







Le lingue
Pagine
Legale

1
CAPITOLO 1: ANALISI INCREMENTALE DI STRUTTURE ELASTO-PLASTICHE
1.1 Introduzione
La resistenza di un qualunque materiale da costruzione è limitata; ovvero esiste un livello di sforzo che in ogni caso non può essere superato. Di conseguenza ogni struttura ha una limitata capacità portante , ovvero è limitata l’entità dei carichi che essa è in grado di sostenere. La valutazione della capacità portante non può essere compiuta in campo elastico-lineare perché al crescere del livello di carico nessun materiale continua a comportarsi in tal modo. Pertanto una valutazione accettabile del coefficiente di sicurezza della struttura , ovvero del rapporto tra il valore dei carichi di progetto e la capacità portante della struttura, non può essere fatta nell’ambito del METODO DELLE TENSIONI AMMISSIBILI , perché inevitabilmente si perde la proporzionalità fra carichi e sforzi e il coefficiente di sicurezza deve essere valutato direttamente sui carichi. In questo primo capitolo al fine di valutare la capacità portante delle strutture si farà riferimento a sistemi di travi (o di aste) realizzati con materiali metallici ( duttili), principalmente in acciaio ma anche in alluminio, rame, piombo…. Vedremo nel seguito come in questo caso la valutazione della capacità portante ultima ( o stato limite ultimo ) possa essere fatta con due tipi di analisi distinte :
• Analisi Incrementale Il carico viene incrementato in modo prefissato e la risposta strutturale viene simulata modificando progressivamente la risposta del materiale al variare dello stato di sollecitazione e/o di deformazione
• Calcolo a Rottura (o Analisi Limite) Si individua il valore ultimo del moltiplicatore dei carichi che la struttura è in grado di sostenere senza la necessità di seguire l’evolversi del comportamento del materiale.
In questo primo capitolo verranno presentati gli elementi essenziali dell’analisi incrementale dei sistemi di travi; si ritiene opportuno tuttavia premettere alla esposizione di essi una brevissima disamina comparativa dei due tipi di analisi. Analisi Incrementale Vantaggi:
- E’ applicabile in presenza di equazioni costitutive complesse e a tutti i tipi di materiali compresi i conglomerati cementizi.
- E’ applicabile anche in presenza di fenomeni di instabilità dell’equilibrio e di spostamenti tali da rendere necessario valutare l’equilibrio nella configurazione deformata (spostamenti finiti).
- E’ disponibile in moltissimi codici di calcolo (Abaqus, Adina, Ansys, Strauss, Sap2000, Nolian etc..)
Svantaggi: - La determinazione della capacità portante dipende, in generale, dalla storia di carico e la
risposta strutturale è influenzata dalla presenza di cedimenti vincolari e di stati di coazione, difficilmente valutabili (in particolare questi ultimi).
- La risposta strutturale ed anche la valutazione della capacità portante sono assai sensibili alla variazione sia dei parametri del materiale che dei parametri da cui dipendono gli algoritmi numerici.
- I risultati ottenuti possono non essere immediatamente interpretabili.
2
Analisi Limite Vantaggi:
- Il valore del moltiplicatore dei carichi al collasso risulta indipendente dalla storia di carico e dalla presenza di cedimenti , autotensioni e stati di coazione.
- Il risultato è immediatamente interpretabile ed è sostanzialmente indipendente dai parametri numerici da cui dipende la procedura di calcolo.
- E’ possibile analizzare strutture anche significative senza l’ausilio a codici di calcolo. Svantaggi:
- E’ di limitata applicabilità e devono essere verificate seguenti ipotesi principali: piccoli spostamenti, duttilità illimitata, plasticità perfetta, leggi di flusso di tipo associato.
- Non è in genere disponibile in molti codici di calcolo. - Quando è applicata a strutture non metalliche, ad esempio a strutture in muratura come
ad esempio previsto dalla OPCM 3274 sulle costruzioni in zona sismica, va applicata con opportuni controlli sull’entità delle deformazioni e degli spostamenti all’atto del collasso
Nel seguito nel paragrafo 2 vengono brevemente discusse le principali caratteristiche del comportamento dei materiali metallici, in particolare degli acciai sottoposti alla prova mono-assiale, ed i principali modelli atti ad interpretarle. Nel paragrafo 3 sono presentate le principali caratteristiche della risposta incrementale, mentre nel paragrafo 4 viene esposta l’analisi incrementale per le strutture reticolari elasto-plastiche. Nel paragrafo 5 viene presentata l’analisi incrementale per travi e sistemi di travi, infine nel paragrafo 6 viene introdotto il concetto di cerniera plastica.
3
1.2 Comportamento dei materiali metallici e modelli costitutivi 1.2.1 Prova mono-assiale
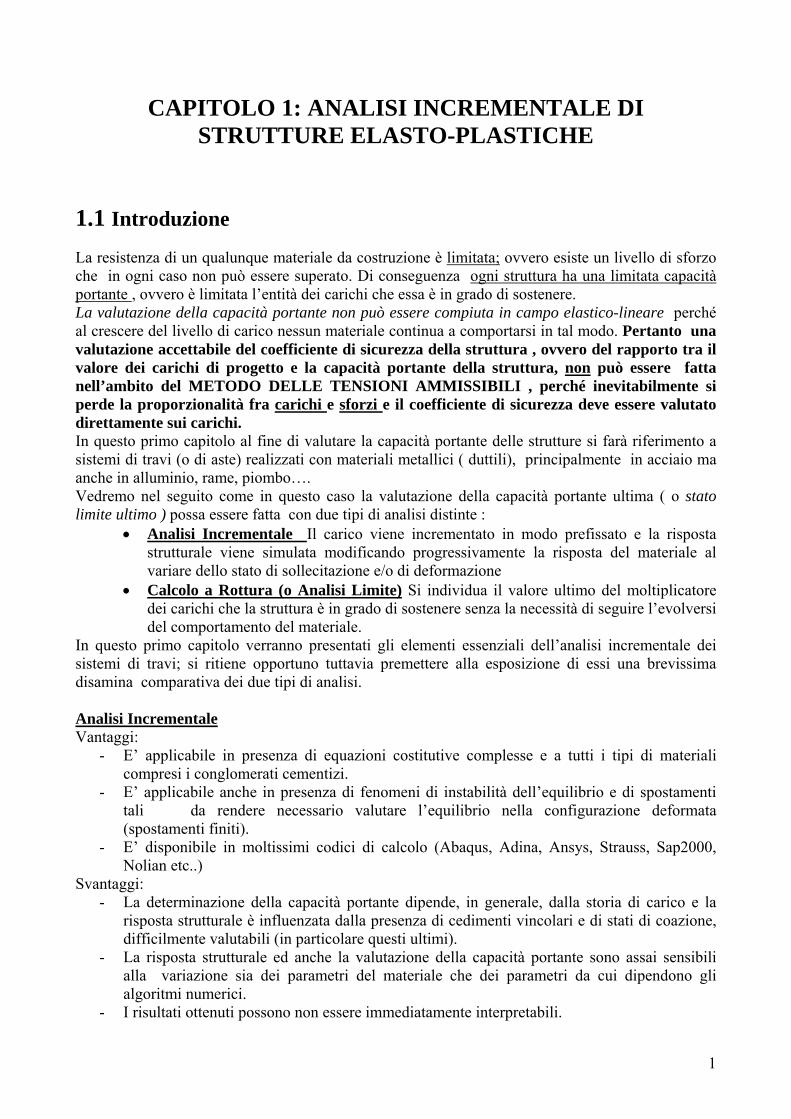
• La prova di trazione per i materiali metallici
0
A0
F F
A
Fig.1.1
0
Fσ=A
tensione nominale; Ft=A
tensione effettiva o di Cauchy
0∆ = - allungamento;
0
∆ε= deformazione assiale
ε
σ
O O
σ
ε
σ0
t t
ε ε0 p
σ
εp
1
2incrudimento incrudimento
(a) (b)
a
b
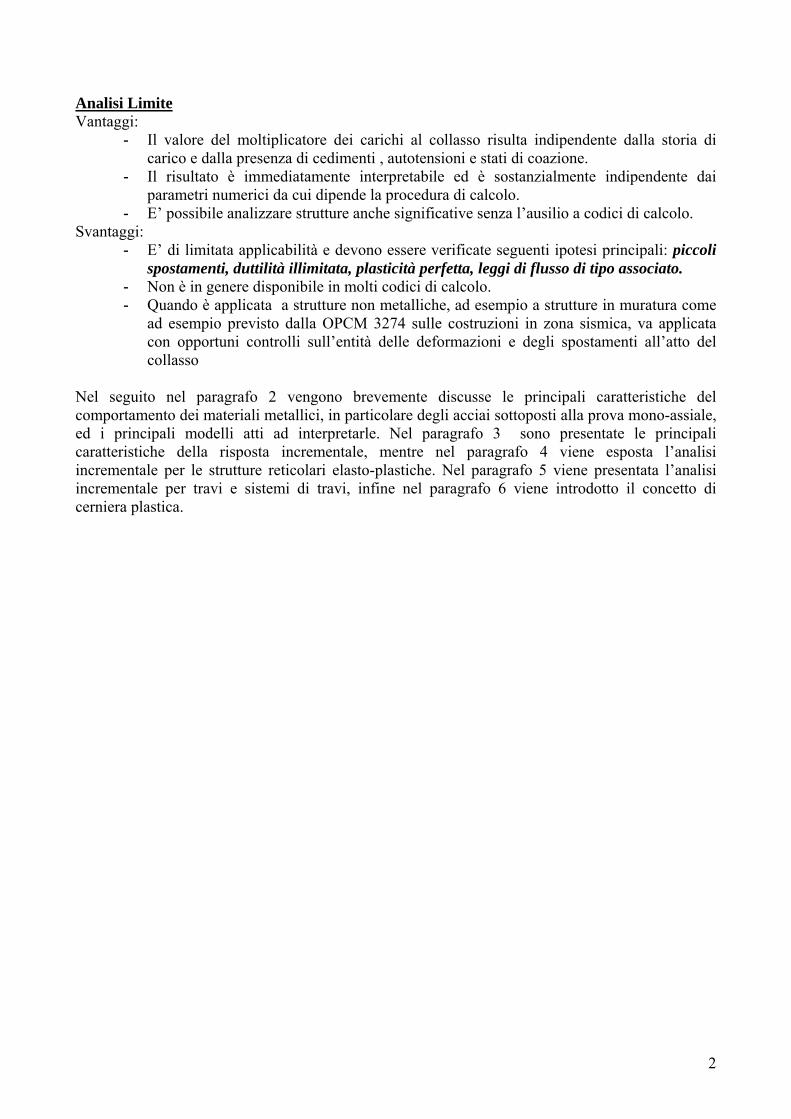
Acciai a basso tenore di carbonio
o dolci (mild steel)
Acciai legati (alloy steel)
0.1% 2% 12÷30%
Fig.1.2
Acciai da costruzione:
- Acciai da carpenteria Fe360, Fe430, Fe510 ( sono caratterizzati da un numero indice della tensione caratteristica di rottura espressa in Nmm-2 )
- Acciai per barre ad aderenza migliorata ( sono caratterizzati da un numero indice della tensione caratteristica di snervamento espressa in Nmm-2) la normativa vigente (DM_09.01.96) prevede i seguenti tipi di acciai:
4
FeB38k disponibile in barre di diametro φ compreso fra 5 e 30 mm FeB44k disponibile in barre di diametro φ compreso fra 5 e 26 mm
FeB38k FeB44k fyk tensione caratteristica di snervamento > 375 Nmm-2 > 430 Nmm-2 ftk tensione caratteristica di rottura > 450 Nmm-2 > 540 Nmm-2 As Allungamento a rottura in % > 14% > 12% Sono inoltre previste dal DM96, e dall’Eurocodice 2, prove di piegamento e raddrizzamento su mandrino che forniscono un indice della lavorabilità e della duttilità del materiale e che si consiglia di far espletare soprattutto in presenza di acciai di provenienza non ben certificata. Gli acciai a basso tenore di carbonio o dolci (mild steel) sono indicativamente caratterizzati, Fig.1.2 a da:
− una fase “elastica” fino alla tensione di snervamento σ0(fy) a cui corrisponde indicativamente un valore della deformazione ε0=0,001;
− una fase “plastica” a cui corrisponde indicativamente un valore della deformazione εp=0,02 (2%) oltre la quale le deformazioni sono irreversibili;
− una fase di incrudimento (hardening) prima della rottura a cui corrisponde indicativamente una deformazione a rottura εu=0,12-0,30 (As=12-30%).
Gli acciai legati (alloy steel) (ad esempio leghe di Fe, Ni e Mo) come gli acciai da precompresso o gli acciai bonificati non presentano uno snervamento evidente. Lo snervamento viene caratterizzato come il valore della tensione fy(0,2) (secondo la normativa) per cui si ha una deformazione residua allo scarico, Fig.1.2b, εp=0,002 (0,2%).
Il rapporto εu/ε0 è spesso definito duttilità del materiale e da esso dipende la capacità della struttura di deformarsi senza crollare. Questa proprietà è di grande importanza per le strutture costruite in zone sismiche.
Si osservi infine, Fig.1.2a, come nel tratto terminale sia evidenziata la differenza fra la tensione nominale σ riferita all’area iniziale A0 del provino con la tensione t di Cauchy riferita all’area effettiva che risulta ridotta per il fenomeno della strizione.
Modulo di elasticità dei materiali ferrosi I materiali metallici hanno una organizzazione policristallina composta di grani orientati in maniera casuale ed in prima approssimazione possono considerarsi isotropi sia in campo elastico che in campo plastico. Il modulo di elasticità o di Young E varia da 180 GPa (per le ghise che hanno un alto tenore di carbonio) a 210 GPa per gli acciai. Si ricorda tuttavia che nel caso dei cavi o funi d’acciaio da precompresso si assume, per effetto dello scorrimento mutuo dei trefoli da cui sono composte, E=190-200 GPa; se esse non sono verticali il modulo apparente viene, inoltre, a dipendere dal valore del tiro e da ciò, ad esempio, dipende il comportamento non lineare dei ponti strallati.
Caratteristiche delle deformazioni plastiche nei metalli
− Le deformazioni plastiche avvengono praticamente senza variazioni di volume. Ovvero si ha: E1=trE=ε11+ε22 +ε33=0. In campo plastico un metallo è dunque incomprimibile ed il coefficiente ν di Poisson passa dal valore iniziale ν=0,3 (per l’acciaio), se 0ε<ε =0,001, al valore ν=0,5 (quando
pε ε 0,02≥ = fluido viscoso perfetto o fluido di Bingham).
5
− Se si esegue una prova di trazione su elementi bidimensionali (lastre) si evidenzia l’insorgere di linee o bande di scorrimento dette di Luders, inclinate di un angolo α (α compreso fra i 30 e i 45 gradi) rispetto l’orizzontale, ove si concentrano o localizzano le deformazioni plastiche. Analoghe linee si evidenziano nelle prove di torsione.
− Ciò ha portato ad affermare che le deformazioni plastiche si attivano una volta raggiunto il valore limite τ0 delle tensioni tangenziali su un piano di scorrimento (criterio di Tresca). Nei materiali “perfetti” composti da un unico cristallo (whiskers) di acciaio dolce τ0=G/3 (13 GPa), valore molto maggiore di quello che si ha nei materiali reali che hanno una organizzazione policristallina con grani distinti.
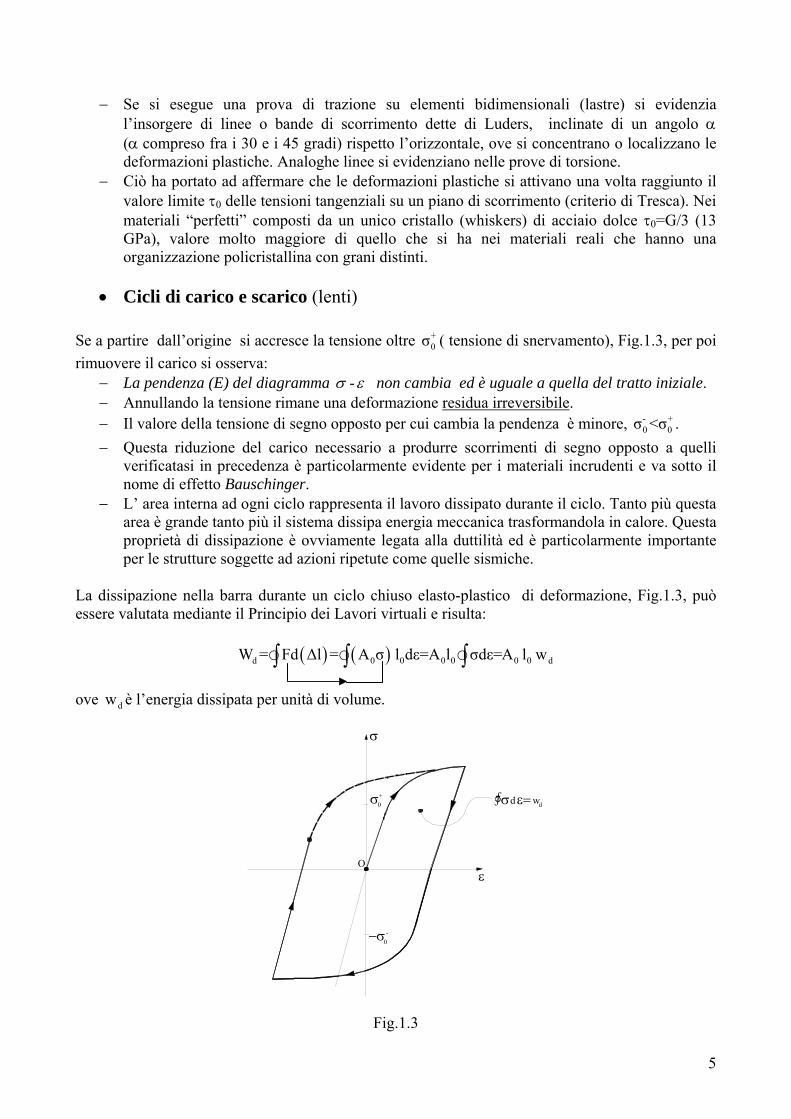
• Cicli di carico e scarico (lenti)
Se a partire dall’origine si accresce la tensione oltre +
0σ ( tensione di snervamento), Fig.1.3, per poi rimuovere il carico si osserva:
− La pendenza (E) del diagramma -σ ε non cambia ed è uguale a quella del tratto iniziale. − Annullando la tensione rimane una deformazione residua irreversibile. − Il valore della tensione di segno opposto per cui cambia la pendenza è minore, - +
0 0σ <σ . − Questa riduzione del carico necessario a produrre scorrimenti di segno opposto a quelli
verificatasi in precedenza è particolarmente evidente per i materiali incrudenti e va sotto il nome di effetto Bauschinger.
− L’ area interna ad ogni ciclo rappresenta il lavoro dissipato durante il ciclo. Tanto più questa area è grande tanto più il sistema dissipa energia meccanica trasformandola in calore. Questa proprietà di dissipazione è ovviamente legata alla duttilità ed è particolarmente importante per le strutture soggette ad azioni ripetute come quelle sismiche.
La dissipazione nella barra durante un ciclo chiuso elasto-plastico di deformazione, Fig.1.3, può essere valutata mediante il Principio dei Lavori virtuali e risulta:
( ) ( )d 0 0 0 0 0 0 dW = Fd ∆l = A σ l dε=A l σdε=A l w∫ ∫ ∫
ove dw è l’energia dissipata per unità di volume.
O
σ
ε
−σ0-
σ ε=d wd∫0σ+
Fig.1.3
6
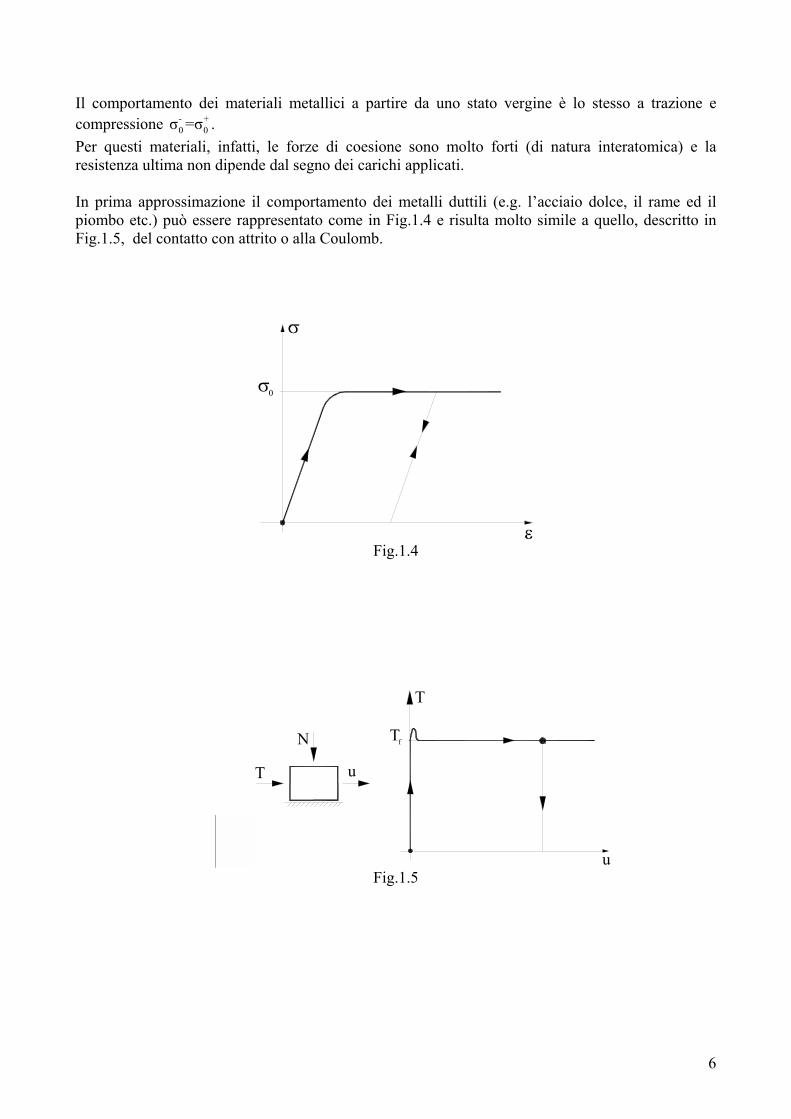
Il comportamento dei materiali metallici a partire da uno stato vergine è lo stesso a trazione e compressione - +
0 0σ =σ . Per questi materiali, infatti, le forze di coesione sono molto forti (di natura interatomica) e la resistenza ultima non dipende dal segno dei carichi applicati. In prima approssimazione il comportamento dei metalli duttili (e.g. l’acciaio dolce, il rame ed il piombo etc.) può essere rappresentato come in Fig.1.4 e risulta molto simile a quello, descritto in Fig.1.5, del contatto con attrito o alla Coulomb.
σ0
Fig.1.4
u
Tf
T
T u
N
Fig.1.5

