CORSO DI SISTEMI DI MOVIMENTAZIONE E ... - Lunaeform 2013 · C 1.375 .847 TEU /anno 7,04 1,2 3,52...
82
CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO 1 TERMINALI PARTE B
Transcript of CORSO DI SISTEMI DI MOVIMENTAZIONE E ... - Lunaeform 2013 · C 1.375 .847 TEU /anno 7,04 1,2 3,52...
CORSO DI SISTEMI DI MOVIMENTAZIONE E STOCCAGGIO
1
TERMINALI
PARTE B

Problema delle code ai “gate” dei terminalistrada-rotaia
All’ingresso del terminal strada-rotaia (“lato strada”) si devono eseguire determinate attività:
- check-in: consegna documenti, scambio di informazioni sulle operazioni da svolgere
2
- controllo del veicolo e dell’unità di carico
I tempi di servizio in generale variano fra 1,5 e 5 minuti, con una media di circa 3 minuti (nel caso di mezzi che hanno effettuato la prenotazione).

Il modello matematico che viene utilizzato per schematizzare il fenomeno è il modello a coda singola con più “server”
3
Le ipotesi che generalmente viene fatta per un ingresso con s gate è quella di una coda M/M/s.
Ossia: arrivi poissoniani, tempi di servizio esponenziali, s“servitori”.
- Ammettiamo di avere un tasso medio di arrivi nel periodo di punta pari a: veicoli/h50=λ
4
- Ammettiamo che il tasso medio di servizio sia pari a: veicoli/h20=µ
(tempo medio di servizio )minuti31 =µ
Ammettiamo di avere 3 “cancelli” attivi nell’ora di punta.
µλρ⋅
=s
Il parametro è detto tasso di servizio (altre volte è detto intensità di trafficoo rapporto di carico)

Il rapporto 83,0203
50 =×
==µλρs
Soddisfa la cosiddettacondizione di “ergodicità” (ossia se nonfosse inferiore ad 1 la coda continuerebbe ad aumentare nel tempoe non si raggiungerebbero le condizioni stazionarie)
La probabilità di trovare tutti i gate vuoti nel modello M/M/s,che si utilizza in questo caso, è data dall’espressione:
5
( ) ( )( )
11
0 1
1
!!
−−
=
−⋅+⋅= ∑ ρ
ρρs
s
k
sp
ss
k
k
o

La probabilità che un utente arrivando trovi tutti i gate occupati è data da (cosiddetta “Erlang-C formula”):
[ ] ( )ρ
ρ−
⋅==1!
queueing 0p
s
sPP
s
Q
Nel nostro caso:
[ ] ( )7016,0
0449,020/50queueing
3
=== PP
6
[ ] ( )7016,0
60/501
0449,0
!3
20/50queueing =
−== PPQ
(ossia c’è una probabilità del 70% di dovere fare una coda)

Il tempo medio di attesa in coda(ossia il tempo medio di attesa prima di iniziare ad essere servito al gate, “waiting time in queue”) è dato da:
[ ]λµ −
=s
PTE Q
coda
[ ] minuti 4,2ore0702,050203
7016,0 ==−×
=codaTE
Il numero medio di veicoli in attesa in coda (in attesa di essere
nel nostro caso:
7
serviti, escluso quelli che sono in servizio) può essere ricavato attraverso la legge di Little:
[ ] 508,350203
7016,050 ≈−×
×=codaNE
[ ]λµ
λ−
=s
PNE Q
coda nel nostro caso:
[ ] [ ]codacoda TENE λ=

Il tempo di attesa nel sistemao di “attraversamento del sistema” o di “soggiorno nel sistema” (“sojourn time”) è dato:
[ ]µλµ1+
−=
s
PTE Q
nel nostro caso:
[ ] [ ] [ ]SETETE coda +=
STT coda +=
Dove S è il tempo di servizio. La media di T è data da:
8
[ ] minuti7,2ore1202,020
1
50203
7016,0 ==+−×
=TE
Il numero medio dei veicoli nel sistema (compresi quelli in servizio) può essere calcolato, nuovamente, attraverso la legge di Little:
[ ] [ ]TENE λ=
[ ] 008,6)20/50(7016,050 =+×=NE
nel nostro caso:
[ ] [ ] [ ] [ ] [ ]SENESETETENE codacoda λλλ +=+== ][)(
[ ] sP
s
PNE QQ ⋅+
−⋅
=+−
= ρρ
ρµλ
λµλ
1
9
[ ] 008,6)20/50(50203
7016,050 =+−×
×=NE
Poiché: servcoda NNN += sarà: [ ] [ ] [ ]servcoda NENENE +=
Il numero medio dei veicoli in servizio sarà dato perciò da:
[ ] [ ] sSENE serv ⋅=== ρµλλ Nel nostro caso: [ ] 5,2
20
50 ==servNE

La probabilità che il tempo di attesa in coda superi una certa soglia è data:
[ ] HsQcoda ePHTprob ⋅−−⋅=> )( λµ
Posso fissare questa probabilità, per esempio 0,1, e ricavare quel valore del tempo di attesa sotto il quale stanno il 90% degli utenti:
He )50203(7016,01,0 −×−=
10
minuti 69,11ore1948,0)50203(
)1,0ln()7016,0ln( ==−×−=H
Fissiamo ora la probabilità a 0,05 e ricaviamo quel valore del tempo di attesa sotto il quale stanno il 95% degli utenti:
He )50203(7016,005,0 −×−=
minuti 85,15ore2641,0)50203(
)05,0ln()7016,0ln( ==−×−=H
Una “rule of thumb” (regola pratica) suggerisce che un progetto è
11
Una “rule of thumb” (regola pratica) suggerisce che un progetto è accettabile, nel caso di un terminale strada rotaia, quando questo valore è inferiore a 20 minuti

Terminal Container Marittimi
I terminal container marittimi sono terminal intermodali in cuiavviene l’integrazione fra iltrasporto marittimo ed il trasportoterrestre(strada e ferrovia). Nel caso dei terminal del mare del nord èspesso presente anche un’altra modalità di trasporto: quellafluviale.
Comunque spesso i porti sono in vicinanza di un aeroporto ed esistequindi l’integrazioneancheconla modalitàdi trasportoaerea.
12
quindi l’integrazioneancheconla modalitàdi trasportoaerea.

All’interno di un terminal contenitori possono distinguersi fondamentalmente tre aree:
The storage yard( area,
The receipt/delivery area(area di ricevimentoe consegna)
13
The berth area (area di ancoraggio, di attracco)
The storage yard( area, piazzale di stoccaggio)

