Le difficoltà del semplice: la frontiera della robotica ... · Le difficoltà del semplice: la...
122
Le difficoltà del semplice: la frontiera della robotica umanocentrica Antonio Bicchi La Natura offre infiniti esempi di sistemi di estrema apparente complessità, organizzati in modo da renderli sorprendente- mente semplici e funzionali. Il modo in cui l’evoluzione ha sapu- to unire in sistemi viventi complessi funzionalità ed eleganza ispira l'avanzamento delle nuove tecnologie, in principal modo la robotica, lungo un difficile cammino verso la semplcità.
Transcript of Le difficoltà del semplice: la frontiera della robotica ... · Le difficoltà del semplice: la...
Le d
ifficoltà d
el sem
plic
e:
la f
rontiera
della
robotica
um
anocentr
ica
A
nto
nio
Bic
chi
La N
atu
ra o
ffre
in
finiti esem
pi di sis
tem
i di estr
em
a a
pp
are
nte
com
ple
ssità, org
aniz
zati in m
odo d
a r
enderli sorp
rendente
-
mente
sem
plic
i e funzio
nali.
Il m
odo in
cui l’e
volu
zio
ne h
a s
apu-
to u
nire in s
iste
mi viv
enti c
om
ple
ssi fu
nzio
nalit
à e
d e
leganza
ispira l'a
vanzam
ento
delle
nuove t
ecnolo
gie
, in
princip
al m
odo la
robotica, lu
ngo u
n d
ifficile
cam
min
o v
ers
o la s
em
plc
ità.
anto
nio
bic
chi
sem
plic
e n
on è
facile
la
robotica
tra
cultura
scie
nza e
tecnolo
gia

CE
NT
RO
“E
. P
IAG
GIO
”
UN
IVE
RS
ITA
’ D
I P
ISA
TH
E H
an
d E
mb
od
ied
IST
ITU
TO
ITA
LIA
NO
DI
TE
CN
OL
OG
IA
anto
nio
bic
chi
sem
plic
e n
on è
facile
la r
obotica
tra
cultura
scie
nza e
tecnolo
gia

I ro
bot in
dustr
ali
att
uali
possono
lavora
re
solo
in a
mbie
nti m
olto s
trutt
ura
ti
The r
obot’s
cage

Tra
bre
ve,
tutt
o q
uesto
cam
bie
rà:
I ro
bo
t d
i n
uo
va g
en
era
zio
ne
inte
rag
iran
no
co
n l
e p
ers
on
e d
irett
am
en
te
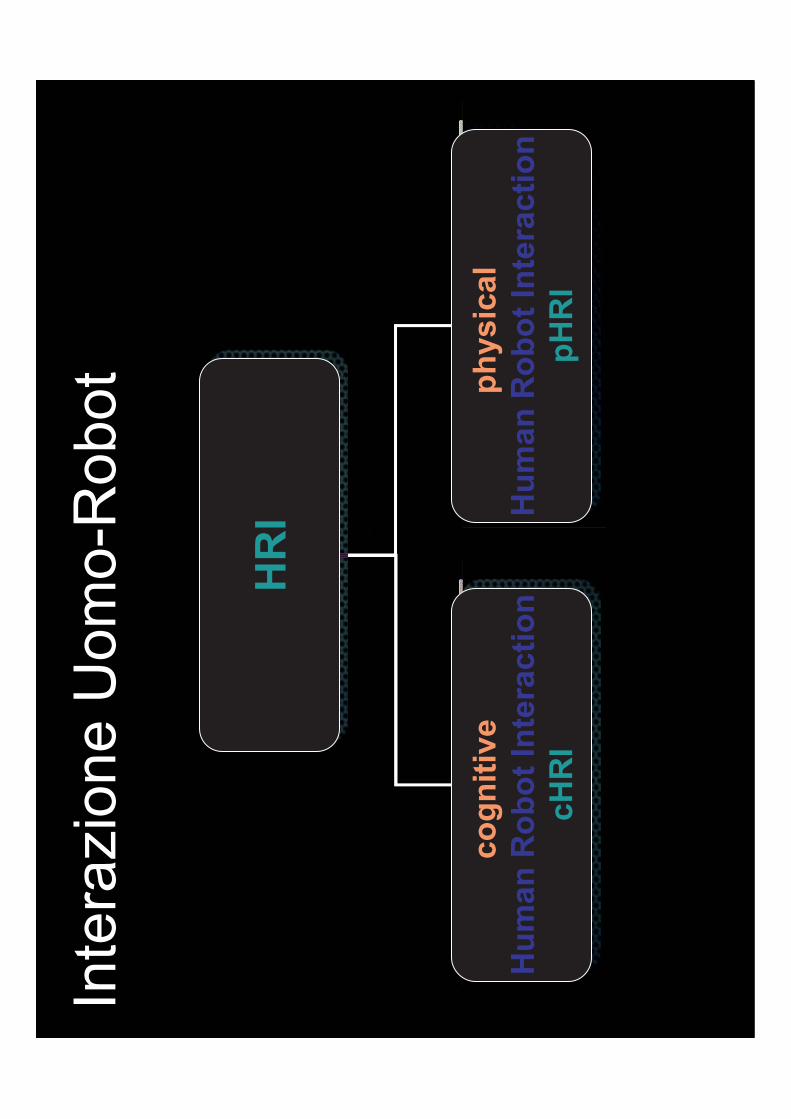
Inte
razio
ne
Uom
o-R
obot
Pri
vate
en
vir
on
men
ts
•Pers
onal assis
tance for
physic
al and p
sycholo
gic
al
welfare
Eco
no
mic
en
vir
on
men
ts
•Aff
ord
able
econom
ic a
nd s
ocia
l
welfare
•Agein
g o
f popula
tion (
at
hom
e,
at
work
, in
the s
ocie
ty…
)
Urb
an
en
vir
on
men
ts
•G
row
ing u
rban c
ente
rs
•M
ain
tain
ing t
he q
ualit
y o
f lif
e a
t
urb
an s
cale
Ph
ysic
al
en
vir
on
men
ts
•Conserv
ing a
nd m
onitoring
the p
lanet
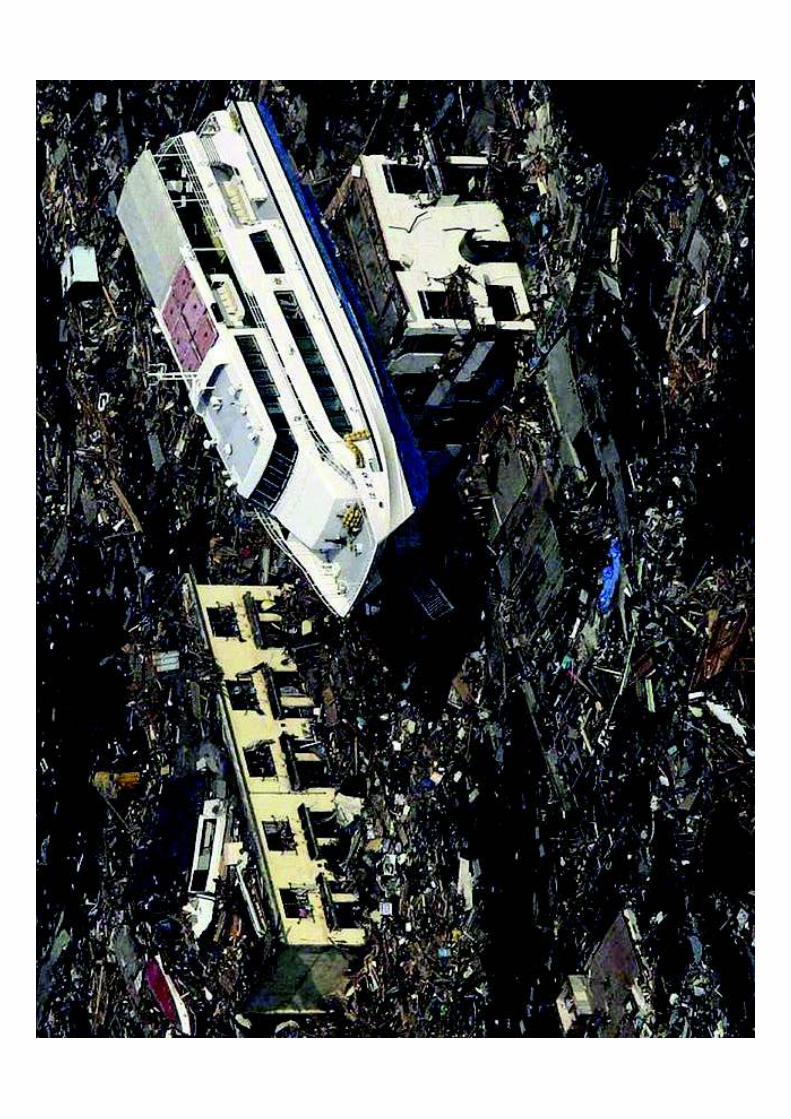
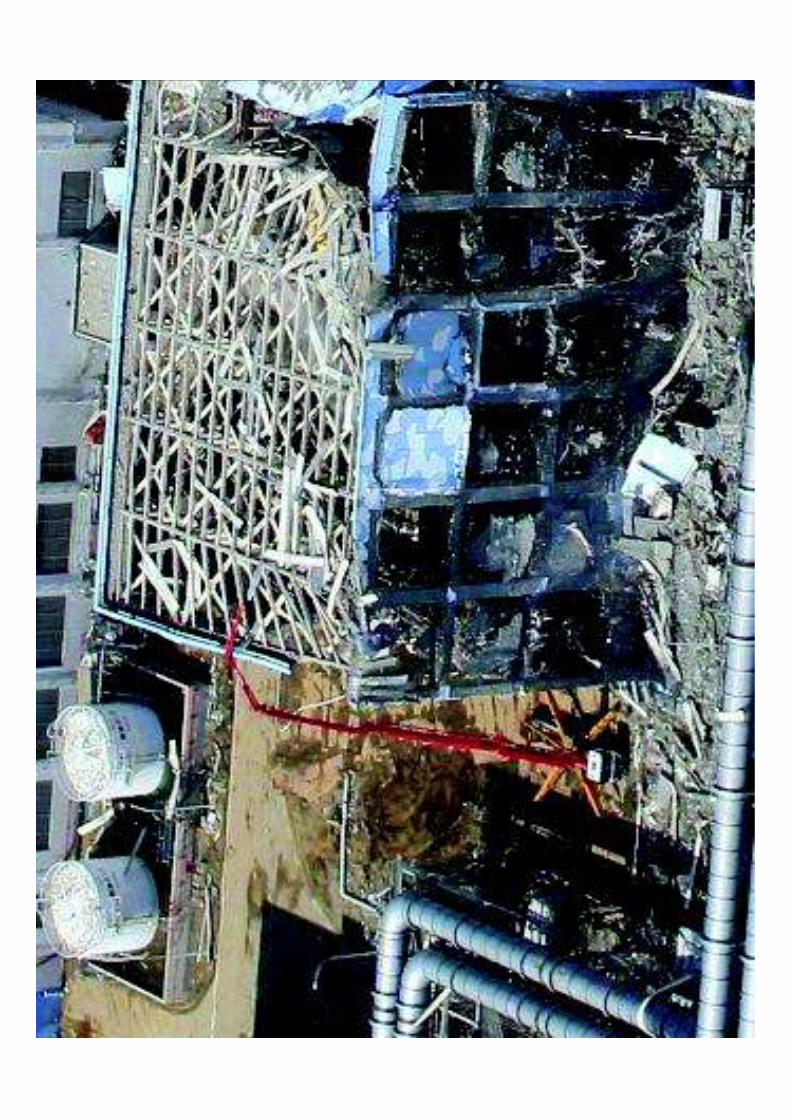
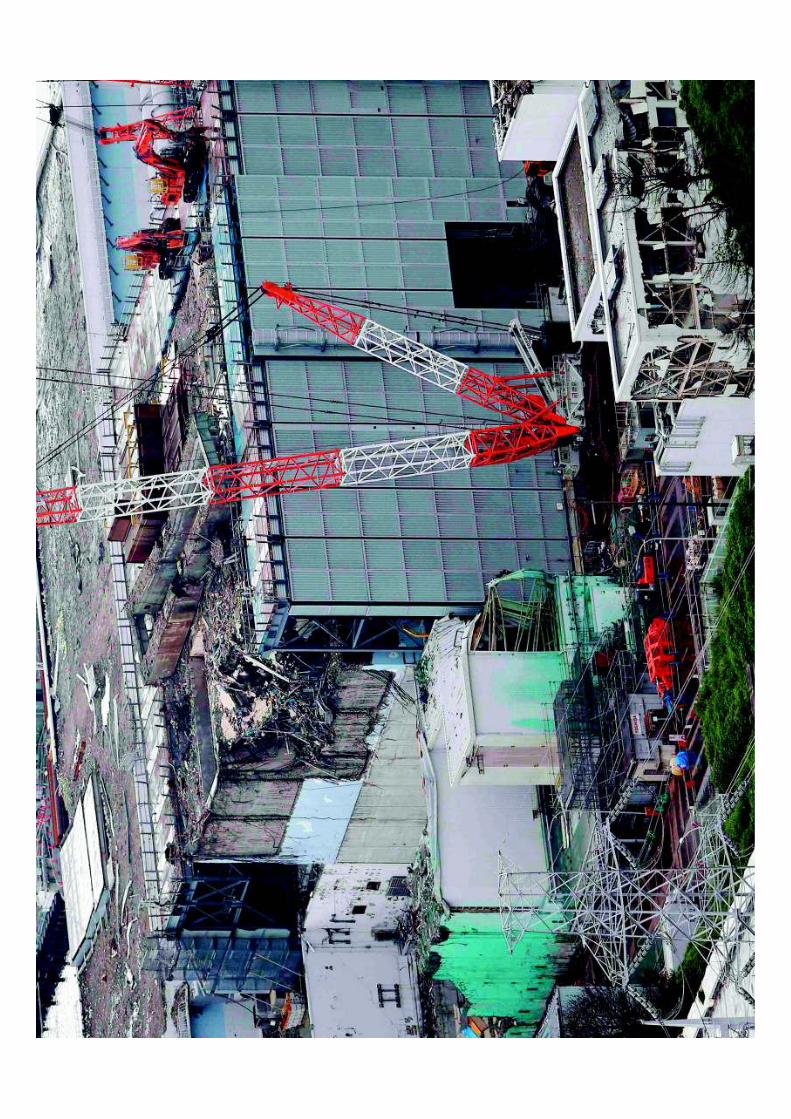
•Tacklin
g n
atu
ral and m
an-
made d
isaste
rs