7
2.2 Modelli costitutivi elasto-plastici Le principali ipotesi alla base del comportamento elasto-plastico, illustrato in Fig.1.7, sono:
− le deformazioni plastiche (irreversibili) insorgono quando lo stato di tensione σ raggiunge la tensione di snervamento 0σ .
− lo stato di deformazione totale ε può essere decomposto nella somma di una parte elastica εe (reversibile) ed in una plastica εp (decomposizione additiva)
e pε=ε +ε (La decomposizione additiva vale unicamente nell’ipotesi di deformazioni “infinitesime”)
− La tensione σ dipende linearmente dalla parte elastica della deformazione εe
e pσ=Eε ovvero σ=E(ε-ε ) . Un semplice modello meccanico che interpreta le relazioni precedenti è mostrato in Fig.1.6.
pσ=E(ε-ε ) .
σ σ
ε
ε εe p
E
Fig.1.6
Il modello elasto-plastico della prima figura può essere pensato come somma di un modello elastico lineare e di uno plastico.
εp
A
ε
σ 1
εp
εe
1
E
=
Oε0
σ
E
σ0
εe
A
1
2 +
εO
ε
σσ A
0
p
σ
1
2
p p
e
ε
σ
O
σ0
Fig.1.7
Il comportamento di un materiale “elasto- plastico” è caratterizzato dal fatto che la sua risposta (e.g. in A) dipende dal segno dell’incremento di deformazione ( 0ε > continuano le deformazioni plastiche, 0ε < - scarico elastico). Si parla invece di materiale “elastico non lineare” ( od olonomo o di teoria della deformazione ) se la risposta è funzione di ε e non diε ed anche in caso di scarico si ripercorre il tratto A-O.

8
• Modello elastico-(perfettamente)plastico (EPP) In Fig.1.8 è rappresentata il comportamento monoassiale di un materiale elastico–perfettamente plastico.
p
A
ε
σ
1
E
=
Oε
0
σ
E
0σ
ε e
A
1
+
εO
ε
σ0
σ
w
p p
B B
d
A
=σ /0 E
0 ε
σ
O
0
ε
Fig.1.8
Le principali ipotesi che lo caratterizzano sono: − La tensione non può superare la tensione di snervamento - +
0 0-σ σ σ≤ ≤ che risulta coincidente con quella di rottura.
− Ogni stato di tensione che verifica queste disuguaglianze è detto ammissibile; per i metalli si può porre - +
0 0-σ =σ=σ e la condizione di ammissibilità diviene 0σ =σ . In tal modo il dominio elastico non varia ed ha grandezza costante al contrario di ciò che avviene per i materiali incrudenti.
− Si ha plasticizzazione solo se: 0(σ)= σ -σ =0φ condizione di snervamento (yield condition) mentre (σ)φ è detta funzione di snervamento .
Poiché per gli acciai dolci εu=12-30% la duttilità viene spesso assunta illimitata.
La velocità (o Potenza ) di dissipazione per unità di volume è definita come pD=σε mentre la dissipazione plastica è definita come:
pb
0
εt
d pt 0
w = σεdt= σdε∫ ∫
Risposta ciclica In Fig.1.9 è mostrata la risposta ad un ciclo di carico-scarico del modello EPP. In particolare nel ciclo chiuso A G→ la dissipazione per unità di volume vale
( )+ -d 0 p pw =2σ ε -ε

9
Risposta ciclica
O
σ
ε
−σ0
F B
E D
Cεp-
0σ
D'
εp+
p(ε =−0)
D = σ0 εp
G A
D = (ε )=(−σ )0 p (−ε )>0σ0 p
Fig.1.9
• Modello rigido perfettamente plastico (RPP)
In Fig.1.11 è raffigurato il comportamento di un materiale rigido perfettamente plastico , schematizzato in Fig.1.10. In questa schematizzazione si assume l’annullarsi della parte elastica della deformazione: εe =0.
σ σε p
ε=
Fig.1.10
0
O
σ
εεp
A B
σ
1
2
Fig.1.11
10
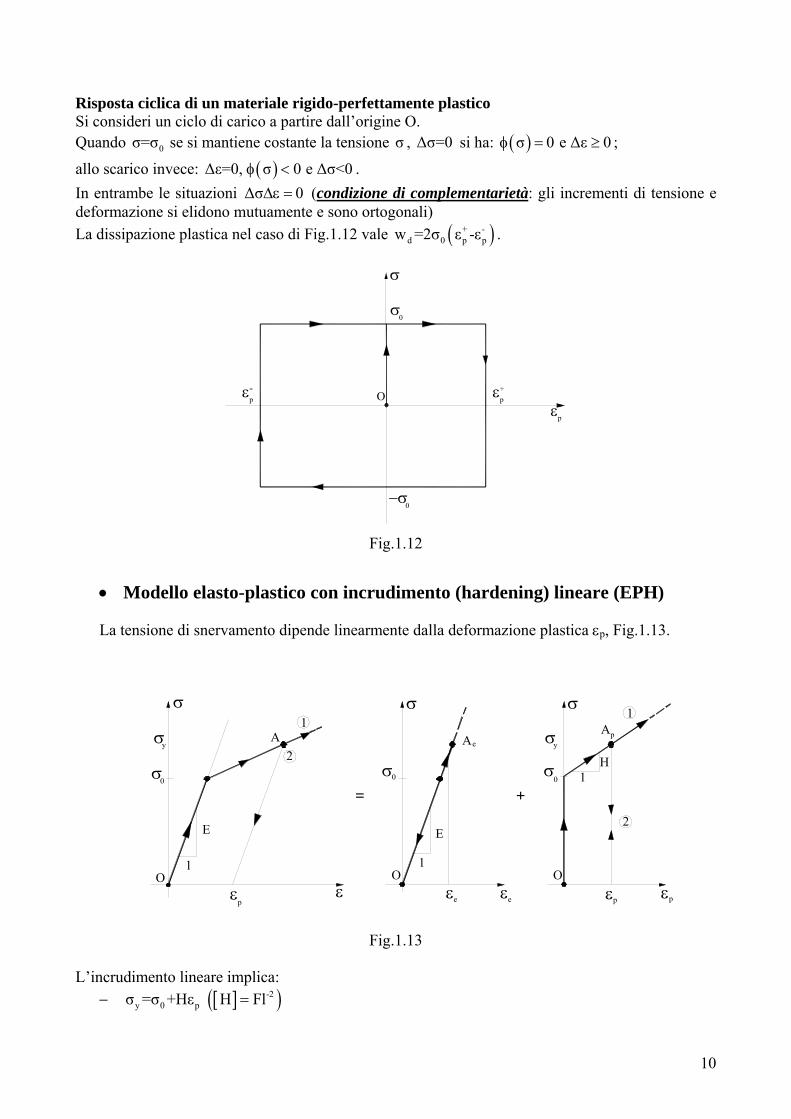
Risposta ciclica di un materiale rigido-perfettamente plastico Si consideri un ciclo di carico a partire dall’origine O. Quando 0σ=σ se si mantiene costante la tensione σ , ∆σ=0 si ha: ( )σ e ∆ε 0φ = 0 ≥ ;
allo scarico invece: ( )∆ε=0, σ 0 e ∆σ<0φ < . In entrambe le situazioni ∆σ∆ε = 0 (condizione di complementarietà: gli incrementi di tensione e deformazione si elidono mutuamente e sono ortogonali) La dissipazione plastica nel caso di Fig.1.12 vale ( )+ -
d 0 p pw =2σ ε -ε .
0
O
σ
pεεp
σ
+ε-p
−σ0
Fig.1.12
• Modello elasto-plastico con incrudimento (hardening) lineare (EPH) La tensione di snervamento dipende linearmente dalla deformazione plastica εp, Fig.1.13.
E
Oε
p
1
ε εe
1O
εe
σ
σ0
y
E
σ
σ
A2
=
1A
0
+
e
σ
Oεεp p
σ pA
Hσ0
y
1
2
σ1
Fig.1.13
L’incrudimento lineare implica: − [ ]( )-2
y 0 pσ =σ +Hε H Fl=