14
Schemadi un terminal contenitori marittimo

Sistema di movimentazione: “Straddle-carrier” per movimentazione da “berth area” a “storage yard” e per movimentazione all’interno della “storage yard”. I contenitori sono stoccati in direzione perpendicolarealla banchina
15
alla banchina
Nella movimentazione da area di banchina ad area di stoccaggio il carrello cavaliere è utilizzato in “pull in – pull outmode”: i carrelli cavalieri svolgono movimenti pendolari. Questo tipo di disposizione tende a minimizzarela distanza di trasferimento, ma richiede d’altra parte un controllo degli itinerari che può essere complesso.
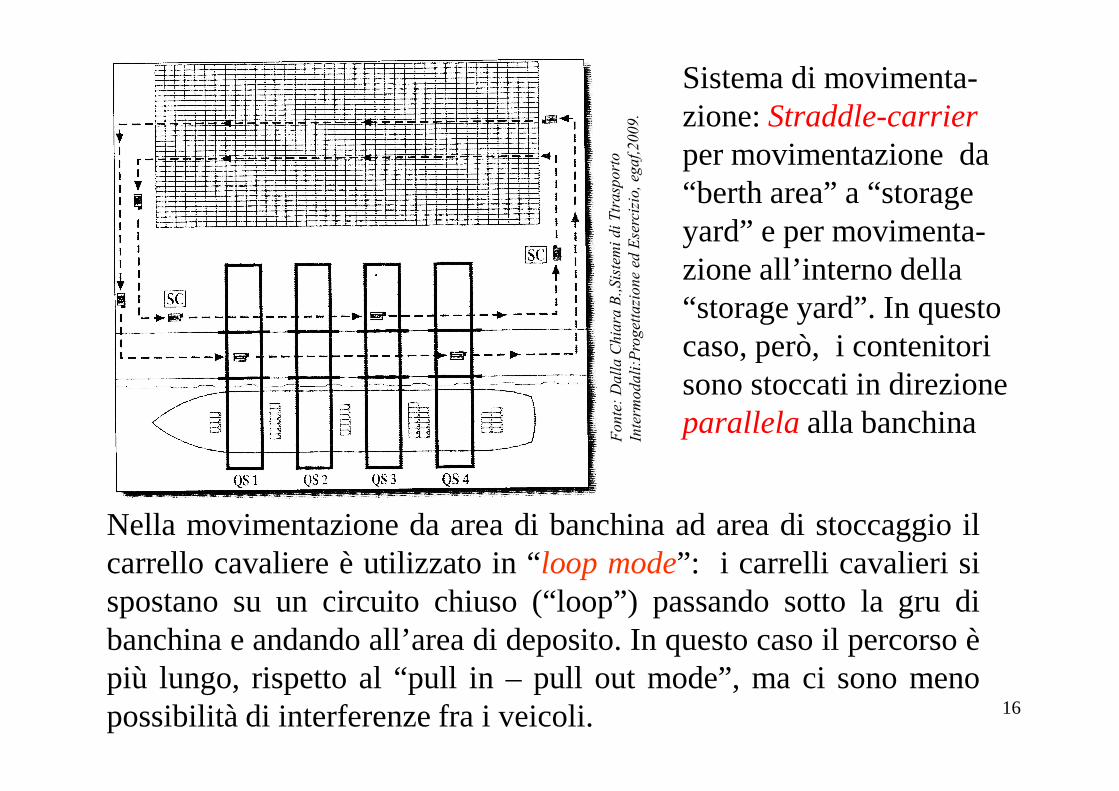
Sistema di movimenta-zione: Straddle-carrier per movimentazione da “berth area” a “storage yard” e per movimenta-zione all’interno della “storage yard”. In questo caso, però, i contenitori sono stoccati in direzione
16
Nella movimentazione da area di banchina ad area di stoccaggio ilcarrello cavaliere è utilizzato in “loop mode”: i carrelli cavalieri sispostano su un circuito chiuso (“loop”) passando sotto la gru dibanchina e andando all’area di deposito. In questo caso il percorso èpiù lungo, rispetto al “pull in – pull out mode”, ma ci sono menopossibilità di interferenze fra i veicoli.
sono stoccati in direzione parallelaalla banchina

17
Sistema di movimentazione:Rubber Tyred GantryCrane(RTG),per la movimentazione nell’area di stoccaggioche può perciòessere ad alta densità, mentre lamovimentazionedall’area dibanchinaall’area distoccaggioè eseguita datrattori che trainanosemirimorchi.

Per quanto riguarda l’area di stoccaggio essa contiene i contenitoriin attesa dell’inoltro via mare (movimento di export), ma soprattuttoi contenitori in arrivo via mare, in attesa di inoltro via terra.Ricordiamoci chel’unità di trasporto navaleha unacapacità ditrasporto decisamentesuperiorealle unità di trasporto terrestri: èperciò necessaria un’area di deposito dei contenitori, in import,molto ampia.
Per quanto riguarda il dimensionamento dell’area di stoccaggioquestopuòessereeffettuatoattraversola formula:
18
questopuòessereeffettuatoattraversola formula:
pg
Tsh
a
AC
TEU
=
che abbiamo già esaminato a proposito dei terminali strada-rotaia,ma che avevamo detto essere importante soprattutto per i terminalimarittimi.

Facciamo un esempio di utilizzo della formula nel caso di un terminale marittimo:
pg
Tsh
a
AC
TEU
=
Ammettiamo che A= 230000 mq
Per quanto riguardah devo tenere conto del fatto che i contenitorisonoin partepieni ed in partevuoti. Quelli vuoti li “impilo” di più.
19
sonoin partepieni ed in partevuoti. Quelli vuoti li “impilo” di più.Inoltre i vuoti, generalmente, sostano per un tempo medio maggiore.
Ammettiamo di avere un 74% di contenitori pieni ed un 26% di vuoti. Assumo h=2 per i pieni e 3 per i vuoti
26,226,0374,02 =×+×=h
D’altra parte i contenitori vuoti sostano di più: ammettiamo 6 giorni per i pieni e 10 giorni per i vuoti.
Ammettiamo di utilizzare come mezzo di movimentazione lo“straddle carrier” e perciò assumiamo s=0,57.
h = 2,26, s=0,57, T=365, g=7,04, p=1,2
giornig 04,726,01074,06 =×+×=
20
annoTEUC /412.8532,104,7
36557,026,2
15
230000 ≈×
××=

Se invece ammettiamo di utilizzare come mezzo dimovimentazione un “transtainer”: s=0,50.
annoTEUC /972.165.12,104,7
36550,052,3
15
230000 ≈×
××=
Consideriamo, però, h=3 per i pieni e 5 per i vuoti
52,326,0574,03 =×+×=h
21
2,104,715 ×

Assumendo s=0,50 ho suppostoche sotto il transtainer sia la corsiadi carico e scarico.
Posso assumere, secondogli schemivisti, s=0,59,
22Fonte: http://www.kalmarind.com
gli schemivisti, s=0,59,ma in questo caso deveesserci, a parte (ossiaoltre i 230.000 mq)un’area per la consegnae il prelievo deicontenitori a marginidell’aria di stoccaggio.

annoTEUC /847.375.12,104,7
36559,052,3
15
230000 ≈×
××=
Da quanto abbiamo visto si può osservare che c’è, in generale,un’alta sensibilità del valore dellacapacità rispetto ai valori deiparametri di input. Per esempio rispetto all’altezza media diimpilamento ed al numero medio di giorni di sosta di un contenitore.Comunque impilare su un’altezza pari a tre, quelli pieni, puòcomportareun fortedispendiodi tempoperla movimentazione.
23
comportareun fortedispendiodi tempoperla movimentazione.
Naturalmente la formula: pg
Tsh
a
AC
TEU
=
Può essere utilizzata (diciamo “inmodo inverso”) per determinare,dato il volume previsto di traffico (“throughput”), la superficieminima dell’area di stoccaggio necessaria per servire tale volumedi traffico.
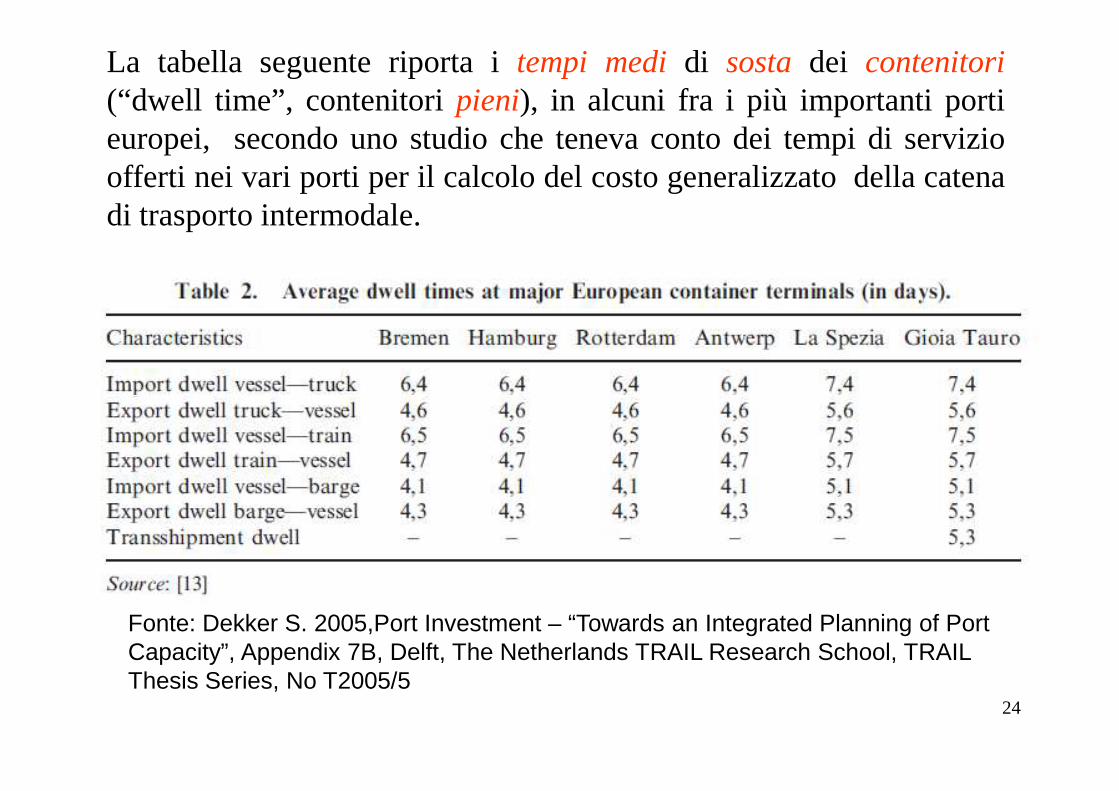
La tabella seguente riporta itempi medidi sosta dei contenitori(“dwell time”, contenitoripieni), in alcuni fra i più importanti portieuropei, secondo uno studio che teneva conto dei tempi di servizioofferti nei vari porti per il calcolo del costo generalizzato della catenadi trasporto intermodale.
24
Fonte: Dekker S. 2005,Port Investment – “Towards an Integrated Planning of Port Capacity”, Appendix 7B, Delft, The Netherlands TRAIL Research School, TRAIL Thesis Series, No T2005/5
Per quanto riguarda la tipologia e la capacità dei mezzi dimovimentazione abbiamo parlato delle caratteristiche principali edella capacità di movimentazione (circa 30 movimenti/h) dellegruportuali per contenitori(“ship-to-shore gantry crane”, “quay crane”).
Per la movimentazione dal “buffer” della gru di banchina all’areadi stoccaggio possono, come abbiamo visto, essere utilizzati:i“trailer”, i “multitrailer”, i carrelli cavalieri, ma anche gliAGVs(“AutomatedGuidedVehicles”)di cui parleremo.
25
(“AutomatedGuidedVehicles”)di cui parleremo.
La movimentazione dei contenitori all’interno dell’area distoccaggio può essere eseguita: congru a portale (“transtainer”),con carrelli cavalieri (“straddle carrier”), congru frontali (“reachstaker”). Le gru a portale, come abbiamo visto, possono essere sugomma o su ferro: “Rubber Tyred Gantry Crane” (RTG) e “Railmounted Gantry Crane” (RMG).

