
Integralitripli - Esercizisvolticantor.polito.it/didattica/materiali/Analisi matematica...
24
Integrali tripli - Esercizi svolti Integrali tripli Si calcolino gli integrali tripli seguenti riducendo per strati e per fili in coordinate cartesiane. Eventualmente fare cambiamenti di coordinate per il calcolo degli integrali doppi risultanti. 1. D (x 2 + y 2 )dx dy dz, ove D ` e il cubo [0, 1] × [0, 1] × [0, 1]; 2. D xy(y + z)dx dy dz ove D ` e il tetraedro di vertici (0, 0, 0), (1, 0, 0), (0, 1, 0), (0, 0, 1); 3. D x 2 dx dy dz ove D ` e la sfera unitaria di centro (0, 0, 0). 4. D xyz dx dy dz con D = {(x,y,z) | z 2 ≤ x 2 + y 2 , z ≥ x 2 + y 2 }. Cambiamento di coordinate 5. Si calcoli, utilizzando le coordinate sferiche, D x 2 dx dy dz ove D ` e la sfera unitaria di centro (0, 0, 0). 6. Si calcoli, utilizzando le coordinate sferiche, D 1 1+ x 2 + y 2 + z 2 dx dy dz ove D = {(x,y,z) | x 2 + y 2 + z 2 - z ≤ 0 , 0 ≤ y ≤ √ 3x/3} ; 7. Si calcoli E x 2 +4y 2 z 2 8y 3 dx dy dz, dove E = {(x,y,z) ∈ R 3 | x 2 +4y 2 (y 2 + z 2 - 1) ≤ 0,y ≥ √ 3 2 }, utilizzando il cambiamento di variabili x = 2uv y = v z = w. 1
Transcript of Integralitripli - Esercizisvolticantor.polito.it/didattica/materiali/Analisi matematica...

Integrali tripli - Esercizi svolti
Integrali tripli
Si calcolino gli integrali tripli seguenti riducendo per strati e per fili in coordinate cartesiane.
Eventualmente fare cambiamenti di coordinate per il calcolo degli integrali doppi risultanti.
1.
∫
D(x2 + y2) dx dy dz, ove D e il cubo [0, 1] × [0, 1] × [0, 1];
2.
∫
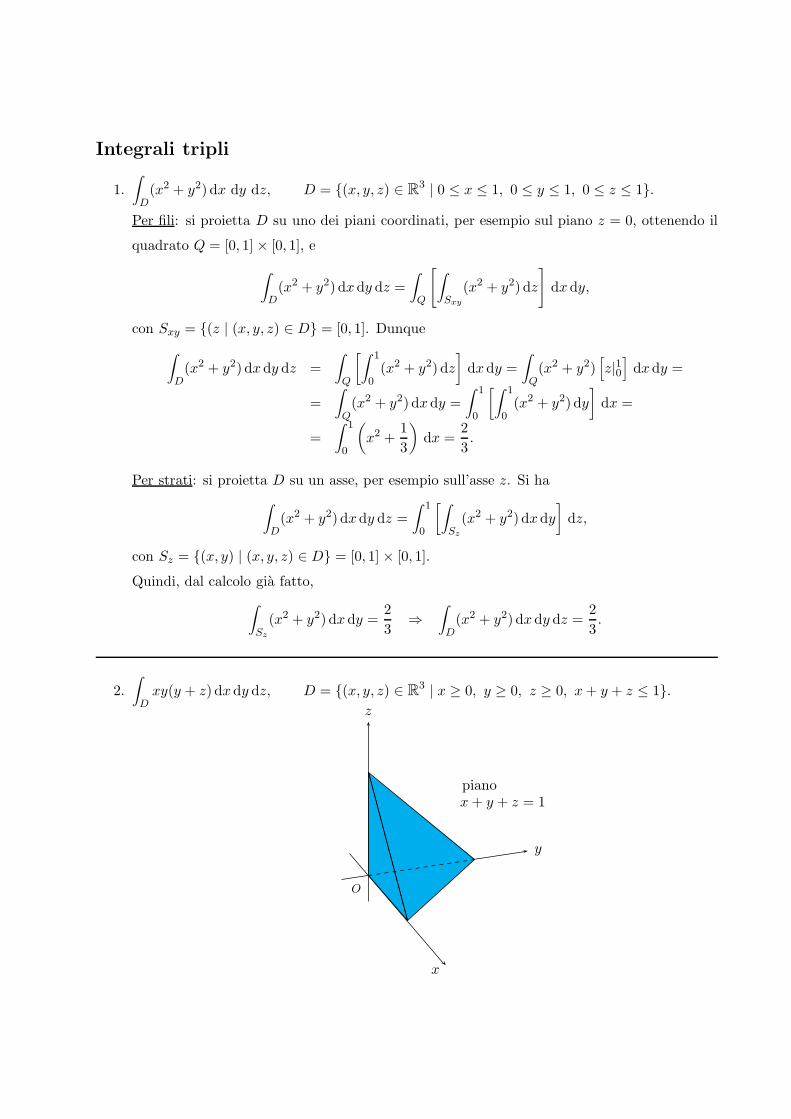
Dxy(y + z) dx dy dz ove D e il tetraedro di vertici (0, 0, 0), (1, 0, 0), (0, 1, 0), (0, 0, 1);
3.
∫
Dx2 dx dy dz ove D e la sfera unitaria di centro (0, 0, 0).
4.
∫
Dxyz dx dy dz con D = {(x, y, z) | z2 ≤ x2 + y2 , z ≥ x2 + y2}.
Cambiamento di coordinate
5. Si calcoli, utilizzando le coordinate sferiche,
∫
Dx2 dx dy dz ove D e la sfera unitaria di centro
(0, 0, 0).
6. Si calcoli, utilizzando le coordinate sferiche,
∫
D
1
1 +√
x2 + y2 + z2dx dy dz ove
D = {(x, y, z) | x2 + y2 + z2 − z ≤ 0 , 0 ≤ y ≤√3x/3} ;
7. Si calcoli∫
E
x2 + 4y2z2
8y3dxdy dz,
dove E = {(x, y, z) ∈ R3 | x2 + 4y2(y2 + z2 − 1) ≤ 0, y ≥
√32 }, utilizzando il cambiamento di
variabili
x = 2uvy = vz = w.
1

