Approccio basato su Compressive Sensing e modellistica...
118
DIPARTIMENTO DI INGEGNERIA DELL’INFORMAZIONE Corso di Laurea Magistrale in Bioingegneria Approccio basato su Compressive Sensing e modellistica Taylor-Fourier per stimare la risposta emodinamica da segnali fNIRS Laureando Marco Cescon Relatore Prof. Giovanni Sparacino Correlatori Ing. Sabrina Brigadoi Ing. Guglielmo Frigo – ANNO ACCADEMICO 2015/2016 – - 19 Aprile 2016 -
Transcript of Approccio basato su Compressive Sensing e modellistica...

DIPARTIMENTO DI INGEGNERIA DELL’INFORMAZIONE
Corso di Laurea Magistrale in Bioingegneria
Approccio basato su Compressive
Sensing e modellistica Taylor-Fourier
per stimare la risposta emodinamica
da segnali fNIRS
Laureando
Marco Cescon
Relatore
Prof. Giovanni Sparacino Correlatori
Ing. Sabrina Brigadoi
Ing. Guglielmo Frigo
– ANNO ACCADEMICO 2015/2016 –
- 19 Aprile 2016 -


INDICE
INDICE ................................................................................ I
ABSTRACT ............................................................................ 1
Capitolo 1
LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS) ..... 3
1.1 ASPETTI GENERALI E STORICI ................................................ 3
1.2 I SETTORI APPLICATIVI DELLA NIRS ...................................... 5
1.3 PUNTI DI FORZA E CRITICITA’ DELLA NIRS ...................... 6
Bassa invasività ................................................................................................................ 6
Complementarità/Intercambiabilità con altre tecniche ............................................ 7
Trasportabilità ................................................................................................................. 8
Praticità e facilità di acquisizione .................................................................................. 8
Basso costo di acquisto e manutenzione ..................................................................... 9
Variabilità dell’SNR ........................................................................................................ 9
Bassa risoluzione spaziale .............................................................................................. 9
Elevato rumore di fondo ............................................................................................. 10
1.4 LA RISPOSTA EMODINAMICA (HRF) .................................... 10
1.5 IL RUMORE ...................................................................................... 13
Il rumore strumentale................................................................................................... 13
L’errore sperimentale ................................................................................................... 14
i

INDICE
2
Le componenti fisiologiche ........................................................................................ 15
1. Componente cardiaca ..................................................................................... 15
2. Componente respiratoria ................................................................................ 15
3. Onda di Mayer ................................................................................................. 15
4. Oscillazioni a basse frequenze ....................................................................... 16
1.6 SCOPO DELLA TESI E OUTLINE ............................................ 16
Capitolo 2
ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL
SEGNALE NIRS ................................................................. 17
2.1 PANORAMICA GENERALE ....................................................... 17
2.2 APPROCCIO DI FILTRAGGIO PASSABANDA .................... 18
2.3 MEDIA CONVENZIONALE ....................................................... 18
2.4 METODI CHE SFRUTTANO IL CANALE DI
RIFERIMENTO ........................................................................................ 20
2.4.1 METODO DI SOTTRAZIONE ............................................................................. 20
2.4.2 METODO CHE INCLUDE IL FILTRAGGIO CON METODO BAYESIANO
(REMCOBA) .................................................................................................................. 21
Capitolo 3
STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE
CS-TFT ............................................................................ 25
3.1 CREAZIONE DI UN DATASET SIMULATO ......................... 26
3.1.1 DATASET IDEALE .............................................................................................. 26
3.1.2 DATASET REALISTICO ....................................................................................... 33
Capitolo 4
ALGORITMO CS-TFT ........................................................ 41
ii

4.1 PRE-PROCESSING ......................................................................... 41
4.2 MEDIA DELLE HRF ...................................................................... 53
4.3 ALCUNI DETTAGLI IMPLEMENTATIVI................................ 54
Capitolo 5
RISULTATI ......................................................................... 57
5.1 SCENARIO COMPLETAMENTE SIMULATO ....................... 57
5.1.1 DETTAGLI IMPLEMENTATIVI ........................................................................... 58
5.1.2 STIMA DELLE HRF ............................................................................................. 60
5.1.3 STIMA DEL RUMORE ........................................................................................... 60
5.1.4 CONFRONTO COL FILTRAGGIO PASSABANDA ................................................ 65
5.2 SCENARIO SEMI-SIMULATO .................................................... 71
5.2.1 DETTAGLI IMPLEMENTATIVI ........................................................................... 72
5.2.2 STIME OTTENUTE E CONFRONTO CON FILTRAGGIO BP E METODO
REMCOBA .................................................................................................................... 72
5.3 DISCUSSIONE ................................................................................. 89
5.4 RMSE................................................................................................... 89
Capitolo 6
CONCLUSIONI E SVILUPPI FUTURI ................................... 93
6.1 SVILUPPI FUTURI .......................................................................... 93
APPENDICE ....................................................................... 97
BIBLIOGRAFIA ................................................................. 109
iii


1
ABSTRACT
La spettroscopia nel vicino infrarosso, definita anche con l’acronimo “NIRS”,
ovvero Near-Infrared Spectroscopy, è una tecnica non invasiva per il monitoraggio
dei cambiamenti emodinamici cerebrali. Si basa principalmente sull’utilizzo
della luce nel rosso e vicino infrarosso e misura le variazioni nell’assorbimento
ottico della luce nel tempo. Dalla differenza tra l’intensità di luce immessa dalla
sorgente e quella misurata dal detettore, è possibile ricavare le variazioni di
concentrazione sia dell’emoglobina ossigenata che deossigenata che
avvengono nella zona indagata, ed esaminare gli effetti metabolici dell’ossigeno
durante l’attività cerebrale.
Il segnale acquisito, tuttavia, risulta composto oltre che dal segnale utile,
ovvero la risposta emodinamica cerebrale, anche da più componenti rumorose
legate a variazioni fisiologiche, quali in particolare le oscillazioni
emodinamiche dovute al battito cardiaco, alla respirazione, e alla pressione
sanguigna, queste ultime a bassa e bassissima frequenza. In letteratura vari
algoritmi sono stati proposti per ridurre questo rumore fisiologico nel segnale
acquisito e migliorare di conseguenza la stima della risposta emodinamica
cerebrale. Tuttavia, non sempre questi metodi sono risultati efficaci (un
semplice filtraggio passa banda, ad esempio, non rimuove completamente il
rumore fisiologico in quanto una parte di esso ha le stesse frequenze della
risposta emodinamica cerebrale).
In questo lavoro è stato sviluppato un nuovo algoritmo per la riduzione del
rumore fisiologico e la stima della risposta emodinamica cerebrale. Tale
algoritmo, definito con l’acronimo CS-TFT, fa uso del campionamento
compresso e implementa la trasformata di Taylor Fourier per ottimizzare la

ABSTRACT
2
stima del rumore fisiologico, che può essere poi sottratta al segnale acquisito.
Tale stima viene effettuata su un segnale acquisito da un canale di riferimento
che contiene le soli componenti rumorose, presenti anche nel canale standard,
ma che non contiene alcuna risposta cerebrale. Dopo la riduzione del rumore
fisiologico, dal canale standard si può stimare la risposta emodinamica
cerebrale. L’algoritmo è stato testato sia su un dataset completamente simulato
che su uno semi-simulato, al fine di testarne il funzionamento in casistiche
differenti. I risultati sono stati poi confrontati con i risultati ottenuti con due
metodi pubblicati in letteratura (il filtraggio passa-banda, e un approccio
basato sul filtro bayesiano).

3
CAPITOLO 1
LA SPETTROSCOPIA NEL VICINO
INFRAROSSO (NIRS)
1.1 ASPETTI GENERALI E STORICI
La spettroscopia nel vicino infrarosso, abbreviata in inglese con l’acronimo
“NIRS”, ovvero Near-Infrared Spectroscopy, è una tecnica non invasiva per il
monitoraggio dei cambiamenti emodinamici cerebrali. Utilizza la luce nel rosso
e vicino infrarosso e misura le variazioni nell’assorbimento ottico della luce nel
tempo. Dalla differenza tra l’intensità di luce immessa dalla sorgente e quella
misurata dal detettore, è possibile ricavare le variazioni di concentrazione sia
dell’emoglobina ossigenata che deossigenata che avvengono nella zona
indagata, ed esaminare gli effetti metabolici dell’ossigeno durante l’attività
cerebrale. La NIRS utilizza lunghezze d’onda comprese nella banda spettrale
che costituisce il rosso e il vicino infrarosso (650 – 950 nm), che risultano
completamente innocue per l’organismo [1][2].
I fotoni emessi dalla sorgente non seguono un percorso rettilineo
corrispondente ad una linea retta tra la sorgente ed il detettore, bensì
percorrono un tragitto più lungo. Essi infatti vengono in parte assorbiti, ma in
maniera preponderante subiscono dispersione (scattering), che fa si che il loro
andamento somigli ad un random walk. L’assorbimento dei fotoni da parte dei

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
4
tessuti come pelle ed ossa è particolarmente basso a queste lunghezze d’onda,
mentre diventa particolarmente rilevante invece grazie all’emoglobina, che
presenta uno spettro di assorbimento differente a seconda che essa sia
ossigenata (HbO2) o meno (HbR).
L’applicazione della NIRS al cervello è attribuita in particolare a Jöbsis [3], che
verso la fine degli anni ‘70 compì importanti studi negli Stati Uniti su questo
nuovo tipo di tecnica di imaging. Jöbsis infatti, è considerato il padre della
NIRS, in quanto dimostrò per primo la possibilità di monitorare non
invasivamente le variazioni di concentrazioni di emoglobina (ossigenata e
deossigenata) nel cervello con l’utilizzo della luce a particolari lunghezze
d’onda [4].
Andando a ritroso, già nei primi anni del XIX secolo fu utilizzata la tecnologia
dell’onda continua per eseguire le prime diagnosi non invasive sul tessuto
umano, tra cui busto e testa, tramite la trasmissione della luce attraverso il
corpo [4]. Con il termine “onda continua” s’intende che la strumentazione si
basa unicamente sulla misurazione dell’intensità della luce, dove viene misurata
l’intensità della luce risultante dopo che questa ha attraversato i tessuti. Tale
tecnica si differenzia in particolare rispetto a quelle basate sul dominio in
frequenza, che misurano il tempo di volo dei singoli fotoni.
Hoppe-Seyler descrive nel 1862 lo spettro dell’ossiemoglobina mentre l’inglese
Stoke, due anni più tardi, aggiunse lo spettro della deossiemoglobina
scoprendo di conseguenza l’importanza dell’emoglobina stessa per il trasporto
dell’ossigeno. Nel 1876 il tedesco Von Vierordt analizzò i tessuti misurando i
cambiamenti spettrali della luce penetrando il tessuto quando la circolazione
sanguigna era occlusa, mentre nel 1894 Hüfner, determinò
spettroscopicamente le quantità assolute e relative di entrambe le tipologie di
emoglobina in vitro. Da quel momento e per alcuni decenni non venne
condotta alcuna rilevante ricerca sul campo fino agli anni ‘30, quando lo studio
sulla determinazione spettroscopica dell’ossigenazione del tessuto venne
ripreso e portato avanti da numerosi ricercatori, fra i quali il tedesco Nicolai,
che continuò gli studi di Von Vierordt, mentre Matthes e Gross
determinarono per la prima volta lo spettro dell’ossiemoglobina e
deossiemoglobina nel tessuto umano usando due lunghezze d’onda, la prima
nella zona rossa mentre la seconda nella banda infrarossa [4].

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
5
Un importante passo in avanti fu soprattutto la scoperta della legge Beer-
Lambert [5] del matematico francese Bouguer, nel 1729: essa fu estesa poi nel
1852 dal tedesco Beer per quantificare le concentrazioni, ma non era
applicabile ai tessuti biologici in quanto non si basava sui fenomeni privi di
scattering: risulta pertanto relativamente recente (1988) la legge Beer-Lambert
modificata e sviluppata dall’inglese Delpy, che nel suo studio tenne conto
anche dell’effetto diffusione. Le prime ricerche durante gli anni ‘80 e ‘90 si
concentrarono sull’uso della luce nel vicino infrarosso sia in neonati che adulti,
principalmente per monitorare i cambiamenti emodinamici e di flusso in
seguito ad eventi clinici di interesse. Ad inizi anni ‘90 la risonanza magnetica
funzionale (fMRI) fece la sua comparsa, fornendo intere immagini cerebrali del
segnale dipendente dal livello dell’ossigeno nel sangue.
Tornando al lavoro svolto da Jöbsis, la sua scoperta portò alla successiva
progettazione e costruzione di numerosi strumenti NIRS basati sulla
misurazione dell’intensità della luce. Negli stessi anni in cui la fMRI faceva la
sua comparsa, anche la NIRS veniva applicata per la prima volta in campo
funzionale (fNIRS). L’anno considerato più importante per lo sviluppo e la
nascita di tale nuova tecnica è sicuramente il 1993: quattro gruppi di ricerca
[6][7][8][9], dimostrarono la possibilità di analizzare l’attività emodinamica
cerebrale in seguito a particolari stimoli con l’utilizzo della fNIRS. [4][10].
1.2 I SETTORI APPLICATIVI DELLA NIRS
Negli ultimi tre decenni questa tecnologia ha continuato a crescere: ad oggi
infatti gli studi con la fNIRS sono stati condotti in svariati ambiti, dal campo
psicologico a quello fisiologico e nello studio delle patologie cerebrali.
Importante è considerare che la fNIRS può essere utilizzata per studiare solo
le aree corticali, perché la luce non riesce a raggiungere zone cerebrali più
profonde, più adatte ad essere studiate con la fMRI. Gli ambiti applicativi della
NIRS sono molteplici, e va menzionato il fatto che oltre ad essere utilizzata
per monitorare il cervello, essa è stata impiegata in particolare anche sul
tessuto muscolare, anche se con risultati meno accurati, in quanto il cromoforo

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
6
associato (citocromo ossidasi) possiede un grado di assorbimento dei raggi
infrarossi di circa un ordine di grandezza inferiore rispetto all’emoglobina,
rendendo quindi più difficile la lettura finale. Ulteriori studi con la NIRS sono
stati inoltre realizzati nell’ambito della chirurgia neurovascolare, in cui si è
dimostrata la capacità di individuare eventi ischemici dal segnale NIRS o nel
monitoraggio di pazienti che presentavano gravi traumi cranici, oltre all’analisi
sul decorso di alcune malattie quali ad esempio l’Alzheimer. Sempre in ambito
chirurgico, la NIRS è stata valutata anche come metodo nella diagnosi di
arteriosclerosi delle arterie carotidee e vertebrali o per la misurazione non
invasiva del pH [11].
In ambito clinico, è utilizzata per il monitoraggio della saturazione cerebrale
dei neonati, soprattutto in terapia intensiva neonatale. Ha fornito inoltre un
importante apporto nello sviluppo della riabilitazione motoria. E’ soprattutto
in ambito cognitivo che la fNIRS ha avuto grande applicazione, in particolare
in popolazioni in età evolutiva e pediatrica, dove altre tecniche di monitoraggio
dello sviluppo cognitivo cerebrale sono di più difficile utilizzo.
1.3 PUNTI DI FORZA E CRITICITA’ DELLA NIRS
L’interesse verso la NIRS è determinato in particolare da una serie di aspetti
che la rendono vantaggiosa rispetto ad altri tecniche di monitoraggio cerebrale.
Vediamone i principali:
Bassa invasività
La tecnica NIRS misura i cambiamenti di assorbimento ottico nel
tempo. Questo viene fatto in modo non invasivo disponendo dei
sensori ottici direttamente sul cuoio capelluto del soggetto. I sensori
inviano e ricevono fasci di luce a lunghezze d’onda nel rosso e vicino
infrarosso, registrando la differenza di intensità tra la luce inviata e
quella misurata dopo aver attraversato il cranio ed aver raggiunto il
cervello. Grazie al basso assorbimento ottico dei tessuti biologici a

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
7
queste lunghezze d’onda, la luce riesce a penetrare alcuni centimetri,
raggiungendo la corteccia cerebrale. E’ una tecnica completamente
non invasiva in quanto non necessita di particolari somministrazioni
di farmaci o traccianti, come avviene ad esempio nella tomografia ad
emissioni di positroni (PET) con i traccianti radioattivi. [12]
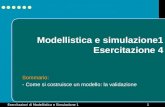
Figura 1.1: Esempio di disposizione dei probe durante un’acquisizione fNIRS effettuata all’università di Zurigo. Le fibre ottiche sono disposte su una cuffia a contatto col cuoio capelluto. Le fibre in grigio sono le sorgenti, mentre quelle nere i detettori [4]
Complementarità/Intercambiabilità con altre tecniche
La tecnica NIRS può essere considerata una valida sostituta dell’fMRI
in soggetti e situazioni dove quest’ultima può difficilmente essere
utilizzata (ad esempio neonati, pazienti con pacemaker, etc.). Il
confronto può essere esteso anche all’elettroencefalografia (EEG), in
quanto le prestazioni offerte da queste tre tipologie di tecniche

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
8
possono essere paragonabili: la NIRS ad esempio ha una risoluzione
temporale particolarmente buona (l’ordine è di qualche millisecondo)
se confrontata con l’fMRI (pari invece a circa 2 – 3 secondi) ma
inferiore rispetto all’EEG. A livello spaziale invece, la situazione si
inverte: la NIRS permette una risoluzione spaziale comparabile con
quella offerta dall’EEG (entrambe dell’ordine dei centimetri) ma
nettamente inferiore alla fMRI (i cui voxel sono dell’ordine dei
millimetri, solitamente 3x3x3 mm) [10].
Trasportabilità
Generalmente, gli strumenti e le attrezzature necessarie a svolgere
un’acquisizione NIRS sono più facilmente trasportabili in quanto più
piccoli e di dimensioni ridotte rispetto ad una normale risonanza
magnetica che invece non ha alcuna possibilità di movimentazione, e
risultano particolarmente vantaggiosi soprattutto in casistiche
particolari e delicate, quali ad esempio la non deambulazione del
paziente o la sua impossibilità di spostamento (ad esempio se il
paziente è in terapia intensiva). In questi casi, la strumentazione NIRS
può essere facilmente posizionata ai piedi del letto senza particolari
difficoltà, ed impiegata inoltre anche su pazienti portatori di protesi
metalliche, che non possono essere sottoposti ad fMRI.
Praticità e facilità di acquisizione
Le procedure sperimentali NIRS sono condotte in un ambiente più
controllabile a livello sperimentale e quindi più ecologico, rispetto ai
rumorosi scanner chiusi usati in fMRI. La NIRS inoltre può tollerare il
movimento del soggetto in proporzioni maggiori rispetto alla fMRI,
purché la sonda NIRS rimanga fissa e stabile sul cuoio capelluto del
soggetto. Ciò ha permesso alla NIRS di essere impiegata anche sui
soggetti che più difficilmente si adattavano a tale situazione, quali ad
esempio bambini o pazienti anziani affetti da particolari patologie.
Questo ha anche permesso alla NIRS di essere usata per studi
richiedenti soggetti in movimento, per esempio per studiare gli effetti
di un esercizio, o la posizione su segnali cerebrali.

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
9
Basso costo di acquisto e manutenzione
La popolarità crescente di questa tecnica è in parte dovuta al basso
costo dell’attrezzatura se comparata alla risonanza magnetica o alla
PET. Gli strumenti ottici infatti, oltre ad essere più piccoli e più
trasportabili sono anche meno costosi da acquistare e richiedono
inoltre minori costi di manutenzione (contrariamente ad esempio ad
un normale scanner MRI).
La NIRS tuttavia presenta anche alcuni aspetti critici o addirittura di
svantaggio nel confronto con altre tecniche di imaging diagnostico. Le
riportiamo di seguito.
Variabilità dell’SNR
Il segnale acquisito, ed in particolare l’SNR (Signal to noise ratio) ha una
variabilità che si differenzia molto da soggetto a soggetto, in quanto
influenzato da diversi fattori, quali ad esempio il colore dei capelli ma
soprattutto lo spessore del cranio, che varia molto sia l’assorbimento
che lo scattering del segnale. La luce emessa infatti, attraversa in
sequenza il cuoio capelluto, il cranio e liquido cerebro-spinale, e il suo
assorbimento è influenzato in particolar modo da questi 3 strati, che
variano in spessore e proprietà ottiche molto in base all’età, al sesso, e
ad altre caratteristiche genetiche. Oltre a ciò, anche il colore dei capelli
ha una particolare influenza sull’assorbimento di luce (le tonalità scure
infatti conducono ad un assorbimento maggiore rispetto a quelle
bionde o più chiare) [12].
Poiché la NIRS è altamente sensibile alle fonti esterne di luce,
l’acquisizione viene solitamente effettuata in una stanza semi buia, in
modo da non influenzare o contaminare con luce esterna il fascio
luminoso misurato dal detettore [10].
Bassa risoluzione spaziale
Come accennato in precedenza, nel confronto con le altre
metodologie (in particolare con la fMRI), la risoluzione spaziale
offerta dalla NIRS è alquanto limitata.

