Controllo Sliding Mode

of 67
-
Upload
dariocasini -
Category
Documents
-
view
129 -
download
15
description
Sliding Mode Control
Transcript of Controllo Sliding Mode
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
TECNICHE DI CONTROLLO SLIDING MODE Nel seguito si descrive una classe particolare di tecniche di controllo, originata dai sistemi di controllo a relay, ovvero i sistemi di controllo in cui lattuatore pu assumere esclusivamente due valori (si parla anche di controllo on-off). Si tratta dei cosiddetti sistemi a struttura variabile (Variable Structure Systems, VSS) o di controllo sliding mode. Il primo nome allude al fatto che la struttura del controllore non fissa ma pu essere cambiata. Il secondo appellativo fa riferimento al fatto che i problemi di stabilizzazione in un punto di equilibrio e di inseguimento della traiettoria desiderata si risolvono forzando la traiettoria del sistema a svolgersi su una superficie detta di commutazione (switching) o di scivolamento (sliding), che contiene il punto di lavoro in cui si vuole stabilizzare il sistema. Pertanto la traiettoria viene forzata a posizionarsi su tale superficie e a scivolare (sliding) sino a raggiungere il punto operativo. questo il motivo per cui questa metodologia detta di controllo sliding mode. La tecnica di controllo detta di sliding mode si basa sul concetto intuitivo che molto pi semplice controllare sistemi del primo ordine, ovvero sistemi descritti da equazioni differenziali del primo ordine, eventualmente non lineari e in presenza di imprecisioni, piuttosto che sistemi di ordine superiore. Pertanto, questa tecnica si basa su una semplificazione della notazione descrittiva di una classe dei sistemi non lineari, grazie alla quale possibile esprimere il problema di stabilizzazione o inseguimento del generico sistema come un problema del primo ordine. Per il problema cos trasformato, quindi possibile sintetizzare una legge di controllo che permette di ottenere una performance perfetta anche in presenza di disturbi e imprecisioni. Limportanza di questa metodologia di controllo nasce dal fatto che essa una metodologia di controllo robusto, ovvero ammessa la presenza di disturbi nellanello di controllo e imprecisioni nel modello: queste ultime possono derivare o da incertezze parametriche del plant o pi semplicemente da semplificazioni di modello, quali ad esempio laver trascurato effetti di ordine superiore, come nel caso della modellazione lineare dellattrito. La struttura tipica di una legge di controllo sliding mode e, pi in generale, di una legge di controllo robusta composta da una parte nominale, che si occupa del funzionamento del sistema in condizioni nominali, ovvero in assenza di imprecisioni, e da termini aggiuntivi che si occupano del trattamento delle imprecisioni.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
1
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Oltre alla propriet di robustezza di questo metodo rispetto alle variazioni parametriche del processo e allapplicazione di disturbi, un punto di forza di questa tecnica la determinazione di una funzione di Lyapunov che garantisce la stabilit della traiettoria. Tuttavia tale tecnica presuppone la completa misurabilit degli stati. Un altro svantaggio di questo metodo il fatto che il successo della regolazione o dellinseguimento si ottiene al prezzo di una attivit di controllo estremamente elevata (lampiezza del segnale sullattuatore spesso affetta da chattering, ossia da oscillazioni spurie in alta frequenza), la quale potrebbe eccitare eventuali dinamiche di ordine superiore trascurate nel modello. comunque possibile modificare la legge di controllo, ottenendo il cosiddetto metodo sliding mode con strato limite o boundary layer, o pi in generale delle tecniche dette di soft variable structure control, ovvero di controllo a struttura variabile soft, in modo da effettuare un compromesso tra la performance e lazione di controllo. La tecnica di controllo sliding mode stata applicata con successo a numerosi e svariati sistemi di controllo non lineare, tra i quali ricordiamo i manipolatori robotici, i veicoli sottomarini, le trasmissioni e i motori degli autoveicoli, i sistemi di potenza e i motori elettrici. Nel seguito descriviamo questa tecnica di controllo prima nel semplice caso della stabilizzazione di sistemi lineari tempoinvarianti (LTI) con un ingresso, quindi nei casi della stabilizzazione e dellinseguimento di una generica traiettoria per sistemi non lineari autonomi ad un ingresso. In tutti i casi si suppone che il sistema sia espresso in forma compagna, ossia nella forma canonica detta di controllabilit.
STABILIZZAZIONE CON CONTROLLO SLIDING MODE DI SISTEMI LTI IN FORMA COMPAGNA
Sia un sistema LTI di ordine n con un ingresso, espresso dalla seguente equazione di stato:
(t) (t) u(t)= +x Ax B , (1) dove x lo stato del sistema e u lingresso (scalare).
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
2
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Supponiamo inoltre che il sistema (1) sia espresso in forma canonica compagna di controllo, del tipo
n n 1 n 2 1
0 1 0 ... 0 00 0 1 ... 0 0
(t) (t) u(t)... ... ... ... ... ...0 0 0 ... 1 0a a a ... a 1
= +
x x , (2)
con polinomio caratteristico
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
nn n 1 n 2
1 2 n 1det(s ) s a s a s ... a s a = + + + +I A . (3)
Osserviamo che se il sistema non nella forma (2) possibile riportare le (1) in tale configurazione con una trasformazione di similitudine, perci lipotesi che le equazioni di stato siano nella forma (2) non inficia la generalit del metodo per un sistema LTI. infatti noto che la trasformazione di coordinate richieste se il sistema non in forma (2) del tipo:
1
1
1
(t) (t) (t) (t)
== = = =
c
c
c
A TATz Tx x T z B TB
C CT
, (4)
dove z il nuovo vettore di stato, T la matrice di trasformazione, A, B, C sono le matrici che definiscono il sistema originale secondo la (1) e Ac, Bc, Cc sono le matrici del sistema espresso nella forma (2). Inoltre la matrice T si determina con la relazione:
1= rc rT K K , (5) dove Krc e Kr sono le matrici di Kalman di raggiungibilit rispettivamente del sistema in forma compagna e del sistema originale.
