Controlli Automatici LA - Automazione LA... · presentazione e discussione di un progetto...
49
Controlli Automatici LA Introduzione al corso Prof. Carlo Rossi DEIS - Università di Bologna Tel. 051-2093020 E-mail: [email protected] http://www-lar.deis.unibo.it/~crossi
Transcript of Controlli Automatici LA - Automazione LA... · presentazione e discussione di un progetto...

Controlli Automatici LA Introduzione al corso
Prof. Carlo Rossi DEIS - Università di Bologna
Tel. 051-2093020 E-mail: [email protected]
http://www-lar.deis.unibo.it/~crossi

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 2
Introduzione ai Corsi di Controlli Automatici LA e LB Obiettivo complessivo dei due corsi
fornire allo studente gli strumenti concettuali e formali per il progetto "consapevole" di semplici Sistemi di Controllo Automatico
Organizzazione dei due corsi si tratta di due corsi fortemente integrati organizzati in
successione approccio tipico delle discipline ingegneristiche
il modulo LA predispone strumenti di "analisi" specifici definizioni, strumenti matematici utili, comprensione dei problemi,
studio delle proprietà, individuazione dei "razionali" di soluzione il modulo LB fornisce i metodi di "sintesi"
traduce in algoritmi e metodi formali di progetto i "razionali" appresi in LA
si svolgeranno prima le lezioni di LA, poi le lezioni di LB utilizzando tutte le ore a disposizione di entrambi i corsi

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 3
Introduzione al Corso di Controlli Automatici Collocazione del corso nel percorso formativo
Controlli Automatici LA e LB
analisi, geometria, mecc. razionale
(strumenti matematici) fisica, elettrotecnica
(leggi e modelli) informatica
(strumenti informatici)
Sistemi di Controllo Digitale Tecnologie dei sistemi di controllo Robotica Industriale Laboratorio di Sistemi di Automazione Laboratorio di Modellistica e Simulazione
Azionamenti Elettrici Macchine Automatiche
Elettronica

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 4
Materiale didattico P. Boltzern, R. Scattolini, N. Schiavoni "Fondamenti di
Controlli Automatici", II edizione, Mc Graw-Hill G. Marro "Controlli Automatici", V edizione, Zanichelli lucidi in rete disponibili sul sito del docente in anticipo (si
spera) rispetto allo svolgimento dell'argomento lucidi delle lezioni a colori (pdf) lucidi delle lezioni a colori tre per foglio (pdf) set di lucidi commentati per molti argomenti di LB (pdf) set di lucidi con esercizi svolti (ppt) i set di lucidi contrassegnati con un * sono quelli dell'anno
precedente non stamparli per evitare di doverlo rifare con la versione
aggiornata il lucidi contrassegnati sul titolo con il simbolo non vengono
presentati a lezione sono per il libero approfondimento da parte dello studente
Software specifico per il corso

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 5
Organizzazione delle lezioni i due corsi LA e LB sono logicamente in serie
come già detto, verranno svolti prima tutti gli argomenti di LA (circa fino all'ultima settimana di ottobre) e poi tutti quelli di LB, utilizzando l'intero monte ore dei due corsi
le lezioni e le esercitazioni si svolgeranno utilizzando le ore indipendentemente da quanto stabilito nel calendario per L e E. Si utilizzeranno anche le ore Q
Orari delle lezioni: concordare l'ora di inizio tra :00 e :15 Mercoledì, giovedì e venerdì non viene fatto l'intervallo
durata effettiva 1 ora e mezzo Il lunedì ed il martedì
1 ora + 15’ + intervallo 15' + 1 ora esercitazione/discussione esercitazione dopo le prime due settimane

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 6
Modalità di esame Controlli Automatici LA
E' prevista solo una prova scritta costituita da: esercizi sulle risposte al gradino, sul tracciamento dei diagrammi
di Bode, funzioni di sensitività e luogo delle radici; domande a risposta multipla e libera su argomenti teorici del
corso non essendo prevista una prova orale il voto della prova
scritta è registrabile direttamente al termine dello svolgimento degli argomenti relativi al
modulo LA (presumibilmente nell'ultima settimana di ottobre), verrà fissata una prova di esame preliminare, il cui voto è registrabile a partire da dicembre 2006

