Introduzione al METODO DEGLI ELEMENTI FINITI · Metodo degli elementi finiti 3 • Il metodo deve...
31
Introduzione al METODO DEGLI ELEMENTI FINITI
-
Upload
trinhkhanh -
Category
Documents
-
view
227 -
download
0
Transcript of Introduzione al METODO DEGLI ELEMENTI FINITI · Metodo degli elementi finiti 3 • Il metodo deve...
Introduzione al
METODO DEGLI
ELEMENTI FINITI
Metodo degli elementi finiti 2
Le funzioni approssimanti devono:
• Soddisfare i requisiti di continuità
• Essere linearmente indipendenti e completi
• Soddisfare le condizioni al contorno (essenziali)
Difficoltà:
• Selezionare idonee funzioni approssimanti per domini complessi
• Definire una procedura sistematica per definire le funzioni approssimanti
Osservazioni sui metodi variazionali approssimati classici
Metodo degli elementi finiti 3
• Il metodo deve avere una base fisica ed un’impostazione matematica
• Il metodo non deve soffrire di limitazioni per problemi definiti su domini complessi
• La formulazione della procedura non deve dipendere dalla specifica forma geometrica del dominio
• Il metodo deve essere sufficientemente flessibile da poter incrementare l’accuratezza della soluzione cercata senza riformulare tutto il problema
• Il metodo deve poter essere implementato semplicemente ed in modo automatico in un codice di calcolo
Requisiti di una buona procedura computazionale
Metodo degli elementi finiti 4
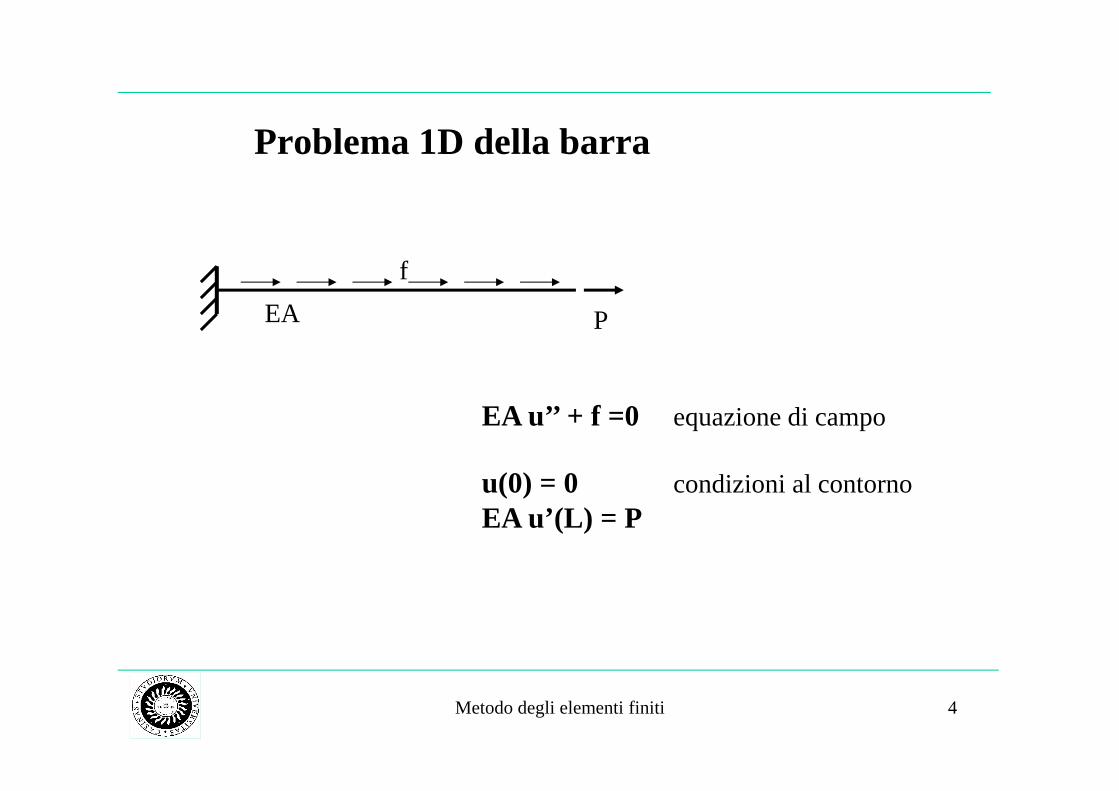
fEA P
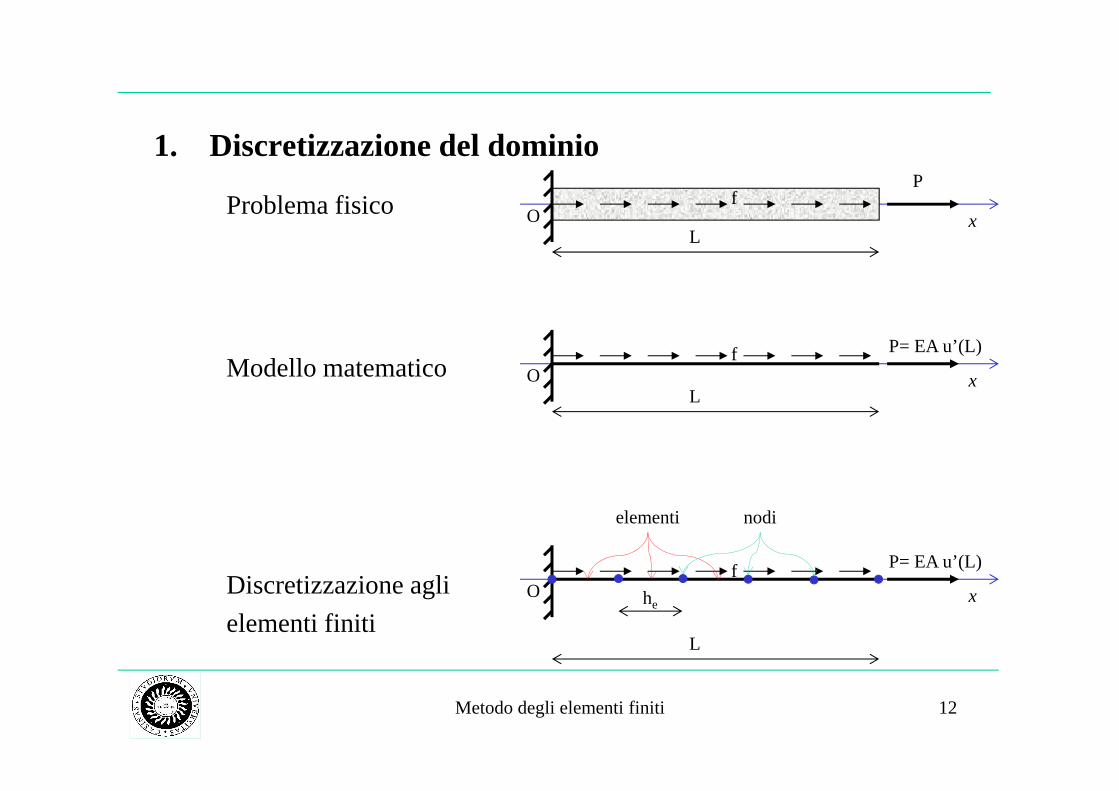
EA u’’ + f =0 equazione di campo
u(0) = 0 condizioni al contornoEA u’(L) = P
Problema 1D della barra
Metodo degli elementi finiti 5
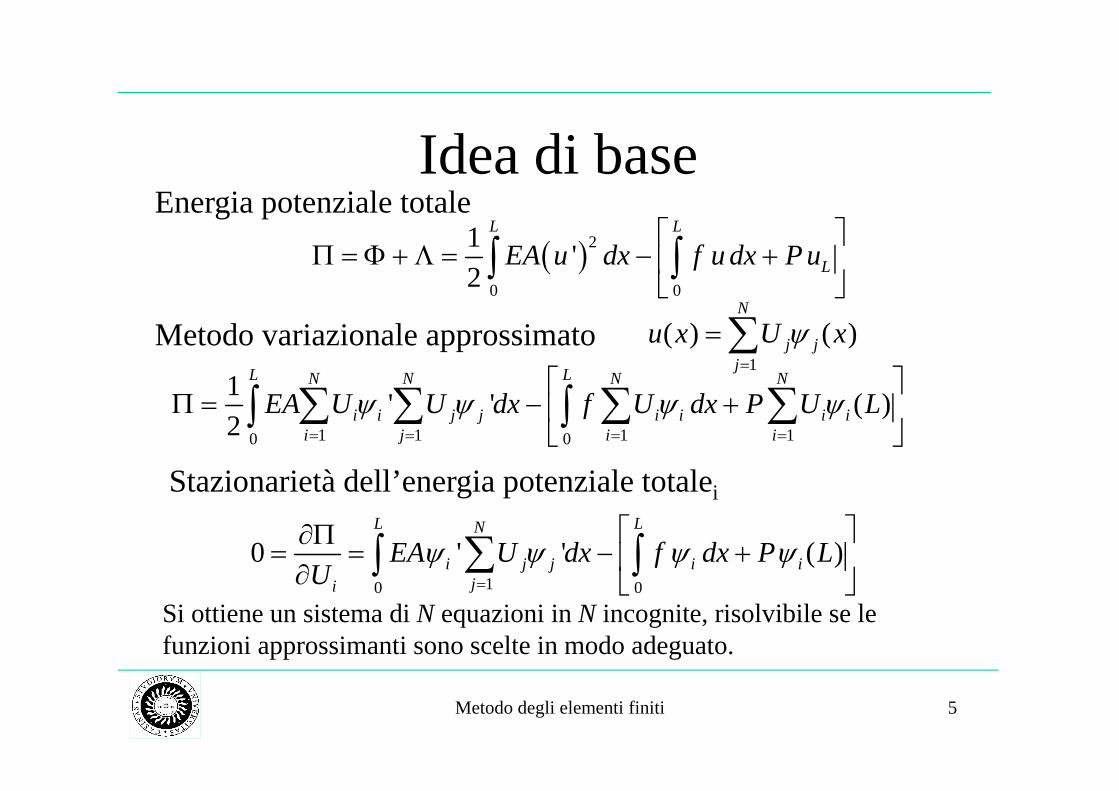
Idea di base
Stazionarietà dell’energia potenziale totalei
1
( ) ( )N
j jj
u x U x
Energia potenziale totale
2
0 0
1 '2
L L
LEA u dx f u dx Pu
Metodo variazionale approssimato
1 1 1 10 0
1 ' ' ( )2
L LN N N N
i i j j i i i ii j i i
EA U U dx f U dx P U L
10 0
0 ' ' ( )L LN
i j j i iji
EA U dx f dx P LU
Si ottiene un sistema di N equazioni in N incognite, risolvibile se le funzioni approssimanti sono scelte in modo adeguato.
