Dodici lezioni sulla Relativit`a - webalice.it · nello spazio (a cui si pu`o attribuire una...
339
Dodici lezioni sulla Relativit` a lezioni del prof. F. Magri, scritte, integrate e organizzate da D. Ghisi
Transcript of Dodici lezioni sulla Relativit`a - webalice.it · nello spazio (a cui si pu`o attribuire una...

Dodici lezionisulla Relativita
lezioni del prof. F. Magri,scritte, integrate e organizzate da D. Ghisi


Lezione 1
L’eredita di Newton
1.1 Concetti fondamentali
La Relativita e lo studio della geometria dello spaziotempo, cioe lo stu-dio delle strutture di questo spaziotempo che non dipendono dalle modalitadei processi di misura. I processi di misura dipendono infatti dall’osserva-tore che li esegue: l’obiettivo della Relativita (cosı come quello di questelezioni) e dunque individuare le caratteristiche che si presentano indipenden-temente dall’osservatore e dai processi di misura. Le proprieta manifestate incomune dalle misure eseguite dai possibili osservatori vengono interpretatecome proprieta dello spaziotempo e ne definiscono la struttura.
Lo spaziotempo e l’insieme degli eventi, cioe dei fenomeni localizzatinello spazio (a cui si puo attribuire una localizzazione spaziale) e di bre-vissima durata (per cui si puo attribuire loro un tempo di accadimento).Un osservatore e quindi un sistema di coordinate sullo spaziotempo. Gliosservatori sono definiti (operativamente) dalle modalita dei processi di mi-sura che determinano le coordinate dell’evento. La nozione di osservatoreha visto un’ampia evoluzione nel corso del tempo; tale evoluzione e sostan-zialmente andata di pari passo con un’evoluzione della geometria. Il cam-biamento sostanziale nella concezione di osservatore che si e verificato con ilpassaggio dalla Relativita newtoniana alla Relativita di Einstein e associatoal passaggio dalla geometria euclidea alla geometria di Riemann.
Relativita di Newton Geometria euclidea
Relativita di Einstein Geometria di Riemann
3

4 LEZIONE 1. L’EREDITA DI NEWTON
1.2 L’osservatore newtoniano
La concezione newtoniana di osservatore e basata sulla nozione di corporigido (tipica nozione della geometria euclidea proveniente dalla fisica ter-restre). Inizialmente un osservatore newtoniano e una piccola piattaformarigida, che costituisce il supporto dell’osservatore e che definisce il concettodi localizzazione, nel senso che un evento avviene in un punto di tale piat-taforma. In ogni punto della piattaforma e situato un orologio in quiete. Inbreve, si dice che un osservatore newtoniano e una rete di orologi posti aivertici di un reticolato di regoli rigidi.
Figura 1.1: L’osservatore newtoniano come rete di orologi posti ai vertici diun reticolato di regoli rigidi.
In questa definizione si ammette tacitamente (e dal punto di vista mate-matico questa e un’ipotesi topologica sulla struttura dello spaziotempo) chetale reticolato possa essere esteso indefinitamente in tutte le direzioni (perquesto si parla di coordinate globali), e che per le misure spaziali tra puntiin quiete rispetto ai reticolati valgano le regole della geometria euclidea.
Per completare la definizione dell’osservatore newtoniano, bisogna infinesincronizzare gli orologi posti nei diversi punti del reticolato: possiamo pen-sare che ogni punto abbia un suo piccolo “laboratorio”, e bisogna fare inmodo che tutti questi “laboratori” siano sincronizzati. Il processo di sincro-nizzazione puo essere fatto, ad esempio, per trasporto di un orologio cam-pione, e qui ipotizziamo tacitamente che la sincronizzazione non dipenda daltrasporto e che orologi sincronizzati rimangano sincronizzati.

1.3. GLI ASSIOMI DELLA RELATIVITA NEWTONIANA 5
Il processo di sincronizzazione definisce il concetto di tempo relativoall’osservatore, definito come il tempo misurato dall’orologio - in quiete(rispetto alla piattaforma dell’osservatore) e sincronizzato nella rete di orologi- nel punto in cui avviene l’evento. E chiaro che questa nozione ha significatosolo se gli orologi sono stati precedentemente sincronizzati.
1.3 Gli assiomi della Relativita newtoniana
Definito il singolo osservatore come un sistema di coordinate globali sullospaziotempo (dove l’aggettivo “globali” rende conto del fatto che ogni eventopuo essere localizzato poiche la piattaforma e estendibile all’infinito), rimaneda fare il confronto tra i diversi osservatori, il che equivale a porsi il problemadi un cambio di coordinate sullo spaziotempo.
Nella Relativita newtoniana si ammettono due assiomi, detti del tempoassoluto e dello spazio assoluto (in quest’ordine).
1.3.1 L’assioma del tempo assoluto
L’assioma del tempo assoluto afferma il carattere invariantivo delle durate:gli intervalli temporali tra due eventi misurati da due diversi osservatori new-toniani in moto relativo coincidono sempre, indipendentemente dalla naturadel moto relativo (questo vale, ad esempio, anche per moti non inerziali). Inparticolare, eventi simultanei in un riferimento sono simultanei in ogni altroriferimento: il concetto di simultaneita e dunque un concetto assoluto (ovequesto vocabolo e utilizzato nel modo in cui il termine “intrinseco” e usatoin geometria, nel senso di “proprieta che non dipende dall’osservatore”) -non nuoce ribadire che la Relativita e lo studio di cio che non dipende dagliosservatori a partire da cio che dipende da tali osservatori. Se il concettodi simultaneita e assoluto, la simultaneita e una relazione di equivalenza,che determina una partizione nello spaziotempo in classi di equivalenza1, icosiddetti piani di simultaneita (relativi a ciascun “istante”).
1.3.2 L’assioma dello spazio assoluto
Se il concetto di tempo assoluto e intuitivo e immediato, il concetto di spa-zio assoluto e piu problematico. Consideriamo un treno in moto rettilineouniforme, un osservatore A posto a terra e un osservatore B all’interno del
1Si intende nell’insieme degli eventi: un evento A e chiaramente simultaneo a se stesso,la relazione di simultaneita tra due eventi e simmetrica e infine se A e B sono simultaneie B e C sono simultanei, allora anche A e C sono simultanei.
6 LEZIONE 1. L’EREDITA DI NEWTON
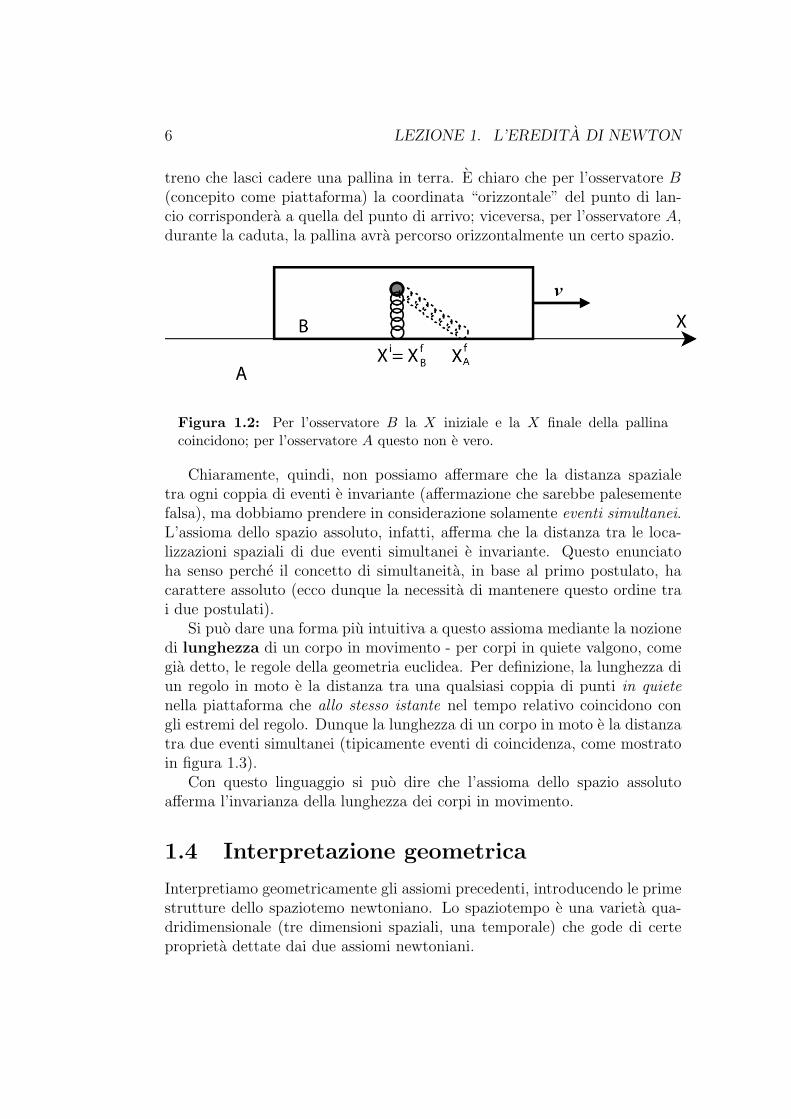
treno che lasci cadere una pallina in terra. E chiaro che per l’osservatore B(concepito come piattaforma) la coordinata “orizzontale” del punto di lan-cio corrispondera a quella del punto di arrivo; viceversa, per l’osservatore A,durante la caduta, la pallina avra percorso orizzontalmente un certo spazio.
Figura 1.2: Per l’osservatore B la X iniziale e la X finale della pallinacoincidono; per l’osservatore A questo non e vero.
Chiaramente, quindi, non possiamo affermare che la distanza spazialetra ogni coppia di eventi e invariante (affermazione che sarebbe palesementefalsa), ma dobbiamo prendere in considerazione solamente eventi simultanei.L’assioma dello spazio assoluto, infatti, afferma che la distanza tra le loca-lizzazioni spaziali di due eventi simultanei e invariante. Questo enunciatoha senso perche il concetto di simultaneita, in base al primo postulato, hacarattere assoluto (ecco dunque la necessita di mantenere questo ordine trai due postulati).
Si puo dare una forma piu intuitiva a questo assioma mediante la nozionedi lunghezza di un corpo in movimento - per corpi in quiete valgono, comegia detto, le regole della geometria euclidea. Per definizione, la lunghezza diun regolo in moto e la distanza tra una qualsiasi coppia di punti in quietenella piattaforma che allo stesso istante nel tempo relativo coincidono congli estremi del regolo. Dunque la lunghezza di un corpo in moto e la distanzatra due eventi simultanei (tipicamente eventi di coincidenza, come mostratoin figura 1.3).
Con questo linguaggio si puo dire che l’assioma dello spazio assolutoafferma l’invarianza della lunghezza dei corpi in movimento.
1.4 Interpretazione geometrica
Interpretiamo geometricamente gli assiomi precedenti, introducendo le primestrutture dello spaziotemo newtoniano. Lo spaziotempo e una varieta qua-dridimensionale (tre dimensioni spaziali, una temporale) che gode di certeproprieta dettate dai due assiomi newtoniani.

1.4. INTERPRETAZIONE GEOMETRICA 7
Figura 1.3: Lunghezza di un corpo in moto: la lunghezza del regolo inmovimento, nell’istante in cui A′ ≡ A e B′ ≡ B, e la distanza tra i due puntiA e B sulla piattaforma.
• L’assioma del tempo assoluto, stabilendo che la simultaneita e una re-lazione di equivalenza, definisce i piani di simultaneita e quindi affermache lo spaziotempo ha una struttura fibrata sull’asse dei tempi, ov-vero divisa in classi di equivalenza. Possiamo rappresentare questofatto graficamente utilizzando uno spaziotempo bidimensionale inveceche quadridimensionale (nascondendo due dimensioni spaziali).
Figura 1.4: La struttura fibrata dello spaziotempo newtoniano: ad ogniistante ti e associato un piano di simultaneita.
• L’assioma dello spazio assoluto precisa poi che i singoli piani di simulta-neita hanno (singolarmente) struttura di spazio euclideo. Esiste quindiuna nozione di distanza tra due eventi, ma limitatamente a ciascunpiano di simultaneita.
In sintesi, lo spaziotempo newtoniano e uno spazio fibrato in spazi eucli-dei.
Nello spaziotempo newtoniano ha senso parlare di simultaneita di dueeventi, parlare di intervallo di tempo tra due eventi, parlare di distanza tra

8 LEZIONE 1. L’EREDITA DI NEWTON
Figura 1.5: La nozione di distanza tra eventi esiste, ma solo limitatamentea ciascun piano di simultaneita.
eventi simultanei. Non ha invece senso dire che due eventi avvengono nellostesso luogo, ne ha senso parlare di distanza tra due eventi qualsiasi. Inquest’ottica, lo spaziotempo newtoniano non e affatto uno spazio metrico, esolo parzialmente metrizzato (e fibrato in spazi metrici).
Per comprendere meglio che la nozione di “eventi che avvengono nellostesso luogo” e relativa, possiamo visualizzare tale nozione mediante il con-cetto di linea di universo di un orologio.
Figura 1.6: Linea di universo di A: i punti sulla linea sono i “battiti”dell’orologio di A.
Detto M lo spaziotempo, un orologio definisce una successione unidi-mensionale di eventi che rappresentiamo come una linea parametrizzata (ilparametro e il tempo misurato dall’orologio) in M , tale linea e detta linea di

1.4. INTERPRETAZIONE GEOMETRICA 9
universo. Un osservatore e rappresentato da una congruenza di linee di uni-verso (che taglino i piani di simultaneita), ciascuna associata ad un orologiodel reticolato che rappresenta l’osservatore.
Figura 1.7: Un osservatore come famiglia di linee di universo.
Questa congruenza definisce la relazione di equivalenza “essere nello stessoluogo”: due eventi E1 ed E2 avvengono nello stesso luogo rispetto all’osser-vatore O se appartengono a una stessa linea di universo delle congruenze diO.
Figura 1.8: Gli eventi E e F avvengono nello stesso luogo rispetto all’os-servatore O, ma non avvengono nello stesso luogo nel giudizio dell’osservatoreO′.
In quest’ottica possiamo definire lo spazio relativo a un osservatore Ocome lo spazio quoziente di M rispetto alla relazione di equivalenza “esserenello stesso luogo”, e il moto relativo a un osservatore O come la curvaottenuta per proiezione sullo spazio quoziente (v. fig. 1.9).

10 LEZIONE 1. L’EREDITA DI NEWTON
Figura 1.9: Spazio relativo e moto relativo in un universo tridimensionale.

1.5. CAMBIO DI COORDINATE 11
1.5 Cambio di coordinate
I due assiomi della cinematica newtoniana sono sufficienti a risolvere il pro-blema delle formule di cambiamento di coordinate sullo spaziotempo. Duediversi osservatori attribuiscono a uno stesso evento coordinate diverse, di-ciamo (x, t) e (x′, t′) (per semplicita stiamo considerando uno spaziotempobidimensionale). Queste coordinate, essendo riferite allo stesso evento, de-vono essere legate da relazioni che dipendono dal moto degli osservatori, chenello schema classico e necessariamente un moto rigido: la “piattaforma”dell’osservatore puo infatti solo traslare o ruotare.
Nel caso di moto traslatorio, rettilineo ed uniforme, si ricavano le formuledi Galileo:
t′ = tx′ = x− ut
dove u = v(R′|R) e la velocita del riferimento R′ rispetto al riferimento R.Tali trasformazioni, come noto, formano un gruppo2 e implicano la formaadditiva del teorema di composizione delle velocita. Per moti traslatori valeinfatti che
~v(P |R) = ~v(P |R′) + ~v(R′|R).
Cio si verifica dal fatto che (nel caso unidimensionale)
∆t′ = ∆t
∆x′ = ∆x− u∆t
implicano che
v′ =∆x′
∆t′=
∆x
∆t− u = v − u,
da cui
v(P |R′) = v(P |R)− v(R′|R).
Ne discende che in cinematica classica non esistono ne velocita invarianti nevelocita limite.
1.6 Altri assiomi della Relativita classica
Lo schema della Relativita classica e completato da due ulteriori assiomi.
2In questo semplice caso di traslazione lungo un asse questo gruppo ha 1 solo parametro(la velocita u); in generale sono 10 i parametri coinvolti: il posizionamento dell’origine, i3 spostamenti degli assi, i 3 angoli di Eulero per le rotazioni e le 3 velocita di traslazione.

12 LEZIONE 1. L’EREDITA DI NEWTON
1.6.1 L’assioma delle particelle libere
Il primo assioma afferma l’esistenza di una classe privilegiata di particelle,dette particelle libere, le cui linee di universo sono quindi delle linee pri-vilegiate sullo spaziotempo. Quindi lo spaziotempo newtoniano non solo emunito della struttura fibrata dei piani di simultaneita, ma anche di questaclasse privilegiata di curve che saranno successivamente interpretate comegeodetiche3 dello spaziotempo. Questa ulteriore struttura permette di sele-zionare una classe privilegiata di osservatori, detti inerziali, rispetto ai qualitali particelle si muovono di moto rettilineo uniforme.4
1.6.2 Il Principio di Relativita
L’ultimo assioma e il Principio di Relativita, che ha una duplice valenza.
• Puntando l’attenzione sugli osservatori, esso afferma una impossibilita,nella fattispecie l’impossibilita, sulla base di esperienze meccaniche, diselezionare un osservatore nella classe degli osservatori inerziali. Tuttigli osservatori inerziali sono quindi equivalenti dal punto di vista dellameccanica.
Formulazioni equivalenti di questo asserto sono:
– non esiste il “moto assoluto” (che sarebbe, per l’appunto, il motorispetto all’osservatore privilegiato);
– lo spaziotempo classico e una varieta fibrata sull’asse dei tempi,ma non e il prodotto cartesiano di spazio e di tempo. Se infattilo spaziotempo fosse il prodotto cartesiano di spazio e di tempo(v. fig. 1.10), potremmo dare ad ogni evento una localizzazioneassoluta, ovvero dire in che punto avviene quando avviene. Cionon e possibile, poiche se ha senso parlare di “stesso istante”, nonha senso parlare di “stesso luogo”.
• D’altro canto, dando uno sguardo alle leggi fisiche, il Principio di Rela-tivita afferma anche qualcosa di costruttivo: esso e un vincolo a priori
3Una delle definizioni di geodetica era quella di “curva autoparallela”; ma per la no-zione di parallelismo abbiamo bisogno, in generale, di una derivata covariante, cioe di unaconnessione, la quale, nel caso newtoniano, non e metrica (non e definito alcun prodottointerno).
4Il che corrisponde (in un universo bidimensionale) a dire che x = 0, cioe che tutti isimboli di Christoffel Γi
jk = 0, e dunque in definitiva che il tensore di Riemann e identica-mente nullo: R = 0. Lo spaziotempo di Newton e dotato quindi di una struttura piatta.Questo equivale ad ammettere che la connessione per cui le linee di universo delle particellelibere sono geodetiche e piatta, cfr. [2]

1.6. ALTRI ASSIOMI DELLA RELATIVITA CLASSICA 13
Figura 1.10: Se lo spaziotempo classico fosse il prodotto cartesiano di spazioe di tempo, ogni evento avebbe due coordinate assegnate univocamente.
sulla forma delle leggi fisiche, che puo diventare costruttivamente uncriterio per la loro selezione. Perche, infatti, i fenomeni meccanici nonpermettono di selezionare un osservatore inerziale privilegiato? Perchei fenomeni meccanici avvengono nello stesso identico modo in due di-versi riferimenti inerziali, a parita di condizioni iniziali ed ambientali.Ma i fenomeni fisici sono retti dalle leggi della fisica, e quindi tali leggidevono essere le stesse in due diversi riferimenti inerziali. Infine, poichegli osservatori inerziali sono legati dalle leggi di Galileo, ne concludiamoche le leggi della fisica devono essere invarianti in forma rispetto alletrasformazioni galileiane.
Un modo di garantire questa invarianza consiste nel verificare che leleggi della fisica siano scritte come relazioni tensoriali tra grandezzefisiche rappresentate da tensori (relativamente al gruppo di Galileo).

14 LEZIONE 1. L’EREDITA DI NEWTON

Lezione 2
Origine della crisi e primesoluzioni
2.1 L’esperimento di Michelson e Morley
Il principio di equivalenza degli osservatori inerziali e rotto dalla scoperta diMaxwell1 che la luce e un’onda elettromagnetica. Come tutte le onde, storica-mente si dedusse che essa doveva propagarsi in un mezzo (detto etere) rispettoa cui la terra e probabilmente in moto.2 Questo etere fornisce dunque un si-stema di riferimento privilegiato, nel quale la luce si propaga isotropicamentecon velocita c. In ogni altro riferimento (ad esempio nel riferimento terrestre)la velocita della luce sara necessariamente diversa a seconda della direzione dipropagazione.3 Quindi la luce percorrera distanze uguali in direzioni diverse
1James Clerk Maxwell (1831-1879), fisico scozzese le cui famose equazioni mostraronola natura elettromagnetica della luce.
2Scrive H. Bondi in [3]:
L’etere serviva a uno scopo, e a uno solo: rendere conto della pro-pragazione della luce, essere per la luce cio che l’aria e per il suono.Ma l’aria puo venir pesata, puo venir messa in moto, puo venir pom-pata fuori di un recipiente o puo venir messa sotto pressione in esso;nulla di tutto cio puo essere fatto con questo ipotetico etere. [...]Quindi l’etere non ha che una proprieta: aiuta a costruire una ana-logia tra propagazione della luce e propagazione del suono; [...] unafalsa analogia.
(Hermann Bondi, La relativita e il senso comune,Zanichelli, pp.36-37)
3O, il che e la stessa cosa, si puo dire che la terra, essendo in moto rispetto all’etere enon trascinandolo, deve risentire di un “vento d’etere”.
15

16 LEZIONE 2. ORIGINE DELLA CRISI E PRIME SOLUZIONI
in tempi diversi, e cio comportera necessariamente il verificarsi di fenomenidi interferenza. Michelson4 e Morley5, nel periodo 1882-1888, hanno cercatodi dedurre proprio da esperimenti di interferometria la velocita della terrarispetto all’etere. Per fare cio hanno creato un’apparecchiatura come quellariportata in figura 2.1.
Figura 2.1: Il dispositivo P1 invia un fascio luminoso che viene parzialmenteriflesso dallo specchio Q. Il raggio si spezza quindi in un raggio trasverso e inun raggio longitudinale, riflessi rispettivamente dagli specchi S1 e S2. I raggiritornano poi allo specchio Q per confluire all’interfereometro P2. Dato che laterra e in moto rispetto all’etere con una certa velocita ~v, l’interferometro P2
dovrebbe rilevare frange d’interferenza.
Possiamo calcolare i tempi di percorrenza per i due diversi segnali lumi-nosi. Contando che tali raggi hanno in comune il primo e l’ultimo tratto,per il confronto ci bastera considerare il tratto trasverso (perpendicolare allavelocita ~v, in verticale nel disegno) e il tratto longitudinale (parallelo a ~v, inorizzontale nel disegno), entrambi di lunghezza l.
4Albert Abraham Michelson (1852-1931), primo scienziato americano a ricevere il pre-mio Nobel (nel 1907); ha misurato la velocita della luce e ha inventato, sfruttando lalunghezza d’onda della luce, un interferometro per misure precise.
5Edward W. Morley (1838-1923), chimico americano e collaboratore di Michelson nelceleberrimo esperimento sull’etere.

2.1. L’ESPERIMENTO DI MICHELSON E MORLEY 17
Raggio trasverso
Sappiamo che il segnale luminoso si propaga nell’etere con velocita c. Chia-miamo T⊥ il tempo totale in cui il raggio percorre (andata e ritorno) il trattotrasverso; chiamiamo T and
⊥ il tempo di andata e T rit⊥ il tempo di ritorno.
Notiamo che il tratto l misurato in laboratorio o nell’etere ha comunque lun-ghezza uguale, per la definizione data di lunghezza di un regolo in moto.Analogamente, per l’assioma del tempo assoluto, non fa differenza misurarei tempi T⊥, T and
⊥ e T rit⊥ in laboratorio o nell’etere.
Per calcolare T and⊥ e T rit
⊥ ci mettiamo quindi dal punto di vista dell’etere.Dato che conosciamo la velocita della luce nel sistema di riferimento dell’etere(e c), ne ricaviamo la figura 2.2.
Figura 2.2: Raggio trasverso nel sistema di riferimento dell’etere.
Abbiamo dunque che
T and⊥
2c2 = v2T and
⊥2+ l2,
da cui
T and⊥ =
l
c
1√1− v2
c2
.
Analogamente otteniamo che
T rit⊥ =
l
c
1√1− v2
c2
,
da cui
T⊥ = T and⊥ + T rit
⊥ = 2l
c
1√1− v2
c2
.

18 LEZIONE 2. ORIGINE DELLA CRISI E PRIME SOLUZIONI
Il termine1√
1− v2
c2
e detto fattore di Lorentz 6. In questo esercizio ab-
biamo ridotto al teorema di Pitagora il teorema di composizione delle velo-cita.
Raggio longitudinale
Analogamente chiamiamo T‖ il tempo totale in cui il raggio percorre (andatae ritorno) il tratto longitudinale; chiamiamo T and
‖ il tempo di andata e T rit‖
il tempo di ritorno. In questo caso e facile calcolare la velocita relativa,poiche le velocita si comportano come scalari anziche come vettori, e quindipossiamo utilizzare il punto di vista del laboratorio. Abbiamo che
T and‖ =
l
c− v,
T rit‖ =
l
c+ v,
da cui
T‖ = T and‖ + T rit
‖ =l
c− v+
l
c+ v= 2
l
c
1
1− v2
c2
6= T⊥.
Ancora a volta compare il fattore di Lorentz, ma stavolta al quadrato.E chiaro che i due tempi di percorrenza sono diversi, e la loro differenza
vale
T‖ − T⊥ = 2l
c
((1− v2
c2
)−1
−(
1− v2
c2
)− 12
)
= 2l
c
(1 +
v2
c2− 1− 1
2
v2
c2+O
(v4
c4
))=l
c
(v2
c2+O
(v4
c4
)).
Diciamo che lo sfasamento e un effetto del second’ordine (poiche va comev2
c2), meccanicamente non rilevabile, ma otticamente sı (mediante appunto
l’analisi delle interferenze). Tuttavia l’esperimento di Michelson e Morleynon rileva alcuna interferenza nei raggi luminosi, al contrario mostra cheT⊥ = T‖. Anche ruotando la piattaforma di 90 gradi, non si rileva alcunainterferenza tra i raggi luminosi. Come si spiega questo effetto?
6Hendrik Antoon Lorentz (1853-1928), fisico olandese che, per tener conto di nuovi ri-sultati sperimentali, sviluppo un tipo di teoria della relativita (precedentemente a Einstein)mentre era al lavoro sulle equazioni di Maxwell.

2.2. SPIEGAZIONE DI FITZGERALD 19
2.2 Spiegazione di Fitzgerald
La coincidenza delle due durate puo essere spiegata ripetendo formalmente icalcoli con l’accortezza di indicare le distanze longitudinali e trasversali condue simboli diversi (rispettivamente l‖ e l⊥). Troviamo che
T⊥ =2
c
l⊥√1− v2
c2
=2
c
l‖
1− v2
c2
= T‖.
L’esperienza di Michelson e Morley mostra che T⊥ = T‖, e tale risultato sispiega se ammettiamo che
l‖ = l⊥
√1− v2
c2,
ovvero che l‖ < l⊥. Fitzgerald, nel 1892, conclude che il moto rispetto al-l’etere deve comportare un fenomeno di distorsione a livello degli elettroni(che compongono la materia, che interagiscono con forze elettromagnetichele quali riconoscono l’etere come osservatore privilegiato) per cui ogni regolosi contrae nella direzione longitudinale del fattore di Lorentz (contrazionedelle lunghezze).
2.3 Spiegazione di Lorentz
2.3.1 Problemi della spiegazione di Fitzgerald
Se la spiegazione di Fitzgerald (che invoca un’interazione fino a quel temposconosciuta tra materia ed etere responsabile del processo di contrazione)da conto dell’esperimento nullo di Michelson e Morley, rimane aperto un se-condo problema. L’esperimento di Michelson e Morley, infatti, e il primodi una serie di esperimenti che mostrano che il campo elettromagnetico sicomporta nel laboratorio terrestre come previsto dalle leggi di Maxwell nel-l’etere. In sostanza, e come se le leggi di Maxwell valessero invariate in formasia nell’etere, sia nel laboratorio terrestre.
Nel 1895 Lorentz si pone dunque il problema di determinare matema-ticamente la piu generale trasformazione di coordinate spaziotemporali chelasci invariate in forma le equazioni di Maxwell. Per semplicita conside-riamo come prototipo delle equazioni di Maxwell l’equazione delle onde (chein realta e una conseguenza) su una componente qualsiasi. Consideriamo ilcampo E = E(x, t), in un universo bidimensionale. L’equazione delle onde e
1
c2∂2E
∂t2− ∂2E
∂x2= 0.

20 LEZIONE 2. ORIGINE DELLA CRISI E PRIME SOLUZIONI
Prima di mostrare la soluzione di Lorentz, come introduzione al problema,mostriamo che tale equazione non e affatto invariante rispetto alle trasfor-mazioni galileiane.
Ipotizzando infatti la trasformazione di coordinate
t′ = tx′ = x− vt e la
trasformazione della legge fisica E ′(x′, t′) = E(x, t), otteniamo quindi che
E ′(x− vt, t) = E(x, t)
e dunque, calcolandoci le derivate parziali, abbiamo che∂E
∂t(x, t) =
∂E ′
∂t′(x− vt, t)− v∂E
′
∂x′(x− vt, t)
∂E
∂x(x, t) =
∂E ′
∂x′(x− vt, t)
,
e derivando nuovamente (sottintendendo i punti di calcolo delle derivate), siha che
∂2E
∂t2=∂2E ′
∂t′2− 2v
∂2E ′
∂x′∂t′+ v2∂
2E ′
∂x′2
∂2E
∂x2=∂2E ′
∂x′2
.
Quindi, l’equazione delle onde nelle nuove coordinate assume la forma
1
c2∂2E ′
∂t′2− ∂2E ′
∂x′2− 2
v
c2∂2E ′
∂x′∂t′+v2
c2∂2E ′
∂x′2= 0.
Come si nota, tale forma e differente dalla precedente, poiche nella deri-vazione sono comparsi gli ultimi due termini che precedentemente non esi-stevano. L’equazione delle onde non e invariante in forma rispetto alle tra-sformazioni galileiane.Sempre in quest’ottica, proviamo a tener conto dell’osservazione di Fitz-gerald, immaginando che la relazione tra le coordinate dei due osservatorisia
t′ = t√1− v2
c2x′ = x− vt
,
ove le coordinate non primate si riferiscono al riferimento dell’etere e le coor-dinate primate al riferimento terrestre. Il fattore di Lorentz rende conto dellacontrazione delle lunghezze constatata da Fitzgerald. In questo caso, sempresupponendo che la legge fisica si trasformi come E ′(x′, t′) = E(x, t), ovvero
che E
(x−vt√1− v2
c2
, t
), troviamo che

2.3. SPIEGAZIONE DI LORENTZ 21
∂E
∂t=∂E ′
∂t′− v√
1− v2
c2
∂E ′
∂x′
∂E
∂x=
1√1− v2
c2
∂E ′
∂x′
,
e derivando nuovamente:∂2E
∂t2=∂2E ′
∂t′2− 2
v√1− v2
c2
∂2E ′
∂x′∂t′+
v2
1− v2
c2
∂2E ′
∂x′2
∂2E
∂x2=
1
1− v2
c2
∂2E ′
∂x′2
,
e sostituendo nell’equazione delle onde otteniamo
1
c2∂2E ′
∂t′2− 2
v
c√c2 − v2
∂2E ′
∂x′∂t′+
v2
c2 − v2
∂2E ′
∂x′2− c2
c2 − v2∂2E ′∂x′2 = 0,
e sommando gli ultimi due termini
1
c2∂2E ′
∂t′2− 2
v
c√c2 − v2
∂2E ′
∂x′∂t′− ∂2E ′
∂x′2= 0.
Notiamo che uno dei due termini aggiuntivi che avevamo con le trasfor-mazioni di Galileo e scomparso, ma rimane pur sempre una correzione.
2.3.2 Le trasformazioni di Lorentz
Seguendo questa linea, Lorentz ha cercao una trasformazione di coordi-nate adatta per mantenere l’invarianza in forma. L’ha trovata correggendol’equazione dei tempi e ipotizzando la trasformazione
√1− v2
c2t′ = t− v
c2x√
1− v2
c2x′ = x− vt
.
Come notiamo, Lorentz ha apportato due modifiche alle trasformazionidi Fitzgerald. Ha lasciato invariata la contrazione delle lunghezze, ma haaggiunto una dilatazione dei tempi. Il fattore davanti a t′ (inserito peranalogia) non bastava infatti per avere l’invarianza in forma: Lorentz ha

22 LEZIONE 2. ORIGINE DELLA CRISI E PRIME SOLUZIONI
dovuto anche introdurre il termine − vc2x (che e a tutti gli effetti un tempo)
nell’equazione dei tempi.Con questa nuova trasformazione si verifica che
∂E
∂t= − v√
1− v2
c2
∂E ′
∂x′− 1√
1− v2
c2
∂E ′
∂t′
∂E
∂x=
1√1− v2
c2
∂E ′
∂x′− v
c2√
1− v2
c2
∂E ′
∂t′
,
e derivando nuovamente:∂2E
∂t2=
v2
1− v2
c2
∂2E ′
∂x′2− 2
v
1− v2
c2
∂2E ′
∂x′∂t′+
1
1− v2
c2
∂2E ′
∂t′2
∂2E
∂x2=
1
1− v2
c2
∂2E ′
∂x′2− 2
v
c2(1− v2
c2
) ∂2E ′
∂x′∂t′+
v2
c4(1− v2
c2
) ∂2E ′
∂t′2
,
e sostituendo nell’equazione delle onde otteniamo
v2
c2(1− v2
c2
) ∂2E ′
∂x′2− 2
v
c2(1− v2
c2
) ∂2E ′
∂x′∂t′+
1
c2(1− v2
c2
) ∂2E ′
∂t′2− 1
1− v2
c2
∂2E ′
∂x′2+
+ 2v
c2(1− v2
c2
) ∂2E ′
∂x′∂t′− v2
c4(1− v2
c2
) ∂2E ′
∂t′2.
Le derivate miste si semplificano. Inoltre notando che
v2
c2(1− v2
c2
) − 1(1− v2
c2
) =v2
c2 − v2− c2
c2 − v2= −1
e che
1
c2(1− v2
c2
) − v2
c4(1− v2
c2
) =c2
c2(c2 − v2)− v2
c2(c2 − v2)=
1
c2,
otteniamo l’equazione delle onde nelle nuove coordinate,
1
c2∂2E ′
∂t′2− ∂2E ′
∂x′2= 0,
equazione che ha conservato intatta la forma che aveva come conseguenzadelle equazioni di Maxwell. Le trasformazioni di Lorentz nascono proprioper mantenere questa invarianza in forma.

2.3. SPIEGAZIONE DI LORENTZ 23
2.3.3 Ragioni algebriche
Vi e un’ulteriore ragione per credere nelle trasformazioni di Lorentz, ed euna ragione algebrica: non ci si poteva accontentare delle trasformazioni diFitzgerald, poiche esse non formavano un gruppo. Componendo due trasfor-mazioni, infatti, in generale non se ne otteneva un’altra della stessa forma.Dunque le trasformazioni di Fitzgerald erano sicuramente parziali e dovevanoessere completate. Le trasformazioni di Lorentz costituiscono il loro comple-tamento anche algebrico, poiche esse costituiscono un gruppo. Dimostriamotale asserto.
Detto infatti L = λv l’insieme delle trasformazioni di Lorentz√
1− v2
c2t′ = t− v
c2x√
1− v2
c2x′ = x− vt
dipendenti dall’unico parametro v (in uno spaziotempo bidimensionale) ab-biamo che in L c’e l’identita (e la trasformazione λ0 corrispondente a v = 0).Scrivendo le trasformazioni in forma matriciale, come
(x′
t′
)=
1√1− v2
c2
v√1− v2
c2v
c2√
1− v2
c2
1√1− v2
c2
(xt
),
notiamo che il determinante della matrice di sistema
det
1√1− v2
c2
v√1− v2
c2v
c2√
1− v2
c2
1√1− v2
c2
=1
1− v2
c2
−v2
c2
1− v2
c2
= 1
e identicamente unitario, quindi per ogni trasformazione esiste la relativainversa. Infine componiamo due generiche trasformazioni λv e λw, esplicita-mente
x′ =1√
1− v2
c2
(x− vt)
t′ =1√
1− v2
c2
(t− v
c2x) e
x′′ =
1√1− w2
c2
(x′ − wt′)
t′′ =1√
1− w2
c2
(t′ − w
c2x′) ,
dipendenti da due parametri velocita v e w.

24 LEZIONE 2. ORIGINE DELLA CRISI E PRIME SOLUZIONI
Otteniamo che la composta e√
1− w2
c2
√1− v2
c2x′′ =
(1 +
vw
c2
)x− (v + w)t√
1− w2
c2
√1− v2
c2t′′ =
(1 +
vw
c2
)t− v + w
c2x
,
ovvero
√(1−w2
c2
)(1− v2
c2
)(1+ vw
c2)2 x′′ = x− v + w
1 + vwc2
t√(1−w2
c2
)(1− v2
c2
)(1+ vw
c2)2 t′′ = t−
v+w1+ vw
c2
c2t
,
e chiamando
u =c2(v + w)
c2 + vw=
v + w
1 + vwc2
,
notando che il fattore ai primi membri puo essere riscritto come√√√√(1− w2
c2
) (1− v2
c2
)(1 + vw
c2
)2 =
√1 + v2w2
c4− v2
c2− w2
c2
1 + v2w2
c4+ 2vw
c2
=
√1−
2vwc2
+ v2
c2+ w2
c2
1 + v2w2
c4+ 2vw
c2
=
√1− 1
c2c4(v + w)2
c4 + v2w2 + 2vwc2
=
√1− u2
c2,
abbiamo che la composta√
1− u2
c2x′′ = x− ut√
1− u2
c2t′′ = t− u
c2x
mantiene la forma delle trasformazioni di Lorentz. Dunque abbiamo che
λw λv = λ v+w1+ vw
c2
, (2.1)
e le trasformazioni di Lorentz formano in effetti un gruppo.

Lezione 3
Osservatori inerziali espaziotempo di Minkowski
Abbiamo ripreso il punto di vista newtoniano su spazio e tempo e le ragionidella sua crisi seguendo un ordine approssimativamente cronologico. Perspiegare il superamento della crisi dei concetti newtoniani abbandoniamoora questo cammino storico e presentiamo la soluzione dal punto di vistamoderno, tenendo conto anche delle informazioni che ci vengono dalla Rela-tivita Generale, cioe della teoria del campo gravitazionale einsteiniano. Insostanza, partiamo dalla fine.
Il punto cruciale e la discussione del concetto di osservatore. Si abbandonail meccanismo delle piattaforme newtoniane e si parte da una nozione diosservatore locale.
3.1 L’osservatore locale
Un osservatore locale e semplicemente una piccola stazione radar, indivi-duata da una piccola piattaforma locale di supporto, da un orologio e da undispositivo che permette di emettere e ricevere segnali luminosi. Trascurandoper il momento il dispositivo elettromagnetico, si puo dire che l’osservatorelocale e un orologio che data gli eventi che accadono nelle sue vicinanze. Geo-metricamente questo osservatore e rappresentato nello spaziotempo dalla sualinea di universo parametrizzata dal tempo misurato dall’orologio.
Questo osservatore ha tutte le caratteristiche dell’osservatore newtoniano,ma in piccolo. Quindi il primo passo per superare la crisi della concezionenewtoniana e la localizzazione dell’osservatore: si abbandona il concetto diosservatore globale e si localizza l’osservatore nello spazio.
Per indagare l’universo fuori dalla sua piattaforma, l’osservatore non usa
25

26 LEZIONE 3. OSSERVATORI INERZIALI E SPAZIOTEMPO
Figura 3.1: Linea di universo di un osservatore. I punti sono i “battiti” delsuo orologio.
piu i regoli rigidi di Newton, bensı i segnali luminosi, scelti per la loro ca-ratteristica di essere i segnali che si propagano con la velocita limite. Perindividuare un evento E fuori dalla linea di universo dell’orologio, l’osser-vatore invia un segnale luminoso al tempo T1, misurato dal suo orologio, inmodo tale che il segnale arrivi nel punto di accadimento dell’evento E esat-tamente quando E accade, e poi misura il tempo di arrivo T2 dell’eco riflessa.La situazione e chiarita anche dalla figura 3.2.1
Figura 3.2: Individuazione di un evento. Per convenzione indicheremo isegnali luminosi con queste particolari frecce trattopuntate.
I regoli di Newton sono stati sostituiti da “regoli di luce” e tutte le misure
1In un universo quadridimensionale dovremmo tener conto anche degli angoli tra ilraggio e gli assi; in questa sede, nel nostro universo bidimensionale, li trascureremo.

3.1. L’OSSERVATORE LOCALE 27
sono ricondotte a misure di tempo eseguite con un unico orologio posto nellapiattaforma dell’osservatore locale.
3.1.1 Misure di spazio, misure di tempo
Il fatto di ricondurre tutte le misure spaziali a misure di tempo (cosa cheaccade con questo “metodo radar”), e un’ampliamento di prospettive e unasemplificazione concettuale. Possiamo portare come esempio quanto scriveH. Bondi in [3]:
Immaginiamo una civilta in cui il metro sia sconosciuto e ogni di-stanza espressa in secondi-luce o millimicrosecondi-luce o in qualsiasialtra unita opportuna; i membri di questa societa considererebberopiuttosto sciocco chi chiedesse il valore della velocita della luce, essinon la considererebbero una quantita da esprimere in metri al secondoo chilometri al secondo, ma semplicemente come una unita, l’unitanaturale di velocita. La velocita di un oggetto verrebbe misurata pa-ragonandola a quella della luce: tutte le velocita ordinarie sarebberoespresse in termini di questo campione. [...] In altre parole accet-tando come campione di velocita [...] la velocita della luce, questacivilta avrebbe eliminato la necessita di costruire oltre a un campionedi tempo anche uno di lunghezza, e di usare uno scomodo numero peresprimere la velocita della luce. In questa civilta esisterebbe solo uncampione di tempo, i suoi componenti ci considererebbero delle per-sone che lavorano con lunghezze e tempi nel modo piu complicato eassurdo.
(Hermann Bondi, La relativita e il senso comune,Zanichelli, pp.36-37)
Si consideri infatti
[...] una civilta in cui la direzione nord-sud viene considerata sacraed e sempre misurata in miglia, mentre quella est-ovest viene consi-derata volgare e profana ed e sempre misurata in yarde. Se la gentevenisse abituata a vedere le cose sotto questo aspetto fin dalla primaeta, occorrerebbe una mente audace per suggerire l’esistenza di unqualche legame tra le distanze nella direzione nord-sud e quelle nelladirezione est-ovest.
(ibidem, p.37)
La stessa cosa accade dunque per noi: abbiamo sempre concepito spazioe tempo come entita separate, cosicche ci e costata fatica vederle come variedeclinazioni di un unico spaziotempo. In un’ottica unitaria di questo tipo

28 LEZIONE 3. OSSERVATORI INERZIALI E SPAZIOTEMPO
non c’e alcuna ragione di considerare anche un campione di lunghezza (comead esempio un regolo graduato): ci basta usare un campione di tempo, chelegheremo poi mediante c alle quantita spaziali.
Questo modo di procedere appare corretto, soprattutto se pen-siamo a come sono fatte in realta le cordelle metriche e le righe gra-duate che usiamo per misurare le distanze. Sappiamo che esse sonofatte da atomi la cui struttura e determinata da forze elettriche; sap-piamo che questi atomi hanno determinati periodi di vibrazione e sap-piamo che, nei corpi che chiamiamo rigidi, gli atomi assumono unadistanza relativa definita come conseguenza dei particolari periodi divibrazione. Quindi possiamo concludere che la lunghezza di una rigae in realta determinata dal periodo di oscillazione degli atomi di cui ecomposta, tradotto poi al solito modo in una distanza, per mezzo dellavelocita della luce. Se concludiamo, come in effetti possiamo fare, chele distanze tra gli atomi di quelli che noi chiamiamo corpi rigidi sonole distanze corrispondenti alle oscillazioni degli atomi, possiamo alloradire che anche queste distanze sono determinate in realta con metodiradar.
(ibidem, p.38)
3.2 Osservatori localmente inerziali
Fin qui non vi e alcun modo di privilegiare un osservatore rispetto ad unaltro. Pero possiamo constatare fisicamente che esiste una classe privilegiatadi osservatori locali, che chiameremo osservatori localmente inerziali.Consideriamo, ad esempio, una navicella spaziale che navighi a motori spentiin un’orbita interplanetaria. L’esperienza mostra che all’interno della navi-cella tutto avviene come previsto dalla teoria newtoniana degli osservatoriinerziali: due particelle lasciate libere o stanno ferme o si muovono di motorettilineo uniforme, un giroscopio messo in rotazione ha l’asse in direzioneinvariabile, e cosı via. Ammettiamo percio, come primo assioma, l’esistenzadi osservatori localmente inerziali (ove l’avverbio “localmente” si riferisce alfatto che le osservazioni sono sempre locali, in un intorno dell’osservatore),gli osservatori che cioe, sulla loro piattaforma, vedono le particelle libere sod-disfare al principio di inerzia, i giroscopi in rotazione avere l’asse in direzionefissa, e cosı via.
Una questione interessante e comprendere l’origine degli osservatori iner-ziali. La risposta accettata oggi e che gli osservatori inerziali sono determi-nati dalla distribuzione di massa nell’universo (principio o punto di vista di

3.3. ASSEMBLAMENTO 29
Mach2). Una conferma di questo punto di vista viene dall’osservazione spe-rimentale la quale mostra che, rispetto a tali osservatori, il complesso dellestelle che popolano l’universo appare fisso (e non ruotante): questo ci dice chec’e una relazione misteriosa tra questi osservatori e la materia nell’universo.Quindi l’origine degli osservatori localmente inerziali, detti anche osservatoriin caduta libera, starebbe in una proprieta globale dell’universo e dello spa-ziotempo che lo rappresenta. Riprenderemo questa breve divagazione nellasezione 10.2.3, in questo momento accettiamo semplicemente l’esistenza ditali osservatori come un principio base della teoria.
Gli osservatori localmente inerziali si riconoscono sperimentalmente fa-cendo semplici esperienze meccaniche con particelle libere (devono essere oferme o muoversi di moto uniforme) oscillatori (non devono allungarsi) egiroscopi (il cui asse non deve cambiare direzione).
3.3 Assemblamento
Introdotti gli osservatori localmente inerziali, si studia poi il loro assembla-mento (ossia come essi sono collegati). Consideriamo due osservatori inerzialiO e O′. Mediante il metodo dei segnali radar ognuno dei due puo decidere sel’altro e in quiete o in moto rispetto a lui. La condizione di quiete e espressadall’invarianza dell’intervallo di tempo T tra emissione e ricezione del segnaleradar, scambiato tra i due osservatori (come mostra la figura qui sotto).
Figura 3.3: Scambio reciproco di segnali luminosi tra osservatori.
La proprieta vale tanto per il primo quanto per il secondo osservatore. Si
2Ernst Mach (1838-1916), filosofo e fisico austriaco di grande influenza su Einstein e sututto il pensiero moderno.

30 LEZIONE 3. OSSERVATORI INERZIALI E SPAZIOTEMPO
constata inoltre che se gli osservatori sono “sufficientemente” vicini (situa-zione corrispondente a periodi T e T ′ “sufficientemente” piccoli) e possibilecalibrare gli orologi dei due osservatori in modo tale che T = T ′. Questoprocesso di calibrazione prende il nome di sincronizzazione degli orologiinerziali in quiete relativa.
Riepilogando: l’esperienza mostra che esistono osservatori localmenteinerziali in quiete relativa che possono essere sincronizzati tra loro. Rimaneaperto il problema dell’estensione di questo processo. Il processo di sincro-nizzazione di osservatori inerziali in grande e in generale impossibile. Taleprocesso funziona solo per osservatori “sufficientemente” vicini: quando sisuperano certe distanze e certi intervalli di tempo, cominciano a compa-rire delle discrepanze e si manifesta l’impossibilita di sincronizzare in grandeosservatori localmente inerziali nel modo prima descritto.
3.4 Lo spaziotempo di Minkowski
Si chiama spaziotempo di Minkowski uno spaziotempo ideale in cui si am-mette che il processo di sincronizzazione prima descritto valga in grande. Lospaziotempo di Minkowski e quindi il modello di spaziotempo dove esistonoosservatori globalmente inerziali, costituiti da una rete di osservatori lo-calmente inerziali in quiete relativa (sempre nel senso dello scambio di segnaliluminosi) e sincronizzati tra loro.
Lo spaziotempo di Minkowski e quindi un’approssimazione dello spazio-tempo fisico che puo essere paragonata all’approssimazione che lo spazio tan-gente fornisce di una superficie curva in un suo punto (fig. 3.4), come vedremomeglio alla Lezione 10.
Nello spazio tangente possiamo parlare di rette e di rette parallele, mentresulla superficie possiamo solo parlare di geodetiche. Infatti le rette riman-gono parallele in ogni punto dello spazio tangente, mentre le corrispondentigeodetiche divergono sulla superficie a causa della curvatura della superficie.Le rette e le geodetiche devono essere confrontate con le linee di universo degliosservatori localmente inerziali nello spaziotempo. Rette parallele corrispon-dono ad osservatori inerziali in quiete relativa. Nello spaziotempo di Minko-wski (corrispondente allo spazio tangente) queste linee di universo rimangonosempre parallele, nello spaziotempo fisico invece no, a significare che dopoun po’ il processo di sincronizzazione diventa impossibile. L’impossibilita didefinire mediante il processo di sincronizzazione un osservatore globalmenteinerziale e quindi una misura della “curvatura” dello spaziotempo.
Nel modello di Minkowski, invece, si assume che esistano osservatori glo-balmente inerziali; cio corrisponde a sviluppare una teoria dello spaziotempo

3.4. LO SPAZIOTEMPO DI MINKOWSKI 31
Figura 3.4: Lo spazio di Minkowski come approssimazione tangente dellasuperficie curva dello spazio fisico: rette parallele su TPS divergono su S pereffetto della curvatura.

32 LEZIONE 3. OSSERVATORI INERZIALI E SPAZIOTEMPO
piatto. Questa teoria e la Relativita Ristretta. Essa e una buona ap-prossimazione del mondo fisico in una scala di misure sulla quale si possonotrascurare gli effetti delle forze gravitazionali. La fisica nello spazio di Min-kowski e, in sostanza, una fisica in assenza di gravita: in questa situazione epossibile il processo di sincronizzazione prima descritto.
Su scale piu grandi, dove non e possibile trascurare l’effetto delle forzegravitazionali prodotte dalle grandi masse distribuite nell’universo, le forzegravitazionali si manifestano come cause distorcenti il processo di sincroniz-zazione (influenti sul moto dei segnali luminosi), cosicche l’approssimazionedello spaziotempo di Minkowski non risulta piu valida e bisogna passare auno schema piu generale, cui si da il nome di Relativita Generale. Insostanza, la Relativita Generale e la geometria dello spazio tempo quando sitiene conto dell’impossibilita della sincronizzazione in grande di osservatorilocalmente inerziali.
Riassumendo:
• il concetto di osservatore ha validita locale ed esistono degli osservatoriprivilegiati detti localmente inerziali ;
• in una prima approssimazione, e possibile parlare di osservatori local-mente inerziali in quiete relativa e sincronizzare i rispettivi orologi inmodo che misurino lo stesso periodo nei segnali scambiati;
• questo processo di sincronizzazione e solamente locale. Una buonaapprossimazione dello spaziotempo reale e fornita dal modello idealein cui si ammette che la nozione di quiete relativa e il processo disincronizzazione abbiano validita globale. Questa proprieta definisce lospaziotempo di Minkowski.
3.5 Postulati
Lo spaziotempo di Minkowski e quindi uno spaziotempo su cui sono definitiosservatori globalmente inerziali. Si assume che per questi osservatori valganodue postulati fondamentali imposti dall’evidenza sperimentale con i fenomenielettromagnetici.
3.5.1 Invarianza della velocita della luce
Il primo postulato afferma che la luce si propaga nel vuoto con la stessavelocita rispetto ad un qualsiasi osservatore inerziale.3 Oppure, in forma leg-
3Non era forse questo il risultato dell’esperimento di Michelson e Morley?

3.5. POSTULATI 33
germente diversa ma equivalente, possiamo dire che la velocita della luce nelvuoto e indipendente dalla velocita della sorgente che la emette. Si noti chepossiamo parlare di velocita di un segnale solamente perche nello spaziotempodi Minkowski abbiamo un osservatore globale.
Oltre che invariante, la velocita della luce e anche una velocita limite,nel senso che non esistono sistemi o segnali fisici che possano superare talevelocita. Questo discende, se vogliamo, dal fatto che la composizione divelocita di oggetti e segnali fisici non puo mai superare la velocita della luce,come mostra la legge gruppale (2.1) e come vedremo meglio piu avanti.
3.5.2 Principio di Relativita
Il secondo postulato e il cosiddetto Principio di Relativita. Esso affermache tutti gli osservatori globalmente inerziali che esistono nello spaziotempodi Minkowski sono fra loro equivalenti e indistinguibili, in quanto tutti ifenomeni meccanici ed elettromagnetici avvengono in due osservatori glo-balmente inerziali con le stesse modalita, a parita di condizioni iniziali edi situazioni ambientali. Di conseguenza, le leggi della fisica devono avere lastessa forma in tutti gli osservatori inerziali. La novita di questa formulazioneforte del principio rispetto alla formulazione newtoniana sta nel riferimentoai fenomeni elettromagnetici.
La Relativita Ristretta e lo studio delle implicazioni che questi due postu-lati hanno sulla geometria dello spaziotempo e sulla forma delle leggi della fi-sica. Riassumendo, abbiamo localizzato l’osservatore, introdotto i concetti diosservatori localmente inerziali e di osservatori localmente inerziali in quieterelativa, abbiamo introdotto l’invarianza della velocita della luce (aspettocompletamente nuovo) e abbiamo esteso il Principio di Relativita.

34 LEZIONE 3. OSSERVATORI INERZIALI E SPAZIOTEMPO

Lezione 4
La struttura dello spaziotempodi Minkowski
Cio che vogliamo fare adesso e determinare la geometria dello spaziotempoMdi Minkowski a partire dagli assiomi fondamentali che caratterizzano questospazio. Ci serviremo dapprima dei due seguenti assiomi:
• esistenza di osservatori inerziali globali (costruiti assemblando osserva-tori inerziali locali in quiete relativa, mediante il processo di sincroniz-zazione);
• invarianza della velocita della luce (che e velocita limite per sistemi esegnali fisici).
Piu avanti, quando analizzeremo l’effetto Doppler ci servieremo anche delterzo postulato fondamentale, il Principio di Relativita.
Si tratta percio di determinare le strutture geometriche intrinseche dellavarieta M , strutture su cui tutti gli osservatori concordano. Vale la penaripeterlo: si parte dal relativo (ossia dalle misure fatte da un singolo osser-vatore) per giungere all’assoluto, tramite confronto tra le diverse descrizionirelative. Individueremo sostanzialmente tre strutture: la struttura causale,la struttura metrica e la struttura affine.
Nella nostra analisi ci serviremo del cosiddetto “k-calcolo” (introdottoalla meta degli anni Cinquanta da H. Bondi), che e semplicemente la geo-metria dei segnali luminosi, nella misura in cui la geometria euclidea e lageometria dei regoli rigidi. Diamo qualche riferimento bibliografico: un’e-sposizione bella e non tecnica del k-calcolo e della Relativita si puo trovarein [3], un trattato piu tecnico e piu esaustivo e [4]; infine un libro che trattal’aspetto piu matematico della faccenda, confrontando la geometria euclideacon la geometria dello spazio di Minkowski, e [5].
35

36 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
4.1 Il cono luce
La prima cosa da fare e geometrizzare l’assioma riguardo all’invarianza di c(velocita della luce nel vuoto): tale velocita e il primo invariante che abbiamo(all’interno della classe degli osservatori inerziali) e dunque corrispone dallaprima struttura geometrica di M , detta “struttura di causalita”, poicheessa regola il segno del divario temporale tra gli eventi, e quindi stabiliscel’ordinamento temporale che e alla base del principio di causa-effetto. Sevogliamo affermare, infatti, che un evento A e causa di un evento B, devequantomeno sussistere il fatto che A accada prima di B. Per confronto conla cinematica newtoniana, vediamo che cosa implica l’assioma dell’invarianzadi c nella geometria di M .
Immaginiamo di considerare nello spaziotempo di Newton due osservatoriinerziali in moto relativo l’uno rispetto all’altro, muniti dello stesso dispo-sitivo per lanciare palline (pensate come punti materiali). Supponiamo chea un certo istante i due osservatori si trovino nello stesso luogo (chiamiamoquesto evento O), e che lancino insieme le due palline. Le figure qui sottomostrano che cosa accade e che cosa accadrebbe se invece di lanciare pal-line nello spazio newtoniano lanciassero segnali luminosi secondo la visionedi Einstein.
Figura 4.1: A sinistra: palline lanciate da osservatori inerziali in moto rela-tivo in un universo newtoniano. A destra: segnali luminosi inviati dagli stessiosservatori inerziali in moto relativo in un universo einsteiniano.
Nel caso newtoniano, la velocita degli oggetti lanciati dipende dalla ve-locita della sorgente, e quindi le linee di universo delle palline lanciate da Ae B nell’evento O, in generale, differiscono. Dunque non vi e alcuna linea diuniverso privilegiata rispetto alle altre: tutte le linee di universo che taglianoi piani di simultaneita sono percorribili da una qualche pallina lanciata dauna sorgente a una certa velocita.

4.1. IL CONO LUCE 37
Viceversa, nel caso di Einstein, il postulato riguardo all’invarianza di crichiede che la velocita della luce non dipenda dalla velocita della sorgente.Quindi due raggi luminosi, inviati in una data direzione da due sorgentiche viaggiano con velocita diverse, viaggeranno comunque con la medesimavelocita. Il che equivale a dire che per ogni direzione spaziale vi e un’unica eben determinata linea di universo del segnale luminoso. L’insieme di questelinee di universo forma il cono luce associato all’evento considerato (v. fig.4.2). Nel caso di un universo bidimensionale, essendoci solo due direzionipossibili per il raggio luminoso, il cono luce degenera a una sorta di triangolo.Nel caso di un universo tridimensionale le direzioni possibili dipendono daun angolo, e in generale l’insieme dei raggi possibili e la superficie laterale diun cono. Nel caso di un universo quadridimensionale, le direzioni possibilidipendono da due angoli e la proiezione sulle dimensioni spaziali del conoluce e un cono pieno (sulla superficie e all’interno di quel cono vi sono tuttele direzioni possibili).
Figura 4.2: Coni luce in universi (rispettivamente) bidimensionale, tridimen-sionale e quadridimensionale. In un universo bidimensionale i possibili raggiinviati sono solamente due.

38 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
I coni luce sono il corrispettivo einsteiniano dei piani di simultaneita new-toniani (con Einstein, infatti, non essendoci piu un tempo assoluto non hasenso parlare di superfici di simultaneita): si immagina infatti facilmente (v.fig. 4.3) che i piani di Newton debbano essere pensati come il limite dei conidi Minkowski quando si ammetta che c→ +∞ (questo e il cosiddetto “limiteclassico1”).
Figura 4.3: Piani di simultaneita come limite dei coni luce.
4.2 c come velocita limite
La velocita della luce e invariante, ma abbiamo anche postulato che sia unavelocita limite, ovvero che non esistano sistemi o segnali fisici che possanooltrepassare tale velocita. Questa proprieta ci e utile per stabilire la relazionetra osservatori inerziali e coni luce.
La questione che ci poniamo e: come sono disposte le linee di universodegli osservatori inerziali rispetto ai coni luce? La risposta e che le lineedi universo di tali osservatori devono necessariamente cadere all’interno delcono, poiche essendo c velocita limite, un segnale che viaggiasse al di fuoridal cono avrebbe pendenza minore, e dunque una velocita maggiore di c.
Il carattere di velocita limite di c implica quindi che le linee di universo de-gli ossevatori inerziali siano contenute nel cono luce.2 Queste linee di universosono dette linee del genere tempo.
Da questa osservazione segue subito la divisione (relativamente a unevento prefissato O) dello spaziotempo M in tre regioni distinte (v. fig.4.7):
1Piu in generale, si parla di limite classico quando vc → 0; si parla di limite relativistico
invece se vc → 1.
2Se invece di considerare osservatori inerziali consideriamo osservatori qualsiasi, la pro-prieta si ripercuote sul vettore tangente, il quale deve essere contenuto nel cono luce inogni punto della linea (fig. 4.6).

4.2. C COME VELOCITA LIMITE 39
Figura 4.4: Il segnale deve rimanere all’interno del cono luce.
Figura 4.5: Possibili linee di universo di osservatori in moto nel casobidimensionale e nel caso tridimensionale.

40 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
Figura 4.6: Per osservatori qualsiasi, in ogni punto la tangente alla linea diuniverso deve rimanere all’interno del cono luce.
• futuro: e la falda del cono che contiene le linee del genere tempo, nelsenso dell’orientamente delle linee di universo degli osservatori;
• passato: e l’altra falda del cono;
• altrove (dall’inglese elsewhere): e tutta la parte rimanente dello spa-ziotempo.
Questa distinzione ha un significato fisico profondo: distingue gli eventiche possono essere influenzati da O (futuro) dagli eventi che possono averinfluenzato O (passato) e da quelli che non possono essere messi in relazionecausale con O (altrove). Vedremo infatti che, se possiamo dare un ordina-mento temporale per gli eventi del futuro e del passato (possiamo dire quindiunivocamente se E avviene prima o dopo O, nel senso che tutti gli osservatoriconcordano su cio), a eventi situati nell’altrove non riusciremo ad attribuireuna consequenzialita temporale: ci saranno osservatori che li diranno simul-tanei a O, altri che li vedranno accadere prima di O, altri ancora che livedranno accadere dopo O.
4.3 Coordinate di un evento
Stabilita la traduzione geometrica degli assiomi, cominciamo a vedere comeogni osservatore inerziale individua, con le sue coordinate relative, ogni evento;in linguaggio geometrico, costruiamo il sistema di coordinate globali su M

4.3. COORDINATE DI UN EVENTO 41
Figura 4.7: Tripartizione dello spaziotempo.
Figura 4.8: Non possiamo dire se E accada prima o dopo O.

42 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
associato ad un dato osservatore inerziale. Non ci sono piu regoli, e quindi ilmeccanismo e interamente basato sui segnali luminosi.
Dato un osservatore A, innanzitutto introduciamo le coordinate radar(T1, T2) dell’evento E, definite come segue:
T1: e il tempo di emissione (rispetto all’orologio dell’osservatore A) delsegnale luminoso emesso da A che giunge in E;
T2: e il tempo di ricezione del segnale riflesso (sempre nel giudizio di A).
Figura 4.9: Le coordinate radar di un evento.
In linguaggio geometrico, le coordinate radar non sono nient’altro che leintercette del cono luce di vertice E con la linea di universo dell’osservatoreA.
Si passa poi alle coordinate spaziotemporali (x, t) dell’evento mediante leseguenti definizioni:3
ct =1
2c(T2 + T1)
x =1
2c(T2 − T1)
(4.1)
Sostanzialmente stiamo definendo il tempo dell’evento E come media deidue tempi (tempo di emissione e tempo di ricezione), e come spazio lo spaziopercorso dal raggio luminoso nella semisomma dei tempi, ossia nella metadel periodo emissione-ricezione.
3Preferiremo sempre ricondurre le espressioni temporali a espressioni di lunghezza,moltiplicando per la costante c. Ad esempio, nelle equazioni (4.1) abbiamo scritto ct =12c(T2 + T1) in luogo della piu semplice t = 1
2 (T2 + T1). Questa notazione ci sara comodain seguito.

4.4. RELATIVITA DELLA SIMULTANEITA 43
Figura 4.10: t come media tra T1 e T2.
Occorre puntare l’attenzione sul fatto che tali definizioni sono le unichedefinizioni plausibili con le informazioni in nostro possesso (solo T1, T2 ec), ipotizzando tacitamente che lo spazio sia isotropo, ossia che la velocitadella luce non cambi tra andata e ritorno.4 Non abbiamo altra scelta cheprendere come tempo il tempo medio di riflessione: secondo il punto di vistadell’osservatore A, la luce, per giungere ad E, deve impiegare lo stesso tempoche impiega per tornare indietro.
4.4 Relativita della simultaneita
Diamo innanzitutto una definizione. Diremo che due eventi E1 ed E2 sonosimultanei nel giudizio di A se t(E1) = t(E2) ovvero (il che e la stessa cosa)se i due eventi hanno coordinate radar che differiscono per una costante (v.fig. 4.11).
In particolare, consideriamo due eventi che abbiano le stesse coordinateradar (T1, T2) nel giudizio dell’osservatore A. Ne consegue che, rispetto atale osservatore, E1 ed E2 sono necessariamente simultanei (e un caso parti-colare della definizione data sopra). Prendiamo ora un osservatore B in motorelativo rispetto ad A verso destra, nel nostro universo bidimensionale: perB gli eventi non sono piu simultanei, dal momento che E1 accade dopo E2.Analogamente considerando C in moto relativo rispetto ad A verso sinistra:per C l’evento E1 accadra prima dell’evento E2.
La situazione e simile a quella incontrata in geometria al momento dellascoperta delle geometrie non euclidee. Si puo sviluppare una geometria dello
4Questa ipotesi, dopotutto, e gia stata formulata, dal momento che e parte del postulatodi invarianza di c.

44 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
Figura 4.11: Eventi simultanei hanno coordinate radar che differiscono peruna costante (|T ′2 − T2| = |T ′1 − T1|).
spaziotempo tanto assumendo l’invarianza del concetto di simultaneita (conNewton) quanto assumendo l’invarianza della velocita della luce (con Ein-stein): in entrambi i casi si hanno sistemi senza incoerenze logiche interne.L’unica cosa che non si puo fare e sviluppare una geometria in cui valganoentrambi i tipi di invarianza: se accettiamo il postulato di Newton non cipuo essere una velocita invariante, se accettiamo l’esistenza di una velocitainvariante non ci puo essere una simultaneita assoluta. I due assiomi sonomutuamente esclusivi.
4.5 L’effetto Doppler longitudinale
Veniamo ora al problema centrale, al cuore della nostra analisi: il problemadel confronto tra diversi osservatori inerziali in moto relativo, passo indispen-sabile per la scoperta delle caratteristiche comuni ai vari osservatori e dellageometria dello spaziotempo.
Il nucleo della questione e il confronto tra gli orologi dei due osservatoriin moto. Questo confronto e fatto misurando il periodo di emissione e ilperiodo di ricezione (ognuno nel giudizio del corrispondente osservatore) in unprocesso di scambio di segnali luminosi periodici - essendo i segnali luminosil’unico mezzo che gli osservatori hanno a disposizione per confrontarsi.
Sia Te il periodo di emissione nel giudizio di A, e sia Tr il periodo diricezione valutato da B. Se B si allontana da A con velocita relativa5 v,
5Si presti attenzione a questo particolare: se trattassimo con l’effetto Doppler acustico(cioe il fenomeno per cui un suono cambia frequenza all’avvicinarsi/allontanarsi di sorgenteo osservatore) non potremmo considerare solo la velocita relativa tra sorgente e osservatore.

4.5. L’EFFETTO DOPPLER LONGITUDINALE 45
Figura 4.12: Per A gli eventi E1 e E2 sono simultanei; per B, E2 accadeprima di E1; per C, E1 accade prima di E2.

46 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
Figura 4.13: Scambio di segnali luminosi periodici tra osservatori inerzialiin moto relativo.
deve necessariamente essere che Tr > Te, poiche il secondo segnale ha dovutopercorrere una distanza maggiore per raggiungere B. In generale, poniamoTr = k(v) · Te, con k(v) > 0 funzione della velocita relativa v tra i dueosservatori. Avremo che k > 1 se i due osservatori si allontanano, k = 1 sei due osservatori sono in quiete relativa, 0 < k < 1 se i due osservatori siavvicinano. Il fattore k, termine centrale nel nostro studio (da cui, appunto,il nome di k-calcolo), viene detto fattore Doppler6 longitudinale, ovel’aggettivo “longitudinale” sta ad indicare che i segnali luminosi sono emessinella direzione del moto relativo dei due osservatori.7 Il problema centrale(semplice, ma bello e profondo) e la determinazione di k in funzione dellavelocita relativa v. Per risolvere il problema disponiamo solamente di dueinformazioni:
(i) B si muove di moto relativo con velocita v rispetto a A, e dunque valeche
x = v · tse (x, t) sono le coordinate di B nel giudizio di A;
Avendo, infatti, l’onda sonora bisogno di un mezzo (l’aria) per propagarsi, e necessarioconsiderare le velocita rispetto all’aria sia della sorgente, sia dell’osservatore. Nella nostraanalisi radar, invece, tutto questo non e necessario: l’onda elettromagnetica non ha bisognodi alcun mezzo per propagarsi.
6Christian Johann Doppler (1803-1853), fisico austriaco.7Chiaramente in un universo bidimensionale non poteva essere altrimenti: la dire-
zione e una sola, e dunque sara quella sia del moto relativo, sia dei segnali luminosi;ergo: l’effetto Doppler e sempre longitudinale. Viceversa, in universi tridimensionali equadridimensionali la specificazione “longitudinale” e importante.

4.5. L’EFFETTO DOPPLER LONGITUDINALE 47
(ii) il Principio di Relativita (che finora non abbiamo usato).
Queste informazioni sono sufficienti per risolvere il problema. Si consideriinfatti la figura 4.14: essa mostra il moto relativo di B rispetto ad A.
Figura 4.14: Moto di B relativo ad A. I tempi T1 e T2 sono misuratidall’orologio di A, il tempo τ e misurato dall’orologio di B.
Il nodo centrale e interpretare questa figura dal punto di vista dell’effettoDoppler, convenendo che A e B si scambino un primo segnale (una sorta di“azzeramento” degli orologi) in O. In questo modo convertiamo le coordinateradar in periodi.8 Esattamente, il passaggio interpretativo e chiaro nel pas-saggio dalla figura 4.14 alla figura 4.15, ovvero nel passaggio dal diagrammadel moto relativo di B nel giudizio di A al diagramma del doppio scambioDoppler tra A e B.
Cio che succede e che A e B sincronizzano gli orologi quando si incontrano;dopo un tempo T1 (nel giudizio di A), A lancia un segnale luminoso che arrivaal tempo τ (nel giudizio di B) all’osservatore B, il quale lo rispedisce subitoindietro. Il segnale ritorna al tempo T2 (nel giudizio di A) all’osservatore A.
Il diagramma 4.14 del moto relativo serve a localizzare B nel giudizio diA. Infatti (T1, T2) sono esattamente le coordinate radar di B (in particolare
8Si faccia sempre molta attenzione alla differenza tra coordinate e periodi. Nelle figurele lettere riferite alle coordinate radar si distingueranno da quelle dei periodi dal fatto che,mentre le prime sono poste in prossimita dei punti che denotano gli eventi, le seconde sonoposte lungo i segmenti individuati dai punti.

48 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
Figura 4.15: Doppio scambio Doppler. Gli istanti temporali della figura 4.14sono stati reinterpretati come periodi di tempo del doppio scambio Dopplertra A e B: T1 e il periodo di emissione da parte di A di un segnale periodicoricevuto da B con un periodo di ricezione τ ; T2 e il periodo di ricezione daparte di A di un segnale periodico emesso da B con un periodo τ
sono le coordinate dell’evento E) rispetto ad A. Quindi le equazionict =
1
2c(T2 + T1)
x =1
2c(T2 − T1)
ci forniscono la posizione e il tempo di B nel giudizio di A. Unendo questorisultato all’informazione (i), possiamo scrivere che
v
c=x
ct=T2 − T1
T2 + T1
.
Ora colleghiamo le coordinate radar con il fattore Doppler, osservandoche τ e, nel grafico dello scambio Doppler, esattamente il periodo di ricezioneda parte di B di un treno d’onde emesso da A con periodo T1 (pensando,come detto, che la prima emissione avvenga in O, e dunque coincida con laricezione). Quindi
τ = kAB(v) · T1,
con kAB(v) fattore Doppler longitudinale quando A emette e B riceve. Allostesso modo, posso interpretare T2 come periodo di ricezione da parte di A diun treno d’onde emesso da B con periodo τ (ancora una volta, come detto,pensiamo il primo segnale emesso in O, come “azzeramento” degli orologi).

4.5. L’EFFETTO DOPPLER LONGITUDINALE 49
Ne deduciamo cheT2 = kBA(v) · τ,
con kBA(v) fattore Doppler longitudinale quando B emette e A riceve.Ma il Principio di Relativita9 impone che ci sia completa simmetria tra
A e B, ovvero chekBA(v) = kAB(v) =: k(v).
Se non fosse cosı, infatti, avremmo modo di scegliere un osservatore privi-legiato (ad esempio, l’osservatore che ha il minor k quando emette i segnaliluminosi).10
Ne deduciamo che devono valere le seguenti tre equazioni:v
c=T2 − T1
T2 + T1
T1 = k−1 · τ
T2 = k · τ
.
Sostituendo le due ultime equazioni nella prima e semplificando τ , si ricavache
v
c=k − k−1
k + k−1=k2 − 1
k2 + 1,
ovvero vk2 + v = ck2 − c, da cui
k =
√c+ v
c− v. (4.2)
Dunque, se B si allontana da A, abbiamo che v > 0, ovvero k > 1. Se Ae B sono in quiete relativa, abbiamo che v = 0, ovvero k = 1. Se infine B siavvicina ad A, abbiamo che v < 0, k < 1.
9Si presti attenzione: e la prima volta che questo principio entra seriamente in gioconella nostra analisi.
10Per dirla con le parole di H. Bondi:
Si noti che il Principio di Relativita, insistendo sulla equivalenzadi tutti gli osservatori inerziali, rende chiaro il fatto che il rapporto [k]deve essere lo stesso per ogni coppia di osservatori inerziali, chiunquesia quello che trasmette. E per questa regola che il caso della lucedifferisce in maniera cosı netta dal caso del suono, [...] in cui [...]occorre tener conto anche delle velocita di chi trasmette e di chi riceverispetto all’aria.
(Hermann Bondi, La relativita e il senso comune,Zanichelli, pp.73-74)

50 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
4.6 La dilatazione dei tempi
Questo era il fulcro della faccenda: iniziamo a trarne le prime conclusioni.Senza aspettare l’introduzione delle trasformazioni di Lorentz possiamo met-tere subito in luce il carattere relativo delle durate11: ogni osservatore at-tribuisce a una coppia di eventi una durata, ma il valore di queste duratacambia in dipendenza dall’osservatore. Consideriamo due eventi che avven-gano nello stesso luogo per un osservatore, o analogamente: due eventi sullalina di universo di un osservatore inerziale (eventi cosiddetti “separati da unvettore del genere tempo”). Quindi i due eventi selezionano un osservatoreinerziale privilegiato, quello che li vede appunto accadere nello stesso luogo.
Si chiama tempo proprio τ la durata misurata dall’osservatore inerzialeche vede i due eventi avvenire nello stesso luogo. Si chiama tempo relativot la durata misurata da un qualunque altro osservatore inerziale.
Figura 4.16: B e l’unico osservatore inerziale che vede accadere E1 ed E2
nello stesso luogo. Pertanto, la durata del periodo tra E1 ed E2 misurata daB sara il tempo proprio τ .
Sotto le ipotesi newtoniane avremmo che t = τ . Qui, invece, le cose
cambiano: t > τ , in particolare t = γτ , con γ =1√
1− v2
c2
≥ 1 detto fattore
di Lorentz. Vediamo perche succede cio.
Con riferimento alla figura 4.17, conosciamo le coordinate radar di E1 (el’origine, l’“azzeramento degli orologi”). Dobbiamo procurarci le coordinate
11Al contrario di quanto accadeva nel caso newtoniano, in cui le durate erano invariantie, in particolare, lo era la simultaneita. Qui, avendo visto che la simultaneita non einvariante, e logico aspettarci che non lo siano nemmeno le durate.

4.6. LA DILATAZIONE DEI TEMPI 51
Figura 4.17: Il tempo proprio e sempre minore del tempo relativo.
di E2 rispetto ad A. Per quanto visto sull’effetto Doppler abbiamo che
T1 = k−1τ,
T2 = kτ.
Per definizione delle coordinate spaziotemporali, abbiamo che il tempo tdi accadimento dell’evento e uguale a
t =1
2(T1 + T2) =
1
2(k + k−1)τ.
Ma d’altro canto, ricordando che k =√
c+vc−v
, si ha che
1
2
(k + k−1
)=
1
2
k2 − 1
k=
1
2
c+vc−v− 1√c+vc−v
=1
2
2cc−v√
c+vc−v
=
=c√
(c+ v)(c− v)=
1√c2−v2
c2
=1√
1− v2
c2
= γ, (4.3)
in base a come avevamo precedentemente definito il fattore γ ≥ 1 di Lorentz.Dunque, il tempo relativo e sempre maggiore o uguale al tempo proprio; inparticolare τ = t se e solo se v = 0, ovvero se i due osservatori sono in quieterelativa.12
12En passant, si noti che, se τ > 0, anche t > 0, il che significa che almeno il segno deldivario temporale tra due eventi il cui vettore cade all’interno del cono luce e invariante.

