6 geometria aree - people.unica.it - Università di...
24
Geometria delle aree Lo studio dei concetti base relativi alla Geometria delle Aree: • consente di trasformare le azioni interne in sollecitazioni • consente di valutare l’elasticità delle strutture • fornisce gli strumenti per valutare le strutture iperstatiche Obiettivi: saper calcolare il baricentro, il momento statico ed il momento di inerzia di semplici figure piane
Transcript of 6 geometria aree - people.unica.it - Università di...

Geometria delle aree
Lo studio dei concetti base relativi alla Geometria delle Aree: • consente di trasformare le azioni interne in sollecitazioni • consente di valutare l’elasticità delle strutture • fornisce gli strumenti per valutare le strutture iperstatiche
Obiettivi: saper calcolare il baricentro, il momento statico ed il momento di inerzia di semplici figure piane

Concetti introduttivi
Si definisce baricentro di un corpo, o centro di gravità, il punto nel quale si può immaginare concentrata tutta la sua forza peso. Per il baricentro, quindi, passa la risultante di tutte le forze peso delle singole parti del corpo, comunque questo venga orientato. Perciò un corpo, sospeso nel suo baricentro, si trova in una condizione di equilibrio indifferente (sottoposto a un qualsiasi spostamento, rimane in equilibrio nella nuova posizione) Partiamo dalla definizione di baricentro per un sistema di masse puntiformi
• Si consideri un sistema di masse puntiformi immerse in un campo gravitazionale
• Ciascun punto sarà soggetto ad una forza (peso) proporzionale alla propria massa
• In tali condizioni esiste una retta, detta retta di applicazione della risultante lungo la quale si può applicare una forza di modulo pari alla somma delle forze peso (la risultante appunto) che è equipollente al sistema di partenza
• Si può pensare che il sistema di masse costituisca il modello di un corpo rigido (di massa totale m) se le distanze mutue delle masse puntiformi non variano

Se si ruota tutto il sistema di punti in una direzione qualsiasi, la direzione della risultante varia conseguentemente. Tutte le possibili rette di applicazione della risultante si intersecheranno in un punto che viene definito baricentro o anche centro delle forze parallele Nel caso di forze peso, le coordinate del baricentro G sono determinate dall’equazione vettoriale
( ) ( ) ( )
m
mOP
gm
gmOP
P
pOPOG
N
iii
N
iii
N
iii ∑∑∑
===
⋅−=
⋅
⋅⋅−=
⋅−=− 111 )(
Nella quale O rappresenta l’origine del sistema di riferimento. Per come è scritta, l’equazione afferma che il baricentro è anche centro di massa L’equazione precedente può essere proiettata su un sistema di riferimento cartesiano come segue:
m
mxx
N
iii
G
∑=
⋅= 1
m
myy
N
iii
G
∑=
⋅= 1
m
mzz
N
iii
G
∑=
⋅= 1
Concetti introduttivi
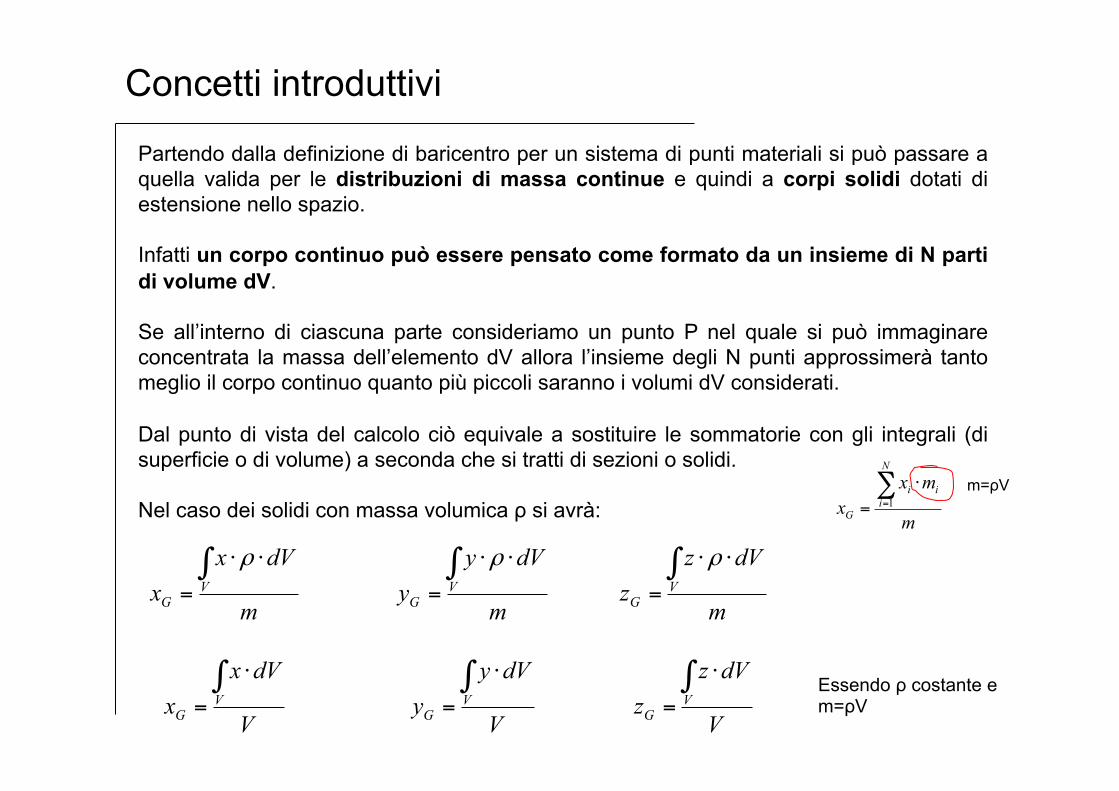
Partendo dalla definizione di baricentro per un sistema di punti materiali si può passare a quella valida per le distribuzioni di massa continue e quindi a corpi solidi dotati di estensione nello spazio. Infatti un corpo continuo può essere pensato come formato da un insieme di N parti di volume dV. Se all’interno di ciascuna parte consideriamo un punto P nel quale si può immaginare concentrata la massa dell’elemento dV allora l’insieme degli N punti approssimerà tanto meglio il corpo continuo quanto più piccoli saranno i volumi dV considerati. Dal punto di vista del calcolo ciò equivale a sostituire le sommatorie con gli integrali (di superficie o di volume) a seconda che si tratti di sezioni o solidi. Nel caso dei solidi con massa volumica ρ si avrà:
Concetti introduttivi
m
dVxx VG
∫ ⋅⋅
=
ρ
m
dVyy VG
∫ ⋅⋅
=
ρ
m
dVzz VG
∫ ⋅⋅
=
ρ
V
dVxx VG
∫ ⋅
=V
dVyy VG
∫ ⋅
=V
dVzz VG
∫ ⋅
=Essendo ρ costante e m=ρV
m
mxx
N
iii
G
∑=
⋅= 1
m=ρV

Anche nel caso delle figure piane, che si ottengono per esempio dalla sezione di un componente tridimensionale, si può ancora definire un baricentro che, nella fattispecie, si definisce baricentro della sezione
Nelle figure piane..
