Corso di Fondamenti di Telecomunicazioni – a.a....
142
1 FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010 UNIVERSITA’ DEGLI STUDI ROMA TRE Ingegneria Informatica Dispense per il corso di FONDAMENTI DI TELECOMUNICAZIONI (Parte Prima) anno accademico 2009-2010 Docente: Prof. Francesco Benedetto F. Benedetto Ottobre 2009
Transcript of Corso di Fondamenti di Telecomunicazioni – a.a....

1
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010UNIVERSITA’ DEGLI STUDI ROMA TRE
Ingegneria Informatica
Dispense per il corso di
FONDAMENTI DI TELECOMUNICAZIONI(Parte Prima)
anno accademico 2009-2010
Docente: Prof. Francesco Benedetto
F. Benedetto Ottobre 2009

2
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Dispense per il corso di
FONDAMENTI DI TELECOMUNICAZIONI(Parte Prima)
anno accademico 2009-2010
Sommario
PREMESSA ................................................................................................................................. 5
1) INTRODUZIONE ................................................................................................................ 6
2) SEGNALI ANALOGICI ED OPERAZIONI FONDAMENTALI ................................. 9
2.1) FUNZIONE SEGNO ............................................................................................................... 9 2.2) FUNZIONE GRADINO .......................................................................................................... 10 2.3) FUNZIONE RETTANGOLO (RECT) .......................................................................................... 11 2.4) FUNZIONE TRIANGOLO (TRI) ............................................................................................... 12 2.5) FUNZIONE SINC ................................................................................................................ 13 2.6) IMPULSO MATEMATICO (DELTA DI DIRAC) ........................................................................... 14
3) TRASFORMATE DI FOURIER ...................................................................................... 16
3.1) LARGHEZZA DI BANDA-DURATA TEMPORALE .......................................................................... 16 3.2) TEOREMA DI DUALITÀ ....................................................................................................... 17 3.3) TEOREMA DI RAYLEIGH ..................................................................................................... 18 3.4) PROPRIETÀ DELL’IMPULSO IN FREQUENZA .............................................................................. 18 3.5) TEOREMA DI PARSEVAL ..................................................................................................... 20 3.6) TRASFORMATE DI FUNZIONI LIMITE ..................................................................................... 21 3.7) RELAZIONI TEMPO-FREQUENZA ............................................................................................ 21
4) TRASFORMATE E ANTITRASFORMATE NOTEVOLI ......................................... 23
4.1) ESERCIZIO 1 ..................................................................................................................... 24 4.2) ESERCIZIO 2 ..................................................................................................................... 24 4.3) ESERCIZIO 3 ..................................................................................................................... 25 4.4) ESERCIZIO 4 ..................................................................................................................... 26 4.5) ESERCIZIO 5 ..................................................................................................................... 27
5) CONVOLUZIONI E CORRELAZIONI CONTINUE .................................................. 28
5.1) SISTEMI LINEARI TEMPO-INVARIANTI (LTI) ......................................................................... 30 5.2) DISTORSIONI NELLA TRASMISSIONE DEI SEGNALI ................................................................... 32 5.3) EQUALIZZAZIONE .............................................................................................................. 33 5.4) MEZZI TRASMISSIVI .......................................................................................................... 35
5.4.1) Doppino Intrecciato (Twisted Pair) ....................................................................... 35
F. Benedetto Ottobre 2009

3
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.4.2) Cavo coassiale ........................................................................................................ 35 5.4.3) Fibre ottiche ........................................................................................................... 36 5.4.4) Trasmissione senza fili ........................................................................................... 37
5.5) FILTRI ............................................................................................................................. 37 5.6) ESERCIZIO 1 ..................................................................................................................... 40 5.7) ESERCIZIO 2 ..................................................................................................................... 42 5.8) ESERCIZIO 3 ..................................................................................................................... 44
6) TEOREMA DEL CAMPIONAMENTO ......................................................................... 46
6.1) TEOREMA DEL CAMPIONAMENTO REALE .............................................................................. 46 6.2) TEOREMA DEL CAMPIONAMENTO IDEALE .............................................................................. 49 6.3) TEOREMA DEL CAMPIONAMENTO UNIFORME (O DI SHANNON) ................................................. 49
7) ELEMENTI DI TEORIA DELL’INFORMAZIONE .................................................... 51
7.1) MISURA DELL’INFORMAZIONE ............................................................................................. 51 7.2) CODIFICA DELL’INFORMAZIONE E CODIFICA DI SORGENTE. ...................................................... 52 7.3) CODIFICA DI CANALE ........................................................................................................ 53
8) TECNICHE DI CODIFICA AUDIO E VIDEO ............................................................. 56
8.1) IL SEGNALE AUDIO ........................................................................................................... 56 8.2) LA COMPRESSIONE ............................................................................................................ 58 8.3) CLASSIFICAZIONE DEGLI ALGORITMI DI COMPRESSIONE ........................................................... 59
8.3.1) Codifiche nel Dominio Temporale ........................................................................ 59 8.3.2) Codifiche per Modelli ............................................................................................ 60 8.3.3) Codifiche nel Dominio della Frequenza ................................................................ 61
8.4) APPROCCIO PSICO-ACUSTICO ALLA COMPRESSIONE ............................................................... 62 8.4.1) La Sensibilità dell’Orecchio Umano ...................................................................... 62 8.4.2) Il Mascheramento Audio ........................................................................................ 62
8.5) STANDARD AUDIO MPEG ................................................................................................ 65 8.5.1) Codificatore Audio MPEG-1 e MPEG-2 ............................................................... 67 8.5.2) I Layer in MPEG .................................................................................................... 69 8.5.3) ID3: Metadati Audio .............................................................................................. 71 8.5.4) Prestazioni del Codificatore MP3 .......................................................................... 72 8.5.5) Lo Standard MPEG-2 ............................................................................................ 73 8.5.6) Lo Standard MPEG-4 ............................................................................................ 74
8.6) MUSICA ELETTRONICA: ESTENSIONE .MID .......................................................................... 76 8.6.1) La Storia ................................................................................................................. 76 8.6.2) Il Protocollo MIDI ................................................................................................. 77 8.6.3) L’Hardware MIDI .................................................................................................. 78 8.6.4) Considerazioni Conclusive .................................................................................... 78
8.7) TECNICHE DI CODIFICA DI IMMAGINI FISSE .......................................................................... 79 8.7.1) Standard JPEG ....................................................................................................... 79 8.7.2) Lettura File Sorgente .............................................................................................. 80 8.7.3) Trasformazione Spazio di Colore .......................................................................... 80 8.7.4) Trasformata DCT ................................................................................................... 81 8.7.5) Quantizzazione ....................................................................................................... 84 8.7.6) RLE ........................................................................................................................ 85 8.7.6) La Decompressione ................................................................................................ 86
8.8) TECNICHE DI CODIFICA DI VIDEOSEQUENZE .......................................................................... 87
F. Benedetto Ottobre 2009

4
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.8.1) Codifica Video MPEG-1 ........................................................................................ 87 8.8.2) Codifica Video MPEG-2 ........................................................................................ 88 8.8.3) Codifica Video MPEG-4 ........................................................................................ 89
9) ESERCIZI E SOLUZIONI ............................................................................................... 92
9.1) CONVOLUZIONI E CORRELAZIONI DISCRETE .......................................................................... 92 9.1.1) Esercizio 1 .............................................................................................................. 92 9.1.2) Esercizio 2 .............................................................................................................. 94 9.1.3) Esercizio 3 .............................................................................................................. 97
9.2) TRASFORMATE DI FOURIER ................................................................................................. 99 9.2.1) Esercizio 1 .............................................................................................................. 99 9.2.2) Esercizio 2 ............................................................................................................ 102 9.2.3) Esercizio 3 ............................................................................................................ 104 9.2.4) Esercizio 4 ............................................................................................................ 105 9.2.5) Esercizio 5 ............................................................................................................ 106 9.2.6) Esercizio 6 ............................................................................................................ 107 9.2.7) Esercizio 7 ............................................................................................................ 109 9.2.8) Esercizio 8 ............................................................................................................ 111 9.2.9) Esercizio 9 ............................................................................................................ 113 9.2.10) Esercizio 10 ........................................................................................................ 115 9.2.11) Esercizio 11 ........................................................................................................ 117
10) COMPITI D’ESAME E SOLUZIONI ......................................................................... 119
10.1) COMPITI D’ESAME DI SEGNALI .................................................................................. 119 10.1.1) Appello N°1 ....................................................................................................... 119 10.1.2) Appello N°2 ....................................................................................................... 123 10.1.3) Appello N°3 ....................................................................................................... 130 10.1.4) Appello N°4 ....................................................................................................... 132 10.1.5) Appello N°5 ....................................................................................................... 137
F. Benedetto Ottobre 2009

5
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010PREMESSA
Questi appunti sono in parte basati sul libro "Communication Systems: an introduction to signals
and noise in electrical communication" di A.B. Carlson, P. B. Crily, J. C. Rutledge, quarta edizione, ed. McGraw-Hill International edition, adottato quale libro di testo del corso.
Essi rispecchiano piuttosto fedelmente il livello di dettaglio che viene seguito durante le lezioni, e costituiscono un ausilio didattico allo studio.
Tuttavia, è importante chiarire che gli appunti non vanno intesi come sostitutivi né del libro di testo né della frequenza alle lezioni, che rimangono fattori importanti per una buona preparazione dell'esame.
F. Benedetto Ottobre 2009

6
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Dispense per il corso di
FONDAMENTI DI TELECOMUNICAZIONI
anno accademico 2009-2010
1) INTRODUZIONENel 1844 Samuel Morse invia il primo messaggio via telegrafo su una linea di 16 km, questo primo passaggio segna l'inizio dell'era delle comunicazioni elettriche. Oggi, assistiamo alla nascita di quelle apparecchiature che prendono il nome di “converged devices”, in cui si fondono i vari aspetti che caratterizzano le comunicazioni mobili dell'ultimo decennio: telefonia e computer, (palmari e/o smartphone).
Un sistema di telecomunicazione (tlc) è quindi un sistema complesso il cui obiettivo è quello di trasferire l'informazione. L'informazione diventa quindi il punto chiave della comunicazione ed il messaggio rappresenta la manifestazione fisica dell'informazione prodotta da una sorgente. L'obiettivo finale di un sistema di tlc (comunque esso sia fatto) è quello di riprodurre a destinazione una replica “accettabile” del messaggio originale. Accettabile perché ovviamente una trasmissione reale sarà sempre affetta da errori. Nel caso di sorgenti analogiche, si parla di fedeltà della trasmissione, nel caso di sorgenti discrete si parla di accuratezza della trasmissione.
Nello schema che segue è esemplificato uno schema di un generico sistema di tlc con tutte le operazioni richieste dai vari blocchi che lo compongono.
In particolare, si può notare come sia necessario già in trasmissione un signal processing per migliorare ed irrobustire la qualità del segnale da trasmettere sul canale tramite operazioni di modulazione, codifica e filtraggio. Analogamente, tali operazioni (in senso inverso) dovranno essere
compiute anche dal ricevitore per riuscire a recuperare una copia accettabile del messaggio
F. Benedetto Ottobre 2009
Trasmettitore Canale di Comunicazione
Ricevitore
Segnale di Ingresso
Segnale Trasmesso
Segnale Ricevuto
Segnale di Uscita
Rumore, Interferenza, Distorsioni
Aumentano con la distanza
Signal Processing per:- Amplificazione - Demodulazione- Decodifica
Signal Processing per:- Modulazione - Codifica - Filtraggio
7
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010trasmesso che sarà stato inevitabilmente rovinato dal passaggio attraverso il canale di comunicazione.
Per modulazione e codifica si intendono delle operazioni realizzate dal trasmettitore per rendere più efficiente e sicura al comunicazione. In particolare, per modulazione si intende un processo che coinvolge due forme d'onda: il segnale modulante (messaggio da trasmettere) e l'onda portante (segnale che dipende dal tipo di applicazione selezionata). In pratica un modulatore altera la portante in corrispondenza delle variazioni del segnale modulante. I vantaggi di tale operazione sono riassunti dai seguenti:
– si genera un segnale che si adatta in maniera efficiente al particolare mezzo trasmissivo scelto per la comunicazione,
– si riescono a realizzare trasmissioni a grande distanza aumentando la frequenza centrale del segnale trasmesso (e diminuendo di conseguenza la dimensione fisica dell'antenna ricevente (più grande è la frequenza, minore è la lunghezza d'onda ad essa associata),
– si abbattono i rumori e le interferenze,
– si assegnano differenti frequenze a differenti utenti (es. FDMA).
Per codifica, si intende un'operazione atta a trasformare il segnale digitale in una sequenza di simboli (symbol processing operation). Si distinguono in particolare due diverse tipologie di codifica: nella codifica di sorgente (simboli in uscita minori di quelli in ingresso), i simboli vengono creati con lo scopo di diminuire il numero di bit da inviare sul canale (compressione); nella codifica di canale simboli in uscita maggiori di quelli in ingresso, i simboli vengono creati con lo scopo di proteggere l'informazione dai rumori introdotti dal canale e poter poi in ricezione individuare e correggere gli errori subiti (error correction and detection).
Per quel che riguarda il rumore, ne esistono di tre tipi diversi in un sistema di tlc:
– Distorsioni, causate dalla risposta imperfetta del sistema (sono assenti in assenza di segnale), si compensano tramite equalizzatori.
– Interferenze, originate (in sistemi radio) dal fatto che l'antenna ricevente intercetta più segnali contemporaneamente (es. interferenza multi-utente), si compensano tramite filtri e codifiche opportune.
– Rumore termico, componente sempre presente in ogni sistema di tlc, si riferisce agli impredicibili e casuali segnali elettrici prodotti da fenomeni naturali interni ed esterni al sistema.
Ecco spiegata l'importanza di analizzare il segnale da trasmettere (o ricevere) non più nel dominio temporale ma in quello delle frequenze che lo compongono (tramite trasformata di Fourier) per riuscire a migliorare solamente quell’intervallo di frequenze in cui l'energia del segnale è più significativa ed eliminare tutte quelle in cui il rumore è predominante.
F. Benedetto Ottobre 2009

8
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Passiamo ora ad analizzare i limiti di un sistema di tlc. Essi si suddividono in:
– limiti fisici (larghezza di banda, rumore)
– limiti tecnologici (disponibilità di hardware, fattori economici, regolamentazione internazionale).
Per quel che attiene la larghezza di banda, essa si applica a sistemi e segnali come una misura di velocità. Ovvero, quando un segnale cambia rapidamente nel tempo, il suo contenuto frequenziale (o spettro) si estende per un ampio intervallo (banda larga). Allo stesso modo, la capacità di un sistema di inseguire le rapide variazioni di un segnale si riflette nella sua larghezza di banda (risposta in frequenza del sistema). Ogni sistema reale ha una larghezza di banda B limitata che limita le prestazioni del sistema (ovvero il tasso di velocità della sorgente trasmissiva). Infatti, la trasmissione richiede una banda sufficiente per accomodare lo spettro (le frequenze) del segnale, in caso contrario si verificano distorsioni. Ad esempio, per una trasmissione televisiva abbiamo bisogno di molti Mhz di banda (circa 12MHz), per una trasmissione voce (segnale più lentamente variabile nel tempo) di qualche Khz (circa 8KHz).
Una seconda limitazione alla capacità trasmissiva è introdotta dal rumore termico, che come detto è una componente sempre presente in un sistema di tlc. Solitamente, si misura il rapporto tra la potenza del segnale e la potenza del rumore e si indica con SNR (Signal-to-Noise Ratio). Possiamo ora esprimere il teorema sulla capacità di canale (di Shannon-Hartley) secondo la seguente:
C=B log 1SNR
Formula che pone un limite massimo alle performance di un sistema di tlc in termini di capacità trasmissiva, data una certa banda B ed un rapporto segnale rumore SNR.
F. Benedetto Ottobre 2009
9
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20102) SEGNALI ANALOGICI ED OPERAZIONI FONDAMENTALIL’informazione può essere trasmessa a distanza variando opportunamente una qualche caratteristica fisica del mezzo scelto per la trasmissione. Tale variazione si propaga, con una certa velocità, lungo il mezzo di trasmissione e dopo un certo tempo arriva all'altra estremità del mezzo, dove può venir rilevata. Ad esempio, se il mezzo è un cavo metallico, si può variare la tensione applicata ad un'estremità. Tale variazione di tensione verrà successivamente rilevata all'altra estremità. In linea di principio, la trasmissione può avvenire con due modalità differenti: trasmissione di segnale analogico e trasmissione di segnale digitale.
La differenza fondamentale fra un segnale analogico e uno digitale è che:
• il primo può variare gradualmente in un intervallo costituito da un numero infinito di possibili valori;
• il secondo può variare solamente passando bruscamente da uno all'altro di un insieme molto piccolo di valori (da due a qualche decina).
Si tenga presente però che il fenomeno fisico utilizzato non è digitale ma analogico. Un segnale quindi non può passare istantaneamente da un valore ad un altro, ma impiegherà un certo tempo per effettuare la transizione. La conseguenza è che un mezzo fisico farà del suo meglio per trasportare un segnale digitale, ma non riuscirà a farlo arrivare esattamente com'è partito. Come vedremo in seguito, in certi casi (e con certe tecniche) è utile trasformare un segnale analogico in uno digitale e viceversa.
Seguiranno ora alcuni esempi di segnali analogici usuali e le operazioni fondamentali cui possono essere sottoposti.
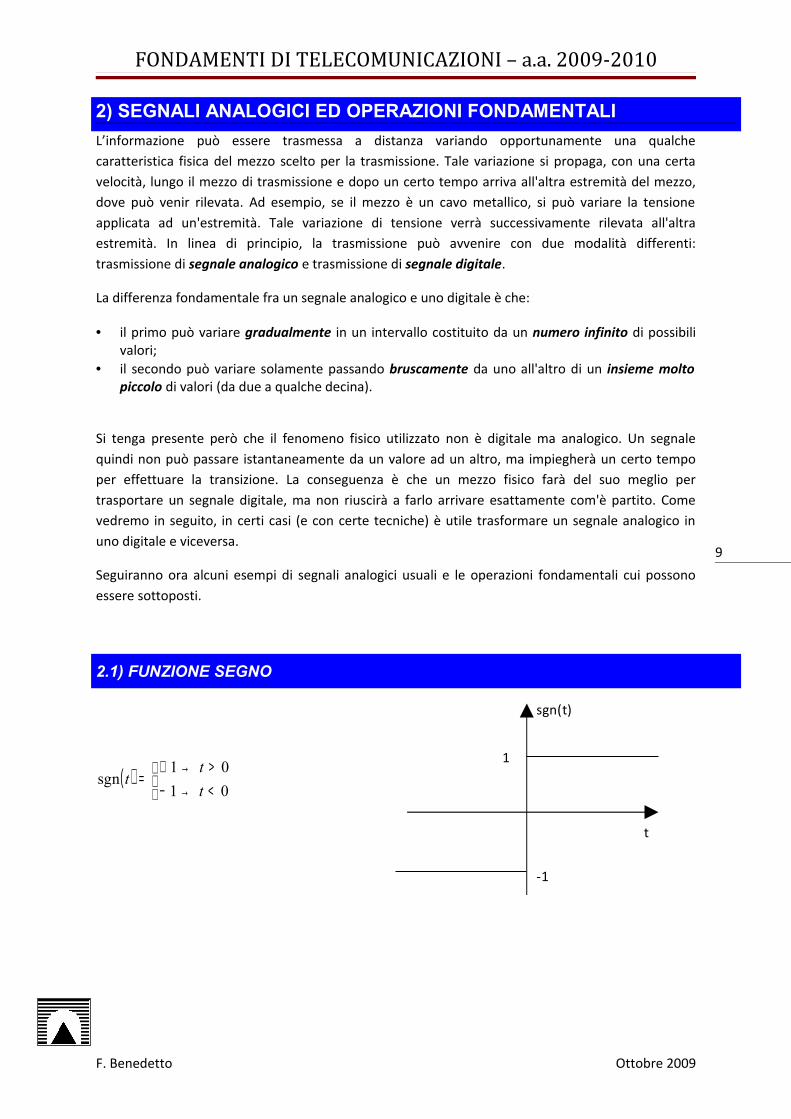
2.1) FUNZIONE SEGNO
( )
<→−>→+
=0101
sgntt
t
F. Benedetto Ottobre 2009
sgn(t)
t
-1
1

10
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20102.2) FUNZIONE GRADINO
( )
→>→
=− altrovet
tU0
011
Ribaltamento: ( )
→<→
=−− altrovet
tU0
011
Traslazione: ( )
→>→
=−− altrovet
tU01
1
ττ
F. Benedetto Ottobre 2009
U-1(-t)
t
1
U-1(t-τ)
t
1
τ
U-1(t)
t
1
11
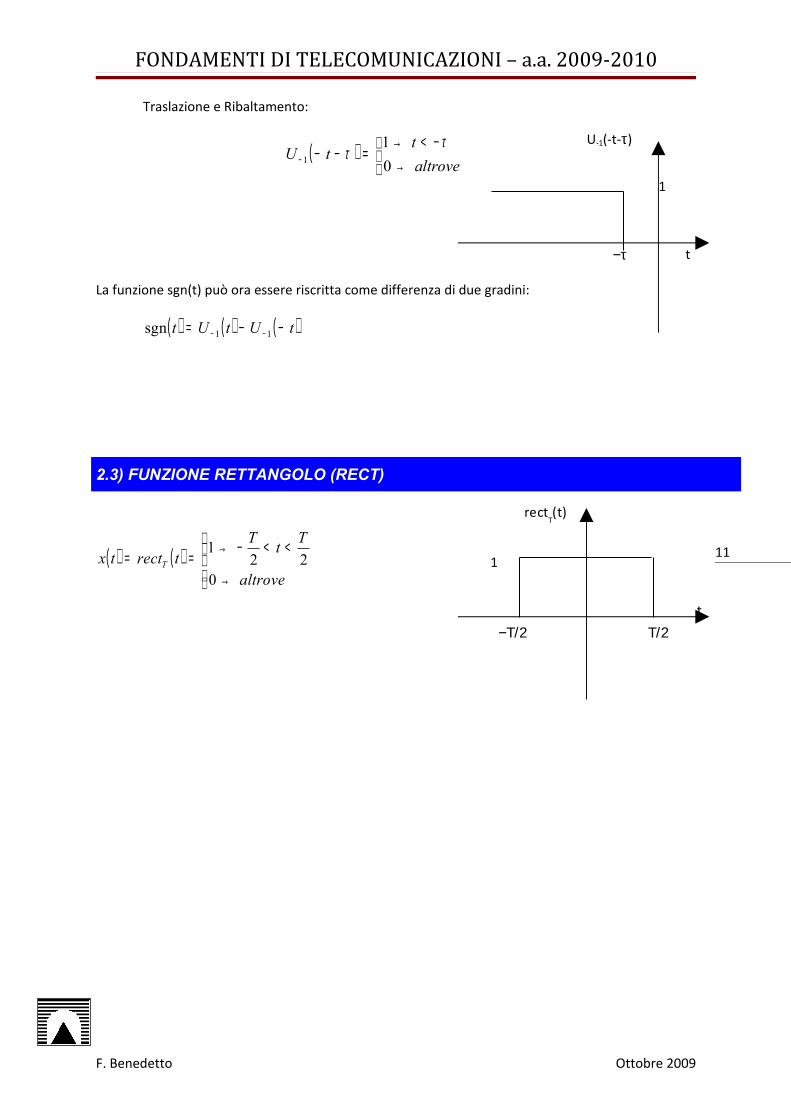
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Traslazione e Ribaltamento:
( )
→−<→
=−−− altrovet
tU01
1
ττ
La funzione sgn(t) può ora essere riscritta come differenza di due gradini:
( ) ( ) ( )tUtUt −−= −− 11sgn
2.3) FUNZIONE RETTANGOLO (RECT)
( ) ( )
→
<<−→==
altrove
TtTtrecttx T
022
1
F. Benedetto Ottobre 2009
U-1(-t-τ)
t
1
−τ
rectT(t)
t
1
−Τ/2 Τ/2

12
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Cambio di scala:
( )
→<<−→
==
⋅ altrovet
trecttrect01
22
ααα α
( ) ( )
→
<<−→==⋅
altrove
ttrecttrect
0
11122 ααα
α
Traslazione: ( ) ( ) ( )
→<<→
=−=−=altrove
ttrecttxty
0201
11 2
essendo x(t) una rect(t) in base due
Compressione: ( ) ( ) ( )
→<<→
=
−=−==
altrovet
trecttrecttytz0
10121122 121
Espansione: ( ) ( )
→<<→
=−=
−=
=
altrovet
trecttrecttytz0
40121
22 422
2.4) FUNZIONE TRIANGOLO (TRI)
( ) ( )
<<→−
<<−→+==
TtTt
tTTt
ttritx T
01
01
F. Benedetto Ottobre 2009
Rect2(t-1)
t
1
0 21
triT(t)
t
1
−Τ Τ

13
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Compressione: ( ) ( ) ( ) ( )
<<→−
<<−→+====
2021
02
2122
21 Tt
Tt
tTTt
ttrittritxtz TT
Espansione: ( ) ( )
<<→−
<<−→+==
=
=
TtTt
tTTt
ttrittritxtz TT
202
1
022
1
22 21
2.5) FUNZIONE SINC
( ) ( )
→
±±=→=→
===
altrovet
ttt
tttctx
ππ
ππ
sin,2,10
01sinsin
F. Benedetto Ottobre 2009

14
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20102.6) IMPULSO MATEMATICO (DELTA DI DIRAC)
Funzione Delta di Dirac δ(t).
( )
→=→
=altrovet
t0
01δ
Traslazione1: ( )
→=→
=−altrovet
t01 τ
τδ
Proprietà fondamentali dell’impulso matematico:
1. ( )
→<<→
=⋅∫ altrimentittv
dtttvt
t 00)0(
)( 212
1
δ
2. ( ) 1=∫+ ∞
∞−dttδ
Ovvero, l’impulso matematico δ(t) ha area unitaria solo in t=0 e vale zero altrove.
3. campionamento: ( ) ( )ττδ vdtttv =−⋅∫+ ∞
∞−)(
( ) ( ) ( )τδττδ −⋅=−⋅ tvttv )(
4. cambio di scala: ( ) ( ) 01 ≠→=⋅ αδα
αδ tt
5. convoluzione: ( ) ( )ττδ −=−∗ tvttv )(
1Si noti come, ad esempio per τ = 1/5, sia un errore oltreché un assurdo scrivere δ(-1/5).
F. Benedetto Ottobre 2009
δ(t-τ)
t
1
τ
δ(t)
t

15
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010NOTA: benché l’impulso matematico non esista fisicamente, esistono numerose funzioni
‘convenzionali’ che hanno le stesse proprietà di δ(t) secondo il limite seguente:
( ) ( )tt δδ εε=
→ 0lim
Due funzioni che soddisfano la precedente sono:
( ) ( )trecttrectt εε εεεδ 11 =
=
( )( )
επεπ
εεεδ ε t
ttctsin1sin1 ⋅=
=
F. Benedetto Ottobre 2009

16
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20103) TRASFORMATE DI FOURIER
Dato un segnale x(t), segnale di energia2, si definisce trasformata di Fourier o spettro di x(t) il segnale X(f) dato dalla seguente:
Il segnale x(t) è poi ottenibile tramite trasformazione inversa secondo la formula:
3.1) LARGHEZZA DI BANDA-DURATA TEMPORALE
Un esempio di trasformata / anti trasformata di Fourier è dato dalla seguente coppia:
( ) ( )sincX f AT fT= ⋅
Si noti come più T aumenta il proprio valore, più il segnale x(t) si allarga (dura) nel tempo, più la sua
trasformata di Fourier si stringe in frequenza! Più T diminuisce il proprio valore, più il segnale x(t) si
stringe nel tempo, più la sua trasformata di Fourier V(f) si allarga in frequenza!
2 Si definisce energia di un segnale x(t) la quantità:
Si noti come tale definizione implichi che l’energia sia pari all’area sottesa alla curva |x(t)| 2 e quindi facilmente calcolabile per segnali di forma comune (es. rettangolo o triangolo).
F. Benedetto Ottobre 2009

17
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Ovvero, alte frequenze variano rapidamente nel tempo (∆T piccolo) mentre segnali lentamente
variabili nel tempo sono caratterizzati da poche alte frequenze (∆f piccolo). In altre parole, sistemi
caratterizzati da larghezze di bande ampie riescono a seguire meglio segnali con molte fluttuazioni
temporali (ovvero velocemente variabili nel tempo). In pratica, la larghezza di banda rappresenta
così una misura di velocità nell’inseguimento delle variazioni temporali dei segnali.
NOTA: Se x(t) è reale e pari, la sua trasformata di Fourier è reale pura e pari.
Se x(t) è reale dispari, la sua trasformata di Fourier è immaginaria pura e dispari.
Se x(t) è reale e causale/anticausale, la sua trasformata di Fourier è qualunque (ovvero, sia
reale che immaginaria).
3.2) TEOREMA DI DUALITÀ
Se esiste la coppia {V(f)=F[v(t)], v(t)} ovvero, se esistono la trasformata ed anti-trasformata di Fourier
di v(t) ed esiste un terzo segnale tale che z(t) = V(t), dove V(t) uguaglia V(f) con t = f, allora si verifica
che F[z(t)]=v(-f), dove v(-f) uguaglia v(t) con t = -f.
Esempio.
Si calcoli tramite il teorema della dualità la trasformata del segnale z(t) dato da:
z(t) = A sinc (2W t)
Possiamo calcolare Z(f) applicando il teorema alla coppia di trasformate anti-trasformate seguenti:
v(t) = B rectT(t) e V(f) = B T sinc (f T)
Notando che z(t) uguaglia V(t) con T = 2W e B = A/2W, si ottiene:
F. Benedetto Ottobre 2009

18
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Z(f) = v(-f) = A/2W rect2W (-f) = A/2W rect2W (f), essendo la rect una funzione pari.
NOTA: Nel caso di funzioni dispari, si tenga presente che il teorema di dualità prevede un segno
meno nel calcolo della trasformata / anti-trasformata. Ad esempio, si ricavi tramite il teorema della
dualità l’anti-trasformata della funzione seno, essendo V(f) = sin(2π τ f).
3.3) TEOREMA DI RAYLEIGH
Tale teorema permette di legare l’energia di un segnale al suo spettro (ovvero alla sua trasformata di
Fourier) secondo la seguente:
Ovvero, integrare il quadrato dello spettro su tutte le frequenze permette di ottenere l’energia del
segnale. A tal proposito, si definisce densità spettrale di energia il valore |V(f)|2
in quanto indica
come sia distribuita l’energia nel dominio delle frequenze (l’area sottesa alla densità spettrale è
proprio l’energia). Si noti come un impulso rettangolare nel tempo di larghezza τ abbia il 92%
dell’energia nella banda in cui ricade il lobo principale della sua trasformata (ovvero tra -1/τ e 1/τ)
3.4) PROPRIETÀ DELL’IMPULSO IN FREQUENZA
Gli impulsi in frequenza rappresentano fasori o costanti. In particolare, sia v(t) = A, ovvero un segnale
costante per tutti i tempi. Nonostante tale segnale abbia energia infinita, è comunque possibile
F. Benedetto Ottobre 2009

19
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010ottenere una rappresentazione nel dominio della frequenza considerando in termini limite la
definizione della trasformata di Fourier:
Tale risultato3 è in accordo con il fatto intuitivo che un segnale costante non possiede variazioni temporali e quindi il suo contenuto spettrale deve essere confinato in f = 0. La forma impulsiva deriva dal fatto che utilizziamo la forma integrale per tornare dal dominio delle frequenze a quello del tempo (attraverso la trasformata inversa) ed è necessaria un impulso per concentrare un’area non nulla (e pari ad A) in un punto discreto dell’asse delle frequenze.
Seguono poi le altre proprietà:
1. ( )fAA δ⋅⇔
Ovvero, la trasformata di una costante nel tempo è un impulso in frequenza centrato in f=0 e di ampiezza A.
2. ( ) AtA ⇔⋅ δ
Ovvero, la trasformata di un impulso nel tempo ha ampiezza costante, ovvero il suo spettro contiene tutte le frequenze in ugual proporzione.
3. ( )2 cj f tcA e A f fπ δ⋅ ⇔ ⋅ −
Ovvero, la trasformata di un esponenziale complesso è pari ad una delta di Dirac traslata della quantità fc. Se fc è un valore positivo, lo spettro di Fourier sarà ritardato dello stesso valore, in caso contrario (fc < 0) si avrà un anticipo della medesima quantità.
4. ( ) ( ) ( )[ ]φφ δδφπ jc
jcc effeffAtfA −⋅++⋅−⋅⇔+⋅
22cos
Ovvero, la trasformata di un coseno (funzione reale e pari) è un segnale reale e pari e costituito da una coppia di delta, entrambe positive e centrate alla frequenza portante del coseno (si ricavi tale risultato sfruttano la proprietà n.3 ed usando le formule di Eulero per il coseno).
3 Si noti come si potesse arrivare al medesimo risultato (teorema di dualità) partendo dal limite di un impulso temporale rettangolare e non da quello di una sinc.
F. Benedetto Ottobre 2009
20
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105. ( ) ( ) ( )[ ]φφ δδφπ j
cj
cc effeffAtfA −⋅+−⋅−⋅⇔+⋅2
2sin
Ovvero la trasformata di un seno (funzione reale e dispari) è pari ad una coppia di delta, una positiva (centrata in +fc) l'altra negativa (centrata alla frequenza immagine -fc). Si ricavi tale risultato sfruttando la proprietà n.3 ed usando le formule di Eulero per il seno.
Si noti come lo spettro di tutti i segnali periodici sia caratterizzato dall’essere uno spettro a “righe”. Ovvero la trasformata di Fourier di un segnale periodico è rappresentata come una funzione discreta della frequenza, diversa da zero solamente in alcuni punti (per il seno ed il coseno abbiamo due impulsi centrati alla frequenza fondamentale fc). Le ampiezze degli impulsi dello spettro dei segnali periodici prendono il nome di coefficienti di Fourier (indicati con il simbolo cn).
Inoltre, i segnali periodici sono caratterizzati dall’essere dei segnali non di energia ma di potenza4. A questo punto possiamo introdurre un teorema duale del teorema di Rayleigh per legare il valore della potenza di un segnale periodico ad i suoi coefficienti di Fourier, ovvero il:
3.5) TEOREMA DI PARSEVAL
Tale teorema afferma che il valore della potenza di un qualunque segnale periodico sia pari alla
somma dei moduli quadri dei coefficienti di Fourier dello spettro del segnale, ovvero:
A tal proposito, si definisce densità spettrale di potenza la funzione G(f) = |cn|2
δ(f-nfc) in quanto
indica come sia distribuita la potenza nel dominio delle frequenze per la frequenza fondamentale fc e
le varie armoniche n fc.
4 Si definisce potenza di un segnale periodico x(t) di periodo T0 la quantità:
Si noti come tale definizione implichi che la potenza sia pari all’area sottesa alla curva |x(t)| 2 e quindi facilmente calcolabile per segnali di forma comune (es. rettangolo o triangolo).
F. Benedetto Ottobre 2009

