Confronto tra la Tomografia a Raggi X e la Mappatura ad ... tra... · Confronto tra mappatura ad...
76
Confronto tra la Tomografia a Raggi X e la Mappatura ad Ultrasuoni Angelo Tatì Laboratorio di Qualificazione Materiali e Componenti ENEA C.R. Casaccia UTT MAT-QUAL CICPND Vicenza 26 Giugno 2015 CONTROLLI INNOVATIVI PER LA COSTRUZIONE E LA MANUTENZIONE DI COMPONENTI MECCANICI ED OPERE INFRASTRUTTURALI [email protected] [email protected]
Transcript of Confronto tra la Tomografia a Raggi X e la Mappatura ad ... tra... · Confronto tra mappatura ad...

Confronto tra la Tomografia a Raggi X e la Mappatura ad Ultrasuoni
Angelo TatìLaboratorio di Qualificazione Materiali e Componenti
ENEA C.R. Casaccia UTT MAT-QUALCICPND Vicenza
26 Giugno 2015
CONTROLLI INNOVATIVI PER LA COSTRUZIONE E LAMANUTENZIONE DI COMPONENTI MECCANICI ED OPERE INFRASTRUTTURALI
[email protected]@enea.it

Applicazioni dei CNDqCivileqIndustrialeqPatrimonio Artistico
03/07/2015 Angelo Tatì 2
03/07/2015CICPND -DTG Vicenza 2015...........
3
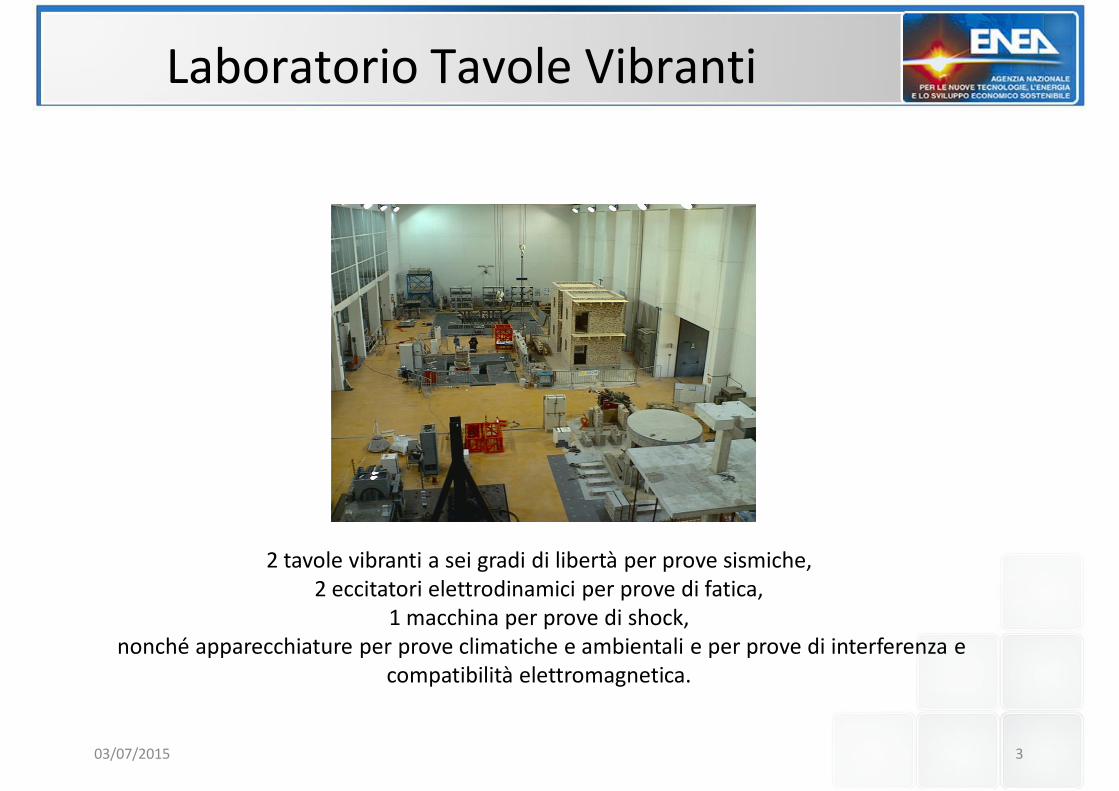
Laboratorio Tavole Vibranti
2 tavole vibranti a sei gradi di libertà per prove sismiche, 2 eccitatori elettrodinamici per prove di fatica,
1 macchina per prove di shock,nonché apparecchiature per prove climatiche e ambientali e per prove di interferenza e
compatibilità elettromagnetica.

03/07/2015CICPND -DTG Vicenza 2015...........
4
Le Tavole Vibranti

03/07/2015 CICPND -DTG Vicenza 2015........... 5
Confronto tra mappatura ad Ultrasuoni e Tomografia
Principi Fisici Mappatura ad ultrasuoni Tomografia a Raggi X
Tipo di onda Meccanica Elettromagnetica
Frequenza di oscillazione 50 KHz a 100 MHz 10 18 Hz
Effetti sulla materia Vibrazione Ionizzante
Velocità nel vuoto Non si propaga 300000 Km/s
Attenuazione nell’acciaio Bassa Alta
Materiale attenuante Aria Piombo
Materiale trasparente Metalli/Acciaio/acqua Vuoto/Aria
Modalità di utilizzo Immersione/liquidi di accoppiamento
Bunker e zona esposta alla radiazione
Misura Sonda/PuntualePhased Array/Lineare
Lastra/immagine
Tipo di Controllo Volumetrico Volumetrico