3
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Si voglia ora determinare una legge di controllo per stabilizzare luscita del sistema (1) a zero, ossia imporre che x=0 sia un punto di equilibrio globalmente asintoticamente stabile per il sistema. Si scelga ora un vettore reale, di dimensione n, del tipo
[ ]T1 2 n 1 np p ... p p=p , (6) con componenti pi>0 (i=1,..,n) e si definisca la seguente superficie, detta di commutazione (switching) o scivolamento (sliding)
T1 1 2 2 n 1 n 1 n ns( (t)) 0 p x (t) p x (t) ... p x (t) p x (t) 0 (t) 0 = + + + + = =x p x . (7)
Si assuma che lazione di controllo sia tale da portare il sistema sulla superficie di commutazione s(x(t))=0 in un certo istante di tempo t. In tal caso in quellistante di tempo t lo stato del sistema verifica la (7). Ma, considerando le prime n-1 equazioni di stato delle (2), si ha (trascurando per semplicit la variabile tempo):
2 11 2 2 13 12 3 3 2
(n 1)n 1 n n n 1 n 1
x xx x x xx xx x x x
...... ...x x x x x x
== === =
= = =
.(8)
Quindi, tenendo conto delle (8), la (7) diventa:
n 1 n 21 1 1
n n 1 2 1 1n 1 n 2d x (t) d x (t) dx (t)p p ... p p x
dtdt dt
+ + + + (t) 0= . (9)
Pertanto la variabile x1(t) la soluzione di una equazione differenziale lineare a coefficienti costanti omogenea alla quale associata la seguente equazione caratteristica, ottenuta trasformando secondo Laplace la (9) con condizioni iniziali nulle:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
n 1 n 2n n 1 2 1p s p s ... p s p 0
+ + + + = . (10)
4
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
noto che le n-1 soluzioni della (10) definiscono univocamente gli n-1 modi che compongono la soluzione x1(t) della equazione differenziale omogenea (9). Pertanto, se si sceglie il vettore p in modo che il polinomio ad esso associato, individuato dai coefficienti a partire dallultimo termine di p sino al primo e definito dal primo membro della (10), abbia le sue n-1 radici tutte disposte nel semipiano sinistro, la soluzione della (9), ovvero la variabile di stato x1(t), la combinazione di modi convergenti a zero. Poich inoltre le rimanenti variabili di stato x2(t),,xn(t) per la (2) rappresentano le derivate sino a quella di ordine n-1 di tale variabile x1(t), esse contengono le derivate di tali modi convergenti e dunque anchesse convergono a zero. Ne consegue che se ad un qualsiasi istante di tempo la traiettoria del sistema si posiziona sulla superficie di sliding, allora lequilibrio x=0 viene successivamente raggiunto ed il problema di stabilizzazione ha successo. Inoltre si osserva che, come anticipato, lo sliding mode insensibile a variazioni della forma di stato e quindi di alcuni parametri del sistema, in quanto la superficie di scivolamento (7), che definisce il modo con cui la traiettoria tende al punto nominale x=0, non dipende dal sistema. Ancora, variando il vettore p possono essere fissati a piacimento i poli del polinomio ad esso associato e dunque i modi delle variabili di stato e la velocit di convergenza al punto x=0 una volta che la traiettoria si sia posizionata sulla superficie di commutazione: in altre parole, ad ogni superficie di sliding corrisponde un determinato modo dominante nella risposta del sistema e dunque una prefissata velocit di stabilizzazione al punto obiettivo a partire da un punto su tale superficie. Pertanto, nellipotesi che sia stata definita una superficie di scivolamento opportuna (ovvero con poli del polinomio associato a p disposti nel semipiano sinistro), sufficiente progettare una legge di controllo che porti la traiettoria del sistema sulla superficie di sliding perch il problema di stabilizzazione sia risolto. Dunque il problema diventa quello di rendere la superficie di scivolamento un attrattore (alla Lyapunov) della generica traiettoria del sistema. Per determinare una legge di controllo che porta il sistema sulla superficie (7), introduciamo la seguente funzione scalare dello stato, in cui per semplicit omettiamo la dipendenza dalla variabile tempo:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
5
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( ) 21 1V( ) V s( ) s ( ) ( )2 2
= = =x x x pT 2x . (11) Tale funzione misura la distanza della traiettoria dalla curva di scivolamento s(x)=0 ed definita positiva nella variabile s(x) e radialmente illimitata nella stessa variabile. Inoltre presenta una derivata prima che vale:
( ) ( )( ) ( )( )T T T T T TV( ) V s( ) s( )s( )= = = = =x x x x p x p x x p p x x pp x . (12) Pertanto una condizione sufficiente perch tale funzione della variabile s(x) sia di Lyapunov (e quindi la superficie di sliding s(x)=0 sia attrattiva per il sistema ed in definitiva il punto x=0 sia globalmente asintoticamente stabile) che la derivata di tale funzione sia definita negativa. Supponiamo inizialmente di utilizzare un controllore con retroazione dello stato del tipo:
u(t) ( (t)) (t)= K x x , (13) dove la matrice di retroazione di stato (che in questo caso un vettore) vale [ ]1 2 n( ) k ( ) k ( ) ... k ( )=K x x x x . (14) Si osserva che il regolatore (13) ha la particolarit che i guadagni ki(x) (i=1,,n) non sono costanti ma possono cambiare con lo stato, ovvero possono variare nel tempo a seconda della regione dello spazio di stato in cui evolve la traiettoria del sistema. Osserviamo che in presenza della legge di controllo (13) lequazione di stato del sistema retroazionato si esprime come segue:
(t) ( ) (t)= x A BK x , (15) dove si omessa la dipendenza della matrice K dallo stato x. Pertanto, sostituendo la (15) nella (12), si determina la seguente condizione sufficiente per lasintotica stabilit globale:
T T T TV( ) ( ) 0= = x x pp x x pp A BK x < per s(x)0. (16) Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
6
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
La (16) si riscrive anche come segue:
T T T T T
TT T T T T T
T T
T
V( ) ( ) ( )
1
s( ) ( ) 0
= = = = =
= =< < =
x p
x p
B
B. (20)
Osserviamo che per la (2) si ha T np=p B , che un termine sempre positivo per ipotesi. Pertanto la (20) si riscrive come segue:
i i i
i i i
k per s( )x 0 i 1...nk per s( )x 0 i 1...n
> > =< < =
xx
. (21)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
7
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Dunque possibile scegliere gli elementi ki (i=1,,n) della matrice di retroazione dello stato K in modo che essi cambino valore quando il termine s(x)xi cambia di segno, ovvero quando la traiettoria attraversa la superficie di scivolamento rispetto ad una direzione xi dello spazio di stato. Una semplificazione della (21) consiste nello scegliere gli elementi ki come segue:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
...n1...n
i i i
i i i
k per s( )x 0 i 1k per s( )x 0 i
= + > == < =
xx
, (22)
dove un generico parametro positivo di progetto. Si osservi che le (13)-(14)-(22) definiscono una legge di controllo di retroazione lineare dello stato adattativa, in quanto i parametri del regolatore cambiano in tempo reale sulla base del valore dello stato. Una scelta alternativa al regolatore definito dalle (13)-(14)-(22) consiste nellosservare che la (12) si pu anche riscrivere come segue per la (1):
( ) ( ) (T T T T T T TV( ) u s( ) u s( ) u= = + = + =x x pp x x pp Ax B x p Ax p B x p B x )+ , (23) dove il vettore precedentemente definito nella (18). Pertanto una possibile scelta del regolatore che rende la funzione V(s(x)) di Lyapunov rispetto alla s(x) la seguente:
1 2 T1u(t) u (t) u (t) (t) sig n(s( (t)))= + = x x
p B,
con , 1u (t) (t)= x 2 T1u (t) sig n(s( (t)))= x
p B, (24)
dove ancora un generico parametro positivo di progetto e si definisce
1 se y 0sign(y)
1 se y 0+ >=
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( )T T T1V( ) s( ) u s( ) (t) sig n(s( (t)))s( )sig n(s( )) | s( ) |
= + = = =
x x p B x x p B x x xp B
x x x
=, (26)
Dunque anche con la scelta (24) la derivata della V(x) definita negativa in s(x). Osserviamo che la (24) esprime il fatto che la legge di controllo sia formata da due parti: una prima parte (u1) necessaria alleliminazione dei termini dipendenti dallo stato nella derivata della funzione candidata V(s(x)), una seconda (u2) che rende tale derivata definita negativa. Osserviamo che la legge di controllo (24) alternativa al regolatore (13)-(14)-(22) definisce ora un controllore non lineare. Si osservi poi che sia le (13)-(14)-(22) che la (24) presentano una discontinuit nel segnale di controllo quando la traiettoria attraversa la superficie di commutazione. Questa proprio la causa del fenomeno del chattering discusso in precedenza. Una ulteriore alternativa che risolve questo problema consiste nello scegliere la seguente azione di controllo:
1 2 T1u(t) u (t) u (t) (t) sat(s( (t)), )= + = x x
p B ,
con , 1u (t) (t)= x 2 T1u (t) sat(s( (t)), )= x
p B, (27)
dove una costante positiva e si definisce
( )1 se y
ysat y, se y
1 se y
+ > =
< , (28)
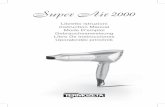
la quale evidentemente una funzione continua e permette dunque leliminazione delloscillazione in alta frequenza dellazione di controllo. Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
9
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-3 -2 -1 0 1 2 3
-1
-0.5
0
0.5
1
1.5 Funzione segnoFunzione saturazione con phi=0.5
Infatti con questa nuova scelta la (23) si riscrive:
2s( ) se s( ) 0
s ( )V( ) s( )sat(s( ), ) se s( )
s( ) se s( ) 0
>= =
>
+
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
eventualmente porre il sistema nella forma canonica di controllo (2); fissare un vettore p di n componenti positive (6) con le n-1 radici del polinomio
ad esso associato (a partire dallultimo sino al primo coefficiente) tutte a parte reale negativa;
determinare la superficie di scivolamento s(x)=0 (7) associata a tale vettore; determinare il vettore definito dalla (18); fissare una costante positiva ; eventualmente fissare una costante positiva nel caso si voglia applicare la (27); determinare la legge di controllo attraverso le (13)-(14)-(22) o alternativamente la
(24) o la (27).
