Generalità sulle trasformazioni geometriche · Grafici trasformati Consideriamo una funzione y =...
55
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 1 Trasformazioni geometriche Generalità sulle trasformazioni geometriche Una trasformazione geometrica è una corrispondenza biunivoca, quindi una funzione, che associa a un punto P del piano in un punto P ’ . Indicando con t una generica trasformazione, con le notazioni utilizzate nelle funzioni, avremo: () ( ) ( ) Essendo t una trasformazione biunivoca esiste anche la trasformazione inversa che trasforma P’ in P Spesso le coordinate di P’ sono esprimibili mediante funzioni matematiche di x e di y, dette equazioni di trasformazione: { ( ) ( ) Si chiama trasformazione identica o identità la trasformazione che ad ogni punto del piano fa corrispondere il punto stesso. In una trasformazione t non identica, chiameremo punto unito un punto che è trasformato in se stesso e figura unita una figura che è trasformata in se stessa. Se tutti i punti di una figura sono punti uniti anche la figura è unita; non sempre è vero il viceversa: i punti di una figura unita, rispetto ad una trasformazione t, possono non essere punti uniti. Ad esempio la trasformazione che associa ad un punto P di una P(x ; y) P’(x’ ; y’) 1
Transcript of Generalità sulle trasformazioni geometriche · Grafici trasformati Consideriamo una funzione y =...

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 1
Trasformazioni geometriche
Generalità sulle trasformazioni geometriche
Una trasformazione geometrica è una corrispondenza biunivoca, quindi una funzione, che associa
a un punto P del piano in un punto P’. Indicando con t una generica trasformazione, con le
notazioni utilizzate nelle funzioni, avremo:
( ) ( ) ( )
Essendo t una trasformazione biunivoca esiste anche la trasformazione inversa che trasforma P’ in P
Spesso le coordinate di P’ sono esprimibili mediante funzioni matematiche di x e di y, dette equazioni di
trasformazione:
{ ( )
( )
Si chiama trasformazione identica o identità la trasformazione che ad ogni punto del piano fa
corrispondere il punto stesso.
In una trasformazione t non identica, chiameremo punto unito un punto che è trasformato in se stesso e
figura unita una figura che è trasformata in se stessa. Se tutti i punti di una figura sono punti uniti anche la
figura è unita; non sempre è vero il viceversa: i punti di una figura unita, rispetto ad una trasformazione t,
possono non essere punti uniti. Ad esempio la trasformazione che associa ad un punto P di una
P(x ; y)
P’(x’ ; y’)
𝑡 1
𝑡

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 2
circonferenza il punto P’ tale che PP’ sia diametro trasforma la circonferenza in se stessa anche se i punti
non sono uniti.
Poiché le trasformazioni sono funzioni si possono fare composizioni di trasformazioni come in figura
( ) ( )
( )
Quindi
( ) → ( )
Esempio
Si considerino le trasformazioni:
1 {
{
Si determini l’immagine di P(1, -3) nelle trasformazioni 1 1 . Si scrivano quindi le espressioni
analitiche di tali trasformazioni composte.
( ) ( )
( )
( ) ( )
( )
Quindi
( ) → ( )
𝑡 𝑡 𝑡1
𝑡
P(x ; y)
P’(x’; y’) 𝑡1
P’’(x’’ ; y’’)

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 3
( ) → ( )
Considerando un generico punto P(x; y) determiniamo le espressioni analitiche delle trasformazioni
composte
( ) ( )
( )
( ) ( )
( )
Quindi
1 {
1 {
Osservazione
Dall’esempio si evince che la composizione delle trasformazioni non è commutativa ossia in generale
1 1
Trasformazione involutoria
Una trasformazione si dice involutoria se, componendola con se stessa, ossia applicandola due volte, si
ottiene lo stesso punto di partenza, cioè tale composizione è una identità. Pertanto una trasformazione
involutoria coincide con la sua inversa.
( ) ( )
( )
La trasformazione che associa ad un punto P di una circonferenza il punto P’ tale che PP’ sia diametro è
involutoria; infatti applicandola due volte si ottiene lo stesso punto di partenza.
Proprietà invarianti rispetto ad una trasformazione
P’(x’; y’) P(x; y)

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 4
Si dice che una certa proprietà geometrica è invariante rispetto ad una trasformazione t se,
comunque si scelga una figura geometrica F che gode di tale proprietà, anche la figura F’ = F(t),
trasformata di F, gode di tale proprietà.
Affinità
Si dice affinità una trasformazione biunivoca che muta rette in rette; conserva l’allineamento (per
questo vengono anche dette trasformazioni lineari) e il parallelismo. Non conserva le distanze né
gli angoli, cioè non conserva la forma delle figure.
Le trasformazioni delle affinità sono date dalle seguenti equazioni lineari:
{
Fissata , viceversa, una coppia di valori (x’ ; y’), è possibile ricavare (x ; y), cioè la trasformazione
inversa risolvendo il sistema:
{
la cui soluzione è garantita dalla condizione .
Se una figura ha area S e la sua trasformata nell’affinità ha area S’, allora risulta:
| |
Il numero è detto rapporto di affinità o costante di affinità.
Proprietà invarianti delle affinità
1. L’allineamento: le immagini di tre punti allineati sono allineati
2. L’appartenenza ad segmento: se C appartiene ad un segmento AB anche C’ immagine di C
appartiene al segmento A’B’ immagine di AB
3. Il parallelismo: le immagini di due rette parallele sono ancora parallele

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 5
4. L’incidenza: le immagini di due rette incidenti sono ancora incidenti e il loro punto di
intersezione è l’immagine del punto d’intersezione delle rette date
5. Il rapporto tra aree: se α e β sono le aree di due figure e α’ e β’ sono le aree delle loro
rispettive trasformate si ha che: α : β = α’ : β’
Esempio 1
Dato il triangolo ABC di vertici A(0; 0), B(1; 0), C(0; 1), determinare i vertici del suo trasformato
A’B’C’ nell’affinità di equazioni:
{
Determinare poi gli eventuali punti uniti nella trasformazione assegnata.
Soluzione
Sostituendo nelle equazioni della trasformazione le coordinate dei punti si ottengono le
coordinate dei punti trasformati:
{
( )
{
( )
{
( )
Per determinare gli eventuali punti uniti dell’affinità basta porre nelle equazioni della
trasformazione: x’ = x e y’ = y:
{
{
{
Esempio 2
Verificare che, nell’affinità di equazioni:
{
l’asse x è una retta unita e che il punto P(1; 0) è unito. Sapendo poi che il trasformato C’ di un
cerchio C ha l’area che misura 24π, si chiede di determinare la misura del raggio di C.

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 6
Soluzione
Un qualunque punto dell’asse delle x ha coordinate (x; 0). Sostituendo tali coordinate
nell’equazioni si ottiene:
{
Un punto di coordinate (2x – 1; 0) appartiene ancora all’asse delle x. L’asse delle x è, quindi, una
retta unita, anche se non è fatta di punti uniti. Il punto (1; 0) è unito. Infatti sostituendolo
nell’equazioni si ottiene lo stesso punto
( ) {
( )
L’area di C’=24π;
;
; ; ; .
Esempio 3
Una retta ha equazione y = 3x + 1. Scrivere l’equazione della retta trasformata nell’affinità:
{
Soluzione
Ci ricaviamo x e y dalle due equazioni e le sostituiamo nella retta.
{
{
{
Sostituendo nella retta la soluzione del sistema si ottiene la retta x + 2y – 4 = 0.
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 7
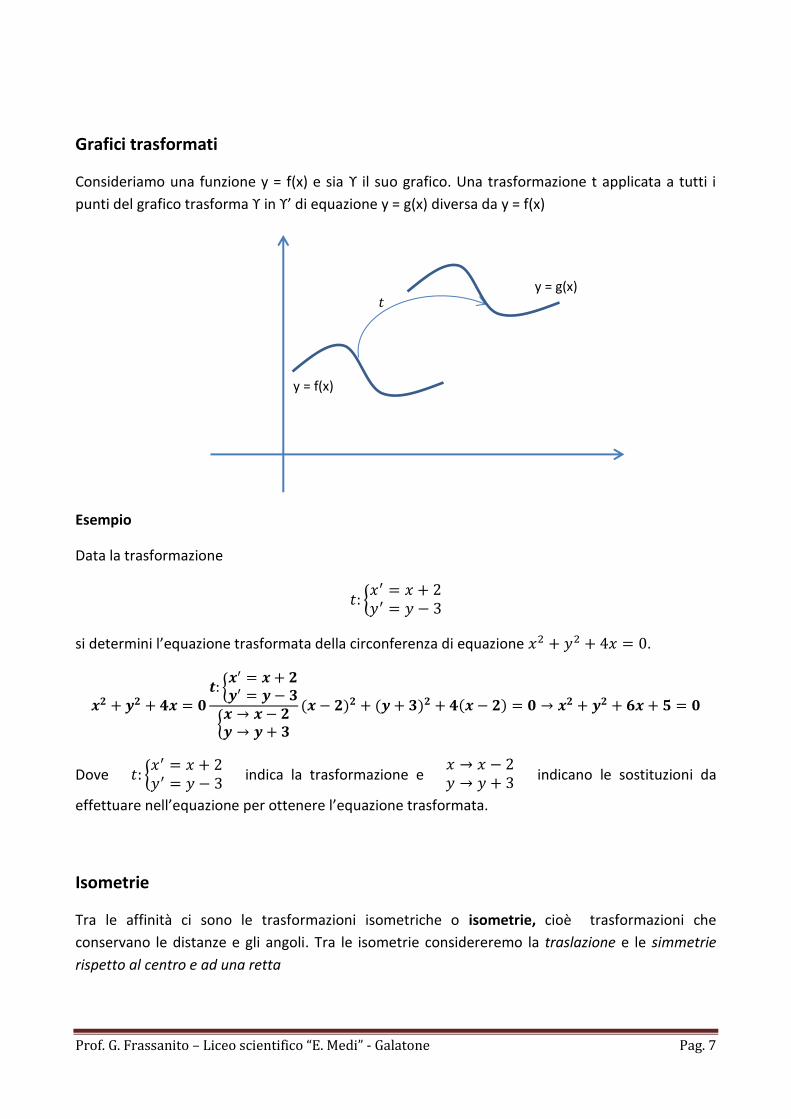
Grafici trasformati
Consideriamo una funzione y = f(x) e sia ϒ il suo grafico. Una trasformazione t applicata a tutti i
punti del grafico trasforma ϒ in ϒ’ di equazione y = g(x) diversa da y = f(x)
Esempio
Data la trasformazione
{
si determini l’equazione trasformata della circonferenza di equazione .
{
{
( ) ( ) ( )
Dove {
indica la trasformazione e
indicano le sostituzioni da
effettuare nell’equazione per ottenere l’equazione trasformata.
Isometrie
Tra le affinità ci sono le trasformazioni isometriche o isometrie, cioè trasformazioni che
conservano le distanze e gli angoli. Tra le isometrie considereremo la traslazione e le simmetrie
rispetto al centro e ad una retta
y = f(x)
y = g(x) 𝑡
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 8
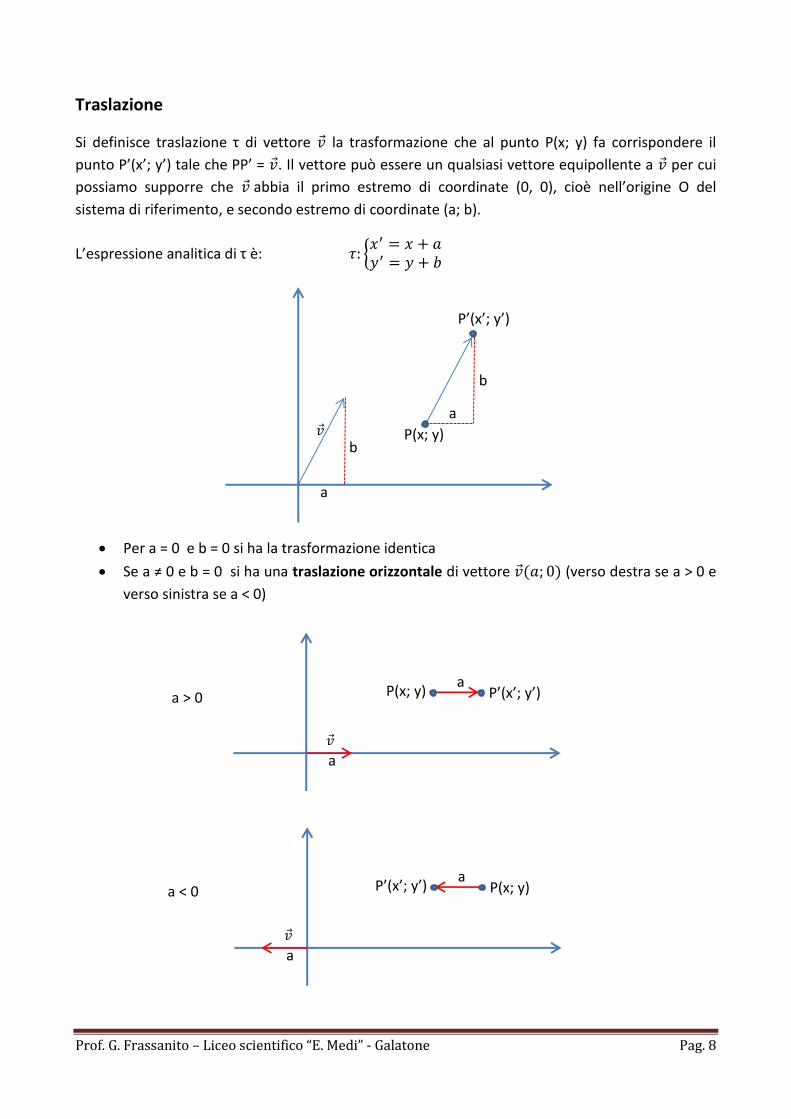
Traslazione
Si definisce traslazione τ di vettore la trasformazione che al punto P(x; y) fa corrispondere il
punto P’(x’; y’) tale che PP’ = . Il vettore può essere un qualsiasi vettore equipollente a per cui
possiamo supporre che abbia il primo estremo di coordinate (0, 0), cioè nell’origine O del
sistema di riferimento, e secondo estremo di coordinate (a; b).
L’espressione analitica di τ è: {
Per a = 0 e b = 0 si ha la trasformazione identica
Se a ≠ 0 e b = 0 si ha una traslazione orizzontale di vettore ( ) (verso destra se a > 0 e
verso sinistra se a < 0)
P’(x’; y’)
��
b
a
b
a
P(x; y)
P’(x’; y’)
��
a
a
P(x; y) a > 0
P(x; y)
��
a
a
P’(x’; y’) a < 0
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 9
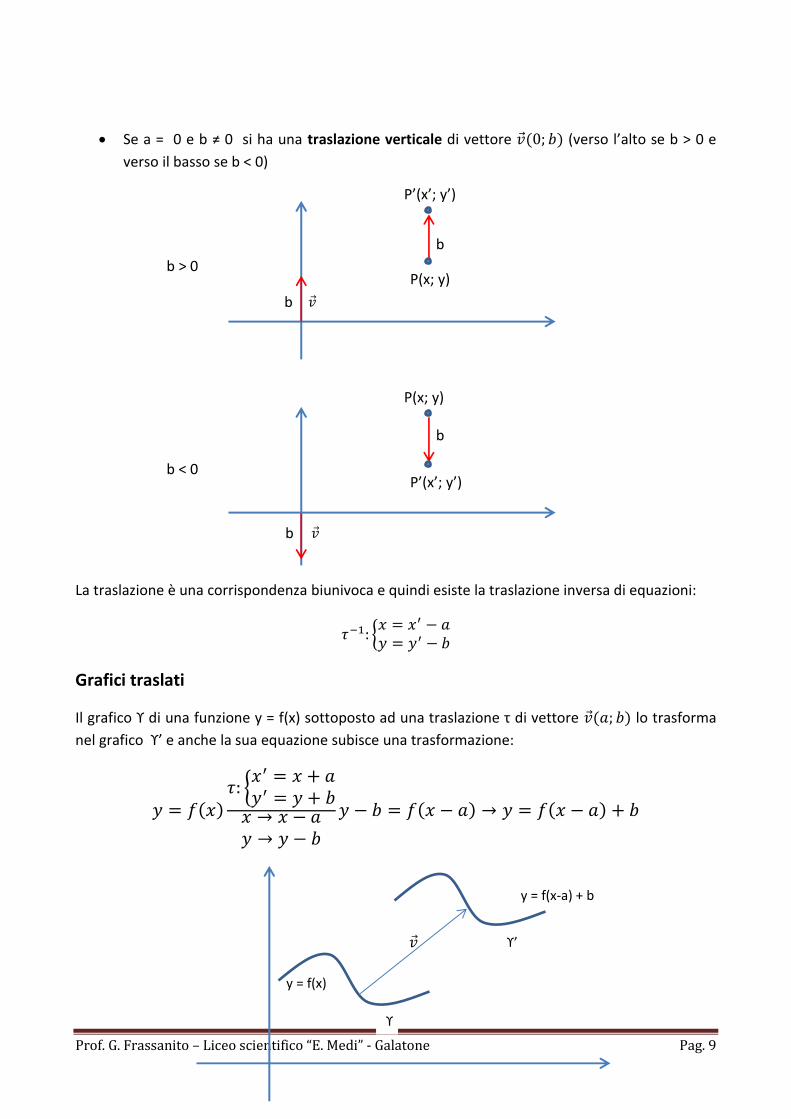
Se a = 0 e b ≠ 0 si ha una traslazione verticale di vettore ( ) (verso l’alto se b > 0 e
verso il basso se b < 0)
La traslazione è una corrispondenza biunivoca e quindi esiste la traslazione inversa di equazioni:
1 {
Grafici traslati
Il grafico ϒ di una funzione y = f(x) sottoposto ad una traslazione τ di vettore ( ) lo trasforma
nel grafico ϒ’ e anche la sua equazione subisce una trasformazione:
( ) {
( ) ( )
y = f(x)
y = f(x-a) + b
��
ϒ
ϒ’
P’(x’; y’)
��
b
b
P(x; y) b > 0
P(x; y)
��
b
b
P’(x’; y’) b < 0
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 10
Esempio 1
Dimostrare che una generica traslazione non ha punti uniti.
Soluzione
Per determinare i punti uniti bisogna sostituire x’ a x e y’ a y nell’equazioni {
che
sono impossibili e per cui non esistono punti uniti.
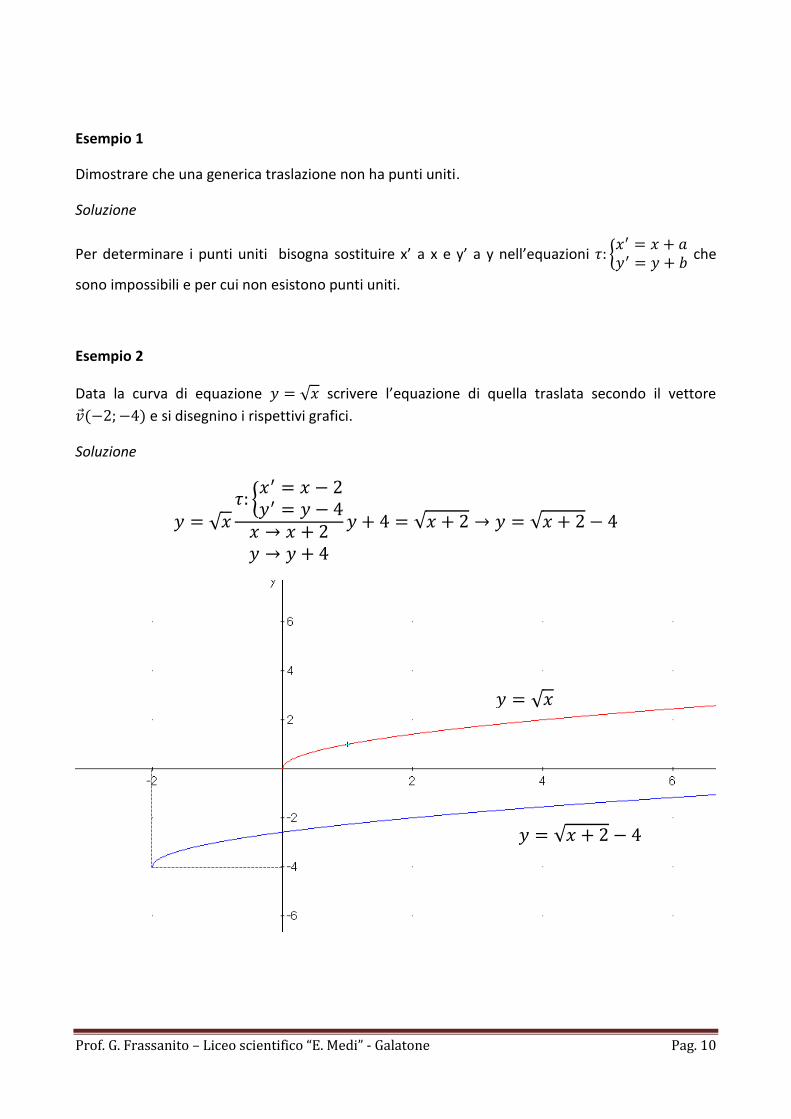
Esempio 2
Data la curva di equazione √ scrivere l’equazione di quella traslata secondo il vettore
( ) e si disegnino i rispettivi grafici.
Soluzione
√ {
√ √
√
√