Ulteriori integrali tripli
8.
∫
Dx2y dx dy dz con D = {(x, y, z) ∈ R
3 | x2 + z2 ≤ 1 , 0 ≤ y ≤ 1};
9.
∫
D
1
3− zdx dy dz,
D = {(x, y, z) | 9z ≤ 1 + y2 + 9x2 , 0 ≤ z ≤√
9− (y2 + 9x2)} ;
10.
∫
Dxdx dy dz, ove D e l’insieme {(x, y, z) | 2x ≤ x2 + y2 + z2 ≤ 1};
Applicazioni
11. Calcolare il volume delle regioni seguenti:
(a) A = {(x, y, z) ∈ R3 | x2 + y2 ≤ 1, x2 + y2 − 2 ≤ z ≤ 4− x− y};
(b) B = {(x, y, z) ∈ R3 | 1− z ≤ x2 + y2 ≤ 1− z2
9 , 0 ≤ z ≤ 2};
(c) C = {(x, y, z) ∈ R3 | 1− z ≤ x2 + y2 ≤ 1, z ≤ 3x2 − y2};
(d) D = {(x, y, z) ∈ R3 | 1
5
√
x2 + y2 ≤ z ≤ e−√
x2+y2};
12. Si consideri il tetraedro di vertici A = (1, 0, 0), B = (0, 2, 0), C = (0, 0, 3), O = (0, 0, 0) e lo
si suddivida in due mediante il piano di equazione x = k. Determinare k ∈ R in modo che i
due solidi ottenuti abbiano volumi uguali.
13. Calcolare i volumi dei seguenti solidi ottenuti ruotando il grafico della funzione y = f(x)
attorno all’asse delle ascisse:
(a) y = 1x , x0 < x < x1;
(b) y = (1− x2/3)3/2, −1 ≤ x ≤ 1 (asteroide );
(c) y = x3, 0 < x < a;
(d) y = e x, 0 < x < a;
(e) y = cosh x, 0 < x < a.
14. Calcolare il volume degli insiemi delimitati dalle superfici:
(a) z = sinx, x = 0, x = π, y = 0, y = 1, z = 0;
(b) z = sinx, x = −π, x = π, y = 0, y = 1, z = 0.

15. I due paraboloidi z + 10 = 5(x2 + y2) e z − 103 = x2 + y2 individuano una regione E che si
suppone omogenea. Verificare che il baricentro di E cade nell’origine.
16. Calcolare i momenti di inerzia (rispetto all’asse di rotazione) dei corpi seguenti, supposti
omogenei, con densita 1 e ruotanti rispetto alla retta indicata.
(a) una sfera, ruotante intorno ad una retta tangente;
(b) il volume interno all’ellissoide x2
a2+ y2
b2+ z2
c2= 1, ruotante intorno all’asse delle ascisse;
(c) un guscio sferico, di raggio interno r ed esterno R, ruotante intorno ad un diametro.
Integrali tripli
1.
∫
D(x2 + y2) dx dy dz, D = {(x, y, z) ∈ R
3 | 0 ≤ x ≤ 1, 0 ≤ y ≤ 1, 0 ≤ z ≤ 1}.
Per fili: si proietta D su uno dei piani coordinati, per esempio sul piano z = 0, ottenendo il
quadrato Q = [0, 1] × [0, 1], e
∫
D(x2 + y2) dxdy dz =
∫
Q
[
∫
Sxy
(x2 + y2) dz
]
dxdy,
con Sxy = {(z | (x, y, z) ∈ D} = [0, 1]. Dunque
∫
D(x2 + y2) dxdy dz =
∫
Q
[∫ 1
0(x2 + y2) dz
]
dxdy =
∫
Q(x2 + y2)
[
z|10]
dxdy =
=
∫
Q(x2 + y2) dxdy =
∫ 1
0
[∫ 1
0(x2 + y2) dy
]
dx =
=
∫ 1
0
(
x2 +1
3
)
dx =2
3.
Per strati: si proietta D su un asse, per esempio sull’asse z. Si ha
∫
D(x2 + y2) dxdy dz =
∫ 1
0
[∫
Sz
(x2 + y2) dxdy
]
dz,
con Sz = {(x, y) | (x, y, z) ∈ D} = [0, 1] × [0, 1].
Quindi, dal calcolo gia fatto,
∫
Sz
(x2 + y2) dxdy =2
3⇒
∫
D(x2 + y2) dxdy dz =
2
3.
2.
∫
Dxy(y + z) dxdy dz, D = {(x, y, z) ∈ R
3 | x ≥ 0, y ≥ 0, z ≥ 0, x+ y + z ≤ 1}.
x
y
z
O
pianox+ y + z = 1

