
Universit`adegli studi di Trento Esercizi di Meccanica...
103
Universit`a degli studi di Trento Esercizi di Meccanica razionale Esercizio 34. Equilibri e stabilit`a di un sistema scleronomo a 2 g.d.l. con lagrangiana e sollecitazioni dissipative assegnate Si consideri il sistema meccanico descritto dalla Lagrangiana: L = 1 2 ( ˙ x 2 +˙ y 2 ) + U (x, y) dove il potenziale U ` e dato dall’espressione: U (x, y)= x 2 2 y − x 2 − 2y 2 . (a) Determinare le configurazioni di equilibrio del sistema. Supposto poi che al sistema siano applicate una ulteriore sollecitazione posizionale di com- ponenti: (Q x ,Q y )= ( x 2 , 4y 2 ) ed una non posizionale del tipo (D x ,D y )= ( ˙ y − 3˙ x, − ˙ x − 3˙ y 3 ) , si proceda a: (b) determinare le configurazioni di equilibrio del sistema in presenza delle nuove sol- lecitazioni; (c) analizzare le propriet` a di stabilit` a di tali configurazioni di equilibrio. Soluzione (a) Configurazioni di equilibrio nel caso conservativo Trattandosi di sistema posizionale conservativo le configurazioni di equilibrio si possono individuare come punti critici del potenziale U . Scritte le espressioni per le derivate parziali U x ≡ ∂U ∂x = x(y − 2) U y ≡ ∂U ∂y = x 2 2 − 4y, si perviene al sistema x(y − 2) = 0 x 2 2 − 4y =0 equivalente a considerare i due sistemi x =0 −4y =0 e y =2 x 2 2 − 8=0 il primo dei quali porge la soluzione (x, y) = (0, 0), mentre dal secondo si deducono le configurazioni di equilibrio (x, y) = (4, 2) e (x, y)=(−4, 2). (b) Configurazioni di equilibrio in presenza delle ulteriori sollecitazioni La sollecitazione posizionale (Q x ,Q y ) risulta banalmente conservativa, potendosi esprimere come gradiente della funzione scalare x 3 3 + 4 3 y 3 . Stefano Siboni 144
Transcript of Universit`adegli studi di Trento Esercizi di Meccanica...

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 34. Equilibri e stabilita di un sistema scleronomo a 2 g.d.l. conlagrangiana e sollecitazioni dissipative assegnateSi consideri il sistema meccanico descritto dalla Lagrangiana:
L =12(x2 + y2
)+ U(x, y)
dove il potenziale U e dato dall’espressione: U(x, y) =x2
2y − x2 − 2y2.
(a) Determinare le configurazioni di equilibrio del sistema.
Supposto poi che al sistema siano applicate una ulteriore sollecitazione posizionale di com-ponenti:
(Qx, Qy) =(x2, 4y2
)ed una non posizionale del tipo (Dx,Dy) =
(y − 3x,−x − 3y3
), si proceda a:
(b) determinare le configurazioni di equilibrio del sistema in presenza delle nuove sol-lecitazioni;
(c) analizzare le proprieta di stabilita di tali configurazioni di equilibrio.
Soluzione(a) Configurazioni di equilibrio nel caso conservativoTrattandosi di sistema posizionale conservativo le configurazioni di equilibrio si possonoindividuare come punti critici del potenziale U . Scritte le espressioni per le derivate parziali
Ux ≡ ∂U
∂x= x(y − 2) Uy ≡ ∂U
∂y=
x2
2− 4y ,
si perviene al sistema
x(y − 2) = 0
x2
2− 4y = 0
equivalente a considerare i due sistemi
x = 0−4y = 0
e
y = 2x2
2− 8 = 0
il primo dei quali porge la soluzione (x, y) = (0, 0), mentre dal secondo si deducono leconfigurazioni di equilibrio (x, y) = (4, 2) e (x, y) = (−4, 2).
(b) Configurazioni di equilibrio in presenza delle ulteriori sollecitazioniLa sollecitazione posizionale (Qx, Qy) risulta banalmente conservativa, potendosi esprimerecome gradiente della funzione scalare
x3
3+
43y3.
Stefano Siboni 144

Universita degli studi di Trento Esercizi di Meccanica razionale
Il sistema risulta pertanto soggetto ad una sollecitazione posizionale conservativa di poten-ziale
U(x, y) = U(x, y) +x3
3+
43y3 =
x2
2y − x2 − 2y2 +
x3
3+
43y3
unitamente alla sollecitazione non posizionale (Dx,Dy). E immediato verificare che que-st’ultima sollecitazione non concorre a determinare le configurazioni di equilibrio del si-stema, avendosi (Dx,Dy) = (0, 0) per (x, y) = costante e dunque (x, y) = (0, 0). Si tratteraancora una volta di determinare i punti critici del potenziale, avendo cura di sostituire Ucon U . Pertanto, essendo
Ux(x, y) = xy − 2x + x2 Uy(x, y) =x2
2− 4y + 4y2
si dovra risolvere il sistema algebrico
xy − 2x + x2 = 0
x2
2− 4y + 4y2 = 0
⇐⇒
x(y − 2 + x) = 0
x2
2− 4y + 4y2 = 0
ovvero, separatamente, ciascuno dei due sistemi
x = 0−4y + 4y2 = 0
y = 2 − x
x2
2− 4(2 − x) + 4(2 − x)2 = 0 .
Il primo dei due sistemi precedenti porge immediatamente le soluzioni (x, y) = (0, 0) e(x, y) = (0, 1), mentre il secondo sistema puo porsi nella forma equivalente
y = 2 − x
(3x − 4)2 = 0
da cui si ottiene l’ulteriore configurazione di equilibrio (x, y) =(4/3, 2/3
).
(c) Stabilita delle nuove configurazioni di equilibrioPer quel che riguarda la stabilita delle configurazioni di equilibrio, conviene analizzarepreventivamente la natura delle sollecitazioni non posizionali (Dx,Dy). A tale scopo sidetermina la potenza di dette sollecitazioni:
π ≡ Dxx + Dy y = (y − 3x)x + (−x − 3y3)y = −3(x2 + y4
)chiaramente non positiva, in quanto x2 + y4 ≥ 0 ∀ x, y ∈ R. Se a cio si aggiunge che lecomponenti Dx e Dy della sollecitazione non dipendono esplicitamente dal tempo e chel’annullarsi della potenza π implica necessariamente l’annullarsi della velocita:
−3(x2 + y4
)= 0 =⇒ (x, y) = (0, 0) ,
Stefano Siboni 145

Universita degli studi di Trento Esercizi di Meccanica razionale
si conclude che (Dx,Dy) ha natura completamente dissipativa. Inoltre le configurazioni diequilibrio sono necessariamente isolate, in quanto in numero finito — tre in tutto —. Nesegue che le proprieta di stabilita degli equilibrio sono completamente caratterizzabili pertramite dei criteri di Barbasin-Krasovskii. Il problema si riconduce a stabilire la naturadelle configurazioni di equilibrio, quali punti critici del potenziale U . I punti di massimorelativo proprio di U risulteranno asintoticamente stabili nel senso di Liapunov, mentre inogni altro caso si avra instabilita.Si scrivono pertanto le espressioni per le derivate seconde del potenziale:
Uxx = y − 2 + 2x Uyy = −4 + 8y Uxy = x
e per l’hessiana del potenziale in un generico punto (x, y) ∈ R2:
HU (x, y) =(
y − 2 + 2x xx −4 + 8y
).
Possiamo quindi procedere all’analisi di stabilita delle singole configurazioni di equilibriogia determinate.
Configurazione (x, y) = (0, 0)L’hessiana del potenziale in (0, 0) risulta
HU (0, 0) =(−2 00 −4
)e da essa si deduce immediatamente che, data la presenza di due autovalori negativi (−2 e−4), la configurazione e un massimo relativo proprio del potenziale, asintoticamente stabileper Barbasin-Krasovskii.
Configurazione (x, y) = (0, 1)La configurazione ha hessiana
HU (0, 1) =(−1 00 4
)chiaramente indefinita, a causa degli autovalori di segno opposto — gli elementi diagonali−1 e 4 —; ne segue l’assenza del massimo del potenziale in (x, y) = (0, 1) e per Barbasin-Krasovskii l’instabilita della configurazione.
Configurazione (x, y) = (4/3, 2/3)L’hessiana di U assume la forma
HU (4/3, 2/3) =(
4/3 4/34/3 4/3
).
Dalle relazioni:
DetHU (4/3, 2/3) = 0 TrHU (4/3, 2/3) = 8/3 > 0
si evince che gli autovalori della matrice hessiana sono uno positivo ed uno nullo. Lapresenza di un autovalore positivo consente di escludere che il punto critico sia un mas-simo relativo proprio del potenziale. Percio per Barbasin-Krasovskii la configurazione diequilibrio risulta instabile.
Stefano Siboni 146

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 35. Sistema scleronomo a 2 g.d.l. posizionale conservativoUna lamina omogenea di massa m avente la forma di un quadrato ABCD di lato L con unforo quadrato concentrico di lato < L/
√2 ha il vertice A scorrevole senza attrito lungo
una guida circolare di raggio R. Adottando come coordinate lagrangiane gli angoli θ e φindicati in figura,
(a) si scriva l’energia cinetica della lamina;
(b) si individuino le posizioni di equilibrio del sistema e si discutano le relative proprietadi stabilita;
(c) si scriva l’espressione della reazione vincolare in un generico istante t;
(d) supponendo di imporre un ulteriore vincolo, per cui si abbia ad ogni istante θ = φ, sideterminino le condizioni iniziali in corrispondenza delle quali si hanno moti oscillatorie quelle per le quali si verificano moti a meta asintotica.
Soluzione(a) Energia cinetica della laminaIl baricentro della lamina e il centro geometrico di questa ed ha coordinate cartesiane(
xG, yG
)=(R sinθ,−R cosθ
)+(L
√2
2sinφ,−L
√2
2cosφ
)=
=(R sinθ +
L√2
sinφ,−R cosθ − L√2
cosφ)
.
Il momento di inerzia delle lamina rispetto all’asse Gz vale inoltre:
I laminaGz = σ
L4 − 4
6=
m
6L4 − 4
L2 − 2= m
L2 + 2
6.
Per una lamina quadrata omogenea di densita superficiale σ e lato a risulta infatti
IGz =
a/2∫−a/2
dx
a/2∫−a/2
dy(x2 + y2
)σ =
σa4
6
Stefano Siboni 147

Universita degli studi di Trento Esercizi di Meccanica razionale
ed e evidente che il momento d’inerzia I laminaGz e dato dalla differenza fra i momenti d’inerzia
rispetto a Gz di due lamine quadrate centrate in G e di lati L ed rispettivamente,entrambe di densita superficiale σ = m/(L2 − 2), essendo L2 − 2 l’area della laminaforata ABCD.
Il vettore velocita angolare della lamina si scrive immediatamente come ω = φ e3. Lavelocita del baricentro G avra infine le componenti cartesiane:
(xG, yG
)=(R cosθ θ +
L√2
cosφ φ,R sinθ θ +L√2
sinφ φ)
(35.1)
ed il suo modulo quadrato si scrivera:
|G|2 = R2cos2θ θ2 +L2
2cos2φ φ2 + 2
RL√2
cosθ cosφ θφ+
+ R2sin2θ θ2 +L2
2sin2φ φ2 + 2
RL√2
sinθ sinφ θφ =
= R2θ2 +L2
2φ2 +
√2RL cos(θ − φ) θφ .
Si e ora in grado di determinare l’espressione per l’energia cinetica della lamina, facendouso del teorema di Konig:
T =12m|G|2 +
12I laminaGz φ2
(si osservi che quello attorno al baricentro e un moto rigido con asse fisso, di velocitaangolare ω). Sostituendo le relazioni trovate in precedenza si ottiene:
T =m
2
[R2θ2 +
L2
2φ2 +
√2RL cos(θ − φ) θφ
]+
m
12(L2 + 2
)φ2 =
=m
2
[R2θ2 +
(L2
2+
L2
6+
2
6
)φ2 +
√2RL cos(θ − φ) θφ
]=
=m
2
[R2θ2 +
(23L2 +
2
6
)φ2 +
√2RL cos(θ − φ) θφ
]
che e l’espressione cercata.
(b) Configurazioni di equilibrio e stabilitaLa sola sollecitazione attiva agente sul sistema e quella gravitazionale, applicata nel bari-centro G. Il potenziale totale risulta quindi
U(θ, φ) = −mgyG = mg(R cosθ +
L√2
cosφ)
.
Stefano Siboni 148

Universita degli studi di Trento Esercizi di Meccanica razionale
EquilibriLe configurazioni di equilibrio sono i punti critici del potenziale U e si determinano dunquerisolvendo il sistema
∂U
∂θ= −mgR sinθ = 0
∂U
∂φ= −mg
L√2sinφ = 0
il quale porge immediatamente θ = πk, k ∈ Z, e φ = πn, n ∈ Z. Le configurazioni diequilibrio assumono percio la forma generale
(θ, φ) = (πk, πn) , k, n ∈ Z
e corrispondono di fatto a quattro sole configurazioni distinte, ad esempio
(θ, φ) = (0, 0) (π, π) (0, π) (π, 0) .
StabilitaAvendosi Uθθ = −mgR cosθ, Uφφ = −mg(L/
√2) cosφ e Uθφ = 0, l’hessiana del potenziale
in un punto arbitrario (θ, φ) vale
HU (θ, φ) =(−mgR cosθ 0
0 −mg(L/√
2) cosφ
)
e nel punto di equilibrio (θ, φ) = (πk, πn) diviene
HU (πk, πn) =(
mgR(−1)k+1 00 mg(L/
√2)(−1)n+1
).
Se almeno uno degli indici k ed n e dispari, HU (πk, πn) ha almeno un autovalore positivoper cui la configurazione (πk, πn) risulta instabile per l’inversione parziale del teoremadi Lagrange-Dirichlet. Se viceversa tanto k quanto n sono pari, la HU (πk, πn) e definitanegativa: la configurazione di equilibrio (πk, πn) risulta quindi un massimo relativo propriodel potenziale, stabile per Lagrange-Dirichlet.
(c) Espressione della reazione vincolareLa reazione vincolare ψ agisce sulla lamina ABCD nel punto di contatto A con la guidacircolare e si ricava dalla equazione cardinale della quantita di moto
mG = ψ − mge2
che porgeψ = mG + mge2 .
Stefano Siboni 149

Universita degli studi di Trento Esercizi di Meccanica razionale
L’accelerazione del baricentro si calcola immediatamente derivando l’espressione (35.1)della sua velocita e risulta
(xG, yG
)=(R cosθ θ +
L√2
cosφ φ −R sinθ θ2 − L√2
sinφ φ2 ,
R sinθ θ +L√2
sinφ φ + R cosθ θ2 +L√2
cosφ φ2)
,
per cui la reazione vincolare assume la forma
ψ ≡(ψx, ψy
)=m
(R cosθ θ +
L√2
cosφ φ− R sinθ θ2 − L√2
sinφ φ2 ,
R sinθ θ +L√2
sinφ φ + R cosθ θ2 +L√2
cosφ φ2 + g) (35.2)
Si osservi che dalle equazioni del moto e sempre possibile ricavare (θ, φ) in funzione di θ,φ, θ, φ. Sostituendo tale espressione nella (35.2) si ottengono le componenti (ψx, ψy) di ψ
in termini della configurazione (θ, φ) e della velocita generalizzata (θ, φ).D’altra parte, la lagrangiana del sistema si scrive
L =m
2
[R2θ2 +
(23L2 +
2
6
)φ2 +
√2RL cos(θ − φ) θφ
]+ mg
(R cosθ +
L√2
cosφ)
e da essa si deducono le equazioni del moto
d
dt
[mR2θ +
m√2RL cos(θ − φ) φ
]+ mgR sinθ = 0
d
dt
[m(2
3L2 +
2
6
)φ +
m√2RL cos(θ − φ) θ
]+ mg
L√2
sinφ = 0
osservato che
d
dt
(∂L
∂θ
)=
d
dt
[mR2θ +
m√2RL cos(θ − φ) φ
] ∂L
∂θ= −mgR sinθ
d
dt
(∂L
∂φ
)=
d
dt
[m(2
3L2 +
2
6
)φ +
m√2RL cos(θ − φ) θ
] ∂L
∂φ= −mg
L√2
sinφ .
A questo punto le equazioni del moto porgono la relazione matriciale
θ
φ
=
R2 RL√
2cos(θ − φ)
RL√2
cos(θ − φ)23L2 +
2
6
−1
RL√2
sin(θ − φ) (θ − φ)φ − gR sinθ
RL√2sin(θ − φ) (θ − φ)θ − gL√
2sinφ
Stefano Siboni 150

Universita degli studi di Trento Esercizi di Meccanica razionale
che sostituita nell’espressione per le componenti della reazione vincolareψx
ψy
= m
Rcosθ
L√2cosφ
RsinθL√2sinφ
θ
φ
+ m
−Rsinθ θ2 − L√
2sinφ φ2
Rcosθ θ2 +L√2cosφ φ2 + g
conduce al risultato richiesto. Vale la pena sottolineare che, a meno di un fattore m/2, la R2 RL√
2cos(θ − φ)
RL√2cos(θ − φ)
23L2 +
2
6
e la matrice dell’energia cinetica del sistema; questa e noto a priori essere definita positiva,dunque invertibile.
(d) Sistema soggetto all’ulteriore vincolo θ = φE facile convincersi che le espressioni dell’energia cinetica e del potenziale del sistema siottengono da quelle gia determinate in precedenza per mezzo della sostituzione θ = φ (sitratta in definitiva di ripetere i calcoli fin qui svolti con θ in luogo di φ). Si ha cosı:
T =m
2
[R2θ2 +
(23L2 +
2
6
)θ2 +
√2RLθ2
]=
m
2
[R2 +
23L2 +
2
6+√
2RL]θ2
U = −mg(R +
L√2
)cosθ .
Il sistema e posizionale conservativo e ad un solo grado di liberta, per cui l’andamento qua-litativo delle soluzioni puo essere descritto mediante la usuale discussione di Weierstrass.L’energia potenziale totale −U (θ) ha il grafico illustrato dalla figura seguente
e l’energia meccanica totale del sistema (integrale primo di Jacobi) si scrive
H(θ, θ) = T − U =m
2
[R2 +
23L2 +
2
6+√
2RL]θ2 + mg
(R +
L√2
)cosθ .
Stefano Siboni 151

Universita degli studi di Trento Esercizi di Meccanica razionale
I moti oscillatori hanno luogo per ogni (e soltanto per ogni) condizione iniziale (θ, θ) =
(θ0, θ0) tale che H(θ0 , θ0) < mg(R +
L√2
), ovvero
12
[R2 +
23L2 +
2
6+√
2RL]θ20 < g
(R +
L√2
)2sin2
(θ0/2
).
A stretto rigore occorrerebbe escludere il caso H(θ0 , θ0) = −mg(R +
L√2
), allorche risulta
necessariamente (θ0, θ0
)=((2k + 1)π, 0
), k ∈ Z
e la soluzione del problema di Cauchy corrispondente e un equilibrio(θ(t), θ(t)
)=(θ0, θ0
)=((2k + 1)π, 0
)∀ t ∈ R .
I moti a meta asintotica ricorrono invece per H(θ0, θ0) = mg(R +
L√2
), ossia
12
[R2 +
23L2 +
2
6+
√2RL
]θ20 = g
(R +
L√2
)2sin2
(θ0/2
)a condizione che si abbia θ0 = 2πk, ∀ k ∈ Z, equivalente a θ0 = 0.
In conclusione, si hanno moti:
periodici per (θ0 , θ0) tale che −mg(R +
L√2
)< H(θ0 , θ0) < mg
(R +
L√2
);
a meta asintotica se (θ0, θ0) soddisfa H(θ0, θ0) = mg(R +
L√2
)e θ0 = 0.
Esercizio 36. Diagramma di biforcazione di un potenziale unidimensionaleDeterminare il diagramma di biforcazione del potenziale:
U(x) =
x∫0
sinξ (cosξ − λ) (cosξ − 2λ) dξ , ∀λ ∈ R .
SoluzioneSi calcolano preventivamente le derivata prima e seconda del potenziale, il che non com-porta alcuna difficolta trattandosi chiaramente di una funzione di classe C∞(R):
U ′(x) = sinx (cosx − λ)(cosx − 2λ)
U ′′(x) = cosx (cosx − λ)(cosx − 2λ) − sin2x (cosx − 2λ) − sin2x (cosx − λ) .
Le configurazioni di equilibrio si identificano con i punti critici del potenziale e sono quindidati dalle soluzioni reali dell’equazione trigonometrica
sinx (cosx − λ)(cosx − 2λ) = 0
Stefano Siboni 152

Universita degli studi di Trento Esercizi di Meccanica razionale
la quale porgesinx = 0 =⇒ x = 0, π , ∀λ ∈ R ,
cosx = λ =⇒ x = ±arc cos λ , ∀λ ∈ R : |λ| < 1 ,
cosx = 2λ =⇒ x = ±arc cos (2λ) , ∀λ ∈ R : |λ| < 1/2 .
Si deve analizzare la stabilita, al variare del parametro d’ordine λ, di tutte queste configu-razioni di equilibrio.
Configurazione x = 0La derivata seconda calcolata nel punto di equilibrio assume la forma
U ′′(0) = (1 − λ)(1 − 2λ) ∀λ ∈ R
per cui si ha U ′′(0) < 0, e dunque stabilita per Lagrange-Dirichlet, se e soltanto se λ ∈(1/2, 1); viceversa, λ ∈ (−∞, 1/2) ∪ (1,+∞) implica U ′′(0) > 0 e la configurazione risultainstabile in forza dell’inversione parziale del teorema di Lagrange-Dirichlet. I casi residuiλ = 1/2 e λ = 1 sono critici.Per λ = 1/2 si ha il seguente sviluppo di Taylor della derivata prima del potenzialenell’intorno di x = 0
U ′(x) = sinx(cosx − 1
2
)(cosx − 1) = −x3
4+
516
x5 + o(x6)
dal quale si deduce
U(x) = −x4
16+
596
x6 + o(x7).
La configurazione costituisce un massimo relativo proprio del potenziale ed e quindi stabileper il teorema di Lagrange-Dirichlet.Quanto al caso λ = 1, si ottengono le espressioni
U ′(x) = sinx (cosx − 1)(cosx − 2) =x3
2+
x5
8+ o(x6)
e di conseguenza
U(x) =x4
8+
x6
48+ o(x7),
da cui si deduce che x = 0 e minimo relativo proprio del potenziale e dunque configurazionedi equilibrio instabile per Weierstrass.
Configurazione x = πPer la derivata seconda nel punto di equilibrio si ottiene in questo caso
U ′′(π) = −(1 + λ)(1 + 2λ)
Stefano Siboni 153

Universita degli studi di Trento Esercizi di Meccanica razionale
e si ha quindi stabilita per Lagrange-Dirichlet se λ ∈ (−∞,−1) ∪ (−1/2,+∞), men-tre l’inversione parziale dello stesso teorema garantisce l’instabilita della configurazionequalora λ ∈ (−1,−1/2). I valori critici del parametro sono ora λ = −1/2 e λ = −1.Se λ = −1/2 vale
U ′(x) = sinx(cosx +
12
)(cosx + 1)
che la sostituzione x = π + ξ ed un successivo sviluppo di Taylor consentono di scriverenella forma
−sinξ(cosξ − 1
2
)(cosξ − 1) =
ξ3
4− 5
16ξ5 + o
(ξ6)
=(x − π)3
4− 5
16(x− π)5 + o
((x − π)6
)cosicche
U(x) = U(π) +
x∫π
U ′(x) dx = U(π) +(x − π)4
16− 5
96(x − π)6 + o
((x − π)7
)
e x = π risulta un minimo relativo proprio di U , instabile per Weierstrass.La configurazione e invece stabile per Lagrange-Dirichlet nel caso λ = −1. Infatti
U ′(x) = sinx (cosx + 1)(cosx + 2)
da cui, ponendo x = π + ξ, si ricava
U ′(x) = −sinξ (cosξ − 1)(cosξ − 2) = − (x − π)3
2− (x − π)5
8+ o((x − π)6
)ed infine
U(x) = U(π) − (x − π)4
8− (x − π)6
48+ o((x − π)7
).
La configurazione costituisce un massimo relativo proprio del potenziale ed e stabile perLagrange-Dirichlet, come gia asserito.
Configurazione x = ±arc cos λPoiche U ′(x) = −U ′(−x), ∀x ∈ R, si ha
U(−x) =
−x∫0
U ′(ξ) dξ =
x∫0
U ′(−ξ) (−1) dξ =
x∫0
U ′(ξ) dξ = U(x)
ed e quindi sufficiente studiare la stabilita della configurazione x = +arc cosλ. La derivataseconda risulta
U ′′(±arc cos λ) =(1 − λ2
)λ
ed assume segno positivo per λ ∈ (−∞,−1) ∪ (0, 1), negativo per λ ∈ (−1, 0) ∪ (1,+∞).Nel primo caso l’instabilita della configurazione segue dall’inversione parziale del teorema
Stefano Siboni 154

Universita degli studi di Trento Esercizi di Meccanica razionale
di Lagrange-Dirichlet, ovvero, equivalentemente, dalla discussione di Weierstrass. Nelsecondo caso, viceversa, il potenziale presenta un massimo relativo proprio di cui il teoremadi Lagrange-Dirichlet implica la stabilita. Dei casi residui, λ = −1, 0,+1, soltanto λ = 0e critico in quanto per λ = −1 e λ = 1 si perviene nuovamente alle configurazioni diequilibrio x = π ed x = 0 gia discusse in precedenza. La configurazione da studiare edunque x = π/2, con
U ′(x) = sinx cos2x =⇒ U(x) =13− 1
3cos3x .
Posto x = π/2 + ξ, il consueto sviluppo di Taylor porge l’espressione
U(x) =13
+13sin3ξ =
13
[1 + ξ3 − 1
2ξ5 + o
(ξ6)]
dalla quale segue che x = π/2 e un flesso orizzontale, la cui instabilita si deduce facilmentecon Weierstrass.
Configurazione x = ±arc cos (2λ). Anche in questo caso ci si puo limitare a consid-erare la configurazione x = +arc cos (2λ). La derivata seconda si scrive
U ′′(±arc cos (2λ))
= −(1 − 4λ2
)λ
e risulta negativa se λ ∈ (−∞,−1/2) ∪ (0, 1/2), positiva se λ ∈ (−1/2, 0) ∪ (1/2,+∞),stabile per Lagrange-Dirichlet nel primo caso, instabile nel secondo (inversione parziale diL-D). I valori residui λ = 1/2 e λ = −1/2 corrispondono alle configurazioni x = 0 ed x = πgia esaminate, mentre per λ = 0 si ricade nella configurazione critica x = π/2, instabileper quanto detto al punto precedente.I risultati ottenuti conducono al seguente diagramma di biforcazione:
Stefano Siboni 155

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 37. Sistema scleronomo a 2 g.d.l. posizionale conservativoIn un riferimento cartesiano ortogonale Oxyz e data un’asta rigida pesante OA, di lunghez-za R e massa m1. L’asta, vincolata a mantenere fisso l’estremo O e a giacere nel pianoverticale Oyz, ha densita lineare δ(ξ), essendo ξ ∈ [0, R] la distanza da O di un genericopunto di OA. L’estremo A e connesso tramite una molla di massa trascurabile e costanteelastica k > 0 ad un punto materiale P , avente massa m2 e libero di scorrere lungo l’asseverticale Oz. Tutti i vincoli si suppongono ideali.Sapendo che la terna Oxyz ruota attorno ad Oz con velocita angolare costante ω rispettoad un riferimento inerziale, ed usando i parametri lagrangiani s e θ mostrati in figura:
(a) determinare le configurazioni di equilibrio relative ad Oxyz e discuterne la stabilita alvariare dei parametri m1, m2, g, R, k, ω e della funzione densita δ(ξ);
(b) scrivere le equazioni lagrangiane del moto del sistema;
(c) individuare un integrale primo del moto;
(d) ricavare l’espressione della reazione vincolare Φ agente su P (per un moto arbitrariodel sistema).
SoluzioneSi puntualizza preliminarmente che la densita lineare δ(ξ) e la massa m1 dell’asta sonolegate dall’ovvia relazione
m1 =
R∫0
δ(ξ) dξ .
Per comodita conviene inoltre introdurre le notazioni sottoriportate, di cui si fara uso nelseguito
ξG =1
m1
R∫0
ξδ(ξ) dξ I =
R∫0
ξ2δ(ξ) dξ ,
che rappresentano rispettivamente la distanza |G − O| fra il baricentro G e l’estremo Odell’asta e il momento d’inerzia della stessa calcolato rispetto all’asse coordinato Ox.
Stefano Siboni 156

