Appunti Cavi Termica
95
Università degli Studi di L’Aquila FACOLTA’ DI INGEGNERIA DIPARTIMENTO DI INGEGNERIA DELLE STRUTTURE, DELLE ACQUE E DEL TERRENO CORSO DI LAUREA IN INGEGNERIA CIVILE Tesi di laurea EFFETTI DELLA DEFORMAZIONE TERMICA NELLA STATICA E NELLA DINAMICA DEI CAVI SOSPESI RELATORE LAUREANDO Vincenzo Gattulli Simone D’Elia CORRELATORE Marco Lepidi Anno Accademico 2008-2009
description
deformabilità dei cavi da ponte
Transcript of Appunti Cavi Termica
Università degli Studi di L’Aquila
FACOLTA’ DI INGEGNERIA
DIPARTIMENTO DI INGEGNERIA DELLE STRUTTURE,
DELLE ACQUE E DEL TERRENO
CORSO DI LAUREA IN INGEGNERIA CIVILE
Tesi di laurea
EFFETTI DELLA DEFORMAZIONE TERMICA NELLA
STATICA E NELLA DINAMICA DEI CAVI SOSPESI
RELATORE LAUREANDO
Vincenzo Gattulli Simone D’Elia
CORRELATORE
Marco Lepidi
Anno Accademico 2008-2009

2
INDICE
3
INTRODUZIONE 6
CAPITOLO 1 10
STATICA
1.1 LA CATENARIA
1.1.1 La catenaria 10
1.1.2 La catenaria per d/l<<1 14
1.2 LA STATICA DEL CAVO ELASTICO
1.2.1 Il cavo estensibile
CAPITOLO 2 22
EFFETTI DELLA DEFORMAZIONE TERMICA SULLA STATICA
2.1 LA STATICA DEL CAVO CON DEFORMAZIONE TERMICA
2.1.1 Definizione del problema generale 22
2.1.2 Il problema particolare del cavo sospeso fra supporti orizzontali 26
2.2 DESCRIZIONE DEGLI EFFETTI DELLA DEFORMAZIONE
TERMICA
2.1.1 Effetti sulla statica del cavo sospeso orizzontale 29
2.2.2 Effetti sulla statica del cavo sospeso inclinato 35
2.2.3 Effetti della temperatura sulla lunghezza del cavo 39
CAPITOLO 3 41
DINAMICA 3.1 LA DINAMICA DEL CAVO SOSPESO
3.1.1 Introduzione alla dinamica del cavo sospeso 41

4
3.1.2 Oscillazioni libere di un cavo sospeso. La teoria lineare 44
3.1.2.1 Moto fuori dal piano 47
3.1.2.2 Moto nel piano 48
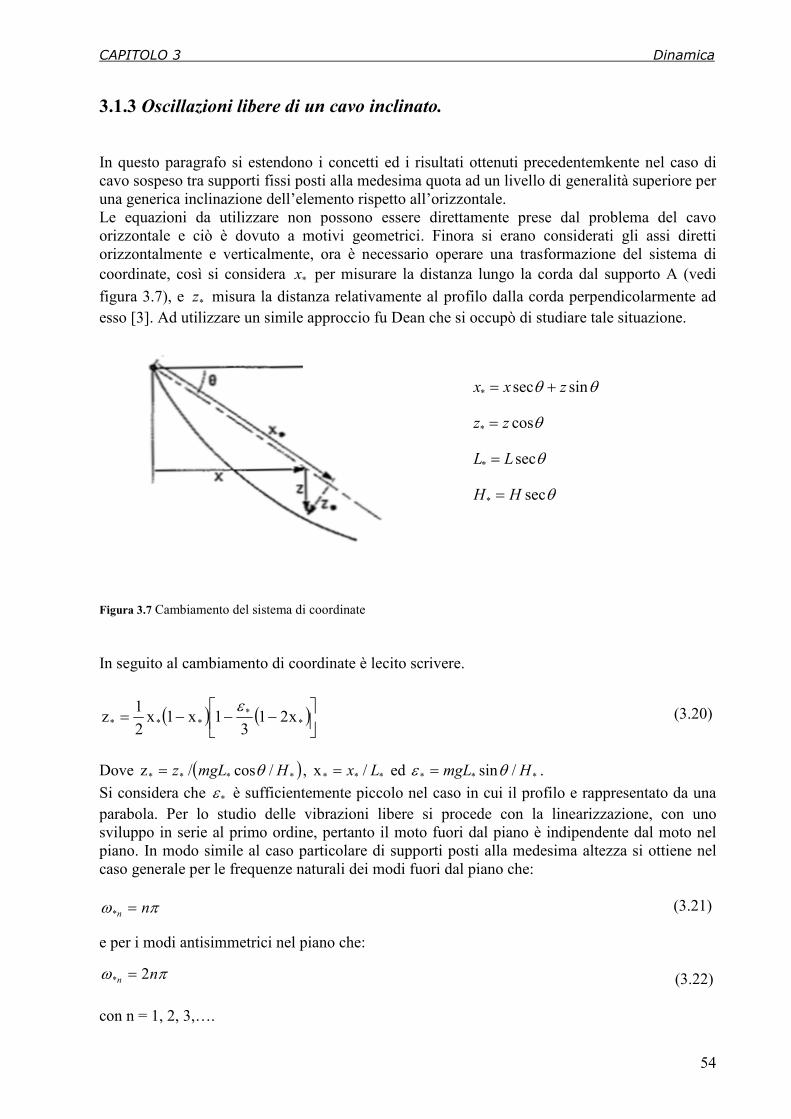
3.1.3 Oscillazioni libere di un cavo inclinato 54
3.1.4 L’energia cinetica e l’energia potenziale 56
CAPITOLO 4 58
EFFETTI DELLA DEFORMAZIONE TERMICA SULLA DINAMICA
4.1 EFFETTI DELLA DEFORMAZIONE TERMICA SULLA DINAMICA
DELLA TRAVE
4.1.1 L’oscillatore semplice 58
4.1.2 La trave di Eulero – Bernoulli. Statica 61
4.1.2.1 Ipotesi cinematiche nel modello di trave di Eulero - Bernoulli 61
4.1.2.2 Equazione differenziale della linea elastica, per la trave di Eulero -
Bernoulli 62
4.1.2.3 Equazione differenziale della linea elastica, per la trave di Eulero –
Bernoulli, con deformazione termica 64
4.1.3 La trave di Eulero – Bernoulli. Dinamica 66
4.1.3.1 La formulazione variazionale. Applicazione alla trave di Eulero –
Bernoulli 67
4.1.3.2 La formulazione variazionale. Applicazione alla trave di Eulero –
Bernoulli, con deformazione termica 69
4.2 Dinamica del cavo sospeso con deformazione
termica
4.2.1 Le equazioni del moto 71
4.2.2. Condensazione della variabile longitudinale 76
4.2.3. Moto fuori del piano 80
4.2.4. Moto nel piano 81

5
4.2.4.1 I modi antisimmetrici 83
4.2.4.2 I modi simmetrici 85
4.3 DESCRIZIONE DEGLI EFFETTI DELLA DEFORMAZIONE
TERMICA
4.3.1 Effetti sulla dinamica del cavo sospeso 90
CONCLUSIONE 94
BIBLIOGRAFIA 95

6
INTRODUZIONE
I cavi sono elementi largamente utilizzati nell’ambito dell’ingegneria civile. La caratteristica fondamentale del cavo, è quella di consentire di sfruttare la resistenza a trazione di un elemento privo di rigidezza a flessione per sostenere carichi trasversali, come nel caso di sollevamento di pesi tramite funi. Quanto detto trova riscontro in molte applicazioni reali, dalle più semplici alle più complesse, ovvero dal ponte di liane utilizzato nelle popolazioni primitive, alle tende a baldacchino delle popolazioni nomadi, ai più attuali ponti sospesi. Esistono ovviamente infinite applicazioni, nell’ambito dell’ingegneria civile, della meccanica, dell’elettronica e in molti altri campi in cui vengono sfruttate le proprietà del cavo. Un simbolo nell’ingegneria civile di quanto affermato finora potrebbe essere rappresentato dal Golden Gate Bridge.
Figura 1. Foto del Golden Gate Bridge
Il Golden Gate Bridge è un ponte sospeso che sovrasta lo stretto che collega l'Oceano Pacifico con la Baia di San Francisco. Quando fu ultimato nel 1937, il Golden Gate Bridge era il più grande ponte a sospensione del Mondo. Il ponte di Akashi-Kaikyō è attualmente il ponte sospeso più lungo del mondo. È alto 282,8 m e lungo 3.911 metri. La sua campata principale è lunga ben 1.991 metri.

7
Figura 2. Foto del ponte di Akashi-Kaikyō
Allo stesso tempo, i cavi rivestono un ruolo fondamentale soprattutto nell’ambito della dinamica. Tali elementi sono soggetti infatti a numerosi fenomeni di grande interesse, tanto che il loro studio è molto antico, ed inoltre è stato affrontato con approcci differenti dai vari ricercatori ed autori che si sono susseguiti nel tempo. Nel capitolo 3 viene riportata la storia della dinamica a partire dai primi studi condotti nell’antica Grecia da Pitagora ad oggi. Attualmente la grande diversità di possibili applicazioni di tali elementi ha portato a differenti teorie. Oggi ci si riferisce fondamentalmente al cavo parabolico (dotato di freccia piccola) o alla catenaria (dotata di freccia grande). Queste due tipologie sono quelle che meglio approssimano i cavi utilizzati per le linee di trasmissione, funivie, ponti… Il primo rappresenta un’approssimazione molto utilizzata in letteratura e che sarà sfruttata anche nel seguente lavoro proprio nell’ambito dello studio della dinamica con deformazione termica. In generale, le strutture sono soggette evidentemente a forze esterne, e tra queste inevitabilmente ci sono il peso proprio e i carichi di tipo termici. Questi carichi quasi-statici producono una pretensione iniziale (prestress) e uno spostamento iniziale (predisplacement) che influenzano il comportamento sia statico che dinamico della struttura. Per strutture snelle come le travi, l’effetto della pretensione dipende molto dalla snellezza delle stesse. La meccanica dei cavi sospesi può essere considerata come caso particolare di quella delle travi. Come prima approssimazione è possibile considerare un cavo come una particolare trave snella, geometricamente parlando, caratterizzata dal fatto di essere priva di rigidezza flessionale. L’obiettivo del seguente lavoro di tesi è quello di mettere in evidenza gli effetti della deformazione termica sulla statica e sulla dinamica dei cavi sospesi. L’analisi sarà condotta sia in relazione a variazioni di temperatura positive che negative. Come è possibile notare è stata eseguita una suddivisione in quattro distinti paragrafi trattanti rispettivamente la statica (primi due capitoli) e la dinamica (terzo e quarto capitolo). Nell’ambito della statica ci si occuperà fondamentalmente di ottenere dei risultati adeguati per poter descrivere gli effetti di tale deformazione sul comportamento dei cavi sospesi in termini di tensione e di freccia. In particolare si noterà come tali effetti siano più o meno rilevanti non solo
8
in relazione all’entità della differenza di temperatura, ma anche in relazione alle proprietà caratteristiche dell’elemento stesso. Riuscire a risolvere la statica del cavo con deformazione termica consente di aprire le porte anche ai due ultimi capitoli trattanti la dinamica dei cavi, unendo a tali risultati l’approssimazione di profilo parabolico. In tale ambito saranno descritti gli effetti della deformazione termica sulle proprietà spettrali dei cavi sospesi, rappresentando l’andamento delle frequenze naturali al variare del parametro di Irvine, in tal modo sarà anche possibile osservare per quali range del parametro stesso gli effetti della temperatura sono più o meno importanti. Inoltre, sarà possibile osservare che in relazione al parametro di Irvine 2
0λ è possibile definire un parametro equivalente 2
Tλ , formalmente simile al precedente, ma con un significato molto differente, e che riveste un ruolo fondamentale nella risoluzione della dinamica in presenza di variazione termica.

9
CAPITOLO 1
STATICA

CAPITOLO 1 Statica del cavo
10
1.1 LA CATENARIA 1.1.1 La catenaria
Il problema della statica dei cavi sospesi sotto l’azione della gravità è uno dei classici problemi della meccanica del continuo. Storicamente il problema venne affrontato nel tempo, prima dai fratelli James e John Bernoulli, in seguito da Leibnitz, e negli anni sessanta da Huygens. Tutti questi ricercatori affermarono che un cavo, elemento privo di rigidezza flessionale, sotto il peso proprio assume la configurazione descritta da una funzione di tipo coseno iperbolico, tale forma viene detta di catenaria. I fratelli Bernoulli furono gli artefici di un notevole passo in avanti nello studio di tale problema, rivestendo un ruolo di rilievo tra i vari ricercatori nominati. Essi formularono le equazioni generali differenziali di equilibrio dell’elemento catena sottoposto all’azione di varie tipologie di carico. Nel 1738 Daniel Bernoulli, figlio di John, contribuirà nello studio della catenaria, nell’ambito della dinamica, pubblicando una soluzione per le frequenze naturali della catena. Possiamo affermare che la catena è un elemento privo di rigidezza flessionale e in grado di poter sostenere solo forze di trazione. Un modo elegante per descrivere tale proprietà fu l’enunciato di James Bernoulli, il quale affermò: “The action of any part of the line upon its neighbor is purely tangential”. In seguito Irvine nel libro del 1981 sistemizza la modellazione della statica e della dinamica dei cavi. In particolare per la statica oltre alla configurazione di catenaria, presenta attraverso l’introduzione di alcune ipotesi significative, valide in un particolare intervallo dei parametri meccanici, il profilo parabolico. Tale semplificazione è funzionale allo sviluppo del modello descrittore delle oscillazioni dinamiche dei cavi. Si riportano di seguito alcuni passi di tale modellazione. Si consideri il caso di cavo sospeso ed inestensibile (catena), sotto l’azione del peso proprio, secondo la teoria di Irvine (1981), che prevede una soluzione di tipo approssimata, relativa a cavi con moderato sag. [2]. In tale teoria il profilo del cavo è rappresentato da una parabola. Figura 1.4 Cavo sospeso sotto l’azione di gravità
N
CAPITOLO 1 Statica del cavo
11
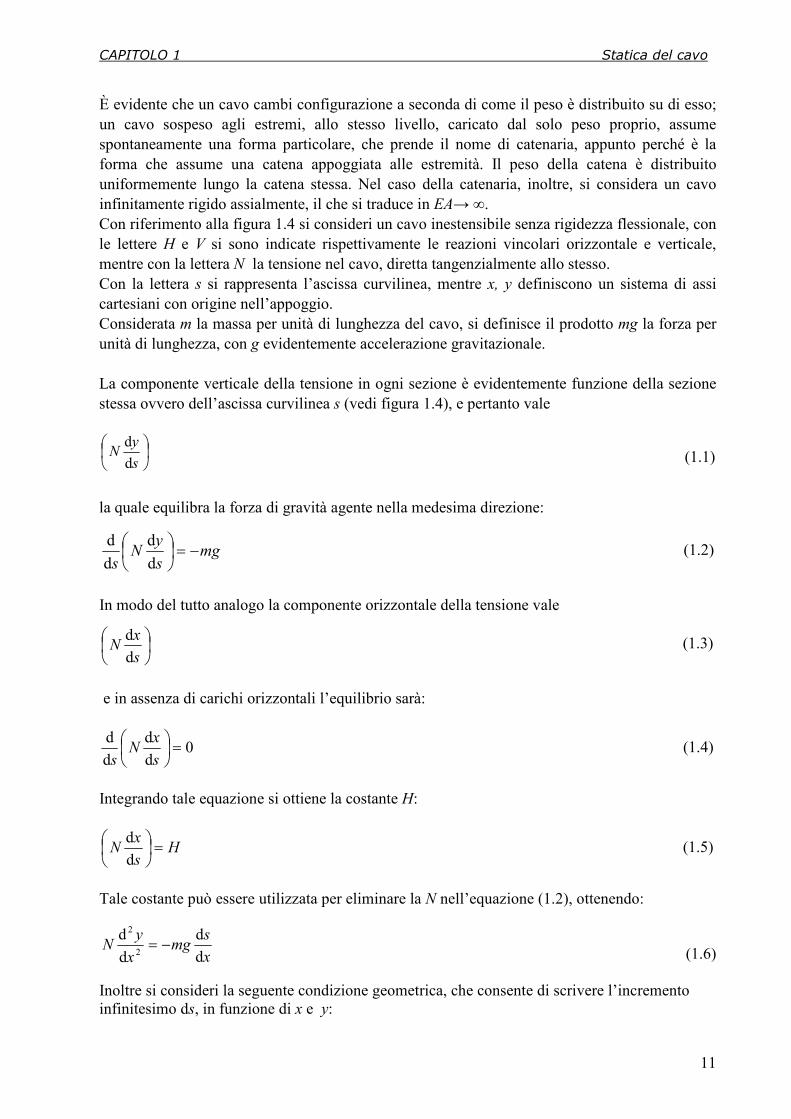
È evidente che un cavo cambi configurazione a seconda di come il peso è distribuito su di esso; un cavo sospeso agli estremi, allo stesso livello, caricato dal solo peso proprio, assume spontaneamente una forma particolare, che prende il nome di catenaria, appunto perché è la forma che assume una catena appoggiata alle estremità. Il peso della catena è distribuito uniformemente lungo la catena stessa. Nel caso della catenaria, inoltre, si considera un cavo infinitamente rigido assialmente, il che si traduce in EA→ ∞. Con riferimento alla figura 1.4 si consideri un cavo inestensibile senza rigidezza flessionale, con le lettere H e V si sono indicate rispettivamente le reazioni vincolari orizzontale e verticale, mentre con la lettera N la tensione nel cavo, diretta tangenzialmente allo stesso. Con la lettera s si rappresenta l’ascissa curvilinea, mentre x, y definiscono un sistema di assi cartesiani con origine nell’appoggio. Considerata m la massa per unità di lunghezza del cavo, si definisce il prodotto mg la forza per unità di lunghezza, con g evidentemente accelerazione gravitazionale. La componente verticale della tensione in ogni sezione è evidentemente funzione della sezione stessa ovvero dell’ascissa curvilinea s (vedi figura 1.4), e pertanto vale
(1.1)
la quale equilibra la forza di gravità agente nella medesima direzione:
(1.2)
In modo del tutto analogo la componente orizzontale della tensione vale
(1.3)
e in assenza di carichi orizzontali l’equilibrio sarà:
0d
d
d
d=
s
xN
s (1.4)
Integrando tale equazione si ottiene la costante H:
Hs
xN =
d
d (1.5)
Tale costante può essere utilizzata per eliminare la N nell’equazione (1.2), ottenendo:
(1.6)
Inoltre si consideri la seguente condizione geometrica, che consente di scrivere l’incremento infinitesimo ds, in funzione di x e y:
x
smg
x
yN
d
d
d
d2
2
−=
mgs
yN
s−=
d
d
d
d
s
yN
d
d
s
xN
d
d

CAPITOLO 1 Statica del cavo
12
(1.7)
Che consente così di scrivere l’equazione di equilibrio verticale in definitiva come:
(1.8)
Questa equazione differenziale è risolvibile introducendo una sostituzione di variabili in termini di funzioni iperboliche, caratteristiche come detto del problema della catenaria.
Le funzioni che sono ora introdotte rispettano ovviamente le proprietà delle funzioni iperboliche:
(1.9)
(1.10)
Tramite l’introduzione di tali funzioni iperboliche è possibile scrivere
(1.11)
Dove il parametro k introdotto è ottenuto sostituendo nella relazione (1.8) il termine:
(1.12)
Se si integra la (1.11) tra due valori definiti x0 e x allora diventa nota la posizione del cavo per ogni x:
(1.13)
La y0 è quel valore dell’ordinata a cui corrisponde il valore particolare x0 lungo l’asse delle x. Tale equazione trova soluzione applicando le regole di derivazione delle funzioni iperboliche precedentemente descritte:
(1.14)
In modo del tutto simile si procede per la risoluzione in ambito del sistema di riferimento curvilineo ovvero ottenendo:
(1.15)
222 ddd yxs +=
2
d
d1
d
d
d
d
+−=
x
y
H
mg
x
y
x
1)(sinh-)cosh( 22 =zz
)sinh(d
dcosh(z)z
z= )cosh(
d
dsinh(z)z
z=
[ ])(sinhd
dy0xxk
x−−=
H
mgk =
[ ]( ))(cosh11
00 xxkk
yy −−=−
[ ]( )∫∫∫ −=
+==−x
x
x
x
x
xdxxxkdx
dx
dydx
dx
dsss
000
)(cosh1 0
2
0
[ ]( )∫∫ −−==−x
x
x
xdxxxkdx
dx
dyyy
00
)(sinh 00

