Macchine e Sistemi per l’Energia e la Propulsione - cap2... · Le combustioni a carica...
20
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.1 Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13 Macchine e Sistemi per l’Energia e la Propulsione (cod. 66172) Anno Accademico 2012/13 Motori a Combustione Interna alternativi (MCI) (prof. Massimo Capobianco) 2 – Problematiche operative dei MCI 2.1 – I processi di combustione nei MCI 2.1.1 - Motori ad accensione comandata Peculiarità dei motori ad accensione comandata è quella di funzionare con cariche premiscelate; infatti, sia che sfruttino uno schema ad iniezione indiretta del combustibile nei condotti di aspirazione sia che l’iniezione avvenga direttamente in camera di combustione, la fase di miscelazione combustibile-comburente non è contestuale ma precede l’inizio della combustione. L’effetto della premiscelazione è quello di ottenere una distribuzione omogenea di α nella camera di combustione o, al più, un sua ben precisa e voluta distribuzione nel caso dei motori ad iniezione diretta con carica stratificata. Le combustioni a carica premiscelata necessitano di un impianto esterno di accensione; nei MCI ad accensione comandata tipicamente è la candela di accensione ad innescare il fronte di fiamma che spazza poi tutta la camera di combustione. La velocità del fronte di fiamma all’interno della camera di combustione non è elevata se confrontata con le tempistiche tipiche di un m.a.c. (generalmente tale velocità è compresa fra 10 e 50 m/s). Esempio Nel caso di candela posta lateralmente in una camera di combustione piatta di un motore avente alesaggio D=0,1m, nell’ipotesi che il fronte di fiamma si muova alla velocità di 30 m/s, occorrono circa 3,33 ms affinchè il fronte di fiamma attraversi l’intera camera di combustione. Nel caso di un MCI 4T che operi ad un regime n pari a 3000 giri/min, l’angolo θ di rotazione dell’albero motore corrispondente alla fase di combustione risulta quindi di circa 60°. Già da questo semplice esempio si nota come il fenomeno della combustione nei m.a.c. sia abbastanza lento e progressivo. Tuttavia c’è un altro aspetto di grande importanza per la comprensione del processo di combustione e la determinazione del valore più appropriato dell’angolo θ ACC di anticipo di accensione: infatti la combustione interessa una massa di combustibile non costante nel tempo. La spiegazione di questo fenomeno risulta semplice ipotizzando, in forma semplificata, che il fronte di fiamma si propaghi con velocità costante per onde sferiche concentriche, partendo dalla zona di innesco verso la periferia. In tal caso la massa di combustibile coinvolta cresce con il cubo della distanza percorsa dal punto di innesco, ovvero con il cubo del tempo (o dell’angolo di manovella). Questo andamento crescente della derivata δM/δθ giustifica l’adozione di un anticipo dell’istante di accensione rispetto alla posizione di p.m.s., necessario per consentire di avviare la combustione e di sfruttare al meglio l’energia ad essa associata nella fase utile di espansione. Dal momento che la quantità di combustibile che brucia nella prima parte della combustione è relativamente modesta, il lavoro negativo compiuto tra θ ACC
Transcript of Macchine e Sistemi per l’Energia e la Propulsione - cap2... · Le combustioni a carica...
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.1
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Macchine e Sistemi per l’Energia e la Propulsione (cod. 66172)
Anno Accademico 2012/13
Motori a Combustione Interna alternativi (MCI) (prof. Massimo Capobianco)
2 – Problematiche operative dei MCI
2.1 – I processi di combustione nei MCI
2.1.1 - Motori ad accensione comandata
Peculiarità dei motori ad accensione comandata è quella di funzionare con cariche premiscelate;
infatti, sia che sfruttino uno schema ad iniezione indiretta del combustibile nei condotti di
aspirazione sia che l’iniezione avvenga direttamente in camera di combustione, la fase di
miscelazione combustibile-comburente non è contestuale ma precede l’inizio della combustione.
L’effetto della premiscelazione è quello di ottenere una distribuzione omogenea di α nella camera di
combustione o, al più, un sua ben precisa e voluta distribuzione nel caso dei motori ad iniezione
diretta con carica stratificata.
Le combustioni a carica premiscelata necessitano di un impianto esterno di accensione; nei MCI ad
accensione comandata tipicamente è la candela di accensione ad innescare il fronte di fiamma che
spazza poi tutta la camera di combustione. La velocità del fronte di fiamma all’interno della camera
di combustione non è elevata se confrontata con le tempistiche tipiche di un m.a.c. (generalmente
tale velocità è compresa fra 10 e 50 m/s).
Esempio
Nel caso di candela posta lateralmente in una camera di combustione piatta di un motore avente
alesaggio D=0,1m, nell’ipotesi che il fronte di fiamma si muova alla velocità di 30 m/s, occorrono
circa 3,33 ms affinchè il fronte di fiamma attraversi l’intera camera di combustione. Nel caso di un
MCI 4T che operi ad un regime n pari a 3000 giri/min, l’angolo θ di rotazione dell’albero motore
corrispondente alla fase di combustione risulta quindi di circa 60°.
Già da questo semplice esempio si nota come il fenomeno della combustione nei m.a.c. sia
abbastanza lento e progressivo. Tuttavia c’è un altro aspetto di grande importanza per la
comprensione del processo di combustione e la determinazione del valore più appropriato
dell’angolo θACC di anticipo di accensione: infatti la combustione interessa una massa di
combustibile non costante nel tempo. La spiegazione di questo fenomeno risulta semplice
ipotizzando, in forma semplificata, che il fronte di fiamma si propaghi con velocità costante per
onde sferiche concentriche, partendo dalla zona di innesco verso la periferia. In tal caso la massa di
combustibile coinvolta cresce con il cubo della distanza percorsa dal punto di innesco, ovvero con il
cubo del tempo (o dell’angolo di manovella). Questo andamento crescente della derivata δM/δθ
giustifica l’adozione di un anticipo dell’istante di accensione rispetto alla posizione di p.m.s.,
necessario per consentire di avviare la combustione e di sfruttare al meglio l’energia ad essa
associata nella fase utile di espansione. Dal momento che la quantità di combustibile che brucia
nella prima parte della combustione è relativamente modesta, il lavoro negativo compiuto tra θACC
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.2
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
ed il p.m.s. risulterà modesto e comunque inferiore all’incremento di lavoro utile ottenibile nella
successiva corsa di espansione.
Se in prima approssimazione si può considerare che il fronte di fiamma spazzi completamente la
camera di combustione, nella realtà bisogna tenere conto del fatto che in alcune zone esso, per vari
motivi, non riesce ad arrivare. La carica presente in tali zone che non viene raggiunta dal fronte di
fiamma subisce soltanto reazioni di preossidazione dovute alla vicinanza del fronte di fiamma
stesso ed alle elevate temperature che tale vicinanza comporta. Tali fenomeni sono usualmente
indicati con il termine “quenching” e, se avvengono in corrispondenza delle pareti del cilindro,
come “wall quenching”. Dal punto di vista quantitativo la frazione incombusta risulta essere
estremamente piccola, tuttavia l’effetto dei fenomeni di quenching sulle emissioni di idrocarburi
incombusti HC allo scarico è invece rilevante.
Quanto sopra esposto vale nel caso di uno sviluppo regolare del processo di combustione. Talvolta
tuttavia la combustione nei m.a.c. può avvenire in maniera differente, per cui si parla di
combustione anomala.
Nel caso della preaccensione si verifica l’innesco spontaneo del processo di combustione
indipendentemente dalla scintilla della candela e prima che essa si verifichi. Tale fenomeno, che
può essere determinato dalla presenza di punti caldi nella camera di combustione (spesso associati a
particelle residue ad alta temperatura), ha l’effetto di sfasare la combustione rispetto ai valori di
progetto, anticipandola. Ciò comporta in genere un peggioramento del rendimento del motore ma,
dal momento che la combustione rimane comunque progressiva, la preaccensione non determina
eccessive sovrasollecitazioni sugli organi del manovellismo.
Ben più pericoloso per l’integrità strutturale del motore è un secondo processo di combustione
anomala, noto come detonazione (knock). In tal caso, dopo che la combustione è stata innescata
dalla candela ed ha iniziato il suo regolare sviluppo, si determina l’accensione spontanea e
contemporanea di tutta la carica non ancora interessata dal fronte di fiamma, con un improvviso e
notevole aumento dei livelli di pressione e temperatura in camera di combustione. La detonazione si
verifica se l’energia termodinamica in camera di combustione è tale da superare il limite di
accendibilità della carica ancora incombusta, e determina un processo di combustione simile a
quello che avviene normalmente in un motore ad accensione per compressione. L’elevato gradiente
δM/δθ e il conseguente aumento di δp/δθ determinano una notevole sovrasollecitazione sugli organi
del manovellismo del motore, che, nel caso dei m.a.c., non sono progettati per questo tipo di
combustione.
Le cause che possono determinare l’insorgere di detonazione sono molteplici; fra esse si ricordano
l’eccessivo valore dell’anticipo dell’accensione (che determina un eccessivo incremento di p e T al
p.m.s.) o un livello troppo elevato del rapporto di compressione volumetrico. In ogni caso, dal
momento che la detonazione comporta l’autoaccensione della miscela combustibile-comburente,
sono di fondamentale importanza le caratteristiche del combustibile e la sua resistenza
all’accensione.
A tale riguardo, è opportuno riflettere sull’influenza che la progressività della combustione ha sul
rendimento globale del ciclo. In sede di analisi di ciclo ideale infatti si è visto come il ciclo B.d.R.
presenti in assoluto i rendimenti più elevati a parità di rapporto di compressione volumetrico; il
motivo risiede nel fatto che la sua combustione avviene a volume costante e di conseguenza la
pressione raggiunge i valori massimi teorici. L’espansione verrà quindi sfruttata completamente,
potendo contare sul massimo salto di pressione possibile, e ciò massimizza il rendimento dell’unica
fase utile del ciclo. Nel motore reale il pistone si muove durante il processo di combustione e quindi
è possibile avere una combustione a volume costante solo se il processo avviene istantaneamente. A
livello teorico quindi la detonazione, determinando una combustione maggiormente isocora,
comporta un incremento del rendimento del ciclo.
