Vettoriapplicatiegeometriadellospazio MarcoRobutti · Capitolo 1...
71
Capitolo 1 Vettori applicati e geometria dello spazio Marco Robutti Facoltà di ingegneria Università degli studi di Pavia Anno accademico 2017-2018 Tutorato di geometria e algebra lineare Marco Robutti Capitolo 1
-
Upload
truongdiep -
Category
Documents
-
view
213 -
download
0
Transcript of Vettoriapplicatiegeometriadellospazio MarcoRobutti · Capitolo 1...

Capitolo 1Vettori applicati e geometria dello spazio
Marco Robutti
Facoltà di ingegneriaUniversità degli studi di Pavia
Anno accademico 2017-2018
Tutorato di geometria e algebra lineare
Marco Robutti Capitolo 1

Definizione (Vettore applicato)Un vettore applicato nel punto O e avente il secondo estremonel punto P viene indicato con la scrittura v =
−→OP.
Un vettore è caratterizzato da:una direzione;un verso;un modulo (|v |);
O
P
~v
Figura: Un vettore.Marco Robutti Capitolo 1

Definizione (Somma tra vettori )
OA
BC
−→OC
−→OA
−→OB
Figura: La somma di due vettori −→OA e −→OB non aventi la stessadirezione si ottiene costruendo il parallelogramma OACB che ha perlati OA e OB; il vettore somma corrisponde a −→OC , ossia alla diagonaledel parallelogramma con un estremo in O e l’altro in C .
Marco Robutti Capitolo 1

Definizione (Moltiplicazione vettore scalare)
Il segmento orientato w =−→OS = α
−→OP = αv , con α ∈ R, ha la
stessa direzione di −→OP e verso concorde a quest’ultimo se α > 0.
O
P
S
~v
−→OS = α
−→OP
Marco Robutti Capitolo 1
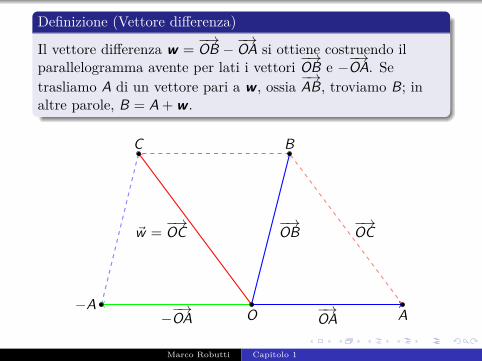
Definizione (Vettore differenza)
Il vettore differenza w =−→OB −
−→OA si ottiene costruendo il
parallelogramma avente per lati i vettori −→OB e −−→OA. Setrasliamo A di un vettore pari a w , ossia −→AB, troviamo B; inaltre parole, B = A + w .
O A
BC
−A
−→OC~w =
−→OC
−→OA−
−→OA
−→OB
Marco Robutti Capitolo 1
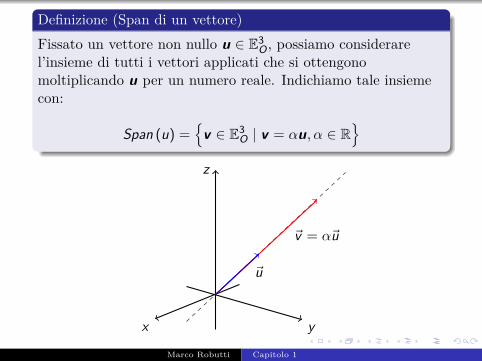
Definizione (Span di un vettore)Fissato un vettore non nullo u ∈ E3
O, possiamo considerarel’insieme di tutti i vettori applicati che si ottengonomoltiplicando u per un numero reale. Indichiamo tale insiemecon:
Span (u) ={
v ∈ E3O | v = αu, α ∈ R
}
x y
z
~u
~v = α~u
Marco Robutti Capitolo 1

Definizione (Vettori linearmente indipendenti)Due vettori u e v di E3
O sono detti:
• linearmente indipendenti, se v /∈ span (u) o viceversa;• linearmente dipendenti, se v ∈ span (u) o viceversa;
x y
z
~u
~v = α~u
x y
z
~u~v
Figura: Vettori linearmente dipendenti (a sinistra) e indipendenti (adestra).
Marco Robutti Capitolo 1

