VACON NXS-NXP FREQUENCY CONVERTERS - … Servodiametro rev1.14.pdf · Vacon Applicazione...
69
VACON NXS-NXP FREQUENCY CONVERTERS Applicazione Servodiametro FOR SMOOTH CONTROL
Transcript of VACON NXS-NXP FREQUENCY CONVERTERS - … Servodiametro rev1.14.pdf · Vacon Applicazione...
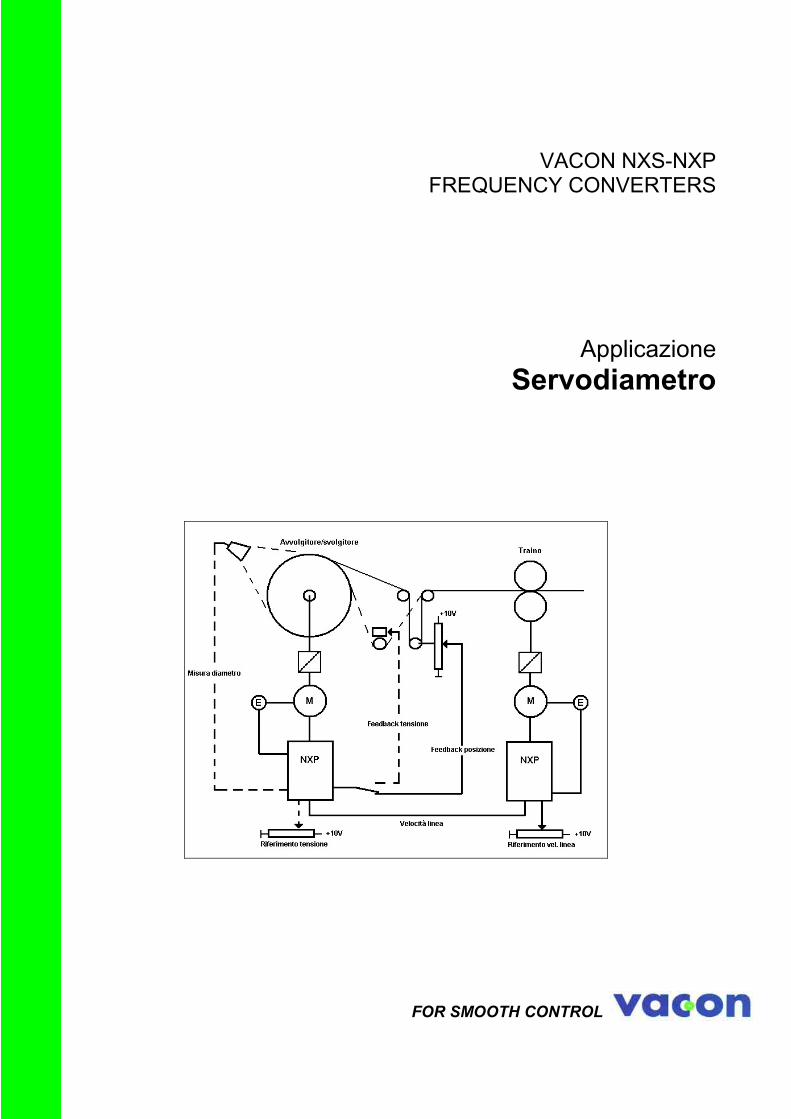
VACON NXS-NXPFREQUENCY CONVERTERS
ApplicazioneServodiametro
FOR SMOOTH CONTROL
Vacon Applicazione Servodiametro rev. 1.14 Pagina 2
Applicazione Servodiametro
INDICE1 CARATTERISTICHE GENERALI ……………………………………………………. 3
1.1 Kit di file della applicazione ………………………………………………….. 4 1.2 Avvolgitore ad anello aperto o chiuso ? Criteri di scelta ………………….. 5
2 SEGNALI DI INGRESSO-USCITA E FUNZIONI AUSILIARIE …………………… 6 2.1 I/O di controllo…………………………………… ………………….. 7
3 MESSA IN SERVIZIO …………………………………………………………………. 9 3.1 Taratura manuale ……………………………………………………………… 9 3.2 Altre operazioni ………………………………………………………………... 10
4 PARAMETRI …………………………………………………………………………… 11 4.1 Parametri Base G2.1 ………………………………………………………….. 11 4.1.1 Descrizione parametri gruppo G2.1 ………………………………………… 114.2 Parametri Configurazione Segnali di Ingresso G2.2 ………………………. 144.2.1 Descrizione parametri gruppo G2.2 ………………………………………… 184.3 Parametri Configurazione Segnali di Uscita G2.3 ………………………… 234.3.1 Descrizione parametri gruppo G2.3 ………………………………………… 254.4 Parametri Controllo Azionamento G2.4 …………………………………… 274.4.1 Descrizione parametri gruppo G2.4 ………………………………………… 284.5 Parametri Controllo Motore G2.5 …………………………………………….. 294.5.1 Descrizione parametri gruppo G2.5 ………………………………………… 294.6 Parametri Protezioni G2.6 ……………………………………………………. 324.6.1 Descrizione parametri gruppo G2.6 ………………………………………… 324.7 Parametri Anello Chiuso G2.7 ……………………………………………….. 364.7.1 Descrizione parametri gruppo G2.7 ………………………………………… 364.8 Parametri Servodiametro G2.8 ……………………………………………… 384.8.1 Descrizione parametri gruppo G2.8.1…………………………………… 414.8.2 Descrizione parametri gruppo G2.8.2……………………………………… 554.8.3 Descrizione parametri gruppo G2.8.3……………………………………… 594.9 Parametri Bus di campo G2.9 ………………………………………………. 634.9.1 Descrizione parametri gruppo G2.9 ………………………………………… 63
5 VARIABILI DEL MENU MONITOR …………………………………………………. 67
6 SCHEDE ESPANSIONE………… …………………………………………………. 68
IDENTIFICAZIONE PROGRAMMA: APITF010_V1234 , ASITF010_V1234
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 3
1. CARATTERISTICHE GENERALI
Il software applicativo "Servodiametro" nella presente versione è utilizzabile per il controllo di azionamenti avvolgitori e svolgitori. Per il funzionamento come svolgitore sono presenti restrizioni legate al tipo di regolazione del motore, descritte nel successivo par.1.2 “Anello aperto o chiuso? Criteri di scelta”.
Sono configurate 5 modalità di controllo dell’azionamento, selezionabili mediante parametro:Modo 0: il software regola la tensione sul materiale a un valore approssimativamentecostante al variare del diametro, senza utilizzare trasduttori di tensione. Il valore deldiametro viene stimato in base al confronto tra riferimento di velocità di linea e velocitàeffettiva dell’azionamento; in alternativa è possibile inviare all’inverter un segnale di diametro misurato da apposito sensore. In questa modalità viene utilizzata una regolazione combinata di velocità e coppia. Il controllo riceve i riferimenti di velocità di linea e tensione. La conversione in velocità e coppia del motore avviene utilizzando la stima del valore del diametro elaborata dalcontrollo (o il valore misurato). In modo avvolgitore, il regolatore di velocità viene mantenuto normalmente saturo con un termine additivo al riferimento, così che il regolatore normalmente attivo è quello di coppia . In modo svolgitore, viene utilizzatoun riferimento di velocità piccolo nella direzione di avvolgimento (ad es. “avanti”), mentre lo svolgimento avviene nella direzione opposta (“indietro”); così che il regolatore di velocità è saturo ed è attivo il regolatore di coppia.Modo 1: l’inverter comanda il motore ad una velocità dipendente dal diametro attuale, che deve necessariamente essere misurato mediante sensore. Non viene attuato alcun controllo sulla tensione. Questa modalità può essere utile qualora sia abbia una connessione diretta fra svolgitore e avvolgitore, e si voglia utilizzare quest’ultimo come pilota.Modo 2: la modalità di controllo è simile al modo 0, ma il valore di riferimento di coppia è corretto da un regolatore PID, che confronta il riferimento di tensione e il feedback ditensione, ottenuto tipicamente da una cella di carico. All’inverter deve inoltre essere trasmesso il riferimento di velocità di linea, mentre il diametro può essere misurato o calcolato dall’algoritmo interno.Modo 3: la regolazione di tensione del materiale è ottenuta controllando il motore in velocità. Questa è determinata dalla velocità di riferimento dipendente dal diametro(calcolato oppure misurato), a cui viene applicata una correzione calcolata dal regolatore PID, che confronta riferimento (variabile) e feedback di tensione. Modo 4: è una variante del modo 3, che prevede un ballerino per determinare la tensione sul materiale. L’azionamento regola la velocità del motore per mantenere il ballerino nella posizione richiesta, configurata mediante parametro.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 4
Il software gestisce correttamente (con le limitazioni legate al tipo di regolazione delmotore descritte più avanti nel par.1.2 “Anello aperto o chiuso?”) la reversibilitàdell’azione con comando linea indietro, situazione nella quale l’avvolgitore e lo svolgitore si scambiano i ruoli. Lo stato di linea indietro è identificato, in modoconfigurabile, dallo stato a “1” di un input digitale con funzione “Reverse” oppure dal segno negativo del riferimento analogico di velocità di linea, ove questo sia in forma differenziale (-10V / +10V). Nel caso di controllo da bus di campo, può essere utilizzato il segno del valore dellavelocità di linea (quando supportato dal protocollo del bus), oppure un bit di “Reverse”nella parola dei comandi.
Indipendentemente dalla funzione svolta, è possibile selezionare il verso di rotazione dell’aspo mediante un input digitale, consentendo la gestione “sopra/sotto”.
E’ importante per un corretto funzionamento che il convertitore, il motore e il riduttore siano dimensionati correttamente: per meglio sfruttare la precisione del controllo di coppia, l’azionamento non deve essere sovradimensionato. Il rapporto di riduzionedeve essere scelto in funzione della frequenza massima scelta per il motore (si tenga conto che alla frequenza massima il motore lavora sempre a carico ridotto, quindi il funzionamento a frequenze superiori alla nominale è una scelta frequente).
Nel caso di svolgitori, la scelta del tipo di trasmissione deve garantire la massima reversibilità possibile per limitare gli attriti in modo da poter regolare la tensione verso valori bassi.
1.1 Kit di file dell'applicazione:
APITF010_v1233D.vcn o ASPITF010_v1233D.vcn: file necessario per utilizzare l’interfaccia di configurazione NCDrive con l’applicazione Servodiametro.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 5
1.2 Avvolgitore ad anello aperto o chiuso ? Criteri di scelta
I modi di controllo 0 e 2 (controllo di coppia del motore) possono essere applicati ad avvolgitori sia nella configurazione ad anello di velocità chiuso (motore con encoder) sia nella configurazione ad anello aperto (sensorless). Richiedono necessariamente anellochiuso nel caso di svolgitori. Questo vincolo funzionale deve essere considerato anche nel caso sia richiesta la reversibilità dell’azione con comando linea indietro, situazione nella quale l’avvolgitore si trova ad essere trascinato dalla linea comportandosi quindi da svolgitore.
Nel caso dell’avvolgitore, sono opportune altre considerazioni: il controllo di coppia del motore ad anello aperto (cioè senza reazione da encoder sull’albero) può essere gestito per valori di riferimento di coppia non inferiori a circa il 10% della coppia nominale del motore. Inoltre la velocità di rotazione non dovrebbe scendere al di sotto di una soglia di circa 3Hz (90 rpm per un motore a 4 poli). Al di sotto di questa velocità, la stima del valore di diametro può risultare inaffidabile, e quindi il calcolo vienesospeso. E’ comunque da considerare che il controllo ad anello aperto non assicura la precisione del controllo ad anello chiuso, e quindi andrebbe riservato ad applicazioni in cui il controllo del tiro sul materiale non è critico.
I modi di controllo dell’azionamento 1,3,4 (basati sul controllo di velocità) possonopresentare difficoltà nella stima del diametro a bassa frequenza. Inoltre richiedono una accurata impostazione della curva tensione/frequenza, per fornire una coppia adeguata alle basse velocità. Se le condizioni di funzionamento comportano frequenze non inferiori a 2-3 Hz, il controlload anello aperto, soprattutto se abbinato a ballerino, può essere considerato.Non sarà comunque disponibile la funzione di misura iniziale del diametro.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 6
2. SEGNALI DI INGRESSO-USCITA E FUNZIONI AUSILIARIE
L’ingresso digitale DIN1 è predefinito per il solo comando di marcia. Gli altri cinque ingressi digitali, presenti come standard, sono configurabili per le altre funzioni.I segnali forniti in forma analogica (riferimenti di velocità e tiro, ecc.) sono associabili in modo configurabile ai relativi ingressi.Il metodo di configurazione degli ingressi supporta l’applicazione di schede opzionali.Tutte le funzioni delle uscite analogiche e digitali sono configurabili Mediante la funzione "Degressione" ("Taper") è possibile variare linearmente la tensione, in aumento o in diminuzione, a partire dal valore desiderato di diametro, specificato da un parametro; l'entità della degressione è assegnata con un parametro o modulata da un ingresso analogico opzionale. Il controllo di coppia è dotato di compensazione dell’attrito statico, viscoso e dell'inerzia, per migliorare la precisione della tensione anche durante le variazioni divelocità di linea. All'avviamento, apposite logiche consentono il corretto pre-tensionamento del materiale; la conclusione di questa fase è segnalata su uscita, per comandare l’avviodella linea. Nel modo 4 (controllo della tensione con ballerino), solo con regolazione ad anello chiuso, può essere attivata una logica di misura del diametro attuale in fase di pre-tensionamento, sia per avvolgitore che per svolgitore. Previa abilitazione da ingresso digitale, viene rilevata e segnalata l'eventuale rottura del materiale; la segnalazione è ripristinata all'arresto. Questa funzione è attiva solo neimodi di controllo 0 e 2. Il valore del diametro può essere ripristinato automaticamente all'arresto, oppure può rimanere memorizzato, per essere ripristinato da un apposito comando digitale. Il valore di ripristino è selezionabile, mediante ingressi digitali, fra quattro valori parametrizzati. All’arresto, il valore è scritto in memoria non volatile così che puòessere mantenuto anche dopo spegnimento e riaccensione. Il valore di ripristino del diametro può anche essere impostato mediante ingresso analogico.Il valore di diametro attuale visualizzato nel menù Monitor può eventualmente essere modificato manualmente, quando l’inverter è in stato di stop. La corretta sequenza di arresto rispetto al traino può essere gestita internamente(funzione "autoritenuta marcia") anche nel caso che il comando di arresto venga dato simultaneamente a tutti gli azionamenti della linea.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 7
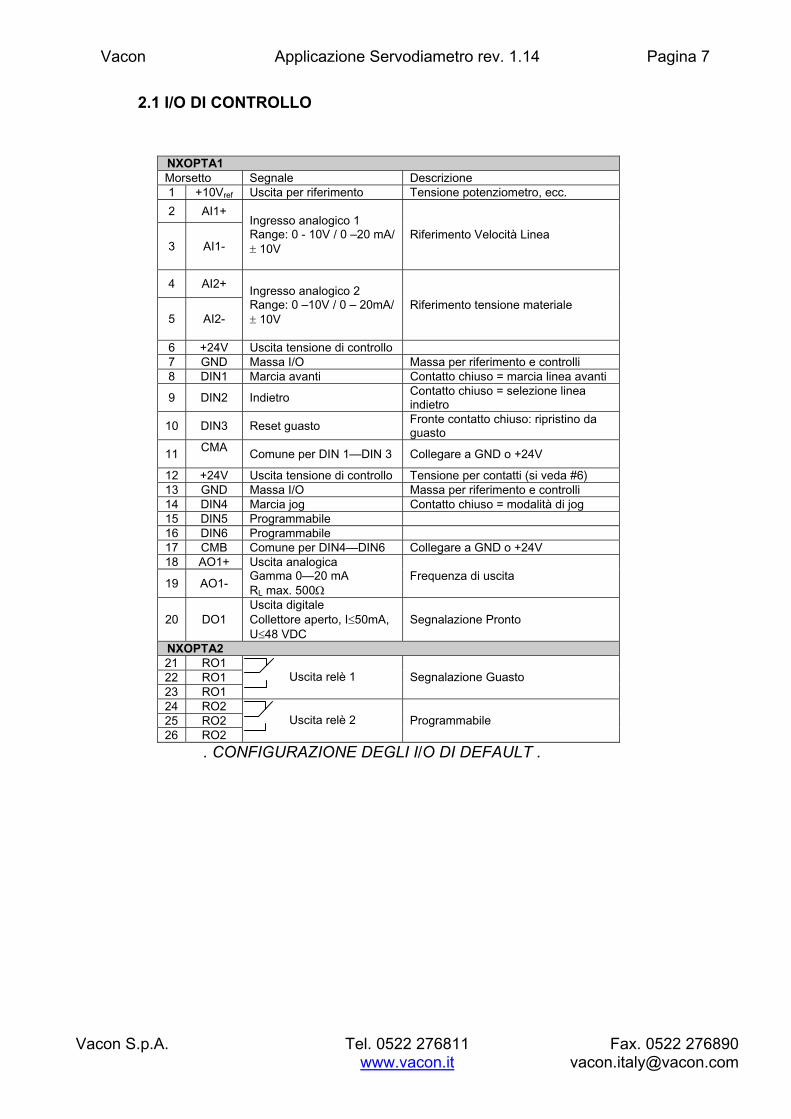
2.1 I/O DI CONTROLLO
NXOPTA1Morsetto Segnale Descrizione1 +10Vref Uscita per riferimento Tensione potenziometro, ecc.
2 AI1+
3 AI1-
Ingresso analogico 1 Range: 0 - 10V / 0 –20 mA/ 10V
Riferimento Velocità Linea
4 AI2+
5 AI2-
Ingresso analogico 2 Range: 0 –10V / 0 – 20mA/ 10V
Riferimento tensione materiale
6 +24V Uscita tensione di controllo7 GND Massa I/O Massa per riferimento e controlli 8 DIN1 Marcia avanti Contatto chiuso = marcia linea avanti
9 DIN2 Indietro Contatto chiuso = selezione lineaindietro
10 DIN3 Reset guasto Fronte contatto chiuso: ripristino da guasto
11 CMA Comune per DIN 1—DIN 3 Collegare a GND o +24V
12 +24V Uscita tensione di controllo Tensione per contatti (si veda #6)13 GND Massa I/O Massa per riferimento e controlli 14 DIN4 Marcia jog Contatto chiuso = modalità di jog 15 DIN5 Programmabile16 DIN6 Programmabile17 CMB Comune per DIN4—DIN6 Collegare a GND o +24V18 AO1+
19 AO1-
Uscita analogicaGamma 0—20 mARL max. 500
Frequenza di uscita
20 DO1Uscita digitale Collettore aperto, I 50mA,U 48 VDC
Segnalazione Pronto
NXOPTA221 RO122 RO123 RO1
Uscita relè 1 Segnalazione Guasto
24 RO225 RO226 RO2
Uscita relè 2 Programmabile
. CONFIGURAZIONE DEGLI I/O DI DEFAULT .
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 8
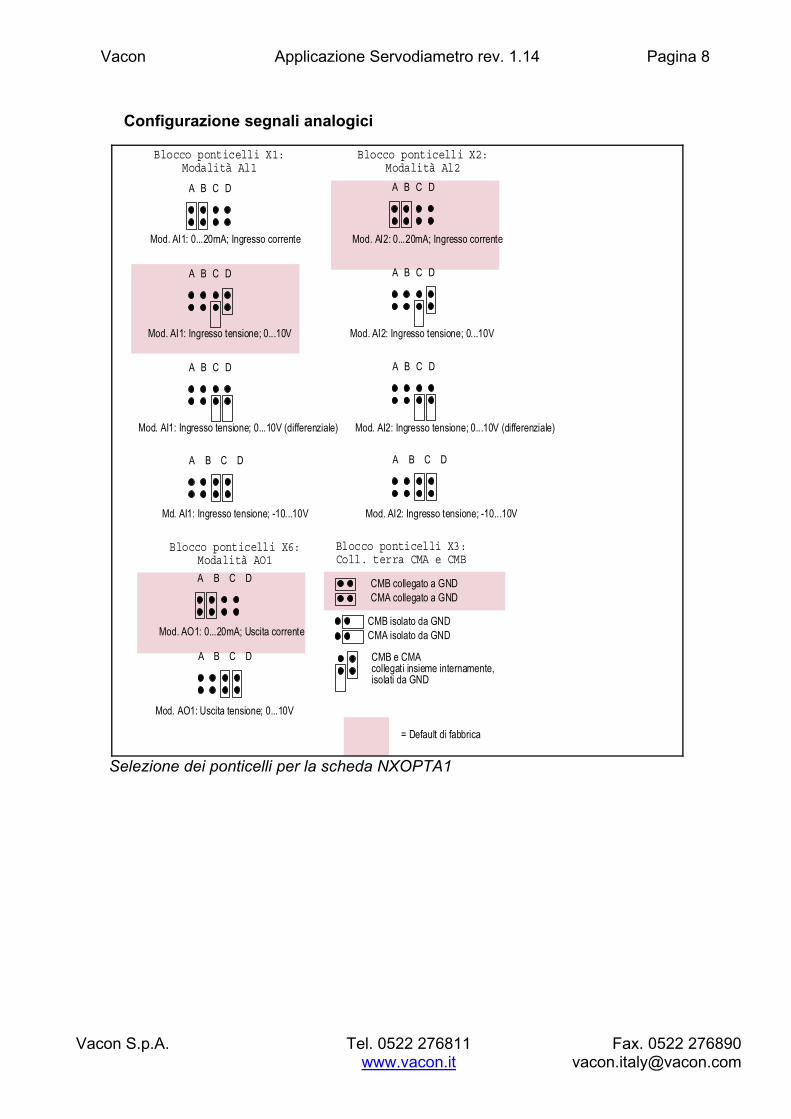
Configurazione segnali analogici
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
A B C D
Blocco ponticelli X1:Modalità Al1
Mod. AI1: 0...20mA; Ingresso corrente
Mod. AI1: Ingresso tensione; 0...10V
Mod. AI1: Ingresso tensione; 0...10V (differenziale)
Md. AI1: Ingresso tensione; -10...10V
Blocco ponticelli X2:Modalità Al2
Mod. AI2: 0...20mA; Ingresso corrente
Mod. AI2: Ingresso tensione; 0...10V
Mod. AI2: Ingresso tensione; 0...10V (differenziale)
Mod. AI2: Ingresso tensione; -10...10V
Blocco ponticelli X3:Coll. terra CMA e CMB
CMB collegato a GNDCMA collegato a GND
CMB isolato da GNDCMA isolato da GND
CMB e CMAcollegati insieme internamente,isolati da GND
= Default di fabbrica
Blocco ponticelli X6:Modalità AO1
Mod. AO1: 0...20mA; Uscita corrente
Mod. AO1: Uscita tensione; 0...10V
Selezione dei ponticelli per la scheda NXOPTA1
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 9
3. MESSA IN SERVIZIO
Per il funzionamento in anello aperto si rinvia alle normali operazioni di messa in servizio descritte nel Manuale Utente dei convertitori Vacon NX al paragrafo 8. Per il funzionamento in anello chiuso vale quanto indicato sotto e nella successiva sezione 3.1 :
Controllare le connessioni dell’encoder e la sua tensione di alimentazione.Controllare il collegamento dell’eventuale resistore di frenatura. Effettuare le normali operazioni di messa in servizio per il controllo in anello aperto descritte nel Manuale Utente dei convertitori Vacon NX al paragrafo 8.
3.1 Taratura manuale controllo motore
Impostate il parametro P2.8.1.2 al valore 1 (controllo in velocità) e il parametroP2.5.1 al valore 0 (anello aperto). Attivate il controllo da pannello nel relativo menù, e fate marciare l’inverter a diversi valori di frequenza impostati dal menù Riferimento del pannello dell’inverter. Verificate che il valore di V1.22 (Velocità encoder) corrisponda al valore di riferimento impostato. Un valore negativo in marcia avanti indica un collegamento invertito dei segnali dell’encoder. Questo può essere corretto impostando il relativoparametro nel menù relativo alla scheda di espansione. Il valore zero indica inveceche vi sono problemi con l’encoder, verificare alimentazione e segnali. Fate marciare il motore a vuoto o con basso carico a circa 2/3 della frequenzanominale. Verificate il valore della coppia, V1.5, che non dovrebbe superare il 20% circa. In tali condizioni la corrente del motore, V1.4, darà una indicazione della corrente magnetizzante, solitamente compresa tra il 30 e il 60% della correntenominale P2.1.10. Scrivete il valore osservato nel parametro P2.7.1, Corrente magnetizzante.Impostate il modo di regolazione in anello chiuso (P2.5.1=1). Se utilizzato, abilitateil chopper di frenatura (P2.4.1=1). Per gli inverter alimentati dai morsetti CC con unconvertitore rigenerativo (CXR) impostate P2.4.1=2 (Chopper frenatura = Esterno) Impostate il guadagno proporzionale di velocità a un valore basso (P2.7.2 <=20) e la costante di tempo a un valore elevato (P2.7.3 >=30). Impostate il riferimento a zero e comandate la marcia. Se interviene un allarme relativo all’encoder oppure il motore si muove a colpi, cambiare il valore del parametro direzione encoder nel menù schede opzionali. Se l’allarme persiste si potrebbe avere un problema sulla lettura dei segnali, da verificare. Aumentate il riferimento a 2/3 della velocità nominale del motore e tarate la corrente magnetizzante (P2.7.1) per ottenere una lettura di tensione sul motore(V1.7) pari a 2/3 della tensione nominale del motore (P2.1.7). Se possibile, aumentate il carico a pari velocità. Se la tensione del motore aumenta significativamente, aumentate il valore del parametro Correzione scorrimento (P2.7.8). Se viceversa la tensione si riduce all’aumentare del carico, riducete il valore del parametro P2.7.8.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 10
Per una regolazione di velocità più pronta, aumentate il valore del guadagno proporzionale P2.7.2 e riducete il valore della costante di tempo, P2.7.3. La stabilità dipende dai valori combinati dei due parametri e andrebbe verificata con il massimo valore previsto di inerzia accoppiata all’albero motore.