Tuttavia occorre tener conto delle sollecitazioni indotte sugli organi del motore dalla combustione
istantanea di elevate frazioni di carica. Per resistere a tali sollecitazioni è necessario dimensionare
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.3
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
adeguatamente il motore, aumentando la sua resistenza strutturale e quindi anche la massa degli
organi in moto relativo. Ciò comporta un incremento delle sollecitazioni inerziali, che possono
essere contenute entro i limiti di resistenza dei materiali solo riducendo la velocità di rotazione del
motore, con una conseguente penalizzazione in termini di potenza del propulsore (si ricordi la
dipendenza lineare di Pe da n).
Nel caso dei m.a.c. il disegno del motore è volutamente “leggero” al fine di consentire di elevare, a
parità di sollecitazioni inerziali, la velocità di rotazione e quindi la potenza specifica (potenza per
unità di cilindrata) del propulsore. Da qui si comprende come il m.a.c. necessiti di un processo di
combustione relativamente lento e comunque progressivo, senza eccessivi gradienti di pressione.
Alla luce di tali considerazioni è evidente che il fenomeno della detonazione risulta deleterio per
l’integrità strutturale dei MCI ad accensione comandata e come debba essere il più possibile evitato
un funzionamento prolungato del propulsore in condizioni di detonazione.
Pertanto i combustibili utilizzati nei m.a.c. devono avere ottime capacità antidetonanti, ovvero forte
resistenza all’autoaccensione. Dal punto di vista della formulazione chimica del combustibile, gli
idrocarburi più efficaci sotto questo punto di vista appartengono alla famiglia dei policiclici a catena
chiusa. Da qui nasce l’esigenza di classificare mediante un indice di merito i diversi combustibili
nei confronti della detonazione.
Tale classificazione è ottenuta tramite una scala in cui il valore 100 è stato attribuito all’idrocarburo
che, all’atto della definizione della scala, dimostrò le migliori capacità antidetonanti. Questo fu
individuato nell’isottano, mentre il valore 0 fu assegnato al normal-eptano, che si dimostrò
scarsamente resistente alla detonazione.
La prova per la determinazione delle capacità antidetonanti di un combustibile viene effettuata su
particolari motori da laboratorio, detti CFR, caratterizzati dalla possibilità di variare il rapporto di
compressione volumetrico ρ durante il funzionamento del propulsore. Viene così individuato il
valore di ρ in corrispondenza del quale si manifesta detonazione (generalmente rilevata mediante un
trasduttore di tipo piezoelettrico) con il combustibile in esame. Viene quindi ricercata la miscela
normal-eptano/isottano che detona per lo stesso valore di ρ. La percentuale di isottano di tale
miscela determina l’indice di merito del combustibile nei confronti della detonazione, che è
denominato numero di ottano.
Si definisce pertanto numero di ottano (NO) di un combustibile la percentuale di isottano in una
miscela isottano/normaleptano che ha lo stesso comportamento del combustibile in esame su motore
campione (CFR) per resistenza alla detonazione.
Ovviamente i valori di ρ che determinano detonazione su motore CFR per le diverse miscele
isottano/normaleptano sono tabulati. Inoltre la scala può essere estrapolata per caratterizzare degli
idrocarburi migliori dell’isottano come comportamento antidetonante. Il numero di ottano di un
combustibile può lievemente differire a seconda della metodologia sperimentale adottata per la sua
determinazione su motore CFR. In generale in Europa si fa riferimento al valore di NO definito
attraverso la procedura “Research Method” (RM).
In conclusione risulta chiaro come gli strumenti più semplici ed immediati su cui agire per attuare
un controllo della detonazione sono il rapporto di compressione ρ e l’anticipo di accensione θACC: ρ
è una quantità geometricamente fissata e di difficile variazione durante il funzionamento del
motore. Pertanto un controllo attivo della detonazione può avvenire agendo sull’anticipo
dell’accensione θACC. Tradizionalmente θACC è gestito da un sistema esterno: in passato veniva
semplicemente adeguato in relazione al regime di rotazione tramite un regolatore di tipo centrifugo
che partiva da una valore iniziale, detto di anticipo statico, e saliva con una rampa lineare fino ad
andare a saturazione; si è poi passati a soluzioni con correttore pneumatico per giungere a sistemi
elettronici integrati alla centralina di controllo motore. E’ chiaro che la soluzione ideale per disporre
di un θACC ottimale in tutte le condizioni di funzionamento deve prevedere un controllo di tale
parametro in loop chiuso con un segnale di feedback proveniente da un sensore di detonazione
installato su motore. Tale soluzione è oggi impiegata solo su motori di classe elevata a causa
dell’elevato costo del sensore di detonazione e della catena di controllo.
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.4
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Infine, si vuole ricordare come, a parità di rapporto di compressione, nei motori sovralimentati si
abbia maggiore probabilità di detonazione a causa dell’incremento dei valori di p e T alla fine della
fase di compressione. In generale tale aspetto costringe ad una riduzione del livello di ρ, peraltro
con conseguenze negative sul rendimento del propulsore.
2.1.2 - Motori ad accensione per compressione
In un motore Diesel la combustione avviene tipicamente attraverso un processo di tipo diffusivo in
cui la fase di miscelazione combustibile-comburente ha inizio allorché il combustibile viene
iniettato nella camera di combustione.
Il combustibile è introdotto sotto forma di gocce e ciò influisce in maniera determinante sulla
tipologia delle reazioni di precombustione che si verificano: sulla superficie della goccia si avranno
reazioni di preossidazione mentre all’interno l’assenza di ossigeno favorirà le reazioni di pirolisi
(reazioni che modificano la struttura molecolare del combustibile e che avvengono in assenza di
ossigeno).
In presenza di un processo di combustione di tipo diffusivo, all’interno della camera di combustione
si verifichino gradienti spaziali del rapporto aria-combustibile α molto forti. Questi sono correlati
principalmente alle caratteristiche dello spray di iniezione. Ciò significa che il valore medio di α ha
il solo significato di rapporto fra la portata di aria e quella di combustibile entranti nel cilindro, ma
non ha una diretta correlazione con i valori locali della qualità della miscela che si forma nella
camera di combustione. I forti gradienti spaziali di α influenzano pesantemente il processo di
combustione che si sviluppa in un MCI Diesel, determinando zone caratterizzate da valori di α al di
fuori dei limiti di accendibilità nelle quali si ha una notevole formazione di incombusti.
La combustione in un MCI Diesel si sviluppa per nuclei di fiamma, che si verificano laddove lo
spray di combustibile iniettato determina condizioni di dosatura favorevoli allo sviluppo delle
reazioni di ossidazione. Tale struttura della combustione determina forti gradienti di temperatura da
punto a punto della camera di combustione, con valori medi inferiori a quelli tipici dei m.a.c. ma
valori locali che, in certe condizioni, possono essere particolarmente elevati. Tali gradienti di T
presentano grande importanza, più che dal punto di vista termodinamico, ai fini delle emissioni
inquinanti, in particolare di NOX.
Cerchiamo ora di analizzare i fenomeni che avvengono a seguito dell’iniezione di combustibile
all’interno della camera di combustione di un MCI Diesel. L’iniezione del combustibile, ad alta
pressione e in forma polverizzata, avviene in prossimità del p.m.s., in presenza di elevati livelli di
pressione e temperatura dell’aria nel cilindro. Teoricamente l’inizio del processo di combustione
dovrebbe essere simultaneo all’inizio dell’iniezione; nella realtà però si rileva un tempo di ritardo τ
tra l’immissione delle prime gocce di combustibile ed il momento in cui si ha l’accensione. Questo
ritardo, quantitativamente piccolo ma qualitativamente molto importante, risulta essere legato al
tempo necessario al combustibile per la sua vaporizzazione e lo sviluppo delle reazioni di
precombustione.
L’estensione dell’intervallo di ritardo τ è legata a numerosi parametri, tra i quali i livelli di
pressione e temperatura in camera di combustione, la composizione chimica del combustibile, la
pressione d’iniezione, la dimensione media delle gocce e la loro distribuzione (spray), il livello di
turbolenza in camera di combustione.
Per quanto riguarda l’influenza dei parametri termodinamici, si è soliti esprimere la dipendenza del
tempo di ritardo τ dai valori di p e T attraverso relazioni semiempiriche del tipo di quella di Wolfer:
= A ∙ e (B/T)
/ pC
ove A, B e C sono parametri dipendenti dal tipo di combustibile e dalla geometria della camera di
combustione.
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.5
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Operativamente si cerca di minimizzare, nei limiti del possibile, il tempo di ritardo τ per ridurre le
sollecitazioni sugli organi del motore. Tuttavia il ritardo di accensione è dovuto a numerosi aspetti,
come può essere ben evidenziato conducendo differenti esperimenti.
