Corso di Riabilitazione Strutturale - unibas.it 3.7... · Stimare nella sezione critica il...
61
Corso di Riabilitazione Strutturale POTENZA, a.a. 2011 – 2012 VALUTAZIONE DI EDIFICI Dott. Marco VONA DiSGG, Università di Basilicata [email protected] http://www.unibas.it/utenti/vona/ VALUTAZIONE DI EDIFICI ESISTENTI IN C.A. – II PARTE ANALISI E STRATEGIE DI INTERVENTO
Transcript of Corso di Riabilitazione Strutturale - unibas.it 3.7... · Stimare nella sezione critica il...

Corso diRiabilitazione Strutturale
POTENZA, a.a. 2011 – 2012
VALUTAZIONE DI EDIFICI
Dott. Marco VONADiSGG, Università di Basilicata
[email protected] http://www.unibas.it/utenti/vona/
VALUTAZIONE DI EDIFICI
ESISTENTI IN C.A. – II PARTE
ANALISI E STRATEGIE DI INTERVENTO

− Legami costitutivi calcestruzzo armato e acciaio− Sfilamento barre− Fessurazione (effetto spinotto, attrito, interlock,..)− Interazione non-lineare suolo-struttura− Grandi spostamenti/rotazioni (deformazioni)− Effetti secondo ordine− Fenomeni di instabilità dell’equilibrio
NON LINEARITÀ DELLA STRUTTURA
∆ ∆
t=3s t=4s∆
V
∆u ∆m ∆y
Inizio espulsione copriferro
Fine espulsione copriferro
Prima cerniera plastica
Cerniere plastiche
Instabilità barre/ crisi calcestruzzo Fessurazione

Modellazione plasticità concentrata (modello cerniera plastica)
‒ analisi veloci
‒ difficile da calibrare
MODELLAZIONE DEL COMPORTAMENTO ANELASTICO
Modellazione plasticità distribuita (modello di fibre)
‒ modellazione più semplificata
‒ analisi prolungate
‒ difficile da calibrare

Nelle strutture intelaiate soggette ad azioni orizzontali lesollecitazioni flettenti massime si verificano in corrispondenzadelle estremità di travi e colonne in cui, superata la soglia elastica,si concentrano le deformazioni anelastiche
Alcuni modelli di trave
MODELLAZIONE A PLASTICITÀ CONCENTRATA
Alcuni modelli di traveconsiderano la plasticità tuttaconcentrata in cerniereplastiche puntuali disposte alleestremità degli elementi
Tali modelli vengonodenominati modelli aPLASTICITÀ CONCENTRATA

MODELLAZIONE A PLASTICITÀ CONCENTRATA
Trascurando gli effetti dei carichi verticali , la distribuzionedei momenti risultalineare e quindi l’elemento può essereriguardato come una trave a mensola, di luce Lv e caricata dauna forza concentrata all’estremo libero

La corretta valutazione del punto di flesso della deformata (puntodi nullo del diagramma dei momenti), ossia della luce di taglio Lv
è un problema di non facile risoluzione
Una semplice analisi lineare consente di valutare in maniera esattala posizione del punto di flesso durante il comportamento linearedella struttura
MODELLAZIONE A PLASTICITÀ CONCENTRATA
λλλλ1F λλλλ2F

D’altro canto, le prime formazioni di regioni plastichecomportano una ridistribuzione delle sollecitazioni flettenti conconseguente traslazione del punto di flesso.
3*My(positivo) = My(negativo)
MODELLAZIONE A PLASTICITÀ CONCENTRATA
λλλλ1F λλλλ2F

Pertanto in genere la posizione del punto di flesso, Lv è assuntacostante durante il processo di carico(di analisi)
La caratterizzazione meccanica della cerniera plastica èdirettamente influenzata dalla posizione del punto di flesso per cuila sua variazione comporterebbe una diversa caratterizzazionedella stessa (problemi di convergenza del calcolo non lineare)
MODELLAZIONE A PLASTICITÀ CONCENTRATA
λλλλ1F λλλλ2F