Per fili: la proiezione di D sul piano z = 0 e il triangolo T delimitato dalla retta x+ y = 1 e
contenuto nel primo quadrante:
∫
Dxy(y + z) dxdy dz =
∫
T
[
∫
Sxy
xy(y + z) dz
]
dxdy,
con Sxy = {z | (x, y, z) ∈ D} = [0, 1− x− y].
x
y
z
Ob
b
Sxy
Quindi
∫
Dxy(y + z) dxdy dz =
∫
Txy
[∫ 1−x−y
0(y + z) dz
]
dxdy =
∫
Txy
[
yz +1
2z2∣
∣
∣
∣
z=1−x−y
z=0
]
dxdy =
=
∫
Txy
[
y(1− x− y) +1
2(1− x− y)2
]
dxdy =
=
∫
Txy
[
y − xy − y2 +1
2(1 + x2 + y2 − 2x− 2y − 2xy)
]
dxdy =
=
∫
Txy
[
y − xy − y2 +1
2+
1
2x2 +
1
2y2 − x− y − xy
]
dxdy =
=
∫
Txy
[
−2xy − 1
2y2 +
1
2+
1
2x2 − x
]
dxdy =
=
∫ 1
0
[
−∫ 1−x
0
(
2x2y2 +1
2xy3 − 1
2xy − 1
2x3y + x2y
)
dy
]
dx =
= −∫ 1
0
{
2
3x2(1− x)3 +
1
8x(1− x)4 − 1
4x(1− x)2 − 1
4x3(1− x)2 +
1
2x2(1− x)2
}
dx
si omette il calcolo dell’integrale semplice.
Per strati: si proietta sull’asse z ottenendo il segmento [0, 1] e quindi
∫
Dxy(y + z) dxdy dz =
∫ 1
0
[∫
Sz
xy(y + z) dxdy
]
dz,
con Sz = {(x, y) | (x, y, z) ∈ D} = {(x, y) | x+ y ≤ 1− z, x ≥ 0, y ≥ 0}.

x
y
z
O
Sz
Quindi∫
Dxy(y + z) dxdy dz =
∫ 1
0
[∫ 1−z
0
(∫ 1−z−x
0xy(y + z) dy
)
dx
]
dz
si omette il calcolo degli integrali semplici.
3.
∫
Dx2 dxdy dz, D = {(x, y, z) | x2 + y2 + z2 ≤ 1}.
Per fili: si proietti su z = 0 ottenendo il disco E = {(x, y) | x2 + y2 ≤ 1}. Quindi
∫
Dx2 dxdy dz =
∫
E
(
∫
Sxy
x2 dz
)
dxdy, Sxy = [−√
1− x2 − y2,√
1− x2 − y2]
=
∫
E2x2
√
1− x2 − y2 dxdy.
Conviene calcolare quest’integrale doppio passando a coordinate polari e integrando sul do-
minio R = {(ρ, θ) ∈ R2 | 0 < ρ ≤ 1, 0 ≤ θ ≤ 2π}. Quindi
∫
E2x2
√
1− x2 − y2 dxdy =
∫
R2ρ2 cos2 θ
√
1− ρ2ρdρdθ =∫ 2π
02 cos2 θ dθ ·
∫ 1
0ρ3√
1− ρ2 dρ = 2π
∫ 1
0ρ3√
1− ρ2 dρ.
Si sostituisce prima ρ2 = u e quindi 1− u = s2:
2π
∫ 1
0ρ3√
1− ρ2 dρ = 2π
∫ 1
0ρ2√
1− ρ2 d
(
ρ2
2
)
= π
∫ 1
0u√1− udu = 2π
∫ 1
0(1− s2)s2 ds.
Si omette il calcolo dell’integrale semplice.
Per strati:∫
Dx2 dxdy dz = 2
∫
D0
x2 dxdy dz, con D0 = {(x, y, z) ∈ R3 | z > 0, x2 + y2 + z2 ≤ 1}
= 2
∫ 1
0
[∫
Sz
x2 dxdy
]
dz con Sz = {(x, y) ∈ R2 | x2 + y2 ≤ 1− z2}.