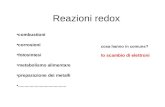
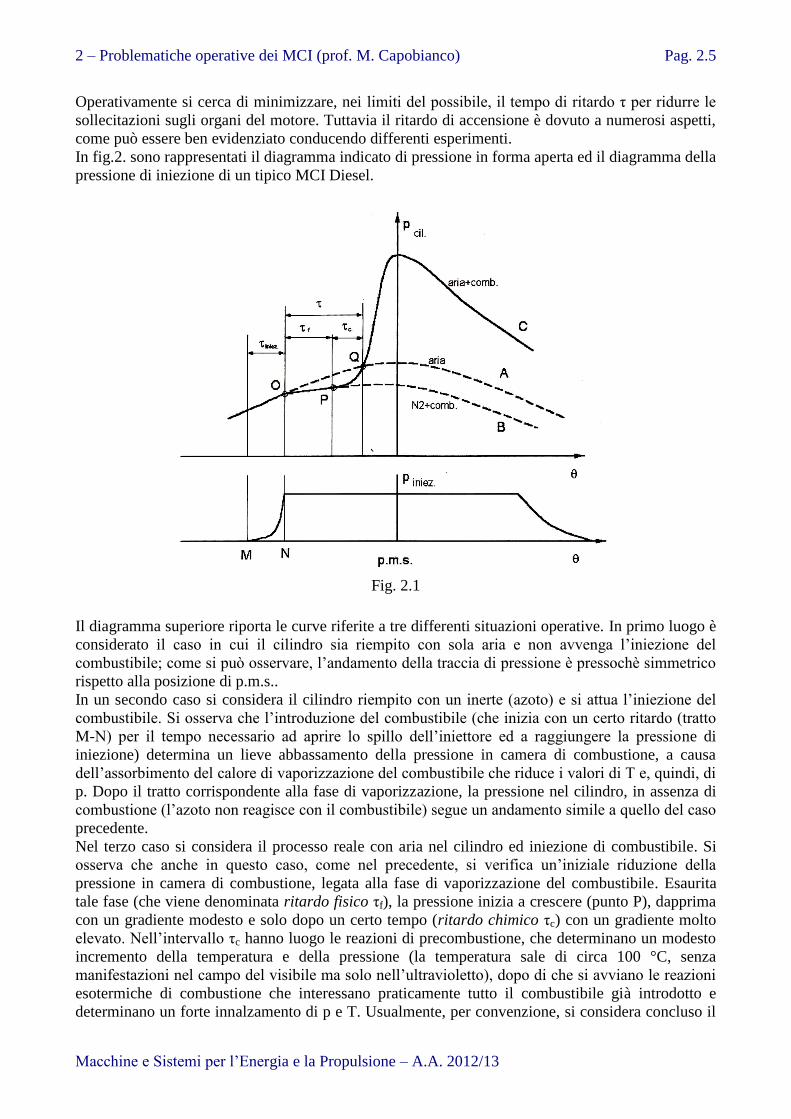
In fig.2. sono rappresentati il diagramma indicato di pressione in forma aperta ed il diagramma della
pressione di iniezione di un tipico MCI Diesel.
Fig. 2.1
Il diagramma superiore riporta le curve riferite a tre differenti situazioni operative. In primo luogo è
considerato il caso in cui il cilindro sia riempito con sola aria e non avvenga l’iniezione del
combustibile; come si può osservare, l’andamento della traccia di pressione è pressochè simmetrico
rispetto alla posizione di p.m.s..
In un secondo caso si considera il cilindro riempito con un inerte (azoto) e si attua l’iniezione del
combustibile. Si osserva che l’introduzione del combustibile (che inizia con un certo ritardo (tratto
M-N) per il tempo necessario ad aprire lo spillo dell’iniettore ed a raggiungere la pressione di
iniezione) determina un lieve abbassamento della pressione in camera di combustione, a causa
dell’assorbimento del calore di vaporizzazione del combustibile che riduce i valori di T e, quindi, di
p. Dopo il tratto corrispondente alla fase di vaporizzazione, la pressione nel cilindro, in assenza di
combustione (l’azoto non reagisce con il combustibile) segue un andamento simile a quello del caso
precedente.
Nel terzo caso si considera il processo reale con aria nel cilindro ed iniezione di combustibile. Si
osserva che anche in questo caso, come nel precedente, si verifica un’iniziale riduzione della
pressione in camera di combustione, legata alla fase di vaporizzazione del combustibile. Esaurita
tale fase (che viene denominata ritardo fisico τf), la pressione inizia a crescere (punto P), dapprima
con un gradiente modesto e solo dopo un certo tempo (ritardo chimico τc) con un gradiente molto
elevato. Nell’intervallo τc hanno luogo le reazioni di precombustione, che determinano un modesto
incremento della temperatura e della pressione (la temperatura sale di circa 100 °C, senza
manifestazioni nel campo del visibile ma solo nell’ultravioletto), dopo di che si avviano le reazioni
esotermiche di combustione che interessano praticamente tutto il combustibile già introdotto e
determinano un forte innalzamento di p e T. Usualmente, per convenzione, si considera concluso il
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.6
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
ritardo chimico nel punto (Q) in cui la traccia di pressione interseca la curva relativa al caso con
sola aria e assenza di combustione (primo caso).
Il ritardo di accensione τ, stimabile attraverso correlazioni tipo quella del Wolfer, è dato da:
τ = τc + τf
In generale nei motori Diesel, dal momento che il combustibile viene iniettato in camera di
combustione per gocce successive ed il ritardo è funzione della pressione e della temperatura, le
prime gocce trovano un ambiente non molto favorevole alla combustione, con temperatura e
pressione ancora relativamente basse. In queste condizioni vi sono forti ritardi di accensione τ,
mentre le gocce che seguono sono accolte in un ambiente dove p e T sono già state innalzate dalla
combustione delle gocce precedenti e perciò più favorevole alla combustione: ne risulta un ritardo
più piccolo per questa seconda porzione di combustibile iniettato, tanto da poter considerare una
combustione quasi immediata per il combustibile iniettato dopo l’intervallo di ritardo.
Il grosso problema dei motori Diesel riguarda quindi la prima parte della fase d’iniezione e consiste
nel fatto che, durante il tempo τ, si accumula nella camera di combustione una certa quantità di
combustibile che poi brucia tutto contemporaneamente allorchè inizia la combustione delle prime
gocce iniettate, determinando forti gradienti di pressione, notevoli sollecitazioni sugli organi del
manovellismo ed un rumore di combustione notevole.
Dal momento che la quantità di combustibile iniettata è funzione dell’angolo di manovella e che
il tempo di ritardo τ è solo marginalmente ed indirettamente influenzato dalla velocità di rotazione
del motore, è evidente che, all’aumentare di n, aumenta la quantità di combustibile che viene
introdotta nel cilindro nell’intervallo temporale corrispondente al ritardo τ. Il risultato finale sarà un
aumento della quantità di combustibile che dopo τ brucerà contemporaneamente, con un deciso
aumento della ruvidità di funzionamento. Di fatto quindi il motore Diesel sfrutta la detonazione
come meccanismo di combustione e ciò deve essere tenuto in debito conto in fase di
dimensionamento strutturale del motore stesso.
Come già visto il ritardo dipende sia da parametri fisici che chimici e per poterlo minimizzare si
cerca di agire su entrambi gli aspetti. Riguardo agli aspetti fisici gli accorgimenti utilizzabili per
minimizzare il ritardo sono volti a:
- aumentare la superficie di contatto tra combustibile e comburente: ciò equivale a ricercare una più
fine polverizzazione dello spray di combustibile iniettato che aumenti il numero di gocce
diminuendone la dimensione media;
- aumentare p e T in camera di combustione all’inizio dell’iniezione: ciò si ottiene tramite un
aumento del rapporto di compressione volumetrico ρ; agendo in tale direzione risultano però
ulteriormente aumentate la già ingenti sollecitazioni meccaniche agenti su basamento, testata ed
organi mobili del motore;
- aumentare il livello di turbolenza in camera di combustione: una forte corrente d’aria che
lambisca la superficie della goccia ne velocizza l’evaporazione superficiale; tale corrente viene
garantita attraverso un attento studio della geometria dei condotti d’aspirazione in modo da indurre
nell’aria entrante un moto detto di swirl, costituito da un vortice con asse parallelo all’asse del
cilindro.
Per quanto riguarda gli aspetti chimici, di primaria importanza risulta la struttura molecolare del
combustibile. A tale riguardo particolarmente indicati per l’applicazione nei MCI Diesel sono gli
idrocarburi paraffinici a catena lunga che risultano più facilmente ossidabili di quelli con struttura
molecolare a catena breve o ciclici, generalmente impiegati nei m.a.c. in cui la maggiore difficoltà
che l’idrocarburo presenta ad essere ossidato si traduce in una maggiore resistenza
all’autoaccensione.
Introduciamo a questo punto un’importante caratteristica dei combustibili per motori Diesel, vale a
dire il numero di cetano (NC). La procedura mediante la quale tale indice viene definito è simile a
quella vista riguardo al numero di ottano. Il cetano è un idrocarburo caratterizzato da un ritardo τ
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.7
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
molto basso, cui viene associato il valore 100; al contrario, l’α-metil-naftalene presenta un’elevata
resistenza all’accensione e ad esso viene associato il valore 0. Anche in questo caso le prove sono
condotte su un motore CFR da laboratorio sul quale viene misurato il ritardo di accensione del
combustibile in esame attraverso un’apposita strumentazione atta a rilevare il picco di pressione
connesso all’avvio della combustione. Successivamente si ricerca la miscela di riferimento
composta da cetano ed α-metil-naftalene che, evolvendo nel motore CFR, presenti lo stesso ritardo
τ. Il numero di cetano è dato appunto dalla percentuale di cetano presente nella miscela di
riferimento. Ovviamente, come nel caso del numero di ottano, i ritardi di accensione su motore CFR
delle differenti miscele cetano/α-metil-naftalene sono tabulati. I combustibili per MCI Diesel hanno,
indicativamente, NC 4760.
Come abbiamo visto il ritardo di accensione τ è responsabile della ruvidezza di funzionamento
tipica dei motori Diesel ed in ogni caso non è annullabile. Vi sono tuttavia alcune applicazioni,
tipicamente per grosse taglie di potenza, per le quali l’effetto del ritardo risulta essere, almeno
teoricamente, abbastanza modesto, a causa delle caratteristiche di funzionamento del motore stesso.
In particolare nel caso dei MCI 2T Diesel per applicazione navale il regime di rotazione risulta
essere molto basso e di conseguenza anche la velocità con cui il combustibile viene iniettato è
ridotta; a ciò consegue che la quantità di combustibile che si accumula in camera di combustione
nell’intervallo di ritardo τ è inferiore e pertanto anche i gradienti di pressione all’inizio della
combustione non sono eccessivi. Inoltre tali motori presentano tipicamente una struttura molto
robusta e non risentono delle sollecitazioni associate all’avvio del processo di combustione.
Il problema è invece molto più sentito nei piccoli motori Diesel veloci per applicazione veicolistica.
