Assi principali d’inerzia zz - ISHTARishtar.df.unibo.it/Uni/bo/ingegneria/all/zucchelli/... · Ö...
14
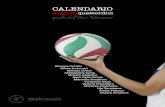
ˆ x u ˆ y u ˆ z u x y z O ˆ u rispetto ai tre assi x, y, z Assi principali d’inerzia di un corpo rigido passante per un punto O qualunque del corpo rigido e con origine nel punto O se il corpo sta ruotando attorno ad un qualsiasi asse di rotazione dal versore la direzione nello spazio di ma piu’ in generale del corpo rigido ˆ u = sara’ determinata ˆ u fino ad ora, ' z z oltre ad assumere che , abbiamo sempre supposto che l’asse di rotazione fosse l’asse z di un sistema di riferimento solidale al corpo rigido
Transcript of Assi principali d’inerzia zz - ISHTARishtar.df.unibo.it/Uni/bo/ingegneria/all/zucchelli/... · Ö...

ˆxu
ˆyu
ˆzu
x
y
z
Ou
rispetto ai tre assi x, y, z
Assi principali d’inerzia di un corpo rigido
passante per un punto O qualunque del corpo rigido
e con origine nel punto O
se il corpo sta ruotando attorno ad un qualsiasi asse di rotazione
dal versore
la direzione nello spazio di
ma piu’ in generale
del corpo rigido
u =
sara’ determinata
u
fino ad ora, 'z zoltre ad assumere che , abbiamo sempre supposto che l’asse di rotazione
fosse l’asse z
di un sistema di riferimento solidale al corpo rigido

uz’
y’
x’
O’
ˆˆ ˆˆx y zu u i u j u k= + + dove
1 1ˆˆxu u i cos cos = = = etc.
proiettando lungo gli assi u cartesiani x, y, z
ˆˆ ˆu cos i cos j cos k = + +quindi
ˆˆ ˆ cos i cos j cos k + += ˆˆ ˆ x y zi j k + +=
e
ˆxu
ˆyu
ˆzu

la posizione di ogni punto Pi del corpo
ˆˆ ˆi i i ir x i y j z k= + +
del punto Pi
i i iR r sen=
2 2ˆ( )i i i im R m u r=
ˆˆ ˆ( ) ( ) ( )i i i i i iz y i x z j x y k − + − + −
posizione
la distanza Ri
ˆˆ ˆu i j k = + +
rispetto ad O e’ definita dal vettore
ˆiu r =
dall’asse
cos =cos = cos =posto
→
di inerzia rispetto all’asse di rotazione udel punto materiale Pi
moltiplicando Ri per la massa mi dell’i-esimo punto
e
ˆiu r=
si otterra’ il momento
u
Pi
iiR
ir
di rotazione e’

quadrando ˆiu r e sommando su tutti i punti del corpo rigido
2 2 2 2 2 2u xx yy zz xy yz zxI I I I I I I = + + − − −
2 2
1
( )n
i i i
i
m y z=
+
momento d’inerzia
rispetto all’asse x
2 2
1
( )n
i i i
i
m x z=
+
momento d’inerzia
rispetto all’asse y
momento d’inerzia
rispetto all’asse z
2 2
1
( )n
i i i
i
m x y=
+1
n
xy i i i
i
I m x y=
= 1
n
yz i i i
i
I m y z=
=
1
n
zx i i i
i
I m x z=
= prodotti
d’inerzia
ˆˆ ˆ( ) ( ) ( )i i i i i iz y i x z j x y k − + − + −ˆiu r =

2 2 2 2 2 2u xx yy zz xy yz zxI I I I I I I = + + − − −
dividendo per Iu
2 2 2
1 2 2 2xx yy zz xy yz zx
u u u u u u
I I I I I II I I I I I
= + + − − −
posto
u
XI
=
u
YI
=
u
ZI
=
2 2 2 2 2 2 1xx yy zz xy yz zxI X I Y I Z I XY I YZ I ZX+ + − − − =
e
cosa rappresentano le grandezze
u
XI
=
u
YI
=
u
ZI
=e ?
2 2 2
2 2 21
x y z
a b c+ + =
e’ l’equazione cartesiana di un elissoide standard in coordinate cartesiane
Nota Bene:

l’estremo del versore u
d, d, d
che ha coordinate , ,
dista uno da O
ossia
sull’asse di rotazione
1
u
dI
= le coordinate X , Y, Z di questo punto P saranno
u
XI
=
u
YI
=
u
ZI
=
che disti esattamentedi coordinate X , Y, Z un punto P
da O
possibile trovare
percio’ sara’ sempre
d = 1
e’ l’equazione a cui devono soddisfare
che disti1
uIdove Iu
definito dai punti O e P
e’ il momento d’inerzia del corpodall’origine O
le coordinate di un qualsiasi punto
rispetto all’asse di rotazione
2 2 2 2 2 2 1xx yy zz xy yz zxI X I Y I Z I XY I YZ I ZX+ + − − − =quindi
u
1d =
I
2
1
0i
n
u i u
i
I m R=
=
P(X,Y,Z)u

