Il calcolo dello Spettro di Risposta Elastico · degli spettri di risposta, valutandone vantaggi e...
121
Universit ` a degli Studi di Firenze Facolt` a di Ingegneria Corso di Laurea in Ingegneria Elettronica Il calcolo dello Spettro di Risposta Elastico Tesi di Laurea di Filippo Micheletti Relatori: Prof. Fabrizio Argenti Ing. Simone Morosi Ing. Barbara Ortolani Anno Accademico 2007/2008
-
Upload
nguyenthien -
Category
Documents
-
view
218 -
download
1
Transcript of Il calcolo dello Spettro di Risposta Elastico · degli spettri di risposta, valutandone vantaggi e...
Universita degli Studi di FirenzeFacolta di Ingegneria
Corso di Laurea in
Ingegneria Elettronica
Il calcolo delloSpettro di Risposta Elastico
Tesi di Laurea di
Filippo Micheletti
Relatori:
Prof. Fabrizio Argenti
Ing. Simone Morosi
Ing. Barbara Ortolani
Anno Accademico 2007/2008

. . . a tutte le persone che non hanno mai smesso di credere in me.
Ringraziamenti
Il pensiero piu importante ai miei genitori, che mi hanno sostenuto moral-
mente ed economicamente nel corso degli studi, con la comprensione che li
ha sempre caratterizzati, e alla mia ragazza, Irene, che ha saputo addolcire i
momenti piu difficili.
Un ringraziamento altrettanto grande all’Ing. Simone Morosi, ed al Prof.
Fabrizio Argenti, soprattutto come persone, per l’importante aiuto tecnico
ed umano.
Un saluto infine all’Ing. Ronga ed a tutti i ragazzi del LENST, all’Ing.
Barbara Ortolani ed il Dipartimento di Ingegneria Civile per lo stimolo ed il
supporto tecnico, a Francesco Del Viva e Valentina Ciani per le piacevoli dis-
cussioni in merito agli argomenti trattati, ed al settore di Sismica dell’ENEL
per aver fornito i dati su cui lavorare.
Indice
Ringraziamenti ii
Introduzione ix
1 Onde sismiche e metodi di rilevamento 1
1.1 Onde di volume . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Onde P . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.2 Onde S . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Onde di superficie . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1 Onde di Rayleigh . . . . . . . . . . . . . . . . . . . . . 6
1.2.2 Onde di Love . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Sismografi ed accelerogrammi . . . . . . . . . . . . . . . . . . 8
1.3.1 Strumenti per la misura sismica . . . . . . . . . . . . . 8
1.3.2 Accelerogrammi e standard delle registrazioni . . . . . 10
1.3.3 Contenuto spettrale di un segnale sismico . . . . . . . . 12
1.3.4 La tecnica della Deconvoluzione . . . . . . . . . . . . . 14
2 La progettazione in zona sismica 16
2.1 L’Analisi Modale . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.2 Spettri di Risposta . . . . . . . . . . . . . . . . . . . . . . . . 18
2.2.1 Grandezze utili . . . . . . . . . . . . . . . . . . . . . . 18
Indice iv
2.2.2 Spettri medi, di inviluppo e lisciati . . . . . . . . . . . 20
2.2.3 Gli Spettri di Normativa . . . . . . . . . . . . . . . . . 22
3 L’oscillatore semplice smorzato 27
3.1 Equazione del moto nella risposta libera . . . . . . . . . . . . 28
3.2 Soluzione dell’equazione differenziale del moto . . . . . . . . . 29
3.3 Risposta forzata . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.3.1 Risposta impulsiva . . . . . . . . . . . . . . . . . . . . 34
3.3.2 Eccitazione arbitraria . . . . . . . . . . . . . . . . . . . 36
3.3.3 Eccitazione impressa al vincolo . . . . . . . . . . . . . 37
4 Calcolo dello SdR nel dominio del tempo 39
4.1 Soluzione dell’equazione del moto tramite simulazione . . . . . 40
4.1.1 Descrizione del codice e del modello . . . . . . . . . . . 42
4.2 Calcolo diretto dell’integrale di Duhamel . . . . . . . . . . . . 44
4.3 Possibili strategie . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Calcolo dello SdR nel dominio della frequenza 47
5.1 Passaggio al dominio trasformato . . . . . . . . . . . . . . . . 47
5.1.1 Le altre grandezze di spettrali . . . . . . . . . . . . . . 51
5.1.2 Implementazione Matlab . . . . . . . . . . . . . . . . . 52
5.1.3 Lo Spettro di Risposta . . . . . . . . . . . . . . . . . . 55
5.2 Limiti imposti da calcolo numerico ed analisi in frequenza . . . 55
5.2.1 Aliasing in frequenza . . . . . . . . . . . . . . . . . . . 56
5.2.2 Condizione sul periodo minimo . . . . . . . . . . . . . 57
5.2.3 Derivazione della risposta per bassi periodi . . . . . . . 64
5.2.4 Aliasing nel tempo . . . . . . . . . . . . . . . . . . . . 66
5.2.5 Condizione sul minimo numero di punti FFT . . . . . . 67
5.2.6 Estensione alle altre grandezze spettrali . . . . . . . . . 72