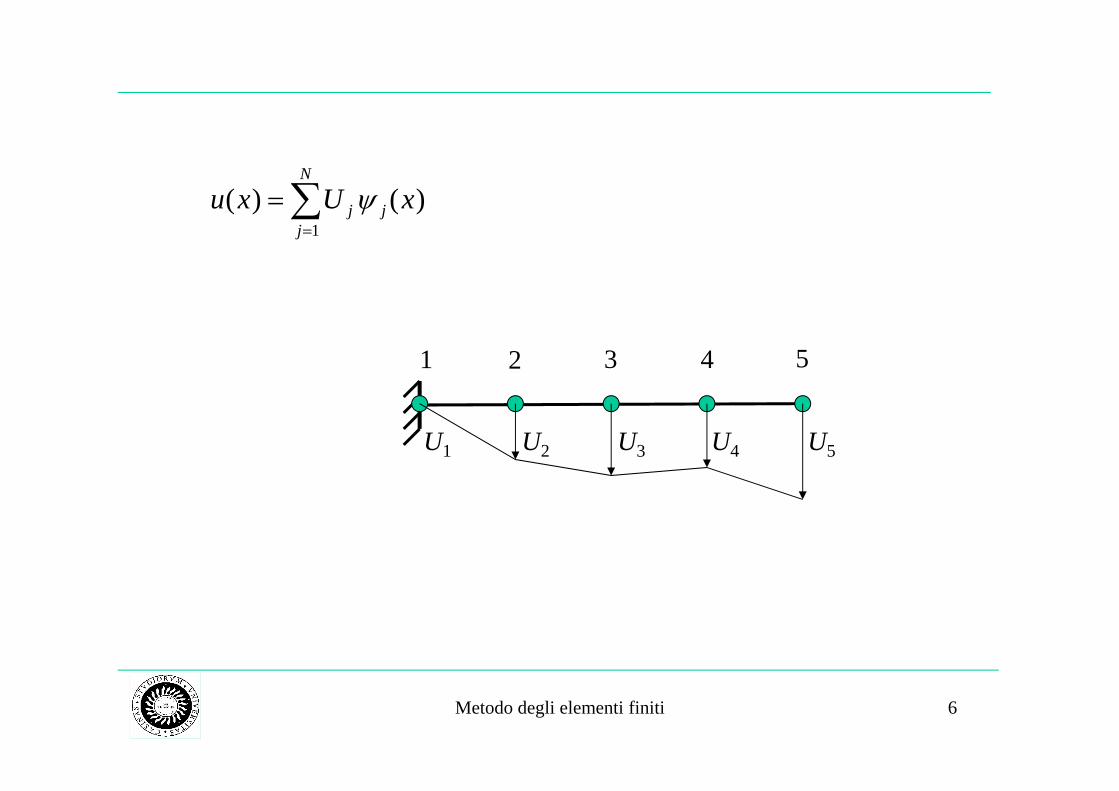
Metodo degli elementi finiti 6
1 2 3 4 5
U2 U3 U4 U5U1
1
( ) ( )N
j jj
u x U x
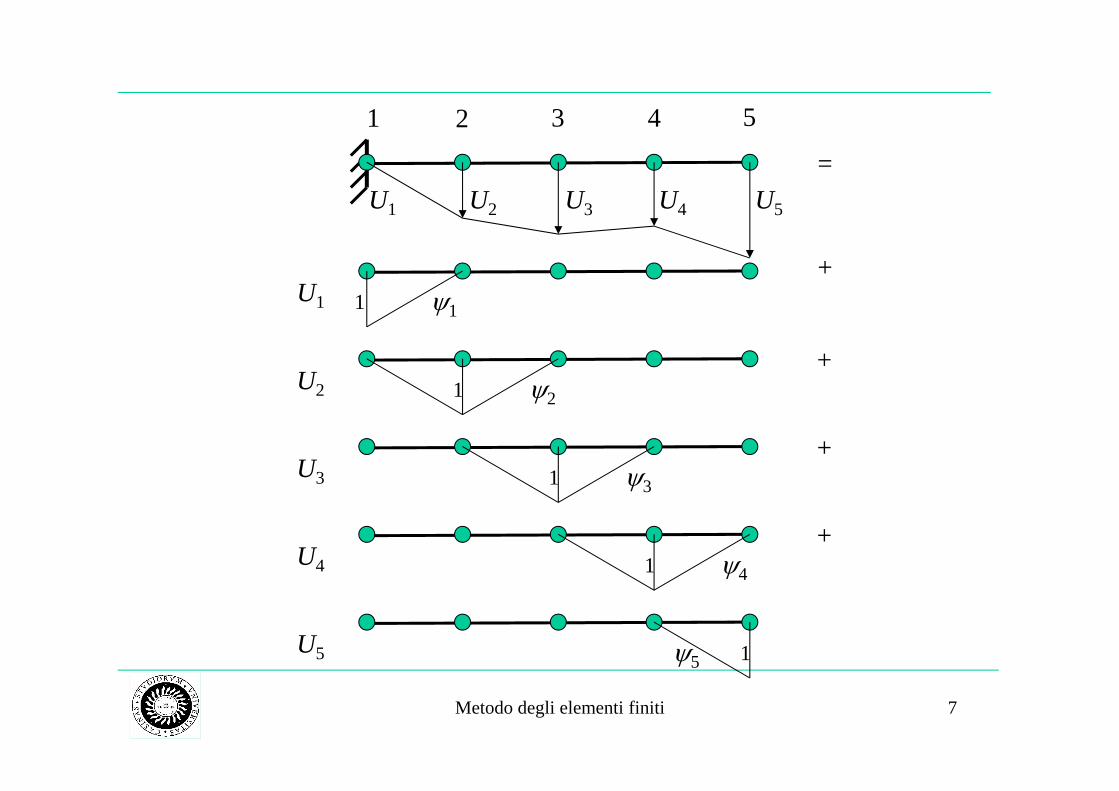
Metodo degli elementi finiti 7
1 2 3 4 5
U2 U3 U4 U5U1
U1 11
U2 21
U3 31
U4 41
U5 5 1
=
+
+
+
+
Metodo degli elementi finiti 8
Schema FEM
1. Discretizzazione del dominio in un insieme di elementi
2. Derivazione delle equazioni per ogni elemento della mesh
3. Assemblaggio di tutte le equazioni ottenute per i singoli
elementi per determinare le equazioni del sistema strutturale
completo
4. Imposizione delle condizioni al contorno
5. Soluzione del sistema di equazioni
6. Postprocessing della soluzione
Metodo degli elementi finiti 9
1. Discretizzazione del dominio in un insieme di elementi
• Definizione della mesh
• Numerazione dei nodi e degli elementi
• Assegnazione delle proprietà agli elementi
2. Derivazione delle equazioni per ogni elemento della mesh
• Formulazione variazionale
• Approssimazione
• Matrice di rigidezza, vettore delle forze
Schema FEM
Metodo degli elementi finiti 10
3. Assemblaggio di tutte le equazioni ottenute per i singoli elementi per determinare le equazioni del sistema strutturale completo
• Condizioni di continuità tra elementi contigui
• relazione di connettività elemento – nodi
• relazione tra i gradi di libertà globali del sistema ed i nodi
