Fisica - Università degli Studi di Enna Kore · Il corpo rigido • È un particolare sistema di...
52
Fisica Facoltà di Ingegneria, Architettura e delle Scienze Motorie Lezione 19 aprile 2013 Architettura (corso magistrale a ciclo unico quinquennale) Prof. Lanzalone Gaetano
Transcript of Fisica - Università degli Studi di Enna Kore · Il corpo rigido • È un particolare sistema di...

Fisica
Facoltà di Ingegneria, Architettura e delle Scienze Motorie
Lezione 19 aprile 2013
Architettura (corso magistrale a ciclo unico quinquennale)
Prof. Lanzalone Gaetano

CORPO RIGIDO

Il corpo rigido • È un particolare sistema di punti materiali in cui le distanze, tra due
qualunque dei suoi punti, non variano nel tempo – un corpo rigido (CR) non subisce alcuna deformazione anche se sottoposto a sollecitazioni estremamente elevate. Il corpo rigido conserva la sua forma.
I corpi solidi possono, in prima approssimazione, essere considerati rigidi. • Il corpo rigido è un’astrazione: in natura non ci saranno mai corpi perfettamente rigidi • Ci saranno corpi il cui comportamento, in particolari condizioni, può essere descritto come
quello di un corpo rigido. • Un corpo rigido non può avere moti caratterizzati da una variazione delle dimensioni del
corpo stesso (vibrazioni, maree, etc.)
i=1
n
∑
discreto numero di punti finito
continuo
tu tto il corpo∫ Infiniti punti
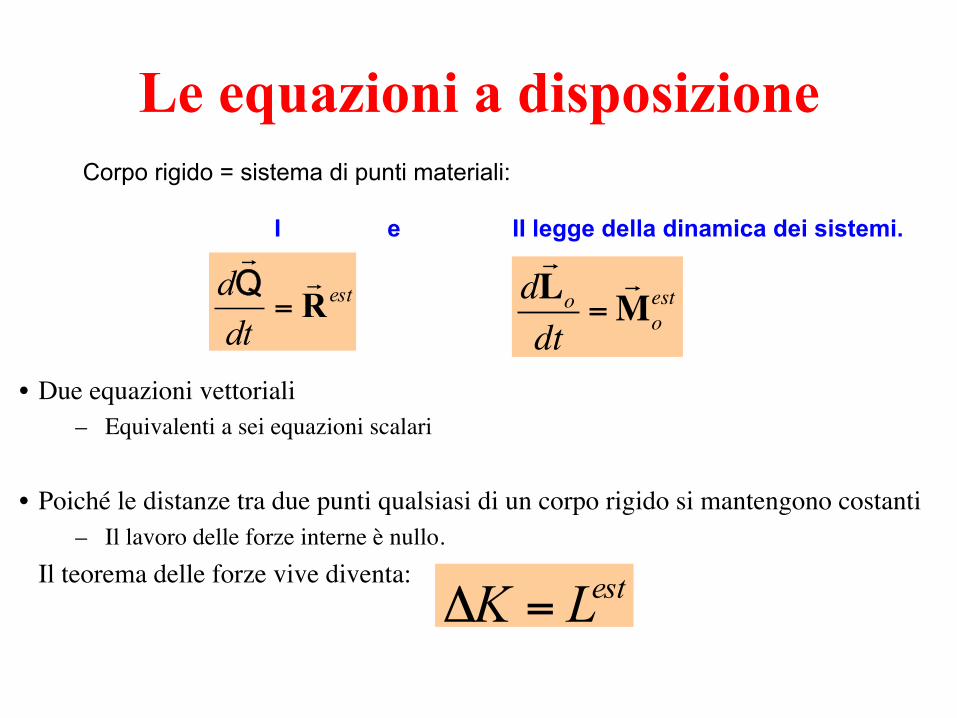
Le equazioni a disposizione Corpo rigido = sistema di punti materiali:
I e II legge della dinamica dei sistemi.
est
dtd R
=Q d
Lo
dt=Mo
est
• Due equazioni vettoriali – Equivalenti a sei equazioni scalari
• Poiché le distanze tra due punti qualsiasi di un corpo rigido si mantengono costanti – Il lavoro delle forze interne è nullo.
Il teorema delle forze vive diventa: estLK =Δ
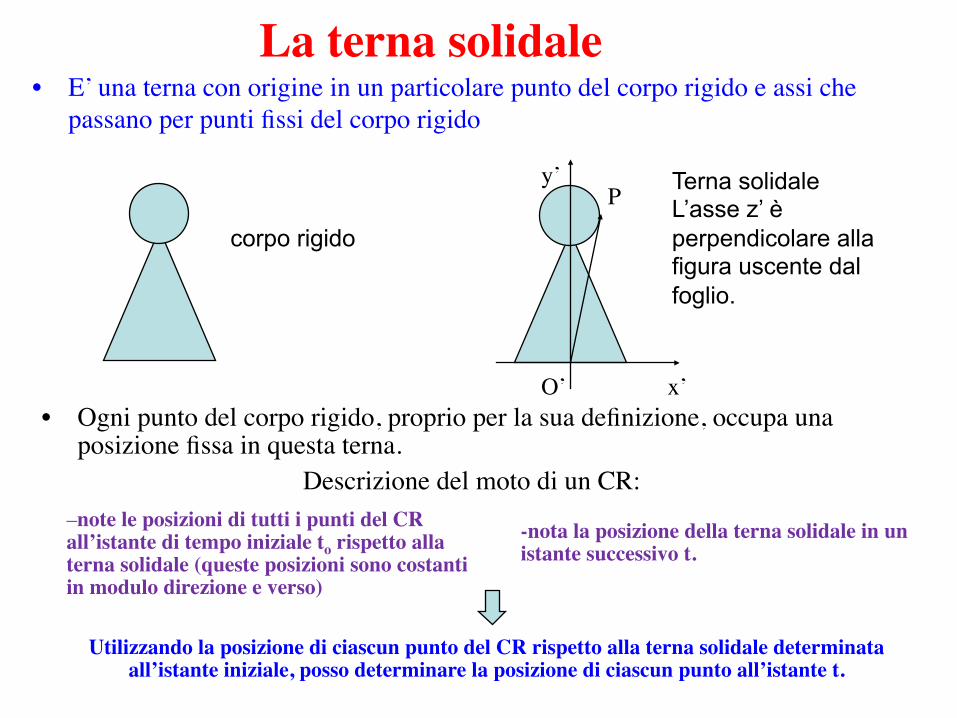
La terna solidale • E’ una terna con origine in un particolare punto del corpo rigido e assi che
passano per punti fissi del corpo rigido
corpo rigido
• Ogni punto del corpo rigido, proprio per la sua definizione, occupa una posizione fissa in questa terna.
Descrizione del moto di un CR:
x’
y’
O’
Terna solidale L’asse z’ è perpendicolare alla figura uscente dal foglio.
P
– note le posizioni di tutti i punti del CR all’istante di tempo iniziale to rispetto alla terna solidale (queste posizioni sono costanti in modulo direzione e verso)
-nota la posizione della terna solidale in un istante successivo t.
Utilizzando la posizione di ciascun punto del CR rispetto alla terna solidale determinata all’istante iniziale, posso determinare la posizione di ciascun punto all’istante t.
0 0
=⇒==
estCM
estCM
CM
CMdtd MML
L
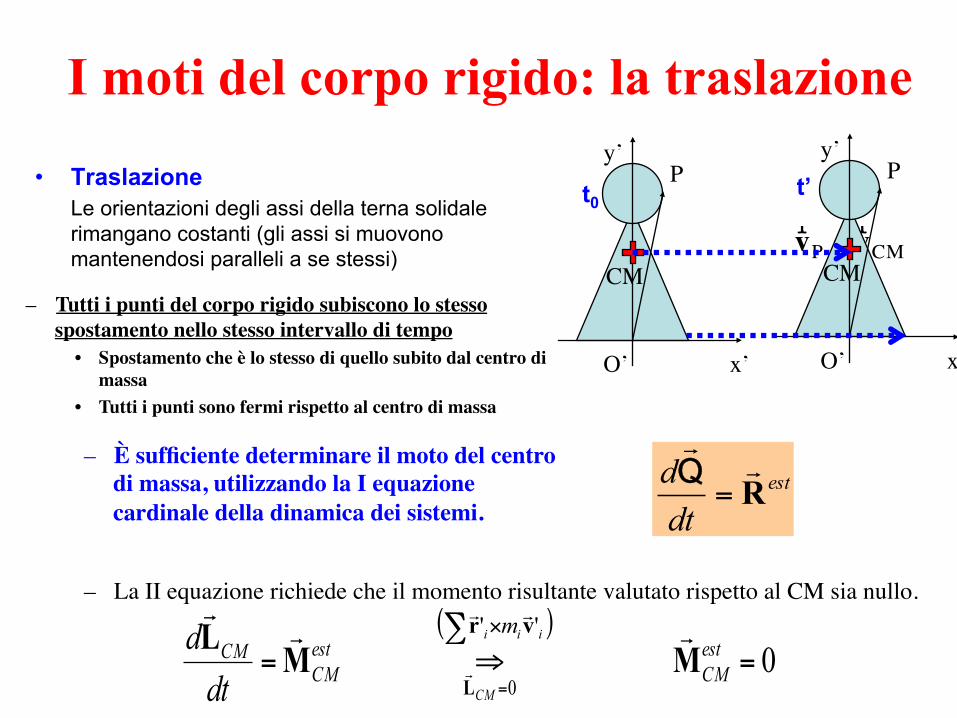
I moti del corpo rigido: la traslazione
• Traslazione Le orientazioni degli assi della terna solidale rimangano costanti (gli assi si muovono mantenendosi paralleli a se stessi)
x’
y’
O’
P
CM
( )∑ × iii m '' vr
est
dtd R
=Q– È sufficiente determinare il moto del centro
di massa, utilizzando la I equazione cardinale della dinamica dei sistemi.
– La II equazione richiede che il momento risultante valutato rispetto al CM sia nullo.
– Tutti i punti del corpo rigido subiscono lo stesso spostamento nello stesso intervallo di tempo
• Spostamento che è lo stesso di quello subito dal centro di massa
• Tutti i punti sono fermi rispetto al centro di massa
r v P =
r v CM
x’
y’
O’
P
CM
t0 t’
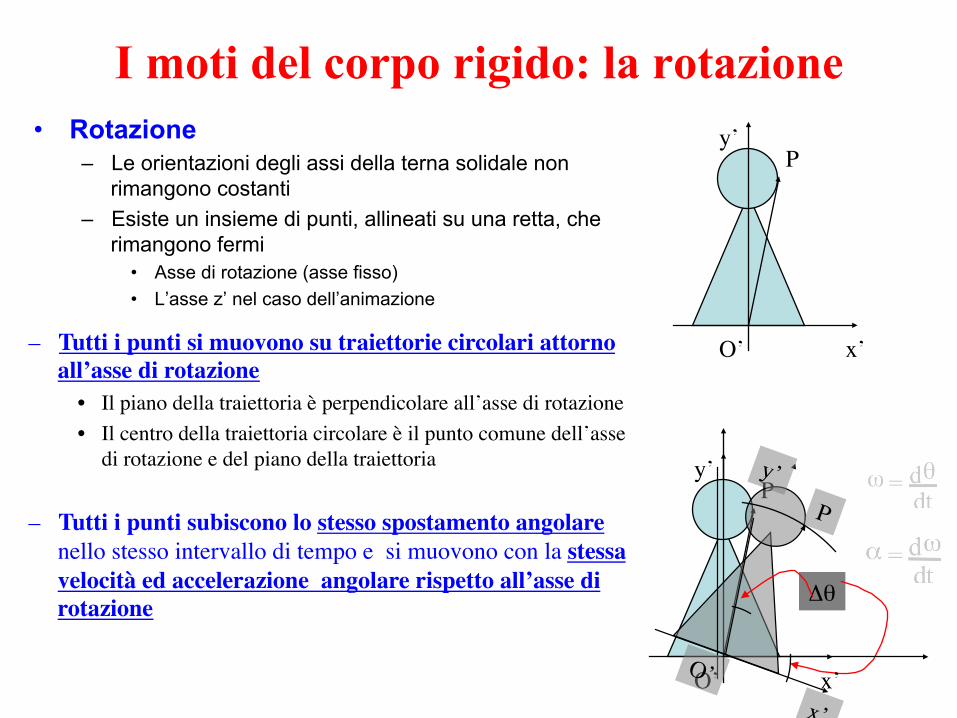
I moti del corpo rigido: la rotazione • Rotazione
– Le orientazioni degli assi della terna solidale non rimangono costanti
– Esiste un insieme di punti, allineati su una retta, che rimangono fermi
• Asse di rotazione (asse fisso) • L’asse z’ nel caso dell’animazione
x’
y’
O’
P
– Tutti i punti si muovono su traiettorie circolari attorno all’asse di rotazione
• Il piano della traiettoria è perpendicolare all’asse di rotazione • Il centro della traiettoria circolare è il punto comune dell’asse
di rotazione e del piano della traiettoria
– Tutti i punti subiscono lo stesso spostamento angolare nello stesso intervallo di tempo e si muovono con la stessa velocità ed accelerazione angolare rispetto all’asse di rotazione Δθ
x’
y’
O’
P
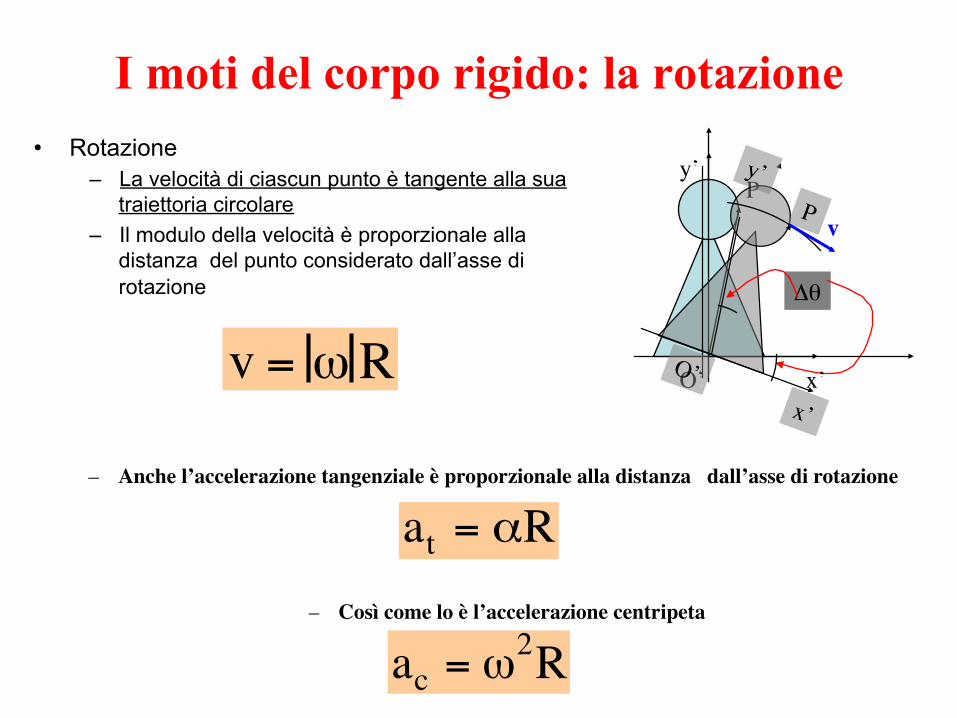
I moti del corpo rigido: la rotazione • Rotazione
– La velocità di ciascun punto è tangente alla sua traiettoria circolare
– Il modulo della velocità è proporzionale alla distanza del punto considerato dall’asse di rotazione Δθ
x’
y’
O’
P v
v = ωR
at = αR
ac = ω2R
– Anche l’accelerazione tangenziale è proporzionale alla distanza dall’asse di rotazione
– Così come lo è l’accelerazione centripeta
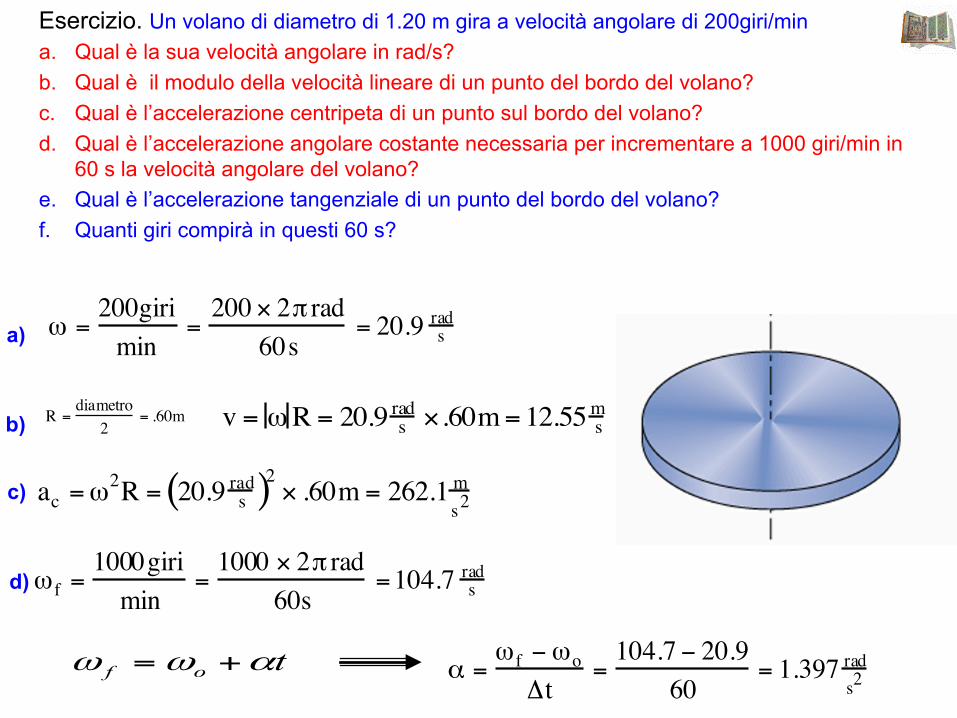
Esercizio. Un volano di diametro di 1.20 m gira a velocità angolare di 200giri/min a. Qual è la sua velocità angolare in rad/s? b. Qual è il modulo della velocità lineare di un punto del bordo del volano? c. Qual è l’accelerazione centripeta di un punto sul bordo del volano? d. Qual è l’accelerazione angolare costante necessaria per incrementare a 1000 giri/min in
60 s la velocità angolare del volano? e. Qual è l’accelerazione tangenziale di un punto del bordo del volano? f. Quanti giri compirà in questi 60 s?