(a) la luce di taglio è valutata comemetà della lucedell’elemento(Lv=0.5L)
(b) la luce di taglio è desunta dal diagramma deimomentiflettenti presente lungo l’elemento valutato medianteuna
MODELLAZIONE A PLASTICITÀ CONCENTRATA
Determinazione luce di taglio
flettenti presente lungo l’elemento valutato medianteunaanalisi elastico lineare (statica o modale)
(c) la luce di taglio è desunta dal diagramma deimomentiflettenti presente lungo l’elemento, valutato mediante unaanalisi non lineare (es. analisi limite), corrispondente ad unaconfigurazione deformata caratterizzata da uno spostamentodel punto di controllo pari allo spostamento sismico richiesto
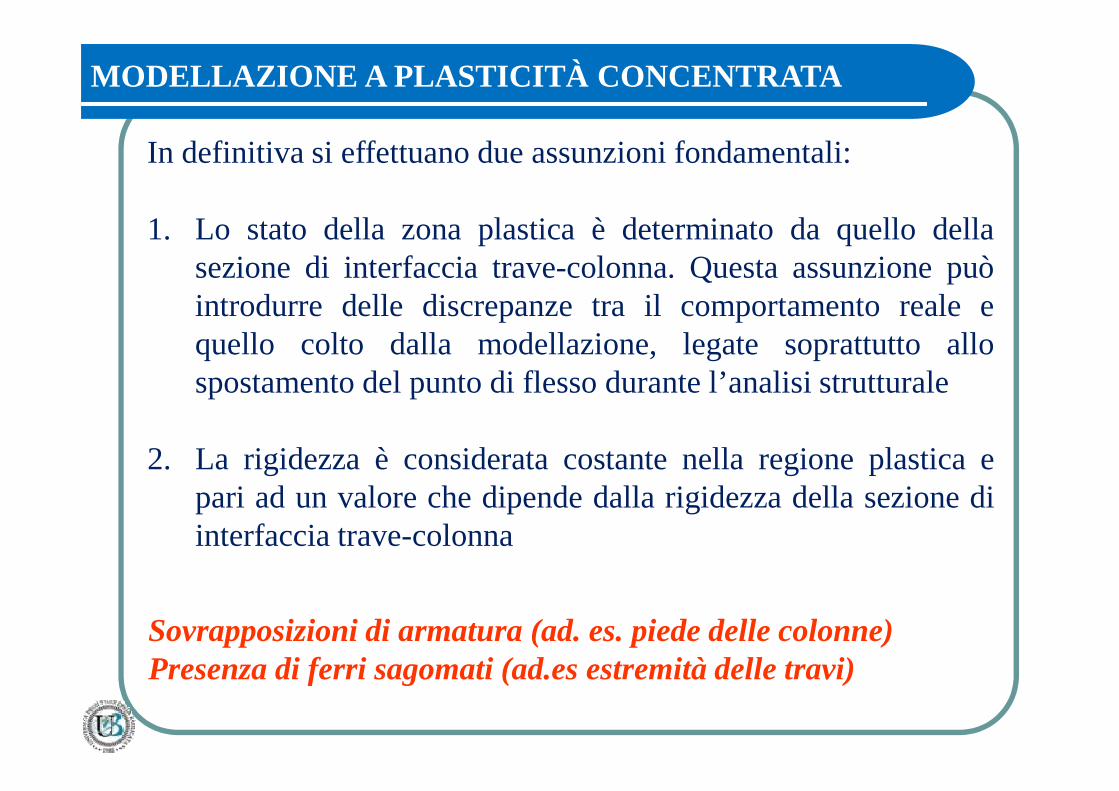
In definitiva si effettuano due assunzioni fondamentali:
1. Lo stato della zona plastica è determinato da quello dellasezione di interfaccia trave-colonna. Questa assunzione puòintrodurre delle discrepanze tra il comportamento reale equello colto dalla modellazione, legate soprattutto allospostamentodelpuntodi flessodurantel’analisi strutturale
MODELLAZIONE A PLASTICITÀ CONCENTRATA
spostamentodelpuntodi flessodurantel’analisi strutturale
2. La rigidezza è considerata costante nella regione plastica epari ad un valore che dipende dalla rigidezza della sezione diinterfaccia trave-colonna
Sovrapposizioni di armatura (ad. es. piede delle colonne)Presenza di ferri sagomati (ad.es estremità delle travi)

Nelle zone di estremità si concentrano e si dispongono elementinon lineari (cerniere plastiche) mentre il resto dell’elemento èlineare
MODELLAZIONE A PLASTICITÀ CONCENTRATA
Per definire gli elementi cerniera bisogna:1. Decidere la loro localizzazione e il corrispondente tipo di 1. Decidere la loro localizzazione e il corrispondente tipo di
rottura