11
− ( )p y 0 pσ,ε σ-σ =σ-σ -Hεφ = per εp >0 (la funzione di snervamento è funzione della deformazione plastica).
Si osservi che: se H=0 si ha il modello elastico perfettamente plastico (EPP) se H=0 ed E tende all’infinito modello rigido perfettamente plastico (RPP)
Nei casi usuali H>0 incrudimento positivo , se H<0 (incrudimento negativo) il materiale non risulterà stabile secondo Drucker come vedremo in seguito.
• Incrudimento Cinematico
Trazione +y 0 pσ σ =σ +Hε≤
Compressione -y 0 pσ σ =-σ +Hε≥ −
Ammissibilità plastica 0 p 0 p-σ +Hε σ σ +Hε≤ ≤
Funzione di snervamento ( )p p 0σ,ε = σ-Hε -σ 0φ ≤
0
O
σ
εεp
σ
+ε-p
−σ0
ε0
A
1
2 εp= 0
1
2σ =σ +Ηεy
+0 p
−σ =−σ +Ηεp0y-
Fig.1.14
L’equazione costitutiva per un solido con un diagramma bi-lineare come quello in esame può essere di due tipi: Olonoma (path independent): il materiale si comporta come un materiale elastico non lineare e lo scarico avviene lungo lo stesso percorso tenuto nella fase di carico. Non Olonoma ( path dependent): il materiale si comporta come effettivamente elasto-plastico e in A si ha lo scarico elastico.

12
Risposta elastica Incrudimento Risposta elastica pd 0ε = Risposta elastica Incrudimento Risposta elastica pd 0ε =
I diversi percorsi a partire dai punti A e B dipendono dal segno degli incrementi dε e dσ .
σ dε
d
E
1
1
ε
dεσd = EH
E+Hεd
E+HEH
E=d
Fig.1.15.
Ed dE+Hp
⎫⇒ ε = ε⎬
⎭
( )d E d dB1d 0 d Hdd 0 EHd d
E+HB
B2 d Edd 0d 0
p
p
⎧ σ = ε − ε⎪
ε < σ = ε⎪⎪ σ <⎪ σ = ε⎪⎪⎨⎪⎪
σ = ε⎪⎪ ε >⎪⎪ σ >⎩
( )d E d dA1d >0 d Hdd 0 EHd d
E+HA
A2d Ed
d 0d 0
p
p
⎧ σ = ε − ε⎪
ε σ = ε⎪⎪ σ >⎪ σ = ε⎪⎨⎪⎪
σ = ε⎪ε <⎪
⎪ σ <⎩
13
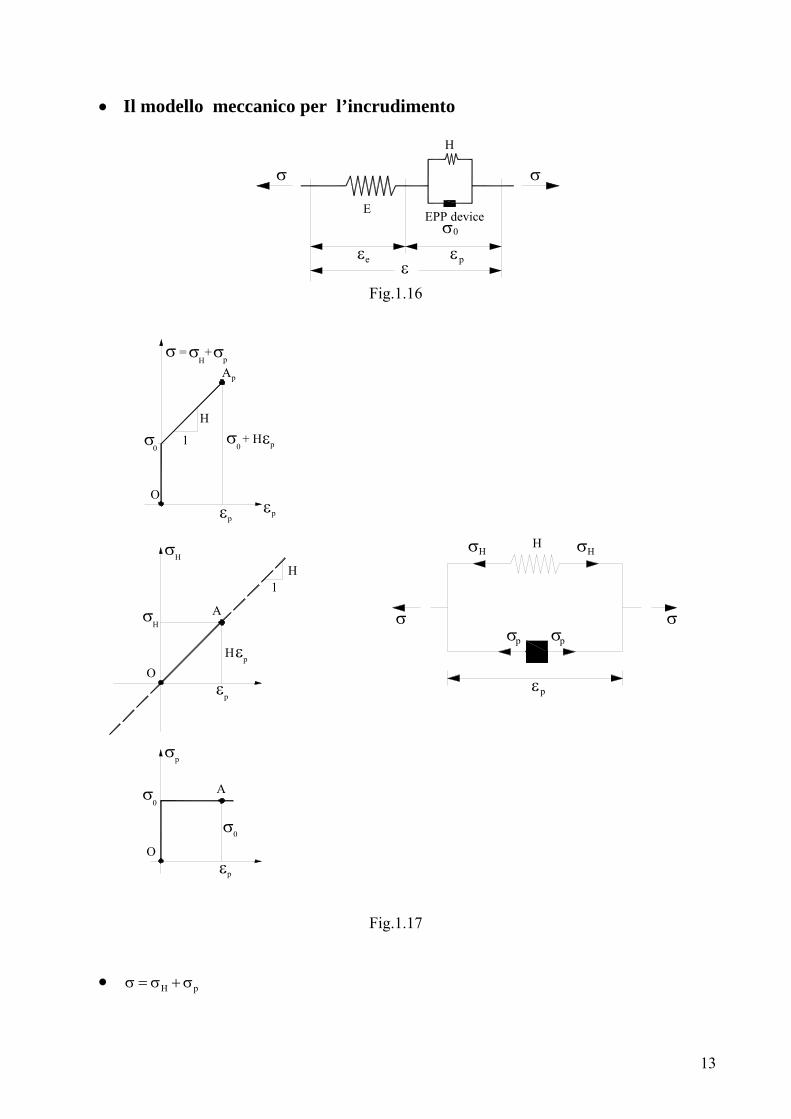
• Il modello meccanico per l’incrudimento
σ σ
ε εe p
E
H
ε
EPP deviceσ0
Fig.1.16
p
σ0+ Hεp
= σH+ σp
H
Oεp
pεH
σ AH
Hσ
1
O
σ0
σ A
p
0
σ
σ
εp
σ
σHH σH
H
1
pε
εp
σp pσ
εO
σ
A
0
p
σ
Fig.1.17
• H pσ = σ + σ

14
1.3 Forma incrementale delle equazioni costitutive elasto-plastiche Si definiscono incrementi o velocità degli stati di tensione e di deformazione (stress and strain rate) le quantità σ= dσ dt , ε= dε dt . Ove t rappresenta una variabile, crescente durante il processo di deformazione (dt>0), non necessariamente coincidente con il tempo. L’equazione costitutiva viene espressa in forma incrementale nel modo seguente:
− Additività degli incrementi di deformazione e pε=ε +ε
− Risposta elastica ( )e pE Eσ ε ε ε= = −
− Condizione di carico e scarico ( loading-unloading condition) Se ( )p 0,φ σ ε < ⇒ risposta elastica Eσ = ε , eε = ε , p 0ε =
Se ( )p 0,φ σ ε = ⇒ stato elasto-plastico: la risposta dipende dall’evoluzione della funzione di snervamento
( ) ( )p p pp
d , , dt = dt⎛ ⎞∂φ ∂φ
φ σ ε = φ σ ε σ + ε⎜ ⎟⎜ ⎟∂σ ∂ε⎝ ⎠
( )p pp
, ∂φ ∂φφ σ ε = σ + ε
∂σ ∂ε
Se ( )p 0,φ σ ε < ⇒ scarico elastico p 0ε = , Eσ = ε
(se ( )p0 0,∂φσ < ⇒ φ σ ε <
∂σ)
Se ( )p 0,φ σ ε = ⇒ deformazioni elasto-plastiche p 0ε ≠
Regola del flusso p = ∂φ⎛ ⎞ε λ⎜ ⎟∂σ⎝ ⎠, 0λ ≥ moltiplicatore plastico; definendo le variabili
n= ∂φ∂σ
,p
h= ∂φ∂ε
( ) ( )p n hn n E En h 0, ⎡ ⎤φ σ ε = σ + λ = ε − − λ =⎣ ⎦
EEn h
⇒ λ = ε−
, pEn
En hε = ε
−, EnE 1
En h⎡ ⎤σ = − ε⎢ ⎥−⎣ ⎦
.
Eep=E [1-(En)/(En-h)] è detto modulo elasto-plastico (istantaneo) Esempio n.1: modello elastico perfettamente plastico (EPP) Il comportamento del modello EPP è illustrato in Fig.1.18.
( ) 0φ σ = σ − σ n= ∂φ σ=
∂σ σ p
h= 0∂φ=
∂ε
Se = 0∂φ σσφ φ = σ = =
∂σ σ, allora
0σλ = ε >
σ, pε = ε , 0σ =

15
la quantità (non negativa) λ detta moltiplicatore plastico è positiva se sono in atto deformazioni plastiche e φ(σ) =0 e nulla quando il punto tensione è interno alla superficie di snervamento
Aσ
B −σ0
λ > 0ε >p 0
1
1
0pε <λ > 0
ε
σ
O
0
Fig.1.18
Esempio n.2: Modello elasto-plastico con incrudimento lineare (EPH) In Fig.1.19 è illustrato il modello EPH di seguito descritto.
p 0Hφ = σ − ε − σ , p
Hn
Hpσ − ε
=σ − ε
, h nH= −
p
p
H E 0E HH
σ − ε ⎡ ⎤λ = ε >⎢ ⎥+σ − ε ⎣ ⎦, p
EE H
ε = ε+
, E EHE 1E H E H
⎡ ⎤σ = − ε = ε⎢ ⎥+ +⎣ ⎦
ε
σ
A
B
λ > 0 , ε >p 0σ >0
σ −Ηε >p 0ε >0
00 ε <0
p−Η 0ε <p
0ε <λ >σ<
σ
1
1
Fig.1.19
16
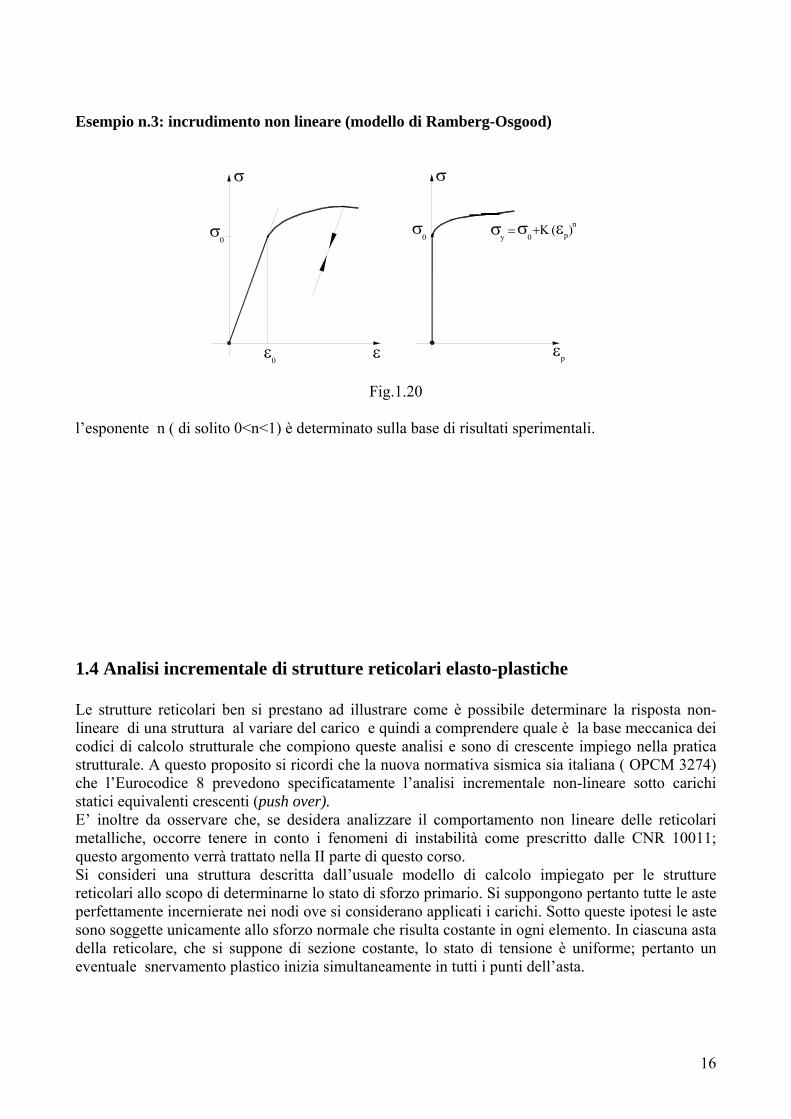
Esempio n.3: incrudimento non lineare (modello di Ramberg-Osgood)
ε0 ε εp
0σ
σ
σ0
σ
σσy = ε+Κ 0
( )pn
Fig.1.20 l’esponente n ( di solito 0<n<1) è determinato sulla base di risultati sperimentali. 1.4 Analisi incrementale di strutture reticolari elasto-plastiche Le strutture reticolari ben si prestano ad illustrare come è possibile determinare la risposta non-lineare di una struttura al variare del carico e quindi a comprendere quale è la base meccanica dei codici di calcolo strutturale che compiono queste analisi e sono di crescente impiego nella pratica strutturale. A questo proposito si ricordi che la nuova normativa sismica sia italiana ( OPCM 3274) che l’Eurocodice 8 prevedono specificatamente l’analisi incrementale non-lineare sotto carichi statici equivalenti crescenti (push over). E’ inoltre da osservare che, se desidera analizzare il comportamento non lineare delle reticolari metalliche, occorre tenere in conto i fenomeni di instabilità come prescritto dalle CNR 10011; questo argomento verrà trattato nella II parte di questo corso. Si consideri una struttura descritta dall’usuale modello di calcolo impiegato per le strutture reticolari allo scopo di determinarne lo stato di sforzo primario. Si suppongono pertanto tutte le aste perfettamente incernierate nei nodi ove si considerano applicati i carichi. Sotto queste ipotesi le aste sono soggette unicamente allo sforzo normale che risulta costante in ogni elemento. In ciascuna asta della reticolare, che si suppone di sezione costante, lo stato di tensione è uniforme; pertanto un eventuale snervamento plastico inizia simultaneamente in tutti i punti dell’asta.