21
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20103.6) TRASFORMATE DI FUNZIONI LIMITE
1. Trasformata della funzione segno: ( )fj
tπ1sgn ⇔
2. Trasformata della funzione gradino ( ) ( )11 1
2 2U t f
j fδ
π− ⇔ +
3.7) RELAZIONI TEMPO-FREQUENZA1. Linearità: v(t) = a1 v1(t) + a2 v2(t)
V(f) = a1 V1(f) + a2 V2(f)
Più in generale: ( ) ( )∑∑ ⇔k
kkk
kk fVatva
2. Ritardo nel tempo: ( ) ( ) dftjd efVttv π2−⋅⇔−
Se td è una quantità negativa, il segnale è anticipato nel tempo ed in frequenza il termine di fase aggiuntivo presenta segno positivo.
3. Cambio di scala: ( )
⇔⋅
ααα fVtv 1
, 0≠α
4. Traslazione in frequenza: ( ) ( )ctfj ffVetv c −⇔⋅ π2
Tale operazione prende il nome di modulazione, in quanto lo spettro V(f) viene traslato intorno alla frequenza portante fc. Si noti che modulare il segnale v(t) con un coseno di frequenza fc, ha il vantaggio di rendere simmetrico lo spettro del segnale ed inoltre di “modulare” tale spettro intorno alle frequenze portanti ± fc.
5. Derivazione (I forma): ( ) ( )fVfjtvdtd ⋅⇔ π2
Più in generale: ( ) ( ) ( )fVfjtvdtd n
n
n
⋅⇔ π2
6. Integrazione: ( ) ( )fVfj
dvt
⋅⇔∫∞− π
λλ21
F. Benedetto Ottobre 2009
22
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Si noti che l’operazione di derivazione esalta le componenti ad alta frequenza del segnale
v(t), poiché |j2πf V(f)| > |V(f)|, per f > 1/2π. Al contrario, l’operazione di integrazione sopprime le componenti ad alta frequenza del segnale v(t).
7. Derivazione (II forma): ( )( )
( )fVdfd
jtvt n
n
nn ⋅
−⇔⋅
π21
F. Benedetto Ottobre 2009

23
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20104) TRASFORMATE E ANTITRASFORMATE NOTEVOLI
F. Benedetto Ottobre 2009

24
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20104.1) ESERCIZIO 1Si calcoli la trasformata di Fourier del segnale x(t) definito come:
x(t) = A rectT(t)
Applicando la definizione di trasformata si ottiene:
( ) ( ) )(sin)sin(2
2
2
22
2
2 fTcATfTfA
fjeAdteAdttrectfX
T
T
ftjT
T
ftjT ==
−
===−
−
−
−∞
∞−∫∫ π
ππ
ππ
NOTA: Si noti che x(0) = X(0) = AT ovvero eguaglia l’area sottesa al segnale nell’intervallo
considerato. Inoltre, si noti che essendo x(t) reale e pari, la sua trasformata di Fourier è reale pura e
pari.
4.2) ESERCIZIO 2Si calcoli la trasformata di Fourier del segnale x(t) definito come:
( )
→>→
=−
altrovete
txt
00
Applicando la definizione di trasformata si ottiene:
( )( )
fjfjedteedttxfX
tfjftjt
ππ
ππ
211
21)(
0
21
0
2
+=
+
−===∞+−∞+
−−∞
∞−∫∫
NOTA : Si noti che essendo x(t) reale e causale, la sua trasformata di Fourier è complessa, ovvero
composta sia da una parte reale che da una immaginaria.
F. Benedetto Ottobre 2009
rectT(t)
t
A
−Τ/2 Τ/2

25
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20104.3) ESERCIZIO 3Si calcoli la trasformata di Fourier del segnale x(t) definito come:
( ) ( )ttriAtx T⋅=
Applicando la definizione di trasformata si ottiene:
ricordando ora che:
si ottiene finalmente:
F. Benedetto Ottobre 2009
triT(t)
t
A
−Τ Τ

26
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010NOTA: Si noti che x(0) = X(0) = AT ovvero eguaglia l’area sottesa al segnale nell’intervallo
considerato. Inoltre, essendo x(t) reale e pari, la sua trasformata di Fourier è reale pura e pari.
4.4) ESERCIZIO 4Si calcoli la trasformata di Fourier del segnale x(t) definito come:
x(t) = sgn[cos(2 π t)] rect1(t)
La trasformata di Fourier del segnale considerato può essere calcolata in due modi analoghi. Il primo (più diretto ma più oneroso dal punto di vista dei calcoli) è di applicare la definizione di trasformata di Fourier come integrale del segnale x(t) e svolgere i successivi conti.
Il secondo metodo consiste invece nel riscrivere il segnale come combinazione lineare di 3 rect come:
x(t) = rect1/2(t)- [rect1/4(t-3/8) + rect1/4(t+3/8)]
A questo punto la trasformata di tale segnale deriva immediatamente dalle proprietà della trasformata di Fourier:
NOTA: Si noti che x(0) = X(0) = 0, ovvero eguaglia l’area sottesa al segnale nell’intervallo considerato.
Inoltre, si noti che essendo x(t) reale e pari, la sua trasformata di Fourier è reale pura e pari.
F. Benedetto Ottobre 2009
x(t)
t
1
−1/4 1/4 1/2−1/2
−1

27
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20104.5) ESERCIZIO 5Si calcoli la trasformata di Fourier del segnale x(t) definito come:
x(t) = sgn[sin(2 π t)] rect1(t)
La trasformata di Fourier del segnale considerato può essere calcolata in due modi analoghi. Il primo (più diretto ma più oneroso dal punto di vista dei calcoli) è di applicare la definizione di trasformata di Fourier come integrale del segnale x(t) e svolgere i successivi conti.
Il secondo metodo consiste invece nel riscrivere il segnale come combinazione lineare di 2 rect come:
x(t) = rect1/2(t - ¼ ) - rect1/2(t + ¼ )
A questo punto la trasformata di tale segnale deriva immediatamente dalle proprietà della trasformata di Fourier:
( ) )2sin()2(sin ffcjfX π⋅⋅−=
NOTA: Si noti che x(0) = X(0) = 0, ovvero eguaglia l’area sottesa al segnale nell’intervallo considerato.
Inoltre, si noti che essendo x(t) reale e dispari, la sua trasformata di Fourier è immaginaria pura e
dispari.
F. Benedetto Ottobre 2009
x(t)
t
1
1/2−1/2
−1

28
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105) CONVOLUZIONI E CORRELAZIONI CONTINUE
Si definisce operazione di convoluzione od integrale di convoluzione tra due segnali v(t) e w(t) la seguente:
( ) ( )∫∫+ ∞
∞−
+ ∞
∞−
−⋅=−⋅=∗= λλλλλλ dtvwdtwvtwtvtz )()()()()(
Si noti immediatamente come la convoluzione goda della proprietà commutativa, ovvero:
)()()()()( tvtwtwtvtz ∗=∗=
Inoltre, valgono le seguenti :
1) proprietà associativa:
[ ] [ ] )()()()()()( tytwtvtytwtv ∗∗=∗∗
2) proprietà distributiva:
[ ] [ ] [ ])()()()()()()( tytvtwtvtytwtv ∗+∗=+∗
3) teoremi di convoluzione:
)()()()( fWfVtwtv ⋅⇔∗
)()()()( fWfVtwtv ∗⇔⋅
Ovvero, la convoluzione in un dominio (tempo/frequenza) diviene un prodotto nel dominio trasformato (frequenza/tempo).
Passiamo ora alla definizione dell’operazione di correlazione (auto e cross-correlazione) definendo dapprima il significato fisico di tale operazione ed in seguito il metodo operativo di calcolo. L’operazione di correlazione è un’operazione fondamentale nei sistemi di Telecomunicazione in quanto da un’indicazione di quanto due segnali siano tra loro simili: ovvero operare una correlazione di due segnali significa misurare il grado di similitudine tra questi due segnali, ovvero quanto un segnale risuona sull’altro. Se i due segnali sono diversi si parla di cross-correlazione, quando invece i due segnali sono uguali si parla di auto-correlazione. Chiaramente, tale operazione diviene come dicevamo fondamentale nei sistemi di TLC all’atto della ricezione in quanto tanto maggiore sarà il grado di correlazione (o l’energia della cross-correlazione) tra il segnale ricevuto e quello trasmesso,
tanto maggiore il segnale ricevuto somiglierà al segnale trasmesso.
F. Benedetto Ottobre 2009

29
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Inoltre, essendo come detto l’auto-correlazione un’operazione di correlazione realizzata con due segnali identici, appare chiaro come essa dovrà godere di alcune proprietà fondamentali diversamente da una generica cross-correlazione. Infatti, essendo i due segnali identici e misurando tramite la correlazione il loro grado di similitudine, l’energia dell’auto-correlazione dovrà essere massima nell’origine (quando cioè i segnali sono completamente sovrapposti l’uno all’altro e la loro risonanza è massima) e simmetrica5 rispetto all’asse delle ordinate (sempre in virtù del fatto che iniziando a sovrapporre i due segnali tra loro o allontanandoli il grado di correlazione deve essere lo stesso essendo i segnali uguali).
Passiamo ora al metodo operativo di calcolo della correlazione. Si definisce operazione di cross-correlazione o integrale di correlazione la seguente6:
E’ importante sottolineare che la cross-correlazione può ricondursi ad un integrale di convoluzione tra il primo segnale, ribaltato e complesso e coniugato, ed il secondo segnale rimasto invariato. Si noti inoltre come la cross-correlazione non goda della proprietà commutativa ovvero:
E’ quindi importante in questo caso l’ordine con cui i segnali vengono cross-correlati. Vale però la seguente:
Seguono poi di conseguenza le altre proprietà (alcune tipiche dell’auto-correlazione):
1) Massima nell’origine:
(0) max ( )xx xxC Cτ
τ=
2) Simmetria coniugata rispetto all’asse delle ordinate:
3) Simmetria, se x(t) è reale:
5 In realtà si parla di simmetria coniugata nel caso i segnali considerati non siano reali.6 Chiaramente per ottenere la definizione di auto-correlazione basterà considerare y(t) = x(t).
F. Benedetto Ottobre 2009

30
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010 4) Disuguaglianza di Schwarz:
( ) (0) (0)xy xx yyC C Cτ ≤ ⋅
( ) (0) (0)yx xx yyC C Cτ ≤ ⋅
5) Teoremi di Correlazione7:
Ovvero, la correlazione in un dominio (tempo/frequenza) diviene un prodotto nel dominio trasformato (frequenza/tempo) e la trasformata di Fourier della funzione di autocorrelazione è pari alla densità spettrale di energia (di potenza se il segnale è periodico).
6) Energia:
Ovvero, l’autocorrelazione calcolata nell’origine corrisponde all’energia del segnale (area sottesa alla densità spettrale di energia).
5.1) SISTEMI LINEARI TEMPO-INVARIANTI (LTI)Nella trattazione che segue prenderemo in considerazione solo una parte dei sistemi con relazione ingresso-uscita, ovvero quelli che risultano essere lineari e tempo invarianti (LTI).
In particolare, dato un sistema con ingresso x(t) ed uscita y(t)=F[x(t)], dove F[•] rappresenta la trasformazione che il sistema compie sull’ingresso, il sistema si definisce lineare se vale il principio di sovrapposizione degli effetti, ovvero se data:
( ) ( )k kk
x t a x t= ∑
si ha:
( ) ( )k kk
y t a F x t = ∑
Inoltre, il sistema si definisce tempo-invariante se le caratteristiche del sistema rimangono invariate con il tempo, ovvero se un ingresso ritardato nel tempo della quantità td produce un’uscita ritardata della stessa quantità:
7 Dove si è fatto uso della seguente: v*(-t) ↔ V*(f)
F. Benedetto Ottobre 2009

31
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Per ottenere ora un’equazione esplicita ingresso-uscita, dobbiamo dapprima definire la risposta impulsiva del sistema come:
Ovvero la risposta del sistema quando in ingresso è applicata una delta di Dirac. Si noti però come ogni segnale d’ingresso continuo possa essere scritto nella forma:
e quindi l’uscita possa essere ottenuta come segue:
in cui l’ultima operazione è effettuata in virtù della linearità del sistema. Ricorrendo ora alla proprietà di invarianza temporale otteniamo che:
e quindi in conclusione:
Ovvero, l’ingresso e l’uscita di un sistema LTI sono legati attraverso l’integrale di convoluzione (operazione di filtraggio). E’ quindi necessaria la conoscenza della risposta impulsiva del sistema per conoscere l’uscita in funzione di un determinato ingresso.
Ovviamente, valendo le proprietà della trasformata di Fourier, l’operazione di convoluzione si trasforma in frequenza in un prodotto tra le trasformate dell’ingresso e della risposta impulsiva del sistema:
( ) ( ) ( )Y f X f H f= ⋅
La trasformata della risposta impulsiva prende il nome di funzione di trasferimento.
F. Benedetto Ottobre 2009

32
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.2) DISTORSIONI NELLA TRASMISSIONE DEI SEGNALIIn generale, i mezzi trasmissivi: attenuano i segnali in proporzione alla distanza percorsa e alla frequenza del segnale e propagano i segnali a velocità proporzionali alle loro frequenze. Una conseguenza è che, per qualunque mezzo trasmissivo, la banda passante si riduce all'aumentare della lunghezza del mezzo stesso. Perché un segnale sia ricevuto come è stato trasmesso, è necessario che la banda passante sia uguale o più ampia della banda di frequenza del segnale stesso. Altrimenti, il segnale viene privato di alcune delle sue armoniche (tipicamente quelle di frequenza più elevata) e viene quindi distorto, cioè alterato. Nel seguito analizzeremo le condizioni per cui una trasmissione si può dire priva di distorsioni (distorsionless).
Una trasmissione priva di distorsione si ha ogni volta che il segnale ricevuto possiede la stessa “forma” del segnale inviato. Più precisamente, dato un segnale di ingresso x(t) definiamo l’uscita del sistema y(t) priva di distorsioni se e solo se l’uscita differisce dall’ingresso per un fattore d’ampiezza ed uno di ritardo temporale.
Analiticamente, si ha trasmissione priva di distorsione se vale la seguente:
dove K e td sono delle costanti. Nel dominio delle frequenze si ha:
( ) ( )2 dj f tY f K e X fπ− ⋅= ⋅ ⋅
e, per definizione di funzione di trasferimento avremo:
( ) 2 dj f tH f K e π− ⋅= ⋅
In altre parole, un sistema privo di distorsioni deve essere caratterizzato da una funzione di trasferimento con ampiezza costante e fase lineare, ovvero:
Possiamo ora definire tre tipi diversi di distorsioni:
1) distorsioni di ampiezza, occorrono ogni volta che :
( )H f K≠
2) distorsioni di fase, occorrono ogni volta che :
3) distorsioni non lineari, occorrono ogni volta che il sistema include elementi non lineari.
Le distorsioni di ampiezza (ovvero eccessive attenuazioni o alti guadagni) sono estremamente dannose per segnali audio e devono essere considerate con molta attenzione nei sistemi Hi-Fi.
F. Benedetto Ottobre 2009

33
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Questo perché l’orecchio umano è particolarmente sensibile a variazioni di ampiezza e poco selettivo a variazioni di fase (ovvero ritardi temporali).
Per quanto riguarda l'udibilità delle distorsioni lineari (ovvero degli scostamenti dalla risposta in frequenza piatta e risposta in fase lineare) occorre fare una forte distinzione tra distorsione di ampiezza e di fase. Numerosissimi studi (basati sia sull'uso di toni puri che di rumore a banda più o meno larga) hanno infatti mostrato che l'orecchio umano è molto sensibile alle variazioni della risposta in ampiezza nell'intorno delle frequenze centrali della banda audio ed a livelli sufficientemente superiori (10 dB e oltre) a quello della soglia di udibilità: in tali condizioni la minima variazione udibile è pari a circa 0,3 dB. Naturalmente l'uso di segnali complessi come quelli musicali facilita molto la percezione delle distorsioni di ampiezza, poiché in questo caso possono emergere, oltre a quelle di livello, anche differenze di timbro. Risultano inoltre più udibili minime distorsioni di ampiezza che interessano un'ampia banda di frequenze che non distorsioni più sostanziose ma circoscritte in un piccola porzione dello spettro udibile: con segnali complessi si riesce a percepire (come variazione del bilanciamento tonale) inclinazioni della risposta in frequenza pari anche a soli 0,1 dB/ottava. Un buon apparecchio audio digitale non dovrebbe tuttavia soffrire di tali scostamenti. Per ciò che concerne invece le distorsioni di fase, gli altrettanto numerosi studi hanno dato risultati piuttosto contrastanti, anche se appare chiaro che la sensibilità umana alle distorsioni di fase è estremamente più bassa di quella alle distorsioni di ampiezza (e ciò è ancor più vero per segnali musicali), in quanto il nostro orecchio è molto più sensibile al contenuto spettrale che non alla forma d'onda del suono.
Al contrario, le distorsioni di fase sono estremamente pericolose per trasmissioni video (e quelle dati), in quanto una distorsioni di fase sul segnale video si traduce in un errore nel ritardo delle componenti del segnale causando un generale sfocamento (blurring) dell’immagine. Al contrario, una variazione in ampiezza causa un lieve aumento (o diminuzione) della luminanza dell‘immagine (cui l’occhio umano è molto meno sensibile).
5.3) EQUALIZZAZIONELe distorsioni lineari (in ampiezza o fase) sono teoricamente perfettamente ricostruibili tramite un sistema di equalizzazione. In particolare, indicando con Hc(f) la funzione di trasferimento di un canale di trasmissione qualunque, si ha una trasmissione senza distorsioni se l’equalizzatore ha la forma seguente:
( ) ( )2 dj f t
eqc
K eH fH f
π− ⋅⋅=
Ad esempio, in una trasmissione radio in presenza del fenomeno del multipath, le riflessioni multiple prodotte da ostacoli tra trasmettitore e ricevitore possono dar luogo ad echi del segnale trasmesso. Supponiamo che il canale sia costituito da due semplici echi, e quindi il segnale ricevuto sia come segue:
F. Benedetto Ottobre 2009

34
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010dove il secondo termine corrisponde ad un eco se t2 > t1. La funzione di trasferimento del canale risulta allora pari a:
con k=K2/K1 e t0 = t2 - t1. A questo punto, considerando K1 e t1 costanti, l‘equalizzatore richiesto per una trasmissione senza distorsioni è semplicemente pari a:
( )02
11eq j f tH f
k e π− ⋅=+ ⋅
F. Benedetto Ottobre 2009

35
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.4) MEZZI TRASMISSIVII mezzi trasmissivi sono sostanzialmente di tre tipi:
• mezzi elettrici (cavi): in essi il fenomeno fisico utilizzato è l'energia elettrica;• mezzi wireless (onde radio): il fenomeno fisico è l'onda elettromagnetica, una combinazione di
campo elettrico e campo magnetico variabili, che si propaga nello spazio e che induce a distanza una corrente elettrica in un dispositivo ricevente (antenna);
• mezzi ottici (LED, laser e fibre ottiche): in essi il fenomeno utilizzato è la luce. Si tratta dei mezzi più recenti, che hanno rivoluzionato il settore.
5.4.1) DOPPINO INTRECCIATO (TWISTED PAIR)Consiste di una coppia di conduttori in rame intrecciati l'uno coll'altro in forma elicoidale. Ciò fa si che si minimizzino le interferenze fra coppie adiacenti (due fili paralleli costituiscono un'antenna; se sono intrecciati no). E' usato, in particolare, per le connessioni terminali del sistema telefonico (da casa alla centrale più vicina: ultimo miglio).
La larghezza di banda dipende dalla lunghezza, ma comunque si può trasmettere a diversi Mbps su distanze fino a qualche km.
Due tipi di doppino sono importanti nella trasmissione dati:
• categoria 3: due fili isolati, leggermente attorcigliati. Quattro coppie contenute in una guaina di plastica. Comune nei cablaggi telefonici interni agli edifici (si possono avere quattro telefoni per stanza);
• categoria 5 (dal 1988): simile alla categoria 3, ma con un più fitto avvolgimento (più giri per centimetro) e con isolamento in teflon. Migliore qualità del segnale sulle lunghe distanze, adatto a collegamenti in alta velocità in ambito LAN (ad esempio per Ethernet a 100 Mbps, ATM a 34 Mbps).
Entrambi i tipi sono spesso chiamati UTP (Unshielded Twisted Pair), per distinguerli da un altro tipo, detto STP (Shielded Twisted Pair) che è schermato e quindi offre migliori prestazioni, ma è molto più ingombrante e, di fatto, non viene usato quasi più.
5.4.2) CAVO COASSIALE
E’ un altro comune mezzo di trasmissione; offre un miglior isolamento rispetto al doppino e quindi consente velocità di trasmissione maggiori su distanze superiori. E’ costituito da un conduttore centrale in rame circondato da uno strato isolante all'esterno del quale vi è una calza metallica. Era molto usato nel sistema telefonico per le tratte a lunga distanza, ma in tale ambito è ormai sostituito quasi ovunque dalla fibra ottica. Rimane in uso per la TV via cavo e in molte LAN. Ci sono due tipi di cavo coassiale, per ragioni storiche più che tecniche.
F. Benedetto Ottobre 2009

36
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• Baseband coaxial cable (50 ohm): il cavo baseband è usato per la trasmissione digitale, e
consente velocità da 1 a 2 Gbps fino a circa 1 km. Per distanze superiori si devono interporre amplificatori.
• Broadband coaxial cable (75 ohm): è usato per la trasmissione analogica. E' il cavo standard della TV. Offre una banda di 300 MHz e può estendersi fino a quasi 100 km. La banda totale è suddivisa in canali di banda più piccola (ad es. 6 MHz per ciascun segnale TV) indipendenti gli uni dagli altri. Mentre un canale porta un segnale TV, un altro può portare una trasmissione dati (ovviamente con apparecchiature di conversione digitale/analogica e viceversa), tipicamente a 3 Mbps.
5.4.3) FIBRE OTTICHE
Sono uno dei mezzi più recenti, e stanno rivoluzionando il mondo delle telecomunicazioni. Sono fatte di un sottilissimo cilindro centrale in vetro, (core) circondato da uno strato esterno (cladding) di vetro avente un diverso indice di rifrazione e da una guaina protettiva. Sono quindi raggruppate insieme in una guaina contenitrice esterna. Le fibre ottiche sfruttano il principio della deviazione che un raggio di luce subisce quando attraversa il confine fra due materiali diversi (core e cladding nel caso delle fibre). La deviazione dipende dagli indici di rifrazione dei due materiali. Oltre un certo angolo, il raggio rimane intrappolato all'interno del materiale. Le fibre ottiche sono di due tipi :
• multimodali: raggi diversi possono colpire la superficie con diversi angoli (detti modi), proseguendo quindi con diversi cammini. Il diametro del core è di 50 micron, come quello di un un capello;
• monomodali: sono così sottili (il diametro del core è 8-10 micron) che si comportano come una guida d'onda: la luce avanza in modo rettilineo, senza rimbalzare. Sono più costose ma reggono distanze più lunghe (fino a 30 km).
Le fibre ottiche hanno prestazioni strepitose: con le correnti tecnologie è raggiungibile una velocità di trasmissione di 50.000 Gbps (50 Tbps) con un bassissimo tasso d'errore. La pratica attuale di usare velocità dell'ordine dei Gbps dipende dall'incapacità di convertire più velocemente segnali elettrici in luminosi. Un sistema di trasmissione ottica ha tre componenti :
• sorgente luminosa: può essere un LED o un laser. Converte un segnale elettrico in impulsi luminosi;
• mezzo di trasmissione: è la fibra ottica vera e propria;• fotodiodo ricevitore: converte gli impulsi luminosi in segnali elettrici. Il tipico tempo di risposta
di un fotodiodo è 1 nsec., da cui il limite di 1 Gbps.
Vantaggi delle fibre ottiche rispetto al rame:
• leggerezza a parità di banda (due fibre sono più capaci di 1.000 doppini, 100 kg/km contro 8.000 kg/km);
• totale insensibilità a disturbi elettromagnetici;• difficile l'inserimento di intrusi per spiare il traffico.
Svantaggi delle fibre ottiche rispetto al rame:
• costo delle giunzioni;• comunicazione unidirezionale (due fibre sono necessarie per una comunicazione two-way).
F. Benedetto Ottobre 2009

37
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.4.4) TRASMISSIONE SENZA FILI
Le onde elettromagnetiche, create dal movimento degli elettroni, viaggiano nello spazio (anche vuoto) alla velocità della luce e possono indurre una corrente in un dispositivo ricevente (antenna) anche molto distante. Le porzioni dello spettro elettromagnetico utilizzabili per la trasmissione dati includono:
• onde radio;• microonde;• raggi infrarossi;• luce visibile;• raggi ultravioletti.
Man mano che si sale di frequenza si hanno comportamenti diversi :
• le onde radio, di frequenza più bassa, passano attraverso gli edifici, percorrono lunghe distanze e vengono riflesse dalla ionosfera;
• a frequenze più elevate (lunghezza d'onda dell'ordine dei cm o mm) sono estremamente direzionali e vengono fermate dagli ostacoli (anche dalle gocce di pioggia!);
Anche in questo ambito la velocità di trasmissione è funzione dell'ampiezza della banda utilizzata. Si trasmettono informazioni modulando l'ampiezza, la frequenza e/o la fase dell'onda.
5.5) FILTRIOgni sistema di telecomunicazione include uno o più filtri allo scopo di separare il segnale che trasporta l’informazione dalle contaminazioni in termini di rumore,interferenza e distorsioni. Nel seguito definiremo i filtri ideali, concludendo la discussione con la differenza tra filtri reali ed ideali.
Per definizione, un filtro ideale ha la caratteristica di essere un filtro che non introduce distorsioni su una o più bande di frequenze ed ha una risposta nulla per tutte le altre frequenze. In particolare, possiamo distinguere quattro tipologie fondamentali di filtri ideali con specifico riferimento alla formula seguente8:
1) Filtro ideale Passa-banda (BPF). La banda del filtro è pari a B = fl – fu (con fl ≠ 0 ed fu ≠ 0).
2) Filtro ideale Passa-basso (LPF). La banda del filtro è pari a B = fu (con fl = 0 ed fu ≠ 0).
3) Filtro ideale Passa-alto (HPF). Ottenibile come (1-LPF) e caratterizzato da fl > 0 ed fu = ∞.
4) Filtro ideale di stop (notch-filter). Un filtro con H(f) = 0, per tutta la banda di interesse.
Ognuno di questi filtri è però fisicamente non-realizzabile, nel senso che le loro caratteristiche non possono essere ottenute con un numero finito di elementi, come dimostreremo ora con un sempilce
8 I parametri fl ed fu sono noti come frequenze (inferiore e superiore) di taglio (cut-off) del filtro in questione.
F. Benedetto Ottobre 2009

38
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010esempio. A tal proposito, si ponga l’attenzione sulla funzione di trasferimento di un generico filtro passa-basso, di banda B (lo stesso esempio può estendersi anche alle altre tipologie di filtro), e se ne calcoli la risposta impulsiva; si otterrà:
Ovvero una funzione (sinc) che si estende su tutto l’asse dei tempi. Ma essendo h(t) la risposta del filtro ad un impulso otteniamo l’assurdo che essa è diversa da zero anche prima dell’applicazione dell’ingresso, ovvero per t < 0. E’ quindi dimostrato che il filtro precedente è un filtro ideale.
Inoltre, si noti come sia ovviamente fisicamente impossibile ottenere un filtro che presenti una discontinuità nel passare dal valore massimo dell’ampiezza al valore nullo. E’ chiaro che per essere reale, un filtro dovrà necessariamente avere una gradualità nel passaggio suddetto (quella che prende il nome di banda di transizione) per passare appunto dalla zona di massima ampiezza e priva di distorsioni (banda passante) a quella di valore nullo (banda oscura). Un filtro avente un andamento graduale di tale forma è senz’altro un filtro reale. E’ però intuitivo comprendere come un tale filtro abbia bisogno di una banda maggiore di quello ideale per permettere la graduale transizione dalla banda passante a quella oscura. L’eccedenza di banda che caratterizza tale filtro
reale è indicata da un parametro adimensionale che prende il nome di roll-off, β: esso è un valore compreso tra 0 e 1 e come detto rappresenta la percentuale di banda in eccedenza. Ciò vuol dire che un filtro con roll-off nullo è un filtro rettangolare (ideale) di banda B, mentre un filtro con roll-off pari ad uno un filtro reale di banda 2B.
Uno dei filtri maggiormente utilizzati nelle telecomunicazioni è il filtro a coseno rialzato definito in frequenza dalla seguente:
e nel tempo da:
con β fattore di roll-off.
Nelle figure seguenti è mostrato l'andamento prima in frequenza poi nel tempo di tale filtro al variare del fattore di roll-off.
F. Benedetto Ottobre 2009

39
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Chiaramente, per β = 0 si ottiene il filtro ideale (la rect).
F. Benedetto Ottobre 2009
40
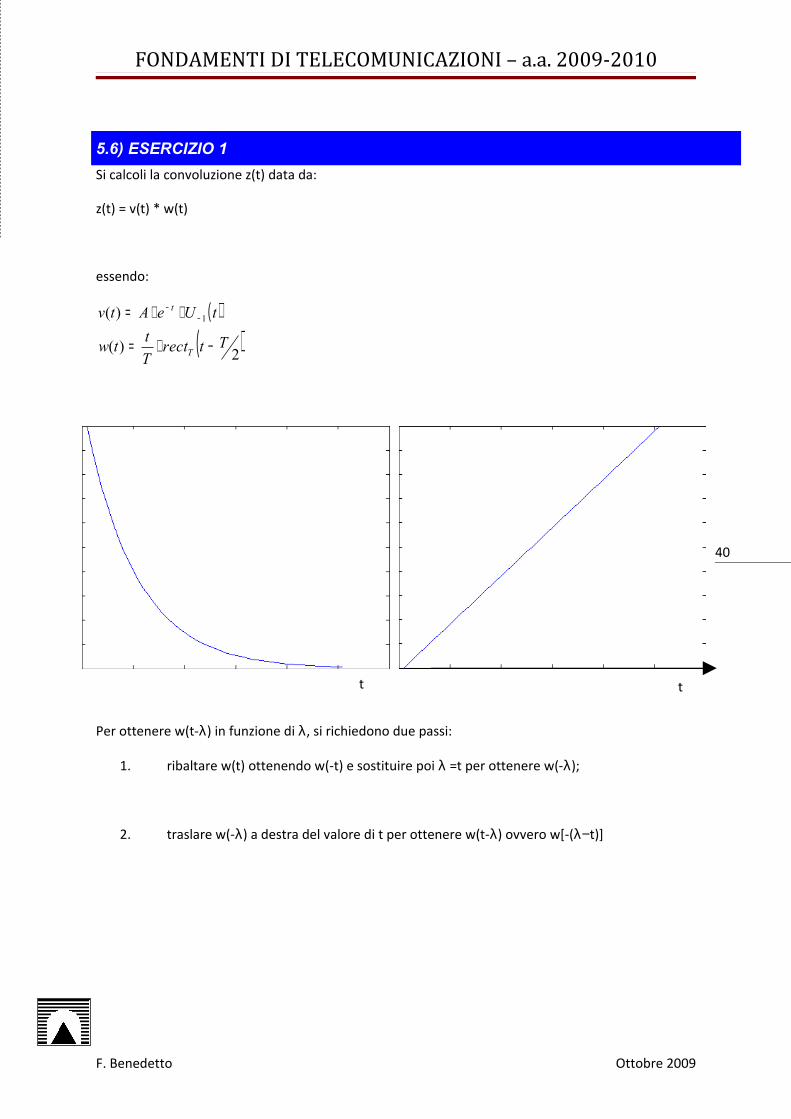
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.6) ESERCIZIO 1Si calcoli la convoluzione z(t) data da:
z(t) = v(t) * w(t)
essendo:
( )( )2)(
)( 1
TtrectTttw
tUeAtv
T
t
−⋅=
⋅⋅= −−
Per ottenere w(t-λ) in funzione di λ, si richiedono due passi:
1. ribaltare w(t) ottenendo w(-t) e sostituire poi λ =t per ottenere w(-λ);
2. traslare w(-λ) a destra del valore di t per ottenere w(t-λ) ovvero w[-(λ−t)]
F. Benedetto Ottobre 2009
v(t) w(t)
T
t t