Per trovare la posizione del baricentro di una sezione si consideri il sistema di riferimento cartesiano in figura e si applichino le relazioni
V
dVxx VG
∫ ⋅
=V
dVyy VG
∫ ⋅
=V
dVzz VG
∫ ⋅
=
tenendo conto del fatto che si può immaginare che il solido abbia spessore s piccolo e uniforme, le espressioni che forniscono le coordinate del baricentro si semplificano in questo modo:
A
dAXX AG
∫ ⋅
=A
dAYY AG
∫ ⋅
=Da queste equazioni si perviene alla definizione di «Momento Statico» di una sezione

Momento statico di una sezione
Per introdurre il concetto di «momento statico» di una sezione, consideriamo: • una superficie piana qualsiasi di area A • una retta r ad essa complanare:
Si immagini di suddividere la superficie in tante piccole aree ΔAi. Moltiplicando ciascun’area elementare per la rispettiva distanza yi dalla retta r, e sommando algebricamente, si ottiene una nuova grandezza definita momento statico Sr della superficie rispetto alla retta assegnata ossia:
∑=
Δ⋅=n
iiir AyS
1∫ ⋅=Ar dAySovvero, per areole infinitesime

Momenti statici
∫ ⋅=AX dAYS
Consideriamo la sezione «A» di un solido di forma prismatica generica:
Si definiscono momenti statici di A rispetto agli assi cartesiani di riferimento adottati le quantità:
∫ ⋅=AY dAXS
Momento statico rispetto all’asse X Momento statico rispetto all’asse Y
I momenti statici si esprimono attraverso una lunghezza3 quindi m3 , mm3 ecc.
Si osservi che i momenti statici si possono ottenere anche come prodotti delle coordinate del baricentro (XG, YG) per l’area della sezione, ossia:
AYS GX ⋅= AXS GY ⋅=A
dAXX AG
∫ ⋅
=A
dAYY AG
∫ ⋅
=

Momenti statici baricentrici
Una volta che sia stata determinata la posizione del baricentro della sezione, questa può essere assunta come origine degli assi per il sistema di riferimento