3.2 Altre operazioni
Configurare i canali analogici per i segnali utilizzati dal modo di controllo previsto (parametri dei gruppi da G2.2.2 a G2.2.7).Configurare gli ingressi digitali relativi alle funzioni che si desidera utilizzare nelgruppo G2.2.8.Nel caso di utilizzo di bus di campo (profibus) definire l’associazione dei segnali coni canali di processo nel gruppo G2.9.Impostare P2.8.1.1 Modo avvolgitura per il funzionamento desiderato (avvolgitore o svolgitore), in condizioni di marcia linea avanti.Impostare P2.8.1.2 per il modo di controllo azionamento desiderato.Impostare la frequenza massima P2.1.2 in base alla massima velocità della lineaconsiderando il diametro minimo. Impostare il diametro minimo di avvolgitura P2.8.1.3 come percentuale del diametro massimo.Per i modi 0 e 2 impostare il valore di coppia di fondo scala P2.8.1.8. Questo rappresenta la coppia espressa in condizioni di massimo diametro e massimo riferimento di tiro. Per il modo 2 rappresenta la massima coppia in assenza di correzione del regolatore PID. Impostare inoltre un termine di sovravelocitàP2.8.1.9 per tenere saturo il regolatore di velocità e lavorare in coppia. Per i modi 2,3,4 impostare valori iniziali per il regolatore PID. Verificare i sensi di rotazione degli aspi, considerando che lo svolgitore a vuoto, nei modi 0 e 2 , deve ruotare in senso opposto alla direzione di svolgitura
Dopo una prima verifica di funzionamento dell’avvolgitore, è possibile affinare il funzionamento tarando il valore di fondo scala della coppia e i guadagni del regolatorePID. Nel caso di modo 0 possono essere introdotti valori della compensazione di attrito e, se sono richieste variazioni rapide di velocità di linea, è utile impostare i valori per la compensazione d’inerzia.Per la funzione Taper si veda la descrizione dei parametri P2.8.1.22 -24.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 11
4. PARAMETRI (Menù M2)
4.1 Parametri Base G2.1
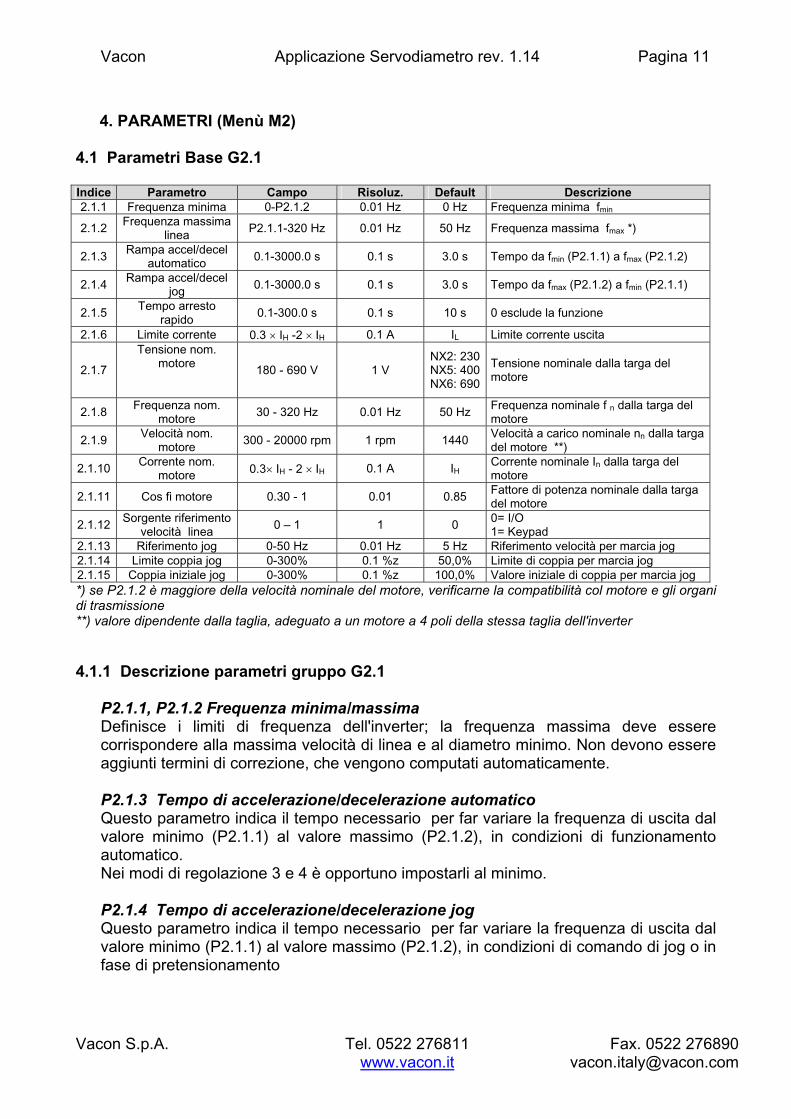
Indice Parametro Campo Risoluz. Default Descrizione2.1.1 Frequenza minima 0-P2.1.2 0.01 Hz 0 Hz Frequenza minima fmin
2.1.2 Frequenza massimalinea P2.1.1-320 Hz 0.01 Hz 50 Hz Frequenza massima fmax *)
2.1.3 Rampa accel/decelautomatico 0.1-3000.0 s 0.1 s 3.0 s Tempo da fmin (P2.1.1) a fmax (P2.1.2)
2.1.4 Rampa accel/deceljog 0.1-3000.0 s 0.1 s 3.0 s Tempo da fmax (P2.1.2) a fmin (P2.1.1)
2.1.5 Tempo arresto rapido 0.1-300.0 s 0.1 s 10 s 0 esclude la funzione
2.1.6 Limite corrente 0.3 IH -2 IH 0.1 A IL Limite corrente uscita
2.1.7
Tensione nom.motore 180 - 690 V 1 V
NX2: 230NX5: 400NX6: 690
Tensione nominale dalla targa del motore
2.1.8 Frequenza nom.motore 30 - 320 Hz 0.01 Hz 50 Hz Frequenza nominale f n dalla targa del
motore
2.1.9 Velocità nom. motore 300 - 20000 rpm 1 rpm 1440 Velocità a carico nominale nn dalla targa
del motore **)
2.1.10 Corrente nom.motore 0.3 IH - 2 IH 0.1 A IH
Corrente nominale In dalla targa delmotore
2.1.11 Cos fi motore 0.30 - 1 0.01 0.85 Fattore di potenza nominale dalla targadel motore
2.1.12 Sorgente riferimento velocità linea 0 – 1 1 0 0= I/O
1= Keypad2.1.13 Riferimento jog 0-50 Hz 0.01 Hz 5 Hz Riferimento velocità per marcia jog 2.1.14 Limite coppia jog 0-300% 0.1 %z 50,0% Limite di coppia per marcia jog2.1.15 Coppia iniziale jog 0-300% 0.1 %z 100,0% Valore iniziale di coppia per marcia jog*) se P2.1.2 è maggiore della velocità nominale del motore, verificarne la compatibilità col motore e gli organidi trasmissione**) valore dipendente dalla taglia, adeguato a un motore a 4 poli della stessa taglia dell'inverter
4.1.1 Descrizione parametri gruppo G2.1
P2.1.1, P2.1.2 Frequenza minima/massima Definisce i limiti di frequenza dell'inverter; la frequenza massima deve essere corrispondere alla massima velocità di linea e al diametro minimo. Non devono essereaggiunti termini di correzione, che vengono computati automaticamente.
P2.1.3 Tempo di accelerazione/decelerazione automatico Questo parametro indica il tempo necessario per far variare la frequenza di uscita dal valore minimo (P2.1.1) al valore massimo (P2.1.2), in condizioni di funzionamento automatico.Nei modi di regolazione 3 e 4 è opportuno impostarli al minimo.
P2.1.4 Tempo di accelerazione/decelerazione jog Questo parametro indica il tempo necessario per far variare la frequenza di uscita dal valore minimo (P2.1.1) al valore massimo (P2.1.2), in condizioni di comando di jog o in fase di pretensionamento
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 12
P2.1.5 Tempo di arresto rapido Questo parametro indica il tempo di arresto dal momento in cui cade il comando di marcia, con riferimento alla massima velocità; il tempo è scalato internamente in modo da essere rispettato per ogni valore di diametro. Questo permette un arresto rapido sincronizzato con le altre unità della linea, ma il controllo sulla tensione del materiale NON è attivo in questa situazione. L’arresto rapido è determinato dalle seguenti situazioni: - cade il comando di marcia e non è attiva la logica di marcia autoritenuta (si veda
P2.8.1.25).- cade il comando di marcia, è attiva la logica di marcia autoritenuta e la velocità di
linea è al di sotto della soglia - cade il segnale di arresto rapido definito in P2.2.8.11, indipendentemente dalla
logica di marcia autoritenuta.
La logica non è attiva se è attivo il comando jog (se il segnale di arresto rapido rimane alto). Non è inoltre attiva se è stato programmato l’arresto per inerzia (P2.4.3 = 0)
L’arresto conseguente alla caduta della abilitazione marcia avverrà sempre per inerzia.
NOTA: in caso di tempi di arresto molto brevi è opportuno programmare il parametroP2.7.5 a 1000-2000 ms (tempo mantenimento 0 Hz all’arresto).
P2.1.6 Limite di correnteQuesto parametro determina la corrente massima di uscita che l'inverter può erogareal motore.
P2.1.7 Tensione nominale del motore Questo valore viene riportato sulla targa del motore. Scegliete quello corrispondente al collegamento effettivamente utilizzato, qualora siano possibili più schemi di collegamento. Assegnando questo parametro si stabilisce automaticamente anche il valore della tensione al punto di indebolimento campo, parametro P2.5.5, pari al 100%della tensione nominale del motore.
NOTA! Se la tensione nominale del motore è inferiore a quella di alimentazione, verificate che l’isolamento del motore sia adeguato.
P2.1.8 Frequenza nominale del motore Questo valore fn viene riportato sulla targa del motore. Assegnando questo parametro si stabilisce anche il punto di indebolimento campo,parametro P2.5.4, allo stesso valore.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 13
P2.1.9 Velocità nominale del motoreVelocità del motore a pieno carico e frequenza nominale. Questo valore nn vieneriportato dalla targa del motore.NOTA: I motori a norma NEMA indicano in targa la velocità a vuoto (sincrona). Deve essere invece utilizzata la velocità a carico.
P2.1.10 Corrente nominale del motore Questo valore In viene riportato dalla targa del motore. Scegliete quello corrispondenteal collegamento effettivamente utilizzato, qualora siano possibili più schemi di collegamento. Questo valore viene utilizzato come valore di riferimento della funzioneprotezione interna del motore.
P2.1.11 Fattore di potenza nominale del motore Questo valore cos fi viene riportato dalla targa del motore.
P2.1.12 Selezione riferimento velocità di linea
0 Il riferimento di velocità di linea è ricavato da ingresso analogico, in base ai parametri del gruppo G2.2.2.
1 Il riferimento di velocità di linea è ricavato dal riferimento programmato sul tastierino (utile per test).
NOTA! Se il riferimento di velocità di linea è configurato su canale del bus di campo(P2.9.2 = 1), il parametro P2.1.12 non è attivo.
P2.1.13 Riferimento velocità di jog Questo parametro definisce la velocità di jog selezionata mediante l'ingresso digitale, con riferimento alla condizione di diametro minimo. Il valore è ridotto automaticamente all’aumentare del diametro. Utilizzando controllo da bus di campo, il parametro P2.9.2 permette di selezionare se la velocità di jog debba essere data dal parametro o acquisita dal riferimento di velocitàdi linea.
P2.1.14 Limite di coppia in jogQuesto parametro definisce la massima coppia erogata dal motore quando è attivo il comando di jog, con riferimento alla condizione di diametro massimo.Il limite è ridotto automaticamente al diminuire del diametro. Il valore 0 disattiva la limitazione di coppia.
P2.1.15 Limite di coppia iniziale in jog Per consentire il rapido raggiungimento della velocità di jog (condizione di ansa sul materiale), il limite di coppia può essere impostato inizialmente ad un valore più elevato. La commutazione verso il valore di P2.1.14 avviene quando la coppia motore raggiunge tale livello. Il valore P2.1.15 viene ripristinato quando si toglie la marcia.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 14
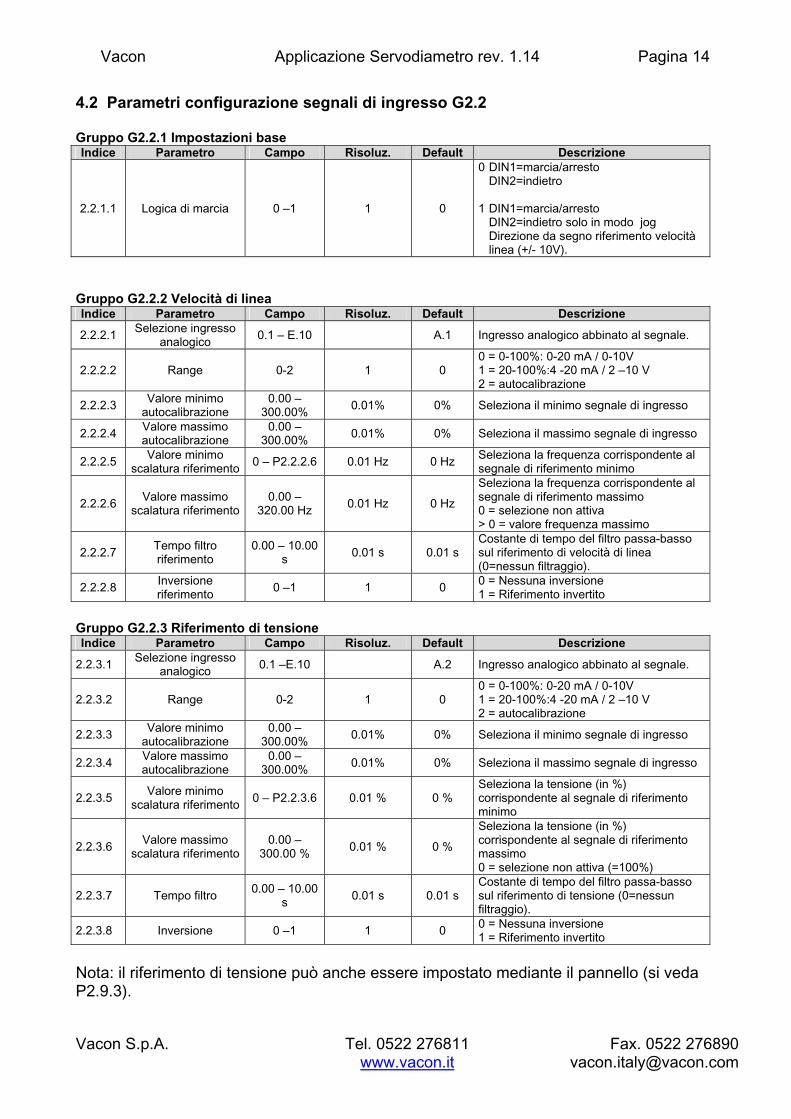
4.2 Parametri configurazione segnali di ingresso G2.2
Gruppo G2.2.1 Impostazioni base Indice Parametro Campo Risoluz. Default Descrizione
2.2.1.1 Logica di marcia 0 –1 1 0
0 DIN1=marcia/arrestoDIN2=indietro
1 DIN1=marcia/arrestoDIN2=indietro solo in modo jogDirezione da segno riferimento velocitàlinea (+/- 10V).
Gruppo G2.2.2 Velocità di linea Indice Parametro Campo Risoluz. Default Descrizione
2.2.2.1 Selezione ingressoanalogico 0.1 – E.10 A.1 Ingresso analogico abbinato al segnale.
2.2.2.2 Range 0-2 1 00 = 0-100%: 0-20 mA / 0-10V1 = 20-100%:4 -20 mA / 2 –10 V 2 = autocalibrazione
2.2.2.3 Valore minimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il minimo segnale di ingresso
2.2.2.4 Valore massimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il massimo segnale di ingresso
2.2.2.5 Valore minimoscalatura riferimento 0 – P2.2.2.6 0.01 Hz 0 Hz Seleziona la frequenza corrispondente al
segnale di riferimento minimo
2.2.2.6 Valore massimoscalatura riferimento
0.00 – 320.00 Hz 0.01 Hz 0 Hz
Seleziona la frequenza corrispondente al segnale di riferimento massimo0 = selezione non attiva > 0 = valore frequenza massimo
2.2.2.7 Tempo filtro riferimento
0.00 – 10.00s 0.01 s 0.01 s
Costante di tempo del filtro passa-bassosul riferimento di velocità di linea(0=nessun filtraggio).
2.2.2.8 Inversioneriferimento 0 –1 1 0 0 = Nessuna inversione
1 = Riferimento invertito
Gruppo G2.2.3 Riferimento di tensioneIndice Parametro Campo Risoluz. Default Descrizione
2.2.3.1 Selezione ingressoanalogico 0.1 –E.10 A.2 Ingresso analogico abbinato al segnale.
2.2.3.2 Range 0-2 1 00 = 0-100%: 0-20 mA / 0-10V1 = 20-100%:4 -20 mA / 2 –10 V 2 = autocalibrazione
2.2.3.3 Valore minimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il minimo segnale di ingresso
2.2.3.4 Valore massimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il massimo segnale di ingresso
2.2.3.5 Valore minimoscalatura riferimento 0 – P2.2.3.6 0.01 % 0 %
Seleziona la tensione (in %) corrispondente al segnale di riferimentominimo
2.2.3.6 Valore massimoscalatura riferimento
0.00 – 300.00 % 0.01 % 0 %
Seleziona la tensione (in %) corrispondente al segnale di riferimentomassimo0 = selezione non attiva (=100%)
2.2.3.7 Tempo filtro 0.00 – 10.00s 0.01 s 0.01 s
Costante di tempo del filtro passa-bassosul riferimento di tensione (0=nessunfiltraggio).
2.2.3.8 Inversione 0 –1 1 0 0 = Nessuna inversione1 = Riferimento invertito
Nota: il riferimento di tensione può anche essere impostato mediante il pannello (si veda P2.9.3).
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 15
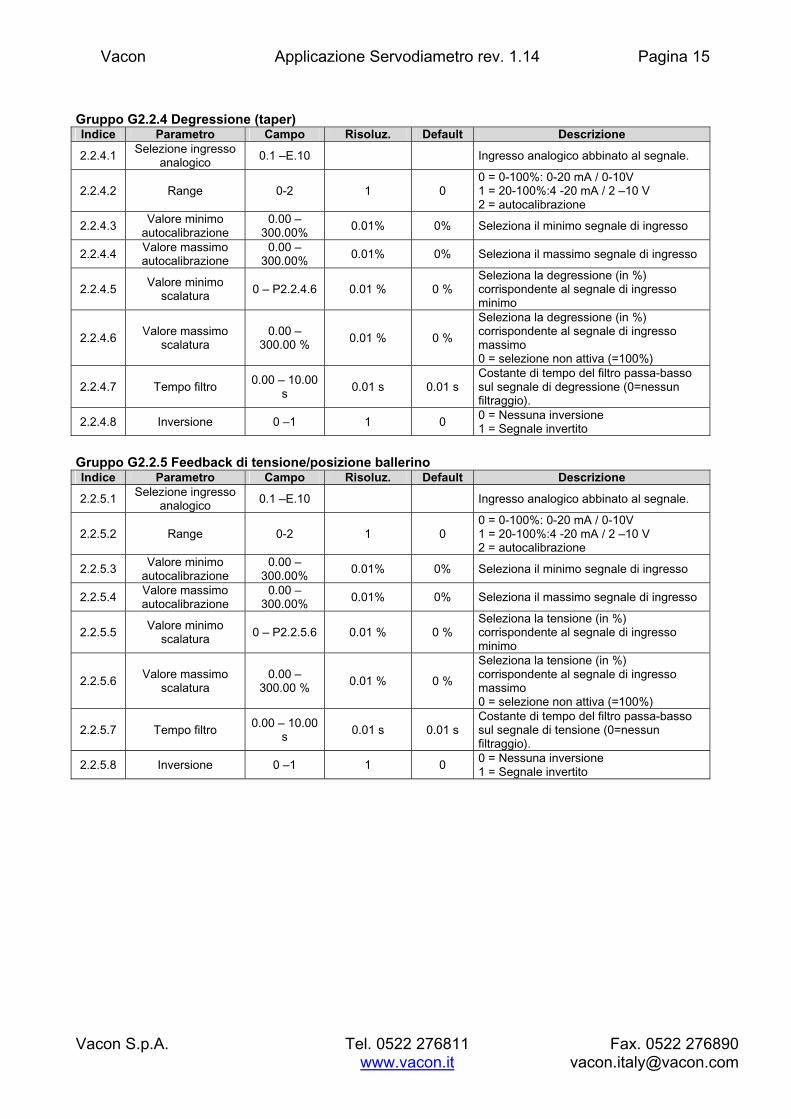
Gruppo G2.2.4 Degressione (taper)Indice Parametro Campo Risoluz. Default Descrizione
2.2.4.1 Selezione ingressoanalogico 0.1 –E.10 Ingresso analogico abbinato al segnale.
2.2.4.2 Range 0-2 1 00 = 0-100%: 0-20 mA / 0-10V1 = 20-100%:4 -20 mA / 2 –10 V 2 = autocalibrazione
2.2.4.3 Valore minimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il minimo segnale di ingresso
2.2.4.4 Valore massimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il massimo segnale di ingresso
2.2.4.5 Valore minimoscalatura 0 – P2.2.4.6 0.01 % 0 %
Seleziona la degressione (in %)corrispondente al segnale di ingressominimo
2.2.4.6 Valore massimoscalatura
0.00 – 300.00 % 0.01 % 0 %
Seleziona la degressione (in %)corrispondente al segnale di ingressomassimo0 = selezione non attiva (=100%)
2.2.4.7 Tempo filtro 0.00 – 10.00s 0.01 s 0.01 s
Costante di tempo del filtro passa-bassosul segnale di degressione (0=nessunfiltraggio).
2.2.4.8 Inversione 0 –1 1 0 0 = Nessuna inversione1 = Segnale invertito
Gruppo G2.2.5 Feedback di tensione/posizione ballerinoIndice Parametro Campo Risoluz. Default Descrizione
2.2.5.1 Selezione ingressoanalogico 0.1 –E.10 Ingresso analogico abbinato al segnale.
2.2.5.2 Range 0-2 1 00 = 0-100%: 0-20 mA / 0-10V1 = 20-100%:4 -20 mA / 2 –10 V 2 = autocalibrazione
2.2.5.3 Valore minimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il minimo segnale di ingresso
2.2.5.4 Valore massimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il massimo segnale di ingresso
2.2.5.5 Valore minimoscalatura 0 – P2.2.5.6 0.01 % 0 %
Seleziona la tensione (in %) corrispondente al segnale di ingressominimo
2.2.5.6 Valore massimoscalatura
0.00 – 300.00 % 0.01 % 0 %
Seleziona la tensione (in %) corrispondente al segnale di ingressomassimo0 = selezione non attiva (=100%)
2.2.5.7 Tempo filtro 0.00 – 10.00s 0.01 s 0.01 s
Costante di tempo del filtro passa-bassosul segnale di tensione (0=nessunfiltraggio).
2.2.5.8 Inversione 0 –1 1 0 0 = Nessuna inversione1 = Segnale invertito
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 16
Gruppo G2.2.6 Misura di diametro Indice Parametro Campo Risoluz. Default Descrizione
2.2.6.1 Selezione ingressoanalogico 0.1 –E.10 Ingresso analogico abbinato al segnale.
2.2.6.2 Range 0-2 1 00 = 0-100%: 0-20 mA / 0-10V1 = 20-100%:4 -20 mA / 2 –10 V 2 = autocalibrazione
2.2.6.3 Valore minimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il minimo segnale di ingresso
2.2.6.4 Valore massimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il massimo segnale di ingresso
2.2.6.5 Valore minimoscalatura 0 – P2.2.6.6 0.01 % 0 %
Seleziona il diametro (in %) corrispondente al segnale di ingressominimo
2.2.6.6 Valore massimoscalatura
0.00 – 300.00 % 0.01 % 0 %
Seleziona il diametro (in %) corrispondente al segnale di ingressomassimo0 = selezione non attiva (=100%)
2.2.6.7 Tempo filtro 0.00 – 10.00s 0.01 s 0.01 s
Costante di tempo del filtro passa-bassosul segnale di diametro misurato(0=nessun filtraggio).
2.2.6.8 Inversione 0 –1 1 0 0 = Nessuna inversione1 = Segnale invertito
Gruppo G2.2.7 Preset DiametroIndice Parametro Campo Risoluz. Default Descrizione
2.2.7.1 Selezione ingressoanalogico 0.1 –E.10 Ingresso analogico abbinato al segnale.
2.2.7.2 Range 0-2 1 00 = 0-100%: 0-20 mA / 0-10V1 = 20-100%:4 -20 mA / 2 –10 V 2 = autocalibrazione
2.2.7.3 Valore minimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il minimo segnale di ingresso
2.2.7.4 Valore massimoautocalibrazione
0.00 – 300.00% 0.01% 0% Seleziona il massimo segnale di ingresso
2.2.7.5 Valore minimoscalatura 0 – P2.2.7.6 0.01 % 0 %
Seleziona il diametro iniziale (in %) corrispondente al segnale di ingressominimo
2.2.7.6 Valore massimoscalatura
0.00 – 300.00 % 0.01 % 0 %
Seleziona il diametro iniziale (in %) corrispondente al segnale di ingressomassimo0 = selezione non attiva (=100%)
2.2.7.7 Tempo filtro 0.00 – 10.00s 0.01 s 0.01 s
Costante di tempo del filtro passa-bassosul segnale di diametro iniziale (0=nessunfiltraggio).
2.2.7.8 Inversione 0 –1 1 0 0 = Nessuna inversione1 = Segnale invertito
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 17
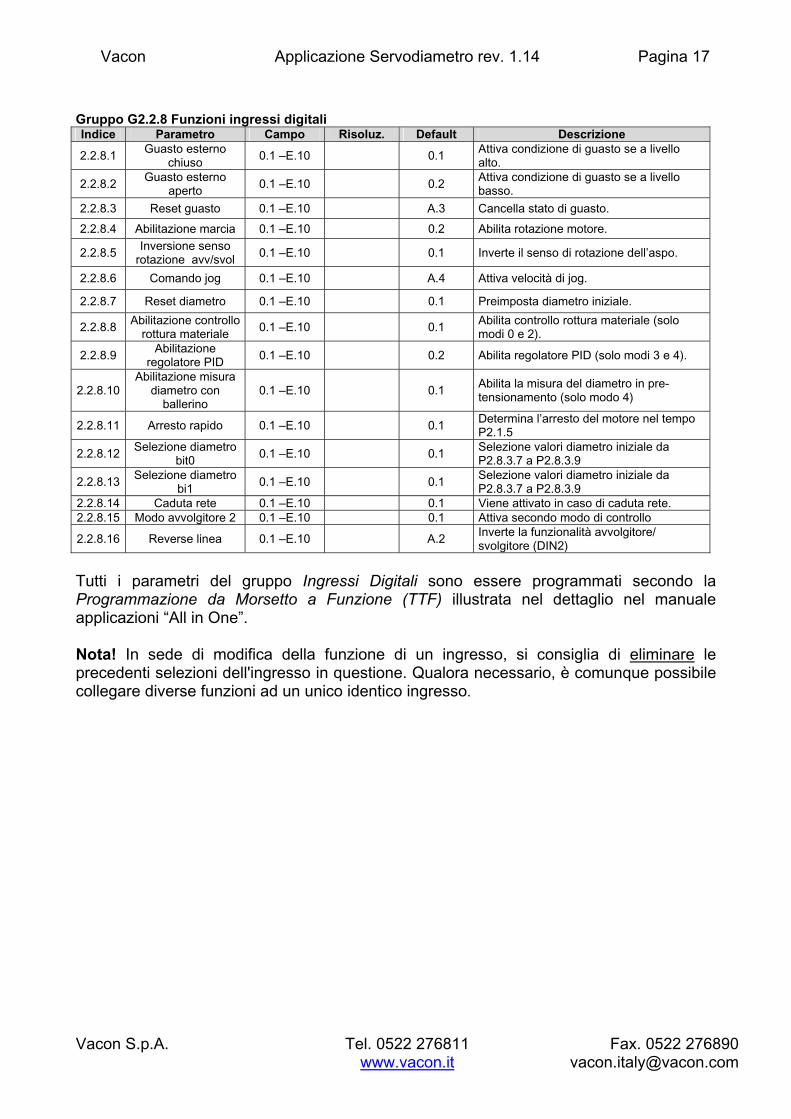
Gruppo G2.2.8 Funzioni ingressi digitali Indice Parametro Campo Risoluz. Default Descrizione
2.2.8.1 Guasto esternochiuso 0.1 –E.10 0.1 Attiva condizione di guasto se a livello
alto.
