La realtà virtuale nella progettazione industriale · La Realtà Virtuale nella Progettazione...
38
ARACNE La realtà virtuale nella progettazione industriale Francesco Caputo Giuseppe Di Gironimo
-
Upload
nguyentuong -
Category
Documents
-
view
251 -
download
4
Transcript of La realtà virtuale nella progettazione industriale · La Realtà Virtuale nella Progettazione...
ARACNE
La realtà virtualenella progettazione
industriale
Francesco Caputo Giuseppe Di Gironimo

Copyright © MMVIIARACNE editrice S.r.l.
via Raffaele Garofalo, 133 A/B00173 Roma
(06) 93781065
ISBN 978–88–548–1339–7
I diritti di traduzione, di memorizzazione elettronica,di riproduzione e di adattamento anche parziale,
con qualsiasi mezzo, sono riservati per tutti i Paesi.
Non sono assolutamente consentite le fotocopiesenza il permesso scritto dell’Editore.
I edizione: settembre 2007

Alle nostre mogli Luciana ed Ornella


Noi vediamo sono molti che hanno l’ingegno, e molti dotati d’ingegno e non di dottrina,
e molti hanno la dottrina e lo ingegno e non hanno il disegno.
Francesco di Giorgio Martini

9
Indice
Presentazione ................................................................................ 15 Introduzione ................................................................................. 17 PARTE PRIMA: STRUMENTI Capitolo I: La Realtà Virtuale I.1. Dematerializzazione della realtà ....................................... 27 I.2. I primi passi della Realtà Virtuale .................................... 33 I.3. Campi di applicazione della Realtà Virtuale .................... 37 I.3.1. Virtual Prototyping ............................................ 38 I.3.2. Applicazioni in ambito veicolistico .................... 44 I.3.3. Applicazioni in ambito architettonico ................ 62 I.3.4. Applicazioni in ambito medico ........................... 63 I.3.5. Applicazioni in ambito militare .......................... 65 I.4. Livelli di interazione ......................................................... 65 I.4.1. Walk Through ..................................................... 65 I.4.2. Spostamento di oggetti virtuali .......................... 66 I.4.3. Modifica delle proprietà degli oggetti virtuali ... 67 I.5. Sistemi grafici ed unità di calcolo ..................................... 67 I.5.1. Introduzione ....................................................... 67 I.5.2. Sistemi high-end Onyx e cluster di PC ............... 71 I.5.3. Soluzioni innovative: Orad VR-X, Nvidia Qua-
dro Plex, SGI VSS .............................................. 77 I.6. Sistemi di visualizzazione ................................................ 79 I.6.1. La visione stereoscopica..................................... 79 I.6.2. La visione stereoscopica nella RV ..................... 83 I.6.3. Parallasse ........................................................... 85 I.6.4. Tecnologie di proiezione .................................... 87 I.6.5. Modalità di proiezione ....................................... 93 I.7. Dispositivi di input ............................................................ 96 I.7.1. Sistemi di tracking .............................................. 96 I.7.2. Sistemi di navigazione ........................................ 101 I.7.3. Sistemi di manipolazione ................................... 104 I.7.4. Sistemi Haptic .................................................... 106 I.8. Dispositivi di output .......................................................... 113 I.8.1. Sistemi di visualizzazione ................................... 113
Indice 10
I.8.2. Audio tridimensionale ........................................ 132 I.9. Ambienti di programmazione e sviluppo .......................... 137 I.9.1. Il linguaggio VRML ........................................... 137 I.9.2. Il linguaggio C++ e la programmazione object
oriented .............................................................. 140 I.9.3. Primitive grafiche ed OpenGL ........................... 140 I.9.4. OpenSG ed OpenInventor .................................. 141 Capitolo II: Laboratori di Realtà Virtuale II.1. Componenti principali ...................................................... 143 II.2. Il laboratorio di Realtà Virtuale del DPGI: VRoom .......... 144 II.2.1. Sistema grafico e di calcolo ............................... 145 II.2.2. Sistema di visualizzazione .................................. 147 II.2.3. Sistema di tracking ............................................. 150 II.2.4. Sistemi di input 3D per la navigazione .............. 152 II.2.5. Sistemi di input 3D per la manipolazione .......... 152 II.2.6. Sala ..................................................................... 152 II.2.7. Software ............................................................. 153 II.3. Il laboratorio di Realtà Virtuale del Centro di Competen-
za Trasporti della Regione Campania: VRTest ................. 153 II.3.1. Sistema grafico e di calcolo ............................... 156 II.3.2. Sistema di visualizzazione .................................. 159 II.3.3. Apparati per lo stereo attivo .............................. 162 II.3.4. Sistema di tracking ............................................. 163 II.3.5. Sistema audio ..................................................... 171 II.3.6. Sistemi di input 3D per la navigazione .............. 171 II.3.7. Sistemi di input 3D per la manipolazione .......... 171 II.3.8. Sala ..................................................................... 172 II.3.9. Software ............................................................. 172 II.4. Considerazioni conclusive sui laboratori .......................... 174 Capitolo III: Software per la Realtà Virtuale III.1. Introduzione ...................................................................... 177 III.2. Problematiche connesse alla scelta del software RV ........ 177 III.2.1. Obiettivi di utilizzo ............................................. 178 III.2.2. Sistema grafico e di calcolo e sistema di visua-
lizzazione ............................................................ 179 III.2.3. Interfacciamento con i dispositivi RV ................ 182 III.3. I software presenti nei laboratori VRTest e VRoom .......... 182 III.4. Classificazione dei software RV ....................................... 186

La Realtà Virtuale nella Progettazione Industriale 11
III.5. Catia V5 ............................................................................ 187 III.5.1. DMU Fitting Simulator ...................................... 189 III.5.2. Virtual Hand for Catia V5 ................................. 194 III.5.3. Simulazione di attività manutentive in ambiente
Catia V5 – Virtual Hand .................................... 200 III.6. Jack ................................................................................... 203 III.6.1. Introduzione: i manichini virtuali nella proget-
tazione ................................................................ 203 III.6.2. Il manichino virtuale Jack .................................. 205 III.6.3. L’Occupant Packaging Toolkit .......................... 216 III.6.4. Il Task Analysis Toolkit ...................................... 228 III.6.5. Jack e la Realtà Virtuale .................................... 242 III.7. Virtual Design 2 ................................................................ 244 III.7.1. Introduzione ....................................................... 244 III.7.2. Virtual Design Scene Editor (VDSE) ................. 244 III.7.3. Virtual Design 2 (VD2) ...................................... 253 III.7.4. Programmazione dell’ambiente virtuale ............ 272 III.7.5. Dynamic Shared Objects (DSO) ........................ 280 III.7.6. Wizard ................................................................ 286 III.7.7. Realizzare un plug-in ......................................... 287 III.7.8. Package .............................................................. 288 III.7.9. Moduli sviluppati dall’Università di Napoli Fe-
derico II .............................................................. 295 III.7.10 Considerazioni conclusive sul software VD2 ..... 300 III.8. ViRstperson ....................................................................... 302 III.8.1. Le funzioni del ViRstperson ............................... 303 III.8.2. Applicazione delle ombre in tempo reale ........... 305 III.8.3. Simulazione della dinamica dei corpi rigidi ...... 306 III.8.4. L’utilizzo del software ........................................ 312 III.8.5. Creazione della scena ........................................ 313 III.8.6. Posizionamento delle luci .................................. 314 III.8.7. Definizione dei parametri che governano la di-
namica dei corpi rigidi ....................................... 315 III.8.8. Avvio della simulazione ...................................... 317 PARTE SECONDA: APPLICAZIONI Capitolo IV: Primo livello d’interazione con ambienti virtuali: il “walk through” IV.1. Introduzione ...................................................................... 321

Indice 12
IV.2. Realizzazione di un “walk through” all’interno della ca-bina passeggeri del Piaggio P180 Avanti .......................... 322
IV.2.1. Ambiente di visualizzazione Catia V5 ................ 325 IV.2.2. Ambiente di visualizzazione ViRstperson ........... 329 IV.2.3. Confronto tra i due approcci proposti ............... 331 IV.3. Ricostruzione di scenari reali e immaginari ...................... 335 IV.3.1. Metodi per la rappresentazione del territorio ... 335 IV.3.2. Ricostruzione della stazione ferroviaria di
Mergellina .......................................................... 338 IV.3.3. Una “passeggiata virtuale” nel Parco dello
Sport di “Bagnoli Futura” ................................. 342 Capitolo V: Progettazione Concettuale in Ambiente Virtuale V.1. Introduzione ...................................................................... 345 V.2. Progettazione concettuale per la qualità ........................... 348 V.3. Il Metodo EVA ................................................................. 351 V.4. Primo caso studio: caffettiera napoletana ......................... 352 V.4.1. Individuazione degli elementi di qualità ............ 353 V.4.2. Classificazione degli elementi di qualità ........... 354 V.4.3. Generazione dei concept .................................... 354 V.4.4. Valutazione della qualità dei concept ................ 355 V.4.5. Definizione del concept ottimale ........................ 356 V.5. Secondo caso studio: plancia di una minicar .................... 357 V.5.1. Individuazione degli elementi di qualità ............ 357 V.5.2. Classificazione degli elementi di qualità ........... 357 V.5.3. Generazione dei concept .................................... 358 V.5.4. Valutazione della qualità dei concept ................ 358 V.5.5. Scelta del concept ottimale ................................. 362 V.6. Terzo caso studio: comparto passeggeri di una carrozza
ferroviaria .......................................................................... 364 V.6.1. Individuazione degli elementi di qualità ............ 367 V.6.2. Classificazione degli elementi di qualità ........... 367 V.6.3. Generazione dei concept .................................... 368 V.6.4. Valutazione della qualità dei concept ................ 375 V.7. Considerazioni conclusive ................................................ 380 Capitolo VI: Progettazione per la Manutenibilità in Ambiente Vir-tuale VI.1. Introduzione ...................................................................... 383 VI.2. Analisi di manutenibilità e limiti dei sistemi CAD tradi-