CAPITOLO 1 Statica del cavo
13
Che risolto ricorrendo nuovamente alle regole di derivazione delle funzioni iperboliche consentono di scrivere:
(1.16)
Le relazioni appena trovate definiscono completamente la geometria del sistema ovvero per ogni x in un caso e per ogni s nell’altro, permettono la definizione del profilo del cavo per effetto del solo peso proprio. In ultimo resta da definire una relazione che consenta di conoscere la tensione nel cavo in ogni punto dello stesso:
(1.17)
Ottenuta sfruttando le relazioni (1.5) e (1.16).
[ ]( ))(sinh1
00 xxkk
ss −=−
[ ]( ))(cosh 0xxkHdx
dsHN −==
CAPITOLO 1 Statica del cavo
14
1.1.2 La catenaria per d/l<<1
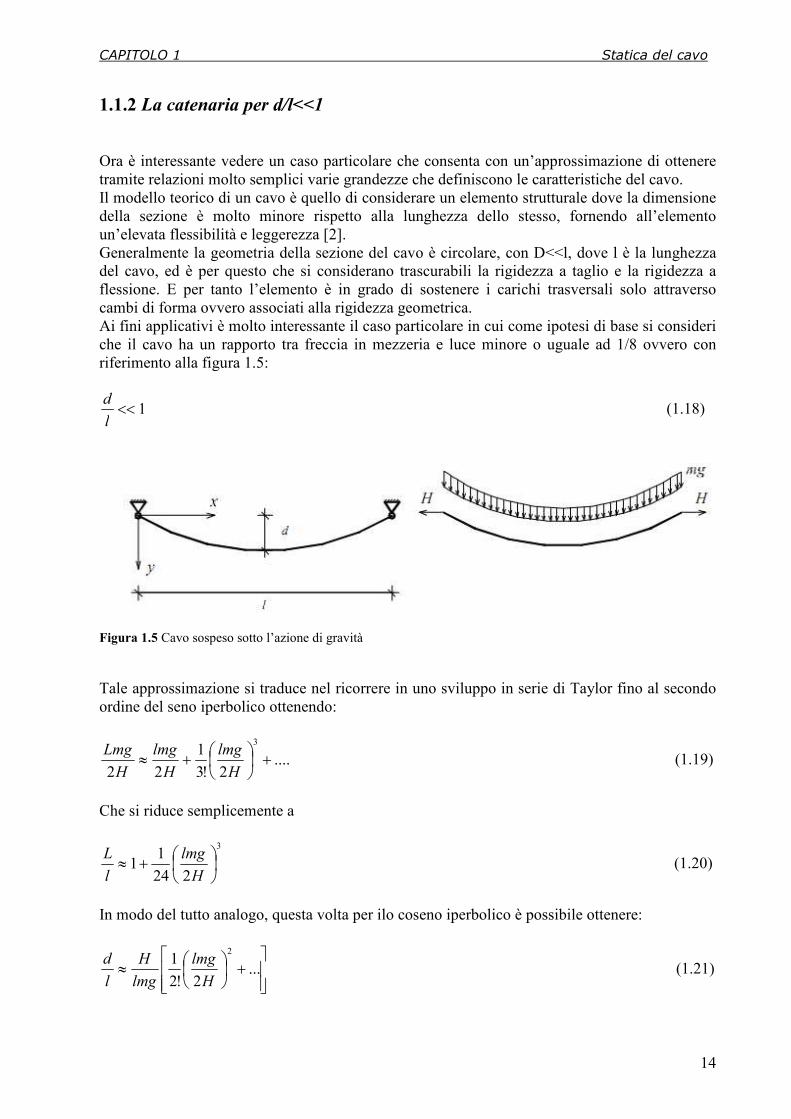
Ora è interessante vedere un caso particolare che consenta con un’approssimazione di ottenere tramite relazioni molto semplici varie grandezze che definiscono le caratteristiche del cavo. Il modello teorico di un cavo è quello di considerare un elemento strutturale dove la dimensione della sezione è molto minore rispetto alla lunghezza dello stesso, fornendo all’elemento un’elevata flessibilità e leggerezza [2]. Generalmente la geometria della sezione del cavo è circolare, con D<<l, dove l è la lunghezza del cavo, ed è per questo che si considerano trascurabili la rigidezza a taglio e la rigidezza a flessione. E per tanto l’elemento è in grado di sostenere i carichi trasversali solo attraverso cambi di forma ovvero associati alla rigidezza geometrica. Ai fini applicativi è molto interessante il caso particolare in cui come ipotesi di base si consideri che il cavo ha un rapporto tra freccia in mezzeria e luce minore o uguale ad 1/8 ovvero con riferimento alla figura 1.5:
1<<l
d (1.18)
Figura 1.5 Cavo sospeso sotto l’azione di gravità Tale approssimazione si traduce nel ricorrere in uno sviluppo in serie di Taylor fino al secondo ordine del seno iperbolico ottenendo:
....2!3
1
22
3
+
+≈H
lmg
H
lmg
H
Lmg (1.19)
Che si riduce semplicemente a
3
224
11
+≈H
lmg
l
L (1.20)
In modo del tutto analogo, questa volta per ilo coseno iperbolico è possibile ottenere:
+
≈ ...2!2
12
H
lmg
lmg
H
l
d (1.21)

CAPITOLO 1 Statica del cavo
15
Che si riduce semplicemente a
H
lmg
l
d
8
1≈ (1.22)
In ultimo è possibile definire la tensione massima in relazione alla reazione vincolare orizzontale all’appoggio:
2
max
8
11
+≈H
lmg
H
N (1.23)
Le relazioni appena trovate possono essere rappresentate graficamente, in modo da visualizzare l’andamento della tensione e dello spostamento verticale:
Figura 1.6 Nei grafici sono state rappresentate con linea tratteggiata le curve ottenute come risoluzione delle equazioni generali, in linea continua le curve asintotiche rappresentanti le soluzioni delle equazioni approssimate precedentemente trovate.
Notare che per quanto riguarda le forze l’approssimazione fatta non comporta alcun distaccamento dalla soluzione reale, per lo spostamento tale teoria approssima bene la soluzione reale nella condizione:
3.0=l
d (1.24)
La relazione (1.22) si può ottenere anche facendo un ragionamento differente dove lo scopo è il calcolo della H. Si consideri ancora un cavo perfettamente flessibile fissato ai suoi estremi posti alla stessa quota ed a distanza lc. Il cavo sia inoltre soggetto ad un carico distribuito verticale q(x). Detta N(x) la trazione che in esso si sviluppa per effetto del carico, le equazioni di equilibrio alla traslazione per il generico elemento di cavo compreso fra x e x + dx forniscono:
0)cos( '' == ϑNH
(1.25)
)()( xqxyH −=′′
Nmax
CAPITOLO 1 Statica del cavo
16
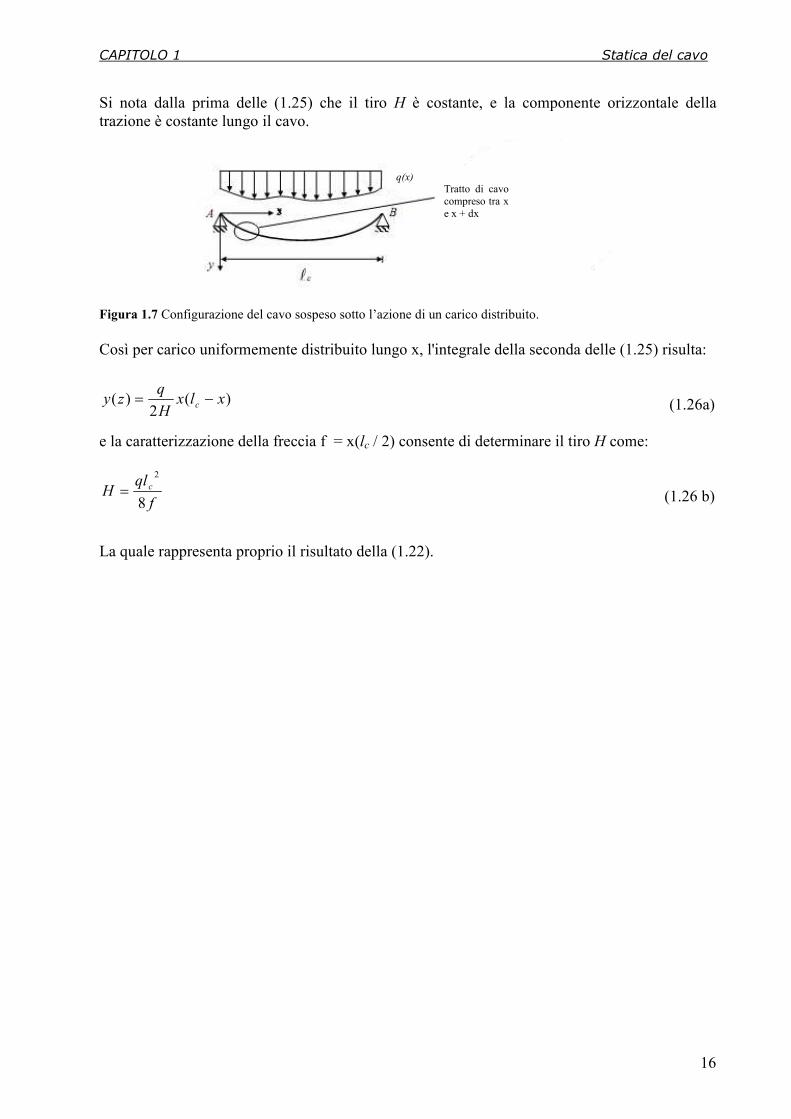
Si nota dalla prima delle (1.25) che il tiro H è costante, e la componente orizzontale della trazione è costante lungo il cavo.
Figura 1.7 Configurazione del cavo sospeso sotto l’azione di un carico distribuito. Così per carico uniformemente distribuito lungo x, l'integrale della seconda delle (1.25) risulta:
(1.26a)
e la caratterizzazione della freccia f = x(lc / 2) consente di determinare il tiro H come:
(1.26 b)
La quale rappresenta proprio il risultato della (1.22).
)(2
)( xlxH
qzy c −=
f
qlH c
8
2
=
x
N(x)
N(x)
Tratto di cavo compreso tra x e x + dx
q(x)

CAPITOLO 1 Statica del cavo
17
1.2 LA STATICA DEL CAVO ELASTICO
1.2.1 Il cavo estensibile Si consideri il cavo sospeso tra due appoggi fissi S0 e S1 posti a distanza L, spaziato da un’ascissa curvilinea s nella sua configurazione naturale C0; si introduce un sistema di coordinate cartesiane x, y (vedi figura 1.8 c) tale che le posizioni dei supporti siano indicate dalle coordinate S0 = (0, 0) ed S1= (L, 0). Il cavo è caratterizzato da una lunghezza L0, peso W, area della sezione trasversale uniforme nella configurazione indeformata A0 e modulo elastico del materiale E. In seguito all’azione del solo peso proprio agente in direzione verticale, il cavo assume una configurazione di equilibrio statico Cs, definita nel seguito come profilo del cavo, descritta dalle funzioni di forma x(s) ed y(s), che rappresentano la posizione occupata nel piano dal punto materiale individuato dall’ascissa curvilinea. Uno degli obiettivi principali nella risoluzione del problema della statica è proprio quello di ottenere le espressioni di tali funzioni di forma, cioè poter individuare la posizione del generico punto P(s) [1] . Ovviamente come osservato già nel problema della catenaria nei paragrafi precedenti un’altra incognita del problema da determinare è la tensione nel cavo N(s).
b
a
c
Figura 1.8 (a) configurazione indeformata Co, (b) equilibrio statico, (c) configurazione statica sotto il peso proprio.
Come si evince dalla figura 1.8 si introduce, in relazione alla configurazione deformata, l’ascissa curvilinea p.
S1
S0
L
p(s)
Cs
y(s)
x(s)
C0
s=0
s
s=L0
P(s)
N(s)

CAPITOLO 1 Statica del cavo
18
Sotto l’azione del solo peso proprio, il cavo è completamente posizionato nel piano verticale, pertanto deve essere soddisfatta la relazione geometrica (1.27):
122
=
+
dp
dy
dp
dx (1.27)
Le equazioni di equilibrio alla traslazione orizzontale e verticale rispettivamente, per una porzione finita di cavo, a partire dal supporto fisso S0, possono essere scritte, in relazione alla figura 1.8, come segue:
Hdp
dxN = (1.28 a)
0L
sWV
dp
dyN −= (1.28 b)
Come già riportato nei paragrafi precedenti, si ricorda brevemente che si sono definite con H e V rispettivamente le reazioni vincolari all’appoggio orizzontale e verticale, mentre N rappresenta la tensione o sforzo normale, in ogni punto diretto tangenzialmente al profilo del cavo[1] . Avendo indicato con W il peso complessivo del cavo, ed essendo nota la lunghezza dello stesso, è possibile esprimere W stesso in funzione del peso per unità di lunghezza w. W = wL0 (1.29)
Tramite l’equazione di legame costitutivo (Legge di Hooke), possiamo ottenere una relazione
tra l’incognita N e la deformazione elastica o elongazione per unità di lunghezza 1−ds
dp:
−= 10ds
dpEAN (1.30)
Le condizioni al contorno ai supporti fissi sono evidentemente, per come definito il problema in figura 1.8: per s=0 x=0 y=0
per s=L0 x=0 y=0
È ora possibile ricavare la tensione nel cavo in funzione dell’ascissa curvilinea, sostituendo le equazioni di equilibrio alla traslazione orizzontale e verticale nella relazione geometrica (1.27) dopo averle elevate al quadrato, si ottiene così l’equazione (1.31) :
(1.31)
2/1
2
0
2 )()(
−+=
L
sWVHsN

CAPITOLO 1 Statica del cavo
19
Sulla base delle note relazioni di algebra delle derivate si può scomporre i due termini ds
dx,
ds
dy
nel prodotto di due fattori: (1.32 a)
(1.32 b)
Sostituendo nell’ equazione (1.32 a) sopra riportata, per i termini al secondo membro la (1.28 a) e la (1.30) si ottiene:
(1.32 a)
Sostituendo allo stesso modo nell’ equazione (1.32 b) sopra riportata, per i termini al secondo membro la (1.28 b) e nuovamente la (1.30) si ottiene l’equazione (1.33 b):
(1.33 b)
Dall’integrazione delle ultime due relazioni (1.33 a) e (1.33 b) rispettivamente tra 0 e x(s) la prima e tra 0 e y(s) la seconda, si ottengono le equazioni risolutive del problema, espresse dalle equazioni (1.34 a) e (1.34 b):
(1.34 a)
(1.34 b)
In verità le equazioni appena ricavate non consentono di ottenere una risoluzione immediata del problema, infatti se la soluzione per la reazione vincolare verticale all’appoggio è da subito possibile (equazione (1.35)), dovendo essere soddisfatto l’equilibrio alla traslazione verticale, lo stesso non può essere detto per la reazione orizzontale all’appoggio.
ds
dp
dp
dx
ds
dx=
ds
dp
dp
dy
ds
dy=
[ ]
−++=
2/120
20 )/( LWsVH
H
EA
H
ds
dx
−+
+
−
=2/12
0
20
0
0 1)(
L
sWVHEA
EA
L
sWV
ds
dy
−+
+= −−
0
110
0
sinhsinh)(L
sWV
H
V
W
HL
EA
Hssx
−+−
++
−=
2/12
0
2/12
0
90
112
)(L
sWV
H
V
W
HL
L
s
W
V
EA
Wssy

CAPITOLO 1 Statica del cavo
20
Infatti per la reazione vincolare orizzontale è necessario ricorrere ad una risoluzione per via numerica. Bisogna, pertanto, dapprima ottenere un’equazione risolutiva in funzione della stessa incognita H, e successivamente procedere alla sua risoluzione..
(1.35) .
Per far ciò è conveniente riscrivere l’equazione risolutiva dopo aver effettuato delle adimensionalizzazioni, le quali consentono di ottenere un’equazione finale più facilmente risolvibile.
Si procede, come detto, per tutte le varie grandezze dimensionali in gioco, con le seguenti adimensionalizzazioni:
0L
ss =
L
xx =
L
yy =
W
Hh
2=
W
Vv
2=
02EA
W=ρ
L
L0=Λ (1.36)
Le ultime due grandezze non dimensionali rappresentano due parametri molto importanti nella risoluzione del problema della statica, e rivestiranno un ruolo di assoluto primo piano quando si affronterà il problema della statica del cavo sotto l’effetto della deformazione termica nel prossimo capitolo. Il primo parametro dei due dipende dal peso proprio dell’elemento e dalla sua rigidezza assiale, e prende il nome di fattore di flessibilità. Il secondo, invece, è di natura puramente geometrica ed è il parametro che consente di distinguere due macro categorie di cavi, quelli pretesi (Λ<1) e quelli non-pretesi (Λ>1). Il risultato di tali adimensionalizzazioni è rappresentato dalle seguenti equazioni risolutive:
(1.37)
(1.38)
(1.39)
La (1.39) è proprio l’equazione che ci si era posti di ottenere da risolvere numericamente, in termini di h evidentemente. Una volta nota la reazione vincolare orizzontale adimensionalizzata, attraverso le altre due equazioni, (1.37) e (1.38), è possibile ottenere il profilo dell’elemento.
2
WV =
−+
Λ+Λ= −−
h
s
hh
hhssx
21sinh
1sinh
2)( 11ρ
−++
+Λ+
−Λ=
2/122/1221
11
1222
12)(
h
s
hh
hshssy ρ
hh
111sinh =
−Λ
ρ
21
CAPITOLO 2
EFFETTI DELLA DEFORMAZIONE TERMICA
SULLA STATICA

CAPITOLO 2 Effetti della deformazione termica sulla statica
22
S0
S1
x(s) y(s)
p(s) ∆T
L
w(s)
Cs
D
θ
2.1 LA STATICA DEL CAVO CON DEFORMAZIONE TERMICA
2.1.1 Definizione del problema generale
Si consideri il caso di cavo sospeso tra i due appoggi fissi S0 e S1 posti ancora una volta a distanza L. In relazione al paragrafo 1.3 (statica del cavo elastico estensibile) del precedente capitolo e in relazione alla figura 1.8, si introduce il problema della statica del cavo sospeso sotto l’effetto del peso proprio e della variazione termica. Le grandezze che caratterizzano tale problema sono state già incontrate e descritte nel capitolo 1, a meno di ∆T che rappresenta proprio la differenza di temperatura (vedi figura 2.1). Come si evince dalla figura 2.1 la nuova configurazione statica Cs, si riferisce ad una condizione di cavo sospeso nella formulazione più generale del problema, ovvero in presenza di un’inclinazione θ dell’elemento rispetto all’orizzontale da cui deriva una distanza verticale tra i supporti pari a D e ne discendono nuove coordinate per gli appoggi S0 e S1 rispettivamente pari a (0, 0) e (L, D). Il caso di cavo sospeso tra due appoggi fissi posti alla medesima quota verrà studiato nelle prossime pagine come caso particolare del problema più generale appena introdotto, nella condizione specifica in cui l’inclinazione θ sarà pari a zero.
Figura 2.1 Configurazione statica sotto il peso proprio e in presenza di ∆T. Ora possiamo scrivere l’equazione di legame costitutivo per il nuovo problema di cavo sospeso, in modo da ottenere ancora una volta una relazione tra l’incognita N e la deformazione, ora
costituita dalla somma di due contributi distinti, il primo 1−ds
dp, già introdotta in precedenza per
cavo elastico, che rappresenta appunto la deformazione elastica, ed ε che rappresenta la deformazione termica. In definitiva:
−−= ε10ds
dpEAN (2.1 a)
Dove la deformazione termica ε si può anche scrivere in funzione della differenza di temperatura e del coefficiente di dilatazione termica α caratteristico del mezzo.