03/07/2015 CICPND -DTG Vicenza 2015........... 6
Confronto tra mappatura ad Ultrasuoni e Tomografia
Ultrasuoni:• sono emessi e ricevuti da un cristallo piezoelettrico• vengono emessi dal cristallo tramite uno strumento che invia alla sonda un impulso di tensione di centinaia di Volt•L’onda meccanica che si propaga all’interno del materiale è riflessa dagli eventuali difetti ed infine dalla fine del pezzo e viene ricevuta dal cristallo che la converte in una tensione di pochi mV quindi viene amplificata dallo stesso strumento e digitalizzata da un oscilloscopio.•Il segnale elettrico digitalizzato acquisito contiene un informazione sullo spessore attraversato sottoforma di echi detto Ecogramma ( A-scan )
Tomografia a Raggi X:• il fascio viene emessa da una sorgente radiogena con una tensione di centinaia di KV•La radiazione che attraversa l’oggetto viene ricevuta da un pannello digitale che converte la radiazione in un segnale elettrico•Tramite un interfaccia elettronica il segnale viene convertito in una immagine•L’immagine in toni di grigio contiene la lastra dell’oggetto ( Proiezione)

03/07/2015 CICPND -DTG Vicenza 2015........... 7
Confronto tra mappatura ad Ultrasuoni e Tomografia
Mappatura ad Ultrasuoni• Il movimento della sonda sul pezzo da esaminare lungo le direzioni XY o Z teta permette la scansione dell’oggetto • sincronizzando la posizione della sonda con l’A-scan relativo si ottiene una matrice 3D del volume dell’oggetto•La matrice 3D può essere vista in 3 direzioni diverse in pianta, e sui 4 lati•Queste viste sono chiamate mappature evidenziano eventuali difetti presenti all’interno
Tomografia a Raggi X:• la rotazione dell’oggetto da esaminare su una tavola rotante tra la sorgente a raggi X e il pannello dove si forma l’immagine permette di ottenere più proiezioni dell’oggetto•Tramite l’operazione software chiamata retroproiezione possiamo ricostruire la forma e l’interno dell’oggetto e i suoi eventuali difetti interni

03/07/2015 CICPND -DTG Vicenza 2015........... 8
Confronto tra mappatura ad Ultrasuoni e Tomografia
Ultrasuoni
Raggi X
Il fascio ultrasonoro subisce effetti di riflessione, assorbimento, rifrazione e diffusione La cavità in rosso nell’acciaio riflette l’onda ultrasonora. Il difetto è rilevabile dal segnale di ritorno.
I raggi X subisconoeffetti di riflessione, assorbimento, rifrazione e diffusione . La cavità è attraversata senza attenuazione ed è poco rilevabile
Raggi X
acquaacqua
aria aria
Ultrasuoni
Ultrasuoni
Raggi X
Raggi X
Oggetto
Oggetto

03/07/2015 CICPND -DTG Vicenza 2015........... 9
Confronto tra mappatura ad Ultrasuoni e Tomografia
Ultrasuoni
Raggi X
La cavità in rosso nell’acciaio non riflette l’onda ultrasonora. Il difetto non è rilevabile
La cavità è attraversata per tutta la sua lunghezza. Il fascio è fortemente attenuato. Il difetto e rilevabile
acqua acqua
aria ariaRaggi X
Raggi X
Oggetto
Oggetto

03/07/2015 CICPND -DTG Vicenza 2015........... 10
Confronto tra mappatura ad Ultrasuoni e Tomografia
Ultrasuoni
Raggi X
La superficie non è perpendicolare al fascio e quindi viene riflessa.L’oggetto non può essere ispezionato facilmente
Il fascio non subisce forti attenuazioni . Il componente può essere ispezionato facilmente
aria aria
acqua acqua
Oggetto

03/07/2015 CICPND -DTG Vicenza 2015........... 11
Confronto tra mappatura ad Ultrasuoni e Tomografia
Ispezione con sonda angolata con onde trasversali e accoppiante.Il difetto è rilevabile
Unica esposizione evidenzia il difetto.
Saldatura di testa

03/07/2015 CICPND -DTG Vicenza 2015........... 12
Confronto tra mappatura ad Ultrasuoni e Tomografia
L’ispezione di oggetti di grandi dimensioni e forme estese come lamiere, Tubazioni, Vessel, assili ferroviari possono essere controllate da una superficie muovendo la sonda.
L’ispezione di grandi oggetti e con dimensioni differenti nelle 3 direzioni creano nella ricostruzione tomografia artefatti cioè zone di materiale non reali
Oggetto
Oggetto
03/07/2015 CICPND -DTG Vicenza 2015........... 13
Controllo Manuale/Automatico
• L’operatore che conduce l’ispezione deve essere formato/certificato e avere una comprovata esperienza nel campo.
• Per controlli ripetitivi e di lunga durata, il sistema automatico è consigliato perché non si stanca e non si annoia.
• Per controlli in fase di produzione e dove il componente è prodotto in serie si possono utilizzare i metodi automatici di misura tra cui la tomografia a raggi X e la mappatura ad ultrasuoni.