52 LEZIONE 4. LO SPAZIOTEMPO DI MINKOWSKI
Figura 4.18: “Tachimetro” di Lorentz: in uno scambio ripetuto di segnaliluminosi, le coordinate temporali sono in progressione geometrica di ragionek.
Potrebbe sorgere spontanea un’obiezione: se τ e il minimo tempo misura-bile, e tutti i t sono maggiori di τ , ho un criterio per scegliere un osservatoreinerziale privilegiato rispetto ad altri; in altre parole, pare esserci un’incon-gruenza interna: se τ e minimo, sembra non valere piu il Principio di Relati-vita. Dove e l’inghippo? L’inghippo e nel fatto che il Principio di Relativitaci garantisce che a parita di condizioni, tutti gli osservatori (globalmente)inerziali sono equivalenti. Ma in questo caso le condizioni non sono affattole stesse! Abbiamo rotto la simmetria scegliendo l’osservatore per cui E1 edE2 accadono nello stesso luogo: per gli altri osservatori questo non succede,e dunque e logico che essi non siano equivalenti, dal momento che abbiamodeliberatamente affidato ad essi diverse condizioni iniziali. Non c’e quindicontraddizione: il Principio di Relativita continua a valere per osservatoriche si trovino nelle stesse condizioni.
4.7 Come misurare k e v con il metodo radar
Con il metodo degli scambi ripetuti di segnali radar, abbiamo anche un modoper misurare k (e conseguentemente v) servendoci delle coordinate radar.
Come mostra la figura 4.18, la successione delle coordinate radar in unoscambio ripetuto di segnali luminosi e una progressione di tipo geometricoe di ragione k (potremmo chiamare questo fatto “tachimetro” di Lorentz ).Tenendo presente la somiglianza con il teorema di Talete della geometria,possiamo anche affermare che: in un triangolo del genere tempo avente perbase un raggio luminoso, gli altri due lati sono in proporzione k.

Lezione 5
Trasformazioni di Lorentz
Abbiamo gia visto alla sezione 2.3.2 che le trasformazioni di Lorentz sonoun completamento idoneo delle trasformazioni di Fitzgerald; reintroduciamoadesso le stesse equazioni dal nostro nuovo punto di vista.
Il problema che ci poniamo e il problema del cambio di coordinate, ovverodi legare le coordinate spaziotemporali di uno stesso evento in due riferimentiinerziali diversi. Le equazioni che otteniamo nello spaziotempo di Minkowskisono dette, appunto, trasformazioni di Lorentz. Esse possono essere dedottecome semplice conseguenza dell’effetto Doppler. Consideriamo il diagrammariassuntivo di figura 5.1.
Facendo riferimento alla terza figura (Lorentz), notiamo che essa mette inevidenza le coordinate radar di uno stesso evento E rispetto a due osservatoriA e B. Per l’analogo del teorema di Talete, visto alla sezione precedente,abbiamo immediatamente che T ′
1 = kT1 e T2 = kT ′2, ovvero che
T ′1 = kT1
T ′2 =
1
kT2
. (5.1)
Bene: abbiamo gia finito. Abbiamo gia trovato le trasformazioni di Lo-rentz (speciali) per uno spaziotempo di Minkowski bidimensionale.1 Tuttoquello che possiamo fare, ora, e mettere queste equazioni in altre forme, chemostrino altri aspetti di queste trasformazioni. Ad esempio, dalle equazioni(5.1) si deducono immediatamente altre espressioni delle trasformazioni diLorentz in coordinate spaziotemporali.
1Se fossimo in uno spaziotempo quadridimensionale, le trasformazioni di Lorentz spe-ciali corrisponderebbero a quelle per cui gli osservatori hanno gli assi paralleli e sono inmoto relativo lungo un solo asse comune, dunque tale moto dipende dall’unico parametrov. Vedremo meglio queste trasformazioni alla sezione 5.3.2.
53

54 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Figura 5.1: Diagramma riassuntivo. A sinistra il diagramma della localiz-zazione radar di un evento E; al centro il diagramma del doppio scambioDoppler tra due osservatori inerziali A e B; a destra il diagramma delle tra-sformazioni di Lorentz, vale a dire di come un evento E viene localizzatoda due osservatori inerziali diversi A e B.
Ricordando che, per definizione,x = 1
2c(T2 − T1)
ct = 12c(T2 + T1)
,
ovvero sommando e sottraendo membro a membro,ct+ x = cT2
ct− x = cT1,
considerando che dalle (5.1) si ha checT ′
1 = k · cT1
cT ′2 = 1
k· cT2
,
sostituendo troviamo che ct′ − x′ = k(ct− x)ct′ + x′ = 1
k(ct+ x)
,
e sommando e sottraendo membro a membro, troviamo la nuova forma delleequazioni di Lorentz:
ct′ = 12(k + k−1)ct− 1
2(k − k−1)x
x′ = 12(k − k−1)ct+ 1
2(k + k−1)x
. (5.2)
Ricordando che 12(k + k−1) = γ(v), e definendo
β(v) :=v
c,

5.1. PROPRIETA DELLE TRASFORMAZIONI DI LORENTZ 55
abbiamo che
1
2(k − k−1) =
1
2(k + k−1)
k − 1k
k + 1k
= γ(v)k2 − 1
k2 + 1= γ(v)
v
c= γ(v)β(v),
dal momento che, per quanto visto con l’effetto Doppler, k2−1k2+1
= vc
= β(v).Abbiamo quindi la nuova e piu comune forma
ct′ = γ(ct− βx)x′ = γ(x− βct) , (5.3)
sottointendendo la dipendenza delle funzioni β e γ dalla velocita relativa v.Infine osserviamo che
γ2 − β2γ2 = γ2(1− β2) =1
1− v2
c2
(1− v2
c2
)= 1.
In virtu di questo fatto, esiste un parametro θ(v), detto parametro dirapidita2 tale che
γ(v) = cosh θ, (5.4)
β(v)γ(v) = sinh θ, (5.5)
ovvero
β(v) = tanh θ. (5.6)
La trasformazione di Lorentz, con il nuovo parametro rapidita θ, assumela forma di una rotazione iperbolica:(
ct′
x′
)=
(γ −γβ−γβ γ
)(ctx
)=
(cosh θ − sinh θ− sinh θ cosh θ
)(ctx
), (5.7)
ove la matrice
(cosh θ − sinh θ− sinh θ cosh θ
)e la matrice di rotazione iperbolica, il
cui determinante e giustamente γ2 − β2γ2 = 1.
5.1 Proprieta delle trasformazioni di Lorentz
Le trasformazioni di Lorentz godono di diverse proprieta importanti.
2Il termine rapidita e qui inteso nel significato di modulo della velocita.

56 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
5.1.1 Linearita
La prima proprieta significativa e la linearita: le trasformazioni di Lorentzsono lineari nelle coordinate. Denotando con L l’insieme delle trasformazionidi Lorentz, possiamo dunque scrivere che
L ⊆ GL(4,R)
(GL(2,R) nel nostro caso particolare; del caso generale parleremo meglio inseguito), dove con GL si intende il gruppo lineare.
Tale proprieta ha una conseguenza diretta sulla struttura geometrica dellospaziotempo: e infatti lecito attribuire a tale spazio la struttura di uno spazioaffine quadridimensionale.3 Quindi l’assioma dell’esistenza degli osservatoriinerziali globali, combinato con il Principio di Relativita, implica la strutturaaffine dello spaziotempo di Minkowski. Ecco dunque che e lecito rappresen-tare gli osservatori inerziali come rette (del genere tempo in M) e rappresen-tare osservatori inerziali in quiete relativa come rette parallele - nello spazioaffine e infatti ben definita la nozione di parallelismo.
5.1.2 Struttura algebrica di gruppo
Le trasformazioni di Lorentz formano un gruppo. Tale fatto e una con-seguenza diretta del principio di relativita: gli osservatori inerziali sono in-distinguibili, e quindi le trasformazioni che li collegano devono essere dellostesso tipo (piu formalmente: devono formare un gruppo). Nel caso specialein cui ci siamo messi (spaziotempo bidimensionale, osservatori con assi paral-leli in moto lungo un asse comune), si tratta di un gruppo ad un parametro(la velocita relativa tra i due osservatori). Ne segue che la legge gruppale hail significato fisico di legge di composizione delle velocita relativisitiche. Allasezione 2.3.3 abbiamo gia dimostrato che le trasformazioni di Lorentz for-mano un gruppo, e abbiamo anche dedotto la legge gruppale (se v e w eranole velocita relative, la velocita della composta era v+w
1+ vwc2
). Vediamo di ricavare
nuovamente questa legge di composizione a partire pero dalle trasformazionidi Lorentz nella forma Doppler.
Nello schema Doppler (con k come parametro del gruppo), infatti, loschema di composizione gruppale e ovvio:
kAC = kAB · kBC ,
3Infatti la linearita delle equazioni, implica che le loro soluzioni siano uno spazio affine(fatto basilare nell’algebra lineare). In sostanza, ci e possibile introdurre un’operazionecoerente e ben definita di somma tra vettori (infatti la somma di soluzioni e ancora unasoluzione) e farne conseguire un’operazione di prodotto di un vettore per uno scalare.

5.1. PROPRIETA DELLE TRASFORMAZIONI DI LORENTZ 57
dove il primo dei pedici indica l’osservatore che emette il raggio luminoso eil secondo indica l’osservatore dello riceve. Ricordandoci ora che v
c= k2−1
k2+1,
tornando alle velocita, abbiamo che
vAC
c=k2
AC − 1
k2AC + 1
=k2
ABk2BC − 1
k2ABk
2BC + 1
=
c+vAB
c−vAB
c+vBC
c−vBC− 1
c+vAB
c−vAB
c+vBC
c−vBC+ 1
=
=
c2+cvAB+cvBC+vABvBC−c2+cvAB+cvBC−vABvBC
(c−vAB)(c−vBC)
c2+cvAB+cvBC+vABvBC+c2−cvAB−cvBC+vABvBC
(c−vAB)(c−vBC)
=
=2c(vAB + vBC)
2(c2 + vABvBC)=vAB + vBC
c+ vABvBC
c
=1
c
vAB + vBC
1 + vABvBC
c2
,
e abbiamo dunque ritrovato la stessa legge gruppale gia ricavata in prece-denza:
vAC =vAB + vBC
1 + vABvBC
c2
.
Questa legge di composizione ha una proprieta molto interessante: com-patibilmente con l’assioma di invarianza della velocita della luce, se una delledue velocita e pari a ±c, allora necessariamente anche la nuova velocita deveessere pari a ±c. Il che equivale a dire: se un oggetto si muove con velocitapari a c, anche componendo tale velocita con il moto relativo di un osserva-tore, quello che si ha e che tale oggetto mantiene la sua velocita c, indipen-dentemente dalla velocita relativa dell’osservatore, cioe indipendentementedal giudizio dell’osservatore. Questo non e difficile da vedere: supponiamoinfatti che vBC = ±c, e che vAB sia una velocita generica (per fissare le idee,possiamo pensare che C sia un fotone che si muove con velocita c rispetto aun osservatore inerziale B, e che A sia un altro osservatore inerziale in motorispetto a B). Abbiamo che
vAC
c=
1
c
vAB ± c1± vABc
c2
=1
c
vAB ± cc±vAB
c
=vAB ± cc± vAB
= ±1,
da cui si deduce immediatamente che vAC = ±c (ovvero: l’oggetto C conti-nua a muoversi con velocita c anche rispetto al nuovo osservatore). Analoga-mente accadrebbe se vAB = ±c: la legge di trasformazione gruppale e infatticompletamente simmetrica nelle velocita, coerentemente con il Principio diRelativita. Questo significa che le trasformazioni hanno dunque due puntifissi: c e −c, il che mostra la compatibilita delle trasformazioni di Lorentzcon il secondo assioma.
Notiamo anche che componendo velocita minori di c si continua ad ot-tenere una velocita minore di c - compatibilmente con l’asserto che c e una

58 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
velocita limite. Il che non e a prima vista banale: se due osservatori A e Bviaggiano, rispetto a un terzo osservatore C, alla velocita di 0, 8c, entrambiin allontanamento da parti opposte (vAC = 0, 8c, vBC = −0, 8c, per fissare leidee), la loro velocita relativa non sara 1, 6c, ma sara solo
vAC =0, 8 + 0, 8
1 + 0,82c2
c2
≈ 0, 976c.
Naturalmente cio significa che sommare velocita elevate non e cosısemplice come sommare piccole velocita, ma questa e una conseguenzadiretta dell’aver definito le velocita in un modo che tiene conto delmetodo effettivamente usato per misurarle.
(Hermann Bondi, La relativita e il senso comune,Zanichelli, p.93)
La velocita c e dunque una velocita limite, una barriera al di la della qualenessun segnale o oggetto fisico (gli unici che possiamo considerare) puoandare.
Notiamo infine che, se vediamo le trasformazioni di Lorentz come rota-zioni iperboliche (punto di vista di Minkowski) la legge gruppale e ovvia, ecoincide con la somma degli angoli di rotazione. Possiamo dunque riassumerele varie forme delle trasformazioni di Lorentz nella seguente tabella:
schema Doppler schema di Lorentz schema di Minkowski
Trasf.
T ′
1 = kT1
T ′2 = 1
kT2
ct′ = γ(ct− βx)T ′
2 = γ(x− βct)
ct′=coshθ·ct−sinhθ·xx′=−sinhθ·ct+coshθ·x
Param. k v θLegge kAC = kAB · kBC vAC = 1
cvAB+vBC
1+vABvBC
c2θAC = θAB + θBC
Gruppo moltiplicativo additivo
Relaz.k =
√c+vc−v
k = eθ
v = ck2−1k2+1
v = c tanh θ
θ = log kθ = 1
2log 1+θ
1−θ
Di fatto, pero, le trasformazioni di Lorentz non sono le piu generali4
trasformazioni che mantengono invariate c e −c; ci si puo chiedere quindise non sia possibile caratterizzare meglio queste trasformazioni, o meglio,identificare piu compiutamente quale e il loro posto all’interno del gruppolineare.
4La piu generale trasformazione che svolge questa funzione e una proiettivita, cioe unafunzione non lineare, razionale.

5.1. PROPRIETA DELLE TRASFORMAZIONI DI LORENTZ 59
5.1.3 Invarianza dell’intervallo spaziotemporale
Questo e possibile mediante la terza proprieta delle trasformazioni di Lo-rentz, la proprieta piu importante, da cui le altre discendono, la proprietache le caratterizza completamente: l’esistenza di una forma quadraticainvariante per tali trasformazioni. In particolare scriveremo che
L = SO(3, 1) ⊂ GL(4,R)
(o, nel caso particolare di un universo bidimensionale, L = SO(1, 1) ⊂GL(2,R)), con questo intendendo che le trasformazioni di Lorentz sono esat-tamente il gruppo ortogonale (da cui la O) speciale (da cui la S) che, inquanto ortogonale, lascia invariata una forma quadratica di segnatura (3, 1),il che significa che gli addendi della forma quadratica sono quattro, tre deiquali hanno segno positivo e uno dei quali ha segno negativo5. I gruppidi trasformazioni che lasciano invariata una forma sono solitamente detticlassici.
L’esistenza di questa forma invariante e del tutto ovvia nella rappresen-tazione Doppler6; infatti se T ′
1 = kT1
T ′2 =
1
kT2
,
moltiplicando membro a membro si ha subito che
T ′1T
′2 = T1T2,
ovvero che la forma quadratica T1T2 e invariante, indipendente quindi dal-l’osservatore inerziale considerato.
Con riferimento alla figura 5.2, il prodotto T1T2 delle coordinate radare sostanzialmente un “numero” associato alla coppia di eventi OE, cioe al
vettore7 −−→OE dello spaziotempo M , un numero invariante al cambiare dell’os-servatore inerziale. Chiamiamo questa forma quadratica T1T2, prodotto dellecoordinate radar, intervallo spaziotemporale tra O ed E.
5Ma sarebbe completamente equivalente dire che tre addendi hanno segno negativo euno positivo: se una forma e invariante, e invariante anche la sua opposta. Si tratta solodi mettersi d’accordo: noi assumeremo che i tre termini spaziali abbiano segno positivo,mentre il termine temporale avra segno negativo.
6Si noti come, ancora una volta, le cose siano davvero semplicissime quando ci serviamodelle coordinate radar e della rappresentazione Doppler. La fatica e sostanzialmente tra-sferire quanto trovato per le coordinate radar alle altre coordinate e alle altre rappresenta-zioni. Questo dovrebbe far comprendere l’estrema utilita dell’introduzione delle coordinateradar.
7Possiamo parlare di vettori e possiamo disegnare vettori dal momento che lospaziotempo M ha una struttura affine.

60 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Figura 5.2: La struttura affine dello spazio di Minkowski ci consente didisegnare vettori nel piano M2.
L’implicazione fondamentale di questa scoperta sulla geometria dello spa-ziotempo e che M risulta essere uno spazio semieuclideo, cioe:
• non solo e munito di una struttura di causalita, a seguito dell’invarianzadella velocita della luce;
• non solo e uno spazio affine, a seguito della linearita delle trasforma-zioni;
• ma soprattutto e uno spazio munito di una struttura metrica, nel sensodi un prodotto scalare sui vettori, detto semieuclideo poiche e rap-presentato da una forma non definita positiva, l’intervallo spaziotem-porale. La forma esplicita di questo prodotto scalare sara chiara trapoco.
Il fatto che l’intervallo spaziotemporale non sia definito positivo e evi-dente: possono benissimo esserci situazioni in cui una coordinata radar enegativa, e dunque il prodotto T1T2 ha segno negativo. Pur non essendodefinito positivo, questo prodotto scalare e essenziale nella geometria dellospaziotempo, poiche ha messo in luce l’ultima struttura che ci mancava dascoprire, la struttura metrica, appunto.

5.2. CONFRONTO CON IL CASO EUCLIDEO 61
5.2 Confronto con il caso euclideo
Per confrontare la geometria dello spaziotempo M con quella del piano eucli-deo e comodo passare a coordinate spaziotemporali. Invertendo le definizioni
x =1
2c(T2 − T1)
ct =1
2c(T2 + T1)
ricaviamo che cT1 = ct− xcT2 = ct+ x
,
e dunque possiamo scrivere
c2T1T2 = (ct− x)(ct+ x) = (ct′ − x′)(ct′ + x′) = c2T ′1T
′2,
ove l’uguale in mezzo e dovuto all’invarianza della forma T1T2. In coordi-nate spaziotemporali possiamo dire quindi che la forma invariante, ovverol’intervallo spaziotemporale, e8
S2(O,E) := x2 − c2t2 = x′2 − c2t′2,
e scegliamo di indicare la quantita invariante come norma al quadrato, pro-prio come se discendesse da un prodotto scalare, anche se abbiamo ben pre-sente che questa forma non e affatto definita positiva, e quindi anche lanorma al quadrato9 in generale non sara una quantita positiva. La notazioneconvenzionale e dunque
‖−−→OE‖2 := x2 − c2t2. (5.8)
A questa norma e naturalmente legato il prodotto scalare associato allametrica dello spaziotempo M : se ~u e ~v sono vettori dello spaziotempo,
~u · ~v = uxvx + uyvy + uzvz − c2utvt. (5.9)
Abbiamo detto che dalla struttua metrica discendono le proprieta giaviste.
Ma, ad esempio, in che senso la struttura metrica congloba la struttura dicausalita? In questo senso: possiamo dividere i vettori di M in tre categorie:
8Ovviamente potevamo benissimo scegliere la forma opposta. Questa scelta e coerentecon la decisione iniziale di attribuire segnatura positiva ai termini spaziali e segnaturanegativa ai termini temporali.
9Che, d’ora innanzi, in generale chiameremo semplicemente norma.

62 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Figura 5.3: A sinistra il caso del piano euclideo E2: la metrica e S2 =x2 + y2, e i luoghi dei punti t.c. S2 = cost sono circonferenze. A destra il casoiperbolico: nello spaziotempo bidimensionale di Minkowski M2 la metrica eS2 = x2 − c2t2 e i luoghi in cui S2 e costante sono le iperboli di calibrazioni -caso particolare e l’iperbole degenere del cono luce, in cui S2 = 0, formata datutti i vettori del genere luce.
• i vettori aventi ‖−−→OE‖2 < 0, quelli in cui quindi prevale la parte tempo-
rale, che vengono detti vettori del genere tempo.
• i vettori aventi ‖−−→OE‖2 > 0, quelli in cui quindi prevale la parte spaziale,
che vengono detti vettori del genere spazio.
• i vettori aventi ‖−−→OE‖2 = 0, detti vettori del genere luce.
Il cono luce e esattamente il cono formato dai vettori del genere tempo.Questo cono e immaginario nel piano euclideo, poiche la forma quadraticadel piano euclideo e definita positiva (e quindi non c’e modo di avere una tri-partizione dei vettori in base al segno del quadrato della norma). L’intervallospaziotemporale e chiaramente l’analogo della distanza nel piano euclideo: leiperboli di calibrazione (ovvero il luogo dei punti in cui S2 = cost) sonol’analogo minkowskiano delle circonferenze (v. fig. 5.3).
A meno di traslazioni, il gruppo delle trasformazioni che lasciano invariatala forma S2 del piano euclideo E2 e il gruppo delle rotazioni SO(2) (con questascrittura intendiamo che i due termini hanno uguale segnatura, ad esempionel caso delle rotazioni che conservano S2 = x2 + y2 = 1), il cui genericorappresentante e la matrice antisimmetrica(
cos θ sin θ− sin θ cos θ
),

5.2. CONFRONTO CON IL CASO EUCLIDEO 63
con θ ∈ [0, 2π] angolo di rotazione. Analogamente, il gruppo delle trasforma-zioni che lasciano invariata la forma S2 di M2 (lo spaziotempo di Minkowski adue dimensioni) e il gruppo delle rotazioni iperboliche SO(1, 1), il cui genericorappresentante e la matrice simmetrica(
cosh θ − sinh θ− sinh θ cosh θ
),
con θ ∈ R parametro di rapidita.10
Raccogliendo tutte le informazioni sulla struttura geometrica dello spa-ziotempo M di Minkowski, arriviamo alle seguenti definizioni.
Definizione 5.1 (Minkowski). Lo spaziotempo di Minkowski e unospazio affine quadridimensionale munito di una forma quadratica di tipolorentziano (ovvero di segnatura 3,1: + + + −).
Definizione 5.2 (Poincare). Il gruppo di Poincare11 e il gruppo delleisometrie dello spaziotempo di Minkowski. Il gruppo di Lorentz e il sotto-gruppo del gruppo di Poincare che tiene fissa un’origine prestabilita (ovvero:evita le traslazioni).
Definizione 5.3 (Osservatori inerziali). Un osservatore inerziale e unsistema di coordinate “cartesiane” (con i versori ortonormati nel senso della
10Per questo B. Finzi, in [9], riferendosi allo spaziotempo della Relativita Ristretta,scrive che
Spazio e tempo non sono separatamente assoluti, ma lo e l’insiemedei due, lo spazio-tempo, precisamente come nel piano xy non sonoseparatamente assolute ne la differenza d’ascissa ∆x ne la differenza diordinata ∆y di due punti [che cambiano al ruotare del sistema], bensıla distanza ∆s tra i due punti, perche essa sola non cambia mutandogli assi x, y di riferimento.
(Bruno Finzi, Teoria dei campi,Cesare Tamburini ed., p.245)
Usando invece le parole di Hermann Minkowski,
Lo spazio in se e il tempo in se sono destinati a divenire mere ombre,e solo una sorta di unione dei due preservera una realta indipendente.
(Hermann Minkowski, 1908)
11Jules Henri Poincare (1854-1912), massimo matematico francese a cavallo tra il XIXe il XX secolo.

64 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
metrica) su M , definito da una tetrade di vettori base (~I, ~J, ~K, ~L), i primitre spaziali, l’ultimo temporale, tali che
‖~I‖2 = ‖ ~J‖2 = ‖ ~K‖2 = +1 e ‖~L‖2 = −1
~I · ~J = ~I · ~K = ~I · ~L = ~J · ~K = ~J · ~L = ~K · ~L = 0.
5.3 Cenno al gruppo di Poincare
Rovesciamo il punto di vista fino ad ora adottato, e partiamo dalla strutturametrica di M , analizzando il gruppo delle sue isometrie, per riottenere inquesto modo le trasformazioni di Lorentz come caso particolare. In altreparole, vogliamo mostrare che la proprieta di lasciare invariata la forma S2 =x2 + y2 + z − c2t2 caratterizza completamente le trasformazioni di Lorentz(non vi sono altre condizioni da imporre), ovvero che
L = SO(3, 1),
e non L ( SO(3, 1).
5.3.1 Linearita delle isometrie
Il primo punto e un fatto di algebra. Prendiamo una generica trasformazionedi coordinate su uno spazio affine
xj′ = F j′(xj) per i = 1, . . . , n, (5.10)
e poniamo un’ipotesi di regolarita della trasformazione (nella fattispecie, F ∈C2). Mostriamo che la richiesta di invarianza della forma quadratica12
ds2 = gjkdxjdxk (5.11)
con g = diag(1, 1, 1,−1) =
1 0 0 00 1 0 00 0 1 00 0 0 −1
, implica che la trasformazione
(5.10) sia lineare.13 Cio equivale ad affermare che tutti i gruppi di isometria
12Ci serviremo in questa sezione della notazione tensoriale, sottointendendo quindi isimboli di sommatoria per indici in posizione covariante e controvariante. Introdurremomeglio piu avanti il concetto di tensore.
13Si noti che chiedere l’invarianza della forma S2 (o ds2 nella notazione della geometriadifferenziale) equivale a chiedere l’invarianza della metrica, e dunque che la trasformazionesia un’isometria.

5.3. CENNO AL GRUPPO DI POINCARE 65
di spazi semieuclidei (con la matrice g della metrica simmetrica e invertibile,ma in generale diversa dall’identita) sono gruppi lineari. Dimostriamo questaaffermazione.14
Per derivazione di funzione composta abbiamo che
ds′2 = gj′k′dxj′dxk′
=
(gj′k′
∂F j′
∂xj
∂F k′
∂xk
)dxjdxk
= gjkdxjdxk = ds2
dove l’ultima eguaglianza vale poiche stiamo imponendo che la trasforma-zione sia un’isometria, ovvero che conservi la metrica, e dunque ds′2 = ds2.Ne deduciamo la legge di trasformazione della metrica:
gjk = gj′k′∂F j′
∂xj
∂F k′
∂xk.
Essendo la matrice g una matrice costante, per derivazione di ambo imembri rispetto al generico xl (ovvero applicando ∂
∂xl ) otteniamo
0 = gj′k′∂2F j′
∂xj∂xl
∂F k′
∂xk+ gj′k′
∂F j′
∂xj
∂2F k′
∂xk∂xl, (5.12)
che e un vincolo sulle derivate seconde della trasformazione (stiamo suppo-nendo che la trasformazione sia C2).
Vediamo perche questo vincolo impone che le derivate seconde siano tutteidenticamente nulle (ovvero che la trasformazione sia lineare). Gli indici j, k, ldell’equazione (5.12) sono tutti indici muti (designano elementi generici):possiamo quindi permutarli ciclicamente. Se applichiamo la permutazione
j → kk → ll→ j
otteniamo
0 = gj′k′∂2F j′
∂xk∂xj
∂F k′
∂xl+ gj′k′
∂F j′
∂xk
∂2F k′
∂xl∂xj. (5.13)
Ora applicando nuovamente
j → kk → ll→ j
otteniamo
0 = gj′k′∂2F j′
∂xl∂xk
∂F k′
∂xj+ gj′k′
∂F j′
∂xl
∂2F k′
∂xj∂xk. (5.14)
14Si notera in questa dimostrazione una somiglianza non accidentale con la dimostrazioneusuale per il Lemma di Ricci della geometria differenziale.

66 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Le equazioni (5.12), (5.13) e (5.14), combinate opportunamente ci for-niscono la soluzione. Notando che gli indici j′ e k′ sono anch’essi muti,poiche sottointendono il simbolo di sommatoria, possiamo scambiare questidue indici nella prima sommatoria dell’equazione (5.14), e otteniamo cosı ilseguente sistema:
0 = gj′k′∂2F j′
∂xj∂xl∂F k′
∂xk + gj′k′∂F j′
∂xj∂2F k′
∂xk∂xl
0 = gj′k′∂2F j′
∂xk∂xj∂F k′
∂xl + gj′k′∂F j′
∂xk∂2F k′
∂xl∂xj
0 = gk′j′∂2F k′
∂xl∂xk∂F j′
∂xj + gj′k′∂F j′
∂xl∂2F k′
∂xj∂xk
(5.15)
Per la simmetria della matrice gj′k′ e per l’eguaglianza delle derivateseconde miste (F infatti e C2), sommando membro a membro la primaequazione con la seconda, e quindi sottraendo la terza, otteniamo che
2gj′k′∂F j′
∂xk
∂2F k′
∂xj∂xl= 0.
Essendo la matrice jacobiana Jj′k = ∂F j′
∂xk invertibile, ed essendo analoga-mente la metrica g invertibile, necessariamente
∂2F k′
∂xj∂xl= 0, (5.16)
e per la generalita degli indici abbiamo che tutte le trasformazioni hannoderivate seconde nulle, dunque sono lineari.
5.3.2 Le trasformazioni speciali
Per analizzare la struttura del gruppo SO(3, 1), cioe il gruppo lineare delletrasformazioni che lasciano invariata S2 = x2 + y2 + z2 − c2t2, partiamodall’osservazione che questo gruppo contiene un certo sottogruppo, dettogruppo dei “boosts”.15 Consideriamo le trasformazioni della forma
ct′ = Act+Bxx′ = Cct+Dxy′ = yz′ = z
(5.17)
a patto che la metrica sia conservata, ovvero che
x′2 + y′2 + z′2 − c2t′2 = x2 + y2 + z2 − c2t2,15Potremmo tradurre “boost” come “calcione”, “spinta”; il termine designa il passaggio
di un’osservatore A da uno stato di moto relativo rispetto a B a uno stato di quiete relativa,mediante un “calcione” che lo mette in movimento alla stessa velocita di B.

5.3. CENNO AL GRUPPO DI POINCARE 67
e dunque che x′2 − c2t′2 = x2 − c2t2, ossia, andando a inserire le espressionidate da (5.17):
C2c2t2 +D2x2 + 2CDctx− A2c2t2 −B2x2 − 2ABctx = x2 − c2t2,
ed eguagliando i coefficienti dei termini in x2, ctx e c2t2 abbiamo che deveessere verificato il sistema
D2 −B2 = 1CD − AB = 0C2 − A2 = −1
(5.18)
Le differenze di quadrati uguali identicamente a 1 ci suggeriscono di ri-solvere queste equazioni mediante le sostituzioni A = cosh θ, B = − sinh θ,C = − sinhϕ, D = coshϕ. La prima e la terza equazione del sistema (5.18)sono automaticamente verificate. La seconda equazione ci dice invece che
sinhϕ cosh θ − coshϕ sinh θ = sinh(ϕ− θ) = 0,
da cui si ricava immediatamente che θ = ϕ. Se ne conclude che le trasforma-zioni
ct′ = cosh θ · ct− sinh θ · xx′ = − sinh θ · ct+ cosh θ · xy′ = yz′ = z
(5.19)
formano un gruppo ad un parametro di rotazioni iperboliche, e che talegruppo e sicuramente un sottogruppo di SO(3, 1), poiche mantiene invariata(per costruzione!) la metrica S2. Notiamo che il gruppo dei boosts e ilgruppo di trasformazioni quando supponiamo che due osservatori inerzialiabbiano gli assi paralleli e che il movimento avvenga solo lungo l’asse delle x,in comune tra i due osservatori. In sostanza, e quello che abbiamo chiamatoil gruppo delle trasformazioni di Lorentz speciali.
Per legare ora θ al moto relativo, si osserva che l’origine x′ = 0 del secondoriferimento deve viaggiare con legge x = vt rispetto al primo riferimento.Sostituendo nella seconda equazione di (5.19) questa informazione, otteniamoche
0 = − sinh θ · ct+ cosh θ · vt,da cui si ricava nuovamente la vecchia relazione sulla tangente iperbolica:
tanh θ =v
c.
Dato inoltre che
cosh2 θ =cosh2 θ
1=
cosh2 θ
cosh2 θ − sinh2 θ=
1
1− tanh2 θ, (5.20)

68 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
ricaviamo che
cosh θ =
√1
1− tanh2 θ=
√1
1− v2
c2
= γ(v)
e che
sinh θ = tanh θ · cosh θ =v
cγ(v) = β(v)γ(v).
Si ottengono in questo modo le trasformazioni di Lorentz speciali, che siinterpretano, lo ripetiamo, come cambiamenti di coordinate tra osservatoriinerziali con assi paralleli in moto relativo lungo il comune asse x.
5.3.3 Il gruppo di Lorentz
Per ricostruire la piu generale trasformazione tra osservatori inerziali R e R′,con assi non paralleli e in moto relativo con velocita ~v (supponiamo che ~vsia la velocita di R′ nel giudizio di R) di direzione arbitraria si procede nelmodo seguente.
Figura 5.4: Come ottenere la piu generale trasformazione di Lorentz.
(i) Eseguiamo una rotazione spaziale di R, per riorientare il suo asse xnella direzione del moto relativo (la direzione di ~v). Non si tratta dellapiu generale rotazione nello spazio: si tratta di un gruppo di rotazionia due parametri.
(ii) Eseguiamo un boost, per conferire all’osservatore R la velocita ~v, edunque portarlo in uno stato di quiete relativa rispetto a R′. Si trattadi un gruppo ad un solo parametro, la velocita del boost.

5.3. CENNO AL GRUPPO DI POINCARE 69
(iii) Riorientiamo gli assi di R nello spazio, per renderli paralleli a quellidi R. Si tratta di un gruppo a tre parametri (i cosiddetti angoli diEulero).
Questa analisi ci permette di concludere che il gruppo di Lorentz e ungruppo a sei parametri: i parametri relativi a (i) e (ii) definiscono la velocita ~vdel moto relativo - infatti, sostanzialmente (i) ne da la direzione (2 parametri)e (ii) ne da il modulo (1 parametro) - mentre i parametri relativi a (iii)servono a riorientare parallelamente i sistemi di riferimento. In generale,possiamo quindi concludere che la piu generale trasformazione di Lorentzortocrona (ossia che preserva l’orientazione degli assi dei tempi: se ∆t >0, anche ∆t′ > 0, e viceversa) e propria (cioe che preserva l’orientazionespaziale) si decompone come due rotazioni inframmezzate da un boost. Piuprecisamente:
L = R′ Lv R,
dove R e una rotazione spaziale a due parametri, Lv e una trasformazione diLorentz speciale (un boost) di velocita v e R′ e una rotazione spaziale a treparametri.
Questa legge di composizione e piuttosto complicata e porta a fenomeniinteressanti; la legge delle velocita longitudinali ne e solo un caso particolare.
Possiamo ottenere trasformazioni ancora piu generali, non ortocrone onon proprie, mediante le operazioni di parita e di time-reversal16, comeillustrato nella figura 5.5.
5.3.4 Il gruppo di Poincare
Al gruppo di Poincare si arriva poi con un’ulteriore generalizzazione. Ilgruppo di Poincare (gruppo delle isometrie sullo spazio di Minkowski) eil prodotto semidiretto17 del gruppo di Lorentz e del gruppo delle traslazioni
16Operazioni che sono in sostanza moltiplicazioni rispettivamente per le matricidiag(+1,−1,−1,−1) e diag(−1,+1,+1,+1), se pensiamo al tempo come primo elementodella quaterna (ct, x, y, z). Cioe: la parita conserva il verso del procedere temporale,mentre inverte tutti quelli spaziali, il time-reversal mantiene l’orientamento spaziale, macambia l’orientazione temporale.
17Ricordiamo che preso un gruppo G, un suo sottogruppo normale N E G e un altrosottogruppo H, diciamo che G e prodotto semidiretto di N e H se
G = NH = nh : n ∈ N,h ∈ H
e N ∩ H = id, intendendo con id l’elemento neutro dell’operazione di G. In sostanza,un gruppo G e prodotto semidiretto di N e H se ogni elemento di G puo essere scrittounivocamente come prodotto di due elementi di N e H. Dicendo che il gruppo di Poin-care e il prodotto semidiretto del gruppo di Lorentz e del gruppo delle traslazioni, in-

70 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Figura 5.5: Diagramma delle trasformazioni di Lorentz all’interno delGruppo Lineare GL(4,R). La freccia verso l’alto ↑ indica l’ortocronia delletrasformazioni, il + indica la proprieta delle stesse. Viceversa, la freccia versoil basso ↓ e il − indicano rispettivamente l’inversione dello scorrere del tempoe l’inversione delle coordinate spaziali. L’identita e contenuta nel sottogruppodi Lorentz ortocrono e proprio (L↑+). Tramite parita otteniamo il gruppo diLorentz ortocrono, ma con coordinate spaziali invertite (L↑−); tramite opera-zione di time-reversal otteniamo il gruppo di Lorentz proprio, ma con oppostaorientazione temporale (L↓+). Combinando parita e time reversal, otteniamoil gruppo di Lorentz avente tutti gli orientamenti spaziotemporali cambiati(L↓−).

5.4. AZIONE DEL GRUPPO DI LORENTZ SU UNA TETRADE 71
spaziotemporali. Sostanzialmente, stiamo aggiungendo una parte affine alletrasformazioni di Lorentz (omogenee). Pertanto, il gruppo di Poincare e ungruppo a 6+4=10 parametri (6 provengono dalle trasformazioni di Lorentz,4 sono i parametri di traslazione spaziotemporale).
Ricapitolando:Lv ⊂ L ⊂ P ⊂ TGL(4,R),
ovvero il gruppo di Lorentz speciale (dei boosts) e un sottogruppo del gruppodi Lorentz, che e un sottogruppo del gruppo di Poincare, che e un sottogruppodel gruppo delle trasformazioni lineari non omogenee (che abbiamo indicatocon TGL(4,R)).18
5.4 Azione del gruppo di Lorentz su una te-
trade
Lo spaziotempo di Minkowski e uno spaziotempo affine munito della formaquadratica
S2(OE) = x2 + y2 + z2 − c2t2.
A tale forma quadratica e associato in modo naturale il prodotto scalare
~u · ~v = uxvx + uyvy + uzvz − c2utvt
tra due vettori ~u,~v di M .Gli osservatori inerziali sono rappresentati da tetradi (~I, ~J, ~K, ~L) in questo
spazio. Fissato un evento E e un origine O, le coordinate spaziotemporali
sono le componenti (x, y, z, t) del vettore posizione−−→OE su questa tetrade:
−−→OE = x~I + y ~J + z ~K + ct~L,
dove, come visto, ‖~I‖2 = ‖ ~J‖2 = ‖ ~K‖2 = 1, ‖~L‖2 = −1, ~I · ~J = ~I · ~K =~I · ~L = ~J · ~K = ~J · ~L = ~K · ~L = 0. Conoscendo l’azione del gruppo di Lorentzsulle coordinate possiamo risalire alla sua azione sulle tetradi dei vettori dibase. Tipicamente, si parla di passaggio da un punto di vista “passivo” a unpunto di vista “attivo”. Ponendo
−−→OE = x~I + y ~J + z ~K + ct~L = x′~I ′ + y′ ~J ′ + z′ ~K ′ + ct′ ~L′ (5.21)
tendiamo quindi dire che ogni elemento del gruppo di Poincare e la composizione di unatrasformazione di Lorentz e di una traslazione.
18Si noti che la scrittura P ⊂ GL(4,R) sarebbe errata, poiche nel gruppo lineareGL(4,R) non sono previste traslazioni, solo trasformazioni lineari omogenee. Il gruppodi Poincare, invece, ha una parte affine.

72 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
e applicando una trasformazione di Lorentz (per semplicita utilizziamo unatrasformazione speciale, al massimo dovremo comporre con rotazioni)
ct′ = γ(ct− βx)x′ = γ(x− βct)y′ = yz′ = z
,
per sostituzione nell’equazione (5.21) otteniamo
x~I + y ~J + z ~K + ct~L = γ(x− βct)~I ′ + y ~J ′ + z ~K ′ + γ(ct− βx)~L′
ed eguagliando i termini in x, y, z e ct troviamo che~L = γ(~L′ − β~I ′)~I = γ(~I ′ − β ~L′)~J = ~J ′
~K = ~K ′
o anche, invertendo ~L′ = γ(~L+ β~I)~I ′ = γ(~I + β~L)~J ′ = ~J~K ′ = ~K
. (5.22)
Da queste trasformazioni si vede che (nel caso di β > 0, ovvero nel caso
in cui R′ si muova nel senso positivo degli assi di R) il vettore ~L′ si ottiene:
(i) anzitutto sommando a ~L il vettore β~I e dunque stringendolo verso ilcono luce19 (figura 5.6, sinistra);
(ii) poi dilatando il vettore precedente del fattore γ > 1 per riportarlo a
avere norma -1 (cosicche, dunque, l’estremo di ~L′ continui ad apparte-nere all’iperbole di calibrazione S2 = 1) (figura 5.6, destra);
Cosı costruito, ~L′ ha ancora norma pari a −1; infatti
‖~L′‖2 = ~L′ · ~L′ = γ(~L+ β~I) · γ(~L+ β~I) = γ2~L · ~L+ 2γ2β~L · ~I + γ2β2~I · ~I =
= γ2 · (−1) + 2γ2β · 0 + γ2β2 · 1 = γ2(β2 − 1) =1
1− β2(β2 − 1) = −1.
Per avere ~I si ripete la medesima costruzione, come illustrato nella figura5.7.
19Senza mai raggiungere il cono luce, pero; questo infatti avverrebbe solo per β = 1.

5.4. AZIONE DEL GRUPPO DI LORENTZ SU UNA TETRADE 73
Figura 5.6: Costruzione di ~L′ (primo e secondo passo).
Figura 5.7: Costruzione di ~I ′ (primo e secondo passo).

74 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Da questa costruzione si vede che una rotazione iperbolica corrisponde astringere i vettori di una base ortonormata attorno alla direzione del conoluce, in maniera simmetrica, nel piano bidimensionale (figura 5.8)
Figura 5.8: Confronto tra una rotazione nel piano euclideo E2 e una rotazioneiperbolica nel piano M2.
5.4.1 Autovalori nelle trasformazioni di Lorentz
Possiamo anche cercare gli autovalori e gli autovettori delle di Lorentz spe-ciali. In forma matriciale, abbiamo che
ct′
x′
y′
z′
=
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
ctxyzy
. (5.23)
Detta A =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
la matrice di sistema, dobbiamo cercare
quei vettori ~v =
ctxyz
t.c. A~v = λ~v, ovvero che (A − λI4)~v = 0 (con I4
matrice identita 4 × 4), e dunque i ~v appartenenti al nucleo di A − λI4.

5.4. AZIONE DEL GRUPPO DI LORENTZ SU UNA TETRADE 75
Innanzitutto A− λI4 ha nucleo non banale se e solo se il suo determinante enullo, quindi imponiamo questa nullita.
det(A−λI4) = det
γ − λ −βγ 0 0−βγ γ − λ 0 0
0 0 1− λ 00 0 0 1− λ
= (1−λ)2[(γ − λ)2 − β2γ2
]=
= (1− λ)2(λ2 − 2γλ+ γ2(1− β2),
e questo si annulla per gli autovalori λ1 = λ2 = 1 (doppio), λ3 = γ(1− β) =1k, λ4 = γ(1 + β) = k.20 Gli autovettori interessanti (quelli associati agli
autovalori 1k
e k) sono poi il nucleo delle matrici A − 1kI4 = A − γ(1 − β)I4
e A − kI4 = A − γ(1 + β)I4. Per quanto riguarda la prima matrice, la sua
20Infatti il determinante del secondo fattore e 4γ2 − 4γ2 + 4β2γ2 = 4β2γ2 > 0, e lesoluzioni sono appunto λ3,4 = 2γ±2βγ
2 = γ(1± β). Inoltre
γ(1 + β) =1 + v
c√1− v2
c2
=c+ v√c2 − v2
=
√c2 + v2 + 2vc
c2 − v2=
=
√c2 − v2 + 2v2 + 2cv
c2 − v2=
√1 +
2v(v + c)(c+ v)(c− v)
=
√1 +
2vc− v
=√c+ v
c− v= k,
e analogamente
γ(1− β) =1− v
c√1− v2
c2
=c− v√c2 − v2
=
√c2 + v2 − 2vc
c2 − v2=
=
√c2 − v2 + 2v2 − 2cv
c2 − v2=
√1− 2v(v − c)
(c+ v)(c− v)=
√1− 2v
c+ v=√c− vc+ v
=1k.

76 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
azione sul generico elemento ~v =
ctxyz
e
(A− 1
kI4
)~v = (A− γ(1− β)I4)~v =
βγ −βγ 0 0−βγ βγ 0 0
0 0 1− λ 00 0 0 1− λ
ctxyz
=
=
βγct− βγx−βγct+ βγx
yz
=
m−myz
al variare di m.
Il nucleo quindi e formato da tutti quei vettori per cui y = 0, z = 0 ex = t = m generico. Chiaramente ha dimensione 1, e il suo generico elemento
e della forma
m−m00
.
Notiamo che, per proiezione sul piano x−ct, l’autovettore coincide con lospazio vettoriale della bisettrice II-IV quadrante, ed e dunque diretto comeil cono luce.21 Del tutto analogamente, per l’altro autovettore non banale:
l’azione della matrice A− kI4 sul generico vettore ~v =
ctxyz
e
(A− kI4)~v = (A− γ(1 + β)I4)~v =
−βγ −βγ 0 0−βγ −βγ 0 0
0 0 1− λ 00 0 0 1− λ
ctxyz
=
=
−βγct− βγx−βγct− βγx
yz
=
mmyz
21Infatti notiamo che le rette con pendenza maggiore di 1, nel piano (x, ct) sono del ge-
nere tempo (corrispondono a velocita minori di c: la variabile temporale e sulle “ascisse”!),e viceversa le rette con pendenza minore di 1 sono del genere spazio.

5.4. AZIONE DEL GRUPPO DI LORENTZ SU UNA TETRADE 77
al variare di m.Il nucleo quindi e formato da tutti quei vettori per cui y = 0, z = 0 e
x = ct = m generico. Ancora una volta ha dimensione 1, e il suo generico
elemento e della forma
mm00
.
Per proiezione sul piano x − ct, l’autovettore coincide con lo spazio vet-toriale della bisettrice I-III quadrante, ed e dunque diretto come il conoluce.
5.4.2 Deduzione delle trasformazioni dalla geometriaiperbolica
Possiamo anche dedurre le trasformazioni di Lorentz facendo uso della trigo-nometria iperbolica (ossia lo studio dei triangoli rettangoli nel piano iperbo-lico di Minkowski).
Con riferimento alla figura 5.9, notiamo che gli assi sono ortogonali peripotesi22 e che quindi possiamo individuare nel grafico altri angoli retti (quelliformati dalle parallele degli assi). Con riferimento al triangolo OPR, vistala posizione dell’angolo retto, OP e l’ipotenusa, e possiamo quindi scrivereche
OR = OP cosh θ = (OV + V P ) cosh θ = (OV + V E tanh θ) cosh θ,
dove l’ultima uguaglianza vale in riferimento al triangolo V PE, in cui PE el’ipotenusa e V P e V E sono i cateti. Abbiamo dunque che ct = cosh θ(ct′ +x′ tanh θ). Analogamente, con riferimento ai triangoli OQT e EWQ, si hache
OT = OQ cosh θ = (OW +WQ) cosh θ = (OW +WE tanh θ) cosh θ,
da cui ricaviamo che x = cosh θ(x′ + ct′ tanh θ). Se ora usiamo la relazione
tanh θ =v
c= β
22Si badi che il concetto di ortogonalita non e mutuato dalla geometria euclidea delpiano, ma dal prodotto scalare trovato precedentemente. Non ci si lasci quindi confonderedal disegno: angoli che euclideamente non sono rettangoli, lo sono pero nella geometriaiperbolica. La geometria iperbolica, essendo la geometria nello spaziotempo di Minkowski,si serve dunque del prodotto scalare scritto nella (5.9):
~u · ~v = uxvx + uyvy + uzvz − c2utvt,
e non del prodotto scalare canonico. Due rette saranno ortogonali (e diremo che formanoun angolo retto) se due loro vettori non nulli avranno questo prodotto scalare nullo.

78 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Figura 5.9: Diagramma della localizzazione di un evento E da parte didue osservatori A e B nel piano iperbolico. A e B posseggono le relativepiattaforme spaziali SA e SB, perpendicolari all’asse temporale nel senso delprodotto scalare sopra definito (e non a caso le abbiamo disegnate come se sicorrispondessero in una rotazione iperbolica intorno all’origine: la rotazioneiperbolica mantiene la perpendicolarita). Nel disegno sono evidenziati tutti isegmenti ortogonali.

5.5. PIU VELOCI DELLA LUCE? 79
e la relazione trovata nell’equazione (5.20), ovvero
cosh θ =
√1
1− tanh2 θ=
√1
1− v2
c2
= γ,
riotteniamo le trasformazioni di Lorentz nella forma con cui le abbiamo giatrovate:
ct′ = γ(ct− βx)x′ = γ(x− βct)y′ = yz′ = z
5.5 Piu veloci della luce?
Appuntamento fisso di ogni scritto sulla Relativita, eccoci a trattare il casodi oggetti che viaggiano piu veloci della luce. La Relativita Ristretta ci diceche la velocita della luce c e una velocita limite per qualsiasi particella osegnale fisico. Ma che cosa accadrebbe se un segnale viaggiasse per un certoperiodo fuori dal cono luce? L’esempio mostrato in figura ?? non lascia aditoa dubbi: la struttura causale per fenomeni di questo tipo non avrebbe piusenso.
Se in E1 viene inviato un segnale che viaggia piu veloce della luce sinoa raggiungere E2, la consequenzialita temporale tra i due eventi non e piuinvariante. Ci saranno osservatori (come A) per cui il segnale e arrivatocorrettamente dopo che e stato inviato; ci saranno pero osservatori anchecome B che vedranno il segnale arrivare istantaneamente, e osservatori comeC che vedranno il segnale arrivare addirittura prima (!) di partire.
E chiaro dunque che segnali piu veloce della luce romperebbero la strut-tura causale dello spaziotempo, cosa che allo stato attuale e inconcepibile.

80 LEZIONE 5. TRASFORMAZIONI DI LORENTZ
Figura 5.10: Se un segnale si propaga piu veloce della luce da un eventoE1 a un evento E2, crolla il concetto di causalita: se infatti per l’osservatoreA il segnale e partito da E1 ed e arrivato a E2 dopo un certo tempo, perl’osservatore B il segnale e arrivato nello stesso istante in cui e partito, e perl’osservatore C, invece, il segnale addirittura e arrivato prima di partire.
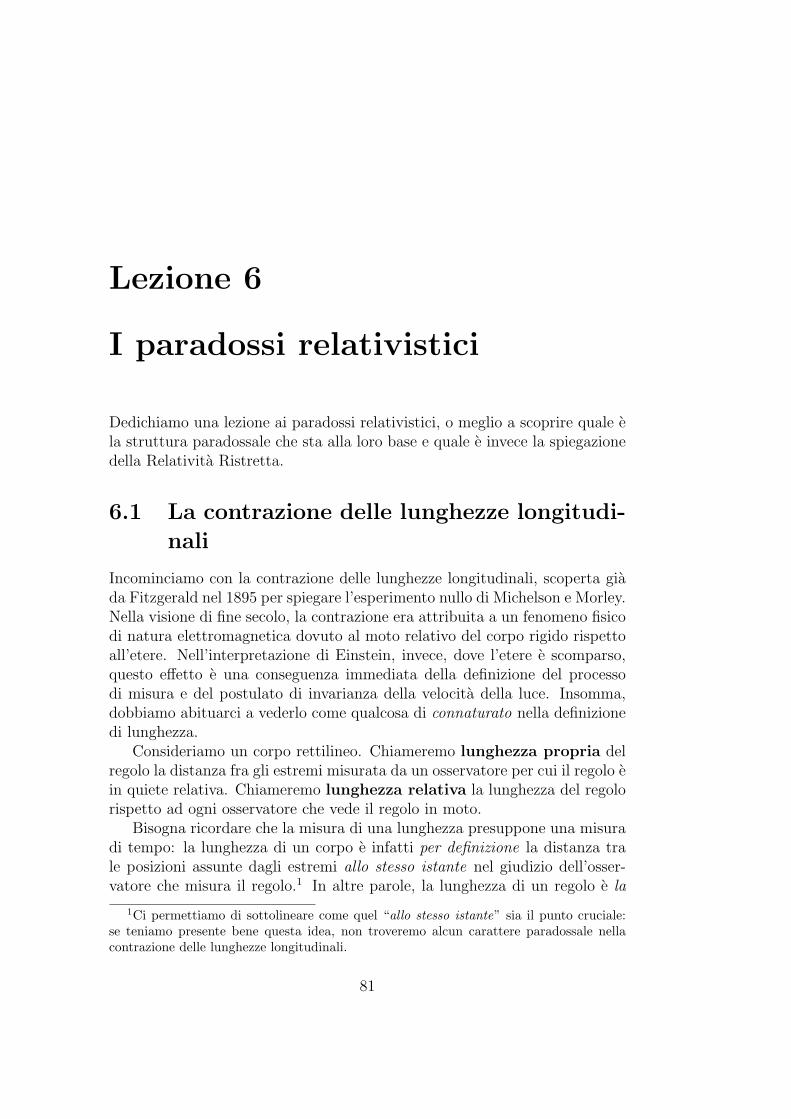
Lezione 6
I paradossi relativistici
Dedichiamo una lezione ai paradossi relativistici, o meglio a scoprire quale ela struttura paradossale che sta alla loro base e quale e invece la spiegazionedella Relativita Ristretta.
6.1 La contrazione delle lunghezze longitudi-
nali
Incominciamo con la contrazione delle lunghezze longitudinali, scoperta giada Fitzgerald nel 1895 per spiegare l’esperimento nullo di Michelson e Morley.Nella visione di fine secolo, la contrazione era attribuita a un fenomeno fisicodi natura elettromagnetica dovuto al moto relativo del corpo rigido rispettoall’etere. Nell’interpretazione di Einstein, invece, dove l’etere e scomparso,questo effetto e una conseguenza immediata della definizione del processodi misura e del postulato di invarianza della velocita della luce. Insomma,dobbiamo abituarci a vederlo come qualcosa di connaturato nella definizionedi lunghezza.
Consideriamo un corpo rettilineo. Chiameremo lunghezza propria delregolo la distanza fra gli estremi misurata da un osservatore per cui il regolo ein quiete relativa. Chiameremo lunghezza relativa la lunghezza del regolorispetto ad ogni osservatore che vede il regolo in moto.
Bisogna ricordare che la misura di una lunghezza presuppone una misuradi tempo: la lunghezza di un corpo e infatti per definizione la distanza trale posizioni assunte dagli estremi allo stesso istante nel giudizio dell’osser-vatore che misura il regolo.1 In altre parole, la lunghezza di un regolo e la
1Ci permettiamo di sottolineare come quel “allo stesso istante” sia il punto cruciale:se teniamo presente bene questa idea, non troveremo alcun carattere paradossale nellacontrazione delle lunghezze longitudinali.
81

82 LEZIONE 6. I PARADOSSI RELATIVISTICI
distanza spaziale tra due eventi simultanei. Il diagramma spaziotemporaledel processo di misura delle lunghezze di un corpo in moto e quindi quelloriportato in figura 6.1.
Figura 6.1: Contrazione della lunghezza longitudinale di un regolo in moto.B e B′ sono gli estremi del regolo. L0 e la lunghezza propria, L e la lunghezzarelativa all’osservatore A.
I dati che abbiamo sono i seguenti: le linee di universo parallele degliestremi del regolo e la linea di universo dell’osservatore A (da cui ricaviamoimmediatamente la sua piattaforma spaziale, ortogonale alla linea di universonel senso della geometria di Minkowski). Questi dati definiscono i tre eventidi coincidenza E1, E2 ed E3:
• E1: passaggio dell’estremo B per A al tempo t = 0 (nel giudiziodell’orologio di A);
• E2: passaggio dell’estremo B′ per A′ (osservatore che si muove allavelocita di A, sincronizzato con A e posto a distanza L da A sullapiattaforma spaziale di A), al tempo t = 0 (nel giudizio dell’orologio diA);

6.1. LA CONTRAZIONE DELLE LUNGHEZZE LONGITUDINALI 83
• E3: passaggio dell’estremo B′ per il punto a distanza L0 da B sullapiattaforma spaziale di B, al tempo t = 0 (nel giudizio dell’orologio diB).
Il confronto tra le misure fatte da A e da B si condensa attorno al diagrammariportato in figura 6.2.
Figura 6.2: Particolare della figura 6.1; triangolo rettangolo del generespazio.
Risolviamo il problema in quattro modi:
1. con l’intervallo spaziotemporale (ossia con il Teorema di Pitagora nellospazio di Minkowski);
2. con le trasformazioni di Lorentz;
3. con il metodo radar;
4. con la trigonometria iperbolica
6.1.1 Risoluzione con l’intervallo spaziotemporale
L’idea e quella di calcolare l’intervallo spaziotemporale S2 = x2 − c2t2 nelgiudizio di A e nel giudizio di B; essi dovranno poi necessariamente coinci-dere, visto che S2 e indipendente dall’osservatore che esegue le misure.Nel giudizio di A si avra che
S2A(E1, E2) = L2 − 0 = L2,
mentre nel giudizio di B sara
S2B(E1, E2) = L2
0 − c2∆t2B.
L’eguaglianza dei due ci fornisce la relazione
L2 = L20 − c2∆t2B. (6.1)

84 LEZIONE 6. I PARADOSSI RELATIVISTICI
Bisogna infatti osservare che i due eventi E1 ed E2 (localizzazione degliestremi del regolo da parte di A), simultanei per A (∆tA = 0), non sonoaffatto simultanei nel giudizio di B. Si tratta quindi di valutare ∆tB: saradeterminato dalla condizione di simultaneita di E1 ed E2 rispetto ad A.Questa condizione puo essere ricavata in due modi.
(i) Possiamo operare una trasformazione di Lorentz speciale da B ad A, escrivere quindi che2
c∆tA = γ(v) (c∆tB + β∆xB) = γ(v) (c∆tB + βL0) . (6.2)
Dato che ∆tA = 0, abbiamo che3
∆tB = − vc2
∆xB = − vc2L0. (6.3)
La (6.3) e esattamente la condizione di simultaneita: due eventi che nelgiudizio di B avvengono in luoghi separati da una distanza ∆xB, dopoun intervallo di tempo ∆tB sono simultanei rispetto ad un osservatoreA, che si muove rispetto a B con velocita v nel senso negativo, se e solose vale appunto la relazione (6.3).
(ii) Possiamo utilizzare la trigonometria iperbolica, facendo riferimento aldiagramma di figura 6.1. Se E1 ed E2 sono simultanei per A, la rettaE1E2 rappresenta la piattaforma spaziale di A. Dunque l’angolo θ el’angolo tra la piattaforma spaziale di A e quella di B. Per la simmetriadelle rotazioni iperboliche (v. fig. 6.3), esso coincide con l’angolo tragli assi temporali, e quindi
tanh θ =v
c.
Sempre dalla figura 6.1 deduciamo quindi la seguente relazione suivalori assoluti
c|∆tB| = L0 tanh θ = L0v
c,
ottenendo la condizione di simultaneita sul valore assoluto
|∆tB| = L0v
c2. (6.4)
2Si tenga presente che v e la velocita di B rispetto ad A; dunque nel giudizio di B, Asi muove con velocita −v, da cui il segno + dinanzi al fattore β nella (6.2). Il fattore γnaturalmente non viene toccato da questo cambiamento, poiche, comparendo in esso solola seconda potenza di v, rimane invariato dopo la sostituzione v → −v.
3Notiamo che ∆tB e negativo, fatto che e coerente con quanto mostrato nel diagrammain figura 6.1.

6.1. LA CONTRAZIONE DELLE LUNGHEZZE LONGITUDINALI 85
Figura 6.3: Simmetria delle rotazioni iperboliche.
Le condizioni (6.3) e (6.4) sono del tutto equivalenti all’atto pratico,poiche inserendo una qualsiasi di esse nella relazione (6.1) otteniamo
L2 = L20 − c2∆t2B = L2
0 − c2L20
v2
c4= L2
0
(1− v2
c2
)< L2
0. (6.5)
Notiamo che al primo passaggio (cioe per ottenere la relazione (6.1)) ab-biamo usato l’analogo del Teorema di Pitagora nello spazio di Minkowski, nelpassaggio successivo abbiamo invece utilizzato la condizione di simultaneita.Abbiamo ottenuto che la lunghezza del regolo nel giudizio di A e minore dellalunghezza propria del regolo.
6.1.2 Risoluzione con le trasformazioni di Lorentz
Un metodo molto piu immediato e operare una trasformazione di Lorentzda A a B, per sfruttare direttamente la condizione di simultaneita. Per ognicoppia di eventi, infatti si ha che
c∆tB = γ(v)(c∆tA − β∆xA)∆xB = γ(v)(∆xA − βc∆tA)
.
Per la coppia di eventi (E1, E2) si ha che ∆xA = L, ∆tA = 0 (sonosimultanei per A), ∆xB = L0, e dunque dalla seconda equazione ricaviamo

86 LEZIONE 6. I PARADOSSI RELATIVISTICI
immediatamente che
L0 = γ(v) · L =⇒ L =L0
γ(v)< L0, (6.6)
riottenendo come risultato la contrazione delle lunghezze. Notiamo ancheche la prima delle due equazioni di Lorentz ribadirebbe la condizione disimultaneita.
6.1.3 Risoluzione con il metodo radar
Figura 6.4: Contrazione delle lunghezze longitudinali, analizzata con ilmetodo radar.
Le coordinate radar di E1 sono note in entrambi i riferimenti A e B. Ilproblema e dunque studiare le coordinate radar di E2; per farlo ci serviamodel diagramma in figura 6.4. Al solito, utilizziamo il “trucco” di trasformarel’invio di un segnale radar in uno scambio Doppler, supponendo che in E1 Ae B si scambino un segnale. Possiamo quindi pensare a T ′
1 come periodo diemissione da parte di B si un segnale che viene ricevuto da A con periodoT1; dato che A e B sono in avvicinamento, vale la relazione Doppler
T1 =1
k(v)· T ′
1.

6.1. LA CONTRAZIONE DELLE LUNGHEZZE LONGITUDINALI 87
Inoltre, del tutto analogamente, possiamo pensare che T ′2 sia il periodo di
emissione da parte di B di un segnale che A riceve con periodo T2. Dato cheora i due osservatori sono in allontanamento, vale che
T2 = k(v) · T ′2.
Abbiamo trovato quindi le relazioni tra le due coordinate. Ora dobbiamoimporre la condizione di simultaneita per E1 ed E2 nel giudizio di A. Talieventi sono infatti simultanei per A se e solo se
T (E2) =T1 + T2
2= T (E1) = 0,
da cui ricaviamo cheT1 + T2 = 0.
Poniamo quindi T1 = T e T2 = −T , e calcoliamoci ora la lunghezza nelgiudizio di A e in quello di B. Abbiamo che
∆xA = L =1
2c(T2 − T1) =
1
2c(T + T ) = cT,
∆xB = L0 =1
2c(T ′
2−T ′1) =
1
2c
(1
kT1 − kT2
)=
1
2c
(1
kT + kT
)=
1
2(k+k−1)ct = γ(v)cT.
Dunque, in definitiva otteniamo nuovamente che
L0 = γ(v) · cT = γ(v) · L =⇒ L =L0
γ(v)< L0.
6.1.4 Risoluzione con la trigonometria iperbolica
Per risolvere il problema basta riferirsi alla gia vista figura 6.2 e scrivere larelazione tra cateto e ipotenusa nel triangolo rettangolo E1E2E3. Essa e
L0 = L cosh θ = γ(v) · L,
da cui si ha immediatamente che
L =L0
γ(v)< L0.
La condizione di simultaneita di E1 ed E2 qui e stata usata per individuarel’angolo θ ed esprimerlo quindi in funzione della velocita relativa: cosh θ =γ(v).

88 LEZIONE 6. I PARADOSSI RELATIVISTICI
6.1.5 Cio che si misura, cio che si vede
Riprendiamo l’esempio della sezione precedente, dove abbiamo visto che,detta L la lunghezza del regolo nel giudizio di A,
L =L0
γ(v)< L0,
con L0 lunghezza propria del regolo. Dunque A misura una lunghezza delregolo minore a quella che potrebbe misurare un osservatore in quiete relativarispetto al regolo.
Figura 6.5: Per trovare quello che A vede a un dato istante dobbiamosupporre che i raggi di ritorno arrivino ad A contemporaneamente.

6.1. LA CONTRAZIONE DELLE LUNGHEZZE LONGITUDINALI 89
Ora supponiamo che il regolo sia gia passato e si stia allontanando daltraguardo: cio cheA vede e qualcosa di diverso. Se si facesse un’istantanea delregolo, A vedrebbe l’estremo piu lontano B in una posizione corrispondentea un tempo precedente a quello cui corrisponde la posizione dell’estremo piuvicino B′ (v. fig. 6.5). Infatti, affinche i raggi arrivino contemporaneamentead A a un tempo tf , essi devono essere stati inviati a due diversi tempi.Precisamente, il raggio inviato all’estremo piu lontano B′ deve essere inviatoa un tempo t′ < t, dove t e il tempo a cui e inviato il raggio destinatoall’estremo piu vicino B. D’altro canto, supponendo che A e B azzerino gliorologi quando si incontrano, possiamo interpretare nella solita maniera ilgrafico come uno scambio Doppler: i tempo di ricezione per B dei due raggisaranno kt′ e kt. Dato che perB la lunghezza del regolo e la lunghezza propriaL0, e dato che (kt′, kt) sono le coordinate radar dell’evento E di localizzazionedel secondo estremo B′ del regolo, ne consegue (per la definizione) che, nelgiudizio di B, la lunghezza del regolo e pari alla coordinata spaziale delsecondo estremo, cioe
L0 =1
2c(kt− kt′) =
1
2kc(t− t′),
da cui
t− t′ = 2L0
kc
e dunque l’osservatore A vedra il regolo di lunghezza4
L =1
2c(tf − t′)−
1
2c(tf − t) =
1
2c(t− t′) =
L0
k=γ(v)L
k=
=1√
1− v2
c2
· 1√c+vc−v
L =1√c2−v2
c2
· 1√c+vc−v
L =1√
(c+v)(c−v)c2
· 1√c+vc−v
L =
=1√
(c+v)2
c2
L =c
c+ vL =
1
1 + β(v)L.
Dunque la lunghezza che A vede (L) e diversa dalla lunghezza che Amisura (L). In particolare, A vede una lunghezza ancora minore di quellache misura. Sussiste dunque la seguente catena di disuguaglianze:
L < L < L0.
4Stiamo prendendo la differenza delle coordinate x′ e x relative ai due estremi B′, Bdel regolo, nel giudizio di A.
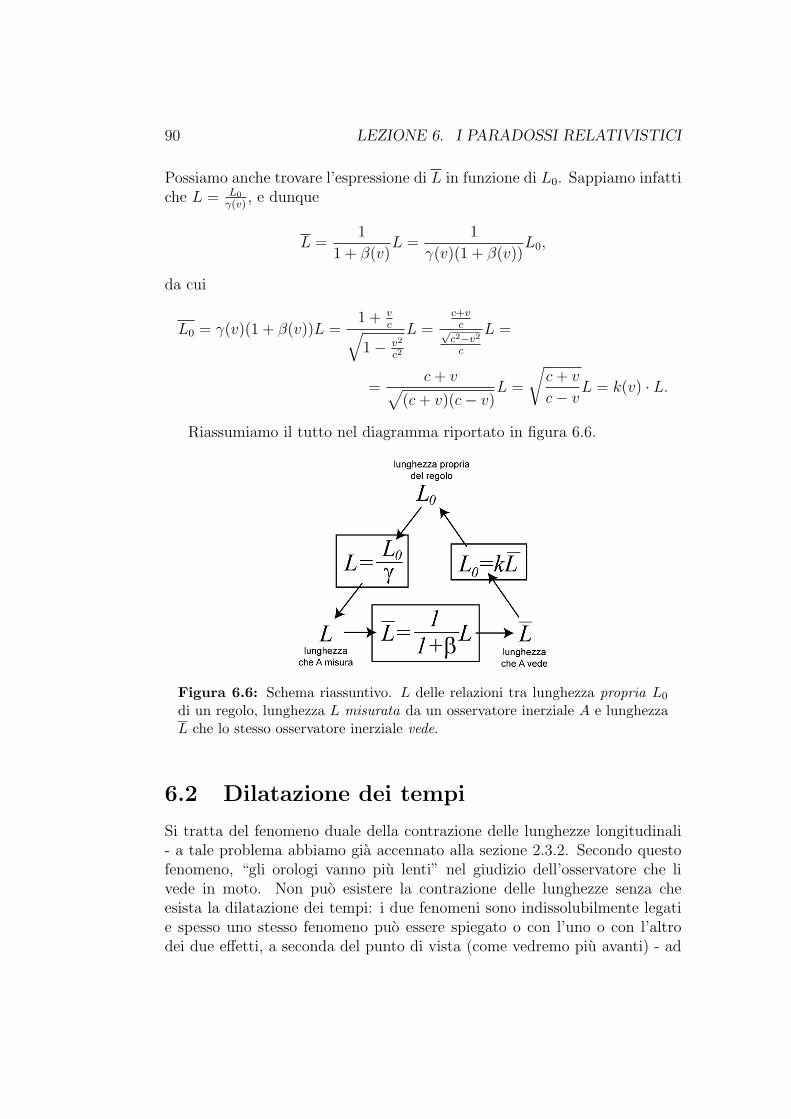
90 LEZIONE 6. I PARADOSSI RELATIVISTICI
Possiamo anche trovare l’espressione di L in funzione di L0. Sappiamo infattiche L = L0
γ(v), e dunque
L =1
1 + β(v)L =
1
γ(v)(1 + β(v))L0,
da cui
L0 = γ(v)(1 + β(v))L =1 + v
c√1− v2
c2
L =c+v
c√c2−v2
c
L =
=c+ v√
(c+ v)(c− v)L =
√c+ v
c− vL = k(v) · L.
Riassumiamo il tutto nel diagramma riportato in figura 6.6.
Figura 6.6: Schema riassuntivo. L delle relazioni tra lunghezza propria L0
di un regolo, lunghezza L misurata da un osservatore inerziale A e lunghezzaL che lo stesso osservatore inerziale vede.
6.2 Dilatazione dei tempi
Si tratta del fenomeno duale della contrazione delle lunghezze longitudinali- a tale problema abbiamo gia accennato alla sezione 2.3.2. Secondo questofenomeno, “gli orologi vanno piu lenti” nel giudizio dell’osservatore che livede in moto. Non puo esistere la contrazione delle lunghezze senza cheesista la dilatazione dei tempi: i due fenomeni sono indissolubilmente legatie spesso uno stesso fenomeno puo essere spiegato o con l’uno o con l’altrodei due effetti, a seconda del punto di vista (come vedremo piu avanti) - ad

6.2. DILATAZIONE DEI TEMPI 91
esempio un fenomeno che si spiega con la contrazione delle lunghezze in unriferimento, si spiega con la dilatazione dei tempi in un altro riferimento.Geometricamente questa dualita e una manifestazione delle proprieta dellerotazioni iperboliche di ruotare simmetricamente gli assi spaziale e temporale:non puo avvenire una rotazione dell’asse temporale senza che vi sia anche unarotazione della piattaforma spaziale (fig. 6.3)
Figura 6.7: Battito dell’orologio di due diversi osservatori inerziali in motorelativo. Fissata la coppia di eventi (E1, E2), T0 e il tempo proprio tra i dueeventi (poiche e il tempo misurato dall’osservatore B che li vede accadere nellostesso luogo,) T e il tempo relativo all’osservatore A.
Il primo problema che consideriamo e quello del “battito dell’orologio”.Fissiamo due eventi E1 ed E2. Sappiamo che esiste un solo osservatore iner-ziale che li vede accadere nello stesso luogo, chiamiamolo B. Il tempo T0 cheintercorre tra i due eventi, misurato nel giudizio di B, e detto (come abbiamogia visto) tempo proprio, poiche per B i due eventi accadono nello stessoluogo. Consideriamo ora un altro osservatore inerziale A che coincida conB in E1, e che veda accadere l’evento E2 in un certo punto ∆xA della suapiattaforma spaziale. Il tempo T che intercorre tra i due eventi, misuratoda quest’altro osservatore inerziale, e detto tempo relativo ad A. Sia E3
l’evento che avviene contemporaneamente a E2 e nello stesso luogo di E1 nelgiudizio dell’osservatore A.
La situazione e riportata nel diagramma in figura 6.7. In questo caso lacondizione “essere nello stesso luogo” sostituisce la condizione di simultaneita

92 LEZIONE 6. I PARADOSSI RELATIVISTICI
della sezione precedente: se daremo il giusto peso a questo concetto, nulla ciapparira paradossale. Nuovamente, possiamo risolvere il problema in quattromodi:
1. con l’intervallo spaziotemporale (ossia con il Teorema di Pitagora nellospazio di Minkowski);
2. con le trasformazioni di Lorentz;
3. con il metodo radar;
4. con la trigonometria iperbolica
6.2.1 Risoluzione con l’intervallo spaziotemporale
Figura 6.8: Particolare della figura 6.7; triangolo rettangolo del generespazio.
L’idea e quella di calcolare l’intervallo spaziotemporale degli eventi E1 edE2 nel giudizio di A e nel giudizio di B; essi dovranno poi necessariamentecoincidere, visto che S2 e indipendente dall’osservatore che esegue le misure.
Mediante il “Teorema di Pitagora” (figura 6.8) prestato allo spaziotempodi Minkowski, abbiamo che, nel giudizio di A,
S2A(E1, E2) = ∆x2
A − c2T 2,
mentre nel giudizio di B
S2B(E1, E2) = 0− c2T 2
0 = c2T 20
(gli eventi per B accadono infatti nello stesso luogo). L’eguaglianza dei dueci fornisce la relazione
c2T 20 = c2T 2 −∆x2
A (6.7)

6.2. DILATAZIONE DEI TEMPI 93
Sappiamo inoltre l’osservatore B si muove rispetto ad A con velocitarelativa v, dunque deve valere la legge del moto uniforme
∆xA = vT,
che possiamo notare essere la condizione di localizzazione nello stesso luogoper B. Cioe: due avvenimenti accadono nello stesso luogo per B se e solo seper un osservatore A, in moto relativo con velocita v, essi accadono a distanzatemporale T e a distanza spaziale ∆xA. Inserendo questa condizione nella(6.7) otteniamo che
c2T 20 = T 2(c2 − v2)
e quindi che
T =
√c2
c2 − v2T0 = γ(v) · T0 =⇒ T > T0. (6.8)
Possiamo immaginare che l’osservatore B sia un orologio che batte pe-riodicamente: abbiamo trovato che il tempo nel giudizio di un osservatore Ain moto relativo rispetto all’orologio B trascorre piu lentamente, ovvero cheil tempo misurato da un orologio solidale con A e minore rispetto al tempomisurato dall’orologio B.
6.2.2 Risoluzione con le trasformazioni di Lorentz
Un metodo piu diretto e operare una trasformazione di Lorentz da B ad A,per inserire direttamente la condizione di concordanza spaziale degli eventiper B (cioe ∆xB = 0). Per ogni coppia di eventi, infatti si ha che
c∆tA = γ(v)(c∆tB − β∆xB)∆xA = γ(v)(∆xB − βc∆tB)
.
Per la coppia di eventi (E1, E2), in particolare, vale ∆tA = T , ∆tB = T0,∆xB = 0 (gli eventi accadono nello stesso luogo per B), e dunque dalla primaequazione ricaviamo immediatamente che cT = γ(v) · cT0, ovvero che
T = γ(v) · T0 =⇒ T > T0, (6.9)
riottenendo come risultato la dilatazione dei tempi.Notiamo anche che la seconda equazione diventa
∆xA = γ(v)β(v) · cT0 = β(v) · cT = vT
ed esprime quindi la condizione (ovvia) su ∆xA e su T affinche i due eventiavvengano nello stesso luogo nel giudizio di B (appartenenza alla linea diuniverso di B).

94 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.9: Dilatazione dei tempi, analizzata mediante il metodo radar.
6.2.3 Risoluzione con il metodo radar
Le coordinate radar di E1 sono note in entrambi i riferimenti A e B. Ilproblema e dunque studiare le coordinate radar di E2; per farlo ci serviamodel diagramma in figura 6.9. Le coordinate di E2 rispetto a B sono ovvie:E2 accade infatti sulla linea di universo di B. Per trovare le coordinate radar(T1, T2) di E2 rispetto ad A, al solito, utilizziamo il “trucco” di trasformarel’invio di un segnale radar in uno scambio Doppler, supponendo che in E1 Ae B si scambino un segnale.
Possiamo quindi pensare a T1 come periodo di emissione da parte di A siun segnale che viene ricevuto da B con periodo T0; vale la relazione Doppler
T0 = k(v) · T1.
Inoltre, del tutto analogamente, possiamo pensare che T0 sia il periodo diemissione da parte di B di un segnale che A riceve con periodo T2. Vale che
T2 = k(v) · T0.
Quindi abbiamo che
T =1
2(T1 + T2) =
1
2(k + k−1)T0 = γ(v) · T0 =⇒ T > T0,
e ritroviamo la dilatazione dei tempi. Notiamo che la condizione di localiz-zazione e gia incorporata nella scelta di B come unico osservatore inerzialeche vede accadere E1 ed E2 nello stesso luogo.

6.2. DILATAZIONE DEI TEMPI 95
6.2.4 Risoluzione con la trigonometria iperbolica
Ancora piu velocemente, per risolvere il problema basta riferirsi nuovamentealla figura 6.8 e scrivere la relazione tra cateto e ipotenusa nel triangolorettangolo E1E2E3. Essa e
T = T0 cosh θ = γ(v) · T0 =⇒ T > T0.
Nuovamente, la condizione di simultaneita di E1 ed E2 qui e stata usataper individuare l’angolo θ ed esprimerlo quindi in funzione della velocita v.
6.2.5 Il metodo del traguardo
Riconduciamo il metodo della contrazione delle lunghezze a quello della di-latazione dei tempi utilizzando il “metodo del traguardo” per definire lalunghezza di un corpo in moto. L’interesse di questo metodo sta nel fattoche esso fa uso di un solo orologio, riconducendo la misura di una lunghezzaa una misura di tempo.
La situazione e rappresentata in figura 6.10. Sia A un osservatore iner-ziale (il “traguardo”), dotato di un orologio (asse temporale) e sia SA la suapiattaforma spaziale. Consideriamo un regolo che si avvicini di moto iner-ziale da sinistra, e siano B e B′ gli estremi di tale regolo. Quando il primoestremo del regolo va a coincidere con A si determina l’evento di coincidenzaE1, quando il secondo estremo del regolo va a coincidere con A si determinal’evento di coincidenza E2. Tali eventi avvengono nello stesso luogo per A,sulla linea di universo di A. Essi fissano quindi due fotogrammi dell’orologiodi A. Per definizione, nel giudizio di A, la lunghezza del regolo e
L = v∆tA,
dove ∆tA e il tempo (misurato dall’orologio di A) che intercorre tra il pas-saggio degli estremi del regolo. Nel giudizio di B, invece, l’orologio di Aha percorso la distanza L0 in un tempo ∆tB muovendosi alla velocita5 v.Dunque deve valere questa volta che
L0 = v∆tB.
∆tB e il tempo trascorso tra i due eventi E1 ed E2 nel giudizio di B.
5Si noti che l’unica cosa che possiamo tenere in comune nei giudizi dei due osservatorie la loro velocita relativa: per il resto dobbiamo stare molto attenti a scindere cio che emisurato da A con cio che e misurato nel giudizio di B.