Universita degli studi di Trento Esercizi di Meccanica razionale
(a) Configurazioni di equilibrio e stabilitaEquilibriPer la determinazione delle configurazioni di equilibrio relative alla terna Oxyz e sufficienteosservare che le sollecitazioni agenti sul sistema sono tutte posizionali e conservative (leforze esterne gravitazionale e centrifuga e quella interna elastica). Si rifletta sul fatto chela forza di Coriolis, pur presente, ha componenti lagrangiane nulle in quanto l’asta OAed il punto P sono vincolati ad un piano fisso passante per l’asse di rotazione Oz, mentrela forza di Coriolis e certamente normale a tale piano. Detta sollecitazione non comparequindi nelle equazioni lagrangiane del moto e puo essere totalmente ignorata nello studiodegli equilibri e della loro stabilita (e del moto del sistema, in generale).Il potenziale gravitazionale e dato dalla somma dei potenziali gravitazionali relativi all’astaAO ed al punto materiale P
Ug(θ, s) = −m2g(−s) − m1g(−ξG cosθ) = m1gξG cosθ + m2gs
dove si e fatto uso della definizione di s (assunto positivo quando P ha quota negativa).Per il potenziale centrifugo vale la stessa considerazione, tuttavia il contributo dovuto alpunto materiale P risulta chiaramente nullo, il punto essendo vincolato all’asse di rotazione.Percio
Ucf(θ, s) =ω2
2Isin2θ
espressione che si ottiene comodamente per integrazione diretta del potenziale centrifugorelativo ad ogni singolo “elemento infinitesimo” dell’asta
R∫0
ω2
2(ξsinθ
)2δ(ξ) dξ .
Allo stesso risultato si perviene, equivalentemente, seguendo la procedura standard gene-rale, fissando cioe una terna di riferimento solidale ad OA, con origine in O. Una sceltaragionevole e rappresentata dagli assi Ox ed A−O, unitamente ad un terzo asse ortogonaleai precedenti ed orientato a piacere. La matrice l’inerzia dell’asta rispetto a questa ternaassume la forma
[L] =
I 0 0
0 0 00 0 I
,
mentre le componenti relative alla stessa terna del versore e3, diretto secondo l’asse dirotazione, risultano
( 0 −cosθ sinθ ) .
Il momento d’inerzia dell’asta rispetto all’asse Oz e dato allora dalla ben nota espressione
( 0 −cosθ sinθ )
I 0 0
0 0 00 0 I
0
−cosθsinθ
= I sin2θ
Stefano Siboni 157

Universita degli studi di Trento Esercizi di Meccanica razionale
che, introdotto il fattore ω2/2, conduce al risultato richiesto. Quanto alla sollecitazioneelastica, la determinazione del potenziale non comporta alcuna difficolta
Uel(θ, s) = −k
2|A − P |2 = −k
2[R2 + s2 − 2Rscosθ
]= −k
2R2 − k
2(s2 − 2Rscosθ
).
Omettendo una costante additiva inessenziale, il potenziale totale del sistema diventaquindi
U(θ, s) = m1gξGcosθ + m2gs +ω2
2Isin2θ − k
2s2 + kRs cosθ
e le configurazioni di equilibrio sono tutti e soli i punti critici di U . Annullando le compo-nenti del gradiente di U
Uθ = −m1gξG sinθ + ω2I sinθ cosθ − kRs sinθ
Us = m2g − ks + kR cosθ
si perviene al sistema di equazioni
0 = −m1ξG
Rsinθ +
Iω2
gRsinθ cosθ − k
gs sinθ
0 =m2g
kR− s
R+ cosθ
equivalente a
sinθ[−m1
ξG
R+
Iω2
gRcosθ − k
gs]
= 0m2g
kR− s
R+ cosθ = 0 .
Grazie alla fattorizzazione della prima equazione, si possono distinguere due casi.
Primo caso:
sinθ = 0m2g
kR− s
R+ cosθ = 0
che porge le soluzioni immediate
(θ, s) =(
0, R +m2g
k
)e (θ, s) =
(π,−R +
m2g
k
).
Secondo caso:
−m1ξG
R+
Iω2
gRcosθ − k
gs = 0
m2g
kR− s
R+ cosθ = 0
Stefano Siboni 158

Universita degli studi di Trento Esercizi di Meccanica razionale
da cui si deduce cosθ =s
R− m2g
kRe quindi, sostituendo nella prima equazione del sistema
sk
g
(Iω2
kR2− 1)
= m1ξG
R+ m2
Iω2
kR2⇐⇒ sk
g(λ − 1) = m1
ξG
R+ m2λ ,
dove λ ≡ Iω2/kR2 ≥ 0. Se λ − 1 = 0 non esiste soluzione in s. Nel caso λ − 1 = 0 si hainvece
s =g
k
[m1
ξG
R+ m2λ
] 1λ − 1
≡ s∗
ecosθ =
g
kR
[m1
ξG
R+ m2λ
] 1λ − 1
− m2g
kR=
g
kR
[m1
ξG
R+ m2
] 1λ − 1
,
per cui
θ = ±arc cos[
g
kR
(m1
ξG
R+ m2
) 1λ − 1
]≡ ±θ∗
a condizione cheg
kR
(m1
ξG
R+ m2
) 1|λ− 1| < 1
— si osservi come, a rigore, l’eventualita che il primo membro sia esattamente uguale ad1 sia gia stata considerata nel primo caso.
StabilitaLa stabilita delle configurazioni di equilibrio viene discussa al solito facendo uso del teoremadi Lagrange-Dirichlet e della sua inversione parziale. Si calcolano in primo luogo le derivateparziali seconde del potenziale, che risultano:
Uθθ = −m1gξG cosθ + Iω2(cos2θ − sin2θ
)− kRs cosθ Uθs = −kR sinθ Uss = −k
Si esaminano una ad una le configurazioni di equilibrio ottenute.
Configurazione (θ, s) = (0, R + (m2g/k))
Posto per brevita µ ≡ g
kR
(m1
ξG
R+ m2
)> 0, l’hessiana del potenziale si scrive
HU
(0, R+
m2g
k
)=(−m1gξG + Iω2 − kR2 −m2gR 0
0 −k
)=(
kR2(−µ + λ − 1) 00 −k
)
ed avendosi −k < 0 da essa si deduce che se −µ + λ − 1 < 0 il potenziale presenta unmassimo relativo proprio, stabile per Lagrange-Dirichlet; per contro, la condizione −µ +λ− 1 > 0 comporta la presenza di un autovalore positivo di HU e quindi l’instabilita dellaconfigurazione per l’inversione parziale di Lagrange-Dirichlet. Il caso infine −µ+λ−1 = 0e ovviamente critico, in quanto gli autovalori di HU risultano uno negativo ed uno nullo:la stabilita della configurazione puo essere provata esaminando termini di ordine superioreal secondo nello sviluppo di Taylor di U intorno al punto di equilibrio.
Stefano Siboni 159

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (θ, s) = (π,−R + (m2g/k))L’hessiana del potenziale e la seguente
HU
(π,−R +
m2g
k
)=(
m1gξG + Iω2 − kR2 + m2gR 00 −k
)=(
kR2(µ + λ − 1) 00 −k
)
e si ha dunque stabilita per L-D se µ+λ− 1 < 0, instabilita per inversione parziale di L-Dqualora µ + λ − 1 > 0. Se µ + λ − 1 = 0 ricorre un caso critico.
Configurazioni (θ, s) = (±θ∗, s∗)Le due configurazioni hanno le stesse proprieta di stabilita causa la simmetria in θ delpotenziale
U(−θ, s) = U(θ, s) ∀ (θ, s) ∈ R2,
ed e quindi sufficiente esaminarne una soltanto, ad esempio la prima. Poiche cosθ∗ =µ/(λ − 1), si ha
Uθθ(θ∗, s∗) = −m1gξG cosθ∗ + Iω2(2cos2θ∗ − 1
)− kRs∗ cosθ∗ =
= −m1gξGµ1
λ − 1+ Iω2
[2µ2 1
(λ − 1)2− 1]− kR
g
k
(m1
ξG
R+ m2λ
) 1λ − 1
µ1
λ − 1=
= −m1gξGµ1
λ − 1+ λkR2
[2µ2 1
(λ − 1)2− 1]− gR
(m1
ξG
R+ m2λ
) µ
(λ − 1)2=
= −m1gξGµ1
λ − 1+ 2kR2 λµ2
(λ − 1)2− λkR2 − gR
(m1
ξG
R+ m2λ
) µ
(λ − 1)2
= −λkR2 − gRµ
(λ − 1)2
[m1
ξG
R(λ − 1) − 2λ
(m1
ξG
R+ m2
)+ m1
ξG
R+ m2λ
]=
= −λkR2 +g2
k
1(λ − 1)2
(m1
ξG
R+ m2
)2
λ = λkR2
[−1 +
µ2
(λ − 1)2
]< 0
in forza della condizione µ/|λ − 1| < 1 di esistenza della configurazione, mentre di nuovoUss(θ∗, s∗) = −k < 0. Per la traccia e per il determinante della matrice hessiana valgonoallora le espressioni
trHU (θ∗, s∗) = Uθθ(θ∗, s∗) + Uss(θ∗, s∗) < 0
detHU (θ∗, s∗) = λk2R2
[1− µ2
(λ − 1)2
]−k2R2
[1− µ2
(λ − 1)2
]= (λ−1)k2R2
[1− µ2
(λ − 1)2
]
dove il segno del determinante coincide con quello di λ − 1. Se λ − 1 > 0 e quindidetHU (θ∗, s∗) > 0 e siccome trHU (θ∗, s∗) < 0 l’hessiana presenta due autovalori negativi:la configurazione costituisce un massimo relativo proprio del potenziale ed e stabile inforza del teorema di Lagrange-Dirichlet. Qualora sia viceversa λ − 1 < 0, il determinanterisulta negativo: l’hessiana ha autovalori di segno opposto, quello positivo dei quali implical’instabilita della configurazione (inversione parziale di L-D). Si ricordi infine che per λ−1 =0 la configurazione di equilibrio (θ∗, s∗) non e definita.
Stefano Siboni 160

Universita degli studi di Trento Esercizi di Meccanica razionale
OsservazioneI risultati precedenti mostrano che se µ < 1 e λ < 1 − µ — si tenga presente che perdefinizione i parametri adimensionali µ e λ assumono valore positivo il primo e non-negativoil secondo — la configurazione di equilibrio
(θ, s) =(π,−R +
m2g
k
)
risulta stabile. E bene sottolineare come questa conclusione sia piuttosto controintuitiva enon si possa immediatamente congetturare in base a considerazioni di ordine fisico.
Osservazione. Discussione di stabilita nei casi criticiPrimo caso criticoPer la configurazione (θ, s) = (0, R+(m2g/k)) si ha condizione critica quando −µ+λ−1 =0. Con il cambiamento di variabile s = R +
m2g
k+ Ru il potenziale diventa
U(θ,R +
m2g
k+ Ru
)= U
(0, R +
m2g
k
)+ kR2
[(µ + 1 + u)(cosθ − 1) − u2
2+
λ
2sin2θ
]
e nel caso critico
U(θ,R +
m2g
k+ Ru
)= U
(0, R +
m2g
k
)+ kR2
[(λ + u)(cosθ − 1) − u2
2+
λ
2sin2θ
].
Facendo uso degli sviluppi di Taylor
cosθ − 1 = −θ2
2+
θ4
24+ o(θ5)
sin2θ = θ2 − θ4
3+ o(θ5)
(θ → 0) ,
nell’intorno della configurazione di equilibrio (θ, u) = (0, 0) si ottiene
U(θ,R +
m2g
k+ Ru
)= U
(0, R +
m2g
k
)− kR2
8
[µθ4 +
(θ2 + 2u
)2]+ o(‖(θ, u)‖4
)essendo ‖ ‖ una qualunque norma di R
2. Dall’espressione scritta risulta evidente che laconfigurazione di equilibrio rappresenta un massimo relativo proprio del potenziale ed equindi stabile per Lagrange-Dirichlet.
Secondo caso criticoIl secondo caso critico da discutere e quello della configurazione (θ, s) = (π,−R+(m2g/k))per µ + λ − 1 = 0. Si pone θ = π + φ, s = −R +
m2g
k+ Ru e si ricava l’espressione
U(π+φ,−R+
m2g
k+Ru
)= U
(π,−R+
m2g
k
)+kR2
[(1−µ−u)
(cosφ−1
)+
λ
2sin2φ− u2
2
]
Stefano Siboni 161

Universita degli studi di Trento Esercizi di Meccanica razionale
che in condizioni critiche equivale alla
U(π+φ,−R+
m2g
k+Ru
)= U
(π,−R+
m2g
k
)+kR2
[(λ−u)
(cosφ−1
)+
λ
2sin2φ− u2
2
].
In un intorno di (φ, u) = (0, 0) vale cosı lo sviluppo di Taylor
U(π+φ,−R+
m2g
k+Ru
)= U
(π,−R+
m2g
k
)+
kR2
2
[−λ
4φ4 +uφ2−u2
]+o(‖(θ, u)‖4
).
Ci si convince facilmente che la configurazione di equilibrio non e ne un massimo ne unminimo relativo del potenziale U . Si consideri ad esempio, per a ∈ R opportunamentefissato, l’insieme dei valori di (φ, u) tali che
(φ, u) ∈ R
2 : (φ, u) =(τ, aτ 2
), τ ∈ R
, (37.1)
in corrispondenza di quali l’approssimazione di Taylor precedente si riduce a
U(π+τ,−R+
m2g
k+Raτ 2
)= U
(π,−R+
m2g
k
)+
kR2
2
[−λ
4+a−a2
]τ 4+o
(τ 4)
(τ → 0) .
Basta notare che la funzione quadratica Φ(a) ≡ a2 − a +λ
4ha minimo in a = 1/2 e soddisfa
Φ(1/2) = (λ − 1)/4 < 0, in quanto λ − 1 = −µ < 0; ne segue che scegliendo a ∈ R inmodo conveniente, la Φ(a) puo assumere valore positivo o negativo. Corrispondentemente,la restrizione di U all’insieme (37.1) presenta in (φ, u) = (0, 0) un massimo o un minimorelativo proprio. L’arbitrarieta di a ∈ R consente di concludere che la configurazione diequilibrio non e un estremo relativo di U , e in particolare che non si tratta di un massimo.I calcoli svolti non conducono quindi ad alcun risultato circa la stabilita o instabilita dellaconfigurazione, non essendo applicabili ne Lagrange-Dirichlet ne la sua parziale inversione.La questione rimane aperta.
Osservazione. Diagramma di biforcazione
La condizione µ < |λ − 1| di esistenza delle configurazioni di equilibrio (±θ∗, s∗) e equiv-alente ad assumere che λ soddisfi λ > 1 + µ oppure λ < 1 − µ. I risultati ottenuti sullaesistenza e stabilita delle configurazioni di equilibrio possono allora essere riassunti nelseguente diagramma di biforcazione — qui rappresentato nell’ipotesi che sia µ < 1; siosservi che per semplicita il diagramma riporta in ordinata la sola componente θ delle con-
Stefano Siboni 162

Universita degli studi di Trento Esercizi di Meccanica razionale
figurazioni di equilibrio.
(b) Equazioni di LagrangePer scrivere la lagrangiana del sistema e necessario ricavare l’espressione dell’energia cine-tica, che consistera della somma di due termini, l’uno relativo all’asta OA e l’altro al puntomateriale P . L’energia cinetica di P si ottiene immediatamente come
TP =m2
2|P |2 =
m2
2s2.
Quanto all’asta OA, questa segue un moto con asse fisso Ox e velocita angolare θe1 (re-lazione valida anche in segno se ci si attiene alla usuale convenzione sinistrorsa nell’orienta-mento relativo dell’angolo AOP e dell’asse Ox); il suo momento d’inerzia rispetto all’assedi rotazione Ox coincide evidentemente con I, cosicche
TOA =I
2θ2
e l’energia cinetica totale del sistema diventa T =m2
2s2 +
I
2θ2. Di qui la lagrangiana
L =m2
2s2 +
I
2θ2 + m1gξGcosθ + m2gs +
ω2
2Isin2θ − k
2s2 + kRs cosθ
e le equazioni del moto
d
dt
(∂L
∂s
)− ∂L
∂s= 0
d
dt
(∂L
∂θ
)− ∂L
∂θ= 0
⇐⇒
m2s = m2g − ks + kR cosθ
Iθ = −m1gξG sinθ + Iω2 sinθ cosθ − kRs sinθ
Stefano Siboni 163

Universita degli studi di Trento Esercizi di Meccanica razionale
— si e gia osservato che le componenti lagrangiane delle forze di Coriolis sono nulle e chequindi esse non compaiono a secondo membro nelle equazioni di Eulero-Lagrange.
(c) Integrale primoSiccome la lagrangiana del sistema non dipende esplicitamente dal tempo, un integraleprimo del moto e quello di Jacobi
θ∂L
∂θ+ s
∂L
∂s− L = 2T − (T + U) = T − U =
=m2
2s2 +
I
2θ2 − m1gξGcosθ − m2gs − ω2
2Isin2θ +
k
2s2 − kRs cosθ
che si identifica con l’hamiltoniana H, ovvero con l’energia meccanica totale del sistema.
(d) Reazione vincolareLa reazione vincolare Φ agente su P si deduce formalmente dalla equazione cardinale dellaquantita di moto, tenuto conto che le sole sollecitazioni attive applicate sono la forza peso equella elastica; la forza centrifuga risulta banalmente nulla in quanto P si localizza sull’assedi rotazione. Percio m2P = −m2g e3 + k(A − P ) + Φ e dunque
Φ = m2P + m2g e3 − k(A − P ) . (37.2)
Dalla geometria del sistema si deducono facilmente le relazioni seguenti:
A − O = R sinθ e2 − R cosθ e3 P −O = −s e3
A − P = R sinθ e2 + (s − R cosθ) e3 m2P = −m2s e3
che sostituite nella (37.2) porgono Φ = −kR sinθ e2 +[k(Rcosθ − s) + m2g − m2s
]e3.
Facendo uso dell’equazione del moto in s si ottiene infine il risultato richiesto
Φ = −kR sinθ e2 .
Si osservi che la reazione vincolare coincide, a meno del segno, con la componente lungoOy della forza elastica prodotta dall’estremo A su P . Cio e consistente con la natura idealedei vincoli, che impone la reazione sia normale all’asse vincolare Oz.
Esercizio 38. Equilibri e stabilita di un sistema scleronomo a 2 g.d.l. conlagrangiana e sollecitazioni dissipative assegnateE dato il sistema meccanico di lagrangiana
L =12(x2 + y2) + U(x, y) , con U(x, y) =
x3
3+ xy2 + 2xy e (x, y) ∈ R
2.
(a) Determinare le configurazioni di equilibrio, discutendone la stabilita.
Stefano Siboni 164

Universita degli studi di Trento Esercizi di Meccanica razionale
Nell’ipotesi che il sistema sia sottoposto ad una ulteriore sollecitazione di componentilagrangiane
Qx = −(x − y)2x + y Qy = −(x − y)2y − x ,
si provveda a:
(b) determinare la natura della sollecitazione addizionale;
(c) individuare le configurazioni di equilibrio e precisare, dove possibile, le relative pro-prieta di stabilita.
Soluzione(a) Configurazioni di equilibrio e relativa stabilita nel caso conservativoEssendo il sistema soggetto a sole sollecitazioni posizionali conservative, le configurazionidi equilibrio si identificano con i punti critici del potenziale U e risolvono percio il sistema
Ux = x2 + y2 + 2y = 0Uy = 2xy + 2x = 0
⇐⇒
x(y + 1) = 0x2 + y2 + 2y = 0 .
Dalla prima equazione segue che x = 0 oppure y + 1 = 0, per cui si hanno le soluzioni:
x = 0y2 + 2y = 0 ⇐⇒
x = 0y(y + 2) = 0 =⇒ (x, y) = (0, 0) , (0,−2) ,
y = −1x2 + 1− 2 = 0
⇐⇒
y = −1x2 = 1
=⇒ (x, y) = (−1,−1) , (1,−1) .
(b) Natura della sollecitazione addizionaleLa potenza della sollecitazione e data da
π = Qxx + Qy y = −(x − y)2(x2 + y2
)e soddisfa π ≤ 0 ∀
(x, y, x, y
)∈ R
4. La sollecitazione ha quindi natura dissipativa e le suecomponenti sono inoltre indipendenti dal tempo. L’annullarsi della potenza non implicapero l’annullarsi della velocita generalizzata, avendosi
π = 0 ∀(x, y, x, y
)∈ R
4 : x = y,
per cui non si e in presenza di sollecitazioni completamente dissipative nell’intero spaziodelle fasi. Il carattere completamente dissipativo della sollecitazione sussiste comunquelocalmente in qualsiasi intorno della varieta delle configurazioni R
2 che abbia intersezionevuota con la retta y = x.
(c) Equilibri e loro stabilita in presenza dell’ulteriore sollecitazioneIl risultato precedente consente di concludere che le configurazioni di equilibrio non mutanorispetto a quelle determinate nel caso puramente conservativo, data la natura dissipativa
Stefano Siboni 165

Universita degli studi di Trento Esercizi di Meccanica razionale
delle sollecitazioni addizionali (e la loro continuita nelle velocita generalizzate). Osservatoche
Uxx = 2x Uxy = 2(y + 1) Uyy = 2x ,
le matrici hessiane del potenziale calcolate nelle varie configurazioni di equilibrio sono leseguenti:
HU (0, 0) =(
0 22 0
)HU (0,−2) =
(0 −2−2 0
)
HU (−1,−1) =(−2 00 −2
)HU (1,−1) =
(2 00 2
)e di qui e immediato riconoscere in (−1,−1) e (1,−1) punti di massimo e di minimo relativoproprio di U rispettivamente, mentre le configurazioni (0, 0) e (0,−2) sono punti di sella.Il punto (0,−2) non appartiene alla retta x− y = 0, per cui vale π = 0 ⇐⇒
(x, y)
= (0, 0)a patto di considerare un intorno sufficientemente piccolo del punto in questione. Analogaproprieta sussiste per (1,−1). Limitatamente a tali intorni la sollecitazione addizionale ecompletamente dissipativa ed e quindi dato applicare i criteri di Barbasin-Krasovskii perdedurre l’instabilita di entrambe le configurazioni, in quanto banalmente isolate e non dimassimo relativo proprio per U .La configurazione (−1,−1) appartiene alla retta x − y = 0 e quindi la dissipazione nonrisulta completa in alcun intorno di (−1,−1). Trattandosi tuttavia di un massimo relativoproprio del potenziale, in presenza di sollecitazione a potenza non positiva, e comunquelecito fare uso del teorema di Lagrange-Dirichlet e dedurre la stabilita della configurazione.Circa l’eventuale attrattivita nulla si puo affermare sulla base dei teoremi generali noti.Per contro, il punto (0, 0) giace a sua volta sulla retta x − y = 0 ma costituisce un puntodi sella per il potenziale: Lagrange-Dirichlet non puo essere utilizzato e la questione dellastabilita rimane irrisolta.
Osservazione. Stabilita di (x, y) = (0, 0) con il metodo di linearizzazioneIl problema della stabilita di (0, 0) puo in realta risolversi ricorrendo al teorema di lineariz-zazione. Dalla lagrangiana
L =12(x2 + y2) +
x3
3+ xy2 + 2xy
e dalle componenti (Qx, Qy) si deducono le equazioni del moto
x = x2 + y2 + 2y − (x − y)2x + y
y = 2xy + 2x − (x − y)2y − x
che linearizzate nell’intorno di (0, 0) porgono
x = 2y + yy = 2x − x
⇐⇒
x = uy = vu = 2y + vv = 2x − u
⇐⇒ d
dt
xyuv
=
0 0 1 00 0 0 10 2 0 12 0 −1 0
xyuv
.
Stefano Siboni 166

Universita degli studi di Trento Esercizi di Meccanica razionale
Gli autovalori della matrice del sistema linearizzato si calcolano immediatamente, in quantoradici del polinomio caratteristico biquadratico λ4 + λ2 − 4, e risultano
λ1,2,3,4 = ±√(
−1 ±√
17)/2 .
Siccome λ1 = +√(
−1 +√
17)/2 > 0, la configurazione risulta instabile per il teorema di
Liapunov (di linearizzazione).
Osservazione. Attrattivita della configurazione (x, y) = (−1,−1)Vale la pena di osservare che la procedura di linearizzazione applicata nell’intorno dellaconfigurazione di equilibrio stabile (−1,−1) non fornisce alcuna informazione a propositodell’attrattivita della configurazione, gli autovalori della matrice rappresentativa del siste-ma linearizzato risultando tutti immaginari puri (si avrebbe attrattivita qualora tutti gliautovalori avessero parte reale negativa). Il risultato puo essere provato utilizzando diret-tamente il criterio di Barbasin-Krasovskii per la stabilita asintotica uniforme. Riscritto ilsistema in forma normale del primo ordine
x = uy = vu = x2 + y2 + 2y − (x − y)2u + vv = 2xy + 2x − (x − y)2v − u
(38.1)
ed assunta come funzione di Liapunov l’hamiltoniana
H(x, y, u, v) =12(u2 + v2) − x3
3− xy2 − 2xy +
23
,
si ha immediatamente che H e definita positiva in un intorno conveniente B[γ] ⊂ R4 della
soluzione di equilibrio (x, y, u, v) = (−1,−1, 0, 0) e che
H = π = −(x − y)2(u2 + v2
)≤ 0 ∀ (x, y, u, v) ∈ R
4
risulta semidefinita positiva nel medesimo intorno. Per poter applicare B.-K. e dunque suf-ficiente scegliere un intorno B[γ] abbastanza piccolo da non includere soluzioni di equilibriodistinte da (−1,−1, 0, 0) e dimostrare che l’insieme
Mγ ≡(x, y, u, v) ∈ B[γ] \ (−1,−1, 0, 0) : −(x − y)2
(u2 + v2
)= 0
non contiene orbite di soluzioni complete di (38.1). Sia allora t ∈ J →
(x(t), y(t), u(t), v(t)
)∈ R
4, con J intervallo reale, una soluzione massimale la cui orbita sia contenuta per interoin Mγ . Deve aversi necessariamente x(t) − y(t) = 0 ∀ t ∈ J . Se cosı non fosse, esisterebbeun t∗ ∈ J tale che x(t∗) − y(t∗) = 0 e per la continuita di x(t) − y(t) risulterebbe altresı
x(t) − y(t) = 0 ∀ t ∈ (t∗ − δ, t∗ + δ) ⊆ J
Stefano Siboni 167

Universita degli studi di Trento Esercizi di Meccanica razionale
con δ > 0 opportuno. L’appartenenza dell’orbita a Mγ implicherebbe pertanto, ∀ t ∈(t∗ − δ, t∗ + δ),
u(t)2 + v(t)2 = 0 ⇐⇒ u(t) = v(t) = 0 ⇐⇒ x(t) = y(t) = 0
e quindi(x(t), y(t), u(t), v(t)
)=(x(t∗), y(t∗), 0, 0
)∀ t ∈ (t∗ − δ, t∗ + δ).
Per il teorema di unicita della soluzione massimale, la soluzione ottenuta non potrebbe cheidentificarsi con una soluzione statica in R e cio in contrasto con l’assenza di (orbite di)soluzioni statiche in Mγ. Appurato in tal modo che x(t) − y(t) = 0 identicamente in J ,sostituendo nelle equazioni del moto (38.1) si ottiene ∀ t ∈ J
x(t) = 2x(t)2 + 2x(t) + x(t)x(t) = 2x(t)2 + 2x(t) − x(t)
ed infine x(t) = 0. In conclusione
x(t) = y(t) = costante u(t) = v(t) = 0 ∀ t ∈ J
e ci si trova nuovamente a dover considerare l’orbita di una soluzione statica in Mγ , la cuiesistenza e esclusa per ipotesi.
Esercizio 39. Nel teorema di Lagrange-Dirichlet il massimo relativo del poten-ziale deve essere proprioSe il massimo relativo del potenziale U non e proprio, puo non aversi stabilita.
Esempio In (x, y) ∈ R2 si consideri il sistema lagrangiano di lagrangiana
L =12x2 +
12y2 + U(x, y) , U(x, y) = −x2
2.
Le equazioni del moto x = −xy = 0 (x, y) ∈ R
2 (39.1)
presentano una configurazione di equilibrio in (x, y) = (0, 0), che e massimo relativo manon proprio del potenziale U . Si verifica facilmente che (0, 0) non e stabile.Infatti il sistema (39.1) puo essere integrato esplicitamente
x(t) = a1 cost + a2 sint y(t) = b1 + b2tx(t) = −a1 sint + a2 cost y(t) = b2
con la condizione iniziale(x(0), y(0), x(0), y(0)
)=(a1, b1, a2, b2
). (39.2)
Ma ogni intorno di(x(0), y(0), x(0), y(0)
)= (0, 0, 0, 0) contiene punti del tipo (39.2) con
b2 = 0. Scelti come condizione iniziale del sistema (39.1), conducono a soluzioni nonlimitate in forza di
y(t) = b1 + b2t
per cui la definizione di stabilita non e soddisfatta.
Stefano Siboni 168

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 40. Il teorema di Lagrange-Dirichlet fornisce una condizione suffi-ciente per la stabilita, ma non necessaria.La condizione espressa dal teorema di Lagrange-Dirichlet e sufficiente per l’equilibrio manon risulta affatto necessaria. Si possono considerare un paio di esempi illustrativi diquesto, per sistemi olonomi a uno e rispettivamente due gradi di liberta.
Esempio a un grado di libertaConsideriamo il seguente esempio di sistema olonomo ad un grado di liberta, soggetto asollecitazioni posizionali conservative, in cui un punto di equilibrio non e massimo relativoproprio del potenziale e pur tuttavia risulta stabile.
Sia data la lagrangiana L = x2/2 + U(x), con il potenziale
U(x) =−e−1/x2
cos(1/x) se x = 00 se x = 0
funzione di classe C∞ su R (dunque localmente Lipschitz). E facile verificare che U ′(0) = 0,per cui x(t) = 0 ∀ t ∈ R e configurazione di equilibrio del sistema x = U ′(x).La configurazione x = 0 non costituisce un estremo relativo di U . Si consideri infattil’insieme dei punti critici di U in R
+, definiti dall’equazione
U ′(x) = − 1x2
e−1/x2[
2x
cos(1/x) + sin(1/x)]
= 0 , x > 0 . (40.1)
Si osservi che necessariamente cos(1/x) = 0, poiche in caso contrario la (40.1) implichereb-be l’assurdo sin(1/x) = 0. L’equazione (40.1) e dunque equivalente alla tg(1/x)+2/x = 0,x > 0, dalla quale si deduce tg(1/x) = −2/x. Posto per semplicita z = 1/x si pervieneall’equazione trascendente
tgz = −2z , z > 0,
che puo essere risolta per via grafica, come illustrato nella figura seguente
Stefano Siboni 169

