CONTROLLO IN RETROAZIONE - Unimore...statiche e dinamiche in condizioni perturbate (prestazioni...
39
Ing. Luigi Biagiotti Tel. 051 20939903 e-mail: [email protected] http://www-lar.deis.unibo.it/~lbiagiotti CONTROLLI AUTOMATICI Ingegneria Meccatronica http://www.automazione.ingre.unimore.it/pages/corsi/Automazione%20Industriale.htm CONTROLLO IN RETROAZIONE CONTROLLO IN RETROAZIONE
Transcript of CONTROLLO IN RETROAZIONE - Unimore...statiche e dinamiche in condizioni perturbate (prestazioni...

Ing. Luigi BiagiottiTel. 051 20939903
e-mail: [email protected]://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICIIngegneria Meccatronica
http://www.automazione.ingre.unimore.it/pages/corsi/Automazione%20Industriale.htm
CONTROLLO IN RETROAZIONECONTROLLO IN RETROAZIONE

Luigi Biagiotti Retroazione -- 2Controlli Automatici
Obiettivo del progetto del sistema di controllo:• garantire che l'errore di controllo l'errore di controllo (e)(e) sia il pisia il piùù piccolo possibilepiccolo possibile e cioè•• yy segua il più fedelmente possibile yyrefref
•• in presenza di disturbi in presenza di disturbi (d)(d) non misurabilinon misurabili•• in presenza di incertezze sui parametri del modelloin presenza di incertezze sui parametri del modello•• con azioni di controllo con azioni di controllo (u)(u) limitatelimitate
comandodi riferimento
yref
d
disturboagente sulsistema
Considerazioni generali sul controlloConsiderazioni generali sul controllo
• Elementi di un sistema di controllo
e = y - yref
errore di controllo
controllore attuatore impianto(modello)
u
ingressodi controllo
y
uscitadel sistema
ua
variabileattuata

Luigi Biagiotti Retroazione -- 3Controlli Automatici
Considerazioni generali sul controlloConsiderazioni generali sul controllo
• Requisiti di un sistema di controllo
• stabilità⎟ e⎟ limitato ∀ t
• prestazioni statichevalore dell'errore (modulo) a regime (esaurito il transitorio)
con segnale di riferimento e/o di disturbo standard gradino, rampa,…
• prestazioni dinamichecaratteristiche del transitorio
segnali di riferimento standard

Luigi Biagiotti Retroazione -- 4Controlli Automatici
t
yref
risposta al riferimento risposta al disturbo
Considerazioni generali sul controlloConsiderazioni generali sul controllo
• Requisiti di un sistema di controllo• regione di ammissibilità della risposta al gradino

Luigi Biagiotti Retroazione -- 5Controlli Automatici
Controllo ad azione direttaControllo ad azione diretta
• Prestazione dinamica:• scelta di Geq(s)
• Prestazione statica:• .
diversi problemi realizzativi, utile come concettodiversi problemi realizzativi, utile come concetto
sintesi diretta
controllore attuatore impianto

Luigi Biagiotti Retroazione -- 6Controlli Automatici
SintesiSintesi direttadiretta
• Tuttavia il controllore opera senza possedere informazioni circa ilrealereale andamento dell’uscita y(t), diverso da quello idealeideale per effetto di
•• disturbidisturbi•• errorierrori del del modellomodello G(s)G(s)•• variazionivariazioni parametricheparametriche
idealmente:
sintesi diretta

Luigi Biagiotti Retroazione -- 7Controlli Automatici
AzioneAzione direttadiretta e e disturbidisturbi
sovrapposizione degli effetti
sintesi diretta
Effetto dei disturbi sull’uscita:
ErroreErrore sullsull’’uscitauscita: : ililcontrollorecontrollore non non agisceagisce sulsul
disturbodisturbo cheche restaresta invariatoinvariato

Luigi Biagiotti Retroazione -- 8Controlli Automatici
AzioneAzione direttadiretta e e variazionivariazioni parametricheparametriche
Nella sintesi si assume:
sintesi diretta
Variazione del plant per effetto della variazione di un parametro:
ErroreErrore sullsull’’uscitauscita

Luigi Biagiotti Retroazione -- 9Controlli Automatici
AzioneAzione direttadiretta ed ed errorierrori di di modellomodello
Errore di modello:
Nella sintesi siassume:
ErroreErrore sullsull’’uscitauscita
sintesi diretta