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 11
Esempio 3
Una traslazione τ trasforma il grafico della funzione 1
in quello della funzione
.
Individuare la traslazione.
Soluzione
{
( )
( )
( )
Applicando il principio d’identità dei polinomi abbiamo:
{
{
La traslazione cercata è:
{
Esercizi proposti
1. Dopo aver tracciato il grafico della funzione dedurre i grafici delle seguenti funzioni:
( ) ( ) ( )
2. Dopo aver tracciato il grafico della funzione √ dedurre i grafici delle seguenti
funzioni:
√ √ √ √
3. Tracciare il grafico della funzione operando sul grafico della parabola
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 12
Simmetrie
Definizioni fondamentali
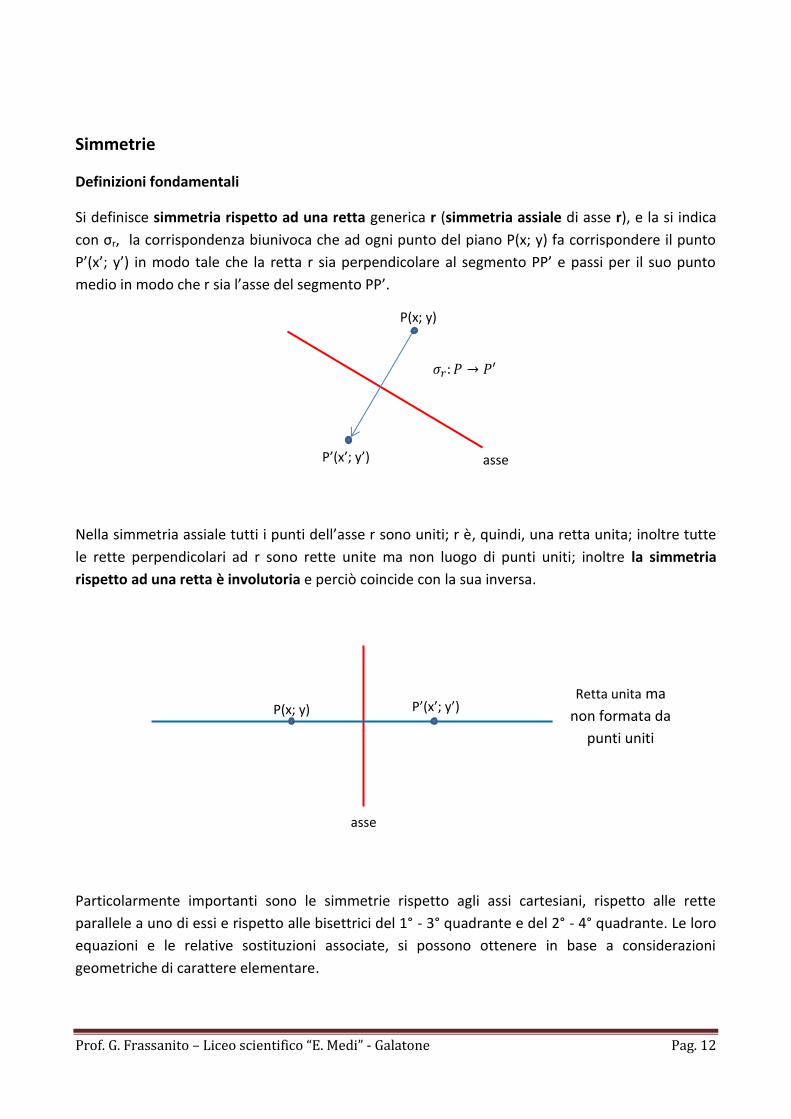
Si definisce simmetria rispetto ad una retta generica r (simmetria assiale di asse r), e la si indica
con σr, la corrispondenza biunivoca che ad ogni punto del piano P(x; y) fa corrispondere il punto
P’(x’; y’) in modo tale che la retta r sia perpendicolare al segmento PP’ e passi per il suo punto
medio in modo che r sia l’asse del segmento PP’.
Nella simmetria assiale tutti i punti dell’asse r sono uniti; r è, quindi, una retta unita; inoltre tutte
le rette perpendicolari ad r sono rette unite ma non luogo di punti uniti; inoltre la simmetria
rispetto ad una retta è involutoria e perciò coincide con la sua inversa.
Particolarmente importanti sono le simmetrie rispetto agli assi cartesiani, rispetto alle rette
parallele a uno di essi e rispetto alle bisettrici del 1° - 3° quadrante e del 2° - 4° quadrante. Le loro
equazioni e le relative sostituzioni associate, si possono ottenere in base a considerazioni
geometriche di carattere elementare.
asse P’(x’; y’)
P(x; y)
𝜎𝑟 𝑃 𝑃
P(x; y) P’(x’; y’)
asse
Retta unita ma
non formata da
punti uniti
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 13
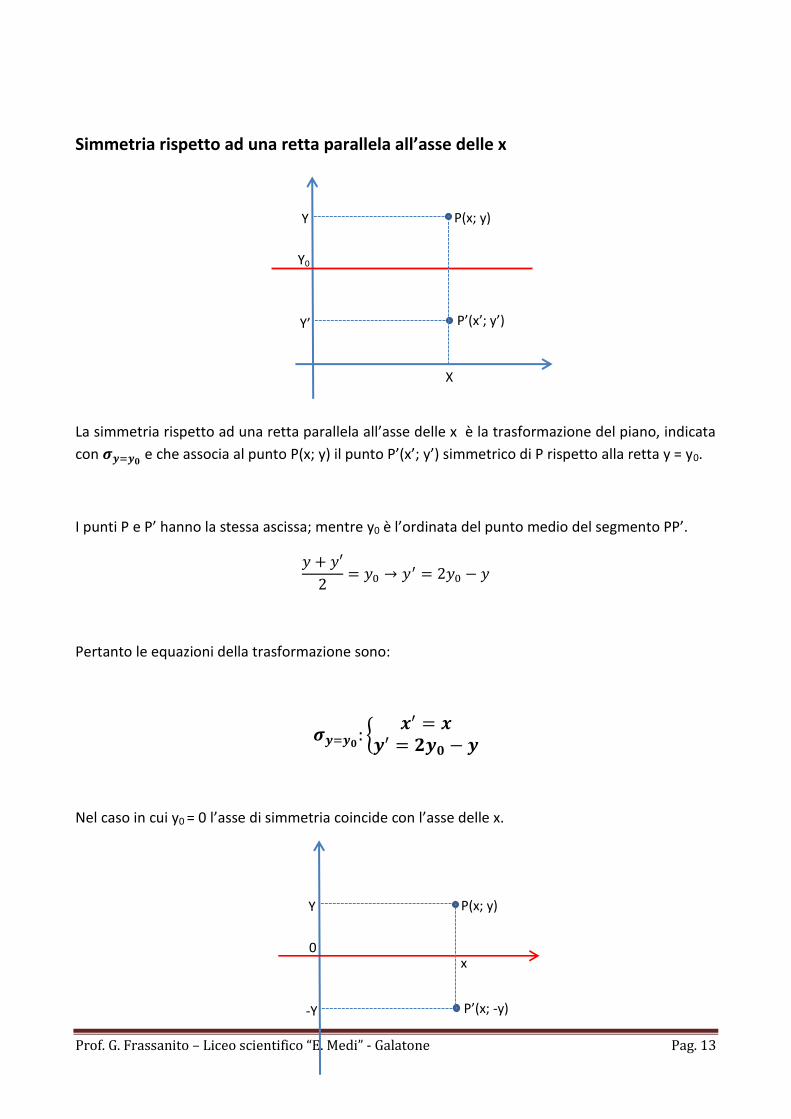
Simmetria rispetto ad una retta parallela all’asse delle x
La simmetria rispetto ad una retta parallela all’asse delle x è la trasformazione del piano, indicata
con e che associa al punto P(x; y) il punto P’(x’; y’) simmetrico di P rispetto alla retta y = y0.
I punti P e P’ hanno la stessa ascissa; mentre y0 è l’ordinata del punto medio del segmento PP’.
Pertanto le equazioni della trasformazione sono:
{
Nel caso in cui y0 = 0 l’asse di simmetria coincide con l’asse delle x.
X
Y
Y’ P’(x’; y’)
Y0
P(x; y)
x
Y
-Y P’(x; -y)
0
P(x; y)