Universita degli studi di Trento Esercizi di Meccanica razionale
Si ottiene una infinita numerabile di soluzioni zn, n = 1, 2, . . ., per le quali risulta
zn ∈(π
2+ π(n − 1) , πn
)n = 1, 2, . . . (40.2)
e quindi coszn > 0 per n pari, coszn < 0 per n dispari. I punti critici di U in x > 0 sonodunque
xn = 1/zn n = 1, 2, . . .
e poiche limn→+∞ zn = +∞ in forza della (40.2), si conclude che limn→+∞ xn = 0.x = 0 e punto di accumulazione dei punti critici (xn)n∈Z+ . Vale inoltre
U(xn) = −e1/x2ncos(1/xn) = −ez2
ncoszn n = 1, 2, . . .
cosicche U(xn) < 0 per n pari e U(xn) > 0 per n dispari. Cio prova che x = 0 non e puntodi estremo relativo di U e che gli xn sono alternativamente massimi e minimi relativipropri di U (tutti i punti critici del potenziale essendo stati individuati). Nondimeno, dalladiscussione di Weierstrass segue la stabilita della configurazione x = 0, tenuto conto delgrafico di U :
Basta osservare che ∀n ∈ Z+ vale zn =
π
2+ π(n − 1) + ∆zn, con ∆zn ∈ (0, π/2) e
∆zn n→+∞
0, sicche ∣∣U(xn)∣∣ = e−z2
nsin(∆zn
), n ∈ Z
+ ,
e una successione monotona decrescente (si ricordi che zn n→+∞
+∞).
Dall’esame del grafico di U si deduce immediatamente che e possibile confinare indefinita-mente il moto del sistema in un intorno sferico di raggio ε > 0 della soluzione (x, x) = (0, 0)considerando livelli di energia E tali che 0 ≤ E < δε, con δε > 0 abbastanza piccolo.
Esempio a due gradi di liberta
Sia L =x2
2+
y2
2+ U(x, y) la lagrangiana del sistema, con potenziale U(x, y) = U1(x) +
U2(y) dato dalle espressioni
U1(x) =−e−1/x2
cos(1/x) ∀x ∈ R \ 00 per x = 0
Stefano Siboni 170

Universita degli studi di Trento Esercizi di Meccanica razionale
e
U2(y) =
e−1/y2[cos(1/y) + y2
]∀ y ∈ R \ 0
0 per y = 0 .
Il sistema delle equazioni di Lagrange e disaccoppiato
x = U ′1(x)
y = U ′2(y)
(40.3a)
(40.3b)
e si verifica che (x, y) = (0, 0) costituisce una configurazione di equilibrio. Inoltre:
x = 0 e una configurazione di equilibrio stabile per la (40.3a) — essa coincide conquella dell’esempio precedente;
y = 0 e configurazione di equilibrio stabile della (40.3b), come si verifica in modoanalogo alla (40.3a). Si osservi infatti che ∀n ∈ Z
+ l’espressione
U2(1/πn) = e−π2n2[(−1)n +
1π2n2
]
ha segno (−1)n. A cio si aggiunga che limy→0 U2(y) = 0 = U(0). Fissando livelli dienergia non negativi e minori di un numero positivo abbastanza piccolo, il moto saralocalizzato in un intorno piccolo a piacere di (y, y) = (0, 0).
Pertanto (x, y) = (0, 0) e una configurazione di equilibrio stabile per il sistema (40.3).Eppure
U(x, x) = U1(x) + U2(x) = x2 e−1/x2> 0 = U(0, 0) ∀x ∈ R \ 0
e dunque (x, y) = (0, 0) certamente non rappresenta un massimo relativo proprio di U .
Esercizio 41. Sistema scleronomo a 1 g.d.l. non conservativoIn un riferimento cartesiano ortogonale Oxyz e data una guida circolare rigida di centroO e raggio R, disposta nel piano verticale Oyz. Un disco rigido piano, pesante, di raggior2 < R e centro C e vincolato a giacere permanentemente nel piano fisso Oyz e a rotolaresenza strisciare sulla guida. Il disco e composto da un cerchio omogeneo di centro C , raggior1 < r2 e massa m1, e da una corona circolare omogenea concentrica e complanare di massam2 e raggio interno r1. Sapendo che la terna Oxyz ruota attorno all’asse verticale Oz convelocita angolare costante Ω rispetto ad un riferimento inerziale, assunti i vincoli ideali, edusando come parametro lagrangiano l’angolo θ mostrato in figura:
(a) determinare le configurazioni di equilibrio relative alla terna Oxyz;
(b) scrivere l’espressione dell’energia cinetica relativa a Oxyz;
(c) ricavare l’espressione per la reazione vincolare esercitata dalla guida ad un istantearbitrario e per un moto arbitrario del sistema.
Stefano Siboni 171

Universita degli studi di Trento Esercizi di Meccanica razionale
(d) Supposto poi che nel centro C del disco sia applicata l’ulteriore sollecitazione
−β|C|2C + γ e1 ∧ C ,
essendo e1 il versore associato all’asse Ox e β, γ due costanti positive fissate, indivi-duare le configurazioni di equilibrio relative a Oxyz e discuterne la stabilita.
Soluzione(a) Configurazioni di equilibrioSi indichi con P il punto di contatto fra disco e guida ad un generico istante. Trattandosidi moto piano, la velocita angolare del disco si scrivera nella forma ω e1, con ω ∈ R, e peril punto P sul disco si avra
P =d
dt(P −O) =
d
dt(P − C) +
d
dt(C − O) = C + ω e1 ∧ (P − C) =
=d
dt
((R − r2) sinθ e2 − (R − r2) cosθ e3
)+ ω
|P − C ||C − O| e1 ∧ (C − O) =
= (R − r2) cosθ θ e2 + (R − r2) sinθ θ e3 +ωr2
R − r2
∣∣∣∣∣∣e1 e2 e3
1 0 00 sinθ −cosθ
∣∣∣∣∣∣ (R − r2) =
= (R − r2) cosθ θ e2 + (R − r2) sinθ θ e3 + ωr2
[cosθ e2 + sinθ e3
]=
=[(R − r2)θ + ωr2
]cosθ e2 +
[(R − r2)θ + ωr2
]sinθ e3 . (41.1)
Per il punto P sulla guida fissa e invece, ovviamente, P = 0. La condizione di rotolamentosenza strisciamento si riduce a porre uguale a zero l’ultimo membro della (41.1). Percio
(R − r2)θ + ωr2 = 0 ⇐⇒ ω = −R − r2
r2θ (41.2)
Stefano Siboni 172

Universita degli studi di Trento Esercizi di Meccanica razionale
che e l’espressione della velocita angolare cercata.Poiche la forza di Coriolis agente su ogni singolo punto del sistema risulta per definizione or-togonale al piano vincolare Oyz, ne segue che tale sollecitazione ha componente lagrangiananulla. Pertanto le sole sollecitazioni da considerare in Oxyz sono quella gravitazionale(reale) e quella centrifuga (fittizia), entrambe posizionali conservative. Notato che il bari-centro del disco coincide con il suo centro geometrico C , il potenziale gravitazionale siscrive
Ugrav = (m1 + m2)g(R − r2) cosθ ,
essendo −(R−r2) cosθ la quota di C . Per contro, una immediata applicazione del teoremadi Huygens-Steiner consente di ottenere per il potenziale centrifugo l’espressione
Uc.f. =Ω2
2[(m1 + m2)(R − r2)2sin2θ + ICz
],
dove si e indicato con ICz il momento d’inerzia (costante) del disco rispetto all’asse condottoper C e parallelo ad Oz. Il potenziale totale e dunque dato, a meno di una costante additivainessenziale, dalla somma dei potenziali gravitazionale e centrifugo
U(θ) = (m1 + m2)g(R − r2) cosθ +Ω2
2(m1 + m2)(R − r2)2sin2θ , (41.3)
ovvero, omettendo il fattore costante positivo (m1 + m2)g(R − r2)
U(θ) = cosθ +Ω2(R − r2)
2gsin2θ .
Vale la pena di sottolineare come la determinazione del potenziale totale non richieda ilcalcolo esplicito del momento d’inerzia ICz, ma semplicemente la verifica della sua indipen-denza da θ — proprieta questa immediata, essendo C centro di simmetria del disco.Le configurazioni di equilibrio del sistema relative alla terna Oxyz si identificano con ipunti critici del potenziale totale, appena determinato. Tenuto conto delle ovvie relazioni
U ′(θ) = −sinθ +Ω2(R − r2)
gsinθ cosθ = sinθ
[−1 +
Ω2(R − r2)g
cosθ]
si ha cosı l’equazione
sinθ[−1 +
Ω2(R − r2)g
cosθ]
= 0
dalla quale si deducono le configurazioni di equilibrio θ = 0 e θ = π, sempre definite, e leulteriori
θ = arc cos( g
Ω2(R − r2)
)θ = −arc cos
( g
Ω2(R − r2)
)che invece ricorrono se e soltanto se g/Ω2(R−r2) < 1 — le soluzioni per g/Ω2(R − r2) = 1si identificano con le precedenti.
Stefano Siboni 173

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Energia cineticaPoiche il disco non presenta punti fissi, conviene ricorrere al teorema di Konig e scriverel’energia cinetica T nella forma
T =12(m1 + m2)|C|2 + TC , (41.4)
essendo TC l’energia cinetica del moto attorno al baricentro. Il primo termine della (41.4)si calcola agevolmente e risulta
12(m1 + m2)(R − r2)2θ2 ,
mentre per il secondo e sufficiente fare uso dell’espressione (41.2) per la velocita angolareistantanea del disco
TC =12ICx
(R − r2
r2
)2
θ2.
Il momento d’inerzia ICx del disco rispetto all’asse Cx si determina applicando la proprietaadditiva. Un primo contributo deriva dal disco centrale di massa m1 e raggio r1
m1r21
2; (41.5)
la corona circolare omogenea di raggi r1 < r2 e massa m2 e caratterizzata da una den-sita superficiale costante m2/π(r2
2 − r21) ed il suo momento d’inerzia puo vedersi come la
differenza fra quelli di due cerchi pieni, l’uno di raggio r2 e l’altro di raggio r1, aventientrambi la medesima densita
r22
2πr2
2
m2
π(r22 − r2
1)− r2
1
2πr2
1
m2
π(r22 − r2
1)=
m2
2(r22 + r2
1
). (41.6)
Il momento ICx segue allora dalla somma di (41.5) ed (41.6). Si ha cosı l’espressione finaleper l’energia cinetica del sistema
T =12(m1 + m2)(R − r2)2θ2 +
12
[m1r21
2+
m2
2(r22 + r2
1
)](R − r2
r2
)2
θ2. (41.7)
(c) Reazione vincolareLa reazione vincolare esercitata dalla guida consiste di un’unica forza Ψ applicata nel puntodi contatto P fra disco e guida (e normale alla guida, in forza dell’ipotesi di idealita deivincoli). Si parte dall’equazione cardinale dell’impulso per il disco. Indicando con Fcf larisultante delle forze centrifughe agenti sul disco si ha
(m1 + m2)C = −(m1 + m2)g e3 + Fcf + Ψ .
Stefano Siboni 174

Universita degli studi di Trento Esercizi di Meccanica razionale
L’idea e ora quella di esprimere l’accelerazione del baricentro C in termini di θ e θ permezzo delle equazioni di Lagrange del moto. Determinata a parte la risultante Fcf dellesollecitazioni centrifughe, si avra cosı
Ψ = (m1 + m2)g e3 − Fcf + (m1 + m2)C . (41.8)
Le equazioni del moto si deducono dalla lagrangiana L = (A/2)θ2 + U(θ), indicando conA/2 il fattore costante positivo di θ2 nella (41.7), e facendo uso della (41.3) per il potenziale.Si perviene dunque all’equazione di Lagrange
Aθ = U ′(θ) ⇐⇒ θ =1A
U ′(θ) ,
che sostituita nell’espressione per l’accelerazione del baricentro
C = (R − r2)[(cosθ e2 + sinθ e3)θ + (−sinθ e2 + cosθ e3)θ2
]porge
C = (R − r2)[(cosθ e2 + sinθ e3)
1A
U ′(θ) + (−sinθ e2 + cosθ e3)θ2]
. (41.9)
Non resta che determinare la risultante delle forze centrifughe. A tale scopo si ricordache per una lamina L disposta in un piano passante per l’asse di rotazione Oz le forzecentrifughe costituiscono un sistema di forze parallele. Nella fattispecie, poiche il piano digiacitura del disco e il piano coordinato Oyz, la risultante delle forze centrifughe si scrive
Fcf =∫L
Ω2y σ(y, z) dydz e2 = mΩ2 1m
∫L
y σ(y, z) dydz e2 = mΩ2 Gy e2 ,
essendo σ la densita superficiale e Gy l’ordinata del baricentro della lamina. Avendosi inquesto caso G = C , si conclude che
Fcf = Ω2(m1 + m2) (R − r2)sinθ e2 . (41.10)
Basta infine sostituire le relazioni (41.9) ed (41.10) nella (41.8) per ottenere il risultatodesiderato:
Ψ =(m1 + m2)g e3 − Ω2(m1 + m2) (R − r2)sinθ e2+
+(m1 + m2)(R − r2)[(cosθ e2 + sinθ e3)
1A
U ′(θ) + (−sinθ e2 + cosθ e3)θ2]
.(41.11)
Si osservi che l’espressione finale contiene soltanto il parametro lagrangiano θ, consideratoquale funzione del tempo t, e la sua derivata θ. Note che siano configurazione e velocitageneralizzata ad un istante arbitrario e dunque possibile determinare la reazione vincolareesercitata dalla guida sul disco.
Stefano Siboni 175

Universita degli studi di Trento Esercizi di Meccanica razionale
Si verifica facilmente che la reazione vincolare non risulta normale alla guida. Infatti ilversore binormale alla guida nel punto di contatto con il disco vale b = e1, mentre quellotangente si scrive τ = cosθ e2 + sinθ e3. Si hanno allora dalla (41.11) le relazioni Ψ · b = 0e
Ψ · τ = sinθ
[1 − Ω2
g(R − r2) cosθ
](m1 + m2)g
[1 −
[1 +
12
r21
r22
+12
m2
m1 + m2
]−1]
che provano l’asserto. La componente lungo τ della Ψ si giustifica come componente direazione vincolare necessaria a che il rotolamento del disco sulla guida abbia luogo senzastrisciamento.Non e inopportuno sottolineare come per ogni soluzione di equilibrio del sistema si abbiaΨ · τ = 0, come l’analisi statica permette di stabilire immediatamente.
(d) Effetto delle ulteriori sollecitazioni su equilibri e stabilitaLa sollecitazione addizionale
F = −β|C|2C + γ e1 ∧ C (41.12)
ha componente lagrangiana
Qθ = F · ∂C
∂θ= −β|C|2C · ∂C
∂θ= −β
∣∣∣∂C
∂θ
∣∣∣2|C|2 θ (41.13)
e si annulla per θ = costante, ossia θ = 0. Percio le configurazioni di equilibrio rimangonole stesse gia calcolate in assenza della (41.12). La potenza della sollecitazione vale inoltre:
Qθ · θ = −β∣∣∣∂C
∂θ
∣∣∣2|C|2 θ2 = −β∣∣∣∂C
∂θ
∣∣∣4 θ4 = −β(R − r2)4θ4 ≤ 0
e vale zero se e soltanto se θ = 0. Dall’assenza di una dipendenza esplicita dal tempo t in(41.13) si conclude che la sollecitazione (41.12) e completamente dissipativa. D’altra parte,le configurazioni di equilibrio del sistema sono in numero finito e quindi necessariamenteisolate. E dunque lecito applicare i criteri di Barbasin-Krasovskii ed affermare che leconfigurazioni di equilibrio corrispondenti a massimi relativi propri del potenziale totalesono asintoticamente stabili, mentre in ogni altro caso si ha instabilita.Cio premesso, si esaminano le singole configurazioni di equilibrio, ricordando che
U ′′(θ) = −cosθ +Ω2
g(R − r2)
(2 cos2θ − 1
).
Stefano Siboni 176

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione θ = 0
Avendosi U ′′(0) = −1 +Ω2
g(R − r2), B.-K. implica che la configurazione sia
asintoticamente stabile, in quanto massimo relativo proprio di U , perΩ2
g(R − r2) < 1;
instabile, quale minimo relativo proprio del potenziale, perΩ2
g(R − r2) > 1.
Il casoΩ2
g(R − r2) = 1 e critico e deve essere discusso a parte. Nella fattispecie, in un
intorno di θ = 0 vale lo sviluppo di Taylor di U
U (θ) = cosθ +12
sin2θ = 1 − θ2
2+
θ4
24+ O
(θ6)
+θ2
2
[1 − θ2
6+
θ4
120+ O
(θ6)]2
=
= 1 − θ2
2+
θ4
24+ O
(θ6)θ2
2
[1 − θ2
3+ O
(θ4)]
= 1 − θ4
8+ O
(θ6)
(θ → 0) ,
per cui θ = 0 risulta un massimo relativo proprio di U , asintoticamente stabile per B.-K..
Configurazione θ = π
La configurazione di equilibrio risulta sempre instabile perchee minimo relativo proprio delpotenziale (e quindi non massimo stretto). Infatti:
U ′′(π) = 1 +Ω2
g(R − r2) > 0 .
Configurazioni θ = ±arc cos( g
Ω2(R − r2)
)= ±θ∗
Le proprieta di stabilita delle due configurazioni sono le stesse in quanto U(−θ) = U(θ)∀ θ ∈ R. Ci si puo dunque limitare a considerare una sola delle due configurazioni, adesempio θ = θ∗, ottenendo
U ′′(θ∗) = − g
Ω2(R − r2)+
Ω2(R − r2)g
[2
g2
Ω4(R − r2)2− 1]
=
= − Ω2(R − r2)g
[1 −
( g
Ω2(R − r2)
)2]
< 0 .
Il segno negativo della derivata si desume dalla condizione g/Ω2(R − r2) < 1 di esistenzadi θ∗. Si conclude che la configurazione e, laddove definita, un massimo relativo propriodel potenziale e che essa risulta quindi asintoticamente stabile per B.-K..
Stefano Siboni 177

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 42. Onda elettromagnetica piana su una carica elettrica puntiformeIn una terna di riferimento cartesiana ortogonale Oxyz si consideri un punto materialelibero di massa m. Il punto e dotato di una carica elettrica costante q e viene sottopostoall’azione di un’onda elettromagnetica piana della forma
E = a cos(ky − ωt) e3 B =a
ccos(ky − ωt) e1 ,
essendo E e B i vettori campo elettrico ed induzione magnetica, a > 0 l’ampiezza ed ω lapulsazione dell’onda. Si e indicato con k il numero d’onda, mentre c = ω/k rappresenta lavelocita della luce nel vuoto.
Ignorando gli effetti di irraggiamento dovuti al moto della carica, si dimostri l’integrabilitadel sistema riconducendone l’analisi ad un problema unidimensionale (la cui soluzione puoessere ottenuta mediante l’usuale discussione di Weierstrass).
SoluzionePosto x = xe1 + ye2 + ze3, il punto materiale e soggetto alla forza di Lorentz
F = q(E + x ∧ B
)per cui le equazioni del moto della carica q si scrivono
m
aqx = 0
m
aqy =
1cz cosk(y − ct)
m
aqz =
(1 − 1
cy)
cosk(y − ct)
delle quali la prima e immediatamente e banalmente integrabile. Le condizioni iniziali(arbitrarie) sono x(0), x(0), y(0), y(0), z(0) e z(0). Conviene introdurre il cambiamentodi variabili t = ατ , y = βU , z = γZ, con α, β, γ costanti reali opportune, ottenendo
m
aq
β
α2
d2U
dτ 2=
1c
γ
α
dZ
dτcos[k(βU − αcτ )
]m
aq
γ
α2
d2Z
dτ 2=[1 − β
αc
dU
dτ
]cos[k(βU − αcτ )
].
Stefano Siboni 178

Universita degli studi di Trento Esercizi di Meccanica razionale
Se, in particolare, β = αc e γ = aqα2/m si ha
d2U
dτ 2=(α
aq
mc
)2 dZ
dτcos[k(αcU − αcτ )
]d2Z
dτ 2=(1 − dU
dτ
)cos[k(αcU − αcτ )
]
da cui, con le ulteriori sostituzioni α = mc/(aq) ed Ω = kmc2/(aq), si conclude:
d2U
dτ 2=
dZ
dτcos[Ω(U − τ )]
d2Z
dτ 2=(1 − dU
dτ
)cos[Ω(U − τ )] .
Introdotta poi la nuova variabile Y = U − τ si riscrive il sistema nella forma
d2Y
dτ 2=
dZ
dτcos(ΩY )
d2Z
dτ 2= −dY
dτcos(ΩY )
equivalente al problema del primo ordine
dY
dτ= PY
dPY
dτ= PZ cos(ΩY )
dZ
dτ= PZ
dPZ
dτ= −PY cos(ΩY ) .
(42.1)
E facile verificare che
PYdPY
dτ+ PZ
dPZ
dτ= PY PZ cos(ΩY ) − PZ PY cos(ΩY ) = 0
e dedurre quindi cheH(Y,Z, PY , PZ) = P 2
Y + P 2Z (42.2)
rappresenta un integrale primo del moto. In modo analogo risulta
d
dτ
[ 1Ω
sin(ΩY ) + PZ
]= cos(ΩY )
dY
dτ+
dPZ
dτ= cos(ΩY )PY − PY cos(ΩY ) = 0
cosicche si identifica l’ulteriore integrale primo
A(Y,Z, PY , PZ) =1Ω
sin(ΩY ) + PZ . (42.3)
Stefano Siboni 179

Universita degli studi di Trento Esercizi di Meccanica razionale
Indicato con A il valore costante assunto dall’integrale (42.3), il sistema (42.1) assume laforma equivalente
dPY
dτ=(A − 1
Ωsin(ΩY )
)cos(ΩY )
dY
dτ= PY
dZ
dτ= A − 1
Ωsin(ΩY )
(42.4)
mentre per il valore E dell’integrale (42.2) si ottiene
P 2Y +
[A − 1
Ωsin(ΩY )
]2= E . (42.5)
L’equazione (42.5) non e altro che il problema di Weierstrass
(dY
dτ
)2
+[A − 1
Ωsin(ΩY )
]2= E (42.6)
con energia potenziale periodica[A − 1
Ωsin(ΩY )
]2, di periodo 2π/Ω. Dalla (42.6) si ricava,
noti che siano i valori a τ = 0 di Y e di dY/dτ , la soluzione Y = Y (τ ). Infine:
Z(τ ) = Z(0) +
τ∫0
[A − 1
Ωsin(ΩY (ξ))
]dξ . (42.7)
Nelle variabili iniziali la soluzione completa si scrive allora
x(t) = x(0) + x(0)t
y(t) =mc2
aqY( aq
mct)
+ ct
z(t) =mc2
aqZ( aq
mct)
dove i parametri mc/(aq) ed mc2/(aq) hanno le dimensioni fisiche di un tempo e di unalunghezza rispettivamente. La funzione Y (τ ) si ricava risolvendo il problema di Weierstrass(42.6) con
Y (0) =aq
mc2y(0) , Ω = k
mc2
aqed A =
1cz(0) +
1Ω
sin(ΩY (0)) ,
mentre E =[1 − y(0)
c
]2+[A − 1
Ωsin(ΩY (0))
]2=[1 − y(0)
c
]2+[ z(0)
c
]2.
Analogamente, Z(τ ) si calcola da (42.7) ponendo Z(0) = aqz(0)/mc2. Cio dimostra l’in-tegrabilita del sistema.
Stefano Siboni 180

Universita degli studi di Trento Esercizi di Meccanica razionale
Osservazione. Onda elettromagnetica piana.Il risultato precedente si estende agevolmente al caso piu generale di un’onda piana pola-rizzata linearmente, del tipo
E = w(ky − ωt) e3 B =1c
w(ky − ωt) e1 ,
con w funzione scalare arbitraria (non necessariamente periodica). Gli stessi cambiamentidi variabile gia discussi consentono di scrivere le equazioni del moto non banali nella forma
dY
dτ= PY
dPY
dτ= PZ w(ΩY )
dZ
dτ= PZ
dPZ
dτ= −PY w(ΩY )
che generalizza la (42.1), e di individuare i seguenti integrali primi:
H(Y,Z, PY , PZ) = P 2Y + P 2
Z A(Y,Z, PY , PZ) = PZ +1Ω
W (ΩY )
essendo W una qualsiasi primitiva di w su R. Anche in queste ipotesi dunque si e ricondottial problema di Weierstrass:(dY
dτ
)2
+[A − 1
ΩW (ΩY )
]2= E
che porge Y (τ ) assegnate che siano le condizioni iniziali Y (0) e dY/dτ (0). La Z(τ ) valeinfine
Z(τ ) = Z(0) +
τ∫0
[A − 1
ΩW (ΩY (ξ))
]dξ .
Esercizio 43. Equilibri e stabilita di un sistema scleronomo a 2 g.d.l. conlagrangiana e sollecitazioni dissipative assegnateIl moto di un punto materiale nel piano Oxy e descritto dalla lagrangiana
L =m
2(x2 + y2
)+ U(x, y)
con U(x, y) =x2
2− x3
3+
y3
3− y, (x, y) ∈ R
2.
(a) Scrivere le equazioni di Lagrange, determinare le configurazioni di equilibrio e discu-terne la stabilita.
(b) Si supponga che sul sistema agisca una sollecitazione addizionale di componenti la-grangiane
Qx = −(x2 + y2 + 1
)(x + 3y
)Qy = −
(x2 + y2 + 1
)(x + 5y
).
Stefano Siboni 181

Universita degli studi di Trento Esercizi di Meccanica razionale
Individuare le configurazioni di equilibrio ed esaminarne le proprieta di stabilita.
(c) Determinare le configurazioni di equilibrio del sistema nell’ipotesi che venga introdottaun’ulteriore sollecitazione di componenti (Qx, Qy) = (x, x).
Soluzione(a) Equazioni di Lagrange, equilibri, stabilitaLa lagrangiana del sistema e
L =m
2(x2 + y2
)+
x2
2− x3
3+
y3
3− y
per cuid
dt
(∂L
∂x
)= mx
∂L
∂x= x − x2
d
dt
(∂L
∂y
)= my
∂L
∂y= y2 − 1
e quindi le equazioni del moto diventano
mx − x + x2 = 0 my − y2 + 1 = 0 .
Le configurazioni di equilibrio sono date dai punti critici del potenziale — essendo l’energiacinetica puramente quadratica in x, y ed esplicitamente indipendente dal tempo —
Ux =∂U
∂x= x − x2 = 0 Uy =
∂U
∂y= y2 − 1 = 0
⇐⇒
x(1 − x) = 0y2 − 1 = 0
⇐⇒
x = 0, 1y = 1, −1 .
Si hanno pertanto le configurazioni di equilibrio
(x, y) = (0, 1) , (0,−1) , (1, 1) , (1,−1) .
Per l’analisi di stabilita si calcolano preventivamente le derivate seconde
Uxx = 1 − 2x Uxy = Uyx = 0 Uyy = 2y ,
ovvero l’hessiana del potenziale
HU (x, y) =(
1 − 2x 00 2y
)
e si ricorda che il sistema non e soggetto ad altre sollecitazioni oltre a quelle descritte dalpotenziale U . Si esaminano le singole configurazioni di equilibrio.
Stefano Siboni 182

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (x, y) = (0, 1)L’hessiana del potenziale risulta
HU (0, 1) =(
1 00 2
)
ed e chiaramente definita positiva in quanto diagonale con elementi diagonali tutti positivi.La presenza di un autovalore positivo (entrambi gli autovalori lo sono, nella fattispecie)comporta l’instabilita della configurazione in forza dell’inversione parziale di Lagrange-Dirichlet.
Configurazione (x, y) = (0,−1)Vale
HU (0,−1) =(
1 00 −2
).
Poiche esiste un autovalore positivo, 1, la configurazione e instabile come nel caso prece-dente.
Configurazione (x, y) = (1, 1)Dall’espressione dell’hessiana
HU (1, 1) =(−1 00 2
)
si deduce l’instabilita della configurazione per il teorema di inversione parziale di Lagrange-Dirichlet, causa la presenza dell’autovalore 2 > 0.
Configurazione (x, y) = (1,−1)In questo caso l’hessiana e definita negativa
HU (1,−1) =(−1 00 −2
)
per cui la configurazione risulta un massimo relativo proprio del potenziale, stabile perLagrange-Dirichlet.
(b) Equilibri e stabilita in presenza della sollecitazione addizionaleLa sollecitazione addizionale di componenti
Qx = −(x2 + y2 + 1
)(x + 3y
)Qy = −
(x2 + y2 + 1
)(x + 5y
)e a potenza non positiva — in effetti si tratta di una sollecitazione dissipativa. Infatti
π = Qxx + Qy y = −(x2 + y2 + 1
)(x2 + 4xy + 5y2
)=
= −(x2 + y2 + 1
)( x y )
(1 22 5
)(xy
)≤ 0 ,
Stefano Siboni 183