R =diametro
2= .60m
ω =200girimin
=200 × 2π rad
60s= 20.9 rads
v = ωR = 20.9 rads ×.60m=12.55ms
ac =ω2R = 20.9 rads( )2 × .60m = 262.1 m
s2
ω f =1000girimin
=1000 × 2π rad
60s=104.7 rads
tof αωω += α =ω f − ωo
Δt=104.7 − 20.9
60= 1.397 rad
s2
a)
b)
c)
d)

Esercizio. Un volano di diametro di 1.20 m gira a velocità angolare di 200giri/min a. Qual è la sua velocità angolare in rad/s? b. Qual è il modulo della velocità lineare di un punto del bordo del volano? c. Qual è l’accelerazione centripeta di un punto sul bordo del volano? d. Qual è l’accelerazione angolare costante necessaria per incrementare a 1000 giri/min in
60 s la velocità angolare del volano? e. Qual è l’accelerazione tangenziale di un punto del bordo del volano? f. Quanti giri compirà in questi 60 s?
θ = θo +ωot + 12αt
2
θ − θo = ωot + 12αt
2 =
20.9× 60 + 12 1.397× 60
2 =1254 + 2414 == 3668rad
3668rad × giro2πrad
= 583.79giri
at = αR = 1.397 rads2× .60m = .84m
s2e)
f)
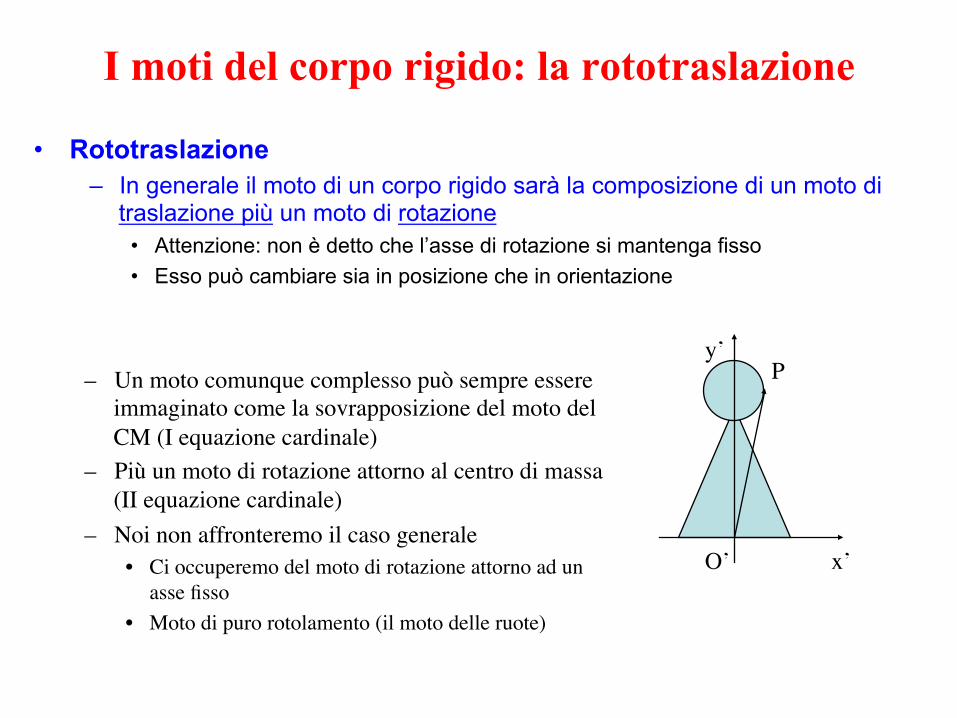
I moti del corpo rigido: la rototraslazione
• Rototraslazione – In generale il moto di un corpo rigido sarà la composizione di un moto di
traslazione più un moto di rotazione • Attenzione: non è detto che l’asse di rotazione si mantenga fisso • Esso può cambiare sia in posizione che in orientazione
– Un moto comunque complesso può sempre essere immaginato come la sovrapposizione del moto del CM (I equazione cardinale)
– Più un moto di rotazione attorno al centro di massa (II equazione cardinale)
– Noi non affronteremo il caso generale • Ci occuperemo del moto di rotazione attorno ad un
asse fisso • Moto di puro rotolamento (il moto delle ruote)
x’
y’
O’
P
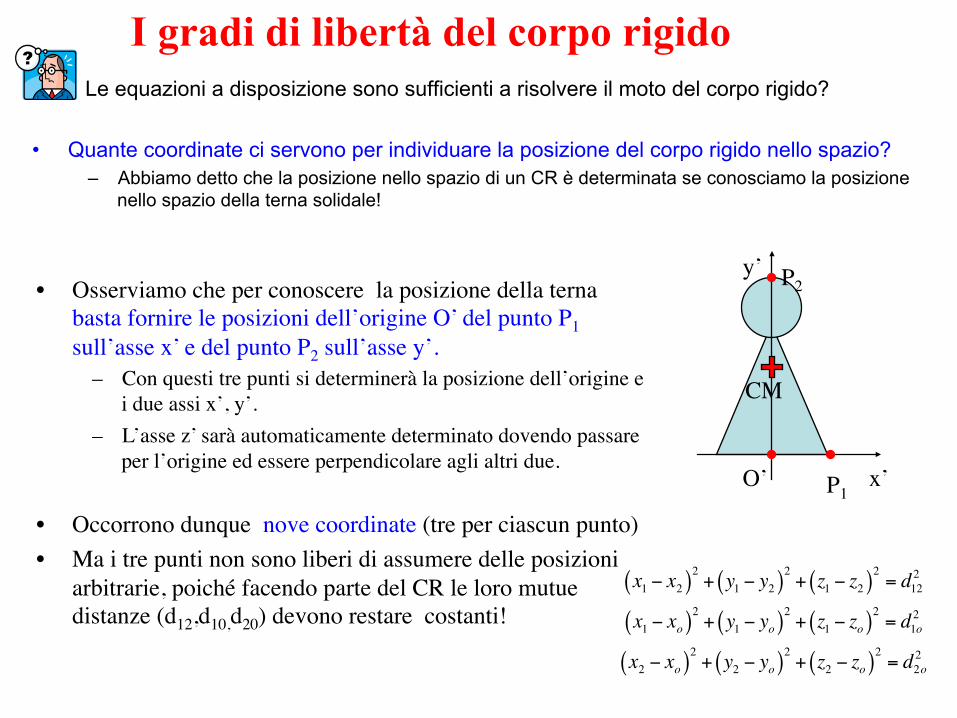
I gradi di libertà del corpo rigido Le equazioni a disposizione sono sufficienti a risolvere il moto del corpo rigido?
• Quante coordinate ci servono per individuare la posizione del corpo rigido nello spazio? – Abbiamo detto che la posizione nello spazio di un CR è determinata se conosciamo la posizione
nello spazio della terna solidale!
x’
y’
O’
P2
CM
P1
• Osserviamo che per conoscere la posizione della terna basta fornire le posizioni dell’origine O’ del punto P1 sull’asse x’ e del punto P2 sull’asse y’.
– Con questi tre punti si determinerà la posizione dell’origine e i due assi x’, y’.
– L’asse z’ sarà automaticamente determinato dovendo passare per l’origine ed essere perpendicolare agli altri due.
• Occorrono dunque nove coordinate (tre per ciascun punto) • Ma i tre punti non sono liberi di assumere delle posizioni
arbitrarie, poiché facendo parte del CR le loro mutue distanze (d12,d10,d20) devono restare costanti!
x1 − x2( )2 + y1 − y2( )2 + z1 − z2( )2 = d122
x1 − xo( )2 + y1 − yo( )2 + z1 − zo( )2 = d1o2
x2 − xo( )2 + y2 − yo( )2 + z2 − zo( )2 = d2o2
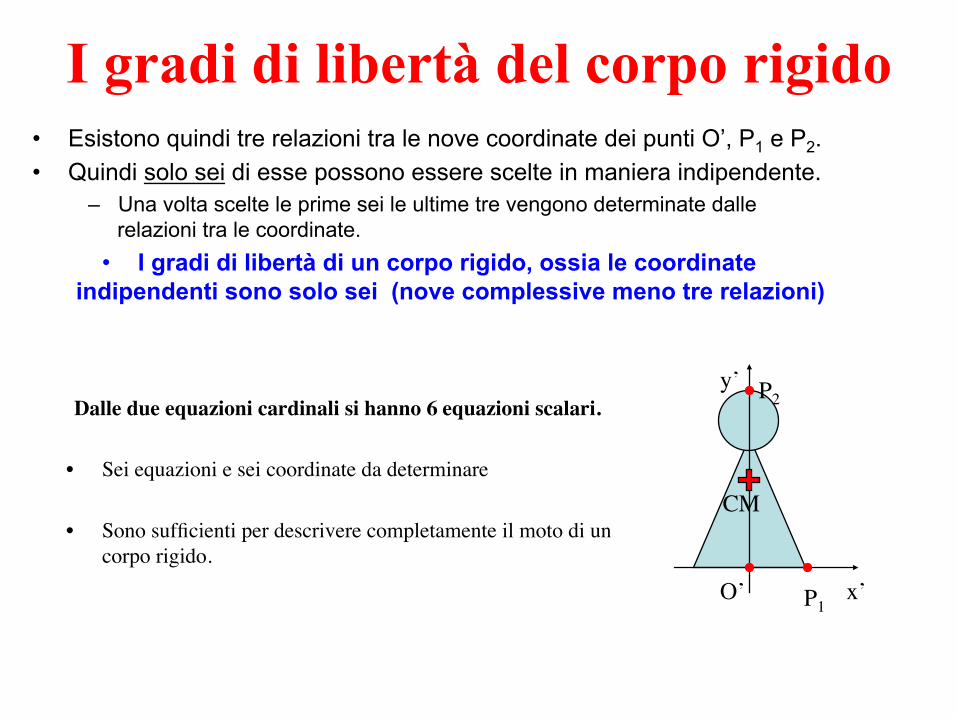
I gradi di libertà del corpo rigido • Esistono quindi tre relazioni tra le nove coordinate dei punti O’, P1 e P2. • Quindi solo sei di esse possono essere scelte in maniera indipendente.
– Una volta scelte le prime sei le ultime tre vengono determinate dalle relazioni tra le coordinate.
• I gradi di libertà di un corpo rigido, ossia le coordinate indipendenti sono solo sei (nove complessive meno tre relazioni)
x’
y’
O’
P2
CM
P1
Dalle due equazioni cardinali si hanno 6 equazioni scalari.
• Sei equazioni e sei coordinate da determinare
• Sono sufficienti per descrivere completamente il moto di un corpo rigido.
