رازفا مرن رد یمونوگرا CATIA¢رگونومي در نرم افزار...
5
45 شماره- تولید فنی مهندسی ساخت و مجله| www.irmpm.com 41 www.iran2020.com در2020 عت ایراندازصن چشم ان نمایشگاه نامه کند: ویژهد منتشر می تولی مجله ساخت و تهران صنعتwww.iran2020.com در بیشترعات اط-09121859068 - 66833349 : تلفن جذب آگهی مقدمه: چیست؟ ارگونومیت، مشاغل و محيطی محصوون اصلی طراح کانن رانسا جسمی و ذهنی اوديت هاینائی ها و محد توا نيازها، علمی است که ارگونومی،ايی آن گردد.يش کار موجب افزات و ايمنی،من آسايش، سن تأميهد تاضم ار می د اطراف قر2009 در سال خود را تولد شصتمين سالگرد)ه می شودنسانی نيز ناميد مهندسی عوامل ا متحده آمريکا،تياکه در ا( دانش ارگونومیه می شود. حتیيددی نيز د شانزده ميت اوايل قرن در مکتوباسان و محيط کارش،بل انثر متقالعة ا مطاجود،اين ودی جشن گرفت. با ميی به منظورتأکيدد مي1857 درسال،»ون قان« به معنای» نموس« و» کار« به معنای»ارگون« کلمه يونانیمی، متشکل از دواژه ارگونو ويستم هایدان سشمننی دوم دان درجنگ جها پيش، زمانيکهيم قرن کمی بيش ازنيد،ه گردشارنطور که اا هماه بود. اميداع گردرابد برعلم کا اينيد. با گذشت زمانيت مطرح گردئز اهمنش حالب يک دارگونومی درقا اند،ن طراحی کردط نظامياظرگرفتن شراي در نفته را بدون پيشرنسانیامل محيطی وای ازعوتن طيف وسيعنظرگرفا، منوط به دريستم هت و سنی در محصورائی و ايميش کار گشت که افزا مطلب آشکارتزی خود سوق داده است.ه امروان به جايگا سالي دانش ارگونومی را درطولين آگاهی، که ا است،انيک، بيومک آناتومی،زيولوژی، فيشناسی، روان بستر علومی نظيرفته درنجام گرت ا تکيه برتحقيقانش نوپا،وان يک داومی به عن ارگون دارد.) بدنبعاد ار ياعلم اندازه گي( پومتری طراحی وآنتروم افزار نر ارگونومی درCATIA وسعه صنعتگام با ت دانشی هم قسمت اول:وينس فرهاد ن مهند مكاترونیک مهندسیانس فوق لیسی ايرانجمن کتیا مديريت انwww.catia.ir novin@catia.ir 09123062503 دن دس هومن مهن مكانیک مهندسی کارشناسی ايرانجمن کتیاور ان مهندس مشاwww.catia.ir novin@catia.ir 09128161078 رهای ابتدا به وسيله نرم افزاتزه اغلب محصوجه به اينکه امرو با توپس به مراحل طراحی شده و سCATIA م افزار نردسی همچون مهنسبه ارگونومیی محای برام افزارجود نری رسند لزوم وی توليد م نهاي از قوی ترينوان يکیر کتيا به عنی است که نرم افزاورزم و ضر . درهد می دنجاممل ا به طور کار راين کا مهندسی ارهای نرم افزا پرداخته می شود.CATIA م افزار نررسی ارگونومی در ين مقاله به بر اHuman Builder محيطCATIA م افزار محيط نر اصلی ترينHuman builder محيطن آدمک هايی که می توا ارگونومی است محيط های زير شاخه در بسته به نوع نيازد وارد نموم افزار و نر ويژگی هايشان در با تعيين را های مختلفمال وضعيتين اع آزادی و همچنی درجهگير با به کار
Transcript of رازفا مرن رد یمونوگرا CATIA¢رگونومي در نرم افزار...

45ره
ما ش
- ید
تول و
تاخ
سسی
ندمه
ی فن
لهمج
| w
ww
.irm
pm.co
m
41
ww
w.ir
an20
20.c
om
در 2
020
انیر
ت انع
صاز
ندم ا
شچ
مجله ساخت و تولید منتشر می کند: ویژه نامه نمایشگاه
تهران صنعت www.iran2020.com تلفن جذب آگهی: 66833349 - 09121859068- اطالعات بیشتر در
مقدمه:ارگونومی چیست؟
ارگونومی، علمی است که نيازها، توانائی ها و محدوديت های جسمی و ذهنی انسان را کانون اصلی طراحی محصوالت، مشاغل و محيط اطراف قرار می دهد تاضمن تأمين آسايش، سالمت و ايمنی، موجب افزايش کارايی آن گردد.