Definizione (Equazioni parametriche di una retta)Una retta r in forma parametrica in E3
O è l’insieme di tutti esoli i punti P che possono essere descritti mediante unascrittura del tipo:
P = P0 + tv , t ∈ R
detta equazione parametrica vettoriale per la retta r .
[P] =
xyz
, [P0] =
x0y0z0
, [v ] =
v1v2v3
,
xyz
=
x0y0z0
+ t
v1v2v3
=⇒
x = x0 + tv1
y = y0 + tv2
z = z0 + tv3
Marco Robutti Capitolo 1

x y
z
r
P0
P = P0 + t · ~v
~v
t · ~v
Figura: Una retta passante per il punto P0 e avente come vettoredirettore v .
Marco Robutti Capitolo 1

Definizione (Equazioni parametriche di una retta passante perdue punti dati)Dati due punti P0 e P1, l’equazione parametrica della retta rpassante per P0 e P1 è data da:
P = P0 + tv , t ∈ R, v = P1 − P0
[P] =
xyz
, [P0] =
x0y0z0
, [P1] =
x1y1z1
,
xyz
=
x0y0z0
+ t
x1 − x0y1 − y0z1 − z0
=⇒
x = x0 + t (x1 − x0)y = y0 + t (y1 − y0)z = z0 + t (z1 − z0)
Marco Robutti Capitolo 1

x y
z
r
P0
P1−−−−−→P1 − P0
Figura: Una retta passante per i punti P0 e P1.
Marco Robutti Capitolo 1

Definizione (Equazioni parametriche di un piano)Un piano π in E3
O è l’insieme di tutti e soli i punti P che sipossono descrivere nel seguente modo, che chiameremorappresentazione (o equazione) parametrica vettoriale del piano:
P = P0 + αu + βv , α, β ∈ R,
[P] =
xyz
, [P0] =
x0y0z0
, [u] =
u1u2u3
, [v ] =
v1v2v3
,
xyz
=
x0y0z0
+ α
u1u2u3
+ β
v1v2v3
=⇒
x = x0 + αu1 + βv1
y = y0 + αu2 + βv2
z = z0 + αu3 + βv3
Marco Robutti Capitolo 1

x y
z
x
z
~u
~v
π
Figura: Un piano avente vettori generatori u e v .
Marco Robutti Capitolo 1

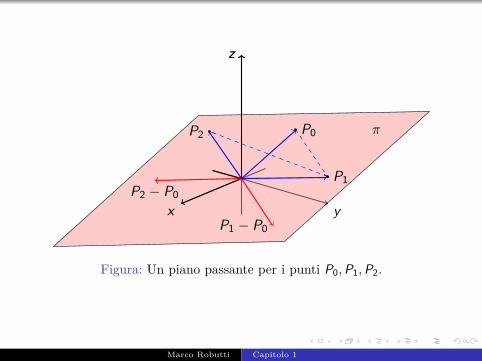
Definizione (Equazioni parametriche di un piano contenente 3punti dati)Dati tre punti P0,P1 e P2, le equazioni parametriche del pianoπ contenente i punti dati sono date da:
P = P0 + αu + βv , α, β ∈ R,u = P2 − P0, v = P1 − P0
[P] =
xyz
, [P0] =
x0y0z0
, [P1] =
x1y1z1
, [P2] =
x2y2z2
xyz
=
x0y0z0
+ α
x2 − x0y2 − y0z2 − z0
+ β
x1 − x0y1 − y0z1 − z0
=⇒
Marco Robutti Capitolo 1

Definizione (Equazioni parametriche di un piano contenente 3punti dati)
=⇒
x = x0 + α (x2 − x0) + β (x1 − x0)y = y0 + α (y2 − y0) + β (y1 − y0)z = z0 + α (z2 − z0) + β (z1 − z0)
Marco Robutti Capitolo 1
x y
z
x
z
P2 − P0
P1 − P0
P0
P1
P2 π
Figura: Un piano passante per i punti P0,P1,P2.
Marco Robutti Capitolo 1