96 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.10: Situazione del “metodo del traguardo”. Un regolo BB′ si muovecon velocita v verso il traguardo A. T0 e il tempo intercorso tra il passaggiodel primo e del secondo estremo, nel giudizio di A.

6.3. IL DECADIMENTO DEI MESONI 97
In questo caso, ∆tB non e il tempo proprio, ma lo e ∆tA = T0, poiche glieventi avvengono nello stesso luogo nel giudizio di A. Per la dilatazione deitempi, dunque, deve accadere che
T = γ(v) · T0.
Possiamo quindi riassumere il tutto nel diagramma riportato in figura 6.11.
Figura 6.11: Schema riassuntivo. L e la lunghezza del regolo nel giudizio diA, L0 e la lunghezza propria del regolo; T0 e il tempo intercorso tra il passaggiodel primo e del secondo estremo del regolo nel giudizio di A (tempo proprio),T e lo stesso tempo nel giudizio del regolo.
6.3 Il decadimento dei mesoni
I raggi cosmici, quando arrivono al bordo superiore dell’atmosfera, ad un’al-tezza di circa h = 20km rispetto al livello del mare, producono nell’urto conl’atmosfera delle particelle instabili, dette mesoni (e solitamente indicati conla lettera greca µ), che viaggiano nell’atmosfera con velocita v ≈ 0.99c (parialla velocita dei raggi cosmici che li producono). Queste particelle instabilihanno una vita media τ che e legata alla legge di decadimento
N(t) = N0e−λt
dal fatto che τ =1
λ. Nell’equazione, N(t) e il numero di particelle a un
istante t, N0 e il numero di particelle iniziali.La vita media τ puo essere misurata in laboratorio (quando i mesoni
sono a riposo), valutando la porzione di popolazione iniziale che dopo undato tempo t non e decaduta in elettroni e neutrini. Abbiamo quindi tutti idati del problema: altezza h, velocita v e vita media τ .
Secondo la fisica newtoniana, lo spazio percorso dal mesone µ tra lanascita e la morte e
s = vt.

98 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.12: Produzione e decadimento dei mesoni µ. Il mesone viene pro-dotto dall’urto dei raggi cosmici con l’atmosfera, a un’altezza h. Dopo untempo τ esso decade in un elettrone e un neutrino.

6.3. IL DECADIMENTO DEI MESONI 99
Se si inseriscono i dati, si trova che vt < h, cioe che s < h, e quindi nondovrebbe essere possibile rilevare mesoni di origine cosmica al livello del mare.Al contrario, tali mesoni sono rilevati.6 Vogliamo quindi dare una spiegazionea questo fenomeno, usando in modo duale sia la dilatazione dei tempi, sia lacontrazione delle lunghezze.
6.3.1 Punto di vista della terra
Dal punto di vista della terra, la spiegazione si basa sulla dilatazione deitempi: la vita media τ e un tempo misurato dall’orologio interno del mesone.Possiamo schematizzare la faccenda nel diagramma di figura 6.13.
Figura 6.13: Diagramma spaziotemporale della vita del mesone. L’eventoE1 e la produzione del mesone, l’evento E2 e il suo rilevamento a terra.
Il punto fondamentale e prestare attenzione, al fine di non confondere lemisure di spazio e di tempo fatte dall’osservatore terrestre con quelle fatte dalmesone, poiche entrambe le misure hanno valore relativo. Dato che l’espe-rienza ci dice che riusciamo a trovare mesoni al livello del mare, ribatteziamoτ il tempo (minimo) tra la produzione e il rilevamento del mesone nel giu-dizio del mesone. Sia invece t il tempo tra gli stessi eventi nel giudizio dellaboratorio terrestre. I due eventi E1 (produzione del mesone) ed E2 (rileva-mento del mesone) avvengono sulla linea di universo del mesone, quindi τ eil tempo proprio. Per la dilatazione dei tempi abbiamo che
t = γ(v) · τ.6Questa e stata una delle prime verifiche sperimentali della validita della Relativita
Ristretta.

100 LEZIONE 6. I PARADOSSI RELATIVISTICI
La legge di moto rispetto all’osservatore terrestre7 e
h = vt,
e quindi la legge corretta e
h = (γ(v) · v) · τ,
che e compatibile con i dati sperimentali.Il fenomeno si spiega dunque, rispetto all’osservatore terrestre, con la
dilatazione dei tempi: sbagliavamo nel ritenere τ il tempo di vita del mesonenel nostro giudizio; lo era nel giudizio del mesone.
6.3.2 Punto di vista del mesone
Dal punto di vista del mesone, il tempo trascorso tra gli eventi E1 (produ-zione, cioe “nascita” del mesone) ed E2 (rilevamento del mesone al livello delmare) e proprio τ , e la velocita con cui la terra precipita addosso al mesone esempre v. Dunque abbiamo ancora il paradosso che, sulla carta, dovremmoavere8
vτ < h,
quando invece accade il contrario. Qui non possiamo piu far valere la dila-tazione dei tempi: il tempo τ e il tempo proprio, non c’e scampo.
Il paradosso e ancora dovuto al fatto che nella legge vτ < h stiamo impie-gando grandezze eterogenee: τ e infatti misurato dal mesone, h e misuratodalla terra. Il paradosso nasce quindi dal mischiare nella stessa equazionedel moto uniforme
spazio = velocita · tempo
grandezze misurate da osservatori diversi. Se ci poniamo nel punto di vistadel mesone, dobbiamo usare sı il tempo τ , ma anche la distanza d che ilmesone attribuisce alla terra al momento della sua nascita (anche le lunghezzesono infatti relative). La situazione e riassunta nel diagramma di figura 6.14.
Sia E1 l’evento della nascita del mesone, E2 il suo rilevamento. Per deter-minare le distanze, dobbiamo considerare l’evento E3 che si trova sulla linea
7Prestiamo attenzione: e vero che le leggi di moto devono avere la stessa forma nelgiudizio del mesone e in quello della terra, ma dobbiamo stare attenti che in ciascuna diesse tutte le grandezze devono essere misurate dallo stesso osservatore. La disomogeneitadelle misure porta inevitabilmente all’invalidita delle equazioni.
8Si badi bene: questa equazione e sbagliata, poiche disomogenea nelle misure.Successivamente viene spiegata la questione.

6.3. IL DECADIMENTO DEI MESONI 101
Figura 6.14: Diagramma spaziotemporale modificato aggiungendo il puntodi vista del mesone. In particolare, quando il mesone viene prodotto (E1), nelgiudizio del mesone la terra si trova in E3. Viceversa, nel giudizio della terra,essa si trova in E4. Quindi k e la distanza tra punto di produzione e terra,nel giudizio del mesone; h e la stessa distanza nel giudizio terrestre. θ e ilparametro di rapidita.

102 LEZIONE 6. I PARADOSSI RELATIVISTICI
di universo della terra e che e simultaneo ad E1 nel giudizio del mesone. Siainoltre E4 l’evento che avviene sulla terra contemporaneamente ad E1 nelgiudizio dell’osservatore terrestre. Dal triangolo E1E3E4 ricaviamo che
h = d cosh θ = γ(v) · d,
fatto che traduce la contrazione delle lunghezze. Quindi, nel giudizio delmesone, la terra si trovava inizialmente a una distanza d < h contratta delfattore cosh θ = γ(v) rispetto alla distanza valutata dalla terra. La legge dimoto va dunque riscritta come
d = vτ,
formulazione che e compatibile con i dati sperimentali.
Dunque, l’esperimento del mesone, dal punto di vista del mesone, e spie-gato in maniera simmetrica, dalla contrazione delle lunghezze. Dilatazionedei tempi e contrazione delle lunghezze sono percio fenomeni duali che nonpossono sussistere separatamente: l’uno implica l’altro. Vale la pena ricor-dare di nuovo che, dal punto di vista della geometria dello spaziotempo diMinkowski, questa dualita e legata alla peculiarita delle rotazioni iperbolicheper cui, se ruota l’asse dei tempi di un osservatore, deve contemporaneamenteruotare anche la piattaforma spaziale, in modo simmetrico rispetto al conoluce, cosı da rispettare la condizione di ortogonalita (figura 6.15).
Figura 6.15: Dilatazione dei tempi e contrazione delle lunghezze sono feno-meni duali, poiche, in un cambio di osservatore, se ruota l’asse dei tempi deveruotare simmetricamente anche la piattaforma spaziale, e viceversa.

6.4. IL PARADOSSO DEI GEMELLI 103
6.4 Il paradosso dei gemelli
6.4.1 Situazione
Consideriamo tre osservatori inerziali A, B, C tali che B e C si muovanorispetto ad A con la stessa velocita v ma da parti opposte. La situazione equella rappresentata in figura 6.16.
Figura 6.16: Situazione del paradosso dei gemelli. B e C si avvicinano convelocita v ad A; C e piu lontano da A rispetto a B (nel giudizio di A.
Possiamo pensare che A sia la torre di controllo di un aeroporto, e cheB e C siano due aerei in avvicinamento. Supponiamo che, nel giudizio di A,inizialmente C sia molto piu lontano.
Disegnamo il diagramma spaziotemporale (figura 6.17) e consideriamo iseguenti eventi. B si sta avvicinando da sinistra ad A, sino a quando loincontra.
• E1: al tempo tA(E1) = 0 (misurato da A) B passa per A, e concordadi tarare il suo orologio in modo tale da segnare anch’esso tB(E1) = 0(azzeramento degli orologi di A e B).
Poi B si allontana da A, viaggiando verso destra, e incrocia C.
• E2: B incrocia C che si sta avvicinando ad A quando il suo orologiosegna tB(E2) = 1 h (per fissare le idee). B e C concordano di regolarel’orologio di C in modo tale che tC(E2) = 1 h anch’esso (regolazionedegli orologi di B e C).
Abbandoniamo ora B e seguiamo C nel suo avvicinamento ad A. Poiche ladistanza da percorrere e (nel giudizio di A) la stessa di quella percorsa da B,e dato che C si avvicina ad A con la stessa velocita con cui B si allontanava,e chiaro che C ci mettera ad avvicinarsi lo stesso tempo che B ci ha messoad allontanarsi (nel giudizio di A).
• E3: C passa per A, quando l’orologio di C segnera tC(E3) = 2h.

104 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.17: Diagramma spaziotemporale del paradosso dei gemelli.

6.4. IL PARADOSSO DEI GEMELLI 105
La domanda paradossale e: quanto tempo e trascorso per A tra gli eventi E1
ed E3?Innanzitutto spieghiamo perche abbiamo chiamato questo paradosso “pa-
radosso dei gemelli”. Supponiamo che vi siano due gemelli; il primo (A) stafermo in terra nella torre di controllo di un aeroporto, il secondo invece viag-gia con velocita relativa v rispetto ad A e poi se ne torna indietro. Questogemello corrisponde all’unione dei gemelli B e C; B per la fase di andata, Cnella fase di ritorno: e come se, incrociando C, B “saltasse sul suo aereo” eritornasse indietro.9 Chiameremo percio questo secondo gemello B + C.
Ora cerchiamo di rispondere alla domanda precedente: appurato che peril gemello B+C tra gli eventi E1 ed E3 sono trascorse due ore, quanto tempoe trascorso per il gemello A tra gli stessi eventi? Rispondiamo alla domandacon il metodo radar (figura 6.18).
Figura 6.18: Quanto tempo e trascorso tra E1 ed E3 nel giudizio di A?Rispondiamo mediante il diagramma del metodo radar.
Per confrontare i tempi trascorsi usiamo il metodo dello scambio di segnaliluminosi (metodo che sta alla base della geometria di Minkowski). Suppo-niamo che, mentre si allontana, B invii n segnali luminosi con periodo T
9Tutto questo e un “trucco” per evitare di parlare di accelerazioni: se dovesse il gemelloB invertire rotta, dovrebbe decelerare, e quindi non saremmo piu in regime di relativitaristretta, poiche non sarebbe piu un osservatore inerziale. Ci inventiamo quindi un altroosservatore C da abbinare a B, un osservatore che si occupi del viaggio di ritorno.

106 LEZIONE 6. I PARADOSSI RELATIVISTICI
(ad esempio, n = 6 e T = 10min, per fissare le idee). L’ultimo segnale ar-riva ad A al suo tempo t1. Supponiamo poi che C faccia la stessa cosa nelsuo avvicinarsi ad A: anch’esso inviera n segnali con periodo T , l’ultimo deiquali e scambiato quando C incrocia A, al tempo t2 nel giudizio di A (conriferimento ancora alla figura 6.18).
Il tempo totale trascorso per il gemello B + C e la somma dei periodi diemissione dei segnali luminosi. Il tempo totale trascorso per A e invece lasomma dei periodi di ricezione. Scindiamo le due diverse fasi.Durante l’allontanamento di B si ha che
Tric = k · Temiss = kT
e dunquet1 = nTric = kn · Temiss = knT = kTB
ove TB e la durata del tempo di viaggio di B.Durante l’avvicinamento di C si ha che
Tric =1
k· Temiss =
T
k
e dunque
t2 − t1 = nTric =n
k· Temiss =
n
kT = k−1TC
ove TC e la durata del tempo di viaggio di C.Dato che, per simmetria, i due tempi di viaggio di B e C devono essereuguali, TB = TC , ricaviamo che
t2 = t1 + (t2 − t1) = kTB + k−1TC = (k + k−1)TB =1
2(k + k−1)2TB =
=1
2(k + k−1)(TB + TC) = γ(v) · (TB + TC).
Dunque il tempo totale trascorso per A e γ(v) volte la somma dei tempitrascorsi per B e per C, cioe γ(v) volte il tempo totale trascorso per ilgemello B + C. Evidentemente, i due tempi coincidono solo se v = 0; neconcludiamo che il gemello A (che non si e allontanato) e invecchiato di piurispetto all’altro gemello B + C.
6.4.2 Carattere paradossale e smascheramento
Nasce pero un’obiezione sensata: questa conclusione sembra violare il Prin-cipio di Relativita! Il moto e infatti relativo, quindi non si puo dire se siail gemello B + C ad allontanarsi da A o se sia invece A che si allontana a

6.4. IL PARADOSSO DEI GEMELLI 107
sinistra da B+C e poi si riavvicina. Se le due situazioni sono indistinguibili,allora gli effetti devono essere uguali, e percio B +C deve invecchiare piu diA! C’e una contraddizione logica nella geometria di Minkowski? Quindi lageometria di Minkowski non sta in piedi? Dove sta l’inghippo?
Sia A sia B + C vedono accadere E1 ed E3 nello stesso luogo, ma traquesti due gemelli c’e una differenza fondamentale: uno dei due non e unvero e proprio osservatore inerziale, o meglio, c’e un istante in cui egli cessadi essere un osservatore inerziale. Il punto chiave e l’inversione del moto:nel punto di inversione del moto, il gemello B + C smette infatti per unattimo di essere inerziale: i suoi pendoli e i suoi giroscopi impazziranno,onde poi riprendere il normale comportamento nella fase di ritorno. Questadifferenza che pare microscopica, e in realta assai significativa: A e sempreun osservatore inerziale, B + C, per un pur breve istante, non lo e.
La risposta e quindi che la situazione non e simmetrica. Per rimanere nelcampo degli osservatori inerziali dobbiamo confrontare A con due osservatori(B e C), situazione palesemente asimmetrica! Se invece vogliamo confrontareA con il gemello B + C (la cui linea di universo e l’unione dei tratti di lineedi universo di B e C), dobbiamo riconoscere che uno tra i due gemelli, perun breve intervallo di tempo, ha cessato di essere inerziale,10 fatto che simanifesta nella presenza dell’angolo nella sua linea di universo.
Stiamo quindi confrontando un osservatore inerziale con un osservatorenon inerziale, e percio non possiamo invocare il Principio di Relativita.
Nella geometria di Minkowski, questa asimmetria si manifesta nel fattoche confrontiamo un segmento del genere tempo (quello di A) con una spez-zata del genere tempo (quella di B+C) - v. fig. 6.19. Abbiamo quindi trovatoche nella geometria di Minkowski, per triangoli del genere tempo, vale la di-suguaglianza triangolare invertita: un lato e maggiore o uguale della sommadegli altri due lati. Questo e il significato geometrico del paradosso dei ge-melli. Da questo punto di vista, tale paradosso non e altro che lo studiodella geometria di un triangolo del genere tempo in M e la scoperta delladisuguaglianza triangolare invertita.
6.4.3 Reinterpretazione del paradosso
Abbiamo analizzato il paradosso dei gemelli utilizzando i coni luce (ossiala struttura causale): infatti per confrontare gli osservatori ci siamo servitidel metodo dello scambio di segnali luminosi. Reinterpretiamo ora lo stesso
10Potremmo dire: ha dovuto accendere i motori per invertire il moto.

108 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.19: Il gemello B +C non e un osservatore inerziale: la sua linea diuniverso non e una retta, ma una spezzata.
paradosso utilizzando pero la struttura metrica, cioe l’intervallo spaziotem-porale.11
Consideriamo la linea di universo di uno dei due gemelli e poniamoci ilproblema di come e misurato il tempo lungo questa linea dell’orologio proprio,cioe comobile con il gemello. Notiamo innanzitutto che tale linea di universoe una linea del genere tempo (dunque c’e una relazione causale tra gli eventisulla linea), interamente contenuta nel cono luce di uno qualsiasi dei suoipunti. Generalizziamo anche il caso precedente, supponendo, in generale,che questa linea non sia una retta (cioe che il gemello in generale non siainerziale). Prendiamo la metrica con la solita segnatura lorentziana (3, 1),e per coerenza continuiamo ad attribuire il + alla parte temporale. Divi-dendo per c2 la definizione della metrica, onde avere tutti termini temporali,abbiamo che
ds2
c2=
1
c2(dx2 + dy2 + dz2)− dt2,
ove x, y, z, t sono le coordinate di un certo evento E sulla linea di universo
11Vale la pena ribadire che e proprio la struttura metrica la struttura centrale nellageometria dello spaziotempo di Minkowski: gli osservatori sono riferimenti ortonormatiche senza struttura metrica, pero, non servirebbero a gran che! Il fulcro della nostraanalisi sta appunto nella presenza di questa metrica S2 invariante al cambio di osservatoreinerziale.

6.4. IL PARADOSSO DEI GEMELLI 109
del gemello (per un qualunque osservatore inerziale: infatti ds2 e invariante).Considerando poi un evento E ′ infinitamente prossimo ad E e situato an-ch’esso sulla linea di universo del gemello12 (figura 6.20): dx, dy, dz, dt sa-ranno le variazioni infinitesime delle coordinate attribuite agli eventi E edE ′ da un qualsiasi osservatore inerziale.
Figura 6.20: Gemello (o particella) e osservatore inerziale.
In particolare, possiamo considerare l’osservatore inerziale istantanea-mente comobile con il gemello13 (principio del moto incipiente): istante peristante, infatti, esiste un osservatore inerziale B che ha sulla sua linea di uni-verso gli eventi infinitamente prossimi E ed E ′ (in particolare essi accadono,nel suo giudizio, nello stesso luogo). Tale osservatore inerziale, naturalmente,cambiera di istante in istante, ma cio che ci interessa e che esso esiste - inparticolare sara rappresentato dalla retta tangente in ogni punto alla curvadel gemello.
Considerando l’osservatore inerziale comobile con il gemello alla streguadel gemello stiamo tacitamente ammettendo che le misure di tempo, perintervalli di tempo infinitesimi, dipendano dalla velocita ma non dall’accele-razione. Se cosı e, il tempo dτ misurato da questo osservatore inerziale tra glieventi E ed E ′ coincide necessariamente con il tempo misurato dall’orologiodel gemello. Sia A un qualsiasi altro osservatore inerziale.
Per l’invarianza dell’intervallo spaziotemporale rispetto al cambiamentodi osservatore inerziale e per la localizzazione nello stesso punto degli eventiE ed E ′ rispetto all’osservatore inerziale D, abbiamo che
ds2A(E,E ′)
c2=
1
c2(dx2 + dy2 + dz2)− dt2,
12Gemello che, a questo punto, puo essere considerato anche una qualsiasi particella cheviaggi di moto non necessariamente inerziale nello spaziotempo.
13O, se si preferisce, con la particella accelerata.

110 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.21: Principio del moto incipiente: B e l’osservatore di quieteistantanea.
ds2B(E,E ′)
c2=
1
c2(0)− dτ 2,
e in particolare, per l’osservatore di quiete istantanea troviamo che
ds2B = −c2dτ 2. (6.10)
Dunque la variazione infinitesima di tempo misurata dall’orologio delgemello coincide con quella misurata dall’orologio di B, ed e quindi datadall’uguaglianza S2
A(E,E ′) = S2B(E,E ′), che conduce a
dτ 2 = c2dt2 − 1
c2(dx2 + dy2 + dz2).
Il tempo totale di un percorso da E0 ad E1 (con E0 ed E1 situati sulla lineadi universo del gemello) sara quindi ottenuto per integrazione:
τ(E0, E1) =
∫ t1
t0
dτ =
∫ t1
t0
√dt− 1
c2(dx2 + dy2 + dz2)
Nel piccolo, il moto e uniforme, cioe possiamo pensare chedx = vxdtdy = vydtdz = vzdt
,
dove supponiamo che il gemello si muova con velocita variabile ~v(t) = (vx(t), vy(t), vz(t)).Allora
dx2 + dy2 + dz2 = (v2x + v2
y + v2z)dt
2 = v2dt2,
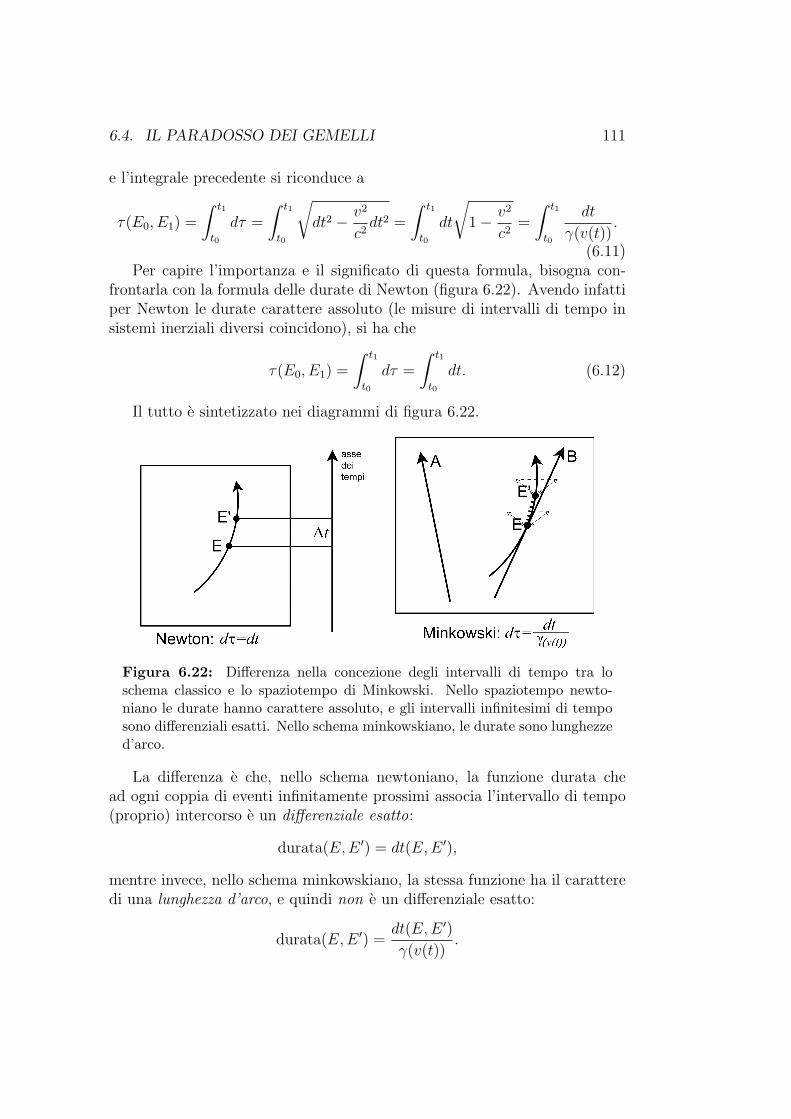
6.4. IL PARADOSSO DEI GEMELLI 111
e l’integrale precedente si riconduce a
τ(E0, E1) =
∫ t1
t0
dτ =
∫ t1
t0
√dt2 − v2
c2dt2 =
∫ t1
t0
dt
√1− v2
c2=
∫ t1
t0
dt
γ(v(t)).
(6.11)Per capire l’importanza e il significato di questa formula, bisogna con-
frontarla con la formula delle durate di Newton (figura 6.22). Avendo infattiper Newton le durate carattere assoluto (le misure di intervalli di tempo insistemi inerziali diversi coincidono), si ha che
τ(E0, E1) =
∫ t1
t0
dτ =
∫ t1
t0
dt. (6.12)
Il tutto e sintetizzato nei diagrammi di figura 6.22.
Figura 6.22: Differenza nella concezione degli intervalli di tempo tra loschema classico e lo spaziotempo di Minkowski. Nello spaziotempo newto-niano le durate hanno carattere assoluto, e gli intervalli infinitesimi di temposono differenziali esatti. Nello schema minkowskiano, le durate sono lunghezzed’arco.
La differenza e che, nello schema newtoniano, la funzione durata chead ogni coppia di eventi infinitamente prossimi associa l’intervallo di tempo(proprio) intercorso e un differenziale esatto:
durata(E,E ′) = dt(E,E ′),
mentre invece, nello schema minkowskiano, la stessa funzione ha il caratteredi una lunghezza d’arco, e quindi non e un differenziale esatto:
durata(E,E ′) =dt(E,E ′)
γ(v(t)).

112 LEZIONE 6. I PARADOSSI RELATIVISTICI
La forte dipendenza da t nel denominatore di quest’ultima relazione fa siche il differenziale non sia esatto e che dunque la durata totale dipenda dalcammino di integrazione. In Minkowski, il tempo e la lunghezza d’arco dellelinee di universo del genere tempo.
Il paradosso dei gemelli non fa altro che ribadire questa natura del temporelativistico: il tempo e una lunghezza d’arco.
6.4.4 Esperimento di Hafele-Keating
Nel 1972 si e avuta la prima verifica sperimentale del paradosso dei gemellifuori dai laboratori,14 con l’esperimento di Hafele-Keating. Essi hanno presotre orologi atomici identici, ne hanno lasciato uno a terra (a Baltimora) ehanno posto gli altri due in volo su aerei di linea, lanciati in versi opposti afare il giro equatoriale della terra.15 Cio costringe i tre orologi a percorrere trelinee di universo diverse nello spaziotempo, ma avendo due eventi coincidenti:l’evento E0 di partenza di due aerei e l’evento E1 di ritrovo dei tre oroloogidopo il giro del mondo degli aerei.
La figura 6.23 riporta le linee di universo di tali orologi in uno spaziobidimensionale (supponiamo che lo spazio sia la sezione terrestre, tagliataequatorialmente con il piano su cui circolano ambedue gli aerei in moto). SiaA l’orologio dermo a Baltimora, siano B e C gli orologi in viaggio sugli aerei.La linea di universo di A sara in prima approssimazione un’elica cilindrica:A non e inerziale, si muove con la rotazione terrestre. Per quanto riguardagli orologi B e C, anche le loro linee di universo saranno eliche cilindriche,ma aventi passi diversi, strutturate in modo diverso. Cio che accomuna le trelinee di universo e il fatto che esse differiscono solamente nei tratti compresitra gli eventi E0 ed E1: prima della partenza e dopo l’arrivo, infatti, i treorologi sono tutti situati a Baltimora, nel medesimo luogo, ove ritornano allafine del viaggio.
Il fatto significativo e che nel tratto in cui le tre linee si distinguono,i tre orologi battono diversamente: all’arrivo a Baltimora, gli orologi B eC in viaggio hanno battuto piu lentamente, e segnano di conseguenza untempo leggermente inferiore all’orologio A, sempre solidale con la terra -una differenza leggera, ma rilevabile e rilevata dall’esperimento. Se al postodell’orologio e degli aerei, avessimo tre macchine e tre contachilometri non cistupiremmo affatto di questo risultato: ci sembrerebbe assai naturale che le
14Il carattere relativistico del tempo era stato gia precedentemente esplorato, ma semprein laboratorio. L’esperimento di Hafele-Keating ha il pregio di portare la relativita a unlivello “quotidiano”.
15L’utilizzo di due aerei in luogo di uno solo e per ovviare ad alcuni effetti gravitazionaleinevitabilmente presenti e dovuti alla rotazione terrestre.

6.4. IL PARADOSSO DEI GEMELLI 113
Figura 6.23: Esperimento di Hafele-Keating. A (linea nera) e l’orologiofermo a Baltimora; B e l’orologio collocato sull’aereo in viaggio equatorialenello senso di rotazione terrestre. C e l’orologio collocato sull’aereo in viaggioin verso contrario rispetto al senso di rotazione terrestre. Tutte le linee diuniverso sono, in prima approssimazione eliche cilindriche. Prima di E0 (par-tenza) e dopo E1 (ritrovo) esse coincidono completamente. Tra i due eventi, leeliche degli osservatori hanno passi diversi. La differenza dei percorsi fatti daA, B e C tra E0 ed E1 si ripercuote in una differenza di cammino percorso, maanche di tempo trascorso - essendo il tempo in tutto e per tutto una lunghezzad’arco, esso dipende infatti dal cammino di integrazione.

114 LEZIONE 6. I PARADOSSI RELATIVISTICI
tre auto, partite da E0, giunte a E1 tramite percorsi diversi, abbiano percorsoun diverso numero di chilometri. Questo accade in maniera del tutto analogaanche per i tempi, poiche il tempo nello spaziotempo di Minkowski e unalunghezza d’arco, e come tale va trattata. Integrando su cammini diversi,otteniamo risultati diversi.
6.5 Paradosso dell’asta nel granaio
L’ultimo paradosso che trattiamo e un paradosso molto simpatico e non ba-nale, detto “paradosso dell’asta nel granaio” (che potremmo ribattezzarepiu concretamente “paradosso dell’auto nel garage”). Esso e giocato sullacontrazione delle lunghezze, anziche sulla dilatazione dei tempi.
Prendiamo un’asta (ovvero un regolo) di lunghezza a riposo l0 = 10m,
che si avvicina con velocita v =√
32c (cosicche γ(v) = 1√
1− 3c2
4c2
= 2) verso
un granaio di lunghezza L = 5m (nel giudizio dell’osservatore terrestre). Lasituazione e quella descritta nella figura 6.24.
6.5.1 Punto di vista della terra
Poniamoci sulla la terra (che supponiamo essere un osservatore inerziale).L’asta ha lunghezza a riposo l0 = 10m e viaggia con una velocita v per cuiγ(v) = 2. La lunghezza relativa (nel giudizio della terra) e quindi contratta diun fattore 2: L’osservatore terrestre, misurando la lunghezza dell’asta, trovache essa e lunga esattamente 5m, come il granaio. Siano A e B i due estremidell’asta. Quando B raggiunge la parete del granaio, l’asta e interamentecontenuta in esso, e supponiamo quindi che l’osservatore terrestre chiuda laporta del granaio.
Nel giudizio di tale osservatore gli eventi
• E1: B raggiunge la parete posteriore del granaio,
• E2: A raggiunge la porta d’ingresso del granaio
sono simultanei, e quindi l’asta e effettivamente contenuta nel granaio.

6.5. PARADOSSO DELL’ASTA NEL GRANAIO 115
Figura 6.24: Situazione del paradosso dell’asta nel granaio. Un regolo diestremi A, B e in moto con velocita ~v verso un granaio di lunghezza L (nelgiudizio dell’osservatore terrestre).

116 LEZIONE 6. I PARADOSSI RELATIVISTICI
6.5.2 Punto di vista dell’asta
Ma anche l’asta e un osservatore inerziale: per il Principio di Relativitac’e dunque completa simmetria tra i due osservatori.16 Dunque possiamodescrivere simmetricamente la stessa situazione dal punto di vista dell’asta.
Un’asta di lunghezza l0 = 10m vede un granaio che le corre incontro auna velocita v t.c. γ(v) = 2. Il granaio, nel giudizio dell’asta, ha quindi unalunghezza contratta di 2, 5m. Ergo: l’asta non puo entrare nel granaio.
6.5.3 Carattere paradossale e smascheramento
La situazione in questo caso e palesemente paradossale: secondo l’osservatoreterrestre l’asta entra (a filo) nel granaio, secondo l’osservatore solidale conl’asta, assolutamente no, anzi, il granaio addirittura si accorcia. Il Princi-pio di Relativita postula completa simmetria tra i due sistemi inerziali: chesignifica allora questa apparente asimmetria? Che c’e una contraddizionelogica nello spaziotempo di Minkowski? O forse che abbiamo fatto un’analisiun po’ affrettata e incompleta?
Naturalmente la risposta esatta e quest’ultima: abbiamo affrettato alcuneconclusioni e ci siamo completamente dimenticati di altri problemi. Analiz-ziamo la faccenda piu nel dettaglio. Il paradosso nasce sostanzialmente datre fatti:
(i) una sottovalutazione dell’importanza del concetto di simultaneita: lasimultaneita di eventi in luoghi distinti e sempre relativa;
(ii) una sopravvalutazione del concetto di rigidita: siamo abituati a pen-sare ai regoli (o alle aste) come a corpi rigidi, di lunghezza invariabile.Ma i corpi rigidi non possono esistere in relativita: a causa del carat-tere limite della velocita della luce tutti i corpi sono deformabili. Sipresti attenzione: con questo “deformabili” non intendiamo riferirci al-l’effetto della contrazione delle lunghezze17, bensı a un effetto di altrotipo. Si prenda un regolo, e siano A e B i suoi estremi. Nel momentoin cui uno dei due estremi (supponiamo A) si mette in moto, l’altroestremo B non puo iniziare il suo movimento fintanto che non gli egiunta l’informazione circa il fatto che A si e messo in moto. Ma que-sta informazione viaggia a velocita finita, poiche la velocita di questo
16In questo caso non e come nel paradosso dei gemelli, in cui uno dei due osservatori nonera a tutti gli effetti inerziale; qui entrambi gli osservatori sono completamente inerziali.
17Pensare che un corpo rigido possa avere lunghezza diversa in moto potrebbe essere giapiu intuitivo.

6.5. PARADOSSO DELL’ASTA NEL GRANAIO 117
segnale non puo superare c. Dunque la lunghezza del regolo e sicu-ramente variata, poiche il regolo si e deformato, “microcontratto” o“microdilatato” a seconda che lo stiamo tirando (allontanando i dueestremi) o spingendo (avvicinando i due estremi).18 Tutti i corpi sonoquindi deformabili in relativita. La nozione di corpo rigido, per aversenso, richiederebbe l’esistenza di un segnale che si propaga a velo-cita infinita (la cosiddetta interazione istantanea a distanza che non epossibile nello spaziotempo di Minkowski).19
(iii) una terminazione precoce dell’analisi del fenomeno: abbiamo seguitoinfatti l’asta finche A entra nel granaio nel giudizio dell’osservatoreterrestre, ma non abbiamo affatto analizzato cosa accade successiva-mente.
Quello che succede e rappresentato nel diagramma spaziotemporale difigura 6.25.
Gli eventi E1 ed E2 rappresentano la posizione degli estremi dell’astanel giudizio terrestre quando B raggiunge la parete di fondo: il diagrammamostra che in quel momento, per l’osservatore terrestre, l’asta e contenutanel granaio.
Nel giudizio dell’asta, di contro, quando B arriva alla parete, A si trovain E3: nel giudizio dell’asta sono gli eventi E1 ed E3 ad essere simultanei, enon gli eventi E1 ed E2. Il diagramma mostra che quando B raggiunge laparete, l’asta e fuori dal granaio: E3 non ha infatti ancora raggiunto la lineadi universo del granaio, e quindi l’asta e inequivocabilmente fuori (e cio ecompatibile con l’analisi precedente, secondo cui l’asta era fuori dal granaioper ben 7, 5m). L’eventoE2 e quindi posteriore all’evento E1 nel giudizio diA.Ci chiediamo: di quanto e posteriore? Usiamo la condizione di simultaneita diE2 con E1 rispetto all’osservatore terrestre. Dalle trasformazioni di Lorentzabbiamo infatti che
c∆tasta = γ(v)(c∆tterra − β(v)∆xterra) = −γ(v)β(v)L,
18Ribadiamo per chiarezza che queste “microdilatazioni” e “microcontrazioni” sono inrealta delle semplici deformazioni, che nulla hanno a che fare con la contrazione dellelunghezze. Sono effetti di tipo diverso: se questa avviene tra due corpi inerziali in motorelativo, quelle avvengono sempre, in generale, indipendentemente dal moto dei corpi inquestione; tirando un’asta, tale asta viene inevitabilmente deformata.
19Per inciso: si noti che questo fatto ha conseguenze molto importanti e drastiche,per certi versi. Ad esempio, cio invalida il principio newtoniano di azione-reazione: taleprincipio infatti prevede che a ogni “azione” corrisponda istantaneamente una “reazione”,ma questa istantaneita e inevitabilmente persa in regime relativistico, dato che qualsiasisegnale si propaga nello spazio e nel tempo con velocita finita, minore o uguale alla velocitadella luce. L’invalidita del principio di azione-reazione (cardine della meccanica classica)non e affatto cosa da poco.
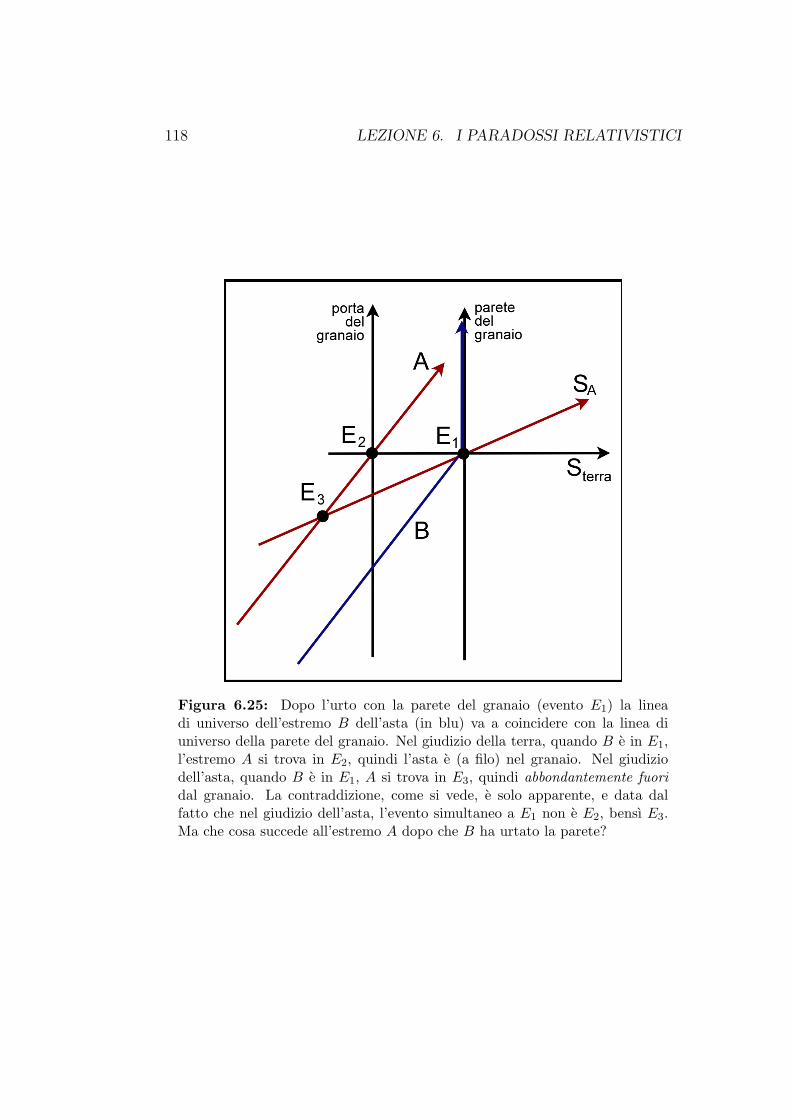
118 LEZIONE 6. I PARADOSSI RELATIVISTICI
Figura 6.25: Dopo l’urto con la parete del granaio (evento E1) la lineadi universo dell’estremo B dell’asta (in blu) va a coincidere con la linea diuniverso della parete del granaio. Nel giudizio della terra, quando B e in E1,l’estremo A si trova in E2, quindi l’asta e (a filo) nel granaio. Nel giudiziodell’asta, quando B e in E1, A si trova in E3, quindi abbondantemente fuoridal granaio. La contraddizione, come si vede, e solo apparente, e data dalfatto che nel giudizio dell’asta, l’evento simultaneo a E1 non e E2, bensı E3.Ma che cosa succede all’estremo A dopo che B ha urtato la parete?

6.5. PARADOSSO DELL’ASTA NEL GRANAIO 119
dove abbiamo usato il fatto che ∆tterra = ∆tterra(E1, E2) = 0, proprio per lasimultaneita dei due eventi rispetto all’osservatore terrestre. L e la lunghezzapropria del granaio (cioe la distanza spaziale tra gli eventi simultanei E1 edE2 nel giudizio della terra. Abbaimo quindi immediatamente che
∆tasta = −γ(v)β(v)
cL = −γ(v)L v
c2,
ove ∆tasta e l’intervallo di tempo tra E1 ed E2 per un generico osservatoreinerziale che non vede i due eventi simultanei, L e la distanza propria deidue eventi (rispetto cioe all’osservatore inerziale che li vede simultanei) e ve la velocita relativa tra questi due osservatori inerziali. L’estremo A dell’a-sta, dopo che B ha raggiunto la parete, deve quindi viaggiare ancora ∆tastasecondi per raggiungere la porta.
Ora, se l’asta AB fosse rigida, quando B urta la parete e si ferma, ancheA dovrebbe istantaneamente arrestarsi, e quindi il grafico di cio che accadedovrebbe essere quello riportato in figura 6.26.
Figura 6.26: Se l’asta fosse rigida, non appena B urtasse la parete del gra-naio, anche A si fermerebbe (rispetto alla terra), e tutti i punti dell’asta di-venterebbero istantaneamente (nel giudizio dell’asta) in quiete relativa rispettoalla terra. L’asta non entrerebbe nel granaio. Ma cosı non puo essere.

120 LEZIONE 6. I PARADOSSI RELATIVISTICI
Percio l’asta non potrebbe entrare dalla porta, e da qui il paradosso. Siesce dal paradosso poiche l’asta non puo essere rigida: quando B urta laparete, manda un segnale (la cosiddetta onda di shock) che raggiunge manoa mano tutti gli altri punti dell’asta. Ma questo segnale viaggia con velocitafinita, di sicuro non maggiore di c; dunque impieghera un tempo finito apervenire a ciascun punto dell’asta. Fin quando a un certo punto dell’asta nonarriva l’informazione dell’onda di shock, tale punto continua a viaggiare dimoto rettilineo uniforme, onde fermarsi bruscamente quando l’informazionesullo stop gli giunge. Il grafico dello spaziotempo relativisticamente correttoe dunque riportato in figura 6.27.
Figura 6.27: L’asta non e rigida: l’informazione che B si e fermato (l’ondadi shock) viaggia a velocita finita minore di c (quindi all’interno del conoluce). Dunque raggiunge tutti i punti dell’asta in un certo tempo non nullo.Quando l’onda di shock raggiunge l’estremo A, l’asta e gia abbondantementenel granaio.
E chiaro dalla figura che, dato che l’onda di shock arriva alla porta delgranaio in un tempo successivo al tempo ∆tasta, non solo l’asta entrera nelgranaio, ma ci sara ancora un po’ di spazio residuo nel granaio, poiche l’astanon occupera il granaio nella sua interezza: urtata la parete B, l’asta si defor-

6.5. PARADOSSO DELL’ASTA NEL GRANAIO 121
mera sino a lasciare altro spazio nel granaio. Si noti che questo e vero sia nelgiudizio dell’osservatore terrestre, sia nel giudizio dell’osservatore sull’asta.

122 LEZIONE 6. I PARADOSSI RELATIVISTICI

Lezione 7
Quadrivettori e meccanica
Abbiamo analizzato e smascherato alcuni tra i piu famosi paradossi dellaRelativita Ristretta; riprendiamo ora le fila del discorso. In base al Principiodi Relativita tutti gli osservatori sono equivalenti. Questo implica che leleggi della fisica devono avere la stessa forma in tutti i riferimenti inerziali(cosiddetta invarianza in forma).
Il problema e che le leggi di Newton sono, in forma per trasformazioni diGalileo, non sono affatto invarianti in forma per trasformazioni di Lorentz.Quindi non verificano la condizione posta dal Principio di Relativita: il pro-blema base della meccanica relativistica e dunque quello di modificare (senzastravolgere) le equazioni di Newton, per renderle compatibili con il Principiodi Relativita (ossia per renderle invarianti in forma rispetto a trasformazionidi Lorentz), in modo tale che per v
c→ 0 si ottengano nuovamente le equazioni
di Newton (condizione del limite classico).
7.1 Innalzamento
Il metodo piu semplice per risolvere questo problema e di formulare le leggidella meccanica senza far ricorso alla nozione di osservatore inerziale e uti-lizzando solamente la struttura geometrica dello spaziotempo di Minkowski.Si tratta quindi di innalzare1 lo studio del moto dallo spazio relativo di unosservatore (spazio quoziente) allo spaziotempo M . In sintesi: abolizionedegli osservatori inerziali, innalzamento dell’analisi.
1Questo vocabolo “innalzare” e una traduzione approssimativa del verbo inglese chetipicamente e usato in letteratura: il verbo “to lift”. In questo significato particolare, taleverbo risulta quasi intraducibile: esso esprime proprio il passaggio dallo studio di un motonello spazio quoziente allo studio del moto in tutto lo spaziotempo. L’“innalzamento”corrisponde in sostanza a una sorta di antiproiezione.
123

124 LEZIONE 7. QUADRIVETTORI E MECCANICA
Lo strumento base per realizzare questo programma e la teoria dei 4-vettori(cioe dei quadrivettori2) dello spaziotempo di Minkowski. Partiamo dal con-fronto tra la descrizione relativa (ad un osservatore) e la descrizione assolutadel moto di una particella, riassunto in figura 7.1.
Figura 7.1: Descrizione relativa (a sinistra) e descrizione assoluta (a destra)del moto di una particella. Preso un osservatore A, il moto di una particellasullo spazio quoziente SA e descritto da una curva parametrizzata con il temporelativo t. Da un punto di vista assoluto, il moto e una linea di universo delgenere tempo e l’unico parametro a disposizione e il tempo proprio τ .
• Nella descrizione assoluta il moto di una particella e una linea di uni-verso Q(τ) del genere tempo, parametrizzata mediante il tempo pro-prio. Infatti il tempo proprio e l’unico strumento che abbiamo a di-sposizione3, nonche il piu naturale: teniamo infatti conto che il tempoproprio, nella geometria di Minkowski, e una lunghezza d’arco. Comee uso comune nella geometria euclidea, anche qui stiamo quindi para-metrizzando la curva mediante il suo parametro arco (a meno di unfattore c), cioe il tempo proprio.
• Nella descrizione relativa ad un osservatore, invece, il moto di una par-ticella (che per definizione e la “variazione della posizione nel tempo”)
2Scriveremo 4-vettori per designare appunto i quadrivettori.3E dato che per la (6.10) l’intervallo spaziotemporale misurato dall’osservatore di quiete
istantanea e ds2 = −c2dτ2, dall’invarianza di ds2 segue l’invarianza di dτ2.

7.2. VELOCITA 125
e una linea P (t) nello spazio relativo all’osservatore4 parametrizzatamediante il tempo relativo t associato all’osservatore.
Il primo passo per passare dallo spazio relativo allo spazio assoluto e dicollegare le due descrizioni. Si utilizza l’interpretazione geometrica di unosservatore come tetrade nello spaziotempo. Fissata un origine, infatti, lastruttura vettoriale dello spaziotempo ci permette di scrivere che
Q(τ) = x(t)~I + y(t) ~J + z(t) ~K + ct~L = P (t) + ct~L. (7.1)
Cioe: la curva P (t) sullo spazio quoziente e la proiezione spaziale dellalinea di universo Q(τ), la quale pero ha anche una coordinata in piu, quellatemporale.
7.2 Velocita
Se seguiamo la descrizione relativa, siamo portati a introdurre la velocitarelativa
~v :=dP (t)
dt.
Se invece seguiamo la descrizione assoluta, siamo portati ad introdurre lavelocita assoluta (o 4-velocita5) della particella
~V :=dQ(τ)
dτ.
Nella geometria dello spazio di Minkowski, questa 4-velocita ha il significatodi versore tangente alla linea di universo della particella6, dal momento cheτ e il parametro arco della curva.
Possiamo derivare rispetto al parametro arco τ la formula (7.1), che legala descrizione relativa a quella assoluta, ottenendo che
~V =dQ(τ)
dτ=
d
dτ(P (t) + ct~L) =
d
dt(P (t) + ct~L) · dt
dτ= γ(v)(~v + c~L),
4Cioe nello spazio quoziente rispetto alle linee di universo dell’osservatore, spazio chesi puo identificare con la piattaforma spaziale dell’osservatore, ossia con l’ortogonale allalinea di universo dell’osservatore.
5Analogamente a prima: questo si leggera “quadrivelocita”. Utilizzeremo sempre lelettere minuscole per gli enti nello spazio relativo, le lettere maiuscole per i corrispettivienti nello spaziotempo di Minkowski.
6Sempre a meno di un fattore c; ma non c’e nessun problema a identificare un vettorea norma costante con il versore tangente.
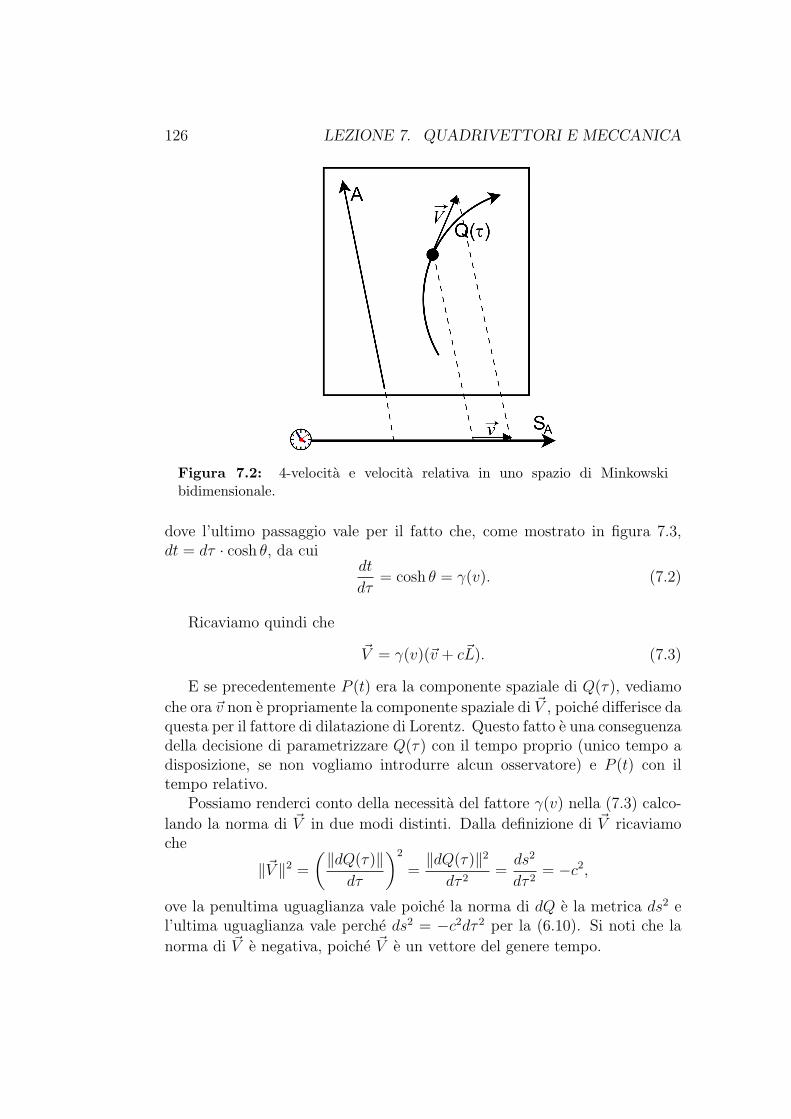
126 LEZIONE 7. QUADRIVETTORI E MECCANICA
Figura 7.2: 4-velocita e velocita relativa in uno spazio di Minkowskibidimensionale.
dove l’ultimo passaggio vale per il fatto che, come mostrato in figura 7.3,dt = dτ · cosh θ, da cui
dt
dτ= cosh θ = γ(v). (7.2)
Ricaviamo quindi che
~V = γ(v)(~v + c~L). (7.3)
E se precedentemente P (t) era la componente spaziale di Q(τ), vediamo
che ora ~v non e propriamente la componente spaziale di ~V , poiche differisce daquesta per il fattore di dilatazione di Lorentz. Questo fatto e una conseguenzadella decisione di parametrizzare Q(τ) con il tempo proprio (unico tempo adisposizione, se non vogliamo introdurre alcun osservatore) e P (t) con iltempo relativo.
Possiamo renderci conto della necessita del fattore γ(v) nella (7.3) calco-
lando la norma di ~V in due modi distinti. Dalla definizione di ~V ricaviamoche
‖~V ‖2 =
(‖dQ(τ)‖dτ
)2
=‖dQ(τ)‖2
dτ 2=ds2
dτ 2= −c2,
ove la penultima uguaglianza vale poiche la norma di dQ e la metrica ds2 el’ultima uguaglianza vale perche ds2 = −c2dτ 2 per la (6.10). Si noti che la
norma di ~V e negativa, poiche ~V e un vettore del genere tempo.

7.2. VELOCITA 127
Figura 7.3: Relazione tra dt e dτ .
D’altro canto, possiamo anche scrivere che
‖~V ‖ = ~V · ~V = γ2(~v + c~L)(~v + c~L) =
= γ2(~v · ~v + 2c~v · ~L+ c2~L · ~L) = γ2(v2 − c2) =c2
c2 − v2(v2 − c2) = −c2,
(7.4)
dove abbiamo usato il fatto che ~v ⊥ ~L (cioe ~v · ~L = 0, visto che ~v e legato
alla piattaforma spaziale, mentre ~L e legato all’asse temporale) e il fatto che~L · ~L = −1.
Notiamo quindi che il fattore γ(v) e essenziale per continuare ad avere unvettore a norma costante (a meno di un fattore c possiamo dire - e diremo
a tutti gli effetti - che ~V e un versore7). A causa di questo fattore γ(v)
la relazione tra velocita relativa ~v e 4-velocita ~V e altamente non lineare.Tale non linearita e tuttavia proprio quella necessaria a rendere semplice lalegge di composizione delle velocita. Mostriamo la superiorita del punto di
7I fattori c spesso sono un inutile e fastidioso impiccio quando si trattano questi argo-menti. Non e raro infatti trovare in letteratura frasi come “Poniamoci in un riferimentoper cui c = 1”, al fine di evitare inutili complicazioni nei conti. D’altro canto tale fattore cnon e perso, poiche puo sempre essere reintrodotto nelle equazioni mediante ragionamentidimensionali.

128 LEZIONE 7. QUADRIVETTORI E MECCANICA
vista assoluto rispetto a quello relativo studiando, per l’appunto, la legge dicomposizione delle velocita.8
7.2.1 Punto di vista relativo
Prendiamo due osservatori inerziali che studiano il moto della stessa parti-cella. Essi daranno una descrizione mediante le funzioni, rispettivamente,(x(t), y(t), z(t)) e (x′(t′), y′(t′), z′(t′)) (ciascuno utilizzera il proprio tempo t).Sia u la velocita relativa tra i due osservatori, che supponiamo (al solito) inmoto lungo il comune asse delle x - di modo da poter operare trasformazionidi Lorentz speciali. Le velocita della particella rispetto a questi osserva-tori saranno, rispettivamente, v = (vx, vy, vz) e v′ = (v′x, v
′y, v
′z). Il nostro
problema, ora, e trovare le formule che legano queste due terne di numeri.I due osservatori sono collegati da una trasformazione di Lorentz speciale
(ipotesi sul moto relativo) di parametro u; dunque valect′ = γ(u)(ct− β(u)x)x′ = γ(u)(x− β(u)ct)y′ = yz′ = z
.
Dunque, differenziando, otteniamo checdt′ = γ(u)(cdt− β(u)dx)dx′ = γ(u)(dx− β(u)cdt)dy′ = dydz′ = dz
,
e quindi, per divisione membro a membro,
v′x′ =dx′
dt′=dx− β(u)c · dtdt− β(u)
cdx
=vx − u1− uvx
c2
[2pt]v′y′ =dy′
dt′=
1
γ(u)
dy
dt− β(u)cdx
=1
γ(u)
vy
1− uvx
c2
[2pt]v′z′ =dz′
dt′=
1
γ(u)
dz
dt− β(u)cdx
=1
γ(u)
vz
1− uvx
c2
. (7.5)
Osserviamo che il ruolo privilegiato della x nelle tre equazioni e dovutoal fatto che il moto avviene lungo l’asse delle x.9
8Abbiamo gia studiato la legge di composizione delle velocita longitudinali ai para-grafi 2.3.3 e 5.1. Qui la studiamo nuovamente da un punto differente e piu in generale -componiamo velocita qualsiasi, non solo velocita longitudinali.
9In essa ritroviamo la formula ricavata in precedenza per le composizioni delle velocitalongitudinali (a megno del segno della velocita relativa u).

7.2. VELOCITA 129
Figura 7.4: Cambiare osservatore inerziale significa operare una rotazioneiperbolica nel piano dei vettori ~I e ~L (supponendo i due osservatori in motorelativo lungo il comune asse delle x).
Queste equazioni forniscono il teorema completo di composizione dellevelocita relativistiche. Sono formule di tipo proiettivo, ben lungi dall’esserelineari.
7.2.2 Punto di vista assoluto
Da un punto di vista assoluto i due osservatori inerziali sono rappresentati dadue tetradi ortonormate nello spaziotempo di Minkowski. Nel caso speciale,queste tetradi sono disposte come indicato in figura 7.4.
Le trasformazioni di Lorentz agiscono sulle tetradi nel seguente modo~L = γ(u)(~L′ − β(u)~I ′)~I = γ(u)(~I ′ − β(u)~L′)~J = ~J ′
~K = ~K ′
,
con u velocita relativa tra i due osservatori.
Il 4-vettore ~V della linea di universo di una particella in moto rispetto adentrambi gli osservatori potra essere scomposto sulle due tetradi, ovvero
~V = Vx~I + Vy
~J + Vz~K + Vt
~L = V ′x′~I ′ + V ′
y′~J ′ + V ′
z′~K ′ + V ′
t′~L′,
e dunque possiamo associare a tale 4-vettore le sue componenti nel riferimentoconsiderato.

130 LEZIONE 7. QUADRIVETTORI E MECCANICA
Dalla legge di trasformazione della base si deduce immediatamente lalegge di trasformazione delle componenti, ovvero
V ′t′ = γ(u)(Vt − β(u)Vx)V ′
x′ = γ(u)(Vx − β(u)Vt)V ′
y′ = Vy
V ′z′ = Vz
, (7.6)
o, in equivalente forma matriciale,V ′
t′
V ′x′
V ′y′
V ′z′
=
γ(u) −γ(u)β(u) 0 0
−γ(u)β(u) γ(u) 0 00 0 1 00 0 0 1
Vt
Vx
Vy
Vz
.
A differenza della legge di trasformazione delle velocita relative, questalegge e lineare. Si dice che le componenti di ~V si trasformano con leggelineare al cambiare dell’osservatore, o che ~V ha carattere vettoriale.
7.2.3 Confronto
Tenendo conto delle relazioniVt = γ(v) · cVx = γ(v) · vx
Vy = γ(v) · vy
Vz = γ(v) · vz
(7.7)
che derivano dalla relazione
~V = γ(v)(~v + c~L),
e delle analoghe relazioni nel sistema dell’osservatore primatoV ′
t′ = γ(v′) · cV ′
x′ = γ(v′) · v′x′V ′
y′ = γ(v′) · v′y′V ′
z′ = γ(v′) · v′z′
che derivano, naturalmente, da
~V ′ = γ(v′)(~v′ + c~L′),

7.2. VELOCITA 131
si vede immediatamente che il sistema (7.6) condensa il sistema (7.5), cioe loimplica. Infatti da (7.6) otteniamo, sostituendo, che
γ(v′)c = γ(u)(γ(v)vt − γ(v)β(u)vx) = γ(u)γ(v)(c− β(u)vx)γ(v′)v′x′ = γ(u)(γ(v)vx − γ(v)β(u)vt) = γ(u)γ(v)(vx − β(u)c)γ(v′)v′y′ = γ(v)vy
γ(v′)v′z′ = γ(v)vz
. (7.8)
Dalla prima equazione si ricava la legge di trasformazione dei fattori γ,cioe
γ(v′) = γ(u)γ(v)(c− β(u)vx), (7.9)
il che significa che, se v e la velocita relativa tra un osservatore e una parti-cella e u e la velocita relativa tra l’osservatore e un altro osservatore, la ve-locita relativa tra quest’ultimo osservatore e la particella sara v′ che verifical’equazione (7.9).
Dalle altre equazioni del sistema (7.8) si ottiene, dividendole per la prima,
v′x′
c=vx − β(u)c
c− β(u)vx
,v′y′
c=
1
γ(u)
vy − β(u)
c− β(u)vy
,v′z′
c=
1
γ(u)
vz − β(u)
c− β(u)vz
.
e non ci vuole molto (basta moltiplicare per c) per vedere che esse sonoequivalenti a
v′x′ = cvx − β(u)c
c− β(u)vx
=vx − u
cc
c−ucvx
c
=vx − u1− uvx
c2
v′y′ = c1
γ(u)vy
c−β(u)vx=
1
γ(u)
vy
c−ucvx
c
=1
γ(u)
vy
1− uvx
c2
v′z′ = c1
γ(u)vz
c−β(u)vx=
1
γ(u)
vz
c−ucvx
c
=1
γ(u)
vz
1− uvx
c2
cioe al sistema (7.5).
Dunque le trasformazioni “assolute” condensano quelle relative, ma hannoun notevole ulteriore vantaggio: sono lineari omogenee nelle 4-velocita. Inaltre parole, passando da ~v a ~V si linearizza la legge di trasformazione dellevelocita. Nello spaziotempo di Minkowski la velocita non e descritta daun vettore nello spazio relativo dell’osservatore, bensı da un 4-vettore delgenere tempo (e tale che ‖~V ‖2 = −c2), tangente alla linea di universo dellaparticella, le cui componenti si trasformano con legge lineare al cambiaredell’osservatore.

132 LEZIONE 7. QUADRIVETTORI E MECCANICA
7.2.4 Ricapitolazione
Ricapitoliamo quanto abbiamo fatto, per tirare le fila del discorso. Abbiamoinnanzitutto posto un problema: rendere le equazioni della dinamica compa-tibili con il Principio di Relativita (questione fisica) cioe invarianti in formaper trasformazioni di Lorentz (questione matematica).
Programma
Per risolvere questo problema abbiamo deciso di seguiere un metodo: scri-vere le equazioni della dinamica indipententemente dalla scelta di un qua-lunque osservatore inerziale, e quindi automaticamente invarianti in formaper cambiamento di osservatore inerziale (ossia trasformazioni di Lorentz),sfruttando a questo scopo la struttura geometrica dello spazio di Minkowski -spazio affine quadridimensionale muito di una struttura semieuclidea di tipolorentziano, segnatura 3,1.
Primo passo
Il primo passo (sezione 7.1) nella realizzazione di questo programma e statoquello di “innalzare” la descrizione del moto dallo spazio relativo ad un os-servatore inerziale nello spaziotempo. Questo innalzamento si e basato sudue idee.
(i) La prima e banale: passare dalla traiettoria parametrizzata P (t) nellospazio relativo, alla linea di universo nello spaziotempo.
(ii) La seconda e essenziale: parametrizzare la linea di universo con il tempoproprio, che e l’unico parametro naturale (del genere tempo) che ab-biamo a disposizione sullo spaziotempo, in assenza di osservatori iner-ziali. E proprio l’introduzione e l’uso sistematico del tempo proprio el’aspetto qualificante della relativita!
Secondo passo
Il secondo passo (sezione 7.2) nella realizzazione del programma ha riguardatole velocita. Siamo passati dalla velocita relativa
~v =dP (t)
dt
(vettore nello spazio quoziente associato all’osservatore, ma non nello spa-ziotempo) al 4-vettore velocita
~V =dQ(τ)
dτ,

7.2. VELOCITA 133
Figura 7.5: Relazione tra spazio assoluto e spazio relativo per uno spazio-tempo di Minkowski tridimensionale. L’innalzamento di una curva P (t) nellospazio relativo corrisponde sostanzialmente a proiettarla su M3 e “attribuirleun tempo”. Nello spazio relativo c’e il tempo relativo all’osservatore A (l’oro-logio). Nello spazio assoluto non c’e nulla di tutto cio: non ci sono piu orologi,ma c’e la metrica ds2 con la struttura causale data dai coni luce.

134 LEZIONE 7. QUADRIVETTORI E MECCANICA
che abbiamo visto avere carattere vettoriale (cioe: le sue componenti si tra-sformano con legge lineare al cambiare dell’osservatore). Tale carattere vet-
toriale di ~V e una conseguenza del carattere invariante10 di dτ e del caratterevettoriale di dQ: il rapporto tra un vettore e una quantita invariante11 rimaneun vettore, e cio si manifesta nella scoperta della linearita nelle trasformazionidi coordinate:
V ′t′
V ′x′
V ′y′
V ′z′
=
γ(u) −γ(u)β(u) 0 0
−γ(u)β(u) γ(u) 0 00 0 1 00 0 0 1
Vt
Vx
Vy
Vz
=
=
cosh θ − sinh θ 0 0− sinh θ cosh θ 0 0
0 0 1 00 0 0 1
Vt
Vx
Vy
Vz
.
Il carattere non vettoriale della velocita relativa ~v, simmetricamente, edovuto al carattere non invariante di dt (il quale si trasforma da osservatorea osservatore con legge complicata) e si manifesta nella proiettivita (in parti-colare nella non linearita) delle leggi di trasformazione delle sue componenti,che abbiamo trovato essere leggi di composizione delle velocita:
v′x′ =vx − u1− uvx
c2
v′y′ =1
γ(u)
vy
1− uvx
c2
v′z′ =1
γ(u)
vz
1− uvx
c2
.
A livello delle velocita, le descrizioni relativa ed assoluta sono legate dallaformula12
~V = γ(v)(~v + c~L).
10Difatti, dato che per la (6.10) ds2 = −c2dτ2, dall’invarianza di ds2 segue l’invarianzadi dτ2, nel senso che tutti gli osservatori, concordando su ds2, devono concordare anchesu dτ2.
11Si puo pensare all’analogia con il prodotto di un vettore per uno scalare.12In questa formula il fattore γ(v) e assolutamente essenziale, perche rende conto del
cambiamento di parametrizzazione. Inoltre si presti attenzione al fatto che l’argomentov non e la velocita relativa tra due osservatori (non ci sono due osservatori, qui: ce nebasta uno solo), ma semplicemente la velocita della particella nello spazio relativo ad unosservatore, cioe il modulo del vettore ~v = dP
dt . Infine ~L e il versore unitario dell’assetemporale dell’osservatore.

7.3. LEGGI DI MOTO 135
dove ~L e il versore della linea di universo dell’osservatore scelto, che verifica
~L · ~L = −1,
dove ~v appartiene alla piattaforma spaziale dell’osservatore, e quindi
~v · ~L = 0
e dove γ(v) e il fattore di Lorentz essenziale per tenere conto del cambiamentodi parametrizzazione da t a τ .
Questa formula trasforma la legge di composizione delle velocita nellalegge di trasformazione lineare delle componenti di un quadrivettore.
7.3 Leggi di moto
7.3.1 Innalzamento delle leggi
Eccoci dunque al terzo passo: si tratta ora di innalzare le leggi di moto diNewton13
~p = m~v ~f =d~p
dt(7.10)
in equazioni aventi la stessa struttura (cosiddetto principio di permanenzadel limite classico: per v
c→ 0 dobbiamo riottenere le equazioni di Newton
nella forma a noi nota) scritte pero sullo spaziotempo, utilizzando solo lastruttura geometrica di tale spazio - e non la decomposizione relativa.
Vediamo di spiegare meglio la faccenda. Le leggi del moto di Newton sonoleggi nello spazio relativo all’osservatore. E finche rimaniamo nello spazionewtoniano, gli enti ~p e ~f hanno a tutti gli effetti carattere vettoriale, poichela quantita dt mediante la quale essi sono definiti14 e invariante al cambiaredell’osservatore. Ma nello spaziotempo di Minkowski questo non e piu vero:ne ~p ne ~f hanno piu carattere vettoriale nello spaziotempo di Minkowski; essirestano vettori dello spazio relativo ad un osservatore. Il fatto essenziale einnalzare queste equazioni, scrivendole in forma assoluta nello spaziotempo.
L’idea piu naturale e quella di postulare ancora il carattere invariantivodella massa (ogni particella ha una sua massa indipentemente dall’osserva-tore e tutti gli osservatori inerziali concordano sulla misura di tale massa) e
13Rimaniamo fedeli al vecchio proposito di notare con caratteri minuscoli le grandezzenello spazio relativo e con caratteri maiuscoli quelle nello spaziotempo. E chiaro, quindi,che ~p sara la quantita di moto “usuale” e che ~f sara analogamente la forza con cui siamoabituati ad avere a che fare, trattando le equazioni di Newton.
14Anche ~p e definito mediante dt, essendo ~p = m~v = mdP (t)dt

136 LEZIONE 7. QUADRIVETTORI E MECCANICA
sostituire le relazioni precedenti con15
~P = m~V ~K =d~P
dτ. (7.11)
Notiamo che ~P e il prodotto di uno scalare che, per il postulato precedente,e invariante (la massa) e un 4-vettore, dunque e anch’esso un 4-vettore; ana-
logamente ~K e il rapporto tra un 4-vettore16 d~P e l’invariante dτ , dunque eanch’esso un 4-vettore.
Il 4-vettore ~P e detto 4-vettore energia-momento (o quantita di
moto), mentre il 4-vettore ~K e detto 4-vettore forza di Minkowski17.
Il processo di innalzamento e di conquista dell’indipendenza dall’osserva-tore inerziale si manifesta soprattutto nella sostituzione ovunque del temporelativo con il tempo proprio. E proprio tale processo che ci ha suggerito lacosiddetta forma relativistica delle equazioni di moto:
~V :=dQ(τ)
dτ~P = m~V ~K =
d~P
dτ. (7.12)
Possiamo riassumere il tutto nel piccolo schema in figura 7.6.
7.3.2 Ricerca dei legami
Il problema successivo e di legare i nuovi personaggi Q(τ), ~V (τ), ~P (τ), ~K(τ)alla descrizione relativa fatta da un qualsiasi osservatore inerziale - in so-stanza ora stiamo “scendendo” dal punto di vista assoluto a quello relativo.
Fissato un osservatore inerziale (cioe una tetrade), ogni 4-vettore potra es-sere decomposto su questa tetrade; in particolare potremo distinguere la suaparte spaziale dalla sua parte temporale. Dunque gli enti assoluti potranno
15Rompiamo la simmetria, e scriviamo ~K in luogo di ~F per due ragioni: innanzituttoperche la F maiuscola ci servira in seguito per indicare il tensore di Faraday, e poi perragioni storiche - ~K e infatti la nomenclatura usata da Minkowski nei suoi lavori.
16Ci rendiamo conto che potrebbero sorgere conflitti di notazioni tra P (t) curva nellospazio relativo e ~P 4-vettore nello spaziotempo. Per ovviare a tali ambiguita porremosempre la freccina di vettore sul secondo di questi due enti.
17Per analogia dovremmo dire “4-vettore potenza-forza”, ma tale nomenclatura non ecomune e non la useremo.

7.3. LEGGI DI MOTO 137
Figura 7.6: Relazioni tra gli enti assoluti introdotti. Sia Q(τ) sia ~V devonocontribuire nella legge di forza per ~K.
essere scritti nella forma18
Q(τ) = P (t) + ct · ~L~V (τ) = γ(v)(~v + c · ~L)
~P (τ) = ~p+E
c· ~L
~K(τ) = γ(v)
(~f +
Π
c· ~L) . (7.13)
Specifichiamo immediatamente che queste relazioni per noi hanno carat-tere di definizioni : in questo modo stiamo definendo le componenti relative19
rispetto ad un dato osservatore, rappresentato da ~L. I membri di sinistra delsistema (7.13) sono gia stati introdotti, e sono intrinseci: ora stiamo ritor-nando indietro! Stiamo ridefinendo il modo in cui chiameremo le componenti.Ad esempio chiameremo posizione relativa P (t) la proiezione di Q(τ) sullospazio relativo ad un osservatore, chiameremo E la componente temporaledel 4-vettore quantita di moto, moltiplicata per c, e cosı via. Da ora in poisi pensera che i quadrivettori Q(τ), ~V (τ), ~P (τ), ~K(τ) siano definiti assioma-ticamente come indicato dal diagramma in figura 7.6, e da essi si torna alladescrizione relativa mediante il sistema (7.13).
L’unica cosa veramente importante nelle definizioni del sistema (7.13) e
la comparsa del fattore di Lorentz γ(v) in ~V (τ) e in ~K(τ). Questa e stata
18I vettori Q(τ) e P (t) vanno intesi come punti (nello spazitempo o nello spazio relativo),ma anche come vettore posizione - una volta introdotte due origini O e O′.
19Anche E e Π sono componenti relative, essendoci la presenza del vettore ~L, cioedell’osservatore.

138 LEZIONE 7. QUADRIVETTORI E MECCANICA
una nostra scelta, ma una scelta assolutamente sensata, dato che questi duepersonaggi sono definiti per derivazione, e dunque γ(v) serve per render contodel passaggio dalla parametrizazione naturale con τ alla parametrizzazionerelativa con t.
7.3.3 Vincoli
Prima di analizzare il significato delle componenti dei 4-vettori, bisogna os-servare che ognuno di essi soddisfa un vincolo, per cui le tre componentispaziali determinano univocamente la componente temporale. Insomma, lequattro componenti di ciascun 4-vettore sono hanno in realta tre gradi diliberta, essendo esse legate da un vincolo. I vincoli derivano dall’equazione(7.4), cioe dal fatto che il 4-vettore ~V ha il carattere di un versore tangentealla linea di universo, cioe ha norma costante:
‖~V ‖2 = −c2, (7.14)
che e gia il vincolo sulla 4-velocita.Di conseguenza abbiamo che
‖~P‖2 =
(~p+
E
c~L
)(~p+
E
c~L
)= p2 + 2
E
c~p · ~L+
E2
c2~L · ~L = p2 − E2
c2,
dove l’ultimo passaggio vale perche ~p ⊥ ~L e ‖~L‖2 = −1. D’altra parte, dalla
forma relativistica delle equazioni del moto sappiamo che ~P = m~V , da cui
‖~P‖2 = ‖m~V ‖2 = m2‖~V ‖2 = −m2c2
ed eguagliando i risultati di questi due diversi modi di calcolo per ‖~P‖2otteniamo
p2 − E2
c2= −m2c2, (7.15)
che e il vincolo sulle componenti del 4-vettore quantita di moto.20
In particolare, anche ~P ha norma costante (questo deriva dal fatto che~P = m~V e dal fatto che m ha carattere invariantivo, come postulato inprecedenza) pari a −m2c2. Dunque la derivata della sua norma si annullera,cioe
d‖~P‖2
dτ=d~P · ~Pdτ
= 0.
20In realta gia‖~P‖2 = −m2c2
era gia il vincolo cercato, abbiamo pero voluto trovare un’importante relazione relativisticacalcolando in due diversi modi la norma del 4-vettore quantita di moto.