17
∆
F F
σ /O
=ε 0
1
εE ε∆ =0
1O
= Eσ /0 0
σ0
E
σF
EA
0
F
∆
EAK =w = K /ε
(a) (b)= F /K0
Fig.1.21 Una volta definite le variabili σ=F/A (tensione normale) e ε=∆/ 0 (deformazione assiale) si valutano: • Funzione di snervamento (yielding function) ( ) ( )0 0 0F = F -F 0 F =Aσφ ≤ • Additività dell’allungamento elastico e plastico e p∆=∆ +∆
• Elasticità ( )e w e w pEAF= ∆ =K ∆ =K ∆-∆
Risposta elastica Se 0φ > o 0φ = e p W<0 ∆ =0, F=K ∆φ ⇒
Risposta plastica p= =0 ∆ =∆, F= 0φ φ ⇒ E’ importante osservare che quando un’asta entra in campo plastico non è in grado, secondo questo modello, di sopportare ulteriori incrementi di carico e, quindi, incrementalmente la struttura si comporta come se questa asta non esistesse più.

18
Esempio n.1: Reticolare isostatica ( modello EPP) Si consideri la struttura isostatica di Fig.1.22.
s
F F
u
P
P/2 P/2
3
P
P0
P = 0
u0
u indeterminato
u
Fig.1.22 Basta fare una sezione di Ritter in S per ottenere: F =3P /4 Pertanto ponendo lo sforzo normale F pari al suo valore di snervamento F0, si verifica che ciò avviene per un valore del carico P0=4F0/3. Per ogni incremento ulteriore del carico la struttura sui comporta come se fosse priva dell’asta in esame, Fig.1.23, e quindi fosse labile.
F=0
u
P
F=0V V
O
Fig.1.23 Equilibrio incrementale 2V-P=0 P=0
3polo in o V -F =0 V=02
⇒
⇒
La travatura è labile rispetto a incrementi di carico. L’equilibrio incrementale della struttura implica P=0 . Pertanto P0 rappresenta dunque il carico massimo o di collasso della struttura. Poiché la struttura è isostatica basta che si plasticizzi una sola asta per portare a collasso la struttura.

19
Esempio n.2: Reticolare iperstatica -3 aste EPP in parallelo Si consideri la struttura di Fig.1.24; essa risulta 2 volte iperstatica. Le equazioni che descrivono il comportamento della struttura risultano:
− Equilibrio 1 2 3F +F +F =F − Equilibrio incrementale 1 2 3F +F +F =F − Congruenza 1 2 3∆ =∆ =∆ =u − Equazioni costitutive K= EA cost. in ogni asta (rigidezza in campo elastico) iF =Ku legame elastico in forma finita iF =Ku legame elastico in forma incrementale iF =0 legame in campo plastico in forma incrementale
Le aste presentano le seguenti tensioni di snervamento: 01 0 02 0 03 0σ =σ , σ =2σ , σ =3σ
Step1- Risposta elastica
Si definisce 0 0F =Aσ e conseguentemente 0 00
F σ∆ = =K E
Sostituendo le equazioni di congruenza e di legame nell’equazione di equilibrio è possibile determinare:
01 0 01
1 2 3
u= F 3K per 0 u σ EF =F =F = F 3
≤ ≤ ∆ = ∆ =
Corpo rigido
1 2 3
Fu
A
F1 2
F F3
σ0
A2
A0σ 3σ0
Fig.1.24 Nella Fig.1.25 è mostrato il comportamento delle 3 aste e la risposta strutturale fino al punto A

20
∆O
1
1O
A
1
2
2 3
3
F /F0
1
2
3
11
u/ 0
1
2
3
3
1 ∆u/ 0
0F/F
F / F =30A
i
Fig.1.25
1 2 3 10 0
3EA F uF=F +F +F =3F = u =3F ∆
⇒
Step.2– Asta 1 snervata 0 0u 2∆ ≤ ≤ ∆
1
0
F 0F
= , 2
0 0
F uF
=∆
, 3
0 0
F uF
= ⇒∆ 0 0
F u2F
=∆
, B 0F 5F= .
1
O1 2 ∆ u /
0
2
3
0F/F
A
B
4
5
12
1
3
Fig.1.26
Step.3- Aste 1_2 snervate 0 02 u 3∆ ≤ ≤ ∆
1 2
0 0
F F= =0F F
; 3 1 2
0 0 0 0
F F Fu= = =0F ∆ F F
⇒ , 3
0 0
F u=F ∆
0 0
F u=F ∆
⇒ , c 0F = 6F
21
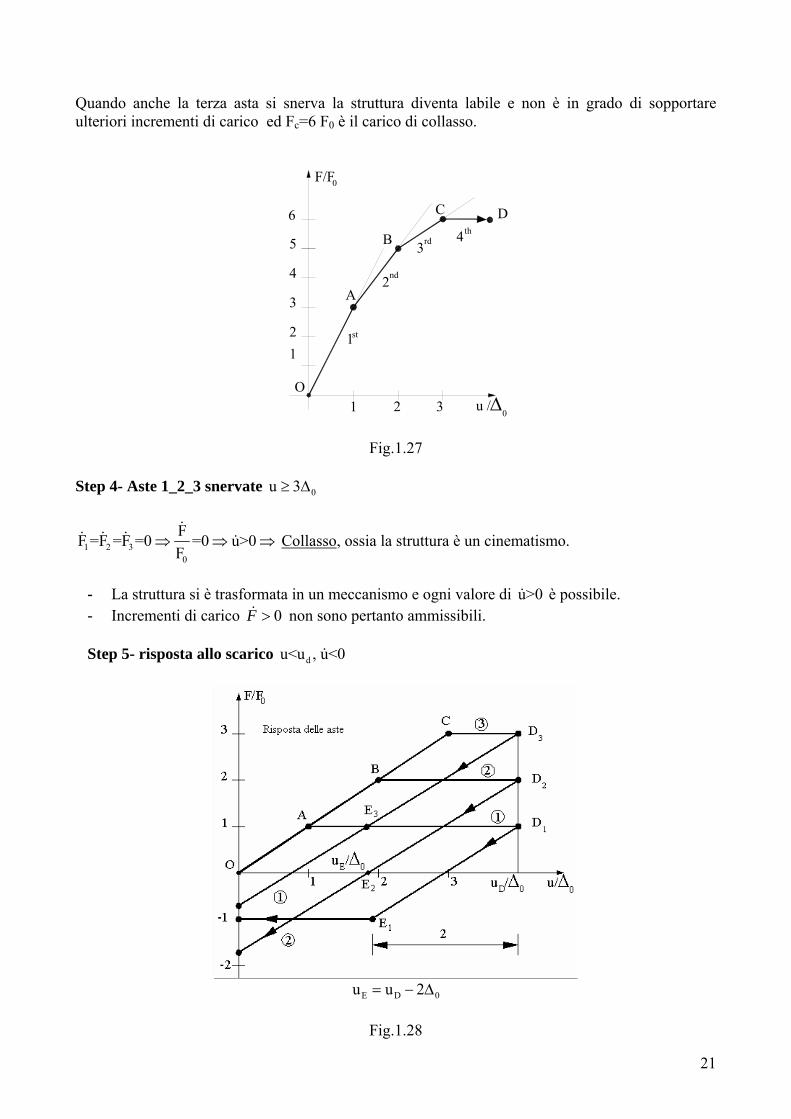
Quando anche la terza asta si snerva la struttura diventa labile e non è in grado di sopportare ulteriori incrementi di carico ed Fc=6 F0 è il carico di collasso.
1
O1 2 ∆ u / 0
2
3
0F/F
A
B
4
5
6
3
DC
1
2
34
st
nd
rdth
Fig.1.27
Step 4- Aste 1_2_3 snervate 0u 3≥ ∆
1 2 30
FF =F =F =0 =0 u>0F
⇒ ⇒ ⇒ Collasso, ossia la struttura è un cinematismo.
- La struttura si è trasformata in un meccanismo e ogni valore di u>0 è possibile. - Incrementi di carico 0F > non sono pertanto ammissibili.
Step 5- risposta allo scarico du<u , u<0
E D 0u u 2= − ∆
Fig.1.28