2.2.8.2 Guasto esternoaperto 0.1 –E.10 0.2 Attiva condizione di guasto se a livello
basso.
2.2.8.3 Reset guasto 0.1 –E.10 A.3 Cancella stato di guasto.
2.2.8.4 Abilitazione marcia 0.1 –E.10 0.2 Abilita rotazione motore.
2.2.8.5 Inversione sensorotazione avv/svol 0.1 –E.10 0.1 Inverte il senso di rotazione dell’aspo.
2.2.8.6 Comando jog 0.1 –E.10 A.4 Attiva velocità di jog.
2.2.8.7 Reset diametro 0.1 –E.10 0.1 Preimposta diametro iniziale.
2.2.8.8 Abilitazione controllorottura materiale 0.1 –E.10 0.1 Abilita controllo rottura materiale (solo
modi 0 e 2).
2.2.8.9 Abilitazioneregolatore PID 0.1 –E.10 0.2 Abilita regolatore PID (solo modi 3 e 4).
2.2.8.10Abilitazione misura
diametro con ballerino
0.1 –E.10 0.1 Abilita la misura del diametro in pre-tensionamento (solo modo 4)
2.2.8.11 Arresto rapido 0.1 –E.10 0.1 Determina l’arresto del motore nel tempoP2.1.5
2.2.8.12 Selezione diametrobit0 0.1 –E.10 0.1 Selezione valori diametro iniziale da
P2.8.3.7 a P2.8.3.9
2.2.8.13 Selezione diametrobi1 0.1 –E.10 0.1 Selezione valori diametro iniziale da
P2.8.3.7 a P2.8.3.92.2.8.14 Caduta rete 0.1 –E.10 0.1 Viene attivato in caso di caduta rete. 2.2.8.15 Modo avvolgitore 2 0.1 –E.10 0.1 Attiva secondo modo di controllo
2.2.8.16 Reverse linea 0.1 –E.10 A.2 Inverte la funzionalità avvolgitore/svolgitore (DIN2)
Tutti i parametri del gruppo Ingressi Digitali sono essere programmati secondo laProgrammazione da Morsetto a Funzione (TTF) illustrata nel dettaglio nel manualeapplicazioni “All in One”.
Nota! In sede di modifica della funzione di un ingresso, si consiglia di eliminare leprecedenti selezioni dell'ingresso in questione. Qualora necessario, è comunque possibile collegare diverse funzioni ad un unico identico ingresso.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 18
4.2.1 Descrizione parametri gruppo G2.2
P2.2.1.1 Logica di marcia Definisce la logica di marcia avanti/indietro dell’avvolgitore/svolgitore, con relativoscambio della funzionalità:
0 DIN1 contatto chiuso = marcia; contatto aperto = arresto DIN2 contatto aperto = direz. avanti (funzionamento come in P2.8.1.1);
contatto chiuso = direz. indietro (funzionamento inverso);
1 DIN1 contatto chiuso = marcia; contatto aperto = arresto;DIN2 ininfluente in stato automatico;
solo con comando jog attivo: contatto aperto = direz. avanti (funzionamento come in P2.8.1.1); contatto chiuso = direz. indietro (funzionamento inverso);
In stato di controllo automatico la marcia avanti/indietro è determinata dal segno del riferimento di velocità di linea, che deve essere configurato come +/- 10V.
NOTA: A partire dalla versione 11.23, l’ingresso di inversione linea DIN2 è configurabile mediante P2.2.8.16
NOTA: Per l’inversione del senso di rotazione, mantenendo la funzionalità di avvolgitore o svolgitore, deve essere usato l’ingresso digitale configurato mediante P2.2.8.5
NOTA: La direzione di rotazione in jog può anche essere gestita con il segnale di inversione del senso di rotazione, di cui al punto precedente.
Utilizzo di segnali su bus di campo: Se la velocità di linea è trasmessa attraverso bus di campo (P2.9.2=1 o 3), la direzione è determinata da DIN2, se il posto di controllo è la morsettiera (P3.1= Morsetto), oppure dal comando di Reverse del bus, se il posto di controllo è il bus (P3.1= Fieldbus). P2.2.1.1 deve essere sempre configurato al valore 0.
Se il posto di controllo è il bus, e la velocità è acquisita da segnale analogico (P2.9.2=0 o 2), la direzione è data dal segno del riferimento se P2.2.1.1=1 (segnale +/-10V), oppure dal comando di Reverse del bus se P2.2.1.1=0.
Quando è attivo il comando di jog, la direzione è sempre determinata da DIN2 o dal Reverse del bus, in base al posto di controllo attivo.
La direzione Reverse da bus di campo risulta dalla somma logica (OR) fra il reverse previsto dal profilo del bus e il bit di reverse linea (bit 5) inserito nella parola dei comandi specifici, abbinata ad un canale di processo (si veda P2.9.1). Quest’ultimo bit è stato previsto come alternativa, per facilitare la gestione delladirezione, utilizzando bus che prevedono riferimento di velocità con segno.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 19
G2.2.2 Velocità di lineaI parametri di questo gruppo consentono di stabilire la relazione tra la velocità di lineae il segnale di riferimento su ingresso analogico.
P2.2.2.1 Selezione ingresso analogicoDefinisce l’ingresso analogico sul quale viene letto il valore della velocità di linea.
P2.2.2.2 Range 0 range 0-20mA / 0-10 V 1 range 4-20mA / 2-10 V 2 sono attivi i valori custom
P2.2.2.3 Valore minimo autocalibrazione (custom) P2.2.2.4 Valore massimo autocalibrazione (custom) Definiscono il range di variazione del segnale in ingresso.NOTA: Premendo il pulsante ENTER, sul parametro viene memorizzato il valore attuale dell’ingresso analogico. Se si vuole impostare manualmente, è necessario mantenere premuto anche il pulsante RESET.
P2.2.2.5 Valore minimo scalaturaP2.2.2.6 Valore massimo scalatura Definiscono il minimo e massimo valore della velocità di linea, corrispondenti al minimo e massimo segnale. Relazioni tra i limiti dei parametri: 0 P2.2.2.3 P2.2.2.4 P2.1.2. Se il parametro P2.2.2.4 = 0 il fattore di scala è inattivo e la velocità di linea puòvariare tra P2.1.1 e P2.1.2.
P2.2.2.7 Tempo filtroFiltra i disturbi provenienti dal segnale di riferimento in ingresso. Un valore elevatorallenta la velocità di risposta della regolazione.
P2.2.2.8 InversioneInverte la relazione tra riferimento e velocità: a riferimento minimo corrisponde lamassima velocità.
G2.2.3 Riferimento di tensioneP2.2.3.1 Selezione ingresso analogicoP2.2.3.2 Range P2.2.3.3 Valore minimo autocalibrazione (custom)P2.2.3.4 Valore massimo autocalibrazione (custom) P2.2.3.5 Valore minimo scalaturaP2.2.3.6 Valore massimo scalatura P2.2.3.7 Tempo filtroP2.2.3.8 InversioneSono i corrispondenti del gruppo G2.2.3, applicati al segnale di riferimento di tensione. Il riferimento di tensione può anche essere impostato mediante il pannello(si veda P2.9.3).
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 20
G2.2.4 Degressione (taper) P2.2.4.1 Selezione ingresso analogicoP2.2.4.2 Range P2.2.4.3 Valore minimo autocalibrazione (custom) P2.2.4.4 Valore massimo autocalibrazione (custom) P2.2.4.5 Valore minimo scalaturaP2.2.4.6 Valore massimo scalatura P2.2.4.7 Tempo filtroP2.2.4.8 InversioneSono i corrispondenti del gruppo G2.2.3, applicati al segnale di degressione (taper).
G2.2.5 Feedback di tensione P2.2.5.1 Selezione ingresso analogicoP2.2.5.2 Range P2.2.5.3 Valore minimo autocalibrazione (custom) P2.2.5.4 Valore massimo autocalibrazione (custom) P2.2.5.5 Valore minimo scalaturaP2.2.5.6 Valore massimo scalatura P2.2.5.7 Tempo filtroP2.2.5.8 InversioneSono i corrispondenti del gruppo G2.2.3, applicati al segnale di feedback di tensione.
G2.2.6 Misura di diametroP2.2.6.1 Selezione ingresso analogicoP2.2.6.2 Range P2.2.6.3 Valore minimo autocalibrazione (custom) P2.2.6.4 Valore massimo autocalibrazione (custom) P2.2.6.5 Valore minimo scalaturaP2.2.6.6 Valore massimo scalatura P2.2.6.7 Tempo filtroP2.2.6.8 InversioneSono i corrispondenti del gruppo G2.2.3, applicati al segnale di diametro misurato.
G2.2.7 Preset diametroP2.2.7.1 Selezione ingresso analogicoP2.2.7.2 Range P2.2.7.3 Valore minimo autocalibrazione (custom) P2.2.7.4 Valore massimo autocalibrazione (custom) P2.2.7.5 Valore minimo scalaturaP2.2.7.6 Valore massimo scalatura P2.2.7.7 Tempo filtroP2.2.7.8 InversioneSono i corrispondenti del gruppo G2.2.3, applicati al segnale di preset diametro.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 21
G2.2.8 Funzioni ingressi digitaliI parametri di questo gruppo permettono di associare un ingresso digitale al segnale di comando per le seguenti funzioni.
P2.2.8.1 Guasto esterno chiuso Il segnale alto sull’ingresso determina stato di fault.
P2.2.8.2 Guasto esterno aperto Se configurato, il segnale basso sull’ingresso determina stato di fault.
P2.2.8.3 Reset guastoIl segnale alto sull’ingresso cancella lo stato di fault, se la causa non è più presente.
P2.2.8.4 Abilitazione marcia Se configurato, il segnale alto sull’ingresso consente la rotazione del motore. L’arresto conseguente alla caduta della abilitazione avviene sempre per inerzia.
P2.2.8.5 Inversione senso rotazione avvolgi/svolgitore Il segnale alto sull’ingresso inverte il senso di rotazione dell’aspo, mantenendoinalterata la funzionalità . Consente la gestione di avvolgimento sopra/sotto. Il comando di inversione non viene accettato se l’inverter è in marcia in stato di funzionamento automatico. Viene invece eseguito quanto è attivo il comando di jog, consentendo di gestirne ladirezione.
P2.2.8.6 Comando jog Il segnale alto sull’ingresso comanda il motore ad una velocità predeterminata (P2.1.13) o modificabile da bus di campo; non è attivo alcun controllo di tensione. Il senso di rotazione è quello di avanzamento della linea, ed è influenzato dal comando di marcia avanti/indietro (vedere P2.2.1.1) e dal comando di inversione (vedere P2.2.8.5).La direzione di avanzamento deve sempre essere gestita mediante il segnale sull’ingresso digitale DIN2, anche se è stata programmata la logica di marcia/riferimento ( P2.2.1.1=1). Esempio: lo svolgitore comandato in jog, con comando “avanti” (DIN2=0) farà svolgere il materiale verso la linea, mentre se comandato “indietro” (DIN2=1) tenderà a riavvolgere. In caso di controllo da bus di campo, le direzione di movimento è comandabile con le stesse modalità dello stato automatico. La velocità può essere parametrica o modificabile da bus, in base al valore di P2.9.2.
NOTA: Quando il comando di jog cade, lo stato di jog è ritenuto internamente per 0.3secondi. Dopo questo tempo viene verificato il comando di marcia: se non è piùattivo, il jog viene mantenuto durante tutta la fase di arresto. Se invece il comando di marcia risulta attivo, viene subito attivato lo stato automatico.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 22
P2.2.8.7 Reset diametro Il segnale alto sull’ingresso reimposta il diametro calcolato al valore iniziale. La funzione è attiva solo se P2.8.1.5=1
P2.2.8.8 Abilita controllo rottura materiale Il segnale alto sull’ingresso abilita il controllo di rottura del materiale. La funzione è abilitata solo se è attivo il modo di controllo 0 oppure 2 (controllo in coppia). Il parametro P2.8.1.27 discrimina la modalità di attivazione.
P2.2.8.9 Abilita regolatore PID Se configurato, il segnale alto sull’ingresso abilita il regolatore PID per la correzionedi velocità o coppia.
P2.2.8.10 Abilita misura diametro con ballerino (solo modo 4) Permette di abilitare la logica di misura diametro in fase di pre-tensionamento del ballerino all’avvio. Vedere anche descrizione P2.8.1.29.
P2.2.8.11 Arresto rapido Il segnale basso forza l’inverter in stato di stop, attivando la rampa di arresto definitain P2.1.5. Se non utilizzato, programmare valore 0.2.
P2.2.8.12 Selezione diametro bit0P2.2.8.13 Selezione diametro bit1Segnali di selezione diametro iniziale. Si veda descrizione parametri P2.8.3.7-9.
P2.2.8.14 Caduta rete Utilizzato per segnalare lo stato di caduta rete e attivare le procedure di arresto sincronizzato.
P2.2.8.15 Modo avvolgitore 2 Attiva il modo di controllo definito in P2.8.3.11, quando l’inverter non è in marcia.
P2.2.8.16 Reverse Linea (DIN2) Scelta della direzione avanti/indietro (avvolgitore/svolgitore). Si veda descrizioneP2.2.1.1.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 23
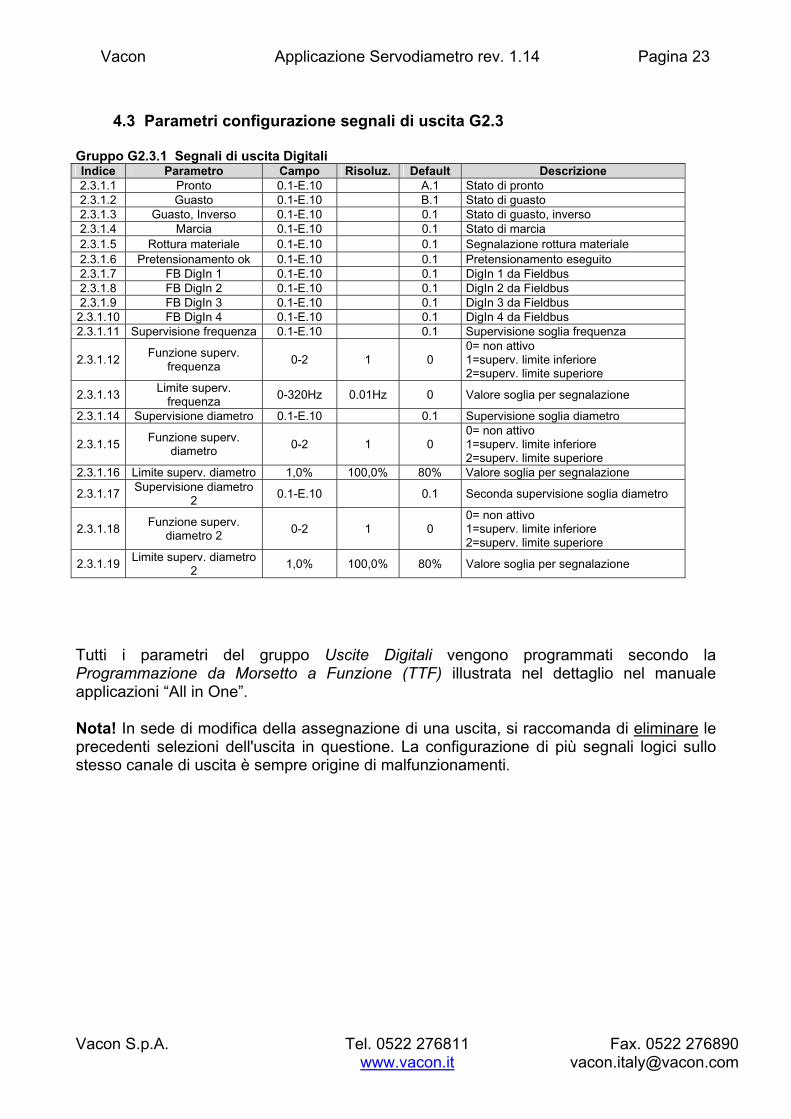
4.3 Parametri configurazione segnali di uscita G2.3
Gruppo G2.3.1 Segnali di uscita Digitali Indice Parametro Campo Risoluz. Default Descrizione2.3.1.1 Pronto 0.1-E.10 A.1 Stato di pronto2.3.1.2 Guasto 0.1-E.10 B.1 Stato di guasto2.3.1.3 Guasto, Inverso 0.1-E.10 0.1 Stato di guasto, inverso 2.3.1.4 Marcia 0.1-E.10 0.1 Stato di marcia2.3.1.5 Rottura materiale 0.1-E.10 0.1 Segnalazione rottura materiale2.3.1.6 Pretensionamento ok 0.1-E.10 0.1 Pretensionamento eseguito2.3.1.7 FB DigIn 1 0.1-E.10 0.1 DigIn 1 da Fieldbus2.3.1.8 FB DigIn 2 0.1-E.10 0.1 DigIn 2 da Fieldbus2.3.1.9 FB DigIn 3 0.1-E.10 0.1 DigIn 3 da Fieldbus2.3.1.10 FB DigIn 4 0.1-E.10 0.1 DigIn 4 da Fieldbus2.3.1.11 Supervisione frequenza 0.1-E.10 0.1 Supervisione soglia frequenza
2.3.1.12 Funzione superv.frequenza 0-2 1 0
0= non attivo 1=superv. limite inferiore2=superv. limite superiore
2.3.1.13 Limite superv.frequenza 0-320Hz 0.01Hz 0 Valore soglia per segnalazione
2.3.1.14 Supervisione diametro 0.1-E.10 0.1 Supervisione soglia diametro
2.3.1.15 Funzione superv.diametro 0-2 1 0
0= non attivo 1=superv. limite inferiore2=superv. limite superiore
2.3.1.16 Limite superv. diametro 1,0% 100,0% 80% Valore soglia per segnalazione
2.3.1.17 Supervisione diametro2 0.1-E.10 0.1 Seconda supervisione soglia diametro
2.3.1.18 Funzione superv.diametro 2 0-2 1 0
0= non attivo 1=superv. limite inferiore2=superv. limite superiore
2.3.1.19 Limite superv. diametro2 1,0% 100,0% 80% Valore soglia per segnalazione
Tutti i parametri del gruppo Uscite Digitali vengono programmati secondo laProgrammazione da Morsetto a Funzione (TTF) illustrata nel dettaglio nel manualeapplicazioni “All in One”.
Nota! In sede di modifica della assegnazione di una uscita, si raccomanda di eliminare le precedenti selezioni dell'uscita in questione. La configurazione di più segnali logici sullo stesso canale di uscita è sempre origine di malfunzionamenti.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 24
Gruppo G2.3.2 Uscita Analogica Indice Parametro Campo Risoluz. Default Descrizione
2.3.2.1 Funzione outputanalogico 0-8 1 1
0= Non usato Scala 100%1= FrequenzaMot (0-fmax)2=Rif.frequenza (0-fmax)3= VelocitàMot (0- Vel. nom) 4= CorrenteMot (0- Inom mot) 5= CoppiaMotore (0- Tn mot) 6= PotenzaMotore (0- Pn mot) 7= TensioneMotore (0- Unmot)8= Tensione bus CC(0-1000V)9= Velocità linea (0 – 100%)10= Diametro attuale (0 – 100%)11= Riferimento tensione (0 – 100%) 12= Tensione attuale (0 – 100%)13= Errore PID (-100 +100% = 0-10V) 14=Uscita PID (-100 +100% = 0-10V) 15=Canale di processo PDI4 (0-10000)
2.3.2.2 Filtro An/Output 0.00- 10.00s 0.01 s 1.00 s Costante di tempo filtro uscita analogica
(0 = nessun filtraggio)
2.3.2.3 Inversione An/Output 0 – 1 1 0 0 = Non invertito1 = Invertito
2.3.2.4 Minimo An/Output 0 – 1 1 0 0 = 0 mA 1 = 4 mA
2.3.2.5 Scala An/Output 10 - 1000% 1 % 100 % Scala output analogico
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 25
4.3.1 Descrizione parametri gruppo G2.3.
P2.3.1.1 Pronto Seleziona l’uscita digitale associata alla segnalazione di pronto.
P2.3.1.2 Guasto Seleziona l’uscita digitale associata alla segnalazione di guasto.
P2.3.1.3 Guasto, inversoSeleziona l’uscita digitale associata alla segnalazione inversa di guasto
P2.3.1.4 MarciaSeleziona l’uscita digitale associata alla segnalazione di marcia.
P2.3.1.5 Rottura materialeSeleziona l’uscita digitale associata alla segnalazione di rottura materiale.
P2.3.1.6 Pretensionamento ok Seleziona l’uscita digitale associata alla segnalazione di pretensionamento eseguito.
P2.3.1.7 – 10 FB DigIN 1,2,3,4 Selezionano le uscite digitali associate ai bit 11-14 della Control Word scritta da bus di campo.
P2.3.1.11 Supervisione soglia frequenzaSeleziona l’uscita digitale associata alla supervisione di frequenza.
P2.3.1.12 Funzione supervisione di frequenza 0= nessuna funzione 1= limite inferiore 2= limite superiore
P2.3.1.13 Limite supervisione frequenzaFrequenza di soglia per la segnalazione.
P2.3.1.14 Supervisione soglia diametro Seleziona l’uscita digitale associata alla supervisione del valore di diametro,
P2.3.1.15 Funzione supervisione diametro 0= nessuna funzione 1= limite inferiore 2= limite superiore
P2.3.1.16 Limite supervisione diametro Valore diametro di soglia per la segnalazione.
P2.3.1.17 Supervisione soglia diametro 2Seleziona l’uscita digitale associata alla seconda supervisione del valore di diametro,
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 26
P2.3.1.18 Funzione supervisione diametro 2 0= nessuna funzione 1= limite inferiore 2= limite superiore
P2.3.1.19 Limite supervisione diametro 2Valore diametro di soglia per la segnalazione.
P2.3.2.1 Funzione output analogico Seleziona la variabile associata all’uscita analogica.
P2.3.2.2 Filtro su output analogico Costante di tempo del filtro sull’uscita analogica.
P2.3.2.3 Inversione output analogico Inverte la relazione tra la variabile e l’entità del segnale elettrico.
P2.3.2.4 Minimo output analogico Consente di impostare il segnale dell’uscita sul range 4-20mA.
P2.3.2.5 Scala output analogico Consente di impostare la scalatura del segnale di uscita.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 27
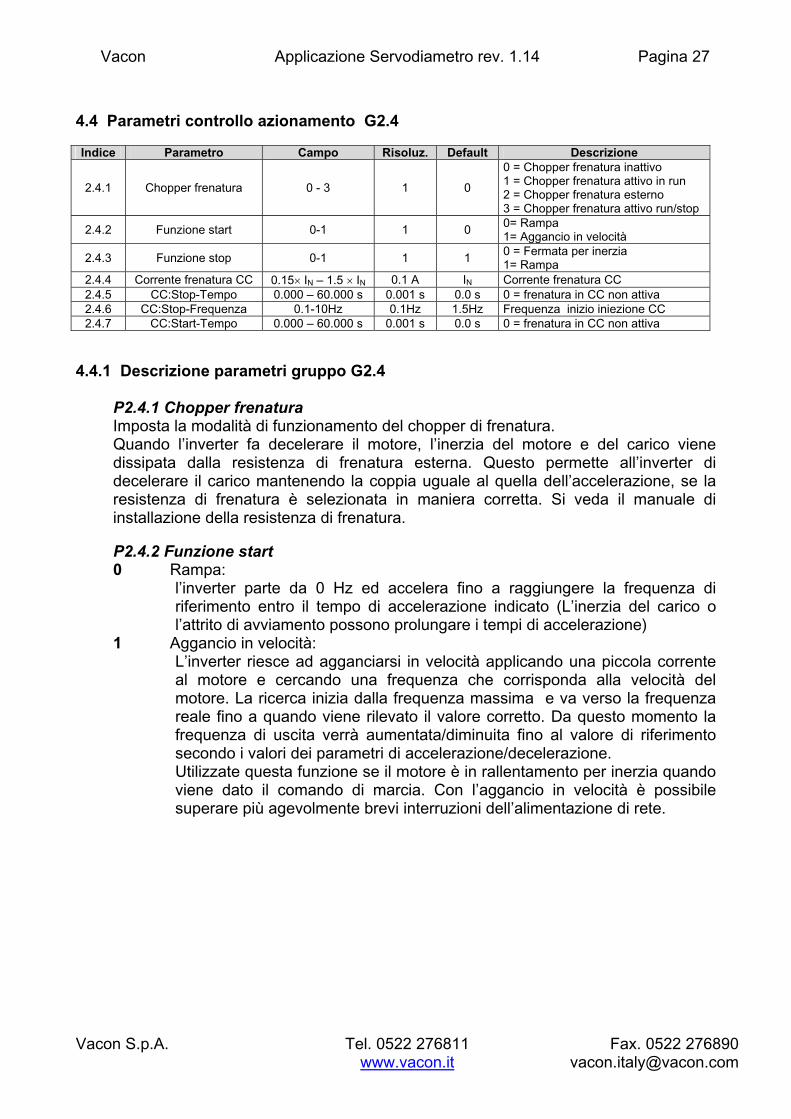
4.4 Parametri controllo azionamento G2.4
Indice Parametro Campo Risoluz. Default Descrizione
2.4.1 Chopper frenatura 0 - 3 1 0
0 = Chopper frenatura inattivo1 = Chopper frenatura attivo in run 2 = Chopper frenatura esterno3 = Chopper frenatura attivo run/stop
2.4.2 Funzione start 0-1 1 0 0= Rampa 1= Aggancio in velocità
2.4.3 Funzione stop 0-1 1 1 0 = Fermata per inerzia 1= Rampa
2.4.4 Corrente frenatura CC 0.15 IN – 1.5 IN 0.1 A IN Corrente frenatura CC 2.4.5 CC:Stop-Tempo 0.000 – 60.000 s 0.001 s 0.0 s 0 = frenatura in CC non attiva2.4.6 CC:Stop-Frequenza 0.1-10Hz 0.1Hz 1.5Hz Frequenza inizio iniezione CC2.4.7 CC:Start-Tempo 0.000 – 60.000 s 0.001 s 0.0 s 0 = frenatura in CC non attiva
4.4.1 Descrizione parametri gruppo G2.4
P2.4.1 Chopper frenatura Imposta la modalità di funzionamento del chopper di frenatura. Quando l’inverter fa decelerare il motore, l’inerzia del motore e del carico vienedissipata dalla resistenza di frenatura esterna. Questo permette all’inverter di decelerare il carico mantenendo la coppia uguale al quella dell’accelerazione, se la resistenza di frenatura è selezionata in maniera corretta. Si veda il manuale di installazione della resistenza di frenatura.