7.3. LEGGI DI MOTO 139
Ma per la regola di Leibnitz
0 =d~P · ~Pdτ
=d~P
dτ· ~P + ~P · d
~P
dτ= 2
d~P
dτ· ~P ,
e l’annullarsi di d~P ·~Pdτ
forza l’annullarsi di d~Pdτ· ~P = ~K · ~P = ~K · m~V . In
definitiva, abbiamo che~K · ~V = 0, (7.16)
cioe che (esplicitando il prodotto scalare, tenendo conto che gli unici terminiche “si salvano” sono il prodotto tra le parti spaziali e il prodotto tra le partitemporali)
~K · ~V = γ(v)
(~f +
Π
c~L
)γ(v)(~v + c~L) = γ2(v)
(~v · ~f +
Π
cc~L · ~L
)=
= γ2(v)(~v · ~f − Π) = 0,
e dunque~f · ~v = Π (7.17)
da cui deduciamo che la componente Π e a tutti gli effetti una potenza.Questo e il vincolo sul 4-vettore forza di Minkowski.
Ci permettiamo di rimarcare il fatto che l’equazione (7.16) afferma che~K e ~P sono ortogonali, cioe lo sono ~K e ~V , il che e equivalente a dire che~K e ortogonale in ogni punto alla linea di universo della particella. Mentrei vincoli su ~V e su ~P sono vincoli di costanza della norma, il vincolo su ~K edunque un vincolo di ortogonalita.
Possiamo anche portare avanti un’analogia con la geometria tradizionale:possiamo pensare a Q(τ) come alla curva parametrizzata, a ~V (o equivalen-
temente a ~P ) come al versore tangente21 e a ~K come al vettore curvatura, inquanto sostanzialmente costruito con la derivata del versore tangente.
7.3.4 Forma relativa
Una volta introdotte le componenti relative (cioe: una volta “ritornati” alladipendenza da un osservatore) e facile scrivere le equazioni assolute della
dinamica relativistica in forma relativa. Dall’equazione assoluta ~P = m~V ,mediante la scrittura per componenti
~p+E
c~L = mγ(v)(~v + c~L)
21Sempre a meno di una costante: intenderemo sempre per versore tangente un vettoretangente a norma costante.
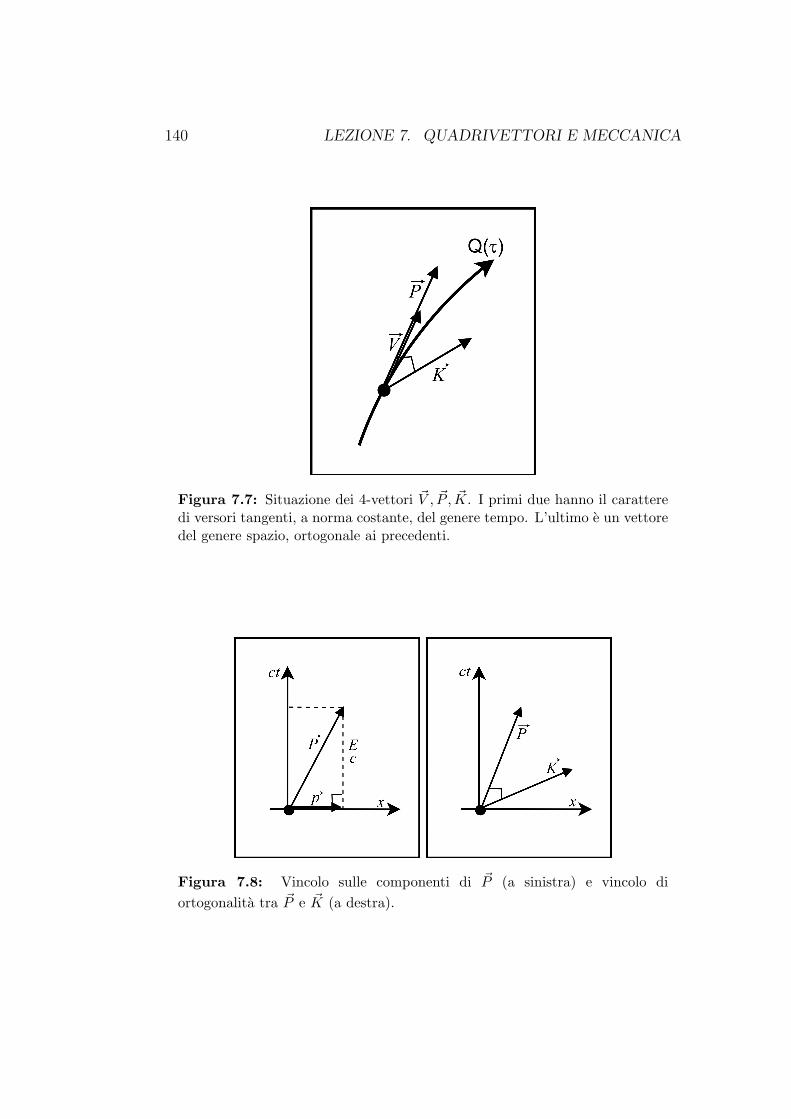
140 LEZIONE 7. QUADRIVETTORI E MECCANICA
Figura 7.7: Situazione dei 4-vettori ~V , ~P , ~K. I primi due hanno il caratteredi versori tangenti, a norma costante, del genere tempo. L’ultimo e un vettoredel genere spazio, ortogonale ai precedenti.
Figura 7.8: Vincolo sulle componenti di ~P (a sinistra) e vincolo diortogonalita tra ~P e ~K (a destra).

7.3. LEGGI DI MOTO 141
si ricavano immediatamente le cosiddette equazioni di Einstein:
~p = mγ(v)~v, (7.18)
??E = mγ(v)c2. (7.19)
La componente spaziale di ~P viene detta quantita di moto relativa. Laprima equazione e dunque la definizione relativistica della quantita di motorelativa. Esplicitando il fattore γ(v) e sviluppando in serie abbiamo che
~p = mγ(v)~v = m~v
(1− v2
c2
)− 12
= m~v
(1 +
1
2
v2
c2+ . . .
)= m~v +O(β2).
Dunque la definizione di ~p e ben posta, poiche soddisfa il principio di limiteclassico (per β → 0 infatti ~p→ m~v).
La componente temporale E e detta energia relativa della particella.Esplicitando γ(v) e sviluppando in serie in modo analogo a quanto fatto inprecedenza, troviamo che
~p = mγ(v)c2 = mc2(
1− v2
c2
)− 12
= mc2(
1 +1
2
v2
c2+ . . .
)= mc2+
1
2mv2+O(β4).
Questo risultato e fondamentale. Abbiamo scritto infatti la componenteE come somma di un termine costante mc2, dell’energia cinetica classica12mv2 e di un termine che va a zero per β → 0. Facciamo quindi qualche
osservazione.
1. Nel limite classico, a meno di una costante additiva, E restituisce l’e-nergia cinetica della particella, a meno di correzioni del 4 ordine in β.Questo giustifica il nome di “energia” dato ad E.
2. Tutte le energie classiche sono definite a meno di una costante addi-tiva22. Cio e dovuto al fatto che solitamente le energie sono introdottecome potenziali di un campo conservativo, con formule del tipo
~F · d~P = dU,
22Questo e chiaro per il potenziale di un campo conservativo (come il campo gravita-zionale terrestre), e meno chiaro per energie quali l’energia cinetica, per la quale siamopiu propensi a porre automaticamente la costante additiva a zero. Ma tutta la meccanicaclassica sta perfettamente in piedi definendo ogni energia (anche quella cinetica) a menodi una costante additiva.

142 LEZIONE 7. QUADRIVETTORI E MECCANICA
per cui il potenziale (e quindi l’energia) e sempre definita a meno diuna costante. Classicamente, importano solo le differenze di energia, isalti di energia.23
3. L’energia relativistica e invece definita univocamente, non c’e dunquel’ambiguita della scelta di una costante arbitraria. La scoperta chel’energia non e solamente un potenziale, ma e soprattutto la compo-nente temporale di un quadrivettore fissa univocamente la costante ad-ditiva, obbligandola a coincidere con la cosiddetta energia di massaa riposo:
E0 = mc2. (7.20)
La profonda differenza, il discrimine, tra meccanica classica e mecca-nica relativitica (conenuta nel principio della formulazione 4-vettorialedella dinamica) e che energia e quantita di moto sono legate dal fatto diessere componenti di un quadrivettore: non c’e piu alcuna arbitrarietapossibile!
4. Alla stessa conclusione si arriva ricordando il vincolo (7.15) sul 4-vettore~P : da E2
c2− p2 = m2c2 otteniamo che
E = c√m2c2 + p2 (7.21)
e dunque E e univocamente determinato nota che sia p. Per p = 0, Enon si annulla (altrimenti sarebbe violato il vincolo sulla norma di ~P ),ma assume il valore di energia di massa a riposo E0 = mc2.
7.3.5 Il 4-vettore energia-momento
L’introduzione del concetto di 4-vettore energia-momento (o quantita dimoto) ha portato alla fusione di tre concetti (massa, quantita di moto edenergia), noti dalla fisica classica e fra loro correlati ma senza comporre ununicum, in un unico ente. Abbiamo quindi visto che massa, energia e quantitadi moto possono essere definite a partire da questo ente nel modo seguente24:
• massa: norma del 4-vettore energia-momento (che e invariante, perquanto gia visto);
23Si pensi ad esempio a una persona che tocchi un filo della luce: se il potenziale del filoequivale al potenziale della terra, per quanto grandi possano essere questi potenziali, nonaccadra nulla. Cio che conta e la differenza di potenziale (ddp).
24Si intende sempre a meno di fattori c; oppure, nuovamente, possiamo metterci in unsistema di riferimento di modo che c = 1.

7.3. LEGGI DI MOTO 143
Figura 7.9: Il 4-vettore impulso ~P . Se c = 1, m e esattamente la norma di~P (a meno del segno che, ovviamente, e negativo per un vettore del generetempo); la quantita di moto relativa p e l’energia relativa E sono poi le sueproiezioni rispettivamente sulla piattaforma spaziale e sull’asse dei tempi.
• quantita di moto: componente spaziale del 4-vettore energia-momento;
• energia: componente temporale del 4-vettore energia-momento (e que-sta e la parte dirompente della teoria einsteiniana: l’energia non e piuuno scalare, e la quarta componente).
Cio che deve rimanere saldo e che massa, energia e quantita di moto sonosolo aspetti differenti di un unico ente intrinseco, il vettore ~P .
7.3.6 Particelle a massa nulla
Notiamo anche questo fatto: se la massa e la norma di un 4-vettore, d’ora inpoi non ci sara nulla di strano nel parlare di particelle a massa nulla, propriocome non c’e nulla di strano nel parlare di vettori a norma nulla. Tali par-ticelle di massa nulla, potranno pero comunque avere energia e quantita dimoto: infatti la nostra norma discende da un prodotto scalare non definitopositivo, dunque in generale ‖~w‖2 = 0 non implica affatto che ~w = 0. Tut-tavia, questo implica pero che ~w sia un vettore del genere luce, e quindi tro-viamo che tutte le particelle a massa nulla devono necessariamente viaggiarealla velocita della luce (ad esempio i fotoni).

144 LEZIONE 7. QUADRIVETTORI E MECCANICA
Alternativamente, se introduciamo m = 0 nell’equazione (7.15) del vin-
colo per ~P , abbiamo che
p2 − E2
c2= −m2c2 = 0,
cioe cheE = pc, (7.22)
e notando che
~p = mγ(v)~v =E
c2~v
troviamo che
~v =c2
E~p, (7.23)
espressione interessante e utile, che (passando ai moduli) nel caso in cuiE = pc ci restituisce
v = c,
e ritroviamo che ogni particella di massa nulla deve muoversi alla velocitadella luce. E dunque possibile avere particelle di massa nulla, e sono quelleper cui la parte temporale del 4-momento (l’energia) deve eguagliare la partespaziale, cioe quelle per cui vale la (7.22).
Ancora diversamente, possiamo notare che nella (??) si puo avere massanulla ed energia non nulla se e solo se γ(v) = +∞, il che accade per v = ±c.
7.3.7 Trasporto di massa mediante fotoni
Un fatto curioso e interessante, conseguenza di quanto appena trovato, echiarito da un piccolo esperimento mentale.
Consideriamo una scatola di lunghezza L e massa M , posata a riposo suuna superficie liscia, senza attrito (fig. ()). Supponiamo che un fotone dienergia E mc2 sia emesso dall’estremita sinistra della scatola e assorbitodall’altra estremita.
Sappiamo dalla (7.22) che un fotone porta con se una quantita di motopari a p = E
c: per la conservazione della quantita di moto, dunque, la scatola
dovra scivolare leggermente verso sinistra, con una velocita v data da
mv = −Ec,
che traduce la semplice conservazione della quantita di moto.Quando il fotone viene assorbito dall’estremita destra, analogamente, per
conservazione del momento, la scatola dovra fermarsi. Intanto, pero, la sca-tola ha percorso una certa distanza ∆x 6= 0 verso sinistra: dato che le forze

7.3. LEGGI DI MOTO 145
associate con l’emissione e l’assorbimento del fotone sono completamente in-terne alla scatola, ci aspettiamo che il centro di massa del sistema non sisia mosso, e dunque necessariamente il fotone deve avere portato con se unaqualche massa µ da un’estremita all’altra della scatola.
Questo non significa affatto che il fotone abbia massa (la massa a riposodel fotone e nulla), ma significa solamente che quando esso esso e emessol’emettitore perde una piccola quantita ∆m di massa, e quando il fotoneviene assorbito l’oggetto assorbente incrementa la sua massa esattamente di∆m.
7.3.8 La 4-forza di Minkowski
A differenza dei 4-vettori ~V e ~P , che sono del genere tempo (perche tangenti
alla linea di universo della particella), la 4-forza di Minkowski ~K e del generespazio, poiche e ortogonale alla linea di universo della particella - come cimostra l’equazione (7.16) e la figura 7.7.
Analizziamo il significato delle componenti relative di ~K in un genericosistema inerziale. Nel sistema (7.13) abbiamo scritto che
~K = γ(v)
(~f +
Π
c~L
),
ove l’unica idea sta nel fatto che, proveniendo ~K da una derivazione rispettoal tempo proprio e volendo interpretare le sue componenti nel tempo re-lativo dell’osservatore inerziale, conviene introdurre nella definizione dellecomponenti il fattore di conversione γ(v) = dt
dτdal tempo proprio al tempo
relativo.Riscalato cosı il tempo, a meno del fattore γ(v) possiamo dare le seguenti
definizioni.
• forza relativa: componente spaziale della 4-forza di Minkowski;
• potenza relativa: componente temporale della 4-forza di Minkowski.
La spiegazione di queste definizioni sta nella decomposizione della leggedi moto (che porta a interpretare ~f come l’analogo della forza newtoniana,almeno nel limite classico) e nel vincolo (7.16) di ortogonalita.
Infatti, tenendo conto che ~P = ~p+ EC~L, dalla legge di moto abbiamo che
d~P
dτ= ~K ⇒ d~p
dτ+
1
c
dE
dτ~L
def= γ(v)
(~f +
Π
c~L
)

146 LEZIONE 7. QUADRIVETTORI E MECCANICA
e dunque moltiplicando per dτdt
= 1γ(v)
m
d~p
dt+
1
c
dE
dt~L = ~f +
Π
c~L,
ed eguagliando componente spaziale e temporale, ricaviamo che
d~p
dt= ~f,
dE
dt= Π, (7.24)
da cui segue il significato dato a ~f di forza relativa.25
Inoltre dall’ortogonalita abbiamo visto che
~V · ~K = 0⇒ ~v · ~f − Π = 0, (7.25)
da cui segue il significato dato a Π di potenza.
Infine dalla seconda equazione delle (7.24) segue l’interpretazione di Ecome energia.
7.3.9 Significato dell’ortogonalita
Quale significato profondo ha il fatto che ~K e ~V siano ortogonali? Significache la 4-forza di Minkowski non puo non dipendere dalla velocita! In un certosenso, ~K deve adattarsi alla linea di universo, restando sempre ortogonale allatangente; per far cio dovra necessariamente dipendere dal versore tangente.In particolare, tutte le 4-forze dipenderanno dalle 4-velocita.
7.3.10 Schema riassuntivo
Riassumiamo i legami tra le grandezze assolute e relative nello schema rias-suntivo riportato in figura 7.10.
7.4 Scrittura delle 4-forze
Affinche l’equazionedQ
dτ= ~K
25Si presti attenzione: ~f non e la forza newtoniana! ~f varia da osservatore a osservatore:soltanto per piccole velocita (in particolare nel limite classico) avra senso confrontare ~f conla forza newtoniana. In particolare avra senso farlo per l’osservatore di quiete istantanea.

7.4. SCRITTURA DELLE 4-FORZE 147
Fig
ura
7.10
:Sc
hem
ari
assu
ntiv
otr
ale
gran
dezz
ede
llaci
nem
atic
a.

148 LEZIONE 7. QUADRIVETTORI E MECCANICA
sia un’effettiva equazione di moto26 e non solo la definizione di ~K e necessarioche ~K sia data esplicitamente, da specifiche leggi di forza, in funzione dellaposizione Q(τ) e della 4-velocita27 ~V (τ) e inoltre in funzione di assegnaticampi esterni28 (come ad esempio il campo elettromagnetico) che precisinola situazione ambientale in cui la particella si muove.
Per il vincolo di ortogonalita (7.16), per conoscere ~K bastera conoscerela funzione
~f(P,~v)
che descrive la forza relativa nel riferimento inerziale. Infatti la componentetemporale sara poi automaticamente dedotta dal vincolo.
Per procurarci tale funzione (che non e invariante, ma varia al variare del-l’osservatore) si usa il metodo degli osservatori di quiete istantanea. In ogni
punto della linea di universo della particella, il 4-vettore ~V definisce un osser-vatore inerziale rispetto al quale la particella e istantaneamente in quiete.29
Rispetto a questo osservatore possiamo ammettere (cioe lo postuliamo) chevalga la legge di forza classica (che valgano le leggi di Newton). Dato che lapotenza in questo riferimento e nulla30 e dato che la velocita relativa e nulla(v = 0⇒ γ(v) = 1), la 4-forza di Minkowski si scrivera come
~K = 1 ·(~fNewton + 0 · ~Loqi
)= ~fNewton. (7.26)
Per avere l’espressione di ~K in un qualsiasi altro riferimento si utilizzapoi la legge di traformazione al cambiare dell’osservatore. ~K si trasforma
26Se definiamo ~K := d ~Qdτ , poi come diavolo facciamo a usare questa definizione come
equazione? Non possiamo, essa resta ovviamente una definizione; possiamo sfruttare taleuguaglianza solo nel momento in cui ~K viene precisato in un altro modo, mediante unalegge di forza.
27Abbiamo visto nella sezione 7.3.9 che questa dipendenza e necessaria.28Non possiamo studiare la meccanica come interazione a distanza. Classicamente tra
due particelle si sviluppa un’interazione istantanea; questo non e piu vero in relativita.Dobbiamo ricorrere al concetto di campo. In sostanza, in relativita, non si puo parlaredi dinamica senza fare riferimento alla teoria dei campi - il che e un serio problema allefondamenta della meccanica.
29Cioe l’osservatore la cui linea di universo sara la tangente alla linea di universo dellaparticella.
30Infatti, detto ~Loqi il versore dell’asse temporale delll’osservatore di quiete istantanea,~Loqi ha la direzione di ~V , e dunque anche ~v ha la direzione di ~V . Dato che ~K ⊥ ~V , ~K nonpuo avere componenti lungo ~L, da cui l’annullarsi della potenza.

7.5. PARTICELLE SOGGETTE A FORZA COSTANTE 149
Figura 7.11: Per l’osservatore di quite istantanea A, la 4-forza di Minkowskicoincide con la forza di Newton, per il vincolo di ortogonalita tra ~K e ~V .
infatti come un 4-vettore, seguendo dunque la leggeKt = γ(v) (Kt0 − β(v)Kx0)Kx = γ(v) (Kx0 − β(v)Kt0)Ky = Ky0
Kz = Kz0
,
ove v e la velocita relativa tra osservatore e particella31 e (Kx0 , Ky0 , Kz0 , Kt0)sono le componenti della 4-forza nel riferimento istantaneamente comobilecon la particella, ovvero
Kt0 = 0
Kx0 =(~fNewton
)x
Ky0 =(~fNewton
)y
Kz0 =(~fNewton
)z
.
7.5 Particelle soggette a forza costante
Applichiamo questo procedimento per studiare il moto di una particella sog-getta a forza costante - l’analogo della caduta dei gravi. Dato che la mi-
31Piu precisamente v e la velocita relativa tra un certo osservatore e l’osservatore diquiete istantanea con la particella; ma la velocita relativa tra quest’ultimo osservatore ela particella e nulla, e dunque mediante la legge di composizione delle velocita abbiamoche v e anche la velocita tra l’osservatore scelto e la particella.

150 LEZIONE 7. QUADRIVETTORI E MECCANICA
sura della forza dipende dalla scelta dell’osservatore inerziale (la forza none piu una grandezza assoluta, come nella meccanica newtoniana), bisognainnanzitutto precisare che cosa si intende per “forza costante”.
Diremo che una particella e soggetta a forza costante se e costante lacomponente spaziale f della 4-forza ~K in ogni riferimento di quiete istanta-nea.
Per comodita di notazione, introduciamo un nuovo ente, la 4-accelerazione~A definita come
~A :=~K
m=
1
m
d~P
dτ=
1
m
d(m~V )
dτ=d~V
dτ.
Sotto l’azione di una forza costante nel riferimento di quiete istantanea, ~Aavra la stessa direzione di ~K, in particolare non avra componente lungo l’assedei tempi e si potra scrivere come
~A =~K
m=
~f
m= ~a,
intendendo con
~a =d~v
dt
l’accelerazione relativa. Naturalmente f e costante in ogni riferimento diquiete istantanea se e solo se e costante ~f · ~f , cioe se e solo se e costante~a · ~a = a2. Ne segue che
‖ ~A‖2 = ~A · ~A = a2
in un moto a forza costante deve essere costante.
Dunque la proprieta caratteristica di un moto a forza costante e che la 4-accelerazione, pur variando da istante a istante, mantiene norma costante32
(v. fig. 7.12).
Poniamoci ora, per semplicita, in un spazitempo bidimensionale. Par-tendo da questa caratterizzazione, vogliamo ricavare le equazioni parametri-che x(τ) e t(τ) delle linee di universo delle particelle che si muovono sottol’azione di una forza costante. Nell’analogia tra lo spaziotempo di Minkowski
32Si confronti il caso classico in cui forza costante significava accelerazione costante.

7.5. PARTICELLE SOGGETTE A FORZA COSTANTE 151
Figura 7.12: La proprieta caratteristica di un moto a forza costante e che la4-accelerazione ~A, pur variando, mantiene norma costante.
e il piano euclideo sappiamo che valgono le seguenti corrispondenze:
τ tempo proprio←→ arco s
Q(τ) linea di universo←→ curva parametrizzata P (s)
~V (τ) 4-velocita←→ versore tangente ~t(s) = vers(~v(s))
d~V
dτ= ~A(τ) 4-accelerazione←→ versore curvatura ~k =
d~t
ds
‖ ~A‖2 norma della 4-accelerazione←→ curvatura k2
moto a norma costante←→ moto a curvatura costante
iperboli←→ circonferenze
Questa analogia porta ad aspettarci che i moti di particelle sotto l’azionedi una forza costante (nel senso sopra specificato) siano moti iperbolici, cioemoti descritti da linee di universo che sono iperboli nello spaziotempo diMinkowski (l’analogo delle circonferenze euclidee).33 Abbiamo due incognite,x(τ) e t(τ), dunque abbiamo bisogno di due equazioni differenziali di moto pertrovare tali funzioni. Queste equazioni differenziali ci sono date dalla costanzadella norma di ~V (che deve essere sempre soddisfatta) e dalla costanza della
33Si noti che, classicamente, la linea di universo per tali moti sarebbe la parabola x =12at
2.

152 LEZIONE 7. QUADRIVETTORI E MECCANICA
norma di ~A (che e vera perche il moto e a forza costante). Dato che Q(τ) =
(x(τ), t(τ)) e che ~V (τ) = dQ(τ)dτ
= (x′(τ), t′(τ)), dalla condizione34
~V · ~V = −c2
otteniamo chex′(τ)2 − t′(τ)2 = −c2.
Analogamente, tenendo presente che ~A = d~Vdτ
= (x′′(τ), y′′(τ)), dalla condi-zione35
~A · ~A = a2
otteniamo chex′′(τ)2 − t′′(τ)2 = a2.
Si tratta quindi ora di integrare il sistema di equazioni differenzialix′(τ)2 − t′(τ)2 = −c2x′′(τ)2 − t′′(τ)2 = a2 . (7.27)
Chiamando X(τ) := x′(τ) e T (τ) := t′(τ), il sistema diventa un sistemadi due equazioni differenziali ordinarie in due incognite, del second’ordine enon lineare36:
X2 − T 2 = (X + T )(X − T ) = −c2X ′2 − T ′2 = (X ′ + T ′)(X ′ − T ′) = a2 .
Chiamando ora W (τ) := X(τ) + T (τ) e Z(τ) := X(τ)− T (τ), possiamoriscrivere il sistema come
WZ = −c2W ′Z ′ = a2 . (7.28)
Dalla prima equazione otteniamo
W = −c2
Z
e, per derivazione,
W ′ =c2
Z2Z ′.
34Questa condizione ci ricorda che ~V e un vettore del genere tempo, avendo normanegativa.
35Questa condizione invece ci ricorda che ~A e un vettore del genere spazio, avendo normapositiva.
36Tralasciamo nella risoluzione la dipendenza delle variabili dal parametro τ .

7.5. PARTICELLE SOGGETTE A FORZA COSTANTE 153
Sostituendo nella seconda abbiamo quindi che
c2
Z2Z ′2 = a2.
Prendiamo la radice di ambo i membri, per fissare le idee consideriamosolamente il segno positivo:
c
ZZ ′ = a,
cioeZ ′ =
a
cZ,
equazione differenziale che si risolve facilmente:
Z(τ) = Deacτ ,
con D costante arbitraria. Allora
Z(τ) = Deacτ W (τ) = −c
2
Z= −c
2
De−
acτ .
Dunque, invertendo il sistema (7.28), troviamoX = W+Z
2=D
2e
acτ − c2
2De−
acτ
T = W−Z2
=D
2e
acτ +
c2
2De−
acτ
.
Compiamo un’opportuna scelta della costante arbitraria: seD = c, infattiX = x′ =
c
2
(e
acτ − e−a
cτ)
= c sinh(acτ)
T = t′ =c
2
(e
acτ + e−
acτ)
= c cosh(acτ) .
Si tratta ora di risolvere le due equazioni differenzialidx
dτ= c sinh
(acτ)
dt
dτ= c cosh
(acτ) ,
il che non e difficile, sapendo che la primitiva del seno iperbolico e il co-seno iperbolico, e viceversa. Integrando ambo i membri delle due equazioniotteniamo quindi che
x(τ) = ccosh
(acτ)
ac
+ E =c2
acosh
(acτ)
+ E
t(τ) = csinh
(acτ)
ac
+ F =c2
asinh
(acτ)
+ F
.

154 LEZIONE 7. QUADRIVETTORI E MECCANICA
Figura 7.13: Confronto tra la linea di universo di un corpo soggetto a forzacostante nel caso classico e nel caso relativistico. Nel caso classico la curvae la parabola x = 1
2vt2, la cui tangente si approssima sempre piu all’oriz-
zontale. Nel caso relativistico questo non puo accadere: il vettore tangentedeve rimanere in ogni punto all’interno del cono luce; la traiettoria risultantee un’iperbole nello spaziotempo.
A questo punto e gia piuttosto chiaro che (x, t) descrive un’iperbole, maper vederlo ancora meglio scegliamo E = F = 0. Dunque
x(τ) =c2
acosh
(acτ)
t(τ) =c2
asinh
(acτ) .
Elevando al quadrato ambo i membri di tutte e due le equazioni, e poiprendendo la loro differenza membro a membro riusciamo a eliminare ladipendenza da τ . Infatti:
x2 − t2 =c4
a2
(cosh2
(acτ)− sinh2
(acτ))
=c4
a2,
ovvero (xc2
a
)2
−
(tc2
a
)2
= 1, (7.29)
che e proprio l’equazione di un’iperbole nello spaziotempo di Minkowski. Ilconfronto tra la traiettoria classica e relativistica di un corpo soggetto a forzacostante e mostrata in figura 7.13.

Lezione 8
Dalla dinamicaall’elettromagnetismo
8.1 Moto di una particella nel campo elettro-
magnetico
8.1.1 Lo “statuto speciale” della forza di Lorentz
Ora vogliamo studiare il moto di una particella carica in un campo elettro-magnetico. In un certo senso questo esempio e piu semplice del precedente,grazie a una particolare proprieta della forza di Lorentz.
Sappiamo infatti che, classicamente, una particella di carica q che viaggiaa una velocita ~v in un campo elettromagnetico e soggetta a una forza, dettaforza di Lorentz, data da
~f = q( ~E + ~v ∧ ~B), (8.1)
ove ~E e ~B sono rispettivamente il campo elettrico e il campo induzionemagnetica.1
1Notiamo che, mentre ~E non ha bisogno di una particolare orientazione dello spazioper essere definito, ~B, cui si perviene mediante un prodotto vettoriale, necessita dellaregola della mano destra per essere completamente definito, o - il che e identico - di unascelta particolare dell’ordine delle coordinate. In generale i vettori si possono dividere indue classi: i vettori che non risentono dell’orientazione spaziale (come il vettore ~E) sonodetti vettori polari, i vettori definiti nel momento in cui fissiamo una orientazione nellospazio (come il vettore ~B) sono detti vettori assiali. Quando vorremo sottolineare piu
esplicitamente che un vettore e assiale e non polare, scriveremo ad esempioyB in luogo di
~B, facendo incurvare la freccina sulla lettera del vettore. CheyB sia un vettore assiale e
dovuto sostanzialmente al fatto che esso e definito mediante la forza di Lorentz, dunque
155

156 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Ci dovremmo chiedere in quale riferimento questa formula valga. Lapeculiarita e che questa forza (gia dipendente, tra l’altro, dalla velocita)vale per qualsiasi osservatore inerziale, a patto di mettere nella formula lavelocita della particella rispetto all’osservatore e i campi ~E e ~B osservatidall’osservatore.
In sostanza, la forza di Lorentz ha uno “statuto speciale”, legato alla pro-prieta del campo elettromagnetico di comportarsi allo stesso modo in tuttii riferimenti inerziali; cio accade in conformita con il Principio di Relativitaeinsteiniano, il quale e esteso (appunto) anche a tutti i fenomeni elettroma-gnetici. Quindi formula (8.1) e valida in tutti i riferimenti inerziali; per unqualsiasi riferimento primato si ha infatti che
~f = q( ~E + ~v ∧ ~B) = q( ~E ′ + ~v′ ∧ ~B′).
Al cambiare dell’osservatore inerziale, ~f cambia secondo la legge di tra-sformazione delle componenti spaziali di ~K (dato che ~f e la componente
spaziale di ~K), q rimane invariata, ~v cambia con la legge di composizione
delle velocita, ed anche ~B e ~E cambiano, poiche entrambi dipendono dal-l’osservatore inerziale scelto. Su come cambino, a priori, non possiamo diremolto, se non che la loro legge di trasformazione deve essere tale da mante-nere valida l’espressione di Lorentz (8.1) in ogni riferimento inerziale. Quindiimplicita nell’invarianza della legge di Lorentz c’e una legge di trasformazioneopportuna dei campi ~E e ~B che vogliamo esplicitare. In sintesi: sappiamoche la formula (8.1) rimane invariata in forma in ogni riferimento inerziale,
sappiamo come si trasformano ~f e ~v, e da questo vorremmo ricavare come sitrasformano i campi al variare dell’osservatore.
mediante un prodotto vettoriale, che necessita di una fissata orientazione spaziale. Tuttii vettori introdotti mediante il prodotto vettoriale risentiranno dell’orientazione spaziale,e dunque saranno vettori assiali.

8.1. MOTO DI UNA PARTICELLA 157
8.1.2 Il tensore di Faraday
Avendo a disposizione la forma di ~f e facile procurarsi l’espressione della4-forza di Minkowski:
~K = γ(v)
(~f +
Π
c~L
)= γ(v)
(~f +
~f · ~vc~L
)
= γ(v)
(q( ~E + ~v ∧ ~B) +
q( ~E + ~v ∧ ~B) · ~vc
~L
)
= qγ(v)
(~E + ~v ∧ ~B +
~E · ~vc
~L
)
= q
(γ(v)c
~E
c+ γ(v)~v ∧ ~B +
~E · γ(v)~vc
~L
).
Tenendo conto delle relazioni (7.7)γ(v)c = Vt
γ(v)vx = Vx
γ(v)vy = Vy
γ(v)vz = Vz
,
riusciamo a scrivere ~K come
~K = q
(Vt
~E
c+ ~Vs ∧ ~B +
q ~E · ~Vs
c~L
), (8.2)
essendo ~Vs = (Vx, Vy, Vz), o equivalentemente in componenti, sviluppando iprodotti vettoriali, come
Kt = q
(Ex
cVx +
Ey
cVy +
Ez
cVz
)Kx = q
(Ex
cVt + VyBz − VzBy
)Ky = q
(Ey
cVt + VzBx − VxBz
)Kz = q
(Ez
cVt + VxBy − VyBx
). (8.3)

158 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Dunque la 4-forza di Lorentz (cioe la 4-forza di Minkowski nel caso diuna particella in moto in un campo elettromagnetico) e una funzione della4-velocita della particella. Che dipendesse dalla velocita gia lo sapevamo(doveva dipendervi per il vincolo di ortogonalita), ma in piu notiamo che ladipendenza e lineare omogenea. Possiamo infatti scrivere il sistema (8.3) informa matriciale come
Kt
Kx
Ky
Kz
= q
0 Ex
c
Ey
cEz
c
−Ex
c0 Bz −By
−Ey
c−Bz 0 Bx
−Ez
cBy −Bx 0
Vt
Vx
Vy
Vz
, (8.4)
dove i segni meno nella prima colonna derivano dal fatto che il prodottomatrice-vettore e definito mediante i prodotti scalari tra le righe della matricee il vettore. In tali prodotti scalari, per la segnatura (1,3) della metricaminkowskiana, la prima componente va presa con il segno opposto rispettoal caso del prodotto scalare euclideo canonico.
L’applicazione lineare data dalla matrice
Fjk =
0 Ex/c Ey/c Ez/c
−Ex/c 0 Bz −By
−Ey/c −Bz 0 Bx
−Ez/c By −Bx 0
(8.5)
e detta applicazione lineare di Faraday2, e si indica con F. La matriceche la rappresenta e detta tensore di Faraday. Tale ente sintetizza il campomagnetico dal punto di vista dello spaziotempo.
La forma finale della 4-forza di Lorentz che agisce su una particella dicarica q in moto con una 4-velocita ~V e, in definitiva,
~KLorentz = qF(~V ). (8.6)
Vediamo di capire che cosa e successo. Dal punto di vista relativo, dalla(8.1) notiamo subito che la forza di Lorentz ~f e una funzione affine dellavelocita relativa. Quando siamo passati alla 4-forza associata, abbiamo inveceottenuto che ~K e una funzione lineare omogenea della 4-velocita. Per qualeragione diventa lineare? In che modo? E stata la moltiplicazione per il fattoreγ(v) (necessario per passare da ~f a ~K) che ha realizzato il “miracolo”: talefattore e proprio cio che serviva per passare dalle velocita relative a quelleassolute, e dalla velocita c alla componente temporale della 4-velocita.
2Michael Faraday (1791-1867), fisico inglese che scoprı l’induzione elettromagnetica esviluppo il concetto di campo, che sostituisce l’idea dell’azione a distanza.

8.1. MOTO DI UNA PARTICELLA 159
8.1.3 La 2-forma di Faraday
L’innalzamento della forza relativa alla 4-forza ha fatto dunque nascere unafunzione lineare F che, fissato un punto P su M , associa a un elemento dellospazio tangente in P a M un altro elemento dello stesso spazio tangenteTPM .3
Sappiamo inoltre che la 4-forza ~K e sempre ortogonale alla linea di uni-verso della particella considerata, cioe vale
~K · ~V = 0⇔ F(~V ) · ~V = 0. (8.7)
Questo cosa significa? Per capirlo meglio, supponiamo che ~V sia somma didue altri vettori, cioe ~V = ~V1 + ~V2. Allora possiamo scrivere che
0 = F(~V1 + ~V2) · (~V1 + ~V2)
= (F(~V1) + F(~V2)) · (~V1 + ~V2)
= F(~V1) · ~V1 + F(~V1) · ~V2 + F(~V2) · ~V1 + F(~V2) · ~V2
= F(~V1) · ~V2 + F(~V2) · ~V1,
dove l’ultimo passaggio vale in virtu della (8.7). Dunque
F(~V1) · ~V2 = −F(~V2) · ~V1. (8.8)
La (8.8) ci dice che F agisce in modo antisimmetrico sulle coppie di vet-tori. O meglio4: a F : TM → TM possiamo associare una applicazionebilineare sui vettori a valori in R (cioe una forma bilineare). Tale funzione,chiamiamola F, e definita quindi come F : TM × TM → R e dalla legge
F(~V1, ~V2) := F(~V1) · V2. (8.9)
In generale, su tutti gli spazi vettoriali muniti di prodotto scalare, ogniapplicazione lineare dallo spazio in se induce naturalmente un’applicazionebilineare costruita in maniera analoga a quanto visto per l’equazione (8.9).
L’equazione (8.8) mostra che la forma bilineare costruita con il campoelettromagnetico (cioe la forma F) e antisimmetrica. Cio si poteva capiregia dal fatto che la matrice F era antisimmetrica, ma con il procedimentoriportato l’abbiamo mostrato piu esplicitamente.
3In sostanza, F va dal fibrato tangente a M nello stesso fibrato tangente TM .4Si noti che, fissato un punto P , lo spazio tangente in P a M non e esattamente M
stesso. Infatti M non e uno spazio vettoriale, ma e solo uno spazio affine, mentre TPM ea tutti gli effetti uno spazio vettoriale.

160 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Una forma bilineare antisimmetrica5 viene detta 2-forma.Abbiamo quindi ottenuto come risultato che i campi ~B e ~E sono le com-
ponenti di una 2-forma, detta 2-forma di Faraday. Che cosa significa?Significa che non devono essere visti separatamente, come campi disgiunti,ma devono essere concepiti come componenti di un unico ente, la 2-forma,appunto. Dalla condizione di ortogonalita ~K · ~V = 0 abbiamo dunque trovatoche il tensore di Faraday da luogo a una 2-forma che ingloba in se il campoelettrico e il campo magnetico.
Studiamo il comportamento di questa 2-forma. Siano ~V1 e ~V2 due vettorinello spazio di Minkowski, applicati allo stesso punto. Allora6
F(~V1, ~V2) = F(~V1) · ~V2
= V2x
(BzV1y −ByV1z +
Ex
cV1t
)+ V2y
(−BzV1x −BxV1z +
Ey
cV1t
)+
+ V2z
(−ByV1x −BxV1y +
Ez
cV1t
)+ V2z
(−ByV1x −BxV1y +
Ez
cV1t
)= Bx(V2yV1z − V2zV1y) +By(V1xV2z − V2xV1z) +Bz(V1yV2x − V2yV1x)+
+Ex
c(V1tV2x − V2tV1x) +
Ey
c(V1tV2y − V2tV1y) +
Ez
c(V1tV2z − V2tV1z)
= Bx
∣∣∣∣V2y V2z
V1y V1z
∣∣∣∣+By
∣∣∣∣V2z V2x
V1z V1x
∣∣∣∣+Bz
∣∣∣∣V2x V2y
V1x V1y
∣∣∣∣++Ex
c
∣∣∣∣V2x V2t
V1x V1t
∣∣∣∣+ Ey
c
∣∣∣∣V2y V2t
V1y V1t
∣∣∣∣+ Ez
c
∣∣∣∣V2z V2t
V1z V1t
∣∣∣∣ .Questa espressione ci insegna che la nostra forma bilineare antisimmetrica
F e una funzione lineare su quei determinanti, cioe sulle speciali forme deltipo ∣∣∣∣V2y V2z
V1y V1z
∣∣∣∣ .5Richiamiamo i significati di questi termini: dato uno spazio vettoriale, una forma
e una applicazione a valori nel campo (in questo caso in R). E bilineare se e lineareseparatamente in entrambe le componenti. E antisimmetrica se, cambiando l’ordine diingresso delle due componenti, la forma cambia segno.
6Va prestata sempre attenzione che il prodotto scalare nello spazio di Minkowski none il prodotto scalare canonico di R4: siamo in uno spazio semieuclideo. In particolare,il segno della componente temporale va cambiato. Ricordiamo che in generale, presi duevettori ~a = (ax, ay, az, at) e ~b = (bx, by, bz, bt), si ha che
~a ·~b = axbx + ayby + azbz − atbt.

8.2. L’ALGEBRA TENSORIALE 161
Tutto e quindi ricondotto allo studio di queste forme particolari. Ad esse sida una collocazione precisa introducendo nuovi operatori.
Se vogliamo pero addentrarci piu approfonditamente nello studio di questiconcetti, dobbiamo entrare nel campo dello studio delle forme, che e unsottocampo dell’algebra tensoriale. Si rende quindi necessario, in questomomento, un excursus di natura matematica.
8.2 L’algebra tensoriale
8.2.1 Primo approccio
Preso uno spazio vettoriale V su un campo K, l’algebra tensoriale e lostudio delle forme multilineari (cioe dei tensori, che vengono classificatiin base al numero di argomenti in V e nel suo duale V ∗) su tale spaziovettoriale. Nel prosieguo supporremo sempre che K = R.
Chiameremo forme le funzioni a valori in R. Tali forme saranno dettemultilineari se sono separatamente lineari in ogni argomento7. Forme mul-tilineari saranno in generale dette tensori. Il dominio di tali forme sarasia lo spazio vettoriale V , sia il suo duale V ∗. In sostanza: queste formesono funzioni che prendono in ingresso un certo numero di vettori e un certonumero di funzionali lineari e restituiscono un valore reale.
Se il dominio di una forma multilineare e solamente lo spazio V (cioe,come si suole dire, se tale forma non ha ingressi nel duale), la forma si dicetensore covariante di rango p (o p-tensore), essendo p il numero degliargomenti della forma - cioe il numero di vettori di V che tale forma esige iningresso.
Se un tensore covariante e totalmente antisimmetrico, ovvero se cam-bia segno scambiando ogni coppia di argomenti, tale tensore e detto p-forma,essendo p, nuovamente, il numero degli argomenti in ingresso. Il numero na-turale p e detto grado della forma, e - detta α la forma - si indica soventecon la notazione |α|. Per convenzione le 0-forme sono le comuni funzioni.
Introduciamo qualche notazione. Indicheremo con T qp (V ) le forme multili-
neari (tensori) aventi q ingressi nel duale V ∗ e p ingressi nello spazio vettorialeV . Diremo che l’indice q e in posizione controvariante, mentre l’indice pe in posizione covariante. Indicheremo, di conseguenza, con Tp(V ) i ten-sori covarianti di ordine p, cioe aventi p ingressi nello spazio vettoriale V(e nessuno nel duale). Infine indicheremo con Ωp(V ) l’insieme dei p-tensori
7Cioe: lineari in ogni argomento, una volta supposti fissati gli altri argomenti.

162 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
totalmente antisimmetrici, vale a dire, lo spazio delle p-forme aventi ingressinello spazio vettoriale V (fig. 8.1).8
Figura 8.1: L’insieme Ωp delle p-forme e un sottoinsieme dell’insieme Tp deitensori covarianti di ordine p, che a sua volta e un sottoinsieme dell’insiemeT p
q delle forme multilineari (tensori).
L’utilita matematica delle p-forme e notevole, poiche sono uno strumentocomodissimo per lavorare sulle varieta e in particolare da integrare su tali va-rieta (linee, superfici, volumi...). Per loro natura sono oggetti (relativamente)facili da maneggiare e facili da integrare.
Dal punto di vista della fisica, le p-forme sono importanti perche molteleggi di bilancio si scrivono mediante esse, come nel caso dell’elettromagne-tismo.
Una volta definiti i tensori e le p-forme, bisogna spiegare perche si parla di“algebra tensoriale”. La ragione e l’esistenza di un prodotto, detto prodottotensoriale, che induce un prodotto sulle forme, detto prodotto esterno.Possiamo dire che l’algebra tensoriale e lo spazio vettoriale di tutte leforme multilineari su V munito del prodotto tensoriale ⊗. Chiameremo poialgebra di Grassmann lo spazio vettoriale di tutte le p-forme su V munitodel prodotto esterno.
La funzione del prodotto (tensoriale o esterno) sara quella di permetterela ricostruzione di ogni tensore come combinazione lineare di prodotti di 1-forme9.
I mattoni essenziali della teoria sono le forme lineari, e in particolarele 1-forme lineari esatte, cioe i differenziali delle funzioni.10 A partire dai
8Quando non vi sara ambiguita sullo spazio vettoriale V , scriveremo anche piusemplicemente T q
p , Tp, Ωp.9Si noti che le 1-forme sono naturalmente sia tensori sia forme.
10Richiamiamo e riadattiamo un po’ di terminologia che poi preciseremo meglio e piuin generale. Per il momento basti tener presente che una 1-forma e esatta se essa e il

8.2. L’ALGEBRA TENSORIALE 163
differenziali delle funzioni coordinate x, definiti da
dxj(~v) = vj
dobbiamo imparare a costruire un qualsiasi p-tensore o una qualsiasi p-formausando, rispettivamente, il prodotto tensoriale o il prodotto esterno. Perdirla in linguaggio matematico: dobbiamo imparare a costruire una basedello spazio dei p-tensori e delle p-forme.
8.2.2 Rappresentazione di vettori
Prima di partire a costruire p-forme e p-tensori, conviene chiarire brevementeil perche nella scrittura delle componenti di un vettore ~v sovente abbiamousato la notazione vi in luogo della notazione classica vi. Questo e dovuto alfatto che un vettore ~v puo essere in generale individuato mediante due tipidi componenti:
(i) le componenti covarianti vi, date da
vi = ~v · ∂P∂xi
,
essendo ∂P∂xi i vettori della base naturale. Tali componenti covarianti si
trasformano, al variare delle coordinate con la legge della covarianza
v′h = ~v · ∂P∂x′h
= ~v · ∂P∂xi
∂xi
∂x′h= vi
∂xi
∂x′h;
(ii) le componenti controvarianti vi, che sono definite dalla relazione
~v = vi ∂P
∂xi
e che sono dunque i coefficienti dei vettori della base naturale nellascomposizione naturale di ~v. Essi si trasformano con legge della con-trovarianza
~v = v′h∂P
∂x′h= vi ∂P
∂xi= vi ∂P
∂x′h∂x′h
∂xi,
da cui
v′h = vi ∂P
∂x′h.
differenziale di una qualche funzione; cioe tutte e sole le forme esatte sono del tipo dg cong funzione scalare.

164 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
In coordinate cartesiante ortogonali le due scritture naturalmente si equi-valgono (vi = vi) e le componenti covarianti e controvarianti si identificanocon le componenti cartesiane del vettore. Ma in coordinate generali questonon e vero: basta solo prendere ad esempio coordinate oblique per romperequesta eguaglianza, come mostra chiaramente la figura 8.2.
Figura 8.2: Le coordinate v1 e v2 (in blu) sono le componenti covarianti,cioe il prodotto scalare del vettore ~v con i versori ~i e ~j degli assi - sono datesostanzialmente da proiezioni ortogonali. Le componenti v1 e v2 (in rosso)sono le componenti covarianti, cioe la scomposizione del vettore ~v sulla basenaturale - sono date sostanzialmente da proiezioni parallele, e generano unparallelogramma di cui ~v e la diagonale. Dato che in coordinate cartesiane or-togonali proiezioni parallele e proiezioni ortogonali coincidono, le componenticovarianti e controvarianti si confondono. Passando a coordinate qualsiasidobbiamo stare attenti alla differenza.
8.2.3 Le 1-forme
Si parte dalle 1-forme. Per definizione, tali forme sono le funzioni che pren-dono in ingresso un vettore di V e restituiscono una numero reale.
Scelto un sistema di coordinate (x1, . . . , xn), abbiamo gia notato il ruolopiuttosto particolare svolto dai differenziali delle funzioni coordinate. Ingenerale, fissata una funzione f a valori nel campo, il suo differenziale inun punto P e una forma lineare sui vettori, cioe un’applicazione che a ogni

8.2. L’ALGEBRA TENSORIALE 165
vettore ~v associa un numero reale. Tale numero e sostanzialmente la derivatadirezionale di f lungo la direzione fissata. In simboli11,
dPf(~v) =d
dtf(P + t~v)
∣∣t=0
= ∇f · ~v =∂f
∂xjvj. (8.10)
Cio e vero in particolare per le funzioni coordinate xj. Dalla (8.10) abbiamoquindi che
dxj(~v) = vj
In pratica, differenziali delle funzioni coordinate sono particolari funzionisui vettori: quelle che associano al vettore in ingresso una sua componente.Proprio per questo essi sono detti solitamente “proiettori”.
E chiaro allora che i dxj costituiscono una base per lo spazio delle 1-forme.La generica 1-forma infatti puo essere scritta come
α = αjdxj,
con gli αj funzioni scalari.Un particolare tipo di 1-forma e il differenziale di una funzione sca-
lare f , per il quale vale la gia citata
df =∂f
∂xjdxj.
8.2.4 Prodotto tensoriale e prodotto esterno
Ora: siano α e β due 1-forme su V . Possiamo quindi definire il loro prodottotensoriale, che indicheremo con12 α ⊗ β, come una funzione bilineare che,presi in ingresso due vettori ~v1, ~v2 ∈ V ad essi associa la quantita
(α⊗ β)(~v1, ~v2) = α(~v1) · β(~v2), (8.11)
dove il puntino indica il prodotto scalare in R.Insomma: date due 1-forme, possiamo sempre costruire una forma bili-
neare, associando alla generica coppia di vettori (~v1, ~v2) il prodotto dei valori
11Utilizzeremo la cosiddetta notazione tensoriale: la presenza di uno stesso indice in dueposizioni diverse (covariante e controvariante) sottointendera automaticamente il simbolodi sommatoria su tale indice. Ad esempio
∂f
∂xjvj =
∑j
∂f
∂xjvj .
12Da leggersi: “df tensor dg”.

166 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
che la prima forma associa al primo vettore e la seconda forma associa alsecondo. Questa nuova forma e chiaramente bilineare: e infatti separata-mente lineare in ~v1 e ~v2, per la linearita delle forme di partenza. Notiamoinoltre che, nonostante la moltiplicazione al secondo membro della (8.11) siauna moltiplicazione tra scalari, quindi commutativa, il prodotto tensorialein generale non e commutativo, poiche dipende dall’ordine delle due forme,cioe da quale dei due vettori in ingresso viene “dato in pasto” a α e quale aβ.
Per questo motivo e possibile antisimmetrizzare non banalmente, cioeassociare alla coppia di p-forme α ⊗ β e β ⊗ α (in generale diverse) una 2-forma che sia la loro differenza. Questa sara in generale non nulla e, percostruzione, antisimmetrica.
Quindi, alle p-forme α e β, possiamo associare una nuova p-forma, ilprodotto esterno13 α ∧ β, cioe la forma antisimmetrica che a ogni coppiadi vettori ~v1, ~v2 ∈ V associa14 la quantita
α ∧ β = α⊗ β − β ⊗ α, (8.12)
ovvero esplicitamente:
(α ∧ β)(~v1, ~v2) = (α⊗ β − β ⊗ α)(~v1, ~v2)
= α(~v1)β(~v2)− α(~v2)β(~v1)
cioe, in definitiva:
(α ∧ β)(~v1, ~v2) =
∣∣∣∣α(~v1) β(~v1)α(~v2) β(~v2)
∣∣∣∣ . (8.13)
Il determinante al secondo membro della (8.13) e detto determinantepluckeriano.
13Questo non e esattamente la restrizione del prodotto tensoriale alle p-forme. Anche sein effetti lo spazio delle p-forme e un sottospazio di quello dei p-tensori, se ci limitiamo arestringere il prodotto tensoriale alle p-forme usciremmo dallo spazio: il prodotto tensorialedi due p-forme, in generale, non sarebbe una p-forma. Ad esempio, il prodotto tensoriale
(dx⊗ dy)(~v, ~w) = vx · wy
chiaramente non e simmetrico. Per avere ancora una p-forma, dobbiamoantisimmetrizzare:
(dx ∧ dy)(~v, ~w) = (dx⊗ dy − dy ⊗ dx)(~v, ~w) = vx · wy − vy · wx.
14Il prodotto esterno (o “wedge”, dall’inglese) di fatto estende a spazi di dimensionearbitraria quasi tutti quello che riguarda il prodotto vettoriale. E questa e la ragione percui, nel designarlo, si usa lo stesso simbolo del prodotto vettoriale.

8.2. L’ALGEBRA TENSORIALE 167
Il prodotto tensoriale e il prodotto esterno permettono sostanzialmentedi prolungare (estendere) le 1-forme dxj in una base rispettivamente deip-tensori e delle p-forme (che prende il nome di base esterna).
8.2.5 Base per i 2-tensori
Iniziamo a calcolare la base esterna in un caso particolare, cioe nel caso dellabase per i 2-tensori su uno spazio vettoriale V tridimensionale. Conside-riamo su tale spazio tridimensionale le coordinate (x1, x2, x3). Sia β(~u,~v) ilgenerico tensore covariante di ordine 2. L’idea e quella di scrivere β come fun-zione delle componenti di ~u e ~v sulla base naturale associata alle coordinate(x1, x2, x3). Infatti possiamo scomporre i due vettori come
~u = u1 ∂P
∂x1+ u2 ∂P
∂x2+ u3 ∂P
∂x3
~v = v1 ∂P
∂x1+ v2 ∂P
∂x2+ v3 ∂P
∂x3
e dunque possiamo scrivere che
β(~u,~v) = β
(u1 ∂P
∂x1+ u2 ∂P
∂x2+ u3 ∂P
∂x3, ~v = v1 ∂P
∂x1+ v2 ∂P
∂x2+ v3 ∂P
∂x3
)= u1v1β
(∂P
∂x1,∂P
∂x1
)+ u1v2β
(∂P
∂x1,∂P
∂x2
)+ u1v3β
(∂P
∂x1,∂P
∂x3
)+
+ u2v1β
(∂P
∂x2,∂P
∂x1
)+ u2v2β
(∂P
∂x2,∂P
∂x2
)+ u2v3β
(∂P
∂x2,∂P
∂x3
)+
+ u3v1β
(∂P
∂x3,∂P
∂x1
)+ u3v2β
(∂P
∂x3,∂P
∂x2
)+ u3v3β
(∂P
∂x3,∂P
∂x3
)=
= ujvkβ(
(∂P
∂xj,∂P
∂xk
). (8.14)
Quest’ultima scrittura chiaramente e piu generale, dal momento che valesu un qualsiasi spazio vettoriale n-dimensionale, e non necessariamente sullospazio tridimensionale.
I valori
βjk := β
(∂P
∂xj,∂P
∂xk
)(8.15)
che il 2-tensore assume sui vettori della base naturale sono detti componentidel tensore.
Dal momento cheujvk = (dxj ⊗ dxk)(~u,~v),

168 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
possiamo riscrivere la (8.14) come
β(~u,~v) =n∑
j,k=1
βjk(dxj ⊗ dxk)(~u,~v), (8.16)
dove per una volta abbiamo esplicitato la sommatoria, per mostrare che gliindici corrono da 1 alla dimensione dello spazio (cioe al numero di coordinatenecessarie).
Per l’arbitrarieta degli argomenti ~u e ~v, la (8.16) implica che
β = βjk dxj ⊗ dxk. (8.17)
La formula (8.17) sostanzialmente dimostra che i prodotti tensoriali deltipo dxj ⊗ dxk, cioe i prodotti tensoriali dei proiettori base per le 1-forme,costituiscono una base per lo spazio dei 2-tensori.
8.2.6 Base per le 2-forme
E per le 2-forme? Nel caso in cui β oltre che un 2-tensore sia anche una2-forma, l’antisimmetria implica un vincolo sulle componenti tensoriali. Siavra che
β
(∂P
∂xj,∂P
∂xk
)= −β
(∂P
∂xk,∂P
∂xj
),
il che in generale implica che
βjk = −βkj
e in particolare cheβjj = 0.
Le componenti tensoriali indipendenti sono solo quelle con j < k, dettecomponenti strette della 2-forma β. Infatti per j = k si hanno entratenulle, e per j > k, per antisimmetria, le entrate sono le stesse del caso j < k,ma cambiate di segno. Tornando al caso particolare di n = 3, le componentistrette della 2-forma β sono solo tre: (β12, β13, β23).
A causa del vincolo di antisimmetria possiamo scrivere la 2-forma comefunzione delle sole componenti strette. Dalla (8.14), ricordandoci delle defi-nizioni (8.15), abbiamo che
β(~u,~v) = (β11u1v1 + β12u
1v2 + β13u1v3) + (β21u
2v1 + β22u2v2 + β23u
2v3)+
+ (β31u3v1 + β32u
3v2 + β33u2v3)
= β12(u1v2 − u2v1) + β13(u
1v3 − u3v1) + β223(u2v3 − u3v2)
=∑j<k
βjk(ujvk − ukvj),

8.3. APPLICAZIONE ALLA 2-FORMA DI FARADAY 169
dove il penultimo passaggio vale per l’antisimmetria e l’ultimo passaggio eun’immediata generalizzazione al caso n-dimensionale.
Osserviamo che
ujvk − ukvj =
∣∣∣∣uj uk
vj vk
∣∣∣∣ = (dxj ∧ dxk)(~u,~v),
e dunque concludiamo che per le 2-forme vale
β(~u,~v) =∑j<k
βjk(dxj ∧ dxk)(~u,~v), (8.18)
e nuovamente, dalla generalita dei vettori in ingresso otteniamo che
β =∑j<k
βjk dxj ∧ dxk. (8.19)
La formula (8.19) afferma che i prodotti esterni tra i proiettori, cioe deltipo dxj ∧ dxk, con j < k formano una base nello spazio delle due forme.
8.2.7 Significato geometrico del prodotto esterno
Torniamo al caso delle coordinate cartesiane. Abbiamo visto che, presi duevettori ~u,~v
(dx ∧ dy)(~u,~v) =
∣∣∣∣ux uy
vx vy
∣∣∣∣ = uxvy − uyvx, (8.20)
risultato che ha il seguente significato geometrico. I vettori ~u e ~v, nell’ordineprefissato, definiscono un parallelogramma (orientato) nello spazio vettoriale,parallelogramma di cui possiamo considerare le proiezioni sui piani coordi-nati. La quantita uxvy−uyvx e esattamente l’area con segno della proiezionesul piano xy.
Dunque geometricamente (con riferimento alla figura 8.3):
• dx proietta sugli assi il vettore ~u e il vettore ~v;
• dx ∧ dy proietta sui piani coordinati il parallelogramma (~u,~v)
8.3 Applicazione alla 2-forma di Faraday
8.3.1 Riscrittura della 2-forma
Torniamo ora all’elettromagnetismo, e applichiamo il formalismo sino a quisviluppato alla 2-forma di Faraday. Consideriamo all’uopo un osservatore

170 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Figura 8.3: Significato geometrico del prodotto esterno come proiezione.
inerziale sullo spaziotempo, quindi in sostanza una tetrade composta daivettori della base naturale
~I =∂P
∂x~J =
∂P
∂y~K =
∂P
∂z~L =
∂P
∂t.
La base duale corrispondente e la base formata dai proiettori
(dx, dy, dz, dt).
La sua funzione e di associare ad ogni 4-vettore, che scomposto sulla basenaturale ha la forma
~V = Vx∂P
∂x+ Vy
∂P
∂y+ Vz
∂P
∂z+ Vt
∂P
∂t= Vx
~I + Vy~J + Vz
~K + Vt~L,
la corrispondente componente:15
dx(~V ) = Vx dy(~V ) = Vy dz(~V ) = Vz dt(~V ) =Vt
c.
15Si presti attenzione alla coordinata temporale: infatti avevamo scritto il vettoreposizione nella forma
Q = x~I + y ~J + z ~K + ct~L,
scegliendo come quarta componente la quantita ct. Dunque, presa la 4-velocita
~V = Vx~I + Vy
~J + Vz~K + Vt
~L,
risulta ched(ct)(~V ) = Vt.
Cio significa che il proiettore non e il differenziale dt, ma e il differenziale della nostraquarta componente del vettore posizione, ovvero d(ct). Dato che il differenziale e unafunzione lineare e che c e costante, e quindi automatico che
dt(~V ) =Vt
c.

8.3. APPLICAZIONE ALLA 2-FORMA DI FARADAY 171
Disponiamo ora di un nuovo concetto: il prodotto esterno delle 1-formebase dx, dy, dz e dt. Sappiamo che i prodotti esterni delle 1-forme base (pro-iettori) formano una base nello spazio delle 2-forme: possiamo quindi pensaredi riscrivere la 2-forma F come combinazione delle 2-forme di base. In parti-colare, tutti quei determinanti ora possono essere riscritti mediante prodottiesterni16:
F(~V1, ~V2) = Bx(dy∧dz)(~V2, ~V1)+By(dz∧dx)(~V2, ~V1)+Bz(dx∧dy)(~V2, ~V1)+
+ Ex(dx ∧ dt)(~V2, ~V1) + Ey(dy ∧ dt)(~V2, ~V1) + Ez(dz ∧ dt)(~V2, ~V1),
e per antisimmetria dei prodotti esterni
F(~V1, ~V2) = −Bx(dy∧dz)(~V1, ~V2)−By(dz∧dx)(~V1, ~V2)−Bz(dx∧dy)(~V1, ~V2)+
− Ex(dx ∧ dt)(~V1, ~V2)− Ey(dy ∧ dt)(~V1, ~V2)− Ez(dz ∧ dt)(~V1, ~V2). (8.21)
Dall’arbitrarieta dei vettori ~V1 e ~V2, a meno di un segno17,
F = Bx dy∧dz+By dz∧dx+Bz dx∧dy+(Exdx+ Eydy + Ezdz)∧dt, (8.22)
che ci fornisce l’espressione generale della 2-forma di Faraday.Guardiamo in faccia gli elementi in gioco nell’equazione (8.22). Sappiamo
il significato geometrico dei prodotti esterni del tipo dy ∧ dz: essi fornisconosostanzialmente delle aree. Bx dy ∧ dz e dunque il flusso del campo magne-tico18 attraverso la faccia infinitesima dydz; e analogamente possiamo direper By dz ∧ dx e per Bzdx ∧ dy, rispettivamente per le facce dzdx e dxdy.Dunque i termini in cui compaiono le componenti di B rendono conto delflusso magnetico. Il termine tra le parentesi tonde, nella (8.22), invece esostanzialmente la tensione elettrica.
Sottolineiamo il fatto che il tensore elettromagnetico F esiste ed e presenteindipendentemente dall’uso di cariche di prova.
Questo modo di procedere ha un vantaggio immediato: siamo in grado dirisolvere il problema (all’apparenza molto ostico) della determinazione dellalegge di trasformazione per il campo elettromagnetico.
16Si noti che i denominatori c scompaiono perche dt(~V ) = Vt
c , da cui, ad esempio
(dx ∧ dt)(~V2, ~V1) =∣∣∣∣V2x
V2t
c
V1xV1t
c
∣∣∣∣ = 1c
∣∣∣∣V2x V2t
V1x V1t
∣∣∣∣ .17Scegliamo infatti di considerare positiva tutta la forma, e una convenzione che non
inficia alcun ragionamento e che ci sara utile piu avanti.18Piu brevemente: il flusso magnetico.

172 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
8.3.2 Legge di trasformazione del campo elettroma-gnetico
Aver scoperto che B ed E sono le 6 componenti di una 2-forma sullo spazio-tempo di Minkowski ci fornisce immediatamente la legge di trasformazionedel campo elettromagnetico al cambiare dell’osservatore inerziale. Dall’inva-rianza in forma della forza di Lorentz siamo giunti alla legge di trasformazionedi E e B.
Mostriamo innanzitutto in un modo efficace che i concetti di campo elet-trico e campo magnetico devono necessariamente compenetrarsi in virtu delPrincipio di Relativita.
Consideriamo il caso particolare di un’unica carica q in quiete nell’originedi un osservatore inerziale. Dato che la carica e in quiete rispetto a tale osser-vatore, esiste solo il campo elettrostatico coulombiano, e il campo magneticoe nullo. ~E =
1
4πε0
q
r2~er
~B = 0(8.23)
Consideriamo ora un secondo osservatore inerziale, in moto relativo ri-spetto al precedente: per questo osservatore, la carica q e in moto, esistequindi una corrente e dunque oltre al campo elettrico si genera un campomagnetico associato a questa corrente. Inoltre il campo elettrico non sarapiu il campo coulombiano.
Questo piccolo esperimento concettuale mostra che un campo elettrico inun riferimento inerziale R genera inevitabilmente un campo magnetico ~B′
in un altro riferimento ineraziale R′: riscopriamo dunque che campi elettricie campi magnetici sono indissolubilmente intrecciati. Non puo esistere uncampo elettrico per un osservatore senza che per qualche altro osservatore visia anche un campo magnetico, e viceversa.
La scoperta che ( ~E, ~B) sono le componenti della 2-forma di Faraday ci
permette di calcolare immediatamente19 i campi ( ~E ′, ~B′), noti i campi ( ~E, ~B).Basta decomporre la 2-forma F sulle basi esterne delle 2-forme associate aidue riferimenti: la forma F e unica, e dunque deve rimanere invariata.20
19E senza tutto il formalismo che abbiamo introdotto non sarebbe stato affatto faciletrovarli! Come avremmo potuto fare? Risolvere le equazioni di Maxwell tenendo contodella legge del movimento delgi osservatori? Non ne saremmo venuti a capo. Questodimostra la potenza del formalismo che abbiamo introdotto.
20Esattamente perche uno stesso vettore in uno spazio vettoriale puo essere espressoequivalentemente come combinazione lineare di due basi diverse.

8.3. APPLICAZIONE ALLA 2-FORMA DI FARADAY 173
F = Bx dy ∧ dz+By dz ∧ dx+Bz dx∧ dy+ (Exdx+ Eydy + Ezdz)∧ dt =
= B′x′ dy
′∧dz′+B′y′ dz
′∧dx′+B′z′ dx
′∧dy′+(E ′
x′dx′ + E ′
y′dy′ + E ′
z′cdz′)∧dt′.
(8.24)
Le trasformazioni di Lorentz21, detta u la velocita relativa tra gli osser-vatori, sono
cdt′ = γ(u)(cdt− β(u)dx)dx′ = γ(u)(dx− β(u)cdt)dy′ = dydz′ = dz
Quindi
F = B′x′ dy∧dz+B′
y′ dz∧(γ(u)(dx−β(u)cdt))+B′z′ γ(u)(dx−β(u)cdt)∧dy+
+(E ′
x′γ(u)(dx− β(u)cdt) + E ′y′dy + E ′
z′dz)∧(γ(u)
(dt− β(u)
cdx
)),
e raccogliendo i prodotti esterni di base, ricordandoci che per antisimmetriadx ∧ dx = 0 (analogamente per y e z) e dx ∧ dy = −dy ∧ dx (analogamenteper le altre combinazioni), otteniamo
F =
(γ(u)B′
z′ + γ(u)β(u)
cE ′
y′
)(dx ∧ dy) +B′
x′(dy ∧ dz)+
+
(γ(u)B′
y′ − γ(u)β(u)
cE ′
z′
)(dz∧dx)+
(γ(u)2E ′
x′ − γ(u)2β(u)2E ′x′
)(dx∧dt)+
+(B′
z′γ(u)β(u)c+ γ(u)E ′y′
)(dy∧dt)+
(−B′
y′γ(u)β(u)c+ γ(u)E ′z′
)(dz∧dt).
Ricordandoci della (8.24), eguagliamo ora ciascuna componente, per otte-nere le leggi di trasformazione delle componenti del campo elettromagnetico:
Ex = γ(u)2 (E ′x′ − β(u)2E ′
x′) = E ′x′
Ey = γ(u)(E ′
y′ +B′z′β(u)c
)= γ(u)
(E ′
y′ + uB′z′
)Ez = γ(u)
(E ′
z′ −B′y′β(u)c
)= γ(u)
(E ′
z′ + uB′y′
)Bx = B′
x′
By = γ(u)
(B′
y′ −β(u)E ′
z′
c
)= γ(u)
(B′
y′ −u
c2E ′
z′
)Bz = γ(u)
(B′
z′ +β(u)E ′
y′
c
)= γ(u)
(B′
z′ +u
c2E ′
y′
)(8.25)
21Al solito, supponiamo gli osservatori in moto lungo il comune asse delle x.

174 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Per la simmetria invocata dal Principio di Relativita, abbiamo immedia-tamente anche la trasformazione inversa: basta infatta sostituire ovunque lavelocita relativa u con la velocita relativa −u, da cui
E ′x′ = Ex
E ′y′ = γ(u) (Ey − uBz)
E ′z′ = γ(u) (Ez − uBy)
B′x′ = Bx
B′y′ = γ(u)
(By +
u
c2Ez
)B′
z′ = γ(u)(Bz −
u
c2Ey
)(8.26)
Notiamo che in ciascuna espressione (eccezion fatta per le componentilungo cui avviene il moto, cioe le componenti x) i campi elettrico e magneticoinevitabilmente si mescolano, sovrapponendosi - possiamo vedere questo fattocome una sorta di fenomeno di induzione.
Dunque l’utilita della 2-forma F ha gia iniziato a dare i suoi frutti: ab-biamo risolto un problema a priori “difficile”. Ma c’e di piu: F e effettiva-mente la rappresentazione piu conveniente del campo elettromagnetico22 inquanto permette di riscrivere in un’elegantissima forma intrinseca le equa-zioni di Maxwell, come vedremo nella prossima lezione. Per arrivare a questo,pero, abbiamo prima ancora bisogno di una nozione matematica, il concettodi differenziale esterno.
8.4 Il differenziale esterno
8.4.1 Derivazione di campi tensoriali
Riprendiamo il filo del discorso con i nostri campi tensoriali. Su di essi non edefinita alcuna operazione intrinseca di derivazione semplicemente mediantel’uso di un sistema di coordinate. Per definire la derivazione di un campotensoriale bisogna introdurre una struttura aggiuntiva, detta connessione,caratterizzata dai coefficienti di connessione. Questa struttura aggiuntiva
22Cosı come ~V e la rappresentazione piu conveniente per la velocita.

8.4. IL DIFFERENZIALE ESTERNO 175
permette di definire la derivata dei campi tensoriali a partire dagli assiomidi Koszul (cosiddetta derivazione covariante alla Koszul23).
8.4.2 Derivazione di p-forme
Al contrario, sulle p-forme e possibile definire un’operazione di derivazionenaturale, detta differenziale esterno, che non richiede l’introduzione distrutture geometriche aggiuntive.24
Il differenziale esterno e un’operazione
d : Ωp(V )→ Ωp+1(V )
che aumenta di una unita il grado della forma che viene differenziata. Essoestende il differenziale di una funzione (cioe di una 0-forma) ad una genericap-forma.
Conviene definire tale operazione in forma assiomatica, dando le sue pro-prieta, ricalcando il modello della definizione assiomatica della derivazionecovariante alla Koszul25.
Definiamo dunque il differenziale esterno come un’operazione di deriva-zione, che prende una p-forma e la trasforma in una p + 1-forma verificantele seguenti quattro proprieta (α, β ∈ Ωp(V ); f, g sono funzioni):
(i) linearita: d(α+ β) = dα+ dβ;
(ii) leibnitzianita: d(α ∧ β) = dα ∧ β + (−1)|α|α ∧ dβ;
(iii) definizione sulle funzioni : df =∂f
∂xjdxj;
(iv) definizione sulle 1-forme esatte: d(dg) = 0.
Possiamo subito fare alcuni commenti riguardo a questa definizione.
(i) La prima proprieta ha lo scopo di ricondurre il differenziale al solo casodei monomi di base (ad esempio, del tipo f dxi ∧ dxj).
23Per maggiori informazioni sull’argomento e in generale per approfondimenti sulle no-zioni di geometria delle curve o delle superfici si rimanda alle “Nozioni di GeometriaDifferenziale” che si possono scaricare dal seguente indirizzo:
http://www.webalice.it/dghisi/scritti/geometria.pdf
24Ecco un’altra bella proprieta delle p-forme: abbiamo automaticamente, e in modoassolutamente naturale, un’operazione di differenziale esterno, senza dovere introdurrealcunche.
25Si veda la nota 23 a pag. 175.

176 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
(ii) La seconda proprieta ha lo scopo di ricondurre la derivazione di unmonomio (ad esempio fdxi ∧ dxj) a quella delle funzioni (f) e delle1-forme esatte (dxi, o in generale del tipo dg).
Tale proprieta e l’analogo della regola di Leibnitz per la comune deri-vazione. Il fattore (−1)|α|, dove vale la pena di ricordare che |α| e ilgrado della forma α, e simile al fattore che compare se per computareun determinante scambiamo un certo numero di colonne o righe; essorende conto del fatto che, in un certo senso e molto informalmente, ildifferenziale deve “attraversare” una forma di grado |α|.
(iii) La terza proprieta definisce il differenziale sulle funzioni, nel modo incui e definito il differenziale usuale.
(iv) La quarta proprieta conclude l’opera, definendo il differenziale sulle1-forme esatte.
La definizione del differenziale sulle 1-forme esatte ci mostra che d(dg) =d2g = 0, dove g e una funzione. Abbiamo imposto l’annullarsi di d2 su tuttele funzioni. Si dimostra facilmente che tale proprieta vale per ogni p-forma,cioe che per ogni α ∈ Ωp(V )
d2α = 0.
Cio e una diretta conseguenza dell’eguaglianza delle derivate seconde misteper funzioni C2. Infatti ogni p-forma α puo essere scritta come combinazionelineare di prodotti esterni dei proiettori nel modo seguente
α =∑
i1<i2<...<ip
αi1i2...ip dxi1 ∧ dxi2 ∧ . . . ∧ dxip ,
e il suo differenziale, utilizzando la (ii), quindi come26
dα =∑
i1<i2<...<ip
∑j
∂αi1i2...ip
∂xjdxj ∧ dxi1 ∧ dxi2 ∧ . . . ∧ dxip .
Differenziando nuovamente otteniamo
d(dα) = d2α =∑
i1<i2<...<ip
∑j
∑k
∂2αi1i2...ip
∂xj∂xkdxj∧dxk∧dxi1 ∧dxi2 ∧ . . .∧dxip .
Ora: se tutte le funzioni αi1i2...ip ∈ C2, vale l’eguaglianza delle derivate miste,cioe
∂2αi1i2...ip
∂xj∂xk=∂2αi1i2...ip
∂xk∂xj,
26La seconda parte della scomposizione leibnitziana si annulla per la (iv), ossia percheil differenziale di forme esatte e nullo.

8.4. IL DIFFERENZIALE ESTERNO 177
e dunque, per antisimmetria delle p-forme di base,
∂2αi1i2...ip
∂xj∂xkdxj ∧ dxk = −
∂2αi1i2...ip
∂xk∂xjdxk ∧ dxj,
e risulta chiaro che per ogni termine della sommatoria, esiste nella stessasommatoria anche il termine opposto, per cui alla fine d2α = 0. Per lagenericita della forma α si ha che d2 = 0.
Questo asserto e noto in letteratura come Lemma di Poincare.27 Essosancisce che ogni forma esatta e chiusa, cioe che d2 = 0.
Che la definizione di differenziale, come l’abbiamo data, sia ben definita(cioe non dipenda dalle coordinate scelte) e immediato: l’unico punto incui essa dipende dalle coordinate e il (iii), ma tale punto e la definizioneusuale del differenziale di una funzione, che sappiamo non dipendere dallecoordinate.
Dalla definizione e dalla rappresentazione delle p-forme sulla base na-turale segue l’espressione esplicita del differenziale di una qualsiasi p-forma,mediante l’utilizzo delle semplificazioni successive introdotte ai punti (i), (ii),(iii) e (iv). Vediamolo per esteso nel caso p = 1.
Se p = 1, la generica forma α si puo scrivere come
α = αjdxj,
con le αj funzioni scalari. Dunque28
dα = d
(n∑
j=i
αjdxj
)=
n∑j=i
d(αjdx
j)
=n∑
j=i
d(αj ∧ dxj
)=
=n∑
j=i
dαj ∧ dxj + (−1)0αj ∧ d(dxj) =n∑
j=i
dαj ∧ dxj
dove al secondo passaggio abbiamo usato la linearita (i), e quindi ci siamoricondotti ai monomi, al terzo passaggio abbiamo visto il monomio ajdx
j
come il prodotto esterno di una 0-forma e di una 1-forma, al quarto passaggioabbiamo utilizzato la leibnitzianita (iii) e infine abbiamo utilizzato la regola(iv) di autonullificazione, caso particolare del Lemma di Poincare. Abbiamocosı ottenuto l’espressione esplicita del differenziale di una generica 1-forma.
27Altri chiamono Lemma di Poincare in realta l’affermazione inversa (quello che noichiameremo l’Inverso del Lemma di Poincare), cioe che ogni forma chiusa e esatta, laquale affermazione pero, come vedremo, vale solo in insiemi topologicamente banali. Noichiameremo Lemma di Poincare l’asserto per cui d2 = 0.
28Scriviamo esplicitamente le sommatorie per mostrare chiaramente dove intervengono,nelle varie fasi, le proprieta (i), (ii), (iii) e (iv).

178 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
8.4.3 Integrazione
Mediante l’utilizzo del differenziale esterno possiamo ottenere un risultatoche generalizza una classe di teoremi dell’analisi matematica.
Il punto di partenza e che le forme differenziali sono gli oggetti naturalidella teoria dell’integrazione sulle varieta pararametrizzate orientate29. Dalnostro punto di vista, non si integrano campi vettoriali, ma si integranoforme differenziali. Integreremo le 1-forme su linee orientate P = P (u), le2-forme su superfici orientate P = P (u, v), le 3-forme su volumi orientatiP = P (u, v, w), e cosı via. Dicendo questo, possiamo immaginare tali curve,superfici, volumi immersi nello spazio euclideo; tale immersione pero non eassolutamente necessaria: la teoria delle p-forme e una teoria intrinseca.
Come definiamo gli integrali di p-forme? Nel modo piu naturale, ricor-dandoci della definizione di prodotto esterno e del suo significato geometrico:
• se α e una 1-forma,∫+C
α =
∫+C
∑j
αj(x(u))dxj(u) =
∫ u1
u0
αj(x(u))dxj
dudu;
• se β e una 2-forma,∫+S
β =
∫+S
∑j<k
βjk(x(u, v))dxj(u, v) ∧ dxk(u, v) =
=
∫∫D
βjk(x(u, v))
∣∣∣∣∣ ∂xj
∂u∂xj
∂v
∂xk
∂u∂xk
∂v
∣∣∣∣∣ dudv• se γ e una 3-forma,∫
+V
γ =
∫+V
∑j<k<l
γjkl(x(u, v, w))dxj(u, v, w)∧dxk(u, v, w)∧dxl(u, v, w) =
=
∫∫∫D
γjkl(x(u, v, w))
∣∣∣∣∣∣∣∂xj
∂u∂xj
∂v∂xj
∂w
∂xk
∂u∂xk
∂v∂xk
∂w
∂xl
∂u∂xl
∂v∂xl
∂w
∣∣∣∣∣∣∣ dudvdw;
29Per avere l’orientazione basta fissare un ordine nella scelta delle coordinate; in questomodo, ad esempio, mediante la regola della mano destra o similia, abbiamo l’orientazionerichiesta.