03/07/2015 CICPND -DTG Vicenza 2015........... 14
Sistemi automatici
I sistemi automatici supportano le più diffuse tecnologie non distruttive
• Ultrasuoni• Radiografia• Eddy Current• Esami visivi• Termografia

03/07/2015CICPND -DTG Vicenza 2015...........
15
Prototipo si sistema automatico
• Sistema 4 assi – 3 traslativi 30 cm– 1 rotativo 360°– Strumento UT monocanale– Oscilloscopio 1 GHz di campionamento– Computer desktop– Software

03/07/2015CICPND -DTG Vicenza 2015...........
16
Ricerca su Reattori a fusione nucleare

03/07/2015CICPND -DTG Vicenza 2015...........
17
Collaudo della saldatura del Divertore

03/07/2015CICPND -DTG Vicenza 2015...........
18
Collaudo della saldatura del Divertore

03/07/2015CICPND -DTG Vicenza 2015...........
19
Sviluppo del software di mappatura

03/07/2015 CICPND -DTG Vicenza 2015........... 20
Saldatura tubo di Rame con tegole di CFC e W

03/07/2015 CICPND -DTG Vicenza 2015........... 21
Software UT - campioni di superconduttore - acciaio

03/07/2015 CICPND -DTG Vicenza 2015........... 22
Software UT per controllo rotore di coda elicottero EH 109 Agusta Westland - composito
03/07/2015 CICPND -DTG Vicenza 2015........... 23
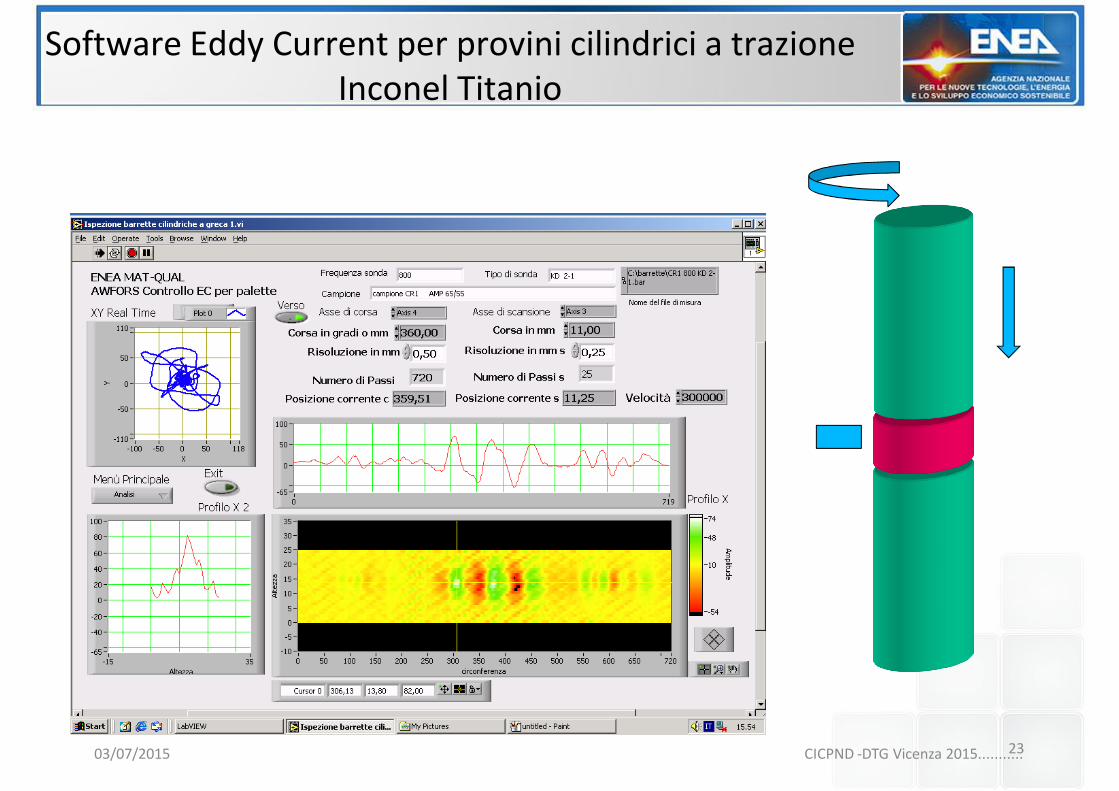
Software Eddy Current per provini cilindrici a trazione Inconel Titanio

03/07/2015 CICPND -DTG Vicenza 2015........... 24
Software Controllo palette turbina saldati con scarica capacitiva su BLISK con i metodi UT EC

03/07/2015CICPND -DTG Vicenza 2015...........
25
Applicazione aeronautica per il controllo del rotore principale dell’elicottero EH101
• Controllo di componenti piani di grandi dimensioni2 metri di diametropale da 9 metri di L
• Controllo componenti complessi con superfici curve
• Velocità di Scansione > 200 mm/sec

03/07/2015 CICPND -DTG Vicenza 2015........... 26
Tecniche ultrasonore
• TT True-Trasmission– Grossi spessori– Scansione veloce– Materiali disomogenei– Mappe tipo C-scan– Gain variabile

03/07/2015 CICPND -DTG Vicenza 2015........... 27
Tecniche ultrasonore
• PE Pulse-Echo– Materiali omogenei– Spessori limitati– Esame volumetrico – Mappe di tipo A-B-C-D-F
Scan– Elaborazione dati

03/07/2015 CICPND -DTG Vicenza 2015........... 28
Sistema automatico a 6 gradi libertà
• Costruzione e progettazione meccanica ed elettronica
• SIMITECNO• COMEB• EUROSYSTEM
Dimensione 4 x 3 x 3 metri

03/07/2015CICPND -DTG Vicenza 2015...........
29
Sistema automatico
Obiettivi ENEA• Progettazione SW• Realizzazione SW• Messa a punto del sistema
elettromeccanico• Messa a punto delle tecniche
ultrasonore• precollaudo• collaudo finale