• Identificazione delle condizioni di equilibrio tra le variabili secondarie
• Assemblaggio delle equazioni di elemento nelle equazioni del sistema
Schema FEM
Metodo degli elementi finiti 11
4. Imposizione delle condizioni al contorno
• Identificazione dei gradi di libertà assegnati
• Identificazione delle variabili secondarie assegnate
5. Soluzione del sistema di equazioni
6. Postprocessing della soluzione
• Calcolo della derivata (deformazione) della soluzione
• Calcolo delle tensioni
• Rappresentazione grafica della soluzione: deformata, curve di livello delle tensioni, tensioni equivalenti
Schema FEM
Metodo degli elementi finiti 12
1. Discretizzazione del dominio
Problema fisico
Modello matematico
Discretizzazione agli elementi finiti
L
fO x
P
L
fO x
P= EA u’(L)
L
fO x
P= EA u’(L)
he
elementi nodi
Metodo degli elementi finiti 13
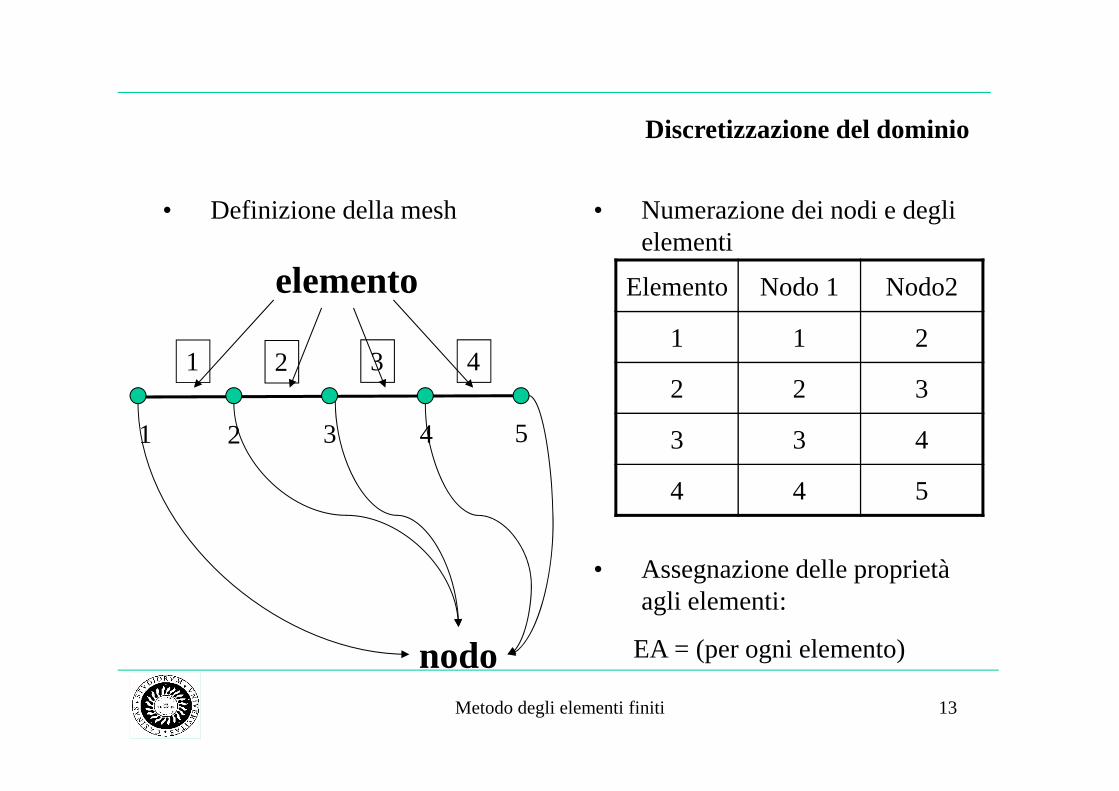
Discretizzazione del dominio
nodo
elemento
1 2 3 4 5
1 2 3 4
• Assegnazione delle proprietà agli elementi:
EA = (per ogni elemento)
Elemento Nodo 1 Nodo2
1 1 2
2 2 3
3 3 4
4 4 5
• Numerazione dei nodi e degli elementi
• Definizione della mesh
Metodo degli elementi finiti 14
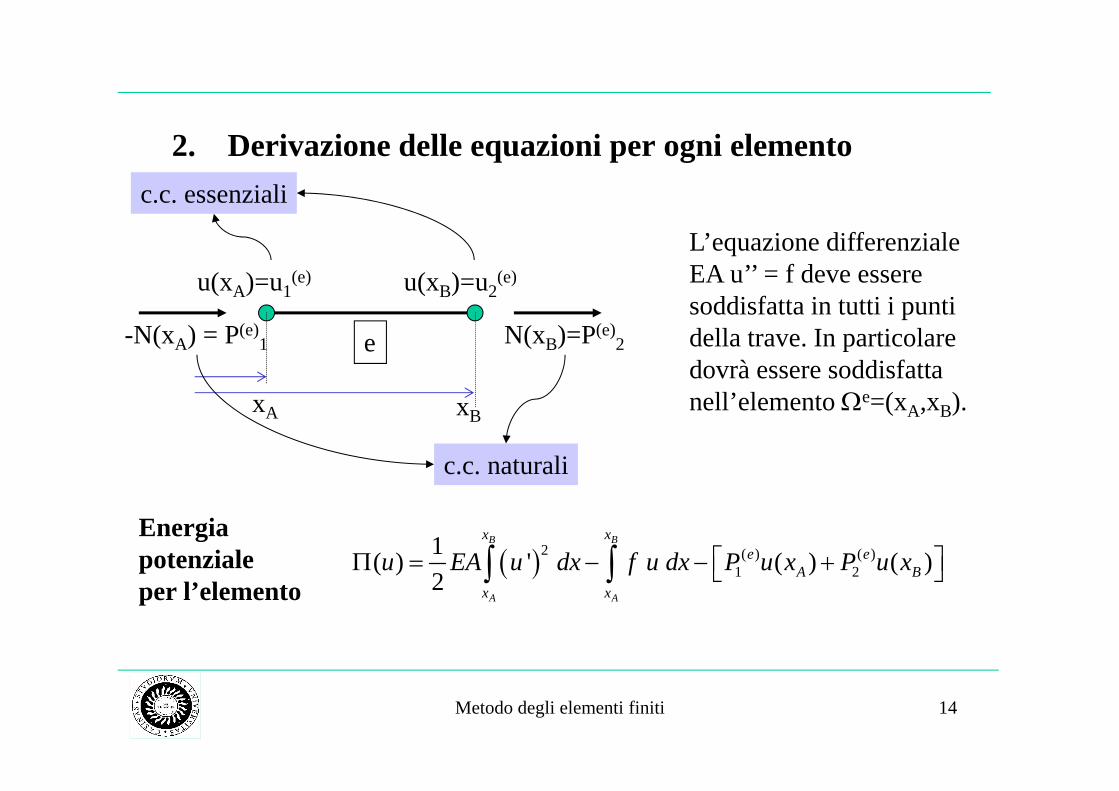
2. Derivazione delle equazioni per ogni elemento
L’equazione differenziale EA u’’ = f deve essere soddisfatta in tutti i punti della trave. In particolare dovrà essere soddisfatta nell’elemento e=(xA,xB).