ESEMPIO Sia il sistema LTI del secondo ordine ad un ingresso definito dalla seguente equazione differenziale:
x(t) x(t) u(t) 0 = . (30) Scegliendo lo stato x=[x1 x2]T=[x ]x T e luscita pari alla prima componente di stato, si ottengono le seguenti equazioni di stato del sistema:
1 2
2 2
1
x (t) x (t)x (t) x (t) u(t)y(t) x (t)
== +
=
, (31)
che evidentemente in forma canonica di controllo. Si ha n=2 ed inoltre risulta:
0 10 1 = A ,
01 = B , [ ]1 0=C . (32)
Scegliamo il seguente vettore:
[ ]T1 1=p , (33)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
11
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
il cui polinomio associato s+1 presenta un polo reale negativo in s=-1. A tale >vettore poi associata la superficie di commutazione:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
2T
1s( ) x x= = +x p x . (34) Il vettore vale
[ ][ ] [TT 0 11 1 1 1 0 20 0 1
1 11
= = = p A
p B]
> = = < =+ += + + += +
xx
. (37)
12
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-4 -3 -2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
y
La figura precedente mostra il ritratto di fase del sistema in anello chiuso. evidente lattrattivit della superficie di commutazione (in questo caso si tratta di una linea di scivolamento).
0 5 10 15 20-5
0
5
Tempo [s]
Controllo sliding mode con retroazione lineare adattativa dello stato
Variabile di stato x1Variabile di stato x2Riferimento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
13
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 5 10 15 20-10
-5
0
5
10
15
Tempo [s]
Controllo sliding mode con retroazione lineare adattativa dello stato
Azione di controllo
Inoltre le figure precedenti mostrano rispettivamente landamento nel tempo delle variabili di stato del sistema e dellazione di controllo per condizioni iniziali x1(0)=3 e x2(0)=3. Sono evidenti sia il successo della regolazione che il fenomeno del chattering della legge di controllo (che in questo caso si verifica circa a partire dallistante t=1.5 secondi). Il fenomeno del chattering evidenziato anche nella successiva figura, la quale mostra come la legge di controllo (36)-(37) presenti una variazione di segno dei parametri ki quando si verifica lattraversamento della superficie di sliding. Pertanto la traiettoria, quando incontra tale linea di commutazione, tende a muoversi nervosamente intorno a questultima.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
14
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-4 -3 -2 -1 0 1 2 3 4-4
-3
-2
-1
0
1
2
3
4
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi
TraiettoriaLinea di scivolamento
Inoltre la successiva figura mostra landamento nel tempo della variabile s(x(t)), la quale si annulla dopo circa t=1.5 s (istante di raggiungimento della superficie di commutazione).
0 5 10 15 20-1
0
1
2
3
4
5
6
Tempo [s]
Variabile s(x(t)) con controllo sliding mode
Applichiamo ora in alternativa la (24). Con le scelte fatte si ha ora: Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
15
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
[ ][ ]
T
11 2
2
2 1 2
1u(t) (t) sig n(s( (t)))
x (t) 10 2 0.5 sig n(x (t) x (t))0x (t)
1 11
2x (t) 0.5sig n(x (t) x (t))
= =
= + = = +
x xp B
. (38)
Anche in questo caso nelle figure successive mostrato il ritratto di fase del sistema in anello chiuso, landamento nel tempo delluscita del sistema e dellazione di controllo e infine la traiettoria del sistema per condizioni iniziali x1(0)=3 e x2(0)=3. Sono evidenti lattrattivit della superficie di commutazione, il successo della regolazione e il fenomeno del chattering. Si osserva anche che in questo caso la convergenza pi lenta rispetto al caso precedente.
-4 -3 -2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
y
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
16
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 5 10 15 20-1
0
1
2
3
4
5
6
Tempo [s]
Controllo sliding mode dicontinuo con retroazione nonlineare dello stato
Variabile di stato x1Variabile di stato x2Riferimento
0 5 10 15 20-7
-6
-5
-4
-3
-2
-1
0
1
2
Tempo [s]
Controllo sliding mode dicontinuo con retroazione nonlineare dello stato
Azione di controllo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
17
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-6 -4 -2 0 2 4 6-6
-4
-2
0
2
4
6
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi
TraiettoriaLinea di scivolamento
Inoltre la successiva figura mostra landamento nel tempo della variabile s(x(t)), la quale si annulla dopo circa t=12 s (istante di raggiungimento della superficie di commutazione).
0 5 10 15 20-1
0
1
2
3
4
5
6
Tempo [s]
Variabile s(x(t)) con controllo sliding mode
Applichiamo quindi in alternativa la (27). In questo caso con le scelte fatte e fissando =0.1 si ha: Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
18
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
2 1 2T1u(t) (t) sat(s( (t)), ) 2x (t) 0.5sat(x (t) x (t),0.1)= = +x x
p B. (39)
-4 -3 -2 -1 0 1 2 3 4
-4
-3
-2
-1
0
1
2
3
4
y
I risultati sono riportati nella figura precedente e in quelle successive. Si osservi landamento simile della traiettoria e delle variabili di stato rispetto al caso precedente. Tuttavia si il fenomeno del chattering ora totalmente assente.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
19
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 5 10 15 20-1
0
1
2
3
4
5
6
Tempo [s]
Controllo sliding mode continuo con retroazione nonlineare dello stato
Variabile di stato x1Variabile di stato x2Riferimento
0 5 10 15 20-7
-6
-5
-4
-3
-2
-1
0
1
Tempo [s]
Controllo sliding mode continuo con retroazione nonlineare dello stato
Azione di controllo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
20
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-5 0 5-5
0
5
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi
TraiettoriaLinea di scivolamento
Inoltre la successiva figura mostra landamento nel tempo della variabile s(x(t)), la quale si annulla ancora dopo circa t=12 s (istante di raggiungimento della superficie di commutazione).
0 5 10 15 200
1
2
3
4
5
6
Tempo [s]
Variabile s(x(t)) con controllo sliding mode
Velocizziamo ora la risposta del sistema applicando ancora la (27) con =0.1 ma in questo caso scegliamo =5. I risultati sono riportati nelle figure successive, le quali Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
21
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
mostrano come il sistema sia ora molto pi rapido che in precedenza. In questo caso, infatti, la linea di sliding si raggiunge in circa t=1.2 s, mentre la stabilizzazione avviene in circa t=5 s. Si osserva tuttavia come il chattering aumenti rispetto al caso precedente.
