Funz di trasferimento - webalice.it Elettrici Automatici/Funz_di... · Considerata l’ampia...
42
La funzione di trasferimento Sistemi elettrici automatici 1 LA FUNZIONE DI TRASFERIMENTO Può essere espressa sia nel dominio della “s” che nel dominio della “jω” Definizione nel dominio della “s” 1. è riferita ai soli sistemi con un ingresso ed un’uscita 2. ha per oggetto i soli sistemi lineari, invarianti e a parametri concentrati 3. è riferita ai sistemi in condizioni iniziali nulle (ossia che si trovano inizialmente in stato di quiete)
Transcript of Funz di trasferimento - webalice.it Elettrici Automatici/Funz_di... · Considerata l’ampia...
La funzione di trasferimento Sistemi elettrici automatici 1
LA FUNZIONE DI TRASFERIMENTOPuò essere espressa sia nel dominio della “s” che nel dominio della “jω”
Definizione nel dominio della “s”
1. è riferita ai soli sistemi con un ingresso ed un’uscita
2. ha per oggetto i soli sistemi lineari, invarianti e a parametri concentrati
3. è riferita ai sistemi in condizioni iniziali nulle (ossia che si trovano inizialmente in stato di quiete)
La funzione di trasferimento Sistemi elettrici automatici 2
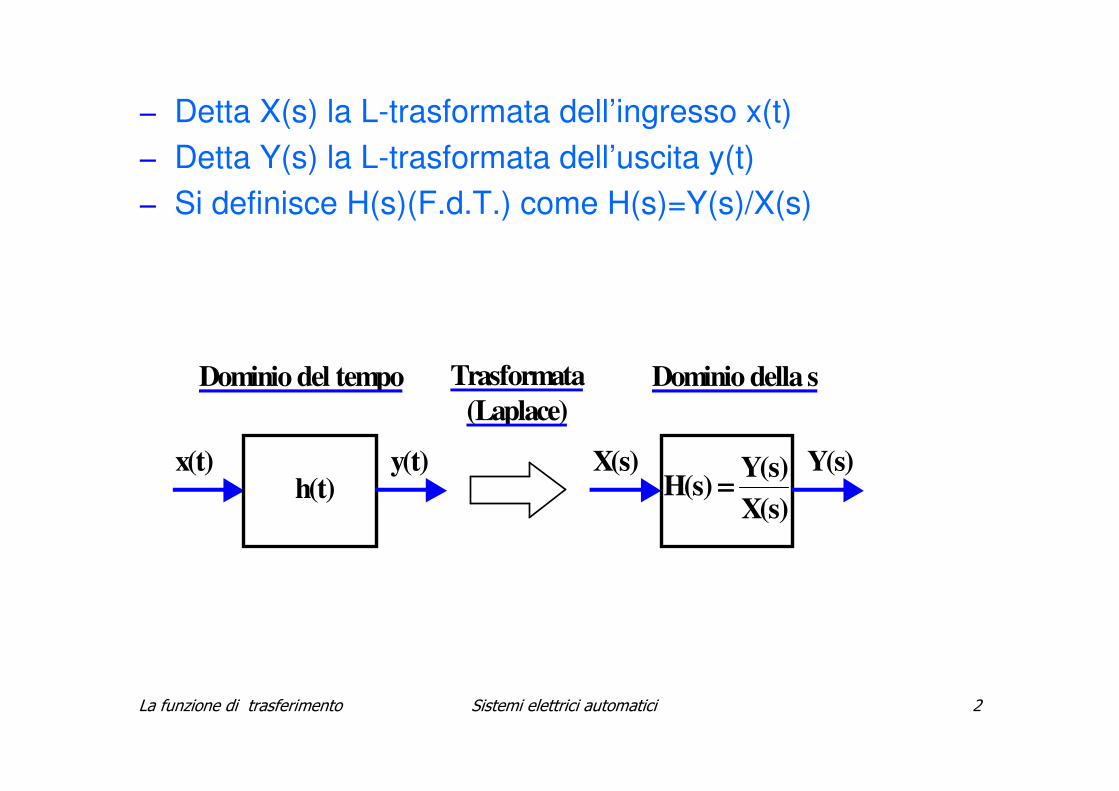
− Detta X(s) la L-trasformata dell’ingresso x(t)− Detta Y(s) la L-trasformata dell’uscita y(t)− Si definisce H(s)(F.d.T.) come H(s)=Y(s)/X(s)
x(t) y(t) h(t)
X(s) Y(s)
)s(X
)s(Y)s(H ====
Dominio del tempo Trasformata
(Laplace)
Dominio della s

La funzione di trasferimento Sistemi elettrici automatici 3
ALCUNE OSSERVAZIONI SULLA F.D.T. NEL DOMINIO DELLE “s”
1. Prenderemo in considerazione solo f.d.t. costituite da funzioni razionali fratte
2. La f.d.t. è dipendente solo da parametri del sistema ed è quindi tipica per ciascun sistema
3. In caso di sollecitazione con impulso unitario, avendo questo L-trasformata pari a 1, si può affermare che l’uscita si identifica con la f.d.t. stessa
4. Per la determinazione delle f.d.t. si farà uso delle “impedenze generalizzate” come già visto nello studio dei transitori
La funzione di trasferimento Sistemi elettrici automatici 4
LA FUNZIONE DI RISPOSTA ARMONICA
è la f.d.t. definita nel dominio della “Jω”
1. Ha ancora per oggetto i soli sistemi lineari, invarianti e a parametri concentrati
2. Serve per descrivere il comportamento del sistema a regime in presenza di segnali sinusoidali in ingresso
3. L’importanza di questo studio è dovuta al fatto che conoscendo il comportamento del sistema ad una sollecitazione sinusoidale ciò permette di estendere i risultati a sollecitazioni con segnali qualsiasi (mediante scomposizione col teorema di Fourier)
La funzione di trasferimento Sistemi elettrici automatici 5
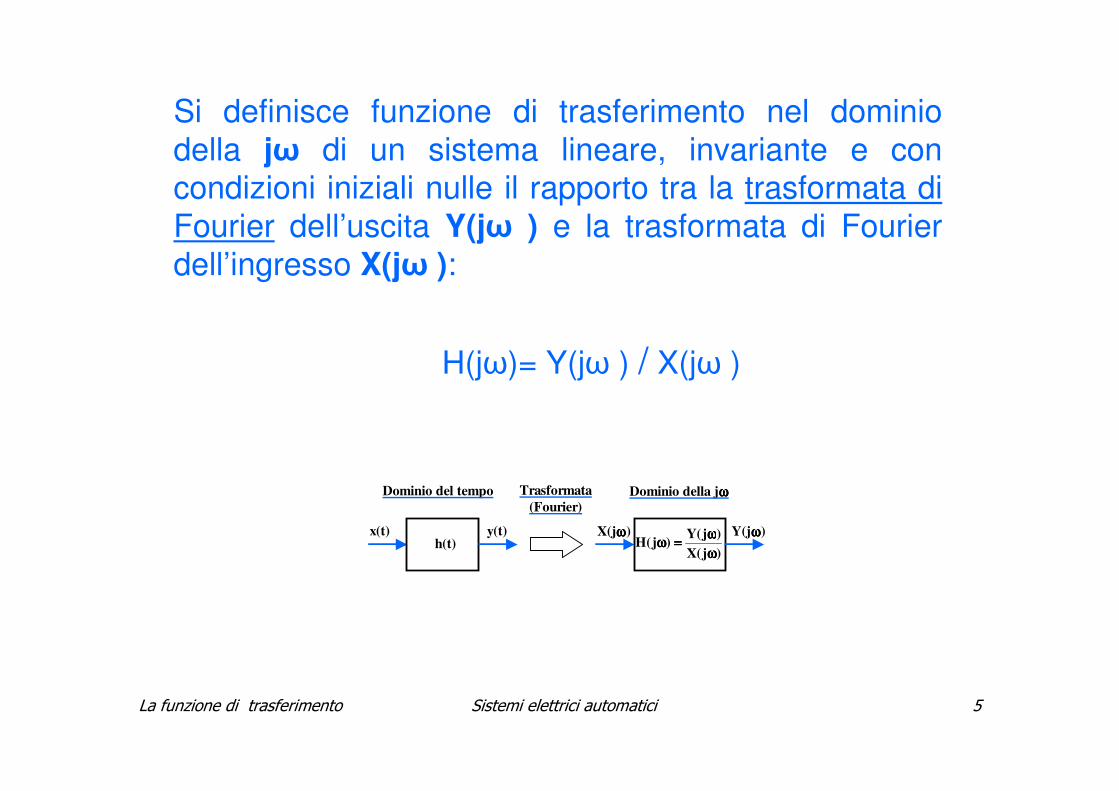
Si definisce funzione di trasferimento nel dominio della jω di un sistema lineare, invariante e con condizioni iniziali nulle il rapporto tra la trasformata di Fourier dell’uscita Y(jω ) e la trasformata di Fourierdell’ingresso X(jω ):
H(jω)= Y(jω ) / X(jω )
x(t) y(t) h(t)
X(jωωωω) Y(jωωωω)
)j(X
)j(Y)j(H
ωωωω
ωωωω====ωωωω
Dominio del tempo Trasformata
(Fourier)
Dominio della jωωωω