u
P
'
ˆ 'u
P’ O
P
P’
se si facesse ruotare il corpo attorno ad un altro asse,
un punto P’ che disti
qual’e’ il ’’luogo’’ di questi punti ?
1
'd
I=
rispetto a prima il corpo avrebbe un nuovo momento d’inerzia I’,
sempre passante per O
ma si potrebbe
comunque trovare sul nuovo asse da O

detta “ elissoide di inerzia “
“Teorema di Poinsot”
l’elissoide d’inerzia e’ fisso rispetto al corpo
dal sistema di riferimento
il ’’luogo dei punti’’
e’ una superficie elissoidale con centro in O
del corpo rigido rispetto al punto O
e non dipende
ma solo da O
qualunque sia la distribuzione di massa del corpo
e il punto geometrico P di intersezione
1
uI
il momento d’ inerzia del corpo rigido
calcolando la distanza tra Opassante per il centro dell’elissoide si otterra’
dell’asse con l’elissoide,
infatti la distanza OP vale
rispetto a qualsiasi asse di rotazione
x, y, z prescelto
Pz’
y’
x’
O’
u
che soddisfano la relazione

si determinano
ai due diametri
perpendicolare
gli assi di un elissoide
gli assi dell’elissoide
assi principali d’inerzia
al diametro massimo
e ad un terzo asse
in base
di un corpo
Assi principali d’inerzia, momenti principali d’inerzia e assi centrali d’inerzia
al diametro minimo
se come assi x, y, z,
assumerebbe la forma standard
2 2 2 1Px Py PzI X I Y I Z+ + =
dove IPx IPy e IPz sono i
si scegliessero proprio
sono i , Px Py PzI I Ie
l’equazione dell’elissoide
agli assi principali d’inerzia
momenti d’inerzia rispetto
gli assi centrali di inerzia
se il punto O coincidesse con
e gli “ assi centrali d’inerzia ”
ma potrebbero essere anche piu’
sono sempre
l’ “elissoide centrale d’inerzia”
proprieta’ di simmetria
almeno tre
se il corpo possedesse particolari
per es. se l’elissoide divenisse
sarebbe asse centrale d’inerzia
qualsiasi asse passante per Ouna superficie sferica
il centro di massa si avrebbe
momenti principali d’inerzia
solidali al corpo rigido
gli assi principali d’inerzia
d’inerzia
rigido sono gli

che specifica le caratteristiche
Nota bene :
dal punto di vista delle
matematica sia dalla forma
delle masse all’ interno del corpo
non e’
di corpo rigido
➢ l’elissoide d’inerzia
e’ una forma geometrica
che dalla distribuzione
di forma elissoidale
rotazioni intorno ad un assedefinita da una equazione
e’ una superficie ’’fittizia’’
( n.d.r. un po’ come per la superficie ’’gaussiana’’
con la differenza che nel teorema di Gauss
di forma qualsiasi )la superficie puo’ essere
e dipende
di un corpo rigido
del corpo rigido,
una porzione

1
vn
i i i
i
L r m=
=
ˆˆ ˆx y zi j k = + +
x xx x xy y xz zL I I I = − −
y xy x yy y yz zL I I I = − + −
z xz x yz y zz zL I I I = − − +
1
( )n
i i i
i
r m r=
in generale
per definizione
ˆˆ ˆi i i ir x i y j z k= + +
ma vi ir=
ˆ( ) xx x xy y xz zI I I i − − + ˆ( ) xy x yy y yz zI I I j − + − + ˆ( ) xz x yz y zz zI I I k − − +L =
Nota Bene :
ˆ x i ˆ y j ˆ z k =
e’ evidente che in generale L non e’ proporzionale ad
+ +

e’ la “matrice d’inerzia”
xx xy xz
xy yy yz
xz yz zz
I I I
I I I
I I I
− −
− −
− −
➢ se scegliessimo come assi di riferimento x, y, z
ˆˆ ˆPx x Py y Pz zL I i I j I k = + +
la matrice d’inerzia diagonalizzerebbe
gli assi principali d’inerzia
0 0
0 0
0 0
Px
Py
Pz
I
I
I
e la relazione tra e diverrebbe semplicementeL
vale a dire che il momento angolare totale diverrebbe direttamente proporzionale alla
velocita’ angolare

in conclusione:
per ogni corpo rigido
esisteranno sempre
L e’ parallelo ad
passanti per punto fisso O del corpo
attorno ad uno di essi
qualunque sia la sua forma geometrica
la sua distribuzione di massa
un qualsiasi
che possiedono la proprieta’ che quando il corpo ruota
tre ( o piu’ ) assi
e qualunque sia
in teoria
sui supporti
che annulli ,
e’ sempre possibile realizzare una configurazione
le sollecitazioni dinamiche
significato fisico →
o quanto meno minimizzi
implicazioni pratiche → sara’ necessario curare molto attentamente la progettazione dei corpi rotanti
che sorreggono il corpo rigido in rotazione

Backup Slides








![]VE #]MX HGX FQ F Bfile.koolearn.com/20181213/15446839916607.pdf · +o } Ö# " w } .1 Ö ` p Ö 2 d '# " w .d Î +eb Ö ( 0$,/ Ö\mv\ ]ve #]mx hgx fq](https://static.fdocumenti.com/doc/165x107/603baf25875c76080a474fe4/ve-mx-hgx-fq-f-bfile-o-w-1-p-2-d-w-d-.jpg)