Definizione (Equazioni cartesiane di una retta)Una retta scritta sotto forma di equazioni cartesiane è vistacome l’intersezione tra due piani distinti contenenti la stessaretta:
r :{
a1x + b1y + c1z + d1 = 0a2x + b2y + c2z + d2 = 0
Marco Robutti Capitolo 1

Definizione (Retta: passaggio da equazioni parametriche acartesiane)Per passare dalle equazioni parametriche di una retta a quellecartesiane bisogna usare il metodo dell’eliminazione deiparametri. Secondo tale metodo, una volta che si è proceduto ascrivere le equazioni parametriche in forma di sistema, bisognaesplicitare in una o più equazioni i parametri rispetto alle altrevariabili e poi sostituirli a turno nelle altre equazioni allo scopodi ottenere, nelle equazioni in cui si effettua la sostituzione,termini che non dipendono dal parametro ma solo dallecoordinate x , y e z .
Marco Robutti Capitolo 1

EsempioTroviamo le equazioni cartesiane della seguente retta scritta informa parametrica:
r :
x = 2 + ty = 1 + tz = 1 + 2t
Usiamo il metodo di eliminazione dei parametri:
r :
x = 2 + tt = y − 1z = 1 + 2t
r :
x = 2 + (y − 1)t = y − 1z = 1 + 2 (y − 1)
Marco Robutti Capitolo 1

EsempioOra che si è effettuata la sostituzione del parametro nelle altredue equazioni, non è più necessaria l’equazione iniziale, quindila si può scartare. Risolvendo i calcoli si ottiene:
r :{
x = 1 + yz = −1 + 2y
che riscritto in modo più elegante diventa:
r :{
x − y = 12y − z = 1
Queste ultime rappresentano le equazioni cartesiane della rettar.
Marco Robutti Capitolo 1

Definizione (Retta: passaggio da equazioni cartesiane aparametriche)Per passare dalle equazioni cartesiane di una retta a quelleparametriche bisogna usare il metodo di aggiunta dei parametri.Secondo tale metodo, bisogna scegliere una tra le coordinate x ,y e z e “trasformarla” nel parametro t della retta in formaparametrica. Dopo aver fatto ciò (si tratta semplicemente dirinominare una coordinata chiamandola t anziché x , y o z) siprocede a sostituire nelle altre equazioni il parametro t laddovecompare la variabile a cui noi abbiamo assegnato il nome t.
Marco Robutti Capitolo 1
EsempioTroviamo le equazioni parametriche della seguente retta scrittain forma cartesiana:
r :{
x − y = 12y − z = 1
Usiamo il metodo di aggiunta dei parametri. Scegliamo peresempio di porre y = t:
r :
y = tx − y = 12y − z = 1
r :
y = tx − t = 12t − z = 1
Marco Robutti Capitolo 1

EsempioOra che si è effettuata la sostituzione del parametro, possiamoriordinare le equazioni e scriverle in modo più elegante:
r :
x = 1 + ty = tz = −1 + 2t
Queste ultime rappresentano le equazioni parametriche dellaretta r. E’ da notare che essendoci molte possibilità nelscegliere quale coordinata verrà “trasformata” nel parametro t,le varie equazioni parametriche che si possono ottenere possonoessere diverse tra di loro: pertanto trovare equazioniparametriche diverse usando coordinate diverse non vuol direche si è commesso un errore!
Marco Robutti Capitolo 1
EsempioE’ bene stare attenti quando si vuole passare dalle equazionicartesiane a quelle parametriche che non ci sia nessuna variabile“bloccata”. Per variabile bloccata si intende una variabile checompare in un equazione in cui c’è solo lei e nella quale le vieneassegnato un valore scalare. Per esempio nel seguente caso:
r :{
x = 1y + z = 1
la variabile x è una variabile bloccata in quanto le è assegnato ilvalore 1. In questo caso non possiamo porre x uguale alparametro t in quanto ci troveremmo ad avere la scrittura t = 1che non ha senso. Quindi, quando si ha una variabile bloccata,è bene sempre ricordare che tale variabile non può essere usatanella fase di assegnamento del parametro: in tal caso bisognaper forza utilizzare una delle altre due variabili (in questo casoy o z).
Marco Robutti Capitolo 1