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 14
In questo caso, le equazioni della trasformazione sono:
Esempio
Si consideri la circonferenza ϒ di centro C(-1; 2) e raggio √ . Determinare l’equazione di ϒ’
simmetrica di ϒ rispetto alla retta passante per A(0; 2) e parallela all’asse y.
Soluzione
Equazione della circonferenza:
( ) ( )
Equazione della retta passante per A e parallela all’asse y: y = 2
Equazioni della simmetria:
{
{
Facendo tali sostituzioni nell’equazione della circonferenza determiniamo ϒ’
( ) ( )
Avendo trovato la stessa equazione significa che la circonferenza è simmetrica rispetto a tale retta.
{
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 15
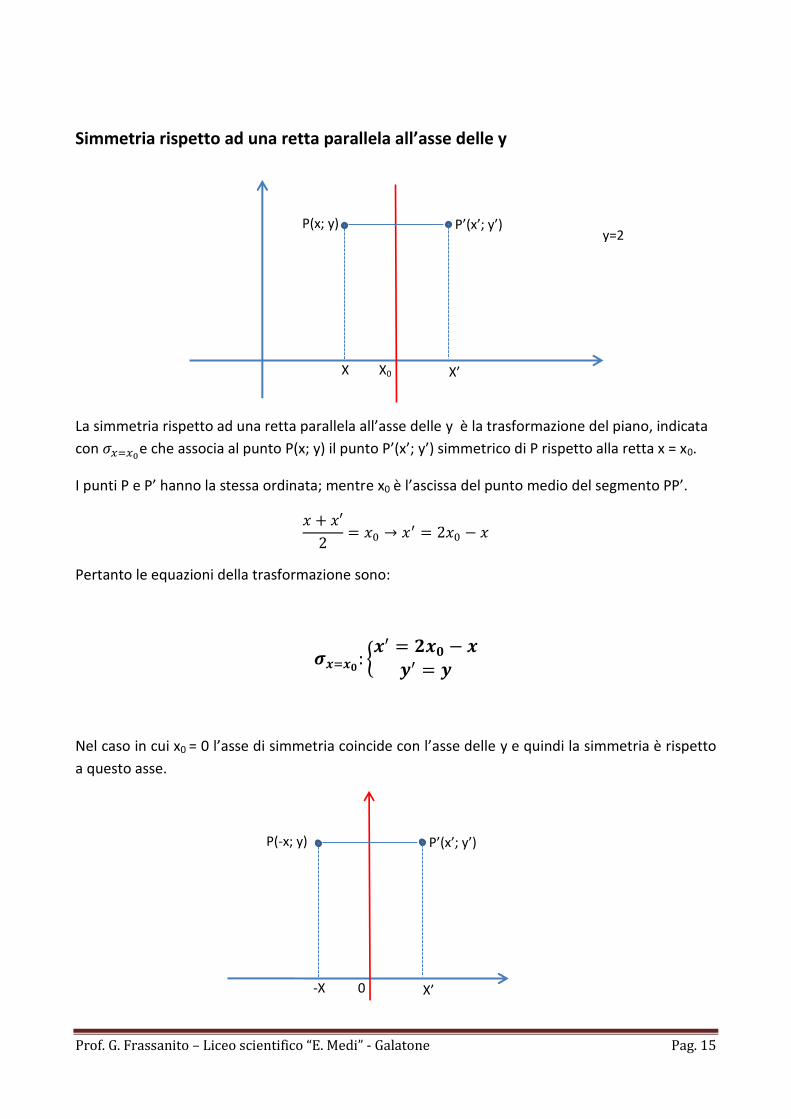
Simmetria rispetto ad una retta parallela all’asse delle y
La simmetria rispetto ad una retta parallela all’asse delle y è la trasformazione del piano, indicata
con e che associa al punto P(x; y) il punto P’(x’; y’) simmetrico di P rispetto alla retta x = x0.
I punti P e P’ hanno la stessa ordinata; mentre x0 è l’ascissa del punto medio del segmento PP’.
Pertanto le equazioni della trasformazione sono:
{
Nel caso in cui x0 = 0 l’asse di simmetria coincide con l’asse delle y e quindi la simmetria è rispetto
a questo asse.
X X’ X0
P(x; y) P’(x’; y’)
-X X’ 0
P(-x; y) P’(x’; y’)
y=2
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 16
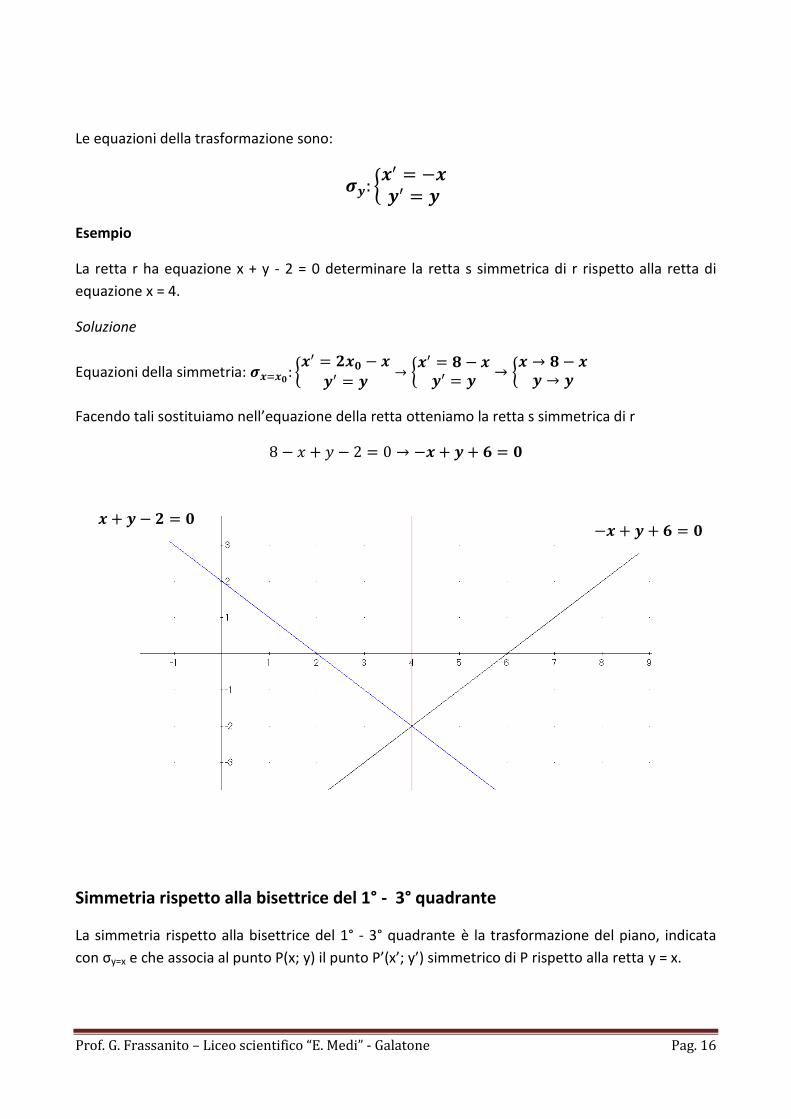
Le equazioni della trasformazione sono:
{
Esempio
La retta r ha equazione x + y - 2 = 0 determinare la retta s simmetrica di r rispetto alla retta di
equazione x = 4.
Soluzione
Equazioni della simmetria: {
{
{
Facendo tali sostituiamo nell’equazione della retta otteniamo la retta s simmetrica di r
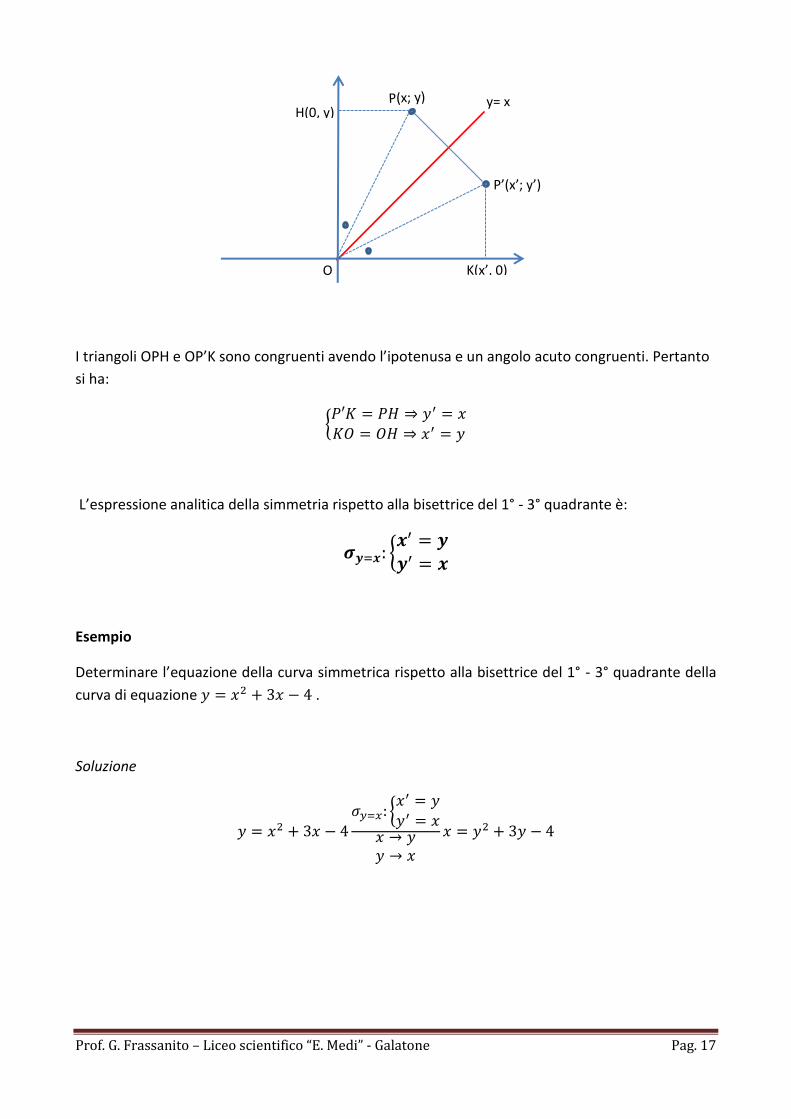
Simmetria rispetto alla bisettrice del 1° - 3° quadrante
La simmetria rispetto alla bisettrice del 1° - 3° quadrante è la trasformazione del piano, indicata
con σy=x e che associa al punto P(x; y) il punto P’(x’; y’) simmetrico di P rispetto alla retta y = x.
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 17
I triangoli OPH e OP’K sono congruenti avendo l’ipotenusa e un angolo acuto congruenti. Pertanto
si ha:
{
L’espressione analitica della simmetria rispetto alla bisettrice del 1° - 3° quadrante è:
{
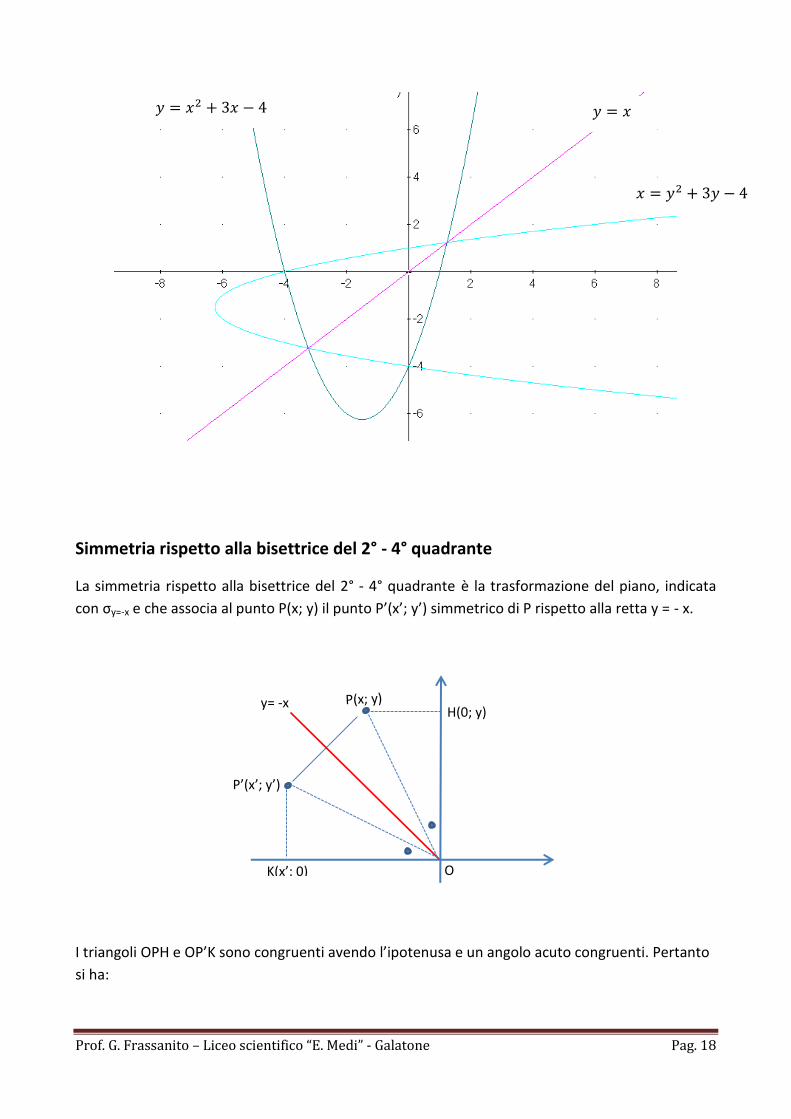
Esempio
Determinare l’equazione della curva simmetrica rispetto alla bisettrice del 1° - 3° quadrante della
curva di equazione .
Soluzione
{
H(0, y)
K(x’, 0)
y= x
O
P’(x’; y’)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 18
Simmetria rispetto alla bisettrice del 2° - 4° quadrante
La simmetria rispetto alla bisettrice del 2° - 4° quadrante è la trasformazione del piano, indicata
con σy=-x e che associa al punto P(x; y) il punto P’(x’; y’) simmetrico di P rispetto alla retta y = - x.
I triangoli OPH e OP’K sono congruenti avendo l’ipotenusa e un angolo acuto congruenti. Pertanto
si ha:
H(0; y)
K(x’; 0)
y= -x
O
P’(x’; y’)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 19
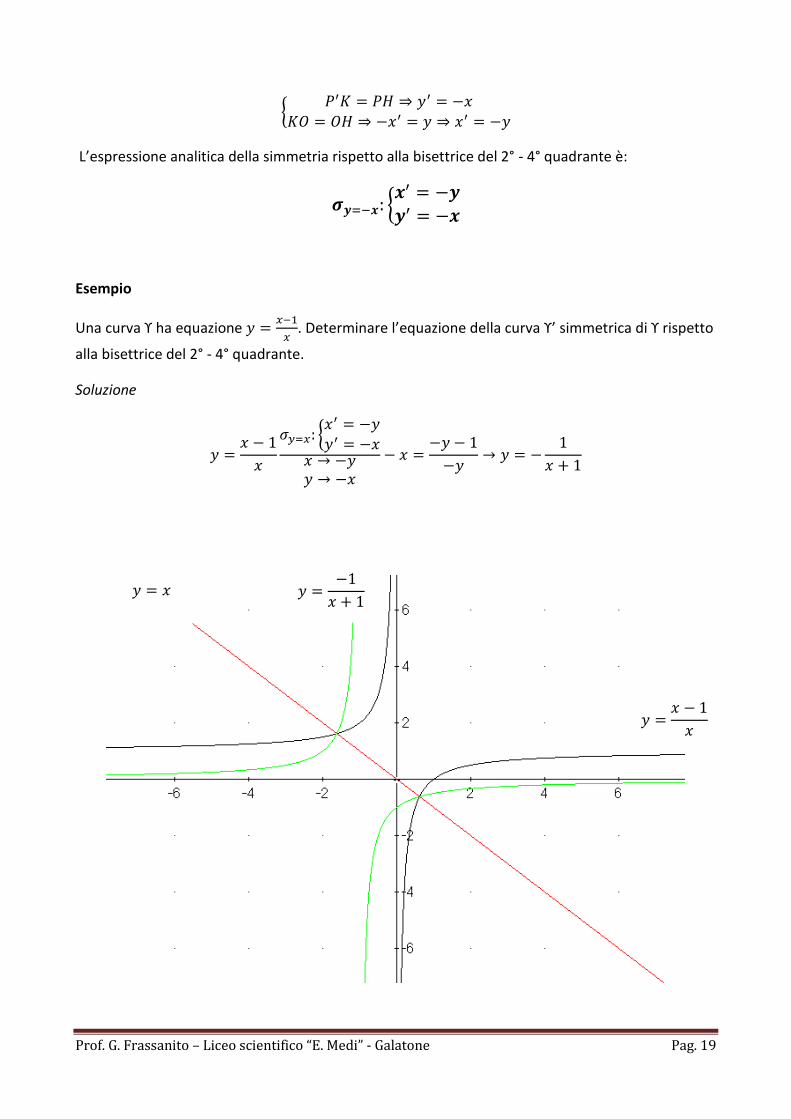
{
L’espressione analitica della simmetria rispetto alla bisettrice del 2° - 4° quadrante è:
{
Esempio
Una curva ϒ ha equazione 1
. Determinare l’equazione della curva ϒ’ simmetrica di ϒ rispetto
alla bisettrice del 2° - 4° quadrante.
Soluzione
{