41
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Ora possiamo calcolare la convoluzione facendo scorrere w(t-λ) da sinistra a destra sull’asse λ.
1. Come si vede immediatamente dalla figura, se t<0 la convoluzione è nulla in quanto non c’è sovrapposizione tra le due curve.
2. Se t > 0 e contemporaneamente t-T < 0, ovvero per 0<t<T la convoluzione vale:
( )tt
etTAd
TteAtwtvtz −− +−=
−⋅=∗= ∫ 1)()()(
0
λλλ
3. Se t-T > 0, ovvero per t > T la convoluzione vale:
( ) ( )TtTt
Tt
eeTTAd
TteAtwtvtz −−−
−
− ⋅+−=
−⋅=∗= ∫ 1)()()( λλλ
In conclusione, la convoluzione z(t), il cui grafico è riportato nella figura seguente, vale:
( )
( ) ( )
>→⋅+−
<<→+−
<→
=∗=
−−−
−
TteeTTA
TtetTA
t
twtvtz
TtT
t
,1
0,1
0,0
)()()(
.
F. Benedetto Ottobre 2009
w(t-λ)
tt-T λ
v(λ)
z(t)
t
42
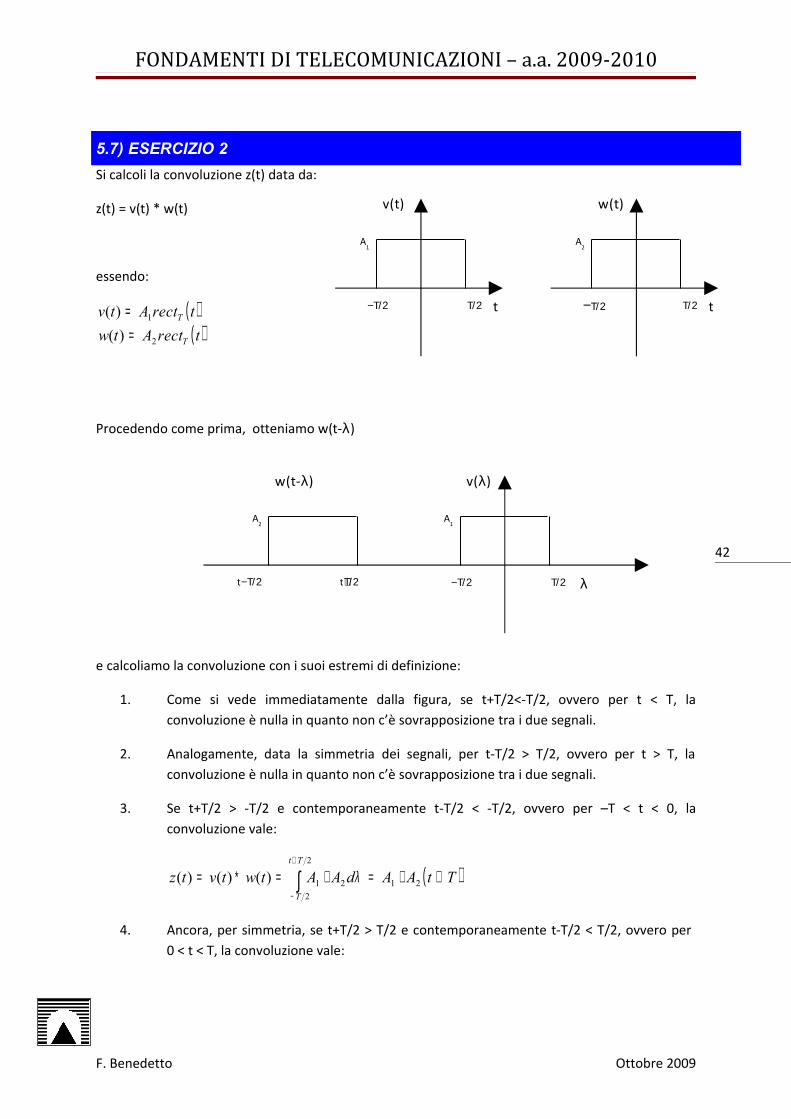
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.7) ESERCIZIO 2Si calcoli la convoluzione z(t) data da:
z(t) = v(t) * w(t)
essendo:
( )( )trectAtwtrectAtv
T
T
2
1
)()(
==
Procedendo come prima, otteniamo w(t-λ)
e calcoliamo la convoluzione con i suoi estremi di definizione:
1. Come si vede immediatamente dalla figura, se t+T/2<-T/2, ovvero per t < T, la convoluzione è nulla in quanto non c’è sovrapposizione tra i due segnali.
2. Analogamente, data la simmetria dei segnali, per t-T/2 > T/2, ovvero per t > T, la convoluzione è nulla in quanto non c’è sovrapposizione tra i due segnali.
3. Se t+T/2 > -T/2 e contemporaneamente t-T/2 < -T/2, ovvero per –T < t < 0, la convoluzione vale:
( )TtAAdAAtwtvtzTt
T
+⋅=⋅=∗= ∫+
−21
2
221)()()( λ
4. Ancora, per simmetria, se t+T/2 > T/2 e contemporaneamente t-T/2 < T/2, ovvero per 0 < t < T, la convoluzione vale:
F. Benedetto Ottobre 2009
v(t)
t
A1
−Τ/2 Τ/2
w(t)
t
A2
−Τ/2 Τ/2
v(λ)
λ
A1
−Τ/2 Τ/2
w(t-λ)
A2
t−Τ/2 t+Τ/2

43
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010( )TtAAdAAtwtvtz
T
Tt
+−⋅=⋅=∗= ∫−
21
2
221)()()( λ
5. Infine, si ha sovrapposizione completa tra le due rect solo se t-T/2 > -T/2 e contemporaneamente t+T/2 < T/2, ovvero solo se t = 0 e la convoluzione vale:
TAAdAAtwtvtzTt
Tt
⋅⋅=⋅=∗= ∫+
−21
2
221)()()( λ
In conclusione, la convoluzione z(t), il cui grafico è riportato nella figura seguente, vale:
( )( )
>→<<→+−⋅<<−→+⋅
−<→
=∗=
TtTtTtAA
tTTtAATt
twtvtz
,00,
0,,0
)()()(21
21
NOTA: la convoluzione tra due rect di pari base è una tri di base doppia!
F. Benedetto Ottobre 2009
z(t)
t
A1A
2T
−Τ Τ

44
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105.8) ESERCIZIO 3Si calcoli la convoluzione z(t) data da:
z(t) = v(t) * w(t)
essendo:
( )( )trectAtw
trectAtv
T
T
2
1
2
1
)(
)(
=
=
Procedendo come prima, otteniamo w(t-λ)
e calcoliamo la convoluzione con i suoi estremi di definizione:
1. Come si vede immediatamente dalla figura, se t+T2/2<-T1/2, ovvero per t < -(T1 + T2)/2, la convoluzione è nulla in quanto non c’è sovrapposizione tra i due segnali.
2. Analogamente, data la simmetria dei segnali, per t-T2/2 > T1/2, ovvero per t > (T1 + T2)/2, la convoluzione è nulla in quanto non c’è sovrapposizione tra i due segnali.
3. Se t+T2/2 > -T1/2 e contemporaneamente t-T2/2 < -T1/2, ovvero per -(T1 + T2)/2 < t < -(T1 - T2)/2, la convoluzione vale:
+
+⋅=⋅=∗= ∫+
− 2)()()( 21
21
2
221
2
1
TTtAAdAAtwtvtzTt
T
λ
4. Ancora, per simmetria, se t+T2/2 > T1/2 e contemporaneamente t-T2/2 < T1/2, ovvero per (T1 - T2)/2 < t < (T1 + T2)/2, la convoluzione vale:
+
+−⋅=⋅=∗= ∫− 2
)()()( 2121
2
221
1
2
TTtAAdAAtwtvtzT
Tt
λ
F. Benedetto Ottobre 2009
v(t)
t
A1
−Τ1/2 Τ
1/2
w(t)
t
A2
−Τ2/2 Τ
2/2
v(λ)
λ
A1
−Τ1/2 Τ
1/2
w(t-λ)A
2
t−Τ2/2 t+Τ
2/2

45
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20105. Infine, si ha sovrapposizione completa tra le due rect solo se -(T1 -T2)/2 < t < (T1 - T2)/2 e
la convoluzione vale:
221
2
221
2
2
)()()( TAAdAAtwtvtzTt
Tt
⋅⋅=⋅=∗= ∫+
−
λ
In conclusione, la convoluzione z(t), ed il cui grafico è riportato nella figura seguente, vale:
+>→
−<<
−−→⋅⋅
+<<
−→
+
+−⋅
−−<<
+−→
+
+⋅
+−<→
=∗=
2,0
22,
22,
2
22,
2
2,0
)()()(
21
2121221
21212121
21212121
21
TTt
TTtTTTAA
TTtTTTTtAA
TTtTTTTtAA
TTt
twtvtz
NOTA: la convoluzione tra due rect di base diversa è un trapezio in cui la base minore è pari alla differenza delle basi delle rect e la base maggiore è pari alla somma delle basi delle due rect!
Ogni qualvolta si calcola la convoluzione di segnali limitati nel tempo, il risultato della convoluzione si estenderà tra i massimi estremi possibili, ovvero tra due estremi dati dalla somma algebrica degli estremi inferiori e superiori dei segnali originali da convolvere!!
F. Benedetto Ottobre 2009
z(t)
t
A1A
2T
2
−(Τ1+Τ
2)/2 −(Τ
1−Τ
2)/2 (Τ
1−Τ
2)/2 (Τ
1+Τ
2)/2

46
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20106) TEOREMA DEL CAMPIONAMENTO
Il processo di campionamento è di enorme importanza ai fini della realizzazione dei dispositivi digitali per le telecomunicazioni. Il contenuto del segnale campionato risultante dipende dalla relazione fra la frequenza di campionamento impiegata e le componenti minime e massime di frequenza del segnale analogico in ingresso.
I segnali a tempo discreto spesso sono una versione campionata di segnali a tempo continuo; analogamente i segnali e dati numerici derivano da una quantizzazione di campioni. Ciò è dovuto al fatto che l’elaborazione di segnali analogici si può eseguire vantaggiosamente operando preventivamente una conversione analogica/numerica o, sinteticamente conversione A/D, sulle forme d’onda, elaborando poi numericamente le sequenze così ottenute ed effettuando infine, se necessario, una conversione numerico/analogica o sinteticamente conversione D/A.
In ipotesi molto bene approssimate in pratica, una forma d’onda è adeguatamente rappresentata dai suoi campioni: nel prosieguo si stabilirà innanzi tutto quali debbano essere tali ipotesi e si mostrerà come la forma d’onda possa essere ricostruita a partire dai propri campioni (Teorema del campionamento).
6.1) TEOREMA DEL CAMPIONAMENTO REALEUn semplice approccio alla teoria del campionamento si può ottenere con lo schema di Fig. 1 (a).
Fig. 1. a) schema del circuito; b) forma d’onda risultante
L’interruttore commuta periodicamente tra i due contatti con un rate fs pari a fs = 1/Ts [Hz],
rimanendo sul contatto del segnale per τ secondi e dando quindi origine alla forma d’onda rappresentata in Fig. 1 (b).
F. Benedetto Ottobre 2009

47
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010La domanda che ci poniamo è: in quali condizioni x(t) può essere ricostruita a partire da xs(t), ovvero dalla sua versione campionata? La risposta a tale domanda è rappresentata dal teorema del campionamento.
Sia ora s(t) una funzione tale che:
)()()( tstxtxs ⋅=
ovvero sia s(t) una funzione costituita da un treno di rettangoli. Poiché s(t) è periodica, essa può essere espansa in serie di Fourier come:
( ) ( )∑∑+ ∞
=
+ ∞
− ∞=
⋅⋅⋅ ⋅⋅⋅⋅⋅+=⋅⋅⋅⋅=1
02 2cos2sin)(
nsn
n
tfnjss tfnccefncfts s πττ π
dove:
( )
⋅⋅⋅⋅=⋅=
τττ
ssn
s
fncfcfc
sin0
ovvero:
( ) ( ) ( ) ( ) ( ) +⋅⋅⋅⋅⋅+⋅⋅⋅⋅⋅+⋅= txtfctxtfctxctx sss 22cos22cos2)( 210 ππ
Trasformando con Fourier, lo spettro di Xs(f) risulta pari a:
( ) ( ) ( )[ ] ( ) ( )[ ] +−+−⋅+−+−⋅+⋅= sssss ffXffXcffXffXcfXcfX 22)( 210
risultato che segue direttamente dal teorema della modulazione (traslazione in frequenza).
Assumendo ora il segnale x(t) limitato in banda tra [-w, w], la Fig. 2 mostra 2 rappresentazioni dello spettro di Xs(f) in funzione del valore scelto perla frequenza di campionamento fs. Si nota immediatamente che la ricostruzione corretta si ha solo per fs ≥ 2w ovvero per Ts ≤ 1/2w. La minima frequenza di campionamento fs = 2w è detta frequenza di Nyquist.
Se fs > 2w si replica lo spettro introducendo una banda di guardia.
Se fs < 2w si verifica quello che prende il nome di fenomeno di aliasing: sovrapposizione delle repliche spettrali.
F. Benedetto Ottobre 2009

48
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Fig. 2. Analisi del campionamento nel dominio della frequenza
Dall’analisi in frequenza del campionamento segue che, se il segnale è a banda limitata ed è soddisfatta la condizione di Nyquist, allora x (t) può essere ricostruito dalla sua versione campionata.
Se invece il segnale non è a banda limitata o se, pur essendolo, non è soddisfatta la condizione di Nyquist, allora le repliche di X(f) si sovrappongono, come mostrato in fig. 2c, e quindi la ricostruzione non è più possibile: si dice allora che il segnale campionato è affetto da aliasing. La minima frequenza di campionamento per cui un segnale con banda w può essere ricostruito senza dar luogo ad aliasing è pari a fs=2w e viene detta frequenza o cadenza di Nyquist.
F. Benedetto Ottobre 2009
Banda di Guardia

49
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20106.2) TEOREMA DEL CAMPIONAMENTO IDEALESe t è molto piccolo, xs(t) approssima una stringa di punti di campionamento istantanei che corrispondono ad un campionamento ideale.
In questo caso la funzione campionatrice ideale sδ(t) diventa un treno di impulsi:
( ) ( )∑+ ∞
− ∞=→−==
kskTttsts δ
ττδ1lim)(
0
e quindi:
( ) ( )∑+ ∞
− ∞=
−⋅=⋅=k
sss kTtkTxtstxtx δδ )()()(
Per ottenere ora lo spettro di Xs(f) richiamiamo le proprietà fondamentali della trasformata di Fourier ottenendo una situazione analoga a prima:
( )∑+ ∞
− ∞=
⋅−⋅=k
sss fkfXffX )(
Il segnale x(t) può ora essere ricostruito attraverso l’utilizzo di una funzione interpolatrice, ovvero moltiplicando lo spettro di Xs (f) per un rettangolo (in frequenza) esteso tra –fs/2 ed fs/2. ciò equivale a convolvere nel tempo xs(t) con l’antitrasformata del rettangolo ovvero con sinc (fs t):
( )frectf
fHsf
s
1)( = ( )tfcth ssin)( =
( ) ( ) ( ) ( )
( ) ( )[ ]∑
∑∑
∞+
− ∞=
+ ∞
− ∞=
+ ∞
− ∞=
−⋅⋅=
=−⋅=∗−⋅=
ksss
ksss
kss
kTtfckTx
ktfckTxtfckTtkTxtx
sin
sin)(sin)( δ
Possiamo quindi concludere con il:
6.3) TEOREMA DEL CAMPIONAMENTO UNIFORME (O DI SHANNON)Un qualunque segnale analogico x(t) è rappresentato dai suoi campioni presi con passo costante Ts, ovvero con cadenza fs=1/ Ts, se:
- il segnale x(t) è a banda rigorosamente limitata, ovvero se il suo spettro soddisfa la condizione X(f) = 0 per |f| ≥ B;
- la cadenza di campionamento è maggiore o uguale a quella di Nyquist, cioè fs ≥ 2B.
F. Benedetto Ottobre 2009
50
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Pertanto, se x(t) è un segnale con spettro con banda B limitata (diverso da zero per le frequenze entro [-B, B]), allora per ogni scelta del passo di campionamento Ts ≤ 1/2B, x(t) ammette lo sviluppo in serie:
( )∑∞+
− ∞=
−⋅=
n s
ss T
nTtcnTxtx sin)(
Esempi di segnali, banda occupata e minima frequenza di campionamento:
a. segnale vocale telefonico: B=4 KHz, fc=8 KHz
b. segnale audio qualità CD: B=22 KHz, fc=44.1 KHz
In conclusione, il teorema del campionamento impone che la frequenza utilizzata per il campionamento debba essere pari al doppio rispetto alla massima frequenza del segnale analogico da campionare 2 fmax, il che assicura la perfetta ricostruzione del segnale analogico a partire dai singoli campioni. La frequenza 2 fmax è chiamata frequenza di Nyquist. E’ importante che la frequenza di campionamento abbia sempre un valore superiore rispetto alla frequenza di Nyquist in modo tale da evitare il noto problema dell’aliasing, ossia della sovrapposizione delle repliche dello spettro, che comporta un’alterazione irreversibile sul segnale campionato.
Nelle applicazioni pratiche, essendo assai raro il caso di segnali rigorosamente limitati in banda, il campionamento viene effettuato utilizzando una misura di banda efficace tale che l’errore di ricostruzione dai campioni (aliasing) sia trascurabile in quanto comparabile con le altre forme di errore di approssimazione (esempio: quantizzazione e codifica dei campioni con un numero finito di bit), con i disturbi additivi (esempio: l’interferenza con segnali utili di altri utenti) e con il rumore termico e di antenna.
F. Benedetto Ottobre 2009

51
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20107) ELEMENTI DI TEORIA DELL’INFORMAZIONEStoricamente, si fa risalire la nascita della teoria dell’informazione al 1948, quando C. Shannon pubblicò il suo lavoro (sulla spinta delle ricerche già effettuate da Nyquist, Hartley e Wiener) intitolato “A mathematical theory of communication”. Nel suo lavoro, Shannon definisce la teoria dell’informazione legata a 3 concetti fondamentali: - la misura dell’informazione di una sorgente, - la capacità di un canale a trasferire l’informazione, - la codifica intesa come un mezzo per utilizzare la capacità del canale al meglio per trasferire l’informazione voluta.
I tre concetti sopra esposti riguardo la teoria dell’informazione concorrono alla definizione di una serie di teoremi che possono essere poi riassunti dalla seguente affermazione:
“se il tasso di informazione di una sorgente non eccede la capacità del canale, allora esiste una tecnica di codifica tale che l’informazione possa essere trasmessa sul canale con una probabilità dell’errore piccola a piacere, indipendentemente dal rumore presente”!
Va notato come l’aspetto più sorprendente di questa affermazione data da Shannon nell’ormai lontano 1948, sia la possibilità di trasmettere idealmente senza errori, anche su un canale rumoroso, con l’ausilio di un’appropriata codifica9.
7.1) MISURA DELL’INFORMAZIONEIn questo contesto, possiamo definire l’informazione come la libertà di scelta che la sorgente esercita sul messaggio da trasmettere. Quando una sorgente può scegliere liberamente uno tra tanti messaggi, l’utente destinatario avrà una grande incertezza su quale messaggio sarà selezionato. Risulta quindi evidente come la quantità di informazione associata al messaggio xi sia strettamente legata al valore della probabilità di tale messaggio e sia una funzione di tale probabilità Pi. Specificamente, il contenuto informativo è definito come:
(1)
La base del logaritmo determina l’unità di misura dell’informazione. Se la base del logaritmo è quella naturale (b = e) il contenuto informativo si misura in nat, se la base del logaritmo è b = 2 allora l’unità informativa è il bit. Nel seguito di questa trattazione si assumerà sempre che la base del logaritmo sia b=2, a meno che non sia diversamente indicato.
9 Il termine codifica è utilizzato in tale contesto nella sua accezione più generale di rappresentazione di un messaggio, sia esso dovuto ad una sorgente discreta o continua.
F. Benedetto Ottobre 2009

52
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Si noti che:
(2)
Inoltre, se xi e xj sono simboli indipendenti prodotti da una sorgente, allora si ha:
(3)
Ovvero l’informazione totale è semplicemente la somma dei contributi dei singoli messaggi. Si noti che la funzione logaritmo è l’unica che soddisfa contemporaneamente le proprietà (2) e (3).
Consideriamo ora una sorgente discreta X che emetta N simboli sorgente con una frequenza di emissione pari a R e ciascun simbolo sia caratterizzato da un valore di probabilità associato pari a Pi
con i = 1, 2,…, N.
Si definisce allora entropia della sorgente la quantità:
( )21
( ) logN
i ii
H X P P=
= − ⋅∑ , misurata in bit/simbolo. (4)
L’entropia H(X) definisce il minimo numero medio di bit con cui è possibile codificare i simboli della sorgente. Siamo quindi ora in grado di calcolare, per ogni sorgente, il suo contenuto informativo e quindi la sua entropia.
Ovviamente deve aversi, per definizione di entropia, che:
(5)
Tale definizione di entropia presuppone la rappresentazione dei messaggi della sorgente attraverso dei codici che siano univocamente ed istantaneamente decodificabili, ovvero: nessuna parola di codice deve essere il prefisso (l’inizio) di parole di codice successive (regola no-prefix).
7.2) CODIFICA DELL’INFORMAZIONE E CODIFICA DI SORGENTE.Supponendo ora di voler inviare su un canale binario i simboli sorgente, essi dovranno essere codificati attraverso delle parole di codice (stringhe di bit). Si dovrà cioè procedere al vero e proprio processo di codifica, scegliendo il codificatore più efficiente, ovvero quello che riesca a trasmettere lo stesso contenuto di informazione ma con meno bit. A tal proposito si definisce efficienza della codifica la seguente quantità:
F. Benedetto Ottobre 2009

53
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010min
avg
LL
η = (6)
ovvero il rapporto tra la minima lunghezza delle parole di codice (Lmin) e la lunghezza media (Lavg). Solo nel caso di alfabeto binario (bit 0 e 1) allora la lunghezza minima coincide con l’entropia della sorgente, mentre nel caso più generale possibile si ha Lmin=H(x)/log2D dove D è il numero di simboli dell’alfabeto di sorgente (D=2 nel caso binario).
L’efficienza del codice diventa:
( )
avg
H XL
η = solo nel caso binario! (7)
Ovvero, il codificatore è tanto più efficiente quanto più la lunghezza media delle parole di codice coincide con l’entropia della sorgente (codificatore entropico!). La lunghezza media è ottenuta dalla seguente:
(8)
dove li è la lunghezza in bit della i-sima parola di codice, con probabilità Pi.
Infine si definisce ridondanza la seguente quantità:
(9)
ovviamente tanto più un codice è efficiente, tanto minore sarà la sua ridondanza!
Si comprende a questo punto come i termini codifica di sorgente e compressione siano sinonimi. In particolare, esistono diversi tipi di compressione: quelle lossless (senza perdite), ovvero entropiche; - quelle lossy (con perdite) attraverso codifiche differenziali.
Esempi di codifiche lossless sono: Huffmann, Shannon-Fano, RLE (FAX), Lempel-ZIV (ZIP).
Esempi di codifiche lossy sono: JPEG e GIF (immagini fisse), MPEG (video), MP3 (musica), CELP (voce).
7.3) CODIFICA DI CANALELe modifiche che introduce il canale sul messaggio da trasmettere non sono note se non in senso statistico. Nasce l’esigenza di definire un codice che permetta, in ricezione, di individuare gli errori e di correggerli. Si aggiunge ridondanza (informazione aggiuntiva) al messaggio da trasmettere. La codifica di canale è, quindi, l’operazione mediante cui una trasmissione, in forma numerica, può essere protetta dagli effetti dei disturbi (soprattutto il rumore termico) introdotti dal canale e dagli
apparati che elaborano il segnale.
F. Benedetto Ottobre 2009
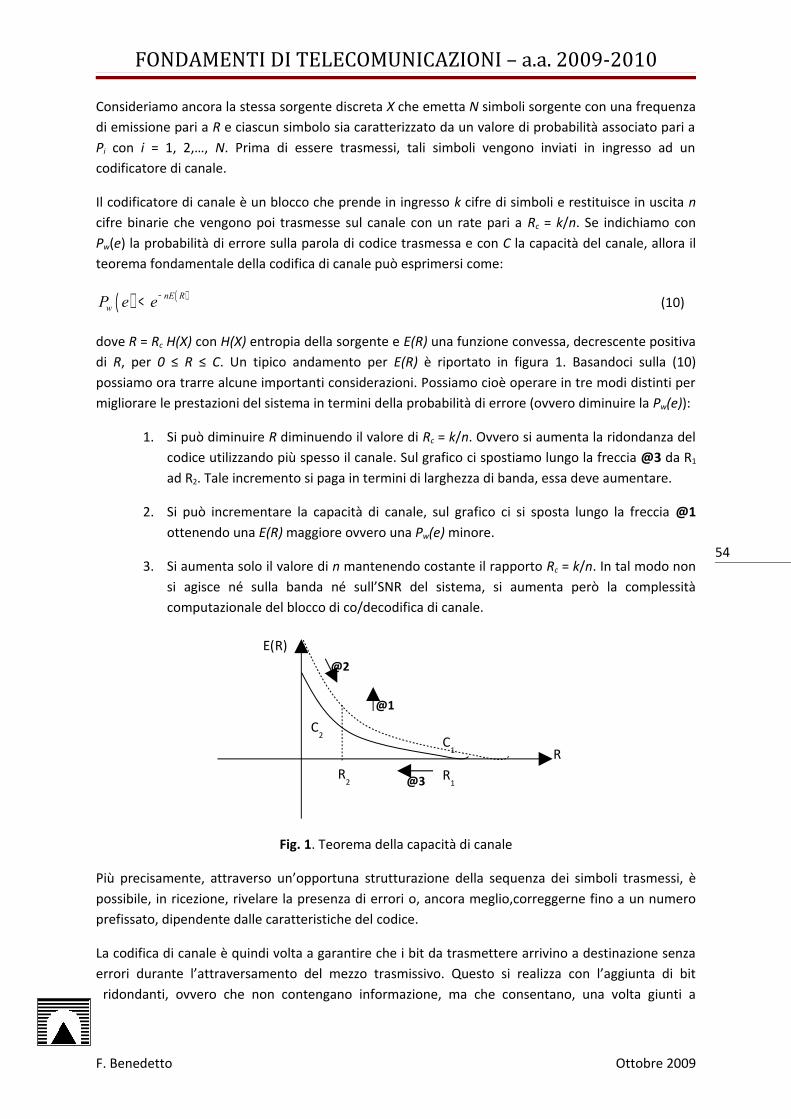
54
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Consideriamo ancora la stessa sorgente discreta X che emetta N simboli sorgente con una frequenza di emissione pari a R e ciascun simbolo sia caratterizzato da un valore di probabilità associato pari a Pi con i = 1, 2,…, N. Prima di essere trasmessi, tali simboli vengono inviati in ingresso ad un codificatore di canale.
Il codificatore di canale è un blocco che prende in ingresso k cifre di simboli e restituisce in uscita n cifre binarie che vengono poi trasmesse sul canale con un rate pari a Rc = k/n. Se indichiamo con Pw(e) la probabilità di errore sulla parola di codice trasmessa e con C la capacità del canale, allora il teorema fondamentale della codifica di canale può esprimersi come:
( ) ( )nE RwP e e−< (10)
dove R = Rc H(X) con H(X) entropia della sorgente e E(R) una funzione convessa, decrescente positiva di R, per 0 ≤ R ≤ C. Un tipico andamento per E(R) è riportato in figura 1. Basandoci sulla (10) possiamo ora trarre alcune importanti considerazioni. Possiamo cioè operare in tre modi distinti per migliorare le prestazioni del sistema in termini della probabilità di errore (ovvero diminuire la Pw(e)):
1. Si può diminuire R diminuendo il valore di Rc = k/n. Ovvero si aumenta la ridondanza del codice utilizzando più spesso il canale. Sul grafico ci spostiamo lungo la freccia @3 da R1
ad R2. Tale incremento si paga in termini di larghezza di banda, essa deve aumentare.
2. Si può incrementare la capacità di canale, sul grafico ci si sposta lungo la freccia @1 ottenendo una E(R) maggiore ovvero una Pw(e) minore.
3. Si aumenta solo il valore di n mantenendo costante il rapporto Rc = k/n. In tal modo non si agisce né sulla banda né sull’SNR del sistema, si aumenta però la complessità computazionale del blocco di co/decodifica di canale.
Fig. 1. Teorema della capacità di canale
Più precisamente, attraverso un’opportuna strutturazione della sequenza dei simboli trasmessi, è possibile, in ricezione, rivelare la presenza di errori o, ancora meglio,correggerne fino a un numero prefissato, dipendente dalle caratteristiche del codice.
La codifica di canale è quindi volta a garantire che i bit da trasmettere arrivino a destinazione senza errori durante l’attraversamento del mezzo trasmissivo. Questo si realizza con l’aggiunta di bit
ridondanti, ovvero che non contengano informazione, ma che consentano, una volta giunti a
F. Benedetto Ottobre 2009
E(R)
RR
2R
1
C1
C2
@2
@1
@3
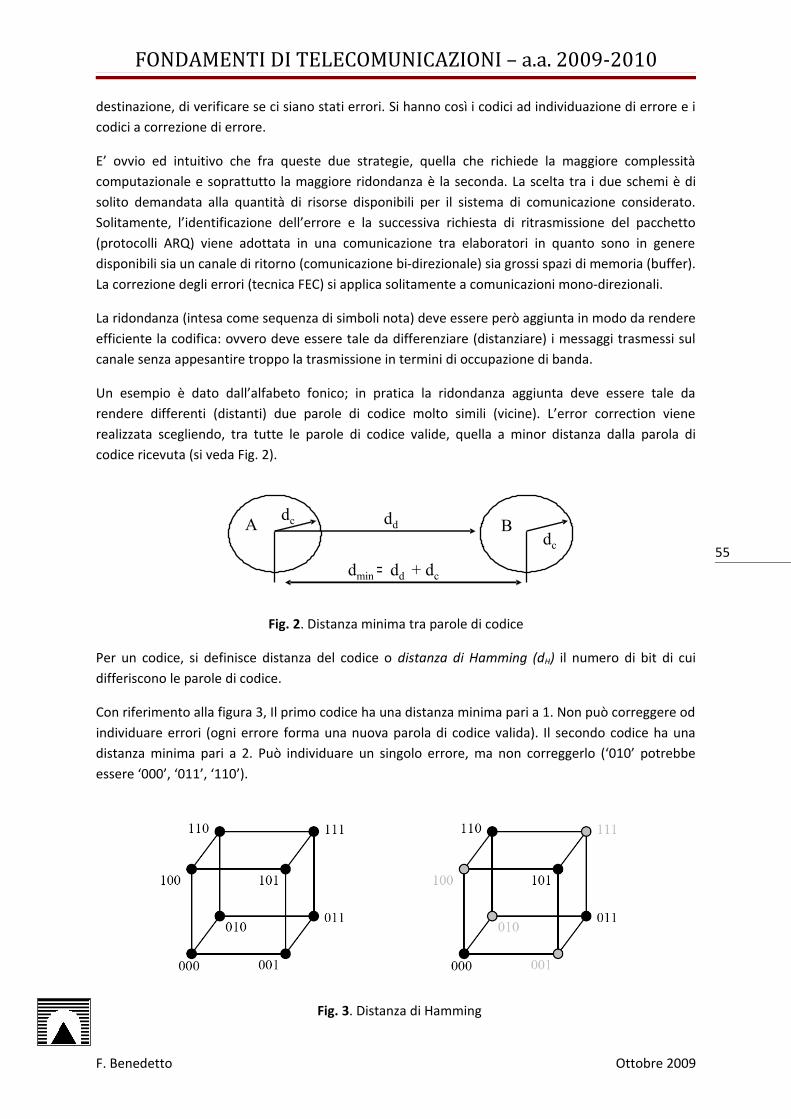
55
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010destinazione, di verificare se ci siano stati errori. Si hanno così i codici ad individuazione di errore e i codici a correzione di errore.
E’ ovvio ed intuitivo che fra queste due strategie, quella che richiede la maggiore complessità computazionale e soprattutto la maggiore ridondanza è la seconda. La scelta tra i due schemi è di solito demandata alla quantità di risorse disponibili per il sistema di comunicazione considerato. Solitamente, l’identificazione dell’errore e la successiva richiesta di ritrasmissione del pacchetto (protocolli ARQ) viene adottata in una comunicazione tra elaboratori in quanto sono in genere disponibili sia un canale di ritorno (comunicazione bi-direzionale) sia grossi spazi di memoria (buffer). La correzione degli errori (tecnica FEC) si applica solitamente a comunicazioni mono-direzionali.
La ridondanza (intesa come sequenza di simboli nota) deve essere però aggiunta in modo da rendere efficiente la codifica: ovvero deve essere tale da differenziare (distanziare) i messaggi trasmessi sul canale senza appesantire troppo la trasmissione in termini di occupazione di banda.
Un esempio è dato dall’alfabeto fonico; in pratica la ridondanza aggiunta deve essere tale da rendere differenti (distanti) due parole di codice molto simili (vicine). L’error correction viene realizzata scegliendo, tra tutte le parole di codice valide, quella a minor distanza dalla parola di codice ricevuta (si veda Fig. 2).
Fig. 2. Distanza minima tra parole di codice
Per un codice, si definisce distanza del codice o distanza di Hamming (dH) il numero di bit di cui differiscono le parole di codice.
Con riferimento alla figura 3, Il primo codice ha una distanza minima pari a 1. Non può correggere od individuare errori (ogni errore forma una nuova parola di codice valida). Il secondo codice ha una distanza minima pari a 2. Può individuare un singolo errore, ma non correggerlo (‘010’ potrebbe essere ‘000’, ‘011’, ‘110’).
Fig. 3. Distanza di Hamming
F. Benedetto Ottobre 2009
BA dc
dc
dmin = dd + dc
dd

56
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Possiamo quindi concludere che un codice può individuare un numero di errori pari alla distanza di Hamming del codice stesso meno uno (dH-1), mentre può correggere un numero di errori pari alla parte intera del rapporto [(dH-1)/2].
F. Benedetto Ottobre 2009

