
Analisi e Modelli Matematici - UniTn · q=1; M=20 Equazioni differenziali-soluzioni con tecniche...
52
Analisi e Modelli Matematici Lezione 5 Marzo - Aprile 2014
Transcript of Analisi e Modelli Matematici - UniTn · q=1; M=20 Equazioni differenziali-soluzioni con tecniche...

Analisi e Modelli Matematici
Lezione 5
Marzo - Aprile 2014
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
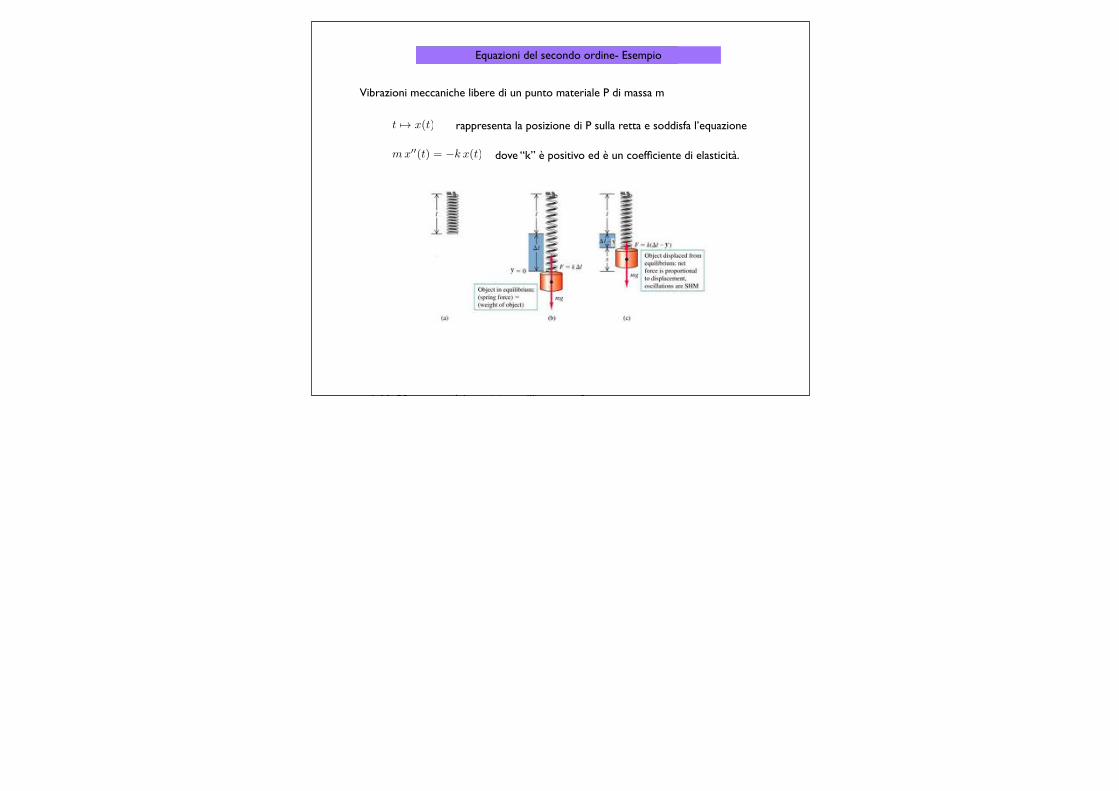
Vibrazioni meccaniche libere di un punto materiale P di massa m
t �→ x(t) rappresenta la posizione di P sulla retta e soddisfa l’equazione
mx��(t) = −k x(t) dove “k” è positivo ed è un coefficiente di elasticità.

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Vibrazioni meccaniche libere di un punto materiale P di massa m
t �→ x(t) rappresenta la posizione di P sulla retta e soddisfa l’equazione
mx��(t) = −k x(t) dove “k” è positivo ed è un coefficiente di elasticità.
L’equazione precedente viene abitualmente scritta come
x�� = −ω2x dove ω :=�
mk > 0

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generali(Intermezzo)
Integrale generale di equazioni lineari del secondo ordine a coefficienti costanti
è la posizione all’istante t=0
Studiamo equazioni del tipo
y�� + 2γ y� + δy = 0 γ, δ ∈ R
Cerchiamo soluzioni del tipo: y(t) = eλt λ ∈ R
Sostituendo nell’equazione si ottiene:
(λ2 + 2γλ+ δ)eλt = 0che è verificata per ogni t reale esattamente quando è una soluzione dell’equazione:
λ2 + 2γλ+ δ = 0
λ
Questa equazione algebrica si dice “equazione caratteristica” dell’equazione differenziale
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generali(Intermezzo)
Integrale generale di equazioni lineari del secondo ordine a coefficienti costanti
è la posizione all’istante t=0
Studiamo l’equazione differenziale: y�� + 2γ y� + δy = 0 γ, δ ∈ R
λ2 + 2γλ+ δ = 0
Se γ2 − δ > 0 l’equazione caratteristica ha le due soluzioni reali
λ1 = −γ −�γ2 − δ, λ2 = −γ +
�γ2 − δ
la cui equazione caratteristica è
e l’integrale generale dell’equazione differenziale è
y(t) := c1eλ1t + c2e
λ2t

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generali(Intermezzo)
Integrale generale di equazioni lineari del secondo ordine a coefficienti costanti
è la posizione all’istante t=0
Studiamo equazioni del tipo y�� + 2γ y� + δy = 0 γ, δ ∈ R
λ2 + 2γλ+ δ = 0
avremmo due soluzioni complesse coniugate.
con l’equazione caratteristica
Se γ2 − δ < 0
Si potrebbe procedere come prima utilizzando esponenziali complessi. Se vogliamo evitarlo, basta osservare che le due funzioni
y1(t) := e−γt sin(�δ − γ2 t), y2(t) := e−γt cos(
�δ − γ2 t)
sono entrambe soluzioni dell’equazione differenziale e quindi, ponendo
ω :=�
δ − γ2
l’integrale generale è
y(t) := e−γt(c1 sin(ωt) + c2 cos(ωt))

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generali(Intermezzo)
Integrale generale di equazioni lineari del secondo ordine a coefficienti costanti
è la posizione all’istante t=0
Studiamo equazioni del tipo
y�� + 2γ y� + δy = 0 γ, δ ∈ R
λ2 + 2γλ+ δ = 0con l’equazione caratteristica
Infine se γ2 − δ = 0 cioè γ2 = δ
le funzioni
y1(t) := e−γt, y2(t) := t e−γt
sono soluzioni e l’integrale generale è
y(t) := e−γt(c1 + c2t)

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generali(Intermezzo)
Integrale generale di equazioni lineari del secondo ordine a coefficienti costanti
è la posizione all’istante t=0
Analogia con le successioni per ricorrenza del secondo ordine�s0 = α, s1 = β sono assegnati,
sn+1 = Asn +Bsn−1
verifica la condizione:sn := λn1 sn+1 = Asn +Bsn−1
esattamente quando è una soluzione dell’equazione caratteristicaλ1
λ2 −Aλ−B = 0
se sono soluzioni dell’equazione caratteristica allora tutte le successioni della forma
λ1, λ2
sn := c1λn1 + c2λ
n2
verificano la condizione: sn+1 = Asn +Bsn−1
verificano la condizione:
Le costanti possono essere determinate in modo che siano verificate le condizioni iniziali.
c1, c2,

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Vibrazioni meccaniche libere di un punto materiale P di massa m
t �→ x(t) rappresenta la posizione di P sulla retta e soddisfa l’equazione
mx��(t) = −k x(t) dove “k” è positivo ed è un coefficiente di elasticità.
L’equazione precedente viene abitualmente scritta come
x�� = −ω2x dove ω :=�
mk > 0
Le soluzioni sono della forma
t �→ x(t) := c1 cos(ωt) + c2 sin(ωt) per t ∈ R.
c1 = x(0)
c2 ω = x�(0)
posizione per t=0
velocità per t=0
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Quindi l’unica soluzione del problema di Cauchy
x�� = −ω2x
x(0) = x0
x�(0) = v0
è la funzione t �→ x(t) := x0 cos(ωt) +v0ω sin(ωt)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
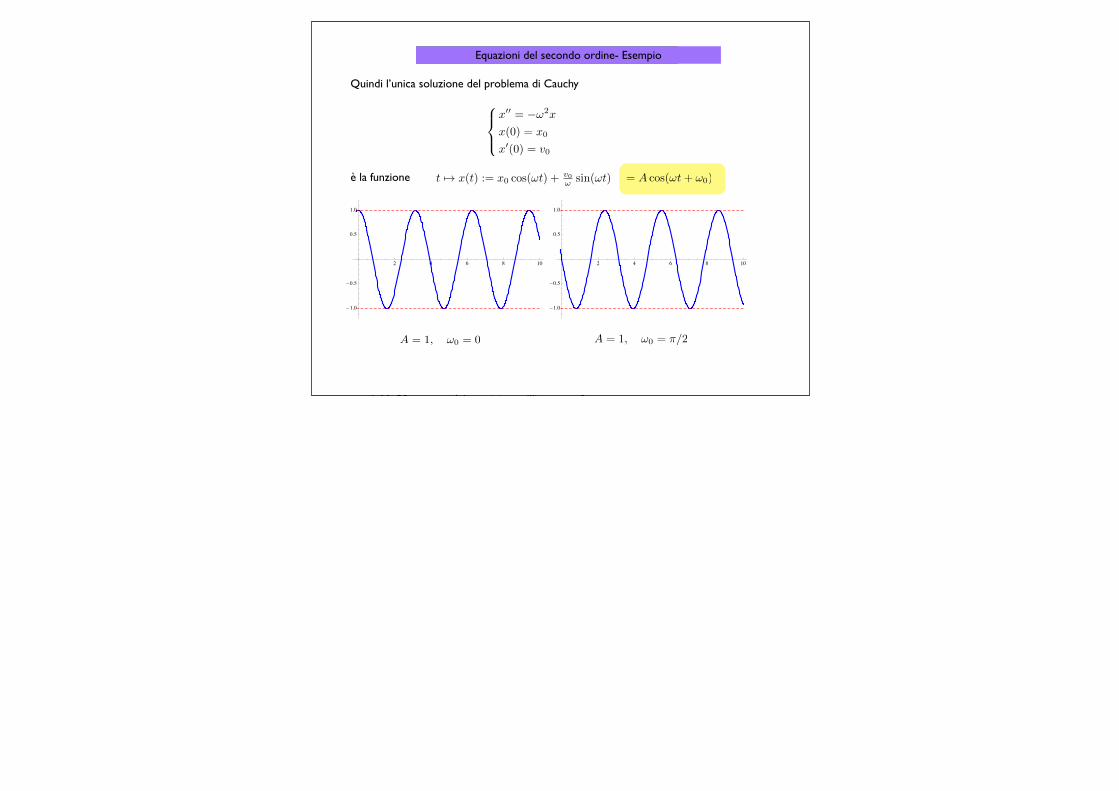
Quindi l’unica soluzione del problema di Cauchy
x�� = −ω2x
x(0) = x0
x�(0) = v0
è la funzione t �→ x(t) := x0 cos(ωt) +v0ω sin(ωt) = A cos(ωt+ ω0)
2 4 6 8 10
�1.0
�0.5
0.5
1.0
2 4 6 8 10
�1.0
�0.5
0.5
1.0
A = 1, ω0 = 0 A = 1, ω0 = π/2
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Quindi l’unica soluzione del problema di Cauchy
x�� = −ω2x
x(0) = x0
x�(0) = v0
è la funzione t �→ x(t) := x0 cos(ωt) +v0ω sin(ωt) = A cos(ωt+ ω0)
A =�x20 +
v20
ω2 è l’ ampiezza del moto
ω0 = arccos�x0A
�è la fase del moto. Nota che A>0 tranne che nel caso in cui P sia fermo nell’origine.
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Esercizio: scrivere c1 cos(ωt) + c2 sin(ωt)
A cos(ωt+ ω0)
come
t �→ x(t) := x0 cos(ωt) +v0ω sin(ωt)
= A cos(ωt+ ω0)
�1 1 2 3 4 5 6
�2
�1
1
2
�1 1 2 3 4 5 6
�2
�1
1
2