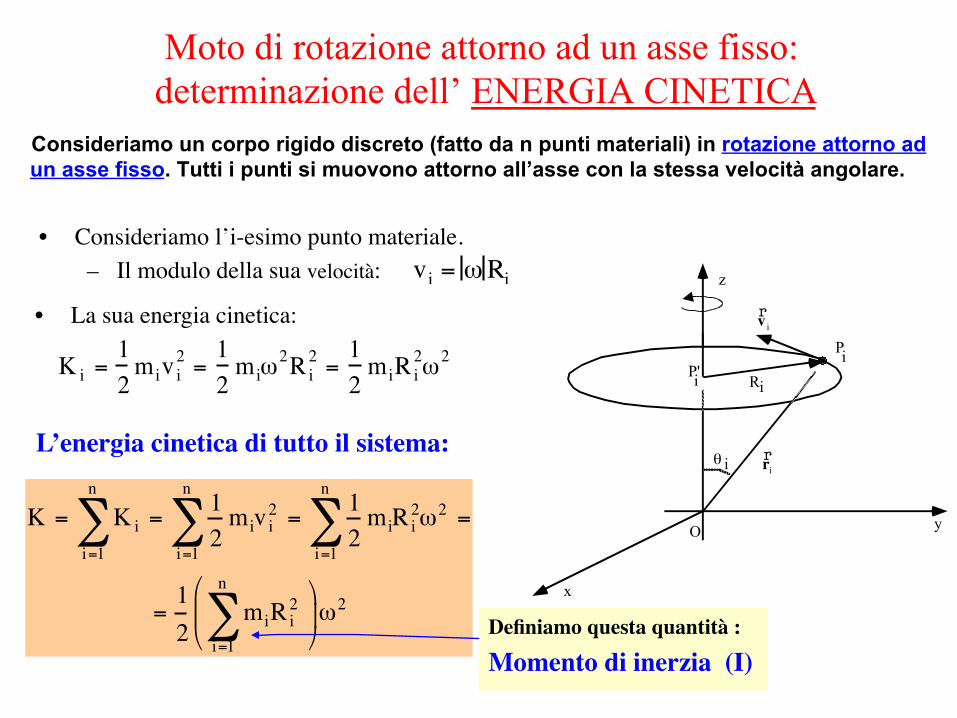
Moto di rotazione attorno ad un asse fisso: determinazione dell’ ENERGIA CINETICA
Consideriamo un corpo rigido discreto (fatto da n punti materiali) in rotazione attorno ad un asse fisso. Tutti i punti si muovono attorno all’asse con la stessa velocità angolare.
y
x
z
R
θ
i
i
PiP'i
O
r r i
r v i
• Consideriamo l’i-esimo punto materiale. – Il modulo della sua velocità: vi = ωRi
Ki =12mivi
2 =12miω
2Ri2 =
12miRi
2ω2
K = Kii=1
n
∑ =12mivi2
i=1
n
∑ =12miRi2ω2
i=1
n
∑ =
=12
miRi2i=1
n
∑⎛
⎝ ⎜
⎞
⎠ ⎟ ω2
• La sua energia cinetica:
L’energia cinetica di tutto il sistema:
Definiamo questa quantità :
Momento di inerzia (I)
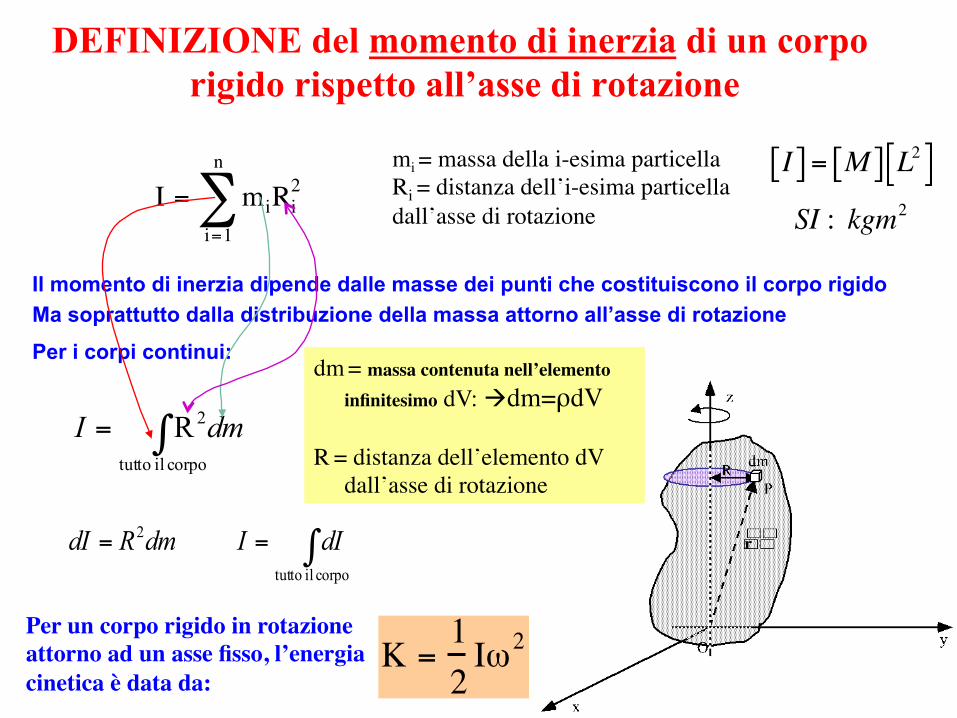
DEFINIZIONE del momento di inerzia di un corpo rigido rispetto all’asse di rotazione
Il momento di inerzia dipende dalle masse dei punti che costituiscono il corpo rigido Ma soprattutto dalla distribuzione della massa attorno all’asse di rotazione
Per i corpi continui:
I = miRi2
i=1
n
∑mi = massa della i-esima particella Ri = distanza dell’i-esima particella dall’asse di rotazione
∫=corpo il tutto
2 R dmI
dm = massa contenuta nell’elemento infinitesimo dV: àdm=ρdV
R = distanza dell’elemento dV
dall’asse di rotazione
I[ ] = M[ ] L2!" #$
SI : kgm2
K =12Iω2Per un corpo rigido in rotazione
attorno ad un asse fisso, l’energia cinetica è data da:
∫==corpo il tutto
2 dIIdmRdI
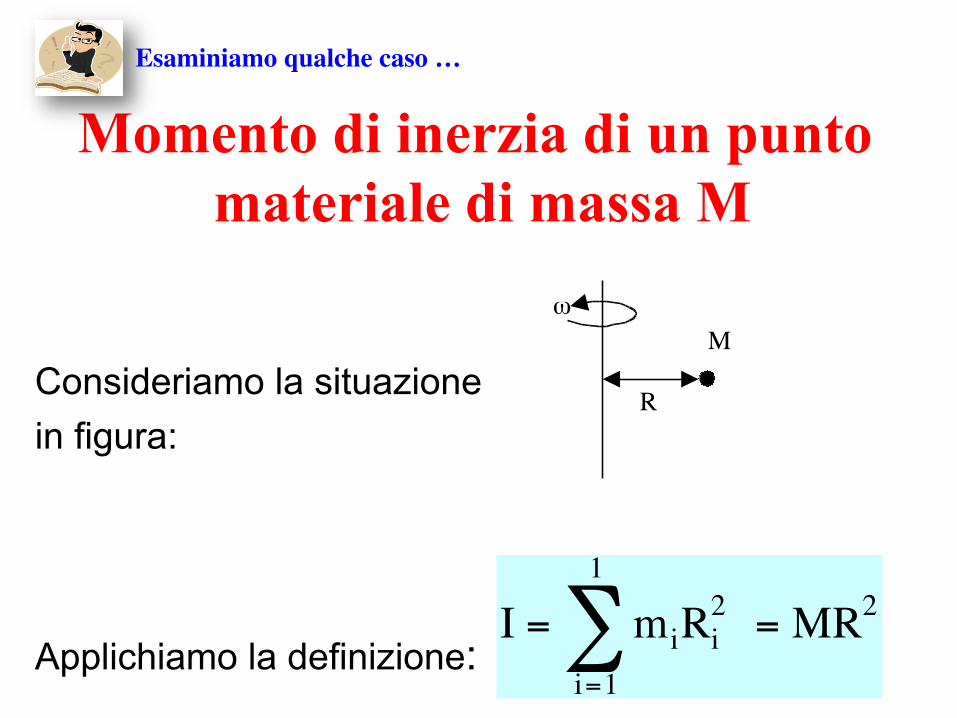
Momento di inerzia di un punto materiale di massa M
Consideriamo la situazione in figura: Applichiamo la definizione:
R
Mω
I = miRi2
i=1
1
∑ = MR2
Esaminiamo qualche caso …
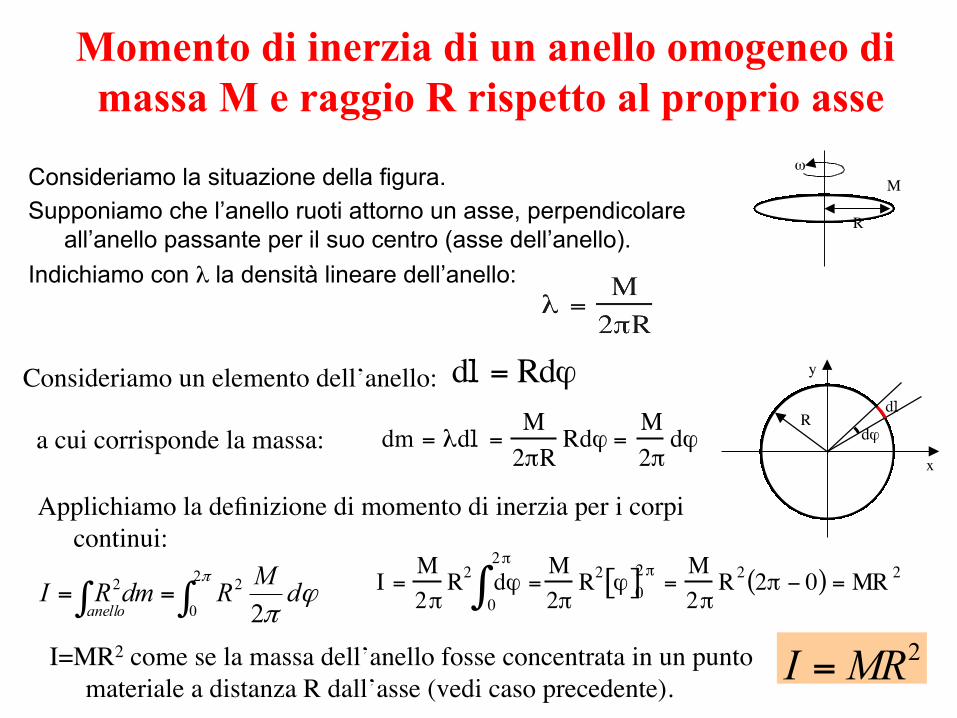
Momento di inerzia di un anello omogeneo di massa M e raggio R rispetto al proprio asse
Consideriamo la situazione della figura. Supponiamo che l’anello ruoti attorno un asse, perpendicolare
all’anello passante per il suo centro (asse dell’anello). Indichiamo con λ la densità lineare dell’anello:
R
Mω
dl
dϕR
x
yConsideriamo un elemento dell’anello: dl = Rdϕ
a cui corrisponde la massa: dm = λdl = M
2πRRdϕ = M
2πdϕ
Applichiamo la definizione di momento di inerzia per i corpi continui:
∫∫ ==π
ϕπ
2
0
22
2dMRdmRI
anello
I = M2πR2 dϕ =
0
2π
∫M2πR2 ϕ[ ]0
2π=M2πR2 2π − 0( ) = MR 2
I=MR2 come se la massa dell’anello fosse concentrata in un punto materiale a distanza R dall’asse (vedi caso precedente).
2MRI =
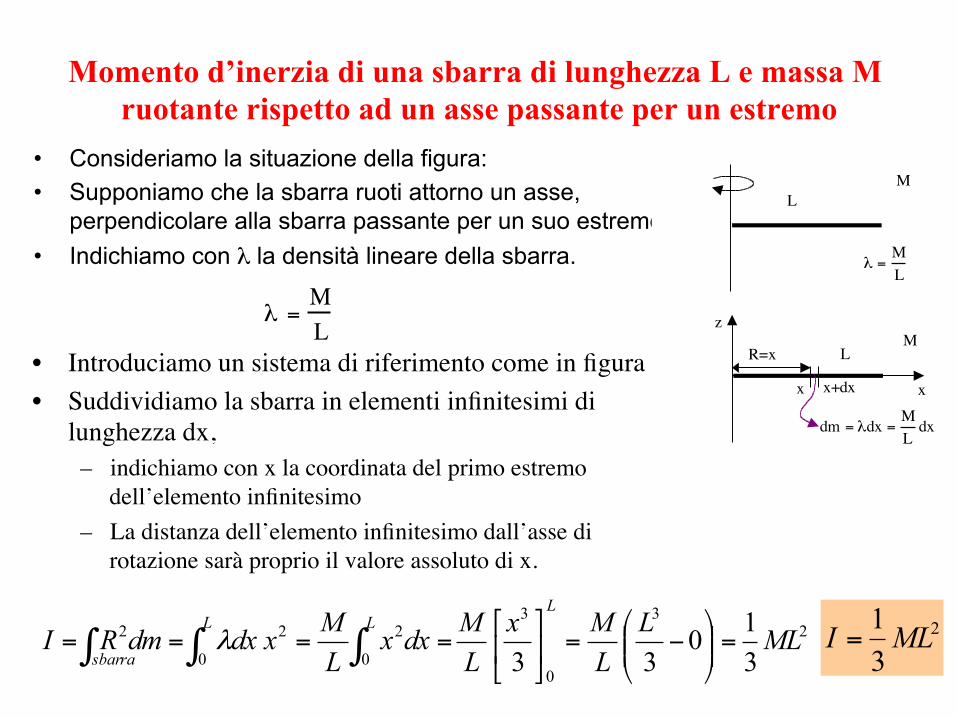
Momento d’inerzia di una sbarra di lunghezza L e massa M ruotante rispetto ad un asse passante per un estremo
• Consideriamo la situazione della figura: • Supponiamo che la sbarra ruoti attorno un asse,
perpendicolare alla sbarra passante per un suo estremo. • Indichiamo con λ la densità lineare della sbarra.
LM
λ =ML
LM
x x+dx
R=x
x
z
dm = λdx = MLdx
λ =ML
• Introduciamo un sistema di riferimento come in figura • Suddividiamo la sbarra in elementi infinitesimi di
lunghezza dx, – indichiamo con x la coordinata del primo estremo
dell’elemento infinitesimo – La distanza dell’elemento infinitesimo dall’asse di
rotazione sarà proprio il valore assoluto di x.