8.4. IL DIFFERENZIALE ESTERNO 179
e cosı via. Qualche precisazione notazionale: le scritture x(u), x(u, v), x(u, v, w)sono quantita vettoriali, cioe x(u) = (x1(u), . . . , xn(u)), e analogamente perle altre. Inoltre la scritture +C, +S e +V designano rispettivamente unacurva orientata, una superficie orientata e un volume orientato.
L’integrale
∫+C
α e detto “circolazione (o circuitazione) della 1-forma
α lungo la curva C”; l’integrale
∫∫+S
β e detto “flusso della 2-forma β
attraverso la superficie S”.Nel caso di una 0-forma f , ossia di una funzione, possiamo definire il suo
integrale coerentemente con il resto come∫+A=a+
1 ,a−2 f = f(a+
1 )− f(a−2 ),
dove +A e un certo insieme di punti, tipicamente due. Tale insieme e orien-tato nel senso che e stabilito un ordine tra i punti, tipicamente a un puntoviene associato il segno +, all’altro il segno −. Tale definizione e piuttostonaturale perche ci ricorda il Teorema fondamentale del Calcolo, la qual cosanon e affatto casuale, scopriamo meglio perche.
8.4.4 Orientazione del bordo
Innanzitutto bisogna precisare piu sensatamente la questione dell’orienta-zione. In particolare, dobbiamo precisare come l’orientazione di una varietasi riflette sull’orientazione del suo bordo.
• Se consideraiamo una linea orientata, il bordo della linea sono i suoiestremi. Essi vengono orientati associando ad essi un segno: + se lalinea entra nell’estremo, − se la linea esce dall’estremo (fig. 8.4).
Figura 8.4: Gli estremi di una linea orientata ereditano l’orientazione dellalinea mediante la differenziazione tra l’estremo da cui la linea esce e l’estremoin cui la linea entra.

180 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
• Se consideraiamo una superficie orientata, il bordo della superficie euna linea chiusa. Dire che la superficie e orientata significa dire chee fissato un verso positivo di circolazione su ogni parallelogramma chegiace sulla superficie. Il bordo ereditera questa orientazione, nel sensoche sara orientato coerentemente con il verso positivo di circolazionedei parallelogrammi della superficie (fig. 8.5).
Figura 8.5: Il bordo di una superfice eredita l’orientazione coerentementecon l’orientazione dei parallelogrammi sulla superficie.
• Se consideraiamo un volume orientato, il bordo del volume e una super-ficie chiusa. Dire che il volume e orientato significa fissare l’ordine deglispigoli di un cubetto A contenuto del volume.30 Consideriamo ora unaltro cubetto B che abbia la base giacente sulla superficie di contornodel nostro volume e il terzo spigolo uscente dal volume. L’orientazionedella superficie orientata sara data dall’orientazione della base di questocubetto B, che a sua volta sara quella per cui questo cubetto (giacentesul bordo) e equiorientato rispetto al cubetto A contenuto nel volume(fig. 8.6).
Figura 8.6: Il bordo di un volume eredita l’orientazione del volume di modoche il cubetto B che esce dalla superficie di contorno sia equiorientato alcubetto A contenuto nel volume.
30Questo equivale sostanzialmente a fissare il senso di avanzamento di una vite, cioeoltre a fissare un senso di rotazione serve anche un verso di avanzamento.

8.4. IL DIFFERENZIALE ESTERNO 181
D’ora in poi considereremo quindi varieta con bordo e supporremo chela varieta ed il suo bordo siano orientati compatibilmente (nel senso espostosopra).
8.4.5 Il Teorema di Stokes generalizzato
Consideriamo ora una p-forma31 αp ed il suo differenziale esterno dαp, che euna p+ 1 forma. Un risultato importante (Teorema di Stokes generaliz-zato) collega l’integrale di dαp su una certa regione +Vp+1 e l’integrale di αp
calcolato sul bordo (orientato) di tale regione, cioe su Sp = ∂Vp+1.
Teorema di Stokes generalizzato. Se αp e una p-forma, allora∫+Vp+1
dαp =
∫Sp=∂Vp+1
αp. (8.27)
+Vp+1 e un volume p+1-dimensionale orientato; Sp e il suo contorno, chene eredita (nel senso precedentemente specificato) l’orientazione; infine αp
e una p-forma qualsiasi. Possiamo riassumere l’enunciato del teorema nelloschema in figura 8.7.
Figura 8.7: Schematizzazione del Teorema di Stokes generalizzato. Vp+1 e unvolume orientato, Sp e il suo bordo; αp e una p-forma, βp+1 e il suo differenziale.Integrare αp su Sp vuol dire calcolare una certa quantita (indicata tra parentesiangolari, con pedice p) dipendente sia da αp sia da Sp; analogamente per βp+1
e Vp+1. Il Teorema di Stokes generalizzato afferma che queste due quantitacalcolate coincidono.
8.4.6 Declinazioni del Teorema di Stokes
Esemplifichiamo il Teorema di Stokes generalizzato nel caso di R3. Notiamoinnanzitutto il fatto che nell’enunciato del teorema non si richiede alcuna
31L’indice che metteremo a pedice stara solo ad esplicitare il grado della forma.

182 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
nozione di distanza ne di prodotto scalare. Il teorema, per essere valido, nonha bisogno di alcuna struttura metrica. Nel caso di R3, pero, queste nozioniesistono, poiche esso e munito di una struttura euclidea, cioe di un prodottoscalare definito positivo che induce quindi una distanza.
Nel di R3 possiamo considerare al massimo fino alle 3-forme (per le qualiesistera un’unica funzione di base, ad esempio dx∧dy∧dz), in particolare var-ranno le seguenti corrispondenze tra forme integrande e luoghi di integrazionedi tali forme:
0-forme←→ punti
1-forme←→ linee
2-forme←→ superfici
3-forme←→ volumi
Ad esempio, prendendo una 1-forma α, il suo differenziale sara una 2-forma. Per il Teorema di Stokes generalizzato abbiamo un legame tra i lorointegrali. Nel caso di R3, quindi, ci saranno in totale tre declinazioni del Teo-rema di Stokes generalizzato, che sono note come Teorema del Gradiente,Teorema del Rotore e Teorema della Divergenza. In apparenza, letre declinazioni del Teorema di Stokes generalizzato e i teoremi sopra citatidell’analisi sembrerebbero avere aspetti diversi, come mostrato dalla tabellacomparativa 8.1.
Declinazioni del Teorema di Stokes Teoremi dell’analisiTeorema del Gradiente32.
Se f ∈ Ω0(R3) e una 0-forma: Se f e una funzione:∫+C
df =
∫∂C
f
∫+C
grad f · dP = f(P )|P1P0
= f(P1)− f(P0)
Teorema del Rotore.
Se α ∈ Ω1(R3) e una 1-forma: Se ~A e un campo vettoriale:∫+S
dα =
∫C=∂S
α
∫+S
rot ~A · ~n dS =
∫+C=∂S
~A · dP
Teorema della Divergenza.
Se β ∈ Ω2(R3) e una 2-forma: Se ~B e un campo vettoriale:∫+V
dβ =
∫S=∂V
β
∫+V
div ~B dV =
∫+S=∂V
~B · ~n dS
Tabella 8.1: Tabella comparativa tra le declinazioni del Teorema di Stokesgeneralizzato e i teoremi dell’analisi.

8.4. IL DIFFERENZIALE ESTERNO 183
Per spiegare queste corrispondenze bisogna comprendere il legame tral’unica33 operazione di differenziale esterno definita sulle forme e i tre ope-ratori differenziali del calcolo vettoriale.
Questa corrispondenza (caso particolare di una dualita piu generale, notacon il nome di dualita di Hodge) utilizza sia la struttura metrica dello spa-zio euclideo, sia la sua orientazione. Se facciamo uso di queste nozioni, infatti,possiamo associare a 0-forme, 1-forme, 2-forme e 3-forme rispettivamentefunzioni, campi vettoriali polari34, campi vettoriali assiali e pseudofunzioni.
Dualita tra forme e campi vettoriali
E chiaro che a una 0-forma f(x1, x2, x3) = f(x, y, z) associeremo banalmentela funzione F = f , essendo f stessa una funzione.
Focalizziamoci sulla prima riga della tabella (8.1). Mediante la diffe-renziazione di f perveniamo a una 1-forma α = df . Tale forma si potrascomporre sulla base dei proiettori come
α = a1dx1 + α2dx
2 + α3dx3 = αxdx+ αydy + αzdz,
dove nell’ultimo passaggio abbiamo solamente rinominato le componenti della1-forma per conformarle alla scelta di coordinate (x, y, z). Chiamiamo ~A =gradF il gradiente della funzione F prima trovata. Vogliamo scoprire illegame che c’e tra questo df = α e il gradF = ~A, di modo da esplicitare larelazione nella prima riga della tabella 8.1. Essendo
gradF =
(∂F
∂x,∂F
∂y,∂F
∂z
)il vettore delle derivate parziali, ed essendo F = f , dalla scrittura
df =∂f
∂xdx+
∂f
∂ydy +
∂f
∂zdz
e dall’uguaglianza f = F discende per confronto che
αx =∂f
∂x, αy =
∂f
∂y, αz =
∂f
∂z
e dunque che~A = αx
~i+ αy~j + αz
~k. (8.28)
33Ecco dunque un altro vantaggio di utilizzare le forme: l’operazione di derivazionenaturale e una sola: tutti gli operatori del calcolo vettoriale si riconducono ad essa.
34Per le precisazioni su vettori polari e assiali si veda la nota 1 a pagina 155.

184 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Passiamo ora alla seconda riga della tabella (8.1). Ora supponiamo di
considerare una 1-forma α generica ed il campo vettoriale ~A associato ad essacome descritto dalla (8.28). Differenziamo questa35 1-forma α, ottenendo una
2-forma β = dα. Consideriamo ora la quantitayB = rot ~A. Come prima, se
riusciamo a trovare il legame tra dα e rot ~A abbiamo trovato il nesso coesivoper la seconda riga della tabella (8.1). Innanzitutto notiamo che
β = β12 dx1 ∧ dx2 + β13 dx
1 ∧ dx3 + β23 dx2 ∧ dx3
= βz dx ∧ dy − βy dx ∧ dz + βx dy ∧ dz= βz dx ∧ dy + βy dz ∧ dx+ βx dy ∧ dz
dove abbiamo rinominato le componenti di β adottando la convenzione nu-merica di associare all’1 la x, al 2 la y e al 3 la z, e di chiamare la componentecon l’unica lettera non associata ad alcuno dei suoi pedici. Per convenzionediamo segno positivo alle componenti le cui funzioni di base rispettano l’or-dine naturali delle permutazioni tra x, y e z, segno negativo altrimenti.36
Inoltre se scomponiamo α come
α = αxdx+ αydy + αzdz
35Chiaramente questa 1-forma α non sara la 1-forma definita precedentemente comeα = df , altrimenti differenziandola si perverra al risultato banale di
dα = d(df) = d2f = 0,
per il Lemma di Poincare. α sara una generica 1-forma.36Ad esempio, la componente βy e stata presa con segno negativo perche la sua forma di
base dx∧dz non rispetta l’ordine delle permutazioni della prima forma dx∧dy. Permutandoinfatti mediante x→ y
y → zz → x
perveniamo prima alla forma dy ∧ dz e quindi alla forma dz ∧ dx, la quale non coincidecon la forma di base per βy, ma ne e l’antisimmetrica:
dz ∧ dx = −dx ∧ dz,
da cui l’immediata sensatezza della convenzione da noi adottata di anteporre un segnomeno alle componenti che non rispettano l’ordine della permutazione.

8.4. IL DIFFERENZIALE ESTERNO 185
risulta che
β = dα = d(αxdx+ αydy + αzdz)
= d(αx ∧ dx+ αy ∧ dy + αz ∧ dz)= dαx ∧ dx+ dαy ∧ dy + dαz ∧ dz
=
(∂αx
∂xdx+
∂αx
∂ydy +
∂αx
∂zdz
)∧ dx+
(∂αy
∂xdx+
∂αy
∂ydy +
∂αy
∂zdz
)∧ dy+
+
(∂αz
∂xdx+
∂αz
∂ydy +
∂αz
∂zdz
)∧ ∧dz
=
(∂αy
∂x− ∂αx
∂y
)dx ∧ dy +
(∂αx
∂z− ∂αz
∂x
)dz ∧ dx+
(∂αz
∂y− ∂αy
∂z
)dy ∧ dz,
e per confronto con la scomposizione precedente di β abbiamo che
βz =∂αy
∂x− ∂αx
∂y, βy =
∂αx
∂z− ∂αz
∂x, βx =
∂αz
∂y− ∂αy
∂z.
Dato che~A = αx
~i+ αy~j + αz
~k,
il vettore (βx, βy, βz) va a coincidere con il rotore di ~A:
βx~i+ βy
~j + βz~k = rot ~A,
e per la definizione diyB, tenendo presente la regola sopra esposta per le
componenti di β, vale la relazione
yB = βx
~i+ βy~j + βz
~k. (8.29)
Infine focalizziamoci sulla terza riga della tabella (8.1). Supponiamo di
considerare una 2-forma β generica ed il campo vettorialeyB associato ad
essa come descritto dalla (8.28). Tale campo vettoriale sara in sostanza
yB = βx
~i+ βy~j + βz
~k.
Differenziamo la 2-forma β, ottenendo37 una 3-forma γ = dβ. Chiamiamo g
la divergenza del vettore assialeyB: g = div
yB. Notiamo che γ ha una sola
componente, cioe che
γ = γ123 dx1 ∧ dx2 ∧ dx3 = γ123 dx ∧ dy ∧ dz.
37Di nuovo: questa 2-forma β non sara la 2-forma definita precedentemente come β =dα, altrimenti differenziandola si otterrebbe solo una forma nulla.

186 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Ancora una volta, se scomponiamo β come
β = βz dx ∧ dy + βy dz ∧ dz + βx dy ∧ dz
risulta che
γ = dβ = d(βz dx ∧ dy + βy dz ∧ dz + βx dy ∧ dz)= d(βz ∧ dx ∧ dy + βy ∧ dz ∧ dz + βx ∧ dy ∧ dz)= dβz ∧ dx ∧ dy + dβy ∧ dz ∧ dz + dβx ∧ dy ∧ dz
=
(∂βz
∂xdx+
∂βz
∂ydy +
∂βz
∂zdz
)∧ dx ∧ dy+
+
(∂βy
∂xdx+
∂βy
∂ydy +
∂βy
∂zdz
)∧ dz ∧ dx+
+
(∂βy
∂xdx+
∂βy
∂ydy +
∂βy
∂zdz
)∧ dy ∧ dz
=
(∂βx
∂x+∂βy
∂y+∂βz
∂z
)dx ∧ dy ∧ dz
= divyB dx ∧ dy ∧ dz
= g dx ∧ dy ∧ dz
dove l’ultimo passaggio vale per la definizione di g. Dal confronto con laprecedente scomposizione di γ si ha immediatamente che
g = γ123. (8.30)
Che cosa e g = γ123? Una funzione? Certo, e una funzione, la quale perodipende dall’orientazione dello spazio. Dalla scomposizione di γ, e chiaro chescambiando il ruolo di dx e dy, la funzione γ123 cambia di segno - per com-pensare all’antisimmetria del prodotto esterno e essa stessa antisimmetrica.Diremo che g = γ123 e una pseudofunzione, cioe una funzione che cambiasegno al cambiare dell’orientazione spaziale.
Tutto quello che abbiamo fino a qui trovato puo essere riassunto neldiagramma di figura 8.8.
Intervento della metrica
Nelle corrispondenze tra β eyB e tra γ e g si vede chiaramente interve-
nire il fatto che stiamo lavorando in uno spazio euclideo, che quindi haun’orientazione fissata. Sembrerebbe invece che la proprieta metrica di

8.4. IL DIFFERENZIALE ESTERNO 187
Figura 8.8: Corrispondenze tra p-forme e funzioni (caso particolare delladualita di Hodge). I coefficienti αx, αy, αz, βx, βy, βz, γ123 si intendono definiticome spiegato nella trattazione. Il diagramma deve essere letto con la seguenteconvenzione: la 1-forma α che viene differenziata per ottenere β sara unagenerica 1-forma, e non il differenziale di f - altrimenti, banalmente, β sarebbenullo per il Lemma di Poincare. Questa convenzione vale anche per tutti glialtri enti in gioco.

188 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
R3 non intervenga da nessuna parte. Ma, come spesso, l’apparenza in-ganna. Mostriamo ad esempio l’intervento (essenziale!) della metrica nella
corrispondenza tra α ed ~A.Se non lavorassimo in coordinate cartesiane ortogonali, la metrica dello
spazio euclideo non avrebbe la forma pitagorica
ds2 = dx2 + dy2 + dz2,
ma avrebbe una forma piu generale
ds2 = gjk(x1, x2, x3)dxjdxk
che e nota col nome di prima forma fondamentale38. La matrice dei gjk,con j, k = 1, 2, 3 e detta tensore metrico e ha la caratteristica di essere unamatrice simmetrica.
Ad esempio in coordinate sferiche, la metrica e
ds2 = dr2 + r2(dθ2 + sin2 θdϕ2),
e dunque il tensore metrico e la matrice diagonale
gjk =
1 0 00 r2 00 0 r2 sin2 θ
La struttura metrica dello spazio e sempre racchiusa in questo tensore.
La forma di gjk cambia con una legge ben determinata al cambiare dellecoordinate (legge della covarianza):
gj′k′ = gjk∂xj
∂xj′
∂xk
∂xk′
Dunque la struttura metrica dello spazio euclideo e descritta da unamatrice simmetrica in ogni sistema di coordinate.
Usando la corrispondenza che c’e tra α e ~A, possiamo scrivere che ingenerale
Aj = gjkαk, (8.31)
dove gjk e la metrica in forma controvariante, ovvero
gjk = (gjk)−1,
38Per tutte le precisazioni e gli esempi riportati in questa sezione si rimanda alla nota23 a pagina 175.

8.4. IL DIFFERENZIALE ESTERNO 189
cioe gjk e l’inverso del tensore metrico. La (8.31) e del tutto equivalentea dire che αk = gkjA
j. Sempre dalla (8.31) notiamo che dunque che la j-
esima componente del vettore ~A non e esattamente la j-esima componentedi α, ma entra in gioco il tensore metrico. Se usiamo le coordinate cartesianeortogonali, questo gioco viene mascherato dal fatto che la metrica e la matriceidentica, cioe gjk = δjk, ma allora anche gjk = δjk, e l’unico termine che sisalva nella sommatoria al secondo membro della (8.31) e solo il j-esimo, peril quale gjj = 1, e dunque ritroviamo che Aj = αj. Ma in generale non e cosı!
Questo ci dice che il differenziale α di una funzione f in generale non e ilgradiente ~A della funzione. Anzi, vale che
df = grad f · dP, (8.32)
dove dP e il vettore dello spostamento infinitesimale, e · e il prodotto scalare- che palesa l’intervento della metrica. La (8.32) e una bella definizione peril gradiente di f , poiche mostra la dipendenza del gradiente da un prodottoscalare, dunque dalla metrica.
La differenza sostanziale tra differenziale e gradiente e che, mentre ildifferenziale e una 1-forma, il gradiente e un campo vettoriale. Lo scartoe nel fatto che le componenti di questi due enti si trasformano in manieradiversa e si rende necessaria la metrica per collegarli. Mentre il differenzialee definito intrinsecamente, il gradiente ha bisogno della metrica. La metricae dunque essenziale per compensare la diversa legge di trasformazione dellecomponenti di 1-forme e di campi vettoriali sulle basi naturali dxj e ∂P
∂xj
associate (rispettivamente nello spazio duale e nello spazio tangente) alle
coordinate xj prescelte. Le componenti di ~A si trasformano come
Aj′ = Aj ∂xj′
∂xj,
mentre le componenti della 1-forma α si trasformano come
αk′ = αk∂xk
∂xk′.
Di conseguenza:
αk′ = αk∂xk
∂xk′=(gkjA
j) ∂xk
∂xk′=
(gkj
∂xk
∂xk′
)Aj =
=
(gkj
∂xk
∂xk′
)Aj′ ∂x
j
∂xj′=
(gkj
∂xk
∂xk′
∂xj
∂xj′
)Aj′ = gk′j′A
j′ ,
dove il primo passaggio vale per la legge di trasformazione delle componentidi α, il secondo passaggio vale per l’ipotesi che α sia associato a un campo

190 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
vettoriale ~A, il terzo passaggio commutativita e associativita del prodottoscalare, il quarto passaggio per la legge di trasformazione delle coordinatedi ~A, il quinto ancora per commutativita e associativita del prodotto scalaree l’ultimo passaggio vale per la legge di trasformazione del tensore metrico.Dunque
αk = gkjAj ⇐⇒ αk′ = gk′j′A
j′ , (8.33)
e abbiamo toccato con mano il fatto che la metrica sia risultata essenzialeper mantenere invariata la legge che lega le componenti di α a quelle di ~A.
L’intervento della metrica nella definizione del gradiente spiega perche ilgradiente di una funzione F in coordinate polari non abbiamo come compo-nenti le derivate parziali ∂F
∂re ∂F
∂θ.
Supponiamo infatti che
f(x, y) = F (r, θ),
dove per convenienza abbiamo usato lettere diverse per una stessa funzionescritta in due coordinate differenti. Allora si ha che
grad f =∂f
∂x~i+
∂f
∂x~j =
∂F
∂r~er +
1
r
∂F
∂θ~eθ 6=
∂F
∂r~er +
∂F
∂θ~eθ.
Perche?Diamo due spiegazioni. La prima spiegazione mantiene la metrica carte-
siane, e trae le mosse dalla (8.32). Dato, che
df = grad f · dP,
dette (Gr, Gθ) le componenti del gradiente di F , il dP e dato da
dP = ds+ rdθ,
e dunque risulta che39
∂F
∂rdr +
∂F
∂θdθ = grad f · dP = (Gr~er +Gθ~eθ) · (dr~er + rdθ~eθ) =
= Grdr +Gθ(rdθ) = Grdr + (Gθr)dθ,
e dunque
Gr =∂F
∂r, Gθ =
1
r
∂F
∂θ.
39Qui il prodotto scalare e il prodotto scalare canonico: stiamo mantenendo la metricacartesiana.

8.4. IL DIFFERENZIALE ESTERNO 191
Figura 8.9: Metrica in coordinate cartesiane mediante il teorema di Pitagora:ds2 = dr2 + r2dθ2.
Oppure possiamo assumere come metrica la metrica in coordinate polaridel piano euclideo. Dalla figura 8.9 ricaviamo che essa vale
ds2 = dr2 + r2dθ2,
e dunque
gjk =
(1 00 r2
),
o anche, in forma controvariante (matrice inversa),
gjk =
(1 00 1
r2
).
Percio, per la (8.31), le componenti del gradiente sono40(1 0
0 1r2
)(∂F∂r∂F∂θ
)=
( ∂F∂r
1r2
∂F∂θ
).
Ma come! Abbiamo asserito e abbiamo anche trovato prima che la secondacomponente del gradiente era 1
r∂F∂θ
e ora troviamo che invece essa e 1r2
∂F∂θ
?Dove e l’inghippo? L’inghippo sta nel fatto che scegliendo dr e dθ comeproiettori di base per la 1-forma α, e scegliendo di utilizzare la metrica in
40Abbiamo infatti che la j-esima componente del gradiente e data da gjkαk, dove α = df .Le αk, componenti della forma, hanno il notevole vantaggio di non dipendere dalla sceltadelle coordinate, percio esse saranno esattamente ∂f
∂r e ∂f∂θ indipendentemente dal fatto che
stiamo scegliendo coordinate polari. Il compito di ricollegare queste componenti a quelledel gradiente viene demandato alla metrica.

192 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
coordinate polari, abbiamo trovato le componenti del vettore ~A sulla basenaturale, che e diversa dalla base dei versori ~er e ~eθ, poiche non e ortonormata!Il calcolo con la metrica restituisce le componenti sulla base naturale. Ladiscrepanza con il calcolo precedente e dunque dovuta al diverso significatodato al termine “componenti”. Prima avevamo calcolato le componenti delgradiente sulla base ortonormata (~er, ~eθ). Ora, con la regola della metricaabbiamo calcolato le componenti del gradiente sulla base naturale
(∂P∂r, ∂P
∂θ
),
che non e affatto ortonormata. Dalla doppia scrittura
dP = dr~er + rdθ~eθ =∂P
∂rdr +
∂P
∂θdθ
segue che
~er =∂P
∂r, r~eθ =
∂P
∂θ.
Dunque ∂P∂θ
non e unitario, ma cresce in lunghezza all’allontanarsi di P dall’o-rigine. Ne deduciamo, a partire da quanto avevamo calcolato sulla metrica,che
gradF =∂F
∂r
∂P
∂r+
1
r2
∂F
∂θ
∂P
∂θ
=∂F
∂r~er +
1
r2
∂F
∂θr~eθ
=∂F
∂r~er +
1
r
∂F
∂θ~eθ,
e ci siamo, poiche abbiamo ritrovato lo stesso risultato precedente.
Di fatto la metrica compare anche nelle relazioni che leganoyB a β e g
a γ, ma non e il caso di analizzarle nel dettaglio. L’importante e tenerepresente che divergenza, gradiente e rotore richiedono tutti la presenza e l’in-tervento del tensore metrico. Il differenziale esterno invece non ha questoproblema: in questo senso generalizza e sublima i tre operatori dell’analisi.Vedremo anche, nella prossima lezione, che le leggi di Maxwell, usualmentescritte mediante tali operatori, si possono riscrivere in maniera elegante eintrinseca utilizzando il differenziale esterno; ma prima di entrare nei det-tagli, concludiamo questo excursus matematico accennando alla teoria deipotenziali.
8.4.7 La teoria dei potenziali
Come ultima applicazione della teoria delle forme differenziali discutiamo lateoria dei potenziali. Diamo innanzitutto le seguenti definizioni.41
41Qualche accenno per il caso delle 1-forme era gia stato dato nella nota 10 a pag. 162.

8.4. IL DIFFERENZIALE ESTERNO 193
Definizione 8.1. Una (p+1)-forma42 βp+1 si dice chiusa se il suo differen-ziale e nullo:
dβp+1 = 0.
Definizione 8.2. Una (p+1)-forma βp+1 si dice esatta se e il differenzialedi una qualche forma αp di grado inferiore:
βp+1 = dαp.
La forma αp e detta potenziale di βp+1.
Notiamo che i potenziali, in generale, non sono piu funzioni scalari (solonel caso particolare di p = 0 lo sono). Questa definizione generalizza dunquela comune definizione di potenziale. Non solo: non trattiamo piu con poten-ziali di campi vettoriali (questo e possibile solo in presenza di una metrica):i potenziali sono potenziali di forme differenziali ; quanto accade con i campivettoriali accade solo di riflesso.43
A causa del Lemma di Poincare, per cui d2 = 0, e chiaro che ogni formaesatta e anche chiusa. Se infatti βp+1 = dαp, e immediato che
dβp+1 = d(dαp) = 0.
Quindi la condizione dβp+1 = 0 e necessaria affinche esista il potenzialedi βp+1. Nella dualita tra forme e campi vettoriali, possiamo ricavare alcunecondizioni in R3. Sia α una 1-forma, f una funzione. L’implicazione
α = df ⇒ dα = 0,
vista “di riflesso” nella teoria dei campi vettoriali, per le analogie trovatenella sezione 8.4.6, significa che44
~A = grad f ⇒ rot ~A = 0,
(infattiyB = rot ~A e il duale di dα) e dunque ricaviamo che rot grad f = 0, e
per la generalita di f abbiamo che
rot grad = 0. (8.34)
42Anche in questa sezione useremo i pedici per specificare i gradi delle forme.43Questa osservazione e volutamente polemica: nella nostra impostazione i campi
vettoriali sono un’ombra della teoria delle forme differenziali.44Se ~A = grad f , f e detto “potenziale scalare” del campo ~A. Analogamente, se
yB = rot ~A, ~A e detto “potenziale vettoriale” del campo
yB.

194 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO
Analogamente sia β una 2-forma e α una 1-forma. L’implicazione
β = dα⇒ dβ = 0,
di riflesso diventayB = rot ~A⇒ div
yB = 0,
(infatti g = divyB e il duale di dβ) da cui ricaviamo che div rot ~A = 0, e per
la generalita di ~A abbiamo che
div rot = 0. (8.35)
Quindi le identita differenziali del calcolo vettoriale sono casi particolaridell’identita generale d2 = 0 (del Lemma di Poincare).
Abbiamo visto che ogni forma esatta e chiusa, cioe che la condizione dβp+1
e necessaria affinche β ammetta potenziale. Ma e anche sufficiente?La risposta e no.45 La sufficienza dipende dalla topologia dello spazio
in cui stiamo studiando le forme. In particolare, il “numero” (inteso come
45Ad esempio la 1-forma
α = − y
x2 + y2dx+
x
x2 + y2dy
e una forma chiusa, poiche ha differenziale nullo. Infatti, dette
αx = − y
x2 + y2, αy =
x
x2 + y2,
si ha che
dα = d(αxdx+ αydy) = d(αx ∧ dx+ αy ∧ dy) = dαx ∧ dx+ dαy ∧ dy =(∂αx
∂xdx+
∂αx
∂ydy
)∧ dx+
(∂αy
∂xdx+
∂αy
∂ydy
)∧ dy =
∂αx
∂ydy ∧ dx+
∂αy
∂xdx ∧ dy,
e per antisimmetria questa quantita si annulla allorche le derivate parziali ∂αx
∂y e ∂αy
∂xcoincidono; fatto che risulta vero in questo caso - basta un semplice esercizio di derivazioneper mostrarlo. Ma α non puo ammettere potenziale. Se lo ammettesse, a meno di unacostante, dovrebbe essere la 0-forma
f = arctan(yx
),
la quale derivata rispetto a x e y restituisce rispettivamente αx e αy; ma tale funzione nonpuo essere un potenziale per α. Infatti se α ammettesse potenziale, il campo ~A ad essalegato sarebbe conservativo, e dunque la sua circuitazione lungo cammini chiusi sarebbesempre nulla. Ma consideriamo γ, circonferenza unitaria in R2; su di essa si ha x = cos te y = sin t, e dunque cambiando variabile nell’integrale∫
γ
α =∫ 2π
0
(sin2 t+ cos2 t)dt = 2π

8.4. IL DIFFERENZIALE ESTERNO 195
dimensione di un sottospazio vettoriale) delle forme chiuse che non sonoesatte e un invariante topologico, detto “numero di Betti”.46
Se lo spazio in cui si lavora e topologicamente banale (ad esempio se euno spazio stellato47 rispetto ad un suo punto) l’ostruzione topologica vienemeno, e quindi ogni forma chiusa ammette potenziale.
Questa affermazione e nota come Inverso del Lemma di Poincare, edequivale all’asserto che localmente48 ogni p + 1-forma βp+1 chiusa ammette
potenziale αp, definito a meno del differenziale di una p− 1 forma. E infattichiaro che la p-forma αp e potenziale per βp+1 se e soltanto se lo e la p-forma αp + dδp−1 (con δp−1 generica p − 1-forma) - infatti il differenziale diquest’ultima quantita, per il Lemma di Poincare, coincide con il differenzialedi αp. Vale in sintesi lo schema riportato in figura 8.10.
Figura 8.10: Relazioni tra forme chiuse e forme esatte.
notiamo che l’integrale su un cammino chiuso non e nullo, e dunque la forma non e esatta.Come si vedra fra poco, questo dipende dal fatto che α non e definita nell’origine, cioe edefinita in R2 r 0, dominio che non e stellato.
46Il fatto che la sufficienza dipenda dalla topologia dell’insieme su cui si lavora nondeve stupire: basti pensare che le forme differenziali sono per loro natura oggetti che siintegrano, dunque devono sposarsi con gli insiemi su cui le si integra.
47Ricordiamo che un insieme A e stellato (rispetto a un suo punto p ∈ A) se, comunquepreso a ∈ A, il segmento che congiunge a con p e tutto contenuto in A. Ad esempio la sferaunitaria e stellata rispetto ad ogni suo punto; viceversa R2r0 (in generale Rnr0) none stellato (rispetto a nessun punto), poiche, fissato (x, y) ∈ R2, il segmento che congiunge(x, y) con (−x,−y) passera per l’origine e dunque non sara contenuto completamentenell’insieme.
48Con “localmente” si intende in un opportuno aperto, dunque in un insiemetopologicamente banale.

196 LEZIONE 8. DALLA DINAMICA ALL’ELETTROMAGNETISMO

Lezione 9
Equazioni di Maxwell
La scoperta che il campo magnetico e una 2-forma permette di scriverein forma assoluta (cioe indipendentemente dall’osservatore) le equazioni diMaxwell e di scoprirne la struttura.1
9.1 Relazioni fondamentali
Le equazioni di Maxwell descrivono le interazioni tra cariche elettriche siain quiete, sia in moto. In presenza di materia e conveniente distinguere lecariche e le correnti in due categorie: quelle controllabili direttamente dallosperimentatore, dette libere o accessibili, e quelle invece vincolate alla materiae prodotte dai fenomeni di polarizzazione e magnetizzazione, dette legate.
Questa distinzione ha senso soprattutto in una teoria macroscopica, dovenon si faccia un’analisi microscopica della distinzione di carica.
Cariche e correnti verificano la prima legge fondamentale dell’elettroma-gnetismo, che in forma differenziale si scrive come
∂ρ
∂t+ div~j = 0, (9.1)
che e la cosiddetta “equazione di continuita” e che traduce il principio diconservazione della carica. Essa e un vincolo tra la derivata temporale delladensita volumica di carica ρ e la divergenza del vettore densita di corrente~j. Per vedere piu chiaramente che la (9.1) traduce la conservazione dellacarica, possiamo notare che integrandola in un volume V attorno al puntoconsiderato otteniamo che∫
V
∂ρ
∂tdV +
∫V
div~j dV = 0,
1Abbiamo incominciato dalla forza di Lorentz per scoprire il campo elettromagnetico,e dal campo elettromagnetico scopriamo ora le equazioni di Maxwell.
197

198 LEZIONE 9. EQUAZIONI DI MAXWELL
e applicando il Teorema della Divergenza
∂
∂t
∫V
ρ dV +
∫∂V
~j · ~n dS = 0, (9.2)
equazione che si riscrive immediatamente come2
∂q
∂t+ i = 0, (9.3)
secondo cui ogni variazione di carica deve essere controbilanciata da unacorrente attraverso la superficie di contorno.3
Parallelamente alla distinzione delle cariche in due categorie, conviene in-
trodurre due diversi campi elettromagnetici, indicati con (yD, ~H) e con ( ~E,
yB),
e detti rispettivamente:
yD : campo di induzione elettrica
~H : campo magnetico
~E : campo elettricoyB : campo di induzione magnetica
I campi ~H, ~E sono vettori polari (insensibili alla variazione dell’orien-tamento spaziale) e di essi si considera sempre la circolazione4. I campi di
induzioneyD,
yB sono vettori assiali (definiti scegliendo un’orientazione dello
spazio) e di essi si considera sempre il flusso5.
2Nella (9.1) ρ e la densita volumica di carica, che quindi integrata sul volume restituiscela carica totale.
3Possiamo generalizzare l’equazione (9.1) a un’equazione di bilancio
∂ρ
∂t+ div~j = π,
dove π e un termine di produzione di carica. Cosı facendo la conservazione della carica siriduce a dire
π = 0.
4La circolazione (o circuitazione) e intesa come integrale di linea. Se portata al limitesu circuiti infinitesimi restituisce il rotore del campo.
5Per flusso si intende un integrale di superficie. Se portato al limite per superficiinfinitesime restituisce la divergenza del campo.

9.1. RELAZIONI FONDAMENTALI 199
Il primo campo elettromagnetico (yD, ~H), che convenzionalmente chiame-
remo “campo elettromagnetico di Maxwell”6, e legato direttamente allesorgenti libere (cariche e correnti) dalle prime due equazioni di Maxwell
divyD = ρ
rot ~H − ∂yD
∂t= ~j
(9.4)
che sono, nell’ordine, l’equazione di Gauss per il campo d’induzione elet-
tricayD e la legge di Maxwell-Ampere. I termini ρ e ~j che compaiono sono
rispettivamente la densita volumica di carica libera e la densita delle cor-renti libere. Insomma, queste due equazioni legano i campi di induzione allesorgenti libere.
Notiamo il fatto che l’equazione di continuita (9.1) si puo ricavare dalleequazioni (9.4). Se consideriamo la seconda di queste equazioni e prendiamola divergenza di ambo i membri, ricordando l’identita (8.35) per cui div rot =0, si ha che
div~j = div rot ~H − div∂
yD
∂t= 0− ∂div
yD
∂t= −∂ρ
∂t,
dove l’ultimo passaggio vale per la prima delle equazioni (9.4).
Il secondo campo elettromagnetico ( ~E,yB), che convenzionalmente chia-
meremo “campo elettromagnetico di Faraday”7, serve invece ad espri-mere le azioni sulle cariche di prova, attraverso la legge di Lorentz
~f = qprova( ~E + ~v ∧yB). (9.5)
Tale campo elettromagnetico e poi caratterizzato dalle due condizioni divincolo imposte dal secondo blocco delle equazioni di Maxwell, secondo cui
divyB = 0
rot ~E +∂
yB
∂t= 0
(9.6)
che sono, nell’ordine, l’equazione di Gauss per il campo magnetico e l’equa-zione di induzione magnetica di Faraday-Neumann-Lenz, per cui un campo
6Poiche e il campo che compare nella equazione di Maxwell-Ampere (generalizzazionedella legge della circuitazione di Ampere con un termine correttivo di Maxwell).
7Poiche e quello le cui componenti sono i coefficienti della 2-forma di Faraday.

200 LEZIONE 9. EQUAZIONI DI MAXWELL
magnetico variabile induce un campo elettrico non conservativo (cioe il cuirotore e non nullo). In particolare il segno piu nella seconda equazione (chediventa naturalmente meno spostando il termine al di la dell’uguale) e dovutoa Lenz, ed e fondamentale nella comprensione del significato dell’induzione.8
I due blocchi (9.4) e (9.6) formano, presi complessivamente, le quattroequazioni di Maxwell. Per simmetria ci aspetteremmo due termini di caricae corrente magnetiche ai secondi membri della (9.6); tuttavia troviamo solotermini nulli. Sovente si dice che questi zeri possono essere letti come
divyB = ρmagnetica = 0
rot ~E +∂
yB
∂t= ~jmagnetica = 0
cioe come l’assenza di monopoli magnetici e di sorgenti del campo magnetico.
Il quadro delle equazioni di Maxwell e infine completato dalle relazionifenomenologiche tra i due campi elettromagnetici: una carica di prova risentedell’azione esercitata da tutte le cariche elettriche presenti, sia libere, sia le-
gate. Dunque i campi ( ~E,yB), che servono a calcolare le azioni sulla carica
di prova, dovranno necessariamente tenere conto di tutte le cariche presenti,sia libere, sia legate. In presenza di materia (e quindi di fenomeni di polariz-zazione e magnetizzazione), essi non potranno quindi coincidere con i campi
(yD, ~H). In generale si avra che
yD = ε0
~E +yP
yB = µ0
~H +yM
(9.7)
doveyP e detto vettore di polarizzazione (legato alla creazione di dipoli
all’interno dei dielettrici) eyM e detto vettore di magnetizzazione. Queste
decomposizioni esprimono la dipendenza dei campi ~E eyB da tutte le cariche:
dalle cariche libere attraversoyD e ~H e dalle cariche legate attraverso
yP
eyM . Questi ultimi due vettori devono essere precisati attraverso equazioni
costitutive che caratterizzano le proprieta della materia presente nella regionedi spazio considerata. Tali equazioni, a differenza delle equazioni generalidi Maxwell, possono avere una forma molto complicata, dove e realmenteracchiusa tutta la fisica del problema.
8Quel segno infatti ci dice che il campo indotto si oppone alla variazione che l’hagenerato.

9.1. RELAZIONI FONDAMENTALI 201
Il caso piu semplice si ha naturalmente se ci poniamo nel vuoto, doveyP = 0 e
yM = 0. Ma possiamo scrivere equazioni semplici anche nel caso
di un mezzo omogeneo, isotropo e in quiete rispetto al riferimento conside-rato; in questo caso possiamo postulare delle equazioni costitutive di sempliceproporzionalita, e sostituire alle equazioni (9.7) le equazioni
yD = ε ~EyB = µ ~H
, (9.8)
dove ε = ε0εr e la costante dielettrica del mezzo in quiete e µ = µ0µr e lasua permeabilita magnetica.
A queste equazioni bisogna poi aggiungere una terza equazione costitutivache precisa la densita di corrente ~j. Nello stesso ordine di semplificazione, siassume solitamente che valga la legge di Ohm e dunque9
~j = σ ~E, (9.9)
ove la costante di proporzionalita σ e detta conducibilita.
Riassumendo il tutto, finora abbiamo trovato il seguente sistema di equa-zioni di Maxwell (quattro fondamentali e tre costitutive):
divyD = ρ
rot ~H − ∂yD
∂t= ~j
divyB = 0
rot ~E +∂
yB
∂t= 0
yD = ε ~EyB = µ ~H~j = σ ~E
9E da questa relazione che si ricava la forma piu nota della legge di Ohm. Infattimettendoci nel caso particolare di un conduttore omogeneo e isotropo, di lunghezza L esezione traversale uniforme di area A alle cui estremita viene applicata una differenza dipotensiale ∆V , si ha che il campo e E = ∆V
L . Ammettendo anche che la densita di corrente~j sia uniforme su tutta l’area A si ha allora che j = i
A . Sostituendo quanto trovato nella(9.9) si ha che i
A = σ∆VL da cui
∆V =L
Aσi,
e chiamando
R :=L
Aσ
la resistenza si ha la ben nota forma ∆V = Ri.

202 LEZIONE 9. EQUAZIONI DI MAXWELL
9.2 I potenziali di Hertz
Le rimanenti equazioni della teoria elettromagnetica sono le equazioni dellateoria dei potenziali di Hertz. Esse sono conseguenze matematiche delle
equazioni di vincolo sui campi ( ~E,yB).
Dalla prima delle (9.6), cioe dal fatto che il campoyB ha divergenza
nulla10, segue che esiste sempre11 un campo vettoriale ~A tale per cui
yB = rot ~A. (9.10)
Tale campo e detto potenziale vettore del campo elettromagnetico.Unendo questo risultato all’equazione di Faraday-Neumann-Lenz, la se-
conda delle (9.6), abbiamo che
rot ~E +∂
yB
∂t= rot ~E + rot
∂ ~A
∂t= rot
(~E +
∂ ~A
∂t
)= 0,
e dunque il campo ~E + ∂ ~A∂t
e irrotazionale, da cui discende immediatamenteche esiste una funzione scalare ϕ t.c.12
~E = −∂~A
∂t− gradϕ. (9.11)
Tale funzione e detta potenziale scalare del campo elettrico - laddove,in effetti, non e proprio il potenziale del campo elettrico poiche, come ab-biamo visto, quest’ultimo viene mediato attraverso una derivata parziale delpotenziale vettore.
La coppia (ϕ, ~A) e detta coppia dei potenziali di Hertz. Questi poten-ziali non sono univocamente determinati: essi sono fissati a meno del gra-diente di una funzione scalare ψ (detta funzione di calibrazione, o funzionedi “gauge”, dall’inglese) secondo le formule
~A′ = ~A+ gradψ
ϕ′ = ϕ− ∂ψ
∂t
. (9.12)
10En passant: un campo a divergenza nulla e detto solenoidale.11Se vogliamo, nella nostra analogia con le p-forme, questo discende dal fatto che ogni
p-forma chiusa e localmente anche esatta, dunque localmente ammette potenziale.12Nella (9.11) il segno meno davanti alla derivata parziale di ~A e obbligato, mentre il
segno meno davanti al gradiente di ϕ e una questione di convenzioni: possiamo sempreprendere ϕ = −ϕ e tale segno diventa un piu.

9.2. I POTENZIALI DI HERTZ 203
E immediato verificare che la coppia (ϕ, ~A′) e ancora una coppia di poten-ziali di Hertz; basta tenere presente la (8.34) e invertendo il sistema (9.13),notare che la riscrittura delle equazioni (9.10) e (9.11) resta invariata informa:
yB = rot ~A = rot( ~A′ − gradψ) = rot ~A′ − rot gradψ = rot ~A′
~E = −∂~A
∂t− gradϕ = − ∂
∂t( ~A′ − gradψ)− grad
(ϕ′ +
∂ψ
∂t
)=
= −∂~A′
∂t+∂ gradψ
∂t− gradϕ′ − ∂ gradψ
∂t= −∂
~A′
∂t− gradϕ′
La funzione di calibrazione e del tutto arbitraria, poiche nessuna condi-zione su di essa e imposta. Utilizzando questa arbitrarieta (cioe la scelta di
ψ) possiamo sempre enucleare una coppia (ϕ, ~A) che verifichi un certo parti-colare vincolo scalare. Per fissare una funzione ψ, insomma, possiamo sempreporre un vincolo scalare che lega tale funzione ai potenziali. Per ragioni chesaranno molto chiare piu avanti, e assai opportuno scegliere il vincolo scalaresui potenziali dato da
div ~A+ εµ∂ϕ
∂t= 0, (9.13)
detto “gauge di Lorentz”.13 Si noti il fatto che la funzione ψ non compareesplicitamente nel vincolo, ma agisce nella “calibrazione” di ( ~A, ϕ), nel sensoche tra gli infiniti valori che questa coppia di potenziali puo assumere (alvariare appunto di una certa funzione ψ), scegliamo l’unico valore per cui la(9.13) e verificata.
Riassumendo, abbiamo fino ad ora sette gruppi di equazioni:
Equazioni di Maxwell(informazioni fisiche)
[1]
divyD = ρ
rot ~H − ∂yD
∂t= ~j
[2]
divyB = 0
rot ~E +∂
yB
∂t= 0
[3]∂ρ
∂t+ div~j = 0
[4]
yD = ε ~EyB = µ ~H~j = σ ~E
13In situazioni statiche esso si riduce al vincolo div ~A = 0, che e detto “gauge diCoulomb”.

204 LEZIONE 9. EQUAZIONI DI MAXWELL
Potenziali di Hertz(conseguenze matematiche)
[5]
yB = rot ~A
~E = −∂~A
∂t− gradϕ
[6]
~A′ = ~A+ gradψ
ϕ′ = ϕ− ∂ψ
∂t
[7] div ~A+ εµ∂ϕ
∂t= 0
[1] Equazioni di Maxwell per il campo elettromagnetico (yD, ~H) di Maxwell
[2] Equazioni di Maxwell per il campo elettromagnetico ( ~E,yB) di Faraday
[3] Equazione di continuita (conservazione della carica)
[4] Equazioni costitutive
[5] Ruolo dei potenziali
[6] Arbitrarieta nella scelta dei potenziali
[7] Gauge di Lorentz
9.3 Equazioni delle onde
Se andiamo a tracciare il diagramma dei personaggi in gioco e delle loro tra-sformazioni, ricaviamo la figura 9.1. L’intero schema e riassunto nel legametra i potenziali di Hertz (ϕ, ~A) e le sorgenti (ρ,~j). Le equazioni che dannoquesto legame sono le equazioni delle onde elettromagnetiche. Per trovarle,partiamo dalla seconda equazione di (9.4)
~j = rot ~H − ∂yD
∂t.
Supponendo il mezzo omogeneo, uniforme e in quiete rispetto al riferimento,
possiamo sostituireyD e ~H con i campi ~E e
yB di Faraday, ottenuti mediante
le equazioni costitutive (9.8) e quindi passare ai potenziali mediante la (9.10)

9.3. EQUAZIONI DELLE ONDE 205
e la (9.11). Abbiamo che
~j = rot ~H − ∂yD
∂t
=1
µrot ~B − ε∂
~E
∂t
=1
µrot rot ~A− ε
(−∂
2 ~A
∂t2− ∂ gradϕ
∂t
)
=1
µrot rot ~A+ ε
∂2 ~A
∂t2+ grad
∂ϕ
∂t.
Se ora usiamo l’identita14
rot rot ~A = grad div ~A− div grad ~A (9.15)
otteniamo che
~j =1
µdiv grad ~A− grad div ~A+ ε
∂2 ~A
∂t2+ grad
∂ϕ
∂t,
ovvero, moltiplicando ambo i membri per −µ e raccogliendo il gradiente:
−µ~j = div grad ~A− εµ∂2 ~A
∂t2− grad
(div ~A+ εµ
∂ϕ
∂t
). (9.16)
Ecco che ora entra in gioco l’opportuna scelta della funzione arbitrariaψ di cui alle (9.12): utilizzando l’arbitrarieta di questa ψ possiamo scegliere
i potenziali ~A e ϕ in modo tale che risultino calibrati secondo il gauge diLorentz, ovvero in modo tale che valga la (9.13):
div ~A+ εµ∂ϕ
∂t= 0.
Dunque il termine nella parentesi della (9.16) si annulla, e l’equazioneassume la forma piu semplice
−µ~j = div grad ~A− εµ∂2 ~A
∂t2. (9.17)
14Identita che deve essere intesa componente per componente. Infatti non abbiamodefinito alcun gradiente di un campo vettoriale ~A; la (9.14) deve essere dunque intesacomponente per componente, nel senso di
(rot rot ~A)x = (grad div ~A)x − div gradAx
(rot rot ~A)y = (grad div ~A)y − div gradAy
(rot rot ~A)z = (grad div ~A)z − div gradAz
. (9.14)

206 LEZIONE 9. EQUAZIONI DI MAXWELL
Ma la divergenza del gradiente di ~A non e altro che il laplaciano15 di ~A,sovente indicato con 4 ~A. Si ha dunque che
−µ~j = 4 ~A− εµ∂2 ~A
∂t2. (9.18)
A questo punto si devono ricordare le relazioni che definiscono la velocitadi propagazione nel vuoto e in un mezzo del campo elettromagnetico. Essesono
c√ε0µ0 = v
√εµ = 1, (9.19)
dove c e la velocita di propagazione nel vuoto e v e la velocita di propagazionein un mezzo generico. Si ha che
c =1
√ε0µ0
v =1√εµ,
per cui l’equazione (9.17) si puo scrivere come
4 ~A− 1
v2
∂2 ~A
∂t2= −µ~j.
o anche, introducendo l’operatore di D’Alembert (il d’alembertiano di ~A)
~A := 4 ~A− 1
v2
∂2 ~A
∂t2
possiamo scrivere ~A = −µ~j. (9.20)
15Utilizzando l’operatore
∇ =(∂
∂x,∂
∂y,∂
∂z
)si ha immediatamente che per ogni ψ,
gradψ ≡ ∇ψ =(∂ψ
∂x,∂ψ
∂y,∂ψ
∂z
)e per ogni campo ~A
div ~A ≡ ∇ ·A =∂Ax
∂x+∂Ay
∂y+∂Az
∂z,
rot ~A ≡ ∇ ∧A =(∂Az
∂y− ∂Ay
∂z,∂Ax
∂z− ∂Az
∂x,∂Ay
∂x− ∂Ax
∂y
).
Dunque4 ~A := ∇2 ~A = ∇ · ∇ ~A = div(∇ ~A) = div grad ~A.

9.3. EQUAZIONI DELLE ONDE 207
Analogamente, dalla prima equazione delle (9.4), ricordando le equazionicostitutive (9.8), nel caso di un mezzo isotropo, omogeneo e in quiete rispettoal riferimento, otteniamo che
div ~D = ρ⇒ div ~E =ρ
ε,
e ricordando l’equazione (9.11) relativa al potenziale scalare, possiamo scri-vere che
ρ
ε= div
(−∂
~A
∂t− gradϕ
)= −div
∂ ~A
∂t− div gradϕ = −div
∂ ~A
∂t−∇2ϕ.
Utilizziamo a questo punto il gauge di Lorentz (9.13), cioe il fatto che
div ~A = −εµ∂ϕ∂t
= − 1
v2
∂ϕ
∂t.
Dunque possiamo scrivere che
1
v2
∂2ϕ
∂t2−∇2ϕ =
ρ
ε,
cioe che
4ϕ− 1
v2
∂2ϕ
∂t2= −ρ
ε, (9.21)
o, utilizzando la definizione di d’alembertiano, che
ϕ = −ρε. (9.22)
Le equazioni (9.20) e (9.22) sono dette equazioni delle onde, e preseinsieme formano il sistema delle onde ~A = −µ~j
ϕ = −ρε
(9.23)
che fornisce il legame tra i potenziali (ϕ, ~A) e le sorgenti (ρ,~j).
Il diagramma in figura 9.1 fornisce il quadro completo (a meno delleequazioni che descrivono gli scambi energetici) della teoria di Maxwell.16
16Per un riferimento bibliografico, si confronti la tabella I3 di [8].

208 LEZIONE 9. EQUAZIONI DI MAXWELL
Figu
ra9.1:
Diagram
ma
riassuntivodella
teoriadi
Maxw
ell.

9.4. FORMA ASSOLUTA DELLE EQUAZIONI DI MAXWELL 209
9.4 Forma assoluta delle equazioni di Max-
well
Il formalismo delle forme differenziali permette di scrivere in modo compattoe trasparente le equazioni di Maxwell, ad eccezione delle equazioni costitutive,nel caso generale di mezzi materiali in moto.
Per semplicita,17 ci limiteremo a presentare la formulazione assoluta nelcaso del vuoto, cioe quando tutte le cariche sono cariche libere.
9.4.1 La 3-forma delle sorgenti
Il punto di partenza e la descrizione delle sorgenti del campo magnetico.Ci lasciamo guidare dall’osservazione che le cariche sono associate a volumispaziali (si parla infatti di carica contenuta in un certo volume), mentre lecorrenti sono associate a superfici spaziali e a intervalli di tempo (si parla dicarica che attraversa la superficie in un certo intervallo di tempo). Per questoscegliamo di caratterizzare le sorgenti mediante la 3-forma sullo spaziotempodi Minkowski
J = ρ dx ∧ dy ∧ dz − (jx dy ∧ dz + jy dz ∧ dx+ jz dx ∧ dy) ∧ dt. (9.24)
Infatti, cosı facendo, la densita di carica ρ (che e relativa all’osservatore,in quanto componente sulla base scelta) e associata a un volume infinitesimo,e ciascuna componente della densita di corrente a una superficie infinitesimae a un tempo infinitesimo. La 3-forma J e dunque una sorta di sorgente delcampo generalizzata, con le dimensioni di una carica.
Questa scelta di J e anche e soprattutto giustificata dall’osservazione chela legge di conservazione della carica (9.1) si scrive nella forma elegante di18
dJ = 0, (9.25)
17La teoria e vasta, e non e nostro scopo in questa sede fare una trattazione completa egenerale dell’elettromagnetismo. Preferiamo soffermarci sui particolari che ci interessano,particolari che emergono perfettamente anche nel caso del vuoto.
18Ci si potrebbe chiedere il perche del segno meno alle componenti di ~j: tale segnoe messo apposta per far sı che il differenziale esterno di J si annulli se e solo se valel’equazione di continuita. Non e superfluo notare che, cosı come abbiamo fatto per la2-forma F, potremmo definire anche J a meno del segno, cioe considerare ogni termine conil segno opposto a quello con cui compare nella (9.24). Infatti di J (e poi, come vedremo,anche di F) dobbiamo imporre l’annullarsi del differenziale, il che equivale completamenteall’annullarsi del differenziale di −J. Scegliamo convenzionalmente di prendere i segnicome nella (9.24), la scelta contraria non sarebbe pero stata un problema.

210 LEZIONE 9. EQUAZIONI DI MAXWELL
poiche, in effetti, differenziando, tenendo presente che per il Lemma di Poin-care d2 = 0 e l’antisimmetria del prodotto esterno19, troviamo20
dJ = d (ρ dx ∧ dy ∧ dz − (jx dy ∧ dz + jy dz ∧ dx+ jz dx ∧ dy) ∧ dt)= dρ ∧ dx ∧ dy ∧ dz − (djx ∧ dy ∧ dz + djy ∧ dz ∧ dx+ djz ∧ dx ∧ dy) ∧ dt
=
(∂ρ
∂xdx+
∂ρ
∂ydy +
∂ρ
∂zdz +
∂ρ
∂tdt
)∧ dx ∧ dy ∧ dz+
−(∂jx∂x
dx+∂jx∂y
dy +∂jx∂z
dz +∂jx∂tdt
)∧ dy ∧ dz ∧ dt+
−(∂jy∂x
dx+∂jy∂y
dy +∂jy∂z
dz +∂jy∂tdt
)∧ dz ∧ dx ∧ dt+
−(∂jz∂x
dx+∂jz∂y
dy +∂jz∂z
dz +∂jz∂tdt
)∧ dx ∧ dy ∧ dt
=∂ρ
∂tdt ∧ dx ∧ dy ∧ dz − ∂jx
∂xdx ∧ dy ∧ dz ∧ dt+
− ∂jy∂y
dy ∧ dz ∧ dx ∧ dt− ∂jz∂z
dz ∧ dx ∧ dy ∧ dt
=
(∂ρ
∂t+ div~j
)dt ∧ dx ∧ dy ∧ dz,
espressione che si annulla se e solo se vale la conservazione della caricaespressa dalla (9.1).
19Stiamo imponendo l’annullarsi di tutte le forme del tipo dx∧dx, e notando che valgonole eguaglianze del tipo dy ∧ dz ∧ dx = dx∧ dy ∧ dz, poiche esse corrispondono a un doppioscambio tra i differenziali. Una doppia antisimmetria non cambia il segno della forma:
dy ∧ dz ∧ dx = −dy ∧ dx ∧ dz = dx ∧ dy ∧ dz.
20In pratica, si usa la regola che se α e una forma chiusa, cioe se
dα = 0,
e in particolare se α e un elemento della base canonica, cioe
α = dxi ∧ dxj ∧ . . . ,
(e quindi di sicuro dα = 0 per il Lemma di Poincare), presa una qualsiasi funzione f , siavra che
d(fα) = df ∧ α.
Notiamo in questo caso l’effetto immediato del differenziale esterno, che delega al prodottoesterno il compito aumenta di un’unita il grado della forma.

9.4. FORMA ASSOLUTA DELLE EQUAZIONI DI MAXWELL 211
9.4.2 La 2-forma di Maxwell
In sostanza, la legge di conservazione della carica impone che J sia una formachiusa. Per l’Inverso del Lemma di Poincare, se J e chiusa, localmente e ancheesatta. Quindi, localmente vale che
J = dM, (9.26)
dove M e una certa 2-forma. Vediamo bene di capire come e fatta questa2-forma M.
In linea del tutto generale, essa ha la forma
M = Mx dy∧dz+My dz∧dx+Mz dx∧dy+Nx dx∧dt+Ny dy∧dt+Nz dx∧dt,(9.27)
con (Mx,My,Mz, Nx, Ny, Nz) funzioni scalari che vogliamo determinare. Pos-
siamo riunire tali funzioni in due vettori ~M = (Mx,My,Mz) e ~N = (Nx, Ny, Nz),le cui componenti troviamo grazie alla (9.26), calcolando il differenziale esternodi M e imponendo che coincida con J. Differenziando la (9.27), le uniche
derivate parziali delle componenti di ~M e ~N che si salvano sono quelle cor-risponenti a coordinate che non sono presenti nella relativa 2-forma di base.Ad esempio
d(Mx dy ∧ dz) = d(Mx ∧ dy ∧ dz) = dMx ∧ (dy ∧ dz) +Mx ∧ d(dy ∧ dz).
Il secondo termine si annulla per il Lemma di Poincare, e otteniamo
d(Mx dy∧dz) = dMx∧dy∧dz =
(∂Mx
∂xdx+
∂My
∂ydy +
∂Mx
∂zdz +
∂Mx
∂tdt
)∧dy∧dz,
e le uniche derivate parziali che non scompaiono per antisimmetria21 sonoquelle rispetto alla x e alla t. Analogamente si opera per tutti gli altritermini, ottenendo che
dM = d(Mx dy ∧ dz +My dz ∧ dx+Mz dx ∧ dy +Nx dx ∧ dt+Ny dy ∧ dt+Nz dx ∧ dt)
=
(∂Mx
∂x+∂My
∂y+∂Mz
∂z
)dx ∧ dy ∧ dz +
(∂Mx
∂t− ∂Ny
∂z+∂Nz
∂y
)dy ∧ dz ∧ dt+
+
(∂My
∂t− ∂Nz
∂x+∂Nx
∂z
)dz ∧ dx ∧ dt+
(∂Mz
∂t− ∂Nx
∂y+∂Ny
∂x
)dx ∧ dy ∧ dt.
La 3-forma dM deve soddisfare l’uguaglianza (9.26), per cui dM = J. Ciosignifica che le sue componenti sulla base delle 3-forme devono soddisfare il
21Infatti dy ∧ dy = dz ∧ dz = 0.

212 LEZIONE 9. EQUAZIONI DI MAXWELL
sistema
∂Mx
∂x+∂My
∂y+∂Mz
∂z= ρ
∂Mx
∂t− ∂Ny
∂z+∂Nz
∂y= −jx
∂My
∂t− ∂Nz
∂x+∂Nx
∂z= −jy
∂Mz
∂t− ∂Nx
∂y+∂Ny
∂x= −jz
(9.28)
che possiamo riscrivere vettorialmente comediv ~M = ρ
∂ ~M
∂t+ rot ~N = −~j
. (9.29)
Confrontando il sistema (9.29) con il primo blocco (9.4) delle equazioni
di Maxwell si verifica subito che ~M = ~D e ~N = − ~H, da cui
M = (Dx dy ∧ dz +Dy dz ∧ dx+Dz dx∧ dy)− (Hxdx+Hydy+Hzdz)∧ dt.(9.30)
dove il segno meno al secondo membro e un riflesso della discrepanza di segnotra le seconde equazioni dei due blocchi (9.4) e (9.6).22
M e detta 2-forma di Maxwell. Essa rappresenta per il campo elet-tromagnetico di Maxwell cio che la 2-forma di Faraday rappresenta per ilcampo elettromagnetico di Faraday. Anche nella versione di Maxwell, dun-
que, le componenti del campo elettromagnetico (yD, ~H) non vanno intese
separatamente, ma all’interno di una 2-forma.
Sussiste quindi la seguente coimplicazione:
dM = J⇐⇒
div
yD = ρ
rot ~H − ∂yD
∂t= ~j
, (9.31)
cioe l’identita dM = J e una riscrittura del primo blocco delle equazioni diMaxwell.
22Si noti che, a differenza di J e F, M non puo essere definita a meno del segno, sevogliamo che l’equazione dM = J traduca il sistema di equazioni non omogenee di Maxwell.Il segno di M dovra essere preso coerentemente con il segno dato a J.

9.4. FORMA ASSOLUTA DELLE EQUAZIONI DI MAXWELL 213
9.4.3 La 2-forma di Faraday
D’altro canto, gia sappiamo dalla sezione 8.1.3 che anche ( ~E,yB) sono le
componenti di una 2-forma, la 2-forma di Faraday, appunto
F = (Bx dy∧dz+By dz∧dx+Bz dx∧dy)+(Exdx+Eydy+Ezdz)∧dt, (9.32)
la quale e completamente analoga a M, non fosse che per quel gia discussosegno meno.
Proviamo ora a prendere il differenziale esterno della 2-forma F.
dF = d(Bx dy ∧ dz) + d(By dz ∧ dx) + d(Bz dx ∧ dy) + d ((Ex + Ey + Ez) ∧ dt)= dBx dy ∧ dz + dBy dz ∧ dx+ dBz dx ∧ dy+
+ dEx ∧ dx ∧ dt+ dEy ∧ dy ∧ dt+ dEz ∧ dz ∧ dt
=
(∂Bx
∂xdx+
∂Bx
∂ydy +
∂Bx
∂zdz +
∂Bx
∂tdt
)∧ dy ∧ dz+
+
(∂By
∂xdx+
∂By
∂ydy +
∂By
∂zdz +
∂By
∂tdt
)∧ dz ∧ dx+
+
(∂Bz
∂xdx+
∂Bz
∂ydy +
∂Bz
∂zdz +
∂Bz
∂tdt
)∧ dx ∧ dy+
+
(∂Ex
∂xdx+
∂Ex
∂ydy +
∂Ex
∂zdz +
∂Ex
∂tdt
)∧ dx ∧ dt+
+
(∂Ey
∂xdx+
∂Ey
∂ydy +
∂Ey
∂zdz +
∂Ey
∂tdt
)∧ dy ∧ dt+
+
(∂Ez
∂xdx+
∂Ez
∂ydy +
∂Ez
∂zdz +
∂Ez
∂tdt
)∧ dz ∧ dt
=
(∂Bx
∂x+∂By
∂y+∂Bz
∂z
)dx ∧ dy ∧ dz+
+
(∂Bz
∂t+∂Ey
∂x− ∂Ex
∂y
)dx ∧ dy ∧ dt+
+
(∂By
∂t+∂Ex
∂z− ∂Ez
∂x
)dz ∧ dx ∧ dt+
+
(∂Bx
∂t+∂Ez
∂y− ∂Ey
∂z
)dy ∧ dz ∧ dt
Abbiamo scritto scomposto dF sulla base delle 2-forme composte dal pro-dotto esterno dei differenziali delle funzioni coordinate. Se prestiamo ben

214 LEZIONE 9. EQUAZIONI DI MAXWELL
attenzione ai coefficienti possiamo anche scrivere che23
dF = divyB dx ∧ dy ∧ dz +
(∂Bz
∂t+ (rot ~E)z
)dx ∧ dy ∧ dt+
+
(∂By
∂t+ (rot ~E)y
)dz ∧ dx ∧ dt+
(∂Bx
∂t+ (rot ~E)x
)dy ∧ dz ∧ dt.
(9.33)
Ora: che cosa succede se dF = 0? Quando dF si annulla, si devonoannullare tutti i suoi coefficienti, in particolare (condensando i termini in ununica equazione vettoriale)
divyB = 0
e
rot ~E +∂
yB
∂t= 0.
Abbiamo trovato la seguente coimplicazione:
dF = 0⇐⇒
div
yB = 0
rot ~E = −∂yB
∂t
. (9.34)
Cioe: imporre dF = 0 equivale a scrivere le equazioni differenziali24 checostituiscono il secondo blocco (9.6) delle equazioni di Maxwell.
9.4.4 La 1-forma dei potenziali
Se valgono le equazioni di Maxwell, dunque, si ha che
dF = 0, (9.35)
da cui deduciamo che F e chiusa, e quindi localmente esatta. Localmente,cioe, ammette potenziale. Esiste percio una 1-forma
Φ = Pxdx+ Pydy + Pzdz + Ptdt.
23Ricordiamo che la freccia curva messa come segno di vettore per il campo magnetico
sta ad indicare che il vettoreyB e un vettore assiale. Per le precisazioni su vettori polari e
assiali si veda la nota 1 a pagina 155.24La forma compatta mostra solo due equazioni, ma le relazioni sono in realta quattro.
Infatti una 3-forma in uno spazio 4-dimensionale ha 4 componenti. Sono infatti quattrole funzioni di base per le 3-forme in uno spazio 4-dimensionale. In generale non e difficilevedere che in uno spazio n-dimensionale, le funzioni di base per le p-forme sono
(np
).

9.4. FORMA ASSOLUTA DELLE EQUAZIONI DI MAXWELL 215
Questa forma dovra verificare dΦ = F, e dato che
dΦ =
(∂Px
∂ydy +
∂Px
∂zdz +
∂Px
∂tdt
)∧ dx+
(∂Py
∂xdx+
∂Py
∂zdz +
∂Py
∂tdt
)∧ dy+
+
(∂Pz
∂xdx+
∂Pz
∂ydy +
∂Pz
∂tdt
)∧ dz +
(∂Pt
∂xdx+
∂Pt
∂ydy +
∂Pt
∂zdz
)∧ dt =
=
(∂Py
∂x− ∂Px
∂y
)dx ∧ dy +
(∂Pz
∂y− ∂Py
∂z
)dy ∧ dz +
(∂Px
∂z− ∂Pz
∂x
)dz ∧ dx+
+
(∂Pt
∂x− ∂Px
∂t
)dx ∧ dt+
(∂Pt
∂y− ∂Py
∂t
)dy ∧ dt+
(∂Pt
∂z− ∂Pz
∂t
)dz ∧ dt,
dall’uguaglianza con le componenti di F, detto ~Ps = (Px, Py, Pz), otteniamoche
rot ~Ps = ~B
e
gradPt −∂ ~Ps
∂t= ~E,
e per confronto con le equazioni (9.10) e (9.11) dei potenziali di Hertz otte-
niamo immediatamente che ~Ps = ~A e Pt = −ϕ.La 1-forma dei potenziali dunque e costituita dunque (potevamo in effetti
aspettarcelo) dalle componenti dei potenziali di Hertz ( ~A, ϕ)
Φ = Axdx+ Aydy + Azdz − ϕdt (9.36)
e verifica
F = dΦ. (9.37)
Quest’unica equazione (9.37) quindi riassume e condensa le equazioni diHertz dei potenziali.
Infine, e ovvio che la 1-forma Φ e definita a meno del differenziale di una0-forma ψ, nel senso che
Φ′ = Φ + dψ (9.38)
e ancora un potenziale per F in virtu del Lemma di Poincare - infatti
dΦ′ = d(Φ + dψ) = dΦ + d2ψ = dΦ.
9.4.5 Conclusione
Possiamo riassumere le relazioni trovate nel diagramma finale di figura 9.2.

216 LEZIONE 9. EQUAZIONI DI MAXWELL
Figu
ra9.2:
Diagram
ma
riassuntivodell’elettrom
agnetismo
dalpunto
divista
dellep-form
e.

9.5. LE EQUAZIONI COSTITUTIVE 217
Alla luce di (9.34) e (9.31), le equazioni di Maxwell sono del tutto equi-valenti al sistema
dM = JdF = 0
. (9.39)
C’e una considerazione molto interessante da fare: e vero che, per comeabbiamo ripensato la teoria elettromagnetica alla luce della Relativita Ri-stretta, sicuramente le leggi dell’elettromagnetismo sono invarianti al cam-biare dell’osservatore inerziale. Ma c’e anche qualcosa di piu. Usando leparole di B. Finzi25:
Il carattere tensoriale delle leggi elettromagnetiche [(9.14)] formu-late nello spazio-tempo ne assicura l’invarianza di fronte ad un gene-rico cambiamento del riferimento spazio-temporale: di fronte, in par-ticolare, al passaggio da un osservatore ad un altro in moto traslatoriorettilineo uniforme rispetto al primo, ma di fronte anche al passaggioda un osservatore ad un altro in moto qualsivoglia rispetto al primo. Sidice, brevemente, che le equazioni elettromagnetiche soddisfano nellospazio-tempo al principio di relativita generale
(Bruno Finzi, Teoria dei campi,Cesare Tamburini ed., p.251)
9.5 Le equazioni costitutive
9.5.1 I problemi delle equazioni costitutive
Riprendiamo ora lo schema riassuntivo della teoria di Maxwell (figura 9.1):siamo quindi riusciti nella sezione 9.4 a ritrascrivere in forma assoluta (con-formemente con il principio di relativita) le equazioni dei collegamenti “ver-ticali” nello schema. Per far cio abbiamo utilizzato la teoria delle formedifferenziale, e abbiamo scoperto che con tale formalismo:
• i campi elettromagnetici sono 2-forme
F = (Bx dy∧dz+By dz∧dx+Bz dx∧dy)+(Exdx+Eydy+Ezdz)∧dt,
M = (Dx dy∧dz+Dy dz∧dx+Dz dx∧dy)−(Hxdx+Hydy+Hzdz)∧dt,
ove il segno meno nell’espressione di M e dovuto sostanzialmente alladifferenza di segno tra le seconde equazioni dei blocchi di Maxwell (9.4)e (9.6);
25Il corsivo e nostro.

218 LEZIONE 9. EQUAZIONI DI MAXWELL
• le sorgenti sono una 3-forma
J = ρ dx ∧ dy ∧ dz − (jx dy ∧ dz + jy dz ∧ dx+ jz dx ∧ dy) ∧ dt;
• i potenziali sono una 1-forma
Φ = Axdx+ Aydy + Azdz − ϕdt.
Alla luce di questo nuovo formalismo abbiamo ricavato lo schema in figura9.2.
E importante sottolineare che in tutte queste espressioni sono contenutetutte le trasformazioni relativistiche. Abbiamo mostrato esplicitamente come
ricavare le trasformazioni per ~E eyB: il procedimento che abbiamo usato e
valido in generale. Ad esempio, data ρ in un sistema di riferimento, per cono-scere ρ in un altro sistema di riferimento basta sostituire in J le trasformazionidi Lorentz.
Rimangono da ritrascrivere in forma assoluta le equazioni costitutive26
“orizzontali” dello schema in figura 9.1, dove compaiono le costanti fenome-nologiche del mezzo. Nel caso del vuoto, a cui ci restringiamo per semplicita,si tratta delle due equazioni “elementari”
yD = ε0
~EyB = µ0
~H, (9.40)
che paradossalmente sono le piu complesse da ritrascrivere in forma asso-luta, poiche richiedono l’utilizzo della metrica e dell’orientazione attraversola cosiddetta dualita di Hodge.
Si puo capire che le equazioni (9.40) siano ostiche da trattare osservandoche:
(i) da un punto di vista relativo esse collegano vettori di tipo diverso, col-legano cioe un vettore polare con un vettore assiale (e certamente l’unonon puo essere trasformato nell’altro semplicemente con la moltiplica-zione per uno scalare);
(ii) da un punto di vista assoluto vi e un incrocio (chiamato nei libri di
elettromagnetismo “rotazione di dualita”) tra la posizione di ( ~E,yB)
e di (yD, ~H) nei due tensori elettromagnetici - in sostanza
yD corrisponde
26Tali equazioni sono dette “costitutive” poiche per formularle e necessario avere notiziesperimentali sul mezzo, quindi e necessaria un’analisi in laboratorio.

9.5. LE EQUAZIONI COSTITUTIVE 219
ayB e ~H corrisponde a ~E, a meno di un segno. Dunque se l’equazione
costitutiva si traducesse in una proporzionalita tra le 2-forme F e M, i
ruoli dei quattro campi ~E,yB,
yD, ~H sarebbero scambiati, in particolare
avremmo proporzionalita27 trayD e
yB e poi tra ~E e ~H, cosa che non
rispecchia affatto le equazioni costitutive (9.40). E chiaro che prima diconfrontare F e M, una delle due 2-forme deve essere “girata” in mododa scambiare parte elettrica e parte magnetica. Questo e proprio lafunzione della dualita di Hodge, cui ora e necessario accennare a livellomatematico.
9.5.2 La dualita di Hodge
Da un punto di vista prettamente matematico, la dualita di Hodge e unprocesso puramente algebrico che agisce su uno spazio vettoriale - nel casoavessimo una varieta differenziabile invece di uno spazio vettoriale, possiamoconsiderare lo spazio tangente alla varieta in un generico punto e quindi faragire la dualita di Hodge punto per punto.
Consideriamo dunque uno spazio vettoriale V su R, di dimensione n =dim(V ) e munito di un prodotto scalare (eventualmente semieuclideo)
〈 , 〉 : V × V → R.
Notiamo che lo spazio vettoriale delle n-forme su V ha dimensione 1(infatti vi e un’unica n-forma di base) e quindi tutte le n-forme sono multipletra loro. Dunque se ω, ω′ ∈ Ωn(V ) necessariamente
ω′ = λω
per un qualche λ ∈ R.Le n-forme si possono dividere in due classi distinte, a seconda del segno
del fattore λ. Per far cio definiamo innanzitutto la nozione di equiorientazionedi due n-forme.
Diremo che due n-forme (su uno spazio vettoriale V n-dimensionale) sonoequiorientate se il fattore λ che le lega e positivo. Viceversa, se λ < 0 diremoche le due n-forme non sono equiorientate.
Definire un’orientazione su uno spazio vettoriale significa scegliere unadi queste due classi, prendendo ad esempio un suo rappresentante.28 In pra-
27In realta anche il segno non funzionerebbe: avremmo un segno meno che non econtemplato nelle (9.40).
28Stiamo privilegiando, sostanzialmente una di queste due classi, esattamente nel modoin cui con la regola della mano destra privilegiamo un certo orientamento spaziale e nonun altro.

220 LEZIONE 9. EQUAZIONI DI MAXWELL
tica, percio, fissare l’orientazione significa scegliere una forma volume.29 Adesempio, sullo spaziotempo di Minkowski prenderemo la forma volume diMinkowski
ω = dx ∧ dy ∧ dz ∧ cdt,
che chiameremo forma volume di Minkowski. Fissare una forma volumeequivale a fissare l’ordine in cui le coordinate devono essere considerate.
Ogni volta che su V fissiamo un prodotto scalare e una forma volume(cioe l’ordine delle coordinate), risulta definita una corrispondenza30
∗ : Ωp(V )→ Ωn−p(V ) (9.41)
chiamata dualita di Hodge.Ad esempio per V = R3 si instaurera una corrispondenza tra le 0-forme e
le 3-forme, e tra le 1-forme e le 2-forme. Usando tale corrispondenza fornitadalla dualita di Hodge, possiamo limitarci a considerare solo i seguenti tipidi forme:
0-forme, 1-forme, 1-forme duali, 0-forme duali,
ove le due ultime tipologie di forme sono a tutti gli effetti 1-forme e 0-forme,solo che sono definite a meno dell’orientazione, nel senso che per definirleserve avere fissata un’orientazione spaziale, cioe una forma volume. Perricordarsi di cio si aggiunge l’aggettivo “duali”.
Sullo spaziotempo M di Minkowski, invece, considereremo
0-forme, 1-forme, 2-forme, 2-forme duali, 1-forme duali, 0-forme duali,
e dunque nelle ipotesi di Hodge (cioe la definizione di una forma volume)possiamo limitarci all’analisi di 0-forme, 1-forme e 2-forme.
In altre parole, la dualita di Hodge e un modo per dimezzare il numerodi forme da considerare.
29Dove per forma volume intendiamo una forma che coinvolga tutte le coordinate dellospazio; ad esempio in R3 una forma volume sarebbe dx∧dy∧dz o anche −2 dx∧dy∧dz, ecosı via. Le forme volume sono quindi le p-forme di grado massimo su uno spazio vettoriale.
30Si noti che infatti, per l’osservazione riportata nella nota 24 a pag. 214, le funzioni dibase per le p-forme in uno spazio n-dimensionale sono
(np
), e per le proprieta del coefficiente
binomiale(np
)=(n−p
p
), da cui lo spazio delle p-forme e lo spazio delle (n−p)-forme hanno lo
stesso numero di funzioni di base, cioe hanno la stessa dimensione. Sappiamo dall’algebralineare che due spazi vettoriali aventi la stessa dimensione sono isomorfi, ma in generalenon lo sono in una maniera privilegiata. La dualita di Hodge, invece, ci fornisce unacorrispondenza privilegiata tra questi due spazi. L’operatore ∗ e detto “operatore stardi Hodge”.