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
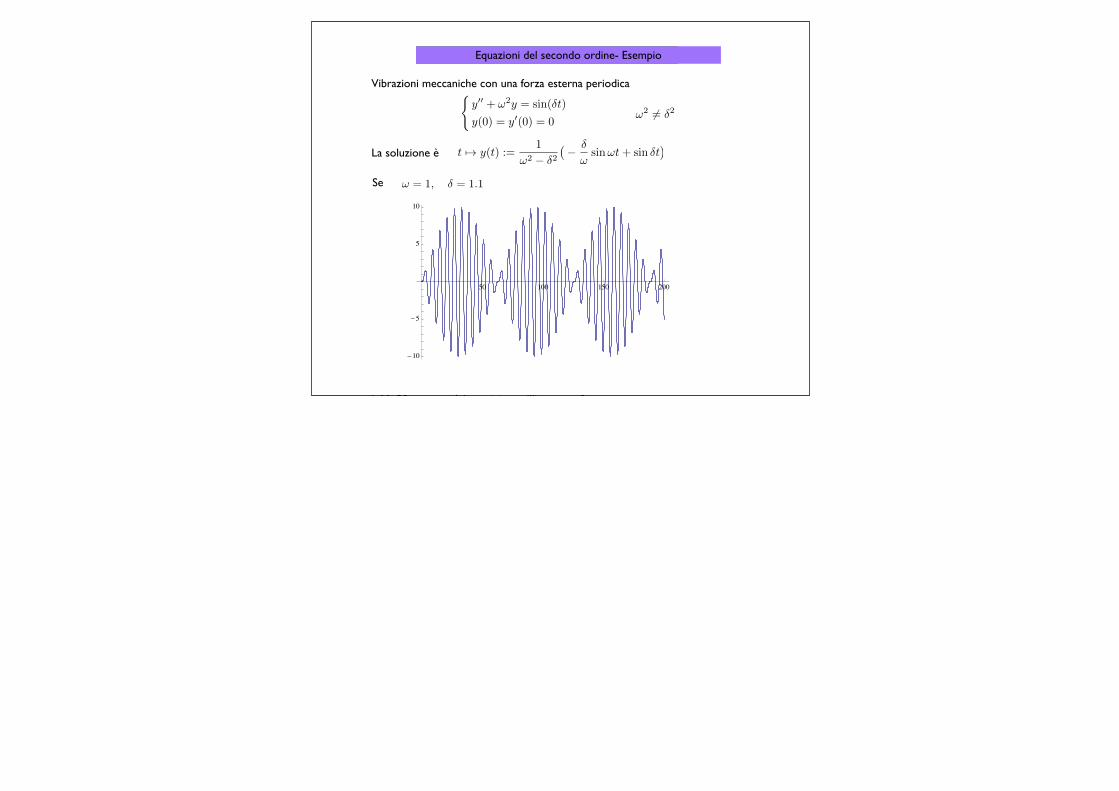
Vibrazioni meccaniche con una forza esterna periodica
�y�� + ω2y = sin(δt)
y(0) = y�(0) = 0ω2 �= δ2
La soluzione è
t �→ y(t) :=1
ω2 − δ2�− δ
ωsinωt+ sin δt
�
Se ω = 1, δ = 1.4
50 100 150 200
�2
�1
1
2
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Vibrazioni meccaniche con una forza esterna periodica �y�� + ω2y = sin(δt)
y(0) = y�(0) = 0ω2 �= δ2
La soluzione è t �→ y(t) :=1
ω2 − δ2�− δ
ωsinωt+ sin δt
�
Se ω = 1, δ = 1.1
50 100 150 200
�10
�5
5
10
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
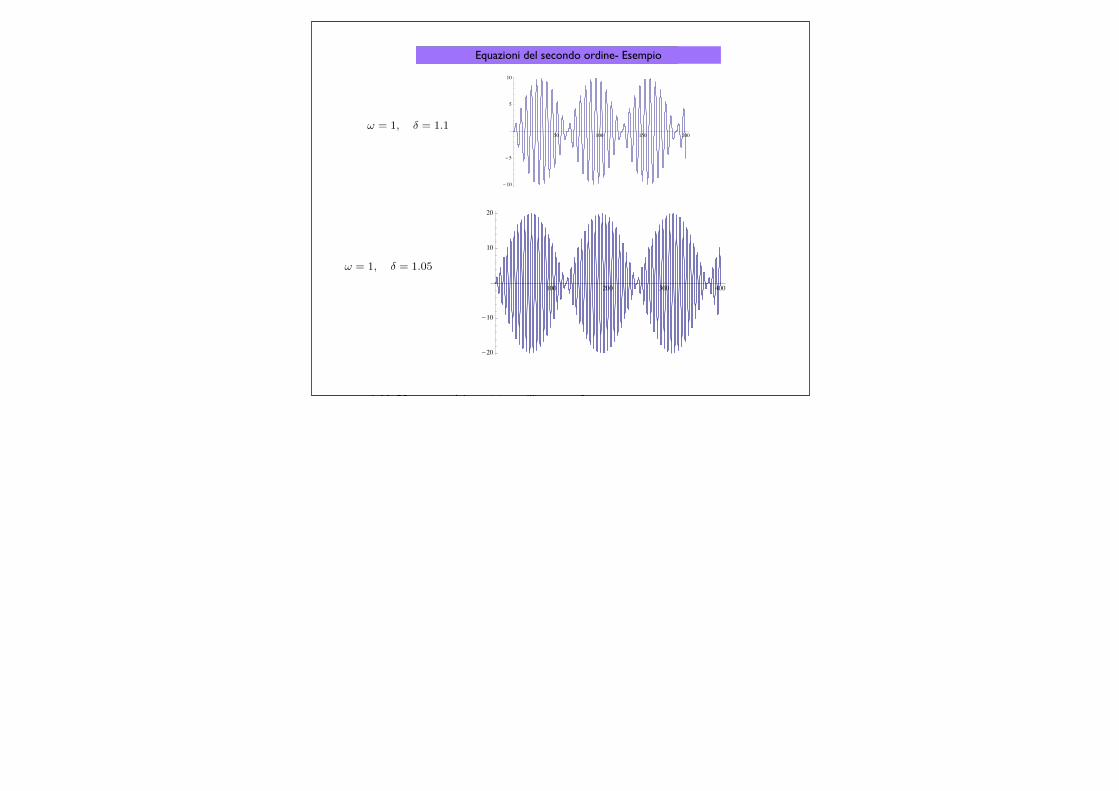
ω = 1, δ = 1.150 100 150 200
�10
�5
5
10
ω = 1, δ = 1.05
100 200 300 400
�20
�10
10
20