Passo a coordinate polari
{
x = ρ cos θy = ρ sin θ
0 ≤ θ ≤ 2π, 0 < ρ ≤√
1− z2
da cui
2
∫ 1
0
[∫
Sz
x2 dxdy
]
dz = 2
∫ 1
0
{
∫ 2π
0
[
∫
√1−z2
0(ρ2 cos2 θ)ρdρ
]
dθ
}
dz
= 2 ·∫ 2π
0cos2 θ dθ
∫ 1
0
(
∫
√1−z2
0ρ3 dρ
)
dz = 2π
∫ 1
0
1
4ρ4∣
∣
∣
∣
√1−z2
0dz =
π
2
∫ 1
0(1− z2)2 dz.
Si omette il calcolo dell’integrale semplice.
4.
∫
Dxyz dxdy dz, D = {(x, y, z) ∈ R
3 | z2 ≤ x2 + y2, z > x2 + y2}.
xy
zγ
Cono e paraboloide si intersecano in (0, 0, 0) e nella circonferenza γ di equazione
{
x2 + y2 = 1z = 1.
Dunque la proiezione di D sul piano z = 0 e il disco
D0 = {(x, y, 0) | x2 + y2 ≤ 1}.
Per fili:∫
D0
[
∫
√x2+y2
x2+y2xyz dz
]
dxdy =1
2
∫
D0
xy
[
z2∣
∣
∣
√x2+y2
x2+y2
]
dxdy
= 12
∫
D0
xy[x2 + y2 − (x2 + y2)2] dxdy
passando a coordinate polari otteniamo
12
∫ 1
0
∫ 2π
0ρ{
(ρ cos θ)(ρ sin θ)[
ρ2 − ρ4]}
dρdθ =
= 12
[∫ 1
0
(
ρ5 − ρ7)
dρ
]
·[∫ 2π
0cos θ sin θ dθ
]
= 0.
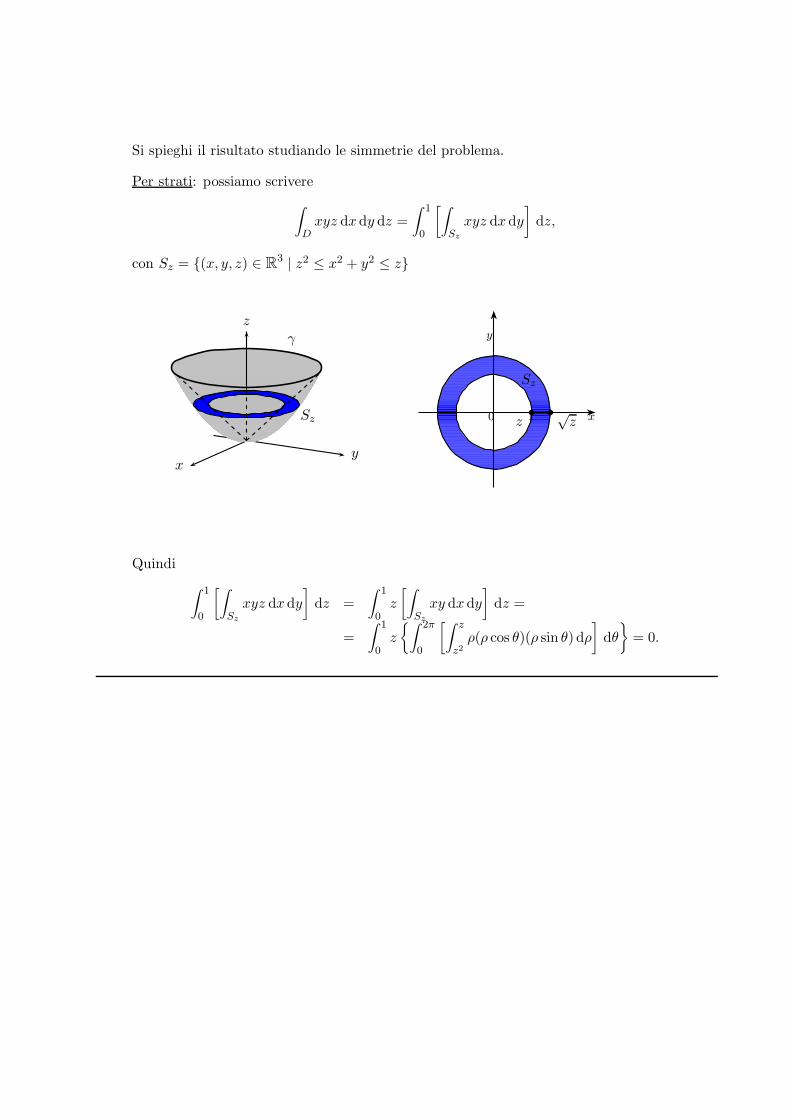
Si spieghi il risultato studiando le simmetrie del problema.
Per strati: possiamo scrivere
∫
Dxyz dxdy dz =
∫ 1
0
[∫
Sz
xyz dxdy
]
dz,
con Sz = {(x, y, z) ∈ R3 | z2 ≤ x2 + y2 ≤ z}
xy
zγ
Sz x
y
0 1b b √
zz
Sz
Quindi
∫ 1
0
[∫
Sz
xyz dxdy
]
dz =
∫ 1
0z
[∫
Sz
xy dxdy
]
dz =
=
∫ 1
0z
{∫ 2π
0
[∫ z
z2ρ(ρ cos θ)(ρ sin θ) dρ
]
dθ
}
= 0.

Cambiamenti di coordinate
5.
∫
Dx2 dxdy dz, D = {(x, y, z) ∈ R
3 | x2 + y2 + z2 ≤ 1}. Passando a coordinate sferiche
x = r cos θ sinϕy = r sin θ sinϕz = r cosϕ
con
0 ≤ ϕ ≤ π2
0 ≤ θ ≤ 2π0 ≤ r ≤ 1
si ha che il valore assoluto del determinante della matrice jacobiana e r2 sinϕ e dunque
∫
Dx2 dxdy dz =
∫ π
0
{∫ 2π
0
[∫ 1
0(r sinϕ cos θ)2r2 sinϕdr
]
dθ
}
dϕ =
=
∫ 1
0r4 dr ·
∫ π
0sin3 ϕdϕ ·
∫ 2π
0cos2 θ dθ =
= 15 ·∫ π
0(1− cos2 ϕ) sinϕdϕ ·
∫ 2π
0
1 + cos 2θ
2dθ =
= π5 ·[
− cosϕ+ 13 cos
3 ϕ]π
0= 4π
15 .
6. Notiamo che 0 = x2 + y2 + z2 − z = x2 + y2 +(
z − 12
)2− 1
4 e l’equazione di una sfera di
centro(
0, 0, 12
)
e raggio 12 . Di questa si vuole la parte contenuta nel diedro delimitato dai
piani y = 0 e y = x√3, in y ≥ 0.
x
y
z
Passando a coordinate sferiche
x = r cos θ sinϕy = r sin θ sinϕz = r cosϕ
con
0 ≤ ϕ ≤ π2
0 ≤ θ ≤ π6
0 ≤ r ≤ cosϕ