La funzione di trasferimento Sistemi elettrici automatici 6
ALCUNE OSSERVAZIONI SULLA F.D.T. NEL DOMINIO DELLE “Jω”
1. Grazie ad alcuni teoremi che non verranno esaminati è possibile passare dalla H(s) alla H(Jω) o viceversa semplicemente sostituendo s con jω
2. È una grandezza che si può ricavare facilmente per via sperimentale in laboratorio con opportune prove
3. Si definisce ordine della funzione di trasferimento il grado del polinomio (in s od in jω) che compare a denominatore della H(s) o della H(jω)
4. Si definiscono zeri della funzione di trasferimento le radici del polinomio a numeratore della H(s) o H(jω) , si definiscono poli della funzione di trasferimento le radici del polinomio a denominatore della H(s) o H(jω)
5. Anche qui per la determinazione delle f.d.t. si farà uso delle “impedenze generalizzate” come già visto nello studio dei transitori
La funzione di trasferimento Sistemi elettrici automatici 7
Attraverso la funzione di risposta armonica H(jω) è possibile determinare la risposta a regime del sistema quando in ingresso vi è il segnale sinusoidale per pulsazioni che variano da zero ad infinito.Preso come ingresso un segnale sinusoidale del tipo
La risposta a regime di un sistema stabile è data da:
dove è chiamato guadagno del sistema e rappresenta il modulo della risposta armonica.
Mentre è chiamato sfasamento e rappresenta lo sfasamento fra uscita e ingresso introdotto dal sistema.
RAPPRESENTAZIONE DELLA RISPOSTA ARMONICA SECONDO BODE E NYQUIST
)t(senA)t(x ⋅⋅⋅⋅ωωωω⋅⋅⋅⋅====
))(t(sen)(GA)t(y ωωωωΦΦΦΦ++++⋅⋅⋅⋅ωωωω⋅⋅⋅⋅ωωωω⋅⋅⋅⋅====
)j(Harg)( ωω =Φ
)()( ωω jHG =

La funzione di trasferimento Sistemi elettrici automatici 8
Diagrammi di Bode• Servono a rappresentare la risposta in frequenza di un sistema stabile. Si
tratta di due diagrammi distinti:1. il diagramma dei guadagni 2. il diagramma degli sfasamenti
• Il diagramma di Bode dei guadagni
(detto anche diagramma delle ampiezze o dei moduli) è un diagramma cartesiano in cui sono rappresentati in ascissa le pulsazioni ed in ordinata i guadagni. Considerata l’ampia variazione delle grandezze da riportare, per una piùcomoda rappresentazione si è soliti impiegare sia per le ascisse che per le ordinate la scala logaritmica realizzando così un diagramma a doppia scala logaritmica. Tuttavia è pure utilizzata la rappresentazione del guadagno in decibel ed in questo caso la sola ascissa è in scala logaritmica realizzandosi così un diagramma semilogaritmico. Il guadagno espresso in decibel è legato al guadagno espresso in valore assoluto dalla relazione:
))(G(log20)(G 10db ωωωω⋅⋅⋅⋅====ωωωω

La funzione di trasferimento Sistemi elettrici automatici 9
• Il diagramma di Bode degli sfasamenti:
(detto anche diagramma delle fasi o degli argomenti) riporta gli sfasamenti tra uscita ed ingresso in funzione della pulsazione. La scala delle ascisse (pulsazioni) è logaritmica mentre quella delle ordinate (sfasamenti) èlineare, si tratta quindi di un diagramma semilogaritmico.
Avremo:1. sfasamenti positivi quando l’uscita è in anticipo sull’entrata,2. sfasamenti negativi in caso contrario.
L’espressione analitica sarà:
• Spesso si tracciano i diagrammi di Bode asintotici che sono costituiti non da curve che identificano il guadagno o la fase per ogni singolo valore di pulsazione bensì da spezzate i cui vertici individuano le pulsazioni d’angolonelle quali si ha un cambiamento della pendenza dei diagrammi.
• Si osserva inoltre che ha senso parlare di funzione di risposta armonica solo per sistemi stabili in quanto se il sistema non fosse stabile non si potrebbe individuare alcuna risposta a regime.
))j(Harg()( ωωωω====ωωωωΦΦΦΦ

La funzione di trasferimento Sistemi elettrici automatici 10
• Esempio: tracciare la rappresentazione della funzione di risposta armonica mediante i diagrammi di Bode per l’assegnata funzione di trasferimento:
• diagramma di Bode dei guadagni:
ωωωω====ωωωωΦΦΦΦ
ωωωω⋅⋅⋅⋅====⇒⇒⇒⇒
++++ωωωω⋅⋅⋅⋅++++ωωωω====ωωωω⇒⇒⇒⇒
++++⋅⋅⋅⋅++++====
))j(Harg()(
)j(Hlog20G
)2j()1j(
1)j(H
)2s()1s(
1)s(H 10db

La funzione di trasferimento Sistemi elettrici automatici 11
• diagramma di Bode degli sfasamenti:

La funzione di trasferimento Sistemi elettrici automatici 12
Diagramma di Nyquist• Se rappresentiamo la funzione di risposta armonica
H(jω) sul piano complesso avremo che per ogni valore di ω la funzione stessa sarà rappresentata da un vettore uscente dall’origine ed il cui estremo si troverà in un punto che avrà come ascissa e ordinata rispettivamente la parte reale e la parte immaginaria della H(jω).
• Va inoltre detto che:1. il modulo di questo vettore rappresenterà il
guadagno2. mentre l’angolo formato col semiasse positivo reale
rappresenterà lo sfasamento introdotti dalla funzione di risposta armonica.

La funzione di trasferimento Sistemi elettrici automatici 13
• Facendo variare ω da zero ad infinito il vettore descriverà col suo estremo un luogo di punti che viene chiamato appunto diagramma di Nyquist.Tale diagramma viene completato facendo percorrere al vettore rappresentante la funzione di risposta armonica anche il campo ipotetico di frequenze negative.
• Il diagramma di Nyquist rappresenta pertanto in forma polare il guadagno della funzione e lo sfasamento, la pulsazione vi appare come variabile implicita e viene indicata in corrispondenza di alcuni punti della curva. Sul diagramma si mettono spesso in evidenza il punto corrispondente a guadagno unitario e sfasamento -180°(detto comunemente punto a guadagno -1) e la circonferenza corrispondente al guadagno unitario. Questi elementi verranno utilizzati per la valutazione della stabilità dei sistemi in retroazione.

La funzione di trasferimento Sistemi elettrici automatici 14
• Esempio: tracciare la rappresentazione della funzione di risposta armonica mediante il diagramma di Nyquist per l’assegnata funzione di trasferimento.
ωωωω====ωωωωΦΦΦΦ
ωωωω⋅⋅⋅⋅====⇒⇒⇒⇒
++++ωωωω⋅⋅⋅⋅++++ωωωω====ωωωω⇒⇒⇒⇒
++++⋅⋅⋅⋅++++====
))j(Harg()(
)j(Hlog20G
)2j()1j(
1)j(H
)2s()1s(
1)s(H 10db
-0.1 0 0.1 0.2 0.3 0.4 0.5-0,4
-0,3
-0,2
-0,1
0
0,1
0,2
0,3
0,4
asse reale
asse
imm
agin
ario
ωωωω=0ωωωω=∞∞∞∞
ωωωω=1
ωωωω=2,5

La funzione di trasferimento Sistemi elettrici automatici 15
Criterio di esecuzione dei diagrammi di Bode
Per eseguire i diagrammi di Bode la funzione di trasferimento deve essere espressa nella forma di Bode con la quale sono evidenziati gli zeri, i poli ed il guadagno statico (detto anche costante di Bode o fattore di trasferimento), ovvero il valore della funzione in corrispondenza di s = 0.
Per prima cosa si scompongono in fattori il numeratore ed il denominatore:
dove ovviamente zi e pi sono i generici zeri e poli della f.d.t.
)ps(...)ps()ps(a
)zs(...)zs()zs(b
asa...sasa
bsb...sbsb)s(H
n21n
m21m
011n
1nn
n
011m
1mm
m
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅====
++++⋅⋅⋅⋅++++++++⋅⋅⋅⋅++++⋅⋅⋅⋅
++++⋅⋅⋅⋅++++++++⋅⋅⋅⋅++++⋅⋅⋅⋅====
−−−−−−−−
−−−−−−−−
La funzione di trasferimento Sistemi elettrici automatici 16
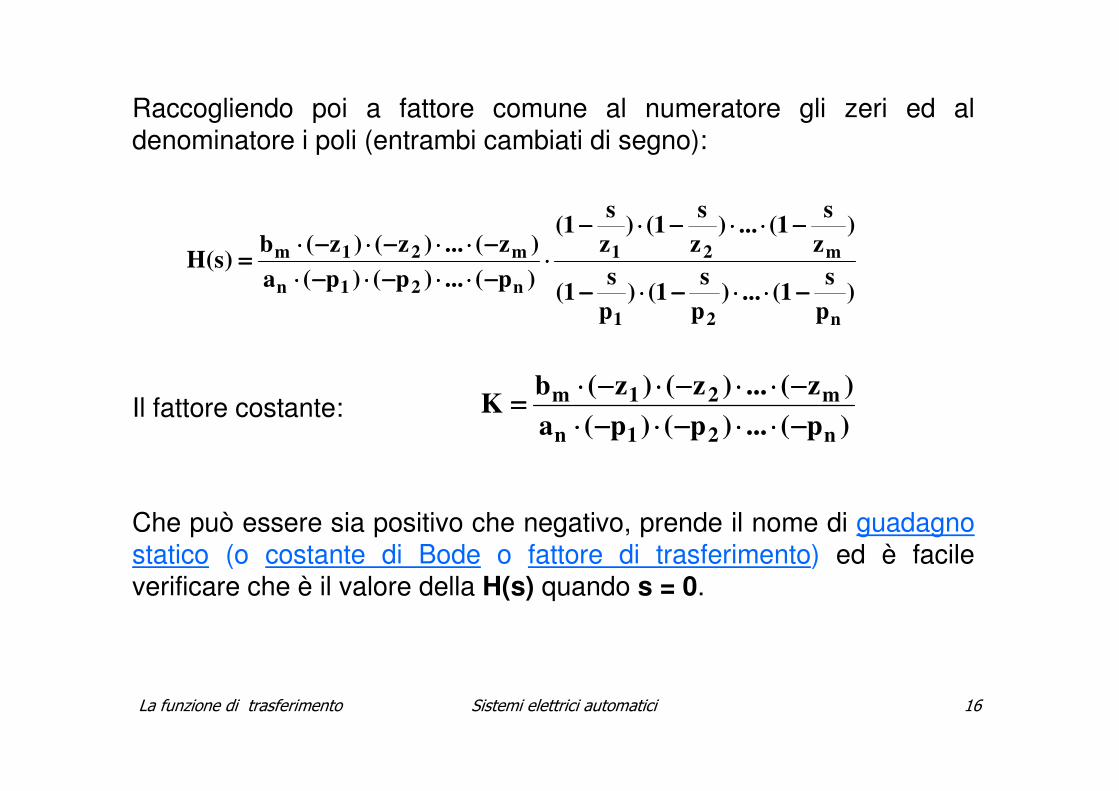
Raccogliendo poi a fattore comune al numeratore gli zeri ed al denominatore i poli (entrambi cambiati di segno):
Il fattore costante:
Che può essere sia positivo che negativo, prende il nome di guadagno statico (o costante di Bode o fattore di trasferimento) ed è facile verificare che è il valore della H(s) quando s = 0.
)p
s1(...)
p
s1()
p
s1(
)z
s1(...)
z
s1()
z
s1(
)p(...)p()p(a
)z(...)z()z(b)s(H
n21
m21
n21n
m21m
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−
⋅⋅⋅⋅−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅====
)p(...)p()p(a
)z(...)z()z(bK
n21n
m21m
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅
−−−−⋅⋅⋅⋅⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅====