In questo caso, osservando che le coordinate del baricentro in questo nuovo sistema di riferimento sono (0,0), risulta che:
00 =⇒=⋅
== ∫y
yAG S
AS
A
dAxx
00 =⇒=⋅
== ∫x
xAG S
AS
A
dAyy
Queste equazioni ci dicono che i momenti statici, quando sono riferiti ad un asse baricentrico, sono nulli

Esempio: sezione rettangolare
Si proceda al calcolo dei momenti statici per una sezione rettangolare rispetto agli assi x e y sovrapposti ai due lati

Esempio: sezione rettangolare
Si proceda al calcolo dei momenti statici per una sezione rettangolare rispetto agli assi x e y sovrapposti ai due lati
Utilizzando la definizione vista in precedenza:
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅=⋅=⋅⋅=⋅= ∫∫∫ 22
2
00
2
0
hbybdyybdybydAySh
hh
Ax
⎟⎟⎠
⎞⎜⎜⎝
⎛⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅=⋅=⋅⋅=⋅= ∫∫∫ 22
2
00
2
0
bhxhdxxhdxhxdAxSb
bb
Ay
Utilizzando la definizione alternativa, si può osservare che il baricentro della sezione si trova alle coordinate (b/2, h/2)
AyS Gx ⋅= AxS Gy ⋅=
( ) 2
21
2hbhbhSx ⋅=⋅⋅= ( ) hbhbbSy ⋅=⋅⋅= 2
21
2
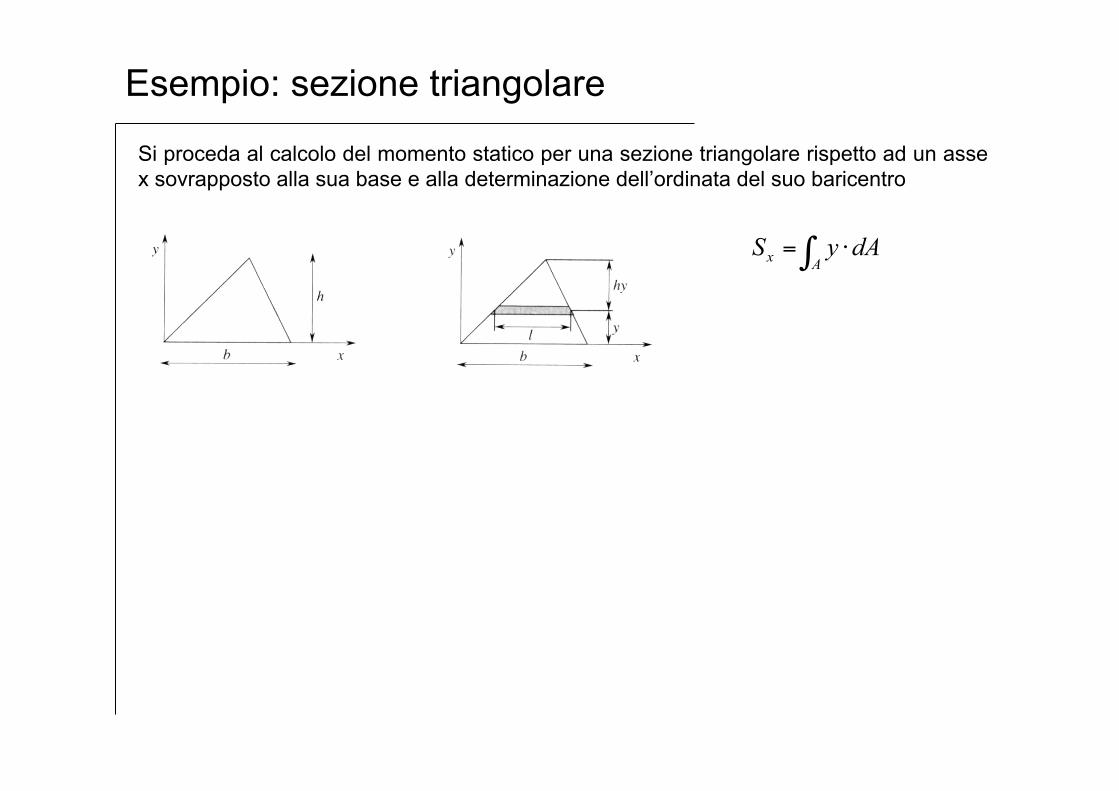
Esempio: sezione triangolare
Si proceda al calcolo del momento statico per una sezione triangolare rispetto ad un asse x sovrapposto alla sua base e alla determinazione dell’ordinata del suo baricentro
∫ ⋅=Ax dAyS

Esempio: sezione triangolare
Si proceda al calcolo del momento statico per una sezione triangolare rispetto ad un asse x sovrapposto alla sua base e alla determinazione dell’ordinata del suo baricentro
∫ ⋅=Ax dAyS
dyldA ⋅=
Il valore di l può essere ricavato dal rapporto di similitudine tra i triangoli
( )hyhblhyhbl −⋅
=⇒−= :)(:
( ) ( ) dyyyhhbSdyy
hyhbSdylyS
AxA Axx ⋅⋅−⋅=⇒⋅⋅−⋅
=⇒⋅⋅= ∫∫ ∫
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡ ⋅⋅=⇒⋅−⋅= ∫
hh
xAxyyh
hbSdyyhy
hbS
0
3
0
22
32
6632
2333 hbhhbhh
hbSx
