2010-06-30 - Esame Azionamenti e Controllo Dei Sistemi Meccanici
2
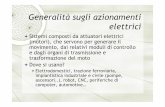
AZIONAMENTI E CONTROLLO DEI SISTEMI MECCANICI (Proff. G. Diana, F. Resta) 30.06.2010 Per il sistema rappresentato in figura, posto nel piano verticale, si considerino in tutto lo svolgimento piccole oscillazioni nell'intorno della posizione di equilibrio statico rappresentata in figura. Il sistema è costituito da un disco omogeneo D che rotola senza strisciare su un piano orizzontale, sormontato da un'asta rigida e priva di massa (incastrata al disco) alla cui estremità superiore è posta una massa m. In corrispondenza della massa m, un elemento elastico e viscoso (k 1 , r 1 ) collega la massa stessa ad un'asta omogenea A per mezzo di un vincolo di tipo pattino (lato asta) e cerniera (lato massa m). L'asta è collegata a terra all'estremità inferiore mediante una cerniera e una molla- smorzatore torsionale (k T ,r T ). Sul disco D agisce un motore in corrente continua a magneti permanenti, che applica una coppia C m al disco stesso. Lo statore è rigidamente vincolato a terra. Sulla massa m, avente coefficiente aerodinamico c x , agisce un vento di velocità v v diretto come in figura, che genera una forza aerodinamica F v (funzione della velocità relativa vento-massa). 3L R=L/2 L r 1 k 1 k T ,r T m M D ,J D M A ,J A C m v V asta A
description
Exam
Transcript of 2010-06-30 - Esame Azionamenti e Controllo Dei Sistemi Meccanici
-
AZIONAMENTI E CONTROLLO DEI SISTEMI MECCANICI (Proff. G. Diana, F. Resta)
30.06.2010
Per il sistema rappresentato in figura, posto nel piano verticale, si considerino in tutto lo svolgimento piccole oscillazioni nell'intorno della posizione di equilibrio statico rappresentata in figura. Il sistema costituito da un disco omogeneo D che rotola senza strisciare su un piano orizzontale, sormontato da un'asta rigida e priva di massa (incastrata al disco) alla cui estremit superiore posta una massa m. In corrispondenza della massa m, un elemento elastico e viscoso (k1, r1) collega la massa stessa ad un'asta omogenea A per mezzo di un vincolo di tipo pattino (lato asta) e cerniera (lato massa m). L'asta collegata a terra all'estremit inferiore mediante una cerniera e una molla-smorzatore torsionale (kT,rT). Sul disco D agisce un motore in corrente continua a magneti permanenti, che applica una coppia Cm al disco stesso. Lo statore rigidamente vincolato a terra. Sulla massa m, avente coefficiente aerodinamico cx, agisce un vento di velocit vv diretto come in figura, che genera una forza aerodinamica Fv (funzione della velocit relativa vento-massa).
3L
R=L/2
Lr1
k1
kT,rT
m
MD,JD
MA,JA
Cm
vV
asta A
-
Considerando dapprima la rigidezza kT infinita e la dinamica del motore molto pi veloce di quella del sistema meccanico (La=0):
1. Scrivere l'equazione del sistema e calcolare il precarico della molla k1 in modo che il sistema abbia come posizione di equilibrio statico quella rappresentata in figura.
2. Linearizzare l'equazione di moto attorno alla posizione di equilibrio indicata in figura. 3. Valutare la stabilit del sistema nel dominio del tempo.
Considerando ora la dinamica del motore ( 0aL ), la rigidezza kT infinita:
4. Scrivere l'equazione di moto del sistema, applicando un controllore proporzionale-integrale sulla posizione della massa m che agisce sulla tensione di alimentazione del motore.
5. Disegnare lo schema a blocchi del sistema al punto 4 e calcolarne le funzioni di trasferimento d'anello e anello chiuso.
6. Studiare la stabilit del sistema controllato nel dominio di Laplace al variare dei parametri del controllo nell'ipotesi di sistema non controllato instabile.
Considerando infine la rigidezza kT finita e la dinamica del motore molto pi veloce di quella del sistema meccanico (La=0):
7. Scrivere le equazioni di moto del sistema, applicando un controllore proporzionale-derivativo sulla rotazione dell'asta A, agente sulla tensione di alimentazione del motore. Si discuta la stabilit del sistema controllato a partire dalle matrici di massa, rigidezza e smorzamento.
8. Disegnare lo schema a blocchi del sistema controllato e studiarne la stabilit nel dominio di Laplace nell'ipotesi di sistema non controllato stabile al variare dei parametri del controllo.
9. Disegnare qualitativamente il luogo delle radici del sistema controllato.