La funzione di trasferimento Sistemi elettrici automatici 17
Si definisce forma canonica della funzione di trasferimento (in “s”) quella che evidenzia il guadagno statico e le costanti di tempo:
Quindi è necessario fare riferimento alla funzione di risposta armonica (in “Jω”) espressa nella forma canonica:
)ds1(...)ds1()ds1(
)ns1(...)ns1()ns1(K)s(H
n21
m21
ττττ⋅⋅⋅⋅++++⋅⋅⋅⋅⋅⋅⋅⋅ττττ⋅⋅⋅⋅++++⋅⋅⋅⋅ττττ⋅⋅⋅⋅++++
ττττ⋅⋅⋅⋅++++⋅⋅⋅⋅⋅⋅⋅⋅ττττ⋅⋅⋅⋅++++⋅⋅⋅⋅ττττ⋅⋅⋅⋅++++⋅⋅⋅⋅====
)p
j1(...)
p
j1()
p
j1(
)z
j1(...)
z
j1()
z
j1(
K)j(H
n21
m21
ωωωω−−−−⋅⋅⋅⋅⋅⋅⋅⋅
ωωωω−−−−⋅⋅⋅⋅
ωωωω−−−−
ωωωω−−−−⋅⋅⋅⋅⋅⋅⋅⋅
ωωωω−−−−⋅⋅⋅⋅
ωωωω−−−−
⋅⋅⋅⋅====ωωωω

La funzione di trasferimento Sistemi elettrici automatici 18
Il guadagno della funzione di trasferimento secondo Bode sarà:
n10
210
110
m10
210
11010
1010db
p
j1log20...
p
j1log20
p
j1log20
z
j1log20...
z
j1log20
z
j1log20Klog20
)j(Hlog20))(G(log20)(G
ωωωω−−−−⋅⋅⋅⋅−−−−−−−−
ωωωω−−−−⋅⋅⋅⋅−−−−
ωωωω−−−−⋅⋅⋅⋅−−−−
−−−−ωωωω
−−−−⋅⋅⋅⋅++++++++ωωωω
−−−−⋅⋅⋅⋅++++ωωωω
−−−−⋅⋅⋅⋅++++⋅⋅⋅⋅====
====ωωωω⋅⋅⋅⋅====ωωωω⋅⋅⋅⋅====ωωωω
Mentre l’argomento della funzione di trasferimento secondo Bode sarà:
ωωωω−−−−−−−−−−−−
ωωωω−−−−−−−−
ωωωω−−−−−−−−
−−−−
ωωωω−−−−++++++++
ωωωω−−−−++++
ωωωω−−−−++++
====ωωωω====ωωωωΦΦΦΦ
n21
m21
patg...
patg
patg
zatg...
zatg
zatg
K
0atg))j(Harg()(

La funzione di trasferimento Sistemi elettrici automatici 19
Si conclude che per l’esecuzione del diagramma del guadagno e del diagramma degli sfasamenti si può sempre procedere con la somma dei diagrammi di funzioni elementari che possono essere solo dei tipi fondamentali qui di seguito elencati.a)Costante pura, In tal caso sia il diagramma dei guadagni che quello degli argomenti hanno andamento rettilineo orizzontale pari a:
I cui andamenti saranno i seguenti:
0K180)(0K0)(
Klog20)(G 10db
<<<<°°°°±±±±====ωωωωΦΦΦΦ>>>>°°°°====ωωωωΦΦΦΦ
⋅⋅⋅⋅====ωωωω
se , se
10 102 103 104 1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω)ω)ω)ω)
)
|K|>1
|K|=1
|K|<1
10 102 103 104 1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
|K|<0
|K|>0
-180°
-90°
|K|<0
K)j(H ====ωωωω
La funzione di trasferimento Sistemi elettrici automatici 20
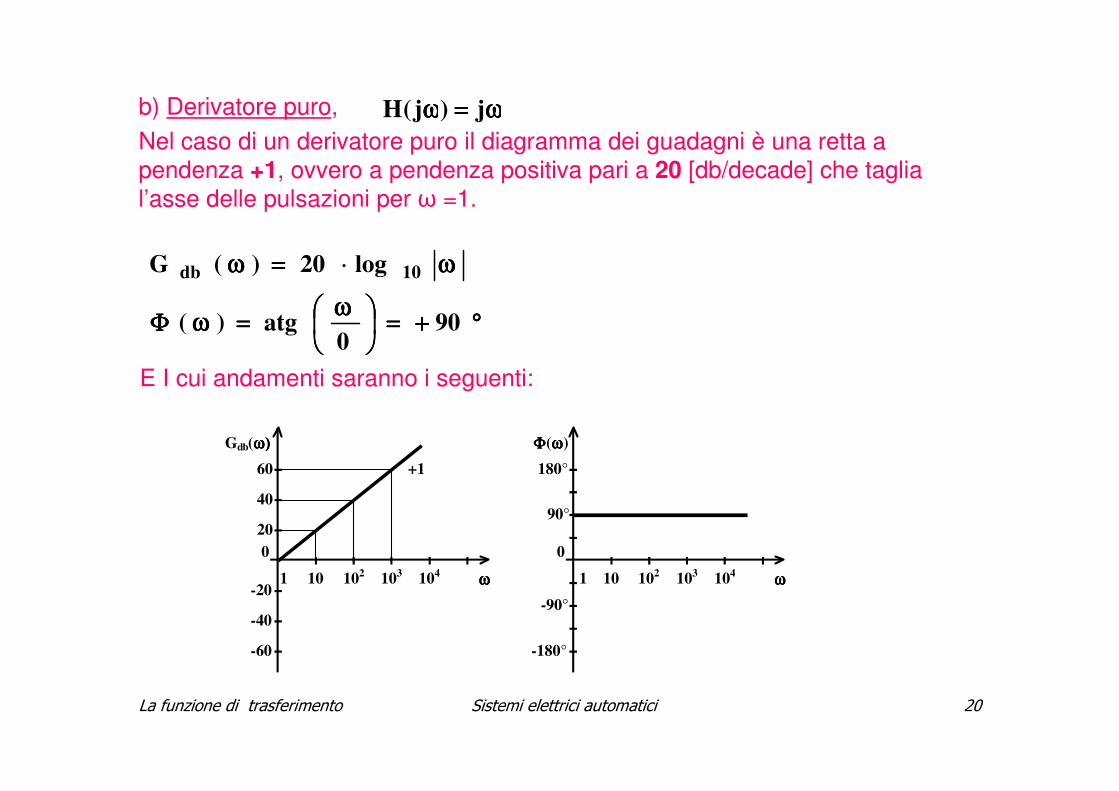
b) Derivatore puro,
Nel caso di un derivatore puro il diagramma dei guadagni è una retta a pendenza +1, ovvero a pendenza positiva pari a 20 [db/decade] che taglia l’asse delle pulsazioni per ω =1.
ωωωω====ωωωω j)j(H
°°°°++++====
ωωωω====ωωωωΦΦΦΦ
ωωωω⋅⋅⋅⋅====ωωωω
900
atg)(
log20)(G 10db
10 102 103 104 1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω)ω)ω)ω)
)
10 102 103 104 1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
-180°
-90°
+1
E I cui andamenti saranno i seguenti:

La funzione di trasferimento Sistemi elettrici automatici 21
Altra rappresentazione dei diagrammi di Bode del guadagno (in blù) e della fase (in rosso) della funzione derivatrice pura H(jω)= jω
Diagramma del
guadagno
Diagramma degli
sfasamenti
Punto a
guadagno 0
(ω=1)

La funzione di trasferimento Sistemi elettrici automatici 22
c) Integratore puro,ωωωω
====ωωωωj
1)j(H
°°°°−−−−====
ωωωω−−−−
====ωωωωΦΦΦΦ
ωωωω⋅⋅⋅⋅====ωωωω
900
atg1
0atg)(
1log20)(G 10db
10 102 103 104 1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω)ω)ω)ω)
)
10 102 103 104 1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
-180°
-90°
-1
E I cui andamenti saranno i seguenti:
Il diagramma dei guadagni è una retta a pendenza –1 (pendenza negativa di 20 [db/decade]) che taglia l’asse delle pulsazioni per ω=1.