⋅=⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛−⋅=
ASy x
G =

Sezioni composite
Per determinare i momenti statici (e quindi la posizione del baricentro) di sezioni di forma complessa di area A ma facilmente scomponibili in una serie di figure elementari A1, A2, ...An delle quali sono note le posizioni dei baricentri, si può sfruttare la seguente proprietà:
∫∫∫∫ ⋅++⋅+⋅=⋅=nA
nAAAx dAydAydAydAyS ...21
21
che, in questo caso, si può anche scrivere come:
∑=
⋅=⋅++⋅+⋅=n
iGiGnGGx inyAyAyAyAS
121 ...
21
Avendo indicato con Ai e yGi le aree e le ordinate rispetto all’asse x dei baricentri delle singole aree elementari. Analogamente si trova il momento statico rispetto all’asse y
∑=
⋅=⋅++⋅+⋅=n
iGiGnGGy inxAxAxAxAS
121 ...
21
La posizione del baricentro della sezione di area A si calcola dunque mediante le relazioni:
A
yAy
A
xAx
n
iGi
G
n
iGi
G
ii ∑∑==
⋅=
⋅= 11
Le coordinate del baricentro si ottengono come media pesata delle coordinate dei baricentri delle aree parziali assumendo come pesi i valori delle stesse.
AYS GX ⋅=AXS GY ⋅=
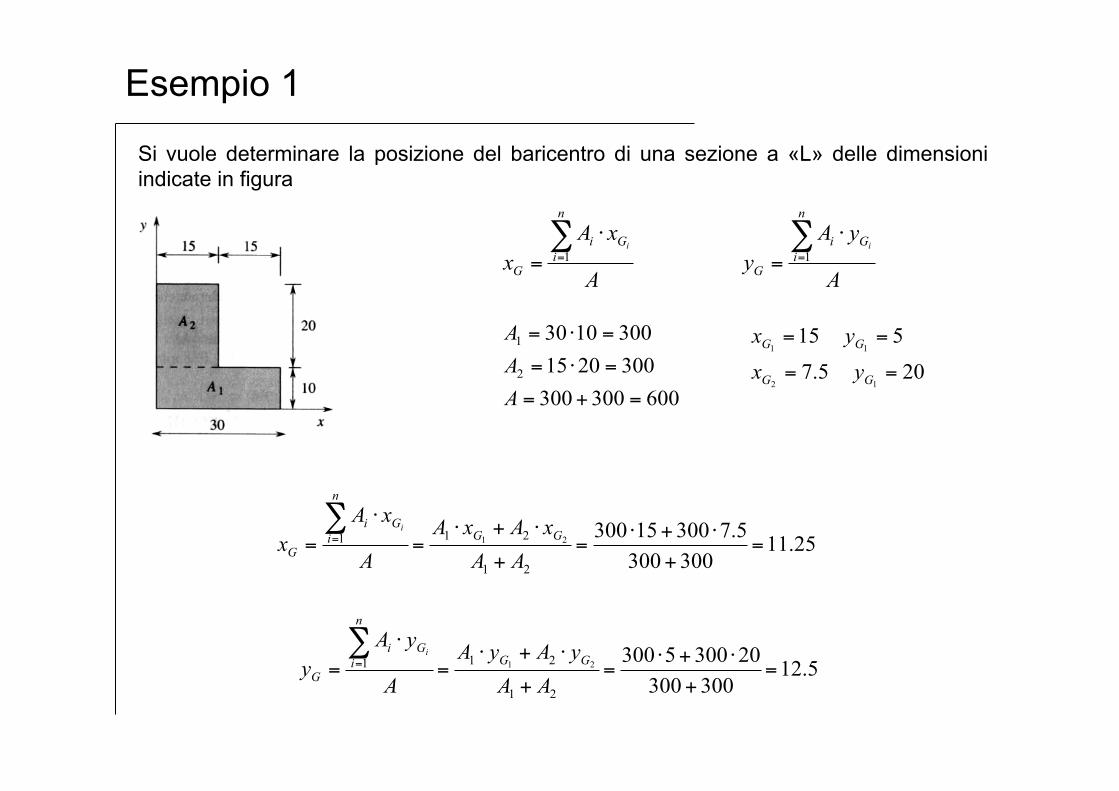
Esempio 1
Si vuole determinare la posizione del baricentro di una sezione a «L» delle dimensioni indicate in figura
A
yAy
A
xAx
n
iGi
G
n
iGi
G
ii ∑∑==
⋅=
⋅= 11
60030030030020153001030
2
1
=+=
=⋅=
=⋅=
AAA
205.7
515
12
11
==
==
GG
GG
yx
yx
25.11300300
5.730015300
21
211 21 =+
⋅+⋅=
+
⋅+⋅=
⋅=∑=
AAxAxA
A
xAx GG
n
iGi
G
i
5.12300300
203005300
21
211 21 =+
⋅+⋅=
+
⋅+⋅=
⋅=∑=
AAyAyA
A
yAy GG
n
iGi
G
i

Esempio 2
Si vuole determinare il momento statico rispetto all’asse y e la posizione del baricentro della sezione a “C” delle dimensioni indicate in figura
A
yAy
A
xAx
n
iGi
G
n
iGi
G
ii ∑∑==
⋅=
⋅= 11

Esempio 2
Si vuole determinare il momento statico rispetto all’asse y e la posizione del baricentro della sezione a “C” delle dimensioni indicate in figura