Energia potenzialeper l’elemento
c.c. essenziali
c.c. naturali
xA xB
e
u(xA)=u1(e) u(xB)=u2
(e)
-N(xA) = P(e)1 N(xB)=P(e)
2
2 ( ) ( )1 2
1( ) ' ( ) ( )2
B B
A A
x xe e
A Bx x
u EA u dx f u dx P u x P u x
Metodo degli elementi finiti 15
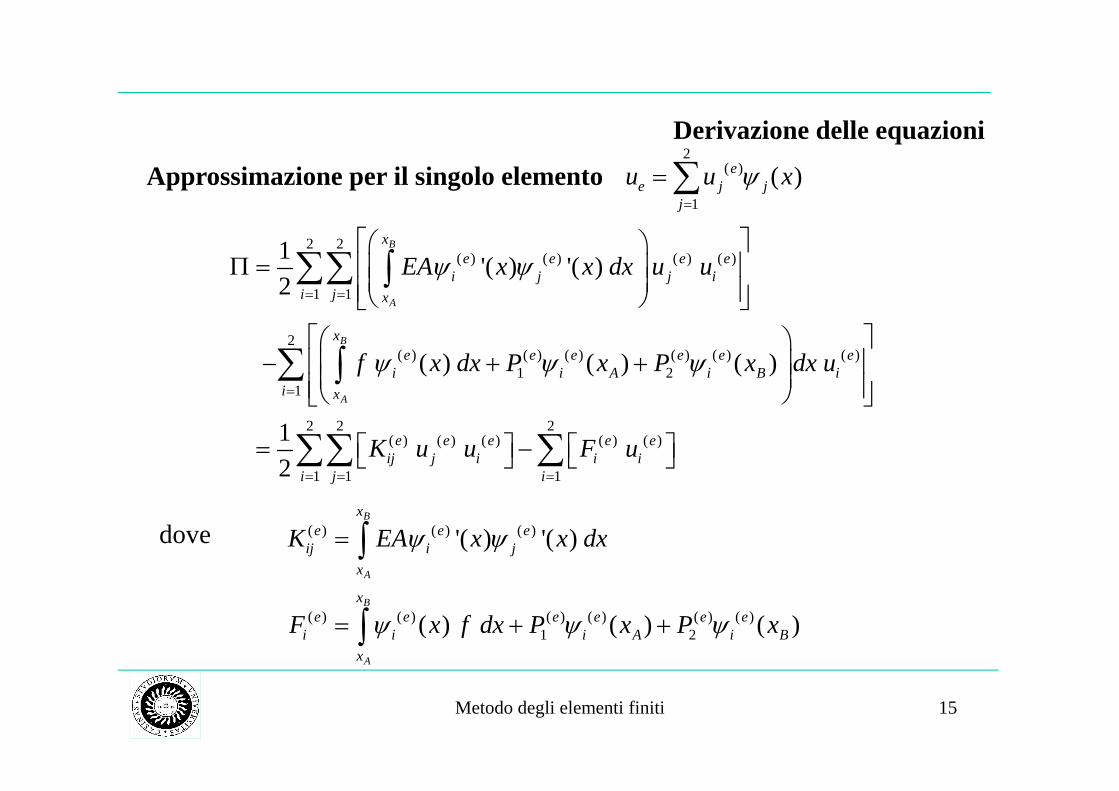
Derivazione delle equazioni
Approssimazione per il singolo elemento 2
( )
1
( )ee j j
j
u u x
2 2
( ) ( ) ( ) ( )
1 1
2( ) ( ) ( ) ( ) ( ) ( )
1 21
2 2 2( ) ( ) ( ) ( ) ( )
1 1 1
1 '( ) '( )2
( ) ( ) ( )
12
B
A
B
A
xe e e e
i j j ii j x
xe e e e e e
i i A i B ii x
e e e e eij j i i i
i j i
EA x x dx u u
f x dx P x P x dx u
K u u F u
( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )1 2
'( ) '( )
( ) ( ) ( )
B
A
B
A
xe e e
ij i jx
xe e e e e e
i i i A i Bx
K EA x x dx
F x f dx P x P x
dove
Metodo degli elementi finiti 16
Stazionarietà dell’energia potenziale totale del singolo elemento
2( ) ( ) ( )
( )1
0 e e eij j ie
ji
K u Fu
2 equazioni di equilibrio (approssimato)
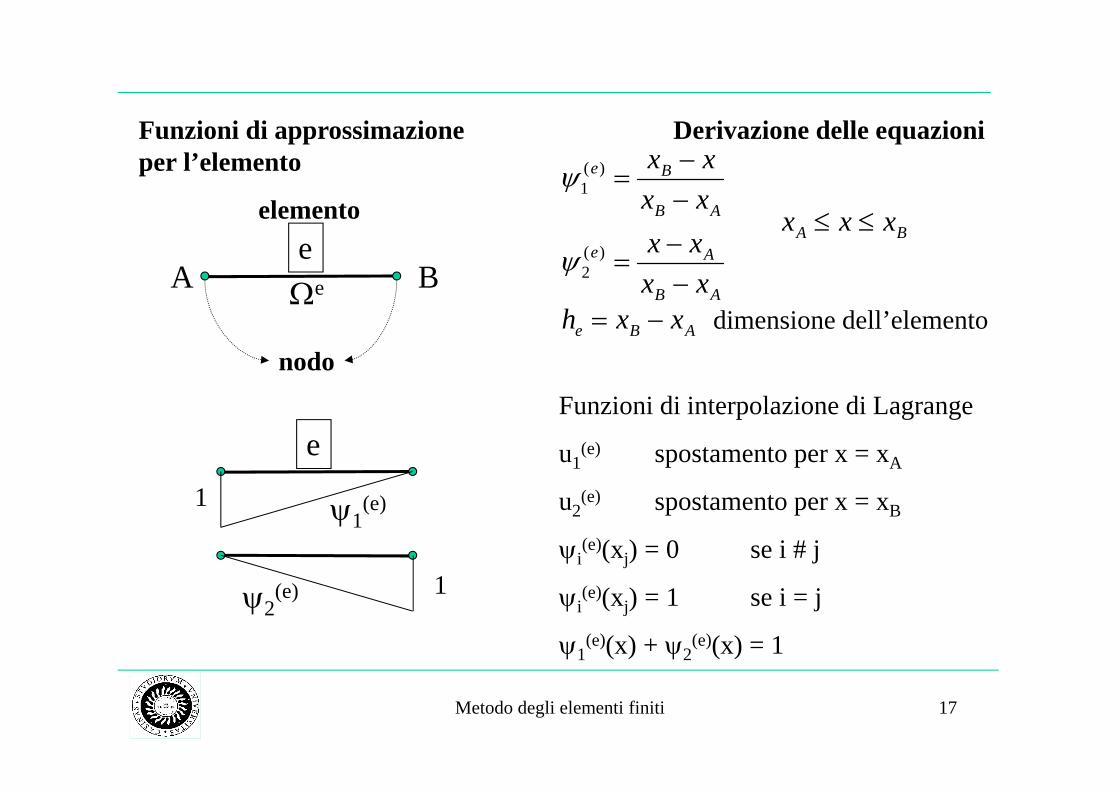
Metodo degli elementi finiti 17
Funzioni di approssimazione per l’elemento
nodo
elemento
A Be
1
1
e
1(e)
2(e)
e
( )1
( )2
e B
B A
e A
B A
x xx xx xx x
A Bx x x
Funzioni di interpolazione di Lagrange
u1(e) spostamento per x = xA
u2(e) spostamento per x = xB
i(e)(xj) = 0 se i # j
i(e)(xj) = 1 se i = j
1(e)(x) + 2
(e)(x) = 1
Derivazione delle equazioni
e B Ah x x dimensione dell’elemento
Metodo degli elementi finiti 18
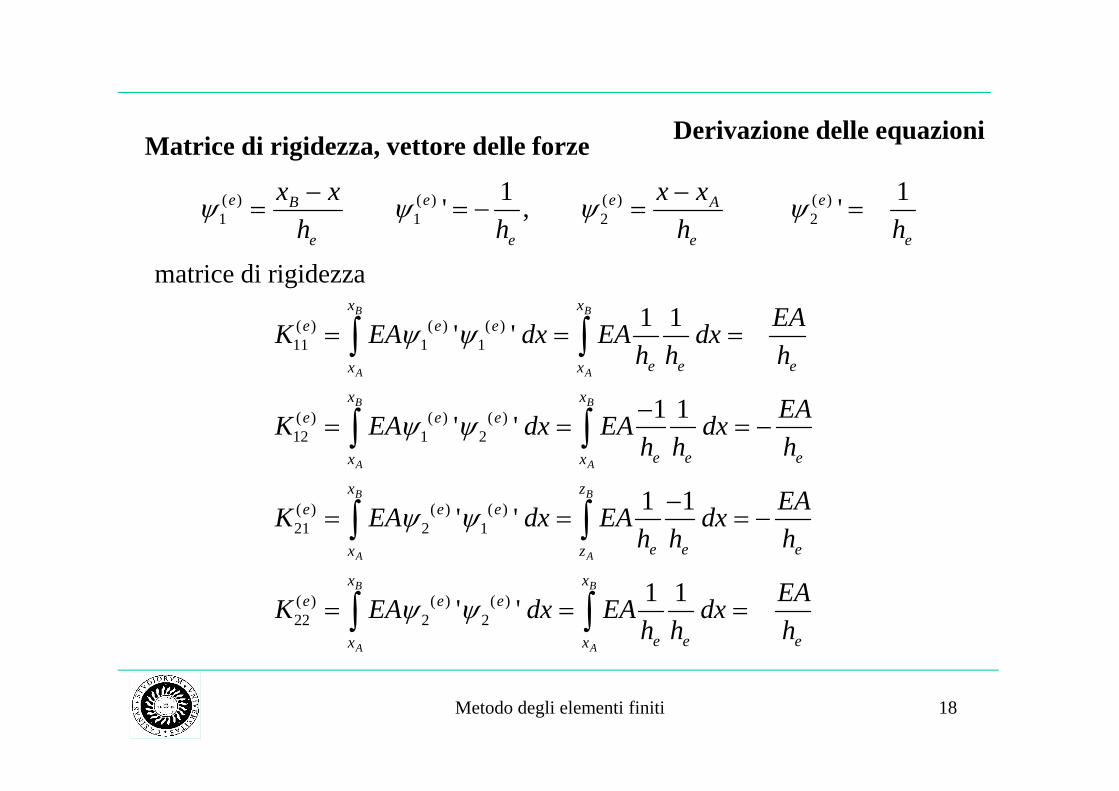