Definizione (Equazione cartesiana di un piano)L’equazione cartesiana di un piano si ottiene considerando ilpiano come l’insieme dei punti dello spazio che soddisfa laseguente condizione:
π = {P ∈ ε |⟨−→OP −
−−→OP0,n
⟩= 0}
P =
xyz
, Po =
x0y0z0
, n =
abc
, vettore normale
In tal caso il piano può essere scritto equivalentemente in duemodi:
a (x − x0) + b (y − y0) + c (z − z0) = 0
Marco Robutti Capitolo 1

Definizione (Equazione cartesiana di un piano)Oppure in modo equivalente, eseguendo i calcoli nella formulaprecedente e raccogliendo tutti i fattori che non dipendono dax , y e z :
ax + by + cz + d = 0
con
d = − (ax0 + by0 + cz0)
Marco Robutti Capitolo 1

Definizione (Piano: passaggio da equazioni parametriche acartesiana)Per passare dalle equazioni parametriche di un piano a quellacartesiana bisogna usare il metodo dell’eliminazione deiparametri come visto per la retta. L’unica cosa che cambia inquesto caso è che i parametri da eliminare sono due (α e β) equindi i calcoli sono leggermente più elaborati.
Marco Robutti Capitolo 1

EsempioTroviamo l’equazione cartesiana del seguente piano scritto informa parametrica:
π :
x = α+ β
y = β
z = 1 + α+ β
Usiamo il metodo di eliminazione dei parametri:
π :
x = α+ β
β = yz = 1 + α+ β
π :
x = α+ yβ = yz = 1 + α+ y
Marco Robutti Capitolo 1

EsempioA questo punto la seconda equazione (β = y) non serve più epuò essere trascurata. Si procede quindi con il trovare il valoredi α.
π :{α = x − yz = 1 + α+ y
Sostituendo la prima equazione nell’ultima e riscrivendo il tuttoin maniera ordinata otteniamo l’equazione cartesiana del piano:
π :{α = x − yz = 1 + x − y + y
π : z = 1 + x
π : x − z = 1Marco Robutti Capitolo 1

Definizione (Piano: passaggio da equazione cartesiana aparametriche)Per passare dall’equazione cartesiana di un piano a quelleparametriche bisogna usare il metodo di aggiunta dei parametri.Secondo tale metodo, bisogna scegliere tra le coordinate x , y e ze “trasformarne” due di esse nei parametri α e β come visto peril caso della retta. Nell’assegnare i parametri alle coordinatevale lo stesso discorso fatto per la retta riguardo alle eventuali“variabili bloccate”.
Marco Robutti Capitolo 1

EsempioTroviamo le equazioni parametriche del seguente piano scrittoin forma cartesiana:
π : x − z = 1
Usiamo il metodo di aggiunta dei parametri. Scegliamo peresempio di porre y = α e z = β:
r :
y = α
z = β
x − z = 1
r :
y = α
z = β
x − β = 1Marco Robutti Capitolo 1

EsempioQuindi infine otteniamo:
r :
x = 1 + β
y = α
z = β
Marco Robutti Capitolo 1

Definizione (Prodotto scalare)Il prodotto scalare tra due vettori u e v è definito come:
〈u, v〉 = ‖u‖ · ‖v‖ · cos θ
oppure, in coordinate:
u =
xyz
, v =
x ′
y ′
z ′
〈u, v〉 = xx ′ + yy ′ + zz ′
Marco Robutti Capitolo 1

Definizione (Proiezione ortogonale di un vettore su un altro)Dati due vettori u e v , la proiezione ortogonale di v su u è datadal vettore w così definito:
w = 〈u, v〉〈u,u〉u
Marco Robutti Capitolo 1