A
yAy
A
xAx
n
iGi
G
n
iGi
G
ii ∑∑==
⋅=
⋅= 11
mmAAA
xAxAxAA
xAx GGG
n
iGi
G
i
10.4120009602000
5020004960502000
321
3211 321 =++
⋅+⋅+⋅=
++
⋅+⋅+⋅=
⋅=∑=
mmAAA
yAyAyAA
yAy GGG
n
iGi
G
i
8020009602000
102000809601502000
321
3211 321 =++
⋅+⋅+⋅=
++
⋅+⋅+⋅=
⋅=∑=
( )( ) ( )
( )2
23
22
21
496020009602000
200020100
960120820216082
200020100
mmAmmA
mmthdAmmA
=++=
=⋅=
=⋅=⋅−⋅=⋅−⋅=
=⋅=
3 20385649601.41 mmSAxS yGy =⋅=⇒⋅=
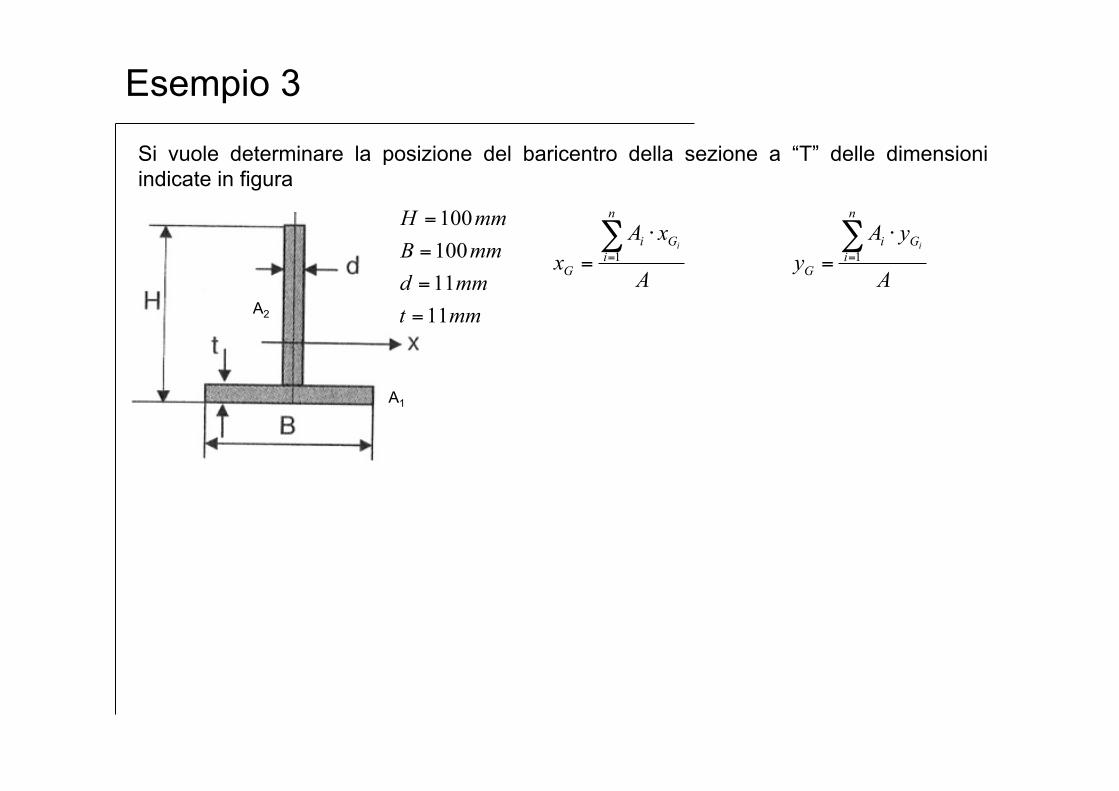
Esempio 3
Si vuole determinare la posizione del baricentro della sezione a “T” delle dimensioni indicate in figura
A
yAy
A
xAx
n
iGi
G
n
iGi
G
ii ∑∑==
⋅=
⋅= 11
mmtmmdmmBmmH
11 11
100 100
=
=
=
=
A1
A2
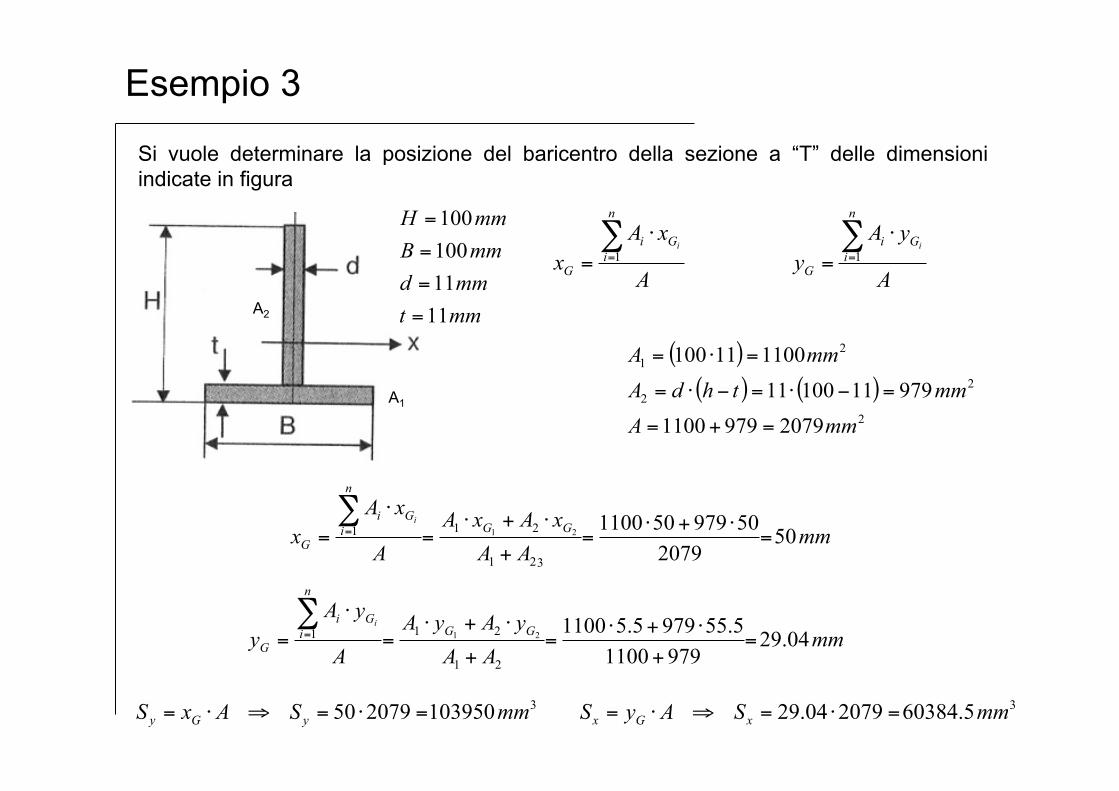
Esempio 3
Si vuole determinare la posizione del baricentro della sezione a “T” delle dimensioni indicate in figura
A
yAy
A
xAx
n
iGi
G
n
iGi
G
ii ∑∑==
⋅=
⋅= 11
mmAA
xAxAA
xAx GG
n
iGi
G
i
50 2079
50979501100
321
211 21 =⋅+⋅
=+
⋅+⋅=
⋅=∑=
mmAAyAyA
A
yAy GG
n
iGi
G
i
04.29 9791100
5.559795.51100
21
211 21 =+
⋅+⋅=
+
⋅+⋅=
⋅=∑=
( )( ) ( )
2
22
21
20799791100
9791110011
110011100
mmAmmthdA
mmA
=+=
=−⋅=−⋅=
=⋅=
3 103950 207950 mmSAxS yGy =⋅=⇒⋅=
mmtmmdmmBmmH
11 11
100 100
=
=
=
=
A1
A2
3 5.60384 207904.29 mmSAyS xGx =⋅=⇒⋅=
Momento di inerzia
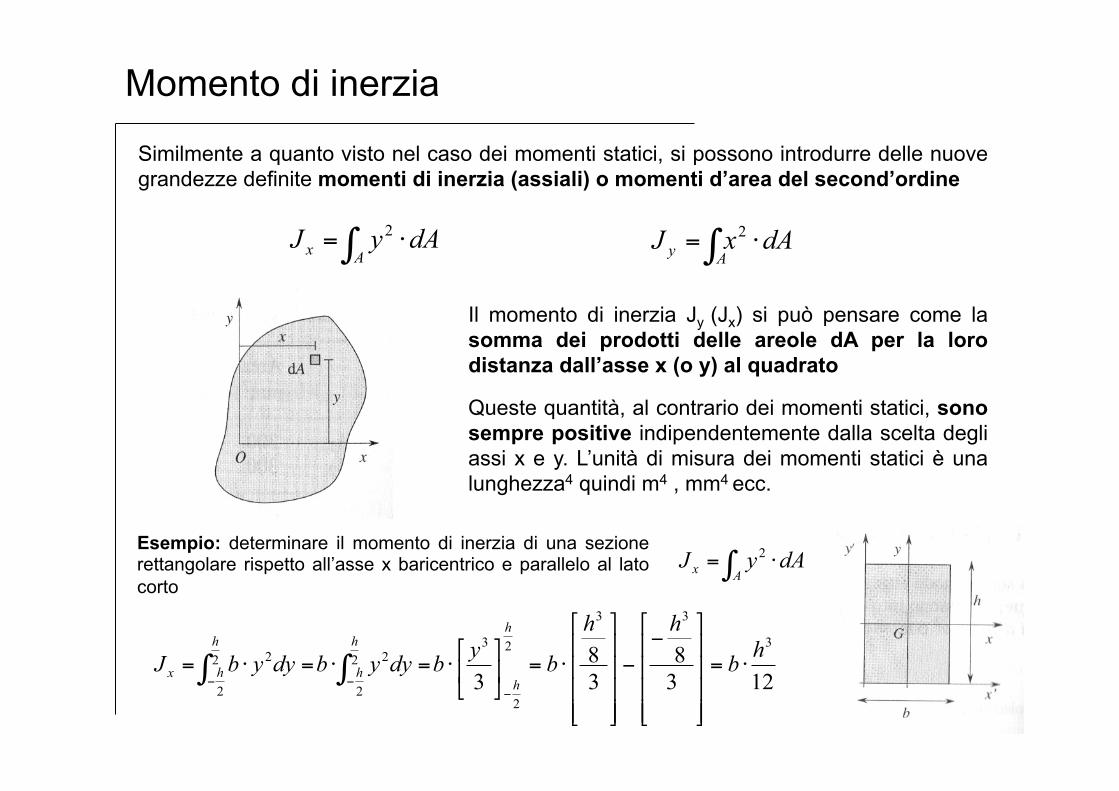
Similmente a quanto visto nel caso dei momenti statici, si possono introdurre delle nuove grandezze definite momenti di inerzia (assiali) o momenti d’area del second’ordine
∫ ⋅=Ax dAyJ 2 ∫ ⋅=
Ay dAxJ 2
Il momento di inerzia Jy (Jx) si può pensare come la somma dei prodotti delle areole dA per la loro distanza dall’asse x (o y) al quadrato Queste quantità, al contrario dei momenti statici, sono sempre positive indipendentemente dalla scelta degli assi x e y. L’unità di misura dei momenti statici è una lunghezza4 quindi m4 , mm4 ecc.