CAPITOLO 2 Effetti della deformazione termica sulla statica
23
ε = α∆T (2.1 b) Con un procedimento analogo a quello svolto nel paragrafo 1.3, è possibile ottenere le espressioni delle funzioni di forma x(s) ed y(s) in forma dimensionale rappresentate dalle equazioni (2.2) e (2.3).
(2.2)
(2.3)
Notare come a differenza del caso affrontato precedentemente nelle espressioni di x(s) ed y(s) si risenta della presenza di un delta della temperatura. Nelle due equazioni (2.2) e (2.3) in questione, per una migliore lettura del problema si sono introdotte le due funzioni ausiliare:
(2.4)
(2.5)
Imponendo la condizione al contorno:
(2.6)
si ottengono le equazioni algebriche non lineari che consentono la risoluzione delle reazioni vincolari all’appoggio:
(2.7 a)
(2.7 b)
Tali due equazioni sono evidentemente da risolvere per via numerica.
)()(
)()( 10
10
0
sW
HLTs
W
HL
EA
Hssx Ψ
∆+Ψ+=
α
)()(
)(2
)( 20
20
00
sW
HLTs
W
HL
L
s
W
V
EA
Wssy Ψ
∆+Ψ+
−=
α
−−
=Ψ0
1 1harcsinharcsin)(L
s
V
W
H
V
H
Vs
−+−
+=Ψ
2/12
0
2/12
2 111)(L
s
V
W
H
V
H
Vs
0Ls = DLy =)( 0 LLx =)( 0
( )
−−
∆+
−−
+=H
WV
H
V
W
HLT
H
WV
H
V
W
HL
EA
HLL arcsinharcsinharcsinharcsinh 000 α
( )
−+−
+
∆+
−+−
++
−=
2/122/12
0
2/122/12
00 11112
1
H
WV
H
V
W
HLT
H
WV
H
V
W
HL
W
V
EA
WLD
α

CAPITOLO 2 Effetti della deformazione termica sulla statica
24
Così come illustrato nel capitolo 1 è conveniente procedere nella risoluzione del problema operando dapprima attraverso delle adimensionalizzazioni. Con riferimento alla (1.36) si ridefiniscono le seguenti grandezze non dimensionali:
0
~L
ss =
L
xx =~
L
yy =~
W
Hh
2=
W
Vv
2=
02EA
W=ρ
L
L θcos0=Λ θsen
Λ=∆
(2.8)
A differenza della (1.36) si nota una differente espressione per Λ e l’introduzione della nuova grandezza ∆, trattandosi del problema generale di cavo sospeso in presenza di un’inclinazione θ. D’ora in avanti sarà omesso il simbolo di tilde per una migliore lettura del problema, in modo tale che le equazioni adimensionalizzate risolutive si presentino nella più semplice forma:
(2.9)
(2.10)
In cui le due funzioni ψ1(s) e ψ2(s) sono rappresentate rispettivamente dalle equazioni (2.11 a) e (2.11 b):
(2.11 a)
(2.11 b)
Sfruttando, coerentemente a quanto fatto in precedenza, la condizione al contorno è possibile ottenere le equazioni (2.12 a) e (2.12 b) da risolvere contemporaneamente per via numerica.
(2.12 a)
(2.12 b)
[ ]Tshhs
sx ∆+ΛΨ
+Λ
= αθθ
ρ1
cos2
)(
cos)( 1
[ ]Tshsvs
sy ∆+ΛΨ
+
−Λ= α
θθρ
1cos2
)(
2cos
2)( 2
−−
=Ψh
sv
h
vs
2arcsinharcsinh)(1
−+−
+=Ψ
2/122/12
2
211)(
h
sv
h
vs
[ ]Th
h ∆+ΛΨ
+Λ= αρθ 12
)1(cos 1
[ ]Thv
∆+ΛΨ
+
−Λ= αρθ 1
2
)1(
2
12sen 2

CAPITOLO 2 Effetti della deformazione termica sulla statica
25
Dove le due funzioni ψ1(1) e ψ2(1) sono definite dalle:
(2.13 a)
(2.13 b)
−−
=Ψh
v
h
v 2arcsinharcsinh)1(1
−+−
+=Ψ
2/122/12
2
211)1(
h
v
h
v
CAPITOLO 2 Effetti della deformazione termica sulla statica
26
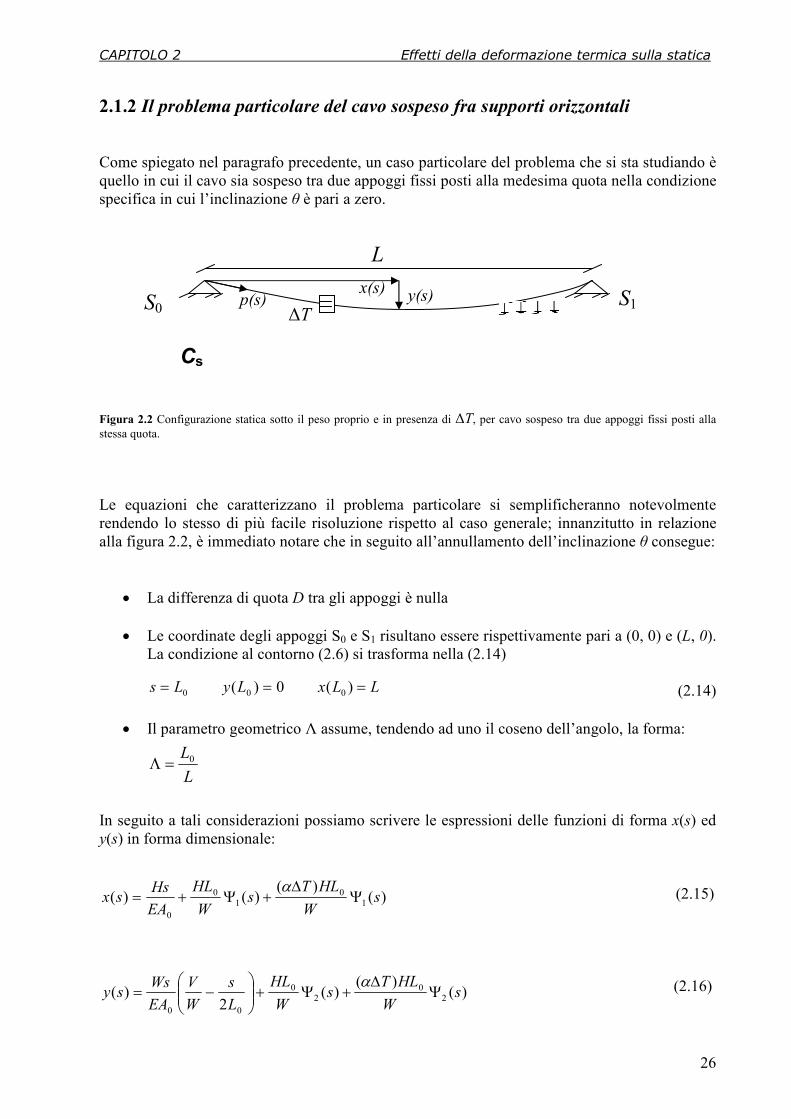
2.1.2 Il problema particolare del cavo sospeso fra supporti orizzontali Come spiegato nel paragrafo precedente, un caso particolare del problema che si sta studiando è quello in cui il cavo sia sospeso tra due appoggi fissi posti alla medesima quota nella condizione specifica in cui l’inclinazione θ è pari a zero.
Figura 2.2 Configurazione statica sotto il peso proprio e in presenza di ∆T, per cavo sospeso tra due appoggi fissi posti alla stessa quota. Le equazioni che caratterizzano il problema particolare si semplificheranno notevolmente rendendo lo stesso di più facile risoluzione rispetto al caso generale; innanzitutto in relazione alla figura 2.2, è immediato notare che in seguito all’annullamento dell’inclinazione θ consegue:
• La differenza di quota D tra gli appoggi è nulla • Le coordinate degli appoggi S0 e S1 risultano essere rispettivamente pari a (0, 0) e (L, 0).
La condizione al contorno (2.6) si trasforma nella (2.14)
(2.14)
• Il parametro geometrico Λ assume, tendendo ad uno il coseno dell’angolo, la forma:
In seguito a tali considerazioni possiamo scrivere le espressioni delle funzioni di forma x(s) ed y(s) in forma dimensionale:
(2.15)
(2.16)
S1
S0
p(s)
Cs
x(s)
y(s) ∆T
0Ls = 0)( 0 =Ly LLx =)( 0
L
L0=Λ
)()(
)()( 10
10
0
sW
HLTs
W
HL
EA
Hssx Ψ
∆+Ψ+=
α
)()(
)(2
)( 20
20
00
sW
HLTs
W
HL
L
s
W
V
EA
Wssy Ψ
∆+Ψ+
−=
α
L

CAPITOLO 2 Effetti della deformazione termica sulla statica
27
In cui le due funzioni ausiliare ψ1(s) e ψ2(s) sono ancora rappresentate rispettivamente dalle equazioni (2.11 a) e (2.11 b). Sfruttando la nuova condizione al contorno (2.14) si ottengono le:
(2.17 a)
(2.17 b)
Nelle quali evidentemente:
(2.18 a)
−+−
+=Ψ
2/122/12
02 11)(H
WV
H
VL (2.18 b)
Le equazioni ottenute, come già ampliamente discusso per il caso generale richiedono una risoluzione per via numerica. I vantaggi di cui si è parlato in precedenza per la risoluzione del caso particolare per θ = 0, non si limitano soltanto a delle equazioni semplificate, ma come già visto nel paragrafo 3.1 (statica del cavo elastico estensibile), si ha bisogno di risolvere solo la (2.17 a) per la reazione vincolare H. Infatti la soluzione per la reazione vincolare verticale all’appoggio è da subito possibile, dovendo essere soddisfatto l’equilibrio alla traslazione verticale, pertanto:
(2.19)
Anche in questo caso è conveniente procedere nella risoluzione del problema passando per delle adimensionalizzazioni, già espresse dalla (2.8) a meno del parametro Λ per il quale vale la considerazione di inizio paragrafo. Si ottiene così, omettendo per semplicità il simbolo di tilde in relazione alle grandezze non dimensionali:
(2.20 a)
(2.20 b)
)()(
)( 010
010
0
0 LW
HLTL
W
HL
EA
HLL Ψ
∆+Ψ+=
α
−−
=ΨH
WV
H
VL arcsinharcsinh)( 01
)()(
)(2
10 02
002
0
0
0 LW
HLTL
W
HL
W
V
EA
WLΨ
∆+Ψ+
−=α
2
WV =
[ ]Tshhssx ∆+ΛΨ+Λ= αρρ 1)()( 1
( ) [ ]Tssvssy ∆+ΛΨ+−Λ= αρρ 1)()( 2

CAPITOLO 2 Effetti della deformazione termica sulla statica
28
In cui le due funzioni ausiliare sono rappresentate dalle:
(2.21 a)
(2.21 b)
Ricorrendo alla condizione al contorno precedentemente utilizzata, questa volta adimensionalizzata, ovvero per s =1, si ottiene l’equazione risolutiva per h, da risolversi come detto per via numerica.
(2.22)
Per la reazione vincolare verticale, non dimensionale, vale:
(2.23)
.
−−
=Ψh
sv
h
vs
2harcsinharcsin
2
1)(1 ρ
−+−
+=Ψ
2/122/12
2
211
2)(
h
sv
h
vhs
ρ
[ ]Thh ∆+ΛΨ+Λ= αρρ 1)1(1 1
2/1=v

CAPITOLO 2 Effetti della deformazione termica sulla statica
29
2.2 2.2 2.2 2.2 DESCRIZIONE DEGLI DESCRIZIONE DEGLI DESCRIZIONE DEGLI DESCRIZIONE DEGLI EFFETTI DELLA DEFORMAZIEFFETTI DELLA DEFORMAZIEFFETTI DELLA DEFORMAZIEFFETTI DELLA DEFORMAZIONE ONE ONE ONE
TERMICATERMICATERMICATERMICA
2.2.1 Effetti sulla statica del cavo sospeso orizzontale
È conveniente per poter comprendere il problema nella sua complessità discutere dapprima della soluzione del problema particolare, per estendere in seguito la formulazione e la discussione al problema generale di cavo sospeso tra due appoggi fissi alla generica quota. La soluzione del problema può essere riassunta tramite la realizzazione dei grafici di Figura 2.3 di pagina seguente. I sei grafici che la costituiscono hanno ognuno un differente significato e nel loro complesso descrivono in modo organico il problema in tutti i suoi aspetti fondamentali. Per una migliore descrizione del problema è conveniente introdurre due nuove grandezze pertanto si definiscono:
(2.24 a)
(2.24 b)
denominate rispettivamente perdita di trazione ed aumento della freccia, in cui i due termini h0
e f0 rappresentano i valori di h e f di riferimento, ovvero in corrispondenza di ∆T = 0.. La grandezza f rappresenta in particolare l’abbassamento del cavo in mezzeria, pertanto la sua definizione è f = y(1/2). I primi due grafici (a e b) rappresentano i due parametri in questione al variare di Λ, per quattro differenti valori della variazione di temperatura, due negativi (∆T = -30 e ∆T = -60) e due positivi (∆T = 30 e ∆T = 60). Entrambi si riferiscono ad un cavo con determinate caratteristiche, il coefficiente α è pari a 0,0001 mentre ρ è pari a 0,00002. È possibile notare che le curve relative a temperature positive e negative si trovano interamente su due differenti porzioni del piano delimitate in un caso dall’asse χ2 = 1, nell’altro κ2 = 1. In pratica sia le curve relative a variazione di temperatura positivi che negativi tendono ad un valore costante prossimo ad uno.. Dalla definizione dei parametri χ2 e κ2 si evince che gli effetti della temperatura si risentono poco sia se i cavi sono molto tesi (Λ < 0,995) sia se sono molto laschi (Λ > 1,005). Al contrario l’effetto della temperatura è tanto maggiore quanto più ci si avvicina in prossimità di quei valori di Λ per cui risulta che la lunghezza del cavo è circa pari alla distanza tra gli appoggi. In tale situazione si nota infatti la presenza di un punto critico per ciascuna curva; nel caso del grafico Λ(χ2) tale punto critico si traduce in un punto di massimo per le curve con variazione di temperatura negativa e in un punto di minimo per le curve con variazione di temperatura positiva; nel caso del grafico Λ(κ2), invece, le curve relative a variazioni di temperatura negative presentano un punto di minimo, mentre quelle relative a variazioni di temperatura positive un punto di massimo. È importante notare che gli assi Λ = 1 e rispettivamente χ2 = 1 e κ2 = 1 messi in evidenza nei due grafici con linea tratteggiata, non rappresentano degli assi di simmetria per le curve. A causa della non linearità del problema si notano due aspetti fondamentali, il primo in relazione al fatto che per un fissato ∆T il comportamento del cavo non è perfettamente identico
02 / hh=χ
02 / ff=κ
CAPITOLO 2 Effetti della deformazione termica sulla statica
30
a seconda se il cavo sia preteso o non, ed il secondo relativo al fatto che fissato un certo Λ, gli effetti dovuti a ∆T > 0 non sono numericamente opposti a quelli relativi alle curve a ∆T < 0. Il primo di questi due aspetti comporta che il massimo o il minimo delle curve (a seconda se il ∆T sia positivo o negativo) sia tanto più spostato verso sinistra tanto più cresca il ∆T sia per il caso di χ2 sia per il caso di κ2. In pratica se si focalizza l’attenzione sul grafico Λ(χ2) possiamo affermare che per le curve caratterizzate da ∆T > 0 il punto di minimo trasla man mano verso la condizione di cavo molto preteso quanto più aumenti il ∆T, condizione analoga si ha per i cavi caratterizzati da ∆T < 0 in cui il massimo trasla verso destra al diminuire del delta. In conclusione gli effetti della temperatura su di un cavo sono sensibilmente differenti a seconda dello stato di pretensione dello stesso. Tale comportamento è ribadito se si osserva il grafico Λ(κ2). Il secondo dei due aspetti messi in evidenza precedentemente, e riscontrabile in entrambi i grafici, si traduce nel fatto che gli effetti di un ∆T sono fortemente differenti a seconda del fatto che quest’ultimo sia positivo o negativo. In generale, inoltre, si può affermare che sia se il cavo sia preteso o non, l’effetto della temperatura genera uno stesso comportamento; in presenza di un raffreddamento la reazione all’appoggio aumenta, in presenza di un riscaldamento la medesima reazione diminuisce. Ciò indica che sul comportamento dell’elemento influiscono contemporaneamente entrambi i fattori, sia la pretensione sia la temperatura; ovviamente sarà l’entità delle due a dare un differente contributo al comportamento del cavo; è evidente, come detto, che per quanto grande possa essere, sempre nell’ordine di grandezza delle variazioni climatiche, la temperatura, il suo effetto sarà rilevante o addirittura trascurabile in funzione dello stato di pretensione in cui si trova l’elemento. I due grafici successivi (c e d) presentano lo stesso schema dei due precedenti, ancora una volta si rappresentano nel piano rispettivamente Λ(χ2) e Λ(κ2),. Questa volta però a caratterizzare le varie curve non sarà la temperatura, per la quale si assume come riferimento ∆T = 30, bensì ρ. Per entrambi i grafici si nota che gli effetti dovuti all’applicazione di un determinato ∆T sono tanto più significativi quanto minore sia ρ sia in termini di reazione all’appoggio che in termini di abbassamento f in mezzeria. Inoltre ancora una volta viene messa in evidenza la contrapposizione tra gli effetti della pretensione e della temperatura; il contributo di quest’ultima, infatti, è tanto più rilevante quanto più ci si avvicina nell’intorno di Λ = 1. Per completare la lettura del problema si considerino le figure e ed f: In questo caso ancora una volta fissate le caratteristiche α e ρ, in ascissa è riportato il ∆T, mentre a caratterizzare le varie curve è il parametro Λ, per due cavi pretesi e due non pretesi.. È un ulteriore confronto tra i due fattori, Λ e ∆T, che si contrappongono e che influenzano contemporaneamente la statica del cavo; sia in termini di χ2 che κ2. Per tutte le curve si ha evidentemente un passaggio per lo zero, proprio per come definiti χ2 e κ2, ma è importante notare il differente comportamento man mano che ci si sposta verso gli estremi del grafico. Man mano che si considerano curve caratterizzate da Λ prossimi a 1 si riscontrano effetti importanti dovuti alla temperatura sia per le ascisse negative che positive. Allo stesso modo per cavi molto pretesi o molto laschi la temperatura gioca un ruolo meno rilevante o al limite trascurabile per temperature tendenti a zero.

CAPITOLO 2 Effetti della deformazione termica sulla statica
31
0.995 0.9975 1 1.0025 1.005
L
0.2
0.4
0.6
0.8
1
1.2
1.4
c 2
r=2e-6
r=2e-05
a=0.00001DT=30
0.995 0.9975 1 1.0025 1.005
L
0.5
1
1.5
2
2.5
3
3.5
4
k 2 a=0.00001DT=30
-40 -30 -20 -10 0 10 20 30 40
DT
0.6
0.8
1
1.2
1.4
c 2 a=0.00001
r=0.00002L=0.999
L=0.995
L=1.001
L=1.005
r=2e-04
r=1.5e-05
r=2e-05
r=1.5e-05
r=2e-04
r=2e-6
-40 -30 -20 -10 0 10 20 30 40
DT
0.6
0.8
1
1.2
1.4
1.6
k 2a=0.00001r=0.00002 L=0.999
L=0.995
L=1.001
L=1.005
Figura 2.3 (a) Relazione Λ - χ2 per α e ρ fissati. (b) Relazione Λ - κ2 per α e ρ fissati. (c) Relazione Λ - χ2 per α e ∆T fissati. (d) Relazione Λ - κ2 per α e ∆T fissati. (e) Relazione ∆T - χ2 per α e ρ fissati. (f) Relazione ∆T - κ2 per α e ρ fissati.
a b
e f
d c
C1
C3
C3
C2
C2
C1 c 2
CAPITOLO 2 Effetti della deformazione termica sulla statica
32
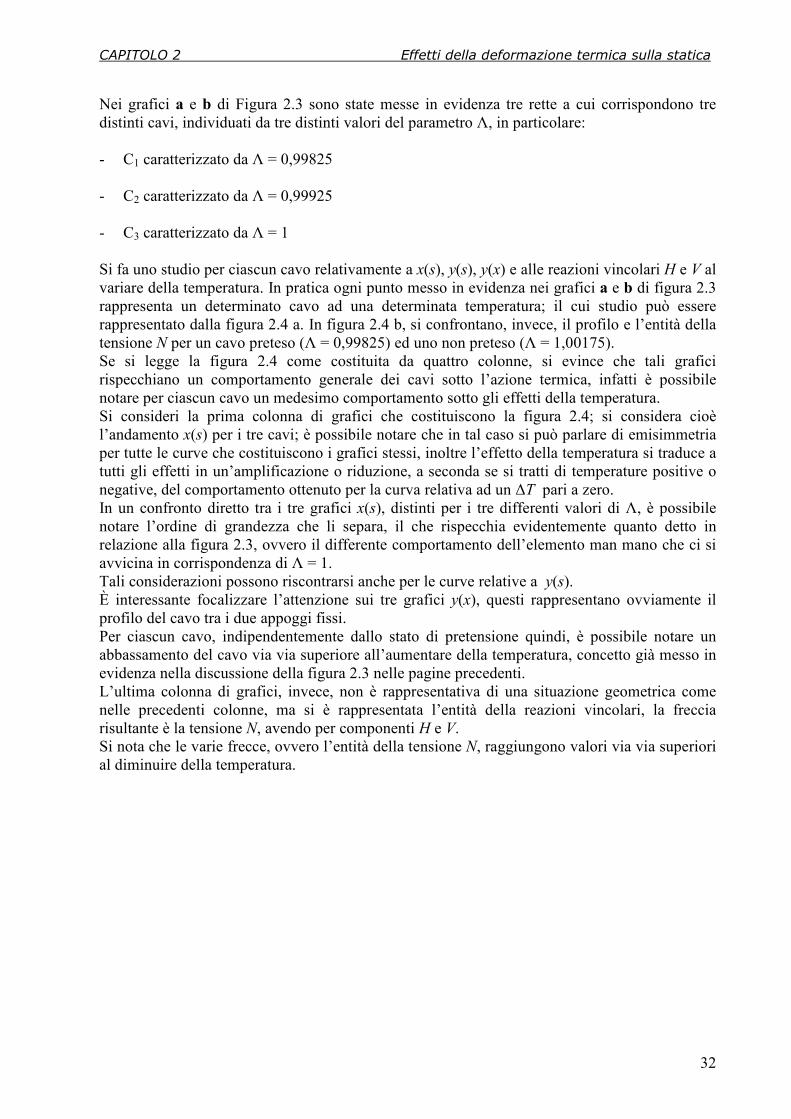
Nei grafici a e b di Figura 2.3 sono state messe in evidenza tre rette a cui corrispondono tre distinti cavi, individuati da tre distinti valori del parametro Λ, in particolare: - C1 caratterizzato da Λ = 0,99825 - C2 caratterizzato da Λ = 0,99925 - C3 caratterizzato da Λ = 1
Si fa uno studio per ciascun cavo relativamente a x(s), y(s), y(x) e alle reazioni vincolari H e V al variare della temperatura. In pratica ogni punto messo in evidenza nei grafici a e b di figura 2.3 rappresenta un determinato cavo ad una determinata temperatura; il cui studio può essere rappresentato dalla figura 2.4 a. In figura 2.4 b, si confrontano, invece, il profilo e l’entità della tensione N per un cavo preteso (Λ = 0,99825) ed uno non preteso (Λ = 1,00175). Se si legge la figura 2.4 come costituita da quattro colonne, si evince che tali grafici rispecchiano un comportamento generale dei cavi sotto l’azione termica, infatti è possibile notare per ciascun cavo un medesimo comportamento sotto gli effetti della temperatura. Si consideri la prima colonna di grafici che costituiscono la figura 2.4; si considera cioè l’andamento x(s) per i tre cavi; è possibile notare che in tal caso si può parlare di emisimmetria per tutte le curve che costituiscono i grafici stessi, inoltre l’effetto della temperatura si traduce a tutti gli effetti in un’amplificazione o riduzione, a seconda se si tratti di temperature positive o negative, del comportamento ottenuto per la curva relativa ad un ∆T pari a zero. In un confronto diretto tra i tre grafici x(s), distinti per i tre differenti valori di Λ, è possibile notare l’ordine di grandezza che li separa, il che rispecchia evidentemente quanto detto in relazione alla figura 2.3, ovvero il differente comportamento dell’elemento man mano che ci si avvicina in corrispondenza di Λ = 1. Tali considerazioni possono riscontrarsi anche per le curve relative a y(s). È interessante focalizzare l’attenzione sui tre grafici y(x), questi rappresentano ovviamente il profilo del cavo tra i due appoggi fissi. Per ciascun cavo, indipendentemente dallo stato di pretensione quindi, è possibile notare un abbassamento del cavo via via superiore all’aumentare della temperatura, concetto già messo in evidenza nella discussione della figura 2.3 nelle pagine precedenti. L’ultima colonna di grafici, invece, non è rappresentativa di una situazione geometrica come nelle precedenti colonne, ma si è rappresentata l’entità della reazioni vincolari, la freccia risultante è la tensione N, avendo per componenti H e V. Si nota che le varie frecce, ovvero l’entità della tensione N, raggiungono valori via via superiori al diminuire della temperatura.