Calcolo del numero di unità di movimentazionenecessarie in un terminale marittimo
La capacità (produttività), pratica, di movimentazione di una unità di movimentazione, espressa in contenitori (unità di carico)/ora, può essere espressa dalla seguente formula:
puntam ct
C3600= punta
ciclom c
tC =
Dove il coefficiente è un coefficiente riduttivo della capacità di movimentazione, dovuto a fenomeni di punta , per il quale si può assumere, per esempio, 0,8.
puntac
: è il tempo di ciclo espresso in secondiciclot
Un ciclo (nel caso, per esempio, di trasferimento da “berth area” a“storage yard”) è dato dalleseguenti fasi: ricevimento dati,posizionamento per il carico del contenitore, carico del contenitore,percorso da banchina ad area di stoccaggio, posizionamento incorrispondenzadel vanoassegnatoperil deposito,scarico,percorso
La durata del tempo di ciclo è data da due componenti: iltempofissoe il tempo variabile. Queste quantità sono variabili aleatorie: siconsiderano i valori medi.
corrispondenzadel vanoassegnatoperil deposito,scarico,percorsoda area di stoccaggio a banchina.
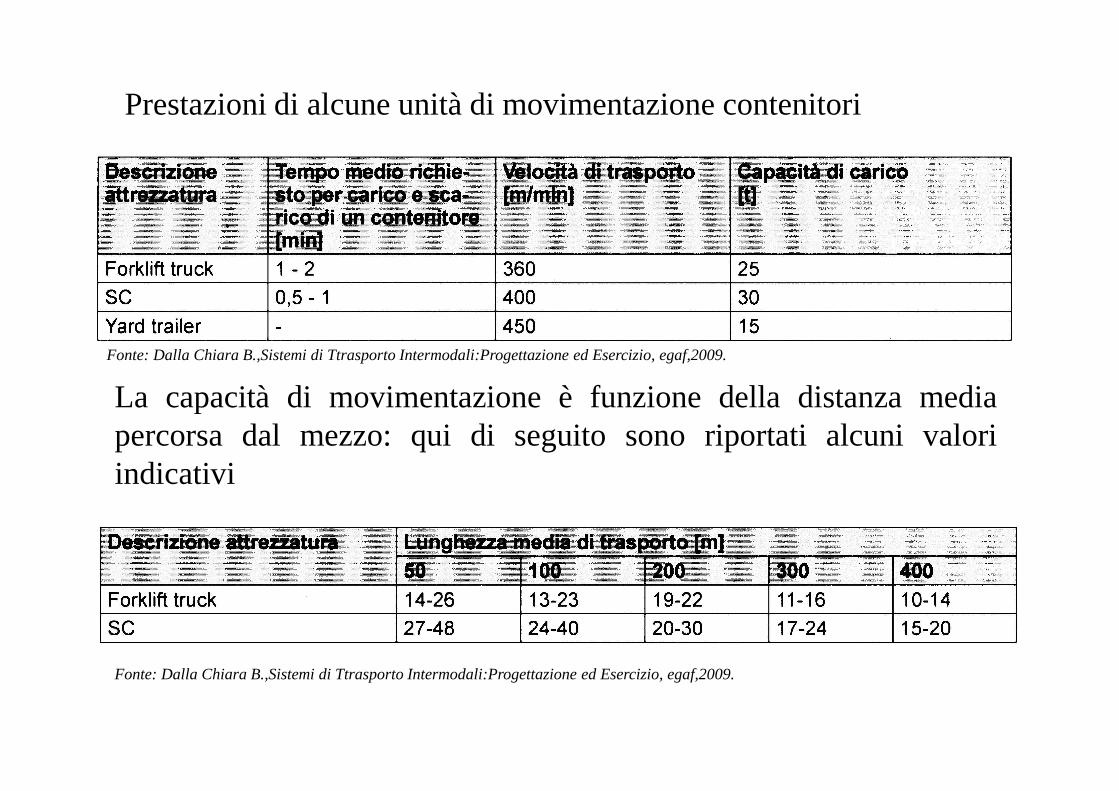
Prestazioni di alcune unità di movimentazione contenitori
La capacitàdi movimentazioneè funzione della distanzamedia
Fonte: Dalla Chiara B.,Sistemi di Ttrasporto Intermodali:Progettazione ed Esercizio, egaf,2009.
La capacitàdi movimentazioneè funzione della distanzamediapercorsa dal mezzo: qui di seguito sono riportati alcuni valoriindicativi
Fonte: Dalla Chiara B.,Sistemi di Ttrasporto Intermodali:Progettazione ed Esercizio, egaf,2009.

