LEZIONE 8 - calvino.polito.itcalvino.polito.it/~casnati/Geometria05BCG/Geometria/Geometria8.pdf ·...
10
LEZIONE 8 8.1. Equazioni parametriche di rette. In questo paragrafo iniziamo ad applicare quanto spiegato sui vettori geometrici per dare una descrizione delle rette nel piano e nello spazio. Sia r ⊆ S 3 una retta. Tale retta ` e sempre parallela ad un’unica retta passante per l’origine r 0 e rimane completamente individuata da essa e da un punto qualsiasi R ∈ r. Si noti che dare r 0 equivale a dare un qualsiasi vettore ~v 6= ~ 0 avente r 0 come direzione (si veda Figura 8.1.1). x y v O r R r r' Figura 8.1.1 Sia P ∈ r. Allora, per definizione, P - R = ~ OP - ~ OR (si veda la lezione 6 per la definizione di P - R): sommando ad ambo i membri ~ OR segue che ~ OP = ~ OR +(P - R). Poich´ e P - R ` e parallelo al segmento PR, dunque a r, ha direzione r 0 , quindi ` e parallelo al vettore ~v 6= ~ 0 menzionato sopra come mostrato in Figura 8.1.2. Typeset by A M S-T E X 1
Transcript of LEZIONE 8 - calvino.polito.itcalvino.polito.it/~casnati/Geometria05BCG/Geometria/Geometria8.pdf ·...

LEZIONE 8
8.1. Equazioni parametriche di rette.
In questo paragrafo iniziamo ad applicare quanto spiegato sui vettori geometriciper dare una descrizione delle rette nel piano e nello spazio.
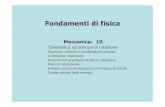
Sia r ⊆ S3 una retta. Tale retta e sempre parallela ad un’unica retta passanteper l’origine r′ e rimane completamente individuata da essa e da un punto qualsiasiR ∈ r. Si noti che dare r′ equivale a dare un qualsiasi vettore ~v 6= ~0 avente r′
come direzione (si veda Figura 8.1.1).
x
y
v
O
r
R
r
O
B
r'
Figura 8.1.1
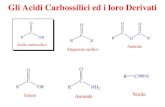
Sia P ∈ r. Allora, per definizione, P − R = ~OP − ~OR (si veda la lezione6 per la definizione di P − R): sommando ad ambo i membri ~OR segue che~OP = ~OR + (P − R). Poiche P − R e parallelo al segmento PR, dunque a r, ha
direzione r′, quindi e parallelo al vettore ~v 6= ~0 menzionato sopra come mostratoin Figura 8.1.2.
Typeset by AMS-TEX
1

2 8.1. EQUAZIONI PARAMETRICHE DI RETTE
x
y
v
O
r
R
r
r'
P
P-R
Figura 8.1.2
Segue allora dalla Proposizione 6.3.9, l’esistenza di un numero reale, che chiame-remo t tale che P − R = t~v. Mettendo assieme quanto visto segue che P ∈ Sr
giace su r se e solo se
(8.1.3) ~OP = ~OR+ t~v,
per un qualche t ∈ R.Fissiamo un sistema di riferimento O~ı~~k in S3. Allora R = (x0, y0, z0), sicche
~OP = x0~ı+y0~+z0~k , e ~v = l~ı+m~+n~k : indicando con (x, y, z) le coordinate delpunto generico P ∈ S3 si ha ~OP = x~ı + y~ + z~k , dunque che l’Equazione (8.1.3)diviene
x~ı + y~ + z~k = x0~ı + y0~ + z0~k + t(l~ı +m~ + n~k ), t ∈ R
o, eguagliando le componenti dei due vettori lungo gli assi coordinati,
(8.1.4)
x = x0 + lt
y = y0 +mt
z = z0 + nt.
Le Equazioni 8.1.4 vengono spesso chiamate equazioni parametriche della retta r
passante per R = (x0, y0, z0) e parallela al vettore ~v = l~ı +m~ + n~k .
Esempio 8.1.5. In S3 sia fissato un sistema di riferimento O~ı~~k . Siano A =(1, 2, 3) ∈ S3 e ~v = 2~ı − 3~k ∈ V3(O). Allora delle equazioni parametriche dellaretta r di S3 parallela al vettore ~v e passante per A sono date da
(8.1.5.1)
x = 1 + 2ty = 2z = 3− 3t.