Indice v
5.3 Un confronto tra tempo e frequenza . . . . . . . . . . . . . . . 73
6 Un’esempio di applicazione: spettri di dati deconvoluti 76
6.1 I dati deconvoluti . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.1.1 Risultato dell’elaborazione e confronto . . . . . . . . . 77
7 SpectCalc 80
7.1 Installazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
7.1.1 Contenuto della cartella di installazione . . . . . . . . . 81
7.2 Panoramica delle sezioni del programma . . . . . . . . . . . . 81
7.3 Utilizzo del programma . . . . . . . . . . . . . . . . . . . . . . 83
7.3.1 Item list e formato dati in ingresso . . . . . . . . . . . 83
7.3.2 Lo script di acquisizione dati . . . . . . . . . . . . . . . 85
7.3.3 Tracce, tipi di spettro ed altri parametri . . . . . . . . 90
7.3.4 Spettri medi, di inviluppo e plotting dati . . . . . . . . 90
7.3.5 Selezione dell’output desiderato . . . . . . . . . . . . . 95
7.3.6 Help di sezione . . . . . . . . . . . . . . . . . . . . . . 96
7.4 Note . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
8 Conclusioni 99
A Il DeciBel 101
A.1 I deciBel assoluti . . . . . . . . . . . . . . . . . . . . . . . . . 103
A.2 Operazioni e conversioni con i dB . . . . . . . . . . . . . . . . 103
B Il Campionamento 105
Bibliografia 109
Elenco delle figure
1.1 Onde P . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Onde S . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Onde di Rayleigh . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Onde di Love . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Composizione di un onda sismica . . . . . . . . . . . . . . . . 9
1.6 Accelerogramma RA01134-NS . . . . . . . . . . . . . . . . . . 12
1.7 Spettro dell’accelerogramma RA01134-NS . . . . . . . . . . . 13
1.8 Sistema meccanico equivalente al sismografo. . . . . . . . . . . 15
2.1 Spettro in pseudo-accelerazione della traccia RA01134-NS . . 21
2.2 Spettri di normativa orizzontale e verticale in pseudo-accelerazione 26
3.1 Oscillatore smorzato SDOF . . . . . . . . . . . . . . . . . . . 28
3.2 Oscillazione sottosmorzata . . . . . . . . . . . . . . . . . . . . 33
4.1 Modello Simulink dell’oscillatore . . . . . . . . . . . . . . . . . 41
4.2 Risposta forzata ottenuta per simulazione . . . . . . . . . . . 43
5.1 Modulo della f.d.t. oscillatore . . . . . . . . . . . . . . . . . . 59
5.2 Aliasing in frequenza . . . . . . . . . . . . . . . . . . . . . . . 60
5.3 Modulo della f.d.t. oscillatore al variare di T . . . . . . . . . . 62
5.4 Maggiorazione della risposta impulsiva dell’oscillatore . . . . . 71
Elenco delle figure vii
6.1 Confronto spettro in spostamento . . . . . . . . . . . . . . . . 78
6.2 Confronto spettro in pseudo-velocita . . . . . . . . . . . . . . 79
6.3 Confronto spettro in pseudo-accelerazione . . . . . . . . . . . 79
7.1 Finestra principale del programma SpectCalc . . . . . . . . . 81
7.2 Finestra principale del programma SpectCalc con il pulsante
di calcolo abilitato . . . . . . . . . . . . . . . . . . . . . . . . 91
7.3 Esempio di spettri medio e di inviluppo con tracce sovrapposte 94
7.4 Organizzazione della matrice spects prodotta dal programma . 96
7.5 Esempio di help del programma . . . . . . . . . . . . . . . . . 97
B.1 Campionamento di un segnale . . . . . . . . . . . . . . . . . . 107
Elenco delle tabelle
2.1 Periodi di separazione dell’andamento dello spettro di normativa 25
2.2 Altri parametri per il calcolo dello spettro di normativa . . . . 25
5.1 Esempi di valori di periodo minimo . . . . . . . . . . . . . . . 64
5.2 Esempi di valori di numero minimo di punti FFT . . . . . . . 75
Introduzione
Nell’ambito dell’Ingegneria Civile la progettazione di strutture sottoposte a
sollecitazioni dinamiche di varia natura (sia naturali come sismi, che artificiali
come vibrazioni prodotte da macchinari, mezzi di trasporto, ecc.) riveste un
ruolo fondamentale per la sicurezza.
A tal fine l’Ingegneria Sismica, branca specializzata dell’Ingegneria Civile,
si avvale di sofisticati strumenti matematici sia per il progetto di nuove strut-
ture che per la verifica di quelle gia esistenti, facendo riferimento a specifiche
opportunamente normate.
In alcune tecniche di progetto, come quella dell’analisi dinamica lineare
tale verifica avviene mediante la riduzione del problema ad un modello re-
lativamente semplice costituito da un’opportuna combinazione di oscillatori
smorzati ad un grado di liberta, analizzando la risposta massima di ciascuno
di questi oscillatori con quello che viene indicato come spettro di risposta.
Lo spettro di risposta e infatti un diagramma che rappresenta la massima
risposta in spostamento, velocita o accelerazione, ed in funzione del periodo
naturale di pulsazione T, dell’oscillatore semplice smorzato, eccitato da una
forzante nota.
Lo scopo del lavoro svolto e stato quello di esplorare i metodi di calcolo
degli spettri di risposta, valutandone vantaggi e svantaggi, con particolare
attenzione al calcolo nel dominio trasformato della frequenza, ed agli aspetti
Introduzione x
legati all’elaborazione numerica la quale, necessitando inevitabilmente della
discretizzazione delle grandezze in gioco, richiede i necessari accorgimenti per
ottenere risultati validi.
Nei primi capitoli che seguono si trovera un’introduzione alla sismologia
ed al progetto in zona sismica, necessarie tanto per comprendere l’ambito
in cui si applicano i risultati ottenuti, quanto per capire sulla base di quali
ragionamenti si e arrivati ad essi.
Nei capitoli successivi verra invece esposta l’analisi nel dominio del tem-
po ed in quello della frequenza, illustrando i calcoli principali ed i risultati
prodotti dal lavoro, con alcune applicazioni di questi.
Capitolo 1
Onde sismiche e
metodi di rilevamento
I terremoti sono vibrazioni del terreno causate essenzialmente da fratture che
si producono nelle rocce della crosta terrestre a seguito di un accumulo di
energia di deformazione causato da movimenti tettonici a grande scala. Tale
energia in parte viene liberata sotto forma di calore prodotto dall’attrito e
in parte convertita in energia cinetica e propagata a distanza sotto forma di
onde sismiche1.
Da alcuni decenni la teoria della tettonica a placche, o tettonica a zolle,
fornisce il principale riferimento per interpretare i fenomeni sismici. La teoria
e nata alla fine del XIX secolo da considerazioni morfologiche e geologiche,
ma e stata definitivamente convalidata solo da pochi decenni grazie ai recenti
sviluppi della geofisica e della geodesia2.
Secondo questa teoria, la litosfera (particolarmente rigida, costituita dalla
1Per la stesura di questo capitolo si faccia riferimento a: [1], [2] in Bibliografia.2Rispettivamente le discipline che si occupano di magnetismo terrestre e delle osservazioni satellitari
della morfologia del globo.
Capitolo 1. Onde sismiche e metodi di rilevamento 2
crosta terrestre e dalla parte piu esterna del mantello) e suddivisa in grandi
placche che “navigano” su uno strato piu viscoso, detto astenosfera.
Le placche si muovono l’una rispetto all’altra con modalita diverse: in
corrispondenza delle dorsali oceaniche, il materiale caldo del mantello risale
fino alla superficie della terra, producendo un progressivo assottigliamen-
to della crosta oceanica, mentre in corrispondenza delle zone di subduzione
si ha sprofondamento della crosta terrestre al di sotto delle zolle adiacenti.
Esistono inotre altri due tipi di interazione tra zolle: un moto relativo preva-
lentemente orizzontale, detto trascorrente ed un moto di collisione tra due
continenti.
Questi moti, che provocano spostamenti dell’ordine di pochi centimetri
all’anno, costituiscono la principale causa degli eventi sismici. Spesso i ter-
remoti generati dalla subduzione sono molto profondi, mentre quelli generati
da moti trascorrenti sono superficiali.
Le onde sismiche generate dall’energia sprigionata durante un terremoto
sono dunque disturbi elastici che si propagano dall’ipocentro3, attraverso la
crosta terrestre, in tutte le direzioni; in particolare quelle che giungono sulla
superficie terrestre sono responsabili delle azioni esercitate sulle costruzioni4.
Esistono vari tipi di onde sismiche classificate in base ai diversi caratteri
e velocita con cui si propagano attraverso i vari mezzi.
Si possono individuare due grandi categorie: le onde di volume, per le
quali l’onda elastica generata all’ipocentro si propaga interessando gli strati
piu profondi della litosfera, e le onde superficiali, per le quali invece la
propagazione interessa soltanto gli strati piu superficiali della crosta terrestre.
3In geofisica si indica con ipocentro il punto in cui si sprigiona l’energia della scossa sismica, in profon-
ditA nella crosta terrestre, mentre con epicentro ci si riferisce alla proiezione dell’ipocentro sulla superficie
terrestre.4Possono esistere anche onde sismiche artificiali, generate sia in superficie che in profondita dall’attivita
umana, come ad esempio da esplosioni, perforazioni, macchinari e grandi mezzi di trasporto.
Capitolo 1. Onde sismiche e metodi di rilevamento 3
1.1 Onde di volume
Le onde volumetriche, dette anche di corpo, si propagano in tutte le direzioni
coinvolgendo gli strati profondi della litosfera (sostanzialmente in maniera
analoga ad un’onda sferica).
Schematizzando la superficie terrestre come superficie di separazione fra
un mezzo denso, la crosta, e un mezzo molto leggero, l’aria dell’atmosfera,
le onde che vi sopraggiungono in parte vengono riflesse, tornando all’interno
della terra, in parte passano per trasparenza e, a contatto con l’aria, generano
rumore5.
L’onda di volume puo essere matematicamente scomposta come somma
di due componenti diverse, distinte dall’azione meccanica svolta: le onde P
e le onde S.
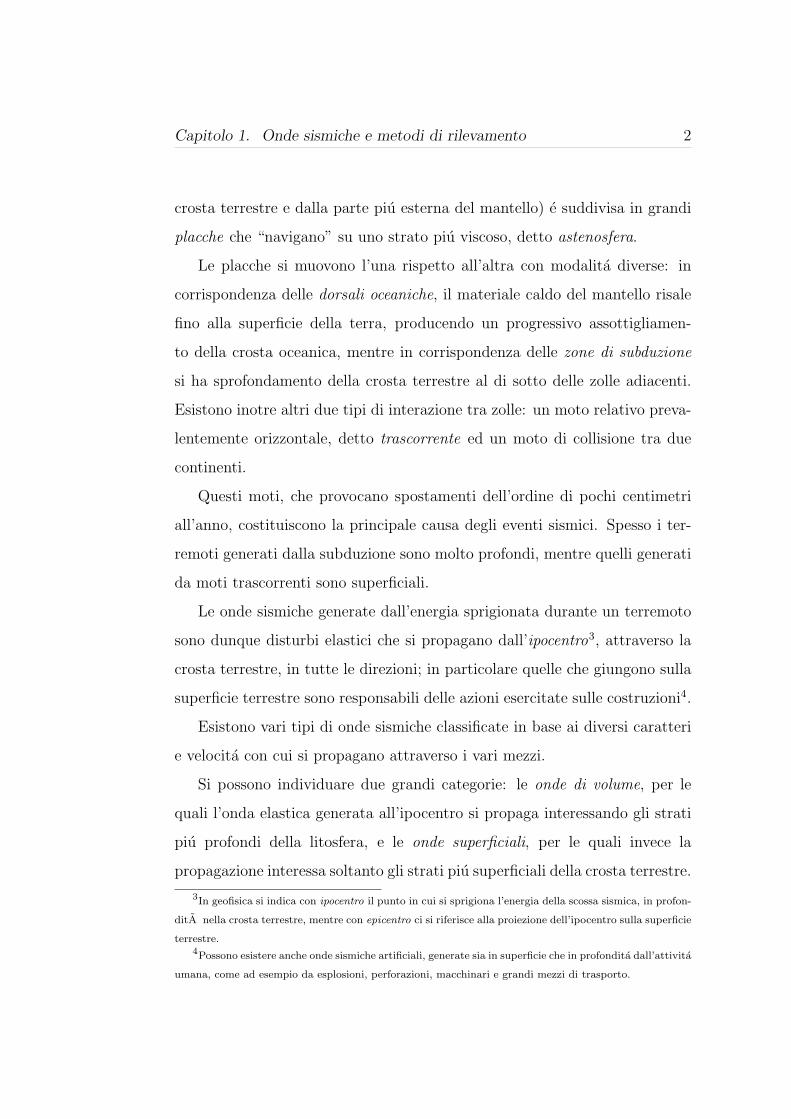
1.1.1 Onde P
Le onde P, abbreviazione di primarie, dette anche di compressione o longi-
tudinali, sono onde di pressione, simili alle onde acustiche, che agiscono sulla
materia tramite un’azione longitudinale alla direzione di propagazione del-
l’onda stessa. Al passaggio di questo tipo di eccitazione dunque la materia
subisce un’alternanza di forti compressioni seguite da rapidi rilassamenti che
corrispondono ad un moto oscillatorio impresso alle particelle nella direzione
di propagazione dell’onda.
5E questa la causa dei tipici boati spesso avvertiti in corrispondenza dei terremoti, nonche della
maggior sensibilita di certi animali agli eventi sismici. L’osservazione del comportamento di alcuni animali
domestici, come i cani, ha infatti tradizionalmente associato a questi la capacita di prevedere gli eventi
sismici; in realta e la maggior sensibilita dell’apparato uditivo di questi animali a permettere loro di
udire l’onda acustica trasmessa nell’aria dall’incidenza con la superficie terrestre di onde piu veloci che, a
seconda della distanza dell’epicentro dal punto di osservazione, possono arrivare con significativo anticipo
rispetto alle piu lente.
Capitolo 1. Onde sismiche e metodi di rilevamento 4
Queste onde, che raggiungono picchi di velocita nella roccia compatta
dell’ordine di 5-6 km/s, sono quelle che raggiungono per prime la superficie
terrestre (da qui la denominazione di primarie) e si propagano in qualunque
mezzo, sia solido che fluido.
Figura 1.1: Rappresentazione dell’azione di compressione longitudinale alla direzione di propagazione
esercitata da un’onda P sulle particelle di terreno.
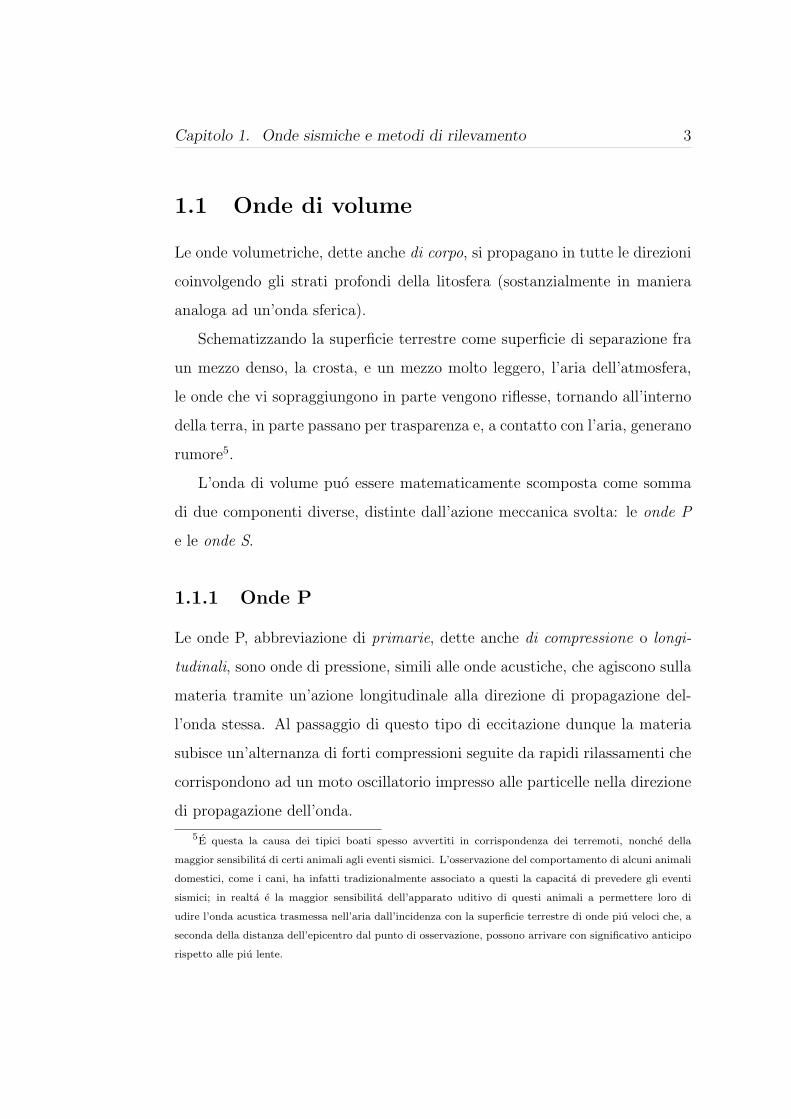
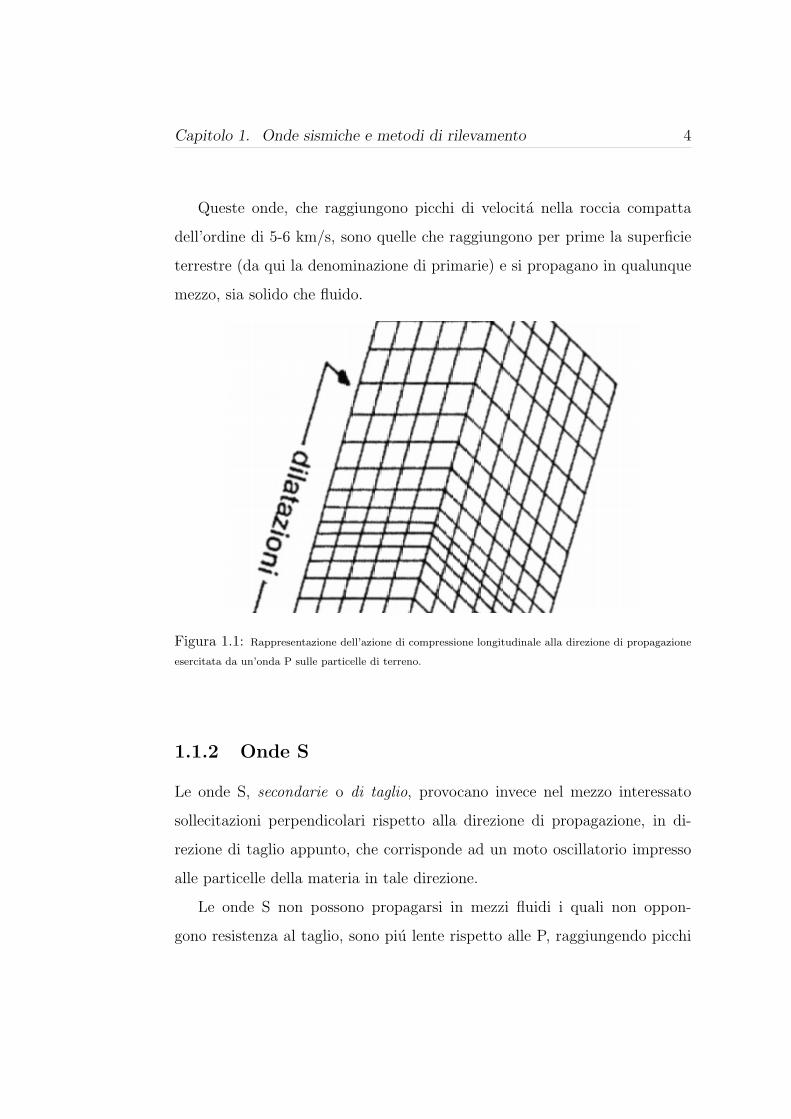
1.1.2 Onde S
Le onde S, secondarie o di taglio, provocano invece nel mezzo interessato
sollecitazioni perpendicolari rispetto alla direzione di propagazione, in di-
rezione di taglio appunto, che corrisponde ad un moto oscillatorio impresso
alle particelle della materia in tale direzione.
Le onde S non possono propagarsi in mezzi fluidi i quali non oppon-
gono resistenza al taglio, sono piu lente rispetto alle P, raggiungendo picchi
Capitolo 1. Onde sismiche e metodi di rilevamento 5
di velocita dell’ordine di 3-3.5 km/s nella roccia compatta, ma sono anche
caratterizzate da ampiezze maggiori di quest’ultime.
Figura 1.2: Rappresentazione dell’azione di taglio perpendicolare alla direzione di propagazione
esercitata da un’onda S sulle particelle di terreno.
1.2 Onde di superficie
Le onde di superficie si generano ogni qualvolta un’onda di corpo viene ad
attraversare una discontinuita nel materiale in cui si propaga; il caso di mag-
gior interesse e, ovviamente, quello della superficie libera della terra, intesa
come interfaccia tra crosta terrestre ed atmosfera.
Volendo fare un’analogia con un’onda elettromagnetica potremmo asso-
ciare l’onda di superficie all’onda elettromagnetica trasmessa all’incidenza
con un conduttore elettrico perfetto (p.e.c.), o ad esempio all’onda evane-
scente che si propaga nel cladding di una fibra ottica: l’energia dell’onda
di superficie infatti decade come un’esponenziale negativo con la profondita
Capitolo 1. Onde sismiche e metodi di rilevamento 6
per cui l’energia dell’onda risulta concentrata nello strato immediatamente
adiacente alla superficie del mezzo in cui si propaga.
Le onde di superficie sono inoltre caratterizzate da una velocita di pro-
pagazione minore di qualsiasi onda di volume (sia P che S), e per questo
vengono anche dette onde lunghe.
Anche le onde di superficie si distinguono in 2 categorie in funzione del
tipo di azione meccanica esercitata sul mezzo che attraversano: le onde di
Rayleigh e le onde di Love.
1.2.1 Onde di Rayleigh
Le onde di Rayleigh sono generate dall’interferenza tra un’onda P ed un’onda
S alla superficie libera della crosta terrestre e possono essere dunque viste
come somma vettoriale dei vettori descriventi ciascuna delle due componenti.
Di conseguenza anche l’azione meccanica esercitata sulla materia e una com-
posizione dei moti che genererebbero singolarmente un’onda P ed un’onda
S.
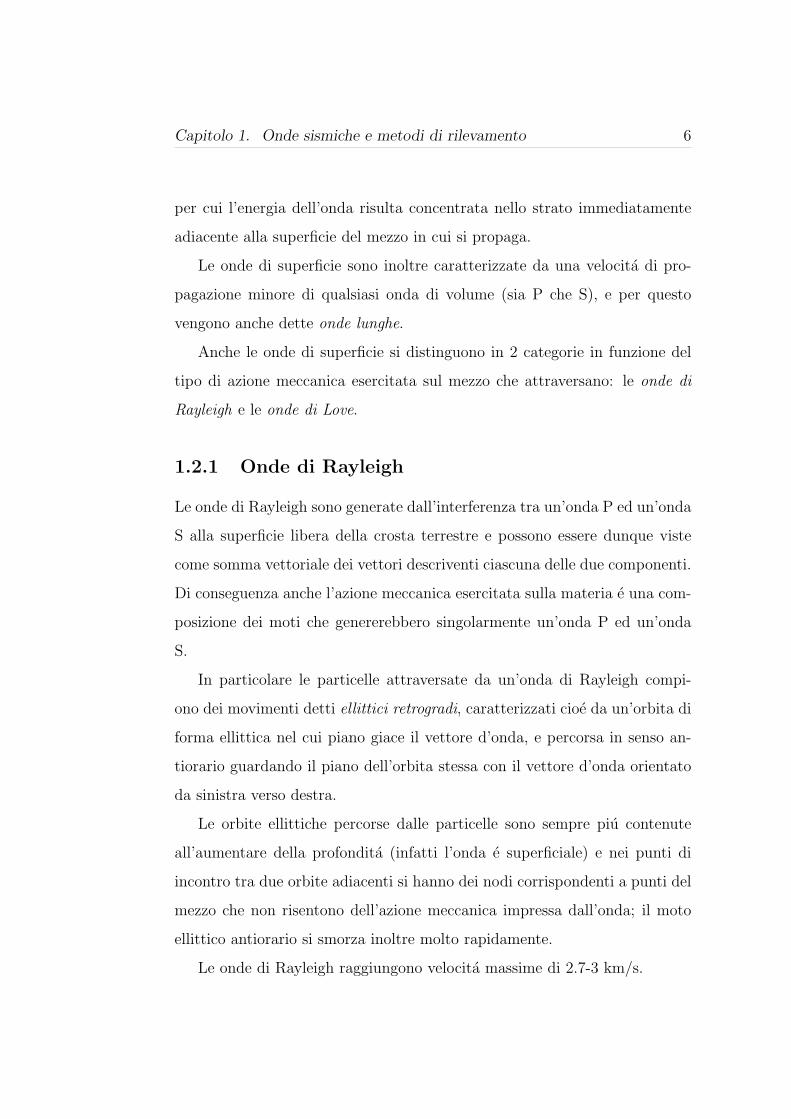
In particolare le particelle attraversate da un’onda di Rayleigh compi-
ono dei movimenti detti ellittici retrogradi, caratterizzati cioe da un’orbita di
forma ellittica nel cui piano giace il vettore d’onda, e percorsa in senso an-
tiorario guardando il piano dell’orbita stessa con il vettore d’onda orientato
da sinistra verso destra.
Le orbite ellittiche percorse dalle particelle sono sempre piu contenute
all’aumentare della profondita (infatti l’onda e superficiale) e nei punti di
incontro tra due orbite adiacenti si hanno dei nodi corrispondenti a punti del
mezzo che non risentono dell’azione meccanica impressa dall’onda; il moto
ellittico antiorario si smorza inoltre molto rapidamente.
Le onde di Rayleigh raggiungono velocita massime di 2.7-3 km/s.
Capitolo 1. Onde sismiche e metodi di rilevamento 7
Figura 1.3: Rappresentazione delle orbite ellitiche retrograde impresse da un’onda di Rayleigh alle
particelle di terreno.
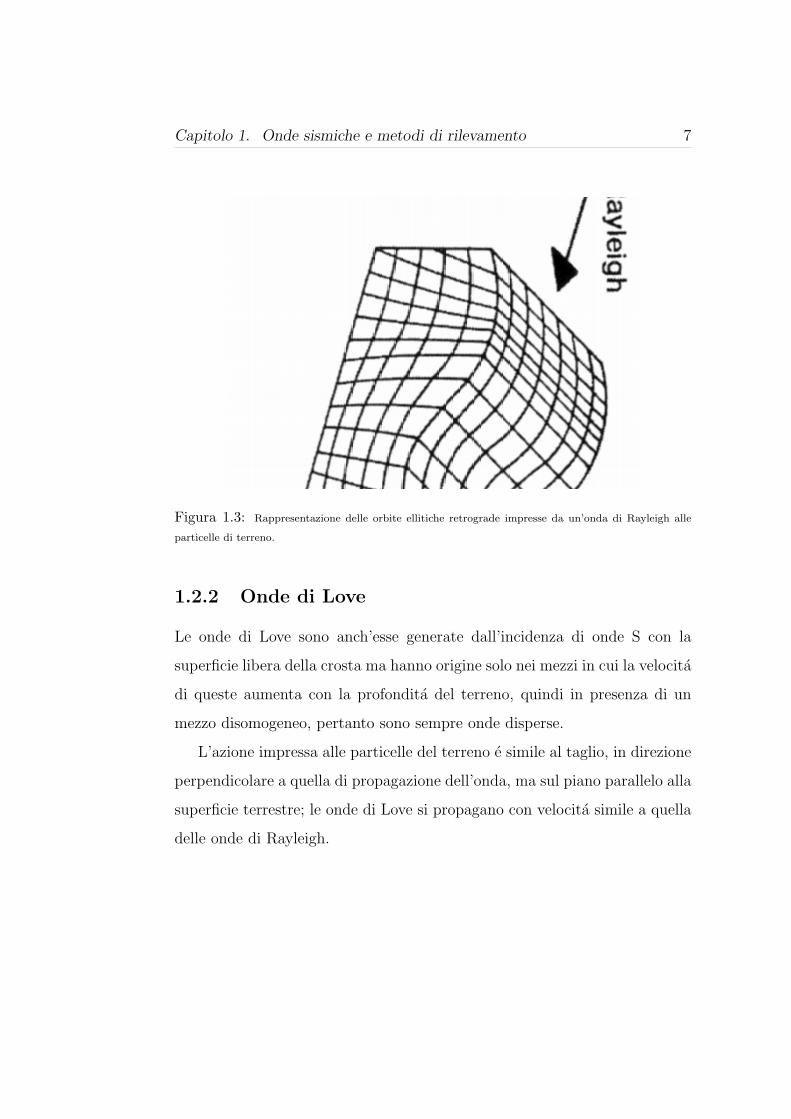
1.2.2 Onde di Love
Le onde di Love sono anch’esse generate dall’incidenza di onde S con la
superficie libera della crosta ma hanno origine solo nei mezzi in cui la velocita
di queste aumenta con la profondita del terreno, quindi in presenza di un
mezzo disomogeneo, pertanto sono sempre onde disperse.
L’azione impressa alle particelle del terreno e simile al taglio, in direzione
perpendicolare a quella di propagazione dell’onda, ma sul piano parallelo alla
superficie terrestre; le onde di Love si propagano con velocita simile a quella
delle onde di Rayleigh.
Capitolo 1. Onde sismiche e metodi di rilevamento 8
Figura 1.4: Azione di taglio impressa da un’onda di Rayleigh alle particelle di terreno.
1.3 Sismografi ed accelerogrammi
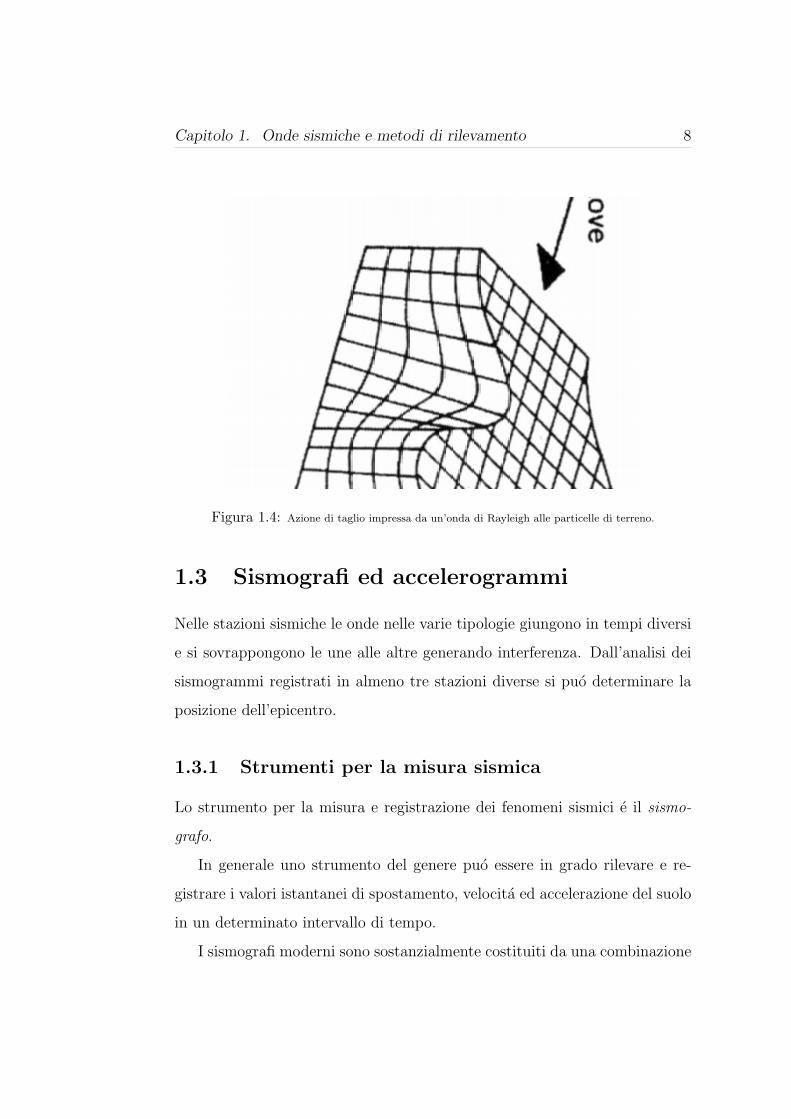
Nelle stazioni sismiche le onde nelle varie tipologie giungono in tempi diversi
e si sovrappongono le une alle altre generando interferenza. Dall’analisi dei
sismogrammi registrati in almeno tre stazioni diverse si puo determinare la
posizione dell’epicentro.
1.3.1 Strumenti per la misura sismica
Lo strumento per la misura e registrazione dei fenomeni sismici e il sismo-
grafo.
In generale uno strumento del genere puo essere in grado rilevare e re-
gistrare i valori istantanei di spostamento, velocita ed accelerazione del suolo
in un determinato intervallo di tempo.
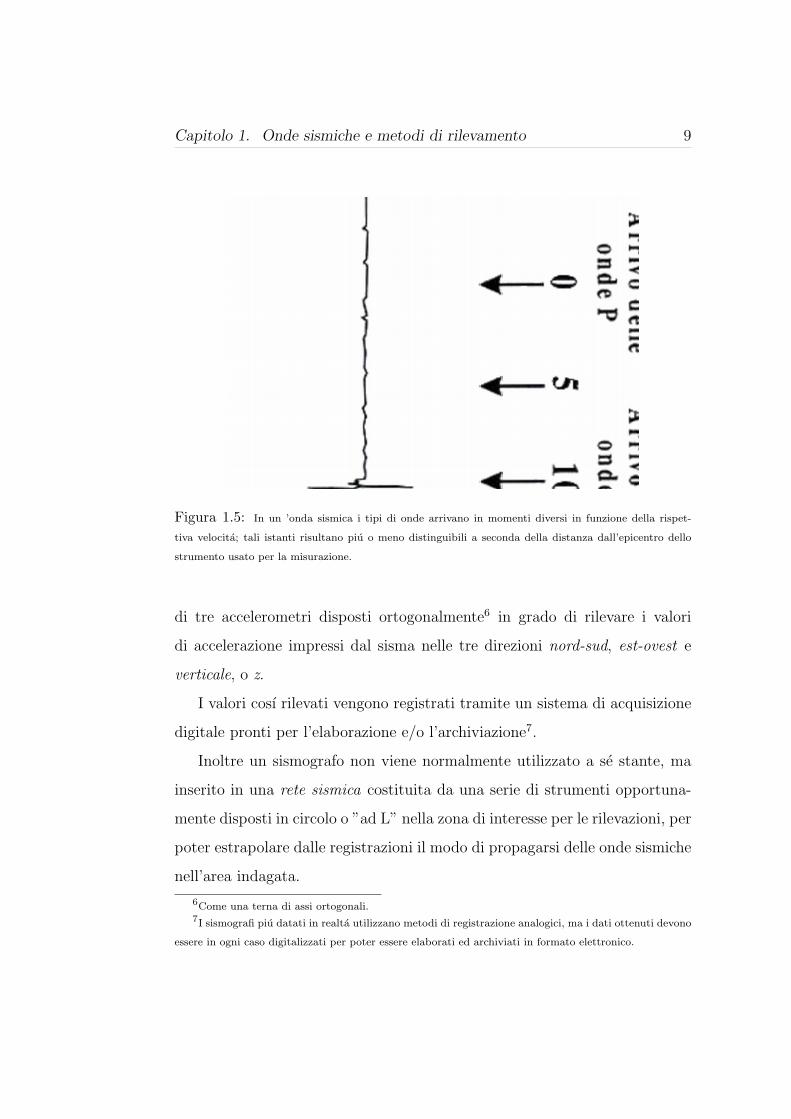
I sismografi moderni sono sostanzialmente costituiti da una combinazione
Capitolo 1. Onde sismiche e metodi di rilevamento 9
Figura 1.5: In un ’onda sismica i tipi di onde arrivano in momenti diversi in funzione della rispet-
tiva velocita; tali istanti risultano piu o meno distinguibili a seconda della distanza dall’epicentro dello
strumento usato per la misurazione.
di tre accelerometri disposti ortogonalmente6 in grado di rilevare i valori
di accelerazione impressi dal sisma nelle tre direzioni nord-sud, est-ovest e
verticale, o z.
I valori cosı rilevati vengono registrati tramite un sistema di acquisizione
digitale pronti per l’elaborazione e/o l’archiviazione7.
Inoltre un sismografo non viene normalmente utilizzato a se stante, ma
inserito in una rete sismica costituita da una serie di strumenti opportuna-
mente disposti in circolo o ”ad L” nella zona di interesse per le rilevazioni, per
poter estrapolare dalle registrazioni il modo di propagarsi delle onde sismiche
nell’area indagata.
6Come una terna di assi ortogonali.7I sismografi piu datati in realta utilizzano metodi di registrazione analogici, ma i dati ottenuti devono
essere in ogni caso digitalizzati per poter essere elaborati ed archiviati in formato elettronico.
Capitolo 1. Onde sismiche e metodi di rilevamento 10
1.3.2 Accelerogrammi e standard delle registrazioni
Come si e detto le registrazioni piu importanti ai fini pratici sono quelle
inerenti alle accelerazioni impresse dal sisma 8 pertanto di solito ci si riferisce
alle registrazioni di tipo accelerometrico dette accelerogrammi.
La misurazione effettuata dallo strumento si riduce quindi ad una serie di
tracce, generalmente tre nelle direzioni di cui si e detto al paragrafo prece-
dente; tali tracce riportano i valori discreti dell’accelerazione relazionati con
i valori temporali in cui sono stati rilevati.
La marcatura temporale e ovviamente fondamentale, sia quella relativa
alla scossa sismica che ha quindi come riferimento t=0 l’inizio della scossa
stessa, sia quella assoluta per il confronto della rilevazione con quelle delle
altre stazioni della rete.
L’uscita del sismografo (o la digitalizzazione di essa nel caso di uno stru-
mento analogico) e quindi un file di testo ASCII, ossia privo di formattazione,
contenente le tre tracce precedute ciascuna da un’intestazione che riporta
dei dati interessanti come appunto il tempo di registrazione, la durata della
traccia, la frequenza di campionamento, ecc. .
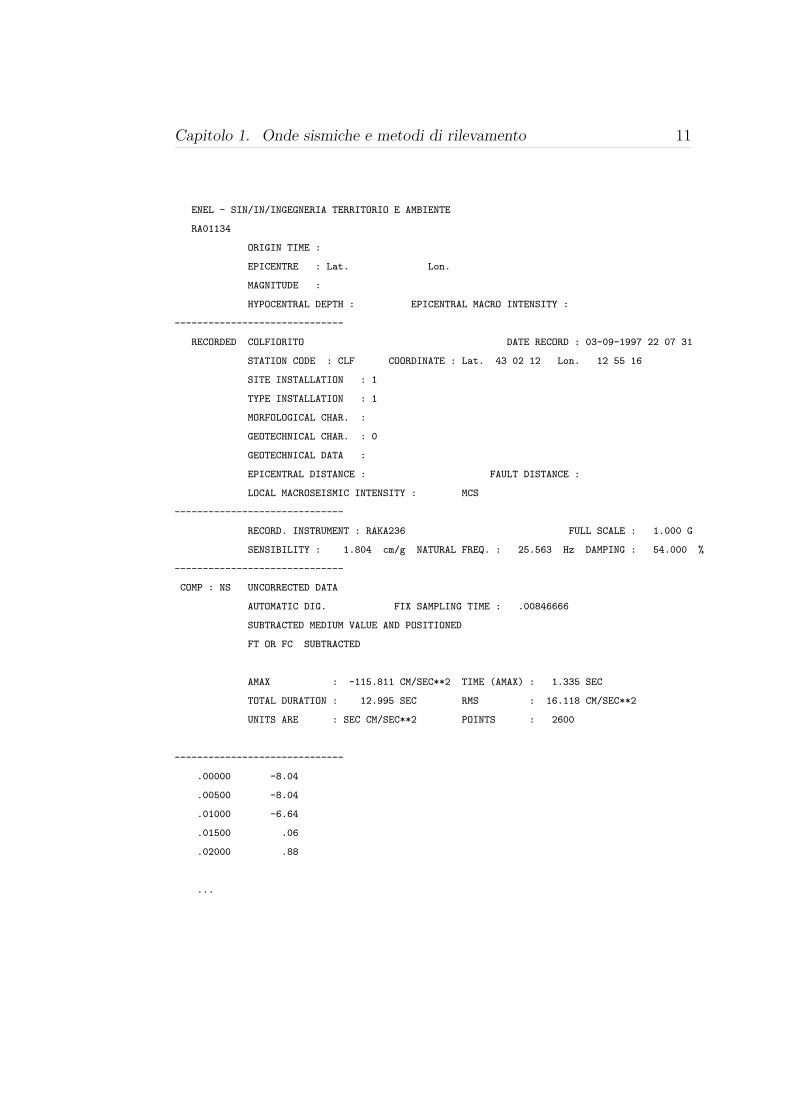
Di seguito e riportata a titolo di esempio l’intestazione ed i primi cinque
campioni di una delle registrazioni utilizzate per il lavoro svolto, provenienti
dalla rete sismica dell’ENEL, e l’andamento temporale della traccia a cui si
riferisce.
8Le ragioni di tale importanza saranno chiarite nel seguito.
Capitolo 1. Onde sismiche e metodi di rilevamento 11
ENEL - SIN/IN/INGEGNERIA TERRITORIO E AMBIENTE
RA01134
ORIGIN TIME :
EPICENTRE : Lat. Lon.
MAGNITUDE :
HYPOCENTRAL DEPTH : EPICENTRAL MACRO INTENSITY :
------------------------------
RECORDED COLFIORITO DATE RECORD : 03-09-1997 22 07 31
STATION CODE : CLF COORDINATE : Lat. 43 02 12 Lon. 12 55 16
SITE INSTALLATION : 1
TYPE INSTALLATION : 1
MORFOLOGICAL CHAR. :
GEOTECHNICAL CHAR. : 0
GEOTECHNICAL DATA :
EPICENTRAL DISTANCE : FAULT DISTANCE :
LOCAL MACROSEISMIC INTENSITY : MCS
------------------------------
RECORD. INSTRUMENT : RAKA236 FULL SCALE : 1.000 G
SENSIBILITY : 1.804 cm/g NATURAL FREQ. : 25.563 Hz DAMPING : 54.000 %
------------------------------
COMP : NS UNCORRECTED DATA
AUTOMATIC DIG. FIX SAMPLING TIME : .00846666
SUBTRACTED MEDIUM VALUE AND POSITIONED
FT OR FC SUBTRACTED
AMAX : -115.811 CM/SEC**2 TIME (AMAX) : 1.335 SEC
TOTAL DURATION : 12.995 SEC RMS : 16.118 CM/SEC**2
UNITS ARE : SEC CM/SEC**2 POINTS : 2600
------------------------------
.00000 -8.04
.00500 -8.04
.01000 -6.64
.01500 .06
.02000 .88
...
Capitolo 1. Onde sismiche e metodi di rilevamento 12
0 2 4 6 8 10 12
−100
−50
0
50
100
tempo [s]
acce
lera
zion
e [
cm/s
2 ]
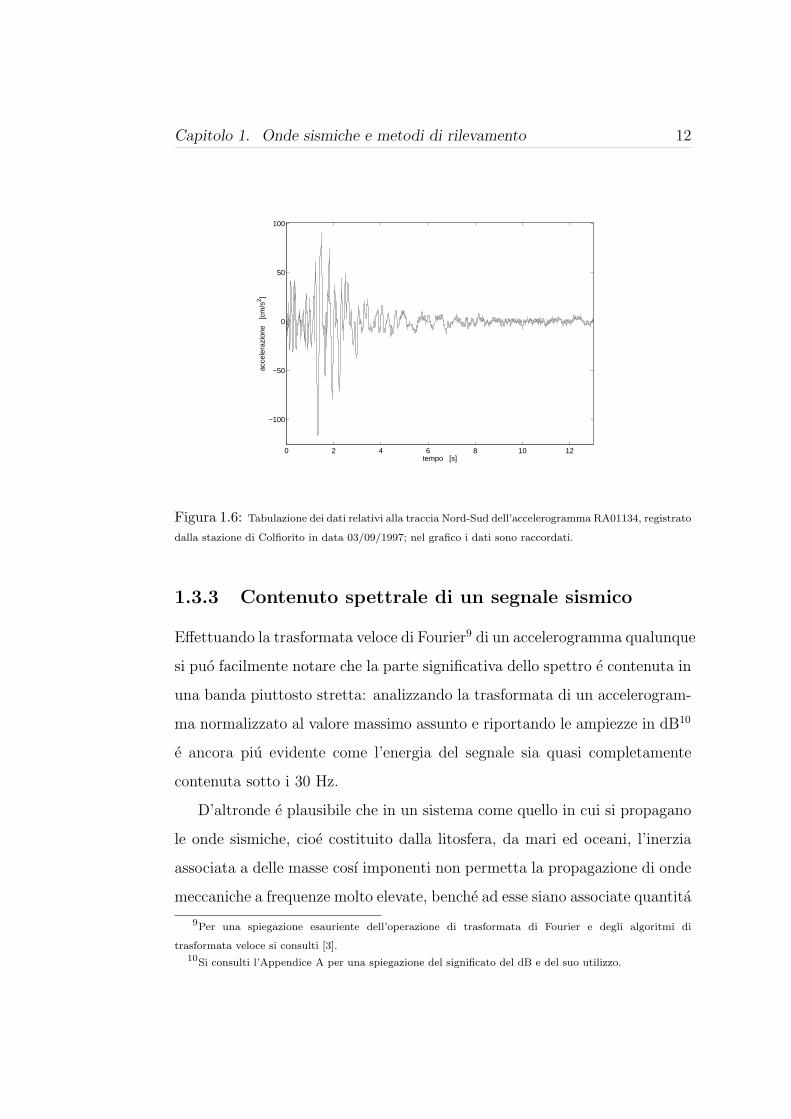
Figura 1.6: Tabulazione dei dati relativi alla traccia Nord-Sud dell’accelerogramma RA01134, registrato
dalla stazione di Colfiorito in data 03/09/1997; nel grafico i dati sono raccordati.
1.3.3 Contenuto spettrale di un segnale sismico
Effettuando la trasformata veloce di Fourier9 di un accelerogramma qualunque
si puo facilmente notare che la parte significativa dello spettro e contenuta in
una banda piuttosto stretta: analizzando la trasformata di un accelerogram-
ma normalizzato al valore massimo assunto e riportando le ampiezze in dB10
e ancora piu evidente come l’energia del segnale sia quasi completamente
contenuta sotto i 30 Hz.
D’altronde e plausibile che in un sistema come quello in cui si propagano
le onde sismiche, cioe costituito dalla litosfera, da mari ed oceani, l’inerzia
associata a delle masse cosı imponenti non permetta la propagazione di onde
meccaniche a frequenze molto elevate, benche ad esse siano associate quantita
9Per una spiegazione esauriente dell’operazione di trasformata di Fourier e degli algoritmi di
trasformata veloce si consulti [3].10Si consulti l’Appendice A per una spiegazione del significato del dB e del suo utilizzo.
Capitolo 1. Onde sismiche e metodi di rilevamento 13
altrettanto grandi di energia.
Sulla base di queste considerazioni i dati accelerometrici provenienti dalle
stazioni sismiche, compresi quelli su cui si e lavorato, sono campionati ad una
frequenza di campionamento di 200 Hz, che rispetta il teorema di Nyquist11
in maniera sufficientemente cautelativa.
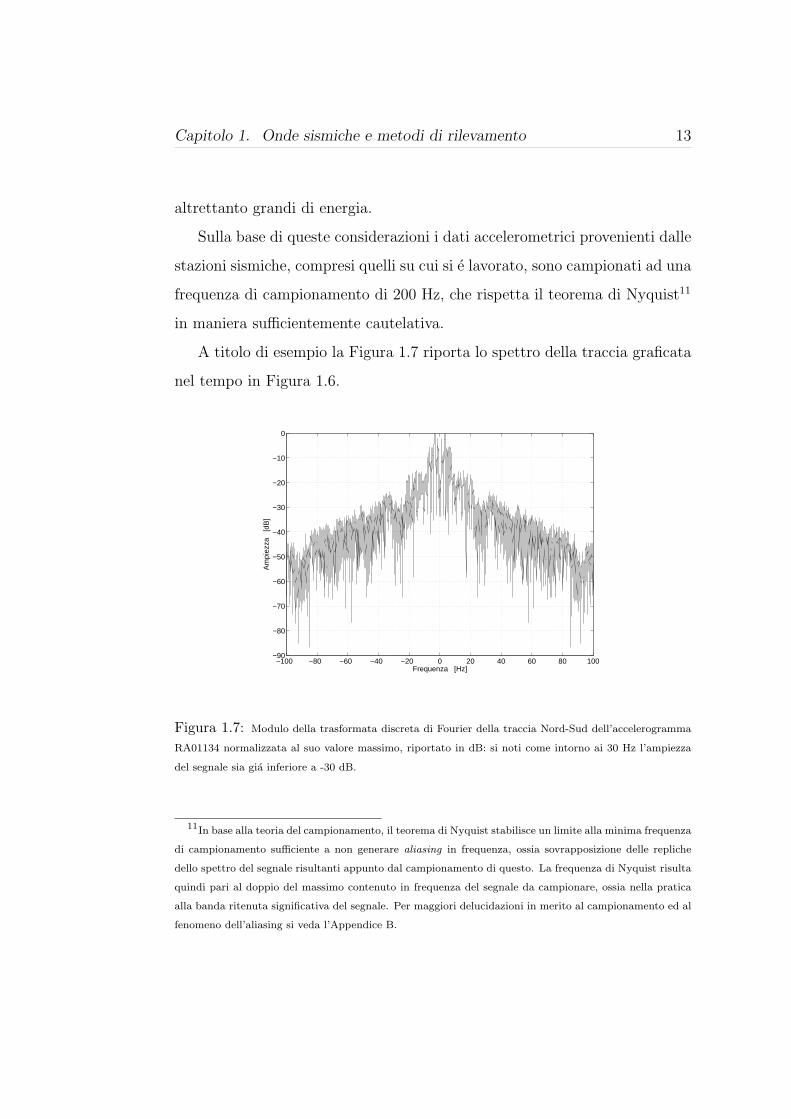
A titolo di esempio la Figura 1.7 riporta lo spettro della traccia graficata
nel tempo in Figura 1.6.
−100 −80 −60 −40 −20 0 20 40 60 80 100−90
−80
−70
−60
−50
−40
−30
−20
−10
0
Frequenza [Hz]
Am
piez
za
[dB
]
Figura 1.7: Modulo della trasformata discreta di Fourier della traccia Nord-Sud dell’accelerogramma
RA01134 normalizzata al suo valore massimo, riportato in dB: si noti come intorno ai 30 Hz l’ampiezza
del segnale sia gia inferiore a -30 dB.
11In base alla teoria del campionamento, il teorema di Nyquist stabilisce un limite alla minima frequenza
di campionamento sufficiente a non generare aliasing in frequenza, ossia sovrapposizione delle repliche
dello spettro del segnale risultanti appunto dal campionamento di questo. La frequenza di Nyquist risulta
quindi pari al doppio del massimo contenuto in frequenza del segnale da campionare, ossia nella pratica
alla banda ritenuta significativa del segnale. Per maggiori delucidazioni in merito al campionamento ed al
fenomeno dell’aliasing si veda l’Appendice B.
Capitolo 1. Onde sismiche e metodi di rilevamento 14
1.3.4 La tecnica della Deconvoluzione
Parliamo brevemente della Deconvoluzione, una tecnica introdotta in tempi
relativamente recenti per ”ripulire” i segnali sismici rilevati dai fattori che li
degradano 12.
Gia dalla semplice osservazione di un accelerogramma, come quello in
Figura 1.6, si puo notare come nella registrazione la fine della scossa sismica
non sia netta, ma prosegua, teoricamente in maniera indefinita, con un’ampiez-
za esigua. Come e facile immaginarsi alla scossa rilevata sara dunque sovrap-
posto un certo rumore di fondo dovuto a svariate cause, che sara modellizz-
abile con adeguati sistemi di natura statistica13.
Dal punto di vista meccanico poi la struttura di un singolo accelerometro
puo essere schematizzata come in Figura 1.8, ossia come un oscillatore sem-
plice smorzato ad un grado di liberta. D’altro canto e anche intuitivamente
necessario che il sistema meccanico preposto alla misura presenti un cer-
to smorzamento proporzionale all’ampiezza massima che si stima di dover
misurare, altrimenti il risultato della misurazione sarebbe un valore pres-
soche costantemente saturato al valore massimo (o minimo) della dinamica
rilevabile.
Ma allora si capisce come l’accelerogramma che si riceve in uscita dallo
strumento sia in realta una versione filtrata dal sistema ”sismografo” (e in
particolare per i fini pratici attenuata) dell’acclerazione realmente impressa
allo strumento, quindi a qualsiasi struttura posta in quell’area, dal sisma.
12In realta la tecnica della Deconvoluzione e applicabile ed applicata anche in molti altri settori
quali l’elaborazione delle immagini o, in generale, ogni qualvolta si abbiano segnali affetti da disturbi
modellizzabili.13Lo studio e la modellizzazione del rumore presente sui sistemi non sara oggetto di discussione per
questo volume, tuttavia l’argomento riveste un’importanza cruciale coadiuvato alle opportune tecniche di
elaborazione del segnale. Per maggiori approfondimenti si puo fare riferimento alla letteratura scientifica
in ambito geofisico.

