23456yuijhg
4
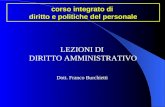
1 Università di Pisa Esame di SCIENZA DELLE COSTRUZIONI Corso di Laurea in Ingegneria Aerospaziale Corso di Laurea in Ingegneria Civile e Ambientale (docente: Prof. Ing. Stefano Bennati) Sintesi della soluzione della prova scritta del 28 febbraio 2015 – Parte I Problema. Nel sistema di figura 1 le travi BE e CF sono estensibili, mentre le altre sono flessibili ma inestensibili. Sulle travi AB, BC, EF e FG agisce un carico distribuito assiale uniforme, di intensità q, inoltre le travi AB e FG sono soggette alle variazioni termiche lineari nello spessore H della trave, indicate in figura. Infine, le aste reticolari BE e CF sono soggette alle variazioni termiche costanti nello spessore della trave indicate in figura. 1) Il sistema è 3 volte cinematicamente iperdeterminato, ma considerazioni di antisimmetria consentono di risolvere il problema mediante il metodo delle forze ricorrendo ad un’unica incognita iperstatica. A tale scopo, si sceglie come X1 il valore dello sforzo normale nell’asta BE (uguale ed opposto a quello nell’asta CF). Il sistema può allora essere decomposto nella somma seguente (figura 2): F (e) = F (0) + X1 F (1) , con: 1 2 E B X w w t l EA α - = + e 1 2 α - =- + F C X w w t l EA , dove E w e B w sono gli spostamenti assiali, positivi nella direzione da B verso E, delle sezioni B ed E della trave BE e F w e C w sono gli spostamenti assiali, positivi nella direzione da C verso F, delle sezioni C ed F della trave CF. Figura 2 Figura 1
-
Upload
marco-picchi-scardaoni -
Category
Documents
-
view
216 -
download
2
description
tyujihgfrderfgh
Transcript of 23456yuijhg
-
1
Universit di Pisa
Esame di SCIENZA DELLE COSTRUZIONI Corso di Laurea in Ingegneria Aerospaziale
Corso di Laurea in Ingegneria Civile e Ambientale
(docente: Prof. Ing. Stefano Bennati)
Sintesi della soluzione della prova scritta del 28 febbraio 2015 Parte I
Problema. Nel sistema di figura 1 le
travi BE e CF sono estensibili,
mentre le altre sono flessibili ma
inestensibili. Sulle travi AB, BC, EF e
FG agisce un carico distribuito
assiale uniforme, di intensit q,
inoltre le travi AB e FG sono soggette
alle variazioni termiche lineari nello
spessore H della trave, indicate in
figura. Infine, le aste reticolari BE e
CF sono soggette alle variazioni
termiche costanti nello spessore della
trave indicate in figura.
1) Il sistema 3 volte cinematicamente iperdeterminato, ma considerazioni di antisimmetria consentono di
risolvere il problema mediante il metodo delle forze ricorrendo ad ununica incognita iperstatica. A tale scopo, si
sceglie come X1 il valore dello sforzo normale nellasta BE (uguale ed opposto a quello nellasta CF). Il sistema
pu allora essere decomposto nella somma seguente (figura 2):
F(e) = F(0) + X1 F(1),
con:
1 2E BX
w w t lEA
= +
e 1 2 = +
F CX
w w t lEA
,
dove Ew e Bw sono gli spostamenti assiali, positivi nella direzione da B verso E, delle sezioni B ed E della trave
BE e Fw e Cw sono gli spostamenti assiali, positivi nella direzione da C verso F, delle sezioni C ed F della trave
CF.
Figura 2
Figura 1
-
2
Considerazioni di equilibrio consentono di determinare le reazioni vincolari esterne per il sistema F(0), mentre
per il sistema F(1) queste ultime sono nulle. I due sistemi sono rappresentati nelle figure 3 e 4.
Figura 3
Figura 4
Le CdS nei vari tratti e nei sistemi F(0) e F(1) sono raccolte nella tabella seguente, nella quale ( )0,s l per AB e BC e ( )0, 2s l per CD.
