
LE INTERSEZIONI STRADALI IN AMBITO EXTRAURBANO · conflitto e del tipo di manovra (strada...
95
LE INTERSEZIONI STRADALI IN AMBITO EXTRAURBANO Sascia Canale Salvatore Leonardi Francesco Nicosia
Transcript of LE INTERSEZIONI STRADALI IN AMBITO EXTRAURBANO · conflitto e del tipo di manovra (strada...

LE INTERSEZIONISTRADALI IN
AMBITOEXTRAURBANO
Sascia Canale
Salvatore Leonardi
Francesco Nicosia
I
Le intersezioni stradali in ambito extraurbano
INDICE
1. PREMESSE……………………………………………………………………1
2. INTERSEZIONI A RASO REGOLATE DALLA PRECEDENZA………. 3
2.1 Intervallo critico……………………………………………………………… 6
2.2 Livello di servizio……………………………………………………………... 7
3. VISIBILITA’ NELLE INTERSEZIONI A RASO…………………………. 8
4. PRINCIPALI SCHEMI DI INTERSEZIONI A RASO…………………… 13
5. ELEMENTI DELLE INTERSEZIONI A RASO…………………………... 19
5.1 Modulo di corsie……………………………………………………………….19
5.2 Corsie di attesa………………………………………………………………... 20
5.3 Corsie di decelerazione………………………………………………………..20
5.4 Corsie di accumulo…………………………………………………………… 22
5.5 Geometria dei cigli……………………………………………………………. 25
5.6 Cigli esterni delle corsie di svolta a destra………………………………….. 27
5.7 Isole di canalizzazione………………………………………………………... 28
5.7.1 Isola divisionale………………………………………………………………. 28
5.7.2 Isola a goccia…………………………………………………………………. 29
5.7.3 Isole direzionali……………………………………………………………….. 30
6. ROTATORIE…………………………………………………………………. 31
6.1 Dimensionamento delle rotatorie………………………………………….… 33
7. ZONE DI SCAMBIO………………………………………………………… 35
8. INTERSEZIONI A RASO REGOLATE SEMAFORICAMENTE………. 41
8.1 Il calcolo del ciclo semaforico………………………………………………... 41
8.2 Il concetto di flusso di saturazione…………………………………………... 42
8.3 Capacità e livelli di servizio delle intersezioni semaforizzate……………… 43

II
Le intersezioni stradali in ambito extraurbano
9. INTERSEZIONI A LIVELLI SFALSATI…………………………………. 46
9.1 Svolta a destra………………………………………………………………… 47
9.2 Manovra di attraversamento………………………………………………… 48
9.3 Svolta a sinistra……………………………………………………………….. 49
10. FATTORI DI COORDINAMENTO DELLE RAMPE……………………. 51
11. TRONCO DI STACCO…………………………………….…………………54
12. TRONCO INTERMEDIO DI DECELERAZIONE……………………….. 58
12.1 Calcolo del fattore di forma (n) ottimale delle iperclotoidi……………….. 62
13. TRONCO INTERMEDIO DI ACCELERAZIONE……………………….. 66
14. TRONCO DI ATTACCO……………………………………………………. 68
15. PRINCIPALI SCHEMI DI INTERSEZIONI A LIVELLI SFALSATI….. 76
APPENDICE: IL SOFTWARE I.S.P. (PROCEDURE PER
INTERSEZIONI STRADALI)………………………………………………. 82
BIBLIOGRAFIA……………………………………………………………... 92

1
Le intersezioni stradali in ambito extraurbano
LE INTERSEZIONI STRADALI
IN AMBITO EXTRAURBANO
1. PREMESSE
Il sistema stradale è costituito da una rete, più o meno complessa, articolata in nodi
ed archi (o rami).
L’utente stradale sceglie il suo itinerario nell’ambito delle possibilità, a lui note,
offertegli dalla rete, utilizzando i rami e i nodi che a lui appaiono più convenienti per
andare da A a B (Fig. 1).
AB
1
2
38
4
5
6
7
9
ramo
nodo
Figura 1. Grafo rappresentativo di una rete stradale.
Come è noto esiste una gerarchia fra i vari rami della rete che generalmente è
funzione della capacità offerta e della velocità ammissibile, per cui alcuni rami avranno
caratteristiche autostradali, altri di viabilità ordinaria, altri ancora di viabilità minore.
Il nodo che è l’elemento di interconnessione fra i vari rami della rete, assume
caratteristiche diverse a seconda della tipologia di rami che in esso si connettono. Il
numero di rami confluenti in un nodo è almeno tre (intersezione a T), più comunemente
è quattro (generico incrocio), raramente è maggiore di quattro.
Il principio basilare di analisi di un nodo è quello di individuare i flussi di traffico per
ognuna delle direzioni possibili nel nodo. Per esempio, in un nodo in cui confluiscono

2
Le intersezioni stradali in ambito extraurbano
tre rami le direzioni possibili sono sei, in un nodo “a quattro rami” sono dodici e così
via.
Dall’analisi della domanda si capisce il peso relativo di un ramo rispetto agli altri e
quindi si possono individuare le modalità di soluzione del problema.
Occorre tuttavia considerare preliminarmente l’esistenza di alcune specificità
condizionanti che possono obbligare a delle scelte, indipendentemente dai flussi. La più
evidente di queste riguarda le autostrade in cui è proibita, per definizione, ogni
intersezione a raso con altre infrastrutture. Tuttavia, questa condizione dirimente non
esclude la necessità di analisi, come già detto, in quanto a valle della decisione “livelli
sfalsati” la gamma di scelte possibili è ampia.
32 punti di conflitto
8 punti di divergenza
8 punti di convergenza
16 punti di intersezione
9 punti di conflitto
3 punti di divergenza
3 punti di convergenza
3 punti di intersezione
8 punti di conflitto
4 punti di divergenza
2 punti di convergenza
2 punti di intersezione
Incrocio a quattro rami Intersezione a T
Incrocio regolato con semaforo
Figura 2. Punti di conflitto in alcune tipologie di intersezioni stradali.

3
Le intersezioni stradali in ambito extraurbano
Si evidenzia quindi come primo orizzonte di scelta, quello fra intersezione “a raso”
ed intersezione “a livelli sfalsati”.
A parte il caso autostradale in cui questo primo passo è obbligato, in tutti gli altri casi
è funzione della distribuzione della domanda. E’ evidente, infatti, che in ogni nodo si
creano delle conflittualità fra le varie direzioni possibili le cui traiettorie si intersecano
in un certo punto (figura 2). A seconda dei flussi, tali conflittualità possono essere
risolte con la semplice regolazione della precedenza, con un impianto semaforico, o,
infine, con lo sfalsamento delle quote di attraversamento, che può essere a due o più
livelli.
2. INTERSEZIONI A RASO REGOLATE DALLA PRECEDENZA
Si tratta del più diffuso tipo di nodo esistente sulla rete viaria ordinaria. In genere
consiste in un incrocio fra una strada principale ed una strada minore regolato dal
segnale di STOP su quest’ultima, che consente ai flussi che percorrono la viabilità
principale di avere la precedenza su quelli che transitano sulla viabilità secondaria
(Figura 3).
Intersezione a T
Intersezione a quattro rami
Priorità delle correnti di traffico
1: 2, 3, 52: 4, 83: 7
Priorità delle correnti di traffico
1: 2, 3, 5, 62: 1, 4, 9, 123: 8, 114: 7, 10
12 3
654
87 9
111210
23
7 8
54
Figura 3. Esempi di intersezioni a raso regolate dal segnale di STOP ed indicazione delle priorità dimanovra.

4
Le intersezioni stradali in ambito extraurbano
In questo tipo di intersezione, in genere, si costituisce la seguente gerarchia
operativa:
la prima priorità è data ai flussi di traffico che percorrono la strada principale in
attraversamento o in svolta a destra sulla secondaria;
la seconda priorità è riferita ai flussi di traffico che dalla strada principale
vogliono svoltare a sinistra verso la secondaria;
la terza priorità concerne i veicoli che, dalla secondaria, vogliono svoltare a
destra verso la principale;
la quarta priorità si riferisce ai veicoli in attraversamento sulla strada secondaria;
infine, l’ultima possibilità riguarda la svolta a sinistra dalla secondaria verso la
principale.
In questo tipo di intersezione, gli utenti che devono dare la precedenza, devono
selezionare quegli intervalli, nel flusso di traffico della strada principale, in cui è
consentito effettuare in sicurezza la manovra desiderata. Nel caso di presenza di code
sulla propria direzione di marcia, occorre considerare anche la quantità di tempo
necessaria per raggiungere la posizione di testa della coda, prima di poter scegliere
l’intervallo idoneo per effettuare in sicurezza la manovra voluta.
Se ne deduce che la capacità di un’intersezione di questo tipo dipende da:
♦ la distribuzione degli intervalli nel flusso della strada principale;
♦ la capacità di scelta dell’intervallo da parte degli utenti;
♦ il tempo richiesto dalla coda.
In questa analisi non si può prescindere dalle regole della teoria di accettazione
dell’intervallo, che considera sia il diverso comportamento degli utenti a parità di
situazione, sia il diverso approccio di un singolo utente nella stessa situazione ripetuta
nel tempo.
Lavorando su basi statistiche, l’HCM 94 propone la seguente formula per il calcolo
della capacità:
3600
tV
fx,p
0y
y,c
et
3600C
⋅
−∑
⋅= [1]
dove:
♦ Cp,x = capacità potenziale della manovra secondaria x (veicoli leggeri/ora);

5
Le intersezioni stradali in ambito extraurbano
♦ Vc,y = flusso nella direzione y in conflitto (veicoli/ora);
♦ t0 = tg – (tf/2);
♦ tg = intervallo critico (secondi);
♦ tf = tempo di attesa in coda (secondi).
Per omogeneità è conveniente esprimere i valori di flusso in veicoli equivalenti
utilizzando un coefficiente di equivalenza che dipende sia dal tipo di veicolo, sia dalla
pendenza longitudinale di ogni ramo in corrispondenza dell’intersezione (Tab. 1).
Pendenza (%)
Tipo di veicolo -4 -2 0 +2 +4Motociclo 0.3 0.4 0.5 0.6 0.7Veicoli leggeri 0.8 0.9 1.0 1.2 1.4SU/RVsa 1.0 1.2 1.5 2.0 3.0Combinazione di veicolib 1.2 1.5 2.0 3.0 6.0Tutti i veicolic 0.9 1.0 1.1 1.4 1.7
a Singola unità di veicoli pesanti e veicoli ricreazionali.b Include combinazioni di rimorchi e autobus.c Se la combinazione di veicoli non è nota, possono essere usati questi valori come approssimazione.
Tabella 1. Veicoli leggeri equivalenti per intersezioni non semaforizzate in base all’HCM 94.
Nel calcolo di Vc,y (il flusso in conflitto) bisogna tenere conto di alcune situazioni
particolari, quali ad esempio:
• La svolta a destra dalla secondaria: in questo caso il flusso in conflitto è soltanto
quello che percorre in attraversamento la corsia di destra della principale, cui è
opportuno aggiungere la metà del flusso che gira a destra dalla principale nel
caso in cui quest’ultima manovra non sia dotata di corsia dedicata. Questo per
tener conto della mancata segnalazione di svolta a destra da parte di diversi
utenti.
• La svolta a sinistra dalla principale: sicuramente il flusso in conflitto è quello
opposto sulla principale in attraversamento a cui si aggiunge anche quello in
svolta a destra a meno che quest’ultimo sia condizionato dallo stop.
• La manovra di attraversamento sulla secondaria: il conflitto avviene con tutti i
flussi della principale a meno della svolta a destra che è valutata per metà, per
tenere conto del mancato segnalamento.
6
Le intersezioni stradali in ambito extraurbano
• La svolta a sinistra dalla secondaria: è la manovra più difficile da effettuare in
questo tipo di intersezione. Il volume del flusso in conflitto è dato
dall’attraversamento della principale, da metà del flusso di svolta a destra della
principale e da metà del flusso di attraversamento e di svolta a destra sul ramo
opposto della secondaria.
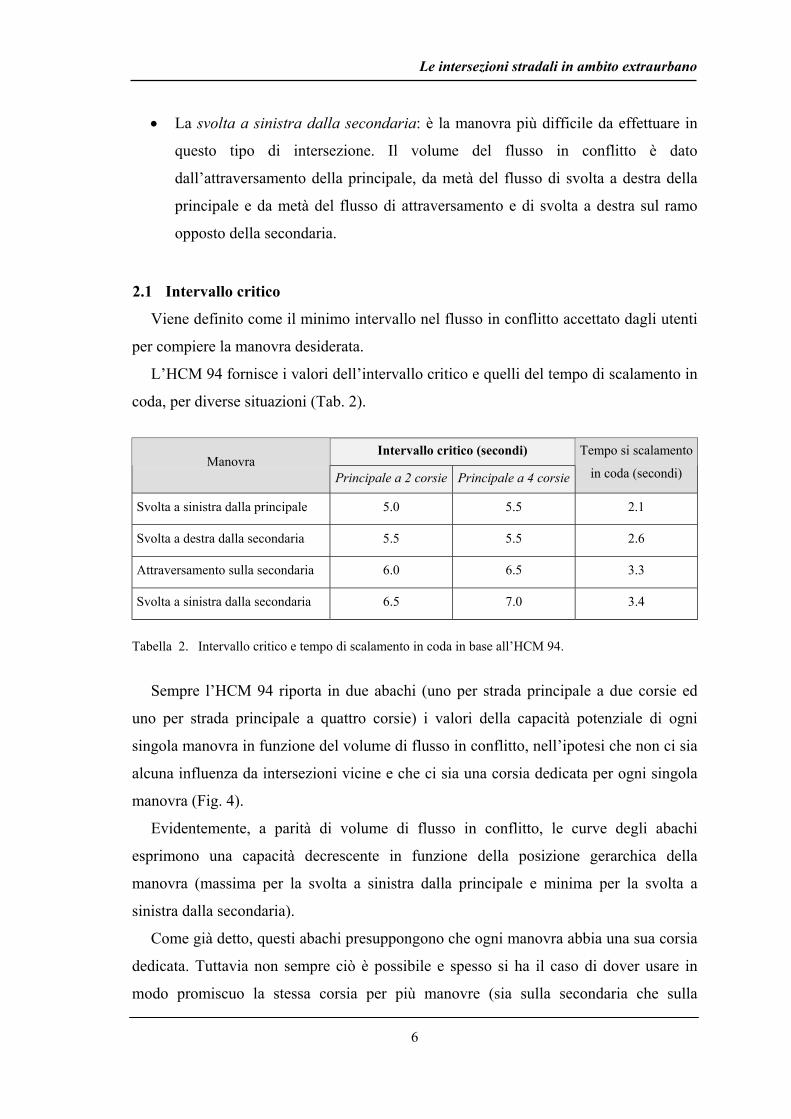
2.1 Intervallo critico
Viene definito come il minimo intervallo nel flusso in conflitto accettato dagli utenti
per compiere la manovra desiderata.
L’HCM 94 fornisce i valori dell’intervallo critico e quelli del tempo di scalamento in
coda, per diverse situazioni (Tab. 2).
Intervallo critico (secondi)Manovra
Principale a 2 corsie Principale a 4 corsie
Tempo si scalamento
in coda (secondi)
Svolta a sinistra dalla principale 5.0 5.5 2.1
Svolta a destra dalla secondaria 5.5 5.5 2.6
Attraversamento sulla secondaria 6.0 6.5 3.3
Svolta a sinistra dalla secondaria 6.5 7.0 3.4
Tabella 2. Intervallo critico e tempo di scalamento in coda in base all’HCM 94.
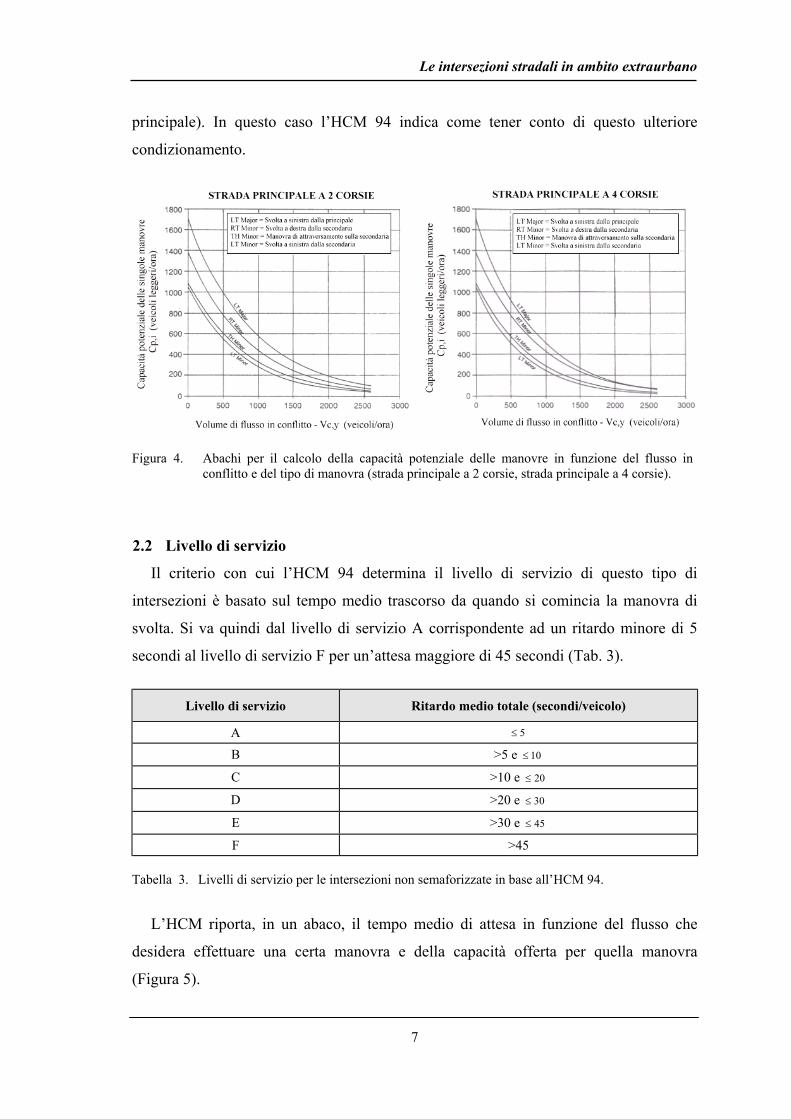
Sempre l’HCM 94 riporta in due abachi (uno per strada principale a due corsie ed
uno per strada principale a quattro corsie) i valori della capacità potenziale di ogni
singola manovra in funzione del volume di flusso in conflitto, nell’ipotesi che non ci sia
alcuna influenza da intersezioni vicine e che ci sia una corsia dedicata per ogni singola
manovra (Fig. 4).
Evidentemente, a parità di volume di flusso in conflitto, le curve degli abachi
esprimono una capacità decrescente in funzione della posizione gerarchica della
manovra (massima per la svolta a sinistra dalla principale e minima per la svolta a
sinistra dalla secondaria).
Come già detto, questi abachi presuppongono che ogni manovra abbia una sua corsia
dedicata. Tuttavia non sempre ciò è possibile e spesso si ha il caso di dover usare in
modo promiscuo la stessa corsia per più manovre (sia sulla secondaria che sulla
7
Le intersezioni stradali in ambito extraurbano
principale). In questo caso l’HCM 94 indica come tener conto di questo ulteriore
condizionamento.
Figura 4. Abachi per il calcolo della capacità potenziale delle manovre in funzione del flusso inconflitto e del tipo di manovra (strada principale a 2 corsie, strada principale a 4 corsie).
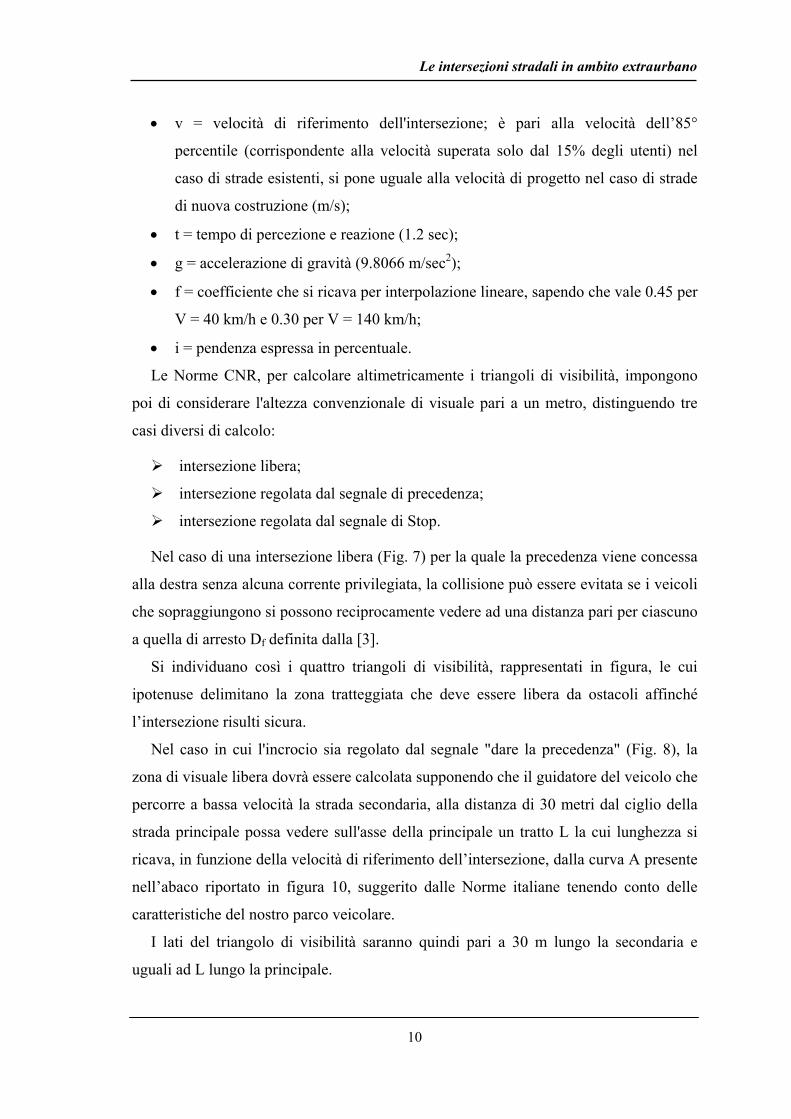
2.2 Livello di servizio
Il criterio con cui l’HCM 94 determina il livello di servizio di questo tipo di
intersezioni è basato sul tempo medio trascorso da quando si comincia la manovra di
svolta. Si va quindi dal livello di servizio A corrispondente ad un ritardo minore di 5
secondi al livello di servizio F per un’attesa maggiore di 45 secondi (Tab. 3).
Livello di servizio Ritardo medio totale (secondi/veicolo)
A 5≤
B >5 e 10≤
C >10 e 20≤
D >20 e 30≤
E >30 e 45≤
F >45
Tabella 3. Livelli di servizio per le intersezioni non semaforizzate in base all’HCM 94.
L’HCM riporta, in un abaco, il tempo medio di attesa in funzione del flusso che
desidera effettuare una certa manovra e della capacità offerta per quella manovra
(Figura 5).