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
10
Nelle acquisizioni fNIRS, solitamente la sorgente e ildetettoresono
disposti sullo scalpo ad una distanza di circa 2-3 cm l’un dall’altro. La
luce può raggiungere in questo modo una profondità di circa 3 cm
sotto la corteccia cerebrale.
Ciò non consente di “ispezionare” i tessuti cerebrali più profondi, in
quanto l’SNR risultante avrebbe valori troppo bassi. La risoluzione
spaziale può essere tuttavia migliorata attraverso l’uso di array ad alta
densità, già utilizzati ad esempio nella tomografia ottica diffusa
(DOT). [13]
Elevato rumore di fondo
Il segnale acquisito non solo contiene la risposta cerebrale di interesse,
ma anche quello che viene definito rumore fisiologico. Come
vedremo nel paragrafo 1.5, il segnale acquisito infatti, è costituito da
un insieme di componenti, quali principalmente le risposte evocate
cerebrali, a cui si aggiungono una serie di variazioni emodinamiche
dovute al battito cardiaco, alla respirazione, e ad altre componenti
fisiologiche. Di conseguenza, si rende necessaria una procedura di
elaborazione del segnale NIRS stesso, che conduca all’estrazione delle
risposte cerebrali, per evitare di catalogare variazioni emodinamiche
dovute alla fisiologia o al rumore come risposte cerebrali.
1.4 LA RISPOSTA EMODINAMICA (HRF)
La risposta emodinamica (HRF, Hemodynamic Response Function) è la
componente di principale interesse contenuta nel segnale fNIRS, in quanto
rappresenta l’attivazione cerebrale che avviene in seguito alla presentazione al
soggetto di particolari stimoli. Quando al soggetto viene chiesto di eseguire un
particolare compito, i neuroni responsabili iniziano a lavorare, incrementando
il loro bisogno metabolico. Il cervello risponde a questa richiesta inducendo un
aumento del flusso sanguigno cerebrale verso le particolari aree del cervello
interessate. Per un principio di conservazione (il principio di coupling neuro-
vascolare) l’aumento di flusso sanguigno avviene in quantità molto maggiore

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
11
rispetto al reale consumo di ossigeno da parte dei neuroni. Pertanto, quello che
si misura è un aumento dell’emoglobina ossigenata, e una diminuzione di
quella deossigenata, al contrario di quello che ci si potrebbe aspettare. La
fNIRS riesce a misurare in maniera distinta, a differenza ad esempio dell’fMRI,
sia la variazione di HbO2 che di HbR, che hanno un andamento simile a
quanto raffigurato nella Figura 1.2:
Figura 1.2: Andamento della concentrazione di emoglobina ossigenata (rosso) e deossigenata (verde) in seguito alla presentazione di uno stimolo al tempo 0.
Solitamente, la HRF ha un andamento lento, con una durata di circa 10 – 15
secondi, molto maggiore pertanto rispetto alle risposte elettriche neuronali
misurate con l’EEG (dell’ordine dei millisecondi).
I modelli parametrici impiegati per stimare o simulare la HRF sono vari, ma il
più usato è il modello canonico dato dalla somma di due funzioni gamma-
variate secondo la formula:
( ) ( )
( ) (1.1)

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
12
dove
( )
(
)
( )
( ) (1.2)
dove regola l’ampiezza, mentre e rispettivamente la larghezza e l’istante
iniziale della risposta. Il parametro infine, regola il rapporto tra la risposta e il
suo undershoot (l’ampiezza della seconda funzione gamma che modella
l’undershoot della risposta). In figura 1.3 è raffigurato l’andamento atteso della
risposta emodinamica, secondo il modello canonico appena menzionato.
Figura 1.3: Risposta emodinamica realizzata mediante modello canonico (1.1) con i seguenti
parametri: , , , , , ,
Da anni ormai i ricercatori studiano ed implementano varie tecniche e
algoritmi con l’obiettivo di rimuovere la componente rumorosa fisiologica,
migliorando pertanto l’SNR.

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
13
1.5 IL RUMORE
Abbiamo già menzionato in precedenza la difficoltà di estrarre dal segnale
NIRS le sole risposte emodinamiche cerebrali, in quanto il segnale misurato
contiene anche alcune componenti fisiologiche di disturbo che alterano le
HRF stesse, perché possono averne la stessa frequenza e fase. Le misurazioni
NIRS sono caratterizzate principalmente da tre tipologie di rumore: il rumore
strumentale, l’errore sperimentale e le fluttuazioni fisiologiche. I primi due tipi
di rumore possono essere facilmente rimossi, tramite dei filtri e un’accurata
predisposizione del disegno sperimentale.
Vediamo in dettaglio le componenti fondamentali.
Il rumore strumentale
E’ costituito solitamente dal rumore di misura dovuto alle componenti
hardware, nonché alla luce di fondo presente nella stanza, e
solitamente presenta uno spettro di frequenze abbastanza uniforme.
Dal momento che le frequenze di campionamento degli strumenti
NIRS sono solitamente molto più elevate rispetto a quelle dei segnali
emodinamici di interesse, si stima pertanto che le frequenze alte siano
date soprattutto dal rumore strumentale. Molte di queste possono
essere separate dalle componenti fisiologiche mediante un semplice
filtro passabasso, o modificando l’intensità del fascio o il guadagno
dell’amplificazione dell’intensità ricevuta [12].

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
14
Figura 1.4: Simulazione del rumore di misura (finestra di 1000 s)
L’errore sperimentale
Come descritto in precedenza, la NIRS è poco sensibile ai movimenti
della testa: se l’accoppiamento optodo-testa è buono, il segnale non
presenta particolari artefatti anche in caso di movimenti bruschi del
soggetto. Tuttavia, non sempre risulta possibile garantire che non vi
sia alcun distacco dell’optodo dalla cute, causando visibili variazioni
sul segnale acquisito simili a volte a “salti” o impulsi, che possono
compromettere la baseline del segnale o modificare l’ampiezza della
HRF. La rimozione di simili artefatti risulta a volte difficile. Algoritmi
che analizzano le tempistiche delle fluttuazioni del segnale, andando a
cercare brusche variazioni in ampiezza e/o deviazione standard,
vengono solitamente utilizzati per riconoscere gli artefatti da
movimento, che possono poi essere corretti utilizzando varie tecniche
proposte in letteratura. Molti errori sperimentali sono evitabili grazie
alla competenza dell’operatore nel preparare la strumentazione

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
15
necessaria e il soggetto al fine da ridurre le fluttuazioni indesiderate
[12].
Le componenti fisiologiche
Una delle più insidiose fonti di rumore è data dai segnali fisiologici
apprezzabili anche a livello superficiale del cuoio capelluto e della
corteccia cerebrale sottostante. Tali componenti fisiologiche sono
principalmente causate dal battito cardiaco, dalla respirazione e dalla
cosiddetta onda di Mayer. Vi sono poi ulteriori oscillazioni definite a
bassa frequenza.
Queste quattro categorie sono illustrate sotto in dettaglio.
1. Componente cardiaca. Il battito cardiaco è assimilabile ad una
sinusoide avente una frequenza compresa tra 60 e 80 pulsazioni al
minuto e un’ampiezza che varia nel range tra 0 e 500 nM. Questa
componente non è cruciale nella stima delle HRF. Questo tipo di
oscillazioni è facilmente eliminabile mediante un filtro passa-
basso, in quanto la sua frequenza (~1 Hz) è ben lontana da quella
di interesse della HRF.
2. Componente respiratoria. Rappresentabile sempre attraverso
una sinusoide, ha anch’essa un’ampiezza variabile tra 0 e 500 nM,
ma frequenza molto più bassa, ovvero intorno ai 0.2 Hz, molto
simile alla frequenza della risposta emodinamica. Il filtraggio
pertanto non risulta in questo caso un metodo efficace per
rimuovere questo tipo di artefatto, in quanto rimuoverebbe anche
la risposta emodinamica, compresa nella stessa banda di
frequenze.
3. Onda di Mayer. Definita anche onda “vasomotore”, è dovuta
probabilmente alle contrazioni dei muscoli presenti sulle pareti dei
vasi sanguigni. Ha una frequenza piuttosto bassa (0.03 – 0.18 Hz)
che si sovrappone a quella della HRF, ma ampiezza maggiore di
quest’ultima, che può variare in base all’età e al sesso del soggetto.

LA SPETTROSCOPIA NEL VICINO INFRAROSSO (NIRS)
16
Anche in questo caso, risulta impossibile rimuovere tale tipo di
componente mediante un filtraggio, in quanto verrebbe eliminata
anche la risposta emodinamica, dal momento che i due segnali
hanno frequenza simile.
4. Oscillazioni a basse frequenze. Si tratta di sinusoidi molto
lente, aventi una frequenza media di circa 0.004 Hz e ampiezza
variabile che può seguire alcuni trend, che si modificano
tipicamente in base alle variazioni di pressione nei vasi sanguigni.
1.6 SCOPO DELLA TESI E OUTLINE
L’obiettivo che ci prefissiamo, è quello di implementare l’algoritmo CS-TFT
idealizzato da Frigo et al. [13] su un segnale fNIRS, al fine di valutarne
l’efficienza nella ricostruzione del rumore presente in modo da poterlo poi
rimuovere, in un secondo momento, riuscendo di conseguenza ad ottenere
una stima delle HRF estratte. Al fine di testare la vera efficienza dell’algoritmo,
si cercherà di implementarlo su un particolare database apposito, in modo da
valutarne concretamente il risultato confrontandolo poi con lo stesso ottenuto
da altri algoritmi già presenti in letteratura e menzionati in precedenza.

17
CAPITOLO 2
ALGORITMI PER LA RIMOZIONE
DEL RUMORE NEL SEGNALE
NIRS
2.1 PANORAMICA GENERALE
Il numero totale di metodi sino ad oggi sperimentati è elevato e una loro
quantificazione precisa risulta difficile, ma riportiamo qui i principali e più
utilizzati, in particolare quelli univariati, ovvero a variante unica.
I metodi a una variante comprendono alcuni dei primissimi e più semplici
algoritmi, quali in particolare il filtraggio passabanda e la media convenzionale
(definita con l’acronimo CA, ovvero Conventional Averaging). Vi sono poi
ulteriori metodologie implementate più di recente che, sempre considerando
un singolo segnale alla volta, hanno un funzionamento più complesso, e che
sfrutta un particolare tipo di canale, il canale di riferimento, che contiene solo
il rumore fisiologico di fondo e non la risposta cerebrale, e che può quindi
essere utilizzato per una più accurata riduzione del rumore fisiologico nel
canale standard. Tra questi vi sono la regressione ai minimi quadrati [15]
ReMCoBA, che utilizza un metodo Bayesiano [16], e l’approccio parametrico
basato sul filtro di Kalman [10].

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
18
Vediamoli in dettaglio:
2.2 APPROCCIO DI FILTRAGGIO PASSABANDA
Uno dei più semplici metodi utilizzati per filtrare i segnali NIRS è il comune
filtraggio passabanda. Esso permette la rimozione di tutta quella parte di
segnale le cui frequenze non sono di particolare interesse per l’analisi, ovvero
le alte frequenze e le bassissime frequenze. Questo semplice metodo sfrutta
solo i segnali del canale standard permettendo di rimuovere tutte le oscillazioni
che presentano sia frequenze piuttosto elevate, come ad esempio quelle
cardiache, sia quelle molto lente, inferiori allo 0.01 Hz. Questo metodo è stato
ampiamente utilizzato in molti studi, non solo come metodo stesso, ma anche
come passo preliminare di pre-processing prima di applicare al segnale NIRS
algoritmi di filtraggio più avanzati. Tuttavia, il filtraggio non permette di
rimuovere completamente il rumore fisiologico di fondo. Ciò avviene in
particolare alle basse frequenze, in quanto vi è completa sovrapposizione tra il
rumore fisiologico e le HRF, poiché hanno frequenze molto simili tra loro
[REF].
2.3 MEDIA CONVENZIONALE
Il CA è un altro metodo piuttosto semplice, utilizzato per stimare le risposte
emodinamiche medie dal segnale acquisito. Il funzionamento si basa su una
prima suddivisione in trial del segnale, tutti della stessa durata. Una volta
ottenuta la serie di trial, se ne calcola la media aritmetica secondo la formula:
( )
∑ ( ( ) ( )) ( )
∑ ( )
(2.1)

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
19
dove è il segnale acquisito, è la HRF del trial i-esimo(con i che va da 1 a
N, dove N è il numero totale di trial), e è la componente rumorosa
(contenente sia il rumore fisiologico che di misura).
Dato che il segnale totale acquisito può essere considerato formato dalla
somma della risposta emodinamica più una componente di rumore, si può
ipotizzare che il rumore abbia media nulla, ovvero:
( ) ( )
∑ ( )
( ) (2.2)
Si ipotizza pertanto che il valore atteso del segnale acquisito tenda ad essere
quanto più simile possibile alle vere risposte emodinamiche, in luce della media
nulla del rumore e di un numero di HRF inserite che risulti più elevato
possibile. Tuttavia, uno dei principali aspetti critici della media convenzionale è
che essa richiede un alto numero di trial per generare una stima affidabile. Il
problema, pertanto, è la lunghezza dell’acquisizione NIRS necessaria per
ottenere un numero di trial sufficienti. Un altro aspetto negativo è legato al
fatto che, sebbene il rumore di misura possa essere considerato con valore
atteso tendente a zero, questo non sempre è vero per il rumore fisiologico. In
tal modo, verrebbe meno una delle ipotesi di partenza di questo metodo,
inficiandone la validità. Potremmo dunque dire che la media convenzionale
risulta un metodo piuttosto semplicistico per la stima delle HRF, in quanto
presenta delle limitazioni piuttosto importanti specie qualora il rumore
fisiologico di fondo e le risposte emodinamiche si presentino in fase [16].
Nell’algoritmo qui implementato, la media convenzionale è stata utilizzata
nella fase finale del codice, dopo aver ridotto il rumore fisiologico, come
tecnica di stima della HRF media partendo da risposte emodinamiche “pulite”
in ogni trial.

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
20
2.4 METODI CHE SFRUTTANO IL CANALE DI RIFERIMENTO
2.4.1 METODO DI SOTTRAZIONE
Per ottimizzare la riduzione del rumore fisiologico dal segnale acquisito in un
canale NIRS standard, Saager e Berger, [15], proposero un’interessante
soluzione. Riducendo la distanza tra sorgente e detettore (canale short-
separation o SS), il fascio luminoso non raggiunge la corteccia e il segnale
NIRS misurato contiene quindi solo la rappresentazione del rumore fisiologico
extra-cerebrale. Questo segnale può essere utilizzato per ridurre il rumore
fisiologico presente nei canali NIRS standard, in quanto viene acquisito
simultaneamente e, non contenendo alcuna informazione sull’attività cerebrale,
non si corre il rischio di eliminare parte del segnale utile, come nei metodi
descritti in precedenza. Il metodo proposto da Saager e Berger (2005), che
prevedeva la sottrazione del segnale SS fittato al segnale del canale standard
con dei minimi quadrati lineari, è stato il precursore di tutti i successivi
algoritmi basati sull’idea di sfruttare il canale SS per ridurre il rumore
fisiologico.
I canali standard (o LS), che contengono sia rumore fisiologico che la risposta
cerebrale, e quelli SS, che contengono solo il rumore fisiologico, possono
infatti essere descritti nel seguente modo:
(2.3)
(2.4)
dove sono le risposte emodinamiche, rappresenta il rumore
fisiologico e il rumore di misura, che sarà diverso nel canale LS e SS,
ma derivante dalla stessa distribuzione. I segnali LS e SS vengono acquisiti in
contemporanea, per cui si può supporre che il rumore fisiologico presente in
entrambi i segnali sia molto simile.

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
21
La risposta HRF si stima quindi sottraendo il canale SS al canale LS, ovvero:
( ) ( ) ( ) (2.5)
( ) è un generico canale convenzionale LS, mentre ( ) è il canale di
riferimento (SS), moltiplicato per un fattore di scala , che minimizza lo scarto
quadratico medio tra ( ) e ( ).
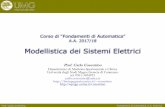
Figura 2.1: Tipica disposizione di sorgente e detettore. Solo il canale costituito da una distanza sorgente-detettore di circa 3 cm, ovvero LS (detector 2), permette un attraversamento del tessuto cerebrale da parte della luce infrarossa [20]
2.4.2 METODO CHE INCLUDE IL FILTRAGGIO CON METODO
BAYESIANO (REMCOBA)
“ReMCoBA”(abbreviazione di “Reference-channel Modelling Corrected Bayesian
Approach”) è un metodo di riduzione del rumore fisiologico che sfrutta il canale
SS [16]. È considerato un metodo non parametrico nella stima della risposta
emodinamica. Brevemente, l’algoritmo consiste in due passi principali: il primo
passo consiste nella stima, trial per trial, del rumore fisiologico, identificato dal
segnale SS fittando un modello dato da una somma di sinusoidi a diversa

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
22
frequenza, e nella sua sottrazione dal segnale LS; il secondo passo consistente
nel filtrare con un approccio bayesiano i trial corretti del canale LS, per ridurre
ulteriormente il rumore residuo.
Più dettagliatamente, il segnale LS, ( ), si può considerare una sommatoria
costituita da tre componenti, la HRF, indicata con ( ), il rumore fisiologico,
( ), e il rumore di misura, ( ):
( ) ( ) ( ) ( ) (2.6)
Nel dettaglio, il rumore ( ) può essere modellizzato mediante una
sommatoria di sinusoidi così strutturata:
( ) ∑ ( ) ( ) ( )
(2.7)
dove ( ) è l’errore del modello, e sono le ampiezze delle sinusoidi,
mentre è la frequenza e l’intercetta (offset).
Il canale SS si può considerare composto dallo stesso rumore fisiologico del
canale LS, ( ), scalato però di una costante che è dovuta al differente
percorso effettuato dai fotoni nei due canali. Al rumore fisiologico nel canale
SS si aggiunge anche il rumore di misura casuale, definito :
( ) ( )
( ) (2.8)
Il coefficiente è determinato con un fit ai minimi quadrati tra i segnali LS e
SS, utilizzando i primi 30 secondi di acquisizione, dove al soggetto non è
ancora stato chiesto di eseguire alcun compito. In tal modo si può supporre
che non sia presente risposta emodinamica cerebrale in questo periodo
temporale, per ridurre il rischio che il coefficiente s la fitti e sia quindi
sovrastimato.

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
23
Il segnale SS viene utilizzato per stimare i parametri del modello del rumore
fisiologico ( ): i valori dei parametri , e vengono calcolati trial per trial
con un fit ai minimi quadrati mentre e sono ricavati dalla densità di
potenza spettrale, anch’essa calcolata in ogni trial. Il valore più comunemente
usato per è 3, a rappresentare il rumore dovuto alla respirazione, all’onda di
Mayer e alle onde con frequenza molto bassa.
Una volta stimato il modello del rumore fisiologico, esso viene sottratto, trial
per trial, al segnale LS:
( ) ( ) ∑[ ( ) ( )]
(2.9)
Il segnale corretto ( ) viene poi filtrato, trial per trial, mediante un
approccio Bayesiano non parametrico. ( ) può essere modellizzato
mediante la somma di 2 segnali: ( ), che è costituito dalle HRF e ( ) che
rappresenta invece il rumore di misura:
( ) ( ) + ( ) (2.10)
La stessa equazione, scritta in forma matriciale, si presenta come:
(2.11)
dove e contengono gli n campioni di un trial.
Un modello stazionario autoregressivo di ordine 4 è stato usato come
descrizione a priori di v, mentre l’informazione a priori su u è stata fornita
modellando la sua “smoothness” come la realizzazione di un processo
stocastico ottenuto dalla cascata di due integratori a rumore bianco gaussiano
( ) e varianza . In queste ipotesi, si può ottenere una stima lineare della
risposta emodinamica, mediante la formula della stima a minima varianza
d’errore, ovvero:

ALGORITMI PER LA RIMOZIONE DEL RUMORE NEL SEGNALE NIRS
24
( ) (2.12)
con
( ) (2.13)
( ) (2.14)
dove è la matrice di covarianza del rumore di processo, A è una matrice
quadrata di Toeplitz contenente i coefficienti del modello autoregressivo e
è la varianza del rumore di processo stimata dai dati calcolati in un intervallo
che solitamente va da 1.5 secondi prima dello stimolo a 2.5 dopo [16]. è la
matrice di covarianza di u, è la matrice quadrata n-dimensionale
triangolare inferiore di Toeplitz che contiene i coefficienti delle derivate
seconde di , ovvero che ha sulla prima colonna i valori [1, -2, 1, 0, 0, …, 0]T e
con determinato, trial per trial, con il criterio di discrepanza di
Twomey (1965).
Dopo aver filtrato i singoli trial, la risposta emodinamica media viene calcolata
mediando i trial con la media convenzionale. Un filtro di Savitzky-Golay del
terzo ordine e una finestra di 25 campioni viene infine applicato alla HRF
media per ridurre il rumore residuo alle alte frequenze.
Il metodo ReMCoBA risulta particolarmente buono nella stima delle HRF sia
su dati simulati che su dati reali, ed ha il grande vantaggio di non richiedere
modelli a priori sulle risposte emodinamiche stesse, essendo un metodo non
parametrico nella stima della HRF. Tuttavia, l’accuratezza del metodo nella
ricostruzione del rumore fisiologico sul singolo trial non è ottimale, poiché lo
spettro di frequenze è costruito su un numero finito e limitato di campioni.

