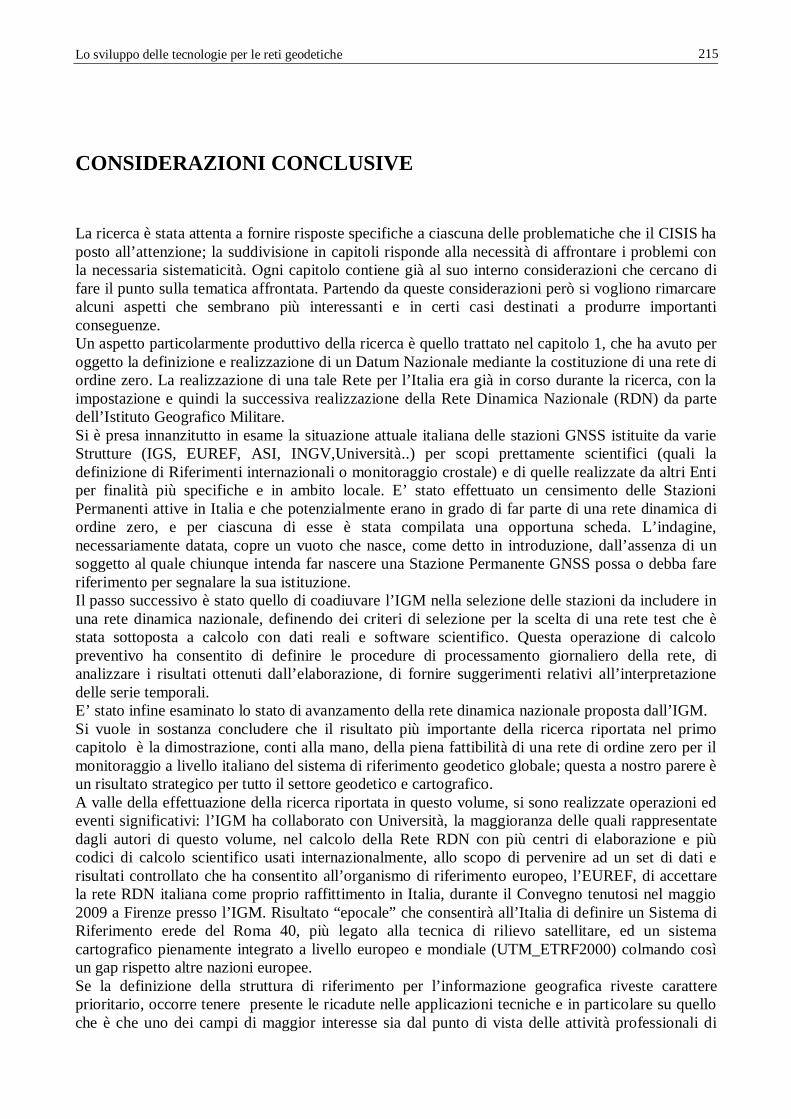
Lo sviluppo delle tecnologie per le reti geodetiche
215
CONSIDERAZIONI CONCLUSIVE
La ricerca è stata attenta a fornire risposte specifiche a ciascuna delle problematiche che il CISIS ha posto all’attenzione; la suddivisione in capitoli risponde alla necessità di affrontare i problemi con la necessaria sistematicità. Ogni capitolo contiene già al suo interno considerazioni che cercano di fare il punto sulla tematica affrontata. Partendo da queste considerazioni però si vogliono rimarcare alcuni aspetti che sembrano più interessanti e in certi casi destinati a produrre importanti conseguenze. Un aspetto particolarmente produttivo della ricerca è quello trattato nel capitolo 1, che ha avuto per oggetto la definizione e realizzazione di un Datum Nazionale mediante la costituzione di una rete di ordine zero. La realizzazione di una tale Rete per l’Italia era già in corso durante la ricerca, con la impostazione e quindi la successiva realizzazione della Rete Dinamica Nazionale (RDN) da parte dell’Istituto Geografico Militare. Si è presa innanzitutto in esame la situazione attuale italiana delle stazioni GNSS istituite da varie Strutture (IGS, EUREF, ASI, INGV,Università..) per scopi prettamente scientifici (quali la definizione di Riferimenti internazionali o monitoraggio crostale) e di quelle realizzate da altri Enti per finalità più specifiche e in ambito locale. E’ stato effettuato un censimento delle Stazioni Permanenti attive in Italia e che potenzialmente erano in grado di far parte di una rete dinamica di ordine zero, e per ciascuna di esse è stata compilata una opportuna scheda. L’indagine, necessariamente datata, copre un vuoto che nasce, come detto in introduzione, dall’assenza di un soggetto al quale chiunque intenda far nascere una Stazione Permanente GNSS possa o debba fare riferimento per segnalare la sua istituzione. Il passo successivo è stato quello di coadiuvare l’IGM nella selezione delle stazioni da includere in una rete dinamica nazionale, definendo dei criteri di selezione per la scelta di una rete test che è stata sottoposta a calcolo con dati reali e software scientifico. Questa operazione di calcolo preventivo ha consentito di definire le procedure di processamento giornaliero della rete, di analizzare i risultati ottenuti dall’elaborazione, di fornire suggerimenti relativi all’interpretazione delle serie temporali. E’ stato infine esaminato lo stato di avanzamento della rete dinamica nazionale proposta dall’IGM. Si vuole in sostanza concludere che il risultato più importante della ricerca riportata nel