P2.4.2 Funzione start 0 Rampa:
l’inverter parte da 0 Hz ed accelera fino a raggiungere la frequenza di riferimento entro il tempo di accelerazione indicato (L’inerzia del carico o l’attrito di avviamento possono prolungare i tempi di accelerazione)
1 Aggancio in velocità: L’inverter riesce ad agganciarsi in velocità applicando una piccola corrente al motore e cercando una frequenza che corrisponda alla velocità del motore. La ricerca inizia dalla frequenza massima e va verso la frequenza reale fino a quando viene rilevato il valore corretto. Da questo momento la frequenza di uscita verrà aumentata/diminuita fino al valore di riferimento secondo i valori dei parametri di accelerazione/decelerazione. Utilizzate questa funzione se il motore è in rallentamento per inerzia quandoviene dato il comando di marcia. Con l’aggancio in velocità è possibile superare più agevolmente brevi interruzioni dell’alimentazione di rete.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 28
P2.4.3 Funzione stop 0 Inerzia:
Dopo il comando di arresto l’inverter blocca immediatamente la tensione diuscita e il motore rallenta senza alcun controllo da parte dell’inverter.
1 Rampa:Dopo il comando di arresto l’inverter riduce la frequenza secondo il parametro di decelerazione attivo, fino all’arresto. Se l’energia rigenerata è elevata può essere necessario utilizzare una resistenza di frenatura esterna per ottenere una decelerazione più veloce.
P2.4.4 Corrente di frenatura in CCDefinisce il valore di corrente mandato al motore durante la frenatura in CC.
P2.4.5 Tempo di frenatura in CC all’arrestoControlla l’attivazione e la durata della frenatura in CC all’arresto. La funzione della frenatura in CC dipende dalla Funzione Stop, P2.4.3.
0 la frenatura in CC non è utilizzata>0 la frenatura in CC è utilizzata con modalità che dipende da P2.4.3
P2.4.3 = 0 (arresto per inerzia): Dopo il comando di arresto, il motore si ferma per inerzia senza controllo da partedell’inverter.Con l’iniezione di corrente continua, il motore può essere arrestato in un tempo molto più breve, senza utilizzare alcuna resistenza di frenatura esterna opzionale.Il tempo di frenatura viene modulato secondo il valore di frequenza presente all’istante di inizio della frenatura in CC. Se la frequenza è maggiore della nominale del motore (P2.1.8), la durata della frenatura è pari al valore di P2.4.5. Se la frequenza è minore del 10 % della frequenza nominale del motore (P2.1.8), il tempo di frenatura è 10% del valore di P2.4.5.
P2.4.3=1 (arresto in rampa).Dopo il comando di arresto, la velocità del motore si riduce secondo il parametro di decelerazione attivo, fino a raggiungere la velocità definita da P2.4.6 dove inizia la frenatura in CC. Il tempo di frenatura è il valore di P2.4.5.NOTA : se l’inerzia è elevata si raccomanda di utilizzare una resistenza di frenatura esterna per ottenere una decelerazione rapida.
P2.4.6 Frequenza di frenatura in CCDefinisce il valore di frequenza sotto al quale, con arresto in rampa, inizia l’iniezione di corrente continua.
P2.4.7 Tempo di frenatura in CC allo startDefinisce il tempo di mantenimento di una eventuale iniezione di corrente continuaalla partenza del motore.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 29
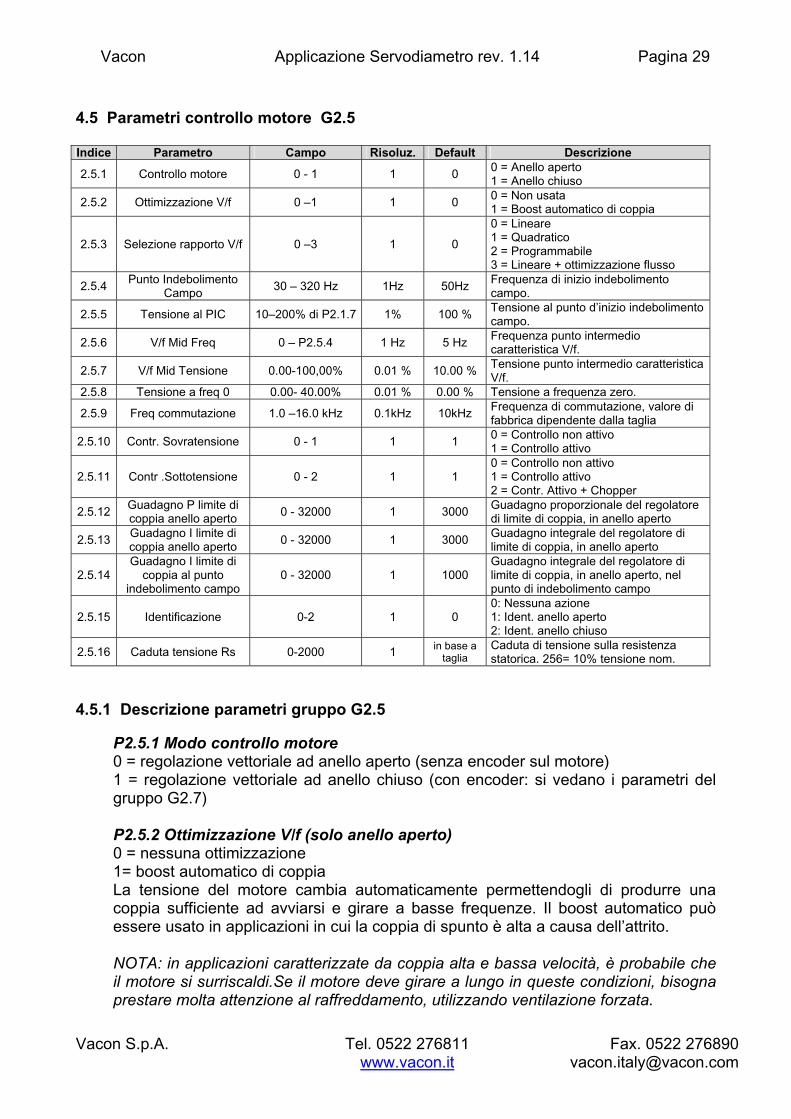
4.5 Parametri controllo motore G2.5
Indice Parametro Campo Risoluz. Default Descrizione
2.5.1 Controllo motore 0 - 1 1 0 0 = Anello aperto1 = Anello chiuso
2.5.2 Ottimizzazione V/f 0 –1 1 0 0 = Non usata 1 = Boost automatico di coppia
2.5.3 Selezione rapporto V/f 0 –3 1 0
0 = Lineare1 = Quadratico2 = Programmabile3 = Lineare + ottimizzazione flusso
2.5.4 Punto IndebolimentoCampo 30 – 320 Hz 1Hz 50Hz Frequenza di inizio indebolimento
campo.
2.5.5 Tensione al PIC 10–200% di P2.1.7 1% 100 % Tensione al punto d’inizio indebolimentocampo.
2.5.6 V/f Mid Freq 0 – P2.5.4 1 Hz 5 Hz Frequenza punto intermediocaratteristica V/f.
2.5.7 V/f Mid Tensione 0.00-100,00% 0.01 % 10.00 % Tensione punto intermedio caratteristicaV/f.
2.5.8 Tensione a freq 0 0.00- 40.00% 0.01 % 0.00 % Tensione a frequenza zero.
2.5.9 Freq commutazione 1.0 –16.0 kHz 0.1kHz 10kHz Frequenza di commutazione, valore di fabbrica dipendente dalla taglia
2.5.10 Contr. Sovratensione 0 - 1 1 1 0 = Controllo non attivo 1 = Controllo attivo
2.5.11 Contr .Sottotensione 0 - 2 1 10 = Controllo non attivo 1 = Controllo attivo 2 = Contr. Attivo + Chopper
2.5.12 Guadagno P limite di coppia anello aperto 0 - 32000 1 3000 Guadagno proporzionale del regolatore
di limite di coppia, in anello aperto
2.5.13 Guadagno I limite di coppia anello aperto 0 - 32000 1 3000 Guadagno integrale del regolatore di
limite di coppia, in anello aperto
2.5.14Guadagno I limite di
coppia al puntoindebolimento campo
0 - 32000 1 1000Guadagno integrale del regolatore di limite di coppia, in anello aperto, nel punto di indebolimento campo
2.5.15 Identificazione 0-2 1 00: Nessuna azione1: Ident. anello aperto 2: Ident. anello chiuso
2.5.16 Caduta tensione Rs 0-2000 1 in base a taglia
Caduta di tensione sulla resistenzastatorica. 256= 10% tensione nom.
4.5.1 Descrizione parametri gruppo G2.5
P2.5.1 Modo controllo motore 0 = regolazione vettoriale ad anello aperto (senza encoder sul motore) 1 = regolazione vettoriale ad anello chiuso (con encoder: si vedano i parametri del gruppo G2.7)
P2.5.2 Ottimizzazione V/f (solo anello aperto) 0 = nessuna ottimizzazione1= boost automatico di coppia La tensione del motore cambia automaticamente permettendogli di produrre una coppia sufficiente ad avviarsi e girare a basse frequenze. Il boost automatico puòessere usato in applicazioni in cui la coppia di spunto è alta a causa dell’attrito.
NOTA: in applicazioni caratterizzate da coppia alta e bassa velocità, è probabile cheil motore si surriscaldi.Se il motore deve girare a lungo in queste condizioni, bisognaprestare molta attenzione al raffreddamento, utilizzando ventilazione forzata.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 30
P2.5.3 Selezione rapporto V/f0 = lineare 1= quadratica 2= programmabile
Lineare: la tensione del motore cresce linearmente con la frequenza nell'intervalloda 0 Hz fino al punto di indebolimento campo (P2.5.4), dove viene fornita al motore la tensione nominale, così che in questo tratto il flussomagnetico è circa costante. Nelle applicazioni a coppia costante dovrebbeessere utilizzato il rapporto V/f lineare. In caso di dubbio si mantengaquesta impostazione di fabbrica.
Quadratica: la tensione del motore cresce in proporzione al quadrato della frequenzanell'intervallo da 0 Hz fino al punto di indebolimento campo (P2.5.4), dove viene fornita al motore la tensione nominale. Il flusso magnetico è ridottoal disotto della velocità nominale e produce una coppia ridotta e minore rumorosità. Questa impostazione può essere utilizzata in applicazioni incui la richiesta di coppia del carico è proporzionale al quadrato dellavelocità, ad esempio nei ventilatori e nelle pompe centrifughe.
Programmabile: la curva V/f può essere programmata con tre punti diversi, mediante i parametri P2.5.4 a P2.5.8. Si può utilizzare la curva programmabile V/fse le altre scelte non soddisfano le esigenze applicative.
P2.5.4 Punto di indebolimento campo P2.5.5 Tensione al punto di indebolimento campoIl punto di indebolimento campo è la frequenza di uscita nel punto in cui la tensionedi uscita raggiunge il valore massimo (P2.5.4). Al di sopra di questa frequenza la tensione di uscita resta al valore massimo. Al disotto di questa frequenza la tensionedi uscita dipende dal valore dei parametri della curva V/f, P2.5.3, P2.5.6, P2.5.7, P2.5.8.Quando i parametri P2.1.7 e P2.1.8 (tensione e frequenza nominale del motore) vengono assegnati, anche i parametri P2.5.4 e P2.5.5 sono automaticamente assegnati agli stessi valori rispettivamente. Se sono necessari valori diversi da quelli di targa del motore, modificate P2.5.4 e P2.5.5 dopo aver assegnato P2.1.7 eP2.1.8.
P2.5.6 Curva V/f, frequenza intermedia Se è stata selezionata la curva V/f programmabile col parametro P2.5.3, questo parametro definisce la frequenza del punto intermedio della curva.
P2.5.7 Curva V/f, tensione intermediaSe è stata selezionata la curva V/f programmabile col parametro P2.5.3, questo parametro definisce la tensione del punto intermedio della curva.
P2.5.8 Curva V/f, tensione di uscita a frequenza zero Il parametro definisce la tensione di frequenza zero della curva.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 31
P2.5.9 Frequenza di commutazione Si può minimizzare il rumore del motore utilizzando una elevata frequenza dicommutazione. Aumentando la frequenza di commutazione si riduce però la potenza disponibile dell’inverter. Prima di aumentare la frequenza rispetto al valore di fabbrica consultare il manuale utente circa l’eventuale declassamento dell’inverter.
P2.5.10 Controllo sovratensione P2.5.11 Controllo sottotensioneQuesti parametri permettono di disattivare i controlli di sovra/sottotensione. Questo può essere utile ad esempio se la tensione di rete ha una variazione superiore a –15% / +10% e l’applicazione non tollera deviazioni di frequenza (il regolatore reagisce alle fluttuazioni di tensione di rete oltre la tolleranza nominale con delle variazioni della frequenza di uscita). Quando i controlli non sono attivi si possono avere anomalie per sovra/sottotensione.Il parametro P2.5.11 impostato al valore 2, attiva il chopper di frenatura in caso di caduta rete, consentendo l’arresto nel tempo previsto da P2.1.5.
P2.5.12 Guadagno proporzionale del regolatore di limite di coppia P2.5.13 Guadagno integrale del regolatore di limite di coppiaP2.5.14 Guadagno integrale del reg. lim. coppia, punto indebolim. campo Guadagni del regolatore P-I del limite di coppia, attivo per i modi 0 e 2, con regolazione in anello aperto. P2.5.14 è attivo nell’intorno del punto di indebolimento campo, e normalmente deve essere ad un valore inferiore, per evitare instabilità.
P2.5.15 Identificazione Attiva una procedura di misura delle caratteristiche del motore, e l’impostazioneautomatica di alcuni parametri di regolazione. Dopo aver selezionato un valore non nullo, l’inverter deve essere posto in stato di marcia entro 20 secondi. Si arresta in modo automatico al termine della funzione.
0: nessuna identificazione 1: anello aperto: ottimizzazione curva V/f e misura caduta tensione Rs 2: anello chiuso: misura corr. magnetizzante e ottimizzazione del flusso
Importante: il modo 1 non determina rotazione dell’albero motore durantel’identificazione. Il modo 2 comporta la rotazione dell’albero, che deve essere privo di carico.
P2.5.16 Caduta di tensione su Rs (resistenza statorica) Valore stimato, o misurato mediante l’identificazione, della caduta di tensione sulla resistenza statorica (256= 10% tensione nominale). il valore può essere modificatomanualmente per influenzare la stima della coppia.Premendo il tasto Reset al momento della conferma del valore, viene ripristinato il valore di default.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 32
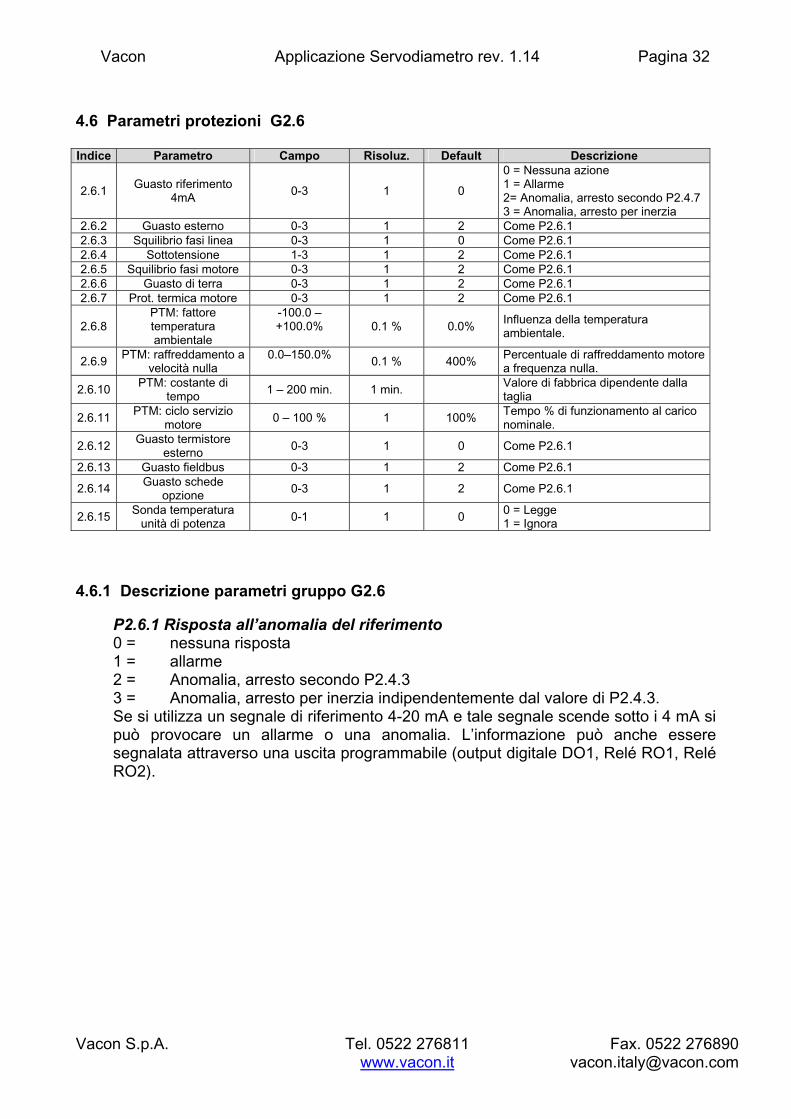
4.6 Parametri protezioni G2.6
Indice Parametro Campo Risoluz. Default Descrizione
2.6.1 Guasto riferimento4mA 0-3 1 0
0 = Nessuna azione1 = Allarme 2= Anomalia, arresto secondo P2.4.7 3 = Anomalia, arresto per inerzia
2.6.2 Guasto esterno 0-3 1 2 Come P2.6.1 2.6.3 Squilibrio fasi linea 0-3 1 0 Come P2.6.1 2.6.4 Sottotensione 1-3 1 2 Come P2.6.12.6.5 Squilibrio fasi motore 0-3 1 2 Come P2.6.1 2.6.6 Guasto di terra 0-3 1 2 Come P2.6.1 2.6.7 Prot. termica motore 0-3 1 2 Come P2.6.1
2.6.8PTM: fattore temperaturaambientale
-100.0 – +100.0% 0.1 % 0.0% Influenza della temperatura
ambientale.
2.6.9 PTM: raffreddamento a velocità nulla
0.0–150.0% 0.1 % 400% Percentuale di raffreddamento motore a frequenza nulla.
2.6.10 PTM: costante di tempo 1 – 200 min. 1 min. Valore di fabbrica dipendente dalla
taglia
2.6.11 PTM: ciclo servizio motore 0 – 100 % 1 100% Tempo % di funzionamento al carico
nominale.
2.6.12 Guasto termistore esterno 0-3 1 0 Come P2.6.1
2.6.13 Guasto fieldbus 0-3 1 2 Come P2.6.1
2.6.14 Guasto schede opzione 0-3 1 2 Come P2.6.1
2.6.15 Sonda temperaturaunità di potenza 0-1 1 0 0 = Legge
1 = Ignora
4.6.1 Descrizione parametri gruppo G2.6
P2.6.1 Risposta all’anomalia del riferimento0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Se si utilizza un segnale di riferimento 4-20 mA e tale segnale scende sotto i 4 mA si può provocare un allarme o una anomalia. L’informazione può anche essere segnalata attraverso una uscita programmabile (output digitale DO1, Relé RO1, Relé RO2).
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 33
P2.6.2 Risposta ad anomalia esterna 0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Se si configura uno degli ingressi programmabili per la funzione Anomalia esterna si può provocare un allarme o una anomalia. L’informazione può anche essere segnalata attraverso una uscita programmabile (output digitale DO1, Relé RO1, Relé RO2).
P2.6.3 Supervisione mancanza fase di linea 0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Impostando il parametro a zero, la supervisione della tensione di linea non causa anomalia. Questo parametro è utilizzato solo a scopo di test.
ATTENZIONE! L’inibizione della protezione di mancanza fase linea, in caso di funzionamento con una fase non alimentata, (funzionamento monofase) può causare surriscaldamento dei cavi e morsetti di alimentazione e danneggiare componenti all’interno dell’inverter.
P2.6.4 Risposta ad sottotensione1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Per i limiti di sottotensione, consultare tabella 4-2 sul Manuale utente Vacon NX.
P2.6.5 Protezione mancanza fase motore0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Il controllo delle fasi del motore assicura che non vi sia uno squilibrio tra le correnti.
P2.6.6 Protezione per guasto a terra0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. La protezione per guasto a terra assicura che la somma delle correnti delle fasi del motore sia zero. La protezione di sovracorrente è sempre attiva e protegge l’inverterdai guasti a terra con correnti elevate.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 34
Parametri P2.6.7 – P2.6.11 Protezione termica del motore
Consultare manuale applicazioni “All in One” per una descrizione dettagliata della funzionalità.
P2.6.7 Protezione termica motore0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Se si seleziona Anomalia l’inverter si arresta e deve essere ripristinato. Se si disattiva la protezione ponendo P2.6.7 = 0, il modello termico viene resettato a 0%.
P2.6.8 PTM: fattore temperatura ambientale Il valore 0% assume che la temperatura ambientale corrisponda alla temperatura del dissipatore dell’inverter al momento dell’accensione. Valori positivi sono appropriati per ambienti surriscaldati, mentre valori negativi possono essere impostati per ambienti refrigerati (-100% := 0°C).
P2.6.9 PTM: raffreddamento motore a frequenza 0 Il valore 0% assume che a frequenza 0 non si abbia alcun raffreddamento del motore. Per motori servoventilati può essere impostato un valore pari o superiore a90%.
P2.6.10 PTM: costante di tempo termica Il valore varia in base al tipo di motore. Consultare manuale “All in One” per indicazioni specifiche.
P2.6.11 PTM: ciclo servizio motore Definisce per quanto tempo il motore opera con il carico nominale.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 35
P2.6.12 Risposta ad anomalia termistore 0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Permette di impostare la risposta ad una anomalia riscontrata sul termistore motore (opzione).
P2.6.13 Risposta ad anomalia bus di campo 0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Permette di impostare la risposta ad una anomalia riscontrata sulla comunicazionecon bus di campo (opzione); consultare anche manuale specifico per il bus utilizzato.
P2.6.14 Risposta ad anomalia slot scheda 0 = nessuna risposta1 = allarme2 = Anomalia, arresto secondo P2.4.3 3 = Anomalia, arresto per inerzia indipendentemente dal valore di P2.4.3. Permette di impostare la risposta ad una anomalia riscontrata su una delle schede di interfaccia.
P2.6.15 Sonda temperatura unità di potenzaConsente di by-passare la sonda di temperatura, nel caso di malfunzionamento.Contattare Vacon prima di modificare il parametro. 0 = legge sonda 1 = ignora sonda
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 36
4.7 Parametri anello chiuso G2.7
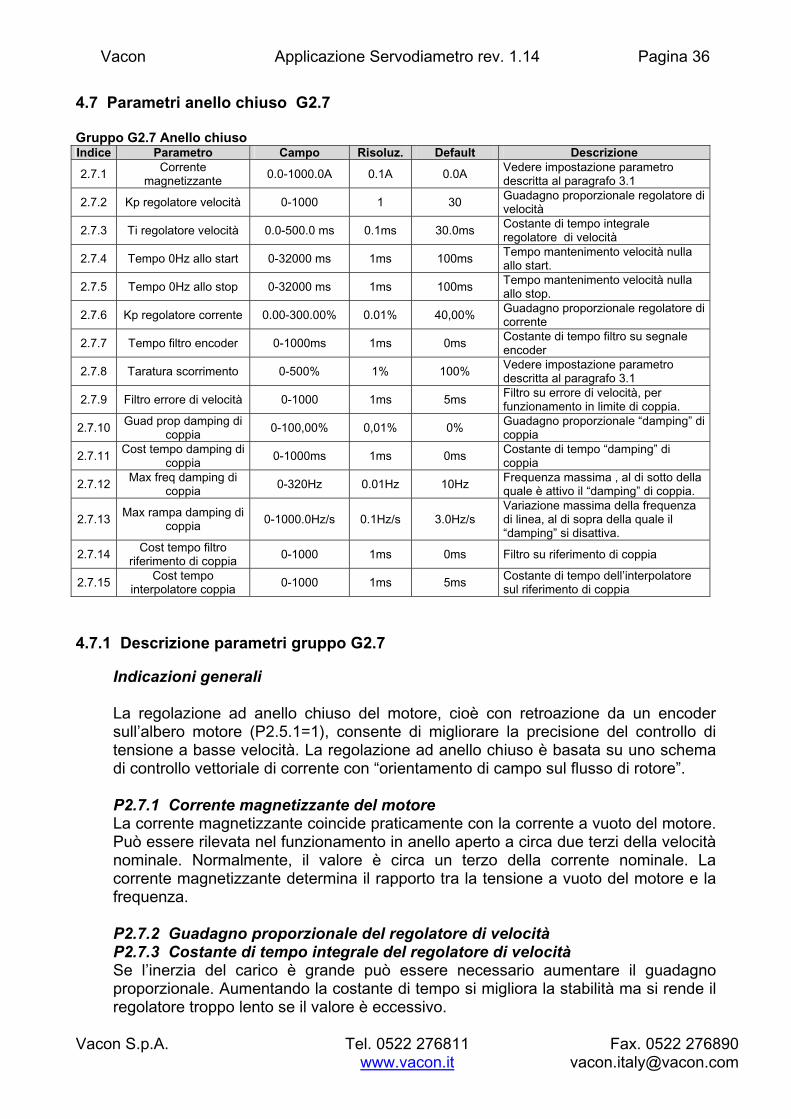
Gruppo G2.7 Anello chiusoIndice Parametro Campo Risoluz. Default Descrizione
2.7.1 Correntemagnetizzante 0.0-1000.0A 0.1A 0.0A Vedere impostazione parametro
descritta al paragrafo 3.1
2.7.2 Kp regolatore velocità 0-1000 1 30 Guadagno proporzionale regolatore di velocità
2.7.3 Ti regolatore velocità 0.0-500.0 ms 0.1ms 30.0ms Costante di tempo integraleregolatore di velocità
2.7.4 Tempo 0Hz allo start 0-32000 ms 1ms 100ms Tempo mantenimento velocità nullaallo start.
2.7.5 Tempo 0Hz allo stop 0-32000 ms 1ms 100ms Tempo mantenimento velocità nullaallo stop.
2.7.6 Kp regolatore corrente 0.00-300.00% 0.01% 40,00% Guadagno proporzionale regolatore di corrente
2.7.7 Tempo filtro encoder 0-1000ms 1ms 0ms Costante di tempo filtro su segnaleencoder
2.7.8 Taratura scorrimento 0-500% 1% 100% Vedere impostazione parametrodescritta al paragrafo 3.1
2.7.9 Filtro errore di velocità 0-1000 1ms 5ms Filtro su errore di velocità, per funzionamento in limite di coppia.
2.7.10 Guad prop damping di coppia 0-100,00% 0,01% 0% Guadagno proporzionale “damping” di
coppia
2.7.11 Cost tempo damping di coppia 0-1000ms 1ms 0ms Costante di tempo “damping” di
coppia
2.7.12 Max freq damping dicoppia 0-320Hz 0.01Hz 10Hz Frequenza massima , al di sotto della
quale è attivo il “damping” di coppia.