8
Le intersezioni stradali in ambito extraurbano
Figura 5. Abaco per il calcolo del tempo medio di attesa (D) in funzione del flusso di manovra e dellacapacità offerta per ogni manovra.
E’ evidente che esistono delle intersezioni in cui una sola manovra presenta un basso
livello di servizio mentre tutte le altre appaiono soddisfacenti. In questi casi si può
cercare di migliorare, se possibile, la geometria dell’intersezione con l’aggiunta di
corsie dedicate. Se questi tentativi si rivelano insufficienti, soprattutto in caso di più
manovre contemporanee, allora bisogna ricorrere alla semaforizzazione
dell’intersezione.
3. VISIBILITA’ NELLE INTERSEZIONI A RASO
In tutti i problemi connessi con la sicurezza della guida la visibilità riveste una
grande importanza. E' infatti necessario che le intersezioni stradali siano organizzate in
modo da consentire ai conducenti una visibilità sufficiente per decidere in primo luogo
quale manovra effettuare, e, in secondo luogo, per poterla compiere riducendo al
minimo il rischio di collisione con il veicolo che sopraggiunge sull'altra via.
Se due veicoli 1 e 2 procedono a velocità rispettivamente V1 e V2 su due traiettorie
intersecantesi in un punto, occorre che in prossimità dell'incrocio vengano rimossi gli

9
Le intersezioni stradali in ambito extraurbano
ostacoli alla visibilità. Occorre pertanto definire planimetricamente i contorni del
triangolo di visibilità (tratteggiato in figura 6) che garantisca i requisiti predetti con
dimensioni variabili in ordine alle velocità di approccio.
d2
d1 Punto di collisione
1
2
V1
V2
Figura 6. Visualizzazione del triangolo di visibilità (tratteggiato).
Il primo requisito di visibilità, che deve garantire qualsiasi incrocio a raso, concerne
la possibilità di discernere da sufficiente distanza la zona di potenziale conflitto
all'interno dell'incrocio.
Si ritiene al riguardo indispensabile che tale zona sia perfettamente visibile ad una
distanza almeno pari a Ds (distanza di visibilità per il sorpasso) per la strada principale e
Df (distanza di frenatura) per la secondaria, secondo le formule:
v10Ds ⋅= [2]
±⋅⋅
+⋅=
100ifg2
vtvD2
f [3]
dove:
10
Le intersezioni stradali in ambito extraurbano
• v = velocità di riferimento dell'intersezione; è pari alla velocità dell’85°
percentile (corrispondente alla velocità superata solo dal 15% degli utenti) nel
caso di strade esistenti, si pone uguale alla velocità di progetto nel caso di strade
di nuova costruzione (m/s);
• t = tempo di percezione e reazione (1.2 sec);
• g = accelerazione di gravità (9.8066 m/sec2);
• f = coefficiente che si ricava per interpolazione lineare, sapendo che vale 0.45 per
V = 40 km/h e 0.30 per V = 140 km/h;
• i = pendenza espressa in percentuale.
Le Norme CNR, per calcolare altimetricamente i triangoli di visibilità, impongono
poi di considerare l'altezza convenzionale di visuale pari a un metro, distinguendo tre
casi diversi di calcolo:
intersezione libera;
intersezione regolata dal segnale di precedenza;
intersezione regolata dal segnale di Stop.
Nel caso di una intersezione libera (Fig. 7) per la quale la precedenza viene concessa
alla destra senza alcuna corrente privilegiata, la collisione può essere evitata se i veicoli
che sopraggiungono si possono reciprocamente vedere ad una distanza pari per ciascuno
a quella di arresto Df definita dalla [3].
Si individuano così i quattro triangoli di visibilità, rappresentati in figura, le cui
ipotenuse delimitano la zona tratteggiata che deve essere libera da ostacoli affinché
l’intersezione risulti sicura.
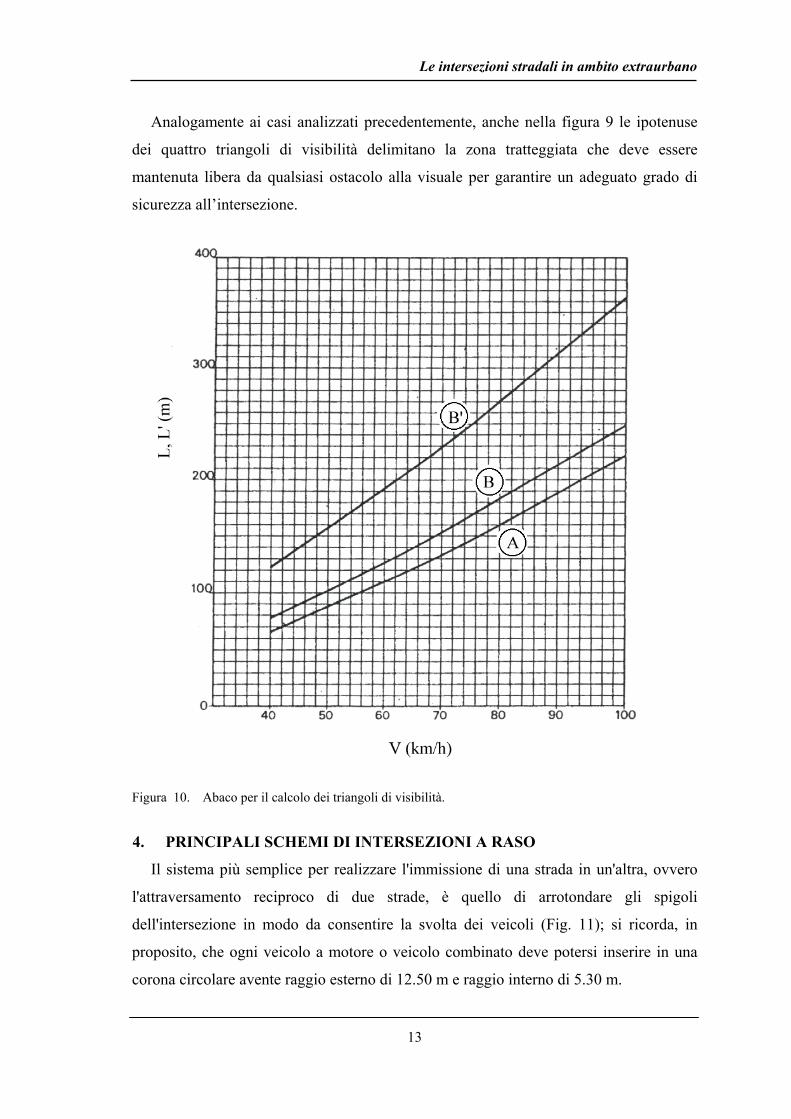
Nel caso in cui l'incrocio sia regolato dal segnale "dare la precedenza" (Fig. 8), la
zona di visuale libera dovrà essere calcolata supponendo che il guidatore del veicolo che
percorre a bassa velocità la strada secondaria, alla distanza di 30 metri dal ciglio della
strada principale possa vedere sull'asse della principale un tratto L la cui lunghezza si
ricava, in funzione della velocità di riferimento dell’intersezione, dalla curva A presente
nell’abaco riportato in figura 10, suggerito dalle Norme italiane tenendo conto delle
caratteristiche del nostro parco veicolare.
I lati del triangolo di visibilità saranno quindi pari a 30 m lungo la secondaria e
uguali ad L lungo la principale.

11
Le intersezioni stradali in ambito extraurbano
La misura di L è tale che il conducente del veicolo proveniente dalla secondaria
possa valutare l'opportunità di immissione o di attraversamento senza dover ridurre
ulteriormente la velocità oppure possa valutare la necessità di arrestarsi.
Df1Df1
Df2
Df2
Figura 7. Triangoli di visibilità in un’intersezione libera.
Nel caso in cui la strada secondaria sia regolata dal segnale di Stop (figura 9), dovrà
essere assicurata al guidatore del veicolo marciante sulla secondaria la visibilità di un
tratto L’ dell'asse della principale sufficiente a consentirgli, partendo da fermo e da una
distanza di 3 m dal ciglio (per ciglio si intende, ai sensi delle Norme, la linea ideale a
delimitazione della corsia esterna) della strada principale, la manovra di immissione o di
attraversamento senza causare rallentamenti sensibili o altri condizionamenti nella
corrente veicolare principale.
La lunghezza L’ si ricava in funzione della velocità caratteristica dell’intersezione
(quella dell’85° percentile o quella di progetto, a seconda se, rispettivamente, si tratta di
strada esistente o di strada di nuova realizzazione) dall’abaco di figura 10, dalla curva B
nel caso che la strada principale nella zona dell’intersezione è a due corsie, oppure dalla
curva B’ se essa è stata allargata per creare una zona di accumulo per i veicoli che
svoltano a sinistra nella strada secondaria.

12
Le intersezioni stradali in ambito extraurbano
LL
30 m
30 m30 m
30 m
Figura 8. Triangoli di visibilità in un’intersezione con vincolo di precedenza.
L’L’
3 m
3 m
Figura 9. Triangoli di visibilità in un’intersezione regolata da STOP.
13
Le intersezioni stradali in ambito extraurbano
Analogamente ai casi analizzati precedentemente, anche nella figura 9 le ipotenuse
dei quattro triangoli di visibilità delimitano la zona tratteggiata che deve essere
mantenuta libera da qualsiasi ostacolo alla visuale per garantire un adeguato grado di
sicurezza all’intersezione.
Figura 10. Abaco per il calcolo dei triangoli di visibilità.
4. PRINCIPALI SCHEMI DI INTERSEZIONI A RASO
Il sistema più semplice per realizzare l'immissione di una strada in un'altra, ovvero
l'attraversamento reciproco di due strade, è quello di arrotondare gli spigoli
dell'intersezione in modo da consentire la svolta dei veicoli (Fig. 11); si ricorda, in
proposito, che ogni veicolo a motore o veicolo combinato deve potersi inserire in una
corona circolare avente raggio esterno di 12.50 m e raggio interno di 5.30 m.

14
Le intersezioni stradali in ambito extraurbano
x
Figura 11. Intersezione a tre bracci senza allargamento delle carreggiate.
Questo sistema determina però la riduzione a valori bassissimi della velocità dei
veicoli ed è pertanto utilizzabile solo nel caso in cui almeno una delle due strade sia di
modestissima importanza. Negli altri casi, pur ammettendo che la velocità dei veicoli in
corrispondenza dell'intersezione possa essere ridotta rispetto alle velocità di progetto
delle strade interessate, i raggi di svolta assumono valori tali da richiedere un aumento
notevole dell'area dell'intersezione. A ciò si aggiunge il fatto che spesso, come vedremo,
in prossimità dell'intersezione, la larghezza della strada deve essere aumentata, allo
scopo di creare delle corsie supplementari, di accelerazione, di decelerazione, di
accumulo. Se si lasciasse una così vasta area senza alcuna sistemazione, i veicoli la
percorrerebbero in modo disordinato, i punti di conflitto fra le varie correnti si
moltiplicherebbero con grave intralcio alla circolazione e con serio pericolo di incidenti.
Per evitare questi inconvenienti è necessario canalizzare le varie correnti di traffico
delimitando opportunamente la zona dell'intersezione riservata a ciascuna di esse con
l'ausilio di isole generalmente non pavimentate.
Le Norme italiane prevedono che un'intersezione come quella rappresentata in figura
11, realizzata mediante il semplice arrotondamento degli spigoli, possa essere adottata
quando le strade sono di tipo B, C, IV, V e VI, purché sulla strada principale, che è
generalmente quella indicata con X in Fig. 11, le svolte a sinistra siano così poche da
non richiedere una corsia specializzata per l'accumulo. Quando l'intersezione è a quattro
bracci, si può realizzare lo schema di Fig. 12 simmetrico se le strade sono di tipo B o C.
Per le strade IV, V e VI, sempre nel caso in cui nella strada principale non siano
necessarie corsie di accumulo, le norme prevedono l'adozione dello schema di figura 13,

15
Le intersezioni stradali in ambito extraurbano
nel quale le due correnti della strada secondaria sono separate, in prossimità
dell'intersezione, da isole divisionali del tipo detto a goccia.
x
Figura 12. Intersezione a quattro bracci senza allargamento delle carreggiate per strade di tipo B o C.
x
Figura 13. Intersezione a quattro bracci senza allargamento delle carreggiata della strada principale.

16
Le intersezioni stradali in ambito extraurbano
Quando sulla strada principale è necessario introdurre corsie di accumulo, di
accelerazione e di decelerazione, si debbono impiegare per le intersezioni a 3 bracci gli
schemi indicati in figura 14 e per quelle a quattro bracci gli schemi di figura 15.
Le figure 14-a) e 15-a) si riferiscono al caso in cui sulla strada principale esista una
non trascurabile portata che svolta verso sinistra sulla strada secondaria.
In questo caso è necessario allargare in corrispondenza dell'intersezione la
carreggiata della strada principale allo scopo di ricavare al centro di essa una corsia di
accumulo, in cui i veicoli che debbono svoltare a sinistra possano sostare in attesa di
eseguire la loro manovra, senza intralciare i veicoli della loro stessa corrente che invece
debbono proseguire sulla strada principale. In questi schemi di intersezione, sempre nel
caso in cui la portata che svolta a sinistra non sia trascurabile, è opportuno tenere
quest'ultima separata, in corrispondenza dell'immissione nella strada secondaria, da
quella che svolta a destra sulla stessa strada secondaria, mediante un'isola triangolare.
Gli schemi delle figure 14-b) e 15-b) sono relativi al caso in cui anche le portate
provenienti dalla strada secondaria e che svoltano, a destra e a sinistra, sulla principale,
non siano trascurabili.
Per esse sono predisposte due corsie, impropriamente dette di accelerazione, che esse
percorrono in attesa di potersi immettere nelle rispettive correnti di destinazione. In
questo modo i veicoli che dalla strada secondaria svoltano a destra non debbono più
arrestarsi a uno STOP, come negli schemi a), e gli unici veicoli fermi in attesa sono
quelli che svoltano a sinistra. Questi, d'altra parte, mentre negli schemi a) per poter
eseguire la loro manovra debbono attendere che si presenti un varco sufficiente tra i
veicoli di entrambe le correnti della strada principale e contemporaneamente che non vi
siano veicoli in sosta nella zona di accumulo, negli schemi b) esaminano la presenza del
varco nella corrente in cui debbono immettersi mentre percorrono la corsia di
accelerazione al centro della carreggiata, riducendo così il tempo di attesa allo STOP.
In questi schemi è prevista una seconda isola triangolare, per tenere separati i veicoli
che sostano allo STOP da quelli che svoltano a destra e che, senza fermarsi, percorrono
la corsia di accelerazione.
Negli schemi c) e d) delle figure 14 e 15 è stata introdotta una corsia, detta di
decelerazione, per i veicoli che dalla strada principale svoltano a destra nella strada
secondaria.

17
Le intersezioni stradali in ambito extraurbano
Questo provvedimento deve essere adottato quando questa portata non è trascurabile,
per consentire ai veicoli di ridurre la velocità fino al valore proprio della curva di svolta,
senza costringere al rallentamento anche i veicoli della corrente diretta.
Figura 14. Schemi complessi di intersezioni a raso a tre bracci.

18
Le intersezioni stradali in ambito extraurbano
Figura 15. Schemi complessi di intersezioni a raso a quattro bracci.

19
Le intersezioni stradali in ambito extraurbano
Negli schemi esaminati s'interrompe il flusso dei soli veicoli che debbono arrestarsi
agli STOP, mentre le altre correnti subiscono solo degli eventuali rallentamenti, senza
però mai arrestarsi. Se però le portate delle correnti da attraversare sono notevoli, i
tempi di attesa allo STOP possono crescere fino a valori che i conducenti giudicano
intollerabili, per cui essi sono portati a eseguire l'attraversamento anche se l'intervallo
nella corrente da attraversare non è sufficiente, con pericolo di incidenti; inoltre, quando
la portata che deve attraversare è notevole, può accadere che essa s'impadronisca
dell'intersezione causando l'arresto della corrente attraversata. In questi casi si ricorre
alla regolazione semaforica delle intersezioni rappresentate negli schemi precedenti, la
quale ha il compito di disciplinare le manovre che avvengono all'intersezione,
determinando il periodico arresto di ciascuna corrente.
Si è già visto, al paragrafo 2, come si valutano le “prestazioni” delle intersezioni
regolate dal diritto di precedenza, e si è avuto modo di osservare come un fattore
discriminante sia costituito dai tempi medi di attesa (analoghe considerazioni verranno
svolte, nel paragrafo 8, a proposito delle intersezioni semaforizzate). Si ribadisce
pertanto un concetto già espresso: allorquando i ritardi accumulati dagli utenti in coda
alle intersezioni diventano intollerabili, diventa necessario ricorrere allo sfalsamento
dell’intersezione.
5. ELEMENTI DELLE INTERSEZIONI A RASO
5.1 Modulo di corsie
Le corsie di marcia della strada principale devono mantenere in tutta la zona
d'incrocio, la larghezza prevista per la sezione corrente. Qualora però l'arteria in
questione avesse corsie di marcia di larghezza inferiore a 3 metri (come, ad esempio, la
strada di tipo B in base alla classificazione del CNR) risulta indispensabile che,
nell'intersezione, le larghezze delle corsie vengano riportate alla dimensione minima di
3 metri. Per le strade di una certa importanza, soprattutto in termini di portate veicolari
(autostrade, strade extraurbane principali, strade urbane di scorrimento), sarebbe
peraltro auspicabile una sezione trasversale minima di 3.50 m.
Le corsie laterali come le corsie di attesa, di accumulo e di decelerazione dovrebbero
comportare una sezione trasversale di larghezza:

20
Le intersezioni stradali in ambito extraurbano
• non inferiore a 3.00 m sulle strade con volumi di traffico normali e con transito
vietato a veicoli articolati o con rimorchio;
• non inferiore a 3.50 m sulle strade con grandi volumi di traffico e senza
limitazioni al transito dei veicoli anzidetti.
5.2 Corsie di attesa
La corsia di attesa, impropriamente chiamata corsia di accelerazione deve avere una
lunghezza Lm tale che un veicolo che la percorre in attesa di immettersi abbia una
probabilità elevata di trovare un varco libero per poter eseguire la manovra, prima di
giungere alla fine della corsia stessa (Fig. 16).
Lm Lr
Figura 16. Elementi geometrici della corsia di attesa.
La lunghezza Lm deve essere dunque valutata in funzione dei tempi di attesa in coda
da parte dei veicoli che si immettono. Per la pratica valutazione della lunghezza Lm e
per la costruzione geometrica del tratto di raccordo di lunghezza Lc, si può fare
riferimento al paragrafo 14 relativo alle problematiche del tronco di attacco per le
intersezioni a livelli sfalsati.
5.3 Corsie di decelerazione
La lunghezza della corsia di decelerazione (Fig. 17) viene determinata dalla
composizione del tronco di invito di lunghezza Lc con il tronco di decelerazione di
lunghezza Lm fino alla velocità ammessa dalla curva terminale secondo la formula
classica:
R5.2v2 ⋅= [4]
dove:

21
Le intersezioni stradali in ambito extraurbano
♦ v2 = velocità di uscita (m/s);
♦ R = raggio della traiettoria media (m).
Per quanto le normative esistenti ammettano valori anche più bassi per il raggio di
uscita, si ritiene conveniente prescrivere un raggio minimo di 20 metri al fine di non
costringere i conducenti a riduzioni di velocità tanto rilevanti da divenire pericolose.
Lc Lm
v1 v1 v2
Figura 17. Elementi geometrici della corsia di decelerazione.
Per la lunghezza Lc si consiglia un minimo di 20 metri e, in ogni caso, valgono le
considerazioni svolte per il tronco di raccordo relativo alle corsie di attesa (per le quali
si è rimandato al paragrafo 14).
La lunghezza Lm è valutabile tramite la seguente formula:
+⋅
−=
10pa26
VVL22
21
m [5]
dove:
• V1 = velocità di entrata nella corsia di decelerazione, da assumersi pari a 3/4 della
velocità di progetto nelle strade di nuova costruzione e alla velocità dell'85°
percentile della distribuzione cinematica di tutti i veicoli rilevati nella tratta in
questione nel caso di strade esistenti (km/h).
• V2 = velocità di uscita dipendente dal raggio di svolta, calcolata tramite la [4] e
convertita in km/h.
• a = decelerazione ammissibile da assumersi pari a 2 m/s2.
• p = pendenza in percento della strada (negativa in discesa e positiva in salita).
A proposito della velocità di ingresso V1, il CNR consiglia di far riferimento alla
velocità di progetto della strada da cui si diparte la corsia di decelerazione. Si ritiene
però inappropriato tale criterio, in quanto la velocità di progetto di fatto viene molto

22
Le intersezioni stradali in ambito extraurbano
raramente raggiunta nella circolazione ordinaria e non certamente da parte di veicoli che
devono svoltare a destra nell'incrocio.
5.4 Corsie di accumulo
La corsia di accumulo (denominata anche corsia centrale di svolta a sinistra) viene
determinata come sommatoria di tre singoli tratti parziali di cui il primo (di lunghezza
Lc) è il tratto di raccordo, il secondo (lungo Lm) è destinato alla decelerazione ed il terzo
(di lunghezza Ln) è il tronco di accumulo dei veicoli in attesa di effettuare la svolta a
sinistra (Fig. 18).
Lc Lm Ln
Figura 18. Elementi geometrici della corsia di accumulo (o corsia centrale di svolta a sinistra).
Per la lunghezza Lc del tratto di raccordo e per la lunghezza Lm del tronco di
decelerazione si procede esattamente alla maniera delle corsie di decelerazione
propriamente dette (paragrafo 5.3).
Per ciò che concerne la lunghezza Ln della zona di accumulo occorre svolgere una
serie di considerazioni legate ai fenomeni di attesa dei veicoli in coda.
Osserviamo inizialmente che, quando l’incrocio non è semaforizzato, tutti i veicoli
che svoltano a sinistra debbono arrestarsi a uno STOP; in ogni caso, ognuna delle
correnti che svoltano a sinistra deve attendere che nell'altra corrente della strada si
presenti un intervallo sufficiente perché sia possibile eseguire la manovra di svolta.
Indichiamo con Q2 la portata oraria che dalla strada principale svolta a sinistra per
immettersi nella strada secondaria e con Q1 la portata della corrente della strada
principale che a tal fine deve essere attraversata (Fig. 19).
Definiamo intervallo critico (T) il più piccolo intervallo temporale fra due veicoli
della corrente da attraversare che consente un’immissione da parte del veicolo che
intende svoltare, senza che tale manovra provochi rallentamenti da parte dei veicoli
appartenenti alla corrente principale. In base ad elaborazioni analitiche supportate dalla

23
Le intersezioni stradali in ambito extraurbano
“teorie delle code” si è visto che l’intervallo critico, nella maggior parte delle situazioni
analoghe a quella prospettata, si mantiene poco al di sotto di 8 s.
Q1
Stradasecondaria
Q1Corrente principaleQ2Q2Corrente secondaria
Strada principale
Figura 19. Portate in gioco per la valutazione della lunghezza delle code.
E’ stato quindi possibile ricavare un abaco (Fig. 20) tramite il quale si può calcolare
la lunghezza media della coda corrispondente ad un punto di conflitto caratterizzato da
un intervallo critico pari ad 8 secondi.
Figura 20. Abaco per il calcolo della lunghezza media della coda in corrispondenza di un punto diconflitto caratterizzato da un intervallo critico T = 8 s.