25
CAPITOLO 3
STIMA DELLA RISPOSTA
EMODINAMICA MEDIANTE
CS-TFT
In questo capitolo viene presentato l’algoritmo di stima della risposta
emodinamica che consta di tre passaggi fondamentali: 1) la definizione delle
componenti spettrali del rumore fisiologico mediante una tecnica di super-
risoluzione basata sul paradigma del campionamento compresso (compressive
sensing, CS); 2) la sottrazione del modello del rumore fisiologico stimato
ottenuto mediante una trasformata di Taylor-Fourier (TFT) dal segnale LS; 3)
la stima della risposta emodinamica, ottenuta mediando i profili delle risposte
riconducibili al medesimo stimolo o compito funzionale presentato al
soggetto. Di seguito verranno anche descritti i dataset utilizzati per testare
l’algoritmo proposto.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
26
3.1 CREAZIONE DI UN DATASET SIMULATO
L’algoritmo che qui proponiamo è stato testato su due dataset, che simulano,
in maniera più o meno veritiera, lo scenario che si può presentare durante
un’acquisizione di segnale fNIRS. I due dataset differiscono per il grado di
complessità e verosimiglianza: il primo, detto anche ideale, è totalmente
simulato e ricavato da un modello matematico dei segnali in esame (la risposta
emodinamica e le diverse componenti rumorose); il secondo, detto realistico,
utilizza del rumore fisiologico acquisito, e quindi reale, e vi aggiunge delle
risposte emodinamiche simulate. Nel primo caso, tutte le grandezze in gioco
sono controllabili ed è possibile verificare se le diverse componenti rumorose
vengono stimate con sufficiente accuratezza. Anche nel secondo caso, la
risposta emodinamica è nota a priori ed è possibile valutare l’accuratezza
dell’algoritmo nella sua stima; tuttavia, il rumore è reale, e quindi lo scenario
molto più simile a quello di una reale acquisizione NIRS.
3.1.1 DATASET IDEALE
Nel cosiddetto dataset ideale, sia la risposta emodinamica sia le componenti
spurie dovute al rumore fisiologico sono generate a partire da un modello
matematico che è stato derivato dalla pratica sperimentale.
In particolare, il modello per la generazione della risposta emodinamica è lo
stesso già menzionato nel capitolo 1, ovvero:
( ) ( )
( ) (3.1)
dove le due funzioni sono funzioni gamma variante:
( )
(
)
( )
( ) (3.2)

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
27
il cui istante iniziale dalla funzione gradino:
( ) { ( )
(3.3)
In questo modello, introdotto in [1], i parametri , e determinano
l’ampiezza, la durata e il tempo di inizio della risposta, mentre il parametro
definisce il rapporto tra il picco della risposta e l’undershoot seguente. In
tabella x sono riportati i valori medi e relative deviazioni standard delle
distribuzioni gaussiane da cui sono derivati i valori dei parametri usati per
creare il dataset in esame, in modo tale da lasciare una certa variabilità sia tra
trial che tra soggetti. Il coefficiente viene impostato pari a coerentemente
con i valori nominali presentati in [17]. L’intervallo inter-stimolo è stato posto
pari a 12 s.
Nella versione simulata, le HRF sono state inserite ad intervalli di tempo non
regolari, in modo da simulare una reale acquisizione NIRS, dove le risposte
emodinamiche, per esempio dovute ad un compito di finger tapping, non hanno
cadenza costante per evitare eventuali sincronizzazioni di fase tra la risposta
emodinamica e quella fisiologica.
Figura 3.1: Esempio di risposte emodinamiche aggiunte al segnale completamente simulato

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
28
Il rumore fisiologico invece, definito con la sigla , è stato implementato
attraverso una sommatoria di 5 sinusoidi, ciascuna con ampiezza, frequenza e
fase diverse, secondo la formula:
∑ ( )
(3.4)
dove , e sono rispettivamente l’ampiezza, la frequenza e la fase della
sinusoide i-esima, mentre è il periodo di campionamento.
I valori attribuiti alle diverse componenti rumorose sono riportati in Tabella
3.1 [16].
Frequency (Hz) Amplitude (nM)
Very low freq.
Low freq.
Vasomotor
Respiratory
Cardiac
Tabella 3.1: Frequenza e ampiezza delle componenti sinusoidali del modello di rumore fisiologico.
Le singole componenti del rumore fisiologico utilizzate nella simulazione sono
raggruppate in un’unica sommatoria che contiene il rumore fisiologico dovuto
al battito cardiaco, alla respirazione, alla pressione sanguigna (quest’ultima
definita onda di Mayer) e alle oscillazioni alle basse e bassissime frequenze.
Alcuni esempi di queste oscillazioni sono rappresentati nelle figure seguenti:

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
29
Figura 3.2: Rumore fisiologico simulato: andamento dell’onda di Mayer.
Figura 3.3: Rumore fisiologico simulato: andamento dell’onda lenta.
Figura 3.4: Rumore fisiologico simulato: andamento dell’onda molto lenta.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
30
Figura 3.5: Rumore fisiologico simulato: andamento del rumore fisiologico dovuto alla respirazione.
Figura 3.6: Rumore fisiologico simulato: andamento del rumore fisiologico dovuto al battito cardiaco.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
31
Figure 3.7: Rumore fisiologico simulato: grafico del rumore fisiologico simulato dato dalla sommatoria delle 5 componenti analizzate separatamente in precedenza (onda di Mayer, onda lenta e molto lenta, rumore cardiaco e respiratorio).
Figura 3.8: Esempio di segnale Long.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
32
Figura 3.9: Esempio di segnale Short.
Infine, rumore bianco additivo e Gaussiano (con ampiezza 400 nM e
deviazione standard di 180 nM) è stato simulato per rappresentare il rumore
strumentale. La somma di rumore strumentale, rumore fisiologico e risposte
emodinamiche da origine ai canali LS, mentre un paio di canali SS per soggetto
sono stati simulati semplicemente sommando il rumore strumentale a quello
fisiologico, senza aggiungervi le HRF.
L’algoritmo è stato implementato inizialmente su 3 soli soggetti, al fine da
poterne estrarre i primi risultati ed ottenere le prime indicazioni. In
corrispondenza di ciascuna risposta evocata è stato implementato
parallelamente un segnale di trigger, costituito da impulsi aventi 5 diversi
possibili valori pari a 1, 2, 3, 4 o 5: i trigger pari a 1 e 2 indicano lo start di una
risposta emodinamica: il trigger 1 simula una HRF ottenuta mediante finger
tapping dell’indice della mano destra, ed è stata aggiunta solo in canali simulati
sopra l’emisfero sinistro. Viceversa, il trigger 2, indica una HRF osservabile nei
canali dell’emisfero destro, a seguito del finger tapping effettuato con l’indice
della mano sinistra. I trigger pari a 3, 4 o 5 non sono stati utilizzati.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
33
Per ciascuno dei due trigger considerati, vi sono un totale di 10 canali: 5 a
risposta “piena” (360 ± 20 nM per il trigger 1 e 420 ± 20 nM per il trigger 2), 2
a risposta “ridotta” (180 ± 20nM per il trigger 1 e 210 ± 20 nM per il trigger
2), 1 a risposta nulla (dove non sono state inserite HRF), e due canali di
riferimento SS. Le numerazioni sono raffigurate nello schema seguente:
Numerazione canali LS
(piena, o “full”) LS
(ridotta o “half”) LS
(0 nM) SS
TRIGGER = 1 1-3-5-11-19 7-9 17 13-15
TRIGGER = 2 21-27-29-31-39 23-25 37 33-35
Tabella 3.2: Schema della numerazione dei canali utilizzato su ciascun soggetto
3.1.2 DATASET REALISTICO
Nel dataset realistico, sono stati simulati due tipi di risposte emodinamiche,
differenti nella forma, nell’ampiezza e nelle latenze. La prima tipologia prevede
una ampiezza di nM e una latenza di s, laddove la
seconda tipologia prevede una ampiezza di nM e una latenza di
s. La distanza tra una risposta e la successiva (indipendentemente
dalla loro tipologia) è definita come una variabile aleatoria uniforme
nell’intervallo s.
Un esempio di risposta emodinamica simulata è fornito in Figura 3.10:

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
34
Figura 3.10: Esempio di risposta emodinamica simulata con i seguenti parametri: , , , , , , [10].
Il rumore fisiologico è invece tratto direttamente da acquisizioni di segnali
fNIRS in condizioni di resting state, dove si suppone non siano presenti risposte
cerebrali evocate. Nei canali SS, nessuna HRF è stata aggiunta al segnale
misurato.
Il fatto di conoscere a priori la risposta emodinamica consente di valutare
l’effettiva capacità dell’algoritmo di rimuovere le componenti spurie e
ricostruire fedelmente l’andamento della risposta emodinamica. A tal fine, nel
capitolo successivo vengono definiti degli indici di performance in grado di
quantificare la bontà della procedura di de-noising e l’accuratezza con cui è
possibile stimare ampiezza e latenza della HRF stimata.
I dati reali di resting state sono stati acquisiti mediante un continuous wave NIRS
system (CW6, TechEn, Medford, MA, USA) ad una frequenza di
campionamento pari a 50 Hz, presso la Optics Division del Martinos Center
for Biomedical Imaging, Massachussets General Hospital, Boston, MA, USA.
La configurazione delle sorgenti e detettori è fornita nella Figura 3.11 [10]: i
nodi identificati da un numero rosso rappresentano le sorgenti, i nodi

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
35
identificati da un numero blu i detettorie le linee verdi indicano le coppie
sorgente-detettore che formano un canale di misurazione (52 canali totali). Si
noti la differenza tra le distanze sorgente-detettore: nei canali standard LS è
pari a circa 3 cm (visibile ad esempio tra la sorgente n° 1 e il detettore n° 1),
nei canali di riferimento SS è invece pari a 0.8 cm (si osservi la linea che
congiunge la sorgente n° 1 e il detettore n° 17). L’array di sorgenti e detettori
era posizionato sulla testa del soggetto in modo da coprire le aree motorie e
frontali bilateralmente.
Figura 3.11: Schema di configurazione delle sorgenti e dei detettori.
Lo schema riassuntivo di tutti i canali è rappresentato in figura 3.12, dove si
distinguono 36 canali Long e 16 Short.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
36
Figura 3.12: Rappresentazione dei canali secondo la distanza sorgente-detettore: in verde i Long Channels, in rosso gli Short Channels
I dati raccolti sono relativi a un campione di sette soggetti sani (numerati
secondo la sequenza 9 - 12 - 13 - 14 - 15 - 16 - 17) a cui è stato chiesto di
sedere su di una sedia, in posizione comoda e rilassata e rimanere fermi con gli
occhi chiusi per circa 8 min. Per tutti i soggetti, ad eccezione del soggetto n°
15, l’acquisizione è stata ripetuta più di una volta, in sessioni distinte di resting
state. In tal modo, si sono ottenuti 14 dataset distinti di resting state.
Al fine di simulare uno scenario il più possibile prossimo a quello reale, ai
campioni dei canali LS relativi a periodi di resting state viene sommata una
risposta emodinamica simulata. Infatti, durante i periodi di resting state, è lecito
assumere che le variazioni di concentrazione di emoglobina ossigenata siano
principalmente dovute al rumore fisiologico e non ad attività cerebrale evocata,
data l’assenza di compiti specifici richiesti al soggetto. La risposta

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
37
emodinamica (HRF) viene generata da un’apposita funzione che implementa il
modello presentato in [16]. Nel caso in esame, ai segnali acquisiti sono
sommate 28 risposte HRF della durata di circa 15 secondi ciascuna. Un
esempio pratico è fornito dalla Figura 3.13 che mostra come le risposte non
siano identiche tra loro ma esibiscano una variabilità che riguarda non solo
l’ampiezza, ma anche la latenza del picco e la durata della risposta.
Figura 3.13: Sequenza di HRF sommate a ciascun canale LS acquisito in resting state.
I canali sono distinti in 3 gruppi: quelli dell’emisfero sinistro (sorgenti da 1 a
6), quelli dell’emisfero destro (sorgenti da 7 a 12) e quelli della parte frontale
(sorgenti da 13 a 15). Osservando la figura 3.11, si nota che la parte sinistra e
destra hanno pertanto lo stesso numero di canali (15), mentre i 6 rimanenti
sono attribuiti alla parte frontale.

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
38
Per quanto riguarda quest’ultimo, i parametri inseriti nel modello per la
simulazione delle HRF sono i seguenti:
Parametro Α Β p
Valore 1600
10 1.3 0.003
2 0.003
0.5 0.0001
1.8 0.0001
0.5
0.0001 2
Nell’emisfero destro sono stati mantenuti gli stessi parametri del precedente ad
eccezione di α, che presenta invece un valore più basso:
Parametro Α Β p
Valore 1600
10 1.3 0.003
2 0.003
0.5 0.0001
1.8 0.0001
0.5
0.0001 2
Essendo α il parametro che determina l’ampiezza delle risposte HRF, l’altezza
dei picchi è diversa a seconda che si tratti di un canale appartenente
all’emisfero destro o sinistro: nel primo infatti è stata mantenuta più bassa,
ovvero circa 75 nM, mentre nel sinistro più elevata, pari a circa 250 nM. A
ciascun parametro, è stata inoltre sommata una componente casuale a
distribuzione normale, al fine di simulare anche la variabilità fisiologica delle
HRF, tipica del caso reale dove le risposte non risultano mai identiche.
Nei canali della parte frontale invece, non sono state inserite risposte
emodinamiche: in tal modo possiamo testare la capacità dell’algoritmo di non
stimare HRF quando queste non sono presenti, ovvero di non generare
attivazioni spurie. Inoltre, si può testare la capacità dell’algoritmo nel ridurre il
rumore fisiologico di fondo.
Nelle figure 3.14 e 3.15 è rappresentata la media delle HRF inserite, sia per
l’emisfero sinistro che destro:

STIMA DELLA RISPOSTA EMODINAMICA MEDIANTE CS-TFT
39
Figura 3.14: Media delle HRF inserite nei canali dell’emisfero sinistro.
Figura 3.15: Media delle HRF inserite nei canali dell’emisfero destro.


41
CAPITOLO 4
ALGORITMO CS-TFT
4.1 PRE-PROCESSING
Una volta caricati i dati relativi al soggetto e alle condizioni di test desiderate
[righe 29-89], si procede alla conversione dell’unità di misura dei campioni
dalla intensità luminosa rilevata dal sensore NIRS alle nano-moli (nM),
utilizzando la legge modificata di Beer-Lambert. Così facendo, la misura
riguarda non più i fotoni luminosi recepiti dal sensore, ma la variazione di
concentrazione dell’emoglobina ossigenata (HbO2) nella zona analizzata.
Ogni canale di acquisizione è formato da una coppia sorgente-detettore. A
seconda della distanza tra questi dispositivi è possibile distinguere i canali short
separation (~0.8 cm), o brevemente canali SS, dai canali long separation (~ 3 cm),
o brevemente canali LS. Nei primi, il segnale acquisito contiene solo rumore
fisiologico e non attività emodinamica cerebrale. Nei secondi, al contrario, è
presente anche la componente informativa, cioè la HRF. Per discriminare gli
uni dagli altri, si è misurata la distanza sorgente-detettore, si è calcolato il
valore medio tra massima e minima distanza e si è utilizzato questo valore
come soglia: i canali con una distanza sorgente-detettore superiore alla soglia
sono classificati come LS, viceversa i canali con una distanza sorgente-
detettore inferiore alla soglia sono classificati come SS [righe 141-157].

ALGORITMO CS-TFT
42
Ogni canale LS è stato associato al canale SS maggiormente correlato.
L’intento è quello di individuare il canale SS i cui campioni siano
un’approssimazione quanto più possibile verosimile del rumore fisiologico
presente nel canale LS in esame. Dal punto di vista implementativo, tale
correlazione viene calcolata attraverso la somma delle differenze in valore
assoluto dei due segnali. Ad ogni canale LS viene associato il canale SS con lo
scostamento minimo [righe 168-174].
I segnali relativi ai canali SS e LS vengono opportunamente filtrati [righe 231-
244] e il segnale SS viene poi scalato per renderlo di ampiezza simile a quello
LS [righe 288-302]. In particolare, viene applicato un filtro passa-banda
nell’intervallo 0.01-0.55 Hz, per eliminare le alte frequenze e i trend alle basse
frequenze, pur preservando la HRF, che ha un’estensione spettrale centrata
intorno a 0.08 Hz.
L’effetto del filtro passa-banda è quello infatti di ridurre significativamente la
distorsione introdotta da una parte del rumore fisiologico, specialmente quello
indotto dal battito cardiaco, che ha una frequenza media di circa 1.1 Hz
nell’adulto. A titolo di esempio, le Figure 4.1 – 4.2 mostra l’effettiva riduzione
del rumore alle alte e bassissime frequenze prodotta dal filtro: con la rimozione
della continua e delle frequenze più basse, il segnale risulta mediamente
centrato attorno allo 0; con il taglio delle frequenze più elevate, anche le
oscillazioni spurie si riducono.
Una volta filtrati i segnali, si rende necessario scalare il canale SS su quello LS
per compensare il diverso percorso intrapreso dai fotoni nei due canali a
lunghezza diversa. Nel caso in esame, la cosiddetta procedura di scaling viene
realizzata mediante un algoritmo di fit polinomiale lineare che consente di
definire non solo il fattore di scala ma anche un eventuale offset additivo.
È bene sottolineare che per ogni coppia di canali LS e SS, la procedura di
scaling viene effettuata su una ridotta porzione di segnale acquisito ad inizio
esperimento e prima della presentazione al soggetto di alcuno stimolo; in
entrambi i canali è lecito quindi attendersi l’assenza di risposta cerebrale.
Altrimenti, ci sarebbe il rischio che l’algoritmo di fit compensi eccessivamente
l’ampiezza del canale SS, fittando anche la HRF, e vanifichi tutti i passaggi
successivi.

ALGORITMO CS-TFT
43
Figura 4.1: Confronto tra segnale originale e segnale filtrato con filtro passa-banda
Figura 4.2: Confronto tra una porzione del segnale originale e la stessa del segnale filtrato
con filtro passa-banda

ALGORITMO CS-TFT
44
In Figura 4.3, si può notare che la fase di fit permette di sovrapporre quasi
perfettamente i canali LS e SS.
Figura 4.3: Confronto tra il canale LS e quello SS sia scalato che non scalato
Una volta filtrato e scalato, il segnale di ogni canale viene suddiviso in trials,
basandosi sul segnale di trigger disponibile. In corrispondenza di ogni trigger,
viene selezionata la porzione di segnale che va da 1 secondo prima del trigger a
13 secondi dopo il trigger, per una durata complessiva di 14 secondi.
Giunti a questo punto, l’algoritmo prevede quattro ulteriori fasi di
elaborazione [14]: l’identificazione delle frequenze delle componenti di rumore
fisiologico, la definizione di un modello di Taylor-Fourier dello stesso rumore,
la sottrazione del rumore e la stima della risposta HRF media. Tale
procedimento è schematizzato in Figura 4.4 ed è illustrato in dettaglio nelle
sezioni che seguono.