La Realtà Virtuale nella Progettazione Industriale 13
zionali ................................................................................ 385 VI.2.1. Analisi di smontabilità ....................................... 386 VI.2.2. Analisi di accessibilità ....................................... 387 VI.2.3. Analisi di manipolabilità .................................... 389 VI.3. L’uomo nel progetto: simulazione delle attività manuten-
tive in ambiente virtuale .................................................... 390 VI.4. Impiego dei manichini virtuali: la Metodologia EDIVE .. 392 VI.5. Applicazione della metodologia EDIVE: casi studio nel
settore ferroviario .............................................................. 398 VI.5.1. Redesign di una locomotiva di manovra e veri-
fica delle operazioni di manutenzione ................ 399 VI.5.2. Progettazione per la manutenibilità di un im-
pianto di condizionamento di un nuovo veicolo ferroviario .......................................................... 406
VI.6. Interazione manuale diretta in ambiente immersivo di re-altà virtuale: l’approccio DIR.MAN.INT. ..........................
422
VI.6.1. Il realismo nell’interazione ................................ 424 VI.6.2. Sistema d’interazione manuale diretta ............... 426 VI.6.3. Applicazione dell’approccio DIR.MAN.INT:
verifica di manutenibilità del sistema di pressu-rizzazione e condizionamento del Piaggio P180 Avanti .................................................................
427 VI.7. Verifiche di manutenibilità su assiemi complessi ............. 433 VI.7.1. La scheda manutentiva ....................................... 437 VI.7.2. Vantaggi offerti dalla metodologia .................... 437 VI.8. Caso studio: analisi delle operazioni di manutenzione su
un carrello motore e portante di un veicolo ferroviario .... 439 VI.8.1. Approccio CATIA V5 – Virtual Hand ................ 442 VI.8.2. Approccio ViRstperson ....................................... 455 VI.8.3. Approccio Virtual Design 2 ............................... 459 VI.8.4. Valutazioni comparative .................................... 467 VI.9. Considerazioni conclusive ................................................ 469 Capitolo VII: Virtual Manufacturing VII.1. Introduzione ...................................................................... 471 VII.2. Studio del ciclo di montaggio di una carrozza ferroviaria
in ambiente virtuale ........................................................... 473 VII.2.1. Stato dell’arte nella produzione di veicoli fer-
roviari ................................................................. 474 VII.2.2. Risorse software impiegate ................................ 476
Indice 14
VII.2.3. Ciclo di montaggio innovativo di un veicolo ferroviario: prima impostazione ........................ 479
VII.2.4. Prima ottimizzazione del ciclo di montaggio ..... 505 VII.2.5. Ottimizzazione finale del ciclo di montaggio ..... 506 VII.3. Considerazioni conclusive ................................................ 510 Conclusioni ................................................................................... 513 Riferimenti bibliografici .............................................................. 517 Ringraziamenti ............................................................................. 541

15
Presentazione di
Guido Trombetti* Sono particolarmente lieto di poter presentare questo bel volume
di Francesco Caputo e Giuseppe Di Gironimo. E ciò per due ordini di motivi. Il primo è che fa sempre piacere poter riflettere sul lavoro compiuto da eminenti colleghi. Il secondo è che questo libro fornisce un’ulteriore conferma di quanto l’interazione tra Università e mondo produttivo possa essere utile ad entrambi. In effetti, gli autori attra-verso sei anni di lavoro hanno operato un significativo ed originale trasferimento di tecnologie di progettazione, fino ad oggi impiegate diffusamente solo in ambito automobilistico, ad altri comparti indu-striali. Ciò attraverso l’ausilio della Realtà Virtuale. Tale attività ha portato tra l’altro alla realizzazione, nell’ambito del Centro di Com-petenza dei Trasporti della Regione Campania, di uno dei più avanza-ti laboratori di Realtà Virtuale d’Europa.
In sintesi, uno straordinario esempio di collaborazione tra il mon-do imprenditoriale con le sue esigenze ed il mondo scientifico con le sue competenze. Il lavoro necessario allo sviluppo e l’impiego delle tecnologie di progettazione con l’ausilio della Realtà Virtuale ha cre-ato anche una straordinaria occasione per formare giovani ingegneri. Ancora una volta, ricerca, sviluppo ed alta formazione unite in modo indissolubile. Tutto ciò si evince dal bel volume che qui presentiamo. In particolare, la prima parte del libro è rivolta alle conoscenze di base della Realtà Virtuale; la seconda alle sue specifiche applicazio-ni. I contenuti del volume, in definitiva, costituiscono un’efficace e documentata dimostrazione di quanto le tecniche di simulazione e, più in generale, il processo di “astrazione dal materiale” siano oggi ca-ratteristica peculiare del ciclo di progettazione e di sviluppo del pro-dotto. Ciò, ovviamente, vale a maggior ragione per i prodotti indu-striali complessi, quali sono gli attuali mezzi di trasporto, che debbo-no rispondere, oltre che a requisiti di funzionalità, affidabilità ed eco-nomia d’acquisto e di gestione, anche a quello del gradimento (esteti-co ed ergonomico) di chi li utilizza.
La Realtà Virtuale, secondo gli autori, si rivela come strumento idoneo a porre l’Uomo al centro del processo di progettazione.
* Rettore Magnifico dell’Università degli Studi di Napoli Federico II. Presidente della Conferenza dei Rettori delle Università Italiane (CRUI).


17
Introduzione
Le attività di modellazione e di simulazione, basate sull’informatica, costituiscono oggi strumenti irrinunciabili per conse-guire risultati di eccellenza nella progettazione dei prodotti industriali. Esse realizzano nella Realtà Virtuale (RV) la loro sintesi più efficace e potente, poiché questo strumento, meglio di ogni altro, favorisce l’essenza stessa del progettare che consiste, essenzialmente, nel con-cepire, e nel proiettare verso il futuro, idee innovative per il soddisfa-cimento di fabbisogni reali della società in cui viviamo.
La progettazione è anche l’attività dell’Ingegneria che richiede og-gi il maggior potenziamento poiché, per il completamento del suo in-tero iter, sono disponibili tempi che tendono a divenire sempre più brevi.
Questi, in sintesi, i motivi che giustificano l’impiego di strumenti hardware e software sofisticati, complessi, costosi ed in continua evo-luzione, che richiedono anche l’opera di tecnici con adeguato livello di preparazione ed in continuo aggiornamento.
La scelta metodologica da intraprendere, già da qualche anno attua-ta nei settori industriali più competitivi, automobilistico, aeronautico, spaziale, è quella dell’ingegneria simultanea, basata sullo sviluppo del modello digitale del prodotto o DMU1, supportata da sistemi di model-lazione solida CAD di ultima generazione, che trova nei sistemi di Realtà Virtuale il suo ambiente più evoluto d’applicazione.
Poiché le tecniche di simulazione tendono a divenire sempre più efficaci, affidabili ed accurate, l’impiego del DMU del prodotto con-sente ogni sorta di verifica, di sperimentazione e di valutazione com-parativa tra più soluzioni alternative. I tempi che complessivamente si richiedono sono evidentemente molto più brevi di quelli occorrenti per la costruzione di altrettanti prototipi fisici, dei cosiddetti “muletti”, per impiegare un termine in uso nell’industria automobilistica.
I vantaggi d’impiegare modelli digitali, riducendo di molto, o ab-bandonando del tutto, l’uso dei modelli fisici, si conseguono con la costruzione di ambienti virtuali nei quali è possibile immergersi per simulare e valutare, fino ad ogni minimo dettaglio, tutte le caratteristi-che funzionali del prodotto.
1 Acronimo che sta per Digital Mock Up.