Universita degli studi di Trento Esercizi di Meccanica razionale
in quanto(
1 22 5
)e definita positiva (avendo determinante e traccia positivi, ad esempio).
Inoltre π = 0 implica−(x2 + y2 + 1
)(x2 + 4xy + 5y2
)= 0
ovvero, essendo certamente x2 + y2 + 1 > 0,
x2 + 4xy + 5y2 = 0
e quindi (x, y) = (0, 0) per la positivita della forma quadratica. Infine Qx e Qy nondipendono esplicitamente dal tempo. Se ne deduce che la sollecitazione e completamentedissipativa. Il fatto che π ≤ 0 e che Qx, Qy siano funzioni continue di (x, y) in (x, y) =(0, 0) comporta che le configurazioni di equilibrio gia determinate come punti critici delpotenziale rimangano invariate (e del resto verificabile direttamente che Qx = Qy = 0per (x, y) = costante). Trattandosi di configurazioni in numero finito (quattro in tutto),queste sono necessariamente isolate ed e percio lecito applicare loro i criteri di Barbasin-Krasovskii. Precisamente:
le configurazioni (0, 1), (0,−1), (1, 1) non sono massimi relativi propri del potenzialeU e dunque risultano instabili per B.-K.;
l’equilibrio (1,−1), massimo relativo proprio di U , e asintoticamente stabile per B.-K..
(c) Equilibri e stabilita in presenza della ulteriore sollecitazione posizionaleL’ulteriore sollecitazione (Qx, Qy) = (x, x) ha natura posizionale ma non conservativa, inquanto
∂Qx
∂y− ∂Qy
∂x= 0 − 1 = −1 = 0
per cui non ammette potenziale. Le configurazioni di equilibrio non possono essere deter-minate che come soluzioni statiche delle equazioni di Lagrange
mx − x + x2 = −(x2 + y2 + 1)(x + 3y) + x
my − y2 + 1 = −(x2 + y2 + 1)(x + 5y) + x .
Posto (x, y) = (x, y), costante ∀ t ∈ R, si deduce
−x + x2 = x−y2 + 1 = x
⇐⇒
x(x − 2) = 0y2 = 1 − x .
La prima equazione porge x = 0, 2 e quindi, sostituendo nella seconda, risulta
y2 = 1 =⇒ y = 1, −1;
y2 = −1 che non ammette soluzioni reali.
Le configurazioni di equilibrio sono pertanto
(x, y) = (0, 1) , (0,−1) .
Stefano Siboni 184

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 44. Sistema scleronomo a 2 g.d.l. posizionale conservativoNel sistema di riferimento Oxyz, rotante con velocita angolare costante ω attorno all’asseverticale Oy rispetto ad una terna inerziale, si considera una lamina rigida quadrataABCD, di massa m e lato , vincolata a restare nel piano coordinato Oxy, con il ver-tice A scorrevole lungo l’asse Ox. La lamina, pesante, e costituita dai triangoli omogeneiABD e BCD, di densita rispettive σ1 e σ2, ed i suoi vertici sono connessi all’origine O permezzo di molle ideali di uguale costante elastica αmω2, con α > 0 e α = 1/4. Supposti ivincoli ideali, e facendo uso delle coordinate lagrangiane s e φ mostrate in figura:
(a) determinare il baricentro G della lamina e quindi la matrice d’inerzia della stessarispetto alla terna ortogonale Gx′y′z′ i cui assi Gx′ e Gy′ siano paralleli alle diagonaliBD e CA rispettivamente;
(b) individuare le configurazioni di equilibrio relativo del sistema;
(c) ricavare l’espressione dell’energia cinetica in Oxyz.
Posto poi σ1 = (4/3)m−2, σ2 = (2/3)m−2 ed α = 1/3:
(d) scrivere le configurazioni di equilibrio del sistema e discuterne la stabilita in terminidel parametro adimensionale λ = ω2/g;
(e) determinare l’espressione dell’energia cinetica e della lagrangiana del sistema, rica-vando le relative equazioni del moto;
(f) per λ = 1/2, calcolare le frequenze normali delle piccole oscillazioni nell’intorno diuna configurazione di equilibrio stabile.
SoluzioneSi puntualizza preliminarmente che le densita superficiali σ1 e σ2 dei triangoli ABD eBCD soddisfano l’equazione della massa
(σ1 + σ2
)2/2 = m, ovvero σ1 + σ2 = 2m/2.
(a) Baricentro e matrice d’inerzia della laminaIl baricentro G della lamina si ricava applicando la proprieta distributiva, ricordando chei baricentri delle lamine triangolari omogenee coincidono con i rispettivi baricentri geo-
Stefano Siboni 185
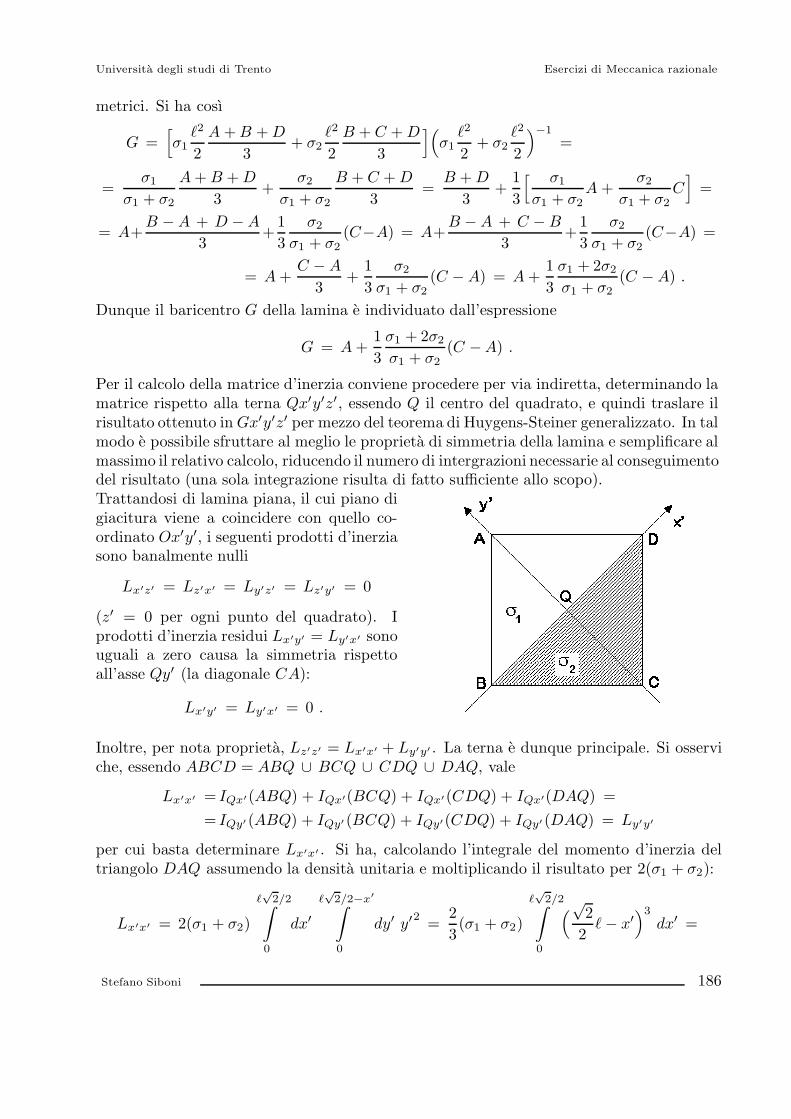
Universita degli studi di Trento Esercizi di Meccanica razionale
metrici. Si ha cosı
G =[σ1
2
2A + B + D
3+ σ2
2
2B + C + D
3
](σ1
2
2+ σ2
2
2
)−1
=
=σ1
σ1 + σ2
A + B + D
3+
σ2
σ1 + σ2
B + C + D
3=
B + D
3+
13
[ σ1
σ1 + σ2A +
σ2
σ1 + σ2C]
=
= A+B − A + D − A
3+
13
σ2
σ1 + σ2(C−A) = A+
B − A + C − B
3+
13
σ2
σ1 + σ2(C−A) =
= A +C − A
3+
13
σ2
σ1 + σ2(C − A) = A +
13
σ1 + 2σ2
σ1 + σ2(C − A) .
Dunque il baricentro G della lamina e individuato dall’espressione
G = A +13
σ1 + 2σ2
σ1 + σ2(C −A) .
Per il calcolo della matrice d’inerzia conviene procedere per via indiretta, determinando lamatrice rispetto alla terna Qx′y′z′, essendo Q il centro del quadrato, e quindi traslare ilrisultato ottenuto in Gx′y′z′ per mezzo del teorema di Huygens-Steiner generalizzato. In talmodo e possibile sfruttare al meglio le proprieta di simmetria della lamina e semplificare almassimo il relativo calcolo, riducendo il numero di intergrazioni necessarie al conseguimentodel risultato (una sola integrazione risulta di fatto sufficiente allo scopo).Trattandosi di lamina piana, il cui piano digiacitura viene a coincidere con quello co-ordinato Ox′y′, i seguenti prodotti d’inerziasono banalmente nulli
Lx′z′ = Lz′x′ = Ly′z′ = Lz′y′ = 0
(z′ = 0 per ogni punto del quadrato). Iprodotti d’inerzia residui Lx′y′ = Ly′x′ sonouguali a zero causa la simmetria rispettoall’asse Qy′ (la diagonale CA):
Lx′y′ = Ly′x′ = 0 .
Inoltre, per nota proprieta, Lz′z′ = Lx′x′ + Ly′y′ . La terna e dunque principale. Si osserviche, essendo ABCD = ABQ ∪ BCQ ∪ CDQ ∪ DAQ, vale
Lx′x′ = IQx′(ABQ) + IQx′(BCQ) + IQx′(CDQ) + IQx′(DAQ) == IQy′ (ABQ) + IQy′ (BCQ) + IQy′(CDQ) + IQy′ (DAQ) = Ly′y′
per cui basta determinare Lx′x′ . Si ha, calcolando l’integrale del momento d’inerzia deltriangolo DAQ assumendo la densita unitaria e moltiplicando il risultato per 2(σ1 + σ2):
Lx′x′ = 2(σ1 + σ2)
√
2/2∫0
dx′√
2/2−x′∫0
dy′ y′2 =23(σ1 + σ2)
√
2/2∫0
(√22
− x′)3
dx′ =
Stefano Siboni 186

Universita degli studi di Trento Esercizi di Meccanica razionale
=23(σ1 + σ2)
[−1
4
(√22
− x′)4]
√2/2
0
=23(σ1 + σ2)
14
4
4=
4
24(σ1 + σ2) =
m2
12.
In conclusione, la matrice d’inerzia risulta
LQx′y′z′
αβ =m2
12
1 0 0
0 1 00 0 2
, α, β = 1, 2, 3 ,
e coincide con quella di un quadrato omogeneo di uguali massa e lato.
Per ottenere le matrice d’inerzia della lamina rispetto a Gx′y′z′ e ora sufficiente determinarele coordinate in Qx′y′z′ del baricentro G ed applicare il teorema di Huygens-Steiner gene-ralizzato. Indicate con (d1, d2, d3) tali coordinate, vale infatti
LGx′y′z′
αβ = LQx′y′z′
αβ − m
d2
2 + d23 −d1d2 −d1d3
−d2d1 d21 + d2
3 −d2d3
−d3d1 −d3d2 d21 + d2
2
, α, β = 1, 2, 3 .
Si ha G −A =13
σ1 + 2σ2
σ1 + σ2(C − A) e Q − A =
12(C − A), sicche
G − Q =[13
σ1 + 2σ2
σ1 + σ2− 1
2
](C − A) =
[13
σ1 + 2σ2
σ1 + σ2− 1
2
]√
2(−e′2
)
e di conseguenza d2 =[12− 1
3σ1 + 2σ2
σ1 + σ2
]√2 , mentre d1 = d3 = 0. Allora:
LGx′y′z′
αβ = LQx′y′z′
αβ − m
d2
2 0 00 0 00 0 d2
2
=
m2
12
1 0 0
0 1 00 0 2
− m
d2
2 0 00 0 00 0 d2
2
=
= m2
(1/12) − (d2/)2 0 0
0 1/12 00 0 (1/6) − (d2/)2
con d2 determinato come sopra.
(b) Configurazioni di equilibrioPer determinare le configurazioni di equilibrio — nonche le equazioni del moto — delsistema conviene utilizzare la terna di riferimento non inerziale Oxyz, ricordando che leforze di Coriolis hanno comunque componenti lagrangiane nulle — il moto avviene nel pianoOxy, rotante attorno all’asse Oy rispetto ad un riferimento inerziale. Dal momento che sul
Stefano Siboni 187

Universita degli studi di Trento Esercizi di Meccanica razionale
sistema non agiscono altre sollecitazioni attive oltre a quelle posizionali conservative, rap-presentate dal potenziale U , le configurazioni di equilibrio sono tutti e soli i punti criticidi U . Si procede dunque a determinare i potenziali delle varie sollecitazioni attive agentisul sistema. A tale scopo, conviene anzitutto determinare le espressioni di alcuni vettorinotevoli, che torneranno utili anche nei calcoli successivi. Le seguenti relazioni vettoriali sideducono immediatamente dalla geometria del sistema:
A − O = s e1
B −A = [sin(φ − π/4) e1 − cos(φ − π/4) e2
]D −A =
[cos(φ − π/4) e1 + sin(φ − π/4) e2
]C −A =B − A + C − B = B −A + D − A =
= [sin(φ − π/4) e1 − cos(φ − π/4) e2
]+ [cos(φ − π/4) e1 + sin(φ − π/4) e2
]=
= [sin(φ − π/4) + cos(φ − π/4)
]e1 +
[−cos(φ − π/4) + sin(φ − π/4)
]e2 =
= √
2(sinφ e1 − cosφ e2
).
Potenziale gravitazionaleIl baricentro della lamina e dato da
G − O = A − O +13
σ1 + 2σ2
σ1 + σ2(C − A) = s e1 +
13
σ1 + 2σ2
σ1 + σ2
√2(sinφ e1 − cosφ e2
).
Pertanto Ug = −mg(G− O) · e2 = mg|G− A| cosφ, essendo |G −A| =13
σ1 + 2σ2
σ1 + σ2
√2.
Potenziale elasticoSi ottiene sommando i potenziali elastici delle quattro molle agenti sulla lamina — k =αmω2 —
Uel = −α
2mω2
[|A − O|2 + |B − O|2 + |C −O|2 + |D − O|2
]=
= −α
2mω2
[2s2 + 2s2 + 2sin2(φ − π/4) + 22s sin(φ − π/4) + 2cos2(φ − π/4)+
+(√
2 sinφ+s)2+22cos2φ+2s2+2cos2(φ−π/4)+22scos(φ−π/4)+2sin2(φ−π/4)
]=
= −α
2mω2
[42s2 + 42 + 2
√22s sinφ + 22s
(sin(φ − π/4) + cos(φ − π/4)
)]=
= −α
2mω22
(4s2 + 4 + 4
√2s sinφ
)= −2αmω22
(s2 +
√2s sinφ + 1
).
Stefano Siboni 188

Universita degli studi di Trento Esercizi di Meccanica razionale
L’omissione di una costante additiva inessenziale conduce a
Uel = −2αmω22(s2 +
√2s sinφ
).
Potenziale centrifugoConviene applicare il teorema di Huygens-Steiner e scrivere
IOy = m[(G−O)·e1
]2+IGy IQy = m[(G−Q)·e1
]2+IGy
per cui IOy = m[(G − O) · e1
]2 − m[(G − Q) · e1
]2 + IQy.Vale inoltre
G−O = s e1+ |G − A|(sinφ e1−cosφ e2
)e di conseguenza (G − O) · e1 = s + |G − A| sinφ. Il vettore posizione del centro Q e datodall’espressione
Q − O =A −O + C − O
2= A − O +
C − A
2= s e1 +
√2
(sinφ e1 − cosφ e2
)
e di qui si deduce G −Q =(|G −A| − √
2
)(sinφ e1 − cosφ e2
)e
(G − Q) · e1 =(|G − A| − √
2
)sinφ .
Infine
IQy = ( sinφ cosφ 0 )m2
12
1 0 0
0 1 00 0 2
sinφ
cosφ0
=
m2
12.
Pertanto:
IOy = m[s + |G − A| sinφ
]2 − m(|G − A| − √
2
)2
sin2φ +m2
12=
= m[2s2 + 2s|G − A| sinφ + |G − A|2sin2φ−
(|G − A| − √
2
)2
sin2φ]
+m2
12=
= m[2s2 + 2s|G − A| sinφ +
√2
(2|G −A| − √
2
)sin2φ
]+
m2
12.
Allo stesso risultato si perviene applicando Huygens-Steiner direttamente
IOy = m[(G − O) · e1
]2 + IGy (44.1)
Stefano Siboni 189

Universita degli studi di Trento Esercizi di Meccanica razionale
dove
IGy = ( sinφ cosφ 0 )m2
(1/12) − (d2/)2 0 0
0 1/12 00 0 (1/6) − (d2/)2
sinφ
cosφ0
=
=m2
12− md2
2sin2φ =
m2
12−( √
2− |G − A|
)2
sin2φ .
Si ha infatti dalla (44.1)
IOy = m(s + |G −A| sinφ
)2
− m( √
2− |G −A|
)2
sin2φ +m2
12,
che coincide con l’espressione gia determinata. Il potenziale centrifugo si scrive percio
Ucf =ω2
2IOy + costante =
m
2ω22
[s2 + 2s
|G − A|
sinφ +(√
2|G − A|
− 1
2
)sin2φ
].
Potenziale totaleE dato dalla somma dei potenziali gravitazionale, elastico e centrifugo:
U = Ug + Uel + Ucf = mg|G− A| cosφ − 2αmω22(s2 +
√2s sinφ
)+
+m
2ω22
[s2 + 2s
|G −A|
sinφ +(√
2|G − A|
− 1
2
)sin2φ
]=
= mg|G −A| cosφ + 2mω22(1
4− α
)s2 + mω22
( |G − A|
− 2√
2α)s sinφ +
+m
2ω22
(√2|G − A|
− 1
2
)sin2φ . (44.2)
Le configurazioni di equilibrio si identificano con i punti critici del potenziale:
∂U
∂s= 4mω22
(14− α)s + mω22
( |G − A|
− 2√
2α)sinφ = 0
∂U
∂φ= −mg|G− A|sinφ + mω22
( |G − A|
− 2√
2α)s cosφ+
+mω22(√
2|G − A|
− 1
2
)sinφ cosφ = 0 .
Grazie all’ipotesi α = 1/4 la prima equazione porge s =1
4α − 1
( |G − A|
− 2√
2α)sinφ
per cui la seconda diviene
−mg|G− A| sinφ + mω22( |G −A|
− 2
√2α)2 1
4α − 1sinφ cosφ+
+ mω22(√
2|G − A|
− 1
2
)sinφ cosφ = 0
Stefano Siboni 190

Universita degli studi di Trento Esercizi di Meccanica razionale
ovvero
sinφ
−|G −A|
+
ω2
g
[( |G −A|
− 2√
2α)2 1
4α − 1+
√2|G − A|
− 1
2
]cosφ
= 0 .
Si hanno soluzioni in φ ∈ R per sinφ = 0 oppure per
ω2
g
[( |G −A|
− 2√
2α)2 1
4α − 1+
√2|G − A|
− 1
2
]cosφ =
|G −A|
.
Da sinφ = 0 si deduce φ = 0, π, cui corrisponde in ogni caso s = 0. Percio
(s, φ) = (0, 0) , (0, π) .
Nella seconda equazione si pone per brevita
β =( |G − A|
− 2
√2α)2 1
4α − 1+
√2|G − A|
− 1
2
e si ottengono le soluzioni
φ = ±arc cos[ |G − A|
g
ω2
1β
]= ±φ ,
purche|G − A|
g
ω2
1|β| < 1. Dunque, posto s =
14α − 1
( |G − A|
− 2√
2α)sinφ:
(s, φ) = (s, φ) , (−s,−φ) .
(c) Energia cinetica del sistema in OxyzPer determinare l’energia cinetica del sistema conviene applicare il teorema di Konig escrivere
T =m
2|G|2 + TG
essendosi indicata con TG l’energia cinetica del moto attorno al baricentro. Si ha:
G − O = se1 + |G −A|(sinφ e1 − cosφ e2
)G =
(s + |G − A| cosφ φ
)e1 + |G − A| sinφ φ e2
m
2|G|2 =
m
22[s2 + 2
|G − A|
cosφ sφ +|G − A|2
2φ2].
La velocita angolare istantanea della lamina e φ e3 e quindi
TG =12φ2m2
[16−( 1√
2− |G − A|
)2],
Stefano Siboni 191

Universita degli studi di Trento Esercizi di Meccanica razionale
poiche nella terna baricentrale la lamina ruota attorno all’asse fisso Gz. L’espressionedell’energia cinetica diviene dunque
T =m
22[s2 + 2
|G − A|
cosφ sφ +(−1
3+
√2|G − A|
)φ2]. (44.3)
OsservazioneL’energia cinetica e una forma quadratica definita positiva in (s, φ). La matrice dell’energiacinetica vale, a meno del fattore costante m2 > 0
M =
1
|G −A|
cosφ
|G − A|
cosφ −13
+√
2|G − A|
ed ha determinante
detM = −13
+√
2|G − A|
−( |G − A|
)2
cos2φ ≥ −13
+√
2|G − A|
−( |G − A|
)2
> 0
e traccia trM =23
+√
2|G −A|
> 0. Per verificare che detM > 0 basta osservare che tale
condizione ricorre se e solo se
12
(√2 −
√23
)<
|G − A|
<12
(√2 +
√23
)(44.4)
e che |G − A|/ ∈ (√
2/3, 2√
2/3), in quanto necessariamente G si localizza sul segmentocongiungente i baricentri di ABD e BCD. In effetti valgono le diseguaglianze
12
(√2 −
√23
)=
√2
2
(1 − 1√
3
)=
√2
3
(3 −
√3)1
2<
√2
3
12
(√2 +
√23
)= 2
√2
3(3 +
√3)14
>23
√2 ,
per cui la (44.4) e sempre soddisfatta.
(d) Configurazioni di equilibrio e loro stabilita nel caso di σ1 = (4/3)m−2, σ2 =(2/3)m−2 ed α = 1/3Per le derivate parziali seconde del potenziale valgono le ovvie relazioni:
Uss =mω22(1 − 4α)
Uφs =Usφ = mω22( |G − A|
− 2
√2α)cosφ
Uφφ = − mg|G− A| cosφ − mω22( |G − A|
− 2
√2α)s sinφ+
+ mω22(√
2|G − A|
− 1
2
)(cos2φ − sin2φ
),
Stefano Siboni 192

Universita degli studi di Trento Esercizi di Meccanica razionale
che consentono di scrivere le matrici hessiane di U in corrispondenza delle varie configu-razioni di equilibrio. I risultati seguenti sono immediati:
HU (0, 0) = mω22
1 − 4α
|G − A|
− 2√
2α
|G −A|
− 2√
2α −g|G− A|2ω2
+√
2|G − A|
− 1
2
HU (0, π) = mω22
1 − 4α −|G − A|
+ 2
√2α
−|G − A|
+ 2√
2αg|G −A|
2ω2+
√2|G − A|
− 1
2
Le matrici HU (s, φ) e HU (−s,−φ) coincidono a causa della simmetria del potenziale:
U(−s,−φ) = U(s, φ) ∀ (s, φ) ∈ R2
ed e quindi sufficiente determinare HU (s, φ). Ricordando che cosφ =|G −A|g2ω2β
si hanno
le relazioni:Uss(s, φ) = mω22(1 − 4α)
Uφs(s, φ) = mω22( |G − A|
− 2
√2α) |G − A|
g
ω2
1β
Uφφ(s, φ) = −mω22β cos2φ − mω22
4α − 1
( |G − A|
− 2√
2α)2
sin2φ+
+mω22(√
2|G − A|
− 1
2
)(2cos2φ − 1
)=
= −mω22β cos2φ − mω22
4α − 1
( |G − A|
− 2√
2α)2
+mω22
4α − 1
( |G − A|
− 2√
2α)2
cos2φ−
−mω22(√
2|G − A|
− 1
2
)+ 2mω22
(√2|G − A|
− 1
2
)cos2φ =
= −mω22β + mω22cos2φ
[−β +
14α − 1
( |G − A|
− 2√
2α)2
+ 2(√
2|G − A|
− 1
2
)]=
= −mω22β + mω22cos2φ(√
2|G − A|
− 1
2
)=
= mω22
[−β +
(√2|G −A|
− 1
2
) |G − A|2
2
( g
ω2
)2 1β2
].
Pertanto HU (s, φ) e data dall’espressione
mω22
1 − 4α( |G − A|
− 2
√2α) |G − A|
g
ω2
1β( |G − A|
− 2
√2α) |G − A|
g
ω2
1β
−β +(√
2|G − A|
− 1
2
) |G − A|2
2β2
( g
ω2
)2
Stefano Siboni 193

Universita degli studi di Trento Esercizi di Meccanica razionale
Non resta che inserire i valori dei parametri σ1 = (4/3)m−2, σ2 = (2/3)m−2, α = 1/3per ottenere:
|G − A| =13
[43
+ 223
][43
+23
]−1
√
2 =49
√2
β =(4
9
√2 − 2
3
√2)2(4
3− 1)−1
+89− 1
2= 3
(−2
9
√2)2
+16− 9
18=
3754
cosφ =49
√2
g
ω2
5437
=2437
√2
g
ω2
φ = arc cos(24
37
√2
g
ω2
)s = 3
(49
√2 − 2
3
√2)
sinφ = −23
√2 sinφ .
Si procede quindi ad analizzare le proprieta di stabilita di ogni singola configurazione diequilibrio.
Configurazione (s, φ) = (0, 0)La matrice hessiana assume la forma
HU (0, 0) = mω22
−1
3−2
9
√2
−29
√2 −4
9
√2
g
ω2+
718
ed il suo determinante vale
detHU (0, 0) =(mω22
)2[ 427
√2
g
ω2− 7
54− 8
81
]=(mω22
)2 4√
227
( g
ω2− 37
24√
2
)
mentre per la traccia si ha trHU (0, 0) = mω22 49
√2( 1
8√
2− g
ω2
). Conseguentemente:
perg
ω2<
3724
√2, ossia λ >
2437
√2, si ottiene detHU (0, 0) < 0, gli autovalori dell’hes-
siana sono di segno opposto e l’instabilita della configurazione segue dall’inversioneparziale di Lagrange-Dirichlet;
perg
ω2>
3724
√2, ovvero λ <
2437
√2, e detHU (0, 0) > 0 e gli autovalori di HU (0, 0)
hanno lo stesso segno. La traccia e invece negativa, percio entrambi gli autovaloririsultano negativi. La configurazione e dunque un massimo relativo proprio di U ,stabile per Lagrange-Dirichlet;
Stefano Siboni 194

Universita degli studi di Trento Esercizi di Meccanica razionale
qualora infine si abbiag
ω2=
3724
√2, ossia λ =
2437
√2, il determinanate di HU (0, 0) si
annulla e la traccia assume valore negativo. Gli autovalori sono pertanto uno nullo eduno negativo ed il punto determinato e critico — non e possibile applicare Lagrange-Dirichlet ne la sua inversione parziale.
Configurazione (s, φ) = (0, π)La matrice hessiana diviene in questo caso
HU (0, π) = mω22
−1
329
√2
29
√2
49
√2
g
ω2+
718
con determinante detHU (0, π) =(mω22
)2[− 427
√2
g
ω2− 37
162
]< 0. Gli autovalori sono
comunque di segno opposto e l’inversione parziale di L.-D. consente di concludere che laconfigurazione e instabile.
Configurazioni (s, φ) = (s, φ), (−s,−φ)Valgono le relazioni:
1 − 4α = −13[ |G − A|
− 2
√2α] |G − A|
g
ω2
1β
= −29
√249
√2
g
ω2
5437
= − 323 · 37
g
ω2
−β+[√
2|G − A|
−1
2
] |G − A|2
2β2
( g
ω2
)2
= −3754
+718
3281
542
372
( g
ω2
)2
= −3754
+7 · 64372
( g
ω2
)2
e la matrice hessiana diventa
HU
(s, φ
)= mω22
− 13
− 323 · 37
g
ω2
− 323 · 37
g
ω2−37
54+
7 · 64372
( g
ω2
)2
con determinante
detHU
(s, φ
)=(mω22
)2[ 373 · 54
− 7 · 643 · 372
( g
ω2
)2
− 322
9 · 372
( g
ω2
)2]
=
=(mω22
)2[ 373 · 54
− 23689 · 372
( g
ω2
)2]=(mω22
)2[ 373 · 54
− 649 · 37
( g
ω2
)2].
La configurazione(s, φ
)e definita a patto che si abbia
|G − A|
g
ω2
1|β| =
49
√2
g
ω2
5437
=2437
√2
g
ω2< 1
Stefano Siboni 195

Universita degli studi di Trento Esercizi di Meccanica razionale
e quindi deve valereg
ω2<
3724
√2. Ne segue che
373 · 54
− 649 · 37
( g
ω2
)2
>37
3 · 54− 64
9 · 37372
2 · 242=
373 · 54
− 372 · 81
= 0
e che quindi detHU
(s, φ
)> 0 (autovalori dello stesso segno). Risulta inoltre
trHU
(s, φ
)= −1
3− 37
54+
7 · 64372
( g
ω2
)2
< −5554
+7 · 64372
372
2 · 242= −55
54+
718
= −1727
< 0 .
In conclusione, gli autovalori dell’hessiana sono entrambi negativi ed implicano la configu-razione sia un massimo relativo proprio del potenziale U . La stabilita segue dal teoremadi Lagrange-Dirichlet.
Si possono riassumere i risultati ottenuti nel successivo diagramma di biforcazione.
(e) Energia cinetica, Lagrangiana ed equazioni del motoSostituendo i parametri del sistema nella espressione generale (44.3), si ottiene per l’energiacinetica
T =m
22[s2 +
89
√2 cosφ sφ +
59φ2],
mentre il potenziale totale assume la forma — dedotta dalla (44.2) —
U = mg49
√2 cosφ − m
6ω22s2 − 2
9
√2mω22s sinφ +
736
mω22sin2φ .
La Lagrangiana del sistema si scrive pertanto
L = T + U =m
22[s2 +
89
√2 cosφ sφ +
59φ2]+
Stefano Siboni 196