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Vibrazioni meccaniche libere di un punto P di massa m con resistenza viscosa
t �→ x(t) rappresenta la posizione di P sulla retta e soddisfa l’equazione
L’equazione precedente viene abitualmente scritta come
La forma delle soluzioni dipende dalla grandezza reciproca dei coefficienti
mx��(t) = −k x(t)− βx�(t)
x�� + 2γx� + ω2x = 0 dove ω :=�
mk > 0 e γ = 1
2βm
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
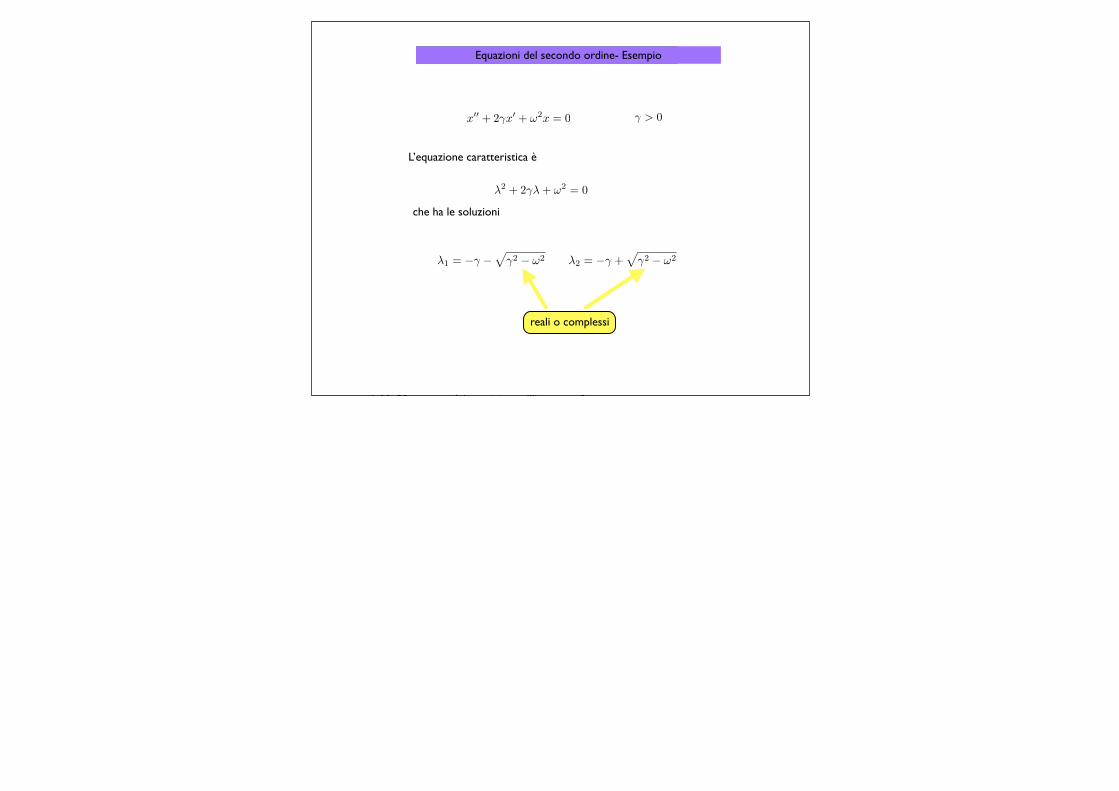
x�� + 2γx� + ω2x = 0 γ > 0
L’equazione caratteristica è
λ2 + 2γλ+ ω2 = 0
che ha le soluzioni
λ1 = −γ −�
γ2 − ω2 λ2 = −γ +�γ2 − ω2
reali o complessi

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
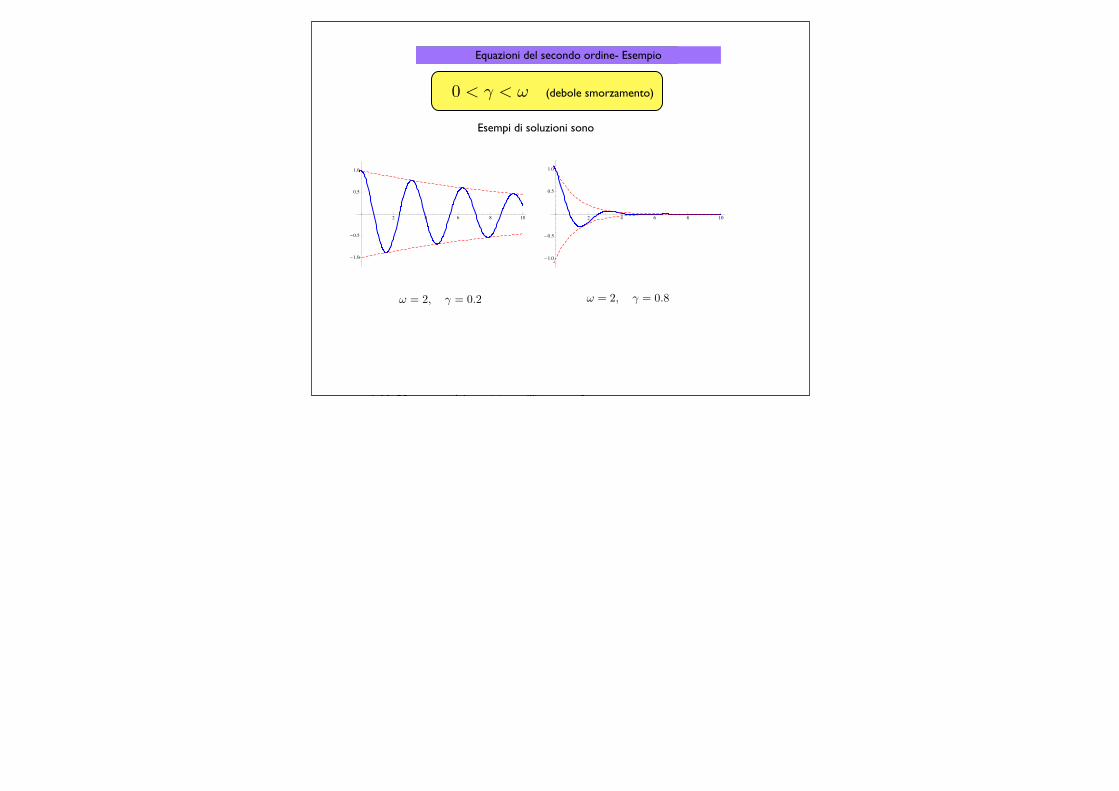
(debole smorzamento)
Continuano ad esserci oscillazioni però smorzate.
0 < γ < ω
Le soluzioni dell’equazione caratteristica sono:
λ1 = −γ − i�
ω2 − γ2 λ2 = −γ + i�ω2 − γ2
Ponendo per semplicità ν =�
ω2 − γ2
l’integrale generale è
x(t) := e−γt(c1 cos(νt) + c2 sin(νt))
oppure, in altra forma,
x(t) := Ae−γt cos(νt+ α)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
(debole smorzamento)0 < γ < ω
2 4 6 8 10
�1.0
�0.5
0.5
1.0
2 4 6 8 10
�1.0
�0.5
0.5
1.0
ω = 2, γ = 0.2 ω = 2, γ = 0.8
Esempi di soluzioni sono
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
Se supponiamo γ > ω (forte smorzamento)
sono entrambe reali e negative.λ1, λ2
L’integrale generale dell’equazione differenziale è:
x(t) := c1eλ1t + c2e
λ2t
per arbitrarie costanti reali c1 e c2.
allora
Tutte le soluzioni hanno limite zero per t tendente a +∞
Non ci sono andamenti oscillatori.
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
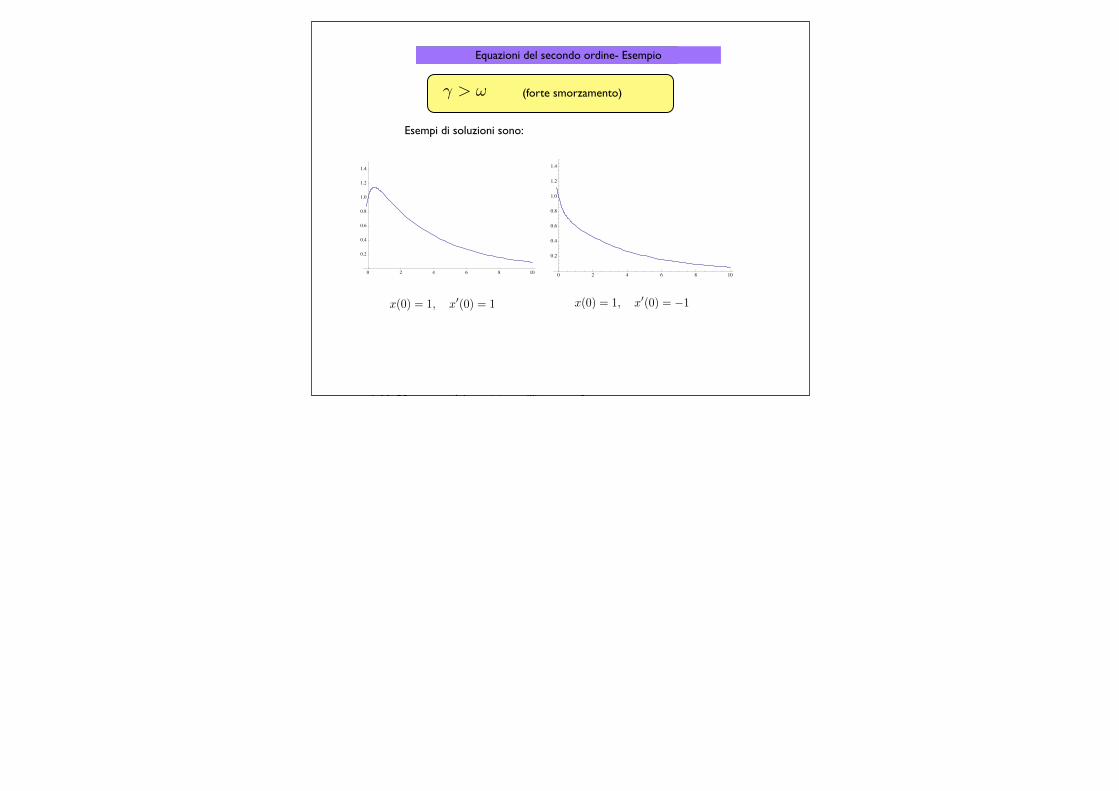
γ > ω (forte smorzamento)
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1.0
1.2
1.4
0 2 4 6 8 10
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Esempi di soluzioni sono:
x(0) = 1, x�(0) = 1 x(0) = 1, x�(0) = −1
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliEquazioni del secondo ordine- Esempio
è la posizione all’istante t=0
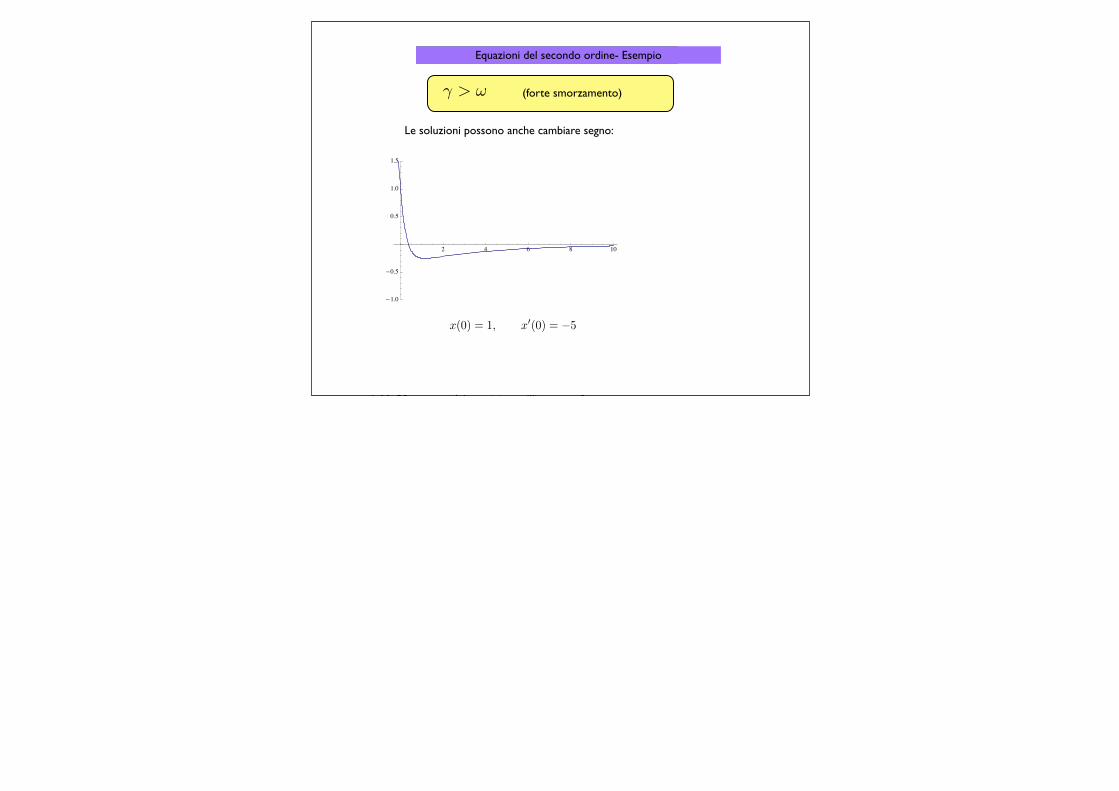
γ > ω (forte smorzamento)
Le soluzioni possono anche cambiare segno:
2 4 6 8 10
�1.0
�0.5
0.5
1.0
1.5
x(0) = 1, x�(0) = −5
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliIsocrona di Leibniz
è la posizione all’istante t=0
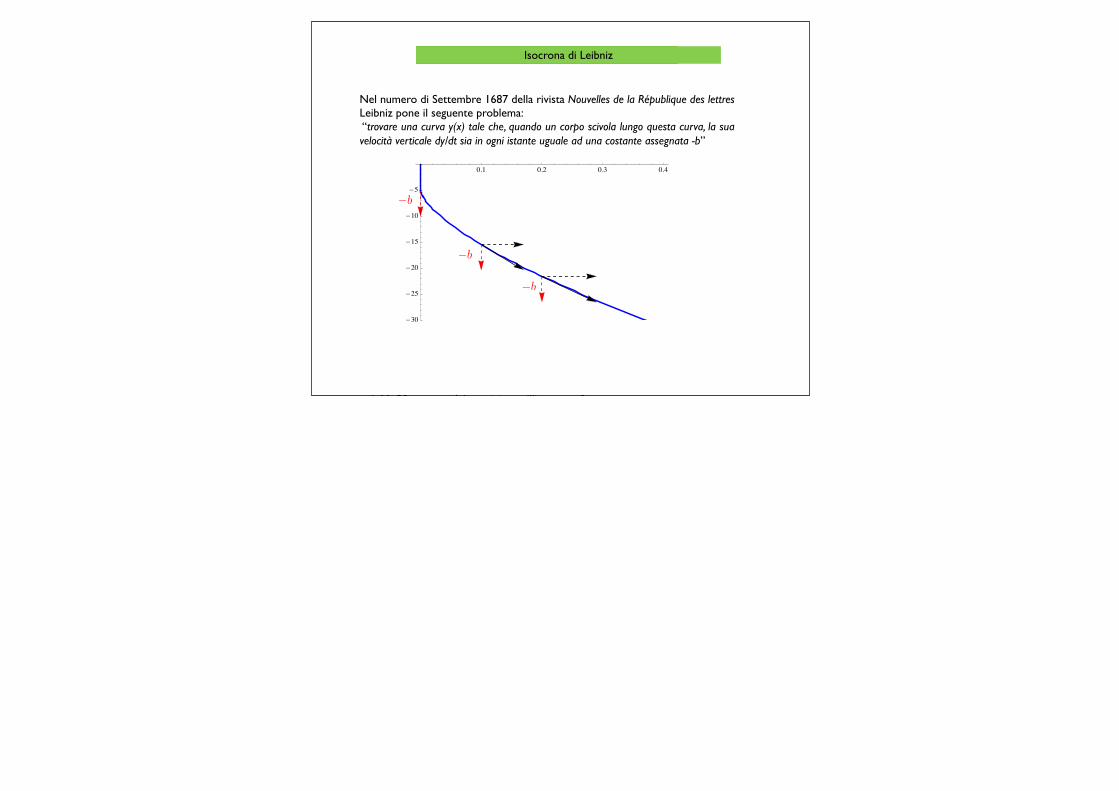
Nel numero di Settembre 1687 della rivista Nouvelles de la République des lettres Leibniz pone il seguente problema: “trovare una curva y(x) tale che, quando un corpo scivola lungo questa curva, la sua velocità verticale dy/dt sia in ogni istante uguale ad una costante assegnata -b”
0.1 0.2 0.3 0.4
�30
�25
�20
�15
�10
�5−b
−b
−b