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 20
Simmetria rispetto ad una retta non parallela agli assi
A causa della loro complessità non formuleremo le equazioni di una generica simmetria assiale ma
illustreremo, con un esempio, un metodo che consenta, data l’equazione di una retta r, di
determinare le equazioni della simmetria rispetto a essa.
Esempio
Determinare le equazioni della simmetria rispetto alla retta r di equazione: 2x – y -2 = 0
Il punto medio M di PP’ ha coordinate:
(
)
Il coefficiente angolare di PP’ è:
Il punto M appartiene alla retta r e quindi le sue coordinate devono soddisfare l’equazione della retta r:
Inoltre dev’essere ; questo vuol dire che:
Ponendo a sistema le due equazioni trovate e risolvendolo rispetto alle incognite x’ e y’, si
ottengono le equazioni della simmetria assiale σr
M
r:asse P’(x; y)
P(x; y)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 21
{
{
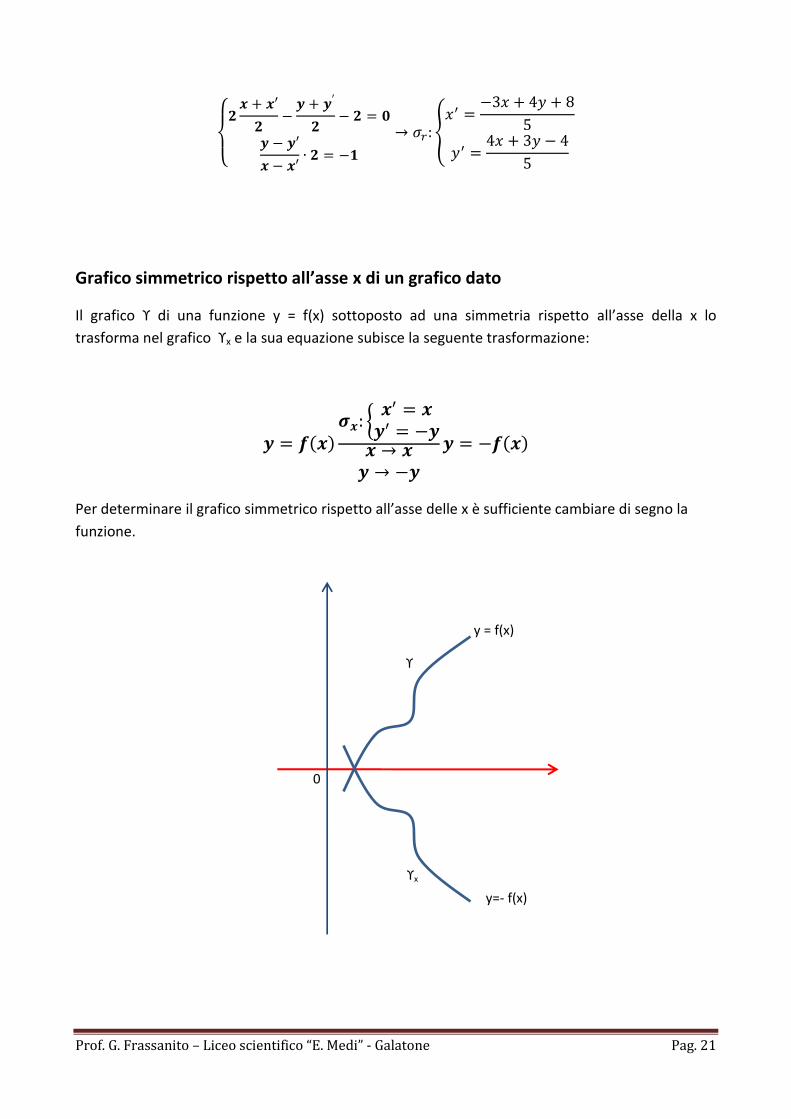
Grafico simmetrico rispetto all’asse x di un grafico dato
Il grafico ϒ di una funzione y = f(x) sottoposto ad una simmetria rispetto all’asse della x lo
trasforma nel grafico ϒx e la sua equazione subisce la seguente trasformazione:
( ) {
( )
Per determinare il grafico simmetrico rispetto all’asse delle x è sufficiente cambiare di segno la
funzione.
ϒx
ϒ
0
y=- f(x)
y = f(x)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 22
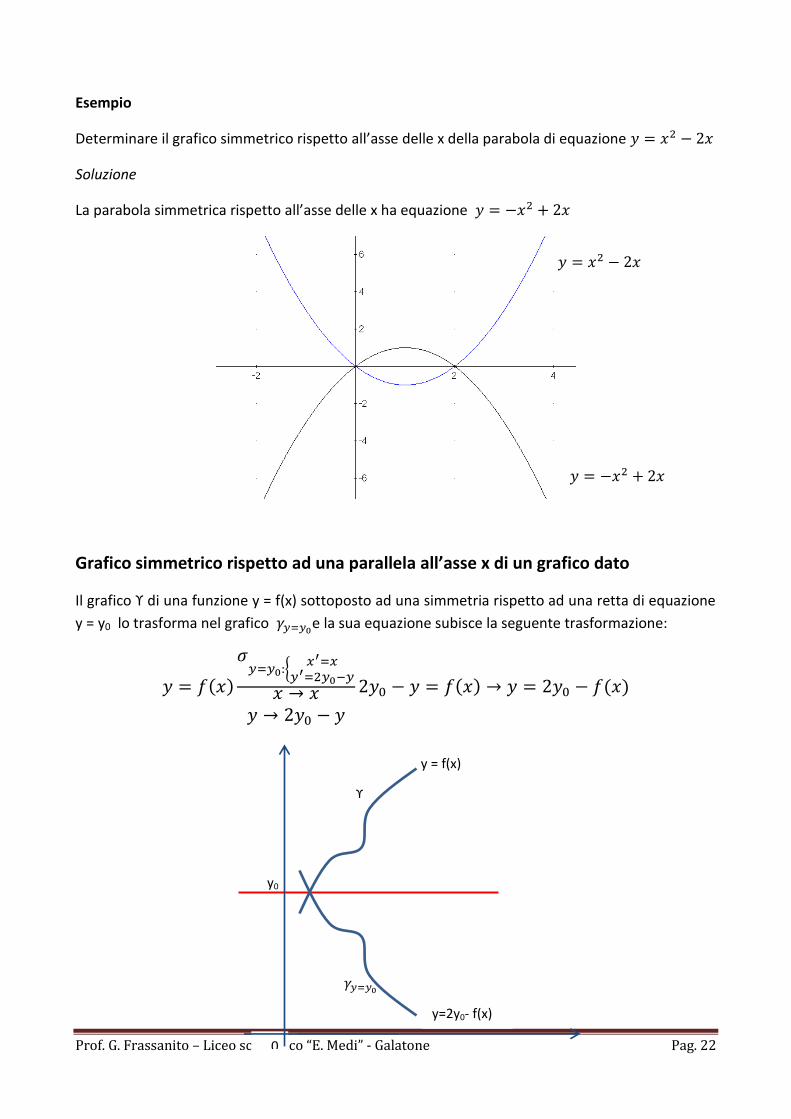
Esempio
Determinare il grafico simmetrico rispetto all’asse delle x della parabola di equazione
Soluzione
La parabola simmetrica rispetto all’asse delle x ha equazione
Grafico simmetrico rispetto ad una parallela all’asse x di un grafico dato
Il grafico ϒ di una funzione y = f(x) sottoposto ad una simmetria rispetto ad una retta di equazione
y = y0 lo trasforma nel grafico e la sua equazione subisce la seguente trasformazione:
( )
{
( ) ( )
y0
𝛾𝑦 𝑦
ϒ
0
y=2y0- f(x)
y = f(x)

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 23
Esempio
Determinare l’equazione del grafico simmetrico rispetto alla retta di equazione y = 4 della
parabola di equazione
Soluzione
La parabola simmetrica rispetto alla retta di equazione y = 4 ha equazione
( )
Grafico simmetrico rispetto all’asse y di un grafico dato
Il grafico ϒ di una funzione y = f(x) sottoposto ad una simmetria rispetto all’asse della y lo
trasforma nel grafico ϒy e la sua equazione subisce la seguente trasformazione:
( ) {
( )
ϒy ϒ
0
y= f(-x) y = f(x)