Introduzione 18
La più evidente ed immediata applicazione della RV nelle attività di progettazione è quella dello stile. In campo automobilistico, ad e-sempio, forme che fino a qualche anno fa venivano realizzate in scala 1:1, con ogni cura, dalle mani di esperti modellisti, in legno, gesso ed altri materiali, vengono oggi realizzate come modelli digitali e valuta-te in ambienti di realtà virtuale, con evidenti vantaggi di tempi e costi ed, inoltre, con la possibilità di apportare correzioni e varianti quasi in tempo reale.
Dopo lo stile, l’ergonomia. I mezzi di trasporto collettivi come gli aerei, gli autobus, le navi o i treni sono da considerare tra i manufatti che maggiormente incidono sulla qualità della vita dell’intera popola-zione. Nella progettazione di questi prodotti industriali complessi, come avviene in campo automobilistico, dovrebbe innanzi tutto essere privilegiato il requisito funzionale del comfort per l’utente, oltre che quello della sicurezza attiva e passiva. Questa priorità dovrebbe valere sia quando essi sono destinati ad operare su percorrenze che richiedo-no tempi di pochi minuti, sia per viaggi che richiedono molte ore.
In relazione alla specifica destinazione del mezzo di trasporto, la-vorando su modelli digitali in ambiente virtuale, è oggi possibile con-cepire, sviluppare, confrontare tra loro ed infine deliberare le soluzioni migliori. Impiegando una tale metodologia, infatti, è possibile speri-mentare caratteristiche funzionali come la facilità d’accesso e d’uscita dal mezzo, la posizione di seduta, la raggiungibilità dei comandi o di altri particolari funzionali o di arredo, come corrimano, bagagliai o piani di appoggio. La fruizione di tali caratteristiche, insieme con quella dei colori, della natura e dell’aspetto dei materiali impiegati, costituisce elemento che, consapevolmente o inconsapevolmente, in-duce l’utente a percepire la qualità del manufatto e, conseguentemen-te, a formulare un suo giudizio. Così il prodotto o il servizio offerto è ritenuto complessivamente più o meno valido, e quindi più o meno gradevole, anche sulla base di una molteplicità d’impressioni sogget-tive formulate da utenti che per cultura, abitudini, sesso, età, statura, peso possono essere anche assai differenti tra loro; queste impressioni, spesso, sono variamente motivate dalla percezione dell’una o dell’altra delle caratteristiche.
Con l’impiego della RV tutte le valutazioni, evidentemente, sono rese possibili prima di aver realizzato alcunché di fisico. Su una parte degli autobus destinati al servizio pubblico di una grande città italiana, ad esempio, è possibile riscontrare che il raggiungimento del pulsante per la richiesta della fermata, collocato in prossimità della porta di

La Realtà Virtuale nella Progettazione Industriale 19
Figura i.1. Posizionamento del pulsante di richiesta fermata su autobus per trasporto pubblico: a sinistra posizionamento non corretto ai fini della rag-
giungibilità; a destra posizionamento corretto.
uscita, sia, a dir poco, problematico, poiché esso è posizionato sulla parete, ma, dal lato della porta, è coperto da un pannello di materiale trasparente, come si vede nella foto di sinistra in figura i.1. In un auto-bus affollato, dove i movimenti sono ostacolati dalla presenza di altri passeggeri e gli equilibri sono precari, con una siffatta soluzione, compiere la banale, ma pur necessaria, operazione di richiedere la fermata da parte di un utente di statura ridotta può riuscire veramente difficile, talvolta impossibile. È evidente che la soluzione è stata adot-tata senza aver potuto effettuare alcun tipo di verifica preventiva. Poi-ché, dopo aver immesso i mezzi in esercizio, l’inconveniente, eviden-temente, è stato rilevato, negli autobus più recenti, come appare dalla foto di destra in figura i.1., la raggiungibilità del pulsante è stata op-portunamente assicurata con una semplice quanto opportuna modifica. Sempre in autobus destinati al trasporto urbano, altro, analogo rilievo riguarda la soluzione adottata per il posizionamento degli elementi tu-bolari verticali di sostegno, detti anche pertiche. È evidente che un passeggero, a meno che non sia di corporatura particolarmente esile, debba avvertire disagio e difficoltà per accedere al sedile, per la
Figura i.2. Posizionamento delle pertiche: a sinistra posizionamento non
corretto ai fini dell’accessibilità al sedile; a destra posizionamento corretto.

Introduzione 20
esiguità dello spazio a disposizione, causata dalla presenza della perti-ca verticale disposta come si vede nella foto di sinistra in figura i.2. Il problema del posizionamento delle pertiche è stato risolto in ben altro modo sugli autobus di altra casa produttrice, foto di destra in figura i.2. In questo caso i progettisti, evidentemente, hanno assicurato ai passeggeri una seduta comoda, ed hanno eliminato ogni ingombro, rendendo solidale lo schienale del sedile al tubolare verticale, median-te un apposito elemento di collegamento.
Poiché si tratta di carenze solo apparentemente marginali, gli e-sempi valgono a dimostrare come, nei casi considerati, l’impiego di un adeguato strumento di simulazione avrebbe consentito di ricercare, ed attuare in prima istanza, soluzioni ben più valide sotto il profilo ergo-nomico, atte, quindi, a rendere il mezzo di trasporto pubblico più ac-cogliente.
Altri, particolari requisiti funzionali di progettazione, come quelli di manutenibilità, si rivelano ancora più importanti, perché il loro cor-retto soddisfacimento si ripercuote sull’intera vita utile del manufatto, che, come accade per gli aerei, per le navi o per i treni, può coprire anche l’arco di alcune decine di anni. In questo caso si tratta di analiz-zare le caratteristiche morfologiche dei componenti, le relazioni fun-zionali d’interdipendenza che tra loro sussistono per le esigenze dell’assemblaggio e del disassemblaggio e di stabilire innanzi tutto se le operazioni sono possibili, e se gli operatori sono in grado di esegui-re tutte le manovre necessarie senza effettuare sforzi eccessivi e senza assumere posizioni potenzialmente nocive. La simulazione in ambien-te virtuale consente anche di definire al meglio le caratteristiche degli attrezzi e delle altre risorse occorrenti.
La simulazione e la visualizzazione dei prototipi virtuali riguarda anche prestazioni strutturali, quali, ad esempio, quelle della sicurezza passiva, con le relative analisi di danno sui passeggeri e sulle strutture, in conseguenza di manovre di emergenza o di collisioni.
Infine, nello spirito dell’ingegneria simultanea, occorre progettare, oltre che il prodotto, anche il processo tecnologico che s’intende attua-re per la sua fabbricazione. Anche per questa problematica la conte-stuale simulazione del prodotto, dei mezzi di produzione, degli attrez-zi e di tutte le azioni cinematiche e dinamiche che è necessario com-piere durante il processo produttivo, può consentire verifiche, confron-ti e scelte, in tempi brevi e con costi sicuramente ridotti rispetto all’eventualità di dover apportare “a posteriori” modifiche all’impianto, o peggio, di dover ritenere definitiva, con maggiore o

