Fedeltà della risposta dei sistemi di controllo in retroazione: analisi della precisione

of 68
-
Upload
marco-salvatore-vanadia -
Category
Documents
-
view
216 -
download
0
Transcript of Fedeltà della risposta dei sistemi di controllo in retroazione: analisi della precisione
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
1/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
FEDELT DELLA RISPOSTA
DEI SISTEMI DI CONTROLLO IN RETROAZIONE:
ANALISI DELLA PRECISIONE IN REGIME PERMANENTE
Nello studio dei sistemi di controllo in retroazione spesso si richiede che luscitasegua lingresso (problema di inseguimento).
Per questo motivo, una specifica molto importante la precisione del sistema,espressa in termini di errore a regime della risposta del sistema in anello chiuso aisegnali canonici gradino, rampa lineare, rampa parabolica.
PRECISIONE DEI SISTEMI DI CONTROLLO
IN RETROAZIONE UNITARIA
Consideriamo inizialmente un generico sistema con retroazione unitaria, del tiponella figura seguente, dove G(s) la funzione di trasferimento di anello,comprendente quella del plant e quella del controllore.
r e
-+
yG(s)
In questo schema la variabile a valle della giunzione sommante
e(t)=r(t)-y(t)
rappresenta lerrore del sistema, ossia lo scostamento della variabile controllata y(t)rispetto al riferimento imposto r(t).
Se lobiettivo del controllo che luscita insegua lingresso, oltre a specifiche di tipodinamico quali la stabilit e la rapidit di assestamento della risposta, anchenecessario progettare lanello di controllo in modo che il sistema sia fedele, ossiasoddisfi specifiche statiche espresse in termini del valore dellerrore a regime.
Nel dominio della frequenza complessa s si ha:
E(s)=R(s)-Y(s)=R(s)-G(s)E(s)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
1
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
2/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
da cui
ER(s) 1
E(s) R(s) G (s)R(s)
1 G(s) 1 G(s)
= = =
+ +
e quindi la funzione di trasferimento dellerrore vale
EE(s) 1
G (s)R(s) 1 G(s)
= =+
e lo schema di riferimento il seguente
e(t)GE(s)
r(t)
Per mezzo della funzione di trasferimento dellerrore dunque possibile calcolarelandamento dellerrore e(t): sufficiente antitrasformare il prodotto
EE(s) G (s)R(s)=
da cui
{ } {1 1 Ee(t) E(s) G (s)R(s) = =L L } .
Di tale andamento e(t) ci interessa principalmente il valore a regime o asintotico, chesi pu agevolmente calcolare, se il sistema progettato asintoticamente stabile,applicando il ben noto teorema del valore finale. Si ha dunque lerrore a regime:
( ) ( )t s 0e lim e(t) lim sE(s)
= = .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
2
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
3/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ERRORE DI POSIZIONE
Si definisce errore di posizione di un sistema il valore dellerrore a regime ottenuto inrisposta ad un ingresso a gradino unitario. Ponendo quindi
r(t)=1(t)
e supponendo il sistema in retroazione unitaria, si ha evidentemente
( ) ( )P s 0 s 0 E
s 0 s 0P
e lim sE(s) lim sG (s)R(s)
1 1 1 1lim s lim
1 G(s) s 1 G(s) 1 K
= = =
= = + +
=+
essendo KP la costante di posizione del sistema, definita come segue:
( )P s 0K lim G(s)= .
ERRORE DI VELOCIT
Si definisce errore di velocit di un sistema il valore dellerrore a regime ottenuto in
risposta ad un ingresso a rampa lineare unitaria.
Ponendo quindi
r(t)=t1(t)
e supponendo il sistema in retroazione unitaria, si ha evidentemente
( ) ( )V s 0 s 0 E
s 0 s 02V
e lim sE(s) lim sG (s)R(s)
1 1 1 1lim s lim1 G(s) s G(s) K s
= =
= = +
=
=
essendo KV la costante di velocit del sistema, definita come segue:
( )V s 0K lim s G(s )= .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
3
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
4/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ERRORE DI ACCELERAZIONE
Si definisce errore di accelerazione di un sistema il valore dellerrore a regimeottenuto in risposta ad un ingresso a rampa parabolica unitaria.
Ponendo quindi
2tr(t) 1(t)
2=
e supponendo il sistema in retroazione unitaria, si ha evidentemente
( ) ( )A s 0 s 0 E
s 0 s 03 2A
e lim sE(s) lim sG (s)R(s)
1 1 1 1lim s lim
1 G(s) K s s G(s)
= =
= = +
=
=
essendo KA la costante di accelerazione del sistema, definita come segue:
( )2A s 0K lim s G(s)= .
TIPO DI UN SISTEMA IN RETROAZIONE UNITARIA
Supponiamo ora che la funzione di trasferimento di anello del sistema in retroazioneunitaria sia espressa in forma poli-zeri come segue:
mj
j 1n
ii 1
(s z )
G(s) k
s (s p
=
)=
=
.
Essa abbia dunque m zeri e n poli, di cui nellorigine, ed un guadagno k.
Il tipo del sistema indica il numero di poli che G(s) presenta nellorigine.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
4
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
5/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
1. Quando =0 si dice che il sistema di tipo zero. Questo un caso abbastanzafrequente. Si ha:
m
jj 1n
ii 1
(s z )
G(s) k
(s p )
=
=
=
.
2. Quando =1 si dice che il sistema di tipo uno. Anche questo un caso tipico,si pensi ad esempio ad un classico servomeccanismo di posizione. Si ha:
m
jj 1n 1
ii 1
(s z )
G(s) k
s (s p
=
)=
=
.
3. Quando =2 si dice che il sistema di tipo due. Questo un caso raro. Si ha:m
jj 1n 22
ii 1
(s z )
G(s) k s (s p
=
)=
=
.
molto infrequente che un sistema abbia tipo superiore a due.
Nel seguito vediamo come spesso il polo nellorigine, semplice o doppio, vengavolutamente introdotto dal progettista nella funzione di trasferimento di anello (e,
quindi, in quella del controllore posto a monte del plant), al fine di otteneredeterminate caratteristiche dellandamento asintotico della risposta.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
5
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
6/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Supponiamo ad esempio che il sistema abbia tipo zero, ossia la sua funzione ditrasferimento in anello aperto sia esprimibile come:
m
jj 1n
ii 1
(s z )
G(s) k
(s p )
=
=
=
.
In tal caso la costante di posizione del sistema
( )P s 0K lim G(s)=
finita. Ne consegue che lerrore di posizione del sistema anchesso finito, essendo:
PP
1e
1 K=
+.
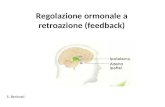
In definitiva, il sistema risponde ad un ingresso a gradino con un errore a regime che finito. Un esempio di questo comportamento quello riportato nella figurasuccessiva. Evidentemente, linseguimento va parzialmente a buon fine, poich ilsistema si comporta a regime come lingresso, producendo una uscita costante, che
per non pari al valore desiderato (il riferimento, appunto).
0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo [s]
Ampiezza
Risposta al gradino in anello chiuso di un sistema di tipo zero
r(t)
y(t)
2
02
40G(s)
s 6s 540
G (s)s 6s 4
= + +
=+ + 5
Osserviamo inoltre che lerrore di posizione tanto pi piccolo quanto maggiore ilguadagno k della funzione di trasferimento. Lerrore a regime comunque non pu maiessere nullo quando il tipo zero.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
6
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
7/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Calcoliamo ora le costanti di velocit e di accelerazione del sistema:
( )V s 0K lim s G(s )= ( )2A s 0K lim s G(s)=
che sono entrambe evidentemente nulle. Ne consegue che lerrore di velocit elerrore di accelerazione del sistema sono entrambi infiniti, essendo:
VV
1e
K= , A
A
1e
K= .
In definitiva, il sistema risponde ad un ingresso a rampa lineare e ad un ingresso a
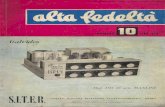
rampa parabolica con un errore a regime che infinito. In tali casi, quindi, luscita delsistema non in grado di seguire lingresso, infatti lo scostamento tra le due diverge(si veda lesempio di risposta alla rampa lineare in figura).