2.7.13 Max rampa damping di coppia 0-1000.0Hz/s 0.1Hz/s 3.0Hz/s
Variazione massima della frequenzadi linea, al di sopra della quale il “damping” si disattiva.
2.7.14 Cost tempo filtroriferimento di coppia 0-1000 1ms 0ms Filtro su riferimento di coppia
2.7.15 Cost tempo interpolatore coppia 0-1000 1ms 5ms Costante di tempo dell’interpolatore
sul riferimento di coppia
4.7.1 Descrizione parametri gruppo G2.7
Indicazioni generali
La regolazione ad anello chiuso del motore, cioè con retroazione da un encodersull’albero motore (P2.5.1=1), consente di migliorare la precisione del controllo di tensione a basse velocità. La regolazione ad anello chiuso è basata su uno schema di controllo vettoriale di corrente con “orientamento di campo sul flusso di rotore”.
P2.7.1 Corrente magnetizzante del motore La corrente magnetizzante coincide praticamente con la corrente a vuoto del motore. Può essere rilevata nel funzionamento in anello aperto a circa due terzi della velocitànominale. Normalmente, il valore è circa un terzo della corrente nominale. Lacorrente magnetizzante determina il rapporto tra la tensione a vuoto del motore e la frequenza.
P2.7.2 Guadagno proporzionale del regolatore di velocitàP2.7.3 Costante di tempo integrale del regolatore di velocitàSe l’inerzia del carico è grande può essere necessario aumentare il guadagnoproporzionale. Aumentando la costante di tempo si migliora la stabilità ma si rende il regolatore troppo lento se il valore è eccessivo.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 37
P2.7.4 Tempo a 0 Hz all’avviamento P2.7.5 Tempo a 0 Hz all’arresto Tempi di stabilizzazione a 0 Hz prima dell’avviamento e dopo l’arresto (se si utilizzaarresto in rampa, P2.4.3 = 1).
P2.7.6 Guadagno proporzionale del regolatore di corrente Il parametro può essere usato per migliorare la stabilità del regolatore di corrente impiegando motori speciali.
P2.7.7 Tempo filtro encoder Il parametro può essere usato per impostare un filtraggio sul segnale encoder,riducendo eventuali disturbi.
P2.7.8 Correzione dello scorrimento I parametri P2.1.7 e P2.1.8 definiscono lo scorrimento nominale del motore. Se lo scorrimento effettivo a carico nominale differisce dal valore ricavato dai dati di targa, con questo parametro si imposta il rapporto tra il valore effettivo e quello di targa. Questo comporta una stima più precisa dei parametri del modello vettoriale delmotore e consente di migliorare la linearità della coppia e la precisionedell’orientamento di campo. Un effetto visibile della precisione di orientamento di campo è l’andamento della tensione a carico del motore. Se si osserva che all’aumentare del carico la tensione ai morsetti del motore (V1.7) aumenta sensibilmente, si aumenti il valore di P2.7.8. Viceversa, se la tensione a carico diminuisce rispetto al valore a vuoto, il parametro P2.7.8 deve essere diminuito.
P2.7.9 Filtro su errore di velocità Il filtro è attivo quando viene utilizzato il controllo di limite di coppia (comando jog), per una maggiore stabilità della coppia motore.
P2.7.10 Gudagno proporzionale “damping” di coppia P2.7.11 Costante di tempo “damping” di coppia P2.7.12 Frequenza max “damping” di coppiaP2.7.13 Rampa max “damping” di coppia La funzione di “damping” è attivabile in modo 0 e 2. Consiste in una correzioneautomatica del riferimento di coppia, tendente a mantenere costante l’errore di velocità fra il riferimento teorico e la velocità attuale del motore. L’effetto è di una maggiore “rotondità” nella rotazione a bassa velocità. La funzione si disattiva quando la frequenza supera la soglia P2.7.12. Inoltre si disattiva quando la velocità di lineasubisce variazioni superiori alla soglia in P2.7.13, per non interferire con lacompensazione di inerzia.
P2.7.14 Costante tempo filtro su riferimento di coppia Il filtro è attivabile, per una variazione più progressiva del comando di coppia.
P2.7.15 Costante tempo interpolatore su riferimento di coppia L’interpolatore determina variazione lineare fra i valori discreti di riferimento di coppia calcolati.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 38
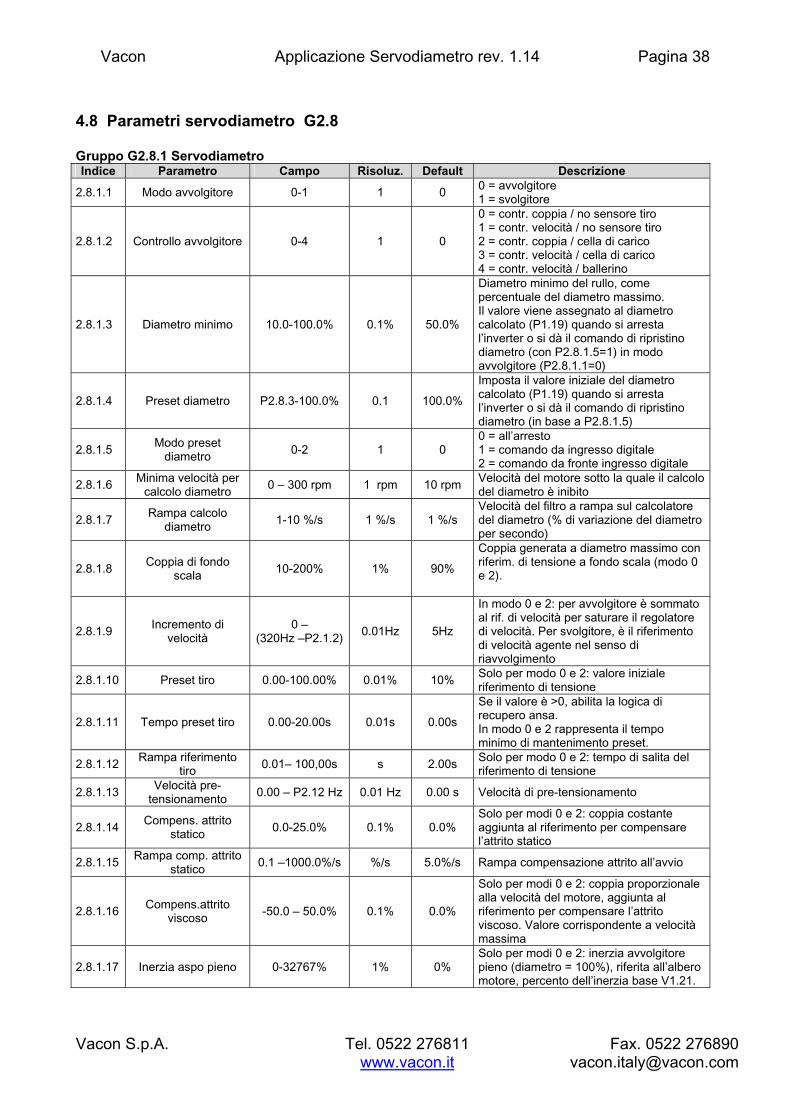
4.8 Parametri servodiametro G2.8
Gruppo G2.8.1 ServodiametroIndice Parametro Campo Risoluz. Default Descrizione
2.8.1.1 Modo avvolgitore 0-1 1 0 0 = avvolgitore1 = svolgitore
2.8.1.2 Controllo avvolgitore 0-4 1 0
0 = contr. coppia / no sensore tiro 1 = contr. velocità / no sensore tiro 2 = contr. coppia / cella di carico3 = contr. velocità / cella di carico4 = contr. velocità / ballerino
2.8.1.3 Diametro minimo 10.0-100.0% 0.1% 50.0%
Diametro minimo del rullo, come percentuale del diametro massimo.Il valore viene assegnato al diametrocalcolato (P1.19) quando si arrestal’inverter o si dà il comando di ripristino diametro (con P2.8.1.5=1) in modoavvolgitore (P2.8.1.1=0)
2.8.1.4 Preset diametro P2.8.3-100.0% 0.1 100.0%
Imposta il valore iniziale del diametrocalcolato (P1.19) quando si arrestal’inverter o si dà il comando di ripristino diametro (in base a P2.8.1.5)
2.8.1.5 Modo presetdiametro 0-2 1 0
0 = all’arresto1 = comando da ingresso digitale2 = comando da fronte ingresso digitale
2.8.1.6 Minima velocità per calcolo diametro 0 – 300 rpm 1 rpm 10 rpm Velocità del motore sotto la quale il calcolo
del diametro è inibito
2.8.1.7 Rampa calcolodiametro 1-10 %/s 1 %/s 1 %/s
Velocità del filtro a rampa sul calcolatoredel diametro (% di variazione del diametroper secondo)
2.8.1.8 Coppia di fondoscala 10-200% 1% 90%
Coppia generata a diametro massimo conriferim. di tensione a fondo scala (modo 0 e 2).
2.8.1.9 Incremento divelocità
0 – (320Hz –P2.1.2) 0.01Hz 5Hz
In modo 0 e 2: per avvolgitore è sommato al rif. di velocità per saturare il regolatoredi velocità. Per svolgitore, è il riferimentodi velocità agente nel senso diriavvolgimento
2.8.1.10 Preset tiro 0.00-100.00% 0.01% 10% Solo per modo 0 e 2: valore inizialeriferimento di tensione
2.8.1.11 Tempo preset tiro 0.00-20.00s 0.01s 0.00s
Se il valore è >0, abilita la logica di recupero ansa.In modo 0 e 2 rappresenta il tempo minimo di mantenimento preset.
2.8.1.12 Rampa riferimentotiro 0.01– 100,00s s 2.00s Solo per modo 0 e 2: tempo di salita del
riferimento di tensione
2.8.1.13 Velocità pre-tensionamento 0.00 – P2.12 Hz 0.01 Hz 0.00 s Velocità di pre-tensionamento
2.8.1.14 Compens. attrito statico 0.0-25.0% 0.1% 0.0%
Solo per modi 0 e 2: coppia costanteaggiunta al riferimento per compensarel’attrito statico
2.8.1.15 Rampa comp. attrito statico 0.1 –1000.0%/s %/s 5.0%/s Rampa compensazione attrito all’avvio
2.8.1.16 Compens.attritoviscoso -50.0 – 50.0% 0.1% 0.0%
Solo per modi 0 e 2: coppia proporzionalealla velocità del motore, aggiunta al riferimento per compensare l’attritoviscoso. Valore corrispondente a velocitàmassima
2.8.1.17 Inerzia aspo pieno 0-32767% 1% 0%Solo per modi 0 e 2: inerzia avvolgitorepieno (diametro = 100%), riferita all’alberomotore, percento dell’inerzia base V1.21.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
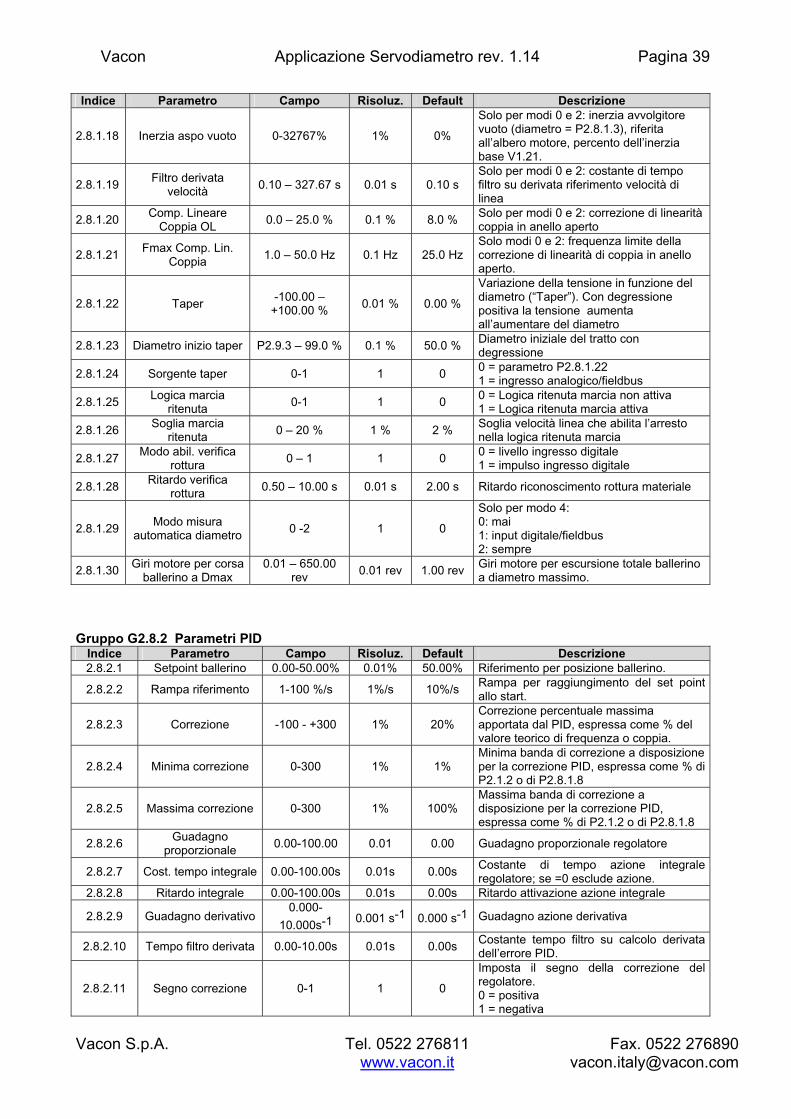
Vacon Applicazione Servodiametro rev. 1.14 Pagina 39
Indice Parametro Campo Risoluz. Default Descrizione
2.8.1.18 Inerzia aspo vuoto 0-32767% 1% 0%
Solo per modi 0 e 2: inerzia avvolgitorevuoto (diametro = P2.8.1.3), riferitaall’albero motore, percento dell’inerziabase V1.21.
2.8.1.19 Filtro derivatavelocità 0.10 – 327.67 s 0.01 s 0.10 s
Solo per modi 0 e 2: costante di tempo filtro su derivata riferimento velocità di linea
2.8.1.20 Comp. LineareCoppia OL 0.0 – 25.0 % 0.1 % 8.0 % Solo per modi 0 e 2: correzione di linearità
coppia in anello aperto
2.8.1.21 Fmax Comp. Lin.Coppia 1.0 – 50.0 Hz 0.1 Hz 25.0 Hz
Solo modi 0 e 2: frequenza limite dellacorrezione di linearità di coppia in anelloaperto.
2.8.1.22 Taper -100.00 – +100.00 % 0.01 % 0.00 %
Variazione della tensione in funzione deldiametro (“Taper”). Con degressione positiva la tensione aumentaall’aumentare del diametro
2.8.1.23 Diametro inizio taper P2.9.3 – 99.0 % 0.1 % 50.0 % Diametro iniziale del tratto con degressione
2.8.1.24 Sorgente taper 0-1 1 0 0 = parametro P2.8.1.221 = ingresso analogico/fieldbus
2.8.1.25 Logica marciaritenuta 0-1 1 0 0 = Logica ritenuta marcia non attiva
1 = Logica ritenuta marcia attiva
2.8.1.26 Soglia marcia ritenuta 0 – 20 % 1 % 2 % Soglia velocità linea che abilita l’arresto
nella logica ritenuta marcia
2.8.1.27 Modo abil. verificarottura 0 – 1 1 0 0 = livello ingresso digitale
1 = impulso ingresso digitale
2.8.1.28 Ritardo verifica rottura 0.50 – 10.00 s 0.01 s 2.00 s Ritardo riconoscimento rottura materiale
2.8.1.29 Modo misuraautomatica diametro 0 -2 1 0
Solo per modo 4: 0: mai 1: input digitale/fieldbus2: sempre
2.8.1.30 Giri motore per corsa ballerino a Dmax
0.01 – 650.00rev 0.01 rev 1.00 rev Giri motore per escursione totale ballerino
a diametro massimo.
Gruppo G2.8.2 Parametri PIDIndice Parametro Campo Risoluz. Default Descrizione2.8.2.1 Setpoint ballerino 0.00-50.00% 0.01% 50.00% Riferimento per posizione ballerino.
2.8.2.2 Rampa riferimento 1-100 %/s 1%/s 10%/s Rampa per raggiungimento del set pointallo start.
2.8.2.3 Correzione -100 - +300 1% 20%Correzione percentuale massimaapportata dal PID, espressa come % delvalore teorico di frequenza o coppia.
2.8.2.4 Minima correzione 0-300 1% 1%Minima banda di correzione a disposizioneper la correzione PID, espressa come % di P2.1.2 o di P2.8.1.8
2.8.2.5 Massima correzione 0-300 1% 100%Massima banda di correzione a disposizione per la correzione PID, espressa come % di P2.1.2 o di P2.8.1.8
2.8.2.6 Guadagnoproporzionale 0.00-100.00 0.01 0.00 Guadagno proporzionale regolatore
2.8.2.7 Cost. tempo integrale 0.00-100.00s 0.01s 0.00s Costante di tempo azione integraleregolatore; se =0 esclude azione.
2.8.2.8 Ritardo integrale 0.00-100.00s 0.01s 0.00s Ritardo attivazione azione integrale
2.8.2.9 Guadagno derivativo0.000-
10.000s-1 0.001 s-1 0.000 s-1 Guadagno azione derivativa
2.8.2.10 Tempo filtro derivata 0.00-10.00s 0.01s 0.00s Costante tempo filtro su calcolo derivatadell’errore PID.
2.8.2.11 Segno correzione 0-1 1 0
Imposta il segno della correzione delregolatore.0 = positiva 1 = negativa
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
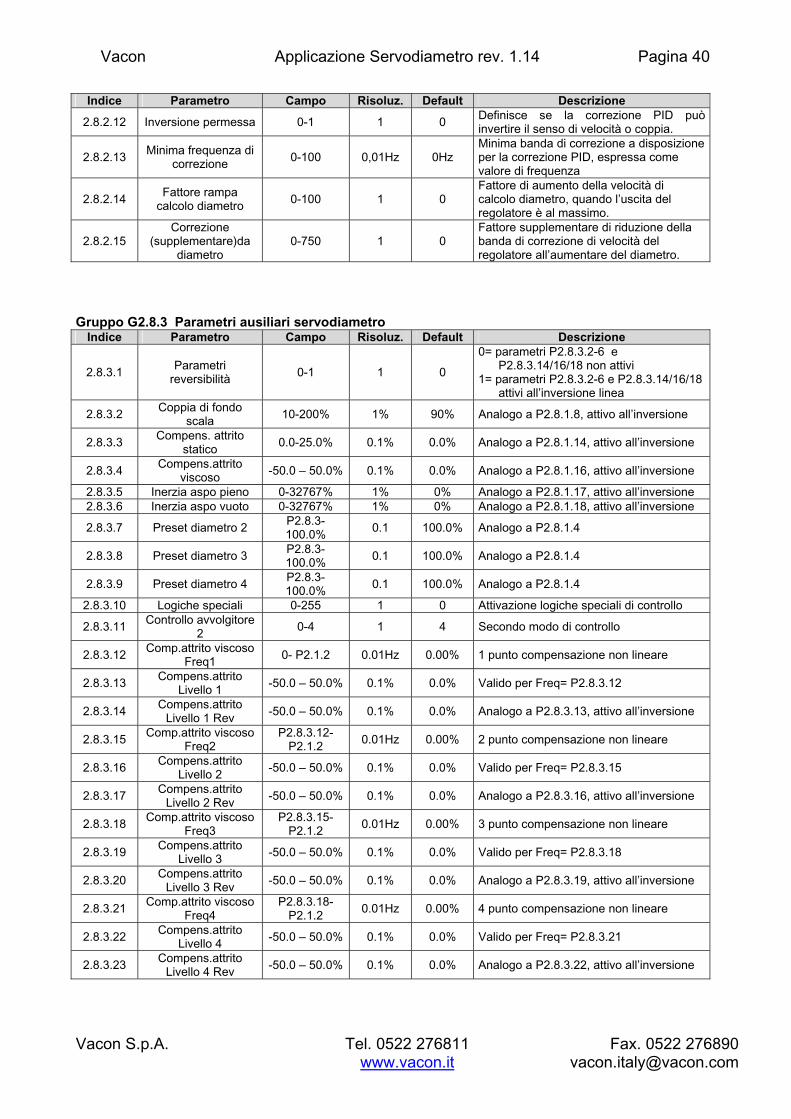
Vacon Applicazione Servodiametro rev. 1.14 Pagina 40
Indice Parametro Campo Risoluz. Default Descrizione
2.8.2.12 Inversione permessa 0-1 1 0 Definisce se la correzione PID puòinvertire il senso di velocità o coppia.
2.8.2.13 Minima frequenza di correzione 0-100 0,01Hz 0Hz
Minima banda di correzione a disposizioneper la correzione PID, espressa come valore di frequenza
2.8.2.14 Fattore rampa calcolo diametro 0-100 1 0
Fattore di aumento della velocità dicalcolo diametro, quando l’uscita del regolatore è al massimo.
2.8.2.15Correzione
(supplementare)dadiametro
0-750 1 0Fattore supplementare di riduzione dellabanda di correzione di velocità del regolatore all’aumentare del diametro.
Gruppo G2.8.3 Parametri ausiliari servodiametroIndice Parametro Campo Risoluz. Default Descrizione
2.8.3.1 Parametrireversibilità 0-1 1 0
0= parametri P2.8.3.2-6 e P2.8.3.14/16/18 non attivi
1= parametri P2.8.3.2-6 e P2.8.3.14/16/18attivi all’inversione linea
2.8.3.2 Coppia di fondoscala 10-200% 1% 90% Analogo a P2.8.1.8, attivo all’inversione
2.8.3.3 Compens. attrito statico 0.0-25.0% 0.1% 0.0% Analogo a P2.8.1.14, attivo all’inversione
2.8.3.4 Compens.attritoviscoso -50.0 – 50.0% 0.1% 0.0% Analogo a P2.8.1.16, attivo all’inversione
2.8.3.5 Inerzia aspo pieno 0-32767% 1% 0% Analogo a P2.8.1.17, attivo all’inversione2.8.3.6 Inerzia aspo vuoto 0-32767% 1% 0% Analogo a P2.8.1.18, attivo all’inversione
2.8.3.7 Preset diametro 2 P2.8.3-100.0% 0.1 100.0% Analogo a P2.8.1.4
2.8.3.8 Preset diametro 3 P2.8.3-100.0% 0.1 100.0% Analogo a P2.8.1.4
2.8.3.9 Preset diametro 4 P2.8.3-100.0% 0.1 100.0% Analogo a P2.8.1.4
2.8.3.10 Logiche speciali 0-255 1 0 Attivazione logiche speciali di controllo
2.8.3.11 Controllo avvolgitore2 0-4 1 4 Secondo modo di controllo
2.8.3.12 Comp.attrito viscoso Freq1 0- P2.1.2 0.01Hz 0.00% 1 punto compensazione non lineare
2.8.3.13 Compens.attritoLivello 1 -50.0 – 50.0% 0.1% 0.0% Valido per Freq= P2.8.3.12
2.8.3.14 Compens.attritoLivello 1 Rev -50.0 – 50.0% 0.1% 0.0% Analogo a P2.8.3.13, attivo all’inversione
2.8.3.15 Comp.attrito viscoso Freq2
P2.8.3.12-P2.1.2 0.01Hz 0.00% 2 punto compensazione non lineare
2.8.3.16 Compens.attritoLivello 2 -50.0 – 50.0% 0.1% 0.0% Valido per Freq= P2.8.3.15
2.8.3.17 Compens.attritoLivello 2 Rev -50.0 – 50.0% 0.1% 0.0% Analogo a P2.8.3.16, attivo all’inversione
2.8.3.18 Comp.attrito viscoso Freq3
P2.8.3.15-P2.1.2 0.01Hz 0.00% 3 punto compensazione non lineare
2.8.3.19 Compens.attritoLivello 3 -50.0 – 50.0% 0.1% 0.0% Valido per Freq= P2.8.3.18
2.8.3.20 Compens.attritoLivello 3 Rev -50.0 – 50.0% 0.1% 0.0% Analogo a P2.8.3.19, attivo all’inversione
2.8.3.21 Comp.attrito viscoso Freq4
P2.8.3.18-P2.1.2 0.01Hz 0.00% 4 punto compensazione non lineare
2.8.3.22 Compens.attritoLivello 4 -50.0 – 50.0% 0.1% 0.0% Valido per Freq= P2.8.3.21
2.8.3.23 Compens.attritoLivello 4 Rev -50.0 – 50.0% 0.1% 0.0% Analogo a P2.8.3.22, attivo all’inversione
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
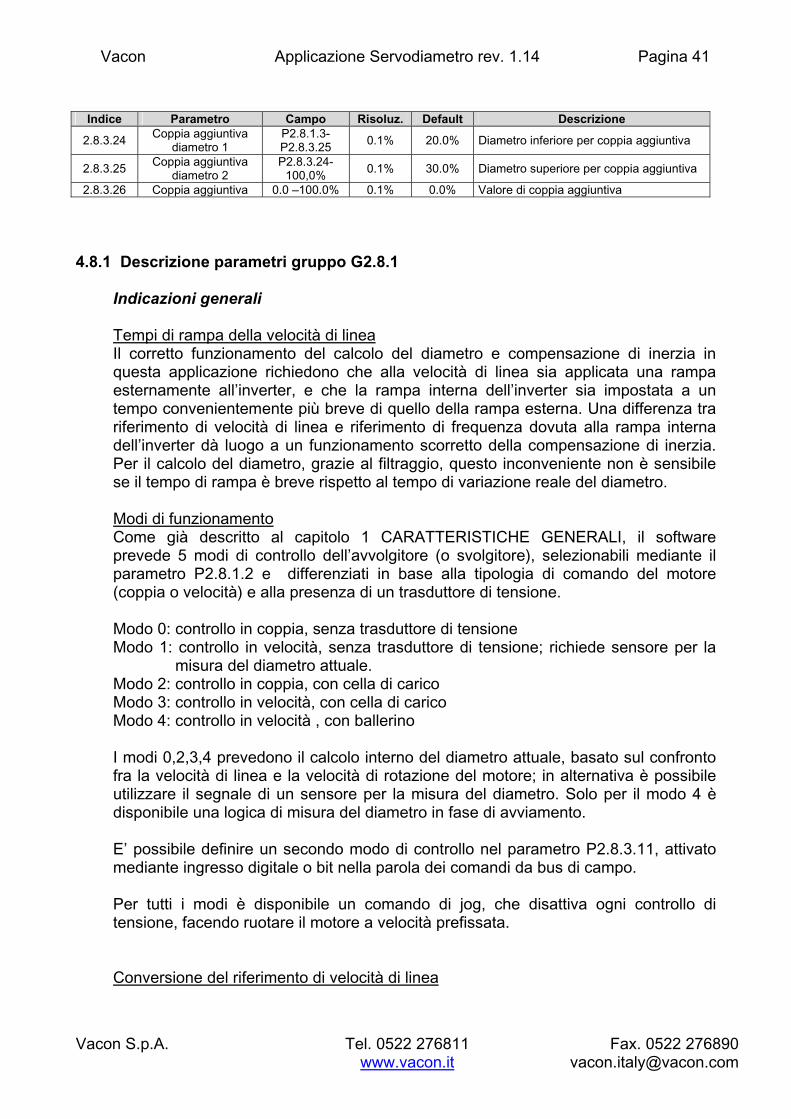
Vacon Applicazione Servodiametro rev. 1.14 Pagina 41
Indice Parametro Campo Risoluz. Default Descrizione
2.8.3.24 Coppia aggiuntivadiametro 1
P2.8.1.3-P2.8.3.25 0.1% 20.0% Diametro inferiore per coppia aggiuntiva
2.8.3.25 Coppia aggiuntivadiametro 2
P2.8.3.24-100,0% 0.1% 30.0% Diametro superiore per coppia aggiuntiva
2.8.3.26 Coppia aggiuntiva 0.0 –100.0% 0.1% 0.0% Valore di coppia aggiuntiva
4.8.1 Descrizione parametri gruppo G2.8.1
Indicazioni generali
Tempi di rampa della velocità di lineaIl corretto funzionamento del calcolo del diametro e compensazione di inerzia in questa applicazione richiedono che alla velocità di linea sia applicata una rampa esternamente all’inverter, e che la rampa interna dell’inverter sia impostata a un tempo convenientemente più breve di quello della rampa esterna. Una differenza tra riferimento di velocità di linea e riferimento di frequenza dovuta alla rampa internadell’inverter dà luogo a un funzionamento scorretto della compensazione di inerzia. Per il calcolo del diametro, grazie al filtraggio, questo inconveniente non è sensibilese il tempo di rampa è breve rispetto al tempo di variazione reale del diametro.