La Realtà Virtuale nella Progettazione Industriale 21
minore consapevolezza, per tutta la durata della produzione, una solu-zione che, invece, sarebbe stato possibile rendere oggettivamente mi-gliore prima di dar inizio alla sua realizzazione costruttiva.
Impiegando adeguati strumenti di simulazione, invece, è agevole definire e prescegliere la soluzione più conveniente per il layout, stu-diando l’accessibilità e l’ergonomia delle postazioni di lavoro, verifi-cando realisticamente ogni problematica d’ingombro e di funzionalità dei sistemi di movimentazione delle parti per le esigenze di montag-gio. Di queste applicazioni, nelle pagine che seguono, è stata fornita documentazione.
Il primo capitolo del libro è dedicato alla storia, alle applicazioni
ed ai principi su cui si basa la RV. In particolare, nella prima parte, dopo l’introduzione della nozione stessa di RV, se ne ripercorre la sto-ria e se ne prospettano anche i principali impieghi, sia nell’ambito del-la progettazione industriale, sia in altri settori. La parte più consistente di questo capitolo è dedicata alla trattazione dettagliata dei principi e delle caratteristiche di funzionamento, nonché delle più valide solu-zioni hardware oggi possibili per realizzare impianti di RV.
Il secondo capitolo contiene la descrizione dettagliata di due labo-ratori di RV, invero molto diversi tra loro per dimensioni, per poten-zialità e per costo; entrambe le risorse sono state progettate e realizza-te a cura del Dipartimento di Progettazione e Gestione Industriale dell’Università di Napoli Federico II. Una è operante presso la Facoltà d’Ingegneria, l’altra è stata allestita presso il Centro di Competenza Trasporti della Regione Campania. La prima di queste strutture, il la-boratorio VRoom, realizzato grazie al finanziamento di un Progetto di Rilevante Interesse Nazionale (PRIN 2003), permette di realizzare ambienti di simulazione virtuale con la visualizzazione di scene reali-stiche, ad un discreto livello di immersività. Il suo impiego è destinato ad attività di ricerca ed allo svolgimento di tesi di laurea assegnate a studenti della Facoltà d’Ingegneria dell’Ateneo Fredericiano. La se-conda realizzazione è quella del Laboratorio di Realtà Virtuale del Centro di Competenza dei Trasporti della Regione Campania. Questo laboratorio, denominato VRTest, destinato alla progettazione avanzata di mezzi e sistemi di trasporto, è tra i più importanti d’Europa per pre-stazioni e dimensioni. Esso consente di sviluppare, con realismo per-fetto, ogni genere di simulazione, per la verifica, in ambiente semi-immersivo, dei requisiti funzionali di oggetti di grandi dimensioni ri-prodotti in scala 1:1. Dei due laboratori, in coerenza con le finalità di
Introduzione 22
produzione e divulgazione della conoscenza, proprie dell’istituzione universitaria, è riportata, in dettaglio, la descrizione e vengono anche illustrate le ragioni che hanno motivato le soluzioni tecniche adottate.
Il terzo capitolo è dedicato ai software per la RV, alla loro scelta ed al loro impiego in relazione alle caratteristiche dell’impianto ed alle specifiche applicazioni da realizzare. La descrizione, ovviamente, è in larga parte riferita alle esperienze condotte nei laboratori VRoom e VRTest.
Con il quarto capitolo si apre la seconda parte del volume, che do-cumenta una parte delle applicazioni di RV alla progettazione, di re-cente sviluppate dal gruppo di “Disegno e Metodi dell’Ingegneria In-dustriale” dell’Università di Napoli Federico II. In questo capitolo, in particolare, è descritta la passeggiata virtuale nel P-180 Avanti, un bimotore prodotto dalla Piaggio Aeronautica, destinato ad impieghi di aviazione generale. La simulazione consente ai progettisti di definire la sistemazione degli spazi interni, con tutte le scelte morfologiche e di materiali che riguardano gli arredi. Come per le altre applicazioni che seguono, anche in questo caso la metodologia seguita è stata illu-strata in ogni dettaglio sia per quanto riguarda le risorse informatiche impiegate, sia per i risultati che è stato possibile raggiungere.
Il quinto capitolo tratta della progettazione concettuale in ambiente virtuale: viene proposta la sintesi di diverse applicazioni di design svi-luppate nei laboratori VRoom e VRTest. Esse valgono a dimostrare che la RV può rivelarsi strumento molto utile per la valutazione della qua-lità dei concept di prodotto e per la scelta di quello ottimale, tra un gruppo di soluzioni proposte, pervenendo alla individuazione ed alla classificazione degli elementi di qualità, quando del prodotto esiste solo il modello digitalizzato.
Il sesto capitolo contiene la descrizione di diversi approcci metodo-logici per la simulazione di attività manutentive in ambiente di RV. Si tratta di analisi di smontabilità, di accessibilità e di manipolabilità at-tuate dal progettista sia direttamente, immergendosi ed operando nell’ambiente virtuale, sia mediante l’impiego di manichini virtuali, umanoidi digitali che sostituiscono l’uomo nel simulare il compimento delle attività. Le applicazioni di manutenibilità virtuale proposte sono state realizzate, in ambito aeronautico e ferroviario, su sottosistemi di mezzi di trasporto, fin dalla fase iniziale del loro processo di sviluppo. È possibile, in tal modo, apportare ogni modifica al progetto, in tempi molto contenuti e senza aggravio dei costi. I casi sviluppati dimostra-no il raggiungimento di due fondamentali risultati: la verifica della ef-
La Realtà Virtuale nella Progettazione Industriale 23
fettiva fattibilità delle azioni manutentive e la certezza che l’impegno di realizzarle non produca effetti nocivi agli operatori, sia per quanto riguarda la correttezza ergonomica delle posture, sia per il controllo ed il contenimento delle forze che essi debbono applicare durante le ope-razioni di manutenzione.
Il settimo ed ultimo capitolo riporta i risultati di una prima applica-zione, di carattere generale, della Realtà Virtuale nella progettazione del ciclo di montaggio di carrozze ferroviarie. Si tratta di una metodo-logia innovativa per lo specifico settore, che consente di sviluppare, in ambiente simulato, l’impianto di produzione, le risorse impiegate e tutte le operazioni che è necessario compiere. Anche in questo caso l’ambiente simulato è facilmente riconfigurabile: è in tal modo possi-bile apportare modifiche all’impianto ed al processo produttivo per valutare diverse soluzioni e scegliere, tra esse, quella che appare la migliore.
Questo libro, in definitiva, ha l’obiettivo di dimostrare che le simu-lazioni sviluppate in ambiente di Realtà Virtuale costituiscono un ef-fettivo e valido supporto alla progettazione, in particolare di quella che occorre dedicare ai sistemi complessi quali sono gli attuali mezzi di trasporto, ferroviari, navali, aeronautici e su gomma. Per conseguire questa finalità i contenuti sono stati organizzati in modo tale che il let-tore possa valutare le applicazioni progettuali proposte nella seconda parte del volume, avendo preventivamente acquisito l’indispensabile conoscenza degli elementi basilari della Realtà Virtuale e degli stru-menti, hardware e software, che essa utilizza.
Vale la pena di ribadire ancora che il laboratorio VRTest rappresen-ta un tentativo, forse ambizioso, di rendere disponibile alle aziende manifatturiere un’importante risorsa per la progettazione dei loro pro-dotti. L’Istituzione Universitaria che la gestisce ha dimostrato di esse-re pronta a sostenerle con tutta la conoscenza e l’impegno che occor-rono per contribuire a renderle competitive sui mercati internazionali.
Questo lavoro può anche costituire utile base di conoscenza per gli
studenti delle facoltà d’Ingegneria, di Architettura e di Disegno Indu-striale che intendano approfondire le metodologie e gli strumenti che, inevitabilmente, nell’immediato futuro si riveleranno essenziali, in tut-ti i settori produttivi, per le attività di progettazione.


PARTE PRIMA
Strumenti


27
Capitolo I
La Realtà Virtuale
I.1. Dematerializzazione della realtà
La possibilità di percorrere nuovi itinerari di sviluppo, quando ap-pare promettente e potenzialmente efficace, apre nuovi scenari per so-luzioni innovative di problematiche tecniche e scientifiche, rispetto a quelle classiche e consolidate, e favorisce, quindi, il progresso [Valen-tini2005]. Ciò oggi si verifica con l’impiego delle tecniche di RV (RV) nella progettazione. La RV, infatti, costituisce un nuovo para-digma che ridefinisce in maniera sostanziale l’interfaccia uomo-macchina, e modifica completamente l’approccio alle tecnologie di progettazione [Bricken1990]. La rivoluzione del virtuale, infatti, ha reso disponibile un sistema di distribuzione e di accesso all’informazione di una potenza senza pari e, al tempo stesso, ad un modo nuovo di rappresentare la realtà. L’immagine digitale diventa così linguaggio e scrittura. Il modello virtuale risulta non essere più partecipe della materialità del reale, bensì appare come il frutto di pure operazioni linguistiche impartite ad un calcolatore [Queau1995].
Muovendo dalla rappresentazione dei manufatti mediante disegni, dapprima nelle due dimensioni del foglio di carta, quindi nelle tre di-mensioni della modellazione solida mediante sistemi CAD, è stato raggiunto un tale livello di sofisticazione nella simulazione degli og-getti da costruire che addirittura la RV viene assunta a dimostrazione della più generale tendenza verso “la dematerializzazione della nostra realtà” [Maldonado2005]. Senza voler pretendere d’entrare nel merito della complessa fase evolutiva che Schrodinger [Schrodinger1994] prospetta come il procedere della nostra società verso
«uno scenario in cui l’impatto delle tecnologie emergenti (informatica, te-lecomunicazioni, bioingegneria, robotica e tecnologie dei materiali avanzati), porterebbe alla riconsiderazione del tradizionale concetto intuitivo di materia come cosa semplice, palpabile, resistente, che si muove nello spazio»,
è sufficiente ricordare che l’uomo, da sempre, è stato non solo homo faber, impegnato a realizzare artefatti materiali, ma anche homo de-pictor, per raffigurare, per esprimersi, per tramandare [Hacking1983].