CAPITOLO 2 Effetti della deformazione termica sulla statica
33
Figura 2.4.a Andamento di x(s), y(s), y(x) ed entità della tensione nel cavo N al variare della temperatura per i tre cavi C1, C2 e C3 fissati α = 0.00001 e ρ = 0,00002.
C1
C2
C3

CAPITOLO 2 Effetti della deformazione termica sulla statica
34
Figura 2.4.b Andamento di y(x) ed entità della tensione nel cavo N al variare della temperatura per i due cavi (Λ = 0,99825 e Λ = 1,00175) fissati α = 0.00001 e ρ = 0,00002.

CAPITOLO 2 Effetti della deformazione termica sulla statica
35
2.2.2 Effetti sulla statica del cavo sospeso inclinato
La soluzione del problema generale può essere riassunta tramite la realizzazione dei grafici di figura 2.6 e figura 2.7. Per una migliore descrizione del problema, come è stato già visto nel precedente paragrafo per cavo sospeso tra due appoggi fissi posti alla medesima altezza, è conveniente introdurre le due grandezze χ2 che κ2. Per la prima, essendo il cavo inclinato, per il tiro, ovvero la componente della tensione lungo il cavo, non è possibile ragionare in termini di h come fatto finora, nel rispetto dell’equilibrio alla traslazione dell’elemento. In relazione alla figura 2.5 a, è possibile notare la geometria del sistema del cavo inclinato, e la relativa schematizzazione del vettore della tensione. La tensione nel cavo, quando inclinato, è un vettore, ancora diretto tangenzialmente al cavo, se si proietta tale vettore sulla corda inclinata di θ rispetto all’orizzontale, allora si ottengono due componenti vettoriali, una tangenziale ed una normale. Questo passaggio è necessario, poiché essendo incognita la configurazione del cavo, per poter conoscere la tensione, si ha bisogno di ricondurre tale vettore ad una corda nota. Nel caso di cavo orizzontale, essendo l’inclinazione nulla, e coincidendo la corda con l’orizzontale, ne deriva che il vettore della tensione proiettato lungo la corda è evidentemente N stesso, per cui la componente normale coincide con la reazione vincolare verticale, mentre la componente tangenziale con la reazione vincolare orizzontale. Pertanto l’indice χ2 deve essere espresso in termini delle due componenti della tensione. Così se ci si riferisce alla componente tangenziale, e per semplicità in termini adimensionalizzati, si
definisce 2tχ come il rapporto tra τt e il corrispondente valore di riferimento τt0 relativo alla
condizione di ∆T = 0.
Figura 2.5 (a) Schema geometrico per cavo inclinato, scomposizione della tensione lungo la corda. (b) Schema geometrico per
cavo inclinato, individuazione dei riferimenti cartesiani per la definizione di κ2.
(2.25 a)
Per completezza nella descrizione del problema si definisce anche l’indice 2nχ in riferimento
proprio alla componente normale:
(2.25 b)
02 / ttt ττχ =
02 / nnn ττχ =
θ
V
H
N
NnNt
θ
y - tgθ
x
yy’
x’
a b

CAPITOLO 2 Effetti della deformazione termica sulla statica
36
Anche per κ2 si devono fare delle nuove considerazioni; infatti essendo quest’ultimo strettamente legato alle caratteristiche geometriche del problema necessita di una nuova definizione ora che la geometria stessa del problema è variata. Non potendo trattare l’aumento della freccia per effetto della temperatura come fatto in precedenza per angolo di inclinazione nullo, con riferimento alla figura 2.5 b si definisce κ2 nel seguente modo:
(2.26)
Figura 2.6 Andamento di χt
2 , χn2 e κ2 al variare della temperatura per i due angoli π/10 e π/4 fissati α = 0,00001 e ρ = 0,00002.
02 / rr=κ
a b
e f
d c

CAPITOLO 2 Effetti della deformazione termica sulla statica
37
In cui
(2.27)
e r0 è il corrispondente valore di riferimento per ∆T = 0. I grafici di figura 2.6 rappresentano l’andamento di χt
2 , χn2 e κ2 al variare della temperatura per
i due angoli π/10 e π/4, fissati α = 0,00001 e ρ = 0,00002. Per l’indice χt
2 (grafici a e b), per quanto concerne l’andamento delle curve che la compongono, non si rilevano differenze sostanziali al variare dell’angolazione θ, e questo si evince non solo dalla figura 2.6 ma anche se si confrontano tali curve con le corrispettive di figura 2.3 per angolo di inclinazione nullo. Possiamo dunque affermare, per quanto concerne la componente tangenziale della tensione lungo la corda, che le considerazioni fatte nel caso particolare di cavo sospeso tra appoggi fissi posti alla medesima quota possono essere estese per un qualsiasi angolo θ dell’elemento rispetto all’orizzontale. Per poter ben comprendere quanto influisca l’inclinazione sul comportamento del cavo sospeso sottoposto ad una variazione termica, si ha bisogno di un confronto diretto offerto dal grafico a di figura 2.7. In tale grafico si rappresenta l’andamento di χt
2 per un delta della temperatura fissato (∆T = 60) al variare dell’angolo di inclinazione θ. Si evince che il rapporto tra la tensione tangenziale a temperatura assegnata e quella di riferimento a temperatura nulla è tanto maggiore quanto maggiore sia l’angolo di inclinazione. È lecito affermare, quindi, per quanto riguarda il tiro, che l’effetto della temperatura è tanto più importante quanto maggiore sia l’angolo θ. Si ha però un’inversione di tendenza di tale fenomeno se ci si sposta verso cavi via via più laschi.
Figura 2.7 Andamento di χt2 , e κ2 al variare dell’inclinazione θ per ∆T = 60, fissati α = 0,00001 e ρ = 0,00002.
Quanto detto si riferisce alla sola componente tangenziale della tensione N lungo la corda, ora a differenza del paragrafo precedente, per quanto detto ad inizio paragrafo, deve essere considerata anche la componente normale della stessa lungo la corda. I grafici c e d di figura 2.6 rappresentano le curve relative all’indice χn
2 al variare della temperatura per gli angoli π/10 e π/4.
a b
θtg−= yr

CAPITOLO 2 Effetti della deformazione termica sulla statica
38
È possibile notare che, così come per χt2, anche nel caso di χn
2 tutte le curve tendono ad un valore costante prossimo ad 1, ma con una notevole differenza, le curve a temperatura positiva si trovano nella parte di piano superiore a χn
2 = 1, viceversa le curve a temperatura negativa si trovano interamente nella porzione di piano inferiore. L’effetto dell’inclinazione sull’entità della componente normale della tensione diminuisce al diminuire dell’angolo stesso, diventando tanto più trascurabile quanto più ci si avvicina alla condizione di supporti posizionati alla medesima altezza. I grafici e ed f di figura 2.6 mostrano l’andamento di κ2 al variare della temperatura ancora per i due angoli π/10 e π/4. Il confronto tra i due mostra una evidente influenza della temperatura all’aumentare dell’inclinazione. Tale fenomeno è messo in risalto dal grafico b di figura 2.7, dove fissata la differenza di temperatura (∆T = 60), si sono realizzate le varie curve al variare dell’angolo θ. È possibile notare che l’effetto della temperatura sul sag si risente tanto più si ha a che fare con inclinazioni dell’elemento via via maggiori.
CAPITOLO 2 Effetti della deformazione termica sulla statica
39
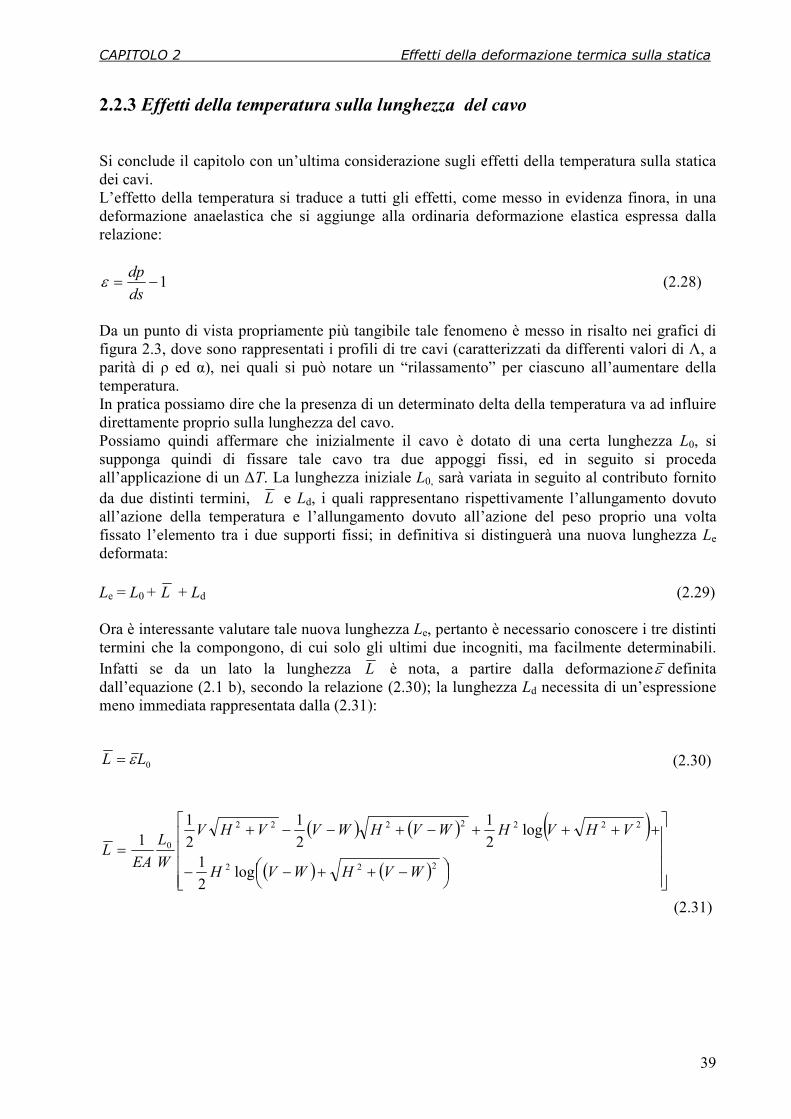
2.2.3 Effetti della temperatura sulla lunghezza del cavo
Si conclude il capitolo con un’ultima considerazione sugli effetti della temperatura sulla statica dei cavi. L’effetto della temperatura si traduce a tutti gli effetti, come messo in evidenza finora, in una deformazione anaelastica che si aggiunge alla ordinaria deformazione elastica espressa dalla relazione:
1−=ds
dpε (2.28)
Da un punto di vista propriamente più tangibile tale fenomeno è messo in risalto nei grafici di figura 2.3, dove sono rappresentati i profili di tre cavi (caratterizzati da differenti valori di Λ, a parità di ρ ed α), nei quali si può notare un “rilassamento” per ciascuno all’aumentare della temperatura. In pratica possiamo dire che la presenza di un determinato delta della temperatura va ad influire direttamente proprio sulla lunghezza del cavo. Possiamo quindi affermare che inizialmente il cavo è dotato di una certa lunghezza L0, si supponga quindi di fissare tale cavo tra due appoggi fissi, ed in seguito si proceda all’applicazione di un ∆T. La lunghezza iniziale L0, sarà variata in seguito al contributo fornito da due distinti termini, L e Ld, i quali rappresentano rispettivamente l’allungamento dovuto all’azione della temperatura e l’allungamento dovuto all’azione del peso proprio una volta fissato l’elemento tra i due supporti fissi; in definitiva si distinguerà una nuova lunghezza Le deformata: Le = L0 + L + Ld (2.29) Ora è interessante valutare tale nuova lunghezza Le, pertanto è necessario conoscere i tre distinti termini che la compongono, di cui solo gli ultimi due incogniti, ma facilmente determinabili. Infatti se da un lato la lunghezza L è nota, a partire dalla deformazioneε definita dall’equazione (2.1 b), secondo la relazione (2.30); la lunghezza Ld necessita di un’espressione meno immediata rappresentata dalla (2.31):
(2.30)
(2.31)
0LL ε=
( ) ( ) ( )( ) ( )
−++−−
++++−+−−+=
222
2222222
0
log2
1
log2
1
2
1
2
11
WVHWVH
VHVHWVHWVVHV
W
L
EAL

CAPITOLO 2 Effetti della deformazione termica sulla statica
40
In definita risulta per Le:
(2.32)
Vista dunque l’influenza della temperatura sulla lunghezza iniziale del cavo, possiamo affermare che, nel caso in cui al cavo venisse applicata una variazione termica allora questo si comporterà come un cavo equivalente caratterizzato da:
(2.33)
La deformazione elastica si scrive, in riferimento alla (2.1 a):
(2.34)
Avendo definito la lunghezza *0L si definisce di conseguenza un corrispondente *Λ :
(2.35)
Più in generale, si consideri il caso in cui non ci si trovi nella situazione particolare di cavo sospeso tra due appoggi fissi posti alla stessa quota, ma posti ad una quota qualsiasi con il conseguente insorgere di un’inclinazione θ dell’elemento rispetto all’orizzontale, allora in tal caso possiamo scrivere per *Λ :
(2.36)
Nella quale posto l’angolo θ pari a zero si riconosce il caso particolare espresso dalla relazione (2.35). In ultimo è possibile osservare che la predeformazione indicata con 0ε si può scrivere in modo
piuttosto semplice come: (2.37)
( ) ( )( ) ( )
( ) ( ) ( )
−++−−+++
+−+−−+++==
222222
2222
000
log2
1log
2
12
1
2
11
1
WVHWVHVHVH
WVHWVVHV
W
L
EALLpLe ε
LLL += 0*
0
2/1
2
0
2 )(1
−+==
L
sWVH
EAEA
Nε
L
LL 00* ε+=Λ
( )Λ+=+
=Λ εθε
1cos00*
L
LL
11cos00 −Λ=−= θε
L
L
41
CAPITOLO 3 DINAMICA

CAPITOLO 3 Dinamica
42
3.1 LA DINAMICA DEL CAVO SOSPESO
3.1.1 Introduzione alla dinamica del cavo sospeso
Come già discusso precedentemente nel capitolo 1, si è detto quanto sia antico lo studio del problema di cavo sospeso e come sia stato affrontato con approcci differenti dai vari ricercatori ed autori che si sono susseguiti nel tempo [3]. Così come fatto nella statica, anche per la dinamica, si introduce il problema a partire da una breve descrizione storica sui principali studiosi della dinamica del cavo. I primi ad occuparsi del comportamento dinamico furono in antichità Pitagora ed i suoi allievi incuriositi dal fenomeno del suono prodotto dalle arpe. Le prime leggi che hanno portato ad uno studio concreto furono formulate molto tempo dopo da Mersenne nel 1636. Nel 1676 furono Noble e Pigott ad introdurre per la prima volta il concetto di modi di vibrazione di un cavo sospeso. Nel tempo si occuparono dello studio della dinamica dei cavi sospesi anche D’Alambert, Eulero, e Daniel Bernoulli. I loro lavori costituirono le basi fondamentali dalle quali Taylor elaborò una teoria matematica del problema nel 1713. Nel 1820 un contributo molto significativo venne apportato da Poisson, il quale formulò le equazioni generali alle derivate parziali del moto di un cavo sotto l’azione di una data forza. Nel 1820 si era dunque ottenuta la soluzione corretta per le vibrazioni lineari di un cavo, nella condizione in cui questo aveva le caratteristiche geometriche della catenaria. Nel 1851 Rohrs, a partire dagli studi svolti da Stokes, ottenne una soluzione approssimata per i modi simmetrici verticali di vibrazione, nella condizione in cui il sag dell’elemento fosse stato piccolo, ma comunque apprezzabile, per cavo omogeneo. Tale soluzione fu ottenuta proprio a partire dalle equazioni generali di Poisson. Nel 1868 Routh fornì una soluzione esatta per i modi simmetrici verticali di vibrazione (a cui è associato il moto longitudinale) di un cavo eterogeneo. Come Rohrs assunse la condizione di cavo inestensibile. Routh, in seguito ottenne la soluzione anche per i modi antisimmetrici. Da allora per diversi decenni sembra che fu abbandonato lo studio di tale problema fino ad arrivare in tempi recenti a Rannie e Von Karman, i quali indipendentemente ripresero lo studio della soluzione dei modi simmetrici ed antisimmetrici nel piano di un cavo inestensibile, per arrivare nel 1945 con Vincent ad estendere tale teoria anche al cavo elastico per i modi simmetrici. Nella metà del 1900 Pugsley formulò una teoria semiempirica per la determinazione delle prime tre frequenze naturali per i modi nel piano. Sulla base di tale formulazione si alternarono vari ricercatori per estendere a diversi casi tale trattazione, a partire da Saxon e Cahn che adattarono i risultati di Pugsley anche a casi in cui il sag non fosse piccolo, a Smith e Thompson che mostrarono come l’analisi poteva essere adattata anche ai cavi inclinati. I risultati ottenuti da tali studi portarono a scrivere che il primo modo simmetrico nel piano, principalmente coinvolgente il moto verticale, per cavo inestensibile e per piccolo sag, avviene ad una frequenza denominata ω1:

CAPITOLO 3 Dinamica
43
ω1 = 2,86π
prima radice diversa da zero di:
Prima di tale risultato si considerava che la prima frequenza del primo modo simmetrico di vibrazione trasversale di un cavo teso è data dalla prima radice di
ovvero ω1 = π. Tale diversità nei risultati, circa del 300 per cento, non può essere risolta tramite analisi ristrette dall’assunzione dell’inestensibilità. Recentemente molti studi analitici hanno dimostrato che l’assunzione di cavo elastico risolve questa ambiguità. .
22tg
ωω=
02
cos =ω

CAPITOLO 3 Dinamica
44
3.1.2 Oscillazioni libere di un cavo sospeso. La teoria lineare.
Se un cavo uniforme sospeso tra due supporti fissi posti alla medesima altezza viene sollecitato, allora in relazione alla figura 3.1, per l’equilibrio è richiesto che:
(3.1)
In cui u e w sono rispettivamente la componente longitudinale e verticale del moto nel piano, mentre v è la componente fuori del piano, in lingua inglese chiamata anche swinging component [3]. Con n si è indicata invece la tensione addizionale generatasi nell’elemento. Tutte le grandezze richiamate sono funzioni sia del tempo che della posizione.
Figura 3.1 a) Componenti dello spostamento u, v, w nella configurazione del cavo sospeso sottoposto ad un’azione esterna. b). Componenti dello spostamento nel piano e componenti della tensione.
( )2
2
s t
um
u
ds
dxnN
s δδ
δδ
δδ
=
++
( ) mgt
wm
w
ds
dznN
s−=
++2
2
s δδ
δδ
δδ
( )2
2
ss t
vm
vnN
δδ
δδ
δδ
=
+
L/2
a
b

CAPITOLO 3 Dinamica
45
Si considera trascurabile l’inerzia relativa alla componente longitudinale 2
2
t
um
δδ
, (se si assume
il profilo del cavo poco profondo, moderato sag) si ottiene così le equazioni (3.2) e (3.3). Grazie a tele semplificazione e tramite due ulteriori condizioni di seguito riportate sarà possibile operare la condensazione statica:
• La configurazione statica di equilibrio è rappresentata dal profilo parabolico; del tipo
−=
2
00
4L
x
L
xdy .
Da tale condizione deriva che dxds ≈ ovvero HN ≈ .
• Lo sforzo iniziale è trascurabile rispetto all’unità per cui
H
EA<< 1.
(3.2)
(3.3)
La condensazione statica permette di considerare che la tensione addizionale n, parte della tensione totale (pari ad n + N), sia invariabile lungo tutto l’elemento (deformazione elastica quasi statica). Così come già fatto per la tensione N anche in relazione alla reazione vincolare orizzontale H si definisce la componente addizionale h, la quale è funzione della sola variabile tempo. In pratica, la componente addizionale h costituisce la parte dinamica della componente orizzontale della tensione.
Al primo ordine l’equazione del cavo è
(3.4)
Che integrata fornisce
(3.5)
Le equazioni (3.3) e (3.5) costituiscono un sistema di equazioni lineari omogenee in w. Con le (3.2), (3.3) e (3.5), ottenute in seguito alla condensazione statica, le caratteristiche fondamentali della teoria lineare delle oscillazioni libere del cavo sospeso possono essere a questo punto indagate. In pratica si possono elencare tutte le semplificazioni che si ottengono in seguito all’aver introdotto la condensazione statica
2
2
2
2
2
2
xx t
wm
zh
wH
δδ
δδ
δδ
=+
2
2
2
2
x t
vm
vH
δδ
δδ
=
( )x
w
dx
dz
x
u
EA
dxdsh
δδ
δδ
+=3/
∫=L
wdxH
mg
EA
hL
0
0
CAPITOLO 3 Dinamica
46
Per iniziare, bisogna considerare che il moto oscillatorio è disaccoppiato dal moto nel piano, perché, al primo ordine, non si genera la tensione addizionale. Tale fenomeno è coerente al caso in cui si ha un filo sospeso incernierato ad un’estremità, e in tal caso l’unico modo di vibrare sarà relativo all’oscillazione del pendolo. In pratica al primo ordine, una sollecitazione che ha componenti fuori dal piano indurrà moti fuori dal piano, e viceversa se la sollecitazione ha componenti solo nel piano indurrà moti solo nel piano, come detto per il caso particolare del pendolo. Sotto tale condizione geometrica, la componente verticale del moto è maggiormente significativa quando la vibrazione del cavo è relativa ad un modo nel piano. Inoltre, sempre per effetto della condensazione statica, ne consegue che le frequenze longitudinali sono molto superiori a quelle trasversali, L’ampiezza della corrispondente componente longitudinale del moto è sempre considerevolmente minore dell’ampiezza del moto verticale. Per questo motivo la relazione (3.4) è adeguata a descrivere il moto longitudinale. Conseguentemente un modo simmetrico nel piano è definito come un modo nel quale la componente verticale del modo è simmetrica, e viceversa per i modi antisimmetrici, in cui tale componente è appunto antisimmetrica.