~u
~v
~w
Figura: La proiezione ortogonale del vettore v sul vettore u.
Marco Robutti Capitolo 1
Definizione (Norma di un vettore)
Dato un vettore v = x i + y j + z k è definita come:
‖v‖ =√〈v , v〉 =
√x2 + y2 + z2
Marco Robutti Capitolo 1
Definizione (Distanza tra due punti)La distanza tra due punti A e B è uguale alla norma del vettoredifferenza B − A:
d(A,B) =√
(xB − xA)2 + (yB − yA)2 + (zB − zA)2
Marco Robutti Capitolo 1

Definizione (Distanza punto-piano)
Dati un punto A =
xAyAzA
e un piano π : ax + by + cz + d = 0,
la distanza tra il punto e il piano è pari a:
d (A, π) = |axA + byA + czA + d |√a2 + b2 + c2
Marco Robutti Capitolo 1

Definizione (Fascio proprio di piani)E’ dato dall’insieme zr dei piani contenenti una data retta r . Ipiani appartenenti al fascio sono tutti e soli quelli la cuiequazione può essere scritta nella forma:
λ (a1x + b1y + c1z + d1) + µ (a2x + b2y + c2z + d2) = 0
(λ, µ) 6= (0, 0)
dove a1x + b1y + c1z + d1 = 0 e a2x + b2y + c2z = 0rappresentano due piani π1 e π2 distinti appartenenti al fascio.
Marco Robutti Capitolo 1

Definizione (Fascio improprio di piani)E’ dato dall’insieme zn dei piani aventi la stessa direzionenormale n. I piani appartenenti al piano sono tutti e soli quellila cui equazione può essere scritta nella forma:
a0x + b0y + c0z + d = 0,
dove [n] =
a0b0c0
6=0
00
, d ∈ R
Marco Robutti Capitolo 1

Definizione (Posizione reciproca tra piani)Dati due piani:
π1 : ax + by + cz = d π′ : a′x + b′y + c ′z = d ′
i due piani possono essere tra loro:
• paralleli;
• coincidenti;
• incidenti.
Marco Robutti Capitolo 1

Definizione (Piani paralleli)I piani π e π′ sono paralleli se e solo se i vettori normali n e n′
generano la stessa retta, ovvero se e solo se n′ ∈ Span (n).Quindi esiste un numero reale non nullo k tale che:
a′ = ka, b′ = kb, c ′ = kc
Marco Robutti Capitolo 1

x y
z
~n
~n′
π
π′
Figura: Due piani paralleli hanno vettori normali linearmentedipendenti tra loro.
Marco Robutti Capitolo 1

Definizione (Piani coincidenti)I piani π e π′ sono coincidenti se e solo se sono paralleli e sed ′ = kd . Ovvero se:
a′ = ka, b′ = kb, c ′ = kc, d ′ = kd
Marco Robutti Capitolo 1
Definizione (Piani incidenti)I piani π e π′ sono incidenti se non sono paralleli e non sonocoincidenti; allora la loro intersezione è una retta:
r = π ∩ π′
e nessuna delle condizioni precedenti si verifica.
Marco Robutti Capitolo 1
x y
z
~n
r
~n′
π
π′
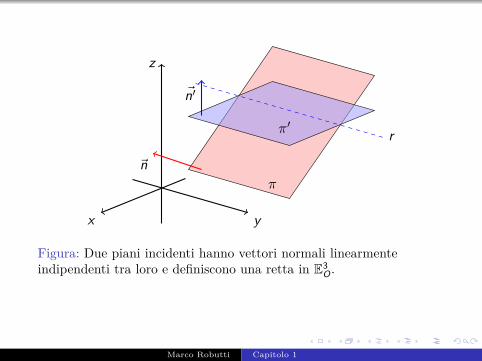
Figura: Due piani incidenti hanno vettori normali linearmenteindipendenti tra loro e definiscono una retta in E3
O .
Marco Robutti Capitolo 1

Definizione (Posizione reciproca tra rette)Due rette r1 e r2 aventi rispettivamente i vettori direttori v1 ev2 ∈ E3
O possono essere tra loro:
• parallele;
• incidenti;
• sghembe;
• complanari.
Marco Robutti Capitolo 1