Capitolo 1. Onde sismiche e metodi di rilevamento 15
Sulla base di ragionamenti come questi si puo pensare di individuare
ciascuna ragionevole causa di disturbo, studiarne la dinamica, e una volta
ricavato un modello matematico immaginare che il segnale originale attraversi
dei sistemi, ciascuno dei quali produce su di esso un effetto deterministico.
In particolare se il sistema ottenuto per modellizzare un certo disturbo e
lineare sara possibile determinarne una funzione di trasferimento, ma soprat-
tutto una funzione di trasferimento inversa 14, con la quale filtrare il segnale
in uscita dallo strumento con l’aspettativa di liberarlo da quel determinato
disturbo.
Questa e tecnica viene indicata sotto il nome di Deconvoluzione; come
vedremo l’analisi di un segnale non deconvoluto e quella dello stesso decon-
voluto possono portare a risultati sensibilmente diversi.
Figura 1.8: Schema del sistema meccanico equivalente ad un sismografo.
14Non entriamo in merito ai problemi di causalita che si possono incontrare; in maniera numerica e
comunque possibile realizzare un sistema lineare anche non causale a patto di rinunciare ad un’elaborazione
di tipo real-time.
Capitolo 2
La progettazione in
zona sismica
In ambito progettuale e di interesse primario conoscere i valori massimi dei
parametri strutturali che maggiormente condizionano la progettazione ese-
cutiva della costruzione, come ad esempio il taglio massimo alla base o lo
spostamento massimo di un punto di controllo particolare1.
In linea generale la valutazione dei parametri strutturali che caratteriz-
zano il comportamento dinamico, e quindi le relative sollecitazioni, viene
ottenuta realizzando un modello computazionale della struttura (modello
ad elementi finiti, analisi FEM); nell’ipotesi di un comportamento strut-
turale di tipo elastico lineare, l’analisi della risposta, ossia la valutazione
degli effetti dell’azione sismica, puo essere effettuata mediante l’impiego del-
la Analisi Dinamica Multimodale con spettro di risposta, detta piu semplice-
mente Analisi Modale.
1Per la stesura di questo capitolo si faccia riferimento a: [4], [5], [6] in Bibliografia.
Capitolo 2. La progettazione in zona sismica 17
2.1 L’Analisi Modale
L’Analisi Modale permette in sostanza di ricondurre la struttura in esame
ad un sistema caratterizzato da N modi di vibrare, approssimandone cosı il
comportamento dinamico come la combinazione lineare di N risposte modali.
Tramite gli opportuni passaggi matematici il modello MDOF 2 cosı ot-
tenuto puo essere disaccoppiato in una combinazione lineare di sistemi SDOF
3.
Appare subito evidente come nel condurre l’Analisi Modale siano di fon-
damentale importanza la determinazione della quantita di modi con cui ap-
prossimare il comportamento della struttura, per ottenere un modello suffi-
cientemente accurato ma al tempo stesso non troppo oneroso per il calcolo,
cosı come la scelta del criterio piu adatto a valutare la risposta complessiva
a partire da quella degli oscillatori SDOF in cui si e scomposto il sistema
MDOF.
A tal fine le normative prevedono vincoli specifici in relazione al tipo di
struttura da progettare ae alle caratteristiche geografiche e morfologiche della
zona d’interesse.
Lo studio delle risposte di ogni singolo oscillatore semplice ad un grado di
liberta permette dunque di determinare la risposta complessiva della strut-
tura. Spesso pero, per la progettazione di strutture soggette a vibrazioni non
a regime come nel caso della progettazione in zona sismica, piu che l’anda-
mento nel tempo delle singole risposte interessa conoscere i valori massimi
della risposta in termini di spostamento, velocita ed accelerazione di ciascuno
di questi oscillatori per verificare le sollecitazioni massime a cui sara sotto-
posta la struttura in quella determinata zona: qui entra in gioco lo spettro
2Acronimo di Multi Degrees Of Freedom ossia gradi di liberta multipli.3Acronimo di Single Degrees Of Freedom ossia un solo grado di liberta.
Capitolo 2. La progettazione in zona sismica 18
di risposta.
2.2 Spettri di Risposta
Lo spettro di risposta e un diagramma le cui ordinate corrispondono alla
massima ampiezza di uno dei parametri della risposta, in funzione del periodo
proprio naturale di oscillazione di un sistema elastico lineare smorzato SDOF,
calcolata per una determinata eccitazione nota.
Lo spettro cosı determinato andrebbe in realta distinto come spettro di
risposta elastico in quanto presuppone che il comportamento del materiale sia
indefinitamente elastico lineare 4. Per verifiche particolari in regime plastico
si ricorre ad un altro tipo di spettro, detto spettro di risposta inelastico.
Poiche il lavoro e stato incentrato sul calcolo dello spettro di risposta elas-
tico nei prossimi capitoli si descriveranno i metodi possibili per raggiungere
tale scopo; d’ora in avanti si fara comunque riferimento sempre a spettri di
tipo elastico.
2.2.1 Grandezze utili
I parametri della risposta a cui si e fatto riferimento fin’ora sono spostamento,
velocita ed accelerazione.
Nella pratica ci si riferisce tuttavia a delle grandezze leggermente diverse
da queste: gli spettri utilizzati riportano infatti la risposta massima in termi-
ni di spostamento spettrale, pseudo-velocita spettrale e pseudo-accelerazione
spettrale.
4Ossia che la rigidezza della molla k sia costante per qualunque valore di elongazione; questa situazione
e ovviamente solo un’approssimazione semplificativa che viene pero ritenuta valida per un gran numero di
analisi.
Capitolo 2. La progettazione in zona sismica 19
Lo spostamento spettrale, che indicheremo con Sd, e coincidente con lo
spostamento inteso tradizionalmente, determinato dalla risposta dell’oscilla-
tore con un determinato periodo di oscillazione, mentre pseudo-velocita Sv e
pseudo-accelerazione Sa sono ricavate a partire dallo spostamento spettrale
secondo le relazioni:
Sv = ωSd (2.1)
Sa = ω2Sd
dove con ω si intende la pulsazione naturale dell’oscillatore per cui e calcolato
quel dato valore di Sd5.
La differenza tra le “pseudo-quantita” utilizzate e quelle reali e minima:
come sara chiaro piu avanti, ricavare gli spettri nei tre parametri della rispos-
ta in questi termini e decisamente meno oneroso dal punto di vista del calcolo
di quanto non lo sarebbe la determinazione di velocita ed accelerazione come
derivate prima e seconda dello spostamento, e permette di evitare l’instabilita
del calcolo numerico di queste6.
Inoltre il fatto che il risultato ottenuto differisca in maniera minima da
quello rigoroso non e un caso: la risposta massima di ogni singolo oscillatore
a quella determinata (e fissa per tutto lo spettro) forzante e infatti ricon-
ducibile al fenomeno della risonanza per cui, con un ragionamento del tutto
intuitivo, potremmo immaginare di ottenere, ai fini della determinazione del-
la risposta massima in spostamento, lo stesso risultato che si ottiene dalla
soluzione dell’equazione che descrive risposta forzata del moto, considerando
5Per una trattazione esauriente della risposta di un oscillatore lineare SDOF si veda il capitolo seguente.6Senza entrare troppo nel dettaglio e sufficiente pensare a quanto sia concettualmente piu semplice
l’operazione di moltiplicazione rispetto a quella di derivazione, dunque anche un’implementazione a livello
numerico delle due operazioni.
Capitolo 2. La progettazione in zona sismica 20
invece l’oscillatore come se fosse eccitato dalla sola componente armonica alla
frequenza di risonanza contenuta nella forzante 7.
La risonanza di un oscillatore viene raggiunta quando questo e eccitato
da una forza armonica caratterizzata dalla stessa pulsazione (o frequenza)
naturale dell’oscillatore stesso, dunque poiche la risposta dell’oscillatore as-
sume sempre forma sinusoidale, come dettagliatamente descritto nel capitolo
successivo, risulta chiaro il passo con cui si puo ragionevolmente passare da
velocita ed accelerazione a pseudo-velocita e pseudo-accelerazione, semplice-
mente tenendo conto delle relazioni che legano una quantita sinuosoidale con
le sue derivate prima e seconda ed i relativi massimi:
x(t) = A sin(ωt) ⇒ xmax = A
x(t) = Aω cos(ωt) ⇒ xmax = Aω
x(t) = −Aω2 sin(ωt) ⇒ xmax = Aω2
2.2.2 Spettri medi, di inviluppo e lisciati
Gli spettri di risposta calcolati sulla base di un determinato accelerogram-
ma presentano un andamento piuttosto irregolare che corrisponde ad effetti
di risonanza locale, i quali legano il contenuto in frequenza dell’accelero-
gramma al periodo naturale dell’oscillatore (e quindi alla sua frequenza di
risonanza); queste irregolarita si attenuano passando a curve calcolate per
indici di smorzamento via via maggiori.
Uno spettro cosı frastagliato, benche rappresenti un andamento preciso
della risposta massima in funzione del periodo dell’oscillatore, non ha molto
significato per la progettazione, proprio perche legato ad una singola regis-
trazione.
7Si e qui implicitamente supposto di poter avere in qualche maniera una stima del contenuto spettrale
della forzante stessa.

Capitolo 2. La progettazione in zona sismica 21
0 0.5 1 1.5 2 2.5 3 3.5 4
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Periodo naturale oscillatore [s]
Ris
post
a in
pse
udo−
acce
lera
zion
e no
rmal
izza
ta a
g
Figura 2.1: spettro di risposta in pseudo-accelerazione normalizzata a g calcolato per un indice di
smorzamento ν = 0.05 usando come forzante la registrazione Nord-Sud della traccia RA01134.
In fase di progetto e invece molto piu significativo utilizzare spettri ge-
neralizzati ricavati da una moltitudine di spettri calcolati su altrettante re-
gistrazioni relative ad eventi compatibili, rilevati cioe nella stessa zona di
interesse nel corso del tempo, ed opportunamente normalizzati.
Dall’insieme di singoli spettri si estrapola poi uno spettro medio, come
media di ciascuno di questi, oppure, per una valutazione piu cautelativa, uno
spettro di inviluppo, ottenuto appunto effettuando l’inviluppo della sovrap-
posizione di tutti gli spettri 8.
Se si hanno a disposizione un buon numero di registrazioni si ottiene uno
spettro di risposta molto piu significativo di quanto non si possa avere da
una singola traccia; il risultato viene inoltre frequentemente lisciato per ad-
dolcire l’andamento della curva, tagliando in pratica i picchi piu elevati e
8Che corrisponde piu semplicemente a prendere il massimo valore tra tutti gli spettri per ciascun
valore del periodo.
Capitolo 2. La progettazione in zona sismica 22
“appianando” i minimi: questa operazione corrisponde nella pratica all’as-
sunzione di una determinata probabilita di rischio, alla quale tuttavia si deve
dare il giusto peso, considerando che ad uno spettro di risposta di inviluppo,
corrisponde gia un certo atteggiamento cautelativo 9; comunque il proget-
to dovra rispettare anche vincoli economici che in certi casi potrebbero non
essere propriamente in accordo con un eccessivo sovradimensionamento dal
punto di vista sismico.
2.2.3 Gli Spettri di Normativa
Spesso per il progetto in zone sismiche non soggette a particolare rischio,
o per le quale non sono disponibili registrazioni accelerometriche, non ci si
riferisce ad uno spettro di risposta del tipo appena descritto, ma a degli
spettri forniti come normativa dall’Ente preposto.
Questi spettri, che indicheremo come spettri di normativa, presentano il
vantaggio di avere un andamento descrivibile analiticamente per cui non c’e
la necessita di calcolarli in ciascun caso specifico e di averli tabulati a portata
di mano.
Per un approccio il piu generale possibile faremo rifermento all’Eurocodice
8, norma europea in fase di ricezione da parte dei paesi comunitari, compresa
l’Italia10.
Ai fini della presente norma i territori devono essere suddivisi dalle au-
torita nazionali in zone sismiche sulla base del rischio locale. Per definizione si
assume che all’interno di una data zona sismica il rischio sismico sia costante.
Per la maggior parte delle applicazione di questo Eurocodice il rischio
sismico e descritto per mezzo di un unico parametro, cioe il valore ag del
9E costituito infatti dai massimi di tutti gli spettri.10Si faccia riferimento a [6] in Bibliografia.
Capitolo 2. La progettazione in zona sismica 23
picco di accelerazione in un terreno roccioso o comunque compatto; si parla
quindi di “valore di progetto dell’accelerazione del terreno”.
Tale valore di progetto dell’accelerazione del terreno, scelto come si e detto
dalle autorita nazionali per ogni zona sismica, corrisponde ad un periodo di
ritorno di riferimento di 475 anni. A questo periodo di riferimento e assegnato
un coefficiente d’importanza γI pari a 1,0.
L’influenza delle caratterisctiche locali del terreno sul valore dell’azione
sismica e generalmente tenuta in conto considerando tre classi di appartenen-
za per il sottosuolo, dette A, B e C, definite sulla base dei differenti profili
stratigrafici qui di seguito descritti:
• Sottosuolo di tipo A: roccia o altra formazione geologica caratterizaata
da una velocita di propagazione delle onde di taglio, vs, pari almeno
a 800 m/s, includendo al massimo uno strato di materiale a piu de-
bole consistenza di 5 m; depositi compatti di sabbia, ghiaia o argilla
sovraconsolidata con spessori maggiori di diverse decine di metri, carat-
terizzati da un graduale incremento delle proprieta meccaniche con la
profondita (e da valori di vs pari ad almeno 400 m/s ad una profondita
di 10 m).
• Sottosuolo di tipo B: depositi profondi di sabbie mediamente addensate,
ghiaia e argille mediamente rigide con spessori che vanno dalle diverse
decine di metri alle molte centinaia, caratterizzati da valori minimi
della vs che vanno da 200 m/s ad una profondita di 10 m, fino a 350
m/s a 50 m.
• Sottosuolo di tipo C: depositi privi di coesione con o senza qualche
morbido strato ceosivo, caratterizzati da valori di vs sotto ai 200 m/s

Capitolo 2. La progettazione in zona sismica 24
nei primi 20 m; depositi di terreni coesivi caratterizzati da rigidezze
basse/medie e con valori di vs sotto ai 200 m/s nei primi 20 m.
L’azione sismica orizzontale descritta dalle due componenti ortogonali
considerate indipendenti e rappresentata mediante il medesimo spettro di
risposta.
A meno che studi specifici non diano indicazioni contrarie, la componente
verticale dell’azione sismica sara modellata secondo lo spettro di risposta
dell’azione sismica orizzontale, ma con i valori in ordinata ridotti nel seguente
modo:
• per T < 0.15s le ordinate vengono scalate per un coefficiente pari a
0.70;
• per T > 0.50s le ordinate vengono scalate per un coefficiente pari a
0.50;
• per 0.15 ≤ T ≥ 0.50s le ordinate vengono ridotte interpolando linear-
mente.
Lo spettro di risposta elastico Se(T ) e definito mediante le seguenti espres-
sioni:
0 ≤ T < TB Se(T ) = agS(1 + T
TB(η · β0 − 1)
)TB ≤ T < TC Se(T ) = agS · η · β0
TC ≤ T < TD Se(T ) = agS · η · β0
(TC
T
)k1
TD ≤ T Se(T ) = agS · η · β0
(TC
TD
)k1
·(
TD
T
)k2
(2.2)
dove β0 e il fattore di amplificazione dell’accelerazione dello spettro per
smorzamento viscoso pari al 5%, TB e TC sono i limiti del tratto costante
Capitolo 2. La progettazione in zona sismica 25
dello spettro di accelerazione, TD e il valore che definisce l’inizio del tratto di
spostamento costante dello spettro, k1 e k2 sono esponenti che modificano la
forma dello spettro per un periodo di vibrazione maggiore, rispettivamente,
di TC e TD, S e un parametro che caratterizza il sottosuolo ed η e un fat-
tore correttivo dello smorzamento che assume un valore pari ad 1 per uno
smorzamento viscoso pari al 5%.
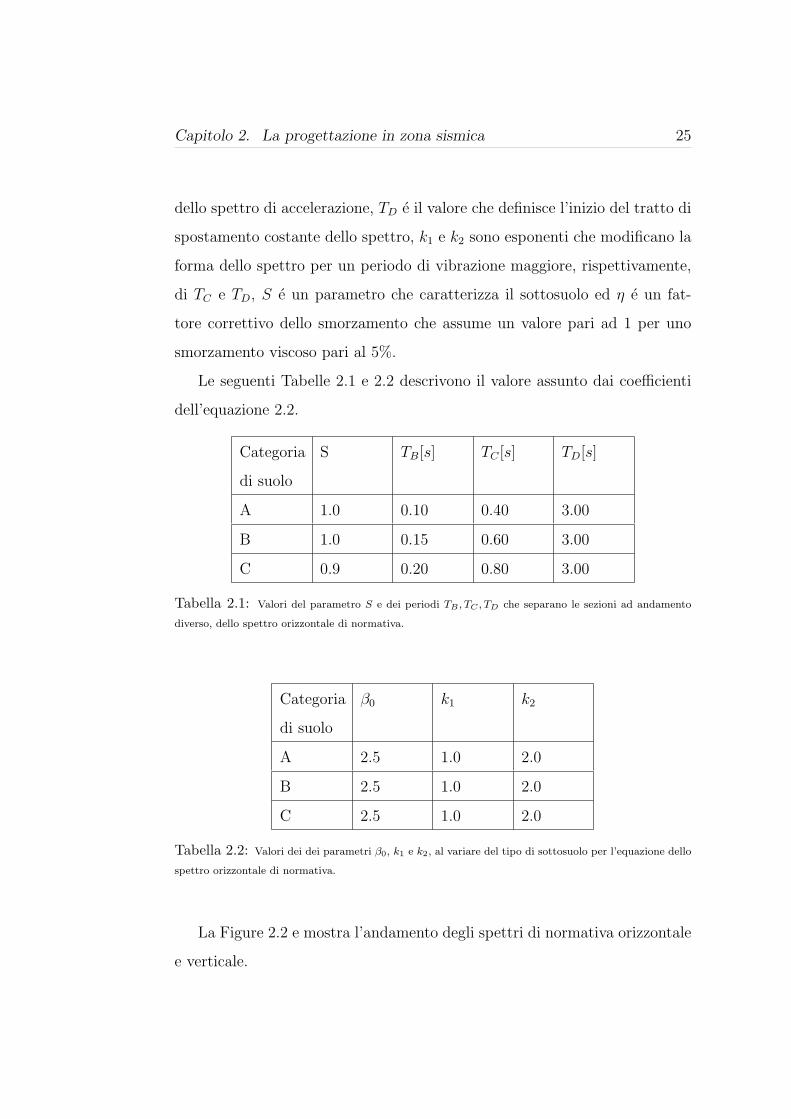
Le seguenti Tabelle 2.1 e 2.2 descrivono il valore assunto dai coefficienti
dell’equazione 2.2.
Categoria
di suolo
S TB[s] TC [s] TD[s]
A 1.0 0.10 0.40 3.00
B 1.0 0.15 0.60 3.00
C 0.9 0.20 0.80 3.00
Tabella 2.1: Valori del parametro S e dei periodi TB , TC , TD che separano le sezioni ad andamento
diverso, dello spettro orizzontale di normativa.
Categoria
di suolo
β0 k1 k2
A 2.5 1.0 2.0
B 2.5 1.0 2.0
C 2.5 1.0 2.0
Tabella 2.2: Valori dei dei parametri β0, k1 e k2, al variare del tipo di sottosuolo per l’equazione dello
spettro orizzontale di normativa.
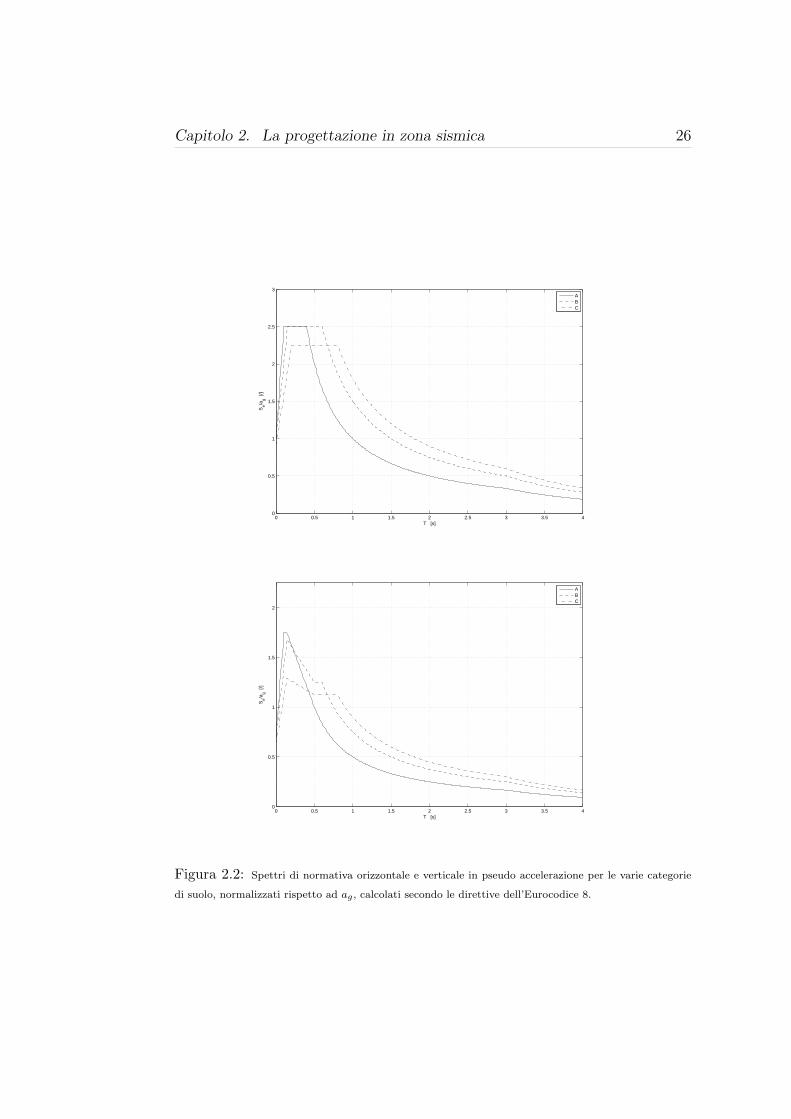
La Figure 2.2 e mostra l’andamento degli spettri di normativa orizzontale
e verticale.
Capitolo 2. La progettazione in zona sismica 26
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
T [s]
Se/a
g [/]
ABC
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
T [s]
Se/a
g [/]
ABC
Figura 2.2: Spettri di normativa orizzontale e verticale in pseudo accelerazione per le varie categorie
di suolo, normalizzati rispetto ad ag , calcolati secondo le direttive dell’Eurocodice 8.
Capitolo 3
L’oscillatore semplice smorzato
Una trattazione matematica esaustiva condurrebbe lo studio delle oscillazioni
di un oscillatore SDOF a partire dall’analisi della risposta libera di un oscil-
latore semplice non smorzato ad un grado di liberta, per introdurre cosı il
termine di smorzamento e successivamente studiare la risposta del sistema
all’eccitazione armonica, giungendo infine all’eccitazione da parte di forzanti
generiche e carichi impulsivi.
Benche questo tipo di approccio sia ottimo per la comprensione del pro-
blema, in questa sede ci si limitera allo studio della risposta libera di un
oscillatore semplice smorzato SDOF tralasciando l’eccitazione armonica e
passando direttamente a quella generica.
Questi due passaggi possono essere infatti considerati “il caso generale”,
visto che un oscillatore semplice non smorzato equivale ad un corrispondente
smorzato con indice (o coefficiente) di smorzamento nullo, e che un’ecci-
tazione armonica non e che una particolare forma dell’eccitazione generica1.
1Per la stesura di questo capitolo si faccia riferimento a: [4], [7], [8] in Bibliografia.
Capitolo 3. L’oscillatore semplice smorzato 28
3.1 Equazione del moto nella risposta libera
L’oscillatore semplice smorzato ad un grado di liberta e un sistema meccanico
elementare costituito da una massa m che puo traslare secondo una sola
direzione x, legata al vincolo da una molla di rigidezza k e da uno smorzatore
(o ammortizzatore) caratterizzato da un coefficiente di resistenza viscosa c.
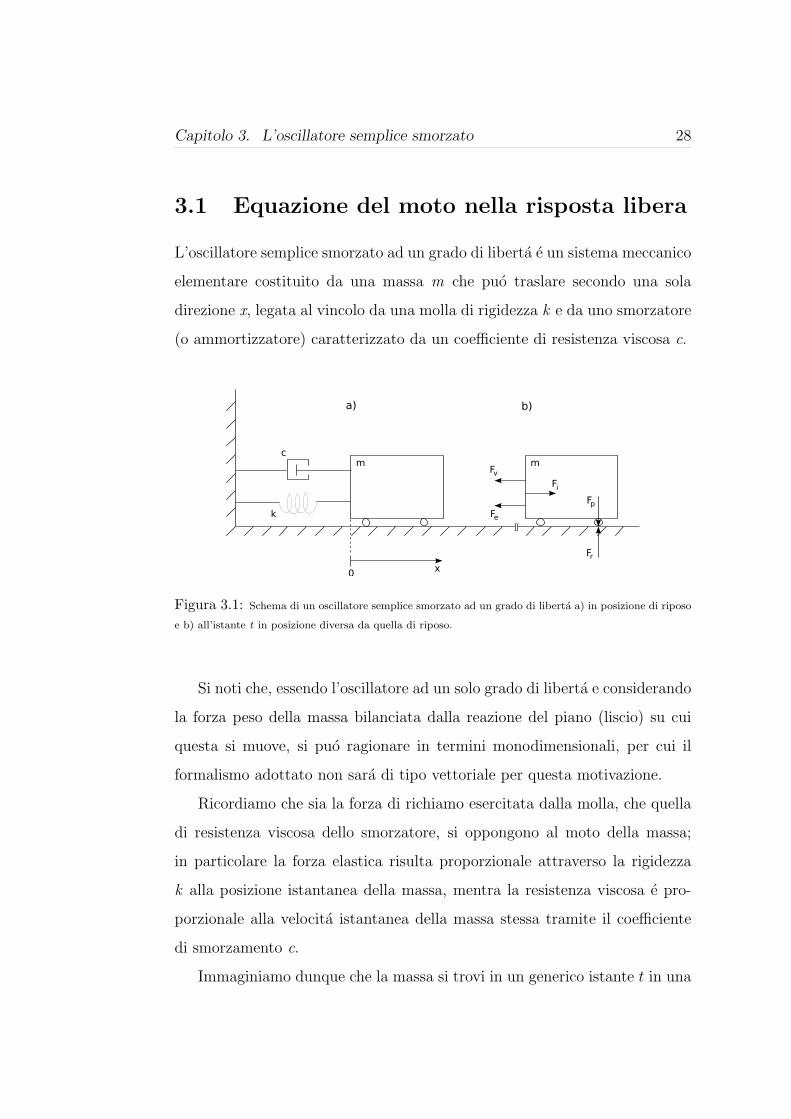
Figura 3.1: Schema di un oscillatore semplice smorzato ad un grado di liberta a) in posizione di riposo
e b) all’istante t in posizione diversa da quella di riposo.
Si noti che, essendo l’oscillatore ad un solo grado di liberta e considerando
la forza peso della massa bilanciata dalla reazione del piano (liscio) su cui
questa si muove, si puo ragionare in termini monodimensionali, per cui il
formalismo adottato non sara di tipo vettoriale per questa motivazione.
Ricordiamo che sia la forza di richiamo esercitata dalla molla, che quella
di resistenza viscosa dello smorzatore, si oppongono al moto della massa;
in particolare la forza elastica risulta proporzionale attraverso la rigidezza
k alla posizione istantanea della massa, mentra la resistenza viscosa e pro-
porzionale alla velocita istantanea della massa stessa tramite il coefficiente
di smorzamento c.
Immaginiamo dunque che la massa si trovi in un generico istante t in una
Capitolo 3. L’oscillatore semplice smorzato 29
posizione diversa da quella di riposo, ossia che quest’ultima si trovi in una
deteminata posizione x(t) in moto con una velocita x(t); allora applicando
la seconda legge della dinamica ed il principio di D’Alambert, e possibile
scrivere il diagramma di corpo libero alla massa:
mx = −cx− kx (3.1)
dove si e volutamente tralasciata la dipendenza dal tempo per non appesan-
tire la notazione, e dove, relativamente alla Figura 3.1 risulta:
Fe = kx Fv = cx Fi = mx
Dividendo tutto per m ed introducendo le quantita pulsazione naturale ω
ed indice di smorazmento ν si giunge all’equazione differenziale del moto
dell’oscillatore:
x + 2νωx + ω2x = 0 (3.2)
con:
ω =
√k
m(3.3)
ν =c
2√
mk=
c
2mω
3.2 Soluzione dell’equazione differenziale del
moto
L’equazione differenziale 3.2 e lineare, omogenea a coefficienti costanti. Si
cerca allora una soluzione della forma:
x(t) = x = eλt

Capitolo 3. L’oscillatore semplice smorzato 30
Calcolate le prime due derivate di x(t) rispetto al tempo, la sostituzione di
queste nella 3.2 fornisce:
eλt(λ2 + 2νωλ + ω2) = 0
che e soddisfatta per qualsiasi valore di t quando:
λ2 + 2νωλ + ω2 = 0 (3.4)
L’equazione di secondo grado 3.4 nell’incognita λ si dice equazione caratteristica
associata all’omogenea 3.2 ed ha radici:
{λ1, λ2} = (−ν ±√
ν2 − 1)ω
Pertanto le due soluzioni:
eλ1t = etω(−ν+√
ν2−1)
eλ2t = etω(−ν−√
ν2−1)
sono entrambe soluzioni particolari della 3.2, e la soluzione generale si trova
come combinazione lineare di esse:
x(t) = C1eλ1t + C2e
λ2t (3.5)
Dall’analisi del discriminante dell’equazione caratteristica si evidenzia la pos-
sibilita di tre tipi distinti di soluzione; indicando come smorzamento critico,
ccr2, il valore del coefficiente di smorzamento che rende nullo il discriminante
della 3.4:
ν2 − 1 = 0 ⇒ ccr = 2mω =2k
ω
le tre soluzioni possono essere distinte confrontando il coefficiente di smorza-
mento con quello critico.
In particolare si ha:
2Spesso l’indice di smorzamento dell’oscillatore viene indicato come rapporto tra il coefficiente di
smorzamento e quello critico ν = cccr
Capitolo 3. L’oscillatore semplice smorzato 31
• Se c > ccr ossia ν > 1 il sistema si dice sovrasmorzato;
• Se c = ccr ossia ν = 1 il sistema si dice criticamente smorzato;
• Se c < ccr ossia ν < 1 il sistema si dice sottosmorzato.
Dove, come detto all’inizio del capitolo, il caso di c = ν = 0 cor-
risponde ad un oscillatore SDOF non smorzato.
Nei casi di sistema sovrasmorzato o criticamente smorzato il determinante
assume un valore rispettivamente positivo o nullo da cui le radici risultano
in entrambi i casi reali (e coincidenti nel caso di smorzamento critico).
In entrambe queste situazioni la soluzione del problema di Cauchy che si
ottiene fissando i valori iniziali x(t) e x(t) ha una forma esponenziale negativa,
corrispondente ad un moto aperiodico che riporta la massa nella posizione
di equilibrio, dal punto di partenza, senza l’insorgere di oscillazioni complete
attorno ad esso.
Nella realta pratica a cui si e interessati questi casi non trovano tuttavia
applicazione: gli oscillatori equivalenti che si vengono a considerare nell’ana-
lisi dinamica lineare delle strutture assumono infatti indici di smorzamento
molto inferiori all’unita.
E interessante allora studiare la soluzione del sistema sottosmorzato.
Essendo ν < 1 le radici λ1 e λ2 dell’equazione caratteristica 3.4
risultano complesse coniugate con parte reale negativa:
λ1 = −νω + jω√
1− ν2
λ2 = −νω − jω√
1− ν2
Sostituendo le soluzioni torvate nella 3.5 si otterrebbe una combinazione
di due esponenziali complessi, che non e adatta a descrivere il moto dell’oscil-
latore.