03/07/2015CICPND -DTG Vicenza 2015...........
30
Sistema automatico
• Sistema 6 assi• 5 traslativi 1 rotativo• 1 coppia di assi indipendenti
per entrambe le sonde

03/07/2015 CICPND -DTG Vicenza 2015........... 31
Software di Acquisizione
Acquisizione
l Acquisizione con scheda oscilloscopio PCI
l 100MHz ADC l 800MHz in ETSl A - C SCAN in tempo realel Rifasamento
dell’interfaccial Medie

03/07/2015 CICPND -DTG Vicenza 2015........... 32
Software
Motion Control
l Scheda PCI 8 assil Scansione piana
1 asse di corsa e 2 assi in sincronia per l’index

03/07/2015 CICPND -DTG Vicenza 2015........... 33
Software
Motion Control
l Scheda PCI 8 assil Scansione complessa l Asse XY posizione fulcro
assel Asse rotativo angolazione
sondal Asse Z di corsa

03/07/2015 CICPND -DTG Vicenza 2015...........
Software di apprendimento profili curvi
Acquisizione delle posizionetramite testina Renishaw
34

03/07/2015 CICPND -DTG Vicenza 2015........... 35
Acquisizione Profilo Tramite File Vettoriale Catia/STL
• Acquisizione delle posizioni da file CAD
• Mesh a elementi triangolari delle superfici e coseni direttori

03/07/2015 CICPND -DTG Vicenza 2015........... 36
Acquisizione Profilo Tramite file di immagine
• Acquisizione delle posizione su immagine digitale (Bitmap)
• Calibrazione • Zero immagine e
movimentazione

03/07/2015 CICPND -DTG Vicenza 2015........... 37
Software di apprendimento profili curvi
Zero macchina
0,01500,0
0,1000
Y dietro
X Sinistra
Y Avanti
X Destra

03/07/2015 CICPND -DTG Vicenza 2015........... 38
Software di apprendimento profili curvi
Ø Interpolazione

03/07/2015 CICPND -DTG Vicenza 2015........... 39
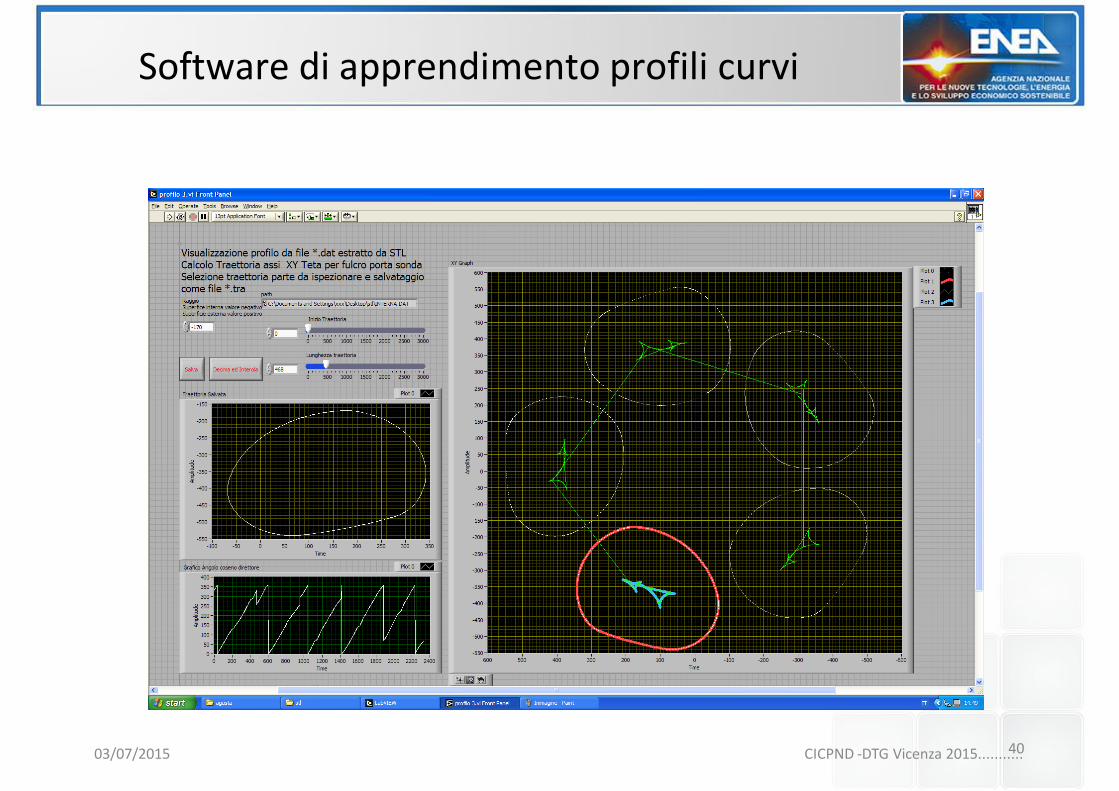
Software di apprendimento profili curvi
Ø Interpolazione
03/07/2015 CICPND -DTG Vicenza 2015........... 40
Software di apprendimento profili curvi

03/07/2015 CICPND -DTG Vicenza 2015........... 41
Software di apprendimento profili curvi
Ø Selezione dei profili