CARATTERIZZAZIONE DEGLI ELEMENTI CERNIERA
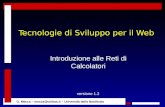
2. Stimare nella sezione critica il diagramma momento-curvatura in presenza di azione assiale e degrado neltempo per scegliere fra i vari modelli proposti
M
Φ
Modello interazione M-N Modello momento-curvatura isteretico

MODELLI DI COMPORTAMENTO ISTERETICO
3. Scegliere il modello isteretico più opportuno (analisiDinamica non lineare)

4. Tener conto della variabilità comportamento non lineare ciclico
MODELLI DI COMPORTAMENTO ISTERETICO
5. Lunghezza di cerniera plastica equivalente tale per cui ilprodotto di questa per la curvatura, derivante dal modelloscelto, definisca una rotazione prossima a quella reale

Vantaggi:• Utilizza principalmente elementi elastici, in pochi punti non
linearità del materiale⇒ minor onere computazionale• permette, con opportuna scelta del legame costitutivo della
cerniera, di descrivere diversi fenomeni, oltre al comportamentoflessionale: deformabilità a taglio, scorrimento dell’armatura,flessibilità del nodo trave-colonna, interazione fra telaio e
⇒
MODELLAZIONE A PLASTICITÀ CONCENTRATA
tamponamenti… ⇒ versatilità, adeguata modellazionecomportamento di strutture esistenti
Limiti: richiede esperienza dell’operatore per stabilire dove distribuire glielementi non lineari, per scegliere lunghezze e curvecaratteristiche⇒ accuratezza dell’intera analisi può esserefacilmente compromessa

σσσσ
εεεε
=
sezi
on
e in
c.a
.C
LS n
on
co
nfin
ato
30
40
50
60
70
80
90
100
Mcr
My
Mmax
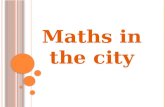
ANALISI DELLA SEZIONE
εεεε
σσσσ
εεεε
σσσσ
+
+1. Fase elastica
2. Fase fessurata
3. Fase post-elastica
4. Fase post-picco (softening)
Cls
co
nfin
ato
acci
aio
0
10
20
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1curvatura [1/m]φcr φy φmax

Mcr φ
Mcr
My
φcr
φy
My
Mmax
Mcrφcr
φy
φmax
Mcrφcr
φy
φ>φmaxM<M
F∆∆∆∆
LA RISPOSTA STRUTTURALE DELL’ELEMENTO
Mcr φcr Myφy Mmax φmax φ>φmaxM<Mmax
�Distribuzione dei momenti flettenti
�Distribuzione delle curvature�Valutazione dello spostamento
mediante applicazione PLV
F
∆(θ=∆/Lv)
(M=FLv)

My
M
φy
φ(M=FL )
=
Regioneplastica
φ φ−φy
+
F ∆∆∆∆
Lv
I CONTRIBUTI DEFORMATIVI FLESSIONALI
M φ(M=FLv) φy φ−φy
Contributo plastico
Contributo elastico
F
∆(θ=∆/Lv)
∆y ∆max
FmaxFy
(θmax)(θy)

Se F ≤ Fy ∆ = FLv/K= M/K
K = 3EI/Lv2
Se Fy ≤ F ≤ Fmax
∆y = FyLv/K = My/K∆ = (F-F )L /K = (M-M )/K
∆= ∆y + ∆p
Molla non
EI=∞EI
M-θ
F ∆∆∆∆
Lv
LA PLASTICITÀ CONCENTRATA
∆p = (F-Fy)Lv/K1 = (M-My)/K1
K1= (Mmax-My)/(θmax- θy)
Se θ ≥ θmax
F = Fmax+ (θ - θmax)K2/Lv
K2 =(Mu - Mmax)/(θu - θmax)
θ
M
θy θmax
Mmax
My
θu
Mu
Molla non lineare

Molla non lineare
EI=∞EI
M-θ θ
M
θy θmax
Mmax
My
θu
MuK1
K2
∆∆∆∆F
Lv
LA CARATTERIZZAZIONE DELLA CERNIERA PLASTICA
lineare
K1= (Mmax-My)/(θmax- θy)
K2 =(Mu - Mmax)/(θu - θmax)
θy θmax θu
Parametri statici
Parametri deformativi
M y
Mmax
M u
θθθθy
θθθθmax
θθθθu