mC
Qfn ⋅÷= 30,125,1
: è il fattore dell’ora di punta rispetto al valore medio orario richiesto di movimentazioni contenitori/ ora (tiri/ora)
f
: è la movimentazione media oraria richiesta espressa in Q
Il numero di macchine (unità di movimentazione) necessario,n, può essere determinato dalla seguente formula:
Movimentazione oraria di progetto
: è la movimentazione media oraria richiesta espressa in contenitori per ora (tiri/ora)
Q
: è la capacità oraria dell’unità di movimentazione espressa in contenitori per ora (tiri/ora)
mC
Il fabbisogno di macchine va incrementato di una percentuale del 25/30% per costituire un parco di scorta che possa far fronte alle sostituzioni dovute a: danni, avarie e manutenzioni.
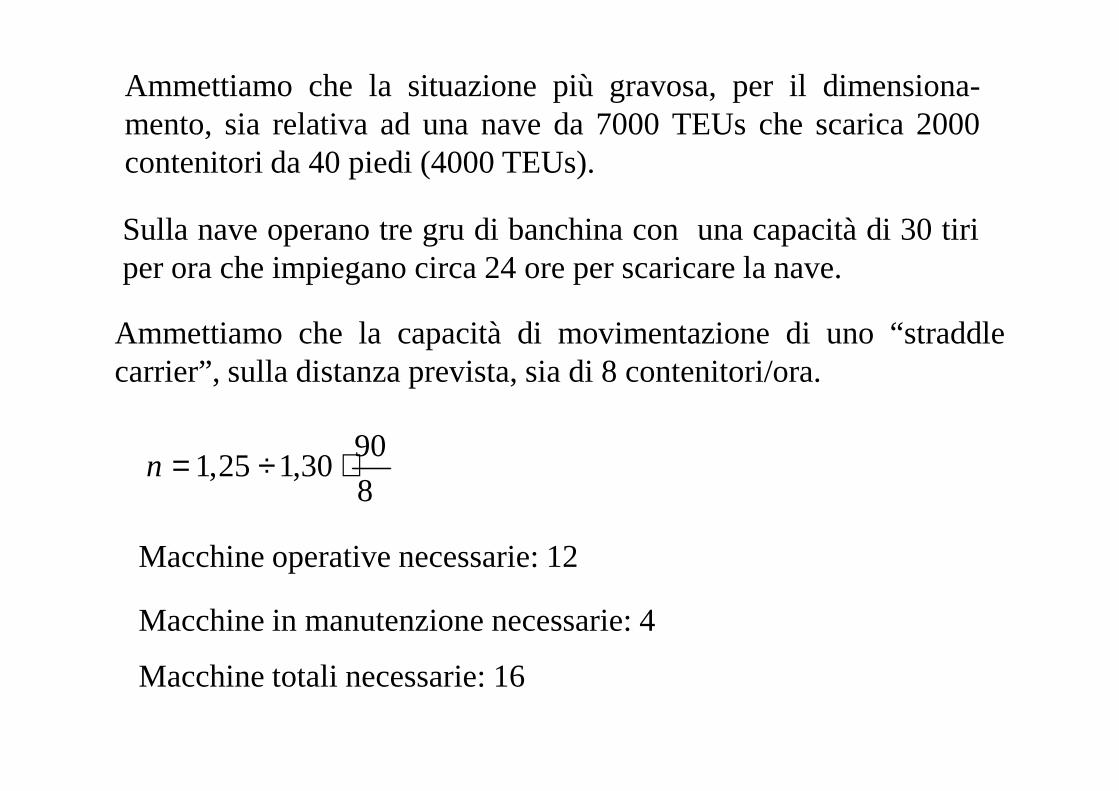
Ammettiamo che la situazione più gravosa, per il dimensiona-mento, sia relativa ad una nave da 7000 TEUs che scarica 2000contenitori da 40 piedi (4000 TEUs).
Sulla nave operano tre gru di banchina con una capacità di 30 tiriper ora che impiegano circa 24 ore per scaricare la nave.
Ammettiamo che la capacità di movimentazione di uno “straddlecarrier”, sulla distanza prevista, sia di 8 contenitori/ora.
8
9030,125,1 ⋅÷=n
Macchine operative necessarie: 12
Macchine in manutenzione necessarie: 4
Macchine totali necessarie: 16
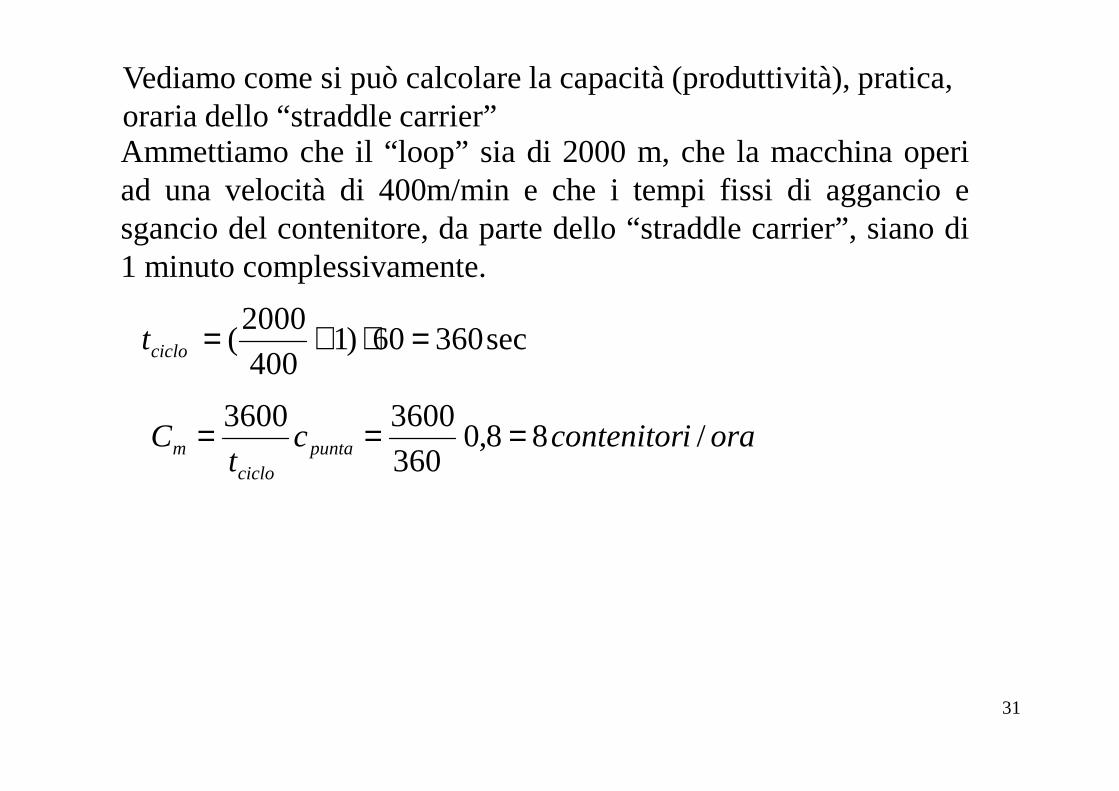
Vediamo come si può calcolare la capacità (produttività), pratica, oraria dello “straddle carrier”Ammettiamo che il “loop” sia di 2000 m, che la macchina operiad una velocità di 400m/min e che i tempi fissi di aggancio esgancio del contenitore, da parte dello “straddle carrier”, siano di1 minuto complessivamente.
sec36060)1400
2000( =⋅+=ciclot
31
oraicontenitorct
C puntaciclo
m /88,0360
36003600 ===

Vediamo di dimensionare un sistema di movimentazione, basato su RTG, per un’area di stoccaggio che movimenta (throughput) 1.000.000 di contenitori/anno.
oraicontenitor /15218365
1000000=⋅
ionemovimentazC
Qfn 30,125,1 ÷=
(ammettendo che il terminal operi su 18 ore)
20
1528,130,125,1
⋅÷=n
Macchine operative necessarie: 14
Macchine in manutenzione necessarie: 4
Macchine totali necessarie: 18
Fattore dell’ ora di punta:sono partito da un valore ditraffico medio sull’anno

Coda all’ingresso di un terminale marittimo (lato terra)
Il problema è del tutto analogoa quello che è stato visto per le code ai terminali terrestri strada-rotaia.
33

Coda all’ingresso di un terminale marittimo (lato mare)
Ammettiamo che il terminal sia attrezzato per accogliere almassimo 4 navi, ossia s=4, e che arrivino mediamente
Anche in questo caso, come nel caso dei “gate”di ingresso, viene fatta una ipotesi di coda del tipo M/M/s.
onavi/giorn3=λ
34
onavi/giorn3=λ
Ammettiamo che il tempo medio di sosta, tempo di servizio, di una nave sia:
ore)24(giornoun/1 =µ