0 1 2 3 4 50
1
2
3
4
5
Tempo [s]
Amp
iezza
Risposta alla rampa in anello chiuso di un sistema di tipo zero
r(t)
y(t)
2
0 2
40G(s)
s 6s 540
G (s)s 6s 4
= + +
=+ + 5
Supponiamo ora che il sistema abbia invece tipo pari a uno, ossia la sua funzione ditrasferimento in anello aperto sia esprimibile come:
mj
j 1n 1
ii 1
(s z )
G(s) k
s (s p
=
)=
=
.
In tal caso la costante di posizione del sistema
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
7
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
8/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
( )P s 0K lim G(s)=
evidentemente infinita. Ne consegue che lerrore di posizione del sistema nullo:
PP
1e1 K
=+
.
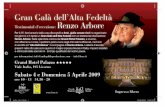
In definitiva, il sistema risponde ad un ingresso a gradino con un errore a regimenullo: linseguimento va perfettamente a buon fine, poich il sistema si comporta aregime proprio come lingresso, producendo una uscita costante pari al valoredesiderato (si veda lesempio in figura).
0 5 10 150
0.2
0.4
0.6
0.8
1
1.2
1.4
Tempo [s]
Ampiezza
Risposta al gradino in anello chiuso di un sistema di tipo uno
r(t)
y(t)
2
0 3 2
4G(s)
s(s 6s 5)
4G (s)
s 6s 5s
= + +
=+ + + 4
Calcoliamo ora la costante di velocit del sistema:
( )V s 0K lim s G(s)=
che evidentemente finita. Ne consegue che lerrore di velocit finito, essendo:
VV
1eK=
.
In definitiva, il sistema risponde ad un ingresso a rampa lineare con un errore aregime che finito. Quindi luscita del sistema in grado di seguire lingresso
parzialmente, con un errore che tanto pi piccolo quanto maggiore il guadagno.
Un esempio riportato nella figura successiva.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
8
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
9/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
0 5 10 150
5
10
15
Tempo [s]
Ampiezza
Risposta alla rampa in anello chiuso di un sistema di tipo uno
r(t)
y(t)
errore
2
0 3 2
4
G(s) s(s 6s 5)
4G (s)
s 6s 5s
= + +
=+ + + 4
Infine valutiamo la costante di accelerazione del sistema:
( )2A s 0K lim s G(s)=
che nulla. Ne consegue che lerrore di accelerazione del sistema infinito, essendo:
AA
1e
K= .
In definitiva, il sistema risponde ad un ingresso a rampa parabolica con un errore aregime che infinito. In tal caso, quindi, luscita del sistema non in grado di seguirelingresso, infatti lo scostamento tra i due segnali diverge (si veda lesempio infigura).
0 5 10 150
20
40
60
80
100
120
Tempo [s]
Ampiezza
Risposta alla rampa parabolica in anello chiuso di un sistema di tipo uno
r(t)
y(t)
2
0 3 2
4G(s) s(s 6s 5)
4G (s)
s 6s 5s
= + +
=+ + + 4
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
9
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
10/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Consideriamo infine la situazione in cui il sistema sia invece di tipo due, ossia la suafunzione di trasferimento in anello aperto sia esprimibile come:
m
jj 1n 22
ii 1
(s z )
G(s) k
s (s p
=
)=
=
.
In tal caso le costanti di posizione e di velocit del sistema
( )P s 0K lim G(s)= ( )V s 0K lim s G(s)=
sono entrambe infinite. Ne consegue che sia lerrore di posizione che quello divelocit sono nulli:
PP
1e
1 K=
+ V
V
1e
K= .
In definitiva, il sistema risponde sia ad un ingresso a gradino che a rampa lineare conun errore a regime nullo: linseguimento va perfettamente a buon fine, poich ilsistema si comporta a regime proprio come lingresso, producendo una uscita che a
regime riproduce il riferimento.
Un esempio riportato nelle due figure successive.
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
Tempo [s]
Ampie
zza
Risposta al gradino in anello chiuso di un sistema di tipo due
y(t)
r(t)
2
2 2
2
0 4 3 2
40(s 2s 2)G(s)
s (s 6s 5)40(s 2s 2)
G (s)s 6s 45s 80s 8
+ +=
+ ++ +
=0+ + + +
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
10
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
11/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
0 1 2 3 40
0.5
1
1.5
2
2.5
3
3.5
4
Tempo [s]
Ampiezza
Risposta alla rampa in anello chiuso di un sistema di tipo due
r(t) y(t)
2
2 2
2
0 4 3 2
40(s 2s 2)G(s) s (s 6s 5)
40(s 2s 2)G (s)
s 6s 45s 80s 8
+ += + +
+ + =
0+ + + +
Infine valutiamo la costante di accelerazione del sistema:
( )2A s 0K lim s G(s)=
che evidentemente finita. Ne consegue che lerrore di accelerazione del sistema anchesso finito, essendo:
AA
1e
K= .
In definitiva, il sistema risponde ad un ingresso a rampa parabolica con un errore aregime finito, che tanto minore quanto maggiore il guadagno. Quindilinseguimento del riferimento va parzialmente a buon fine. Un esempio riportatonella figura successiva.
0 2 4 6 8 100
10
20
30
40
50
Tempo [s]
Ampiezza
Risposta alla rampa parabolica in anello chiuso di un sistema di tipo due
r(t), y(t)
2
2 2
2
0 4 3 2
40(s 2s 2)G(s)
s (s 6s 5)
40(s 2s 2)G (s)
s 6s 45s 80s 8
+ +=
+ +
+ + =
0+ + + +
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
11
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
12/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Si ha
AA
1 1e 0
K 16
= = .06
pertanto linseguimento della rampa parabolica quasi perfetto: infatti lerrore divelocit, anche se non nullo, molto piccolo poich la costante di accelerazione elevata (infatti nella figura precedente non si distinguono quasi ingresso e uscita).
Possiamo riassumere quanto abbiamo visto nella seguente tabella.
TIPO KP eP KV eV KA eA
0 Finita Finito 0 0
1 0 Finita Finito 0
2 0 0 Finita Finito
Possiamo inoltre affermare che la precisione aumenta allaumentare del tipo delsistema e comunque allaumentare del guadagno k. Per aumentare questultimo necessario agire sugli amplificatori inseriti nella catena di controllo a monte delsistema controllato. Per quanto riguarda il tipo, invece, per aumentarlo necessariointrodurre nel regolatore un numero opportuno di poli nellorigine.
Daltra parte, noto che un sistema di tipo elevato presenta notevoli difficoltrealizzative per ci che riguarda la stabilit: in altre parole, la presenza di un elevatonumero di poli nellorigine in anello aperto innesca fenomeni di instabilit (si pensi al
luogo delle radici del sistema, che almeno per elevati valori del guadagno di anellopresenta alcuni rami in parte disposti nel semipiano destro). Per questo motivo gi isistemi di tipo due sono rari, essendone giustificato limpiego solo in sistemi di
posizionamento e inseguimento ad altissima precisione.
Questi risultati corrispondono al cosiddetto Principio del modello interno: affinchsia neutralizzato (con errore nullo a regime) un modo nellingresso corrispondente adun polo nellorigine di ordine , occorre generare lo stesso modo nel regolatore, chequindi deve avere un polo nellorigine di ordine almeno (se il plant di tipo zero).
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
12
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
13/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
PRECISIONE DEI SISTEMI DI CONTROLLO
IN RETROAZIONE NON UNITARIA
Consideriamo ora un generico sistema in retroazione non unitaria, con funzione ditrasferimento del ramo diretto (che congloba il regolatore e il plant) G(s) e funzionedi trasferimento del ramo di retroazione (ossia del trasduttore) H(s).
+
y
-
H(s)
G(s)r
In questo caso non possibile definire ancora lerrore come e(t)=r(t)-y(t), poich lapresenza del trasduttore indica che lingresso e luscita sono variabili non omogenee.
Ugualmente non ha senso definire lerrore come la variabile ottenuta a valle dellagiunzione sommante, poich in tal caso otterremmo:
E(s)=R(s)-H(s)Y(s)
Ossia, antitrasformando:
e(t)=r(t)-h(t)*y(t)
che un segnale che non fornisce indicazioni rilevanti sulla fedeltdellinseguimento.
Poich appunto linseguimento dellingresso che ci interessa, ossia lobiettivo del problema di precisione che luscita segua fedelmente landamento dellingresso,definiamo la variabile errore come:
e(t)=r(t)-y(t)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
13
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
14/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
essendo una costante dimensionale fissata dal progettista che permette di compararele grandezze eterogenee r(t) e y(t). Spesso si pone tale costante pari al guadagnostatico del trasduttore:
=H(s=0).Si pu anche porre =1, ricordando per in tal caso che tale costante non adimensionale.