Welfare
soste
nib
ile
•T
ra a
desso
ed il 2033 il
cam
bia
mento
dem
ogra
fico
è
massim
o p
er
il gru
ppo >
60+
•Il 1
0%
delle
pers
one, il
20%
tra
quelle
70+
, ed il 50%
di quelle
85+
, h
an
no
qu
alc
he
form
a d
i d
isa
bili
tà(O
NS
20
08
“N
ation
al P
roje
ctio
ns U
K p
op
ula
tion to
exce
ed 6
5m
by 2
018”
)
Tra
40 a
nni, q
uasi il
35%
della
popola
zio
ne E
uro
pea
avrà
60 a
nni o p
iù
(United N
ations,
2007)
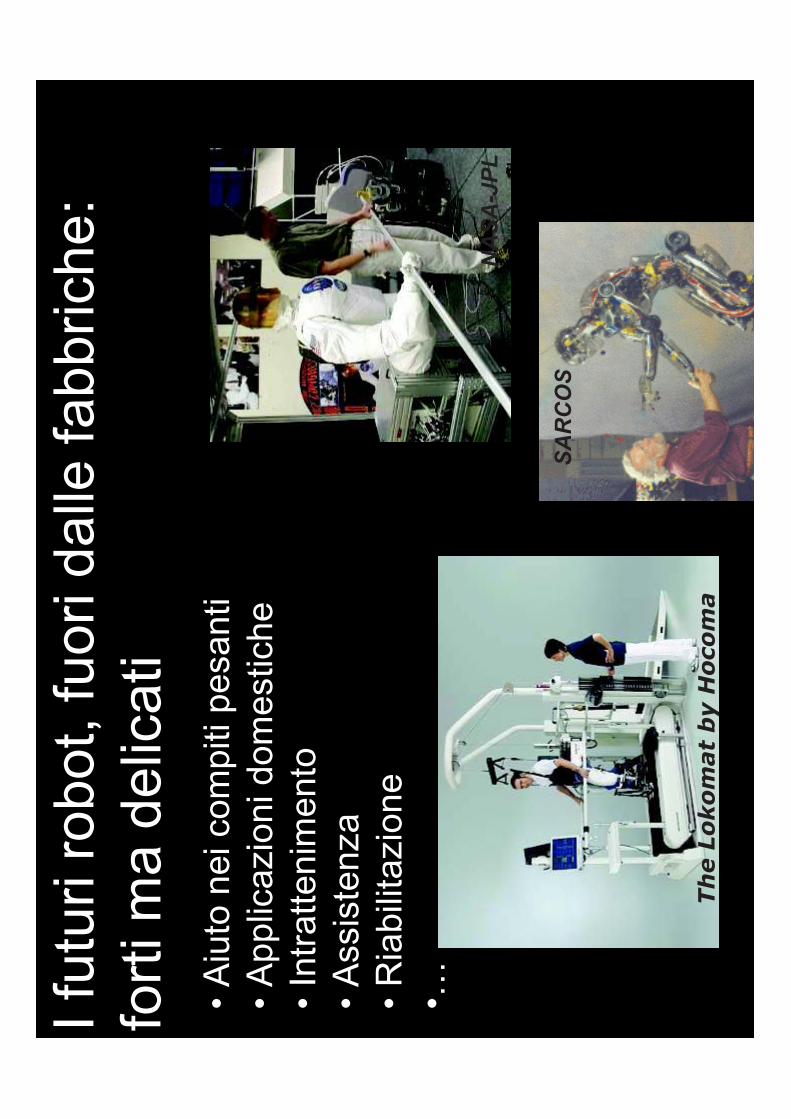
SA
RC
OS
NA
SA
-JP
L
Th
e L
oko
mat
by H
oco
ma
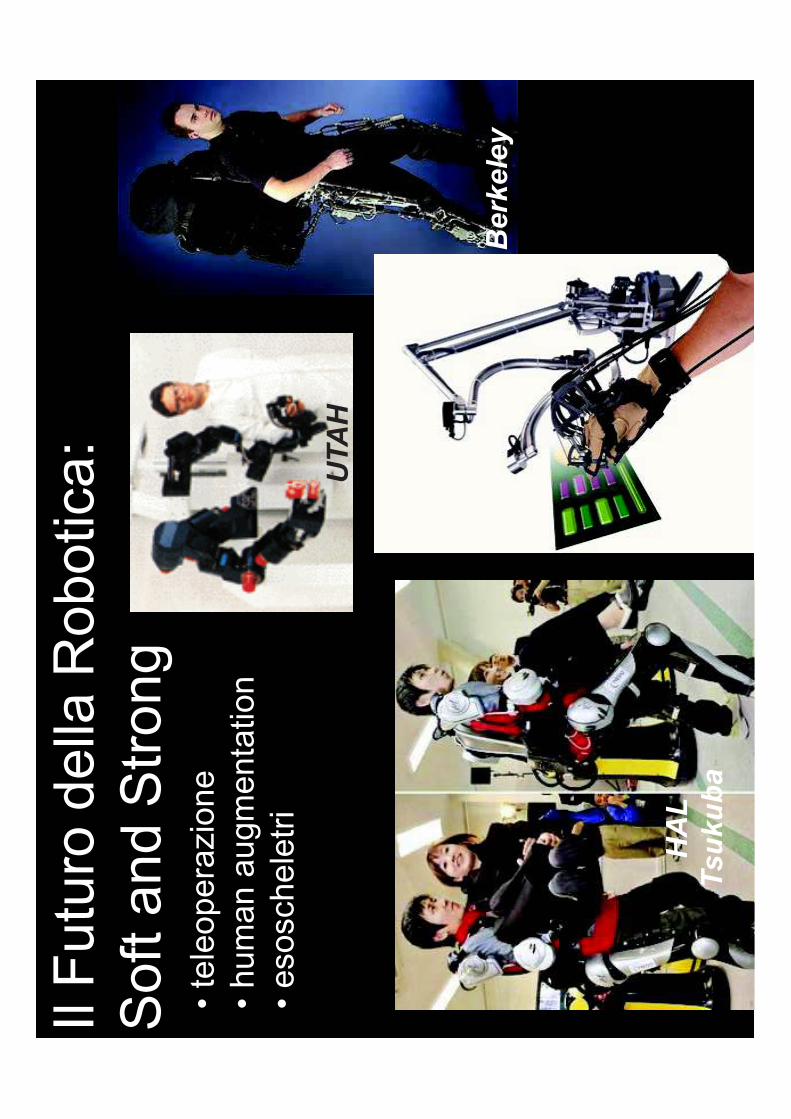
UTA
H
Berk
ele
y
HA
L
Tsu
ku
ba
Inte
razio
ne
Uom
o-R
obot
HR
I
co
gn
itiv
e
Hu
man
Ro
bo
t In
tera
cti
on
cH
RI
ph
ysic
al
Hu
man
Ro
bo
t In
tera
cti
on
pH
RI
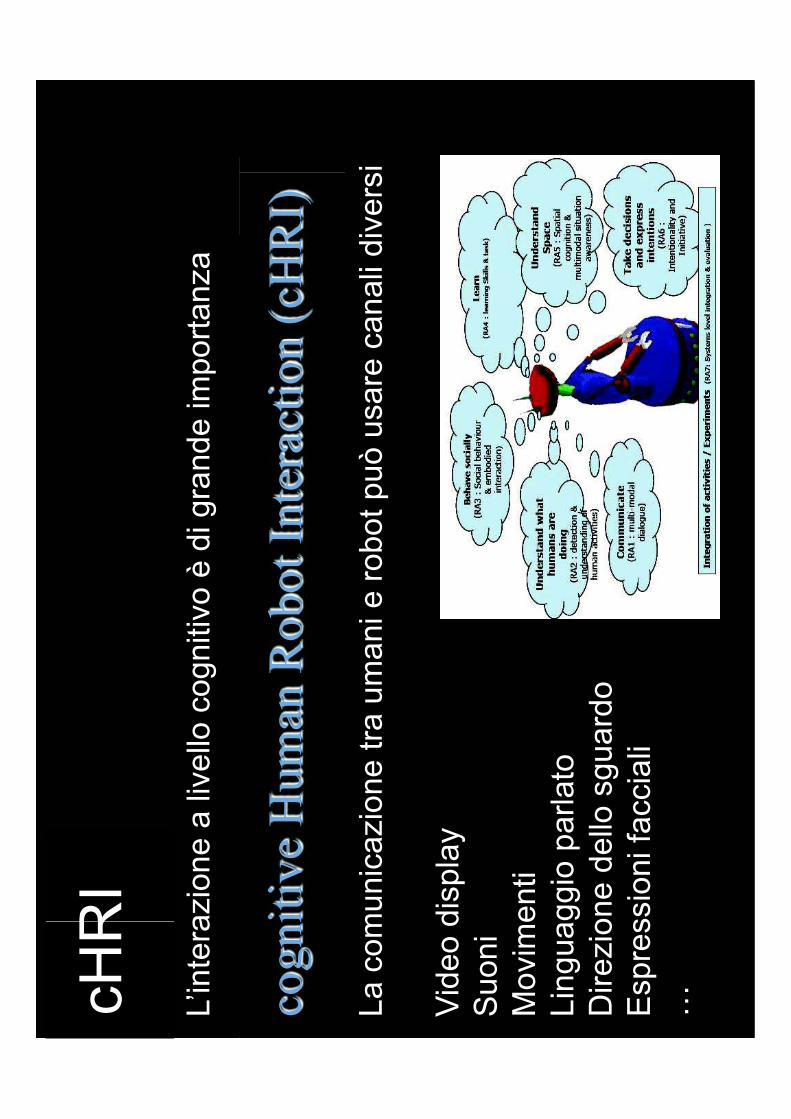
L’in
tera
zio
ne
a liv
ello
cognitiv
o è
di gra
nde im
port
anza
cog
nit
ive
Hum
an R
ob
ot
Inte
ract
ion (
cHR
I)
La c
om
unic
azio
ne
tra
um
ani e r
obot
può u
sare
canali
div
ers
i
Vid
eo d
ispla
y
Suoni
Movim
enti
Lin
guag
gio
parlato
Direzio
ne d
ello
sguard
o
Espre
ssio
ni fa
ccia
li
…cH
RI
HR
I
co
gn
itiv
e
Hu
man
Ro
bo
t In
tera
cti
on
cH
RI
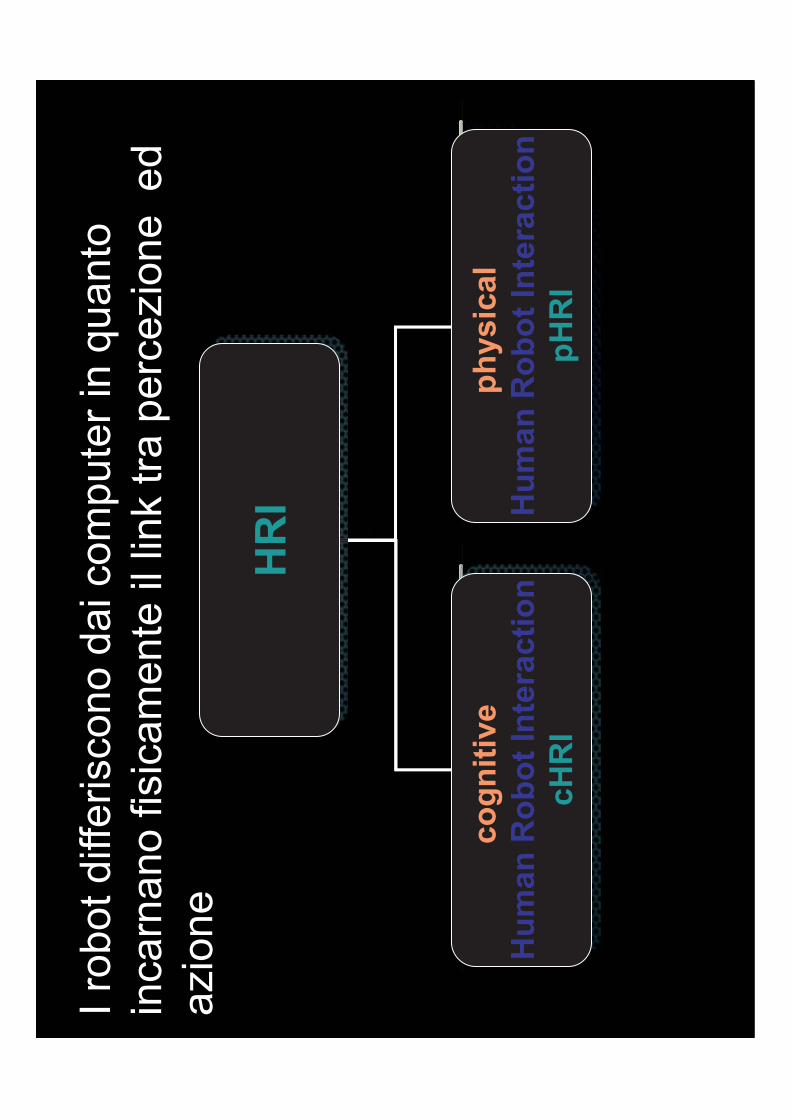
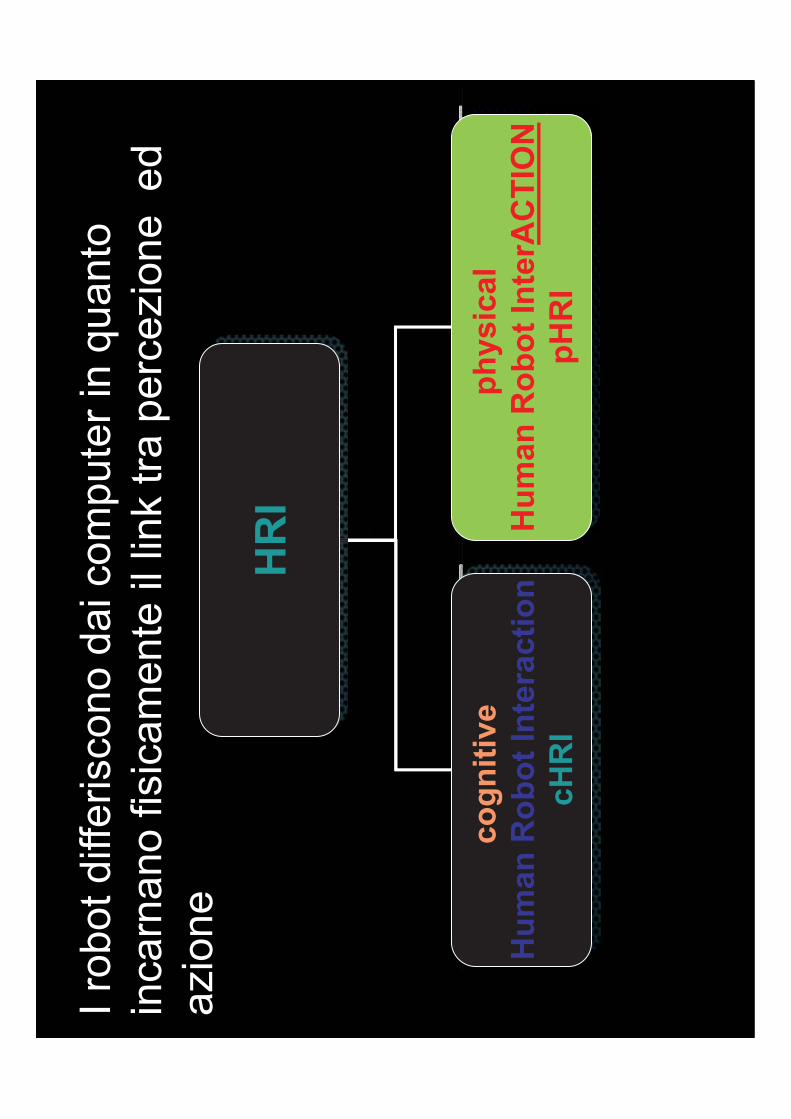
I ro
bot diffe
riscono d
ai com
pute
r in
quanto
incarn
ano fis
icam
ente
il lin
k tra
perc
ezio
ne ed
azio
ne
ph
ysic
al
Hu
man
Ro
bo
t In
tera
cti
on
pH
RI
HR
I
co
gn
itiv
e
Hu
man
Ro
bo
t In
tera
cti
on
cH
RI
ph
ysic
al
Hu
man
Ro
bo
t In
terA
CT
ION
pH
RI
I ro
bot diffe
riscono d
ai com
pute
r in
quanto
incarn
ano fis
icam
ente
il lin
k tra
perc
ezio
ne ed
azio
ne

Sourc
e:
US
National In
stitu
te o
f O
ccupational H
ealth a
nd S
afe
ty
Fata
lity A
ssessm
ent
and C
ontr
ol E
valu
ation,
NIO
SH
-FA
CE
Quando
c’è
inte
razio
ne f
isic
a,
ci sono r
ischi
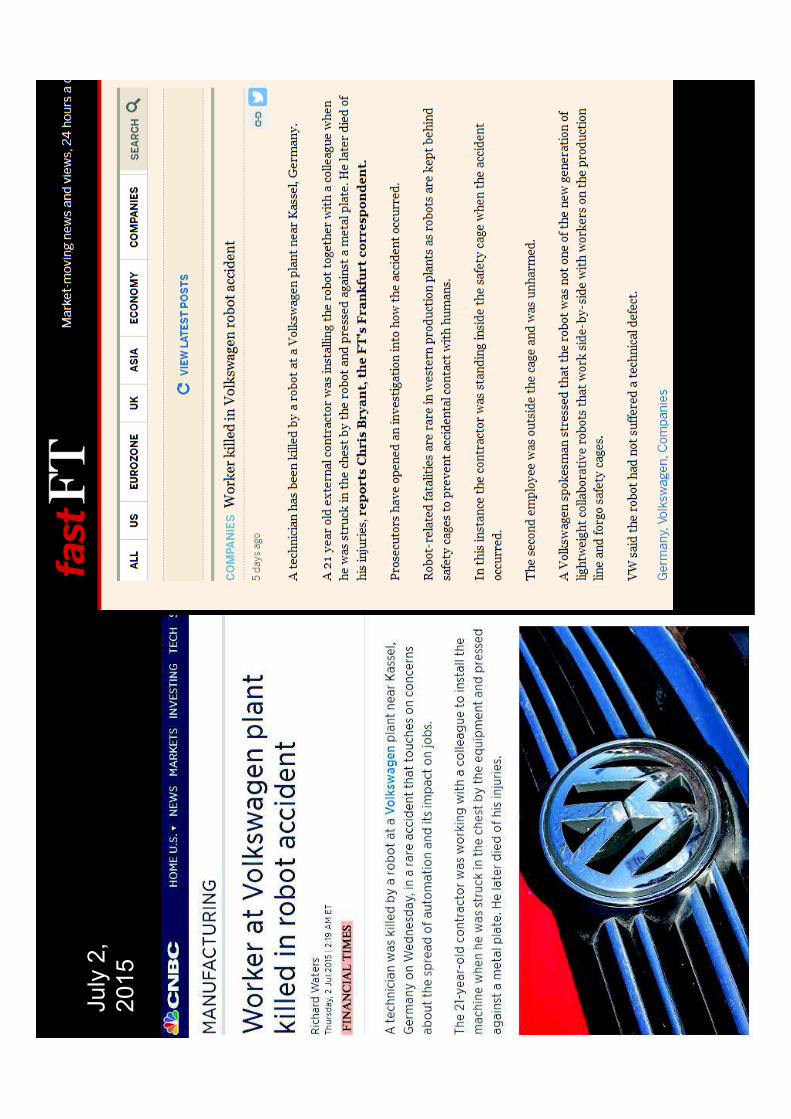
July
2,
20
15

Machin
es d
esig
ned to s
hare
the e
nvironm
ent
and t
o p
hysic
ally
inte
ract
with p
eople
must
meet
the
str
icte
st
safe
ty s
tandard
s,
yet
als
o t
o d
eliv
er
usefu
l perf
orm
ance
New
challe
nges to t
he d
esig
n o
f all
com
ponents
of
the r
obo
t, inclu
din
g m
echanic
s,
contr
ol,
pla
nnin
g a
lgorith
ms a
nd s
uperv
isio
n s
yste
ms.
PH
RIE
ND
S p
roposed a
n inte
gra
ted a
ppro
ach t
o t
he c
o-d
esig
n o
f ro
bots
for
safe
physic
al
inte
raction w
ith h
um
ans,
whic
h r
evolu
tioniz
ed the c
lassic
al appro
ach for
desig
nin
g industr
ial ro
bots
– r
igid
desig
n for
accura
cy,
active c
ontr
ol fo
r safe
ty –
by c
reating a
new
para
dig
m:
desig
n r
obots
that
are
intr
insic
ally
safe
, and c
ontr
ol th
em
to
deliv
er
perf
orm
ance
.
•LA
AS
, C
NR
S
•D
IS,
Univ
ers
ità d
i R
om
a “
La S
apie
nza”
•P
RIS
MA
Lab/D
IS,
Univ
ers
ità d
i N
apoli
Federico II
•C
entr
o “
E.
Pia
ggio
”, U
niv
ers
ità d
i P
isa
•In
stitu
te o
f R
obotics &
Mechatr
onic
s,
DLR
•K
UK
A R
obote
r G
mbH

Il v
ero
pro
ble
ma
Com
e c
ostr
uire
robot
che
sia
no
– s
icuri m
a f
ort
i
– s
em
plic
i m
a c
apaci
– inte
lligenti m
a p
ratici
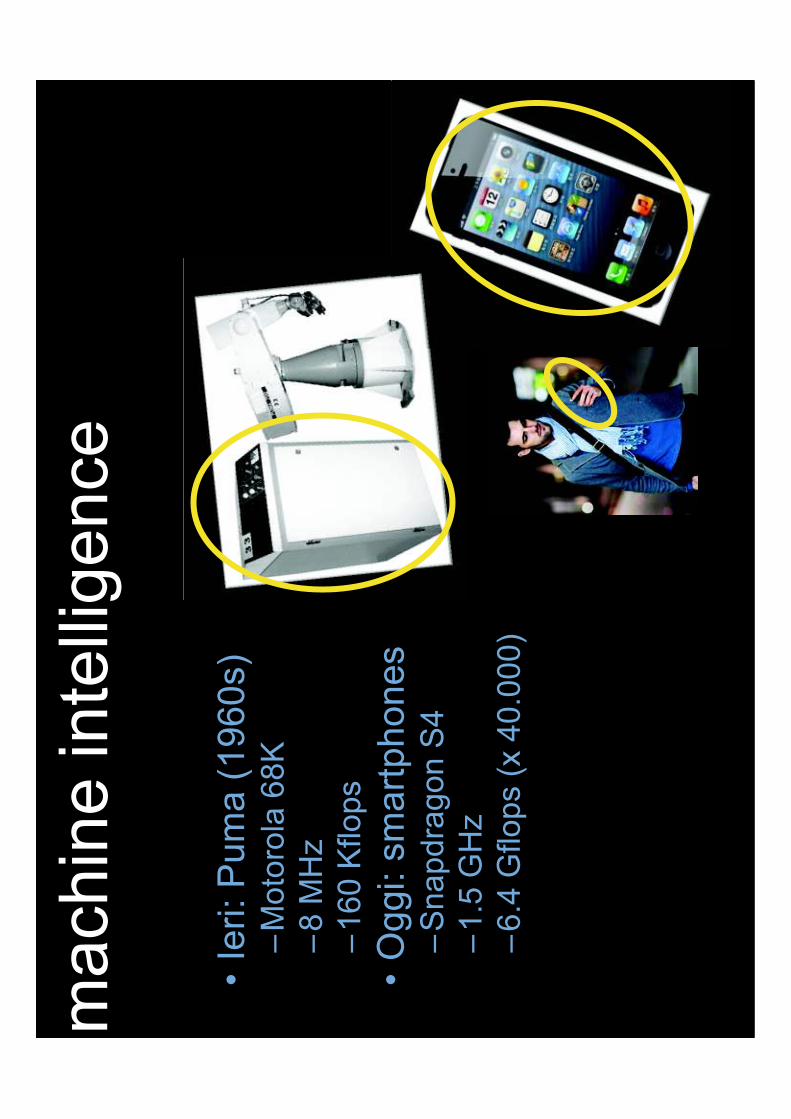
machin
e inte
lligence
•Ie
ri: P
um
a (
19
60
s)
–M
oto
rola
68K
–8 M
Hz
–160 K
flops
•O
ggi: s
mart
ph
ones
–S
napdra
gon S
4
–1.5
GH
z
–6.4
Gflops (
x 4
0.0
00)

machin
e m
otion
•Ie
ri: P
um
a (
19
60s)
–S
erv
om
oto
ri
•O
ggi
–S
erv
om
oto
ri

Buone
Notizie
Nuovi pote
nti fatt
ori
abili
tanti
•S
cie
ntifici
•T
ecnolo
gic
i
•F
iloso
fici