primo capitolo è la dimostrazione, conti alla mano, della piena fattibilità di una rete di ordine zero per il monitoraggio a livello italiano del sistema di riferimento geodetico globale; questa a nostro parere è un risultato strategico per tutto il settore geodetico e cartografico. A valle della effettuazione della ricerca riportata in questo volume, si sono realizzate operazioni ed eventi significativi: l’IGM ha collaborato con Università, la maggioranza delle quali rappresentate dagli autori di questo volume, nel calcolo della Rete RDN con più centri di elaborazione e più codici di calcolo scientifico usati internazionalmente, allo scopo di pervenire ad un set di dati e risultati controllato che ha consentito all’organismo di riferimento europeo, l’EUREF, di accettare la rete RDN italiana come proprio raffittimento in Italia, durante il Convegno tenutosi nel maggio 2009 a Firenze presso l’IGM. Risultato “epocale” che consentirà all’Italia di definire un Sistema di Riferimento erede del Roma 40, più legato alla tecnica di rilievo satellitare, ed un sistema cartografico pienamente integrato a livello europeo e mondiale (UTM_ETRF2000) colmando così un gap rispetto altre nazioni europee. Se la definizione della struttura di riferimento per l’informazione geografica riveste carattere prioritario, occorre tenere presente le ricadute nelle applicazioni tecniche e in particolare su quello che è che uno dei campi di maggior interesse sia dal punto di vista delle attività professionali di
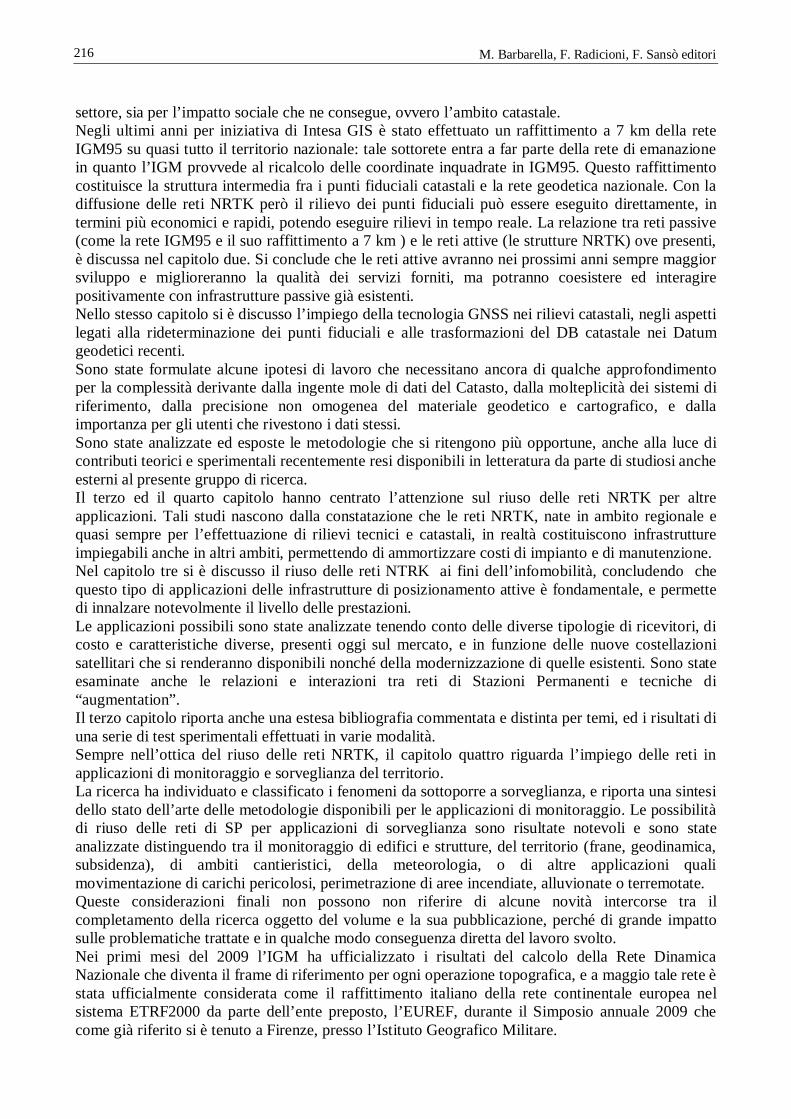
M. Barbarella, F. Radicioni, F. Sansò editori
216
settore, sia per l’impatto sociale che ne consegue, ovvero l’ambito catastale. Negli ultimi anni per iniziativa di Intesa GIS è stato effettuato un raffittimento a 7 km della rete IGM95 su quasi tutto il territorio nazionale: tale sottorete entra a far parte della rete di emanazione in quanto l’IGM provvede al ricalcolo delle coordinate inquadrate in IGM95. Questo raffittimento costituisce la struttura intermedia fra i punti fiduciali catastali e la rete geodetica nazionale. Con la diffusione delle reti NRTK però il rilievo dei punti fiduciali può essere eseguito direttamente, in termini più economici e rapidi, potendo eseguire rilievi in tempo reale. La relazione tra reti passive (come la rete IGM95 e il suo raffittimento a 7 km ) e le reti attive (le strutture NRTK) ove presenti, è discussa nel capitolo due. Si conclude che le reti attive avranno nei prossimi anni sempre maggior sviluppo e miglioreranno la qualità dei servizi forniti, ma potranno coesistere ed interagire positivamente con