LEZIONE 8 3
Ci chiediamo quale fra i punti B = (3, 2, 0) e C = (−1, 2, 1) di S3 appartengaalla retta r. Per rispondere a questa domanda bisogna capire se esistono valoridi t ∈ R per cui le coordinate di B e C possano essere scritte nella forma datadall’Equazione (8.1.5.1), ovvero se e quale fra i sistemi
3 = 1 + 2t2 = 20 = 3− 3t,
−1 = 1 + 2t2 = 21 = 3− 3t.
abbia soluzione.Consideriamo il primo dei due sistemi. Dalla prima equazione si ricava t = 1,
valore che sostituito nelle equazioni seguenti le soddisfa identicamente: possiamoquindi affermare che B ∈ R.
Consideriamo ora il secondo dei due sistemi. Dalla prima equazione si ricavat = −1, valore che sostituito nella terza equazione da l’dentita numerica 1 = 6 che,ovviamente, non e verificaa: concludiamo che C 6∈ R.
Viceversa supponiamo di avere fissato in S3 un sistema di riferimento O~ı~~k .Dati numeri reali fissati x0, y0, z0, l,m, n, si consideri il luogo r dei punti P =(x, y, z) dello spazio le cui coordinate sono della forma
x = x0 + lt
y = y0 +mt
z = z0 + nt
al variare di t ∈ R. Allora, preso t = 0, segue che R = (x0, y0, z0) ∈ r. Se poil,m, n non sono tutti nulli esistono in R infiniti altri punti P tali che
x~ı + y~ + z~k = x0~ı + y0~ + z0~k + t(l~ı +m~ + n~k ),
ovvero tali che P − R = ~OR + t~v ove ~v = l~ı + m~ + n~k . Tali punti descrivonoquindi la retta passante per il punto R sopra definito e parallela al vettore nonnullo ~v.
Concludiamo che, fissato in S3 un sistema di riferimento O~ı~~k , ogni retta puoessere descritta mediante un sistema di equazioni della forma (8.1.4) con l,m, n nonsimultaneamente nulli e, viceversa, ogni sistema di equazioni della forma (8.1.4)con l,m, n non simultaneamente nulli rappresenta una retta.
Si noti che data una retta r rappresentata tramite un sistema di equazionidella forma (8.1.4) si e subito in grado di determinarne un punto (basta scegliereun valore di t ∈ R, per esempio t = 0) e un vettore ad esso parallela (bastaconsiderare il vettore definito dai coefficienti di t nell’equazione, cioe l~ı+m~+n~k ).In particolare, tramite le loro equazioni parametriche, e facile stabilire se due rettesono parallele oppure no.