03/07/2015 CICPND -DTG Vicenza 2015........... 42
Software di apprendimento profili curvi
Ø Selezione dei profili interni
03/07/2015 CICPND -DTG Vicenza 2015........... 43
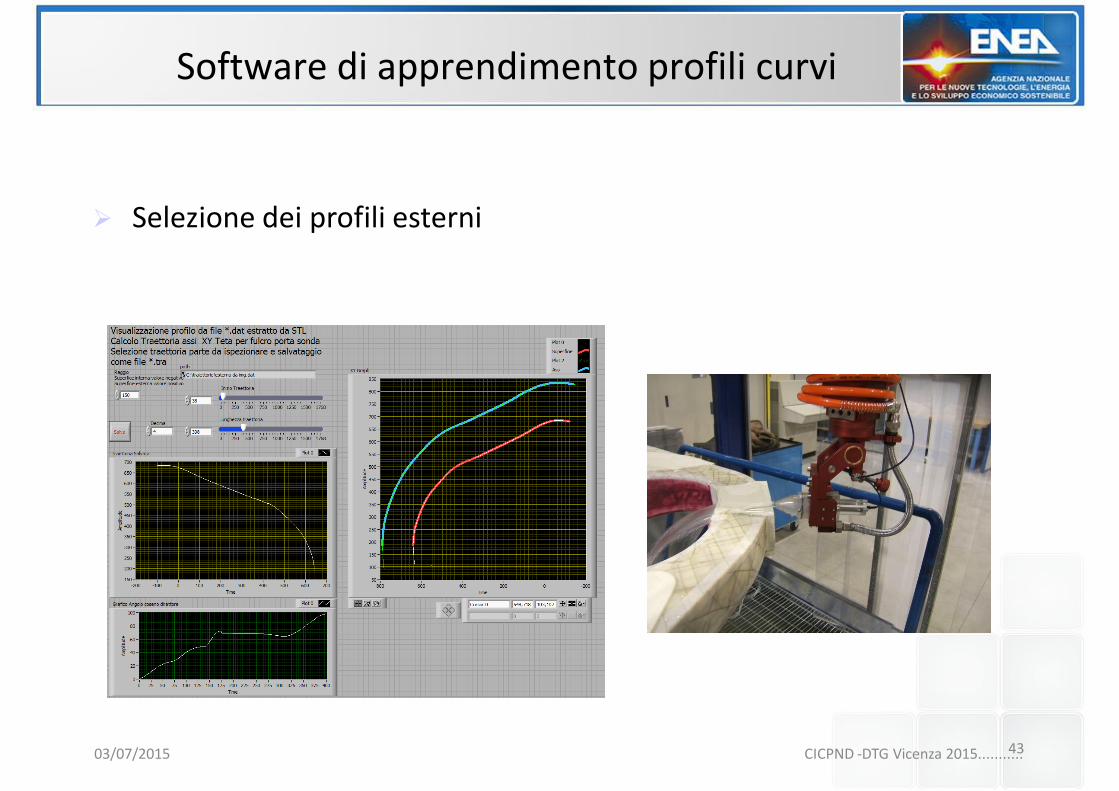
Software di apprendimento profili curvi
Ø Selezione dei profili esterni

03/07/2015 CICPND -DTG Vicenza 2015........... 44
Software di apprendimento profili curvi
Ø Esecuzione traiettorie – scelta della zona
03/07/2015 CICPND -DTG Vicenza 2015........... 45
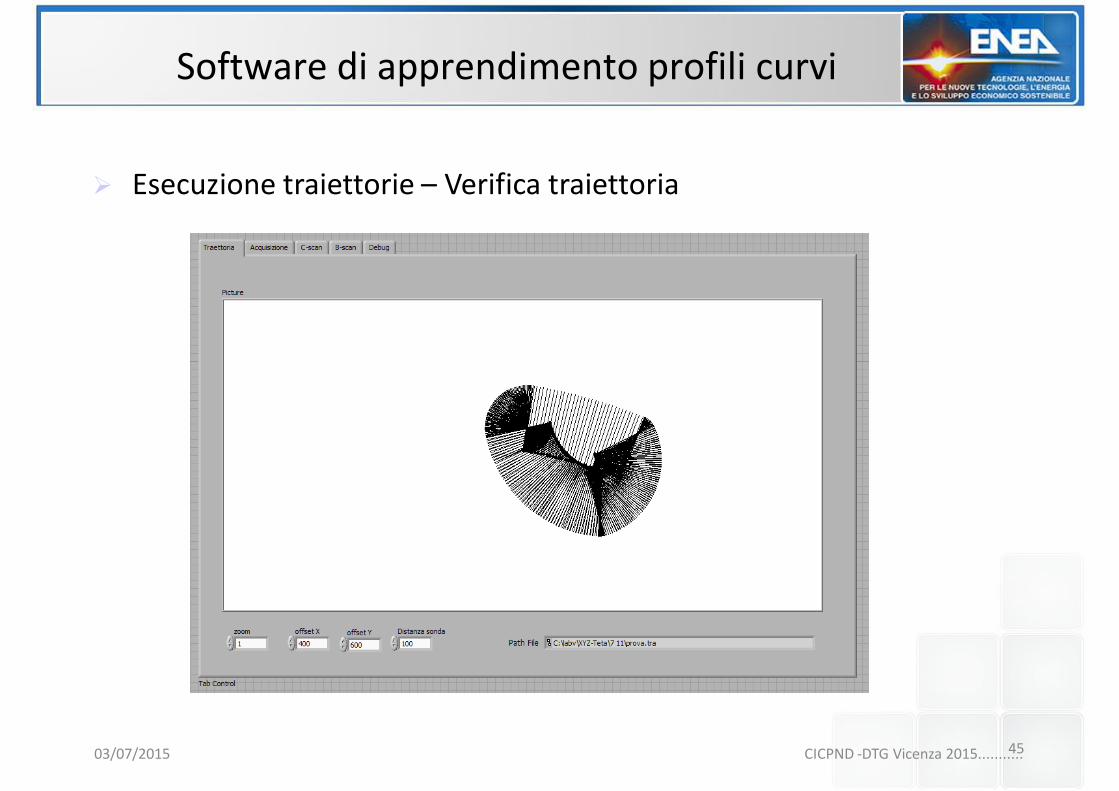
Software di apprendimento profili curvi
Ø Esecuzione traiettorie – Verifica traiettoria