Per limitare gli effetti di tale caratteristica del processo di combustione e realizzare motori con alta
potenza specifica (ovvero con alti regimi di rotazione) i costruttori hanno negli anni sviluppato
diverse soluzioni tecnologiche. In ordine di tempo la prima intuizione è stata di smorzare le forti
onde di pressione dovute alla detonazione della carica mediante il passaggio attraverso una sezione
ristretta: costruttivamente ciò si tradusse nelle soluzioni a precamera (o ad iniezione indiretta, IDI)
in cui il combustibile veniva iniettato all’interno di una piccola cavità ricavata all’interno della
testa. In tal modo venivano ridotte le sollecitazioni meccaniche sugli organi mobili del motore, il
che consentiva un alleggerimento degli organi stessi e, in ultima analisi, minori sollecitazioni
inerziali all’aumento del regime di rotazione. D’altra parte la precamera assorbiva il forte gradiente
di pressione senza risentirne troppo, potendo essere più compatta e situata in una zona
strutturalmente più resistente. Il rovescio della medaglia di tale soluzione è facilmente intuibile: il
passaggio attraverso una sezione ristretta comporta una notevole dissipazione energetica per il
flusso, con una non trascurabile riduzione del rendimento globale del motore
Attualmente le soluzioni utilizzate si muovono parallelamente su due fronti: da una parte si punta a
ridurre il ritardo τ effettuando un’iniezione pilota, con il compito di preparare un ambiente
abbastanza caldo per il combustibile iniettato successivamente, così da ridurre il tempo di
incubazione della combustione; dall’altra si cerca invece di aumentare la pressione d’iniezione del
combustibile al fine di ottenere delle particelle di minori dimensioni e, in ultima analisi, più
velocemente vaporizzabili. Sono così nati i primi sistemi con pompa rotativa e, più recentemente,
con iniettore-pompa e common-rail in cui si possono raggiungere pressioni di iniezione dai 1350 ai
2000 bar. Risulta così notevolmente aumentata anche la capacità di penetrazione del getto di
combustibile con il positivo effetto di ottenere una più omogenea distribuzione di α in camera di
combustione.
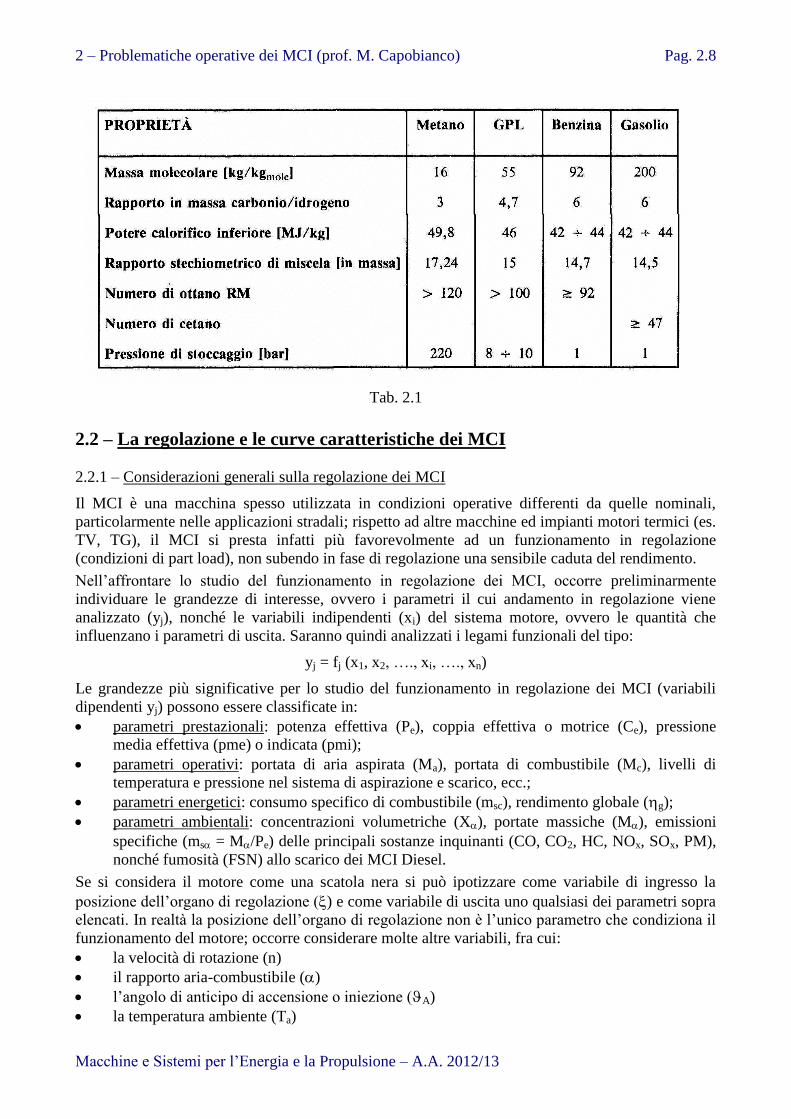
A conclusione della trattazione sui processi di combustione, in tab.2.1 sono riportate le principali
caratteristiche di alcuni dei combustibili maggiormente utilizzati nei MCI.
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.8
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Tab. 2.1
2.2 – La regolazione e le curve caratteristiche dei MCI
2.2.1 – Considerazioni generali sulla regolazione dei MCI
Il MCI è una macchina spesso utilizzata in condizioni operative differenti da quelle nominali,
particolarmente nelle applicazioni stradali; rispetto ad altre macchine ed impianti motori termici (es.
TV, TG), il MCI si presta infatti più favorevolmente ad un funzionamento in regolazione
(condizioni di part load), non subendo in fase di regolazione una sensibile caduta del rendimento.
Nell’affrontare lo studio del funzionamento in regolazione dei MCI, occorre preliminarmente
individuare le grandezze di interesse, ovvero i parametri il cui andamento in regolazione viene
analizzato (yj), nonché le variabili indipendenti (xi) del sistema motore, ovvero le quantità che
influenzano i parametri di uscita. Saranno quindi analizzati i legami funzionali del tipo:
yj = fj (x1, x2, …., xi, …., xn)
Le grandezze più significative per lo studio del funzionamento in regolazione dei MCI (variabili
dipendenti yj) possono essere classificate in:
parametri prestazionali: potenza effettiva (Pe), coppia effettiva o motrice (Ce), pressione
media effettiva (pme) o indicata (pmi);
parametri operativi: portata di aria aspirata (Ma), portata di combustibile (Mc), livelli di
temperatura e pressione nel sistema di aspirazione e scarico, ecc.;
parametri energetici: consumo specifico di combustibile (msc), rendimento globale (g);
parametri ambientali: concentrazioni volumetriche (X), portate massiche (M), emissioni
specifiche (ms = M/Pe) delle principali sostanze inquinanti (CO, CO2, HC, NOx, SOx, PM),
nonché fumosità (FSN) allo scarico dei MCI Diesel.
Se si considera il motore come una scatola nera si può ipotizzare come variabile di ingresso la
posizione dell’organo di regolazione () e come variabile di uscita uno qualsiasi dei parametri sopra
elencati. In realtà la posizione dell’organo di regolazione non è l’unico parametro che condiziona il
funzionamento del motore; occorre considerare molte altre variabili, fra cui:
la velocità di rotazione (n)
il rapporto aria-combustibile ()
l’angolo di anticipo di accensione o iniezione (A)
la temperatura ambiente (Ta)

2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.9
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
la pressione ambiente (pa)
l’umidità ambiente (Φa)
la temperatura del refrigerante (Tr)
la temperatura del lubrificante (Tl)
la densità del combustibile (c)
Tali parametri sono in gran parte evidenziati dall’espressione della potenza:
Pe = A vA Vt Hi
g n / 60
Prescindendo da Vt, Hi ed , che sono caratteristiche costruttive del motore o dipendono dal
combustibile utilizzato, si osserva che vA e A sono legati alla portata d’aria che è a sua volta
funzione della posizione dell’organo di regolazione (), della velocità di rotazione (n) e delle
condizioni ambientali.
Per quanto riguarda e A sono in genere previsti appositi sistemi di controllo, un tempo di tipo
meccanico ed oggi sempre più frequentemente di tipo elettronico, che definiscono i valori di tali
quantità in funzione della velocità e del carico del motore. Pertanto tali parametri non possono
essere considerati variabili indipendenti se non in fase di progettazione e di messa a punto della
taratura dei relativi sistemi di controllo.
L’effetto di alcune variabili di minore impatto, quali Tr, Tl e c, viene generalmente trascurato o
ridotto attraverso opportuni sistemi sperimentali che consentono di operare con valori controllati di
tali quantità (sistemi termostatici per il circuito di lubrificazione e di refrigerazione al banco
dinamometrico).
Le variazioni indotte dai parametri ambientali possono essere tenute in conto attraverso correlazioni
semiempiriche che consentono di riferire le grandezze oggetto di studio, per lo più potenza, coppia
e consumo specifico di combustibile, a condizioni ambientali standard, generalmente pa=1013
mbar, Ta=288 K, Φa=50%.
Si vede quindi come, almeno in prima approssimazione, sia possibile assimilare il MCI ad un
sistema a due gradi di libertà, ovvero la posizione dell’organo di regolazione () e la velocità di
rotazione (n). Si ha quindi:
yj = fj (, n)
Tale aspetto è evidente nel caso di un motore installato al banco, ma lo è meno se si considera il
sistema motore-veicolo in cui, nella realtà fisica, l’unica variabile di ingresso sembra essere la
posizione dell’organo di regolazione (); tuttavia per l’elemento motore del sistema esiste la
seconda variabile di ingresso (n), che sfugge all’osservazione superficiale del conducente ma che è
connessa alla retroazione intermedia relativa al bilancio fra coppia motrice (Ce) e coppia resistente
dovuta al carico stradale (Cr).