23
0
3
0
2
0
22
310
33 MLL
LMx
LMdxx
LMxdxdmRI
LLL
sbarra=⎟⎟⎠
⎞⎜⎜⎝
⎛−=⎥
⎦
⎤⎢⎣
⎡==== ∫∫∫ λ 2
31MLI =
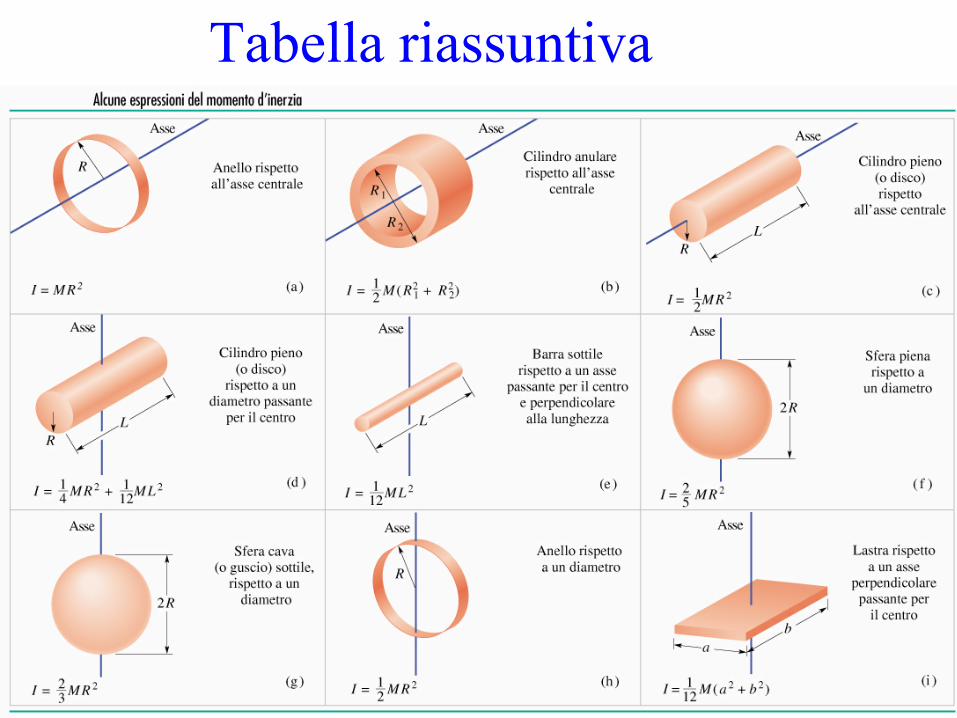
Tabella riassuntiva
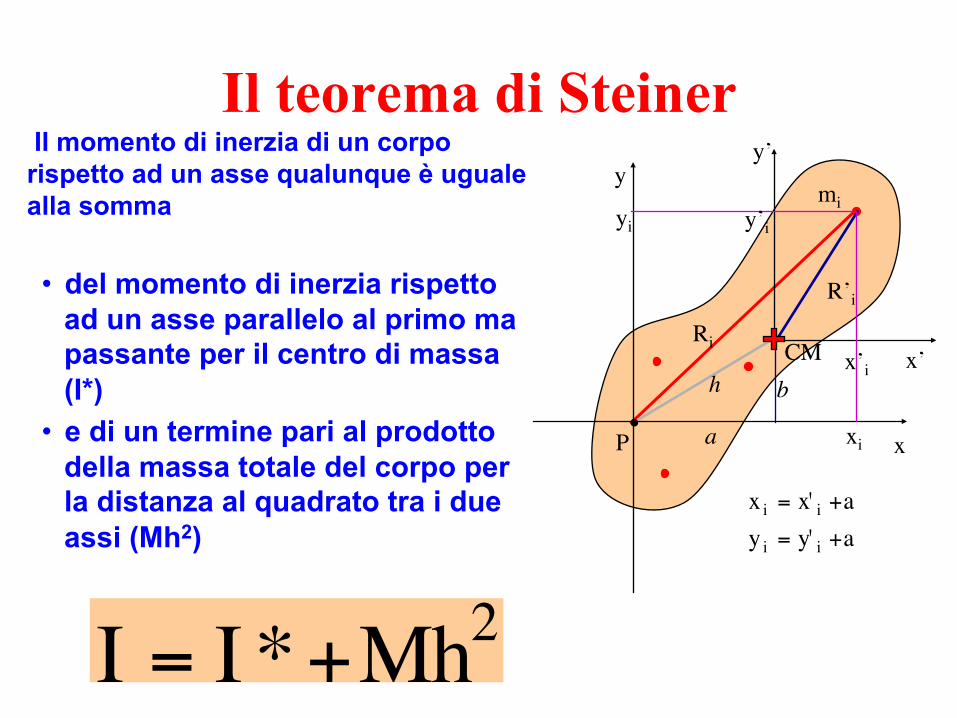
Il teorema di Steiner
I = I *+Mh2
mi
R’i
Ri
b
y y’
x
x’ CM
a
yi y’i
xi
x’i
xi = x' i +ayi = y' i +a
P
h
Il momento di inerzia di un corpo rispetto ad un asse qualunque è uguale alla somma • del momento di inerzia rispetto
ad un asse parallelo al primo ma passante per il centro di massa (I*)
• e di un termine pari al prodotto della massa totale del corpo per la distanza al quadrato tra i due assi (Mh2)
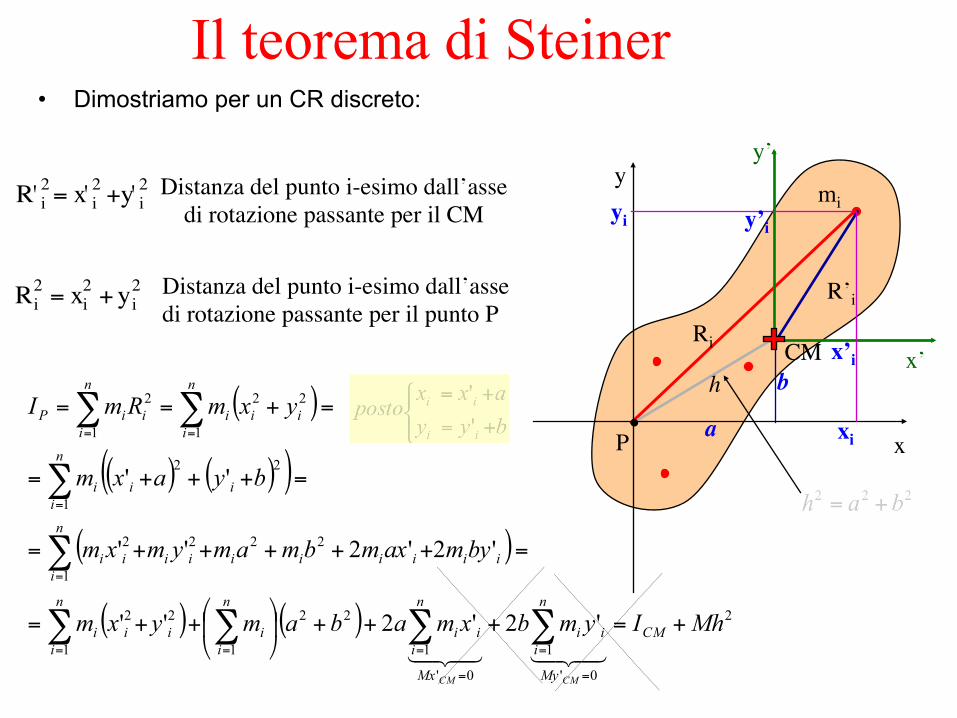
Il teorema di Steiner • Dimostriamo per un CR discreto:
mi
R’i
Ri
R' i2= x' i
2 +y' i2 Distanza del punto i-esimo dall’asse
di rotazione passante per il CM
Distanza del punto i-esimo dall’asse di rotazione passante per il punto P
b ( )
( ) ( )( )
( )
( ) ( ) 2
0'
1
0'
1
22
11
22
1
2222
1
22
1
22
1
2
'2'2''
'2'2''
''
MhIymbxmabamyxm
bymaxmbmamymxm
byaxm
yxmRmI
CM
My
n
iii
Mx
n
iii
n
ii
n
iiii
n
iiiiiiiiiii
n
iiii
n
iiii
n
iiiP
CMCM
+=+++⎟⎠
⎞⎜⎝
⎛++=
=+++++=
=+++=
=+==
=
=
=
===
=
=
==
∑∑∑∑
∑
∑
∑∑
y y’
x
x’ CM
a
yi y’i
xi
x’i
P
h
Ri2 = xi
2 +yi2
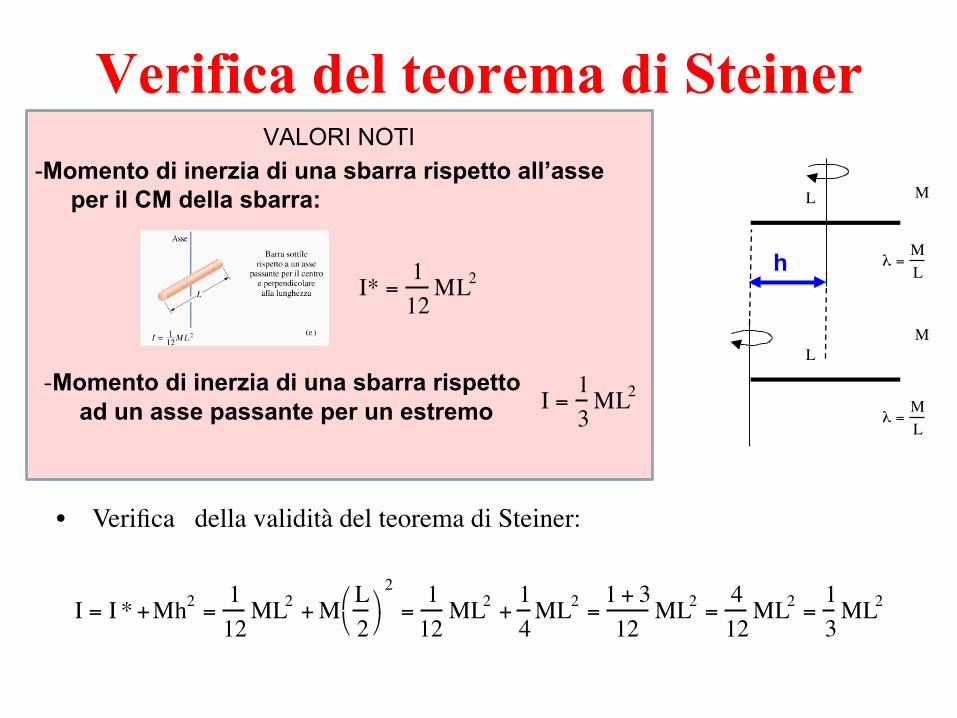
Verifica del teorema di Steiner VALORI NOTI
-Momento di inerzia di una sbarra rispetto all’asse per il CM della sbarra: L M
λ =ML
LM
λ =ML
I* = 112ML2
-Momento di inerzia di una sbarra rispetto ad un asse passante per un estremo I = 1
3ML2
• Verifica della validità del teorema di Steiner:
I = I *+Mh2 =112ML2 +M L
2⎛ ⎝
⎞ ⎠
2
=112ML2 +
14ML2 =
1+ 312
ML2 =412ML2 =
13ML2
h

ESERCIZI
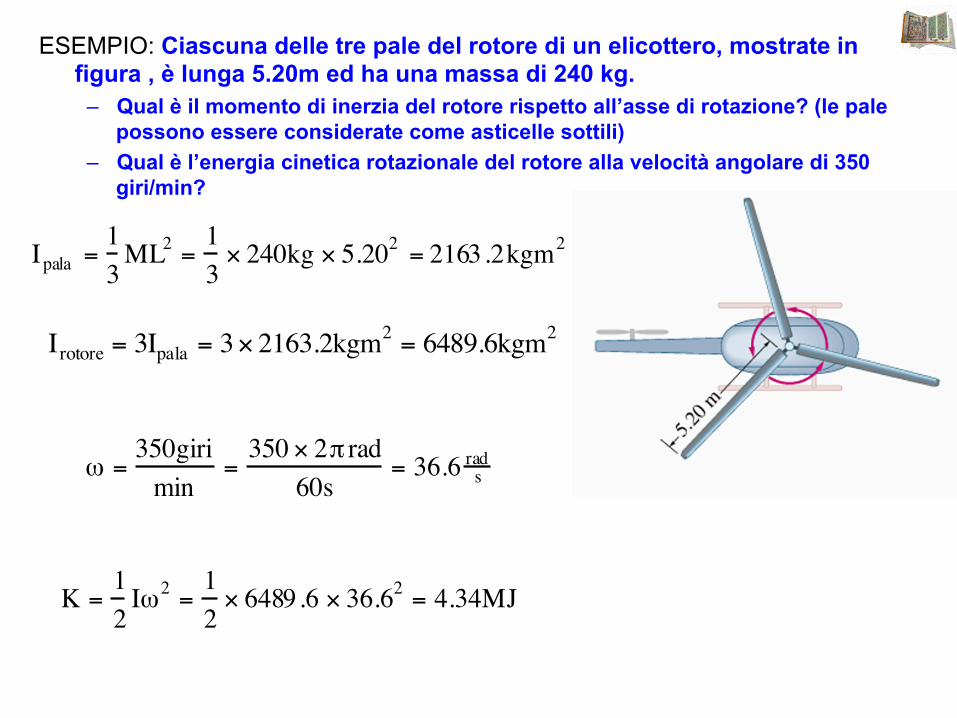
ESEMPIO: Ciascuna delle tre pale del rotore di un elicottero, mostrate in figura , è lunga 5.20m ed ha una massa di 240 kg.
– Qual è il momento di inerzia del rotore rispetto all’asse di rotazione? (le pale possono essere considerate come asticelle sottili)
– Qual è l’energia cinetica rotazionale del rotore alla velocità angolare di 350 giri/min?
ω =350girimin
=350 × 2π rad
60s= 36.6 rads
K =12Iω2 =
12× 6489.6 × 36.62 = 4.34MJ
Ipala =13ML2 = 1
3× 240kg × 5.202 = 2163.2kgm2
Irotore = 3Ipala = 3× 2163.2kgm2 = 6489.6kgm2

Esempio: L’elemento oscillante di un pendolo è costituito da una sbarretta di massa ms=0.5kg e lunga 50 cm a cui è attaccato un disco di massa md=1kg di 20cm di diametro. Determinare il momento di inerzia rispetto ad un asse perpendicolare alla figura passante per l’estremo superiore della sbarretta.
x
y Asse di rotazione ∫∫∫ +==2 corpo
2
1 corpo
2
corpo il tutto
2 R R R dmdmdmI
Isbarra =13ML2 = 1
3× 0.5 × 0.52 = 0.0417kgm2
Idisco* =
12MR2 = 1
2× 1.0 × 0.12 = 0.005kgm2
Idisco = Idisco* +Mh2 = 0.005kgm2 +1.0kg× .5+ .1( )2 = 0.005kgm2 + .36kgm2 = .365kgm2
Applicando Steiner:
h

Momento assiale
26

Rotazione di un corpo rigido attorno ad un asse fisso
θ
• E’ possibile determinare la posizione del CR con la sola conoscenza dell’angolo θ
• Un CR in rotazione attorno ad un asse fisso ha un solo grado di libertà
• È sufficiente una sola equazione scalare per determinare il suo moto.
• Facciamo riferimento all’anta di una porta
Asse di rotazione
Vista dall’alto
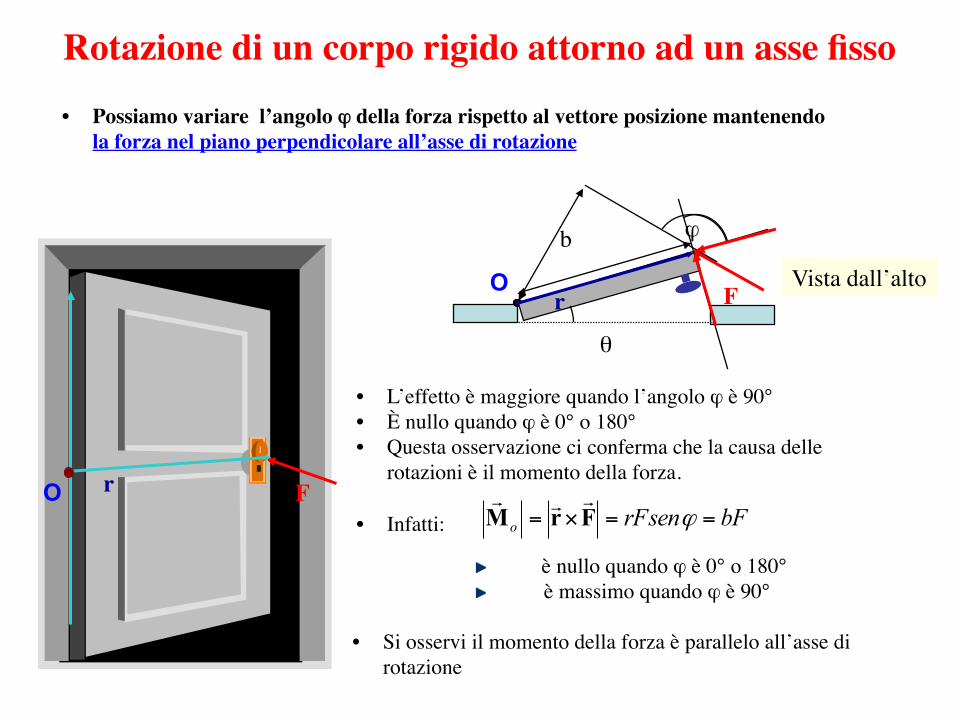
Rotazione di un corpo rigido attorno ad un asse fisso
θ
• L’effetto è maggiore quando l’angolo ϕ è 90° • È nullo quando ϕ è 0° o 180° • Questa osservazione ci conferma che la causa delle
rotazioni è il momento della forza.