Nel dominio della frequenza complessa s si ha:
G(s) G(s)E(s)=R(s)- Y(s)=R(s)- R(s) 1- R(s)
1 G(s)H(s) 1 G(s)H(s)
= + +
da cui
( )1 G(s) H(s)1 H(s)G(s) G(s)E(s)= R(s)= R(s)
1 G(s)H(s) 1 G(s)H(s)
+ + + +
o anche
( ) ( )
1 1E(s)= R(s) R(s)
1 G(s)H(s) 1 G(s)H(s) G(s) G(s)1 G(s) H(s) 1 G(s) H(s)
=
+ + + + +
da cui
( )
EEQ
1 1E(s)= R(s) R(s) G (s)R(s)G(s) 1 G (s)1
1 G(s) H(s)
= = + + +
e quindi la funzione di trasferimento dellerrore vale
EEQ
E(s) 1G (s)
R(s) 1 G (s)= =
+.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
14
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
15/68
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
16/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Questo schema equivale al seguente, che ha retroazione unitaria con uscita y ai finidellerrore.
( )G(s)
1 G(s) H(s)
+
r+
e 1
y
-
y
Perci la funzione di trasferimento dellerrore tra r(t) e y(t) vale:
EEQ
E(s) 1G (s) R(s) 1 G (s)= = +
con
( )EQ
G(s)G (s)=
1 G(s) H(s)
+
.
In definitiva la funzione di trasferimento GEQ(s) fa le veci della funzione ditrasferimento del ramo diretto G(s) (che si otteneva nella formula per il sistema conretroazione unitaria) nella funzione di trasferimento dellerrore quando si ha unsistema con retroazione non unitaria.
Evidentemente, si ha
EQG (s)=G(s)
quando la retroazione unitaria e si sceglie =1 nella definizione della funzioneerrore.
Riassumendo, i risultati trovati per la funzione di trasferimento dellerrore nel caso diretroazione unitaria valgono anche per sistemi in retroazione non unitaria, conlaccortezza di sostituire alla funzione di trasferimento G(s) la funzione ditrasferimento GEQ(s), che evidentemente dipende dal ramo diretto ma anche daltrasduttore, nonch da come definito lerrore (ossia dalla scelta della costante ).
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
16
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
17/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Anche nel caso di retroazione non unitaria, per mezzo della funzione di trasferimentodellerrore dunque possibile calcolare landamento dellerrore e(t). sufficienteantitrasformare il prodotto
EE(s) G (s)R(s)= .
Ancora una volta dellandamento di e(t) ci interessa principalmente il valore a regimeo asintotico, che si pu agevolmente calcolare con il teorema del valore finale. Siindividuano cos lerrore di posizione, velocit e accelerazione del sistema in anellochiuso in retroazione non unitaria.
Applicando tale teorema si ottengono gli stessi risultati visti per il sistema conretroazione unitaria, con la differenza che in questo caso il tipo del sistema non
definito sulla funzione di trasferimento G(s) del ramo diretto ma il tipo dellafunzione di trasferimento equivalente GEQ(s), che congloba le informazioni su tutto ilsistema e su come definito lo stesso segnale errore:
( )EQ
G(s)G (s)=
1 G(s) H(s)
+
.
Ne consegue dunque che lerrore di posizione vale:
PP
1e1 K
=+
essendo KP la costante di posizione del sistema, definita come segue:
( )P s 0 EQK lim G (s)= .
Analogamente lerrore di velocit del sistema vale:
VV
1e
K=
essendo KV la costante di velocit del sistema, definita come segue:
( )V s 0 EQK lim s G (s)= .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
17
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
18/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Inoltre lerrore di accelerazione vale:
AA
1e
K=
essendo KA la costante di accelerazione del sistema, definita come segue:
( )2A s 0 EQK lim s G (s= ) .Un caso particolare quello in cui il trasduttore abbia funzione di trasferimento
puramente algebrica:
H(s)=h.
+
y
-
e
h
G(s)r
In tal caso conviene definire lerrore scegliendo =h:
e(t)=r(t)-hy(t)
ossia come il segnale a valle del sommatore, per cui si ha una funzione ditrasferimento equivalente:
( ) ( )EQ
G(s) hG(s)G (s)= hG(s
1 G(s) H(s) 1 G(s) h h
= =
+ + )
che ha evidentemente lo stesso tipo, ossia lo stesso numero di poli nellorigine, dellafunzione di trasferimento G(s).
Il sistema si comporta dunque in termini di precisione come un sistema aventeretroazione unitaria (e tutte le deduzioni viste sugli errori a regime sono valide), main questo caso la funzione di trasferimento dellerrore leggermente variata, essendo:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
18
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
19/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
EE(s) 1
G (s)R(s) 1 hG(s)
= =+
.
In definitiva, la precisione di un sistema in retroazione qualsiasi migliora aumentando
il guadagno e il tipo del sistema. Tali parametri vengono in generale definiti conriferimento alla funzione di trasferimento di anello equivalente GEQ(s), che perretroazione unitaria o statica coincide o ha caratteristiche analoghe a quelle dellafunzione di trasferimento del ramo diretto G(s).
ESEMPIO
Dopo aver definito la variabile errore, si determinino il tipo, la costante di posizione,
velocit e accelerazione nonch lerrore di posizione, velocit e accelerazione delsistema in figura, essendo
3 2s 1
G(s)s 2s
+=
+.
r e
-+
yG(s)
Omettiamo la verifica della stabilit asintotica del sistema in anello chiuso, che facilmente effettuabile con il criterio di Routh.
Il sistema in retroazione unitaria, pertanto lerrore vale e(t)=r(t)-y(t) e il tipo delsistema il numero di poli nellorigine della funzione di trasferimento del ramo
diretto, in questo caso pari a due.
Si ha inoltre
PP
1e
1 K=
+
essendo KP la costante di posizione del sistema, definita come segue:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
19
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
20/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
( )P s 0 s 0 3 2s 1
K lim G(s) lims 2s
+
= = = ++
.
Pertanto eP=1/KP=0, come prevedibile avendo il sistema tipo due.
Si ha poi
VV
1e
K=
essendo KV la costante di velocit del sistema, definita come segue:
( )V s 0 s 0 s 03 2 2s(s 1) s 1
K lim s G(s) lim lims 2s s 2s
+ += = = = +
+ +.
Pertanto eV=1/KV=0, come prevedibile avendo il sistema tipo due.
Inoltre lerrore di accelerazione vale:
AA
1e
K
=
essendo KA la costante di accelerazione del sistema, definita come segue:
( )2
2A s 0 s 0 s 03 2
s (s 1) s 1 1K lim s G(s) lim lim
s 2 2s 2s
+ += = =
+=
+.
Pertanto eA=1/KA=2, che un valore finito, come prevedibile avendo il sistema tipo
due.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
20
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
21/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ESEMPIO
Dopo aver definito la variabile errore, si determinino il tipo, la costante di posizione,velocit e accelerazione nonch lerrore di posizione, velocit e accelerazione del
sistema in figura, essendo
2
s 1G(s)
5s s
3
+=
+
, H(s)=s+2.
+
y
-
H(s)
G(s)r
Omettiamo la verifica della stabilit asintotica del sistema in anello chiuso, che facilmente effettuabile con il criterio di Routh.
In questo caso il sistema in retroazione non unitaria, pertanto lerrore vale e(t)=r(t)-y(t). Si sceglie =H(0)=2, quindi e(t)=r(t)-2y(t).
Poich il sistema in retroazione non unitaria, il tipo del sistema il numero di polinellorigine della funzione di trasferimento equivalente:
( ) ( )
2 2
EQ
2
2 2
s 1 s 12 2
5 5s s s s
G(s) 3 3G (s)=s 1 s 11 G(s) H(s)
1 s 2 2 15 5s s s s
3 3
2(s 1) 2(s 1)5 8
s s s(s 1) s s s 13 3
+ + + + = = =
+ ++ + + + + +
+ +
= = + + + + +
pertanto il tipo del sistema uno. Si ha inoltre:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
21
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
22/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
PP
1e
1 K=
+
essendo KP la costante di posizione del sistema, definita come segue:
( )P s 0 EQ s 02
2(s 1)K lim G (s) lim
8s s s 1
3
+
= = + +
= + .