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 24
Per determinare il grafico simmetrico rispetto all’asse delle x è sufficiente cambiare di segno la
variabile x.
Esempio
Determinare l’equazione del grafico simmetrico rispetto all’asse delle y della parabola di
equazione .
Soluzione
Per determinare l’equazione richiesta è sufficiente cambiare di segno la variabile x
( ) ( ) ( )
Grafico simmetrico rispetto ad una parallela all’asse y di un grafico dato
Il grafico ϒ di una funzione y = f(x) sottoposto ad una simmetria rispetto ad una retta di equazione
x = x0 lo trasforma nel grafico e la sua equazione subisce la seguente trasformazione:
( )
{
( )
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 25
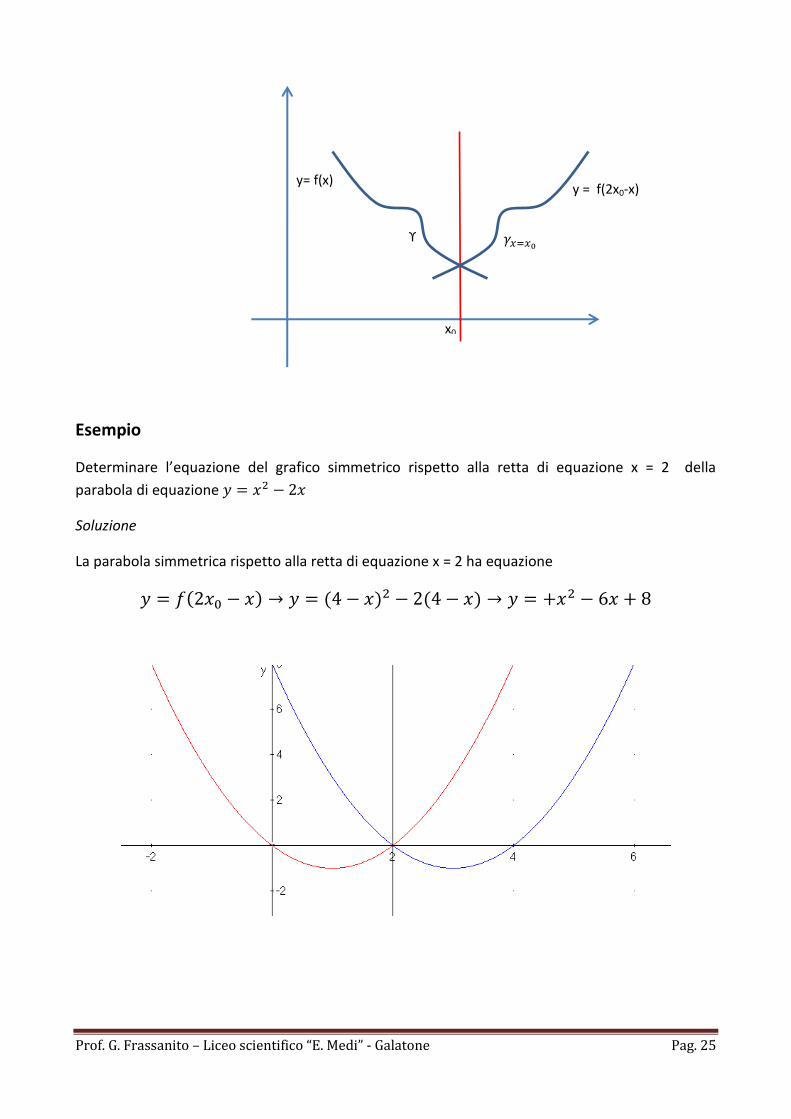
Esempio
Determinare l’equazione del grafico simmetrico rispetto alla retta di equazione x = 2 della
parabola di equazione
Soluzione
La parabola simmetrica rispetto alla retta di equazione x = 2 ha equazione
( ) ( ) ( )
𝛾𝑥 𝑥 ϒ
x0
y= f(x) y = f(2x0-x)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 26
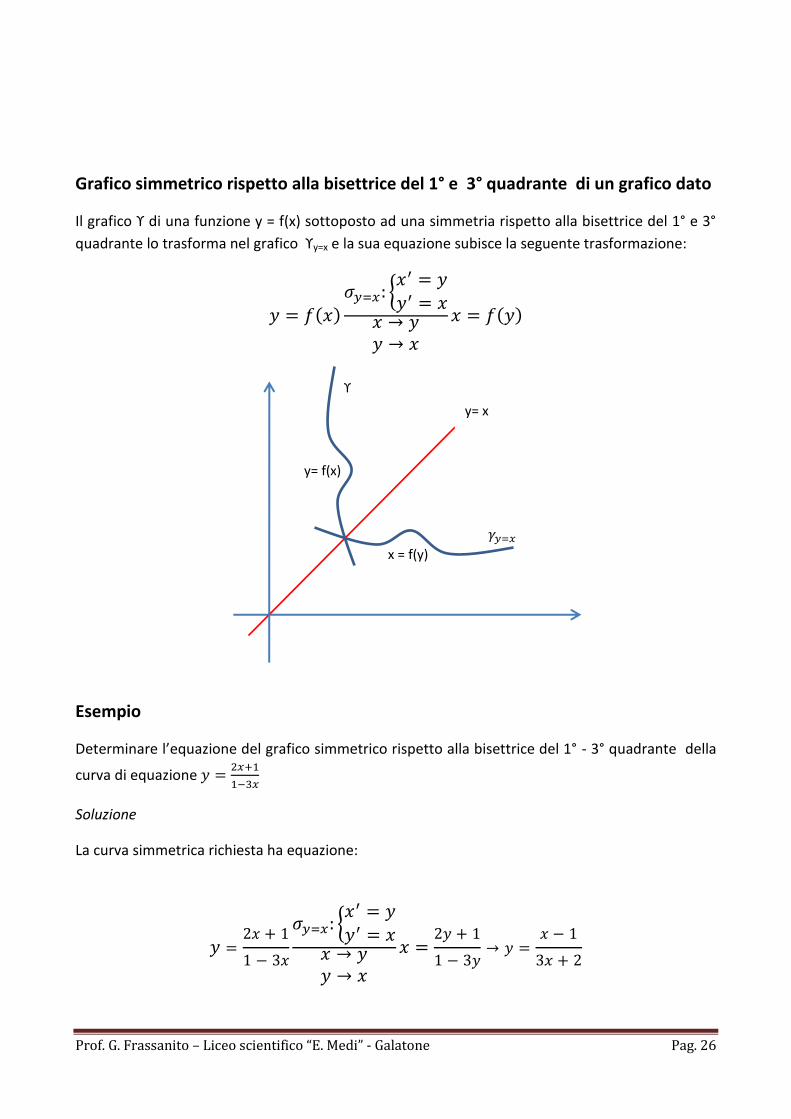
Grafico simmetrico rispetto alla bisettrice del 1° e 3° quadrante di un grafico dato
Il grafico ϒ di una funzione y = f(x) sottoposto ad una simmetria rispetto alla bisettrice del 1° e 3°
quadrante lo trasforma nel grafico ϒy=x e la sua equazione subisce la seguente trasformazione:
( ) {
( )
Esempio
Determinare l’equazione del grafico simmetrico rispetto alla bisettrice del 1° - 3° quadrante della
curva di equazione 1
1
Soluzione
La curva simmetrica richiesta ha equazione:
{
𝛾𝑦 𝑥
ϒ
y= f(x)
x = f(y)
y= x
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 27
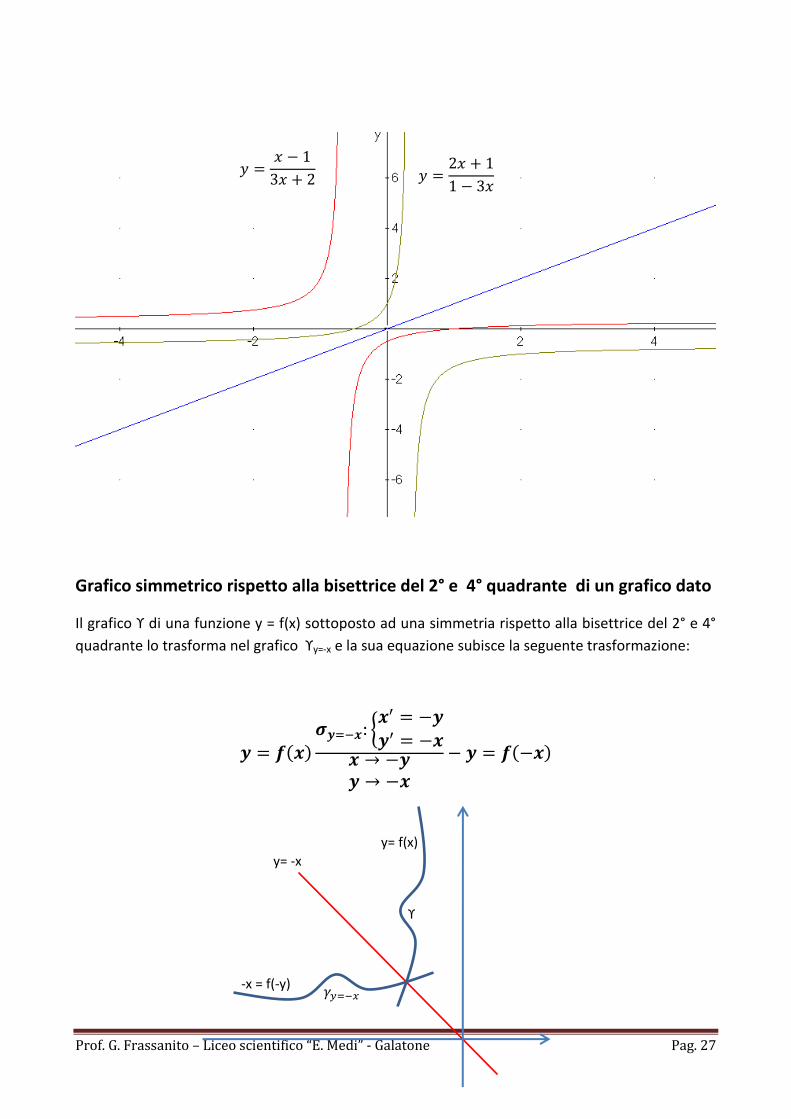
Grafico simmetrico rispetto alla bisettrice del 2° e 4° quadrante di un grafico dato
Il grafico ϒ di una funzione y = f(x) sottoposto ad una simmetria rispetto alla bisettrice del 2° e 4°
quadrante lo trasforma nel grafico ϒy=-x e la sua equazione subisce la seguente trasformazione:
( ) {
( )
y= -x
𝛾𝑦 𝑥
ϒ
y= f(x)
-x = f(-y)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 28
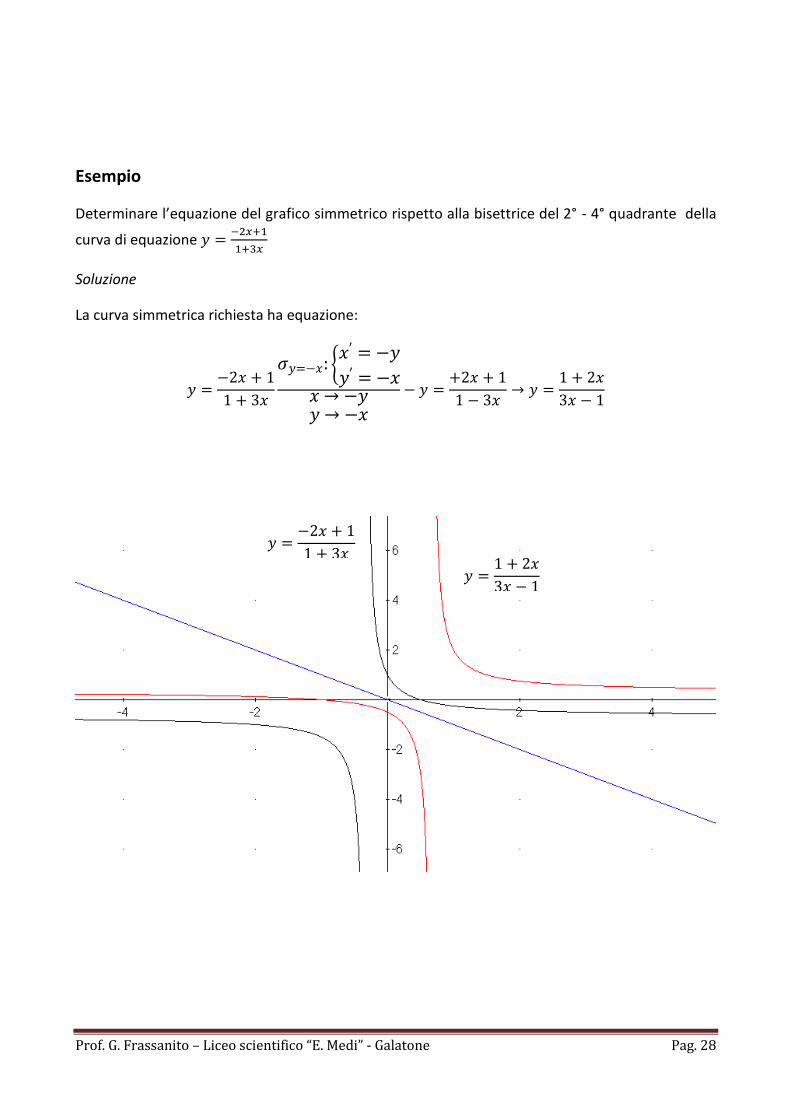
Esempio
Determinare l’equazione del grafico simmetrico rispetto alla bisettrice del 2° - 4° quadrante della
curva di equazione 1
1
Soluzione
La curva simmetrica richiesta ha equazione:
{
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 29
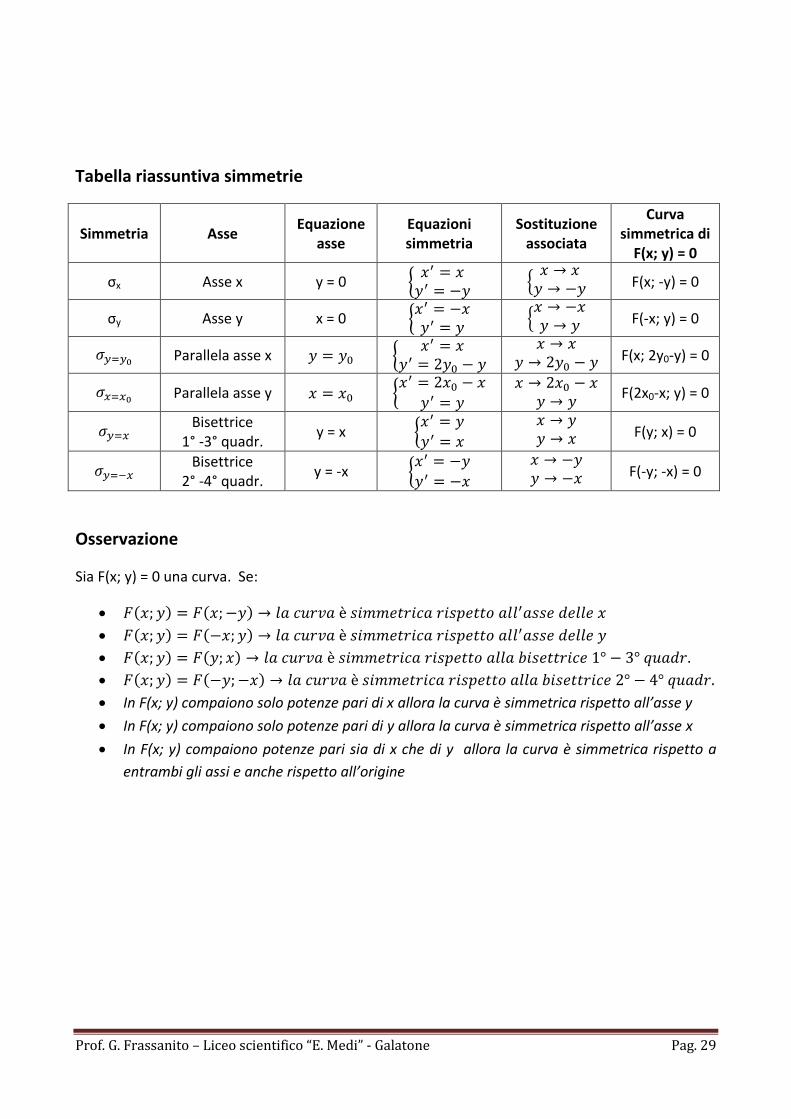
Tabella riassuntiva simmetrie
Simmetria Asse Equazione
asse Equazioni simmetria
Sostituzione associata
Curva simmetrica di
F(x; y) = 0
σx Asse x y = 0 {
{ F(x; -y) = 0
σy Asse y x = 0 {
{ F(-x; y) = 0
Parallela asse x {
F(x; 2y0-y) = 0
Parallela asse y {
F(2x0-x; y) = 0
Bisettrice
1° -3° quadr. y = x {
F(y; x) = 0
Bisettrice
2° -4° quadr. y = -x {
F(-y; -x) = 0
Osservazione
Sia F(x; y) = 0 una curva. Se:
( ) ( )
( ) ( )
( ) ( )
( ) ( )
In F(x; y) compaiono solo potenze pari di x allora la curva è simmetrica rispetto all’asse y
In F(x; y) compaiono solo potenze pari di y allora la curva è simmetrica rispetto all’asse x
In F(x; y) compaiono potenze pari sia di x che di y allora la curva è simmetrica rispetto a
entrambi gli assi e anche rispetto all’origine

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 30
Simmetria rispetto a un punto o simmetria centrale
Si definisce simmetria rispetto ad un punto generico C (simmetria centrale, di centro C), e la si
indica con σc, la corrispondenza biunivoca che ad ogni punto del piano P(x; y) fa corrispondere il
punto P’(x’; y’) in modo tale che il punto C sia il punto medio del segmento PP’.
Nella simmetria centrale di centro C il centro è l’unico punto unito e sono unite tutte le rette
passanti per il centro anche se non sono luoghi di punti uniti.
Per determinare le equazioni della simmetria σc basta tenere presente che C è punto medio del
segmento PP’. Ricordando che le coordinate del punto medio di un segmento sono le medie
aritmetiche delle coordinate omonime degli estremi si ha:
{
{
{
Quando il centro di simmetria coincide con l’origine O(0; 0) del sistema di riferimento le equazioni
della simmetria σo rispetto all’origine sono:
{
Anche la simmetria centrale è una trasformazione involutoria e quindi coincide con la sua inversa.
Esempio
Determinare le coordinate del punto P’ simmetrico del punto P(-3; 3) rispetto al punto C(2; -1).
Soluzione
Le coordinate di P’ sono date dalle seguenti formule:
C(xc; yc)
P’(x; y)
P(x; y)
𝜎𝑟 𝑃 𝑃

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 31
{
{
{
Grafico simmetrico rispetto ad un punto di un grafico dato
Data una curva ϒ di equazione F(x; y) = 0 e un punto C(xc; yc) il grafico sottoposto ad una simmetria
rispetto al punto C lo trasforma nel grafico ϒc e la sua equazione subisce la seguente
trasformazione:
( )
{
( )
Esempio
Verificare che la curva di equazione è simmetrica rispetto al
punto C(-1; 2).
Soluzione
Una curva è simmetrica rispetto ad un punto C(xc; yc) se ( ) ( )
Sostituiamo, quindi, le equazioni della simmetria centrale nell’equazione data e dovremmo
ottenere la stessa equazione
{
( ) ( ) ( ) ( )
Sviluppando l’ultima equazione si ottiene l’equazione di partenza.
C(xc; yc)
F(2xc-x; 2yc-y) = 0
F(x;y) = 0