Universita degli studi di Trento Esercizi di Meccanica razionale
+mω22[49
√2
g
ω2cosφ − s2
6− 2
9
√2s sinφ +
736
sin2φ].
Dalle relazioni
∂L
∂s= m2
[s +
49
√2cosφ φ
] ∂L
∂s= mω22
[− s
3− 2
9
√2 sinφ
]d
dt
(∂L
∂s
)= m2
[s +
49
√2 cosφ φ− 4
9
√2 sinφ φ2
]si deduce l’equazione di Lagrange
s +49
√2 cosφ φ− 4
9
√2 sinφ φ2 + ω2
(+
s
3+
29
√2 sinφ
)= 0 .
In modo analogo le∂L
∂φ= m2
[49
√2 cosφ s +
59φ]
d
dt
(∂L
∂φ
)= m2
[49
√2 cosφ s +
59φ− 4
9
√2 sinφ φs
]∂L
∂φ= −4
9
√2m2sinφ sφ + mω22
[−4
9
√2
g
ω2sinφ− 2
9
√2s cosφ +
718
sinφ cosφ]
porgono la seconda equazione lagrangiana
49
√2 cosφ s +
59φ + ω2
[49
√2
g
ω2sinφ +
29
√2s cosφ − 7
18sinφ cosφ
]= 0 .
(f) Piccole oscillazioniPer λ = ω2/g = 1/2 la sola configurazione di equilibrio stabile e (s, φ) = (0, 0). LaLagrangiana delle piccole oscillazioni si scrive quindi
Lp.o. =m
22(s φ)
1
49
√2
49
√2
59
( s
φ
)+
m
2ω22(s φ)
−1
3−2
9
√2
−29
√2 −8
9
√2 +
718
( s
φ
)
ed il sistema delle corrispondenti equazioni linearizzate e 1
49
√2
49
√2
59
( s
φ
)− ω2
−1
3−2
9
√2
−29
√2 −8
9
√2 +
718
( s
φ
)= 0 .
L’equazione delle “frequenze” normali Ω risulta infine
det
−Ω2
1
49
√2
49
√2
59
− ω2
−1
3−2
9
√2
−29
√2 −8
9
√2 +
718
= 0
Stefano Siboni 197

Universita degli studi di Trento Esercizi di Meccanica razionale
che, posto per brevita µ = Ω2/ω2, si riduce a
∣∣∣∣∣∣∣∣µ − 1
349
√2µ − 2
9
√2
49
√2µ − 2
9
√2
59µ − 8
9
√2 +
718
∣∣∣∣∣∣∣∣= 0
ovvero1381
µ2 +(−8
9
√2 +
97162
)µ +
827
√2 − 37
162= 0 .
E immediato verificare che l’equazione algebrica di secondo grado ottenuta ammette dueradici reali entrambe positive. In forma decimale, le frequenze normali di oscillazionerisultano
Ω1 = 0.559949ω Ω2 = 1.94634ω .
Esercizio 45. Equilibri e stabilita di un sistema scleronomo a 2 g.d.l. conlagrangiana e sollecitazioni dissipative assegnateSi consideri un sistema meccanico descritto dalla lagrangiana L(q, q) = T (q) − V (q) doveT (q) = 1
2 q2 e V (q) = αcosq + βcos2q, con α, β > 0.
(a) Si determinino le configurazioni di equilibrio al variare del parametro α/2β.
(b) Si studi la stabilita delle configurazioni di equilibrio al variare del parametro α/2β.
(c) Supposto α = β, si caratterizzino le condizioni iniziali in corrispondenza delle quali sihanno moti oscillatori (periodici).
(d) Sempre nell’ipotesi che sia α = β, si caratterizzino le condizioni iniziali in corrispon-denza delle quali si hanno verificano moti a meta asintotica.
(e) Supponendo che sul sistema agisca anche una sollecitazione di componente lagrangianaQ = −(1 + sin2q)q, si individuino gli equilibri e se ne discuta la stabilita.
SoluzioneConviene calcolare preliminarmente il potenziale totale del sistema e le sue derivate primae seconda, che serviranno nel seguito. Si ha:
U(q) = −α cosq − β cos2q
U ′(q) = α sinq + 2β cosq sinq = sinq (α + 2β cosq)
U ′′(q) = α cosq + 2β(cos2q − sin2q
)= α cosq + 2β
(2cos2q − 1
).
(a) Configurazioni di equilibrioSi identificano con i punti critici del potenziale
U ′(q) = 0 ⇐⇒ sinq (α + 2β cosq) = 0.
Tale equazione e soddisfatta se sinq = 0, ossia per q = 0, π. La condizione α + 2β cosq = 0
Stefano Siboni 198

Universita degli studi di Trento Esercizi di Meccanica razionale
porge le ulteriori soluzioniq = ±arc cos(−α/2β) = ±q
a condizione che si abbia α/2β < 1. Ogni altra configurazione di equilibrio coincide con leprecedenti a meno di multipli interi di 2π.
(b) Stabilita delle configurazioni di equilibrio.L’analisi di stabilita viene condotta esaminando il segno della derivata seconda del poten-ziale. Si discutono le singole configurazioni.
Configurazione q = 0La derivata seconda vale U ′′(0) = α + 2β > 0, per cui la configurazione risulta instabile(inversione parziale di Lagrange-Dirichlet).
Configurazione q = πDall’espressione della derivata seconda
U ′′(π) = −α + 2β = 2β(− α
2β+ 1)
si deduce che:
se α/2β < 1 risulta U ′′(π) > 0 e si ha instabilita della configurazione per l’inversioneparziale di L.-D.;
se α/2β > 1 vale U ′′(π) < 0 e la configurazione e un massimo relativo proprio delpotenziale, stabile per Lagrange-Dirichlet;
se α/2β = 1 ricorre un caso critico, avendosi U ′′(π) = 0. In questa ipotesi il potenzialeassume la forma
U(q) = −α cosq − α
2cos2q = −α
[cosq +
12cos2q
]= −α
2[(1 + cosq)2 − 1
].
Posto q = π + ξ, si perviene alla identita
U(π + ξ) = −α
2[(1 − cosξ)2 − 1
]= −α
2[4 sin4(ξ/2) − 1
]cosicche q = π e un massimo relativo proprio di U , la cui stabilita segue per Lagrange-Dirichlet.
Configurazioni q = q,−q, con cosq = −α/2βLe proprieta di stabilita sono le stesse in quanto U(−q) = U(q) ∀ q ∈ R. E quindi sufficientestudiare la sola configurazione q = q. La derivata seconda si calcola immediatamente erisulta di segno negativo
U ′′(q) = α(− α
2β
)+ 2β
(2
α2
4β2− 1)
= −2β(1 − α2
4β2
)< 0
causa la condizione di esistenza α/2β < 1. Dunque q = q costituisce un massimo relativoproprio del potenziale ed e stabile per Lagrange-Dirichlet.
Stefano Siboni 199

Universita degli studi di Trento Esercizi di Meccanica razionale
I risultati ottenuti possono essere riassunti nel seguente diagramma di biforcazione
(c) Moti periodici nel caso α = βSia α = β. L’energia potenziale del sistema diventa
V (q) = α(cosq + cos2q
)funzione periodica di periodo 2π, dotata di massimo relativo proprio in q = 0, π e diminimo relativo proprio in q = ±q = ±arc cos(−1/2) = ±2π/3 — si consideri il precedentediagramma di biforcazione per α/2β = 1/2. Vale inoltre
V (0) = 2α > 0 V (π) = 0 V(±q
)= α
(−1
2+
14
)= −α
4.
Il grafico dell’energia potenziale e dunque quello illustrato nella figura seguente
L’energia totale e un integrale primo del sistema
H(q, q) =12q2 + α
(cosq + cos2q
)Stefano Siboni 200

Universita degli studi di Trento Esercizi di Meccanica razionale
identificabile con l’integrale di Jacobi. Si puo quindi applicare la discussione di Weierstrassper caratterizzare qualitativamente i moti del sistema.I moti periodici si hanno per ogni scelta delle condizioni iniziali (q0, q0) tali che
V (q) < H(q0, q0) < V (0)
escludendo quelle in cui H(q0, q0) = V (π) = 0, associate a soluzioni statiche o a moti ameta asintotica. In definitiva
V (q) < H(q0 , q0) < V (π) oppure V (π) < H(q0, q0) < V (0) .
(d) Moti a meta asintotica nel caso α = β
I moti a meta asintotica sono individuati immediatamente sulla base dei risultati precedenti.Si hanno moti a meta asintotica per:
(i) H(q0, q0) = V (π), purche q0 /∈ π + 2πn, n ∈ Z;(ii) H(q0, q0) = V (0), a condizione che q0 /∈ 2πn, n ∈ Z.
I casi esclusi corrispondono a soluzioni statiche — con q0 = 0.
(e) Equilibri e stabilita in presenza dell’ulteriore sollecitazioneLa sollecitazione Q e completamente dissipativa. Infatti:
π = Qq = −(1 + sin2q)q2 ≤ 0 ∀ (q, q) ∈ R2
π = 0 =⇒ −(1 + sin2q)q2 = 0 =⇒ q = 0
ed inoltre Q non dipende esplicitamente dal tempo t. Dal carattere dissipativo della sol-lecitazione e lecito concludere che le configurazioni di equilibrio del sistema non varianorispetto al caso puramente conservativo considerato al punto (a) — in effetti si verifica persostituzione diretta che Q = 0 per q = 0.Le configurazioni di equilibrio sono inoltre sempre e comunque isolate (se ne ha un numerofinito in ogni intervallo di ampiezza 2π). E dunque lecito applicare i criteri di Barbasin-Krasovskii e concludere che:
(i) le configurazioni di equilibrio giudicate stabili nel caso conservativo, in forza del teo-rema di Lagrange-Dirichlet quali massimi relativi propri del potenziale, sono asintoti-camente stabili in presenza della nuova sollecitazione Q;
(ii) le configurazioni di equilibrio che risultavano instabili nel caso conservativo, per ilteorema di inversione parziale di L.-D., corrispondono comunque a punti che non sonodi massimo relativo proprio per il potenziale. I criteri di Barbasin-Krasovskii implicanol’instabilita di tali configurazioni.
Stefano Siboni 201

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 46. Sistema scleronomo a 2 g.d.l. posizionale conservativoIn una terna cartesiana ortogonale inerziale Oxyz si consideri una guida circolare rigida dicentro O e raggio R, fissa nel piano verticale Oyz. Sulla guida, e nello stesso piano Oyz,sono vincolari a rotolare senza strisciare due dischi circolari omogenei D1 e D2, di egualeraggio r = R/3 e masse rispettive m1 = 3m/2 ed m2 = 3m/4. D1 si colloca nella parteinterna della guida, mentre D2 e posizionato all’esterno della stessa (vedi figura). Infine, icentri C1 e C2 dei due dischi sono connessi da una molla ideale di costante elastica k > 0.
Supposti i vincoli ideali e facendo uso degli angoli θ e φ come parametri lagrangiani:
(a) scrivere l’espressione dell’energia cinetica del sistema;
(b) determinare lagrangiana ed equazioni del moto del sistema;
(c) individuare le configurazioni di equilibrio, discutendone le proprieta di stabilita, intermini del parametro adimensionale λ = kR/mg.
Soluzione(a) Calcolo dell’energia cineticaL’energia cinetica del sistema si ottiene sommando le energie cinetiche dei due dischi D1 eD2, rispettivamente interno ed esterno alla guida circolare.
Indicato con P1 il punto di contatto fra D1 e la guida ad un istante generico, la velocitaangolare istantanea del disco D1 — ω1 e1 — e determinata dalla condizione di rotolamentosenza strisciamento
P1 = C1 + ω1 e1 ∧ (P1 −C1) = 0
ovvero, considerato che di fatto il centro C1 ruota rigidamente attorno ad O con velocitaangolare φ e1 e che P1 − C1 = (C1 − O)r/(R − r),
φ e1 ∧ (C1 − O) + ω1 e1 ∧ (C1 − O)r
R − r= 0 .
Stefano Siboni 202

Universita degli studi di Trento Esercizi di Meccanica razionale
Quest’ultima relazione puo scriversi nella forma equivalente
[φ +
rω1
R − r
]e1 ∧ (C1 − O) = 0
e quindi, avendosi e1 ∧ (C1 − O) = 0,
φ +rω1
R − r= 0 ⇐⇒ ω1 = −R − r
rφ .
Il teorema di Konig fornisce allora
TD1 =m1
2|C1|2 +
12IC1zω
21 =
m1
2(R − r)2φ2 +
12
m1r2
2(R − r)2
r2φ2 =
=12m1(R − r)2φ2 +
14m1(R − r)2φ2 =
34m1(R − r)2φ2.
Analogamente, se P2 e il punto di contatto fra il disco D2 e la guida ad un istante genericoe ω2 e1 la corrispondente velocita angolare istantanea, vale
P2 = C2 + ω2 e1 ∧ (P2 −C2) = 0
ossia, considerato che di fatto il centro C2 ruota rigidamente attorno ad O con velocitaangolare θ e1 e che P2 − C2 = (C2 − O)(−r)/(R + r),
θ e1 ∧ (C2 − O) + ω2 e1 ∧ (C2 − O)−r
R + r= 0 .
Quest’ultima relazione si riduce a[θ − rω2
R + r
]e1 ∧ (C2 − O) = 0 e quindi, essendo e1 ∧
(C2 − O) = 0,
θ − rω2
R + r= 0 ⇐⇒ ω2 =
R + r
rθ .
L’energia cinetica del disco D2 si scrive pertanto, facendo uso del teorema di Konig,
TD2 =m2
2|C2|2 +
12IC2zω
22 =
m2
2(R + r)2 θ2 +
12
m2r2
2(R + r)2
r2θ2 =
=12m2(R + r)2 θ2 +
14m2(R + r)2 θ2 =
34m2(R + r)2 θ2.
La somma dei contributi TD1 e TD2 fornisce l’energia cinetica totale
T = TD1 + TD2 =34m1(R − r)2φ2 +
34m2(R + r)2θ2.
Stefano Siboni 203

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Lagrangiana ed equazioni del motoPer determinare la lagrangiana del sistema e necessario procedere al calcolo del potenzialetotale del sistema, che tornera utile anche nel successivo studio delle configurazioni diequilibrio.
Il potenziale U consiste nella somma del potenziale gravitazionale dei due dischi
Ug = m1g(R − r)cosφ + m2g(R + r)cosθ
e di quello elastico, immediatamente ottenibile applicando il teorema di Carnot al triangoloOC1C2:
Uel = −k
2[(R − r)2 + (R + r)2 − 2
(R2 − r2
)cos(θ − φ)
].
Notato che nella fattispecie i prodotti m1(R − r) ed m2(R + r) sono identici, indicato conµ il loro comune valore ed omettendo le costanti additive inessenziali il potenziale totale siscrive
U(φ, θ) = µg(cosφ + cosθ) + k(R2 − r2
)cos(θ − φ) .
La lagrangiana e data da L = T + U e si scrive percio
L =34m1(R − r)2φ2 +
34m2(R + r)2 θ2 + µg(cosφ + cosθ) + k
(R2 − r2
)cos(θ − φ) .
Da essa si deducono, per sostituzione nelle equazioni di Eulero-Lagrange, le equazioni delmoto:
d
dt
(∂L
∂φ
)− ∂L
∂φ= 0
d
dt
(∂L
∂θ
)− ∂L
∂θ= 0 .
Un semplice calcolo, che peraltro non richiede alcuna attenzione particolare dal momentoche i coefficienti dell’energia cinetica sono costanti, conduce alle espressioni
32m1(R − r)2φ + µg sinφ − k
(R2 − r2
)sin(θ − φ) = 0
32m2(R + r)2 θ + µg sinθ + k
(R2 − r2
)sin(θ − φ) = 0 .
(c) Configurazioni di equilibrio e stabilitaPoiche il sistema e a vincoli indipendenti dal tempo e non risulta soggetto ad altre sol-lecitazioni oltre a quelle posizionali conservative gia descritte, le configurazioni di equilibriodel sistema si identificano con i punti critici del potenziale totale e sono percio date da tuttee sole le soluzioni del sistema trigonometrico
Uφ = −µgsinφ + k(R2 − r2
)sin(θ − φ) = 0
Uθ = −µgsinθ − k(R2 − r2
)sin(θ − φ) = 0 .
(46.1)
Stefano Siboni 204

Universita degli studi di Trento Esercizi di Meccanica razionale
Sommando membro a membro le due equazioni si ottiene la relazione
sinφ + sinθ = 0 (46.2)
mentre la prima delle (46.1) puo riscriversi come
−µgsinφ + k(R2 − r2
)(sinθ cosφ− sinφ cosθ
)= 0 .
Sostituendo in quest’ultima relazione la (46.2) si perviene a
−µgsinφ + k(R2 − r2
)(−sinφ cosφ − sinφ cosθ
)= 0 ,
per cui i punti critici saranno le soluzioni del sistema equivalente
sinθ = −sinφ
sinφ[µg + k
(R2 − r2
)(cosφ + cosθ)
]= 0
dove la seconda equazione e ora scritta in forma fattorizzata. Eguagliando a zero sepa-ratamente i due fattori si ottengono due sistemi di equazioni trigonometriche, ciascuno deiquali fornisce alcune configurazioni di equilibrio.
(i) Ponendo a zero il primo fattore si perviene al sistema
sinφ = 0sinθ = 0
la cui soluzione e immediata e fornisce le configurazioni di equilibrio:
(φ, θ) = (0, 0) , (0, π) , (π, 0) , (π, π)
(a meno di multipli interi di 2π, che non individuano configurazioni distinte dalle prece-denti).
(ii) L’annullarsi del secondo fattore conduce invece al sistema
sinθ = −sinφ
cosθ = − µg
k(R2 − r2)− cosφ . (46.3)
Quadrando e sommando membro a membro le due equazioni si deduce
1 = 1 +[ µg
k(R2 − r2)
]2+ 2
µg
k(R2 − r2)cosφ
e quindi
cosφ = −k(R2 − r2)2µg
[ µg
k(R2 − r2)
]2= − µg
2k(R2 − r2). (46.4)
Stefano Siboni 205

Universita degli studi di Trento Esercizi di Meccanica razionale
Le soluzioni in φ sono quindi date da
φ = ±arc cos[− µg
2k(R2 − r2)
]= ±φ
a patto che si abbiaµg
2k(R2 − r2)< 1
— il segno di uguaglianza non viene considerato in quanto condurrebbe a configurazionigia considerate nel precedente caso (i). Le equazioni del sistema (46.3) forniscono il senoed il coseno dell’angolo incognito θ
sinθ = −sin(±φ
)cosθ = − µg
2k(R2 − r2)= cos
(±φ
).
La prima equazione ammette le soluzioni in θ
θ = ∓φ , π ± φ.
Tuttavia, mentre θ = ∓φ soddisfano anche la seconda equazione
cos(∓φ
)= cos
(±φ
),
le altre due radici θ = π ± φ non la verificano
cos(π ± φ
)= −cos
(±φ
)(si ricordi che cosφ non e mai nullo, causa la (46.4)). In conclusione, le sole configurazionidi equilibrio desumibili da (46.3) sono
(φ, θ) =(φ,−φ
),(−φ, φ
)purche sia soddisfatta la condizione di esistenza
µg
2k(R2 − r2)< 1.
Per l’analisi delle proprieta di stabilita delle configurazioni di equilibrio ottenute e neces-sario il calcolo delle derivate seconde del potenziale, date dalle seguenti — immediate —espressioni
Uφφ = −µg cosφ − k(R2 − r2
)cos(θ − φ)
Uφθ = Uθφ = k(R2 − r2
)cos(θ − φ)
Uθθ = −µg cosθ − k(R2 − r2
)cos(θ − φ) .
Si esaminano quindi le singole configurazioni di equilibrio, una ad una.
Stefano Siboni 206

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (φ, θ) = (0, 0)L’hessiana del potenziale assume la forma
HU (0, 0) =(−µg − k
(R2 − r2
)k(R2 − r2
)k(R2 − r2
)−µg − k
(R2 − r2
))
il cui determinante e positivo
detHU (0, 0) =µ2g2 + k2(R2 − r2
)2 + 2µgk(R2 − r2
)− k2
(R2 − r2
)2 =
=µ2g2 + 2µgk(R2 − r2
)> 0
mentre la traccia risulta negativa trHU (0, 0) = −2µg − k(R2 − r2
)< 0. Dalla prima con-
dizione segue che gli autovalori dell’hessiana sono di uguale segno, mentre dalla seconda sideduce che tale comune segno e negativo. La configurazione risulta percio massimo relativoproprio del potenziale e la sua stabilita segue dal teorema di Lagrange-Dirichlet.
Configurazione (φ, θ) = (0, π)Si ha in questo caso per l’hessiana del potenziale l’espressione
HU (0, π) =(−µg + k
(R2 − r2
)−k(R2 − r2
)−k(R2 − r2
)µg + k
(R2 − r2
))
di determinante detHU (0, π) = −µ2g2 < 0. Gli autovalori sono quindi uno negativo eduno positivo. Quest’ultimo implica l’instabilita della configurazione in forza dell’inversioneparziale di Lagrange-Dirichlet.
Configurazione (φ, θ) = (π, 0)Vale l’espressione
HU (π, 0) =(
µg + k(R2 − r2
)−k(R2 − r2
)−k(R2 − r2
)−µg + k
(R2 − r2
))
con determinante negativo detHU (π, 0) = −µ2g2, per cui la configurazione e instabile(inversione parziale di L.-D.).
Configurazione (φ, θ) = (π, π)Dalla matrice hessiana
HU (π, π) =(
µg − k(R2 − r2
)k(R2 − r2
)k(R2 − r2
)µg − k
(R2 − r2
))
si deducono le relazioni
detHU (π, π) = µ2g2 − 2µgk(R2 − r2
)= 2µgk
(R2 − r2
)[ µg
2k(R2 − r2
) − 1]
Stefano Siboni 207

Universita degli studi di Trento Esercizi di Meccanica razionale
trHU (π, π) = 2[µg − k
(R2 − r2
)]= 2k
(R2 − r2
)[ µg
k(R2 − r2)
],
ovvero, posto per brevita α = 2k(R2 − r2
)/µg,
detHU (π, π) = µ2g2(1 − α) trHU (π, π) = µg(2 − α) .
Dal segno delle espressioni ottenute si verifica immediatamente che gli autovalori dell’hes-siana sono entrambi positivi per α < 1, uno positivo ed uno nullo se α = 1, uno positivoe l’altro negativo nell’ipotesi che α > 1. In ogni caso il teorema di inversione parziale diLagrange-Dirichlet comporta l’instabilita della configurazione ottenuta.
Configurazioni (φ, θ) = (φ,−φ), (−φ, φ)Presentano le stesse proprieta di stabilita, causa la simmetria del potenziale
U(−φ,−θ) = U(φ, θ) ∀φ, θ ∈ R
per cui e sufficiente analizzare la sola configurazione (φ, θ) = (φ,−φ). Le derivate secondedel potenziale si scrivono:
Uφφ(φ,−φ) = −µg cosφ − k(R2 − r2
)cos(2φ)
= −µg cosφ − k(R2 − r2
)(2cos2φ − 1)
= µgµg
2k(R2 − r2
) − 2k(R2 − r2
) µ2g2
4k2(R2 − r2
)2 + k(R2 − r2
)= k
(R2 − r2
)Uθθ(φ,−φ) = −µg cosφ − k
(R2 − r2
)cos(2φ)
= k(R2 − r2
)Uφθ(φ,−φ) = k
(R2 − r2
)cos(2φ)
= k(R2 − r2
)[2
µ2g2
4k2(R2 − r2
)2 − 1]
.
Per il fatto che la traccia e positiva
trHU (φ,−φ) = 2k(R2 − r2
)> 0
si conclude che almeno un autovalore deve risultare positivo. Ne segue l’instabilita dellaconfigurazione per il teorema di inversione parziale di L.-D..
Riassumendo, le configurazioni di equilibrio del sistema sono
(φ, θ) = (0, 0) , (0, π) , (π, 0) , (π, π) , (φ,−φ) , (−φ, φ)
Stefano Siboni 208
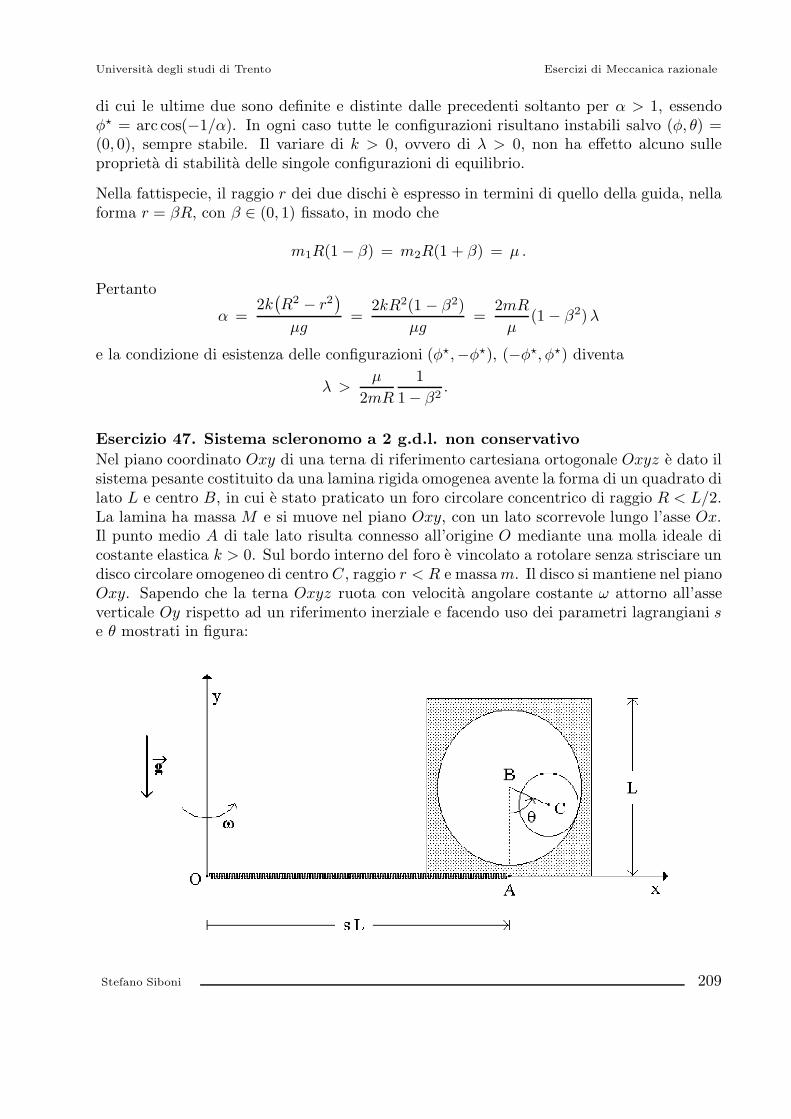
Universita degli studi di Trento Esercizi di Meccanica razionale
di cui le ultime due sono definite e distinte dalle precedenti soltanto per α > 1, essendoφ = arc cos(−1/α). In ogni caso tutte le configurazioni risultano instabili salvo (φ, θ) =(0, 0), sempre stabile. Il variare di k > 0, ovvero di λ > 0, non ha effetto alcuno sulleproprieta di stabilita delle singole configurazioni di equilibrio.
Nella fattispecie, il raggio r dei due dischi e espresso in termini di quello della guida, nellaforma r = βR, con β ∈ (0, 1) fissato, in modo che
m1R(1 − β) = m2R(1 + β) = µ .
Pertanto
α =2k(R2 − r2
)µg
=2kR2(1 − β2)
µg=
2mR
µ(1 − β2)λ
e la condizione di esistenza delle configurazioni (φ,−φ), (−φ, φ) diventa
λ >µ
2mR
11− β2
.
Esercizio 47. Sistema scleronomo a 2 g.d.l. non conservativoNel piano coordinato Oxy di una terna di riferimento cartesiana ortogonale Oxyz e dato ilsistema pesante costituito da una lamina rigida omogenea avente la forma di un quadrato dilato L e centro B, in cui e stato praticato un foro circolare concentrico di raggio R < L/2.La lamina ha massa M e si muove nel piano Oxy, con un lato scorrevole lungo l’asse Ox.Il punto medio A di tale lato risulta connesso all’origine O mediante una molla ideale dicostante elastica k > 0. Sul bordo interno del foro e vincolato a rotolare senza strisciare undisco circolare omogeneo di centro C , raggio r < R e massa m. Il disco si mantiene nel pianoOxy. Sapendo che la terna Oxyz ruota con velocita angolare costante ω attorno all’asseverticale Oy rispetto ad un riferimento inerziale e facendo uso dei parametri lagrangiani se θ mostrati in figura:
Stefano Siboni 209