CAPITOLO 3 Dinamica
47
3.1.2.1 Moto fuori dal piano Il moto oscillatorio, ovvero il moto fuori del piano, viene considerato per primo avendo una risoluzione meno complessa [3]. Se si considera che tiexvtxv ϖ)(),( = , dove ω è la frequenza circolare naturale di vibrazione, la (3.3) si riduce a
(3.6)
Inoltre, le relative condizioni al contorno sono rappresentate da v (0) = v (L) = 0, e permettono di ottenere le frequenze naturali ed i relativi modi associati (equazioni (3.7)):
(3.7)
Dove n = 1, 2 ,3,… sta ad indicare il primo, il secondo, il terzo modo, rispettivamente, e così procedendo. La frequenza naturale del primo modo fuori piano è quella più bassa
02
2
2
=+ vmdx
vdH ϖ
2/1
=m
H
L
nn
πω
L
xnAv nn
πsin=

CAPITOLO 3 Dinamica
48
3.1.2.2 Moto nel piano I modi antisimmetrici.
Dall’equazione (3.5) è possibile notare che h = 0 se ∫L
wdx0
= 0.
I modi di vibrazione che rispettano tale condizione e che pertanto non inducono tensione addizionale si definiscono modi antisimmetrici.
Bisogna però essere prudenti in questo, perché quando λ2 è molto grande allora ∫L
wdx0
→ 0 per
i modi simmetrici, in cui la tensione addizionale è generata.. Come anticipato in precedenza i modi antisimmetrici nel piano sono caratterizzati da componenti antisimmetriche verticali e componenti simmetriche longitudinali; mentre i modi simmetrici nel piano sono caratterizzati da componenti simmetriche verticali e componenti antisimmetriche longitudinali. Nel caso dei modi antisimmetrici nel piano l’equazione (3.2) diventa:
(3.8)
Dove è stata operata la sostituzione tiexwtxw ϖ)(),( = . L’equazione del cavo si riduce ad una condizione di compatibilità geometrica data dall’equazione (3.9):
(3.9)
Dove anche in questo caso è stata effettuata la sostituzione tiexutxu ϖ)(),( = .
Con le condizioni al contorno w (0) = w (L/2) = 0, le equazioni (3.8) e (3.9) sono sufficienti ad ottenere le frequenze naturali e le componenti modali dei modi antisimmetrici nel piano:
(3.10)
Dove n = 1, 2 ,3,… sta ad indicare il primo, il secondo, il terzo modo, rispettivamente, e così procedendo. Le componenti verticali modali sono fornite dalla (3.11):
(3.11)
Le componenti longitudinali vengono ottenute anche queste a partire dalla (3.9). Tali componenti sono simmetriche per i modi antisimmetrici.
0x
2
2
2
=+ wmw
H ωδδ
0=+x
w
dx
dz
x
u
δδ
δδ
2/12
=m
H
L
nn
πω
=L
xnAw nn
π2sin

CAPITOLO 3 Dinamica
49
In seguito alla sostituzione ed integrazione si ottiene: (3.12)
Dove con nA è stata indicata l’ampiezza della componente verticale dell’n-esimo
antisimmetrico modo nel piano, introdotta nell’equazione (3.11). È chiaro che le ampiezze delle componenti longitudinali divengono molto piccole tanto più il
cavo sia flat
H
mgL → 0.
Queste componenti hanno alcune proprietà peculiari (si veda figura 3.2) perché il massimo spostamento avviene in corrispondenza di un quarto della lunghezza e non in mezzeria nel caso della prima componente modale (lo spostamento è un minimo locale alla mezzeria). Inoltre sia la pendenza che lo spostamento sono nulli in mezzeria (L0/2) per la seconda componente. Questo schema si ripete anche per i modi superiori.
Infatti ( ) [ ] 2//)/12/1(1/ /max, nHmgLAu nn π−−= , così che il picco dello spostamento
longitudinale è non più della metà della componente verticale al limite è raggiunto per il cavo nella condizione di flat-sag. Gli studi di Luongo e Rega indicano che le caratteristiche essenziali dei modi antisimmetrici nel piano sono stati conservati con un’eccezione.
a) prima componente modale simmetrica longitudinale
b) seconda componente modale simmetrica longitudinale
Figura 3.2 Componenti longitudinali e relative componenti verticali (tratteggiate) dei primi due antisimmetrici modi nel piano..
( )
−+
−
−=π
ππn
Lxn
L
xn
L
xA
H
mgLu nn
/2cos12sin
21
2
1

CAPITOLO 3 Dinamica
50
Luongo e Rega affermano che una distribuzione antisimmetrica della tensione addizionale h (x)
è possibile, in modo tale che ( )∫L
dxxh0
= 0.
Ciò si ottiene se si considera l’equazione del moto longitudinale: (3.13)
o anche
quando si rimuove il tempo. In seguito alla sostituzione e all’integrazione, si ottiene:
(3.12)
I modi simmetrici.
Nel caso dei modi simmetrici in piano, la tensione addizionale è indotta ed è sostanzialmente costante con la lunghezza, l’equazione (3.2) diviene così:
(3.15)
La soluzione della (3.15) è rappresentata dalla:
(3.16)
Dove ( )HmgLw //w 2= , Lx /x = , Hh /h = , e ( ) 2/1// mHLωβ = , e il suo valore specifica la particolare (simmetrica) componente modale verticale. Sono state operate in tal modo delle adimensionalizzazioni. Come è facile notare le frequenze naturali (adimensionalizzate) sono incognite e quindi è necessario ottenere una relazione per la loro determinazione.
Usando ora la relazione (3.5) è possibile eliminare h e ottenere la seguente equazione trascendentale da cui si ottengono le frequenze naturali dei modi simmetrici nel piano:
(3.17)
2
2
2
2
tx δδ
δδ
δδ u
mu
Hx
h+−=
+−= um
uH
x
h 22
2
xω
δδ
δδ
( )
+
−
−=L
xn
L
xn
L
A
H
mgL
H
xh nn ππ
2sin
21
hH
mgwm
x
wH =+ 2
2
2
ωδδ
( ) ( )
−
−= xcosxsin2
tg1h
w2
βββ
β
3
2 2
4
22tg
−=β
λββ

CAPITOLO 3 Dinamica
51
Dove ( ) ( )EAHLLHmgL /// 002
02 =λ . Tale parametro definito parametro di Irvine, è un
parametro fondamentale nella dinamica dei cavi sospesi, e dipende dalle proprietà meccaniche e geometriche dell’elemento. Può essere espresso anche in funzione della grandezza denominata
ratio of span rappresentata dal rapporto
0L
d nel seguente modo
2
0
2 64
=L
d
H
EAλ . Dove d
rappresenta il sag ed L0 la lunghezza del cavo
In termini di ordine di grandezza, si individuano tre range del parametro di Irvine:
• 2λ < 1, condizione di taut string; con tale termine si indica un particolare profilo del cavo caratterizzato da un piccolo valore del parametro geometrico ratio of span, cioè il sag è piccolo rispetto alla lunghezza del cavo.
• 1 < 2λ < 103 circa, condizione di caso sospeso 40/10
≈
L
d.
• 2λ >> 1, condizione di cavo inestensibile.
L’equazione (3.17) riveste un ruolo fondamentale nella teoria del cavo sospeso. Notare come sia presente solo questo unico parametro indipendente. Tale dipendenza delle frequenze naturali per i modi simmetrici da 2λ è rappresentata attraverso la figura 3.3 di seguito riportata.
Quando 2λ è molto grande il cavo si può considerare inestensibile e ne deriva che l’equazione (3.17) si riduce semplicemente a
(3.18)
La (3.18) è l’equazione trascendentale data per la prima volta da Rohrs nel 1851. Le radici sono date da ( ) ( )22)12/((4112 ππβ +−+= nn , con n = 1, 2, 3,…
Dall’altro lato invece, quando il valore di 2λ è relativo al profilo di taut string, le radici dell’equazione trascendentale per le frequenze naturali dei modi simmetrici sono rappresentate da ( )πβ 12 −= n con n = 1, 2, 3,…
Come si nota dalla figura 3.3 infatti, se 2λ < 1 oppure 2λ >> 1, neanche i modi simmetrici dipendono dal parametro di Irvine. In tal caso infatti l’equazione trascendentale per il calcolo delle frequenze diventa semplicemente la (3.18) come detto. La condizione di inestensibilità sposta di circa 2π le radici, cioè le frequenze naturali, ottenute dall’equazione governante per i modi simmetrici per il caso di filo teso, dalla prima radice diversa da zero data dall’equazione (3.17) posizionata tra π/2 e 1.43π, dalla seconda radice compresa tra 3π/2 e 2.46π, e così via. Tali valori dipendono da 2λ .
22tg
ββ=

CAPITOLO 3 Dinamica
52
Figura 3.3 prime quattro frequenze naturali di un (flat-sag) cavo sospeso: (a) primo modo simmetrico nel piano, (b) primo modo antisimmetrico nel piano, (c) secondo modo simmetrico nel piano, (b) secondo modo antisimmetrico nel piano.
Figura 3.4 Soluzione grafica per la prima radice
dell’equazione (3.17). Nel grafico ω = b1
Figura 3.5 Possibili forme per la componente verticale
del primo modo simmetrico nel piano 1w .
w
w
w
bbbb1111////π

CAPITOLO 3 Dinamica
53
Come si nota dalla figura 3.4, in cui è riportata la soluzione grafica dell’equazione (3.17) per la prima radica, è possibile in relazione al primo modo appunto distinguere tre intervalli fondamentali:
1 – se 2λ < 4π2, la frequenza del primo modo simmetrico è minore della frequenza del primo modo antisimmetrico. La componente verticale del primo modo simmetrico non ha nodi interni (figura 3.5 a). 2 – se 2λ = 4π2, allora in quel punto le frequenze di questi modi sono uguali. La componente modale verticale è tangenziale al profilo ai supporti. Per tale valore di 2λ si ha il crossover (figura 3.5 b). In tale punto di intersezione denominato appunto punto di crossover, avviene la risonanza tra i due modi coinvolti nella sovrapposizione dato che in quel punto il modo simmetrico e antisimmetrico hanno, come detto, la stessa frequenza.
3 – se 2λ > 4π2, la frequenza del modo simmetrico è in tal caso grande, e ci sono due nodi interni (figura 3.5 c). Da questo studio si vide che quando 2λ è prossimo a 4π2 il cavo vibra in modo simmetrico e dopo salta ad un antisimmetrico modo. I risultati di ciò vennero ottenuti da Ramberg e Griffin basandosi sugli studi condotti precedentemente da Richardson. Si può inoltre notare che quando 4π2 < 2λ < 16π2 sia il primo che il secondo modo simmetrici presentano due nodi interni. Inoltre quando 2λ = 16π2 la frequenza del secondo modo simmetrico è uguale alla frequenza del secondo modo antisimmetrico. Le componenti modali longitudinali associate sono ottenibili con una leggera maggiore difficoltà.
Per tali componenti modali longitudinali è possibile scrivere, in modo simile a quanto fatto per l’equazione (3.16):
(3.19)
Dove ( )( )[ ]HmgLHmgLu ///u 2= , ed ( ) ( )
++= 3/x42x-x/8
3x 322
HmgLLLx .
Tali componenti modali longitudinali sono antisimmetriche, dalle (3.19) e (3.4) si evince che lo spostamento longitudinale sono sempre zero e diverso da zero in mezzeria (midspan), rispettivamente.
( ) ( ) ( ) ( ) ( )
−−
−
−
−= xsinxcos1(2
tg-x1
xcosxsin2
tg-12x-12
1hu
2
2
2ββ
ββ
βββ
βλβ
β e
x
L
L
CAPITOLO 3 Dinamica
54
3.1.3 Oscillazioni libere di un cavo inclinato. In questo paragrafo si estendono i concetti ed i risultati ottenuti precedentemkente nel caso di cavo sospeso tra supporti fissi posti alla medesima quota ad un livello di generalità superiore per una generica inclinazione dell’elemento rispetto all’orizzontale. Le equazioni da utilizzare non possono essere direttamente prese dal problema del cavo orizzontale e ciò è dovuto a motivi geometrici. Finora si erano considerati gli assi diretti orizzontalmente e verticalmente, ora è necessario operare una trasformazione del sistema di coordinate, così si considera *x per misurare la distanza lungo la corda dal supporto A (vedi
figura 3.7), e *z misura la distanza relativamente al profilo dalla corda perpendicolarmente ad esso [3]. Ad utilizzare un simile approccio fu Dean che si occupò di studiare tale situazione.
Figura 3.7 Cambiamento del sistema di coordinate In seguito al cambiamento di coordinate è lecito scrivere.
(3.20)
Dove ( )**** /cos/z HmgLz θ= , *** /x Lx= ed *** /sin HmgL θε = .
Si considera che *ε è sufficientemente piccolo nel caso in cui il profilo e rappresentato da una parabola. Per lo studio delle vibrazioni libere si procede con la linearizzazione, con uno sviluppo in serie al primo ordine, pertanto il moto fuori dal piano è indipendente dal moto nel piano. In modo simile al caso particolare di supporti posti alla medesima altezza si ottiene nel caso generale per le frequenze naturali dei modi fuori dal piano che:
(3.21)
e per i modi antisimmetrici nel piano che: (3.22)
con n = 1, 2, 3,….
θθ sinsec* zxx +=
θcos* zz =
θsec* LL =
θsec* HH =
( ) ( )
−−−= *
**** x21
31x1x
2
1z
ε
πω nn =*
πω nn 2* =

CAPITOLO 3 Dinamica
55
mentre le frequenze naturali dei modi simmetrici nel piano non risultano subito note, esse rappresentano le radici dell’equazione trascendentale (3.23):
(3.23)
con ( ) 2/1**** // mHLββ = e ( ) ( )EAHLLHmgL e ///cos **
2**
2* θλ = nella quale
( )[ ]8//cos1 2**** HmgLLLe θ+= .
Le equazioni trovate sono di applicabilità generale e contengono il caso particolare affrontato in precedenza per θ nullo.
Dall’altro lato quando l’inclinazione θ = 90°, allora 2*λ = 0, e i risultati sono relativi al caso di
taut string. È chiaro che in tal caso la tensione del cavo deve essere molto superiore al peso dello stesso altrimenti il filo tenderebbe all’unico supporto finale.
3
*2
*
**
2
4
22tg
−=
β
λ
ββ

CAPITOLO 3 Dinamica
56
3.1.4 L’energia cinetica e l’energia potenziale Si considerino le oscillazioni libere nella forma:
con (3.24)
( )φω += tiet)
h)(h dove φ rappresenta l’angolo di fase. L’energia potenziale e l’energia cinetica si scrivono rispettivamente:
(3.25)
Con le sostituzioni opportune e in seguito all’integrazione si ottiene:
(3.26)
Le tre equazioni rappresentano rispettivamente l’energia di deformazione, l’energia potenziale gravitazionale e l’energia cinetica.
( ) ( ) ( )φββββ
β+
−
−= tiexcosxsin2
tg1h
t)x,(w2
x wh2
1 x
w
2
1V
1
0
1
0
2
ddt ∫∫ +
=
δδ
xw
2
1T
1
0
2
dt∫
=
δδ
2e
8
16
hV
λ=
+=
2
2
2
g
2
2tg
4
16
hV
β
β
λ
+=+=
2
2
2
ge
2
2tg
12
16
hVVT
β
β
λ

CAPITOLO 3 Dinamica
57
Il rapporto (3.27)
ha il suo maggior valore pari a 2/3 quando λ =2jπ , con j = 1, 2, 3, quando avviene la sovrapposizione modale (crossover). Così in generale, dell’energia potenziale totale tenuta dal cavo sospeso, al più due terzi possono andare nell’energia di deformazione [3].
+
=2
2
e
2
2tg
121
3
2
V
V
β
βλ

58
CAPITOLO 4 EFFETTI DELLA DEFORMAZIONE TERMICA
SULLA DINAMICA
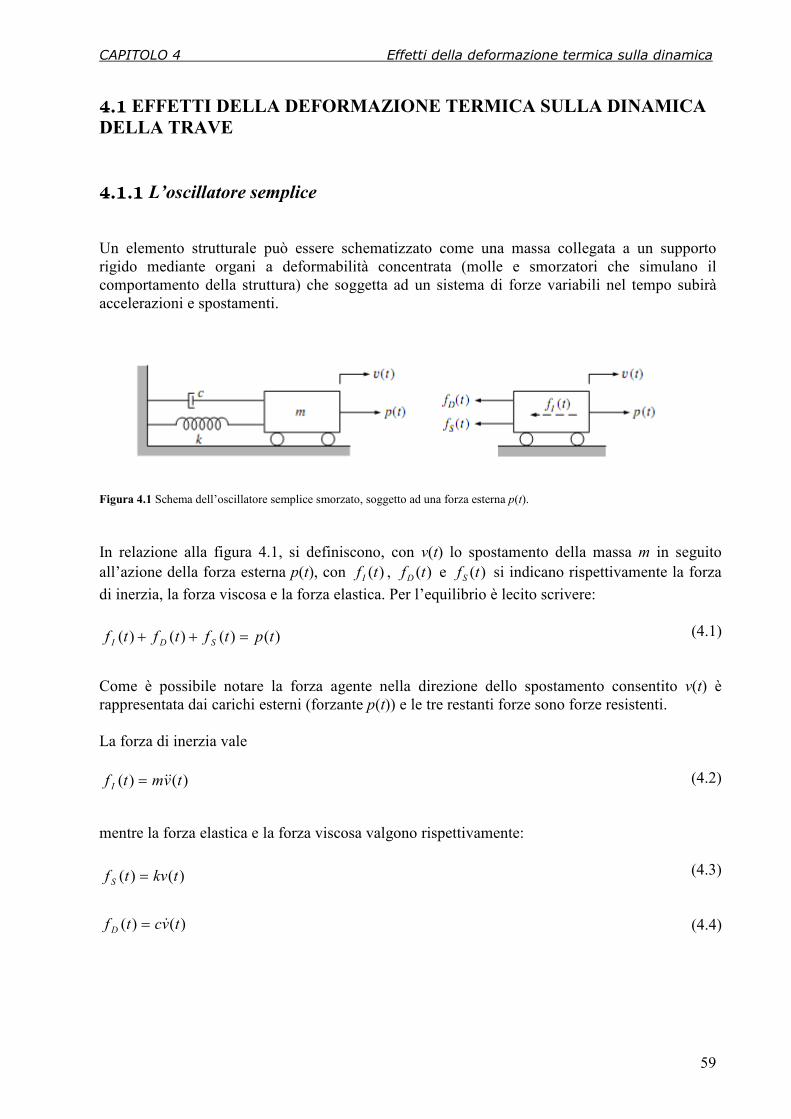
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
59
4444.1 .1 .1 .1 EFFETTI DELLA DEFORMAZIONE TERMICA SULLA DINAMICA
DELLA TRAVE
4444.1.1.1.1.1.1.1.1 L’oscillatore semplice
Un elemento strutturale può essere schematizzato come una massa collegata a un supporto rigido mediante organi a deformabilità concentrata (molle e smorzatori che simulano il comportamento della struttura) che soggetta ad un sistema di forze variabili nel tempo subirà accelerazioni e spostamenti.
Figura 4.1 Schema dell’oscillatore semplice smorzato, soggetto ad una forza esterna p(t).
In relazione alla figura 4.1, si definiscono, con v(t) lo spostamento della massa m in seguito all’azione della forza esterna p(t), con )(tf I , )(tfD e )(tfS si indicano rispettivamente la forza
di inerzia, la forza viscosa e la forza elastica. Per l’equilibrio è lecito scrivere:
(4.1)
Come è possibile notare la forza agente nella direzione dello spostamento consentito v(t) è rappresentata dai carichi esterni (forzante p(t)) e le tre restanti forze sono forze resistenti. La forza di inerzia vale
(4.2)
mentre la forza elastica e la forza viscosa valgono rispettivamente:
(4.3)
(4.4)
)()()()( tptftftf SDI =++
)()( tvmtf I&&=
)()( tkvtf S =
)()( tvctf D&=