θθθθy,shear
+
∆∆∆∆shear
+
∆∆∆∆slip
θθθθy,slip
=
∆∆∆∆flex
θθθθy,flex
∆∆∆∆F
Lv
θθθθy
ROTAZIONE LIMITE ELASTICO : CONTRIBUTI DEFORMATIVI
c
yby
V
Vyy
f
fd
L
hL φφθ 13,05,110013,03
+
++=
θθθθy,shear θθθθy,slipθθθθy,flexθθθθy
Valutazione dei 3 contributi (Circolare 2009, NTC 2008)

θy = φy Lv /3
Analisi della sezione
∆∆∆∆F
M φ
Lv
θθθθy
Valutazione approssimata
φy = εy /(h-xc) φy = γ εy /H
LA ROTAZIONE AL LIMITE ELASTICO (SNERVAMENTO)
Myφy
La rotazione allo snervamento così valutata tiene conto della deformabilità flessionale
A questa va aggiunta la componente deformativa:
Tagliante
Scorrimento delle barre di armatura

θθθθy,shear
+ +
∆∆∆∆flex ∆∆∆∆shear ∆∆∆∆slip
θθθθy,flex θθθθy,slip
ROTAZIONE LIMITE ELASTICO : CONTRIBUTI DEFORMATIVI
θθθθy,shearθθθθy,flex θθθθy,slip

ROTAZIONE ULTIMA : DEFINIZIONE
φy Lpl= αLv
Regioneplastica= +
F ∆∆∆∆
Lv
θθθθu
F
∆(θ=∆/Lv)
(M=FLv)
∆y ∆max
FmaxFy
(θmax)(θy)
(15-20%)Fmax
∆u
φu>φmaxMu<Mmax
Lpl= αLv
φy φu−φy
θθθθu
θu = θy + θp,u

F ∆∆∆∆
Lv
θθθθ θθθθ
= + +
∆∆∆∆flex ∆∆∆∆shear ∆∆∆∆slip
θθθθ θθθθ
ROTAZIONE ULTIMA : CONSIDERAZIONI
θθθθp θθθθp,shearθθθθp,flex θθθθp,slip
Ma anche in questo caso la rotazione plastica così valutata tiene conto della sola deformabilità flessionale
A questa va aggiunta la componente deformativa:TaglianteScorrimento delle barre di armatura

F ∆∆∆∆
Lv
θθθθ θθθθp,shear
= + +
∆∆∆∆flex ∆∆∆∆shear ∆∆∆∆slip
θθθθp,flex θθθθ
LA VALUTAZIONE DEI CONTRIBUTI DEFORMATIVI
θθθθp θθθθp,shearθθθθp,flex θθθθp,slip
In genere, i contributi aggiuntivi ( taglianti e per lo scorrimentodelle barre) sono valutati aumentando la lunghezza della regioneplastica, Lpl

LUNGHEZZA DI CERNIERA PLASTICA

F ∆∆∆∆
Lv
θθθθ θθθθp,shear
= + +
∆∆∆∆flex ∆∆∆∆shear ∆∆∆∆slip
θθθθp,flex θθθθ
LA VALUTAZIONE DEI CONTRIBUTI DEFORMATIVI
La Circolare esplicativa propone in particolare una lunghezza di cerniera plastica per la sola condizione “ultima”, ossia:
θθθθp θθθθp,shearθθθθp,flex θθθθp,slip
c
ybLVpl
f
fd24,0h17,0L1,0L ++=

La lunghezza di cerniera plastica è tarata direttamente per lacondizione ultima così come definita in precedenza
LA VALUTAZIONE DEI CONTRIBUTI DEFORMATIVI
c
ybLVpl
f
fd24,0h17,0L1,0L ++=
( )
−−+= plLL
5,01φφθθ
In particolare, la curvatura ultimaφu è valutata considerando ledeformazioni ultime del conglomerato (tenuto conto delconfinamento) e dell’acciaio da stimare:
− sulla base dell’allungamento uniforme al carico massimo,
− si può assumere la deformazione ultima dell’acciaio pari al 4%
( )
−−+=v
plplyuyu L
L 1φφθθ