• Infatti:
• Possiamo variare l’angolo ϕ della forza rispetto al vettore posizione mantenendo la forza nel piano perpendicolare all’asse di rotazione
Vista dall’alto
O
Or
bFrFseno ==×= ϕFrMr F
" è nullo quando ϕ è 0° o 180° " è massimo quando ϕ è 90°
• Si osservi il momento della forza è parallelo all’asse di rotazione
F
b ϕ

Rotazione di un corpo rigido attorno ad un asse fisso
• Lo stesso modulo del momento quando la forza F è perpendicolare al piano della porta (caso precedente !)
• Ma in questo caso l’effetto prodotto è nullo!! • Non si verifica alcun moto della porta.
Se consideriamo una forza perpendicolare al vettore posizione r • Il modulo del momento è
O r
F
Mo =
r×F = Frsenϕ = Fb
• In cosa differisce dal caso precedente ? Osserviamo che in questo caso il momento Mo è perpendicolare all’asse di rotazione
• In precedenza esso era parallelo all’asse di rotazione
• Possiamo concludere: Il moto di rotazione di un corpo rigido attorno ad un asse fisso dipende dalla componente del momento della forza lungo l’asse di rotazione
(che chiameremo Momento assiale)
Equazione del moto di rotazione di un corpo rigido attorno ad un asse fisso
• Abbiamo dedotto: – il moto di rotazione di un corpo rigido attorno ad un asse
fisso dipende dal momento assiale (la componente del momento delle forze esterne lungo l’asse di rotazione)
• Si trova infatti che:
Equazione del moto di rotazione di un CR attorno ad un asse fisso
• I momento di inerzia del CR rispetto all’asse di rotazione
• α accelerazione angolare
• Mz componente assiale del momento delle forze esterne
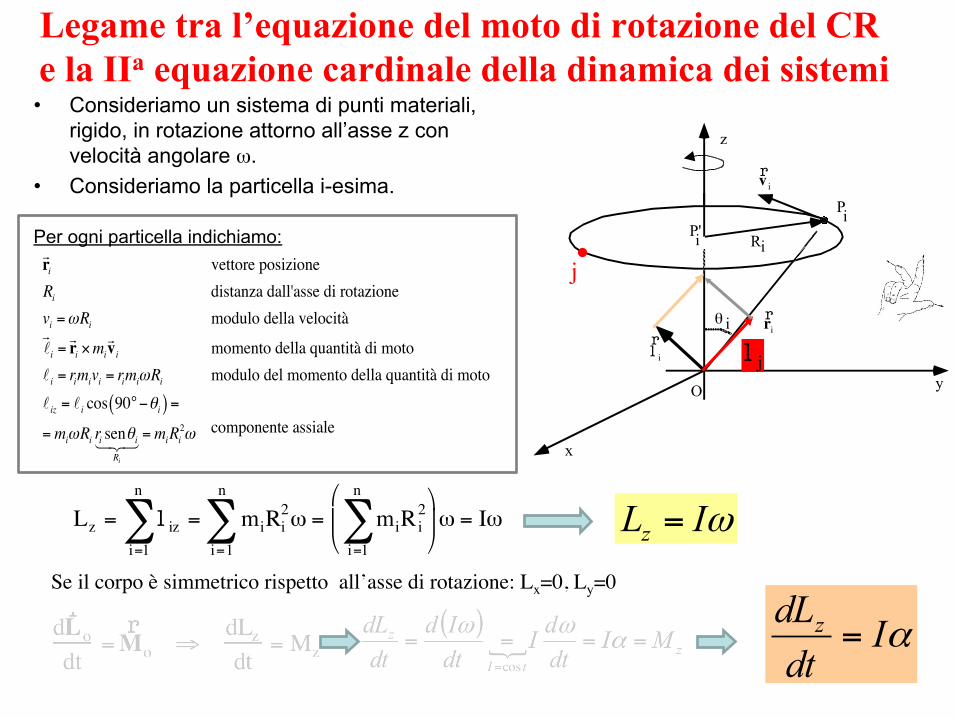
Legame tra l’equazione del moto di rotazione del CR e la IIa equazione cardinale della dinamica dei sistemi • Consideriamo un sistema di punti materiali,
rigido, in rotazione attorno all’asse z con velocità angolare ω.
• Consideriamo la particella i-esima.
Per ogni particella indichiamo:
y
x
z
R
θ
i
i
PiP'i
O
r l i
r r i
r v i
ri vettore posizioneRi distanza dall'asse di rotazionevi =ωRi modulo della velocitài =ri ×mi
vi momento della quantità di moto i = rimivi = rimiωRi modulo del momento della quantità di moto iz = i cos 90°−θi( ) ==miωRi ri senθi
Ri =miRi
2ω componente assiale
Lz = l iz
i=1
n
∑ = miRi2ω
i=1
n
∑ = miRi2
i=1
n
∑⎛
⎝ ⎜
⎞
⎠ ⎟ ω = Iω
Se il corpo è simmetrico rispetto all’asse di rotazione: Lx=0, Ly=0
j
l j
ωILz =
αIdtdLz =
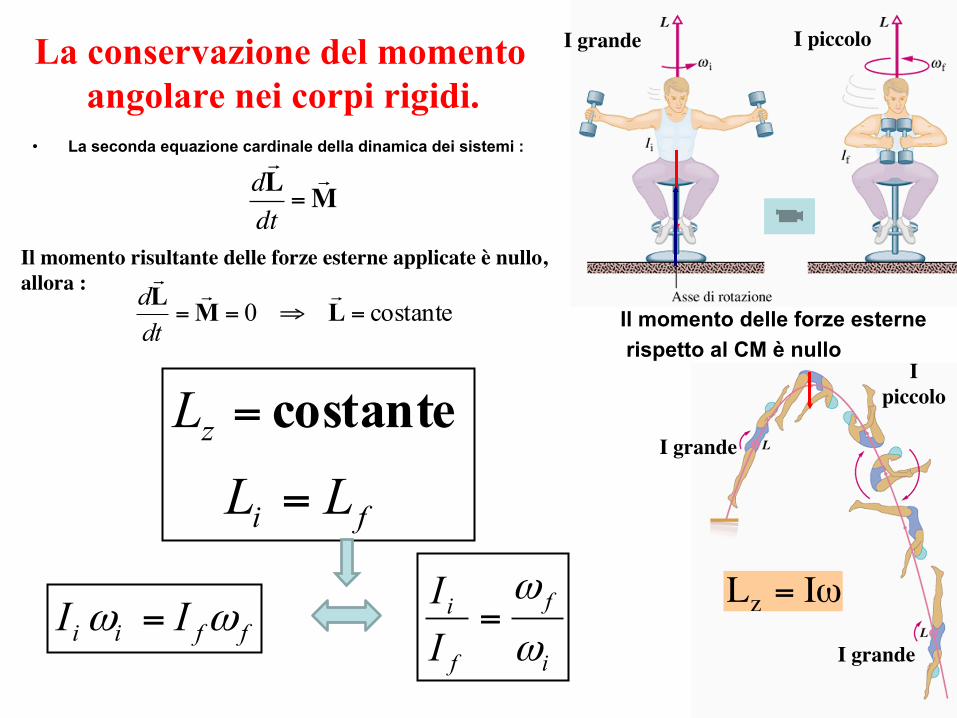
La conservazione del momento angolare nei corpi rigidi.
• La seconda equazione cardinale della dinamica dei sistemi :
dLdt
=M
Il momento risultante delle forze esterne applicate è nullo, allora :
costante0 =⇒== LML
dtd
Il momento delle forze esterne rispetto al CM è nullo
I grande I piccolo
I grande
I grande
I piccolo
Lz = Iω
fi
z
LLL
=
=
costante
ffii II ωω =i
f
f
i
II
ω
ω=
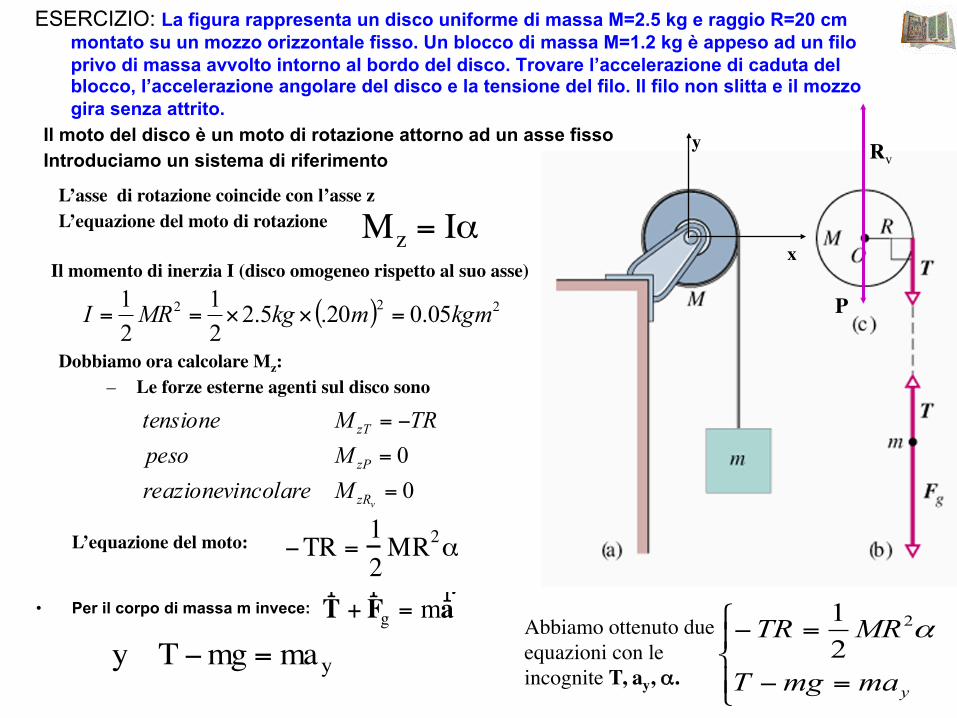
ESERCIZIO: La figura rappresenta un disco uniforme di massa M=2.5 kg e raggio R=20 cm montato su un mozzo orizzontale fisso. Un blocco di massa M=1.2 kg è appeso ad un filo privo di massa avvolto intorno al bordo del disco. Trovare l’accelerazione di caduta del blocco, l’accelerazione angolare del disco e la tensione del filo. Il filo non slitta e il mozzo gira senza attrito.
Il moto del disco è un moto di rotazione attorno ad un asse fisso Introduciamo un sistema di riferimento Rv
x
y
L’asse di rotazione coincide con l’asse z L’equazione del moto di rotazione Mz = Iα
Il momento di inerzia I (disco omogeneo rispetto al suo asse)
( ) 222 05.020.5.221
21 kgmmkgMRI =××==
Dobbiamo ora calcolare Mz: – Le forze esterne agenti sul disco sono
00=
=
−=
vzR
zP
zT
MvincolarereazioneMpeso
TRMtensione
P
L’equazione del moto: −TR =12MR2α
• Per il corpo di massa m invece: Abbiamo ottenuto due equazioni con le incognite T, ay, α. ⎪⎩
⎪⎨
⎧
=−
=−
ymamgT
MRTR α221
r T +
r F g = m
r a y T−mg =may
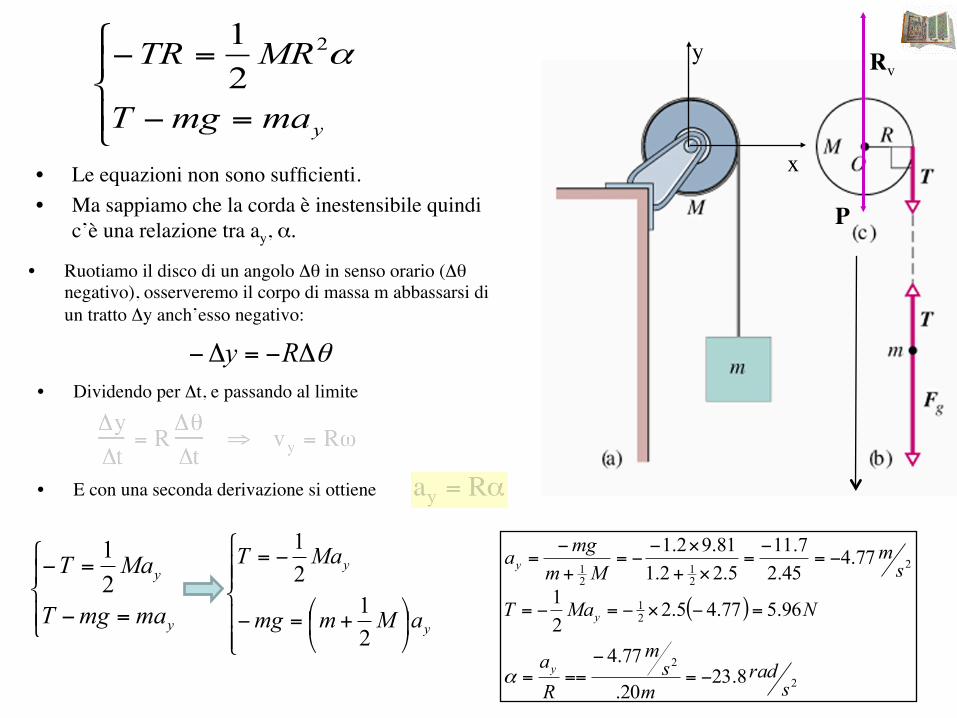
• Ruotiamo il disco di un angolo Δθ in senso orario (Δθ negativo), osserveremo il corpo di massa m abbassarsi di un tratto Δy anch’esso negativo:
Rv
x
y
P
• Le equazioni non sono sufficienti. • Ma sappiamo che la corda è inestensibile quindi
c’è una relazione tra ay, α.
θΔ−=Δ− Ry• Dividendo per Δt, e passando al limite
• E con una seconda derivazione si ottiene
⎪⎩
⎪⎨
⎧
=−
=−
ymamgT
MRTR α221
⎪⎩
⎪⎨
⎧
=−
=−
y
y
mamgT
MaT21
( )
2
2
21
221
21
8.2320.