Capitolo 3. L’oscillatore semplice smorzato 32
Ricorrendo alle formule di Eulero si puo allora individuare un nuovo
insieme di soluzioni reali da utilizzare in maniera piu utile:
e−λ1t = e−νωt (cos(ωDt) + j sin(ωDt))
e−λ2t = e−νωt (cos(ωDt)− j sin(ωDt))
da cui ponendo:
z1 =e−λ1t + e−λt
2= e−νωt (cos(ωDt))
z2 =e−λ1t − e−λt
2j= e−νωt (sin(ωDt))
la soluzione generale:
x(t) = A1z1 + A2z2 = e−νωt (A1 cos(ωDt) + A2 sin(ωDt)) (3.6)
dove con il termine ωD si e indicata la pulsazione smorzata dell’oscillatore:
ωD = ω√
1− ν2
La soluzione trovata in 3.6 mette in evidenza come nella risposta libera
dell’oscillatore in esame la massa oscilli attorno alla posizione di equilibrio,
con pulsazione pari alla pulsazione smorzata ωD (ovvero con periodo TD =
2πωD
), ma con ampiezza man mano decrescente, governata da un esponenziale
negativo che e funzione dell’indice di smorzamento ν.
Si puo determinare allora la soluzione del problema di Cauchy; fissate le
condizioni iniziali:
x(t = 0) = x0
x(t = 0) = x0

Capitolo 3. L’oscillatore semplice smorzato 33
sostituendo nella 3.6 e derivando rispetto a t :
x0 = A1
x0 = −A1νω + A2ωD
da cui risolvendo il sistema per sostiuzione:
A1 = x0
A2 =x0 + νωx0
ωD
e la soluzione finale:
x(t) = e−νωt
[x0 cos(ωDt) +
(x0 + νωx0
ωD
)sin(ωDt)
]∀t ≥ 0 (3.7)
0 1 2 3 4 5 6 7 8 9 10−1.5
−1
−0.5
0
0.5
1
1.5
Tempo [s]
Spo
stam
ento
[m
]
Figura 3.2: Esempio di risposta libera di un oscillatore sottosmorzato caratterizzato dai coefficienti
ν = 0.05, T = 0.8s e condizioni iniziali x0 = 1m, x0 = 5m/s.
Capitolo 3. L’oscillatore semplice smorzato 34
3.3 Risposta forzata
Ricaviamo ora l’equazione che descrive il comportamento dell’oscillatore smor-
zato semplice SDOF quando ad esso e applicata una forzante esterna, che
puo essere vista nella Figura 3.1 b) come una ulteriore forza, che indicheremo
con p(t), agente sulla massa in direzione dell’asse x.
3.3.1 Risposta impulsiva
Si definisce impulso elementare di una generica forza ~p = ~p(t) nell’inter-
vallo di tempo [t, t + dt], il vettore:
d~I = ~pdt
da cui l’impulso della forza ~p = ~p(t) relativo al generico intervallo
temporale [t1, t2]:
~I =
∫ t2
t1
~p(t)dt
Applicando la seconda legge della dinamica alla quantita di moto vale il
seguente teorema: la derivata rispetto al tempo della quantita di moto uguaglia,
istante per istante, la risultante delle forze agenti sul corpo3; nel caso della
singola forza ~p(t) si ha:
~Q(t) = mx(t)d~Q(t)
dt= ~p(t)
Integrando rispetto al tempo si ottiene il noto teorema dell’impulso, secondo
il quale l’impulso ~I della forza ~p(t) nell’intervallo di tempo [t1, t2] applicato
ad un corpo uguaglia la variazione della quantita di moto dello stesso:
~Q(t2)− ~Q(t1) =
∫ t2
t1
~p(t)dt
3Spesso indicato appunto come teorema della quantita di moto.
Capitolo 3. L’oscillatore semplice smorzato 35
Tornando alla trattazione monodimensionale dell’oscillatore smorzato
SDOF osserviamo che, se sulla massa dell’oscillatore agisce ad un determinato
istante τ una forza di intensita elevata, per una durata molto inferiore al
periodo di oscillazione dello stesso, potremo approssimare l’impulso di tale
forza, che si dira impulsiva, come:
I =
∫ τ+ε
τ
p(t)dt ' p(τ)ε dove : ε << T
Immaginiamo ora che l’impulso sia unitario e di mantenere costante tale
quantita4: operando il limite per ε → 0, l’ampiezza della forza che genera
l’impulso tende all’infinito, ma il suo integrale resta, appunto, costante.
Questa condizione limite prende il nome di impulso unitario, e viene
matematicamente trattata tramite la distribuzione delta di Dirac 5.
Per quanto detto allora, se il generico impulso agisce all’istante τ su di
un corpo di massa m in quiete, produce su di essa un’improvvisa variazione
di velocita, x0, senza un’apprezzabile cambiamento di posizione, tale che:
I = mx0
Pertanto, se un oscillatore semplice smorzato in condizioni di quiete viene
eccitato da un impulso di durata trascurabile rispetto al periodo naturale T,
la risposta puo essere derivata da quella libera 3.7 imponendo le condizioni
iniziali:
x0 = 0 , x0 =I
m
Tale risposta, considerando il generico impulso unitario applicato al-
l’istante t = τ , fornisce quella che viene indicata come risposta impulsiva
4Ossia il lavoro che la forza a cui e associato compie sul corpo in virtu della variazione di quantita di
moto prodotta su di esso5Di cui si richiamano due proprieta utili per i calcoli seguenti: δ(t−τ) = 0 ∀t 6= τ,
R∞0 δ(t−τ)dτ =
1.
Capitolo 3. L’oscillatore semplice smorzato 36
dell’oscillatore semplice smorzato:
h(t) =1
mωD
e−νωt sin (ωD(t− τ)) ∀t ≥ 0 (3.8)
La notazione h(t) e introdotta a titolo di distinzione dalla risposta libera
dell’oscillatore.
E importante notare come sia la risposta libera che quella impulsiva rica-
vate rispettivamente in 3.7 e 3.8 essendo relative ad un sistema causale sono
da intendersi valide ∀t ≥ 0, e che la risposta impulsiva ha senso, come sara
chiaro tra poche righe, solo se il sistema e lineare.
3.3.2 Eccitazione arbitraria
Se la legge di variazione della forzante esterna p(t) risulta essere arbitraria puo
essere decomposta in una serie di impulsi elementari di durata infinitesima
mediante un’operazione concettualmente simile a quella con cui si giunge alla
definizione di integrale di Cauchy-Riemann.
La risposta dx(t) dell’oscillatore smorzato all’impulso dI = p(τ)dτ e data
dalla 3.8:
dx(t) =dI
mωD
e−νωt sin (ωD(t− τ))
Essendo il sistema lineare6, la risposta complessiva dell’oscillatore x(t)
al tempo t puo essere considerata come la sommatoria delle singole risposte
dx(t) relative a tutti gli impulsi elementari dI che si verificano prima dell’is-
tante t. Integrando allora dall’istante τ = 0 a τ = t si giunge all’equazione
che descrive la risposta dell’oscillatore in tale intervallo temporale:
6Ossia, con dire meccanico, risulta valido il principio di sovrapposizione degli effetti.
Capitolo 3. L’oscillatore semplice smorzato 37
x(t) =1
mωD
∫ t
0
p(τ)e−νω(t−τ) sin (ωD(t− τ)) dτ (3.9)
In letteratura l’equazione appena scritta prende il nome di Integrale di
Duhamel (in forma smorzata).
3.3.3 Eccitazione impressa al vincolo
Lo studio finora condotto sull’oscillatore semplice smorzato SDOF ha portato
a definire, con l’integrale di Duhamel, un’equazione adatta a calcolare per
ogni istante la risposta in spostamento dell’oscillatore stesso, quando alla
massa sia applicata una forza p(t).
Tuttavia tale risultato non e immediatamente adattabile al calcolo dello
spettro di risposta: secondo l’approccio teorico dell’Analisi Dinamica Lin-
eare che stiamo seguendo infatti, nel modellare una struttura come com-
binazione di oscillatori SDOF, per ciascun questi non sarebbe la massa ad
essere soggetta alla forza p(t), bensı il supporto (o vincolo)7.
In base a queste osservazioni si puo concludere che se l’eccitazione viene
impressa al supporto l’oscillatore puo essere studiato come facente parte di
un sistema di riferimento relativo non inerziale, considerando assoluto (e
inerziale) il sistema di riferimento in cui si trovano oscillatore + supporto.
Allora, per il teorema delle forze apparenti, quando una forza p(t) e ap-
plicata al vincolo, nel sistema di riferimento relativo la massa dell’oscillatore
risentira di una forza apparente di intensita proporzionale alla massa stessa,
nella stessa direzione ma con verso opposto rispetto a p(t).
7Si noti che anche la rilevazione dell’accelerogramma, tramite il sismografo descritto nel Capitolo 1,
avviene in maniera simile. Come evidenziato anche dalla Figura 1.8 infatti, gli strumenti schematizzabili
con questa struttura hanno solo un terminale (la base) fissa al punto in cui eseguire la misura, mentre le
caratteristiche del moto sono ricavate dallo spostamento relativo della massa sismica rispetto alla base
stessa dello strumento. Per questo motivo tali strumenti si dicono a riferimento inerziale, o inerziali.
Capitolo 3. L’oscillatore semplice smorzato 38
In riferimento alla Figura 3.1 b) quindi il diagramma di corpo libero alla
massa m nel sistema di riferimento relativo (in cui siamo interessati a trovare
la risposta in spostamento) assume la forma:
mx(t) + cx(t) + kx(t) = −mp(t) (3.10)
da cui, immediatamente, l’integrale di Duhamel nel caso di eccitazione im-
pressa al vincolo:
x(t) = − 1
ωD
∫ t
0
p(τ)e−νω(t−τ) sin (ωD(t− τ)) dτ (3.11)
Capitolo 4
Calcolo dello
Spettro di Risposta
nel dominio del tempo
Come precedentemente descritto lo spettro di risposta non e che un’insieme
di coppie di valori (periodo oscillatore, risposta massima) calcolati per una
determinata forzante, con indice di smorzamento fisso, dalle quali si ricava
poi il diagramma di spettro1.
Per ottenere queste coppie di valori si possono adottare diverse metodolo-
gie ognuna delle quali e caratterizzata da vantaggi e difetti rispetto alle
altre.
In questo capitolo si descriveranno i metodi di risoluzione nel dominio
del tempo, caratterizzati da semplicita concettuale ma anche, in generale, da
un’elevata complessita computazionale; si rimanda invece al Capitolo 5 per
il calcolo degli spettri nel dominio della frequenza.
1Per la stesura di questo capitolo si faccia riferimento a: [9], [3], [10] in Bibliografia.
Capitolo 4. Calcolo dello SdR nel dominio del tempo 40
4.1 Soluzione dell’equazione del moto
tramite simulazione
Per quanto detto al Paragrafo 3.3.3 la risposta forzata di un oscillatore sem-
plice smorzato SDOF con forzante impressa al vincolo puo essere espressa
nei termini dell’equazione 3.10.
Applicando un approccio diretto, si puo pensare di reiterare la soluzione
della suddetta equazione differenziale, variando di volta in volta il periodo di
oscillazione entro un intervallo prestabilito, e per ciascuna soluzione cercare
il massimo in valore assoluto, ottenendo cosı lo spettro di risposta.
Anche se il metodo e invitante per l’apparente semplicita, ci si deve ri-
cordare che l’equazione da risolvere e un’ equazione differenziale di secondo
grado con un termine forzante che non assume una forma descrivibile ana-
liticamente. Infatti il valore di accelerazione registrato e nella pratica una
variabile aleatoria continua e scorrelata, pertanto non si puo ottenere una
soluzione analitica in forma chiusa.
D’altro canto avendo a disposizione un calcolatore si puo pensare di im-
plementare un sistema simulazione che risolva l’equazione differenziale in
maniera numerica, ciclando la simulazione per i valori desiderati di periodo
naturale.
Di seguito e riportato lo schema del modello utilizzato per la simulazione,
realizzato in ambiente Simulink e chiamato time simulation; si riportano inol-
tre l’andamento della risposta in spostamento che si ottiene dalla simulazione
del modello, per un fissato valore di periodo e coefficiente di smorzamento,
impostando come forzante la registrazione Nord-Sud della traccia RA01134
ed alcune righe di codice Matlab che realizzano il ciclo su cui si basa questo
tipo di calcolo dello spettro di risposta.
Capitolo 4. Calcolo dello SdR nel dominio del tempo 41
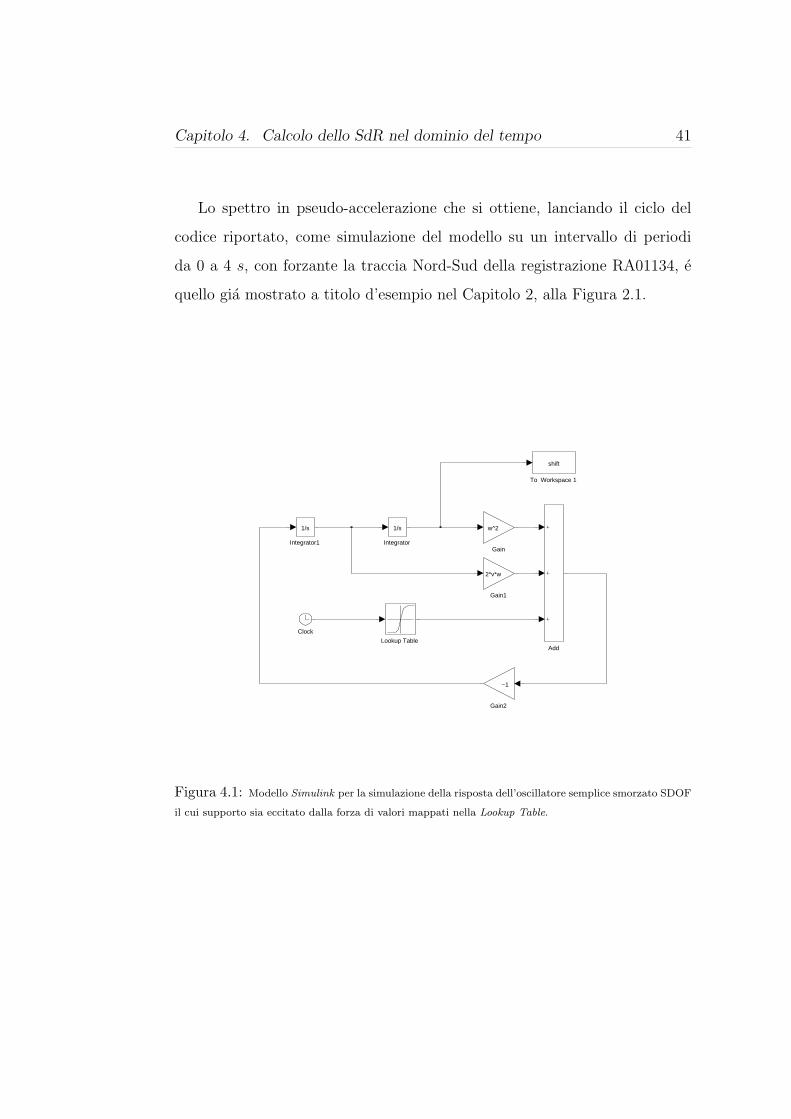
Lo spettro in pseudo-accelerazione che si ottiene, lanciando il ciclo del
codice riportato, come simulazione del modello su un intervallo di periodi
da 0 a 4 s, con forzante la traccia Nord-Sud della registrazione RA01134, e
quello gia mostrato a titolo d’esempio nel Capitolo 2, alla Figura 2.1.
To Workspace 1
shift
Lookup Table
Integrator1
1/s
Integrator
1/s
Gain2
−1
Gain1
2*v*w
Gain
w^2
Clock
Add
Figura 4.1: Modello Simulink per la simulazione della risposta dell’oscillatore semplice smorzato SDOF
il cui supporto sia eccitato dalla forza di valori mappati nella Lookup Table.
Capitolo 4. Calcolo dello SdR nel dominio del tempo 42
1 %--- calcolo dei parametri necessari alla simulazione
2
3 lp=length(p); %calcolo base dei tempi per la simulazione
4 tc=1/fc;
5 t=[0:tc:tc*(lp -1)];
6
7 ti=0; %impostazione intervallo di simulazione
8 tf=t(lp);
9
10 %--- calcolo dello Spettro di Risposta
11
12 periods =[Ti:dT:Tf]; %generazione del vettore di periodi
13 lT=length(periods );
14
15 time_res_spect=nan(lT ,4); %preparazione della matrice Spettri
16 time_res_spect (:,1)= periods ’;
17
18
19 for z=1:lT
20 T=periods(z); %impostazione periodo naturale oscillatore
21 w=2*pi/T; %calcolo pulsazione naturale corrispondente
22 sim(’time_simulation ’); %simulazione e registrazione valori massimi
23
24 val=max(abs(shift ));
25 time_res_spect(z,2)= val;
26 time_res_spect(z,3)= val*w;
27 time_res_spect(z,4)= val*(w^2);
28 end
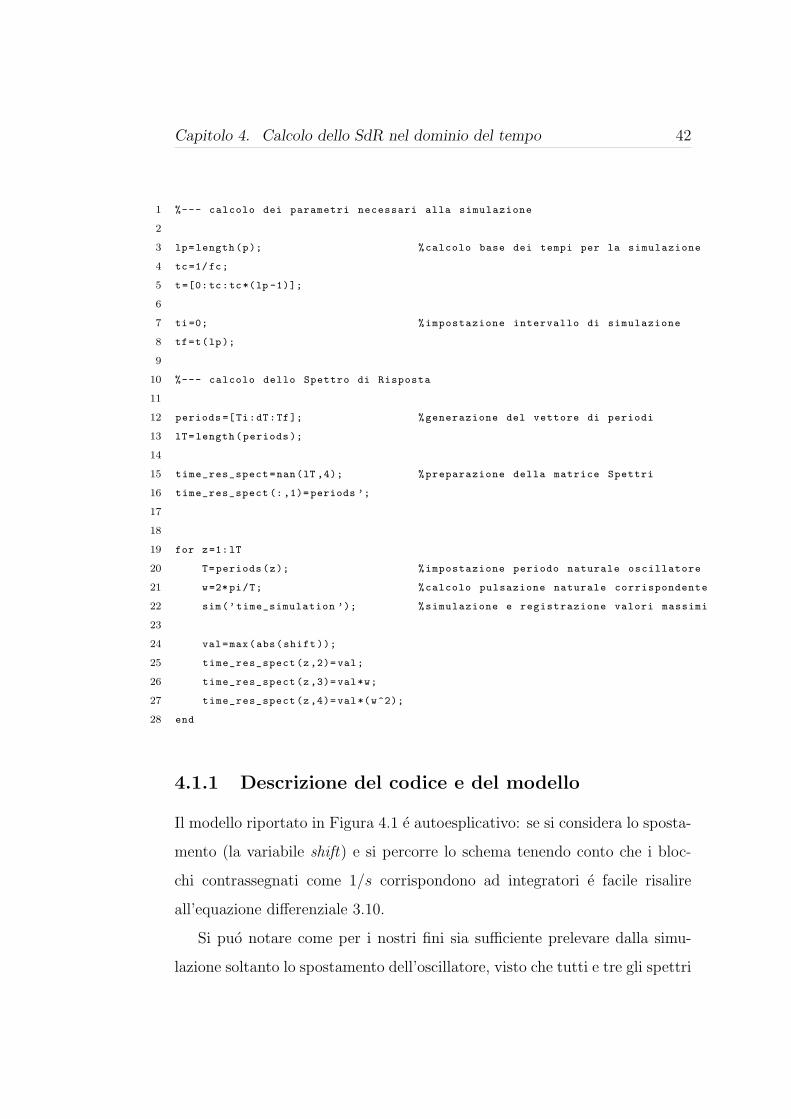
4.1.1 Descrizione del codice e del modello
Il modello riportato in Figura 4.1 e autoesplicativo: se si considera lo sposta-
mento (la variabile shift) e si percorre lo schema tenendo conto che i bloc-
chi contrassegnati come 1/s corrispondono ad integratori e facile risalire
all’equazione differenziale 3.10.
Si puo notare come per i nostri fini sia sufficiente prelevare dalla simu-
lazione soltanto lo spostamento dell’oscillatore, visto che tutti e tre gli spettri

Capitolo 4. Calcolo dello SdR nel dominio del tempo 43
0 2 4 6 8 10 12
−1.5
−1
−0.5
0
0.5
1
1.5
Tempo [s]
Spo
stam
ento
[c
m]
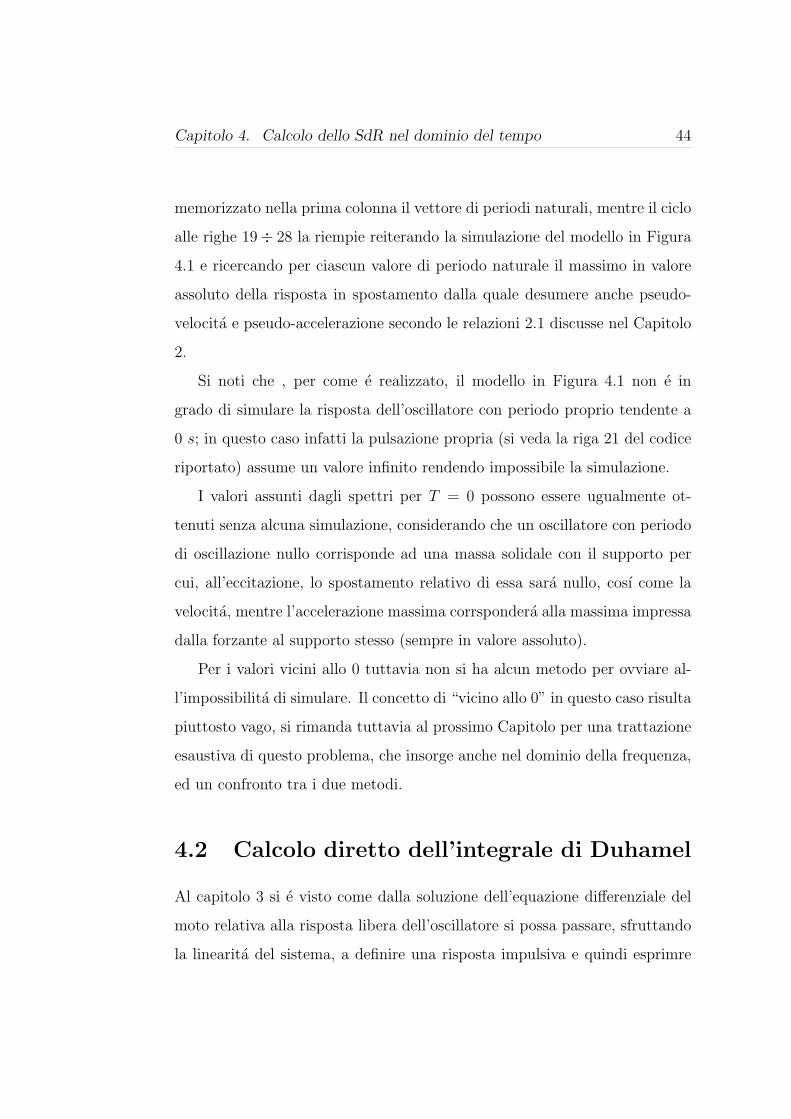
Figura 4.2: Risposta forzata dell’oscillatore caratterizzato da T = 0.8s e ν = 0.05 eccitato dalla
registrazione N-S della traccia RA01134, ottenuta tramite simulazione del modello di Figura 4.1.
vengono calcolati a partire da esso, mentre senza alcuna complessita aggiun-
tiva si potrebbero estrarre anche velocita ed accelerazione reali, rispettiva-
mente a monte del primo e del secondo blocco integratore.
La simulazione avviene tra gli istanti temporali ti e tf , con passo tc, i
cui valori devono essere impostati sul workspace nelle tre variabili ti, tf e tc
(quest’ultima e ricavata come l’inverso di fc, la frequenza di campionamento
della traccia in p); i valori dei parametri dell’oscillatore, ν ed ω, utilizzati nei
blocchi di guadagno, devono invece essere riportati nelle variabili v e w. Si
devono inoltre fissare gli estremi dell’intervallo di valori di periodo naturale
dell’oscillatore su cui si intende ottenere lo spettro (Ti e Tf , rispettivamente
in Ti e Tf ), ed infine la forzante contenuta in p.
Nelle righe 3 ÷ 8 viene dunque calcolato il vettore dei tempi necessario
alla simulazione ed impostati l’istante iniziale e quello finale.
Alle righe 12 ÷ 16 viene preparata la matrice che conterra gli spettri, e
Capitolo 4. Calcolo dello SdR nel dominio del tempo 44
memorizzato nella prima colonna il vettore di periodi naturali, mentre il ciclo
alle righe 19÷ 28 la riempie reiterando la simulazione del modello in Figura
4.1 e ricercando per ciascun valore di periodo naturale il massimo in valore
assoluto della risposta in spostamento dalla quale desumere anche pseudo-
velocita e pseudo-accelerazione secondo le relazioni 2.1 discusse nel Capitolo
2.
Si noti che , per come e realizzato, il modello in Figura 4.1 non e in
grado di simulare la risposta dell’oscillatore con periodo proprio tendente a
0 s; in questo caso infatti la pulsazione propria (si veda la riga 21 del codice
riportato) assume un valore infinito rendendo impossibile la simulazione.
I valori assunti dagli spettri per T = 0 possono essere ugualmente ot-
tenuti senza alcuna simulazione, considerando che un oscillatore con periodo
di oscillazione nullo corrisponde ad una massa solidale con il supporto per
cui, all’eccitazione, lo spostamento relativo di essa sara nullo, cosı come la
velocita, mentre l’accelerazione massima corrspondera alla massima impressa
dalla forzante al supporto stesso (sempre in valore assoluto).
Per i valori vicini allo 0 tuttavia non si ha alcun metodo per ovviare al-
l’impossibilita di simulare. Il concetto di “vicino allo 0” in questo caso risulta
piuttosto vago, si rimanda tuttavia al prossimo Capitolo per una trattazione
esaustiva di questo problema, che insorge anche nel dominio della frequenza,
ed un confronto tra i due metodi.
4.2 Calcolo diretto dell’integrale di Duhamel
Al capitolo 3 si e visto come dalla soluzione dell’equazione differenziale del
moto relativa alla risposta libera dell’oscillatore si possa passare, sfruttando
la linearita del sistema, a definire una risposta impulsiva e quindi esprimre
Capitolo 4. Calcolo dello SdR nel dominio del tempo 45
la risposta forzata al generico istante t sotto forma dell’integrale 3.11, detto
di Duhamel.
Si potrebbe allora pensare di cercare una primitiva di suddetto integrale
e calcolarne il valore assunto da t=0 a t=t’ dove t’ sia un generico punto
interno ad un supporto temporale fissato.
Come gia detto al paragrafo precedente la forzante p(t) non e esprimibile
in forma chiusa 2 per cui in genrale non si potra trovare una primitiva ed il
calcolo dell’integrale dovra avvenire per via numerica.
Considerando che ci stiamo riferendo ad un oscillatore armonico smorza-
to, la cui risposta una volta terminata l’eccitazione si attenua secondo un
esponenziale negativo, si puo sicuramente limitare l’intervallo temporale di
interesse alla durata della traccia della forzante, discretizzandolo con lo stesso
intervallo su cui sono campionati i dati di quest’ultima (una discretizzazione
piu fitta non avrebbe infatti senso mentre una piu rada farebbe correre il
rischio di perdere l’istante in cui si verifica la risposta massima).
Dovendo poi reiterare il procedimento al variare del periodo naturale del-
l’oscillatore, si evidenzia l’elevata complessita di questa strategia di calcolo
che risulta quindi inapplicabile.
4.3 Possibili strategie
Come detto la ricerca di una soluzione direttamente nel dominio del tempo
presenta limitazioni dovute alla complessita di calcolo.
Benche formalmente le soluzioni qui proposte siano infatti corrette questo
tipo di elaborazione puo divenire piuttosto impegnativa anche per un calco-
2Tranne nel caso in cui si debba studiare la risposta ad un’oscillazione artificiale persistente, come una
vibrazione, che sia esprimibile in serie di Fourier come somma di poche armoniche.

Capitolo 4. Calcolo dello SdR nel dominio del tempo 46
latore moderno, e la complessita di calcolo aumenta con l’aumentare della
durata dell’accelerogramma registrato3.
L’analisi dei segnali sismici potrebbe pero suggerire uno spunto per miglio-
rare questo tipo di analisi: in riferimento al Capitolo 1, parlando di onde di
volume, si e detto che queste sono composte da una componente P che vi-
aggia a velocita sostenuta, ed una S, piu lenta4; si e poi detto, al Capitolo
2, che la risposta massima dell’oscillatore si ha quando l’eccitazione avviene
con frequenze vicine, al limite coincidenti, con quella naturale dell’oscillatore
stesso.
Potrebbe darsi allora che in una determinata onda sismica solo una delle
due componenti, P o S, sia quella che porta l’oscillatore alla sua massima
risposta, per cui l’analisi potrebbe essere limitata ad una di queste due
componenti.
Un approccio di questo tipo tuttavia comporta non poche difficolta, come
la scomposizione dell’onda in P + S e la relativa analisi in frequenza, e non
considera comunque il fatto che gli effetti delle due onde sull’oscillatore si
sovrappongono per cui potrebbe rivelarsi numericamente instabile o portare
a risultati inaffidabili.
3Alla fine del prossimo Capitolo, nel quale verra presentata l’analisi nel dominio trasformato della
freqenza, sono riportate alcune misurazioni del tempo impiegato da ciascuno dei due metodi per il calcolo
della singola risposta e di uno spettro completo; non si riporta qui alcun valore visto che non varebbe
nessun significato in assenza di misure con cui confrontarlo.4Questi due “pacchetti” di onde sono spesso anche riconoscibili ad occhio nudo su di un
accelerogramma, come mostrato al Capitolo 1, Figura 1.5.
Capitolo 5
Calcolo dello
Spettro di Risposta
nel dominio della frequenza
In questo capitolo verra descritto il punto centrale del lavoro svolto: il calcolo
dello spettro di risposta nel dominio della frequenza; dualmente all’analisi nel
dominio del tempo questo metodo permette un’elaborazione decisamente piu
snella a patto tuttavia di rispettare le dovute condizioni sulle grandezze in
gioco1.
5.1 Passaggio al dominio trasformato
Alla fine del Capitolo 3 si e giunti a definire la risposta forzata dell’oscillatore
semplice smorzato SDOF nella forma dell’integrale di Duhamel 3.11:
x(t) = − 1
ωD
∫ t
0
p(τ)e−νω(t−τ) sin (ωD(t− τ)) dτ
1Per la stesura di questo capitolo si faccia riferimento a: [9], [3], [10], [11] in Bibliografia.

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 48
In relazione alla risposta impulsiva h(t) in 3.8, la 3.11 rappresenta l’integrale
di convoluzione2 tra la risposta impulsiva stessa moltiplicata per −m e la
forzante p(t):
x(t) = −m · h(t) ∗ p(t) (5.1)
dove il coefficiente −m nasce appunto dal fatto che l’eccitazione e applicata
al vincolo.
In questa condizione possiamo allora definire una risposta impulsiva equiv-
alente che tenga conto del fatto che l’eccitazione e impressa al supporto:
heq(t) = − 1
ωD
e−νωt sin (ωD(t− τ)) ∀t ≥ 0 (5.2)
In questo modo l’integrale 3.11 rappresenta la convoluzione:
x(t) = heq(t) ∗ p(t) (5.3)
A partire da questa equazione siamo dunque interessati passare al do-
minio della frequenza applicando la trasformata di Fourier ; per prima cosa
estendiamo il supporto temporale dell’equazione 5.2, definita solo per valori
di t ≥ 0,scrivendola nella forma:
heq(t) =1
ωD
e−νωt sin (ωD(t− τ)) · u(t) (5.4)
dove si definisce gradino unitario la funzione:
u(t) =
1 se t ≥ 0
0 se t < 0(5.5)
La risposta dell’oscillatore in forma di convoluzione e allora:
x(t) = − 1
ωD
[p(t) ∗
(sin(ωDt)e−νωtu(t)
) ](5.6)
2Fino a questo momento ci stiamo riferendo a grandezze analogiche, per cui la convoluzione
e da considerarsi lineare. Verranno considerati in seguito gli effetti dovuti alla discretizzazione
dell’accelerogramma.

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 49
Riflettiamo ora su come utilizzare questa espressione per il calcolo dello
spettro di risposta: l’idea di variare il valore di periodo naturale dell’oscilla-
tore, ovvero la pulsazione ωD, per la ricerca della risposta massima suggerisce
di passare al dominio trasformato della frequenza, in modo che.
In questo modo, una volta calcolata la trasformata di Fourier della traccia
p(t), il calcolo della risposta complessiva dell’oscillatore si riduce alla molti-
plicazione di tale trasformata per una funzione della frequenza corrispondente
alla trasformata della risposta impulsiva.
Con la successiva trasformazione inversa si puo dunque tornare al dominio
del tempo dove determinare la risposta massima per quel determinato valore
di pulsazione naturale.
Un’esposizione matematica chiarifica sicuramente il procedimento.
Definiamo la trasformata di Fourier della forzante p(t) la funzione:
P (f) = F{p(t)
}=
∫ +∞
−∞p(τ)e−j2πfτdτ
che ha senso in quanto p(t) sara in generale una funzione ad energia limitata3.
In base alla proprieta della trasformata di Fourier per cui l’operazione di
convoluzione lineare nel tempo equivale alla moltiplicazione in frequenza e
viceversa, la trasformata dell’espressione 5.6 risulta:
X(f) = F{x(t)
}= − 1
ωD
P (f)[F {sin(ωDt)} ∗ F
{e−νωtu(t)
} ](5.7)
Sfruttando le formule di Eulero e la trasformata dell’esponenziale comp-
lesso4 si giunge alla trasformata del seno:
F{
sin(ωDt)}
=1
2j
[δ(f − ωD
2π
)− δ
(f +
ωD
2π
)](5.8)
mentre per la parte esponenziale si ricava facilmente:
3Essendo la registrazione di un segnale realmente esistente e di durata limitata.4Che vale: e±j2πfnt ↔ δ (f ∓ fn) .

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 50
F{e−νωtu(t)
}=
∫ +∞
0
e−νωte−j2πftdt =1
νω + j2πf(5.9)
La sostituzione di 5.8 e 5.9 nella 5.7, unita alla proprieta distributiva del
prodotto di convoluzione, porta all’equazione:
X(f) = −P (f)
2jωD
[(δ(f − ωD
2π
)∗ 1
νω + j2πf
)−
(δ(f +
ωD
2π
)∗ 1
νω + j2πf
)]la quale, sfruttando le proprieta della δ5 e svolgendo i calcoli, porta all’e-
spressione finale:
X(f) =P (f)
4π2f 2 − ω2 − j4πνωf(5.10)
L’espressione appena ricavata rappresenta dunque la trasformata di Fuori-
er della risposta dell’oscillatore armonico smorzato SDOF eccitato dalla forzante
p(t) impressa al vincolo.
Poiche per la costruzione dello spettro di risposta siamo interessati ad
avere un’espressione che sia funzione dei parametri ν e T 6, possiamo ri-
condurci a questa forma considerando che ω = 2πT
da cui si ottiene:
X(f) =P (f)
4π2(f 2 − 1
T 2 − j 2νfT
) (5.11)
E dunque evidente che la trasformata di Fourier della risposta impulsiva
dell’oscillatore con impulso applicato al vincolo, ossia quella che chiamerem-
mo funzione di trasferimento equivalente dell’oscillatore stesso e:
Heq(f) =1
4π2(f 2 − 1
T 2 − j 2νfT
) (5.12)
5In questo caso: δ(f ± fn) ∗G(f) = G(f ± fn) .6Questo fatto e dovuto al metodo di stima sperimentale dei parametri dell’oscillatore equivalente ad
una determinata struttura: risulta infatti relativamente semplice stimare il periodo di oscillazione e l’indice
di smorzamento.