Matrice di rigidezza, vettore delle forze
( ) ( ) ( )11 1 1
( ) ( ) ( )12 1 2
( ) ( ) ( )21 2 1
( ) ( ) ( )22 2 2
1 1' '
1 1' '
1 1' '
1 1' '
B B
A A
B B
A A
B B
A A
B B
A A
x xe e e
e e ex x
x xe e e
e e ex x
x ze e e
e e ex z
x xe e e
e e ex x
EAK EA dx EA dxh h h
EAK EA dx EA dxh h h
EAK EA dx EA dxh h h
EAK EA dx EA dxh h h
( ) ( ) ( ) ( )1 1 2 2
1 1' , 'e e e eB A
e e e e
x x x xh h h h
Derivazione delle equazioni
matrice di rigidezza
Metodo degli elementi finiti 19
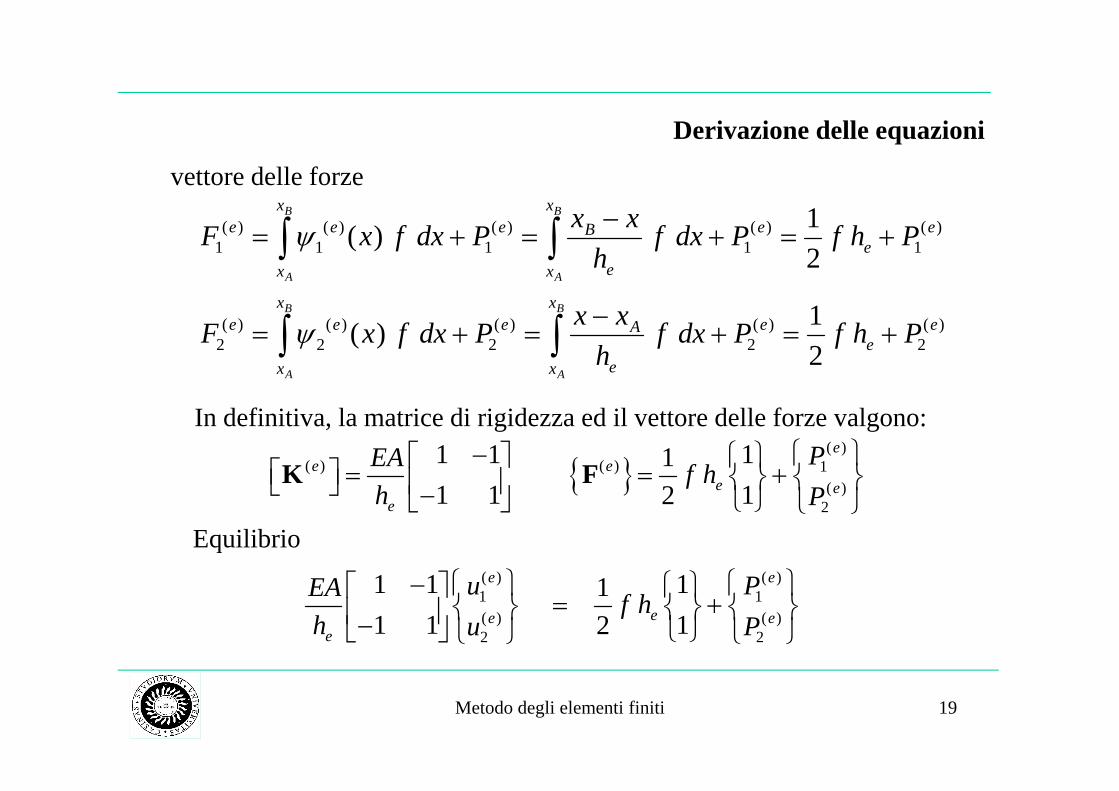
Derivazione delle equazioni
( ) ( ) ( ) ( ) ( )1 1 1 1 1
( ) ( ) ( ) ( ) ( )2 2 2 2 2
1( )2
1( )2
B B
A A
B B
A A
x xe e e e eB
eex x
x xe e e e eA
eex x
x xF x f dx P f dx P f h Ph
x xF x f dx P f dx P f h Ph
( )
( ) ( ) 1( )
2
1 1 111 1 12
ee e
e ee
PEA f hh P
K F
In definitiva, la matrice di rigidezza ed il vettore delle forze valgono:
vettore delle forze
Equilibrio( ) ( )1 1( ) ( )2 2
1 1 111 1 12
e e
ee ee
u PEA f hh u P
Metodo degli elementi finiti 20
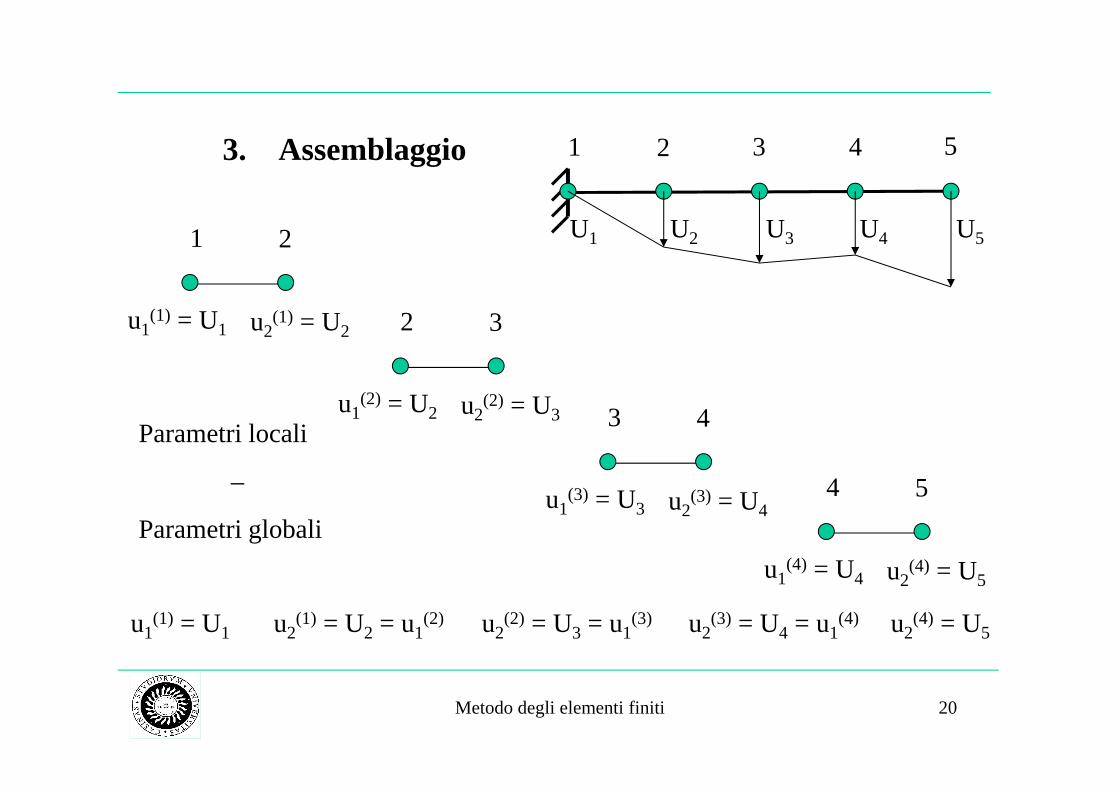
3. Assemblaggio 1 2 3 4 5
U2 U3 U4 U5U11 2
u1(1) = U1 u2
(1) = U2 2 3
u1(2) = U2 u2
(2) = U3 3 4
u1(3) = U3 u2
(3) = U44 5
u1(4) = U4 u2
(4) = U5
u1(1) = U1 u2
(1) = U2 = u1(2) u2
(2) = U3 = u1(3) u2
(3) = U4 = u1(4) u2
(4) = U5
Parametri locali
–
Parametri globali
Metodo degli elementi finiti 21
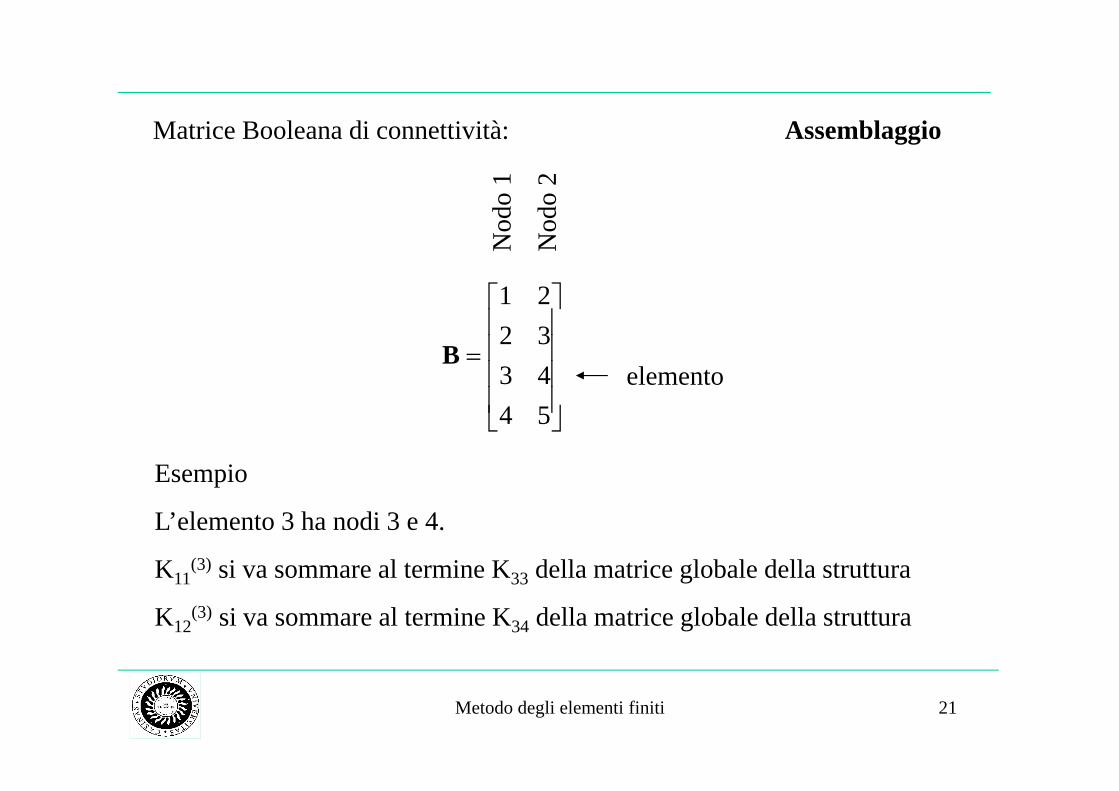
AssemblaggioMatrice Booleana di connettività:
54433221
Belemento
Nod
o 1
Nod
o 2
Esempio
L’elemento 3 ha nodi 3 e 4.