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 7
Modalità di esame Controlli Automatici LB
L'esame consiste, di norma, di due prove, svolte consecutivamente nella stessa giornata Prova scritta preliminare
domande a risposta multipla e esercizio il docente potrebbe anche, in particolari situazioni, decidere di non
svolgere lo scritto preliminare e passare direttamente all'orale Prova orale
presentazione e discussione di un progetto sviluppato con strumenti di CAD Matlab-Simulink su uno dei temi proposti durante il corso (breve relazione scritta + files Matlab-Simulink da discutere con il docente)
Approfondimenti teorici sugli argomenti della prova scritta e/o, più in generale, del corso
il docente può condizionare l'accesso alla prova orale se lo studente non supera una soglia minima nel punteggio relativo alle domande a risposta multipla della prova scritta preliminare

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 8
Modalità di esame Esame congiunto LA-LB
E' possibile avvalersi della possibilità di svolgere l'esame congiuntamente per i due moduli Le modalità di esame sono quelle del modulo LB
scritto preliminare lo stesso di LB
presentazione e discussione del progetto lo stesso di LB
approfondimenti teorici sugli argomenti della prova scritta e/o, più in generale, del corso estesi, in questo caso, al programma di entrambi i moduli
lo studente che intende avvalersi di questa modalità di esame deve comunicarlo al docente prima di iniziare la prova orale
il voto conseguito verrà registrato per entrambi i moduli

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 9
Modalità di esame Validità Voto
I voti conseguiti nel corso dell'A.A. saranno registrabili fino a settembre 2010
Le registrazioni avverranno, di norma, in occasione degli orali LB oppure in determinate giornate specificate dal docente nella pagina WEB
Controlli Automatici LA Lo studente che si presenta ad un appello e consegna il compito,
perde automaticamente ogni eventuale voto positivo conseguito in appelli precedenti
Controlli Automatici LB Lo studente che sostiene l'orale perde automaticamente ogni
eventuale voto positivo conseguito in appelli precedenti

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 10
Modalità di esame Iscrizione Esami
Iscrizione obbligatoria su Uniwex: https://uniwex.unibo.it Gli studenti che risultano iscritti alla lista elettronica nel momento
della chiusura della stessa e che non si presentano il giorno della prova non potranno sostenere l'appello successivo
Oltre a quelle indicate nel capoverso precedente, non sono previste ulteriori restrizioni sul numero di appelli sostenibili nell'anno accademico

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 11
Introduzione ai Corsi di Controlli Automatici Significato del termine Controllo
Azione su una macchina, un apparato, un impianto, un processo per modificarne (migliorarne) il comportamento
Più antico sistema di controllo Uomo
Alcuni esempi di attività umane dove il controllo è elemento indispensabile
camminare suonare il pianoforte guidare l'automobile cucire …….

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 12
Situazione attuale e prospettive di sviluppo Sofisticati sistemi di controllo sono presenti in tutti i
sistemi militari, industriali, civili applicazioni in settori ingegneristici industriali
settore manifatturiero linee di assemblaggio automobili, elettrodomestici, … robot e macchine per la lavorazione ed il confezionamento
settore chimico petrolchimico, materie plastiche, vernici, solventi, detersivi,… cementifici, …..
settore energetico centrali elettriche, sistemi di distribuzione energia,
settore trasporti ed aeronautico veicoli spaziali ed aerei, treni e metropolitane, navi
questi impianti funzionano grazie a numerosissimi (centinaia ed anche migliaia) di sistemi di controllo

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 13
Situazione attuale e prospettive di sviluppo Sofisticati sistemi di controllo sono presenti in tutti i
sistemi militari, industriali, civili applicazioni in settori ingegneristici non industriali
autoveicoli già oggi ci sono decine di sistemi di controllo
servosterzo, servofreno, ABS, controllo di assetto, controllo dell'iniezione, fasatura variabile, …..
In prospettiva si arriverà a centinaia di sistemi di controllo elettronica di consumo
macchine fotografiche, videocamere, telefoni cellulari lettori di CD, DVD, periferiche per computer
elettrodomestici lavatrici, lavastoviglie, frigoriferi,..
domotica controllo remoto delle attività domestiche
favorito dallo sviluppo dei sistemi di comunicazione

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 14
Situazione attuale e prospettive di sviluppo Aree di sviluppo in settori non ingegneristici
apparecchiature biomediche sistemi biologici ambiente e territorio sistemi socio-economici mercati finanziari marketing

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 15
Cenni storici Le origini del controllo
l'uomo ha sempre tentato di costruire sistemi il cui comportamento fosse migliorato da un sistema di controllo
l'approccio è stato empirico ed inventivo fino alla metà del IXX secolo
tem
po
orologio ad acqua Ktesibios 300 a.c.

