HARDWARE DI I-D E ARCHITETTURA DESCRIZIONE ...E ARCHITETTURA HARDWARE DI I-D ROID 01 VISIONE...
25
DESCRIZIONE GENERALE E ARCHITETTURA HARDWARE DI I-DROID01
Transcript of HARDWARE DI I-D E ARCHITETTURA DESCRIZIONE ...E ARCHITETTURA HARDWARE DI I-D ROID 01 VISIONE...

DESCRIZIONE GENERALE E ARCHITETTURA
HARDWARE DI I-DROID01

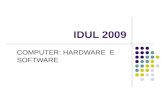
VISIONE GENERALE DEGLI APPARATI
DI CUI È DOTATO I-D01

VISIONE GENERALE
LED VERDI, ROSSI E
GIALLI PER GLI ‘OCCHI’
LED AZZURRI PER LE
‘ORECCHIE’
MECCANISMO MOVIMENTO ALTO/BASSO
RUOTA POSTERIORE
NON MOTRICE
TESTA CON 2 MOTORI
(DOTATI DI ENCODER)
BRACCIA CON MOTORI
(DOTATI DI ENCODER)
GIUNTO NON MOTORIZZATO DEL GOMITO
2 RUOTE MOTRICI
ANTERIORI CON ENCODER

VISIONE GENERALE
SENSORE DI TEMPERATURA (NELLO ZAINO)
DISPLAY E TASTIERA
BREADBOARD PER INGRESSI
E USCITE GENERAL PURPOSE
ADDIZIONALI
SENSORE DI SFIORAMENTO
TELECAMERA CMOS
MICROFONI PER SOUND FOLLOWER
MICROFONO PER RICONOSCIMENTO
VOCALE
SPEAKER
SENSORI A ULTRASUONI
(2 TRASMETTITORI, 3 RICEVITORI)
LUCI DI POSIZIONE

CONTROLLO REMOTO TRAMITE TELEFONO CELLULARE
BLUETOOTH

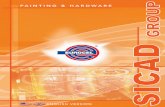
CONTROLLO VIA TELEFONINO
Utilizzabile da telefoni cellulari in grado di eseguire applicazioni Java e dotati di dispositivo Bluetooth

CONTROLLO VIA TELEFONINO
JOYSTICK PER IL CONTROLLO DEI MOVIMENTI
DEL ROBOT
VISUALIZZAZIONE DELLO STATO DEL ROBOT:
TEMPERATURA, LIVELLO
BATTERIE, STATO LUCI DI POSIZIONE
VISUALE DA CAMERA A BORDO
DEL ROBOT
COMANDO IN CORSO DI
ESECUZIONE (IN ROSSO)
TASTO ‘0’: SELEZIONE
MODALITA’ DI CONTROLLO TESTA/BASE
MOBILE
N.B. TRAMITE APPOSITI MENU SARÀ POSSIBILE ANCHE
ATTIVARE E DISATTIVARE I COMPORTAMENTI DI BASE
DEL ROBOT (SEGUI SUONO, EVITA OSTACOLI…)

CONTROLLO VIA TELEFONINO
AVANTI (BASE)
DESTRA (BASE)
INDIETRO (BASE)
SU (BRACCIO SX)
STOP (BRACCIO SX)
GIÙ (BRACCIO SX) SU (TRONCO)
GIÙ(TRONCO)
GIÙ (BRACCIO DX)
STOP (BRACCIO DX)
SU (BRACCIO DX)
SINISTRA (BASE)
STOP (BASE)
INDICATORE MODALITA’ DI CONTROLLO TESTA/BASE (CASO BASE
MOBILE)

CONTROLLO VIA TELEFONINO
AVANTI (TESTA)
DESTRA (TESTA)
INDIETRO (TESTA)
CONTROLLO LED ORECCHIO SX
CONTROLLO LED VERDI OCCHIO SX
CONTROLLO LED GIALLI OCCHIO SX
CONTROLLO LED GIALLI OCCHIO DX
CONTROLLO LED VERDI OCCHIO DX
CONTROLLO LED ORECCHIO DX
SINISTRA (TESTA)
ACCENSIONE SPEGNIMENTO
LUCI DI POSIZIONE
INDICATORE MODALITA’ DI CONTROLLO TESTA/BASE
(CASO TESTA)
CONTROLLO LED ROSSI OCCHI DX E SX

CONTROLLO TRAMITE COMANDI VOCALI

• Il robot è in grado di comprendere numerosi comandi vocali, grazieai quali possono essere attivatevarie funzioni.
• I comandi vocali hanno una determinata struttura, organizzatasu vari livelli attivabili in sequenza.
CONTROLLO VOCALE