Universita degli studi di Trento Esercizi di Meccanica razionale
(a) scrivere l’espressione dell’energia cinetica relativa ad Oxyz del sistema;
(b) determinare le equazioni lagrangiane del moto e si dia una interpretazione fisica delrisultato;
(c) individuare le configurazioni di equilibrio, discutendone la stabilita in termini dei
parametri adimensionali µ =ω2M
ke λ =
g
ω2(R − r)ω2(M + m) − k
ω2M − k.
(d) Si supponga poi che in C sia applicata una ulteriore sollecitazione del tipo −βC,essendo β una costante positiva e C la velocita del centro C relativa al riferimentoOxyz. Si determinino le componenti lagrangiane della sollecitazione e se ne discuta lanatura (posizionale, dissipativa, ecc.).
Soluzione(a) Calcolo dell’energia cineticaL’energia cinetica del sistema e data dalla somma delle energie cinetiche della lamina L edel disco D. Si indichino con TL e TD tali energie cinetiche. Poiche la velocita angolare dellalamina e nulla ed il baricentro si identifica con il centro di simmetria B, il teorema di Konig
porge TL =M
2|B|2 + 0 =
M
2L2s2. La velocita angolare istantanea del disco D si ricava
imponendo la condizione di rotolamento senza strisciamento e risulta ω = −(R
r− 1)θ e3.
Conviene anche in questo caso applicare il teorema di Konig e scrivere
TD =m
2|C|2 + T ′
D
dove l’energia cinetica del moto attorno al baricentro vale
T ′D =
12ID,Cz|ω|2 =
mr2
4
(R
r− 1)2
θ2 =m
4(R − r)2θ2
mentre C − O =[Ls + (R − r) sinθ
]e1 +
[L2− (R − r) cosθ
]e2 , per cui
C =[Ls + (R − r) cosθ θ
]e1 + (R − r) sinθ θ e2
|C|2 = L2s2 + 2L(R − r) cosθ sθ + (R − r)2 θ2
ed infineTD =
m
2L2s2 + mL(R − r) cosθ sθ +
34m(R − r)2θ2 .
L’energia cinetica totale e data pertanto dall’espressione seguente
T =M
2L2s2 +
m
2L2s2 + mL(R − r) cosθ sθ +
34m(R − r)2θ2
che si verifica immediatamente essere una forma quadratica definita positiva delle velocitageneralizzate s, θ.
Stefano Siboni 210

Universita degli studi di Trento Esercizi di Meccanica razionale
(b) Equazioni del moto e loro interpretazione fisicaLa determinazione delle equazioni lagrangiane del moto richiede il calcolo del potenzialetotale del sistema. Questo risulta dalla somma dei contributi elastico, gravitazionale e cen-trifugo, tenuto conto del fatto che le sollecitazioni di Coriolis hanno componenti lagrangianenulle (il moto del sistema e vincolato ad un piano passante per l’asse di rotazione Oy). Ilpotenziale elastico della molla ideale OA vale
Uel = −k
2|A − O|2 = −k
2L2s2
mentre quello gravitazionale consta della somma di due termini, l’uno relativo al disco
Ug = −mg(C − O) · e2 = −mgL
2+ mg(R − r) cosθ ,
l’altro relativo alla lamina e trascurabile in quanto costante (l’ordinata (B − O) · e2 delbaricentro B si mantiene inveriata per qualunque moto del sistema). Quanto al potenzialecentrifugo, per la lamina L si ha l’espressione
ω2
2IL,Oy =
ω2
2
[ML2s2 + IL,Ay
]immediata conseguenza del teorema di Huygens-Steiner, il quale, applicato al disco D porgeanalogamente:
ω2
2ID,Oy =
ω2
2
[m[Ls + (R − r) sinθ
]2 + ID,Cy
].
I momenti IL,Ay e ID,Cy sono chiaramente costanti, il primo per il fatto che la laminanon ruota nel piano vincolare Oxy(1), il secondo causa la struttura giroscopica del discoomogeneo. Di conseguenza, i relativi termini possono essere ignorati nell’espressione delpotenziale centrifugo del sistema
Ucf =ω2
2
[ML2s2 + m
[Ls + (R − r) sinθ
]2].
Il potenziale totale risulta allora
U = −k
2L2s2 + mg(R − r) cosθ +
ω2
2
[ML2s2 + m
[Ls + (R − r) sinθ
]2]e la lagrangiana del sistema assume la forma
L = T + U =M
2L2s2 +
m
2L2s2 + mL(R − r) cosθ sθ +
34m(R − r)2θ2−
− k
2L2s2 + mg(R − r) cosθ +
ω2
2
[ML2s2 + m
[Ls + (R − r) sinθ
]2](1)
Si osservi che quand’anche la lamina fosse libera di ruotare in Oxy, il momento IL,Ay risulterebbe co-munque costante in quanto una lamina quadrata omogenea con foro circolare concentrico e un corpo a struttura
giroscopica.
Stefano Siboni 211

Universita degli studi di Trento Esercizi di Meccanica razionale
da cui si deducono le relazioni
d
dt
(∂L
∂s
)= (M + m)L2s + mL(R − r) cosθ θ − mL(R − r) sinθ θ2
d
dt
(∂L
∂θ
)= mL(R − r) cosθ s +
32m(R − r)2 θ − mL(R − r) sinθ sθ
∂L
∂s= L2
[ω2(M + m) − k
]s + mω2L(R − r) sinθ
∂L
∂θ= −mL(R − r) sinθ sθ − mg(R − r) sinθ + mω2
[Ls + (R − r) sinθ
](R − r) cosθ
e le corrispondenti equazioni di Eulero-Lagrange
(M + m)L2s + mL(R − r) cosθ θ−mL(R − r) sinθ θ2 =
=L2[ω2(M + m) − k
]s + mω2L(R − r) sinθ
mL(R − r) cosθ s+32m(R − r)2θ =
= −mg(R − r) sinθ + mω2[Ls + (R − r) sinθ
](R − r) cosθ .
Si vuole fornire una interpretazione fisica delle equazioni del moto appena determinate.Per un generico punto P della lamina, la cui posizione puo scriversi P−O = P−A + sL e1,vale
∂P
∂s= L e1 e
∂P
∂θ= 0
essendo P −A costante. Se invece Q e un punto arbitrario del disco, il suo vettore posizionepuo esprimersi come
Q − O = C −O + Q − C ,
dove C − O =[sL + (R − r) sinθ
]e1 +
[(L/2) − (R − r) cosθ
]e2, mentre Q − C dipende
esclusivamente dall’angolo θ. Si hanno cosı le relazioni:
∂C
∂s= L e1
∂C
∂θ= (R − r) cosθ e1 + (R − r) sinθ e2
∂
∂θ(Q −C) = −
(R
r− 1)
e3 ∧ (Q − C)∂
∂s(Q − C) = 0 ,
per cui
∂Q
∂s= L e1 e
∂Q
∂θ= (R − r)
(cosθ e1 + sinθ e2
)−(R
r− 1)
e3 ∧ (Q −C) .
Tutte le velocita virtuali del sistema risultano allora
νP = α1L e1
νQ = α1L e1 + α2(R − r)[cosθ e1 + sinθ e2 −
1re3 ∧ (Q − C)
] (47.1)
per ogni P ∈ L, Q ∈ D ed α1, α2 ∈ R arbitrari.
Stefano Siboni 212

Universita degli studi di Trento Esercizi di Meccanica razionale
Tenuto conto delle (47.1), la condizione di vincoli ideali diviene
π =∑P∈L
L e1 · ΦP α1 +∑P∈D
L e1 · ΦP α1+
+∑P∈D
(R − r)[cosθ e1 · ΦP + sinθ e2 · ΦP − 1
re3 ∧ (P − C) · ΦP
]α2 =
=∑
P∈L∪D
e1 ·ΦP Lα1 +∑P∈D
[cosθ e1 ·ΦP +sinθ e2 ·ΦP − 1
re3 · (P −C)∧ΦP
](R− r)α2 = 0
essendo ΦP la reazione vincolare applicata sul generico punto P ∈ L ∪ D. Indicati con RL
ed RD i risultanti delle reazioni vincolari agenti su L e D rispettivamente, e con MC,D ilmomento risultante delle reazioni vincolari su D rispetto al polo C , si ottiene
(RL + RD
)· e1 Lα1 +
[(cosθ e1 + sinθ e2
)· RD − 1
rMC,D · e3
](R − r)α2 = 0
e per l’arbitrarieta di α1, α2 ∈ R(RL + RD
)· e1 = 0
−r(cosθ e1 + sinθ e2
)· RD + MC,D · e3 = 0 .
(47.2)
Si osservi poi che se S e il punto di contatto disco-lamina ad un istante generico, valel’identita
e3 ∧ (S − C) =
∣∣∣∣∣∣e1 e2 e3
0 0 1r sinθ −r cosθ 0
∣∣∣∣∣∣ = r(cosθ e1 + sinθ e2
)e la seconda delle (47.2) assume la forma equivalente
−e3 ∧ (S − C) · RD + e3 · MC,D = 0
ossia e3 ·[(C − S) ∧ RD + MC,D
]= 0.
E immediato verificare che l’espressione entro parentesi quadre si identifica con il momentototale rispetto al polo S delle reazioni vincolari agenti su D. Indicato con MS,D talemomento, la condizione (47.2) di vincolo ideale si riscrive come(
RL + RD
)· e1 = 0
MS,D · e3 = 0 .(47.3)
Le equazioni simboliche della dinamica del sistema si deducono sostituendo nelle (47.3)l’espressione mP P − FP in luogo di ΦP per ogni punto P del sistema. Con FP si indicail risultante delle sollecitazioni attive applicate a P e con mP la massa di tale punto. Sihanno cosı le equazioni
[∑P∈L
(mP P − FP
)+∑P∈D
(mP P − FP
)]· e1 = 0
∑P∈D
(P − S) ∧(mP P − FP
)· e3 = 0
Stefano Siboni 213

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia
[ ∑P∈L∪D
mP P −∑
P∈L∪D
FP
]· e1 = 0
[∑P∈D
(P − S) ∧ mP P −∑P∈D
(P − S) ∧ FP
]· e3 = 0
che in forza delle (47.3) possono anche scriversi come
[ ∑P∈L∪D
mP P −∑
P∈L∪D
(FP + ΦP
)]· e1 = 0[∑
P∈D
(P − S) ∧ mP P −∑P∈D
(P − S) ∧(FP + ΦP
)]· e3 = 0 .
(47.4)
Si riconoscono nelle (47.4) rispettivamente la proiezione lungo e1 dell’equazione cardinaledell’impulso per il sistema completo L∪D e la proiezione secondo e3 dell’equazione cardinaledel momento angolare per il solo disco D, rispetto al polo S. Un semplice calcolo permettedi identificare la prima delle (47.4) con l’equazione di Lagrange
d
dt
(∂L
∂s
)− ∂L
∂s= 0
mentre la seconda coincide cond
dt
(∂L
∂θ
)− ∂L
∂θ= 0.
(c) Configurazioni di equilibrio e loro stabilitaDal momento che le sole sollecitazioni attive agenti sul sistema hanno natura posizionaleconservativa ed i vincoli sono indipendenti dal tempo, le configurazioni di equilibrio siidentificano con i punti critici del potenziale totale U e sono quindi soluzioni del sistema
Us = L2
[ω2(M + m) − k
]s + mω2L(R − r) sinθ = 0
Uθ = −mg(R− r) sinθ + mω2[Ls + (R − r) sinθ
](R − r) cosθ = 0
equivalente a L[ω2(M + m) − k
]s + mω2(R − r) sinθ = 0
−g sinθ + ω2[Ls + (R − r) sinθ
]cosθ = 0 .
(47.5)
La distribuzione delle configurazioni di equilibrio non risulta fondamentalmente diversa aseconda che il parametro k − ω2(M + m) sia nullo o meno.
Se k − ω2(M + m) = 0 la prima equazione in (47.5) porge
s =mω2(R − r)
L[k − ω2(M + m)]sinθ (47.6)
che sostituita nella seconda delle (47.5) conduce all’equazione trigonometrica in θ
Stefano Siboni 214

Universita degli studi di Trento Esercizi di Meccanica razionale
−g sinθ + ω2[ mω2(R − r)k − ω2(M + m)
+ R − r]sinθ cosθ = 0
ovvero
sinθ[−g + ω2(R − r)
k − ω2M
k − ω2(M + m)cosθ
]= 0.
Quest’ultima equazione e soddisfatta se sinθ = 0, e dunque θ = 0, π, oppure se
−g + ω2(R − r)k − ω2M
k − ω2(M + m)cosθ = 0 . (47.7)
L’equazione (47.7) non ammette radici reali per ω2(k − ω2M
)= 0. Si puo pertanto as-
sumere ω2(k − ω2M
)= 0 e scrivere
cosθ =g
ω2(R − r)k − ω2(M + m)
k − ω2Mottenendo le ulteriori soluzioni
θ = ±θ = ±arc cos[
g
ω2(R − r)k − ω2(M + m)
k − ω2M
]purche sia verificata la condizione di esistenza
g
ω2(R − r)
∣∣∣∣k − ω2(M + m)k − ω2M
∣∣∣∣ < 1 . (47.8)
Ricordando la (47.6) si perviene alle configurazioni di equilibrio:
(θ, s) = (0, 0) , (π, 0) ,(θ, s
),(−θ,−s
)
essendosi posto per brevita s =mω2(R − r)
L[k − ω2(M + m)]sinθ. Nel caso k − ω2(M + m) = 0 la
prima equazione del sistema (47.5) si riduce a sinθ = 0, mentre la seconda implica s = 0.Le configurazioni di equilibrio sono pertanto le sole (θ, s) = (0, 0), (π, 0).
Prima di procedere alla discussione di stabilita, conviene al solito scrivere le espressionidelle derivate parziali seconde del potenziale totale
Uθθ = −mg(R− r) cosθ + mω2(R − r)[−Ls sinθ + (R − r)
(cos2θ − sin2θ
)]Uθs = Usθ = mω2L(R − r) cosθ Uss = L2
[ω2(M + m) − k
].
Vale la pena ricordare che, come un calcolo banale permette di verificare immediatamente,se una matrice reale e simmetrica 2 × 2 ha determinante positivo allora i suoi elementidiagonali sono necessariamente di segno concorde. Tale segno dovra coincidere con quellodella traccia. Nella fattispecie, la traccia della matrice hessiana avra segno uguale a quellodi Uss = L2
[ω2(M + m) − k
], indipendente dalla configurazione di equilibrio prescelta.
Si puo ora passare all’esame delle proprieta di stabilita di ogni configurazione, ricordandoche per ipotesi k > 0 e facendo uso dei parametri adimensionali µ e λ introdotti nel testodell’esercizio.
Stefano Siboni 215

Universita degli studi di Trento Esercizi di Meccanica razionale
Configurazione (θ, s) = (0, 0)L’hessiana del potenziale risulta in questo caso
HU (0, 0) =(−mg(R− r) + mω2(R − r)2 mω2L(R − r)
mω2L(R − r) L2[ω2(M + m) − k
])con determinante
detHU (0, 0) = −mg(R − r)L2[ω2(M + m) − k
]+ mω2L2(R − r)2
[ω2M − k
]=
mω2L2(R−r)2[ω2M − k
][1− g
ω2(R − r)ω2(M + m) − k
ω2M − k
]= mω2L2(R−r)2k(µ−1)(1−λ)
per µ = 1 e detHU (0, 0) = −m2g(R − r)L2ω2 < 0 per µ = 1.Il determinante della matrice hessiana risulta negativo se µ < 1 e λ < 1, oppure se µ > 1 eλ > 1, nel qual caso la configurazione di equilibrio e instabile per il teorema di inversioneparziale di Lagrange-Dirichlet.Qualora sia, viceversa, µ < 1 e λ > 1 ovvero µ > 1 e λ < 1, il determinante dell’hessiana hasegno positivo ed il segno della traccia coincide con quello di ω2(M + m) − k. Nella primaipotesi deve aversi certamente k − ω2(M + m) > 0 per cui trHU (0, 0) < 0 e gli autovaloridi HU (0, 0) sono negativi; la stabilita segue dal teorema di Lagrange-Dirichlet. Nel secondocaso, la condizione µ > 1 implica k − ω2(M + m) < 0 e dunque trHU (0, 0) > 0. Di quidiscende che la matrice hessiana presenta due autovalori positivi e che la configurazione einstabile per l’inversione parziale di L.-D..Per µ = 1 si e gia verificato come il determinante della matrice assuma segno negativo,dunque la configurazione risulta instabile.Il caso residuo, in cui µ = 1 e λ = 1, corrisponde ad una matrice hessiana singolare eviene riguardato come critico, per semplicita. Se si spingesse oltre l’analisi, il secondoautovalore dell’hessiana potrebbe risultare positivo, nel qual caso sarebbe lecito concludereche la configurazione e instabile per l’inversione parziale di Lagrange-Dirichlet. Se viceversadetto autovalore si rivelasse nullo o negativo, lo studio potrebbe complicarsi non poco, datala difficolta di accertare l’eventuale presenza del massimo nell’ipotesi di hessiana singolare(nulla o semidefinita non definita negativa). Qualora si fosse in grado di provare tuttaviache la configurazione di equilibrio costituisce un massimo relativo proprio del potenziale(facendo uso di uno sviluppo di Taylor appropriato, o ricorrendo a trucchi o cambiamenti divariabile “astuti”, ecc.), Lagrange-Dirichlet consentirebbe comunque di dedurre la stabilitadella configurazione. Nella malaugurata eventualita che il punto critico non risultassemassimo relativo proprio del potenziale totale NULLA potrebbe concludersi.
Configurazione (θ, s) = (π, 0)La matrice hessiana diventa ora
HU (π, 0) =(
mg(R − r) + mω2(R − r)2 −mω2L(R − r)−mω2L(R − r) L2
[ω2(M + m) − k
])
ed il suo determinante si scrive
detHU (π, 0) = mg(R − r)L2[ω2(M + m) − k
]+ mω2L2(R − r)2
[ω2M − k
]=
Stefano Siboni 216

Universita degli studi di Trento Esercizi di Meccanica razionale
mω2L2(R−r)2[ω2M − k
][1+
g
ω2(R − r)ω2(M + m) − k
ω2M − k
]= mω2L2(R−r)2k(µ−1)(1+λ)
nel caso si abbia µ = 1, mentre per µ = 1 vale detHU (π, 0) = m2g(R − r)L2ω2 > 0.Si ha detHU (π, 0) < 0 qualora sia µ < 1 e λ > −1, mentre l’ulteriore condizione µ > 1 eλ < −1 non puo ricorrere causa la definizione di µ e λ: la configurazione e instabile perl’inversione parziale di L.-D..D’altra parte risulta detHU (π, 0) > 0 se µ < 1 e λ < −1, ovvero per µ > 1 — si osservi chein quest’ultima ipotesi λ e sicuramente positivo e dunque λ > −1 —. La prima condizioneimplica l’instabilita della configurazione per l’inversione parziale di L.-D., in quanto dalladefinizione di λ segue che deve sempre aversi k − ω2(M + m) < 0 e dunque trHU (π, 0) >0; di qui si deduce che HU (π, 0) e definita positiva. Nel secondo caso vale banalmentek − ω2(M + m) < 0 e quindi, ripetendo l’argomento precedente, la configurazione risultaparimenti instabile.Per µ = 1 determinante e traccia sono positivi e la configurazione di equilibrio e instabile.Qualora infine sia µ = 1 e λ = −1, la matrice hessiana del potenziale risulta singolare, percui anche questo caso viene considerato critico, senza ulteriori analisi.
Configurazioni (θ, s) = (θ, s) e (−θ,−s)Le due configurazioni presentano le stesse proprieta di stabilita in quanto il potenzialetotale e una funzione pari dei parametri lagrangiani:
U(−θ,−s) = U(θ, s) ∀ (θ, s) ∈ R2 .
L’analisi puo quindi essere limitata alla sola configurazione (θ, s). A tale scopo, ricordatoche e necessariamente ω2(M + m) − k = 0, si hanno le relazioni:
Uθθ
(θ, s
)= −mg(R− r) cosθ + mω2(R − r)
[−Ls sinθ + (R − r)
(2 cos2θ − 1
)]=
= −mg(R−r) cosθ +mω2(R−r)[mω2(R − r) (1 − cos2θ)
ω2(M + m) − k+2(R−r) cos2θ−(R−r)
]=
= −mg(R− r) cosθ +mω2(R− r)2[ ω2m
ω2(M + m) − k− ω2m cos2θ
ω2(M + m) − k+2 cos2θ −1
]=
= mω2(R − r)2[− (k − ω2M) cos2θ
k − ω2(M + m)+
ω2m cos2θ
k − ω2(M + m)+ 2 cos2θ +
k − ω2M
ω2(M + m) − k
]=
= mω2(R − r)2[cos2θ − ω2M − k
ω2(M + m) − k
]
Uθs
(θ, s
)= Usθ
(θ, s
)= mω2L(R − r) cosθ Uss
(θ, s
)= L2
[ω2(M + m) − k
]per cui il determinante detHU
(θ, s
)della matrice hessiana diviene
Stefano Siboni 217

Universita degli studi di Trento Esercizi di Meccanica razionale
mω2L2(R − r)2[ω2(M + m) − k
](cos2θ − ω2M − k
ω2(M + m) − k
)− m2ω4L2(R − r)2cos2θ =
= mω2L2(R − r)2(k − ω2M) sin2θ = mω2L2(R − r)2k(1− µ)(1 − λ2
).
Avendosi detHU
(θ, s
)< 0 per µ > 1, la configurazione di equilibrio risulta in tal caso in-
stabile data la presenza di un (ed un solo) autovalore positivo. Il determinante di HU
(θ, s
)e invece positivo nell’ipotesi che µ < 1; il segno della traccia si identifica con quello diω2(M + m) − k, che nella fattispecie e a sua volta opposto al segno di λ. Si avra percioinstabilita della configurazione se λ < 0, stabilita per λ > 0. Si ricordi che in forza dellacondizione di esistenza (47.8) deve comunque risultare |λ| < 1. Inoltre ω2(M + m) − k = 0,ossia λ = 0.Infine, il caso µ = 1 non puo verificarsi — e escluso dalla condizione |λ| < 1.
Trattandosi di sistema a due gradi di liberta, l’uso dei diagrammi di biforcazione non sidimostra di particolare utilita nel descrivere le configurazioni di equilibrio e le loro proprietadi stabilita al variare dei parametri adimensionali µ, λ. Cio anche in considerazione delfatto che, come gia sottolineato, i parametri µ e λ non sono completamente indipendentifra loro — nel senso che l’essere µ > 1 implica necessariamente che λ > 0, mentre per µ = 1il parametro λ non assume alcun valore definito.Conviene piuttosto, per ciascuna configurazione di equilibrio, riassumere le eventuali con-dizioni di esistenza e le proprieta di stabilita che si sono accertate, evidenziando i casicritici.
La configurazione (θ, s) = (0, 0) e sempre definita e risulta:
stabile per µ < 1 e λ > 1instabile per µ > 1 e λ < 1instabile per µ < 1 e λ < 1instabile per µ > 1 e λ > 1instabile per µ = 1critica per µ = 1 e λ = 1.
La configurazione (θ, s) = (π, 0), sempre definita, ha le proprieta di stabilita sottoelencate:
instabile per µ < 1 e λ > −1instabile per µ < 1 e λ < −1instabile per µ > 1instabile per µ = 1critica per µ = 1 e λ = −1.
Le configurazioni (θ, s) = (θ, s) e (−θ,−s) sono definite se e soltanto se |λ| < 1, conλ = 0. Le proprieta di stabilita sono le medesime per entrambe le configurazioni, cherisultano
instabili per µ > 1instabili per µ < 1 e λ < 0stabili per µ < 1 e λ > 0.
Stefano Siboni 218

Universita degli studi di Trento Esercizi di Meccanica razionale
(d) Componenti lagrangiane e natura della sollecitazione addizionaleLa sollecitazione addizionale e applicata nel centro C del disco e vale
FC = −βC = −β[Ls + (R − r) cosθ θ
]e1 − β(R − r) sinθ θ e2 .
Per determinare le componenti lagrangiane della sollecitazione occorre esprimere il vettoreposizione del punto di applicazione C in funzione dei parametri lagrangiani e calcolarne lederivate parziali rispetto a detti parametri. Si hanno cosı le relazioni
C −O =[Ls + (R − r) sinθ
]e1 +
[L2− (R − r) cosθ
]e2
∂C
∂s= L e1
∂C
∂θ= (R − r)
(cosθ e1 + sinθ e2
)da cui, ricordando la definizione di componente lagrangiana di una sollecitazione attiva, sideduce il risultato richiesto
Qs = FC · ∂C
∂s= −βL
[Ls + (R − r) cosθ θ
]Qθ = FC · ∂C
∂θ= −β(R − r)
[L cosθ s + (R − r) θ
].
La sollecitazione e chiaramente non posizionale, dal momento che le componenti ottenutedipendono in modo esplicito dalle componenti s, θ della velocita generalizzata. Si trattaallora di appurare se le sollecitazioni abbiano o meno potenza di segno definito. Il calcolodella potenza π NON richiede in questo caso la determinazione preventiva delle componentilagrangiane. Infatti:
π = Qss+Qθ θ = −βC(∂C
∂ss+
∂C
∂θθ)
= −β|C|2 = −β[L2s2+2L(R−r) cosθ sθ+(R−r)2 θ2
]= −β ( s θ )
(L2 L(R − r) cosθ
L(R − r) cosθ (R − r)2
)(sθ
)= −β ( s θ ) B
(sθ
).
Il problema viene quindi ricondotto allo studio della matrice B, reale e simmetrica. Nellafattispecie si ha
trB = L2 + (R − r)2 > 0 e detB = L2(R − r)2sin2θ ≥ 0
e pertanto gli autovalori di B sono entrambi positivi per sinθ = 0, uno nullo ed unopositivo se sinθ = 0. Nel primo caso la potenza π e una forma quadratica definita negativadi (s, θ), mentre nel secondo risulta soltanto semidefinita non definita negativa. Benchedissipativa, la sollecitazione non lo e completamente: per θ = 0, π esistono velocita nonnulle in corrispondenza delle quali la potenza della sollecitazione risulta uguale a zero.
Si osservi tuttavia che, dato il carattere locale dei criteri di Barbasin-Krasovskii, per tuttele applicazioni riguardanti la stabilita delle configurazioni di equilibrio la condizione dicompleta dissipazione non necessariamente deve essere soddisfatta sull’intero spazio dellefasi, ma basta che ricorra in un intorno delle soluzioni statiche corrispondenti. Se nededuce che la stabilita delle configurazioni (θ, s) = (θ, s), (−θ,−s) puo essere comunquediscussa facendo uso dei teoremi di Barbasin-Krasovskii, mentre cio non sara possibile per(θ, s) = (0, 0) e (θ, s) = (π, 0).
Stefano Siboni 219

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 48. Sistema scleronomo a 3 g.d.l. posizionale conservativoUn sistema meccanico e costituito da tre aste rettilinee OA, OB, OC , aventi l’estremo fissoO in comune e gli estremi A, B, C vincolati a scorrere su una circonferenza di centro Oe raggio L (vedi figura). Le aste OA ed OB sono omogenee, di massa m, mentre OC hadensita λ(ξ) = mξ(L − ξ)/L3, essendo ξ = |Q − O| ∀Q ∈ OC .Dato inoltre un punto P , fisso sulla circonferenza, si ha che le coppie di punti (P,A), (A,B),(B,C), (C,A) sono collegate da altrettante molle elastiche ideali di uguale costante k > 0.
Supponendo i vincoli ideali e facendo uso dei parametri lagrangiani α, β, γ mostrati infigura:
(a) determinare l’energia cinetica del sistema nel riferimento di quiete della guida circo-lare;
(b) individuare le configurazioni di equilibrio, analizzandone la stabilita;
(c) scrivere le equazioni lagrangiane del moto;
(d) calcolare le frequenze delle piccole oscillazioni nell’intorno delle configurazioni di equi-librio stabile.
Nell’ipotesi che la molla fra P ed A venga rimossa, come cambiano le configurazioni diequilibrio e le loro proprieta di stabilita?
Soluzione(a) Calcolo dell’energia cineticaL’espressione per l’energia cinetica totale T del sistema si ottiene dalla somma delle energiecinetiche di OA, OB, OC , ricordando che il punto O e fisso e che le velocita angolariistantanee delle tre aste sono rispettivamente
ωOA = α e3 ωOB = (α + β) e3 ωOC = (α + β + γ) e3
Stefano Siboni 220

Universita degli studi di Trento Esercizi di Meccanica razionale
dove si e indicato con e3 il versore normale al piano di giacitura della circonferenza vincolare.Si ha cosı
T =12IOAα2 +
12IOB(α + β)2 +
12IOC(α + β + γ)2.
I momenti d’inerzia IOA, IOB, IOC delle aste rispetto all’asse diretto secondo e3 e passanteper O si calcolano banalmente
IOA = IOB =∫ L
0
ξ2 m
Ldξ =
mL2
3IOC =
∫ L
0
ξ2 m
L2ξ(1 − ξ
L
)dξ =
mL2
20
(b) Configurazioni di equilibrio e loro stabilitaLe sole sollecitazioni attive agenti sul sistema sono quelle elastiche, dovute alla presenzadelle molle ideali. Il potenziale totale e dato dalla somma dei potenziali elastici delle singolemolle
UPA = −k
2
[2L sin
(α
2
)]2
UAB = −k
2
[2L sin
(β
2
)]2
UBC = −k
2
[2L sin
(γ
2
)]2UAC = −k
2
[2L sin
(β + γ
2
)]2e risulta pertanto
U(α, β, γ) = −2kL2
[sin2
(α
2
)+ sin2
(β
2
)+ sin2
(γ
2
)+ sin2
(β + γ
2
)].
Agli effetti della determinazione delle configurazioni di equilibrio e della relativa discussionedi stabilita, il fattore costante positivo kL2 puo essere ignorato ed e quindi lecito considerareil potenziale adimensionale
U (α, β, γ) =1
kL2U(α, β, γ) = −2
[sin2
(α
2
)+ sin2
(β
2
)+ sin2
(γ
2
)+ sin2
(β + γ
2
)]
le cui derivate parziali prime si scrivono
Uα = −sinα Uβ = −sinβ − sin(β + γ) Uγ = −sinγ − sin(β + γ)
mentre per le derivate seconde si hanno le relazioni
Uαα = −cosα Uβα = 0 Uγα = 0Uαβ = 0 Uββ = −cosβ − cos(β + γ) Uγβ = −cos(β + γ)Uαγ = 0 Uβγ = −cos(β + γ) Uγγ = −cosγ − cos(β + γ) .
Le configurazioni di equilibrio si identificano con i punti critici del potenziale e sono quinditutte e sole le soluzioni del sistema trigonometrico sinα = 0
sinβ + sin(β + γ) = 0sinγ + sin(β + γ) = 0 .
(48.1)
Stefano Siboni 221