Capitolo I 28
Figura I.1. Il Bisonte di Altamira. Figura I.2. Filippo Brunelleschi: pri-
mo esempio di Augmented Reality.
Nella raffigurazione della realtà l’artista ha quasi sempre tentato di ri-produrre la tridimensionalità della percezione visiva, impiegando ogni artificio possibile.
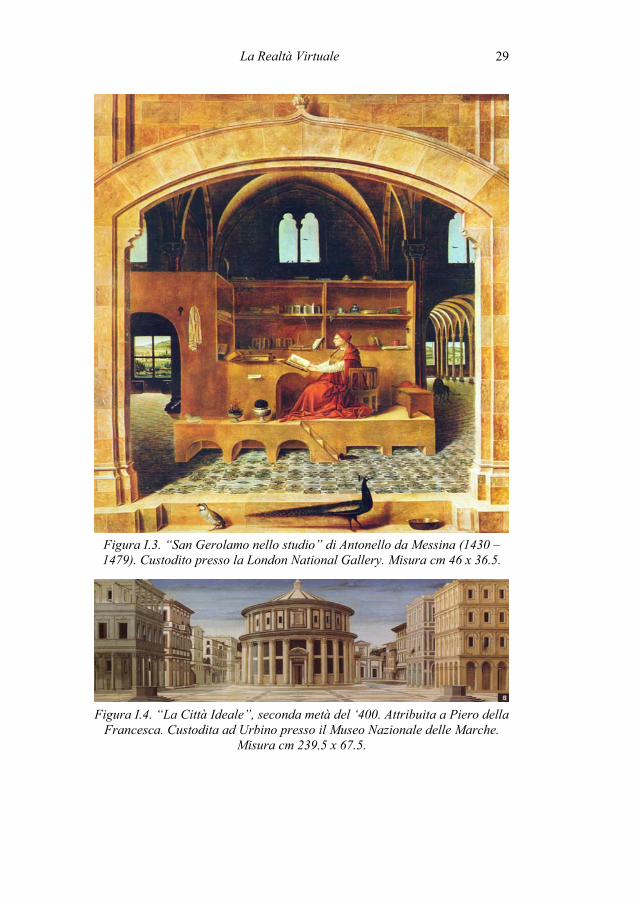
La ricerca, da parte dell’uomo, di creare immagini quanto più pos-sibile realistiche, si sono concretizzate dapprima con lo studio della prospettiva, quindi l’invenzione di veri e propri effetti di RV da parte di artisti di ogni tempo. Basterà ricordare l’effetto plastico dei podero-si glutei del bisonte di Altamira riprodotti in rilievo, scegliendo, all’uopo, una parte di parete rocciosa tondeggiante (v. fig. I.1). O, an-cora, il tentativo del Brunelleschi di fondere, in una sorta d’antesignana Augmented Reality, la vista prospettica di un dipinto con l’immagine reale del cielo e delle nuvole. L’artista, infatti, aveva dipinto su una tavoletta il Battistero di Firenze e sul punto principale della prospettiva aveva praticato un forellino, in modo che attraverso di esso, dal rovescio dell’opera, si potesse ammirare l’immagine ri-flessa su uno specchio posto a conveniente distanza: l’argento brunito che sostituiva l’azzurro, contornando l’immagine architettonica, ren-deva ancora più realistica la scena, poiché rifletteva anche il cielo, con le nuvole in movimento che lo attraversavano (v. fig.I.2), [Capu-to2005a]. Nel San Gerolamo nello studio di Antonello da Messina (v. fig.I.3), poi, il Maldonado riconosce un vero e proprio caso di RV, creato con mezzi pittorici tradizionali e puntualmente ne dimostra, ri-percorrendolo, la narrazione spaziale [Maldonado1999].
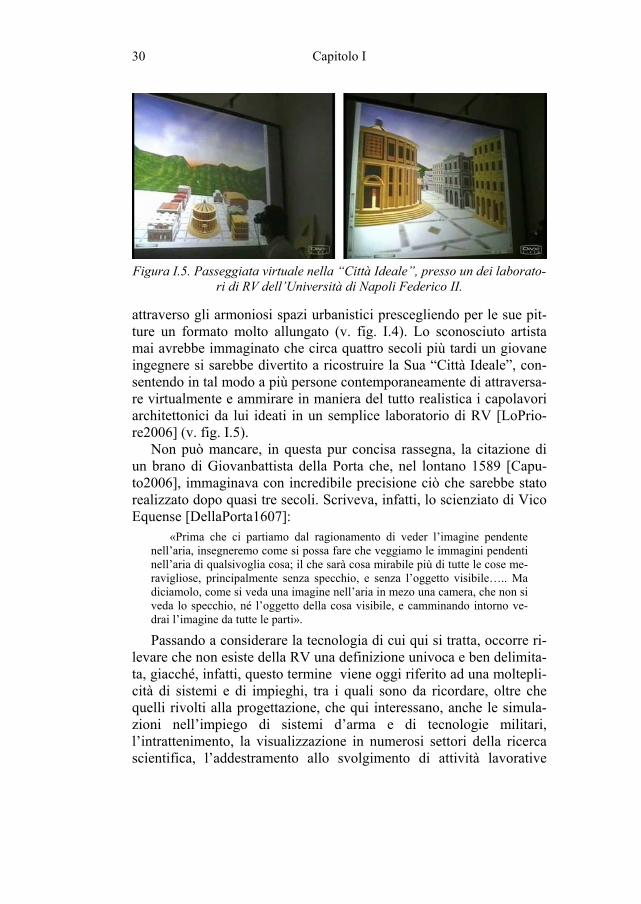
Lo sconosciuto artista del Rinascimento italiano (probabilmente Piero della Francesca) che realizzò le prospettive della città ideale inconsapevolmente, forse, propose un vero e proprio walk through
La Realtà Virtuale 29
Figura I.3. “San Gerolamo nello studio” di Antonello da Messina (1430 – 1479). Custodito presso la London National Gallery. Misura cm 46 x 36.5.
Figura I.4. “La Città Ideale”, seconda metà del ‘400. Attribuita a Piero della
Francesca. Custodita ad Urbino presso il Museo Nazionale delle Marche. Misura cm 239.5 x 67.5.
Capitolo I 30
Figura I.5. Passeggiata virtuale nella “Città Ideale”, presso un dei laborato-
ri di RV dell’Università di Napoli Federico II.
attraverso gli armoniosi spazi urbanistici prescegliendo per le sue pit-ture un formato molto allungato (v. fig. I.4). Lo sconosciuto artista mai avrebbe immaginato che circa quattro secoli più tardi un giovane ingegnere si sarebbe divertito a ricostruire la Sua “Città Ideale”, con-sentendo in tal modo a più persone contemporaneamente di attraversa-re virtualmente e ammirare in maniera del tutto realistica i capolavori architettonici da lui ideati in un semplice laboratorio di RV [LoPrio-re2006] (v. fig. I.5).
Non può mancare, in questa pur concisa rassegna, la citazione di un brano di Giovanbattista della Porta che, nel lontano 1589 [Capu-to2006], immaginava con incredibile precisione ciò che sarebbe stato realizzato dopo quasi tre secoli. Scriveva, infatti, lo scienziato di Vico Equense [DellaPorta1607]:
«Prima che ci partiamo dal ragionamento di veder l’imagine pendente nell’aria, insegneremo come si possa fare che veggiamo le immagini pendenti nell’aria di qualsivoglia cosa; il che sarà cosa mirabile più di tutte le cose me-ravigliose, principalmente senza specchio, e senza l’oggetto visibile….. Ma diciamolo, come si veda una imagine nell’aria in mezo una camera, che non si veda lo specchio, né l’oggetto della cosa visibile, e camminando intorno ve-drai l’imagine da tutte le parti».
Passando a considerare la tecnologia di cui qui si tratta, occorre ri-levare che non esiste della RV una definizione univoca e ben delimita-ta, giacché, infatti, questo termine viene oggi riferito ad una moltepli-cità di sistemi e di impieghi, tra i quali sono da ricordare, oltre che quelli rivolti alla progettazione, che qui interessano, anche le simula-zioni nell’impiego di sistemi d’arma e di tecnologie militari, l’intrattenimento, la visualizzazione in numerosi settori della ricerca scientifica, l’addestramento allo svolgimento di attività lavorative

La Realtà Virtuale 31
complesse, la teledidattica. Nell’ambito specialistico della progetta-zione industriale s’intende per RV l’insieme delle rappresentazioni che definiscono e riproducono in maniera realistica ambienti, oggetti e fenomeni che ancora non esistono nella realtà, ma che potrebbero, a tutti gli effetti, esistere od essere esistiti come risultato della capacità dell’uomo di costruire oggetti per migliorare le condizioni di vita. Nelle attività di produzione industriale l’uomo è il designer, il proget-tista o il cliente, mentre l’ambiente virtuale è il modello digitale del prodotto che s’intende sviluppare, con tutte le sue funzionalità, inseri-to nel contesto di utilizzo, che può essere anch’esso virtuale o reale. In altri termini la RV è costituita dall’interazione di vari ambienti che, stimolando le capacità sensoriali di un essere umano attraverso oppor-tune interfacce, riproducono artificialmente situazioni reali. Nella RV l’uomo è immerso in un ambiente artificiale, simulato dal calcolatore, che impartisce sensazioni visive, sonore e tattili [Burdea1993]. Il con-cetto stesso di virtualità implica la disponibilità di visualizzazioni tri-dimensionali e di sistemi interattivi finalizzati alla creazione di am-bienti simulati, direttamente fruibili, generati in tempo reale dal calco-latore [Lanier2005]. Si può, dunque, intendere la RV come una tecno-logia che migliora l’interazione tra l’uomo ed il modello virtuale del prodotto, consentendo di estendere le capacità sensoriali umane, gra-zie ad un approccio più congeniale ed intuitivo tra l’uomo e la mac-china. L’utente può sperimentare, così, il modello virtuale direttamen-te in maniera interattiva e multisensoriale, muovendosi attorno ad esso o al suo interno, sollevando oggetti, captando suoni, vivendo in defini-tiva esperienze sensoriali complesse e molto simili alle sensazioni percepibili nel mondo reale. Tale approccio, infatti, incrementa le ca-pacità di comprensione, analisi, creatività e comunicazione. In questo senso la RV si configura come strumento tecnologico innovativo e po-tente per la risoluzione di numerose problematiche tecniche. È proprio in virtù di ciò che essa è stata definita come una tecnologia rivoluzio-naria, che fornisce un nuovo modo di guardare alla soluzione di un problema [Cobb1995].
Analizzando il termine RV da un punto di vista puramente seman-tico ci si rende conto di trovarsi di fronte ad un ossimoro. Infatti l’aggettivo virtuale ed il sostantivo realtà sembrano paradossalmente elidersi a vicenda. Il primo rimanda a “ciò che non è nel concreto”, il secondo invece a “ciò che è nel concreto”. Il termine è stato coniato