K11(3) si va sommare al termine K33 della matrice globale della struttura
K12(3) si va sommare al termine K34 della matrice globale della struttura
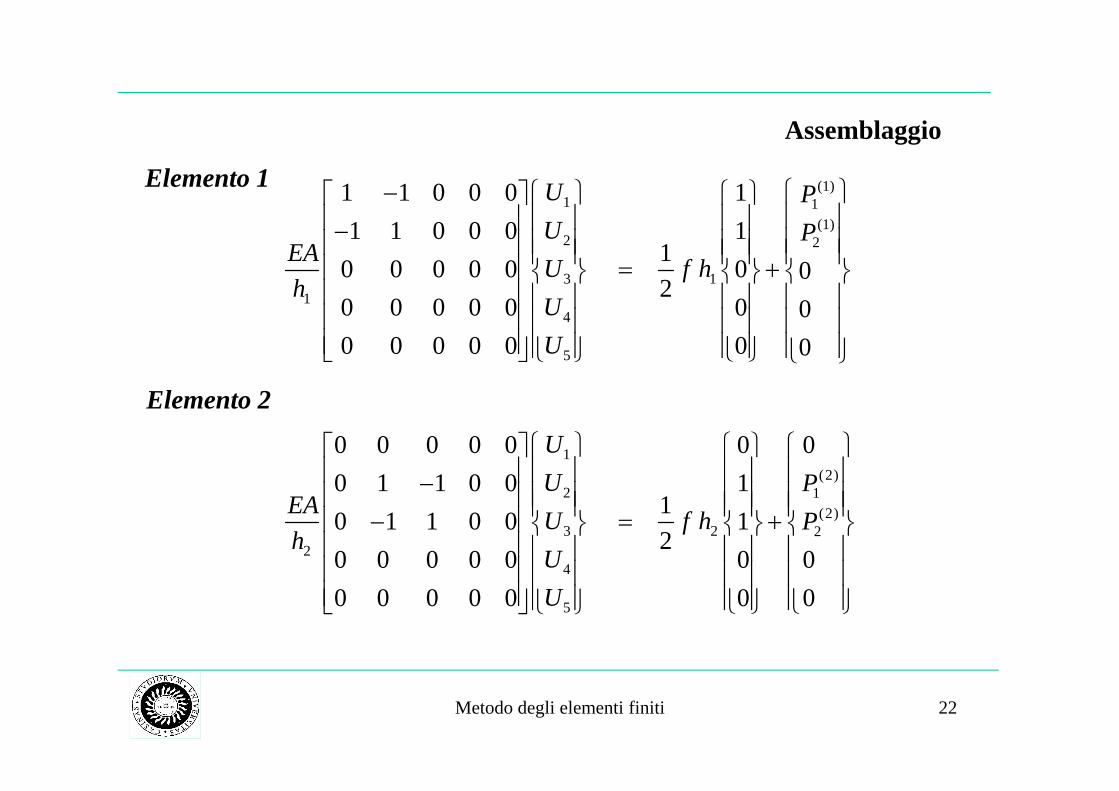
Metodo degli elementi finiti 22
(1)1 1
(1)2 2
3 11
4
5
1 1 0 0 0 11 1 0 0 0 1
10 0 0 0 0 0 02
0 0 0 0 0 0 00 0 0 0 0 0 0
U PU P
EA U f hh
UU
Elemento 1
1(2)
2 1(2)
3 2 22
4
5
0 0 0 0 0 0 00 1 1 0 0 1
10 1 1 0 0 12
0 0 0 0 0 0 00 0 0 0 0 0 0
UU P
EA U f h Ph
UU
Assemblaggio
Elemento 2
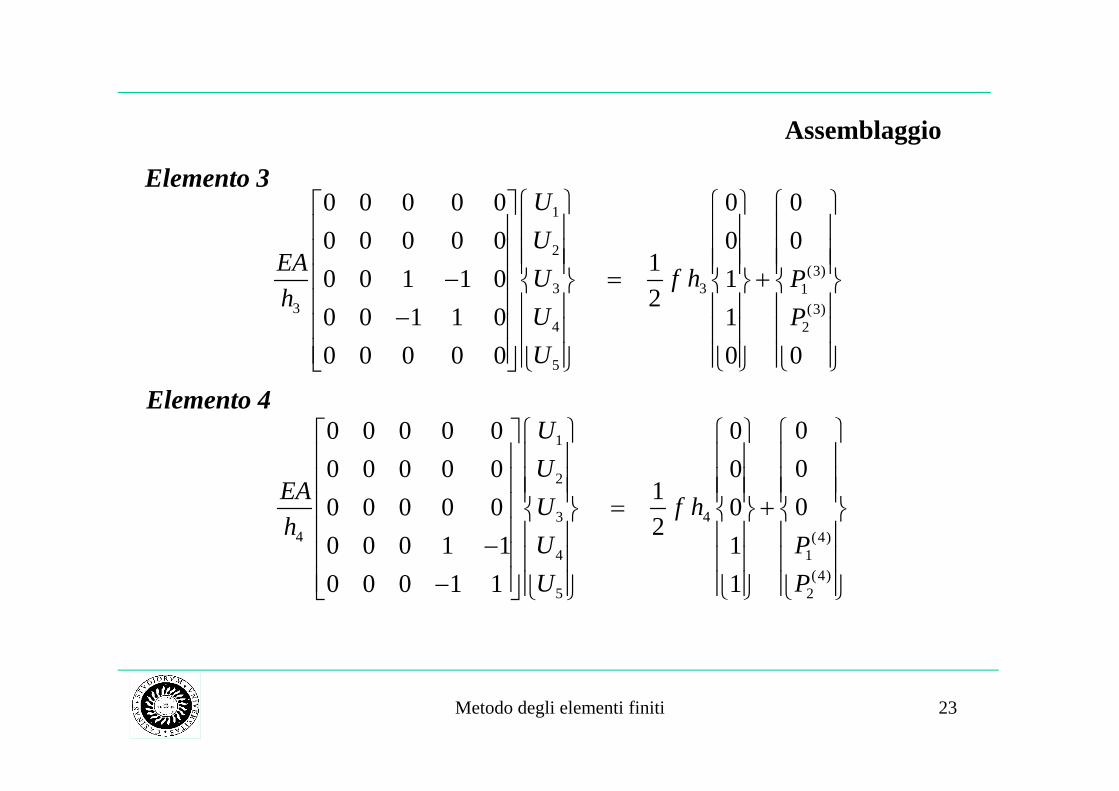
Metodo degli elementi finiti 23
1
2(3)
3 3 13 (3)
4 2
5
0 0 0 0 0 0 00 0 0 0 0 0 0
10 0 1 1 0 12
0 0 1 1 0 10 0 0 0 0 0 0
UU
EA U f h Ph
U PU
Elemento 3
1
2
3 44 (4)
4 1(4)
5 2
00 0 0 0 0 000 0 0 0 0 0
1 00 0 0 0 0 02
0 0 0 1 1 10 0 0 1 1 1
UU
EA U f hh
U PU P
Assemblaggio
Elemento 4
Metodo degli elementi finiti 24
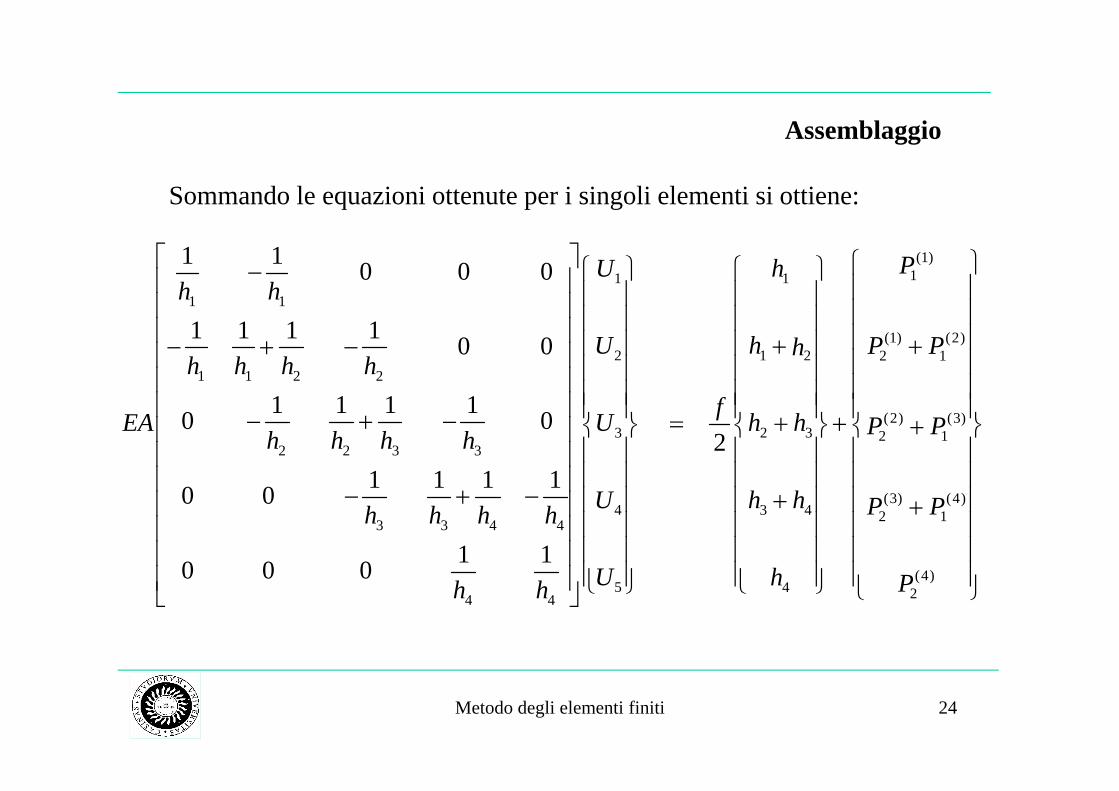
Assemblaggio