La funzione di trasferimento Sistemi elettrici automatici 23
Altra rappresentazione dei diagrammi di Bode del guadagno (in blù) e della fase (in rosso) della funzione integratrice pura H(jω)= 1/jω
Diagramma del
guadagno
Diagramma degli
sfasamenti
Punto a
guadagno 0
(ω=1)
La funzione di trasferimento Sistemi elettrici automatici 24
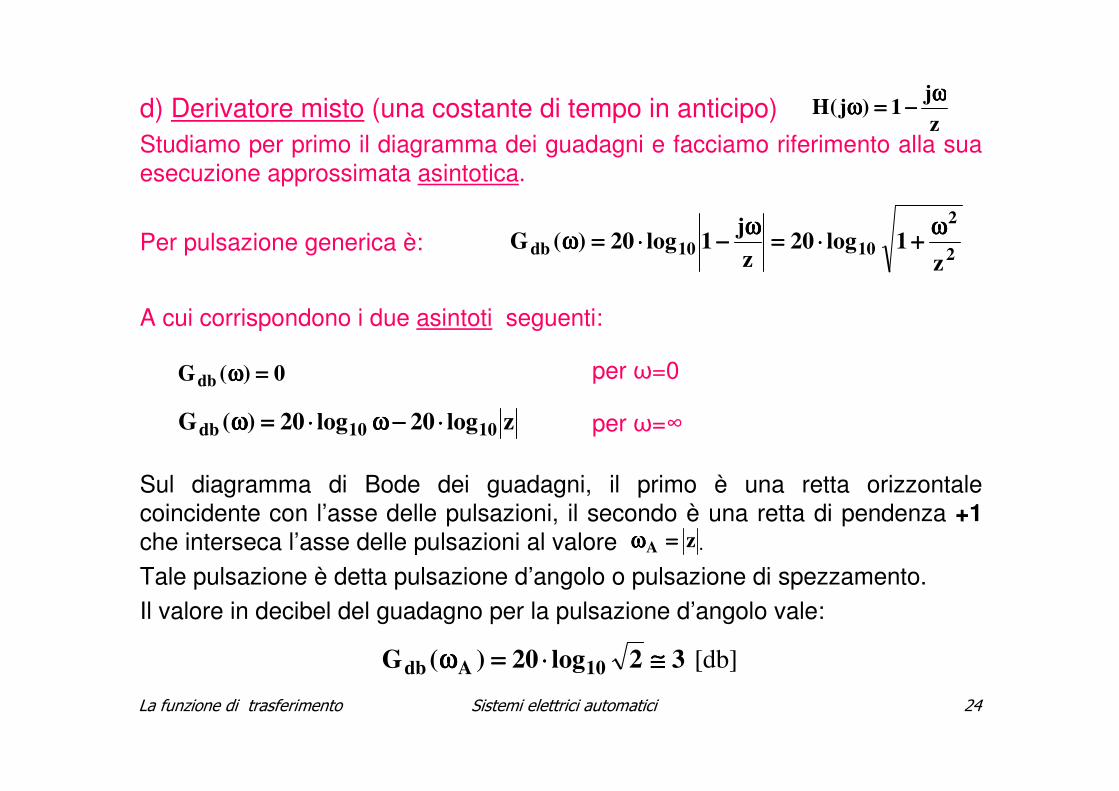
d) Derivatore misto (una costante di tempo in anticipo)Studiamo per primo il diagramma dei guadagni e facciamo riferimento alla sua esecuzione approssimata asintotica.
Per pulsazione generica è:
Sul diagramma di Bode dei guadagni, il primo è una retta orizzontale coincidente con l’asse delle pulsazioni, il secondo è una retta di pendenza +1che interseca l’asse delle pulsazioni al valore .
Tale pulsazione è detta pulsazione d’angolo o pulsazione di spezzamento.Il valore in decibel del guadagno per la pulsazione d’angolo vale:
z
j1)j(H
ωωωω−−−−====ωωωω
2
2
1010dbz
1log20z
j1log20)(G
ωωωω++++⋅⋅⋅⋅====
ωωωω−−−−⋅⋅⋅⋅====ωωωω
A cui corrispondono i due asintoti seguenti:
0)(Gdb ====ωωωω per ω=0
zlog20log20)(G 1010db ⋅⋅⋅⋅−−−−ωωωω⋅⋅⋅⋅====ωωωω per ω=∞
zA ====ωωωω
[db] 32log20)(G 10Adb ≅≅≅≅⋅⋅⋅⋅====ωωωω

La funzione di trasferimento Sistemi elettrici automatici 25
Studiamo ora il diagramma asintotico degli argomenti procedendo in maniera analoga.
Per la pulsazione generica si ha:
Inoltre in corrispondenza della pulsazione d’angolo si verifica che è:
si nota che nell’intervallo di pulsazioni comprese tra 0,1·|z| e 10·|z| il diagramma può essere approssimato da un segmento ad esso tangente nel punto di flesso ωA=|z|
ωωωω−−−−====ωωωωΦΦΦΦ
zatg)(
A cui corrispondono i due seguenti asintoti orizzontali:
°°°°====ωωωωΦΦΦΦ 0)(
0z90)(0z90)( >>>>°°°°−−−−====ωωωωΦΦΦΦ<<<<°°°°++++====ωωωωΦΦΦΦ se oppure se
,
per ω=0
per ω=∞
0z45)(0z45z
zatg)( AA >>>>°°°°−−−−====ωωωωΦΦΦΦ<<<<°°°°++++====
−−−−====ωωωωΦΦΦΦ se oppure se