Capitolo I 32
nel 1989 da Jaron Lanier, fondatore del VPL1 Research, malgrado già si avvertisse il sentore della nuova rivoluzione in atto, quando negli anni ’70 Myron Krueger iniziava a parlare di artificial reality e, nel 1984, William Gibson di “Cyberspace” [Andreolotti2005]. Solo suc-cessivamente, negli anni ’90, furono introdotti i concetti di mondo vir-tuale e di ambiente virtuale.
Risulta evidente che la grande potenzialità della RV consiste nel fatto che essa, anche nel caso di forme ed organizzazioni di spazi mol-to complesse, può essere portatrice sia delle valenze e dei significati studiati mediante rappresentazioni a carattere simbolico-ricostruttivo, sia di valenze e di significati definiti mediante rappresentazioni a ca-rattere percettivo.
Un ambiente virtuale consente ai partecipanti di interagire nel mo-do più naturale possibile, come se si trattasse della realtà, comunican-do con l’ambiente simulato generato dal computer, distinto da quello in cui gli oggetti esistono fisicamente [Ellis1995] in modo del tutto efficace. Ancora una volta appare chiaro come la rappresentazione a-stratta degli oggetti possa essere utilizzata come strumento di stimola-zione per i sensi. In realtà la difficoltà maggiore è proprio legata alla risposta realistica che il sistema virtuale restituisce all’interazione dell’utente. Infatti essa non deve comprometterne il senso di presenza, vale a dire l’illusione di sentirsi realmente parte della scena virtuale.
Nelle attività di sviluppo e di progettazione dei prodotti industriali la potenzialità maggiore fornita dalla RV è correlata alla possibilità di prevedere e verificare lo stadio di avanzamento, l’organizzazione e la coerenza formale e sostanziale di qualsiasi concept. Il grande interesse che tale tecnologia sta suscitando all’interno delle comunità accade-miche ed industriali è legato alla prospettiva di sostituire, a breve ter-mine, la sperimentazione su mock up fisici, o prototipi, del prodotto in esame con quella su oggetti virtuali e digitali equivalenti in termini di caratteristiche geometriche e fisiche, nei loro ambienti di utilizzo, anch’essi simulati. Tale processo, in realtà è già in atto, e questo libro tenta di dimostrarlo. La totale eliminazione dei prototipi fisici, a van-taggio di quelli virtuali, comporterebbe una sostanziale riduzione dei tempi e dei costi di progettazione dei prodotti, con un sensibile incre-mento della qualità. Tale ultimo vantaggio è principalmente dovuto alla concreta possibilità di valutare un prodotto, fin dagli stadi preli-minari dell’iter progettuale, in un ambiente virtuale altamente interat-
1 Acronimo che sta per Virtual Programming Languages.
La Realtà Virtuale 33
tivo e riconfigurabile, nonché alla possibilità di compiere un maggior numero di iterazioni sul mock up digitale.
L’obiettivo, quindi, è quello di sostituire la simulazione alla speri-mentazione fisica, non solo per le economie ottenibili, ma per permet-tere il raggiungimento di una ben più alta qualità tecnologica, in tempi sempre più ridotti. In fase di progettazione, quindi, si tende a passare dal tradizionale metodo Trial and Error al più sistematico Continuous Improvement, tipico della simulazione.
L’impiego della RV, che può coinvolgere oltre che la fase di pro-gettazione del prodotto, anche quella del processo produttivo, incide in maniera sensibile sulla qualità di qualsiasi tipo di manufatto, mi-gliorandone le caratteristiche estetiche, funzionali, costruttive, nonché economiche e sociali, in termini di utilità e di grado di soddisfazione percepito dal cliente nella fruizione di esso. Tali vantaggi si rivelano maggiori quando i prodotti da progettare sono complessi. Tuttavia, perchè una così favorevole prospettiva di progresso nelle tecnologie della progettazione si concretizzi in pieno, resta ancora da compiere un importante lavoro di sviluppo che coinvolge e richiede l’interazione di una molteplicità di saperi positivi.
I.2. I primi passi della Realtà Virtuale
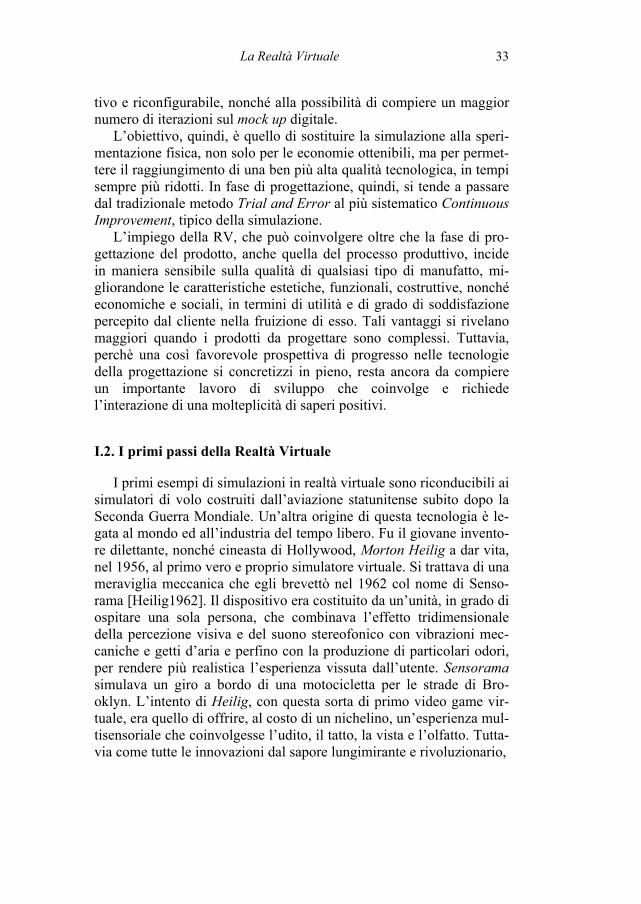
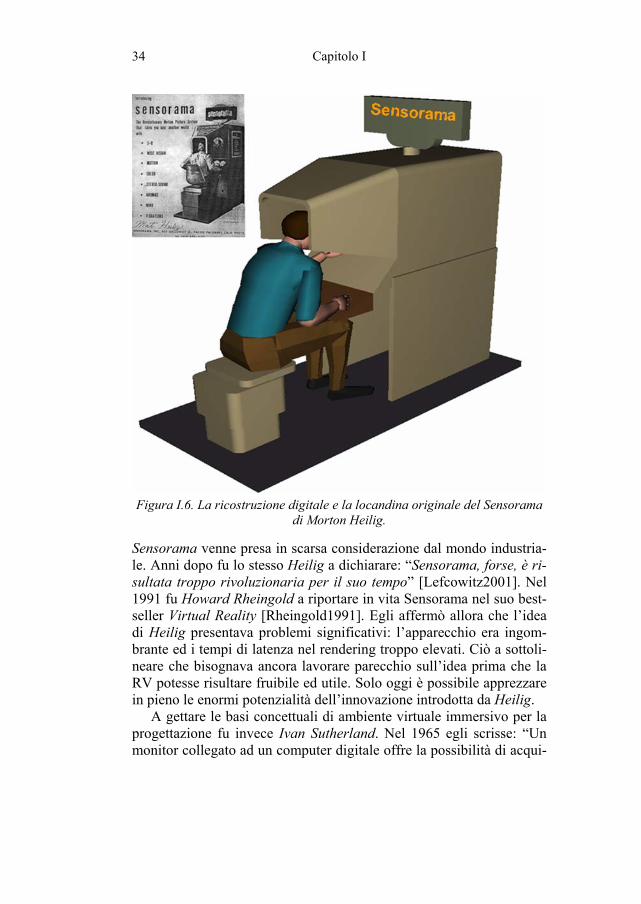
I primi esempi di simulazioni in realtà virtuale sono riconducibili ai simulatori di volo costruiti dall’aviazione statunitense subito dopo la Seconda Guerra Mondiale. Un’altra origine di questa tecnologia è le-gata al mondo ed all’industria del tempo libero. Fu il giovane invento-re dilettante, nonché cineasta di Hollywood, Morton Heilig a dar vita, nel 1956, al primo vero e proprio simulatore virtuale. Si trattava di una meraviglia meccanica che egli brevettò nel 1962 col nome di Senso-rama [Heilig1962]. Il dispositivo era costituito da un’unità, in grado di ospitare una sola persona, che combinava l’effetto tridimensionale della percezione visiva e del suono stereofonico con vibrazioni mec-caniche e getti d’aria e perfino con la produzione di particolari odori, per rendere più realistica l’esperienza vissuta dall’utente. Sensorama simulava un giro a bordo di una motocicletta per le strade di Bro-oklyn. L’intento di Heilig, con questa sorta di primo video game vir-tuale, era quello di offrire, al costo di un nichelino, un’esperienza mul-tisensoriale che coinvolgesse l’udito, il tatto, la vista e l’olfatto. Tutta-via come tutte le innovazioni dal sapore lungimirante e rivoluzionario,
Capitolo I 34
Figura I.6. La ricostruzione digitale e la locandina originale del Sensorama
di Morton Heilig.
Sensorama venne presa in scarsa considerazione dal mondo industria-le. Anni dopo fu lo stesso Heilig a dichiarare: “Sensorama, forse, è ri-sultata troppo rivoluzionaria per il suo tempo” [Lefcowitz2001]. Nel 1991 fu Howard Rheingold a riportare in vita Sensorama nel suo best-seller Virtual Reality [Rheingold1991]. Egli affermò allora che l’idea di Heilig presentava problemi significativi: l’apparecchio era ingom-brante ed i tempi di latenza nel rendering troppo elevati. Ciò a sottoli-neare che bisognava ancora lavorare parecchio sull’idea prima che la RV potesse risultare fruibile ed utile. Solo oggi è possibile apprezzare in pieno le enormi potenzialità dell’innovazione introdotta da Heilig.
A gettare le basi concettuali di ambiente virtuale immersivo per la progettazione fu invece Ivan Sutherland. Nel 1965 egli scrisse: “Un monitor collegato ad un computer digitale offre la possibilità di acqui-