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliIsocrona di Leibniz
è la posizione all’istante t=0
La soluzione viene data un mese più tardi dal “Vir Celeberrimus Christianus Hugenius” , ma senza dimostrazione. Leibniz pubblica una “dimostrazione” nel 1689 che lascia insoddisfatti i contemporanei. Invece una dimostrazione che usa il “moderno” calcolo differenziale è pubblicata da Jacob Bernoulli (1690).
Galileo aveva scoperto che se un corpo cade, a partire dall’origine, la sua velocità quando raggiunge un quota y<0 è
v =�
−2gy
dove “g” è l’accelerazione di gravità ed è una costante.
Quindi se s(t)=(x(t),y(t)) rappresenta la traiettoria del punto in caduta
����ds
dt
����2
= −2gy(t)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliIsocrona di Leibniz
è la posizione all’istante t=0
Cioè ����ds
dt
����2
=
�dx
dt
�2
+
�dy
dt
�2
= −2gy(t)
utilizzando la condizione
�dy
dt
�2
= b2
si ottiene
e quindi
�dx
dt
�2
+
�dy
dt
�2
=
�dx
dy
dy
dt
�2
+
�dy
dt
�2
= b2��
dx
dy
�2
+ 1
�= −2gy(t)
�dx
dy
�2
= −1− 2gy(x)
b2

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliIsocrona di Leibniz
è la posizione all’istante t=0
Cioè ����ds
dt
����2
=
�dx
dt
�2
+
�dy
dt
�2
= −2gy(t)
utilizzando la condizione
�dy
dt
�2
= b2
si ottiene
e quindi
�dx
dt
�2
+
�dy
dt
�2
=
�dx
dy
dy
dt
�2
+
�dy
dt
�2
= b2��
dx
dy
�2
+ 1
�= −2gy(t)
�dx
dy
�2
= −1− 2gy(x)
b2