9.5. LE EQUAZIONI COSTITUTIVE 221
Per il momento, diciamo che il prodotto scalare
〈 , 〉 : V × V → R
definito sui vettori di V si estende in modo naturale prima sulle 1-forme (cioesugli elementi dello spazio duale di V ) con
〈 , 〉1 : V ∗ = Ω1(V )× V ∗ = Ω1(V )→ R
e poi, nuovamente per estensione, sulle p-forme con
〈 , 〉p : Ωp(V )× Ωp(V )→ R.
Quindi, date due p-forme α e β, a loro possiamo associare il numero reale
〈α, β〉p ∈ R
che verra detto ancora prodotto scalare (il pedice p sta a ricordare che ledue forme sono p-forme).
Con questi strumenti (prodotto scalare e forma volume), possiamo definirecon semplicita il duale di Hodge di una data p-forma α, vale a dire quella(n− p)-forma β che corrisponde ad α mediante la relazione ∗.
Fissiamo una p-forma α di cui vogliamo costruire il duale e facciamone ilprodotto esterno con una (n−p)-forma β arbitraria. Otteniamo, in generale,una n-forma α ∧ β che deve necessariamente essere un multiplo della formavolume ω.31 Esiste percio uno scalare λα(β), che dipende esplicitamente daβ ma anche dalla scelta32 di α, t.c.
α ∧ β = λα(β)ω. (9.42)
Il nodo e che lo scalare λα(β), dipende linearmente da β,33 e come ognifunzione lineare su uno spazio vettoriale munito di prodotto scalare34, puoessere scritta nella forma35
λα(β) = 〈∗α, β〉n−p. (9.43)
31Chiaramente se α e β condividono una qualche funzione di base, il loro prodottoesterno sara banalmente nullo, e quindi sara anche banalmente multiplo della formavolume; ma questo caso e quello meno interessante.
32Ecco perche scriviamo α come parametro a pedice e β come variabile esplicita.33Al raddoppiare della forma β chiaramente raddoppia α∧ β e dunque anche il secondo
membro della (9.42). Essendo la forma volume ω fissata, e chiaro che deve raddoppiare lafunzione λα(β) - e cosı via.
34In questo caso lo spazio delle (n− p)-forme, munito del prodotto scalare 〈 , 〉n−p.35Dobbiamo pensare ad α e β come elementi di uno spazio vettoriale: lo scalare λα(β) e
quindi un funzionale lineare dello spazio duale. E sappiamo, come espliciteremo meglio trapoco, che esiste una corrispondenza biunivoca privilegiata tra gli elementi di uno spaziovettoriale e gli elementi del suo duale. Dunque la forma ∗α e unica.

222 LEZIONE 9. EQUAZIONI DI MAXWELL
In altre parole, per la linearita di λα(β) e per le proprieta del prodottoscalare, fissata una forma α esiste un’unica (n− p)-forma ∗α associata ad αt.c.
α ∧ β = 〈∗α, β〉n−p ω (9.44)
comunque scelta una (n− p)-forma β, e quindi, in generale:
α ∧ · = 〈∗α, ·〉n−p ω. (9.45)
La (n− p)-forma ∗α sara detta duale di Hodge di α.
9.5.3 Applicazioni sullo spaziotempo di Minkowski
Ritorniamo ora a considerare uno spazio vettoriale particolare: lo spazio-tempo M di Minkowski. Abbiamo introdotto la dualita di Hodge parlandodella necessita di avere un prodotto scalare; abbiamo accennato nel paragrafoprecedente al fatto che sulle p-forme e definito un certo prodotto scalare,senza pero mostrarlo esplicitamente. Ora e giunto il momento di mostrarecome questo prodotto scalare possa essere costruito grazie alla metrica di M .
Si procede in due passi.
(i) Innanzitutto si osserva che il prodotto scalare, ovvero la metrica dellospaziotempo di Minkowski, avente la forma36
η = diag(1, 1, 1,−1) =
1 0 0 00 1 0 00 0 1 00 0 0 −1
,
stabilisce una corrispondenza uno a uno tra un V = TPM e il suoduale V ∗ = TPM
∗. In breve, il prodotto scalare identifica un spazioV con il suo duale V ∗. Questa corrispondenza e definita dal teoremadi rappresentazione delle forme lineari usato in precedenza. Piu espli-citamente: fissato un certo ~u ∈ V , con V spazio vettoriale munito diprodotto scalare, a questo ~u e sicuramente associata una forma lineareα(·) := 〈~u, ·〉 : V → R che a ogni vettore in ingresso associa uno scalaredel campo. In simboli:
V 3 ~u 〈~u, ·〉 = α(·) α ∈ V ∗.
36Indicheremo, come e divenuta ormai consuetudine, con η la metrica dello spaziotempodi Minkowski.

9.5. LE EQUAZIONI COSTITUTIVE 223
Questo ci dice che ogni vettore definisce una forma lineare, e - sim-metricamente - ogni forma lineare si puo rappresentare come prodottoscalare per un opportuno vettore.
In componenti rispettivamente sulla base naturale e sulla base duale,possiamo scrivere che
~u = uj ∂P
∂xjα = αkdx
k
e dato che
αk·k = αkdxk(·) = α(·) = 〈~u, ·〉 = ηjku
j·k,
abbiamo cheαk = ηkju
j, (9.46)
il che palesa un abbassamento degli indici, e che
uj = ηjkαk, (9.47)
il che mostra un innalzamento degli indici, dove ηjk e la metrica informa controvariante, cioe l’inverso del tensore metrico.
Indicando la corrispondenza precedente con η : V → V ∗ e la sua inversacon η−1 : V ∗ → V , e facile vedere che si ha
η−1(dx) = ~I, η−1(dy) = ~J, η−1(dz) = ~K, η−1(cdt) = −~L,(9.48)
o, del tutto analogamente,
η(~I) = dx, η( ~J) = dy, η( ~K) = dz, η(~L) = −cdt. (9.49)
Le formule (9.48) e (9.49) danno, in concreto, la rappresentazione delprecedente isomorfismo sulla base associata alla tetrade ortonormatadi un osservatore inerziale.
• A questo punto si usa la corrispondenza η : V ∗ → V per “riportareindietro” il prodotto scalare da V in V ∗, ponendo, comunque scelte le1-forme α, β ∈ Ω1(V ),
〈α, β〉1 := 〈η−1(α), η−1(β)〉 = ηjkαjβk. (9.50)
Si usa cioe la corrispondenza biunivoca η per trasportare le forme invettori, di cui poi siamo in grado di calcolare il prodotto scalare. In-somma: in virtu della corrispondenza tra forme e vettori siamo in gradodi definire un prodotto scalare sulle 1-forme (cioe sugli elementi delduale), riconducendo queste ultime a vettori mediante la metrica.

224 LEZIONE 9. EQUAZIONI DI MAXWELL
• Infine si estende questo prodotto scalare alle 2-forme, 3-forme e ingenerale alle p-forme ponendo sui monomi
〈α1 ∧ α2, β1 ∧ β2〉 =
∣∣∣∣〈α1, β1〉 〈α1, β2〉〈α2, β1〉 〈α2, β2〉
∣∣∣∣ (9.51)
e quindi estendendo poi per linearita.37
9.5.4 Tavole per lo spaziotempo di Minkowski
Riportiamo di seguito alcune tavole riassuntive del calcolo di prodotti scalarie dell’azione della dualita di Hodge nello spaziotempo M di Minkowski.
Tavola dei prodotti scalari
Gli unici prodotti scalari non nulli tra i proiettori (1-forme) di base sono:
〈dx, dx〉 = 1,〈dy, dy〉 = 1,〈dz, dz〉 = 1,〈cdt, cdt〉 = −1.
(9.52)
Gli unici prodotti scalari non nulli tra gli elementi della base per le 2-formesono:
〈dx ∧ dy, dx ∧ dy〉 = 1,〈dy ∧ dz, dy ∧ dz〉 = 1,〈dz ∧ dx, dz ∧ dx〉 = 1,〈dx ∧ cdt, dx ∧ cdt〉 = −1,〈dy ∧ cdt, dy ∧ cdt〉 = −1,〈dz ∧ cdt, dz ∧ cdt〉 = −1.
(9.53)
Gli unici prodotti scalari non nulli tra gli elementi della base per le 3-formesono:
〈dx ∧ dy ∧ dz, dx ∧ dy ∧ dz〉 = 1,〈dx ∧ dy ∧ cdt, dx ∧ dy ∧ cdt〉 = −1,〈dy ∧ dz ∧ cdt, dy ∧ dz ∧ cdt〉 = −1,〈dz ∧ dx ∧ cdt, dz ∧ dx ∧ cdt〉 = −1.
(9.54)
Infine
〈dx ∧ dy ∧ dz ∧ cdt, dx ∧ dy ∧ dz ∧ cdt〉 = −1.
37Non stiamo a dimostrare nel dettaglio qui che tale estensione e effettivamente unprodotto scalare, poiche sarebbe superfluo, ai fini della trattazione.

9.5. LE EQUAZIONI COSTITUTIVE 225
Tavola della dualita di Hodge
Duali dei proiettori di base:
∗dx = −dy ∧ dz ∧ cdt,∗dy = −dz ∧ dx ∧ cdt,∗dz = −dz ∧ dy ∧ cdt,∗cdt = −dx ∧ dy ∧ dz.
(9.55)
Duali degli elementi di base per le 2-forme:38
∗(dx ∧ dy) = −dz ∧ cdt,∗(dy ∧ dz) = −dx ∧ cdt,∗(dz ∧ dx) = −dy ∧ cdt,∗(dx ∧ cdt) = dy ∧ dz,∗(dy ∧ cdt) = dz ∧ dx,∗(dz ∧ cdt) = dx ∧ dy.
(9.56)
Duali degli elementi di base per le 3-forme:
∗(dx ∧ dy ∧ dz) = −cdt,∗(dx ∧ dy ∧ cdt) = −dz,∗(dy ∧ dz ∧ cdt) = −dx,∗(dz ∧ dx ∧ cdt) = −dy,
(9.57)
9.5.5 Forma assoluta delle equazioni costitutive
Con la nozione di duale di Hodge torniamo ora alla scrittura assoluta delleequazioni di Maxwell. Proviamo ad esempio a calcolare il duale della 2-formaF di Faraday. Abbiamo che
∗F = ∗ (Bxdy ∧ dz +Bydz ∧ dx+Bzdx ∧ dy + (Exdx+ Eydy + Ezdz) ∧ dt) =
= ∗(Bxdy ∧ dz +Bydz ∧ dx+Bzdx ∧ dy +
1
c(Exdx+ Eydy + Ezdz) ∧ cdt
)=
= −(Bxdx+Bydy +Bzdz) ∧ cdt+1
c(Exdy ∧ dz + Eydz ∧ dz + Ezdx ∧ dy)
= −c(Bxdx+Bydy +Bzdz) ∧ dt+1
c(Exdy ∧ dz + Eydz ∧ dz + Ezdx ∧ dy).
38Gia ora possiamo intuire l’utilita di questa corrispondenza: ad esempio nella primadelle (9.56) notiamo la “rotazione” da due coordinate spaziali a una coordinata spazialepiu una coordinata temporale. Comprendiamo gia da ora che la relazione ∗ potra risultarciutile per passare da F a M e viceversa.

226 LEZIONE 9. EQUAZIONI DI MAXWELL
Servendoci ora delle equazioni costitutive (9.40)
yD = ε0
~E,yB = µ0
~H
e sostituendole nell’espressione trovata per ∗F si ha che
∗F =1
ε0c(Dxdy∧dz+Dydz∧dz+Dzdx∧dy)−µ0c(Bxdx+Bydy+Bzdz)∧dt.
(9.58)Teniamo ora conto della relazione elettromagnetica (9.19) che individua
della velocita della luce, secondo cui
c√ε0µ0 = 1⇐⇒ cµ0 =
1
cε0
. (9.59)
Unendo la (9.58) alla (9.59) troviamo subito che
∗F =1
ε0cM = µ0cM =
õ
εM, (9.60)
relazione che lega la 2-forma di Faraday alla 2-forma di Minkowski. Essa tra-duce in forma assoluta il sistema (9.40) delle equazioni costitutive. Tuttaviavale la pena notare che, mentre le altre leggi assolute che avevamo trovatonon richiedevano alcuna ipotesi aggiuntiva sullo spazio di lavoro, per scriverela (9.60) abbiamo avuto bisogno di richiedere l’intervento sia della metricasia dell’orientazione. Non possiamo scrivere in forma assoluta le equazionicostitutive senza introdurre un prodotto scalare e senza scegliere un ordinedelle coordinate.
9.6 Formulazioni alternative
Nelle sezioni precedenti abbiamo sviluppato sostanzialmente due sole idee:
• l’esistenza di un isomorfismo, indotto dalla metrica, tra le 1-forme e icampi vettoriali;
• la dualita di Hodge.
Tali concetti possono essere utilizzati per dare altre formulazioni delleequazioni di Maxwell, alternative alle formulazioni viste nella sezione (9.4).In particolare, la dualita di Hodge e l’esistenza della metrica permettono diriscrivere le equazioni di Maxwell non omogenee (quelle in cui compaionocariche e correnti) in una “forma vettoriale” particolarmente saliente.

9.6. FORMULAZIONI ALTERNATIVE 227
Il nostro obiettivo e sostituire all’equazione
dM = J,
che condensa le equazioni vettoriali
rot ~H − ∂yD
∂t= ~j
divyD = ρ
una nuova equazione
div⇒G = ~S, (9.61)
dove⇒G sara un’entita chiamata bivettore di Maxwell e ~S un vettore detto
vettore corrente.Conviene accennare sin d’ora alla definizione di bivettore: se le 2-forme
sono tensori doppi covarianti antisimmetrici nello scambio tra due qualsiasientrate, i 2-tensori (o bivettori), sono tensori doppi controvarianti antisim-metrici nello scambio tra due qualsiasi entrate.39 In sostanza i bivettori sonooggetti antisimmetrici a due indici controvarianti, corrispondenti due ingressinel duale (e nessuno nello spazio di partenza).40
L’idea che sta alla base di questo cambiamento di formalismo e la stessaidea che presiede al passaggio dalla teoria delle forme su R3 al calcolo vet-toriale su R3 (v. schema in figura 8.8), e quindi all’utilizzo degli operatorigradiente, rotore e divergenza.
Possiamo riassumere l’idea fondamentale di questo passaggio nello schemain figura 9.3.
Abbiamo definito ~S cosı come appare nello schema di figura 9.3, cioeeseguendo il duale di J, allo scopo di passare da una 3-forma a una 1-forma, e quindi innalzando gli indici41, per ricondurre la 1-forma a un campovettoriale:42
~S := cη−1(∗J). (9.62)
39Dato che i tensori sono oggetti multilineari, cioe separatamente lineari nelle entrate, ibivettori saranno oggetti bilineari.
40Altrove i bivettori sono definiti semplicemente come tensori doppi antisimmetrici, indi-pendentemente dal fatto che siano controvarianti o covarianti. Noi preferiremo distingueretra le 2-forme (covarianti) e i bivettori (controvarianti), ben sapendo pero che gli uni e glialtri sono strettamente legati, e che possiamo sempre innalzare o abbassare gli indici conla metrica.
41Ricordiamo infatti che il passaggio da forma a vettore si esegue attraverso la moltipli-cazione per la metrica in forma controvariante, e quindi mediante un innalzamento degliindici (v. equazione (9.47)).
42L’utilita della moltiplicazione per c apparira evidente quando calcoleremoesplicitamente il campo ~S.

228 LEZIONE 9. EQUAZIONI DI MAXWELL
Figura 9.3: Passaggio dalla teoria delle p-forme alla teoria vettoriale.
La definizione di⇒G segue per analogia, per chiudere lo schema.
L’equazione
div⇒G = ~S (9.63)
e la definizione della divergenza di un bivettore.La scrittura
div~S = 0 (9.64)
traduce la legge di continuita (conservazione della carica), tuttavia e solo laparte alta dello schema che ci interessa analizzare.
9.6.1 Vettore densita di corrente
Rendiamo concreta, nel caso delle equazioni di Maxwell, la corrispondenzatra la 3-forma delle sorgenti J e il campo vettoriale ~S. Cioe sostituiamo (perun principio di economia sugli indici) la 3-forma J delle sorgenti dapprimanella 1-forma ∗J, la cui esistenza ci e garantita dalla dualita di Hodge, e poi,utilizzando la metrica, in un campo vettoriale
~S := cη−1(∗J).

9.6. FORMULAZIONI ALTERNATIVE 229
Dato che
∗J = ∗ (ρdx ∧ dy ∧ dz − (jxdy ∧ dz + jydz ∧ dx+ jzdx ∧ dy) ∧ dt) =
= ∗(ρdx ∧ dy ∧ dz − 1
c(jxdy ∧ dz + jydz ∧ dx+ jzdx ∧ dy) ∧ cdt
)=
= −ρcdt+1
c(jxdx+ jydy + jzdz),
si ha che
cη−1(∗J) = cρ~L+ (jx~I + jy ~J + jz ~K),
e quindi la definizione (9.62) si traduce in
~S = ~j + cρ~L. (9.65)
Il vettore ~S e il vettore densita di corrente, che ha un significato fisicomolto pregnante. Ricordando che per cariche libere nel vuoto vale43
~j = ρ · ~v, (9.66)
si ha che~S = ρ(~v + c~L) =
ρ
γ(v)· γ(v)(~v + c~L) =
ρ
γ(v)~V , (9.67)
dove ~V e naturalmente la 4-velocita della carica contenuta nell’elemento divolume considerato.
Contrazione dei volumi
Dobbiamo ora chiarire il ruolo svolto dal fattore ργ; per far cio partiamo
dall’invarianza della carica elettrica. Carica e densita di carica sono legatedalla relazione differenziale
dq = ρdV, (9.68)
ove con dV intendiamo un volume infinitesimo44. Poiche la misura del volumee relativa (e dq e fissato45), anche la misura della densita di carica ρ e relativa.Conviene introdurre pertanto la nozione di densita propria ρ0.
43Infatti, senza troppi formalismi, in modulo
j =i
S=
dq
dt · S=
dq
S · dldl
dt=
dq
dV
dl
dt= ρv,
essendo dV il volume infinitesimo; infine ~j ha per definizione direzione e verso della velocita~v delle cariche.
44E non, naturalmente, la variazione della 4-velocita.45Postuliamo infatti l’invarianza della carica.

230 LEZIONE 9. EQUAZIONI DI MAXWELL
Figura 9.4: Tubo di universo delle particelle contenute in un volume dV ,misurato nel giudizio dell’osservatore inerziale A
Per farlo notiamo innanzitutto che le particelle contenute nel volume dVconsiderato generano un tubo di universo nello spazio di Minkowski (figura9.4). Il volume dV valutato da un osservatore inerziale e l’intersezione deltubo di universo con la piattaforma dell’osservatore. In particolare possiamochiamare volume dV misurato dall’osservatore di quiete istantanea volumeproprio dV0 - l’osservatore di quiete istantanea sara caratterizzato dall’avere4-velocita ~V pari alla 4-velocita dell’elemento di volume, cioe pari alla 4-velocita del tubo di universo nel punto considerato (figura 9.5).
Con riferimento alla figura 9.6, per il teorema della proiezione nella geo-metria iperbolica vale la formula di contrazione dei volumi
dV0 = dV · cosh θ =dV√1− v2
c2
= γ(v) · dV. (9.69)
Da un punto di vista fisico si interpreta la forma di contrazione dei vo-lumi come una conseguenza della contrazione delle lunghezze longitudinali edell’invarianza delle lunghezze trasversali. Pensando che il volume abbia duespigoli trasversali e uno spigolo longitudinale, si arriva immediatamente allaformula
dV0 = γ(v) · dV.

9.6. FORMULAZIONI ALTERNATIVE 231
Figura 9.5: Il volume proprio dV0 e il volume misurato dall’osservatoreprivilegiato comobile con il centro di massa delle particelle.
Figura 9.6: Particolare della figura 9.5: relazione tra volume proprio dV0 evolume relativo dV .

232 LEZIONE 9. EQUAZIONI DI MAXWELL
Dilatazione delle densita
Dall’invarianza della carica dq e dalla contrazione dei volumi segue subito laformula di dilatazione delle densita. Infatti se
dq = ρdV = ρdV0
γ(v),
e chiaro che
ρ = γ(v) · dqdV0
= γ(v) · ρ0, (9.70)
chiamando
ρ0 :=dq
dV0
la densita propria di carica, cioe la densita di carica misurata dall’osser-vatore di quiete istantanea. La (9.70) traduce il fatto che per osservatori inmoto relativo rispetto all’osservatore di quiete inerziale, la densita di caricaapparira sempre minore della densita propria.
Dato che dalla (9.70) si ricava immediatamente che
ρ
γ(v)= ρ0,
ne discende che
~S = ρ0~V , (9.71)
cioe che il 4-vettore ~S densita di corrente e direttamente proporzionale alla4-velocita del tubo di universo (cioe alla 4-velocita dell’elemento di volumeconsiderato) e la costante di proporzionalita e la grandezza propria ρ0.
9.6.2 Bivettore di Maxwell
In modo del tutto simile a quanto fatto prima, rendiamo ora concreto il
collegamento tra la 2-forma M di Maxwell e il bivettore di Maxwell⇒G. Cioe
sostituiamo la 2-forma M di Maxwell dapprima nella 2-forma ∗M, la cuiesistenza ci e garantita dalla dualita di Hodge, e poi nel campo vettoriale
⇒G := cη−1(∗M).

9.6. FORMULAZIONI ALTERNATIVE 233
Dato che
∗M = ∗ (Dxdy ∧ dz +Dydz ∧ dx+Dzdx ∧ dy − (Hxdx+Hydy +Hzdz) ∧ dt) =
= ∗(Dxdy ∧ dz +Dydz ∧ dx+Dzdx ∧ dy −
1
c(Hxdx+Hydy +Hzdz) ∧ cdt
)=
= −(Dxdx+Dydy +Dzdz) ∧ cdt−1
c(Hxdy ∧ dz +Hydz ∧ dx+Hzdx ∧ dy) =
si ha che
cη−1(∗M) = −(Hxη−1(dy ∧ dz) +Hyη
−1(dz ∧ dx) +Hzη−1(dx ∧ dy))+
− c(Dxη−1(dx ∧ cdt) +Dyη
−1(dy ∧ cdt) +Dzη−1(dy ∧ cdt)) =
= −(Hx · ~J ∧ ~K +Hy · ~K ∧ ~I +Hz · ~I ∧ ~J)− c(Dx · ~I +Dy · ~J +Dz · ~K) ∧ ~L,
dove ciascun elemento della forma ~I ∧ ~J e un bivettore, cioe un tensoredoppio controvariante, avente entrate nello spazio duale. Esplicitamente,~I ∧ ~J prende in ingresso due 1-forme α, β ∈ Ω1(V ) = V ∗ e restituisce
~I ∧ ~J(α, β) =
∣∣∣∣~I(α) ~I(β)~J(α) ~J(β)
∣∣∣∣ = αxβy − αyβx (9.72)
Identifichiamo le componenti tensoriali del bivettore di Maxwell46:
Gjk =
0 −cDx −cDy −cDz
cDx 0 −Hz Hy
cDy Hz 0 −Hx
cDz −Hy Hx 0
(9.73)
Notiamo un fatto interessante e importante: il bivettore Gjk p propor-zionale al tensore di Faraday Flm. Se andiamo a confrontare infatti la (9.73)con la forma del tensore di Faraday data dalla (8.5), cioe
Fjk =
0 Ex/c Ey/c Ez/c 0
−Ex/c 0 Bz −By
−Ey/c −Bz 0 Bx
−Ez/c By −Bx 0
(9.74)
e se ci ricordiamo delle equazioni costitutive (9.40) del vuoto, per cui
yD = ε0
~EyB = µ0
~H
46Si pensi sempre al tempo come prima componente: nella prima riga e colonna dunquele entrare relative a ~L, nella seconda le entrate relative a ~I, quindi ~J e ~K.

234 LEZIONE 9. EQUAZIONI DI MAXWELL
e della relazione
c =1
ε0
µ0,
troviamo che possiamo scrivere il bivettore di Maxwell come
Gjk =
0 − ε0√
ε0µ0Ex − ε0√
ε0µ0Ey − ε0√
ε0µ0Ez
ε0√ε0µ0
Ex 0 − 1µ0Bz
1µ0By
ε0√ε0µ0
Ey1µ0Bz 0 − 1
µ0Bx
ε0√ε0µ0
Ez − 1µ0By
1µ0Bx 0
=
= − 1
µ
0
√ε0µ0Ex
√ε0µ0Ey
√ε0µ0Ez
−√ε0µ0Ex 0 Bz −By
−√ε0µ0Ey −Bz 0 Bx
−√ε0µ0Ez By −Bx 0
=
= − 1
µ
0 Ex/c Ey/c Ez/c
−Ex/c 0 Bz −By
−Ey/c −Bz 0 Bx
−Ez/c By −Bx 0
da cui
Gjk = − 1
µδjlδkmFlm, (9.75)
dove i tensori doppi individuati dai delta di Kronecker servono solo ad ag-giustare gli indici. Ogni componente del tensore di Maxwell (controvariante)si ottiene dalla componente del tensore di Faraday (covariante) moltiplicataper −1/µ.
9.6.3 Forma vettoriale delle equazioni non omogenee
Mostriamo ora che l’equazione di Maxwell non omogenea
dM = J
si puo effettivamente riscrivere nella forma vettoriale
∂Glk
∂xl= Sk (9.76)
o, in forma intrinseca, come47
div⇒G = ~S. (9.77)
47Formalmente stiamo estendendo (in modo naturale) la definizione di divergenza daivettori ai tensori doppi. La divergenza di un tensore doppio da un vettore.

9.6. FORMULAZIONI ALTERNATIVE 235
Infatti, ricordando che ~S = ~j + cρ~L, prendiamo componente per compo-nente la (9.77):48
(div⇒G)t =
∂Gtt
∂ct+∂Gxt
∂x+∂Gyt
∂y+∂Gzt
∂z=
= c
(∂Dx
∂x+∂Dy
∂y+∂Dz
∂z
)= cρ
(div⇒G)x =
∂Gtx
∂ct+∂Gxx
∂x+∂Gyx
∂y+∂Gzx
∂z=
= −∂Dx
∂t+∂Hz
∂y− ∂Hy
∂z= jx,
(div⇒G)y =
∂Gty
∂ct+∂Gxy
∂x+∂Gyy
∂y+∂Gzy
∂z=
= −∂Dy
∂t− ∂Hz
∂x+∂Hx
∂z= jy,
(div⇒G)z =
∂Gtz
∂ct+∂Gxz
∂x+∂Gyz
∂y+∂Gzz
∂z=
= −∂Dz
∂t+∂Hy
∂x− ∂Hx
∂y= jz,
Dalle prime tre componenti ritroviamo che
rot ~H − ∂yD
∂t= ~j.
Dalla quarta componente ritroviamo che
ρ = divyD.
Dunque, in definitiva, la (9.77) effettivamente riassume e coimplica leequazioni di Maxwell non omogenee, cioe le equazioni che coinvolgono ladensita di corrente e la densita di carica:
div⇒G = ~S ⇐⇒
div
yD = ρ
rot ~H − ∂yD
∂t= ~j
48Scriveremo ad apice t per la componente temporale (quella della prima riga e colonna),legata alla funzione di base ct, scriveremo ad apice x, y, z rispettivamente per le colonne orighe 2,3 e 4.

236 LEZIONE 9. EQUAZIONI DI MAXWELL
Notiamo che la (9.76) e esattamente la riscrittura della (9.77) componenteper componente - al primo membro la notazione tensoriale sottointende ilsimbolo di sommatoria.
9.6.4 Forma per componenti delle equazioni omogenee
Anche il blocco di equazioni omogenee di Maxwell ha una riscrittura percomponenti.
Dato che, a meno di fattori c,
Fjk =
0 Ex Ey Ez
−Ex 0 Bz −By
−Ey −Bz 0 Bx
−Ez By −Bx 0
,
derivando le componenti di F si puo verificare che la relazione49
∂Fjk
∂xl+∂Fkl
∂xj+∂Flj
∂xk= 0 (9.78)
e del tutto equivalente al secondo sistema (9.6) delle equazioni di Maxwell.50
Notando che∂Fii
∂xj+∂Fij
∂xi+∂Fji
∂xi= 0
per antisimmetria del tensore di Faraday, non sono poi molte le equazioni dascrivere per verificare quanto affermato.51
∂Fxy
∂z+∂Fyz
∂x+∂Fzx
∂y=∂Bz
∂z+∂Bx
∂x+∂By
∂y= div
yB,
49Tale relazione si trova sovente scritta in notazione tensoriale anche come
Fij,k + Fjk,i + Fki,j = 0,
dove le virgole sono una notazione piuttosto comune per la derivata parziale rispettoall’indice che segue la virgola (in contrapposizione con il punto e virgola che, come vedremo,sara usato per la derivata covariante). Ancora piu sinteticamente si puo scrivere che
F[jk,l] = 0
a sottointendere la permutazione ciclica dei tre elementi.50Il calcolo risultera analogo a quello fatto per scoprire che dF = 0 traduce lo stesso
blocco omogeneo delle equazioni di Maxwell.51Usiamo la stessa (naturale) convenzione di prima riguardo agli indici: t, x, y, z indicano
rispetticamente le colonne o righe 1, 2, 3, 4.

9.7. IL TENSORE ENERGIA-MOMENTO 237
∂Fxy
∂t+∂Ftx
∂y+∂Fyt
∂x=∂Bz
∂t− ∂Ey
∂x+∂Ex
∂y,
∂Fyz
∂t+∂Fty
∂z+∂Fzt
∂y=∂Bx
∂t− ∂Ez
∂y+∂Ey
∂z,
∂Fzx
∂t+∂Ftz
∂x+∂Fxt
∂z=∂Bz
∂t− ∂Ex
∂z+∂Ez
∂x,
e, in scrittura compatta vettoriale, l’annullarsi delle quantita scritte sopra
equivale quindi all’annullarsi di divyB e di rot ~E − ∂
yB
∂t, e dunque in definitiva
al blocco omogeneo delle equazioni di Maxwell.
9.6.5 Ricapitolazione
Possiamo quindi ricapitolare nella tabella 9.1 le varie forme in cui abbiamovisto scritti i due blocchi di equazioni di Maxwell.
2-forme bivettori componenti
Maxwell I (9.4) dM = J div⇒G = ~S
∂Glk
∂xl= Sk
Maxwell II (9.6) dF = 0∂Fjk
∂xl+∂Fkl
∂xj+∂Flj
∂xk= 0
Tabella 9.1: Diversi modi di scrittura dei due blocchi delle leggi di Maxwell.
9.7 Il tensore energia-momento
9.7.1 Aspetti energetici
Vogliamo infine indagare gli aspetti energetici del campo elettromagnetico,mostrando che e possibile associare al campo una energia e una quantitadi moto. Se per una particella gli aspetti energetici erano descritti da un 4-vettore ~P detto 4-impulso, per il campo elettromagnetico ci vuole un tensoredoppio (simmetrico) detto tensore energia-momento52.
Sappiamo che il 4-impulso ~P e legato alla 4-forza di Minkowski dallarelazione
~K =d~P
dt.
52Di fatto il tensore energia-momento e una matrice simmetrica le cui componenti furonoscoperte poco a poco grazie ai contributi di diversi fisici, tra cui Poynting; ma il tutto nonprese una forma unitaria sino all’intervento di Minkowski nel 1908.

238 LEZIONE 9. EQUAZIONI DI MAXWELL
Passando al caso di un campo invece che di una particella, le grandezze ingioco sono distribuite nello spazio, e dunque bisogna considerarne la densita.Dato che i volumi, come visto nella sezione 9.6.1, dipendono dall’osservatoreche li misura, bisogna decidere quale volume e quale densita considerare.
L’unica possibilita per avere grandezze intrinseche (indipendenti dall’os-servatore) e quella di considerare l’osservatore di quiete istantanea, che e bendefinito, e quindi il volume proprio V0, cioe il volume misurato da tale osser-vatore. Introdurremo percio la densita propria di 4-forza di Lorentz53
e dimostreremo che varra la relazione
d ~K
dV0
= divT. (9.79)
A ben vedere, in realta la (9.79) puo essere assunta come definizione peril tensore T : il tensore energia-momento del campo elettromagnetico e queltensore doppio e simmetrico54 la cui divergenza e la densita propria di 4-forzadi Lorentz.
Dall’equazione (8.6) che definisce la 4-forza di Lorentz, passando agliincrementi infinitesimali, ricaviamo che
d ~K = dqF(~V ) =dq
dV0
dV0F(~V ) = (ρ0 dV0) · F(~V ),
dove V0 e il volume proprio e ρ0 e la densita propria (misurata cioe dall’os-servatore di quiete istantanea). Segue che
d ~K
dV0
= ρ0F(~V ) = F(ρ0~V ) = F(~S) = F · ~S, (9.80)
dove ~S e il vettore densita di corrente.
Sviluppiamo questa espressione componente per componente, a partire
53Ricordiamo che nel caso di un campo elettromagnetico la 4-forza di Minkowski prendeil nome di 4-forza di Lorentz.
54Non approfondiamo il perche T sia un tensore simmetrico: la ragione di cio trae lemosse dalla conservazione del momento angolare.

9.7. IL TENSORE ENERGIA-MOMENTO 239
dalla definizione della 4-forza di Lorentz:(d ~K
dV0
)j
= FjkSk
= Fjk∂Glk
∂xl
=∂
∂xl(FjkG
lk)−Glk ∂Fjk
∂xl
=∂
∂xl(FjkG
lk)− 1
2Glk
(∂Fjk
∂xl− ∂Fjl
∂xk
)
poiche
1
2Glk
(∂Fjk
∂xl− ∂Fjl
∂xk
)=
1
2Glk ∂Fjk
∂xl− 1
2Glk ∂Fjl
∂xk=
1
2Glk ∂Fjk
∂xl− 1
2Gkl∂Fjk
∂xl=
=1
2Glk ∂Fjk
∂xl+
1
2Glk ∂Fjkx
l
∂ =Glk ∂Fjk
∂xl,
e dunque(d ~K
dV0
)j
=∂
∂xl(FjkG
lk)− 1
2Glk
(∂Fjk
∂xl− ∂Fjl
∂xk
)=
∂
∂xl(FjkG
lk)− 1
2Glk
(∂Fjk
∂xl+∂Flj
∂xk
)=
∂
∂xl(FjkG
lk)− 1
2Glk
(∂Fjk
∂xl+∂Flj
∂xk+∂Fkl
∂xj
)+
1
2Glk ∂Fkl
∂xj,
=∂
∂xl(FjkG
lk) +1
2Glk ∂Fkl
∂xj,
poiche, se valgono le equazioni di Maxwell, vale anche la (9.78), e quindiandando avanti (
d ~K
dV0
)j
=∂
∂xl(FjkG
lk)− 1
2Glk ∂Flk
∂xj,
Nel complesso abbiamo utilizzato la definizione di 4-forza di Lorentz, ilprimo blocco delle leggi di Maxwell (scritte componente per componente, v.tabella 9.1) e ripetutamente l’antisimmetria del bivettore G e della 2-forma

240 LEZIONE 9. EQUAZIONI DI MAXWELL
F. A questo punto conviene notare che per la (9.75) F e G sono proporzionali,in particolare
Glk = − 1
µδlpδkqFpq,
e dunque possiamo scrivere che(d ~K
dV0
)j
=∂
∂xl(FjkG
lk)− ∂
∂xj
(1
4GlkFlk
),
poiche
∂
∂xj
(1
4GlkFlk
)=
1
4
∂Glk
∂xjFlk+
1
4Glk ∂Flk
∂xj= − 1
4µδlpδ
kq
∂Fpq
∂xjFlk+
1
4Glk ∂Flk
∂xj=
=1
4
(− 1
µδlpδkqFlk
)∂Fpq
∂xj+
1
4Glk ∂Flk
∂xj=
1
4
(− 1
µδplδqkFpq
)∂Flk
∂xj+
1
4Glk ∂Flk
∂xj=
=1
4Glk ∂Flk
∂xj+
1
4Glk ∂Flk
∂xj=
1
2Glk ∂Flk
∂xj
Infine si osserva che il gradiente di una funzione si puo scrivere comedivergenza del tensore doppio fδl
j (δjk e il solito tensore doppio identico):
∂f
∂xj=
∂
∂xl(fδl
j),
poiche quest’ultimo e non nullo solo per l = j, e per tale valore vale ∂f∂xj .
Dato che la contrazione 14GlkFlk e a tutti gli effetti una funzione scalare, si
ha che∂
∂xj
(1
4GlkFlk
)=
∂
∂xl
(1
4GlkFlkδ
lj
),
da cui (d ~K
dV0
)j
=∂
∂xl
(FjkG
lk − 1
4FpqG
pqδlj
).
Il tensore doppio simmetrico di componenti
T lj = FjkG
lk − 1
4FpqG
pqδlj (9.81)
e detto tensore energia-momento del campo elettromagnetico. Esso echiaramente bilineare nei due termini elettromagnetici. Per come l’abbiamocostruito esso verifica l’eguaglianza per componenti(
d ~K
dV0
)j
=∂T l
j
∂xl(9.82)

9.7. IL TENSORE ENERGIA-MOMENTO 241
oppure l’analoga eguaglianza (d ~K
dV0
)p
=∂T lp
∂xl(9.83)
ottenuta componendo con la metrica.55 Assemblando le componenti, otte-niamo la cercata relazione
d ~K
dV0
= divT, (9.84)
che lega la densita propria di 4-forza di Lorentz e la divergenza del tensoredoppio simmetrico T .
9.7.2 Bilancio energetico
Per interpretare l’eguaglianza 9.84 e per mostrare che il tensore T e legato albilancio energetico e di quantita di moto del campo elettromagnetico, ripe-tiamo lo stesso calcolo dal punto di vista del formalismo vettoriale introdottonella sezione 9.6.
Consideriamo il campo elettromagnetico prodotto da una certa distribu-zione di carica in un riferimento inerziale. La densita di potenza dissipata(per effetto Joule) dal campo elettromagnetico, per muovere le cariche, e datada56
Π = ~f · ~v =
= ρ · ~E · ~v= ~j · ~E =
=
rot ~H − ∂yD
∂t
· ~E,55Moltiplicando ambo i membri della (9.81) per ηjp, infatti, abbiamo che nella som-
matoria sull’indice j, tale indice viene contratto e otteniamo il tensore T in formacompletamente controvariante: T lp. Piu esplicitamente(
d ~K
dV0
)p
= ηjp
(d ~K
dV0
)j
= ηjp∂T l
j
∂xl=∂ηjpT l
j
∂xl=∂T pl
∂xl,
formula che vale perche la metrica minkowskiana η e una metrica costante.56Nel caso di una carica puntiforme abbiamo che Π = ~f · ~v = q ~E · ~v. Ma qui stiamo
considerando il campo elettromagnetico prodotto in generale da una distribuzione di caricaρ, quindi sostituiamo ρ a q.

242 LEZIONE 9. EQUAZIONI DI MAXWELL
dove al terzo passaggio abbiamo applicato la (9.66) e al quarto passaggioabbiamo applicato il primo blocco - quello non omogeneo (9.4) - delle equa-zioni di Maxwell. Questa formula ci dice che la potenza dissipata in un certopunto dipende dal campo elettromagnetico nel punto. Questo e il punto dipartenza del bilancio energetico per il campo elettromagnetico. Il passo suc-cessivo e utilizzare il secondo blocco - quello omogeneo (9.6) - delle equazionidi Maxwell:
Π =
rot ~H − ∂yD
∂t
· ~E =
=
rot ~H − ∂yD
∂t
· ~E +
rot ~E +∂
yB
∂t
· ~H =
=(rot ~H · ~E − rot ~E · ~H
)−
~E · ∂yD
∂t+ ~H · ∂
yB
∂t
.
Abbiamo scritto la potenza dissipata come somma di due termini: la ilprimo termine contiene solo le derivate spaziali dei campi, il secondo ter-mine contiene solo le derivate temporali. Dalle equazioni costitutive (9.40)sappiamo che, nel caso del vuoto,
yD = ε0
~EyB = µ0
~H.
Sostituendo tali equazioni nella parte temporale dell’espressione per Πtroviamo che
~E · ∂yD
∂t+ ~H · ∂
yB
∂t= ε0
~E · ∂~E
∂t+ µ0
yH · ∂
yH
∂t=
=∂
∂t
(1
2ε0~E · ~E +
1
2µ0
yH ·
yH
)=
=1
2
∂
∂t
(~E ·
yD + ~H ·
yB
)=
=∂e
∂t,
dove abbiamo definito
e :=1
2
(~E ·
yD + ~H ·
yB
)(9.85)

9.7. IL TENSORE ENERGIA-MOMENTO 243
la densita di energia del campo elettromagnetico nel riferimento inerzialeconsiderato.
Per quanto riguarda la parte spaziale vale l’identita
(rotyH) · ~E − (rot ~E) ·
yH = div( ~H ∧ ~E) (9.86)
che si dimostra nel modo seguente:
(rotyH) · ~E = ~E · (rot
yH) =
= ~E · ~∇∧yH =
=
∣∣∣∣∣∣Ex Ey Ez∂∂x
∂∂y
∂∂z
Hx Hy Hz
∣∣∣∣∣∣ =
= Ex
(∂Hz
∂y− ∂Hy
∂z
)+ Ey
(∂Hx
∂z− ∂Hz
∂x
)+ Ez
(∂Hy
∂x− ∂Hx
∂y
)e analogamente per (rot ~E) · ~H, da cui
(rot ~H) · ~E − (rot ~E) · ~H = Ex
(∂Hz
∂y− ∂Hy
∂z
)+ Ey
(∂Hx
∂z− ∂Hz
∂x
)+
+ Ez
(∂Hy
∂x− ∂Hx
∂y
)−Hx
(∂Ez
∂y− ∂Ey
∂z
)+
−Hy
(∂Ex
∂z− ∂Ez
∂x
)−Hz
(∂Ey
∂x− ∂Ex
∂y
)=
=
(Ez∂Hy
∂x− Ey
∂Hz
∂x
)−(Hz
∂Ey
∂x−Hy
∂Ez
∂x
)+(
Ex∂Hz
∂y− Ez
∂Hx
∂y
)−(Hx
∂Ez
∂y−Hz
∂Ex
∂y
)+(
Ey∂Hx
∂z− Ez
∂Hx
∂y
)−(Hx
∂Ez
∂z−Hz
∂Ex
∂y
)=
= div( ~H ∧ ~E).
Quindi il risultato della manipolazione e di aver scritto la potenza dissi-pata dall’azione del campo elettromagnetico sulle cariche nella forma
Π = div( ~H ∧ ~E)− ∂e
∂t(9.87)
che possiamo anche riscrivere come
∂e
∂t+ div
yP = −Π, (9.88)

244 LEZIONE 9. EQUAZIONI DI MAXWELL
avendo postoyP = ~E∧ ~H e e =
1
2( ~E ·
yD+ ~H ·
yB). Il vettore
yP e detto vettore
di Poynting.
Interpretiamo l’equazione (9.88) come bilancio energetico del campo elet-tromagnetico. Consideriamo un volume fisso nello spazio, in un certo riferi-mento, e integriamo l’equazione (9.88) su tale volume. Abbiamo che
d
dt
∫V
e dV +
∫V
divyP dV = −
∫V
Π dV
e per il Teorema della Divergenza possiamo riscrivere che
d
dt
∫V
e dV +
∫∂V
yP · ~n dS = −
∫V
Π dV. (9.89)
Il primo termine della (9.89) rappresenta l’energia del campo elettroma-gnetico contenuto nel volume V ; questa energia varia, poiche in parte e dis-sipata per azione sulle cariche e in parte fluisce fuori dal volume attraversole pareti.
∫V
e dV −→ energia contenuta nel volume V∫∂V
~P · ~n dS −→ flusso uscente di energia∫V
−Π dV −→ energia fornita dalle cariche al campo
Questa interpretazione da il significato al vettore di Poynting di densitadi corrente di energia.
9.7.3 Bilancio di quantita di moto
Dallo studio della forza di Lorentz57
~f = ρ( ~E + ~v ∧ ~B)
si apprende che si puo attribuire al campo elettromagnetico una quantita dimoto allo stesso modo in cui dallo studio della potenza Π = ρ ~E · ~v abbiamo
57Si veda la nota 56 a pag. 241.

9.7. IL TENSORE ENERGIA-MOMENTO 245
imparato ad attribuire al campo un’energia. Possiamo infatti scrivere che
~f = ρ( ~E + ~v ∧ ~B) =
= ρ ~E +~j ∧ ~B =
= (divyD) ~E +
rot ~H − ∂yD
∂t
∧ yB =
dove al secondo passaggio abbiamo applicato la (9.66) e al terzo passaggio ab-biamo applicato il primo blocco - quello non omogeneo (9.4) - delle equazionidi Maxwell.
A questo punto gradiremmo scrivere questa espressione come somma diuna divergenza e di una derivata temporale, che sono i tipici termini checompaiono in un’equazione di bilancio - come ad esempio la (9.88). Comeprima, ci arriviamo sfruttando il secondo blocco - quello omogeneo, (9.6) -delle equazioni di Maxwell:
~f = (divyD) ~E +
rot ~H − ∂yD
∂t
∧ yB =
=
(divyD) ~E +
rot ~H − ∂yD
∂t
∧ yB
+
(divyB) ~H +
rot ~E +∂
yB
∂t
∧ yD
=
=
((rot ~E) ∧
yD + (div
yD) ~E
)+
((rot ~H) ∧
yB + (div ~B) ~H
)− ∂
∂t(
yD ∧
yB),
poiche l’ultimo termine verifica
− ∂
∂t(
yD ∧
yB) = −
∂yD
∂t∧
yB +
yD ∧ ∂
yB
∂t
= −∂yD
∂t∧
yB − ∂
yB
∂t∧
yD
per l’antisimmetria del prodotto vettoriale.Si tratta ora di verificare che i primi due termini nelle parentesi sono
divergenze di un tensore doppio; infatti valgono le seguenti identita:
(rot ~E) ∧yD + (div
yD) ∧ ~E = div
(yD ⊗ ~E − 1
2(
yD · ~E) · id
), (9.90)
(rot ~H) ∧yB + (div
yB) ∧ ~H = div
(yB ⊗ ~H − 1
2(
yB · ~H) · id
), (9.91)

246 LEZIONE 9. EQUAZIONI DI MAXWELL
dove con id = δij si intende il tensore doppio identico.La verifica e fatta componente per componente.(
(rot ~E) ∧yD + (div
yD) ~E
)x
= (rot ~E)yDz − (rot ~E)zDy + (divyD)Ex =
=
(∂Ex
∂z− ∂Ez
∂x
)Dz −
(∂Ey
∂x− ∂Ex
∂y
)Dy + (div
yD)Ex =
= −Dy∂Ey
∂x−Dz
∂Ez
∂x+
∂
∂y(ExDy) +
∂
∂z(ExDz)− Ex
∂Ey
∂y− Ex
∂Dz
∂z+ (div ~D)Ex =
= −(Dy
∂Ey
∂x+Dz
∂Ez
∂x
)+
∂
∂y(ExDy) +
∂
∂z(ExDz) + Ex
∂Ex
∂x=
=∂
∂x(ExDx) +
∂
∂y(ExDy) +
∂
∂z(ExDz)−
(Dx
∂Ex
∂x+Dy
∂Ey
∂x+Dz
∂Ez
∂x
)=
=∂
∂x(ExDx) +
∂
∂y(ExDy) +
∂
∂z(ExDz)−
(Dx
∂Ex
∂x+Dy
∂Ey
∂x+Dz
∂Ez
∂x
)e dato che il prodotto tensoriale di
yD e ~E da
yD ⊗ ~E =
DxEx DxEy DxEz
DyEx DyEy DyEz
EzEx DzEy EzEz
i primi tre termini si possono scrivere come divergenza della componente x
del tensoreyD ⊗ ~E:(
(rot ~E) ∧yD + (div
yD) ~E
)x
=∂
∂x(ExDx) +
∂
∂y(ExDy) +
∂
∂z(ExDz)+
−(Dx
∂Ex
∂x+Dy
∂Ey
∂x+Dz
∂Ez
∂x
)=
= div(yD ⊗ ~E)x −
∂
∂x
(Dx
∂Ex
∂x+Dy
∂Ey
∂x+Dz
∂Ez
∂x
)=
= div(yD ⊗ ~E)x −
∂
∂x
(1
2
yD · ~E
),
dove l’ultimo passaggio vale poiche nel vuoto
∂
∂x
(1
2
yD · ~E
)=
∂
∂x
(1
2(ε0
~E · ~E)
)=ε0
2
∂ ~E · ~E∂x
=
=ε0
2· 2 ~E∂
~E
∂x= ε0
~E · ∂~E
∂x= ~D · ∂
~E
∂x= Dx
∂Ex
∂x+Dy
∂Ey
∂x+Dz
∂Ez
∂x,

9.7. IL TENSORE ENERGIA-MOMENTO 247
e infine notando che il termine∂
∂x
(1
2
yD · ~E
)si interpreta a sua volta come
prima componente della divergenza di un vettore doppio
div
(1
2(
yD · ~E) · id
)= div
12
yD · ~E 0 0
0 12
yD · ~E 0
0 0 12
yD · ~E
=
∂
∂x
(1
2
yD · ~E
)∂
∂y
(1
2
yD · ~E
)∂
∂z
(1
2
yD · ~E
)
,
possiamo scrivere in definitiva che((rot ~E) ∧
yD + (div
yD) ~E
)x
= div(yD ⊗ ~E)x −
∂
∂x
(1
2
yD · ~E
)= div
(yD ⊗ ~E − 1
2(
yD · ~E) · id
)x
.
In maniera del tutto analoga si opera per le componenti y e z, sicche la(9.90) e dimostrata. Per la (9.91) il ragionamento e ovviamente identico,
previa sostituzione diyD con
yB e di ~E con ~H.
Possiamo dunque scrivere che
~f = div
(yD ⊗ ~E +
yB ⊗ ~H − 1
2(
yD · ~E +
yB · ~H) · id
)− ∂
∂t( ~D ∧ ~B), (9.92)
oppure, in forma leggermente differente, ricordandoci la definizione dell’e-
nergia del campo elettromagnetico e = 12( ~E ·
yD + ~H ·
yB), possiamo scrivere
che∂
∂t( ~D ∧ ~B) = div
(yD ⊗ ~E +
yB ⊗ ~H − e · id
)− ~f. (9.93)
Il tensore nella parentesi
Q =yD ⊗ ~E +
yB ⊗ ~H − e · id
e detto tensore di Maxwell degli sforzi.L’equazione (9.93) e un’equazione di bilancio; come fatto precedentemente
con l’equazione di bilancio energetico, integriamola e otteniamo che
d
dt
∫V
( ~D∧ ~B) dV =
∫V
div
(yD ⊗ ~E +
yB ⊗ ~H − e · id
)dV −
∫V
~f dV. (9.94)

248 LEZIONE 9. EQUAZIONI DI MAXWELL
Le grandezze in gioco si interpretano quindi nel modo seguente: il primointegrale non puo che essere la quantita di moto, poiche la sua derivata tem-porale e una forza; il secondo integrale (quello con la divergenza) rende contodelle azioni di contatto che si esercitano sul contorno del volume occupatodal campo elettromagnetico, esso misura quindi lo sforzo del campo elettro-magnetico; l’ultimo integrale della forza rappresenta le azioni che le caricheesercitano sul volume occupato dal campo elettromagnetico. Riassumendo:58∫
V
( ~D ∧ ~B) dV −→ quantita di moto del campo∫V
div
(yD ⊗ ~E +
yB ⊗ ~H − e · id
)dV −→ sforzo del campo sul contorno di V∫
V
~f dV −→ azione delle cariche sul volume V
Quindi le equazioni (9.93) e (9.94) vengono interpretate come equazionidi bilancio delle quantita di moto del campo elettromagnetico.
9.7.4 Ricapitolazione
In conclusione il campo elettromagnetico deve essere pensato come un sistemafisico (analogo a un corpo materiale59) che possiede una certa quantita dimoto ~g e una certa energia e, le cui espressioni sono fornite da
~g =yD ∧
yB,
e =1
2(
yD · ~E +
yB · ~H).
(9.95)
Tali grandezze variano nel tempo, poiche:
• in parte fluiscono attraverso le pareti di contatto, con densita di cor-rente data rispettivamente da:
tensore degli sforzi di Maxwell (per ~g):yD ⊗ ~E +
yB ⊗ ~H − e · id;
vettore di Poynting (per e):yP := ~E ∧ ~H;
58Esemplifichiamo: se pensiamo ad un pallone, l’ultimo integrale e una forza che agiscesu tutte le particelle (come ad esempio la forza di gravita), il secondo integrale e solo localee rende conto dele azioni di contatto su bordo del pallone, come ad esempio l’azione dellemani che schiacciano il pallone.
59Questa analogia aveva portato all’introduzione dell’etere.

9.7. IL TENSORE ENERGIA-MOMENTO 249
• in parte sono prodotte attraverso la forza ~f e la potenza Π.
La forma delle equazioni di bilancio relative a ~g e a e quindi non deve piustupire:
∂
∂te = −Π +div
(~E ∧ ~H
)∂
∂t
yD ∧
yB +div
(−
yD ⊗ ~E −
yB ⊗ ~H + e · id
)= −~f
(9.96)
Tali equazioni di bilancio si possono ritrascrivere in forma assoluta come
div
(e
yD ∧
yB
( ~E ∧ ~H)T −(yD ⊗ ~E +
yB ⊗ ~H) + e · id
)= −
(Π~f
).
dove T indica la trasposizione (il vettore diventa un vettore colonna) o anche,cambiando i segni,
div
(−e −
yD ∧
yB
−( ~E ∧ ~H)TyD ⊗ ~E +
yB ⊗ ~H − e · id
)=
(Π~f
). (9.97)
La matrice al primo membro un tensore doppio di dimensioni60 4 × 4,scritto sotto forma di matrice a blocchi. Osserviamo al secondo membro checosa appare: sappiamo che in questa sezione abbiamo designato con ~f ladensita di forza di Lorentz: l’avevamo infatti definita come
~f = ρ( ~E + ~v ∧yB) =
dq
dV( ~E + ~v ∧
yB) =
d~fq
dV
ove ~fq designa la usuale forza di Lorentz
~fq = q( ~E + ~v ∧ ~B).
Ma allora consideriamo il vettore al secondo membro della (9.97), e sup-poniamo di dividere la potenza Π per il fattore c: cio che otteniamo e ilvettore61
~f +Π
c· ~L = ~f +
~f · ~vc· ~L =
d~fq
dV+
d~fq
dV· ~vc· ~L =
d
dV
(~fq +
~fq · ~vc· ~L
)=
=1
γ(v)
d
dV
(γ(v)
(~fq +
~fq · ~vc· ~L
))=
1
γ(v)
d ~K
dV=d ~K
dV0
,
60Il blocco in alto a sinistra e uno scalare, e, il blocco in basso a destra e un tensore didimensioni 3× 3, gli altri blocchi sono vettori di dimensione 3.
61Si consideri sempre il tempo come prima componente: il vettore(Π~f
)sara quindi un
vettore avente la prima coordinata come coordinata temporale e le ultime tre coordinatecome coordinate spaziali.

250 LEZIONE 9. EQUAZIONI DI MAXWELL
dove abbiamo usato all’ultimo passaggio la relazione (9.69) di contrazionedei volumi. E chiaro allora che se scriviamo
div
−ec
−yD ∧
yB
−(
1
c~E ∧ ~H
)T yD ⊗ ~E +
yB ⊗ ~H − e · id
=
Π
c
~f
. (9.98)
abbiamo sostanza riscritto esattamente l’equazione (9.84) che avevamo rica-vato con il formalismo assoluto, e che avevamo scritto nella forma
divT =d ~K
dV0
.
Dunque la (9.98) rende esplicita la forma del tensore energia-momento Tdel corpo, e il suo significato meccanico, che e espresso da
T ij =
−ec
−yD ∧
yB
−(
1
c~E ∧ ~H
)T yD ⊗ ~E +
yB ⊗ ~H − e · id
(9.99)
e che e riassunto nello schema in figura 9.7.
Figura 9.7: Forma del tensore T jk energia-momento. La prima colonna(quella temporale) e riservata all’energia, le ultime tre colonne (quelle spaziali)sono riservate al momento, cioe alla quantita di moto.

Lezione 10
Approdo alla RelativitaGenerale
10.1 Relativita Generale e teoria della gravi-
tazione
10.1.1 Due problemi, una soluzione
Torniamo per un attimo ad assumere un punto di vista cronologico. Unavolta messa a punto la geometria dello spazio di Minkowski (cioe della Rela-tivita Ristretta), si aprivano di fronte a Einstein due problemi a prima vistascorrelati.
(i) In primo luogo, tutta la teoria relativistica svolta sino ad ora ha uti-lizzato il concetto di osservatore inerziale ed ha avuto come scopo lascrittura delle equazioni della fisica in una forma indipendente dallascelta dell’osservatore inerziale, al fine di mostrare la compatibilita ditali equazioni con il Principio di Relativita. Il problema di Einsteinnel 1906 e dunque quello di estendere la teoria precedente, cosı daconglobare in essa anche osservatori non inerziali, con il proposito discrivere le equazioni della fisica in una forma che sia invariante nel pas-saggio da un osservatore a un altro. Lo scopo e quindi il superamentodel concetto di osservatore inerziale e della cosiddetta “formulazionecovariante”1 delle equazioni della fisica.
1Cioe formulazione indipendente dal sistema di riferimento inerziale scelto. Nella suaforma estesa, la formulazione indipendente dall’osservatore (qualsiasi) scelto verra detta“formulazione covariante generale”.
251

252 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
E dunque in questo senso che questa parte della teoria e stata denomi-nata da Einstein Relativita Generale (dal momento che considera laclasse generale degli osservatori, pensati sempre come sistemi di coordi-nate sullo spaziotempo), per contrasto con la parte della teoria basatasull’uso dei soli osservatori inerziali (detta Relativita Ristretta).2
(ii) D’altro canto, il proposito della Relativita Ristretta di scrivere le equa-zioni della fisica in forma invariante rispetto al gruppo di Lorentz (cioerispetto al cambio di osservatore inerziale) doveva ancora essere com-pletato. Dopo aver realizzato questo scopo per la meccanica della parti-cella, per la meccanica dei fluidi3 e per l’elettromagnetismo4, rimanevada trattare la gravitazione. E ovvio che la gravitazione newtoniana, ba-sata sul concetto di simultaneita assoluta e di azione a distanza istan-tanea5, non e compatibile con i principi della Relativita Ristretta; sitratta quindi di riaffrontare il problema.
La prima idea e che bisogna procedere con le equazioni di Newton delcampo gravitazionale cosı come abbiamo fatto per le equazioni newto-niane della dinamica, cioe modificandole (senza stravolgerle) per ren-derle compatibili con la geometria dello spaziotempo di Minkowski, dicui lo spaziotempo newtoniano discusso nella Lezione 1 non e altroche un’approssimazione locale. Si puo qualificare questo secondo pro-
2Va sfatato un deleterio luogo comune: si legge e si sente dire spesso che la RelativitaRistretta si applica solo ai sistemi di riferimento inerziali, cioe al caso di moti non accele-rati. Non c’e nulla di piu falso: la Relativita Ristretta va bene per qualsiasi tipo di moto,nell’ipotesi che lo spaziotempo sia piatto, ossia nell’ipotesi di assenza di gravita. Addirit-tura, la Relativita Ristretta nasce dalle simmetrie dell’elettromagnetismo, e dunque nonha alcun problema a contemplare (ad esempio) elettroni accelerati.
Come riconciliare questo con l’idea che la gravita e sostanzialmenteun’accelerazione? Ebbene, e questa idea, e non la Relativita Ristretta,che ha un dominio limitato di applicabilita.
(Sean Carrol)
3Studio che non abbiamo condotto in questa sede.4Ricordiamo che, se per rendere compatibili le equazioni della meccanica con il Principio
di Relativita abbiamo dovuto modificare le equazioni di Newton, le equazioni dell’elettro-magnetismo erano gia compatibili con tale principio, e quindi invarianti per trasformazionidi Lorentz.
5Difatti, l’asserto newtoniano secondo cui due masse a distanza r esercitano una forzadiretta lungo la congiungente in verso centripeto e proporzionale a r−2, presuppone chespostando una delle due masse l’informazione arrivi all’altra massa istantaneamente, edunque che la forza vari istantaneamente (concetto di azione a distanza istantanea). Inol-tre per avere la distanza tra le due particelle dobbiamo compiere le misurazioni in unostesso istante, il che implica che deve esserci simultaneita assoluta.

10.1. RELATIVITA GENERALE E GRAVITAZIONE 253
blema come il problema di conglobare la teoria della gravitazione nellospaziotempo di Minkowski.6
L’analisi di questo problema (costata ad Einstein parecchi anni) hamostrato che in questa forma il problema non ha soluzione. Non e cioepossibile, a causa delle peculiarita della forza gravitazionale, inglobarela gravitazione nello schema relativistico senza modificare la strutturadello spaziotempo di Minkowski.
Il punto centrale della teoria einsteiniana della gravitazione e quindiche bisogna abbandonare la struttura semieuclidea dello spaziotempo,assegnata a priori7, e pensare alla geometria dello spaziotempo comead una variabile dinamica. Pensare alla geometria dello spaziotempocome a un variabile dinamica significa, nella nostra visione intrinseca,pensare alla metrica dello spaziotempo come a un tensore dinamico,non piu fissato a priori, ma definito dalla distribuzione di massa edenergia nell’universo. La teoria gravitazionale e la teoria che per-mette di determinare la geometria dello spaziotempo in funzione delleinformazioni sulla distribuzione di massa ed energia, riassunte in unente che, come mostrato dalla teoria elettromagnetica, deve essere iltensore energia-momento.
Il fulcro e dunque che la teoria della gravitazione si identifica con lageometria dello spaziotempo, il quale acquista un carattere dinamico.
Dal punto di vista della prospettiva storica attuale, i due problemi, cheper Einstein avevano uguale importanza, svolgono un ruolo completamentediverso. I problemi della Relativita Generale e del principio di covarianzagenerale8 - punto (i) - hanno poi assunto un carattere via via piu seconda-rio. Nella prospettiva moderna, la teoria della Relativita Generale e definitacome la teoria della gravitazione einsteiniana, identificata con lo studio dellageometria dello spaziotempo - punto (ii).
6Ribadiamo che di principio non vorremmo alterare lo spaziotempo di Minkowski, vor-remmo anzi modificare la teoria della gravitazione di modo da riuscire a conglobarla intale spaziotempo.
7Di fatti tale struttura era conseguenza degli assiomi, assegnati a priori, di cui abbiamodiscusso alla sezione 3.5.
8Cioe il principio secondo cui le leggi fisiche devono essere le stesse per ogni sistemadi riferimento. Si noti che da tale principio consegue quasi immediatamente che lo stru-mento matematico per la descrizione della Relativita Generale non puo che essere il calcolotensoriale.

254 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
10.1.2 Il collegamento: le forze apparenti
Rimane il fatto che, storicamente, la scoperta della peculiare natura dellagravitazione e passata attraverso il problema della Relativita Generale, nelsenso di Einstein, cioe nel senso del punto (i). In forma qualitativa, la ragionepuo essere spiegata nel modo seguente.
Passando da un osservatore inerziale ad un osservatore non inerziale(quindi, nello schema minkowskiano, da coordinate cartesiane ortogonali as-sociate a una tetrade a coordinate curvilinee9) bisogna introdurre le cosid-dette forze apparenti. In altre parole, il compito della Relativita Generalee la formulazione generale delle forze apparenti.
E a questo livello che c’e il punto di contatto con la teoria della gravita-zione. In un certo senso, la forza gravitazionale ha gli stessi caratteri di unaforza apparente.
Caratteri delle forze apparenti
Mettiamoci infatti nell’ottica dello schema newtoniano (l’unico che al ri-guardo per ora conosciamo); il primo carattere delle forze apparenti e diessere strettamente proporzionali alla massa inerziale della particella su cuisi esercitano.10
Il secondo carattere delle forze apparenti e (appunto!) di essere apparenti :il che, per definizione, significa che esse possono essere rigorosamente e glo-balmente annullate semplicemente cambiando osservatore, cioe passando dal-l’osservatore di cui si sta studiando il moto a un cert’altro osservatore. Questacaratteristica e detta proprieta di annullamento globale delle forze ap-parenti: basta cambiare osservatore, e rispetto a questo nuovo osservatoreimmediatamente tutte le forze apparenti scompaiono.
9E bene puntualizzare: lo spaziotempo di Minkowski e piatto, poiche in coordinatecartesiane ortogonali la metrica η e costante, dunque in particolare sono nulli tutti isimboli di Christoffel ed e identicamente nullo di conseguenza il tensore di Riemann. Main generale possiamo anche scegliere un riferimento non cartesiano ortogonale, relativoa un osservatore non inerziale, per cui la scrittura di η puo cambiare, ferma restandola piattezza dello spazio - il fatto che il tensore di Riemann sia (appunto) un tensore ciinforma infatti che, essendo nullo in un sistema di riferimento, deve essere nullo anche inogni altro sistema di riferimento.
10Ad esempio la forza di Coriolis e data da
~FCoriolis = −2m~ω ∧ ~vr.

10.1. RELATIVITA GENERALE E GRAVITAZIONE 255
Caratteri della forza gravitazionale
La prima proprieta delle forze apparenti (proporzionalita alla massa iner-ziale mi) e rigorosamente condivisa dalla forza di gravitazione: e noto infattiche tutte le particelle, in un campo gravitazionale uniforme e stazionario, ca-dono con la stessa accelerazione ~g, detta accelerazione di gravita. Quindi,per la legge di Newton,
~Fgrav = mi · ~g, (10.1)
dove mi e la massa inerziale. In questo modo si ottiene che
mi · ~a = ~Fgrav = mi · ~g, (10.2)
da cui
~a = ~g, (10.3)
e quindi tutte le particelle cadono con uguale accelerazione.
Per sottolineare questo fatto si usa introdurre una “carica gravitazionale”mg, detta massa gravitazionale, e scrivere che
~Fgrav = mg · ~g, (10.4)
in analogia con la formula della forza elettrica ~Felettr = q · ~E. Possiamo quindiriscrivere la (10.2) come
mi · ~a = mg · ~g (10.5)
e la proprieta scoperta da Galileo dell’universalita dell’accelerazione di gra-vita si esprime quindi dicendo che
mi = mg. (10.6)
La (10.6) e detta principio di equivalenza debole: lo assumeremocome un postulato11; esso ci garantisce che (per qualche strana ragioneche puo apparire quasi “magica”) massa gravitazionale e massa inerzialecoincidono sempre.
Anche la seconda proprieta delle forze apparenti (la proprieta di an-nullamento12) e condivisa dalle forze gravitazionali, ma con un’importantedifferenza: essa vale ora solo localmente.
11Il piu famoso esperimento che lo avvalora e l’esperimento di Eotvos, di bilanciamentotra forze gravitazionali e forze apparenti.
12E proprio questa proprieta che giustifica l’utilizzo del termine “apparenti”.

256 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
10.1.3 Osservatori in caduta libera
Per comprendere questo fatto, consideriamo anzitutto il caso speciale diun campo gravitazionale uniforme (costante) nello spazio e stazionario neltempo; quindi ~g e un vettore costante nello spaziotempo rispetto ad un op-portuno osservatore inerziale. Proprio per il principio di equivalenza debole,possiamo annullare il campo gravitazionale in ogni punto dello spazio sempli-cemente passando ad un osservatore in caduta libera, cioe un osservatorenon inerziale, che si muove rispetto all’osservatore inerziale precedente conun’accelerazione ~a = ~g. Rispetto a tale osservatore, secondo le leggi delladinamica di Newton, una certa particella di prova si muove sotto l’azionecombinata della gravitazione (dovuta al fatto che essa e in un campo gravi-tazionale) e della forza apparente di gravitazione (dovuta al fatto che stiamoconsiderando un osservatore non inerziale). Dunque l’equazione di moto e
mi~arel = ~Fgrav + ~Fapp = mg~g +mi(−~aapp) = mg~g −mi~aapp = 0,
dove ~arel e l’accelerazione totale della particella relativa all’osservatore in ca-duta libera, ~Fgrav e la forza gravitazionale agente sulla particella e ~Fapp e laforza apparente (detta anche forza di trascinamento) che agisce sulla parti-cella in virtu del fatto che siamo in un riferimento non inerziale. Abbiamousato nell’ultimo passaggio il principio di equivalenza debole (mg = mi) eil fatto che, per l’osservatore in caduta libera, l’accelerazione apparente ditrascinamento eguaglia in modulo esattamente l’accelerazione gravitazionale,ed e di verso opposto a questa. Percio nel campo gravitazionale costante estazionario la particella si muove, rispetto all’osservatore in caduta libera,come se fosse libera, come se non fosse soggetta ad alcuna forza.
Poiche ogni campo gravitazionale puo essere localmente considerato co-stante13, ne segue che la proprieta di annullamento, globale per ogni campouniforme e stazionario, vale localmente per ogni campo gravitazionale.14
13Qui “localmente” deve essere inteso in senso spaziotemporale, cioe per “piccole” regionidi spazio (cosı piccole da poter considerare ~g uniforme in tale regione) e per “brevi”intervalli di tempo (cosı brevi che la particella di prova non esca, in questo intervallo ditempo, dalla regione in cui ~g puo essere considerato uniforme).
14E questa la situazione di “moto in assenza di peso” che si verifica, ad esempio, in ogninavicella spaziale orbitante attorno alla terra: in assenza di spinta dei motori, essa si trovainfatti in caduta libera rispetto alla terra (“cade” infatti sulla terra con un’accelerazionecentripeta ~g), e dunque la gravita terrestre e localmente annullata.

10.2. INCOMPATIBILITA DELLA GRAVITAZIONE 257
10.2 Incompatibilita della gravitazione con la
Relativita Ristretta
Vediamo ora come queste peculiarita della gravitazione che la rendono similealle forze apparenti15 portino alla conclusione che la gravitazione e incompa-tibile con la struttura dello spaziotempo di Minkowski - o, in altri termini,che lo spazio di Minkowski e la fisica in assenza di gravitazione.
10.2.1 Significato geometrico delle forze apparenti
Per spiegare questo punto vediamo innanzitutto come si possono descriverele forze apparenti nello spaziotempo M di Minkowski, considerando il casoelementare del moto di una particella libera. In un riferimento inerziale(coordinate cartesiane ortogonali su M) le sue equazioni di moto si scrivonoin forma intrinseca come
dV j
dτ= 0 (10.7)
ovvero comed2xj
dτ 2= 0, (10.8)
con j = 0, 1, 2, 3, essendo ~V la 4-velocita e xj(τ) le coordinate nel riferimentoinerziale scelto. Per far comparire le forze apparenti dobbiamo scrivere leequazioni di moto in un riferimento non inerziale (e quindi in coordinatecurvilinee su M). Per farlo, ci rifacciamo al significato geometrico delleequazioni precedenti: le soluzioni rappresentano infatti le geodetiche dellospaziotempo di Minkowski. Vederlo non e difficile: facendo uso del concettodi derivata direzionale (o covariante), possiamo sostituire la derivata rispettoal tempo proprio τ con la derivata direzionale ∇~V , che per definizione e la
derivata direzionale lungo la linea il cui vettore tangente e ~V , cioe il cuiparametro affine e l’arco τ . Possiamo dunque scrivere le equazioni di moto(10.7) e (10.8) nella forma geodetica
∇~V~V = 0, (10.9)
che e esattamente la definizione di geodetica come curva autoparallela16.
15Abbiamo cosı collegato il problema iniziale della Relativita Generale, vista come teoriadelle forze apparenti, alla teoria gravitazionale, vista come teoria delle forze gravitazionali.
16Curva, cioe, la cui derivata covariante del campo dei vettori tangenti calcolata lungola curva stessa e nulla.

258 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
La geometria ci insegna che in coordinate generali (o curvilinee) l’equa-zione (10.9) si scrive nella forma
d2xj
dτ 2+ Γj
hk
dxh
dτ
dxk
dτ= 0. (10.10)
Le equazioni (10.10), al variare di j = 1, 2, 3, 4, devono essere pensatecome equazioni di moto in un riferimento non inerziale. Confrontandolecon le equazioni di Newton (10.8) in un riferimento inerziale, arriviamo allaconclusione che il termine
Γjhk
dxh
dτ
dxk
dτdeve essere interpretato come un’accelerazione apparente, e che quindi le forzeapparenti siano descritte da tale termine. Quindi, in relativita, notiamo che leforze apparenti dipendono quadraticamente dalla velocita relativa, attraversoi simboli di Christoffel Γj
hk. In breve, possiamo dire che i simboli di Christoffelrappresentano le forze apparenti. Il carattere non tensoriale di tali simboliben si collima con il carattere apparente (appunto) delle forze apparenti.
Poiche i simboli di Christoffel sono per ipotesi17 relativi alla metricadello spaziotempo di Minkowski (che sappiamo essere piatto, cioe R = 0),deve esistere18 un sistema di coordinate dove simultaneamente e globalmentetutti i simboli di Christoffel si annullano, manifestando cosı la proprieta diannullamento globale delle forze apparenti.
Questa proprieta di annullamento globale e quindi una manifestazionedella piattezza dello spaziotempo di Minkowski, la quale a sua volta im-plica l’esistenza di osservatori inerziali globali. La discussione ora fattamette quindi in luce la correlazione tra questi tre concetti, correlazioneschematizzata in figura 10.1.
Dove sta il nodo cruciale, l’anello che non tiene? L’anello che fa saltarela catena e il fatto che la teoria della gravitazione obbliga la proprieta diannullamento a essere solo locale! Intuitivamente comprendiamo gia sin d’orache questo forzera gli osservatori inerziali a essere solo localmente tali e lospaziotempo M a essere solo localmente piatto, dunque in generale curvo.
10.2.2 Curvatura dello spaziotempo
L’analisi fino ad ora condotta ci ha portato a confrontare la gravitazione conle forze apparenti, e a trovare tra esse le seguenti analogie:
17Infatti stiamo ipotizzando di potere lavorare ancora nello spaziotempo piatto diMinkowski.
18Dalla geometria differenziale sappiamo infatti che il tensore di Riemann si annullaidenticamente se e solo se esiste un sistema di coordinate in cui tutti i simboli di Christoffelsono nulli.

10.2. INCOMPATIBILITA DELLA GRAVITAZIONE 259
Figura 10.1: La piattezza di M coimplica la proprieta di annullamento glo-bale. Infatti se M e piatto, R = 0 e dunque esiste un riferimento in cui i Γj
hk
sono tutti nulli, ergo: vale la proprieta di annullamento globale. Viceversa, sevale la proprieta di annullamento globale, tutti i Γj
hk sono nulli in un qualcheriferimento, da cui R = 0. D’altro canto la piattezza di M implica l’esistenzadi osservatori globalmente inerziali; ma d’altro canto l’esistenza di osservatoriglobalmente inerziali forza la piattezza di M . Possiamo quindi chiudere il cir-colo, ottenendo che la proprieta di annullamento globale coimplica l’esistenzadi osservatori inerziali globalmente definiti.
• la rigorosa proporzionalita delle forze alle masse inerziali;
• la proprieta di annullamento: anche la gravita puo essere (localmente)annullata, come conseguenza della possibilita di compensare azioni gra-vitazionali con forze apparenti. Si passa dalla fisica in un campo gra-vitazionale uniforme alla fisica in assenza di peso per passaggio ad unosservatore in caduta libera.
L’analogia con il caso delle forze apparenti suggerisce che gli osserva-tori in caduta libera possano giocare il ruolo, in presenza di gravita, che gliosservatori inerziali avevano nello spaziotempo di Minkowski, in assenza digravita.
La discrepanza tra forze gravitazionali e forze apparenti rispetto a unosservatore accelerato nello spaziotempo di Minkowski e - abbiamo visto -la localita della proprieta di annullamento delle prime. Si possono annullareazioni gravitazionali (a un certo ordine di approssimazione) nell’intorno diogni punto (scelto ad arbitrio) dello spaziotempo, ma non simultaneamentein tutti i punti. Se per analogia pensiamo che ancora le forze gravitazionalisiano rappresentate dai simboli di Christoffel, dobbiamo supporre che talisimboli si annullino solo localmente, e non identicamente sullo spaziotempo.19
19Ribadiamo che il non annullamento globale dei simboli Γijk e una misura della curva-
tura dello spazio. Se infatti R = 0, di sicuro esiste un sistema di riferimento per cui i Γijk

260 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
La geometria ci insegna che cio si realizza su una varieta (riemannianae di tipo lorentziano20). Infatti dalla geometria sappiamo sussistere dueimportanti proprieta:
(i) Esistenza di coordinate locali geodetiche.
SeM e una qualsiasi varieta riemanniana dotata di metrica g, e P0 ∈Me un punto fissato ad arbitrio su M , allora esistono coordinate locali uc
centrate in P0 t.c.21
gab(P0) = ηab = diag(−1, 1, 1, 1)
e∂gab
∂uc(P0) = 0.
Sostanzialmente stiamo dicendo che comunque preso un punto di unavarieta riemanniana, esistono delle coordinate per cui la metrica, nel-l’intorno del punto, ha la forma diagonale del tensore metrico minkow-skiano η e inoltre tutte le derivate della metrica si annullano nel puntofissato.22 Annullandosi le derivate della metrica in un certo intornodi P0, notiamo che in tale intorno devono necessariamente annullarsianche tutti i simboli di Christoffel Γi
jk. Questi sistemi locali di coor-dinate che annullano nel punto i simboli di Christoffel rappresentano,anzi definiscono, gli osservatori in caduta libera23 e le coordinate adessi associati vengono dette geometricamente coordinate locali geo-detiche (mentre in fisica si preferisce la dicitura coordinate localmenteinerziali).
(ii) Effetto della curvatura.
La geometria ci insegna anche che l’ostruzione all’estensione globaledelle coordinate locali trovate al punto precedente e misurata dal ten-sore di Riemann. E ovvio (dalla definizione di R) che se Γi
jk = 0
sono tutti identicamente nulli.20La varieta deve essere riemanniana (cioe dotata di metrica) per una nostra ipotesi
fisica: stiamo supponendo che lo spazio fisico sia metrico. Il fatto che la metrica debbaessere di tipo lorentziano e un retaggio della Relativita Ristretta: quando il campo edebole, infatti, lo spazio di Minkowski e un’eccellente approssimazione dello spazio fisico.
21L’utilizzo dei pedici a, b in luogo dei soliti j, k sta ad indicare che quelle uguaglianzesono valide in quello speciale sistema di coordinate di cui si sta mostrando l’esistenza.
22Anzi, potremmo anche estendere la proprieta agli intorni tubolari di una geodetica delgenere tempo, per tempi piccoli; ma questo fatto non interessa affatto la nostra trattazione.
23Infatti un osservatore in caduta libera puo essere definito come quell’osservatore percui la metrica ha localmente forma diagonale e derivate nulle.