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
60
Per il calcolo delle oscillazioni libere in assenza di smorzamento si ha:
(4.5)
con
(4.6)
pulsazione o frequenza naturale del sistema.
0)()( =+ tvm
ktv&&
m
k=0ω

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
61
4.1.2 La trave di Eulero – Bernoulli. Statica
4.1.2.1 Ipotesi cinematiche nel modello di trave di Eulero - Bernoulli
Per tale modello di trave il legame costitutivo è esprimibile nel seguente modo:
(4.7)
Il legame costitutivo è del tipo elastico lineare, con la condizione che γ = 0, annullando gli scorrimenti, in tal modo le sezioni restano ortogonali alla linea d’asse.
Si hanno cioè due ipotesi fondamentali: 1. ‘conservazione delle sezioni piane’, per cui le sezioni rette della trave rimangono piane anche a deformazione avvenuta; 2. assenza di scorrimenti nella trave, per cui le sezioni rette, a deformazione avvenuta, rimangono ortogonali all’asse deformato. In conseguenza di tale ipotesi le due funzioni che governano la cinematica della trave sono lo spostamento assiale u e quello trasversale v dell’asse della trave, mentre la rotazione della sezione è nota a partire dallo stesso spostamento trasversale v.
Figura 4.2 Schema di trave. Si sono messi in evidenza i vettori dello spostamento, in un riferimento cartesiano x,y come in figura. Si è scelta una convenzione per la quale lo spostamento v(x) è diretto verso l’alto.
Tramite l’introduzione di una terza ipotesi: 3. piccoli spostamenti si ha che la rotazione della sezione è data più semplicemente da:
(4.8)
χγ
ε
EIM
EAN
=
=
=
0
x
v(x)
u(x)
φ(x)
vtg ′= −1φ
v′=φ
y

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
62
Passando alla deformazione si ha:
deformazione 0=γ , deformazione estensionale u′=ε , curvatura v ′′−=χ , dato che φχ ′= .
4.1.2.2 Equazione differenziale della linea elastica, per la trave di Eulero -
Bernoulli :
L’obiettivo è di determinare gli spostamenti di tutti i punti di una trave, in modo da conoscere la sua configurazione deformata, e per quanto detto è sufficiente conoscere gli spostamenti della linea d’asse della trave (inoltre se la trave è un elemento snello è trascurabile l’effetto del taglio sulla deformazione). Nel piano gli spostamenti significativi sono u, v, φ. Lo spostamento assiale u dipende da N:
(4.9)
mentre la curvatura dal momento flettente:
(4.10 a)
(4.10 b)
Dove
(4.11 a)
(4.11 b)
Se si sostituisce nella (4.10 a) la (4.11 b) si ottiene:
(4.12)
Se si considera la presenza di un carico distribuito p, per convenzione diretto verso l’alto,
l’equilibrio del concio di trave è:
∫ +=x
udxEA
Nxu
0
)0()(
EI
xM
cioè
EI
xM
r
)(
)(1
=
=
χ
χφ
χφ
=′′⇒=′=
==
vvdx
dv
e
rdx
d 1
EI
xMv
EI
xM
dx
vd )()(2
2
=′′⇒=

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
63
Figura 4.3 Equilibrio del concio di trave, soggetto all’azione di un carico distribuito p
I valori di T + ed M + sono rispettivamente:
T + = T + dT (4.13 a)
M + = M + dM (4.13 b)
In relazione alla figura dall’equilibrio statico si ottiene:
equilibrio alla traslazione:
-T + pdx + T + dT=0 ovvero dT = - pdx (4.14 a)
equilibrio alla rotazione:
-M + M + dM + Tdx + px2/2 = 0 ovvero dM = -Tdx al primo ordine (4.14 b)
Da cui si ricavano le fondamentali relazioni tra il carico p, lo sforzo di taglio T ed il momento
flettente M:
(4.15 a)
(4.15 b)
Pertanto dalla (4.12) si ottiene
(4.16)
pvEI =′′′′
M M+
T
T+
p dx
m d2x/dt2
Tdx
dM−=
q dx
dT−=
p

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
64
4.1.2.3 Equazione differenziale della linea elastica, per la trave di Eulero –
Bernoulli, con deformazione termica : Si definiscono le seguenti grandezze: ∆T = variazione (in aumento) della temperatura α = coefficiente di dilatazione termica h = altezza della trave (altezza sezione rettangolare)
Figura 4.4 Schema di trave in presenza di deformazione termica
In tal caso è conveniente trattare il problema a partire dalla scrittura della curvatura totale totχ ,
somma di due distinti contributi, la curvatura elastica χ , già definita nei precedenti paragrafi del capitolo, e la curvatura termica χ :
(4.17)
In cui:
(4.18 a)
(4.18 b)
A partire dalle stesse relazioni del capitolo precedente è possibile scrivere:
(4.19 a)
(4.19 b)
h
T∆−=
αχ
2
EI
xM )(=χ
-∆T
+∆T
+∆T
-∆T v(x)
χχχ +=tot
TM
pT
−=′
−=′
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
65
Derivanti come si è visto in precedenza dall’equilibrio del concio di trave soggetto all’azione di un carico distribuito p. Se si deriva una volta la (4.19 b) si ottiene:
(4.20)
E sostituendo in quest’ultima la (4.19 a) si ottiene:
(4.21)
Come noto dalla (4.12) si ha che:
(4.22)
Dalla (4.17) si ottiene sostituendo:
(4.23)
Inoltre essendo:
(4.24)
e
(4.25)
allora in definitiva si ottiene sostituendo la (4.25) nella (4.23):
(4.26)
TM ′−=′′
pM =′′
( ) pEI =″χ
[ ] pEI tot =″− )( χχ
totv χ=′′
h
T
EI
Mv
∆−=′′
α2
ph
TvEI =
″
∆−′′
α2

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
66
4.1.3 La trave di Eulero – Bernoulli. Dinamica
Da quanto visto nel paragrafo 1.1.1, relativamente al caso specifico di oscillatore semplice, si può affermare che aggiungendo le forze d’inerzia alle altre forze presenti sul sistema in movimento si produce equilibrio. L’obiettivo di questo paragrafo è allora quello di estendere i risultati della statica precedentemente ottenuti per il modello di trave di Eulero – Bernoulli anche al caso della dinamica. In modo del tutto simile a quanto fatto per la statica, si considera l’equilibrio del medesimo concio di trave, con l’aggiunta in tal caso della forza d’inerzia, come mostrato dallo schema in figura 4.5. Figura 4.3 Equilibrio del concio di trave. Si nota l’introduzione della forza d’inerzia.
In relazione alla figura 4.5, è possibile scrivere:
(4.26)
In cui con il puntino al solito si è indicata la derivata rispetto al tempo, nel caso particolare dello spostamento vdtvd &&=22 / In modo del tutto simile a quanto fatto per la (4.20) e per la (4.21) nel paragrafo precedente si può scrivere:
(4.27)
Seguendo gli stessi passaggi già affrontati dall’equazione (4.22) alla (4.26), si ottiene:
(4.28)
M M+
T
T+
p dx
m d2x/dt2
dx
m d2v/dt2
vpT &&ρ+−=′
vpM &&ρ−=′′
ph
TvEIv =
″
∆−′′+
αρ
2&&

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
67
4.1.3.1 La formulazione variazionale. Applicazione alla trave di Eulero –
Bernoulli. Così come visto nel precedente paragrafo (1.1.1 L’oscillatore semplice), aggiungendo le forze d’inerzia alle altre forze presenti sul sistema in movimento si produce equilibrio. In tal modo sostanzialmente è possibile passare dall’ambito della statica a quello della dinamica. Anche per quanto concerne la formulazione variazionale, è richiesto l’introduzione di un nuovo strumento per poter affrontare problemi di dinamica, il Principio di Hamilton [4]: il moto di un sistema dinamico sottoposto a forze conservative rende stazionaria la funzione:
(4.29)
rispetto a tutti i moti cinematicamente ammissibili che conducono il sistema dalla posizione iniziale a quella finale nello stesso intervallo di tempo [t1, t2]. Nella (4.29) H è l’Hamiltoniana del sistema (anche detta energia totale), U è l’energia potenziale totale e T è l’energia cinetica definita come
(4.30)
In relazione all’energia potenziale totale è possibile distinguere due differenti contributi, essendo la stessa energia potenziale totale somma dell'energia elastica eU e dell'energia
potenziale dei carichi pU :
(4.31)
in tal caso per la trave di Eulero – Bernoulli:
(4.32)
Mentre
(4.33)
Assegnate le posizioni in t1 e t2, allora la condizione di stazionarietà si scrive:
(4.34)
( ) dxvdxt
vT
LL 2
0
2
0 2
1
2
1∫∫ =
∂∂
= &ρρ
[ ]dttUtTH
t
t
∫ −=2
1
)()(
( ) dxvEIdxx
vEIU
LL
e
2
0
2
02
2
2
1
2
1∫∫ ′′=
∂∂
=
dxpvU
L
p ∫−=0
pe UUU +=
[ ] 0)()(2
1
=−= ∫ dttUtTH
t
t
δδδ

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
68
L’equazione (4.34) scritta, in particolare per la trave di Eulero – Bernulli, è rappresentata dalla:
(4.35)
La variazione dell'energia elastica si calcola come:
(4.36)
Integrando per parti una volta:
(4.37)
Integrando per parti una seconda volta:
(4.38)
Per quanto concerne l’energia cinetica si può scrivere la sua variazione come: (4.39)
Integrando per parti si ottiene: (4.40)
Applicando quindi la condizione di stazionarietà, ne segue, per l'arbitrarietà della variazione vδ , che dovrà essere soddisfatta la seguente equazione differenziale:
(4.41)
nell'intervallo [0, L]. I termini tra parentesi quadre nell’equazione (4.38) forniscono le condizioni al contorno. L’equazione (4.41) si riferisce al caso in cui ci si trovi in presenza di un carico esterno p, altrimenti si ottiene semplicemente:
(4.42)
02
1
2
12
1
2
00
2
02
2
=
∂∂
++
∂∂
−∫ ∫∫∫t
t
LLL
dtdxt
vdxpvdx
x
vEI ρδ
[ ]L
L
e vvEIdxvvEIU 0
0
′′′+′′′′−= ∫ δδδδ
[ ] [ ]LL
L
e vvEIvvEIdxvvEIU 00
0
δδδδ ′′′−′′′+′′′′= ∫
( ) dxvvT
L
&& δρδ ∫=0
( ) vdxvT
L
δρδ ∫−=0
&&
pvEIv =′′′′+&&ρ
0=′′′′+ vEIv&&ρ
( ) dxvvEIU
L
e′′′′= ∫ δδ
0

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
69
4.1.3.2 La formulazione variazionale. Applicazione alla trave di Eulero –
Bernoulli, con deformazione termica Con deformazione termica χ , l’energia potenziale totale si scrive:
(4.43)
In cui si riconosce il termine elastico:
(4.44)
Avendo definito la χ elastica in tal modo nella (4.17). Se si sviluppa il quadrato nella (4.44) è possibile scrivere:
(4.45)
Poiché l’energia potenziale elastica è definita a meno di una costante inessenziale, è possibile scrivere:
(4.46)
Il secondo integrale al secondo membro nell’ultima equazione è stato incontrato già in precedenza, mentre per il primo integrale che chiameremo U si ottiene:
(4.47)
in cui con Uδ si è indicata la sua variazione. Integrando per parti si ottiene:
(4.48)
Scrivendo la deformazione termica come
(4.49)
e imponendo la stazionarietà dell’equazione (4.35) si ottiene, considerando anche i contributi del secondo integrale al secondo membro nell’equazione (4.46) e dell’energia cinetica offerti dalle (4.38) e (4.40), ne segue, per l'arbitrarietà della variazione vδ , che dovrà essere soddisfatta la seguente equazione differenziale
( ) dxpvdxEIU
LL
tott ∫∫ −−=00
2
2
1χχ
h
T∆−=
αε
2
( ) dxEIU
L
tote ∫ −=0
2
2
1χχ
( ) ( ) dxEIdxEIdxEIU
LLL
e ∫∫∫ +−=0
2
00
2
2
1
2
1χχχχ
( ) dxEIdxEIU
LL
e ∫∫ +−=0
2
0 2
1χχχ
dxvEIU
L
∫ ′′−=0
δχδ
( )LL
vEIdxvEIU00
′+′′= ∫ δχδχδ

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
70
(4.50)
nell'intervallo [0, L]. Si nota che tale equazione (4.50) è la stessa equazione ottenuta con approccio diretto nel paragrafo 4.1.2.3.
ph
TvEIv =
″
∆−′′+
αρ
2&&
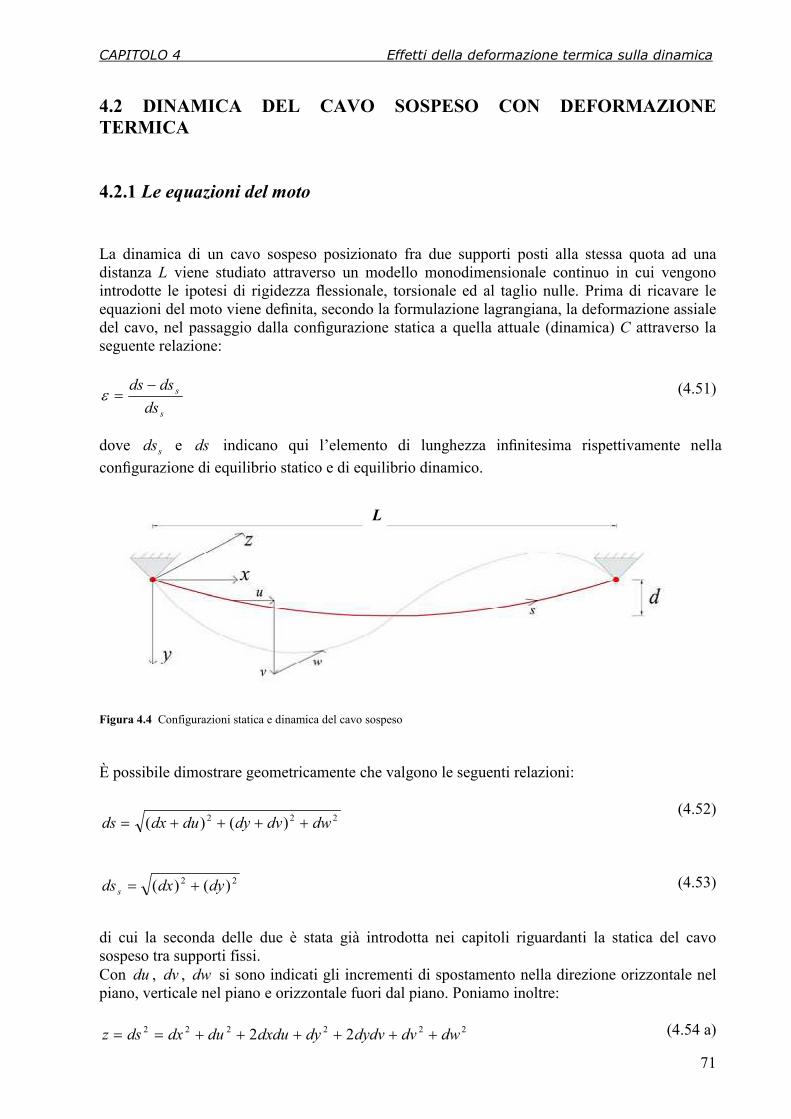
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
71
4.2 DINAMICA DEL CAVO SOSPESO CON DEFORMAZIONE
TERMICA
4.2.1 Le equazioni del moto
La dinamica di un cavo sospeso posizionato fra due supporti posti alla stessa quota ad una distanza L viene studiato attraverso un modello monodimensionale continuo in cui vengono introdotte le ipotesi di rigidezza flessionale, torsionale ed al taglio nulle. Prima di ricavare le equazioni del moto viene definita, secondo la formulazione lagrangiana, la deformazione assiale del cavo, nel passaggio dalla configurazione statica a quella attuale (dinamica) C attraverso la seguente relazione:
(4.51)
dove sds e ds indicano qui l’elemento di lunghezza infinitesima rispettivamente nella
configurazione di equilibrio statico e di equilibrio dinamico.
Figura 4.4 Configurazioni statica e dinamica del cavo sospeso È possibile dimostrare geometricamente che valgono le seguenti relazioni:
(4.52)
(4.53)
di cui la seconda delle due è stata già introdotta nei capitoli riguardanti la statica del cavo sospeso tra supporti fissi. Con du , dv , dw si sono indicati gli incrementi di spostamento nella direzione orizzontale nel piano, verticale nel piano e orizzontale fuori dal piano. Poniamo inoltre:
(4.54 a)
222 )()( dwdvdydudxds ++++=
s
s
ds
dsds −=ε
22 )()( dydxds s +=
222222 22 dwdvdydvdydxdududxdsz ++++++==
L
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
72
(4.54 b)
Per 0zz ≅ si ha lo sviluppo di Taylor:
(4.55)
Assumiamo la configurazione istantanea C adiacente a quella di equilibrio statico Cs e consideriamo che valga l’ipotesi dxds s ≅ .
Sostituendo la (4.54 a) e la (4.54 b) nella misura di deformazione assunta (4.51) ed ipotizzando
che ( ) uu ′<<′ 2 , (ipotesi di Biot), otteniamo la seguente espressione per la deformazione assiale:
(4.56)
A questo punto per ricavare le equazioni del moto sarà necessario effettuare alcune ipotesi già discusse nel capitolo 3. Assumiamo, come ipotesi di partenza, che la configurazione di equilibrio statico sia approssimabile attraverso l’equazione della parabola:
(4.57)
dove d )( T∆ è il valore assunto dalla funzione y del cavo in mezzeria (x = L/2). Questa ipotesi è valida per cavi con piccoli rapporti freccia/luce d/L< 1/8 . Notare che, a differenza del capitolo 3, d è funzione della variazione di temperatura. Nello studio della statica del cavo sospeso con deformazione termica (capitolo 2) si è infatti visto come la presenza del T∆ influisca fondamentalmente sulla tensione del cavo N (ovvero su H per cavo orizzontale) e inoltre proprio sul profilo del cavo y, da cui l’esigenza di esprimere d in funzione della variazione di temperatura. Inoltre possiamo pensare che dxds s ≅ e che HN ≅ , ovvero che la variabile curvilinea si possa
pensare coincidente con la variabile longitudinale e che la tensione presente nel cavo come reazione alle forze statiche agenti sullo stesso sia costante lungo il cavo (N(s) = cost) ed approssimabile alla componente orizzontale della reazione agli appoggi. In condizioni di equilibrio statico tale componente, come visto già nei capitoli trattanti la statica del cavo, si è visto essere pari a H = mgL
2/8d. Un’altra ipotesi che viene fatta è quella di considerare il rapporto H/EA<<1. A seguito di tali ipotesi si ricaveranno le equazioni del moto attraverso il principio di Hamilton esteso, il quale afferma che: Fra tutti i moti variati sincroni (che si svolgono nello stesso intervallo di tempo), tra le stesse
configurazioni iniziali e finali (moti sincroni tra estremi fissi), i moti naturali sono caratterizzati
dalla condizione di rendere nulla la variazione del funzionale di azione Hamiltoniana (ovvero
rendere stazionaria l’azione Hamiltoniana)
(4.58)
dove T e U sono rispettivamente l’energia cinetica e l’energia potenziale totale del sistema.
22200 dydxdsz +==
200
0
0 )()(1
zzzzz
zz −Ο+−+=
( ) ( )22
2
1
2
1wvvyu ′+′+′′+′=ε
−∆=2
)(4L
x
L
xTdy
[ ] 0)()(2
1
=−= ∫ dttUtTH
t
t
δδδ
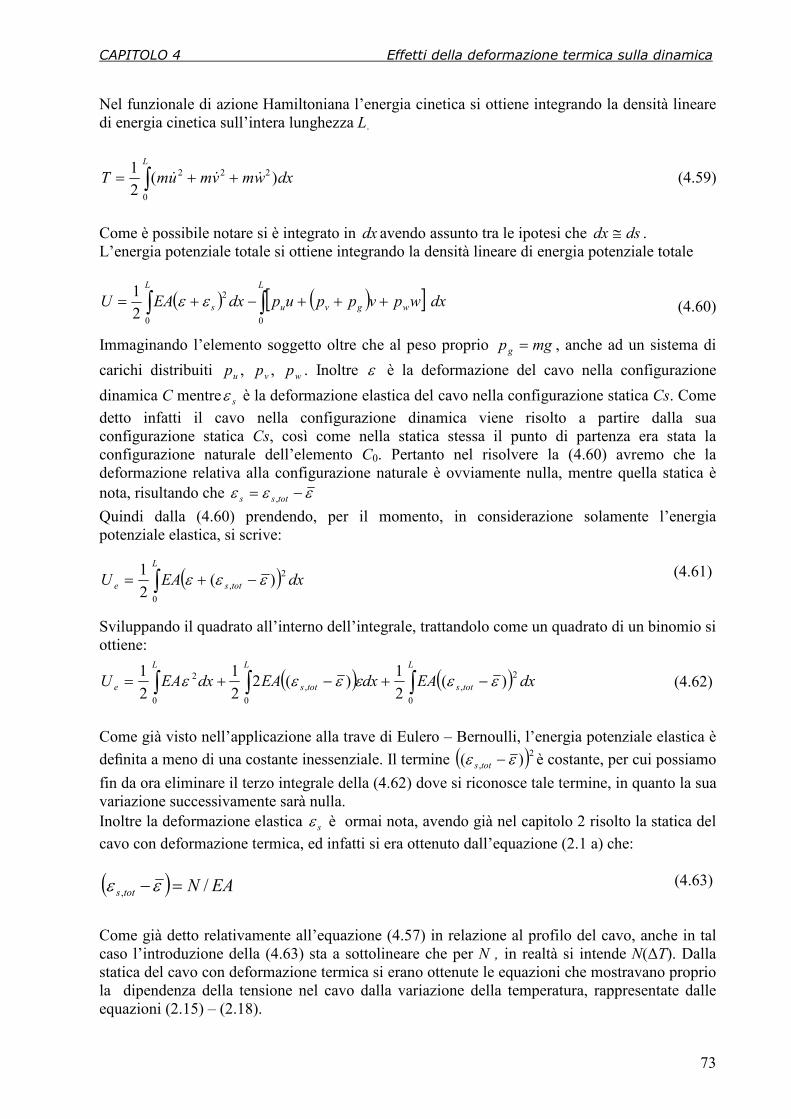
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
73
Nel funzionale di azione Hamiltoniana l’energia cinetica si ottiene integrando la densità lineare di energia cinetica sull’intera lunghezza L.
(4.59)
Come è possibile notare si è integrato in dx avendo assunto tra le ipotesi che dsdx ≅ . L’energia potenziale totale si ottiene integrando la densità lineare di energia potenziale totale
(4.60)
Immaginando l’elemento soggetto oltre che al peso proprio mgpg = , anche ad un sistema di
carichi distribuiti wvu ppp ,, . Inoltre ε è la deformazione del cavo nella configurazione
dinamica C mentre sε è la deformazione elastica del cavo nella configurazione statica Cs. Come
detto infatti il cavo nella configurazione dinamica viene risolto a partire dalla sua configurazione statica Cs, così come nella statica stessa il punto di partenza era stata la configurazione naturale dell’elemento C0. Pertanto nel risolvere la (4.60) avremo che la deformazione relativa alla configurazione naturale è ovviamente nulla, mentre quella statica è nota, risultando che εεε −= totss ,
Quindi dalla (4.60) prendendo, per il momento, in considerazione solamente l’energia potenziale elastica, si scrive:
(4.61)
Sviluppando il quadrato all’interno dell’integrale, trattandolo come un quadrato di un binomio si ottiene:
(4.62)
Come già visto nell’applicazione alla trave di Eulero – Bernoulli, l’energia potenziale elastica è
definita a meno di una costante inessenziale. Il termine ( )2, )( εε −tots è costante, per cui possiamo
fin da ora eliminare il terzo integrale della (4.62) dove si riconosce tale termine, in quanto la sua variazione successivamente sarà nulla. Inoltre la deformazione elastica sε è ormai nota, avendo già nel capitolo 2 risolto la statica del
cavo con deformazione termica, ed infatti si era ottenuto dall’equazione (2.1 a) che:
(4.63)
Come già detto relativamente all’equazione (4.57) in relazione al profilo del cavo, anche in tal caso l’introduzione della (4.63) sta a sottolineare che per N , in realtà si intende N(∆T). Dalla statica del cavo con deformazione termica si erano ottenute le equazioni che mostravano proprio la dipendenza della tensione nel cavo dalla variazione della temperatura, rappresentate dalle equazioni (2.15) – (2.18).
dxwmvmumT
L
)(2
1 22
0
2&&& ++= ∫
( ) ( )[ ]∫∫ +++−+=L
wgvu
L
s dxwpvppupdxEAU00
2
2
1εε
( )∫ −+=L
totse dxEAU0
2, )(
2
1εεε
( ) ( )∫∫∫ −+−+=L
tots
L
tots
L
e dxEAdxEAdxEAU0
2,
0
,
0
2 )(2
1)(2
2
1
2
1εεεεεε
( ) EANtots /, =−εε
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
74
Pertanto in definita è possibile scrivere per la (4.62):
(4.64)
Ora scriviamo la variazione dell’energia potenziale elastica.
(4.65)
Della deformazione ε è nota la sua espressione dalla (4.56), e allora la sua variazione è rappresentata dalla:
(4.66)
Sostituendo nella (4.65):
(4.67)
Integrando per parti si ottiene:
(4.68)
Se si considera la variazione dell’energia potenziale totale:
(4.69)
∫∫ +=LL
e dxNdxEAU00
2 22
1
2
1εε
∫∫ +=LL
e dxEAdxNU00 2
1εδεδεδ
wwvvvyu ′′+′′+′′+′= δδδδδε
′′+′′+′′+′+
+
′′+′′+′′+′=
∫ ∫ ∫ ∫
∫ ∫ ∫ ∫L L L L
L L L L
e
dxwwEAdxvvEAdxvyEAdxuEA
dxwwNdxvvNdxvyNdxuNU
0 0 0 0
0 0 0 0
δεδεδεεδ
δδδδδ
( ) ( ) ( )
[ ] [ ] [ ] [ ] [ ] [ ]LLLLLL
L L L L
L L L
e
wwEAvvEAuEAdwwNdvvNdvyN
wdxwEAvdxvEAvdxyEAudxEA
wdxwNvdxvNvdxyNU
000000
0 0 0 0
0 0 0
δεδεεδ
δεδεδεδε
δδδδ
′+′++′+′+′+
+
′′+′′+′′+′−
+
′′+′′+′′−=
∫ ∫ ∫ ∫
∫ ∫ ∫
( ) ( ) ( )
( )( )
[ ] [ ] [ ] [ ] [ ] [ ]LLLLLL
L
wgvu
L L L L
L L L
wwEAvvEAuEAwwNvvNvyN
dxwpvppup
wdxwEAvdxvEAvdxyEAudxEA
wdxwNvdxvNvdxyNU
000000
0
0 0 0 0
0 0 0
δεδεεδδδδ
δδδ
δεδεδεδε
δδδδ
′+′++′+′+′+
++++−
+
′′+′′+′′+′−
+
′′+′′+′′−=
∫
∫ ∫ ∫ ∫
∫ ∫ ∫