24
Le intersezioni stradali in ambito extraurbano
In maniera del tutto analoga, si può far riferimento ad un altro abaco (Fig. 21) che
consente la valutazione dei tempi di attesa (sempre in corrispondenza di T = 8 s).
Figura 21. Abaco per il calcolo del tempo medio di attesa in corrispondenza di un punto di conflittocaratterizzato da un intervallo critico T = 8 s.
Pertanto, in corrispondenza dei valori assegnati di Q1 e Q2, dall'abaco riportato in
figura 20 si ottiene il numero medio (q) dei veicoli della strada principale in attesa di
svoltare a sinistra per immettersi nella strada secondaria (lunghezza della coda).
Moltiplicando questo numero per la lunghezza necessaria a ciascun veicolo per la sosta,
in media 6 m, si ricava la lunghezza della corsia di accumulo necessaria per ospitare un
numero di veicoli eguale a q.
E’ da notare però che le ipotesi che stanno alla base di questa applicazione della
teoria delle code originano valori della probabilità che si verifichi una coda più lunga di
q abbastanza elevati (altrettanto elevata sarà quindi la probabilità che i veicoli in attesa
invadano la zona Lm di decelerazione). Per portare quest'ultima probabilità a valori
piuttosto bassi (intorno al 10%) è necessario raddoppiare la lunghezza della zona di
accumulo precedentemente calcolata.
25
Le intersezioni stradali in ambito extraurbano
In definitiva si ha:
q62Ln ⋅⋅= [6]
In maniera analoga, dall'abaco di figura 21 si ottiene la media dei tempi di attesa.
Quest’ultimo dato e la lunghezza della zona di accumulo, valutata come si è visto,
forniscono al progettista anche un giudizio circa il livello di servizio dell'intersezione;
se i valori ottenuti fossero giudicati troppo elevati, occorrerebbe procedere alla
semaforizzazione dell'intersezione, ovvero alla progettazione di uno svincolo a livelli
sfalsati.
5.5 Geometria dei cigli
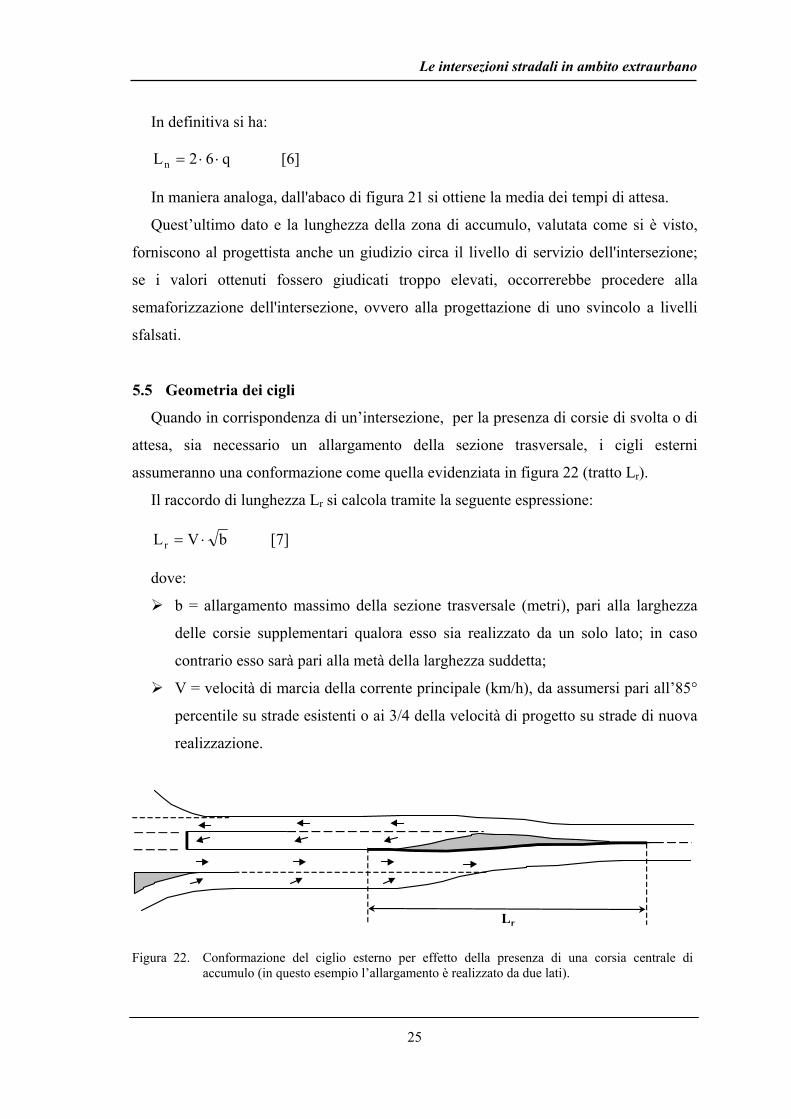
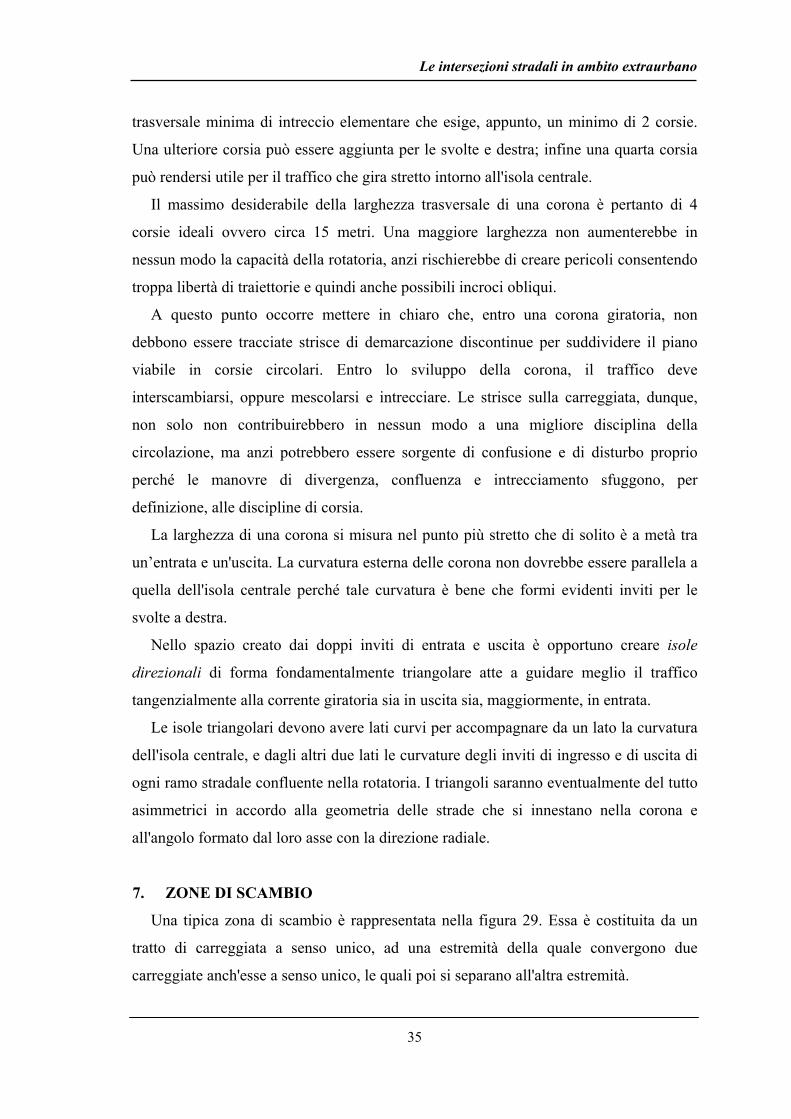
Quando in corrispondenza di un’intersezione, per la presenza di corsie di svolta o di
attesa, sia necessario un allargamento della sezione trasversale, i cigli esterni
assumeranno una conformazione come quella evidenziata in figura 22 (tratto Lr).
Il raccordo di lunghezza Lr si calcola tramite la seguente espressione:
bVLr ⋅= [7]
dove:
b = allargamento massimo della sezione trasversale (metri), pari alla larghezza
delle corsie supplementari qualora esso sia realizzato da un solo lato; in caso
contrario esso sarà pari alla metà della larghezza suddetta;
V = velocità di marcia della corrente principale (km/h), da assumersi pari all’85°
percentile su strade esistenti o ai 3/4 della velocità di progetto su strade di nuova
realizzazione.
Lr
Figura 22. Conformazione del ciglio esterno per effetto della presenza di una corsia centrale diaccumulo (in questo esempio l’allargamento è realizzato da due lati).

26
Le intersezioni stradali in ambito extraurbano
bbx
Lx
Lr
Figura 23. Sagomatura del ciglio della carreggiata per realizzare l’allargamento in corrispondenza diuna corsia di accumulo o di una corsia di attesa.
Il raccordo dei cigli sarà conformato secondo un tratto parabolico (Fig. 23), la cui
costruzione, per punti, si basa sulla seguente relazione:
beb xx ⋅= [8]
dove:
♦ bx = allargamento trasversale in corrispondenza dell’ascissa Lx;
♦ ex = allargamento relativo (adimensionale) valutabile dalla tabella 4 in funzione
del rapporto Lx/Lr.
Lx/Lr ex Lx/Lr ex
0.00
0.05
0.10
0.15
0.20
0.25
0.30
0.35
0.40
0.45
0.50
0.0000
0.0050
0.0200
0.0450
0.0800
0.1250
0.1800
0.2450
0.3200
0.4050
0.5000
0.55
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
0.5950
0.6800
0.7550
0.8200
0.8750
0.9200
0.9550
0.9800
0.9950
1.0000
Tabella 4. Valori dell’allargamento relativo necessari per il calcolo dell’allargamento totale.

27
Le intersezioni stradali in ambito extraurbano
5.6 Cigli esterni delle corsie di svolta a destra
Le curve che vengono utilizzate per il tracciamento dei cigli delle corsie di svolta a
destra, nel caso di intersezioni a raso, hanno usualmente una forma geometrica che
approssima la traccia interna della sagoma dei grandi veicoli (articolati e con rimorchio)
che percorrono curve di raggio piccolo e grande angolo di deviazione.
La Normativa italiana propone la tricentrica come curva che meglio approssima la
linea ideale suddetta. Si tratta di una successione di tre archi di cerchio (Fig. 24) che
deve rispettare le seguenti condizioni:
a) per gli angoli:
α1 + α2 + α3 = δ (angolo di deviazione dei cigli)
α1 = α3
12 5.5 α⋅=α
b) per i raggi:
R1 : R2 : R3 = 2.5 : 1 : 5.5
α1
α2
α3
R2
R3
R1
R1R2
R3
δ
Figura 24. Sagomatura dei cigli delle corsie di svolta a destra a mezzo delle tricentriche.
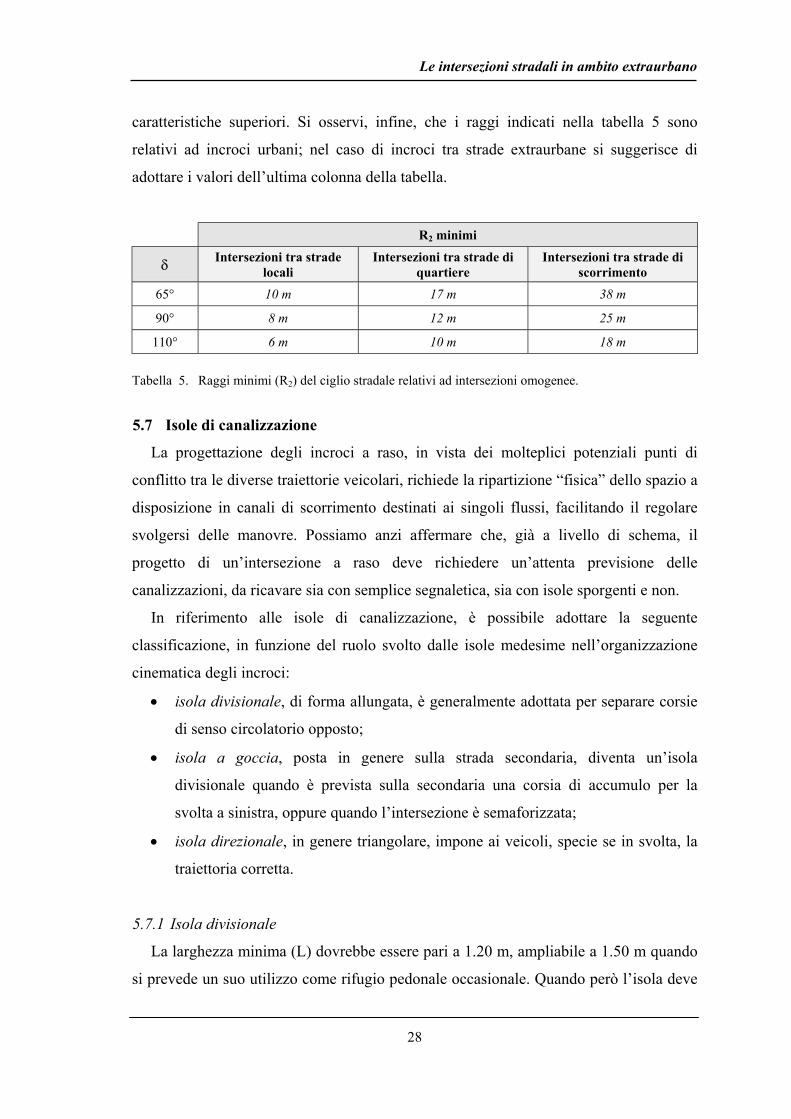
I valori minimi del raggio R2, per intersezioni tra strade “omogenee”, si ricavano
dalla tabella 5 in funzione dell’angolo (δ) di deviazione dei cigli. Nelle intersezioni
disomogenee, il tracciamento della striscia esterna individuante il margine delle corsie
di svolta a destra si effettua con riferimento ai valori relativi al ramo dell’intersezione di
28
Le intersezioni stradali in ambito extraurbano
caratteristiche superiori. Si osservi, infine, che i raggi indicati nella tabella 5 sono
relativi ad incroci urbani; nel caso di incroci tra strade extraurbane si suggerisce di
adottare i valori dell’ultima colonna della tabella.
R2 minimi
δ Intersezioni tra stradelocali
Intersezioni tra strade diquartiere
Intersezioni tra strade discorrimento
65° 10 m 17 m 38 m
90° 8 m 12 m 25 m
110° 6 m 10 m 18 m
Tabella 5. Raggi minimi (R2) del ciglio stradale relativi ad intersezioni omogenee.
5.7 Isole di canalizzazione
La progettazione degli incroci a raso, in vista dei molteplici potenziali punti di
conflitto tra le diverse traiettorie veicolari, richiede la ripartizione “fisica” dello spazio a
disposizione in canali di scorrimento destinati ai singoli flussi, facilitando il regolare
svolgersi delle manovre. Possiamo anzi affermare che, già a livello di schema, il
progetto di un’intersezione a raso deve richiedere un’attenta previsione delle
canalizzazioni, da ricavare sia con semplice segnaletica, sia con isole sporgenti e non.
In riferimento alle isole di canalizzazione, è possibile adottare la seguente
classificazione, in funzione del ruolo svolto dalle isole medesime nell’organizzazione
cinematica degli incroci:
• isola divisionale, di forma allungata, è generalmente adottata per separare corsie
di senso circolatorio opposto;
• isola a goccia, posta in genere sulla strada secondaria, diventa un’isola
divisionale quando è prevista sulla secondaria una corsia di accumulo per la
svolta a sinistra, oppure quando l’intersezione è semaforizzata;
• isola direzionale, in genere triangolare, impone ai veicoli, specie se in svolta, la
traiettoria corretta.
5.7.1 Isola divisionale
La larghezza minima (L) dovrebbe essere pari a 1.20 m, ampliabile a 1.50 m quando
si prevede un suo utilizzo come rifugio pedonale occasionale. Quando però l’isola deve

29
Le intersezioni stradali in ambito extraurbano
contenere segnali verticali o semaforici, è opportuno che la dimensione corrisponda alla
sagoma del segnale aumentata di almeno 30 cm per parte.
Con riferimento alla figura 25, si ritiene conveniente assumere per c un valore
compreso tra 4 e 6 m; per a si consiglia di non superare il limite massimo di 1 metro.
La geometria dei bordi dell’isola non presenta problemi particolari poiché essi
coincidono coi cigli delle corsie (già trattati ai paragrafi 5.5 e 5.6).
L
c
a
Figura 25. Isola divisionale.
5.7.2 Isola a goccia
La costruzione geometrica dell'isola a goccia si opera a partire dall'asse della
secondaria e dalle traiettorie dei veicoli.
La successione delle operazioni da tenersi per il tracciamento dei contorni (Fig. 26) è
costituita da:
• tracciamento degli assi della principale e della secondaria;
• scelta dei valori da adottare per R1 ed R2 in modo da garantire una certa fluidità del
deflusso veicolare (si consiglia per R1 un minimo di 13 m, e per R2 un valore
minimo di 15 m);
• tracciamento di due parallele all'asse della secondaria a distanza e pari almeno a
1.20 m;

30
Le intersezioni stradali in ambito extraurbano
• tracciamento delle circonferenze di raggio R1 ed R2 tangenti da una parte alle
parallele e dall’altra al bordo delle vie di circolazione;
• conduzione, a partire da un punto A situato a una distanza L di almeno 30 m dal
ciglio più esterno, delle due tangenti ai cerchi di raggio R1 ed R2;
• interruzione dell'isola quando la distanza ortogonale tra gli assi delle due predette
tangenti è pari a 1.50 m;
• realizzazione dei raccordi tra le estremità dell'isola a mezzo di archi di cerchio del
raggio minimo di 60 cm;
• apposizione della segnaletica orizzontale nella zona pseudo-triangolare individuata
dalle due tangenti tracciate a partire dal punto A.
1.50 1.50
R=0.60
Segnaleticaorizzontale
R=0.60
e
L
R1
R2
Asse dellasecondaria
Asse dellaprincipale
A
Figura 26. Tracciamento dei contorni dell’isola a goccia.
5.7.3 Isole direzionali
Le isole direzionali (Fig. 27) possono assumere diverse forme e dimensioni a
seconda della funzione rivestita nell'incrocio.

31
Le intersezioni stradali in ambito extraurbano
Figura 27. Isole direzionali per le canalizzazioni di un incrocio a 90°.
La forma più comune è quella triangolare per indirizzare il traffico di svolta a destra,
separandolo contemporaneamente da quello diretto.
Le intersezioni su cui si effettuano molte manovre di svolta possono richiedere più
isole per canalizzare i vari movimenti; esiste però un limite dettato dalla necessità di
non ingenerare confusione negli utenti e di non alterare la funzionalità cinematica
dell’incrocio. E’ preferibile pertanto realizzare poche e grandi isole piuttosto che molte
e piccole.
Il tracciamento dei cigli corrisponde ai bordi delle corsie interessate e pertanto non si
richiedono modalità particolari di tracciamento; si consiglia comunque di mantenere una
sezione trasversale libera di almeno 5.50 m comprensiva di banchina praticabile,
arretrando i contorni dell'isola direzionale e sostituendoli con segnaletica orizzontale.
6. ROTATORIE
Una rotatoria (Fig. 28) è formata da una carreggiata stradale circolare a senso unico
su cui converge un certo numero di bracci di entrata e nella quale tutta la circolazione
segue la medesima direzione, in senso antiorario, attorno all’isola centrale.
Dal punto di visto dell’organizzazione della circolazione, si può notare che il traffico
che proviene da una qualunque strada e che è diretto nella strada contigua di destra,
rimane a destra e non si intreccia. Il traffico diretto ad una delle strade successive alla

32
Le intersezioni stradali in ambito extraurbano
contigua di destra si intreccia entro la sezione di rotatoria compresa tra il punto di
entrata e il punto di uscita.
I movimenti di intreccio sono quindi i prevalenti nelle rotatorie, le quali riconducono
ogni manovra sotto tale forma.
Figura 28. Sistemazione geometrica di una rotatoria.
Se ben costruite ed opportunamente usate, le rotatorie presentano una serie di
vantaggi:
♦ funzionano a velocità relativa piccola con tutti i vantaggi di maggiore sicurezza,
del moto uniforme e del flusso continuo;
♦ rendono omogenei i punti di possibile collisione trasformando i movimenti di
incrocio in progressive manovre di interscambio;
♦ le svolte a sinistra sono agevoli come le svolte a destra, in quanto la corona
giratoria funziona come una strada a senso unico;

33
Le intersezioni stradali in ambito extraurbano
Tra gli svantaggi delle rotatorie si deve mettere in evidenza che:
• la circolazione rotatoria richiede grande spazio che non sempre è disponibile (o
che non si è disposti a destinare per le rotatorie); oltre al maggior ingombro va
poi tenuta presente anche la vasta estensione da pavimentare con ulteriore
aggravio di costo.
• malgrado i più pesanti oneri costruttivi, il rendimento di una rotatoria, espresso in
termini di “capacità”, non è superiore a quello di un incrocio canalizzato munito
di regolazione semaforica;
• le circolazioni giratorie funzionano a velocità assoluta modesta e pertanto male si
adattano sul percorso di arterie veloci di scorrimento;
• il flusso continuo, proprio del sistema giratorio, ostacola notevolmente il traffico
pedonale di attraversamento delle varie strade che entrano ed escono radialmente
dalla rotatoria;
• dal punto di vista progettuale le rotatorie vanno insediate soltanto in terreni
pianeggianti o in lievissima pendenza, al fine di garantire la visuale della
“dinamica” della circolazione a tutti gli utenti già a partire dai bracci di entrata;
• la sistemazione a rotatoria si rivela una scelta irreversibile e inadeguata a processi
di potenziamento per gradi successivi, per cui le rotatorie vanno subito impostate
per servire un traffico futuro inesistente all'atto della costruzione.
6.1 Dimensionamento delle rotatorie
I parametri fondamentali che entrano in gioco nella progettazione di una rotatoria
sono:
la velocità di base stabilita sulla rotatoria stessa, dalla quale dipende il raggio di
questa, o i suoi vari raggi se, come talvolta avviene, l'isola centrale non è circolare;
la distanza minima fra due vie contigue confluenti nella rotatoria, dalla quale
dipende lo sviluppo della zona per le manovre di intreccio tra veicoli che svoltano a
destra e a sinistra, e, conseguentemente, la capacità della rotatoria;
la forma e le dimensioni dell'isola centrale;
la larghezza della carreggiata, e quindi il numero di corsie, attorno all'isola centrale.
Per quanto concerne la velocità di base sulla rotatoria, l'esperienza ha dimostrato che
si hanno buoni rendimenti per velocità di 25-40 km/h in ambito urbano e di 50-65 km/h

34
Le intersezioni stradali in ambito extraurbano
in ambito extraurbano. L'A.A.S.H.O. (American Association of State Highways), in
relazione alla maggiore delle velocità di progetto (Vb) delle vie confluenti, suggerisce
per la rotatoria le velocità di base riportate nella tabella 6, sconsigliando l'adozione delle
rotatorie quando la velocità di progetto di una delle vie confluenti superi i 95 km/h.
Vb massima delle vie confluenti Vb della rotatoria
50 km/h 40 km/h
65 km/h 50 km/h
80 km/h 55 km/h
95 km/h 65 km/h
Tabella 6. Velocità di base delle rotatorie in funzione delle massime velocità di progetto delle stradeconfluenti (fonte: A.A.S.H.O.)
Per ciò che riguarda la distanza minima fra due successive vie confluenti nella
rotatoria, occorre preliminarmente ribadire che l’aspetto peculiare della circolazione
rotatoria è quello di ricondurre ogni manovra sotto forma di movimento d’intreccio.
Naturalmente, questo avviene solo se la distanza tra un'entrata e una uscita adiacenti è
sufficiente per l'intreccio delle traiettorie a velocità relativa molto piccola, vale a dire se
i veicoli possono mescolarsi e interscambiarsi procedendo su direzioni formanti tra loro
un piccolo angolo e quasi alla stessa velocità.
La lunghezza ottimale della distanza tra due successivi bracci di una rotatoria è
quindi funzione delle modalità attraverso le quali si manifesta lo scambio tra le portate
veicolari che percorrono i tratti in esame. Si rimanda al paragrafo successivo l’analisi
delle problematiche riguardanti le zone di scambio; in tale contesto verrà svolta
un’applicazione numerica relativa al dimensionamento delle zone d’intreccio che
compongono una rotatoria.
La forma dell'isola centrale non è sempre circolare; in ogni caso è necessario che
vengano rispettati i raggi di curvatura necessari per la velocità di progetto della
rotatoria.
La larghezza minima di una corona giratoria deve essere di 7.50 m, che equivalgono
alla larghezza teorica di due corsie affiancate da 3.75 m sufficienti a garantire
l’iscrizione di un veicolo in curva. Tale larghezza corrisponde anche ed una sezione
35
Le intersezioni stradali in ambito extraurbano
trasversale minima di intreccio elementare che esige, appunto, un minimo di 2 corsie.
Una ulteriore corsia può essere aggiunta per le svolte e destra; infine una quarta corsia
può rendersi utile per il traffico che gira stretto intorno all'isola centrale.
Il massimo desiderabile della larghezza trasversale di una corona è pertanto di 4
corsie ideali ovvero circa 15 metri. Una maggiore larghezza non aumenterebbe in
nessun modo la capacità della rotatoria, anzi rischierebbe di creare pericoli consentendo
troppa libertà di traiettorie e quindi anche possibili incroci obliqui.
A questo punto occorre mettere in chiaro che, entro una corona giratoria, non
debbono essere tracciate strisce di demarcazione discontinue per suddividere il piano
viabile in corsie circolari. Entro lo sviluppo della corona, il traffico deve
interscambiarsi, oppure mescolarsi e intrecciare. Le strisce sulla carreggiata, dunque,
non solo non contribuirebbero in nessun modo a una migliore disciplina della
circolazione, ma anzi potrebbero essere sorgente di confusione e di disturbo proprio
perché le manovre di divergenza, confluenza e intrecciamento sfuggono, per
definizione, alle discipline di corsia.
La larghezza di una corona si misura nel punto più stretto che di solito è a metà tra
un’entrata e un'uscita. La curvatura esterna delle corona non dovrebbe essere parallela a
quella dell'isola centrale perché tale curvatura è bene che formi evidenti inviti per le
svolte a destra.
Nello spazio creato dai doppi inviti di entrata e uscita è opportuno creare isole
direzionali di forma fondamentalmente triangolare atte a guidare meglio il traffico
tangenzialmente alla corrente giratoria sia in uscita sia, maggiormente, in entrata.
Le isole triangolari devono avere lati curvi per accompagnare da un lato la curvatura
dell'isola centrale, e dagli altri due lati le curvature degli inviti di ingresso e di uscita di
ogni ramo stradale confluente nella rotatoria. I triangoli saranno eventualmente del tutto
asimmetrici in accordo alla geometria delle strade che si innestano nella corona e
all'angolo formato dal loro asse con la direzione radiale.
7. ZONE DI SCAMBIO
Una tipica zona di scambio è rappresentata nella figura 29. Essa è costituita da un
tratto di carreggiata a senso unico, ad una estremità della quale convergono due
carreggiate anch'esse a senso unico, le quali poi si separano all'altra estremità.