La funzione di trasferimento Sistemi elettrici automatici 26
Quindi gli andamenti dei diagrammi di Bode saranno:
10 102
103
104
1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω )ω )ω )ω )
10 102
103
104
1
0
90°
180°
ωωωω
ΦΦΦΦ (ωωωω )
-180°
-90°
+1
ωωωω A ωωωω A 10·ωωωω A 0,1·ωωωω A
z = -1000 z = -1000
La funzione di trasferimento Sistemi elettrici automatici 27
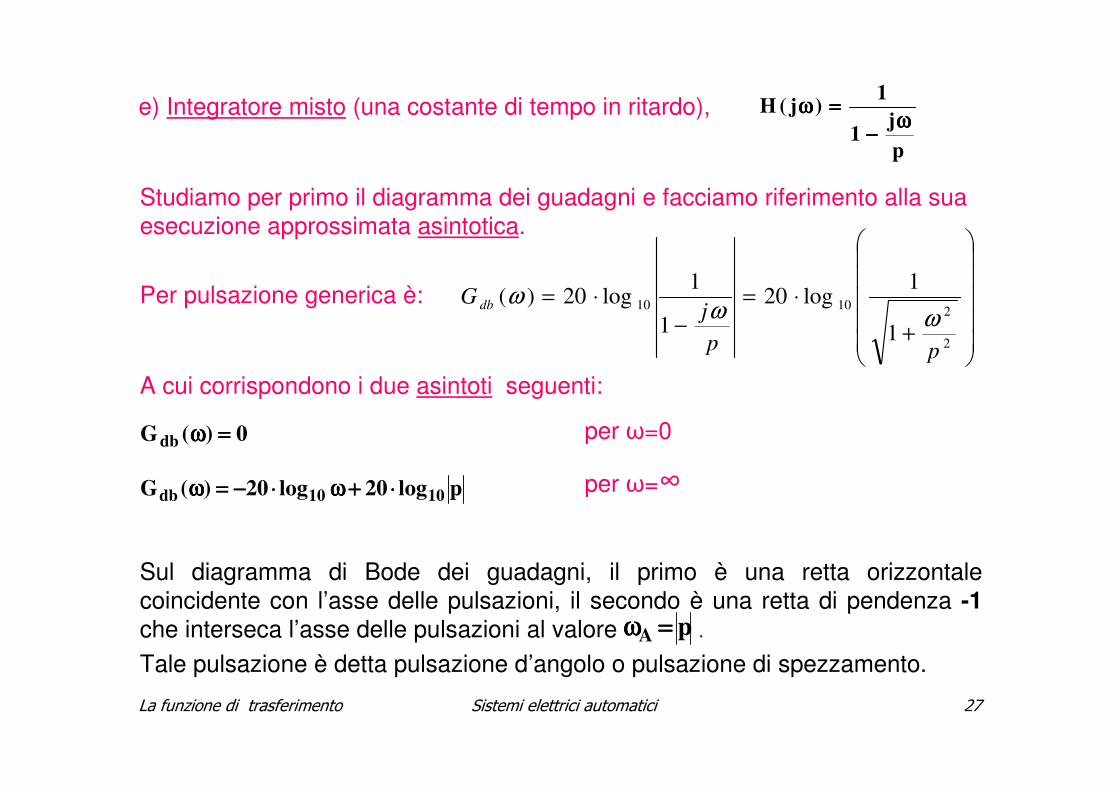
e) Integratore misto (una costante di tempo in ritardo),
p
j1
1)j(H
ωωωω−−−−
====ωωωω
Studiamo per primo il diagramma dei guadagni e facciamo riferimento alla sua esecuzione approssimata asintotica.
Per pulsazione generica è:
Sul diagramma di Bode dei guadagni, il primo è una retta orizzontale coincidente con l’asse delle pulsazioni, il secondo è una retta di pendenza -1che interseca l’asse delle pulsazioni al valore .
Tale pulsazione è detta pulsazione d’angolo o pulsazione di spezzamento.
+
⋅=
−
⋅=
2
21010
1
1log20
1
1log20)(
pp
jG db
ωωω
A cui corrispondono i due asintoti seguenti:
0)(Gdb ====ωωωω per ω=0
per ω=∞plog20log20)(G 1010db ⋅⋅⋅⋅++++ωωωω⋅⋅⋅⋅−−−−====ωωωω
pA ====ωωωω
La funzione di trasferimento Sistemi elettrici automatici 28
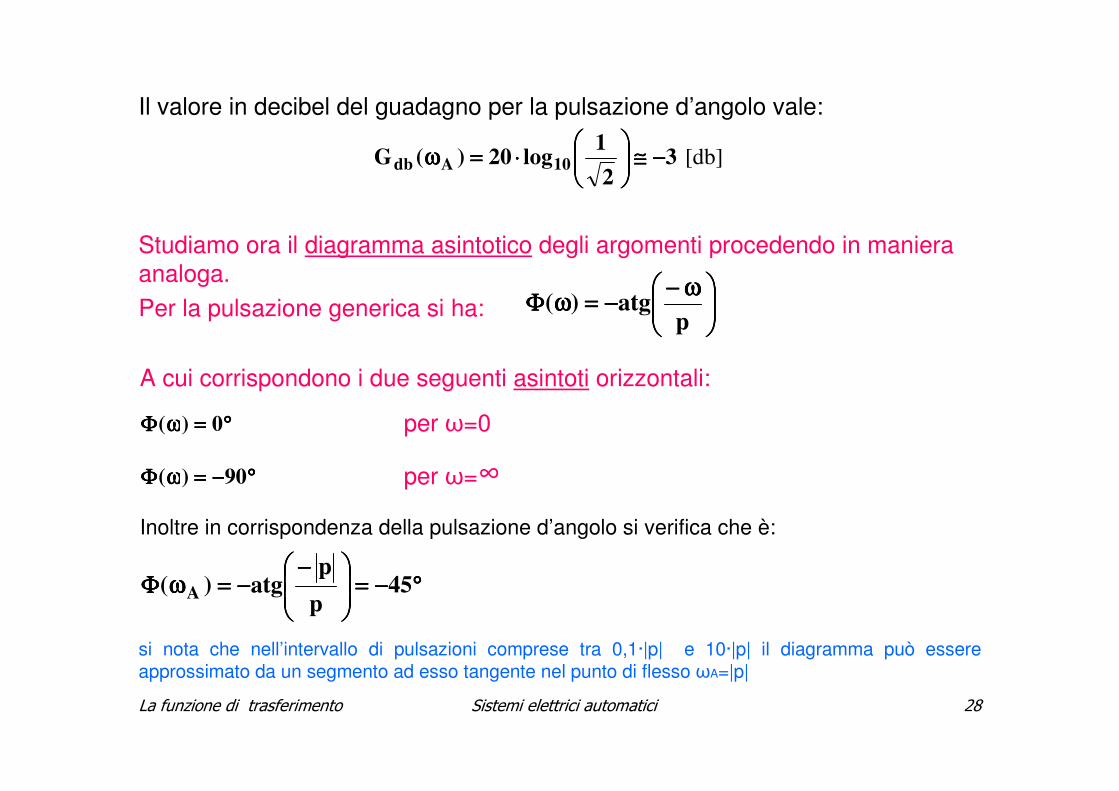
Il valore in decibel del guadagno per la pulsazione d’angolo vale:
Studiamo ora il diagramma asintotico degli argomenti procedendo in maniera analoga.Per la pulsazione generica si ha:
si nota che nell’intervallo di pulsazioni comprese tra 0,1·|p| e 10·|p| il diagramma può essere approssimato da un segmento ad esso tangente nel punto di flesso ωA=|p|
[db] 32
1log20)(G 10Adb −−−−≅≅≅≅
⋅⋅⋅⋅====ωωωω
ωωωω−−−−−−−−====ωωωωΦΦΦΦ
patg)(
A cui corrispondono i due seguenti asintoti orizzontali:
°°°°====ωωωωΦΦΦΦ 0)( per ω=0
°°°°−−−−====ωωωωΦΦΦΦ 90)( per ω=∞
Inoltre in corrispondenza della pulsazione d’angolo si verifica che è:
°°°°−−−−====
−−−−−−−−====ωωωωΦΦΦΦ 45
p
patg)( A
La funzione di trasferimento Sistemi elettrici automatici 29
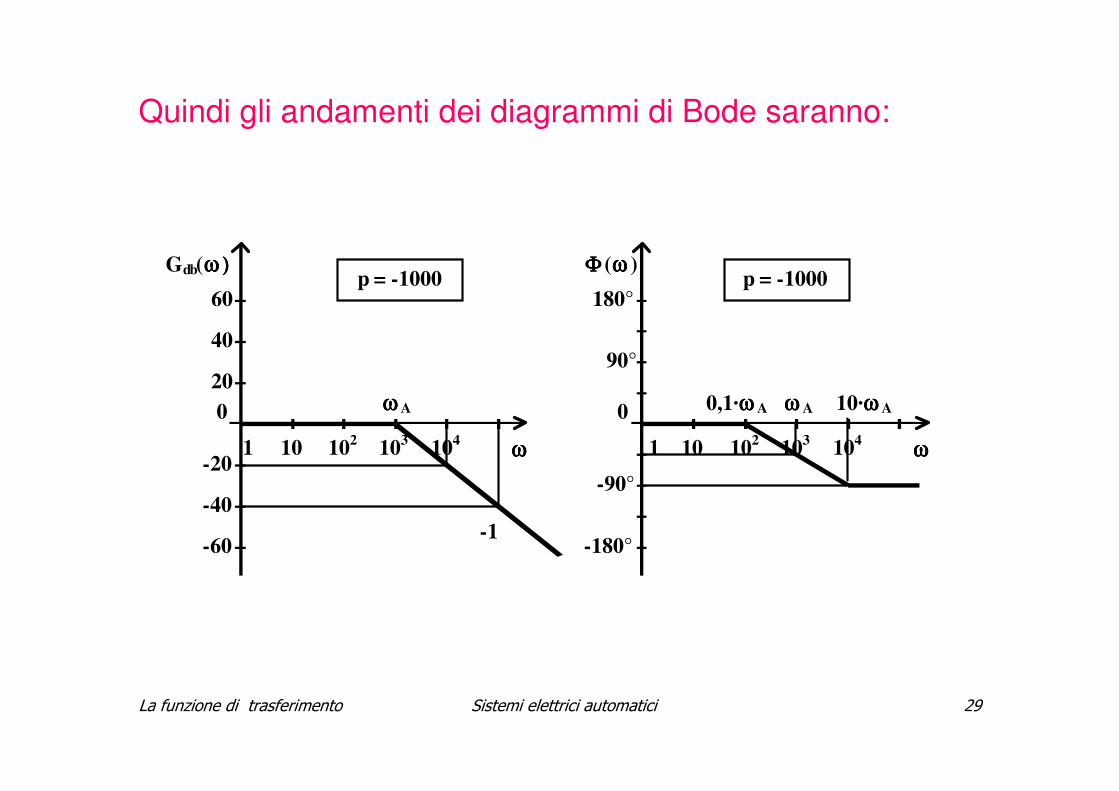
Quindi gli andamenti dei diagrammi di Bode saranno:
10 102
103
104
1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω )ω )ω )ω )
10 102
103
104
1
0
90°
180°
ωωωω
ΦΦΦΦ (ωωωω )
-180°
-90°
-1
ωωωω A ωωωω A 10·ωωωω A 0,1·ωωωω A
p = -1000 p = -1000