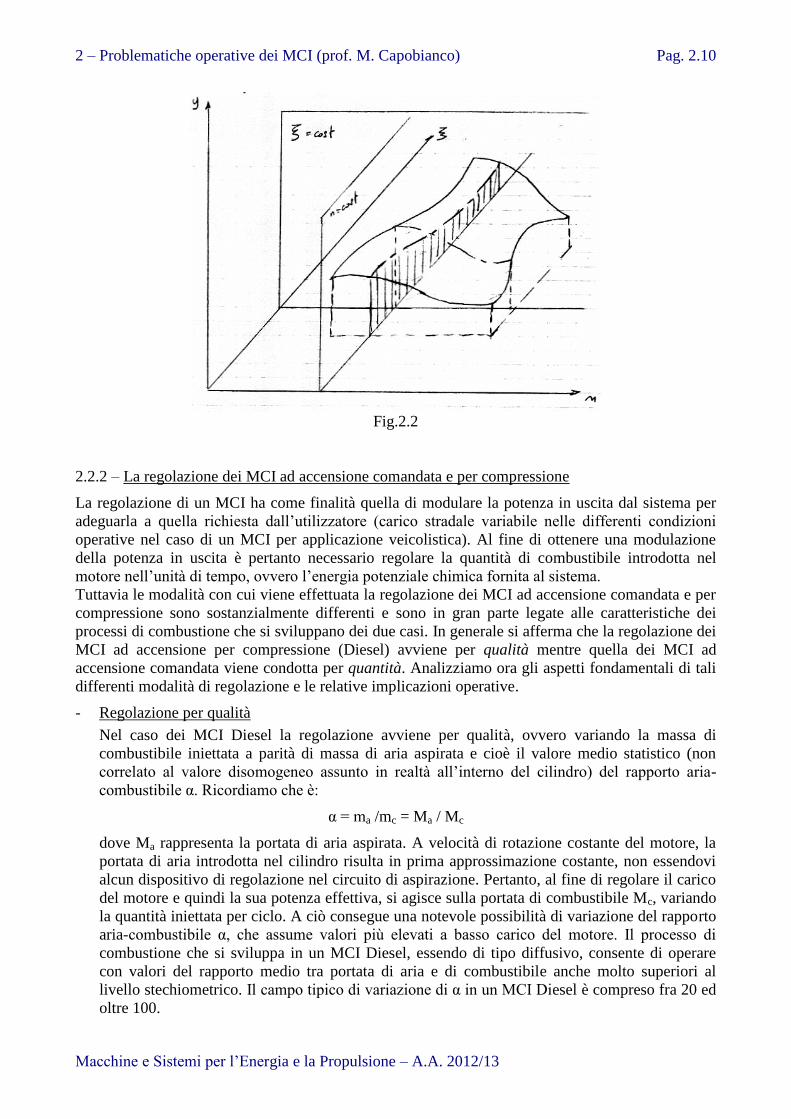
Considerando quindi il MCI come un sistema a 2 gradi di libertà, l’andamento di una generica
variabile dipendente yj nello spazio è rappresentato da una superficie yj = fj (, n), che si spera
essere continua e regolare, ovvero senza cuspidi o punti di discontinuità (fig.2.2).
Nello studio del funzionamento in regolazione dei MCI, la variabile rappresenta la posizione
dell’organo di regolazione del motore ed assume valori compresi tra 0 ed 1 (ovvero fra 0 e 100%).
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.10
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Fig.2.2
2.2.2 – La regolazione dei MCI ad accensione comandata e per compressione
La regolazione di un MCI ha come finalità quella di modulare la potenza in uscita dal sistema per
adeguarla a quella richiesta dall’utilizzatore (carico stradale variabile nelle differenti condizioni
operative nel caso di un MCI per applicazione veicolistica). Al fine di ottenere una modulazione
della potenza in uscita è pertanto necessario regolare la quantità di combustibile introdotta nel
motore nell’unità di tempo, ovvero l’energia potenziale chimica fornita al sistema.
Tuttavia le modalità con cui viene effettuata la regolazione dei MCI ad accensione comandata e per
compressione sono sostanzialmente differenti e sono in gran parte legate alle caratteristiche dei
processi di combustione che si sviluppano dei due casi. In generale si afferma che la regolazione dei
MCI ad accensione per compressione (Diesel) avviene per qualità mentre quella dei MCI ad
accensione comandata viene condotta per quantità. Analizziamo ora gli aspetti fondamentali di tali
differenti modalità di regolazione e le relative implicazioni operative.
- Regolazione per qualità
Nel caso dei MCI Diesel la regolazione avviene per qualità, ovvero variando la massa di
combustibile iniettata a parità di massa di aria aspirata e cioè il valore medio statistico (non
correlato al valore disomogeneo assunto in realtà all’interno del cilindro) del rapporto aria-
combustibile α. Ricordiamo che è:
α = ma /mc = Ma / Mc
dove Ma rappresenta la portata di aria aspirata. A velocità di rotazione costante del motore, la
portata di aria introdotta nel cilindro risulta in prima approssimazione costante, non essendovi
alcun dispositivo di regolazione nel circuito di aspirazione. Pertanto, al fine di regolare il carico
del motore e quindi la sua potenza effettiva, si agisce sulla portata di combustibile Mc, variando
la quantità iniettata per ciclo. A ciò consegue una notevole possibilità di variazione del rapporto
aria-combustibile α, che assume valori più elevati a basso carico del motore. Il processo di
combustione che si sviluppa in un MCI Diesel, essendo di tipo diffusivo, consente di operare
con valori del rapporto medio tra portata di aria e di combustibile anche molto superiori al
livello stechiometrico. Il campo tipico di variazione di α in un MCI Diesel è compreso fra 20 ed
oltre 100.
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.11
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
In tal caso la quantità , variabile tra 0 e 100%, è rappresentata dalla posizione dell’organo di
comando che determina la variazione della quantità di combustibile iniettata per ciclo di
funzionamento.
- Regolazione per quantità
In un MCI ad accensione comandata i margini di oscillazione del rapporto aria-combustibile
sono molto più limitati (tipicamente α può variare fra 10 e 18 circa, anche se in pratica spesso la
qualità della miscela è prossima al valore stechiometrico αst=14,7), a causa delle caratteristiche
del processo di combustione (combustione premiscelata).
Pertanto, al fine di regolare la quantità di energia introdotta nel motore, ovvero la portata di
combustibile, è necessario variare in misura pressochè proporzionale anche la portata di aria.
Tale modalità di regolazione viene detta per quantità. La soluzione tecnologicamente più
semplice per conseguire tale risultato consiste nell’aggiunta di una valvola di regolazione nel
condotto di aspirazione, a monte della valvola di aspirazione vera e propria, con cui viene
introdotta una perdita di carico controllata e modulabile. Tale perdita di carico ha l’effetto di far
scendere la pressione nel collettore di aspirazione da patm a pA e pertanto la densità della carica
introdotta nel cilindro ρA, parametro direttamente correlato alla potenza effettiva Pe. E’ peraltro
evidente che un sistema di regolazione fondato sulla laminazione della pressione ambiente
risulta altamente dissipativo, comportando di fatto un effetto opposto a quello che viene
perseguito con la tecnica della sovralimentazione. Generalmente la regolazione della carica
entrante nel motore viene effettuata mediante una valvola a farfalla, che realizza una
laminazione che può essere considerata, in prima approssimazione, isoentalpica (quindi a
temperatura pressochè costante del fluido). In tal caso si ha quindi proporzionalità diretta fra il
valore di pA e quello di ρA.
Una soluzione innovativa per la regolazione dei MCI ad accensione comandata è costituita dal
controllo dell’apertura delle valvole di aspirazione nelle differenti condizioni operative del
propulsore (sistemi di tipo VVA, Variable Valve Actuation), agendo sulla fase, sull’estensione
dell’intervallo di apertura e sulla legge di alzata delle valvole. Mediante un sistema di tipo VVA
evoluto è pertanto possibile regolare la quantità di carica introdotta nel cilindro senza dover
ricorrere ad una valvola di laminazione dedicata posta in serie sul circuito di aspirazione del
motore, con indubbi vantaggi in termini di rendimento.
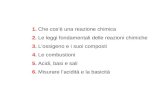
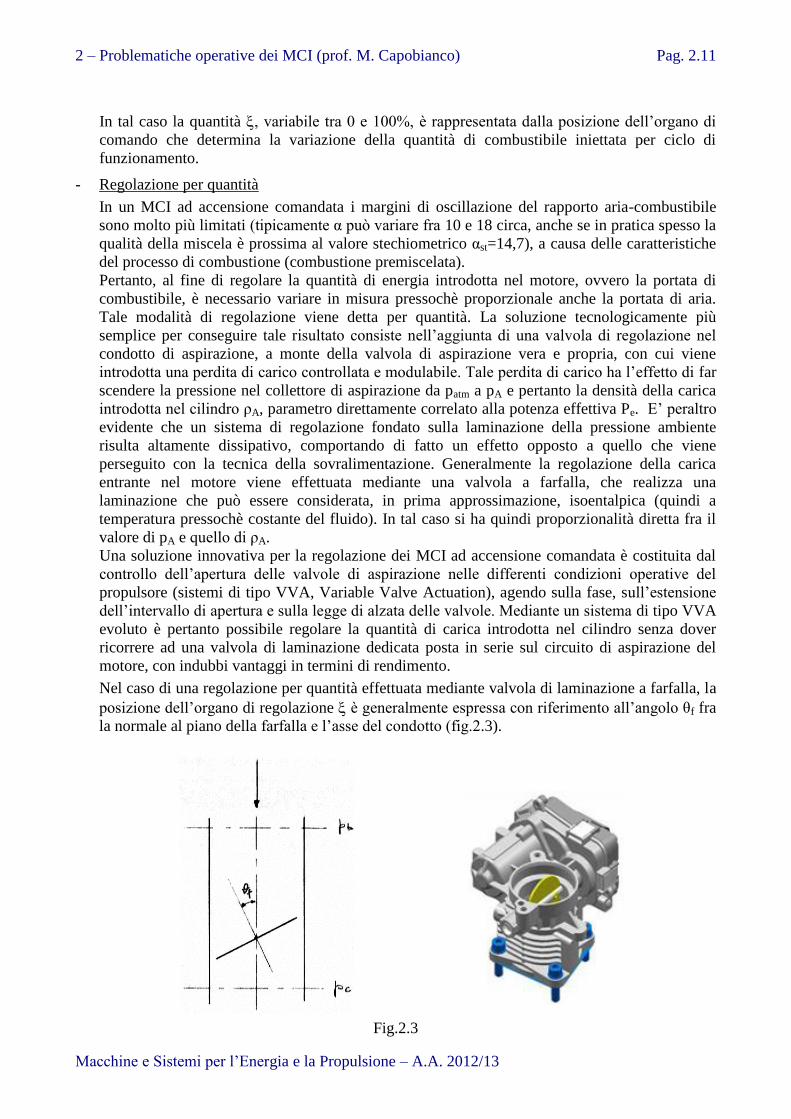
Nel caso di una regolazione per quantità effettuata mediante valvola di laminazione a farfalla, la
posizione dell’organo di regolazione è generalmente espressa con riferimento all’angolo θf fra
la normale al piano della farfalla e l’asse del condotto (fig.2.3).