36
Le intersezioni stradali in ambito extraurbano
Q1 (PORTATA DIRETTA)
Q2 (PORTATA DIRETTA)
Q2sQ1s
(PORTATE CHE SCAMBIANO)
LUNGHEZZA DELLA ZONA DI SCAMBIO
Figura 29. Schema di una zona di scambio.
Zone di scambio si incontrano nelle autostrade, quando immissioni ed uscite si
succedono a distanza ravvicinata.
In questo contesto ci interessa far riferimento alla circolazione nelle zone di scambio
che si formano quando due strade, aventi caratteristiche simili, si intersecano sotto un
angolo molto acuto (è anche il caso delle rotatorie che, come detto, si possono
considerare costituite dall’assemblaggio di una serie di zone di intreccio); i problemi
che in questo caso si pongono sono diversi da quelli che invece si presentano nelle zone
di intreccio autostradali dove interferiscono strade di caratteristiche molto diverse, cioè
la carreggiata autostradale e le rampe.
Il fenomeno dello scambio di due correnti di traffico è abbastanza simile a quello
della immissione da una corsia di attesa ad una corsia di marcia normale. Anche nello
scambio, come nella immissione, il veicolo che si deve spostare nella corsia parallela
percorre la sua corsia in attesa che si presenti l'intervallo favorevole allo scopo. Ci si
deve attendere, quindi, che la zona di intreccio debba essere tanto più lunga quanto
maggiori sono le portate che devono scambiare.
Il singolo veicolo che deve cambiare corsia tende a rallentare mentre attende di poter
eseguire la manovra, facendosi sorpassare dai veicoli della corrente parallela proprio per
osservare l'ampiezza degli intervalli fra di essi.
Questo rallentamento sarà tanto maggiore quanto più corta è la zona di scambio, e,
conseguentemente, si incrementa la probabilità che essa venga percorsa tutta senza aver
avuto la possibilità di scambiare. Il rallentamento, inoltre, determina una generale
caduta di velocità nella zona di scambio, e quindi un accumulo dei veicoli, a cui, per
evitare che si crei congestione, occorre far fronte con un aumento della sezione stradale.

37
Le intersezioni stradali in ambito extraurbano
Appare quindi chiaro che, nella progettazione di una zona di intreccio, è possibile
assegnare ad essa una lunghezza tale che non si determini alcun sensibile rallentamento
delle correnti che la percorrono, per cui la sua sezione viene proporzionata in base alla
portata totale di tali correnti, come quella di una qualsiasi strada caratterizzata da un
flusso veicolare ininterrotto. Se invece la lunghezza assegnata alla zona di scambio è
inferiore al valore ottimale, diviene necessario aumentare la sezione per evitare che si
producano fenomeni di congestione.
Uno studio teorico del fenomeno dello scambio, che tenga conto dell'effettivo
comportamento degli automobilisti, non è molto semplice data la difficoltà di ridurre ad
uno schema sufficientemente semplice, il comportamento degli automobilisti.
Per la progettazione riesce molto più efficace utilizzare i risultati di esperienze
compiute negli Stati Uniti, i quali hanno condotto al criterio di progettazione riassunto
nell'abaco riportato in figura 30. In esso, sull'asse delle ascisse è indicata la lunghezza
della zona di scambio, sull'asse delle ordinate la somma delle portate (Q1s + Q2s) che
scambiano.
L'abaco comprende una famiglia di curve, suddivise in gruppi, ciascuno
contrassegnato con un indice, da I a V, rappresentanti diverse qualità di circolazione
nella zona di scambio, da ottima a scadente.
Assegnata alla zona di scambio una certa lunghezza (che si legge sull'asse delle
ascisse), ed individuata la qualità di circolazione che si vuole assegnare allo scambio, e
quindi una certa curva dell'abaco, si legge (sull'asse delle ordinate) la portata
compatibile con la lunghezza assegnata. Viceversa, partendo dalla portata, ed assegnata
la qualità di circolazione, si può calcolare la lunghezza dello scambio, oppure, assegnate
portata e lunghezza, si può ricavare la qualità della circolazione.
La qualità della circolazione, in questo metodo di progetto, viene espressa in
funzione della velocità media con cui i veicoli che scambiano percorrono la zona di
scambio; in particolare le curve contrassegnate con gli indici III, IV e V sono relative a
velocità rispettivamente di 65-70 km/h, 50-55 km/h, 35-50 km/h. Per le curve
appartenenti ai gruppi contrassegnati con gli indici I e II la velocità possibile è senz'altro
superiore a 70 km/h, anche se non può essere individuata con precisione, poiché a questi
livelli di circolazione portate di scambio e portate dirette tendono a percorrere le stesse
corsie.

38
Le intersezioni stradali in ambito extraurbano
Figura 30. Abaco per il calcolo della lunghezza di una zona di scambio.
Ciascuna curva dell'abaco è contrassegnata da un numero K, variabile da 1.0 a 3.0
che viene utilizzato per il calcolo della sezione trasversale della zona di scambio. Tale
calcolo viene eseguito in base a una portata virtuale Q crescente col peggiorare della
qualità della circolazione, fornita dalla somma delle portate dirette (Ql + Q2), della
maggiore delle due portate di scambio e della minore moltiplicata per il fattore K
ottenuto dall’abaco.
Cioè:
s2s121 QKQQQQ ⋅+++= [9]
nell'ipotesi che risulti Q1s > Q2s.
Nota questa portata virtuale Q, la sezione stradale si può scegliere, in ottemperanza
alle indicazioni dell’Highway Capacity Manual (1994), in funzione di un assegnato
livello di servizio.

39
Le intersezioni stradali in ambito extraurbano
Il livello di servizio deve essere evidentemente omogeneo con la qualità della
circolazione dei veicoli che scambiano: in questo senso, è utile la tabella 7, ricavata da
studi americani, che fornisce una relazione fra livelli di servizio e qualità del flusso
nello scambio.
Qualità del flusso di scambio
Autostrade e strade extraurbane a più corsie
Livellodi
servizio
Stradapropriamente detta
Strade di raccolta edistribuzione ed altre
carreggiate di interscambi
Strade extraurbane
a due corsie
Strade importanti
urbane e suburbane
A I – II II – III II III – IV
B II III II – III III – IV
C II – III III – IV III IV
D III – IV IV IV IV
E IV – V V V V
Tabella 7. Relazione tra livelli di servizio delle zone d’intreccio e qualità del flusso di scambio.
Come applicazione del metodo di calcolo ora illustrato, calcoliamo la sezione
trasversale ed il raggio della rotatoria circolare schematicamente rappresentata nella
figura 31 nella quale convergono le quattro strade A, B, C, D a due corsie. Le portate
orarie di punta provenienti da ciascuna strada e dirette verso le altre sono indicate nella
matrice riportata nella stessa figura, dove i simboli collocati a fianco di ciascuna riga si
riferiscono alle strade di provenienza e quelli in testa a ciascuna colonna si riferiscono
alle strade di destinazione.
Lo schema di circolazione sulla rotatoria è quello illustrato di seguito: un veicolo
proveniente da una delle quattro strade si immette sulla corsia più esterna e prosegue
lungo di essa solo se deve uscire nella strada successiva; in caso contrario si sposta su
una delle corsie più interne per non rimanere coinvolto nelle manovre di immissione e
di uscita della strada successiva, e ritorna sulla corsia più esterna solo in prossimità del
ramo in cui deve uscire.
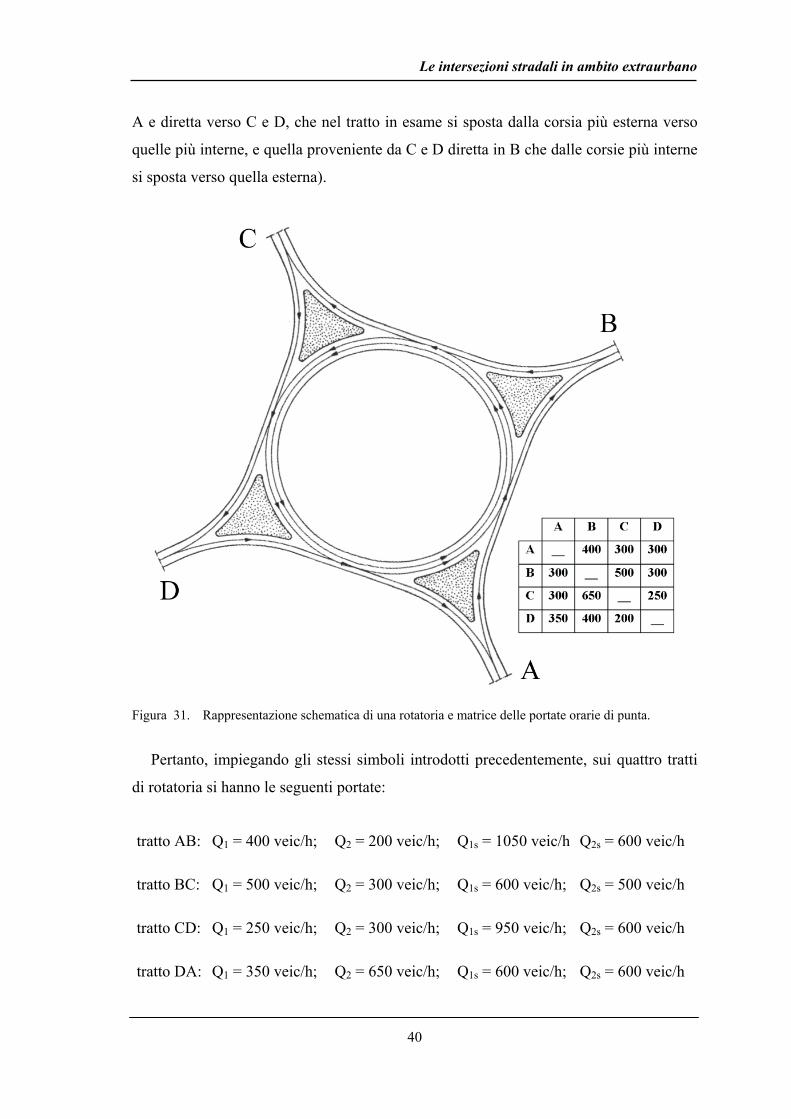
Un tratto di rotatoria, per esempio quello compreso fra le strade A e B, è percorso da
due portate dirette, che cioè in questo tratto non cambiano corsia (quella proveniente da
A e diretta in B, che percorre la corsia più esterna, e quella proveniente da D e diretta in
C, che percorre le corsie più interne), e da due portate di scambio (quella proveniente da
40
Le intersezioni stradali in ambito extraurbano
A e diretta verso C e D, che nel tratto in esame si sposta dalla corsia più esterna verso
quelle più interne, e quella proveniente da C e D diretta in B che dalle corsie più interne
si sposta verso quella esterna).
Figura 31. Rappresentazione schematica di una rotatoria e matrice delle portate orarie di punta.
Pertanto, impiegando gli stessi simboli introdotti precedentemente, sui quattro tratti
di rotatoria si hanno le seguenti portate:
tratto AB: Q1 = 400 veic/h; Q2 = 200 veic/h; Q1s = 1050 veic/h Q2s = 600 veic/h
tratto BC: Q1 = 500 veic/h; Q2 = 300 veic/h; Q1s = 600 veic/h; Q2s = 500 veic/h
tratto CD: Q1 = 250 veic/h; Q2 = 300 veic/h; Q1s = 950 veic/h; Q2s = 600 veic/h
tratto DA: Q1 = 350 veic/h; Q2 = 650 veic/h; Q1s = 600 veic/h; Q2s = 600 veic/h

41
Le intersezioni stradali in ambito extraurbano
Le condizioni più sfavorevoli si verificano sul tratto AB; ritenendo di dover
mantenere su di esso un livello di servizio D, la qualità dello scambio, (dalla tabella 7) è
IV. Pertanto, in corrispondenza della portata totale di scambio Q1s + Q2s = 1650 veic/h,
dall’abaco di figura 30 si ricava la lunghezza del tratto AB: LAB = 130 m.
La portata virtuale del tratto è, dalla [9]:
veic/h345060031050200400Q =⋅+++=
Progettando la carreggiata dello scambio con larghezza di corsie e di banchine ideali,
al livello D la portata di servizio di una corsia è 1800 veic/h. Si assegna perciò alla
rotatoria una carreggiata a due corsie larghe 3.75 m.
Seguendo lo stesso procedimento, e conservando la stessa qualità dello scambio, si
calcolano le lunghezze degli altri tratti di rotatoria:
tratto BC: Q1s + Q2s = 1100 veic/h LBC = 50 m
tratto CD: Q1s + Q2s = 1550 veic/h LCD = 120 m
tratto DA: Q1s + Q2s = 1200 veic/h LDA = 85 m
Aggiungendo ancora la lunghezza occupata dalle zone di immissione delle quattro
strade ( m 160404 =⋅ ) si ha che lo sviluppo della rotatoria in asse della carreggiata è di
565 m, a cui corrisponde un raggio di circa 90 m.
8. INTERSEZIONI A RASO REGOLATE SEMAFORICAMENTE
Le intersezioni semaforizzate sono abbastanza rare in ambito extraurbano, dove, in
genere, quando l’intersezione a raso presenta un basso livello di servizio, si preferisce
ricorrere alla “soluzione” a livelli sfalsati. Tuttavia esse trovano una larga applicazione
anche sulla viabilità di lunga percorrenza, quando si trovano in ambito peri-urbano,
dove flussi notevoli convivono con la difficoltà ad effettuare lo sfalsamento altimetrico.
I criteri di calcolo di questo tipo di intersezioni sono riportati nell’HCM 94.
8.1 Il calcolo del ciclo semaforico
L'Highway Capacity Manual propone un livello di verifica ed uno di progettazione
delle regolazioni semaforiche.

42
Le intersezioni stradali in ambito extraurbano
L’analisi di verifica viene realizzata utilizzando informazioni dettagliate riguardanti
le caratteristiche geometriche, di traffico e di semaforizzazione delle intersezioni.
Un concetto molto importante espresso dal manuale americano è che, mentre per la
stesura dell’analisi di verifica sono necessari accurati e attendibili dati di ingresso, nel
metodo di progettazione tale scrupolosità viene richiesta non tanto ai dati d’ingresso
quanto alle procedure computazionali.
Il manuale fornisce la seguente formula per il calcolo della lunghezza del ciclo
semaforico:
( )
−
=
RSRS,CSMin1
TLC [10]
dove:
• TL è il tempo totale perso per ciclo;
• CS è la somma critica dei volumi di fase (è il volume, o somma di volumi, che per
un certo ramo richiede il massimo utilizzo dell’intersezione);
• RS è la somma di riferimento dei volumi di fase.
8.2 Il concetto di flusso di saturazione
La definizione della capacità e del livello di servizio delle intersezioni regolate
semaforicamente si basa sul concetto del flusso di saturazione: si tratta del flusso, in
veicoli per ora, che potrebbe essere fornito da un gruppo di corsie(1), assumendo che la
fase di verde sia sempre disponibile per il gruppo di corsie in esame.
I calcoli iniziano con la selezione di un flusso di saturazione ideale, di solito pari a
1900 veicoli leggeri per ora di verde per corsia, dopodiché questo valore si corregge con
una serie di coefficienti che riflettono la non idealità delle condizioni esistenti. Questi
fattori di correzione sono riportati in una serie di tabelle presenti nell’Highway Capacity
Manual (1994).
LTRTabbpgHVW0 ffffffffNss ⋅⋅⋅⋅⋅⋅⋅⋅⋅= [11]
dove:
(1) Un gruppo di corsie è definito come una o più corsie che smaltiscono traffico e hanno una linea difermata comune e capacità condivisa tra tutti i veicoli.

43
Le intersezioni stradali in ambito extraurbano
♦ s è il flusso di saturazione per il gruppo di corsie in studio, espresso come totale per
tutte le corsie del gruppo nelle condizioni esistenti, [veicoli/ora];
♦ s0 è il flusso di saturazione ideale per corsia, di solito 1900 veicoli leggeri per ora di
verde per corsia;
♦ N è il numero di corsie nel gruppo;
♦ fw è il fattore di correzione per la larghezza della corsia (la larghezza standard di
una corsia è di 12 ft);
♦ fHV è il fattore di correzione per i veicoli pesanti presenti nella corrente di traffico;
♦ fg è il fattore di correzione per la pendenza del ramo;
♦ fp è il fattore di correzione per l’esistenza di una corsia di sosta adiacente al gruppo
di corsie e per l’attività di parcheggio in quella corsia;
♦ fbb è il fattore di correzione per l’effetto di blocco del traffico dovuto agli autobus
che fermano nell’area dell’intersezione;
♦ fa è il fattore di correzione dovuto al tipo di area;
♦ fRT è il fattore di correzione per la svolta a destra nel gruppo di corsie;
♦ fLT è il fattore di correzione per la svolta a sinistra nel gruppo di corsie (tiene conto
dei condizionamenti legati all’effettuazione della manovra di svolta a sinistra).
8.3 Capacità e livelli di servizio delle intersezioni semaforizzate
La capacità (veicoli/ora) di un’intersezione semaforizzata (Fig. 32) rappresenta il
numero massimo di veicoli che possono attraversare l’intersezione per una determinata
direzione nelle condizioni prevalenti stradali e di traffico per un dato intervallo di
tempo. La capacità di un’intersezione è fortemente dipendente dalla semaforizzazione
presente. In effetti, la semaforizzazione, potendo essere cambiata frequentemente e
velocemente, permette considerevoli libertà nella gestione della capacità fisica dello
spazio e della geometria dell’intersezione.
La capacità nelle intersezioni semaforizzate è basata sul concetto di flusso di
saturazione, su cui si è dissertato al paragrafo precedente; per un dato gruppo di corsie,
essa è data da:
⋅=
Cg
sc iii [12]
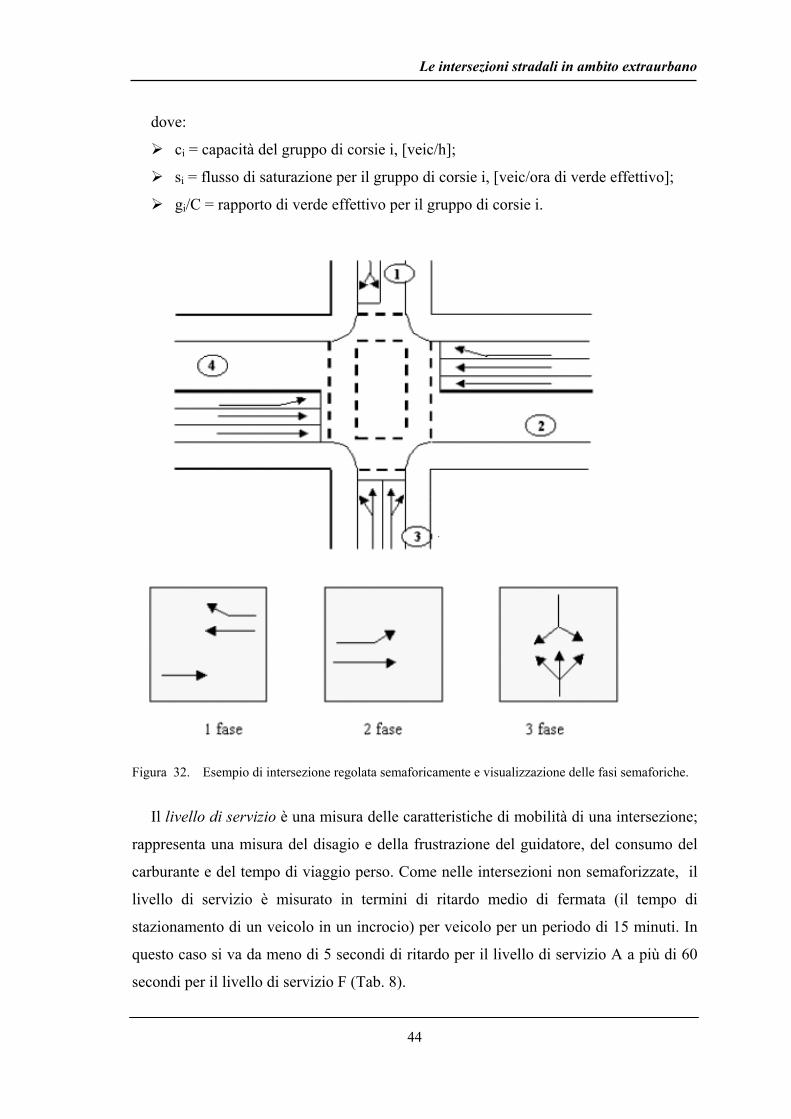
44
Le intersezioni stradali in ambito extraurbano
dove:
ci = capacità del gruppo di corsie i, [veic/h];
si = flusso di saturazione per il gruppo di corsie i, [veic/ora di verde effettivo];
gi/C = rapporto di verde effettivo per il gruppo di corsie i.
Figura 32. Esempio di intersezione regolata semaforicamente e visualizzazione delle fasi semaforiche.
Il livello di servizio è una misura delle caratteristiche di mobilità di una intersezione;
rappresenta una misura del disagio e della frustrazione del guidatore, del consumo del
carburante e del tempo di viaggio perso. Come nelle intersezioni non semaforizzate, il
livello di servizio è misurato in termini di ritardo medio di fermata (il tempo di
stazionamento di un veicolo in un incrocio) per veicolo per un periodo di 15 minuti. In
questo caso si va da meno di 5 secondi di ritardo per il livello di servizio A a più di 60
secondi per il livello di servizio F (Tab. 8).