77.4
96.577.45.221
77.445.27.11
5.22.181.92.1
srad
ms
m
Ra
NMaT
sm
Mmmga
y
y
y
−=−
===
=−×−=−=
−=−
=×+
×−−=
+
−=
α
⎪⎪⎩
⎪⎪⎨
⎧
⎟⎠
⎞⎜⎝
⎛ +=−
−=
y
y
aMmmg
MaT
21
21
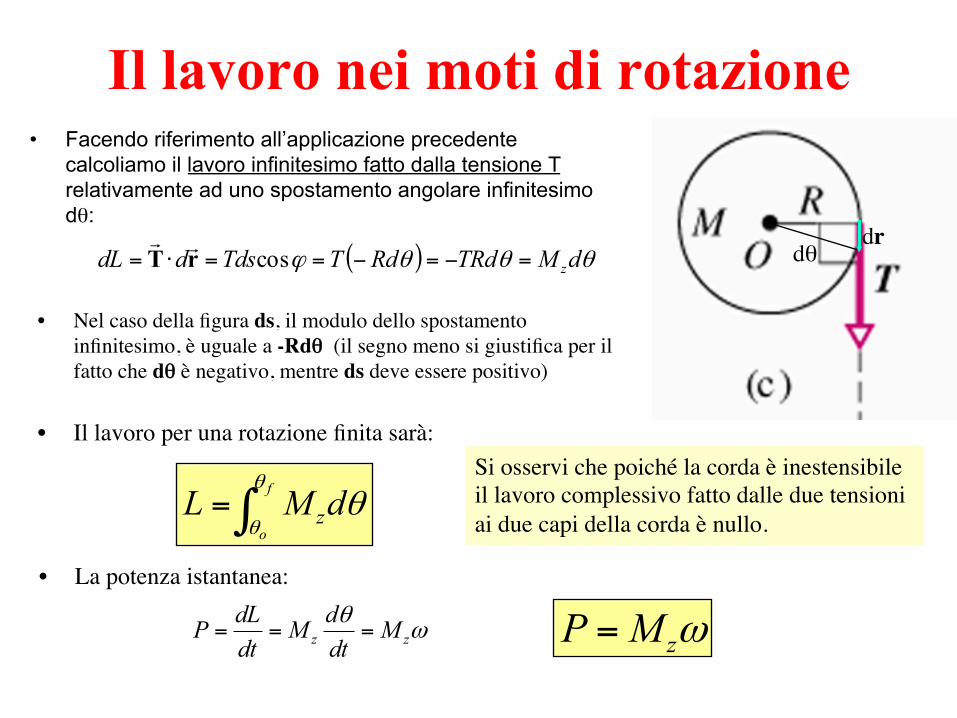
Il lavoro nei moti di rotazione • Facendo riferimento all’applicazione precedente
calcoliamo il lavoro infinitesimo fatto dalla tensione T relativamente ad uno spostamento angolare infinitesimo dθ:
dθ dr
( ) θθθϕ dMTRdRdTTdsddL z=−=−==⋅= cosrT
• Il lavoro per una rotazione finita sarà:
∫=f
o
dML z
θ
θθ
• La potenza istantanea:
ωθ
zz MdtdM
dtdLP ===
Si osservi che poiché la corda è inestensibile il lavoro complessivo fatto dalle due tensioni ai due capi della corda è nullo.
• Nel caso della figura ds, il modulo dello spostamento infinitesimo, è uguale a -Rdθ (il segno meno si giustifica per il fatto che dθ è negativo, mentre ds deve essere positivo)
ωzMP =
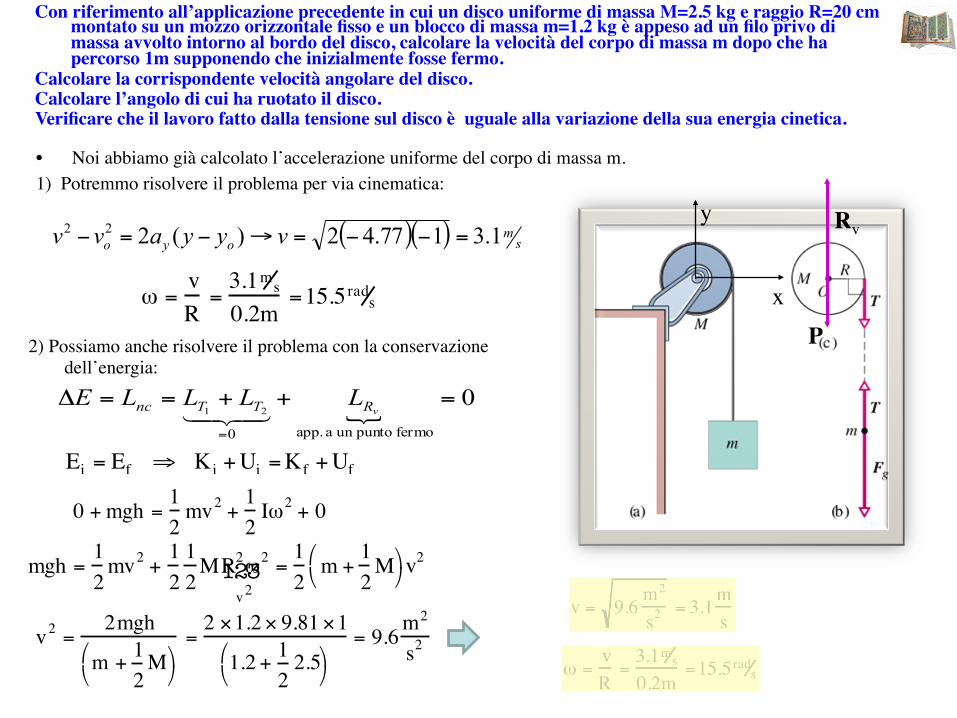
• Noi abbiamo già calcolato l’accelerazione uniforme del corpo di massa m. 1) Potremmo risolvere il problema per via cinematica:
Rv
x
y
P
( )( ) sm
oyo vyyavv 1.3177.42)(222 =−−=→−=−
ω =vR=3.1ms0.2m
=15.5rads
2) Possiamo anche risolvere il problema con la conservazione dell’energia:
0
fermo puntoun a app.0
21=++==Δ
=
vRTTnc LLLLE
Con riferimento all’applicazione precedente in cui un disco uniforme di massa M=2.5 kg e raggio R=20 cm montato su un mozzo orizzontale fisso e un blocco di massa m=1.2 kg è appeso ad un filo privo di massa avvolto intorno al bordo del disco, calcolare la velocità del corpo di massa m dopo che ha percorso 1m supponendo che inizialmente fosse fermo.
Calcolare la corrispondente velocità angolare del disco. Calcolare l’angolo di cui ha ruotato il disco. Verificare che il lavoro fatto dalla tensione sul disco è uguale alla variazione della sua energia cinetica.
Ei = Ef ⇒ Ki +Ui =Kf +Uf
0 +mgh = 12mv2 + 1
2Iω2 + 0
mgh =
12mv2 +
1212MR2ω2
v21 2 3 =
12m +
12M⎛
⎝ ⎞ ⎠ v
2
v2 =2mgh
m +12M⎛
⎝ ⎞ ⎠
=2 ×1.2 × 9.81 ×1
1.2+122.5⎛
⎝ ⎞ ⎠
= 9.6m2
s2
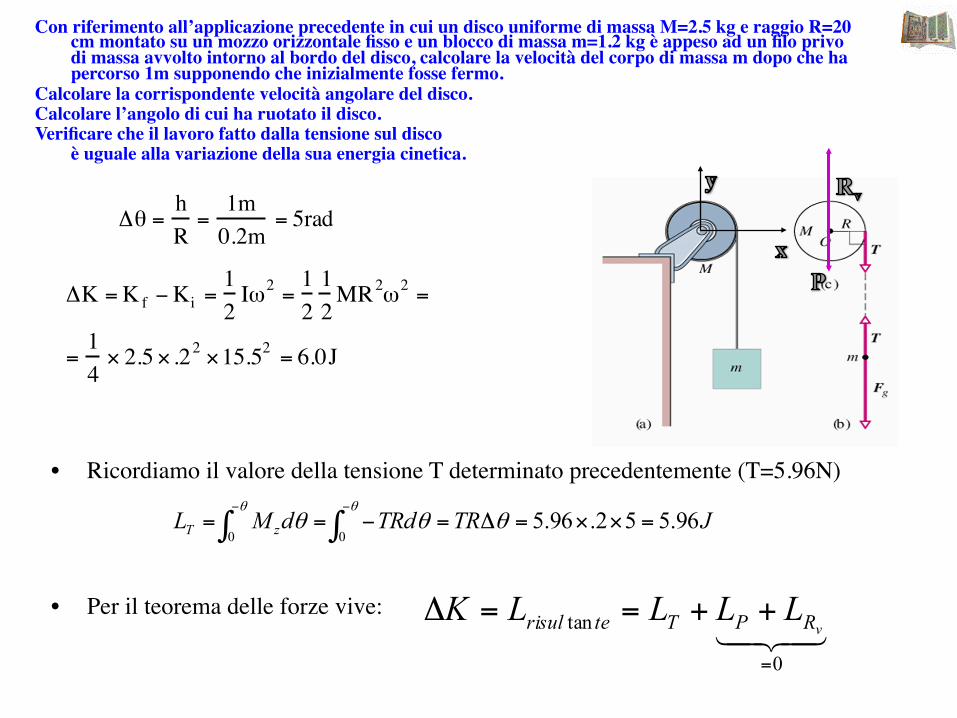
Δθ =hR=1m0.2m
= 5rad
ΔK =Kf −Ki =12Iω2 = 1
212MR2ω2 =
=14× 2.5× .22 ×15.52 = 6.0J
JTRTRddML zT 96.552.96.500
=××=Δ=−== ∫∫−−
θθθθθ
• Ricordiamo il valore della tensione T determinato precedentemente (T=5.96N)
• Per il teorema delle forze vive: 0
tan
=
++==ΔvRPTterisul LLLLK
Con riferimento all’applicazione precedente in cui un disco uniforme di massa M=2.5 kg e raggio R=20 cm montato su un mozzo orizzontale fisso e un blocco di massa m=1.2 kg è appeso ad un filo privo di massa avvolto intorno al bordo del disco, calcolare la velocità del corpo di massa m dopo che ha percorso 1m supponendo che inizialmente fosse fermo.
Calcolare la corrispondente velocità angolare del disco. Calcolare l’angolo di cui ha ruotato il disco. Verificare che il lavoro fatto dalla tensione sul disco
è uguale alla variazione della sua energia cinetica.
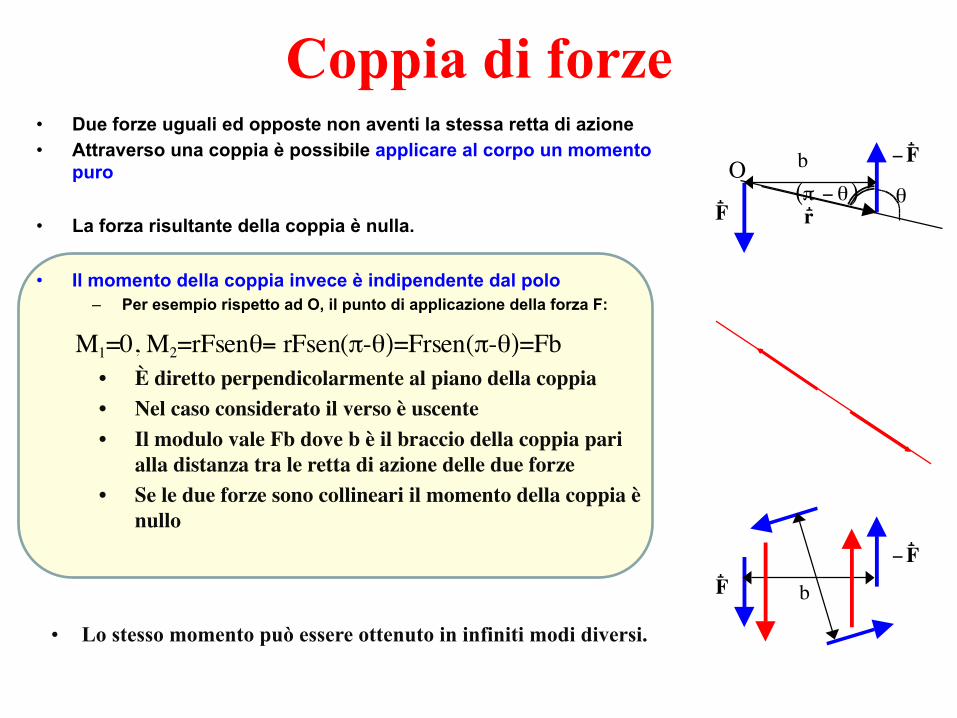
Coppia di forze • Due forze uguali ed opposte non aventi la stessa retta di azione • Attraverso una coppia è possibile applicare al corpo un momento
puro
• La forza risultante della coppia è nulla.
• Il momento della coppia invece è indipendente dal polo – Per esempio rispetto ad O, il punto di applicazione della forza F:
b
r F
−r F
r r θπ − θ( )
b r F
−r F
• È diretto perpendicolarmente al piano della coppia • Nel caso considerato il verso è uscente • Il modulo vale Fb dove b è il braccio della coppia pari
alla distanza tra le retta di azione delle due forze • Se le due forze sono collineari il momento della coppia è
nullo
M1=0, M2=rFsenθ= rFsen(π-θ)=Frsen(π-θ)=Fb
O
• Lo stesso momento può essere ottenuto in infiniti modi diversi.

Coppia di forze • Due forze uguali ed opposte non aventi la stessa retta di azione • Attraverso una coppia è possibile applicare al corpo un momento
puro
• La forza risultante della coppia è nulla.
• Il momento della coppia invece è indipendente dal polo – Per esempio rispetto ad O, il punto di applicazione della forza F:
b
r F
−r F
r r θπ − θ( )
b r F
−r F
• È diretto perpendicolarmente al piano della coppia • Nel caso considerato il verso è uscente • Il modulo vale Fb dove b è il braccio della coppia pari
alla distanza tra le retta di azione delle due forze • Se le due forze sono collineari il momento della coppia è
nullo
M1=0, M2=rFsenθ= rFsen(π-θ)=Frsen(π-θ)=Fb
O
• Lo stesso momento può essere ottenuto in infiniti modi diversi.

Esercizio. Il piatto di grammofono di raggio r=0.10 m gira intorno ad un asse centrale verticale alla velocità di 4.7 rad/s. Il suo momento di inerzia rispetto all’asse di rotazione vale 5.0x10-4 kg*m2. Un pezzetto di stucco di massa 0.020 kg cade dall’alto verticalmente sul disco e si appiccica sul bordo. Qual è la velocità angolare del disco subito dopo che lo stucco si è attaccato?
L’urto è un urto anelastico, dopo l’urto i due oggetti si muovono restando attaccati. Le forze esterne presenti sono le forze peso del disco e dello stucco più la reazione vincolare esercitata dall’asse di rotazione. Proprio la presenza della reazione vincolare non consente la conservazione della quantità di moto. Poiché la reazione vincolare, impulsiva, è applicata all’asse di rotazione, ha momento assiale nullo rispetto all’asse di rotazione.