دانش ارگونومی )که در اياالت متحده آمريکا، مهندسی عوامل انسانی نيز ناميده می شود( شصتمين سالگرد تولد خود را در سال 2009 ميالدی جشن گرفت. بااين وجود، مطالعة اثر متقابل انسان و محيط کارش، در مکتوبات اوايل قرن شانزده ميالدی نيز ديده می شود. حتی واژه ارگونومی، متشکل از دوکلمه يونانی »ارگون« به معنای » کار« و » نموس« به معنای » قانون«، درسال1857 ميالدی به منظورتأکيد برعلم کارابداع گرديده بود. اما همانطور که اشاره گرديد، کمی بيش ازنيم قرن پيش، زمانيکه درجنگ جهانی دوم دانشمندان سيستم های پيشرفته را بدون در نظرگرفتن شرايط نظاميان طراحی کردند، ارگونومی درقالب يک دانش حائز اهميت مطرح گرديد. با گذشت زمان اين مطلب آشکارتر گشت که افزايش کارائی و ايمنی در محصوالت و سيستم ها، منوط به درنظرگرفتن طيف وسيعی ازعوامل محيطی وانسانی
است، که اين آگاهی، دانش ارگونومی را درطول ساليان به جايگاه امروزی خود سوق داده است. ارگونومی به عنوان يک دانش نوپا، تکيه برتحقيقات انجام گرفته در بستر علومی نظير روانشناسی، فيزيولوژی، آناتومی، بيومکانيک،
طراحی وآنتروپومتری )علم اندازه گير يا ابعاد بدن( دارد.
ارگونومی در نرم افزارCATIA
دانشی همگام با توسعه صنعتقسمت اول:
مهندس فرهاد نوين
فوق لیسانس مهندسی مكاترونیک
مديريت انجمن کتیای ايران
www.catia.ir
09123062503
مهندس هومن الدن
کارشناس مهندسی مكانیک
مهندس مشاور انجمن کتیای ايران
www.catia.ir
09128161078
با توجه به اينکه امروزه اغلب محصوالت ابتدا به وسيله نرم افزارهای مهندسی همچون نرم افزار CATIA طراحی شده و سپس به مراحل نهايی توليد می رسند لزوم وجود نرم افزاری برای محاسبه ارگونومی الزم و ضروری است که نرم افزار کتيا به عنوان يکی از قوی ترين نرم افزارهای مهندسی اين کار را به طور کامل انجام می دهد. در
اين مقاله به بررسی ارگونومی در نرم افزار CATIA پرداخته می شود. Human Builder محيط
CATIA اصلی ترين محيط نرم افزار Human builder محيطدر زير شاخه محيط های ارگونومی است که می توان آدمک هايی را با تعيين ويژگی هايشان در نرم افزار وارد نمود و بسته به نوع نياز با به کارگيری درجه آزادی و همچنين اعمال وضعيت های مختلف

45ره
ما ش
- ید
تول و
تاخ
سسی
ندمه
ی فن
لهمج
| w
ww
.irm
pm.co
m
42
ww
w.ir
an20
20.c
om
در 2
020
انیر
ت انع
صاز
ندم ا
شچ
مجله ساخت و تولید منتشر می کند:صنعت مشهد نمایشگاه نامه ویژه
www.iran2020.com تلفن جذب آگهی: 66833349- 09121859068- اطالعات بیشتر در
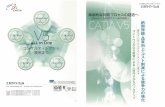
برای عمليات ارگونومی انجام داد.برای وارد کردن آدمک از مسير زير اين کار را انجام دهيد :
ابزار از جعبه Human Builder از منوی Start وارد محيط Insert e new آيکون روی بر شده Manikin Tools
Manikin کليک کنيد.
با انتخاب اين گزينه پنجره New Manikin باز خواهد شد، در سربرگ Manikin چهار گزينه وجود دارد که به بررسی آن ها
پرداخته می شود.
بقيه و بوده نهايی محصول همان Father Productمحصوالت پيرو آن خواهند بود. در قسمت Father Product بر
روی Product1 از نمودار درختی کليک کنيد.در قسمت های Manikin Name وGender به ترتيب نام
آدمک و جنسيت آن تعيين می شود.در بخش Percentile می توان درصد متوسط ابعاد آدمک ورودی
را که می تواند بين 99.9 تا 0.01 متغير باشد را تعريف نمود. Optional سربرگ ديگری به نام Manikin عالوه بر سربرگ
وجود دارد که شامل موارد زير است که به توضيح آن پرداخته می شود.