La Realtà Virtuale 35
sire familiarità con concetti impossibili da realizzare nel mondo fisi-co” [Sutherland1965]. Ciò indusse Sutherland a sviluppare e realizza-re il primo casco virtuale per grafica computerizzata [Suther-land1968], vale a dire un Head-Mounted Display (HMD) del tutto funzionale ed in grado di garantire all’utente, munito del casco stesso, una visione tridimensionale stereoscopica dell’ambiente simulato. L’HMD era accoppiato ad un sistema di tracking meccanico a sei gra-di di libertà deputato ad individuare e localizzare sullo scenario la po-sizione della testa dell’utente.
Nel 1970 Myron Krueger focalizzò la sua attenzione sull’interazione uomo-macchina. Fu il primo ad introdurre il concetto di artificial reality come strumento di sperimentazione ed a coniarne il termine [Lefcowitz2001]. Scopo dei suoi studi era quello di poter inte-ragire interamente, vale a dire con tutto il corpo, mediante il computer, in ambienti che venissero percepiti dai partecipanti come realistici. Egli intuì che la tastiera costituiva un mero limite fisico nel rendere l’esperienza virtuale una “illusione convincente”. Utopicamente per i suoi tempi, Krueger intendeva realizzare un ambiente artificiale in cui l’utente potesse operare con tutto il suo corpo, senza l’ausilio di dispo-sitivi dedicati. Si trattava di un’idea ancora oggi non realizzata, pur con i mezzi attualmente disponibili, ma a cui si continua a tendere con lo sviluppo di nuove soluzioni per sistemi immersivi di realtà virtuale. Krueger, in concreto, aveva intuito appieno le potenzialità di queste nuove tecnologie. Egli lavorò negli anni seguenti a più progetti, tra i quali vale la pena citare Videoplace, un sistema costituito da una tele-camera collegata ad un calcolatore in grado di controllare le interazio-ni tra le immagini dell’utente e gli oggetti presenti nella scena simula-ta su un grande schermo di proiezione. La silhouette dell’utente, cattu-rata dalla telecamera e processata opportunamente in digitale, così da essere differenziata dallo sfondo, veniva combinata con immagini gra-fiche generate dal computer ed i movimenti erano convertiti in azioni sulla scena bidimensionale. Risposte visive o anche sonore tra oggetti ed utenti conferivano maggiore realismo alla simulazione. È interes-sante notare che in tutti gli esperimenti condotti Myron Krueger evi-denziò che l’utente percepiva un senso di autocoscienza tra il corpo reale ed il profilo proiettato sullo schermo.
Ancora negli Stati Uniti all’inizio degli anni ’70 l’ARPA2 fu impe-gnata a concentrare le sue risorse per finalità di ricerca e sviluppo sul-
2 Acronimo che sta per Agenzia Avanzata dei Progetti di Ricerca.

Capitolo I 36
le armi, per far fronte alle esigenze della guerra del Vietnam. In quegli stessi anni diverse innovazioni tecnologiche ed il crescente interesse per i viaggi spaziali ad opera della NASA, indussero le industrie ad intravedere e valutare le possibili applicazioni della RV, tanto che le più lungimiranti cominciarono ad istituire i primi centri di ricerca sulla RV. Parallelamente si consolidava nell’industria manifatturiera l’introduzione della progettazione assistita dal calcolatore ed i primi sistemi CAD 3 permettevano la creazione di immagini tridimensionali su uno schermo bidimensionale. Fu per questi motivi che il governo degli Stati Uniti continuò a puntare su progetti di ricerca e sviluppo nel settore della RV. Nel 1981, sotto la direzione di Tom Furnes, da parte dell’aeronautica americana venne realizzato il progetto Super-Cockpit. Fu costruita, infatti, una cabina di pilotaggio munita di un computer e di un casco virtuale per la visualizzazione dello spazio grafico tridimensionale: all’interno di essa i piloti potevano effettuare il loro addestramento senza esporsi a situazioni di reale pericolo. Nel 1982 Thomas Zimmermann della VPL Research sviluppò il primo guanto virtuale in grado di stimare non solo la posizione e l’orientamento della mano, ma anche il livello di flessione ed abdu-zione di ciascun dito. Tali progressi portarono nel 1986 Jaron Lanier, eclettico fondatore ed esploratore delle frontiere della realtà virtuale [Lanier2005], a realizzare il primo ambiente di RV immersivo, utiliz-zando un visore HMD corredato di un guanto tattile, così da consenti-re all’utente la visione tridimensionale e l’interazione con l’ambiente simulato in cui era completamente inserito. In seguito le ricerche NA-SA sull’ausilio della realtà virtuale nella progettazione e preparazione di missioni spaziali, condussero al VIEW 4, vale a dire al primo siste-ma a combinare grafica computerizzata, suono con localizzazione spaziale, riconoscimento vocale attraverso un casco virtuale, basato su monitor video ricavato da piccoli schermi televisivi e da un DataGlo-ve, ossia da un guanto, entrambi derivanti dalle invenzioni precedenti. Nel corso degli anni successivi gli studi si sono sempre più focalizzati su ambienti virtuali ad immersività crescente. In tale ottica un ambien-te virtuale, ossia un modello costruito in RV di cui l’utente fa espe-rienza, deve possedere alcune caratteristiche basilari [Usoh1995; San-chez-Segura2004]: il livello di controllo dell’utente, ossia il grado di autonomia che consente all’utente di navigare all’interno
3 Computer Aided Design. 4 Virtual Interface Environment Workstation

La Realtà Virtuale 37
dell’ambiente; la quantità di interazione, ossia il grado di manipola-zione in tempo reale degli oggetti; presenza, ossia il coinvolgimento personale dell’utente relativo al grado di fedeltà e di immersività che l’ambiente restituisce.
In definitiva è possibile effettuare un confronto tra le caratteristiche fondamentali dei sistemi interattivi del futuro ed i primi sistemi di RV già sviluppati. L’interfaccia non ha più il compito di garantire esclusi-vamente la funzionalità, ma include l’utente all’interno dell’ambiente. La tecnologia RV adatta il computer alle azioni dell’utente, che risulta essere parte attiva dell’applicazione, poiché il sistema stesso è prepa-rato per reagire alle azioni esterne. I software si discostano da quelli tradizionalmente visivi, ma sono configurati in modalità multimodale, per incrementare il senso di immersione. Infine, è importante sottoli-neare la novità dell’interazione diretta con gli oggetti, in maniera del tutto intuitiva, come se fossero reali [Sanchez-Segura2004].
I.3. Campi di applicazione della Realtà Virtuale
La realtà virtuale si è rapidamente imposta come tecnologia che of-fre uno strumento effettivo di supporto alle abilità umane in ogni ge-nere di applicazione: dal campo militare alla fisica, dall’intrattenimento al design, dall’ingegneria dei settori aerospaziale, automobilistico e ferroviario alla microrobotica, dall’architettura all’orografia, dall’analisi di processo alla biomeccanica [Usoh1995; Stone2001]. In ogni caso, affinché la simulazione in ambiente virtuale fornisca risultati soddisfacenti, è necessario raggiungere un adeguato livello di realismo. Questo si traduce in software applicativi caratteriz-zati da un livello di dettaglio sempre crescente. L’incremento della complessità del sistema in esame risulta poi strettamente correlato alle potenzialità dei calcolatori, in termini di spazio disco, memoria e ve-locità del processore, in modo tale che i risultati della simulazione vengano restituiti in tempi utili [Bonini2001].
Nell’ambito industriale, di particolare interesse per questa tratta-zione, la RV è particolarmente impiegata, come insostituibile risorsa multidisciplinare di visualizzazione, nella progettazione e nello svi-luppo di soluzioni innovative, nonché nella validazione di strategie in-tegrate processo-prodotto [Bao2002]. Inoltre il significativo incremen-to delle potenze disponibili per il rendering ha indotto allo sviluppo di molti sistemi RV di simulazione per l’addestramento all’impiego ed