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 32
Esempio
Determinare il valore del parametro k per il quale la curva di equazione è
simmetrica rispetto all’origine degli assi.
Soluzione
La curva è simmetrica rispetto all’origine degli assi se sostituendo si ottiene la stessa
equazione
Affinché le due equazioni risultino uguali k = -k e questo succede se k = 0.
Grafico simmetrico rispetto all’origine di un grafico dato
Data una curva ϒ di equazione F(x; y) = 0 il grafico sottoposto ad una simmetria rispetto all’origine
del sistema di riferimento lo trasforma nel grafico ϒo e la sua equazione subisce la seguente
trasformazione:
( ) {
( )
F(-x; -y) = 0
F(x;y) = 0
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 33
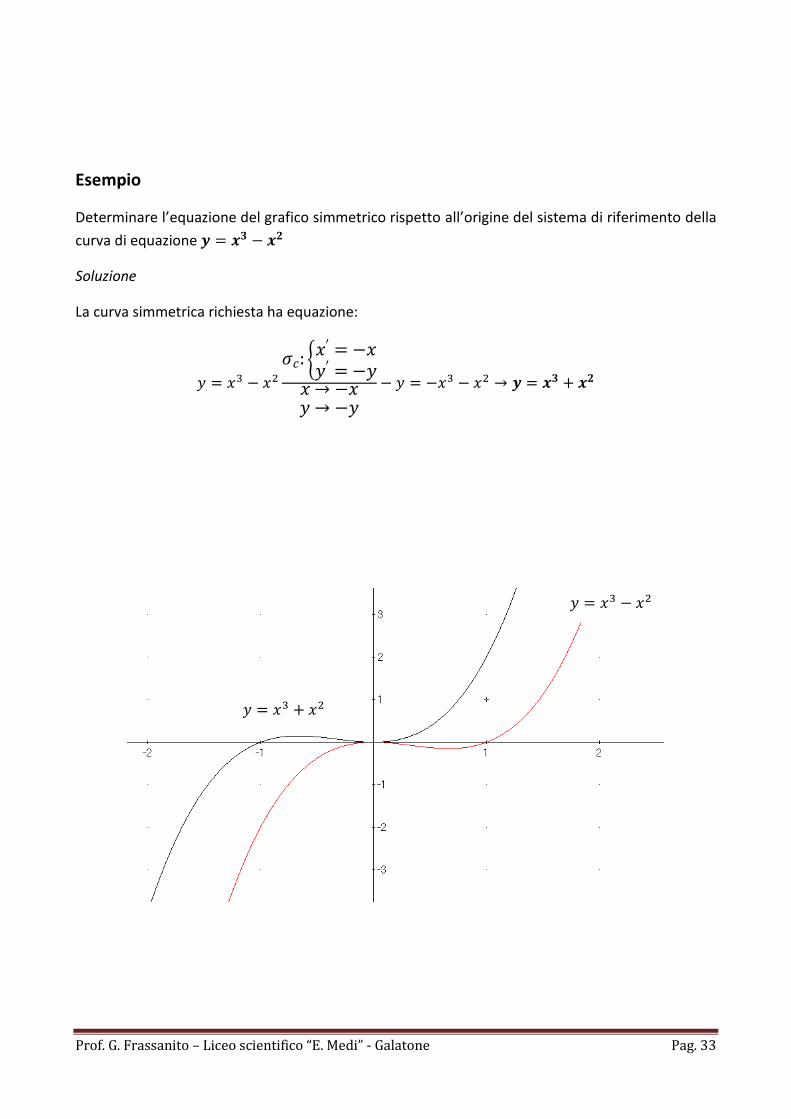
Esempio
Determinare l’equazione del grafico simmetrico rispetto all’origine del sistema di riferimento della
curva di equazione
Soluzione
La curva simmetrica richiesta ha equazione:
{

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 34
Rotazioni
Dato un punto C e un angolo α, si definisce rotazione di centro C e angolo α la trasformazione che
associa, a un generico punto P del piano, il punto P’ tale che e .
Osservazione
Se la rotazione si riduce all’identità
Se si ottiene la simmetria centrale rispetto al punto C (una simmetria centrale
può essere considerata una rotazione di un angolo piatto attorno al centro di simmetria)
L’unico punto unito è il centro e non vi sono rette unite
Rotazione rispetto all’origine
Nel caso in cui il centro della rotazione coincide con l’origine degli assi, si parla di rotazione
rispetto all’origine le cui equazioni si possono ottenere nel seguente modo
P’ P
α
C
Q(x’; 0)
K(0; y’)
H(x; 0)
θ
ρ
ρ
P’(x’; y’)
P(x; y)
α
O

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 35
Nei triangoli rettangoli OPH e OP’K si ha che:
( )
cos( ) ( ) ( )
Applicando alle (2) le formule di addizione di seno e coseno e tenendo conto delle (1), si ottiene:
( ) ( ) ( )
( ) ( ) ( )
Le equazioni della rotazione sono quindi:
{
( )
Equazioni della rotazione rispetto a un centro C(xc; yc)
Per determinare tali equazioni si considera, per prima, il sistema di riferimento XCY rispetto al
quale il centro di rotazione è l’origine. Successivamente tali equazioni si riferiscono al sistema di
riferimento xOy
C
y
x
Y
X yc
xc Q(x’; 0)
K(0; y’)
H(x; 0)
θ
ρ
ρ
P’(x’; y’)
P(x; y)
α
O

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 36
Rispetto al sistema di riferimento XCY la rotazione è rispetto all’origine, quindi si ha:
{
Riferendo le precedenti equazioni rispetto al sistema di riferimento xOy e tenendo presenti le
equazioni della traslazione degli assi cartesiani {
{
si otterranno le
equazioni della rotazione rispetto a C
{ ( ) ( )
( ) ( )
{ ( ) ( ) ( ) ( )
Eseguendo le moltiplicazioni
{
e ponendo
avremo:
{
( )
Trasformazione inversa
La trasformazione inversa di una rotazione di un angolo α è sempre una rotazione di un angolo
–α e la si ottiene sostituendo nelle equazioni (3) al posto di α –α:
1 {
( ) ( )
( ) ( )

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 37
{
( )
Poiché la rotazione non è una trasformazione involutoria, le sostituzioni da fare nell’equazione
F(x; y) = 0 di una curva ϒ, per ottenere l’equazione della curva ϒ’, immagine di ϒ nella rotazione di
un angolo α rispetto all’origine è:
( )
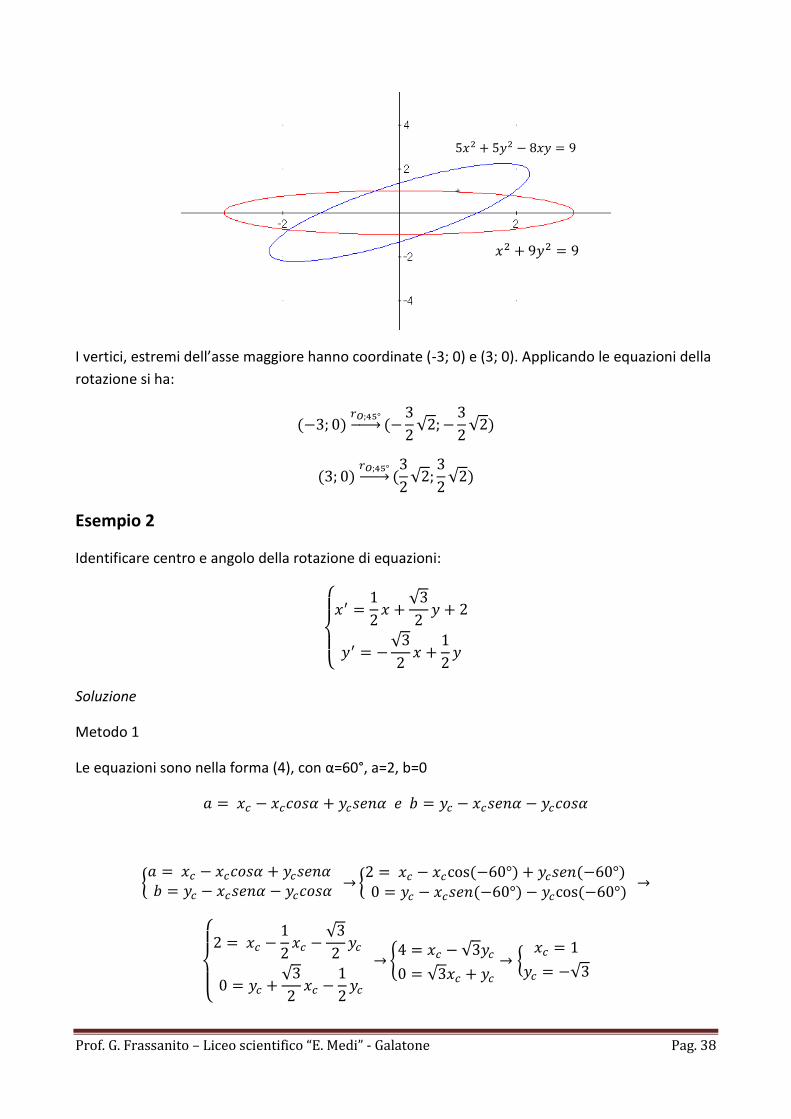
Esempio 1
Dato il grafico dell’ellisse ϒ di equazione , determinare l’equazione dell’ellisse che si
ottiene ruotando ϒ di 45° rispetto all’origine e le coordinate e le coordinate dei vertici, estremi
dell’asse maggiore.
Soluzione
Applicando la (3) e la (6) abbiamo le equazioni della rotazione e la sostituzione associata:
{
√
√
√
√
√
√
√
√
√
√
√
√
(√
√
) (
√
√
)
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 38
I vertici, estremi dell’asse maggiore hanno coordinate (-3; 0) e (3; 0). Applicando le equazioni della
rotazione si ha:
( ) → (
√
√ )
( ) → (
√
√ )
Esempio 2
Identificare centro e angolo della rotazione di equazioni:
{
√
√
Soluzione
Metodo 1
Le equazioni sono nella forma (4), con α=60°, a=2, b=0
{
{ cos ( ) ( ) ( ) cos ( )
{
√
√
{ √
√ {
√

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 39
Metodo 2
Il centro della rotazione è l’unico punto unito della trasformazione e le sue coordinate non
mutano. Ponendo nelle equazione del testo x al posto di x’ e y al posto di y’ si ottiene un sistema
che fornisce le coordinate del centro
{
√
√
{ √
√ {
√
√ {
√
Esempio 3
Data la retta r di equazione √ , scrivere l’equazione della retta r’ che si ottiene
sottoponendo r a una rotazione di 240° rispetto al punto (0; 3).
Soluzione
La retta data ha una inclinazione di 60° rispetto all’asse delle x; sottoponendola ad una rotazione
di 240° alla fine la retta forma un angolo di 300° rispetto all’asse della x. Il suo coefficiente
angolare è ( ) ( ) √ Sapendo che la retta passa per il
punto (0; 3) si ha:
( ) √ ( ) √
Esempio 4
√
√
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 40
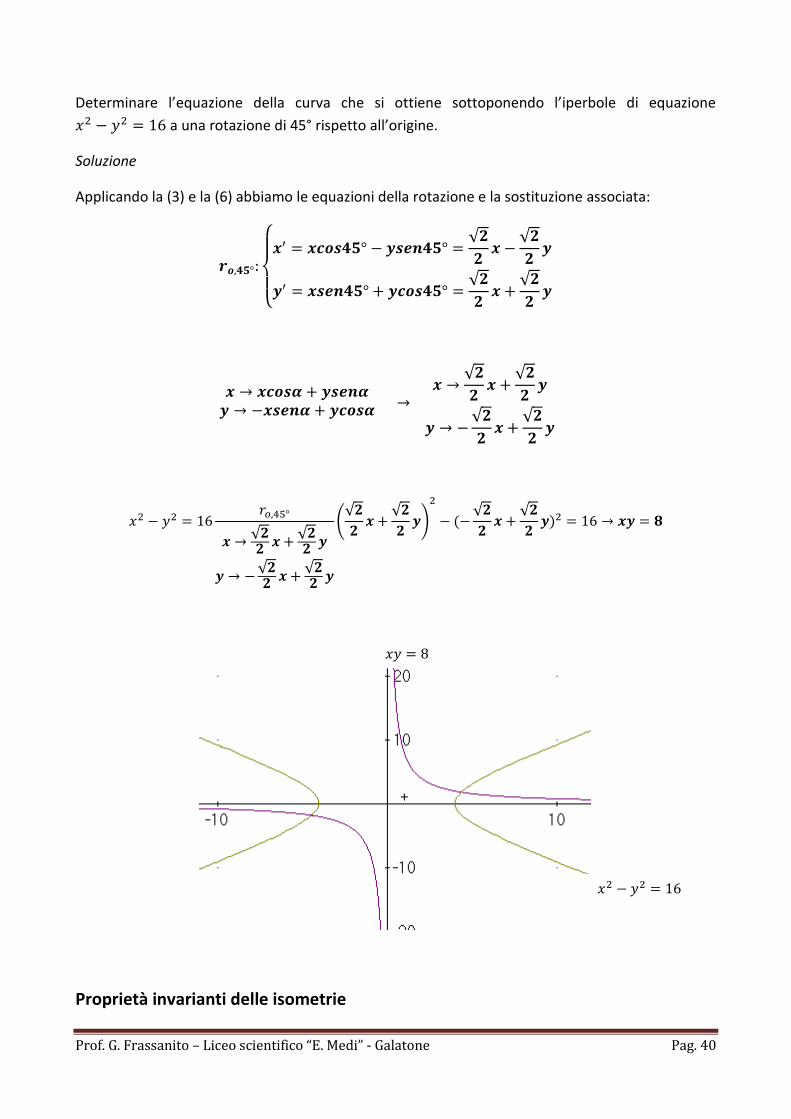
Determinare l’equazione della curva che si ottiene sottoponendo l’iperbole di equazione
a una rotazione di 45° rispetto all’origine.
Soluzione
Applicando la (3) e la (6) abbiamo le equazioni della rotazione e la sostituzione associata:
{
√
√
√
√
√
√
√
√
√
√
√
√
(√
√
)
( √
√
)
Proprietà invarianti delle isometrie