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliIsocrona di Leibniz
è la posizione all’istante t=0
otteniamo infine
ed equivalentemente
dx
dy= −
�−1− 2gy(x)
b2
dy
dx= − 1�
−1− 2gb2 y(x)
Si tratta di una equazione a variabili separabili. Procedendo come al solito:
−� �
−1− 2g
b2y dy =
�dx
b2
3g
�−1− 2g
b2y(x)
�3/2
= x+ c
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliIsocrona di Leibniz
è la posizione all’istante t=0
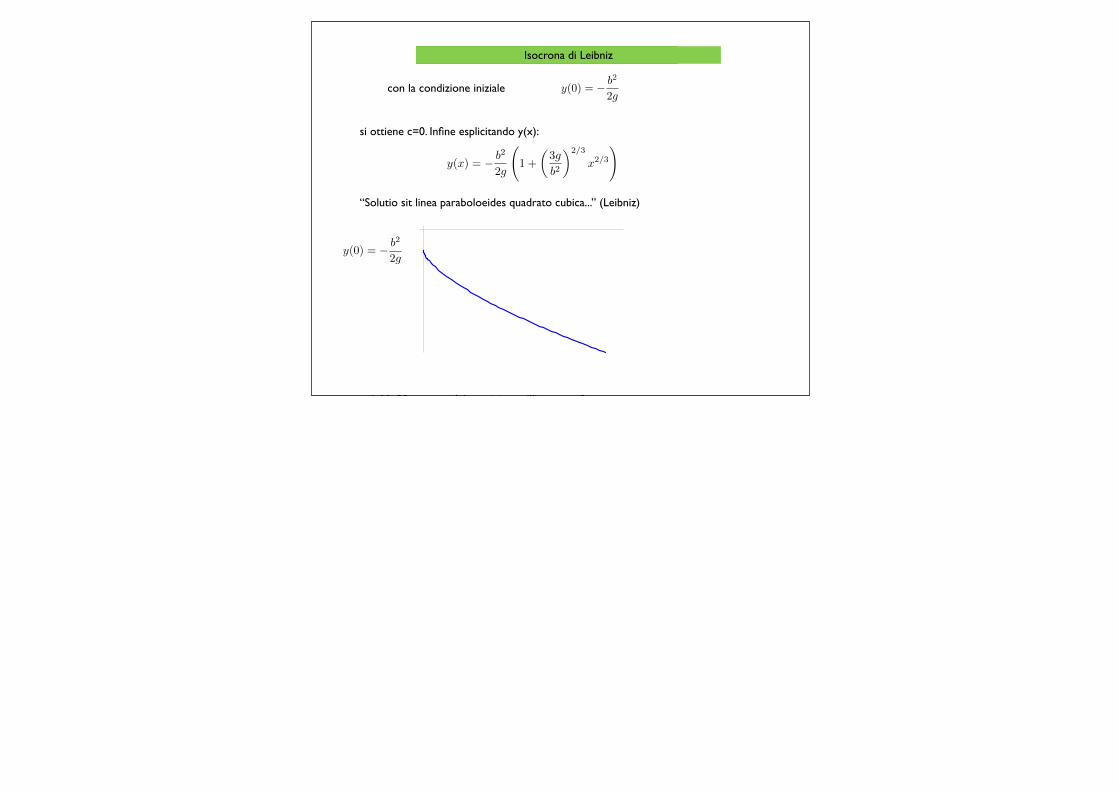
con la condizione iniziale y(0) = − b2
2g
si ottiene c=0. Infine esplicitando y(x):
y(x) = − b2
2g
�1 +
�3g
b2
�2/3
x2/3
�
y(0) = − b2
2g
“Solutio sit linea paraboloeides quadrato cubica...” (Leibniz)

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa Trattrice
è la posizione all’istante t=0
“Il famoso medico parigino Claude Perrault, altrettanto famoso per i suoi studi di meccanica e di architettura ... e membro dell’Accademia Reale Francese delle Scienze, propose questo problema a me e a molti altri prima di me, ammettendo chiaramente di non essere stato in grado di risolverlo...”
Leibniz (1693)
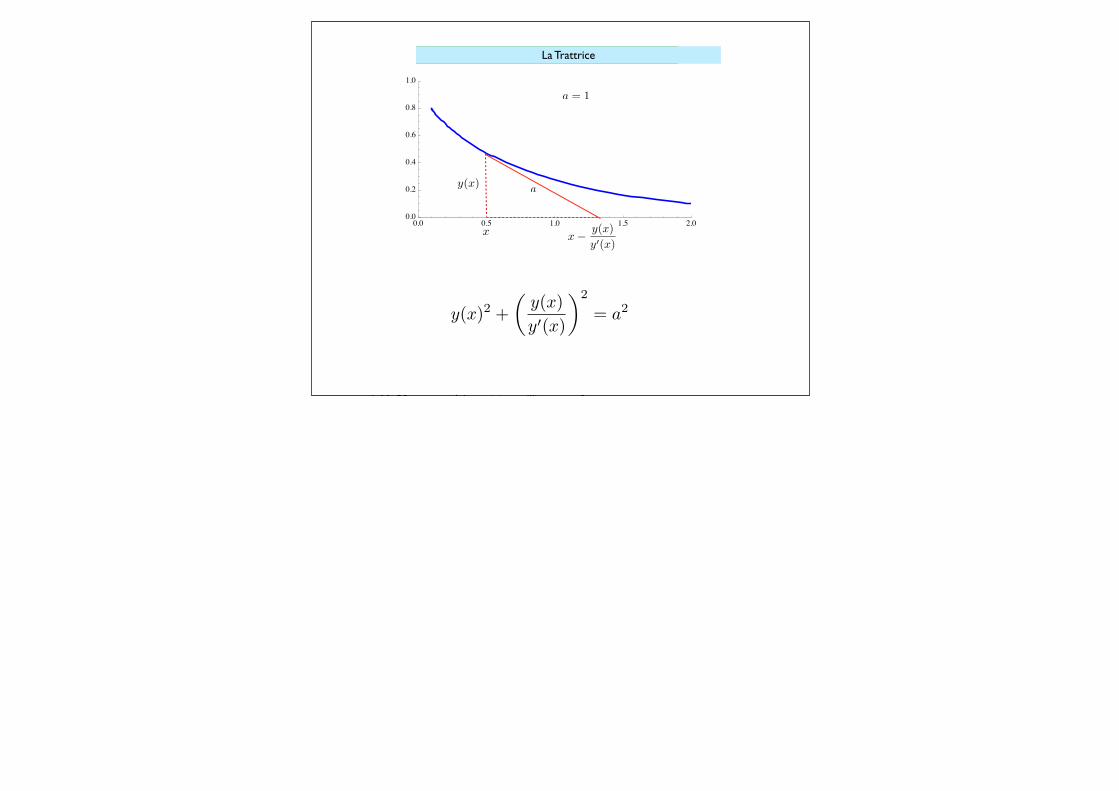
Per quale curva la lunghezza del segmento di tangente, compreso fra la curva e l’asse delle ascisse, è costante?
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa Trattrice
è la posizione all’istante t=0
0.0 0.5 1.0 1.5 2.00.0
0.2
0.4
0.6
0.8
1.0
y(x)
x x− y(x)
y�(x)
a
a = 1
y(x)2 +
�y(x)
y�(x)
�2
= a2

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa Trattrice
è la posizione all’istante t=0
y(x)2 +
�y(x)
y�(x)
�2
= a2
y�(x) = − y(x)�a2 − y(x)2
Abbiamo scelto il segno meno compatibilmente con il disegno precedente. E’ ancora un’equazione a variabili separabili, quindi
−�a2 − y2
ydy = dx
−� �
a2 − y2
ydy = x+ c

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa Trattrice
è la posizione all’istante t=0
−� �
a2 − y2
ydy = x+ c
La primitiva si calcola esplicitamente con la sostituzione
�a2 − y2 = v, a2 − y2 = v2, −ydy = vdv
e si ottiene
�v2
a2 − v2dv = x+ c
−v +a
2log |a+ v
a− v| = x+ c
che si integra con la tecnica dei “fratti semplici” (introdotta da Johann Bernoulli nel 1702) ottenendo

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa Trattrice
è la posizione all’istante t=0
−� �
a2 − y2
ydy = x+ c
Quindi da
si ottiene
−�a2 − y2 + a log(
a+�a2 − y2
y) = x+ c
e con la condizione y(0)=a si ha c=0
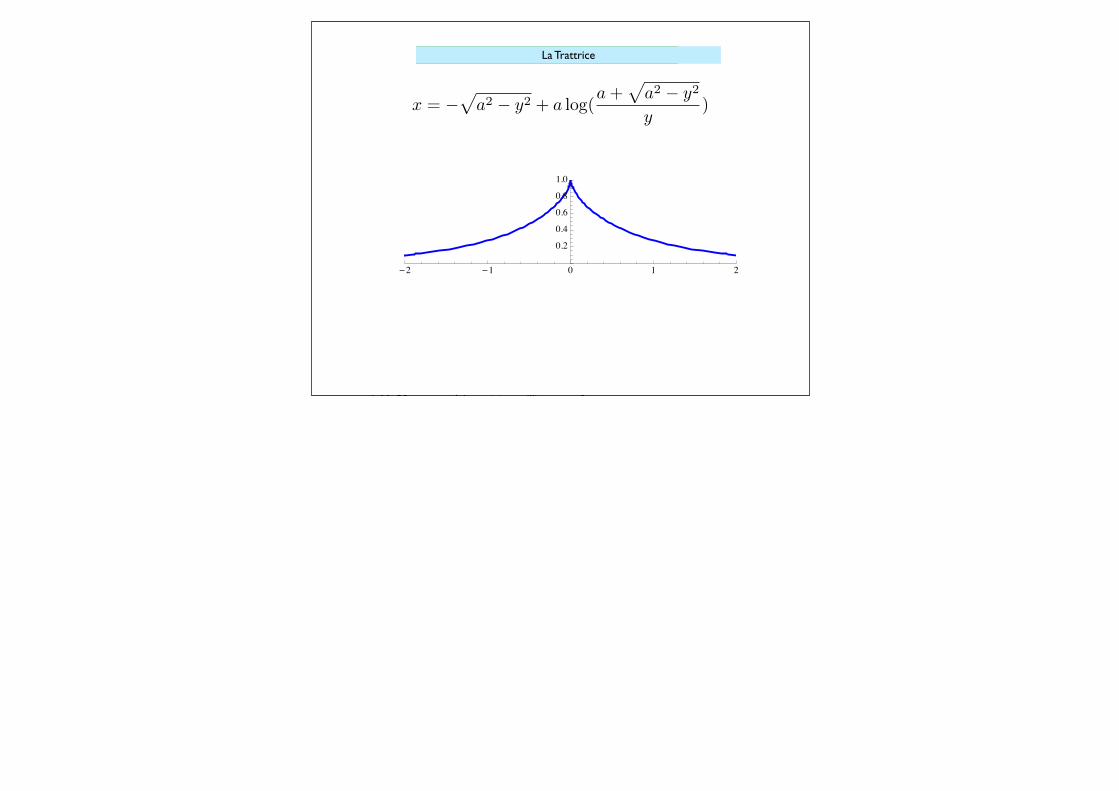
x = −�
a2 − y2 + a log(a+
�a2 − y2
y)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa Trattrice
è la posizione all’istante t=0
x = −�
a2 − y2 + a log(a+
�a2 − y2
y)
�2 �1 0 1 2
0.2
0.4
0.6
0.8
1.0