Pertanto eP=1/KP=0, come prevedibile avendo il sistema tipo uno.
Si ha poi
VV
1e
K=
essendo KV la costante di velocit del sistema, definita come segue:
( )V s 0 EQ s 02
2(s 1)K lim sG (s) lim 2
8
s s 13
+
= = =
+ +
.
Pertanto eV=1/KV=1/2, che un valore finito, come prevedibile avendo il sistema tipouno.
Inoltre lerrore di accelerazione vale:
A
A
1e
K=
essendo KA la costante di accelerazione del sistema, definita come segue:
( )2A s 0 EQ s 02
2s(s 1)K lim s G (s) lim
8s s 1
3
0+
= = + +
= .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
Pertanto eA=1/KA=+, come prevedibile avendo il sistema tipo uno.
22
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
23/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ESEMPIO
Un sistema retroazionato presenta il legame ingresso-uscita, calcolato dopo lariduzione dello schema a blocchi, riportato in figura.
y
3 210(s 1)
s 2s 20s 20
+
+ + +
r
Omettiamo la verifica della stabilit asintotica del sistema, che facilmenteeffettuabile estraendo le radici del denominatore della funzione di trasferimento.
Definendo lerrore di precisione come segue:
e(t)=r(t)-2y(t)
si determinino lerrore di posizione, velocit e accelerazione, nonch il tipo delsistema.
Da come definito lerrore del sistema si deduce che il sistema non in retroazione
unitaria. Si ha:
EE(s) G (s)R(s)=
con
EEQ
1G (s)
1 G (s)=
+.
Vediamo tre possibili metodi di risoluzione del problema.
Trasformando lespressione dellerrore secondo Laplace si ha:
E(s)=R(s)-2Y(s)=R(s)-2G0(s)R(s)
ossia
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
23
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
24/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
3 2
3 2 3 210(s 1) s 2s
E(s) R(s) 2 R(s) R(s)s 2s 20s 20 s 2s 20s 20
+ += =
+ + + + + +.
Pertanto
3 2 3 2
EQ3 2 3 2EQ
3 2 3 2 3 2
EQ 3 2 2 2
1 s 2s s 2s 20s 201 G (s)
1 G (s) s 2s 20s 20 s 2s
s 2s 20s 20 s 2s 20s 20 s 2s 20(s 1)G (s) 1
s 2s s (s 2) s (s 2
+ + + += + =
+ + + + +
+ + + + + + + = = =
+ + )
+
Poich il sistema in retroazione non unitaria, il tipo del sistema il numero di poli
nellorigine della funzione di trasferimento equivalente, pertanto il tipo del sistema due.
Si ha inoltre
PP
1e
1 K=
+
essendo KP la costante di posizione del sistema, definita come segue:
( )P s 0 EQ s 0 220(s 1)
K lim G (s) lims (s 2)
+
= = =+
+ .
Pertanto eP=1/KP=0, come prevedibile avendo il sistema tipo due.
Si ha poi
VV
1e K=
essendo KV la costante di velocit del sistema, definita come segue:
( )V s 0 EQ s 020(s 1)
K lim sG (s) lims(s 2)
+= = =
++ .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
24
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
25/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Pertanto eV=1/KV=0, che un valore finito, come prevedibile avendo il sistema tipodue.
Inoltre lerrore di accelerazione vale:
AA
1e
K=
essendo KA la costante di accelerazione del sistema, definita come segue:
( )2A s 0 EQ s 0 20(s 1)K lim s G (s) lim 10(s 2) +
= =+
= .
Pertanto eA=1/KA=0.1, che un valore finito, come prevedibile avendo il sistema tipodue.
Un altro metodo di risoluzione del problema si basa sul teorema del valore finale. Siha:
3 2
3 2s 2s
E(s) R(s)s 2s 20s 20
+=
+ + +.
Applicando il teorema del valore finale si ha quindi:
( )3 2
P s 0 s 0 3 2s 2s 1
e lim sE(s) lim s 0ss 2s 20s 20
+
= = + + + =
( )3 2
V s 0 s 0 3 2 2s 2s 1
e lim sE(s) lim ss 2s 20s 20 s
+
= = + + +
0=
( )3 2
A s 0 s 0 3 2 3
s 0 3 2
s 2s 1e lim sE(s) lim s
s 2s 20s 20 s
s 2 1lim
10s 2s 20s 20
+= = + + +
+= =
+ + +
=
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
25
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
26/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Inoltre si osserva che vale:
( )3 2
0 3 2EQ
1 s 2sE(s) 1 2G (s) R(s) R(s) R(s)
1 G (s) s 2s 20s 20
+= = =
+ + + +.
Si deduce quindi ancora:
3 2
EQ 3 2 3 2 2s 2s 20s 20 20s 20 20(s 1)
G (s) 1s 2s s 2s s (s 2
+ + + + += = =
)+ + +
e il tipo del sistema evidentemente 2, conclusione confermata dal fatto che sononulli lerrore di posizione e velocit, mentre finito quello di accelerazione.
Vediamo un ultimo metodo grafico alternativo. Lerrore di precisione vale:
e(t)=r(t)-2y(t)
perci introduciamo un ramo di retroazione, ottenendo lerrore a valle del sommatore.
y
+ -
-2
r
+
e
3 2
10(s 1)
s 2s 20s 20
+
+ + +
-
2
Risolvendo lanello pi interno si ha:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
r
+
y
-G1(s)
e
2
26
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
27/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
dove
3 21 3 2 3 2
3 2
10(s 1)
10(s 1) 10(s 1)s 2s 20s 20G (s) 10(s 1) s 2s 20s 20 20s 20 s 2s1 ( 2)s 2s 20s 20
+
+ ++ + += =+ + + + ++ + + +
= .
Questo schema equivale al seguente, che ha retroazione unitaria ed uscita 2y ai finidellerrore.
3 2
20(s 1)
s 2s
+
+
r
+
e 2y
-
1
2
y
ossia
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
EQG (s)+
e 2y
-
1
2
yr
Perci la funzione di trasferimento dellerrore vale:
EEQ
E(s) 1G (s) R(s) 1 G (s)= = +
con
EQ 13 220(s 1)
G (s)= 2G (s)s 2s
+=
+.
27
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
28/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Il sistema dunque di tipo due, ed ha errore di posizione e velocit nullo. Lerrore diaccelerazione invece finito, pari allinverso della costante di accelerazione:
( )2
A s 0 EQ s 0
20(s 1)K lim s G (s) lim 10
(s 2)
+= =
+ = ,
A A
1 1e
K 1= =
0
P v
.
ESEMPIO
Si determini lerrore a regime del sistema in figura in risposta al segnale r(t)rappresentato di seguito.
y
+ -
2
r1s 2s 1s
+ -
1
+0.3s
+
+
Omettiamo la verifica della stabilit asintotica del sistema in anello chiuso, che facilmente effettuabile con il criterio di Routh.
Si chiede di calcolare lerrore a regime ottenutoin corrispondenza dellingresso:
1 2 30 t
3
2
1
r(t)
r(t)=1(t-1)+(t-2)1(t-2).
Pertanto, per il principio di sovrapposizionedegli effetti (dovuto alla linearit del sistema) e
per la tempoinvarianza del sistema si ha:
ve e e e= + =
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
28
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
29/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
dove la seconda uguaglianza discende dal fatto che si hanno i seguenti casi possibili:o lerrore di posizione finito e quello di velocit infinito (sistema di tipo 0); olerrore di posizione nullo e quello di velocit finito (sistema di tipo 1), oppure sialerrore di posizione che quello di velocit sono nulli (sistema di tipo 2 o superiore).
Risolviamo il diagramma a blocchi riorganizzando il parallelo e risolvendo lanellointerno sul ramo diretto.
Si ha il seguente schema a blocchi equivalente.
y
+-
0.3s
r
2
s 1
s
+
1s
21s
+
-+
ossia
y
+ -
0.3s
r
2s 1
s (s 2)
+
+
-+
Risolvendo lanello pi interno si ottiene dunque un sistema in retroazione unitaria.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
r e
-+
yG(s)
29
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
30/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
In questo schema la variabile a valle della giunzione sommante lerrore
e(t)=r(t)-y(t)
e la funzione di trasferimento del ramo diretto vale
2
2 3 2 2
2
s 1
s 1 s 1 s 1s (s 2)G(s)
s 1 s (s 2) 0.3s(s 1) s 2.3s 0.3s s(s 2.3s 0.3)1 0.3ss (s 2)
+
+ ++= = = =
+ + + + + + + +++
+
Quindi il sistema di tipo uno e si ha eP=0. Inoltre lerrore di velocit vale
VV
1e
K= con ( )V s 0 s 0 2
s 1 1K lim s G(s) lim
0.3s 2.3s 0.3
+= = =
+ + .