ALGORITMO CS-TFT
45
Figura 4.4: Schema dell’algoritmo CS-TFT per la stima della risposta emodinamica [5].
La fase di stima spettrale si basa su una tecnica di super-risoluzione, che mira a
superare i limiti della trasformata discreta di Fourier (DFT) causati dal
troncamento a N coefficienti, e a ridurre di almeno un ordine di grandezza
l’incertezza sulla frequenza. La tecnica in questione sfrutta i principi della
teoria matematica del campionamento compresso: pur lavorando su un
ristretto insieme di campioni, si è in grado di fornire stime con
un’accuratezza pari a quella che si avrebbe lavorando con
campioni. In questo contesto, il parametro viene identificato con il nome di
fattore di super-risoluzione [18].
Evidentemente, passare da a campioni, con è possibile solo sotto
opportune ipotesi matematiche. Matematicamente, questo passaggio fornisce
una soluzione solo se il segnale in esame è sparso nel dominio della frequenza,
ovvero esibisce un numero di coefficienti non nulli o comunque significativi
che è molto inferiore alla sua cardinalità. In tal caso, la teoria del
campionamento compresso garantisce che è possibile arrivare ad una
soluzione risolvendo un problema di minimizzazione di norma . Il problema
non prevede una soluzione in forma chiusa, ma può essere risolto mediante
tecniche di ottimizzazione convessa o tecniche iterative cosiddette greedy, come

ALGORITMO CS-TFT
46
nel caso in esame dove si applica una versione dell’algoritmo Orthogonal
Matching Pursuit [19].
Grazie all’applicazione di questa tecnica di super-risoluzione, pur lavorando su
campioni, si riesce a fornire una stima della DFT su una griglia di
campioni, risultanti cioè da un fattore . La scelta di questi
parametri è dettata dal fatto che, campionando a 50 Hz, ciò consente di
passare da una risoluzione di mHz a mHz. In particolare, la scelta di
un numero dispari di campioni garantisce che i coefficienti della DFT del
segnale si dispongano su una griglia frequenziale con simmetria centrale.
Inoltre, la scelta di un fattore di interpolazione che sia co-primo consente di
minimizzare la probabilità di casi di mal condizionamento numerico nel
calcolo dei nuclei di Dirichlet.
Nel caso in esame, sono stati acquisiti circa 8 minuti si segnale su ciascun
soggetto, ed ogni canale consta di un numero medio di 24239 campioni.
L’algoritmo viene applicato al segnale SS associato al canale LS in questione.
Applicando la DFT su porzioni consecutive di campioni, si
ottengono diversi segmenti, che matematicamente possono essere
rappresentati da un vettore colonna , con una leggera sovrapposizione (pari a
5 campioni) tra un segmento e il successivo.
La DFT del vettore delle misure risulta dalla seguente formula matriciale:
(4.1)
dove è la matrice degli esponenziali complessi della DFT. L’idea alla
base della tecnica di super-risoluzione è quella di sostituire la matrice con
una matrice che renda conto sia del passaggio dal dominio del tempo a quello
della frequenza sia della proiezione su una griglia composta da un numero
superiore di punti. Allo scopo l’equazione (4.1) viene riformulata come:
(4.2)

ALGORITMO CS-TFT
47
dove è la matrice di dimensione le cui colonne contengono dei
nuclei Dirichlet centrati nelle frequenze della griglia più risoluta, i.e. in
con , mentre il vettore di dimensione
assume valori non nulli o comunque significativi solo in corrispondenza delle
attuali frequenze delle componenti rumorose.
A titolo di esempio, in Figura 4.5 è fornita una rappresentazione
tridimensionale della matrice D per e . In un certo senso, la
matrice può essere interpretata come una sorta di dizionario, da cui estrarre
singoli vettori colonna che sommati assieme approssimino lo spettro del
segnale in esame. I singoli elementi della matrice possono essere calcolati dalla
seguente espressione:
( ) [ (
)]
[ (
)]
(
)
(4.3)
dove il primo termine rappresenta la versione campionata del nucleo di
Dirichlet, mentre l’esponenziale complesso consente di traslarlo nel punto
desiderato della griglia più risoluta.

ALGORITMO CS-TFT
48
Figura 4.5: Rappresentazione tridimensionale della matrice D nel caso di e .
Per poter applicare la teoria del campionamento compresso è necessario
ipotizzare che il vettore sia sparso, ossia abbia solo pochi coefficienti non
nulli, ipotesi plausibile nel caso in esame dal momento che ci attendiamo che il
rumore fisiologico consti di al massimo 5 componenti spettrali.
In tale contesto, il sistema si presenta sotto-determinato perché prevede un
numero di incognite molto maggiore del numero di dati e quindi ammette
un numero infinito di soluzioni. Ciò nonostante, sfruttando l’ipotesi di sparsità
del vettore è possibile definire la soluzione del problema come il vettore
con minima norma :
(4.4)

ALGORITMO CS-TFT
49
A tal proposito, è bene sottolineare che la norma è definita come la distanza
in modulo tra i due vettori, mentre la norma quantifica il numero di
coefficienti non nulli della differenza dei due vettori. Per questo motivo, la
norma viene usata per definire il livello di sparsità del segnale, ossia quale sia
il massimo livello di compressione dell’informazione in esso contenuta. Dal
punto di vista formale, la miglior soluzione al problema formulato
nell’equazione 4.4 prevedrebbe la minimizzazione di una norma , tuttavia dal
punto di vista matematico un simile modo di procedere risulta improponibile
in pratica: infatti, il problema presenta complessità non polinomiale e porge
infinite soluzioni. Una plausibile alternativa è fornita dalla norma che pur
non garantendo la massima sparsità restituisce una versione ragionevolmente
compressa del segnale iniziale e dispone di numerosi algoritmi ottimizzati per
la soluzione del problema. Per esempio, in questo caso l’equazione 4.4 viene
risolta mediante l’approccio iterativo noto come Orthogonal Marching Pursuit [19]
che si arresta quando l’energia dei residui della soluzione corrente è inferiore a
una determinata soglia o quando la soluzione corrente ha raggiunto il livello di
sparsità desiderato.
Le frequenze delle componenti significative vengono stimate a partire dagli
indici non nulli del vettore soluzione :
‖ ‖
(4.5)
Stimate le frequenze delle componenti di rumore fisiologico del segnale, è
necessario stabilire con accuratezza la loro ampiezza e fase iniziale. Qualsiasi
algoritmo che adotti una trasformata discreta di Fourier, basandosi su un
modello statico di segnale, fornisce solo una stima mediata sull’intervallo di
osservazione considerato. Nel caso in esame, se il segnale non si mantiene
stazionario nell’arco della finestra di campioni, le stime di ampiezza e fase
iniziale cercheranno di fornire una media dei valori assunti ma non
garantiranno una accuratezza assoluta, in quanto le ipotesi della trasformata
non sono soddisfatte in toto.

ALGORITMO CS-TFT
50
Dal punto di vista dell’analisi funzionale, la trasformata DFT può essere
rappresentata dal suo nucleo o kernel, che viene formulato come segue:
(4.6)
dove è il passo di campionamento. È immediato constatare come se si cerca
di rappresentare un segnale tempo variante solo con questi nuclei,
l’informazione relativa alle dinamiche del segnale venga persa o comunque
distorta e influisca sulla accuratezza delle stime delle componenti statiche.
Per superare questo limite, si ricorre alla cosiddetta trasformata di Taylor-
Fourier (nel seguito indicata con l’acronimo TFT), che svolge un’espansione in
serie di Taylor-Mclaurin della DFT canonica. Analogamente all’equazione 4.6,
il nucleo della TFT può essere espresso come:
( )
(4.7)
dove denota il massimo ordine di derivazione adottato nell’espansione.
Grazie a questa trasformata, si ottiene una miglior accuratezza nella
ricostruzione del rumore fisiologico dovuta al fatto che ciascuna componente
del canale SS viene rappresentata mediante K vettori di coefficienti TFT
linearmente indipendenti tra loro e ciascuno rappresentante peculiari
caratteristiche del segnale. In particolare, i termini di ordine rendono
conto della parte stazionaria del segnale, mentre i termini di ordine superiore
sono in grado di rappresentare al meglio eventuali variazioni, siano esse
regolari e periodiche o transitorie e limitate nel tempo. Un buon compromesso
tra complessità computazionale e accuratezza delle stime è stato individuato in
, ossia in un’espansione in serie di Taylor che si arresti al secondo
ordine di derivazione. Gli eventuali andamenti lineari o rapide oscillazioni
dovute a funzionamenti non lineari dei sensori o a piccoli spostamenti dei
sensori vengono perlopiù proiettati sui termini di ordine superiore e

ALGORITMO CS-TFT
51
consentono una stima più accurata della reale ampiezza delle specifiche
sorgenti di rumore.
Per facilitare il calcolo della TFT, i nuclei definiti dall’equazione 4.7 vengono
usati come colonne di una matrice dove per ogni punto della griglia super-
risoluta vengono definiti vettori. Il vettore dei coefficienti TFT è il
risultato della stima ai minimi quadrati:
( ) (4.8)
dove è il vettore delle misure della partizione di segnale SS in esame e
indica la matrice trasposta hermitiana di B [riga 366]. Il passaggio dai
coefficienti alla stima del rumore fisiologico è immediato e altro non è che la
combinazione lineare dei nuclei TFT opportunamente pesati per il
vettore dei coefficienti [righe 350-354]:
[∑ ∑
] (4.9)
Questo modello del rumore fisiologico può essere sottratto dal rispettivo
segmento nel canale LS. Tale sottrazione non garantisce però la soppressione
di tutto il rumore presente nel canale. Pertanto, si individuano tutti i trial
relativi al medesimo tipo di stimolo e li si media tra di loro, per stimare la
risposta emodinamica media. Tutti i trial sono stati corretti per la baseline,
sottraendo la media del segnale in un intervallo centrato intorno all’istante di
presentazione dello stimolo (da -1 a 1 s), in modo che in tutti i trial la HRF
partisse da 0.

ALGORITMO CS-TFT
52
Figura 4.6: Long Signal raffigurato prima (blu) e dopo la sottrazione del rumore ricostruito mediante algoritmo CS-TFT (verde)
L’operazione di media aritmetica fornisce una stima media della risposta
emodinamica del soggetto al dato stimolo, il cui livello di regolarità dipende dal
numero di trial su cui si effettua la media. Non volendo aumentare a dismisura
questo numero, così da evitare acquisizioni troppo lunghe che possono
indurre fenomeni di stanchezza o abituazione nel soggetto, eventuali
oscillazioni residue sono eliminate mediante un filtraggio di Savitzky-Golay di
ordine 3 e lunghezza pari a 25 campioni.

ALGORITMO CS-TFT
53
Figura 4.7: Media delle HRF dell’emisfero destro prima (rosso) e dopo il filtraggio mediante il filtro di Savitzky-Golay (blu).
4.2 MEDIA DELLE HRF
Su ciascun canale poi, è stata calcolata la media delle HRF ricostruite mediante
algoritmo CS-TFT, mantenendo separata la distinzione ancora una volta tra i
canali dell’emisfero destro e sinistro [righe 472-474 e 477-479]. Infine, le HRF
medie appartenenti a canali dello stesso emisfero sono state mediate tra di
loro, per ottenere una singola HRF media rappresentativa di una delle 3 aree di
interesse: area motoria destra [righe 540-542], area motoria sinistra [righe 536-
538]e area frontale [righe 490-496]. Tali medie sono state confrontate sia a
livello grafico che numerico con le medie delle HRF vere ottenute nelle stesse
aree, e allo stesso tempo anche con quelle ottenute sia mediante ReMCoBA

ALGORITMO CS-TFT
54
che con il metodo di filtraggio passabanda senza uso del canale SS (BP W/O
SS).
4.3 ALCUNI DETTAGLI IMPLEMENTATIVI
Come descritto in particolare nel capitolo 3, per quanto riguarda lo scenario
semi-simulato, sono state aggiunte 28 risposte emodinamiche simulate, ad
intervalli di circa 15 secondi. Il numero 28 non è scelto tuttavia a caso, in
quanto si è deciso di aggiungere le HRF fino al termine del segnale di resting
state (eccezion fatta per i primi 30 secondi di segnale, necessari per lo scaling,
mantenuti originali e su cui nessuna risposta è stata aggiunta), in modo tale che
la media risultante fosse calcolata sul numero massimo di risposte
emodinamiche inseribili.
Le caratteristiche peculiari del codice sono contraddistinte dai seguenti
parametri in particolare:
– N = numero di campioni della griglia originale = 501
– P = fattore di interpolazione della griglia super-risoluta = 11
– Numero di campioni di overlap = 5
– Numero di ordine massimo della serie di Taylor = 2
Tali valori non sono stati modificati particolarmente nello sviluppo del codice,
ma sono rimasti inalterati durante tutta la fase di implementazione fin qui
realizzata, in quanto, come primo studio, si è cercato principalmente di creare
un primo algoritmo in grado di filtrare il segnale NIRS e stimare la risposta
emodinamica, con risultati soddisfacenti rispetto agli altri metodi e tempi
computazionali non eccessivi. I parametri elencati, pertanto, sono da
considerarsi come valori di “default”, ma nessuno può attualmente garantire
che, cambiando anche uno solo di essi, si raggiungano risultati sicuramente
peggiori.

ALGORITMO CS-TFT
55
Valutando le prestazioni del codice dal punto di vista del costo
computazionale, emerge in particolare che i comandi Matlab più onerosi
dell’intero programma sono esattamente due, eseguiti in sequenza uno dopo
l’altro. Essi si riferiscono in particolare alla creazione della matrice super-
risoluta D di dimensioni NxH (dove N = 501 e H = 11*501 = 5511), e alla
norma calcolata sulla diagonale della matrice DT*D, necessaria alla costruzione
della griglia super-risoluta, ovvero:
D = creaMatriceD(N,H) (4.10)
NormACols = sqrt(diag(D'*D)) (4.11)
Attualmente, questi comandi vengono calcolati ogni volta che l’algoritmo
esamina un canale diverso dal precedente, ovvero per un totale di 36 volte nel
nostro caso specifico, pari al numero di canali, per ogni soggetto. I tempi di
tale calcolo, considerato come riferimento un computer di medie prestazioni,
risultano circa di 5 e 7 secondi ciascuno. La creazione della matrice D su
ciascun canale è stata inizialmente mantenuta in virtù di possibili modifiche
alle dimensioni della stessa, con l’ipotesi iniziale che N e H potessero appunto
variare a seconda della tipologia di canale o dell’SNR del segnale analizzato.
Tuttavia, tale ipotesi non è stata ancora attualmente considerata o
implementata, e i valori di N e H risultano inalterati sia in tutti i canali, che in
ciascuno dei 14 data set su cui l’algoritmo è stato testato. Sempre considerando
la matrice D, un ulteriore miglioramento in campo computazionale
deriverebbe dal fatto che la gamma di frequenze attualmente implementata
nella matrice è eccessivamente ampia rispetto alla banda poi effettivamente
considerata: il range su cui varia la matrice super-risoluta va infatti da 0 Hz a
7.8125 Hz, mentre le effettive frequenze di interesse, tra cui quella della
risposta emodinamica, variano in un intervallo molto più ristretto, ovvero da
0.01 Hz a 0.55 Hz (come si nota anche dal filtraggio passabanda che viene
implementato sul segnale prima dell’avvio dell’algoritmo).


57
CAPITOLO 5
RISULTATI
5.1 SCENARIO COMPLETAMENTE SIMULATO
L’algoritmo CS-TFT è relativamente recente e per questo in questo capitolo
viene testato su segnali creati “artificialmente” mediante funzioni random e
componenti sinusoidali, al fine di riprodurre un segnale NIRS realistico.
I segnali NIRS analizzati e confrontati nell’implementazione dell’algoritmo,
sono essenzialmente due: il Long Signal (LS) e il Short Signal (SS). Il primo è
una somma di varie componenti, quali il rumore fisiologico (dato da una
somma di sinusoidi), il rumore di misura, e le HRF, mentre il secondo
comprende solamente il rumore fisiologico e di misura (non include pertanto
le risposte emodinamiche). La struttura dei due canali, come già anticipato nel
capitolo 2, è la seguente:
(5.1)
(5.2)
dove sono le risposte emodinamiche, il rumore fisiologico e
il rumore di misura.

RISULTATI
58
Figura 5.1: Esempio di segnale LS (sopra) e SS (sotto) utilizzati nello scenario completamente simulato.
L’algoritmo è stato inizialmente testato scansionando un solo canale alla volta,
dove l’utente poteva inserire il numero del canale Long e Short su cui
effettuare il calcolo, oltre ovviamente al valore di trigger.
5.1.1 DETTAGLI IMPLEMENTATIVI
Essendo le risposte emodinamiche inserite a cadenza non costante, il segnale è
stato partizionato secondo un numero di campioni sempre diverso, dove
ciascun segmento di segnale poteva contenere, in certi casi, anche più di una
singola onda HRF, specie se molto ravvicinate tra loro. Le partizioni sono
state realizzate facendo riferimento al segnale di trigger, dove lo start

RISULTATI
59
corrispondeva ad un valore di trigger pari a 1, mentre lo stop al successivo
trigger sempre uguale ad 1, ma con la condizione che tra i due valori di trigger
di start e stop e pari a 1 non ce ne fossero altri di diverso valore, quali ad
esempio 3, 4 o 5. Al fine di rendere poi, al momento del calcolo della griglia
super-risoluta, le porzioni tutte di uguale lunghezza, si è fatto uso dello zero-
padding, prendendo come riferimento la porzione più lunga, e adattando le
altre alla stessa lunghezza mediante aggiunta di zeri, ininfluenti alla stima.
Figura 5.2: confronto tra la HRF vera (blu) e quella ricostruita mediante algoritmo CS-TFT
(rossa).

RISULTATI
60
5.1.2 STIMA DELLE HRF
Il risultato illustrato in Figura 5.2, che confronta l’onda HRF stimata con
quella vera: vi è la totale corrispondenza temporale dei rispettivi picchi su
ciascuna risposta emodinamica. Meno ottimale risulta invece la corrispondenza
in ampiezza, in quanto la HRF stimata risulta, nei picchi, sempre inferiore
rispetto a quella vera: in alcuni casi, si nota dal grafico una differenza di anche
70 nM. Nella parte inferiore dell’onda invece, ovvero per valori negativi di
HbO2, l’onda CS-TFT sottostima sempre quella vera, ma questa volta con una
differenza minore e a volte quasi trascurabile. Potremmo pertanto ipotizzare
una cattiva ricostruzione dell’intercetta, probabilmente dovuta allo scaling tra i
due segnali (quello LS e quello SS) effettuato subito dopo il filtraggio, in
quanto l’onda vera sembra essere leggermente “shiftata” verso l’alto rispetto a
quella ricostruita, cosa che avviene su tutti i picchi analizzati. Un’altra ipotesi è
che la costante sottostima sia dovuta ad una rimozione di parte del segnale
utile durante le operazioni di sottrazione del rumore fisiologico.
Essendo in una condizione ideale di totale simulazione, importante risulta
anche l’analisi sull’efficacia della rimozione del rumore fisiologico. Da figura
5.2, si desume come tale sottrazione non sia sufficiente a rimuovere
definitivamente le onde fisiologiche presenti nel segnale di resting state, cioè
dove nessuna risposta emodinamica era presente. Il grafico denota pertanto,
che una volta finita la HRF, il segnale non diventa mai nullo, ma sembra
oscillare attorno allo zero con una sinusoide piuttosto regolare.
5.1.3 STIMA DEL RUMORE
L’obiettivo dell’algoritmo, come precedentemente menzionato, è la
ricostruzione del rumore di fondo, al fine da poterlo poi rimuovere, in un
secondo momento, dal canale Long. Confrontando il rumore stimato con
quello vero lungo tutto il segnale (Figura 5.3), emerge che l’algoritmo fornisce
in uscita un segnale che sembra fittare molto bene il rumore vero, evitando di
fittare le alte frequenze, frutto del rumore di misura. Infatti, l’idea di utilizzare

RISULTATI
61
un modello che fitti solo particolari frequenze presenti nel segnale SS (cioè
quelle fisiologiche), per poi sottrarlo al segnale LS, invece di sottrarre
direttamente il segnale SS, deriva proprio dalla necessità di evitare di introdurre
ulteriore rumore nel canale LS, soprattutto rumore alle alte frequenze.
L’algoritmo qui sviluppato quindi raggiunge bene l’obiettivo, stimando solo la
parte del segnale SS di interesse.
Figura 5.3: Confronto tra il rumore vero (rosso) e quello ricostruito mediante algoritmo (blu).

RISULTATI
62
Figura 5.4: Dettaglio del confronto tra il rumore vero (blu) e quello ricostruito mediante algoritmo (rosso), raffigurato in un range temporale di 100 secondi
In virtù di tale risultato, si è deciso di osservare i residui, dati dalla sottrazione
tra il rumore vero e quello stimato (Figura 5.5):

RISULTATI
63
Figura 5.5: Grafico dei residui del rumore stimato rispetto a quello vero. La media di essi, raffigurata in rosso, è pari a 0.16773
Ad eccezione di alcuni picchi ben visibili, i residui denotano un’ampiezza
abbastanza costante, la cui media totale è approssimabile allo zero (~0.17).
Osservando anche in questo caso una porzione di tali valori (Figura 5.6), si
osserva ancora una volta un andamento regolare, simile ad una sinusoide.

RISULTATI
64
Figura 5.6:. Residui del rumore stimato rispetto a quello vero, raffigurati in un range temporale di 100 secondi
Osservando il particolare trend dell’onda residua, si è deciso di calcolarne la
trasformata di Fourier discreta (DFT) al fine di verificare se vi fosse una
frequenza dominante, ed in caso affermativo confrontarla con la stessa
frequenza delle principali componenti del rumore fisiologico inserito
manualmente.
Come si evince dal grafico della trasformata (Figura 5.7), i residui hanno un
andamento che può propriamente essere assimilabile ad una sinusoide, in
quanto costituiti da una frequenza principale pari a circa 0.23 Hz. L’unica
componente di rumore fisiologico che ha frequenza simile è quella respiratoria
(0.2 0.03 Hz).