Modi di funzionamentoCome già descritto al capitolo 1 CARATTERISTICHE GENERALI, il softwareprevede 5 modi di controllo dell’avvolgitore (o svolgitore), selezionabili mediante il parametro P2.8.1.2 e differenziati in base alla tipologia di comando del motore (coppia o velocità) e alla presenza di un trasduttore di tensione.
Modo 0: controllo in coppia, senza trasduttore di tensione Modo 1: controllo in velocità, senza trasduttore di tensione; richiede sensore per la
misura del diametro attuale. Modo 2: controllo in coppia, con cella di carico Modo 3: controllo in velocità, con cella di carico Modo 4: controllo in velocità , con ballerino
I modi 0,2,3,4 prevedono il calcolo interno del diametro attuale, basato sul confronto fra la velocità di linea e la velocità di rotazione del motore; in alternativa è possibile utilizzare il segnale di un sensore per la misura del diametro. Solo per il modo 4 è disponibile una logica di misura del diametro in fase di avviamento.
E’ possibile definire un secondo modo di controllo nel parametro P2.8.3.11, attivato mediante ingresso digitale o bit nella parola dei comandi da bus di campo.
Per tutti i modi è disponibile un comando di jog, che disattiva ogni controllo di tensione, facendo ruotare il motore a velocità prefissata.
Conversione del riferimento di velocità di linea
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 42
IMPORTANTE: con applicazione dalla versione software 7.08, l’impostazione della frequenza massima P2.1.2 segue un diverso criterio rispetto alle versioni precedenti.Per il corretto funzionamento dell’avvolgitore è fondamentale una correttaimpostazione del parametro P2.1.2 Frequenza massima di linea: questa rappresentala frequenza di rotazione del motore in condizioni di massima velocità di linea e diametro minimo.
La frequenza si riferisce alla velocità sincrona, non è necessario considerare loscorrimento (l’azionamento è regolato in velocità così che lo scorrimento è già compensato). Usando le grandezze sotto indicate: VLM massima velocità di linea in m/min Dmin diametro minimo di avvolgitura in mm
rapporto riduttore = giri albero motore/giri albero condotto PP numero di paia poli del motore
pi greco = 3.14159...
si può calcolare la frequenza massima di linea in questo modo: Fmax [Hz] = P2.1.2 = (VLM x x PP x 1000) / (Dmin x 60 x )
EsempioLa massima velocità di linea sia 20 m/min, il diametro minimo 90mm, il rapporto delriduttore 30, il motore sia a 4 poli. Applicando la formula (arrotondando il risultato all’intero più prossimo): P2.1.2 = (20 x 30 x 2 x 1000) / (90 x 60 x 3.14159) = 70,7 Hz
I termini di correzione della velocità per il controllo della tensione vengono impostati solo nei parametri specifici (P2.8.1.9, P2.8.2.3, P2.8.2.4 e P2.8.2.5) e la massimafrequenza di lavoro dell’inverter è determinata automaticamente.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 43
P2.8.1.1 Modo avvolgitore Il parametro definisce la modalità di funzionamento principale, cioè con linea in marcia avanti. 0 avvolgitore 1 svolgitore
P2.8.1.2 Controllo avvolgitore Il parametro definisce il tipo di controllo sull’avvolgitore.0 = contr. coppia / nessun sensore di tensione tiro 1 = contr. velocità / nessun sensore di tensione tiro 2 = contr. coppia / cella di carico 3 = contr. velocità / cella di carico 4 = contr. velocità / ballerino
P2.8.1.3 – 7 Calcolo del diametroPer il corretto funzionamento del calcolatore, è necessario specificare il valore minimo del diametro, P2.8.1.3, come percentuale del diametro massimo. Il diametro massimo è posto = 100 % per definizione.Il diametro calcolato, visibile come variabile P1.19 nel menu monitor, è inizializzatoogni volta che il calcolatore viene resettato (v. P2.8.1.5 per le modalità di reset). Il valore iniziale è:
P2.8.1.4 o P2.8.3.7 o P2.8.3.8 o P2.8.3.9, in base agli ingressi digitali diselezioneValore impostato mediante ingresso analogico (o bus di campo) seconfigurato.
Il calcolatore di diametro è abilitato quando è attivo il controllo di tensione e la velocità motore è superiore alla soglia P2.8.1.6. Al di sotto della soglia il calcolatore del diametro è inibito e il valore di diametro utilizzato per la regolazione è l’ultimo valore calcolato o assegnato prima dell’inibizione.
P2.8.1.3 Diametro minimo Valore del diametro dell’aspo vuoto. Il valore deve essere specificato come percentuale del diametro massimo. Il campo ammissibile è dal 1 al 100%.
P2.8.1.4 Ripristino (preset) diametroValore di inizializzazione del diametro a seguito del comando di reset. Altri valori,selezionati mediante segnali digitali, sono disponibili nei parametri P2.8.3.7-9.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 44
P2.8.1.5 Modo di ripristino del diametro Il parametro definisce la modalità con cui il valore del diametro è ripristinato al valore iniziale (P2.8.1.4 o P2.8.3.7-9). Il valore del diametro calcolato è registrato in memoria permanente ogni volta che l’inverter viene arrestato, così che il valore vienemantenuto anche se l’inverter viene spento e riacceso. 0 = “Ripristino all’arresto” il valore del diametro calcolato è ripristinato ogni volta
che l’inverter viene arrestato. 1 = “Ingresso digitale” il valore del diametro calcolato è ripristinato quando un
comando è ricevuto su un ingresso digitale programmabile, e mantenuto bloccato finchè perdura il comando.
2 = “Impulso ingr. digitale” il valore del diametro calcolato è ripristinato sul fronte di salita dell’ingresso digitale programmabile.
Si fa presente che il valore attuale di diametro può comunque essere impostato attraverso il display, agendo sul valore P1.19 del menù Monitor.
P2.8.1.6 Velocità minima di blocco del calcolo diametro Quando la velocità motore corrispondente al riferimento di linea e al diametroassume un valore inferiore a questa soglia, il calcolatore del diametro si blocca mantenendo l’ultimo valore calcolato finché il valore di velocità non aumenta di nuovo. Se il controllo motore è ad anello chiuso, deve essere inferiore alla minima velocità di lavoro, valutata a diametro massimo. In anello aperto è opportuno non sia inferiore alla velocità corrispondente a 2-3 Hz.
P2.8.1.7 Pendenza rampa diametro Questo parametro determina la velocità di risposta del filtro a rampa all’uscita del blocco calcolatore del diametro. Una unità corrisponde a 1% di variazione di diametro in 3 secondi. Il campo ammissibile è da 1 %/3s a 10 %/3s. La velocità di calcolo diametro può essere resa dipendente dal regolatore PID, mediante il parametro P2.8.2.14.
P2.8.1.8 Coppia di fondo scala (solo modo 0 e 2) Modo 0: questo parametro specifica la coppia richiesta al motore quando il riferimento di tensione è a fondo scala e il diametro è uguale al massimo (100%). La misura è espressa in percentuale della coppia nominale del motore. Modo 2: come modo 0, con la differenza che questo valore teorico verrà corretto dal regolatore PID. Si consiglia di impostarlo sperimentalmente, con i guadagni del regolatore impostati a zero, in modo che il valore di tensione risulti prossimo al riferimento.Nota: il valore si riferisce al modo di funzionamento (avvolgitore o svolgitore)programmato in P2.8.1.1; se è richiesta reversibilità, si può impostare il valore in P2.8.3.2 , relativo al funzionamento opposto.
P2.8.1.9 Incremento di velocitàModi 0 e 2: il parametro specifica l’entità di incremento sommato al riferimento di velocità di linea in funzionamento avvolgitore, allo scopo di saturare il regolatore di velocità e forzare il regolatore in controllo di coppia. In funzionamento svolgitore, l’Incremento di velocità è utilizzato da solo come riferimento di velocità di riavvolgitura.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 45
P2.8.1.10 – 13 Logica pre-tensionamento
Modo 0 e modo 2: per avere un recupero dell’eventuale ansa di materiale senzastrappi, è possibile utilizzare questa funzione, che viene abilitata inserendo un valorenon nullo nel parametro P2.8.1.11. La logica prevede che il riferimento di tiro sia forzato inizialmente al valore P2.8.1.10,
per il quale si può inserire un valore leggermente inferiore al minimo tiro utilizzato. Questo valore viene tenuto per il tempo P2.8.1.11, nel quale si deve inserire un valore diverso da zero per attivare la funzione, ma comunque limitato (es. 0,5s). Trascorso questo tempo, il riferimento di tiro sale in rampa verso il valore richiesto; la rampa si regola con P2.8.1.12, che rappresenta il tempo di salita e non la pendenza;quindi per tiri più elevati si avrà un incremento di coppia più veloce. Normalmente un tempo di 2-3 s può essere adeguato. Durante il pre-tensionamento la velocità rimane limitata secondo il valore in P2.8.1.13;questo valore rappresenta il limite di velocità in condizioni di diametro minimo e tiro massimo (100%). Il valore è poi scalato in funzione del diametro e varia linearmente in funzione del tiro richiesto: questo velocizza il pre-tensionamento quando si lavora contiri elevati. La velocità è comunque costante per riferimento di tiro inferiore al 30%. In modo 0, allo scadere del tempo P2.8.1.13 viene confrontata la coppia effettiva del motore con quella teorica; se il materiale non è ancora in tiro perché si è partiti con un'ansa notevole, la coppia motore è bassa. Il software mantiene allora attivo il pre-tensionamento limitando la velocità finchè la coppia non raggiunge il valore teorico. Questa logica potrebbe non funzionare in condizioni di diametro piccolo e tiro ridotto, se la coppia per tensionare il materiale è comparabile agli attriti sull'aspo, per cui il motore risulta frenato anche se il materiale non è in tensione. In questo caso è necessario partire con ansa ridotta, in modo che il materiale vada in tiro entro il tempo P2.8.1.12.In modo 2 il pre-tensionamento è invece considerato concluso quando il segnale di tensione dalla cella di carico raggiunge un valore pari al 50% del riferimento attuale. Al termine viene emessa una segnalazione di “pre-tensionamento eseguito” su uscitadigitale configurabile, ed è eventualmente attivato il regolatore PID.
Modo 3 e modo 4: il parametro P2.8.1.13 permette di definire una velocità di pre-tensionamento che l’avvolgitore/svolgitore manterrà sino al raggiungimento, in fase di avvio, della posizione di set-point del ballerino o del valore di carico della cellarichiesto.Il parametro rappresenta la velocità nelle condizioni di minimo diametro e errore del 100% sulla tensione; la logica adegua la velocità al diametro e al segnale di errore, comandando velocità nulla quando l’errore si è estinto; in caso di svolgitore, il segnodella velocità è gestito automaticamente. Il pretensionamento viene eseguito sempre allo start se nel parametro P2.8.1.11 è inserito un valore non nullo (l’entità del valore non ha significato). Se invece il valore è nullo, il pretensionamento viene eseguito solo quando è richiesta la misura automatica del diametro (si veda P2.8.1.29). A set-point raggiunto viene emessa una segnalazione di “pre-tensionamento eseguito”su uscita digitale configurabile, ed è attivato il regolatore PID.
Nota: si veda anche descrizione del parametro P2.8.3.10 Logiche Speciali, chepermette di modificare alcuni aspetti delle logiche di pre-tensionamento.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 46
P2.8.1.10 Preset di tensione Valore iniziale di tensione quando è abilitata la logica recupero ansa (P2.8.1.11 > 0).
P2.8.1.11 Tempo di preset di tensione Determina l’intervallo minimo per il quale la tensione è forzata al valore di presetP2.8.1.11 prima di sbloccare la rampa. Se nullo, disabilita la logica.
P2.8.1.12 Pendenza della rampa di tensione Tempo di salita del riferimento di tensione.
P2.8.1.13 Velocità di pre-tensionamentoIn modo 0 e 2: limite di velocità durante il pre-tensionamento, riferito a diametro minimo e riferimento di tiro massimo. In modo 3 e 4: velocità iniziale di pre-tensionamento, riferita a diametro minimo emassimo errore di tensione/posizione.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 47
P2.8.1.14 – 19 Compensazione d’ inerzia e d’attrito (modi 0 e 2)
Il fenomeno dell’attrito statico è compensato con un termine di coppia costante (additivo in modo avvolgitore, sottrattivo in modo svolgitore) definito dal parametroP2.8.1.14. Vi è anche la possibilità di compensare l’attrito viscoso con un termine proporzionale alla velocità del motore. Il valore di compensazione alla massima velocità del motore (corrispondente alla massima velocità di linea e a diametro minimo) è impostabile col parametro P2.8.1.16. Per una corretta compensazione della coppia dinamica dovuta all’inerzia, il valore di inerzia complessiva dell’avvolgitore pieno (diametro 100%), riportato all’albero motore e comprensivo dell’inerzia propria di trasmissione e motore deve essere specificato nel parametro P2.8.1.17. Il valore è espresso in percento della Inerzia base dell’azionamento. L’inerzia base dell’azionamento è calcolata dall’inverter in unità ingegneristiche (kg x m2) ed è visibile come V1.21 nel menu Monitor.
NOTA: L’inerzia base dell’azionamento è definita come l’inerzia che richiedetempo unitario (un secondo) per essere accelerata fino alla velocità nominale del motore, utilizzando la sua coppia nominale. Si noti che con questa definizione, l’inerzia “per unit” è numericamente uguale al tempo diaccelerazione a velocità e coppia nominale (nel caso teorico di inerzia constante).
Se significativa, anche l’inerzia complessiva ad aspo vuoto (comprensiva del motore) può essere presa in considerazione specificando il valore del parametro P2.8.1.18, con la stessa unità di misura.
NOTA: tutti i valori di inerzia (base, avvolgitore pieno e vuoto) sono riportati all’albero motore. Perciò il valore calcolato di inerzia dell’avvolgitore deveessere diviso per il quadrato del rapporto di trasmissione, definito come:Rapporto di trasmissione = velocità angolare motore / velocità angolare aspo.
La compensazione di inerzia è basata sul diametro calcolato, P1.19, e sulla derivata dell’ingresso di riferimento della velocità di linea.La derivata del riferimento di velocità di linea è filtrata con un passa-basso per eliminazione del rumore. La costante di tempo del filtro (di fabbrica 0.1 sec) puòessere cambiata col parametro P2.8.1.19. I termini di compensazione sono sommati/sottratti al riferimento di coppia calcolatoper attuare la tensione richiesta. Il riferimento di coppia complessivo può essere visto come variabile V1.18 nel menu monitor.
NOTA: in modo 2 le compensazioni di attrito e di inerzia sono sommate allacorrezione apportata dal regolatore PID e possono eventualmente essere impostateper correggere elementi di disturbo della regolazione (ad es. presenza di attriti considerevoli).
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 48
P2.8.1.14 Compensazione attrito statico Valore di coppia costante sommata (in modo avvolgitore) o sottratta (in modo svolgitore) al riferimento per compensare l’attrito statico. Campo di variazione da 0 a 25% della coppia nominale del motore. La compensazione è applicata solo con lineain movimento, ed è sottoposta a rampa iniziale regolabile con P2.8.1.15. Nota: il valore si riferisce al modo di funzionamento (avvolgitore o svolgitore)programmato in P2.8.1.1; se è richiesta reversibilità, si può impostare il valore in P2.8.3.3 , relativo al funzionamento opposto.
P2.8.1.15 Rampa compensazione attrito statico Rampa per l’applicazione progressiva della compensazione di attrito, all’avvio dellalinea.
P2.8.1.16 Compensazione attrito viscosoComponente di coppia proporzionale al riferimento di velocità del motore, che vienesommata (in modo avvolgitore) o sottratta (in modo svolgitore) al riferimento di coppia per compensare l’attrito viscoso. Il parametro rappresenta il valore alla massima velocità di rotazione del motore, corrispondente alla massima velocità di linea con diametro minimo.Nota: l’effetto delle compensazioni di attrito viene limitato nel caso dello svolgitoreper non avere coppia risultante con segno opposto. Se fosse necessario ottenere questa inversione di coppia (es. attriti molto alti) si deve impostare P2.8.2.12 al valore “Si”. Nota: il valore si riferisce al modo di funzionamento (avvolgitore o svolgitore)programmato in P2.8.1.1; se è richiesta reversibilità, si può impostare il valore in P2.8.3.4 , relativo al funzionamento opposto. Nota: se gli attriti risultano non lineari in funzione della velocità, è possibile attivare una compensazione “a spezzata”, impostando i parametri da P2.8.3.12 a P2.8.3.23.
P2.8.1.17 Inerzia avvolgitore pieno Valore dell’inerzia dell’avvolgitore completamente carico di materiale (diametro = 100%), riportato all’albero motore e comprensivo del contributo di motore e trasmissione. Il valore è specificato in percentuale dell’inerzia base dell’azionamento (V1.21). Campo di valori ammissibile da 0 a 32767 % (valori >> 100% sono comuni per avvolgitori in presa diretta). Nota: il valore si riferisce al modo di funzionamento (avvolgitore o svolgitore)programmato in P2.8.1.1; se è richiesta reversibilità, si può impostare il valore in P2.8.3.5 , relativo al funzionamento opposto.
P2.8.1.18 Inerzia a vuoto Valore dell’inerzia dell’aspo vuoto (diametro pari al minimo, P2.8.1.3), riportato all’albero motore e comprensivo del contributo di motore e trasmissione. Il valore è specificato in percentuale dell’inerzia base dell’azionamento (V1.21). Campo di valoriammissibile da 0 a P2.8.1.17. Nota: il valore si riferisce al modo di funzionamento (avvolgitore o svolgitore)programmato in P2.8.1.1; se è richiesta reversibilità, si può impostare il valore in P2.8.3.6 , relativo al funzionamento opposto.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
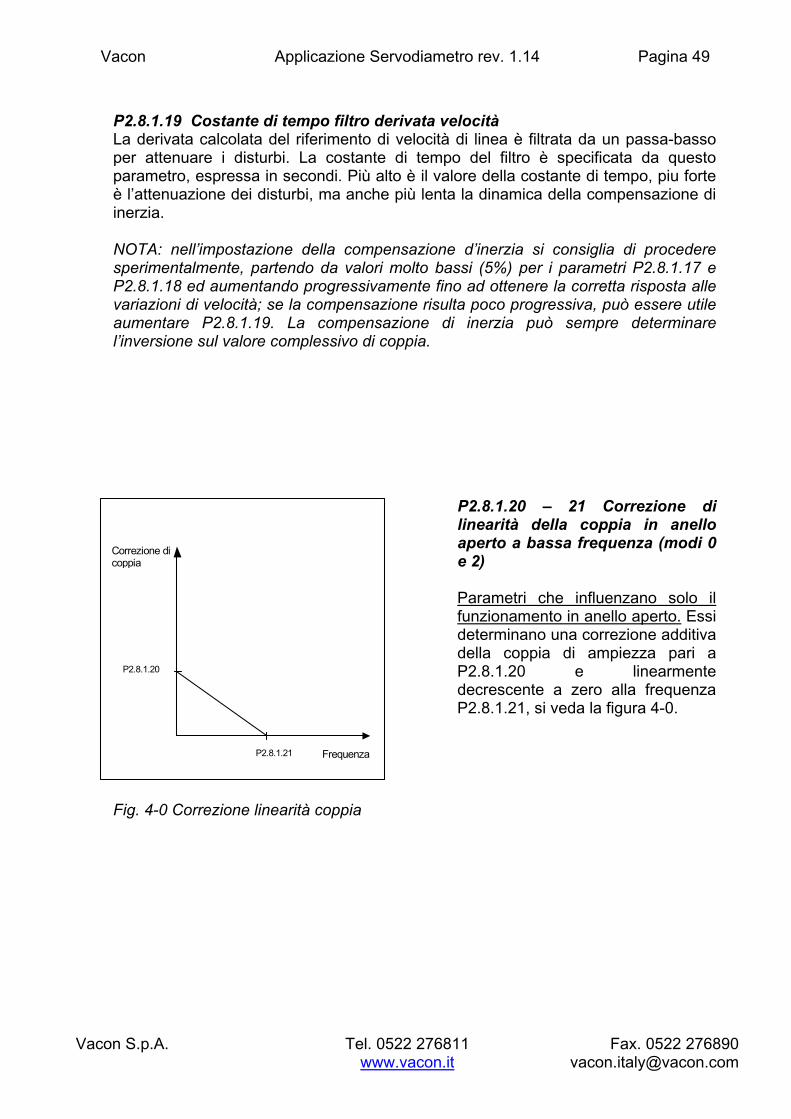
Vacon Applicazione Servodiametro rev. 1.14 Pagina 49
P2.8.1.19 Costante di tempo filtro derivata velocitàLa derivata calcolata del riferimento di velocità di linea è filtrata da un passa-bassoper attenuare i disturbi. La costante di tempo del filtro è specificata da questo parametro, espressa in secondi. Più alto è il valore della costante di tempo, piu forte è l’attenuazione dei disturbi, ma anche più lenta la dinamica della compensazione di inerzia.
NOTA: nell’impostazione della compensazione d’inerzia si consiglia di procederesperimentalmente, partendo da valori molto bassi (5%) per i parametri P2.8.1.17 e P2.8.1.18 ed aumentando progressivamente fino ad ottenere la corretta risposta alle variazioni di velocità; se la compensazione risulta poco progressiva, può essere utile aumentare P2.8.1.19. La compensazione di inerzia può sempre determinare l’inversione sul valore complessivo di coppia.
Correzione dicoppia
Frequenza
P2.8.1.20
P2.8.1.21
P2.8.1.20 – 21 Correzione di linearità della coppia in anello aperto a bassa frequenza (modi 0 e 2)
Parametri che influenzano solo il funzionamento in anello aperto. Essi determinano una correzione additiva della coppia di ampiezza pari a P2.8.1.20 e linearmente decrescente a zero alla frequenzaP2.8.1.21, si veda la figura 4-0.