infrastrutture passive già esistenti. Nello stesso capitolo si è discusso l’impiego della tecnologia GNSS nei rilievi catastali, negli aspetti legati alla rideterminazione dei punti fiduciali e alle trasformazioni del DB catastale nei Datum geodetici recenti. Sono state formulate alcune ipotesi di lavoro che necessitano ancora di qualche approfondimento per la complessità derivante dalla ingente mole di dati del Catasto, dalla molteplicità dei sistemi di riferimento, dalla precisione non omogenea del materiale geodetico e cartografico, e dalla importanza per gli utenti che rivestono i dati stessi. Sono state analizzate ed esposte le metodologie che si ritengono più opportune, anche alla luce di contributi teorici e sperimentali recentemente resi disponibili in letteratura da parte di studiosi anche esterni al presente gruppo di ricerca. Il terzo ed il quarto capitolo hanno centrato l’attenzione sul riuso delle reti NRTK per altre applicazioni. Tali studi nascono dalla constatazione che le reti NRTK, nate in ambito regionale e quasi sempre per l’effettuazione di rilievi tecnici e catastali, in realtà costituiscono infrastrutture impiegabili anche in altri ambiti, permettendo di ammortizzare costi di impianto e di manutenzione. Nel capitolo tre si è discusso il riuso delle reti NTRK ai fini dell’infomobilità, concludendo che questo tipo di applicazioni delle infrastrutture di posizionamento attive è fondamentale, e permette di innalzare notevolmente il livello delle prestazioni. Le applicazioni possibili sono state analizzate tenendo conto delle diverse tipologie di ricevitori, di costo e caratteristiche diverse, presenti oggi sul mercato, e in funzione delle nuove costellazioni satellitari che si renderanno disponibili nonché della modernizzazione di quelle esistenti. Sono state esaminate anche le relazioni e interazioni tra reti di Stazioni Permanenti e tecniche di “augmentation”. Il terzo capitolo riporta anche una estesa bibliografia commentata e distinta per temi, ed i risultati di una serie di test sperimentali effettuati in varie modalità. Sempre nell’ottica del riuso delle reti NRTK, il capitolo quattro riguarda l’impiego delle reti in applicazioni di monitoraggio e sorveglianza del territorio. La ricerca ha individuato e classificato i fenomeni da sottoporre a sorveglianza, e riporta una sintesi dello stato dell’arte delle metodologie disponibili per le applicazioni di monitoraggio. Le possibilità di riuso delle reti di SP per applicazioni di sorveglianza sono risultate notevoli e sono state analizzate distinguendo tra il monitoraggio di edifici e strutture, del