si ha
∫
D
1
1 +√
x2 + y2 + z2dxdy dz =
∫ π
6
0
[
∫ π
2
0
(∫ cosϕ
0
1
1 + rsinϕdr
)
dϕ
]
dθ =
= π6
∫ π
2
0sinϕ
[
∫ cosϕ
0
r2 − 1 + 1
1 + rdr
]
dϕ =π
6
∫ π
2
0sinϕ
[∫ cosϕ
0
(
r − 1 +1
1 + r
)
dr
]
dϕ =
= π6
∫ π
2
0sinϕ
{
1
2r2 − r + log(1 + r)
∣
∣
∣
∣
cosϕ
0
}
dϕ =
= −π6
∫ π
2
0
[
1
2cos2 ϕ− cosϕ+ log(1 + cosϕ)
]
d cosϕ =
= − π12 · 1
3 cos3 ϕ∣
∣
∣
π
2
0+ π
6 · 12 cos
2 ϕ∣
∣
∣
π
2
0− π
6
∫ π
2
0log(1 + cosϕ) d cosϕ =
= − π36 · (−1) + π
12 · (−1)− π6
∫ π
2
0log(1 + cosϕ) d cosϕ.
Integrando per parti
∫
log(1 + u) du = u log(1 + u)−∫
u
1 + udu = u log(1 + u)− u− log(1 + u),
e sostituendo nell’integrale precedente otteniamo
− π18 − π
6 {cosϕ · log(1 + cosϕ)− cosϕ− log(1 + cosϕ)|π
2
0
}
=
= − π18 − π
6 [0− (2 log 2− 1)] = −2π9 + π
3 log 2.
7. La matrice Jacobiana del cambiamento di coordinate φ e
Jφ =
2v 2u 00 1 00 0 1
⇒ |det Jφ| = 2v.
Il dominio di integrazione E diventa
E′ =
{
(u, v, w) ∈ R3 | u2 + v2 +w2 ≤ 1, v ≥
√3
2
}
e quindi
I =
∫
E′
4u2v2 + 4v2w2
8v32v dudv dw.
Integrando per strati paralleli al piano uw e passando a coordinate polari u = ρ cosϕ, v =
ρ sinϕ
I =
∫ 1
√3
2
(
∫ 2π
0dϕ
∫
√1−v2
0ρ3 dρ
)
dv = π
(
4
15− 49
320
√3
)
.
Ulteriori integrali tripli
8.
∫
Dx2y dxdy dz D = {(x, y, z) ∈ R
3 | x2 + z2 ≤ 1, 0 ≤ y ≤ 1}.
∫
Dx2y dxdy dz =
∫ 1
0
{∫ 2π
0
[∫ 1
0r2 cos2 θy dr
]
dθ
}
dy =∫ 1
0y ·∫ 2π
0cos2 θ ·
∫ 1
0ρ3 dρ =
1
2· π · 1
4=
π
8.
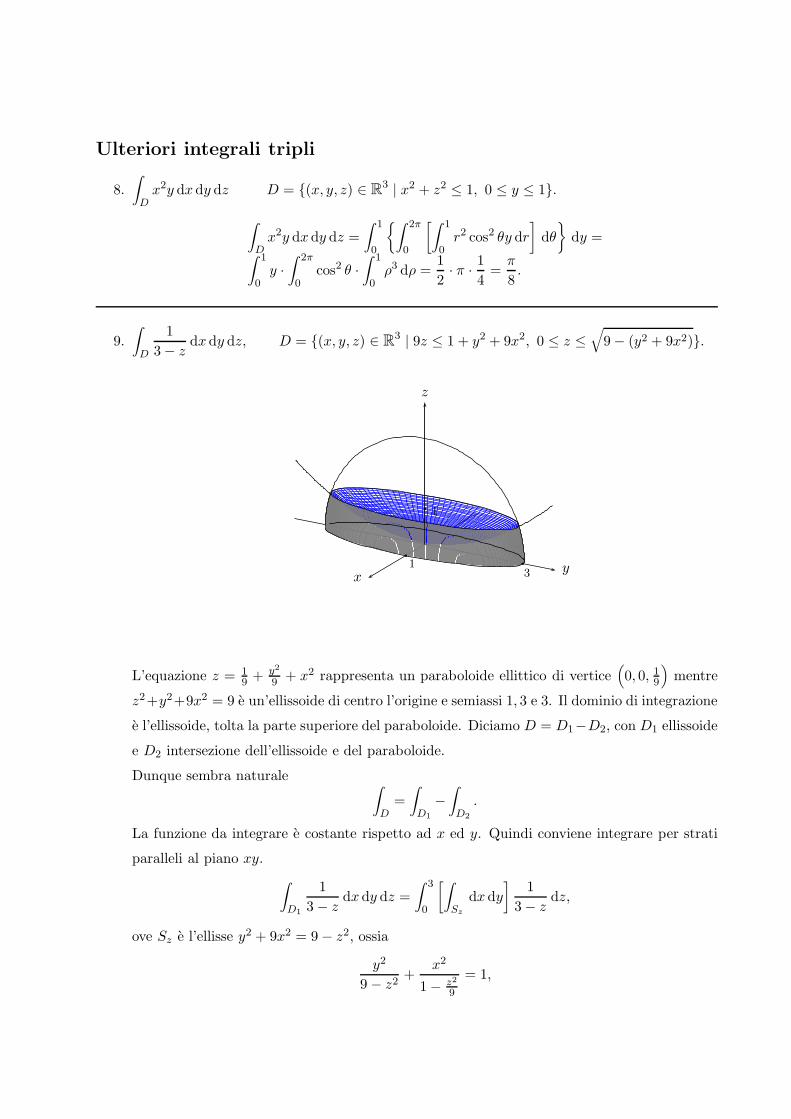
9.
∫
D
1
3− zdxdy dz, D = {(x, y, z) ∈ R
3 | 9z ≤ 1 + y2 + 9x2, 0 ≤ z ≤√
9− (y2 + 9x2)}.
xy
z
b
b
b
31
1
L’equazione z = 19 + y2
9 + x2 rappresenta un paraboloide ellittico di vertice(
0, 0, 19
)
mentre
z2+y2+9x2 = 9 e un’ellissoide di centro l’origine e semiassi 1, 3 e 3. Il dominio di integrazione
e l’ellissoide, tolta la parte superiore del paraboloide. Diciamo D = D1−D2, con D1 ellissoide
e D2 intersezione dell’ellissoide e del paraboloide.
Dunque sembra naturale∫
D=
∫
D1
−∫
D2
.
La funzione da integrare e costante rispetto ad x ed y. Quindi conviene integrare per strati
paralleli al piano xy.
∫
D1
1
3− zdxdy dz =
∫ 3
0
[∫
Sz
dxdy
]
1
3− zdz,
ove Sz e l’ellisse y2 + 9x2 = 9− z2, ossia
y2
9− z2+
x2
1− z2
9
= 1,