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 41
4. Le lunghezze: se A’B’ è l’immagine del segmento AB in una isometria, allora , cioè i
due segmenti hanno la stessa lunghezza.
5. L’estensione delle superfici: se α’ è l’immagine di una superficie αin un’isometria, allora
, cioè α e α’ hanno la stessa superficie.
Similitudini
Sia t una trasformazione e siano A’ e B’ le immagini in t rispettivamente di due punti qualunque A
e B del piano; se:
( )
Il numero reale r è detto rapporto di similitudine
La figura geometrica ϒ’ ottenuta applicando una similitudine ad una figura ϒ è simile alla
figura data.
Se il rapporto di similitudine è 1, la similitudine è una isometria (le isometrie sono delle
particolari similitudini)
Omotetia con centro nell’origine
Si definisce omotetia con centro nell’origine di rapporto k, numero reale diverso da zero, e si
indica con , la trasformazione che associa ad un punto P(x; y) il punto P’(x’; y’) tale che:
{
( )
O
P(kx; ky)
P(x; y)
k>0
H’ H
H’
H
P(kx; ky) K<0

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 42
Equazioni della trasformazione inversa dell’omotetia
Dalle (1) si ricavano facilmente le equazioni della trasformazione inversa dell’omotetia
{
{
La trasformazione inversa dell’omotetia di rapporto con centro nell’origine è ancora una
omotetia di rapporto 1
e centro nell’origine
1
1 {
La sostituzione associata all’omotetia di rapporto k con centro nell’origine è
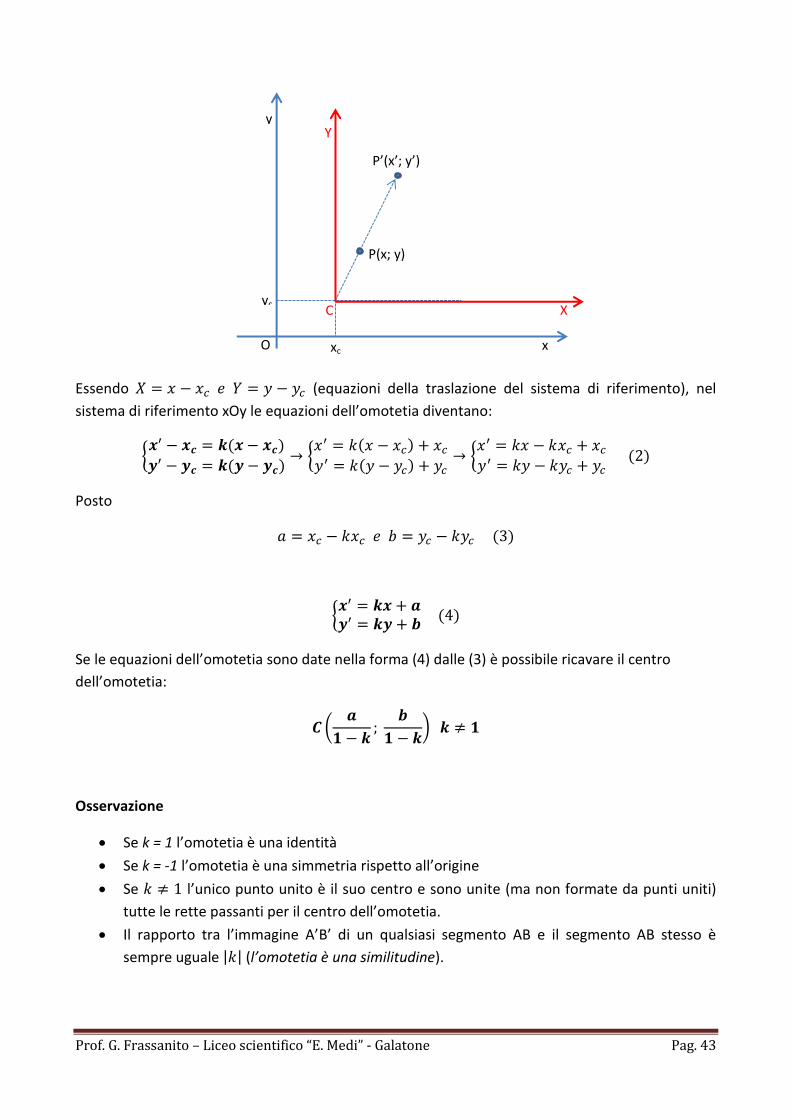
Omotetia con centro in un punto C
Per ottenere le equazioni dell’omotetia con centro in un generico punto C e rapporto k, che si
indica con , è sufficiente considerare il sistema di riferimento XCY, traslato rispetto a xOy, con
l’origine nel punto C. Rispetto a tale sistema di riferimento l’omotetia ha equazioni:
{
( )
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 43
Essendo (equazioni della traslazione del sistema di riferimento), nel
sistema di riferimento xOy le equazioni dell’omotetia diventano:
{ ( )
( ) { ( ) ( )
{
( )
Posto
( )
{
( )
Se le equazioni dell’omotetia sono date nella forma (4) dalle (3) è possibile ricavare il centro
dell’omotetia:
(
)
Osservazione
Se k = 1 l’omotetia è una identità
Se k = -1 l’omotetia è una simmetria rispetto all’origine
Se l’unico punto unito è il suo centro e sono unite (ma non formate da punti uniti)
tutte le rette passanti per il centro dell’omotetia.
Il rapporto tra l’immagine A’B’ di un qualsiasi segmento AB e il segmento AB stesso è
sempre uguale | | (l’omotetia è una similitudine).
C
y
x
Y
X yc
xc
P’(x’; y’)
P(x; y)
O

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 44
In un’omotetia con centro nell’origine, l’origine O, il punto P e la sua immagine P’ sono
allineati. Infatti le rette OP e OP’ passano per l’origine e hanno lo stesso coefficiente
angolare
Esempio 1
Si consideri la trasformazione di equazioni
{
Verificare che è un’omotetia, determinandone l centro.
Soluzione
Le equazioni sono date nella forma
{
E sono quindi le equazioni di una omotetia di rapporto k = 3.
Determiniamo le coordinate del centro
Metodo 1
Applichiamo le formule
(
) (
) ( )
Metodo 2
Poiché il centro è l’unico punto unito è sufficiente sostituire nelle equazioni dell’omotetia
{
{
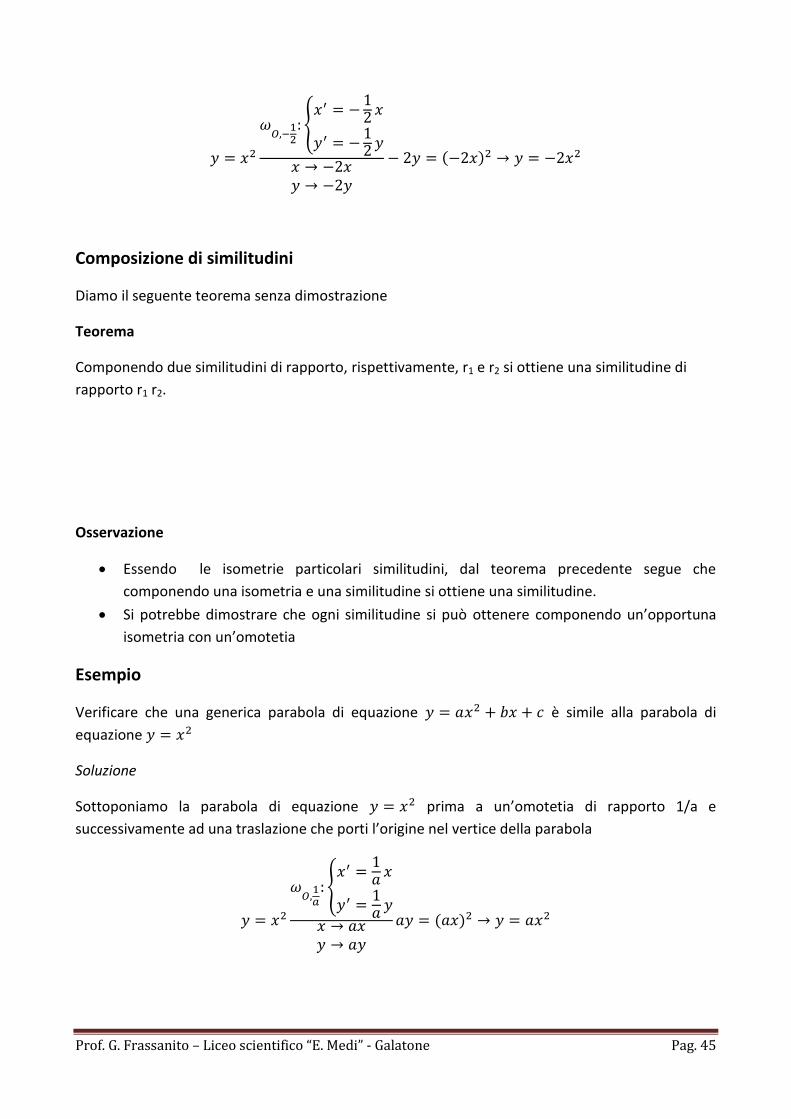
Esempio 2
Determinare l’equazione della curva che si ottiene sottoponendo la parabola di equazione
a un’omotetia di rapporto -1/2 e centro nell’origine.
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 45
1 {
( )
Composizione di similitudini
Diamo il seguente teorema senza dimostrazione
Teorema
Componendo due similitudini di rapporto, rispettivamente, r1 e r2 si ottiene una similitudine di
rapporto r1 r2.
Osservazione
Essendo le isometrie particolari similitudini, dal teorema precedente segue che
componendo una isometria e una similitudine si ottiene una similitudine.
Si potrebbe dimostrare che ogni similitudine si può ottenere componendo un’opportuna
isometria con un’omotetia
Esempio
Verificare che una generica parabola di equazione è simile alla parabola di
equazione
Soluzione
Sottoponiamo la parabola di equazione prima a un’omotetia di rapporto 1/a e
successivamente ad una traslazione che porti l’origine nel vertice della parabola
1 {
( )

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 46
{
(
)
Qualunque parabola può essere trasformata mediante un’opportuna rotazione in una parabola
con asse di simmetria parallelo all’asse delle y e poiché queste sono tutte simili possiamo
affermare che tutte le parabole sono simili tra di loro.
Proprietà invarianti delle similitudini
1. I rapporti tra lunghezze: se A’B’ e C’D’ sono le immagini di AB e CD in una similitudine, si ha
che
.
2. Le ampiezze degli angoli: se è l’immagine di un angolo , allora i due angoli sono
congruenti.
3. La perpendicolarità: le immagini di due rette perpendicolari in una similitudine, per la
precedente proprietà, sono anch’esse perpendicolari.
Dilatazioni con centro nell’origine
Assegnati due numeri reali h e k entrambi non nulli, si dice dilatazione con centro nell’origine e si
indica con quella trasformazione che associa a un generico punto P(x; y) il punto P’(x’; y’) tale
che
{
( )
Osservazione
Se h = k la dilatazione è un’omotetia
Se h = k = 1, la dilatazione si riduce all’identità
Se h = k = -1, la dilatazione coincide con la simmetria rispetto all’origine
Se h = -1 e k = 1 la dilatazione è una simmetria rispetto all’asse y
Se h = 1 e k =- 1 la dilatazione è una simmetria rispetto all’asse x
Se h 1 e k =1 la dilatazione è detta orizzontale
Se h = 1 e k 1 la dilatazione è detta verticale
Se una dilatazione non è l’identità l’unico punto unito è l’origine e le uniche rette unite
sono gli assi cartesiani
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 47
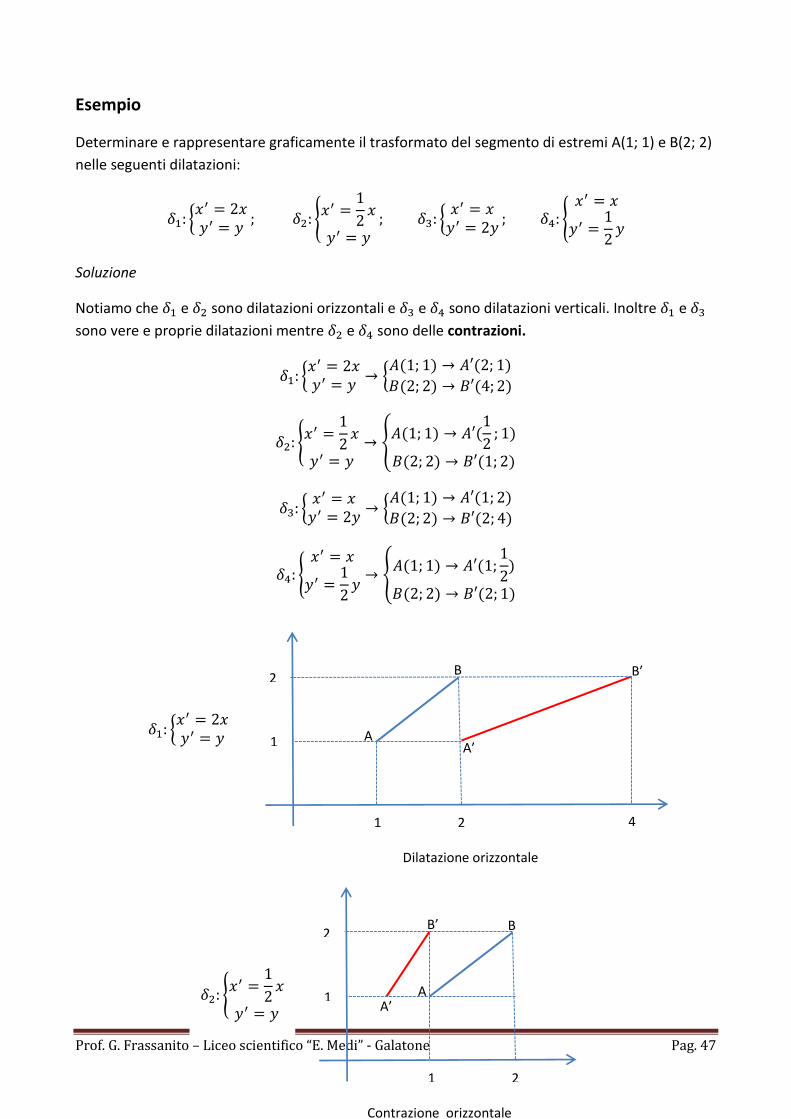
Esempio
Determinare e rappresentare graficamente il trasformato del segmento di estremi A(1; 1) e B(2; 2)
nelle seguenti dilatazioni:
1 {
{
{
{
Soluzione
Notiamo che 1 e sono dilatazioni orizzontali e e sono dilatazioni verticali. Inoltre 1 e
sono vere e proprie dilatazioni mentre e sono delle contrazioni.
1 {
{ ( ) ( )
( ) ( )
{
{
( ) (
)
( ) ( )
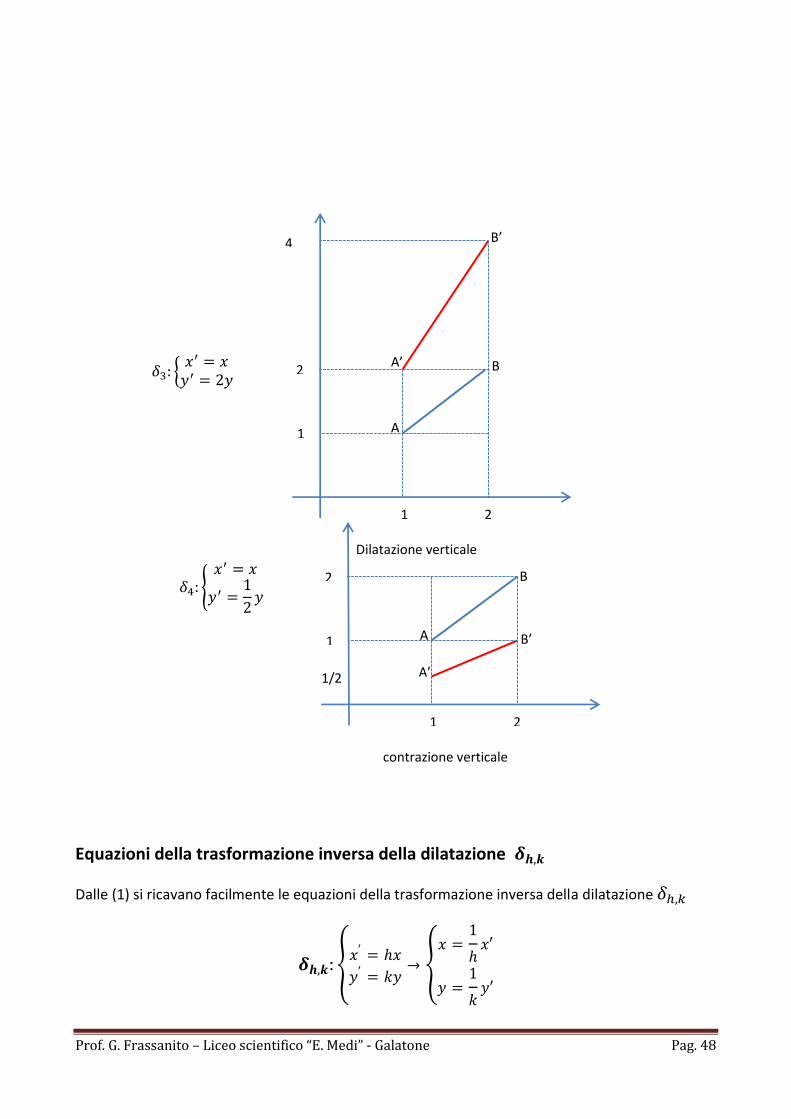
{
{ ( ) ( )
( ) ( )
{
{
( ) (
)
( ) ( )
B’
A’
B
A 1
2
1 2 4
𝛿1 {𝑥 𝑥𝑦 𝑦
Dilatazione orizzontale
B’
A’
B
A 1
2
1 2
𝛿 {𝑥
𝑥
𝑦 𝑦
Contrazione orizzontale
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 48
Equazioni della trasformazione inversa della dilatazione
Dalle (1) si ricavano facilmente le equazioni della trasformazione inversa della dilatazione
{
{
B’
A’ B
A 1
2
1 2
4
𝛿 {𝑥 𝑥𝑦 𝑦
Dilatazione verticale
B’
A’
B
A
1/2
1
2
1 2
𝛿 {𝑥 𝑥
𝑦
𝑦
contrazione verticale