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 16
Cenni storici Le origini del controllo
seconda metà del IXX secolo prime teorie del controllo basate su modelli descritti da equazioni
differenziali (Maxwell 1870, Routh 1880, Liapunov 1890) prima metà del XX secolo
gli sviluppi della teoria del controllo proseguirono in modo differenziato nei paesi occidentali ed in Unione Sovietica
a partire da motivazioni più ingegneristiche all'ovest su basi prettamente matematiche all'est
pietre miliari nello sviluppo dei Controlli Automatici amplificatore in retroazione negativa (Black, 1927) sviluppi teorici sulla stabilità (Nyquist 1930, Bode 1940) metodi nello spazio degli stati (Kalman 1960, Basile e Marro 1970) controllo di sistemi stocastici (Astrom 1970) microprocessore e DSP (Intel 1970, Texas Instruments 1980) controllo di sistemi nonlineari (Isidori 1985) controllo di sistemi ad eventi discreti (a. v. 1990)

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 17
Cenni storici I Controlli Automatici divennero una vera e propria disciplina ingegneristica a partire dagli anni 40'
Impulsi allo sviluppo dei Controlli Automatici la seconda guerra mondiale
autopiloti per aerei, sistemi di puntamento per cannoni, per radar,…
lo sviluppo dei calcolatori elettronici (primi anni 50') rese applicabili molte teorie già sviluppate sul piano formale
la conquista dello spazio (anni 60' e 70') fu possibile per la disponibilità di sofisticati sistemi di
controllo lo sviluppo dei microprocessori (seconda metà degli anni 70') e
dei DSP (seconda metà degli anni 80') diffusione generalizzata dei sistemi di Automazione Industriale introduzione di sistemi di controllo in una moltitudine di
apparati anche al di fuori delle applicazioni industriali

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 18
Terminologia ed esempi Terminologia
Sistema insieme costituito da più parti (sottosistemi) tra loro interagenti di
cui si vuole indagare il comportamento astrazione di comodo
Sistema fisico insieme complesso costituito da elementi materiali
circuito elettrico, macchina meccanica, impianto chimico, bacino idrico, azienda, corpo umano, ….
Sistema astratto insieme complesso costituito da elementi immateriali
sistema giuridico, sistema universitario, sistema sociale, …. Fenomeno (fisico)
manifestazione delle interazioni tra le parti di un sistema

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 19
Terminologia ed esempi Esempi di sistemi
aereo supersonico Sottosistemi: reattore, ali, flaps,pressurizzazione,...
automobile sportiva Sottosistemi: motore, sospensioni, freni, ...

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 20
Terminologia ed esempi Terminologia
Collegamento interazione del sistema con il resto del mondo
classificazione dei collegamenti con il mondo esterno: sistema orientato ingressi
azioni che il resto del mondo effettua sul sistema sono in grado di modificarne il comportamento
ingressi di controllo (su cui abbiamo deciso di agire) ingressi di disturbo (su cui non possiamo o non vogliamo agire)
uscite risultati esterni (effetti) delle azioni e dell'evoluzione temporale
del sistema dovuta a condizioni iniziali in molti casi l'attribuzione ad un collegamento della natura
di ingresso o di uscita è arbitrariamente fatta dal progettista per sua convenienza o scelta.

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 21
Terminologia ed esempi Esempi di collegamento
Sono collegati ? • gravità, • interazione con l'aria,..
• gravità • interazione con l'aria • interazione con la strada,..
ingressi
uscite • posizione (x,y,z) • velocità (x,y,z) • temperatura allo scarico, • sforzo sulle ali, ...
• posizione • velocità • temperatura dell'acqua, • giri del motore, ...