به توجه با را آدمک مليت قادريد Population قسمت در کشورهايی که نرم افزار در نظر گرفته انتخاب کنيد . نرم افزار کتيا 7 مليت آمريکايی، کانادايی، فرانسوی، ژاپنی، کره ای، آلمانی و
چينی در اين بخش در نظر گرفته است.در قسمت Model امکان نمايش آدمک به سه صورت بدن کامل،
ساعد راست يا ساعد چپ وجود دارد.
در قسمت Referential می توانيد نقطه ای مرجع برای آدمک تعيين کرده و آدمک را در موقعيتی که ايجاد کرده ايد قرار دهيد .
برای اينکار قبل از هر چيز بايد به صورت زير عمل شود ابتدا بر روی گزينه Product از درخت طراحی کليک راست کرده
و سپس از گزينه Components بر روی New Part کليک کنيد .
با انجام اين کار يک زير شاخه Part به product اضافه می شود. زير شاخه Part را باز کرده و بر روی Part1 کليک کنيد .
سپس از منوی Start و زير شاخه Mechanical Designوارد محيط Part Design شويد.
و xy صفحه انتخاب با وارد Sketch دستور شويد Sketch محيط و مستطيلی با ابعاد دلخواه
رسم کنيد

45ره
ما ش
- ید
تول و
تاخ
سسی
ندمه
ی فن
لهمج
| w
ww
.irm
pm.co
m
43
ww
w.ir
an20
20.c
om
در 2
020
انیر
ت انع
صاز
ندم ا
شچ
مجله ساخت و تولید منتشر می کند: ویژه نامه نمایشگاه
تهران صنعت www.iran2020.com تلفن جذب آگهی: 66833349 - 09121859068- اطالعات بیشتر در
بعدی دو محيط از سپس استفاده با و شده خارج نوار از Part دستور از Sketch Based ابزار مستطيل به Featuresبه مقدار دلخواه ترسيم شده
حجم دهيد .
کليک بار دو با سپس Product کردن بر رویاز نمودار درختی به محيط
ارگونومی باز گرديد Insert بر روی آيکون Manikin Tools بار ديگر از جعبه ابزار
new Manikin کليک کنيدCompass را برداشته و و بر روی نقطه ای دلخواه ازPart ساخته شده
قرار دهيد. Referential قسمت از سپس قصد که آدمک بدن از قسمتی داريد در موقعيت Compass قرار Set بگيرد انتخاب کنيد و بعد گزينه Referential to compassLocation را فعال کنيد. با انتخاب که کرد خواهيد مشاهده ok گزينه آن برای که موقعيتی در آدمک
تعريف کرديد قرار خواهد گرفت.
Set Referential to compass Location چنانچه گزينهدر آدمک نکنيد انتخاب را افزار نرم قراردادی موقعيت
جای می گيرد.
درخت در آدمک مشخصات طراحی
آدمک کردن وارد از پس بخش هايی به نمودار درختی Manikin شاخه زير در
اضافه خواهد شد. : Body زير شاخه
شامل Spine که خود شامل زير شاخه های Lumber و
Thoracic است Profiles مشخصات کلی آدمک را در بر می گيرد
Setting که شامل تنظيمات موقعيت و حاالت آدمک در محيط است.
Manikin Tools ابزار از جعبه آدمک ويژگی های تغيير برای گزينه Changes the display of a manikinرا انتخاب
کنيد.
سپس بر روی گزينه Manikin از در آدمک روی بر يا طراحی درخت
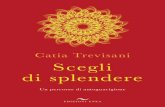
صفحه کليک کنيدبا انتخاب اين گزينه پنجره زير باز می شود . نمايش انواع توان می پنجره اين در
برای آدمک را تعيين کرد گزينه فرض پيش حالت در غير و شده انتخاب Surfacesفعال است که شامل سطح بدن آدمک است، با انتخاب هر يک از گزينه های اين Ellipses و Segmentsگزينه نيز به حالت فعال درخواهد آمد.
و Segment گزينه انتخاب با Ellipses نوع نمايش آدم به ترتيب
به صورت زير خواهد شد .
Ellipses در حالت Segment در حالتهمچنين امکان نمايش هر 3 گزينه با هم وجود دارد.