la cui area e
π · (9− z2)1
2 ·(
1− z2
9
) 1
2
=π
3· (9− z2).
Dunque∫
D1
1
3− zdxdy dz =
π
3
∫ 3
0
9− z2
3− zdz.
Notare: questo metodo non funziona perche si e incontrato un integrale improprio divergente.
Si noti pero che il punto (0, 0, 3) non appartiene al dominio d’integrazione.
Procediamo allora in un altro modo. Chiamiamo D1 e D2 i due insiemi in figura e notiamo
che
D = D1 ∪D2 ⇒∫
D=
∫
D1
+
∫
D2
.
Per z fissato, z ∈[
0, 19
]
va calcolato
∫
Sz
1
3− zdxdy, con Sz ellisse di area π
3 · (9 − z2), come
visto sopra, e quindi
∫
D1
1
3− zdxdy dz =
π
3
∫ 1
9
0
1
3− z(9− z2) dz =
π
3
∫ 1
9
0(3 + z) dz =
π
3
(
1
3+
1
162
)
=55
486π.
Calcoliamo
∫
D2
, ancora per strati perpendicolari all’asse z.
In questo caso la sezione e la corona ellittica
Sz = {(x, y, z) | 9z − 1 ≤ y2 + 9x2 ≤ 9− z2}.
Inoltre abbiamo
1
9≤ z ≤ ?
cioe va capito a che quota si intersecano l’ellissoide ed il paraboloide. Si impone quindi
l’uguaglianza
z =1
9+
(
y2
9+ x2
)
= 3·√
1−(
y2
9+ x2
)
ossia z = 3·√
1− z +1
9⇒ z2+9z−10 = 0,
le cui radici sono z = 1, z = −11 e di cui va presa la positiva. Dunque 19 ≤ z ≤ 1 ed abbiamo
∫
D2
1
3− zdxdy dz =
∫ 1
1
9
1
3− z
[∫
Sz
dxdy
]
dz = AreaSz ·∫ 1
1
9
1
3− zdz.
L’area di Sz e
π
3· (9− z2)− π
3· (9z − 1) = −π
3· (z2 + 9z − 10),

dunque
∫
D2
1
3− zdxdy dz = −π
3·∫ 2
1
9
z2 + 9z − 10
3− zdz =
π
3·∫ 2
1
9
(
z + 12 +26
z − 3
)
dz =
=π
3·[
z2
2+ 12z + 26 log |z − 3|
]2
1
9
=
=π
3·[
4
2+ 12 · 2 + 26 log | − 1| −
(
1
181· 12+
12
9+ 26 log
∣
∣
∣
∣
1
9− 3
∣
∣
∣
∣
)]
=
=π
3·(
26− 1
162− 4
3− 26 log
26
9
)
=
=π
3·(
3995
162− 26 log
26
9
)
.
Concludendo,
∫
D=
∫
D1
+
∫
D2
=55
486π +
π
3·(
3995
162− 26 log
26
9
)
=25π
3− 26π
3log
26
9.
10.
∫
Dxdxdy dz, D = {(x, y, z) ∈ R
3 | 2x ≤ x2 + y2 + z2 ≤ 1}.
2x = x2+y2+z2 e come scrivere (x−1)2+y2+z2 = 1, dunque il dominio di integrazione e la
zona interna alla sfera x2+y2+z2 = 1, meno l’intersezione con la sfera (x−1)2+y2+z2 = 1.
La sezione del dominio con piano y = 0 e
−1 1 21
20
Se poniamo D1 = D∩{x ≤ 0} = {(x, y, z) ∈ R3 | x2+y2+z2 ≤ 1, x ≤ 0} e D2 = D∩{x > 0},
possiamo scrivere∫
D=
∫
D1
+
∫
D2
e, dal momento che la funzione integranda e costante rispetto ad y e z, conviene calcolare i
due integrali per strati paralleli al piano (y, z).
Per quanto riguarda D1, le sezioni con piani perpendicolari all’asse x sono cerchi Sx, di raggio√1− x2, quindi
∫
D1
xdxdy dz =
∫ 0
−1
(∫
Sx
xdy dz
)
dx =
∫ 0
−1x · AreaSx dx =
=
∫ 0
−1x · π · (1− x2) dx = π
∫ 0
−1(x− x3) dx = π
[
1
2x2 − 1
4x4]0
−1= −π
4.

Per quanto riguarda D2, le sezioni Tx sono corone circolari di raggi√2x− x2 e
√1− x2, e
quindi
∫
D2
xdxdy dz =
∫ 1
2
0
(∫
Tx
xdy dz
)
dx =
∫ 1
2
0x · AreaTx dx =
∫ 1
2
0x · π · [1− x2 − (2x− x2)] dx = π
∫ 1
2
0(x− 2x2) dx = π
[
1
2x2 − 2
3x3] 1
2
0=
π
24.
Concludendo∫
D=
∫
D1
+
∫
D2
= −π
4+
π
24= −5π
24.

Applicazioni
11. (a) La regione A e delimitata dalle superfici z = x2+y2−2 e z = 4−x−y e la sua proiezione
sul piano xy e il dominio D = {(x, y, 0) | x2 + y2 ≤ 1}. Indichiamo con V il volume di
A ed integriamo per fili paralleli all’asse z:
V =
∫
Adxdy dz =
∫
D
(∫ 4−x−y
x2+y2−2dz
)
dxdy =
∫
D(6− x− y − x2 − y2) dxdy.
Passando a coordinate polari
V =
∫ 2π
0
(∫ 1
0(6− ρ cos θ − ρ sin θ − ρ2)ρdρ
)
dθ =
=
∫ 2π
0
[
3ρ2 − ρ3
3(cos θ + sin θ)− ρ4
4
]1
0
dθ =
=
∫ 2π
0
[
11
4− 1
3(cos θ + sin θ)
]
dθ =
=11
2π.
(b) La superficie z = 1 − (x2 + y2) e un paraboloide di rotazione di vertice U = (0, 0, 1),
mentre x2 + y2 + z2
9 = 1 e un ellissoide di semiassi 1, 1, 3 e centro (0, 0, 0).
x
y
z
b
b
b
2
1
Le sezioni Bz di B con piani z = cost, per 0 ≤ z ≤ 1 sono corone circolari di raggi
r1 =√1− z ed r2 =
√
1− z2
9 , mentre per 1 ≤ z ≤ 2 sono cerchi di raggio r2.