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 51
5.1.1 Le altre grandezze di spettrali
Il grande vantaggio dell’uso delle trasformate e che, a patto di aver rispet-
tato tutte le condizioni sulla trasformabilita dei segnali, operazioni integro-
differenziali nel tempo divengono nel dominio trasformato delle semplici op-
erazioni algebriche.
Sfruttando la proprieta per cui:
dng(t)
dnt↔ (j2πf)nG(f)
si giunge facilmente alle trasformate della risposta in velocita ed accelerazione
dell’oscillatore:
F{x(t)
}=
jfP (f)
2π(f 2 − 1
T 2 − j 2νfT
)e
F{x(t)
}=
f 2P (f)1
T 2 − f 2 + j 2νfT
Come specificato nel Capitolo 2 pero ai fini pratici interessano pseudo-
velocita e pseudo-accelerazione, per cui si ha:
F{Sv(t)
}=
P (f)
2π(Tf 2 − 1
T− j2νf
) (5.13)
e
F{Sa(t)
}=
P (f)
T 2f 2 − 1− j2νTf(5.14)
Si noti come, nel dominio della frequenza, l’espressione della trasformata
della pseudo-accelerazione risulti particolarmente “pulita”, e non dipendente
ad esempio da π, cosa positiva per il calcolo numerico in quanto si evitera
almeno l’approssimazione di tale quantita.
Ricordiamo che la pseudo-accelerazione spettrale riveste un ruolo impor-
tante nella progettazione sismica in quanto permette ad esempio di calcolare
la massima azione di taglio applicata alla base della struttura.
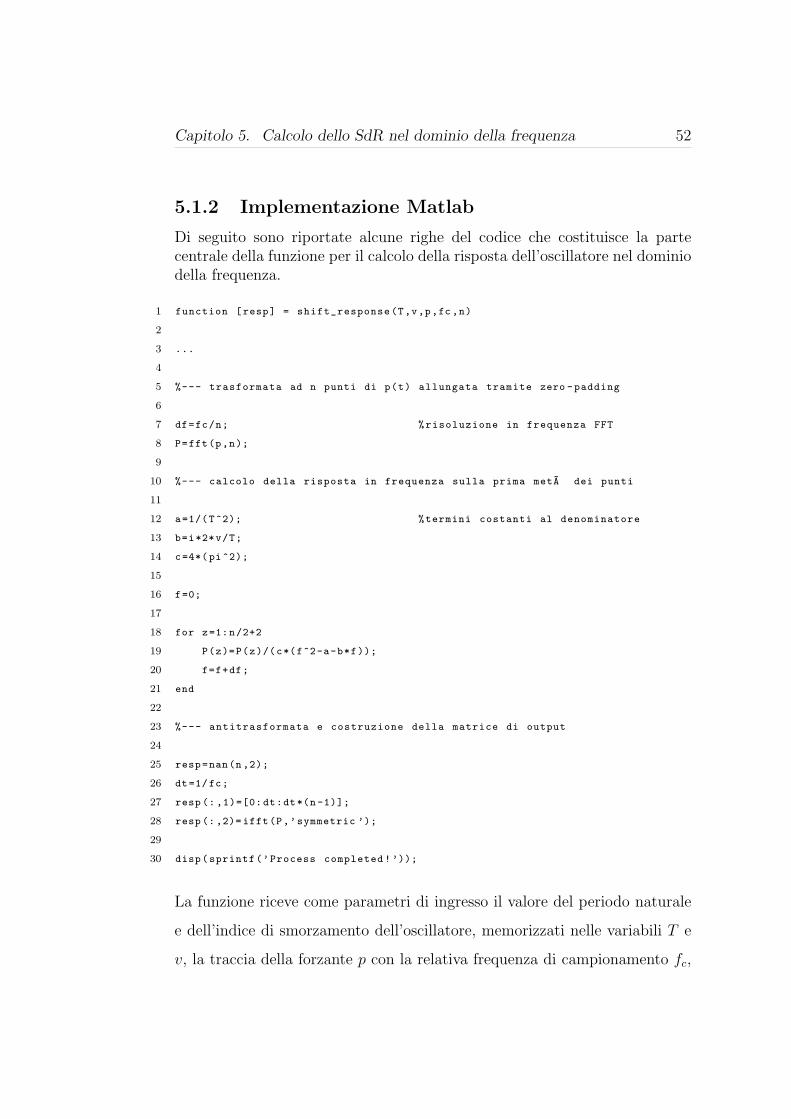
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 52
5.1.2 Implementazione Matlab
Di seguito sono riportate alcune righe del codice che costituisce la partecentrale della funzione per il calcolo della risposta dell’oscillatore nel dominiodella frequenza.
1 function [resp] = shift_response(T,v,p,fc ,n)
2
3 ...
4
5 %--- trasformata ad n punti di p(t) allungata tramite zero -padding
6
7 df=fc/n; %risoluzione in frequenza FFT
8 P=fft(p,n);
9
10 %--- calcolo della risposta in frequenza sulla prima met~A dei punti
11
12 a=1/(T^2); %termini costanti al denominatore
13 b=i*2*v/T;
14 c=4*(pi^2);
15
16 f=0;
17
18 for z=1:n/2+2
19 P(z)=P(z)/(c*(f^2-a-b*f));
20 f=f+df;
21 end
22
23 %--- antitrasformata e costruzione della matrice di output
24
25 resp=nan(n,2);
26 dt=1/fc;
27 resp (: ,1)=[0:dt:dt*(n -1)];
28 resp (:,2)= ifft(P,’symmetric ’);
29
30 disp(sprintf(’Process completed !’));
La funzione riceve come parametri di ingresso il valore del periodo naturale
e dell’indice di smorzamento dell’oscillatore, memorizzati nelle variabili T e
v, la traccia della forzante p con la relativa frequenza di campionamento fc,
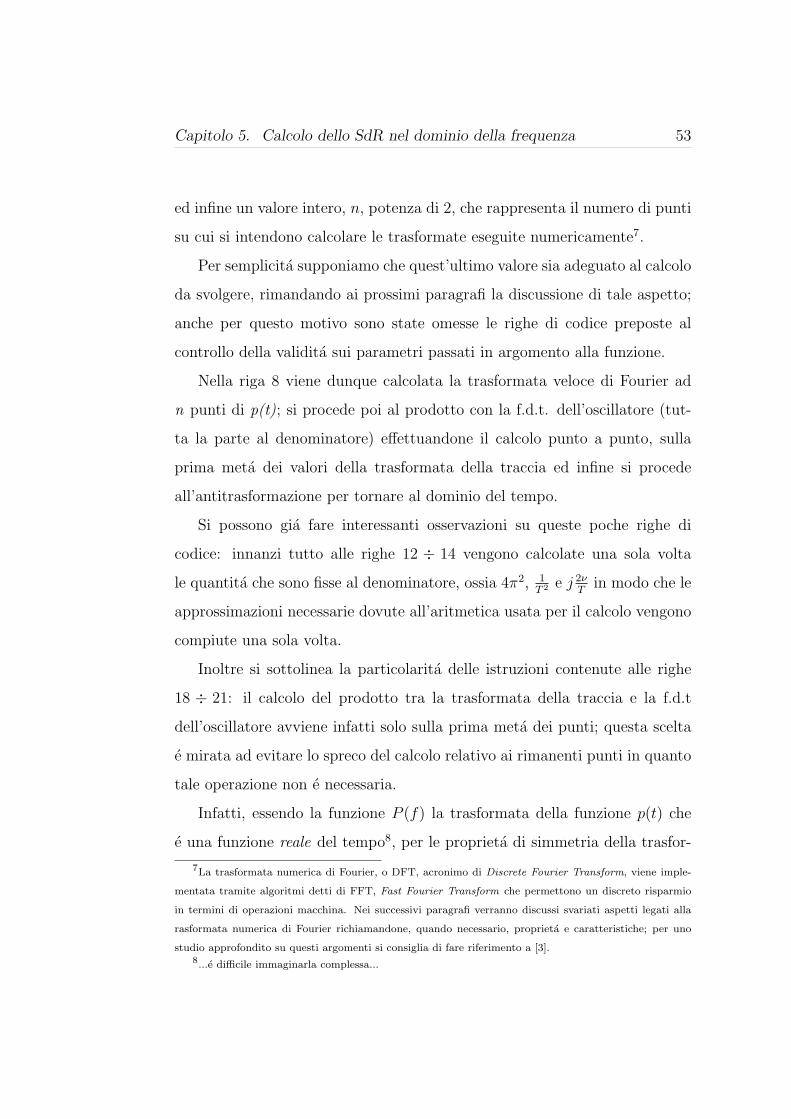
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 53
ed infine un valore intero, n, potenza di 2, che rappresenta il numero di punti
su cui si intendono calcolare le trasformate eseguite numericamente7.
Per semplicita supponiamo che quest’ultimo valore sia adeguato al calcolo
da svolgere, rimandando ai prossimi paragrafi la discussione di tale aspetto;
anche per questo motivo sono state omesse le righe di codice preposte al
controllo della validita sui parametri passati in argomento alla funzione.
Nella riga 8 viene dunque calcolata la trasformata veloce di Fourier ad
n punti di p(t); si procede poi al prodotto con la f.d.t. dell’oscillatore (tut-
ta la parte al denominatore) effettuandone il calcolo punto a punto, sulla
prima meta dei valori della trasformata della traccia ed infine si procede
all’antitrasformazione per tornare al dominio del tempo.
Si possono gia fare interessanti osservazioni su queste poche righe di
codice: innanzi tutto alle righe 12 ÷ 14 vengono calcolate una sola volta
le quantita che sono fisse al denominatore, ossia 4π2, 1T 2 e j 2ν
Tin modo che le
approssimazioni necessarie dovute all’aritmetica usata per il calcolo vengono
compiute una sola volta.
Inoltre si sottolinea la particolarita delle istruzioni contenute alle righe
18 ÷ 21: il calcolo del prodotto tra la trasformata della traccia e la f.d.t
dell’oscillatore avviene infatti solo sulla prima meta dei punti; questa scelta
e mirata ad evitare lo spreco del calcolo relativo ai rimanenti punti in quanto
tale operazione non e necessaria.
Infatti, essendo la funzione P (f) la trasformata della funzione p(t) che
e una funzione reale del tempo8, per le proprieta di simmetria della trasfor-
7La trasformata numerica di Fourier, o DFT, acronimo di Discrete Fourier Transform, viene imple-
mentata tramite algoritmi detti di FFT, Fast Fourier Transform che permettono un discreto risparmio
in termini di operazioni macchina. Nei successivi paragrafi verranno discussi svariati aspetti legati alla
rasformata numerica di Fourier richiamandone, quando necessario, proprieta e caratteristiche; per uno
studio approfondito su questi argomenti si consiglia di fare riferimento a [3].8...e difficile immaginarla complessa...

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 54
mata di Fourier P (f) sara una funzione della frequenza pari in modulo e
dispari in fase; lo stesso vale per la funzione di trasferimento dell’oscillatore
(il denominatore e infatti un numero complesso con parte reale dipendente
da sole potenze pari della frequnza e parte immaginaria dipendente da sole
potenze dispari della frequenza), pertanto la loro moltiplicazione sara ancora
una funzione della frequenza a modulo pari e fase dispari, ossia la trasformata
di una funzione reale del tempo.
Di conseguenza, nota la simmetria a priori, ci si puo calcolare il prodotto
delle due trasformate solo sui punti positivi della frequenza, o viceversa su
quelli negativi, e dalla conoscenza di questi antitrasformare tenendo conto
della simmetria del modulo e dell’antisimmetria della fase.
Questa operazione e svolta dalla funzione che implementa in Matlab la
IFFT9 la quale, chiamata in modalita ’symmetric’ come si nota alla riga 28,
gestisce proprio questa eventualita10.
Come sara chiaro alla fine di questo Capitolo il codice appena esposto
rappresenta una semplificazione di quello realmente implementato nell’algo-
ritmo di calcolo degli spettri di risposta; in questa circostanza infatti risulta
utile avere un’idea generale dei passi da seguire per la determinazione della
risposta del singolo oscillatore nel dominio della frequenza, mentre l’imple-
mentazione completa deve tener conto di alcuni fattori legati all’elaborazione
numerica di cui ci accingiamo a discutere.
9Acronimo di Inverse Fast Fourier Transform.10In certi casi infatti nonostante si abbia con certezza una trasformata di una funzione reale del tempo,
e possibile che modulo e fase nella frequenza non rispettino perfettamente le simmetrie di cui si e appena
discusso, ad esempio a causa di arrotondamenti e troncamenti dovuti ai calcoli effettuati sui campioni, per
cui si deve usare questa variante dell’algoritmo.
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 55
5.1.3 Lo Spettro di Risposta
Con quanto ottenuto nei paragrafi precedenti risulta abbastanza immediato
passare al calcolo degli spettri di risposta semplicemente reiterando la fun-
zione per il calcolo della risposta del singolo oscillatore appena descritta, per
ciascun valore di periodo naturale su cui si desidera calcolare lo spettro e
cercare via via il massimo in valore assoluto.
Non si riporta codice relativo a questa operazione in quanto sarebbe
sostanzialmente equivalente a quello descritto al Paragrafo 4.1.1 del Capitolo
4.
Analogamente, utilizzando le definizioni in 5.13 e 5.14, si calcolano gli
spettri in pseudo-velocita e pseudo-accelerazione ed il risultato finale e una
funzione che restituisce una matrice di 4 colonne contenente rispettivamente
il vettore di valori di periodo sul quale si e costruito lo spettro, le cor-
rispospondenti risposte massime in spostamento, in pseudo-velocita e in
pseudo-accelerazione.
5.2 Limiti imposti da calcolo numerico ed
analisi in frequenza
L’analisi fin qui sviluppata si basa sulle grandezze considerate come ana-
logiche; tuttavia la necessita di di far svolgere i calcoli ad una macchina
rende inevitabile il passaggio ad insiemi finiti di valori discreti11.
Nel codice riportato al Paragrafo 5.1.2 di questo Capitolo si e implicita-
mente assunta una sostanziale equivalenza tra il segnale discretizzato e l’o-
11E questo un argomento che riveste un’importanza cruciale e che da origne allo studio dell’Elaborazine
Numerica dei Segnali, disciplina che si occupa appunto dello sviluppo di tecniche di analisi numerica sui
segnali il piu possibile equivalenti alle tecniche analitiche.
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 56
riginale continuo, nella realta pero diventa fondamentale studiare gli effetti
di questo passaggio valutando l’entita degli effetti parassiti che comporta.
Bisognera altresı considerare che la gran parte dell’elaborazione avviene
nel dominio della frequenza.
5.2.1 Aliasing in frequenza
Per i motivi appena detti la registrazione dell’accelerogramma, finora indicata
con p(t), non e una funzione analogica, bensı un’insieme di valori derivati
dal campionamento e quantizzazione della quantita rilevata dallo strumento
sismico.
Tralasciando gli effetti della quantizzazione12, concentriamoci invece sulle
implicazioni dovute al campionamento. I segnali su cui si e lavorato sono tutti
campionati ad una frequenza di campionamento di 200 Hz; in base a quanto
detto al Paragrafo 1.3.3 del Capitolo 1 il contenuto spettrale rilevante di un
generico segnale sismico e ampiamente compreso sotto i 100 Hz, per cui la
frequenza di campionamento adottata rispetta la condizione di Nyquist e,
teoricamente, non da luogo ad aliasing in frequenza13.
Volendo essere piu accurati possiamo osservare che nella pratica la trac-
cia relativa alla registrazione dell’evento sismico ha una durata temporale
finita che si traduce in una funzione della frequenza a supporto infinito: for-
malmente dunque, qualsiasi sia la frequenza di campionamento, si avrebbe
comunque la generazione di aliasing.
Tuttavia, come gia discusso, si puo in generale osservare che la quasi
totalita dell’energia del segnale puo considerarsi allocata a frequenze inferiori
12Sia perche non abbiamo informazioni dettagliate relative allo strumento sia perche si suppone che
questa operazione sia compiuta in modo da avere un SNR di quantizzazione ampiamente trascurabile.13Per un riepilogo qualitativo sul campionamento e sulla nascita di aliasing si veda l’appendice B.
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 57
ai 100 Hz per cui l’aliasing introdotto dal campionamento sara sı inevitabile
ma anche trascurabile.
Una stima corretta di questa fonte di errore comporterebbe il calcolo del
rapporto tra la potenza utile di segnale e quella associata alla componente
distorta dalla sovrapposizione con le repliche dello spettro centrate sui mul-
tipli della frequenza di campionamento, ma avendo a che fare con un segnale
che e la realizzazione di un processo aleatorio questa verifica non puo essere
condotta a priori e tantomeno per via analitica, per cui a questo livello ci
limiteremo alle osservazioni puramente qualitative appena effettuate.
Supponendo dunque che il campionamento della registrazione sismica non
sia affetta da aliasing saremo ora interessati a contenere entro una certa
banda anche la f.d.t. dell’oscillatore in modo che anche la risposta impulsiva
di quest’ultimo risulti campionabile alla stessa frequenza di campionamento
della forzante.
5.2.2 Condizione sul periodo minimo
Si dovra allora stimare l’aliasing introdotto dalla sovrapposizione delle repliche
centrate sui multipli di fc della 5.12 al variare dei parametri ν e T , e la sti-
ma migliore sarebbe sempre quella ottenuta con considerazioni sulla potenza
utile in relazione a quella distorta; anche in questo caso pero integrare analiti-
camente il quadrato del modulo della f.d.t. dell’oscillatore risulta impossibile
e l’analisi dovrebbe avvenire per via numerica.
Benche questo sia fattibile non si avrebbe comunque un riferimento del
valore dei parametri suddetti nell’intorno dei quali ci si aspetta ragionevol-
mente che inizino a farsi pesanti gli effetti dovuti all’aliasing e, fissato ν,
si dovrebbe ripetere l’integrazione per verificare se l’aliasing introdotto sia
accettabile per ogni valore di T , quindi decidere se per quel dato T si puo

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 58
procedere o meno con il calcolo della risposta. Anche questo metodo risulta
troppo oneroso.
Definiamo g(f) il modulo della 5.12 per cui:
g(f) =1
4π2
√[(f 2 − 1
T 2
)2+
(2 ν
Tf)] (5.15)
Osservando l’espressione della 5.15 e evidente che questa non rappresenta
una funzione a supporto compatto. Anche in questo caso quindi una ripe-
tizione dello spettro sui multipli della frequenza di campionamento comporta
l’inevitabile insorgenza di aliasing.
L’andamento di g(f), riportato in Figura 5.1, ci suggerisce tuttavia una
possibilita: considerando che lo spettro di risposta viene calcolato per un dato
valore fisso di ν, si puo di cercare una relazione sull’ampiezza di tale funzione
che permetta di ottenere un’espressione funzione di ν e di un parametro “di
regolazione” che chiameremo α dalla quale ricavare il limite da imporre su
T .
Dall’osservazione di Figura 5.1 e evidente che la 5.15 e una funzione pari;
considerando solo le ascisse positive si nota che esiste un valore di f oltre
il quale la funzione assume un andamento monotono decrescente; inoltre in
tale valore, che d’ora in avanti indicheremo con f ∗, la funzione assume valore
massimo.
Il punto f ∗ assume per i nostri scopi una particolare importanza: infatti
ci rendiamo conto che la risposta massima, da ricercarsi nel dominio del
tempo dopo opportuna antitrasformazione del prodotto tra P (f) e la f.d.t.
dell’oscillatore, corrisponde ad un fenomeno di risonanza e visto in frequenza
tale fenomeno avra luogo quando il prodotto appena menzionato raggiunga
valori massimi.
Non conoscendo (se non qualitativamente) lo spettro di P (f) ci possiamo

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 59
−10 −8 −6 −4 −2 0 2 4 6 8 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
f
g(f)
Figura 5.1: Grafico della funzione g(f), modulo della f.d.t. dell’oscillatore smorzato SDOF, con ν =
0.05 e T = 0.8s.
riferire a quello della f.d.t. dell’oscillatore 5.12 e affermare che la risonanza
avviene sicuramente per f ≤ f ∗.
Questa considerazione equivale a dire che non importa quanto lo spettro
per f > f ∗ sia corrotto dall’aliasing, ma che quello che conta e limitare tale
“inquinamento” in un intorno di f ∗.
D’altro canto se pensiamo che lo spettro di P (f), trasformata di Fouri-
er del segnale sismico, ha un contenuto spettrale considerevole a frequenze
basse, tipicamente sotto i 30 Hz, possiamo ben osservare che se f ∗ risulta infe-
riore a tale frequenza allora la risonanza avverra con certezza per f ∈ [0, f∗],
ma in questo caso lo spettro della f.d.t. dell’oscillatore risultera anche suffi-
cientemente compatto da non generare aliasing; se invece, per valori di T pic-
coli, tale spettro si allarga portando la f ∗ a valori maggiori di 30÷40 Hz, dove
il contenuto spettrale del segnale sismico e ormai trascurabile, la risonanza
avverra sicuramente per valori della frequenza inferiori a f ∗ e, considerando

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 60
−300 −200 −100 0 100 200 3000
0.2
0.4
0.6
0.8
1
1.2x 10
−4
f
g(f)
, g
(f−
fc)
Figura 5.2: Sovrapposizione di due repliche di g(f), modulo della f.d.t. dell’oscillatore smorzato SDOF,
centrate rispettivamente in f = 0 e f = fc, con fc = 200 Hz, e calcolate con ν=0.05 e T=0.02 s, valore
del periodo naturale per cui si ha una significativa sovrapposizione.
l’andamento monotono decrescente delle code della f.d.t. dell’oscillatore, se
si e verificata una condizione sull’ampiezza ritenuta sufficiente su f ∗ allora
tale condizione sara a maggior ragione verificata ad f < f ∗, essendo qui
l’ampiezza delle repliche sovrapposte ancora inferiore. Formalmente dunque
questa condizione si traduce nell’imporre:
g(f)
fc−f∗< α · g(f)
f∗
(5.16)
dove α e un parametro arbitrario da scegliere in base alla necessita (sara
comunque sempre α � 1).
Applicando il teorema di Wierstrass cerchiamo allora il valore di f ∗.
Deriviamo innanzi tutto rispetto ad f la 5.15 ottenendo:
dg
df= −
4f(f 2 − 1
T 2
)+ 8 ν2
T 2 f
8π2
√[(f 2 − 1
T 2
)2+
(2 ν
Tf)2
]3

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 61
Uguagliando a zero si giunge alla seguente equazione di terzo grado in f :
4f 3 +
(8
ν2
T 2− 4
T
)f = 0
la quale puo essere facilmente risolta in quanto composta da soli termini di
grado dispari della variabile indipendente, ottenendo le soluzioni:
f = 0, f = ±√
1− 2ν2
T
Si e cosı giunti alla determinazione del valore di f ∗ :
f ∗ =
√1− 2ν2
T(5.17)
Operando i limiti per T →∞ e per T → 0 e ora evidente quale sia, per ν
costante, il comportamento dello spettro della f.d.t. dell’oscillatore al variare
di T .
limT→∞
√1− 2ν2
T= 0
limT→0
√1− 2ν2
T= ∞
Ossia, tradotto in parole povere, una variazione positiva di T produce uno
spostamento verso l’origine di f ∗, che corrisponde ad una “compressione”
dello spettro verso l’origine, mentre per valori di T sempre piu piccoli lo
spettro “utile” di g(f) si allarga sempre di piu, quindi f ∗ si sposta verso
valori maggiori, come mostra la Figura 5.3.
Sostituendo a questo punto l’espressione trovata in 5.17 per f ∗ in quella di
g(f) in 5.15 e svolgendo i calcoli si puo ottenere un’espressione che permetta
di calcolare direttamente il valore assunto dalla funzione g(f) per f = f ∗
ottenendo:
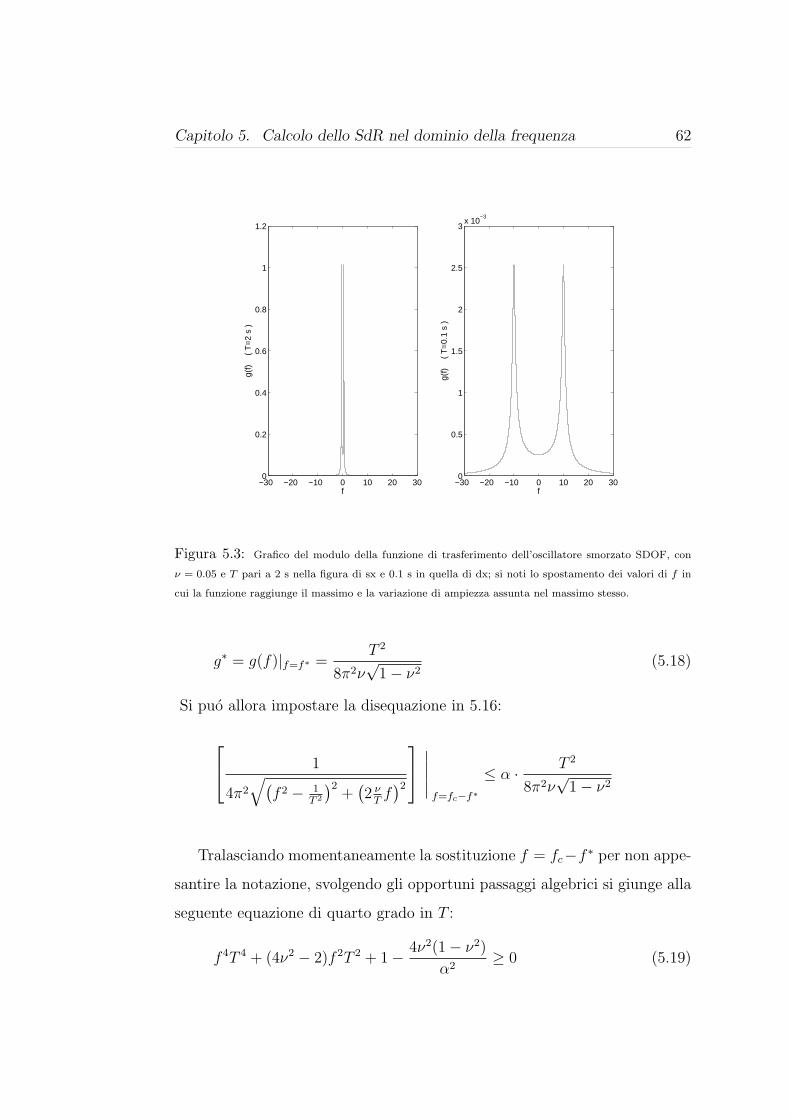
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 62
−30 −20 −10 0 10 20 300
0.2
0.4
0.6
0.8
1
1.2
f
g(f)
(
T=
2 s
)
−30 −20 −10 0 10 20 300
0.5
1
1.5
2
2.5
3x 10
−3
f
g(f)
(
T=
0.1
s )
Figura 5.3: Grafico del modulo della funzione di trasferimento dell’oscillatore smorzato SDOF, con
ν = 0.05 e T pari a 2 s nella figura di sx e 0.1 s in quella di dx; si noti lo spostamento dei valori di f in
cui la funzione raggiunge il massimo e la variazione di ampiezza assunta nel massimo stesso.
g∗ = g(f)|f=f∗ =T 2
8π2ν√
1− ν2(5.18)
Si puo allora impostare la disequazione in 5.16:
1
4π2
√(f 2 − 1
T 2
)2+
(2 ν
Tf)2
f=fc−f∗
≤ α · T 2
8π2ν√
1− ν2
Tralasciando momentaneamente la sostituzione f = fc−f ∗ per non appe-
santire la notazione, svolgendo gli opportuni passaggi algebrici si giunge alla
seguente equazione di quarto grado in T :
f 4T 4 + (4ν2 − 2)f 2T 2 + 1− 4ν2(1− ν2)
α2≥ 0 (5.19)
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 63
la quale questa volta presenta solo termini di grado positivo e quindi e
anch’essa facilmente risolvibile.
Si cerca la soluzione che da il valore massimo positivo e reale di T ,
tale soluzione, che indicheremo con Tcritico andra cercata tra quelle fornite
dall’equazione risolutiva della 5.19:
Tcritico = max
{1
fc − f ∗
√(1− 2ν2)± 2ν
α
√(α2 − 1)(ν2 − 1)
}(5.20)
Considerando che la soluzione del moto dell’oscillatore e riferita al caso
di sottosmorzamento, per cui ν ≤ 1 e che per limitare l’aliasing in frequenza
si impostera un α ≤ 1, la soluzione che da il valore maggiore di T reale e
positivo e quella con il segno positivo sotto radice nella 5.20; sostituendo ora
f = fc−f ∗, si giunge al valore minimo di periodo per cui si possa calcolare la
risposta dell’oscillatore mantenendo in f ∗ il rapporto α tra l’ampiezza della
replica in banda-base e quella adiacente centrata in fc :
Tcritico =
√(1− 2ν2) + 2ν
α
√(α2 − 1)(ν2 − 1) +
√1− 2ν2
fc
(5.21)
Questa condizione equivale di fatto a limitare l’aliasing in frequenza.
Nelle applicazioni usuali, dove lo spettro di risposta trova un impiego
qualitativo per cui non sono richieste risoluzioni elevate per i periodi natu-
rali, questa condizione comporta la perdita di pochi tra i primi punti dello
spettro14; la seguente Tabella 5.1 riporta alcuni esempi di Tcritico ottenuto
dalla condizione appena calcolata per diversi valori di ν.
14Nel seguito vedremo che in realta questi punti si possono parzialmente recuperare o sostituire.
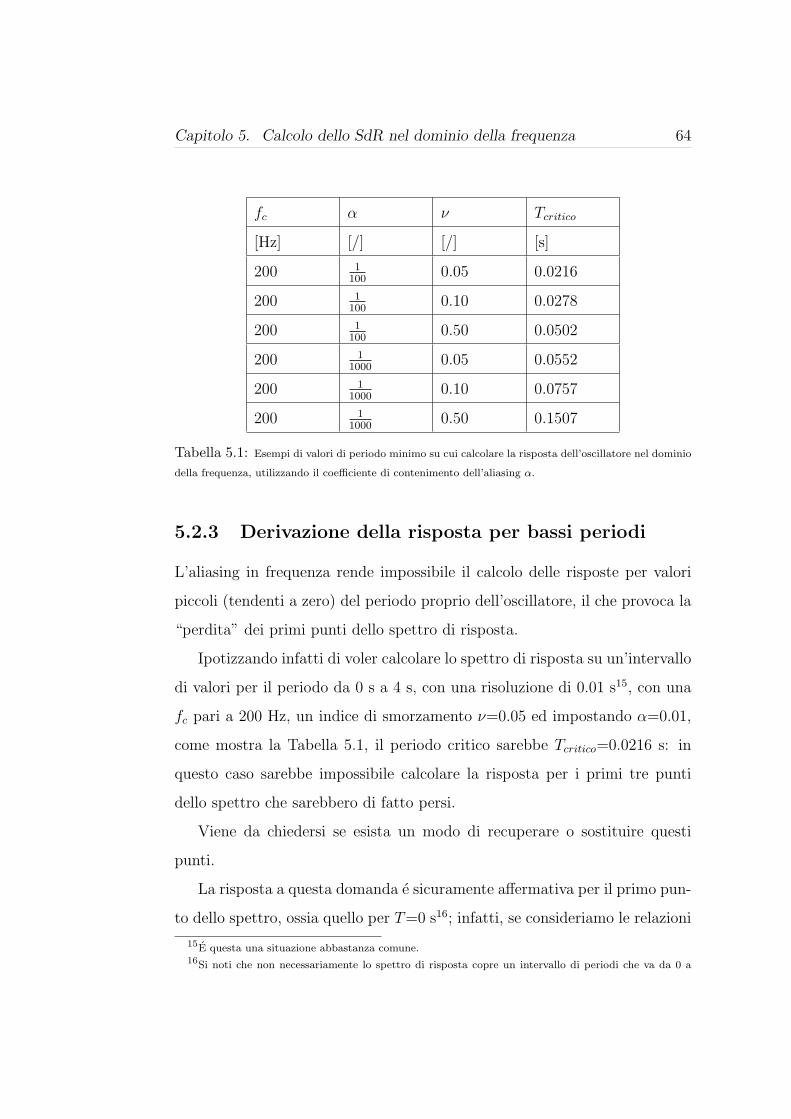
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 64
fc α ν Tcritico
[Hz] [/] [/] [s]
200 1100
0.05 0.0216
200 1100
0.10 0.0278
200 1100
0.50 0.0502
200 11000
0.05 0.0552
200 11000
0.10 0.0757
200 11000
0.50 0.1507
Tabella 5.1: Esempi di valori di periodo minimo su cui calcolare la risposta dell’oscillatore nel dominio
della frequenza, utilizzando il coefficiente di contenimento dell’aliasing α.
5.2.3 Derivazione della risposta per bassi periodi
L’aliasing in frequenza rende impossibile il calcolo delle risposte per valori
piccoli (tendenti a zero) del periodo proprio dell’oscillatore, il che provoca la
“perdita” dei primi punti dello spettro di risposta.
Ipotizzando infatti di voler calcolare lo spettro di risposta su un’intervallo
di valori per il periodo da 0 s a 4 s, con una risoluzione di 0.01 s15, con una
fc pari a 200 Hz, un indice di smorzamento ν=0.05 ed impostando α=0.01,
come mostra la Tabella 5.1, il periodo critico sarebbe Tcritico=0.0216 s: in
questo caso sarebbe impossibile calcolare la risposta per i primi tre punti
dello spettro che sarebbero di fatto persi.
Viene da chiedersi se esista un modo di recuperare o sostituire questi
punti.
La risposta a questa domanda e sicuramente affermativa per il primo pun-
to dello spettro, ossia quello per T=0 s16; infatti, se consideriamo le relazioni
15E questa una situazione abbastanza comune.16Si noti che non necessariamente lo spettro di risposta copre un intervallo di periodi che va da 0 a