La rotazione ultima può essere valutata mediante la formulazionetarata sulla base di risultati desunti da sperimentazioni dirette
h è l’altezza della sezione;
sforzo assiale normalizzato sulla sezione A ;
ROTAZIONE ULTIMA
)25,1(25);01,0(max
)';01,0(max)3,0(016,0 dc
ywsx
10035,0
V
225.0
cuρ
αρν
ωωθ
⋅= f
f
h
Lf
)fA/(N cc=ν sforzo assiale normalizzato sulla sezione Ac;
percentuale armatura longitudinale in trazione
percentuale armatura longitudinale in compressione fc , fy e fyw resistenze materiali
percentuale armatura trasversale
percentuale armature diagonali
α fattore di efficienza del confinamento
)fA/(N cc=ν
)bhf/(fA cys=ω
)bhf/(fA cys′=ω′
hwsxsx sbA=ρdρ

La caratterizzazione meccanica della molla rotazionale nonlineare, dipende in definitiva da una serie di parametri:
Geometrici:dimensioni della sezione (B e H), luce di taglio (Lv, ) diametrodellebarre (dbl ), ecc.
LA CARATTERIZZAZIONE DELLA CERNIERA PLASTICA
dellebarre (dbl ), ecc.
Meccanici:resistenze dei materiali, resistenze flessionali, curvatureflessionali, ecc.

Molle rotazionali non lineari
Il modello “one component model”, consiste nell’accoppiamentoin serie di un elemento elastico e di un elemento rigido plastico
LA MODELLAZIONE
Pertanto la matrice dirigidezza dell’elementocomplessivo è ottenuta
Elemento elastico EI
Punto di flesso
fisso
A B
LA LB
L
complessivo è ottenutadall’inversione della matricedi flessibilità fornita, a suavolta, dalla somma dellematrici di flessibilità dei dueelementi in serie

L’ elemento elastico rappresenta ilcomportamento elastico della trave sino alsuperamento della soglia elastica (conrigidezza costante pari ad EI)
LA MODELLAZIONE
Elemento elastico EI
Punto di flesso
fisso
A B
Molle rotazionali non lineari
LA LB
L
L’ elemento rigido plastico,composto da un’asta rigidadelimitataalle sueestremità
Molla non lineare
EI=∞EI
∆∆∆∆F
Lv
Ldelimitataalle sueestremitàda due molle rotazionaliplastiche
Le cerniere sono attivatesolo dopo il superamentodel momento disnervamento

MODELLAZIONE A PLASTICITÀ CONCENTRATA
I principali vantaggi di tale modello sono soprattutto la suasemplicità e l’efficienza computazionale
Il modello non permette di computare la formazione di zoneplastiche in campata, causate dall’interazione tra i carichiorizzontali e quelli gravitazionali
Codici disponibili gratuitamente in internet che utilizzano questo tipo di modellazione non lineare:
OPENSEES http://nisee2.berkeley.edu/peer/prediction_contest/)
DRAIN-2DX (http://nisee.berkeley.edu/software/drain2dx)
IDARC-2D (http://civil.eng.buffalo.edu/idarc2d50)

L’intero elemento trave/colonna è suddiviso inelementi FIBRE:elementi monodimensionali con legame costitutivo non lineareStato di sforzo-deformazione di una sezione ottenuto tramiteintegrazione della risposta sforzo-deformazione uniassiale nonlineare di ciascuna fibra
MODELLAZIONE A PLASTICITÀ DIFFUSA
Sezione cemento armato
Fibre calcestruzzo non confinato
Fibre calcestruzzo confinato
Fibre acciaio
Numero sufficiente di fibre (200-400 in 3D) ⇒ distribuzione non linearità del materiale nella sezione modellata accuratamente anche in condizioni di elevata non linearità

Suddividendo opportunamente ciascun elemento strutturale⇒descrizione accurata di formazione e diffusione di cerniera plasticanell’elemento senza bisogno di supporla a priori
MODELLAZIONE A PLASTICITÀ DIFFUSA
σ
GaussSection b
GaussSection a
GaussSection a
node A
node B
σ
ε
σ
σ
ε
ε B
A
L/2L/2 3

Limiti:Utilizza legami costitutivi non lineari in tutto l’elemento⇒ maggior onere computazionale
Vantaggi:Non richiedeesperienzadell’operatore,è sufficienteconoscere
MODELLAZIONE A PLASTICITÀ DIFFUSA
Non richiedeesperienzadell’operatore,è sufficienteconoscerecaratteristiche geometriche e comportamento anelastico ciclico⇒ accuratezza dell’intera valutazione
Nota: Ancora pochi i codici che colgono tutti gli aspetti della risposta strutturale ad azione sismica

Codici disponibili gratuitamente in internet che utilizzanoquesto tipo di modellazione non lineare:
SEISMOSTRUCT (http://www.seismosoft.com)
MODELLAZIONE A PLASTICITÀ DIFFUSA
OPENSEES (http:// opensees.berkeley.edu).