La funzione di trasferimento Sistemi elettrici automatici 30
f) Sistemi con più zeri reali:….si passa da diagrammi con pendenza +1 a pendenze di grado superiore (+2,+3, etc…) mano a mano che si incontrano gli zeri successivi….g) Sistemi con più poli reali:
….si passa da diagrammi con pendenza -1 a pendenze di grado superiore (-2,-3, etc…) mano a mano che si incontrano i poli successivi….
Rimangono inoltre da studiare i casi di:
h) sistemi con poli complessi e coniugati…i) sistemi con zeri complessi e coniugati…
La funzione di trasferimento Sistemi elettrici automatici 31
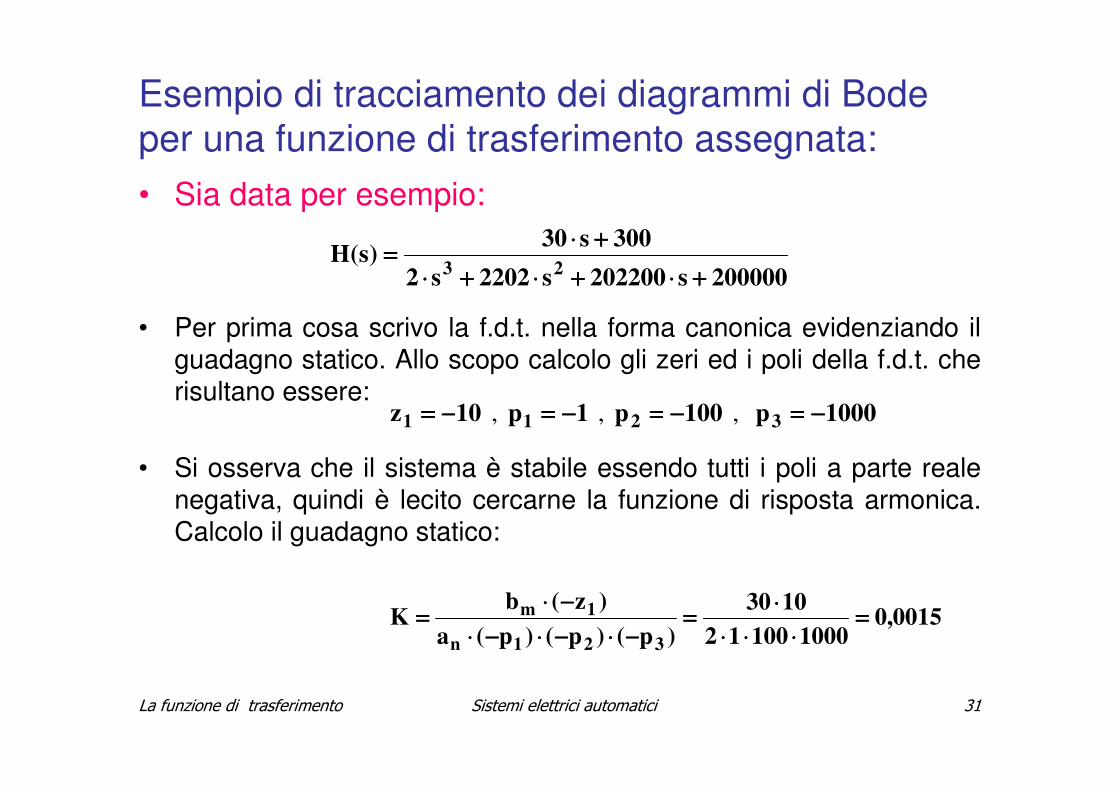
Esempio di tracciamento dei diagrammi di Bodeper una funzione di trasferimento assegnata:
• Sia data per esempio:
• Per prima cosa scrivo la f.d.t. nella forma canonica evidenziando il guadagno statico. Allo scopo calcolo gli zeri ed i poli della f.d.t. che risultano essere:
• Si osserva che il sistema è stabile essendo tutti i poli a parte reale negativa, quindi è lecito cercarne la funzione di risposta armonica. Calcolo il guadagno statico:
200000s202200s2202s2
300s30)s(H
23++++⋅⋅⋅⋅++++⋅⋅⋅⋅++++⋅⋅⋅⋅
++++⋅⋅⋅⋅====
, , , 1000p100p1p10z 3211 −−−−====−−−−====−−−−====−−−−====
0015,0100010012
1030
)p()p()p(a
)z(bK
321n
1m ====⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅
⋅⋅⋅⋅====
−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅−−−−⋅⋅⋅⋅
−−−−⋅⋅⋅⋅====
La funzione di trasferimento Sistemi elettrici automatici 32
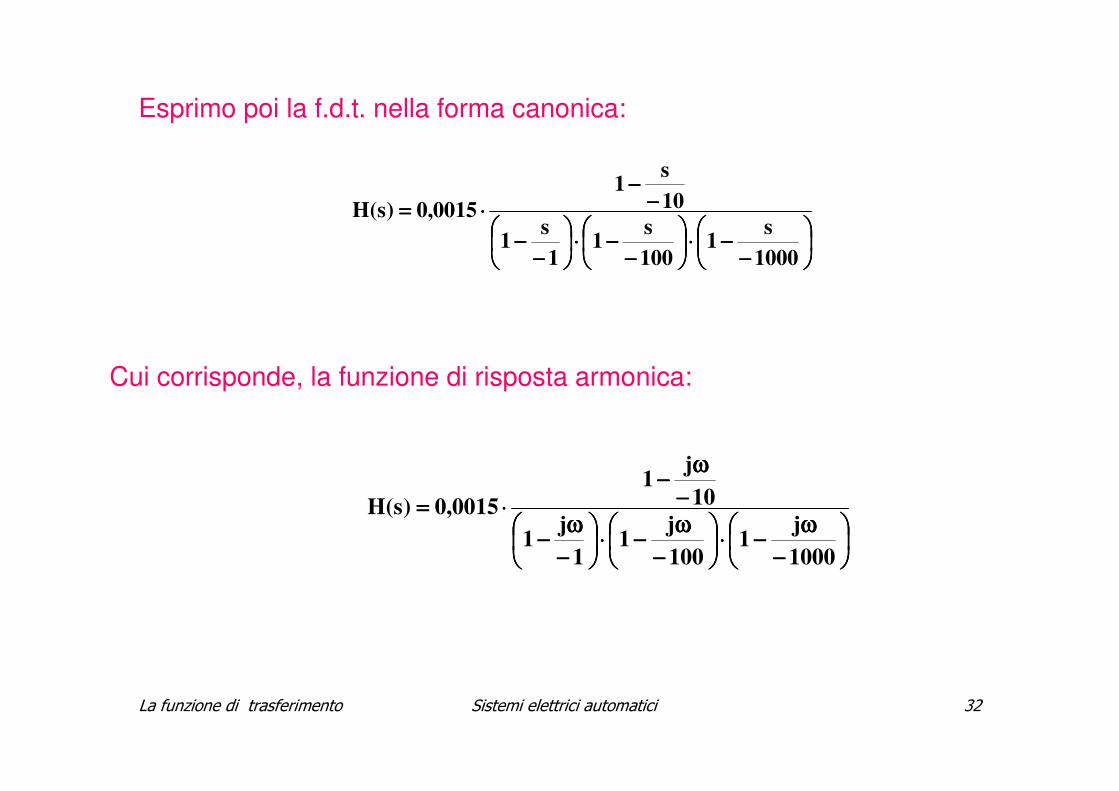
Esprimo poi la f.d.t. nella forma canonica:
−−−−−−−−⋅⋅⋅⋅
−−−−−−−−⋅⋅⋅⋅
−−−−−−−−
−−−−−−−−
⋅⋅⋅⋅====
1000
s1
100
s1
1
s1
10
s1
0015,0)s(H
Cui corrisponde, la funzione di risposta armonica:
−−−−
ωωωω−−−−⋅⋅⋅⋅
−−−−
ωωωω−−−−⋅⋅⋅⋅
−−−−
ωωωω−−−−
−−−−
ωωωω−−−−
⋅⋅⋅⋅====
1000
j1
100
j1
1
j1
10
j1
0015,0)s(H
La funzione di trasferimento Sistemi elettrici automatici 33
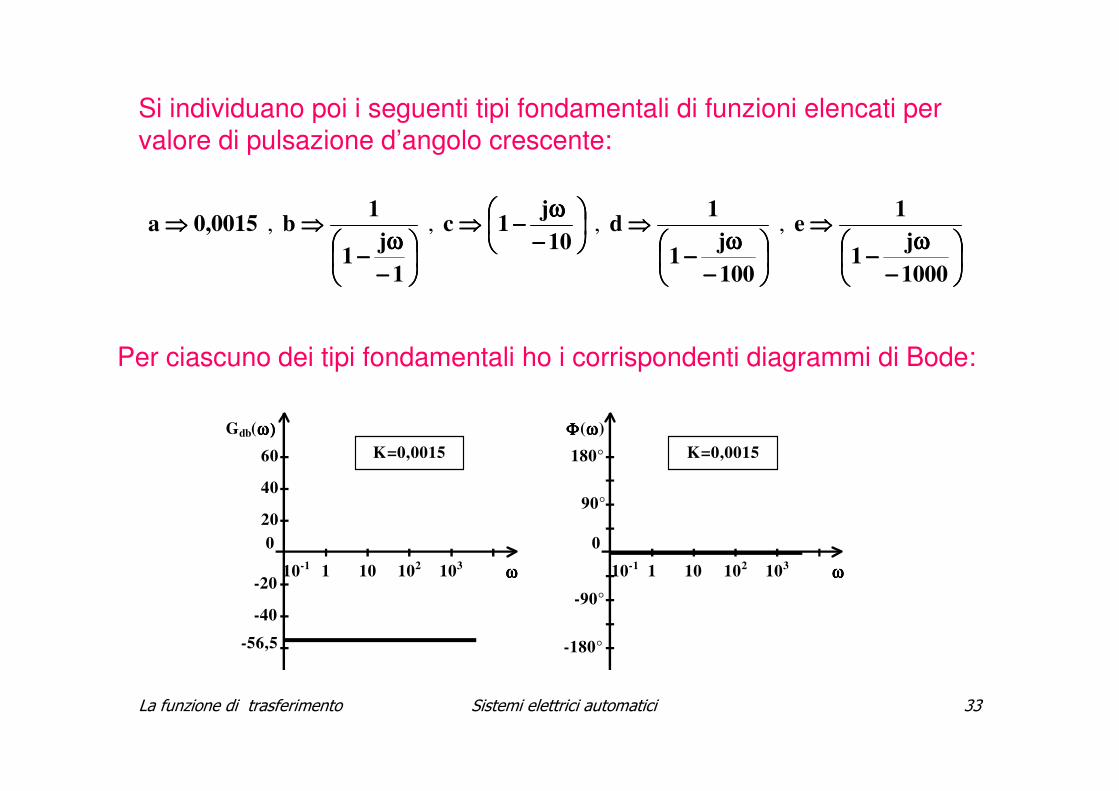
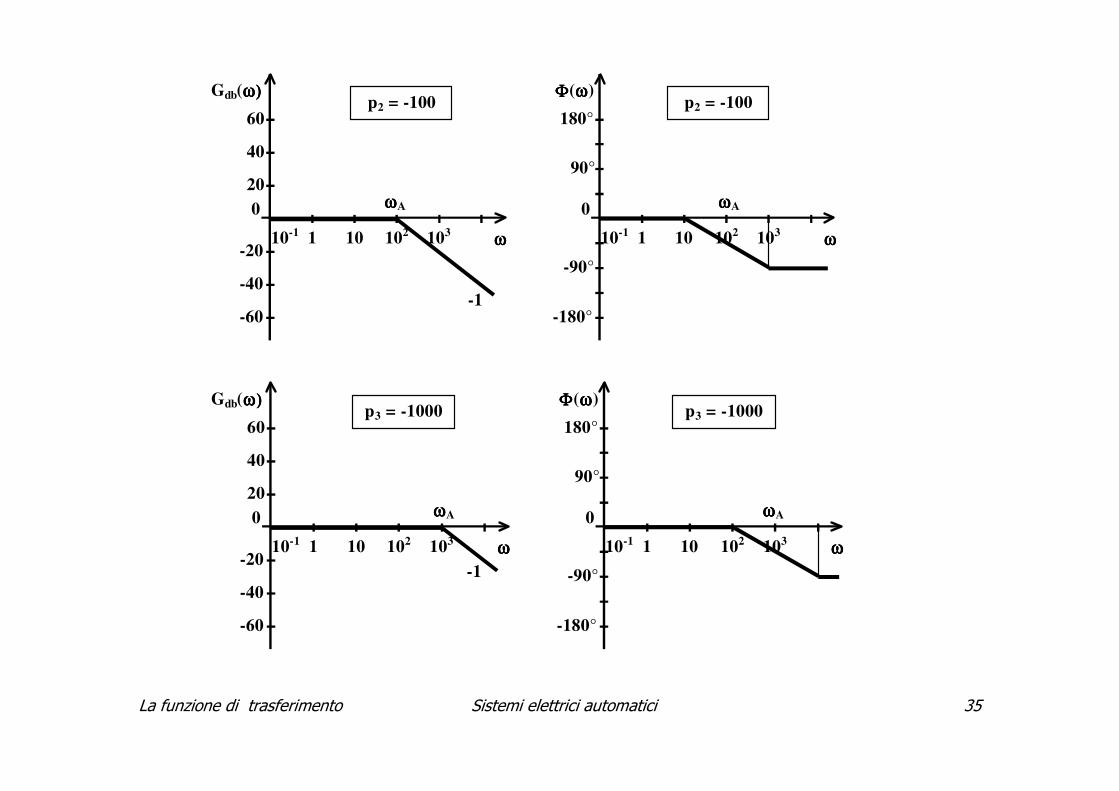
Si individuano poi i seguenti tipi fondamentali di funzioni elencati per valore di pulsazione d’angolo crescente:
−−−−
ωωωω−−−−
⇒⇒⇒⇒
−−−−
ωωωω−−−−
⇒⇒⇒⇒
−−−−
ωωωω−−−−⇒⇒⇒⇒
−−−−
ωωωω−−−−
⇒⇒⇒⇒⇒⇒⇒⇒
1000
j1
1e
100
j1
1d
10
j1c
1
j1
1b0015,0a , , , ,
1 10 102 103 10-1
0
20
40
60
-20
-40
-56,5
ωωωω
Gdb(ω)ω)ω)ω)
) K=0,0015
1 10 102 103 10-1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
-180°
-90°
K=0,0015
Per ciascuno dei tipi fondamentali ho i corrispondenti diagrammi di Bode:
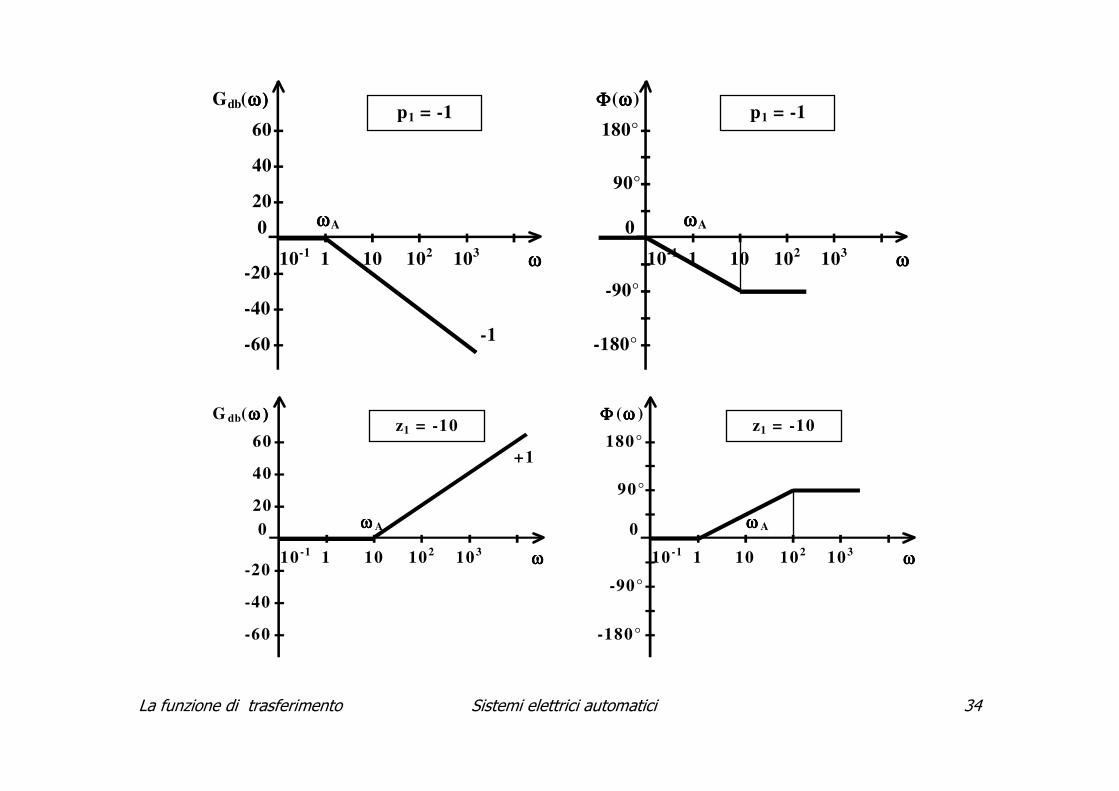
La funzione di trasferimento Sistemi elettrici automatici 34
1 10 102 103 10-1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω)ω)ω)ω)
)
1 10 102 103 10-1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
-180°
-90°
-1
ωωωωA ωωωωA
p1 = -1 p1 = -1
1 10 102 103 10 -1
0
20
40
60
-20
-40
-60
ωωωω
G db(ω )ω )ω )ω )
)
1 10 102 103 10 -1
0
90°
180°
ωωωω
ΦΦΦΦ (ωωωω )
-180°
-90°
+1
ωωωω A ωωωω A
z1 = -10 z1 = -10
La funzione di trasferimento Sistemi elettrici automatici 35
1 10 102 103 10-1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω)ω)ω)ω)
)
1 10 102 103 10-1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
-180°
-90°
-1
ωωωωA ωωωωA
p2 = -100 p2 = -100
1 10 102 103 10-1
0
20
40
60
-20
-40
-60
ωωωω
Gdb(ω)ω)ω)ω)
)
1 10 102 103 10-1
0
90°
180°
ωωωω
ΦΦΦΦ(ωωωω)
-180°
-90° -1
ωωωωA ωωωωA
p3 = -1000 p3 = -1000