57
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108) TECNICHE DI CODIFICA AUDIO E VIDEONegli ultimi anni abbiamo assistito all'esplosivo sviluppo di tecnologie e tecniche che hanno reso la comunicazione a livello globale alla portata di chiunque. L’esempio più classico di tale enorme crescita tecnologica è costituito dalla rete Internet. Definire in poche parole Internet non è cosa facile: un buon termine riassuntivo dei suoi vari aspetti può essere quello di Rete delle Reti, intendendo con ciò un’infrastruttura che consente a reti distanti anche migliaia di Km e che adottano protocolli di comunicazione distinti, di entrare in contatto fra di loro e di scambiarsi informazioni. E' evidente che in una struttura così complessa è richiesto un ingente insieme di risorse per garantire una minima qualità di servizio e la disponibilità di banda diventa un nodo cruciale in quest’ottica. Se l'informazione viaggia lungo un doppino telefonico oppure attraverso una fibra ottica risulta chiaro che i tempi di transito siano assai diversi. Un modo per ovviare alla scarsità di banda è la compressione dei dati. Ovvero immagazzinare la medesima quantità di informazione nel minor numero di bit (o Byte) possibile. Un modem, per citare un esempio, prima di trasmettere i dati sul doppino telefonico, li elabora utilizzando diversi algoritmi di compressione, inclusi nel protocollo V90.
Tale introduzione è servita a dare un'idea dei vantaggi che la compressione dei dati offre, sia ai fini del risparmio di spazio per l'immagazzinamento, sia per il risparmio dei tempi di attraversamento nelle reti . È bene chiarire sin da subito che non esiste un algoritmo definitivo, unico e perfetto per la compressione di tutti i tipi di dati . Per fare un esempio, non si può comprimere un’immagine a colori abbastanza efficientemente se si usa un algoritmo pensato per comprimere file binari generici. Nel corso di questa trattazione, ci soffermeremo sulla compressione dei segnali audio, esaminando la basi della conversione analogico-digitale, le tecniche di compressione più semplici approfondendo infine le codifiche psico-acustiche che hanno portato alla realizzazione dell'ormai famosissimo MP3.
8.1) IL SEGNALE AUDIOIl segnale audio è per sua natura un segnale analogico, ovvero un segnale che varia in modo continuo nel tempo. Se volessimo rappresentarlo graficamente, riportando su un diagramma la variazione dell'intensità sonora nel tempo, otterremmo un andamento di questo tipo:
Fig. 1: Rappresentazione del segnale audio (analogico) nel tempo
F. Benedetto Ottobre 2009

58
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Da notare che non ci sono salti bruschi. Inoltre l’ampiezza può assumere una infinità di valori passando da un valore minimo ad uno massimo. La larghezza temporale di questa forma d'onda è molto breve, tipicamente un millisecondo o due. Un segnale digitale ha invece una forma di questo tipo:
Fig. 2: Rappresentazione di un generico segnale digitale nel tempo
Riuscire a rappresentare un segnale audio, per sua natura analogico con un segnale digitale preservando l'informazione è un argomento che è alla base della teoria dell'informazione. La risposta sta nel campionare il segnale, ossia prelevare, ad intervalli regolari, il valore del segnale audio, che si presenta sotto forma di un segnale elettrico che varia nel tempo. L'idea è quella di approssimare la funzione analogica con una funzione fatta a rettangoli.
Fig. 3: Esempio di campionamento di un segnale analogico
In figura 3 abbiamo supposto di dividere la porzione del segnale in 10 parti, ognuna di durata T. Se la durata complessiva è di 1ms, il passo di campionamento sarà di 0.1 ms, ovvero la frequenza di campionamento è di 1/(0.1 ms) cioè 10KHz . L'errore che si commette con l'approssimazione è notevole. Nelle seguenti figure vediamo la spezzata che approssima la funzione (è stata costruita prendendo i valori delle altezze dei rettangoli) e il risultato di un campionamento a frequenza maggiore. Se aumentiamo la risoluzione, cioè il numero di rettangoli, l'errore di conversione diminuisce:
Fig. 4: Relazione tra passo di campionamento ed errore di conversione (risoluzione)
F. Benedetto Ottobre 2009

59
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Ora, notiamo che l'altezza della funzione al variare di t varia in modo continuo. Nella figura in alto si è supposto di poter dividere l'altezza in 18 parti. Se il segnale originale cade nell'istante di campionamento fra i valori, diciamo, 12 e 13, si decide arbitrariamente di assegnargli il valore 12. Si è quindi quantizzata l'ampiezza che potrà assumere solo valori discreti, compresi fra 0 e 17. In informatica si lavora con le potenze del due, quindi supponiamo di quantizzare l'ampiezza con 16 livelli: dunque essa potrà assumere solo valori compresi fra 0 e 15. Il meccanismo di campionamento e la successiva quantizzazione dell'ampiezza costituiscono le basi della conversione di un segnale da analogico a digitale.
Passiamo ad un esempio concreto: le tracce audio digitali di un CD sono immagazzinate in file binari esattamente seguendo questo principio, solo che in ogni secondo vengono prelevati ben 44100 campioni e ogni campione è quantizzato con 16 bit. Considerando due canali, sinistro e destro, si avrà un bit-rate complessivo pari a: 44100 * 16 *2= 176400 bytes/secondo valore che corrisponde alla velocità di lettura "1x" dei normali lettori CD audio. Tale bit-rate, a partire dalla codifica finora discussa, porta alla qualità sonora nota come "qualità CD", che è lo standard di riferimento quando si valutano i risultati prodotti dagli algoritmi di compressione.
Per quale motivo si è scelto di utilizzare un rate o tasso di campionamento di 44100 campioni al secondo? Perchè è noto che l'orecchio umano arriva idealmente a percepire frequenze entro i 20 KHz. Oltre questo limite l'uomo non ode nulla, così come sotto i 20 Hz. Dal noto teorema di Nyquist, si deve scegliere una frequenza di campionamento che sia almeno pari alla massima frequenza di interesse moltiplicata per due, se non si vogliono avvertire imperfezioni nell'ascolto. In breve, 20mila per due fa 40mila. Un valore leggermente superiore (44100) permette però di avere un pò di tolleranza al rumore nella costruzione dei filtri digitali preposti al trattamento del segnale. Questa discussione "qualitativa" è servita ad introdurre i concetti di base dell'audio digitale. Lo standard PCM, tipicamente usato per maneggiare un segnale audio in forma digitale non compressa, prevede proprio l'impiego di un rate di campionamento pari a 44100 campioni al secondo quantizzati a 16 bit per canale. Un formato audio non compresso molto noto agli utenti Windows è il WAV; WAV organizza i dati campionati in modo analogo al PCM. È facilmente calcolabile che un brano di 5 minuti trattato in questo modo produce un file di una cinquantina di Megabyte (10MByte/minuto). L' aumento progressivo di potenza dei calcolatori ha favorito, negli ultimi decenni, lo sviluppo e la diffusione dei sistemi di compressione dei dati audio che permettono, come vedremo, una forte riduzione delle dimensioni dei file.
8.2) LA COMPRESSIONEFinora abbiamo visto come si campiona e si converte un segnale da analogico a digitale. In questa operazione viene inevitabilmente introdotto del rumore, legato al fatto che l'approssimazione della curva analogica originale tramite una spezzata non è perfetta. Comunque, d'ora in avanti per noi il segnale da considerare perfetto è quello di qualità CD, con passo di campionamento a 44100 Hz e quantizzazione dei campioni a 16 bit (queste specifiche in realtà lasciano ancora dei margini di miglioramento, e infatti in futuro forse assisteremo a brani musicali campionati a 96 KHz con quantizzazioni a 32 bit. Chiaramente una tale risoluzione genera una mole di dati enorme che solo
l'impiego dei DVD può gestire). Nel campo dei segnali vocali (es: telefonate, audio-conferenza) le
F. Benedetto Ottobre 2009

60
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010richieste in termini di frequenza di campionamento e bit per campione sono più limitate di quelle sopra elencate. Infatti la voce emette frequenze tipicamente più basse di 4KHz e con dinamica limitata rispetto a quella di uno strumento musicale, quindi un segnale vocale può essere ricostruito con qualità adeguata campionando a soli 8KHz con campioni da 13bit.
Storicamente, una delle prime tecniche di compressione è stata la quantizzazione non lineare. Questa tecnica è tutt'ora utilizzata nella telefonia fissa e consiste nell'applicare una scala logaritmica in fase di campionamento e ricostruzione del segnale. Basandosi su alcune proprietà della voce e dell'orecchio si privilegiano i segnali a bassa ampiezza piuttosto che quelli ad elevata ampiezza e si riesce ad ottenere la stessa qualità dei 13bit menzionati sopra con soli 8bit. Questa codifica a 8000 campioni al secondo e 8bit per campione prende il nome di LogPCM o PCM telefonico e richiede una banda "canonica" di 64Kbit/s (guarda caso la banda di una canale telefonico ISDN) valore tipicamente usato come misura della banda necessaria per un segnale vocale.
8.3) CLASSIFICAZIONE DEGLI ALGORITMI DI COMPRESSIONEL'obiettivo delle tecniche di compressione è ovviamente quello di ridurre lo spazio necessario ad immagazzinare determinati dati o la banda necessaria per trasmetterli. Una prima classificazione delle tecniche di compressione distingue tra tecniche che mantengono perfettamente inalterate le informazioni dopo la compressione (tecniche lossless cioè senza perdita) e tecniche che prevedono un certo degrado delle informazioni (lossy). E' abbastanza ovvio che nel comprimere informazioni come testi, documenti o programmi non ci si possa permettere la perdita di nessun bit di informazione, dovremo quindi utilizzare necessariamente tecniche lossless come quelle adottate dallo Zip. Nel caso dell'audio, delle immagini e dei filmati, un certo livello di degradazione è un compromesso accettabile per ridurre (e di molto) l'occupazione o la banda richiesta dal file. Le tecniche di compressione audio che analizzeremo sono infatti tutte di tipo lossy.
Le codifiche di compressione dell'audio sono numerose ed utilizzano tecniche anche molto differenti l'una dall'altra. Esistono però tre categorie principali: le codifiche nel dominio del tempo, le codifiche per modelli e le codifiche nel dominio delle frequenze. Generalmente le prime due categorie di algoritmi vengono usate per comprimere il segnale vocale mentre alla terza appartengono algoritmi come MP3, WMA, ATRAC-3 e AAC ottimi per la compressione della musica. Esulando le prime due codifiche dall’obiettivo primario di tale nota, nei successivi paragrafi verranno presentate solamente le caratteristiche fondamentali e le definizioni delle codifiche nel dominio del tempo e per modelli. Per una più approfondita trattazione riguardo questi temi rimandiamo a [3]. In questa breve trattazione ci soffermeremo sulle codifiche nel dominio della frequenza, approfondendo le codifiche psico-acustiche che hanno portato alla realizzazione dell'ormai famosissimo standard MPEG Layer III (MP3). Concluderemo, infine, con una breve nota riguardo il protocollo MIDI.
8.3.1) CODIFICHE NEL DOMINIO TEMPORALE
Si tratta di algoritmi che elaborano il segnale campionato direttamente, senza estrarre le informazioni spettrali (frequenze). L'obiettivo è quello di trovare correlazioni tra i campioni e/o
F. Benedetto Ottobre 2009

61
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010proprietà dalla sorgente e della destinazione che permettano di ridurre il numero di bit usati per descrivere il valore di un campione audio. Sono storicamente le prime ad essere state elaborate, hanno bassa efficienza e sono state ampiamente superate dai nuovi algoritmi. Le più importanti sono il DPCM e l'ADPCM
La Differential Code Pulse Modulation è in sostanza una PCM "truccata". Il punto è il seguente: poichè la voce umana emette suoni che non passano da volumi bassi a volumi alti o da frequenze basse a frequenze alte in un tempo inferiore ad alcune decine di millisecondi (corrispondenti quindi a centinaia di campioni registrati), si può pensare di trasmettere non tanto il campione attuale, ma la differenza fra il campione passato e quello attuale. Facciamo un esempio per meglio comprendere il tutto: se il campione N ha ampiezza pari a 100, il campione N+1 avrà ampiezza pari a 100, 101 o 99. Non potrà avere ampiezza pari a 200 perchè fra un campione e l'altro passano solo poche centinaia di microsecondi e la gola e le corde vocali hanno un tempo di rilassamento molto maggiore. Quindi, anzichè trasmettere il valore 101 del campione N+1, trasmetto solo il valore +1. Il decoder che riceve l'informazione vede quanto è il valore di N (es: 100), legge poi che il valore del campione N+1 è pari a quello di N cui va sommato 1, e quindi assume che il valore del campione N+1 sia 101. Utilizzando questo approccio sono necessari molti meno bit per trasferire l'informazione poichè si trasmette la sola differenza fra i campioni e non i valori effettivi a 16 bit .
Qual'è il problema? Questo sistema funziona bene con la voce umana, che gode di certe proprietà, ma si presta meno bene ad essere impiegato quando siano presenti anche degli strumenti musicali.
Una tecnica molto simile al DPCM è quella Adaptative Differential PCM, in cui cioè si trasmettono sempre i bit differenza, ma tenendo conto della "storia" dei bit passati. Il meccanismo è molto più complesso poichè si cerca di capire quali saranno i campioni futuri sulla base della storia di quelli passati. Il principio è comunque lo stesso, cioè trasmettere l'informazione collegata alle differenze fra i campioni, anzichè i valori effettivi con un numero di bit che dipende dalle caratterisiche del segnale nella porzione in esame (da cui il nome "adattivo"). Questa tecnica raggiunge un rapporto di compressione di 1:2 rispetto all'originale non compresso.
8.3.2) CODIFICHE PER MODELLI
Le codifiche per modelli sono tecniche legate ad una particolare sorgente sonora (in questo caso la voce) che si tenta di emulare tramite un modello più o meno semplificato. Le corde vocali e la gola hanno delle ben precise caratteristiche fisiche, il loro comportamento sarà quindi predicibile sulla base di un modello. Queste codifiche rappresentano una scelta ottimale per la compressione della voce, tanto che vengono utilizzate nella telefonia mobile (GSM) e anche su Internet. Le più famose sono LPC e il CELP.
La Linear Predictive Coding è una tecnica utilizzata esclusivamente ai fini della compressione spinta della voce (vocoder). Il vantaggio è un bit-rate bassissimo: si può arrivare a soli 2.4 Kbit al secondo (fattore di compressione: 1:26). Si è sviluppato negli anni successivi il Code Excited Linear Predictor (CELP) che fa uso della LPC ma migliora la qualità poichè trasmette anche l'informazione sull'errore associato alla codifica LPC. La qualità è buona e il bit-rate minimo raggiungibile risulta comunque
molto basso: 4.8 Kbit al secondo (ratio 1:13). Questo tipo di codifica è molto usata in vari ambiti:
F. Benedetto Ottobre 2009

62
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Nei telefonini GSM sotto forma di EFR (Enhanced FullRate) da 12.2 Kbps e grazie alla sua flessibilità viene anche utilizzata spesso nella trasmissione della voce via Internet. (Audio-Video-conferenza e Voice over IP).
8.3.3) CODIFICHE NEL DOMINIO DELLA FREQUENZA
Questi algoritmi sono accomunati dal fatto di esaminare e processare il segnale non nel dominio del tempo, ma nel dominio della frequenza. Ogni strumento musicale, ogni suono e anche la voce ha una propria impronta spettrale caratteristica costituita da una combinazione di frequenze contenute in uno spettro più o meno ampio. Lavorando su tale spettro è possibile comprimere il segnale in misura molto maggiore di quanto non si riesca a fare nel dominio del tempo.
Ora, si osservi la figura seguente:
Fig. 5: Range di frequenze della voce umana e di vari strumenti musicali
Si capisce subito che la voce umana occupa solo certe frequenze mentre gli strumenti musicali spaziano secondo range diversi a seconda del tipo di strumento impiegato. La tastiera elettronica, poi, può occupare virtualmente qualsiasi frequenza. In realtà l'intervallo di frequenze occupato da uno strumento dice poco. Per esempio, come fa il nostro orecchio a distinguere fra un "do" emesso da un pianoforte e un "do" emesso da un violino , visto che la frequenza del "do" è sempre quella? Qui entra in gioco il timbro. Nessuno strumento emette una singola frequenza. Quando uno strumento emette, per esempio, un "la", corrispondente a 440Hz, emette in realtà molte altre frequenze multiple della fondamentale, note come armoniche (880, 1320, e 1760Hz ad esempio). È proprio la diversa distribuzione di queste frequenze, nonché la loro differente intensità, che distingue il "la" prodotto da un violino da quello prodotto da un piano. Anche se la frequenza centrale, cioè l'armonica fondamentale, sia per il violino che per il piano è sempre 440 Hz.
Oltre al timbro, un altro aspetto del suono prodotto da uno strumento o dalla nostra voce è il pitch. Supponiamo di avere un "la" minore e un "la" maggiore. Entrambi sono dei "la", nel senso che la distribuzione delle varie armoniche è sempre la stessa, ma cambia la frequenza centrale di riferimento, ora leggermente più bassa, ora leggermente più alta. Si dice dunque che è cambiato il pitch, cioè la frequenza "centrale".
Detto questo, appare chiaro che tentare di comprimere una musica generica utilizzando un approccio basato su modelli (come per il CELP) risulterebbe estremamente complesso. Limitarsi alla
F. Benedetto Ottobre 2009
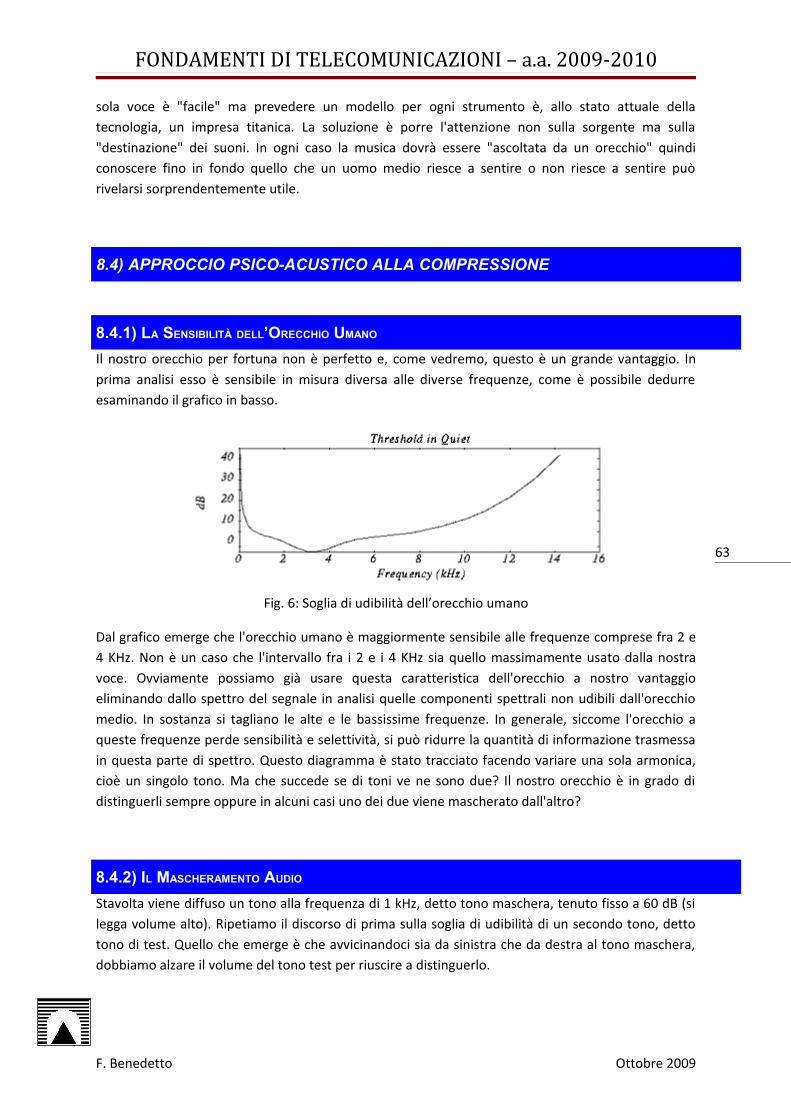
63
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010sola voce è "facile" ma prevedere un modello per ogni strumento è, allo stato attuale della tecnologia, un impresa titanica. La soluzione è porre l'attenzione non sulla sorgente ma sulla "destinazione" dei suoni. In ogni caso la musica dovrà essere "ascoltata da un orecchio" quindi conoscere fino in fondo quello che un uomo medio riesce a sentire o non riesce a sentire può rivelarsi sorprendentemente utile.
8.4) APPROCCIO PSICO-ACUSTICO ALLA COMPRESSIONE
8.4.1) LA SENSIBILITÀ DELL’ORECCHIO UMANO
Il nostro orecchio per fortuna non è perfetto e, come vedremo, questo è un grande vantaggio. In prima analisi esso è sensibile in misura diversa alle diverse frequenze, come è possibile dedurre esaminando il grafico in basso.
Fig. 6: Soglia di udibilità dell’orecchio umano
Dal grafico emerge che l'orecchio umano è maggiormente sensibile alle frequenze comprese fra 2 e 4 KHz. Non è un caso che l'intervallo fra i 2 e i 4 KHz sia quello massimamente usato dalla nostra voce. Ovviamente possiamo già usare questa caratteristica dell'orecchio a nostro vantaggio eliminando dallo spettro del segnale in analisi quelle componenti spettrali non udibili dall'orecchio medio. In sostanza si tagliano le alte e le bassissime frequenze. In generale, siccome l'orecchio a queste frequenze perde sensibilità e selettività, si può ridurre la quantità di informazione trasmessa in questa parte di spettro. Questo diagramma è stato tracciato facendo variare una sola armonica, cioè un singolo tono. Ma che succede se di toni ve ne sono due? Il nostro orecchio è in grado di distinguerli sempre oppure in alcuni casi uno dei due viene mascherato dall'altro?
8.4.2) IL MASCHERAMENTO AUDIO
Stavolta viene diffuso un tono alla frequenza di 1 kHz, detto tono maschera, tenuto fisso a 60 dB (si legga volume alto). Ripetiamo il discorso di prima sulla soglia di udibilità di un secondo tono, detto tono di test. Quello che emerge è che avvicinandoci sia da sinistra che da destra al tono maschera, dobbiamo alzare il volume del tono test per riuscire a distinguerlo.
F. Benedetto Ottobre 2009

64
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Fig. 7: Esempio di mascheramento audio di due segnali
Oltre i 4 kHz e al di sotto degli 0.5 kHz le cose tornano a posto, però notiamo che nell'intorno di 1 kHz i due toni sono praticamente indistinguibili a meno di non alzare pesantemente il volume del tono test. In sostanza, una frequenza debole può essere benissimo mascherata, cioè risultare inudibile, da una frequenza anche lontana qualche centinaio di Hz, se quest'ultima è forte, cioè con un’intensità alta. Se abbiamo più toni tenuti fissi a volumi alti, per esempio a 60 dB e a frequenze fisse di 0.25, 1, 4 e 8 kHz, notiamo che la risoluzione del nostro orecchio peggiora sempre più, perchè per avvisare il segnale del tono test a ben 1 kHz di lontananza dal segnale tenuto fisso a 4 kHz, il segnale del tono test deve raggiungere i 40dB. Se non vi fosse stato il tono maschera a 4 kHz sarebbero bastati un paio di dB.
Fig. 8: La risoluzione dell’orecchio peggiora all’aumentare di toni alti
Tramite il fenomeno appena descritto è possibile eliminare componenti spettrali che, essendo troppo vicine a suoni forti, non risultano udibili all'orecchio umano. Finora abbiamo parlato del mascheramento in frequenza. Esiste però un altro tipo di mascheramento, ed è quello temporale. Supponiamo di avere al solito due toni, uno forte e l'altro, che gli è vicino in frequenza, piuttosto debole. Dall'analisi vista prima sappiamo già che il nostro orecchio sente solo il tono più forte che si comporta così da tono maschera. Ora, se improvvisamente questo tono maschera cessa di esistere, avvertiamo subito il tono più debole o impieghiamo un pò di tempo per avvertirlo? Chiaramente la seconda, perchè la membrana del nostro timpano deve assestarsi. Il problema è: quanto tempo impieghiamo? Dipende dal volume del tono maschera e da quello del tono test. Se il tono maschera ci assorda, il nostro orecchio impiegherà un pò prima di riuscire a sentire il tono più debole anche dopo che il tono forte è morto.
F. Benedetto Ottobre 2009

65
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Fig. 9: Esempio di mascheramento temporale
Il tono test, di 1 kHz, viene disattivato all'istante zero: esso manteneva un valore fisso di 60dB. Se il nostro test tone ha un'ampiezza di una quarantina di dB, bastano 5 ms per avvertirlo; se è di soli 20 dB, ne occorrono quasi 20 di millisecondi perchè risulti avvertibile. Cosa succede se abbiamo più toni a diverse frequenze e alcuni di questi muoiono? in altri termini, come si fondono le maschere temporali e quelle in frequenza? La figura sottostante è molto chiarificatrice:
Fig. 10: Rappresentazione 3-D del mascheramento audio (in frequenza e nel tempo)
In conclusione l'effetto complessivo del mascheramento è che molti toni non saranno mai udibili perchè collocati nel dominio della frequenza e del tempo troppo vicino a toni forti. Tenendo conto della sensibilità dell'orecchio e del fenomeno del Masking Audio è quindi possibile eliminare dallo spettro del segnale una quantità molto alta di informazioni inutili, perchè non udibili dall'orecchio umano. Questi sono i fenomeni Psico-Acustici su cui si basano i moderni algoritmi di compressione audio come MP3, MP3Pro, Atrac-3, AAC, etc...
F. Benedetto Ottobre 2009

66
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.5) STANDARD AUDIO MPEGMPEG/Audio è uno standard internazionale riconosciuto dall'ISO, che è l'organizzazione internazionale preposta all’approvazione definitiva di uno standard. È stato varato ufficialmente nel 1992 quando lo stato dell'arte dell'home computing era il 386. Esso è solo una branca degli standard di cui si occupa il comitato MPEG, come si vede dalla figura qui in basso:
Fig. 11: Compiti del comitato MPEG e standard studiati
L’MPEG (Moving Picture Experts Group) è un gruppo di lavoro gestito dalla ISO/IEC che si occupa dello sviluppo di standard per la codifica audio-video digitale. Il primo progetto MPEG iniziò nel 1988 per terminare nel 1992 con l’uscita dello standard internazionale MPEG-1 (ISO/IEC 11172), principalmente utilizzato nei prodotti basati su Video-CD e MP3. Successivamente vennero prodotti altri tre standard internazionali, MPEG-2 (ISO/IEC 13818), che trova il suo maggiore utilizzo nelle codifiche televisive e satellitari, MPEG-4 (ISO/IEC 14496) ed MPEG-7 “Multimedia Content Description Interface”. MPEG-21 “Multimedia Framework” invece è l’ultimo progetto, iniziato nel 2000, al quale MPEG sta attualmente lavorando.
Il layer-2 e il layer-3 sono versioni migliorate del livello 1. In linea di massima, offrono una migliore compressione e qualità audio appoggiandosi a codificatori e a modelli psico-acustici che richiedono maggiori risorse di elaborazione. Oggi le risorse di calcolo disponibili sono sprecate e per effettuare un conversione di un file WAV in un file MP3 impostando la massima qualità occorrono al massimo un paio di minuti. MP3 sta per MPEG layer 3, ed era fino a poco tempo fa il sistema di codifica che realizzava il miglior rapporto qualità/dimensione dei file audio. Una versione recente e migliorata è l'MP3pro. I file codificati con il layer 2 e il layer 1 sono leggibili dai lettori per il layer 3 ma non viceversa. Vale cioè la retrocompatibilità.
L'algoritmo di codifica è composto di diversi steps che possono essere così riassunti: si usano dei filtri per dividere il segnale audio che è campionato con una certa frequenza, ad esempio di 44100 campioni al secondo, in 32 sottobande , per ognuna delle quali sono noti i parametri di mascheramento nel tempo e in frequenza (si fa riferimento al modello psicoacustico introdotto prima). Per ognuna delle sottobande, viene calcolata l'entità del mascheramento causata dalle bande adiacenti. Se la potenza in una sottobanda è sotto la soglia di mascheramento, allora non viene codificata in uscita l'informazione che essa trasporta, poiché sarebbe inudibile. Altrimenti, occorre calcolare il numero di bit necessari per rappresentare l'informazione della sottobanda
F. Benedetto Ottobre 2009

67
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010facendo attenzione che in questo procedimento, per sua natura approssimante e dunque rumoroso, il rumore introdotto stia sotto la soglia. Infine, si forma il flusso di bit (bitstream) in uscita.
Il diagramma a blocchi della codifica MP3 può essere così schematizzato:
Fig. 12: Diagramma a blocchi della codifica MP3
Per capire il funzionamento facciamo un esempio: dall'esame del bitstream di ingresso, che viene suddiviso in 32 sottobande, abbiamo calcolato il livello massimo del segnale in ognuna di queste e abbiamo ottenuto una tabella di questo tipo, ove per semplicità si considerano solo 16 dei 32 intervalli:
Banda 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Livello(dB) 0 8 12 10 6 2 10 60 35 20 15 2 3 5 3 1
Fig. 13: Esempio di divisione del segnale in sotto-bande
Esaminiamo la banda numero 8. Dai dati del nostro modello psicoacustico, sappiamo che l'ottava banda, se presenta una intensità di 60dB, genera una maschera di 12dB nella settima e di 15dB nella nona. La settima ha un livello pari a 10 (<12dB), ed è perciò mascherata e tagliata via dall'uscita. La nona è a 35dB (>15) così passa in uscita . Con quanti bit si quantizza? Non si può far passare 16 bit per ogni campione. La teoria dell'informazione ci dice che per ogni bit di quantizzazione utilizzato aumento di 6dB il rapporto segnale/rumore. Siccome non devo scendere sotto il limite di mascheramento (punto 4 dell'algoritmo) che è di 15 dB, posso usare al minimo 3bit per quantizzare i dati. Se usassi meno di tre bit, otterrei un rumore di quantizzazione troppo alto che verrebbe avvertito compromettendo la qualità finale. Ora, in realtà questo era il modello di base, valido per tutti e tre i layers dell'MPEG, l'MP3 introduce invece alcune migliorie, che si pagano in termini di risorse di sistema impiegate.
L'MP3 utilizza sempre il blocco dei filtri, però a differenza dei layers 1 e 2 le sottobande non sono tutte della stessa dimensione, poiche certe frequenze contengono molta più informazione e vanno trattate con maggiore dettaglio. Il layer 3 inoltre fa uso di una MDCT, cioè di una trasformata discreta coseno modificata. In breve si tratta di effettuare un’operazione che consenta di migliorare la risoluzione in frequenza per ognuna delle sottobande. Questa operazione consente di suddividere ognuna delle 32 sottobande in ulteriori 6 (short) o 18 (long) sottofrequenze, secondo un processo noto come filtraggio sottobanda (sub-band filtering).
Il modello psico-acustico lavora ulteriormente su queste sotto-sottomaschere, in particolare sui coefficienti della MDCT che le rappresentano. Il modello psico-acustico deciderà quali coefficienti
devono passare in uscita e quali no, sulla base del calcolo del mascheramento temporale e sul fatto
F. Benedetto Ottobre 2009

68
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010che alcuni di questi sono ridondanti giacché magari provengono dai canali sinistro e destro che spesso portano la medesima informazione. A questo punto il tutto è quasi pronto. I coefficienti "sopravvissuti" contengono le informazioni necessarie alle varie frequenze e devono ora essere organizzati in uscita. I coefficienti vengono ordinati passando dalla frequenza più bassa a quella più alta. Poiché la massima informazione è contenuta in bassa frequenza, i coefficienti di bassa frequenza sono più numerosi di quelli in alta frequenza. L'intero intervallo viene diviso in tre parti (frequenze basse, medie e alte). Ognuno di questi intervalli viene codificato a parte secondo l'algoritmo di Huffmann, che è uno degli algoritmi basilari nella teoria della compressione. L'algoritmo è ottimizzato per ognuno dei tre intervalli. A questo punto i dati vengono inviati in uscita sotto forma di pacchetti che contengono un CRC (codice per la correzione dell'errore) per rendere il sistema più robusto agli eventuali errori che si possono presentare durante il trattamento del file. Il fattore di compressione che tipicamente si ottiene è quello di 1:11 (128Kbit/s), per cui è possibile immagazzinare un minuto di musica in poco meno di un megabyte.
8.5.1) CODIFICATORE AUDIO MPEG-1 E MPEG-2Il sistema di codifica MPEG è costituito da tre entità fondamentali:
• Formato di codifica: insieme di regole definite dagli standard MPEG (ad esempio: l’ISO-IEC 11172-2 per l’MPEG-1 Layer 3) che specificano come deve essere codificata e strutturata l’informazione audio compressa.
• Encoder: blocco software che ha il compito di prendere in input un file non compresso (ad esempio WAV) e trasformarlo in formato compresso, secondo lo standard di codifica MPEG scelto dall’utente.
• Decoder: blocco software che prende in input un formato di codifica compresso MPEG e lo riporta nel formato non compresso.
Il sistema encoder-decoder è tale per cui gran parte della complessità algoritmica risiede nell’encoder di modo da rendere il più semplice e veloce possibile la fase di decoding. Questo perché è compito d chi gestisce piattaforme multimediali creare un file MP3 di qualità massima con elevati tassi di compressione, mentre l’utente finale deve solamente utilizzare il decoder per ascoltare musica avendo a disposizione un software che occupi poco in termini di spazio (byte) e sfrutti al minimo il processore del PC.
Lo schema a blocchi di un generico Encoder Audio Mpeg-1 ed MPEG-2 è riportato nella figura seguente:
F. Benedetto Ottobre 2009