Definizione (Rette parallele)Le rette r1 e r2 sono parallele se e solo se hanno la stessadirezione, ovvero se e solo se i loro vettori direttori generano lastessa retta, cioè se e solo se v2 ∈ Span (v1) (o viceversa).
Marco Robutti Capitolo 1
x y
zr1 r2
~v1
~v2
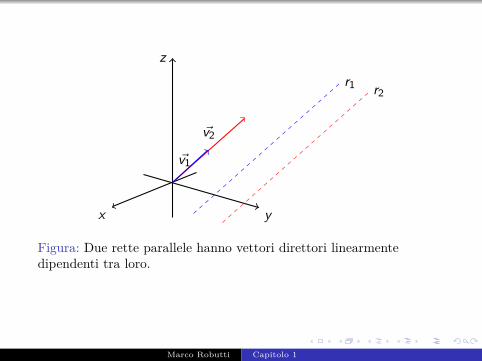
Figura: Due rette parallele hanno vettori direttori linearmentedipendenti tra loro.
Marco Robutti Capitolo 1

Definizione (Rette incidenti)Le rette r1 e r2 sono incidenti se e solo se si intersecano in ununico punto r1 ∩ r2 = {P}.Esistono due metodi per poter determinare il punto diintersezione P.
Marco Robutti Capitolo 1

x y
zr1
r2P
Figura: Due rette incidenti hanno un solo punto in comune. Se hannopiù di un punto in comune, allora sono coincidenti.
Marco Robutti Capitolo 1

Algoritmo - Metodo 1
Avendo le equazioni cartesiane di r1 e r2, basta metterle asistema:
{(equazioni cartesiane di r1)(equazioni cartesiane di r2)
se il sistema ammette una soluzione, allora le due rettesono incidenti;
se il sistema ammette infinite soluzioni, allora le due rettesono coincidenti;
se il sistema non ammette soluzioni, allora le due rette nonsono incidenti;
Marco Robutti Capitolo 1

Algoritmo - Metodo 2
Avendo le equazioni parametriche di r1 e l’equazione cartesianadi r2, si effettuano i seguenti passi:
Considero un generico punto P1 = P01 + t1 appartenente
alla retta r1 e lo sostituisco al posto delle coordinate
xyz
nelle equazioni cartesiane di r2:
{a1xP1 + b1yP1 + c1zP1 + d1 = 0a2xP1 + b2yP1 + c2zP1 + d2 = 0
Risolvo il sistema considerando il parametro t1 comevariabile;
Marco Robutti Capitolo 1

Algoritmo - Metodo 2
Se il sistema è risolubile, allora le due rette sono incidenti eil punto di intersezione P può essere trovatodeterminandone le coordinate dalla equazioni parametrichedi r1, dando al parametro il valore t1 = t∗, dove t∗ è lasoluzione del sistema; se invece il sistema non è risolubile,allora vuol dire che le due rette non sono incidenti.
Marco Robutti Capitolo 1
Definizione (Rette sghembe)Le rette r1 e r2 sono sghembe se non sono parallele e non sonoincidenti. In altre parole se non vi nessun piano che le contengaentrambe:
n1 /∈ span (n2) ∧ r1 ∩ r2 = ∅
Marco Robutti Capitolo 1

x y
z r1r2
Figura: Due rette sghembe hanno come intersezione l’insieme vuoto.
Marco Robutti Capitolo 1

Definizione (Rette complanari)Le rette r1 e r2 sono complanari se sono parallele o incidenti.
Marco Robutti Capitolo 1

x y
z
r1 r2
π
Figura: Due rette parallele (come in figura) o incidenti sonocomplanari.
Marco Robutti Capitolo 1

Definizione (Posizione reciproca retta-piano)Una retta r avente vettore direttore v e un piano avente vettorenormale n e giacitura {u1,u2} possono essere reciprocamentenelle seguenti posizioni:
• incidenti;
• perpendicolari (la retta r è perpendicolare al piano π);
• paralleli;
• la retta r è contenuta nel piano π.
Marco Robutti Capitolo 1