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
Nel 1690 Jakob Bernoulli pose esplicitamente il problema di trovare la curva che rappresenta la forma di un cavo pesante, flessibile e inestendibile, appeso liberamente a due punti fissi. Questa curva è chiamata da Leibniz “Catenaria”.
Il problema era stato trattato da Leonardo da Vinci nel XV secolo. Galileo nel 1638 aveva affermato che la forma assunta fosse simile a quella di una parabola “la catenella cammina quasi ad unguem sopra la parabola”. Nel 1646 Christiaan Huygens (16 anni) aveva mostrato, in una lettera a Padre Mersenne, con ragionamenti fisici, che la catenaria non poteva essere una parabola.
Christiaan HuygensL’Aia 1629-L’Aia 1695
La catenaria in un manoscritto di Huygens

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
Negli <<Acta Eruditorum>> del giugno 1691, Leibniz, Huygens, Johann Bernoulli pubblicano, indipendentemente, le loro soluzioni.
“...Gli sforzi di mio fratello non ebbero successo; per parte mia fui più fortunato, perché trovai il modo di risolverlo ... E’ vero che mi costò tanto sforzo da rubarmi il riposo per una intera notte... il mattino successivo corsi da mio fratello che stava lottando contro questo nodo gordiano pensando, come Galileo, che la catenaria fosse una parabola. Alt. Alt, gli dico...”
Johann Bernoulli (lettera a Pierre de Montmort del 1718)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
�1.0 �0.5 0.5 1.0 1.5 2.0
0.5
1.0
1.5
2.0
2.5
3.0
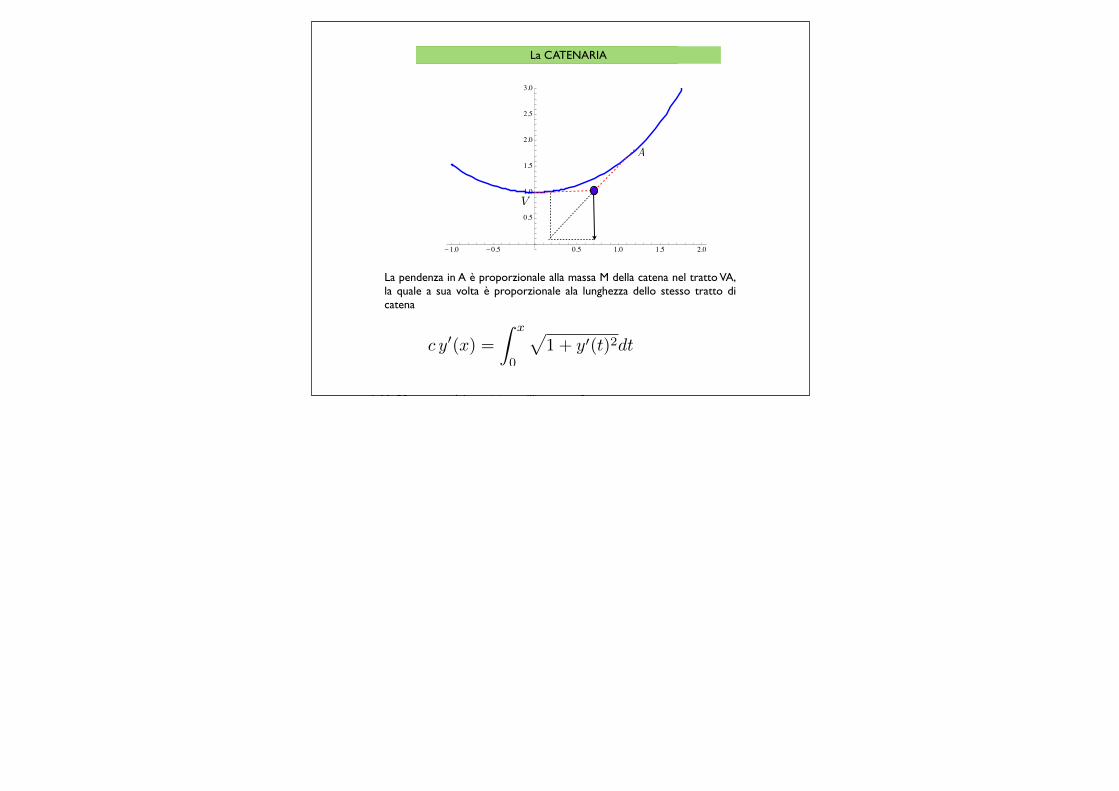
A
V
La pendenza in A è proporzionale alla massa M della catena nel tratto VA, la quale a sua volta è proporzionale ala lunghezza dello stesso tratto di catena
c y�(x) =
� x
0
�1 + y�(t)2dt

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
c y�(x) =
� x
0
�1 + y�(t)2dt
c y��(x) =�
1 + y�(x)2
Sostituendo y’(x)=p(x)
c p� =�
1 + p2
che è a variabili separabili
c1�
1 + p2dp = dx

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
c1�
1 + p2dp = dx
c
�1�
1 + p2dp =
�dx
c sinh−1(p) = x+ c1
p(x) = y�(x) = sinh(x
c+
c1c)
se poniamo la condizione y’(0)=0 otteniamo c1=0
y�(x) = sinh(x
c)