Fig. 4-0 Correzione linearità coppia
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
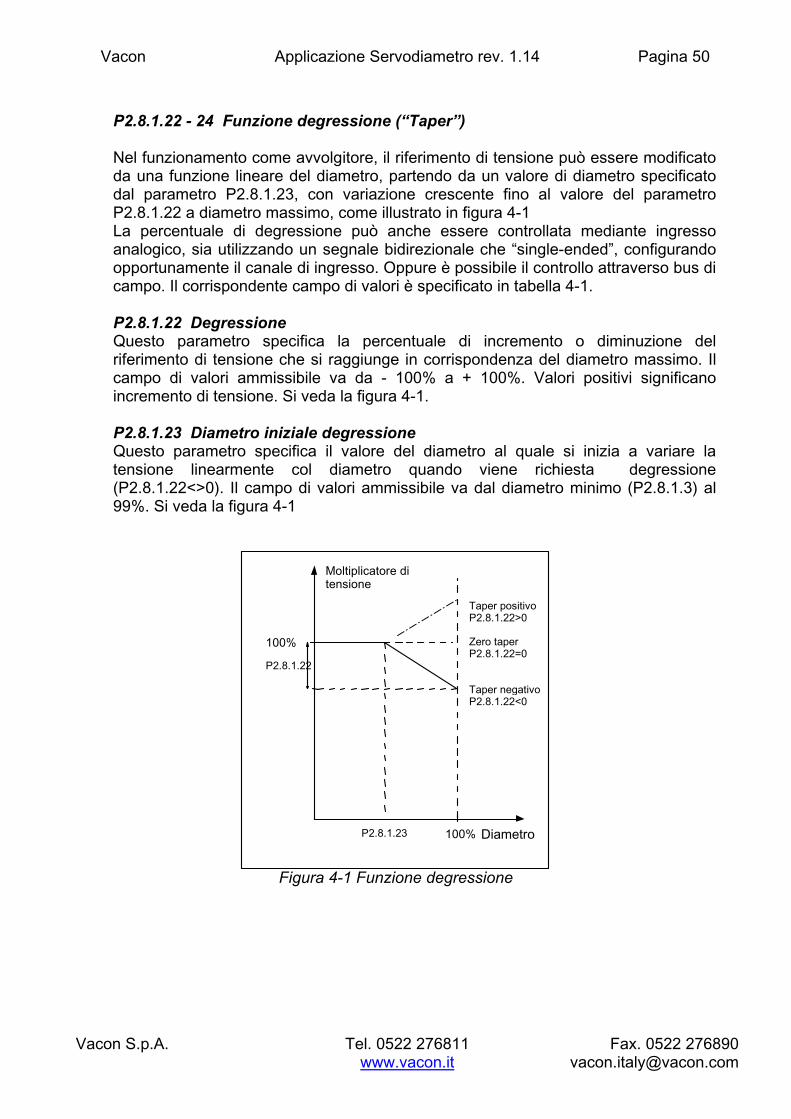
Vacon Applicazione Servodiametro rev. 1.14 Pagina 50
P2.8.1.22 - 24 Funzione degressione (“Taper”)
Nel funzionamento come avvolgitore, il riferimento di tensione può essere modificato da una funzione lineare del diametro, partendo da un valore di diametro specificatodal parametro P2.8.1.23, con variazione crescente fino al valore del parametro P2.8.1.22 a diametro massimo, come illustrato in figura 4-1 La percentuale di degressione può anche essere controllata mediante ingresso analogico, sia utilizzando un segnale bidirezionale che “single-ended”, configurandoopportunamente il canale di ingresso. Oppure è possibile il controllo attraverso bus di campo. Il corrispondente campo di valori è specificato in tabella 4-1.
P2.8.1.22 DegressioneQuesto parametro specifica la percentuale di incremento o diminuzione del riferimento di tensione che si raggiunge in corrispondenza del diametro massimo. Ilcampo di valori ammissibile va da - 100% a + 100%. Valori positivi significanoincremento di tensione. Si veda la figura 4-1.
P2.8.1.23 Diametro iniziale degressione Questo parametro specifica il valore del diametro al quale si inizia a variare latensione linearmente col diametro quando viene richiesta degressione(P2.8.1.22<>0). Il campo di valori ammissibile va dal diametro minimo (P2.8.1.3) al99%. Si veda la figura 4-1
100%
Diametro
Moltiplicatore ditensione
Taper positivoP2.8.1.22>0
100%
P2.8.1.22
P2.8.1.23
Zero taperP2.8.1.22=0
Taper negativoP2.8.1.22<0
Figura 4-1 Funzione degressione
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 51
P2.8.1.24 Selezione sorgente valore degressione Questo parametro selezione la sorgente del valore di degressione: 0 = la degressione è il valore di P2.8.1.22 1= la degressione è il valore dell’ingresso analogico oppure è assegnata da bus di campo, mediante una word con segno.
Ingresso bidirezionale in tensione
Ingresso unidirezionale in tensione
Ingresso unidirezionale in corrente
Ingresso Degressione Ingresso Degressione Ingresso Degressione-10V +100% 0V +100% 0 mA +100%0V 0% +5V 0% 10 mA 0%
+10V -100% +10V -100% 20 mA -100%
Controllo mediante canale di processo del bus di campo Valore word Degressione
-10000 +100%0 0%
+10000 -100%Tabella 4-1. Campo variazione ingresso degressione
Nota: i parametri del gruppo G2.2.4 consentono di modificare sia il range delsegnale/word di controllo, che l’entità della degressione massima.
Es. : si vuole controllare la degressione nel range -/+ 30,00%, scrivendo sul canale di processo un valore +/- 300. I parametri da impostare sono: P2.2.4.2: 2 / Autocalibrazione P2.2.4.3: 0.00% minimo valore (assoluto) word di controllo P2.2.4.4: 3.00% massimo valore (assoluto) word di controllo P2.2.4.5: 0.00% minimo valore (assoluto) degressioneP2.2.4.6: 30.00% massimo valore (assoluto) degressione
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 52
P2.8.1.25 – 26 Logica ritenuta marcia
Questa logica può essere utilizzata, abilitandola con P2.8.1.25=1, qualora il controllo della linea non coordini i comandi di stop tra la linea e l’avvolgitore, e comandi invecel’arresto di tutti gli azionamenti simultaneamente. Per mantenere in tensione ilmateriale durante la rampa di arresto, l’avvolgitore è mantenuto in marcia finché il riferimento di velocità di linea scende al disotto del valore del parametro P2.8.1.26 e solo a quel punto viene arrestato. Se un ingresso è configurato come Abilitazione Marcia oppure come Arresto Rapido, esso può arrestare il motore in qualsiasimomento, anche se la logica è attiva.
P2.8.1.25 Ritenuta marcia 0 = Ritenuta marcia non attiva l’inverter segue il comando di arresto secondo la
modalità specificata in P2.4.3 1 = Ritenuta marcia attiva quando è comandato l’arresto, l’inverter rimane in
marcia finché: - il riferimento di velocità di linea scende al disotto del
valore di P2.8.1.26 - oppure finché Abilitazione Marcia o Arresto rapido
vengono negati
P2.8.1.26 Soglia velocità ritenuta marciaValore di velocità di linea che sblocca il comando di arresto quando P2.8.1.25=1. Il campo di variazione ammissibile è da 0 al 20 % del fondo scala di velocità di linea.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 53
P2.8.1.27 – 28 Rilevamento rottura materiale ( modi 0 e 2)
Uno degli ingressi configurabili può essere utilizzato per abilitare una logica dirilevamento della rottura del materiale. Questa logica rileva la condizione di rottura durante la marcia in controllo di tensione, dopo l’eventuale fase di recupero ansa, se viene rilevata la condizione di “Velocità raggiunta”. La logica è inibita quando il controllo di tensione non è attivo (inverter in arresto, in rampa di arresto, in marciajog).L’indicazione “Rottura materiale” può essere segnalata tramite una delle uscite digitali o relé programmabili. La condizione “Rottura materiale” non provoca anomalia dell’inverter; tuttavia, una volta intervenuta, provoca il blocco del calcolo diametro. Il normale funzionamento è ripristinato quando l’inverter viene arrestato.
P2.8.1.27 Modo di abilitazione rilevamento rottura materiale 0 = livello il comando per abilitare il rilevamento rottura materiale è il livello alto
sull’ingresso. Il livello basso disabilita la funzione. 1 = impulso il comando per abilitare il rilevamento rottura materiale è un fronte di
salita sull’ingresso. Il comando è memorizzato e si resetta all’arresto.
P2.8.1.28 Ritardo rottura materiale Questo parametro definisce la durata minima della condizione di “Velocità raggiunta”che causa il rilevamento rottura materiale. Il campo di valori ammissibili va da 0.5 a10 secondi (valore di fabbrica 2 secondi).
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 54
P2.8.1.29 Modo misura automatica diametro (solo modo 4 anello chiuso)Nel caso di modo 4, è possibile utilizzare la fase di pre-tensionamento per una misura del diametro attuale , sia per svolgitore che per avvolgitore. Viene misurato lo spostamento angolare del motore (con encoder) durante la salitadel ballerino e, dal confronto con il valore immesso nel P2.8.1.30, viene stimato il diametro.Nel caso il ballerino si trovasse al di sopra della soglia minima, viene eseguitaautomaticamente una fase di svolgitura. Durante la misura è fondamentale che il materiale a monte del ballerino (a valle se svolgitore) sia tenuto fermo, ad esempio con il traino abilitato a velocità nulla. La funzione è attivabile con ingresso digitale o bit della parola di comando del bus di campo (P2.8.1.29=1), oppure sempre attiva ad ogni avviamento.
NOTA: la funzione è attiva solo se P2.8.2.1 è almeno pari al 30%.
Nella fase di misura, la velocità di pretensionamento è automaticamente ridotta, per assicurare una maggiore precisione. Inoltre la scalatura in base al diametro è limitata, per evitare che al cambio bobina l’errore sul diametro porti a velocità troppo elevate nel caso dello svolgitore o ridotte nel caso dell’avvolgitore.
P2.8.1.30 Giri motore per corsa del ballerino a diametro massimoNel parametro devono essere inseriti i giri del motore necessari affinchè il ballerino salga dalla posizione minima a quella massima, quando il materiale avvolto è al massimo diametro. Esempio: lunghezza ballerino 300 mm; diametro massimo 500 mm; rapporto riduzione aspo-motore 1:10. Lo spostamento di materiale necessario per la corsa può essere approssimato con 600 mm; i giri dell’aspo a diametro massimo sono : 600 / (500 x )= 0.38; i giri del motore sono P2.8.1.30= 0.38 x 10 = 3.8.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
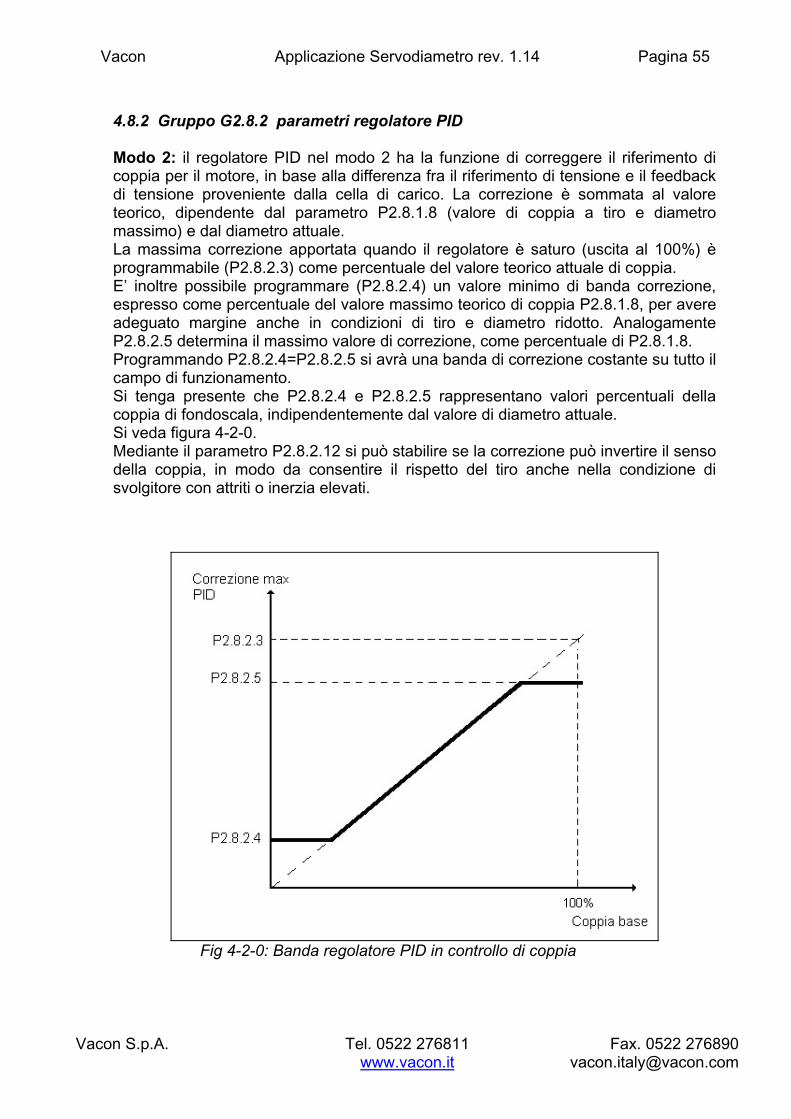
Vacon Applicazione Servodiametro rev. 1.14 Pagina 55
4.8.2 Gruppo G2.8.2 parametri regolatore PID
Modo 2: il regolatore PID nel modo 2 ha la funzione di correggere il riferimento dicoppia per il motore, in base alla differenza fra il riferimento di tensione e il feedbackdi tensione proveniente dalla cella di carico. La correzione è sommata al valoreteorico, dipendente dal parametro P2.8.1.8 (valore di coppia a tiro e diametro massimo) e dal diametro attuale. La massima correzione apportata quando il regolatore è saturo (uscita al 100%) è programmabile (P2.8.2.3) come percentuale del valore teorico attuale di coppia. E’ inoltre possibile programmare (P2.8.2.4) un valore minimo di banda correzione,espresso come percentuale del valore massimo teorico di coppia P2.8.1.8, per avere adeguato margine anche in condizioni di tiro e diametro ridotto. AnalogamenteP2.8.2.5 determina il massimo valore di correzione, come percentuale di P2.8.1.8. Programmando P2.8.2.4=P2.8.2.5 si avrà una banda di correzione costante su tutto il campo di funzionamento. Si tenga presente che P2.8.2.4 e P2.8.2.5 rappresentano valori percentuali dellacoppia di fondoscala, indipendentemente dal valore di diametro attuale. Si veda figura 4-2-0.Mediante il parametro P2.8.2.12 si può stabilire se la correzione può invertire il senso della coppia, in modo da consentire il rispetto del tiro anche nella condizione di svolgitore con attriti o inerzia elevati.
Fig 4-2-0: Banda regolatore PID in controllo di coppia
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 56
Modi 3 e 4: il regolatore PID nei modi 3 e 4 ha la funzione di correggere il riferimento di frequenza per il motore, in base alla differenza fra il riferimento di tensione e il feedback di tensione proveniente dalla cella di carico o in base all’errore di posizione del ballerino. La correzione è sommata al valore teorico, dipendente dal parametro P2.1.2 (valore di frequenza a massima velocità e diametro minimo), dalla velocità di linea e dal diametro attuale. La massima correzione apportata quando il regolatore è saturo (uscita al 100%) è programmabile (P2.8.2.3) come percentuale del valore teorico attuale di frequenza, quindi dipendente dalla velocità di linea. Questo termine è sommato ad un eventuale valore minimo di banda di correzione(P2.8.2.4), espresso come percentuale del valore massimo di frequenza di lineaP2.1.2, per avere adeguato margine anche in condizioni di velocità ridotta. Analogamente P2.8.2.5 determina il massimo valore di correzione, come percentuale di P2.8.1.8. Programmando P2.8.2.4=P2.8.2.5 si avrà una banda di correzione costante su tutto il campo di funzionamento.Si tenga presente che P2.8.2.4 e P2.8.2.5 rappresentano valori percentuali dellavelocità massima, ma la banda di correzione è comunque scalata in funzione delvalore di diametro attuale. Il termine dipendente dalla velocità di linea (P2.8.2.3) può eventualmente essere negativo, se è necesssario ridurre la banda di correzione all’aumentare della velocità.Si veda figura 4-2-1.
Fig 4-2-1: Banda regolatore PID in controllo di velocità
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 57
La banda di correzione è normalmente scalata in base al rapporto [diametro minimo/diametro attuale]. E’ possibile ottenere una maggiore diminuzione dellabanda di correzione all’aumentare del diametro, inserendo un valore nel parametro P2.8.2.15 (superiore a 80-100%); questo consente di aumentare la stabilità in condizioni di bobina grande, e quindi inerzia elevata.
Per applicazioni in anello aperto, può essere opportuno definire una banda di correzione minima indipendente dal diametro; in questo modo il regolatore PID può incrementare la frequenza di uscita generando lo scorrimento necessario ad ottenere la coppia richiesta. Il parametro P2.8.2.13 rappresenta pertanto una correzione in Hzsempre disponibile.
Mediante il parametro P2.8.2.12 si può stabilire se la correzione può invertire il senso della rotazione; questo può essere utile per mantenere il tiro sul materiale in condizioni di linea arrestata.
Anche in presenza di un anello di regolazione della tensione del materiale, è fondamentale la corretta preimpostazione del diametro, in modo che in fase iniziale la velocità/coppia non presenti un errore eccessivo; questo consente di limitare l’entità della correzione e ottenere una maggiore precisione della regolazione.E’ possibile condizionare la velocità di aggiornamento del calcolo del diametro, in funzione della uscita del regolatore PID, mediante il parametro P2.8.2.14.
P2.8.2.1 Setpoint ballerino ( modo 4) Valore fisso per la regolazione di posizione, espresso come percentuale del range di segnale del trasduttore. Es: P2.8.2.1 =50% significa che la regolazione deve mantenere il ballerino nellaposizione corrispondente al 50% (5V) del suo segnale massimo.
P2.8.2.2 Rampa riferimento Quando il motore è fermo, o la regolazione non è attiva, in ingresso al regolatoreviene forzato un valore di setpoint pari al valore attuale del trasduttore di tiro. Nel momento dell’attivazione il setpoint raggiunge il valore impostato mediante una rampa; questo consente una variazione progressiva della velocità motore, anche partendo da una condizione di errore elevato. Il parametro rappresenta la variazione percentuale del setpoint per secondo. In caso di regolazione di coppia (modo 2) è opportuno mantenere un valore elevato.
P2.8.2.3 CorrezioneP2.8.2.4 Correzione MinimaP2.8.2.5 Correzione MassimaI parametri determinano la banda di correzione del regolatore PID, come descritto nella parte introduttiva.
P2.8.2.6 Guadagno proporzionale Il parametro definisce il guadagno proporzionale del regolatore. Es: P 2.8.2.6= 1,00%; un errore pari al 10% determina una correzione pari al 10%.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 58
P2.8.2.7 Costante di tempo integraleIl parametro definisce la costante di tempo dell’azione integrale del regolatore. Il valore 0.00 annulla l’azione integrale. Es: P2.8.2.7=1.00s; un errore costante pari al 10% determina una variazione di correzione pari al 10% per ogni secondo.
P2.8.2.8 Ritardo azione integrale L’azione integrale può essere inserita con un tempo di ritardo, definito da questo parametro, rispetto alla partenza del motore e all’attivazione della regolazione.
P2.8.2.9 Guadagno derivativo Il parametro definisce il guadagno dell’azione derivativa del regolatore.Il valore 0.00 annulla l’azione derivativa. Es: P2.8.2.9=1.00s-1;una variazione di errore pari al 10% in un secondo determina una variazione di correzione pari al 10% .
P2.8.2.10 Filtro derivata L’azione derivativa può essere filtrata per eliminare componenti di disturbo o avere una azione più progressiva.
P28.2.11 Segno correzione0 un errore positivo (valore attuale < setpoint) incrementa la velocità o la coppia 1 un errore positivo decrementa la velocità o la coppia.
P2.8.2.12 Inversione consentita 0 la correzione di frequenza/coppia è limitata in modo da non consentire inversione
rispetto al valore teorico 1 la correzione di frequenza/coppia può determinare inversione rispetto al valore
teorico
P2.8.2.13 Frequenza minima di correzione Frequenza sempre disponibile per la regolazione PID. Il parametro è previsto per le applicazioni di controllo in velocità (modi 3 e 4) in anello aperto. Impostare un valore(normalmente 3-5Hz) che consenta al motore di sviluppare la coppia per la massima tensione richiesta, in condizioni di linea ferma e diametro massimo.Nota: nelle applicazioni in anello aperto, è fondamentale una corretta impostazione della curva V/f alle basse frequenze.
P2.8.2.14 Fattore rampa calcolo diametro Se il valore del parametro è superiore a 1, la pendenza della rampa di calcolo del diametro (P2.8.1.7) viene moltiplicata per un fattore che raggiunge linearmente il valore di P2.8.2.14, in funzione della uscita del regolatore PID.
P2.8.2.15 Correzione (supplementare) da diametro Il parametro consente di ridurre maggiormente la banda di correzione di velocità del regolatore PID, all’aumentare del diametro. Questo può consentire di risolvereproblemi di stabilità legati alla inerzia elevata della bobina, senza ridurre il margine di regolazione nella situazione di diametro ridotto. Normalmente utilizzare valori superiori a 80-100%.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
Vacon Applicazione Servodiametro rev. 1.14 Pagina 59
4.8.3 Gruppo G2.8.3 parametri ausiliari servodiametro
P2.8.3.1 – 6 Parametri per reversibilità ( modi 0 e 2)
Quando all’azionamento è richiesta reversibilità, cioè scambio fra le funzioni di avvolgitore e svolgitore all’inversione della velocità di linea, non sempre la configurazione meccanica risulta ideale. Nel controllo di coppia, il risultato è tipicamente un aumento del tiro sul materiale quando l’avvolgitore si trova ad essere trascinato dal materiale (svolgitore) e unadiminuzione del tiro nella situazione opposta.I parametri da P2.8.3.2 a P2.8.3.6 rappresentano i valori di coppia di fondo scala e delle compensazioni, attivi quando l’inversione della velocità di linea (o il comando Indietro) determina il funzionamento opposto rispetto alla funzionalità programmata in P2.8.1.1. I valori risultano efficaci solo se P2.8.3.1=1.
P2.8.3.1 Parametri reversibilità 0: i parametri del controllo di coppia non vengono differenziati in base alla funzionalità attiva 1: vengono attivati i parametri da P2.8.3.2 a P2.8.3.6 e i parametri P2.8..3.14-17-20,quando l’azionamento cambia la propria funzionalità.
P2.8.3.2 Coppia di fondo scala Significato analogo a P2.8.1.8.
P2.8.3.3 Compensazione attrito statico Significato analogo a P2.8.1.14.
P2.8.3.4 Compensazione attrito viscosoSignificato analogo a P2.8.1.16.
P2.8.3.5 Inerzia aspo pieno Significato analogo a P2.8.1.17.
P2.8.3.6 Inerzia aspo vuoto Significato analogo a P2.8.1.18.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
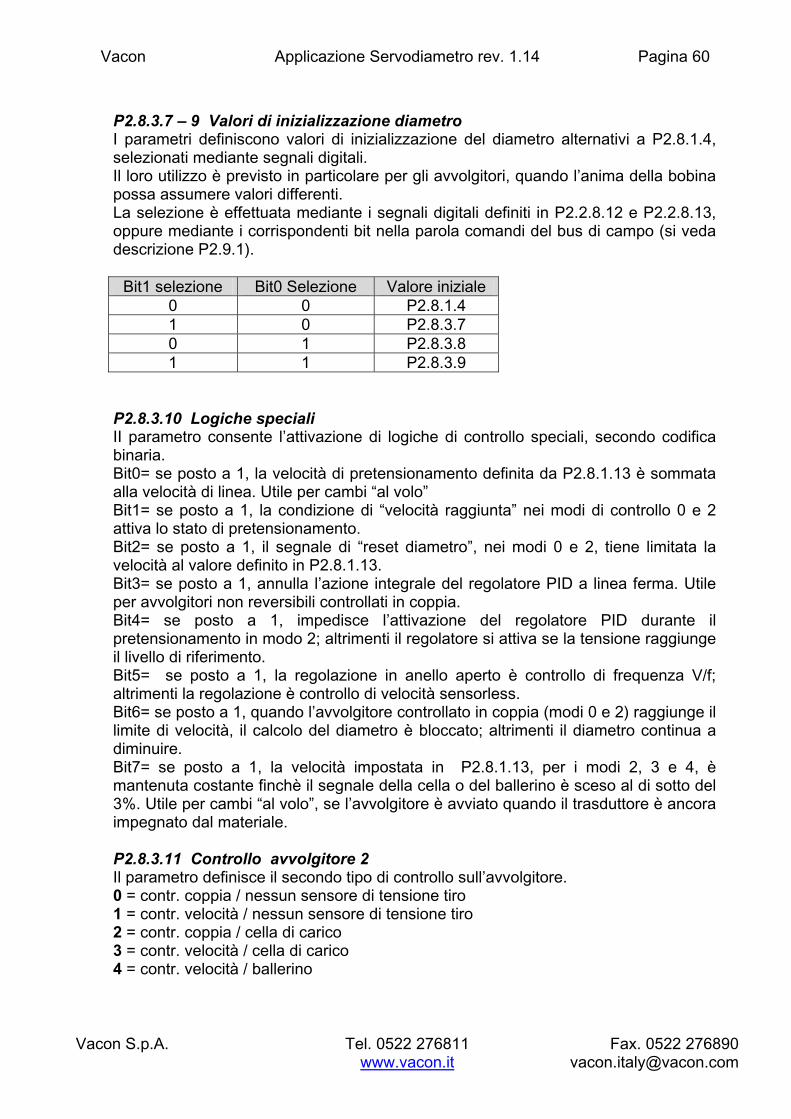
Vacon Applicazione Servodiametro rev. 1.14 Pagina 60
P2.8.3.7 – 9 Valori di inizializzazione diametro I parametri definiscono valori di inizializzazione del diametro alternativi a P2.8.1.4, selezionati mediante segnali digitali. Il loro utilizzo è previsto in particolare per gli avvolgitori, quando l’anima della bobinapossa assumere valori differenti. La selezione è effettuata mediante i segnali digitali definiti in P2.2.8.12 e P2.2.8.13, oppure mediante i corrispondenti bit nella parola comandi del bus di campo (si vedadescrizione P2.9.1).
Bit1 selezione Bit0 Selezione Valore iniziale0 0 P2.8.1.41 0 P2.8.3.70 1 P2.8.3.81 1 P2.8.3.9
P2.8.3.10 Logiche speciali II parametro consente l’attivazione di logiche di controllo speciali, secondo codificabinaria.Bit0= se posto a 1, la velocità di pretensionamento definita da P2.8.1.13 è sommata alla velocità di linea. Utile per cambi “al volo”Bit1= se posto a 1, la condizione di “velocità raggiunta” nei modi di controllo 0 e 2 attiva lo stato di pretensionamento.Bit2= se posto a 1, il segnale di “reset diametro”, nei modi 0 e 2, tiene limitata la velocità al valore definito in P2.8.1.13. Bit3= se posto a 1, annulla l’azione integrale del regolatore PID a linea ferma. Utileper avvolgitori non reversibili controllati in coppia. Bit4= se posto a 1, impedisce l’attivazione del regolatore PID durante il pretensionamento in modo 2; altrimenti il regolatore si attiva se la tensione raggiunge il livello di riferimento. Bit5= se posto a 1, la regolazione in anello aperto è controllo di frequenza V/f; altrimenti la regolazione è controllo di velocità sensorless.Bit6= se posto a 1, quando l’avvolgitore controllato in coppia (modi 0 e 2) raggiunge il limite di velocità, il calcolo del diametro è bloccato; altrimenti il diametro continua a diminuire.Bit7= se posto a 1, la velocità impostata in P2.8.1.13, per i modi 2, 3 e 4, è mantenuta costante finchè il segnale della cella o del ballerino è sceso al di sotto del 3%. Utile per cambi “al volo”, se l’avvolgitore è avviato quando il trasduttore è ancora impegnato dal materiale.