territorio (frane, geodinamica, subsidenza), di ambiti cantieristici, della meteorologia, o di altre applicazioni quali movimentazione di carichi pericolosi, perimetrazione di aree incendiate, alluvionate o terremotate. Queste considerazioni finali non possono non riferire di alcune novità intercorse tra il completamento della ricerca oggetto del volume e la sua pubblicazione, perché di grande impatto sulle problematiche trattate e in qualche modo conseguenza diretta del lavoro svolto. Nei primi mesi del 2009 l’IGM ha ufficializzato i risultati del calcolo della Rete Dinamica Nazionale che diventa il frame di riferimento per ogni operazione topografica, e a maggio tale rete è stata ufficialmente considerata come il raffittimento italiano della rete continentale europea nel sistema ETRF2000 da parte dell’ente preposto, l’EUREF, durante il Simposio annuale 2009 che come già riferito si è tenuto a Firenze, presso l’Istituto Geografico Militare.

Lo sviluppo delle tecnologie per le reti geodetiche
217
Parallelamente l’IGM in collaborazione con il Comitato Permanente sui Sistemi Geografici del CISIS hanno proposto nel contesto delle attività relative alla attuazione del codice dell’amministrazione digitale un DPCM (Decreto della Presidenza del Consiglio dei Ministri) che ha anch’esso come tema l’adozione da parte di tutte le pubbliche amministrazioni del nuovo sistema geodetico nazionale materializzato dalla Rete Dinamica Nazionale. Vari sono i contenuti innovativi presenti nel documento, soprattutto in relazione ad obblighi per tutte le pubbliche amministrazioni: la sua adozione per i nuovi rilievi e di predisposizione di piani operativi per la pubblicazione dei dati geografici pregressi nel nuovo sistema di riferimento; la compilazione su sito web CNIPA della scheda di censimento delle SP ( scheda peraltro derivata da quella adottata nel censimento presente nel capitolo uno); la pubblicazione su sito web del gestore di ogni Stazione Permanente GNSS dei dati acquisiti a 30 secondi. Questo è il punto di partenza per il molto lavoro che ci attende. Gli autori sono consapevoli che questa ricerca non può essere esaustiva: non è un commento di rito, ma la consapevolezza che i problemi affrontati sono da un lato pieni di risvolti di grande interesse pratico ancora da indagare e dall’altro lo sviluppo continuo delle tecnologie per non parlare delle possibilità offerte dalle altre costellazioni satellitari, indurrebbe a rivisitare con idee nuove le proposte di soluzione ritenute consolidate.
I COORDINATORI DELLA RICERCA
Maurizio Barbarella, Fabio Radicioni e Fernando Sansò