Fig.2.3
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.12
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
A = 1 corrisponde f = 90°, cioè farfalla tutta aperta.
A = 0 non corrisponde f = 0° ma f min per evitare impuntamenti della valvola sulla superficie
del condotto; tale angolo costruttivo è generalmente abbastanza ridotto: f min = 56°.
Si ponga attenzione al fatto che il valore di apertura minima costruttiva non è da confondere con
l’apertura della valvola a farfalla corrispondente al funzionamento al minimo del motore, cioè
alla condizione di autosostentamento. Tale apertura è variabile con la velocità di rotazione del
motore e ad essa corrisponde una portata d’aria aspirata dal motore non nulla.
Occorre sottolineare come la valvola a farfalla costituisca in qualche misura un’assurdità dal
punto di vista puramente impiantistico, poiché, essendo collocata in serie alla valvola di
aspirazione, crea una dissipazione aggiuntiva nel condotto di aspirazione. Tuttavia non è
possibile prescindere da questo sistema di regolazione (molto semplice ed economico) a meno
di poter controllare, oltre alla fase, anche la legge di alzata delle valvole di aspirazione (sistema
VVA): ciò può permettere infatti di regolare il carico del motore agendo direttamente sulle
valvole di aspirazione.
2.2.3 – Rappresentazione dei parametri funzionali di un MCI (curve caratteristiche)
Al par.2.2.1 si è visto che, considerando il MCI come un sistema a 2 gradi di libertà, l’andamento di
qualunque parametro yj del motore (prestazionale, operativo, energetico, ambientale) può essere
rappresentato da una superficie yj = fj (, n) con una rappresentazione tridimensionale (fig.2.2).
Tale rappresentazione, pur essendo compatta ed esaustiva, mal si presta allo sviluppo di valutazioni
di tipo quantitativo. A tal fine è pertanto usuale ricorrere a rappresentazioni bidimensionali, ottenute
intersecando la superficie rappresentativa della variabile yj con piani a =cost o ad n=cost,
ottenendo quindi curve (n, yj) oppure (, yj) che sono rispettivamente denominate caratteristiche
meccaniche o caratteristiche di regolazione.
Si definisce pertanto caratteristica meccanica il luogo dei punti rappresentativi dell’andamento di
un parametro del motore al variare della velocità di rotazione per una posizione costante dell’organo
di regolazione:
yj = fj (n) con = cost
Analogamente si definisce caratteristica di regolazione il luogo dei punti rappresentativi
dell’andamento di un parametro del motore al variare della posizione dell’organo di regolazione a
velocità di rotazione costante:
yj = fj () con n = cost
Questo metodo di rappresentazione non ha solo lo scopo di semplificare la rappresentazione grafica
delle caratteristiche di funzionamento bensì corrisponde anche alla strategia con cui vengono
effettivamente condotte le prove sperimentali: per caratterizzare un MCI rispetto ad un determinato
regime di funzionamento si manterrà costante il parametro n facendo variare ξ e viceversa per
caratterizzarlo rispetto ad un preciso valore del carico.
E’ d’altra parte evidente che sia le caratteristiche meccaniche che quelle di regolazione forniscono
informazioni discretizzate rispetto ai parametri che vengono mantenuti costanti e che lo studio delle
prestazioni di un MCI nell’intero campo operativo dovrà considerare un insieme di curve riferite a
differenti livelli di tali parametri. Tuttavia, tra le caratteristiche meccaniche, le curve ottenute in
condizioni di piena apertura dell’organo di regolazione, dette caratteristiche meccaniche di pieno
carico, sono spesso utilizzate come riferimento per confrontare le prestazioni dei MCI.
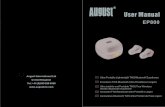
La fig.2.4 mostra l’andamento tipico delle caratteristiche meccaniche di piena apertura per alcuni
tra i parametri operativi di maggiore interesse di un MCI, ovvero la potenza effettiva, la coppia ed il
consumo specifico di combustibile.

2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.13
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Fig. 2.4
Dall’esame della fig.2.4, si osserva che la caratteristica di potenza, anche se tale parametro si azzera
per n=0, viene usualmente rappresentata a partire da un valore minimo di velocità di rotazione
(punto B) compatibile con un funzionamento regolare del propulsore. Per valori inferiori di n,
infatti, le irregolarità del momento motore e le conseguenti irregolarità nell’alimentazione tendono
ad arrestare il motore. Al di sopra del regime di rotazione corrispondente al punto B, la potenza
tende ad aumentare (vedi dipendenza di Pe da n evidenziata dalle due espressioni della potenza di
un MCI) fino a raggiungere un massimo in corrispondenza di un certo regime di rotazione (punto
A) oltre il quale diminuisce rapidamente fino ad annullarsi per un valore più elevato di n. Tale
andamento può essere giustificato tenendo conto che in un primo tratto (B-M) contribuiscono ad
aumentare la potenza sia l’aumento di n che della coppia; quest’ultimo parametro è sostanzialmente
influenzato dall’andamento del coefficiente di riempimento vA, che raggiunge un massimo per un
livello definito di n, in funzione del valore dell’angolo di chiusura della valvola di aspirazione AC.
Tenendo conto che:
Ce = k ∙ Pe / n
si deduce che la coppia Ce, indicata con Mt in fig.2.4, sarà massima quando è massimo il rapporto
Pe/n, che rappresenta la tangente dell’angolo ’ che l’asse delle ascisse forma con una qualsiasi
semiretta uscente dall’origine degli assi e che taglia la curva della potenza. La coppia raggiunge
pertanto il suo valore massimo per quella velocità di rotazione n=ñ (fig.2.4) che rappresenta
l’ascissa del punto M sulla curva della potenza nel quale la semiretta uscente dall’origine degli assi
è tangente alla curva stessa. In tali condizioni l’angolo ’ assume il suo valore massimo (ᾱ) e così
pure la sua tangente, ovvero Pe/n.
Per velocità di rotazione superiori a ñ la potenza cresce con gradiente minore (tratto M-A di fig.2.4)
in quanto, pur diminuendo la quantità di fluido evolvente per ciclo (e quindi la coppia del motore),
continua ad aumentare, grazie all’incremento di n, il numero di cicli nell’unità di tempo. Oltre il
punto A la quantità di fluido evolvente per ogni ciclo si riduce più rapidamente di quanto aumenti il
numero di cicli nell’unità di tempo, per cui, anche a causa della sensibile riduzione del rendimento
meccanico del motore m, la potenza diminuisce fino ad annullarsi per quella velocità in
corrispondenza della quale le perdite meccaniche assorbono completamente il lavoro indicato
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.14
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
prodotto. Si osservi che in genere il motore è utilizzato fino a velocità poco superiori a quella di
potenza massima.
Per quanto riguarda il consumo specifico di combustibile, inversamente proporzionale al
rendimento globale g, nelle condizioni di pieno carico del motore si osserva che la relativa
caratteristica presenta un minimo per regimi prossimi a quelli di coppia massima. Al crescere di n a
partire dalle condizioni di minimo, i consumi aumentano principalmente per effetto dell’incremento
delle perdite meccaniche (diminuzione di m) ed in minor misura per la tendenza ad arricchire la
miscela ad alta velocità di rotazione del motore. Al diminuire di n, invece, si ha un aumento del
consumo specifico connesso principalmente all’incremento delle perdite per scambio termico.
Come si è già accennato, per meglio definire le prestazioni di un MCI, è comunque opportuno fare
riferimento anche alle curve relative alle condizioni di alimentazione parzializzata. Una visione più
completa, ancorché discretizzata, dell’andamento di una qualunque variabile yj del motore può
essere fornita da una differente rappresentazione, ottenibile intersecando la superficie yj = fj (n, )
con piani ad yj = cost e proiettando quindi le curve di intersezione sul piano (n, ); tali linee di
intersezione, ciascuna rappresentativa di uno specifico valore yj, sono dette curve di livello ed il
piano ottenuto per proiezione assume il nome di piano quotato o diagramma collinare.
Dal momento che il valore di è correlato alle caratteristiche dello specifico sistema di regolazione
utilizzato sul motore, spesso i piani quotati vengono rappresentati non sul piano (n, ) ma su piani
aventi in ascissa n ed in ordinata una differente quantità (tipicamente Pe, Ce o pme) legata a da un
legame funzionale continuo e monotono per ciascun livello di n. In tal modo si ottiene una
maggiore confrontabilità dei risultati ottenuti su propulsori differenti.
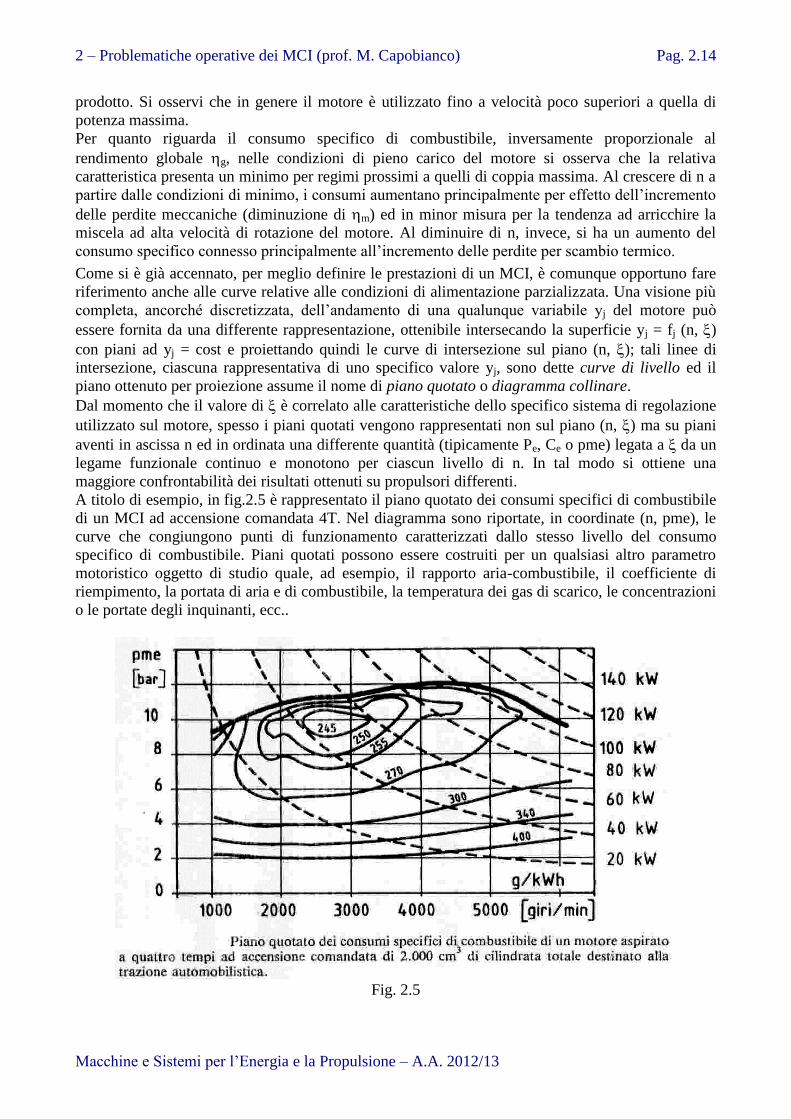
A titolo di esempio, in fig.2.5 è rappresentato il piano quotato dei consumi specifici di combustibile
di un MCI ad accensione comandata 4T. Nel diagramma sono riportate, in coordinate (n, pme), le
curve che congiungono punti di funzionamento caratterizzati dallo stesso livello del consumo
specifico di combustibile. Piani quotati possono essere costruiti per un qualsiasi altro parametro
motoristico oggetto di studio quale, ad esempio, il rapporto aria-combustibile, il coefficiente di
riempimento, la portata di aria e di combustibile, la temperatura dei gas di scarico, le concentrazioni
o le portate degli inquinanti, ecc..