0 5 10 15 20-3
-2
-1
0
1
2
3
4
Tempo [s]
Controllo sliding mode continuo con retroazione nonlineare dello stato
Variabile di stato x1Variabile di stato x2Riferimento
0 5 10 15 20-12
-10
-8
-6
-4
-2
0
2
4
6
Tempo [s]
Controllo sliding mode continuo con retroazione nonlineare dello stato
Azione di controllo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
22
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-5 0 5-5
0
5
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi
TraiettoriaLinea di scivolamento
0 5 10 15 200
1
2
3
4
5
6
Tempo [s]
Variabile s(x(t)) con controllo sliding mode
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
23
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
STABILIZZAZIONE CON CONTROLLO SLIDING MODE DI SISTEMI NON LINEARI AUTONOMI IN FORMA COMPAGNA
possibile stabilizzare una particolare classe di sistemi non lineari molto diffusi in natura con una tecnica analoga a quella precedentemente descritta per i sistemi LTI. Si tratta dei sistemi non lineari autonomi ad un ingresso u descritti da ununica equazione differenziale, a coefficienti costanti di ordine n in una variabile x di interesse, che presenti una combinazione non lineare di x e delle sue derivate e lineare dellingresso u: ( ) ( )(n) (n 1) (n 1)1 1x (t) f x(t),x(t),..., x (t) g x(t),x(t),..., x (t) u(t) = + , (40)
dove si posto n
(n)d x(t) x (t)dt
= . Introducendo il vettore di stato
T(n 1)(t) x(t) x(t) ... x (t) = x (41) un modello equivalente del sistema (40) il seguente:
1 1
00 1 ... 0 000 0 ... 0 0
(t) (t) ...0 0 ... 1 000 0 ... 0 1
f ( (t)) g ( (t))u(t)0 0 0 0 0
= + +
x x
x x
, (42)
o pi semplicemente:
2 2
3 3
n n
1 1 1 1
x (t) x (t) 0x (t) x (t) 0
(t) (t) u(t)... ... 0x (t) x (t) 0
f ( (t)) g ( (t))u(t) f ( (t)) g ( (t))(t) ( (t)) ( (t))u(t)
= = + + = +
x x
x x x xx f x g x
, (43)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
24
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
dove si posto:
2
3
n
1
x (t)x (t)
( (t)) ...x (t)
f ( (t))
=
f x
x
,
1
00
( (t)) 00
g ( (t))
=
g x
x
. (44)
Naturalmente le funzioni f1(x(t)) e g1(x(t) sono in generale non lineari. Quando esse sono lineari la (42) analoga alla (2). In particolare tali equazioni sono identiche se f1(x(t) lineare e g1(x(t)=1. Si assume ancora di voler determinare un controllore tale che x=0 sia un punto di equilibrio globalmente asintoticamente stabile per il sistema controllato (problema di stabilizzazione). Si definiscono nuovamente il vettore p dato dalla (6), con la condizione che il polinomio associato abbia radici tutte nel semipiano reale negativo, quindi si individuano la superficie di sliding s(x)=0 secondo la (7) e la funzione candidata V(s(x)) in base alla (11). Anche in questo caso si pu associare alla superficie s(x)=0 una equazione differenziale con equazione caratteristica del tipo (9), come mostrato nei paragrafi precedenti. Ragionando come in precedenza, si conclude che le variabili di stato x1(t) xn(t) sono date dalla combinazione di modi convergenti a zero. Ne consegue che se ad un qualsiasi istante di tempo la traiettoria del sistema si posiziona sulla superficie di sliding, allora lequilibrio x=0 viene raggiunto a regime ed il problema di stabilizzazione ha successo. Pertanto il problema della stabilizzazione consiste ancora nel rendere la superficie di commutazione s(x)=0 attrattiva, ovvero nello scegliere una legge di controllo in modo che la funzione V(s(x)) abbia derivata definita negativa. In questo caso la derivata della funzione di Lyapunov vale, trascurando la dipendenza dal tempo:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
25
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( ) ( ) ( )( )
T T
T T
V( ) V s( ) s( )s( ) s( ) s( ) s( )
s( ) ( ) ( )u
= = = = == +
x x x x x p x x p x x p
x p f x p g x
T =x, (45)
la quale nulla per s(x)=0 e deve inoltre essere strettamente negativa quando risulta s(x)0. Scegliendo la legge di controllo:
T1 2 T T
1 1u(t) u (t) u (t) ( (t)) sig n(s( (t)))( (t)) ( (t))
= + = p f x xp g x p g x
,
con T1 T1u (t) ( (t))( (t))
= p f xp g x
, 2 T1u (t) sig n(s( (t)))( (t))
= xp g x
, (46)
dove sign indica la funzione segno (26) e una costante positiva opportuna, si ha dunque:
( )T T T
T T
T T
1 1V( ) s( ) ( ) ( ) ( ) sig n(s( ))( ) ( )
s( ) ( ) ( ) sig n(s( )) s( )sig n(s( )) | s( ) |
= + = = =
x x p f x p g x p f x xp g x p g x
x p f x p f x x x x x
=
0
, (47)
che una funzione definita negativa in s(x). Pertanto la asintotica stabilit globale della superficie s(x)=0 e quindi del punto x=0 assicurata. Si nota ancora che il segnale di controllo (46) affetto da una discontinuit quando avviene il passaggio della traiettoria del sistema attraverso la superficie di scivolamento. Come gi discusso, ci origina il fenomeno di chattering. Inoltre importante notare che la superficie di scivolamento viene raggiunta per la prima volta in un tempo tR finito. Infatti supponiamo che la condizione iniziale x(0) sia tale che risulti:
0s s( (0))= >x . (48) Per le (45) e (47) si ha allora:
V( ) s( )s( ) s( )sig n(s( )) | s( ) |= = = x x x x x x , (49) Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
26
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
e per la (48) si conclude che deve essere per t=0
s( (t)) = x , (50) equazione valida per tutti gli istanti di tempo t[0,tR], ovvero dallistante di tempo iniziale sino allistante in cui s(x(t)) cambia di segno rispetto alla (48), ovvero sino allistante tR di raggiungimento della superficie di commutazione da parte della traiettoria. Integrando lequazione differenziale (50) tra gli estremi temporali t=0 e t=tR, nei quali si ha rispettivamente s(x(0))=s0 e s(x(tR))=0, si ottiene dunque:
RR
00
t0 0 t 00 R Rs 0
s 0
sds dt s( ) t 0 s t 0 t= = = = x , (51) che un istante di tempo finito. Ragionando in modo analogo per
0s s( (0))
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Raggruppando le (51) e (54) si ha in definitiva:
0R
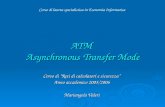
| s |t = , (55) che esprime il fatto che la superficie di scivolamento viene raggiunta in un tempo finito inversamente proporzionale alla costante , che quindi definisce la velocit di raggiungimento della superficie di commutazione, e direttamente proporzionale alla distanza del punto iniziale della traiettoria da tale superficie. Pertanto la legge di controllo (46) impone che il sistema funzioni secondo due modalit: nellintervallo di tempo [0, tR[ si ha la fase di raggiungimento della superficie di sliding, mentre nellintervallo [tR, +[ si ha la fase di scivolamento lungo la superficie di sliding (si veda la figura successiva, che schematizza un esempio di traiettoria per un sistema del secondo ordine stabilizzato in x=0 con un regolatore sliding mode).
x=0
Fase di scivolamento
Fase di raggiungimento
s(x)=p1x1+p2x2=0
x2
x1
Nel progetto e nella analisi dei sistemi di controllo a struttura variabile si assume implicitamente, con luso della funzione segno nella determinazione della legge di controllo, che lazione di controllo possa variare in modo infinitamente rapido quando la traiettoria del sistema attraversa la superficie di scivolamento. Nella pratica, un attuatore fisico non pu manipolare tali variazioni a velocit infinita, ed per giunta spesso rallentato per la presenza di ritardi di tempo dovuti al tempo finito di calcolo della legge di controllo, che solitamente implementata con un elaboratore digitale. Il risultato proprio loscillazione rapida della traiettoria lungo la superficie di scivolamento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
28
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
(chattering). Naturalmente questa indesiderata, poich porta alla presenza di dinamiche in alta frequenza non modellate del sistema. Il problema del chattering solitamente risolto approssimando la caratteristica della funzione segno utilizzata nella legge di controllo (46) con una funzione meno brusca, la funzione saturazione definita dalla (29). Si introduce pertanto una legge di controllo:
T1 2 T T
1 1u(t) u (t) u (t) ( (t)) sat(s( (t)), )( (t)) ( (t))
= + = p f x xp g x p g x
,
con T1 T1u (t) ( (t))( (t))
= p f xp g x
, 2 T1u (t) sat(s( (t)), )( (t))
= xp g x
. (56)
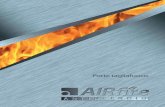
La (46) e la (56) possono essere interpretate geometricamente per un sistema del secondo ordine utilizzando la figura successiva. Infatti si consideri il generico punto A=(x1,x2) e il segmento AC, che rappresenta la componente verticale della distanza del punto dalla superficie di scivolamento. Si ha:
( )2 21 1 2 21 12 22 22
p x p xp x | s( ) |AC xp pp
+ = = = x
. (57)
x1
x2
superficie di sliding: rettas(x)=p1x1+p2x2=0
Fase di raggiungimento
/p2
Fase di scivolamento
strato limite B C=(x1,-p1x2/p2)
B=(x1,(-p1x2)/p2) A=(x1,x2)
=/p1
x=0
retta p1x1+p2x2+=0
retta p1x1+p2x2-=0
D=(x1,0)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
29
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Si definisca ora lo strato limite o boundary layer B come linsieme dei punti compreso tra le due rette:
11 1 2 2 2 1
2 2
pp x p x 0 x xp p
+ = = . (58) Allora la componente verticale della distanza di un punto esterno al boundary layer B vale:
1 1 1 12 2 2 2 2
| s( ) | p x p x | s( ) |AB AC BD DC AC BCp p p p p
= = = = x x . (59) Pertanto il boundary layer linsieme dei punti per i quali risulta ACBC, ovvero:
{2 2
| s( ) |B , B ,| s( ) |p p
= = xx x } x . (60)
Ne consegue che la legge di controllo continua (56) pari alla (46) se la traiettoria esterna allo strato limite, ovvero se il generico punto Bx si sceglie la legge di controllo secondo la condizione di scivolamento; invece, quando la traiettoria interna al boundary layer B si utilizza una approssimazione continua della (46) che dipende dallo spessore /p2 dello strato limite ed quindi tanto pi prossima alla (46) tanto pi piccolo , ovvero quanto pi stretto il boundary layer che si sviluppa intorno alla superficie di switching. Naturalmente lo spessore finito /p2 dello strato limite e in definitiva il valore non nullo di fanno s che la regolazione non sia perfetta, ovvero vi sia un errore massimo che in valore assoluto vale =/p1, pari allampiezza dello strato limite (si veda la figura precedente), il quale evidentemente dipende dalla pendenza della superficie di sliding p1/p2 e dallo spessore . Pertanto consigliabile scegliere uno strato limite di spessore molto piccolo.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
Pertanto, per garantire il funzionamento della legge di controllo necessario in questo caso garantire lattrattivit dello strato limite B piuttosto che della semplice superficie s(x)=0. comunque possibile dimostrare con una opportuna funzione candidata V(x) che non solo il boundary layer globalmente asintoticamente stabile, ma anche che nella grande maggioranza dei sistemi non lineari il punto x=0 asintoticamente stabile.