03/07/2015 CICPND -DTG Vicenza 2015........... 46
Software di apprendimento profili curvi
Ø Esecuzione traiettorie – Ispezione

03/07/2015 CICPND -DTG Vicenza 2015........... 47
Software di apprendimento profili curvi
Ø Esecuzione traiettorie – Risultati

03/07/2015 CICPND -DTG Vicenza 2015........... 48
Software di apprendimento profili curvi
Ø Esecuzione traiettorie – Risultati

03/07/2015 CICPND -DTG Vicenza 2015........... 49
Software di apprendimento profili curvi
Ø Verifica dei Risultati

03/07/2015 CICPND -DTG Vicenza 2015........... 50
Software di apprendimento profili curvi

03/07/2015 CICPND -DTG Vicenza 2015........... 51
Software di Elaborazione
ØØ C_scanC_scan TTTT

03/07/2015 CICPND -DTG Vicenza 2015........... 52
Software di Elaborazione
ØØ AA--SCAN SCAN -- BB--SCANSCAN

03/07/2015 CICPND -DTG Vicenza 2015........... 53
Software di Elaborazione
ØØ AA--SCAN SCAN -- CC--SCAN SCAN -- DD--SCANSCAN

03/07/2015 CICPND -DTG Vicenza 2015........... 54
Software di Elaborazione
ØØ AA--SCAN SCAN -- CC--SCAN SCAN -- BB--SCANSCAN

03/07/2015 CICPND -DTG Vicenza 2015........... 55
Software di Elaborazione
ØØ AA--SCAN SCAN -- CC--SCAN SCAN -- RR--SCANSCAN

03/07/2015 CICPND -DTG Vicenza 2015........... 56
Software di Elaborazione
ØØ AA--SCAN FSCAN F--SCANSCAN
03/07/2015 CICPND -DTG Vicenza 2015........... 57
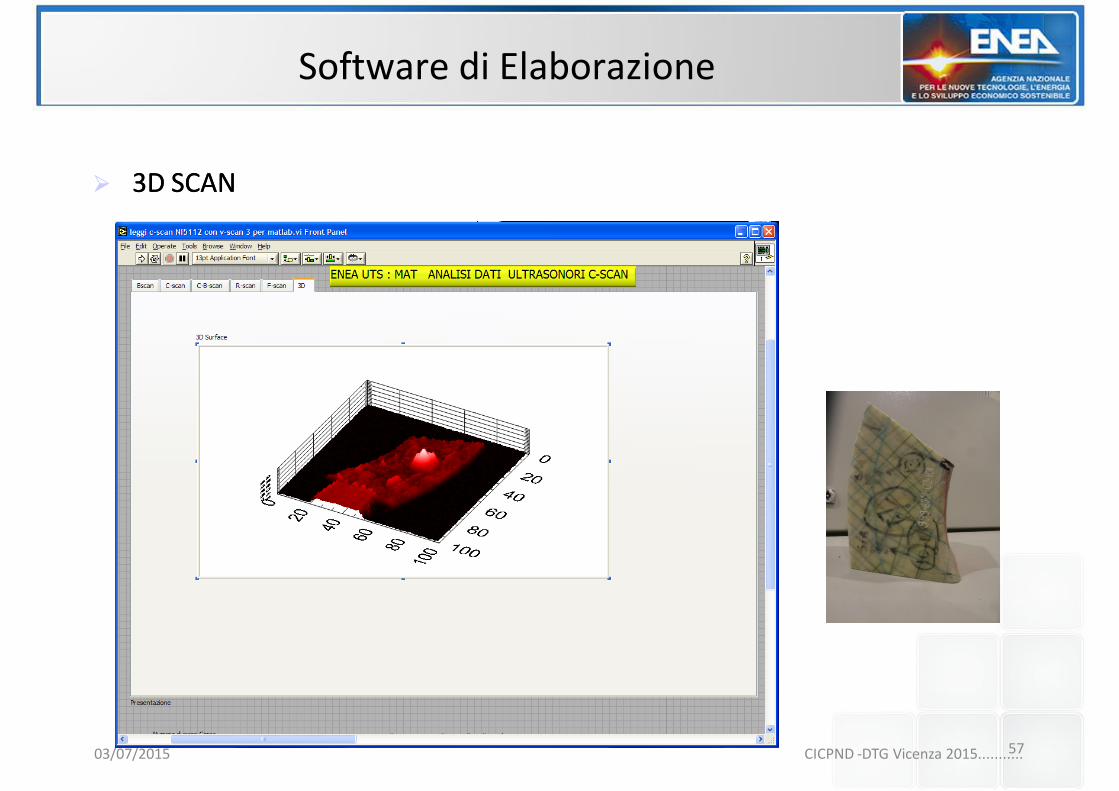
Software di Elaborazione
ØØ 3D SCAN3D SCAN

03/07/2015 CICPND -DTG Vicenza 2015........... 58
Sistema Automatico di ispezione di tubi con saldatura elicoidale tramite braccio antropomorfo