xy
z
b
b
Bz
Quindi
V =
∫
Bdxdy dz =
∫ 1
0
(∫
Bz
dxdy
)
dz +
∫ 2
1
(∫
Bz
dxdy
)
dz =
= π
∫ 1
0
(
1− z2
9− 1 + z
)
dz + π
∫ 2
1
(
1− z2
9
)
dz =
= π[
z2
2 − z3
27
]1
0+ π
[
z − z3
27
]2
1=
= 6554π.
(c) La proiezione D di C sul piano xy e
1
y =√
3xy = −
√
3x
π
3
Integrando per fili paralleli all’asse z
V =
∫
Cdxdy dz =
∫
D
(
∫ 3x2−y2
0dz
)
dxdy =
∫
D(3x2 − y2) dxdy = . . .

passando a coordinate polari
. . . =
∫ π
3
−π
3
[∫ 1
0(3ρ2 cos2 θ − ρ2 sin2 θ)ρdρ
]
dθ +
∫ 4π
3
2π
3
[∫ 1
0(3ρ2 cos2 θ − ρ2 sin2 θ)ρdρ
]
dθ =
=
∫ π
3
−π
3
(4 cos2 θ − 1) dθ ·∫ 1
0ρ3 dρ+
∫ 4π
3
2π
3
(4 cos2 θ − 1) dθ ·∫ 1
0ρ3 dρ =
= 14
[
∫ π
3
−π
3
(1 + 2 cos 2θ) dθ +
∫ 4π
3
2π
3
(1 + 2 cos 2θ) dθ
]
=
= 14
{
[θ + sin 2θ]π
3
−π
3
+ [θ + sin 2θ]4π
32π
3
}
=
= 14
{[(
π3 +
√32
)
−(
−π3 −
√32
)]
+[(
4π3 +
√32
)
−(
2π3 −
√32
)]}
=
= π3 +
√32 .
(d) La proiezione D di E sul piano xy e
D = {(x, y) ∈ R2 | x2 + y2 ≤ α},
dove 1 < α < 2 e la radice dell’equazione e−α = 15α.
xy
z
b
z = e−√
x2+y2
z = 1
5
√
x2 + y2
Integrando per fili paralleli all’asse z:
V =
∫
Edxdy dz =
∫
D
∫ e−√
x2+y2
1
5
√x2+y2
dz
dxdy =
=
∫ 2π
0dθ
∫ α
0
(
e ρ − 1
5ρ
)
ρdρ =
= 2π(
1− αe−α − e−α − 115α
3)
.
12. La sezione del tetraedro ABCD mediante i piani x = cost e

y
z
0
3(1− x)
2(1− x)
Tx
Denotiamo con V1 e V2 i volumi di S1 ed S2 rispettivamente.
x y
z
S2
S1
Si ha
V1 =
∫
S1
dxdy dz =
∫ k
0
(∫
Tx
dy dz
)
dx =
∫ k
0
1
2· 2 · (1− x) · 3 · (1− x) dx =
=
∫ k
03 · (1− x)2 dx =
[
−(1− x)3]k
0= 1− (1− k)3,
V2 =
∫
S2
dxdy dz =
∫ 1
k
(∫
Tx
dy dz
)
dx =
∫ 1
k3 · (1− x)2 dx =
=[
−(1− x)3]1k = (1− k)3.
Dunque la condizione affinche si abbia V1 = V2 e
1− (1− k)3 = (1− k)3 ⇒ k = 1− 13√2.

13. Ricordiamo che se f(x), x ∈ [a, b], e una funzione continua, il volume del solido ottenuto
ruotandone il grafico intorno all’asse delle ascisse e dato da
V = π
∫ b
af2(x) dx.
(a) V = π
∫ x1
x0
1
x2dx = π
[
1
x0− 1
x1
]
. Notare che il volume rimane finito al tendere di x1 a
+∞.
(b)
V = π
∫ 1
−1(1− x2/3)3 dx = π
∫ 1
−1(1− 3x2/3 + 3x4/3 − x2) dx =
= π
[
x− 3 · 35x
5
3 + 3 · 37x
7
3 − 1
3x3]1
−1=
= 2π
(
1− 9
5+
9
7− 1
3
)
=
=32π
105.
(c) V = π
∫ a
0x6 dx =
π
7a7.
(d) V = π
∫ a
0e 2x dx =
π
2
(
e 2a − 1)
.
(e)
V = π
∫ a
0
(
e x − e−x
2
)2
dx =
∫ a
0
(
e 2x + 2 + e−2x
4
)
dx =
=π
4
[
1
2
(
e 2a − 1)
+ 2a− 1
2
(
e−2a − 1)
]
=
=π
4(2a+ sinh 2a).

14. (a) Si tratta del volume di un cilindro la cui proiezione sul piano z = 0 e il rettangolo
R = [0, π] × [0, 1].
x
y
z
R
π
1
b
b
x
y
0 π
1
R
b
b
b
Conviene quindi integrare per fili:
V =
∫
D1 dxdy dz =
∫
R
[∫ sinx
0dz
]
dxdy =
∫
Rsinxdxdy =
=
∫ 1
0
[∫ π
0sinxdx
]
dy = [− cos x]π0 = 2.
(b) Si tratta ancora di calcolare il volume di un cilindro, ma ora il grafico di z = sinx e in
parte sopra e in parte sotto il piano z = 0.
π
−π
1
b
b
b
x
y
z
Quindi vanno calcolati due integrali: quello relativo alla parte di solido nel semispazio
z ≥ 0 e quello relativo alla parte di solido in z < 0, che da non il volume ma l’opposto
del volume. I due numeri vanno quindi sottratti.
Usando la simmetria della figura ed il calcolo precedente, si vede che il volume vale 4.