30
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Come detto, se cos non si ottiene una regolazione affetta da un errore. Pertanto la (56) costituisce una scelta di compromesso: la stabilizzazione non perfetta ma lazione di controllo richiesta agli attuatori meno nervosa rispetto a quella richiesta dalla legge (46), la quale produce invece una stabilizzazione perfetta. Per quanto riguarda listante di raggiungimento dello strato limite, anche in questo caso vale la (55), che si determina come fatto in precedenza supponendo che il punto iniziale della traiettoria sia allesterno dello strato limite definito dalla (56), ovvero che risulti s(x(0))> oppure s(x(0))
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
1 2
2 2 2
x (t) x (t)1x (t) | x (t) | x (t) u(t)5 5
== +
1 . (62)
Si vuole ora stabilizzare il sistema. Scegliamo il seguente vettore:
[ ]T1 1=p , (63) che presenta un polo reale negativo in s=-1 e al quale associata la superficie di commutazione:
1 2s( ) x x 0= + =x . (64) Scegliamo =5. La legge di controllo (46) in questo caso diventa:
[ ][ ]
[ ]
TT T
21 2
2 2
2 2 2 1 2
1 1u(t) ( (t)) sig n(s( (t)))( (t)) ( (t))
x (t)1 11 1 5 sig n(x (t) x (t))10 0| x (t) | x (t)
51 1 1 11 15 5
5x (t) | x (t) | x (t) 25sig n(x (t) x (t))
= =
= + = = + +
p f x xp g x p g x
. (65)
Le figure successive mostrano rispettivamente landamento nel tempo delle variabili di stato del sistema, dellazione di controllo e la traiettoria per condizioni iniziali x1(0)=2 e x2(0)=1. Sono evidenti sia il successo della regolazione che il fenomeno del chattering della legge di controllo. Inoltre in questo caso si ha s(0)=x1(0)+x2(0)=3, pertanto risulta
0R
| s |t = =0.6s. Infatti il chattering si verifica a partire dallistante tR=0.6 secondi, istante di raggiungimento della superficie di sliding.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
32
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Tempo [s]
Controllo sliding mode discontinuo
Variabile di stato x1Variabile di stato x2Riferimento
0 2 4 6 8 10-30
-20
-10
0
10
20
30
40
Tempo [s]
Controllo sliding mode discontinuo
Azione di controllo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
33
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi
TraiettoriaLinea di scivolamento
Inoltre la successiva figura mostra landamento nel tempo della variabile s(x(t)), la quale si annulla dopo circa t=0.6 s (istante di raggiungimento della superficie di commutazione).
0 2 4 6 8 10-0.5
0
0.5
1
1.5
2
2.5
3
Tempo [s]
Variabile s(x(t)) con controllo sliding mode
Applichiamo ora in alternativa la legge di controllo continua (56). In questo caso con le scelte fatte e fissando =0.1 si ha: Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
34
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
[ ][ ]
[ ]
TT T
21 2
2 2
2 2 2 1 2
1 1u(t) ( (t)) sat(s( (t)), )( (t)) ( (t))
x (t)1 11 1 5 sat(x (t) x (t),0.1)10 0| x (t) | x (t)
51 1 1 11 15 5
5x | x (t) | x (t) 25sat(x (t) x (t),0.1)
= =
= + = = + +
p f x xp g x p g x
. (66)
I risultati sono riportati nelle figure successive. Si osservi landamento simile della traiettoria e delle variabili di stato rispetto al caso precedente. Tuttavia il fenomeno del chattering ora totalmente assente e lazione di controllo si assesta a zero, pertanto il costo di questo controllore molto ridotto rispetto al precedente.
0 2 4 6 8 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
Tempo [s]
Controllo sliding mode continuo
Variabile di stato x1Variabile di stato x2Riferimento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
35
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-30
-25
-20
-15
-10
-5
0
5
10
Tempo [s]
Controllo sliding mode continuo
Azione di controllo
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi
TraiettoriaLinea di scivolamento
Inoltre la successiva figura mostra landamento nel tempo della variabile s(x(t)), la quale si annulla ancora dopo circa t=0.6 s.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
36
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
Tempo [s]
Variabile s(x(t)) con controllo sliding mode
ROBUSTEZZA DEL CONTROLLO SLIDING MODE DI SISTEMI NON LINEARI AUTONOMI IN FORMA COMPAGNA
Nel seguito discutiamo il problema della robustezza alle imprecisioni nel modello delle leggi di controllo sliding mode per il semplice caso della stabilizzazione con la legge di controllo discontinua definita dalla (46). Tuttavia, i risultati esposti nel seguito sono validi anche nel caso dellinseguimento, nonch in presenza di una legge di controllo continua quale la (56). Supponiamo che il modello del sistema dato dalle (40)-(43) sia noto con una certa imprecisione. In altre parole, sono note delle approssimazioni e delle funzioni f(x) e g(x), tali che gli errori e
( )f x ( )g x| ( ) ( ) |f x f x | ( ) ( ) |g x g x siano limitati superiormente e
che e g(x) abbiano lo stesso segno. Pertanto la migliore approssimazione della legge di controllo continua si ottiene dalla (46) sostituendo alle f(x) e g(x) le loro stime:
( )g x
T
T T1 1u(t) ( (t)) sig n(s( (t)))
( (t)) ( (t))= p f x x
p g x p g x. (67)
Scegliendo ancora come funzione candidata la (12), si ha dunque:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
37
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( ) ( )T T TT T T
T T
T T T T T
T T
T
V( ) s( )s( ) s( ) s( ) ( ) ( )u
1 1s( ) ( ) ( ) ( ) sig n(s( )) ( ) ( )
( ) ( ) ( ) ( ) ( )s( ) sig n(s( )) ( ) ( )
( )s( )
= = = + = = + = =
=
x x x x p x x p f x p g x
x p f x p g x p f x xp g x p g x
p f x p g x p g x p f x p g xx xp g x p g x
p f x px
( ) ( )( )=
( )
T T T
T T
T T T T
T T
( ) ( ) ( ) ( ) sig n(s( )) ( ) ( )
( ) ( ) ( ) ( ) ( )s( ) sig n(s( )) s( )sig n(s( )) ( ) ( )
= =
g x g x p f x p g x xp g x p g x
p f x g x g x f x p p g xx xp g x p g x
x x , (68)
dove lultima relazione verificata (ovvero la (68) una quantit negativa) se una costante o una funzione positiva sufficientemente grande e se sono verificate le ipotesi che gli errori e | ( ) ( ) |f x f x | ( ) ( ) |g x g x siano entrambi limitati superiormente e che
e g(x) abbiano lo stesso segno. In altri termini, la (68) costituisce una generalizzazione della condizione di scivolamento. ( )g x
possibile dimostrare in modo analogo che le leggi di controllo sliding mode sono robuste rispetto alla presenza di disturbi limitati.