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 65
al Capitolo 2 che definiscono la pseudo-velocita e la pseudo-accelerazione,
e che portano alle equazioni 5.11, 5.13 e 5.14, si nota facilmente come, per
T=0, valga:
x(t)∣∣∣T=0
= 0
x(t)∣∣∣T=0
= 0
x(t)∣∣∣T=0
= p(t)
Evidentemente allora il punto per T=0 e nullo per lo spettro di risposta in
spostamento e in pseudo-velocita, mentre per quello in pseudo-accelerazione
corrisponde alla massima accelerazione impressa al supporto ossia al massimo
di p(t)17.
Per quanto riguarda i restanti punti per cui non si puo calcolare la rispos-
ta invece, questi possono ragionevolmente sostituiti tramite interpolazione
lineare tra il punto per T=0 s ed il primo punto utile calcolato.
I valori cosı ottenuti non sono certamente esatti, ma visto che la rispos-
ta massima avviene in corrispondenza a fenomeni di risonanza locale, per
oscillatori caratterizzati da periodo naturale cosı basso la risposta massima
sara contenuta poiche alla corrispondente frequenza di risonanza elevata il
contenuto spettrale del sisma e sempre piu basso, fino a divenire trascurabile.
Questo ragionamento e confermato dall’andamento degli spettri di rispos-
ta, che, a partire da T=0 s, salgono verso un picco che si attesta per valori
di periodo il cui inverso, la frequenza di risonanza dell’oscillatore corrispon-
4 s, per cui non e detto che il primo punto debba essere quello per T=0 s, ma in questo caso molto
probabilmente non si avrebbe la perdita di nessun punto.17Risultato a cui si poteva arrivare anche inuitivamente, in quanto un oscillatore con periodo naturale
nullo corrisponde alla massa fissa al supporto che qundi e soggetta ad uno spostamente relativo nullo per
qualsiasi accelerazione impressa al vincolo stesso, una velocita relativa nulla, e la stessa accelerazione con
cui viene eccitato il supporto.
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 66
dente, rientra nell’intervallo di frequenze per cui il sisma ha un contenuto
spettrale considerevole.
Equivalentemente si puo osservare (anche in Figura 5.3) come il picco g∗
della f.d.t. dell’oscillatore, per cui avviene la risonanza, si riduca sempre di
piu al diminuire di T18, dando luogo appunto a risposte sempre piu ridotte.
L’approccio di interpolazione risulta comunque accettabile solo se sono
persi pochi punti, per cui e bene valutare il risultato ottenuto in ogni caso.
5.2.4 Aliasing nel tempo
Cosı come l’elaborazione numerica ha richiesto una discretizzazione dei valori
temporali, la stessa discretizzazione e richiesta per le frequenze.
Il calcolo di trasformate ed antitrasformate avviene infatti come prece-
dentemente anticipato mediante algoritmi particolari (FFT ed IFFT ) che
operano su di un insieme finito di valori. E intuibile allora come un “cam-
pionamento delle frequenze” porti ai medesimi problemi di aliasing a cui si
e dovuto far fronte campionando nel tempo.
In questo caso dunque si dovra fare in modo che, nel tempo, si possa
evitare o quantomeno contenere entro prestabiliti limiti, la sovrapposizione
di repliche della risposta dell’oscillatore le quali si disporranno su multipli
interi di quello che potremmo indicare come periodo di campionamento in
frequenza, ossia l’inverso del passo di discretizzazione dell’asse delle frequenze.
Un ruolo cruciale assumera allora la scelta di tale passo di discretizzazione,
che indicheremo con fs; poiche le trasformate veloci di Fourier vengono cal-
colate nel solo intervallo di frequenze [0, fc]19, occorrera determinare un suf-
18Dalla equazione 5.18 infatti g∗ = g(f)|f=f∗ = T2
8π2ν√
1−ν2va come T 2 che tende a 0 per T → 0.
19Equivalente all’intervallo [− fc2
, fc2
]; la limitazione a tale intervallo e dovuta ancora al fatto che per
avere un calcolo effettuabile su di una macchina il numero di operazioni deve essere finito, da qui la
necessita di limitare l’intervallo di frequenze su cui effetture la trasformata, mentre la scelta dell’intervallo
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 67
ficiente numero di punti, n, su cui calcolare la trasformata stessa, secondo la
relazione:
fs =fc
nf
(5.22)
5.2.5 Condizione sul minimo numero di punti FFT
Riassumiamo la notazione finora adottata, dove si e indicato con ∆t il sup-
porto temporale della funzione del tempo, con Tc il passo di discretizzazione
del tempo e fc il suo inverso, la frequenza di campionamento nel tempo, con
nt in numero di punti della funzione nel tempo, con 2B il supporto in fre-
quenza della trasformata (ossia sia le frequenze positive che quelle negative,
supponendo che il segnale campionato sia reale e quindi a spettro simmet-
rico), con fs il passo di discretizzazione della frequenza e Ts il suo inverso,
periodo di campionamento in frequenza, ed infine con nf il numero di punti
su cui e discretizzata la frequenza.
Se ipotizziamo che il segnale nel tempo sia stato campionato in modo da
non avere aliasing in frequenza ammettiamo che sia rispettata la condizione
di Nyquist:
Tc ≤1
2B
che dalla discretizzazione nel tempo su nt punti equivale a:
∆t
nt
≤ 1
2B
(nt =
∆t
Tc
)(5.23)
Il campionamento delle frequenze richiede che, affinche non si abbia alias-
ing nel tempo, sia rispettata un’ equivalente alla condizione di Nyquist ma
stesso perviene dalla considerazione che essendo la funzione nel tempo campionata ad una determinata
fc (e non potrebbe essere altrimenti sempre per la necessita di una quantita finita di valori) anche il
suo spettro si ripetera, a causa del campionamento, a multipli di fc per cui tutta l’informazione utile e
contenuta in un qualsiasi intervallo contiguo di frequenze di larghezza fc. Per naturalezza e semplicita si
sceglie l’intervallo suddetto.
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 68
per la frequenza:
fs ≤1
∆t
la quale a sua volta, dalla discretizzazione in frequenza su nf punti, equivale
a:
2B
nf
≤ 1
∆t
(nf =
2B
fs
)(5.24)
Dal confronto delle equazioni 5.23 e 5.24 si puo giungere alla seguente disug-
uaglianza:
2B
nt
≤ 1
∆t≥ 2B
nf
⇒ nf ≥ nt
la quale chiarisce come un numero di punti su cui calcolare la FFT al-
meno pari a quello su cui e discretizzato il segnale nel tempo rispettando la
condizione di Nyquist sia sufficiente ad evitare anche l’aliasing in frequenza.
Nel nostro caso pero mentre abbiamo a disposizione la traccia dell’ac-
celerogramma, che e per appunto una funzione discreta e di durata finita
della quale conosciamo quindi il numero di punti, non abbiamo a disposizione
una risposta impulsiva campionata dell’oscillatore, bensı si sono sviluppati i
ragionamenti come se tutto fosse continuo e ci troviamo a far i conti con la
discretizzazione della frequenza nell’espressione 5.11.
Continuiamo allora a ragionare come se tutto fosse continuo.
Come appena detto l’equazione 5.11, che e la risposta in frequenza del-
l’oscillatore, corrisponde alla trasformata di Fourier della convoluzione 5.3;
come sappiamo il supporto della convoluzione lineare di due funzioni e pari
alla somma dei supporti delle singole funzioni, ma nel nostro caso mentre la
durata della traccia dell’accelerogramma p(t) e finita, quella della risposta
impulsiva dell’oscillatore h(t) non lo e20.
20Per non appesantire la notazione qui si fara riferimento alla risposta impulsiva dell’oscillatore h(t)
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 69
Ci troviamo quindi ancora di fronte all’impossibilita di evitare completa-
mente l’aliasing, dovendoci “accontentare” di contenerlo.
La stima tramite rapporto tra potenza utile e potenza del segnale distor-
to risulta nuovamente inutile poiche non fornisce una relazione generale per
determinare il numero minimo di punti su cui calcolare la FFT; procedendo
allora in maniera analoga a quanto fatto nel precedente paragrafo per con-
tenere l’aliasing in frequenza, si dovra questa volta fissare un parametro che
permetta di stabilire quando la risposta nel tempo dell’oscillatore puo ra-
gionevolmente considerarsi esaurita, ossia in pratica quando, fissato un rap-
porto ritenuto sufficiente allo scopo, il rapporto tra l’ampiezza della risposta
dell’oscillatore assunta all’istante t∗ e quella massima risulti inferiore ad esso.
Indichiamo allora con ∆p la durata in secondi dell’accelerogramma (che
e quindi la durata considerevole dell’evento sismico registrato), e con ∆h la
durata, sempre in secondi, della risposta impulsiva dell’oscillatore troncata
all’istante t∗; per quanto detto ∆p e nota, mentre ∆h e da cercarsi secondo
i ragionamenti appena fatti.
Considerando che la risposta impulsiva dell’oscillatore e, dalla causalita
del sistema, nulla ∀t < 0, e che sono noti il numero di punti dell’accelero-
gramma np e la sua frequenza di campionamento fc si ha allora che:
∆p = np · Tc =np
fc
(5.25)
∆h = t∗
e
∆t = ∆p + ∆h
e non a quella equivalente heq(t) effettivamente utilizzata nei calcoli precedenti, visto che il supporto
temporale e identico essendo le due grandezze legate dalla relazione heq(t) = −m · h(t).

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 70
Allora l’istante t∗ va cercato come quell’istante per cui:∣∣∣h(t)∣∣∣t=t∗
∣∣∣ ≤ β · |hmax(t)| (5.26)
dove β e il parametro di controllo accennato in precedenza che stabilisce
quando il rapporto tra h(t∗) ed hmax(t) possa essere considerato trascurabile
e dunque la risposta impulsiva dell’oscillatore esaurita.
Si noti che la relazione appena scritta ha senso in quanto la risposta im-
pulsiva dell’oscillatore e maggiorata da una funzione monotona strettamente
decrescente:
|h(t)| =∣∣∣∣ 1
ωD
sin(ωDt) · e−νωt
∣∣∣∣ ≤ e−νωt
ωD
∀t (5.27)
la quale, tenendo di nuovo conto delle causalita, porta a stabilire che:
|hmax(t)| ≤(
e−νωt
ωD
) ∣∣∣t=0
=1
ωD
Dunque la condizione in 5.26 si traduce nella seguente:
e−νωt∗
ωD
≤ β
ωD
Svolgendo i calcoli si perviene al valore di t∗:
t∗ = − ln(β)
νω
quindi dalle relazioni in 5.22 e 5.25 alla disuguaglianza:
fs =fc
n≤ 1
∆t=
1np
fc− ln(β)
νω
da cui il numero minimo di punti su cui calcolare la FFT, che indicheremo
come nmin:
nmin = np −ln(β)Tfc
2πν(5.28)

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 71
0 2 4 6 8 10 12−0.15
−0.1
−0.05
0
0.05
0.1
0.15
t
h(t)
Figura 5.4: Maggiorazione della risposta impulsiva dell’oscillatore smorzato da un esponenziale
decrescente, come espresso nell’equazione 5.27.
Per motivi legati all’aritmetica usata dal calcolatore, si preferisce che il
numero di punti su cui si effettuano le trasformate veloci sia una potenza di
2, cosicche la relazione 5.28 si modifica come segue:
nmin = min{2n} : 2n ≥ np −ln(β)Tfc
2πν
La Tabella 5.2 mostra alcuni esempi di numero minimo di punti per la
FFT per alcuni valori di periodo proprio, indice di smorzamento e parametro
β, per frequenza di campionamento nel tempo e numero di punti dell’ac-
celerogramma fissati a fc=200 Hz ed np=2600 punti rispettivamente.

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 72
5.2.6 Estensione alle altre grandezze spettrali
I ragionamenti svolti in questo paragrafo per studiare e prevenire gli effetti
dell’aliasing, sia nel tempo che in frequenza, si sono basati sull’equazione
5.12.
Dalle equazioni 5.13 e 5.14 si puo facilmente dedurre una funzione di
trasferimento equivalente in maniera analoga a quanto fatto per il calcolo
della risposta in spostamento:
HSveq =1
2π(Tf 2 − 1
T− j2νf
)e
HSaeq =1
T 2f 2 − 1− j2νTf
Ovviamente i moduli di queste funzioni sono ben diversi, ed in generale
notevolmente piu ampi, rispetto a quello della fdt equivalente per il calcolo
della risposta in spostamento, quindi viene da pensare che tutti i ragiona-
menti finora esposti non siano direttamente applicabili anche al calcolo delle
altre grandezze spettrali.
Tuttavia, se ricordiamo che queste ultime due relazioni sono state ricavate
dalla 5.12 semplicemente moltiplicando per una costante21, ripercorrendo i
calcoli svolti per arrivare alle condizioni sul minimo periodo e sul minimo
numero di punti per il calcolo della FFT, ci accorgiamo che questi vincoli
sono direttamente validi anche per il calcolo degli spettri in pseudo-velocita
e pseudo-accelerazione.
21Per definizione di pseudo-velocita e pseudo-accelerazione, date al Capitolo 2.
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 73
5.3 Un confronto tra tempo e frequenza
Da quanto emerso in questo Capitolo puo sembrare che il calcolo degli spettri
di risposta nel dominio della frequenza sia un’operazione alquanto macchi-
nosa ed imprecisa in confronto al calcolo nel dominio del tempo.
Sicuramente la complessita dell’analisi in frequenza a livello concettuale
non e indifferente: in questa trattazione si sono chiamati in causa settori
molto vasti di Ingegneria e Matematica, a partire dalla teoria di Fourier,
per passare dalle distribuzioni di Dirac, fino al campionamento di Shannon
e Nyquist; per l’approccio nel tempo invece in pratica e sufficiente saper
risolvere un’equazione differenziale.
Senza analizzare gli effetti dovuti alla precisione macchina finita osservia-
mo che l’analisi in frequenza comporta la presenza inevitabile di una com-
ponente di disturbo sull’uscita, dovuta all’aliasing. Questo fenomeno puo
essere in ogni modo contenuto entro un limite arbitratio accettando, come si
e visto, di aumentare la complessita delle trasformate numeriche utilizzate,
o sacrificando un numero maggiore di punti dell’uscita.
Questo secondo inconveniente non manca neppure nell’elaborazione nel
dominio del tempo, dove e l’overflow sui bit con cui si rappresentano le cifre
dell’elaborazione ad impedire il calcolo della risposta per valori di periodo
piccoli22.
Insomma, un bilancio qualitativo tra i due metodi sembra nettamente a
favore del calcolo nel dominio del tempo; tuttavia, come abbiamo gia dis-
cusso, l’implementazione a livello numerico rende evidenti i vantaggi del cal-
colo nel dominio della frequenza, in quanto trasforma le operazioni integro-
differenziali in moltiplicazioni che possono essere svolte con elevata semplicita
22Si veda in proposito il Capitolo 4.