In definitiva lerrore a regime in risposta allingresso r(t) vale:
VV
1e e 0.
K= = = 3.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
30
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
31/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ESEMPIO
Si determinino i parametri positivi K e in modo che, per il sistema in figura, sianosoddisfatte le seguenti specifiche: risposta al gradino oscillatoria con coefficiente di
smorzamento 0.5, errore di velocit eV0.1, essendo lerrore e(t) la variabile avalle del primo sommatore come in figura. Con i valori di K e stabiliti si determini,infine, il tempo di assestamento al 2% del sistema.
e y
+ -
r K
s 2+
1
s
2
-+
Evidentemente il sistema equivale a un sistema con retroazione non unitaria statica:
+y
-
e
2
G(s)r
con
( )
K1 Ks 2G(s)
K s s s (K 2)1s 2
+= =+ ++
+
.
Omettiamo la verifica della stabilit asintotica del sistema in anello chiuso, che facilmente effettuabile con il criterio di Routh.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
31
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
32/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Si ha:
EEQ
E(s) 1G (s)
R(s) 1 G (s)= =
+
con
( ) ( ) ( )EQ
G(s) 2G(s) 2K G (s)= 2G(s)
1 G(s) H(s) 1 G(s) 2 2 s s (K 2)
= = =
+ + + +.
Poich GEQ(s) presenta un polo nellorigine, il sistema di tipo uno con
( )V s 0 EQ s 0 2K 2K K lim s G (s) lim (s K 2) K 2 = = = + + +
da cui si ottiene la condizione
VV
1 K 2e 0
K 2K.1
+= = .
La funzione di trasferimento in anello chiuso vale
2n
0 2 22n n
G(s) K 1G (s)
1 2G(s) 2s (2 K )s 2K s 2 s
= = =
+ + + + + +
dove
n
2
n
2 K
2
2K
+ =
=
da cui si ottiene
n
2 K 2 K 2 2 2K
+ + = =
e quindi le condizioni sul coefficiente di smorzamento diventano:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
32
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
33/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
2 K0.5
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
34/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
0.2K 2K
K
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
35/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
K>0.25
K 200
che equivale a
K 200 .
In definitiva le soluzioni del sistema sono le seguenti:
2K 2 K 0.2K
50 K
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
36/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
n =10, =0.5
con i poli del sistema posti in
1/ 2p 5 j5= 3
e un errore di velocit limite:
VV
1 K 2e 0
K 2K.1
+= = = .
Il sistema presenta inoltre un tempo di assestamento al 2%:
sn
4t 0= =
.80
un tempo di picco e di salita rispettivamente pari a
Pd
t 0.365 3
= =
, R
d
1arcos 22t 0.245 3 15 3
= = =
e una massima sovraelongazione percentuale
21 3PM 100e 100e 16.3%
= = .
Se invece si sceglie K=100, il sistema diventa:
2 100 202 100 200
+ +
da cui
200 2 180.12 0.18
100 100
= .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
36
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
37/68
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
38/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ESEMPIO
Con riferimento alla figura, sia:
k(s 3)G(s) 2(s 1) (s p)+=
+ +, H(s) s 2= + , k>0, p>0.
Dopo aver calcolato la funzione di trasferimento G0(s) del sistema in anello chiuso, sene verifichi la stabilit asintotica nelle ipotesi k>0 e p>0.Definito lerrore di precisione come e(t)=u(t)-3y(t), si determini la relazione che deveintercorrere tra i parametri p e k affinch si abbia un errore di posizione eP=0.1.Si determini la relazione che deve intercorrere tra i parametri p e k perch si abbia unerrore di velocit finito e si calcoli questultimo in tale caso. Infine si dica se
possibile ottenere un errore di accelerazione finito per tale sistema.
+
y
-
H(s)
G(s)u
La funzione di trasferimento del sistema in anello chiuso vale:
0
k(s 3)2G(s) k(s 3)(s 1) (s p)
G (s)k(s 3) 21 G(s)H(s) (s 1) (s p) k(s 3)(s 2)1 (s 2)
2(s 1) (s p)
+
++ += = =
++ + + + + ++ ++ +
quindi lequazione caratteristica del sistema
2(s 1) (s p) k(s 3)(s 2) 0+ + + + + =
o anche
3 2s (p k 2)s (2p 5k 1)s (p 6k) 0+ + + + + + + + = .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
38
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
39/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Il lemma di Routh verificato, quindi il sistema pu essere asintoticamente stabile.
Costruiamo la tabella di Routh del sistema.
s3 1 2p+5k+1
s2 p+k+2 p+6k
s12 22p 5k 7kp 4p 5k 2
p k 2+ + + + +
+ +
s0 p+6k
Evidentemente nella prima colonna vi sono tre permanenze (essendo per ipotesi k>0
e p>0), dunque il sistema in anello chiuso asintoticamente stabile per qualsiasivalore dei parametri p e k positivi.
La funzione di trasferimento dellerrore vale inoltre
EEQ
E(s) 1G (s)
R(s) 1 G (s)= =
+
dove
( ) ( )EQ
3
k(s 3)3
2G(s) (s 1) (s p)G (s)=
k(s 3)1 G(s) H(s) 1 s 2 32(s 1) (s p)
3k(s 3) 3ks 9k 2 2(s 1) (s p) k(s 3)(s 1) s (p k 2)s (2p 2k 1)s (p 3k)
+
+ += =
++ + + + +
+ += =
+ + + + + + + + + + +
.
Quindi la costante di posizione vale
( )P s 0 EQ9k
K lim G (s)p 3k
= =
.
Ne consegue che
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
39
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
40/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
PP
1 1e
1 K 10= =
+
se
P9k
K 9p 3k
= =
che ha soluzione per
p=4k.
Se invece si richiede un errore di velocit finito, allora lerrore di posizione deve
essere nullo, dovendo essere la GEQ(s) di tipo 1, quindi deve essere
P9k
Kp 3k
=
ossia
p=3k
che indica proprio lannullarsi del termine noto del denominatore della GEQ(s) equindi un tipo pari a 1. In tal caso si ha una costante di velocit finita:
( )V s 0 EQ9k 9k 9k
K lim s G (s)2p 2k 1 2 3k 2k 1 8k 1
= = = =+ + + + +
e quindi lerrore di velocit vale
VV
1 8keK 9k
1+= = .
Osserviamo infine che non possibile avere un errore di accelerazione finito, poichin tal caso il tipo della GEQ(s) dovrebbe essere pari a due. Ci accade solo se iltermine noto e il coefficiente del termine di grado uno nel denominatore di talefunzione di trasferimento si annullano contemporaneamente, ossia per:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
40
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
41/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
p 3k 0
2p 2k 1 0
=
+ + =
ossia
p 3k
8k 1 0
=
+ =
che ha soluzione unicamente per
1k
8
3p8
= =
che non sono valori consentiti per i parametri del sistema.
ESEMPIO
Con riferimento alla figura, sia:
10G (s)P 2s s 2
=0+ +
eKIG (s) K C P s
= + , con KP, KI >0.
+
y(t)
-
e(t) w(t)+d(t)
+GP(s)GC(s)
u(t)
Si determinino le condizioni che le costanti KP e KI devono soddisfare affinch ilsistema in anello chiuso sia asintoticamente stabile.
Detta e(t) la variabile errore a valle del sommatore, sia e(t)=eu(t)+ed(t), dove eu(t) eded(t) sono le componenti dellerrore dovute rispettivamente al solo ingresso ed al solo
Copyright distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
41
2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
42/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
disturbo. Si calcoli il valore asintotico di e(t) quando u(t) e d(t) sono dei segnali arampa lineare unitaria.
La funzione di trasferimento del sistema in anello chiuso vale:
P I2
C P P I0 3 2P IC P P I
2
10(K s K )
G (s)G (s) 10K s 10K s(s s 20)G (s)
10(K s K )1 G (s)G (s) s s (20 10K )s 10K 1s(s s 20)
+
++ += = =
++ + + + +++ +
quindi lequazione caratteristica del sistema
3 2
P Is s (20 10K )s 10K 0+ + + + = .