69
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Fig. 14: Schema a blocchi dell’encoder MPEG Audio
Esso riceve un segnale PCM (segnale audio tempo-discreto con codifica di modulazione ad impulsi, Pulse Code Modulation) e lo legge a blocchi di 384, 576 o 1152 campioni, in funzione del formato MPEG e del Layer utilizzati, effettuando le seguenti operazioni nei diversi passaggi:
• Banco di Filtri Ibrido: vengono convertiti i campioni PCM nel corrispondente dominio della frequenza (spettro) utilizzando un banco di filtri polifasico seguito da una Trasformata Coseno Modificata (MDCT).
• Modello Psicoacustico: questo blocco rappresenta il “cuore” dell’encoder e di tutto il sistema MPEG/Audio. Il suo compito è di analizzare lo spettro del segnale (calcolato con la trasformata di Fourier) e definire il livello di soglia di udibilità SMR (Signal to Mask Ratio) sfruttando i principi psicoacustici dell’apparato uditivo umano. In pratica, il modello psicoacustico determina quali sono le informazioni che il nostro orecchio è in grado di percepire e quali no fornendo questa informazione al blocco successivo.
• Quantizzatore non lineare: compito di questo blocco è di codificare numericamente lo spettro ricevuto dal banco di filtri ibrido in funzione dell’importanza di ogni banda di frequenze: se il modello psicoacustico indica che una particolare banda di frequenze è percepita poco, essa verrà codificata con pochi bit; viceversa se per il modello una banda di frequenze è percepita molto, la sua codifica avverrà con molti bit. L’obiettivo finale è quello di ottenere una quantizzazione dello spettro tale che il rumore di quantizzazione introdotto si trovi al di sotto della soglia di udibilità (SMR) fornita dal modello psicoacustico.
• Impacchettamento: si prende la codifica numerica dello spettro frequenziale e la si impacchetta secondo la sintassi dello standard MPEG utilizzato. In questa fase il layer 3 prevede un ulteriore compressione con l’algoritmo di Huffman.
F. Benedetto Ottobre 2009
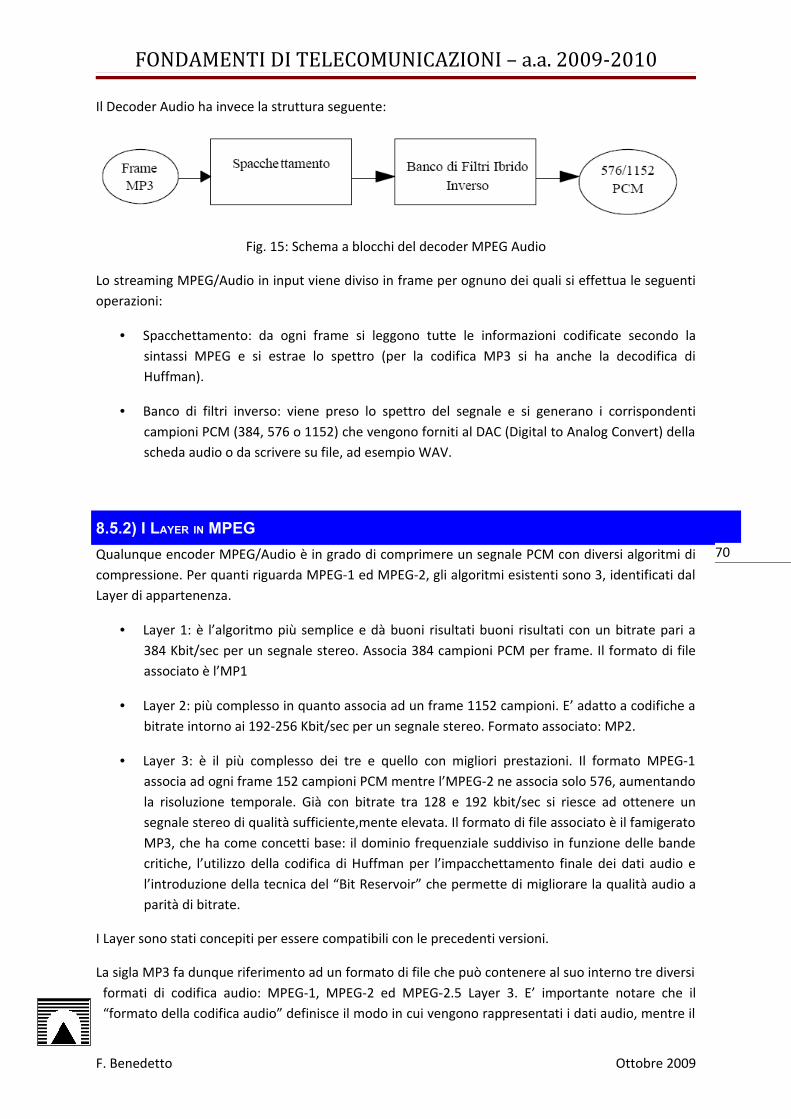
70
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Il Decoder Audio ha invece la struttura seguente:
Fig. 15: Schema a blocchi del decoder MPEG Audio
Lo streaming MPEG/Audio in input viene diviso in frame per ognuno dei quali si effettua le seguenti operazioni:
• Spacchettamento: da ogni frame si leggono tutte le informazioni codificate secondo la sintassi MPEG e si estrae lo spettro (per la codifica MP3 si ha anche la decodifica di Huffman).
• Banco di filtri inverso: viene preso lo spettro del segnale e si generano i corrispondenti campioni PCM (384, 576 o 1152) che vengono forniti al DAC (Digital to Analog Convert) della scheda audio o da scrivere su file, ad esempio WAV.
8.5.2) I LAYER IN MPEGQualunque encoder MPEG/Audio è in grado di comprimere un segnale PCM con diversi algoritmi di compressione. Per quanti riguarda MPEG-1 ed MPEG-2, gli algoritmi esistenti sono 3, identificati dal Layer di appartenenza.
• Layer 1: è l’algoritmo più semplice e dà buoni risultati buoni risultati con un bitrate pari a 384 Kbit/sec per un segnale stereo. Associa 384 campioni PCM per frame. Il formato di file associato è l’MP1
• Layer 2: più complesso in quanto associa ad un frame 1152 campioni. E’ adatto a codifiche a bitrate intorno ai 192-256 Kbit/sec per un segnale stereo. Formato associato: MP2.
• Layer 3: è il più complesso dei tre e quello con migliori prestazioni. Il formato MPEG-1 associa ad ogni frame 152 campioni PCM mentre l’MPEG-2 ne associa solo 576, aumentando la risoluzione temporale. Già con bitrate tra 128 e 192 kbit/sec si riesce ad ottenere un segnale stereo di qualità sufficiente,mente elevata. Il formato di file associato è il famigerato MP3, che ha come concetti base: il dominio frequenziale suddiviso in funzione delle bande critiche, l’utilizzo della codifica di Huffman per l’impacchettamento finale dei dati audio e l’introduzione della tecnica del “Bit Reservoir” che permette di migliorare la qualità audio a parità di bitrate.
I Layer sono stati concepiti per essere compatibili con le precedenti versioni.
La sigla MP3 fa dunque riferimento ad un formato di file che può contenere al suo interno tre diversi formati di codifica audio: MPEG-1, MPEG-2 ed MPEG-2.5 Layer 3. E’ importante notare che il “formato della codifica audio” definisce il modo in cui vengono rappresentati i dati audio, mentre il
F. Benedetto Ottobre 2009
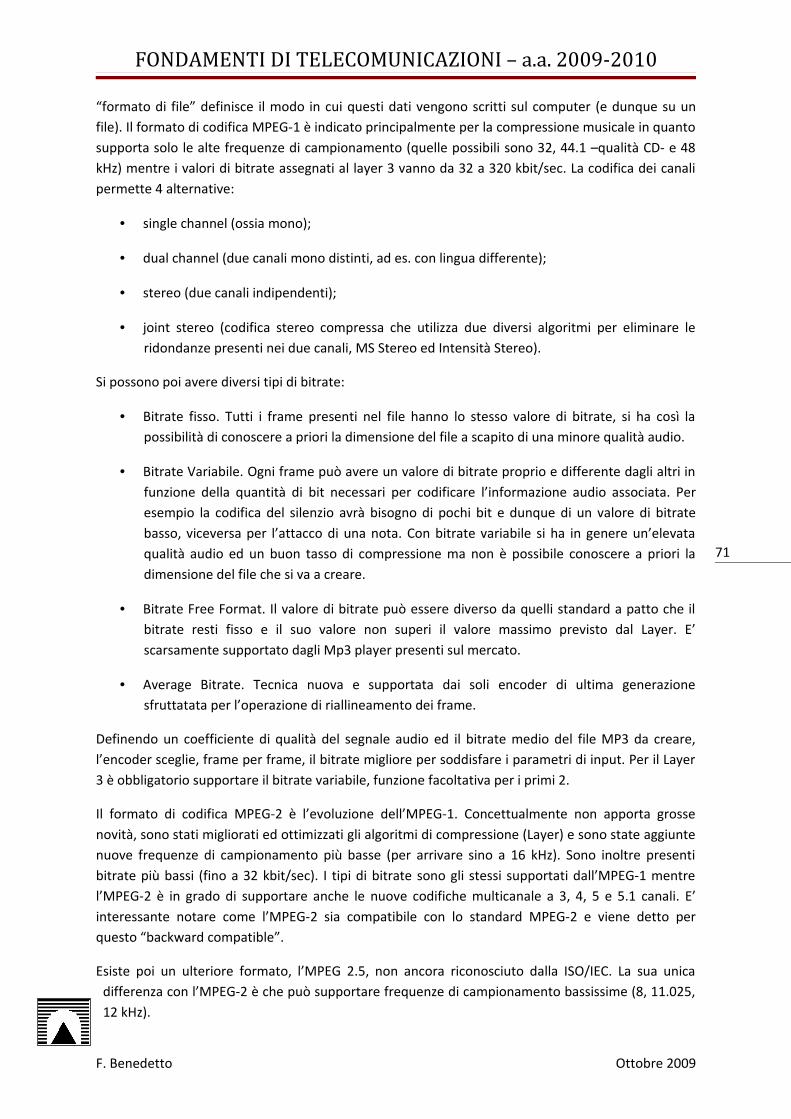
71
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010“formato di file” definisce il modo in cui questi dati vengono scritti sul computer (e dunque su un file). Il formato di codifica MPEG-1 è indicato principalmente per la compressione musicale in quanto supporta solo le alte frequenze di campionamento (quelle possibili sono 32, 44.1 –qualità CD- e 48 kHz) mentre i valori di bitrate assegnati al layer 3 vanno da 32 a 320 kbit/sec. La codifica dei canali permette 4 alternative:
• single channel (ossia mono);
• dual channel (due canali mono distinti, ad es. con lingua differente);
• stereo (due canali indipendenti);
• joint stereo (codifica stereo compressa che utilizza due diversi algoritmi per eliminare le ridondanze presenti nei due canali, MS Stereo ed Intensità Stereo).
Si possono poi avere diversi tipi di bitrate:
• Bitrate fisso. Tutti i frame presenti nel file hanno lo stesso valore di bitrate, si ha così la possibilità di conoscere a priori la dimensione del file a scapito di una minore qualità audio.
• Bitrate Variabile. Ogni frame può avere un valore di bitrate proprio e differente dagli altri in funzione della quantità di bit necessari per codificare l’informazione audio associata. Per esempio la codifica del silenzio avrà bisogno di pochi bit e dunque di un valore di bitrate basso, viceversa per l’attacco di una nota. Con bitrate variabile si ha in genere un’elevata qualità audio ed un buon tasso di compressione ma non è possibile conoscere a priori la dimensione del file che si va a creare.
• Bitrate Free Format. Il valore di bitrate può essere diverso da quelli standard a patto che il bitrate resti fisso e il suo valore non superi il valore massimo previsto dal Layer. E’ scarsamente supportato dagli Mp3 player presenti sul mercato.
• Average Bitrate. Tecnica nuova e supportata dai soli encoder di ultima generazione sfruttatata per l’operazione di riallineamento dei frame.
Definendo un coefficiente di qualità del segnale audio ed il bitrate medio del file MP3 da creare, l’encoder sceglie, frame per frame, il bitrate migliore per soddisfare i parametri di input. Per il Layer 3 è obbligatorio supportare il bitrate variabile, funzione facoltativa per i primi 2.
Il formato di codifica MPEG-2 è l’evoluzione dell’MPEG-1. Concettualmente non apporta grosse novità, sono stati migliorati ed ottimizzati gli algoritmi di compressione (Layer) e sono state aggiunte nuove frequenze di campionamento più basse (per arrivare sino a 16 kHz). Sono inoltre presenti bitrate più bassi (fino a 32 kbit/sec). I tipi di bitrate sono gli stessi supportati dall’MPEG-1 mentre l’MPEG-2 è in grado di supportare anche le nuove codifiche multicanale a 3, 4, 5 e 5.1 canali. E’ interessante notare come l’MPEG-2 sia compatibile con lo standard MPEG-2 e viene detto per questo “backward compatible”.
Esiste poi un ulteriore formato, l’MPEG 2.5, non ancora riconosciuto dalla ISO/IEC. La sua unica differenza con l’MPEG-2 è che può supportare frequenze di campionamento bassissime (8, 11.025, 12 kHz).
F. Benedetto Ottobre 2009

72
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.5.3) ID3: METADATI AUDIO
Una delle pecche dello standard MPEG/Audio Layer 3 ed AAC è sicuramente la totale mancanza di strutture dati testuali contenenti informazioni riguardanti il contenuto di un file MP3/AAC. Infatti, tutto ciò che è stato incluso a riguardo sono due bit indicanti la presenza di Copyright e l’originalità del pezzo audio. Con il proliferarsi del formato e la conseguente necessità di catalogare file MP3/AAC all’interno di database, è stato necessario includere un qualcosa che permettesse di conoscere tutte quelle informazioni di fondamentale importanza per l’identificazione e la catalogazione di brani audio (titolo, genere, autore...).
La risposta è stata la nascita dello standard ID3 la cui prima versione (ID3 V1) permette di salvare il nome dell’autore e del brano, la data di pubblicazione, ecc, negli ultimi 128 Byte di un file MP3 (è stata posta in fondo per evitare problemi di compatibilità con i decoder che, nel periodo in cui questo standard uscì, si aspettavano come primo byte l’inizio del primo frame). La struttura completa di ID3 V1 è la seguente:
Song Title 30 characters
Artist 30 characters
Album 30 characters
Year 4 characters
Comment 30 characters
Genre 1 byte
L’ovvia evoluzione (128 byte non erano sufficienti) fu ID3 V2; essa è anteposta al bit-stream MP3, ha una dimensione variabile ed è strutturata a chunk ognuno dei quali permette di inglobare tutte le informazioni contenute in ID3 V1 più ulteriori campi come il nome dell’encoder utilizzato, informazioni sui diritti di copyright, informazioni sull’artista, un eventuale sito web di riferimento, ecc. Le due strutture sono completamente indipendenti tra loro: è possibile ometterle, oppure utilizzarne solamente una, o ancora usarle entrmbe. La strututra di un file MP3 con l’aggiunta di ID3 Tag è la seguente:
ID3 V2(Dimensione Variabile)
Streaming Audio MPEG layer 3
ID3 V1(128 byte)
F. Benedetto Ottobre 2009

73
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.5.4) PRESTAZIONI DEL CODIFICATORE MP3Nella seguente figura 16, sono riportate le prestazioni di un codificatore MP3 a differenti bitrate, in modalità mono e/o stereo, indicando il rapporto di compressione che si riesce ad ottenere in uscita.
Fig. 16: Prestazioni di un codificatore MP3 a diversi bitrate.
I dati non sono “assoluti”, la riduzione varia in funzione del suono da comprimere e del codificatore utilizzato. I dati riportati sono stati recuperati dal Fraunhofer Institut e si riferiscono al loro codificatore. In figura 17, è invece riportato il confronto tra la codifica MPEG e varie altre codifiche audio-musicali.
Fig. 17: Codificatori a confronto*.
Sono evidenti le migliori performance raggiunte dai codificatori MPEG.
* Il sistema European DAB usa MPEG-1 Layer II
F. Benedetto Ottobre 2009

74
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.5.5) LO STANDARD MPEG-2Con il passare del tempo è divenuto chiaro che due canali non sono sufficienti a coprire tutte le applicazioni e per permettere la codifica multi-canale è stato sviluppato il secondo standard. L’impulso principale è stato dato dalla necessità di codificare l’audio che rispondesse alle richieste del settore cinematografico-televisivo, con almeno 5 canali: destro, sinistro, centrale, destro e sinistro surround. Il progetto MPEG-2 si articola in due fasi successive, nella prima si è privilegiata la compatibilità con gli standard precedenti. Nella seconda questa è stata sacrificata, si era compreso che abbandonare la compatibilità era l’unica via per ottenere un notevole incremento nelle prestazioni.
I codificatori (vedi figura 18) non presentano novità concettuali rispetto ai precedenti. I codificatori di seconda generazione aggiungono altre frequenze di campionamento: a 16 kHz, a 22.05 e a 24 kHz. Per quanto riguarda il bitrate, questo può variare da un minimo di 8 kbit/s fino a 160 kbit/s per canale.
Fig. 18: MPEG-2 coder e decoder.
La seconda fase di MPEG-2, denominata AAC (Advanced Audio Coding), parte con l’obiettivo di sviluppare un tool per migliorare le prestazioni nella codifica multicanale. Il risultato ottenuto è notevole, si possono codificare fino a 48 canali con una frequenza di campionamento che va da 8 a 96 kHz per canale. Per comprendere il livello raggiunto si tenga presente che alcuni test dimostrano come, a parità di qualità e nel caso di codifica a 5 canali, l’AAC in pratica dimezza la bitrate rispetto a MPEG-2 Layer II.
Com’è possibile notare dalla fig. 19, l’AAC segue gli stessi principi del layer III, oltre a migliorare il funzionamento d’alcuni punti, introduce una serie di blocchi che migliorano la compressione e riducono il bitrate.
F. Benedetto Ottobre 2009
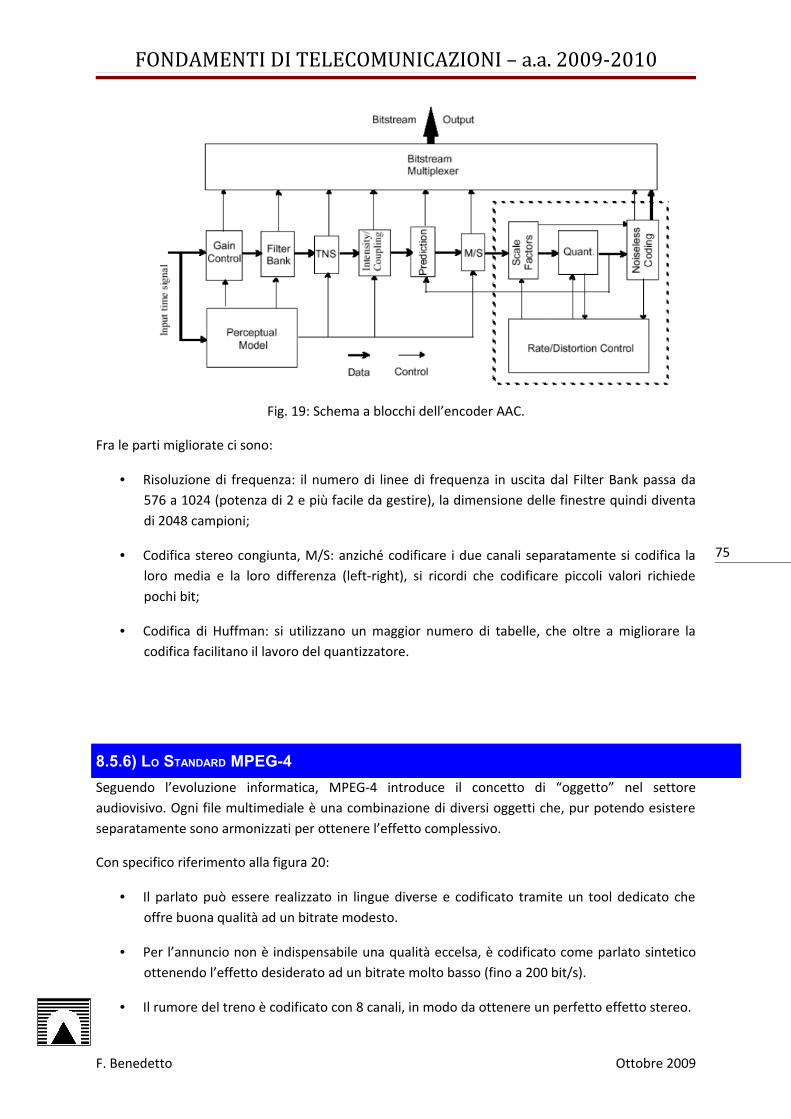
75
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Fig. 19: Schema a blocchi dell’encoder AAC.
Fra le parti migliorate ci sono:
• Risoluzione di frequenza: il numero di linee di frequenza in uscita dal Filter Bank passa da 576 a 1024 (potenza di 2 e più facile da gestire), la dimensione delle finestre quindi diventa di 2048 campioni;
• Codifica stereo congiunta, M/S: anziché codificare i due canali separatamente si codifica la loro media e la loro differenza (left-right), si ricordi che codificare piccoli valori richiede pochi bit;
• Codifica di Huffman: si utilizzano un maggior numero di tabelle, che oltre a migliorare la codifica facilitano il lavoro del quantizzatore.
8.5.6) LO STANDARD MPEG-4Seguendo l’evoluzione informatica, MPEG-4 introduce il concetto di “oggetto” nel settore audiovisivo. Ogni file multimediale è una combinazione di diversi oggetti che, pur potendo esistere separatamente sono armonizzati per ottenere l’effetto complessivo.
Con specifico riferimento alla figura 20:
• Il parlato può essere realizzato in lingue diverse e codificato tramite un tool dedicato che offre buona qualità ad un bitrate modesto.
• Per l’annuncio non è indispensabile una qualità eccelsa, è codificato come parlato sintetico ottenendo l’effetto desiderato ad un bitrate molto basso (fino a 200 bit/s).
• Il rumore del treno è codificato con 8 canali, in modo da ottenere un perfetto effetto stereo.
F. Benedetto Ottobre 2009
76
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• La musica di sottofondo è codificata con l’AAC.
Fig. 20. Esempio di diverse codifiche in MPEG 4.
Infine lo standard MPEG-4 è dotato di un’interessante proprietà, la Synthetic-Natural Hybrid Coding (SNHC): questa tecnica permette la composizione d’audio naturale (compresso) e suono sintetico creato in real-time sul terminale ricevente.
F. Benedetto Ottobre 2009

77
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.6) MUSICA ELETTRONICA: ESTENSIONE .MIDNato come standard per la comunicazione tra strumenti musicali, si è in seguito evoluto in una maggiore standardizzazione denominata General MIDI. In un file Wave può essere memorizzato, ad esempio, il suono di un pianoforte che esegue una nota per una certa durata di tempo. In un file MIDI, viceversa, sono contenute istruzioni che comunicano alla scheda audio di modulare la frequenza in modo da produrre una particolare nota che abbia una timbrica simile a quella di un pianoforte e che duri una certa quantità di tempo. In un file Wave ci sono suoni, in un file MIDI ci sono solo comandi. I file MIDI sono enormemente più piccoli dei file WAV. Un intero brano musicale, con tutte le parti, della durata di svariati minuti, può occupare qualche decina di Kbyte, dal momento che ogni singolo evento MIDI occupa soltanto 11 byte.
Nonostante siano passati quasi vent’anni, il protocollo midi rimane indiscutibilmente il linguaggio informatico che ha più cambiato il modo di eseguire e produrre musica.
8.6.1) LA STORIA
Il midi, acronimo di musical instruments digital interface, nasce principalmente da due fattori: primo, la ricerca di compatibilità tra strumenti diversi e di diverse marche; secondo, la crescente disponibilità di tecnologia digitale. Fino agli anni ’80 il collegamento tra sintetizzatori, batterie elettroniche e altri strumenti musicali elettronici era affidato al gate o trigger (un impulso di tensione fornito da una macchina all'altra, che generalmente determinava la scansione delle note o il sincronismo) e al VC (Voltage Control, che determinava la frequenza delle note). Ogni costruttore ottemperava a proprie specifiche, nella definizione delle caratteristiche elettriche, che quasi mai corrispondevano a quelle definite da altri costruttori.
Il problema era particolarmente avvertito negli Stati Uniti, tanto che già nel 1981, fu presentato un progetto di Universal Synthesizer interface. Nel corso dei mesi successivi vennero perfezionate le caratteristiche tecniche di quello che doveva diventare il MIDI, e da parte della Sequential Circus, da sempre principale promotrice dello sviluppo del sistema (ironia della sorte ora fallita), nel dicembre del 1982 fu posto in commercio il Prophet 600, primo synth al mondo dotato del nuovo modo di dialogare in musica. Tra il 1983 e il 1984 i sintetizzatori digitali Midi ebbero una prima diffusione di massa con la commercializzazione di prodotti come lo Yamaha DX7 e il Korg Po1y800. Sorsero due comitati: l'americano MMA (Midi Manufacturers Association) e il giapponese JMSC (Japanese Midi Standards Commitee) che diedero il via a periodici incontri tesi a perfezionare il Midi e a farne rispettare le direttive. Dal marzo 1984 tutte le aziende che dotano i propri prodotti di porte Midi sono obbligate a rispettare alcune caratteristiche base, che garantiscono la compatibilità fra gli strumenti delle diverse marche. La IMA (International Midi Association) nel settembre 1985 pubblicò le specifiche dettagliate dello standard Midi 1.0, debitamente riviste e corrette. Con il rapido diffondersi di nuove apparecchiature Midi e di applicazioni inizialmente non previste, il codice Midi è stato più volte rivisto e soprattutto espanso. Le appendici più significative sono state pubblicate nell'autunno 1986 e nella primavera 1987, ma ancora adesso si sta lavorando alla definizione di
nuovi messaggi destinati a consentire lo scambio universale di file di dati MIDI.
F. Benedetto Ottobre 2009

78
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Così come lo vediamo oggi, il Midi quindi è il risultato di due distinte proposte, una made in USA, e l'altra giapponese: superate le traversie operative del primo anno di vita, dal marzo 1984 esiste un accordo ulteriore, in base al quale tutte le macchine Midi prodotte ottempereranno alle medesime specifiche, almeno quelle di base.
8.6.2) IL PROTOCOLLO MIDIAbbiamo visto come il MIDI è stato istituito come protocollo, quindi come standard riconosciuto in tutto il mondo da tutti i costruttori, non solo di strumenti musicali, ma anche d’apparecchiature informatiche e audio/video. Il protocollo MIDI quindi stabilisce le specifiche sia hardware (interfaccia, cavi, connettori), sia software (linguaggio informatico, modalità di trasmissione, tipologia dei messaggi) che ogni apparecchiatura deve “capire” se vuole essere veramente MIDI compatibile. Allo stato attuale delle cose tutte le apparecchiature presenti sul mercato sono tranquillamente compatibili tra loro almeno nelle funzioni principali.
Lo scopo del MIDI è di trasmettere comandi: quando sulla nostra tastiera premiamo un tasto, dalla presa MIDI out uscirà un comando digitale che indicherà ad un’apparecchiatura in ricezione che è stato premuto quel determinato tasto (numero di nota) con una determinata forza (velocity). Quindi una cosa fondamentale da capire è che il MIDI non trasmette nessun tipo di suono ma unicamente comandi che verranno rieseguiti dall’apparecchiatura in ricezione. Ogni movimento fatto dall’esecutore su di una tastiera MIDI verrà codificato in un modo univoco secondo il protocollo: abbassare o rilasciare un tasto e con che forza, il muovere una rotella o un altro controllo, il cambiare timbro ecc… Questo sistema permette di comandare con una sola tastiera più generatori sonori collegati o la possibilità di memorizzazione attraverso computer o sequencer dedicato dei dati di esecuzione di una partitura suonata su una tastiera MIDI. Il primo caso è tipico di una situazione concertistica, dove il musicista suona dal vivo uno o più generatori sonori (expander) collegati ad una tastiera di comando (master keyboard) mentre il secondo è normalmente più proprio di una situazione di studio e compositiva dove, con l’ausilio di computer o sequencer, è possibile registrare, correggere, modificare, sovrapporre, riascoltare situazioni musicali precedentemente eseguite. Lo scopo del codice Midi è quello di trasformare in numeri ogni azione compiuta da un musicista nell'eseguire un brano, tanto da poter eventualmente permetterne una riesecuzione elettronica automatica.
Ciò permette di memorizzare e manipolare digitalmente un'esecuzione musicale, svincolandola dal timbro di un particolare strumento, dalle possibilità tecniche dell'esecutore, e dalle imperfezioni accidentali tipiche dell'uomo. Midi dunque è un sistema di comunicazione dati, che consente ad uno strumento musicale o altro dispositivo (detto master) di controllarne un altro (detto slave), e anche più di uno, in modo da suonare insieme le stesse note, cambiare i timbri nello stesso momento, iniziare (da capo o dal segno) i brani memorizzati, mantenere la sincronizzazione. In alcuni casi (che vedremo più avanti), è anche possibile, tramite la tastiera che funge da 'master', controllare altri parametri, come modulation wheel, pitch bender, e anche i valori di inviluppo, filtri e volume.
F. Benedetto Ottobre 2009

79
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.6.3) L’HARDWARE MIDIIl componente principale è l’UART (universal asynchronous receiver transmit) un microprocessore appositamente costruito alla comprensione e decodificazione dei dati MIDI che lavora in maniera asincrona cioè solo quando qualcosa appare alle porte MIDI. Le prese MIDI sono tre: un ingresso (Midi In, dati in ricezione) , una uscita (Midi Out, dati in uscita dalla macchina) e un terzo connettore, denominato Midi Through, che si limita a ripetere fedelmente in uscita tutti i dati che appaiono all'ingresso Midi In.
Per il sistema MIDI, anche se la trasmissone parallela è molto più veloce, è stato scelto il tipo di trasmissione seriale, per semplificare i collegamenti e aumentarne l'affidabilità. Ciascun byte dunque può assumere diversi significati, a seconda della sequenza logica di volta in volta proposta: il protocollo di trasmissione si assume il compito di determinare univocamente il significato di una sequenza di byte.
Il vantaggio della trasmissione seriale è che basta un solo filo per trasmettere l'informazione, per cui il collegamento risulta economico, pratico e affidabile. Perchè la trasmissione seriale risulti efficiente, la velocità della trasmissione deve essere abbastanza alta. Per questo motivo i bit del codice Midi vengono trasmessi alla velocità di 31.25 Kbaud, cioè 31.250 bit al secondo. La trasmissione è asincrona e ciò significa che l'inizio e la fine di ogni byte devono essere "annunciati" ogni volta da due bit speciali, lo start bit e lo stop bit, posti rispettivamente davanti e dietro gli otto bit del byte Midi da trasmettere. Dunque è necessario trasmettere 10 bit per inviare un byte Midi, quindi tale byte richiederà 320 msec prima di essere ricevuto, ovvero l'impercettibile ritardo che il Midi impone per sua natura tra l'azione del musicista e l'effettiva esecuzione sonora.
8.6.4) CONSIDERAZIONI CONCLUSIVE
Abbiamo visto che esistono tecniche ottime per la compressione della voce (il CELP, ad esempio, che è ottimo per il trasferimento del segnale vocale su Internet) e della musica (MP3). Entrambe sono tecniche lossy, e fanno uso del medesimo principio per il quale l'apparato uditivo umano è incapace di rivelare certi suoni per via del mascheramento temporale e frequenziale. Il CELP è inutilizzabile per codificare la musica, poiché produrrebbe risultati scadentissimi, mentre l'MP3 è eccessivamente articolato per essere utilizzato efficacemente nella codifica in tempo reale della voce. Un nuovo standard, che incorpora sia la codifica della voce che quella della musica, è l'MPEG4, varato nel 1998. Per avere una idea della complessità che sta dietro questa tecnologia, basta menzionare il fatto che per comprimere il parlato abbina le tecniche CELP e HXVC (harmonic vector excitation coding), mentre per codificare la musica usa il TWIN-VQ e l'AAC. Interessante anche l'evoluzione diretta dell'MP3, l'MP3Pro che permette un fattore di compressione quasi doppio a parità di qualità sonora. Infine, è stato brevemente discusso il protocollo per lo scambio di dati seriali tra apparecchiature MIDI.
F. Benedetto Ottobre 2009

80
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.7) TECNICHE DI CODIFICA DI IMMAGINI FISSENei successivi paragrafi viene fornita una breve descrizione degli standard JPEG e MPEG. Si ricordi che per la codifica di immagini fisse ci si riferisce alla codifica JPEG, mentre per le sequenze video si utilizza una codifica di tipo MPEG.
8.7.1) STANDARD JPEGJPEG è uno standard di compressione per immagini, definito nel 1991 da un gruppo di esperti (Joint Photographic Experts Group). JPEG è stato progettato per comprimere sia immagini a colori che immagini a gradazioni di grigio.
Si distinguono due tipi di compressione:
• compressione lossy: scarta delle informazioni delle immagini poco visibile all'occhio umano e comprime le rimanenti informazioni. L'immagine compressa è una buona approssimazione dell'immagine originale;
• compressione lossless: comprime tutte le informazioni di un immagine, in modo tale che l’immagine prima compressa e poi decompressa, è identica bit a bit a quella originale, senza alcuna perdita di informazioni e quindi di qualità.
JPEG utilizza un algoritmo di compressione di tipo lossy. Piuttosto che indicare esplicitamente gli algoritmi di compressione si sono definite una serie di tecniche per la compressione. In questo modo si è lasciata una certa libertà implementativi ai produttori di applicazioni. Tale schema produce soddisfacenti rapporti di compressione sulle immagini “complesse”, quali sono ad esempio, le immagini del mondo reale, mentre non è adeguato alla compressione di immagini “semplici”, come ad esempio, immagini derivanti da applicazioni CAD e semplici disegni. E' stato realizzato tenendo in considerazione le limitazioni del sistema visivo umano, inoltre è possibile, tramite la modifica di alcuni parametri, controllare il grado di compressione. Variando il grado di compressione si può diminuire la dimensione del file immagine sorgente a discapito della qualità. Lo standard JPEG è stato sviluppato in modo da soddisfare le seguenti indicazioni:
• deve essere in grado di ottenere elevati rapporti di compressione;
• deve poter ricostruire l'immagine in modo totalmente reversibile, oppure in modo irreversibile, ma con una elevata fedeltà;
• deve poter essere parametrizzato in modo da lasciare all'applicazione la possibilità di definire al meglio il rapporto di compressione e la fedeltà dell'immagine ricostruita;
• l'algoritmo non deve dipendere né dalla complessità della scena rappresentata né, possibilmente, dalle caratteristiche intrinseche dell'immagine, quali dimensione dello spazio dei colori, rapporto bit/pixel, etc.;
• la sua complessità computazionale deve permettere sia un'implementazione software, sia un'implementazione hardware, che rimanga contenuta in termini di costo.
F. Benedetto Ottobre 2009