15. I due paraboloidi si intersecano lungo la circonferenza
x2 + y2 =10
3, z =
20
3.
x
y
z
b
Per simmetria xa = ya = 0. Verifichiamo che anche za = 0, cioe che
∫
Ez dxdy dz = 0,
dove
E =
{
(x, y, z) ∈ R3 | −10 + 5(x2 + y2) ≤ z ≤ 10
3+ x2 + y2
}
.
La proiezione di E sul piano xy e
D =
{
(x, y) ∈ R2 | x2 + y2 ≤ 10
3
}
.
Integrando per fili paralleli all’asse z:
∫
Ez dxdy dz =
∫
D
(
∫ 10
3+x2+y2
−10+5(x2+y2)z dz
)
dxdy =
= 12
∫ 2π
0dθ
∫
√10
3
0ρ
[
(
10
3+ ρ2
)2
− (5ρ2 − 10)2]
dρ = 0.

16. (a) Prendiamo come asse di rotazione la retta tangente di equazioni x = R, y = 0. La
distanza del punto (x, y, z) da tale retta e data da√
(R − x)2 + y2.
x y
z
b
basse
Dunque il momento d’inerzia e
I =
∫
D[(R− x)2 + y2] dxdy dz.
Se passiamo a coordinate sferiche
x = ρ cos θ sinϕy = ρ sin θ sinϕz = ρ cosϕ,
r ≤ ρ ≤ R,0 ≤ θ ≤ 2π,−π ≤ ϕ ≤ π
abbiamo che il valore assoluto del determinante della matrice jacobiana della trasfor-
mazione e
|det J | = ρ2 sinϕ,
e dunque il momento d’inerzia diventa
I =
∫ π
0
{
∫ 2π
0
[
∫ R
0ρ2 sinϕ(R2 − 2Rρ cos θ sinϕ+ ρ2 sin2 ϕ) dρ
]
dθ
}
dϕ =
= 2π
∫ π
0R2 · R
3
3sinϕdϕ−
∫ π
02R · R
4
4sin2 ϕdϕ ·
∫ 2π
0cos θ dθ + 2π
∫ π
0
R5
5sin3 ϕdϕ =
=2πR5
3[− cosϕ]π0 +
R5
2
∫ π
0sin2 ϕdϕ · [sin θ]2π0 +
2πR5
5
[
− cosϕ+cos3 ϕ
3
]π
0
=
=4πR5
3+ 0 +
2πR5
5
[
1− 1
3−(
−1 +1
3
)]
=
=4πR5
3+
8πR5
15=
=28πR5
15.

(b) L’asse di rotazione sia quello delle ascisse.
assey
z
b
La distanza di (x, y, z) da tale asse e√
z2 + y2. Il momento d’inerzia e
I =
∫
D(z2 + y2) dxdy dz.
Passando a coordinate polari ellittiche
x = aρ cos θ sinϕy = bρ sin θ sinϕz = cρ cosϕ,
0 ≤ ρ ≤ 1,0 ≤ θ ≤ 2π,0 ≤ ϕ ≤ π
si trova che il valore assoluto del determinante della matrice jacobiana della trasfor-
mazione e
|det J | = abcρ2 sinϕ,

e dunque il momento d’inerzia diventa
I =
∫ 2π
0
{∫ π
0
[∫ 1
0
(
c2ρ2 cos2 ϕ+ b2ρ2 sin2 θ sin2 ϕ)
abcρ2 sinϕdρ
]
dϕ
}
dθ =
= abc
∫ 2π
0
{∫ π
0
[∫ 1
0ρ4(
c2 cos2 ϕ sinϕ+ b2 sin2 θ sin3 ϕ)
dρ
]
dϕ
}
dθ =
=abc
5
[∫ 2π
0
(∫ π
0c2 cos2 ϕ sinϕdϕ
)
dθ +
∫ 2π
0
(∫ π
0b2 sin2 θ sin3 ϕdϕ
)
dθ
]
=
=abc
5
{
2πc2[
−cos3 ϕ
3
]π
0
+ b2∫ 2π
0
(
1− cos 2θ)
2
)
dθ ·∫ π
0sinϕ(1 − cos2 ϕ) dϕ
}
=
=abc
5
{
2πc2[
1
3+
1
3
]
+ πb2[
− cosϕ+cos3 ϕ
3
]π
0
}
=
=abc
5
[
4πc2
3+ πb2
(
1− 1
3+ 1− 1
3
)
]
=
=abc
5
[
4πc2
3+
4πb2
3
]
=
=4πabc
15(b2 + c2).
(c) L’asse di rotazione sia l’asse z. La distanza di (x, y, z) da tale asse e√
x2 + y2. Va
quindi calcolato
I =
∫
D(x2 + y2) dxdy dz.
Passando a coordinate sferiche
x = ρ cos θ sinϕy = ρ sin θ sinϕz = ρ cosϕ,
r ≤ ρ ≤ R,0 ≤ θ ≤ 2π,−π ≤ ϕ ≤ π
si trova che il momento d’inerzia e
I =
∫ π
0
{
∫ 2π
0
[
∫ R
r
(
ρ2 sin2 ϕ)
ρ2 sinϕdρ
]
dθ
}
dϕ =
= 2π
∫ π
0
(
∫ R
rρ4 sin3 ϕdρ
)
dϕ =
= 2π · (R5 − r5)
5
∫ π
0sinϕ(1 − cos2 ϕ) dϕ =
=2π(R5 − r5)
5
[
− cosϕ+cos3 ϕ
3
]π
0
=
=2π(R5 − r5)
5· 43=
=8π(R5 − r5)
15.

![Integrali definiti - matematicainrete.itmatematicainrete.it/wp-content/uploads/2020/09/5.9.integrali.definiti.… · Integrali definiti 202 Integrali definiti Sia f : [a, b] una funzione](https://static.fdocumenti.com/doc/165x107/60a2bf59166b26174147cb86/integrali-definiti-integrali-definiti-202-integrali-definiti-sia-f-a-b-una.jpg)
