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
75
A questo punto la variazione del funzionale dell’azione hamiltoniana, a partire dall’ultima equazione e integrando per parti anche l’energia cinetica, risulta, raccogliendo nelle variazioni degli spostamenti uδ , vδ e wδ :
(4.70)
Da cui, imponendo l’annullamento della Hδ (stazionarietà dell’azione hamiltoniana), discendono le equazioni del moto
(4.71 a)
(4.71 b)
(4.71 c)
In cui come è possibile notare si è sostituita alla N la H, perché come detto nelle ipotesi iniziali
HN ≅ , ed inoltre si sono semplificati i due termini yN ′′ e gp perché uguali e contrari.
Ovviamente per quanto detto in precedenza per H si intende ovviamente H(∆T), in seguito all’introduzione della (4.63). Le condizioni al contorno sono rappresentate da:
(4.72)
[ ]
( ) ( )( )
( )
[ ][ ]
[ ][ ] dtwwEAwN
dtvyEAvEAvN
dtwdxpwEAwNwm
dtvdxppvEAyEAvNyNvm
dtudxpEAumH
Lt
t
Lt
t
t
t
L
w
t
t
L
gv
t
t
L
u
0
0
0
0
0
2
1
2
1
2
1
2
1
2
1
∫
∫
∫ ∫
∫ ∫
∫ ∫
′+′+
+′+′+′+
+
−′′−′′−−+
+
−−′′+′−′′−′′−−+
+
−′−−=
δε
δεε
δε
δεε
δεδ
&&
&&
&&
0=−′− upEAum ε&&
( ) 0=−′′−′′− wpwEAwHwm ε&&
0)0( =u 0)0( =v 0)0( =w
0)( =Lv0)( =Lu 0)( =Lw
( ) ( )( ) 0=−′′+′−′′− vpvEAyEAvHvm εε&&

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
76
4.2.2 Condensazione della variabile longitudinale.
Nel Capitolo 3 si è trattata la teoria della dinamica del cavo sospeso e si era introdotta la condensazione statica. Prima di applicare tale semplificazione è conveniente richiamare le ipotesi fondamentali che la caratterizzano: • Si assume il profilo del cavo poco profondo (rapporti freccia/luce d/L< 1/8) • La configurazione statica di equilibrio è rappresentata dal profilo parabolico; del tipo
−=
2
00
4L
x
L
xdy . Da tele condizione deriva che dxds ≈ HN ≈ . Dove H è la
componente orizzontale della tensione pari alla reazione vincolare all’appoggio.
• Lo sforzo iniziale è trascurabile rispetto all’unità per cui
H
EA<< 1.
Sotto tali ipotesi è possibile considerare trascurabile l’inerzia relativa alla componente longitudinale um && . Sotto le semplificazioni considerate possiamo dire che il moto oscillatorio è disaccoppiato dal moto nel piano. In pratica una sollecitazione che ha componenti fuori dal piano indurrà moti fuori dal piano, e viceversa se la sollecitazione ha componenti solo nel piano indurrà moti solo nel piano, cioè come se si considerasse un filo sospeso incernierato ad un’estremità, allora in tal caso l’unico modo di vibrare sarà quello dell’oscillazione del pendolo. Inoltre la componente verticale del moto è maggiormente significativa quando la vibrazione del cavo è relativa ad un modo nel piano; e ancora, le frequenze longitudinali del moto sono sempre superiori a quelle trasversali del moto. L’ampiezza della corrispondente componente longitudinale del moto è sempre considerevolmente minore dell’ampiezza del moto verticale (in un moto nel piano). Come conseguenza del procedimento di condensazione statica della variabile longitudinale, si ha che l’equazione del moto (4.71 a) trascurando i termini dinamici, si riduce semplicemente a:
(4.73)
La cui soluzione è rappresentata da:
(4.74)
Cioè la deformazione longitudinale assume in un determinato istante valore costante lungo tutta la lunghezza del cavo. In pratica per effetto della condensazione statica, si ha che la deformazione longitudinale non dipende dal tempo direttamente, ma vi dipende in maniera costante.
0=′εEA
( ) ( ) )(2
1
2
1 22tewvvyu =′+′+′′+′=′ε

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
77
Integrando lungo x la (4.74) si ottiene: (4.75)
Si ottiene quindi:
(4.76)
In particolare per x = L:
(4.77)
Sfruttando le condizioni al contorno (4.72) si ottiene per la deformazione longitudinale:
(4.78)
Inoltre in virtù del procedimento di condensazione statica della variabile longitudinale la dinamica del cavo è descritta dalle sole variabili di spostamento trasversali. Le equazioni del moto (4.71 b) e (4.71 c), senza l’apporto dei carichi, risultano:
(4.79)
(4.80) Le condizioni al contorno sono rappresentate da:
(4.81)
Le equazioni (4.79) e (4.80) con le condizioni (4.81) rappresentano le equazioni fondamentali del problema. Come già visto nel capitolo precedente prima di passare alla risoluzione può essere conveniente operare delle adimensionalizzazioni. Come già detto, adimensionalizzare le equazioni significa valutare il comportamento di un’intera classe di sistemi (cioè tutti quelli caratterizzati da uno stesso valore del parametro dimensionale) e non di un unico sistema come si fa per il caso dimensionale. Prima di procedere, però, è bene ribadire e chiarire un aspetto fondamentale del problema. L’introduzione della deformazione termica nella dinamica del cavo sospeso si risente fondamentalmente per effetto di H ovvero N e del profilo del cavo y, in quanto sono tutte funzione della variazione termica ∆T.
( ) ( ) dxwvvyudxte
xx
∫∫
′+′+′′+′=0
22
0 2
1
2
1)(
[ ] ( ) ( ) dxwvvyuxte
xL
∫
′+′+′′+=0
220
2
1
2
1)(
( ) ( ) dxwvvyLL
uLute
x
∫
′+′+′′+−
=0
22
2
1
2
11)0()()(
( ) ( ) dxwvvyL
te
L
∫
′+′+′′=0
22
2
1
2
11)(
0=′′−′′− ewEAwHwm &&
( ) 0=′′+′′−′′− evEAyEAvHvm &&
0)0( =v 0)0( =w
0)( =Lv 0)( =Lw

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
78
Per cui se finora si è trattata la dinamica del cavo sospeso con deformazione termica per mezzo di H(∆T) e y(∆T) , ora procedendo con le adimensionalizzazioni è conveniente specificare, quando ci si riferisce ad una determinata grandezza, se si è in presenza o meno della variazione termica. Per cui come fatto per la statica del cavo sospeso si indicheranno con il pedice 0 tutte le grandezze di riferimento, ovvero riferite ad una variazione termica nulla, mentre le corrispettive grandezze senza pedici si riferiscono al caso di cavo sospeso in presenza di deformazione termica. La forma adimensionale delle equazioni può essere ottenuta introducendo le seguenti quantità:
(4.82)
Dove 1ϖ rappresenta la frequenza naturale della stinga tesa (vedi capitolo 3), ed ϖ la frequenza adimensionalizzata del cavo con deformazione termica. Operando le sostituzioni è possibile ottenere le equazioni adimensionalizzate del moto fuori e nel piano, per la (4.79) l’adimensionalizzazione porta a scrivere:
(4.83)
Nella quale si è indicato con il puntino la derivata rispetto a τ e con l’apice la derivata rispetto a x~ . Con e~ si è indicato invece:
(4.84)
Per la (4.80) la adimensionalizzazione consente di scrivere.
(4.85)
D’ora in avanti si ometterà il simbolo di tilde per una più facile lettura delle equazioni. A questo punto è conveniente ricordare tre grandezze adimensionali introdotte nel capitolo 2 nelle (2.8):
(4.86)
L
xx =~
L
yy =~
L
vv =~
L
ww =~
00
H
EA=µt1ϖτ =
L
d=v
[ ] 0~~-v8~~2
2
=′′+′′− evvv µµϖβ &&
[ ] ( ) ( ) xdwvvxe ~~2
1~2
1~~2-1v4~1
0
22
∫
′+′+′=
0~~~~2
2
=′′−′′− ewww µϖβ &&
W
Hh 0
0
2=
EA
W
2=ρ
H
mL22122 ϖ
ϖβ =H
EA=µ
W
Hh
2=
202
1mL
H=ϖ

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
79
Il nostro obiettivo ora è quello di introdurre la reazione adimensionalizzata h , che ha rivestito un ruolo fondamentale nella risoluzione della statica del cavo con deformazione termica, nelle nostre equazioni (4.83) e (4.85). Si ricorda che si era indicato con W il peso complessivo del cavo. Ne consegue quindi che è possibile scrivere che:
(4.87)
In definitiva le (4.83) e (4.85) possono essere riscritte rispettivamente come:
(4.88)
(4.89)
Ora tramite v ed h possiamo sfruttare i risultati ottenuti nella statica del cavo sospeso con deformazione termica, per risolvere anche la dinamica dello stesso.
µρ
1=h
01
-v8
2
2
=
′′+′′− ev
hhvv
ρρϖβ
&&
01
2
2
=′′−′′− eh
wwwρϖ
β&&
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
80
4.2.3. Moto fuori del piano Come già sottolineato nel Capitolo 3, e in questi paragrafi del presente Capitolo, il moto fuori del piano è disaccoppiato dal moto nel piano. Come fatto per il cavo sospeso senza deformazione termica anche in questo caso si affronta prima la risoluzione del problema del moto fuori del piano, essendo questo di più facile risoluzione. In tal caso possiamo sfruttare direttamente l’equazione fondamentale (4.80) senza passare per la corrispondente equazione (4.89) adimensionalizzata. Innanzitutto come dalla teoria generale della dinamica del cavo è possibile considerare il caso lineare; per cui se si linearizza la (4.80) si ottiene:
. (4.90)
Avendo trascurato il termine ew ′′ . A questo punto possiamo, separando le variabili, scrivere:
. (4.91)
dove i rappresenta l’unità immaginaria. Sostituendo nella (4.90) si ottiene:
. (4.92)
Nella quale al solito si è indicato con il puntino la derivata rispetto al tempo e con l’apice la derivata rispetto ad x.. Le condizioni al contorno associate sono ora:
. (4.93)
Le frequenze naturali dell’n-esimo modo (con n = 1, 2, 3, …) saranno dunque:
. (4.94 a)
A questo punto si riscontrano i benefici di aver risolto la statica del cavo sospeso con deformazione termica. La soluzione appena trovata è formalmente del tutto identica a quella scritta per il caso generale della dinamica del cavo sospeso, a differenza del fatto che ora la H è in realtà una H(∆T), a questo punto nota. Infatti:
(4.94 b)
0=′′− wHwm &&
tiexwtxw ϖ̂)(),()
=
0ˆ 2 =′′− wHwm))ϖ
0)()0( == Lww))
m
H
L
nn
πϖ =
m
H
L
nn
02χπ
ϖ =
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
81
4.2.4. Moto nel piano In tal caso è conveniente sfruttare l’equazione adimensionalizzata (4.88). Come già detto nel paragrafo 4.3.3., è possibile considerare il caso lineare; per cui se si linearizza la (4.88) si ottiene:
. (4.95)
Avendo trascurato il termine non lineare ve ′ . Linearizzando anche la (4.84) si ottiene:
(4.96)
.
Ricorrendo alla separazione delle variabili:
(4.97)
ed effettuando tale sostituzione otteniamo:
(4.98)
Semplificando:
(4.99)
Ora per poter considerare gli effetti della temperatura si introduce un ulteriore termine adimensionale:
(4.100)
In contrapposizione a
(4.101)
già precedentemente definito, ed il quale può essere riscritto come:
(4.102)
Infatti dalla statica del cavo sospeso con deformazione termica sappiamo che:
(4.103)
0v8
2
2
=
+′′− e
hvv
ρϖβ
&&
[ ][ ]dxvxe ∫ ′=1
0
2-1v4
ϖττ ixxv e)(),( Φ=
( ) [ ][ ] 0e)(2-1v4v8
e)(e)(1
0
ˆ22
2
2
=′
+′′− ∫ dxxx
hxix iii ϖττϖϖτ φ
ρφϖφ
ϖβ
[ ][ ] 0)(2-1v32
)()(1
0
22 =′
−′′+ ∫ dxxx
hxx φ
ρφφβ
221
020
20
mL
H
ϖβϖ =
221
22
mL
H
ϖβϖ =
221
2022
mL
H
ϖχ
βϖ =
20 χH
H =

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
82
O anche in forma adimensionale:
(4.104)
In cui H e h rappresentano al solito la reazione vincolare per cavo sospeso sotto l’azione della deformazione termica rispettivamente in forma dimensionale ed adimensionale..
20 χh
h =
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
83
4.2.4.1 I modi antisimmetrici
I modi antisimmetrici sono caratterizzati da una componente antisimmetrica verticale v e da una componente simmetrica longitudinale u. Applicando la definizione di modi antisimmetrici (paragrafo 3.1.2.2), è possibile riscrivere l’equazione (4.99) governante il problema del moto nel piano come:
(4.105)
Risolviamo il corrispondente problema alla temperatura di riferimento, ovvero per 20
2 ββ =
La soluzione della seguente espressione è facile vedere è data da:
(4.106) Oppure in forma trigonometrica:
(4.107)
Per prima cosa possiamo sfruttare le condizioni al contorno rappresentate da 0)1()0( == vv . Per )0(v = 0 si ottiene:
(4.108)
per cui 0=B . Inoltre per i modi antisimmetrici si ha la condizione di moto nullo in mezzeria (x = 1/2):
(4.109)
Ed avendo ottenuto che 0=B , la (4.109), a meno della soluzione (A = 0) è soddisfatta se::
(4.110)
Per cui otteniamo:
(4.111 a)
Oppure in modo del tutto simile per β :
(4.111 b)
Ora se si sostituisce la definizione di 2
1ϖ nelle (4.100) e (4.101) e si semplifica si ottiene, in generale che:
(4.112)
0)()(2 =′′+ xx φφβ
xix 0e)( βφ =
)cos()sin()( 00 xBxAx ββφ +=
)2/cos()2/sin(0 00 ββ BA +=
)0cos()0sin(0 BA +=
0)2/sin( 0 =β
πβ n20 =
20
20 βϖ =
222 χβϖ =
πβ n2=

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
84
Per cui per i modi antisimmetrici si ottiene che:
(4.113)
( ) 222 2 χπϖ n=

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
85
4.2.4.2 I modi simmetrici I modi simmetrici sono caratterizzati da una componente simmetrica verticale v e da una componente antisimmetrica longitudinale u. L’equazione risolutiva adimensionalizzata per i moti nel piano è rappresentata dalla (4.99). L’introduzione della (4.100) ha consentito di considerare la presenza della deformazione termica tramite l’introduzione di 2β . A questo punto se si osserva la (4.99) abbiamo bisogno di introdurre un’ulteriore grandezza che ci permetta di trattare i modi simmetrici per cavo sospeso sotto l’azione della temperatura. Infatti in relazione al sag, se si osserva 2v per definizione esso rappresenta quello che nella statica avevamo indicato con il simbolo 2f . Dal capitolo 2 sappiamo che:
(4.113)
In conclusione possiamo scrivere la (4.99) come:
(4.114)
La quale si può scrivere anche come:
(4.115)
Introducendo la variazione termica nella (4.115) tramite le (4.102 b) e (4.113) si ottiene:
(4.116)
Per una più facile lettura delle equazioni si sostituisce all’integrale:
(4.117)
Per cui si può riscrivere in forma più compatta la (4.116) come:
(4.118)
[ ][ ] 0)(2-132
)()(1
0
22 =′
−′′+ ∫ dxxx
h
fxx φ
ρφφβ
20 κf
f =
0)(-2
164)()(
1
0
22 =
′
−′′+ ∫ dxxx
h
fxx φ
ρφφβ
0)(-2
164)()(
1
02
0
20
42 =
′
−′′+ ∫ dxxx
h
fxx φ
ρχκ
φφβ
064
)()(2
0
20
42 =
−′′+ e
h
fxx
ρχκ
φφβ
dxxxe ∫
′
=1
0
)(-2
1φ