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 22
Terminologia ed esempi Esempi di orientamento
qual'è l'ingresso ? qual è l'uscita?
La coppia erogata dal motore è un ingresso o una uscita ? Per l'intero veicolo è un ingresso per il sottosistema motore è una uscita
i(t)
v(t)

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 23
Terminologia ed esempi Ingressi di controllo e di disturbo
Riscaldamento dell'aula
irraggiamento solare
potenza termica generata dalla persone
Il valore della temperatura all'istante t (uscita) dipende solo dalla potenza termica (ingresso) immessa in quel momento dai radiatori?
no ! dipende anche da tutto quello che è successo prima. Questo sistema ha "memoria"; diremo che si tratta di un sistema dinamico

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 24
Terminologia ed esempi Terminologia
Sistemi autonomi non possiedono ingressi la loro evoluzione temporale non dipende dal resto del mondo non si possono controllare
Controllo azione su un sistema per imporgli comportamenti desiderati
Attenzione! Talora in italiano il termine Controllo è usato per indicare
una attività di semplice osservazione in termine tecnico
monitoraggio Controllo Automatico
azione di controllo esplicata automaticamente da una macchina

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 25
Terminologia ed esempi Controllo di temperatura dell'aula
misuriamo la temperatura dell'aula e la confrontiamo con le specifiche (ad es. 20°C di giorno e 17°C di notte)
agiamo sulla potenza termica immessa dai radiatori in modo che la temperatura si porti al più presto (altra specifica) nell'intorno del valore di specifica e vi si mantenga indefinitamente, indipendentemente dai disturbi

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 26
Terminologia ed esempi Terminologia
Modello rappresentazione (fisica o astratta) approssimata di un sistema
costruita per uno scopo per un sistema possono essere costruiti infiniti modelli
riproduce solo i comportamenti e le proprietà che interessano Segnale
grandezza fisica o astratta associata per comodità di manipolazione ad una grandezza fisica ad una grandezza fisica possono essere associati infiniti
segnali riproduce solo i comportamenti e le proprietà che interessano
di solito non ha associata una potenza tensione senza corrente, velocità senza forza,...
modelli e segnali sostituiscono i corrispondenti sistemi e grandezze fisiche nelle manipolazioni formali

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 27
Terminologia ed esempi Rappresentazione a blocchi
modello del
sistema
ingressi di
controllo uscite non controllate
ingressi di disturbo
uscite controllate
rappresentazione tipica usata nei
Controlli Automatici
Nei due corsi di base di Controlli Automatici ci si limiterà a considerare sistemi con un solo ingresso di controllo, un eventuale ingresso di disturbo ed una sola uscita controllata:
• strumenti matematici di rappresentazione e manipolazione più semplici • concetti più facilmente comprensibili • semplificazione valida per moltissimi sistemi di controllo industriali
modello del
sistema
(segnali di) ingresso
(segnali di) uscita

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 28
Terminologia ed esempi Terminologia
Tipologie di modello modello fisico
in scala, .. per lo studio del comportamento
modello comportamentale descrizione a parole, ..
per la comprensione del sistema per il progetto di semplici sistemi di controllo
modello descrittivo schemi, disegni, ..
per il progetto per la costruzione

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 29
Terminologia ed esempi Terminologia
Tipologie di modello modello matematico
sistemi di equazioni (differenziali) per la formalizzazione di leggi fisiche per lo studio al calcolatore del comportamento (simulazione) per la previsione per il controllo
modello neurale aggregati di informazioni e di regole di elaborazione
per l'inferenza per la simulazione per il controllo

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 30
Terminologia ed esempi Terminologia
Tipologie di segnale segnale fisico
grandezze fisiche il cui comportamento riproduce (in parte) quello della grandezza di interesse ma la cui manipolazione risulta possibile o più agevole con la tecnologia disponibile è opportuno che la natura fisica dei segnali utilizzati in un sistema
di controllo sia congruente con quella del dispositivo utilizzato per implementare il controllo stesso
tipicamente: elettrico, pneumatico, idraulico segnale astratto
grandezza concettuale che riproduce (di solito solo in parte) il solo contenuto informativo della grandezza fisica di interesse variabile o funzione in un sistema di equazioni contenuto di memoria in un calcolatore elettronico

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 31
il sistema da controllare (impianto)
l’attuatore
+ - √, α ∑, > ε
l’algoritmo di controllo
l’unità di controllo il sensore
Terminologia ed esempi Elementi chiave di un sistema di controllo

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 32
il sistema da controllare (impianto)
0010110100
l’algoritmo di controllo
Terminologia ed esempi Dal Controllo Manuale al Controllo Automatico
l’unità di controllo il sensore
l’attuatore
Ingegneria e Tecnologie dei Sistemi di Controllo
Controlli Automatici