Capitolo 5. Calcolo dello SdR nel dominio della frequenza 74
a livello macchina23.
A titolo di esempio si puo confrontare il tempo necessario all’elaborazione
di un set completo di spettri (ossia spostamento, pseudo-velocita e pseudo-
accelerazione) nel dominio del tempo e in quello della frequenza, sullo stesso
intervallo di periodi e con la stessa forzante.
Utilizzanto la traccia N-S della registrazione RA01134, ed un intervallo di
periodi compreso tra 0.3 s e 4 s con precisione di 0.01 s, l’elaborazione degli
spettri su di una macchina libera richiede mediamente 140 s nel dominio del
tempo e 50 s in quello della frequenza.
Benche questi risultati siano legati all’architettura del calcolatore usato
e siano comunque leggermente variabili24, il rapporto tra i due evidenzia
nettamente il vantaggio di lavorare nel dominio della frequenza.
23Mentre operazioni di inegrazione e derivazione richiedono l’uso di particolari (e laboriosi) algoritmi
per poter essere effettuate a livello numerico.24L’elaborazione e in ogni caso avvenuta senza concorrenza con altri programmi.
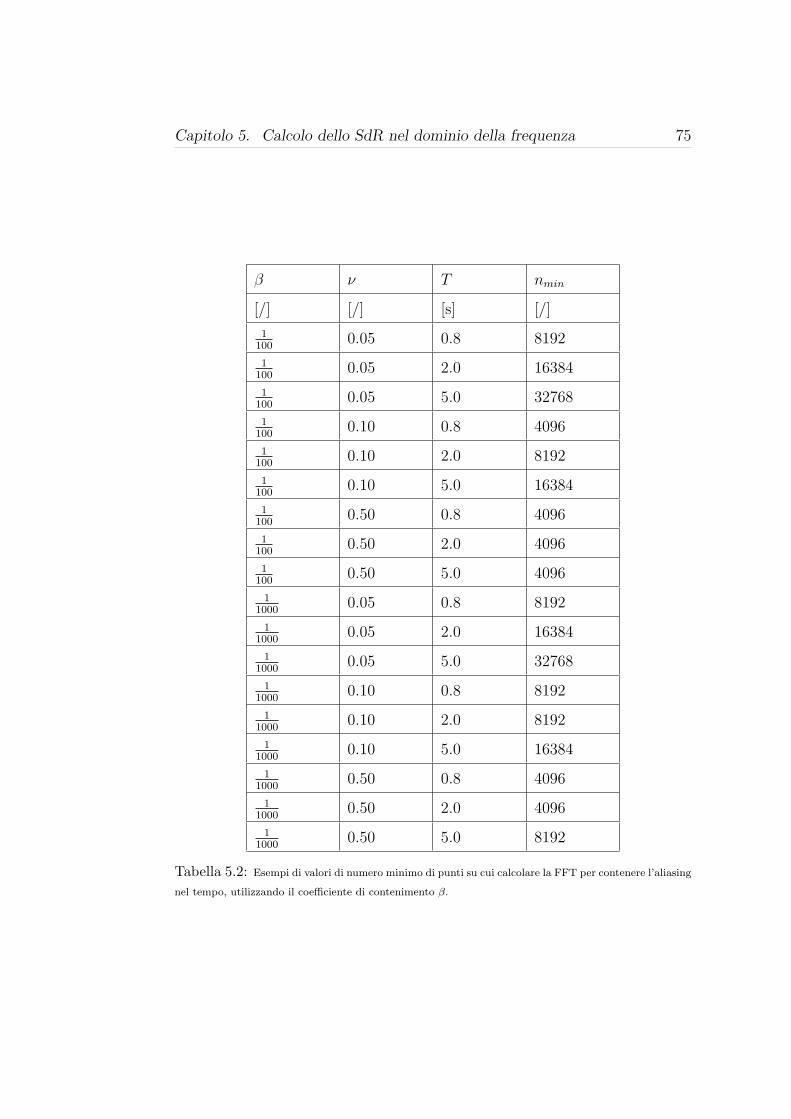
Capitolo 5. Calcolo dello SdR nel dominio della frequenza 75
β ν T nmin
[/] [/] [s] [/]
1100
0.05 0.8 8192
1100
0.05 2.0 16384
1100
0.05 5.0 32768
1100
0.10 0.8 4096
1100
0.10 2.0 8192
1100
0.10 5.0 16384
1100
0.50 0.8 4096
1100
0.50 2.0 4096
1100
0.50 5.0 4096
11000
0.05 0.8 8192
11000
0.05 2.0 16384
11000
0.05 5.0 32768
11000
0.10 0.8 8192
11000
0.10 2.0 8192
11000
0.10 5.0 16384
11000
0.50 0.8 4096
11000
0.50 2.0 4096
11000
0.50 5.0 8192
Tabella 5.2: Esempi di valori di numero minimo di punti su cui calcolare la FFT per contenere l’aliasing
nel tempo, utilizzando il coefficiente di contenimento β.
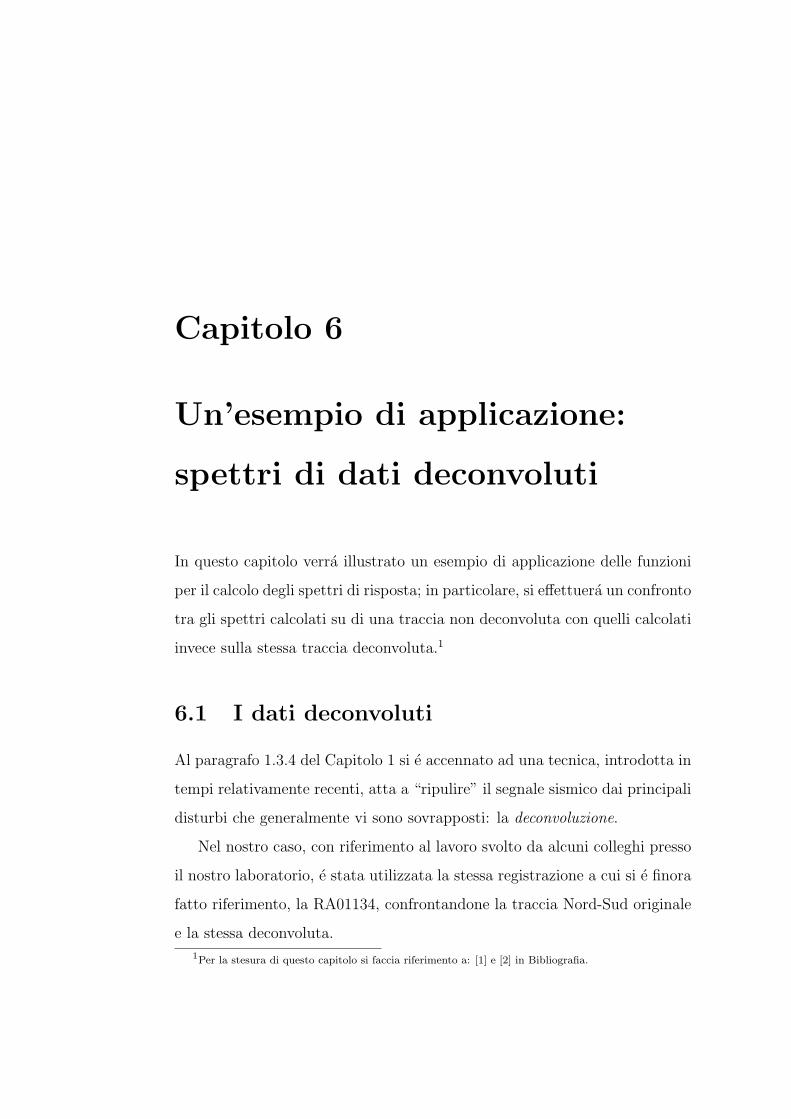
Capitolo 6
Un’esempio di applicazione:
spettri di dati deconvoluti
In questo capitolo verra illustrato un esempio di applicazione delle funzioni
per il calcolo degli spettri di risposta; in particolare, si effettuera un confronto
tra gli spettri calcolati su di una traccia non deconvoluta con quelli calcolati
invece sulla stessa traccia deconvoluta.1
6.1 I dati deconvoluti
Al paragrafo 1.3.4 del Capitolo 1 si e accennato ad una tecnica, introdotta in
tempi relativamente recenti, atta a “ripulire” il segnale sismico dai principali
disturbi che generalmente vi sono sovrapposti: la deconvoluzione.
Nel nostro caso, con riferimento al lavoro svolto da alcuni colleghi presso
il nostro laboratorio, e stata utilizzata la stessa registrazione a cui si e finora
fatto riferimento, la RA01134, confrontandone la traccia Nord-Sud originale
e la stessa deconvoluta.
1Per la stesura di questo capitolo si faccia riferimento a: [1] e [2] in Bibliografia.
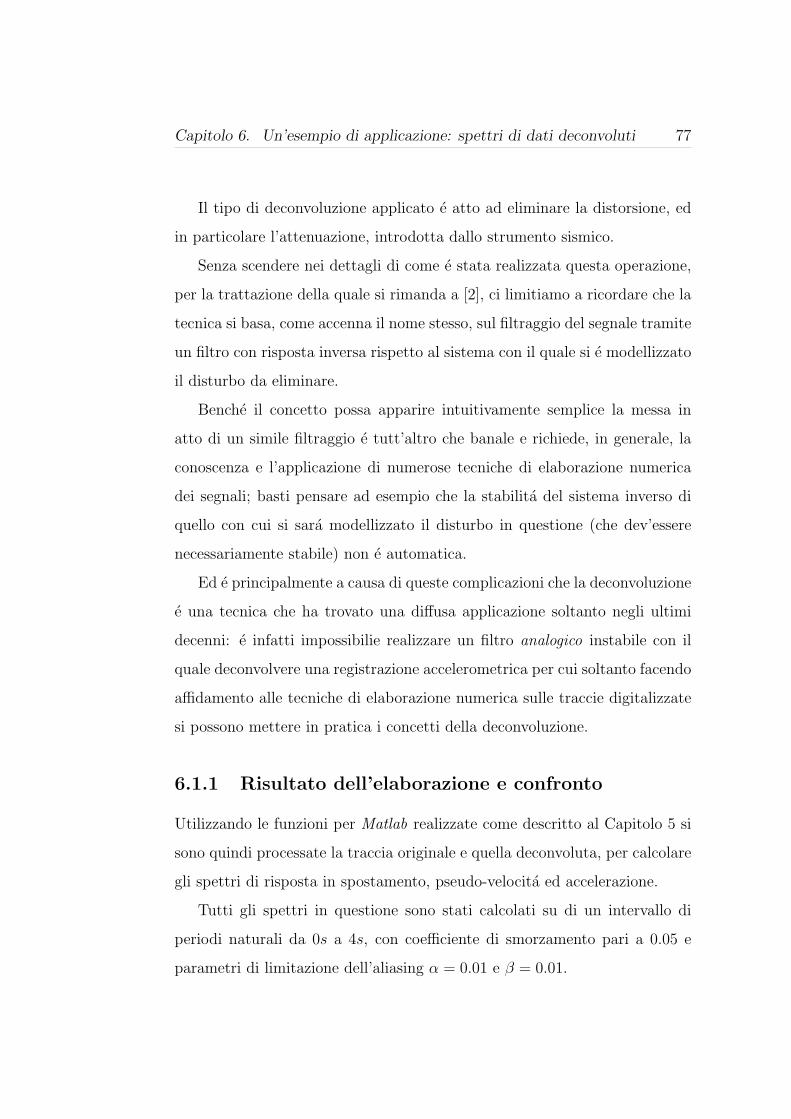
Capitolo 6. Un’esempio di applicazione: spettri di dati deconvoluti 77
Il tipo di deconvoluzione applicato e atto ad eliminare la distorsione, ed
in particolare l’attenuazione, introdotta dallo strumento sismico.
Senza scendere nei dettagli di come e stata realizzata questa operazione,
per la trattazione della quale si rimanda a [2], ci limitiamo a ricordare che la
tecnica si basa, come accenna il nome stesso, sul filtraggio del segnale tramite
un filtro con risposta inversa rispetto al sistema con il quale si e modellizzato
il disturbo da eliminare.
Benche il concetto possa apparire intuitivamente semplice la messa in
atto di un simile filtraggio e tutt’altro che banale e richiede, in generale, la
conoscenza e l’applicazione di numerose tecniche di elaborazione numerica
dei segnali; basti pensare ad esempio che la stabilita del sistema inverso di
quello con cui si sara modellizzato il disturbo in questione (che dev’essere
necessariamente stabile) non e automatica.
Ed e principalmente a causa di queste complicazioni che la deconvoluzione
e una tecnica che ha trovato una diffusa applicazione soltanto negli ultimi
decenni: e infatti impossibilie realizzare un filtro analogico instabile con il
quale deconvolvere una registrazione accelerometrica per cui soltanto facendo
affidamento alle tecniche di elaborazione numerica sulle traccie digitalizzate
si possono mettere in pratica i concetti della deconvoluzione.
6.1.1 Risultato dell’elaborazione e confronto
Utilizzando le funzioni per Matlab realizzate come descritto al Capitolo 5 si
sono quindi processate la traccia originale e quella deconvoluta, per calcolare
gli spettri di risposta in spostamento, pseudo-velocita ed accelerazione.
Tutti gli spettri in questione sono stati calcolati su di un intervallo di
periodi naturali da 0s a 4s, con coefficiente di smorzamento pari a 0.05 e
parametri di limitazione dell’aliasing α = 0.01 e β = 0.01.
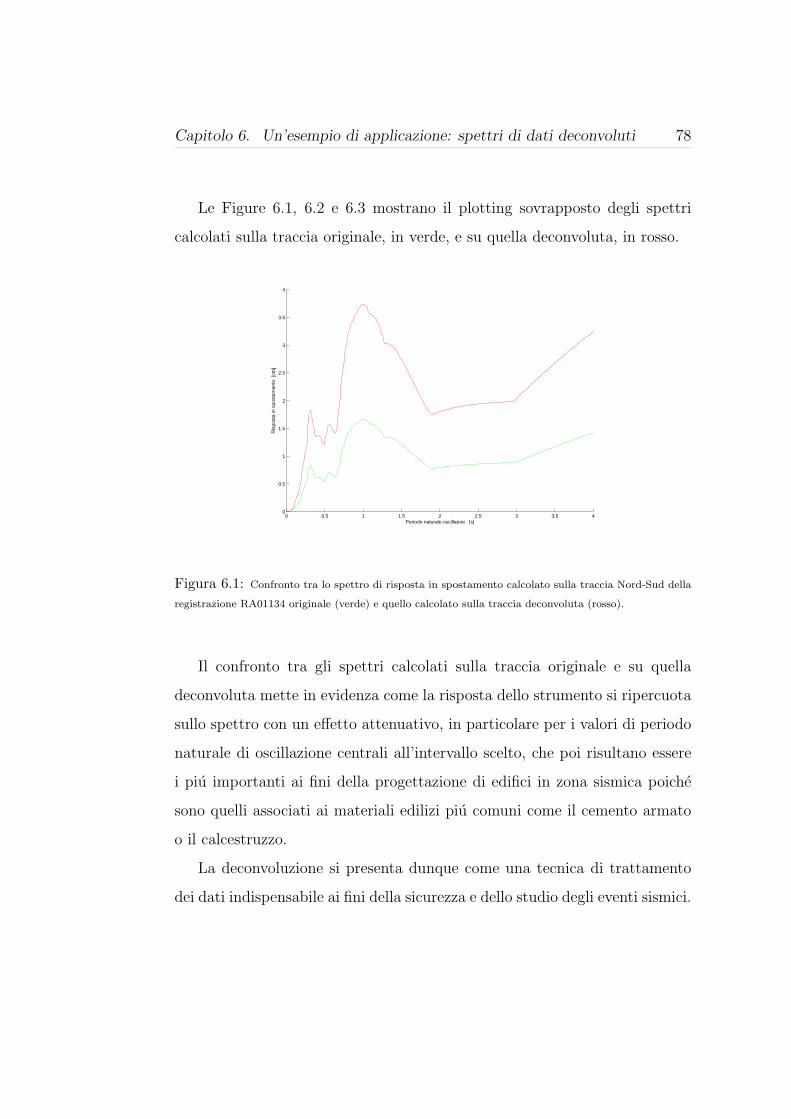
Capitolo 6. Un’esempio di applicazione: spettri di dati deconvoluti 78
Le Figure 6.1, 6.2 e 6.3 mostrano il plotting sovrapposto degli spettri
calcolati sulla traccia originale, in verde, e su quella deconvoluta, in rosso.
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
2
2.5
3
3.5
4
Periodo naturale oscillatore [s]
Ris
post
a in
spo
stam
ento
[cm
]
Figura 6.1: Confronto tra lo spettro di risposta in spostamento calcolato sulla traccia Nord-Sud della
registrazione RA01134 originale (verde) e quello calcolato sulla traccia deconvoluta (rosso).
Il confronto tra gli spettri calcolati sulla traccia originale e su quella
deconvoluta mette in evidenza come la risposta dello strumento si ripercuota
sullo spettro con un effetto attenuativo, in particolare per i valori di periodo
naturale di oscillazione centrali all’intervallo scelto, che poi risultano essere
i piu importanti ai fini della progettazione di edifici in zona sismica poiche
sono quelli associati ai materiali edilizi piu comuni come il cemento armato
o il calcestruzzo.
La deconvoluzione si presenta dunque come una tecnica di trattamento
dei dati indispensabile ai fini della sicurezza e dello studio degli eventi sismici.
Capitolo 6. Un’esempio di applicazione: spettri di dati deconvoluti 79
0 0.5 1 1.5 2 2.5 3 3.5 40
5
10
15
20
25
30
35
40
Periodo naturale oscillatore [s]
Ris
post
a in
pse
udo−
velo
citÃ
[c
m/s
]
Figura 6.2: Confronto tra lo spettro di risposta in pseudo-velocita calcolato sulla traccia Nord-Sud
della registrazione RA01134 originale (verde) e quello calcolato sulla traccia deconvoluta (rosso).
0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1x 10
−3
Periodo naturale oscillatore [s]
Ris
post
a in
pse
udo−
acce
lera
zion
e no
rmal
izza
ta a
g [
/]
Figura 6.3: Confronto tra lo spettro di risposta in pseudo-accelerazione calcolato sulla traccia Nord-
Sud della registrazione RA01134 originale (verde) e quello calcolato sulla traccia deconvoluta (rosso). Gli
spettri sono normalizzati rispetto a g = 981cm/s2.
Capitolo 7
SpectCalc
SpectCalc e l’intrfaccia grafica che permette un’utilizzo semplice ed intuitivo
delle funzioni sviluppate per il calcolo dei vari tipi di spettro di risposta.1.
Tramite l’utilizzo di SpectCalc non e necessaria infatti alcuna conoscenza
dell’ambiente di lavoro Matlab, e le operazioni di calcolo, plotting e salvatag-
gio dati dati possono essere impostate visivamente interagendo con elementi
comuni come menu a tendina, pulsanti e caselle di spunta.
7.1 Installazione
Per avere a disposizione il programma SpectCalc e necessario copiare la
cartella che ne contiene i files in una posizione nota ed aggiungerla al path
di ricerca di Matlab2 utilizzando l’opzione Add with subfolders.
Una volta salvato il nuovo path di ricerca, il programma SpectCalc e
pronto all’uso.
1Per la stesura di questo capitolo si faccia riferimento a: [12].2Dal menu File → Set Path.
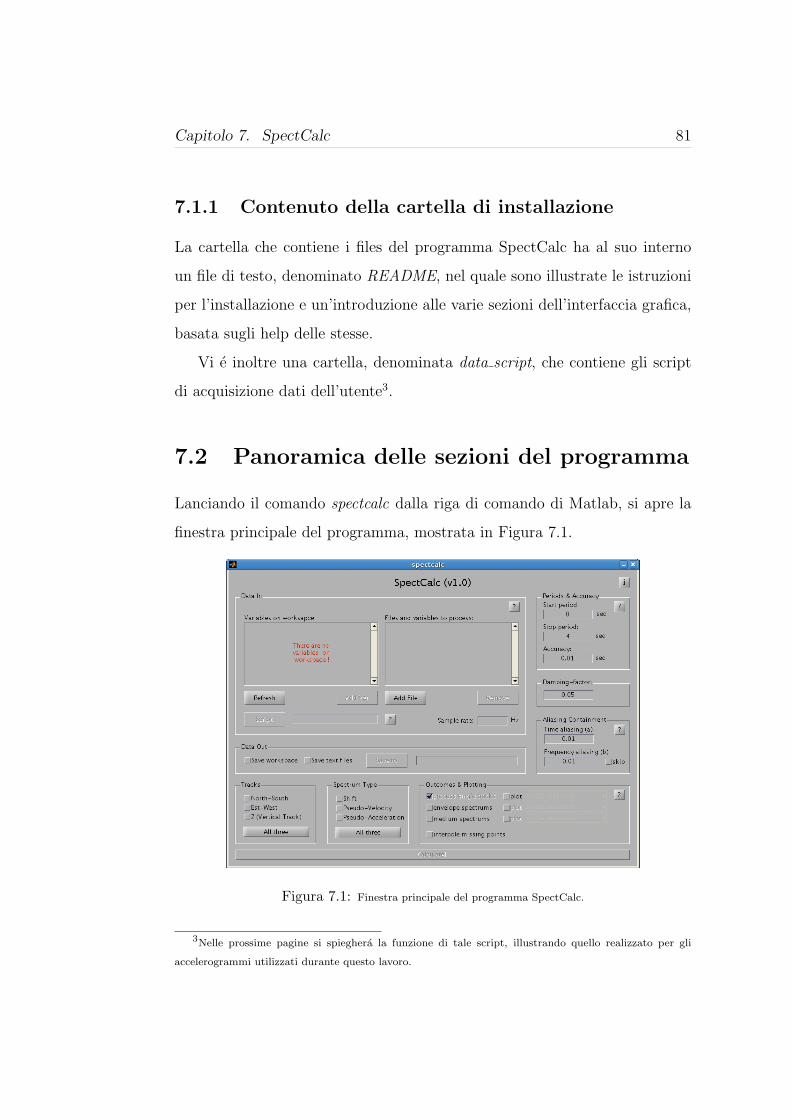
Capitolo 7. SpectCalc 81
7.1.1 Contenuto della cartella di installazione
La cartella che contiene i files del programma SpectCalc ha al suo interno
un file di testo, denominato README, nel quale sono illustrate le istruzioni
per l’installazione e un’introduzione alle varie sezioni dell’interfaccia grafica,
basata sugli help delle stesse.
Vi e inoltre una cartella, denominata data script, che contiene gli script
di acquisizione dati dell’utente3.
7.2 Panoramica delle sezioni del programma
Lanciando il comando spectcalc dalla riga di comando di Matlab, si apre la
finestra principale del programma, mostrata in Figura 7.1.
Figura 7.1: Finestra principale del programma SpectCalc.
3Nelle prossime pagine si spieghera la funzione di tale script, illustrando quello realizzato per gli
accelerogrammi utilizzati durante questo lavoro.
Capitolo 7. SpectCalc 82
Tale finestra e divisa in 8 sezioni che raggruppano in maniera logica le
impostazioni del programma.
• La sezione Data In contiene due finestre che mostrano rispettivamente
la lista delle variabili presenti sul workspace di Matlab (finestra di
sinistra) e la lista di file e variabili che si intende elaborare (finestra
di destra). I pulsanti presenti nella sezione permettono di interagire
con le liste appena mensionate, mentre dal pulsante Script si puo se-
lezionare uno script di acquisizione dati nel caso in cui si inenda pro-
cessare dei file. Infine dal campo Sample Rate si imposta la frequenza
di campionamento dei dati da elaborare.
• La sezione Data Out permette di selezionare il tipo di output del pro-
gramma. Spuntando le caselle in questa sezione si puo scegliere se
salvare il workspace prodotto dall’elaborazione ed i dati elaborati sot-
to forma di file di testo; il pulsante Save To permette di scegliere la
destinazione dei file.
• Dalla sezione Periods & Accuracy si imposta l’intervallo di valori su cui
si intendono calcolare gli spettri di risposta e l’accuratezza di questo.
• La sezione Damping Factor serve per settare il coefficiente di smorza-
mento dell’oscillatore armonico con cui calcolare gli spettri.
• Nella sezione Aliasing Containment si impostano i coefficienti α e β
per il contenimento dell’aliasing nel tempo e nella frequenza, in base a
quanto discusso nel Capitolo 5.
• La sezione Tracks permette di selezionare le tracce da elaborare.
• Dalla sezione Spectrum Type si scelgono i tipi di spettro che si desidera
calcolare.
Capitolo 7. SpectCalc 83
• La sezione Outcomes & Plotting permette di scegliere se calcolare anche
gli spettri medi e/o di inviluppo, decidendo quali di questi plottare ed
in che modo. Si puo inoltre impostare il programma per interpolare
linearmente i punti degli spettri non calcolabili.
7.3 Utilizzo del programma
Come detto, all’avvio del programma si presenta la finestra di Figura 7.1,
nella quale il pulsante di calcolo (in basso) e disabilitato.
7.3.1 Item list e formato dati in ingresso
L’elaborazione puo avvenire sia su dati gia acquisiti ed importati sul workspace
di Matlab sotto forma di variabili4, cosı come, nel caso piu generico, proces-
sando i file di testo ottenuti direttamente dallo strumento sismico.
SpectCalc permette di processare contemporaneamente sia variabili del
workspace che file provenienti dagli strumenti.
Le prime possono essere aggiunte alla lista di elementi da elaborare, con-
trassegnata dal nome Item List, mediante selezione sulla finestra sinistra della
sezione Data In e con l’uso del pulsante Add Var, i file possono invece essere
aggiunti in lista tramite il pulsante Add File, che permette la selezione grafica
tramite un file-browser.
E bene aprire una parentesi riguardo alla creazione della lista di elementi
da elaborare: il programma esegue una serie di controlli sull’effettiva presenza
delle variabili selezionate sul workspace, eventualmente annullando l’opera-
zione di aggiunta nel caso in cui siano avvenute delle modifiche su queste
4Ad esempio da fogli elettronici, o file di testo, utilizzando il tool uiimport, ma anche passati in un
file .mat .
Capitolo 7. SpectCalc 84
dall’ultimo refresh effettuato5, ma non puo essere effettuato alcun controllo
sulla coerenza dei dati contenuti nelle variabili stesse.
Deve essere quindi l’utente ad assicurarsi che i dati in input al programma
siano corretti.
Il formato standard dei dati che il programma puo elaborare e quello
di matrice costituita da 4 colonne: la prima deve contenere la marcatura
temporale della registrazione, la seconda la traccia Nord-Sud, la terza la
traccia Est-Ovest ed infine la quarta la traccia Z o verticale.
I dati devono inoltre essere in un formato numerico valido (tipicamente
double), mentre non vi e in teoria un limite alla lunghezza della registrazione.
Se per qualche motivo non fossero presenti una o piu tracce di una data
registrazione e previsto che la colonna corrispondente sia rimpiazzata da una
colonna di Nan6.
Ogni variazione dal formato standard appena descritto puo provocare la
terminazione improvvisa dell’elaborazione da parte del programma o com-
promettere il risultato, rendendo del tutto imprevedibili (ed inaffidabili) gli
spettri ottenuti.
Si consiglia pertanto di accertarsi, prima dell’elaborazione, della corret-
tezza delle variabili che si intende aggiungere alla Item List.
Per quanto riguarda l’aggiunta di file invece, questa richiede che venga in-
dicato al programma anche uno script di acquisizione: appena si aggiunge un
file alla Item List infatti viene automaticamente abilitato il pulsante Script, in
basso alla sezione Data In; premendo questo pulsante si apre un file-browser
dal quale e possibile scegliere lo script adatto al formato dei file di cui si
5Si possono infatti utilizzare in maniera dinamica workspace e programma importando dati in nuove
variabili anche durante l’esecuzione del programma stesso, ottenendo disponibili queste ultime con il
semplice aggiornamento della lista variabili sul programma dal pulsante Refresh.6Acronimo di Not A Number, utilizzato nel linguaggio Matlab per indicare un campo numerico vuoto.
Capitolo 7. SpectCalc 85
dispone.
7.3.2 Lo script di acquisizione dati
Uno script di acquisizione dati e una funzione scritta in linguaggio Matlab
che permette di estrarre i dati relativi ad una registrazione accelerometrica
da un file di testo non formattato proveniente da uno strumento sismico7.
Nella sezione 1.3.2 del Capitolo 1 si e descritto in maniera generale il
formato di uno di questi file, portando come esempio l’intestazione di una
delle tracce contenute in uno dei file a disposizione per lo svolgimento di
questo lavoro; purtroppo pero non esiste uno standard preciso ed unico per
tali registrazioni e ciascun tipo di strumento adotta un formato proprio di
organizzazione dei dati e delle informazioni aggiuntive.
In generale infatti un file contenente una registrazione sismica riporta
una o piu tracce relative a quel determinato evento ed una o piu intestazioni
contenenti informazioni aggiuntive quali la durata della registrazione in punti,
la frequenza di campionamento, l’ordine delle tracce all’interno del file o
l’indicatore della traccia seguente l’intestazione.
L’esempio riportato al Capitolo 1 mostra la disposizione di tali infor-
mazioni per un file proveniente dalla Rete Sismica dell’ENEL ma altri stru-
menti avranno in generale un modo diverso di organizzare questi ed altri
campi informativi.
Per l’elaborazione dei dati contenuti in questi file e necessario estrarre
i soli valori numerici dei campioni riportandoli in una matrice organizzata
come descritto al paragrafo precedente; nasce quindi il problema di avere uno
7In tal senso l’appellativo di script e scorretto in quanto la funzione fornisce come output la matrice
contenente i campioni della registrazione, tuttavia la funzione adibita all’estrazione dati da un file verra
indicata, per semplicita, come script acquisizione dati nel resto del Capitolo.
Capitolo 7. SpectCalc 86
strumento che permetta l’estrazione automatica dei dati da una moltitudine
di file dello stesso tipo.
I tool di importazione dati di Matlab permettono di importare dati da
fogli elettronici o file di testo che contengono solo valori numerici o, al
piu, un’intestazione, rendendo quindi impossibile l’acquisizione da file che
alternano intestazioni a registrazioni delle varie tracce.
E dunque necessario che, per ogni tipo di registrazione, l’utente, conoscen-
do la struttura organizzativa dei file stessi, scriva una breve funzione per
espletare l’acquisizione dei dati8.
La scrittura di una funzione di questo tipo e in generale basata su pochi
comandi come fid e fclose per aprire e chiudere i file, textscan, textread, fget,
fgetl e strread per leggere le porzioni delle righe che interessano, str2double
per convertire tali stringhe in valori numerici.
Una volta individuata la struttura del file risulta quindi abbastanza sem-
plice scansionare ciclicamente le varie parti di questo, spostandosi di volta in
volta alle righe che permettono di riconoscere la durata ed il tipo di traccia
e, successivamente, leggere e salvare i valori dei campioni.
In generale quindi uno script di acquisizione deve essere una funzione
per Matlab (ossia un M-file), che riceva in ingresso una stringa che speci-
fichi il nome del file contenente la registrazione (ed eventualmente il path
assoluto scritto secondo lo standard di Matlab). L’output dello script deve
invece essere la matrice contenente la marcatura temporale ed i valori delle
registrazioni di cui discusso al paragrafo precedente.
Gli script di acquisizione devono avere inoltre un nome univocamente
riconoscibile da Matlab9, e possono essere collocati in una qualunque cartella
8E sufficiente leggere uno di questi tramite un editor di testo; generalmente viene inoltre fornito un
file di testo aggiuntivo che riportal’ordine ed il significato dei campi dell’intestazione.9Si deve cioe evitare di assegnare alla funzione lo stesso nome di una di quelle gia presenti nel path di
Capitolo 7. SpectCalc 87
del proprio computer, a patto che questa sia inclusa nel path di ricerca.
Se non si ha dimestichezza con le operazioni descritte e sufficiente collo-
care lo script di acquisizione nella cartella data script contenuta nella cartella
di installazione del programma SpectCalc, la quale verra automaticamente
aggiunta al path di ricerca all’esecuzione del programma stesso, rendendo
disponibile lo script.
Infine, nella distribuzione originale del programma e presente lo script di
acquisizione gia mensionato, realizzato per files provenienti dalla Rete Sismi-
ca dell’ENEL, del quale di seguito e riportato il listato che puo essere anche
usato come base realizzare nuovi script applicando poche modifiche.
1 function [data] = getdatafromfile(file)
2 %help omesso ...
3
4 %apre il file e verifica la corretta apertura segnalando un eventuale
5 %errore con conseguente terminazione della funzione
6
7 id=fopen(char(file ));
8 if id <0
9 error(’Access to file was not possible .’);
10 end
11 disp(sprintf(’\nReading tracks from file: %s ...\n’,file)) ;
12
13 %esegue la lettura dalla prima intestazione del numero di punti da cui ~A¨
14 %composta la regitrazione.
15
16 for z=1:27
17 fgetl(id);
18 end
19 pointsline=fgetl(id) ;
20 pf=length(pointsline );
21 pi=pf;
22 while ~isspace(pointsline(pi))
23 pi=pi -1;
Matlab, o comunque settare l’ordine di ricerca del path stesso in modo da scegliere la funzione corretta.
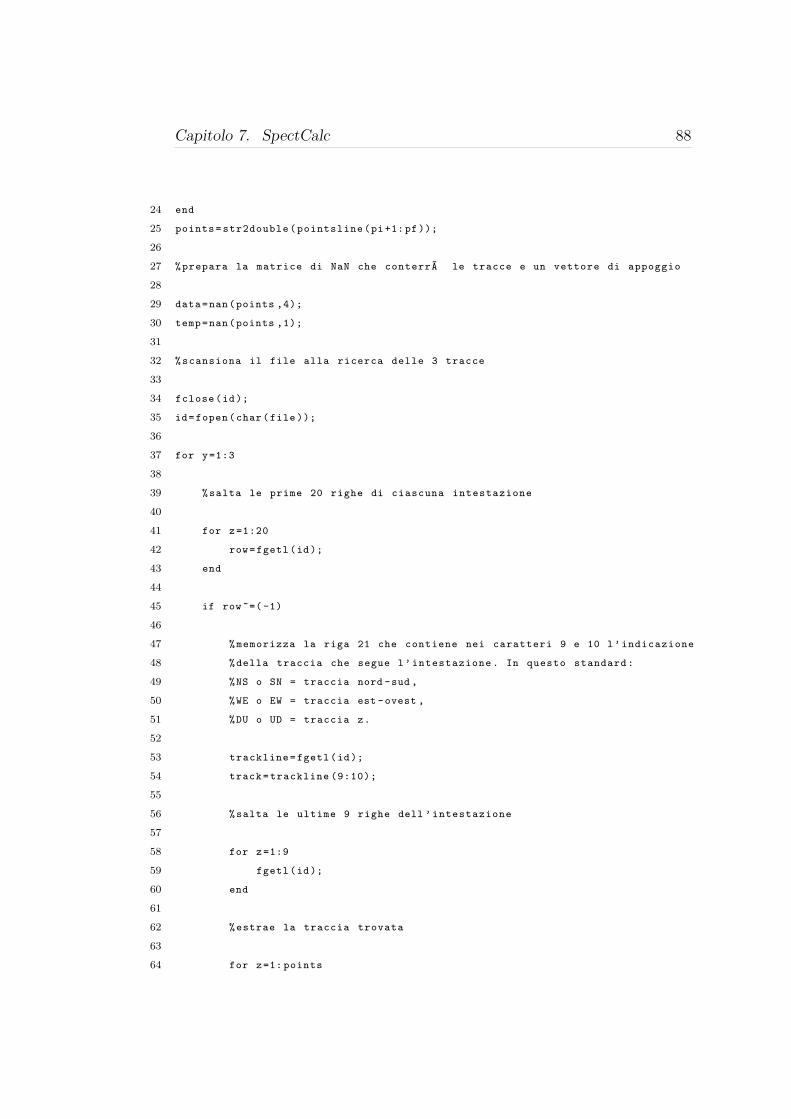
Capitolo 7. SpectCalc 88
24 end
25 points=str2double(pointsline(pi+1:pf));
26
27 %prepara la matrice di NaN che conterr~A le tracce e un vettore di appoggio
28
29 data=nan(points ,4);
30 temp=nan(points ,1);
31
32 %scansiona il file alla ricerca delle 3 tracce
33
34 fclose(id);
35 id=fopen(char(file ));
36
37 for y=1:3
38
39 %salta le prime 20 righe di ciascuna intestazione
40
41 for z=1:20
42 row=fgetl(id);
43 end
44
45 if row ~=( -1)
46
47 %memorizza la riga 21 che contiene nei caratteri 9 e 10 l’indicazione
48 %della traccia che segue l’intestazione. In questo standard:
49 %NS o SN = traccia nord -sud ,
50 %WE o EW = traccia est -ovest ,
51 %DU o UD = traccia z.
52
53 trackline=fgetl(id);
54 track=trackline (9:10);
55
56 %salta le ultime 9 righe dell ’intestazione
57
58 for z=1:9
59 fgetl(id);
60 end
61
62 %estrae la traccia trovata
63
64 for z=1: points
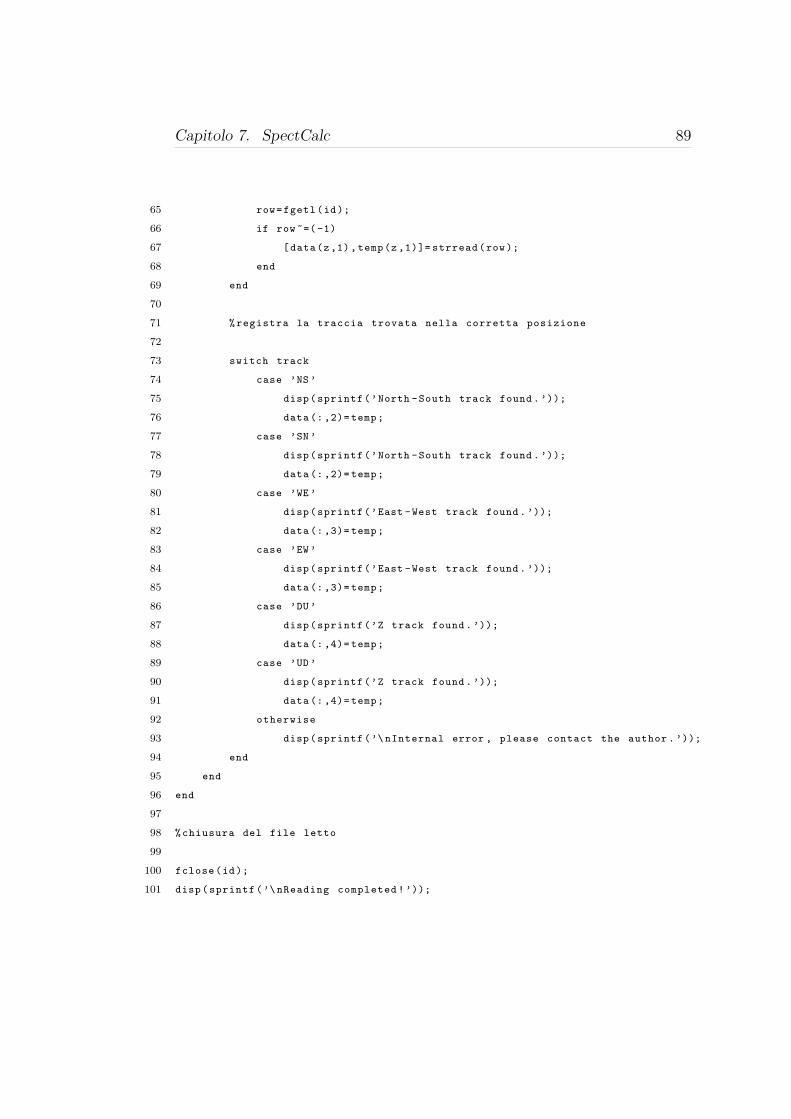
Capitolo 7. SpectCalc 89
65 row=fgetl(id);
66 if row ~=( -1)
67 [data(z,1),temp(z,1)]= strread(row);
68 end
69 end
70
71 %registra la traccia trovata nella corretta posizione
72
73 switch track
74 case ’NS’
75 disp(sprintf(’North -South track found .’));
76 data (:,2)= temp;
77 case ’SN’
78 disp(sprintf(’North -South track found .’));
79 data (:,2)= temp;
80 case ’WE’
81 disp(sprintf(’East -West track found .’));
82 data (:,3)= temp;
83 case ’EW’
84 disp(sprintf(’East -West track found .’));
85 data (:,3)= temp;
86 case ’DU’
87 disp(sprintf(’Z track found .’));
88 data (:,4)= temp;
89 case ’UD’
90 disp(sprintf(’Z track found .’));
91 data (:,4)= temp;
92 otherwise
93 disp(sprintf(’\nInternal error , please contact the author .’));
94 end
95 end
96 end
97
98 %chiusura del file letto
99
100 fclose(id);
101 disp(sprintf(’\nReading completed !’));
Capitolo 7. SpectCalc 90
7.3.3 Tracce, tipi di spettro ed altri parametri
Una volta selezionati i file e/o le variabili da elaborare con la rispettiva
frequenza di campionamento e necessario settare i parametri su cui calcolare
gli spettri desiderati.
Dalla sezione Periods & Accuracy si imposta l’intervallo di valori a l’accu-
ratezza con cui verranno calcolati gli spettri; nella sezione Damping Factor si
imposta il coefficiente di smorzamento dell’oscillatore, mentre nella sezione
Aliasing Containment si impostano i parametri α e β per il contenimento
dell’aliasing in frequenza e nel tempo.
Si noti che il programma verifica automaticamente la validita dei valo-
ri inseriti, eventualmente restituendo un messaggio di errore ed annullando
l’inserimento10.
E necessario infine selezionare almeno una traccia da elaborare nella
sezione Tracks ed almeno un tipo di spettro dalla sezione Spectrum Type.
A questo punto il pulsante di calcolo si abilita, come mostrato in Figura
7.2 ed e possibile procedere al calcolo degli spettri selezionati.
7.3.4 Spettri medi, di inviluppo e plotting dati
Dalla sezione Outcomes & Plotting e possibile impostare il programma per
calcolare anche spettri medi e di inviluppo, i quali verranno calcolati su tutti
gli elementi elaborati, distinguendo tipo di spettro e traccia.
Inoltre si puo scegliere se far interpolare o meno al programma i punti
degli spettri che risultano non calcolabili per motivi di aliasing; una eventuale
interpolazione sara effettuata linearmente dal primo punto calcolato verso
10Ad esempio se si tentasse di inserire un valore negativo per il coefficiente di smorzamento.
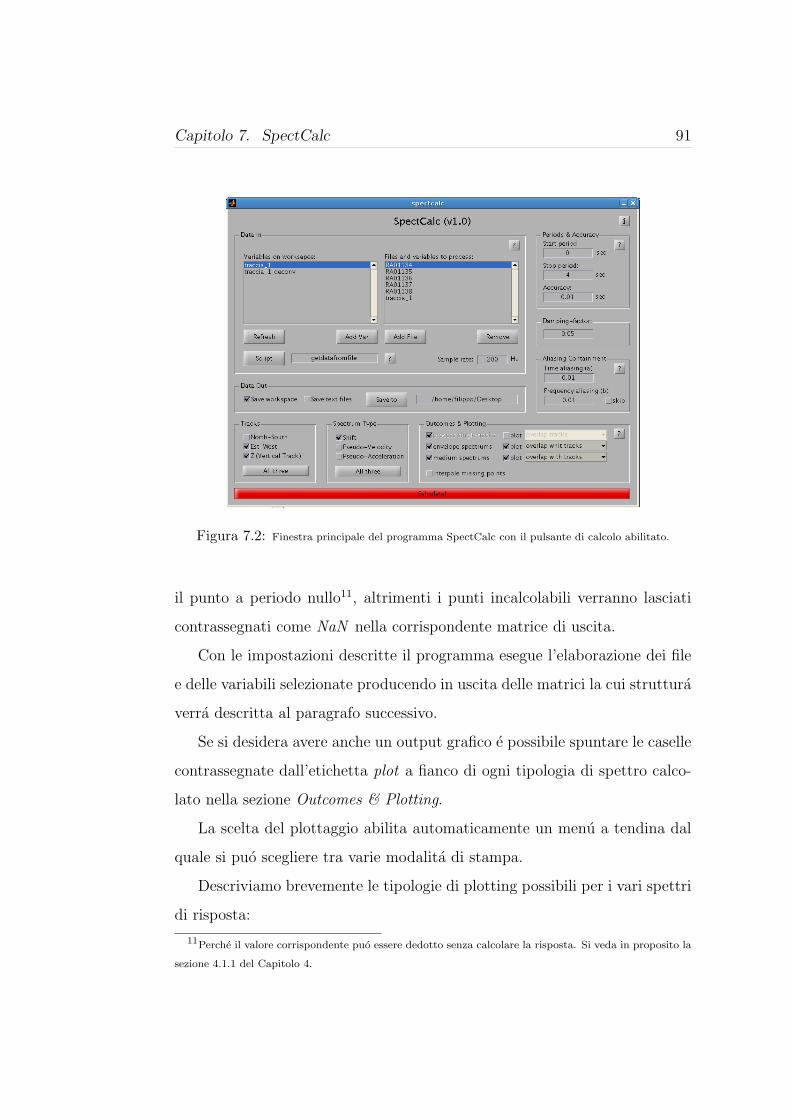
Capitolo 7. SpectCalc 91
Figura 7.2: Finestra principale del programma SpectCalc con il pulsante di calcolo abilitato.
il punto a periodo nullo11, altrimenti i punti incalcolabili verranno lasciati
contrassegnati come NaN nella corrispondente matrice di uscita.
Con le impostazioni descritte il programma esegue l’elaborazione dei file
e delle variabili selezionate producendo in uscita delle matrici la cui struttura
verra descritta al paragrafo successivo.
Se si desidera avere anche un output grafico e possibile spuntare le caselle
contrassegnate dall’etichetta plot a fianco di ogni tipologia di spettro calco-
lato nella sezione Outcomes & Plotting.
La scelta del plottaggio abilita automaticamente un menu a tendina dal
quale si puo scegliere tra varie modalita di stampa.
Descriviamo brevemente le tipologie di plotting possibili per i vari spettri
di risposta:
11Perche il valore corrispondente puo essere dedotto senza calcolare la risposta. Si veda in proposito la
sezione 4.1.1 del Capitolo 4.
Capitolo 7. SpectCalc 92
• Single separately : e disponibile sia per gli spettri delle singole tracce
che per quelli medi e di inviluppo; con questa opzione verra graficato in
una nuova finestra ciascun tipo di spettro calcolato per ciascuna traccia
selezionata di ciascun file/variabile elaborato.
In questo modo si ottiene sicuramente la massima visibilita per il sin-
golo spettro ma il numero di finestre risultante puo divenire molto
elevato12 e non si ha alcun metodo di confronto con gli altri spettri: e
consigliabile dunque scegliere questa impostazione per visualizzare uno
(o coumunque pochi) spettri.
• Group tracks : l’opzione, che e disponibile solo per gli spettri calcolati
sulle singole tracce, raggruppa per cascun file/variabile elaborato tutte
le tracce che si e scelto di processare dalla sezione Tracks.
Ovviamente se si e selezionata una sola traccia questo tipo di plotting
equivale all’opzione single separately, altrimenti ciascuna finestra con-
terra 2 o 3 grafici riportanti, per ciascun tipo di spettro, lo spettro di
risposta calcolato su tutte le tracce di quel file/variabile.
• Group types : analogamente all’opzione group tracks, questo tipo di
plotting raggruppa in una singola finestra tutti i tipi di spettro calcolati
per ciascuna traccia di ciascun file/variabile processata.
In questo caso il risultato sara equivalente all’opzione single separately
se si e scelto di calcolare un solo tipo di spettro dalla sezione Spectrum
Type. Questa opzione e disponibile sia per gli spettri delle singole tracce
che per quelli medi e di inviluppo.
• Overlap tracks : nel caso di plotting degli spettri delle singole tracce puo
12Ad esempio elaborando 3 file e selezionando tutte le tracce e tutti e 3 i tipi di spettro (spostamento,
pseudo-velocita e pseudo-accelerazione) si avrebbero plottati 27 diversi spettri di risposta in altrettante
finestre separate.
Capitolo 7. SpectCalc 93
essere utile confrontare, per ciascun elemento elaborato, le componenti
(tracce) che si e scelto di processare13.
Questa opzione dunque sovrappone le tracce selezionate dalla sezione
Tracks in una nuova finestra per ciascun tipo di spettro di ciascun
file/variabile processato (anche in questo caso se ne e stata selezionata
una soltanto il plotting risultante sara equivalente a quello dell’opzione
single separately).
• Overlap with tracks : da non confondere con la precedente, questa
opzione e disponibile solo per gli spettri medi e di inviluppo e grafi-
ca, per ciascun tipo di spettro di ciascuna traccia, lo spettro medio o
di inviluppo con sovrapposti gli spettri delle tracce omogenee14 da cui
questo e stato calcolato, provenienti da ciascun file/variabile processato.
La Figura 7.3 mostra due esempi di plotting di spettri medi e di inviluppo
sovrapposti con le tracce che li hanno generati.
13Ad esempio per individuare la componente che porta sollecitazioni piu significative per un determinato
accadimento sismico.14Cioe dello stesso tipo, poiche non avrebbe senso calcolare spettri medi o di inviluppo mescolando
componenti diverse di varie registrazioni.
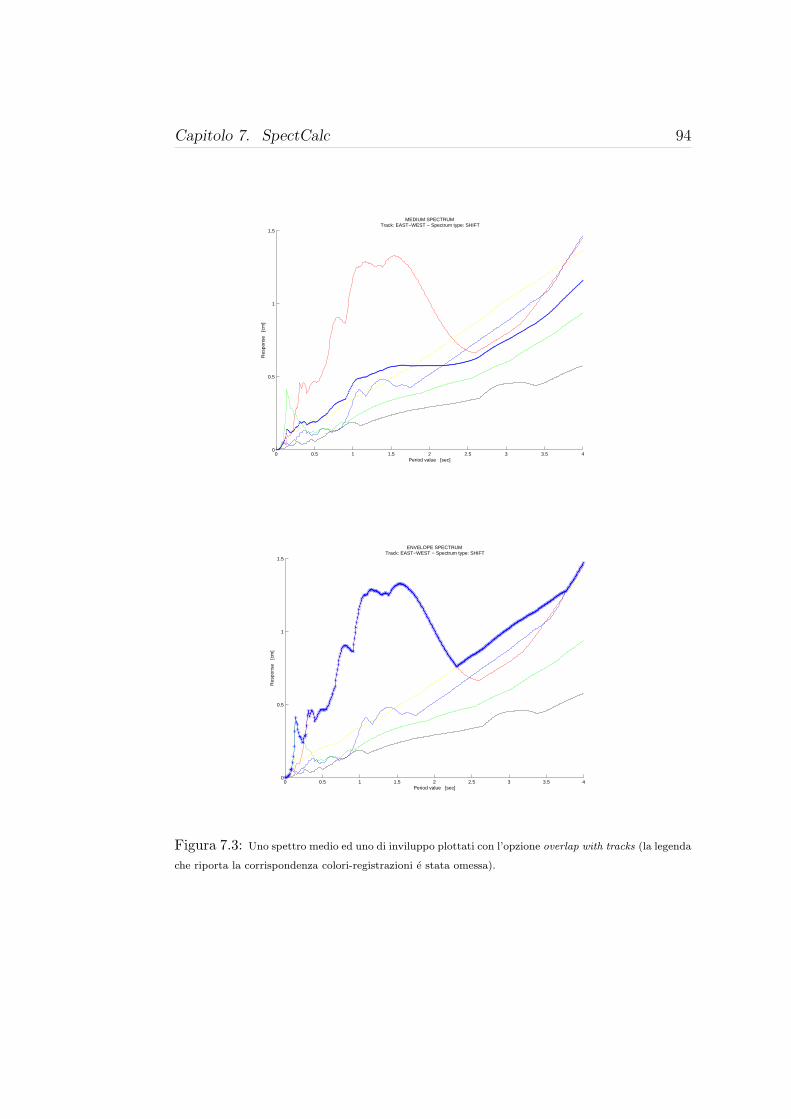
Capitolo 7. SpectCalc 94
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
MEDIUM SPECTRUMTrack: EAST−WEST − Spectrum type: SHIFT
Period value [sec]
Res
pons
e [
cm]
0 0.5 1 1.5 2 2.5 3 3.5 40
0.5
1
1.5
ENVELOPE SPECTRUMTrack: EAST−WEST − Spectrum type: SHIFT
Period value [sec]
Res
pons
e [
cm]
Figura 7.3: Uno spettro medio ed uno di inviluppo plottati con l’opzione overlap with tracks (la legenda
che riporta la corrispondenza colori-registrazioni e stata omessa).
Capitolo 7. SpectCalc 95
7.3.5 Selezione dell’output desiderato
Come si e accennato al paragrafo precedente, il calcolo degli spettri di risposta
selezionati, con le opzioni impostate, produce una o piu matrici contenen-
ti tutti i singoli spettri organizzati in una maniera che potremmo definire
gerarchica.
Si supponga infatti di aver processato l file/variabili, e di ciascuno di
questi aver calcolato m tipi di spettro (con m che puo valere 1, 2 o 3) su n
tracce (con n che puo valere 1, 2 o 3).
Allora, al termine dell’elaborazione, si avra sul workspace una matrice
denominata spects composta da l ·m · n + 1 colonne di cui:
• la prima colonna e il vettore dei periodi;
• le successive colonne a gruppi di m ·n sono gli spettri relativi a ciascun
file/variabile elaborato;
• le colonne relative a ciascun file/variabile sono organizzate in n gruppi
di m: ciascuno di questi e relativo ad una traccia, e le tracce sono
ordinate secondo la sequenza Nord-Sud, Est-Ovest, Z;
• le m colonne relative a ciascuna traccia riportano i tipi di spettro cal-
colati su di essa ed ordinati in spostamento, pseudo-velocita, pseudo-
accelerazione.
Lo schema di Figura 7.4 chiarisce sicuramente le cose.
Se si e scelto di calcolare anche gli spettri medi e di inviluppo allora
il programma salvera sul workspace altre 2 matrici, denominate rispettiva-
mente medium ed envelope, organizzate in maniera analoga a quanto appena
descritto per la matrice spects.
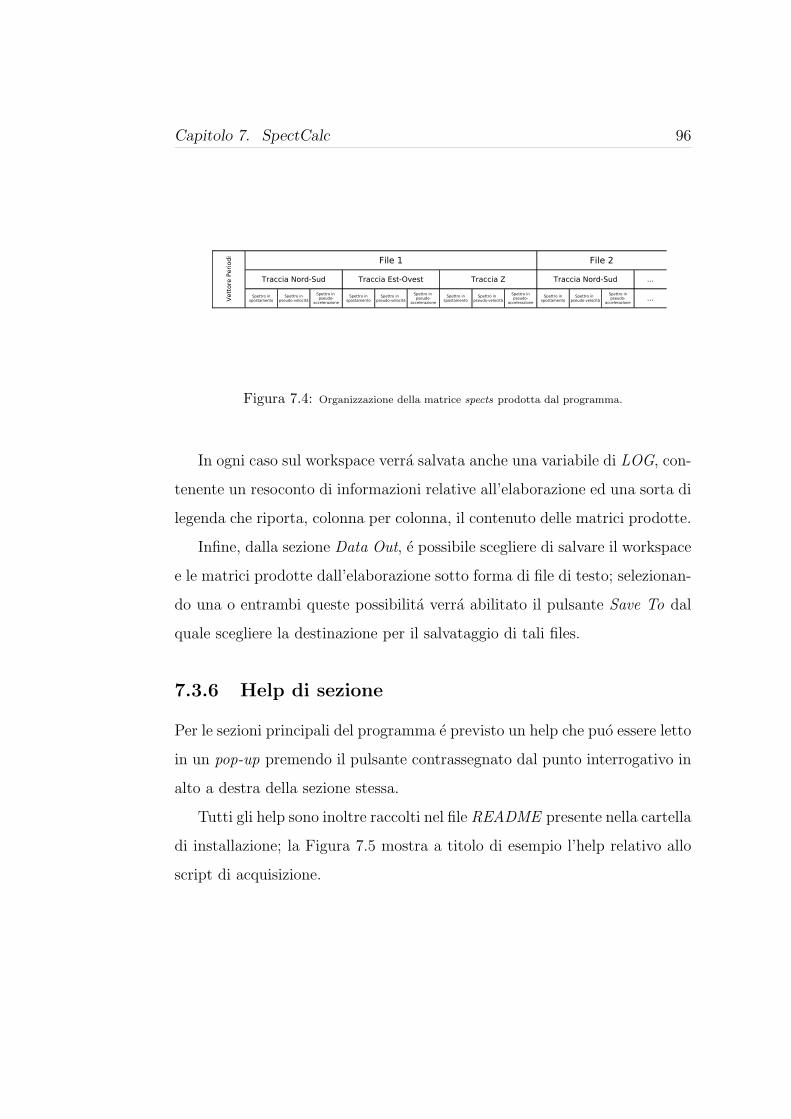
Capitolo 7. SpectCalc 96
Vett
ore
Peri
od
i
File 1 File 2
Traccia Nord-Sud Traccia Est-Ovest Traccia Z Traccia Nord-Sud ...
...Spettro in spostamento
Spettro in pseudo-velocità
Spettro in pseudo-
accelerazione
Spettro in spostamento
Spettro in pseudo-velocità
Spettro in pseudo-
accelerazione
Spettro in spostamento
Spettro in pseudo-velocità
Spettro in pseudo-
accelerazione
Spettro in spostamento
Spettro in pseudo-velocità
Spettro in pseudo-
accelerazione
Figura 7.4: Organizzazione della matrice spects prodotta dal programma.
In ogni caso sul workspace verra salvata anche una variabile di LOG, con-
tenente un resoconto di informazioni relative all’elaborazione ed una sorta di
legenda che riporta, colonna per colonna, il contenuto delle matrici prodotte.
Infine, dalla sezione Data Out, e possibile scegliere di salvare il workspace
e le matrici prodotte dall’elaborazione sotto forma di file di testo; selezionan-
do una o entrambi queste possibilita verra abilitato il pulsante Save To dal
quale scegliere la destinazione per il salvataggio di tali files.
7.3.6 Help di sezione
Per le sezioni principali del programma e previsto un help che puo essere letto
in un pop-up premendo il pulsante contrassegnato dal punto interrogativo in
alto a destra della sezione stessa.
Tutti gli help sono inoltre raccolti nel file README presente nella cartella
di installazione; la Figura 7.5 mostra a titolo di esempio l’help relativo allo
script di acquisizione.
Capitolo 7. SpectCalc 97
Figura 7.5: Help relativo allo script di acquisizione dati del programma SpectCalc.
7.4 Note
L’interfaccia SpectCalc si presenta come uno strumento semplificativo per
l’uso delle funzioni di calcolo degli spettri di risposta ma soprattutto per il
plotting di essi.
Resta tuttavia aperta la possibilita di usare direttamente da riga di co-
mando le funzioni di calcolo sviluppate secondo i ragionamenti discussi al
Capitolo 5, senza l’uso di alcuna interfaccia grafica.
Tra le principali di queste ricordiamo shift spectrum, pseudovel spectrum
e pseudoacc spectrum per il calcolo dei rispettivi 3 tipi di spettro di risposta
singolarmente, e response spectrums per il calcolo di tutti e 3 in un unica
volta.
Tutte le funzioni sviluppate per il calcolo degli spettri sulle singole regis-