ANALISI DINAMICA NON LINEARE
−Modello 3D della struttura con carichi gravitazionali e masse−Comportamento non lineare del materiale (valori medi delle
proprietà dei materiali)−Accelerazione imposta alla base: modello sollecitato
contemporaneamente da due eventi sismici orizzontali eeventualmente da un evento verticale
la risposta della struttura è calcolata integrando direttamentel’equazione non lineare del moto del sistema
gx)( &&&&& MRUFUCUM −=++
Analisi più accurata: rappresentazione diretta del fenomeno reale

ANALISI DINAMICA NON LINEARE: PROBLEMATICHE
−Scelta accelerogrammi di input (reali?, artificiali?, spettro-compatibili?, basati su uno scenario? ecc.)
−Decisioni su importanti e complessi aspetti dellamodellazione (ad es. smorzamento, criterio di convergenza,time-step, etc.)
−Individuazione di un modello in grado di descrivere ilcomportamento post-elastico sotto cicli di carico e scarico deglielementi e conseguente dissipazione di energia (modellazioneplasticità concentrata)
−Analisi lunghe con interpretazione dei risultati relativamentecomplessa

L’idea di base alla base del metodo è quella di applicare unadistribuzione di forzecrescentialla struttura in modo tale che ilcomportamento della struttura ottenuto inviluppi tutte le possibilirisposte calcolate mediante analisi non lineari dinamiche
Si ipotizza che la risposta della struttura ottenuta sotto l’effetto diun vettore crescente di azioni (o di deformazioni) possa sostituirei risultatiottenutidall’analisidinamica
ANALISI STATICA NON LINEARE (ANALISI PUSHOVER)
i risultatiottenutidall’analisidinamica
Il metodo dell’analisi statica non lineare prevede l’impiego diprocedure di soluzione ditipo incrementale iterativo
Il carico agente è applicato sulla struttura tramite incrementisuccessivi predefiniti e la ricerca della condizione di equilibrio inogni incremento tramite iterazioni

60
80
100
120M
ax
Ba
se S
he
ar
(kN
)
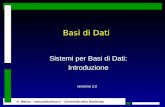
ANALISI DINAMICA NL vs ANALISI PUSHOVER
0
20
40
0 0.5 1 1.5 2 2.5 3
drift (%)

ANALISI STATICA NON LINEARE
−Modello della struttura (2D o 3D) soggetto ai carichigravitazionali
−Comportamento non lineare del materiale (valori medi delleproprietà dei materiali)
−Particolari distribuzioni di forze statiche orizzontali chespingonoin campo non lineare la struttura fino al collasso
Nell’applicazione ormai classica le forze orizzontali vengono tuttescalate, mantenendo invariati i rapporti relativi fra le stesse, inmodo da far crescere monotonamente lo spostamento orizzontaledi un punto di controllo sulla struttura

ANALISI STATICA NON LINEARE
Applicazione delle forze orizzontali

capacitàdella struttura da confrontare con la domanda
CURVA TAGLIO ALLA BASE – SPOSTAMENTO
ANALISI STATICA NON LINEARE
2000
2500
3000
3500
4000B
S [k
N]
0
500
1000
1500
2000
0 0.05 0.1 0.15 0.2
BS
[kN
]
S [m]
Domanda: punti sulla curva individuati in corrispondenza divalori di spostamento relativi alle massime domande dispostamento che la struttura subirebbe se fosse soggetta ai diversiterremoti di progetto (da spettri di risposta)

Il carico applicato incrementalmente è pari aPi =λλλλi P0
λλλλi fattore di carico responsabile dell’i-esimo incremento dicarico
P0 valore nominale del carico
Nelle analisi non lineari convenzionali (non-adattive), il caricoincrementale Pi consiste in forze applicate alla struttura
ANALISI STATICA NON LINEARE
incrementale Pi consiste in forze applicate alla strutturatramite una procedura in cui il carico viene controllato infunzione della risposta di un particolare nodo (o meglio, gradodi libertà) della struttura (punto di controllo )
Si definiscono quindi il nodo, il corrispondente grado di libertàche viene controllato dall’algoritmo e il target (spostamentotarget) di valore della risposta in corrispondenza del qualel’analisi deve terminare