4 8.1. EQUAZIONI PARAMETRICHE DI RETTE
Esempio 8.1.6. In S3 sia fissato un sistema di riferimento O~ı~~k e si considerinola retta r dell’Esempio 8.1.5 e la retta s di equazioni parametriche
x = 2− 2ty = 0z = 3t.
Allora r ed r′ sono parallele: infatti r e parallela al vettore ~v = 2~ı − 3~k ed s a~w = −2~ı + 3~k , che sono paralleli fra loro.
Si noti che di punti su una retta ne esistono infiniti, cosı come sono infiniti ivettori ad essa paralleli. Questa infinita di possibili scelte ci permette di affermareche una stessa retta puo essere rappresentata da sistemi di equazioni parametricheanche molto diversi: per tale motivo non si dovrebbe mai scrivere “le equazioniparametriche di r sono . . . ”, bensı “delle equazioni parametriche di r sono . . . ”.
Esempio 8.1.7. In S3 sia fissato un sistema di riferimento O~ı~~k e si consideri laretta s di equazioni parametriche
x = 3− 4ty = 2z = 6t.
Tale retta passa per il punto di coordinate B = (3, 2, 0) ed e parallela al vettore~w = −4~ı + 6~k .
Ricordando l’Esempio 8.1.5 segue che s ha in comune con la retta r di Equazioni(8.1.5.1) il punto B ed e ad essa parallela, perche ~w = −4~ı + 6~k = −2(2~ı − 3~k ) =−2~v, quindi essendo rette parallele ed incidenti devono coincidere, cioe s = r:questa uguaglianza non e immediatamente deducibile dall’analisi dei sistemi diequazioni parametriche che definiscono r ed s.
Piu in generale, dal confronto di sistemi di equazioni parametriche di due rette,si puo dedurre la loro posizione relativa. Ricordo che due rette r, s ⊆ S3 possonoessere coincidenti, incidenti in un unico punto, parallele distinte (in questi tre casile rette sono contenute in un piano e vengono percio dette complanari) oppure nonessere ne parallele ne incidenti: in quest’ultimo caso si parla di rette sghembe.
Osservazione 8.1.8. Le Equazioni (8.1.4) della retta r possono essere pensate comeleggi orarie del moto di un punto P lungo la retta r con posizione iniziale R =(x0, y0, z0) e velocita costante ~v = l~ı +m~ +n~k . Questo punto di vista puo esseremolto utile nell’affrontare problemi di incidenza fra rette date tramite equazioniparametriche.
Per esempio si consideri la retta r dell’Esempio 8.1.5 e la retta s di equazioniparametriche
(8.1.8.1)
x = t− 1y = 2− tz = 6 + t.

LEZIONE 8 5
La retta s e parallela al vettore ~w =~ı −~ +~k : poiche r e parallela a ~v = 2~ı − 3~ ,deduciamo che r 6‖ s.
Ci domandiamo se r ed s siano incidenti. Un primo approccio che puo venirein mente e il seguente: conosciamo le coordinate del punto generico su r e su sin funzione di un parametro, quindi basta eguagliare tali coordinate e vedere seil sistema cosı ottenuto ha soluzione o no: se sı allora r ∩ s 6= ∅, se no r ∩ s =∅. Bisogna fare pero attenzione a come si traduce praticamente tale approccio.Infatti se semplicemente eguagliamo le Equazioni (8.1.5.1) alle Equazioni (8.1.8.1)otteniamo
1 + 2t = t− 12 = 2− t3− 3t = 6 + t.
che, come e facile verificare, non ha soluzione, dunque sembrerebbe che r ∩ s = ∅,cioe sembrerebbe di essere di fronte a una coppia di rette sghembe.
Invece si noti che (−1, 2, 6) ∈ r∩ s: infatti si ottiene per t = −1 dalle Equazioni(8.1.5.1) e per t = 0 dalle Equazioni (8.1.8.1). Dove sta l’errore?
L’errore sta nel fatto che noi ci siamo domandati non se i punti in moto sulledue rette r ed s potranno mai passare per uno stesso punto, ma se cio accadeesattamente nello stesso istante!
Quindi il modo per non sbagliare e quello di misurare i tempi in modo diversosulle due rette utilizzando, ad esempio, il tempo t su r e t′ su s: in questo modoil problema si traduce nel sistema
1 + 2t = t′ − 12 = 2− t′
3− 3t = 6 + t′.
Dalla seconda equazione otteniamo t′ = 0: sostituendo nelle rimanenti ottenniamot = −1. Come visto sopra i valori t′ = 0 su s e t = −1 su r danno lo stesso punto(−1, 2, 6).
Se invece consideriamo la retta u di equazioni parametrichex = t
y = 2− tz = 6 + t
ancora r 6‖ u e, inoltre, e facile verificare che r ∩ u = ∅, poiche il sistema1 + 2t = t′
2 = 2− t′
3− 3t = 6 + t′
non e compatibile: concludiamo che r ed u sono sghembe.