Tutt
o C
om
inc
ia c
on
la F
iloso
fia
[…]
l-u
om
o è
ilp
iù
inte
llig
en
te t
ra g
li
an
ima
li p
erc
hé
ha
le
ma
ni…
An
ass
ag
ora
,
cita
to d
a A
rist
ote
le,
De
pa
rtib
us
an
ima
liu
m
M
ente
e C
orp
o –
“E
mbodie
d I
nte
lligence”
–“C
ognitio
n d
epends o
n t
he k
ind o
f experiences
that com
e f
rom
havin
g a
body”
Esth
er
Thele
n
– T
hat
the b
ody m
ay d
ete
rmin
e a
nd a
nticip
ate
cognitio
n is n
ot
“the innocuous a
nd o
bvio
us c
laim
that w
e n
eed a
body t
o r
eason;…
Th
e v
ery
str
uctu
re
of
reaso
n i
tself
co
mes f
rom
th
e d
eta
ils o
f o
ur
em
bo
dim
en
t.“
Philo
sop
hy in t
he F
lesh:
The E
mbodie
d M
ind a
nd its
Challe
nge t
o W
este
rn T
hought,
G. Lackoff
, M
. Johnson
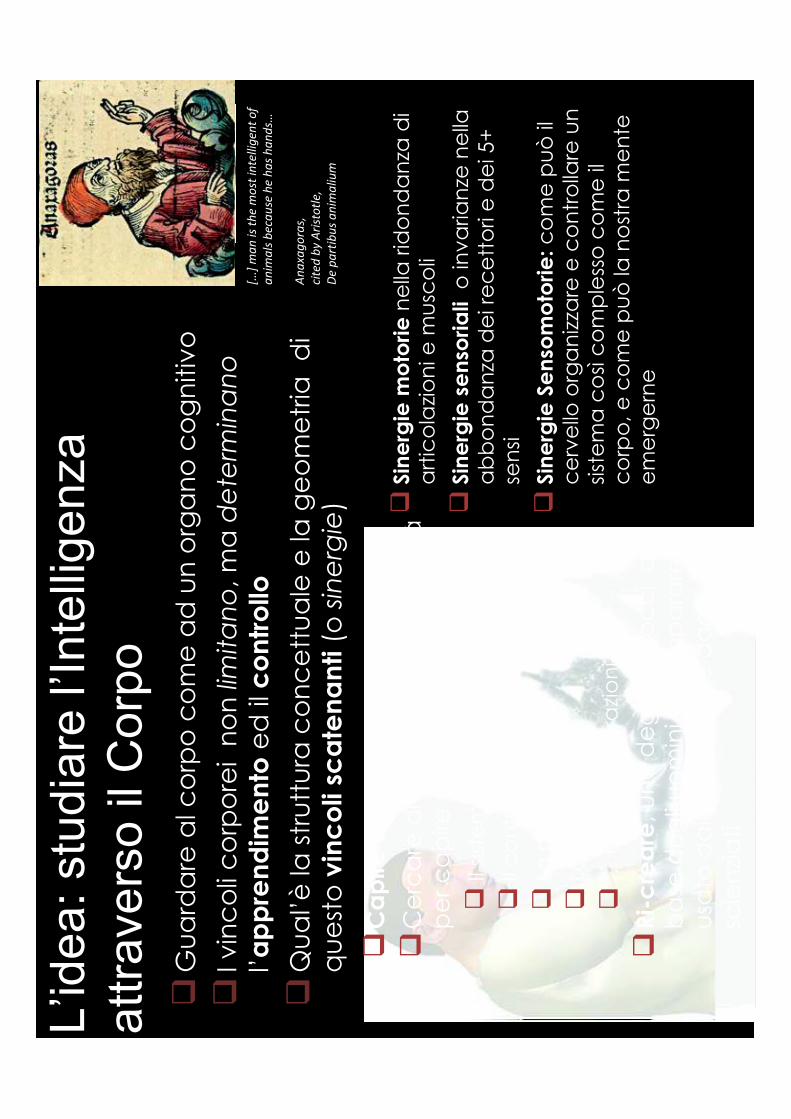
L’id
ea
: stu
dia
re l’Inte
lligenza
att
rave
rso
il C
orp
o
qG
ua
rda
re a
l co
rpo
co
me
ad
un
org
an
o c
og
nitiv
o
qI vin
co
li c
orp
ore
i n
on
lim
ita
no
, m
a d
ete
rmin
an
o
l’a
pp
ren
dim
en
to e
d il
co
ntr
ollo
ua
l’è
la s
tru
ttu
ra c
on
ce
ttu
ale
e la
ge
om
etr
ia
di
qu
est
o v
inc
oli s
ca
ten
an
ti (
o s
ine
rgie
)
qSin
erg
ie m
oto
rie
ne
lla r
ido
nd
an
za d
i a
rtic
ola
zio
ni e
mu
sco
li
qSin
erg
ie s
en
sori
ali
o in
va
ria
nze
ne
lla
ab
bo
nd
an
za d
ei r
ec
ett
ori e
de
i 5+
se
nsi
qSin
erg
ie S
en
som
oto
rie
: c
om
e p
uò
il
ce
rve
llo o
rga
niz
zare
e c
on
tro
llare
un
si
ste
ma
co
sì c
om
ple
sso
co
me
il
co
rpo
, e
co
me
pu
ò la
no
stra
me
nte
e
me
rge
rne
[…]
ma
n is
the
mo
st in
tell
ige
nt
of
an
ima
ls b
eca
use
he
ha
s h
an
ds…
An
axa
go
ras,
cite
d b
y A
rist
otl
e,
De
pa
rtib
us
an
ima
liu
m
q
Ca
pir
e c
ost
rue
nd
o
qC
erc
are
di r
ipro
du
rre
le f
un
zio
na
lità
p
er
ca
pire
qIl
sist
em
a m
usc
ulo
-sc
he
letr
ico
qIl
co
ntr
ollo
se
nso
rim
oto
rio
qLa
pe
rce
zio
ne
qLa
co
gn
izio
ne
q…
e le
loro
inte
razi
on
i
qR
i-c
rea
re, u
no
de
gli
ap
pro
cc
i d
i b
ase
de
gli
uo
min
i p
er
imp
ara
re –
u
sato
da
i ba
bin
i co
me
da
gli
scie
nzi
ati
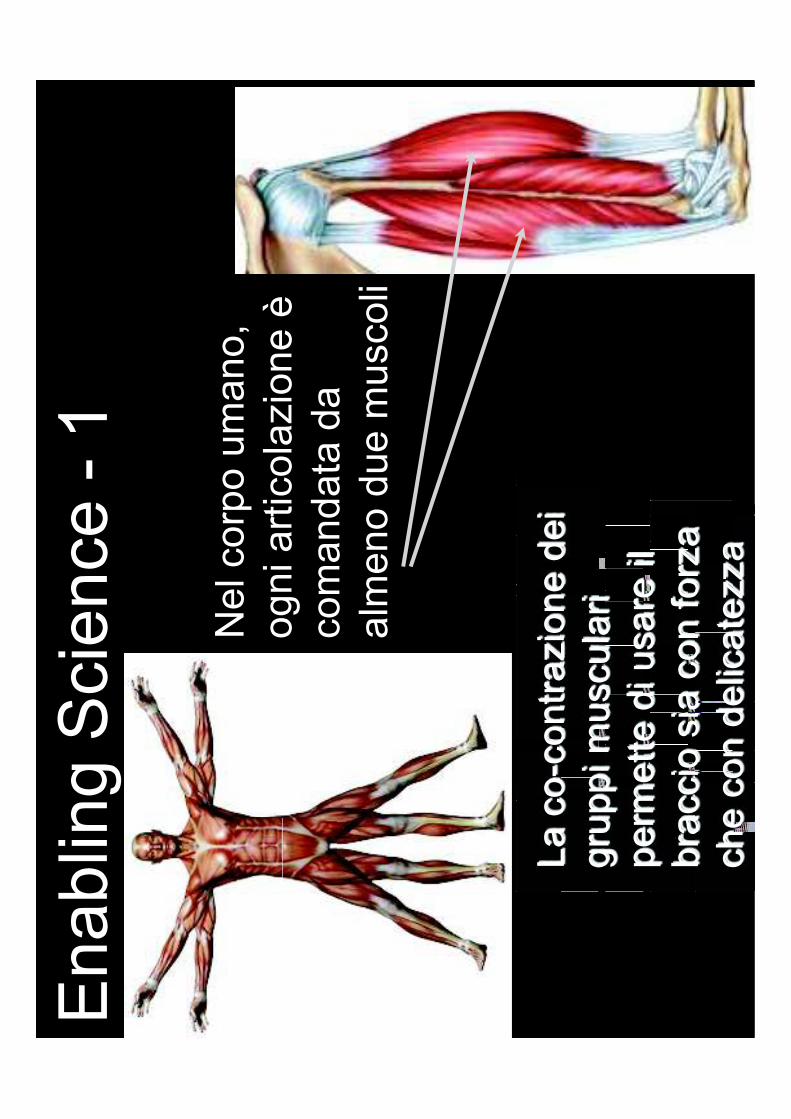
Nel corp
o u
mano,
ogni art
icola
zio
ne è
com
andata
da
alm
eno d
ue m
uscoli
Enablin
g S
cie
nce -
1

•L
a c
om
ple
ssità d
ei sis
tem
i
sensom
oto
ri d
el corp
o u
mano
non a
ppare
gestibile
neppure
da u
n c
erv
ello
str
abili
ante
com
e
quello
um
ano
•C
’è u
na
evid
enza n
euro
scie
ntifica e
ste
nsiv
a a
support
o d
ell’
esis
ten
za d
i sin
erg
ie s
en
so
mo
tori
e
(Babin
ski, B
ern
ste
in, B
izzi, A
rbib
, Jeannero
d, W
olp
ert
,
Fla
nagan, S
oechting, S
perr
y,
…)
•R
isultati q
uantita
tivi sono m
olto
più
recenti
Enablin
g S
cie
nce -
2

Labs a
re a
-changin
g…
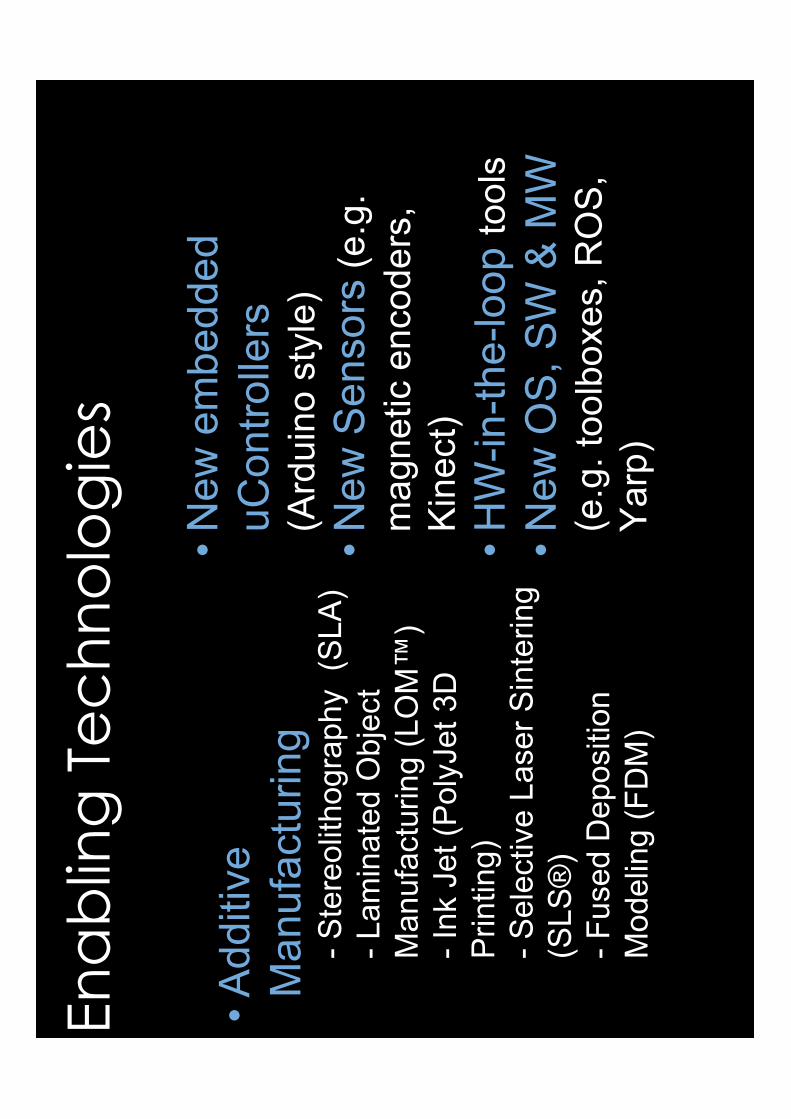
En
ab
ling
Te
ch
no
log
ies
•A
dditiv
e
Manufa
ctu
ring
- S
tere
olit
hogra
phy
(SLA
)
- Lam
inate
d O
bje
ct
Manufa
ctu
rin
g (
LO
M™
)
- In
k J
et (P
oly
Jet
3D
Printing)
- S
ele
ctive L
aser
Sin
tering
(SLS
®)
- F
used D
epositio
n
Modelin
g (
FD
M)
•N
ew
em
bedded
uC
ontr
olle
rs
(Ard
uin
o s
tyle
)
•N
ew
Sensors
(e.g
.
magnetic e
ncode
rs,
Kin
ect)
•H
W-in-t
he-loop t
ools
•N
ew
OS
, S
W &
MW
(e.g
. to
olb
oxes,
RO
S,
Yarp
)

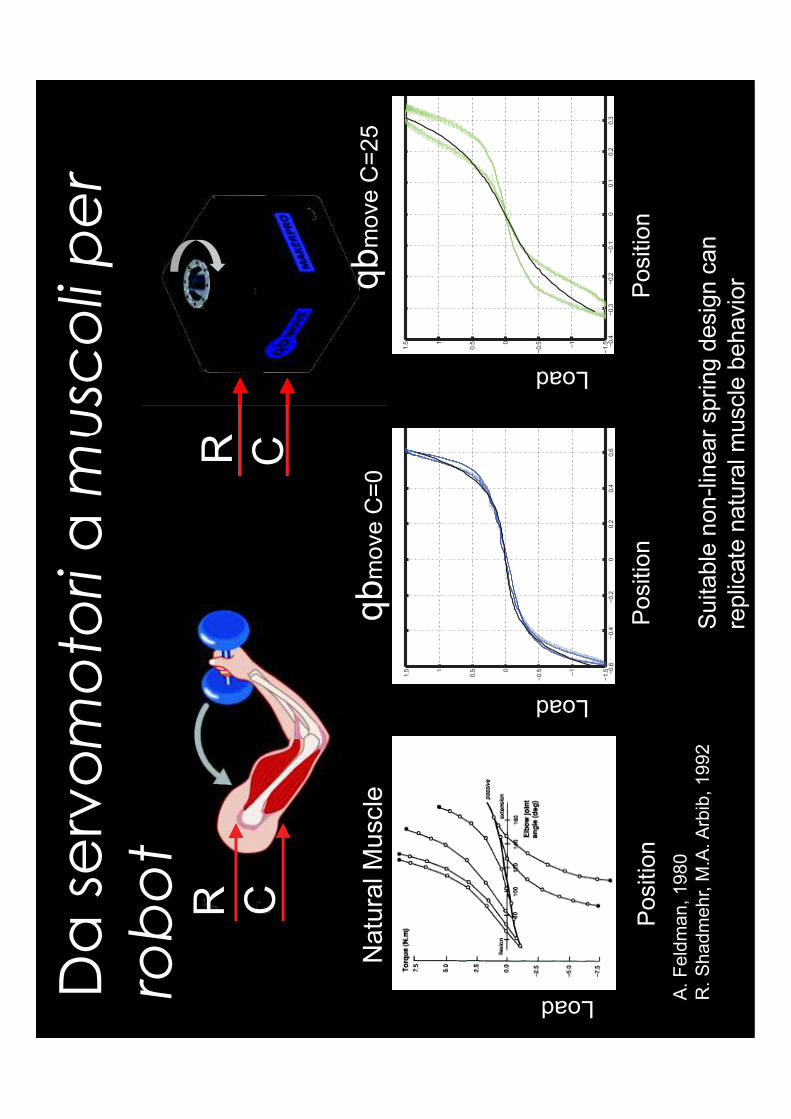
da
moto
ri a
muscoli
per
robot
àS
erv
om
oto
ri
à A
ttuato
ri c
on
Ela
sticità in S
eri
e
(S
EA
)
à à
Att
uato
ri a
Cedevole
zza
V
ariab
ile (
VS
A)
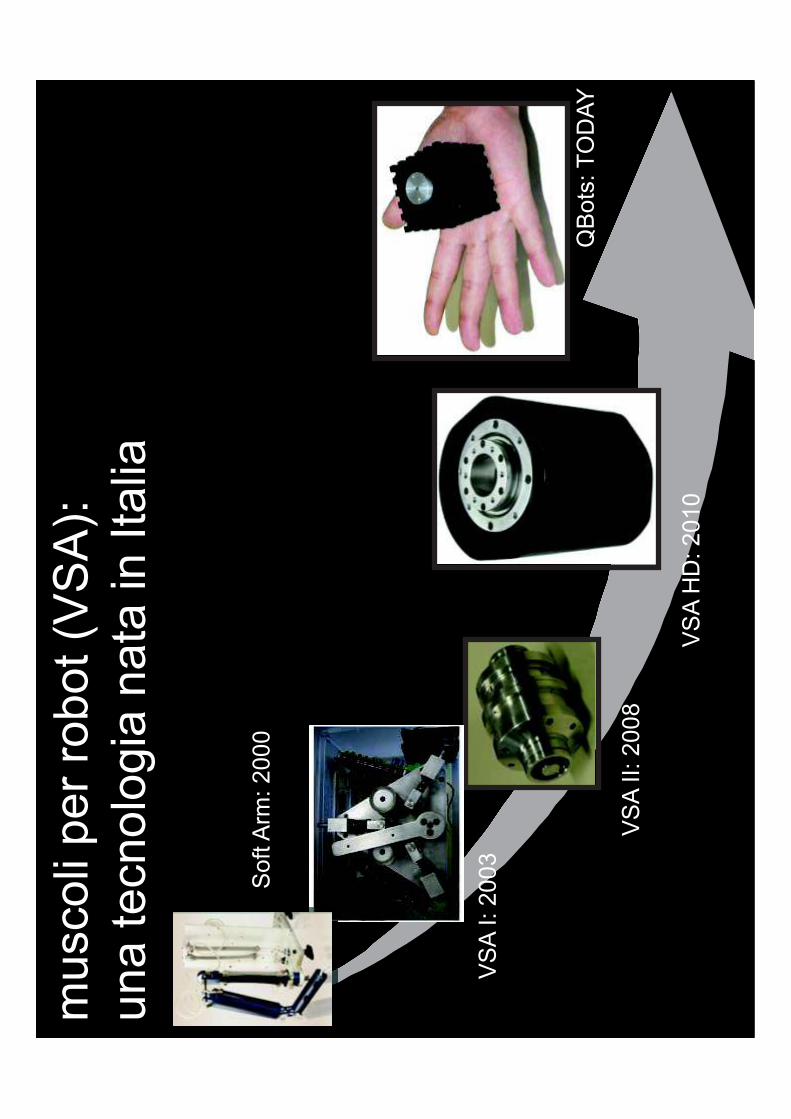
muscoli
per
robot
(VS
A):
un
a tecnolo
gia
nata
in I
talia
VS
A I
: 200
3
VS
A I
I: 2
008
VS
A H
D:
2010
QB
ots
: T
OD
AY
Soft
Arm
: 2000
wher
er
:=
The
stif
fnes
s
R
C
R
C
Natu
ral M
uscle
−0.6
−0.4
−0.2
00.2
0.4
0.6
0.8
−1.5−1
−0.50
0.51
1.5
qL [ra
d]
L [Nm]
Load
Positio
n
0.8
−0.4
−0.3
−0.2
−0.1
00.1
0.2
0.3
0.4
−1.5−1
−0.50
0.51
1.5
qL [ra
d]
L
Positio
n
Load
Suitable
non
-lin
ear
sprin
g d
esig
n c
an
replic
ate
natu
ral m
uscle
behavio
r
qb
mo
ve
C=
0
Load
Positio
n
A.
Feld
man
, 19
80
R.
Shad
meh
r, M
.A. A
rbib
, 19
92
qb
mo
ve
C=
25
Da
se
rvo
mo
tori a
mu
sco
li p
er
ro
bo
t