Luigi Biagiotti Retroazione -- 10Controlli Automatici
0
1
2
3
0 2 4 6 8 t
yref
10s10
21s
++
Esempi di controllo ad azione direttaEsempi di controllo ad azione diretta
0
1
2
3
0 2 4 6 8 t
u y1s
2+
Caso idealeCaso ideale
yyref
10s10+
Sistema dacontrollare
Dinamicadesiderata
sintesi diretta

Luigi Biagiotti Retroazione -- 11Controlli Automatici
0
1
2
3
0 2 4 6 8 t
0
1
2
3
0 2 4 6 8 t
u yyref
1.1s2+10s
102
1s+
+
variazione dei parametrivariazione dei parametricancellazione imperfetta polo/zero
G < 1
u yyref
3.1s2+10s
102
1s+
+
variazione dei parametrivariazione dei parametri
G < 1
la dinamicadello zeroprevale
Esempi di controllo ad azione direttaEsempi di controllo ad azione diretta

Luigi Biagiotti Retroazione -- 12Controlli Automatici
Sintesi direttaSintesi diretta
Il progetto per sintesi diretta non è sempre possibile:
• Sistemi non a fase minima
Poli e/o zeri non stabili
• Sistemi con ritardo
• Sistemi (non strettamente) propri

Luigi Biagiotti Retroazione -- 13Controlli Automatici
Controllo in retroazioneControllo in retroazione
• Per limitare i problemi dei controllori in azione diretta, ricorriamo allaretroazione
• Consente di fornire al controllore informazioni circa l’andamentoandamentoeffettivoeffettivo delldell’’uscitauscita y(t)y(t)
• Costi maggiori per la presenza del trasduttore di misura
•• SonoSono retroazionabiliretroazionabili solo le solo le variabilivariabili accessibiliaccessibili allaallamisuramisura
controlloreyref impianto
(modello)ua y
trasduttore
attuatoreu
SistemaSistema di di controllocontrollo

Luigi Biagiotti Retroazione -- 14Controlli Automatici
Schema di Schema di controllocontrollo in in retroazioneretroazione
-+
• Schema equivalente in retroazioneretroazione unitariaunitaria
-+
: trasduttore di misura e di acquisizione del riferimento
: attuatore
: regolatore: impianto da controllare

Luigi Biagiotti Retroazione -- 15Controlli Automatici
Schema di Schema di controllocontrollo in in retroazioneretroazione
• Utilizzando il guadagno di anello L(s) otteniamo le seguenti fdt:
-+
fdtfdt di anello L(s)di anello L(s)

Luigi Biagiotti Retroazione -- 16Controlli Automatici
RRetroazioneetroazione e e disturbidisturbi
•• Se Se ilil guadagnoguadagno di di anelloanello L(s) L(s) èè sufficientementesufficientemente elevatoelevato•• ll’’uscitauscita y segue y segue fedelmentefedelmente ll’’ingressoingresso yyrefref
•• ilil disturbodisturbo d d risultarisulta attenuatoattenuato
+
-

Luigi Biagiotti Retroazione -- 17Controlli Automatici
RRetroazioneetroazione e e variazionivariazioni parametricheparametriche
•• Se Se ilil guadagnoguadagno di di anelloanello L(s) L(s) èè sufficientementesufficientemente elevatoelevato•• VariazioniVariazioni delladella fdtfdt di di anelloanello vengonovengono attenuate attenuate nellanella fdtfdt
del del sistemasistema retroazionatoretroazionato
-+
Variazione del plant per effetto della variazione di un parametro:

Luigi Biagiotti Retroazione -- 18Controlli Automatici
Sistemi di controllo in retroazioneSistemi di controllo in retroazione
• Requisiti• Stabilità
in condizioni nominaliin condizioni perturbate (stabilità robusta)
• Prestazionistatiche in condizioni nominali
per diverse tipologie di segnali di ingresso (ysp, d, n)valori a regime
dinamiche in condizioni nominaliper variazioni a gradino dei segnali di ingresso (ysp, d, n)
tempo di assestamento, massimo sorpassobanda passante, picchi di risonanzamoderazione dell'azione di controllo
statiche e dinamiche in condizioni perturbate (prestazioni robuste)
errori di modello, variazione dei parametri

Luigi Biagiotti Retroazione -- 19Controlli Automatici
Sistema del 1Sistema del 1°° ordineordine
al crescere di k:il guadagno tende ad 1il polo (reale) si sposta a sinistra
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Controllo proporzionale - calcolo della fdt
+ -
+ -
nuovo polonuovo polo