Universita degli studi di Trento Esercizi di Meccanica razionale
La prima equazione del sistema (48.1) conduce alle soluzioni α = πn, n ∈ Z, mentre leultime due equazioni porgono
sinβ − sinγ = 0sinβ + sin(β + γ) = 0 ⇐⇒
2 sin
[(β − γ)/2
]cos[(β + γ)/2
]= 0
sinβ + sin(β + γ) = 0 .(48.2)
Da sin[(β − γ)/2
]cos[(β + γ)/2
]= 0 si deducono le condizioni
β − γ
2= πm , m ∈ Z e
β + γ
2=
π
2+ πq , q ∈ Z
che vanno sostituite nella seconda equazione (48.2) per determinare i punti critici richiesti.La relazione (β − γ)/2 = πm implica β = γ + 2πm, m ∈ Z, sicche
sinγ + sin(2γ) = 0 ⇐⇒ sinγ[1 + 2 cosγ
]= 0
le cui soluzioni sono date da γ = πa, a ∈ Z, e da γ = ±arc cos(−1/2)+2πb = ±2π/3+2πb,b ∈ Z. A meno di inessenziali multipli interi di 2π, le configurazioni di equilibrio ottenutesono individuate da
(α, β, γ) = (0, 0, 0) , (0, π, π) ,(0, 2π/3, 2π/3
),(0,−2π/3,−2π/3
)(π, 0, 0) , (π, π, π) ,
(π, 2π/3, 2π/3
),(π,−2π/3,−2π/3
).
Dalla condizione (β+γ)/2 = (π/2)+πq si deduce invece β+γ = π+2πq e quindi sinβ = 0.I soli valori significativi sono pertanto β = 0, π e corrispondentemente γ = π − β = π, 0.Di qui le ulteriori configurazioni di equilibrio:
(α, β, γ) = (0, 0, π) , (0, π, 0) , (π, 0, π) , (π, π, 0) .
L’interpretazione geometrica, per α = 0, degli equilibri determinati e illustrata nella figuraseguente:
Per α = π le configurazioni di equilibrio si ottengono dalle precedenti per rotazione di πradianti in senso antiorario.
Stefano Siboni 222

Universita degli studi di Trento Esercizi di Meccanica razionale
Possiamo ora procedere all’analisi di stabilita di ogni configurazione di equilibrio mediantelo studio dell’hessiana del potenziale adimensionale U .
Configurazione (α, β, γ) = (0, 0, 0)L’hessiana del potenziale adimensionale in questo punto di equilibrio risulta
HU (0, 0, 0) =
−1 0 0
0 −2 −10 −1 −2
con equazione caratteristica (λ + 1)2(λ + 3) = 0 ed autovalori λ = −1,−1,−3. Si trattachiaramente di una forma quadratica definita negativa e di conseguenza la configurazione(0, 0, 0) e un massimo relativo proprio del potenziale, stabile per Lagrange-Dirichlet.
Configurazione (α, β, γ) = (0, π, π)Si ha in questo caso
HU (0, π, π) =
−1 0 0
0 0 −10 −1 0
di equazione caratteristica (−1 − λ)(λ2 − 1
)= 0 ed autovalori λ = −1,−1,+1. La pre-
senza dell’autovalore positivo +1 comporta l’instabilita della configurazione per l’inversioneparziale di L.-D..
Configurazione (α, β, γ) = (0, 2π/3, 2π/3)Dalla matrice hessiana
HU (0, 2π/3, 2π/3) =
−1 0 0
0 1 1/20 1/2 1
si ricavano l’equazione caratteristica −(λ + 1)(λ − 3
2
)(λ − 1
2
)= 0 e gli autovalori λ =
−1, 1/2, 3/2. Come nel caso precedente, dalla presenza degli autovalori positivi 1/2 e 3/2si deduce l’instabilita (un autovalore positivo e in realta sufficiente).
Configurazione (α, β, γ) = (0,−2π/3,−2π/3)L’hessiana del potenziale coincide con quella calcolata per la configurazione (α, β, γ) =(0, 2π/3, 2π/3). Anche questo equilibrio e percio instabile.
Configurazione (α, β, γ) = (0, 0, π)L’instabilita della configurazione si dimostra facendo uso del teorema di inversione parzialedi L.-D., notato che la matrice hessiana del potenziale
HU (0, 0, π) =
−1 0 0
0 0 10 1 2
Stefano Siboni 223

Universita degli studi di Trento Esercizi di Meccanica razionale
ha equazione caratteristica −(1+λ)(λ2 −2λ−1) = 0 ed autovalori λ = −1, 1−√
2, 1+√
2,l’ultimo dei quali positivo.
Configurazione (α, β, γ) = (0, π, 0)La matrice hessiana del potenziale assume in questo caso la forma
HU (0, π, 0) =
−1 0 0
0 2 10 1 0
per cui l’equazione caratteristica relativa si scrive −(1+λ)(λ2−2λ−1) = 0 e gli autovalorisono gli stessi gia calcolati per la configurazione (α, β, γ) = (0, 0, π); le proprieta di stabilitasono pertanto le medesime.
Nei rimanenti casi, per i quali α = π, si ha che −cosα = −cosπ = +1 e sempre autovalorepositivo dell’hessiana del potenziale: l’instabilita delle configurazioni segue pertanto dalteorema di inversione parziale di Lagrange-Dirichlet.
Riassumendo, si conclude che di tutte le configurazioni di equilibrio la (α, β, γ) = (0, 0, 0)e l’unica stabile, mentre tutte le altre risultano instabili.
(c) Equazioni lagrangiane del motoLa Lagrangiana del sistema si scrive L = T (α, β, γ) + U(α, β, γ) e dunque
L =12IOAα2 +
12IOB(α + β)2 +
12IOC(α + β + γ)2 −
− 2kL2
[sin2
(α
2
)+ sin2
(β
2
)+ sin2
(γ
2
)+ sin2
(β + γ
2
)].
Per le equazioni del moto si hanno cosı le espressioni:
d
dt
(∂L
∂α
)− ∂L
∂α= IOAα + IOB(α + β) + IOC(α + β + γ) + kL2sinα = 0
d
dt
(∂L
∂β
)− ∂L
∂β= IOB(α + β) + IOC(α + β + γ) + kL2sinβ + kL2sin(β + γ) = 0
d
dt
(∂L
∂γ
)− ∂L
∂γ= IOC(α + β + γ) + kL2sinγ + kL2sin(β + γ) = 0
ovvero:
13α +
13(α + β) +
120
(α + β + γ) +k
msinα = 0
13(α + β) +
120
(α + β + γ) +k
m
[sinβ + sin(β + γ)
]= 0
120
(α + β + γ) +k
m
[sinγ + sin(β + γ)
]= 0 .
(48.3)
Stefano Siboni 224

Universita degli studi di Trento Esercizi di Meccanica razionale
(d) Piccole oscillazioniLo studio delle piccole oscillazioni deve essere condotto nell’intorno dell’unica configurazionedi equilibrio stabile (α, β, γ) = (0, 0, 0), per la quale l’hessiana del potenziale e definitanegativa. All’equazione delle piccole oscillazioni si perviene direttamente linearizzando le(48.3) nell’intorno della configurazione di equilibrio
13α +
13(α + β) +
120
(α + β + γ) +k
mα = 0
13(α + β) +
120
(α + β + γ) +k
m(2β + γ) = 0
120
(α + β + γ) +k
m(2γ + β) = 0
per cui risulta
13α +
13(α + β) +
120
(α + β + γ) +k
mα = 0
13(α + β) +
120
(α + β + γ) +k
m(2β + γ) = 0
120
(α + β + γ) +k
m(2γ + β) = 0 .
(48.4)
Tale equazione puo porsi nella forma matriciale equivalente
43/60 23/60 1/20
23/60 23/60 1/201/20 1/20 1/20
α
βγ
+
k
m
1 0 0
0 2 10 1 2
α
βγ
= 0
che ammette soluzioni sinusoidali del tipo (α β γ) = eiωt(a1 a2 a3), con (a1 a2 a3) =(0 0 0) ed ω > 0, se e soltanto se
det
−ω2
43/60 23/60 1/20
23/60 23/60 1/201/20 1/20 1/20
+
k
m
1 0 0
0 2 10 1 2
= 0
ossia−27µ3 + 525µ2 − 1100µ + 400 = 0 ,
essendosi posto µ =20ω2
k
m. Di qui si ricavano le soluzioni approssimate
µ = 0.463893972 , 1.866001744 , 17.1145487
ed infine, ricordando la definizione di µ, le frequenze normali
ω = 6.566071886√
k/m , 3.273851492√
k/m , 1.081016373√
k/m.
Stefano Siboni 225
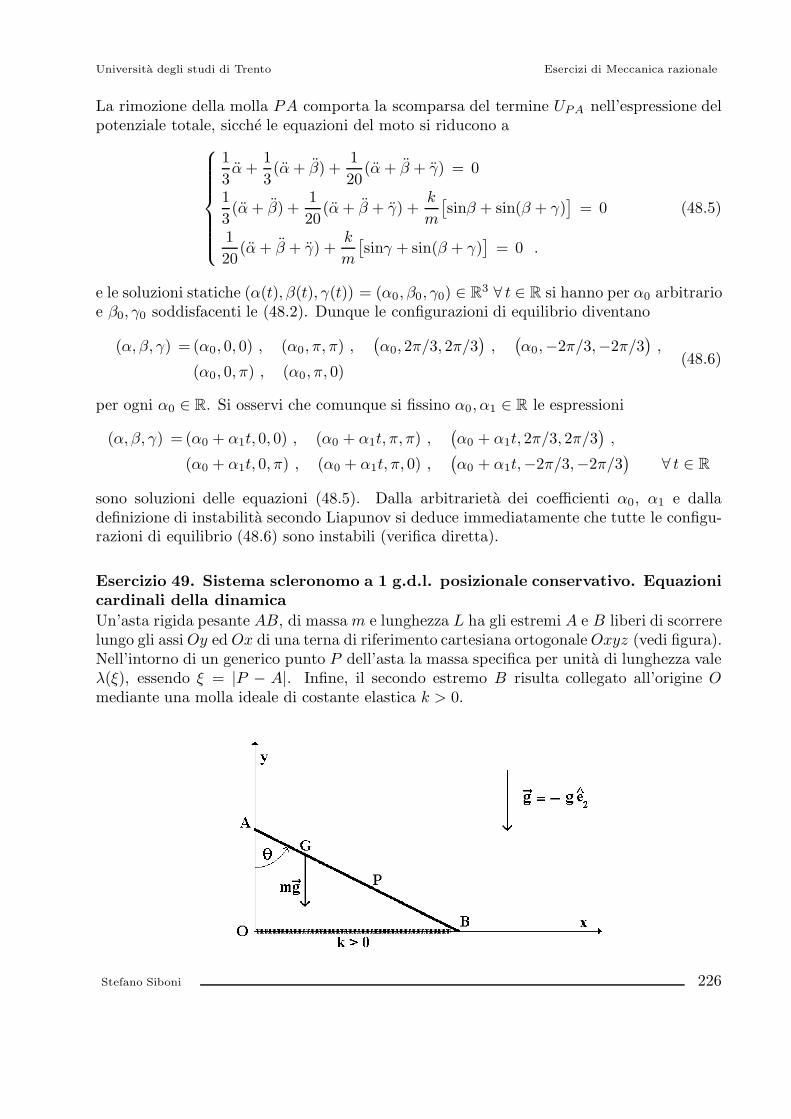
Universita degli studi di Trento Esercizi di Meccanica razionale
La rimozione della molla PA comporta la scomparsa del termine UPA nell’espressione delpotenziale totale, sicche le equazioni del moto si riducono a
13α +
13(α + β) +
120
(α + β + γ) = 0
13(α + β) +
120
(α + β + γ) +k
m
[sinβ + sin(β + γ)
]= 0
120
(α + β + γ) +k
m
[sinγ + sin(β + γ)
]= 0 .
(48.5)
e le soluzioni statiche (α(t), β(t), γ(t)) = (α0, β0, γ0) ∈ R3 ∀ t ∈ R si hanno per α0 arbitrario
e β0, γ0 soddisfacenti le (48.2). Dunque le configurazioni di equilibrio diventano
(α, β, γ) = (α0, 0, 0) , (α0, π, π) ,(α0, 2π/3, 2π/3
),(α0,−2π/3,−2π/3
),
(α0, 0, π) , (α0, π, 0)(48.6)
per ogni α0 ∈ R. Si osservi che comunque si fissino α0, α1 ∈ R le espressioni
(α, β, γ) = (α0 + α1t, 0, 0) , (α0 + α1t, π, π) ,(α0 + α1t, 2π/3, 2π/3
),
(α0 + α1t, 0, π) , (α0 + α1t, π, 0) ,(α0 + α1t,−2π/3,−2π/3
)∀ t ∈ R
sono soluzioni delle equazioni (48.5). Dalla arbitrarieta dei coefficienti α0, α1 e dalladefinizione di instabilita secondo Liapunov si deduce immediatamente che tutte le configu-razioni di equilibrio (48.6) sono instabili (verifica diretta).
Esercizio 49. Sistema scleronomo a 1 g.d.l. posizionale conservativo. Equazionicardinali della dinamicaUn’asta rigida pesante AB, di massa m e lunghezza L ha gli estremi A e B liberi di scorrerelungo gli assi Oy ed Ox di una terna di riferimento cartesiana ortogonale Oxyz (vedi figura).Nell’intorno di un generico punto P dell’asta la massa specifica per unita di lunghezza valeλ(ξ), essendo ξ = |P − A|. Infine, il secondo estremo B risulta collegato all’origine Omediante una molla ideale di costante elastica k > 0.
Stefano Siboni 226

Universita degli studi di Trento Esercizi di Meccanica razionale
Facendo uso del parametro lagrangiano θ ∈ (0, π/2) mostrato in figura:
(a) scrivere l’equazione lagrangiana del moto del sistema, nell’ipotesi di vincoli ideali;
(b) determinare esplicitamente la condizione affinche il sistema possa considerarsi a vincoliideali;
(c) scrivere le equazioni cardinali della dinamica (dell’asta);
(d) verificare che nel caso di vincoli ideali le equazioni cardinali della dinamica conduconoall’equazione lagrangiana del moto;
(e) calcolare, se possibile, le reazioni vincolari del sistema supponendo che queste sianocostituite da due sole forze Φ1 e Φ2 applicate in A e B rispettivamente (e che i vincolisiano ideali);
(f) specializzare il risultato precedente al caso particolare in cui Φ1 e Φ2 siano l’unaortogonale ad Oy in A e l’altra ad Ox in B. Verificare che i vincoli sono comunqueideali e determinare le reazioni vincolari Φ1,Φ2.
Soluzione(a) Equazione lagrangiana del motoPosto ξG = |G−A|, il vettore posizione del baricentro G nella terna Oxy e la corrispondentevelocita sono date dalle espressioni
G −O = ξG sinθ e1 + (L − ξG) cosθ e2 G =[ξGcosθ e1 − (L − ξG) sinθ e2
]θ
per cui l’energia cinetica si ottiene immediatamente facendo uso del teorema di Konig
T =m
2[ξ2Gcos2θ + (L − ξG)2sin2θ
]θ2 + T ′ =
12[ΛG + mξ2
Gcos2θ + m(L − ξG)2sin2θ]θ2,
essendo T ′ = ΛG|ω|2/2 = ΛGθ2/2 l’energia cinetica del moto attorno al baricentro, con
ΛG =
L∫0
(ξ − ξG)2λ(ξ) dξ ed ω = θ e3 .
Il potenziale totale consta della somma del potenziale elastico Uel = −k
2L2 sin2θ della
molla e di quello gravitazionale Ug = −mg(L − ξG) cosθ dell’asta, ossia
U = −k
2L2 sin2θ −mg(L − ξG) cosθ .
La Lagrangiana del sistema si scrive percio
L = T + U =12[ΛG + mξ2
Gcos2θ + m(L − ξG)2sin2θ]θ2 − k
2L2 sin2θ − mg(L− ξG) cosθ .
Da essa si deducono le relazioni:
d
dt
(∂L
∂θ
)=
d
dt
[[ΛG + mξ2
Gcos2θ + m(L − ξG)2sin2θ]θ]
Stefano Siboni 227

Universita degli studi di Trento Esercizi di Meccanica razionale
∂L
∂θ=[−mξ2
Gsinθ cosθ + m(L − ξG)2sinθ cosθ]θ2 − kL2sinθ cosθ + mg(L − ξG) sinθ
e l’equazione del moto:
[ΛG + mξ2
Gcos2θ + m(L − ξG)2sin2θ]θ +
[−2mξ2
G sinθ cosθ + 2m(L − ξg)2sinθ cosθ]θ2+
+[mξ2
Gsinθ cosθ − m(L − ξG)2sinθ cosθ]θ2 + kL2sinθ cosθ −mg(L − ξG) sinθ = 0
ovvero [Λ + m(L2 − 2LξG) sin2θ
]θ + m(L2 − 2LξG) sinθ cosθ θ2+
+kL2sinθ cosθ − mg(L− ξG) sinθ = 0 , (49.1)
essendosi posto Λ = ΛG + mξ2G.
(b) Condizione dei vincoli idealiLa velocita virtuale di un generico punto P dell’asta assume la forma
νP = νA + f ∧ (P − A) (49.2)
con νA = −L sinθ α e2 ed f = α e3 ∀α ∈ R e quindi
νP = −L sinθ α e2 + α e3 ∧ (P − A) = α[−L sinθ e2 + e3 ∧ (P − A)
]∀α ∈ R .
La condizione di idealita dei vincoli diventa∑P
νP · ΦP = α[−L sinθ e2 ·
∑P
ΦP + e3 ·∑P
(P − A) ∧ ΦP
]= 0 ∀α ∈ R ,
ossiaL sinθ e2 ·
∑P
ΦP − e3 ·∑P
(P − A) ∧ ΦP = 0 ,
da cui, posto per brevita R =∑
P ΦP ed MA =∑
P (P −A)∧ΦP , si perviene alla relazioneequivalente
L sinθ e2 · R − e3 ·MA = 0 . (49.3)
Ricordando il principio di azione e reazione, che sollecitazioni attive interne e reazionivincolari interne soddisfano separatamente, si ha
R = Ri+ R
eR
i= 0 MA = MA
i+ MA
eMA
i= 0
per cui la (49.3) puo anche scriversi
L sinθ e2 · Re − e3 · MA
e= 0 , (49.4)
dove risultante e momento risultante sono calcolati tenendo conto delle sole reazioni vin-colari esterne.
Stefano Siboni 228

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Equazioni cardinali della dinamicaL’equazione cardinale dell’impulso per l’asta AB risulta
mG = Re+ (−mg) e2 − kL sinθ e1
mentre quella del momento angolare e
d
dtKA = −mA ∧ G + (G − A) ∧ (−mg) e2 + (B − A) ∧ (−kL sinθ e1) + MA
e.
Possiamo percio scrivere il sistema delle equazioni cardinali nella forma
Re
= mG + mg e2 + kL sinθ e1
MAe
=d
dtKA + mA ∧ G + (G −A) ∧ mg e2 + (B − A) ∧ kL sinθ e1 .
(49.5)
(d) Relazione fra le equazioni cardinali della dinamica e l’equazione di LagrangeSi ricorda che
KA =∑P
(P −A)∧mP P =∑P
(P −O)∧mP P + m(O−A)∧ G = KO −m(A−O)∧ G
per cuid
dtKA =
d
dtKO − mA ∧ G − m(A − O) ∧ G e l’equazione del momento angolare
in (49.5) si riscrive come
MAe
=d
dtKO−mA∧G−(A−O)∧mG+mA∧G+(G−A)∧mg e2+(B−A)∧kL sinθ e1 =
=d
dtKO − (A − O) ∧ mG + (G − A) ∧ mg e2 + (B −A) ∧ kL sinθ e1 . (49.6)
Imponendo la condizione di idealita dei vincoli (49.4) e sostituendo le espressioni (49.5) ed(49.6) per risultante e momento risultante delle reazioni vincolari esterne si ottiene infinel’equazione
L sinθ[mG· e2+mg
]= e3 ·
[ d
dtKO−(A−O)∧mG+(G−A)∧mg e2+(B−A)∧kL sinθ e1
].
Verifichiamo che tale relazione coincide con l’equazione di Lagrange del moto. A tale scopooccorre e basta riesprimere tutti i termini in funzione del parametro lagrangiano θ e dellesue derivate in t. Si osserva preliminarmente che vale l’espressione
G = [ξG cosθ e1 − (L − ξG) sinθ e2] θ + [−ξG sinθ e1 − (L − ξG) cosθ e2] θ2 (49.7)
assieme alle identita
A − O = L cosθ e2 =⇒ G − A = ξG(sinθ e1 − cosθ e2)B − O = L sinθ e1 =⇒ B −A = L(sinθ e1 − cosθ e2) .
(49.8)
Stefano Siboni 229

Universita degli studi di Trento Esercizi di Meccanica razionale
Si ha inoltre
L sinθ[mG · e2 + mg
]= L sinθ
[−m(L− ξG) sinθ θ − m(L − ξG) cosθ θ2 + mg
]=
= −mL(L − ξG) sin2θ θ − mL(L − ξG) sinθ cosθ θ2 + mgL sinθ
mentre
KO = θ e3(Λ − mLξG) ⇒ d
dtKO = (Λ − mLξG) θ e3 ⇒ e3 ·
d
dtKO = (Λ −mLξG) θ
e
−e3 · (A −O) ∧ mG = −m
∣∣∣∣∣∣0 0 10 L cosθ 0
ξG(cosθ θ − sinθ θ2) −(L − ξG)(sinθ θ + cosθ θ2) 0
∣∣∣∣∣∣ =
= +mLξG
(cos2θ θ − sinθ cosθ θ2
).
A queste si aggiungono le ulteriori relazioni, desunte dalle (49.2),
e3 · (G − A) ∧ mg e2 = mgξG
∣∣∣∣∣∣0 0 1
sinθ −cosθ 00 1 0
∣∣∣∣∣∣ = mgξG sinθ
e3 · (B − A) ∧ kL sinθ e1 = kL2sinθ
∣∣∣∣∣∣0 0 1
sinθ −cosθ 01 0 0
∣∣∣∣∣∣ = kL2 sinθ cosθ .
Percio la condizione di idealita dei vincoli si traduce nell’equazione
−mL(L− ξG) sin2θ θ − mL(L− ξG) sinθ cosθ θ2 + mgL sinθ =
= (Λ − mLξG)θ + mLξG cos2θ θ −mLξG sinθ cosθ θ2 + mgξG sinθ + kL2 sinθ cosθ
ovvero [Λ − mLξG + mL(L − ξG) sin2θ + mLξG cos2θ
]θ+
+m(L2 − 2LξG) sinθ cosθ θ2 − mg(L − ξG) sinθ + kL2 sinθ cosθ = 0
ed infine
[Λ+mL(L−2ξG) sin2θ
]θ+mL(L−2ξG) sinθ cosθ θ2−mg(L−ξG) sinθ+kL2sinθ cosθ = 0 ,
che coincide con l’equazione di Lagrange gia ottenuta. Il risultato non meraviglia in quantole equazioni di Lagrange sono ricavate dalle equazioni di Newton (ovvero, nella fattispecie,dalle equazioni cardinali della dinamica) imponendo la condizione che i vincoli siano ideali,esattamente cio che e stato fatto.
Stefano Siboni 230

Universita degli studi di Trento Esercizi di Meccanica razionale
(e) Calcolo delle reazioni vincolariLe equazioni
R
e= mG + mg e2 + kL sinθ e1
MAe
=d
dtKO − (A − O) ∧ mG + (G −A) ∧ mg e2 + (B − A) ∧ kL sinθ e1
forniscono risultante e momento risultante in A delle reazioni vincolari esterne.Il calcolo delle singole reazioni vincolari in generale non e possibile e, comunque, di regolarichiede che vengano specificate ulteriori proprieta delle reazioni, compatibilmente con lacondizione di idealita dei vincoli.
Nella fattispecie, si suppone che le reazioni vincolari esterne consistano in due sole forzeΦ1 e Φ2 applicate in A e B rispettivamente; si esclude in particolare la presenza di coppieesterne associate all’azione dei vincoli.Gli unici punti dei quali occorre determinare le velocita virtuali sono in questo caso A e B.A tale scopo, per un punto arbitrario P dell’asta scriviamo
P − O = P −A + A −O = ξ sinθ e1 − ξ cosθ e2 + L cosθ e2 = ξ sinθ e1 + (L − ξ) cosθ e2
per cui P =[ξ cosθ e1 − (L − ξ) sinθ e2
]θ e l’espressione della velocita virtuale di P risul-
teraνP =
[ξ cosθ e1 − (L − ξ) sinθ e2
]α , ∀α ∈ R ,
equivalente alla (49.2). Specializzando la relazione precedente a P = A e P = B si ottiene
νA = −L sinθ e2 α νB = L cosθ e1 α
da cui segue che
νA · Φ1 + νB · Φ2 =[−L sinθ e2 · Φ1 + L cosθ e1 · Φ2
]α .
La condizione di idealita dei vincoli diviene νA · Φ1 + νB ·Φ2 = 0 ∀ νA , νB e quindi
−sinθ e2 · Φ1 + cosθ e1 · Φ2 = 0 (49.9)
che e la relazione (49.4) riscritta con queste ipotesi particolari sulle reazioni associate aivincoli.
Si dimostra facilmente che queste sole ipotesi non bastano a determinare le reazioni vincolariin modo univoco. L’equazione cardinale dell’impulso si scrive in questo caso
Φ1 + Φ2 − mg e2 − kL sinθ e1 = mG (49.10)
e quella del momento angolare in O
(A − O) ∧ Φ1 + (B − O) ∧ Φ2 + (G −O) ∧ (−mg e2) + (B − O) ∧ (−kL sinθ e1) =d
dtKO
Stefano Siboni 231

Universita degli studi di Trento Esercizi di Meccanica razionale
Dalla prima relazione si ha
Φ2 = mG + mg e2 + kL sinθ e1 − Φ1 (49.11)
che sostituita nella seconda porge
(A −O) ∧ Φ1 + (B − O) ∧[mG + mg e2 + kL sinθ e1
]− (B − O) ∧ Φ1+
+(G −O) ∧ (−mg e2) + (B − O) ∧ (−kL sinθ e1) =d
dtKO
e percio
(A −B) ∧ Φ1 =d
dtKO − (B − O) ∧
[mG + mg e2
]+ (G − O) ∧ mg e2
ossia
(A − B) ∧ Φ1 =d
dtKO − (B − O) ∧ mG + (G −B) ∧ mg e2 . (49.12)
Questa non e altro che l’equazione del momento angolare scritta rispetto al polo mobile B
(si ricordi che KO = KB + (B − O) ∧ mG e dKB/dt = Mest
B − mB ∧ G, essendo Mest
B
il momento risultante in B di tutte le forze esterne applicate). La (49.12) implica che siabbia
(A − B) ·[
d
dtKO − (B − O) ∧ mG + (G − B) ∧ mg e2
]= 0
e, qualora tale condizione sia verificata, determina Φ1 a meno di λ(A−B) = λL(−sinθ e1 +cosθ e2) ∀λ ∈ R. In conclusione Φ1 e Φ2 non sono determinabili univocamente, comeaffermato in precedenza.
Si procede ora a determinare l’espressione delle reazioni vincolari per un moto arbitrario delsistema a vincoli ideali, tenendo ben presente che il risultato non potra che essere definitoa meno di un termine λ(A −B). A questo scopo conviene esplicitare l’equazione cardinaledel momento angolare rispetto al polo fisso O.Il momento angolare dell’asta AB si ottiene immediatamente dalla definizione
KO =∫ L
0
(P −O) ∧ P λ(ξ) dξ =∫ L
0
∣∣∣∣∣∣e1 e2 e3
ξ sinθ (L − ξ) cosθ 0ξ cosθ −(L − ξ) sinθ 0
∣∣∣∣∣∣ θ λ(ξ) dξ =
=∫ L
0
−ξ(L − ξ) e3 θ λ(ξ) dξ = θ e3
∫ L
0
[ξ2 − Lξ]λ(ξ) dξ = (Λ − mLξG) θ e3
Stefano Siboni 232

Universita degli studi di Trento Esercizi di Meccanica razionale
per cui dKO/dt = (Λ − mLξG) θ e3. Il momento in O delle forze peso risulta invece, dalladefinizione di centro di massa,
(G −O) ∧ (−mg e2) =
∣∣∣∣∣∣e1 e2 e3
ξG sinθ (L − ξG) cosθ 00 −mg 0
∣∣∣∣∣∣ = −mgξG sinθ e3 ,
mentre quello della forza elastica, applicata in B, vale
(B − O) ∧[−kL sinθ e1
]= 0 .
Quanto alle reazioni vincolari si ha semplicemente
(A − O) ∧ Φ1 + (B −O) ∧ Φ2 = L cosθ e2 ∧ Φ1 + L sinθ e1 ∧ Φ2 .
L’equazione cardinale del momento angolare in O diventa pertanto
d
dtKO = −mgξG sinθ e3 + (A −O) ∧ Φ1 + (B − O) ∧ Φ2
e porge(A − O) ∧ Φ1 + (B − O) ∧ Φ2 =
[θ(Λ − mLξG) + mgξG sinθ
]e3 ,
ovvero
(A − B) ∧ Φ1 + (B − O) ∧(Φ1 + Φ2
)=[θ(Λ −mLξG) + mgξG sinθ
]e3 . (49.13)
Si inseriscono le espressioni di A − B e B − O in funzione di θ e si fa uso della (49.10),sostituendo la (49.7)
L(cosθ e2 − sinθ e1
)∧ Φ1 = − L sinθ e1 ∧
[−m(L − ξG)
(sinθ θ + cosθ θ2
)+ mg
]e2+
+[θ(Λ − mLξG) + mgξG sinθ
]e3
per poi eseguire il prodotto vettoriale a secondo membro e riordinare i termini
L(−sinθ e1 + cosθ e2
)∧ Φ1 = (49.14)
=[mL(L − ξG) sinθ
(sinθ θ + cosθ θ2
)− mgL sinθ + θ(Λ − mLξG) + mgξG sinθ
]e3 .
Omesso per brevita il versore e3, il secondo membro della (49.14) puo porsi nella forma
θ[Λ − mLξG + mL(L − ξG) sin2θ
]+ mL(L − ξG) sinθ cosθ θ2 − mg(L− ξG) sinθ =
= θ[Λ+m
(L2−2LξG
)sin2θ
]−mLξG cos2θ θ+m
(L2−LξG
)sinθ cosθ θ2−mg(L−ξG) sinθ
Stefano Siboni 233