Si fissa il numero di incrementi (n) in cui il valore della rispostafinale deve essere suddivisa (es n = 10)
A ciascun incremento (o passo) corrisponderà uno step di carico
λ viene automaticamente calcolato in modo tale che, ad unparticolare incremento i-esimo del vettore dei carichi
(λλλλi( Uci )P0 - λλλλi-1( Uci-1 )P0 )
ANALISI STATICA NON LINEARE
(λλλλi( Uci )P0 - λλλλi-1( Uci-1 )P0 )
corrisponda una risposta i-esima del punto di controllo (pari alvalore predefinito Uci)
Tale modalità di applicazione del carico orizzontale vieneusualmente denominato inCONTROLLO DI SPOSTAMENTIoppureCONTROLLO DI RISPOSTA, poiché non è il caricoma la risposta in spostamento della struttura che vienecontrollata dall’utilizzatore

Controllo di risposta: si incrementa (i=1,n) lo spostamento uic di
un punto di controllo fino a un valore prefissato (ūc= unc). λλλλi =
fattore di carico (calcolato automaticamente) t.c.λλλλiP0= carico chepermette il raggiungimento all’incremento i-esimo dellospostamento uic.
λi(uic)F4 ui
c F
METODO DI CONTROLLO IN SPOSTAMENTO
λi(uic)F3
λi(uic)F2
λi(uic)F1
F
λλλλ1(u1c)P0
λλλλ2(u2c)P0
λλλλ3(u3c)P0
λλλλ5(u8c)P0
λλλλ4(u4c)P0
U ∆∆∆∆u
u1c u2
c u3c u4
c u5c u6
c u7c u8
c u9c u10
c

Il controllo del CARICO (e quindi delleFORZE) è diretto nonpermettono alle analisi di proseguire oltre il punto di picco dellacurva di capacità, motivo per il quale non vengono normalmenteimpiegate nella modellazione di strutture esistenti, in quantospesso lo spostamento corrispondente al raggiungimento dellostato limite (DS e CO) si trova oltre il punto di picco della curvadi capacità, cioè nel ramo discendente della risposta
METODI DI CONTROLLO IN FORZE
λ λiF4
λiF3
λiF2
λiF1
F
λλλλ1P0
λλλλ2P0
λλλλ3P0
λλλλ4P0
λλλλ5P0
U
∆∆∆∆λλλλ
F
U

ANALISI STATICA NON LINEARE: RISULTATI
3000
4000
5000
6000WM15, NR3
Tagl
io a
lla B
ase
0% 1% 2% 3%total drift
0
1000
2000 DINAMICA
UNIFORME
TRIANGOLARE
Tagl
io a
lla B
ase
Spostamento punto di controllo

− Non linearità geometrica della struttura tenuta in conto
− Non linearità costitutiva della struttura : fessurazione eirreversibilità comportamento tenute in conto
− Modellazione facilitata (modello a plasticità concentrata)
− Spostamento (deformazione) come grandezza principale a cui èlegato ildanno
− Parametri di risposta
ANALISI STATICA NON LINEARE: VANTAGGI
− Parametri di risposta in corrispondenza di ogni punto dellacurva di capacità:
spostamenti globalespostamento relativo fra i vari pianideformazioni e le sollecitazioni nei vari elementi strutturali
− valutazione rapporti disovraresistenza
− individuazione realistica dellarichiesta di resistenza suelementi fragili

− individuazione realistica richiesta di deformazione suelementi duttili
− verifica effettiva distribuzionedomanda inelastica
− verifica conseguenzeperdita di resistenza di elemento sustabilità struttura
− individuazionezonemaggiorerichiesta di duttilità
ANALISI STATICA NON LINEARE: VANTAGGI
− individuazionezonemaggiorerichiesta di duttilità
− individuazione diirregolarità in pianta o in altezza in terminidi resistenza
− monitoraggio continuo deformazioni, sollecitazioni,snervamento e rottura nei singoli elementi
−come metodo per la valutazione della capacità di edificiesistenti

L’analisi statica non lineare consente di rappresentare l’effettivocomportamento:
−del materiale
−della sezione
ANALISI STATICA NON LINEARE
−dell’elemento
−della struttura
Procedendo secondo questo processo logico-strutturale è possibilevalutare la CAPACITÀ intesa sia in termini di resistenza e(soprattutto) in termini di spostamento