45
Le intersezioni stradali in ambito extraurbano
Livello di servizio Ritardo medio totale (secondi/veicolo)
A 0.5≤
B > 15.0 e 0.5 ≤
C > 25.0 e 0.15 ≤
D > 40.0 e 0.25 ≤
E > 60.0 e 0.40 ≤
F > 0.60
Tabella 8. Livelli di servizio per le intersezioni semaforizzate in base all’HCM 94.
Il ritardo medio di fermata per veicolo per un dato gruppo di corsie è dato da:
( ) 21 dDFdd +⋅= [13]
( )[ ]
⋅
−
−
⋅⋅=0.1,Xmin
Cg1
Cg1
C38.0d
2
1 [14]
( ) ( )
⋅
+−+−⋅⋅=c
Xm1X1XX173d 222 [15]
dove:
• d è il ritardo di fermata, [sec/veic];
• d1 è il ritardo uniforme, [sec/veic];
• d2 è il ritardo incrementale, [sec/veic];
• DF è il fattore di correzione del ritardo che mette in conto la qualità della
progressione e il tipo di controllo;
• X è il rapporto v/c per il gruppo di corsie;
• C è la lunghezza del ciclo, [sec];
• c è la capacità del gruppo di corsie, [veic/h];
• g è il tempo di verde effettivo per il gruppo di corsie, [sec];
• m è il termine di calibrazione del ritardo incrementale, che rappresenta l’effetto
del tipo d’arrivo e del livello di plotone.

46
Le intersezioni stradali in ambito extraurbano
I concetti di capacità e livello di servizio sono fondamentali nell’analisi delle
intersezioni semaforizzate, come lo sono anche per tutti i tipi di infrastrutture per le
quali si richiedono informazioni sulle caratteristiche quali-quantitative della
circolazione. Nell’analisi delle intersezioni, tuttavia, i due concetti non sono così
fortemente correlati come accade per altre procedure analoghe illustrate dall’HCM.
L’analisi della capacità è fatta tramite il calcolo del rapporto volume/capacità per
ogni gruppo di corsie. Il rapporto v/c è il flusso reale o progettato, di un designato
gruppo di corsie durante un intervallo di punta di 15 minuti, diviso per la capacità
dell’intera intersezione. Il livello di servizio è basato sul ritardo medio di fermata per
veicolo, per le varie manovre nell’intersezione. Nonostante il rapporto v/c influisca sul
ritardo, ci sono altri parametri che lo influenzano maggiormente, quali la qualità della
progressione, la lunghezza delle fasi di verde, la lunghezza del ciclo e altro. Dunque,
per ogni rapporto v/c assegnato, possono risultare diversi valori di ritardo e viceversa.
In pratica, comunque, deve essere riconosciuto che un’intersezione non può
funzionare oltre una certa capacità senza avere un ritardo eccessivo.
Si osserva infine che nell’HCM del 94 sono riportati tutti i fogli di lavoro a supporto
delle procedure di verifica e progetto delle intersezioni controllate semaforicamente; si
tratta di una serie di schede tra loro collegate che consentono all’operatore una certa
“agilità” nell’immissione degli input ed una notevole semplicità nell’ottenimento e
nell’interpretazione dei dati provenienti dalle varie procedure computazionali.
9. INTERSEZIONI A LIVELLI SFALSATI
Come già detto, il livello di servizio di una intersezione semaforizzata è funzione del
tempo di attesa all’incrocio. Quando tale tempo diventa inaccettabile (normalmente
oltre i 50 secondi) bisogna ricorrere allo sfalsamento dell’intersezione.
Si è anche osservato che questo tipo di intersezione è obbligatorio per tutte quelle
strade (autostrade) che non ammettono intersezioni a raso, in quanto sono caratterizzate
da flussi veicolari talmente sostenuti che non possono ammettere in alcun modo
attraversamenti delle correnti di traffico in nessuno dei due sensi di percorrenza..
In figura 33 è rappresentata schematicamente l’intersezione di una strada (X) con
un’altra strada (Y). In generale, un qualsiasi veicolo, appartenente per esempio alla
corrente Y, deve avere la possibilità di proseguire nella stessa strada attraversando le

47
Le intersezioni stradali in ambito extraurbano
correnti veicolari che percorrono la strada X, oppure svoltare a destra per trasferirsi
sulla corrente 3-3 dell’altra strada, oppure svoltare a sinistra per immettersi nella
corrente 4-4.
2 1
2 1
4
3
4
3
Y
X
Figura 33. Schema di intersezione tra due strade.
Le tre manovre classiche di ogni incrocio sono pertanto quella di svolta a destra,
quella di attraversamento e quella di svolta a sinistra. Tutte presentano punti di conflitto
con le analoghe manovre che si svolgono su altri rami dell’incrocio. Però soltanto la
prima (svolta a destra) permette di risolvere le conflittualità senza ricorrere allo
sfalsamento, in quanto in quel caso si tratta di una conflittualità convergente e non
alternativa.
9.1 Svolta a destra
Per i motivi che si è detto, si tratta della manovra più facile da risolvere. Infatti, tale
svolta avviene normalmente su una rampa dedicata (rampa diretta per la svolta a

48
Le intersezioni stradali in ambito extraurbano
destra) che si stacca dal margine destro della corsia di destra del ramo che accede
all’incrocio e si attacca al margine destro della corsia di destra del ramo che parte
dall’incrocio (Fig. 34).
Figura 34. Rampa diretta per la svolta a destra.
9.2 Manovra di attraversamento
Nel caso di intersezioni a raso, la manovra di attraversamento non può in genere
eseguirsi senza che si abbia l’arresto delle correnti che devono effettuare la manovra
medesima.
Come minimo, questo tipo di manovra genera due punti di conflitto, per di più critici
in quanto si tratta di intersezioni con le due correnti veicolari che interessano la strada
che si sta intersecando. Inoltre possono generarsi numerosi altri punti di conflitto in
conseguenza delle altre manovre di immissione e diversione interessanti la dinamica di
percorribilità dello svincolo.

49
Le intersezioni stradali in ambito extraurbano
Quando le portate che attraversano l’intersezione diventano considerevoli, diventa
quindi necessario fare in modo che una strada sovrapassi l’altra con un cavalcavia; un
sistema di rampe consentirà poi i collegamenti tra le due strade per quel che concerne le
manovre di svolta a sinistra e a destra.
9.3 Svolta a sinistra
Se si fa riferimento nuovamente allo schema di intersezione rappresentato in figura
33, ci si rende immediatamente conto come la manovra di svolta a sinistra risulti essere
quella potenzialmente più pericolosa rispetto alle altre due, in quanto genera come
minimo quattro punti di conflitto:
• una diversione dalla corrente 1-1 della strada Y;
• un attraversamento della corrente 3-3 della strada X;
• un attraversamento della corrente 2-2 della strada Y;
• un’immissione nella corrente 4-4 della strada X.
E’ facile intuire come la presenza contemporanea di più manovre di svolta a sinistra
possa far incrementare sensibilmente il numero di punti di conflitto (a tal proposito si
può rivedere la figura 2 di questa trattazione, nella quale vengono evidenziati i vari
punti di conflitto che si generano nei più comuni schemi di intersezione) e rendere
necessario, nei casi in cui tali conflittualità non possono essere risolte con la regolazione
a mezzo del segnale di precedenza o tramite le lanterne semaforiche, lo sfalsamento
delle quote di attraversamento.
Per effettuare la svolta a sinistra si ricorre a rampe che riconducono totalmente o
parzialmente la manovra di svolta a sinistra in una manovra di svolta a destra.
Tali rampe possono avere forme differenti, che però possono essere sempre
ricondotte a due tipologie fondamentali:
♦ rampe indirette o a cappio, che trasformano la svolta a sinistra in una svolta a
destra con angolo al centro di circa 270° e non richiedono lo scavalcamento di
nessuna corrente di traffico (Fig. 35);
♦ rampe semidirette, le quali consentono la svolta a sinistra uscendo dalla destra;
ogni rampa di questo tipo inizia quindi con una svolta a destra, la quale
gradatamente si trasforma in svolta a sinistra (Fig. 36).

50
Le intersezioni stradali in ambito extraurbano
Figura 35. Rampa indiretta (o a cappio).
Figura 36. Rampa semidiretta.
51
Le intersezioni stradali in ambito extraurbano
10. FATTORI DI COORDINAMENTO DELLE RAMPE
Le rampe che vengono utilizzate per l’effettuazione dei collegamenti tra le strade
situate a diversa quota devono essere realizzate mediante criteri progettuali adeguati a
mettere in conto una serie di problematiche tra loro interconnesse.
Per chiarire il concetto appena espresso possiamo sinteticamente, a titolo d’esempio,
far riferimento al tronco di stacco delle rampe. Questo tratto è erroneamente chiamato
corsia di decelerazione in base al presupposto che serva al veicolo in manovra per
effettuare la decelerazione necessaria per passare dalla velocità di progetto consentita
sulla strada da cui si vuole uscire a quella possibile sulla rampa.
Ora è vero che questa decelerazione è normalmente necessaria in quanto la geometria
delle rampe di uno svincolo di solito non consente velocità comparabili con quelle delle
strade che collega. Questo per due motivi: innanzitutto perché una geometria tale da
consentire velocità paragonabili a quelle delle strade principali costringerebbe a spazi di
occupazione ed a conseguenti costi di esproprio e di costruzione quasi sempre non
giustificati dal flusso che vuole effettuare quella manovra; in secondo luogo, per
necessità di coerenza con la manovra di attacco sulla seconda strada. Non ha senso
infatti consentire lo stacco e la percorrenza della rampa a velocità elevate se poi non si
dimensiona l’attacco in modo tale da non costringere il veicolo in manovra al
rallentamento.
Da quanto detto appare evidente la necessità di coerenza fra tutte le parti della rampa
affinché non ci sia contraddizione fra un elemento e l’altro.
Le rampe dedicate (per la manovra di svolta a destra) sono sempre rampe dirette e,
come tali, possono essere condizionate dalla presenza o meno di una rampa indiretta
nello stesso quadrante dello svincolo.
Ulteriore elemento condizionante è la pendenza longitudinale della rampa, che,
dovendo consentire uno sfalsamento in quota di circa 6-7 metri fra le due strade, deve
avere uno sviluppo tale da permettere velocità compatibili con quelle possibili per
l’andamento planimetrico.
La sezione può essere ad una o più corsie a seconda del flusso, ma deve consentire in
ogni caso la funzionalità anche nel caso di arresto di emergenza di un veicolo sulla
carreggiata. Ne consegue che, nel caso di gran lunga più frequente di corsia unica,
bisogna sempre prevedere una banchina laterale pavimentata che consenta alla
52
Le intersezioni stradali in ambito extraurbano
carreggiata pavimentata di avere una larghezza di almeno 6.50 metri. I fattori di
coordinamento sono quindi cinque:
• stacco;
• attacco;
• geometria orizzontale;
• geometria verticale;
• sezione tipo.
Per ciò che concerne i tronchi di stacco e attacco e la geometria plano-altimetrica dei
tratti intermedi, effettueremo una trattazione nei paragrafi seguenti; in questo contesto ci
interessa riportare i suggerimenti delle Norme italiane di progettazione relativi alle
caratteristiche d’asse delle rampe:
a) quando la più importante fra le due strade che si intersecano è di tipo III o A:
• raggio planimetrico minimo d’asse 35 m
• pendenza massima in salita 7 %
• pendenza massima in discesa 8 %
• raggio verticale minimo convesso 800 m
• raggio verticale minimo concavo 400 m
b) quando la più importante fra le due strade che si intersecano è di tipo I o II:
• raggio planimetrico minimo d’asse 60 m
• pendenza massima in salita 5 %
• pendenza massima in discesa 6 %
• raggio verticale minimo convesso 1500 m
• raggio verticale minimo concavo 500 m
Per quanto riguarda l’organizzazione della sezione trasversale delle rampe, la
Normativa del CNR consiglia la piattaforma per le rampe unidirezionali rappresentata
nella figura 37-a) e 37-b): la carreggiata, se a unica corsia, è larga 4 m ed è
fiancheggiata da una banchina larga 1.50 m sulla destra e da una larga 1 m sulla sinistra;
se la carreggiata è a due corsie, sarà larga 7 m e fiancheggiata da due banchine di 1 m.
La piattaforma delle rampe bidirezionali è illustrata nella figura 37-c); la carreggiata,
a due corsie da 3.75 m ciascuna, è fiancheggiata da due banchine larghe 1 m; quando è

53
Le intersezioni stradali in ambito extraurbano
prevista l’installazione di una barriera di separazione fra le due corsie, si impiega la
piattaforma indicata nella figura 37-d).
1.00 1.504.00
6.50
1.00 1.007.00
9.00
1.00 1.007.509.50
1.00 1.004.0012.00
4.002.00
CARREGGIATA
CARREGGIATA
CARREGGIATA CARREGGIATA
CARREGGIATA
SPARTITRAFF.BANC. BANC.
BANC. BANC.
BANC. BANC.
BANC.BANC.
a)
b)
c)
d)
Figura 37. Piattaforma stradale sulle rampe.
Osserviamo infine che le intersezioni a livelli sfalsati richiedono la realizzazione di
uno o più manufatti di cavalcavia. L’altezza libera di tali manufatti, necessaria al
passaggio della carreggiata sottostante in tutta la sua interezza, deve essere almeno di
4.75 m (meglio se 5.00 m). Supposto, pertanto uno spessore di architrave tra 1 m ed
1.75 m, la differenza di quota fra le due strade sarà compresa tra 5.65 m e 6.50 m.
54
Le intersezioni stradali in ambito extraurbano
11. TRONCO DI STACCO
A partire da questo paragrafo, prenderemo in considerazione le problematiche
relative alla realizzazione pratica delle “vie” per l’uscita e l’immissione nelle strade,
sempre nel caso in cui si abbia a che fare con situazioni in cui una delle carreggiate
sovrapassi l’altra. In generale si ha a che fare con una dinamica delle manovre che
prevede l’impegno di una serie di “tronchi”:
• il tronco di stacco, tramite il quale i veicoli in uscita abbandonano la carreggiata;
• il tronco intermedio di decelerazione, che consente agli automobilisti di portarsi
alla velocità consentita sulle rampe;
• il tronco a curvatura costante che assume diverse conformazioni a seconda del
tipo di rampa (è generalmente di breve sviluppo nel caso delle rampe dirette; è
caratterizzato da uno sviluppo notevole per le rampe indirette (o a cappio);
consente un inversione della curvatura rispetto al tronco di decelerazione nel caso
delle rampe semidirette);
• il tronco intermedio di accelerazione, attraverso cui i veicoli raggiungono la
velocità ammissibile sulla strada che si apprestano a raggiungere;
• il tronco di attacco, impegnato dai veicoli in attesa di immettersi nella corrente
principale.
E’ chiaro che la strutturazione in tronchi appena esposta si riferisca a tutte quelle
situazioni in cui le strade collegate da rampe di interallacciamento sono caratterizzate da
intervalli di velocità notevolmente differenti. Si può infatti pensare a soluzioni più
“lineari” nel caso in cui le strade da collegare siano della stessa importanza (dove con
“lineare” intendiamo una soluzione progettuale che consenta all’utente di effettuare le
manovre di uscita ed immissione senza variare significativamente la propria velocità).
Il tronco di stacco deve consentire al veicolo che vuole effettuare la manovra di
svolta di uscire dalla carreggiata della strada impegnata disturbando il meno possibile il
flusso che percorre la stessa carreggiata. Questa condizione è un fattore di sicurezza per
la circolazione in quanto l’eventuale decelerazione sulla carreggiata principale da parte
di un veicolo che si predispone alla manovra di uscita potrebbe essere causa di
tamponamenti da parte di altri veicoli che sopraggiungono sulla stessa carreggiata senza
essere interessati alla manovra di uscita e quindi non predisposti al rallentamento
(soprattutto se brusco e mal segnalato).
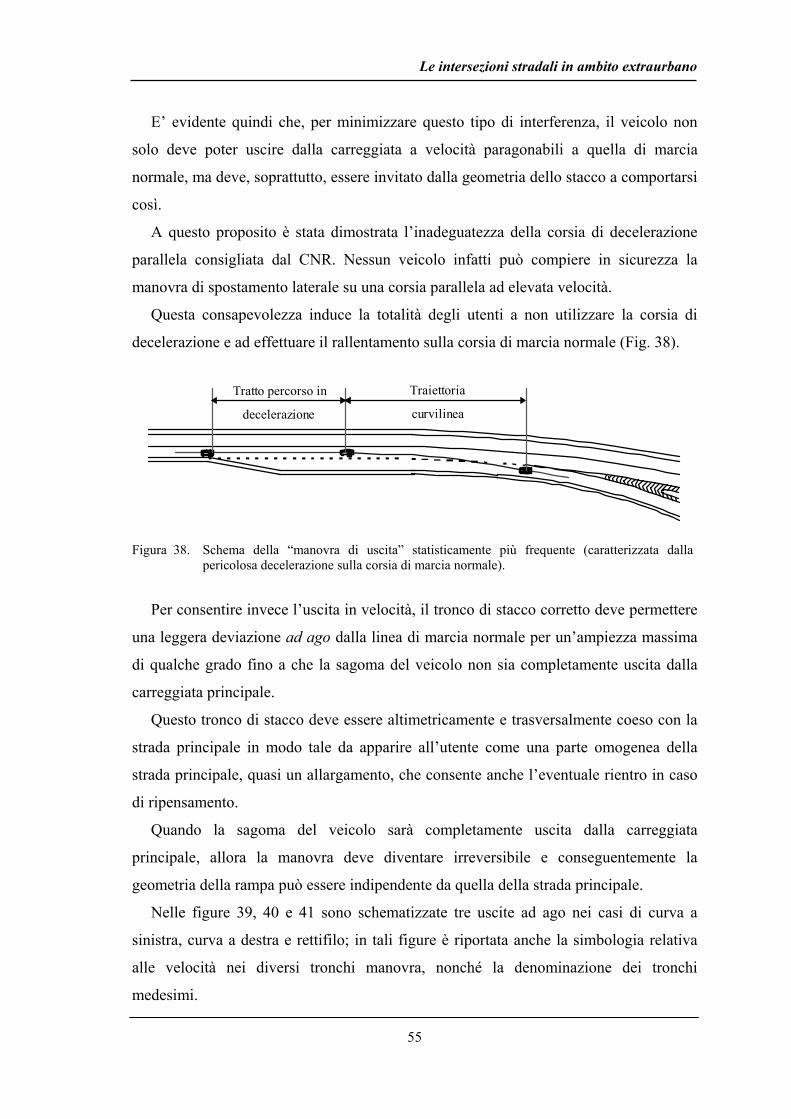
55
Le intersezioni stradali in ambito extraurbano
E’ evidente quindi che, per minimizzare questo tipo di interferenza, il veicolo non
solo deve poter uscire dalla carreggiata a velocità paragonabili a quella di marcia
normale, ma deve, soprattutto, essere invitato dalla geometria dello stacco a comportarsi
così.
A questo proposito è stata dimostrata l’inadeguatezza della corsia di decelerazione
parallela consigliata dal CNR. Nessun veicolo infatti può compiere in sicurezza la
manovra di spostamento laterale su una corsia parallela ad elevata velocità.
Questa consapevolezza induce la totalità degli utenti a non utilizzare la corsia di
decelerazione e ad effettuare il rallentamento sulla corsia di marcia normale (Fig. 38).
Tratto percorso in
decelerazione
Traiettoria
curvilinea
Figura 38. Schema della “manovra di uscita” statisticamente più frequente (caratterizzata dallapericolosa decelerazione sulla corsia di marcia normale).
Per consentire invece l’uscita in velocità, il tronco di stacco corretto deve permettere
una leggera deviazione ad ago dalla linea di marcia normale per un’ampiezza massima
di qualche grado fino a che la sagoma del veicolo non sia completamente uscita dalla
carreggiata principale.
Questo tronco di stacco deve essere altimetricamente e trasversalmente coeso con la
strada principale in modo tale da apparire all’utente come una parte omogenea della
strada principale, quasi un allargamento, che consente anche l’eventuale rientro in caso
di ripensamento.
Quando la sagoma del veicolo sarà completamente uscita dalla carreggiata
principale, allora la manovra deve diventare irreversibile e conseguentemente la
geometria della rampa può essere indipendente da quella della strada principale.
Nelle figure 39, 40 e 41 sono schematizzate tre uscite ad ago nei casi di curva a
sinistra, curva a destra e rettifilo; in tali figure è riportata anche la simbologia relativa
alle velocità nei diversi tronchi manovra, nonché la denominazione dei tronchi
medesimi.