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
86
La soluzione dell’equazione, in forma trigonometrica è del tipo:
(4.119)
Ponendo che:
(4.120)
e sostituendo la stessa (4.120) nell’equazione (1.118) si ottiene:
(4.121)
La posizione (4.120) è giustificata dalla condensazione statica della variabile longitudinale (equazione (4.78) ). Per cui risulta semplicemente che:
(4.122)
Ora sostituendo il risultato appena ottenuto nell’equazione generale (4.119) allora si ottiene che la soluzione è rappresentata da:
(4.123)
Nella quale )cos()sin()( xBxAx ββφ += è la soluzione dell’equazione omogenea, già incontrata per i modi antisimmetrici in cui e = 0. Ricorrendo alle condizioni al contorno 0)1()0( == vv , si ottiene un sistema di due equazioni nelle incognite A e B:
(4.124 a)
(4.124 b)
eparticolarxxBxAx )()cos()sin()( φββφ ++=
2
20
20
464
)0cos()0sin(0β
ρχκ
eh
f
BA
++=
2
20
20
464
)cos()sin(0β
ρχκ
ββ
eh
f
BA
++=
Ctx eparticolar == cos)(φ
064
02
0
20
42 =
−+ e
h
fC
ρχκ
β
2
20
20
464
β
ρχκ
eh
f
C
=
2
20
20
464
)cos()sin()(β
ρχκ
ββφ
eh
f
xBxAx
++=
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
87
È facile a questo punto ottenere le espressioni delle due incognite:
(4.125 a)
(4.125 b)
Calcolate le costanti A e B è a questo punto semplice ottenere per sostituzione l’espressione per
)(xφ rappresentata da::
(4.126)
Avendo sfruttato la seguente relazione trigonometrica
−)sin(
1)cos(
ββ
=
2
tg-β
.
Mettendo in evidenza nella (4.126) si ottiene:
(4.127)
Ora è conveniente definire in contrapposizione a 20λ , che si riferisce al caso del cavo senza
variazione termica, il parametro 2Tλ , così definito:
(4.128 a)
(4.128 b)
Come è facile notare i due parametri sono strettamente collegati tramite la seguente relazione:
(4.129)
2
20
20
464
β
ρχκ
eh
f
B
−=
−
+=)sin(
1)cos(
64
2
20
20
4
ββ
β
ρχκ
eh
f
A
2
20
20
4
2
20
20
4
2
20
20
4 64
)cos(
64
)sin(2
tg-
64
)(β
ρχκ
ββ
ρχκ
ββ
β
ρχκ
φ
eh
f
x
eh
f
x
eh
f
x
+
−
+=
+−
= 1)cos()sin(2
tg-
64
)(2
20
20
4
xx
eh
f
x βββ
β
ρχκ
φ
2
420
2
χκ
λλ =T
h
fT ρ
λ2
2 64=
0
202
0 64h
f
ρλ =

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
88
Riscriviamo a questo punto la (4.127) come:
(4.130)
Ora se si riprende la (4.117), questa può essere riscritta anche come:
(4.131)
Ora avendo scomposto l’integrale possiamo risolve dapprima il primo termine ed in seguito il secondo. Per il primo integrale otteniamo che:
(4.132)
Ed essendo
−)sin(
1)cos(
ββ
=
2
tg-β
allora otteniamo che questo primo integrale risulta
essere nullo. Il secondo integrale può essere trattato per parti ottenendo:
(4.133)
Sostituendo la (4.133) nella (4.131) e semplificando si ottiene:
(4.134)
Semplificando nella (4.134) e riordinando si ottiene:
(4.135)
[ ]dxxxdxxdxxxe ∫∫∫ ′−
′=
′
=1
0
1
0
1
0
)()(2
1)(-
2
1φφφ
+−
= 1)cos()sin(2
tg-)(2
2
420
xx
e
x βββ
β
χκ
λ
φ
+−
−
=
′∫ 1)cos()sin(2
tg2
1)(
2
12
2
4201
0
xx
e
dxx βββ
β
χκ
λ
φ
[ ]
+−+
−+−
−
=′∫ ββ
ββ
βββ
βββ
β
χκ
λ
φ1
2tg1
sincos
2tg1cossin
2tg)(
2
2
4201
0
e
dxxx
−+−
−=−2
tg1
sin
11
sin
1 2
2
2
420
βββββ
χκ
λ
β
+=+
−
2tg1
2
sin
22
2
2
420
3 βββ
χκ
λ
β

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
89
Poiché dalla trigonometria sappiamo che:
(4.136)
allora è lecito riscrivere la (4.135) nel seguente modo:
(4.137)
La quale può essere riscritta in modo equivalente come:
(4.138)
A questo punto è necessario fare un ultimo passaggio sfruttando la relazione (4.112) che ci permette di ottenere in conclusione:
(4.139)
=
+2
tg22
tg1sin 2 βββ
=+
−
2tg
22
2
420
3 ββ
χκ
λ
β
3
4
2
20 2
4
22tg
−=β
κχ
λββ
3
2
4
20 2
4
22tg
−=
χϖ
χκ
λχϖ
χϖ

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
90
4.3 DESCRIZIONE DEGLI EFFETTI DELLA DEFORMAZIONE
TERMICA
4.3.1 Effetti sulla dinamica del cavo sospeso Nel presente paragrafo sono descritti gli effetti della deformazione termica sulle proprietà spettrali dei cavi sospesi. Attraverso una procedura numerica che attinge ai risultati ottenuti nella soluzione del problema statico, vengono rappresentati gli effetti della variazione di temperatura sulle frequenze naturali dei cavi sospesi attraverso il classico diagramma di Irvine.
Figura 4.4 Effetti della deformazione termica sulle frequenze naturali del cavo. a) Primi due modi simmetrici e antisimmetrici,
in funzione del parametro di Irvine 20λ , fissato ρ = 2x10-5. b) Punto di crossover tra il primo modo simmetrico ed il primo
modo antisimmetrico.
In particolare in figura 4.4 a è rappresentato l’andamento delle frequenze naturali al variare del parametro di Irvine, per fissato valore di ρ = 2x10-5. È da notare l’aumento delle frequenze dei modi simmetrici incrementando il parametro 2
0λ .
Diversamente le frequenze dei modi antisimmetrici sono costanti al variare del parametro stesso. In tale classico scenario si sono rappresentate le variazioni delle frequenze naturali causate da un salto di temperatura, uniforme sulla sezione del cavo, rispetto ad una temperatura di riferimento. Si riconoscono in linea continua le curve relative alla temperatura di riferimento ∆T = 0, e in linea tratteggiata l’andamento delle frequenze naturali dei cavi che hanno subito una deformazione termica positiva o negativa. In particolare un aumento di temperatura coincide con una diminuzione delle frequenze naturali e viceversa.
a b 0.01 0.1 1 10 100 1000
l0
2
1p
2p
3p
4p
5pw
DT=0
DT=15
DT=30
DT=-15
DT=-30
r=2ä10-5
a=1ä10-5
4p2 16p2
10 20 30 40 50 60 70 80
l0
2
1p
2p
3pw
DT=0
DT=15
DT=30
DT=-15
DT=-30
4p2
r=2ä10-5
a=1ä10-5
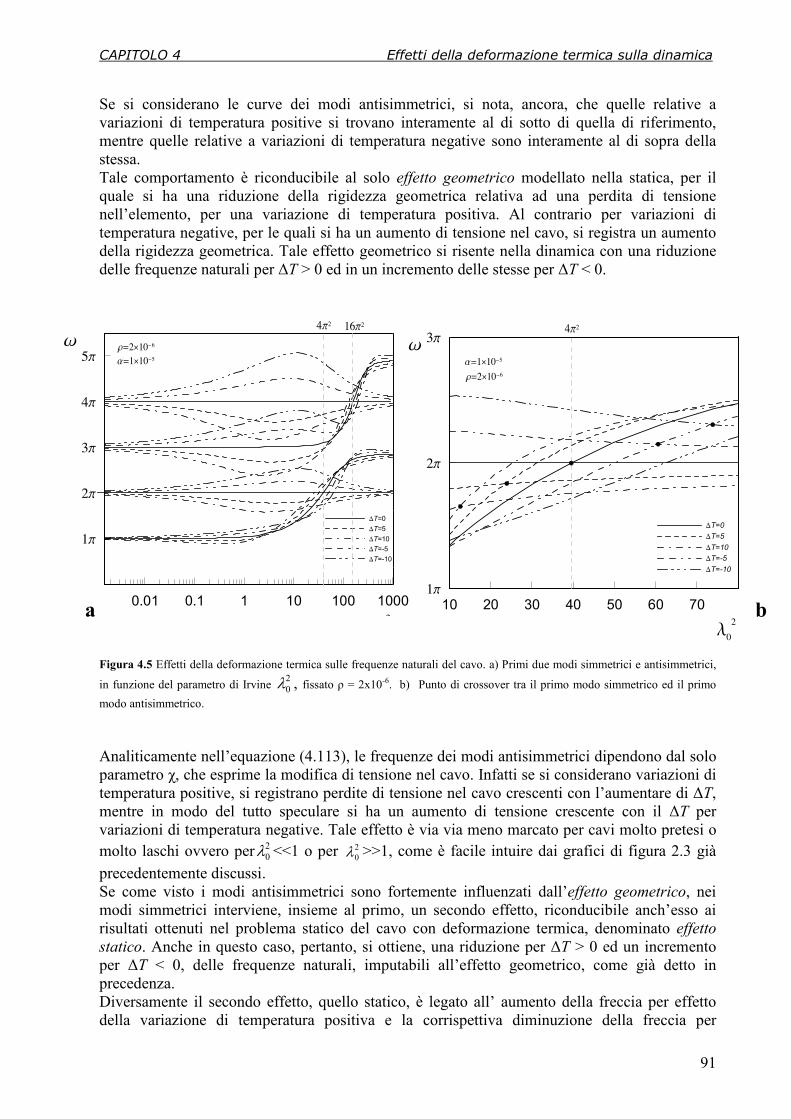
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
91
Se si considerano le curve dei modi antisimmetrici, si nota, ancora, che quelle relative a variazioni di temperatura positive si trovano interamente al di sotto di quella di riferimento, mentre quelle relative a variazioni di temperatura negative sono interamente al di sopra della stessa.
Tale comportamento è riconducibile al solo effetto geometrico modellato nella statica, per il quale si ha una riduzione della rigidezza geometrica relativa ad una perdita di tensione nell’elemento, per una variazione di temperatura positiva. Al contrario per variazioni di temperatura negative, per le quali si ha un aumento di tensione nel cavo, si registra un aumento della rigidezza geometrica. Tale effetto geometrico si risente nella dinamica con una riduzione delle frequenze naturali per ∆T > 0 ed in un incremento delle stesse per ∆T < 0.
Figura 4.5 Effetti della deformazione termica sulle frequenze naturali del cavo. a) Primi due modi simmetrici e antisimmetrici,
in funzione del parametro di Irvine 20λ , fissato ρ = 2x10-6. b) Punto di crossover tra il primo modo simmetrico ed il primo
modo antisimmetrico.
Analiticamente nell’equazione (4.113), le frequenze dei modi antisimmetrici dipendono dal solo parametro χ, che esprime la modifica di tensione nel cavo. Infatti se si considerano variazioni di temperatura positive, si registrano perdite di tensione nel cavo crescenti con l’aumentare di ∆T, mentre in modo del tutto speculare si ha un aumento di tensione crescente con il ∆T per variazioni di temperatura negative. Tale effetto è via via meno marcato per cavi molto pretesi o molto laschi ovvero per 2
0λ <<1 o per 20λ >>1, come è facile intuire dai grafici di figura 2.3 già
precedentemente discussi. Se come visto i modi antisimmetrici sono fortemente influenzati dall’effetto geometrico, nei modi simmetrici interviene, insieme al primo, un secondo effetto, riconducibile anch’esso ai risultati ottenuti nel problema statico del cavo con deformazione termica, denominato effetto
statico. Anche in questo caso, pertanto, si ottiene, una riduzione per ∆T > 0 ed un incremento per ∆T < 0, delle frequenze naturali, imputabili all’effetto geometrico, come già detto in precedenza. Diversamente il secondo effetto, quello statico, è legato all’ aumento della freccia per effetto della variazione di temperatura positiva e la corrispettiva diminuzione della freccia per
a b 0.01 0.1 1 10 100 1000
l2
1p
2p
3p
4p
5pw
DT=0
DT=5
DT=10
DT=-5
DT=-10
4p2 16p2
r=2ä10-6
a=1ä10-5
10 20 30 40 50 60 70
l0
2
1p
2p
3pw
DT=0
DT=5
DT=10
DT=-5
DT=-10
a=1ä10-5
r=2ä10-6
4p2

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
92
temperature negative (figura 2.3 b). Tale modifica di configurazione, indicato appunto come effetto statico, produce un diretto effetto sulle frequenze dei modi simmetrici. L’effetto statico essendo legato al parametro κ interviene solamente sui modi simmetrici, per i
quali per mezzo della relazione (4.129) è stato introdotto il parametro 2Tλ correttivo del
parametro di Irvine 20λ per mezzo del rapporto 24 / χκ . L’effetto geometrico e l’effetto statico
contribuiscono insieme sui modi simmetrici. Fin quando 20λ <1 per il primo modo simmetrico e
20λ <40 circa per il secondo, si riscontra lo stesso fenomeno discusso per gli antisimmetrici,
imputabile fondamentalmente all’effetto geometrico. A causa dell’interazione dell’effetto statico, oltre tali valori di 2
0λ , non si ottiene lo stesso comportamento osservato per i modi
antisimmetrici in cui le curve erano interamente al di sopra o al di sotto (a seconda del segno della variazione di temperatura) della curva di riferimento. Dalla figura 2.3 abbiamo che per le temperature positive 2κ è sempre maggiore di 1, mentre 2χ
è comunque positivo ma minore di 1, per cui il rapporto 24 / χκ risulta essere sempre maggiore di 1. In modo del tutto analogo si ha che tale rapporto è sempre minore di 1 se riferito a temperature negative. Bisogna però considerare che tale rapporto, indipendentemente se ∆T > 0 o ∆T < 0, è tanto più prossimo all’unità quanto più l’elemento sia molto lasco o molto preteso. È invece sensibilmente lontano da uno per cavi nell’intorno di Λ = 1. Possiamo pertanto affermare che l’effetto statico strettamente connesso al rapporto 24 / χκ è poco rilevante sia per cavi molto laschi che molto pretesi. Infatti per valori del parametro di Irvine molto grandi o molto piccoli l’effetto statico è trascurabile, mentre riveste un ruolo fondamentale quello geometrico. Infatti sia per il primo che per il secondo modo simmetrico c’è una zona in cui il comportamento osservato finora, legato essenzialmente all’effetto geometrico, cambia, addirittura invertendosi, per cui risulta esservi una riduzione delle frequenze naturali per ∆T < 0 ed un aumento per ∆T > 0. Tale comportamento è legato al fatto che l’interazione dell’effetto statico è molto rilevante in tale range del parametro di Irvine. La figura 4.4 b, mette in evidenza anche il comportamento delle curve in prossimità del punto di crossover tra il primo modo simmetrico ed il primo modo antisimmetrico al variare della differenza di temperatura. Al solito in linea continua sono rappresentate ancora le curve relative a ∆T = 0 che costituiscono il nostro riferimento per comprendere meglio gli effetti della temperatura sulla dinamica del cavo sospeso. Come già visto nella teoria di Irvine, in assenza di variazione di temperatura, il punto di crossover si trova in corrispondenza di λ0
2 = 4π2. E’ possibile notare che con il variare del ∆T varia anche la posizione del punto di crossover, in particolare si ha uno spostamento verso destra o verso sinistra lungo l’asse delle ascisse di tale punto a seconda se il ∆T risulta essere positivo o negativo. Si nota infatti che per variazioni di temperatura positive il crossover si realizza in corrispondenza di valori del parametro di Irvine via via minori di 4π2 all’aumentare del ∆T. Un comportamento speculare caratterizza le curve caratteristiche di variazioni termiche negative per le quali il crossover avviene in corrispondenza dei valori del parametro di Irvine maggiori di 4π2. Uno spostamento simile può essere facilmente riscontrato anche se ci si riferisce all’asse delle ordinate. E’ possibile notare , in generale, che il punto di crossover si sposta man mano verso frequenze superiori passando da variazioni di temperatura positive scendendo verso variazioni termiche negative. La figura 4.5, ribadisce quanto osservato nel grafico precedente. In tal caso si riscontra lo stesso comportamento osservato e discusso per il grafico 4.4, in maniera ancora più marcata. Il perché di un’accentuazione del fenomeno è facilmente deducibile se si osservano i grafici di figura 2.3. Infatti aver scelto un valore di ρ minore ha comportato un sensibile aumento dei parametri descrittori della variazione della temperatura χ e κ. In tal caso è sufficiente infatti, considerare
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
93
anche una piccola variazione di temperatura per poter da subito osservare gli effetti provocati dal ∆T. Per quanto detto in precedenza si risente di ciò nella dinamica in relazione all’effetto geometrico e all’effetto statico che risultano di conseguenza essere amplificati. Per quanto riguarda il crossover ritroviamo le stesse considerazioni fatte per il caso precedente, considerando ovviamente che in tal caso i due effetti citati sono appunto amplificati.
CAPITOLO 4 Effetti della deformazione termica sulla dinamica
94
CONCLUSIONE
Nel seguente lavoro sono stati descritti gli effetti che la deformazione termica produce sul comportamento dei cavi sospesi. Nei primi due capitoli, in particolare, si è analizzata la statica e negli ultimi due la dinamica. Si è visto come la variazione di temperatura influisca sulla statica dei cavi in termini di freccia e tensione nel cavo tramite l’introduzione di due parametri descrittori adimensionali. È stato possibile vedere quanto sia influente tale deformazione a seconda di come varino le proprietà del cavo (peso proprio o stato di pretensione), e a seconda dell’entità della variazione termica stessa sia positiva che negativa. Tramite l’utilizzo di vari grafici è semplice vedere quanto sia importante l’interazione della deformazione termica e in che casi questa rivesta un ruolo molto rilevante. In generale, inoltre, si può affermare che sia se il cavo sia preteso o non, l’effetto della temperatura genera uno stesso comportamento; in presenza di un raffreddamento la reazione all’appoggio aumenta, in presenza di un riscaldamento la medesima reazione diminuisce. Ciò indica che sul comportamento dell’elemento influiscono contemporaneamente entrambi i fattori, sia la pretensione sia la temperatura; ovviamente sarà l’entità delle due a dare un differente contributo al comportamento del cavo; è evidente, come detto, che per quanto grande possa essere, sempre nell’ordine di grandezza delle variazioni climatiche, la temperatura, il suo effetto sarà rilevante o addirittura trascurabile in funzione dello stato di pretensione in cui si trova l’elemento. Inoltre un altro aspetto messo in evidenza, e riscontrabile dagli stessi grafici è dato dal fatto che gli effetti di un ∆T sono fortemente differenti a seconda se questo sia positivo o negativo. Considerazioni del tutto simili sono state fatte anche in relazione all’aumento della freccia. A partire dai risultati ottenuti dalla risoluzione della statica è stato inoltre possibile passare allo studio del comportamento dinamico, sfruttando quanto ottenuto in termini di freccia e tensione nel cavo e contemporaneamente fissando l’approssimazione di profilo parabolico. Sono stati così descritti gli effetti della deformazione termica sulle proprietà spettrali dei cavi sospesi rappresentando l’andamento delle frequenze naturali al variare del parametro di Irvine. Si è visto che le frequenze dei modi antisimmetrici sono costanti al variare del parametro stesso al contrario dei modi simmetrici. Si è potuto osservare per quali range del parametro di Irvine gli effetti della temperatura sono più o meno importanti. In particolare sono stati definiti due effetti fondamentali responsabili di tale fenomeno, l’effetto statico e l’effetto geometrico. I due effetti non sono del tutto indipendenti tra loro e interagiscono contemporaneamente per quanto riguarda i modi simmetrici mentre influisce uno solo per gli antisimmetrici. In ultimo si sono messi in evidenza gli effetti provocati dalla deformazione termica in relazione al punto di crossover.

CAPITOLO 4 Effetti della deformazione termica sulla dinamica
95
BIBLIOGRAFIA
[1] Francesco Potenza; Modelli meccanici e strategie di controllo attivo per la riduzione delle oscillazioni di un cavo sospeso [2] Elsa de Sá Caetano; “Cable vibrations in cable-stayed bridges”. [3] IrvineHM ~1981!, CableStructures
[4] Luongo, Paolone; Meccanica delle strutture, sistemi rigidi ad elasticità concentrata. [5] Marco Lepidi, Vincenzo Gattulli, Fabrizio Vestroni; Static and dynamic response of elastic suspended cables with damage