Capitolo I 38
alla manutenzione di apparecchiature industriali, come simulatori di volo e di guida per autoveicoli, per il controllo del traffico [Lof-tin1988; Vora2002]. In definitiva le applicazioni della RV nei settori industriali sono molteplici: in particolare è ragionevole prevedere che l’impiego delle sue potenzialità nella progettazione avrà un influsso decisivo per la competitività sul mercato globale [Ziegler1999]. Inol-tre la tecnologia RV ben si configura come utile strumento di integra-zione all’interno di un’ottica progettuale di Concurrent Engineering. Essa, infatti, poiché favorisce la collaborazione tra membri del team di progetto, fin dalla fase iniziale migliora il processo di definizione del modello di stile e riduce il tempo necessario alla costruzione del pro-totipo di riferimento: essa, in definitiva, rende più naturale il passag-gio dal concept originario alla sua formalizzazione definitiva [Capu-to2006a].
I campi di applicazione della realtà virtuale tendono ad espandersi, dato che le simulazioni virtuali 3D costituiscono uno strumento im-portante in molti settori scientifici ed industriali. Uno dei motivi del successo della RV è legato alla disponibilità di unità di calcolo e gra-fiche con risorse 3D sempre più potenti. L’efficacia e gli impieghi del-le tecnologie RV, quindi, aumentano ed aumenteranno al crescere del-le capacità di calcolo e di visualizzazione.
I.3.1. Virtual Prototyping
La competizione sul mercato globale impone, a chi produce, di far fronte ai continui mutamenti della domanda: ciò, in sostanza, significa di essere in grado di vendere a costi accettabili, in tempi assai ridotti, prodotti innovativi, disponibili in un’ampia varietà di versioni perso-nalizzate, per di più caratterizzati da alta qualità. La competizione, quindi, si gioca sul ciclo di sviluppo prodotto dove la RV risulta stru-mento sicuramente idoneo sia per la riduzione del time to market, sia per il contenimento dei costi di progettazione, poiché riduce drastica-mente la necessità di realizzare mock up fisici. Tra i vantaggi aggiun-tivi che la RV offre vanno considerati l’approccio intuitivo ed interat-tivo alla valutazione delle prestazioni del prodotto in forma di prototi-po digitale, nonché la migliore comunicazione tra team interdiscipli-nari, che possono analizzare, in tempi contenuti, numerosi modelli e soluzioni alternative, anche applicando procedure standard di valuta-zione. L’ambiente virtuale da sviluppare deve essere necessariamente flessibile e collaborativo, quindi multi-utente: in esso ciascun compo-
La Realtà Virtuale 39
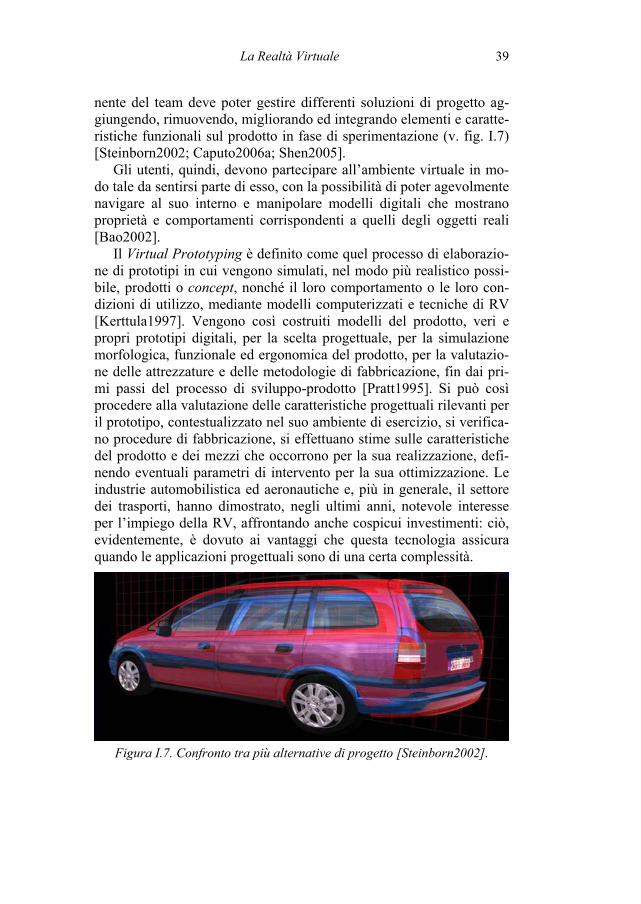
nente del team deve poter gestire differenti soluzioni di progetto ag-giungendo, rimuovendo, migliorando ed integrando elementi e caratte-ristiche funzionali sul prodotto in fase di sperimentazione (v. fig. I.7) [Steinborn2002; Caputo2006a; Shen2005].
Gli utenti, quindi, devono partecipare all’ambiente virtuale in mo-do tale da sentirsi parte di esso, con la possibilità di poter agevolmente navigare al suo interno e manipolare modelli digitali che mostrano proprietà e comportamenti corrispondenti a quelli degli oggetti reali [Bao2002].
Il Virtual Prototyping è definito come quel processo di elaborazio-ne di prototipi in cui vengono simulati, nel modo più realistico possi-bile, prodotti o concept, nonché il loro comportamento o le loro con-dizioni di utilizzo, mediante modelli computerizzati e tecniche di RV [Kerttula1997]. Vengono così costruiti modelli del prodotto, veri e propri prototipi digitali, per la scelta progettuale, per la simulazione morfologica, funzionale ed ergonomica del prodotto, per la valutazio-ne delle attrezzature e delle metodologie di fabbricazione, fin dai pri-mi passi del processo di sviluppo-prodotto [Pratt1995]. Si può così procedere alla valutazione delle caratteristiche progettuali rilevanti per il prototipo, contestualizzato nel suo ambiente di esercizio, si verifica-no procedure di fabbricazione, si effettuano stime sulle caratteristiche del prodotto e dei mezzi che occorrono per la sua realizzazione, defi-nendo eventuali parametri di intervento per la sua ottimizzazione. Le industrie automobilistica ed aeronautiche e, più in generale, il settore dei trasporti, hanno dimostrato, negli ultimi anni, notevole interesse per l’impiego della RV, affrontando anche cospicui investimenti: ciò, evidentemente, è dovuto ai vantaggi che questa tecnologia assicura quando le applicazioni progettuali sono di una certa complessità.
Figura I.7. Confronto tra più alternative di progetto [Steinborn2002].

Capitolo I 40
La maggiore difficoltà che si riscontra per un più generalizzato im-piego della RV nella progettazione industriale è dovuta al fatto che quasi tutti i software CAD 3D disponibili sul mercato risultano so-stanzialmente privi della possibilità di manipolazione diretta del mock up digitale da parte dell’utente. Risulta quindi evidente come, a breve termine, sia da attendersi una diffusa implementazione in ambienti vir-tuali dei digital mock up per la simulazione computerizzata del prodot-to e di tutte le funzionalità richieste dal design, dalla fase di ingegne-rizzazione, dalla produzione, nonché dalla manutenzione e dal rici-claggio. Tuttavia il cammino da compiere verso metodologie di pro-gettazione in grado di attuare la totale sostituzione dei mock up fisici con quelli digitali è ancora lungo. Le tecnologie della RV costituisco-no la soluzione più affascinante e promettente, oltre che l’unica possi-bile.
Una attività di fondamentale importanza al fine di realizzare simu-lazioni in ambiente di RV è la gestione di protocolli di riferimento per lo scambio-dati tra gli ambienti di modellazione CAD e l’ambiente di RV. Partendo infatti dal concetto che una qualunque geometria CAD risulta essere la rappresentazione grafica di una espressione matemati-ca più o meno complessa, risulta evidente che la manipolazione di as-siemi costituiti da diversi modelli CAD implica la manipolazione di tutte le matematiche di base. La gestione di assiemi complessi costi-tuiti da centinaia di elementi, i cui componenti sono delimitati per lo più da superfici a forma libera con una rappresentazione matematica piuttosto complessa, risulterebbe impossibile da ottenere anche me-diante risorse hardware con prestazioni elevate. L’idea di base per la creazione di una soluzione di visualizzazione e prototipazione digitale che consenta verifiche virtuali in tempo reale in un ambiente tipica-mente friendly (ovvero facile da gestire), è quella di prendere i dati na-tivi dal CAD e di ridurli a un formato di visualizzazione che, non a-vendo le complessità del CAD stesso, risulta essere molto snello. Al-leggerito del superfluo, mantenendo tuttavia esattamente la stessa ge-ometria di origine, il modello di visualizzazione assume una dimen-sione nettamente compatta, che riduce notevolmente il carico di me-moria [Elsenhaus1997]. I passi necessari al processo di prototipazione virtuale possono essere così schematizzati [Caputo2001]: - Costruzione del modello virtuale: approssimazione della geome-
tria, proveniente dai modelli CAD, mediante la creazione di una mesh di poligoni (tassellazione) e successiva riduzione della com-plessità della mesh (decimazione).