Il lemma di Routh verificato, quindi il sistema pu essere asintoticamente stabile.
Costruiamo la tabella di Routh del sistema.
s3 1 20+10KP
s2 1 10KI
s1 20+10KP-10KI
s0 10KI
Perch nella prima colonna vi siano tre permanenze e il sistema in anello chiuso siaasintoticamente stabile, si richiede dunque:
2+KP-KI>0
ossia
KI
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
43/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
e(t)=eu(t)+ed(t)
che esprime appunto il principio di sovrapposizione degli effetti, essendo
eu(t)=u(t)-yu(t)
la componente dellerrore dovuta al solo ingresso e
ed(t)=0-yd(t)=-yd(t)
la componente dellerrore dovuta al solo disturbo.
Per calcolare la componente dellerrore dovuta al solo ingresso consideriamo ilsistema privo di disturbo. Si ha evidentemente lo schema seguente:
+
yu(t)
-
eu(t)GC(s) GP(s)
u(t)
Il sistema in retroazione unitaria e quindi di tipo pari al tipo di
P IC P 2
10(K s K )G (s)G (s)
s(s s 20)
+=
+ +
che uno ( presente un polo nellorigine). Ne consegue che lerrore a regime pariallerrore di velocit
u VV
1e ( ) e
K = =
dove la costante di velocit vale
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
43
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
44/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
( ) P IV s 0 C P s 0 210(K s K ) K
K lim s G (s)G (s) lim s2s(s s 20)
+
= = + +
I=
da cui si ottiene:
u VV I
1 2e ( ) e
K K = = = .
Alternativamente possiamo notare che la funzione di trasferimento dellerrore vale:
u
2u
E 2
C P P I
E (s) 1 s(s s 20)G (s)
R(s) 1 G (s)G (s) s(s s 20) 10(K s K )
+ += = =
+ + + + +
da cui si calcola facilmente la componente asintotica corrispondente, che forniscenuovamente il risultato precedente
( )2
u s 0 u s 0 2 2IP I
s(s s 20) 1 2e ( ) lim s E (s) lim s
Ks(s s 20) 10(K s K ) s
+ + = = = + + + +
.
Calcoliamo ora la componente dellerrore dovuta al solo disturbo, ovvero nonconsiderando lingresso. Si ha evidentemente lo schema che segue.
yd(t)w(t)+d(t)
-GP(s)GC(s)
Si ha quindi
de(t) y (t)=
da cui
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
44
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
45/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Pd d 2 2
P C P I
G (s) 10s 1E (s) Y (s) D(s)
1 G (s)G (s) s(s s 20) 10(K s K ) s= = =
+ + + + +
Si calcola quindi facilmente la componente asintotica corrispondente
( )d s 0 d s 0 2 2IP I
10s 1 1e ( ) lim s E (s) lim s
Ks(s s 20) 10(K s K ) s
= = = + + + +
.
Si ha dunque un errore asintotico complessivo
u dI I
2 1 1e( ) e ( ) e ( )
K K K = + = =
I
che quindi diminuisce allaumentare della costante integrale del controllore PI.
ESEMPIO
Con riferimento alla figura, sia:
1
G (s)P 1 10s= + , G (s) K C = , H(s)=s+2 con K>0.
+
y(t)
-
H(s)
+
d(t)
+
GP(s)GC(s)u(t)
Supposto che lingresso e il disturbo siano due gradini di ampiezza unitaria, sidetermini il valore di K per il quale luscita a regime yd(+) prodotta dal disturbo d(t) il 5% delluscita a regime yu(+) dovuta allingresso u(t), ovvero risultay(+)=yu(+)+yd(+)=1.05yu().
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
45
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
46/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Con il valore di K determinato, supposto ora lingresso U(s)=1/s e D(s)=0.1/s, sicalcoli il valore finale raggiunto dallerrore e(t)=r(t)-2y(t)=eu(t)+ed(t), dove eu(t) eded(t) sono le componenti dellerrore dovute rispettivamente al solo ingresso ed al solodisturbo.
La funzione di trasferimento del sistema in anello chiuso vale:
C P0
C P
KG (s)G (s) K 1 10sG (s)
K(s 2)1 G (s)G (s) (10 K)s 2K 111 10s
+= = =++ ++ + +
+
pertanto il sistema in anello chiuso sempre asintoticamente stabile per qualsiasi
valore di K>0.
Applichiamo il principio di sovrapposizione degli effetti. Se lingresso un gradinounitario il valore a regime delluscita dovuta al solo ingresso vale, per il teorema delvalore finale:
u s 0 u s 0 0 s 01 K
y ( ) lim sY (s) lim sG (s) lims (10 K)s 2K 1 2
+ = = = =K
K 1+ + + +.
Analogamente se il disturbo un gradino unitario il valore a regime delluscitadovuta al solo disturbo vale, per il teorema del valore finale:
d s 0 d s 0C P
s 0 s 0
1 1y ( ) lim sY (s) lim s
1 G (s)G (s)H(s) s
1 1 10slim lim
K(s 2) (10 K)s 2K 1 2K 111 10s
+ = = =+
+= =
+1
=+ + + ++
+
.
Pertanto imponiamo:
1 K 50.05 1 K K 20
2K 1 2K 1 100= =
+ += .
Osserviamo ora che lerrore del sistema, che in retroazione non unitaria, espressocome:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
46
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
47/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
e(t)=u(t)-y(t)=u(t)-2y(t)=u(t)-2yu(t)-2yd(t)
dove si applicato il principio di sovrapposizione degli effetti. Si ha dunque:
e(t)=eu(t)+ed(t)
che esprime appunto il principio di sovrapposizione degli effetti, essendo
eu(t)=u(t)-2yu(t)
la componente dellerrore dovuta al solo ingresso e
ed(t)=0-2yd(t)=-2yd(t)
la componente dellerrore dovuta al solo disturbo.
Per calcolare la componente dellerrore dovuta al solo ingresso consideriamo ilsistema privo di disturbo. Si ha evidentemente lo schema seguente:
+
yu(t)
-
H(s)
GP(s)GC(s)u(t)
Il sistema in retroazione non unitaria e quindi di tipo pari al tipo di
C PEQ
C P
K22G (s)G (s) 401 10sG (s)K1 G (s)G (s)(H(s) 2) 30s 11 (s 2 2)
1 10s
+= =+ + +
=+
+
,
dove si tenuto conto della scelta K=20, che zero (non sono presenti polinellorigine). Ne consegue che lerrore a regime pari allerrore di posizione che finito e si scrive
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
47
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
48/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
u PP
1e ( ) e
1 K+ = =
+
dove la costante di posizione vale
( )P s 0 EQ s 040
K lim G (s) lim 430s 1
= = + 0=
da cui si ottiene:
u PP
1 1e ( ) e 0.0244
1 K 41+ = = =
+ .
Calcoliamo ora la componente dellerrore dovuta al solo disturbo, ovvero nonconsiderando lingresso. Si ha evidentemente lo schema che segue.
yd(t)+
d(t)
-GC(s)GP(s)H(s)
Si ha quindi
de(t) 2y (t)=
da cui
d dP C
2E (s) 2Y (s) D(s)1 G (s)G (s)H(s)
2 0.1 0.2(1 10s)20(s 2) s s(30s 41)11 10s
= = =+
+= =
+ +++
Si calcola quindi facilmente la componente asintotica corrispondente
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
48
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
49/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
( )d s 0 d s 00.2(1 10s) 0.2
e ( ) lim s E (s) lim s 0.0049s(30s 41) 41
++ = = = +
.
Si ha dunque un errore asintotico complessivo
u de( ) e ( ) e ( ) 0.0244 0.0049 0.0195+ = + + + = .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
49
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
50/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
SENSIBILIT AI DISTURBI
Consideriamo il generico schema di controllo in catena chiusa, in cui sono presentidiversi disturbi. Questi vengono distinti in disturbi di carico o sulluscita, posti in
uscita al plant come d2(t), disturbi sullattuatore, posti in uscita allorgano dicontrollo o attuatore come d1(t), e rumore di misura, posti sul ramo di retroazione edovuti alla non idealit del trasduttore come n(t). Per semplicit consideriamo unsistema in retroazione unitaria, ma i risultati seguenti sono validi anche perretroazione non unitaria.