ANALISI STATICA NON LINEARE: LIMITI
Le distribuzioni forze proporzionali a massa e primo modocolgono comportamenti limite (sistema elastico e sistema moltodanneggiato)solo per strutture regolari
Sistema di forze applicato (approssimazione forze di inerzia sustruttura durante sisma) adistribuzione costante nel tempo:modificherispostedel sistemanel tempononconsiderate
No analisi 3D effettiva
Non linearità costitutiva della struttura: comportamento ciclico con dissipazione e accumulo danno non tenuti in conto
Presuppone comportamento M-GDL assimilabile 1-GDL
modificherispostedel sistemanel tempononconsiderate

2500
3000
3500
4000B
S [k
N]
ANALISI PUSHOVER ADATTIVA
0
500
1000
1500
2000
0 0.05 0.1 0.15 0.2
BS
[kN
]
S [m]

Consiste nell’applicare all’edificio i carichi gravitazionali e unsistema di forze orizzontali crescenti in maniera monotona fino alraggiungimento delle condizioni ultime.
Analisi statica non lineare a plasticità concentrata
Fb
dc

Il metodo si articola nei seguenti passi:
1. Determinazione del legameTaglio alla baseFb – spostamentodc di un punto di controllo usualmente scelto come ilbaricentro dell’ultimo impalcato
2. Determinazione delle caratteristiche di un sistema ad un gradodi libertà equivalente a comportamento bi-lineare
AN. STATICA NON LINEARE A PLASTICITÀ CONCENTRATA
3. Determinazione della risposta massima in spostamento di talesistema con utilizzo di spettro di risposta di progetto
4. Conversione dello spostamento del sistema equivalente nellaconfigurazione deformata effettiva dell’edificio
5. Verifica della compatibilità degli spostamenti per glielementi/meccanismi duttili e delle resistenze per glielementi/meccanismi fragili

Determinazione di un legame forza-spostamento generalizzato
In seguito alla caratterizzazione, per ciascun elemento trave epilastro, delle cerniere plastiche si procede alla analisi statica nonlineare del modello strutturale dell’edificio
L’analisi condottacontrollo di forza , incrementando di un fattoredi carico λ il vettoredi forze orizzontali applicato,si prestaper
AN. STATICA NON LINEARE A PLASTICITÀ CONCENTRATA
di carico λ il vettoredi forze orizzontali applicato,si prestaperl’uso su edifici esistenti (poco degradanti)
L’analisi descrive il comportamento della struttura fino al punto dipicco della curva di capacità
I risultati delle analisi non lineari devono essere riportati conriferimento alle due distribuzioni di forze orizzontali relative alledirezioni longitudinale X e trasversale Y

Sistema bilineare equivalenteIl sistema bilineare equivalente è valutato al fine di determinare larichiesta di spostamento della struttura per lo stato limite preso inesame
È necessario trasformare il sistema a n gradi di libertà (MDOF) inun sistema ad un solo grado di libertà equivalente (SDOF)
Indicando con Φ il vettore normalizzato al valore unitario
AN. STATICA NON LINEARE A PLASTICITÀ CONCENTRATA
Indicando con Φ il vettore normalizzato al valore unitariorappresentativo del primo modo di vibrazione della struttura nelladirezione presa in esame, si valuta ilcoefficiente dipartecipazione
∑∑
ΦΦ
=Γ2ii
ii
m
m

Sistema bilineare equivalenteLa curva di capacità relativa del sistema a n gradi di libertà vienescalata mediante il coefficiente di partecipazioneΓ in modo dadeterminare la curva forza-spostamento (F*-d*) del sistemaequivalente ad un grado di libertà tramite le seguenti relazioni:
AN. STATICA NON LINEARE A PLASTICITÀ CONCENTRATA
Γ= FF * Γ= cdd*
Ottenuta la curvaF*-d* del sistema equivalente ad un grado dilibertà è necessario valutare una legge forza-spostamento di tipobilineare equivalenteSi considera il procedimento di uguaglianza delle areeSi ricava la rigidezzaK * e conseguentemente il periodo elasticoT* del sistema bilineare equivalente ad un grado di libertàmediante la seguente espressione
Γ= bFF Γ= cdd

Determinazione del sistema SDOF equivalente
Analisi statica non lineare a plasticità concentrata
Fb
d d*F*
coeff. di partecipazione del 1° modo
∑∑
ΦΦ
=Γ2ii
ii
m
m
F*
d*dy*
Fy*
F*
Fb; dc
∑ Φ= iimm*
Γ= bFF * Γ= cdd*
**
ydFk y= *
** 2
k
mT π= Γ= buy FF *