22
1
O1 ∆ u /
0
2
3
0F/F
A
B
4
5
6 DC
2 3D∆ u /
-1
12
11
1
2
13
F =0F20
Stato E
F=0
0F
Risposta strutturale
31
∆E
u /0
E 0
Fig.1.29 Risposta ciclica
1
O1 2 ∆ u / 0
2
3
0F/F
A
B4
5
6
3
DC
-1
F0 F =0
F=-4
Stato F
4-1-2-3
-2
-3
-4
-5
-6
L
M
GH
I E
∆ p3
2F0
F0
EA (u - F ∆ 3p )
F=-6
Stato G
0F
02F3F
F
0
0
F
Fig.1.30
Se una struttura è iperstatica, in genere, non basta lo snervamento di un’asta per provocare il collasso della struttura. Si osservi che: - La plasticizzazione di un elemento modifica lo schema resistente e l’incremento di carico si
ridistribuisce in modo diverso fra le altre aste.
23
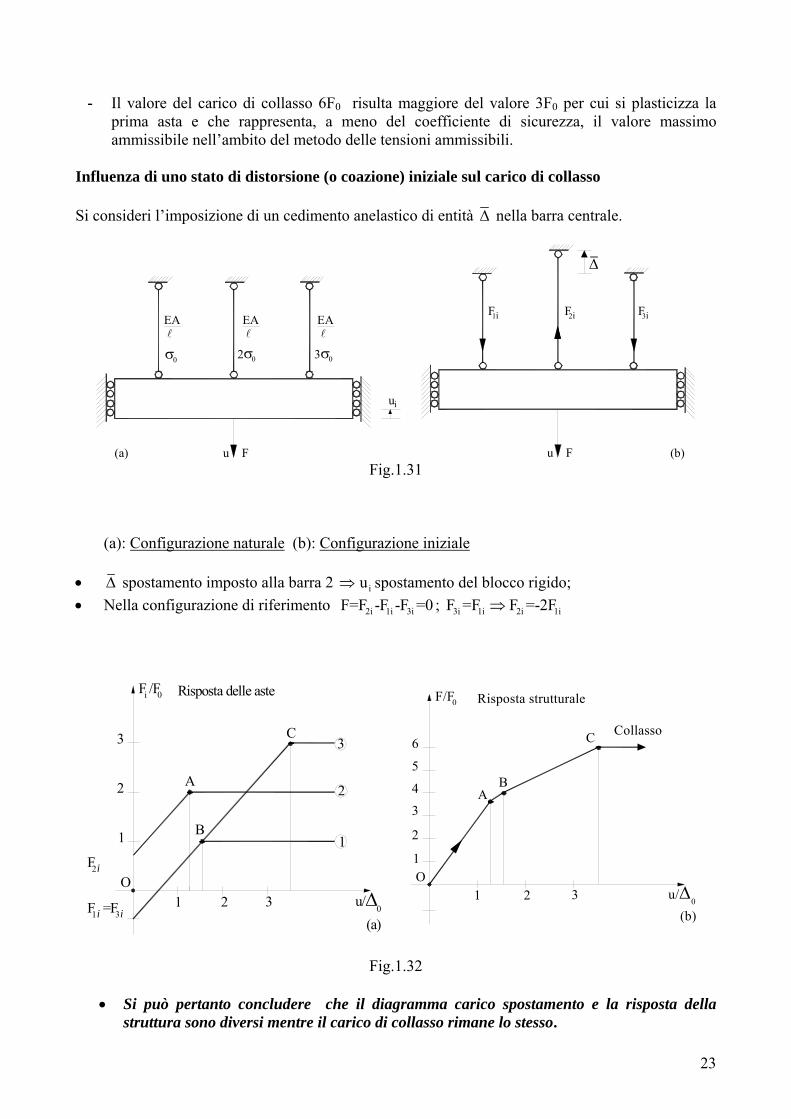
- Il valore del carico di collasso 6F0 risulta maggiore del valore 3F0 per cui si plasticizza la prima asta e che rappresenta, a meno del coefficiente di sicurezza, il valore massimo ammissibile nell’ambito del metodo delle tensioni ammissibili.
Influenza di uno stato di distorsione (o coazione) iniziale sul carico di collasso Si consideri l’imposizione di un cedimento anelastico di entità ∆ nella barra centrale.
Fu
σ0 σ02 σ3 0
EA EA EA
u
iF
F
1 iF2 Fi3
∆
ui
(a) (b) Fig.1.31
(a): Configurazione naturale (b): Configurazione iniziale • ∆ spostamento imposto alla barra 2 ⇒ iu spostamento del blocco rigido; • Nella configurazione di riferimento 2i 1i 3iF=F -F -F =0 ; 3i 1i 2i 1iF =F F =-2F⇒
B1 1
F i1 3=F i
i2FO
1 32 u/∆(a)
0
Risposta delle aste
2
3
A
0F /F
2
C3
i
Risposta strutturale
1O
2
3
1
F/F
6
5
4 BA
0
2 3(b)∆u/
0
C Collasso
Fig.1.32
• Si può pertanto concludere che il diagramma carico spostamento e la risposta della struttura sono diversi mentre il carico di collasso rimane lo stesso.
24
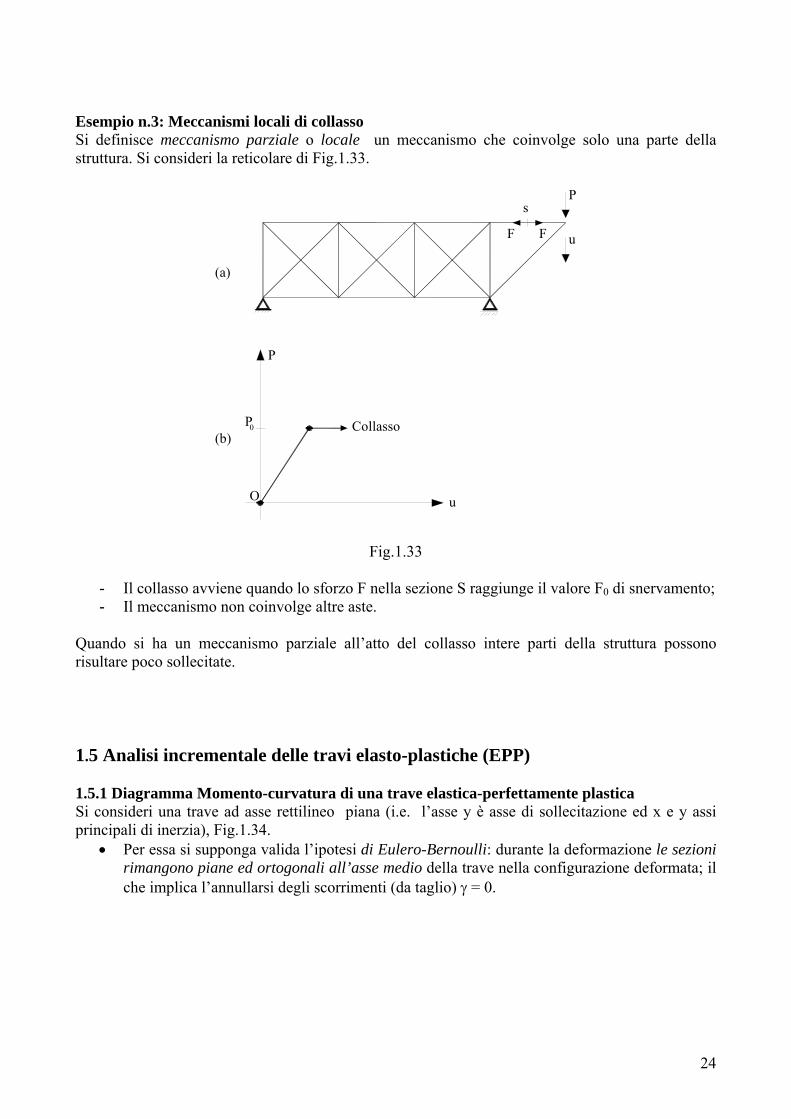
Esempio n.3: Meccanismi locali di collasso Si definisce meccanismo parziale o locale un meccanismo che coinvolge solo una parte della struttura. Si consideri la reticolare di Fig.1.33.
P
uF
s
F
O
0P(b)
P
u
Collasso
(a)
Fig.1.33
- Il collasso avviene quando lo sforzo F nella sezione S raggiunge il valore F0 di snervamento; - Il meccanismo non coinvolge altre aste.
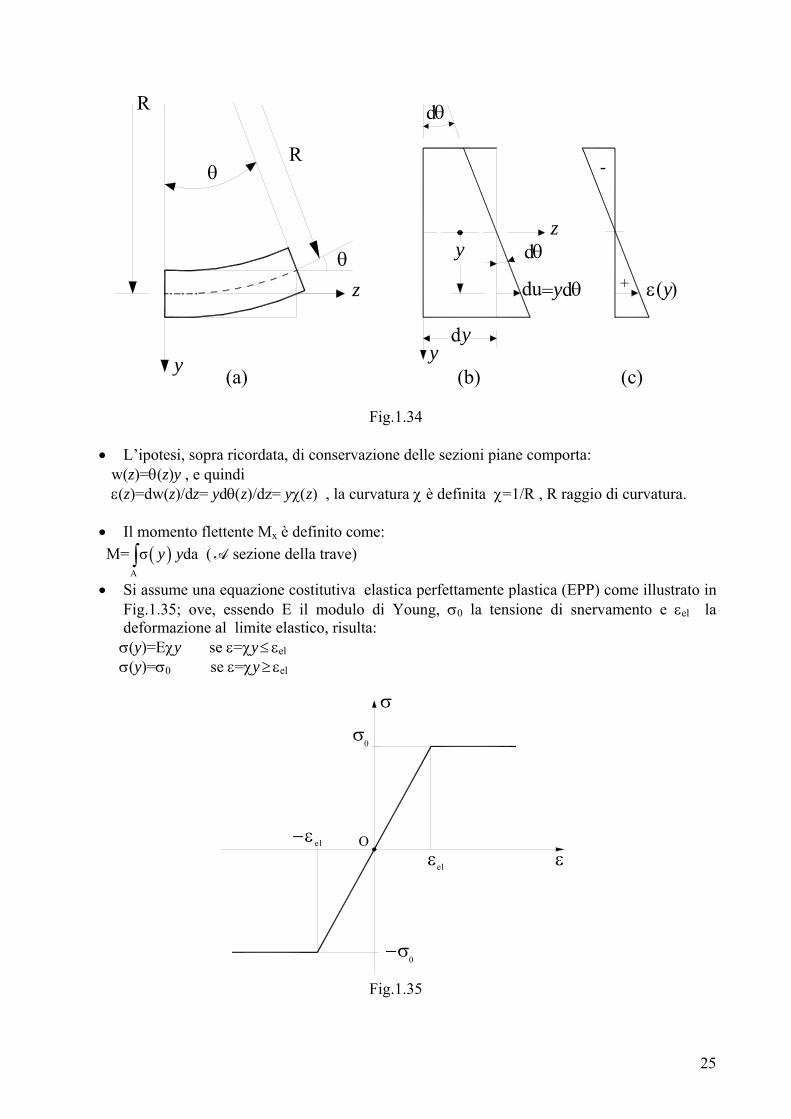
Quando si ha un meccanismo parziale all’atto del collasso intere parti della struttura possono risultare poco sollecitate. 1.5 Analisi incrementale delle travi elasto-plastiche (EPP) 1.5.1 Diagramma Momento-curvatura di una trave elastica-perfettamente plastica Si consideri una trave ad asse rettilineo piana (i.e. l’asse y è asse di sollecitazione ed x e y assi principali di inerzia), Fig.1.34.
• Per essa si supponga valida l’ipotesi di Eulero-Bernoulli: durante la deformazione le sezioni rimangono piane ed ortogonali all’asse medio della trave nella configurazione deformata; il che implica l’annullarsi degli scorrimenti (da taglio) γ = 0.
25
(yε )
y
dθ
dθz
d
du= θd
-
+
yy
z
θ
R
R
θ
(a) (b) (c)
y
y
Fig.1.34 • L’ipotesi, sopra ricordata, di conservazione delle sezioni piane comporta: w(z)=θ(z)y , e quindi ε(z)=dw(z)/dz= ydθ(z)/dz= yχ(z) , la curvatura χ è definita χ=1/R , R raggio di curvatura. • Il momento flettente Mx è definito come:
( )A
M= σ day y∫ ( A sezione della trave)
• Si assume una equazione costitutiva elastica perfettamente plastica (EPP) come illustrato in Fig.1.35; ove, essendo E il modulo di Young, σ0 la tensione di snervamento e εel la deformazione al limite elastico, risulta:
σ(y)=Eχy se ε=χy ≤ εel σ(y)=σ0 se ε=χy ≥ εel
ε
σ
O
0σ
−σ0
ε−ε
el
el
Fig.1.35
26
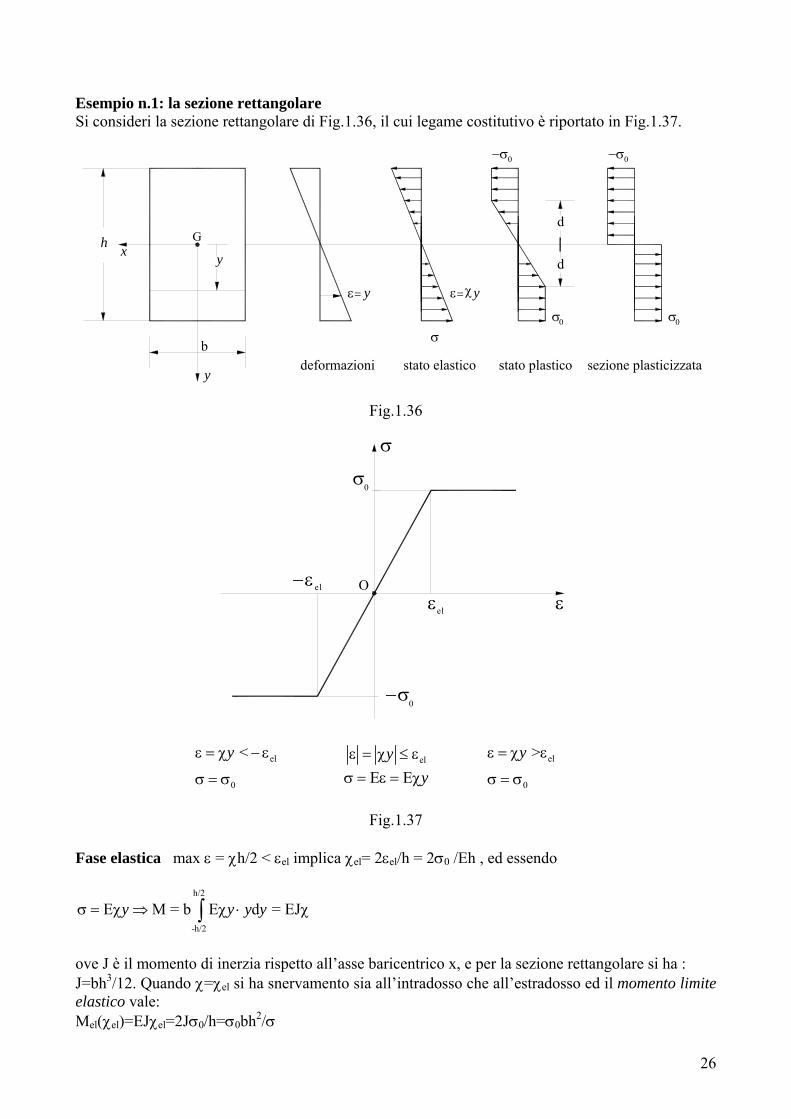
Esempio n.1: la sezione rettangolare Si consideri la sezione rettangolare di Fig.1.36, il cui legame costitutivo è riportato in Fig.1.37.
b
xG
y
ε y
σ
d
d
deformazioni stato elastico stato plastico
−σ0
=
hy
=ε yχ
σ0
sezione plasticizzata
0σ
−σ0
Fig.1.36
ε
σ
O
0σ
−σ0
ε−ε
el
el
el <yε = χ − ε elyε = χ ≤ ε el>yε = χ ε
0σ = σ E E yσ = ε = χ 0σ = σ
Fig.1.37 Fase elastica max ε = χh/2 < εel implica χel= 2εel/h = 2σ0 /Eh , ed essendo
h/2
-h/2
E M = b E d = EJy y y yσ = χ ⇒ χ ⋅ χ∫
ove J è il momento di inerzia rispetto all’asse baricentrico x, e per la sezione rettangolare si ha : J=bh3/12. Quando χ=χel si ha snervamento sia all’intradosso che all’estradosso ed il momento limite elastico vale: Mel(χel)=EJχel=2Jσ0/h=σ0bh2/σ

27
Ricordando che il modulo elastico è Wel=bh2/6 si può anche scrivere: Mel=σ0Wel Inoltre, per la linearità del tratto elastico, è possibile scrivere in forma adimensionale: M/Mel=χ/χel Fase elasto-plastica χ>χel=2σ0/Eh Nella fibra a distanza y=d ove si ha la transizione dal comportamento elastico a quello plastico, Fig1.38, si può scrivere: ε(d)=εel, e ponendo χd=εel =σ0/E, si ricava d=σ0/Eχ=(h/2)χel/χ ossia d/h=χel/(2χ).
−σ
d
d
σ0
0
σ=Εχ =σd 0
Fig.1.38 Mentre nella fase elastica, M ≤ Mel, ed è proporzionale alla curvatura, ora risulta:
h/22
d
1 2 h 1 hM 2b E d d 2b d d + d d+ d2 3 2 2 2
y y y y⎡ ⎤ ⎧ ⎫⎡ ⎤⎛ ⎞ ⎛ ⎞= χ + σ = σ ⋅ σ − − =⎨ ⎬⎢ ⎥ ⎜ ⎟ ⎜ ⎟⎢ ⎥⎝ ⎠ ⎝ ⎠⎣ ⎦⎩ ⎭⎣ ⎦∫ ∫d
0 0 00
22el
elbh 3 d 3 12 M 6 2 h 2 2
20
⎡ ⎤⎡ ⎤ ⎛ ⎞σ χ⎛ ⎞= − = −⎢ ⎥⎢ ⎥⎜ ⎟ ⎜ ⎟χ⎝ ⎠ ⎝ ⎠⎢ ⎥⎢ ⎥⎣ ⎦ ⎣ ⎦
2el
el3 1M M 12 3
/⎡ ⎤⎛ χ ⎞
⇒ = −⎢ ⎥⎜ ⎟χ⎝ ⎠⎢ ⎥⎣ ⎦
0 el3lim M = M M2χ→∞
=
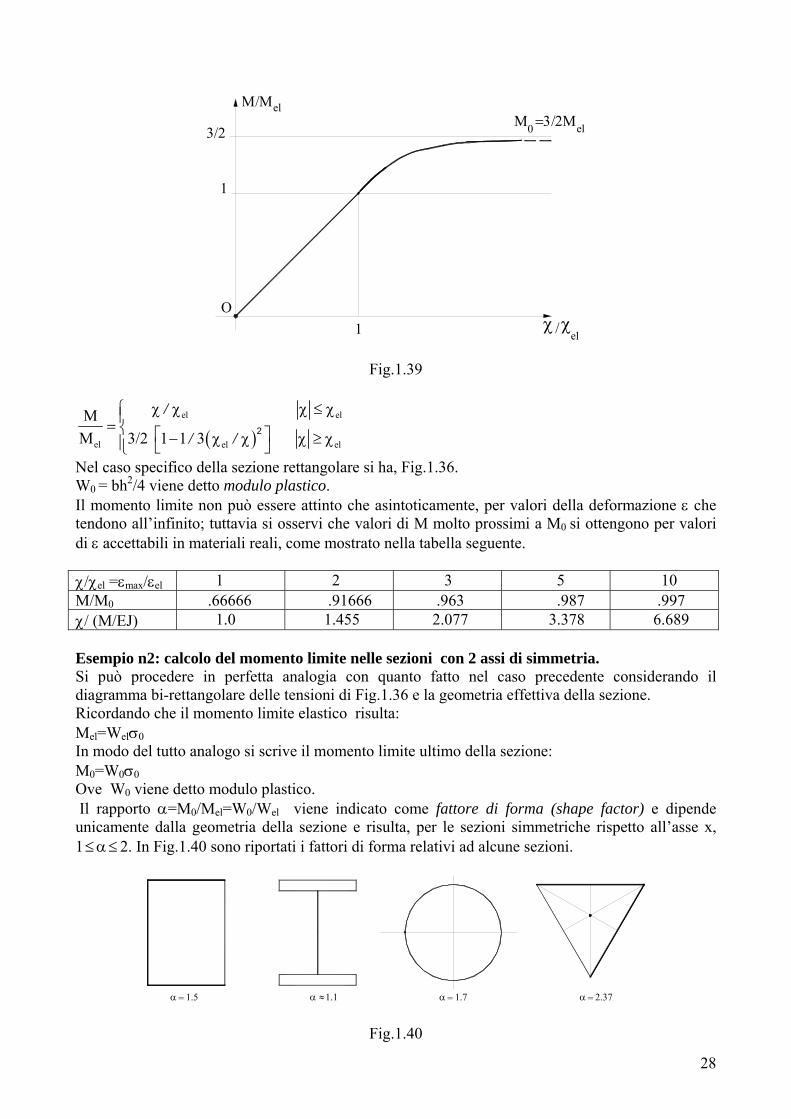
Quando la curvatura tende all’infinito il momento flettente tende al valore M0 detto Momento limite plastico o ultimo della sezione Fig.1.39, in corrispondenza del quale la sezione è completamente snervata, come mostrato in Fig.1.36.
28
χ
Μ/Μ
O
1
3/2
1 /χel
elΜ =3/2Μ0 el
Fig.1.39
( )el el
el el el
MM 3/2 1 1 3
/
/ /
⎧ χ χ χ ≤ χ⎪= ⎨ ⎡ ⎤− χ χ χ ≥ χ⎪ ⎣ ⎦⎩2
Nel caso specifico della sezione rettangolare si ha, Fig.1.36. W0 = bh2/4 viene detto modulo plastico. Il momento limite non può essere attinto che asintoticamente, per valori della deformazione ε che tendono all’infinito; tuttavia si osservi che valori di M molto prossimi a M0 si ottengono per valori di ε accettabili in materiali reali, come mostrato nella tabella seguente. χ/χel =εmax/εel 1 2 3 5 10 M/M0 .66666 .91666 .963 .987 .997 χ/ (M/EJ) 1.0 1.455 2.077 3.378 6.689 Esempio n2: calcolo del momento limite nelle sezioni con 2 assi di simmetria. Si può procedere in perfetta analogia con quanto fatto nel caso precedente considerando il diagramma bi-rettangolare delle tensioni di Fig.1.36 e la geometria effettiva della sezione. Ricordando che il momento limite elastico risulta: Mel=Welσ0 In modo del tutto analogo si scrive il momento limite ultimo della sezione: M0=W0σ0 Ove W0 viene detto modulo plastico. Il rapporto α=M0/Mel=W0/Wel viene indicato come fattore di forma (shape factor) e dipende unicamente dalla geometria della sezione e risulta, per le sezioni simmetriche rispetto all’asse x, 1 ≤ α ≤ 2. In Fig.1.40 sono riportati i fattori di forma relativi ad alcune sezioni.
α = 1.5 α 1.1≈ α 1.7= =α 2.37
Fig.1.40