Definizione (Retta e piano incidenti)Una retta r e un piano π sonon incidenti se e solo se siintersecano in un unico punto:
r ∩ π = {P}
Esistono tre metodi per poter determinare il punto diintersezione P.
Marco Robutti Capitolo 1

x y
z r
Pπ
Figura: Una retta e un piano sono incidenti se hanno un punto incomune.
Marco Robutti Capitolo 1

Algoritmo - Metodo 1
Avendo le equazioni parametriche di r e le equazioniparametriche di π, si ha che la retta e il piano sono incidenti see solo se:
v /∈ Span (u1,u2) ,
cioè se e solo se:
〈v ,n〉 6= 0
Questo metodo è il più comodo per poter determinare se unaretta e un piano sono incidenti.
Marco Robutti Capitolo 1
Algoritmo - Metodo 2
Avendo le equazioni cartesiane di r e π,basta metterle a sistema:
{(equazioni cartesiane di r)(equazione cartesiana di π)
se il sistema ammette una soluzione, allora il piano e laretta sono incidenti;se il sistema ammette infinite soluzioni, allora la retta ècontenuta nel piano;se il sistema non ammette soluzioni, allora la retta e ilpiano sono paralleli;
Marco Robutti Capitolo 1

Algoritmo - Metodo 3
Avendo le equazioni parametriche di r e l’equazione cartesianadi π, si effettuano i seguenti passi:
Considero un generico punto P1 = P01 + t1 appartenente
alla retta r1e lo sostituisco al posto delle coordinate
xyz
nell’equazione cartesiana di π:
axP1 + byP1 + czP1 + d = 0
Risolvo l’equazione considerando il parametro t1 comevariabile;
Marco Robutti Capitolo 1

Algoritmo - Metodo 3
Se il sistema è risolubile, allora retta e piano sono incidentie il punto di intersezione P può essere trovatodeterminandone le coordinate dalla equazioni parametrichedi r1, dando al parametro il valore t1 = t∗, dove t∗ è lasoluzione dell’equazione; se invece il sistema non èrisolubile, allora vuol dire che la retta e il piano sonoparalleli.
Marco Robutti Capitolo 1

Definizione (Retta perpendicolare al piano)La retta r è perpendicolare al piano π se e solo se la direzione dir coincide con la direzione normale al piano, cioè:
v ∈ Span (n)
Esistono tre metodi per poter determinare il punto diintersezione P, e sono gli stessi visti per il caso della retta epiano incidenti.
Marco Robutti Capitolo 1

x y
z~n
r
~v
Pπ
Figura: Una retta è perpendicolare ad un piano se il vettore direttoredella prima è linearmente dipendente al vettore normale del secondo(nella figura vettore direttore e normale sono stati disegnatirispettivamente sulla retta e sul piano per ragioni di chiarezzaespositiva: in realtà si trovano tutti nell’origine O!)
Marco Robutti Capitolo 1

Definizione (Retta e piano paralleli)La retta r e il piano π sono paralleli se e solo se:
v ∈ Span (u1,u2) ∧ r ∩ π = ∅
La prima condizione equivale a dire che:
v ⊥ n =⇒ 〈v ,n〉 = 0
Marco Robutti Capitolo 1

x y
z ~nr
~vπ
Figura: Una retta e un piano sono paralleli se non hanno punti incomune e se il prodotto scalare tra il vettore direttore della retta e ilvettore normale del piano è nullo, cioè se tra di loro c’è un angolo di90°.
Marco Robutti Capitolo 1

Definizione (Retta contenuta nel piano)La retta r è contenuta nel piano π se e solo se:
v ∈ Span (u1,u2) ∧ r ∩ π 6= ∅
Marco Robutti Capitolo 1

x y
z
~u1~u2
r
~vπ
Figura: Una retta è contenuta in un piano se il suo vettore direttoreappartiene allo Span dei vettori generatori del piano e se esiste almenoun punto che appartiene sia alla retta che al piano. In questo casonell’immagine i vettori generatori del piano e il vettore direttore dellaretta sono stati disegnati a partire dall’origine come è giusto che sia...
Marco Robutti Capitolo 1