La funzione di trasferimento Sistemi elettrici automatici 36
Componendo i singoli contributi si ottiene il diagramma asintotico complessivo dei guadagni:
-1
-1
-2
La funzione di trasferimento Sistemi elettrici automatici 37
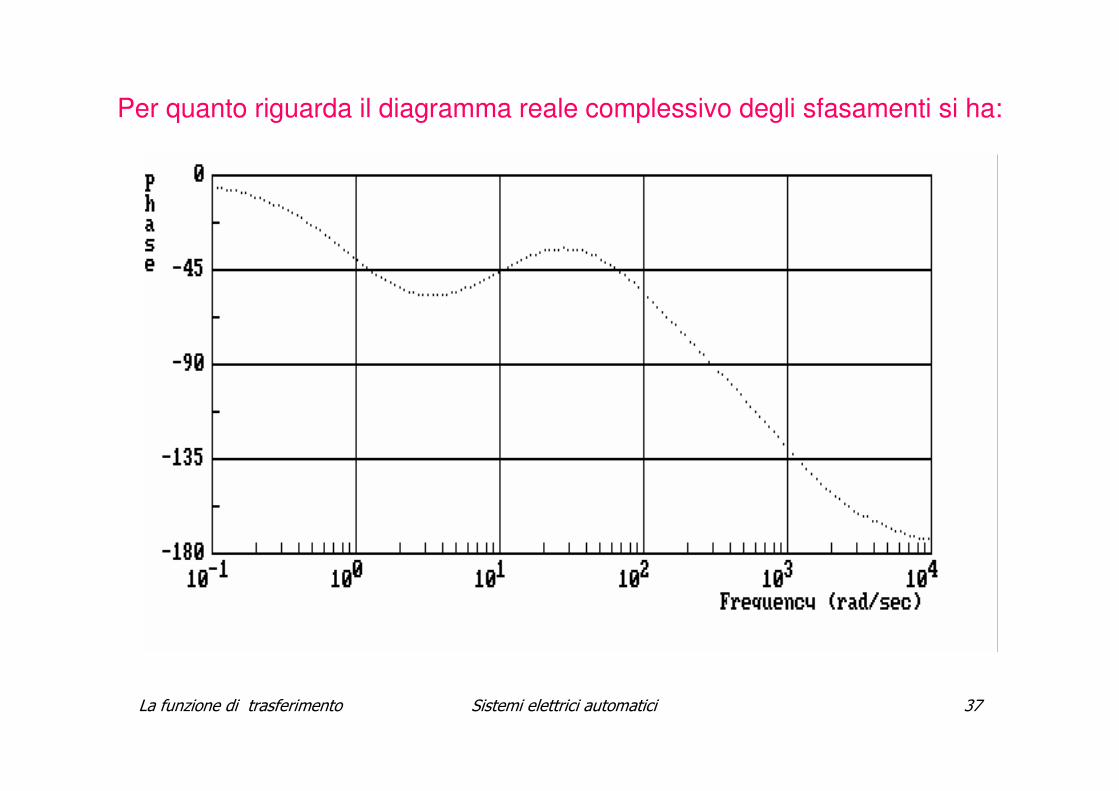
Per quanto riguarda il diagramma reale complessivo degli sfasamenti si ha:

La funzione di trasferimento Sistemi elettrici automatici 38
Per quanto riguarda il diagramma reale complessivo dei guadagni si ha:
La funzione di trasferimento Sistemi elettrici automatici 39
Criterio di esecuzione dei diagrammi di Nyquist
Abbiamo visto come la risposta in frequenza di un sistema sia rappresentabile sotto forma grafica, oltre che con i diagrammi di Bode, anche con il diagramma di Nyquist altrimenti detto diagramma polare……..
La funzione di trasferimento Sistemi elettrici automatici 40
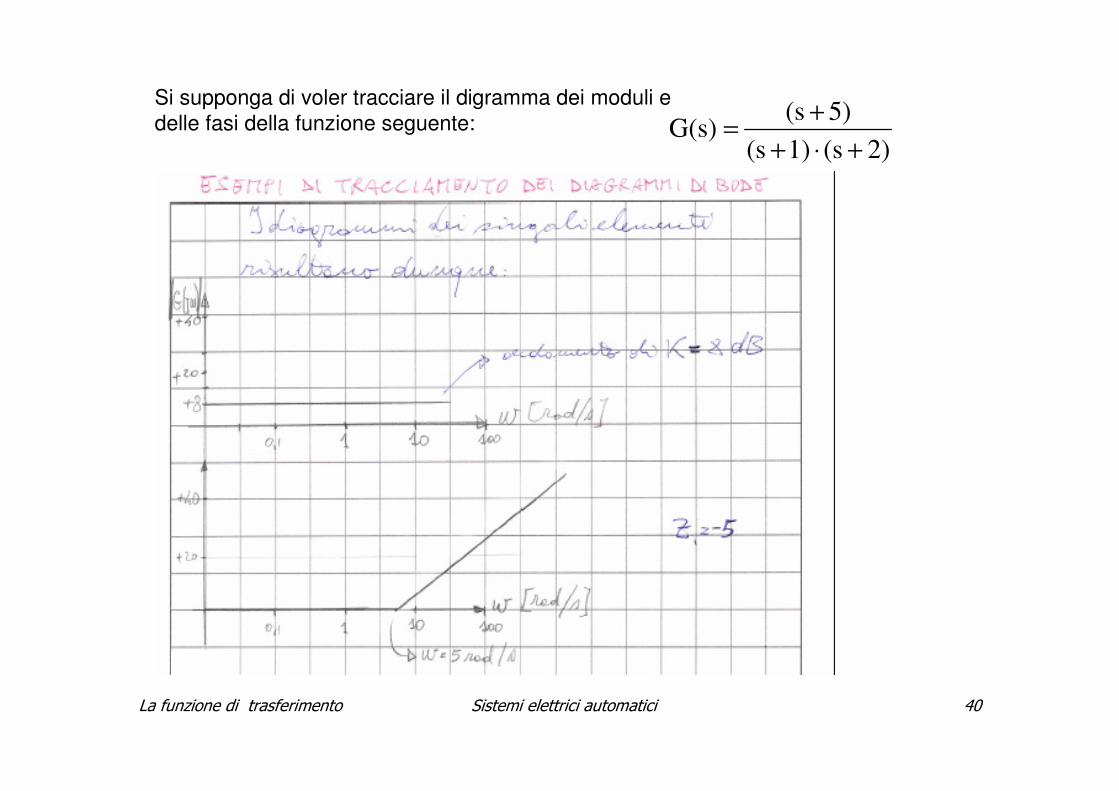
2)(s1)(s
5)(sG(s)
+⋅+
+=
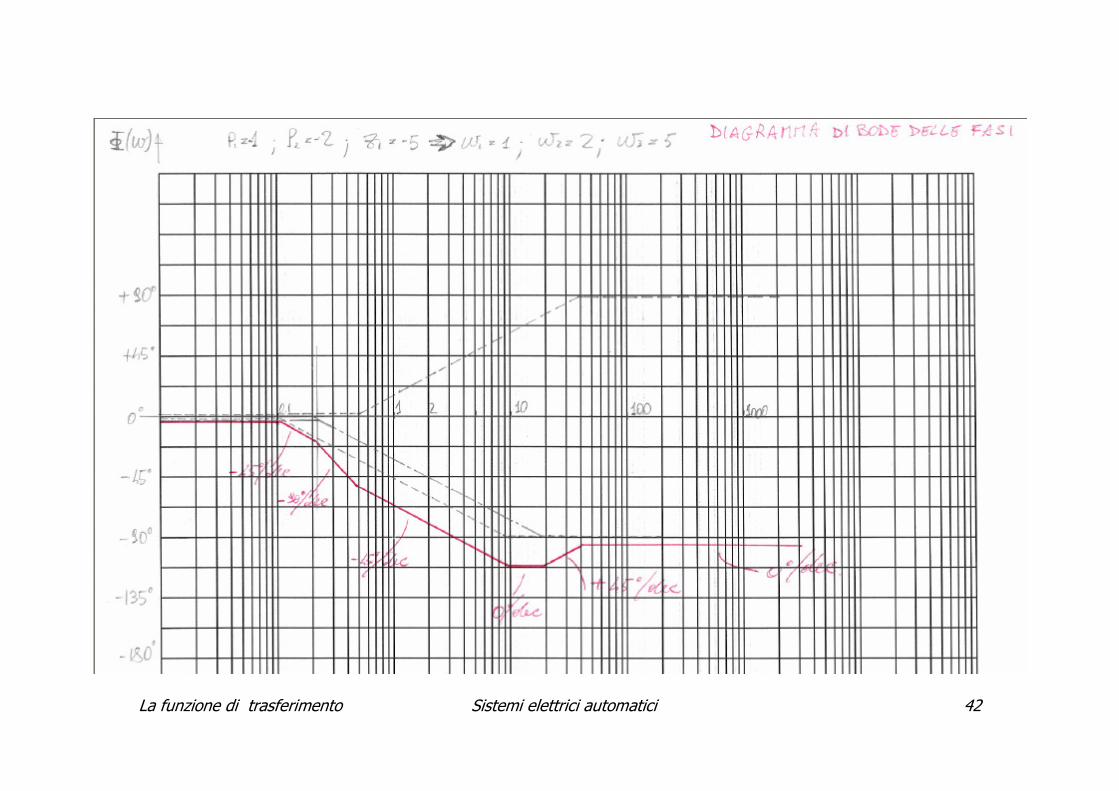
Si supponga di voler tracciare il digramma dei moduli e delle fasi della funzione seguente:
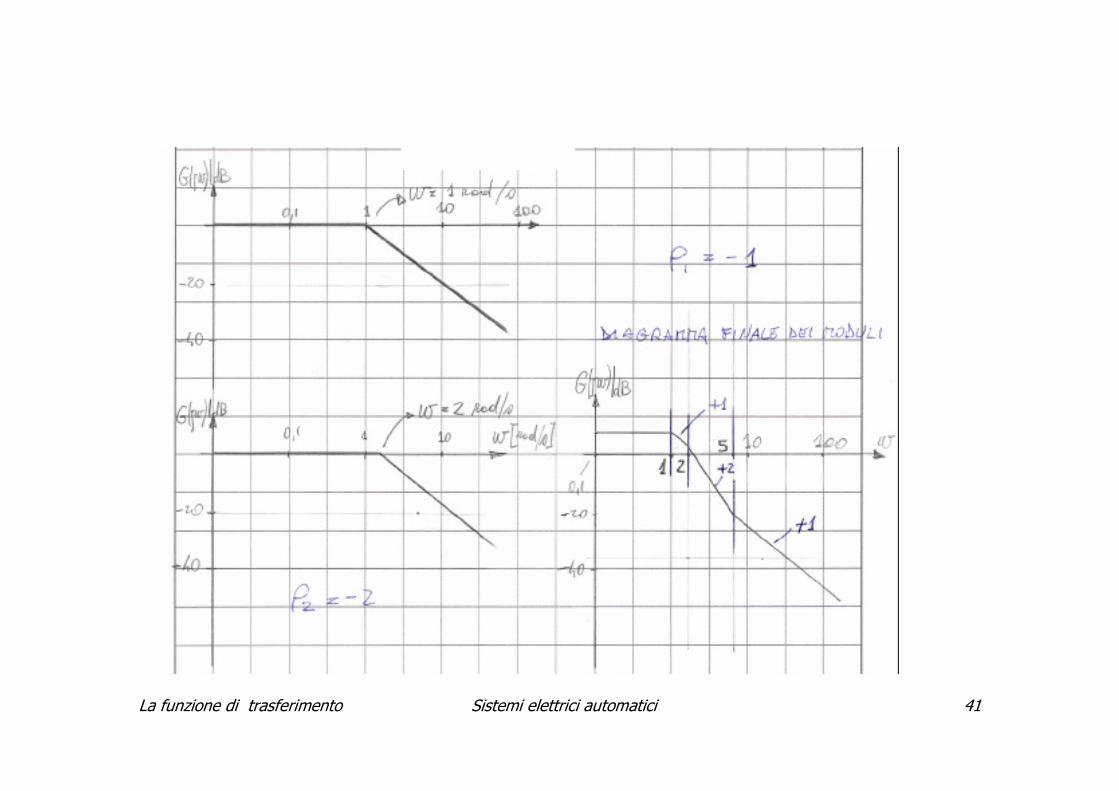
La funzione di trasferimento Sistemi elettrici automatici 41
La funzione di trasferimento Sistemi elettrici automatici 42
![Funzionamento E.S.Co. Condition Monitoring – una fonte di guadagno per qualsiasi impianto industriale. [ENERGETICO & AFFIDABILISTICO] SSE.](https://static.fdocumenti.com/doc/165x107/5542eb72497959361e8d9277/funzionamento-esco-condition-monitoring-una-fonte-di-guadagno-per-qualsiasi-impianto-industriale-energetico-affidabilistico-sse.jpg)