Il modello utilizzato (come nel caso dei gate di un terminale terrestre) è il modello a coda singola con più “server”.
35
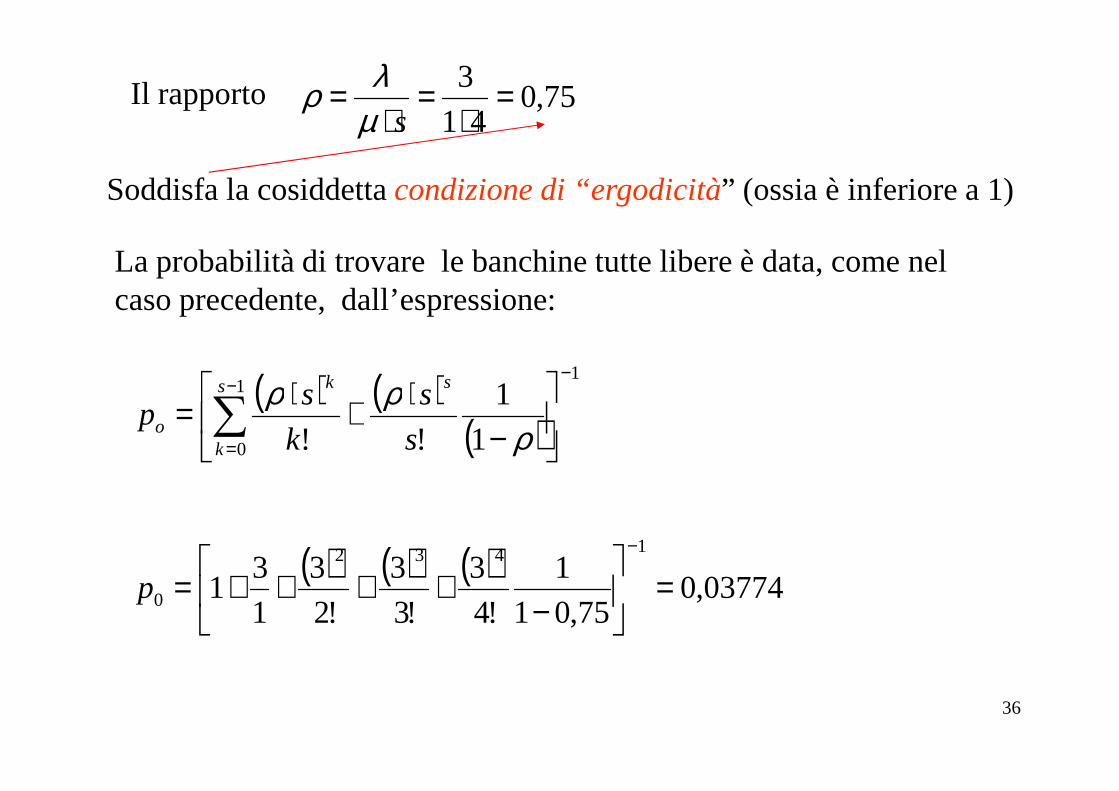
Soddisfa la cosiddetta condizione di “ergodicità” (ossia è inferiore a 1)
La probabilità di trovare le banchine tutte libere è data, come nel caso precedente, dall’espressione:
( ) ( ) 11 1
−− ⋅+⋅= ∑
ρρ ss ss k
Il rapporto 75,041
3 =⋅
=⋅
=sµ
λρ
36
( ) ( )( )
1
0 1
1
!!
−
=
−⋅+⋅= ∑ ρ
ρρs
s
k
sp
s
ko
( ) ( ) ( )03774,0
75,01
1
!4
3
!3
3
!2
3
1
31
1432
0 =
−++++=
−
p
La probabilità che una nave arrivando trovi tutte le banchine occupate (cosiddetta “Erlang-C formula”):
[ ] ( )ρ
ρ−
⋅==1!
queueing 0p
s
sPP
s
Q
Nel nostro caso:
[ ] ( )5095,0
303774,0
!4
3queueing
4
=== PPQ
37
[ ] 5095,0
43
1!4queueing =
−== PPQ
(ossia c’è una probabilità del 51 % circa di dovere fare la coda)

Il tempo medio di attesa in coda(ossia il tempo medio di attesa in rada prima di potersi accostare alla banchina, “waiting time in queue”) è dato da
[ ]λµ −
=s
PTE Q
coda
[ ] ore23,12giorni5095,0314
5095,0 ==−×
=codaTE
Il numero medio di navi in rada in attesa di attraccare alla banchina
nel nostro caso:
38
(in attesa di essere servite) può essere ricavato attraverso la legge di Little:
[ ] 53,1314
5095,03 ≈−×
×=codaNE
[ ]λµ
λ−
=s
PNE Q
coda nel nostro caso:
[ ] [ ]codacoda TENE λ=

Il tempo di “attraversamento del sistema” o di “soggiorno nel sistema” (“sojourn time”) è dato:
[ ]µλµ1+
−=
s
PTE Q
nel nostro caso:
[ ] [ ] [ ]SETETE coda +=
STT coda +=
Dove S è il tempo di servizio. La media di T è data da:
39
[ ] ore36,23giorni51,11
1
314
5095,0 ==+−×
=TE
Il numero medio di navi nel sistema (comprese quelle in servizio) può essere calcolato attraverso la legge di Little:
[ ] [ ]TENE λ=

[ ] 53,4)1/3(5095,03 =+×=NE
nel nostro caso:
[ ] [ ] [ ] [ ] [ ] [ ]SENESETETENE codaQ λλλ +=+== )(
[ ] sP
s
PNE QQ ⋅+
−⋅
=+−
= ρρ
ρµλ
λµλ
1
40
[ ] 53,4)1/3(314
5095,03 =+−×
×=NE
Poiché: servcoda NNN += sarà: [ ] [ ] [ ]servcoda NENENE +=
Il numero medio di navi in servizio sarà dato perciò da:
[ ] [ ] ssENE serv ⋅==⋅= ρµλλ Nel nostro caso: [ ] 3
1
3 ==servNE
La probabilità che il tempo di attesa in coda superi una certa soglia è data:
[ ] HsQcoda ePHTprob )( λµ −−⋅=>
Posso fissare questa probabilità, per esempio 0,1, e ricavo quel valore del tempo di attesa sotto il quale stanno il 90% degli utenti
41
He )314(5095,01,0 −×−=
ore39giorni628,1)314(
)1,0ln()5095,0ln( ≈=−×−=H

Ammettiamo che il terminal sia attrezzato per accogliere almassimo 3 navi, ossia m=3, e che arrivino mediamente:
onavi/giorn5,2=λSupponiamo che il tempo medio di sosta, tempo di servizio, di una
Vediamo dei dati differenti: in particolare che portino ad unasituazione di maggiore carico (valore maggiore per l’intensità ditraffico), in modo di avere la sensibilità dei risultati rispetto ai dati diinput.
42
Supponiamo che il tempo medio di sosta, tempo di servizio, di una nave sia ancora:
ore)24(giornoun/1 =µ
Soddisfa la cosiddetta condizione di “ergodicità” (ossia è inferiore a 1)
La probabilità di trovare le banchine tutte libere è data, come nel caso precedente, dall’espressione:
( ) ( ) 11 1
−− ⋅⋅∑
ρρ ss ss k
Il rapporto 833,013
5,2 =×
==µλρs
43
( ) ( )( )
1
0 1
1
!!
−
=
−⋅+⋅= ∑ ρ
ρρs
s
k
sp
ss
k
k
o
( ) ( )045,0
833,01
1
!3
5,2
!2
5,2
1
5,21
132
0 =
−+++=
−
p
La probabilità che una nave arrivando trovi tutte le banchine occupate (cosiddetta “Erlang-C formula”):
[ ] ( )ρ
ρ−
⋅==1!
queueing 0p
s
sPP
s
Q
Nel nostro caso:
[ ] ( )7031,0
045,05,2queueing
3
=== PP
44
[ ] 7031,0
35,2
1!3queueing =
−== PPQ
(ossia c’è una probabilità del 70 % circa di dovere fare la coda)

Il tempo medio di attesa in coda(ossia il tempo medio di attesa in rada prima di potersi accostare alla banchina, “waiting time in queue”) è dato da:
[ ]λµ −
=s
PTE Q
coda
[ ] ore75,33giorni4062,15,213
7031,0 ==−×
=codaTE
Il numero medio di navi in rada in attesa di attraccare alla banchina
nel nostro caso:
45
(in attesa di essere servite) può essere ricavato attraverso la legge di Little:
[ ] 52,35,213
7031,05,2 ≈−×
×=codaNE
[ ]λµ
λ−
=s
PNE Q
coda nel nostro caso:
[ ] [ ]codacoda TENE λ=

Il tempo di “attraversamento del sistema” o di “soggiorno nel sistema” (“sojourn time”) è dato:
[ ]µλµ1+
−=
s
PTE Q
17031,0
nel nostro caso:
[ ] [ ] [ ]SETETE coda +=
STT coda +=
Dove S è il tempo di servizio. La media di T è data da:
46
[ ] ore75,57giorni41,21
1
5,213
7031,0 ==+−×
=TE
Il numero medio di navi nel sistema (comprese quelle in servizio) può essere calcolato attraverso la leggse di Little:
[ ] [ ]TENE λ=

[ ] 02,6)1/5,2(7031,05,2 =+×=NE
nel nostro caso:
[ ] [ ] [ ] [ ] [ ] [ ]SENESETETENE codaQ λλλ +=+== )(
[ ] sP
s
PNE QQ ρ
ρρ
µλ
λµλ
+−⋅
=+−
=1
47
[ ] 02,6)1/5,2(5,213
7031,05,2 =+−×
×=NE
Poiché: servcoda NNN += sarà: [ ] [ ] [ ]servcoda NENENE +=
Il numero medio di navi in servizio sarà dato perciò da:
[ ] [ ] sSENE serv ρµλλ === Nel nostro caso: [ ] 5,2
1
5,2 ==servNE