29
Esempio n.3: Analisi incrementale di una trave semplicemente appoggiata di materiale EPP. Si consideri la trave di sezione rettangolare riportata in Fig.1.41.
P, 1
P/2 P/2
Mel
Ma
a
= P /4 ,
M, M*b
h
aM+ = /4
Fig.1.41 •Tutte le sezioni si mantengono in campo elastico se P<Pel ≤ 4Mel/ La freccia in mezzeria vale v=P 3/48EJ Mentre per il carico al limite elastico si ha: vel=Pel
3/48EJ=Mell2/12EJ, pertanto v/vel = P /Pel
•Alcuni punti vanno in campo plastico non appena P>Pel, mentre poiché nella sezione di mezzeria il momento non può superare il momento limite M0 il carico non può superare il valore P0=4M0/ (carico di collasso) La freccia in mezzeria può essere calcolata mediante il Principio dei Lavori Virtuali come nel seguito riportato, tenendo conto che se il momento è superiore al momento limite elastico occorre mettere in conto la curvatura elasto-plastica in precedenza calcolata. In Fig.1.42 è riportato il diagramma carico spostamento per la struttura in esame.
( ) ( )-1 22 2
*el el
el el0 0
2 P 4 Pv 2 M d = 2 d + 2 3 d 2 P 2 P
a
a
z zz z z z z z z⎡ ⎤⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞= χ χ − χ⎢ ⎥⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠⎣ ⎦∫ ∫ ∫i
( )( ) ( )e
el el2el
vv 5 3 P P 3 2 P PP P
⎡ ⎤⇒ = − + −⎣ ⎦
30
3/2
1 /vel
el(dP/dv) =0c
E
C
20/9
1/2
v
P/P
O
1
Fig.1.42
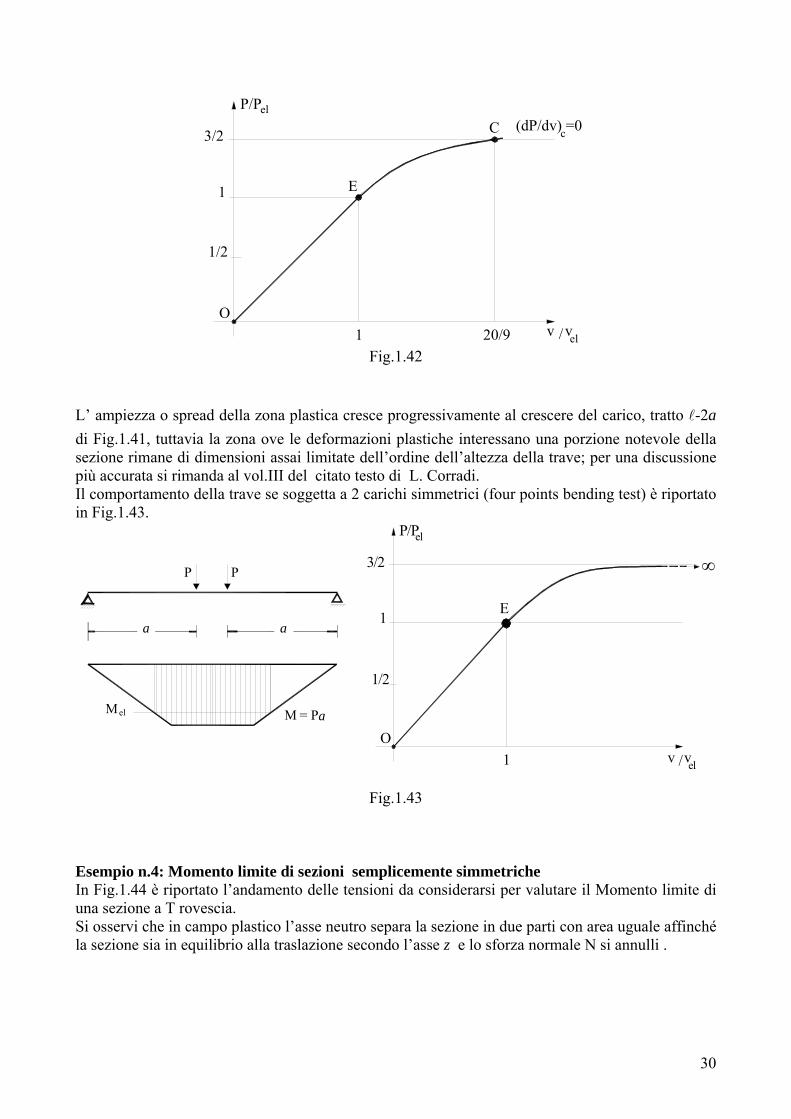
L’ ampiezza o spread della zona plastica cresce progressivamente al crescere del carico, tratto -2a di Fig.1.41, tuttavia la zona ove le deformazioni plastiche interessano una porzione notevole della sezione rimane di dimensioni assai limitate dell’ordine dell’altezza della trave; per una discussione più accurata si rimanda al vol.III del citato testo di L. Corradi. Il comportamento della trave se soggetta a 2 carichi simmetrici (four points bending test) è riportato in Fig.1.43.
P
Mel M = Pa
a a
P
P/P
O
1
3/2
1
el
vv / el
∞
E
1/2
Fig.1.43
Esempio n.4: Momento limite di sezioni semplicemente simmetriche In Fig.1.44 è riportato l’andamento delle tensioni da considerarsi per valutare il Momento limite di una sezione a T rovescia. Si osservi che in campo plastico l’asse neutro separa la sezione in due parti con area uguale affinché la sezione sia in equilibrio alla traslazione secondo l’asse z e lo sforza normale N si annulli .
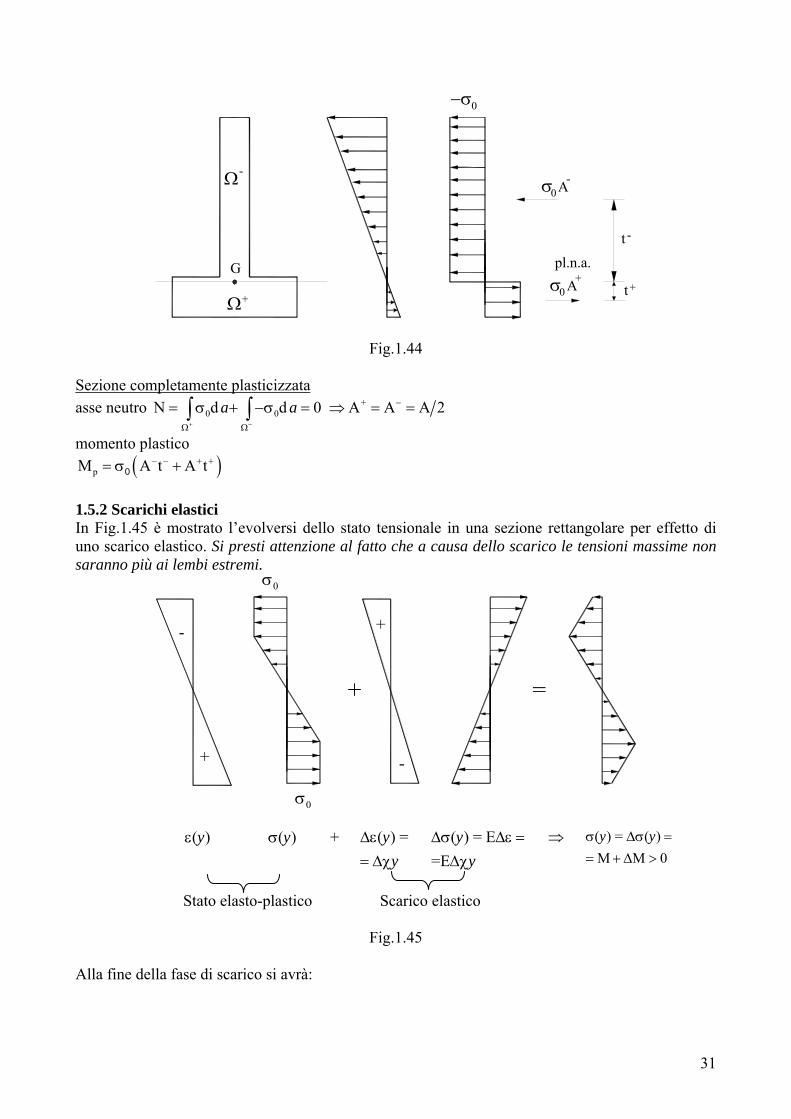
31
G
t
0σ
−σ0
σ0 A-
+AΩ+
Ω-
pl.n.a.
-
t+
Fig.1.44
Sezione completamente plasticizzata asse neutro +
0 0N d d 0 A A A 2a a+ −
−
Ω Ω
= σ + −σ = ⇒ = =∫ ∫
momento plastico ( )pM A t A t0
− − + += σ + 1.5.2 Scarichi elastici In Fig.1.45 è mostrato l’evolversi dello stato tensionale in una sezione rettangolare per effetto di uno scarico elastico. Si presti attenzione al fatto che a causa dello scarico le tensioni massime non saranno più ai lembi estremi.
σ0
-
+
+
-
+
=
σ0
( )yε ( )yσ + ( ) = yy
∆ε= ∆χ
( ) = E
=Ey
y∆σ ∆ε =
∆χ
⇒ ( ) = ( )M M 0y yσ ∆σ =
= + ∆ >
Stato elasto-plastico Scarico elastico
Fig.1.45
Alla fine della fase di scarico si avrà:
32
( )2
ep ep el el ep el3 1M M M 0 M = M M 1 W2 3 i
⎡ ⎤= − ∆ = ⇒ ∆ = − χ χ = ∆σ⎢ ⎥⎣ ⎦
( ) ( )
( )
2 20el ep el ep
3
d el ep el ep
3 11 = 12 3 2
3 12d h 12 2
i i
i
0
0 0
σ⎡ ⎤ ⎡ ⎤⇒ ∆σ = σ − χ χ ⇒ σ χ χ −⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦⎡ ⎤∆σ = ∆σ ⇒ σ = σ − χ χ + χ χ⎢ ⎥⎣ ⎦
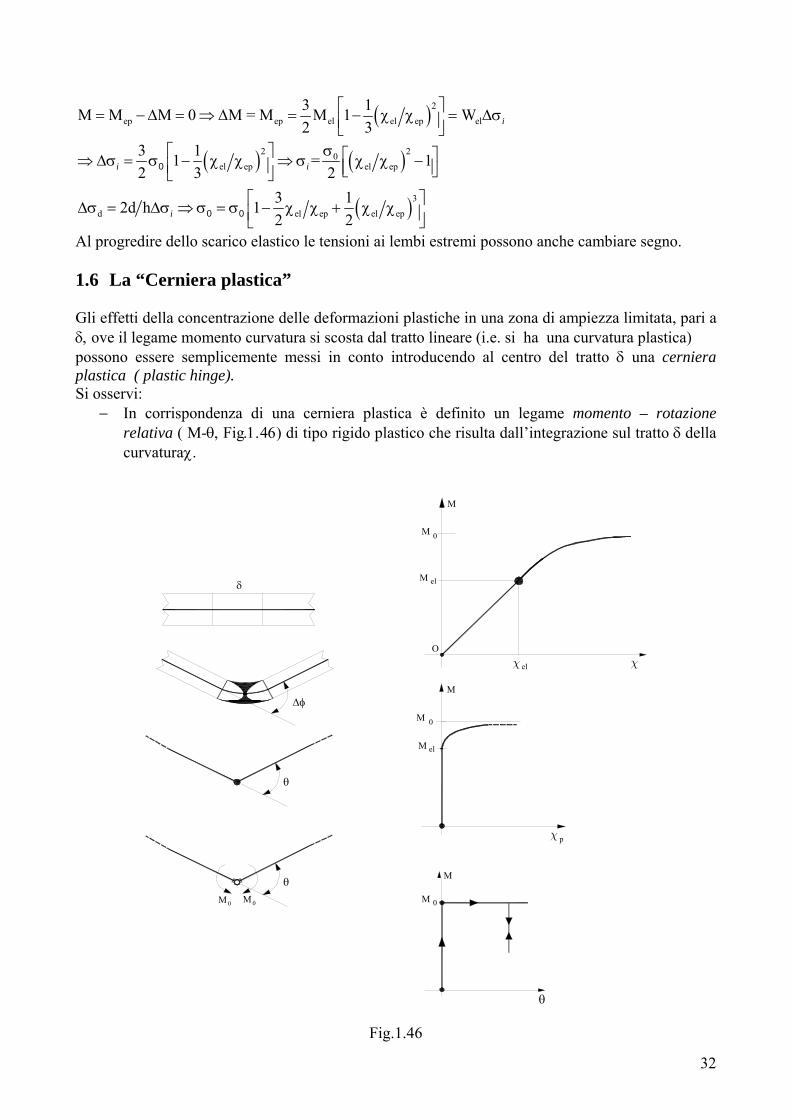
Al progredire dello scarico elastico le tensioni ai lembi estremi possono anche cambiare segno. 1.6 La “Cerniera plastica” Gli effetti della concentrazione delle deformazioni plastiche in una zona di ampiezza limitata, pari a δ, ove il legame momento curvatura si scosta dal tratto lineare (i.e. si ha una curvatura plastica) possono essere semplicemente messi in conto introducendo al centro del tratto δ una cerniera plastica ( plastic hinge). Si osservi:
− In corrispondenza di una cerniera plastica è definito un legame momento – rotazione relativa ( M-θ, Fig.1.46) di tipo rigido plastico che risulta dall’integrazione sul tratto δ della curvaturaχ.
δ
∆φ
θ
θ
M0 M0
M
Oχ el
elM
0M
χ
Μ
χ
0Μ
Μ
Μ
0Μ
θ
el
p
Fig.1.46