Fig. 2.5

2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.15
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Nella pratica, la costruzione di un piano quotato generalmente parte dalla definizione delle
caratteristiche di regolazione del parametro di interesse, misurate per differenti velocità di rotazione
del motore ed espresse in funzione di una grandezza confrontabile correlata a (Pe, Ce, pme). Su
tali diagrammi vengono poi letti i valori di potenza (o coppia o pme) corrispondenti ai diversi livelli
della grandezza in esame che si vogliono riportare sul piano quotato. Le coppie di valori (n, Pe) così
individuate e corrispondenti allo stesso livello del parametro di interesse vengono poi riportati sul
piano quotato in un diagramma (n, Pe), individuando punti che vengono identificati con lo stesso
simbolo. Le curve di livello sono quindi ottenute congiungendo tali punti.
2.3 – La sovralimentazione dei MCI
2.3.1 – Generalità e schemi impiantistici
La sovralimentazione di un MCI è definita come precompressione di una parte o di tutta la carica al
di fuori del cilindro.
La sovralimentazione è finalizzata ad aumentare la quantità di carica introdotta nel cilindro e quindi
le prestazioni del motore, senza aumentare la velocità di rotazione. Infatti si ha:
Pe = pme ∙ Vt ∙n
60
Pe = A vA (1/) Vt Hi g n
60
Fissata la cilindrata Vt e la tipologia di motore (2 tempi o 4 tempi, quindi ε), la sovralimentazione
consente di incrementare la potenza del motore attraverso l’aumento della densità della carica A
ovvero l’aumento della pressione media effettiva pme, parametri entrambi correlati linearmente alla
potenza. Con la sovralimentazione vengono incrementati tutti i livelli di pressione dei gas
all’interno del cilindro (diagramma indicato) e quindi i valori della pressione media indicata (pmi)
ed effettiva (pme).
Occorre osservare che, incrementando n, aumentano con legge quadratica le sollecitazioni d’inerzia
(proporzionali ad n2), mentre agendo su pme aumentano linearmente le sollecitazioni dovute alla
pressione dei gas all’interno del cilindro dal punto di vista strutturale è meglio agire su pme
piuttosto che su n per incrementare la potenza del motore.
Dal momento che il processo di compressione comporta generalmente un incremento della
temperatura del fluido, è evidente che la densità della carica A potrà essere incrementata in misura
superiore se, a valle del compressore di sovralimentazione, sarà installato uno scambiatore di
refrigerazione (intercooler).
I principali vantaggi della sovralimentazione sono:
minore ingombro (possibilità di mantenere lo stesso livello di Pe del motore con una cilindrata
inferiore concetto di downsizing);
minore peso;
migliore g per i MCI Diesel turbosovralimentati;
minor costo per unità di Pe;
vantaggi in quota;
emissioni più basse (particolarmente CO ed HC per i più elevati eccessi d’aria);
Tuttavia l’adozione della sovralimentazione comporta anche alcuni svantaggi, più o meno rilevanti:
carichi termici e meccanici superiori per il motore;
caratteristiche di coppia più sfavorevoli (particolarmente con la turbosovralimentazione);
peggiore risposta in transitorio.
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.16
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
I sistemi di sovralimentazione possono essere classificati secondo diversi approcci:
a) secondo il tipo di collegamento fra il motore ed il sistema di sovralimentazione;
b) secondo la tipologia del sistema di compressione della carica;
In base al collegamento motore-sovralimentatore, si può avere:
compressore collegato meccanicamente al motore, nessuna turbina (sovralimentazione a
trascinamento meccanico, MS);
compressore e turbina sullo stesso asse, con collegamenti con il motore solo di tipo
fluidodinamico (sovralimentazione a gas di scarico o turbosovralimentazione, TC);
motore, compressore e turbina sullo stesso asse (sistema Compound);
motore e compressore collegati meccanicamente costituenti un generatore di gas per una turbina
di potenza;
In base alla tipologia del sistema di compressione della carica, si può avere:
sovralimentazione con compressore volumetrico (alternativo o rotativo);
sovralimentazione con compressore dinamico (turbocompressore radiale o assiale);
sovralimentazione con scambiatore ad onde di pressione (Comprex).
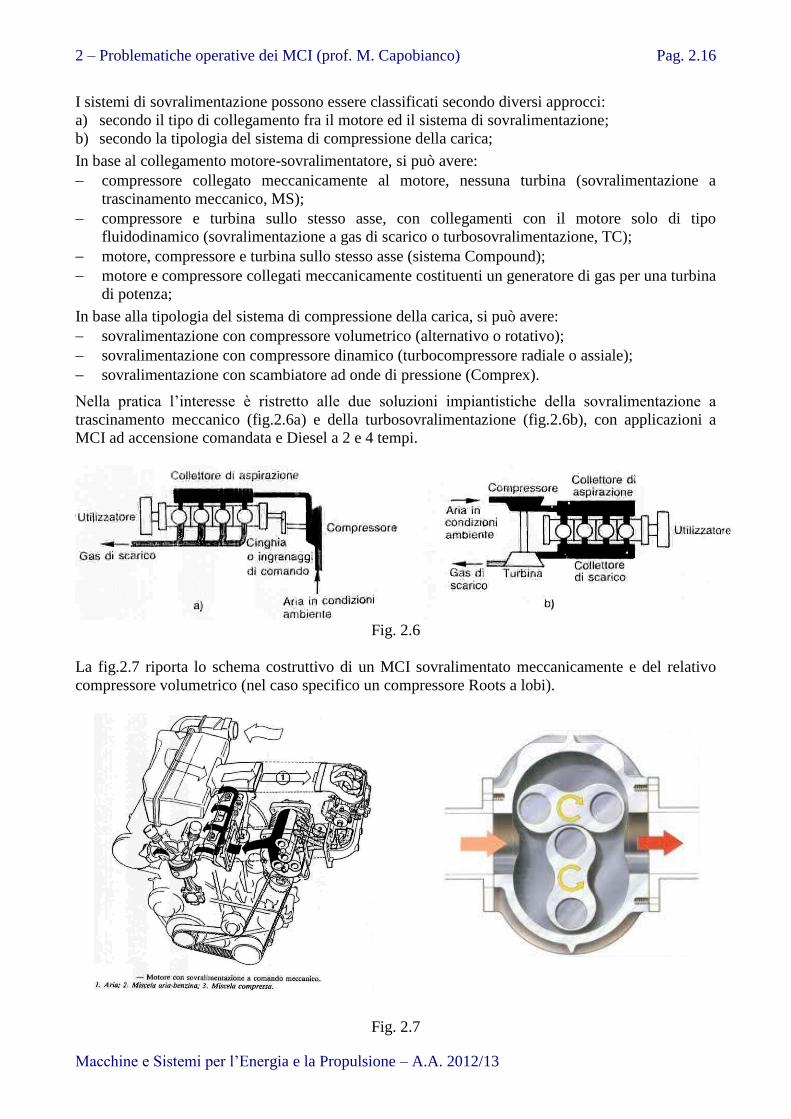
Nella pratica l’interesse è ristretto alle due soluzioni impiantistiche della sovralimentazione a
trascinamento meccanico (fig.2.6a) e della turbosovralimentazione (fig.2.6b), con applicazioni a
MCI ad accensione comandata e Diesel a 2 e 4 tempi.
Fig. 2.6
La fig.2.7 riporta lo schema costruttivo di un MCI sovralimentato meccanicamente e del relativo
compressore volumetrico (nel caso specifico un compressore Roots a lobi).