INSEGUIMENTO CON CONTROLLO SLIDING MODE DI SISTEMI NON LINEARI AUTONOMI IN FORMA COMPAGNA
Nel seguito descriviamo un approccio analogo a quello descritto nel paragrafo precedente ma pi generale, poich affronta il problema dellinseguimento. Questo approccio dovuto a Slotine. Il sistema ancora non lineare di ordine n del tipo (40)-(43), ma lobiettivo il tracking o inseguimento da parte delle variabili di stato di una traiettoria tempovariante definita dal seguente vettore:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
38
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
T(n 1)d d d(t) x (t) x (t) ... x (t)
= dx , (69) eventualmente in presenza di imprecisioni nel modello. In, particolare, in presenza di imprecisioni si suppone quindi di non conoscere perfettamente le funzioni f(x) e g(x), ovvero f1(x) e g1(x), ma una loro stima e , nonch una stima F1f ( )x 1g ( )x 1(x) e G1(x) del massimo errore su ciascuna di esse. Inoltre, se g1(x) non nota si assume che g1(x) e
siano di segno costante noto. 1g ( )x Si definisce lerrore di inseguimento come segue:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
=
T(n 1)1 d 2 d n d
Tn 1 (n 1)1 d 1 d 1 d
T(n 1)
(t) (t) (t) x (t) x (t) x (t) x (t) ... x (t) x (t)
x (t) x (t) x (t) x (t) ... x (t) x (t)
e(t) e(t) ... e (t)
= = = = =
de x x
, (70)
dove si posto in analogia con la definizione
del vettore di stato. Si definisce poi la superficie di scivolamento
T(n 1)d d d(t) x (t) x (t) ... x (t)
= dx
n 1ds( (t)) ( )
dt= + x e(t) = 0 , (71)
dove un parametro positivo di progetto, detto parametro di sliding. In particolare per un sistema di ordine n=2 la superficie data dalla (71) , trascurando la dipendenza dal tempo:
2 1d de(t)s( (t)) ( ) s( (t)) s( ) e e 0dt dt
= + = = + = = + =x x e(t) 0 e(t) 0 x , (72) mentre per n=3 si ottiene
39
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
23 1 2
2
22 2
2
d d ds( (t)) ( ) s( (t)) ( 2 )dt dtdt
d e(t) de(t)s( (t)) 2 s( ) e 2 e e 0dtdt
= + = = + + =
= + = = + + =
x x
x x
e(t) 0 e(t) 0
+ e(t) 0
, (73)
e cos via per valori superiori della dimensione dello stato n. Se si confronta la (71) con la (7), si nota che in questo caso la superficie di commutazione (switching surface) definita da un unico parametro , per cui la scelta della superficie pi semplice. Inoltre, trasformando secondo Laplace la (71) con condizioni iniziali nulle si ottiene lequazione caratteristica associata allequazione differenziale (71), i cui poli definiscono i modi associati allerrore e(t) soluzione della equazione differenziale omogenea (71):
n 1(s ) + = 0 . (74) Pertanto gli n-1 modi associati allerrore e(t) della variabile di stato x1(t) rispetto allobiettivo xd(t) sono le funzioni e-t, te-t,tn-2e-t, che sono tutte convergenti a zero avendo scelto >0. Poich le altre componenti dello stato sono le derivate della variabile x1(t), anchesse sono convergenti. Ne consegue che, una volta raggiunta la superficie di commutazione, la traiettoria del sistema evolve in modo che a regime risulti e(t)=0, ovvero la traiettoria tende a regime al punto xd(t). Pertanto il problema di inseguimento, il quale consiste nel fare in modo che sia:
x(t)=xd(t), o equivalentemente x(t)=xd(t), (75) equivalente a quello di far restare la traiettoria del sistema sulla superficie
s(x(t))=0 (76) per ogni istante di tempo. Cos, il problema n-dimensionale di inseguimento (75) si riduce a quello di mantenere nulla la quantit scalare s. Osserviamo inoltre che, sebbene la (71) rappresenti una ben determinata superficie nelle variabili errore (ovvero una retta nel piano (e,e ) se n=2, una superficie nello spazio Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
40
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
(e,e , ) se n=3 ecc), diversamente dal problema di stabilizzazione, nel caso dellinseguimento nello spazio di stato la superficie di commutazione tempovariante. Ad esempio, se il sistema del secondo ordine la superficie di sliding varia nella variabile tempo t e, una volta raggiuntala, la traiettoria del sistema, restando su di essa, tende al punto e(t)=0, ovvero al punto x
e
d(t), che anchesso tempovariante. Scegliamo ora una legge di controllo che renda la superficie di commutazione attrattiva. Analogamente a quanto fatto per il problema della stabilizzazione, scegliamo la funzione candidata:
21V( ) s ( )2
=x x
x
. (77)
Essa definita positiva in s(x) con derivata prima:
V( ) s( )s( )=x x , (78) che risulta definita negativa in s(x) se vale la relazione:
( )V( ) s( )s( ) s( )sign s( ) | s( ) | 0= = x x x x x x < per s(x)0 (79) con parametro positivo grande a piacere. Eventualmente pu essere anche una funzione dello stato, ovvero =(x(t)). La (79) detta condizione di scivolamento o sliding. Quando la condizione (79) valida, la superficie s(x)=0, che una possibile traiettoria del sistema, risulta una traiettoria globalmente asintoticamente stabile per il teorema di Lyapunov del metodo diretto. Si noti che se vale la relazione:
(0) (0)= dx x , (80) Si ha e(0)=0, ovvero la traiettoria del sistema parte da un punto sulla superficie di scivolamento ed il sistema pertanto sempre in regime di sliding, viceversa se la (80) non verificata, la (79) impone che la superficie di scivolamento venga raggiunta dalla traiettoria del sistema per la prima volta in un tempo finito che si ottiene al solito
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
41
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
integrando la condizione di scivolamento e pu essere determinato come nei paragrafi precedenti:
0R
| s |t = , (81) dove si posto s0=s(x(0)). Si distingue dunque ancora una volta un transitorio di durata finita detto fase di raggiungimento e una fase successiva detta fase di scivolamento. A titolo di esempio, nella figura successiva rappresentata la traiettoria di un sistema del secondo ordine (n=2) controllato con la tecnica sliding mode. La superficie di scivolamento una retta nel piano delle fasi dellerrore, descritto dai punti (e, ). Tale superficie di scivolamento contiene evidentemente il punto 0, ovvero il punto (x
e
1,x2)=(xd, )=xdx d. Questo generalmente tempovariante, per cui la stessa superficie, la quale una retta nel piano (e, ), nel piano (xe 1,x2) una curva espressa dalla relazione ottenuta dalla (72):
d d
2 1 d d
e(t) e(t) 0 x(t) x (t) x(t) x (t) 0x (t) x (t) x (t) x (t)+ = + =
= + +
, (82) che evidentemente varia nel tempo poich xd(t), e conseguentemente la sua derivata, variano nel tempo nel caso di inseguimento. Invece nel caso di stabilizzazione il punto obiettivo della traiettoria evidentemente fisso. Ci corrisponde al caso particolare xd=0, in cui si ottiene invece una retta di scivolamento fissa (stabilizzazione) nel piano (x1,x2). quindi chiaro il motivo per il quale spesso nel caso si affronti un problema di inseguimento si studia la traiettoria nel piano (e, ). e
pendenza -
e=0
Fase di scivolamento
Fase di raggiungimento
s(x)=e +e=0
e
e
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
42
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Si noti poi che, poich nella fase di scivolamento vale lequazione (71), la cui soluzione e(t) contiene i modi e-t, te-t,tn-2e-t, il parametro determina la costante di tempo della fase di scivolamento. dunque evidente quanto sia delicata la scelta di tale parametro, poich da esso dipende la velocit di convergenza verso il punto e=0. Evidentemente, se tale parametro troppo elevato, il sistema pu andare incontro a instabilit poich si richiede una velocit di convergenza che esso non in grado di raggiungere. Viceversa un valore di troppo basso porta ad un inseguimento lento della traiettoria desiderata. Vediamo ora come determinare una legge di controllo che soddisfa la condizione di sliding (79). Il primo membro della (71) si scrive in forma estesa come segue, dove per semplicit si omette la variabile tempo:
n 1 (n 2) n 2 n 11 n 2
ds( ) ( ) k e ... k e edt
= + + + + + x (n-1)e = e , (83) dove i coefficienti ki (i=1,,n-2) sono i coefficienti dei prodotti risultanti dallespansione dellelevamento alla potenza n-1-esima nella (71). Derivando la (83) rispetto al tempo si ha dunque:
(n 1) n 2 n 11 n 2s( ) k e ... k e e
= + + + + x (n)e
. (84) Ma per le (42)-(43) risulta:
(n)n 1 1 1 1 1
(n) (n) (n)(n)1 d 1 1 d
x f ( ) g ( )u x f ( ) g ( )u
e x x f ( ) g ( )u x
= + = + = = +
x x x x
x x
, (85)
che sostituita nella (84) fornisce:
(n) (n 1) n 2 n 11 1 d 1 n 2s( ) f ( ) g ( )u x k e ... k e e
= + + + + + x x x . (86) Quindi la derivata prima della funzione candidata (77) vale: Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