Anche le altre forze esterne presenti, le forze peso, essendo verticali hanno momento assiale nullo (Mz=0) rispetto all’asse di rotazione (il Momento generato è ortogonale all’asse)
Quindi si conserva il momento angolare assiale Lz.
z
v
ω
O
Richiami al moto di PURO ROTOLAMENTO
41

1) pura rotazione attorno ai punti di contatto
2) sovrapposizione del moto del centro di massa più una rotazione attorno al centro di massa
Risoluzione del moto di rotolamento :
N.B. : Entrambi devono condurre al medesimo risultato
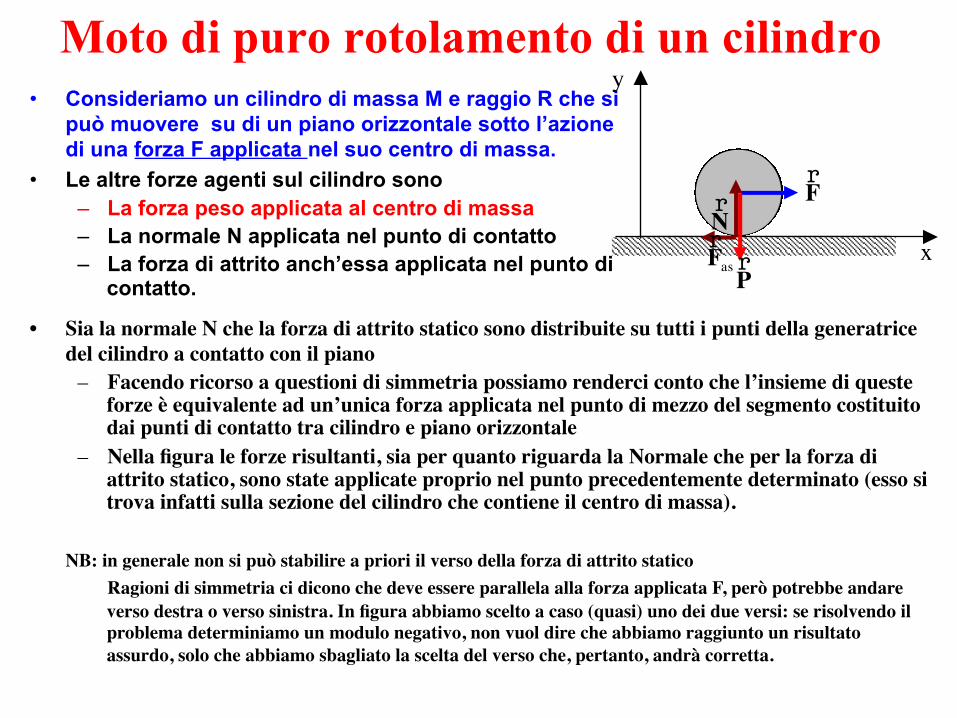
Moto di puro rotolamento di un cilindro • Consideriamo un cilindro di massa M e raggio R che si
può muovere su di un piano orizzontale sotto l’azione di una forza F applicata nel suo centro di massa.
• Le altre forze agenti sul cilindro sono – La forza peso applicata al centro di massa – La normale N applicata nel punto di contatto – La forza di attrito anch’essa applicata nel punto di
contatto. x
y
r P
r N
r F as
r F
• Sia la normale N che la forza di attrito statico sono distribuite su tutti i punti della generatrice del cilindro a contatto con il piano
– Facendo ricorso a questioni di simmetria possiamo renderci conto che l’insieme di queste forze è equivalente ad un’unica forza applicata nel punto di mezzo del segmento costituito dai punti di contatto tra cilindro e piano orizzontale
– Nella figura le forze risultanti, sia per quanto riguarda la Normale che per la forza di attrito statico, sono state applicate proprio nel punto precedentemente determinato (esso si trova infatti sulla sezione del cilindro che contiene il centro di massa).
NB: in generale non si può stabilire a priori il verso della forza di attrito statico Ragioni di simmetria ci dicono che deve essere parallela alla forza applicata F, però potrebbe andare verso destra o verso sinistra. In figura abbiamo scelto a caso (quasi) uno dei due versi: se risolvendo il problema determiniamo un modulo negativo, non vuol dire che abbiamo raggiunto un risultato assurdo, solo che abbiamo sbagliato la scelta del verso che, pertanto, andrà corretta.
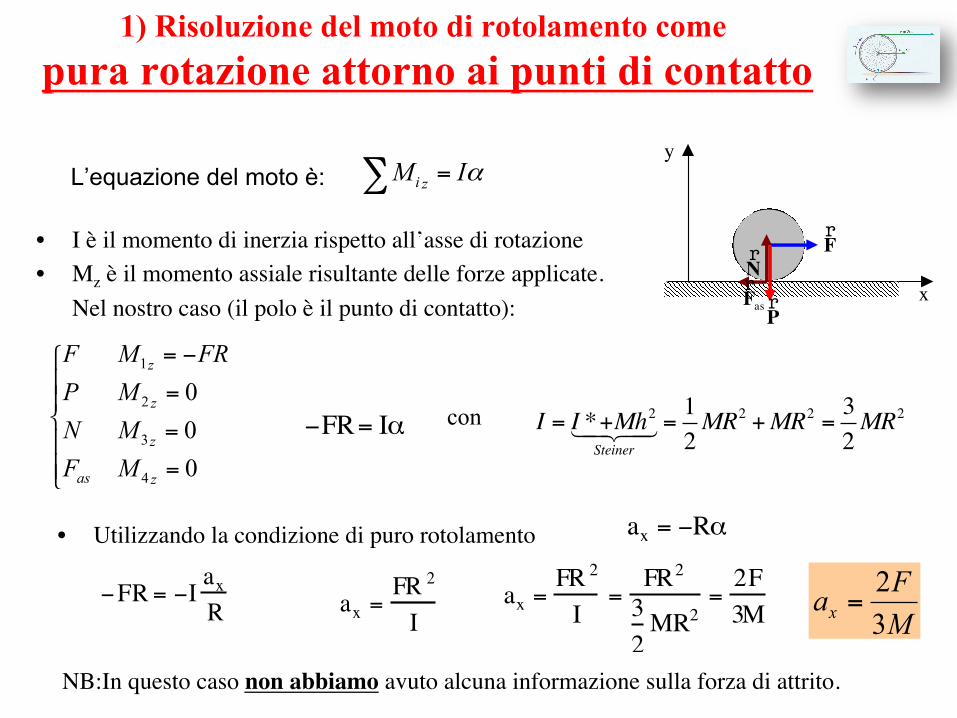
1) Risoluzione del moto di rotolamento come pura rotazione attorno ai punti di contatto
L’equazione del moto è:
x
y
r P
r N
r F as
r F • I è il momento di inerzia rispetto all’asse di rotazione
• Mz è il momento assiale risultante delle forze applicate. Nel nostro caso (il polo è il punto di contatto):
αIM zi =∑
I = I *+Mh2Steiner =
12MR2 +MR2 = 3
2MR2
⎪⎪⎩
⎪⎪⎨
⎧
=
=
=
−=
000
4
3
2
1
zas
z
z
z
MFMNMP
FRMF
−FR= Iα
• Utilizzando la condizione di puro rotolamento ax = −Rα
−FR = −I axR ax =
FR 2
Iax =
FR2
I=FR232MR2
=2F3M
NB:In questo caso non abbiamo avuto alcuna informazione sulla forza di attrito.
MFax 32
=
con
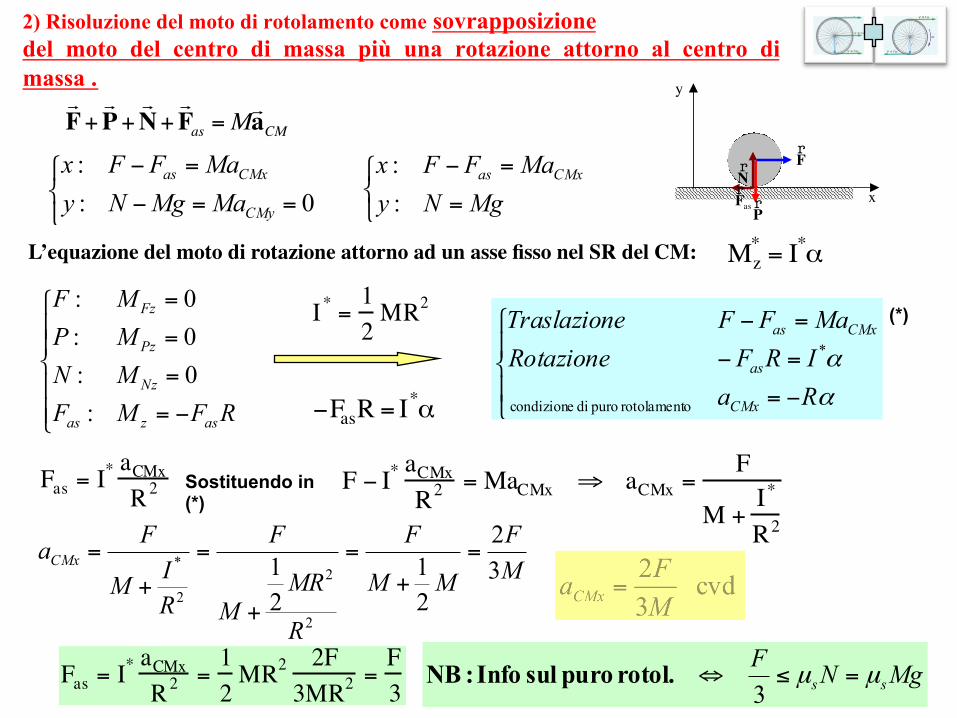
2) Risoluzione del moto di rotolamento come sovrapposizione del moto del centro di massa più una rotazione attorno al centro di massa .
x
y
r P
r N
r F as
r F
L’equazione del moto di rotazione attorno ad un asse fisso nel SR del CM: Mz* = I*α
Fas = I* aCMxR2
F − I* aCMxR2
=MaCMx ⇒ aCMx =F
M +I*
R2
MF
MM
F
R
MRM
F
RIM
FaCMx 32
21
21
2
22
* =+
=
+
=+
=
F+P+N+Fas =M
aCM
⎩⎨⎧
==−
=−
0::
CMy
CMxas
MaMgNyMaFFx
I* = 12MR2
⎪⎪⎩
⎪⎪⎨
⎧
−=
=
=
=
RFMFMNMPMF
aszas
Nz
Pz
Fz
:0:0:0:
−FasR = I*α
Fas = I* aCMxR2
=12MR2 2F
3MR2=F3
MgNFss µµ =≤⇔
3rotol. puro sul Info :NB
Sostituendo in (*)
⎩⎨⎧
=
=−
MgNyMaFFx CMxas
::
⎪⎩
⎪⎨
⎧
−=
=−
=−
α
α
RaIRFRotazioneMaFFeTraslazion
CMx
as
CMxas
orotolament puro di condizione
*
(*)
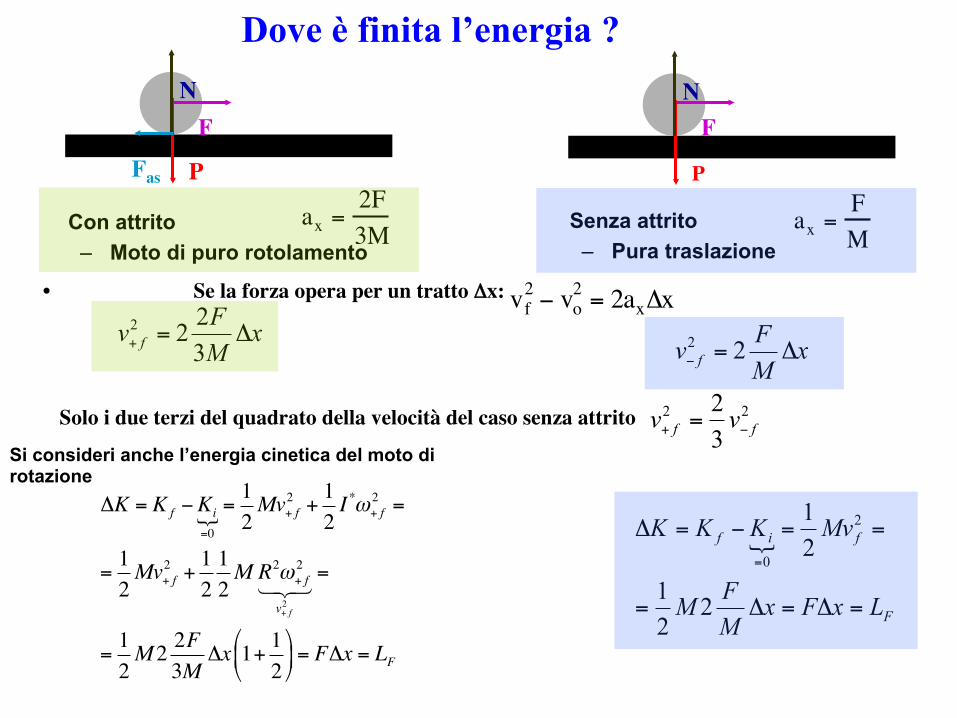
Dove è finita l’energia ?
Con attrito – Moto di puro rotolamento
Senza attrito – Pura traslazione
F
P
N
Fas
F
P
N
ax =2F3M ax =
FM
• Se la forza opera per un tratto Δx: vf2 − vo
2 = 2axΔxx
MFv f Δ=+ 3222
xMFv f Δ=− 22
Solo i due terzi del quadrato della velocità del caso senza attrito
F
fif
LxFxMFM
MvKKK
=Δ=Δ=
==−=Δ=
221
21 2
0
Si consideri anche l’energia cinetica del moto di rotazione
22
32
ff vv −+ =
ΔK = K f −Ki=0 =
12Mv+ f
2 +12I *ω+ f
2 =
=12Mv+ f
2 +1212M R2ω+ f
2
v+ f2
=
=12M2 2F
3MΔx 1+ 1
2#
$%
&
'(= FΔx = LF
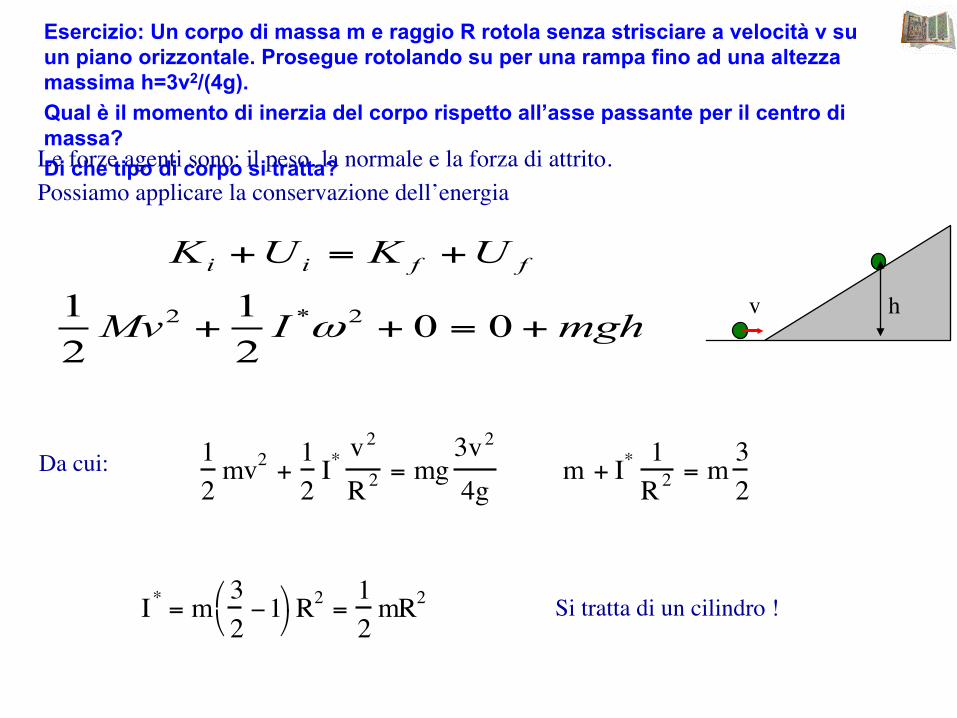
Esercizio: Un corpo di massa m e raggio R rotola senza strisciare a velocità v su un piano orizzontale. Prosegue rotolando su per una rampa fino ad una altezza massima h=3v2/(4g). Qual è il momento di inerzia del corpo rispetto all’asse passante per il centro di massa? Di che tipo di corpo si tratta? Le forze agenti sono: il peso, la normale e la forza di attrito.