Esempio: determinare il momento di inerzia di una sezione rettangolare rispetto all’asse x baricentrico e parallelo al lato corto
∫ ⋅=Ax dAyJ 2
1238
38
3
3
33
2
2
32
2
22
2
2 hb
hh
bybdyybdyybJ
h
h
h
h
h
hx ⋅=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⋅=⎥⎦
⎤⎢⎣
⎡⋅=⋅=⋅=
−−− ∫∫
Momento di inerzia
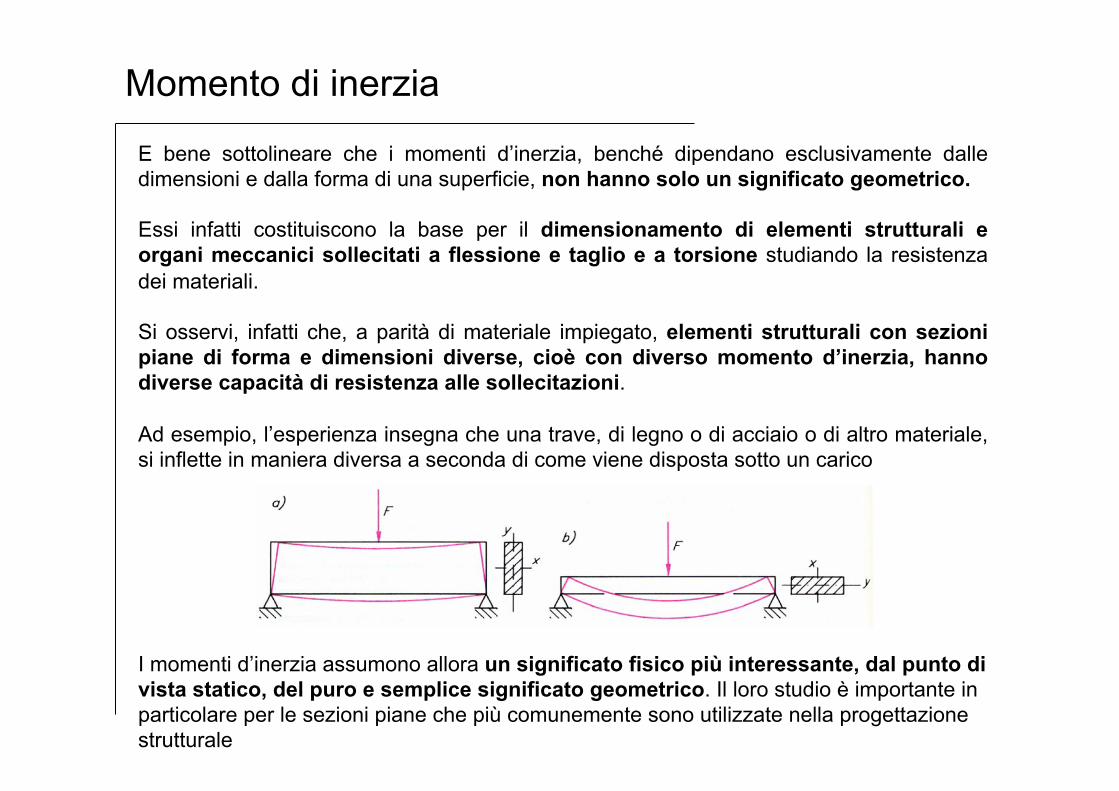
E bene sottolineare che i momenti d’inerzia, benché dipendano esclusivamente dalle dimensioni e dalla forma di una superficie, non hanno solo un significato geometrico. Essi infatti costituiscono la base per il dimensionamento di elementi strutturali e organi meccanici sollecitati a flessione e taglio e a torsione studiando la resistenza dei materiali. Si osservi, infatti che, a parità di materiale impiegato, elementi strutturali con sezioni piane di forma e dimensioni diverse, cioè con diverso momento d’inerzia, hanno diverse capacità di resistenza alle sollecitazioni. Ad esempio, l’esperienza insegna che una trave, di legno o di acciaio o di altro materiale, si inflette in maniera diversa a seconda di come viene disposta sotto un carico
I momenti d’inerzia assumono allora un significato fisico più interessante, dal punto di vista statico, del puro e semplice significato geometrico. Il loro studio è importante in particolare per le sezioni piane che più comunemente sono utilizzate nella progettazione strutturale

Momento di inerzia polare
∫ ⋅=Ap dArJ 2
Si definisce momento di inerzia polare il momento d’area del second’ordine espresso dalla seguente relazione:
Con riferimento alla figura, si osservi che la distanza di un qualunque punto dall’origine degli assi può essere espressa come:
22 yxr +=
E quindi potremo scrivere:
( ) ∫∫∫∫ +=⋅+⋅=⋅+=⋅=A xyAAAp JJdAydAxdAyxdArJ 22222
Questa relazione consente di calcolare agevolmente il momento di inerzia polare (per esempio di sezioni rettangolari) noti i momenti di inerzia assiali, oppure di calcolare i momenti di inerzia assiali per altre geometrie (come quella circolare) per la quale risulta più semplice il calcolo del momento di inerzia polare
Caso della sezione circolare piena
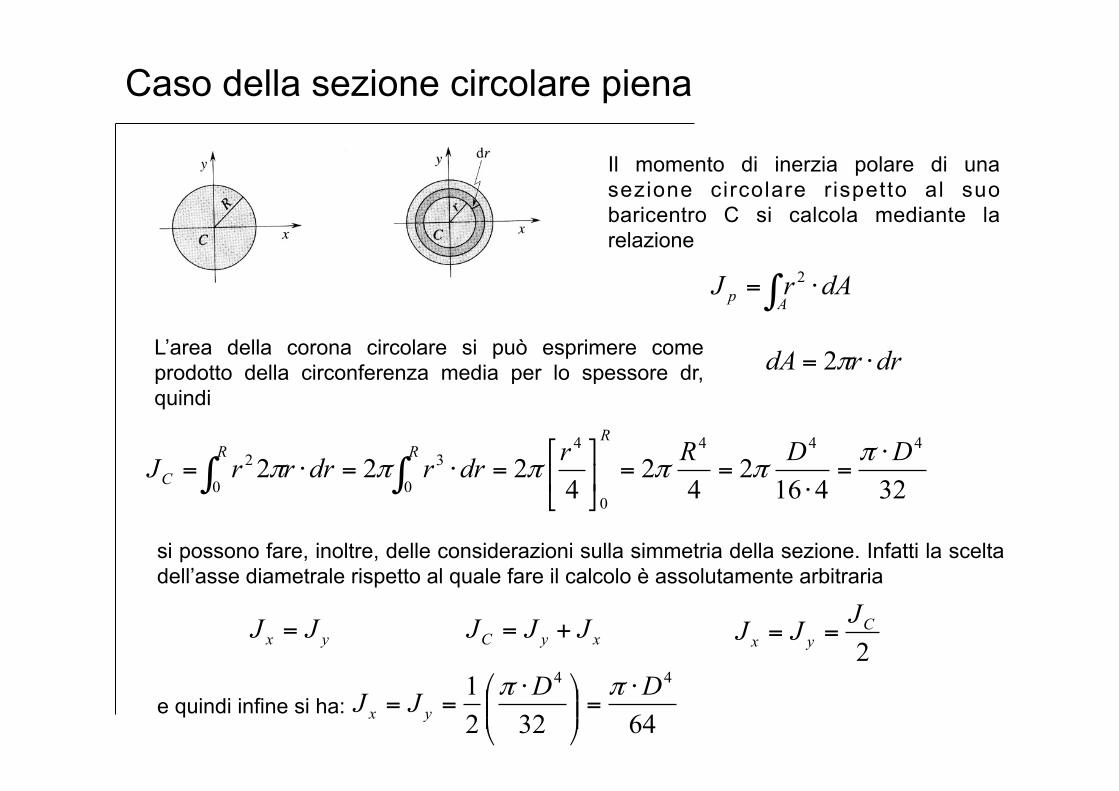
Il momento di inerzia polare di una sezione circolare rispetto al suo baricentro C si calcola mediante la relazione
si possono fare, inoltre, delle considerazioni sulla simmetria della sezione. Infatti la scelta dell’asse diametrale rispetto al quale fare il calcolo è assolutamente arbitraria
yx JJ =
∫ ⋅=Ap dArJ 2
324162
42
4222
444
0
4
0
3
0
2 DDRrdrrdrrrJR
RR
C⋅
=⋅
==⎥⎦
⎤⎢⎣
⎡=⋅=⋅= ∫∫
ππππππ
xyC JJJ +=2C
yxJJJ ==
e quindi infine si ha: 64322
1 44 DDJJ yx⋅
=⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅==
ππ
L’area della corona circolare si può esprimere come prodotto della circonferenza media per lo spessore dr, quindi
drrdA ⋅= π2
Caso della sezione circolare cava
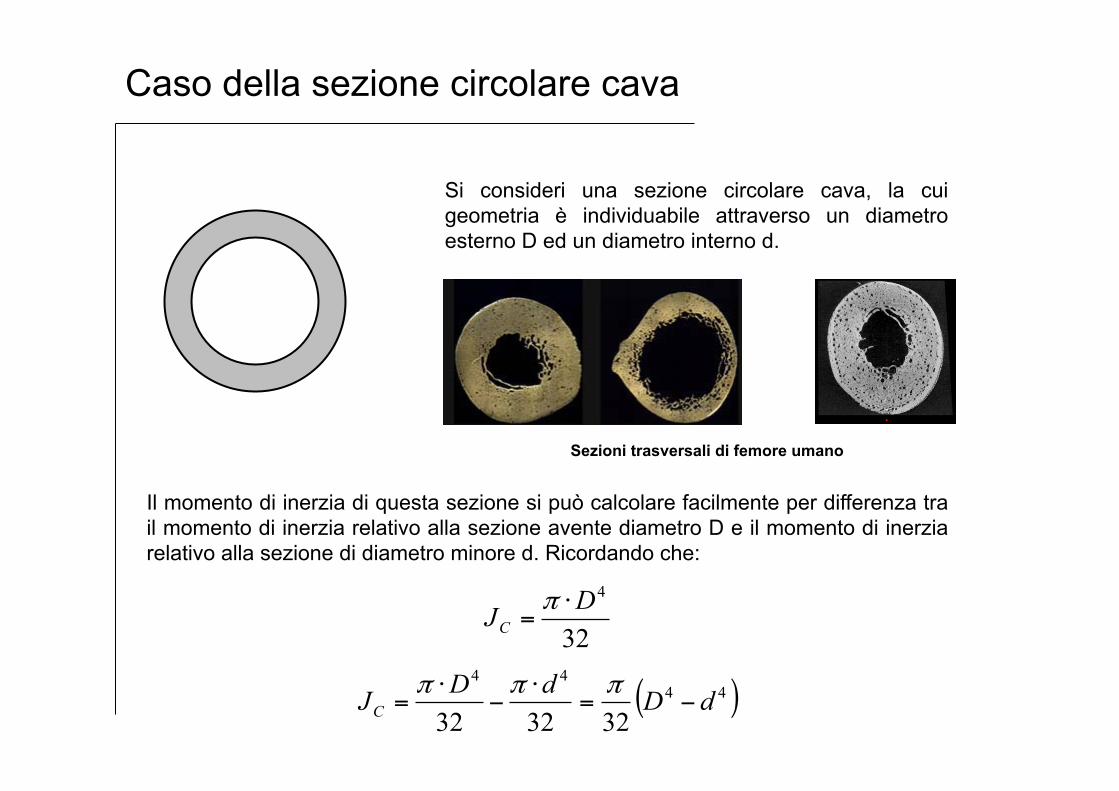
Si consideri una sezione circolare cava, la cui geometria è individuabile attraverso un diametro esterno D ed un diametro interno d.