QB
ots
: T
OD
AY
muscoli
per
robot
(VS
A):
un
a tecnolo
gia
in r
apid
a e
spansio
ne
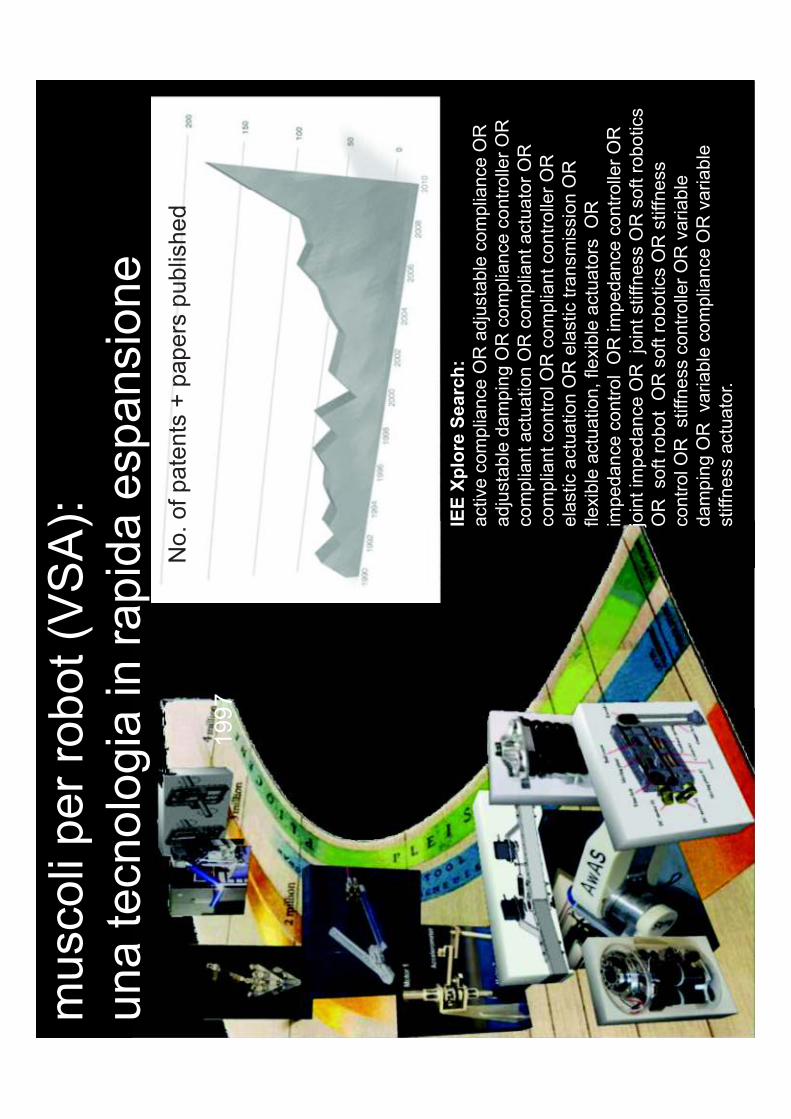
19
97
IEE
Xp
lore
Searc
h:
active c
om
plia
nce O
R a
dju
sta
ble
co
mplia
nce O
R
ad
justa
ble
da
mpin
g O
R c
om
plia
nce c
ontr
olle
r O
R
co
mplia
nt actu
ation O
R c
om
plia
nt actu
ato
r O
R
co
mplia
nt co
ntr
ol O
R c
om
plia
nt co
ntr
olle
r O
R
ela
stic a
ctu
atio
n O
R e
lastic tra
nsm
issio
n O
R
fle
xib
le a
ctu
ation, fle
xib
le a
ctu
ato
rs O
R
impe
da
nce c
ontr
ol O
R im
pe
dance c
ontr
olle
r O
R
join
t im
pe
dance O
R jo
int stiffness O
R s
oft
ro
bo
tics
OR
so
ft r
obot O
R s
oft
ro
bo
tics O
R s
tiffne
ss
co
ntr
ol O
R
stiffness c
ontr
olle
r O
R v
aria
ble
da
mpin
g O
R va
ria
ble
co
mplia
nce O
R v
aria
ble
stiffne
ss a
ctu
ato
r.
muscoli
per
robot
(VS
A):
un
a tecnolo
gia
in r
apid
a e
spansio
ne
N
o.
of pate
nts
+ p
apers
publis
hed
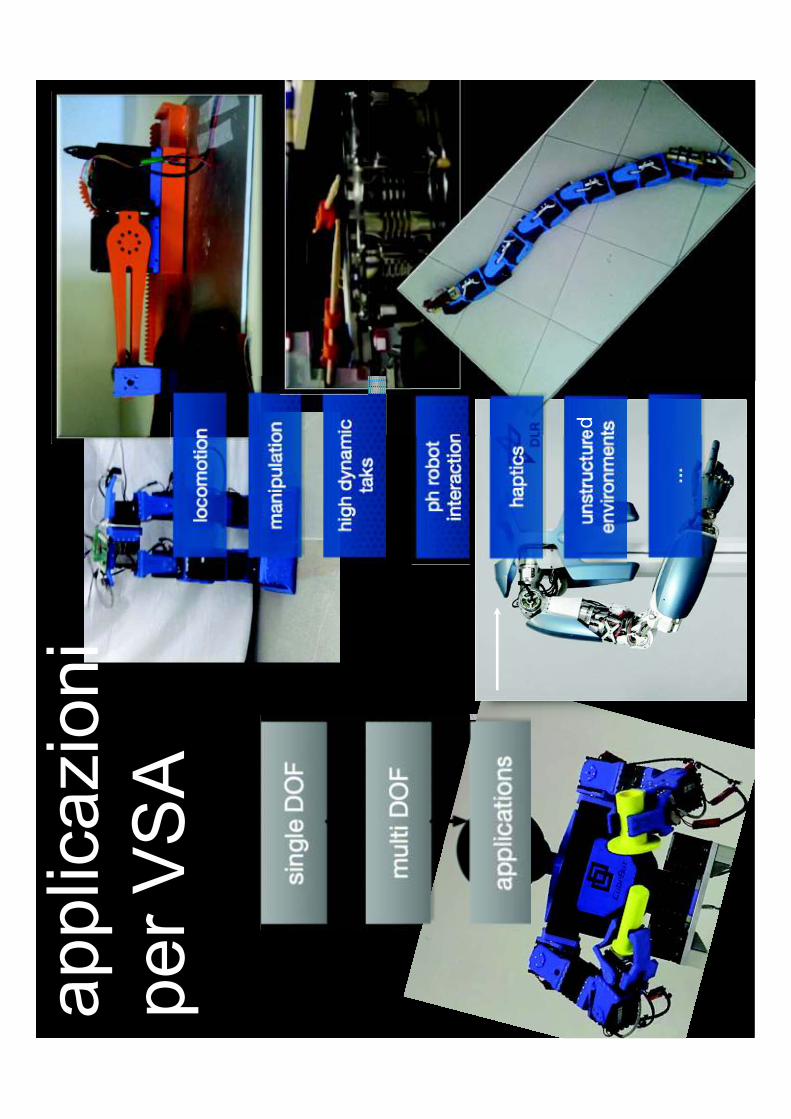
applic
azio
ni
per
VS
A
d
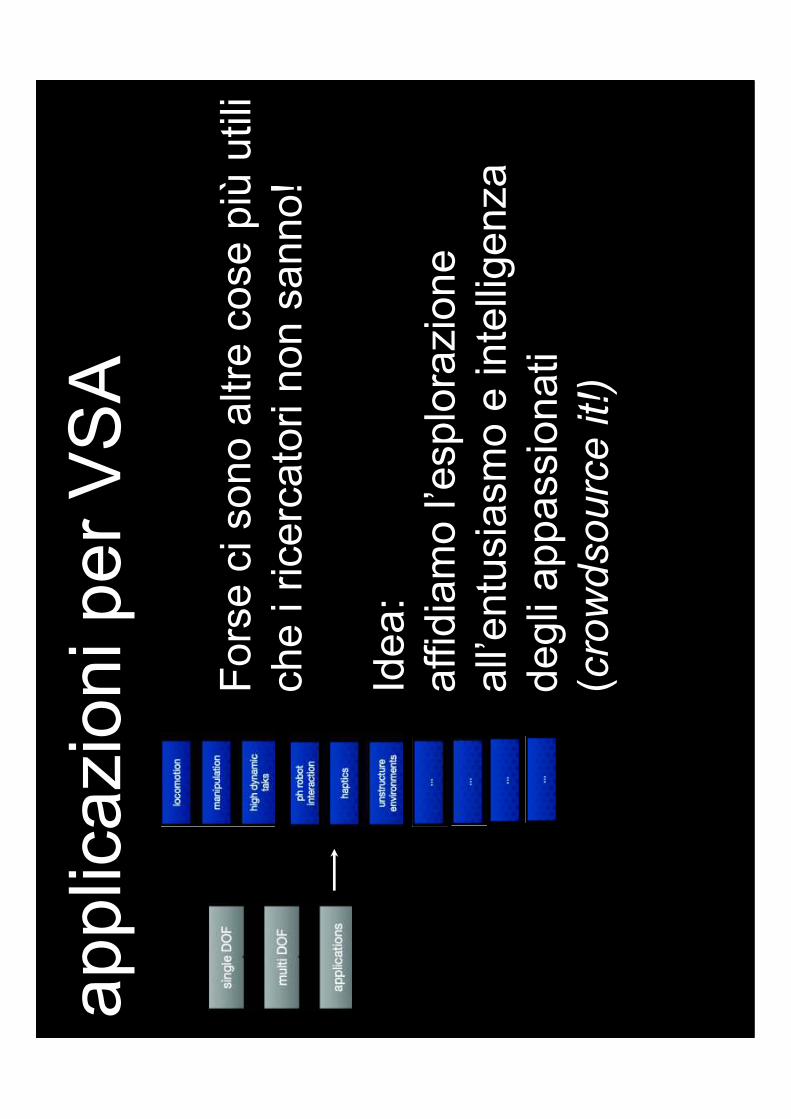
Fors
e c
i sono a
ltre
cose
più
utili
che i r
icerc
ato
ri n
on s
anno!
Idea:
affid
iam
o l’e
splo
razio
ne
all’
entu
sia
sm
o e
inte
lligenza
degli
appassio
nati
(cro
wdsourc
e it!)
applic
azio
ni per
VS
A
pre
ndere
l’in
izia
tiva
Pro
ble
mi
•T
em
po
•K
now
-how
•D
iffu
sio
ne
•C
osto
So
luzio
ni
•B
asso c
osto
•M
odula
rità
•A
ccesso p
ubblic
o
•U
tiliz
zo
sem
plic
e
•D
iscussio
ne a
pert
a
•P
art
ecip
azio
ne
à p
iatt
afo
rma
F
ull
Op
en
•
SW
•E
lectr
onic
s H
W
•M
echan
ical H
W

OP
EN
pa
rad
igm
BS
D &
Cre
ative C
om
mons lic
ensin
g
leads t
o the f
ast diffu
sio
n o
f th
e technolo
gy
best
choic
e f
or
develo
pers
cre
ate
a c
om
munity t
o g
et support
and f
eedback
exam
ple
s
Lin
ux
I-
Cub
A
rduin
o
an o
pen
initia
tive t
o f
oste
r th
e d
iffu
sio
n o
f so
ft
actu
ation in r
ob
oti
cs

foste
ring t
he d
iffu
sio
n o
f soft
actu
ation
for
robots
that m
ove lik
e u
s
natu
ral m
achin
e
motion initia
tive

Share
•
Dra
win
gs
•S
chem
atics
•In
str
uctions
•A
ctu
ato
rs
•A
ccessories
•S
yste
ms
•…
natu
ralm
achin
em
otion.c
om

Build
ing b
locks
natu
ralm
achin
em
otion.c
om
Soft
Robots
for
Makers
IIT
-AD
VR
CO
MA
N -
CO
mplia
nt
huM
AN
oid

Clip
s d
a u
n v
ideota
pe d
el 1989
Me
asu
re F
rictio
n C
oe
ffic
ien
ts
Dete
ct
Obje
cts
by T
extu
re
Reflex C
ontr
ol of G
raspin
g
Follo
w a
nd R
econstr
uct
Shape
M
oto
r box
Bow
de
n C
able
s

altre
mani
un
a m
ano
th
e s
tory
un
told
Moto
r
box
Tendons
sem
plic
e n
on
è f
acile
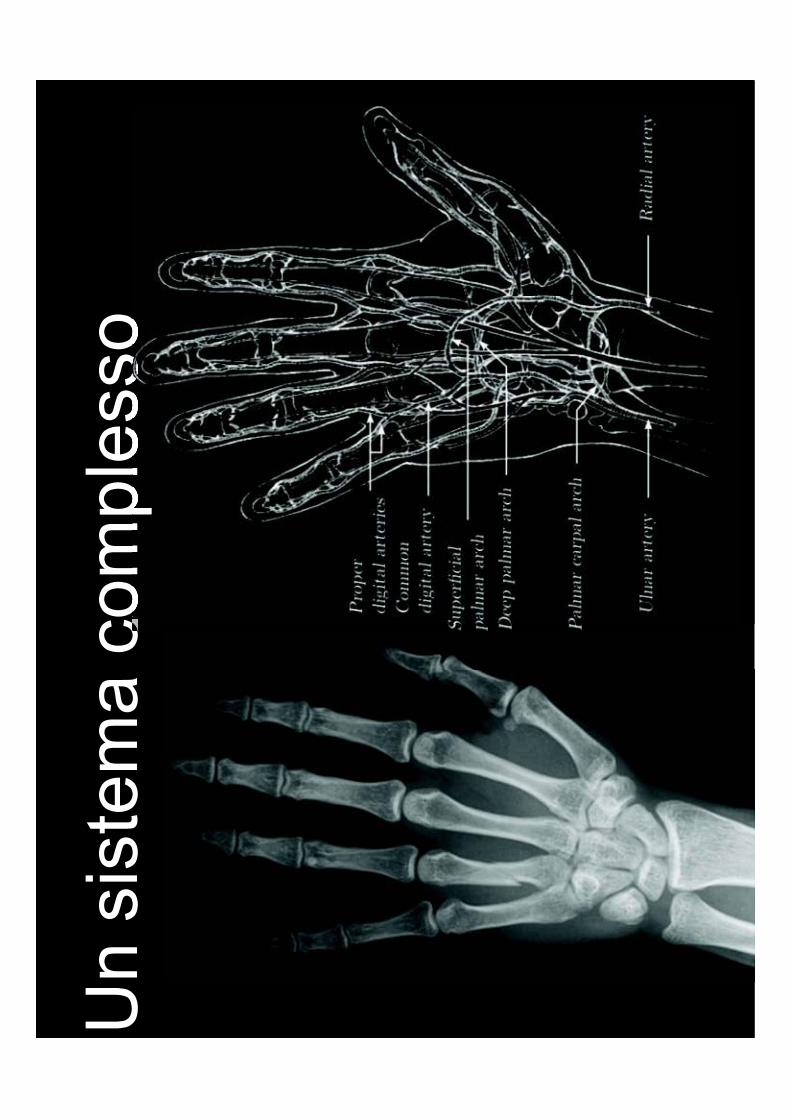
Un s
iste
ma
com
ple
sso

Un s
iste
ma
com
ple
sso

Legam
enti e
muscoli
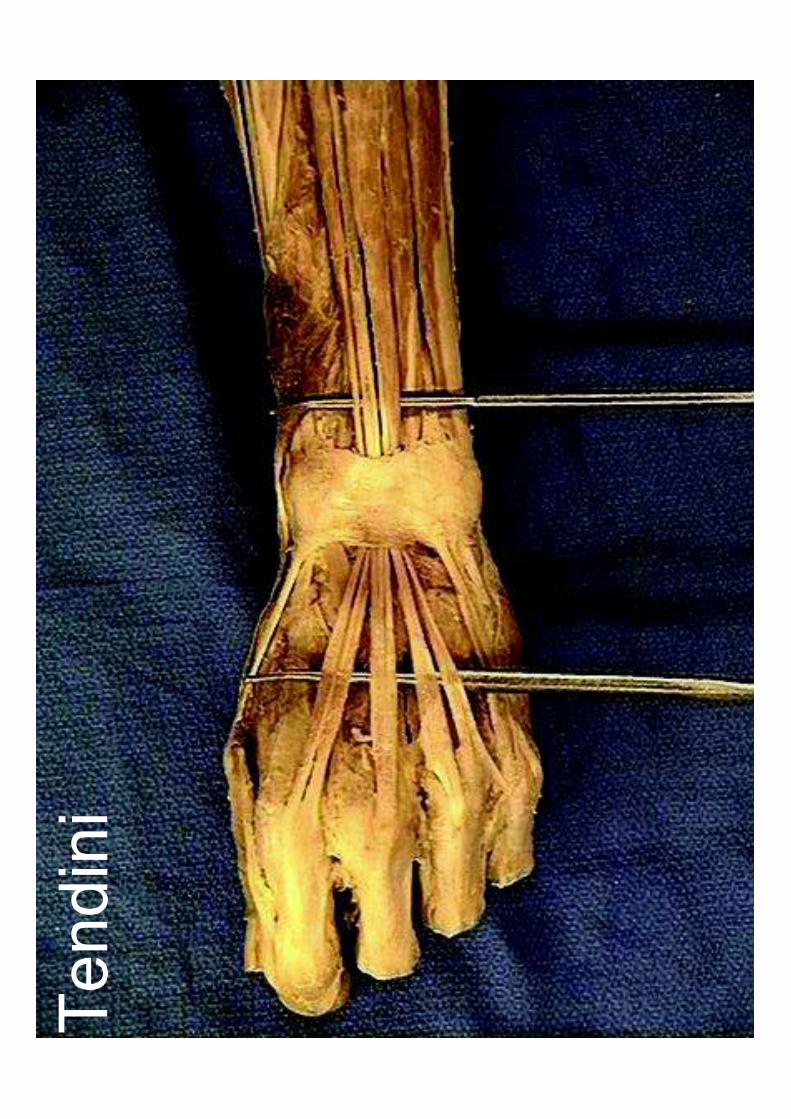
Tendin
i
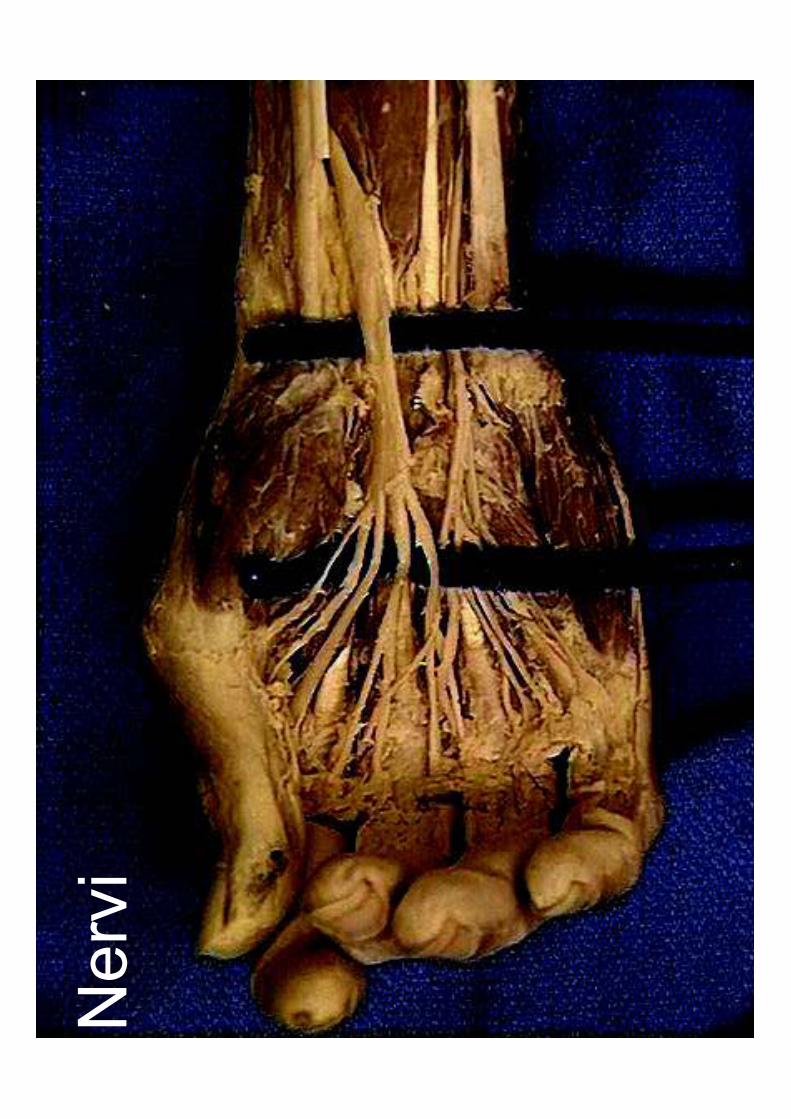
Nerv
i
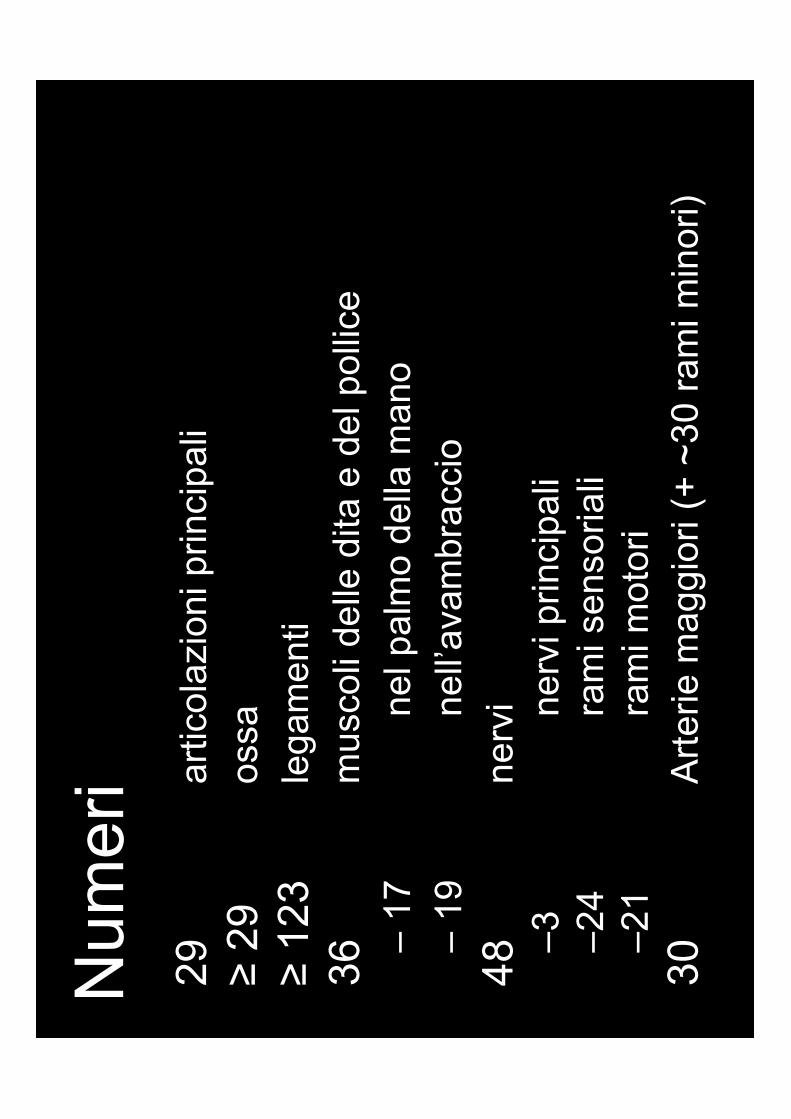
Num
eri
29
a
rtic
ola
zio
ni p
rin
cip
ali
≥ 2
9
o
ssa
≥ 1
23
legam
enti
36
m
usco
li d
elle
dita
e d
el p
olli
ce
– 1
7
ne
l palm
o d
ella
mano
– 1
9
ne
ll’a
va
mb
raccio
48
n
erv
i
–3
n
erv
i p
rin
cip
ali
–2
4
ram
i sensoria
li
–2
1
ram
i m
oto
ri
30
A
rterie
maggio
ri (
+ ~
30 r
am
i m
inori
)