Sommando le equazioni ottenute per i singoli elementi si ottiene:
(1)11 1
1 1
2 1 21 1 2 2
3 2 32 2 3 3
4 3 43 3 4 4
5 44 4
1 1 0 0 0
1 1 1 1 0 0
1 1 1 10 02
1 1 1 10 0
1 10 0 0
PU hh h
U h hh h h h
fU h hEAh h h h
U h hh h h h
U hh h
(1) (2)2 1
(2) (3)2 1
(3) (4)2 1
(4)2
P P
P P
P P
P
Metodo degli elementi finiti 25
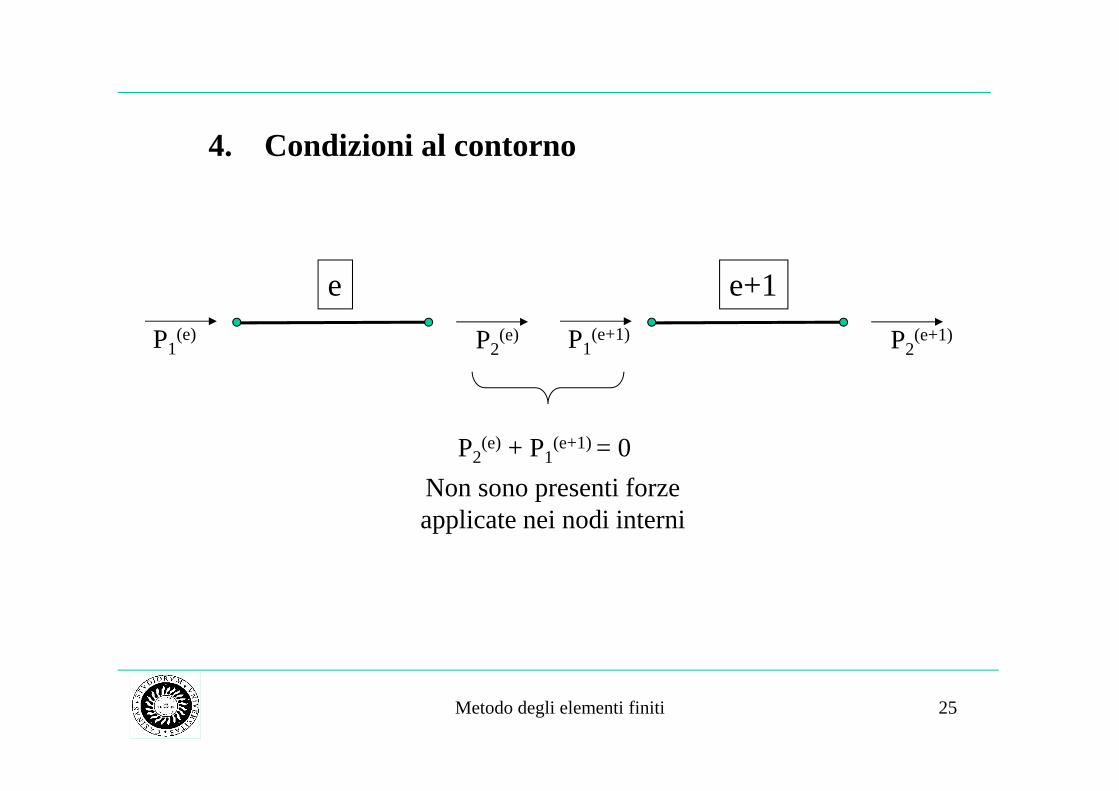
4. Condizioni al contorno
eP1
(e) P2(e)
e+1P1
(e+1) P2(e+1)
P2(e) + P1
(e+1) = 0Non sono presenti forze applicate nei nodi interni
Metodo degli elementi finiti 26
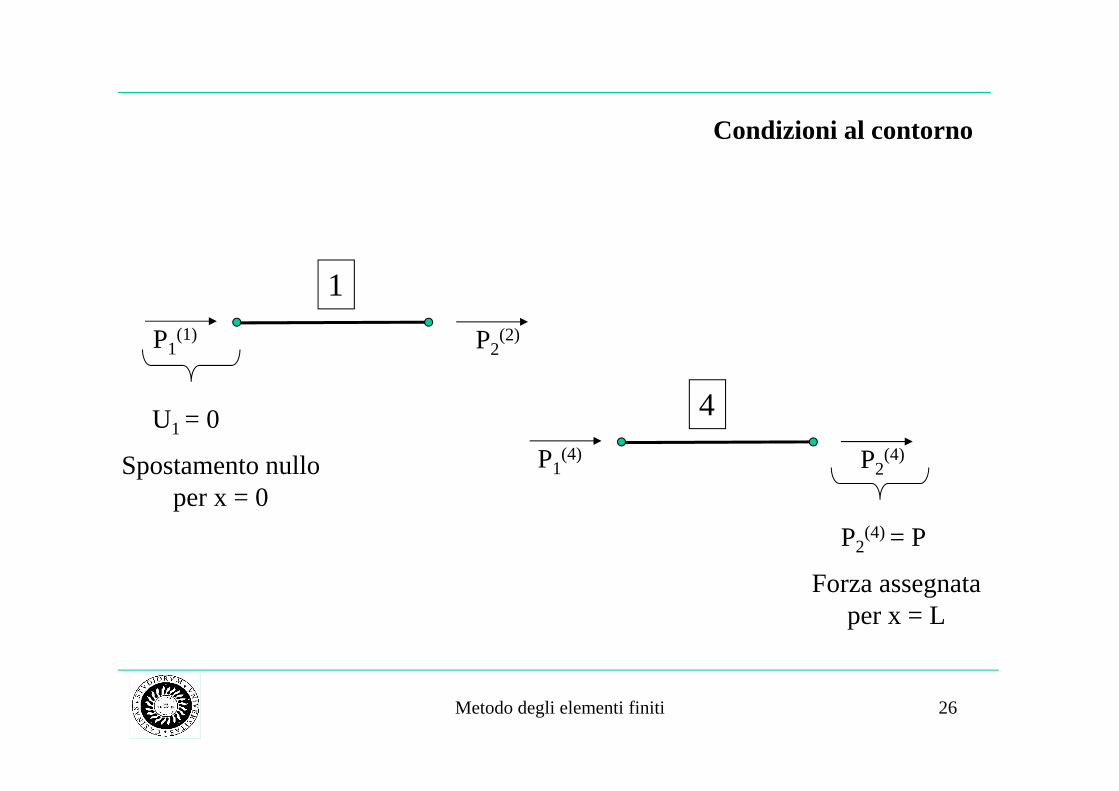
Condizioni al contorno
1P1
(1) P2(2)
4P1
(4) P2(4)
P2(4) = P
Forza assegnata per x = L
U1 = 0
Spostamento nullo per x = 0
Metodo degli elementi finiti 27
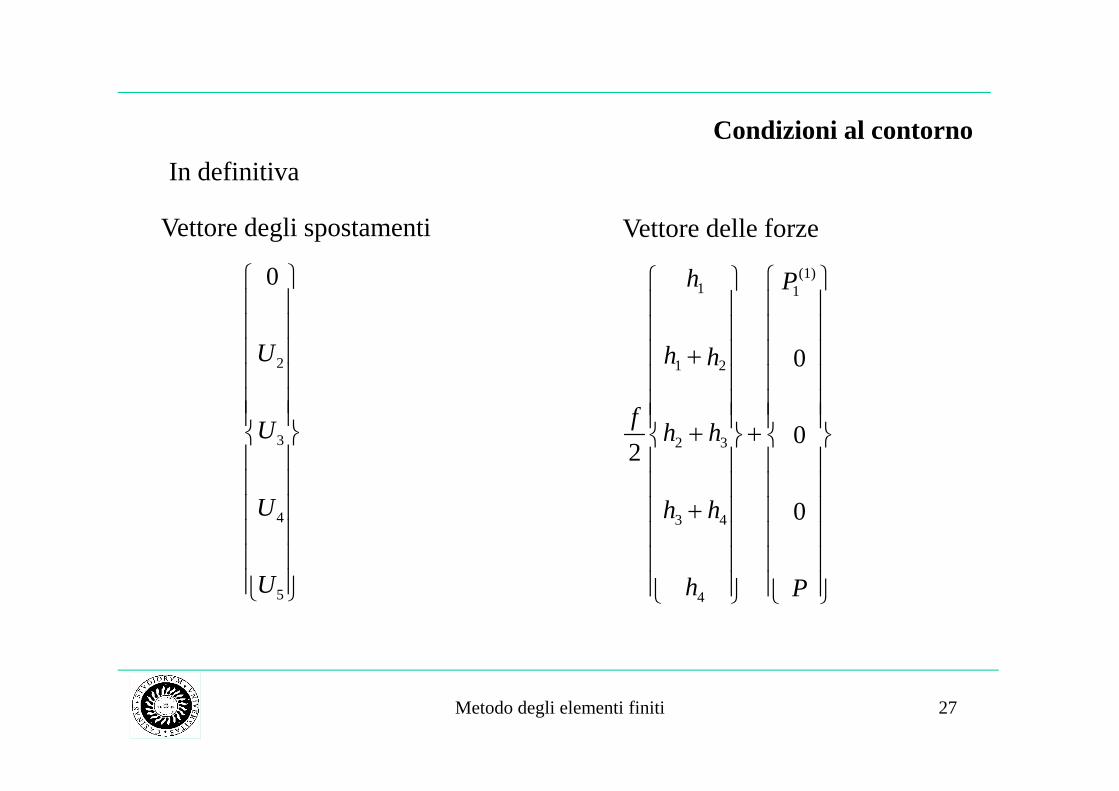
Condizioni al contornoIn definitiva
2
3
4
5
0
U
U
U
U
(1)1 1
1 2
2 3
3 4
4
0
02
0
h P
h h
f h h
h h
h P
Vettore degli spostamenti Vettore delle forze
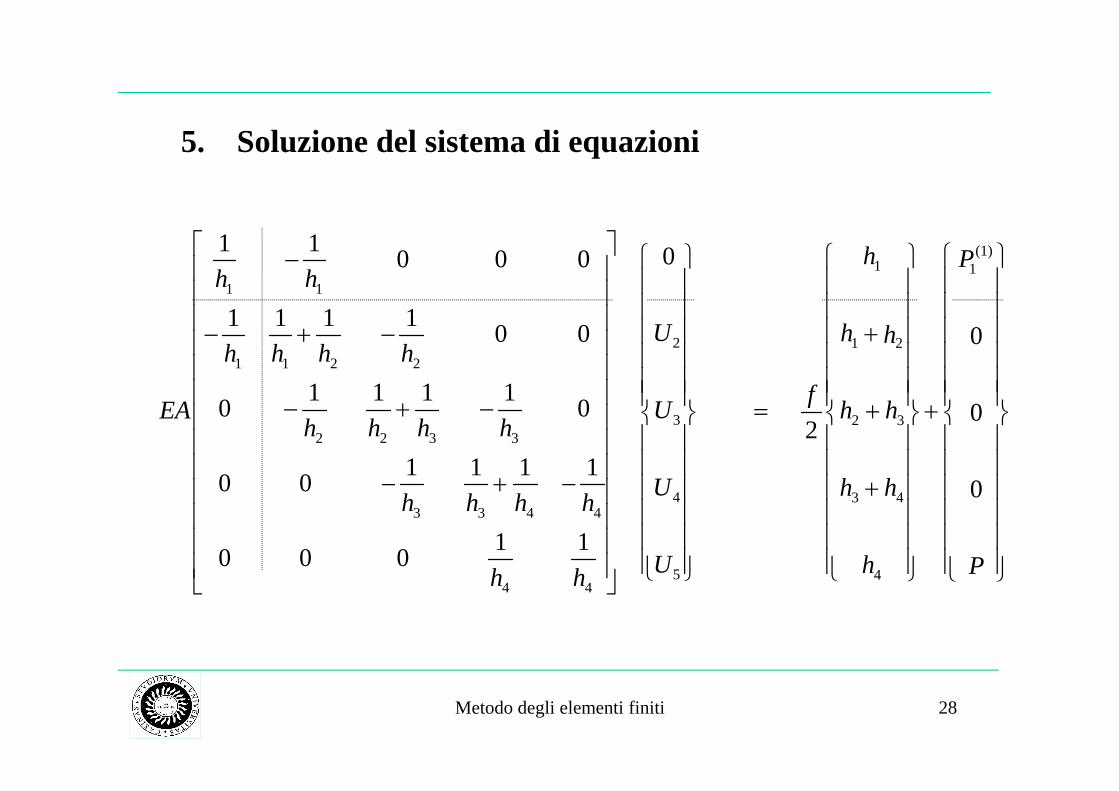