43
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( )(n) (n 1) n 2 n 11 1 d 1 n 2V( ) s( ) f ( ) g ( )u x k e ... k e e = + + + + + x x x x . (87) Si scelga ora la seguente legge di controllo, dove per semplicit si trascura la dipendenza dal tempo:
(n) (n 1) n 2 n 11 d 1 n 2
1 21 1
f ( ) x k e ... k e e sign(s( ))u u ug ( ) g ( )
+ = + = x xx x
,
con (n) (n 1) n 2 n 1
1 d 1 n 21
1
f ( ) x k e ... k e eug ( )
+ = xx
, 2
1
sign(s( ))ug ( )
= xx
. (88)
Con questa scelta, la (87) diventa:
V( ) s( )sign(s( )) | s( ) |
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Anche nel caso dellinseguimento di una traiettoria prefissata si presenta naturalmente il fenomeno del chattering. Una soluzione a tale problema si ottiene naturalmente rendendo continua la legge di controllo discontinua (88) come segue:
(n) (n 1) n 2 n 11 d 1 n 2
1 21 1
f ( ) x k e ... k e e sat(s( ), )u u ug ( ) g ( )
+ = + = x xx x
, con
(n) (n 1) n 2 n 11 d 1 n 2
11
f ( ) x k e ... k e eug ( )
+ = xx
, 2
1
sat(s( ), )ug ( )
= xx
, (91)
dove lo spessore dello strato limite prescelto. Nel caso invece siano presenti imprecisioni, naturalmente si sostituisce la (91) con la legge di controllo:
(n) (n 1) n 2 n 11 d 1 n 2
1 21 1
f ( ) x k e ... k e e sat(s( ), )u u u g ( ) g ( )
+ = + = x xx x
, con
(n) (n 1) n 2 n 11 d 1 n 2
11
f ( ) x k e ... k e eug ( )
+ = xx
, 2
1
sat(s( ), )ug ( )
= xx
. (92)
In definitiva il metodo di controllo sliding mode per linseguimento di sistemi non lineari autonomi in forma compagna si riduce ai seguenti passi:
fissare il parametro >0; determinare la superficie di scivolamento s(x)=0 (71) associata a tale parametro; eventualmente fissare una costante positiva nel caso si voglia applicare la (91); scrivere lespressione completa della funzione in funzione dello stato e della
legge di controllo; V( )x
imporre la condizione di scivolamento (79) scegliendo lazione di controllo come la somma di due termini: u1, che rende possibile leliminazione dei termini dipendenti dallo stato nella , e uV( )x 2 secondo la solita espressione definita dalla (88) nel caso di legge di controllo discontinua e dalla (91) nel caso di legge continua, utilizzando, in caso di imprecisioni nel modello, le stime delle funzioni f1(x) e g1(x) che definiscono lequazione di stato;
fissare la costante positiva (funzione) nel caso di assenza (presenza) di imprecisioni nel modello.
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
45
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
ESEMPIO Sia il sistema non lineare del secondo ordine:
( )2x(t) 1.5x (t)cos 3x(t) u(t)= + , (93) dove x(t)=[x1(t) x2(t)]T=[x(t) (t)]x T e u(t) rappresentano rispettivamente il vettore di stato e lingresso del sistema. Si ha dunque un sistema del tipo
1 1x(t) f ( (t)) g ( (t))u(t)= +x x , (94) con g1(x)=1 e . ( )21f ( ) 1.5x (t)cos 3x(t)= x Sia inoltre
dtx (t) sin
2= (95)
la traiettoria desiderata che la prima variabile di stato x1(t)=x(t) deve inseguire. Scegliendo =20, la superficie di scivolamento (71) individuata dallequazione:
s e e 0 e 20e 0= + = + = , (96) dove lerrore sulla prima variabile di stato vale:
dte(t) x(t) x (t) x(t) sin
2= = . (97)
Si ha pertanto:
t ts e 20e x(t) cos 20x(t) 20sin2 2 2 = + = +
(98) Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
46
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
2 t ts e 20e x(t) sin 20x(t) 10 cos4 2 2 = + = + +
. (99) In tal caso la derivata della funzione candidata vale:
( ) 22 t tV( ) ss s 1.5x (t)cos 3x(t) u(t) sin 20x(t) 10 cos4 2 2
= = + + + x .(100)
Pertanto, scegliendo la legge di controllo discontinua (88), si ha:
( ) 22 t tu(t) 1.5x (t)cos 3x(t) sin 20x(t) 10 cos sign(s( ))4 2 2 = + + x , (101)
da cui si ottiene la condizione di scivolamento (89). Fissando =0.5 e sostituendo la (98) nella (101) si ha in definitiva:
( ) 22 t tu(t) 1.5x (t)cos 3x(t) sin 20x(t) 10 cos4 2 2
t t0.5sign x(t) cos 20x(t) 20sin2 2 2
= + + +
. (102)
I risultati ottenuti con questo controllore sono riportati nelle figure successive, che rappresentano rispettivamente landamento temporale della variabile x(t), ottenuto con condizioni iniziali x1(0)=x2(0)=0, quello dellerrore e(t), la dinamica della variabile e dellerrore su tale variabile , landamento dellazione di controllo u(t) nel tempo, quello della variabile s(x(t)) e infine la traiettoria del sistema nel piano delle fasi e quella nel piano (e,e ).
x(t)e(t)
Si osservi come risulti s(x(0))0, poich allistante di tempo iniziale si ha e(0)=0 e
(0)=-/2, da cui s(x(0))=-/20. e
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
47
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-1.5
-1
-0.5
0
0.5
1
1.5
Tempo [s]
Controllo sliding mode discontinuo
Variabile di stato x1Riferimento
0 2 4 6 8 10-0.08
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Tempo [s]
Err
ore
sulla
var
iabi
le x
1
Controllo sliding mode discontinuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
48
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Tempo [s]
Controllo sliding mode discontinuo
Variabile di stato x2Riferimento
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Err
ore
sulla
var
iabi
le x
2
Controllo sliding mode discontinuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
49
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-5
0
5
10
15
20
25
30
35
Tempo [s]
Azi
one
di c
ontro
llo
Controllo sliding mode discontinuo
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Var
iabi
le s
cala
re s
Controllo sliding mode discontinuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
50
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-1.5 -1 -0.5 0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria con SMC discontinuo
-0.08 -0.06 -0.04 -0.02 0 0.02-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Errore sulla variabile di stato x1
Err
ore
sulla
var
iabi
le d
i sta
to x
2
Traiettoria nel piano (e,edot) con SMC discontinuo
Anche in questo caso si verifica che linseguimento eccellente, ma ottenuto al prezzo di una elevata intensit dellazione di controllo. Per risolvere questo problema utilizziamo uno stretto boundary layer con =0.1 scegliendo la legge di controllo che si ottiene modificando la (102) come segue:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
51
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( ) 22 t tu(t) 1.5x (t)cos 3x(t) sin 20x(t) 10 cos4 2 2
t t0.5sat x(t) cos 20x(t) 20sin ,0.12 2 2
= + + +
. (103)
I risultati ottenuti con questo controllore sono riportati nelle figure successive, che rappresentano ancora, con le precedenti condizioni iniziali, landamento temporale della variabile x(t) e quello dellerrore e(t), la dinamica della variabile e dellerrore su tale variabile , landamento dellazione di controllo u(t) nel tempo, quello della variabile s(x(t)) e la traiettoria del sistema nel piano delle fasi e quella nel piano (e, ).
x(t)e(t)
e
0 2 4 6 8 10-1.5
-1
-0.5
0
0.5
1
1.5
Tempo [s]
Controllo sliding mode continuo
Variabile di stato x1Riferimento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
52
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-0.08
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Tempo [s]
Err
ore
sulla
var
iabi
le x
1
Controllo sliding mode continuo
0 2 4 6 8 10
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Tempo [s]
Controllo sliding mode continuo
Variabile di stato x2Riferimento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
53
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Err
ore
sulla
var
iabi
le x
2
Controllo sliding mode continuo
0 2 4 6 8 10-5
0
5
10
15
20
25
30
35
Tempo [s]
Azi
one
di c
ontro
llo
Controllo sliding mode continuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
54
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Var
iabi
le s
cala
re s
Controllo sliding mode continuo
-1.5 -1 -0.5 0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi con SMC continuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
55
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-0.08 -0.06 -0.04 -0.02 0 0.02-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Errore sulla variabile di stato x1
Err
ore
sulla
var
iabi
le d
i sta
to x
2
Traiettoria nel piano (e,edot) con SMC continuo
Come si vede dai risultati nelle figure, la performance dellinseguimento pi che soddisfacente, e il valore assoluto dellerrore contenuto nello strato limite. stato nel contempo risolto il problema del chattering, come si pu notare osservando lazione di controllo, esente da oscillazioni spurie.