81
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010La compressione JPEG si basa su un algoritmo detto baseline. Tale algoritmo prevede i seguenti passaggi.
8.7.2) LETTURA FILE SORGENTE
I dati letti dal file immagine sorgente, sono organizzati come tre matrici, nello Spazio Colore RGB,
(confronta per completezza il capitolo 2), di generiche dimensioni NM × . Ogni matrice sarà successivamente divisa in blocchi di dimensione 8x8, ovvero ogni blocco conterrà 64 pixel dell’immagine originale. Quindi se M o N non risultano multipli di 8, sono aggiunte delle copie dell’ultima riga o dell’ultima colonna alla matrice dell’immagine originale, sino a che la dimensione della nuova matrice non diventi un multiplo di 8. Nella decodifica si terrà conto di questi pixel di riempimento aggiunti, che verranno quindi eliminati.
8.7.3) TRASFORMAZIONE SPAZIO DI COLORE
L’immagine viene trasformata dallo Spazio Colore RGB a quello Yuv. Dopo aver calcolato Y, u e v è possibile ridurre l’informazione riguardante le componenti di crominanza. La componente di luminanza non deve invece essere decimata, altrimenti si avrebbe una perdita elevata di informazione a livello di qualità percettiva. Come detto, ciò deriva dal fatto che l’occhio umano è meno sensibile alle variazioni cromatiche e non a quelle di luminosità.
Ogni matrice è divisa in blocchi di dimensione 8x8. Ad ogni blocco è applicata la trasformata DCT bidimensionale, che restituisce ancora un blocco di dimensioni 8x8. Con l’applicazione della DCT si passa da una rappresentazione nel dominio spaziale a una nel dominio delle frequenze. Una caratteristica saliente del blocco restituito dalla DCT è che nell’angolo in lato a sinistra si trovano i dati relativi alle basse frequenze ed energeticamente più rilevanti, mentre nell’angolo in basso a destra i coefficienti rappresentanti le alte frequente ed energeticamente meno importanti.
L’utilità dell’utilizzo della DCT è duplice: da un lato si sfruttano le note proprietà di compattazione dell’energia, dall’altro si riescono a trattare i coefficienti DCT in modo indipendente senza perdere di efficienza nella compressione. Infatti l’occhio umano è meno sensibile alle alte frequenze rispetto alle basse e l’algoritmo baseline sfrutta tale caratteristica. La DCT è invertibile senza perdita d’informazione, a parte eventuali errori di arrotondamento.
F. Benedetto Ottobre 2009

82
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.7.4) TRASFORMATA DCTLa trasformata DCT è stata adottata in standard internazionali importanti e di successo pratico come il JPEG (escluso il lossless) e l' H.261, un insieme di algoritmi finalizzati alla compressione video che ha influenzato anche l'MPEG-1 e 2. Le caratteristiche che hanno giustificato l'adozione della DCT sono la sua capacità di contenere la maggior parte dell'energia del segnale in pochi coefficienti, di essere facilmente implementabile tramite algoritmi veloci, la struttura ricorsiva, il fatto di usare solo l'insieme dei numeri reali e di essere ortogonale e separabile, caratteristiche che rende semplice ed esatta la trasformazione inversa e l'estensione a più dimensioni, la facilità di una implementazione in circuiti integrati, la sua praticità nel realizzare filtri.
Esistono quattro famiglie di DCT, ma la più utilizzata è la DCT-II. La trasformata diretta (Forward DCT) e la trasformata inversa (IDCT, Inverse DCT) sono rispettivamente:
DCT
IDCT
con:
( )
−≤<
==101
021
Nkper
kperkβ
dove x(n) rappresenta la sequenza di N dati campionati uniformemente nel dominio spaziale o temporale, mentre X(k) la sequenza di N coefficienti DCT. All’aumentare di k, X(k) rappresenta frequenze maggiori. È possibile esprimere la DCT e la IDCT in forma matriciale come sviluppo della sequenza su base ortogonale. Definiti i vettori:
( ) ( ) ( )[ ]TNxxxx 1,...,1,0 −=
( ) ( ) ( )[ ]TNXXXX 1,...,1,0 −=
e le matrici C e D di dimensione NxN, i cui elementi { }nkc e { }knd , con 0 ≤ n ≤ N-1 e 0 ≤ k ≤ N-1,
sono:
{ } ( ) ( )
+=
Nnkk
Ncnk 2
12cos2 πβ
F. Benedetto Ottobre 2009

83
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010{ } ( ) ( )
+=
Nnkk
Nd kn 2
12cos2 πβ
Le trasformazioni DCT e IDCT possono pertanto essere espresse mediante gli operatori lineari C e D = C-1 = CT come:
xCX =
XCXDx 1−==
Poiché i vettori componenti le matrici C e D sono ortogonali e di modulo unitario, gli operatori corrispondenti sono semplici rotazioni di coordinate. Per tali trasformazioni valgono perciò le proprietà geometriche delle trasformazioni ortonormale (ad esempio conservazione delle distanze). La DFT (Discrete Fourier Transform), è uno sviluppo del segnale su una base di coseni e seni, mentre la DCT è uno sviluppo su una base di soli coseni. È possibile sviluppare un segnale reale in soli coseni se e solo se la sua trasformata di Fourier è reale pura, cioè se il segnale è pari (simmetrico intorno allo zero). È possibile sviluppare un qualunque segnale in serie di soli coseni se il dominio del segnale è raddoppiato mediante una “specchiatura” attorno all’origine dello stesso segnale.
Figura 9.1 - Sviluppo in serie di coseni
NOTA 1: i campioni originari si sono tutti spostati di mezzo periodo di ritardo.
NOTA 2: i campioni “specchiati” sono in totale in numero doppio rispetto agli originali.
La validità della rappresentazione mediante coefficienti DCT consiste nella capacità di rappresentare in forma compatta (ovvero con pochi bit) i coefficienti dello sviluppo.
F. Benedetto Ottobre 2009

84
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Figura 9.2 - Confronto tra coefficienti DFT e DCT
In altre parole, benché l’energia totale dei coefficienti di sviluppo fra le differenti basi che possono essere usate per rappresentare i segnali deve essere uguale per trasformazioni ortonormale, l’energia media dei coefficienti DCT risulta assai spesso la più “sbilanciata”, essendo maggiore l’entità dei primi coefficienti (basse frequenze) e minore quella degli ultimi (alte frequenze). Questa proprietà consente di quantizzare fortemente (riducendo così il numero di bit adoperati) molti dei coefficienti DCT, arrivando perfino ad ometterli nella trasmissione (costo in bit praticamente nullo) se risultano essere molto piccoli. Se ad esempio, si decidesse di trasmettere solo metà o un quarto dei coefficienti, l’errore di troncamento sarebbe praticamente insignificante per la DCT, mentre assai più rilevante per la DFT.
Figura 9.3 - Errore di Troncamento con DFT e DCT
F. Benedetto Ottobre 2009
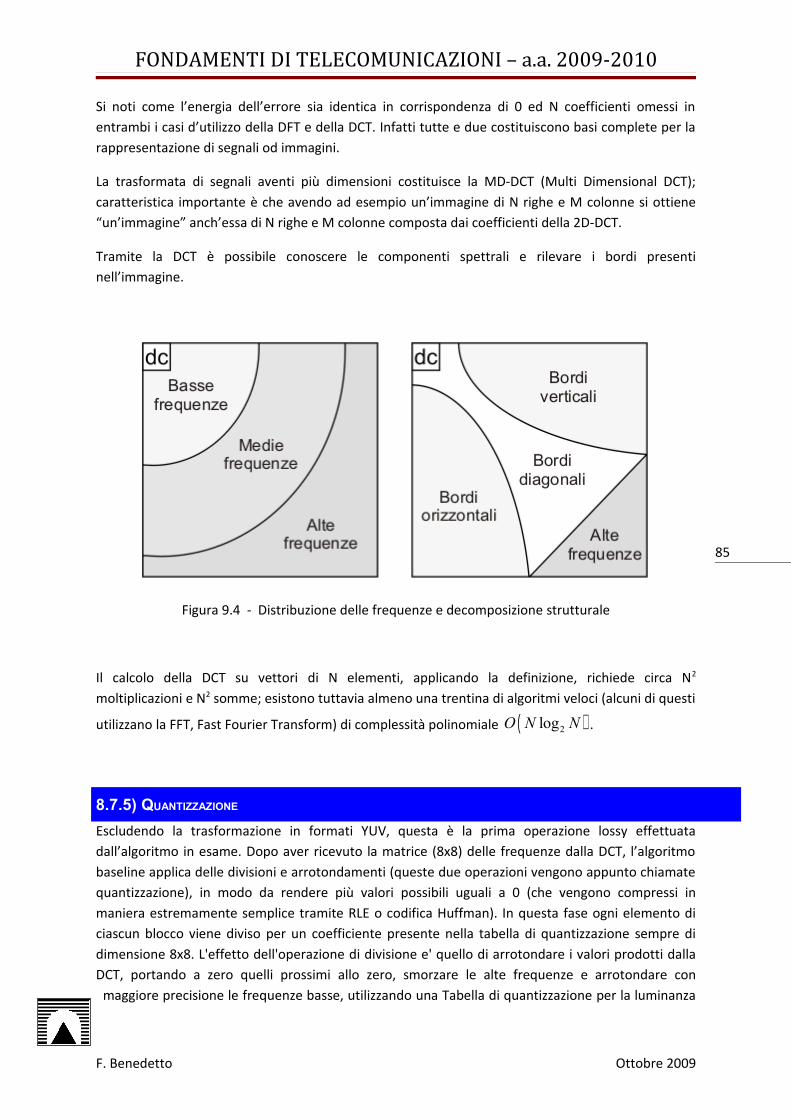
85
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Si noti come l’energia dell’errore sia identica in corrispondenza di 0 ed N coefficienti omessi in entrambi i casi d’utilizzo della DFT e della DCT. Infatti tutte e due costituiscono basi complete per la rappresentazione di segnali od immagini.
La trasformata di segnali aventi più dimensioni costituisce la MD-DCT (Multi Dimensional DCT); caratteristica importante è che avendo ad esempio un’immagine di N righe e M colonne si ottiene “un’immagine” anch’essa di N righe e M colonne composta dai coefficienti della 2D-DCT.
Tramite la DCT è possibile conoscere le componenti spettrali e rilevare i bordi presenti nell’immagine.
Figura 9.4 - Distribuzione delle frequenze e decomposizione strutturale
Il calcolo della DCT su vettori di N elementi, applicando la definizione, richiede circa N2
moltiplicazioni e N2 somme; esistono tuttavia almeno una trentina di algoritmi veloci (alcuni di questi
utilizzano la FFT, Fast Fourier Transform) di complessità polinomiale ( )2logO N N .
8.7.5) QUANTIZZAZIONE
Escludendo la trasformazione in formati YUV, questa è la prima operazione lossy effettuata dall’algoritmo in esame. Dopo aver ricevuto la matrice (8x8) delle frequenze dalla DCT, l’algoritmo baseline applica delle divisioni e arrotondamenti (queste due operazioni vengono appunto chiamate quantizzazione), in modo da rendere più valori possibili uguali a 0 (che vengono compressi in maniera estremamente semplice tramite RLE o codifica Huffman). In questa fase ogni elemento di ciascun blocco viene diviso per un coefficiente presente nella tabella di quantizzazione sempre di dimensione 8x8. L'effetto dell'operazione di divisione e' quello di arrotondare i valori prodotti dalla DCT, portando a zero quelli prossimi allo zero, smorzare le alte frequenze e arrotondare con
maggiore precisione le frequenze basse, utilizzando una Tabella di quantizzazione per la luminanza
F. Benedetto Ottobre 2009

86
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010e una opportuna per le due di crominanza. Questo perché, come si e' già detto all'inizio, e' maggiore la sensibilità visiva in luminosità piuttosto che per i colori. Inoltre, per entrambe le tabelle di quantizzazione, vengono scelti opportuni valori per arrotondare con meno precisione i coefficienti delle alte frequenze rispetto a quelle basse.
Figura 9.5 - Esempio di tabella di quantizzazione
L'operazione di divisione e di arrotondamento del risultato per alti coefficienti nella Tabella di quantizzazione definiscono una tabella DCT quantizzata con valori notevolmente meno accurati nella parte bassa a sinistra. E' evidente che l'errore aumenta all'aumentare del coefficiente di quantizzazione a causa degli arrotondamenti. Le Tabelle di Quantizzazione non sono standard ma differiscono dal produttore di software, i gradi di compressione poi dipendono da essa (di solito viene usate quelle definite dagli standard H263 o MPEG).
Qualitativamente se si ricostruisse l'immagine considerando le basse frequenze, essa risulterebbe priva di dettagli, con zone d'ombra e di luminosità notevolmente sfuocate. Diversamente considerando quelle alte si evidenzierebbero i contorni e i dettagli, mentre le parti sfumate verrebbero eliminate, quindi tutte di una stessa tonalità. Queste matrici sono di solito mutuate da studi psicovisuali (dobbiamo ringraziare i limiti dei nostri occhi per questo). La soluzione ideale sarebbe, ovviamente, avere una matrice per ogni caso particolare in esame…
La matrice di quantizzazione viene scalata, in modo da adattarsi alle esigenze di qualità/riduzione, moltiplicando i valori contenuti per un fattore intero aggiuntivo, detto quantizer.
8.7.6) RLELa fase finale del processo JPEG è la codifica dell'immagine quantizzata. La codifica JPEG consiste in tre differenti passi per comprimere l'immagine. Se i valori del blocco vengono visti come un'onda acustica (con la posizione nel blocco in ascissa e il valore in ordinata), l'elemento del blocco in posizione (0,0) detto coefficiente DC rappresenta la componente continua dell'onda (da qui il nome DC, Direct Current o corrente continua); gli altri valori del blocco sono relativi ad esso. Ai fini del calcolo, il coefficiente DC è il valore massimo in ampiezza presente nel blocco.
F. Benedetto Ottobre 2009

87
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010La componente AC viene scansionata tramite una lettura a zig-zag (vedi figura 9.6). La lettura a zig-zag rende adiacenti il più possibile i coefficienti uguali a 0 e permette una ottimale rappresentazione dei dati tramite Run Lenght Encoding.
Figura 9.6 - Esempio di lettura a “zig-zag”
Run Length Encode (RLE) è una semplice tecnica di compressione applicata ai componenti AC: il vettore 1x64 risultante dalla lettura a zig-zag contiene diversi valori nulli in sequenza, per questo si rappresenta il vettore tramite coppie (skip, value), dove skip è il numero di valori uguali a zero e value è il successivo valore diverso da zero. La coppia (0,0) viene considerata come segnale di fine sequenza.
Sul valore DC di ciascun blocco viene invece applicata una tecnica detta DPCM. Questo sistema modifica il coefficiente DC dal valore assoluto ad un valore relativo al coefficiente DC del blocco precedente. Ad esempio, se i coefficienti DC di due blocchi adiacenti sono 227 e 205, il secondo diventerà -22. I blocchi adiacenti solitamente hanno un elevato grado di correlazione, così la codifica del coefficiente DC come differenza dal coefficiente precedente tipicamente produce un piccolissimo numero; gli altri elementi, di valori di per sé già contenuti, non vengono modificati.
L'ultima codifica entropica applicata ai dati è la classica codifica a lunghezza di codice variabile. In pratica i dati vengono suddivisi in 'parole' (stringhe di bit), viene analizzata la frequenza statistica di ciascuna parola e ognuna viene ricodificata con un codice a lunghezza variabile in funzione della frequenza di apparizione. Un codice corto per le parole che appaiono frequentemente e via via codici più lunghi per quelle meno frequenti. Complessivamente il numero di bit necessari per rappresentare i dati si riduce consistentemente.
8.7.6) LA DECOMPRESSIONE
JPEG è un algoritmo simmetrico per sua natura quindi l'elaborazione necessaria per la decompressione è l'esatto inverso di quella necessaria per la compressione.Sui dati compressi si applica la decompressione Huffman, i dati risultanti servono per la ricostruzione blocco dopo blocco delle componenti DC e AC, quindi i coefficienti vengono moltiplicati per una tabella di quantizzazione inversa. il blocco 8x8 risultante viene sottoposto ad una DCT inversa e a questo punto, a seconda delle impostazioni del file si è già ottenuto l'immagine RGB oppure si deve effettuare la conversione Yuv -> RGB.
F. Benedetto Ottobre 2009

88
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20108.8) TECNICHE DI CODIFICA DI VIDEOSEQUENZELe tecnologie multimediali digitali sono affermate in tutti i campi della comunicazione mediatica: dai CD rom ai DVD, dalla TV digitale via satellite alla musica MP3, per arrivare al multimediale interattivo su Internet o su reti mobili. Stringhe di bit che trasportano suoni, colori e immagini in movimento, e attraversano il pianeta utilizzando varie reti di trasporto. E nella maggior parte dei casi questi bit sono codificati tramite i sistemi definiti da MPEG, un gruppo di lavoro internazionale fondato in Telecom Italia Lab (allora CSELT) da Leonardo Chiariglione. Il gruppo MPEG (Moving Picture Coding Experts Group) nasce nel 1988 all'interno di ISO, l'International Standard Organisation, per sviluppare gli standard di codifica per la rappresentazione di immagini in movimento e audio, nel contesto dell'immagazzinamento di tali informazioni su supporti digitali (Digital Media Storage). Ma dopo poco tempo diventa chiaro che le funzionalità richieste per gestire il caso di memorizzazione sottintendono funzionalità di applicabilità più ampia. Quindi la struttura di MPEG si orienta verso applicazioni generali.
Inoltre viene incluso esplicitamente il discorso audio, sulla base della considerazione che, benché le due discipline audio e video siano a quel tempo studiate e trattate separatamente sia all'interno delle compagnie sia nei gruppi internazionali di standardizzazione (più per motivi storici che tecnici, peraltro), l'end user della tecnologia le vede intrinsecamente collegate, e soprattutto le desidera utilizzare congiuntamente. Le direzioni di lavoro originariamente seguite dal gruppo MPEG sono 3: codifica digitale del segnale fino a 1,5 Mbit/s, codifica a 10 Mbit/s, codifica a 40 Mbit/s. Queste tre diverse direzioni di lavoro sono battezzate MPEG-1, MPEG-2, MPEG-3, ma l'attività sul filone MPEG-3 viene abbandonata, quando diventa chiaro che tutti gli obiettivi di MPEG-3 possono essere raggiunti attraverso un uso appropriato di MPEG-2. Il filone di lavoro noto come MPEG-4, orientato agli aspetti di codifica a bit-rate molto basso (pochi kbit/s), con la diretta conseguenza della coesistenza di immagini reali ed immagini di sintesi, viene aperto nel 1993, già in presenza delle prime avvisaglie di quell'onda di piena chiamata Internet.
Una delle sfide principali di MPEG è quella di costituire un elemento di standardizzazione a priori anziché a posteriori come consueto, con abbastanza anticipo da costituire il fattore abilitante per lo sviluppo ed il decollo del mercato.
8.8.1) CODIFICA VIDEO MPEG-1MPEG-1 è lo standard che permette la codifica del video in forma digitale, una forma di rappresentazione assai indicata per la memorizzazione, l'elaborazione, il trasporto e la visualizzazione dei flussi audiovisivi, orientata al mercato dei video-CD. E poiché uno degli scopi di uno standard deve essere soprattutto quello di facilitare lo sviluppo di un mercato di massa, in MPEG-1 si è voluto seguire un approccio flessibile alla standardizzazione, per evitare il rischio di ingessare il mercato in regole troppo rigide. Allora con MPEG-1 si possono trattare immagini a quarto di schermo (Q-CIF significa 176x144 pixel) ma anche grandi quadri di dimensioni fino a 4096x4096 pixel. E' possibile inoltre avere una frequenza di ripetizione che va da un minimo di 25 immagini al secondo fino a 50. Tutto ciò senza sacrificare la completa compatibilità dei formati, grazie al concetto di "profilo". Combinando opportunamente diversi casi di dimensione
dell'immagine, frequenze di ripetizione, si possono definire "profili" qualitativamente diversi, ma
F. Benedetto Ottobre 2009

89
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010che garantiscono una compatibilità verso il basso quando, ad esempio, un'apparecchiatura di "profilo basso" (ad esempio con una bassa definizione) si trova a dover visualizzare un video originariamente costruito con "profilo alto". Ciò non pone vincolo alcuno sulla quantità di memoria e sulla potenza elaborativa che deve avere il decoder per leggere il video MPEG-1, e lascia la massima libertà al mercato di esprimere le sue potenzialità.
8.8.2) CODIFICA VIDEO MPEG-2Il contesto di applicazione per MPEG-1 è stato fondamentalmente quello dei Video-CD, o dei filmati digitali da riprodurre in locale (anche in load & play su Internet). Aprire l'utilizzo dei flussi audiovisivi digitali ad applicazioni più varie, che richiedessero anche un trasporto a lunga distanza e di buona qualità, è stata la sfida raccolta da MPEG-2.
In particolare con MPEG-2 si è andati ad espandere ulteriormente il concetto di qualità scalabile tipico di MPEG-1, aggiungendo poi altre caratteristiche quali la possibilità di trasmettere il flusso multimediale su reti di LC a larga banda, assicurando una buona robustezza nei confronti degli errori della rete, il trasporto parallelo di molteplici canali audio, il supporto allo zapping fra diversi flussi video, le funzioni di protezione e di controllo di accesso al flusso, per citarne i principali. L'insieme di questi elementi rende MPEG-2 una tecnologia particolarmente adatta per i broadcaster che, via etere o via cavo, desiderino distribuire i loro programmi alla utenza residenziale. Negli USA MPEG-2 è dal 1996 il sistema adottato dalle televisioni via satellite, ed anche in Italia è attualmente utilizzato per la diffusione dei palinsesti via cavo di Stream.
Figura 8.8.1 - Schema generale di codifica MPEG
F. Benedetto Ottobre 2009

90
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Naturalmente il concetto di profilo non si è perso in MPEG-2, anzi. Combinando adeguatamente le diverse caratteristiche supportate dallo standard si può passare da un profilo di qualità equivalente a MPEG-1 fino a profili adatti per supportare la televisione ad Alta Definizione, da 1440 pixel per linea fino a 1920 pixel per linea. Fin dal 1995 CSELT ha potuto dimostrare le capacità offerte dalla tecnologia MPEG-2 per il trasporto a lunga distanza, sulla rete ATM di Telecom Italia, di filmati ad alta definizione. Questo grazie al sistema Armida, la prima implementazione al mondo di un sistema completo in grado di usare questa tecnologia.
Il flusso video MPEG-2 è organizzato con una sintassi stratificata. In una struttura gerarchica "dall'alto in basso", la video sequenza è partizionata in gruppi multipli di immagini (GOPs), che rappresentano degli insiemi di video trame contigui nell'ordine di trasmissione. Lo strato successivo è costituito da una trama singola, composta da più porzioni. Quindi, ogni porzione contiene uno o più macro blocchi, consistenti di quattro blocchi di luminanza (Y) e di due blocchi di crominanza (U,V). infine, il blocco è l'unità di base di codifica di dimensione 8x8 pixel.
Per ottenere un alto rapporto di compressione, ci si serve sia delle ridondanze spaziali che di quelle temporali. La ridondanza spaziale viene ridotta dall'utilizzo di un sottocampionamento delle componenti di crominanza (U,V), in accordo con la sensibilità dell'apparato visivo umano. Successivamente, viene utilizzata la trasformata coseno discreta sui blocchi con componenti Y e U,V. i coefficienti DCT sono quantizzati e infine codificati utilizzando un codice a lunghezza variabile. La ridondanza temporale viene ridotta da una predizione temporale di alcune trame derivate da altre trame moto-compensate. L'errore di predizione viene quindi codificato.
8.8.3) CODIFICA VIDEO MPEG-4MPEG-2 ha definito anche le funzioni necessarie all'interazione di controllo con il flusso audiovisivo. I comandi resi disponibili sono sostanzialmente quelli equivalenti ai tasti base di un videoregistratore (navigazione fra i flussi con selezione canale, play, pause, fast forward, fast rewind) e rappresentano la possibilità minima di interazione. L'obiettivo di rendere sempre più personalizzato il servizio di informazioni multimediali non può esimersi dall'andare oltre, per esplorare possibilità di interazione più sofisticate, da realizzarsi con i contenuti dei flussi multimediali, e non solamente con i contenitori.
Questo è uno degli obiettivi di MPEG-4, lo standard che porta l'audiovisivo digitale sulle reti interattive a basso bit-rate, come Internet o la rete mobile, la cui prima versione è promulgata nell'autunno del 1998. MPEG-4 da un lato adotta tecniche di codifica particolarmente efficienti, appositamente pensate per il basso bit-rate, e dall'altra rivoluziona il concetto classico di audiovisivo, per trasformarlo da una collezione di quadri che si inseguono a ritmo costante ad un insieme di oggetti audiovisivi, ciascuno con una propria forma, un proprio comportamento, e con i quali è anche possibile interagire, all'interno dell'ambiente complessivo detto "scena". Gli oggetti MPEG-4 possono essere sia risultati di una ripresa live sia componenti sintetiche nate dalla computer grafics: entrambi vengono trattati in modo totalmente equivalente e presentano le stesse proprietà. Inoltre, tramite il paradigma point&click, reso familiare dalla navigazione in Internet, con ciascuno di questi oggetti si può interagire, chiedendo loro di modificare il proprio aspetto audiovisivo, il proprio
comportamento all'interno di quelli per i quali sono stati programmati, o domandando loro
F. Benedetto Ottobre 2009

91
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010informazioni specifiche. La combinazione fra oggetti di sintesi ed oggetti live è anche un elemento importante per limitare la quantità di banda richiesta per far vedere a distanza un audiovisivo MPEG-4. Infatti gli oggetti di sintesi possono essere animati attraverso regole di animazione predefinite, a seconda di parametri standard. In questo caso la trasmissione in tempo reale attraverso la rete non richiede più l'invio di una sequenza di immagini che raffigurano il comportamento dell'oggetto interessato, ma solamente la trasmissione delle informazioni di animazione dell'oggetto stesso, con cui il sistema ricevente sarà in grado di riprodurre autonomamente e con la massima precisione la scena rappresentata. In tal modo è possibile far trasportare un audiovisivo anche da un collegamento di rete con capacità di poche centinaia di kbit/sec, aprendo la strada anche a una nuova classe di applicazioni per la rete Internet.
Per tutti questi motivi MPEG-4 è stato scelto come standard di riferimento per la diffusione di contenuti audiovisivi sulle reti mobili di nuova generazione, che grazie al fatto di poter disporre di almeno alcune decine di kbit/s di banda, rendono possibili servizi multimediali relativi alla informazione, alla messaggistica personale e quant’altro. Lo standard MPEG-4 offre una rappresentazione video basata sull'oggetto.
Figura 8.8.2 - Esempio di manipolazione di oggetti in MPEG-4 di una sequenza di immagine
Specificatamente, MPEG-4 considera una scena come fosse composta da video oggetti (VOs), ognuno descritto dal momento, dalla struttura e dal contorno. La codifica della struttura, come quella della stima del movimento, sono basate sugli stessi principi usati per MPEG-2 e adattata a oggetti di forma arbitraria. Le istanze temporali di video oggetti si riferiscono al piano video oggetti (VOPs). Negli standard MPEG2/4 sono utilizzati tre tipi di trame (confronta figura 3.4): codifica intra (I), predizione temporale (P), predizione bidirezionale (B). In MPEG-2 ci riferiamo alle trame, in MPEG-4 ai VOPs.
• I - trama (I – VOPs): sono codificate senza nessun riferimento alle altre trame.
• P - trama (P - VOPs): sono codificate riferendosi al precedente I o P.
• B - trama (B - VOPs): sono codificate riferendosi sia alle trame (o VOPs) precedenti che a quelle successive.
F. Benedetto Ottobre 2009
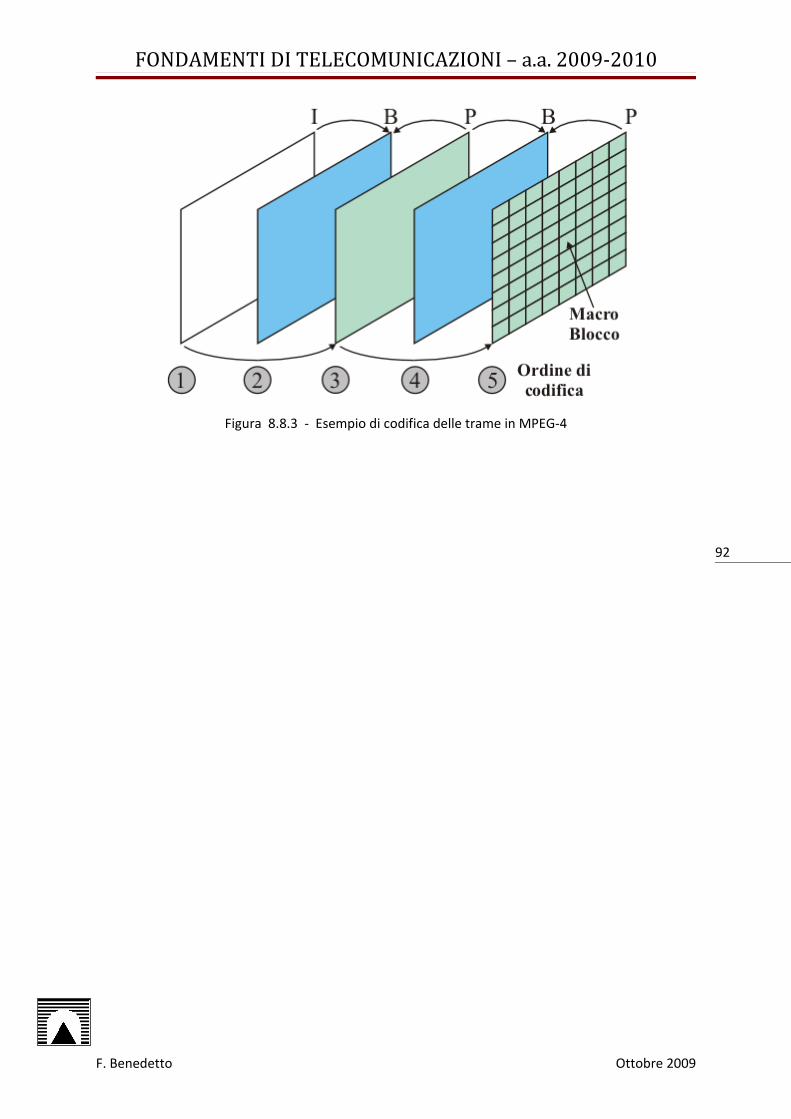
92
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Figura 8.8.3 - Esempio di codifica delle trame in MPEG-4
F. Benedetto Ottobre 2009

93
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109) ESERCIZI E SOLUZIONI
9.1) CONVOLUZIONI E CORRELAZIONI DISCRETE
9.1.1) ESERCIZIO 1Si calcoli la convoluzione delle seguenti sequenze per n = -2, -1, …, 3:
x(n) = cos (π n /2)
y(n) = sin (3 π n /2)
Successivamente si calcoli il valore della cross-correlazione Cxy(n) e si verifichi la validità della disuguaglianza di Schwartz.
SOLUZIONE
Per calcolare la convoluzione richiesta, sequenza che indicheremo con z(n), dapprima calcoliamo i valori che x(n) ed y(n) assumono al variare di n:
x(n) = [-1 0 1 0 -1 0], per n = -2, -1, …, 3
y(n) = [0 1 0 -1 0 1], per n = -2, -1, …, 3
E’ ora immediato calcolare la convoluzione con il procedimento grafico (come somma di prodotti) ottenendo il risultato riportato in figura.
Ovvero:
z(n) = [0 -1 -0 2 0 -3 0 2 0 -1 0], per n = -4, …, 6
Allo stesso modo procediamo al calcolo della cross-correlazione secondo la definizione:
F. Benedetto Ottobre 2009

94
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Cxy(n) = x*(-n) * y(n)
Ottenendo quindi il risultato di figura:
Cxy(n) = [0 0 -1 0 2 0 -3 0 2 0 -1], per n = -5, …, 5
Verifichiamo che valga per ogni n la disuguaglianza di Schwartz. A tal proposito calcoliamo le autocorrelazioni di x(n) ed y(n), ottenendo:
Cxx(n)
Cyy(n)
F. Benedetto Ottobre 2009

95
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010NOTA: si noti come le due autocorrelazioni siano, come da definizione, simmetriche e con il massimo nell’origine (= energia della sequenza!!). Si noti, inoltre, come le due autocorrelazioni siano identiche in quanto l’autocorrelazione di una funzione sinusoidale, dovendo essere pari, simmetrica e con un massimo nell’origine, non può che essere ancora una funzione sinusoidale ed avere quindi l’andamento di una funzione pari (tipo sinc)!!
Per verificare la disuguaglianza di Schwartz, basterà ora verificare che (per ogni valore di n):
( ) ( ) ( )0 0 , xy xx yyC n C C n≤ ⋅ ∀
prendiamo come esempio il valore di n per cui la cross-correlazione è massima ottenendo:
n = 3, Cxy(3) = 2 che risulta < (3 x 3)½, ovvero (2< 3), Q.E.D.
NOTA: si noti come la disuguaglianza di Schwartz resti valida anche per la cross-correlazione di y(n)
con x(n): ( ) ( ) ( )0 0 , yx xx yyC n C C n≤ ⋅ ∀.
9.1.2) ESERCIZIO 2Si calcoli la convoluzione delle seguenti sequenze per n = -3, -1, …, 4:
x(n) = sinc (n- ½)
y(n) = ejπn + e-jπn
Successivamente si calcoli il valore della cross-correlazione Cyx(n) e si verifichi la validità della disuguaglianza di Schwartz.
SOLUZIONE
Per calcolare la convoluzione richiesta, sequenza che indicheremo con z(n), dapprima calcoliamo i valori che x(n) ed y(n) assumono al variare di n:
x(n) = [-0.0909 0.1273 -0.2122 0.6366 0.6366 -0.2122 0.1273 -0.0909], per n = -3, -1, …, 4
y(n) = 2 cos (π n) = [-2 2 -2 2 -2 2 -2 2], per n = -3, -1, …, 4
E’ ora immediato calcolare la convoluzione con il procedimento grafico (come somma di prodotti) ottenendo il risultato riportato in figura.
F. Benedetto Ottobre 2009