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
se poniamo la doppia condizione y’(0)=0 e y(0)=1 otteniamo c1=c2=0
y�(x) = sinh(x
c+
c1c)
y(x) = c cosh(x
c+
c1c) + c2
y(x) = c cosh(x
c)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
�1.0 �0.5 0.5 1.0
�3
�2
�1
1
2
3
4
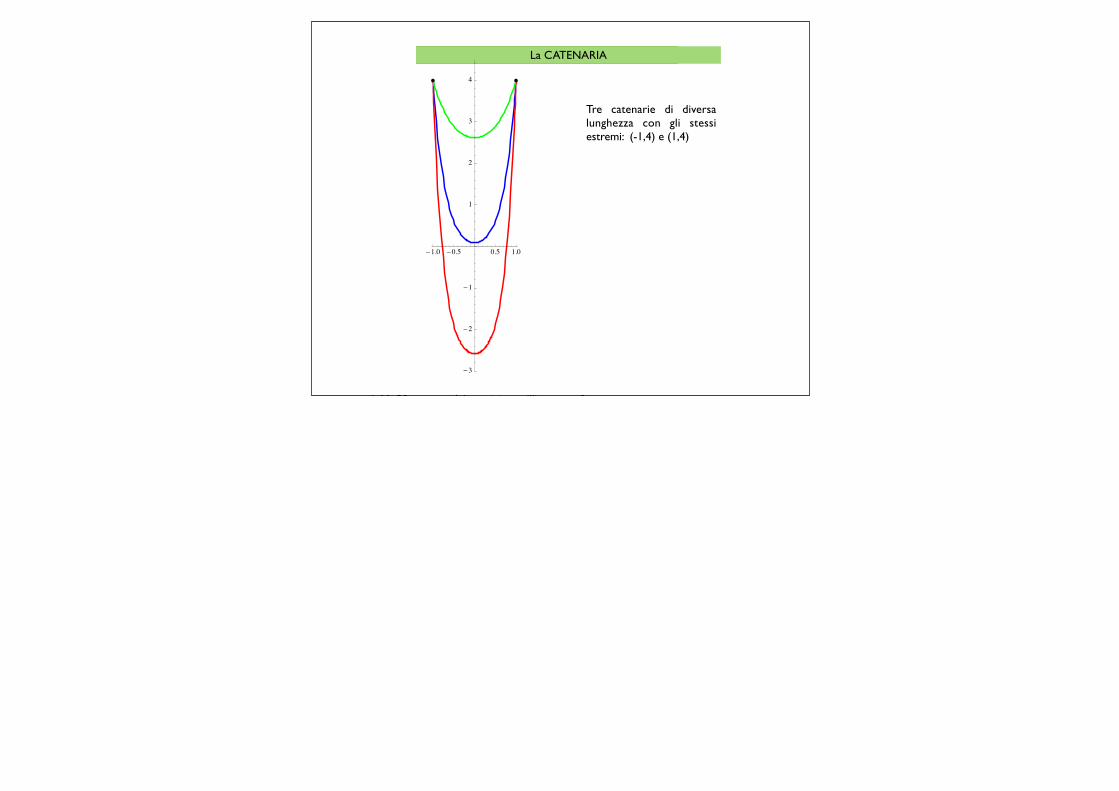
Tre catenarie di diversa lunghezza con gli stessi estremi: (-1,4) e (1,4)
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
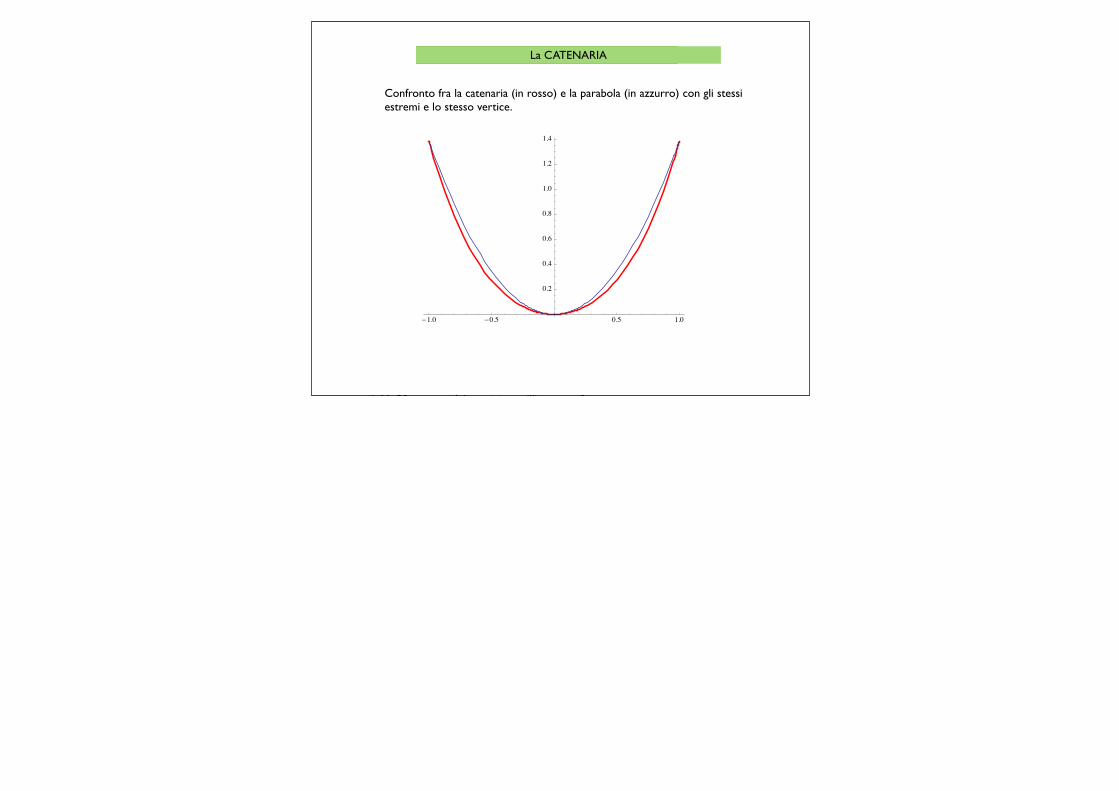
Confronto fra la catenaria (in rosso) e la parabola (in azzurro) con gli stessi estremi e lo stesso vertice.
�1.0 �0.5 0.5 1.0
0.2
0.4
0.6
0.8
1.0
1.2
1.4
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
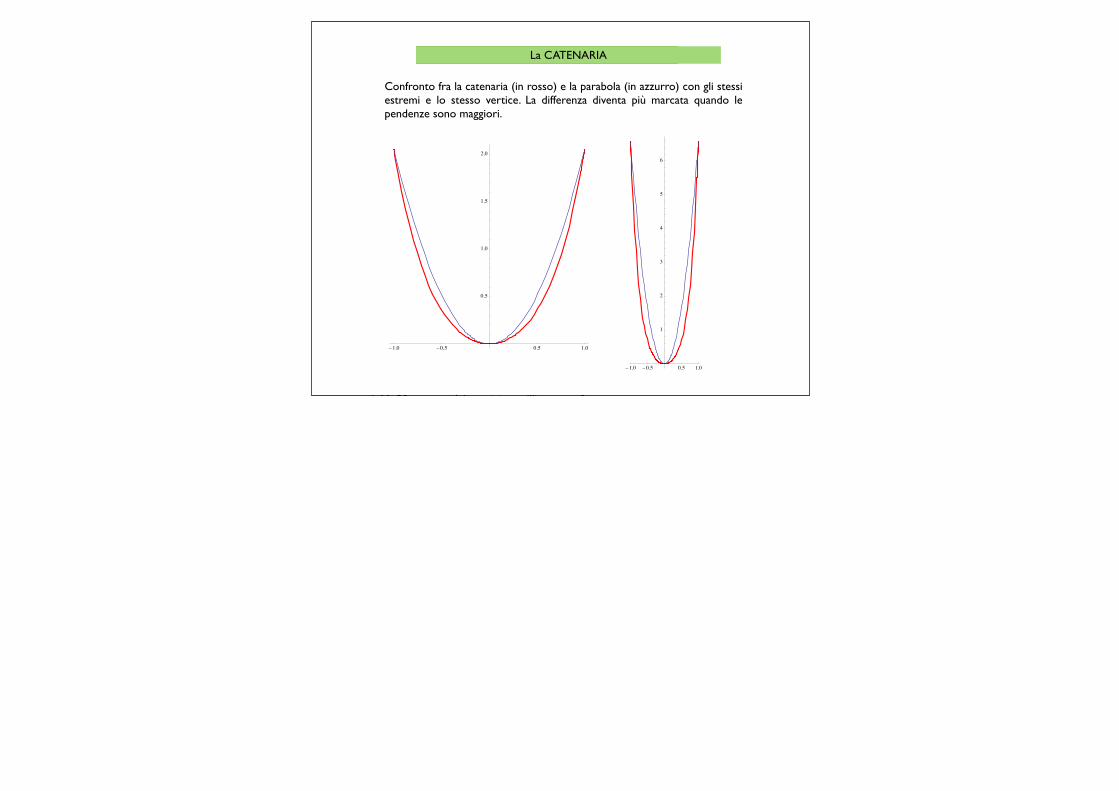
Confronto fra la catenaria (in rosso) e la parabola (in azzurro) con gli stessi estremi e lo stesso vertice. La differenza diventa più marcata quando le pendenze sono maggiori.
�1.0 �0.5 0.5 1.0
0.5
1.0
1.5
2.0
�1.0 �0.5 0.5 1.0
1
2
3
4
5
6
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa CATENARIA
è la posizione all’istante t=0
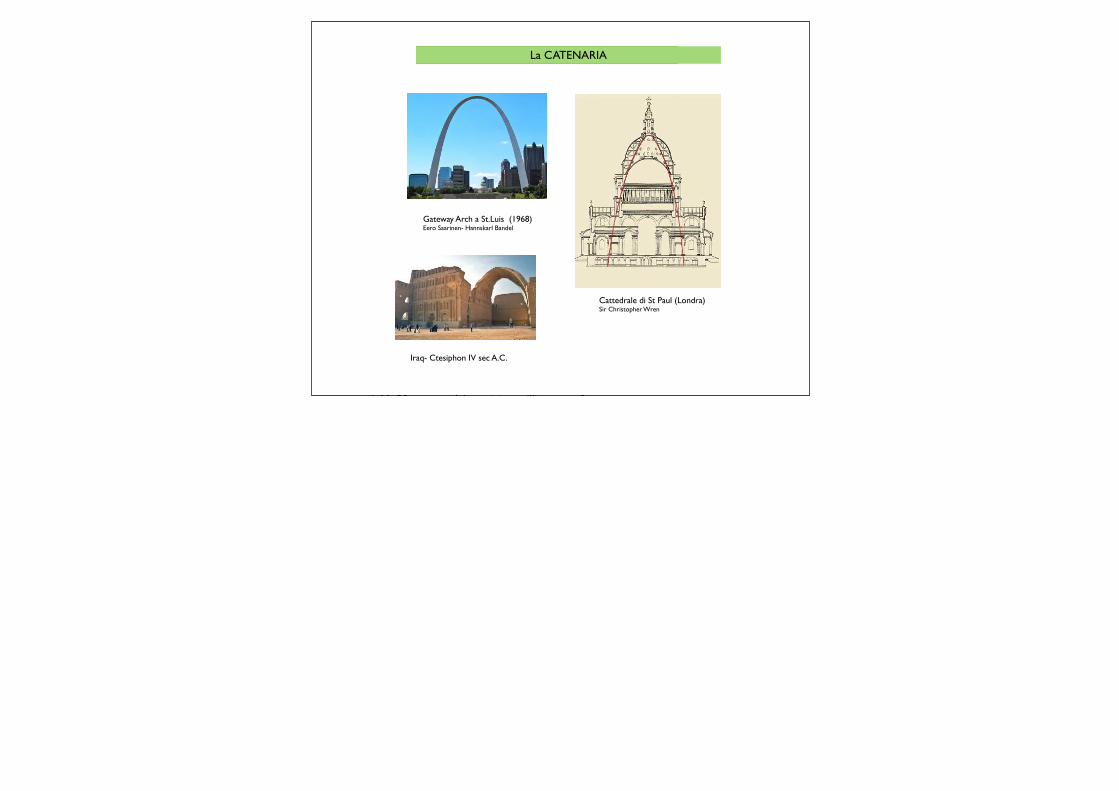
Cattedrale di St Paul (Londra)Sir Christopher Wren
Gateway Arch a St.Luis (1968)Eero Saarinen- Hannskarl Bandel
Iraq- Ctesiphon IV sec A.C.

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
Negli <<Acta Eruditorum>> del 1696 Johann Bernoulli propose, come sfida agli altri matematici, il problema in seguito diventato famoso come problema della brachistocrona.
“Dati due punti A e B in un piano verticale, determinare il cammino AMB lungo il quale una particella M che parte da A ed è soggetta unicamente al proprio peso raggiunge B nel tempo minore.”
Joh. Bernoulli
Il problema era già stato affrontato da Galileo nel 1638. Galileo aveva dimostrato, correttamente, che il segmento congiungente A e B non era la traiettoria ottimale, ma aveva poi concluso, in modo errato, che la traiettoria ottimale fosse un arco di circonferenza.
Johann BernoulliBasilea 1667- Basilea 1748
Newton, Leibniz, de L’Hospital, Johann Bernoulli e Jacob Bernoulli trovarono tutti la soluzione esatta. Tutte furono pubblicate nel numero di maggio di <<Acta Eruditorum>> del 1697.Con sorpresa, scoprirono che la curva soluzione era un arco di cicloide.