10.2. INCOMPATIBILITA DELLA GRAVITAZIONE 261
identicamente in ogni punto e per ogni i, j, k, allora R = 0 dovunque,e quindi la varieta e piatta per definizione. E meno ovvio, ma vero,che vale il viceversa: se R = 0, allora esiste un sistema di coordinateper cui i Γi
ik sono tutti identicamente nulli. R e cioe l’unica ostruzioneall’annullamento dei Γi
jk dappertutto. Calcolando R, mediante la suadefinizione, nelle coordinate scelte in precedenza, in P0, abbiamo che
Rlmjk(P0) =
∂Γlmj
∂uk(P0)−
∂Γlmk
∂uj(P0) + Γs
mj(P0)Γlsk(P0)− Γs
mk(P0)Γlsj(P0) =
=∂Γl
mj
∂uk(P0)−
∂Γlmk
∂uj(P0),
poiche i Γijk sono tutti identicamente nulli nelle coordinate scelte. Ma
le loro derivate, cioe le derivate seconde della metrica, in generale nonsi annullano, e dunque Rl
mjk se ne guarda bene dall’essere nullo!
In breve: la presenza della gravita richiede la curvatura dello spaziotempo,e quindi e incompatibile con l’esistenza di osservatori inerziali globali.
Con che cosa sostituirli? Dopotutto la fisica di Minkowski nel piccolodeve continuare a valere! L’idea e quella di passare dal punto di vista globaleal punto di vista locale attribuendo il ruolo di osservatori localmente inerzialiagli osservatori in caduta libera, la cui esistenza ci e garantita dalla primadelle due proprieta geometriche elencate.
Da un punto di vista prettamente geometrico la situazione e chiara24: laproprieta (i) appena menzionata significa che lo spazio tangente al punto P0
(TP0M) e uno spazio di Minkowski, poiche la metrica in questo spazio e lametrica di Minkowski. Il passaggio dalla Relativita Ristretta alla relativitagenerale (vista ormai come teoria spaziotemporale del campo gravitazionale)consiste nell’estendere lo sguardo dallo spazio tangente alla varieta (fig. 10.2).
La curvatura dello spaziotempo, causata dalla presenza di materia, puoessere intuitivamente afferrata nella figura 10.3. Posizionando un oggetto pe-sante (come una sfera di marmo) su un trampolino elastico, il trampolino ri-sultera incurvato; piu l’oggetto e pesante, piu il trampolino risulta incurvato.Questo e sostanzialmente quanto accade quando una grande massa (qualequella terrestre) viene posizionata nello spaziotempo, forzando la geometrialocale dello spazio (l’analogo del trampolino) a incurvarsi.
24Ma era leggermente meno chiara all’epoca di Einstein.

262 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
Figura 10.2: Lo spaziotempo fisico M e uno spaziotempo curvo, il cui spaziotangente TPM in ogni punto P e uno spazio semieuclideo di Minkowski.
Figura 10.3: Visualizzazione bidimensionale della curvatura dello spazio-tempo: la presenza della materia modifica la geometria dello spaziotempo,forzandolo ad incurvarsi (come una sfera di marmo al centro di un trampolinoelastico). Questa curvatura viene interpretata come gravita, sicche la geome-tria svolge nella Relativita Generale il compito che la gravita svolgeva nellameccanica classica.

10.2. INCOMPATIBILITA DELLA GRAVITAZIONE 263
10.2.3 Origine degli osservatori inerziali
L’aver collegato il concetto di osservatore (localmente) inerziale alla geome-tria dello spaziotempo, e quindi in senso fisico alla geometria dell’universo,ha anche un aspetto soddisfacente da un punto di vista fisico. Un problemagenerale che ha assillato i fisici25, da Newton in avanti, era di spiegare dache cosa fossero determinati gli osservatori inerziali, perche cioe un certo os-servatore fosse inerziale, mentre un altro non lo fosse. Newton rispondeva aquesta domanda con l’assioma dello spazio assoluto: gli osservatori inerzialisono dunque quelli in quiete rispetto allo spazio. Questa giustificazione nonpuo piu funzionare per Einstein.
La verifica sperimentale che nel nostro sistema solare gli osservatori iner-ziali fossero in qualche modo legati alla materia distante (al “cielo delle stellefisse”) aveva portato Mach - come gia accennato nella sezione 3.2 - a svilup-pare l’idea che gli osservatori inerziali dovessero essere definiti dalla distri-buzione di materia nell’universo.26 Gli osservatori inerziali sarebbero quindicorpi in una particolare relazione con la materia distante (principio o puntodi vista di Mach).
Einstein riprende il punto di vista di Mach e lo realizza compiutamente:comprendendo che la materia fissa la geometria dello spaziotempo e sapendoche la geometria fissa gli osservatori localmente inerziali, egli realizza con-cretamente il legame tra materia distante27 e osservatori inerziali. Quindi,l’idea degli osservatori in caduta libera realizza il principio di Mach.
10.2.4 Il principio di equivalenza forte
Una volta arrivati a questo concetto e naturale assimilare gli osservatori incaduta libera agli osservatori inerziali dello spaziotempo di Minkowski, ac-cettando che nei riferimenti degli osservatori in caduta libera i fenomeni fisiciavvengano localmente tutti con le stesse modalita (a parita di condizioniambientali) e che le leggi della fisica assumano in tali riferimenti la formaminkowskiana. Questa affermazione prende il nome di principio di equi-valenza forte: esso postula la completa equivalenza (locale) degli osservatoriin caduta libera con gli osservatori inerziali di minkowskiana memoria.28
25In effetti, questo e un punto critico assai problematico per la fisica in generale.26In sostanza, Mach ritiene che se ci fosse un solo corpo nello spazio vuoto non avrebbe
nemmeno senso la nozione di osservatore inerziale.27Perche “distante”? Perche per fissare la curvatura dello spaziotempo in un punto non
e sufficiente la materia nel punto: servono le derivate prime dei simboli di Christoffel, cioele derivate seconde della metrica, e dunque entra in gioco la materia distante.
28In altre parole, postula che localmente gravita e accelerazione siano indistinguibili.Naturalmente questo vale solo localmente: se lasciamo cadere due palline in un razzo in ac-

264 LEZIONE 10. APPRODO ALLA RELATIVITA GENERALE
Nello stesso ordine di idee e naturale assimilare le particelle in cadutalibera (cioe non soggette a forze di natura diversa dalla forza gravitazionale)alle particelle libere tout-court di Newton, e quindi postulare che le linee diuniverso di tali particelle siano geodetiche del genere tempo nello spaziotempo(principio della geodetica). Tornando all’analogia con il trampolino difigura 10.3, un oggetto di prova (ad esempio: una pallina di ping-pong)posizionato sul trampolino incurvato, accelerera verso la sfera centrale inun modo governato dalla curvatura stessa del trampolino. Il principio dellageodetica ci dice come la curvatura dello spaziotempo (cioe del trampolino)governa il moto della materia: i corpi in caduta libera (come la pallina daping-pong) seguono geodetiche nello spaziotempo. Ad esempio, inviando lapallina con la giusta velocita e direzione, essa iniziera a orbitare intorno allapalla di marmo centrale (come la luna orbita intorno alla terra).
Concettualmente, abbiamo sostituito all’idea di forza gravitazionale lageometria: la traiettoria della pallina da ping-pong non e piu dovuta allagravita, piuttosto diciamo che e dovuta alla curvatura dello spaziotempo eal principio che vuole la traiettoria della pallina essere una geodetica in talespaziotempo. In generale stiamo considerando fenomeni che classicamenteerano legati all’azione della gravita (come la caduta dei gravi o il moto diuna navicella orbitante) come fenomeni di caduta libera, che localmente sonoa tutti gli effetti inerziali.29
La presenza di un campo gravitazionale non uniforme, che quindi non puoessere annullato globalmente e che implica la curvatura dello spaziotempo, simanifesta nel fenomeno di deviazione geodetica che studieremo tra poco.
celerazione, tali palline seguiranno sempre traiettorie parallele, mentre se lasciamo caderele stesse palline da posizioni molto diverse della superficie terrestre, entrambe si indiriz-zeranno verso il centro della terra (con evidente rottura della simmetria tra accelerazioniapparenti e gravita).
29Cosı, ad esempio, quando percepiamo, stando sulla superficie terrestre, una “forza digravita”, essa e sostanzialmente un risultato del fatto che, non essendo noi osservatoriin caduta libera, siamo continuamente sottoposti a un’accelerazione fisica causata dallaresistenza meccanica della superficie terrestre.

Lezione 11
Equazioni di Einstein
11.1 Il problema delle equazioni di campo
Il principio della geodetica dice come la geometria dello spaziotempo controlliil moto della materia. Resta pero da determinare come la materia (intesanella duplice veste einsteiniana di massa ed energia) governi la geometriadello spaziotempo1, secondo lo schema in figura 11.1.
Figura 11.1: La materia (intesa come distribuzione di massa ed energia)produce il campo gravitazionale, e quindi e la responsabile (mediante le equa-zioni di campo) della curvatura dello spaziotempo, e piu in generale della suageometria. La curvatura dello spaziotempo, a sua volta, mediante il principiodella geodetica, ci dice come avviene il moto della materia, come si muovononel campo le particelle e la luce.
11.1.1 Le accelerazioni di marea
Abbiamo ripetuto piu volte che la curvatura dello spaziotempo e dovuta alladisomogeneita del campo gravitazionale, disomogeneita che si manifesta nellecosiddette accelerazioni di marea. Analizziamo questo fenomeno anzituttodal punto di vista tridimensionale classico di Newton.
1Dira John Arcibald Wheeler: “lo spazio influenza la massa, dicendole come muoversi,e la massa influenza lo spazio, dicendogli come incurvarsi”. (“Spacetime grips mass, tellingit how to move, and mass grips spacetime, telling it how to curve.”)
265

266 LEZIONE 11. EQUAZIONI DI EINSTEIN
Le accelerazioni di marea sulla superficie terrestre
Iniziamo a studiare, ad esempio, il campo gravitazionale prodotto dal solesulla superficie terrestre.2 Mettiamoci innanzitutto nel punto di vista di unosservatore inerziale che assumiamo situato nel centro del sole. La situa-zione e quella riportata in figura 11.2a: il centro della terra “cadra” sul solecon un’accelerazione ~g, mentre i punti sulla superficie terrestre in generalesubiranno accelerazioni diverse, a seconda della loro distanza dal centro delsole, poiche vale la legge di gravitazione universale e dunque l’accelerazionein un punto sulla superficie sara proporzionale al quadrato della distanza trail punto e il centro del sole.
Passiamo poi all’osservatore in caduta libera posizionato nel centro dellaterra: in questo modo stiamo annullando la gravita nel centro della terra(localmente), ma non sulla superficie terrestre (non globalmente). Per avereil campo gravitazionale in un qualsiasi punto della superficie terrestre, nondobbiamo far altro che sommare l’accelerazione di trascinamento ~a = −~g aogni vettore disegnato precedentemente. Si ottiene il diagramma di figura11.2b, che rappresenta la distribuzione delle accelerazioni di marea. Notiamodunque che, tra due qualsiasi dei punti della superficie terrestre, viene aprodursi un’accelerazione relativa non nulla.
Piu in generale, notiamo che l’effetto delle accelerazioni di marea e di pro-durre un’accelerazione relativa tra le particelle di un fascio di particelle incaduta libera nel campo gravitazionale. Spieghiamo meglio: qualsiasi puntodella superficie terrestre, infatti puo essere considerato in caduta libera; l’in-sieme dei punti della superficie terrestre e quindi sostanzialmente un fasciodi particelle in caduta libera in un campo gravitazionale. A causa delladisomogeneita di questo campo, le particelle del fascio sono sottoposte adaccelerazioni diverse, e non esiste un sistema che possa annullare tutte que-ste accelerazioni contemporaneamente (l’annullamento sara solo locale, comeavviene scegliendo come sistema di riferimento il centro della terra): l’effettoe la produzione di accelerazioni relative tra le particelle del fascio, per cui taliparticelle tenderanno a separarsi con legge non lineare. Piu chiaramente, nonc’e nulla di strano che le particelle si separino: se non ci fosse gravita, essesi muoverebbero di moto rettilineo e uniforme, e quindi nulla impedisce chesi separino, ma a velocita costante, quindi con legge lineare. La presenza delcampo disomogeneo, invece, fa separare le particelle del fascio con una certaaccelerazione relativa: ribaltando il ragionamento, possiamo anche dire che
2Le accelerazioni di marea terrestri, poi, sono pero essenzialmente prodotte dal-l’attrazione lunare, e non dal sole. Tuttavia questo esempio e utile per chiarire lasituazione.

11.1. IL PROBLEMA DELLE EQUAZIONI DI CAMPO 267
Figura 11.2: Campo delle accelerazioni di marea sulla superficie terrestre in-dotte dal sole. Nel diagramma (a) la situazione e descritta dal punto di vistadi un osservatore inerziale situato nel centro del sole: il centro della terra e incaduta libera sul sole con un’accelerazione ~g; ogni punto della superficie ter-restre, a causa delle disomogeneita del campo, subisce invece un’accelerazionediversa, proporzionale al quadrato della sua distanza dal centro del sole. Neldiagramma (b) e dipinta la stessa situazione dal punto di vista di un osserva-tore in caduta libera nel centro della terra: ivi la gravita e annullata, ma none annullata la gravita sulla superficie terrestre, poiche in ogni punto la sommadell’accelerazione del diagramma a e dell’accelerazione ~g con cui il centro delsole cade ora sulla terra e non nulla. Naturalmente ambedue i diagrammimostrano effetti volutamente esagerati, a scopo esemplificativo.

268 LEZIONE 11. EQUAZIONI DI EINSTEIN
la presenza di questa accelerazione relativa tra le particelle e sintomo dellapresenza di un campo gravitazionale non uniforme.
Calcolo classico dell’accelerazione di marea
Studiamo ora questa accelerazione relativa che si viene a creare. Conside-riamo una regione di spazio descritta da un’energia potenziale Φ, secondo laversione della legge di gravitazione universale data dalla cosiddetta equazionedi Poisson:
4Φ = 4πGρ. (11.1)
Questa e la legge classica, che mostra come la materia (rappresentata dalladensita di massa ρ) governa il campo gravitazionale (rappresentato dalla suaenergia potenziale Φ).
In ogni punto dello spazio e quindi definita un’accelerazione di gravita ~gdata da
~g = − grad Φ. (11.2)
Le particelle in caduta libera sono quelle che si muovono con accelerazionepari in modulo, direzione e verso, all’accelerazione del campo, e dunque sidevono muovere secondo l’equazione di Newton
~a = ~g,
che in coordinate cartesiane3 possiamo scrivere come
d2xa
dt2= − ∂Φ
∂xa. (11.3)
Consideriamo ora un fascio di particelle in caduta libera, fascio descrittodalla famiglia di funzioni
xa(t, s),
ove s e il parametro che individua la particella all’interno del fascio e t e ilparametro tempo.4
Il vettore separazione tra due particelle infinitamente prossime e dato
wa =∂xa
∂s, (11.4)
3Ricordiamo che in coordinate cartesiane scrivere gli indici dei vettori in postocovariante o covariante e equivalente.
4Si immagini, ad esempio, una collanina di perle che cada in un campo gravitazionalenon uniforme: che cosa accade tra le perle?

11.1. IL PROBLEMA DELLE EQUAZIONI DI CAMPO 269
la velocita relativa tra le particelle (cioe la variazione nel tempo del vettoreseparazione) e dunque data da
dwa
dt=∂2xa
∂t∂s(11.5)
e l’accelerazione relativa e
d2wa
dt2=
∂3xa
∂t2∂s, (11.6)
dove abbiamo usato i simboli di derivata ordinaria, intendendo la velocitarelativa e l’accelerazione relativa come funzioni del tempo t.
Il nostro obiettivo e ora trovare l’equazione differenziale per quest’ultimovettore (l’accelerazione relativa), e lo facciamo derivando la legge di moto(11.3) e utilizzando la commutativita delle derivate parziali:
d2wa
dt2=
∂
∂s
(∂2xa
∂t2
)=
∂
∂s
(∂Φ
∂xa(x(t, s))
)=
∂2Φ
∂xa∂xb
∂xb
∂s=
∂2Φ
∂xa∂xbwb
Dunque la matrice hessiana
Hab =∂2Φ
∂xa∂xb, (11.7)
che in generale non e nulla, misura la disomogeneita del campo gravitazionale:l’accelerazione relativa d2wa
dt2e a sua volta non nulla, ed e funzione lineare del
vettore separazione wa. Possiamo infatti scrivere, in notazione tensoriale, che
d2wa
dt2= −Ha
bwb, (11.8)
con a = 1, 2, 3 (siamo infatti nel caso dello spazio tridimensionale newto-niano).
Dalla (11.8) e chiaro come l’accelerazione di marea (legata alla diso-mogeneita del campo gravitazionale) sia una funzione lineare del vettoreseparazione. Inoltre la traccia dell’hessiana H e laplaciando di Φ
trH = Haa =
3∑a=1
∂2Φ
∂xa∂xa= 4Φ,
e quindi l’equazione di campo newtoniana (11.1) si puo anche scrivere nellaforma equivalente di
Haa = 4πGρ. (11.9)

270 LEZIONE 11. EQUAZIONI DI EINSTEIN
Calcolo relativistico dell’accelerazione di marea
Ripetiamo lo stesso calcolo della sezione precedente in un contesto differente,cioe nel contesto di uno spaziotempo quadridimensionale che sia una varietariemanniana (dotata di metrica g).5 Sia
xj(τ, σ)
una famiglia ad un parametro (σ) di geodetiche del genere tempo parame-trizzate dal tempo proprio τ - sono cioe le curve descritte da una famigliaparticelle in caduta libera.
La 4-velocita lungo la singola geodetica e data dall’espressione
~V = V j ∂
∂xj=∂xj
∂τ
∂
∂xj, (11.10)
dove i vettori ∂∂xj sono i vettori della base naturale6. Il vettore separazione e
~w = wj ∂
∂xj=∂xj
∂σ
∂
∂xj. (11.11)
Vogliamo studiare l’accelerazione relativa in funzione del vettore sepa-razione ~w: l’equazione che esprimera la dipendenza tra tali due quantitaprendera il nome di equazione della deviazione geodetica. Per studiare l’ac-celerazione relativa dobbiamo innanzitutto definirla.
Se ~w e il vettore separazione dipendente dal parametro temporale t e dalparametro σ che identifica la curva del fascio, chiameremo velocita relativatra due particelle del fascio la quantita
∂ ~w
∂τ= ∇~V ~w =
(∂2xj
∂τ∂σ+ Γj
hk
∂xh
∂σ
∂xk
∂τ
)∂
∂xj, (11.12)
cioe la derivata covariante7 lungo la 4-velocita ~V del vettore separazione -come riportato, essa coincide esattamente con la derivata di ~w rispetto altempo proprio, essendo ~V il vettore velocita della curva parametrizzata con
5Per convenzione utilizzeremo la segnatura lorentziana − + + +, mettendo lacoordinata temporale nella entrata 0-esima di ogni vettore (ad esempio x0).
6La notazione e piuttosto comune: si pensa ai campi vettoriali come a derivazione difunzioni, dunque la base naturale e data dai funzionali ∂
∂xj . Si puo altrimenti pensare allabase naturale come ai vettori ∂P
∂xj .7Il passaggio dalla Relativita Ristretta alla Relativita Generale va di pari passo con il
passaggio dalla derivata direzionale euclidea (costruita con le derivate parziali ordinarie)alla derivazione covariante che, come sara meglio ricordato dopo, se calcolata di un campotangente alla superficie considerata, restituisce ancora un campo tangente.

11.1. IL PROBLEMA DELLE EQUAZIONI DI CAMPO 271
il tempo proprio. Analogamente definiamo come accelerazione relativa laquantita
∂2 ~w
∂τ 2= ∇~V∇~V ~w, (11.13)
nella cui espressione esplicita compariranno anche derivate e prodotti deiΓj
hk.8
Per calcolare in modo intrinseco (cioe non in componenti) il vettoreaccelerazione relativa di marea
∇~V∇~V ~w
ricordiamo le seguenti proprieta della derivazione covariante e delle geodeti-che.
(i)
∇~V ~w = ∇~w~V ,
cioe la derivata covariante commuta rispetto allo scambio degli argo-menti. Questo e chiaro dal momento che nella definizione di derivatacovariante (posto ~w = wk ∂
∂xk = ∂xk
∂σ∂
∂xk e ~V = V k ∂∂xk = ∂xk
∂τ∂
∂xk )
∇~V ~w =
(∂wj
∂τ+ Γj
hkwhV k
)∂
∂xj=
(∂2xj
∂σ∂τ+ Γj
hk
∂xh
∂σ
∂xk
∂τ
)∂
∂xj
le derivate parziali miste commutano e i simboli di Christoffel sonosimmetrici rispetto allo scambio degli indici covarianti.
In virtu di questa proprieta si usa dire che la connessione e a tor-sione nulla (in un certo senso infatti la torsione misura il difetto dicommutativita nello scambio di argomenti).
Questa proprieta non e vera per ogni campo vettoriale, ma solo peri campi vettoriali della base canonica, altrimenti bisogna inserire untermine correttivo.
(ii)
(∇~v∇~w −∇~w∇~v) ~X = R~v ~w( ~X) = Rpqjkv
jwkXq ∂
∂xp,
che traduce la dipendenza del trasporto per parallelismo dalla curvascelta. Infatti, al contrario delle derivate parziali, le derivate covariantinon commutano: il difetto di commutazione e misurato dal tensore diRiemann, visto come una famiglia di applicazioni lineari associati aidiversi piani coordinati.
8E cio ci lascia gia subodorare che possa fare il suo ingresso, da qualche parte, il tensoredi Riemann, che e proprio costruito con derivate e prodotti dei simboli di Christoffel.

272 LEZIONE 11. EQUAZIONI DI EINSTEIN
Figura 11.3: Figura esemplificativa: il trasporto per parallelismo lungo ilprimo circuito elementare, caratterizzato dal valore R12 dell’applicazione li-neare di Riemann, restituisce un vettore ~X ′ ruotato rispetto all’originale. Ingenerale la differenza ∆ ~X dipende dall’area del circuito e dall’applicazioneR~v ~w( ~X) associata ai vettori del circuito determinato dalla coppia di vettori(~v, ~w). In generale R~v ~w, per qualsiasi scelta di ~v e ~w, sara combinazione linearedei circuiti elementari associati ai piani coordinati. Se, a scopo esemplificativo,si considerano triangoli elementari al posto di parallelogrammi elementari e sesi assumono i vettori delle tre facce segnalate in figura come vettori fondamen-tali, allora ogni altra applicazione R~v ~w si potra scrivere come combinazionelineare di R12, R13 e R23. I coefficienti della combinazione saranno sostan-zialmente i coseni direttori dell’area del parallelogramma (~v, ~w) proiettato suipiani coordinati.

11.1. IL PROBLEMA DELLE EQUAZIONI DI CAMPO 273
Figura 11.4: Trasporto per parallelismo lungo un triangolo geodetico di S2:alla fine del cammino, il vettore iniziale risulta ruotato rispetto al vettoreiniziale. Il trasporto per parallelismo quindi su superfici curve dipende dalcammino scelto.
Chiariamo meglio la situazione. Si supponga, a scopo esemplificativo,di prendere un tetraedro9 come quello in figura 11.3. Se trasportiamoper parallelismo il vettore ~X lungo il circuito indicato, quando il vet-tore tornera alla punta (chiamiamo ~X ′ questo nuovo vettore), non avracambiato modulo ma avra in generale cambiato direzione, sara cioeruotato di un certo angolo per effetto della curvatura (v. fig. 11.4). Laquantita
∆ ~X = ~X ′ − ~X
in generale sara lineare in X (se un ~v = ~u + ~w, anche i relativi vet-tori dopo il trasporto soddisferanno alla stessa identita) e dipendera
dall’area della regione lungo cui abbiamo trasportato ~X.
In generale sara quindi che
∆ ~X = A ·R~v ~w( ~X), (11.14)
ove A e l’area della regione e R~v ~w e la matrice che esprime la linearitain ~X, la quale sappiamo dalla geometria differenziale coincidere conil tensore di Riemann. Il tensore di Riemann misura dunque anchela dipendenza del trasporto per parallelismo dal cammino scelto. Inparticolare, ad ogni circuito identificato dai vettori ~v e ~w (cioe a ogni
9In realta questo discorso dovrebbe essere fatto sui parallelogrammi, ma l’esempio deltetraedro e piu efficace.

274 LEZIONE 11. EQUAZIONI DI EINSTEIN
parallelogramma da essi formato) sara associata l’applicazione lineare
R~v ~w che fornisce il vettore differenza ∆ ~X dopo il trasporto in funzionedel vettore di partenza. Se consideriamo come “parallelogrammi base”quelli costruiti sui vari piani coordinati, avremo che l’applicazione R~v ~w
per ~v, ~w generici (quindi anche sghembi, rispetto alle rette coordinate)sara una combinazione lineare delle applicazioni sui piani coordinati.Ad esempio, tornando alla semplificazione del tetraedro in figura 11.3,se prendiamo R13, R23 e R12 come piani coordinati, l’applicazione suqualsiasi altro circuito sara data da una loro combinazione lineare, dellaforma
R~v ~w = R12v1w2 +R13v
1w3 +R23v2w3,
in cui i pesi sono essenzialmente i coseni direttori dell’elemento di areadeterminato da ~v e ~w rispetto ai piani coordinati.
Riassumendo: l’applicazione lineare associata al circuito (~v, ~w) e unacombinazione lineari delle applicazioni associate ai piani coordinati, icui coefficienti sono le aree delle proiezioni dell’elemento di area delcircuito sui piani coordinati (sostanzialmente i coseni direttori).
Tornando alla formula
(∇~v∇~w −∇~w∇~v) ~X = R~v ~w( ~X) = Rpqjkv
jwkXq ∂
∂xp,
ancora una volta bisogna specificare che essa non vale per qualsiasicampo vettoriale, ma solo per i campi vettoriali della base naturale.
Notiamo anche il diverso ruolo svolto dai quattro indici nel tensore diRiemann: in Rp
qjk, la coppia (p, q) e formata dagli indici di matriceed individua l’applicazione lineare, mentre la coppia (j, k) e formatadagli indici di dipendenza dalle facce coordinate, quindi e associata alparallelogrammino.
(iii) L’equazione∇~v~v = 0
e la definizione di curva geodetica come curva autoparallela, cioe curvalungo la quale si vede (mettendosi sulla superficie considerata) che ilversore tangente non cambia direzione.
Proviamo ora a combinare queste tre proprieta.10 L’idea e che dobbiamosfruttare l’equazione delle geodetiche: stiamo infatti calcolando variazioni
10Per apprezzare veramente questo formalismo intrinseco bisognerebbe riavvicinarsi adesso dopo aver sprecato una gran quantita di fatica provando a linearizzare direttamentel’equazione (11.13), dopo averla espressa in componenti.

11.1. IL PROBLEMA DELLE EQUAZIONI DI CAMPO 275
lungo delle geodetiche, e questa informazione da qualche parte alla fine dovracomparire.
Partendo dalla definizione dell’accelerazione di marea come ∇~V∇~V ~w si
passa per la proprieta (i) all’espressione11 ∇~V∇~w~V , alla quale possiamo poi
aggiungere il termine −∇~w∇~V~V , essendo esso nullo per la proprieta (iii) delle
geodetiche. Dunque
∇~V∇~V ~w = ∇~V∇~w~V = (∇~V∇~w −∇~w∇~V )~V .
La proprieta (ii) infine ci ricollega all’applicazione R~V ~w:
∇~V∇~V ~w = (∇~V∇~w −∇~w∇~V )~V = R~V ~w(~V ), (11.15)
ovvero per componenti
(∇~V∇~V ~w)l =(R~V ~w(~V )
)l
= RlmjpV
jwpV m = −Rlmpjv
jvmwp, (11.16)
ove abbiamo sfruttato l’antisimmetria del tensore di Riemann per scambiodegli ultimi due indici covarianti: Rl
mjp = −Rlmpj.
Possiamo riscrivere anche come
(∇~V∇~V ~w)l = −RlmpjV
jV mwp = −K lp(~V )wp (11.17)
per notare ancora meglio come l’espressione dell’accelerazione relativa sialineare nel vettore separazione ~w.
L’equazione (11.15) prende il nome di equazione della deviazione geo-detica. Essa afferma che, anche nel caso delle geodetiche, l’accelerazionerelativa (o accelerazione di marea) e una funzione lineare del vettore se-parazione. L’applicazione lineare che lega accelerazione di marea a vettoreseparazione e data da
K lp(~V ) = Rl
mpjVmV j
e corrisponde all’hessiana Hab definita dalla (11.7) che avevamo trovato nel
calcolo classico.
11.1.2 La derivata covariante
Dal caso euclideo alle superfici
Per rinfrescare la memoria, richiamiamo brevemente il concetto di derivatacovariante, di cui abbiamo fatto uso nei calcoli precedenti.
11Notiamo ancora una volta che l’accelerazione di marea e legata al trasporto lungo ilparallelogramma definito da (~V , ~w) e quindi in generale non e nulla.

276 LEZIONE 11. EQUAZIONI DI EINSTEIN
Figura 11.5: Derivata covariante sulla circonferenza: la derivata euclidea diun campo tangente non e in generale un campo tangente.
Nel caso del piano euclideo, abbiamo a disposizione una nozione di deri-vazione direzionale ben definita e nota dall’analisi. L’idea e di trasportarequesta derivazione al caso di superfici qualunque.
Si consideri un campo vettoriale ~X(P ) superficiale, ovvero tangente alsupporto di una certa superficie in ogni suo punto. Si consideri inoltre unacurva γ passante per P con velocita ~v. Il campo ~X puo essere pensato comeimmerso nello spazio euclideo, e quindi derivato nella maniera euclidea cuisiamo abituati (derivata direzionale ordinaria). Il problema e che la derivatadi un campo tangente alla superficie non e in generale un campo tangentealla superficie.12
12Come esempio banale si consideri (fig. 11.5) la circonferenza unitaria, di equazioneparametrica
P (θ) = cos θ~i+ sin θ~j.
Consideriamo il campo tangente alla curva
~eθ =dP
dθ= − sin θ~i+ cos θ~j
e la sua derivata direzionale lungo il vettore ~v (il vettore velocita della curva)
∇~v~eθ =d
dt(− sin θ~i+ cos θ~j) = −∂θ
∂t(cos θ~i+ sin θ~j) = −∂θ
∂t~er.
Cio che otteniamo e un vettore che non e per nulla tangente alla curva (la nostra varietariemanniana), anzi: e addirittura normale ad essa. Dunque in generale non e vero che laderivata direzionale di un campo superficiale e un vettore tangente alla superficie.

11.1. IL PROBLEMA DELLE EQUAZIONI DI CAMPO 277
Si conviene allora di chiamare derivata covariante (o derivata dire-zionale superficiale) la miglior approssimazione della derivata precedente,cioe la proiezione sul piano tangente alla superficie della derivata direzionaleeuclidea. In simboli:
∇~v~X :=
∏TP S
∇E~v~X (11.18)
dove∏TP S
indica appunto la proiezione sul piano tangente e ∇E~v indica la
derivata direzionale euclidea, che in generale potra essere scomposta in duecomponenti: la componente tangente alla superficie e la componente normalead essa; con la derivata covariante stiamo prendendo solo la componentetangente, dimenticandoci dell’altra.
La derivata covariante∇~v associa dunque a un campo tangente ~X un altrocampo ∇~v
~X tangente alla superficie per costruzione. Si puo dimostrare facil-mente che il risultato di questa derivazione non dipende dall’immersione, mache e intrinseca e che dipende unicamente dalla conoscenza della metrica.13
Essa risulta definita come
∇~v~X :=
(∂Xj
∂t+ Γj
hkXhvk
)∂
∂xj(11.19)
dove le xi sono le coordinate e Xk, vk sono le componenti dei vettori sullabase naturale dei ∂
∂xk .Incidentalmente, dalla definizione (11.19) segue che
∇ ∂∂xq
∂
∂xp= Γl
pq
∂
∂xl, (11.20)
il che da un ulteriore significato ai simboli di Christoffel.
Assiomatizzazione di Koszul
La derivata covariante puo essere definita anche in maniera assiomatica, comeoperazione di composizione sui campi vettoriali (che a due campi ne associaun terzo)
( ~X, ~Y )→ ~Z = ∇ ~X~Y
e che gode delle seguenti proprieta (dette assiomi di Koszul):
13Come gia scritto nella nota 23 a pagina 175, per l’approfondimento (e per le dimostra-zioni) sull’argomento si rimanda alle “Nozioni di Geometria Differenziale” scaricabilidal seguente indirizzo:
http://www.webalice.it/dghisi/scritti/geometria.pdf

278 LEZIONE 11. EQUAZIONI DI EINSTEIN
(i) additivita in ~X e in ~v:
∇~v( ~X1 + ~X2) = ∇~v~X1 +∇~v
~X2,
∇~v1+~v2~X = ∇~v1
~X +∇~v2~X.
Si noti come quest’ultima espressione (principio di sovrapposizione) diala derivata lungo lungo la diagonale del parallelogramma avente per lati~v1 e ~v2;
(ii) f-linearita in ~v:
∇f ·~v ~X = f · ∇~v~X
con f una qualsiasi funzione scalare differenziabile;
(iii) leibnitzianita in ~X:
∇~v(f · ~X) = f · ∇~v~X + (∇~vf) · ~X.
La derivazione covariante definita assiomaticamente in questo modo vienedetta derivazione covariante alla Koszul (o connessione lineare).
Si dimostra che questa definizione coincide esattamente con la derivatacovariante definita nella sezione precedente, a patto che i coefficienti nella(11.1.2) siano proprio i simboli di Christoffel. Piu esplicitamente, la deriva-zione covariante alla Koszul e definita, in un qualsiasi sistema di coordinate,dai coefficienti di connessione, ossia dai coefficienti dello sviluppo di ∇~bk
~bj,
una volta fissata una base ~bi per lo spazio tangente. In altre parole: seinvece che considerare la base naturale dei ∂
∂xj consideriamo una qualsiasibase nello spazio tangente, possiamo scomporre i vettori rispetto a tale basee considerare i relativi coefficienti di connessione.
Oppure, simmetricamente, conviene non cambiare base nello spazio tan-gente (restare con la base naturale) ma alterare i coefficienti della (), che ingenerale non saranno piu i simboli di Christoffel; in questo senso fissato unsistema di coordinate, dare una derivazione covariante significa dare le n3
funzioni Lljk che descrivono il comportamento dei vettori della base naturale
associata alle coordinate, le funzioni quindi che soddisfano
∇ ∂
∂xk
∂
∂xj= Ll
jk
∂
∂xl. (11.21)
Il cambiamento di punto di vista e chiaro: la connessione (la derivazionecovariante) e data a partire dai coefficienti Ll
jk, ed e completamente definitada essi.

11.2. EQUAZIONI NEL VUOTO 279
Nel caso in cuiLl
jk = Γljk, (11.22)
cioe nel caso “semplice” che abbiamo analizzato nella sezione precedente, ilprocedimento di derivazione viene anche detto derivazione covariante allaLevi-Civita.
Definendo infatti la torsione T di due campi ~X, ~Y come
T ( ~X, ~Y ) = ∇~Y~X −∇ ~X
~Y − [ ~X, ~Y ] (11.23)
dove [ ~X, ~Y ] e il commutatore14: [ ~X, ~Y ] = ~X~Y − ~Y ~X, si dimostra che laconnessione di Levi-Civita e l’unica connessione che, oltre ai tre assiomi diKoszul, verifica anche le seguenti proprieta:
(iv) e a torsione nulla:
T ( ~X, ~Y ) = ∇~Y~X −∇ ~X
~Y − [ ~X, ~Y ] = 0,
cioe∇~Y
~X −∇ ~X~Y = [ ~X, ~Y ];
(v) e metrica, cioe e compatibile con la metrica (conserva angoli e prodottiscalari):
~X(~Y · ~Z) = (∇ ~X~Y ) · ~Z + ~Y · (∇ ~X
~Z).
L’asserto di unicita e anche noto con il nome di Teorema Fondamentaledella Geometria Riemanniana; per questo talvolta la connessione di Levi-Civita viene anche detta connessione di Riemann o, dalla proprieta (v),“connessione metrica”.
Dato che i coefficienti di connessione coincidono con i simboli di Chri-stoffel, la derivata covariante alla Levi-Civita e dunque proprio la parte tan-gente della derivata euclidea ed e dunque la derivata che abbiamo trovato eutilizzato nei paragrafi precedenti, e sara anche la derivata che in generaleutilizzeremo.
11.2 Equazioni nel vuoto
11.2.1 Equazioni di campo e tensore di Ricci
Mettiamoci ora in una regione ove non c’e materia. Secondo Newton vale la(11.1), e dunque che
4Φ = 4ϕGρ = 0, (11.24)
14Talvolta anche detto parentesi di Lie. Si noti che ~X~Y e ~Y ~X non sono in generalecampi vettoriali tangenti; tuttavia si puo dimostrare che [ ~X, ~Y ] e un campo vettorialetangente.

280 LEZIONE 11. EQUAZIONI DI EINSTEIN
poiche ρ = 0 per l’assenza di materia, o anche, ricordando la (11.9), come
trH = Haa = 0. (11.25)
Per analogia con la formula newtoniana, Einstein propone di considerarecome equazioni del campo gravitazionale nel vuoto le equazioni
K ll (~V ) = Rl
mljVmV j = 0, (11.26)
o ancheK l
l (~V ) = RmjVmV j = 0, (11.27)
chiamando Rmj = Rlmlj la contrazione del tensore di Riemann sulla com-
ponente controvariante e sulla terza componente covariante, contrazione chesolitamente viene chiamata tensore di Ricci e indicata con Ric(g), ovel’argomento esplicita la (naturale) dipendenza di tale tensore dalla metrica.15
La (11.27) si annulla identicamente qualunque sia il fascio di particelleconsiderato: e necessario dunque che Rmj(g) = 0 per ogni m, j, cioe deveannullarsi identicamente il tensore di Ricci. Pertanto l’analogo einsteinianodell’equazione di campo di Newton 4Φ = 0 e
Ric(g) = 0, (11.28)
o, per componenti,Rjk = 0 ∀j, k. (11.29)
Queste sono a tutti gli effetti le equazioni che descrivono il campo gra-vitazionale in assenza di materia, e sono note con il nome di equazioni diRicci oppure come equazioni di Einstein nel vuoto, poiche coinciderannocon le piu generali equazioni di Einstein nell’ipotesi in cui non vi sia materia.
11.2.2 Parallelo con la teoria newtoniana
Perfezioniamo l’analogia tra Newton ed Einstein nello schema riportato infigura 11.6.
Il confronto mostra che la teoria newtoniana e una teoria scalare (conun solo potenziale), e quindi le equazioni di campo si riducono a una solaequazione scalare differenziale del second’ordine.
La teoria einsteiniana e invece una teoria a 10 potenziali: tutte le quantitasono infatti costruite unicamente a partire dalla metrica, che e una matricesimmetrica di ordine 4, e dunque ha esattamente 10 elementi indipendenti.
15Naturalmente essendo una contrazione del tensore di Riemann dipende unicamentedalla metrica. Si usa solitamente riportare tale dipendenza sempre in modo esplicito.

11.2. EQUAZIONI NEL VUOTO 281
Figura 11.6: Schema riepilogativo del parallelo tra la teoria newtoniana e lateoria Einsteiniana. La teoria newtoniana e una teoria a un solo potenziale Φ,da cui discendono per derivazione l’accelerazione di gravita ~g e il tensore che dale accelerazioni di marea (l’hessiana Ha
b ); la traccia di tale tensore deve essere,per le equazioni di Newton, il laplaciano del potenziale. La teoria einsteinianae una teoria a dieci potenziali (le componenti indipendenti del tensore metricogjk), che per derivazione danno luogo ai simboli di Christoffel Γl
jk e al tensoredi curvatura di Riemann Rl
mjk, tensore che rende conto anch’esso delle acce-lerazioni di marea, come mostra l’equazione (11.17), e che per contrazione daluogo al tensore di Ricci, il quale deve quindi essere visto come l’analogo dellaplaciano di Φ.

282 LEZIONE 11. EQUAZIONI DI EINSTEIN
L’identificazione della gravitazione con la geometria dello spaziotempo im-plica che le 10 componenti del tensore metrico svolgano il ruolo di 10 poten-ziali.16 Le equazioni di campo devono percio essere un sistema di 10 equazionidifferenziali del second’ordine nella metrica. Di fatto la scrittura
Ric(g) = 0
racchiude 10 equazioni differenziali del second’ordine: anche il tensore diRicci infatti e un tensore di ordine 4 simmetrico, con quindi 10 componentiindipendenti.
Una seconda differenza essenziale tra l’equazione di Newton e le equa-zioni di Einstein (oltre al numero) e che queste ultime sono non lineari nellametrica: la prima non linearita subentra sin dal calcolo dei simboli di Chri-stoffel e dall’inversione del tensore metrico, che poi viene moltiplicato per lesue derivate e cosı via. Questa forte non linearita non era affatto presentenell’equazione newtoniana.
Una terza differenza (importante dal punto di vista fisico) e che, laddovel’equazione di campo newtoniana e un’equazione di tipo ellittico17, per cuiuna piccola perturbazione si propaga istantaneamente con velocita infinita18,le equazioni di Einstein sono di tipo iperbolico, quindi ammettono un pro-blema di Cauchy ai valori iniziali che permette, di principio, di determinarela geometria dello spaziotempo nota che sia la geometria su una superfi-cie spaziale tridimensionale portante i dati iniziali.19 Inoltre le equazioni diEinstein, essendo di tipo iperbolico, sono compatibili con un fenomeno dipropagazione ondosa a velocita finita.20 In altri termini, se per Newton l’u-niverso e un sistema statico e immutabile, per Einstein e invece un sistemain fieri soggetto a un’evoluzione.
16Il che e una generalizzazione assolutamente non banale! Si pensi al cambiamentodrastico del punto di vista e della descrizione del campo gravitazionale.
17Ricordiamo che una equazione differenziale alle derivate parziali del second’ordineviene detta di tipo ellittico se la matrice Z dei coefficienti delle derivate parziali seconde edefinita positiva. I prototipi di equazioni ellittiche sono l’equazione di Laplace (4Φ = 0)e la sua generalizzazione, l’equazione di Poisson (4Φ = 4πGρ). Se il determinante diZ, invece, e negativo, l’equazione viene detta di tipo iperbolico. Il prototipo di equazionedi tipo iperbolico e l’equazione delle onde 4f − 1
v2∂2f∂t2 , in cui la matrice Z e la matrice
identica a meno di un elemento, quello di valore − 1v2 , e dunque detZ < 0. Infine se
il determinante di Z e nullo, l’equazione viene detta di tipo parabolico. Il prototipo diequazione parabolica e l’equazione del calore ∂T
∂t − k4T = 0, in cui il coefficiente deltermine ∂2T
∂t2 e nullo (tale termine non compare), e dunque la matrice Z e singolare.18Se a un dato istante spostiamo un poco una delle due masse, immediatamente cambia
tutto il campo.19Dati iniziali che dovranno essere la metrica, ma inevitabilmente anche le sue derivate,
visto che le equazioni di Einstein sono alle derivate seconde.20Si pensi, per analogia, all’equazione delle onde di D’Alembert, che e di tipo iperbolico.

11.3. EQUAZIONI IN PRESENZA DI MATERIA 283
11.3 Equazioni in presenza di materia
11.3.1 Intervento di massa ed energia
Veniamo ora alle equazioni in presenza di materia21. Si tratta ora di divinarela forma del termine noto, che deve essere legato alla distribuzione di massaed energia. Nel caso newtoniano, c’e una proporzionalita tra il laplaciano delpotenziale e la densita di massa:
4Φ = 4πGρ.
Ora abbiamo sostituito il laplaciano con un tensore doppio simmetricoRic(g), quindi anche ρ deve essere sostituito da un tensore doppio simmetrico.La meccanica dei corpi celesti e dei fluidi22 e l’elettromagnetismo mostranoche il bilancio energetico deve essere associato al bilancio della quantita dimoto e descritto da un complesso di quattro equazioni (tre per la quantitadi moto, una per l’energia) aventi la forma trovata con la (9.84)
divT =d ~K
dV0
,
dove T e un tensore doppio simmetrico che abbiamo chiamato tensore energia-
momento del sistema e d ~KdV0
e la densita per unita di volume proprio della4-forza che l’ambiente esterno esercita sul sistema considerato (v. sezione 9.7per il caso dell’elettromagnetismo).
Per un sistema isolato (come e l’universo) deve dunque essere
divT = 0, (11.30)
equazione che in relativita generale si traduce nel vincolo
∇jTjk = 0, (11.31)
dove il simbolo ∇jkl e il simbolo di derivazione covariante tensoriale23 definito
come segue.
21Ribadiamo che materia e sempre inteso nel senso relativistico di massa ed energia.22Meccanica che non abbiamo visto in questa sede ne nella sua formulazione classica ne
nella sua versione relativistica.23Si noti che, quando avevamo scritto esplicitamente divT , avevamo utilizzato le derivate
parziali ordinarie, cioe avevamo scritto che
divT = T jk,j
ove la virgola prima della j covariante e una notazione tensoriale diffusa che sta ad indicarela cosiddetta “comma derivative” (letteralmente: “derivata con la virgola”). Il passaggio

284 LEZIONE 11. EQUAZIONI DI EINSTEIN
11.3.2 Derivata covariante di un tensore
Di un tensore doppio, infatti, possiamo anche definire la derivata covariante,introducendo assiomi aggiuntivi (come ad esempio l’assioma che imponealla derivata di commutare con l’operazione di contrazione degli indici) eil risultato sara ancora un tensore doppio
∇~vT,
le cui componenti sono date da
(∇~vT )lm = vj
(∂T lm
∂xj+ Γl
sjTsm + Γm
sjTls
), (11.32)
dove la prima parte e la derivata direzionale usuale e i termini con i simbolidi Christoffel sono quelli legati alla curvatura dello spaziotempo.
Questo nuovo tensore e ancora una funzione lineare del vettore ~v: pos-siamo indicare i coefficienti di questa combinazione, cioe i termini tra paren-tesi della (11.32), con∇kT
lm, o piu in generale, gli operatori che restituisconoi termini in parentesi con ∇lm
k . Si noti che i ∇kTlm non dipendono affatto
dal vettore ~v lungo cui si sta derivando, dipendono unicamente dalle derivateparziali delle componenti del tensore. Ognuna dei ∇kT
lm e la componente(l,m) della derivata del tensore T rispetto a xk (definita come sopra).
Per tale ente si suole utilizzare, nei libri di relativita, anche la notazionecon il punto e virgola
T lm;k ,
cioe
∇kTlm ≡ T lm
;k =∂T lm
∂xk+ Γl
skTsm + Γm
skTls (11.33)
L’insieme dei ∇kTlm ≡ T lm
;k e un ente a tre indici (un tensore triplo) dettodifferenziale covariante del tensore doppio T e indicato usualmente con lanotazione∇T . Possiamo vederlo come un applicazione che prende in ingresso
dalla Relativita Ristretta alla Relativita Generale, abbiamo detto, va di pari passo conla (naturale) sostituzione delle derivate covarianti alle derivate ordinarie, e quindi con lasostituzione alla comma derivative della “semicolon derivative” (letteralmente: “derivatacon il punto e virgola”), e dunque d’ora in poi assumeremo che la divergenza sia calcolatacon le derivate covarianti, cioe che
divT = T jk;j .
Se dalla Relativita Speciale sapevamo che T jk,j = 0, ora stiamo generalizzando
ragionevolmente, assumendo che T jk;j = 0.

11.3. EQUAZIONI IN PRESENZA DI MATERIA 285
due elementi del duale e un vettore, e restituisce la derivata covariante deltensore T lungo ~v; in simboli:24
∇T (·, ·, ~v) = ∇~vT (·, ·). (11.34)
11.3.3 Modifica delle equazioni nel vuoto
La prima idea potrebbe essere quella di sostituire alle equazioni di moto nelvuoto
Rjk = 0
le equazioni nella materiaRjk = kT jk. (11.35)
In questa estensione c’e pero un difetto: infatti mentre il secondo membrodella (11.35) e a divergenza nulla (per quanto detto prima sull’universo comesistema isolato), il primo membro verifica
∇jRjk 6= 0.
Per vederlo partiamo dall’identita di Bianchi sulle componenti del tensoredi Riemann
Rijhk;r +Rijrh;k +Rijkr;h = 0. (11.36)
Innalzando la i con la metrica abbiamo
Rijhk;r +Ri
jrh;k +Rijkr;h = 0,
o anche, per l’antisimmetria del tensore di Riemann,
Rijhk;r −Ri
jhr;k +Rijkr;h = 0,
contraendo gli indici i e h (ricordando che la derivazione covariante tensorialecommuta con l’operazione di contrazione degli indici) si ha
Rjk;r −Rjh;k +Rijkr;i = 0,
quindi innalzando l’indice j
Rjk;r −R
jh;k +Rij
kr;i = 0,
o anche per l’antisimmetria del tensore di Riemann
Rjk;r −R
jh;k −R
jikr;i = 0,
24Per una trattazione piu accurata del calcolo tensoriale relativistico si confrontino icapitoli 5 e 6 di [11].

286 LEZIONE 11. EQUAZIONI DI EINSTEIN
e contraendo ancora j e k, denotanco con Rkk = R la traccia del tensore di
Ricci in forma mista, detta curvatura scalare, si ha
R;r −Rjh;j −R
ir;i = 0,
cioeR;r − 2Ri
r;i = 0. (11.37)
Le identita (11.37) sono dette identita di Bianchi contratte, e mo-strano che la divergenza del tensore di Ricci
∇iRir = Ri
r;i =1
2R;r (11.38)
e una quantita in generale diversa da zero.La situazione e simile a quella incontrata da Maxwell nell’elettroma-
gnetismo, passando da un regime stazionario al regime variabile del campomagnetico. L’equazione di Ampere
rot ~H = ~j
che descrive il campo magnetico quando ~j e stazionario (cioe ha divergenzanulla), non e piu valido nel caso variabile, in cui div~j 6= 0, essendo
div~j +∂ρ
∂t= 0
per l’equazione di continuita (conservazione della carica).25 Invece la diver-genza del primo membro e identicamente nulla:
div rot ~H = 0.
Per risolvere il problema, Maxwell ha introdotto la coorente di sposta-mento, modificando l’equazione di Ampere in
rot ~H − ∂yD
∂t= ~j.
In questo modo l’equazione diventa compatibile con la legge di conservazionedella carica.
Perche abbiamo sottolineato questo fatto? Perche l’idea e, per analogia, dimodificare le equazioni di Einstein nel vuoto in modo da renderle compatibili
25Non e la divergenza di ~j a essere nulla, e la divergenza della corrente vista come4-vettore spaziotemporale ad esserlo, o come abbiamo visto nel nostro formalismo, e ildifferenziale della 3-forma J delle sorgenti ad annullarsi.

11.3. EQUAZIONI IN PRESENZA DI MATERIA 287
con la legge di conservazione dell’energia e della quantita di moto tradottada
divT = 0,
cioe, in componenti,
∇jTjk = 0.
Dato che, per quanto detto prima, T deve apparire nella formula, ci sideve chiedere, quindi, quale sia un tensore doppio simmetrico, costruito conla metrica e le sue derivate, che sia anche a divergenza nulla.
11.3.4 Il tensore di Einstein
Un esempio semplice potrebbe la metrica stessa: gli elementi gjk del tensoremetrico verificano infatti
∇lgjk = 0, (11.39)
relazione che esprime la metricita della connessione ed implica l’annullarsidella divergenza del tensore metrico. Questo tensore chiaramente non fa alcaso nostro, poiche in esso non compaiono le derivate della metrica. Inoltrela metrica non si annulla affatto su una varieta piatta, fatto che per noie indispensabile, poiche vogliamo che, in assenza di materia, le equazioniritornino ad essere omogenee del tipo
Rjk = 0.
Riunendo tutte le idee, vorremmo cercare un tensore:
(i) che si annulli quando la connessione e piatta26;
(ii) che sia costruito solo a partire dal tensore metrico e dalle sue derivate(dovra comparire da qualche parte il tensore di curvatura di Riemann);
(iii) che sia lineare nel tensore di curvatura di Riemann;
(iv) che sia a divergenza nulla (deve essere eguagliato infatti a un multiplotensore energia-momento T ).
La condizione (i) nasce da esigenze di compatibilita con la Relativita Ri-stretta, la condizione (iv) e un vincolo prettamente matematico, la condizione
26Incidentalmente, questo implica che, tra le soluzioni dell’equazione nel vuoto, ci siaanche lo spaziotempo di Minkowski.

288 LEZIONE 11. EQUAZIONI DI EINSTEIN
(ii) e quella che ci garantisce l’intrinsecita del tensore27, la condizione (iii)nasce invece da un’esigenza di semplicita.
Le identita di Bianchi contratte (11.37) ci suggeriscono pero un secondoesempio. Infatti, notiamo che esse possono essere riscritte nella forma
Rir;i −
1
2R;r =
(Ri
r −1
2δirR
);i
= 0, (11.40)
da cui, innalzando l’indice r con la metrica,(Rik − 1
2gikR
);i
= 0. (11.41)
L’equazione (11.41) ci dice esattamente che il tensore
Gik = Rik − 1
2Rgik (11.42)
ha divergenza nulla. Tale tensore28 e noto con il nome di tensore di Ein-stein.
E chiaro quindi che tale tensore soddisfa a tutte le proprieta richieste(i), (ii), (iii) e (iv); si puo dimostrare che e l’unico tensore che soddisfacontemporaneamente a tali proprieta.
Con questo tensore, le equazioni di Einstein nella materia dovranno esserescritte nella forma
Gjk = kT jk,
cioe
Rjk − 1
2Rgjk = kT jk. (11.43)
Le equazioni di campo einsteiniane devono ridursi alle leggi di gravitanewtoniane nel limite classico di un campo debole e velocita basse. Mediantequesta analogia si calcola che la costante k vale 8πG
c4, da cui le equazioni di
Einstein per il campo gravitazionale diventano
Rjk − 1
2Rgjk =
8πG
c4T jk. (11.44)
27Lo spaziotempo non e un’entita immersa in un qualche spazio euclideo: per questotutta la teoria deve essere intrinseca, e per questo il Teorema Egregium di Gauss (chestabilisce che la curvatura gaussiana K e una grandezza intrinseca, poiche si calcola solomediante la metrica, ovvero la prima forma) e cosı importante per la fisica della RelativitaGenerale.
28Ricordiamo che R = Rii e la traccia del tensore di Ricci, cioe la cosiddetta curvatura
scalare.

11.3. EQUAZIONI IN PRESENZA DI MATERIA 289
11.3.5 Compatibilita con il caso del vuoto
Si potrebbe obiettare che avendo sostituito le equazioni di Einstein all’an-nullarsi del tensore di Ricci, bisogni anche modificare le equazioni nel vuoto,rovinando cosı l’analogia mostrata nello schema in figura 11.6. Non e que-sto il caso, poiche le nuove equazioni nel caso del vuoto (in cui T jk = 0identicamente) sono
Rjk − 1
2Rgjk = 0, (11.45)
equazioni del tutto equivalenti alle equazioni di Ricci
Ric(g) = 0.
Se e infatti vero che Ric(g) = 0, cioe che Rjk = 0, allora R = Rjj = 0, e
le equazioni (11.45) sono verificate, poiche si riducono a Rjk = 0 (fatto chestiamo supponendo vero per ipotesi).
Supponiamo invece che le equazioni (11.45) siano verificate. Mettendo le(11.45) in forma mista, abbassando un indice con la metrica e notando che29
gjk = δj
k, troviamo
Rjk −
1
2Rgj
k = 0
Rjk −
1
2Rδj
k = 0
e prendendo la traccia da ambo i membri si ha che
Rjj −
1
2Rδj
j = 0
R− 1
2R · 4 = 0
R− 2R = 0
e dunque in definitivaR = 0,
e inserendo tale informazione ancora nelle (11.45) riotteniamo le equazionidi Ricci Rjk = 0, cioe
Ric(g) = 0.
In altre parole, abbiamo verificato la compatibilita delle equazioni diEinstein con la richiesta (i) di pag. 287.
29Infatti per portare il tensore metrico in forma mista sostanzialmente lo moltiplichiamoper il suo inverso, ottenendo l’identita.

290 LEZIONE 11. EQUAZIONI DI EINSTEIN
11.3.6 L’intervento della costante cosmologica
Le prime semplici soluzioni cosmologiche (trovate da Friedmann) delle equa-zioni di Einstein (11.44) avevano un andamento dinamico, rappresentavanocioe un universo in via d’espansione; contrastando cio con la credenza dell’e-poca (di retaggio newtoniano) di un universo statico e immutabile, Einsteinmodifico le equazioni aggiungendo un altro termine a divergenza nulla χgjk,dove χ e una costante, detta costante cosmologica, da calibrare opportu-namente per avere soluzioni cosmologiche statiche. Le equazioni di Einsteindiventano, con questa correzione,
Rjk − 1
2Rgjk − χgjk =
8πG
c4T jk, (11.46)
che sono piu generali delle (11.44), poiche queste ultime vengono riottenuteper χ = 0.
Tuttavia questa nuova forma (11.46) non rispetta l’esigenza precedente-mente espressa dalla proprieta (i) di pag. 287: in sostanza, per R = 0 nonriotteniamo le equazioni trovate in assenza di materia. O, in altri termini,nell’equazione (11.46), il tensore al primo membro non si annulla quando laconnessione e piatta (poiche banalmente non si annulla il tensore metrico).
Tredici anni dopo la scrittura di tale equazione da parte di Einstein, lascoperta fatta da Hubble del red-shift dello spettro luminoso delle galassieveniva interpretata come una prova dell’espansione dell’universo, e quindicome una sorta di conferma sperimentale dell’equazione (11.44) piuttosto chedella sua correzione con il termine cosmologico, che quindi fu abbandonato30.Attualmente, dalle osservazioni, si deduce che la costante cosmologica, se none nulla, e comunque molto piccola, e dunque vengono usualmente prese comeequazioni di campo le (11.44).31
30Einstein descrivera infatti la costante cosmologica come il piu grande errore della suavita.
31Le (11.46) sono state in tempi recenti riutilizzate per tener conto del contributo allagravita dato dall’energia quantistica del vuoto; in questo caso tuttavia il termine χgjk
viene pero interpretato come un contributo al tensore energia-momento T piuttosto cheun termine cosmologico alla maniera einsteiniana.

Lezione 12
Soluzione di Schwarzschild
La soluzione di Schwarzschild (datata 1916) e la prima soluzione esatta1 delleequazioni di Einstein nel caso del vuoto, che, come sappiamo, possono esserescritte in forma equivalente come
Rjk = 0, Rjk = 0, Rjk = 0
abbassando o innalzando gli indici con il tensore metrico.
12.1 Soluzione delle equazioni
Si ammette innanzitutto che tali equazioni rappresentino il campo gravita-zionale esterno ad un pianeta sferico, non ruotante e di carica nulla.2
Si ammette, cioe, che un satellite (o una cometa) si muova attorno alpianeta in modo tale che la sua linea di universo sia una geodetica del ge-nere tempo della metrica soluzione, mentre analogamente un raggio luminosopercorrera una geodetica del genere luce3.
L’incognita delle equazioni di Einstein nel vuoto e naturalmente la me-trica4, cioe 10 funzioni in 4 variabili: in questa situazione, chiaramente, ilproblema e proibitivo. L’idea e dunque quella di cercare la soluzione in una
1In merito, Karl Schwarzschild dira, dopo aver trovato la soluzione, che “e semprepiacevole valersi di soluzioni esatte in forma semplice”. (“Es ist immer angenehm, uberstrenge Losungen einfacher Form zu verfugen.”)
2In particolare le soluzioni descriveranno solo il campo all’esterno del pianeta, dalmomento che le equazioni da risolvere sono le equazioni di Einstein nel vuoto.
3Quest’ultima condizione, in particolare, forzera un incurvamento dei segnali luminosi,al pari dell’incurvamento delle orbite dei pianeti.
4Sostanzialmente tali equazioni legano la materia alla geometria dello spazio: risolverlesignifica capire in che modo la materia influenzi tale geometria, la quale e completamentefissata a partire dal tensore metrico.
291

292 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Figura 12.1: Coordinate sferiche nello spazio euclideo.
classe particolare, che si congettura rappresenti bene le proprieta di simmetriadel sistema fisico. Per individuare tale classe, conviene passare a coordinatesferiche.
12.1.1 Metrica di Minkowski in coordinate sferiche
Partiamo dalla situazione di assenza di gravita (o di gravita trascurabile),situazione che si realizza a grande distanza dal pianeta. Qui, dunque, lametrica deve essere quella di Minkowski:
ds2 = −c2dt2 + dx2 + dy2 + dz2. (12.1)
Poiche le piattaforme spaziali sono spazi semieuclidei, ha senso introdurreivi delle coordinate sferiche, ponendo
x = r sin θ cosϕy = r sin θ sinϕz = r cos θ
(12.2)
con le quali la metrica minkowskiana assume la forma di5
ds2 = −c2dt2 + dr2 + r2(dθ2 + sin2 θdϕ2). (12.3)
5Naturalmente questa nuova forma della metrica e sempre una metrica piatta, poichee sempre la metrica di Minkowski, solamente abbiamo cambiato coordinate. E immediato

12.1. SOLUZIONE DELLE EQUAZIONI 293
12.1.2 Introduzione del pianeta
La presenza del pianeta perturba la metrica di Minkowski (il campo gravita-zionale non sara piu nullo, la metrica non sara piu piatta). Tuttavia, per leipotesi di sfericita e di staticita6, possiamo ragionevolmente ammettere chela metrica deformata preservi la simmetria sferica della metrica di Minkowskinelle coordinate θ e ϕ.
Congetturiamo quindi che la soluzione (cioe la metrica) sia all’internodella classe delle piu semplici perturbazioni di questo tipo7, cioe sia del tipo
ds2 = −A(r)dt2 +B(r)dr2 + r2(dθ2 + sin2 θdϕ2), (12.4)
che rappresenta una ragionevole perturbazione sferica della metrica Minko-skiana in coordinate sferiche (12.3).8
Si presti bene attenzione a un fatto fondamentale: poiche la geometriadello spaziotempo fisico M non e piu la geometria dello spaziotempo di Min-kowski, non bisogna necessariamente pensare che i simboli (t, r, θ, ϕ) dellecoordinate abbiano ancora il significato di coordinate sferiche, associate cioea un ben preciso processo di misura della geometria euclidea. Esse sono atutti gli effetti coordinate sullo spaziotempo M , ma, benche continuiamoa usare gli stessi simboli, non possiamo piu dire che r sia il raggio, θ e ϕgli angoli e neppure che t sia il tempo. Vedremo meglio questa particolaresituazione alla sezione 12.3.2.
Possiamo inoltre formulare l’ipotesi aggiuntivalim
r→+∞A(r) = c2
limr→+∞
B(r) = 1(12.5)
corrispondente all’intuizione fisica che, a grande distanza dal pianeta, la gra-vita sia trascurabile, cosicche lo spaziotempo deve diventare minkowskianoe dunque la metrica deve tendere a µij per r → +∞ (metriche di questotipo saranno dette “asintoticamente piatte”). Possiamo percio ben dire chele coordinate (t, r, θ, ϕ) hanno il significato di coordinate sferiche non sul-l’intero spaziotempo M , ma solo per un osservatore a grande distanza dalpianeta (o per un osservatore all’infinito).
vedere che la nuova metrica ha questa forma, poiche la parte temporale non viene toccatadalla trasformazione (12.2) e per la parte spaziale si ha un normale passaggio a coordinatesferiche.
6Infatti abbiamo supposto che il pianeta non ruoti.7In un certo senso seguiamo un criterio fisico di semplicita: si tenga presente che tutte
queste affermazioni sono congetture fisiche, e non necessita matematiche.8Infatti la perturbazione dipende solo dal raggio, e non dalle componenti angolari o
temporale. Le componenti angolari, inoltre, proprio non vengono perturbate.

294 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Limitandoci alle metriche della forma (12.4), abbiamo ridotto le incogniteda 10 funzioni in 4 variabili a 2 funzioni in 2 variabili, con una notevolesemplificazione del problema che, in questa veste, puo essere risolto.
12.1.3 I simboli di Christoffel con la lagrangiana
Il primo passo e calcolare, a partire da (12.4) i simboli di Christoffel. Il modopiu rapido per farlo e notare che essi sono i coefficienti che compaiono nelleequazioni delle geodetiche
xj + Γjhkx
jxk = 0, (12.6)
dove il punto indica la derivata rispetto al tempo proprio τ .
Equazioni di Lagrange e geodetiche
Naturalmente possiamo interpretare le equazioni delle geodetiche come tra-iettorie di particelle che si muovono in assenza di forze.
Definendo formalmente la lagrangiana L come
L(u, u) =1
2v2 =
1
2gjkx
jxk (12.7)
possiamo scrivere le equazioni di Lagrange per la coordinata xk:
d
dt
∂L
∂xk− ∂L
∂xk= 0. (12.8)
Si ha che∂L
∂xk= gjkx
j,∂L
∂xk=
1
2
∂glj
∂xkxlxj
e inoltre
d
dt
∂L
∂xk= gjkx
j +dgjk
dtxj = gjkx
j +∂gjk
∂xlxlxj = gjkx
j +1
2
∂gjk
∂xlxlxj +
1
2
∂glk
∂xjxjxl,
dove l’ultima uguaglianza vale per la scissione della sommatoria e lo scambiodi indici tra l e j.
Le equazioni di Lagrange dunque diventano:
gjkxj +
1
2
(∂gjk
∂xl+∂glk
∂xj+∂glj
∂xk
)xlxj = 0.
Moltiplicando ambo i membri per ghk, possiamo ricondurre tali equazioniin forma normale9:
ghkgjkxj +
1
2ghk(∂gjk
∂xl+∂glk
∂xj+∂glj
∂xk
)xlxj = 0
9Ovvero facendo in modo che il coefficiente della derivata di grado massimo sia 1.

12.1. SOLUZIONE DELLE EQUAZIONI 295
cioe, dato che ghkgkj = δhj e il prodotto righe per colonne del tensore metrico
con il suo inverso, ovvero l’identita, abbiamo che
δhj x
j +1
2ghk
(∂gjk
∂xl+∂glk
∂xj+∂glj
∂xk
)xlxj = 0
cioe, per la definizione dei simboli di Christoffel,
xh + Γhjlx
lxj = 0 (12.9)
Queste sono dunque le equazioni di Lagrange in forma normale; basta unrapido confronto con le equazioni (12.6) per notare che esse sono le equazionidelle geodetiche.10
Tali equazioni ci forniscono un modo veloce per ricavare i simboli di Chri-stoffel. Basta infatti calcolare L = 1
2v2 nelle coordinate assegnate, scrivere le
equazioni di Lagrange del sistema e risolverle rispetto alle derivate seconde(ossia, metterle in forma normale): i coefficienti dei termini quadratici nellavelocita risultano essere proprio i simboli di Christoffel, prestando attenzioneai termini misti, il cui simbolo di Christoffel e logicamente la meta del coeffi-ciente, dato che i simboli di Christoffel sono simmetrici rispetto allo scambiodei due indici covarianti.
Risoluzione delle equazioni
Utilizzando il formalismo di Lagrange, la lagrangiana nelle coordinate (12.4)ha la forma
L =1
2V 2 =
1
2
(ds
dτ
)=
1
2
ds2
dτ 2=
1
2
(−A(r)t2 +B(r)r2 + r2(θ2 + sin2 θϕ2)
).
(12.10)Scriviamo per ogni coordinata le equazioni di Lagrange:
d
dτ
∂L
∂t− dL
dt= 0
d
dτ
∂L
∂r− dL
dr= 0
d
dτ
∂L
∂θ− dL
dθ= 0
d
dτ
∂L
∂ϕ− dL
dϕ= 0
(12.11)
10Non dovremmo stupircene, pensando al significato fisico della lagrangiana e delleequazioni di Lagrange.

296 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
ovvero (i fattori 12
si semplificano ovunque)
d
dτ(−2A(r)t)− 0 = 0
d
dτ(2B(r)r) + A′(r)t2 −B′(r)r2 − 2r(θ2 + sin2 θϕ2) = 0
d
dτ(2r2θ)− 2r2 sin θ cos θϕ2 = 0
d
dτ(2r2 sin2 θϕ) = 0
(12.12)
con A′(r) e B′(r) derivate rispetto alla coordinata r, da cui, sottointendendoper pulizia di scrittura la dipendenza A = A(r) e B = B(r),
−2A′rt− 2At = 0
2B′r2 + 2Br + A′t2 −B′r2 − 2rθ2 − 2r sin2 θϕ2 = 0
4rrθ + 2r2θ − 2r2 sin θ cos θϕ2 = 0
4rr sin2 θϕ+ 4r2 sin θ cos θθϕ+ 2r2 sin2 θϕ = 0
(12.13)
equazioni che possiamo mettere nella forma normale
t+A′
Art
r +B′
2Br2 +
A′
2Bt2 − r
Bθ2 − r sin2 θ
Bϕ2 = 0
θ +2
rrθ − sin θ cos θϕ2 = 0
ϕ+2
rrϕ+ 2 cot θθϕ
(12.14)
Pensando alla solita naturale associazione t = x0, r = x1, θ = x2, ϕ = x3,per confronto con l’equazione delle geodetiche (12.6) si ricavano i simboli diChristoffel per la metrica (12.4). Le equazioni lagrangiane delle geodetiche,infatti, coordinata per coordinata, si scrivono come11:
t+ Γtttt
2 + 2Γttr tr + 2Γt
tθ tθ + 2Γttϕtϕ+ Γt
rrr2+
+ 2Γtrθrθ + 2Γt
rϕrϕ+ Γtθθθ
2 + 2Γtθϕθϕ+ Γt
ϕϕϕ2 = 0,
11Si ricordi che i fattori 2 sono retaggio della simmetria dei simboli di Christoffel rispettoagli indici covarianti.

12.1. SOLUZIONE DELLE EQUAZIONI 297
r + Γrttt
2 + 2Γrtr tr + 2Γr
tθ tθ + 2Γrtϕtϕ+ Γr
rrr2+
+ 2Γrrθrθ + 2Γr
rϕrϕ+ Γrθθθ
2 + 2Γrθϕθϕ+ Γr
ϕϕϕ2 = 0,
θ + Γθttt
2 + 2Γθtr tr + 2Γθ
tθ tθ + 2Γθtϕtϕ+ Γθ
rrr2+
+ 2Γθrθrθ + 2Γθ
rϕrϕ+ Γθθθθ
2 + 2Γθθϕθϕ+ Γθ
ϕϕϕ2 = 0,
ϕ+ Γϕttt
2 + 2Γϕtr tr + 2Γϕ
tθ tθ + 2Γϕtϕtϕ+ Γϕ
rrr2+
+ 2Γϕrθrθ + 2Γϕ
rϕrϕ+ Γϕθθθ
2 + 2Γϕθϕθϕ+ Γϕ
ϕϕϕ2 = 0,
e confrontando con la (12.14) otteniamo immediatamente che gli unici simbolidi Christoffel non nulli sono:
Γtrt =
A′
2A,
Γrrr =
B′
2B, Γr
tt =A′
2B, Γr
θθ = − rB
, Γrϕϕ = −r sin2 θ
B,
Γθrθ =
1
r, Γθ
ϕϕ = − sin θ cos θ,
Γϕrϕ =
1
r, Γϕ
θϕ = cot θ.
(12.15)
12.1.4 Tensore di Riemann e tensore di Ricci
Ottenuti i simboli di Christoffel, non ci resta che calcolare con pazienza,tabella dei Γi
jk alla mano, le componenti del tensore di Riemann, che sonoper definizione
Rlmjk =
∂Γlmj
∂xk− ∂Γl
mk
∂xj+ Γs
mjΓlsk − Γs
mkΓlsj (12.16)
che e poi serviranno per calcolare il tensore di Ricci
Rmk = Rlmlk = Rt
mtk +Rrmrk +Rθ
mθk +Rϕmϕk. (12.17)
Calcolo delle componenti
Visto che il nostro obiettivo e il tensore di Ricci, conviene scrivere una peruna le sue componenti Rmk esplicitando la contrazione, e quindi calcolare le

298 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
componenti Rlmjk necessarie. Il tensore di Ricci, essendo simmetrico nei due
indici, ha solo dieci componenti indipendenti:
Rtt, Rtr, Rtθ, Rtϕ, Rrr, Rrθ, Rrϕ, Rθθ, Rθϕ, Rϕϕ.
Iniziamo con la prima componente:
Rtt = Rtttt +Rr
trt +Rθtθt +Rϕ
tϕt.
Il termine Rtttt e sicuramente nullo per antisimmetria: il tensore di Riemann
in forma una volta controvariante e tre volte covariante e infatti chiaramenteantisimmetrico rispetto allo scambio degli ultimi due indici covarianti - lo sinota direttamente dalla (12.16). Quanto agli altri termini:
Rrtrt =
∂Γttr
∂t− ∂Γt
tt
∂r+ Γs
trΓrst − Γs
ttΓrsr = 0− 2A′′B − 2A′B′
4B2+
A′2
4AB− A′B′
4B2,
poiche nelle due sommatorie su s gli unici termini che sono non nulli sonoΓt
trΓrtt per la prima e Γr
ttΓrrr per la seconda.
Rθtθt =
∂Γθtθ
∂t− ∂Γθ
tt
∂θ+ Γs
tθΓθst − Γs
ttΓθsθ = 0− 0 + 0− A′
2Br,
poiche nella prima sommatoria su s non si salva alcun termine, mentre nellaseconda si salva solo Γr
ttΓθrθ.
Rϕtϕt =
∂Γϕtϕ
∂t− ∂Γϕ
tt
∂ϕ+ Γs
tϕΓϕst − Γs
ttΓϕsϕ = 0− 0 + 0− A′
2Br,
poiche ancora una volta nella prima sommatoria su s non si salva alcuntermine, mentre nella seconda si salva solo Γr
ttΓϕrϕ. Dunque
Rtt = Rtttt +Rr
trt +Rθtθt +Rϕ
tϕt = −A′′
2B+A′B′
4B+
A′2
4AB− A′
B,
e abbiamo trovato la prima delle dieci componenti indipendenti del tensoredi Ricci.
Procediamo analogamente per le altre:
Rtr = Rtttr +Rr
trr +Rθtθr +Rϕ
tϕr.
Il termine Rrtrr e nullo per antisimmetria. Quanto agli altri termini:
Rtttr =
∂Γttt
∂r− ∂Γt
tr
∂t+ Γs
ttΓtsr − Γs
trΓtst = 0− 0 + 0− 0 = 0,

12.1. SOLUZIONE DELLE EQUAZIONI 299
dove la seconda derivata e nulla non perche Γttr sia nullo, ma perche non
dipende da t (A e B dipendono solo da r, e cosı le loro derivate). E anche
Rθtθr =
∂Γθtθ
∂r− ∂Γθ
tr
∂θ+ Γs
tθΓθsr − Γs
trΓθsθ = 0− 0 + 0− 0 = 0,
Rϕtϕr =
∂Γϕtϕ
∂r− ∂Γϕ
tr
∂ϕ+ Γs
tϕΓϕsr − Γs
trΓϕsϕ = 0− 0 + 0− 0 = 0,
da cuiRtr = Rt
ttr +Rrtrr +Rθ
tθr +Rϕtϕr = 0.
Andiamo avanti con la terza componente:
Rtθ = Rtttθ +Rr
trθ +Rθtθθ +Rϕ
tϕθ.
Il termine Rθtθθ e nullo per antisimmetria. Quanto agli altri termini:
Rtttθ =
∂Γttt
∂θ− ∂Γt
tθ
∂t+ Γs
ttΓtsθ − Γs
tθΓtst = 0− 0 + 0− 0 = 0,
Rrtrθ =
∂Γrtr
∂θ− ∂Γr
tθ
∂r+ Γs
trΓrsθ − Γs
tθΓrsr = 0− 0 + 0− 0 = 0,
Rϕtϕθ =
∂Γϕtϕ
∂θ− ∂Γϕ
tθ
∂ϕ+ Γs
tϕΓϕsθ − Γs
tθΓϕsϕ = 0− 0 + 0− 0 = 0,
da cuiRtθ = Rt
ttθ +Rrtrθ +Rθ
tθθ +Rϕtϕθ = 0.
La quarta componente:
Rtϕ = Rtttϕ +Rr
trϕ +Rθtθϕ +Rϕ
tϕϕ.
Il termine Rϕtϕϕ e nullo per antisimmetria. Quanto agli altri termini:
Rtttϕ =
∂Γttt
∂ϕ−∂Γt
tϕ
∂t+ Γs
ttΓtsϕ − Γs
tϕΓtst = 0− 0 + 0− 0 = 0,
Rrtrϕ =
∂Γrtr
∂ϕ−∂Γr
tϕ
∂r+ Γs
trΓrsϕ − Γs
tϕΓrsr = 0− 0 + 0− 0 = 0,
Rθtθϕ =
∂Γθtθ
∂ϕ−∂Γθ
tϕ
∂θ+ Γs
tθΓθsϕ − Γs
tϕΓθsθ = 0− 0 + 0− 0 = 0,
da cuiRtϕ = Rt
ttϕ +Rrtrϕ +Rθ
tθϕ +Rϕtϕϕ = 0.