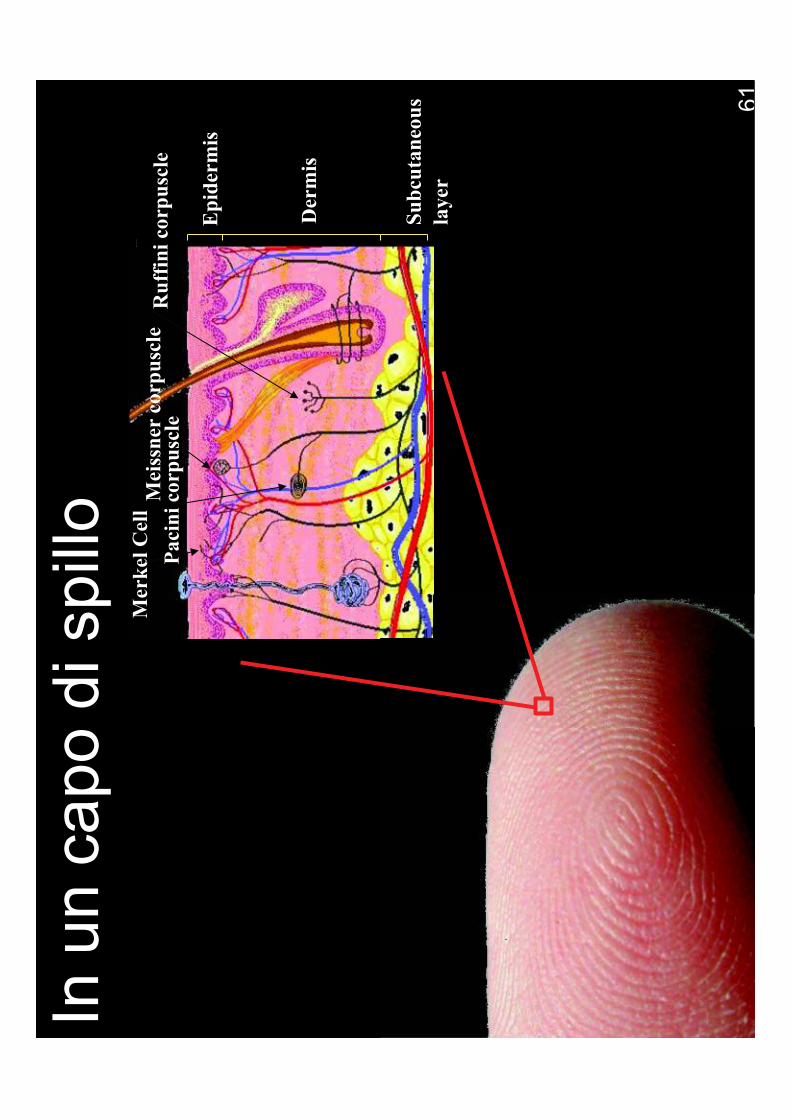
In u
n c
apo d
i spill
o
60
In u
n c
apo d
i spill
o
61
Mer
kel
Cel
l M
eiss
ner
co
rpu
scle
Ep
ider
mis
Der
mis
Ru
ffin
i co
rpu
scle
P
acin
i co
rpu
scle
Su
bcu
tan
eou
s
lay
er
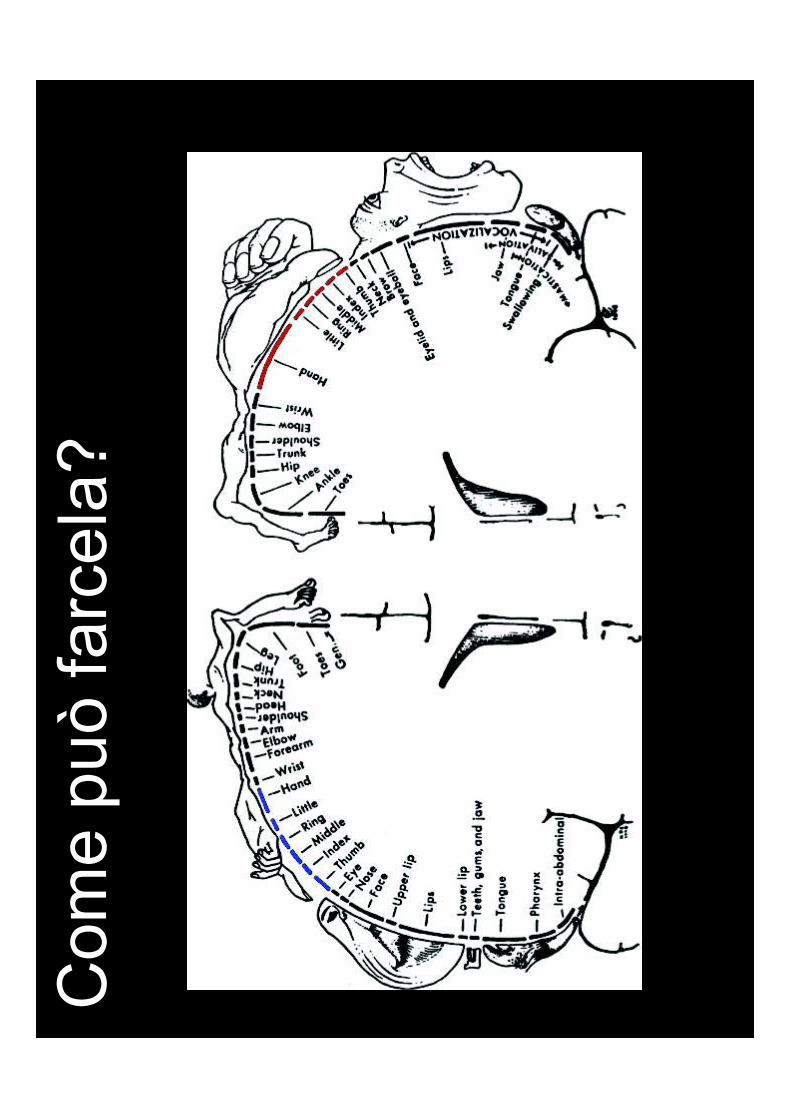
Com
e p
uò
farc
ela
?
Dom
are
la
Com
ple
ssità
Il C
orp
o d
ella
Mano c
om
e
sem
plic
em
e lim
ite
o invece
fatt
ore
dete
rmin
ante
che o
rganiz
za
la c
ogniz
ione
nella
form
a in c
ui la
conoscia
mo ?
“Enablin
g C
onstr
ain
ts”
Sono
i v
incoli
de
l co
rpo
ch
e r
en
do
no p
ossib
ili e
dete
rmin
ano
le
nostr
e s
tra
tegie
di a
pp
ren
dim
en
to e
di
contr
ollo
• Q
ual’è
la
str
utt
ura
co
ncett
uale
e l
a g
eo
metr
ia d
i
questi “
vin
coli
scate
nanti”,
o s
inerg
ie?
–S
inerg
ie S
en
so
riali
nella
abbondanza
tatt
ile
–S
inerg
ie M
oto
rie n
ella
com
ple
ssità a
rtic
ola
re
–S
inerg
ie S
en
so
-Mo
tori
e n
el contr
ollo
fin
e d
ella
mano

Il c
orp
o d
ella
mano
parla
un
lin
guaggio
le c
ui paro
le s
ono
le
sin
erg
ie s
enso-m
oto
rie
Pe
r costr
uire s
iste
mi art
ific
iali
che p
ossano d
ialo
gare
con la
pers
ona è
necessario c
ap
ire q
ue
sto
lin
gu
ag
gio
La n
ostr
a ipote
si