33
− In Fig.1.46 il momento flettente, che si suppone positivo, tende le fibre all’intradosso ed è rappresentato con una coppia M0 che ha verso opposto alla rotazione relativa θ, (convenzionalmente si è disegnata la coppia che la cerniera trasmette al tronco di trave ad essa adiacente).
− dissipazione nella cerniera plastica risulta 0D=M =Mθ θ 1.7 Analisi incrementale di travi e telai elasto-plastici (EPP) Le ipotesi costitutive che implicitamente vengono fatte quando si assume che la generica sezione o risulta in campo elastico o è sede di una cerniera plastica flessionale sono:
Si trascura l’influenza dello sforzo normale e del taglio sullo snervamento della sezione
In campo elastico si assume M=EJχ Si considera l’attivazione di una cerniera rigido-plastica come descritto nel
paragrafo 6 per cui si ha:
( ) 0M M M 0φ = − ≤ funzione di snervamento
M,∂φ⎛ ⎞θ = λ⎜ ⎟∂⎝ ⎠
0λ ≥ regola del flusso
Esempio n.1: Trave incastrata alle estremità La trave in Fig.1.47, di rigidezza EJ e di resistenza plastica M0 costanti, è due volte staticamente indeterminata potendosi assumere, nell’ipotesi di piccoli spostamenti, uguali a zero le reazioni orizzontali e lo sforzo normale.
CA B
q =µq0
Fig.1.47 In figura si indica con µ il moltiplicatore dei carichi e con q0 il valore di riferimento del carico; al crescere del moltiplicatore sulla trave inizialmente elastica si formano due cerniere alle estremità ove il momento è massimo in modulo. La trave si comporta come trave semplicemente appoggiata per il successivo incremento di carico e si forma una terza cerniera nella mezzeria C. La trave, divenuta labile, si trasforma in un meccanismo (meccanismo di collasso) e non è in grado di sopportare ulteriori incrementi di carico. Una diminuzione del carico, ovvero un carico di segno opposto, può tuttavia indurre lo scarico elastico nelle cerniere.
34
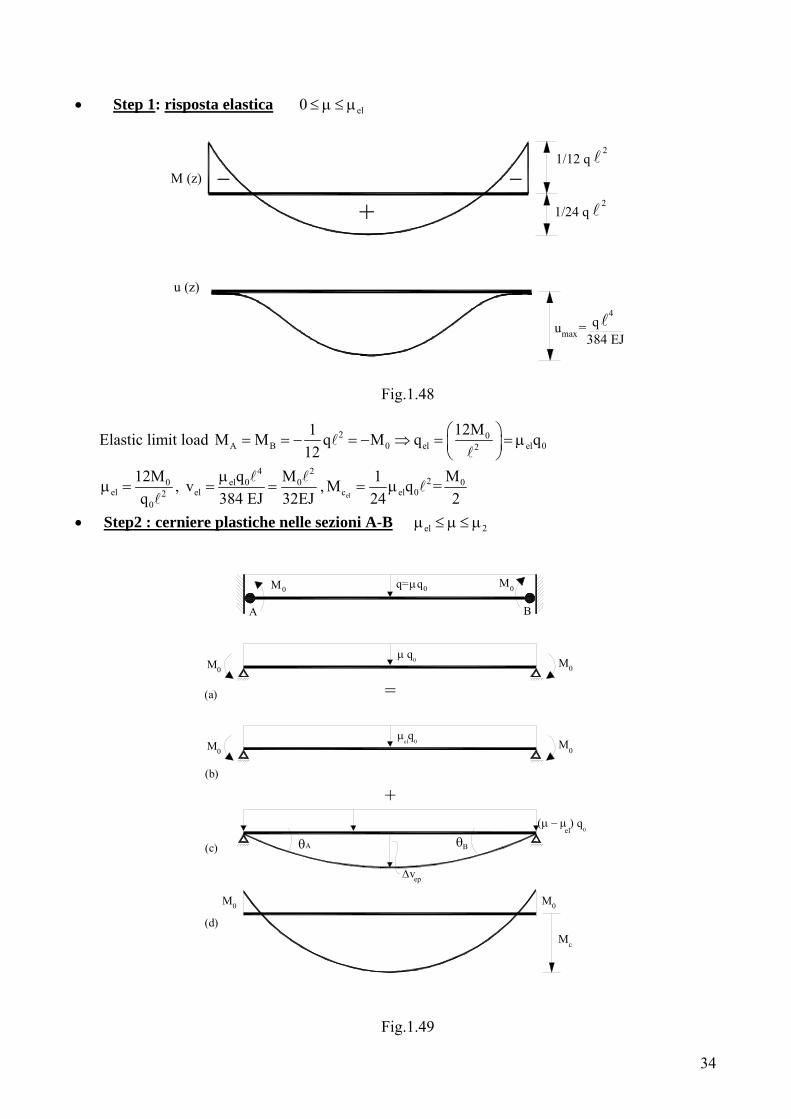
• Step 1: risposta elastica el0 ≤ µ ≤ µ
M (z)
+− −
1/12 q2
1/24 q2
u =
u (z)
4q
384 EJmax
Fig.1.48
Elastic limit load 2 0A B 0 el el 02
12M1M M q M q q12
⎛ ⎞= = − = − ⇒ = = µ⎜ ⎟⎝ ⎠
0el 2
0
12Mq
µ = , 4 2
el 0 0el
q Mv384 EJ 32EJµ
= = ,el
2 0c el 0
1 MM q =24 2
= µ
• Step2 : cerniere plastiche nelle sezioni A-B el 2µ ≤ µ ≤ µ
Mc
A B
M M0 0q= q0µ
MM
(a)
0
q µ0
0
(b)
M0
q µ0
0Mel
(µ − µ )
vep∆
(c) Aθ
+
Bθq
el 0
=
M
(d)0 M0
Fig.1.49