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 33
Terminologia ed esempi elementi di un sistema di controllo
impianto sistema (fisico) su cui esercitare il controllo
sensore dispositivo per la misura dell'uscita
attuatore dispositivo di potenza per imporre valori desiderati all'ingresso
dell'impianto (comandare l'impianto) controllore
dispositivo elettronico o sistema di elaborazione (hardware/software) per l'implementazione della strategia di controllo
nel corso non si considerano i dispositivi veri ma i loro modelli matematici

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 34
Introduzione al Controllo Elementi fondamentali per il progetto di
un sistema di controllo occorre:
costruire un modello del sistema (in generale un impianto o una macchina
definire i segnali corrispondenti alle grandezze fisiche interessate dal controllo
stendere le specifiche di progetto per il sistema controllato progettare un algoritmo di controllo basato sul modello del
sistema, sui segnali disponibili e sulle specifiche gli algoritmi di controllo che lo studente imparerà a progettare
nei vari corsi di Controlli Automatici rappresentano, in realtà, il modello del sistema di controllo (vero) da costruire
verificarne il comportamento mediante tecniche di simulazione realizzare il sistema fisico che implementa il controllo
corso di Ingegneria e Tecnologie dei Sistemi di Controllo

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 35
grandezze fisiche
ingressi grandezze
fisiche
uscite
sistema
grandezze fisiche
stati
Controlli Automatici
Introduzione al Controllo Concettualizzazione a blocchi
specifiche

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 36
Introduzione al Controllo Controllo della temperatura dell'aula
• Irraggiamento solare • potenza termica generata dalla persone
Qin Qout T

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 37
Introduzione al Controllo Controllo della temperatura dell'aula
Qin Qout T
Qin
Qout
+
- aula
T
Schema a blocchi dell'impianto
Orientamento: La quantità di calore Qin erogata dal radiatore è la variabile di controllo La quantità di calore Qout scambiata con l'esterno è la variabile di disturbo La temperatura dell'aula T è la variabile di cui ci interessa garantire l'andamento temporale (variabile di uscita)

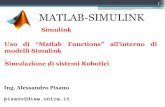
Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 38
Introduzione al Controllo
Schema fisico del sistema di controllo Controllo della temperatura dell'aula
caldaia acqua calda
pompa
T sensore
21.5°
termoregolatore
+ -
220Vac
012Vdc
Qout
elettrovalvola
motore
Qin

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 39
Introduzione al Controllo Controllo della temperatura dell'aula
Funzionamento una caldaia centralizzata (esterna al nostro sistema) produce
acqua calda ad una temperatura adeguata (ad es. 70°). l'acqua viene convogliata con tubazioni ad un radiatore collocato
nell'aula il circuito dell'acqua calda è sezionato da una valvola che si apre o
si chiude mediante comando elettrico (elettrovalvola) l'apertura/chiusura sono proporzionali alla tensione applicata
all'elettrovalvola elettrovalvola proporzionale
l'elettrovalvola è comandata da un controllore elettronico, collocato all'interno dell'aula, che apre/chiude l'elettrovalvola sulla base della misura della temperatura dell'aula rilevata da un sensore

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 40
Introduzione al Controllo Controllo della temperatura dell'aula
Soluzione sofisticata Schema a blocchi concettuale del sistema di controllo
La logica di controllo è la seguente se è freddo (Taula < Tdesiderata ) bisogna far arrivare più
acqua al radiatore e quindi aprire di più l'elettrovalvola all'elettrovalvola una tensione maggiore
se è caldo (Taula > Tdesiderata ) bisogna ridurre la quantità di acqua calda al radiatore e quindi aprire di meno l'elettrovalvola all'elettrovalvola una tensione minore
Attuatore
Valvola acqua radiatore
termoregolatore
Tdes controllore
Impianto
Σ Qin
Qout
+
- Aula
Taula
sensore

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 41
Introduzione al Controllo Controllo della temperatura dell'aula
Soluzione più economica Schema a blocchi concettuale del sistema di controllo
Specifiche meno severe è accettabile uno scostamento di temperatura (errore) di 1 °C il costo del controllore va mantenuto al minimo
Soluzione tecnologica si utilizza un Termostato (regolatore/sensore con uscita a due
livelli) si usa una elettrovalvola on/off più semplice ed economica
completamente aperta o completamente chiusa
Impianto Attuatore termoregolatore
Σ Qin
Qout
+
- Aula
Taula Valvola acqua Termostato
Tdes radiatore