03/07/2015 CICPND -DTG Vicenza 2015........... 59
Tomografia
• Sistema Tomografico Phoenix Nanotom mFigure 8. Phoenix nanotom m

03/07/2015 CICPND -DTG Vicenza 2015........... 60
Tomografia
• Sistema Tomografico Phoenix nanotom m
Figure 8. Phoenix nanotom mMax. tube voltage 180 kVMax. output 15 WDetail detectability Up to 200nm (0.2µm)Min. focus-detector-distance 0.4mmMax. voxel resolution (depending on object size) < 500nm (0.5µm)Geometric magnification (3D) 1.5 times up to 100 timesMax. object size (height x diameter) 150mm x 120mm / 5.9" x 4.7"Max. object weight 2 kg/ 4.4 lbImage chain 5-Megapixel fully digital image chain3D computed tomography yesAdvanced surface extraction yes (optional)CAD comparison + dimensional measurement yes (optional)
System size (1640 x 1430 x 750 mm), (64.6” x 56.3” x 29.5”), larger cabinets on request
System weight 1300kg / 2866 lb
Radiation Safety
Full protective radiation safety cabinet according to the German RöV (attachment 2 nr. 3) and the US Performance Standard 21 CFR 1020.40 (Cabinet X-ray Systems)- Exposure rate < 1 µSv/h emission limit measured at 10 cm distance from accessible su
03/07/2015 CICPND -DTG Vicenza 2015........... 61
Tomografia
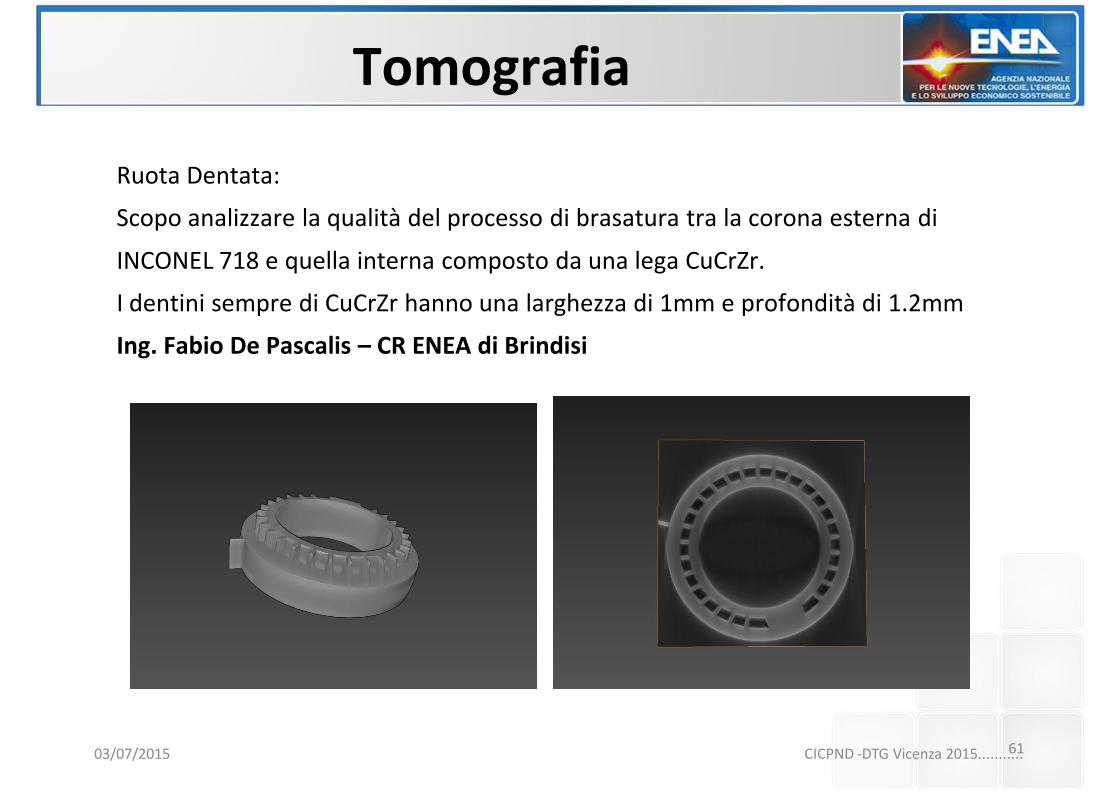
Ruota Dentata:
Scopo analizzare la qualità del processo di brasatura tra la corona esterna di
INCONEL 718 e quella interna composto da una lega CuCrZr.
I dentini sempre di CuCrZr hanno una larghezza di 1mm e profondità di 1.2mm
Ing. Fabio De Pascalis – CR ENEA di Brindisi

03/07/2015 CICPND -DTG Vicenza 2015........... 62
Tomografia
Figure 8. Phoenix nanotom m
Ing. Fabio De Pascalis – CR ENEA di Brindisi

03/07/2015 CICPND -DTG Vicenza 2015........... 63
Tomografia
Figure 8. Phoenix nanotom m
Tubo ( guaina reattore nucleare di IV Generazione ) in SiC

03/07/2015 CICPND -DTG Vicenza 2015........... 64
Tomografia
Figure 8. Phoenix nanotom m
Tubo ( guaina reattore nucleare di IV Generazione ) in SiC

03/07/2015 CICPND -DTG Vicenza 2015........... 65
Tomografia
Figure 8. Phoenix nanotom m
Tubo ( guaina reattore nucleare di IV Generazione ) in SiC