Metodo degli elementi finiti 28
(1)1 1
1 1
2 1 21 1 2 2
3 2 32 2 3 3
4 3 43 3 4 4
5 44 4
1 1 00 0 0
1 1 1 1 0 0 0
1 1 1 10 02
1 1 1 10 0
1 10 0 0
h Ph h
U h hh h h h
fU h hEAh h h h
U h hh h h h
U hh h
0
0
P
5. Soluzione del sistema di equazioni
Metodo degli elementi finiti 29
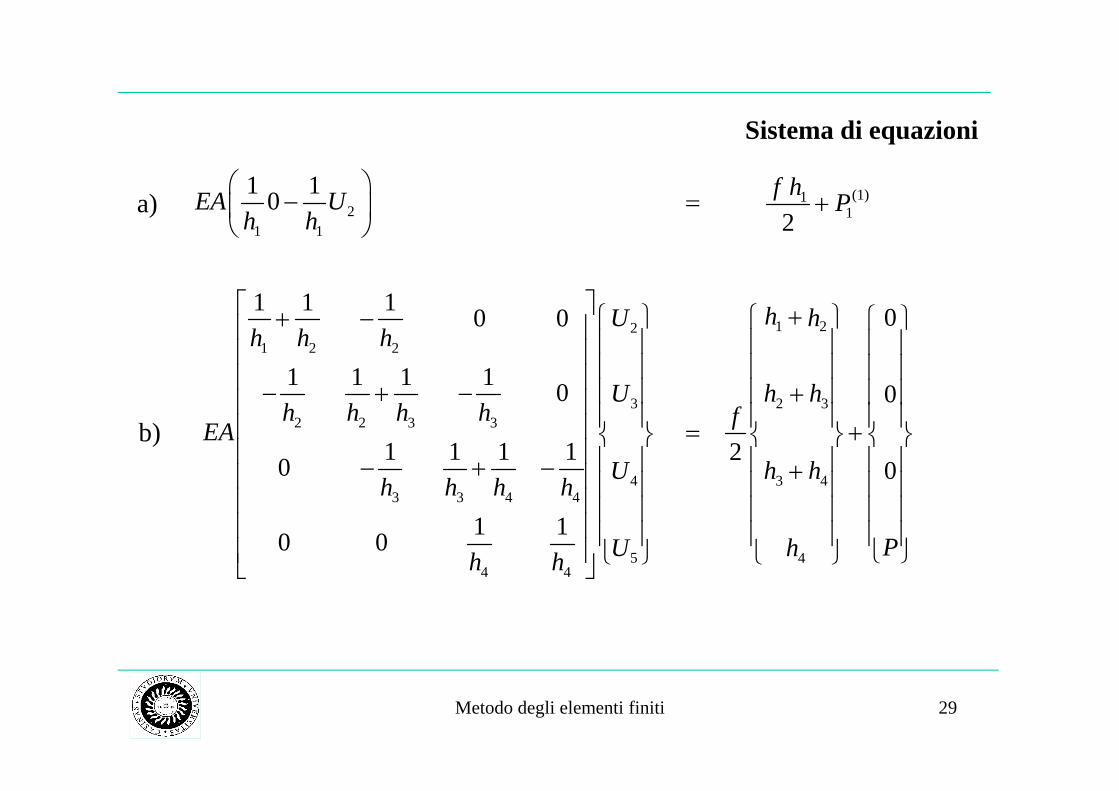
Sistema di equazioni
(1)12 1
1 1
1 221 2 2
3 2 32 2 3 3
4 3 43 3 4 4
5 44 4
1 102
1 1 1 00 0
1 1 1 1 0 0
1 1 1 1 20 0
1 10 0
f hEA U Ph h
hU hh h h
U h hh h h h fEA
U h hh h h h
PU hh h
a)
b)
Metodo degli elementi finiti 30
Sistema di equazioni
Si risolve il sistema b).
Noti gli spostamenti nodali U2, U3, U4 e U5, si sostituiscono nel sistema a) e si ricava P1
(1) che rappresenta la reazione del vincolo.
Metodo degli elementi finiti 31
6. Postprocessing della soluzione
Calcolo delle tensioni interne
Interpretazione della soluzione
Rappresentazione grafica dei risultati