La probabilità che il tempo di attesa in coda superi una certa soglia è data:
[ ] HsQcoda ePHTprob )( λµ−−⋅=>
Si fissa questa probabilità, per esempio 0,1, e ricavo quel valore del tempo di attesa sotto il quale stanno il 90% degli utenti
He )5,213(7031,01,0 −×−=
48
ore62,93giorni9,3)5,213(
)1,0ln()7031,0ln( ≈=−×
−=H
Questo è un valore decisamente alto che mette in evidenza come “le cose non funzionino”.
Nel caso di una coda per essere serviti ad un terminale marittimo,generalmente, si è più interessati, dal punto di vista del livello diservizio offerto, a che il tempo di attesa nel sistema (piuttosto che iltempo di attesa in coda) non superi una certa soglia. Infatti, da unpunto di vista economico, quello che conta è che il tempo diattraversamento del sistema non superi una certa soglia: è per iltempodi attraversamentodel sistema che lanave non è produttiva.
La formula da utilizzare in questo caso è la seguente:
49
[ ] => HTprob
−
−−−−
−−−−−
−= −−− )1(1)1(
)1(1)1(
)1()1(1 )( HsQHQ e
s
Pe
s
Ps λµµ
ρρρ

−−−
−−−−
−−−−= −−− )1(
1)35,2
1(3
7031,0)1(
1)35,2
1(3
)7031,01()35,2
1(31 )5,23( HH ee
[ ] => HTprob
[ ])1(4062,1)1(4062,01 50,0 HH ee −− −+−−−[ ] => HTprob
50
HH ee 5,04062,14062,14062,04062,01 −− +−−+[ ] => HTprob
[ ] => HTprob HH ee 5,04062,14062,0 −− +−
Pongo questa probabilità uguale a 0,1 e ricavo quel valore deltempo di attesa, nel sistema, sotto il quale stanno il 90% degliutenti:
[ ] => HTprob HH ee 5,04062,14062,0 −− +−
=1,0 HH ee 5,04062,14062,0 −− +−
H=5,24 giorni
Questo è un valore decisamente alto (che conferma che le “cose non
51
Questo è un valore decisamente alto (che conferma che le “cose non funzionano”).
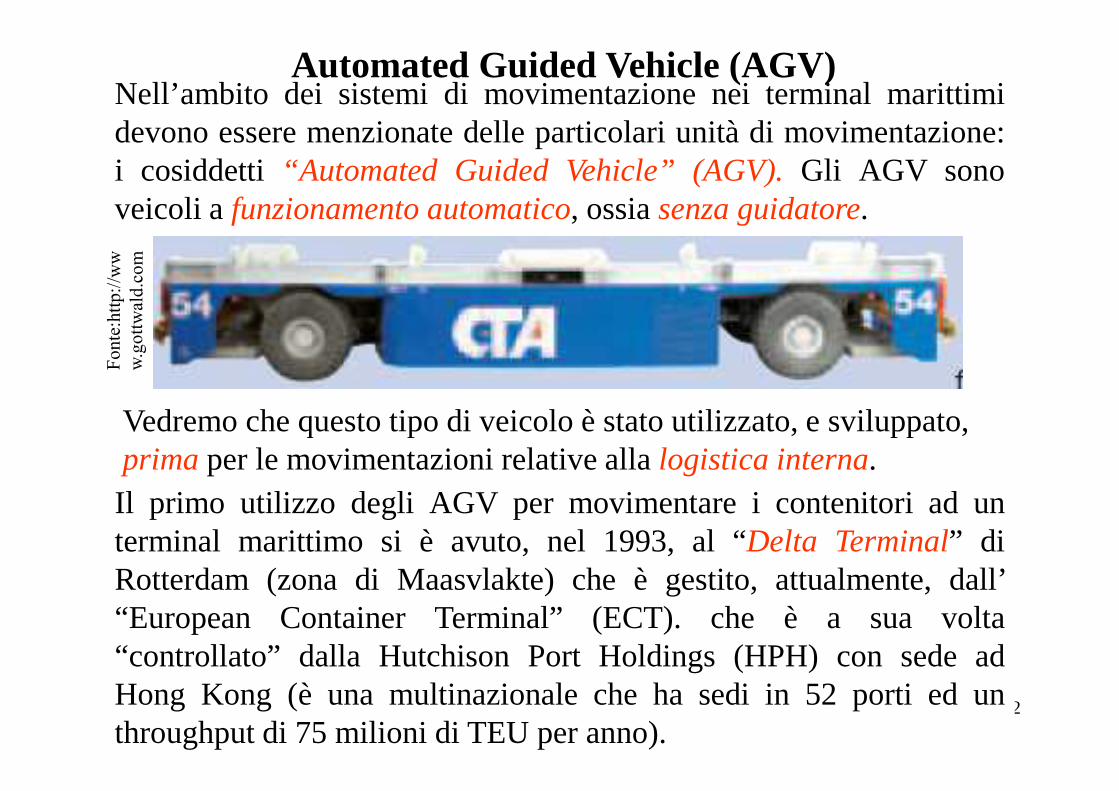
Nell’ambito dei sistemi di movimentazione nei terminal marittimidevono essere menzionate delle particolari unità di movimentazione:i cosiddetti “Automated Guided Vehicle” (AGV).Gli AGV sonoveicoli afunzionamento automatico, ossiasenza guidatore.
Automated Guided Vehicle (AGV)
52
Vedremo che questo tipo di veicolo è stato utilizzato, e sviluppato, primaper le movimentazioni relative alla logistica interna.Il primo utilizzo degli AGV per movimentare i contenitori ad unterminal marittimo si è avuto, nel 1993, al “Delta Terminal” diRotterdam(zona di Maasvlakte) che è gestito, attualmente, dall’“European Container Terminal” (ECT). che è a sua volta“controllato” dalla Hutchison Port Holdings (HPH) con sede adHong Kong (è una multinazionale che ha sedi in 52 porti ed unthroughput di 75 milioni di TEUper anno).

Gli AGV del “ECT Delta Terminal” sono equipaggiati con un motorediesel e trasmissione idraulica (per i veicoli più recenti è statautilizzatala trasmissione elettrica).
Ogni veicolo puòtrasportare 1contenitore da 40piedi, oppure 2 da20.
53

Il trasporto di container dalle gru di banchina all’aria di stoccaggioècompletamente automatizzato. Inoltre anche l’area di stoccaggio èorganizzata con “Automated Stacking Cranes” (ASCs).
54

Il sistema di controllo (Process Control System(PCS) “ordina” aiveicoli di andare avanti e indietro dalle banchine alle aree distoccaggio lungo degliitinerari specificati. Il computer di bordo, diciascun AGV, valuta la posizione del veicolo, con unaapparecchiatura di bordo. Gli errori di determinazione della posizionesono corretti attraverso una griglia di “trasponder” (apparecchiaturache trasmette un determinato segnale in risposta ad un determinatosegnale ricevuto) che sono “immersi” nella pavimentazione dell’areain cui si muovonogli AGV. I transponderfunzionanocome degli
55
in cui si muovonogli AGV. I transponderfunzionanocome degli“electro-magnetic route markers”
Il computer di bordo, di ciascun AGV, ha un continuo “rifasamento”(annullamento degli errori) riguardo alla posizione del veicolo:attraverso i dati che riceve dalla griglia di trasponder. Il computer dibordo “passa” alsistema di controllo centralela posizione e lavelocità del veicolo. Il sistema di controllo centrale“vede” ecentralizza le posizioni di tutti gli AGVsed elabora una strategia dicontrollo relativamente agli itinerari da fare seguire a ciascun AGVealle precedenze fra essi.
56

57“Delta terminal” di Rotterdam )

I veicoli AGV inoltre sono equipaggiati con sensori che evitanocollisioni che si possono verificare per circostanze non previste. Ilcomputer di bordo è comunque piuttosto potente e monitorizza: latemperatura del motore, i livelli dell’olio, del carburante e comunicaogni anomalia al Centro di Controllo.
Il centro di controllo riserva una “area” (un’area che potremmodefinire area di “blocco”: in modo simile a quanto avviene in
58
definire area di “blocco”: in modo simile a quanto avviene inferrovia) a ciascun AGV, all’interno della zona di movimentazionedegli AGV. Sotto la zona di movimentazione degli AGVè presente lagriglia di “trasponder”. Solamente un AGVè presente in ciascuna“area di blocco”.