Imm
agin
i per
Mani
Imm
agin
i per
Mani

69
hp
zyx
P
jj
jjj
j
uj
u
+= ÷÷÷ øö
ççç èæ
=
¶¶-
=×
Ñ;
uÑhj
pj
Pz
yx
dP
dz
yx
¶¶+
¶¶+
¶¶+
¶¶=
=u
ju
ju
ju
u0
Un
a S
ine
rgia
Se
nso
ria
le:
il
Flu
sso
Ta
ttile
Il flu
sso
ott
ico g
enera
illu
sio
ni:
l’eff
ett
o “
ba
rbe
r pole
”
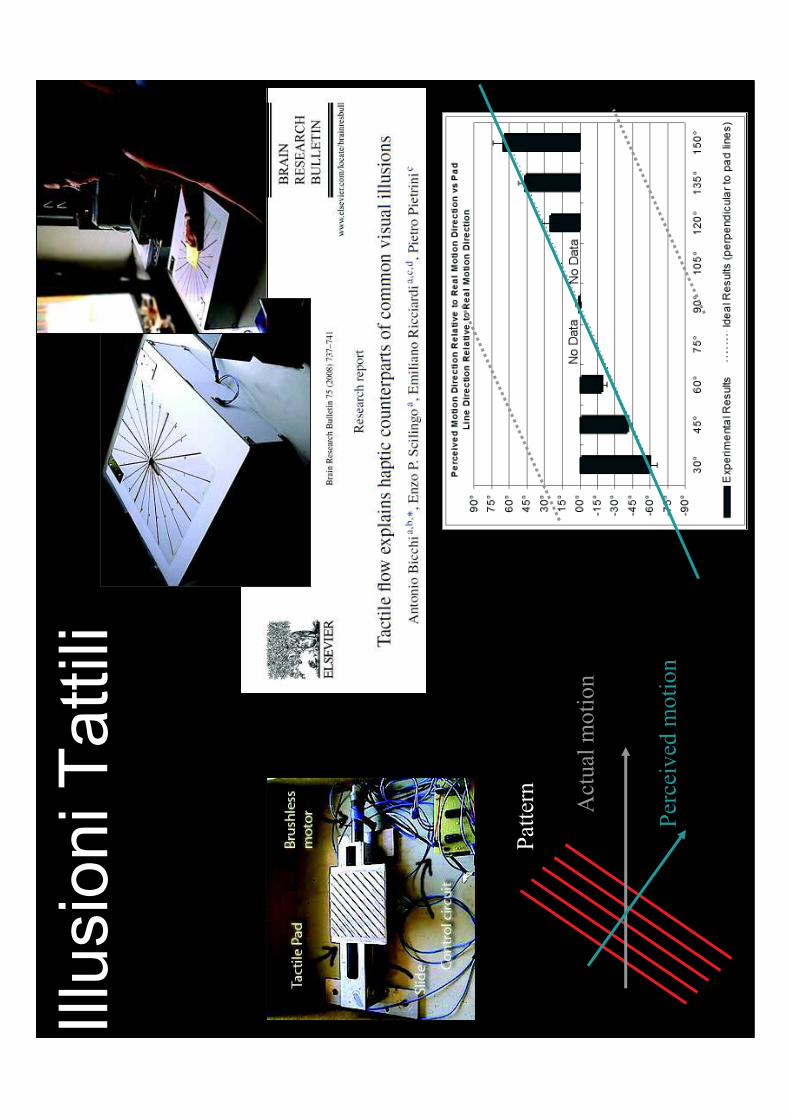
Illu
sio
ni T
att
ili
Act
ual
mo
tio
n
Per
ceiv
ed m
oti
on
Pat
tern
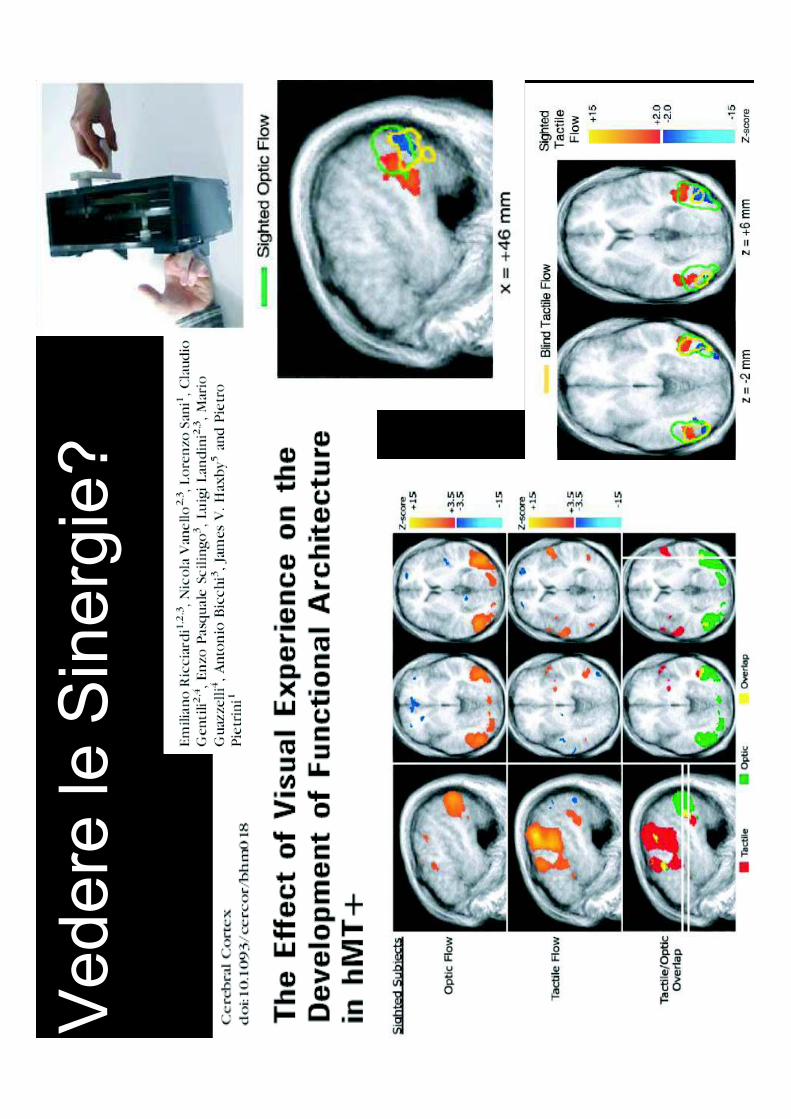
Vedere
le
Sin
erg
ie?
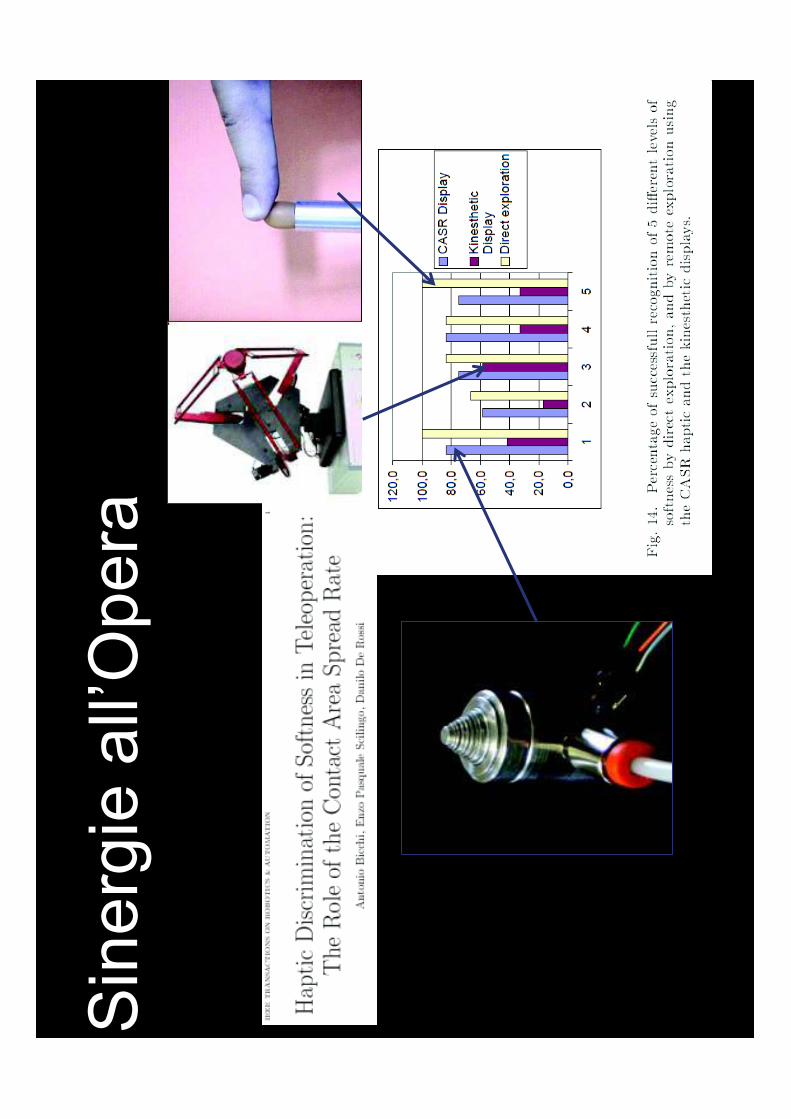
Sin
erg
ie a
ll’O
pera
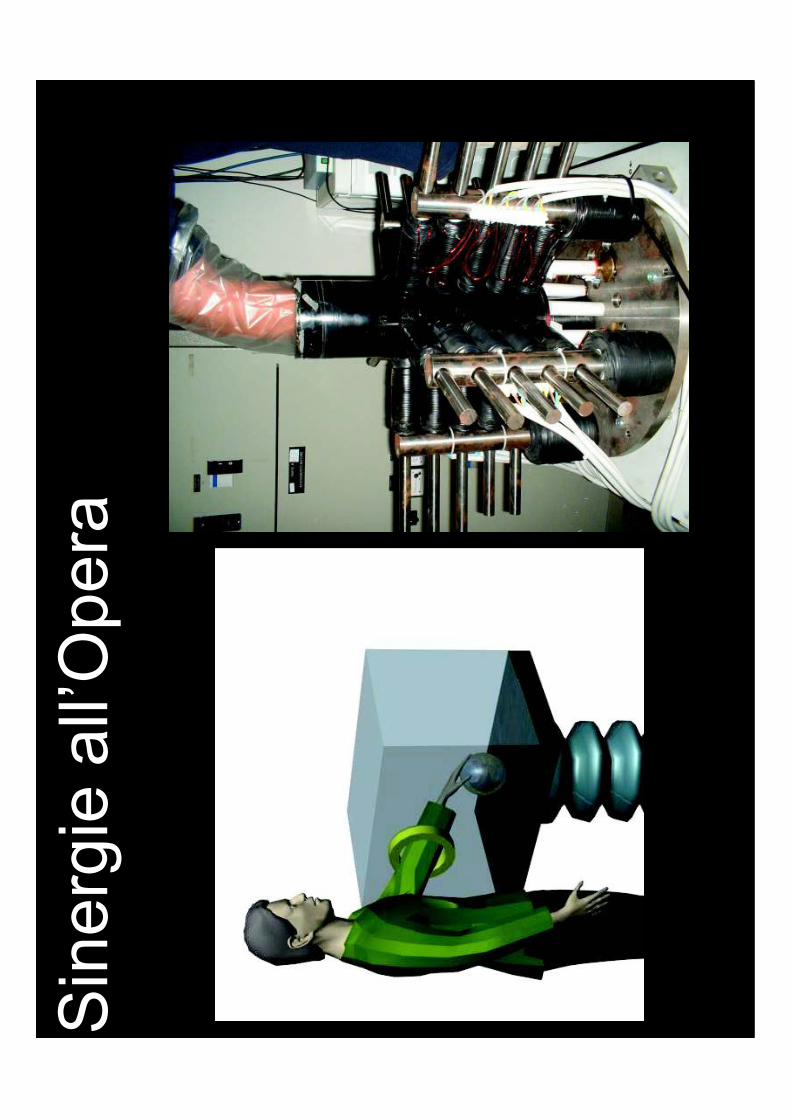
Sin
erg
ie a
ll’O
pera
(3-r
d s
yn
erg
y)
(1-s
t sy
ne
rgy
) (2
-nd
sy
ne
rgy
) (
d)
)
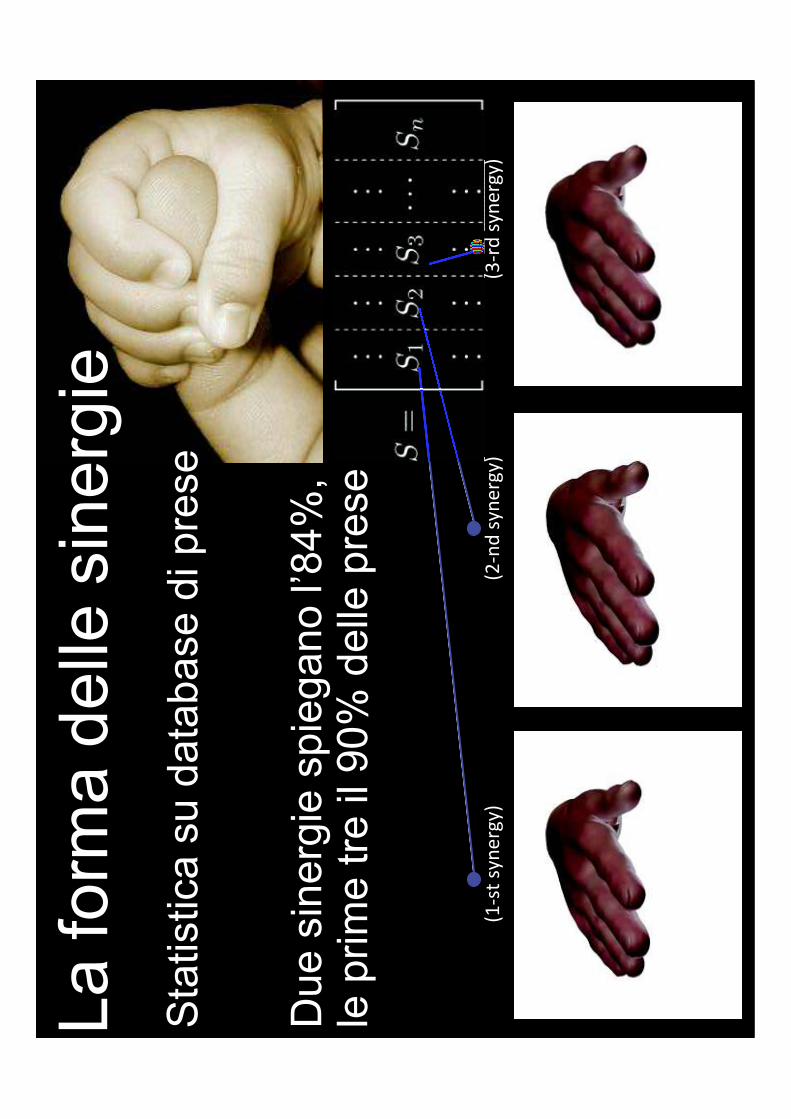
La f
orm
a d
elle
sin
erg
ie
Sta
tistica s
u d
ata
base d
i pre
se
Due s
inerg
ie s
pie
gano l’8
4%
, le
prim
e tre
il 90%
delle
pre
se
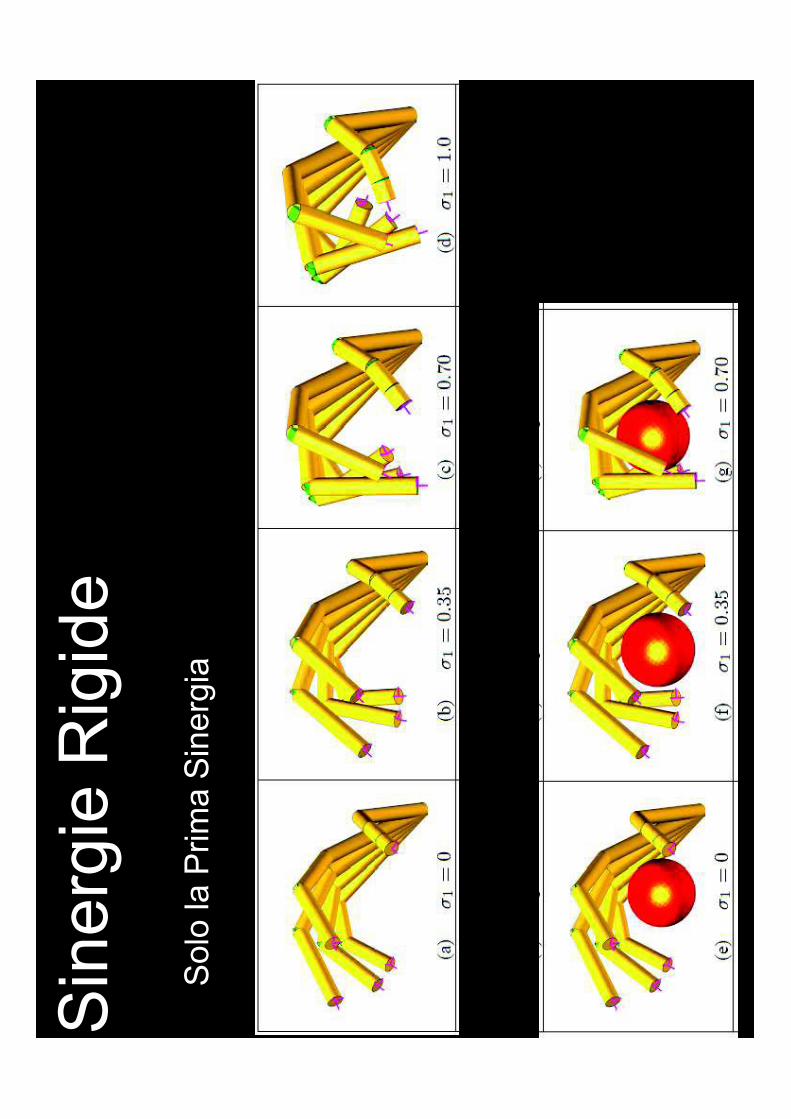
Solo
la P
rim
a S
inerg
ia
Pre
sa
di un o
gg
ett
o
Sin
erg
ie R
igid
e
Sin
erg
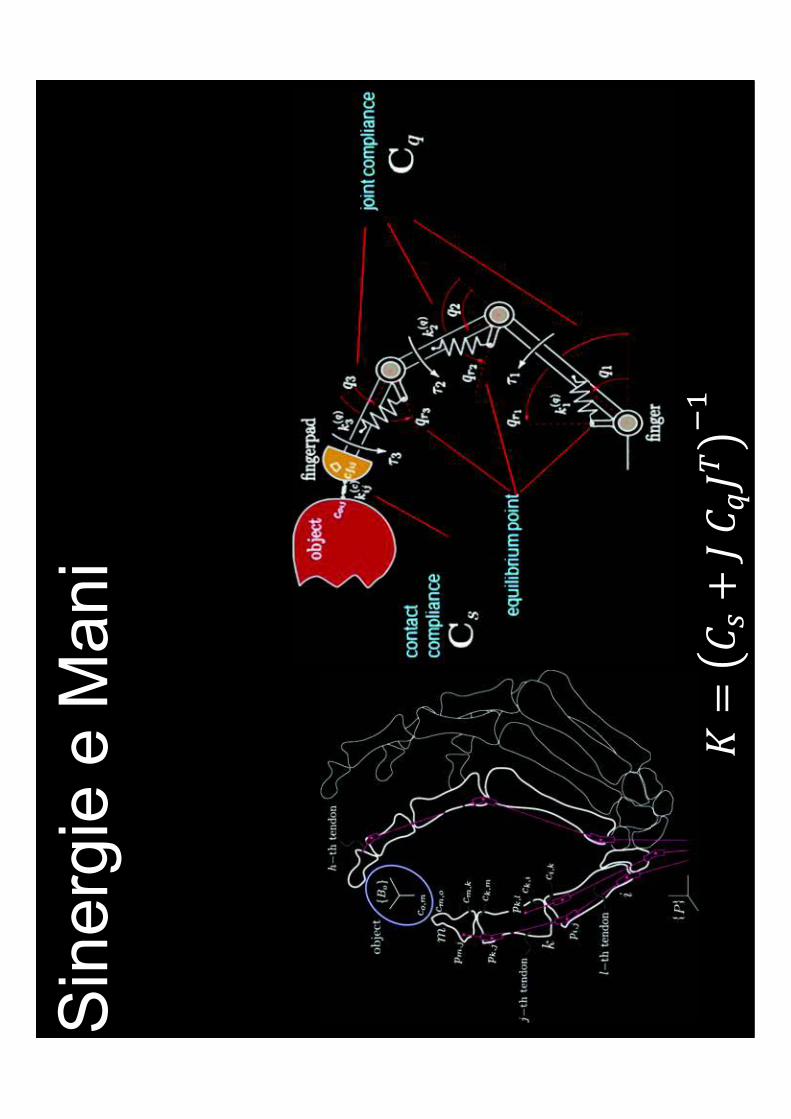
ie e
Mani
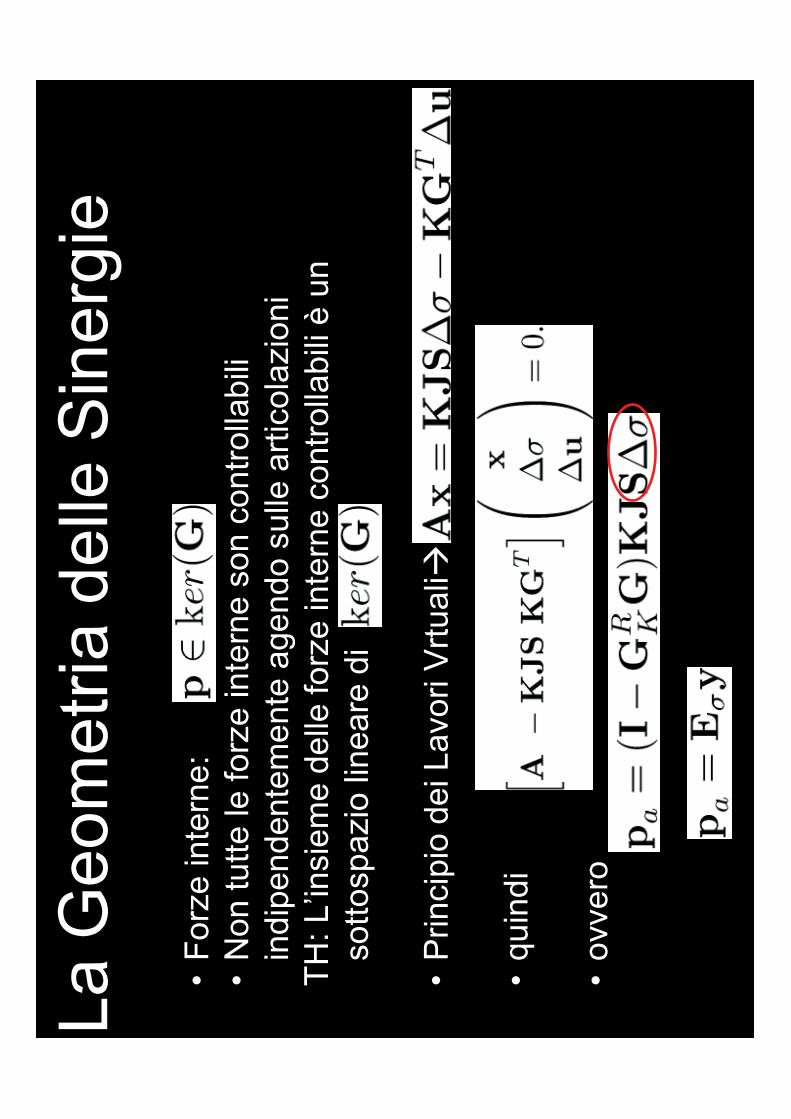
•F
orz
e inte
rne:
•N
on tu
tte
le forz
e inte
rne s
on c
ontr
olla
bili
indip
endente
mente
ag
en
do s
ulle
art
icola
zio
ni
TH
: L’in
sie
me d
elle
forz
e inte
rne c
ontr
olla
bili
è u
n
sott
ospazio
lin
eare
di
•P
rincip
io d
ei Lavori
Vrt
ualià
•quin
di
•ovve
ro
La
Geom
etr
ia d
elle
Sin
erg
ie
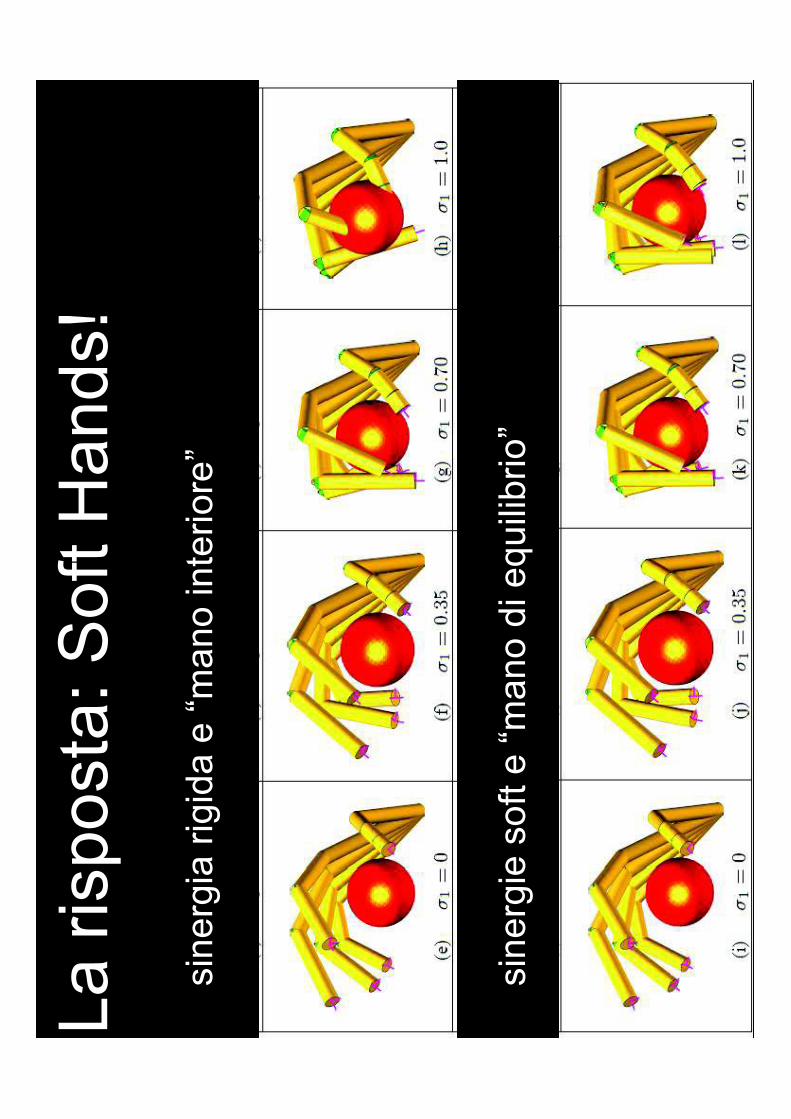
sin
erg
ia r
igid
a e
“m
ano
inte
riore
”
sin
erg
ie s
oft
e “
mano
di e
qu
ilib
rio
”
La
ris
posta
: S
oft
Hands!
Pic
colo
Oggett
o R
osso