Possiamo applicare la conservazione dell’energia
Da cui:
I* = m 32−1⎛
⎝ ⎞ ⎠ R
2 =12mR2 Si tratta di un cilindro !
mghIMv
UKUK ffii
+=++
+=+
0021
21 2*2 ω
12mv2 + 1
2I*v2
R2= mg
3v2
4gm + I* 1
R2= m 3
2
h v
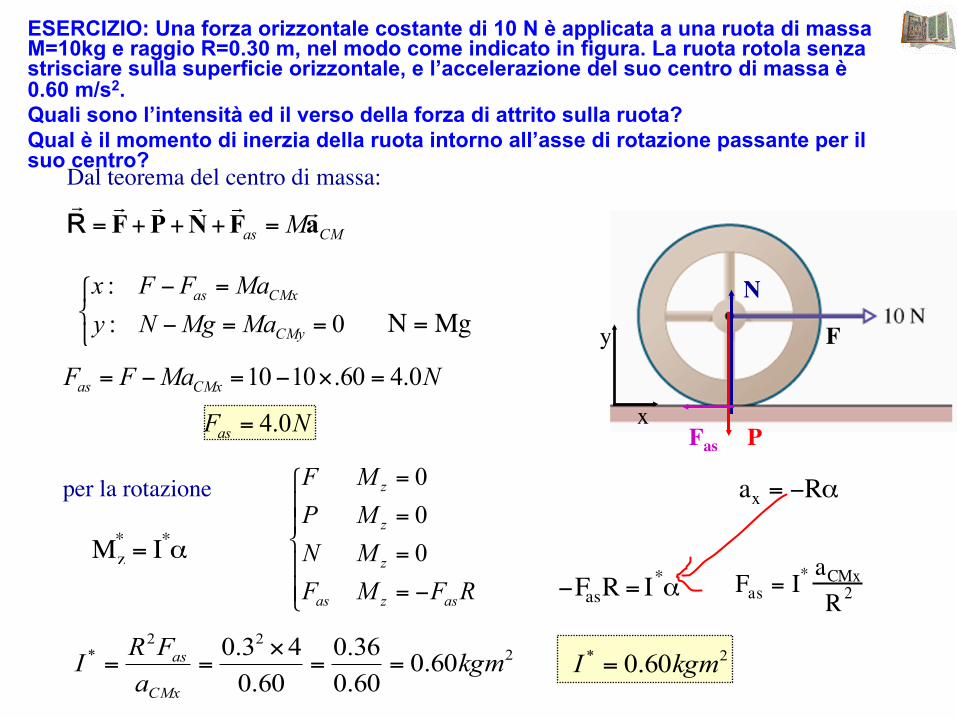
ESERCIZIO: Una forza orizzontale costante di 10 N è applicata a una ruota di massa M=10kg e raggio R=0.30 m, nel modo come indicato in figura. La ruota rotola senza strisciare sulla superficie orizzontale, e l’accelerazione del suo centro di massa è 0.60 m/s2. Quali sono l’intensità ed il verso della forza di attrito sulla ruota? Qual è il momento di inerzia della ruota intorno all’asse di rotazione passante per il suo centro?
Dal teorema del centro di massa:
N =Mg
CMas MaFNPF =+++=R
⎩⎨⎧
==−
=−
0::
CMy
CMxas
MaMgNyMaFFx
NMaFF CMxas 0.460.1010 =×−=−=
F
P
N
Fas
Fas = I* aCMxR2
Mz* = I*α
⎪⎪⎩
⎪⎪⎨
⎧
−=
=
=
=
RFMFMNMPMF
aszas
z
z
z
000
−FasR = I*α
per la rotazione
222
* 60.060.036.0
60.043.0 kgm
aFRICMx
as ==×
==
ax = −Rα
x
y
NFas 0.4=
2* 60.0 kgmI =
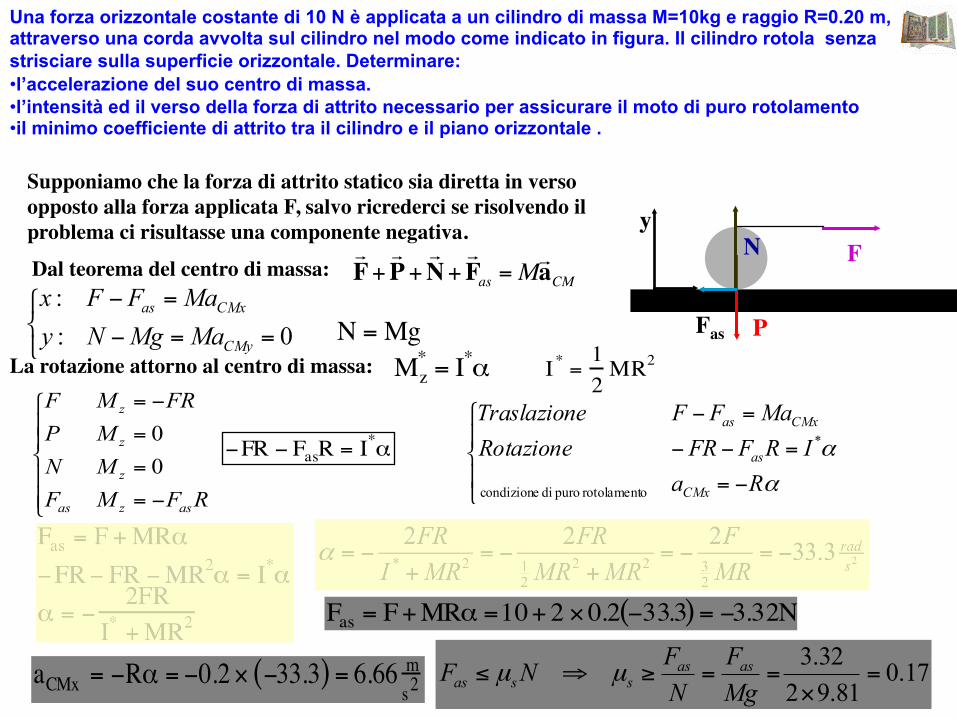
Una forza orizzontale costante di 10 N è applicata a un cilindro di massa M=10kg e raggio R=0.20 m, attraverso una corda avvolta sul cilindro nel modo come indicato in figura. Il cilindro rotola senza strisciare sulla superficie orizzontale. Determinare: • l’accelerazione del suo centro di massa. • l’intensità ed il verso della forza di attrito necessario per assicurare il moto di puro rotolamento • il minimo coefficiente di attrito tra il cilindro e il piano orizzontale .
Dal teorema del centro di massa: F
P
N
Fas N =Mg
F+P+N+Fas =M
aCM
⎩⎨⎧
==−
=−
0::
CMy
CMxas
MaMgNyMaFFx
Supponiamo che la forza di attrito statico sia diretta in verso opposto alla forza applicata F, salvo ricrederci se risolvendo il problema ci risultasse una componente negativa.
La rotazione attorno al centro di massa: Mz* = I*α I* = 1
2MR2
⎪⎪⎩
⎪⎪⎨
⎧
−=
=
=
−=
RFMFMNMP
FRMF
aszas
z
z
z
00
−FR − FasR = I*α
⎪⎩
⎪⎨
⎧
−=
=−−
=−
α
α
RaIRFFRRotazione
MaFFeTraslazion
CMx
as
CMxas
orotolament puro di condizione
*
x
y
aCMx = −Rα = −0.2× −33.3( ) = 6.66 ms2
Fas = F+MRα =10+2 ×0.2 −33.3( ) = −3.32N
17.081.9232.3
=×
==≥⇒≤MgF
NFNF asas
ssas µµ
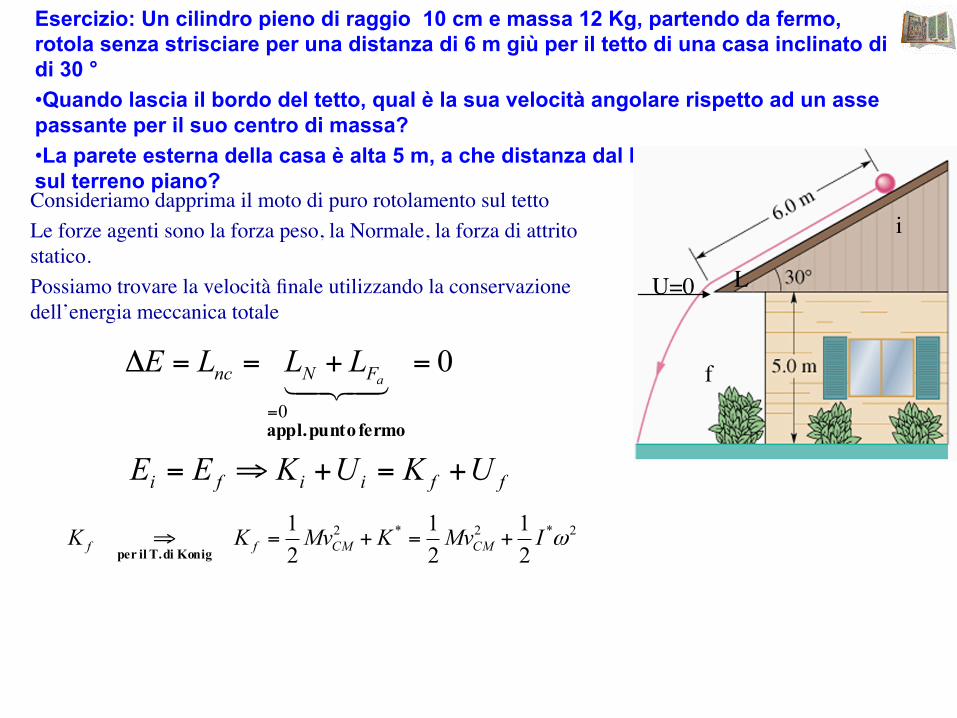
Esercizio: Un cilindro pieno di raggio 10 cm e massa 12 Kg, partendo da fermo, rotola senza strisciare per una distanza di 6 m giù per il tetto di una casa inclinato di di 30 ° • Quando lascia il bordo del tetto, qual è la sua velocità angolare rispetto ad un asse passante per il suo centro di massa? • La parete esterna della casa è alta 5 m, a che distanza dal bordo del tetto atterrerà sul terreno piano?
00
=+==Δ
=
fermo punto appl.
aFNnc LLLE
ffiifi UKUKEE +=+⇒=
L
i
f
U=0
2*2*2
21
21
21
ωIMvKMvKK CMCMff +=+=⇒Konig di T. ilper
Consideriamo dapprima il moto di puro rotolamento sul tetto Le forze agenti sono la forza peso, la Normale, la forza di attrito statico. Possiamo trovare la velocità finale utilizzando la conservazione dell’energia meccanica totale
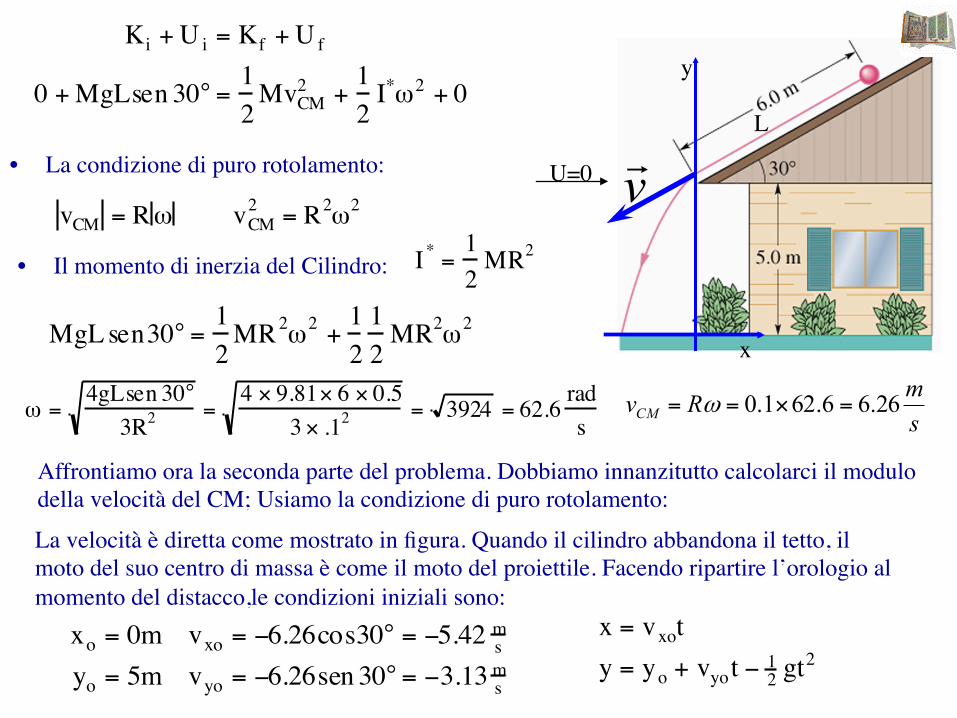
• La condizione di puro rotolamento:
vCM = Rω vCM2 = R2ω2
L
Ki +Ui = Kf +Uf
0 +MgLsen 30° = 12MvCM2 +
12I*ω2 + 0
• Il momento di inerzia del Cilindro: I* = 12MR2
MgLsen30° = 12MR2ω2 +
1212MR2ω2
ω =4gLsen 30°3R2
=4 × 9.81× 6 × 0.5
3 × .12= 3924 = 62.6 rad
s smRvCM 26.66.621.0 =×== ω
Affrontiamo ora la seconda parte del problema. Dobbiamo innanzitutto calcolarci il modulo della velocità del CM; Usiamo la condizione di puro rotolamento:
xo = 0m vxo = −6.26cos30° = −5.42 msyo = 5m vyo = −6.26sen 30° = −3.13 ms
La velocità è diretta come mostrato in figura. Quando il cilindro abbandona il tetto, il moto del suo centro di massa è come il moto del proiettile. Facendo ripartire l’orologio al momento del distacco,le condizioni iniziali sono:
x = vxoty = yo + vyot − 1
2 gt2
v
x
y
U=0

Determiniamo l’istante di impatto al suolo imponendo che y sia nulla:
La soluzione negativa è da scartare. La distanza a cui atterrerà:
v
x
y
x = vxot = −5.42 × .74 =−4.01m
yo + vyot − 12 gt
2 = 0 ⇒ 4.9 t2 + 3.13t − 5= 0
t1,2 =−b ± b2 − 4ac
2a=−3.13± 3.132 + 4× 4.91× 5
9.81=−3.13±10.39
9.81=−1.37+0.74
• Si osservi che la velocità di rotazione attorno all’asse passante per il centro di massa rimane costante dal momento del distacco fino all’impatto al suolo.
– L’unica forza esterna agente, la forza peso, essendo applicata al CM, ha momento assiale nullo rispetto all’asse di rotazione.