300 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
La quinta componente:
Rrr = Rtrtr +Rr
rrr +Rθrθr +Rϕ
rϕr.
Il termine Rrrrr e nullo per antisimmetria. Quanto agli altri termini:
Rtrtr =
∂Γtrt
∂r− ∂Γt
rr
∂t+ Γs
rtΓtsr − Γs
rrΓtst =
2A′′A− 2A′2
4A2− 0 +
A′2
4A2− A′B′
4AB,
Rθrθr =
∂Γθrθ
∂r− ∂Γθ
rr
∂θ+ Γs
rθΓθsr − Γs
rrΓθsθ = − 1
r2+ 0 +
1
r2− B′
2rB,
Rϕrϕr =
∂Γϕrϕ
∂r− ∂Γϕ
rr
∂ϕ+ Γs
rϕΓϕsr − Γs
rrΓϕsϕ = − 1
r2+ 0 +
1
r2− B′
2rB,
da cui
Rrr = Rtrtr +Rr
rrr +Rθrθr +Rϕ
rϕr =A′′
2A− A′B′
4AB− A′2
4A2− B′
rB.
La sesta componente:
Rrθ = Rtrtθ +Rr
rrθ +Rθrθθ +Rϕ
rϕθ.
Il termine Rθrθθ e nullo per antisimmetria. Quanto agli altri termini:
Rtrtθ =
∂Γtrt
∂θ− ∂Γt
rθ
∂t+ Γs
rtΓtsθ − Γs
rθΓtst = 0− 0 + 0− 0 = 0,
Rrrrθ =
∂Γrrr
∂θ− ∂Γr
rθ
∂r+ Γs
rrΓrsθ − Γs
rθΓrsr = 0− 0 + 0− 0 = 0,
Rϕrϕθ =
∂Γϕrϕ
∂θ− ∂Γϕ
rθ
∂ϕ+ Γs
rϕΓϕsθ − Γs
rθΓϕsϕ = 0− 0 +
cot θ
r− cot θ
r= 0,
da cuiRrθ = Rt
rtθ +Rrrrθ +Rθ
rθθ +Rϕrϕθ = 0.
La settima componente:
Rrϕ = Rtrtϕ +Rr
rrϕ +Rθrθϕ +Rϕ
rϕϕ.
Il termine Rϕrϕϕ e nullo per antisimmetria. Quanto agli altri termini:
Rtrtϕ =
∂Γtrt
∂ϕ−∂Γt
rϕ
∂t+ Γs
rtΓtsϕ − Γs
rϕΓtst = 0− 0 + 0− 0 = 0,
Rrrrϕ =
∂Γrrr
∂ϕ−∂Γr
rϕ
∂r+ Γs
rrΓrsϕ − Γs
rϕΓrsr = 0− 0 + 0− 0 = 0,

12.1. SOLUZIONE DELLE EQUAZIONI 301
Rθrθϕ =
∂Γθrθ
∂ϕ−∂Γθ
rϕ
∂θ+ Γs
rθΓθsϕ − Γs
rϕΓθsθ = 0− 0 + 0− 0,
da cuiRrϕ = Rt
rtϕ +Rrrrϕ +Rθ
rθϕ +Rϕrϕϕ = 0.
L’ottava componente:
Rθθ = Rtθtθ +Rr
θrθ +Rθθθθ +Rϕ
θϕθ.
Il termine Rθθθθ e nullo per antisimmetria. Quanto agli altri termini:
Rtθtθ =
∂Γtθt
∂θ− ∂Γt
θθ
∂t+ Γs
θtΓtsθ − Γs
θθΓtst = 0− 0 + 0 +
A′r
2AB
Rrθrθ =
∂Γrθr
∂θ− ∂Γr
θθ
∂r+ Γs
θrΓrsθ − Γs
θθΓrsr = 0 +
B −B′r
B2− 1
B+B′r
2B2= −B
′r
2B2
poiche
∂Γrθθ
∂r=
d
dr
(− rB
)= − d
dr
r
B= −B − rB
′
B2= − 1
B+B′r
B2,
e infine
Rϕθϕθ =
∂Γϕθϕ
∂θ− ∂Γϕ
θθ
∂ϕ+ Γs
θϕΓϕsθ − Γs
θθΓϕsϕ = − 1
sin2 θ− 0 +
(1
sin2 θ− 1
)+
1
B
in quanto
dΓϕθϕ
dθ=d cot θ
dθ=
d
dθ
cos θ
sin θ=− cos2 θ − sin2 θ
sin2 θ= − 1
sin2 θ
e
ΓsθϕΓϕ
sθ = ΓϕθϕΓϕϕθ = cot2 θ =
cos2 θ
sin2 θ=
cos2 θ + sin2 θ − sin2 θ
sin2 θ=
1
sin2 θ− 1,
e dunque
Rθθ = Rtθtθ +Rr
θrθ +Rθθθθ +Rϕ
θϕθ =A′r
2AB− B′r
2B2+
1
B− 1.
La nona componente:
Rθϕ = Rtθtϕ +Rr
θrϕ +Rθθθϕ +Rϕ
θϕϕ.
Il termine Rϕθϕϕ e nullo per antisimmetria. Quanto agli altri termini:
Rtθtϕ =
∂Γtθt
∂ϕ−∂Γt
θϕ
∂t+ Γs
θtΓtsϕ − Γs
θϕΓtst = 0− 0 + 0− 0,

302 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Rrθrϕ =
∂Γrθr
∂ϕ−∂Γr
θϕ
∂r+ Γs
θrΓrsϕ − Γs
θϕΓrsr = 0− 0 + 0− 0,
Rθθθϕ =
∂Γθθθ
∂ϕ−∂Γθ
θϕ
∂θ+ Γs
θθΓθsϕ − Γs
θϕΓθsθ = 0− 0 + 0− 0,
da cui
Rθϕ = Rtθtϕ +Rr
θrϕ +Rθθθϕ +Rϕ
θϕϕ = 0.
L’ultima componente:
Rϕϕ = Rtϕtϕ +Rr
ϕrϕ +Rθϕθϕ +Rϕ
ϕϕϕ.
Il termine Rϕϕϕϕ e nullo per antisimmetria. Quanto agli altri termini:
Rtϕtϕ =
∂Γtϕt
∂ϕ−∂Γt
ϕϕ
∂t+ Γs
ϕtΓtsϕ − Γs
ϕϕΓtst = 0− 0 + 0 +
A′r sin2 θ
2AB,
Rrϕrϕ =
∂Γrϕr
∂ϕ−∂Γr
ϕϕ
∂r+ Γs
ϕrΓrsϕ − Γs
ϕϕΓrsr = 0 +
sin2 θ
B− sin2 θ
B+B′r sin2 θ
2B2,
Rθϕθϕ =
∂Γθϕθ
∂ϕ−∂Γθ
ϕϕ
∂θ+Γs
ϕθΓθsϕ−Γs
ϕϕΓθsθ = 0−(sin2 θ−cos2 θ)−cos2 θ+
sin2 θ
B,
da cui
Rϕϕ = Rtϕtϕ +Rr
ϕrϕ +Rθϕθϕ +Rϕ
ϕϕϕ =A′r sin2 θ
2AB+B′r sin2 θ
2B2+
sin2 θ
B− sin2 θ.
Notiamo che il tensore di Ricci Rmk e puramente diagonale, cioe gli unicielementi non nulli sono quelli del tipo Rii.
12.1.5 Tensore di Ricci in forma mista
Infine si puo passare alla forma mista del tensore di Ricci innalzando unindice con la metrica12
Rmk = gmsRsk, (12.18)
forma che permettera di notare meglio alcune relazioni tra le componenti deltensore.
12Indifferentemente si poteva innalzare prima un indice di Riemann, passando al tensoredi Riemann due volte covariante e due volte controvariante.

12.1. SOLUZIONE DELLE EQUAZIONI 303
Visto che il tensore di Ricci Rmk e gia in forma diagonale, e visto che lametrica e in forma diagonale, e immediato che anche Rm
k sara non nullo soloper m = k. In particolare, dato che il tensore metrico e
gjk =
−A 0 0 00 B 0 00 0 r2 00 0 0 r2 sin2 θ
,
la sua inversa e (tensore metrico in forma controvariante)
gjk =
− 1
A0 0 0
0 1B
0 00 0 1
r2 00 0 0 1
r2 sin2 θ
e gli unici valori non nulli di Rm
k sono:
Rtt = gtsRst = gttRtt = − 1
ARtt =
A′′
2AB− A′B′
4AB2− A′2
4A2B+
A′
rAB,
Rrr = grsRsr = grrRrr =
1
BRrr =
A′′
2AB− A′B′
4AB2− A′2
4A2B− B′
rB2,
Rθθ = gθsRsθ = gθθRθθ = − 1
r2Rθθ =
A′
2rAB− B′
2rB2− B − 1
r2B,
Rϕϕ = gϕsRsϕ = gϕϕRϕϕ = − 1
r2 sin2 θRϕϕ =
A′
2rAB− B′
2rB2− B − 1
r2B.
Riassumendo le componenti non nulle di Rmk :
Rtt =
A′′
2AB− A′B′
4AB2− A′2
4A2B+
A′
rAB
Rrr =
A′′
2AB− A′B′
4AB2− A′2
4A2B− B′
rB2
Rθθ = Rϕ
ϕ =A′
2rAB− B′
2rB2− B − 1
r2B
(12.19)
Notiamo nuovamente che il tensore Rmk continua ad essere solo diagonale;
cio che si e aggiunto e che due delle sue componenti sono uguali. Cio significache per la metrica (12.4) le 10 equazioni di Einstein si riducono a 3 equazioni.
Inoltre, per effetto del vincolo sul tensore di Ricci dato dalle identitadi Bianchi contratte (11.37), queste tre equazioni non sono nemmeno indi-pendenti, e dunque si riducono a due. Ricapitolando, avevamo 2 funzioniincognite e abbiamo 2 equazioni che le definiscono: possiamo risolvere ilproblema.13
13Altrimenti avremmo dovuto estendere la classe di funzioni in cui cercare la soluzione.

304 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
12.1.6 Risoluzione delle equazioni di Ricci
Le equazioni di Ricci (equazioni di Einstein nel vuoto) sono dunque
A′′
2AB− A′B′
4AB2− A′2
4A2B+
A′
rAB= 0
A′′
2AB− A′B′
4AB2− A′2
4A2B− B′
rB2= 0
A′
2rAB− B′
2rB2− B − 1
r2B= 0
(12.20)
cioe un sistema di equazioni differenziali ordinarie: benche il sistema sembritemibile, combinando opportunamente le equazioni riusciamo a separare leincognite.
Per le equazioni di Ricci deve sussistere che
Rtt −Rr
r −Rθθ −Rϕ
ϕ = 0, (12.21)
cioe che
2B′
rB2+ 2
B − 1
r2B= 0, (12.22)
equazione differenziale ordinaria che si risolve per separazione di variabili.Semplificando la scrittura si trova
rB′ = B(1−B),
da cuidB
B(1−B)=dr
r.
Dato che1
B(1−B)=
1
B+
1−B,
si ha ∫1
BdB −
∫−1
1−BdB =
∫1
rdr
e dunque
lnB − ln(1−B) = ln r + C,
con C costante arbitraria, oppure
lnB
1−B= ln r + C,

12.1. SOLUZIONE DELLE EQUAZIONI 305
e passando agli esponenziali
B
1−B= −r
a, (12.23)
dove abbiamo riscritto la costante arbitraria nella forma
−1
a= eC
la cui particolarmente importanza sara chiara in seguito.Dalla (12.23) si ricava facilmente
aB = −r(1−B) = −r + rB,
cioeB(r − a) = r
e dunque
B(r) =r
r − a=
1
1− ar
. (12.24)
Dopodiche notiamo che, sempre per le equazioni di Ricci,
Rtt −Rr
r = 0, (12.25)
cioe cheA
rAB+
B
rB2= 0, (12.26)
il che implica cheA′B + AB′ = (AB)′ = 0,
cioe che AB sia una quantita costante. Per l’ipotesi aggiuntiva (12.5) talecostante deve essere c2, e dunque da
AB = c2
ricaviamo subito cheA(r) = c2
(1− a
r
). (12.27)
Et voila: abbiamo trovato le espressioni delle funzioni incognite, e dunqueabbiamo determinato la metrica di Schwarzschild
ds2 = −c2(1− a
r
)dt2 +
1
1− ar
dr2 + r2(dθ2 + sin2 θdϕ2) (12.28)
e il campo gravitazionale.Ci resta da determinare il valore della costante a (detta raggio di Sch-
warzschild), cosa che faremo successivamente.

306 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
12.2 Dal campo al moto
Una volta determinato il campo gravitazionale, studiamo come si muovonoin tale campo le particelle e la luce. Per il principio della geodetica, si trattadi risolvere in sostanza le equazioni delle geodetiche del genere tempo e delgenere luce.
Limitiamo innanzitutto i possibili movimenti; per la simmetria sferica delproblema e del campo, ci possono essere solamente due tipi di moti14:
(i) il moto radiale, cioe il moto lungo un raggio spiccato dal pianeta,corrispondente a θ = 0 e ϕ = 0;
(ii) il moto equatoriale, cioe il moto in un piano ben determinato (sup-poniamo il piano θ = π
2), corrispondente quindi a θ = π
2e θ =
0.
12.2.1 Moto delle particelle
Cominciamo dalle geodetiche del genere tempo, dove il moto e parametriz-zato dal tempo proprio τ . La simmetria del problema (sferica e di traslazionetemporale15) comporta che due equazioni di Lagrange delle geodetiche pos-sano essere sostituite con due integrali primi. Abbiamo inoltre un ulteriorevincolo sul modulo della velocita.
Per esteso, la lagrangiana e
L = V 2 =∂s2
∂τ 2= −
(1− a
r
)c2t2 +
1
1− ar
r2 + r2(θ2 + sin2 θϕ2) (12.29)
che deve essere costante, poiche in un moto geodetico la velocita e costante.Inoltre dato che la Lagrangiana non dipende ne da t ne da ϕ, abbiamo i dueintegrali primi sopra accennati. Dal fatto che in
d
dτ
∂L
∂t− ∂L
∂t= 0,
∂L
∂tsi annulla ricaviamo che (
1− a
r
)t = cost,
14Nel caso delle geodetiche del genere tempo, il punto sopra la coordinata indica semprela derivazione rispetto al tempo proprio. Nel caso delle geodetiche del genere luce, nonha senso parlare di tempo proprio: in questo caso vedremo meglio successivamente cosadobbiamo intendere allora con le scritture θ e ϕ.
15Simmetria sferica significa che la metrica ha la forma (12.4) rispetto alle coordinate ϕe θ. Simmetria di traslazione temporale significa che la coordinata temporale non comparenelle funzioni della metrica, cioe che la metrica e indipendente dal tempo.

12.2. DAL CAMPO AL MOTO 307
e analogamente dal fatto che in
d
dτ
∂L
∂ϕ− ∂L
∂ϕ= 0,
∂L
∂ϕsi annulla ricaviamo
r2 sin2 θϕ = cost.
Infine possiamo scrivere l’equazione di Lagrange rispetto alla coordinata θ:
∂
∂τ(r2θ)− r2ϕ sin θ cos θ = 0.
Riuniamo quanto trovato nel seguente sistema di quattro equazioni:
−(1− a
r
)c2t2 +
1
1− ar
r2 + r2(θ2 + sin2 θϕ2) = −c2(1− a
r
)t = γ
r2 sin2 θϕ = J
∂
∂τ(r2θ)− r2ϕ sin θ cos θ = 0
(12.30)
ove γ e J sono due opportune costanti.Notiamo il fatto che la prima equazione traduce la conservazione del mo-
dulo della quadrivelocita, dovuto al fatto che un moto geodetico avviene sem-pre a velocita costante - il valore −c2 di questa costante dipende dalla sceltadel parametro. La seconda equazione traduce il fatto che la metrica e simme-trica per traslazioni temporali; tra poco sara chiaro che dovremo interpretarela costante γ come una energia. La terza equazione, infine, si interpreta comeconservazione del momento angolare, ed e dovuta al fatto che la metrica esimmetrica per rotazioni. L’ultima equazione non e legata a un integraleprimo, ma e semplicemente l’equazione di Lagrange per la coordinata θ.
12.2.2 Geodetiche radiali del genere tempo
Concentriamoci ora sulle geodetiche radiali del genere tempo, imponendo ivincoli, quindi, θ = 0 e ϕ = 0. Inserendo tali informazioni nel sistema (12.30)rimaniamo con due equazioni del prim’ordine:
−(1− a
r
)c2t2 +
1
1− ar
r2 = −c2(1− a
r
)t = γ
(12.31)

308 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Procediamo per eliminazione di t, ricavandolo dalla seconda
t =γ
1− ar
e inserendolo nella prima:
− c2γ2
1− ar
+1
1− ar
r2 = −c2
Mettiamo l’equazione in forma normale come
r2 + c2(1− a
r
)= c2γ2,
formula che rappresenta l’integrale dell’energia durante il moto radiale, e chedunque permette di interpretare γ come energia. Derivando, otteniamo
2r +c2a
r2= 0,
ovvero
r =d2r
dτ 2= −c
2a
2r2.
che e la corrispondente equazione di moto radiale nello spazio.Per confronto con il caso newtoniano (che deve essere vero nel limite
classico), in cui si aveva che
d2r
dt2= −GM
r2,
si arriva ad identificare16 il raggio di Schwarzschild: da
−ac2
2r2= −GM
r2
ricaviamo immediatamente che
ac2 = 2GM, (12.32)
cioe che
a =2GM
c2. (12.33)
Abbiamo quindi legato il raggio di Schwarzschild alla massa del pianetamediante il confronto con il caso classico.
16Il confronto infatti e sensato nel limite classico, quando il campo e debole (cioe agrandi distanze) e quando il pianeta ha basse velocita.

12.2. DAL CAMPO AL MOTO 309
12.2.3 Geodetiche equatoriali del genere tempo
Ripetiamo ora l’analisi precedente, stavolta studiando il moto confinato diun satellite intorno al pianeta, pensato come responsabile della metrica diSchwarzschild. Lo scopo e confrontare con la prima legge di Keplero i risultatiche otterremo.
Le ipotesi sono quindi che θ = π2, cioe sin θ = 1, cos θ = 0 e θ = 0. Sosti-
tuendo queste informazioni nel sistema (12.30) rimaniamo con tre equazioni(la quarta e identicamente verificata):
−(1− a
r
)c2t2 +
1
1− ar
r2 + r2ϕ2 = −c2(1− a
r
)t = γ
r2ϕ = J
(12.34)
Si procede come prima, per eliminazione del tempo t e dell’angolo ϕ.Dalla seconda equazione si ha che
t =γ
1− ar
,
dalla terza
ϕ =J
r2.
Sostituendo tali informazioni nella prima, si ha che
− c2γ2
1− ar
+r2
1− ar
+J2
r2= −c2,
e mettendola in forma normale otteniamo subito che
r2 +(1− a
r
)(c2 +
J2
r2
)= c2γ2. (12.35)
Si effettua poi il cambiamento di variabile
u =1
r
e il cambiamento di variabile indipendente17 da τ a ϕ, essendo∂ϕ
∂τ= ϕ > 0
17Il pianeta funziona come una sorta di orologio: l’angolo che spazza e in una relazioneben determinata e invertibile con il tempo, e quindi possiamo considerare tale angolo ϕcome tempo, al posto di τ .

310 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
sempre.18 In questo modo si passa dal moto all’orbita, con
u =du
dτ=
d
dτ
1
r= − 1
r2r =
du
dϕ
dϕ
dτ= u′ϕ = u′
J
r2,
da cui si ricava
r = −Ju′,
essendo (si badi bene!) u′ = dudϕ
la derivata rispetto al nuovo orologio ϕ.
Sostituendo quest’ultima eguaglianza nella (12.35), l’equazione differen-ziale dell’orbita (valevole anche per i moti non legati, cioe per i moti aperti19)diventa
J2u′2 + (1− au)(c2 + J2u2) = c2γ2,
cioe, messa in forma normale,
u′2 + (1− au)(u2 +
c2
J2
)=c2γ2
J2,
da cui la formula
u′2 + u2 =c2(γ2 − 1)
J2+ac2
J2u+ au3. (12.36)
La formula (12.36) e particolarmente interessante, nel senso che l’equa-zione di moto in questa forma risulta particolarmente significativa: la scrit-tura
u′2 + u2 =c2(γ2 − 1)
J2+ac2
J2u (12.37)
e esattamente l’equazione di moto di un pianeta nel caso newtoniano. Il ter-mine aggiuntivo che appare al secondo membro della (12.36) e invece un ter-mine nuovo, che rende conto della perturbazione relativistica. Finche l’equa-zione era di secondo grado nell’incognita u (caso newtoniano), essa era perfet-tamente integrabile con le sostituzioni trigonometriche usuali. Aggiungendoil termine cubico, questa facile integrabilita viene meno, e bisogna servirsi
18Infatti ϕ = Jr2 , e se tale quantita non fosse maggiore di zero sempre, avrebbe comunque
segno costante, dunque la relazione tra ϕ e t sarebbe comunque invertibile. In particolare,potremmo scegliere la coordinata ϕ in altro modo, di modo che la derivata sia maggioredi zero, ma non e questo il punto: il punto e che essendo la relazione tra ϕ e t invertibile,possiamo usare ϕ come “orologio”. L’unico caso critico e quello per cui J = 0, ma alloraanche ϕ = 0, e dato che si aveva anche θ = 0, saremmo nel caso gia trattato del motoradiale.
19Infatti, fino a questo punto, tutti i ragionamenti sono validi per qualsiasi motoequatoriale, limitato o non limitato (satelliti o comete).

12.2. DAL CAMPO AL MOTO 311
delle funzioni ellittiche (la generalizzazione delle funzioni trigonometriche),ambito in cui non ci addentreremo.
Per risolvere la (12.36) utilizzeremo invece un metodo iterativo (dettometodo di Picard), che ci fornira una soluzione approssimata, ma comun-que soddisfacente gia alla prima iterazione. Iniziamo a derivare la (12.36),passando al second’ordine20, e sostituendo il raggio di Schwarzschild a con ilsuo valore, trovato con la (12.33). Si arriva a
u′′ + u =GM
J2+ 3
GM
c2u2, (12.38)
che e la vera e propria equazione di moto (in cui si vede ancora meglio che iltermine 3GM
c2e la perturbazione relativistica alla formula newtoniana).
Seguendo il metodo di Picard (che agisce come un comune metodo ite-rativo), prendiamo come approssimazione zero la funzione u0(ϕ) soluzionedell’equazione di Newton
u′′0 + u0 =GM
J2. (12.39)
E immediato vedere che tale soluzione ha la forma
u0 =GM
J2(1 + ε cosϕ), (12.40)
ove ε e un’opportuna costante iniziale. La prima approssimazione sara datadall’equazione
u′′1 + u1 =GM
J2+
3GM
c2u2
0, (12.41)
che, essendo u20 funzione nota, e perfettamente risolvibile. E cosı via si puo
iterare il procedimento:
u′′i + ui =GM
J2+
3GM
c2u2
i−1. (12.42)
Fermiamoci per semplicita alla prima iterazione (12.41): si tratta di un’e-quazione differenziale lineare con un termine forzante (dato dalla presenzadella funzione u2
0).Esplicitamente, sostituendo l’espressione per u2
0, l’equazione (12.41) di-venta
u′′1 + u1 =GM
J2+
3G3M3
c2J4(1 + ε cosϕ)2, (12.43)
la cui soluzione e data da
u1 = u0 + 3G3M3
c2J4
(1 + εϕ sinϕ+
1
2ε2
(1− 1
3cos(2ϕ)
))(12.44)
20Abbiamo gia semplificato il fattore 2 a tutti i termini.

312 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Si puo ammettere di trascurare i termini limitati nella parentesi, cioeil termine costante21 1 e il termine limitato22 1
2ε2(1− 1
3cos(2ϕ)
). Rimane
dunque solo il termine εϕ sinϕ, che e detto termine secolare per il fatto cheaumenta allo scorrere dell’orologio ϕ. Si assume quindi, in prima approssi-mazione, che
u1 = u0 +3G3M3
c2J4εϕ sinϕ =
GM
J2
(1 + ε cosϕ+ 3ε
G2M2
c2J2ϕ sinϕ
). (12.45)
Per interpretare la formula (12.45) si ricorre al teorema di composizionedelle funzioni trigonometriche: notando che
cos
(3G2M2
c2J2ϕ
)≈ 1,
e che
sin
(3G2M2
c2J2ϕ
)≈ 3G2M2
c2J2ϕ,
poiche la quantita 3G2M2
c2J2 ϕ e molto piccola. Possiamo dunque riscrivere la(12.45) come23
u1 =GM
J2
(1 + ε
(cosϕ cos
(3εG2M2
c2J2ϕ
)+ sin
(3εG2M2
c2J2ϕ
)sinϕ
)),
(12.46)cioe
u1 =GM
J2
(1 + ε cos
(ϕ− 3ε
G2M2
c2J2ϕ
))=GM
J2
(1 + ε cos
((1− 3ε
G2M2
c2J2
)ϕ
)),
(12.47)forma in cui si legge il termine perturbatore come una variazione della pul-sazione. Il termine
1− 3G2M2
c2J2,
che fornisce il fattore di dilatazione della pulsazione, e molto prossimo a uno,ma e in generale diverso da 1: cio significa che la velocita angolare relativisticadel pianeta non e la velocita angolare prevista dalla teoria classica.
21Soprattutto perche cio che ci interessera sara poi trovare i massimi di u1.22A maggior ragione perche ε e verosimilmente piccolo.23Stiamo portando “dentro la parentesi” la perturbazione, la stiamo interpretando come
un cambiamento di pulsazione; ricordiamoci infatti della formula
cos(α− β) = cosα cosβ + sinα sinβ.

12.3. PROBLEMA DELLE SINGOLARITA 313
Studiamo adesso i massimi24 di u1. I massimi saranno i valori per cuil’argomento del coseno25 e un multiplo di 2π: il primo massimo e per
ϕ0 = 0,
soluzione banale prevista anche classicamente, il massimo successivo e
ϕ1 =2π
1− 3G2M2
c2J2
≈ 2π
(1 + 3
G2M2
c2J2
).
Come si nota, il pianeta non ritorna a un massimo dopo un angolo di 2π(cioe dopo un “giro d’orologio”, una rivoluzione), ma dopo un angolo di
2π
(1 + 3
G2M2
c2J2
),
cioe leggermente dopo. Questo effetto, di rivoluzione in rivoluzione, di giroin giro, si va ad amplificare: ad ogni giro il semiasse minore26 “precede” diuna quantita pari a
∆ϕ = 3G2M2
c2J2, (12.48)
fenomeno di cui si e avuta conferma nell’osservazione sperimentale del pia-neta Mercurio. Anzi: la precessione del perielio di Mercurio e stata la primaconferma sperimentale della Relativita Generale. Gli astronomi non riusci-vano a spiegarsi perche tale precessione fosse cosı marcata (in disaccordocon le teorie newtoniane); quando Einstein uso la soluzione di Schwarzschildper calcolare - come abbiamo fatto noi - la precessione, egli scoprı che essacoincideva esattamente (all’interno del margine d’errore sperimentale) con laprecessione osservata. Questo fu il primo grande trionfo per la RelativitaGenerale.
12.3 Problema delle singolarita
La metrica di Schwarzschild (12.28), che ha la forma
ds2 = −c2(1− a
r
)dt2 +
1
1− ar
dr2 + r2(dθ2 + sin2 θdϕ2),
24Cioe i punti in cui il pianeta e piu vicino al sole, o il satellite e piu vicino al pianeta(infatti u e l’inverso del raggio r).
25Si riconduce infatti alla ricerca dei massimi della funzione cos(hϕ), i cui massimi sonotutti i valori per cui l’argomento hϕ = 2kπ per qualche k. Il primo massimo si ha perhϕ1 = 0, da cui ϕ1 = 0; il secondo massimo si ha per hϕ1 = 2π, cioe per ϕ1 = 2π
h , e cosıvia.
26Infatti u1 e massimo dove r e minimo.

314 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
presenta due singolarita: in r = 0 e in r = a, punti in cui qualche denomi-natore si annulla.
Il caso di r = 0 e una singolarita ineliminabile, corrispondente al diver-gere della curvatura (basta scrivere gli elementi del tensore di Riemann peraccorgersene).
Viceversa, mostreremo che r = a e una singolarita apparente27, elimi-nabile con un opportuno cambiamento di coordinate.28 Cio significa, in so-stanza, che le coordinate usate sono una carta locale solo per una parte dellospaziotempo fisico (per r > a e 0 < r < a) e che lo spaziotempo puo essereesteso eliminando la singolarita e cambiando le coordinate. Questo processodi estensione e stato portato ai massimi termini da Kruskal (1961) con la suaestensione massimale.29
Per indagare la natura della singolarita r = a studiamo il prolungamentomassimale delle geodetiche del genere luce di tipo radiale (fasci di fotoni checadono radialmente sul pianeta). Essendoci liberati dalle coordinate angolari,possiamo lavorare, per semplicita, in un universo bidimensionale (t, r).
12.3.1 Geodetiche radiali del genere luce
Si procede esattamente come fatto in precedenza, considerando le equazionidel sistema (12.30), con l’unica differenza che, trattandosi di geodetiche delgenere luce, il vettore 4-velocita e un vettore del genere luce, cioe di normanulla, da cui dobbiamo porre a zero il termine noto della prima equazionedel sistema. Dato che il moto e radiale vale che θ = 0 e ϕ = 0, le equazionidel sistema collassano a
−(1− a
r
)c2t2 +
1
1− ar
r2 = 0(1− a
r
)t = γ
(12.49)
27Naturalmente la metrica di Schwarzschild e la soluzione esterna al pianeta generanteil campo, per cui essa vale per r > rpianeta. Per i moti classici, dunque, il problema non sipone, visto che a e in generale molto piu piccolo del raggio di un pianeta. Ma in seguitoalla scoperta delle stelle massive (o massicce) e ad altre recenti scoperte della cosmologiae dell’astrofisica, ha senso considerare anche il caso di a > rpianeta.
28Ad esempio, anche in coordinate polari, nel piano, c’e una singolarita per r = 0,ma questo non significa che il piano in tale punto sia in se singolare, visto che con unopportuno cambiamento di coordinate (ad esempio passando alle coordinate cartesiane)tale singolarita puo essere eliminata.
29Si pensi, come analogia, al processo di prolungamento delle soluzioni con cui abbiamoa che fare risolvendo un’equazione differenziale.

12.3. PROBLEMA DELLE SINGOLARITA 315
dove questa volta non possiamo piu utilizzare la nozione di tempo proprio, edobbiamo definire
t =dt
dλ,
con λ un qualunque parametro affine lungo l’orbitra (parametro che saradeterminato dalla seconda delle (12.49).
Per passare dal moto parametrizzato con λ alla linea di universo (indipen-tente dalla parametrizzazione) riscriviamo la prima equazione della (12.49)nella forma differenziale
−(1− a
r
)c2dt2 +
1
1− ar
dr2 = 0,
da cuidt2
dr2=
1(1− a
r
)2c2,
cioedt
dr= ± 1(
1− ar
)c, (12.50)
dove il doppio segno distingue le geodetiche che “entrano” nel pianeta daquelle “uscenti” dal pianeta.
Le equazioni (12.50) si integrano ancora una volta per separazione divariabili.
Ad esempio, supponiamo che r > a, cioe r > 2GMc2
. Prendiamo nella(12.50) il segno positivo e scriviamo
dt =1
c(1− 2GM
c2r
)dr =r
c(r − 2GMc2
)dr =
=1
c
(r − 2GM
c2
r − 2GMc2
dr +2GM
c2
r − 2GMc2
dr
)=
1
c
(dr +
2GMc2
r − 2GMc2
dr
),
equazione che possiamo facilmente integrare, ottenendo
t =1
c
(r +
2GM
c2ln
(r − 2GM
c2
))+ cost,
o equivalentemente
t =1
c
(r +
2GM
c2ln
(rc2
2GM− 1
))+ cost′, (12.51)

316 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
dove abbiamo cambiato la costante, poiche le funzioni 2GMc2
ln(r − 2GMc2
)
e 2GMc2
ln(
rc2
2GM− 1), avendo uguale derivata, differiscono proprio per una
qualche costante. Questa e l’equazione per le geodetiche uscenti.Analogamente prendendo il segno negativo nella (12.50) abbiamo
dt = − 1
c(1− 2GM
c2r
)dr = − r
c(r − 2GMc2
)dr =
=1
c
(−r − 2GM
c2
r − 2GMc2
dr −2GM
c2
r − 2GMc2
dr
)=
1
c
(−dr −
2GMc2
r − 2GMc2
dr
),
che possiamo integrare, ottenendo
t =1
c
(−r − 2GM
c2ln
(r − 2GM
c2
))+ cost,
o equivalentemente
t =1
c
(−r − 2GM
c2ln
(rc2
GM− 2
))+ cost′, (12.52)
per le stesse ragioni addotte precedentemente. Questa e l’equazione per legeodetiche entranti.
Per r > a, le equazioni sono quindi
t− 1
c
(r +
2GM
c2ln
(rc2
2GM− 1
))= u (12.53)
per le geodetiche entranti e
t+1
c
(r +
2GM
c2ln
(rc2
GM− 2
))= v (12.54)
per le geodetiche entranti, con u e v costanti del moto.Per 0 < r < a il discorso e analogo; l’interesse delle equazioni delle
geodetiche del genere luce e dato anche dal fatto che esse si integrano com-pletamente, fino in fondo.
12.3.2 Analisi della struttura causale
Analizziamo ora la geometria di queste geodetiche del genere luce studiandola disposizione dei coni luce. Per fare questo, non ci servono le equazioni(12.54) e (12.54) che descrivono il moto radiale della luce, ma ci basta andare

12.3. PROBLEMA DELLE SINGOLARITA 317
a riprendere l’equazione (12.50) che da la pendenza del raggio luminoso inuno spaziotempo bidimensionale.
Consideriamo la figura 12.2, e mettiamoci nella parte di spaziotempo conr > a. La pendenza dei coni e ivi definita da30
dt
dr= ± 1
1− ar
= ± 1
1− 2GMrc2
.
Dall’analisi di questa derivata, tradotta nel grafico di figura 12.2, notiamoinnanzitutto tre fatti:
• per r → +∞ la derivata tende a 1, e ritroviamo quindi esattamente iconi luce dello spaziotempo di Minkowski (cio e corretto, e corrispondealla nostra supposizione che, a grande distanza dal pianeta generanteil campo, la geometria debba essere minkowskiana);
• al decrescere di r, per r → a+, i coni si stringono, poiche la derivataaumenta illimitata;
• le geodetiche luce entranti devono per definizione essere sempre tangentialla “falda con pendenza negativa” del cono luce: questa fenomenologiale forza quindi a tendere asintoticamente alla retta r = a per r → a+.A maggior ragione si schiaccia verso la retta r = a una particella, lacui linea di universo deve essere strettamente contenuta all’interno delcono luce.
Specialmente quest’ultima affermazione sembra confermare il caratteresingolare della retta r = a. Tuttavia, prima di discutere questo problema piunel dettaglio, procediamo allo stesso modo per studiare i coni luce dell’altraregione (0 < r < a), e quindi vedere l’andamento delle geodetiche in taleregione.
Bisogna innanzitutto prestare molta attenzione a un fatto essenziale:transitando dalla zona r > a alla zona 0 < r < a, accade che il segnodei primi due coefficienti della metrica cambia:
ds2 = −(1− a
r
)c2dt2 +
1
1− ar
dr2 + r2dΩ2.
30Per convenzione i grafici sono tracciati supponendo c = 1, sicche i coni luce min-kowskiani risultino proprio giacere sulle bisettrici degli assi. Si noti che nella RelativitaGenerale e convenzione assai comune addirittura omettere completamente dalle equazioni(cioe porre c = 1) tutti i fattori c: sebbene possa confondere leggermente, cio permettepero che tutte le equazioni siano scritte in maniera piu concisa, e nessuna informazionein effetti viene persa, dal momento che i fattori mancanti possono sempre essere reinseritisenza ambiguita mediante un’analisi dimensionale.

318 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Figura 12.2: Disposizione dei coni luce nello spaziotempo di Schwarzschild(grafico tracciato con la convenzione c = 1). Per r grande la metrica e minko-wskiana, e dunque il cono luce tende al cono luce minkowskiano, le cui faldesono, se c = 1, le bisettrici dei quadranti. Per r → a+ i coni si stringono,e forzano le geodetiche luce entranti (che devono essere tangenti alla falda apendendenza negativa dei coni) ad avvicinarsi asintoticamente alla retta r = a.

12.3. PROBLEMA DELLE SINGOLARITA 319
Il coefficiente di dt2, prima negativo, diventa positivo, poiche ora ar< 1;
analogamente il coefficiente di dr2, prima positivo, diventa negativo.Questo ha un’immediata ripercussione sul significato delle coordinate che
stiamo utilizzando. Abbiamo gia accennato precedentemente che in uno spa-zio non semieuclideo, non possiamo pensare di mantenere incondizionata-mente il significato di (t, r) rispettivamente come tempo e raggio. In par-ticolare: che cosa ci assicurava (anche nello spazio minkowskiano) che lacoordinata t fosse effettivamente il tempo? Solo una cosa: il segno della me-trica! E il segno della metrica che in generale ci dice se una coordinata edel genere tempo o del genere spazio: visto che nell’analisi minkowskiana,ηtt = −1 < 0, allora la coordinata t poteva a buon diritto essere interpre-tata come tempo. Analogamente, le altre coordinate, avendo il corrispettivoelemento sulla diagonale della metrica positivo, venivano interpretate comespazio. Ma allora anche qui, non possiamo affatto dire a priori che t e coor-dinata temporale e r coordinata spaziale: ce lo dice la metrica! Se nellaregione 0 < a < r il coefficiente negativo e quello di dr2 e quello positivo e didt2, significa che in tale regione le coordinate si scambiano i ruoli : r diventacoordinata temporale, t coordinata spaziale. Cio significa che i coni luce, inquesta regione avranno come asse un asse parallelo al nuovo asse temporaler (v. fig. 12.3). In particolare, una curva con r < a costante non e piu unapossibile linea di universo di una particella, di un osservatore o di un raggioluminoso, nemmeno se una qualche forza si esercita per mantenere l’oggettosu quella retta (nemmeno, cioe, se l’osservatore “accende i motori”).
12.3.3 Significato della singolarita r = a
Per comprendere la natura della singolarita r = a dobbiamo innanzituttocomprendere il significato della coordinata t: operativamente, che cosa e?
Consideriamo un osservatore che abbia una linea di universo parallelaall’asse t e di equazione
r = r0 a.
Si tratta di un osservatore in quiete relativa rispetto al pianeta (e nonin caduta libera: per non “cadere” sul pianeta e per mantenersi in quieterelativa, infatti, tale osservatore deve “accendere i motori”!) che osserva ifotoni e i pianetini cadere verso il pianeta centrale, generante il campo.
Poiche r0 a, lo spaziotempo vicino all’osservatore e praticamente lospaziotempo di Minkowski, e quindi lungo la linea di universo dell’osservatore(ove r = 0, θ = 0 e ϕ = 0), la metrica e31
ds2 = −c2dt2. (12.55)
31Infatti, per quanto detto, ivi si ha che dr = 0, dθ = 0, dϕ = 0.
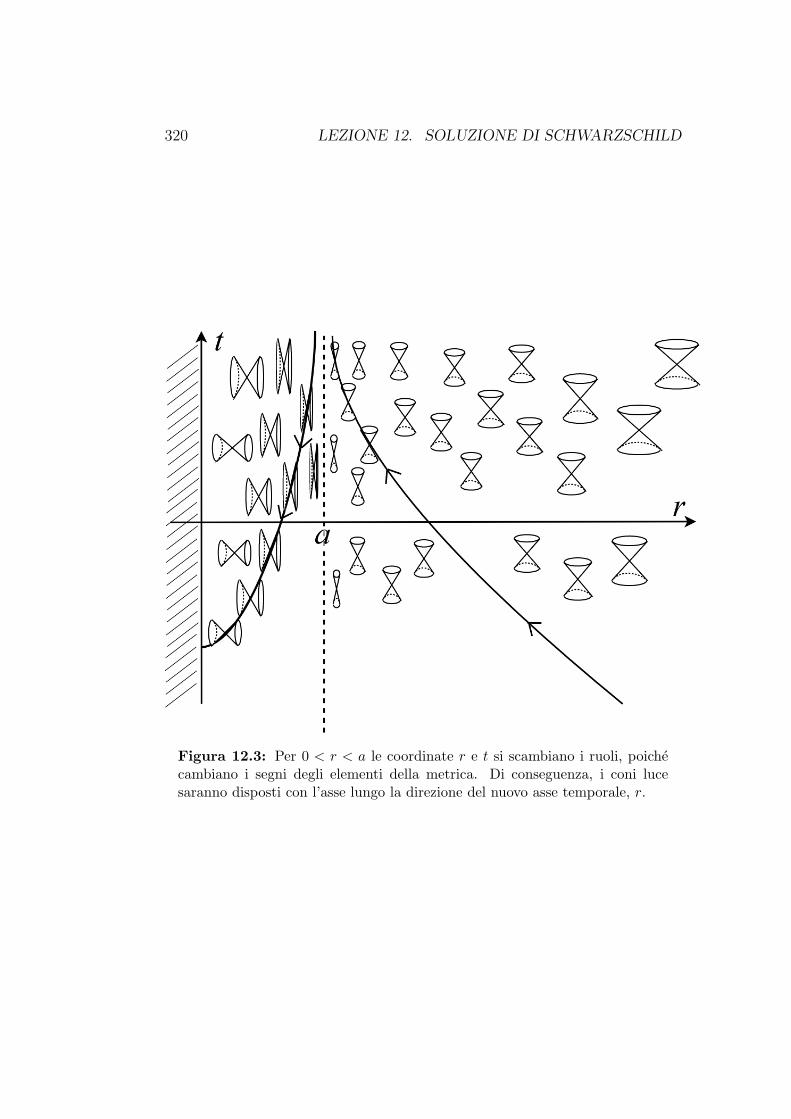
320 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Figura 12.3: Per 0 < r < a le coordinate r e t si scambiano i ruoli, poichecambiano i segni degli elementi della metrica. Di conseguenza, i coni lucesaranno disposti con l’asse lungo la direzione del nuovo asse temporale, r.

12.3. PROBLEMA DELLE SINGOLARITA 321
Figura 12.4: O e un osservatore in quiete relativa con il pianeta P (la cuilinea di universo e l’asse dei tempi); cio significa che O deve “tenere i motoriaccesi” per non cadere su P , e dunque non e un osservatore in caduta libera. Ae un astronauta in caduta libera su P che manda, a periodi di tempo regolari∆τ del suo tempo proprio, segnali radar verso l’esterno. L’osservatore O vedei periodi di ricezione divergere all’infinito prima che l’astronauta A raggiungala retta r = a. Ma questo non significa che l’astronauta non raggiungera maila retta!
Questa formula ci dice che t e il tempo proprio misurato dall’orologio diun tale osservatore.32
Ora: come puo l’osservatore O rendersi conto della caduta, supponiamo,di un astronauta A sul pianeta principale? L’unico metodo che abbiamoa disposizione, ormai lo sappiamo bene, e il metodo radar: l’osservatoresi rende conto della caduta dell’astronauta perche riceve, a certi intervalli,dei segnali luminosi emessi dall’astronauta; tali segnali luminosi dovrannoviaggiare tangenti alla “falda a pendenza positiva” dei coni luce (fig. 12.4).
Il problema e che la somma dei tempi di ricezione dei segnali ricevuti
32Infatti per la per la (6.10) il tempo proprio e il tempo che verifica
ds2 = −c2dτ2,
essendo la parte spaziale nulla poiche gli eventi accadono nello stesso luogo nel giudiziodell’osservatore.

322 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
diverge all’infinito prima che l’astronauta A abbia raggiunto la retta r = a:O non vede quindi A raggiungere tale retta, perche i segnali che riceve diver-gono all’infinito piu velocemente del tendere di A alla retta. In altre parole,la geometria dello spaziotempo, che distorce i segnali luminosi, impedisceall’osservatore O di vedere A cadere su r = a.
Ma questo non significa affatto che A non ci arrivi a tale retta! Infatti, sesi calcola la lunghezza della geodetica per r → a, cioe se si calcola il tempomisurato dall’orologio di A, si trova un tempo finito!33
Infatti, per l’osservatore O vale che
ds2 = −c2(1− a
r
)dt2 +
1
1− ar
dr2,
mentre per l’astronauta in caduta libera
ds2 = −c2(1− a
r
)dτ 2,
e dunque deve valere
−c2(1− a
r
)dτ 2 = −c2
(1− a
r
)dt2 +
1
1− ar
dr2, (12.56)
D’altro canto se l’osservatore e distante dal pianeta la sua metrica, comeabbiamo, visto deve essere data dalla (12.55), e dato che sappiamo che iltempo proprio (che e il tempo di eventi che accadono nello stesso luogo) elegato alla metrica dalla relazione
ds2 = −c2(1− a
r
)dτ 2.
Si ha per confronto la relazione che lega il dt dell’osservatore O al tempoproprio dτ :
dτ 2 =(1− a
r
)dt2,
cioe
dτ =
√(1− a
r
)dt ≤ dt, (12.57)
equazione che rende conto di una dilatazione gravitazionale dei tempi:il tempo scorre piu lentamente laddove il campo e piu intenso. Cio signi-fica che l’osservatore distante dal pianeta vede il tempo proprio scorrere piulentamente, a causa del campo gravitazionale.
33Come suggestione, si pensi all’analogia con l’integrazioni di funzioni che vannoall’infinito, ma il cui integrale e finito.

12.3. PROBLEMA DELLE SINGOLARITA 323
Inserendo l’informazione della (12.57) nella (12.56) ci liberiamo di dt eabbiamo una relazione pulita tra dτ e dr:
−c2(1− a
r
)dτ 2 = −c2dτ 2 +
1
1− ar
dr2,
da cuidτ 2
(c− c+
ac
r
)=
r
r − adr2,
cioedτ 2 =
r
ac
r
r − adr2,
e dunque
dτ =r√
ac(r − a)dr. (12.58)
Il tempo (proprio) che l’astronauta A impiega a cadere sulla retta r = adal momento in cui si trova in r = r0 e dato da
τr=a − τr=r0 =
∫ r0
a
r√ac(r − a)
dr =1√ac
∫ r0
a
r√r − a
dr, (12.59)
e con una sostituzione s = r − a (ds = dr) l’integrale acquista la forma
τr=a − τr=r0 =1√ac
∫ r0
a
s+ a√sds =
1√ac
(∫ r0−a
0
√sds+ a
∫ r0−a
0
1√sds
),
(12.60)ed entrambi gli integrali nella prentesi convergono: il primo banalmente,il secondo perche e un’integrale improprio di una funzione del tipo sλ chedall’analisi sappiamo convergere in s = 0 se e solo se λ > −1. Dato che nelnostro caso λ = −1
2, l’astronauta A arriva alla retta r = a in un tempo finito.
Il fatto che il tempo impiegato da A per arrivare a r = a appaia infinitoall’osservatore O, dunque, e un problema delle coordinate di O, e non di A:il divergere all’infinito e solo un effetto della scelta di coordinate!
12.3.4 Risoluzione della singolarita
Se effettivamente A attraversa r = a, proseguendo il moto di caduta versoil centro, la sua geodetica esterna deve saldarsi con una geodetica interna(della zona quindi 0 < r < a). Con quale geodetica verra saldata?
L’idea e di usare l’uguaglianza delle costanti del moto u e v, precedente-mente introdotte; cio significa che dovremo usare come coordinate, ad esem-pio (r, v), essendo v la costante del moto per le geodetiche entranti. Lecoordinate (r, v) sono dette coordinate di Eddington-Finkelstein.

324 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Il cambio di coordinate tra (t, r) e (r, v) ci e fornito immediatamente dalla(12.53):
r = r
v = t+1
c
(r +
2GM
c2ln
(rc2
GM− 2
))(12.61)
e dunque, in queste coordinate, la metrica nella parte esterna assume la formanon piu diagonale
ds2 =
(1− 2GM
rc2
)dv2 + 2dvdr + r2dΩ2, (12.62)
essendo dΩ2 = dθ2 + sin2 θdϕ2 l’elemento standard di angolo solido (cioe lametrica standard sulla 2-sfera).
Cio che notiamo immediatamente nella (12.62) e che, anche se
gvv = −(
1− 2GM
rc2
)= 0
per r = a = 2GMc2
, la metrica ivi non e singolare, poiche il suo determinantesi mantiene ben diverso da zero. Insomma, con il passaggio alle coordinatedi Eddington-Finkelstein e scomparsa la singolarita in r = a.
Rifacciamo ora l’analisi della struttura causale nel grafico (r, v) di figura12.5.
Nel caso dei segnali luminosi radiali si ha che dϕ = 0 e dθ = 0, da cui dΩ =0, e dunque l’equazione delle geodetiche luce radiali si ricava immediatamentedalla (12.62):
ds2 =
(1− 2GM
rc2
)dv2 + 2dvdr = 0, (12.63)
la quale si puo scindere nelle due equazioni
dv
dr= 0,
dv
dr=
2
1− 2GMrc2
. (12.64)
La prima afferma che tutte le rette orizzontali sono geodetiche (e cio eragia ben visibile nel grafico di figura 12.5), la seconda stabilisce la presenzadi altre geodetiche, oltre alle rette orizzontali, e definisce (per r > a) l’altrafalda dei coni luce nel grafico (r, v) di figura 12.5.
Questa trasformazione di coordinate mostra chiaramente che le geodeticheorizzontali transitano tranquillamente attraverso la retta r = a.

12.3. PROBLEMA DELLE SINGOLARITA 325
Figura 12.5: Nel grafico (r, v), le geodetiche del genere luce non hanno piualcun problema a superare la retta r = a, che dunque non e piu una singolarita.Tuttavia, qualsiasi segnale luminoso diretto verso il pianeta sorpassi la rettar = a, non ha piu possibilita di essere recepito da un osservatore situato nellazona r > a: infatti il fatto che i coni si stringano, e il fatto che i coni sur = a siano ad angolo retto, forzano i segnali luminosi che sorpassano r = a arestare indirizzati verso il pianeta, senza piu alcuna possibilita di uscire. Se uncorpo di raggio R ha un raggio di Schwarzschild a > R, qualsiasi informazionesituata nella zona tra R ed a non potra mai piu essere recepita dagli osservatoriesterni. Corpi di questo tipo sono quelli che vengono chiamati buchi neri.

326 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
12.3.5 L’orizzonte degli eventi
Ma che cosa e allora r = a? E una superficie che viene solitamente denomi-nata orizzonte degli eventi, per una sua importante proprieta. Infatti unavolta che un raggio luminoso proveniente dalla zona r > a oltrepassa talesuperficie, non ha piu la possibilita di tornare indietro, poiche i coni luce sistringono, sicche la geodetica, una volta entrata, non puo piu uscire, essendotali coni ora troppo stretti. Un orizzonte degli eventi e dunque una superficieche isola una regione da cui le geodetiche non possono uscire. I segnali chefiniscono in tale zona sono, per un osservatore esterno, a tutti gli effetti persi,poiche non hanno piu la possibilita di uscire.
Nella maggior parte dei casi, corpi di raggio R hanno un raggio di Sch-warzschild ben minore del proprio raggio34. In tale situazione, il valore r = asi troverebbe all’interno del corpo, dove quindi la soluzione di Schwarzschildnon ha validita.
Nel caso in cui, invece, un corpo di raggio R abbia raggio di schwarzschilda > R, allora si verrebbe a creare la situazione precedentemente descritta,cioe si verrebbero ad individuare due zone: quella per r > a e quella perR < r < a. In particolare, da quest’ultima zona nessun segnale puo ritornarealla zona r > a, poiche, come mostrato dalla figura 12.5, i coni luce sonotroppo stretti : tale segnale, per un osservatore esterno, e a tutti gli effettiperso per sempre. Corpi aventi raggio di Schwarzschild maggiore del proprioraggio sono detti buchi neri.
12.3.6 Estensione massimale di Kruskal
Lo spaziotempo di Eddington-Finkelstein (cioe il semipiano r > 0 con la me-trica data dalla (12.62) puo essere considerato una vera e propria estensionedello spaziotempo di Schwarzschild: abbiamo in sostanza “incollato” le dueregioni che prima erano separate dalla singolarita. L’estensione e stata fattautilizzando le geodetiche entranti, e saldandole naturalmente alle geodetichedella zona 0 < r < a mediante la costante del moto v.
Si puo ripetere il processo anche con le geodetiche uscenti, andando a sce-gliere le coordinate delle costanti del moto (u, v), con u costante del moto perle geodetiche uscenti data dalla (12.54) e v costante delmoto per le geodeticheentranti data dalla (12.53).
Di piu: possiamo fare anche i cambi di coordinate mostrati nel dia-gramma di figura 12.6, mettendoci nell’ipotesi r > a, restrizione che poiverra automaticamente eliminata.
34Ad esempio il raggio di Schwarzschild della terra e di soli 8, 92mm, quello del sole di2, 96km, comunque valori ben minori dei rispettivi raggi (6378km e 6, 96 · 105km).

12.3. PROBLEMA DELLE SINGOLARITA 327
Figura 12.6: Cambi di coordinate, dalle usuali coordinate (t, r) allecoordinate di Kruskal (T,R).
Le coordinate (T,R) sono dette coordinate di Kruskal. Dal diagrammasegue in particolare che, la trasformazione diretta tra (t, r) e (T,R) la tra-sformazione diretta e data da
T 2 −R2 =
(1− rc2
2GM
)e
rc2
2GM
T
R= tanh
(tc2
4GM
) (12.65)
La metrica nelle coordinate di Kruskal diventa
ds2 = 32G3M3
rc6e−
rc2
2GM (−dT 2 + dR2) +R2dΩ2, (12.66)
sempre supponendo che dΩ2 conglobi la parte sferica della metrica.
Notiamo che l’unica singolarita di questa metrica e la singolarita inelimi-nabile r = 0, tutto il resto e completamente scomparso. In particolare, nonc’e piu traccia del fatto che r = a sia un punto di singolarita, e abbiamoottenuto una quadruplice estensione dello spaziotempo di Schwarzschild, nelsenso che abbiamo riuinto quattro regioni di tale spaziotempo, le regionirappresentate nel grafico di figura 12.7.

328 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Figura 12.7: Estensione massimale di Kruskal: utilizzando le coordinate(T,R) otteniamo una quadruplice estensione dello spaziotempo di Schwarz-schild. La zona I corrispondeva alla zona r > a, la zona II corrisponde allazona r < a: non v’e piu alcuna singolarita tra le due zone, che sono perfetta-mente collegate. In piu troviamo si aggiungono anche le zone III e IV, comeraddoppiamento della I e della II. Sul diagramma e segnata la “zona proibi-ta” (corrispondente a r < 0), delimitata da due iperboli; le bisettrici degli assisono le rette corrispondenti a r = a. La zona II e a tutti gli effetti un buconero: qualsiasi geodetica che entri in tale zona, infatti, per la configurazionedei coni luce non avra mai piu la possibilita di uscirvi. Il grafico e al solitotracciato con la convenzione c = 1.

12.4. CONSEGUENZE DELLA RELATIVITA GENERALE 329
12.4 Conseguenze della Relativita Generale
12.4.1 Paradossi
Riassumiamo brevemente alcuni degli effetti paradossali predetti dalla Rela-tivita Generale che abbiamo trovato nelle sezioni precedenti, insieme ad altriche non abbiamo analizzato e cui accenniamo solo brevemente.
• Deviazione geodetica: a causa della curvatura dello spaziotempo duegeodetiche localmente vicine possono divergere; questo si traduce adesempio nel cambio di orientazione nel tempo di un giroscopio orbitante.
• Precessione dei perieli: i semiassi delle orbite planetarie ruotano(“precedono”) nel tempo piu di quanto la teoria della gravita new-toniana avesse predetto. La conferma sperimentale piu importante,come detto, e stata la precessione del perielio di Mercurio, la cui mar-cata orbita a “rosetta” e in linea con i calcoli teorici della RelativitaGenerale.
• Buchi neri: come previsto dalla teoria di Schwarzschild, i buchi nerisono corpi aventi raggio di Schwarzschild maggiore del proprio raggio,in cui le informazioni entranti non potranno mai piu essere recuperate.35
• Deviazione dei raggi luminosi: a causa della gravita, anche le ondeluminose e i segnali radar incurvano la loro traiettoria. In particolare,se lo spazio e incurvato dal campo gravitazionale solare, un raggio diluce che passa nelle vicinanze del sole non compiera un cammino ret-tilineo: dunque le stelle la cui luce ci giunge passando vicino al soleci appariranno in una posizione leggermente deviata dalla loro posi-zione effettiva. Di questo fatto di cui si e avuta conferma sperimentaleosservando pulsar passare dietro al sole durante le eclissi di sole.
• Dilatazione gravitazionale dei tempi: il tempo scorre piu lenta-mente ove il campo e piu intenso - fatto che abbiamo gia ricaviamoprecedentemente, con l’equazione (12.57).
Per convincerci di cio in altro modo, consideriamo la figura 12.8: A eun osservatore posto al centro di un disco rotante, B e un osservatoreposto sul bordo del disco rotante, C e un osservatore inerziale postoa terra, al di fuori del disco rotante. Dato che A e C sono in quieterelativa, vedranno scorrere il tempo nello stesso modo. Dato inoltre cheB e in moto, nel giudizio di C, allora C vedra l’orologio di B battere
35Piu recentemente sono nate molte altre variegate teorie al riguardo.

330 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD
Figura 12.8: “Disco di Einstein”: A e B ruotano sul disco, A al centro e Bal bordo, C e fermo a terra. Nel giudizio sia di A sia di B il tempo per Cscorre piu lentamente, ma se per B questo si spiega col fatto che egli e in motorelativo rispetto a C, A non e in moto relativo rispetto a C. A vede dunquescorrere piu lentamente il tempo dove il campo di accelerazioni e piu forte, equindi verso il bordo.
piu lentamente, e dunque anche A dovra vedere l’orologio di B batterepiu lentamente.
D’altro canto, anche A e C sono in quiete relativa, poiche sono entrambisulla piattaforma rotante. E se per C il fatto che l’orologio di B battapiu lentamente si puo spiegare quindi con il fatto che B e in motorelativo rispetto a C, questo non regge piu per A, poiche non v’e alcunmoto relativo tra A e B sulla disco, c’e solo un campo di accelerazionicentripete verso il centro del disco. Ne discende che, nel giudizio diA, il tempo scorre piu lentamente verso il bordo, e ricordando chel’accelerazione centripeta e data da ω2r, possiamo anche generalizzaredicendo che gli orologi battono piu lentamente laddove il campo e piuforte.
• Lunghezza delle circonferenze: dall’esperimento mentale appenaesposto si deduce anche un altro fatto curioso. Se posizioniamo (ariposo) dei metri lungo la circonferenza del disco e lungo il suo diametro,troveremo che naturalmente il rapporto tra il numero di metri usati saraπ. Se immaginiamo ora che la piattaforma si metta a ruotare, mentrei metri posti lungo il diametro (ortogonali al moto) non cambierannolunghezza, i metri posti lungo la circonferenza (longitudinali al moto) siaccorceranno, e dunque avremo bisogno di piu metri per coprire tuttala circonferenza. Esibendo un rapporto tra circonferenza e diametroche non e piu il valore costante π, questo esperimento curioso mostraanche che la geometria della Relativita Generale non puo piu essere lageometria euclidea o semieuclidea.
• Red-shift gravitazionale: fenomeno direttamente derivante dalla di-

12.4. CONSEGUENZE DELLA RELATIVITA GENERALE 331
latazione gravitazionale dei tempi. A causa della deformazione spazio-temporale prodotta dal campo gravitazionale solare, ad esempio, ve-diamo le righe degli spettri degli atomi solari eccitati a una frequenzaminore di quella che vedremmo per atomi eccitati sulla terra.
• Espansione dell’universo: le prime soluzioni cosmologiche alle equa-zioni di campo di Einstein prevedevano un universo in espansione, fattoconfermato dagli esperimenti di Edwin Hubble nel 1921.
12.4.2 Guardando avanti
In un certo senso, questo e solo l’inizio della Relativita Generale, il cui ul-teriore studio si intreccia poi naturalmente con la cosmologia, per cui laRelativita Generale costituisce un ottimo modello geometrico gravitazionale,un modello che ha superato indenne tutti i test sperimentali seri cui e statosottoposto negli ultimi decenni.
D’altro canto, il problema piu serio e che la Relativita Generale e in apertoconflitto con la meccanica quantistica; le predizioni relativistiche che sem-brano valere “nel grande” sicuramente non valgono “in piccolo”: la necessitadei fisici e quindi ora quella di unificare questi due mondi cosı diversi (Rela-tivita e Meccanica Quantistica), riuscendo a costruire una teoria coerente econsistente, che possa inglobarle con successo.

332 LEZIONE 12. SOLUZIONE DI SCHWARZSCHILD

Indice
1 L’eredita di Newton 3
1.1 Concetti fondamentali . . . . . . . . . . . . . . . . . . . . . . 3
1.2 L’osservatore newtoniano . . . . . . . . . . . . . . . . . . . . . 4
1.3 Gli assiomi della Relativita newtoniana . . . . . . . . . . . . . 5
1.3.1 L’assioma del tempo assoluto . . . . . . . . . . . . . . 5
1.3.2 L’assioma dello spazio assoluto . . . . . . . . . . . . . 5
1.4 Interpretazione geometrica . . . . . . . . . . . . . . . . . . . . 6
1.5 Cambio di coordinate . . . . . . . . . . . . . . . . . . . . . . . 11
1.6 Altri assiomi della Relativita classica . . . . . . . . . . . . . . 11
1.6.1 L’assioma delle particelle libere . . . . . . . . . . . . . 12
1.6.2 Il Principio di Relativita . . . . . . . . . . . . . . . . . 12
2 Origine della crisi e prime soluzioni 15
2.1 L’esperimento di Michelson e Morley . . . . . . . . . . . . . . 15
2.2 Spiegazione di Fitzgerald . . . . . . . . . . . . . . . . . . . . . 19
2.3 Spiegazione di Lorentz . . . . . . . . . . . . . . . . . . . . . . 19
2.3.1 Problemi della spiegazione di Fitzgerald . . . . . . . . 19
2.3.2 Le trasformazioni di Lorentz . . . . . . . . . . . . . . . 21
2.3.3 Ragioni algebriche . . . . . . . . . . . . . . . . . . . . 23
3 Osservatori inerziali e spaziotempo di Minkowski 25
3.1 L’osservatore locale . . . . . . . . . . . . . . . . . . . . . . . . 25
3.1.1 Misure di spazio, misure di tempo . . . . . . . . . . . . 27
3.2 Osservatori localmente inerziali . . . . . . . . . . . . . . . . . 28
3.3 Assemblamento . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.4 Lo spaziotempo di Minkowski . . . . . . . . . . . . . . . . . . 30
3.5 Postulati . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5.1 Invarianza della velocita della luce . . . . . . . . . . . . 32
3.5.2 Principio di Relativita . . . . . . . . . . . . . . . . . . 33
333

334 INDICE
4 La struttura dello spaziotempo di Minkowski 354.1 Il cono luce . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2 c come velocita limite . . . . . . . . . . . . . . . . . . . . . . . 384.3 Coordinate di un evento . . . . . . . . . . . . . . . . . . . . . 404.4 Relativita della simultaneita . . . . . . . . . . . . . . . . . . . 434.5 L’effetto Doppler longitudinale . . . . . . . . . . . . . . . . . . 444.6 La dilatazione dei tempi . . . . . . . . . . . . . . . . . . . . . 504.7 Come misurare k e v con il metodo radar . . . . . . . . . . . . 52
5 Trasformazioni di Lorentz 535.1 Proprieta delle trasformazioni di Lorentz . . . . . . . . . . . . 55
5.1.1 Linearita . . . . . . . . . . . . . . . . . . . . . . . . . . 565.1.2 Struttura algebrica di gruppo . . . . . . . . . . . . . . 565.1.3 Invarianza dell’intervallo spaziotemporale . . . . . . . . 59
5.2 Confronto con il caso euclideo . . . . . . . . . . . . . . . . . . 615.3 Cenno al gruppo di Poincare . . . . . . . . . . . . . . . . . . . 64
5.3.1 Linearita delle isometrie . . . . . . . . . . . . . . . . . 645.3.2 Le trasformazioni speciali . . . . . . . . . . . . . . . . 665.3.3 Il gruppo di Lorentz . . . . . . . . . . . . . . . . . . . 685.3.4 Il gruppo di Poincare . . . . . . . . . . . . . . . . . . . 69
5.4 Azione del gruppo di Lorentz su una tetrade . . . . . . . . . . 715.4.1 Autovalori nelle trasformazioni di Lorentz . . . . . . . 745.4.2 Deduzione delle trasformazioni dalla geometria iperbolica 77
5.5 Piu veloci della luce? . . . . . . . . . . . . . . . . . . . . . . . 79
6 I paradossi relativistici 816.1 La contrazione delle lunghezze longitudinali . . . . . . . . . . 81
6.1.1 Risoluzione con l’intervallo spaziotemporale . . . . . . 836.1.2 Risoluzione con le trasformazioni di Lorentz . . . . . . 856.1.3 Risoluzione con il metodo radar . . . . . . . . . . . . . 866.1.4 Risoluzione con la trigonometria iperbolica . . . . . . . 876.1.5 Cio che si misura, cio che si vede . . . . . . . . . . . . 88
6.2 Dilatazione dei tempi . . . . . . . . . . . . . . . . . . . . . . . 906.2.1 Risoluzione con l’intervallo spaziotemporale . . . . . . 926.2.2 Risoluzione con le trasformazioni di Lorentz . . . . . . 936.2.3 Risoluzione con il metodo radar . . . . . . . . . . . . . 946.2.4 Risoluzione con la trigonometria iperbolica . . . . . . . 956.2.5 Il metodo del traguardo . . . . . . . . . . . . . . . . . 95
6.3 Il decadimento dei mesoni . . . . . . . . . . . . . . . . . . . . 976.3.1 Punto di vista della terra . . . . . . . . . . . . . . . . . 996.3.2 Punto di vista del mesone . . . . . . . . . . . . . . . . 100

INDICE 335
6.4 Il paradosso dei gemelli . . . . . . . . . . . . . . . . . . . . . . 1036.4.1 Situazione . . . . . . . . . . . . . . . . . . . . . . . . . 1036.4.2 Carattere paradossale e smascheramento . . . . . . . . 1066.4.3 Reinterpretazione del paradosso . . . . . . . . . . . . . 1076.4.4 Esperimento di Hafele-Keating . . . . . . . . . . . . . . 112
6.5 Paradosso dell’asta nel granaio . . . . . . . . . . . . . . . . . . 1146.5.1 Punto di vista della terra . . . . . . . . . . . . . . . . . 1146.5.2 Punto di vista dell’asta . . . . . . . . . . . . . . . . . . 1166.5.3 Carattere paradossale e smascheramento . . . . . . . . 116
7 Quadrivettori e meccanica 1237.1 Innalzamento . . . . . . . . . . . . . . . . . . . . . . . . . . . 1237.2 Velocita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
7.2.1 Punto di vista relativo . . . . . . . . . . . . . . . . . . 1287.2.2 Punto di vista assoluto . . . . . . . . . . . . . . . . . . 1297.2.3 Confronto . . . . . . . . . . . . . . . . . . . . . . . . . 1307.2.4 Ricapitolazione . . . . . . . . . . . . . . . . . . . . . . 132
7.3 Leggi di moto . . . . . . . . . . . . . . . . . . . . . . . . . . . 1357.3.1 Innalzamento delle leggi . . . . . . . . . . . . . . . . . 1357.3.2 Ricerca dei legami . . . . . . . . . . . . . . . . . . . . 1367.3.3 Vincoli . . . . . . . . . . . . . . . . . . . . . . . . . . . 1387.3.4 Forma relativa . . . . . . . . . . . . . . . . . . . . . . . 1397.3.5 Il 4-vettore energia-momento . . . . . . . . . . . . . . . 1427.3.6 Particelle a massa nulla . . . . . . . . . . . . . . . . . 1437.3.7 Trasporto di massa mediante fotoni . . . . . . . . . . . 1447.3.8 La 4-forza di Minkowski . . . . . . . . . . . . . . . . . 1457.3.9 Significato dell’ortogonalita . . . . . . . . . . . . . . . 1467.3.10 Schema riassuntivo . . . . . . . . . . . . . . . . . . . . 146
7.4 Scrittura delle 4-forze . . . . . . . . . . . . . . . . . . . . . . . 1467.5 Particelle soggette a forza costante . . . . . . . . . . . . . . . 149
8 Dalla dinamica all’elettromagnetismo 1558.1 Moto di una particella nel campo elettromagnetico . . . . . . 155
8.1.1 Lo “statuto speciale” della forza di Lorentz . . . . . . . 1558.1.2 Il tensore di Faraday . . . . . . . . . . . . . . . . . . . 1578.1.3 La 2-forma di Faraday . . . . . . . . . . . . . . . . . . 159
8.2 L’algebra tensoriale . . . . . . . . . . . . . . . . . . . . . . . . 1618.2.1 Primo approccio . . . . . . . . . . . . . . . . . . . . . 1618.2.2 Rappresentazione di vettori . . . . . . . . . . . . . . . 1638.2.3 Le 1-forme . . . . . . . . . . . . . . . . . . . . . . . . . 1648.2.4 Prodotto tensoriale e prodotto esterno . . . . . . . . . 165

336 INDICE
8.2.5 Base per i 2-tensori . . . . . . . . . . . . . . . . . . . . 1678.2.6 Base per le 2-forme . . . . . . . . . . . . . . . . . . . . 1688.2.7 Significato geometrico del prodotto esterno . . . . . . . 169
8.3 Applicazione alla 2-forma di Faraday . . . . . . . . . . . . . . 1698.3.1 Riscrittura della 2-forma . . . . . . . . . . . . . . . . . 1698.3.2 Legge di trasformazione del campo elettromagnetico . . 172
8.4 Il differenziale esterno . . . . . . . . . . . . . . . . . . . . . . 1748.4.1 Derivazione di campi tensoriali . . . . . . . . . . . . . 1748.4.2 Derivazione di p-forme . . . . . . . . . . . . . . . . . . 1758.4.3 Integrazione . . . . . . . . . . . . . . . . . . . . . . . . 1788.4.4 Orientazione del bordo . . . . . . . . . . . . . . . . . . 1798.4.5 Il Teorema di Stokes generalizzato . . . . . . . . . . . . 1818.4.6 Declinazioni del Teorema di Stokes . . . . . . . . . . . 1818.4.7 La teoria dei potenziali . . . . . . . . . . . . . . . . . . 192
9 Equazioni di Maxwell 1979.1 Relazioni fondamentali . . . . . . . . . . . . . . . . . . . . . . 1979.2 I potenziali di Hertz . . . . . . . . . . . . . . . . . . . . . . . 2029.3 Equazioni delle onde . . . . . . . . . . . . . . . . . . . . . . . 2049.4 Forma assoluta delle equazioni di Maxwell . . . . . . . . . . . 209
9.4.1 La 3-forma delle sorgenti . . . . . . . . . . . . . . . . . 2099.4.2 La 2-forma di Maxwell . . . . . . . . . . . . . . . . . . 2119.4.3 La 2-forma di Faraday . . . . . . . . . . . . . . . . . . 2139.4.4 La 1-forma dei potenziali . . . . . . . . . . . . . . . . . 2149.4.5 Conclusione . . . . . . . . . . . . . . . . . . . . . . . . 215
9.5 Le equazioni costitutive . . . . . . . . . . . . . . . . . . . . . . 2179.5.1 I problemi delle equazioni costitutive . . . . . . . . . . 2179.5.2 La dualita di Hodge . . . . . . . . . . . . . . . . . . . 2199.5.3 Applicazioni sullo spaziotempo di Minkowski . . . . . . 2229.5.4 Tavole per lo spaziotempo di Minkowski . . . . . . . . 2249.5.5 Forma assoluta delle equazioni costitutive . . . . . . . 225
9.6 Formulazioni alternative . . . . . . . . . . . . . . . . . . . . . 2269.6.1 Vettore densita di corrente . . . . . . . . . . . . . . . . 2289.6.2 Bivettore di Maxwell . . . . . . . . . . . . . . . . . . . 2329.6.3 Forma vettoriale delle equazioni non omogenee . . . . . 2349.6.4 Forma per componenti delle equazioni omogenee . . . . 2369.6.5 Ricapitolazione . . . . . . . . . . . . . . . . . . . . . . 237
9.7 Il tensore energia-momento . . . . . . . . . . . . . . . . . . . . 2379.7.1 Aspetti energetici . . . . . . . . . . . . . . . . . . . . . 2379.7.2 Bilancio energetico . . . . . . . . . . . . . . . . . . . . 2419.7.3 Bilancio di quantita di moto . . . . . . . . . . . . . . . 244

INDICE 337
9.7.4 Ricapitolazione . . . . . . . . . . . . . . . . . . . . . . 248
10 Approdo alla Relativita Generale 25110.1 Relativita Generale e teoria della gravitazione . . . . . . . . . 251
10.1.1 Due problemi, una soluzione . . . . . . . . . . . . . . . 25110.1.2 Il collegamento: le forze apparenti . . . . . . . . . . . . 25410.1.3 Osservatori in caduta libera . . . . . . . . . . . . . . . 256
10.2 Incompatibilita della gravitazione . . . . . . . . . . . . . . . . 25710.2.1 Significato geometrico delle forze apparenti . . . . . . . 25710.2.2 Curvatura dello spaziotempo . . . . . . . . . . . . . . . 25810.2.3 Origine degli osservatori inerziali . . . . . . . . . . . . 26310.2.4 Il principio di equivalenza forte . . . . . . . . . . . . . 263
11 Equazioni di Einstein 26511.1 Il problema delle equazioni di campo . . . . . . . . . . . . . . 265
11.1.1 Le accelerazioni di marea . . . . . . . . . . . . . . . . . 26511.1.2 La derivata covariante . . . . . . . . . . . . . . . . . . 275
11.2 Equazioni nel vuoto . . . . . . . . . . . . . . . . . . . . . . . . 27911.2.1 Equazioni di campo e tensore di Ricci . . . . . . . . . . 27911.2.2 Parallelo con la teoria newtoniana . . . . . . . . . . . . 280
11.3 Equazioni in presenza di materia . . . . . . . . . . . . . . . . 28311.3.1 Intervento di massa ed energia . . . . . . . . . . . . . . 28311.3.2 Derivata covariante di un tensore . . . . . . . . . . . . 28411.3.3 Modifica delle equazioni nel vuoto . . . . . . . . . . . . 28511.3.4 Il tensore di Einstein . . . . . . . . . . . . . . . . . . . 28711.3.5 Compatibilita con il caso del vuoto . . . . . . . . . . . 28911.3.6 L’intervento della costante cosmologica . . . . . . . . . 290
12 Soluzione di Schwarzschild 29112.1 Soluzione delle equazioni . . . . . . . . . . . . . . . . . . . . . 291
12.1.1 Metrica di Minkowski in coordinate sferiche . . . . . . 29212.1.2 Introduzione del pianeta . . . . . . . . . . . . . . . . . 29312.1.3 I simboli di Christoffel con la lagrangiana . . . . . . . . 29412.1.4 Tensore di Riemann e tensore di Ricci . . . . . . . . . 29712.1.5 Tensore di Ricci in forma mista . . . . . . . . . . . . . 30212.1.6 Risoluzione delle equazioni di Ricci . . . . . . . . . . . 304
12.2 Dal campo al moto . . . . . . . . . . . . . . . . . . . . . . . . 30612.2.1 Moto delle particelle . . . . . . . . . . . . . . . . . . . 30612.2.2 Geodetiche radiali del genere tempo . . . . . . . . . . . 30712.2.3 Geodetiche equatoriali del genere tempo . . . . . . . . 309
12.3 Problema delle singolarita . . . . . . . . . . . . . . . . . . . . 313

338 INDICE
12.3.1 Geodetiche radiali del genere luce . . . . . . . . . . . . 31412.3.2 Analisi della struttura causale . . . . . . . . . . . . . . 31612.3.3 Significato della singolarita r = a . . . . . . . . . . . . 31912.3.4 Risoluzione della singolarita . . . . . . . . . . . . . . . 32312.3.5 L’orizzonte degli eventi . . . . . . . . . . . . . . . . . . 32612.3.6 Estensione massimale di Kruskal . . . . . . . . . . . . 326
12.4 Conseguenze della Relativita Generale . . . . . . . . . . . . . 32912.4.1 Paradossi . . . . . . . . . . . . . . . . . . . . . . . . . 32912.4.2 Guardando avanti . . . . . . . . . . . . . . . . . . . . . 331

Bibliografia
[1] Edwin F. Taylor-John Arcibald Wheeler, Spacetime Physics, secondedition, 1992
[2] Michael Friedman, Foundation of Space-time Theories, PrincetonUniversity Press, 1983
[3] Hermann Bondi, La relativita e il senso comune, Zanichelli, Bologna,1965
[4] George F. R. Ellis, Ruth M. Williams, Flat and curved spacetimes,Oxford University Press, 1983
[5] Isaak M. Jaglom, Relativity Principle of Galileian and Non-EuclideianMoskva, 1969
[6] Harley Flanders, Differential Forms with Applications to the PhysicalSciences, Dover, 1989
[7] David Halliday, Robert Resnick, Kenneth S. Krane, Fisica 2, quintaedizione, 2004
[8] Wolfgang Kurt Panofski, M. Phillips, Elettricita e magnetismo, CEA,1962
[9] Bruno Finzi, Teoria dei campi, ed. Cesare Tamburini, Milano, 1958
[10] Abraham Pais, Einstein, La Biblioteca di Repubblica, 2005
[11] B. Schutz, A first course in general relativity
339