35
( ) 20c el 0
M 1M q2 8
= + µ − µ
( )4
el el 05v v q
384 EJ= + µ − µ ; ( ) 0
A B elq
24EJθ = θ = µ − µ
Cerniera plastica nella sezione di mezzeria C ( )2µ = µ
0c 0 2 2
0
16MM Mq
= ⇒ µ = 2 el 4 3µ µ =
( )2
2 4 20 0
c 2 el 0M 5 Mv q32EJ 384 EJ 12EJ
= + µ − µ = ; 2 2
0A B
M6EJ
θ = θ =
2c elv v 8 3=
• Step 3: cerniere plastiche nelle sezioni A-B-C
µ
0M0MA
3
M0
M0q0
Fig.1.50
Meccanismo di collasso Si osservi che nella condizione di collasso incipiente la struttura è ancora in equilibrio e si ha: (1) A B 3 0V +V q= µ (2) 2
A 3 0V =1 2 qµ (3) 2
c A 0 3 0 0M V 2 M 2 q 4 M 0= − − µ − =
( ) ( )2 0A 3 0 3
4M l2 V 1 2µ q µ q 34
⇒ → = = + ← ⇒ equilibrio limite 23 0 0 2µ 16M q µ= =
AM0 M0
M0
µ q03
VB
0M
VA
C
Fig.1.51 L’equilibrio è possibile solo se µ=µ3=µc=16M0/q0
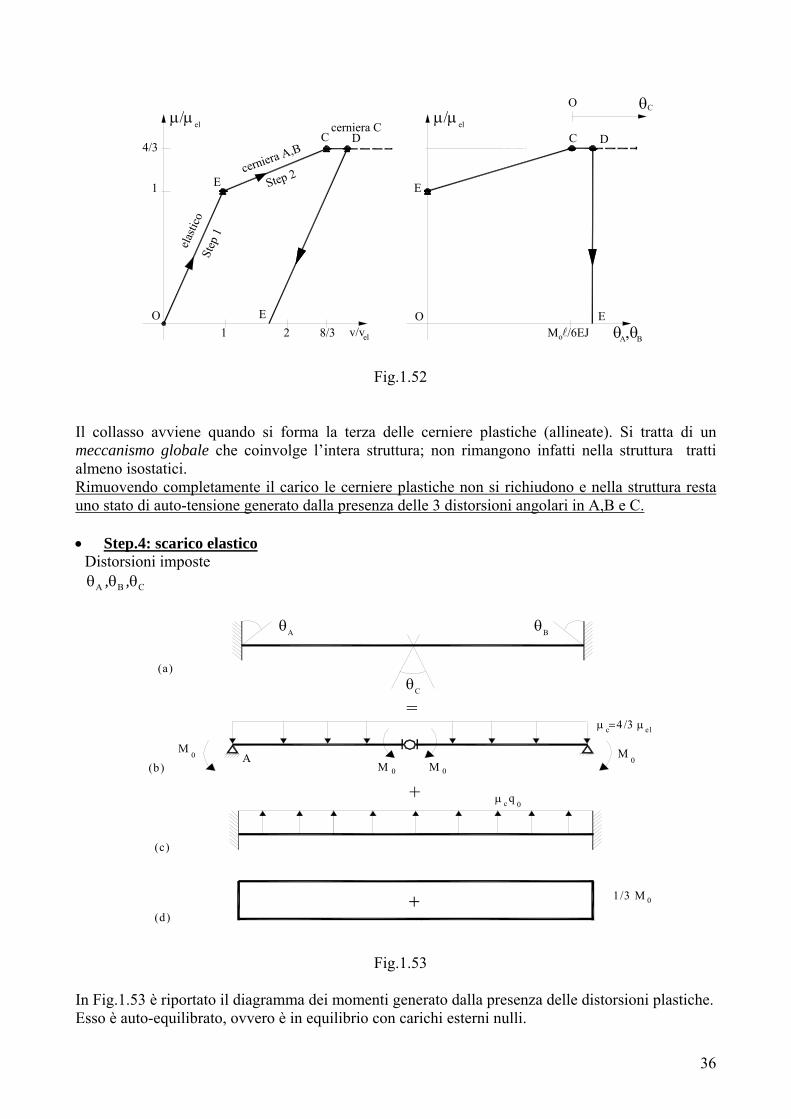
2; se µ>µc l’equilibrio non è più possibile. In Fig.1.52 è riportato il diagramma carico-spostamento per il problema in esame, che risulta lineare a tratti. La formazione di una cerniera plastica modifica la struttura originaria, che man mano diminuisce la sua iperstaticità e diviene più deformabile; in corrispondenza al moltiplicatore di collasso µc la struttura diviene labile e può avere un atto di moto rigido senza alcun incremento di carico. Una diminuzione del carico fa sì che tutte le cerniere ritornino in campo elastico e la struttura riassuma la rigidezza (pendenza) iniziale.
36
O
1 E
µ/µC
el
4/3
1 2 8/3 v/vel
E
M /6EJ
µ/µ el
θ ,θo A B
Step 2
Step
1
D
elasti
co
cerniera A,B
cerniera CDC
O
θCO
EE
Fig.1.52 Il collasso avviene quando si forma la terza delle cerniere plastiche (allineate). Si tratta di un meccanismo globale che coinvolge l’intera struttura; non rimangono infatti nella struttura tratti almeno isostatici. Rimuovendo completamente il carico le cerniere plastiche non si richiudono e nella struttura resta uno stato di auto-tensione generato dalla presenza delle 3 distorsioni angolari in A,B e C. • Step.4: scarico elastico
Distorsioni imposte A B C, ,θ θ θ
AM 0 M 0
M0
µ =4/3c
0M
µ el
(b)
(a)
=
µ
(c)
c
θA Bθ
θC
q0
+
(d)+ 1/3 M 0
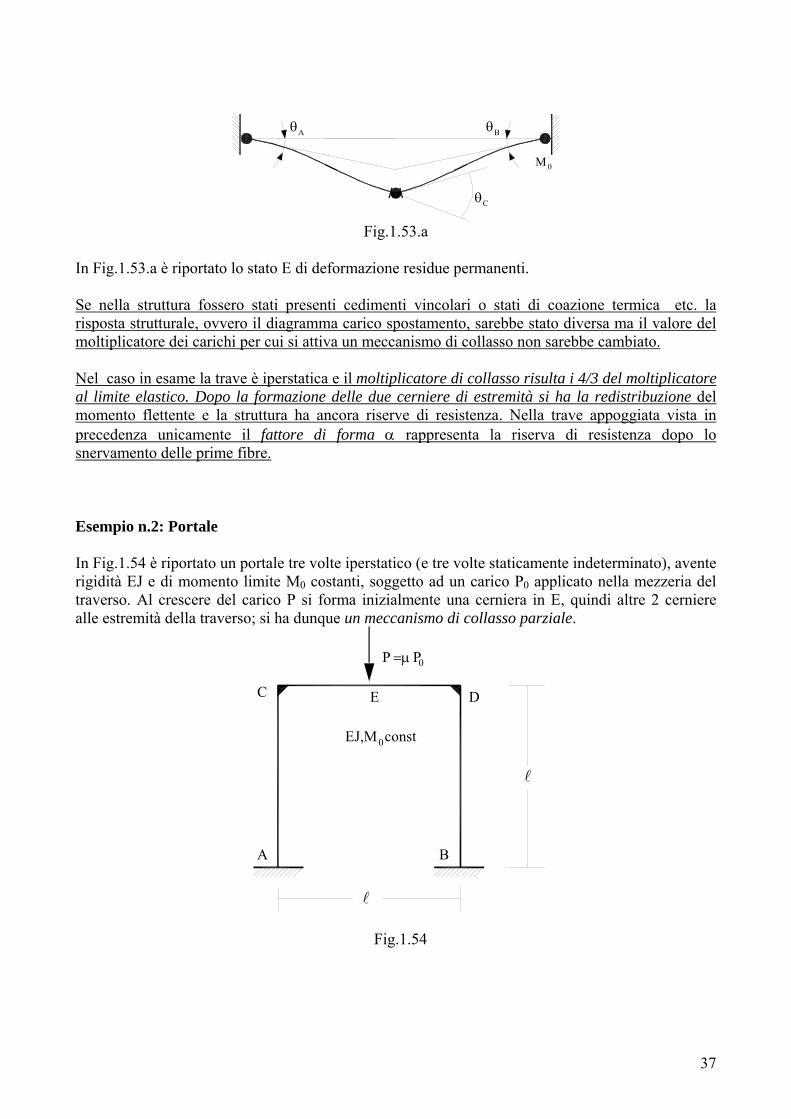
Fig.1.53 In Fig.1.53 è riportato il diagramma dei momenti generato dalla presenza delle distorsioni plastiche. Esso è auto-equilibrato, ovvero è in equilibrio con carichi esterni nulli.
37
θB
M 0
θA
θC
Fig.1.53.a
In Fig.1.53.a è riportato lo stato E di deformazione residue permanenti. Se nella struttura fossero stati presenti cedimenti vincolari o stati di coazione termica etc. la risposta strutturale, ovvero il diagramma carico spostamento, sarebbe stato diversa ma il valore del moltiplicatore dei carichi per cui si attiva un meccanismo di collasso non sarebbe cambiato. Nel caso in esame la trave è iperstatica e il moltiplicatore di collasso risulta i 4/3 del moltiplicatore al limite elastico. Dopo la formazione delle due cerniere di estremità si ha la redistribuzione del momento flettente e la struttura ha ancora riserve di resistenza. Nella trave appoggiata vista in precedenza unicamente il fattore di forma α rappresenta la riserva di resistenza dopo lo snervamento delle prime fibre. Esempio n.2: Portale In Fig.1.54 è riportato un portale tre volte iperstatico (e tre volte staticamente indeterminato), avente rigidità EJ e di momento limite M0 costanti, soggetto ad un carico P0 applicato nella mezzeria del traverso. Al crescere del carico P si forma inizialmente una cerniera in E, quindi altre 2 cerniere alle estremità della traverso; si ha dunque un meccanismo di collasso parziale.
EJ,M const0
E
A B
C D
P =µ P0
Fig.1.54
38
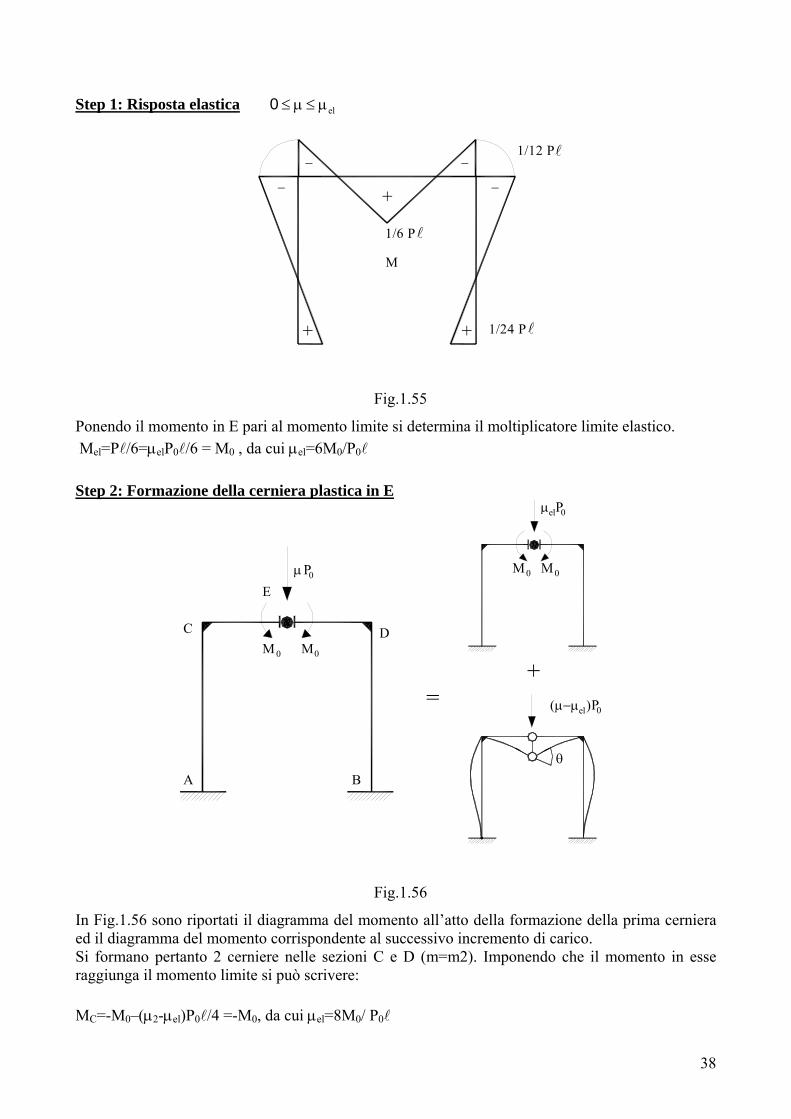
Step 1: Risposta elastica el≤ µ ≤ µ0
M
−
+
1/12 P
+
− −
−
1/6 P
+
1/24 P
Fig.1.55
Ponendo il momento in E pari al momento limite si determina il moltiplicatore limite elastico. Mel=P /6=µelP0 /6 = M0 , da cui µel=6M0/P0 Step 2: Formazione della cerniera plastica in E
A B
C D
µP0
M M0 0
E
=
M0 M0
Pµ 0el
+(µ−µ )el P0
θ
Fig.1.56
In Fig.1.56 sono riportati il diagramma del momento all’atto della formazione della prima cerniera ed il diagramma del momento corrispondente al successivo incremento di carico. Si formano pertanto 2 cerniere nelle sezioni C e D (m=m2). Imponendo che il momento in esse raggiunga il momento limite si può scrivere: MC=-M0–(µ2-µel)P0 /4 =-M0, da cui µel=8M0/ P0
39
M /2
−
+ +
− −
−+
+ +
−
− + −
−
elµ 0P
0 M /20
M /40M /40
P0elµ
M0
+
0Pelµ )(µ−
(µ−µ ) 0el P /4
µ )(µ− el P /80(µ−µ ) 0el P
Fig.1.57
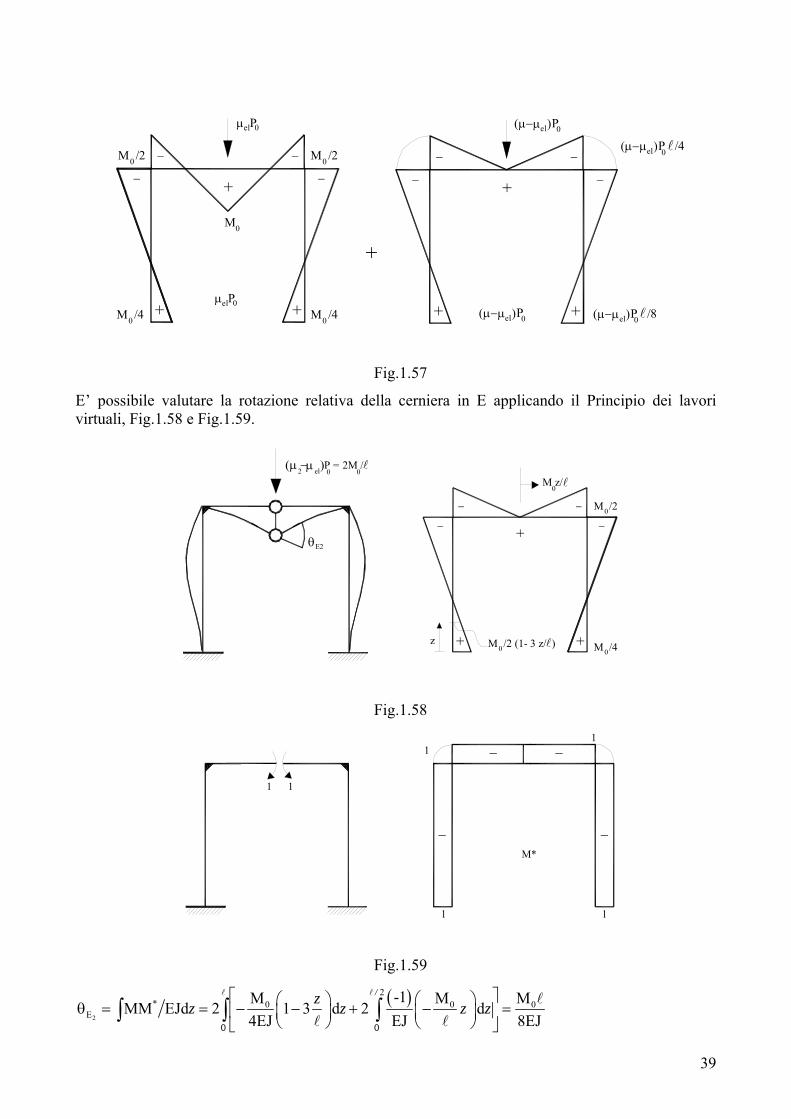
E’ possibile valutare la rotazione relativa della cerniera in E applicando il Principio dei lavori virtuali, Fig.1.58 e Fig.1.59.
+ +
−
− + −
−
0
0P =µ )(µ −
θ
2 el2M /
0M z/
M /20
0M /2 (1- 3 z/ )0M /4
E2
z
Fig.1.58
1 1
11
− −
1 1
− −M*
Fig.1.59
( )2
2* 0 0 0
E
-1M M MMM EJd 2 1 3 d 2 d4EJ EJ 8EJ
/zz z z z⎡ ⎤⎛ ⎞⎛ ⎞θ = = − − + − =⎢ ⎥⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠⎣ ⎦∫ ∫ ∫
0 0
40
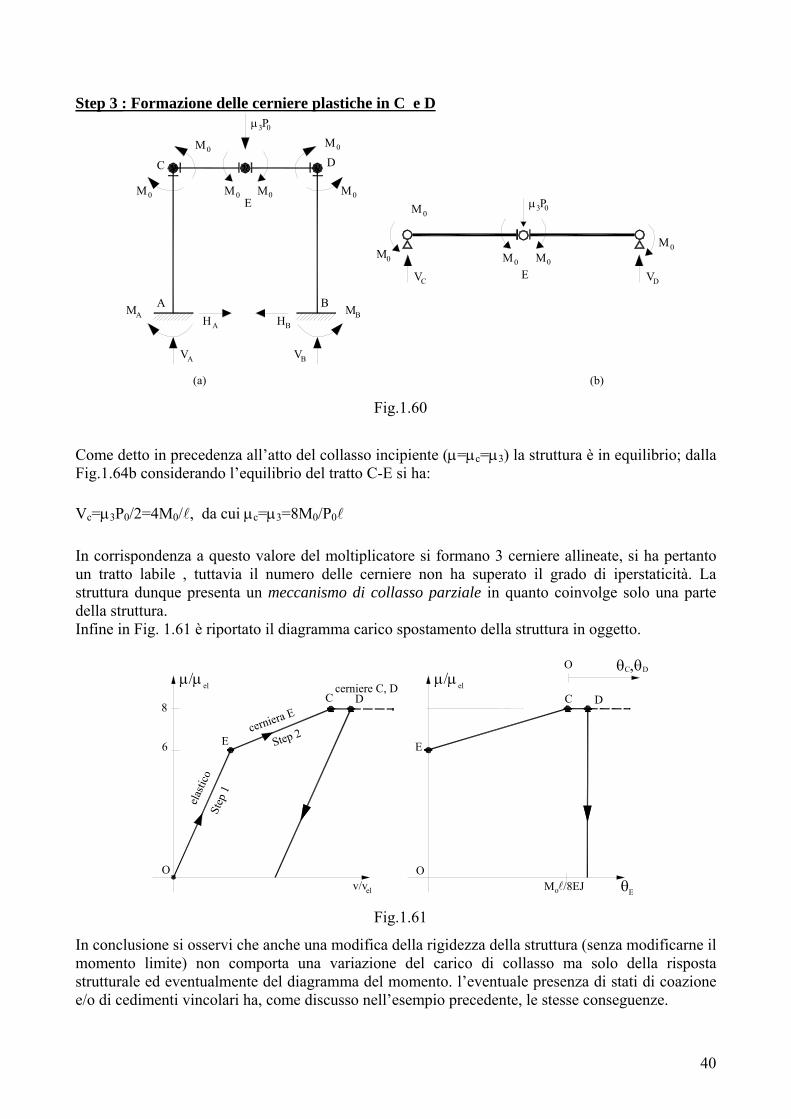
Step 3 : Formazione delle cerniere plastiche in C e D
A B
0
Pµ
C
M0 ME
0
D
3
MAAH
VA VB
BH BM
M0 M0
M0M0
M
M0
M0 0
M0
VC DV
03Pµ
E0M
(a) (b) Fig.1.60
Come detto in precedenza all’atto del collasso incipiente (µ=µc=µ3) la struttura è in equilibrio; dalla Fig.1.64b considerando l’equilibrio del tratto C-E si ha: Vc=µ3P0/2=4M0/ , da cui µc=µ3=8M0/P0 In corrispondenza a questo valore del moltiplicatore si formano 3 cerniere allineate, si ha pertanto un tratto labile , tuttavia il numero delle cerniere non ha superato il grado di iperstaticità. La struttura dunque presenta un meccanismo di collasso parziale in quanto coinvolge solo una parte della struttura. Infine in Fig. 1.61 è riportato il diagramma carico spostamento della struttura in oggetto.
O
6 E
µ/µC
el
8
v/vel
E
M /8EJ
µ/µ el
θ o E
Step 2
Step
1
D
elasti
co
cerniera E
cerniere C, DDC
O
θCO D,θ
Fig.1.61
In conclusione si osservi che anche una modifica della rigidezza della struttura (senza modificarne il momento limite) non comporta una variazione del carico di collasso ma solo della risposta strutturale ed eventualmente del diagramma del momento. l’eventuale presenza di stati di coazione e/o di cedimenti vincolari ha, come discusso nell’esempio precedente, le stesse conseguenze.
Top Related