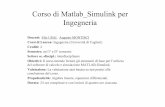
Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 42
Impianto Attuatore termoregolatore
Introduzione al Controllo
Schema a blocchi del sistema di controllo
Σ Qin
Qout
+
- Aula
Taula Valvola acqua Termostato
Tdes radiatore
Controllo della temperatura dell'aula
Variazione della temperatura desiderata da 18°C a 20°C
20°
18°
on
off
comando valvola
Tdes
Taula
Qin >> Qout

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 43
Motivazioni del Controllo Esempio
Sospensione dell'automobile perché controllo
condizioni operative variabili numero di persone rettilineo/curva tipo di tracciato e di asfalto
specifiche variabili corsa su pista rally guida in città guida confortevole in autostrada

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 44
Motivazioni del Controllo Sospensione tradizionale (senza controllo)
Elementi in gioco Mv = massa del veicolo Mr = Massa della ruota S = Sospensione A = Ammortizzatore
Scopo della sospensione • garantire la tenuta di strada ed il
confort ⇒ h costante • mediante la scelta (taratura) di: S ⇒ accumulatore di energia (forza posizionale) A ⇒ dissipatore di energia (forza dinamica) Problemi: - specifiche in contrasto - condizioni operative variabili (passeggeri, tipo di strada, ..) ⇒ soluzione di compromesso valida in condizioni nominali
Mr
A S
h
Mv

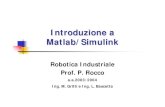
Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 45
Motivazioni del Controllo Sospensione con controllo (Sospensione attiva)
Mv
Elementi in gioco Mv = massa del veicolo Mr = Massa della ruota S = Sospensione A = Ammortizzatore Se = serbatoio energ. At = attuatore
Scopo della sospensione attiva • garantire la tenuta di strada ed il
confort ⇒ h costante • mediante azione intelligente e
continua su: At ⇒ scambiatore di energia con Serb. Vantaggi • Cambiamento della strategia di azione nelle diverse condizioni ⇒ soluzione ottimizzata valida in tutte le condizioni Svantaggi • costi
Mr
A S
h
Att Serb.
Azione di controllo

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 46
Motivazioni del Controllo Alcune considerazioni
Gli esempi mostrano che è indispensabile garantire che il sistema da controllare sia, di per sé,
funzionante al meglio anche senza controllo non si costruisce una Panda per correre in F1
il controllo deve principalmente garantire le prestazioni al variare delle specifiche
programmazione giornaliera/settimanale tipo di guida
al variare delle condizioni operative dell'impianto (parametri) numero di persone presenti nella stanza o di passeggeri
al variare degli agenti esterni (disturbi) temperatura esterna irraggiamento salita/discesa, vento, stato dell'asfalto (buche,…)
punto di partenza per il progetto di un sistema di controllo è la predisposizione di un modello dell'impianto insieme di relazioni tra le azioni sull'impianto ed il loro effetto

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 47
Conclusione Il corso intende fornire allo studente gli elementi concettuali di base per la comprensione della problematica del controllo sono usati modelli matematici di tipo differenziale per la modellazione
degli impianti e per il progetto dei controllori lo studente non apprende quindi a progettare un sistema di controllo
reale, ma impara a ricavarne un modello matematico sono considerati semplici sistemi dinamici lineari caratterizzati da un
solo ingresso di controllo ed una sola uscita controllata i concetti base sono appresi più facilmente, ma mantengono la loro
valenza concettuale anche per sistemi più complessi il progetto di sistemi di controllo reali coinvolge competenze
informatiche ed elettroniche specifiche successivi corsi obbligatori e a scelta nella laurea triennale e nella laurea
specialistica

Prof. Carlo Rossi – Controlli Automatici LA Introduzione al corso 48
Riferimenti bibliografici Per approfondimenti
[1] Boltzern, Scattolini, Schiavoni "Fondamenti di Controlli Automatici", McGraw-Hill, II edizione
Capitolo 1 [2] Marro "Controlli Automatici", Zanichelli, V edizione,
Capitolo 1

Controlli Automatici LA Introduzione al corso
FINE
Prof. Carlo Rossi DEIS - Università di Bologna
Tel. 051-2093020 E-mail: [email protected]
http://www-lar.deis.unibo.it/~crossi