Capitolo 7. SpectCalc 98
trazioni sono rilasicate nella cartella spectral functions dell’installazione del
programma SpectCalc, e saranno automaticamente disponibili con esso.
Si noti che le funzioni menzionate richiedono in ingresso gli stessi parametri
che e necesario impostare dall’interfaccia grafica, piu la traccia (gia acquisita)
sulla quale calcolare lo spettro15.
Inoltre, di default, vengono eseguiti i controlli necessari sui parametri e
l’interpolazione lineare dei punti non calcolabili: sono disponibili funzioni
equivalenti che non ffettuano l’interpolazione, identificate dallo stesso nome
seguito dall’appendice ni16.
15Quindi in ordine: periodo iniziale Ti, periodo finale Tf , accuratezza dT , coefficiente di smorzamento
ν, traccia p, frequenza di campionamento fc, parametro anti-aliasing in frequenza α e nel tempo β.16Si veda l’help della funzione di interesse per maggior chiarezza.
Capitolo 8
Conclusioni
Lo sviluppo del lavoro svolto ha portato alla realizzazione di un set di fun-
zioni e di un’interfaccia grafica che troveranno applicazione nell’ambito della
progettazione per l’Ingegneria Civile.
L’argomento trattato si e inoltre rivelato veramente interessante e questa
esperienza mi ha dato modo di approfondire numerosi aspetti legati all’e-
laborazione numerica dei segnali, con un filo conduttore pratico che mi ha
permesso di capire in maniera diretta l’opportunita insita nella scelta di certe
tecniche, cosı come il quadro teorico di riferimento.
Volendo fare un riassunto dei passi percorsi ricordiamo che si e innanzi
tutto introdotto il problema sismico, le onde e la tipologia di segnali con cui
si e avuto a che fare; dopo aver definito lo spettro di risposta e le grandezze
spettrali di utilizzo comune si e dunque passati all’analisi di un approccio
risolutivo nel dominio del tempo.
A questo punto si sono sviluppati i ragionamenti necessari ad analizzare il
problema nel dominio della frequenza, trattando in particolare l’aliasing per
trovare dei vincoli da rispettare per evitare questo fenomeno ed illustrando i
vantaggi di uesto tipo di soluzione.
Capitolo 8. Conclusioni 100
Infine si e mostrato un esempio di utilizzo delle funzioni di calcolo degli
spettri di risposta nel dominio della frequenza e si e presentata l’interfaccia
grafica spectcalc che le rende di facile utilizzo.
Questo lavoro, congiuntamente a quello svolto da altri colleghi, apre la
strada a svariate prospettive, come la realizzazione di routine e programmi
finalizzati ad una deconvoluzione generale in grado di sopprimere una molti-
tudine di disturbi dai segnali sismici, oppure l’implementazione di codici
ottimizzati ad esempio per un’applicazione real-time di tali tecniche diretta-
mente in place sullo strumento, o ancora lo sviluppo di un programma che
riunisca i principali tipi di elaborazione effettuabili su tali dati e ne permetta
un’interazione semplice e diretta.
Sono sicuro che questi interessanti stimoli porteranno in futuro ad ottimi
risultati grazie all’esperienza ed alla disponibilita dei docenti e dei ricercatori
che operano nei dipartimenti della Facolta di Ingegneria di Firenze, ed in
particolare nel Dipartimento di Elettronica e Telecomunicazioni.
Appendice A
Il DeciBel
Il deciBel (simbolo dB) e un decimo di Bel (simbolo B): 10dB = 1B. Il Bel e
ormai caduto in disuso, ma rimane l’ unita di misura fondamentale da cui il
deciBel deriva.
Il deciBel e una misura molto utilizzata in qualunque settore dell’Inge-
gneria (ma non solo) in quanto permette di lavorare in modo semplice con
rapporti, anche molto elevati, di grandezze omogenee1; fu proprio l’obbietti-
vo di misurare rapporti, in particolare l’ attenuazione per miglio delle linee
telefoniche a far si che il Bel, chiamato inizialmente Transmission Unit, fosse
introdotto nei Bell Telephone Laboratory all’ inizio del XX secolo e successi-
vamente, dopo la morte di Alexander Graham Bell nel 1922, rinominato Bel
in suo onore.
Il deciBel e un’ unita di misura di tipo logaritmico2: le corrispondenti
1Esprimibili cioe nella stessa unita di misura, cosı che il loro rapporto e un numero puro adimensionale.2La misura del rapporto fra due grandezze deve essere di tipo logaritmico perche una proprieta in-
dispensabile alla definizione di una misura e la sua additivita. Per esempio, aggiungendo una massa di 1
kg ad un’ altra massa di 1 kg si ottiene una massa di 2 kg; accostando in linea due regoli lunghi 1 m si
ottiene un oggetto lungo 2 m. Ma, se il rapporto fra una grandezza A ed una grandezza omogenea B e 10
ed il rapporto fra B e C e ancora 10, il rapporto fra A e C non e 20, bensı 100.
Appendice A. Il DeciBel 102
misure sono numeri puri, e precisamente un logaritmo in base 10 del rapporto
fra due grandezze omogenee.
L’unita di minura del deciBel e dunque anch’essa adimensionale, quindi
non specifica una grandezza fisica come il metro o il watt, ma deve essere
ugualmente indicata nella misura perche la sua conoscenza e necessaria (e
sufficiente) per risalire dalla misura al rapporto originale.
Definendo la misura di un rapporto come il suo logaritmo si ottiene una
quantita additiva, e questo e uno dei motivi per cui il deciBel e cosı usato.
Un rapporto tra due grandezze omogenee A e B misurato in Bel si definisce
come il logaritmo in base 10 del rapporto stesso, per cui un rapporto misurato
in deciBel e 10 volte il logaritmo in base 10 dello stesso:
RATIOdB = 10 · log
(A
B
)Possiamo quindi legittimamente dire che il rapporto fra una tonnellata e
un chilogrammo e 1000:1, o 3 Bel, o 30 deciBel, cosı come che il rapporto fra
un eurocent e 1000 euro e 1:100000, ossia - 5 Bel, o - 50 dB.
Il rapporto corrispondente a 1 deciBel e meno intuitivo: se A supera B
di 1 dB, il rapporto A:B e pari a 1,25892, mentre se A supera B di 3 dB,
il rapporto A:B risulta 1,995262 : nell’ uso tecnico corrente, questo valore
viene approssimato a 2, per cui si usa dire che un incremento di un valore
di 3 deciBel corrisponde ad un raddoppio, mentre un incremento di - 3 dB
corrisponde ad un dimezzamento3.
Inoltre in Fisica ed Ingegneria spesso si assume che i rapporti in dB che
vengono calcolati siano sempre relativi a energie o potenze, anche partendo da
altre grandezze da cui energie e potenze dipendono non linearmente. Questo
introduce nei calcoli un fattore 20 che puo creare confusione.
3L’ errore che si commette con questa approssimazione e lo stesso che si commette, in informatica,
approssimando 210 (= 1024) con 1k (= 1000).

Appendice A. Il DeciBel 103
Ad esempio, in elettronica ed elettrotecnica, parlando di rapporti in dB
fra tensioni o correnti elettriche, talvolta non si intende il rapporto fra le
grandezze stesse, ma fra le potenze che le tensioni o le correnti sviluppereb-
bero se applicate ad una medesima impendenza. Essendo la potenza P pro-
porzionale al quadrato della tensione V o della corrente I, sfruttando le
proprieta dei logaritmi si ricavano le formule seguenti:
PowerRatiodB = 10 · log
(PA
PB
)= 10 · log
(VA
2
VB2
)= 20 · log
(VA
VB
)
A.1 I deciBel assoluti
Spesso si sceglie di misurare grandezze (tensioni, potenze ecc.) direttamente
in deciBel, ovvero riferendo la grandezza alla sua unita di misura.
Usando la definizione sopra riportata scegliamo per B l’unita di misura
appropriata, ad esempio 1 V o 1 A, specificando questo fatto nel simbolo
dimensionale della misura: decibel-Volt (dBV), decibel-Watt (dBW), decibel-
milliwatt (dBmW) e poi si calcola il rapporto in dB fra la grandezza misurata
e quella di riferimento: per esempio, una tensione di 220 volt equivale a 23,4
dBV (tensione di riferimento 1 V) o a 53,4 dBmV (tensione di riferimento 1
mV)4.
A.2 Operazioni e conversioni con i dB
E chiaro che i dB risultano particolarmente utili nel confronto tra grandezze
omogenee.
4In elettronica e diffuso l’uso di abbreviare la sigla dBmW in dBm, sottintendendo l’unita di misura.

Appendice A. Il DeciBel 104
Se ad esempio si vuole esprimere in dB il rapporto tra le due ampiezze A1
e A2 di uno stesso segnale si puo ottenere il risultato come differenza delle
ampiezze espresse in dB:(A1
A2
)dB
= 20 · log (A1)− 20 · log (A2)
Ovviamente valgono le proprieta dei logaritmi, per cui ad esempio:
10 · log(V 2
)= 20 · log (V )
e
20 · log
(1
V
)= −20 · log (V )
La conversione da dB in lineare si ottiene ovviamente tramite l’esponen-
ziale in base 10:
AdB = 10 · log (A) ⇒ A = 10AdB10
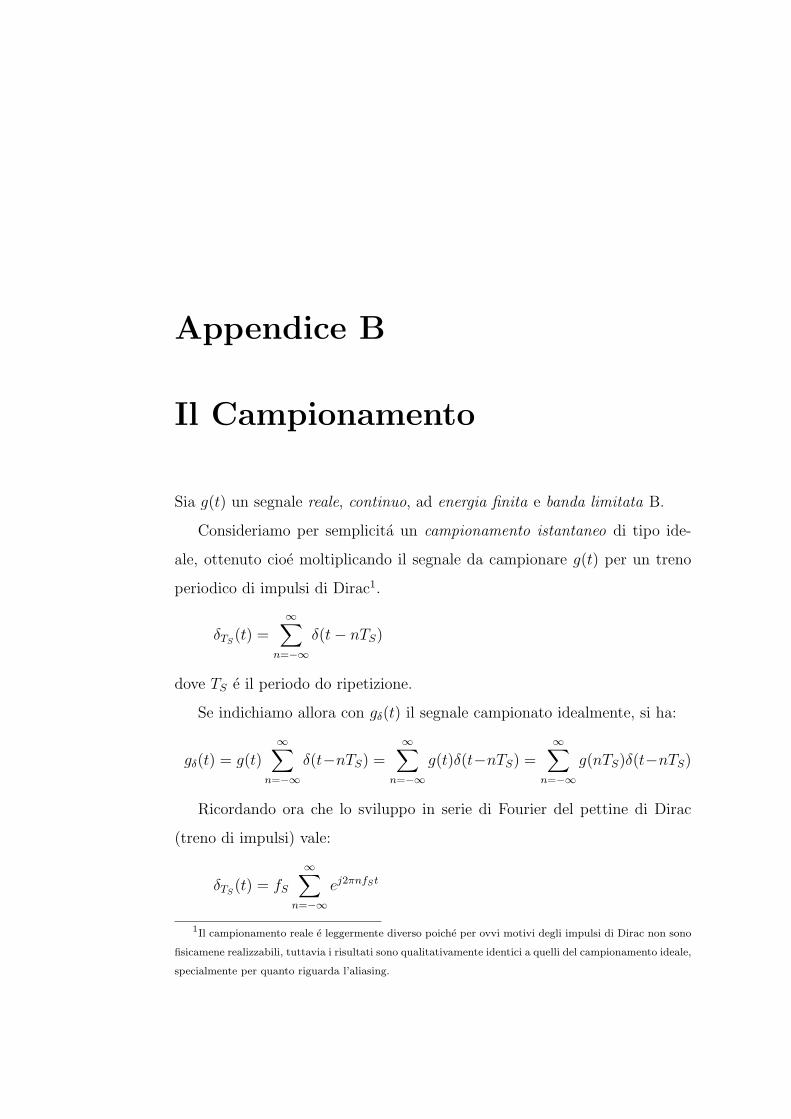
Appendice B
Il Campionamento
Sia g(t) un segnale reale, continuo, ad energia finita e banda limitata B.
Consideriamo per semplicita un campionamento istantaneo di tipo ide-
ale, ottenuto cioe moltiplicando il segnale da campionare g(t) per un treno
periodico di impulsi di Dirac1.
δTS(t) =
∞∑n=−∞
δ(t− nTS)
dove TS e il periodo do ripetizione.
Se indichiamo allora con gδ(t) il segnale campionato idealmente, si ha:
gδ(t) = g(t)∞∑
n=−∞
δ(t−nTS) =∞∑
n=−∞
g(t)δ(t−nTS) =∞∑
n=−∞
g(nTS)δ(t−nTS)
Ricordando ora che lo sviluppo in serie di Fourier del pettine di Dirac
(treno di impulsi) vale:
δTS(t) = fS
∞∑n=−∞
ej2πnfSt
1Il campionamento reale e leggermente diverso poiche per ovvi motivi degli impulsi di Dirac non sono
fisicamene realizzabili, tuttavia i risultati sono qualitativamente identici a quelli del campionamento ideale,
specialmente per quanto riguarda l’aliasing.

Appendice B. Il Campionamento 106
dove fS = 1/TS.
Allora il segnale campionato si esprime come:
gδ(t) = g(t)∞∑
n=−∞
δ(t− nTS) = g(t)fS
∞∑n=−∞
ej2πnfSt
A questo punto risulta agevole valutare la trasformata di Fourier di tale
segnale, e quindi lo spettro, che vale:
Gδ(f) = fS
∞∑n=−∞
G(f − nfS)
Si osserva l’interessante risultato che, a meno del parametro costante fS,
lo spettro del segnale campionato ideale e ottenuto per ripetizione periodica
con periodo fs di quello del segnale originario g(t).
In relazione al valore della frequenza di campionamento fS rispetto alla
banda B del segnale da campionare si hanno due situazioni distinte nello
spettro del segnale campionato:
• se fS > 2B non si ha sovrapposizione delle repliche dello spettro G(f);
• viceversa, se fS < 2B, si ha parziale sovrapposizione delle repliche dello
spettro di G(f).
Nella Figura B.1 sono mostrati, partendo dall’alto, lo spettro del segnale
analogico da campionare, che qui si suppone reale e pari, lo spettro del seg-
nale campionato alla frequenza di Nyquist fS = 2B, e lo spettro del segnale
campionato ad una frequenza inferiore a quella di Nyquist.
Il fenomeno di sovrapposizione delle repliche dello spettro di G(f) che
insorge campionando il segnale ad una frequenza di campionamento troppo
bassa prende il nome di aliasing e porta ad una inevitabile perdita dell’in-
formazione contenuta nel segnale stesso.
Appendice B. Il Campionamento 107
Figura B.1: Modulo dello spettro di un generico segnale g(t) e del risultante dal suo compionamento
a frequenza di Nyquist e a frequenza inferiore (insorgenza di aliasing).
In queste condizioni il segnale originario non sara piu ricostruibile a par-
tire da suoi campioni come avviene invece, in base al teorema di Shannon,
se il segnale e campionato ad una frequenza fS ≥ 2B, ed un’operazione di
ricostruzione restituisce in generale un segnale diverso da quello originale.
Ragionamenti analoghi e duali valgono per il campionamento in frequen-
za: se si campiona lo spettro di un segnale, per passare da una forma d’onda
continua ad un insieme discreto di punti sui quali poter lavorare numerica-
mente, si devono rispettare condizioni sul minimo periodo di campionamento
dello spettro; un sottocampionamento in frequenza genera aliasing nel tempo,

Appendice B. Il Campionamento 108
producendo una sovrapposizione delle repliche dela forma d’onda del segnale,
con una conseguente perdita di informazione.
Bibliografia
[1] Robert E. Sheriff, “What is deconvolution,” Adapted from the
Geophysical Corner in AAPG Explorer, 2004.
[2] Francisco Torrejon Martınez Fracisco Manuel Almazo Pareja, “Tecnica
di deconvoluzione dei segnali sismica,” M.S. thesis, Universita degli
Studi di Firenze, Facolta di Ingegneria, 2008.
[3] R.W. Schafer A.V. Oppenheim, Discrete-Time Signal Processing,
Prentice-Hall, 1989.
[4] Maria Luisa Beconcini, Elementi di Dinamica delle Strutture, Appunti
per il corso di Costruzioni in Zona Sismica. TEP, 1999.
[5] R. Pinho G.M. Calvi, L. Petrini, Criteri di Progettazione Antisismica
degli Edifici, Collana IUSS Press. IUSS Press, 3 edition, 2006.
[6] Ente Nazionale Italiano di Unificazione, “Eurocodice 8, indicazioni pro-
gettuali per la resistenza sismica delle strutture,” Pubblicazione UNI,
1997.
[7] Erasmo Viola, Fondamenti di Dinamica e vibrazione delle Strutture,
Bologna, Pitagora, 2001.
BIBLIOGRAFIA 110
[8] Sergio Rosati, Fisica Generale, Casa Editrice Ambrosiana Milano, 1
edition, 1990.
[9] Enrico Del Re, Elementi di Elaborazione Numerica dei Segnali, Bologna,
Pitagora, 1997.
[10] Massimiliano Laddomada Marina Mondin, Elaborazione Numerica Dei
Segnali, Pearson Education, Italia, 2007.
[11] Monica Gherardelli, Appunti per il Corso di Comunicazioni Elettriche
I, Eprint University Press Firenze, 2006.
[12] Francesco Vasca Alberto Cavallo, Roberto Setola, La nuova guida a
Matlab, Simulink e Control Toolbox, Napoli, Liguori, 2002.