• Movimento della base/testa/braccia• Attivazione/disattivazione dei
comportamenti di base (es. segui suono, segui oggetto, evita ostacoli,…)
• Accensione/Spegnimento luci di posizione, tools braccio destro o sinistro, GPO.
CONTROLLO VOCALE
ESEMPI DI FUNZIONI ATTIVABILI VIA VOCE

• Registrazione/riproduzione messaggi sonori
• Comunicazione temperatura• Scatto di una fotografia• Impostazione e attivazione password
biometrica
CONTROLLO VOCALE

I-Droid01, inoltre, è in grado di riconoscere alcune parole di valenza positiva o negativa che influiscono sul suo stato d’animo.
CONTROLLO VOCALE

SINTESI VOCALE E PAROLE PRONUNCIATE DA I-D01

Il robot è in grado di pronunciare diverse frasi a seconda dello stato in cui si trova. Alcuni esempi:
• Accensione: “Ciao! Sono I-Droid01!”• Basso livello batteria: “Ho fame! Per
favore dammi da mangiare!”• Spegnimento: “Ora vado a dormire”
SINTESI VOCALE

Le frasi pronunciate dal robot dipendono anche dal suo ‘umore’. Ad esempio, quando gli viene chiesto di iniziare una nuova attività, I-D01 risponde con “Ok, mi piace questo gioco” se ‘felice’, ma anche con “Non voglio giocare con te” se ‘arrabbiato’.
SINTESI VOCALE

ARCHITETTURA DELLA DOTAZIONE HARDWARE DI I-D01

I-Droid01 è dotato di 7 unità di controllo(alloggiate su schede elettroniche)
• Base controller: per i movimenti della base e il controllo dei sensori a ultrasuoni
• Arms controller: per i movimenti delle braccia e il controllo del sensore di temperatura, luci di posizione e ingressi/uscite general purpose
• Head controller: per i movimenti della testa e il controllo del Sound Follower, led di ‘occhi’e ‘orecchie’ e sensore di sfioramento
ARCHITETTURA HARDWARE

• Motherboard: per il controllo del display e della tastiera e per l’alimentazione degli altri moduli
• Brain & Vision: per l’acquisizione e l’elaborazione di immagini e per la supervisione dei comportamenti del robot, nonché per la gestione della rete neurale.
• Bluetooth module: per la comunicazione via Bluetooth
• Voice: per il riconoscimento e la sintesi vocale
ARCHITETTURA HARDWARE

ARCHITETTURA HARDWARE
µc2 – Arms Controller
µc6 –Bluetooth Module
µc1 – Base Controller µc3 – Head Controller
µc5 – Brain & VisionRAM 16MB , Flash 16MB
PWM Sound Follower
µc4 – Motherboard
µc7 – Voice
USB
RS2
32
(UART finché B&V non presente)
Tele
cam
era
CM
OS
Display
I2C BUS
Microfono
Speaker
Tastiera
Motoriruote
Motoretronco
Ricevitori e trasmettitori a
ultrasuoniMotoribraccia
Tool braccia, general porpuse I/O, led,
sensore temperaturaMotoritesta
MicrofoniSound
Follower
SensoreLed ‘occhi’e
‘orecchie’
UART
UART

RIEPILOGO DELLE PRINCIPALI FUNZIONI DI I-D01

I-Droid01 può portare a termine diverse operazioni, anche complesse. Ad esempio:
• Muoversi in ogni direzione e con diverse velocità
• Avvertire la presenza di ostacoli (anche al buio) ed evitarli nei movimenti
PRINCIPALI FUNZIONI

• Registrare messaggi vocali e suoni e riprodurli a comando
• Trasmettere a distanza (via Bluetooth) ciò che vede
• Riconoscere la presenza di una persona nel suo campo visivo
• Seguire persone e oggetti in movimento• Individuare la provenienza di suoni
PRINCIPALI FUNZIONI

• Evolvere nella propria ‘personalità’ed esprimere i propri ‘stati emotivi’
• Proiettare un fascio di luce e trasportare oggetti
• Essere programmato per combinare diverse funzioni ed eseguire le istruzioni impartite da PC anche via Internet
PRINCIPALI FUNZIONI












![[Arte Architettura Visual Design] Gyorgy Kepes - Il Linguaggio Della Visione](https://static.fdocumenti.com/doc/165x107/55cf8f0e550346703b9882c4/arte-architettura-visual-design-gyorgy-kepes-il-linguaggio-della-visione.jpg)