Sezioni trasversali di femore umano
Il momento di inerzia di questa sezione si può calcolare facilmente per differenza tra il momento di inerzia relativo alla sezione avente diametro D e il momento di inerzia relativo alla sezione di diametro minore d. Ricordando che:
32
4DJC⋅
=π
( )4444
323232dDdDJC −=
⋅−
⋅=
πππ
Momenti di inerzia rispetto ad assi paralleli
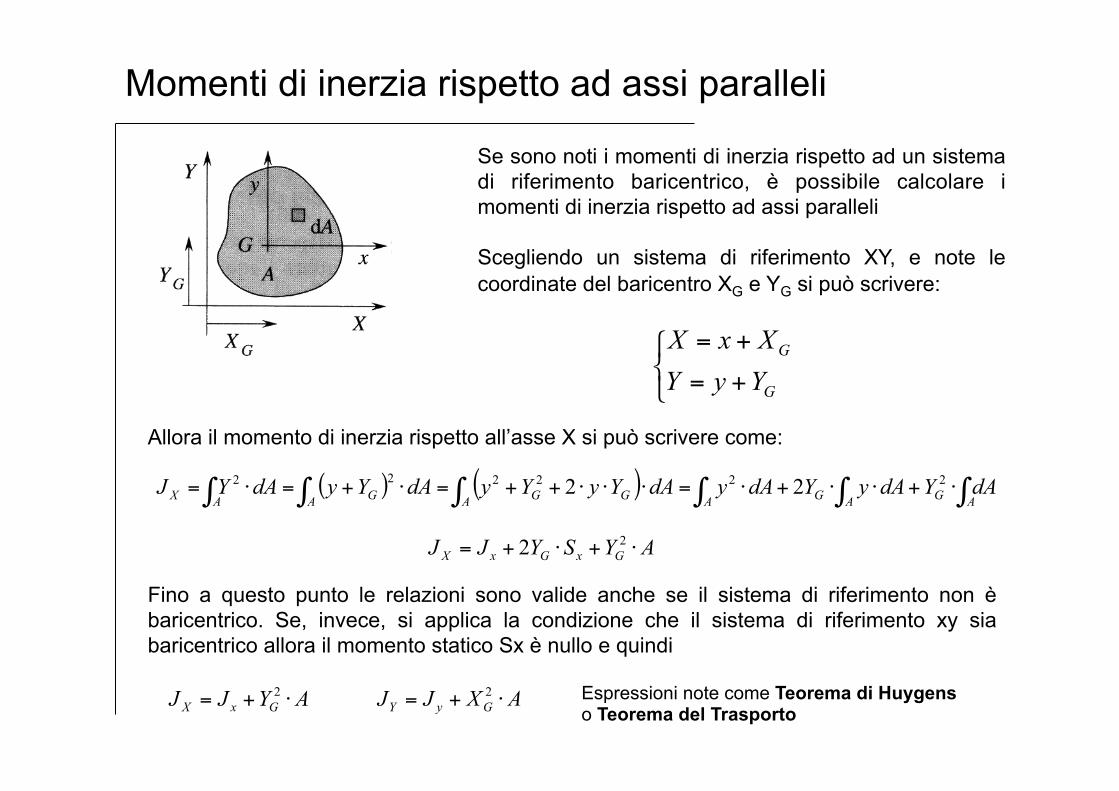
Se sono noti i momenti di inerzia rispetto ad un sistema di riferimento baricentrico, è possibile calcolare i momenti di inerzia rispetto ad assi paralleli Scegliendo un sistema di riferimento XY, e note le coordinate del baricentro XG e YG si può scrivere:
⎩⎨⎧
+=
+=
G
G
YyYXxX
Allora il momento di inerzia rispetto all’asse X si può scrivere come:
( ) ( ) ∫∫∫∫∫∫ ⋅+⋅⋅+⋅=⋅⋅⋅++=⋅+=⋅=AGAGAA GGA GAX dAYdAyYdAydAYyYydAYydAYJ 222222 22
AYSYJJ GxGxX ⋅+⋅+= 22
Fino a questo punto le relazioni sono valide anche se il sistema di riferimento non è baricentrico. Se, invece, si applica la condizione che il sistema di riferimento xy sia baricentrico allora il momento statico Sx è nullo e quindi
AYJJ GxX ⋅+= 2 AXJJ GyY ⋅+= 2 Espressioni note come Teorema di Huygens o Teorema del Trasporto