Ad un AGV vuoto è “ordinato” di andare in un’area di movimentazione(“buffer” della gru di banchina) dove un container viene caricato sulveicolo; l’AGV trasporta il contenitore in un’altra area dimovimentazione dove viene “stoccato” (il percorso può essere anche,ovviamente, dall’area di stoccaggio alla gru di banchina).
59

AGV del tutto simili a quelli utilizzati al “Delta Terminal” di Rotterdamsono utilizzati nel “Terminal Container Altenwerder” (CTA) del porto diAmburgo: E’ un terminal molto moderno (è’ stato aperto nel 2002)
60

M.Lupi, "Sistemi di Movimentazione e Stoccaggio" - A.A. 2010/11 - Univ. di Pisa - Polo della Logistica di Livorno61
I veicoli sono costruiti dalla stessa azienda di quelli di Rotterdam ( la tedesca Gottwald). La trasmissione però è elettrica (sono veicoli Diesel-elettrici).
AGV del Container Terminal Altenwerder (CTA) (ci sono circa 80AGVs al terminal Altenwerder).

62
Layout del terminal container di Altenwerderdel porto di Amburgo. E’ gestito dalla Hamburger Hafen und Logistik AG (HHLA).
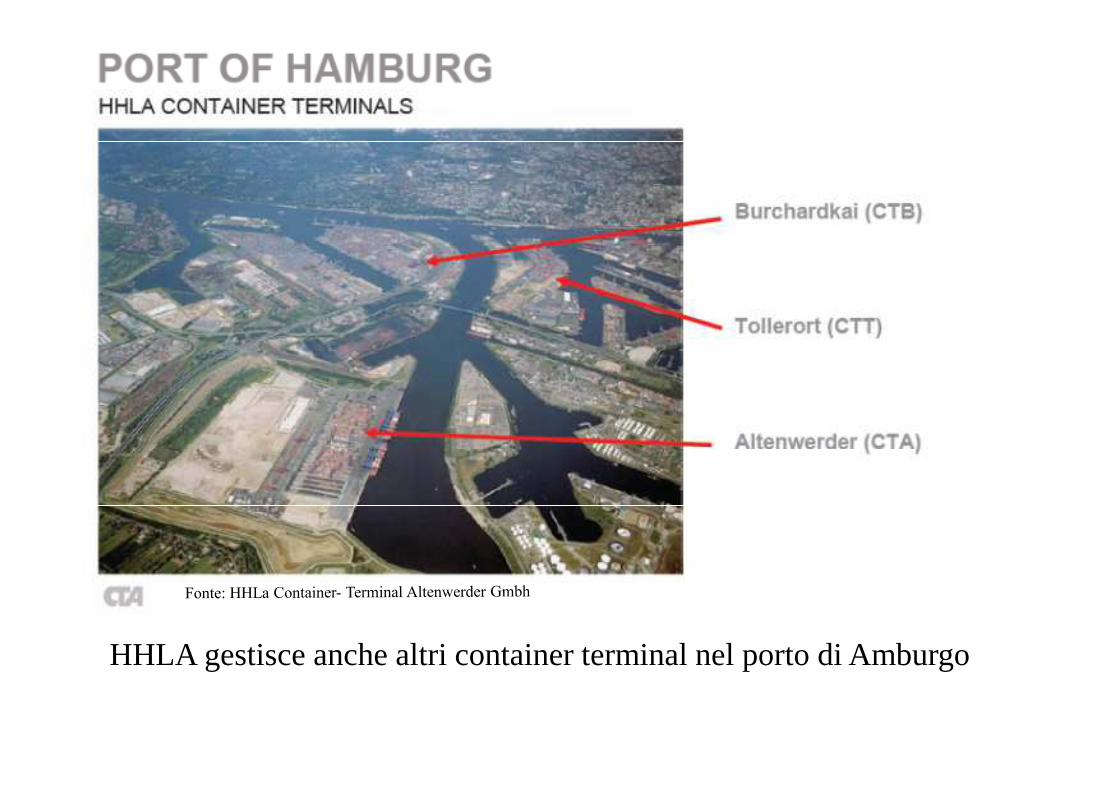
HHLA gestisce anche altri container terminal nel porto di Amburgo
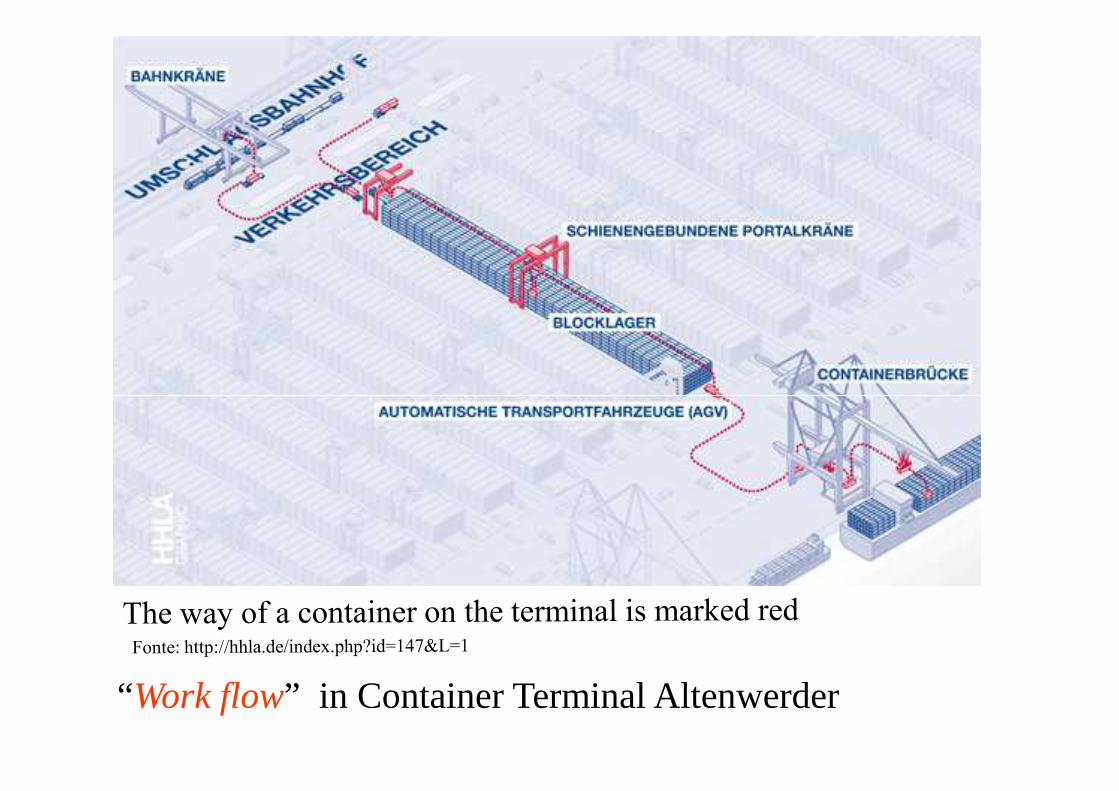
“Work flow” in Container Terminal Altenwerder
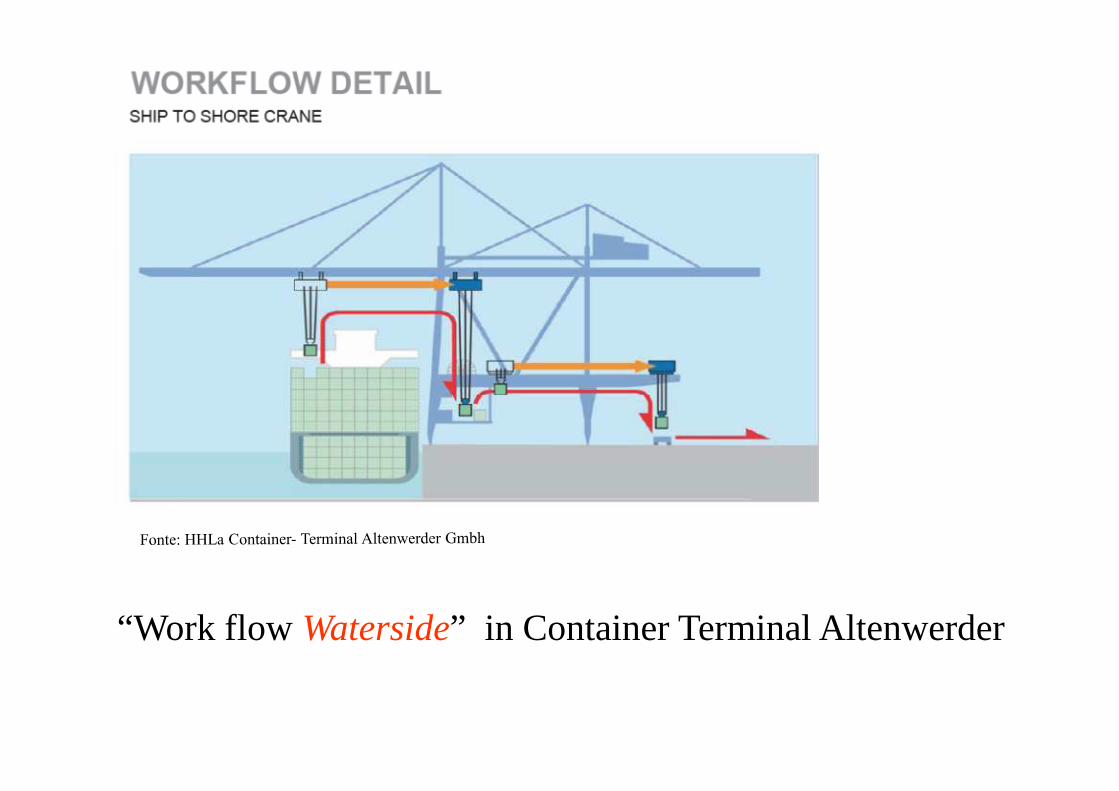
“Work flow Waterside” in Container Terminal Altenwerder