RISULTATI
65
Figura 5.7: Grafico della DFT dei residui.
Potremmo dire pertanto che l’algoritmo fatica in questo caso a stimare almeno
una componente del rumore fisiologico, che sembrerebbe principalmente
quella causata dalla respirazione.
5.1.4 CONFRONTO COL FILTRAGGIO PASSABANDA
Con lo scopo di analizzare i primi risultati forniti dal CS-TFT, si è deciso di
confrontarli con gli stessi dati dalla media convenzionale realizzata a seguito
del filtraggio BP già menzionato nel capitolo 2. Come enunciato in precedenza
, è stata mantenuta la separazione nella ricostruzione e nel confronto delle
HRF distinte sia per gli emisferi destro e sinistro, che sia per ampiezza, ovvero
piene (chiamate “Full” nei grafici sottostanti) e ridotte (“Half”).

RISULTATI
66
A)
B)
C)
D)
Figura 5.8: HRF dell’emisfero sinistro: A) HRF a risposta piena a confronto: media delle HRF stimate mediante algoritmo CS-TFT
(rossa), media delle HRF vere simulate (nera), HRF medie di ogni soggetto ottenute mediante algoritmo CS-TFT (verdi).
B) Media delle HRF a risposta piena a confronto: HRF stimate mediante algoritmo CS-TFT (rossa), filtraggio passabanda BP (blu), confrontata con la media delle HRF vere (nero).
C) HRF a risposta ridotta a confronto: media delle HRF stimate mediante algoritmo CS-TFT (rossa), media delle HRF vere simulate (nera), HRF medie di ogni soggetto ottenute mediante algoritmo CS-TFT (verdi).
D) Media delle HRF a risposta ridotta a confronto: HRF stimate mediante algoritmo CS-TFT (rossa), filtraggio passabanda BP (blu), confrontata con la media delle HRF vere (nero).
Come si vede in Figura 5.8 in entrambi i casi, sia per le HRF piene (riquadri A
e B) che ridotte (quadri C e D), l’algoritmo CS-TFT conduce a risultati migliori

RISULTATI
67
rispetto al BP. Accurata sembra essere la stima in latenza, mentre vi è una
leggera sottostima, da parte del CS-TFT rispetto alla HRF vera, per quanto
riguarda l’ampiezza del picco.
A)
B)
C)
D)
Figura 5.9: HRF dell’emisfero destro: A) HRF a risposta piena a confronto: media delle HRF stimate mediante algoritmo CS-TFT
(rossa), media delle HRF vere simulate (nera), HRF medie di ogni soggetto ottenute mediante algoritmo CS-TFT (verdi).
B) Media delle HRF a risposta piena a confronto: HRF stimate mediante algoritmo CS-TFT (rossa), filtraggio passabanda BP (blu), confrontata con la media delle HRF vere (nero).
C) HRF a risposta ridotta a confronto: media delle HRF stimate mediante algoritmo CS-TFT (rossa), media delle HRF vere simulate (nera), HRF medie di ogni soggetto ottenute mediante algoritmo CS-TFT (verdi).
D) Media delle HRF a risposta ridotta a confronto: HRF stimate mediante algoritmo CS-TFT (rossa), filtraggio passabanda BP (blu), confrontata con la media delle HRF vere (nero).

RISULTATI
68
Per quanto riguarda la stima delle HRF nell’emisfero destro (Figura 5.9), si
osserva un fit ottimo per quanto riguarda il CS-TFT rispetto alle HRF vere,
mentre particolarmente instabile risulta la parte discendente dell’onda,
costituita da evidenti oscillazioni presenti sia sulle HRF piene che ridotte.
Per confrontare le performance dei metodi in maniera quantitativa si sono
calcolati degli indici di errore di stima. Questo è stato possibile poiché ci si
trova in uno scenario simulato dove le HRF vere sono note. In tal modo è
stato possibile quantificare l’accuratezza di ciascun metodo nella stima
dell’andamento temporale delle risposte emodinamiche e nella stima di alcune
metriche derivanti da essa, come l’ampiezza e la latenza del picco massimo. In
particolare la stima dell’errore percentuale in ampiezza, è calcolata mediante la
formula:
| ( ) ( )|
| ( )| (5.3)
dove è il segnale vero (ovvero le HRF simulate note), mentre è la
HRF stimata da uno degli algoritmi. Come si desume dalla formula, l’errore è
stimato in percentuale e considera il rapporto tra la differenza in ampiezza dei
rispettivi picchi (val_picco) e il valore di picco del segnale vero.
E_amp % (LEFT side, FULL HRF)
CS-TFT BP
[W/O SS]
E_amp % (LEFT side, HALF HRF)
CS-TFT BP
[W/O SS]
Subj1 10,04 3,74 Subj1 9,47 6,02
Subj2 25,05 50,36 Subj2 8,10 50,34
Subj3 16,46 5,10 Subj3 17,02 14,53
Tabella 5.1: Tabella errore in ampiezza emisfero sinistro. Tabella contenente i valori di errore in ampiezza delle risposte emodinamiche stimate rispetto a quelle vere, sia per le piene che per le ridotte, considerando solo quelle stimate nei canali dell’emisfero sinistro, e calcolate distintamente su ciascun volontario.

RISULTATI
69
E_amp % (RIGHT side, FULL HRF)
CS-TFT BP
[W/O SS]
E_amp % (RIGHT side, HALF HRF)
CS-TFT BP
[W/O SS]
Subj1 12,26 23,89 Subj1 13,10 36,36
Subj2 12,57 8,49 Subj2 66,34 46,97
Subj3 7,45 19,28 Subj3 10,23 43,43
Tabella 5.2:. Tabella errore in ampiezza emisfero destro. Tabella contenente i valori di errore in ampiezza delle risposte emodinamiche stimate rispetto a quelle vere, sia per le piene che per le ridotte, considerando solo quelle stimate nei canali dell’emisfero destro, e calcolate distintamente su ciascun volontario.
L’errore percentuale nella stima della latenza del picco, misurando pertanto
l’eventuale “sfasamento temporale” tra la HRF vera e quella stimata è calcolato
come:
| ( ) ( )|
| ( )| (5.4)
dove t_picco indica l’istante temporale (in secondi) del picco massimo.
E_lat % (LEFT side, FULL HRF)
CS-TFT BP
[W/O SS]
E_lat % (LEFT side, HALF HRF)
CS-TFT BP
[W/O SS]
Subj1 0,50 5,58 Subj1 0,00 10,21
Subj2 6,07 9,10 Subj2 6,22 13,69
Subj3 12,75 9,19 Subj3 7,66 3,83
Tabella 5.3: Tabella errore in latenza emisfero sinistro. Tabella contenente i valori di errore
in latenza delle risposte emodinamiche stimate rispetto a quelle vere, sia per le piene che per
le ridotte, considerando solo quelle stimate nei canali dell’emisfero sinistro, e calcolate
distintamente su ciascun volontario.

RISULTATI
70
E_lat %
(RIGHT side, FULL HRF)
CS-TFT BP
[W/O SS]
E_lat %
(RIGHT side, HALF HRF)
CS-TFT BP
[W/O SS]
Subj1 0,45 0,46 Subj1 0,00 1,16
Subj2 6,95 8,80 Subj2 25,47 27,79
Subj3 2,29 2,32 Subj3 2,32 2,32
Tabella 5.4: Tabella errore in latenza emisfero destro. Tabella contenente i valori di errore in
latenza delle risposte emodinamiche stimate rispetto a quelle vere, sia per le piene che per le
ridotte, considerando solo quelle stimate nei canali dell’emisfero destro, e calcolate
distintamente su ciascun volontario.
Infine, al fine di determinare con accuratezza l’errore commesso nella stima
dell’andamento temporale della HRF, si è calcolato un altro indice di errore,
l’errore totale, mediante la formula:
(5.5)
In termini pratici, l’errore totale considera la differenza, campione per
campione, tra le due risposte emodinamiche, e ne calcola la norma quadratica.
E_tot % (LEFT side, FULL HRF)
CS-TFT BP
[W/O SS]
E_tot % (LEFT side, HALF HRF)
CS-TFT BP
[W/O SS]
Subj1 1,21 10,70 Subj1 1,47 34,30
Subj2 11,33 26,06 Subj2 14,62 43,81
Subj3 11,07 16,25 Subj3 11,88 31,76
Tabella 5.5: Tabella errore totale emisfero sinistro. Tabella contenente i valori di errore
totale delle risposte emodinamiche stimate rispetto a quelle vere, sia per le piene che per le
ridotte, considerando solo quelle stimate nei canali dell’emisfero sinistro, e calcolate
distintamente su ciascun volontario.

RISULTATI
71
E_tot %
(RIGHT side, FULL HRF)
CS-TFT BP
[W/O SS]
E_tot %
(RIGHT side, HALF HRF)
CS-TFT BP
[W/O SS]
Subj1 2,73 9,75 Subj1 3,60 25,18
Subj2 14,65 14,99 Subj2 122,37 77,12
Subj3 6,59 16,25 Subj3 56,28 101,54
Tabella 5.6: Tabella errore totale emisfero destro. Tabella contenente i valori di errore totale
delle risposte emodinamiche stimate rispetto a quelle vere, sia per le piene che per le ridotte,
considerando solo quelle stimate nei canali dell’emisfero destro, e calcolate distintamente su
ciascun volontario.
In generale, dalle Tabelle 5.1, 5.2, 5.3, 5.4, 5.5 e 5.6, si osserva che le
percentuali di errore date dal BP sono sempre maggiori di quelle offerte dal
CS-TFT. La differenza minima si osserva nell’errore in latenza, in quanto i
risultati sono simili, mentre più marcato risulta lo scarto nella stima del picco.
Dopo questo primo test, si è passati a testare l’algoritmo in una situazione più
vicina a quella reale, implementandolo in uno scenario semi-simulato.
5.2 SCENARIO SEMI-SIMULATO
In tale scenario, il canale standard è stato realizzato sommando delle HRF
simulate a dati reali di resting state acquisiti su alcuni volontari. Rispetto al caso
completamente simulato realizzato nella prima fase dunque, il rumore
fisiologico che in precedenza era stato creato in simulazione mediante una
sommatoria di 5 sinusoidi a frequenze diverse, ora viene invece realmente
acquisito.
Come enunciato nel paragrafo 3.1.2, i segnali utilizzati per testare l’algoritmo
sono in particolare 14, provenienti da 7 soggetti sani e acquisiti in sessioni
distinte di resting state.

RISULTATI
72
5.2.1 DETTAGLI IMPLEMENTATIVI
Lo schema di funzionamento dell’algoritmo qui implementato, non di molto si
discosta rispetto a quello adottato nella prima fase, eccezion fatta per le
partizioni di segnale che qui non contengono alcun zero-padding, in quanto le
HRF sono state inserite ad intervalli regolari. Si è in tal modo provveduto a
segmentare tutto il segnale acquisito in parti uguali facendo corrispondere
l’inizio di ogni segmento con l’inizio di ciascun trial. L’obiettivo rimane il
medesimo, ovvero quello di stimare il rumore fisiologico a partire dal canale di
riferimento (SS), sottrarlo al segnale del canale standard (LS) per ridurre il
rumore fisiologico presente ed infine stimare la HRF media. Con lo scopo di
analizzare l’algoritmo in una visione più ampia e dettagliata, si è deciso di
estendere lo studio confrontando le prestazioni fin qui raggiunte con quelle
ottenute mediante algoritmi già implementati in passato, quali ad esempio la
media convenzionale realizzata a seguito del filtraggio passabanda (BP) e la
stima ReMCoBA, descritte entrambe nel capitolo 2.
5.2.2 STIME OTTENUTE E CONFRONTO CON FILTRAGGIO BP E
METODO REMCOBA
Nei grafici sottostanti sono raffigurate, separatamente per emisfero destro e
sinistro, le risposte emodinamiche medie stimate sia con l’algoritmo CS-TFT,
che con i metodi usati per il confronto, ovvero ReMCoBA e filtraggio
passabanda (BP W/O SS). Sono riportate inoltre in verde le medie delle HRF
di ciascuno dei 14 soggetti considerati stimate utilizzando il campionamento
compresso di Taylor Fourier, per dare un’idea della variabilità inter-individuale
nelle stime ottenute con questo algoritmo.

RISULTATI
73
A)
B)
Figura 5.10: Emisfero sinistro, HRF a confronto: A) Media delle HRF stimate mediante algoritmo CS-TFT (rossa), media delle HRF vere
simulate (nera), HRF medie di ogni soggetto ottenute mediante algoritmo CS-TFT (verdi).
B) HRF stimate mediante algoritmo CS-TFT (rossa), filtraggio passabanda BP (blu), ReMCoBA (magenta) confrontata con la media delle HRF vere (nero).
Osservando la Figura 5.10, appare chiara fin da subito la forte differenza nella
stima in ampiezza del picco della risposta emodinamica. Nessuno dei metodi
qui a confronto riesce a fittare il picco della HRF vera, che si discosta
notevolmente con uno scarto di circa 50 nM per il CS-TFT e addirittura di 100
nM per l’algoritmo ReMCoBA. L’algoritmo CS-TFT e il filtraggio passabanda
sembrano condurre a risultati simili per quanto riguarda la stima del picco, ma
diversi nella fase discendente dell’onda, in quanto il filtraggio comporta una
deriva molto maggiore (circa 50 nM) sia rispetto all’ HRF vera che a
ReMCoBA e CS-TFT. La latenza del picco sembra tuttavia essere abbastanza
buona.

RISULTATI
74
A)
B)
Figura 5.11: Emisfero destro, HRF a confronto: A) Media delle HRF stimate mediante algoritmo CS-TFT (rossa), media delle HRF vere
simulate (nera), HRF medie di ogni soggetto ottenute mediante algoritmo CS-TFT (verdi).
B) HRF stimate mediante algoritmo CS-TFT (rossa), filtraggio passabanda BP (blu), ReMCoBA (magenta) confrontata con la media delle HRF vere (nero).
Sul lato opposto, ovvero nell’emisfero destro (Figura 5.11), la situazione
appare alquanto diversa, in quanto il fit tra HRF vera e stimata mediante CS-
TFT appare ottimo per quanto riguarda la stima del picco. Tuttavia, la HRF
stimata non riesce a tornare a baseline, rimanendo ad un valore di circa 15 – 20
nM, per entrambi i metodi implementati. Anche nella fase ascendente vi è uno
scostamento, dove entrambe le HRF ricostruite non fittano i dati reali
risultando “in anticipo” rispetto all’onda simulata di circa 1 secondo.
L’algoritmo ReMCoBA tuttavia ha una peggiore stima in ampiezza del picco,
dal momento che, come nel caso dell’emisfero sinistro, presenta un andamento
più smooth: il picco medio stimato è infatti inferiore rispetto al vero di circa 20
nM. Poiché l’ampiezza delle risposte inserite nell’emisfero destro risulta circa
un terzo di quella dell’emisfero sinistro, il rapporto segnale-rumore nei canali
dell’emisfero destro è molto più basso. Questo è il motivo principale
dell’aumento di variabilità inter-individuale tra le stime medie dei diversi
soggetti, che risultano anche divergere maggiormente dalla HRF vera.
Oltre alla stima dell’errore calcolata separatamente per gli emisferi destro e
sinistro come nello scenario completamente simulato, nei canali dove non

RISULTATI
75
erano state aggiunte HRF simulate (canali posizionati frontalmente), si è
calcolato l’RMSE (cioè la radice quadrata dell’errore quadratico medio) come
metrica quantitativa, per confrontare la capacità degli algoritmi di stimare
l’assenza di HRF e, di conseguenza, la loro abilità nell’evitare di stimare bias.
Per ognuna delle metriche calcolate, una serie di t-test a due code a campioni
appaiati sono stati calcolati per confrontare le performance degli algoritmi
anche da un punto di vista statistico.
In Tabella 5.7 sono riportati, per l’emisfero sinistro, i valori medi dell’errore in
ampiezza di ogni soggetto e in Figura X gli scatter plot (dove il CS-TFT è
confrontato sia con il filtraggio passa-banda [BP W/O SS] che con l’algoritmo
ReMCoBA).
E_amp % (LEFT side)
CS-TFT BP
[W/O SS] ReMCoBA
Subj9 rs1 33,25 31,65 49,29
Subj9 rs2 21,18 18,98 38,54
Subj12 rs1 27,42 24,31 47,14
Subj12 rs2 26,85 41,33 29,19
Subj13 rs1 28,22 14,88 37,32
Subj13 rs2 17,27 20,03 34,37
Subj14 rs1 35,78 25,84 50,46
Subj14 rs2 29,63 54,88 53,91
Subj14 rs3 28,70 16,07 36,58
Subj15 rs1 37,80 43,71 33,09
Subj16 rs1 13,13 24,04 29,65
Subj16 rs2 13,23 24,17 14,47
Subj17 rs1 18,57 28,83 21,50
Subj17 rs2 17,84 16,78 30,34
MEAN 24,92 27,54 36,13
STD 17,09 17,26 14,62
Tabella 5.7: Tabella errore in ampiezza emisfero sinistro. Tabella contenente i valori di errore in ampiezza delle risposte emodinamiche stimate rispetto a quelle vere, considerando solo quelle stimate nei canali dell’emisfero sinistro, e calcolate distintamente su ciascun volontario.

RISULTATI
76
T-TEST E_amp (LEFT)
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs.
ReMCoBA
P-VALUE 0,1960 0,0001 0,0193
Tabella 5.8: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri
due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica differenze
statisticamente significative tra gli algoritmi confrontati.
E’ evidente come la stima media in ampiezza dell’algoritmo ReMCoBA risulta
peggiore rispetto ad entrambi gli altri metodi (36,13 % contro il 27,53 % del
filtraggio BP W/O SS e i 24,92 % del CS-TFT). Il motivo potrebbe essere
riconducibile ad un’eccessiva riduzione del rumore fisiologico da parte di
questo algoritmo, che inevitabilmente comporta una rimozione di parte del
segnale utile. Un riscontro in questo verso si ha dalla miglior performance del
metodo BP W/O SS rispetto a ReMCoBA, che, al contrario di ReMCoBA,
non prevede nessuna sottrazione del rumore fisiologico proveniente dal canale
SS. La miglior performance del metodo CS-TFT potrebbe indicare una miglior
capacità ed accuratezza di questo algoritmo, rispetto a ReMCoBA, nello
stimare il rumore fisiologico dal canale SS.
A)
B)
Figura 5.12: A) Scatter plot dell’errore in ampiezza per confrontare la performance dell’algoritmo CS-
TFT (asse delle x) e di quello di filtraggio passabanda (asse delle y) per l’emisfero sinistro. Ogni asterisco rappresenta un soggetto di Tabella 5.7.
B) Scatter plot dell’errore in ampiezza per confrontare la performance dell’algoritmo CS-TFT (asse delle x) e di quello di Bayes (asse delle y) per l’emisfero sinistro. Ogni cerchio rappresenta un soggetto di Tabella 5.7.

RISULTATI
77
Lo scatter plot conferma quanto appena descritto: nel confronto tra BP W/O
SS e CS-TFT i risultati sono disposti equamente ai lati della diagonale (7 valori
contro 7), mentre lo stesso non si può dire nel secondo grafico, dove l’errore
in stima dell’ampiezza da parte di ReMCoBA è maggiore in 13 soggetti su 14
rispetto all’algoritmo CS-TFT.
Le Tabelle 5.9 e 5.10 riportano gli analoghi risultati ottenuti per l’emisfero
destro.
E_amp %
(RIGHT side) CS-TFT
BP
[W/O SS] ReMCoBA
Subj9 rs1 80,31 86,55 73,76
Subj9 rs2 80,15 76,00 59,76
Subj12 rs1 60,29 102,36 54,63
Subj12 rs2 71,75 261,95 58,74
Subj13 rs1 40,27 145,92 29,24
Subj13 rs2 47,15 72,98 35,30
Subj14 rs1 27,57 255,51 24,90
Subj14 rs2 48,12 71,81 44,71
Subj14 rs3 70,82 152,22 38,73
Subj15 rs1 95,78 87,97 66,81
Subj16 rs1 65,91 43,22 48,55
Subj16 rs2 76,00 42,91 74,74
Subj17 rs1 88,16 196,89 89,82
Subj17 rs2 65,87 127,93 44,11
MEAN 65,58 123,16 53,13
STD 56,42 67,50 42,03
Tabella 5.9: Tabella errore in ampiezza emisfero destro. Tabella contenente i valori di errore in ampiezza delle risposte emodinamiche stimate rispetto a quelle vere, considerando solo quelle stimate nei canali dell’emisfero destro, e calcolate distintamente su ciascun volontario.