N0 T0 M0 N1 T1 M1
AB qs 0 2
2
ql 0 0 0
BC qs ql 2
lql s 12
12
2s
CD ql ql 2
lql s 0 2 2 2
ls
Considerazioni di antisimmetria (figura 5) consentono di descrivere le CdS nelle travi DE, EF e FG in funzione di
quelle fornite nella tabella precedente:
( ) ( )= DE CDN s N s ; ( ) ( )=DE CDT s T s ; ( ) ( )=DE CDM s M s ( ) ( )= EF BCN s N s ; ( ) ( )=EF BCT s T s ; ( ) ( )=EF BCM s M s ( ) ( )= FG ABN s N s ; ( ) ( )=FG ABT s T s ; ( ) ( )=FG ABM s M s
Figura 5
-
3
I diagrammi quotati delle CdS sono rappresentati in figura 6.
Figura 6
I coefficienti di Mller-Breslau sono i seguenti:
11 2 2
= +
Xl tEA
;
,0 ,0 ,0 010 ,1 ,1 ,1 1
0 0 0
1 2 2 2 d = B C Dm m mB C D
m m m
BC
M M M MM M M M s
k k k EJ;
4 3
100
2 28 2
= +ql qlEJ k
;
( ) ( ) ( )2 2 2 2,1 ,1 ,0 111
0 0 0,
1 2 2 2 d = B C Dm m m
BC CD
M M M Ms
k k k EJ;
3 2
110
12
= +l lEJ k
.
Conseguentemente,
101
11
2 2
2 2
+=
+
tlX l
EA
;
2
01 2 2
0 0
2 28 22 2
2 2 2 22 2
+
=
+ + + +
EA l EAlEJ k
X EA t qlEAl EAl EAl EAl
EJ k EJ k
.
-
4
2) Le equazioni differenziali e le condizioni al bordo per i tratti AB (tratto 1), BC (tratto 2) e CD (tratto 3)
che consentono di risolvere il problema mediante il metodo della linea elastica sono le seguenti (figura 1): IV 0=iEJv , per 1, 2, 3=i ;
1. ( )3 2 0=v l ; 2. ( )2 0=v l ; 3. ( ) ( )1 3 0=v l v ; 4. ( )I1 0 0=v ; 5. ( )
2II1
202
=
t qlEJ vH
; 6. ( ) ( )II II1 22 0 =
tEJ v l EJvH
;
7. ( ) ( ) ( )II I I2 0 1 20 0 = EJv k v l v ; 8. ( ) ( )II II2 3 0 = EJv l EJv ; 9. ( ) ( ) ( )II I I3 0 2 30 0 = EJv k v l v ; 10. ( )III1 0 0 =EJv ; 11. ( )III2 10 2 = + BEEJv ql N , (fig. 7) ; 12. ( )
III3 0 2 = BEEJv ql N , (fig. 7) .
Avendo espresso la curvatura della trave AB come:
( ) ( )1II1 2 = M s tv s EJ H , ed avendo determinato gli sforzi nelle aste estensibili in funzione degli spostamenti trasversali delle sezioni B e
C come (figura 8):
( ) ( )2 10 2 22 = BEEAN v v l tl
l; = CF BEN N .
Figura 7
Figura 8
Gli spostamenti delle travi DE (tratto 4), EF (tratto 5) e FG (tratto 6) possono essere dedotti attraverso
considerazioni di antisimmetria come (figura 5):
( ) ( )6 1=v s v s ; ( ) ( )5 2=v s v s ; ( ) ( )4 3=v s v s .
3) Il sistema risulta 3 volte cinematicamente
iperdeterminato, infatti la matrice cinematica una
matrice 12 9, di rango 9.
N.B. Si ricorda che la presente prova scritta pu essere
utilizzata per le successive prove (quella scritta, relativa
alla parte II, e quella orale) entro 60 giorni dalla data
della prova stessa.
4 marzo 2015.
Figura 9