45ره
ما ش
- ید
تول و
تاخ
سسی
ندمه
ی فن
لهمج
| w
ww
.irm
pm.co
m
44
ww
w.ir
an20
20.c
om
در 2
020
انیر
ت انع
صاز
ندم ا
شچ
مجله ساخت و تولید منتشر می کند:صنعت مشهد نمایشگاه نامه ویژه
www.iran2020.com تلفن جذب آگهی: 66833349- 09121859068- اطالعات بیشتر در
هر که نقاطی تعداد Resolutionايجاد صفحات نمايش برای بيضی آدمک استفاده می کند نمايش می دهد که اين عدد در حالت پيش فرض 32 تغيير تا 128 بين 4 تواند است و می
کند . Line Vision سه حالت در قسمت و of Sight، Field of Viewبه که دارد وجود Visual Coneترتيب مربوط به خط ديد، فضای ديد فضای و خارجی مخروط صورت به است. داخلی مخروط صورت به ديد در قسمت Visual Cone يا فضای
حاالت داخلی مخروط صورت به ديد که دارد وجود زير صورت به ديگری از نمايش صورت های مختلفی امکان
مخروط را فراهم می کند.
بودن فعال با Others قسمت در Center of gravity مرکز گزينه غير ثقل مرکز يابد. می نمايش ثقل قابل تغيير است اما هر زمان که بخشی ثقل مرکز موقعيت کند بدن حرکت از در و کند می تغيير خودکار به صورت
موقعيت جديد قرار می گيرد .
Forward Kinematics دستورForward Kinematics در جعبه ابزار با استفاده از دستورManikin Posture می توان اعضای مختلف آدمک را حرکت
داد.
انتخاب اين کار دستورManikin Kinematics را انجام برای کنيد.
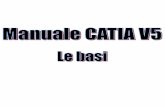
قسمتی از آدمک را که می خواهيد انتخاب شود داده حرکت پيکان دو حالت اين در کنيد ظاهر می شود که يکی جهت با و نشان می دهد را حرکت قابل موس چپ سمت دکمه ديگری و است دادن حرکت حرکتی دامنه دوران محور
است کار به حرکت قرارداد طبق DOF1 (Degree of رفته (Freedomاست . با کليک می موضوع روی بر راست
اين با بيشتر آشنايی برای کرد انتخاب را نظر مورد DOF توان موضوع 3 نوع DOF برای عضو بازو بررسی شده است.
DOF1 با قابلیت باال و پايین رفتن بازو
DOF2 با قابلیت باز و بسته شدن کتف ها DOF3 با قابلیت چرخش بازوبهتر حرکت همچنين و بهتر مشاهده برای است تر راحت معموال شده انتخاب قسمت باشد دوران محور موازی ديد نقطه جهت درجه برای ديد نقطه بهترين مثال طور به )Flexion/Extension(DOF1 آزادی
نمای جانبی است . چنانچه قصد داشتيد قسمتی از بدن آدمک به کليک عضو آن روی بر بازگردد اوليه حالت
راست کرده و Reset را انتخاب کنيد .

45ره
ما ش
- ید
تول و
تاخ
سسی
ندمه
ی فن
لهمج
| w
ww
.irm
pm.co
m
45
ww
w.ir
an20
20.c
om
در 2
020
انیر
ت انع
صاز
ندم ا
شچ
مجله ساخت و تولید منتشر می کند: ویژه نامه نمایشگاه
تهران صنعت www.iran2020.com تلفن جذب آگهی: 66833349 - 09121859068- اطالعات بیشتر در
Body چنانچه قصد داشتيد همه قسمت ها به حالت اوليه بازگردند از نمودار درختی بر رویکليک راست کرده و از قسمت Posture ، Reset Posture را انتخاب کنيد .
Manikin Tools برای آنکه بخواهيد توصيفاتی از آدمک مورد نظر بنويسيم از جعبه ابزارAdds a description to آيکون Manikin tools را انتخاب کنيد.
سپس بر روی ادمک در صفحه و يا گزينه Manikinدر نمودار درختی کليک کنيد در اين صورت پنجره زير باز خواهد شد که می توانيد توضيحاتی در مورد آدمک بنويسيد.
برای استفاده مجدد از اين دستور بار ديگر بر روی اين آيکون کليک کنيد، اين پنجره برای هر آدمک ايجاد شده يکبار ايجاد می شود .
در شماره بعدی ارگونومی در نرم افزار CATIA به موضوعات زير پرداخته خواهد شد .Inverese Kinematics حرکت آدمک در محيط -
- حالت های استاندارد آدمکCompass تعيين موقعيت آدمک با استفاده از -
Posture Editor معرفی محيط -- تعيين رنگ اعضا
- تعيين موقعيت آدمک در خودرو