• A
shtr
ay
Port
acenere
Grigio
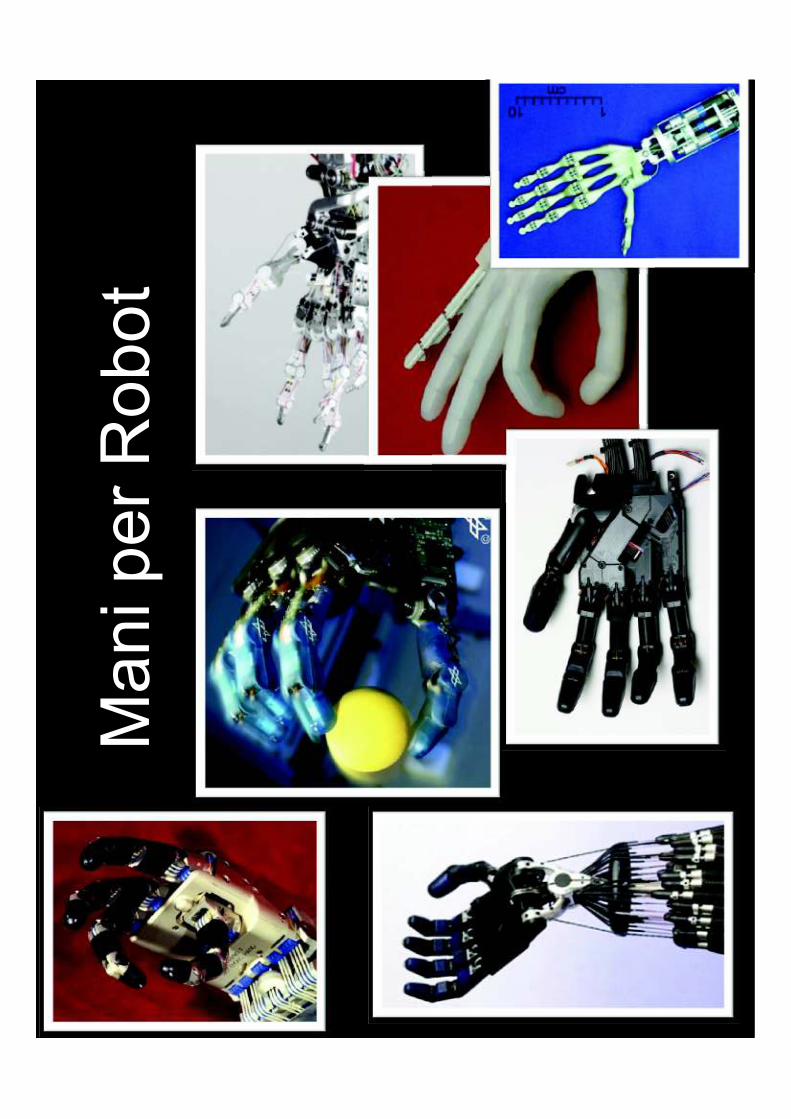
Mani per
Robot
Il v
ero
pro
ble
ma
Com
e c
ostr
uire
robot
che
sia
no
– s
icuri m
a f
ort
i
– s
em
plic
i m
a c
apaci
– inte
lligenti m
a p
ratici
Le
nostr
e a
rmi
– m
uscoli
per
robot e s
oft
robotics
– s
inerg
ie
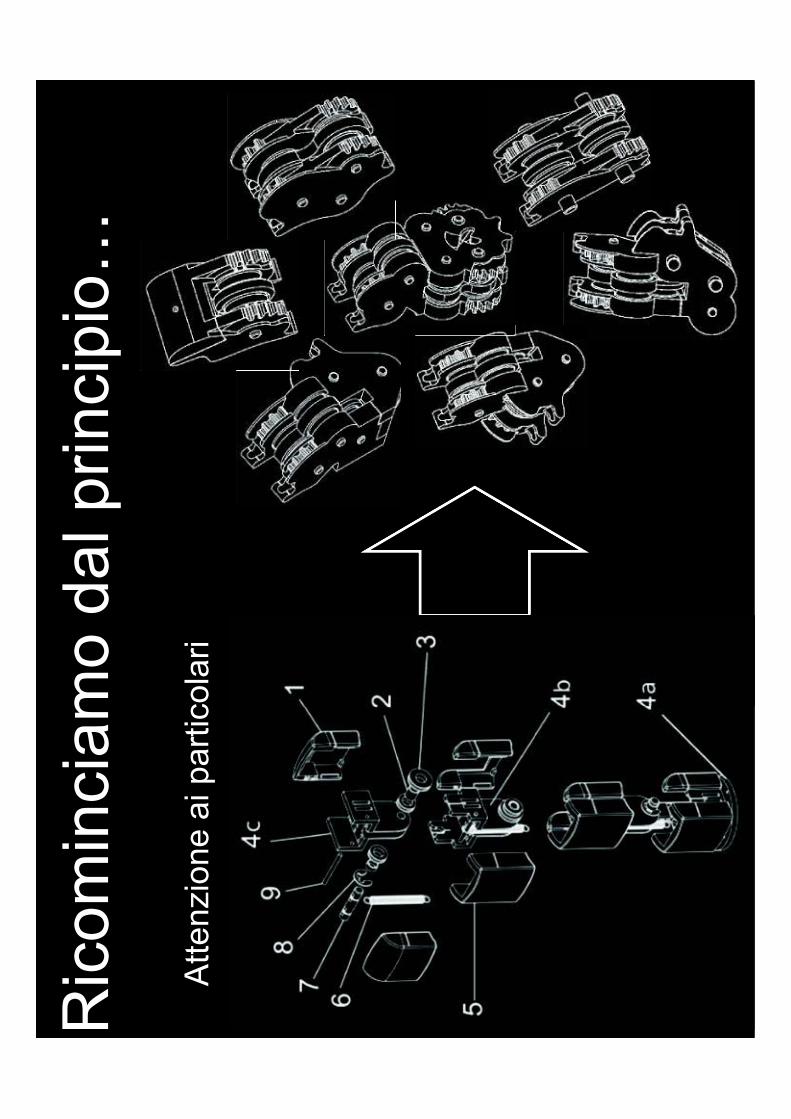
Ric
om
incia
mo
dal princip
io…
Att
enzio
ne a
i part
icola
ri
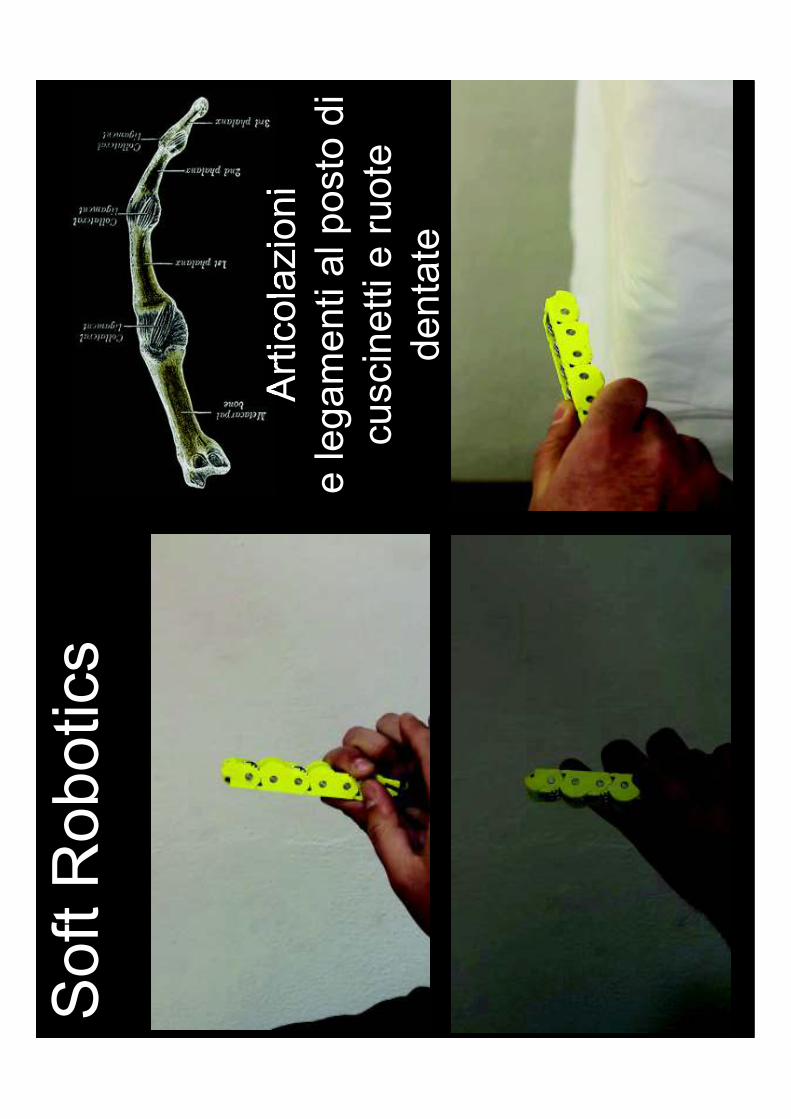
Art
icola
zio
ni
e legam
enti a
l posto
di
cuscin
etti e r
uote
denta
te
Soft
Robotics
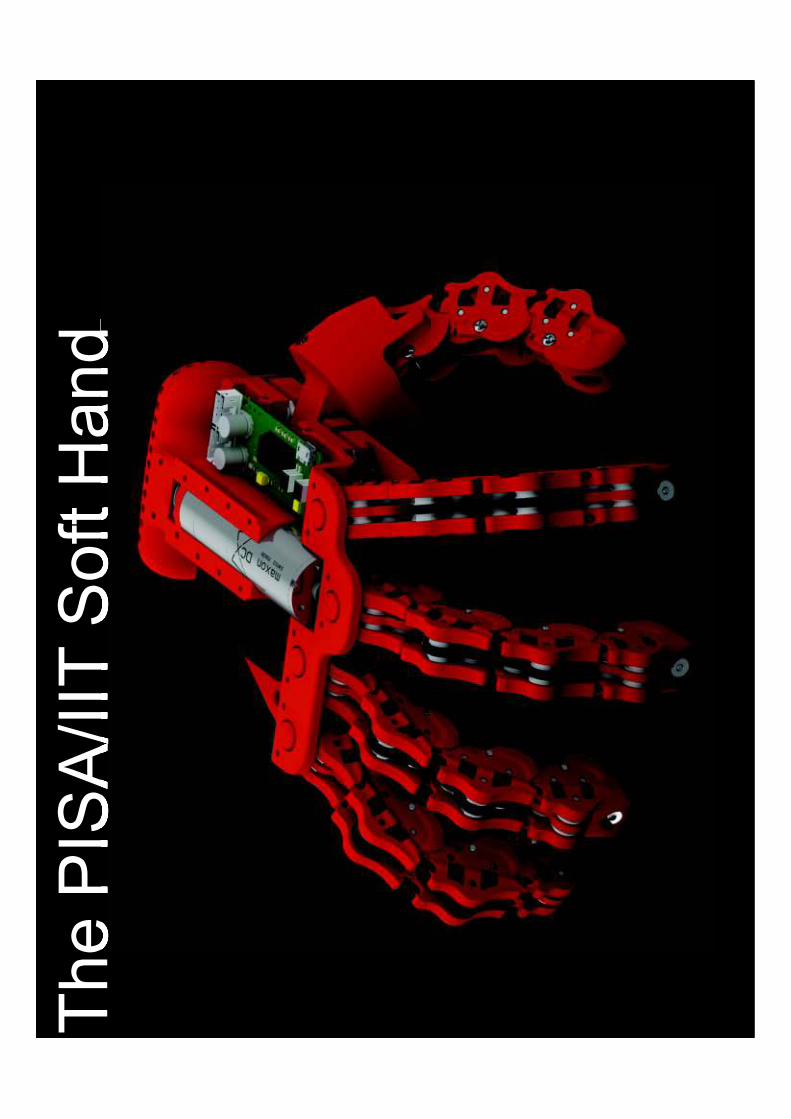
The P
ISA
/IIT
Soft
Hand

The h
and

Hand o
n R
obots
Robotics to H
elp
in
Dis
aste
r S
earc
h a
nd R
escue
A C
halle
nge t
o b
e T
aken U
p
An I
talia
n C
ontr
ibution
CE
NT
RO
“E
. P
IAG
GIO
”
UN
IVE
RS
ITA
’ D
I P
ISA
IST
ITU
TO
ITA
LIA
NO
DI
TE
CN
OL
OG
IA


I
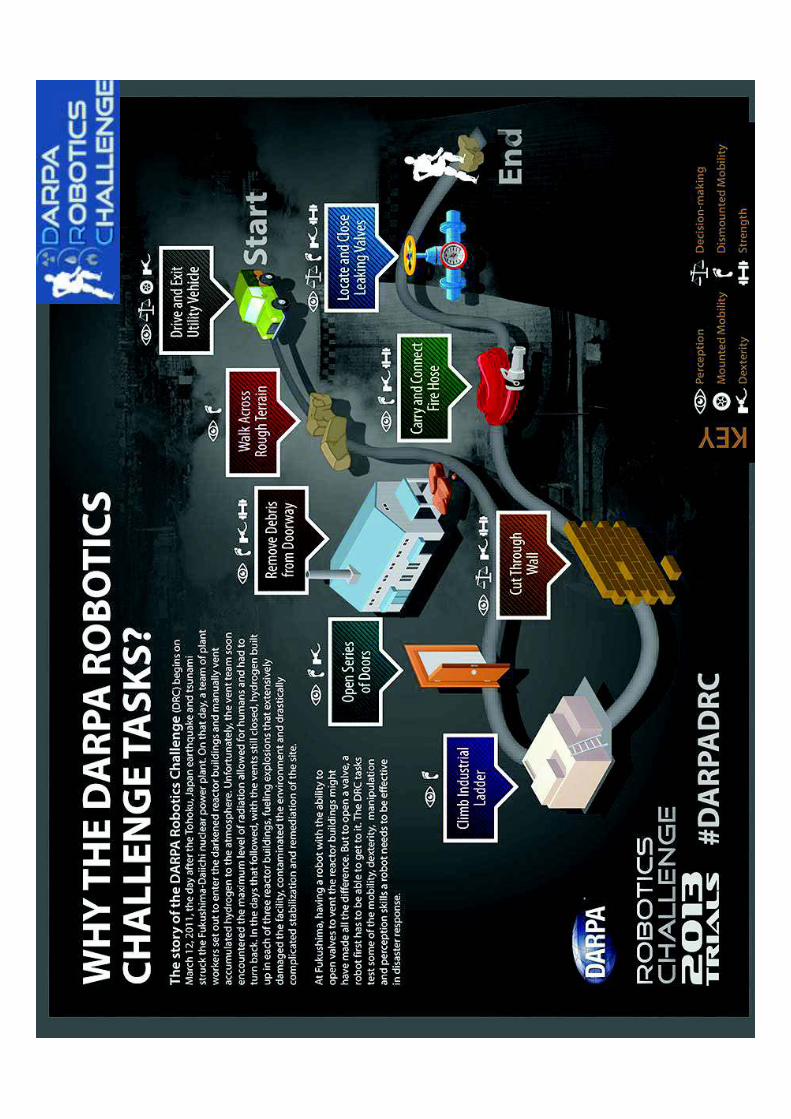
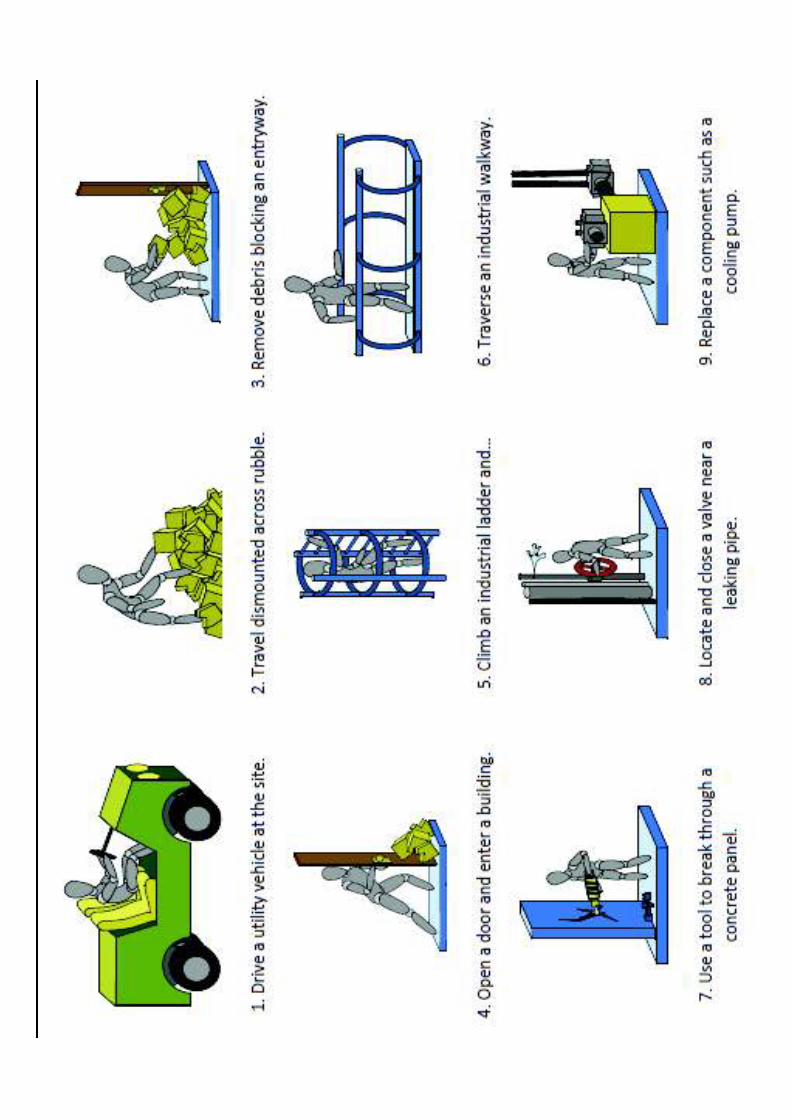
ntro
du
ctio
n
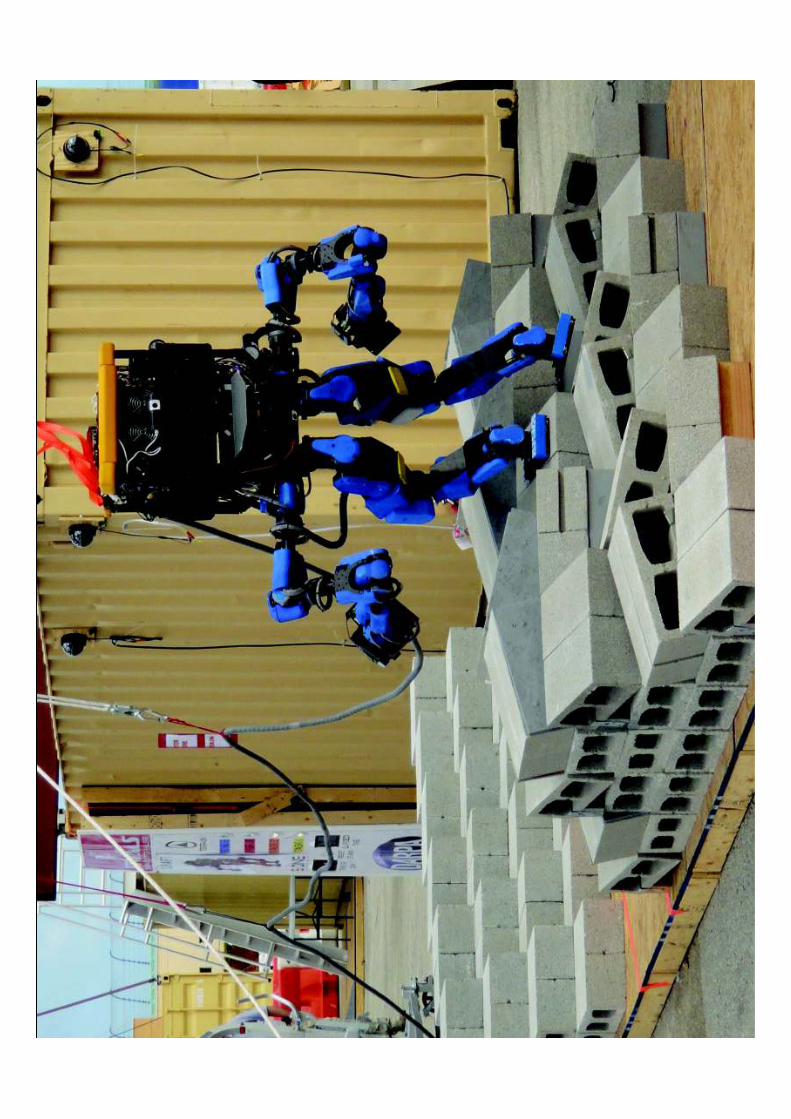
•D
arp
a R
ob
oti
cs C
ha
lle
ng
e
99
99
99

WA
LK
-MA
N E
U P
roje
ct
•In
tegra
ted P
roje
ct
(IP
), 5
part
ners
•C
oord
inato
r: I
IT
•B
udget:
€5,6
20,0
00
•D
ura
tion:
48M
•S
tart
ing:
Sept 2013
10
0
Wh
ole
Bo
dy A
dap
tive L
oco
mo
tio
n a
nd
MA
Nip
ula
tio
n