RISULTATI
78
T-TEST E_amp (RIGHT)
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs.
ReMCoBA
P-VALUE 0,0083 0,0003 0,0024
Tabella 5.10: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri
due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica differenze
statisticamente significative tra gli algoritmi confrontati.
Sul lato destro, a più basso SNR, notiamo una situazione inversa rispetto al
sinistro per quanto riguarda il confronto tra CS-TFT e ReMCoBA, con il
primo che commette una maggiore percentuale di errore di stima del picco
rispetto al secondo. Confrontando la media dell’errore col grafico di Figura
5.11 B), tale risultato appare inveritiero, in quanto il grafico denota un fitting
ottimo del picco HRF da parte del CS-TFT, decisamente migliore rispetto a
ReMCoBA.
Tuttavia, va detto che il confronto di tale grafico con i risultati in Tabella 5.9
sarebbe improprio, in quanto basato su misurazioni di diverso tipo: dal
momento che l’errore in ampiezza è infatti calcolato in modulo, non si
percepisce la tipologia della stima (se ad esempio vi è una sotto o sovrastima),
cosa di cui invece l’andamento dell’HRF nel grafico tiene in considerazione.
Osservando il grafico sembrerebbe pertanto che il CS-TFT ha una maggior
accuratezza del ReMCoBA rispetto alla stima sul picco, ma i valori della tabella
denotano che quest’ultimo ha una maggior precisione.
Il metodo BP W/O SS ha invece una performance nettamente inferiore agli
altri due metodi, mettendo in evidenza come la sottrazione del rumore
fisiologico sia di particolare importanza soprattutto nelle situazioni di dati con
basso SNR.

RISULTATI
79
A)
B)
Figura 5.13: A) Scatter plot dell’errore in ampiezza per confrontare la performance dell’algoritmo CS-
TFT (asse delle x) e di quello di filtraggio passabanda (asse delle y) per l’emisfero destro. Ogni asterisco rappresenta un soggetto di Tabella 5.9.
B) Scatter plot dell’errore in ampiezza per confrontare la performance dell’algoritmo CS-TFT (asse delle x) e di quello di Bayes (asse delle y) per l’emisfero destro. Ogni cerchio rappresenta un soggetto di Tabella 5.9.
Le Tabelle 5.11 e 5.13 riportano gli errori percentuali per latenza,
rispettivamente nell’emisfero sinistro e destro. I valori dei p-value sono
riportati, per gli stessi due casi, in Tabella 5.12 e 5.14.

RISULTATI
80
E_lat %
(LEFT side) CS-TFT
BP
[W/O SS] ReMCoBA
Subj9 rs1 6,20 5,88 6,19
Subj9 rs2 7,18 5,62 9,67
Subj12 rs1 45,73 29,28 48,20
Subj12 rs2 13,82 29,04 27,08
Subj13 rs1 11,88 13,60 14,11
Subj13 rs2 7,96 13,38 15,26
Subj14 rs1 9,14 12,08 6,90
Subj14 rs2 6,20 7,67 10,35
Subj14 rs3 4,24 19,44 10,17
Subj15 rs1 10,07 28,07 18,92
Subj16 rs1 4,44 7,57 10,77
Subj16 rs2 8,81 5,68 9,10
Subj17 rs1 7,80 10,29 8,38
Subj17 rs2 11,02 12,65 11,91
MEAN 11,04 14,30 14,79
STD 11,97 14,51 16,70
Tabella 5.11: Tabella errore in latenza emisfero sinistro. Tabella contenente i valori di errore in latenza delle risposte emodinamiche stimate rispetto a quelle vere, considerando solo quelle stimate nei canali dell’emisfero sinistro, e calcolate distintamente su ciascun volontario.
T-TEST E_lat (LEFT)
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs
ReMCoBA
P-VALUE 0,0915 0,0025 0,3976
Tabella 5.12: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica differenze statisticamente significative tra gli algoritmi confrontati.

RISULTATI
81
Emerge dai risultati che in latenza l’algoritmo da noi proposto si comporta
bene, fornendo risultati migliori, anche se non con ampio margine di
differenza, sia rispetto all’approccio ReMCoBA che al semplice filtraggio BP
W/O SS (11,04% del CS-TFT a fronte di 14,3% del BP W/O SS e 14,79% del
ReMCoBA). Lo stesso risultato è visibile dallo scatter plot, dove in entrambi i
grafici i valori percentuali dell’errore propendono in tutti e due i casi a favore
del CS-TFT (4-10 per il CS-BP e 1-12 per il CS-ReMCoBA).
A)
B)
Figura 5.14:
A). Scatter plot dell’errore in latenza per confrontare la performance dell’algoritmo CS-TFT
(asse delle x) e di quello di filtraggio passabanda (asse delle y) per l’emisfero sinistro. Ogni
asterisco rappresenta un soggetto di Tabella 5.11.
B) Scatter plot dell’errore in latenza per confrontare la performance dell’algoritmo CS-TFT
(asse delle x) e di quello di Bayes (asse delle y) per l’emisfero sinistro. Ogni cerchio
rappresenta un soggetto di Tabella 5.11.

RISULTATI
82
E_lat %
(RIGHT side) CS-TFT
BP
[W/O SS] ReMCoBA
Subj9 rs1 46,22 57,88 59,20
Subj9 rs2 33,15 38,49 33,92
Subj12 rs1 48,91 42,75 70,18
Subj12 rs2 84,49 124,79 122,02
Subj13 rs1 36,15 47,50 21,24
Subj13 rs2 85,16 103,86 88,80
Subj14 rs1 69,29 179,46 91,45
Subj14 rs2 38,73 138,91 103,65
Subj14 rs3 55,14 153,65 92,02
Subj15 rs1 43,19 81,31 49,35
Subj16 rs1 21,88 76,01 26,03
Subj16 rs2 37,15 23,04 18,73
Subj17 rs1 25,87 12,52 28,66
Subj17 rs2 32,09 56,86 63,30
MEAN 46,96 81,22 62,04
STD 50,61 47,33 52,61
Tabella 5.13: Tabella errore in latenza emisfero destro. Tabella contenente i valori di errore in latenza delle risposte emodinamiche stimate rispetto a quelle vere, considerando solo quelle stimate nei canali dell’emisfero destro, e calcolate distintamente su ciascun volontario.
T-TEST E_lat (RIGHT)
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs.
ReMCoBA
P-VALUE 0,0047 0,0128 0,0210
Tabella 5.14: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica differenze statisticamente significative tra gli algoritmi confrontati.

RISULTATI
83
Sul lato destro a più basso SNR le differenze tra i vari metodi implementati
sono maggiori e i valori ottenuti ben distanti tra loro: il vantaggio, ancora una
volta, è osservabile particolarmente per l’algoritmo qui proposto (46,96% di
errore di stima della latenza), che offre una percentuale di errore minore di
circa il 15% rispetto all’approccio ReMCoBA, e del 34% rispetto al BP W/O
SS. Nello scatter plot emerge che in soli 3 casi su 14 i valori di errore in latenza
ottenuti da ReMCoBA e BP W/O SS sono stati inferiori a quelli dati dal CS-
TFT.
A)
B)
Figura 5.15: A) Scatter plot dell’errore in latenza per confrontare per l’emisfero destro la performance
dell’algoritmo CS-TFT (asse delle x) e di quello di filtraggio passabanda (asse delle y) per l’emisfero destro. Ogni asterisco rappresenta un soggetto di Tabella 5.13.
B) Scatter plot dell’errore in latenza per confrontare per l’emisfero destro la performance dell’algoritmo CS-TFT (asse delle x) e di quello di Bayes (asse delle y) per l’emisfero destro. Ogni cerchio rappresenta un soggetto di Tabella 5.13.
Infine, come per lo scenario completamente simulato, si è calcolata anche la
percentuale di errore. Le Tabelle 5.15 e 5.17 riportano gli errori percentuali
calcolati sulla stima dell’intera curva, rispettivamente nell’emisfero sinistro e
destro. I valori dei p-value sono riportati, per gli stessi due casi, in Tabella 5.16
e 5.18.

RISULTATI
84
E_tot %
(LEFT side) CS-TFT
BP
[W/O SS] ReMCoBA
Subj9 rs1 27,87 31,98 35,32
Subj9 rs2 11,32 11,30 18,77
Subj12 rs1 93,08 104,67 131,41
Subj12 rs2 81,11 177,95 49,20
Subj13 rs1 19,60 38,20 20,36
Subj13 rs2 14,45 35,54 20,26
Subj14 rs1 34,27 129,14 46,27
Subj14 rs2 24,46 85,15 40,58
Subj14 rs3 17,02 63,19 22,79
Subj15 rs1 93,95 96,40 63,64
Subj16 rs1 11,11 23,33 15,88
Subj16 rs2 16,87 23,99 17,96
Subj17 rs1 19,97 39,22 17,58
Subj17 rs2 22,85 50,07 23,23
MEAN 34,85 65,01 37,38
STD 36,84 45,33 28,87
Tabella 5.15: Tabella errore totale emisfero sinistro. Tabella contenente i valori di errore
totale delle risposte emodinamiche stimate rispetto a quelle vere, considerando solo quelle
stimate nei canali dell’emisfero sinistro, e calcolate distintamente su ciascun volontario.
T-TEST E_tot (LEFT)
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs.
ReMCoBA
P-VALUE 0,0021 0,2980 0,0104
Tabella 5.16: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri
due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica differenze
statisticamente significative tra gli algoritmi confrontati.

RISULTATI
85
Dalla Tabella 5.15 emerge come il metodo BP W/O SS commetta l’errore
maggiore (quasi doppio rispetto agli altri metodi, 65% contro i 34% e 37% di
CS-TFT e ReMCoBA), sottolineando ulteriormente l’importanza di utilizzare il
segnale proveniente dal canale SS per ridurre il rumore fisiologico e stimare la
HRF. L’algoritmo CS-TFT commette in media un errore leggermente inferiore
rispetto a ReMCoBA, anche se non ci sono differenze statisticamente
significative tra i risultati dei due algoritmi. Lo scatter plot dei risultati di questi
due algoritmi infatti, denota che i valori sono abbastanza bilanciati attorno alla
diagonale, anche se il loro numero propende a favore del CS-TFT (2 contro 8,
con i restanti disposti intorno alla diagonale).
A)
B)
Figura 5.16: A) Scatter plot dell’errore totale per confrontare la performance dell’algoritmo CS-TFT (asse
delle x) e di quello di filtraggio passabanda (asse delle y) per l’emisfero sinistro. Ogni asterisco rappresenta un soggetto di Tabella 5.15.
B) Scatter plot dell’errore totale per confrontare la performance dell’algoritmo CS-TFT (asse delle x) e di quello di Bayes (asse delle y) per l’emisfero sinistro. Ogni cerchio rappresenta un soggetto di Tabella 5.15.

RISULTATI
86
E_tot % (RIGHT side)
CS-TFT BP
[W/O SS] ReMCoBA
Subj9 rs1 278,23 260,30 252,53
Subj9 rs2 864,14 822,30 513,62
Subj12 rs1 317,94 433,11 265,74
Subj12 rs2 443,18 2654,46 421,13
Subj13 rs1 86,35 647,12 63,75
Subj13 rs2 192,60 363,23 181,30
Subj14 rs1 181,89 1444,77 205,60
Subj14 rs2 314,62 621,07 284,99
Subj14 rs3 362,88 1010,02 183,08
Subj15 rs1 448,53 655,96 335,73
Subj16 rs1 224,31 274,90 204,34
Subj16 rs2 268,68 224,14 245,85
Subj17 rs1 450,04 1022,67 404,89
Subj17 rs2 325,40 839,40 174,59
MEAN 339,91 805,25 266,94
STD 461,75 593,74 297,75
Tabella 5.17: Tabella errore totale emisfero destro. Tabella contenente i valori di errore
totale delle risposte emodinamiche stimate rispetto a quelle vere, considerando solo quelle
stimate nei canali dell’emisfero destro, e calcolate distintamente su ciascun volontario.
T-TEST E_tot (RIGHT)
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs.
ReMCoBA
P-VALUE 0,0073 0,0077 0,0026
Tabella 5.18: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri
due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica
differenze statisticamente significative tra gli algoritmi confrontati.

RISULTATI
87
Come per le altre tipologie di errore in precedenza considerate, anche in
questo caso il lato destro, a più basso SNR, presenta valori di errore medio
totale molto maggiori e più eterogenei. ReMCoBA questa volta appare in netto
“vantaggio” rispetto a CS-TFT, con uno scarto in percentuale del 73%.
Nettamente superiore invece l’errore percentuale medio commesso da BP
W/O SS, che supera di circa il triplo ReMCoBA (805,25% contro 266,94%) e
di più del doppio CS-TFT (805,25% contro 339,91%).
Nello scatter plot che raffigura CS-TFT e ReMCoBA a confronto, per la prima
volta rispetto ai grafici precedenti emerge che gli errori propendono tutti a
sfavore di CS-TFT (13 contro 1), anche se buona parte di questi, per la
precisione 9, sono situati a ridosso della diagonale.
A)
B)
Figura 5.17:
A) Scatter plot dell’errore totale per confrontare la performance dell’algoritmo CS-TFT (asse
delle x) e di quello di filtraggio passabanda (asse delle y) per l’emisfero destro. Ogni
asterisco rappresenta un soggetto di Tabella 5.17.
B) Scatter plot dell’errore totale per confrontare la performance dell’algoritmo CS-TFT (asse
delle x) e di quello di Bayes (asse delle y) per l’emisfero destro. Ogni cerchio rappresenta
un soggetto di Tabella 5.17.
La media totale e la relativa deviazione standard per le tre metriche di errore
considerate, per ciascun algoritmo implementato, e per i due emisferi, è
raffigurata nei grafici a barre sottostanti. Si nota sin da una prima osservazione

RISULTATI
88
che le percentuali di errore si differenziano molto a seconda dell’emisfero
considerato: con HRF di ampiezza più alta (emisfero sinistro, circa 250 nM) e
quindi dati con SNR più alto, le prestazioni migliori sono ottenute
dall’algoritmo qui descritto, ovvero CS-TFT, che permette di ottenere una
stima migliore delle HRF sia in ampiezza che in latenza. Come dai grafici e
dalle tabelle precedenti, emerge come la stima dell’ampiezza e della latenza del
picco di ReMCoBA sia in media peggiore del più semplice BP W/O SS. In
quanto ad errore totale invece, CS-TFT e ReMCoBA sembrano avere circa gli
stessi risultati, con una miglior stima ancora una volta leggermente a favore di
CS-TFT e in entrambi i casi nettamente migliore di BP W/O SS.
A)
B)
Figura 5.18: A) Emisfero sinistro, grafico della media dell’errore con deviazione standard: percentuale media di errore in ampiezza (sinistra), latenza (centro) e totale (destra) per ciascun algoritmo: CS-TFT (blu), BP W/O SS (azzurro), e ReMCoBA (giallo). B) Emisfero destro, grafico della media dell’errore con deviazione standard: percentuale media di errore in ampiezza (sinistra), latenza (centro) e totale (destra) per ciascun algoritmo: CS-TFT (blu), BP W/O SS (azzurro), e ReMCoBA (giallo).
Osservando l’emisfero destro tuttavia, a più basso SNR, ci si accorge
immediatamente che ReMCoBA e CS-TFT offrono prestazioni molto più
simili tra loro rispetto a quanto notato sul lato sinistro, mentre il metodo BP
W/O SS si discosta di molto, e sembra non “competere” con le prestazioni
offerte dai due metodi precedentemente menzionati. Considerando infatti i
soli ReMCoBA e CS-TFT, le differenze in percentuali di errore possono dirsi
trascurabili, specie se paragonate ai valori ottenuti da BP W/O SS: una
prestazione migliore di ReMCoBA rispetto a CS-TFT per quanto riguarda

RISULTATI
89
l’ampiezza (53% di ReMCoBA contro il 65% di CS-TFT), mentre si nota
un’inversione di posizioni nella stima dell’errore in latenza (46% contro 62%).
Nell’errore totale, invece, ReMCoBA commette un errore inferiore (266%
contro 340%).
5.3 DISCUSSIONE
A conclusione delle analisi effettuate distintamente su entrambi gli emisferi,
potremmo pertanto dire che l’algoritmo di CS-TFT e ReMCoBA offrono
entrambi interessanti soluzioni per la riduzione del rumore fisiologico e la
stima della HRF: entrambi hanno una resa decisamente superiore al normale
filtraggio passabanda BP W/O SS. In particolare, il metodo del
campionamento compresso sembra avere i migliori risultati in assoluto quando
il segnale contiene delle risposte emodinamiche di ampiezza più elevata (~250
nM), mentre lo stesso non si può dire se queste hanno invece il picco intorno
nell’intorno di 75nM, ovvero con dati che presentano un più basso SNR.
Un’ipotesi potrebbe essere dunque quella di utilizzare il metodo CS-TFT nella
stima del rumore fisiologico, e di applicare in cascata un filtraggio bayesiano
per migliorare la stima della HRF, come in ReMCoBA.
5.4 RMSE
Per i canali situati in zona frontale, a cui non è stata aggiunta alcuna risposta
emodinamica simulata, si è deciso, come termine di confronto quantitativo tra
algoritmi, di calcolare la radice quadrata dell’errore quadratico medio (o Root
Mean Square Error, RMSE), ovvero:
√∑ (
)
(5.6)

RISULTATI
90
dove N è il numero di campioni contenuti in un trial.
A)
B)
Figura 5.19: A) Parte frontale, resting state (RS) confronto: RS stimato mediante algoritmo CS-TFT (rosso), vero (nero), e resting state di ogni soggetto ottenuto mediante algoritmo CS-TFT (verdi). B) Parte frontale, media dei resting state (RS) a confronto: RS stimato mediante algoritmo CS-TFT (rosso), filtraggio passabanda BP (blu), ReMCoBA (magenta) confrontate con la media del resting state vero (nero).
In tal caso, il segnale risulta completamente nullo, mentre la stima
dovrebbe essere il più vicina possibile allo zero. Tuttavia, come si può notare
in Figura 5.19, essa presenta delle oscillazioni causate dal rumore fisiologico di
fondo che persistono nonostante l’uso del segnale proveniente dal canale SS. Il
rumore fisiologico residuo oscilla intorno alla linea della 0: questo risultato è
molto promettente, in quanto evidenzia come, in una situazione reale, la
possibilità di stimare una HRF dove questa non è presente, sia molto ridotta. I
risultati ottenuti sono visibili nella tabella sottostante:

RISULTATI
91
RMSE
FRONTAL CS-TFT
BP
[W/O SS] ReMCoBA
Subj9 rs1 40,23 31,92 26,57
Subj9 rs2 18,98 26,64 15,83
Subj12 rs1 52,54 45,08 45,49
Subj12 rs2 46,36 81,20 42,34
Subj13 rs1 37,21 49,82 29,45
Subj13 rs2 31,17 47,11 35,00
Subj14 rs1 41,68 100,49 43,49
Subj14 rs2 29,16 65,52 30,36
Subj14 rs3 42,76 71,10 44,84
Subj15 rs1 32,19 51,81 33,23
Subj16 rs1 26,31 36,46 24,84
Subj16 rs2 40,74 29,92 29,81
Subj17 rs1 45,76 71,07 49,33
Subj17 rs2 40,75 44,67 34,93
MEAN 37,56 53,77 34,68
STD 9,00 21,44 9,45
Tabella 5.19: Tabella RMSE. Tabella contenente i valori di RMSE calcolate distintamente su ciascun volontario sui segnali di resting state dei canali frontali.
T-TEST RMSE
CS-TFT vs. BP
CS-TFT vs.
ReMCoBA
BP vs.
ReMCoBA
P-VALUE 0,0042 0,0368 0,0003
Tabella 5.20: Risultati dei t-test, calcolati confrontando ciascuno dei 3 algoritmi con gli altri due. Per ciascun confronto, sono riportati i valori del p. Un p < 0.05 indica differenze statisticamente significative tra gli algoritmi confrontati.

RISULTATI
92
Come emerge dai valori della tabella, i risultati di ReMCoBA e CS-TFT
sembrano simili. Tuttavia, i T-test mostrano una differenza significativa tra i
due algoritmi, con una miglior performance di ReMCoBA rispetto al CS-TFT.
È probabile che il filtro bayesiano applicato in ReMCoBA riesca a ridurre
ulteriormente il rumore fisiologico rimasto e quindi a prevalere nei risultati sul
CS-TFT. La soluzione proposta prima, di applicare il filtro bayesiano in
cascata al CS-TFT, rimane valida anche qui. Il solo filtraggio BP W/O SS non
porta a risultati altrettanto soddisfacenti, sottolineando ulteriormente
l’importanza di ridurre il rumore fisiologico con l’uso del canale SS.