+
y
-
+
n+
+
+
d2
+
+
d1
GP(s)G
C(s)
u
Nel seguito mostriamo come i disturbi sul ramo diretto siano pi facilmente reiettabilia regime permanente rispetto ai disturbi posti sul ramo di retroazione.
Applicando il principio di sovrapposizione degli effetti, consideriamo inizialmente lasola presenza del disturbo d2(t). Lo schema equivalente del sistema il seguente.
yd2
_
+
d2
GP(s)+GC(s)
Si osserva che la componente della risposta dovuta a questo disturbo vale:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
50
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
51/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
2d 2P C
1Y (s) D (s)
1 G (s)G (s)=
+.
Si osserva che la funzione di trasferimento tra disturbo e uscita corrispondente pari
alla funzione di trasferimento dellerrore per il sistema in retroazione unitaria. Siottengono quindi delle conclusioni analoghe a quelle viste per la precisione a regimecon il principio del modello interno.
Ad esempio, supponiamo che il disturbo d2 sia un segnale canonico del tipo gradino,rampa lineare ecc. Ne consegue che per reiettare completamente il disturbo in regime
permanente (ossia per annullare la componente asintotica di yd2) le funzioni ditrasferimento che si trovano a monte di d2 (ossia il plant e il regolatore) devonocontenere complessivamente un numero di poli nellorigine almeno uguale al numerodi modi introdotti da d2 (ad esempio un polo in s=0 se il disturbo un gradino, due
poli nellorigine se d2 un segnale a rampa lineare unitaria e cos via).
Se invece il numero di poli nellorigine delle funzioni di trasferimento che si trovanoa monte di d2 inferiore di una unit al numero di modi introdotti da d2, allora lacomponente asintotica di yd2 finita ed tanto minore quanto pi grande ilguadagno della funzione di trasferimento (ad esempio un polo in s=0 se il disturbo una rampa lineare unitaria, due poli nellorigine se d2 un segnale a rampa
parabolica unitaria e cos via).
Consideriamo ora il caso della sola presenza del disturbo d1(t). Lo schemaequivalente del sistema il seguente.
yd1
+
+
d1
GP(s)-GC(s)
Si osserva che la risposta dovuta a questo disturbo vale:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
51
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
52/68
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
53/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Consideriamo infine il caso di un disturbo presente sul ramo di retroazione n(t). Loschema equivalente del sistema il seguente.
-
yn
-GP(s)GC(s)
n
Si osserva che la risposta dovuta a questo disturbo vale:
P Cn 0
P C
G (s)G (s)Y (s) N(s) G (s)N(s)1 G (s)G (s)
= = +
.
Ne consegue che tutti i tentativi di reiettare a regime tale componente della risposta siriflettono sulla forma di G0(s) e quindi sulluscita vera e propria del sistema. Ildisturbo trattato quindi come un ingresso. Dunque lunica possibilit per reiettaretale componente migliorare la qualit del ramo di retroazione, con dei trasduttori di
buon livello (si elimina cos il problema alla base).
Si osserva comunque che solitamente il rumore composto da armoniche in altafrequenza, mentre i segnali di interesse (gli ingressi e le uscite del sistema) sonogeneralmente localizzati in bassa frequenza. Poich la funzione di trasferimento di unsistema realistico generalmente di tipo passabasso, ossia ha delle caratteristicheattenuatrici alle alte frequenze (il modulo del suo diagramma di Bode diminuisce inalta frequenza), allora alle frequenze di interesse avviene una naturale depurazionedal rumore dei segnali di interesse.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
53
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
54/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ESEMPIO
+y
- ++
d2
++
d1
GP(s)GC(s)u
Nel sistema in figura sia
P 100G (s) s(s 1)= + , C n kG (s) s (1 s)= + , k>0,>0, n .
I disturbi valgono inoltre
1d (t) 1(t)= , 2d (t) t 1(t)= .
Si progetti il regolatore (i parametri k, n, ) in modo da reiettare completamente aregime i due disturbi.
Evidentemente la reiezione completa del disturbo a gradino sullattuatore d1 richiedeche questo contenga almeno un polo nellorigine (n=1). Si ha infatti:
1
n 1P
d 1 n 1P C
n
100G (s) 1 100s (1 s)s(s 1)
Y (s) D (s)100 k 1 G (s)G (s) s s (s 1)(1 s) 100k 1
s(s 1) s (1 s)
++ +
= = =+ + + ++
+ +
e quindi la componente asintotica della risposta al disturbo vale:
( )1 1n
d s 0 d s 0 n 1100s (1 s)
y ( ) lim s Y (s) lim 0s (s 1)(1 s) 100k
+
+ = = = + + +
se n almeno pari ad uno, ossia non nullo.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
54
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
55/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Analogamente, la reiezione completa del disturbo di carico a rampa d2 richiede chenelle funzioni di trasferimento che lo precedono ci siano almeno due poli nellorigine.Essendone gi presente uno nel plant, si richiede che il regolatore contenga almenoun polo nellorigine (n=1). Si ha infatti:
2
n 1
d 2 2 n 1P C
n
1 1 1 s (sY (s) D (s)
100 k 1 G (s)G (s) s s (s 1)(1 s) 1001s(s 1) s (1 s)
++ +
= = =+ + + ++
+ +
1)(1 s)
k
e quindi la componente asintotica della risposta al disturbo vale:
( )2 2
n
d s 0 d s 0n 1
s (s 1)(1 s)y ( ) lim s Y (s) lim 0
s (s 1)(1 s) 100k
+
+ + = = =
+ + +
ancora se n almeno pari ad uno.
In definitiva, per reiettare completamente i disturbi a regime in questo sistema,qualunque sia il guadagno del regolatore e il valore della sua costante di tempo, necessario che il controllore contenga almeno un polo nellorigine, in modo che aregime leffetto dei disturbi sia nullo.
Supponiamo ora che il regolatore sia privo di poli nellorigine (n=0). Si ha in tal caso:
( )1 1d s 0 d s 0 1100(1 s) 1
y ( ) lim s Y (s) limks (s 1)(1 s) 100k
+
= = = + + +
dunque leffetto a regime del disturbo sullattuatore contenibile solo aumentando ilguadagno del regolatore, ossia della funzione di trasferimento a monte di taledisturbo.
Si ha poi
( )2 2d s 0 d s 0 1(s 1)(1 s) 1
y ( ) lim s Y (s) lim100ks (s 1)(1 s) 100k
+ +
= = = + + +
dunque leffetto a regime del disturbo di carico contenibile sia aumentando ilguadagno del regolatore (k) che quello del plant stesso (che vale 100), ossia
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
55
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
56/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
incrementando il guadagno della funzione di trasferimento complessiva a monte ditale disturbo.
ESEMPIO
Nel sistema in figura, si determini la componente a regime dellerrore e(t) dovuta aitre disturbi d1(t)=1(t), d2(t)=1(t), n(t)=10
-21(t).
+
y(t)
-
+
n(t)+
+
+
d2(t)
e(t)
+1
s(s 25)+
GP(s)+
d1(t)
1000u(t)
GC(s)
Per il principio di sovrapposizione degli effetti calcoliamo la componente dellerroredovuta al solo disturbo d1(t). Si ottiene lo schema seguente.
y(t)
-1
s(s 25)+
+
d1(t)
1000
Si ha quindi
1 1d d 1
11 1s(s 25)
E (s) Y (s) D (s)1 s(s 25) 1000 s1 1000
s(s 25)
+= = =
+ +++
da cui si calcola facilmente la componente asintotica corrispondente
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
56
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
57/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
( )1 1d s 0 d s 01 1 1
e ( ) lim s E (s) lim s 0.001s(s 25) 1000 s 1000
= = = = + +
.
Si osserva dunque che la componente asintotica dellerrore dovuta al solo disturbo d 1 finita. In effetti il disturbo d1 contiene un polo nellorigine (d1 un gradino) e ilcontrollore non ha poli nellorigine, ossia vi una differenza di una unit tra il tipodel disturbo e quello del regolatore, cui corrisponde sempre un errore a regimedovuto al solo disturbo finito.
Determiniamo ora lerrore dovuto al solo d2(t). Si ottiene lo schema seguente.
y(t)1000
s(s 25)+ -
+
d2(t)
Si ha quindi
2 2d d 21 s(sE (s) Y (s) D (s)
1 s(s 25) 1000 s1 1000s(s 25)
+= = = + ++
+
25) 1
da cui si calcola facilmente la componente asintotica corrispondente
( )2 2d s 0 d s 0s(s 25) 1
e ( ) lim s E (s) lim s 0s(s 25) 1000 s
+ = = = + +
.