56
Le intersezioni stradali in ambito extraurbano
Lm(manovra)
Ld(decelerazione) Rf
bi
Vp
ViVfα
iperclotoide
CURVA A SINISTRAasse principale
riga esterna dellacorsia destra
cerchio (R) oclotoide (A)
cerchio (R) oclotoide (A)
Figura 39. Schematizzazione di uscita “ad ago” nel caso di curva a sinistra.
Lm(manovra)
Ld(decelerazione)
Rf
bi
iperclotoide
riga esterna dellacorsia destra
cerchio (R) oclotoide (A)Vp
Vi
Vf
α
asse principaleCURVA A DESTRAcerchio (R) o
clotoide (A)
Figura 40. Schematizzazione di uscita “ad ago” nel caso di curva a destra.
Lm(manovra)
Ld(decelerazione)
Rf
bi
iperclotoide
Vp
Vi
Vf
α
riga esterna dellacorsia destra
rettifilo
asse principale RETTIFILO
rettifilo
Figura 41. Schematizzazione di uscita “ad ago” nel caso di rettifilo.
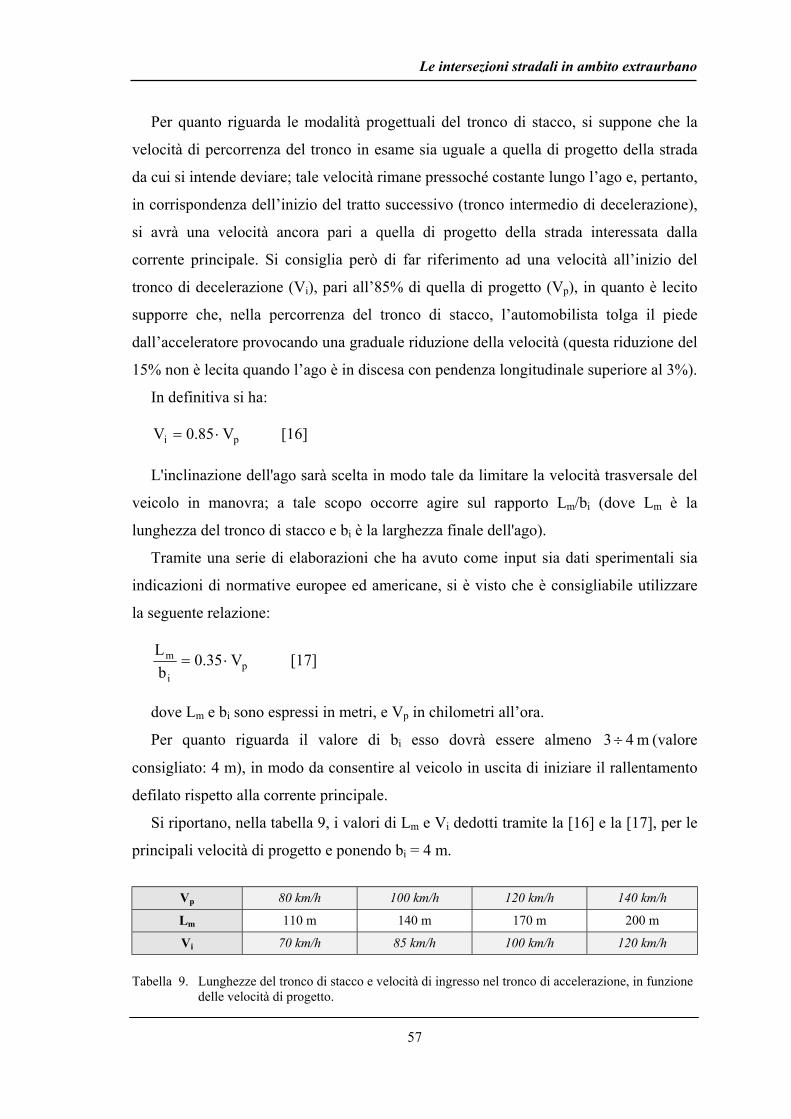
57
Le intersezioni stradali in ambito extraurbano
Per quanto riguarda le modalità progettuali del tronco di stacco, si suppone che la
velocità di percorrenza del tronco in esame sia uguale a quella di progetto della strada
da cui si intende deviare; tale velocità rimane pressoché costante lungo l’ago e, pertanto,
in corrispondenza dell’inizio del tratto successivo (tronco intermedio di decelerazione),
si avrà una velocità ancora pari a quella di progetto della strada interessata dalla
corrente principale. Si consiglia però di far riferimento ad una velocità all’inizio del
tronco di decelerazione (Vi), pari all’85% di quella di progetto (Vp), in quanto è lecito
supporre che, nella percorrenza del tronco di stacco, l’automobilista tolga il piede
dall’acceleratore provocando una graduale riduzione della velocità (questa riduzione del
15% non è lecita quando l’ago è in discesa con pendenza longitudinale superiore al 3%).
In definitiva si ha:
pi V85.0V ⋅= [16]
L'inclinazione dell'ago sarà scelta in modo tale da limitare la velocità trasversale del
veicolo in manovra; a tale scopo occorre agire sul rapporto Lm/bi (dove Lm è la
lunghezza del tronco di stacco e bi è la larghezza finale dell'ago).
Tramite una serie di elaborazioni che ha avuto come input sia dati sperimentali sia
indicazioni di normative europee ed americane, si è visto che è consigliabile utilizzare
la seguente relazione:
pi
m V35.0bL
⋅= [17]
dove Lm e bi sono espressi in metri, e Vp in chilometri all’ora.
Per quanto riguarda il valore di bi esso dovrà essere almeno m 43 ÷ (valore
consigliato: 4 m), in modo da consentire al veicolo in uscita di iniziare il rallentamento
defilato rispetto alla corrente principale.
Si riportano, nella tabella 9, i valori di Lm e Vi dedotti tramite la [16] e la [17], per le
principali velocità di progetto e ponendo bi = 4 m.
Vp 80 km/h 100 km/h 120 km/h 140 km/h
Lm 110 m 140 m 170 m 200 m
Vi 70 km/h 85 km/h 100 km/h 120 km/h
Tabella 9. Lunghezze del tronco di stacco e velocità di ingresso nel tronco di accelerazione, in funzionedelle velocità di progetto.

58
Le intersezioni stradali in ambito extraurbano
12. TRONCO INTERMEDIO DI DECELERAZIONE
Come si è già detto, la geometria della rampa deve essere coerente dall’inizio alla
fine, al suo interno, e con le altre rampe, all’esterno. Soprattutto deve essere funzionale
ai traffici previsti.
Se risulta accettabile una velocità minima di percorrenza di 50 km/h, vuol dire che il
raggio planimetrico minimo può essere di 60 m e quindi, dal punto in cui la sagoma del
veicolo è completamente uscita dalla carreggiata principale, occorre prevedere una
geometria che consenta la decelerazione dalla velocità di uscita a quella consentita sul
raggio di curvatura minimo.
A tal proposito si consiglia di adottare le cosiddette curve di frenatura, che non sono
altro che curve di transizione multiparametriche(2) (iperclotoidi). Queste ultime si
(2) Le clotoidi multiparametriche sono definite dalla seguente equazione intrinseca:
r s An n⋅ = +1 [n.1]
dove:• r = raggio di curvatura in un generico punto P;• s = ascissa curvilinea in un generico punto P;• A = parametro della clotoide; è un fattore di scala che influisce sulle dimensioni lineari della curva
(sviluppo, scostamento, tangenti);• n = fattore di forma; modifica le variazioni di curvatura e, di conseguenza, le deviazioni angolari
all’interno della stessa, senza che le variazione comporti sensibili differenze nelle dimensioni.Partendo dalla [n.1] è possibile determinare le espressioni parametriche in funzione della variabile τ,angolo (detto di deviazione) che la tangente alla curva nel generico punto P, forma con l’asse delleascisse.
M
τ
τ
Y
X
P
r
f
B
r
∆r
tx
y
tl
tk
α
XM
0 A
lC
Figura n.1 - Elementi caratteristici delle clotoidi.
Ricordando che in un arco infinitesimo di una generica curva si ha: τ =dsr
, possiamo scrivere:

59
Le intersezioni stradali in ambito extraurbano
distinguono dalle clotoidi classiche in quanto non partono dal presupposto di essere
percorse a velocità costante ed a sterzatura costante. Anzi, i loro input sono costituiti dai
valori costanti della decelerazione longitudinale e dell’accelerazione trasversale. Ciò si
τ ττ
= = =+ ⋅
∫ ∫ ∫+
+ddsr
sn A
sn
n
s
0 0
1
10 1( ) ed in definitiva, si ha: τ =
+ ⋅
+
+
sn A
n
n
1
11( )Quindi, ciascuna delle quattro grandezze τ, r, s ed A può essere espressa in funzione di una qualsiasidelle altre tre:
r = =+ ⋅
=+ ⋅
+
+
As
A
n
sn
n
n nn
1
111
[( ) ]( )
ττ
; s =A
n+1
n
rn r A nn= + ⋅ ⋅ = ⋅ + ⋅+( ) ( )1 11τ τ
A = ⋅ =+ ⋅
= + ⋅ ⋅+ ++
r ss
nn r nn
nn
n1 1
11
1 ( )[( ) ]
ττ ; =
1n +1
τ ⋅
=+
⋅
=+
⋅
++A
r nsA n
sr
nn
n1
111
11
Utilizzando le relazioni precedenti è possibile esprimere le coordinate cartesiane x ed y del genericopunto P di una fissata clotoide multiparametro sotto forma di serie di potenze di τ. Trascurando ipassaggi intermedi si riportano le due espressioni finali.
[ ] x
= ⋅ + ⋅ ⋅ −⋅ − ⋅ − ⋅ + +
+ +⋅ −
=
∞
∑A ni i n
n ii
i( ) ( )
( )! ( ) ( )1 1
2 2 2 2 1 11 1
2 2
1τ
τ
[ ] y
= ⋅ + ⋅ ⋅ −⋅ − ⋅ − ⋅ + +
+ +⋅ −
=
∞
∑A ni i n
n ii
i( ) ( )
( )! ( ) ( )1 1
2 1 2 1 1 11 1
2 1
1τ
τ
Note le coordinate di un punto della curva, si calcolano le coordinate (Xm,Ym) del cerchio osculatore nelpunto stesso.
X x rY y r
M
M
= − ⋅= + ⋅
sencos
ττ
poiché: rA
nnn=
+⋅ + ⋅+
( )( )
111
ττ , si ha:
X [(2 i - 2) (n +1) +1]
Mn i
i
iA
nn
ni
= ⋅+
⋅ + ⋅ ⋅ −⋅ − ⋅ ⋅
+ +
⋅ −
=
∞
∑11 1
2 11 1
2 2
1( ) ( )
( )!τ
τ
Y [(2 i -1) (n +1) +1]
Mn i
i
iA
nn
nn i
= ⋅+
⋅ + ⋅ ⋅⋅
+
−⋅ ⋅ ⋅
+ +
⋅ −
=
∞
∑11
11
21 1
2 1
1( ) ( )
!τ
ττ
Lo scostamento ∆r del cerchio di raggio r dalla retta tangente alla clotoide nell’origine è: ∆r Y rm= −
Tenendo conto delle espressioni precedentemente ricavate, si ottiene:
r [(2 i - 1) (n + 1) + 1]
∆ = ⋅+
⋅ + ⋅ ⋅ −⋅ ⋅ ⋅
+ +
⋅ −
=
∞
∑An
nn
in i
i
i11 1
21 1
2 1
1( ) ( )
!τ
τ
Si riportano di seguito altri parametri, per i quali si forniscono le espressioni in funzione di x, y e τ.La lunghezza Tl del segmento OA, detto segmento di tangente lunga, è: T x y g l = − ⋅ cot τ
La lunghezza Tk del segmento AP, detto segmento di tangente corta, è: Ty
k =sen τ
La lunghezza del segmento OB è: t x y tg = + ⋅ τ
ed infine la lunghezza del segmento PB è:fy
=cosτ
.

60
Le intersezioni stradali in ambito extraurbano
può ottenere cambiando il fattore di forma n delle clotoidi che diventa superiore ad 1
(da cui il nome di iperclotoide). Dal momento che esistono infinite iperclotoidi che
soddisfano la possibilità di collegare un rettifilo con una curva a raggio costante, si
possono introdurre dei criteri per la scelta del fattore di forma n. Stabilite le velocità di
entrata (fine dell’ago) e di uscita (inizio della curva circolare) e posizionate nello spazio
sia l’ago che la curva circolare, si tratta di trovare quel valore di n per cui l’iperclotoide
ha una lunghezza Ld tale da corrispondere alle condizioni di decelerazione longitudinale
ed accelerazione trasversale congruenti con i valori voluti (si rinvia al paragrafo 12.1,
per una trattazione particolareggiata della metodologia per ricavare il valore ottimale del
fattore di forma (n) dell’iperclotoide).
La lunghezza del tronco di decelerazione viene specificatamente valutata tramite la
seguente relazione:
+⋅
−=
10pd26
VVLl
2f
2i
a [18]
dove:
• Vi = velocità di immissione del flusso veicolare nel tronco di decelerazione (si
tratta della velocità dei veicoli all’uscita del tronco di stacco) (km/h);
• Vf = velocità all’inizio del tronco a curvatura costante (dettata dalla geometria del
tratto circolare di raccordo) (km/h);
• dl = decelerazione longitudinale variabile tra 1.5 m/s2 e 2.0 m/s2 (ammettendo
l’uso del cambio, possono essere consigliati i seguenti valori in funzione della
velocità: per Vi = 40 km/h dl = 1.5 m/s2, per Vi = 60 km/h dl = 1.7 m/s2, per
Vi > 80 km/h al = 2.0 m/s2);
• p = pendenza, in per cento, della rampa (positiva in salita, negativa in discesa).
Occorre poi ricordare che il problema dell’accelerazione è naturalmente legato alla
rotazione della piattaforma, per cui è importante fare questa verifica in più punti
dell’iperclotoide con maggiore attenzione nella parte finale dove più elevati sono i
valori dell’accelerazione trasversale. A tal proposito, alcuni autori consigliano di
adottare la pendenza trasversale massima (che si avrà anche nella curva circolare) già al
75% della lunghezza dell’iperclotoide nel caso di raccordo di transizione (tra rettifilo e

61
Le intersezioni stradali in ambito extraurbano
cerchio), e addirittura al 50% dello sviluppo nel caso di raccordo tra due archi di cerchio
(clotoide di continuità) (Fig. 42).
Figura 42. Proposta di variazione delle pendenze trasversali per le iperclotoidi percorse a velocitàfortemente variabili.
Così facendo, abbiamo introdotto anche il concetto di rotazione della sagoma che è
essenziale per una buona progettazione della rampa di uno svincolo. Mentre infatti nei
tratti iniziale e finale, la piattaforma della rampa deve essere solidale con quella delle
strade da cui si stacca prima e si attacca dopo, nel tratto intermedio, la dinamica della
rotazione deve essere tale da consentire in piena sicurezza la percorrenza alla velocità
voluta.
A tal proposito si fa rilevare una errata interpretazione delle norme per quanto
riguarda la velocità di percorrenza delle rampe dirette, che purtroppo è abbastanza
frequente. Partendo infatti dai valori di raggio minimo consigliati dalle norme per le
rampe degli svincoli, molti ritengono per consuetudine di dover applicare al tratto
intermedio la velocità di progetto derivante dal valore di quel raggio con la massima
pendenza trasversale. E’ invece opportuno che il progettista valuti i pro e i contro di una
scelta che deve essere congruente con gli altri elementi di scelta. Anche la rampa infatti,
come la strada principale, ha un suo livello di servizio che è funzione del flusso e della

62
Le intersezioni stradali in ambito extraurbano
velocità possibile di percorrenza. Se la rampa collega due strade ad elevata intensità di
traffico e ad elevate caratteristiche geometriche, non si capisce perché debba penalizzare
gli utenti che la percorrono, rispetto al resto dell’itinerario.
Analoghe considerazioni possono essere svolte per le rampe indirette e semidirette;
anche in questi casi infatti si dovrebbe sviluppare una tendenza di progetto mirata a non
limitarne le prestazioni in termini del livello di servizio potenzialmente offribile agli
utenti.
12.1 Calcolo del fattore di forma (n) ottimale delle iperclotoidi
Al paragrafo precedente si è accennato al fatto che l’utilizzo delle iperclotoidi come
curve per la realizzazione dei tronchi intermedi delle rampe derivi dal fatto che esse
costituiscono una buona approssimazione delle cosiddette curve di frenatura.
Le curve di frenatura discendono dalle ricerche sulla dinamica dei veicoli percorrenti
le rampe di uscita condotti da Blaschke ed Heller. Tali studi, iniziati negli anni '50 con
le prove di controllo di percorrenza su alcune uscite di autostrade in Germania, hanno
consentito di dedurre, con buona precisione, l'andamento delle grandezze dinamiche
legate alla percorrenza di una rampa, e più in generale il tipo di traiettoria veicolare che
si ottiene in presenza di raggi variabili e di variazione della velocità longitudinale.
Non riuscendosi ad esprimere in forma geometrica esplicita la curva approssimante il
comportamento medio dell’utente, si stabilì il legame tra curvatura e spazio di questa
curva cercando la legge di variazione della accelerazione trasversale (at), visto che la
legge di variazione dell'accelerazione longitudinale (al) era ormai nota. Si ricavò un
modello di comportamento caratterizzato da accelerazione longitudinale e variazione
dell’accelerazione trasversale (contraccolpo) costanti.
Si osservi però che la pratica impossibilità di tradurre il legame tra curvatura ed
ascissa curvilinea in una semplice formulazione cartesiana che consentisse il pratico
tracciamento della curva di frenatura, ha invogliato numerosi studiosi a “cimentarsi”
nella ricerca di curve che, oltre ad approssimare quanto più possibile la curva di
frenatura teorica, avessero una semplice rappresentazione nel piano xy.
L’idea della possibilità dell’impiego della iperclotoide (clotoide multiparametrica
con n>1) come curva di frenatura venne a Lorenz. In effetti vi è una notevole
somiglianza, nel piano spazio-curvature, con la curva di frenatura teorica; in particolare

63
Le intersezioni stradali in ambito extraurbano
si coglie un certo legame tra N (rapporto tra velocità iniziale e velocità finale) ed il
fattore di forma (n) dell’iperclotoide.
La relazione che esprime la variazione dell’accelerazione trasversale ( Nta ) lungo un
arco di curva di frenatura teorica è la seguente:
−−
−⋅+−−
⋅=N1Nz1
KN
N1Nz)T(a)z(a
2
tNt [19]
dove:
• at(T) = accelerazione trasversale massima (si valuta in corrispondenza dell’arco
di cerchio nel caso dei raccordi di transizione, ed in corrispondenza del più
piccolo dei raccordi circolari nel caso di clotoidi di continuità) (m/s2);
• fV
vz = (1 < z < N);
• f
i
VVN = ;
• f
i
RRK = (tale variabile interviene solo nel caso delle clotoidi di continuità; infatti
nel caso dei raccordi di transizione, ∞=iR e, quindi, anche ∞=K );
• v = velocità nel generico punto (km/h);
• Vi = velocità iniziale (km/h);
• Vf = velocità finale (km/h).
L’accelerazione trasversale lungo l’iperclotoide ( Cta ) ha invece la seguente
espressione:
n
2
22
2
22
n1
2t
Ct N1
NzN1Nz1
K
1z)T(a)z(a
−−
+
−−
−⋅⋅⋅= [20]
dove n è il fattore di forma della clotoide.
Una volta imposto che le due curve abbiano raggi iniziali e finali uguali ed uguale
lunghezza, la scelta tra le 1∞ iperclotoidi soddisfacenti i vincoli suddetti sarà fatta
calcolando, punto per punto, tramite la [19] e la [20], le accelerazioni trasversali e
trovando, per ogni N, l’esponente n (ottimale) dell’iperclotoide che minimizzi la

64
Le intersezioni stradali in ambito extraurbano
funzione )z(a)z(a Ct
Nt − .
A titolo esemplificativo, in figura 43, si sono riportati gli andamenti di Nta e C
ta in
funzione dello sviluppo (L) delle curve.
Figura 43. Andamento delle accelerazioni trasversali in funzione dello sviluppo (L) per le curve difrenatura teorica (a diverso parametro N) e per le iperclotoidi (a diverso fattore di forma n).
Nella tabella 10 sono indicati i fattori di forma ottimali da assegnare all’iperclotoide
in funzione di N e di K. Inoltre si è calcolata la differenza massima ∆at tra le
accelerazioni trasversali relative rispettivamente alla curva teorica ed alle iperclotoidi a
diverso fattore di forma.

65
Le intersezioni stradali in ambito extraurbano
K = 3.0 K = 5.0 K = 7.0 K = 10.0 K = 20.0 K = 50.0 K = 100.0 K = ∞
N = 1.3 n = 100∆at =0.013
n = 4.5∆at =0.008
n = 3.0∆at =0.012
n = 2.4∆at =0.015
n = 1.9∆at =0.022
n = 1.7∆at =0.029
n = 1.6∆at =0.033
n = 1.5∆at =0.041
N = 1.4 n = 100∆at =0.046
n = 36∆at =0.009
n = 5.8∆at =0.012
n = 3.6∆at =0.018
n = 2.5∆at =0.027
n = 2.0∆at =0.036
n = 1.9∆at =0.042
n = 1.7∆at =0.054
N = 1.5 n = 100∆at =0.000
n = 40∆at =0.014
n = 6.7∆at =0.020
n = 3.3∆at =0.031
n = 2.4∆at =0.043
n = 2.2∆at =0.050
n = 1.8∆at =0.067
N = 1.6 n = 29.0∆at =0.021
n = 4.8∆at =0.034
n = 3.0∆at =0.049
n = 2.6∆at =0.058
n = 2.0∆at =0.080
N = 1.8 n = 21.0∆at =0.039
n = 4.9∆at =0.059
n = 3.7∆at =0.071
n = 2.4∆at =0.105
N = 2.0 n = 100∆at =0.097
n = 10.6∆at =0.066
n = 5.7∆at =0.081
n = 2.8∆at =0.130
N = 2.2 n = 100∆at =0.188
n = 100∆at =0.078
n = 10.7∆at =0.089
n = 3.2∆at =0.153
N = 2.5 n = 100∆at =0.341
n = 100∆at =0.203
n = 100∆at =0.121
n = 3.8∆at =0.187
N = 3.0 n = 100∆at =0.633
n = 100∆at =0.454
n = 100∆at =0.339
n = 5.0∆at =0.238
Tabella 10. Valori del fattore di forma nottimale dell’iperclotoide e di ∆at in funzione dei fattori K ed N.
E’ importante osservare che il progettista può utilizzare anche curve con n ≠ nottimale;
egli dovrà giustificare questa scelta, stabilendo un valore massimo di ∆at che è disposto
ad accettare e che può eventualmente correggere agendo sulle pendenze trasversali della
rampa.
La possibilità di variare n risolve il problema di collegare elementi geometrici come
rettifili e/o cerchi la cui posizione nel piano sia fissata (noti quindi Ri, Rf e ∆r o D);
questo problema si affronta calcolando le velocità Vi e Vf relative ai raggi Ri ed Rf e
quindi N da cui, tramite la tabella 10, si trova il valore di n ottimale; con l'ausilio degli
abachi o delle formule si determina il parametro A che risolva il problema geometrico;
si verifica poi che la lunghezza L della iperclotoide sia tale da consentire decelerazioni
(o accelerazioni) longitudinali inferiori a quelle di progetto. Qualora ciò non accada, si
aumenta il valore di n e di conseguenza la lunghezza L fino a rientrare nei limiti della
accelerazione/decelerazione consentita; le formule [19] e [20] serviranno a controllare
che il valore di n così trovato identifichi una iperclotoide avente soddisfacente
andamento di Cta (∆at basso e andamento possibilmente sempre crescente di C
ta ).
Si sintetizzano infine le motivazioni che hanno indotto molti autori a suggerire
l’impiego delle iperclotoidi come soluzione ottimale al problema della decelerazione in
curva dei veicoli:

66
Le intersezioni stradali in ambito extraurbano
1) la soluzione proposta approssima il comportamento dinamico delle curve di
frenatura teoriche;
2) nell’iperclotoide le grandezze geometriche caratteristiche sono calcolabili con
semplici espressioni in funzione di raggio (R), sviluppo (L), parametro A e
fattore di forma (n) della clotoide;
3) le curve sinora adottate nel calcolo del collegamento di due cerchi equiversi
(continuità) presentavano notevoli difficoltà operative;
4) legame diretto (espressione polinomiale) tra scostamento D o ∆R ed i parametri
della curva, che consente, nel caso più frequente di collegamento tra elementi a
curvatura costante di cui sia fissata la posizione, di trovare l’iperclotoide che
risolve il problema matematico variando A o n;
5) andamento del contraccolpo a campana con valore nullo all’inizio e molto
piccolo alla fine; ciò comporta il vantaggio di caricare con gradualità le
sospensioni e le parti meccaniche del veicolo.
13. TRONCO INTERMEDIO DI ACCELERAZIONE
Il veicolo dopo aver percorso il tratto intermedio di decelerazione si trova, alla fine
dello stesso, ad affrontare il tratto circolare della rampa che deve percorrere a velocità
costante (Vf). Prima di “riattaccarsi” alla corsia di destra della strada che si è voluto
collegare, ad una velocità prossima a quella dei veicoli che transitano sulla corsia
medesima, è necessario che il veicolo attraversi un tratto intermedio nel quale,
muovendosi con accelerazione costante (sia longitudinale che trasversale), possa alla
fine raggiungere la velocità richiesta (Vi) (Fig. 44).
Il tronco intermedio di accelerazione (La) sarà di norma composto da iperclotoidi.
Anche in questo caso possono essere ripetute, per ciò che concerne la scelta del fattore
di forma nottimale ed i criteri di rotazione della sagoma stradale, le considerazioni svolte
per il tratto percorso in decelerazione. In effetti, il dimensionamento del tronco di
accelerazione presenta delle problematiche che possono essere considerate “speculari”
rispetto a quelle affrontate quando si è trattato il caso del tratto intermedio di
decelerazione.
Osserviamo in particolare, e ciò vale anche per il tronco percorso a decelerazione
costante, che al posto dell’iperclotoide può essere utilizzata la “semplice” clotoide
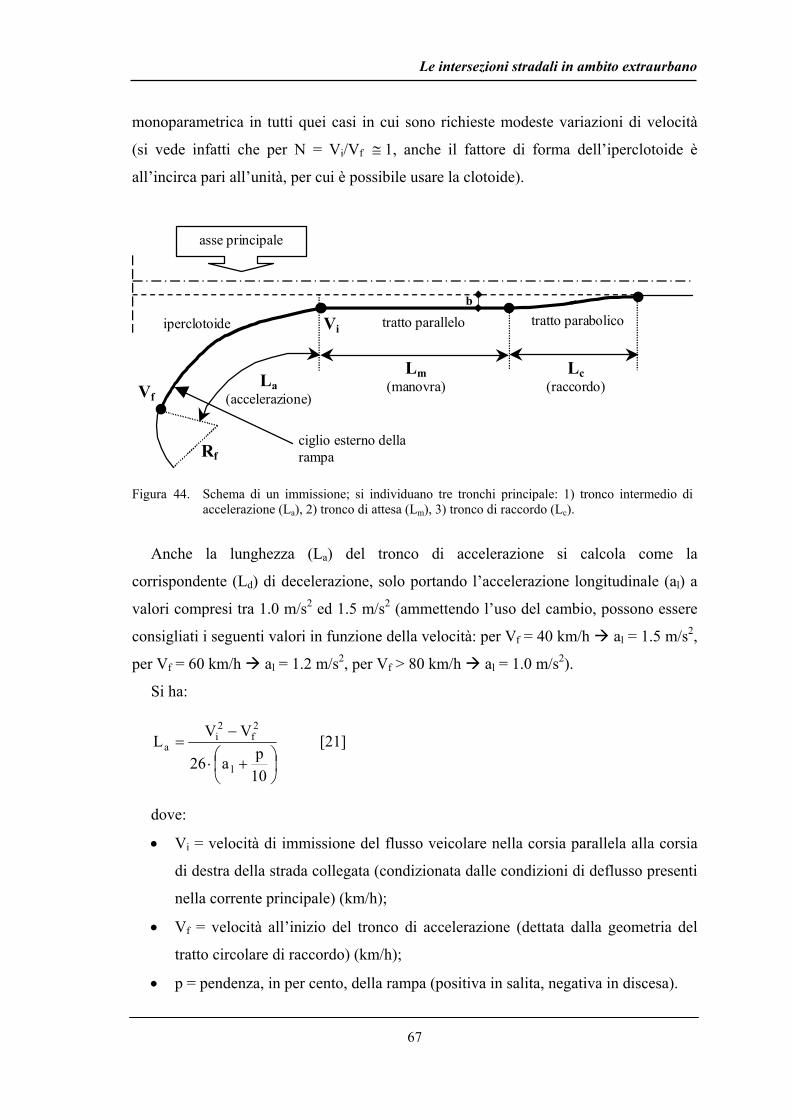
67
Le intersezioni stradali in ambito extraurbano
monoparametrica in tutti quei casi in cui sono richieste modeste variazioni di velocità
(si vede infatti che per N = Vi/Vf ≅ 1, anche il fattore di forma dell’iperclotoide è
all’incirca pari all’unità, per cui è possibile usare la clotoide).
b
asse principale
Lm(manovra)La
(accelerazione)
Rf
Vf
Viiperclotoide tratto parallelo tratto parabolico
Lc(raccordo)
ciglio esterno dellarampa
Figura 44. Schema di un immissione; si individuano tre tronchi principale: 1) tronco intermedio diaccelerazione (La), 2) tronco di attesa (Lm), 3) tronco di raccordo (Lc).
Anche la lunghezza (La) del tronco di accelerazione si calcola come la
corrispondente (Ld) di decelerazione, solo portando l’accelerazione longitudinale (al) a
valori compresi tra 1.0 m/s2 ed 1.5 m/s2 (ammettendo l’uso del cambio, possono essere
consigliati i seguenti valori in funzione della velocità: per Vf = 40 km/h al = 1.5 m/s2,
per Vf = 60 km/h al = 1.2 m/s2, per Vf > 80 km/h al = 1.0 m/s2).
Si ha:
+⋅
−=
10pa26
VVLl
2f
2i
a [21]
dove:
• Vi = velocità di immissione del flusso veicolare nella corsia parallela alla corsia
di destra della strada collegata (condizionata dalle condizioni di deflusso presenti
nella corrente principale) (km/h);
• Vf = velocità all’inizio del tronco di accelerazione (dettata dalla geometria del
tratto circolare di raccordo) (km/h);
• p = pendenza, in per cento, della rampa (positiva in salita, negativa in discesa).

68
Le intersezioni stradali in ambito extraurbano
14. TRONCO DI ATTACCO
Questo tratto è impropriamente considerato ancora facente parte del tronco di
accelerazione, in base al presupposto che consenta al veicolo in manovra di completare
la fase di variazione della velocità, iniziata nel tratto precedente, e di immettersi nella
corrente principale sfruttando un ulteriore breve tronco parallelo di manovra.
Nella realtà si è visto che il comportamento tipico di gran parte degli utenti che,
provenendo dalla rampa, si presentano alla sua sezione terminale, è quello di percorrere
il tronco parallelo aumentando trascurabilmente la propria velocità di marcia,
attendendo essenzialmente l’istante più opportuno per inserirsi nella corrente principale.
Questo è confermato da numerose esperienze compiute negli USA, dalle quali si evince
che, quando le “corsie parallele” hanno sufficiente lunghezza, le mediane delle
distribuzioni delle velocità al termine della rampa e nel punto d’immissione sono poco
diverse fra loro.
Il tronco di attacco deve inoltre consentire un ordinato inserimento della corrente
secondaria in quella principale, con l’obiettivo di evitare fenomeni di congestione e di
rallentamento, cause potenziali di incidenti per elevati flussi veicolari.
La denominazione di “corsia di accelerazione” è dunque errata, in quanto detta corsia
è percorsa da veicoli aventi velocità pressoché costanti tra ingresso ed uscita; sarebbe
quindi più corretto parlare di “corsia di manovra” o, meglio, di “corsia di “attesa”.
Consideriamo un veicolo che, giunto all’estremità della rampa, si arresti (come se ci
fosse materialmente il segnale di STOP) in attesa di immettersi nella corsia di marcia
della corrente principale (corsia n°1) (Fig. 45). Affinché il veicolo della corsia n°1 che
segue quello che si immette non sia da questo costretto a rallentare o a cambiare corsia
(immissione ideale), è necessario che, nell’istante in cui il veicolo, ripartito con velocità
nulla dall’estremità della rampa, ha raggiunto quello che lo segue nella corsia n°1,
questo si trovi ad una distanza almeno pari a quella di sicurezza.
Si definisce intervallo critico il più piccolo intervallo temporale fra due veicoli della
corsia n°1 che consente un’immissione ideale.
Indichiamo con δ la distanza temporale di sicurezza fra due veicoli della corsia n°1
(tale distanza viene generalmente posta uguale ad 1 secondo che è il tempo di
percezione e reazione). Chiamiamo zero l’istante in cui il veicolo “B” che si immette è
affiancato dal veicolo “A” della corrente principale, e riteniamo che esso, all’istante δ,

69
Le intersezioni stradali in ambito extraurbano
inizi a muoversi con moto uniformemente accelerato di accelerazione a. In queste
condizioni, il veicolo in immissione avrà raggiunto la velocità v (in m/s) della corrente
principale dopo un tempo t=v/a e in questo tempo avrà percorso uno spazio pari a:
a2v
ava
21ta
21s
222
B ⋅=
⋅⋅=⋅⋅=
rampa
corsia 1 A
B
V
Tempo 0
Tempo δ
rampa
corsia 1 A
B a
V
δ⋅V
Tempo t =aV
corsia 1 C V B V
δ⋅= VsC
A V
T
aVVs
2
A +δ⋅=
a2V
2tas
22
B ⋅=
⋅=
Figura 45. Schematizzazione della manovra di immissione nella corrente principale.

70
Le intersezioni stradali in ambito extraurbano
In questo stesso tempo un altro veicolo “C” della corrente principale si sarà portato
alla distanza di sicurezza δ⋅= vsC dal veicolo “B”.
Sempre all’istante t, il veicolo “A” che era “partito” δ secondi prima rispetto al
veicolo fermo allo STOP, e che pertanto ha già percorso un tratto di lunghezza pari a
δ⋅v , si troverà ad aver percorso un’ulteriore distanza pari a:
av
avvtvs
2=
⋅=⋅=
e quindi:
avvs
2
A +δ⋅=
In definitiva l’intervallo critico può essere così calcolato (Fig. 45):
a2v2
a2vv2
v1
a2vv
avv
v1
vsss
T222
BCA
⋅+δ⋅=
⋅
+δ⋅⋅⋅=
⋅
−δ⋅++δ⋅⋅=−+
= [22]
Consideriamo adesso il caso, più aderente alla realtà, in cui il veicolo in immissione
non si arresti alla fine della rampa (come se ci fosse lo STOP) ma vi giunga ad una
velocità vi (osservazioni condotte negli Stati Uniti indicano valori di vi compresi tra 60 e
70 km/h, purché le caratteristiche geometriche della rampa siano tali da garantire che
nel suo punto terminale questo valore possa essere raggiunto).
E’ facile ricondurre il caso appena prospettato a quello analizzato precedentemente in
cui si ipotizzava l’arresto del veicolo in immissione in corrispondenza di un’ipotetica
linea di STOP posta all’estremità finale della rampa; occorre assegnare al complesso
strada principale/corsia di attesa, una traslazione contraria al moto con velocità vi.
Se introduciamo nella [22] la velocità relativa v-vi otteniamo l’intervallo critico per
il “caso” reale:
δ⋅+⋅
−= 2
a2vvT i [23]
in cui si pone generalmente δ = 1 s ed a = 1.2 m/s2 (le velocità sono espresse in m/s).

71
Le intersezioni stradali in ambito extraurbano
Solitamente si ipotizza che gli intervalli temporali τ con cui i veicoli della corsia n°1
si succedono dinanzi a quello che vuole immettersi siano distribuiti con la legge di
probabilità di Erlang, la cui densità è:
( ) τ⋅λ−−τ ⋅τ⋅λ⋅
−λ
=τ e)!1K(
)(f 1K [24]
dove λ e K sono i due parametri della legge di probabilità di Erlang.
Nella figura 46 è rappresentato l’andamento della [24] nel caso di λ=1, e per diversi
valori di K.
Figura 46. Funzione di densità di probabilità della legge probabilstica di Erlang.
Quando K=1 la [24] coincide con la distribuzione di Poisson. Da un punto di vista
“pratico”, il fatto che K sia pari all’unità implica che la portata Q sulla corsia n°1 è
bassa (circa 400 – 600 veic/h), pertanto i condizionamenti reciproci si possono
considerare trascurabili e la legge dei distanziamenti approssima bene l’andamento
poissoniano. Al crescere della portata Q sulla corsia n°1 aumentano i condizionamenti
tra i veicoli e, sperimentalmente, si è visto che la legge del distanziamento segue la

72
Le intersezioni stradali in ambito extraurbano
distribuzione probabilistica di Erlang, con valori del parametro K crescenti al crescere
del flusso Q (Fig. 47).
Figura 47. Relazione tra portata Q e parametro K della legge di probabilità di Erlang.
Partendo da una serie di schematizzazioni e da un complesso di opportune
semplificazioni aventi come supporto teorico gli elementi della “teoria delle code”, è
stato possibile evincere la relazione che consente di calcolare la media dei tempi E(w)
di attesa in coda:
[ ][ ])s(EQ12
)s(V)s(EQ)s(E)w(E2
22
⋅−⋅+⋅
+= [25]
dove E(s) e V(s) sono rispettivamente la media e la varianza del tempo di servizio(3), ed
hanno le seguenti espressioni:
(3) Il tempo di servizio viene definito come l’intervallo di tempo che trascorre mentre l’utente che è allatesta della coda viene “servito”. Se consideriamo un veicolo che, giunto alla fine della rampa, intendeimmettersi nella corrente principale, prima che possa eseguire la sua manovra trascorre un tempo ugualealla somma degli intervalli temporali tra i veicoli marcianti nella strada principale: questa sommarappresenta il tempo di servizio, che è nullo solo se il primo intervallo che si presenta al veicolo in attesaè uguale o superiore all’intervallo critico.
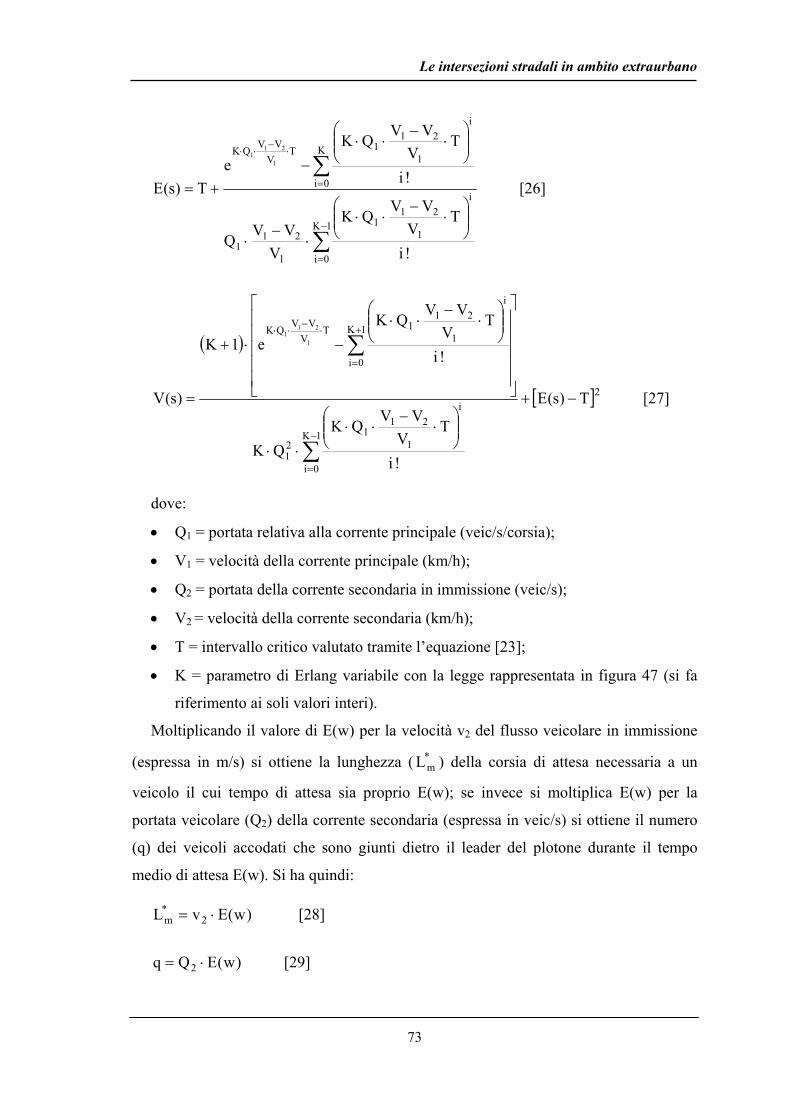
73
Le intersezioni stradali in ambito extraurbano
∑
∑
−
=
=
⋅−
⋅⋅
⋅
−⋅⋅
⋅−
⋅
⋅
−⋅⋅
−+=
1K
0i
i
1
211
1
211
K
0i
i
1
211T
VVVQK
! i
TV
VVQK
VVVQ
! i
TV
VVQKe
T)s(E
1
211
[26]
( )
[ ]2
1K
0i
i
1
211
21
1K
0i
i
1
211T
VVVQK
T)s(E
! i
TV
VVQKQK
! i
TV
VVQK
e1K
)s(V
1
211
−+
⋅
−⋅⋅
⋅⋅
⋅
−⋅⋅
−⋅+
=
∑
∑
−
=
+
=
⋅−
⋅⋅
[27]
dove:
• Q1 = portata relativa alla corrente principale (veic/s/corsia);
• V1 = velocità della corrente principale (km/h);
• Q2 = portata della corrente secondaria in immissione (veic/s);
• V2 = velocità della corrente secondaria (km/h);
• T = intervallo critico valutato tramite l’equazione [23];
• K = parametro di Erlang variabile con la legge rappresentata in figura 47 (si fa
riferimento ai soli valori interi).
Moltiplicando il valore di E(w) per la velocità v2 del flusso veicolare in immissione
(espressa in m/s) si ottiene la lunghezza ( *mL ) della corsia di attesa necessaria a un
veicolo il cui tempo di attesa sia proprio E(w); se invece si moltiplica E(w) per la
portata veicolare (Q2) della corrente secondaria (espressa in veic/s) si ottiene il numero
(q) dei veicoli accodati che sono giunti dietro il leader del plotone durante il tempo
medio di attesa E(w). Si ha quindi:
)w(EvL 2*m ⋅= [28]
)w(EQq 2 ⋅= [29]

74
Le intersezioni stradali in ambito extraurbano
Si osservi però che il valore assunto dalla distribuzione di probabilità di Erlang in
corrispondenza di E(w) è piuttosto basso, per cui la probabilità che si verifichi una coda
più lunga di q è abbastanza elevata, ed altrettanto elevata è quindi la probabilità che i
veicoli in attesa invadano il tronco intermedio di accelerazione. Per portare quest’ultima
probabilità ad assumere valori inferiori (intorno al 10%) è necessario raddoppiare la
lunghezza della corsia di manovra. In definitiva, si ha:
)w(Ev2L 2m ⋅⋅= [30]
A titolo di esempio, si riporta nelle figure 48, 49 e 50, l’andamento della quantità
Lm/2 in funzione della velocità Vi = V2 per diversi valori della portata di immissione Q2,
quando la portata Q1 assume i valori rispettivamente di 400 veic/h, 800 veic/h, 1200
veic/h, ritenendo che la velocità sulla corsia n°1 sia di 80 km/h.
Figura 48. Lunghezza media Lm/2 in metri della corsia di manovra in funzione della velocità con cuiviene percorsa e della portata (Q2) entrante quando la velocità della corrente principale èV1=80 km/h e la portata sulla corsia n°1 è Q1=400 veic/h

75
Le intersezioni stradali in ambito extraurbano
Figura 49. Lunghezza media Lm/2 in metri della corsia di manovra in funzione della velocità con cuiviene percorsa e della portata (Q2) entrante quando la velocità della corrente principale èV1=80 km/h e la portata sulla corsia n°1 è Q1=800 veic/h
Figura 50. Lunghezza media Lm/2 in metri della corsia di manovra in funzione della velocità con cuiviene percorsa e della portata (Q2) entrante quando la velocità della corrente principale èV1=80 km/h e la portata sulla corsia n°1 è Q1=1200 veic/h

76
Le intersezioni stradali in ambito extraurbano
La corsia parallela di attesa è raccordata alla strada principale mediante un tratto a
lunghezza variabile il cui ciglio ha un andamento parabolico (Fig. 51).
Lc/2 Lc/2
ez
b
Figura 51. Costruzione geometrica del tronco di raccordo della corsia di attesa.
Le norme italiane per questi tratti accettano una lunghezza ridotta pari a:
bV27.0L ic ⋅⋅= [31]
dove:
• Vi = V2 = velocità della corrente secondaria in immissione (km/h);
• b = larghezza della corsia parallela (m).
Riguardo alla costruzione del ciglio si attua un allargamento (e) variabile in funzione
di una curva costituita dalla successione di due parabole uguali ma di verso opposto.
L’allargamento e avrà la seguente espressione:
R2ze
2
⋅=
dove:
• z = ascissa di riferimento (variabile da 0 ad Lc/2);
• R = raggio del cerchio equivalente alla parabola (ha equazione: b4
LR
2c
⋅= )
Una volta costruita la prima parabola, la seconda si otterrà “specchiando” due volte
la prima rispetto a due assi ortogonali (rispettivamente parallelo ed ortogonale all’asse
della corsia di attesa).
15. PRINCIPALI SCHEMI DI INTERSEZIONI A LIVELLI SFALSATI
Nella figura 52 è rappresentato lo svincolo a losanga (o a rombo, o a diamante, o
olandese) nel quale le due strade che si sovrapassano sono collegate da quattro rampe
direzionali, percorse a senso unico. Una delle due strade può essere a carreggiate
separate, perché su di essa non si verificano attraversamenti di correnti. Inoltre su questa

77
Le intersezioni stradali in ambito extraurbano
strada le immissioni e le uscite si svolgono sotto angoli molto acuti, quindi in posizione
molto favorevole. Si può inoltre osservare che, per due manovre sulla strada secondaria
si ha l'attraversamento di più di una corrente di traffico.
Figura 52. Svincolo a losanga (o a rombo, o a diamante, o olandese).
Questo inconveniente può però essere evitato, sfalsando le intersezioni delle rampe
con la strada secondaria di una lunghezza pari a quella della zona di accumulo e
disponendo inoltre, lungo la zona centrale, nel tratto compreso fra le due corsie di
accumulo, due corsie di accelerazione, anche se di modesta lunghezza, per i veicoli che
svoltano a sinistra dalle rampe per immettersi nella strada secondaria (Fig. 53).
Quando non si possono accettare attraversamenti di correnti di traffico su nessuna
delle due strade, come per esempio avviene se entrambe sono a carreggiate separate, è
necessario ricorrere a schemi più complessi. In essi le manovre di svolta a destra sono
sempre affidate a rampe dirette, per cui le differenze fra i vari schemi sono dovute al
modo con cui si esegue la svolta a sinistra.

78
Le intersezioni stradali in ambito extraurbano
Figura 53. Svincolo a rombo a rampe diagonali sfalsate planimetricamente.
Per le intersezioni a tre bracci (dette anche a T) lo schema più frequentemente usato,
per esempio per le intersezioni delle autostrade con i rami di collegamento alla viabilità
ordinaria, è quello rappresentato nella figura 54, detto a trombetta, in cui le svolte a
destra sono realizzate con due rampe dirette, mentre per quelle a sinistra esistono
rispettivamente una rampa semidiretta e una a cappio.
Quando un incrocio, risolto a rotatoria per la convergenza di più arterie, non riesce
più a smaltire la circolazione che vi confluisce, presentando frequenti fenomeni di
congestione e formazioni di code, si può pensare di trasformarlo in una intersezione a
due livelli (Fig. 55) mediante la realizzazione di una direttrice sopraelevata che consenta
l’attraversamento indisturbato alla corrente prevalente, lasciando che la rotatoria a raso
disimpegni tutte le svolte e gli intrecci tra le correnti.
L’arteria sopraelevata, da orientarsi nel senso delle correnti più consistenti, comporta
almeno due manufatti di scavalco nella sottostante rotatoria.
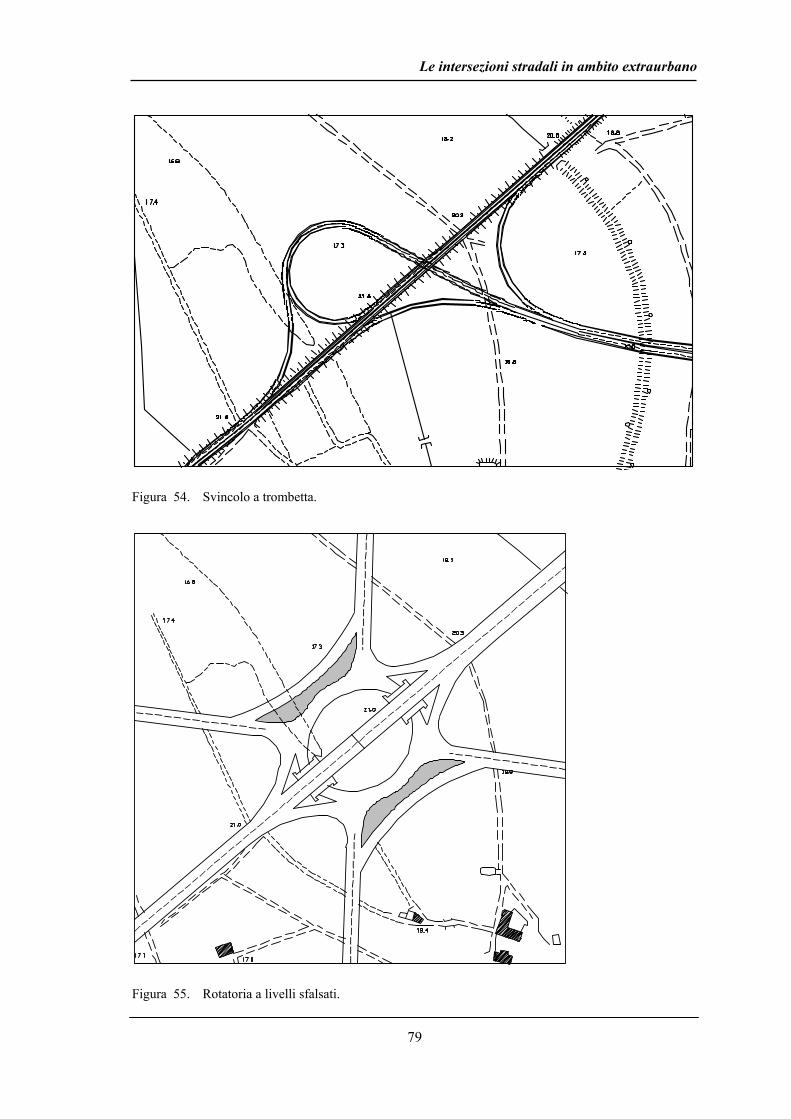
79
Le intersezioni stradali in ambito extraurbano
Figura 54. Svincolo a trombetta.
Figura 55. Rotatoria a livelli sfalsati.