6 8.1. EQUAZIONI PARAMETRICHE DI RETTE
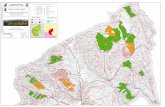
E noto dalla geometria euclidea che un altro modo per descrivere una retta r equello di dare due punti distinti A e B che le appartengono. In tal caso ci si puoricondurre al caso precedente. Infatti un punto, per esempio A, l’abbiamo: percostruire un vettore parallelo a r basta considerare B−A (si veda la Figura 8.1.9).
x
y
O
A
rB
B-A
Figura 8.1.9
Se fissiamo un sistema di riferimento O~ı~~k in S3, A = (xA, yA, zA), B =(xB , yB , zB) allora B−A = (xB−xA)~ı+(yB−yA)~+(zB−zA)~k , sicche sostituendonell’Equazione (8.1.4) otteniamo le equazioni parametriche della retta r passanteper A = (xA, yA, zA) e B = (xB , yB , zB)
(8.1.10)
x = xA + (xB − xA)ty = yA + (yB − yA)tz = zA + (zB − zA)t
o anche x = (1− t)xA + txB
y = (1− t)yA + tyB
z = (1− t)zA + tzB
(talvolta si scrive sinteticamente P = (1− t)A+ tB).Si noti che P = (x, y, z) ∈ AB se e solo se
x = (1− t)xA + txB
y = (1− t)yA + tyB
z = (1− t)zA + tzB ,
t ∈ [0, 1],
o, equivalentemente, sex = λxA + µxB
y = λyA + µyB
z = λzA + µzB ,
λ, µ ≥ 0, λ+ µ = 1.

LEZIONE 8 7
Per esempio il punto medio M di AB ha coordinate corrispondenti a t = 1/2,cioe
M =(xA + xB
2,yA + yB
2,zA + zB
2
).
Esempio 8.1.11. Fissiamo un sistema di riferimento O~ı~~k in S3. Siano A =(1, 2,−3), B = (2, 1, 1): chiaramente A 6= B, quindi esiste unica una retta rcontenente A e B le cui equazioni parametriche si ottengono utilizzando la Formula(8.1.10)
x = 1 + t
y = 2− tz = −3 + 4t.
8.2. Equazioni parametriche di piani.In questo paragrafo imiteremo quanto gia fatto per descrivere le rette nel piano
e nello spazio alla descrizione di piani in S3.Sia α ⊆ S3 un piano. Tale piano e sempre parallelo ad un’unico piano passante
per l’origine α′ e rimane completamente individuata da essa e da un punto qualsiasiA ∈ α.
x
y
z
O
α'
α
A
w
v
Figura 8.2.1
Quindi per descrivere α e necessario descrivere α′. Siano ~v e ~w due vettoricontenuti in α′ e non paralleli: allora la Proposizione 6.3.10 assicura che P ′ ∈ α′
se e solo se esistono t, u ∈ R tali che ~OP ′ = t~v + u~w.Sia ora P ∈ α. Allora per definizione P − A = ~OP − ~OA: segue che ~OP =
~OA + (P − A). Poiche P − A e parallelo al segmento PA, dunque a α, esso econtenuto in α′, quindi esistono, per quanto osservato sopra, s, t ∈ R tali cheP −A = t~v + u~w. Mettendo assieme quanto visto segue che P ∈ S3 giace su α see solo se
(8.2.2) ~OP = ~OA+ t~v + u~w,

8 8.2. EQUAZIONI PARAMETRICHE DI PIANI
per un qualche t, u ∈ R (si veda Figura 8.2.3).
x
y
z
O
α'
α
A
w
v
P
P-A
Figura 8.2.3
Fissiamo un sistema di riferimento O~ı~~k in S3. Allora A = (xA, yA, zA), sicche~OA = xA~ı + yA~ + zA
~k , ~v = vx~ı + vy~ + vz~k , ~w = wx~ı + wy~ + wz
~k : indicandocon (x, y, z) le coordinate del punto generico P ∈ S3 si ha ~OP = x~ı + y~ + z~k ,dunque l’Equazione (8.2.2) diviene
x~ı+y~+z~k = xA~ı+yA~+zA~k+t(vx~ı+vy~+vz
~k )+u(wx~ı+wy~+wz~k ), t, u ∈ R
o, eguagliando le componenti dei due vettori lungo gli assi coordinati,
(8.2.4)
x = xA + vxt+ wxu
y = yA + vyt+ wyu
z = zA + vzt+ wzu.
Le Equazioni (8.2.4) vengono spesso chiamate equazioni parametriche del piano
α passante per A = (xA, yA, zA) e parallelo ai vettori ~v = vx~ı + vy~ + vz~k , ~w =
wx~ı + wy~ + wz~k .
Esempio 8.2.5. In S3 sia fissato un sistema di riferimento O~ı~~k . Siano A =(1, 2, 3) ∈ S3 e ~v = 2~ı − 3~k , ~w = ~ı + ~ + ~k ∈ V3(O). I vettori ~v e ~w non sonoparalleli, quindi i dati individuano un piano α le cui equazioni parametriche sonodate da
(8.2.5.1)
x = 1 + 2t+ u
y = 2 + u
z = 3− 3t+ u.
Si noti che la retta r dell’Esempio 8.1.5 di equazioni parametrichex = 1 + 2ty = 2z = 3− 3t,