96
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Ovvero:
z(n) = [0.1819 -0.4365 0.8610 -2.1342 0.8610 -0.4365 0.1819 -0.0000 -0.1819 0.4365 -0.8610 2.1342 -0.8610 0.4365 -0.1819], per n = -6, …, 8
Allo stesso modo procediamo al calcolo della cross-correlazione secondo la definizione:
Cxy(n) = y*(-n) * x(n)
Ottenendo quindi il risultato di figura
Cyx(n) = [-0.1819 0.4365 -0.8610 2.1342 -0.8610 0.4365 -0.1819 0.0000 0.1819 -0.4365 0.8610 -2.1342 0.8610 -0.4365 0.1819], per n = -7, …, 7
Verifichiamo che valga per ogni n la disuguaglianza di Schwartz. A tal proposito calcoliamo le autocorrelazioni di x(n) ed y(n), ottenendo:
F. Benedetto Ottobre 2009

97
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Cxx(n)
Cxx(n) = [0.0083 -0.0232 0.0548 -0.1698 0.0913 -0.0695 0.0579 0.9496 0.0579 -0.0695 0.0913 -0.1698 0.0548 -0.0232 0.0083], per n = -7, …, 7
Cyy(n)
Cyy(n) = [-4 8 -12 16 -20 24 -28 32 -28 24 -20 16 -12 8 -4], per n = -7, …, 7
Per verificare la disuguaglianza di Schwartz, basterà ora verificare che:
( ) ( ) ( )0 0 , yx xx yyC n C C n≤ ⋅ ∀
prendiamo come esempio il valore di n per cui la cross-correlazione è massima ottenendo:
n = -4, Cxy(-4) = 2.1342 che risulta < (0.9496 x 32)½, ovvero (2.1342< 5.5125), Q.E.D.
F. Benedetto Ottobre 2009

98
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.1.3) ESERCIZIO 3Si calcoli la convoluzione delle seguenti sequenze per n = -3, -1, …, 4:
x(n) = ejπn
y(n) = e-jπn
Successivamente si calcoli il valore della cross-correlazione Cxy(n) e si verifichi la validità della disuguaglianza di Schwartz.
SOLUZIONE
Per calcolare la convoluzione richiesta, sequenza che indicheremo con z(n), dapprima calcoliamo i valori che x(n) ed y(n) assumono al variare di n:
x(n) = [-1 1 -1 1 -1 1 -1 1], per n = -3, -1, …, 4
y(n) = [-1 1 -1 1 -1 1 -1 1], per n = -3, -1, …, 4
E’ ora immediato calcolare la convoluzione con il procedimento grafico (come somma di prodotti) ottenendo il risultato riportato in figura.
Ovvero:
z(n) = [1 -2 3 -4 5 -6 7 -8 7 -6 5 -4 3 -2 1], per n = -6, …, 8
Allo stesso modo procediamo al calcolo della cross-correlazione secondo la definizione:
Cxy(n) = x*(-n) * y(n)
Ottenendo quindi il risultato di figura
F. Benedetto Ottobre 2009
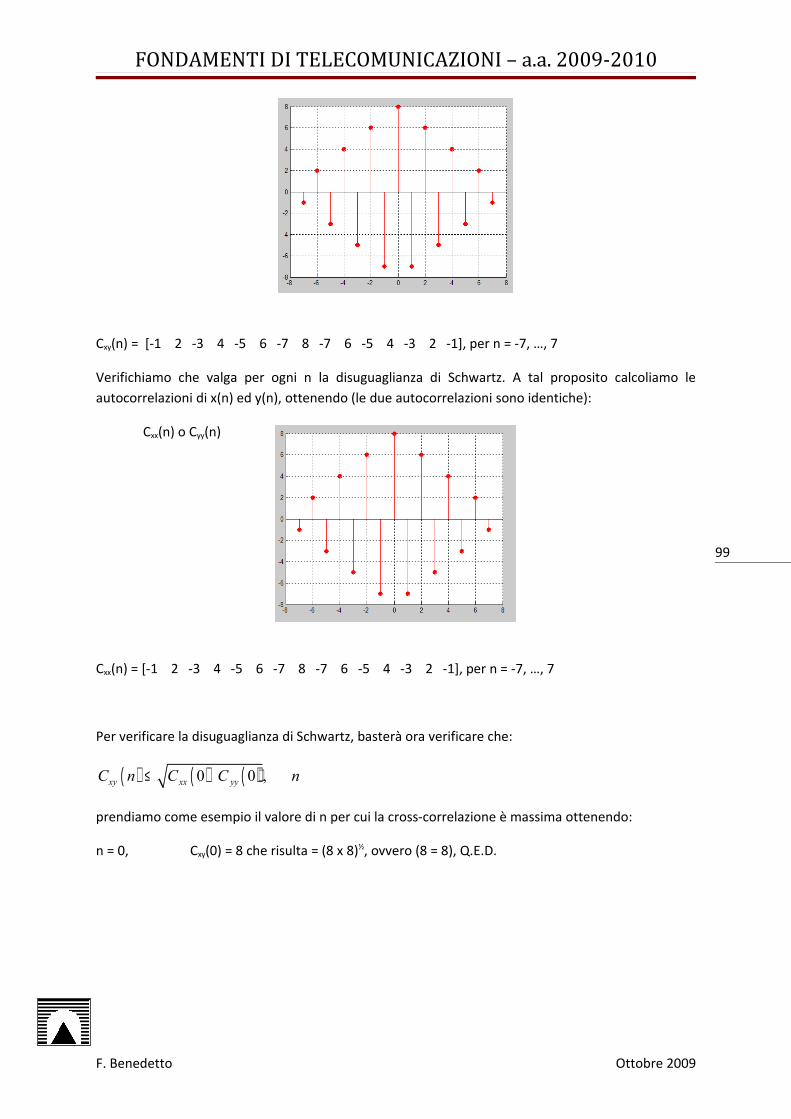
99
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Cxy(n) = [-1 2 -3 4 -5 6 -7 8 -7 6 -5 4 -3 2 -1], per n = -7, …, 7
Verifichiamo che valga per ogni n la disuguaglianza di Schwartz. A tal proposito calcoliamo le autocorrelazioni di x(n) ed y(n), ottenendo (le due autocorrelazioni sono identiche):
Cxx(n) o Cyy(n)
Cxx(n) = [-1 2 -3 4 -5 6 -7 8 -7 6 -5 4 -3 2 -1], per n = -7, …, 7
Per verificare la disuguaglianza di Schwartz, basterà ora verificare che:
( ) ( ) ( )0 0 , xy xx yyC n C C n≤ ⋅ ∀
prendiamo come esempio il valore di n per cui la cross-correlazione è massima ottenendo:
n = 0, Cxy(0) = 8 che risulta = (8 x 8)½, ovvero (8 = 8), Q.E.D.
F. Benedetto Ottobre 2009

100
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2) TRASFORMATE DI FOURIERSi noti come tutti gli esercizi che seguono possano essere risolti tramite il metodo di applicazione della trasformata di Fourier come integrale. Tale metodo però non viene qui proposto perché si tratta di una mera applicazione di una formula di integrazione. Al contrario, nel seguito si stimolano gli studenti, laddove possibile, ad utilizzare metodi alternativi, più rapidi ed intuitivi, da confrontare in caso con la soluzione finale (corretta) ottenuta tramite il metodo di integrazione.
9.2.1) ESERCIZIO 1Si Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0, f=±1/T e f=±2/T.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi.
Il metodo più diretto prevede di applicare la definizione di trasformata attraverso l’applicazione dell’integrale. Ciò presuppone però di scrivere il segnale di figura come:
( ) ( )trecttT
BABAtx T⋅
⋅−−+=
2
F. Benedetto Ottobre 2009

101
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010L’integrale della trasformata è un classico integrale risolvibile per parti con estremi –T/2 e T/2, ottenendo quindi il risultato finale con un procedimento poco complesso ma decisamente laborioso, ovvero10:
( ) ( ) ( )fTcfjBAfT
fjBAfTcTBAfX sin
2cos
2)(sin
2 ππ
π−−−+⋅⋅+=
Il secondo metodo prevede invece l’utilizzo delle proprietà della trasformata di Fourier, in
particolare l’applicazione del metodo della derivata. Infatti, derivando il segnale x(t) si ottiene il
segnale d(t) rappresentato in figura:
NOTA: per calcolare la derivata di un segnale x(t) lineare a tratti, lo si percorre da sinistra a destra ed in
corrispondenza di una discontinuità si trova una delta di Dirac con area pari all’ampiezza della discontinuità.
L’ampiezza dell’impulso sarà positiva se la funzione è crescente, negativa in caso contrario. In corrispondenza
di un tratto lineare si avrà una rect di altezza pari alla pendenza (coefficiente angolare) del tratto.
10 L’integrale da sviluppare è rappresentato da:
( ) ∫−
⋅−−⋅⋅+=2
2
2.)(sin2
T
T
ftj dtetT
BAfTcTBAfX π
Tenendo conto della simmetria dell’intervallo e risolvendo con una integrazione per parti, con pochi calcoli si
arriva a scrivere la soluzione finale.
F. Benedetto Ottobre 2009

102
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010La sua trasformata D(f) è ora facilmente ottenibile come trasformata di funzioni notevoli. Infine, lo
spettro X(f) è calcolato come X(f) = (j2πf)-1 D(f): 11
( ) ( ) ( )
( ) ( )fTcfjBAfT
fjBAfTcTBA
fjfTcBA
fjBeAefX
fTjfTj
sin2
cos2
)(sin2
2sin
2
ππ
π
ππ
ππ
−−−+⋅⋅+=
=⋅−−−=−
( ) TBAX ⋅+=2
0
( ) Tj
BAT
X ⋅−=
±
π21
( ) Tj
BAT
X ⋅−±=
±
π42
11 Il risultato finale è stato ottenuto con delle semplici manipolazioni algebriche (ovvero somme e differenze di medesime quantità) per evidenziare ancora meglio l’equivalenza dei due metodi risolutivi:
Si noti come la X(f) possa scriversi in infiniti modi diversi, (come combinazione lineare di differenti funzioni) a seconda del procedimento scelto per la risoluzione dell’esercizio. Si noti anche però che il valore numerico dello spettro risulta essere lo stesso per ogni f.
F. Benedetto Ottobre 2009
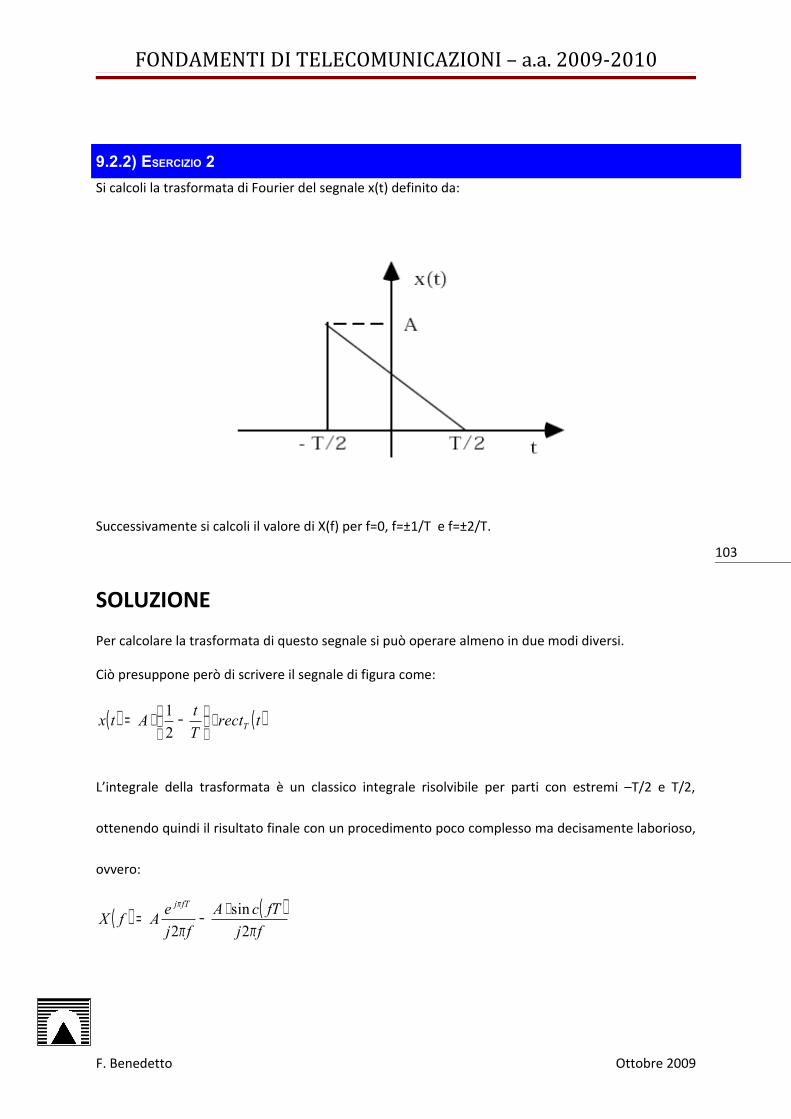
103
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.2) ESERCIZIO 2Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0, f=±1/T e f=±2/T.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi.
Ciò presuppone però di scrivere il segnale di figura come:
( ) ( )trectTtAtx T⋅
−⋅=
21
L’integrale della trasformata è un classico integrale risolvibile per parti con estremi –T/2 e T/2,
ottenendo quindi il risultato finale con un procedimento poco complesso ma decisamente laborioso,
ovvero:
( ) ( )fj
fTcAfj
eAfXfTj
ππ
π
2sin
2⋅−=
F. Benedetto Ottobre 2009
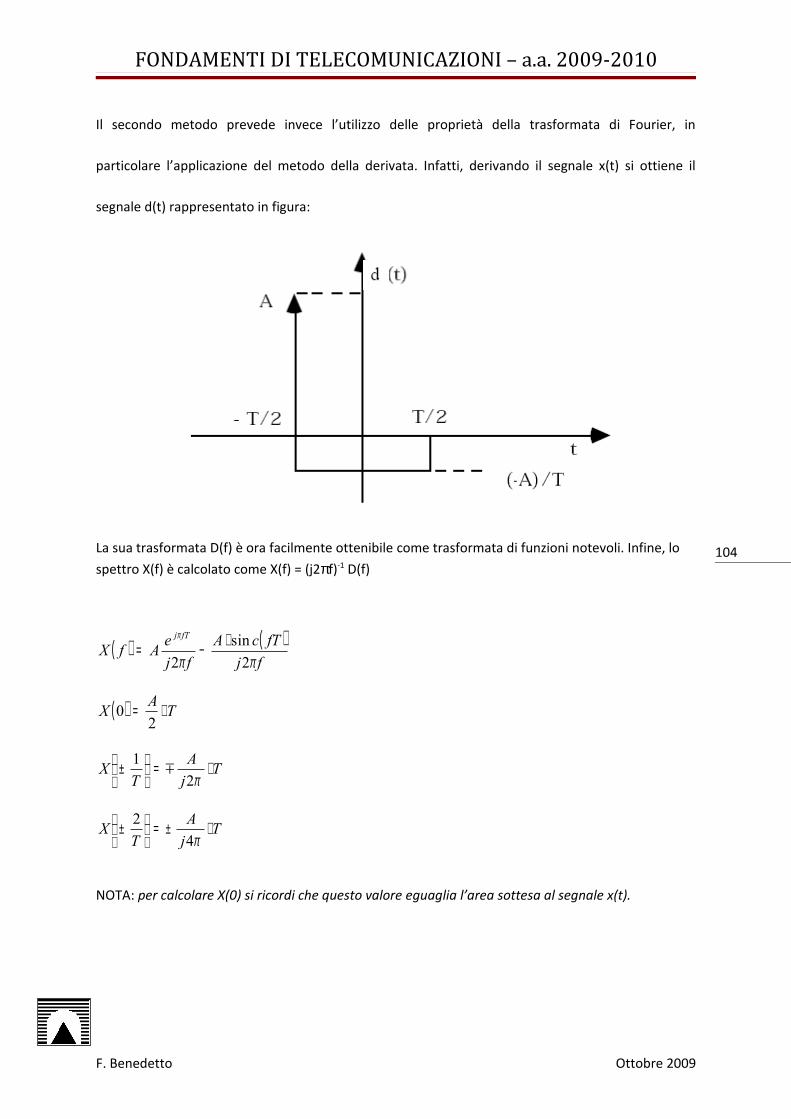
104
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Il secondo metodo prevede invece l’utilizzo delle proprietà della trasformata di Fourier, in
particolare l’applicazione del metodo della derivata. Infatti, derivando il segnale x(t) si ottiene il
segnale d(t) rappresentato in figura:
La sua trasformata D(f) è ora facilmente ottenibile come trasformata di funzioni notevoli. Infine, lo
spettro X(f) è calcolato come X(f) = (j2πf)-1 D(f)
( ) ( )fj
fTcAfj
eAfXfTj
ππ
π
2sin
2⋅−=
( ) TAX ⋅=2
0
TjA
TX ⋅=
±
π21
TjA
TX ⋅±=
±
π42
NOTA: per calcolare X(0) si ricordi che questo valore eguaglia l’area sottesa al segnale x(t).
F. Benedetto Ottobre 2009

105
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.3) ESERCIZIO 3Si calcoli la trasformata di Fourier del segnale x(t) definito da:
( ) ( )
⋅⋅=
Tttrecttx T
πcos2
Successivamente si calcoli il valore di X(f) per f=0, f=±1/T e f=±2/T.
SOLUZIONE
Innanzitutto grafichiamo il segnale x(t), per semplicità ponendo T grande pari ad 1, e immediatamente ci accorgiamo che si tratta di un segnale pari! Nei conti della trasformata utilizzeremo poi il valore parametrico T.
Senza applicare la definizione di trasformata tramite integrale ma ricordando il teorema della modulazione, otteniamo immediatamente:
( ) ( )
++
−⋅=
=
+⋅+
−⋅∗=
TfTc
TfTcT
Tf
TfTfcTfX
21sin
21sin
21
21
21
21sin2 δδ
( ) TX ⋅=π40
TT
X ⋅=
±
π341
TT
X ⋅=
±
π542
F. Benedetto Ottobre 2009

106
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.4) ESERCIZIO 4Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0, f=±1/T e f=±1/2T, con θ=3T.
SOLUZIONE
Senza applicare la definizione di trasformata tramite integrale ma ricordando il teorema della traslazione nel tempo, otteniamo immediatamente:
( ) ( ) ( ) ( )θπθπ fTfcjATfjTfcTAfX sin2
sinsin22
sin2
22 ⋅
=⋅⋅
=
( ) 00 =X
01 =
±
TX
ATjT
X 2
421
π−=
ATjT
X 2
421
π+=
−
F. Benedetto Ottobre 2009

107
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.5) ESERCIZIO 5Si calcoli la trasformata di Fourier del segnale x(t) definito da:
SOLUZIONE
Il segnale x(t) è un treno di N rettangoli di ampiezza A, base T e periodo τ, ovvero:
( ) ( )∑−
=
−⋅=1
0
N
nT ntrectAtx τ
La sua trasformata vale, per la proprietà di linearità:
( ) ( )∑−
=
−=1
0
2sinN
n
nfjefTcATfX τπ
F. Benedetto Ottobre 2009

108
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.6) ESERCIZIO 6Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0, f=±1/T e f=±2/T.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi.
Ciò presuppone però di scrivere il segnale di figura come:
( )
−⋅
−⋅=
21 Ttrect
TtAtx T
L’integrale della trasformata è un classico integrale risolvibile per parti con estremi 0 e T/2,
ottenendo quindi il risultato finale con un procedimento poco complesso ma decisamente laborioso.
Il secondo metodo prevede invece l’utilizzo delle proprietà della trasformata di Fourier, in
particolare l’applicazione del metodo della derivata. Infatti, derivando il segnale x(t) si ottiene il
segnale d(t):
F. Benedetto Ottobre 2009

109
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010( ) ( )
−⋅−⋅=
2Ttrect
TAtAtd Tδ
Lo spettro X(f) è calcolato come (j2πf)-1 D(f):
( ) ( ) fTjefjfTcA
fjAfX π
ππ−⋅⋅−=
2sin
21
( ) TAX ⋅=2
0
TjA
TX ⋅±=
±
π21
TjA
TX ⋅±=
±
π42
NOTA: per calcolare X(0) si ricordi che questo valore eguaglia l’area sottesa al segnale x(t).
F. Benedetto Ottobre 2009
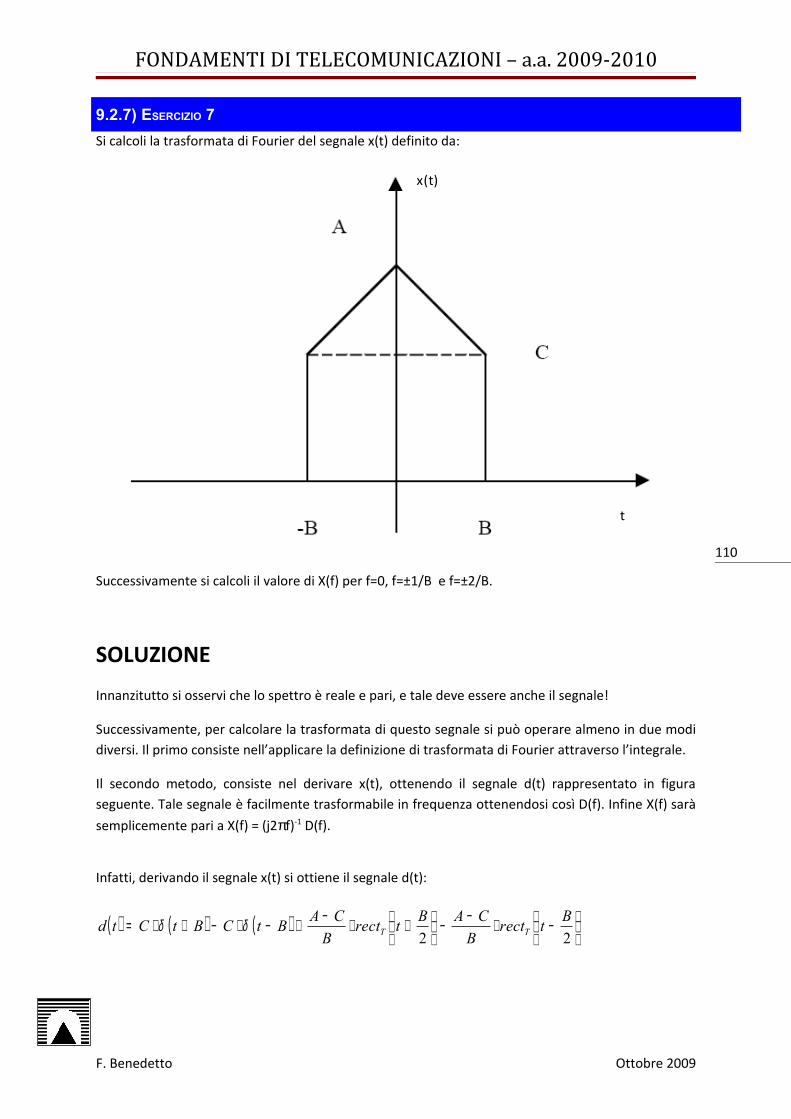
110
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.7) ESERCIZIO 7Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0, f=±1/B e f=±2/B.
SOLUZIONE
Innanzitutto si osservi che lo spettro è reale e pari, e tale deve essere anche il segnale!
Successivamente, per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi. Il primo consiste nell’applicare la definizione di trasformata di Fourier attraverso l’integrale.
Il secondo metodo, consiste nel derivare x(t), ottenendo il segnale d(t) rappresentato in figura seguente. Tale segnale è facilmente trasformabile in frequenza ottenendosi così D(f). Infine X(f) sarà
semplicemente pari a X(f) = (j2πf)-1 D(f).
Infatti, derivando il segnale x(t) si ottiene il segnale d(t):
( ) ( ) ( )
−⋅−−
+⋅−+−⋅−+⋅=
22Btrect
BCABtrect
BCABtCBtCtd TTδδ
F. Benedetto Ottobre 2009
t
x(t)

111
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Il suo spettro sarà pari a:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )fBcBfCAjBfCj
eefBcCAeCeCfD fBjfBjfBjfBj
sinsin22sin2
sin22
⋅⋅−⋅+⋅⋅⋅=
=−⋅⋅−+⋅−⋅= −−
ππ
ππππ
ottenendo infine per X(f):
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )fBcBCAfBcBC
ffBcBfCA
fBfCfDfjfX
2
1
sin2sin2
sinsin2sin)(2
⋅−+=
=⋅⋅−+⋅⋅=⋅= −
ππ
πππ
ovvero un segnale reale e pari!!
( ) BCABX +=0
01 =
±
BX
02 =
±
BX
NOTA: per calcolare X(0) si ricordi che questo valore eguaglia l’area sottesa al segnale x(t).
F. Benedetto Ottobre 2009
t
d(t)

112
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.8) ESERCIZIO 8Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi. Il primo consiste nell’applicare la definizione di trasformata di Fourier attraverso l’integrale.
Il secondo metodo, consiste nel derivare x(t), ottenendo il segnale d(t) rappresentato in figura seguente. Tale segnale è facilmente trasformabile in frequenza ottenendosi così D(f). Infine X(f) sarà
semplicemente pari a X(f) = (j2πf)-1 D(f).
Infatti, derivando il segnale x(t) si ottiene il segnale d(t):
( ) ( )[ ] ( )[ ]
+−⋅+
++⋅−+−⋅−++⋅=
22
22 BFtrect
BABFtrect
BABFtABFtAtd TBδδ
Il suo spettro sarà pari a:
F. Benedetto Ottobre 2009
t
d(t)

113
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010( ) ( ) ( ) ( )
( )[ ] ( )fBcBFfAjBFfAj
eefBcAeAeAfDB
FfjB
FfjBFfjBFfj
sin2
2sin22sin2
sin 22
22
22
+⋅⋅⋅−+⋅⋅⋅=
=
−⋅⋅−⋅−⋅=
+−
+
+−+
ππ
ππππ
ottenendo infine per X(f):
( ) ( ) ( )[ ] ( )
( ) ( )[ ] ( )
+⋅
+−++=
=⋅
+⋅
⋅−+⋅⋅=⋅= −
22sinsin
222sin2
sin2
2sin2sin)(2 1
BFfcfBcBFABFfcBFA
fBcf
BFfA
fBFfAfDfjfX
π
π
πππ
ovvero un segnale reale e pari!!
Mentre in f = 0 otterremo il seguente valore:
( ) ABX =0
NOTA: per calcolare X(0) sie verificare l’esattezza della soluzione, ricordi che questo valore eguaglia
l’area sottesa al segnale x(t).
F. Benedetto Ottobre 2009

114
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.9) ESERCIZIO 9Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi.
Il primo, processo lungo e laborioso, prevede l’applicazione della trasformata di Fourier tramite l’integrale.
Il secondo deriva immediatamente dalle proprietà della trasformata di Fourier, ricordando come un trapezio sia ottenibile dalla convoluzione di due rect di base diversa ed inoltre come due trapezi traslati nel tempo diano luogo ad una modulazione in frequenza (prodotto con il coseno a frequenza portante fc = (t1+t4) / 2).
Le due rect sono facilmente ottenibili ricordando che la base maggiore del trapezio è pari alla
somma della basi delle due rect e che la base minore del trapezio è pari alla differenza tra le basi
delle due rect, ovvero, indicando con a e b (a>b) la larghezza delle basi delle due rect:
F. Benedetto Ottobre 2009
t
x(t)
t1
t2
t3
t4
(t1+t
4)/2
-t4
-t3
-t2
-t1
-(t1+t
4)/2
A

115
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
−=−
−=+
23
14
ttba
ttba
,
+−−=
−+−=
2
2
2314
2314
ttttb
tttta
Lo spettro di x(t) quindi pari a:
( ) [ ] [ ] ( )[ ]14cossinsin ttffbcfacKfX +⋅⋅⋅= π
Rimane ora solo da calcolare la costante di ampiezza K che risulterà pari al valore di X(0) ovvero
l’area complessiva sottesa al segnale x(t):
( ) ( ) ( )[ ]23140 ttttAXK −+−⋅==
Ottenendo quindi lo spettro cercato e pari a:
( ) ( ) ( )[ ] [ ] [ ] ( )[ ]142314 cossinsin ttffbcfacttttAfX +⋅⋅⋅−+−⋅= π
F. Benedetto Ottobre 2009

116
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.10) ESERCIZIO 10Si calcoli la trasformata di Fourier del segnale x(t) definito da:
Successivamente si calcoli il valore di X(f) per f=0.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare almeno in due modi diversi.
Il primo, processo lungo e laborioso, prevede l’applicazione della trasformata di Fourier tramite l’integrale.
Il secondo deriva immediatamente dalle proprietà della trasformata di Fourier, in particolare il metodo della derivata. Anzi, si noti immediatamente come il segnale x(t) possa essere ottenuto come somma di due segnali x1(t) e x2(t) dati nelle figure seguenti.
F. Benedetto Ottobre 2009
t
x(t)
t1
t2
t3
-t3
-t2
-t1
A
t
x1(t)
t2
t3
-t3
-t2
A

117
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010
Il segnale x1(t) è ora banalmente trasformabile (si otterrà una sinc modulata con un coseno), mentre il segnale x2(t) tramite la proprietà della derivata è riconducibile ad un segnale altrettanto facile da trasformare. Per linearità, lo spettro X(f) sarà semplicemente la somma degli spettri dei due segnali X1(f) e X2(f). Quindi:
( ) ( ) ( )[ ] ( )[ ]2323231 cossin2 ttfttfcttAfX +⋅−⋅−⋅⋅= π
Il segnale x2(t) derivato da luogo ad un segnale d2(t) che possiamo scrivere come:
( ) ( ) ( ) ( ) ( )
+
−⋅−
+
+
+⋅−
−−⋅−+⋅= −− 2212
12
12
12222 1212
tttrecttt
Atttrecttt
AttAttAtd ttttδδ
Quindi lo spettro D2(f) sarà:
( ) ( ) ( )[ ] ( )[ ]121222 sinsin22sin2 ttfttfcAjtfAjfD +⋅⋅−⋅−⋅⋅= ππ
Ovvero X2(f):
( ) ( ) ( ) ( )[ ] ( )[ ]
( ) ( ) ( )[ ] ( )[ ]12121222
121222
2
sinsin2sin2
sinsin2sin2
ttfcttfcttAtfcAt
ttfttfcfAtf
fA
fjfDfX
+⋅⋅−⋅+⋅−⋅⋅=
=+⋅⋅−⋅−⋅⋅== ππ
πππ
Infine:
( ) ( ) ( )[ ] ( )[ ]( ) ( ) ( )[ ] ( )[ ]12121222
232323
sinsin2sin2cossin2
ttfcttfcttAtfcAtttfttfcttAfX
+⋅⋅−⋅+⋅−⋅⋅+++⋅−⋅−⋅⋅= π
( ) ( ) ( ) ( )21312223 2220 tttAttAAtttAX −−⋅=+⋅−+−⋅=
ovvero l’area sottesa al segnale x(t).
F. Benedetto Ottobre 2009
t
x2(t)
t1
t2
-t2
-t1
A

118
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-20109.2.11) ESERCIZIO 11Si calcoli la trasformata di Fourier del segnale x(t) definito da:
( )trectttx T2)( ⋅=
In seguito, si calcoli il valore di X(f) per f=0, f = ± 1/T e f = ± 1/2T.
SOLUZIONE
Per calcolare la trasformata di questo segnale si può operare mediante l’applicazione della trasformata di Fourier tramite la definizione di integrale, ottenendo:
( ) dtetdtetfX ftjT
ftj
T
ππ 2
0
20
−−
−
⋅+⋅−= ∫∫
Ovvero due integrali risolvibili con un’unica integrazione per parti. Inoltre, si ricordi che:
b
a
ftjftjftj
b
a fe
fjetdtet
+
−⋅=⋅
−−−∫ 22
222
42 ππ
πππ
Quindi lo spettro cercato risulta pari a, dopo alcune semplificazioni matematiche:
( ) ( ) ( ) ( ) ( )fTcTfTcTf
fTf
fTTfX 22222 sin2sin2
212cos2sin ⋅−⋅=−+⋅=
ππ
ππ
Dove nell’ultima espressione si è fatto uso della seguente:
( ) ( )xx 2sin212cos ⋅−=
Possiamo ora calcolare il valore dello spettro nei punti richiesti:
( ) 20 TX =
01 =
±
TX
2
2
2
2
2 4
2
2sin
21
ππ
πTT
TX −=
⋅−=
±
F. Benedetto Ottobre 2009

119
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Si noti come si possa verificare ora il corretto svolgimento dei calcoli prima controllando il valore
dello spettro in f= 0, esso deve essere pari all’area sottesa alla curva, ovvero anche pari a:
( ) 2
0
0
0 TdttdttXT
T
=⋅+⋅−= ∫∫−
Successivamente si noti come, essendo x(t) reale e pari, la sua trasformata di Fourier debba
necessariamente essere reale pura e pari!
Infine, si osservi come si potesse applicare anche in questo caso almeno altri due metodi alternativi di risoluzione dell’esercizio: ovvero utilizzando le proprietà della trasformata di Fourier, in particolare il metodo della derivata nel primo caso; oppure considerando il segnale x(t) come la differenza tra una rect ed una tri (ottenendo in frequenza proprio la differenza tra la trasformata della rect, ovvero la sinc, e la trasformata della tri, ovvero una sinc2…)
F. Benedetto Ottobre 2009