80
Le intersezioni stradali in ambito extraurbano
Si riporta infine, nella figura 56, uno svincolo “storico”. Si tratta dello svincolo a
quadrifoglio, il quale consente, con un unico manufatto a 8 rampe (4 dirette e 4
indirette), la totalità delle relazioni tra le due arterie intersecantesi, eliminando tutti i
punti di conflitto tra le traiettorie.
Figura 56. Svincolo a quadrifoglio.
Diffuso in tutto il mondo, specie negli USA, il suo impiego è oggi sconsigliato per
una serie di motivazioni che ci apprestiamo a sintetizzare. Questo svincolo presenta
fondamentalmente un grave difetto: l'immissione nella strada da una rampa a cappio
precede l'uscita dalla stessa strada nel cappio successivo. Le corsie di accelerazione e di
decelerazione si dispongono perciò l'una di seguito all'altra, e, volendo dimensionarle in

81
Le intersezioni stradali in ambito extraurbano
funzione della velocità, in genere modesta, consentita dalle rampe, assumono
considerevole lunghezza, per cui la distanza fra immissione e uscita diventa notevole.
D'altra parte, è necessario che il tratto compreso fra immissione e uscita abbia
lunghezza considerevole in virtù del fatto che tale tratto è una zona d'intreccio, fra i
veicoli che immessisi dalla rampa nella corsia di destra della strada tendono a spostarsi
sulla corsia più interna per non rimanere coinvolti nelle manovre di uscita, e quelli che,
dalla corsia più interna, cercano invece di spostarsi sulla corsia di destra per poter
uscire. Pertanto un quadrifoglio, in cui le rampe a cappio sono interessate da
considerevoli portate, se si vuole consentire su tali rampe una velocità di percorrenza
accettabile, ha bisogno di occupare un'ampia area per poter funzionare correttamente
(con raggi dei cappi pari a 100 m, l’area occupata diventa prossima ai 40 ettari). Se
invece i flussi veicolari che devono svoltare a sinistra e che interessano pertanto le
rampe indirette, sono modesti, le distanze fra immissione e uscita possono avere
lunghezze limitate: in questo caso le corsie di accelerazione e di decelerazione tendono
a saldarsi, realizzando in pratica una corsia aggiuntiva tra i punti d'immissione e di
uscita. A tal proposito si sottolinea, in conclusione, come, tra gli interventi più frequenti
mirati alla riqualificazione ed al potenziamento di questo tipo di svincolo, ci sia quello
della predisposizione di una carreggiata aggiuntiva sulla quale far avvenire le manovre
di scambio (quadrifoglio potenziato) (Fig. 57).
Figura 57. Schema di quadrifoglio potenziato.

82
Le intersezioni stradali in ambito extraurbano
APPENDICE:
IL SOFTWARE I.S.P.
PROCEDURE PER
INTERSEZIONI STRADALI

83
Le intersezioni stradali in ambito extraurbano
APPENDICE
IL SOFTWARE I.S.P.
(PROCEDURE PER INTERSEZIONI STRADALI)
A supporto delle procedure progettuali riportate nella presente trattazione, si è
ritenuto opportuno elaborare un software in grado di rendere immediata l’esecuzione di
alcuni procedimenti di calcolo particolarmente laboriosi.
E’ stato così sviluppato il software I.S.P. (Procedure per Intersezioni Stradali),
preposto alla risoluzione guidata delle procedure di calcolo relative ai seguenti quattro
moduli principali:
Modulo N° 1: Calcolo del fattore di forma ottimale dell’iperclotoide (tramite
questo modulo viene consentito il calcolo di nottimale in base alla metodologia
esposta al paragrafo 12.1, sia nel caso di raccordo di transizione che nel caso di
raccordo di continuità).
Modulo N° 2: Parametri dell’iperclotoide di transizione (il modulo consente di
valutare tutti i parametri necessari al corretto tracciamento di un’iperclotoide nel
caso in cui essa debba fungere da raccordo tra un tratto circolare ed un tratto in
rettilineo; si possono ricavare i dati necessari alla definizione geometrica sia del
tronco intermedio di decelerazione, sia del tronco intermedio di accelerazione).
Modulo N° 3: Parametri dell’iperclotoide di continuità (questo modulo permette
di valutare i parametri indispensabili per la corretta definizione geometrica di
un’iperclotoide nel caso in cui essa debba costituire il raccordo tra due tratti
circolari da percorrere nello stesso verso; anche in questo caso, si possono
ricavare i dati necessari alla caratterizzazione geometrica sia del tronco
intermedio di decelerazione che del tronco intermedio di accelerazione).
Modulo N° 4: Valutazione della lunghezza della corsia di attesa (con questo
modulo, è possibile calcolare la lunghezza (Lm) del tronco di attacco in funzione
della probabilità di trovare un varco libero nella corrente veicolare principale; in
pratica, è stata informatizzata la procedura di calcolo riportata nel paragrafo 14).

84
Le intersezioni stradali in ambito extraurbano
Il software I.S.P. è un’applicazione che gira sotto Microsoft Excel® e
sostanzialmente si fonda sull’assemblaggio di una serie di fogli di lavoro tra loro
collegati.
L’inserimento dei dati di input avviene semplicemente tramite la digitazione degli
stessi nelle celle evidenziate di colore celeste.
I dati di output si ottengono immediatamente al variare dei dati di input e la loro
visualizzazione è opportunamente evidenziata.
Per la strutturazione dei quattro moduli di cui si è detto si è fatto uso anche di alcune
procedure avanzate di Microsoft Excel®, quali la funzione “Ricerca obiettivo” e la
funzione “Risolutore”; occorre, pertanto, essere in possesso della versione 7.0 di
Microsoft Excel e della configurazione hardware adeguata a supportare l’esecuzione di
Microsoft Excel®.
L’uso del software I.S.P. è abbastanza intuitivo. Si ritiene però opportuno, per
maggiore chiarezza, riportare una serie di schede esplicative del corretto utilizzo di
I.S.P.

85
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 1
AVVIO DI I.S.P.
I.S.P. si avvia caricando, tramite il comando “Apri” di Excel 97, il file ISP.XLS
direttamente dal dischetto allegato, oppure dopo aver copiato il file medesimo
all’interno di una qualsiasi cartella di Windows 95/98®.
Se non è stata precedentemente inibita la visualizzazione, all’avvio di I.S.P. dovrebbe
apparire la seguente schermata:
Una macro è costituita da una serie di comandi e funzioni memorizzati in un modulo
Visual Basic® ed eseguibili in qualsiasi momento occorra svolgere una determinata
attività. L’utilizzo delle macro è indispensabile per l’automatizzazione di tutte le
procedure ripetitive.
Nell’ambito del software I.S.P. si è fatto ampio uso delle macro e pertanto, dopo la
comparsa della schermata sopra riportata, occorre scegliere l’opzione “Attiva macro” al
fine di garantire il corretto funzionamento di I.S.P.
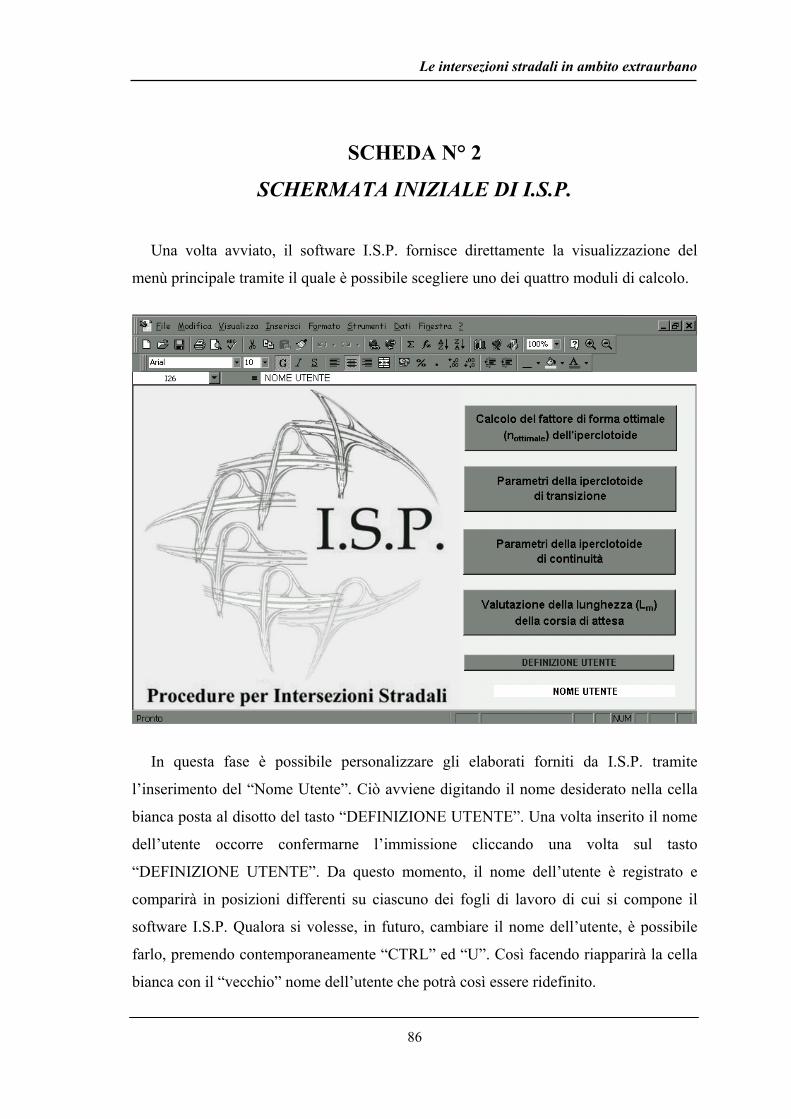
86
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 2
SCHERMATA INIZIALE DI I.S.P.
Una volta avviato, il software I.S.P. fornisce direttamente la visualizzazione del
menù principale tramite il quale è possibile scegliere uno dei quattro moduli di calcolo.
In questa fase è possibile personalizzare gli elaborati forniti da I.S.P. tramite
l’inserimento del “Nome Utente”. Ciò avviene digitando il nome desiderato nella cella
bianca posta al disotto del tasto “DEFINIZIONE UTENTE”. Una volta inserito il nome
dell’utente occorre confermarne l’immissione cliccando una volta sul tasto
“DEFINIZIONE UTENTE”. Da questo momento, il nome dell’utente è registrato e
comparirà in posizioni differenti su ciascuno dei fogli di lavoro di cui si compone il
software I.S.P. Qualora si volesse, in futuro, cambiare il nome dell’utente, è possibile
farlo, premendo contemporaneamente “CTRL” ed “U”. Così facendo riapparirà la cella
bianca con il “vecchio” nome dell’utente che potrà così essere ridefinito.

87
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 3
CALCOLO DEL FATTORE DI FORMA OTTIMALE
(CASO DELL’IPERCLOTOIDE DI TRANSIZIONE)
Nel caso del raccordo di transizione, vengono richiesti come input i valori delle
velocità (minima e massima) ed il raggio della curva circolare (tronco a curvatura
costante). Gli output sono: nottimale; ∆at max (in percentuale); ∆at max (in m/s2).
Le elaborazioni hanno inizio dopo aver cliccato sul pulsante con la scritta
“CALCOLO di n OTTIMALE”. Il tasto “CALCOLO di n OTTIMALE” funziona
soltanto se è attivata l’opzione di Excel 97 denominata “Risolutore”. Qualora tale
funzione non fosse disponibile occorre richiamarla tramite l’opzione “Aggiunte” del
menù “Strumenti” di Excel 97. Nel caso in cui il pulsante “CALCOLO di n
OTTIMALE” non dovesse funzionare, si può utilizzare il tasto “Help” tramite il quale il
valore di nottimale viene calcolato con una approssimazione maggiore di quella fornita
dal tasto “CALCOLO di n OTTIMALE”.

88
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 4
CALCOLO DEL FATTORE DI FORMA OTTIMALE
(CASO DELL’IPERCLOTOIDE DI CONTINUITÀ)
Nel caso dell’iperclotoide di continuità, vengono richiesti come input i valori delle
velocità (minima e massima) ed i raggi delle due curve circolari che compongono
rispettivamente il tronco di stacco ed il tronco a curvatura costante.
Gli output sono: nottimale; ∆at max (in percentuale); ∆at max (in m/s2).
Analogamente al caso dell’iperclotoide di transizione, le elaborazioni hanno inizio
dopo aver cliccato sul pulsante con la scritta “CALCOLO di n OTTIMALE” (che
funziona soltanto se è attivata l’opzione di Excel 97 denominata “Risolutore”).
A margine degli output effettivi, il software I.S.P. visualizza anche i valori dei
rapporti N = Vmax/Vmin e K = R1/R2.
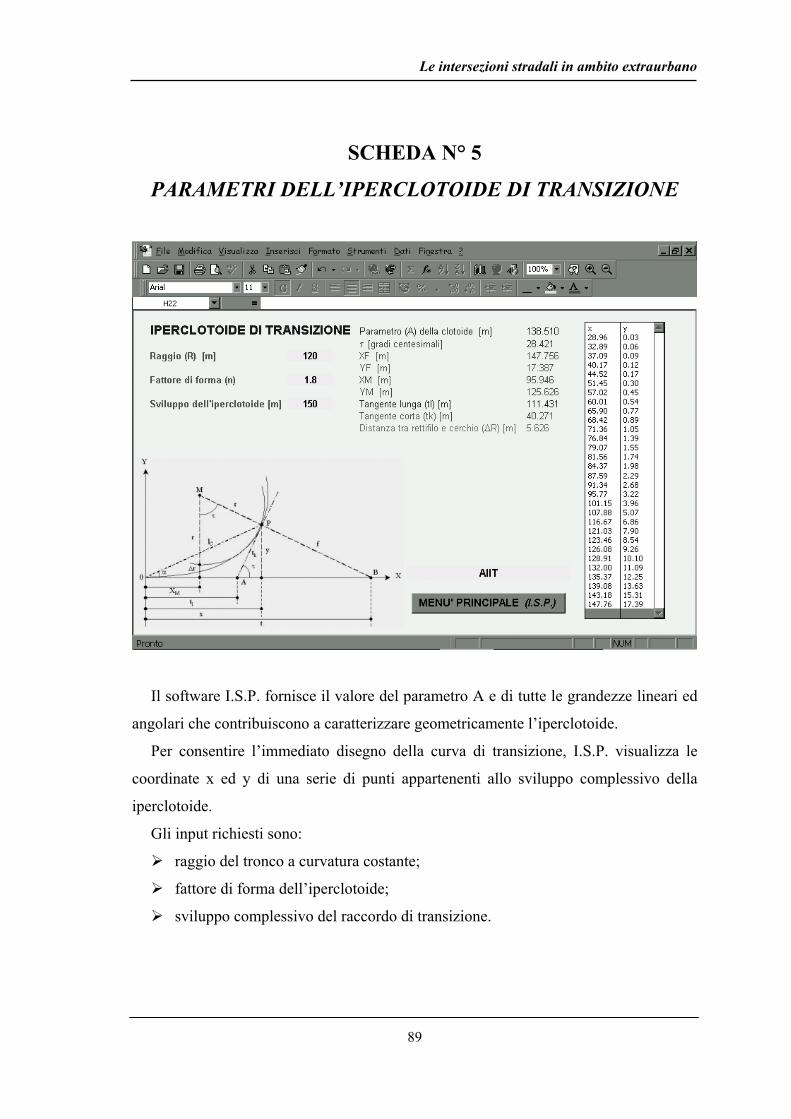
89
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 5
PARAMETRI DELL’IPERCLOTOIDE DI TRANSIZIONE
Il software I.S.P. fornisce il valore del parametro A e di tutte le grandezze lineari ed
angolari che contribuiscono a caratterizzare geometricamente l’iperclotoide.
Per consentire l’immediato disegno della curva di transizione, I.S.P. visualizza le
coordinate x ed y di una serie di punti appartenenti allo sviluppo complessivo della
iperclotoide.
Gli input richiesti sono:
raggio del tronco a curvatura costante;
fattore di forma dell’iperclotoide;
sviluppo complessivo del raccordo di transizione.
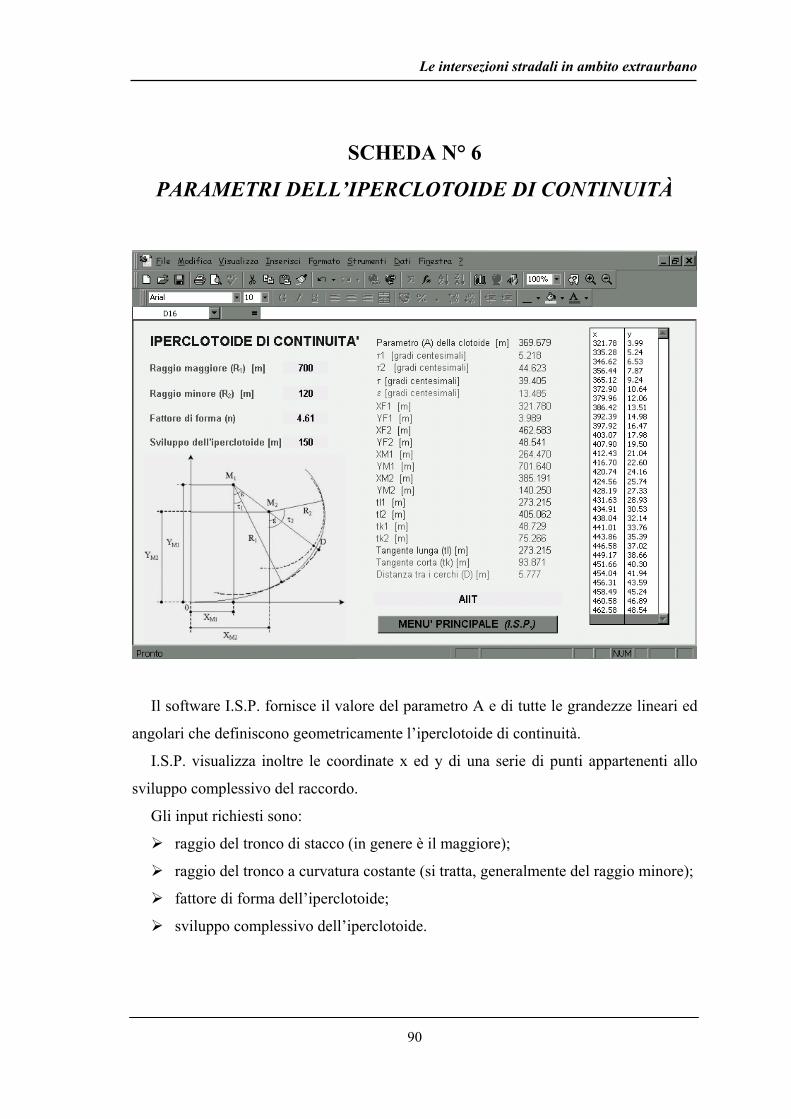
90
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 6
PARAMETRI DELL’IPERCLOTOIDE DI CONTINUITÀ
Il software I.S.P. fornisce il valore del parametro A e di tutte le grandezze lineari ed
angolari che definiscono geometricamente l’iperclotoide di continuità.
I.S.P. visualizza inoltre le coordinate x ed y di una serie di punti appartenenti allo
sviluppo complessivo del raccordo.
Gli input richiesti sono:
raggio del tronco di stacco (in genere è il maggiore);
raggio del tronco a curvatura costante (si tratta, generalmente del raggio minore);
fattore di forma dell’iperclotoide;
sviluppo complessivo dell’iperclotoide.

91
Le intersezioni stradali in ambito extraurbano
SCHEDA N° 7
VALUTAZIONE DELLA LUNGHEZZA
DELLA CORSIA DI ATTESA
Il software I.S.P. permette di ottenere immediatamente la lunghezza del tronco di
attacco necessaria a consentire l’immissione, in sicurezza, degli autoveicoli in entrata
dalla rampa.
Per la valutazione della lunghezza Lm, è necessaria l’introduzione dei seguenti dati:
portata oraria dei veicoli in marcia sulla corsia di destra della strada principale;
portata oraria dei veicoli provenienti dalla rampa;
velocità della corrente veicolare principale;
velocità del flusso veicolare in immissione.
Il software I.S.P. calcola inoltre i tempi medi di attesa, l’intervallo critico e gli altri
parametri che entrano in gioco nella caratterizzazione del meccanismo di formazione
delle code.

92
Le intersezioni stradali in ambito extraurbano
BIBLIOGRAFIA
[1] CNR. Istruzioni per la redazione di progetti di strade – Bollettino Ufficiale
N.77 – 1980.
[2] CNR. Norme sulle caratteristiche geometriche delle strade extraurbane –
Bollettino Ufficiale N. 78 – 1980.
[3] C.N.R. Norme sulle caratteristiche geometriche e di traffico delle intersezioni
stradali urbane - Bollettino Ufficiale N.90 - 1983.
[4] AA. VV. Highway Capacity Manual - Special Report 209 - Ed. Transportation
Research Board - 1994.
[5] Nuovo Codice della Strada e Regolamento di Esecuzione – Ed. Simone –
1993.
[6] S. Canale, F. Nicosia, S. Leonardi. Verifiche delle corsie di decelerazione
proposte dalla Normativa CNR - Riv. Autostrade - Anno XXXVIII - N. 4 -
Ottobre-Dicembre 1996.
[7] S. Canale, S. Torrisi, F. Nicosia, S. Leonardi. Adeguamento delle corsie di
uscita autostradali mediante informazioni ricavate dai rilievi sperimentali –
Atti del Convegno SIIV (Adeguamento funzionale e manutenzione delle
infrastrutture viarie) – Milano – 19/20 Ottobre 1998.
[8] G. Da Rios. Intersezioni stradali – Ed. CLUP CittàStudi - 1991
[9] P. Ferrari, F. Giannini. Ingegneria stradale - Geometria e progetto di strade -
Ed. ISEDI - 1991.
[10] F. Giannini, F. La Camera, A. Marchionna. Appunti di Costruzione di Strade
Ferrovie ed Aeroporti - MASSON Editoriale SEA - 1993.
[11] F. La Camera. Il calcolo del progetto stradale - La planimetria - MASSON
Editoriale SEA - 1992.
[12] G. Tesoriere. Strade Ferrovie Aeroporti - Il progetto e le opere d’arte (Vol. 1)
- Ed. UTET - 1990.


