P2.8.3.11 Controllo avvolgitore 2 Il parametro definisce il secondo tipo di controllo sull’avvolgitore.0 = contr. coppia / nessun sensore di tensione tiro 1 = contr. velocità / nessun sensore di tensione tiro 2 = contr. coppia / cella di carico 3 = contr. velocità / cella di carico 4 = contr. velocità / ballerino
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
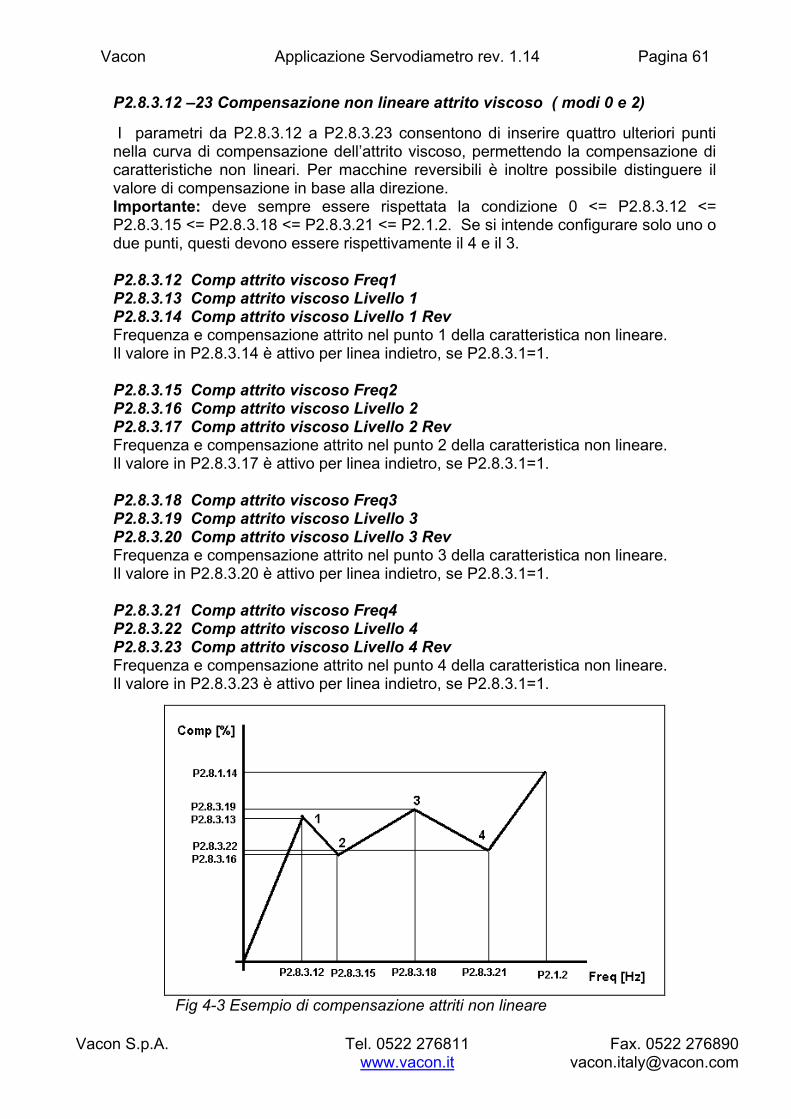
Vacon Applicazione Servodiametro rev. 1.14 Pagina 61
P2.8.3.12 –23 Compensazione non lineare attrito viscoso ( modi 0 e 2)
I parametri da P2.8.3.12 a P2.8.3.23 consentono di inserire quattro ulteriori punti nella curva di compensazione dell’attrito viscoso, permettendo la compensazione di caratteristiche non lineari. Per macchine reversibili è inoltre possibile distinguere il valore di compensazione in base alla direzione. Importante: deve sempre essere rispettata la condizione 0 <= P2.8.3.12 <= P2.8.3.15 <= P2.8.3.18 <= P2.8.3.21 <= P2.1.2. Se si intende configurare solo uno o due punti, questi devono essere rispettivamente il 4 e il 3.
P2.8.3.12 Comp attrito viscoso Freq1 P2.8.3.13 Comp attrito viscoso Livello 1 P2.8.3.14 Comp attrito viscoso Livello 1 Rev Frequenza e compensazione attrito nel punto 1 della caratteristica non lineare.Il valore in P2.8.3.14 è attivo per linea indietro, se P2.8.3.1=1.
P2.8.3.15 Comp attrito viscoso Freq2 P2.8.3.16 Comp attrito viscoso Livello 2 P2.8.3.17 Comp attrito viscoso Livello 2 Rev Frequenza e compensazione attrito nel punto 2 della caratteristica non lineare.Il valore in P2.8.3.17 è attivo per linea indietro, se P2.8.3.1=1.
P2.8.3.18 Comp attrito viscoso Freq3 P2.8.3.19 Comp attrito viscoso Livello 3 P2.8.3.20 Comp attrito viscoso Livello 3 Rev Frequenza e compensazione attrito nel punto 3 della caratteristica non lineare.Il valore in P2.8.3.20 è attivo per linea indietro, se P2.8.3.1=1.
P2.8.3.21 Comp attrito viscoso Freq4 P2.8.3.22 Comp attrito viscoso Livello 4 P2.8.3.23 Comp attrito viscoso Livello 4 Rev Frequenza e compensazione attrito nel punto 4 della caratteristica non lineare. Il valore in P2.8.3.23 è attivo per linea indietro, se P2.8.3.1=1.
Fig 4-3 Esempio di compensazione attriti non lineare
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
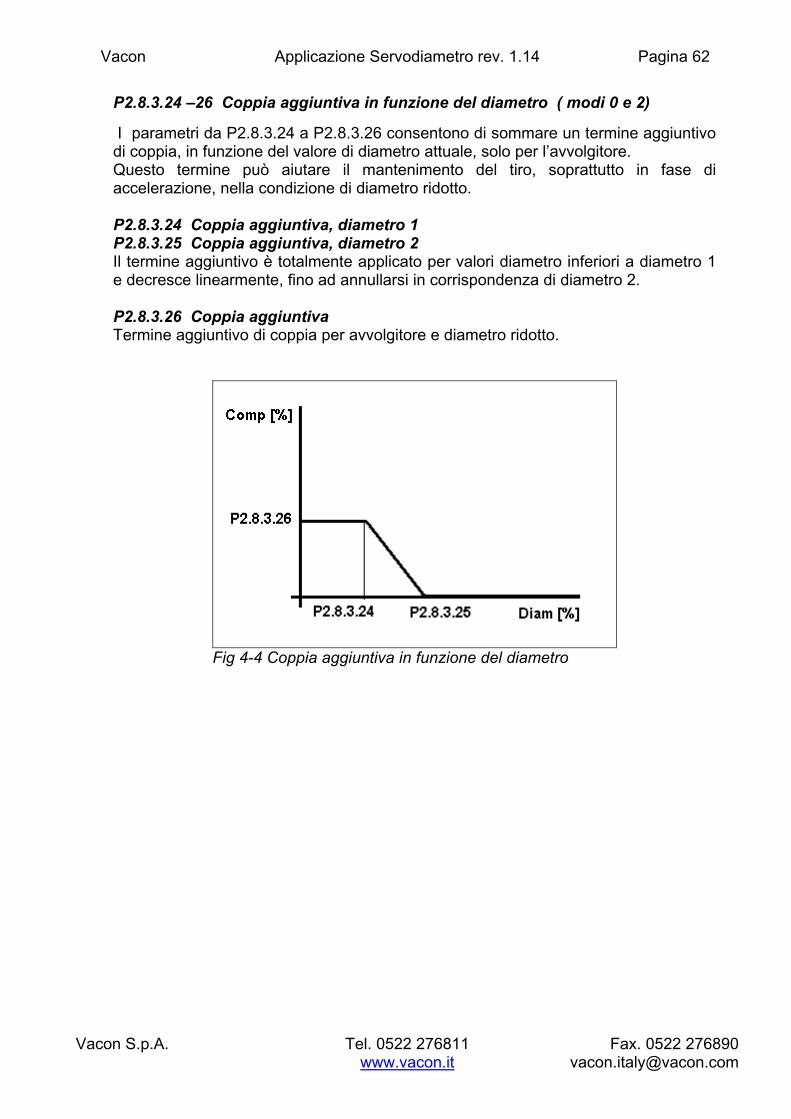
Vacon Applicazione Servodiametro rev. 1.14 Pagina 62
P2.8.3.24 –26 Coppia aggiuntiva in funzione del diametro ( modi 0 e 2)
I parametri da P2.8.3.24 a P2.8.3.26 consentono di sommare un termine aggiuntivodi coppia, in funzione del valore di diametro attuale, solo per l’avvolgitore. Questo termine può aiutare il mantenimento del tiro, soprattutto in fase di accelerazione, nella condizione di diametro ridotto.
P2.8.3.24 Coppia aggiuntiva, diametro 1 P2.8.3.25 Coppia aggiuntiva, diametro 2 Il termine aggiuntivo è totalmente applicato per valori diametro inferiori a diametro 1 e decresce linearmente, fino ad annullarsi in corrispondenza di diametro 2.
P2.8.3.26 Coppia aggiuntiva Termine aggiuntivo di coppia per avvolgitore e diametro ridotto.
Fig 4-4 Coppia aggiuntiva in funzione del diametro
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 63
4.9 Parametri Bus di campo G2.9
Indice Parametro Campo Risoluz. Default Descrizione
2.9.1 Canale comandi 0-8 1 0
Stabilisce il canale per la gestione deisegnali corrispondenti alle funzionidescritte da P2.2.8.5 a P2.2.8.10 e del segnale di reverse (linea indietro) da fieldbus.
0= locale (input digitali)1=PD12=PD23=PD34=PD45=PD56=PD67=PD78=PD8
2.9.2 Canale velocità linea(e jog) 0-3 1 0
0= linea da input analogico / jog da parametro
1= linea da bus / jog da bus 2= linea da input analogico / jog da bus3= linea da bus / jog da parametro
2.9.3 Canale riferimentotiro 0-9 1 0
Stabilisce il canale corrispondente alsegnale di riferimento di tiro. 0= locale (input analogico)1=PD12=PD23=PD34=PD45=PD56=PD67=PD78=PD89=Pannello
2.9.4 Canale tiro attuale 0-8 1 0
Stabilisce il canale corrispondente alsegnale di feedback di tiro. Codifica come P2.9.3.
2.9.5 Canale taper 0-8 1 0Stabilisce il canale corrispondente alsegnale di taper.Codifica come P2.9.3 (0-8)
2.9.6 Canale diametroattuale 0-8 1 0
Stabilisce il canale corrispondente alsegnale di diametro misurato.Codifica come P2.9.3 (0-8)
2.9.7 Canale diametroiniziale 0-8 1 0
Stabilisce il canale corrispondente alsegnale di diametro iniziale.Codifica come P2.9.3 (0-8)
2.9.8 Selezione PDO1 1 1599 ID della variabile trasmessa sul canale PDO1
2.9.9 Selezione PDO2 1 1601 ID della variabile trasmessa sul canale PDO2
2.9.10 Selezione PDO3 1 37 ID della variabile trasmessa sul canale PDO3
2.9.11 Selezione PDO4 1 1574 ID della variabile trasmessa sul canale PDO4
2.9.12 Selezione PDO5 1 1603 ID della variabile trasmessa sul canale PDO5
2.9.13 Selezione PDO6 1 0 ID della variabile trasmessa sul canale PDO6
2.9.14 Selezione PDO7 1 0 ID della variabile trasmessa sul canale PDO7
2.9.15 Selezione PDO8 1 0 ID della variabile trasmessa sul canale PDO8
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 64
4.9.1 Descrizione parametri gruppo G2.9
Mediante questo menù vengono assegnati i canali di processo del bus di campo associati alle grandezze di controllo dell’avvolgitore e ai comandi funzionali.
P2.9.1 Canale comandi 0 (locale): i comandi per le funzionalità specifiche per l’avvolgitore sono assegnati ad ingressi digitali, selezionati mediante i parametri da P2.2.8.5 a P2.2.8.10; il segnaledi marcia indietro è sempre associato a DIN2.
Da 1 (PD1) a 8 (PD8): i comandi sono associati ai bit della parola del canale diprocesso selezionato, con la seguente codifica:bit 0: inversione senso rotazione (vedere descrizione P2.2.8.5) bit 1: selezione modo jog (vedere descrizione P2.2.8.6) bit 2: reset diametro (vedere descrizione P2.2.8.7)bit 3: abilit. verifica rottura materiale (vedere descrizione P2.2.8.8) bit 4: abilitazione regolatore PID (vedere descrizione P2.2.8.9) bit 5: inversione marcia linea (vedere descrizione P2.2.1.1) bit 6: abilitazione misura diametro (vedere descrizione P2.2.8.10) bit 7: selezione diametro bit0 (vedere descrizione P2.2.8.12) bit 8: selezione diametro bit1 (vedere descrizione P2.2.8.13) bit 9: modo controllo 2 (vedere descrizione P2.2.8.15)
P2.9.2 Canale velocità linea (e jog) 0 (linea locale, jog da parametro): il riferimento della velocità di linea è associatoad ingresso analogico. La velocità di jog è data da parametro.1 (linea FB, jog FB): il riferimento della velocità di linea è associato alla parola del riferimento di velocità principale del bus di campo; la stessa parola è usata perimpostare la velocità di jog. Il range può essere 0 – 10000 (0,00% –100,00%) se lamarcia indietro è gestita mediante bit di comando, oppure –10000 / +10000 (-100,00% / +100,00%) se la direzione è gestita con il segno del riferimento di velocità (es. Profibus) Il valore numerico è condizionato dai parametri del gruppo G2.2.2 . 2 (linea locale, jog FB): il riferimento della velocità di linea è associato ad ingressoanalogico. La velocità di jog è data dalla parola del riferimento di velocità del bus. 3 (linea FB, jog da parametro): il riferimento della velocità di linea è associato allaparola del riferimento di velocità principale del bus di campo. La velocità di jog è data da parametro.
P2.9.3 Canale riferimento di tiro 0 (locale): il riferimento di tiro è associato ad ingresso analogicoda 1 (PD1) a 8 (PD8): il riferimento di tiro è associato al canale di processo selezionato. Il range è 0 –10000, corrispondente a 0,00% –100,00%. Il valore numerico è condizionato dai parametri del gruppo G2.2.3. 9 (pannello): il riferimento è impostabile mediante il parametro P3.5 nel gruppoControllo da Pannello.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 65
P2.9.4 Canale tiro attuale0 (locale): il feedback di tiro è associato ad ingresso analogicoda 1 (PD1) a 8 (PD8): il feedback di tiro è associato al canale di processo selezionato. Il range è 0 –10000, corrispondente a 0,00% –100,00%. Il valore numerico è condizionato dai parametri del gruppo G2.2.5
P2.9.5 Canale taper 0 (locale): il riferimento per la degressione è associato ad ingresso analogicoda 1 (PD1) a 8 (PD8): il riferimento per la degressione è associato al canale di processo selezionato. Il range è 0 –10000, corrispondente a 0,00% –100,00%. Il valore numerico è condizionato dai parametri del gruppo G2.2.4.
P2.9.6 Canale diametro attuale 0 (locale): il valore di diametro attuale è associato ad ingresso analogicoda 1 (PD1) a 8 (PD8): il valore di diametro attuale è associato al canale di processo selezionato. Il range è 0 –10000, corrispondente a 0,00% –100,00%. Il valore numerico è condizionato dai parametri del gruppo G2.2.6, che consentono l’adeguamento dei valori corrispondenti ai diametri minimo e massimo.
P2.9.7 Canale diametro iniziale0 (locale): il valore di diametro iniziale è associato ad ingresso analogicoda 1 (PD1) a 8 (PD8): il valore di diametro iniziale è associato al canale di processo selezionato. Il range è 0 –10000, corrispondente a 0,00%–100,00%. Il valore numerico è condizionato dai parametri del gruppo G2.2.7
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
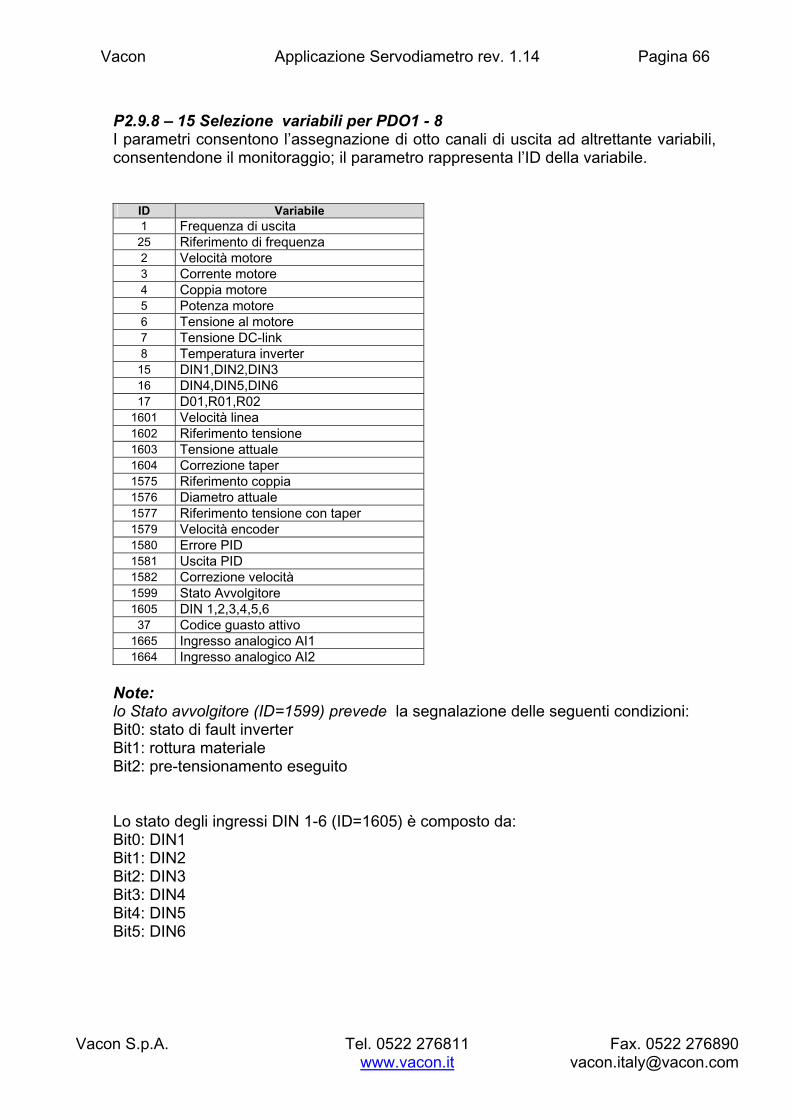
Vacon Applicazione Servodiametro rev. 1.14 Pagina 66
P2.9.8 – 15 Selezione variabili per PDO1 - 8 I parametri consentono l’assegnazione di otto canali di uscita ad altrettante variabili,consentendone il monitoraggio; il parametro rappresenta l’ID della variabile.
ID Variabile1 Frequenza di uscita
25 Riferimento di frequenza2 Velocità motore 3 Corrente motore 4 Coppia motore 5 Potenza motore6 Tensione al motore7 Tensione DC-link 8 Temperatura inverter
15 DIN1,DIN2,DIN316 DIN4,DIN5,DIN617 D01,R01,R02
1601 Velocità linea 1602 Riferimento tensione1603 Tensione attuale1604 Correzione taper1575 Riferimento coppia 1576 Diametro attuale1577 Riferimento tensione con taper1579 Velocità encoder1580 Errore PID 1581 Uscita PID 1582 Correzione velocità 1599 Stato Avvolgitore 1605 DIN 1,2,3,4,5,637 Codice guasto attivo
1665 Ingresso analogico AI11664 Ingresso analogico AI2
Note:lo Stato avvolgitore (ID=1599) prevede la segnalazione delle seguenti condizioni: Bit0: stato di fault inverter Bit1: rottura materiale Bit2: pre-tensionamento eseguito
Lo stato degli ingressi DIN 1-6 (ID=1605) è composto da: Bit0: DIN1 Bit1: DIN2 Bit2: DIN3 Bit3: DIN4 Bit4: DIN5Bit5: DIN6
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]

Vacon Applicazione Servodiametro rev. 1.14 Pagina 67
5. VARIABILI MONITOR (Menù M2)
Codice Nome Unità DescrizioneV1.1 Frequenza di uscita Hz Frequenza al motoreV1.2 Riferimento di frequenza Hz Frequenza comandata al regolatore di velocità V1.3 Velocità motore rpm Velocità motore calcolataV1.4 Corrente motore A Corrente motore misurataV1.5 Coppia motore % Coppia come % del valore nominaleV1.6 Potenza motore % Potenza come % del valore nominaleV1.7 Tensione al motore V Tensione di alimentazione del motore calcolataV1.8 Tensione DC-link V Tensione misurata sul bus DC V1.9 Temperatura °C Temperatura rilevata sul dissipatoreV1.10 DIN1,DIN2,DIN3 Stato input digitali gruppo 1V1.11 DIN4,DIN5,DIN6 Stato input digitali gruppo 2V1.12 D01,R01,R02 Stato output digitali V1.13 Uscita analogica mA Corrente su uscita analogicaV1.14 Velocità linea % Riferimento di velocità di linea V1.15 Riferimento tensione % Riferimento di tensione materialeV1.16 Tensione attuale % Tensione attuale sul materialeV1.17 Correzione taper % Valore correzione degressioneV1.18 Riferimento coppia % Coppia comandata al regolatore di coppia
P1.19 Diametro attuale % Valore calcolato, o misurato esternamente, del diametro,come percentuale del diametro massimo
V1.20 Riferimento tensione % Valore del riferimento di tensione, compresadegressione, a valle rampa.
V1.21 Inerzia base Kg m2 Valore base dell’inerzia calcolato (costante dipendente dalla taglia)
V1.22 Velocità encoder rpm Valore di velocità misurata sull’encoder V1.23 Errore PID % Errore di tensione in ingresso a regolatore PID V1.24 Uscita PID % Valore dell’uscita del regolatore PID V1.25 Correzione velocità Hz Valore della correzione di velocità da PID Tabella 5-1 Variabili del menu Monitor
Il valore di diametro attuale presenta le proprietà di un parametro, con possibilità di modifica manuale quando l’inverter è in stato di stop e non è attivo il comando di resetdiametro.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
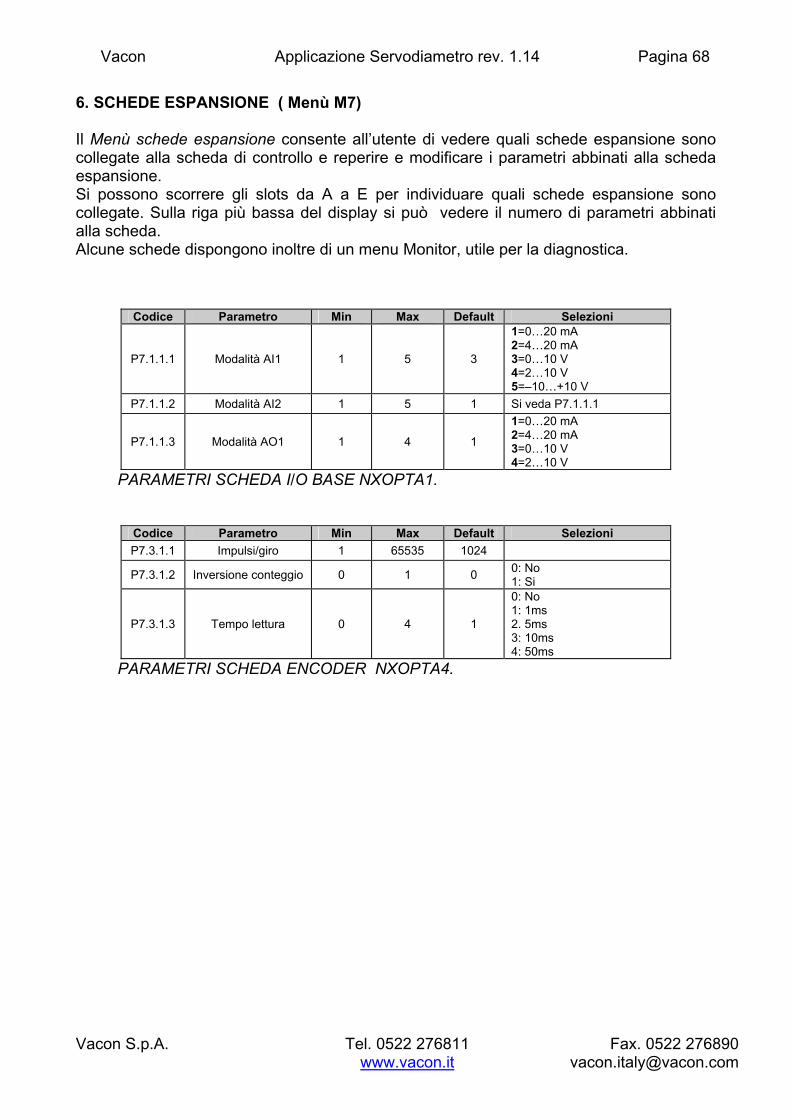
Vacon Applicazione Servodiametro rev. 1.14 Pagina 68
6. SCHEDE ESPANSIONE ( Menù M7)
Il Menù schede espansione consente all’utente di vedere quali schede espansione sono collegate alla scheda di controllo e reperire e modificare i parametri abbinati alla scheda espansione.Si possono scorrere gli slots da A a E per individuare quali schede espansione sono collegate. Sulla riga più bassa del display si può vedere il numero di parametri abbinatialla scheda.Alcune schede dispongono inoltre di un menu Monitor, utile per la diagnostica.
Codice Parametro Min Max Default Selezioni
P7.1.1.1 Modalità AI1 1 5 3
1=0…20 mA 2=4…20 mA 3=0…10 V 4=2…10 V 5=–10…+10 V
P7.1.1.2 Modalità AI2 1 5 1 Si veda P7.1.1.1
P7.1.1.3 Modalità AO1 1 4 1
1=0…20 mA 2=4…20 mA 3=0…10 V 4=2…10 V
PARAMETRI SCHEDA I/O BASE NXOPTA1.
Codice Parametro Min Max Default SelezioniP7.3.1.1 Impulsi/giro 1 65535 1024
P7.3.1.2 Inversione conteggio 0 1 0 0: No 1: Si
P7.3.1.3 Tempo lettura 0 4 1
0: No 1: 1ms 2. 5ms 3: 10ms 4: 50ms
PARAMETRI SCHEDA ENCODER NXOPTA4.
Vacon S.p.A. Tel. 0522 276811 Fax. 0522 276890 www.vacon.it [email protected]
ASITF010
VACON SPAVia F.lli Guerra, 35
42100 Reggio Emilia ITALY
Tel: +39 0522 276811 Fax +39 0522 276890
E-mail: [email protected]