120
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-201010) COMPITI D’ESAME E SOLUZIONI
10.1) COMPITI D’ESAME DI SEGNALI
10.1.1) APPELLO N°1• ESERCIZIO 1, Compito C
Calcolare la trasformata di Fourier del segnale x(t) definito come:
dove si definisce triT(t) la funzione:
mentre |t| rappresenta l’operatore di modulo (valore assoluto) sulla variabile t.
Successivamente calcolare:
a) il valore numerico di X(f) per f = 0
b) il valore numerico di X(f) per f = ± 1/T.
• ESERCIZIO 2, Compito CSi calcoli la convoluzione z(n) delle seguenti sequenze, dove U-1(n) rappresenta la sequenza
gradino e si consideri n esteso a tutti i valori non nulli di x(n) e y(n):
x(n) = [U-1 (−n) - U-1 (n + 4)] · [U-1 ( n ) - U-1 ( n - 7)]
y(n) = j·sin (3 π n /2) · ej π n /2 · [U-1 ( −n - 1) - U-1 (- n – 4)]
Successivamente si calcoli:
a) il valore della cross-correlazione Cxy(n)
b) Si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009

121
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010SOLUZIONI (Appello N°1, Compito C)
• ESERCIZIO 1
Prendiamo come esempio il compito C, per gli altri compiti basterà poi moltiplicare il risultato finale
semplicemente per il coefficiente di ampiezza diverso da compito a compito. Nello specifico basterà
moltiplicare il risultato ottenuto per:
-compito A: moltiplicare il risultato del compito C per il coefficiente +1/T
-compito B: moltiplicare il risultato del compito C per il coefficiente -1/T
-compito D: moltiplicare il risultato del compito C per un segno negativo.
Passiamo ora alla risoluzione dell’esercizio. Tale problema può risolversi in vari modi. Dapprima
sostituiamo alla funzione triangolo la sua espressione in funzione della variabile t e eliminiamo il
modulo ottenendo:
Come dicevamo, i metodi di risoluzione possono essere molteplici. Il più diretto è rappresentato dall’applicazione di definizione di trasformata di Fourier come integrazione. Ci si trova a dover svolgere quattro integrali per parti (di cui due per due volte, visto che c’è t2) cambiando semplicemente gli estremi di integrazione.
Il secondo metodo, più rapido, sfrutta alcuni risultati notevoli già ottenuti in precedenza. In particolare, si può notare come il segnale x(t) sia possibile scriverlo come la somma del modulo di t (moltiplicato T e definito negli estremi –T e T) e una parabola pari a –t2 ancora negli estremi –T e T. Lo spettro finale sarà semplicemente la somma degli spettri X1(f) e X2(f). A questo punto, per la risoluzione del modulo di t, il risultato cercato è pari a:
Rimane a questo punto l’unico integrale vero da calcolarsi e pari a:
Tale trasformata è immediatamente ottenibile andando ad integrare per parti due volte. Si riportano
di seguito, solamente per semplicità e chiarezza di esposizione, le formule di integrazione per parti
necessarie a tale svolgimento:
F. Benedetto Ottobre 2009
122
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Sostituendo ora gli estremi di integrazione si ottiene il risultato cercato:
Lo spettro cercato sarà la somma di X1(f) e X2(f). Per trovare i valori richiesti poi dall’esercizio basterà sostituire i valori ad f. In particolare, per f = 1/T il calcolo si annullano tutti i contributi di X1(f) e tutti
quelli di X2(f) tranne il coseno (che vale 1) moltiplicato per il suo fattore di ampiezza (-T3/π2).
Si noti come per f = +1/T il risultato sia identico a f=-1/T.
Per il calcolo di X(f) per f = 0, ricordando le proprietà della trasformata di Fourier, ovvero che X(f) per f=0 è pari all’area sottesa al segnale nel dominio del tempo, si dovrà risolvere un semplice integrale tra gli estremi –T eT.
• ESERCIZIO 2
Prendiamo come esempio ancora il compito C, per gli altri compiti basterà poi semplicemente
cambiare le espressioni delle sequenze x(n) e y(n). Analizziamo la prima sequenza x(n) e ricordiamo
la definizione, le proprietà del segnale gradino, del gradino ribaltato e del gradino ribaltato e
traslato. Note tali proprietà, la sequenza x(n) può ottenersi come il prodotto di:
[U-1 (−n) - U-1 (n + 4)]: una sequenza di campioni alti 1 che si estende da n=-5 a -∞ e alti -1 da n=+1 a +∞.
[U-1 ( n ) - U-1 ( n - 7)]: una sequenza di campioni alti 1 che si estende da n=0 a n= +6.
Il loro prodotto sarà diverso da zero solo quando si moltiplicano tra loro due valori diversi da zero! Si
otterrà cioè una sequenza di 6 campioni alti -1 ed estesi da n=+1 ad n=+6.
Allo stesso modo analizziamo la seconda sequenza y(n) e ci accorgiamo che tale sequenza è diversa
da zero quando la differenza dei due gradini è diversa da zero:
[U-1 ( −n - 1) - U-1 (- n - 4)]: è una sequenza di valori alti +1 ed estesa tra n=-1 e n=-3.
F. Benedetto Ottobre 2009

123
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010A questo punto,otteniamo il valore di y(n) svolgendo il seguente prodotto solamente per n=-3, per
n=-2 ed n=-1: j·sin (3 π n /2) · ej π n /2 ovvero: y(-3) = +1
y(-2) = 0y(-1) = +1,
Ovvero una sequenza di 3 valori (di cui solo due diversi da zero!).
Il resto dell’esercizio è somma di prodotti (di valori pari a 1, 0 e -1!!) tra queste due sequenze per
ottenere la convoluzione e la cross-correlazione discreta.
F. Benedetto Ottobre 2009

124
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-201010.1.2) APPELLO N°2
• ESERCIZIO 1 (Compito A)
Calcolare la trasformata di Fourier del segnale x(t) definito come:
dove si definisce cotan(t) la cotangente sulla variabile t
Successivamente calcolare:
a) il valore numerico di X(f) per f = 0 b) il valore numerico di X(f) per f = ± 1/5.c) la potenza del segnale x(t).
• ESERCIZIO 2 (Compito A)
Si calcoli la convoluzione z(n) delle seguenti sequenze, dove U-1(n) rappresenta la sequenza gradino e si consideri n esteso a tutti i valori non nulli di x(n) e y(n):
x(n) = j · ej π n · [U-1 ( −n ) - U-1 (- n - 6)]
y(n) = [ej π n /2 - e-j π n /2 ]· [U-1 ( n - 1) - U-1 (n - 7)]
Successivamente si calcoli:
a) il valore della cross-correlazione Cxy(n)b) Si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009

125
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• ESERCIZIO 1 (Compito B)
Calcolare la trasformata di Fourier del segnale x(t) definito come:
dove si definisce cotan(t) la cotangente sulla variabile t.
Successivamente calcolare:
a) il valore numerico di X(f) per f = 0 b) il valore numerico di X(f) per f = ± 1/3.c) la potenza del segnale x(t).
• ESERCIZIO 2 (Compito B)
Si calcoli la convoluzione z(n) delle seguenti sequenze, dove U-1(n) rappresenta la sequenza gradino e si consideri n esteso a tutti i valori non nulli di x(n) e y(n):
x(n) = j · ej 3 π n · [U-1 ( −n -1) - U-1 (- n - 7)]
y(n) = [ej 3 π n /2 - e-j 3 π n /2 ]· [U-1 ( n ) - U-1 (n - 6)]
Successivamente si calcoli:
a) il valore della cross-correlazione Cxy(n)b) Si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009

126
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010SOLUZIONI (Appello N°2, Compito A)
• ESERCIZIO 1 Per Risolvere l’esercizio si può procedere semplificando l’espressione iniziale come segue, ottenendo alla fine una trasformata di funzioni sinusoidali di immediata risoluzione:
Si noti come l’ultima equivalenza (ottenuta) tramite applicazione delle proprietà delle funzioni sinusoidali non sia affatto necessaria per ottenere la soluzione finale (si noti ancora come si possa procedere verso la soluzione finale anche sostituendo alle forme sinusoidali le loro espressioni in termini esponenziali tramite le formule di Eulero…). Infatti, come dimostrato più sotto, per arrivare al risultato finale si può procedere trasformando singolarmente il coseno ed il seno e convolvendo le due trasformate così ottenute (ovvero ottenendo delle convoluzioni tra delte di Dirac!):
• ESERCIZIO 2
x(n) = [-j, +j, -j, +j, -j, +j], con n = -5, -4, -3, -2, -1, 0.
y(n) = [+2j, 0, -2j, 0, +2j], con n = 1, 2, 3, 4, 5, 6.
F. Benedetto Ottobre 2009

127
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Convoluzione:
a) il valore della cross-correlazione Cxy(n)
F. Benedetto Ottobre 2009
n
Cxy
(n)
n
z(n)

128
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010b) Si verifichi la validità della disuguaglianza di Schwartz.
Cxx(0) = 6;
Cyy(0) = 12;
( ) 6 12xyC n < ⋅
SOLUZIONI (Appello N°2, Compito B)
• ESERCIZIO 1 Per Risolvere l’esercizio si può procedere semplificando l’espressione iniziale come segue, ottenendo alla fine una trasformata di funzioni sinusoidali di immediata risoluzione:
Si noti come l’ultima equivalenza (ottenuta) tramite applicazione delle proprietà delle funzioni sinusoidali non sia affatto necessaria per ottenere la soluzione finale (si noti ancora come si possa procedere verso la soluzione finale anche sostituendo alle forme sinusoidali le loro espressioni in termini esponenziali tramite le formule di Eulero…). Infatti, come dimostrato più sotto, per arrivare al risultato finale si può procedere trasformando singolarmente il coseno ed il seno e convolvendo le due trasformate così ottenute (ovvero ottenendo delle convoluzioni tra delte di Dirac!):
F. Benedetto Ottobre 2009

129
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• ESERCIZIO 2
x(n) = [+j, -j, +j, -j, +j, -j], con n = -6, -5, -4, -3, -2, -1.
y(n) = [0, -2j, 0, +2j, 0, -2j], con n = 0, 1, 2, 3, 4, 5.
Convoluzione:
F. Benedetto Ottobre 2009
n
z(n)

130
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010a) il valore della cross-correlazione Cxy(n)
b) Si verifichi la validità della disuguaglianza di Schwartz.
Cxx(0) = 6;
Cyy(0) = 12;
( ) 6 12xyC n < ⋅
F. Benedetto Ottobre 2009
n
Cxy
(n)

131
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-201010.1.3) APPELLO N°3
• ESERCIZIO 1 (Compito A)
Calcolare la trasformata di Fourier del segnale x(t) definito come:
Successivamente calcolare:
a) la potenza del segnale x(t).
• ESERCIZIO 1 (Compito B)
Calcolare la trasformata di Fourier del segnale x(t) definito come:
Successivamente calcolare:
a) la potenza del segnale x(t).
SOLUZIONI (Appello N°3, Compito A)
• ESERCIZIO 1
a)2 8n
nPotenza c= =∑
F. Benedetto Ottobre 2009

132
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010SOLUZIONI (Appello N°3, Compito B)
• ESERCIZIO 1
F. Benedetto Ottobre 2009

133
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-201010.1.4) APPELLO N°4
• ESERCIZIO 1 (Compito A)
Si consideri il segnale y(t) dato da:
y(t) = x(t) • z(t)
dove z(t) = [cos(t)]2 mentre sia x(t) il segnale rappresentato in figura:
Si calcoli:
a) la trasformata di Fourier Y(f) del segnale y(t);b) il valore numerico di Y(f) per f = 0;c) la potenza di z(t).
• ESERCIZIO 2 (Compito A)
Si considerino le seguenti sequenze:
• x(n) = j*sinc (-n-2), per n compreso tra [-2, 2];• y(n) = ( e0.5 j π n - e 1.5 j π n ) • [U-1(n-3) - U-1(n+2)];
Per le due sequenze x(n) ed y(n), si calcoli:
a) la convoluzione z(n);b) il valore della cross-correlazione Cxy (k);c) si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009
t
x(t)
3-3
33
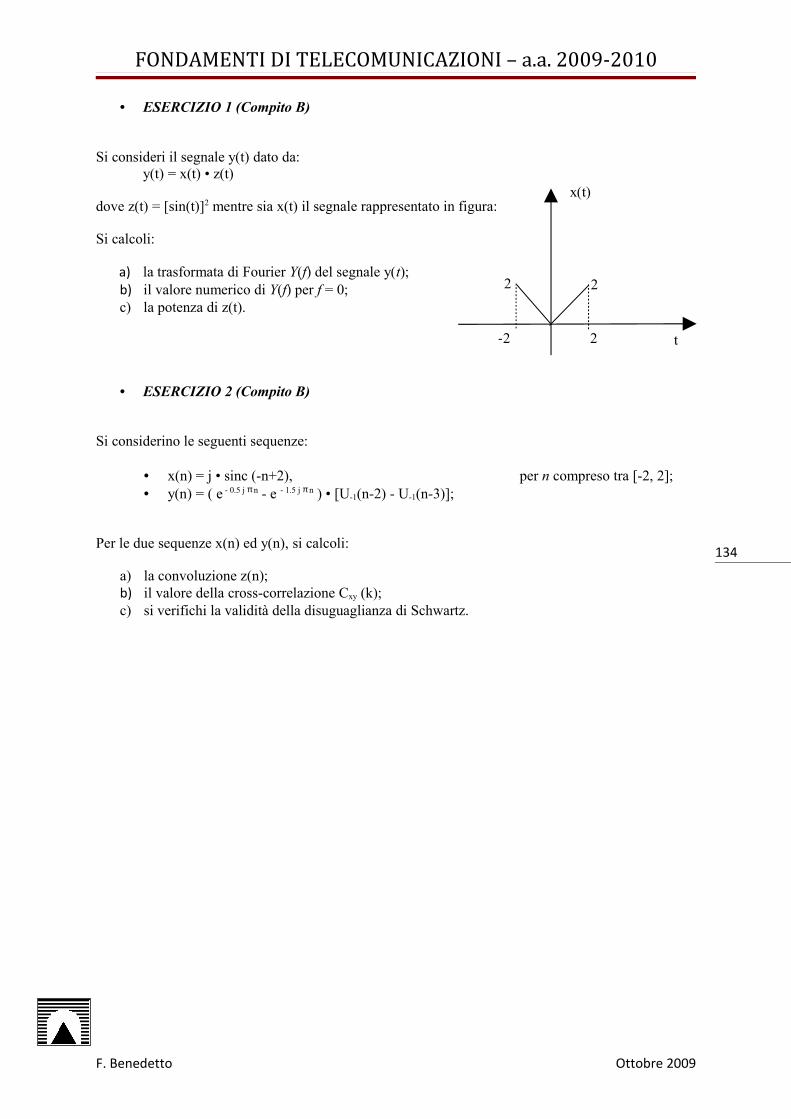
134
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• ESERCIZIO 1 (Compito B)
Si consideri il segnale y(t) dato da:y(t) = x(t) • z(t)
dove z(t) = [sin(t)]2 mentre sia x(t) il segnale rappresentato in figura:
Si calcoli:
a) la trasformata di Fourier Y(f) del segnale y(t);b) il valore numerico di Y(f) per f = 0;c) la potenza di z(t).
• ESERCIZIO 2 (Compito B)
Si considerino le seguenti sequenze:
• x(n) = j • sinc (-n+2), per n compreso tra [-2, 2];• y(n) = ( e - 0.5 j π n - e - 1.5 j π n ) • [U-1(n-2) - U-1(n-3)];
Per le due sequenze x(n) ed y(n), si calcoli:
a) la convoluzione z(n);b) il valore della cross-correlazione Cxy (k);c) si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009
t
x(t)
2-2
22

135
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010SOLUZIONI (Appello N°4, Compito A)
• ESERCIZIO 1L'esercizio può risolversi in vari modi equivalenti: con il metodo della derivata, applicazione della trasformata di Fourier come integrale, come trasformata diretta del modulo di t tra gli estremi assegnati oppure notando graficamente che il segnale può ottenersi come differenze di una funzione rect con una funzione tri aventi la stessa base, ottenendo quindi in frequenza una differenza tra una sinc ed una sinc2:
X(f) = 18 sinc (6f) – 9 sinc2 (3f)
La trasformata di z(t) è direttamente nota come trasformata di una funzione sinusoidale e pari a:
Z(f) = ¼ [δ( f -1/π ) + 2 δ( f )+ δ( f + 1/π )]
Il risultato finale sarà la convoluzione tra X(f) e Z(f) ovvero la funzione X(f) centrata dove sono centrate le delta di Dirac:
Y(f) = 9 sinc (6f) – 4.5 sinc2 (3f) + 4.5 sinc [6(f - 1/π)] – 2.25 sinc2 [3(f – 1/π)] +
+ 4.5 sinc [6(f + 1/π)] – 2.25 sinc2 [3(f + 1/π)]
In f = 0, la Y(f) vale:
Y(0) = 9 – 4.5 + 4.5 sinc (- 6/π) – 2.25 sinc2 (- 3/π) + 4.5 sinc ( 6/π) – 2.25 sinc2 ( 3/π) = = 4.655
La potenza di z(t) vale, tramite il teorema di Parseval:
P = |¼|2 + |½|2 + |¼|2 = 3/8 = 0.375
• ESERCIZIO 2Scriviamo intanto i valori assunti dalle due sequenze per poi operare la convoluzione tra di esse. La x(n) è una sequenza che vale sempre 0 tranne in n = -2 ( l'argomento della sinc vale zero) dove vale +j. Quindi:
x(n) = [j, 0, 0, 0, 0], per n = -2, -1, 0, 1, 2.
La seconda sequenza invece è definita solo dove la differenza dei gradini non da risultato nullo, ovvero solo per l'intervallo [-2, 2] dove vale -j. Rimane ora da calcolare la differenza degli esponenziali complessi, ma solamente per l'intervallo [-2, 2]. Quindi:
n = -2, y(-2) = [0],n = -1, y(-1) = [2 j],n = 0, y(0) = [0],n = 1, y(1) = [-2 j],n = 2, y(2) = [0],
La convoluzione risulta ora immediata anche perché si tratta di convolvere la sequenza (un impulso) x(n) con una sequenza di due impulsi alti +2j e -2j centrati in n = -1 ed n = 1, rispettivamente.
Per la convoluzione si otterrà una sequenza z(n) composta di due soli impulsi diversi da zero:
F. Benedetto Ottobre 2009

136
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010z(n) = [-2], per n = -3z(n) = [+2], per n = -1.
Per la correlazione, ancora due soli impulsi diversi da zero:Cxy(k) = [-2], per n = 1Cxy(k) = [+2], per n = 3
La disuguaglianza è verificata in quanto: 2 < 2*(2)1/2
SOLUZIONI (Appello N°4, Compito B)
• ESERCIZIO 1L'esercizio può risolversi in vari modi equivalenti: con il metodo della derivata, applicazione della trasformata di Fourier come integrale, come trasformata diretta del modulo di t tra gli estremi assegnati oppure notando graficamente che il segnale può ottenersi come differenze di una funzione rect con una funzione tri aventi la stessa base, ottenendo quindi in frequenza una differenza tra una sinc ed una sinc2:
X(f) = 8 sinc (4f) – 4 sinc2 (2f)
La trasformata di z(t) è direttamente nota come trasformata di una funzione sinusoidale e pari a:
Z(f) = ¼ [δ( f -1/π ) - 2 δ( f ) - δ( f + 1/π )]
Il risultato finale sarà la convoluzione tra X(f) e Z(f) ovvero la funzione X(f) centrata dove sono centrate le delta di Dirac:
Y(f) = 4 sinc (4f) – 2 sinc2 (2f) + 2 sinc [4(f - 1/π)] – sinc2 [2(f – 1/π)] +
- 2 sinc [4(f + 1/π)] + sinc2 [2(f + 1/π)]
In f = 0, la Y(f) vale:
Y(0) = 4 – 2 + 2 sinc (- 4/π) – sinc2 (- 2/π) - 2 sinc ( 4/π) – sinc2 ( 2/π) = = 2
La potenza di z(t) vale, tramite il teorema di Parseval:
P = |¼|2 + |-½|2 + |-¼|2 = 3/8 = 0.375
F. Benedetto Ottobre 2009

137
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• ESERCIZIO 2
Scriviamo intanto i valori assunti dalle due sequenze per poi operare la convoluzione tra di esse. La x(n) è una sequenza che vale sempre 0 tranne in n = 2 ( l'argomento della sinc vale zero) dove vale +j. Quindi:
x(n) = [0, 0, 0, 0, j], per n = -2, -1, 0, 1, 2.
La seconda sequenza invece è definita solo dove la differenza dei gradini non da risultato nullo, ovvero solo per un unico valore pari a +j in n = 2. Rimane ora da calcolare la differenza degli esponenziali complessi, ma solamente in n = 2, dove gli esponenziali valgono entrambi -1. Quindi:
y(n) = [0], per ogni n.
La convoluzione risulta ora immediata anche perché si tratta di convolvere la sequenza x(n) con una seuqneza di tutti zeri. Sia la convoluzione che la cross-correlazione sono sequenza nulle e la disuguaglianza è verificata nel caso limite.
F. Benedetto Ottobre 2009

138
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-201010.1.5) APPELLO N°5
• ESERCIZIO 1 (Compito A)
Si consideri il segnale y(t) dato da:
y(t) = x(t) • z(t)
dove z(t) = [3 + cos( t / 3 )]2 mentre sia x(t) il segnale rappresentato in figura.
Si calcoli:
a) la trasformata di Fourier Y(f) del segnale y(t);
b) il valore numerico di Y(f) per f = 0;
c) la potenza di z(t).
• ESERCIZIO 2 (Compito A)
Si considerino le seguenti sequenze:
x(n) = j • sinc [-(n-1/2)], per n compreso tra [-2, 2];
y(n) = j • [δ(n -3) – δ(-n + 2)];
Essendo δ(n) la funzione delta di Dirac. Per le due sequenze x(n) ed y(n), si calcoli:
a) la convoluzione z(n);
b) il valore della cross-correlazione Cxy (k);
c) si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009
t
x(t)
3-3
1/31/3
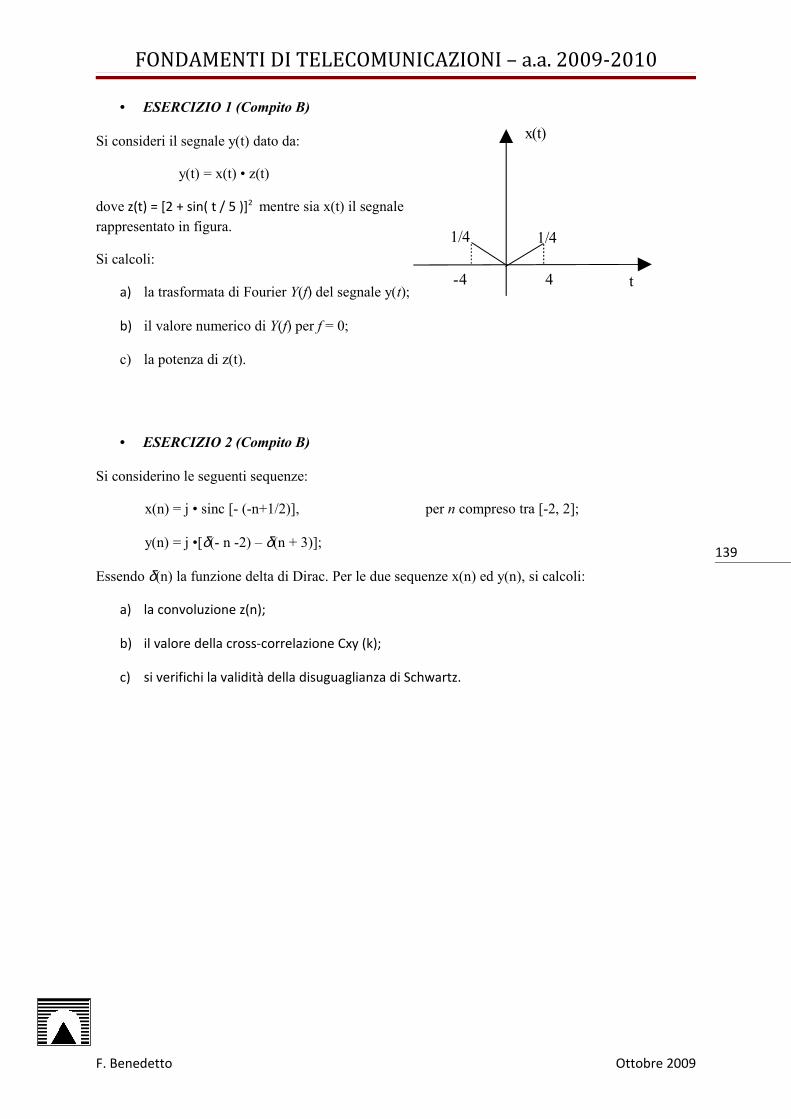
139
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• ESERCIZIO 1 (Compito B)
Si consideri il segnale y(t) dato da:
y(t) = x(t) • z(t)
dove z(t) = [2 + sin( t / 5 )]2 mentre sia x(t) il segnale rappresentato in figura.
Si calcoli:
a) la trasformata di Fourier Y(f) del segnale y(t);
b) il valore numerico di Y(f) per f = 0;
c) la potenza di z(t).
• ESERCIZIO 2 (Compito B)
Si considerino le seguenti sequenze:
x(n) = j • sinc [- (-n+1/2)], per n compreso tra [-2, 2];
y(n) = j •[δ(- n -2) – δ(n + 3)];
Essendo δ(n) la funzione delta di Dirac. Per le due sequenze x(n) ed y(n), si calcoli:
a) la convoluzione z(n);
b) il valore della cross-correlazione Cxy (k);
c) si verifichi la validità della disuguaglianza di Schwartz.
F. Benedetto Ottobre 2009
t
x(t)
4-4
1/41/4

140
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010SOLUZIONI (Appello N°5, Compito A)
• ESERCIZIO 1L'esercizio può risolversi in vari modi equivalenti: con il metodo della derivata, applicazione della trasformata di Fourier come integrale, come trasformata diretta del modulo di t tra gli estremi assegnati oppure notando graficamente che il segnale può ottenersi come differenze di una funzione rect con una funzione tri aventi la stessa base, ottenendo quindi in frequenza una differenza tra una sinc ed una sinc2:
X(f) = 3 sinc (6f) – sinc2 (3f)
La trasformata di z(t) è direttamente nota come trasformata di una funzione sinusoidale. Anche in questo caso si può ottenere in vari modi, svolgendo il quadrato del binomio e trasformando i singoli termini del trinomio oppure trasformando il binomio e facendo la convoluzione tra le trasformate (il quadrato, ovvero un prodotto nel tempo diventa una convoluzione in frequenza) e pari a:
Z(f) = 9.5 δ( f ) + 3 δ( f - 1/6π ) + 3 δ( f + 1/6π ) + ¼ δ( f - 1/3π ) + ¼ δ( f + 1/3π )
Il risultato finale sarà la convoluzione tra X(f) e Z(f) ovvero la funzione X(f) centrata dove sono centrate le delta di Dirac:
Y(f) = 28.5 sinc (6f) – 9.5 sinc2 (3f) + 9 sinc [6(f - 1/6π)] – 3 sinc2 [3(f – 1/6π)] +
+ 9 sinc [6(f + 1/6π)] – 3 sinc2 [3(f + 1/6π)] + 0.75 sinc [6(f - 1/3π)] – ¼ sinc2 [3(f – 1/3π)]+
+ 0.75 sinc [6(f + 1/3π)] – ¼ sinc2 [3(f + 1/3π)]
In f = 0, la Y(f) vale:
Y(0) = 28.5 – 9.5 + 9 sinc (- 1/π) – 3 sinc2 (- 1/2π) + 9 sinc ( 1/π) – 3 sinc2 ( 1/2π) +
+ 0.75 sinc (- 2/π) – ¼ sinc2 (- 1/π) + 0.75 sinc ( 2/π) – ¼ sinc2 ( 1/π) = = 19,417
La potenza di z(t) vale, tramite il teorema di Parseval:
P = |9.5|2 +|3|2 + |3|2 +|¼|2 + |¼|2 = 108.3125
• ESERCIZIO 2Anche per questo esercizio si può procedere almeno in un paio di modi differenti. Si noti infatti che viene richiesta la convoluzione tra due sequenze di cui la prima, x(n), assume valori che sono dati dalla sinc traslata, mentre la seconda è costituita da sue soli impulsi. Pertanto il risultato della convoluzione tra una sequenza e degli impulsi è la stessa sequenza “centrata” dove sono centrati gli impulsi. Quindi, potremmo calcolare i valori della x(n) e successivamente operare la “classica” convoluzione, oppure, calcolare prima le due sinc centrate negli impulsi e successivamente calcolarne i valori.
In tal modo otteniamo che la z(n) è pari a:
z(n) = j sinc (n -1/2) * j • [δ(n -3) – δ(-n + 2)] ovvero: z(n) = - sinc (n - 7/2) + sinc (n - 5/2) per n = 0, 1, 2, …, 5
F. Benedetto Ottobre 2009

141
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010Ora possiamo calcolarne i valori per i vari n, come segue:
z(0) = sinc (-7/2) + sinc (-5/2) = -2/7π + 2/5π = 4/35π = 0.0363e a seguire tutti gli altri valori...
Allo stesso modo si può ragionare per la cross correlazione, ricordando che questa si può esprimere come la convoluzione tra la x(n) complessa e coniugata e ribaltata e la y(n), ottenendo:
Cxy(k) = - j sinc (n +1/2) * j • [δ(n -3) – δ(-n + 2)]
Ovvero:
Cxy(k) = - sinc (n - 5/2) + sinc (n - 3/2) per n = 0, 1, 2, …, 5
Infine si può verificare facilmente la disuguaglianza richiesta.
SOLUZIONI (Appello N°5, Compito B)
• ESERCIZIO 1L'esercizio può risolversi in vari modi equivalenti: con il metodo della derivata, applicazione della trasformata di Fourier come integrale, come trasformata diretta del modulo di t tra gli estremi assegnati oppure notando graficamente che il segnale può ottenersi come differenze di una funzione rect con una funzione tri aventi la stessa base, ottenendo quindi in frequenza una differenza tra una sinc ed una sinc2:
X(f) = 4 sinc (8f) – sinc2 (4f)
La trasformata di z(t) è direttamente nota come trasformata di una funzione sinusoidale. Anche in questo caso si può ottenere in vari modi, svolgendo il quadrato del binomio e trasformando i singoli termini del trinomio oppure trasformando il binomio e facendo la convoluzione tra le trasformate (il quadrato, ovvero un prodotto nel tempo diventa una convoluzione in frequenza) e pari a:
Z(f) = 4.5 δ( f ) -2 j δ( f - 1/10π ) + 2 j δ( f + 1/10π ) - 0.25 δ( f - 1/5π ) - 0.25 δ( f + 1/5π )
Il risultato finale sarà la convoluzione tra X(f) e Z(f) ovvero la funzione X(f) centrata dove sono centrate le delta di Dirac:
Y(f) = 18 sinc (8f) – 4.5 sinc2 (4f) -8 j sinc [8(f - 1/10π)] + 2 j sinc2 [4(f – 1/10π)] +
+ 8 j sinc [8(f + 1/10π)] – 2 j sinc2 [4(f + 1/10π)] - sinc [8(f - 1/5π)] + ¼ sinc2 [4(f – 1/5π)]+
- sinc [8(f + 1/5π)] + ¼ sinc2 [4(f + 1/5π)]
In f = 0, la Y(f) vale (si noti come ora essendoci un seno i componenti simmetrici ed uguali si eliminano):
Y(0) = 18 – 4.5 – 2 sinc (8/5π) + .5 sinc (4/5π)= 13,474
La potenza di z(t) vale, tramite il teorema di Parseval:
P = |4.5|2 +|-2j|2 + |2j|2 +|-¼|2 + |-¼|2 = 28.375
F. Benedetto Ottobre 2009
142
FONDAMENTI DI TELECOMUNICAZIONI – a.a. 2009-2010• ESERCIZIO 2
Anche per questo esercizio si può procedere almeno in un paio di modi differenti. Si noti infatti che viene richiesta la convoluzione tra due sequenze di cui la prima, x(n), assume valori che sono dati dalla sinc traslata, mentre la seconda è costituita da sue soli impulsi. Pertanto il risultato della convoluzione tra una sequenza e degli impulsi è la stessa sequenza “centrata” dove sono centrati gli impulsi. Quindi, potremmo calcolare i valori della x(n) e successivamente operare la “classica” convoluzione, oppure, calcolare prima le due sinc centrate negli impulsi e successivamente calcolarne i valori.
In tal modo otteniamo che la z(n) è pari a:
z(n) = j sinc (n -1/2) * j •[δ(- n -2) – δ(n + 3)] ovvero: z(n) = - sinc (n + 3/2) + sinc (n + 5/2) per n = -5, -4, -3, …, 0Ora possiamo calcolarne i valori per i vari n, come segue:
z(0) = - sinc (3/2) + sinc (5/2) = -2/3π + 2/5π = − 4/15π = − 0.0848e a seguire tutti gli altri valori...
Allo stesso modo si può ragionare per la cross correlazione, ricordando che questa si può esprimere come la convoluzione tra la x(n) complessa e coniugata e ribaltata e la y(n), ottenendo:
Cxy(k) = - j sinc (n +1/2) * j •[δ(- n -2) – δ(n + 3)]
Ovvero:
Cxy(k) = - sinc (n + 5/2) + sinc (n + 7/2) per n = -5, -4, -3, …, 0
Infine si può verificare facilmente la disuguaglianza richiesta.
F. Benedetto Ottobre 2009