Universita degli studi di Trento Esercizi di Meccanica razionale
e tenuto conto dell’equazione del moto (49.1)
−m(L2 − 2LξG
)sinθ cosθ θ2 − kL2sinθ cosθ + mg(L − ξG) sinθ −mLξG cos2θ θ+
+m(L2 − LξG
)sinθ cosθ θ2 − mg(L − ξG) sinθ =
= mLξG sinθ cosθ θ2 − kL2sinθ cosθ − mLξG cos2θ θ .
Basta ora sostituire in (49.14) l’espressione ottenuta per giungere alla condizione
(−sinθ e1 + cosθ e2
)∧ Φ1 = e3 sinθ cosθ
(mξGθ2 − kL
)− e3 mξG cos2θ θ (49.15)
che la reazione vincolare Φ1 deve soddisfare ad ogni istante. Si risolve la (49.15) ponendoΦ1 = φ1
x e1 + φ1y e2 + φ1
z e3. Poiche
(−sinθ e1 + cosθ e2
)∧ Φ1 =
∣∣∣∣∣∣e1 e2 e3
−sinθ cosθ 0φ1
x φ1y φ1
z
∣∣∣∣∣∣ =
= cosθ φ1z e1 + sinθ φ1
z e2 +(−sinθ φ1
y − cosθ φ1x
)e3 ,
si e ricondotti al set di equazioni scalari
cosθ φ1z = 0
sinθ φ1z = 0
−sinθ φ1y − cosθ φ1
x = sinθ cosθ(mξGθ2 − kL
)− mξG cos2θ θ
dal quale si ricava, quadrando e sommando membro a membro le prime due,
φ1z = 0
mentre la terza si riscrive
sinθ φ1y + cosθ φ1
x = sinθ cosθ(kL− mξGθ2
)+ mξG cos2θ θ . (49.16)
In definitiva la reazione vincolare Φ1 e data dall’espressione
Φ1 = φ1x e1 + φ1
y e2 (49.17)
con φ1x e φ1
y soddisfacenti la (49.16), mentre per il vettore Φ2 si ha
Φ2 = mξG
[cosθ θ − sinθ θ2
]e1 − m(L − ξG)
[sinθ θ + cosθ θ2
]e2 +
+ kL sinθ e1 + mg e2 − φ1x e1 − φ1
y e2
(49.18)
facendo uso della (49.11) ed inserendo la relazione (49.7).
Stefano Siboni 234

Universita degli studi di Trento Esercizi di Meccanica razionale
Si osservi che la condizione (49.9) di vincoli ideali e effettivamente verificata, come deveessere. Infatti
−sinθ e2 · Φ1 + cosθ e1 · Φ2 = −sinθ φ1y + cosθ
[mξG(cosθ θ − sinθ θ2) + kL sinθ − φ1
x
]=
= −(sinθ φ1
y + cosθ φ1x
)+ mξGcos2θ θ −mξGsinθ cosθ θ2 + kL sinθ cosθ = 0
in forza della (49.16). Cio nondimeno, le reazioni vincolari non sono determinate in modounivoco.
(f) Calcolo delle reazioni vincolari: caso particolareNell’ipotesi particolare che Φ1 e Φ2 siano l’una ortogonale ad Oy in A e l’altra ad Ox in B,la condizione (49.9) e soddisfatta identicamente ed i vincoli sono certamente ideali. PostoΦ2 = φ2
x e1 +φ2y e2 +φ2
z e3, nelle precedenti espressioni (49.16), (49.17) e (49.18) deve aversidi necessita φ1
y = 0 e φ2x = 0. La (49.16) porge
cosθ φ1x = sinθ cosθ
(kL − mξGθ2
)+ mξG cos2θ θ
ed essendo cosθ = 0 ∀ θ ∈ (0, π/2) implica
φ1x = sinθ
(kL− mξGθ2
)+ mξG cosθ θ
che sostituita in (49.18) conduce a
Φ2 = mξG
(cosθ θ − sinθ θ2
)e1 + kL sinθ e1 − sinθ
(kL− mξGθ2
)e1 − mξGcosθ θ e1 −
− m(L − ξG)(sinθ θ + cosθ θ2
)e2 + mg e2 = m
[g − (L − ξG)
(sinθ θ + cosθ θ2
)]e2 .
Va rilevato in particolare che risulta direttamente φ2x = 0, come a priori richiesto. Le
reazioni vincolari sono ora fissate univocamente dalla legge oraria θ = θ(t)
Φ1 =[mξGcosθ θ + sinθ
(kL− mξGθ2
)]e1
Φ2 = m[g − (L − ξG)
(sinθ θ + cosθ θ2
)]e2 .
Vale la pena di osservare che le condizioni assunte sulle reazioni vincolari seguono in modonaturale nell’ipotesi che gli estremi A e B possano scorrere senza attrito lungo i rispettiviassi coordinati. Questa costituisce l’interpretazione fisicamente piu immediata delle con-dizioni φ1
y = 0 e φ2x = 0. La definizione matematica dei vincoli ideali e tuttavia molto piu
generale. Come si e visto al punto precedente, essa non permette di calcolare le reazionivincolari in modo unico. Di qui la necessita di assumere ipotesi piu restrittive, quali quelleconsiderate nel presente caso. Va da se che qualora si fossero introdotte condizioni addizio-nali troppo forti, il problema della determinazione delle reazioni vincolari avrebbe potutonon ammettere alcuna soluzione.
Stefano Siboni 235

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 50. Sistema scleronomo a 2 g.d.l. posizionale conservativo
Nel piano coordinato Oxy di una terna di riferimento cartesiana ortogonale Oxyz e datoil sistema pesante costituito da un disco rigido di raggio R, massa m e centro C , e daun’asta rigida omogenea CB, connessa al disco in C ma ad esso non solidale, di massa 2me lunghezza L. Il disco non e omogeneo ed in un suo generico punto P ha massa specificaper unita di superficie σ(P ) = 3m|P −C |/(2πR3). Disco ed asta sono vincolati a restare nelpiano Oxy, con il disco che rotola senza strisciare lungo l’asse orizzontale Ox e l’asta liberadi ruotare attorno all’estremo C . Il centro C e connesso ad un punto A, posto sull’asseverticale Oy e di ordinata R, mediante una molla ideale di costante elastica k = 5mω2.
Sapendo che la terna Oxyz ruota con velocita angolare costante ω attorno all’asse Oy,rispetto ad un riferimento inerziale, e facendo uso dei parametri lagrangiani s e θ illustratiin figura:
(a) scrivere l’espressione dell’energia cinetica del sistema nel riferimento Oxyz;
(b) determinare le configurazioni di equilibrio del sistema, discutendone, ove possibile, leproprieta di stabilita in termini del parametro adimensionale λ = Lω2/g;
(c) ricavare le equazioni lagrangiane del moto del sistema;
(d) assunto λ = 3/8, si scriva l’equazione per le frequenze delle piccole oscillazioni nell’in-torno di una configurazione di equilibrio stabile a scelta.
Soluzione(a) Espressione dell’energia cineticaPer brevita, si indichino con D e A il disco e l’asta, rispettivamente. L’energia cineticadel sistema e data quindi dalla somma delle energie cinetiche di A e di D. Siano TA eTD tali energie cinetiche. Per la determinazione dell’energia cinetica dell’asta si osservache il vettore velocita angolare istantanea e dato da ωA = θ e3 e che il vettore posizione
del baricentro, punto medio di CB, risulta G − O =(Ls +
L
2sinθ
)e1 +
(R − L
2cosθ
)e2,
Stefano Siboni 236

Universita degli studi di Trento Esercizi di Meccanica razionale
cosicche G = L(s +
12cosθ θ
)e1 +
L
2sinθ θ e2. Dal teorema di Konig si deduce allora
TA =122m|G|2+1
2IA
Gz|ωA|2 = mL2[s2+cosθ sθ+
θ2
4
]+
12
2mL2
12θ2 = mL2
[s2+cosθ sθ+
θ2
3
]
dove si e indicato con IA
Gz il momento d’inerzia dell’asta rispetto all’asse passante per Ge parallelo ad Oz. La condizione di rotolamento senza strisciamento porge per la velocitaangolare del disco l’espressione
ωD = −L
Rs e3
che si deduce immediatamente ricordando che per moti piani quali quelli considerati valeωD = ωD e3 ed imponendo che il punto di contatto Q del disco con l’asse Ox abbia velocitanulla:
C + ωD e3 ∧ (Q − C) = Q = 0 .
La massa del disco si ottiene mediante integrazione della densita superficiale, eseguita incoordinate polari,
∫D
σ(P ) dA =∫D
3m|P − C |2πR3
dA =
2π∫0
dα
R∫0
dρ ρ3m
2πR3ρ = m.
Un calcolo analogo conduce all’espressione del momento d’inerzia ID
Cz del disco rispettoall’asse Cz:
ID
Cz =∫D
|P − C |2σ(P ) dA =
2π∫0
dα
R∫0
dρ ρ ρ2 3m
2πR3ρ =
3m
R3
R5
5=
35mR2 .
Poiche inoltre il baricentro C e individuato da C−O = Ls e1+Re2, con velocita C = Ls e1,una immediata applicazione del teorema di Konig conduce a
TD =m
2|C|2 +
12ID
Cz
∣∣ωD
∣∣2 =m
2L2s2 +
310
mR2 L2
R2s2 =
45mL2s2
per cui l’energia cinetica totale del sistema risulta
T = TA + TD = mL2[95s2 + cosθ s θ +
θ2
3
]
(b) Configurazioni di equilibrio relativo Oxyz e analisi di stabilitaIl potenziale elastico del disco e dato dalla semplice espressione
Uel = −k
2L2s2.
Stefano Siboni 237

Universita degli studi di Trento Esercizi di Meccanica razionale
Il solo contributo rilevante al potenziale gravitazionale del sistema risulta quello dell’asta
Ug = −2mg[R − L
2cosθ
],
mentre quello relativo al disco e banalmente costante e puo essere ignorato. Infine, ilpotenziale centrifugo totale consta di un termine relativo al disco
ω2
2ID
Oy =ω2
2[mL2s2 + ID
Cy
]con ID
Cy costante per simmetria, e di uno dovuto all’asta
ω2
2IA
Oy =ω2
2
[2m(Ls +
L
2sinθ
)2
+ IA
Gy
]
essendo G il baricentro di A e IA
Gy =∫ L/2
−L/2
ξ2sin2θ2m
Ldξ =
mL2
6sin2θ. Il potenziale
centrifugo complessivo si scrive percio, omettendo costanti additive inessenziali,
Ucf =ω2
2
[mL2s2 + 2mL2
(s +
12sinθ
)2
+mL2
6sin2θ
].
Per il potenziale totale vale cosı l’espressione
U = Uel + Ug + Ucf =(−k
2L2 +
32mω2L2
)s2 + mω2L2s sinθ + mgL cosθ + mω2 L2
3sin2θ
e nell’ipotesi che k = 5mω2
U(θ, s) = mω2L2
[−s2 + s sinθ +
g
Lω2cosθ +
13sin2θ
].
Le sollecitazioni di Coriolis, benche presenti nel riferimento non inerziale Oxyz, non hannotuttavia alcun effetto sul moto, essendo le loro componenti lagrangiane uguali a zero. Cioin forza del fatto che il moto del sistema avviene in un piano passante per l’asse di rotazioneOy, per cui le sollecitazioni di Coriolis risultano normali a detto piano in ogni punto delsistema. Non agendo altre sollecitazioni oltre a quelle posizionali conservative descritte dalpotenziale, si deduce che le configurazioni di equilibrio sono e sono soltanto i punti criticidi U , soluzioni di
Uθ = mω2L2[s cosθ − g
Lω2sinθ +
23sinθ cosθ
]= 0
Us = mω2L2(−2s + sinθ) = 0 ,
dove i simboli Uθ ed Us indicano al solito le derivate parziali di U rispetto alle corrispondenti
variabili. Dalla seconda equazione si deduce che s =12sinθ, per cui la prima diventa
12sinθ cosθ − g
Lω2sinθ +
23sinθ cosθ = 0
Stefano Siboni 238

Universita degli studi di Trento Esercizi di Meccanica razionale
ossia
76sinθ cosθ − g
Lω2sinθ = 0 ⇐⇒ sinθ
[76cosθ − g
Lω2
]= 0 . (50.1)
La (50.1) ammette soluzioni per sinθ = 0 — ovvero θ = 0, π — e per76cosθ − g
Lω2= 0.
Di qui si deducono le ulteriori soluzioni
θ = ±θ = ±arc cos(6
7g
Lω2
)= ±arc cos
( 67λ
)a patto che sia soddisfatta la condizione di esistenza 6/7λ < 1 e quindi λ > 6/7. Ricordatoche s = 1
2 sinθ, si conclude che le configurazioni di equilibrio del sistema sono
(θ, s) = (0, 0) , (π, 0),
sempre definite, e(θ, s) =
(θ, s
),(−θ,−s
),
definite per 6/7 < λ — si e posto per brevita s = 12sinθ.
Si puo ora procedere allo studio delle proprieta di stabilita di ogni singola configurazionedi equilibrio appena determinata.
A tale scopo, si fa uso delle derivate seconde del potenziale totale:
Uθθ = mω2L2[−s sinθ − g
Lω2cosθ +
23(cos2θ − sin2θ
)]
Uss = −2mω2L2 Uθs = Usθ = mω2L2cosθ .
Configurazione (θ, s) = (0, 0)La matrice hessiana del potenziale e la seguente
HU (0, 0) = mω2L2
((−g/Lω2) + (2/3) 1
1 −2
)
ed il suo determinante risulta
detHU (0, 0) = 2(mω2L2
)2( g
Lω2− 7
6
)mentre per la traccia si ha l’espressione
trHU (0, 0) = − g
Lω2− 4
3< 0 . (50.2)
Seg
Lω2− 7
6> 0, vale detHU (0, 0) > 0 e gli autovalori della matrice HU (0, 0) hanno percio
lo stesso segno. Dalla condizione (50.2) si deduce allora che detti autovalori sono negativi e
Stefano Siboni 239

Universita degli studi di Trento Esercizi di Meccanica razionale
che (θ, s) = (0, 0) rappresenta dunque un massimo relativo proprio del potenziale U , stabileper Lagrange-Dirchlet.
Seg
Lω2− 7
6< 0 risulta invece detHU (0, 0) < 0, per cui gli autovalori di HU (0, 0) hanno
segno opposto. La presenza dell’autovalore positivo implica l’instabilita della configurazioneper il teorema di inversione parziale di Lagrange-Dirichlet.
Perg
Lω2− 7
6= 0 e infine detHU (0, 0) = 0 e trHU (0, 0) < 0. La matrice HU (0, 0) e
semidefinita non definita negativa e nulla si puo concludere tout court sulla stabilita dellaconfigurazione. Il caso e critico. Si ha in effetti l’espressione “ridotta” del potenziale
U(θ, s)mω2L2
= −s2 + s sinθ +76cosθ +
13sin2θ
che nell’intorno di (θ, s) = (0, 0) puo riscriversi come
U(θ, s)mω2L2
= −(s − 1
2sinθ
)2
+76cosθ +
712
sin2θ =
= −(s − 1
2sinθ
)2
+76
[1 − θ2
2+
θ4
24+ O
(θ5)
+θ2
2− θ4
6
]=
= −(s − 1
2sinθ
)2
+76− 7
48θ4 + O
(θ5)
=U(0, 0)mω2L2
−(s − 1
2sinθ
)2
− 748
θ4 + O(θ5)
e risulta strettamente minore di U(0, 0)/mω2L2 per qualsiasi (θ, s) ∈ R2 \ (0, 0) di
norma abbastanza piccola. In conclusione, anche nel caso critico appena individuato laconfigurazione (θ, s) = (0, 0) costituisce un massimo relativo proprio del potenziale, di cuiLagrange-Dirichlet garantisce la stabilita.
Configurazione (θ, s) = (π, 0)Per la matrice hessiana del potenziale si ha l’espressione
HU (π, 0) = mω2L2
((g/Lω2) + (2/3) −1
−1 −2
)
con determinante sempre negativo:
detHU (π, 0) =(mω2L2
)2[− 2g
ω2L2− 7
3
]< 0 .
La matrice e quindi indefinita e la presenza di un autovalore positivo comporta l’instabilitadella configurazione per l’inversione parziale di Lagrange-Dirichlet.
Configurazioni (θ, s) =(θ, s
),(−θ,−s
)Le proprieta di stabilita delle due configurazioni sono le stesse, poiche
U(θ, s) = U(−θ,−s) ∀ (θ, s) ∈ R2
Stefano Siboni 240

Universita degli studi di Trento Esercizi di Meccanica razionale
ed e quindi sufficiente studiare la sola configurazione(θ, s
). Dalle seguenti espressioni
per le derivate seconde del potenziale:
Uθθ
(θ, s
)= mω2L2
[−1
2sin2θ − g
Lω2cosθ +
23(2cos2θ − 1
)]=
= mω2L2[−7
6+
116
cos2θ − g
Lω2cosθ
]= mω2L2
[−7
6+
116
62
72
( g
Lω2
)2
− 67
( g
Lω2
)2]
Uss
(θ, s
)= −2mω2L2 Uθs
(θ, s
)= mω2L2 6
7g
Lω2
si deduce la matrice hessiana
HU
(θ, s
)= mω2L2
−76
+2449
( g
Lω2
)2 67
g
Lω2
67
g
Lω2−2
il cui determinante risulta sempre positivo
detHU
(θ, s
)=(mω2L2
)2[73− 48
49
( g
Lω2
)2
− 3649
( g
Lω2
)2]>
>(mω2L2
)2[73− 48
494936
− 3649
4936
]=(mω2L2
)2[73− 4
3− 1]
= 0
mentre la traccia e comunque negativa
trHU
(θ, s
)= −7
6+
2449
( g
Lω2
)2
− 2 < −76
+2449
4936
− 2 < 0 .
Entrambi gli autovalori di HU
(θ, s
)sono dunque negativi, per cui il potenziale ha un
massimo relativo proprio in corrispondenza della configurazione di equilibrio. La stabilitadi questa segue dal teorema di Lagrange-Dirichlet.
(c) Equazioni di LagrangeLa lagrangiana del sistema si ottiene immediatamente dalle espressioni dell’energia cineticae del potenziale totale
L = T + U = mL2[95s2 + cosθ sθ +
θ2
3
]+ mL2ω2
[−s2 + s sinθ +
g
Lω2cosθ +
13sin2θ
].
Di qui si ricavano le relazioni:
d
dt
(∂L
∂θ
)= mL2 d
dt
(cosθ s +
23θ)
= mL2[23θ + cosθ s − sinθ θs
]
∂L
∂θ= −mL2sinθ θs + mω2L2
[s cosθ − g
Lω2sinθ +
23sinθ cosθ
]
Stefano Siboni 241

Universita degli studi di Trento Esercizi di Meccanica razionale
d
dt
(∂L
∂s
)= mL2
[185
s + cosθ θ]
= mL2[18
5s + cosθ θ − sinθ θ2
]∂L
∂s= mω2L2(−2s + sinθ)
e le equazioni di Lagrange cercate
23θ + cosθ s = ω2
[s cosθ − g
Lω2sinθ +
23sinθ cosθ
]185
s + cosθ θ − sinθ θ2 = ω2(−2s + sinθ) .
(d) Piccole oscillazioniIn base ai risultati della precedente analisi di stabilita, per λ = 3/8 la sola configurazione diequilibrio stabile del sistema e data da (θ, s) = (0, 0). Si vogliono determinare le frequenzenormali delle piccole oscillazioni nell’intorno di tale configurazione. La lagrangiana dellepiccole oscillazioni si ottiene approssimando L con un polinomio di Taylor al secondo ordinein un intorno della configurazione data ed ignorando i termini di resto:
Lp.o. =12mL2 ( θ s )
(2/3 cosθcosθ 18/5
) ∣∣∣∣θ=0
(θs
)+
12
( θ s )HU (0, 0)(
θs
)=
=12mL2 ( θ s )
(2/3 11 18/5
)(θs
)+
12mω2L2 ( θ s )
(−2 11 −2
)(θs
).
Le frequenze normali ν delle piccole oscillazioni sono le soluzioni (assunte con segno posi-tivo) dell’equazione caratteristica
det[ν2mL2
(2/3 11 18/5
)+ mω2L2
(−2 11 −2
)]= 0
ovvero
det[
ν2
ω2
(2/3 11 18/5
)+(−2 11 −2
)]= 0
e quindi, posto per brevita µ = ν2/ω2,
det
2
3µ − 2 µ + 1
µ + 1185
µ − 2
= 0 .
L’equazione per le frequenze normali delle piccole oscillazioni risulta cosı
21µ2 − 158µ + 45 = 0 .
Stefano Siboni 242

Universita degli studi di Trento Esercizi di Meccanica razionale
Esercizio 51 Sistema scleronomo a 1 g.d.l. posizionale conservativoE dato un disco circolare omogeneo di raggio R, massa m e centro C , vincolato a restarein un piano verticale. Due punti A e B del disco, posti agli estremi di un diametro, sonovincolati a scorrere rispettivamente lungo gli assi Ox ed Oy di una terna di riferimentocartesiana ortogonale Oxyz, con l’asse Oy avente la direzione verticale. (Si ricorda che inqueste ipotesi il bordo circolare del disco passa sempre per l’origine O della terna, comemostrato in figura.) Il punto A e inoltre connesso all’origine O mediante una molla idealedi costante elastica k > 0 e lunghezza a riposo nulla.
Nell’ipotesi di vincoli ideali e facendo uso dell’angolo θ mostrato in figura:
(a) determinare l’espressione dell’energia cinetica del sistema;
(b) scrivere le equazioni del moto del sistema;
(c) individuare le configurazioni di equilibrio, analizzandone la stabilita.
Soluzione(a) Calcolo dell’energia cineticaLa velocita angolare del disco e ω e3, dove ω si identifica con la derivata in t dell’angoloOAC , compreso fra la direzione OA (fissa in Oxy) e la direzione AB (fissa sul disco peripotesi). Poiche il triangolo OAC e isoscele, risulta OAC = θ e quindi ω = −θ, dove il segnonegativo si giustifica in quanto al crescere di θ il disco ruota in senso orario (convenzionesinistrorsa).Il vettore posizione del centro C vale
C − O = R(cosθ e1 + sinθ e2)
per cui C = R(−sinθ e1 + cosθ e2)θ e dunque |C|2 = R2θ2. Il teorema di Konig conduceinfine all’espressione
T =m
2|C|2 +
12ICz θ
2 =m
2R2θ2 +
12
mR2
2θ2 =
34mR2θ2 (51.1)
in cui ICz = mR2/2 e il momento d’inerzia del disco rispetto all’asse Cz.
Stefano Siboni 243

Universita degli studi di Trento Esercizi di Meccanica razionale
OsservazioneAllo stesso risultato si previene osservando che il centro di rotazione istantanea del disco eil punto P di intersezione fra le rette Ay e Bx, localizzato sulla circonferenza (in posizionediametralmente opposta ad O). Pertanto
T =12IPz θ2 =
34mR2θ2,
essendo
IPz = ICz + m|P − C |2 =mR2
2+ mR2 =
32mR2
per Huygens-Steiner.
(b) Equazioni del motoPotenziale elasticoIl potenziale elastico associato all’interazione fra i punti O ed A si calcola applicandodirettamente la formula generale, che fornisce
Uel = −k
2|A −O|2 = −k
2(2R cosθ)2 = −2kR2cos2θ .
Potenziale gravitazionaleIl potenziale gravitazionale del sistema consta del contributo del solo disco, il cui baricentrocoincide con l’evidente centro di simmetria C — il disco e per ipotesi omogeneo —
Ug = −mg(C − O) · e2 = −mgR sinθ .
Potenziale totaleIl potenziale del sistema si determina sommando i potenziali elastico e gravitazionale giacalcolati
U(θ) = Uel + Ug = −2kR2cos2θ − mgR sinθ . (51.2)
LagrangianaLa lagrangiana del sistema e definita come somma dell’energia cinetica (51.1) e del poten-ziale (51.2)
L = T + U =34mR2θ2 − 2kR2cos2θ − mgR sinθ .
Equazioni di LagrangeL’unica equazione di Lagrange del sistema si scrive
32mR2θ − 4kR2cosθ sinθ + mgR cosθ = 0
avendosi
d
dt
(∂L
∂θ
)=
32mR2θ e
∂L
∂θ= 4kR2cosθ sinθ − mgR cosθ .
Stefano Siboni 244

Universita degli studi di Trento Esercizi di Meccanica razionale
(c) Configurazioni di equilibrio e stabilitaEquilibriScriviamo preliminarmente le espressioni del potenziale totale e delle sue derivate prima eseconda:
U(θ) = −2kR2cos2θ − mgR sinθ
U ′(θ) = 4kR2cosθ sinθ −mgR cosθ
U ′′(θ) = 4kR2)(cos2θ − sin2θ
)+ mgRsinθ .
Le configurazioni di equilibrio sono i punti critici del potenziale, soluzioni di
4kR2cosθ sinθ −mgR cosθ = 0
ovvero dicosθ
[sinθ − mg
4kR
]= 0 .
Per cosθ = 0 si ha θ = +π/2,−π/2, mentre da sinθ = mg/4kR si deducono le configurazionidi equilibrio ulteriori
θ = θ , π − θ
con θ = arc sin(mg/4kR), sempreche mg/4kR < 1.
StabilitaSi esaminano le proprieta di stabilita delle singole configurazioni di equilibrio.
Configurazione θ = π/2In questa posizione la derivata seconda del potenziale vale
U ′′(π/2) = −4kR2 + mgR = 4kR2[ mg
4kR− 1]
Se mg/4kR < 1 si ha U ′′(π/2) < 0 e quindi θ = π/2 e un massimo relativo proprio diU , stabile per Lagrange-Dirichlet; se mg/4kR > 1 vale U ′′(π/2) > 0, il che comportal’instabilita della configurazione in forza dell’inversione parziale di Lagrange-Dirichlet; semg/4kR = 1 la derivata seconda del potenziale in π/2 si annulla, e ricorre quindi un casocritico.
Configurazione θ = −π/2In questo caso si ha invece U ′′(−π/2) = −4kR2 − mgR < 0. La configurazione e un mas-simo relativo proprio del potenziale U e risulta stabile per Lagrange-Dirichlet.
Configurazioni θ = θ, π − θ
Le due configurazioni presentano le stesse proprieta di stabilita, in quanto U(θ) = U(π−θ)∀ θ ∈ R. Si ha
U ′′(θ) = 4kR2(1 − 2 sin2θ
)+ mgR sinθ
Stefano Siboni 245

Universita degli studi di Trento Esercizi di Meccanica razionale
e ricordando che sinθ = mg/4kR < 1
U ′′(θ) = 4kR2[1 − m2g2
8k2R2
]+
m2g2
4k=
= 4kR2[1 − m2g2
8k2R2+
m2g2
16k2R2
]= 4kR2
[1 −
( mg
4kR
)2]> 0 .
Le configurazioni sono pertanto instabili per l’inversione parziale di Lagrange-Dirichlet.
Esercizio 52. Verifica di un integrale primoSi consideri il sistema di equazioni differenziali
x = −kxy = −ky
(52.1)
con (x, y) ∈ R2 e k ∈ R costante non nulla. Determinare quali condizioni devono soddisfare
i coefficienti reali a, b, c ed α, β, γ affinche la funzione
F (x, x, y, y) = ax2 + bxy + cy2 + αx2 + βxy + γy2
sia un integrale primo per (52.1).
SoluzioneConviene ricondurre il sistema (52.1) ad un sistema equivalente del primo ordine in formanormale mediante le ovvie sostituzioni
x = u y = v ,
che conducono a
x = uu = −kxy = vv = −ky ,
(52.2)
per cui la funzione da studiare si riscrive come
F (x, u, y, v) = ax2 + bxy + cxy + αu2 + βuv + γv2.
E ben noto che la funzione F costituisce un integrale primo se e soltanto se la sua derivatalungo le soluzioni di (52.2) risulta identicamente nulla in (x, u, y, v) ∈ R
4. Si ha, perdefinizione,
F (x, u, y, v) =∂F
∂xu +
∂F
∂u(−kx) +
∂F
∂yv +
∂F
∂v(−ky) =
= (2ax + by)u + (2αu + βv)(−kx) + (bx + 2cy)v + (βu + 2γv)(−ky) =
= 2(a − αk)xu + (b − kβ)(yu + xv) + 2(c − kγ)yv .
L’espressione ottenuta risulta nulla identicamente se e soltanto se
a = αk b = βk c = γk ,
che rappresenta la condizione cercata.
Stefano Siboni 246


