Luigi Biagiotti Retroazione -- 20Controlli Automatici
0
1
0 1 2 3 4 t
yref = 1k = 100
0
1
0 1 2 3 4 t
yref = 1k = 10
0
1
0 1 2 3 4 t
yref = 1k = 1
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Sistema del 1° ordine con controllo proporzionale•• condizioni nominalcondizioni nominalii
• Risposte al gradino
+ -

Luigi Biagiotti Retroazione -- 21Controlli Automatici
0
1
0 1 2 3 4 t
yref = 1k = 100
0
1
0 1 2 3 4 t
yref = 1k = 10
0
1
0 1 2 3 4 t
yref = 1k = 1
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Sistema del 1° ordine con controllo proporzionale•• variazionevariazione deidei parametriparametri
• Risposte al gradino+ -
nominale

Luigi Biagiotti Retroazione -- 22Controlli Automatici
CalcoloCalcolo delladella fdtfdt
al crescere di k:il guadagno tende ad 1
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Controllo proporzionale – sistema del 2° ordine
+ -

Luigi Biagiotti Retroazione -- 23Controlli Automatici
k = 1
3
0 2 4 6 8 100
0.5
1
1.5
2
2.5
k = 100 2 4 6 8 10
0
0.5
1
1.5
2
2.5
3
k = 1000 2 4 6 8 10
0
0.5
1
1.5
2
2.5
3
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Sistema del 2° ordine in retroazione unitaria•• condizioni nominalcondizioni nominalii
• Risposte al gradino
+ -

Luigi Biagiotti Retroazione -- 24Controlli Automatici
k = 1
3
0 2 4 6 8 100
0.5
1
1.5
2
2.5
k = 100 2 4 6 8 10
0
0.5
1
1.5
2
2.5
3
k = 1000 2 4 6 8 10
0
0.5
1
1.5
2
2.5
3
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Sistema del 2° ordine in retroazione unitaria•• variazionevariazione deidei parametriparametri
• Risposte al gradino
+ -

Luigi Biagiotti Retroazione -- 25Controlli Automatici
u( )
11s + ( )
22s +
y
d+
+
ImpiantoImpianto
Sistema di controllo in retroazioneSistema di controllo in retroazione
d
yref u( )
11s + ( )
22s +
y+
+ke
-
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Sensitività ai disturbi

Luigi Biagiotti Retroazione -- 26Controlli Automatici
valore del disturbo senza
controllo
Esempi di controllo in retroazioneEsempi di controllo in retroazione
• Sensitività ai disturbi
yref u( )
11s + ( )
22s +
y+
+ke
-
d
00.10.20.30.40.50.60.70.80.9
1Step Response
0 1 2 3 4 s
yref = 0, d = 1k = 1
yref = 0, d = 1k = 10
yref = 0, d = 1k = 100
00.10.20.30.40.50.60.70.80.9
1Step Response
0 1 2 3 4 s0
0.10.20.30.40.50.60.70.80.9
1Step Response
0 1 2 3 4 s

Luigi Biagiotti Retroazione -- 27Controlli Automatici
Sistemi di controllo in retroazioneSistemi di controllo in retroazione
• Schema di riferimento
R(s)ysp e u
-+ G(s)y
d
++
+-n
Matrice delle funzioni di trasferimento Matrice delle funzioni di trasferimento tra le diverse tra le diverse usciteuscite di interesse di interesse
e gli e gli ingressiingressi

Luigi Biagiotti Retroazione -- 28Controlli Automatici
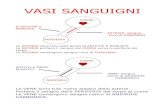
ErroreErrore a regime e a regime e tipotipo di di sistemasistema
• Consideriamo il sistema in retroazione unitaria:
Errore a regime nella risposta ad un segnale X(s):
Teorema del valore finale:

Luigi Biagiotti Retroazione -- 29Controlli Automatici
ErroreErrore nellanella rispostarisposta al al gradinogradino
• La L-trasformata del gradino di ampiezza A vale:
L’errore rispetto al gradino è detto anche erroreerrore di di posizioneposizione eepp
Se G(s) è di TIPO ≥1 (ha 1 o più poli nell’origine) ⇒ eepp=0=0
Il Il numeronumero (h) di (h) di polipoli nellnell’’origineorigine di G(s) di G(s) determinadetermina ilil TIPO del TIPO del sistemasistema
CostanteCostante di di posizioneposizione (o di guadagno):