93
CAPITOLO 6
CONCLUSIONI E SVILUPPI
FUTURI
6.1 SVILUPPI FUTURI
Come accennato nei capitoli precedenti, l’algoritmo Compressive Sensing
mediante trasformata di Taylor-Fourier presentato in questa tesi è ancora agli
albori per quanto riguarda il suo utilizzo nella riduzione del rumore fisiologico
e stima della risposta emodinamica in segnali acquisiti con la NIRS. Essendo
questo uno dei primi tentativi di sperimentazione, e data la poca storicità del
metodo, è indubbio che i primi risultati forniti siano da considerarsi provvisori
e atti ad essere assolutamente oggetto di uno studio più approfondito che
accerti, a seguito di molteplici prove e sperimentazioni, l’effettiva validità della
nuova soluzione proposta.
Osservando il codice implementato, molti sono ancora i punti su cui si può
lavorare cercando eventuali soluzioni migliori. L’algoritmo è stato applicato sia
nello scenario totalmente simulato che in quello semi-simulato senza alcuna
modifica: questo, da un lato mostra la stabilità e generalità dell’algoritmo,
dall’altro il fatto che potenzialmente è migliorabile, in quanto i parametri erano
stati settati basandosi sullo scenario totalmente simulato. Inoltre, va aggiunto
che non sono stati eseguiti test particolarmente intensivi sul codice, variando

CONCLUSIONI E SVILUPPI FUTURI
94
ad esempio numerose volte i parametri fondamentali. Non sono stati trattati
segnali particolari (ad esempio segnali ricchi di artefatti da movimento, dove
l’algoritmo potrebbe andare in crisi e offrire risultati completamente
discordanti rispetto agli attuali), e non si è cercato, per ora, di migliorare il
costo computazionale dell’algoritmo. In questa tesi l’algoritmo è stato testato
su un numero ridotto di soggetti (7 soggetti per un totale di 14 dataset): per
una migliore attendibilità ed accuratezza della performance dell’algoritmo è
auspicabile testare l’algoritmo su un numero maggiore di soggetti. Inoltre, la
validazione dell’algoritmo su dati totalmente reali è essenziale per una sua
futura applicabilità in contesti reali.
Si potrebbe pertanto ridurre la dimensione di D al solo range di frequenze di
interesse, riducendo in tal modo il tempo di calcolo di circa il 90%.
Il costo computazionale totale risulta attualmente inaccettabile qualora si
volesse far lavorare l’algoritmo in real-time, in quanto occorrono circa 20
minuti per ottenere i risultati di un singolo soggetto con 36 canali (sempre
considerando un computer di medie prestazioni). E’ ovvio pertanto che
qualora l’obiettivo fosse raggiungere una rielaborazione del segnale in tempo
reale, ulteriori sono ancora i progressi da realizzare: uno di questi, in prima
ipotesi, potrebbe essere quello di implementare il parallelismo del codice, oltre
indubbiamente a semplificare le parti di programma costituite dai comandi più
onerosi, come accennato poc’anzi.
Un interessante test per l’algoritmo presentato potrebbe essere dedicato alla
stima della media data da un numero di HRF sempre minore, sia per
osservarne il cambiamento della stima che per stabilire magari un numero
minimo di risposte sotto il quale la media risulta completamente distorta e
insignificante. Confrontare le performance dell’algoritmo proposto e di quelli
di confronto potrebbe fornire importanti indicazioni sull’abilità dell’algoritmo
proposto di convergere ad una stima stabile con un numero minore di trial
disponibili, essenziale, per esempio, in disegni sperimentali che coinvolgono
bambini o particolari popolazioni cliniche, che devono per necessità essere di
breve durata.
Un’interessante ed ulteriore prova potrebbe essere un’analisi di sensibilità, che
faccia variare tali parametri, uno o più alla volta, su un vasto campione di dati

CONCLUSIONI E SVILUPPI FUTURI
95
simulati, con l’obiettivo di raggiungere la miglior stima dell’errore sia in
ampiezza che in latenza. In tal modo si potrebbe riuscire anche a determinare,
ad esempio, se tali parametri dipendono molto dai dati considerati (e quindi
devono essere adattati e “personalizzati” di volta in volta su ciascun differente
segnale), o se invece possono essere mantenuti costanti in ogni segnale
analizzato. In particolare, tra i parametri considerati, l’ordine a cui viene
troncata la serie di Taylor, potrebbe essere quello più interessante da
modificare e allo stesso tempo forse il più determinante: non sappiamo
attualmente se facendo lavorare l’algoritmo con ordini maggiori si abbia una
ricostruzione ancora migliore del rumore fisiologico, dove anche le frequenze
molto più vicine tra loro vengano rilevate in maniera chiara e distinta, o se
invece si abbia una sorta di “saturazione” dove anche implementando ordini
nettamente maggiori, i miglioramenti visibili risultino alquanto trascurabili
rispetto agli attuali.
Finora i termini derivativi di ordine superiore sono stati usati solo per cercare
di riprodurre al meglio le variazioni nel tempo del rumore fisiologico, ma si
potrebbe iniziare a studiarle singolarmente. La derivata inoltre, potrebbe essere
utilizzata anche nelle valutazioni sull’ampiezza del segnale, al fine di
determinare se siamo in presenza di un particolare artefatto o se si tratta invece
di solo rumore fisiologico.


97
APPENDICE
% ********************************************** 1 % Algoritmo CS-TFT implementato su segnali fNIRS 2 % ********************************************** 3 % 4 % ------------- Marco Cescon ------------------- 5 % ------------- matr. 1039022 ------------------ 6 % --------- Anno accademico 2015/16 ------------ 7 % 8 % ********************************************** 9 % "Approccio basato su Compressive Sensing e 10 % modellistica Taylor-Fourier per stimare la 11 % risposta emodinamica da segnali fNIRS" 12 % ********************************************** 13 % 14 % Scenario semi-simulato 15 % 14 segnali, 52 canali per ciascun segnale 16 17 function stimatore_fNIRS(soggetto,rs) 18 close all 19 clc 20 21 if nargin ~= 2 22 display('Use: stimatore_fNIRS_human(soggetto,rs,trigger,Fs)') 23 return 24 end 25 26 27 % Conversione dei dati da densità ottiche a nanomoli 28 switch soggetto 29 case 9 30 if rs == 1 31 load('20120917_6009_RS1.nirs','-mat'); 32 elseif rs == 2 33 load('20120917_6009_RS2.nirs','-mat'); 34 else disp('ERROR!! invalid RS') 35 return 36 end 37 case 12 38

APPENDICE
98
if rs == 1 39 load('20120921_6012_RS1.nirs','-mat'); 40 elseif rs == 2 41 load('20120921_6012_RS2.nirs','-mat'); 42 else disp('ERROR!! invalid RS') 43 return 44 end 45 case 13 46 if rs == 1 47 load('20120925_6013_RS1.nirs','-mat'); 48 elseif rs == 2 49 load('20120925_6013_RS2.nirs','-mat'); 50 else disp('ERROR!! invalid RS') 51 return 52 end 53 case 14 54 if rs == 1 55 load('20120925_6014_RS1.nirs','-mat'); 56 elseif rs == 2 57 load('20120925_6014_RS2.nirs','-mat'); 58 elseif rs == 3 59 load('20120925_6014_RS3.nirs','-mat'); 60 else disp('ERROR!! invalid RS') 61 return 62 end 63 case 15 64 if rs == 1 65 load('20120925_6015_RS1.nirs','-mat'); 66 else disp('ERROR!! invalid RS') 67 return 68 end 69 case 16 70 if rs == 1 71 load('20120927_6016_RS1.nirs','-mat'); 72 elseif rs == 2 73 load('20120927_6016_RS2.nirs','-mat'); 74 else disp('ERROR!! invalid RS') 75 return 76 end 77 case 17 78 if rs == 1 79 load('20120927_6017_RS1.nirs','-mat'); 80 elseif rs == 2 81 load('20120927_6017_RS2.nirs','-mat'); 82 else disp('ERROR!! invalid RS') 83 return 84 end 85 otherwise 86 disp('ERROR!! Invalid subject') 87 return 88 end 89 90 coeff = 1e9; % Conversione in nM 91

APPENDICE
99
dod = hmrIntensity2OD(d); 92 conc = hmrOD2Conc(dod,SD,[6 6]); 93 concHbO = squeeze(conc(:,1,:)); 94 concHbO = coeff*concHbO; 95 96 nHRF = 28; 97 t_camp = t(2)-t(1); 98 % Valori inseriti di default 99 durata_hrf = 15; 100 distance = 40; 101 102 display('----------------------------------------------------------------') 103 pause(.5) 104 clc 105 106 disp(['Numero HRF: ' num2str(nHRF)]) 107 disp(['Durata HRF: ' num2str(durata_hrf)]) 108 109 %------------------------------------------------------------------------- 110 NumChannels = size(concHbO,2); 111 112 channel_LEFT = [1 2 3 4 5 6]; % Sorgenti emisfero SX 113 channel_RIGHT = [7 8 9 10 11 12]; % Sorgenti emisfero DX 114 channel_MIDDLE = [13 14 15]; % Sorgenti frontali 115 116 errorAmpRic_LEFT = []; 117 errorAmpRic_RIGHT = []; 118 errorLatRic_LEFT = []; 119 errorLatRic_RIGHT = []; 120 errorTotRic_LEFT = []; 121 errorTotRic_RIGHT = []; 122 123 errorAmpFiltr_LEFT = []; 124 errorAmpFiltr_RIGHT = []; 125 errorLatFiltr_LEFT = []; 126 errorLatFiltr_RIGHT = []; 127 errorTotFiltr_LEFT = []; 128 errorTotFiltr_RIGHT = []; 129 130 HRFvera_LEFT = []; 131 HRFric_LEFT = []; 132 HRFfiltr_LEFT = []; 133 HRFvera_RIGHT = []; 134 HRFric_RIGHT = []; 135 HRFfiltr_RIGHT = []; 136 137 rmse_ric = []; 138 rmse_filtr = []; 139 140 for i = 1:NumChannels 141 sorg = SD.MeasList(i,1); 142 detet = SD.MeasList(i,2); 143 144

APPENDICE
100
distX = abs(SD.SrcPos(sorg,1) - SD.DetPos(detet,1)); 145 distY = abs(SD.SrcPos(sorg,2) - SD.DetPos(detet,2)); 146 147 dist(i) = norm([distX distY]); 148 end 149 150 % I valori in uscita delle distanze sono solo 2, pertando è sufficiente 151 % fare la media tra il valore minimo e massimo: LS sono i valori sopra la 152 % media, SS invece quelli sotto 153 meanDist = mean([min(dist) max(dist)]); 154 155 SS = find(dist<meanDist); 156 LS = find(dist>meanDist); 157 158 numCh_LS = length(LS); 159 numCh_SS = length(SS); 160 161 clear meanDist valMinDiff indMinDiff diff_Ch 162 163 diff_Ch = zeros(numCh_SS,1); % Alloco la matrice delle differenze 164 abbinam_LS_SS = zeros(numCh_LS,2); % Alloco la matrice degli abbinamenti LS - 165 SS 166 167 for i = 1:numCh_LS 168 for j = 1:numCh_SS 169 diff_Ch(j) = sum(abs(concHbO(:,LS(i)) - concHbO(:,SS(j)) )); 170 end 171 [valMinDiff,indMinDiff] = min(diff_Ch); 172 abbinam_LS_SS(i,:) = [LS(i) SS(indMinDiff)]; % Inserisco gli abbinamenti 173 LS-SS 174 end 175 176 clear valMinDiff diff_Ch indMinDiff 177 display(' Start calculating...') 178 pause(.5) 179 180 181 % ************************************************************************* 182 % ************************************************************************* 183 % ************************************************************************* 184 for iter = 1:numCh_LS 185 cha_long = abbinam_LS_SS(iter,1); 186 cha_short = abbinam_LS_SS(iter,2); 187 src_long = SD.MeasList(cha_long,1); % Sorgente del canale lungo 188 189 clc 190 fprintf('\n\n') 191 display(['Iteration ' num2str(iter) ' of ' num2str(numCh_LS)]) 192 fprintf('\n\n') 193 display(['SELECTED SUBJECT: ' num2str(soggetto) ', RS: ' num2str(rs)]) 194 display(['SELECTED LONG CHANNEL: ' num2str(cha_long) ' (Src=' 195 num2str(SD.MeasList(cha_long,1)) ', Det=' num2str(SD.MeasList(cha_long,2)) 196 ')']) 197

APPENDICE
101
display(['SELECTED SHORT CHANNEL: ' num2str(cha_short) ' (Src=' 198 num2str(SD.MeasList(cha_short,1)) ', Det=' num2str(SD.MeasList(cha_short,2)) 199 ')']) 200 %--------------------------------------------------------------------------201 - 202 203 if ismember(src_long,channel_LEFT) 204 hr_amp = 1600; % Emisfero SX: ampiezza effettiva di 250 nmol 205 titleText = ['Channel: LEFT, HRF amp= ' num2str(hr_amp) ' nmol']; 206 disp(['Ampiezza HRF: ' num2str(hr_amp)]) 207 elseif ismember(src_long,channel_RIGHT) 208 hr_amp = 500; % Emisfero DX: ampiezza effettiva di 75 nmol 209 titleText = ['Channel: RIGHT, HRF amp= ' num2str(hr_amp) ' nmol']; 210 disp(['Ampiezza HRF: ' num2str(hr_amp)]) 211 else hr_amp = 0; % Fronte: non aggiungo alcuna HRF 212 titleText = ['Channel: MIDDLE, HRF amp= NO HRF inserted']; 213 disp(['Ampiezza HRF: no HRF']) 214 end 215 216 % Lo calcolo comunque per tutti i canali per mantenere poi il trigger 217 218 [raw.data,vett_hrf,raw.trigger,t_hrf,hrf_avg]=aggiungiHRF_marco(t,concHbO(:,cha219 _long),durata_hrf,nHRF,distance,hr_amp); 220 if ismember(src_long,channel_MIDDLE) 221 raw.data = concHbO(:,cha_long); % Annullo tutte le risposte evocate 222 della fronte 223 end 224 225 sig_long = raw.data; % segnale long separation 226 sig_short = concHbO(:,cha_short); 227 sig_trig = raw.trigger; % segnale di trigger corrispondente 228 % ************************************************************************ 229 230 %% Filtraggio passa-banda delle tracce ----------------------------------- 231 % % filtraggio passa-banda del segnale raw nell'intervallo 0.005 - 0.55 Hz 232 load LP_filter.mat % variabili: filtro - FIR_Hann_lp, ordine - No 233 load HP_filter.mat % variabili: filtro - FIR_Hann_hp, ordine - No 234 235 % segnale long separation 236 sig_lonf = filtfilt(FIR_Hann_lp.Numerator,1,sig_long); % filtraggio LP 237 sig_lonf = filtfilt(FIR_Hann_hp.Numerator,1,sig_lonf); % filtraggio HP 238 sig_lonf = sig_lonf(No+1:end); % tronco l'andata a regime del filtro 239 240 % segnale short separation 241 sig_shorf = filtfilt(FIR_Hann_lp.Numerator,1,sig_short); % filtraggio LP 242 sig_shorf = filtfilt(FIR_Hann_hp.Numerator,1,sig_shorf); % filtraggio HP 243 sig_shorf = sig_shorf(No+1:end); % tronco l'andata a regime del filtro, 244 elimino i primi 100 campioni 245 246 sig_trig = sig_trig(No+1:end); % segnale di trigger corrispondente 247 vett_hrf_bis = vett_hrf(No+1:end); % segnale con le HRF 248 % ************************************************************************ 249 250

APPENDICE
102
%% Estrazione del trigger di interesse ------------------------------------ 251 index_start = 1; % Per circa 30 secondi non ci sono impulsi HRF, lo 252 scaling lo calcoliamo qui 253 index_stop= min(find(sig_trig==1))-1; % Trovo l'indice di stop pari al 254 primo trigger meno 1 255 % ************************************************************************* 256 257 % Trovo gli indici di start di ciascuna porzione di 258 % segnale relativa al trigger desiderato ---------------------------------- 259 iStart = find(sig_trig==1); % Start = trigger 260 numPorz = length(iStart); % Numero di HRF (porzioni segnale) 261 262 HRF_start = -1; % La porzione di HRF la considero da -1 a 13 sec 263 HRF_stop = 13; % La porzione di HRF la considero da -1 a 13 sec 264 tHRF = HRF_start:t_camp:HRF_stop; % Considero un asse dei tempi da -1 a 13 265 ind_start = iStart-abs(HRF_start)/t_camp; 266 ind_stop = iStart+HRF_stop/t_camp; 267 durataPorz = ind_stop(1)-ind_start(1)+1; 268 269 % Matrice con tutte le risposte evocate vere e solo filtrate di un singolo 270 canale 271 totalHRF_vere = zeros(durataPorz,numPorz); 272 totalHRF_filtr = zeros(durataPorz,numPorz); 273 274 for i = 1:numPorz 275 totalHRF_vere(:,i) = vett_hrf_bis(ind_start(i):ind_stop(i)); 276 totalHRF_filtr(:,i) = sig_lonf(ind_start(i):ind_stop(i)); 277 end 278 279 if ismember(src_long,channel_MIDDLE) 280 % Annullo se non è stata aggiunta HRF al canale 281 mediaHRFvera_singleCh = zeros(durataPorz,1); 282 else 283 mediaHRFvera_singleCh = mean(totalHRF_vere,2); 284 end 285 clear iStart iStop durate_trig nCampAftPeak nCampBefPeak 286 287 % ************************************************************************* 288 % Scaling ----------------------------------------------------------------- 289 % Effettuato sui primi 30 secondi di segnale, dove forzatamente non ci sono 290 % impulsi 291 [xData, yData] = prepareCurveData( sig_shorf(index_start:index_stop), 292 sig_lonf(index_start:index_stop) ); 293 ft = fittype( 'poly1' ); % Tipologia di fitting polinomiale 294 295 % Trovo le costanti p1 e p2. 296 fitresult = fit(xData,yData, ft); 297 p1 = fitresult.p1; % P1: y = p1*x + p2 298 p2 = fitresult.p2; % P2: y = p1*x + p2 299 300 sig_shorf1 = p1*sig_shorf + p2; % Scaling del segnale short -------------- 301 clear index_start index_stop 302 % ************************************************************************ 303

APPENDICE
103
304 % Super risoluzione ------------------------------------------------------ 305 Ns = length(sig_shorf1); 306 Ts = t(2)-t(1); % Periodo di campionamento 307 Fs = 1/Ts; % Freq di campionamento 308 N = 501; 309 P = 11; % fattore interpolazione 310 H = N*P; % granularità griglia risultante 311 Qh = Fs/H; % nuovo quanto frequenziale 312 h_axis = 0:Qh:Qh*(H-1); % asso spettrale super-risoluto 313 tot_iter = ceil(Ns/N); 314 max_iter = 20; % massimo numero di componenti da stimare 315 316 %% Ciclo stima CSTFM 317 % stimo le frequenze sul segnale short separation 318 frq_cstfm = zeros(tot_iter,max_iter*2); % inizializzo vettore stime 319 sig_noise = zeros(N,tot_iter); 320 overlap = 5; % Serve per ricostruire bene il segnale anche nei bordi 321 simm = 1; % simmetria del supporto 322 323 %--------------------------------- 324 % Sono le due funzioni più onerose computazionalmente di tutto il 325 % programma: 326 D = creaMatriceD(N,H); % Circa 5 secondi 327 NormACols = sqrt(diag(D'*D)); % NormACols è un vettore colonna di lunghezza 328 H=5011, circa 7 secondi 329 %--------------------------------- 330 331 for k = 1:tot_iter 332 if k == 1 333 y_run = sig_shorf1(1:N); 334 else 335 iStart = N*(k-1)-overlap; 336 iStop = iStart+N-1; 337 if iStop > Ns 338 y_run = [sig_shorf1(iStart:end); zeros(iStop-Ns,1)]; 339 else 340 y_run = sig_shorf1(iStart:iStop); 341 end 342 end 343 344 v = fft(y_run); 345 suppo = RunOMP_IMEKO(v,D,max_iter,NormACols,simm); 346 347 if suppo(1) == 1 348 suppo(1) = 2; 349 end 350 351 frq_cstfm(k,1:length(suppo)) = h_axis(suppo); 352 353 % Definizione template 354 % ricostruzione del segnale mediante TFT costruita sulla base del 355 % supporto di cui al passo prima 356