LEZIONE 8 9
e contenuta in α: infatti i suoi punti si ottengono ponendo u = 0 nelle Equazioni(8.2.5.1)
Viceversa supponiamo di avere fissato in S3 un sistema di riferimento O~ı~~k .Dati numeri reali fissati xA, yA, zA, vx, vy, vz, wx, wy, wz, si considerino il luogo αdei punti P = (x, y, z) dello spazio le cui coordinate sono della forma
x = xA + vxt+ wxu
y = yA + vyt+ wyu
z = zA + vzt+ wzu.
al variare di t, u ∈ R. Allora, procedendo come nel caso della retta, e facileverificare che tale luogo e il piano α passante per il punto A = (xA, yA, zA) eparallelo ai vettori ~v = vx~ı + vy~ + vz
~k , ~w = wx~ı + wy~ + wz~k .
E noto dalla geometria euclidea che un altro modo per descrivere un pianoα e quello di dare tre suoi punti A, B e C non allineati. In tal caso ci si puoricondurre al caso precedente. Infatti un punto, per esempio A, l’abbiamo: percostruire due vettori paralleli a α basta considerare B − A e C − A. Se, rispettoal sistema di riferimento O~ı~~k fissato in S3, A = (xA, yA, zA), B = (xB , yB , zB),C = (xC , yC , zC) allora B−A = (xB −xA)~ı + (yB − yA)~ + (zB − zA)~k e C−A =(xC − xA)~ı + (yC − yA)~ + (zC − zA)~k sicche sostituendo nell’Equazione (8.2.4)otteniamo le equazioni parametriche del piano α passante per A = (xA, yA, zA),B = (xB , yB , zB), C = (xC , yC , zC)
(8.2.6)
x = xA + (xB − xA)t+ (xC − xA)uy = yA + (yB − yA)t+ (yC − yA)uz = zA + (zB − zA)t+ (zC − zA)u.
o anche x = (1− t− u)xA + txB + uxC
y = (1− t− u)yA + tyB + uyC
z = (1− t− u)zA + tzB + uzC
(talvolta si scrive sinteticamente P = (1− t)A+ tB + uC).Se poi vogliamo descrivere le coordinate dei punti del triangolo ∆ABC e suffi-
ciente che ci limitiamo a considerare i punti le cui coordinate si possono esprimeretramite la Formula (8.2.6) con t, u ∈ [0, 1] e t+ u ≤ 1, cioe P = (x, y, z) ∈ ∆ABC
se e solo se x = (1− t− u)xA + txB + uxC
y = (1− t− u)yA + tyB + uyC
z = (1− t− u)zA + tzB + uzC
t, u, t+ u ∈ [0, 1],

10 8.2. EQUAZIONI PARAMETRICHE DI PIANI
o, equivalentemente, sex = λxA + µxB + νxC
y = λyA + µyB + νyC
z = λzA + µzB + νzC
λ, µ, ν ≥ 0, λ+ µ+ ν = 1.
Esempio 8.2.6. Fissiamo un sistema di riferimento O~ı~~k in S3. Siano A =(1, 2,−3), B = (2, 1, 1), C = (2, 2, 2).: chiaramente A 6= B, quindi esiste unico unpiano α contenente A, Be C le cui equazioni parametriche si ottengono utilizzandola Formula 8.2.6
x = 1 + t+ u
y = 2− tz = −3 + 4t+ 5u.