Si osserva dunque che la componente asintotica dellerrore dovuta al solo disturbo d 2 nulla. In effetti sia il disturbo d2 (che un gradino) che e la funzione ditrasferimento a monte di tale segnale contengono un polo nellorigine, pertanto come noto lerrore a regime dovuto al solo disturbo nullo.
Determiniamo infine la componente dellerrore dovuta al solo disturbo n(t). Si ottienelo schema seguente.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
57
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
58/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
-
y(t)
-
GCGP(s)
1000
s(s 25)+
n(t)
Si ha quindi
2
n n
11000
1000 10s(s 25)E (s) Y (s) N(s)
1 s(s 25) 1000 s
1 1000 s(s 25)
+= = =
+ +
+ +
da cui si calcola facilmente la componente asintotica corrispondente
( )2
n s 0 n s 01000 10
e ( ) lim s E (s) lim s 0.01s(s 25) 1000 s
= = = + + .
Si osserva dunque che la componente asintotica dellerrore dovuta al solo disturbo n
finita.
In definitiva si ha un errore a regime complessivo dovuto ai tre disturbi pari a:
1 2d d ne ( ) e ( ) e ( ) 0.001 0 0.010 0.009 + + = + + = +
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
58
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
59/68
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
60/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Nel seguito vediamo come uno dei vantaggi del controllo in retroazione consistaproprio nella riduzione della sensibilit alle variazioni parametriche.
Sia dunque F(s) una funzione di trasferimento dipendente da un parametro p. Lasensibilit della funzione alla variazione di tale generico parametro si definisce comeil limite del rapporto tra la variazione relativa della funzione e la variazione relativadel parametro quando la variazione di questultimo tende a zero:
Fp p 0 p 0
FF/ F F/ p p
S lim limFp / p F/ pp
= =
= .
Osserviamo che vale la seguentepropriet della catena.
Supponiamo che F(s) sia ottenuta conglobando diverse funzioni di trasferimento (sipensi ad uno schema a blocchi ridotto ad un unico blocco), ad esempio esso contengala generica funzione di trasferimento F1(s). Supponiamo altres che F1 e quindi Fcontenga un parametro p variabile. Si ha dunque:
1
11 1
F 1 1
p p 0 p 0 1 1F 0
1
FF1 1 1F 0 p 0 pF11 1
1
F/ p F/ p F / F
S lim limF/ p F/ p F / F
F FF/ F F / p F p
lim lim S SF FF/ F F / pF p
= =
= = =
=
Consideriamo ad esempio un generico sistema in retroazione e valutiamo lasensibilit della funzione di trasferimento in anello chiuso rispetto ad una variazione
di un parametro di G(s) (ad esempio un polo di G(s)).
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
60
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
61/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
+
y
-
H(s)
G(s)r
Per la regola della catena si ha:
( )000 2
GG G G G G
G
G1
S S S S S1 GHG 1 GH 1 GH
G
= = ++ +
0
G1 GH GH
G 1 GH1 GHG G
S SG G 1
+ + +
= = = .
Dunque un effetto positivo della retroazione nel fatto che sufficiente aumentare ilmodulo del guadagno di anello G(s)H(s) (e quindi in particolare, ragionando pers0, incrementare il guadagno statico, che influisce sul comportamento a regime, oaumentare il tipo della funzione di anello G(s)H(s)) per ridurre linfluenza dellavariazione di un parametro presente nel ramo diretto sulla sensibilit della funzione
di trasferimento di un fattore
1
1 G(s)H(s)+
rispetto al caso di controllo in anello aperto.
Si osserva dunque che le stesse misure efficaci nella reiezione dei disturbi enellaumento della precisione (aumento del guadagno statico, introduzione di poli
nellorigine nella funzione di trasferimento di anello) sono efficaci anche per lariduzione della sensibilit alla variazioni di parametri nel ramo diretto.
In altre parole si ha (almeno a regime, ossia per s0):
0G GS S .
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
61
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
62/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
invece immediato verificare che le variazioni parametriche nel ramo di retroazionesono pi insidiose.
Consideriamo ancora il generico sistema in retroazione in figura e valutiamo la
sensibilit della funzione di trasferimento in anello chiuso rispetto ad una variazionedi un parametro di H(s).
Per la regola della catena si ha:
( )0 0
2
0 2G G H H H H H
0H0
GG
G 1 GH1 GH GHH HS S S S S S S G H S
G G 1 G 1 GH
H 1 GH H (1 GH)H
+ + = = = = = =
+
+ +
H
In questo caso, se si aumenta il guadagno di anello GH (attraverso un aumento delguadagno statico o lintroduzione di poli nellorigine), si ha, almeno a regime:
0G H H
s 0
GHS S 1 S
1 GHHS
= = +
dunque la retroazione non ha alcun effetto benefico sulla sensibilit alle variazioni di
un parametro nel ramo inverso, poich la sensibilit tende ad essere la stessa, ameno del segno, di quella che si avrebbe in anello aperto. Come per i disturbi sulramo di retroazione, anche per la sensibilit alla variazione dei parametri in tale ramosi conclude che il trasduttore deve essere di buona qualit.
ESEMPIO
Per il sistema in figura, calcolare la sensibilit della funzione di trasferimento inanello chiuso G
0(s) alla variazione del parametro a nel ramo diretto G(s).
+
y
-K
s(s a)+
euG(s)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
62
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
63/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
La funzione di trasferimento in anello chiuso :
0 2
K
G(s) K K s(s a)G (s) K1 G(s) s(s a) K s as K 1s(s a)
+= = = =+ + + + ++
+
Applichiamo dapprima la definizione di funzione sensibilit. Si ha:
0
20 2
Ga 2 2 202
KG s as K
Ks a(s as K) asa aS G K K(s as K) s as K a s as K
a
+ +
+ + = = = = + + +
+ ++ .
Allo stesso risultato si giunge applicando la regola della catena per un parametro nelramo diretto:
00 GG G Ga a aG
2 2
2 2 2
K
s(s a)G1 1 1a aS S S SG K K1 GH 1 G 1a s(s a) as(s a)
as (s a) ( Ks) as
K(s(s a) K) s (s a) (s as K)
+ = = = =
+ + ++ +
+ = =
+ + + + +
=
Si osserva che la funzione di sensitivit diminuisce allaumentare del guadagno K.
Essa inoltre tende a zero per s0, ossia sussiste la notevole propriet che a regime ilsistema presenta sensibilit al parametro a nulla.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
63
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
64/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
ESEMPIO
Con riferimento alla figura, sia:
10G (s)P 2s s 2=
0+ +e KIG (s) K C P s= + , con K
P, KI >0.
Si calcolino le sensibilit alle variazioni parametriche S e S , essendo G0(s) la
funzione di trasferimento in anello chiuso.
0I
GK
0P
GK
+y
-e
++
d
GP(s)GC(s)u
Ai fini del calcolo della sensibilit alle variazioni parametriche il disturbo d ovviamente considerato nullo.
La funzione di trasferimento in anello chiuso
C P0
C P
G(s) G (s)G (s)G (s)
1 G(s) 1 G (s)G (s)= =
+ +,
dove si posto G(s)=GC(s)GP(s). Applicando la regola della catena si ha:
0 0I C
G G GGGK GS S S S=
CIK
.
Si sa inoltre che, trattandosi di un sistema in retroazione unitaria, vale la relazione:
0GG
C P
21 1 1 s(s s 20)S
10(K s K ) 21 G 1 G G P I s(s s 20) 10(K s K )1 P I2s(s s 20)
+ += = = =
++ + + + + +++ +
.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente
riconosciuti e citati.
64
-
8/3/2019 Fedelt della risposta dei sistemi di controllo in retroazione: analisi della precisione
65/68
Ing. Mariagrazia Dotoli Controlli Automatici NO (9 CFU) Precisione a Regime
Inoltre vale la relazione:
( )
C
C P
G PC C
G C P P
C C
G GGGG G
S 1G G G GG G
= = = =
Ricaviamo ora
C
I
C
G I I
K CI I
KIKP sGK s K1K K I IS
G K s K K s K s K s K P I P I P IK K s
+
= = = =
+ + +.
Si ha in definitiva:
0 0 CI C I
G