Luigi Biagiotti Retroazione -- 30Controlli Automatici
ErroreErrore di di posizioneposizione e tipo die tipo di sistemasistema
• Risposte al gradino
0 5 10 15 20 250
0.5
1
1.5
sistema di tipo 1sistema di tipo 1
errore a regimeerrore a regimenullonullo
0 5 10 15 200
0.5
1
1.5
sistema di tipo 2sistema di tipo 2
errore a regimeerrore a regimenullonullo
sistema di tipo 0sistema di tipo 0
0 1 2 3 4 50
0.5
1
1.5
errore a regimeerrore a regimecostantecostante

Luigi Biagiotti Retroazione -- 31Controlli Automatici
ErroreErrore nellanella rispostarisposta allaalla ramparampa
• La L-trasformata della rampa di pendenza A vale:
L’errore rispetto alla rampa è detto anche erroreerrore di di velocitvelocitàà eevv
In funzione del tipo del sistema avremo:tipotipo 0: 0: eevv==∞∞tipotipo 1: 1: eevv=A/K=A/Ktipotipo ≥≥2: 2: eevv == 00
CostanteCostante di di velocitvelocitàà:
Se G(s) è di TIPO ≥2 (ha 2 o più poli nell’origine) ⇒
eevv=0=0

Luigi Biagiotti Retroazione -- 32Controlli Automatici
ErrorErrore di e di velocitvelocitàà e tipo di sistemae tipo di sistema
• Risposte alla rampa
sistema di tipo 0sistema di tipo 0
0 1 2 3 4 50
0.5
1
1.5
errore a regimeerrore a regimecrescentecrescente
0 5 10 15 20 250
0.5
1
1.5
sistema di tipo 1sistema di tipo 1
errore a regimeerrore a regimecostantecostante
sistema di tipo 2sistema di tipo 2
0 5 10 15 200
0.5
1
1.5
errore a regimeerrore a regimenullonullo

Luigi Biagiotti Retroazione -- 33Controlli Automatici
ErroreErrore di di accelerazioneaccelerazione
• Analogamente, considerando il segnale:
L’ erroreerrore di di accelerazioneaccelerazione eea a risulta:
In funzione del tipo del sistema avremo:tipotipo 0,1: 0,1: eeaa==∞∞tipotipo 2: 2: eeaa=A/K=A/Ktipotipo ≥≥3: 3: eeaa=0=0
Se G(s) è di TIPO ≥3 (ha 3 o più poli nell’origine) ⇒
eeaa=0=0
CostanteCostante di di accelerazioneaccelerazione:

Luigi Biagiotti Retroazione -- 34Controlli Automatici
CasoCaso generalegenerale
• Per segnali, in generale del tipo:
ea
∞
∞
Κ
Kp
∞
Κ
0
Kv
Κ
0
0
Ka
Tipo 0
Tipo 1
Tipo 2
G(s) evep
Si ha, indicando con h il tipo del sistema:

Luigi Biagiotti Retroazione -- 35Controlli Automatici
RetroazioneRetroazione non non unitariaunitaria
• Nel caso in cui il sistema in esamepresenti una dinamica H(s) non unitaria sul ramo di retroazione:
• Ci si riconduce alla retroazioneunitaria considerando, per ilcalcolo dell’errore a regime, lo schema equivalente:

Luigi Biagiotti Retroazione -- 36Controlli Automatici
EsempioEsempio
• Determinare l’errore a regime del sistema in retroazione con ingresso:
• a gradino X(s) = 5/s• a rampa X(s) = 5/s2
+ -
Per i valori di k = 1, 100
Verificare con Matlab/Simulink la correttezza dei risultati

Luigi Biagiotti Retroazione -- 37Controlli Automatici
EsempioEsempio
• Determinare gli errori a regime diposizione, velocita` ed accelerazione (ep , ev , ea) del sistema in retroazione con ingresso il gradino X(s) = 2/s
Verificare con Matlab/Simulink la correttezza dei risultati

Luigi Biagiotti Retroazione -- 38Controlli Automatici
EsempioEsempio
• Determinare il valore di K per avere errore a regime < 0.1 con ingresso a gradino unitario.
• Il sistema in retroazione, per tale valore di K, e` stabile?
+ -
Verificare con Matlab/Simulink la correttezza dei risultati

Ing. Luigi BiagiottiTel. 051 20939903
e-mail: [email protected]://www-lar.deis.unibo.it/~lbiagiotti
CONTROLLI AUTOMATICIIngegneria Meccatronica
http://www.automazione.ingre.unimore.it/pages/corsi/Automazione%20Industriale.htm
CONTROLLO IN RETROAZIONE CONTROLLO IN RETROAZIONE FINEFINE