IIT
-Pis
a t
eam
@ D
RC

The n
ext big
thin
g

Inte
rfacce U
mane
per
la
Pis
a-I
IT S
oft
Hand
Una
ma
no
da
str
ingere

Learn
ing f
rom
the H
um
an
Robot
Hands W
ork
shop
Hard
Work
10K
g
Hard
er
and h
ard
er
If
need b
e
Too m
uch
is
too m
uch
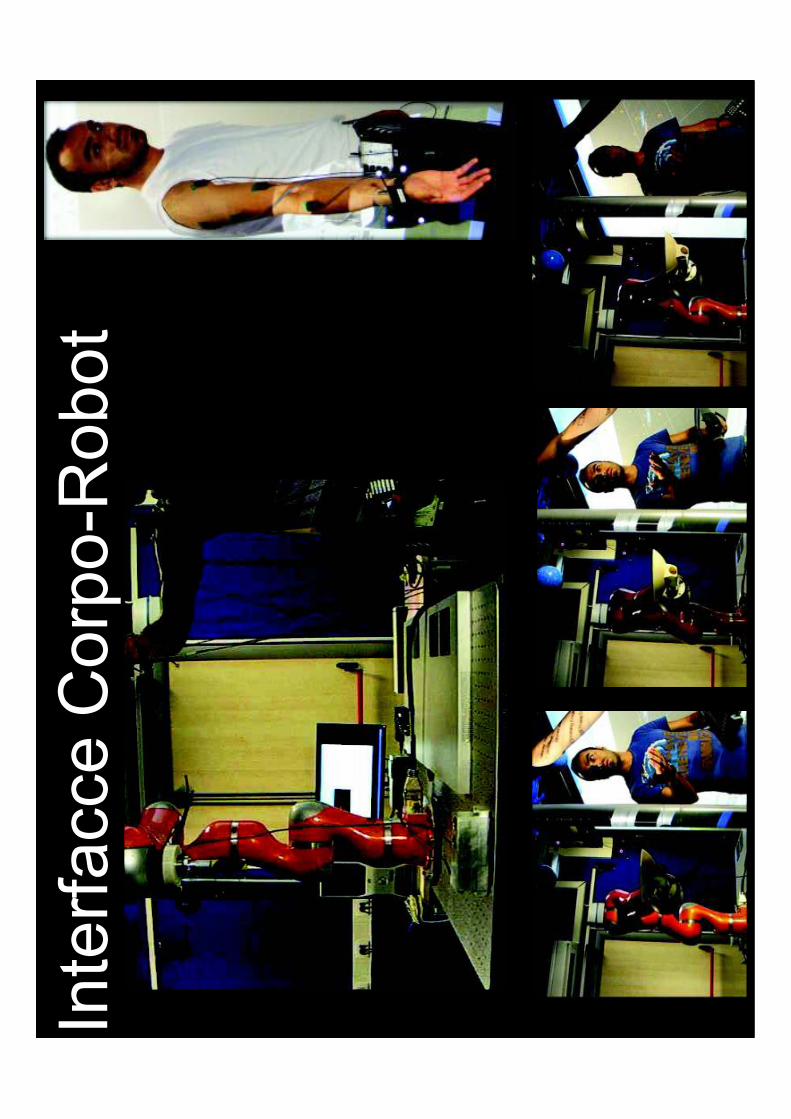
Inte
rfacce C
orp
o-R
obot
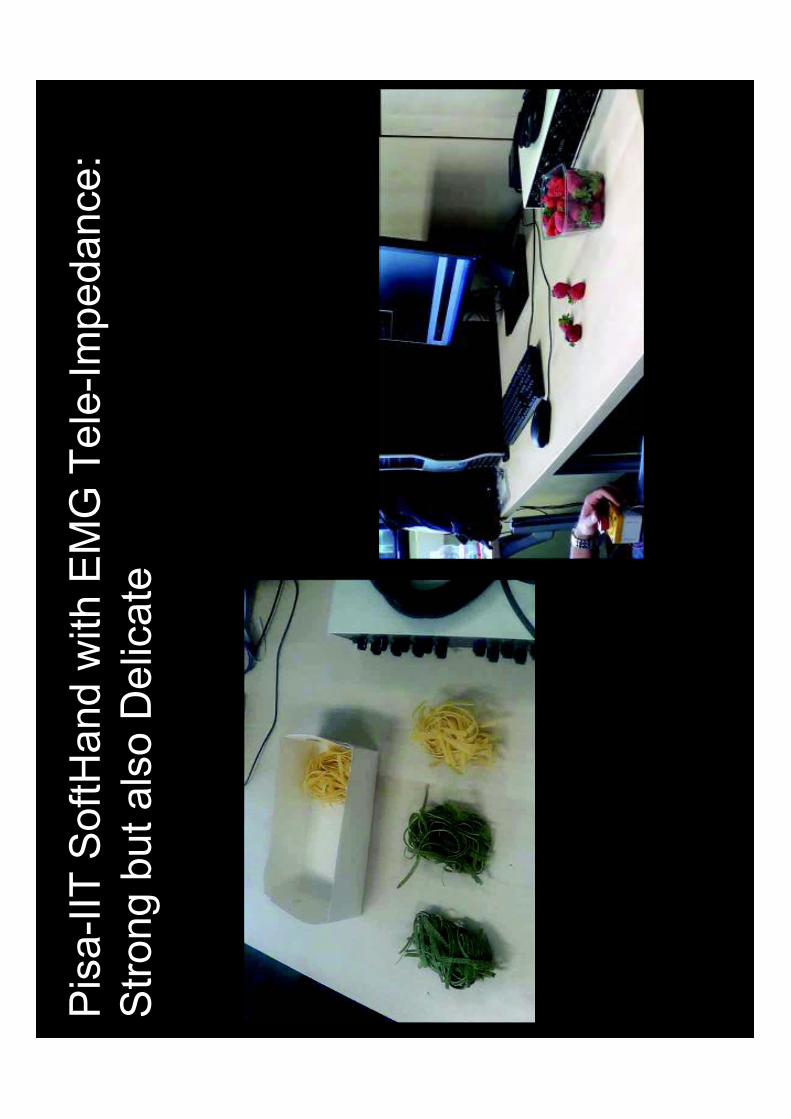
Pis
a-I
IT S
oft
Hand w
ith E
MG
Tele
-Im
pedance:
Str
ong b
ut als
o D
elic
ate

EM
G C
ontr
ol

Fro
m h
um
ans to r
obots
and b
ack a
gain
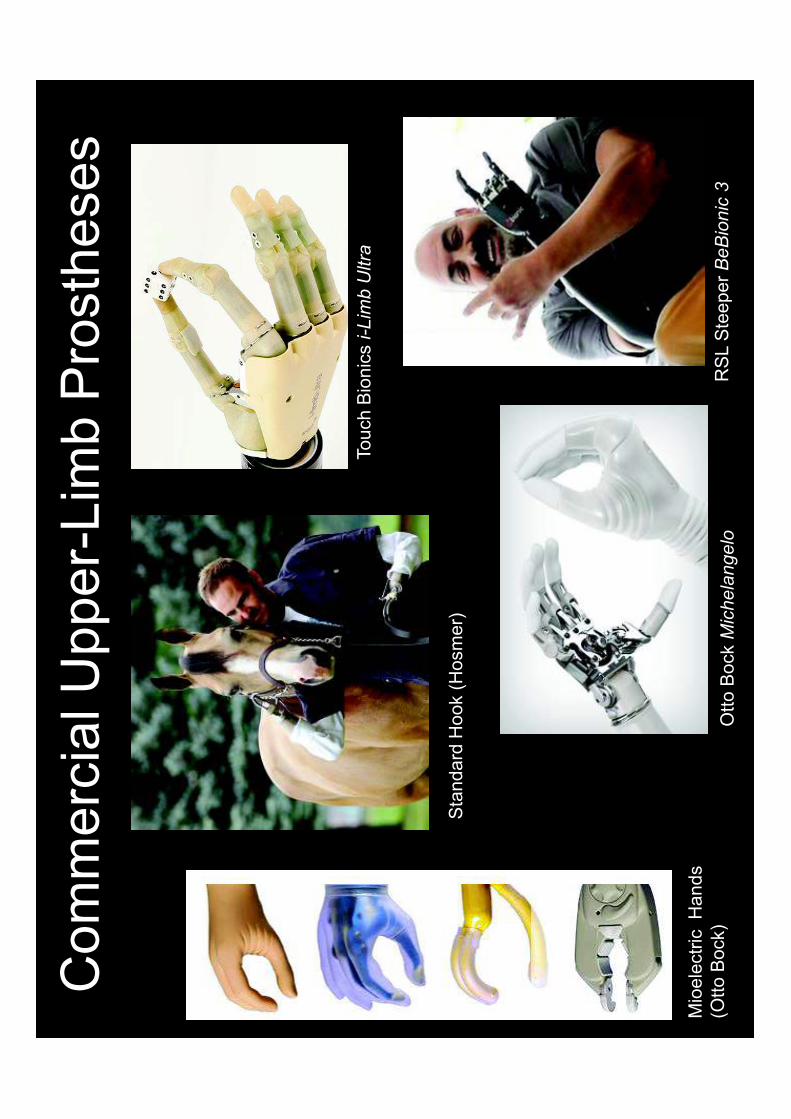
Com
merc
ial U
pper-
Lim
b P
rosth
eses
Sta
nda
rd H
ook (
Hosm
er)
Tou
ch
Bio
nic
s i-L
imb U
ltra
Mio
ele
ctr
ic H
an
ds
(Ott
o B
ock)
Ott
o B
ock M
ich
ela
ngelo
R
SL S
tee
pe
r B
eB
ion
ic 3

Soft
Hand P
ro

Pro
sth
etics
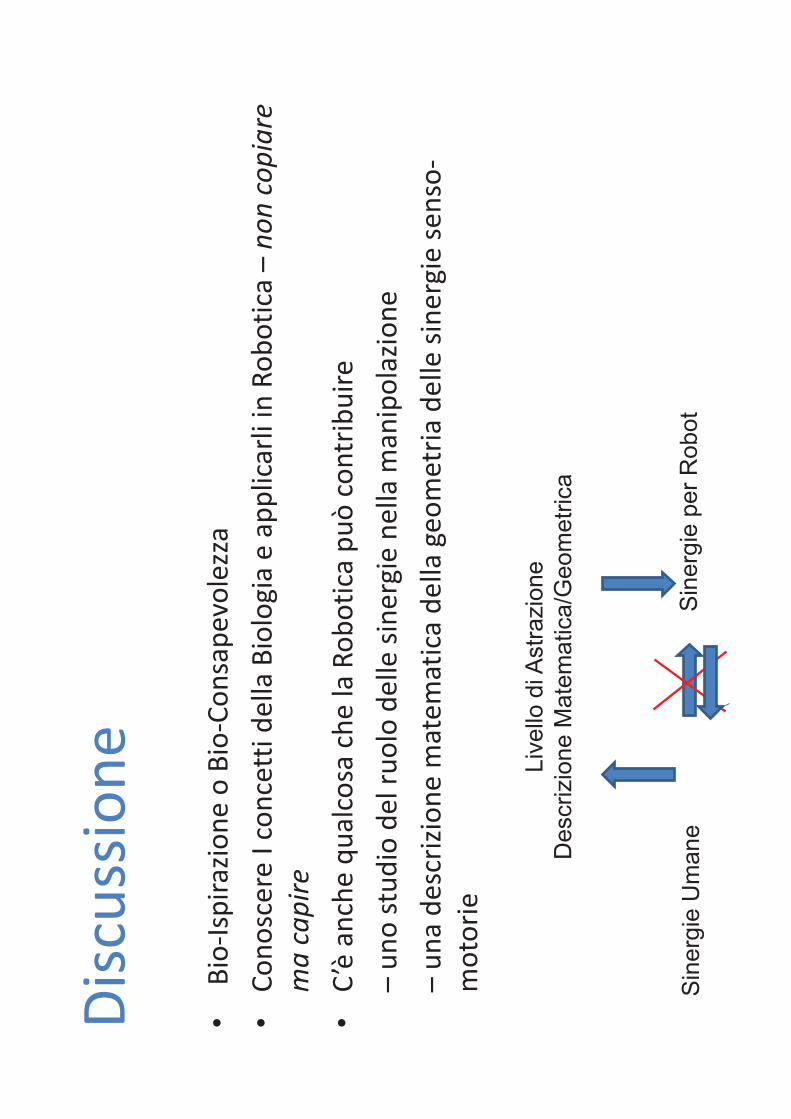
• B
io-I
spir
azi
on
e o
Bio
-Co
nsa
pe
vo
lezz
a
•C
on
osc
ere
I c
on
cett
i d
ell
a B
iolo
gia
e a
pp
lica
rli
in R
ob
oti
ca –
no
n c
op
iare
ma
ca
pir
e
•C’è
an
che
qu
alc
osa
ch
e l
a R
ob
oti
ca p
uò
co
ntr
ibu
ire
–
un
o s
tud
io d
el
ruo
lo d
ell
e s
ine
rgie
ne
lla
ma
nip
ola
zio
ne
–
un
a d
esc
rizi
on
e m
ate
ma
tica
de
lla
ge
om
etr
ia d
ell
e s
ine
rgie
se
nso
-
mo
tori
e
Dis
cuss
ion
e
Sin
erg
ie U
man
e
Sin
erg
ie p
er
Rob
ot
Liv
ello
di A
str
azio
ne
Descri
zio
ne
Mate
matica
/Geom
etr
ica
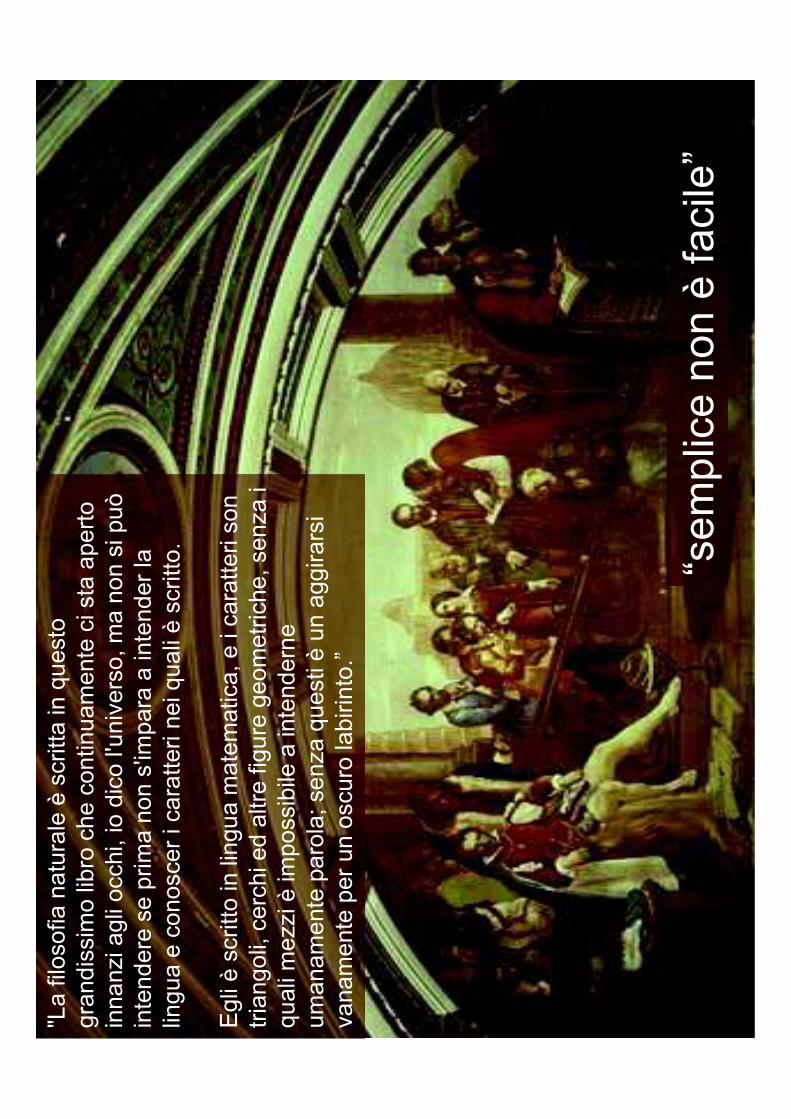
"La f
ilosofia
natu
rale
è s
critt
a in q
uesto
gra
nd
issim
o lib
ro c
he c
ontinua
mente
ci sta
apert
o
inna
nzi agli
occhi, io d
ico
l'u
niv
ers
o, m
a n
on s
i può
inte
nde
re s
e p
rim
a n
on
s'im
para
a inte
nder
la
lingua e
conoscer
i cara
tteri n
ei quali
è s
critt
o.
Egli
è s
critt
o in lin
gu
a m
ate
matica, e i c
ara
tteri s
on
tria
ngo
li, c
erc
hi ed a
ltre
fig
ure
geo
metr
iche, senza i
quali
mezzi è im
po
ssib
ile a
inte
ndern
e
um
an
am
en
te p
aro
la; se
nza
qu
esti è
un
ag
gir
ars
i
vanam
ente
per
un o
scuro
labirin
to.”
“sem
plic
e n
on è
facile
”

CE
NT
RO
“E
. P
IAG
GIO
”
UN
IVE
RS
ITA
’ D
I P
ISA
Gra
zie
!

Anoth
er
pers
pective
Am
pute
es a
re m
ostly w
here
vio
lence
and w
ar
are
Pro
sth
eses a
re m
ost
needed
whe
re t
hey a
re least
ava
ilab
le
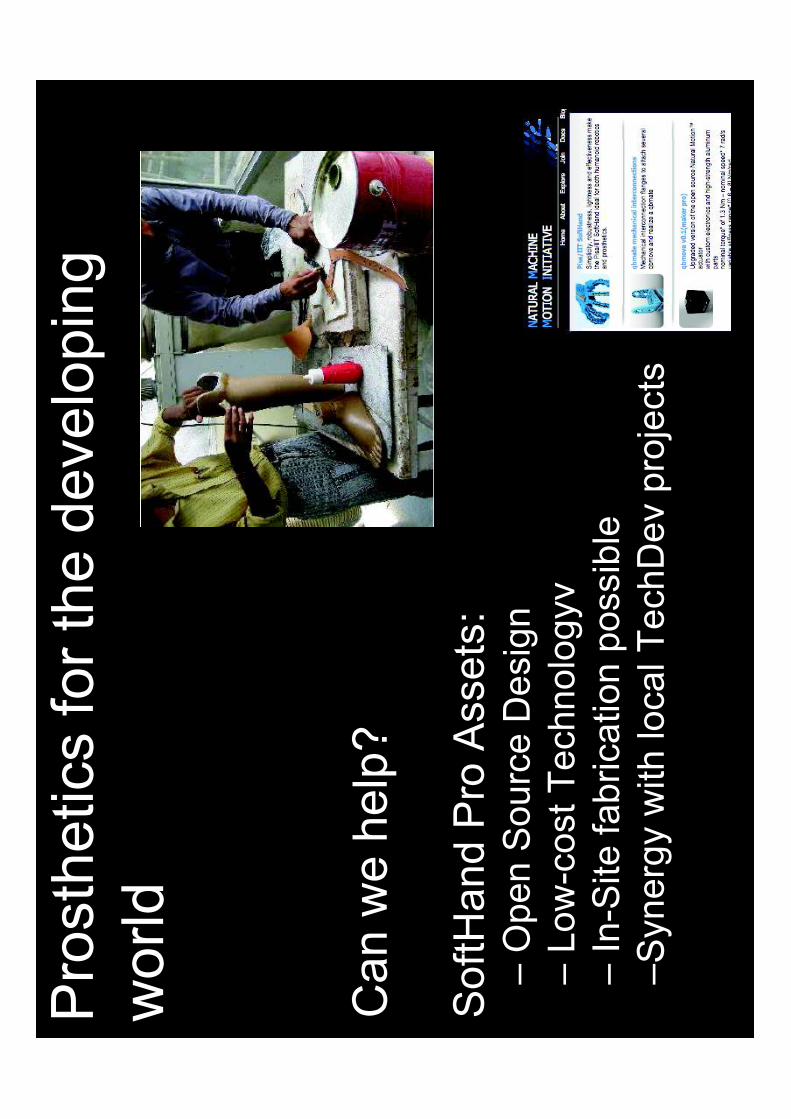
Pro
sth
etics f
or
the d
evelo
pin
g
world
Can w
e h
elp
?
Soft
Hand P
ro A
ssets
: –
Open S
ourc
e D
esig
n
– L
ow
-cost
Techno
logyv
– In
-Site fabrica
tion p
ossib
le
–S
ynerg
y w
ith local T
echD
ev p
roje
cts