Fig. 2.7
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.17
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
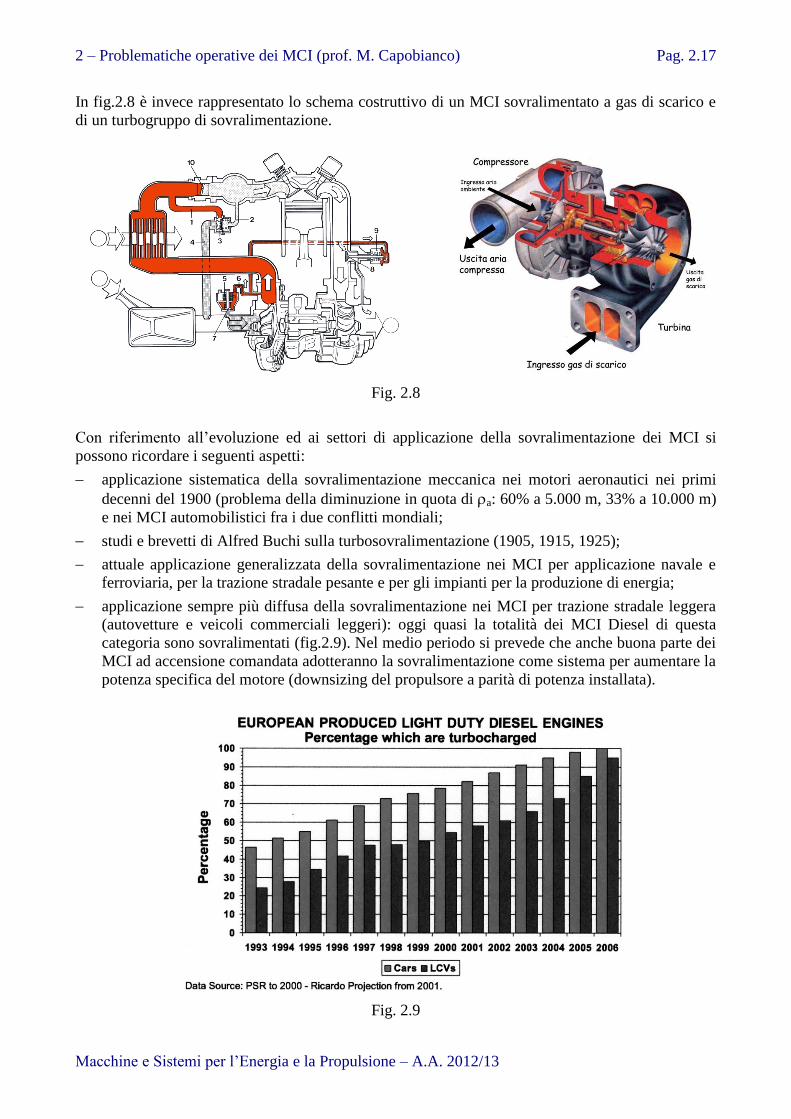
In fig.2.8 è invece rappresentato lo schema costruttivo di un MCI sovralimentato a gas di scarico e
di un turbogruppo di sovralimentazione.
Fig. 2.8
Con riferimento all’evoluzione ed ai settori di applicazione della sovralimentazione dei MCI si
possono ricordare i seguenti aspetti:
applicazione sistematica della sovralimentazione meccanica nei motori aeronautici nei primi
decenni del 1900 (problema della diminuzione in quota di a: 60% a 5.000 m, 33% a 10.000 m)
e nei MCI automobilistici fra i due conflitti mondiali;
studi e brevetti di Alfred Buchi sulla turbosovralimentazione (1905, 1915, 1925);
attuale applicazione generalizzata della sovralimentazione nei MCI per applicazione navale e
ferroviaria, per la trazione stradale pesante e per gli impianti per la produzione di energia;
applicazione sempre più diffusa della sovralimentazione nei MCI per trazione stradale leggera
(autovetture e veicoli commerciali leggeri): oggi quasi la totalità dei MCI Diesel di questa
categoria sono sovralimentati (fig.2.9). Nel medio periodo si prevede che anche buona parte dei
MCI ad accensione comandata adotteranno la sovralimentazione come sistema per aumentare la
potenza specifica del motore (downsizing del propulsore a parità di potenza installata).
Fig. 2.9
2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.18
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
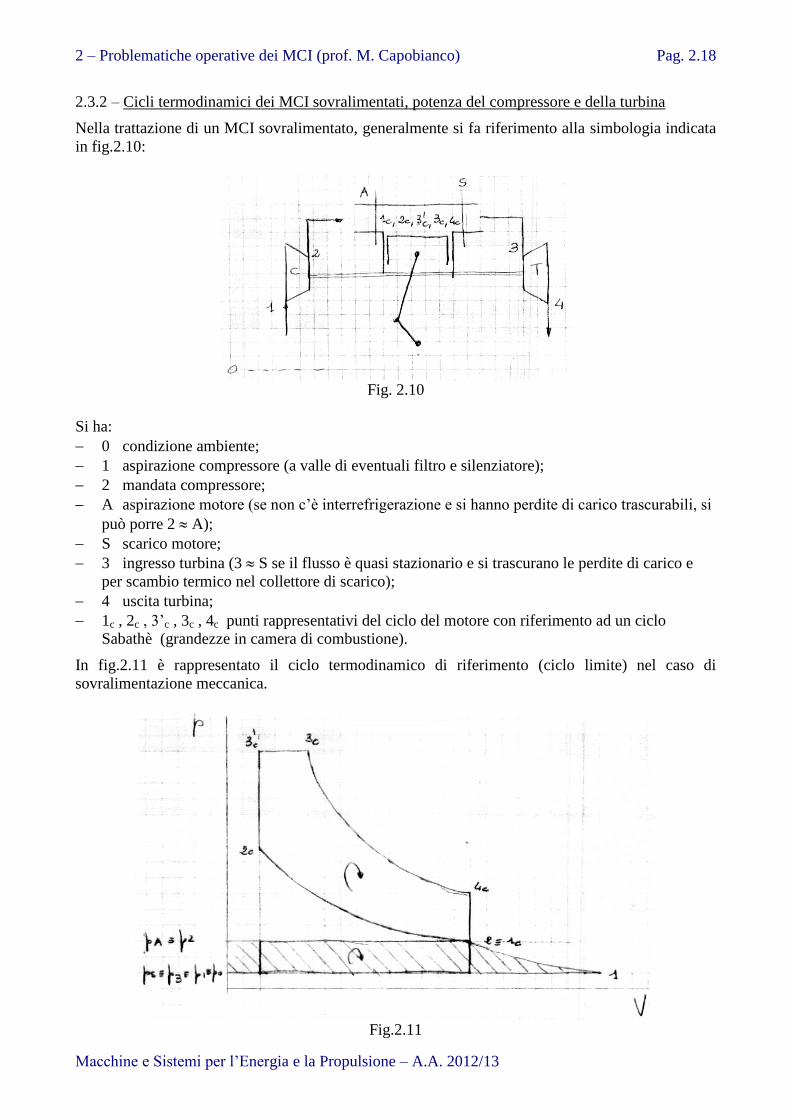
2.3.2 – Cicli termodinamici dei MCI sovralimentati, potenza del compressore e della turbina
Nella trattazione di un MCI sovralimentato, generalmente si fa riferimento alla simbologia indicata
in fig.2.10:
Fig. 2.10
Si ha:
0 condizione ambiente;
1 aspirazione compressore (a valle di eventuali filtro e silenziatore);
2 mandata compressore;
A aspirazione motore (se non c’è interrefrigerazione e si hanno perdite di carico trascurabili, si
può porre 2 A);
S scarico motore;
3 ingresso turbina (3 S se il flusso è quasi stazionario e si trascurano le perdite di carico e
per scambio termico nel collettore di scarico);
4 uscita turbina;
1c , 2c , 3’c , 3c , 4c punti rappresentativi del ciclo del motore con riferimento ad un ciclo
Sabathè (grandezze in camera di combustione).
In fig.2.11 è rappresentato il ciclo termodinamico di riferimento (ciclo limite) nel caso di
sovralimentazione meccanica.
Fig.2.11

2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.19
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Si ha:
ps = p3 = p1 = p0 (non c’è turbina). Inoltre, nel caso dei MCI 2T, manca l’area di pompaggio.
Il lavoro netto per ciclo è dato dalla differenza fra le due aree positive del ciclo motore (se sono
presenti entrambe) e l’area negativa rappresentativa del lavoro assorbito dal compressore. Rispetto
ad un motore aspirato il lavoro utile per ciclo è superiore per l’incremento dell’area del ciclo
principale per effetto dell’aumento di tutti i livelli di pressione.
In fig.2.12 è invece rappresentato il ciclo termodinamico di riferimento (ciclo limite) nel caso di
turbosovralimentazione, assumendo pA>pS.
Fig.2.12
Si ha:
ps = p3;
p4 = p0 = p1.
Nel caso della turbosovralimentazione, il lavoro netto per ciclo risente della diminuzione (o
addirittura dell’inversione di segno) del ciclo di pompaggio del motore.
Infatti il lavoro limite del motore è dato da:
LL = dVp +
Vpp SA
lavoro di pompaggio
Il lavoro limite del compressore (per unità di massa) è dato da:
Lsc = (hs)c = (h2 - h1) = cp (T2 - T1) = cP T1
1
1
2
T
T =
= cP T1
11
11
1
1
211
1
1
211
1
1
2k
k
k
k
Pk
k
p
p
k
kVp
p
p
R
Vpc
p
p
dove a rigore andrebbero considerate le pt.

2 – Problematiche operative dei MCI (prof. M. Capobianco) Pag. 2.20
Macchine e Sistemi per l’Energia e la Propulsione – A.A. 2012/13
Indicando con Mc la portata evolvente nel compressore e con c il rendimento adiabatico
(isentropico) del compressore, la potenza reale del compressore è data da:
Pc =
c
cc hsM
Per quanto riguarda le trasformazioni subite dai gas combusti, dal punto 4c (fine espansione
all’interno del cilindro) al punto 3 (inizio espansione in turbina) si hanno processi complessi che, in
prima approssimazione, possono essere descritti attraverso un’espansione 4c-3’ adiabatica
isentropica fino alla pressione p3, seguita da un recupero isobaro 3’-3. Nella realtà i gas espandono
secondo una trasformazione 4c-3 assimilabile ad una politropica di esponente n. Occorre peraltro
sottolineare che il lavoro corrispondente all’area triangolare 4c-0-3' è di fatto inutilizzabile: esso
viene in parte convertito in calore, ragione per cui la temperatura T3 all’ingresso della turbina è
maggiore della temperatura T3' di fine espansione isentropica alla pressione p3.
Il lavoro limite della turbina (per unità di massa) è dato da:
Lst = (hs)t = (h3 – h4) = cp (T3 – T4) = cP T3
3
41T
T =
cP T3
k
k
k
k
Pk
k
p
p
k
kVp
p
p
R
Vpc
p
p1
3
433
1
3
433
1
3
4 11
11
con 1p
p
3
4
Indicando con Mt la portata evolvente nella turbina e con t il rendimento adiabatico (isentropico)
della turbina, la potenza reale della turbina è esprimibile come:
Pt = Mt (hs)t t