APPENDICE
104
f1 = frq_cstfm(k,1); % frequenza più bassa rintracciata 357 (fondamentale), in Hz 358 ih = frq_cstfm(k,[2:max_iter])./f1; % interarmoniche della 359 fondamentale, in Hz 360 361 B=matrixTaylorFourier_ih(f1,Fs,N,3*ones(max_iter,1),ih,0); 362 % generazione della matrice TFT in base a fondamentale e interarmoniche 363 364 % coefficienti della TFT 365 stima = pinv(B'*B)*B'*y_run; 366 367 % Porzione di segnale ricostruito 368 z(:,k) = B*stima; % vettore ricostruito 369 370 %% Sottrazione template 371 sig_noise(:,k) = y_run - real(z(:,k)); 372 end 373 374 ric = real(z); % Segnale ricostruito 375 sig_end = ric(N-overlap+1:end,1); 376 sig_tot_ric = ric(1:N-overlap,1); 377 378 for i = 2:tot_iter 379 sig_start = ric(1:overlap,i); 380 mean_sig = mean([sig_start sig_end],2); 381 382 sig_tot_ric = [sig_tot_ric; mean_sig; ric(overlap+1:end,i);]; 383 sig_end = ric(N-overlap+1:end,i); 384 end 385 386 % Segnale ricostruito generale 387 sig_tot_ric = sig_tot_ric(1:Ns); 388 389 % Calcolo la risposta evocata 390 rispEvocate = sig_lonf-sig_tot_ric; 391 392 rispEvocateSing = zeros(durataPorz,numPorz); 393 meanHRF_singlCh_filtr = zeros(durataPorz,numPorz); 394 for i = 1:numPorz 395 % Faccio la baseline su ciascuna risposta evocata (sottraggo la 396 % media della stessa considerato tra -1 e 1 sec) 397 HRF_ric = rispEvocate(ind_start(i):ind_stop(i)); 398 HRF_filtr = totalHRF_filtr(:,i); 399 400 baseLineRic = mean(HRF_ric(1:(2/t_camp))); 401 baseLineFiltr = mean(HRF_filtr(1:(2/t_camp))); 402 403 rispEvocateSing(:,i) = HRF_ric - baseLineRic; 404 meanHRF_singlCh_filtr(:,i) = HRF_filtr - baseLineFiltr; 405 end 406 407 % CALCOLO LA MEDIA DELLE RISPOSTE EVOCATE: 408

APPENDICE
105
% Media degli impulsi calcolata a partire dalle porzioni intere di segnale 409 corrispondenti al trigger 410 mediaPorz_ric = mean(rispEvocateSing,2); 411 mediaPorz_filtr = mean(meanHRF_singlCh_filtr,2); 412 413 % Filtro mediano 414 mediaPorz_medianRic = zeros(1,durataPorz); 415 mediaPorz_medianFiltr = zeros(1,durataPorz); 416 417 % Metà banda, la banda intera del filtro è 80 campioni 418 halfWindow = 40; 419 420 for j = 1:durataPorz 421 i= max([j-halfWindow,1]):min([j+halfWindow,durataPorz]); 422 mediaPorz_medianRic(j) = median(mediaPorz_ric(i)); 423 mediaPorz_medianFiltr(j) = median(mediaPorz_filtr(i)); 424 end 425 426 % Filtro Savitzky - Golay 427 mediaPorz_sgolayRic = sgolayfilt(mediaPorz_medianRic,3,51); 428 mediaPorz_sgolayFiltr = sgolayfilt(mediaPorz_medianFiltr,3,51); 429 430 if iter==1 % Inizializzazione delle matrici contenente tutti i canali 431 mediaHRF_VeraChannel = zeros(durataPorz,numCh_LS); 432 mediaHRF_RicChannel = zeros(durataPorz,numCh_LS); 433 mediaHRF_FiltrChannel = zeros(durataPorz,numCh_LS); 434 rispEvocate_channel = zeros(Ns,numCh_LS); 435 end 436 437 rispEvocate_channel(:,iter) = rispEvocate; 438 mediaHRF_RicChannel(:,iter) = mediaPorz_sgolayRic; 439 mediaHRF_FiltrChannel(:,iter) = mediaPorz_sgolayFiltr; 440 mediaHRF_VeraChannel(:,iter) = mediaHRFvera_singleCh; 441 442 if ~ismember(src_long,channel_MIDDLE) 443 [valPeakRic,indPeakRic] = max(mediaPorz_sgolayRic); 444 [valPeakFiltr,indPeakFiltr] = max(mediaPorz_sgolayFiltr); 445 [valPeakVera,indPeakVera] = max(mediaHRFvera_singleCh); 446 447 t_indPeakVera = tHRF(indPeakVera); 448 t_indPeakRic = tHRF(indPeakRic); 449 t_indPeakFiltr = tHRF(indPeakFiltr); 450 451 errorAmpRic = 100*(abs(valPeakVera-valPeakRic)/abs(valPeakVera)); 452 errorLatRic = 100*(abs(t_indPeakVera-t_indPeakRic)/abs(t_indPeakVera)); 453 errorTotRic = 100*((norm(mediaPorz_sgolayRic-454 mediaHRFvera_singleCh') 2)/(norm(mediaHRFvera_singleCh) 2)); 455 456 errorAmpFiltr = 100*(abs(valPeakVera-valPeakFiltr)/abs(valPeakVera)); 457 errorLatFiltr = 100*(abs(t_indPeakVera-458 t_indPeakFiltr)/abs(t_indPeakVera)); 459 errorTotFiltr = 100*((norm(mediaPorz_sgolayFiltr-460 mediaHRFvera_singleCh') 2)/(norm(mediaHRFvera_singleCh) 2)); 461

APPENDICE
106
462 if ismember(src_long,channel_LEFT) 463 errorAmpRic_LEFT = [errorAmpRic_LEFT; errorAmpRic]; 464 errorLatRic_LEFT = [errorLatRic_LEFT; errorLatRic]; 465 errorTotRic_LEFT = [errorTotRic_LEFT; errorTotRic]; 466 467 errorAmpFiltr_LEFT = [errorAmpFiltr_LEFT; errorAmpFiltr]; 468 errorLatFiltr_LEFT = [errorLatFiltr_LEFT; errorLatFiltr]; 469 errorTotFiltr_LEFT = [errorTotFiltr_LEFT; errorTotFiltr]; 470 471 HRFvera_LEFT = [HRFvera_LEFT mediaHRFvera_singleCh]; 472 HRFric_LEFT = [HRFric_LEFT mediaPorz_sgolayRic']; 473 HRFfiltr_LEFT = [HRFfiltr_LEFT mediaPorz_sgolayFiltr']; 474 475 else 476 errorAmpRic_RIGHT = [errorAmpRic_RIGHT; errorAmpRic]; 477 errorLatRic_RIGHT = [errorLatRic_RIGHT; errorLatRic]; 478 errorTotRic_RIGHT = [errorTotRic_RIGHT; errorTotRic]; 479 480 errorAmpFiltr_RIGHT = [errorAmpFiltr_RIGHT; errorAmpFiltr]; 481 errorLatFiltr_RIGHT = [errorLatFiltr_RIGHT; errorLatFiltr]; 482 errorTotFiltr_RIGHT = [errorTotFiltr_RIGHT; errorTotFiltr]; 483 484 HRFvera_RIGHT = [HRFvera_RIGHT mediaHRFvera_singleCh]; 485 HRFric_RIGHT = [HRFric_RIGHT mediaPorz_sgolayRic']; 486 HRFfiltr_RIGHT = [HRFfiltr_RIGHT mediaPorz_sgolayFiltr']; 487 end 488 else 489 rmse_ric_singleCh = sqrt(sum((mediaHRFvera_singleCh-490 mediaPorz_sgolayRic'). 2)/durataPorz); 491 rmse_filtr_singleCh = sqrt(sum((mediaHRFvera_singleCh-492 mediaPorz_sgolayFiltr'). 2)/durataPorz); 493 494 rmse_ric = [rmse_ric; rmse_ric_singleCh]; 495 rmse_filtr = [rmse_filtr; rmse_filtr_singleCh]; 496 end 497 end 498 499 mediaHRF_RicTot = mean(mediaHRF_RicChannel,2); 500 mediaHRF_VeraTot = mean(mediaHRF_VeraChannel,2); 501 mediaHRF_FiltrTot = mean(mediaHRF_FiltrChannel,2); 502 503 % Errore e STD del segnale ricostruito mediante algoritmo 504 MeanErrorAmp_LEFT_Ric = mean(errorAmpRic_LEFT); 505 MeanErrorLat_LEFT_Ric = mean(errorLatRic_LEFT); 506 MeanErrorTot_LEFT_Ric = mean(errorTotRic_LEFT); 507 MeanErrorAmp_RIGHT_Ric = mean(errorAmpRic_RIGHT); 508 MeanErrorLat_RIGHT_Ric = mean(errorLatRic_RIGHT); 509 MeanErrorTot_RIGHT_Ric = mean(errorTotRic_RIGHT); 510 511 StdErrorAmp_LEFT_Ric = std(errorAmpRic_LEFT); 512 StdErrorLat_LEFT_Ric = std(errorLatRic_LEFT); 513 StdErrorTot_LEFT_Ric = std(errorTotRic_LEFT); 514

APPENDICE
107
StdErrorAmp_RIGHT_Ric = std(errorAmpRic_RIGHT); 515 StdErrorLat_RIGHT_Ric = std(errorLatRic_RIGHT); 516 StdErrorTot_RIGHT_Ric = std(errorTotRic_RIGHT); 517 518 % Errore e STD del segnale solamente filtrato 519 MeanErrorAmp_LEFT_Filtr = mean(errorAmpFiltr_LEFT); 520 MeanErrorLat_LEFT_Filtr = mean(errorLatFiltr_LEFT); 521 MeanErrorTot_LEFT_Filtr = mean(errorTotFiltr_LEFT); 522 MeanErrorAmp_RIGHT_Filtr = mean(errorAmpFiltr_RIGHT); 523 MeanErrorLat_RIGHT_Filtr = mean(errorLatFiltr_RIGHT); 524 MeanErrorTot_RIGHT_Filtr = mean(errorTotFiltr_RIGHT); 525 526 StdErrorAmp_LEFT_Filtr = std(errorAmpFiltr_LEFT); 527 StdErrorLat_LEFT_Filtr = std(errorLatFiltr_LEFT); 528 StdErrorTot_LEFT_Filtr = std(errorTotFiltr_LEFT); 529 StdErrorAmp_RIGHT_Filtr = std(errorAmpFiltr_RIGHT); 530 StdErrorLat_RIGHT_Filtr = std(errorLatFiltr_RIGHT); 531 StdErrorTot_RIGHT_Filtr = std(errorTotFiltr_RIGHT); 532 % ----------------------------------------------------------------------- 533 534 % Media delle HRF emisfero SX 535 meanHRFvera_LEFT = mean(HRFvera_LEFT,2); 536 meanHRFric_LEFT = mean(HRFric_LEFT,2); 537 meanHRFfiltr_LEFT = mean(HRFfiltr_LEFT,2); 538 % Media delle HRF emisfero DX 539 meanHRFvera_RIGHT = mean(HRFvera_RIGHT,2); 540 meanHRFric_RIGHT = mean(HRFric_RIGHT,2); 541 meanHRFfiltr_RIGHT = mean(HRFfiltr_RIGHT,2); 542 543 clc 544 fprintf('\n\n\n\n\n\n\n') 545 display('****************** ERRORE *************************') 546 fprintf('\n') 547 display('---Errore sul segnale ricostruito mediante CFT-----') 548 display('---------------- Emisfero SX ----------------------') 549 display(['MEDIA Errore AMPIEZZA = ' num2str(MeanErrorAmp_LEFT_Ric) ' %']) 550 display(['MEDIA Errore LATENZA = ' num2str(MeanErrorLat_LEFT_Ric) ' %']) 551 display(['MEDIA ERRORE TOTALE = ' num2str(MeanErrorTot_LEFT_Ric) ' %']) 552 display('---------------------------------------------------') 553 display('---------------- Emisfero DX ----------------------') 554 display(['MEDIA Errore AMPIEZZA = ' num2str(MeanErrorAmp_RIGHT_Ric) ' %']) 555 display(['MEDIA Errore LATENZA = ' num2str(MeanErrorLat_RIGHT_Ric) ' %']) 556 display(['MEDIA ERRORE TOTALE = ' num2str(MeanErrorTot_RIGHT_Ric) ' %']) 557 display('---------------------------------------------------') 558 fprintf('\n') 559 display('------SD degli errori di ogni singolo canale-------') 560 display('---------------- Emisfero SX ----------------------') 561 display(['SD Errore AMPIEZZA = ' num2str(StdErrorAmp_LEFT_Ric) ]) 562 display(['SD Errore LATENZA = ' num2str(StdErrorLat_LEFT_Ric) ]) 563 display(['SD ERRORE TOTALE = ' num2str(StdErrorTot_LEFT_Ric) ]) 564 display('---------------------------------------------------') 565 display('---------------- Emisfero DX ----------------------') 566 display(['SD Errore AMPIEZZA = ' num2str(StdErrorAmp_RIGHT_Ric) ]) 567

APPENDICE
108
display(['SD Errore LATENZA = ' num2str(StdErrorLat_RIGHT_Ric) ]) 568 display(['SD ERRORE TOTALE = ' num2str(StdErrorTot_RIGHT_Ric) ]) 569 display('---------------------------------------------------') 570 fprintf('\n\n\n\n\n') 571 display('-------Errore sul segnale solo filtrato------------') 572 display('---------------- Emisfero SX ----------------------') 573 display(['MEDIA Errore AMPIEZZA = ' num2str(MeanErrorAmp_LEFT_Filtr) ' %']) 574 display(['MEDIA Errore LATENZA = ' num2str(MeanErrorLat_LEFT_Filtr) ' %']) 575 display(['MEDIA ERRORE TOTALE = ' num2str(MeanErrorTot_LEFT_Filtr) ' %']) 576 display('---------------------------------------------------') 577 display('---------------- Emisfero DX ----------------------') 578 display(['MEDIA Errore AMPIEZZA = ' num2str(MeanErrorAmp_RIGHT_Filtr) ' %']) 579 display(['MEDIA Errore LATENZA = ' num2str(MeanErrorLat_RIGHT_Filtr) ' %']) 580 display(['MEDIA ERRORE TOTALE = ' num2str(MeanErrorTot_RIGHT_Filtr) ' %']) 581 display('---------------------------------------------------') 582 fprintf('\n') 583 display('------SD degli errori di ogni singolo canale-------') 584 display('---------------- Emisfero SX ----------------------') 585 display(['SD Errore AMPIEZZA = ' num2str(StdErrorAmp_LEFT_Filtr) ]) 586 display(['SD Errore LATENZA = ' num2str(StdErrorLat_LEFT_Filtr) ]) 587 display(['SD ERRORE TOTALE = ' num2str(StdErrorTot_LEFT_Filtr) ]) 588 display('---------------------------------------------------') 589 display('---------------- Emisfero DX ----------------------') 590 display(['SD Errore AMPIEZZA = ' num2str(StdErrorAmp_RIGHT_Filtr) ]) 591 display(['SD Errore LATENZA = ' num2str(StdErrorLat_RIGHT_Filtr) ]) 592 display(['SD ERRORE TOTALE = ' num2str(StdErrorTot_RIGHT_Filtr) ]) 593 display('---------------------------------------------------') 594 595 fprintf('\n\n\n\n') 596 display('************** Canali FRONTALI ********************') 597 display(['Media RMSE segnale filtrato: ' num2str(mean(rmse_filtr))]) 598 display(['Media RMSE segnale ricostruito: ' num2str(mean(rmse_ric))]) 599 display('***************************************************') 600 601 % Salvataggio dei dati 602 eval(['save RESULT_subj' num2str(soggetto) '_rs' num2str(rs) ' 603 rispEvocate_channel mediaHRF_RicChannel mediaHRF_VeraChannel 604 mediaHRF_FiltrChannel HRFvera_LEFT HRFvera_RIGHT HRFric_LEFT HRFric_RIGHT 605 HRFfiltr_LEFT HRFfiltr_RIGHT rmse_ric rmse_filtr']) 606
607

109
BIBLIOGRAFIA
[1] GRATTON G., FABIANI M., FRIEDMAN D., FRANCESCHINI M.A.,
FANTINI S., CORBALLIS P., GRATTON E., Rapid Changes of Optical
Parameters in the Human Brain during a Tapping Task, Journal of Cognitive
Neuroscience, 7, 446-456, 1995.
[2] HOSHI Y., TAMURA M., Near-Infrared Optical Detection of Sequential Brain
Activation in the Prefrontal Cortex during Mental Tasks, NeuroImage, 5, 292-297,
1997.
[3] JÖBSIS, F.F., Noninvasive infrared monitoring of cerebral and myocardial sufficiency
and circulatory parameters, Science, 198, 1264-1267, 1977.
[4] SCHOLKMANN F., KLEISER S., JAAKKO METZ A.,
ZIMMERMANN R., MATA PAVIA J., WOLF U., WOLF M., A review on
continuous wave functional near-infrared spectroscopy and imaging instrumentation and
methodology, NeuroImage, Volume 85, 2014, 6-27, 2014.
[5] BOAS D., FRANCESCHINI M., DUNN A., STRANGMAN G.,
Nonivasive Imaging of Cerebral Activation with Di_use Optical Tomography, In Vivo
Optical Imaging of Brain Function, CRC Press, 8, 196-216, 2002.

BIBLIOGRAFIA
110
[6] CHANCE B., ZHUANG Z., UNAH C., ET AL., Cognition-activated low-
frequency modulation of light absorption in human brain., Proc. Natl. Acad. Sci. USA
90 (8), 3770–3774, 1993.
[7] HOSHI Y., TAMURA M., Detection of dynamic changes in cerebral oxygenation
coupled to neuronal function during mental work in man., Neurosci. Lett. 150 (1),
1993.
[8] KATO T., KAMEI A., TAKASHIMA S., ET AL., Human visual cortical
function during photic stimulation monitoring by means of near-infrared spectroscopy. J.
Cereb. Blood Flow Metab. 13 (3), 516–520. 5–8., 1993.
[9] VILLRINGER A., PLANCK J., HOCK C., ET AL., Near infrared
spectroscopy (NIRS): a new tool to study hemodynamic changes during activation of brain
function in human adults. Neurosci. Lett. 154 (1–2), 101–104., 1993.
[10] P. DAL BIANCO, Approaches based on nonlinear Kalman filtering to deal with
physiological noise in the estimation of the hemodynamic response from Functional Near-
Infrared Spectroscopy data, Master Thesis, 2014.
[11] AMBROSIN A., Master Thesis: Kalman filter approach for the estimation of the
hemodynamic response from near-infrared spectroscopy data (fNIRS), Università di
Padova, 2013.
[12] HUPPERT T. J., DIAMOND S. G., FRANCESCHINI M. A., BOAS D.
A., HomER: a review of time-series analysis methods for near infrared spectroscopy of the
brain, Appl Opt., 48(10): D280–D298 1 Aprile 2009.

BIBLIOGRAFIA
111
[13] LLOYD-FOX S., BLASI A., ELWELL C. E., Illuminating the developing
brain: the past, present and future of functional near infrared spectroscopy, Neuroscience
and Biobehavioral Reviews, 34, 269-284, 2010.
[14] FRIGO G, BRIGADOI S., GIORGI G., SPARACINO G.,
NARDUZZI C., Measuring Cerebral Activation From fNIRS Signals: An Approach
Based on Compressive Sensing and Taylor-Fourier Model, IEEE Transactions on
Instrumentation and Measurement, vol. PP, no. 99, 1-9, doi:
10.1109/TIM.2016.2518363.
[15] SAAGER R. B., BERGER A. J., Direct characterization and removal of
interfering absorption trends in two-layer turbid media, Optical Society of America,
Vol. 22, no. 9, 1874 – 1882, , September 2005.
[16] SCARPA F., BRIGADOI S., CUTINI S., SCATTURIN P., ZORZI M.,
DELL'ACQUA R., SPARACINO G., A reference-channelbasedmethodology to
improveestimation of event-related hemodynamic response from fNIRSmeasurements,
NeuroImage, Volume 72, 106-119, 15 May 2013, ISSN 1053-8119.
[17] GLOVER G. H., Deconvolution of Impulse Response in Event-Related BOLD
fMRI, NeuroImage, Volume 9, Issue 4, 416-429, April 1999, ISSN 1053-8119
[18] BERTOCCO M., FRIGO G., NARDUZZI C., On compressed sensing
and super-resolution in DFT-based spectral analysis, Proceedings 19th
IMEKO TC-4 Symposium and 17th IWADC Workshop Advances in
Instrumentation and Sensors Interoperability, 615-620, Barcelona, 18 July
2013.

BIBLIOGRAFIA
112
[19] TROPP J. A., GILBERT A. C., Signal Recovery From Random Measurements
Via Orthogonal Matching Pursuit, in IEEE Transactions on Information Theory,
vol. 53, no. 12, 4655-4666, Dec. 2007, doi: 10.1109/TIT.2007.909108.
[20] http://www.iopscience.iop.org/0967-3334/33/6/925/article


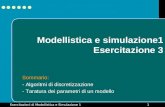


![Modellistica Dei Combustori - [D. Lentini]](https://static.fdocumenti.com/doc/165x107/5695d2191a28ab9b029918a3/modellistica-dei-combustori-d-lentini.jpg)