67Il “Terminal Container Altenwerder” è in continua espansione.
Fonte: http://www.hafen-hamburg.de/en/article/HHLA-CTA

I veicoli a guida automatica, come si vede chiaramente in questa figura, hanno entrambi gli assi sterzanti.
M.Lupi, "Sistemi di Movimentazione e Stoccaggio" - A.A. 2010/11 - Univ. di Pisa - Polo della Logistica di Livorno68

Euromax(5 m TEU; 2m TEU in first phase)
Delta (Maasvlakte I)
Maasvlakte II
Anche a Rotterdam è stato costruito un nuovo terminal automatico, “Euromax” ed è in corso di realizzazione una vasta espansione del porto verso il mare (Maasvlakte II)
Fonte: Notteboom Theo E. , “Container shipping and new port hierarchies in Europe: an update”, IAME Melbourne, July 12, 2006.
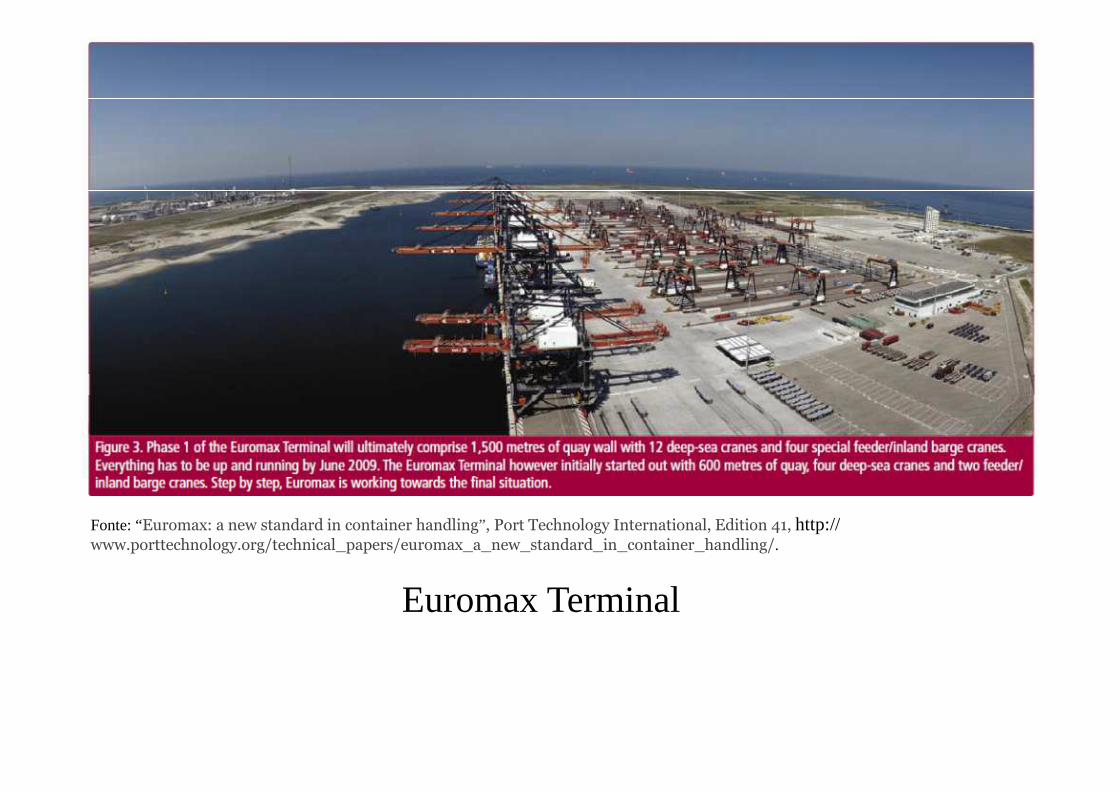
Fonte: “Euromax: a new standard in container handling” , Port Technology International, Edition 41, http://www.porttechnology.org/technical_papers/euromax_a_new_standard_in_container_handling/.
Euromax Terminal

I veicoli AGV, per la movimentazione dei contenitori nei terminalimarittimi, sono in continua evoluzione. Attualmente sono statisviluppati i cosidetti“lift AGV “ (sempre della “Gottwald”). Essi hannodue piattaforme sollevabili (elettricamente) che permettono loscaricodei contenitori senzaintervento di unaunità di movimentazione(operazione cosiddetta di “decupling”: disaccoppiamento,sganciamento).
(In questo caso c’è un disaccoppiamento fra
71
disaccoppiamento fra le operazione di banchina e quelle del piazzale di stoccaggio).

Fonte:http://www.gottwald.com
72

73

Evoluzione degli AGV della Gottwald_ Recentemente (2011) sono stati lanciati i “Battery AGV” che sono dotati esclusivamente di motore elettrico

Unità di carico(semirimorchio)
Sistema AGV – Cassetta – Unità di carico
Sono inoltre in corso di sperimentazione sistemi che utilizzano AGV per lo scarico e il carico dei contenitori da navi di tipo RO-RO
75
AGV
Cassetta
Massimo carico trasportabile: 82,5 ton

Sistema AGV – Cassetta
76AGV sotto la cassetta sollevamento trasporto

77
Formazione a trenino (max 10 AGV)
Velocità max: 20 km/h

“Cassette AGV” realizzato da TTS e Danaher
78
“Cassette AGV” realizzato da TTS e Danaher Motion

In effetti nel campo dei veicoli automatici sono stati messi a puntoanche dei carrelli cavalieri (“straddle carrier”) automatici (dallaKalmar): essi oltre atrasportare, automaticamente, in sensoorizzontale spostano,automaticamente, anche insenso verticaleleunità di carico.
Kalmar Autoshuttle
(automated shuttle /
79
(automated shuttle / straddle carrier)

Fo
nte
: P
irho
nen
J., “
Ka
lma
r A
uto
shu
ttle
”, K
alm
ar,
20
08
.
80
In uno studio è stato eseguito un confronto economico (spese diinvestimento e spese annuali di esercizio), basato su una simulazione,fra i diversi sistemi automatici ed un sistema “manuale”, basato su“straddle carrier” tradizionali (detti “shuttle carrier”, nello studioaventi altezza di stoccaggio pari a 2 contenitori). Il confronto è statoeseguito fra sistemi con stessa capacità di movimentazione.
Fo
nte
: P
irho
nen
J., “
Ka
lma
r A
uto
shu
ttle
”, K
alm
ar,
20
08
.

81
CAPEX (Capital Expenditure) to purchase the transportation equipment tosupport 10 QCs at a peak berth productivity of 400 bx/h. Yearly OPEX(Operationa Expenditure) of operating this fleet of equipment, including labourcost, running costs, maintenance and capital costs at an interest rate of 7%.
Fonte: Yvo Saanen, “Head To Head For Today’s State-of-the-art Robotised Container Transportation Equipment”, Freight International
Sistema “tradizionale”

Dallo studio emerge che da un punto di vista economico tutti isistemi automatici sono superiori a quello “manuale” (detto così percontrapposizione ad automatico, ma forse sarebbe meglio definirlo“tradizionale”). Esso ha i più bassi costi di investimento, ma i piùalti costi operativi annui.
Fra quelli automatici il più conveniente risulterebbe il sistema “lift AGV” della Gottwald (pero l’autore dello studio……).
82