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
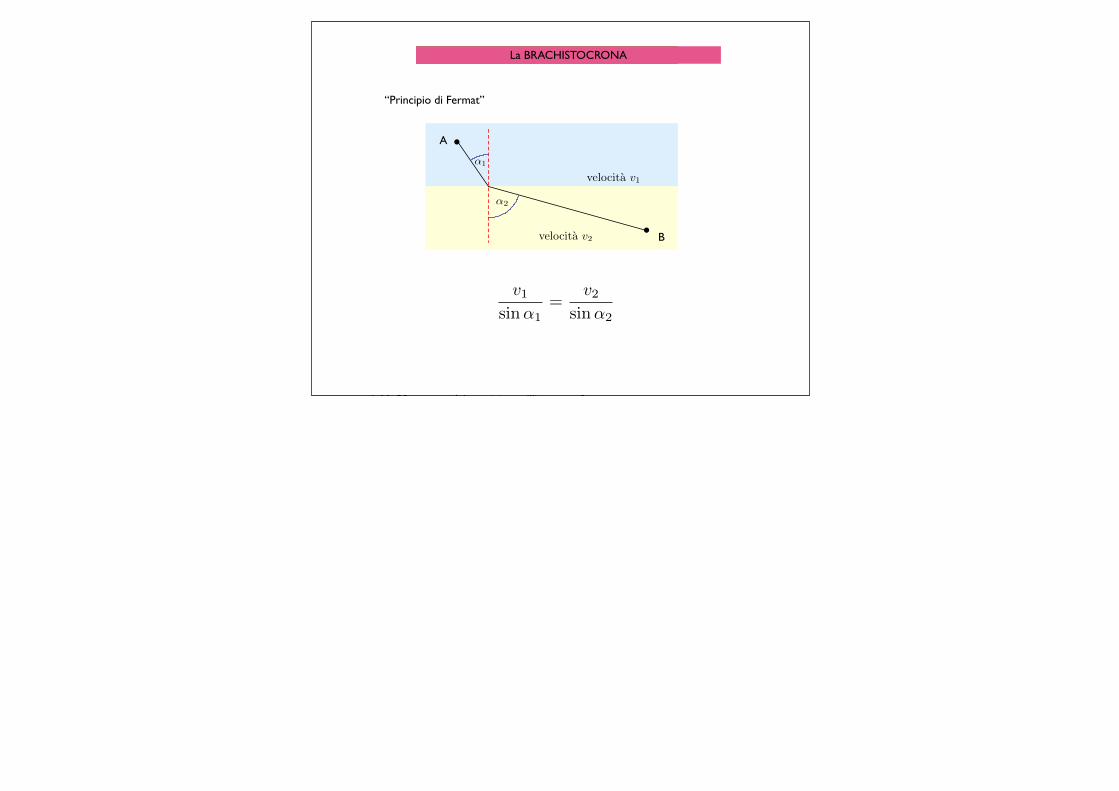
Johann Bernoulli usa il “Principio di Fermat”, secondo il quale il percorso di massima velocità media (e minimo tempo di percorrenza) per un corpo che parte da A e raggiunge B e deve attraversare due regioni nelle quali si muove con velocità differenti
A
B
velocita v1
velocita v2
v1 < v2
è caratterizzato dalla condizione seguente
Le tecniche di soluzione utilizzate sono differenti.
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
“Principio di Fermat”
A
Bvelocita v2
velocita v1
α1
α2
v1sinα1
=v2
sinα2
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
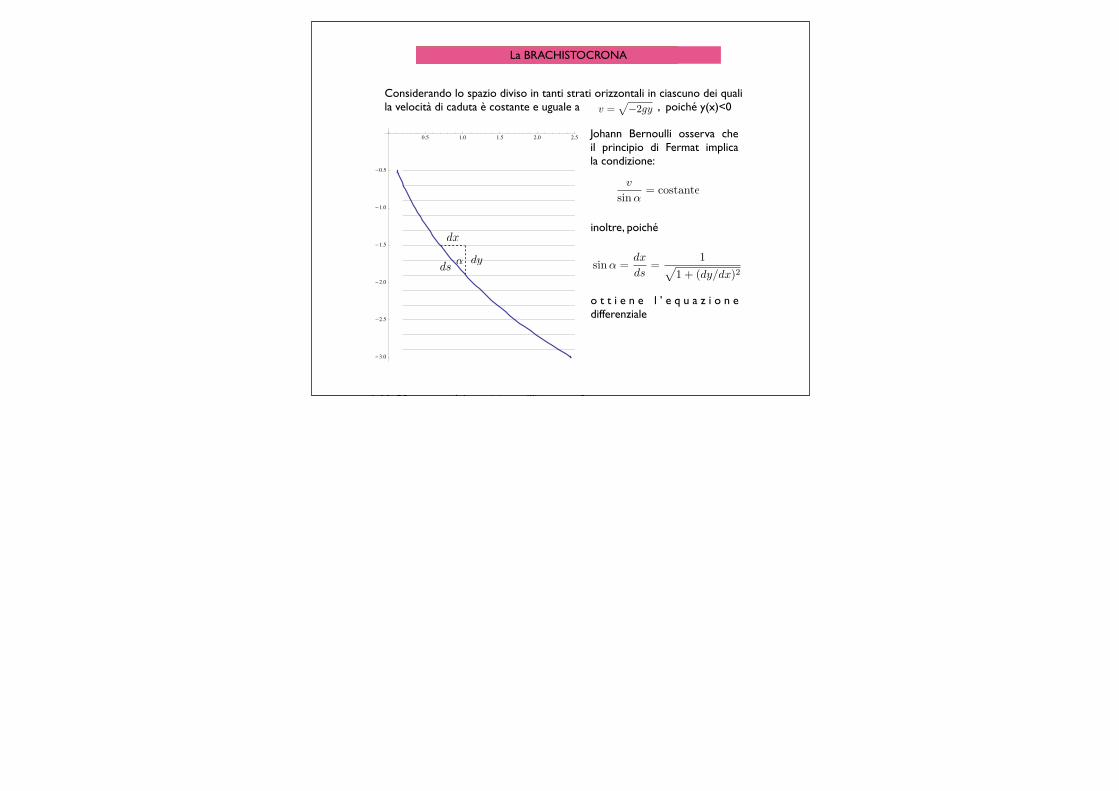
Considerando lo spazio diviso in tanti strati orizzontali in ciascuno dei quali la velocità di caduta è costante e uguale a , poiché y(x)<0
0.5 1.0 1.5 2.0 2.5
�3.0
�2.5
�2.0
�1.5
�1.0
�0.5
dx
dyds
v =�
−2gy
α
Johann Bernoulli osserva che il principio di Fermat implica la condizione:
v
sinα= costante
inoltre, poiché
sinα =dx
ds=
1�1 + (dy/dx)2
o t t i e n e l ’ e q u a z i o n e differenziale

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
Che può essere riscritta come
�−2gy
�1 + (y�)2 = K
y� = −
�2gy +K2
−2gy
La scelta del segno della radice è motivata dal fatto che y’(x)<0.
−�
−2gy
2gy +K2dy = dx
e ponendo si ottiene:δ =K2
2g

q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
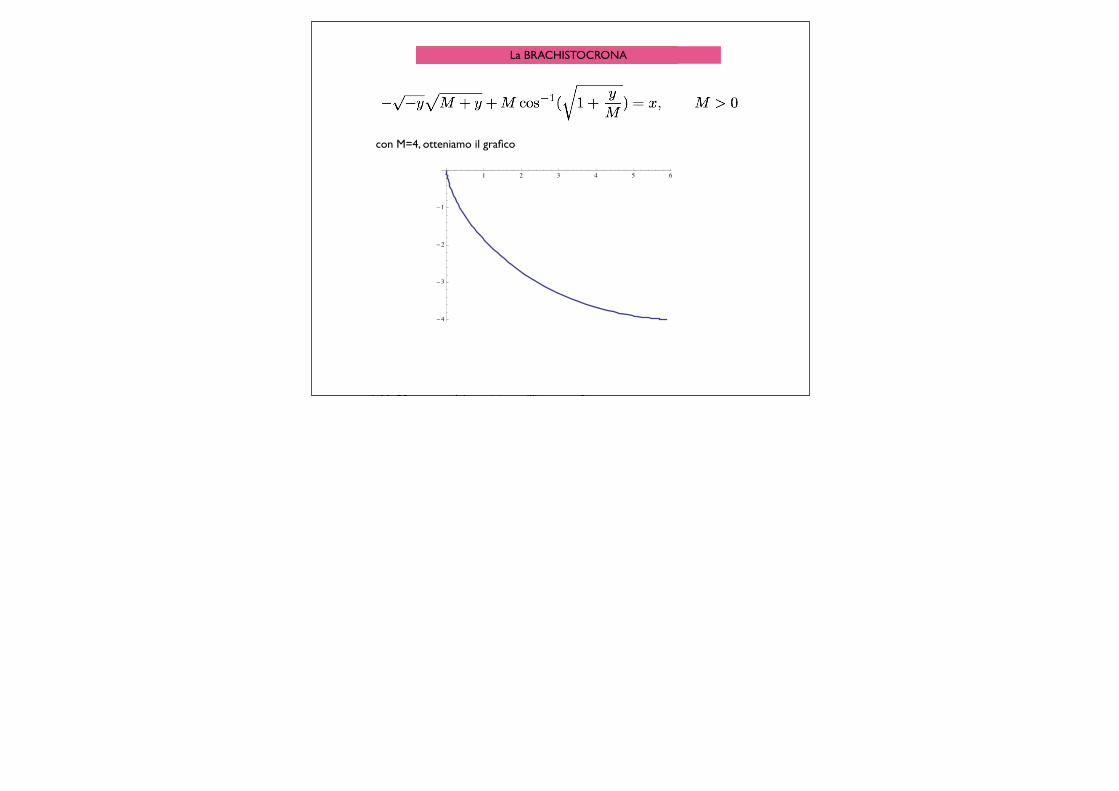
integrando si ottiene
Imponendo la condizione che il moto abbia inizio dall’origine, cioè y(0)=0 si ottiene c=0. La soluzione assume i valori −δ ≤ y(x) ≤ 0
q=1; M=20
Equazioni differenziali-soluzioni analiticheEquazioni differenziali-soluzioni con tecniche analiticheRicerca di integrali generaliLa BRACHISTOCRONA
è la posizione all’istante t=0
con M=4, otteniamo il grafico
1 2 3 4 5 6
�4
�3
�2
�1


