ESEMPIO Consideriamo ora il sistema non lineare del secondo ordine:
( )2x(t) a(t)x (t)cos 3x(t) u(t)= + , (104) ottenuto dal sistema (93) sostituendo alla costante 1.5 il parametro a(t), che non noto ma del quale si sa che verifica la disequazione:
1 a(t) 2 . (105) Si ha dunque un sistema del tipo
1 1x(t) f ( (t)) g ( (t))u(t)= +x x , (106) Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
56
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
con e dove si sceglie la stima della funzione f1g ( ) 1=x 1f ( )x 1(x) come segue:
2f ( ) 1.5x cos(3x)= x . (107) Con questa scelta si ha infatti un errore massimo su f1(x) che vale:
21F ( ) 0.5x | cos(3x) |=x . (108)
La traiettoria desiderata sia ancora la (95) e si scelga ancora =20, per cui la superficie di scivolamento data nuovamente dalla (96) e le variabili scalari e(t), s(x(t)) e s sono ancora espresse rispettivamente dalle (97), (98) e (99).
( (t))x
In questo caso la derivata della funzione candidata vale:
( ) 22 t tV( ) ss s a(t)x (t)cos 3x(t) u(t) sin 20x(t) 10 cos4 2 2
= = + + + x , (109)
pertanto, scegliendo la legge di controllo discontinua (90) in presenza di imprecisioni, ed essendo poich presente incertezza unicamente sul parametro a(t) e quindi sulla f
1 1g ( ) g ( ) 1=x x =1(x), si ha:
( ) 22 t tu(t) 1.5x (t)cos 3x(t) sin 20x(t) 10 cos sign(s( ))4 2 2 = + + x . (110)
Infatti con questa scelta si ottiene:
( ) ( )( )( ) ( )( )
2 2
2
V( ) s a(t)x (t)cos 3x(t) 1.5x (t)cos 3x(t) sign(s( ))
s 1.5 a(t) x (t)cos 3x(t) sign(s( ))
= + ==
x x
x
, (111)
dove risulta per la (105):
2 a(t) 1 0.5 1.5 a(t) 0.5 . (112) Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
57
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
Pertanto per rendere negativa la (111) si sceglie:
( ) ( )( )( ) ( )( )
2 2
2
V( ) s a(t)x (t)cos 3x(t) 1.5x (t)cos 3x(t) sign(s( ))
s 1.5 a(t) x (t)cos 3x(t) sign(s( ))
= + ==
x x
x
2
1F ( ) K 0.5x | cos(3x) | K = + = +x , (113) dove K una costante positiva, in modo da riscrivere la (111) come segue (trascurando la dipendenza dal tempo):
( ) ( ) ( )( )2 2V( ) s( ) 1.5 a x cos 3x 0.5x | cos(3x) | K sign(s( ))Ks( )sign(s( )) K | s( ) |
= + =
x x x
x x x
, (114)
che proprio la condizione di scivolamento. Sostituendo la (113) con K=0.5 e la (98) nella legge di controllo (110) si ha dunque la seguente espressione:
( )( )
22
2
t tu(t) 1.5x (t)cos 3x(t) sin 20x(t) 10 cos4 2 2
t t0.5x | cos(3x) | 0.5 sign x(t) cos 20x(t) 20sin2 2 2
= + + + +
. (115)
I risultati ottenuti con questo controllore sono riportati nelle figure successive, che rappresentano rispettivamente landamento temporale della variabile x(t), ottenuto con condizioni iniziali x1(0)=x2(0)=0, quello dellerrore e(t), la dinamica della variabile e dellerrore su tale variabile e , landamento dellazione di controllo u(t) nel tempo, quello della variabile s(x(t)) e infine la traiettoria del sistema nel piano delle fasi e quella nel piano (e,e ).
x(t)(t)
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
58
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-1.5
-1
-0.5
0
0.5
1
1.5
Tempo [s]
Controllo sliding mode discontinuo
Variabile di stato x1Riferimento
0 2 4 6 8 10-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Tempo [s]
Err
ore
sulla
var
iabi
le x
1
Controllo sliding mode discontinuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
59
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Tempo [s]
Controllo sliding mode discontinuo
Variabile di stato x2Riferimento
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Err
ore
sulla
var
iabi
le x
2
Controllo sliding mode discontinuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
60
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-5
0
5
10
15
20
25
30
35
Tempo [s]
Azi
one
di c
ontro
llo
Controllo sliding mode discontinuo
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Var
iabi
le s
cala
re s
Controllo sliding mode discontinuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
61
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
-1.5 -1 -0.5 0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi con SMC discontinuo
-0.07 -0.06 -0.05 -0.04 -0.03 -0.02 -0.01 0 0.01-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Errore sulla variabile di stato x1
Err
ore
sulla
var
iabi
le d
i sta
to x
2
Traiettoria nel piano (e,edot) con SMC discontinuo
Utilizziamo ora uno stretto boundary layer con =0.1 scegliendo la legge di controllo modificando la (115) come segue:
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
62
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
( )( )
22
2
t tu(t) 1.5x (t)cos 3x(t) sin 20x(t) 10 cos4 2 2
t t0.5x | cos(3x) | 0.5 sat x(t) cos 20x(t) 20sin ,0.12 2 2
= + + + +
. (116)
I risultati ottenuti con questo controllore sono riportati nelle figure successive, che rappresentano ancora, con le precedenti condizioni iniziali, landamento temporale della variabile x(t) e quello dellerrore e(t), la dinamica della variabile e dellerrore su tale variabile , landamento dellazione di controllo u(t) nel tempo, quello della variabile s(x(t)) e la traiettoria del sistema nel piano delle fasi e quella nel piano (e, ).
x(t)e(t)
e
0 2 4 6 8 10-1.5
-1
-0.5
0
0.5
1
1.5
Tempo [s]
Controllo sliding mode continuo
Variabile di stato x1Riferimento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
63
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
Tempo [s]
Err
ore
sulla
var
iabi
le x
1
Controllo sliding mode continuo
0 2 4 6 8 10
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Tempo [s]
Controllo sliding mode continuo
Variabile di stato x2Riferimento
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
64
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Err
ore
sulla
var
iabi
le x
2
Controllo sliding mode continuo
0 2 4 6 8 10-5
0
5
10
15
20
25
30
35
Tempo [s]
Azi
one
di c
ontro
llo
Controllo sliding mode continuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
65
-
Ing. Mariagrazia Dotoli Controllo non Lineare NO (3 CFU) Controllo Sliding Mode
0 2 4 6 8 10-1.6
-1.4
-1.2
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
Tempo [s]
Var
iabi
le s
cala
re s
Controllo sliding mode continuo
-1.5 -1 -0.5 0 0.5 1 1.5-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Variabile di stato x1
Var
iabi
le d
i sta
to x
2
Traiettoria nel piano delle fasi con SMC continuo
Copyright 2009 Mariagrazia Dotoli. Lautore garantisce il permesso per la riproduzione e la distribuzione del presente materiale per i soggetti privati, alla condizione che la fonte originale e lautore siano esplicitamente riconosciuti e citati.
66
-
Ing. Maria