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 49
La trasformazione inversa della dilatazione di rapporti con centro nell’origine è
ancora una omotetia di rapporto 1
1
e centro nell’origine
1 1
1 {
La sostituzione associata alla dilatazione di rapporti h e k con centro nell’origine è
Dilatazione di Grafici
Se si applica una dilatazione a una curva ϒ di equazione y = f(x), si ottiene la curva ϒ’d dilatata
la cui equazione è
( ) {
(
) (
)
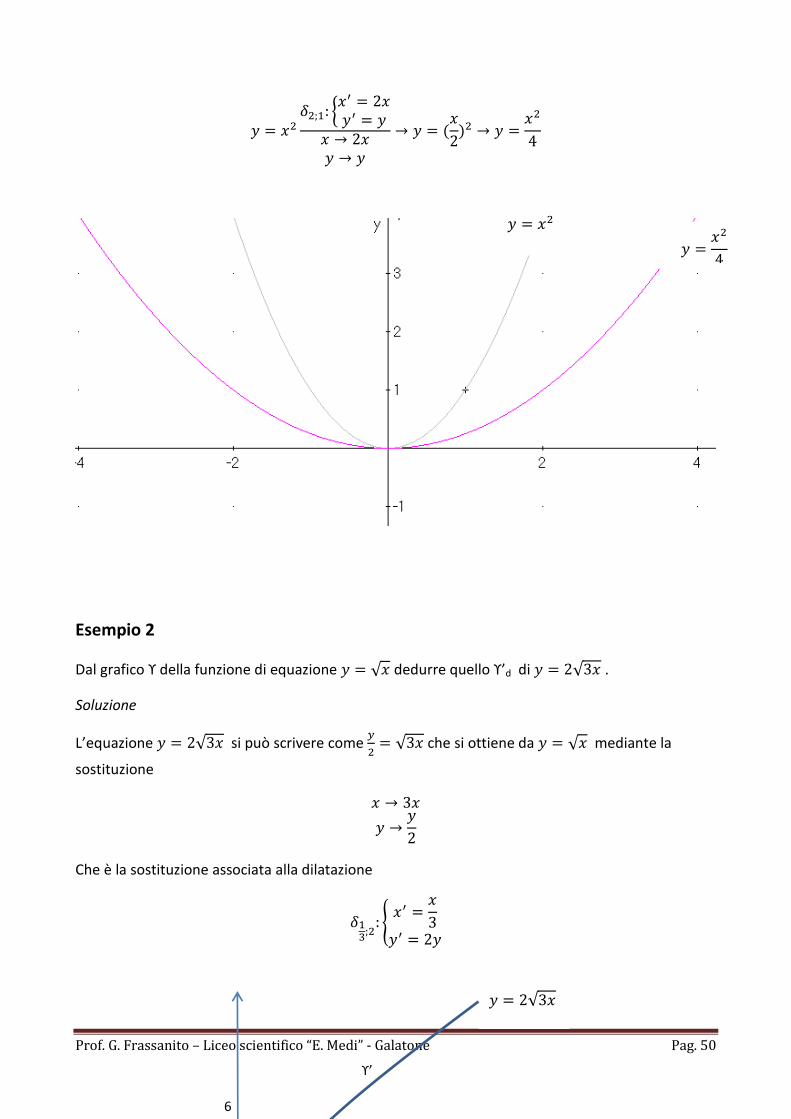
Esempio 1
Determinare equazione e grafico ϒ’ della parabola di grafico ϒ e di equazione , sottoposta
alla dilatazione orizzontale di equazioni:
1 {
Soluzione
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 50
1 {
(
)
Esempio 2
Dal grafico ϒ della funzione di equazione √ dedurre quello ϒ’d di √ .
Soluzione
L’equazione √ si può scrivere come
√ che si ottiene da √ mediante la
sostituzione
Che è la sostituzione associata alla dilatazione
1 {
ϒ’
𝑦 √ 𝑥
6

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 51
Il grafico ϒ’d si otterrà da ϒ facendo corrispondere ad ogni punto P di ϒ un punto P’ che ha ascissa
un terzo di quella di P e ordinata doppia.
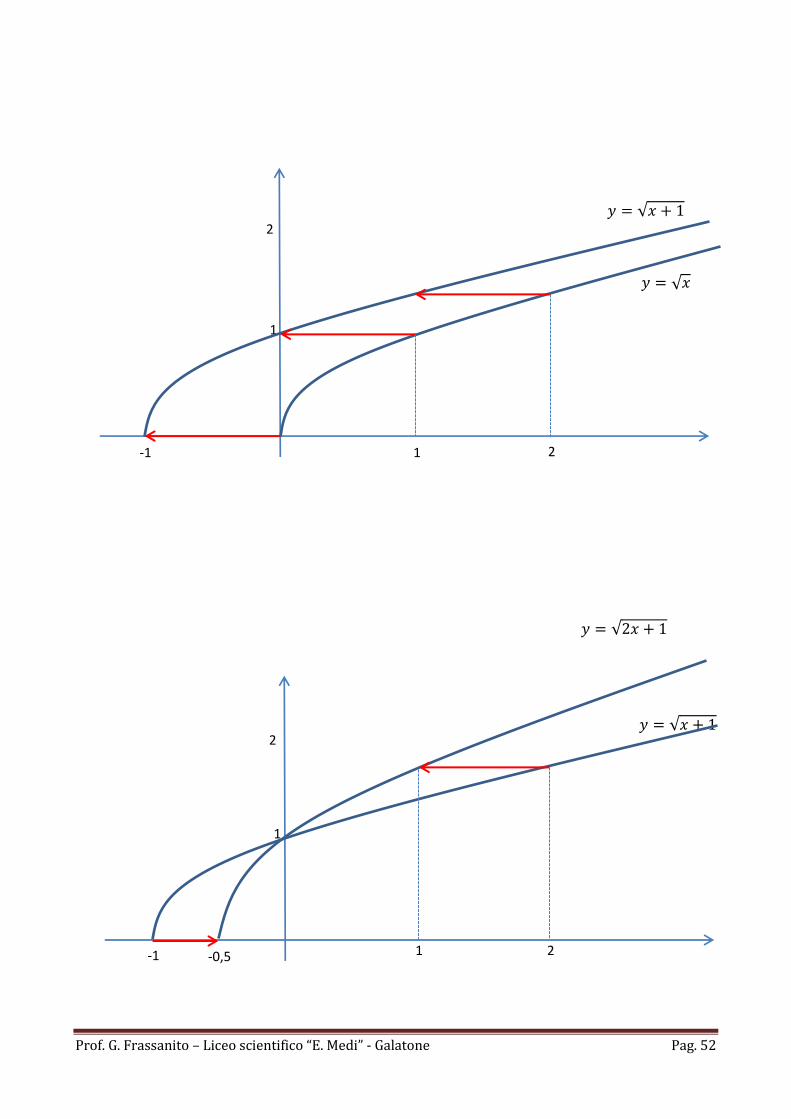
Esempio 3
Dal grafico della funzione di equazione √ dedurre quello di √ applicando
opportune trasformazioni.
Soluzione
Per ottenere il grafico richiesto occorre effettuare sul grafico √ prima una traslazione di una
unità verso sinistra; poi, sul grafico trasformato una dilatazione orizzontale di rapporto ½; infine
sul grafico così ottenuto una simmetria rispetto all’asse delle y.
√ {
√
{
√ {
√
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 52
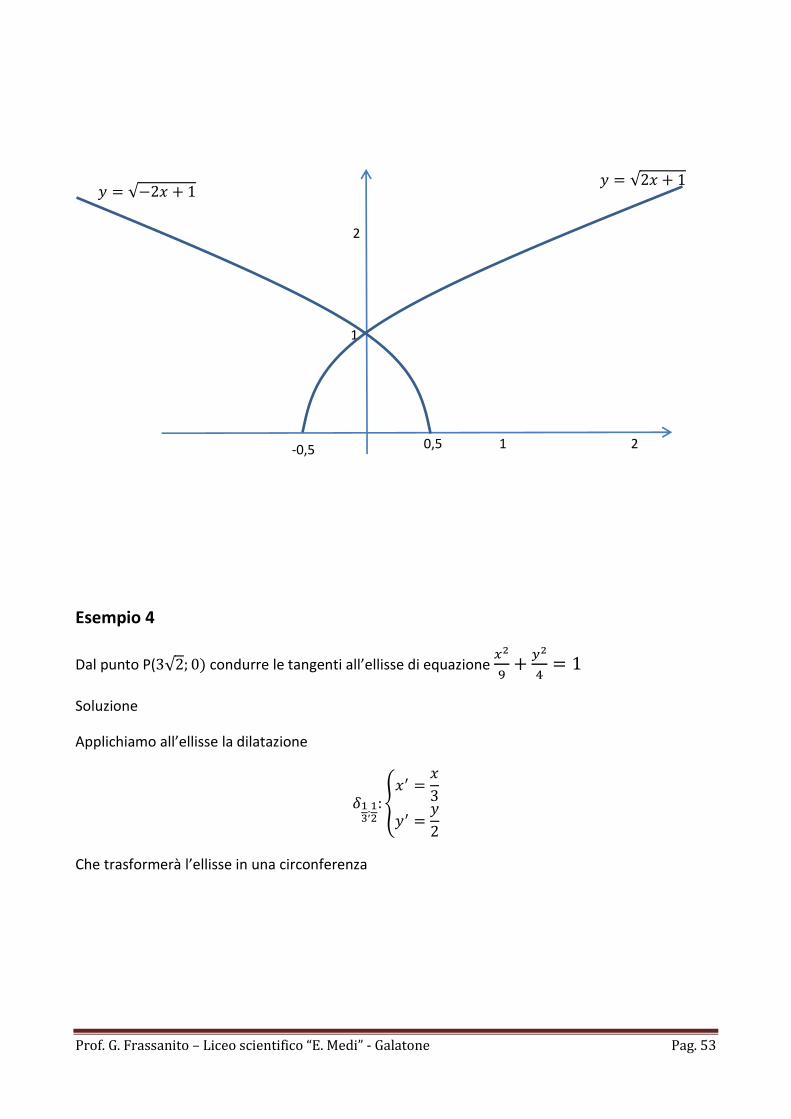
√
√
-1
𝑦 √𝑥
𝑦 √𝑥
2
1
2 1
-1
2
1
-0,5 1 2
Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 53
Esempio 4
Dal punto P( √ ) condurre le tangenti all’ellisse di equazione
Soluzione
Applichiamo all’ellisse la dilatazione
1 1 {
Che trasformerà l’ellisse in una circonferenza
𝑦 √ 𝑥 𝑦 √ 𝑥
0,5
2
1
-0,5 1 2

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 54
{
Il trasformato del punto P( √ ) è P’(√ )
Determiniamo le tangenti alla circonferenza condotte dal punto P’.
Scriviamo l’equazione del fascio di rette passante per P’
( √ ) √ √
Imponiamo che la distanza di tale retta dal centro della circonferenza C(0; 0) sia uguale al raggio
r = 1
| √ |
√
Le rette tangenti cercate hanno equazioni:
1 √ √
Applicando a r1 e r2 la dilatazione inversa otterremo le equazioni delle tangenti all’ellisse
√ 1 {
√
( √ )
√ 1 {
√
( √ )
Dilatazioni con centro diverso dall’origine
Le equazioni delle dilatazioni con centro diverso dall’origine, ricavate con considerazioni analoghe
a quelle svolte per le omotetie sono
{ ( )
( ) { ( ) ( )
{
{ ( )
( )

Prof. G. Frassanito – Liceo scientifico “E. Medi” - Galatone Pag. 55
Posto ( ) ( )
{
Le coordinate del centro sono date dalle seguenti formule
(
)
Bibliografia
N. Dodero – P. Baroncini – R. Manfredi: Elementi di matematica vol. 3 e Nuovi elementi di
matematica vol A - Ghisetti e Corvi Editori