03/07/2015 CICPND -DTG Vicenza 2015........... 66
Tomografia
Figure 8. Phoenix nanotom m
Tubo ( guaina reattore nucleare di IV Generazione ) in SiC

03/07/2015 CICPND -DTG Vicenza 2015........... 67
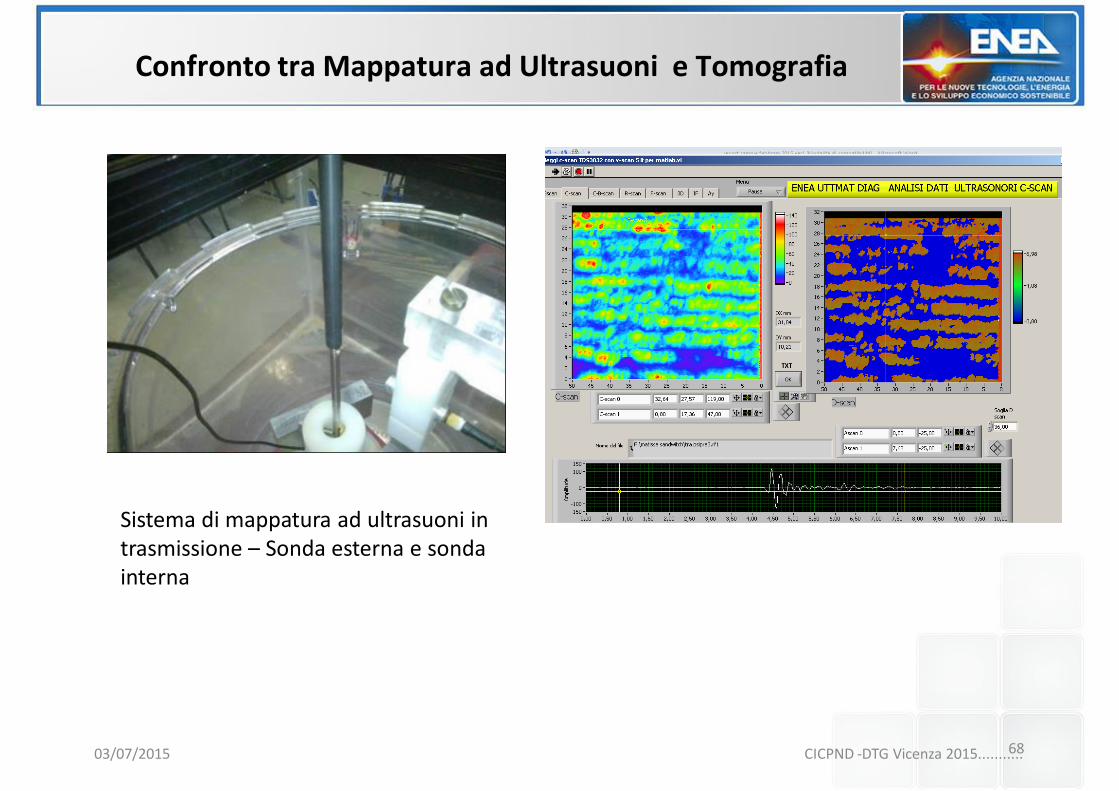
Confronto tra Mappatura ad Ultrasuoni e Tomografia
Sistema di mappatura ad ultrasuoni in trasmissione – Sonda esterna e sonda interna
03/07/2015 CICPND -DTG Vicenza 2015........... 68
Confronto tra Mappatura ad Ultrasuoni e Tomografia
Sistema di mappatura ad ultrasuoni in trasmissione – Sonda esterna e sonda interna

03/07/2015 CICPND -DTG Vicenza 2015........... 69
Confronto tra Mappatura ad Ultrasuoni e Tomografia

03/07/2015 CICPND -DTG Vicenza 2015........... 70
Confronto tra Mappatura ad Ultrasuoni e Tomografia
26 mm

03/07/2015 CICPND -DTG Vicenza 2015........... 71
Confronto tra Mappatura ad Ultrasuoni e Tomografia

03/07/2015 CICPND -DTG Vicenza 2015........... 72
Confronto tra Mappatura ad Ultrasuoni e Tomografia
26 mm

03/07/2015 CICPND -DTG Vicenza 2015........... 73
TomografiaSistema Tomografico YXLON per pala di elicotteri
in materiale composito
Rivelatore

03/07/2015 CICPND -DTG Vicenza 2015........... 74
Confronto tra mappatura ad Ultrasuoni e Tomografia
Aspetto Mappatura ad ultrasuoni Tomografia
Forma dell’oggetto La sonda deve essere sempre perpendicolare alla superficie
La radiazione non è influenzata dall’orientazione della superficie
Spessore Può attraversare grossispessori
Utilizzo di energia elevate con problemi di esposizione alla radiazione
Costo Modesto Elevato
Risoluzione spaziale 0,08 – 1 mm 0,5 micron

03/07/2015 CICPND -DTG Vicenza 2015........... 75
Confronto tra mappatura ad Ultrasuoni e Tomografia
Aspetto Mappatura ad ultrasuoni Tomografia
Velocità di ispezione 20 minuti per scansioni di 5 metri x 0,5
Tubo 10 mm x 5 cm1 ora di acquisizione + 1 ora di elaborazione
Dati acquisiti 100 KB a 200 MB 2 GB
PC Desktop Workstation con array di schede grafiche

03/07/2015 CICPND -DTG Vicenza 2015........... 76
Confronto tra mappatura ad Ultrasuoni e Tomografia
Grazie per l’attenzione